Rainer Vogt Sommersemester 2008 - Universität Osnabrück · IV Biholomorphe Abbildungen 89 15...
134
Funktionentheorie Rainer Vogt Sommersemester 2008
Transcript of Rainer Vogt Sommersemester 2008 - Universität Osnabrück · IV Biholomorphe Abbildungen 89 15...

Funktionentheorie
Rainer Vogt
Sommersemester 2008

Inhaltsverzeichnis
I Elementare Analysis 4
1 Grundbegriffe 4
2 Differenzierbarkeit 7
3 Analytische Funktionen 14
4 Die Exponentialfunktion 23
5 Stammfunktion und Wegintegral 27
II Lokale Eigenschaften holomorpher Funktionen 45
6 Cauchy’sche Integralformel 45
7 Isolierte Singularitaten 51
8 Die lokale Abbildung 55
9 Anwendungen auf reelle Integrale 60
10 Der Logarithmus 66
III Reihen- und Produktentwicklungen 71
11 Laurentreihen 71
12 Unendliche Produkte 76
13 Beispiele Sinus und Cotangens 81
14 Die Γ-Funktion 85
2
IV Biholomorphe Abbildungen 89
15 Konforme Abbildungen 89
16 Der Riemann’sche Abbildungssatz 94
V Riemannsche Flachen 100
17 Analytische Fortsetzungen 100
18 Der Begriff “Riemannsche Flache” 106
19 Elliptische Funktionen 111
20 Die Riemannsche Flache eines Funktionenkeims 123
3

Teil I
Elementare Analysis
Funktionentheorie ist die Theorie komplexer Funktionen. Wir beginnen dahermit einer kurzen Wiederholung der Eigenschaften des Korpers der komplexenZahlen C und seiner Topologie.
1 Grundbegriffe
1.1 Die Korper der komplexen Zahlen: C = (R2,+, ·) mit
(a, b) + (c, d) = (a+ c, b+ d)(a, b) · (c, d) = (ac− ab, ad+ bc)
Es gelten die Korperaxiome. Das neutrale Element bzgl. + ist (0, 0) undbzgl. · ist (1, 0). Das additive Inverse ist
−(a, b) = (−a,−b).Das multiplikative Inverse
(a, b)−1 =
(a
a2 + b2,
−ba2 + b2
)(a, b) 6= (0, 0)
1.2 Die AbbildungR → C a 7→ (a, 0)
ist ein Monomorphismus von Korpern. Wir konnen daher R als Teilkorpervon C auffassen. Die Multiplikation mit a ∈ R macht C zu einem reellenVektorraum. Diese Vektorraumstruktur ist die ubliche auf C = R2.
(1, 0) und (0, 1) bilden eine Basis. Da (1, 0) das multiplikative neutrale Ele-ment ist, bezeichnen wir es kurz mit
1 = (1, 0)
und fuhren fur (0, 1) die Bezeichnung i ein. Jedes z = (a, b) ∈ C ist dahereindeutig in der Form z = a · 1 + b · i = a+ bi, a, b ∈ R darstellbar.
i nennen wir die imaginare Einheit, die Menge
R · i = {b · i = (0, b); b ∈ R}die Menge der imaginaren Zahlen oder imaginare Achse.
R = R · 1 = {a · (1, 0) = (a, 0); a ∈ R} nennen wir die Menge der reellenZahlen oder reelle Achse.
4

1.3 Beachte: i2 = −1
a+ bi = c+ di ⇐⇒ a = c, b = d.
1.4 Bezeichnung: Fur jede komplexe Zahl
z = a+ bi a, b ∈ R
heißt a der Realteil von z, bezeichnet Re(z), und b der Imaginarteil von z,bezeichnet Im(z).
1.5 Definition und Satz: Die Konjugation
C → C, z = x+ yi 7→ z = x− yi
ist ein Korperautomorphismus der Ordnung 2, d.h.
z1 + z2 = z1 + z2z1 · z2 = z1 · z2
z = z
Auf R2 und damit auf C haben wir bekanntlich die Euklidische Norm:
1.6 Definition: Der Betrag |z| einer komplexen Zahl z = x + iy ist ihreeuklidische Norm:
|z| =√x2 + y2
1.7 Eigenschaften des Betrags:
(i) |z| = 0 ⇐⇒ z = 0 (0 = (0, 0))
(ii) |z1 · z2| = |z1| · |z2| ∀ z1, z2 ∈ C
(iii) |z1 + z2| ≤ |z1|+ |z2| Dreiecksungleichung
Dieses sind (mit Ausnahme von (ii), das man leicht nachrechnet) gerade dieEigenschaften der euklidischen Norm auf R2.
1.8 Rechenregeln: (Aufgabe)
(1) Re z = z+z2
Im z = z−z2i
(2) z ∈ R ⇐⇒ z = Re z ⇐⇒ Im z = 0 ⇐⇒ z = zz ∈ Ri ⇐⇒ z = Im z ⇐⇒ Re z = 0 ⇐⇒ z = −z
5

(3) |Re z| ≤ |z|, | Im z| ≤ |z|
(4) |z| = |z|
(5) |z|2 = z · z
(6) z−1 =z
|z|2 fur z 6= 0
(7) |z1 − z2| ≥∣∣|z1| − |z2|
∣∣
1.9 Bekanntlich definiert eine Norm auf einem Vektorraum eine Metrik
d : C× C → R+, d(z1, z2) = |z1 − z2|
(C, d) ist ein vollstandiger metrischer Raum, d.h. jede Cauchy-Folge ist in C
konvergiert.
1.10 Topologische Begriffe:
(1) Sei r > 0. Dann heißt
Kr(z) = {z′ ∈ C; d(z, z′) = |z − z′| < r}
r-Kugel oder Kugel vom Radius r um z.
(2) A ⊂ C heißt offen, wenn es zu jedem a ∈ A ein r > 0 ergibt, so dassKr(a) ⊂ A.
(3) A ⊂ C heißt abgeschlossen, wenn C\A offen ist.
(4) A, das Innere, von A, ist die Vereinigung aller offenen Mengen B in C,fur die B ⊂ A.
(5) A, der Abschluss von A, ist der Durchschnitt aller abgeschlossenen Men-gen B ⊂ C, fur die A ⊂ B.
(6) Sei A ⊂ C beliebig. U heißt Umgebung von A, wenn A ⊂ U .
(7) A ⊂ C heißt zusammenhangend, falls gilt
{U, V ⊂ C offen , A ⊂ U ∪ V, A ∩ U ∩ V = ∅}⇒ {A ∩ U = ∅ oder A ∩ V = ∅}
6

1.11 Polarkoordinatendarstellung:
R · i
R
z = x+ yi
z
x
|z|
α
|z| = |z|
y
x = Re z = |z| · cosαy = Im z = |z| · sinα
}⇒ z = x+ yi = |z| · (cosα + i sinα)
Wir bezeichnen α mit α = arc z, den Arcus von z.
Es folgt fur z1 = |z1| · (cosα + i sinα)z2 = |z2| · (cos β + i sin β)
z1 · z2= |z1| · |z2| · [(cosα · cos β − sinα sin β) + i(cosα · sin β + sinα · cos β)]= |z1| · |z2| · (cos(α + β) + i sin(α + β))
nach den Additionstheoremen fur sin und cos.
1.12 Algebraische Eigenschaften:
(1) Der Korper C der komplexen Zahlen ist algebraisch abgeschlossen; d.h.dass jedes Polynom f ∈ C[X] vom Grad > 0 Nullstellen in C besitzt(Fundamentalsatz der Algebra).
(2) Als Folgerung erhalt man, dass jede algebraische Erweiterung von R inC enthalten ist. Insbesondere kann es auf Rm fur m > 2 keine Korper-struktur geben, die die R-Vektorraumstruktur erweitert.
2 Differenzierbarkeit
In diesem Abschnitt beginnen wir mit dem Studium komplexwertiger Funk-tionen, d.h. von Funktionen
f : A→ C,
7

wobei A ⊂ C.
Stetigkeit einer solchen Funktion ist eine topologische Eigenschaft und perDefinition ist die Topologie (Metrik) auf C die von R2.
2.1 Definition: f ist in a ∈ A stetig, wenn f , aufgefasst als Funktion A→R2, in a stetig ist. f heißt stetig, wenn es in jedem a ∈ A stetig ist.
Eine Funktion f : A→ R2 besteht aus den beiden Koordinatenfunktionen
f = (f1, f2) : A→ R2, f1, f2 : A→ R2
wobei fi = pi ◦ f und pi : R2 → R die Projektion auf die i-te Koordinate ist.
Beispiel: f(x, y) = (x2 − y, 2x+ 3y). Dann gilt f1 = x2 − y, f2 = 2x+ 3y
Da die erste Koordinate den Realteil und die zweite den Imaginarteil angibt,ist
f = (Re f, Im f) : A→ R2 = C
f(z) = Re f(z) + i Im f(z)
und Re f , Im f : A→ R sind reelle Funktionen.
Bekanntlich (Analysis II) gilt
2.2 f : A→ C ist stetig in a ∈ A ⇐⇒ Re f und Im f sind stetig in a.
Wir erinnern an die
2.3 Kettenregel: Sind f : A → C, g : B → C in a ∈ A bzw. b ∈ B stetigund gilt f(A) ⊂ B, f(a) = b, dann ist g ◦ f : A → C definiert und in a ∈ Astetig.
Als Folgerung erhalten wir
2.4 Sind f, g : A→ C stetig in a ∈ A, dann sind auch f ± g und f · g stetigin a. Ist g(z) 6= 0 ∀ z ∈ A, so ist auch f
gstetig in a.
Das folgt aus der Kettenregel und der Stetigkeit der Addition
C× C → C, ((a, b), (c, d)) 7→ (a+ c, b+ d),
der Multiplikation
C× C → C, ((a, b), (c, d)) 7→ (ac− bd, ad+ bc)
8

und der Inversion
C∗ → C, z = (a, b) 7→ z−1 =
(a
a2 + b2,
−ba2 + b2
)
�
Wir erinnern auch an Kriterien fur globale Stetigkeit:
2.5 f : A→ C ist genau dann stetig, wenn es zu jeder offenen Menge V ⊂ C
eine offene Menge U ⊂ C gibt, so dass
f−1(V ) = U ∩ A.
Stetigkeit komplexer Funktionen ist also dasselbe wie Stetigkeit von Abbil-dungen nach R2. Bei der Differenzierbarkeit ist das anders. Differenzieren istdas Approximieren durch lineare Funktionen. Wir erinnern:
2.6 Definition: Sei A ⊂ R2 offen. f : A→ R2 heißt in a ∈ A reell differen-zierbar, wenn es eine R-lineare Abbildung
L : R2 → R2
und eine in a ∈ A stetige Abbildung F : A→ R2 gibt, so dass
(1) f(z) = f(a) + L(z − a) + |z − a| · F (z) ∀ z ∈ A
(2) F (a) = 0
L ist bekanntlich das Differential von f in a
L = Df(a)
und ist bzgl. der Standardbasis von R2 durch die Jacobi-Matrix
Jf(a) :=
∂f1∂x
(a),∂f1∂y
(a)
∂f2∂x
(a),∂f2∂y
(a
gegeben, wobei z = (x, y), f = (f1, f2). Insbesondere ist Df(a) eindeutigbestimmt.
Fur die komplexe Differenzierbarkeit hatten wir also gerne eine komplex li-neare Funktion
L : C → C
und keine reell linear R2 → R2.
9

2.7 Definition: Sei A ⊂ C offen. f : A → C heißt in a ∈ A (komplex)differenzierbar, wenn es eine C-lineare Abbildung
L : C → C
und eine in a stetige Abbildung
F : A→ C
gibt, so dass
(1) f(z) = f(a) + L(z − a) + |z − a| · F (z) ∀ z ∈ A
(2) F (a) = 0
Um die Definitionen 2.6 und 2.7 miteinander vergleichen zu konnen, wollenwir untersuchen, wann eine R-lineare Abbildung
f : R2 // R2
C C
C-linear ist und umgekehrt.
Addition in C und Multiplikation in C mit einer reellen Zahl sind genau dieAddition und Skalarmultiplikation in R2. Also erhalten wir
2.8 Jede C-lineare Abbildung f : C → C ist als Abbildung R2 → R2 R-linear. Also ist jede komplexe differenzierbare Funktion reell differenzierbar.
Umgekehrt ist eine Abbildung f : C → C genau dann C-linear, wenn
f(z) = z · f(1) ∀ z ∈ C.
Sei z = x + iy mit x, y ∈ R. Wir wollen nun voraussetzen, dass f R-linearist. Dann gilt
f(z) = f(x+ iy) = f(x) + f(yi) = x · f(1) + y · f(i), da x, y ∈ R
z · f(1) = x · f(1) + i · yf(1)
Also ist f genau dann C-linear, wenn
f(i) = i · f(1).
In unserer Schreibweise ist
f = f1 + i · f2
10

und die Matrix von f bzgl. der Standardbasis 1, i von R2 ist
(f1(1) f1(i)f2(1) f2(i)
).
Es folgt, dass f genau dann C-linear ist, wenn
f1(i) + i · f2(i) = f(i) = i · f(1) = i(f1(1) + i · f2(1)) = i · f1(1)− f2(1).
Es folgt
2.9 Eine R-linear Abbildung
f = (f1, f2) : C = R2 → R2 = C
ist genau dann C-linear, wenn
f1(1) = f2(i) f1(i) = −f2(1).
Als Folgerung erhalten wir
2.10 Satz: Sei A ⊂ C offen, a ∈ A. Sei f : A → C in a reell differenzier-bar. Dann ist f in a genau dann komplex differenzierbar, wenn die Cauchy-Riemann’schen Differentialgleichungen
∂f1∂x
(a) =∂f2∂y
(a)∂f1∂y
(a) = −∂f2∂x
(a)
erfullt sind.
Ist f : A→ C in a ∈ A komplex differenzierbar, so ist das Differential
Df(a) : C → C
nach Definition C-linear und somit eindeutig durch Df(a)(1) gegeben.
2.11 Definition: Ist f : A→ C in a ∈ A differenzierbar, so heißt Df(a)(1)die Ableitung von f in a und wird
f ′(a) =∂f
∂x(a) = Df(a)(1) =
∂f1∂x
(a) + i · ∂f2∂x
(a)
bezeichnet.
Weiter erhalten wir
11

2.12 Ist f : A → C in a ∈ A differenzierbar, dann ist wegen 2.10 dieJacobimatrix
Jf(a) =
∂f1∂x
(a),∂f1∂y
(a)
∂f2∂x
(a),∂f2∂y
(a)
schiefsymetrisch und
|f ′(a)|2 =(∂f1∂x
(a)
)2
+
(∂f2∂x
(a)
)2
= Det(Jf(a)).
Wir wollen diese Bezeichnung mit der vertrauten Bezeichnung aus der Ana-lysis vergleichen.
2.13 Satz: Sei A ⊂ C offen und f : A → C eine Abbildung, dann sindaquivalent
(1) f ist in a komplex differenzierbar.
(2) limz→a
f(z)−f(a)z−a existiert.
(3) Es gibt eine in a stetige Abbildung f ∗ : A→ C, so dass
f(z) = f(a) + f ∗(z) · (z − a) ∀ z ∈ C
Es gilt: f ′(a) = f ∗(a) = limx→a
f(z)−f(a)z−a .
Beweis: (2) ⇐⇒ (3): Der Differenzenquotient (2) ist fur z 6= a definiert.Fur z 6= a ist aber f ∗(z) der Differenzenquotient. Der Limes ist die stetigeErganzung des Differenzenquotienten.
(1) ⇒ (3): Sei f in a differenzierbar, also
f(z) = f(a) + L(z − a) + |z − a| · F (z),
L = Df(a) ist C-linear, F (a) = 0, F stetig in a
L(z − a) + |z − a| · F (z) =(L(1) +
|z − a|z − a
· F (z))· (z − a) fur z 6= a
Wir definieren
f ∗(z) =
{L(1) + |z−a|
z−a · F (z) z 6= a (∗)L(1) z = a
12

Es bleibt die Stetigkeit von f ∗ bei a nachzuweisen.
|f ∗(a)− f ∗(z)| =∣∣−|z − a|
z − aF (z)
∣∣ = |F (z)| 0 mit z a
(3) ⇒ (1): Setze (vergl. ∗)
L : C → C, z 7→ f ∗(a) · z
und
F (z) =
{f∗(z)−f∗(a)
|z−a| · (z − a) z 6= a
0 z = a
Dann gilt
f(z) = f(a) + f ∗(z) · (z − a)= f(a) + f ∗(a)(z − a) + (f ∗(z)− f ∗(a)) · (z − a)= f(a) + L(z − a) + |z − a| · F (z)
F ist bei a stetig, denn
|0− F (z)| =∣∣f
∗(z)− f ∗(a)
|z − a| (z − a)∣∣ = |f ∗(z)− f ∗(a)| 0 z a
�
2.14 Bemerkung: Wir haben bisher immer vorausgesetzt, dass A ⊂ C of-fen ist. Fur die Differenzierbarkeit von f : A→ C in a ∈ A genugt naturlichstets, dass a ein innerer Punkt von A ist, d.h. a ∈ A. Wir werden aberoft Funktionen behandeln, die nur auf Teilmengen von R gegeben sind. Hiermacht es naturlich wenig Sinn, von complexer Differenzierbarkeit zu sprechen:Da die Gleichung (1) in Definition 2.7 nur fur z ∈ R gilt, ist L nicht mehreindeutig festgelegt. Definiert man dagegen Differenzierbarkeit mit Hilfe derBedingung (2) aus Satz 2.13, sieht man, dass in diesem Fall die Differenzier-barkeit dasselbe ist wie die bekannte reelle Differenzierbarkeit.
Satz 2.13 versetzt uns in eine Situation, die analog zur Situation einer reellenFunktion in einer Variablen ist. Damit ubertragen sich die Beweise folgenderSatze aus der Analysis I.
2.15 Kettenregel: Sei f : A→ C in a und g : B → C in b differenzierbar.Sei f(a) ⊂ B und f(a) = b. Dann ist h := g ◦ f : A→ C in a differenzierbar,und es gilt
h′(a) = g′(b) · f ′(a).
13

2.16 Rechenregel: Sind f, g : A→ C in a differenzierbar, dann sind auchf ± g, f · g und, falls definiert, f
gin a differenzierbar, und es gilt
(f ± g)′(a) = f ′(a)± g′(a)
(f · g)′(a) = f ′(a) · g(a) + f(a) · g′(a)(f
g
)′(a) =
f ′(a) · g(a)− f(a) · g′(a)(g(a))2
2.17 Satz: Sei f : A→ C eine injektive, in a ∈ A differenzierbare Funktion.
f−1 : B = f(A) → C
ist genau dann im Punkt b = f(a) differenzierbar, wenn f−1 in b stetig undf ′(a) 6= 0 ist. Es gilt dann
(f−1)′(b) =1
f ′(a)b = f(a)
2.18 Ist f = a0 + a1z + +a2z2 + . . . + anz
n ein komplexes Polynom, so istf auf ganz C differenzierbar, und es gilt
f ′ = a1 + 2a2z + 3a3z2 + . . .+ nanz
n−1.
Die Funktionentheorie ist die Theorie komplex differenzierbarer Funktionenauf offenen Teilmengen von C.
2.19 Definition: Eine holomorphe Funktion ist eine komplex differenzier-bare Funktion auf einer offenen Teilmenge von A ⊂ C.
2.20 Beispiel: Jede komplex rationale Funktion
f =p
q: C\q−1(0) → C
ist auf ihrem Definitionsbereich holomorph.
3 Analytische Funktionen
Aus der reellen Analysis sind die Exponentialfunktionen und die trigonome-trischen Funktionen als analytische Funktionen bekannt, d.h. als Funktionen,die sich durch Potenzreihen darstellen lassen.
14

Wir untersuchen in diesem Abschnitt den komplexen Fall. Zuvor wiederholenwir die Begriffe und wichtigsten Resultate uber Folgen und Reihen. Soweit dieBeweise wortlich dieselben sind wie in der Analysis, verzichten wir weitgehendauf sie.
Sei (an)n≥0 eine Folge in C. Die unendliche Reihe∑an ist die Folge der
Partialsummen (sn =
n∑
j=0
aj
)
n≥0
Konvergiert die Folge der Partialsummen, heißt∑an konvergent.
3.1 Die Reihe∞∑j=0
aj heißt absolut konvergent, wenn die reelle Reihe∞∑j=0
|aj|konvergiert.
3.2 Absolute Konvergenz ⇒ Konvergenz
3.3∞∑j=0
aj konvergiert ⇒ (aj)j≥0 ist Nullfolge.
3.4 Eine Folge von Funktionen (fn : A → C) heißt punktweise konvergentmit Grenzfunktion f : A→ C, wenn
limn→∞
fn(z) = f(z) ∀ z ∈ A
(fn) heißt gleichmassig konvergent mit Grenzfunktion f , wenn es zu jedems > 0 ein n0 = n0(s) gibt, so dass
|f(z)− fn(z)| < s ∀ n ≥ n0 ∀ z ∈ A
(fn) heißt lokal gleichmaßig konvergent gegen f , wenn es zu jedem a ∈ Aeine Kugel Kr(a) gibt, auf der (fn) gleichmaßig gegen f konvergiert.
3.5 Konvergiert eine Folge stetiger Funktionen (fn) lokal gleichmaßig auf Agegen f , so ist f : A→ C stetig.
3.6 Majorantenkriterium: Sei (fn : A → C) eine Folge Funktionen und∞∑j=0
aj eine konvergente Reihe. Gibt es ein n0 ∈ N, so dass
|fn(z)| ≤ an ∀ z ∈ A, ∀ n ≥ n0,
so konvergiert die Funktionenreihe∞∑n=0
fn auf A absolut und gleichmaßig.
15

3.7 Satz: Zu jeder Potenzreihe P (z) =∞∑n=0
an(z − z0)n gibt es ein R,
0 ≤ R ≤ ∞, so dass P auf der Kugel KR(z0) absolut und lokal gleichmaßigkonvergiert, aber P (z) fur z /∈ KR(z0) divergiert (hier ist K∞(z0) = C undK0(z0) = {z0}). R heißt Konvergenzradius von P , und es gilt
R =1
lim sup n√|an|
mit der Konvention, dass 10= ∞ und 1
∞ = 0.
(Zur Erinnerung: Der Limes superior lim sup ist der großte Haufungswert derFolge).
Beweis: Sei z ∈ KR(z0), R > 0. Wahle r ∈ R, so dass |z − z0| < r < R.Dann ist
1
r>
1
R= lim sup n
√|an|
Also gibt es ein n0 ∈ N mit 1r> n√|an| ∀ n ≥ n0. Es folgt
∞∑
n=n0
|an(z − z0)n| <
∞∑
n=n0
|z − z0|nrn
=∞∑
n=n0
( |z − z0|r
)n
Da |z−z0|r
< 1, konvergiert diese Reihe. Folglich konvergiert P (z) nach demMajorantenkriterium absolut und lokal gleichmaßig. Sei umgekehrt
z /∈ K0(z0), d.h. |z − z0| > R, also
1
|z − z0|<
1
R= lim sup n
√|an|,
dann gibt es unendlich viele n ∈ N, fur die
1
|z − z0|n< |an| d.h. 1 < |an(z − z0)
n|
Folglich ist (an(z − z0)n)n≥0 keine Nullfolge, und somit P nicht konvergent.
�
3.8 Satz: Es seien P (z) =n∑n=0
an(z − z0)n und Q(z) =
∞∑n=0
bn(z − z0)n Po-
tenzreihen mit Konvergenzradien R1, R2 > 0. Dann gilt:
16

(1) Die Konvergenzradien der Potenzreihen
(P +Q)(z) :=∞∑n=0
(an + bn)(z − z0)n
(P ·Q)(z) :=∞∑n=0
cn(z − z0)n mit cn :=
n∑j=0
aj · bn−j
sind großer oder gleich min(R1, R2).
(2) (P +Q)(z) = P (z) +Q(z) und (P ·Q)(z) = P (z) ·Q(z) fur |z − z0| <min(R1, R2)
Beweis: Die Folge der Partialsummen von P +Q ist die Summe der Folgender Partialsummen von P und von Q. Damit folgt der Summenteil aus derSummenregel fur Folgen. Aus dieser Regel folgt auch (P + Q)(z) = P (z) +Q(z). Fur den Produktteil sei |z − z0| < min(R1, R2). Es gilt
n∑j=0
|cj(z − z0)j| ≤
n∑j=0
j∑k=0
|ak · bj−k| |z − z0|j
=n∑j=0
j∑k=0
|ak(z − z0)k| · |bj−k(z − z0)
j−k|
≤(
n∑j=0
|aj(z − z0)j|)
·(
n∑j=0
|bj(z − z0)j|)
Denn multiplizieren wir aus, erhalten wir auf der rechten Seite alle Kombi-natione |aj| · |bj| mit 0 ≤ i, j ≤ n und auf der linken Seite nur diejenigen mit0 ≤ i+ j ≤ n auf.
0
n
12......
0 1 2 . . .. . . nj
i
linke Seite
Damit konvergiert∞∑j=0
|cj(z−z0)j|, weil die rechte Seite der Ungleichung kon-
vergiert.
17

Fur m ≥ 2n haben wir
0
ab
2n
n 2n
n
m
m
(n,m− n)
(m− n, n)
∣∣∣m∑j=0
cj(z − z0)j −
( n∑j=0
aj(z − z0)j)·( n∑j=0
bj(z − z0)j)∣∣∣
≤( ∑j≤m−n
|aj(z − z0)j|)·( m∑j>n
|bj(z − z0)j|)
+( ∑j≤m−n
|bj(z − z0)j|)·( m∑j>n
|aj(z − z0)j|)
Die Existenz von∞∑j=0
cj(z − z0)j ist bereits gezeigt. Lassen wir m gegen ∞
gehen, erhalten wir∣∣∣∞∑j=0
cj(z − z0)j −
( n∑j=0
aj(z − z0)j)·( n∑j=0
bj(z − z0)j)∣∣∣
≤( ∞∑
j=0
|aj(z − z0)j|
︸ ︷︷ ︸A
)·( ∞∑
j>n
|bj(z − z0)j|
︸ ︷︷ ︸B(n)
)
+( ∞∑
j=0
|bj(z − z0)j|
︸ ︷︷ ︸B
)·( ∞∑
j>n
|aj(z − z0)j|
︸ ︷︷ ︸A(n)
)
Da∑aj(z − z0)
j und∑bj(z − z0)
j absolut konvergieren, sind A,B festereelle Werte A ≥ A(n) und B ≥ B(n), und B(n), A(n) 0 mit n ∞. �
18

3.9 Satz: (1)∞∑j=0
aj(z − z0)j hat denselben Konvergenzradius R wie
∞∑j=0
(j + 1)aj+1(z − z0)j
(2) f : KR(z0) → C, z 7→∞∑j=0
aj(z − z0)j ist holomorph mit
f ′ : KR(z0) → C, z 7→∞∑j=0
(j + 1)aj+1(z − z0)j
Beweis: (1) Sei R′ der Konvergenzradius von∞∑j=0
(j + 1)aj+1(z − z0)j.
Behauptung: R′ ≤ R: Sei |z − z0| < R′. Dann konvergiert∞∑j=0
(j + 1)aj+1(z − z0)j und damit auch
∞∑j=0
(j + 1)aj+1(z − z0)j+1 absolut. Da
|aj+1| ≤ (j + 1)|aj+1|
konvergiert nach dem Majorantenkriterium auch
∞∑
j=0
aj(z − z0)j
absolut.
Behauptung: R ≤ R′: Sei |z − z0| < r < R. Aus der Analysis I weiß man,dass
limn→∞
n√n = 1.
Also existiert ein n0 ∈ N mit
n√n · |z − z0| < r ∀n ≥ n0.
Fur solche n gilt:
|n · an · (z − z0)n| = |an| · ( n
√n · |z − z0|)n < |an| · rn.
Da r < R, konvergiert∑n≥n0
an| · rn. Also konvergiert nach dem Majoranten-
kriterium auch
∑
n≥n0
n · an · (z − z0)n = (z − z0) ·
∑
n≥n0−1
(n+ 1) · an+1(z − z0)n
19

(2) Offensichtlich genugt es, den Fall z0 = 0 zu behandeln. Sei z ∈ Kr(0) mitr < R und ε > 0 gegeben. Wir suchen eine δ > 0, so dass
∣∣f(z + h)− f(z)
h−
∞∑
j=0
(j + 1)aj+1zj∣∣ < ε fur |h| < δ
Fur h ∈ C mit 0 < |h| < r − |z| gilt
|z + h| ≤ |z|+ |h| < r.
Also
f(z + h)− f(z)
h−
∞∑
j=0
(j + 1)aj+1zj
=∞∑j=1
aj(z + h)j − zj
h−
∞∑
j=1
j · ajzj−1
(die a0-Terme in der ersten Reihe heben sich weg)
z
z0 = 0 rR
z + h
=∞∑j=1
uj(z, h) mit uj(z, h) = aj
((z+h)j−zj
h− j · zj−1
).
Da (z+h)j−zjh
= (z+h)j−zj(z+h)−z = (z+h)j−1+(z+h)j−2 ·z+ . . .+(z+h) ·zj−2+zj−1,
folgt uj(z, h) = aj
((z + h)j−1 + (z + h)j−2 · z + . . .+ zj−1
︸ ︷︷ ︸j Summanden
−j · zj−1)
|uj(z, h)| ≤ |aj| · (j · rj−1 + j · rj−1) = 2j|aj| · rj−1
Da die Reihe∞∑j=1
j|aj| · rj−1 konvergiert, gibt es zu ε > 0 ein n0, so dass
∣∣∑
j≥n0
uj(z, h)∣∣ ≤ ε
2∀h
Da uj(z, h) stetig in h ist und fur h = 0 den Wert 0 hat, gibt es ein δj > 0,so dass
|uj(z, h)| <ε
n0 · 2fur |h| < δj
Sei δ = min(δ1, . . . , δn0 , r − |z|). Dann gilt
∣∣∞∑
j=1
uj(z, h)∣∣ ≤
∣∣n0∑
j=1
|uj(z, h)∣∣+∣∣∑
j≥n0
uj(z, h)∣∣ < ε
2+ε
2,
falls |h| < δ. �
20

3.10 Folgerung: Sei P (z) =∞∑j=0
aj(z − z0)j eine Potenzreihe mit Konver-
genzradius R > 0. Dann ist die durch P auf KR(z0) dargestellte Funktionenbeliebig oft komplex differenzierbar, insbesondere also stetig und holomorph.
3.11 Bemerkung: Sei f (n) die n-te Abbildung von f(z) =∞∑j=0
aj(z − z0)j.
Dann giltf (n)(z0) = n!an
Also sind die Koeffizienten der Reihe eindeutig durch f bestimmt!
3.12 Definition: Sei A ⊂ C offen und f : A → C eine Funktion. f lasstsich um z0 ∈ A in eine Potenzreihe entwickeln, wenn es eine Potenzreihe
P (z) =∞∑
j=0
aj(z − z0)j
mit Konvergenzradius R > 0 und ein r > 0 gibt, so dass Kr(z0) ⊂ A und
f(z) = P (z) ∀z ∈ Kr(z0) ∩KR(z0)
f : A → C heißt analytisch, wenn f sich in jedem Punkt z0 ∈ A in einePotenzreihe entwickeln lasst.
3.13 f : A→ C analytisch ⇒ f holomorph (s. 3.10).
3.14 Aufgabe: Sei P (z) =∞∑j=0
aj(z−z0)j eine Potenzreihe mit Konvergenz-
radius R > 0. Dann ist
f : KR(z0) → C, z 7→ P (z)
analytisch.
3.15 Satz: Sei A ⊂ C sein Gebiet, d.h. A ist offen und zusammenhangend,sei f : A → C analytisch. Sei K ⊂ A eine Teilmenge, die einen Haufungs-punkt z0 in A hat. Dann gilt
f(z) = 0 ∀z ∈ K ⇒ f = 0.
21

Beweis: Nach Voraussetzung gibt es ein z0 ∈ A und eine Folge (zn)n>0 mitzn 6= z0 in K, so dass lim
n→∞zn = z0 und f(zn) = 0 ∀n > 0. Da f analytisch
ist, gibt es ein Kr(z0) ⊂ A, so dass
f(z) =∞∑
j=0
aj(z − z0)j ∀z ∈ Kr(z0).
Behauptung 1: f(z) = 0 ∀z ∈ Kr(z0).
Wir zeigen, dass aj = 0 ∀j. Sei ak der kleinste Verbrecher, d.h. ak 6= 0, aberaj = 0 fur j < k. Dann gilt
f(z) =∞∑
j=k
aj(z − z0)j = (z − z0)
k
∞∑
j=0
aj+k(z − z0)j
Sei 0 < s < r und n0 so groß, dass zn ∈ Ks(z0) ∀n ≥ n0. Fur diese n gilt
0 = f(zn) = (zn − z0)k
︸ ︷︷ ︸6=0
·∞∑
j=0
aj+k(zn − z0)j.
Also 0 = ak + (zn − z0) ·∞∑j=1
aj+k(zn − z0)j−1 (∗)
0 ≤∣∣(zn−z0)·
∞∑
j=1
aj+k(zn−z0)j−1∣∣ ≤ |zn−z0|·
∞∑
j=1
|aj+k|·sj−1 =|zn − z0|sk+1
·∞∑
j=1
|aj+k| · sj+k
︸ ︷︷ ︸konvergent
Da limn→∞
|zn − z0| = 0, folgt aus (∗), dass ak = 0 ein Widerspruch!
Behauptung 2: B := {z ∈ A; f = 0 in einer Umgebung von z} ist offenund abgeschlossen in A.
Beweis: “offen” folgt aus der Defi-nition von B.“abgeschlossen”: Wir mussen zeigen,dass alle Haufungspunkt von B zuB gehoren. Sei also z ein Haufungs-punkt von B, d.h. es gibt eine Fol-ge (zn) in B mit Grenzwert z. Daf(zn) = 0, folgt nach Behauptung 1,dass f = 0 in einer Umgebung vonz. Es folgt z ∈ B.
z′
z
f = 0
22

Behauptung 3: A = B.
Da B 6= ∅, denn z0 ∈ B, und A zusammenhangend ist, folgt A = B. �
3.16 Identitatssatz: Sei A ⊂ C ein Gebiet, seien f, g : A→ C analytischeFunktionen mit f |K = g|K, wobei K ⊂ A eine Teilmenge ist, die in A einenHaufungspunkt hat. Dann gilt f = g.
Beweis: Wende 3.15 auf die nach 3.8 analytische Funktion f − g an. �
3.17 Satz: Sei A ⊂ C ein Gebiet und f : A → C analytisch. Sei c ∈ C.Dann gilt f−1(c) = A oder f−1(c) ist diskret, d.h. zu jedem z ∈ f−1(c) gibtes ein r > 0, so dass
f−1(c) ∩Kr(z) = {z}(f−1(c) besteht nur aus isolierten Punkten.)
Beweis: Angenommen f−1(c) besteht nicht nur aus isolierten Punkten, dannbesitzt es einen Haufungspunkt. Nach 3.15 ist die Funktion f − c die Null-funktion auf A, also f konstant, und f−1(c) = A. �
4 Die Exponentialfunktion
Fur reelle x gilt
exp x = ex =∞∑
n=0
xn
n!.
Die Reihe konvergiert absolut (man wende das Quotientenkriterium an). Er-setzen wir x durch eine komplexe Zahl z, konvergiert die Reihe daher nach
dem Majorantenkriterium ebenfalls absolut. Also hat∞∑n=0
zn
n!den Konvergenz-
radius ∞.
4.1 Definition: Die Funktion
exp : C → C, z 7→∞∑
n=0
zn
n!
heißt Exponentialfunktion. Wir schreiben auch exp z = ez.
4.2 Satz: (1) exp ist analytisch, also holomorph.
(2) exp(z1 + z2) = exp z1 · exp z2
23

(3) exp z = exp z
(4) x reell ⇒ exp x reell und exp x > 0
(5) y ∈ R ⇒ | exp(iy)| = 1
(6) exp′ z = exp z
(7) exp z 6= 0 ∀z ∈ C und 1exp z
= exp(−z)
Beweis: (1) exp ist durch eine Potenzreihe definiert.
(2) Es gilt:
exp z1 · exp z2 =∞∑
k=0
zk1k!
·∞∑
l=0
zl2l!
=∞∑
n=0
an mit an =n∑
j=0
zj1j!
· zn−j2
(n− j!)
Da nun (z1 + z2)n =
n∑j=0
(n
j
)zj1 · zn−j2 =
n∑j=0
n!j!(n−j)!z
j1 · zn−j2 = n! · an, folgt
exp z1 · exp z2 =n∑
j=0
(z1 + z2)n
n!= exp(z1 + z2)
(3) Da die Konjugation stetig ist und stetige Funktionen Grenzwerte erhalten,gilt
exp z = limn→∞
n∑
j=0
zj
j!= lim
n→∞
n∑
j=0
zj
j!= lim
n→∞
n∑
j=0
zj
j!= exp z
(7) exp z · exp(−z) (2)= exp 0 = 1. Es folgt exp z 6= 0 und exp(−z) = 1
exp z.
(4) x ∈ R ⇒ exp x ∈ R nach Definition. Ist x > 0, besteht die Exponential-reihe aus positiven Summanden. Also folgt exp x > 0.
x < 0(7)⇒ exp x = 1
exp |x| > 0
(5) | exp(iy)|2 = exp(iy) · exp(iy) (3)= exp(iy) · exp (iy) = exp(iy) · exp(−iy)
= exp 0 = 1
(6) exp′ z =∞∑n=1
nn!zn−1 =
∞∑n=1
zn−1
(n−1)!=
∞∑n=0
zn
n!= exp z
�
4.3 S1 := {z ∈ C, |z| = 1}, der Einheitskreis in der komplexen Ebene, istbzgl. der Multiplikation eine Gruppe und
ψ : (R,+) → (S1, ·), y 7→ eiy
ist wegen 4.2.2 ein Homomorphismus.
24

4.4 Satz: ψ ist surjektiv, und Kernψ = {2πn;n ∈ Z}
Es ist sinnvoll, fur den Beweis die trigonometrischen Funktionen von R aufC zu erweitern. Bekanntlich gilt fur alle x ∈ R
sin x =∞∑
n=0
(−1)nx2n+1
(2n+ 1)!cos x =
∞∑
n=0
(−1)nx2n
(2n)!
Nach denselben Prinzipien wie bei der Exponentialfunktion konvergieren die-se Reihen auch fur alle komplexen Zahlen, so dass wir setzen konnen
4.5 Definition: sin : C → C, z 7→∞∑n=0
(−1)n x2n+1
(2n+1)!
cos : C → C,∞∑n=0
(−1)n x2n
(2n)!
4.6 (1) sin und cos sind analytisch.
(2) sin z = 12i(eiz − e−iz) cos z = 1
2(eiz + e−iz)
(3) eiz = cos z + i sin z
(4) x ∈ R ⇒ Re(eix) = cos x, Im(eix) = sin x
(5) sin2 z + cos2 z = 1
(6) sin(−z) = − sin z, cos(−z) = cos z
(7) sin′ = cos, cos′ = − sin
Beweis: (1) klar, (6) folgt sofort aus der Definition, (4) folgt aus (3).
(3) eiz =∞∑n=0
(iz)n
n!=
∞∑n=0
(iz)2n+1
(2n+1)!+
∞∑n=0
(iz)2n
(2n)!
= i∞∑n=0
(−1)n · z2n+1
(2n+1)!+
∞∑n=0
(−1)n · z2n
(2n)!, da i2 = −1
= cos z + i sin z
(5) e−iz = cos(−z) + i sin(−z) = cos z − i sin z nach (3) und (6).
1 = eiz · e−iz = (cos z + i sin z) · (cos z − i sin z) = cos2 z + sin2 z.
(2) eiz − e−iz = cos z + i sin z − (cos z − i sin z) = 2i · sin zeiz + e−iz = cos z + i sin z + cos z − i sin z = 2 cos z.
(7) folgt leicht aus (2):
(sin z)′ =1
2i(eiz − e−iz)′ =
1
2i(ieiz + ie−iz) =
1
2(eiz + e−iz) = cos z
25

(cos z)′ = 12(eiz + e−iz)′ = 1
2(ieiz − ie−iz) = 1
2i(i2eiz − i2e−iz)
= − 12i(eiz − e−iz) = −(sin z)′
�
Beweis 4.4: Zur Surjektivitat : Sei w = x + iy ∈ S1. Da |w| = 1, haben wirx2 + y2 = 1, insbesondere also −1 ≤ x ≤ 1. Folglich gibt es ein t ∈ [0, π] mitcos t = x. Ist y ≥ 0, gilt dann y = sin t, ist y < 0, haben wir y = − sin t.
Somit gilt
eit = cos t+ i · sin t = x+ iy fur y ≥ 0e−it = cos(−t) + i · sin(−t)
= cos t− i sin t = x+ iy fur y < 0
x+ iy
t
Zum Kern: Kernψ = {y ∈ R; eiy = cos y + i sin y = 1} = {y ∈ R; cos y = 1}= {2πn;n ∈ Z}. �
4.7 Satz: (1) exp z = ex · (cos y + i sin y) fur z = x+ iy mit x, y ∈ R.
(2) exp bildet den abgeschlossenen Parallelstreifen
P := {z ∈ C; | Im z| ≤ π}
surjektiv auf die in 0 gelochte Ebene C∗ = C\{0} ab.
(3) Sei zj = xj + iyj mit xj, yj ∈ R, j = 1, 2. Dann gilt:
exp z1 = exp z2 ⇐⇒ x1 = x2 und y1 = y2 + 2πn fur ein n ∈ Z.
(4) exp bildet den offenen Parallelstreifen
P := {z ∈ C; | Im z| < π}
bijektiv auf die geschlitzte Ebene E∗ := {z ∈ C; z 6= −|z|} = C\R− ab.
Beweis: (1) exp z = ex+iy = ex · eiy = ex · (cos y + i sin y).
(2) Ist w = |w| · (cos t + i sin t) ∈ C∗, d.h. |w| 6= 0, so existiert ein x ∈ R
mit ex = |w|. Also ex+it = w, und t kann in [−π, π] gewahlt werden. Also istexp : P → C∗ surjektiv.
26

(3) Es gilt
| exp z1| = | exp z2| ⇐⇒ ex1 = ex2 ⇐⇒ x1 = x2
Falls x1 = x2, folgt also
exp z1 = exp z2 ⇐⇒ cos y1 + i sin y1 = cos y2 + i sin y2⇐⇒ y1 = y2 + 2πn, n ∈ Z.
(4) Nach (3) ist exp auf P injektiv und E∗ ist offensichtlich das Bild. �
4.8 Aufgabe: Zeigen Sie: exp : C → C ist die einzige holomorphe Funkti-on f , fur die
(1) f ′(0) = 1
(2) f(z1 + z2) = f(z1) · f(z2) ∀z1, z2 ∈ C.
5 Stammfunktion und Wegintegral
Wie im Reellen geht es beim Stammfunktionenproblem um die Umkehrungder Differentiation.
5.1 Definition: Sei A ⊂ C. Eine differenzierbare Funktion g : A→ C heißtStammfunktion der Funktion f : A→ C, falls g′ = f .
Ist A ⊂ R ⊂ C ein Intervall, so unterscheiden sich die Realteile und Ima-ginarteile zweier Stammfunktionen g1 und g2 von f jeweils um eine Konstantecr bzw. ci. Also unterscheiden sich g1 und g2 um die Konstante c = cr + ici.Ist A ⊂ C ein Gebiet, d.h. eine offene zusammenhangende Teilmenge von C,gilt dasselbe (Aufgabe). Wir erhalten
5.2 Satz: Sei A ⊂ C ein Intervall in R oder ein Gebiet und f : A → C eineFunktion. Dann gilt
(1) Sind g1, g2 : A → C Stammfunktionen von f , dann existiert ein c ∈ C
mit g1 = g2 + c.
(2) Stimmen zwei Stammfunktionen von f in einem a ∈ A uberein, sindsie gleich.
5.3 Aufgabe: Sei f : Kr(z0) → C eine Funktion. Zu jedem z ∈ Kr(z0) gebees ein r2 > 0, so dass Kr2(z) ⊂ Kr(z0) und f |Kr2(z) eine Stammfunktionbesitzt. Dann besitzt f eine Stammfunktion.
27

Wir wenden uns nun dem Existenzproblem von Stammfunktionen zu. Ist Aein Intervall in R, so gibt der Hauptsatz der Differential- und Integralrech-nung, separat angewandt auf Re f und Im f , daruber Auskunft:
5.4 Satz: Jede stetig Funktion f : I → C auf einem Intervall I ⊂ R besitzteine Stammfunktion. Fur a ∈ I definiert
g(t) :=
t∫
a
f dx :=
t∫
a
Re f dx+ i
t∫
a
Im f dx
die eindeutig gegebene Stammfunktion mit g(a) = 0. �
Fur Gebiete G ⊂ C erinnern wir uns an die Konstruktion von Potentialenaus der Analysis II. Hier wurde das Wegintegral benutzt.
5.5 Definition: (1) Sei A ⊂ C. Ein Weg in A ist eine stetige Abbildung
γ : [a, b] → A a < b ∈ R
γ(a) heißt Anfangspunkt und γ(b) heißt Endpunkt von γ
γ heißt geschlossen oder Schleife, wenn γ(a) = γ(b).
Der Trager von γ ist γ∗ = Bild γ ⊂ A.
(2) γ hießt stuckweise glatt, wenn es eine Zerlegung a = t0 < t1 < . . . <tn = b von [a, b] gibt, so dass γ[ti, ti+1] glatt ist, d.h. stetig differenzier-bar (mit einseitigen Ableitungen in ti, ti+1)
5.6 Satz: Besitzt die stetige Funktion f : G → C, G ⊂ C ein Gebiet, eineStammfunktion g, dann gilt fur jeden stuckweise glatten Weg γ : [a, b] → Gmit Zerlegung a = t0 < . . . < tn = b
g(γ(b))− g(γ(a)) =n∑
i=1
ti∫
ti−1
(f ◦ γ) · γ′dt
Beweis: Sei zunachst g glatt. Dann ist g ◦ γ : [a, b] → C differenzierbar, undnach der Kettenregel gilt
(g ◦ γ)′(t) = g′(γ(t)) · γ′(t) = ((f ◦ γ) · γ′)(t).Also ist g ◦ γ Stammfunktion der stetigen Funktion (f ◦ γ) · γ′. Nach 5.4 gilt
b∫
a
(f ◦ γ) · γ′dt = g(γ(b))− g(γ(a)).
28

Im allgemeinen Fall gilt
n∑i=1
ti∫ti−1
(f ◦ γ) · γ′dt =n∑i=1
[g(γ(ti))− g(γ(ti−1))] = g(γ(tn))− g(γ(t0))
= g(γ(b))− g(γ(a))
�
Sei G ein Gebiet. Besitzt f : G → C eine Stammfunktion g, so hangt dasIntegral 5.6 nicht vom Verlauf des Weges, sondern nur von seinen Endpunktenab. Also lasst sich g mit Hilfe der Integration uber stuckweise glatten Wegenermitteln. Dies ist der Ansatz zur Ermittlung von Stammfunktionen.
5.7 Definition: Ist γ : [a, b] → A ⊂ C bzgl. der Zerlegung a = t0 < . . . <tn = b stuckweise glatt und f : γ∗ → C stetig, dann heißt die komplexe Zahl
∫
γ
f dz :=n∑
i=1
ti∫
ti−1
(f ◦ γ) · γ′dt
das Wegintegral von f langs γ.
Das Argument im Beweis des allgemeinen Teils von 5.6 zeigt, dass das Weg-integral unabhangig von der Zerlegung des Weges in glatte Teilstucke ist.
5.8 Beispiel: Sei f : C → C, f(z) = z. Sei z0 ∈ C, r > 0 und
γ : [0, 2π] → C, t 7→ z0 + r · exp(it).Dann ist γ glatt,
γ∗ = Sr(z0) := {z ∈ C; |z − z0| = r}und
∫γ
f dz =2π∫0
z0 + r · exp(it) · (i · r · exp(it))dt
=2π∫0
(z0 + r · exp(−it)) · (i · r · exp(it))dt
=2π∫0
(z0 · i · r · exp(it) + ir2)dt
Die Stammfunktion von i exp(iz) ist exp(iz). Also folgt
∫γ
z dz =2π∫0
z0 · r(exp(it))′dt+2π∫0
ir2dt = rz0(exp(2πi)− exp 0) + 2πir2
∫γ
z dz = 2πir2
29

5.9 Addition von Wegen: Sind
γ1 : [a, b] → C und γ2 : [c, d] → C
zwei Wege, so dass γ1(b) = γ2(c) ist, dann ist die Addition
γ1(a) γ1(b) = γ2(c)γ1 γ2
γ1 + γ2 : [a, b+ d− c] → C, t 7→{γ1(t) a ≤ t ≤ bγ2(c− b+ t) b ≤ t ≤ b+ d− c
definiert. Weiter definieren wir
−γ1 : [a, b] → C, t 7→ γ1(b+ a− t)
Man pruft leicht nach:
(1) γ1 + γ2 und −γ1 sind stetig.
(2) Sind γ1 und γ2 stuckweise glatt, dann sind es auch γ1 + γ2 und −γ1(3) Die Addition von Wegen ist assoziativ.
5.10 Eigenschaften des Wegintegrals: Sei γ : [a, b] → C stuckweiseglatt und f : γ∗ → C stetig.
(1) Linearitat: Seien f1, f2 : γ∗ → C stetig und c1, c2 ∈ C. Dann gilt
∫
γ
(c1f1 + c2f2)dz = c1
∫
γ
f1 dz + c2
∫
γ
f2 dz.
(2) Seien γ1 : [a, b] → C und γ2 : [c, d] → C stuckweise glatt und γ1(b) =γ2(c). Dann gilt ∫
γ1+γ2
f dz =
∫
γ1
f dz +
∫
γ2
f dz
(3) Parametrisierungsregel: Ist ϕ : [c, d] → [a, b] eine bijektive stuck-weise glatte Funktion, dann ist γ ◦ ϕ : [c, d] → C stuckweise glatt und
∫
γ◦ϕ
f dz =
∫γ
f dz , falls ϕ monoton wachst
−∫γ
f dz , falls ϕ monoton fallt
30

(1) und (2) sind trivial. (2) impliziert auch, dass∫γ
f dz unabhangig von der
speziellen Zerlegung des Intervalls in glatte Teile ist. Bei (3) ist klar, dassγ ◦ϕ stuckweise glatt ist. Wegen der Definition 5.7 und 5.10.2 genugt es, denFall γ und ϕ glatt zu behandeln:
Nach der Substitutionsregel fur das bestimmte Integral gilt fur g : [a, b] → C
d∫
c
(g ◦ ϕ) · ϕ′ ds =
ϕ(d)∫
ϕ(c)
g dt = ±b∫
a
g dt
Wir wenden dies auf g = (f ◦ γ) · γ′ an. Dann ist mit w = γ ◦ ϕ
(g ◦ ϕ) · ϕ′(s) = (f ◦ γ ◦ ϕ)(s) · (γ′ ◦ ϕ)(s) · ϕ′(s) = (f ◦ w)(s) · w′(s)
�
5.11 Satz: Sei γ : [a, b] → C stuckweise glatt und f : γ∗ → C stetig. Es gilt
∣∣∫
γ
f dz∣∣ ≤ ‖ f ‖ ·L(γ)
mit ‖ f ‖= sup{|f(z)|; z ∈ γ∗} und L(γ) = Lange (γ) =n∑i=1
ti∫ti−1
|γ′(t)|dt,
wobei a = t0 < t1 < . . . < tn = b und γ[ti−1, ti] glatt ist fur i = 1, . . . , n.
Bemerkungen:
(1) Da γ∗ kompakt ist, wird das betrachtete Supremum angenommen.
(2) Die Bogenlange von γ wurde in der Analysis I definiert. Fur differenzier-bare Wege lasst sie sich wie angegeben berechnen. Fur einen stuckweiseglatten Weg mussen wir diesen in glatte Teile unterteilen und dann dieTeilbogenlangen aufsummieren.
31

Beweis: Es genugt, den Satz fur glatte Wege zu zeigen. Sei∫γ
f dz = r · c
mit c = eit ∈ S1. Dann gilt
|∫γ
f dz| = r = r · c · c = c∫γ
f dz =∫cf dz
= Reb∫a
c · (f ◦ γ) ◦ γ′dt da r ∈ R
=b∫a
Re(c(f ◦ γ) · γ′)dt ≤b∫a
|Re(c(f ◦ γ) · γ′|dt
≤b∫a
|(c(f ◦ γ) · γ′|dt =b∫a
|f ◦ γ| · |γ′|dt
≤b∫a
‖ f ‖ ·|γ′|dt = ‖ f ‖ ·L(g).
�
5.12 Produktregel: Sei γ : [a, b] → C stuckweise glatt. Seien f, g : A→ C
stetig differenzierbar und γ∗ ⊂ A. Dann gilt mit z1 = γ(b) und z0 = γ(a)
∫
γ
f ′ · g dz = (f(z1) · g(z1)− f(z0) · g(z0))−∫
γ
f · g′ dz
Beweis: ((f · g) ◦ γ)′ = [(f ◦ γ) · (g ◦ γ)]′= (f ′ ◦ γ) · γ′ · (g ◦ γ) + (f ◦ γ) · (g′ ◦ γ) · γ′= ((f ′ · g) ◦ γ) · γ′ + ((f · g′) ◦ γ) · γ′
Also, nach (stuckweisem) Integrieren
(f · g) ◦ γ(b)− (f · g) ◦ γ(a) =b∫a
((f ′ · g) ◦ γ) · γ′ dt+b∫a
((f · g′) ◦ γ) · γ′ dt=∫γ
f ′ · g dz +∫γ
f · g′ dz
�
5.13 Substitutionsregel: Sei γ : [a, b] → C stuckweise glatt, sei g : A→ C
stetig differenzierbar, γ∗ ⊂ A, und f : g(γ∗) → C stetig. Dann gilt
∫
g◦γ
f dz =
∫
γ
(f ◦ g) · g′ dz
32

Beweis:
∫g◦γ
f dz =b∫a
(f ◦ g ◦ γ) · (g ◦ γ)′ dt =b∫a
(f ◦ g ◦ γ) · (g′ ◦ γ) · γ′ dt
=b∫a
(((f ◦ g) · g′) ◦ γ) · γ′ dt =∫γ
(f ◦ g) · g′ dz
�
Sei C(γ∗,C) der C-Vektorraum der stetigen Funktionen f : γ∗ → C. Durch‖ f ‖ wird auf C(γ∗,C) eine Norm definiert, die C(γ∗,C) zu einem normiertenVektorraum und damit zu einem metrischen Raum macht. Beachte: EineFolge (fn) in C(γ
∗,C) konvergiert in der Metrik genau dann gegen f , wenn(fn) gleichmaßig gegen f konvergiert. Daher ist C(γ∗,C) vollstandig.
5.14 Satz: C(γ∗,C)I→ C, f 7→
∫γ
f dz ist stetig.
Beweis: I ist nach 5.10.1 linear. Eine lineare Funktion I : V → W vonnormierten Vektorraumen ist genau dann stetig, wenn es ein C ∈ R gibt, sodass
‖ I(x) ‖ ≤ C· ‖ x ‖ ∀x ∈ V.
Nach 5.11 ist L(γ) ein solches C fur unser I. �
5.15 Satz: Sei γ : [a, b] → C stuckweise glatt. Sei (fn : γ∗ → C) ein Fol-
ge stetiger Funktionen, so dass (n∑j=0
fn)n≤0 gleichmaßig gegen f konvergiert.
Dann ist f : γ∗ → C stetig und
∫
γ
f dz =
∫
γ
∞∑
n=0
fn dz =∞∑
n=0
∫
γ
fn dz
Beweis: Wir wissen bereits, dass f stetig ist. Aus der Linearitat von∫γ
und
der Stetigkeit von∫γ
als Abbildung folgt der Satz. �
Wir wollen fur diesen Satz ein Anwendungsbeispiel geben.
5.16 Satz: Ist γ ein stuckweise glatter Weg in C und f : γ∗ → C stetig.Dann ist
g : C\γ∗ → C, z 7→ g(z) =
∫
γ
f(ζ)
ζ − zdζ
33

analytisch. Genauer haben wir: Ist a /∈ γ∗ und der Abstand d(a, γ∗) = r,dann gilt fur alle z ∈ Kr(a)
g(z) =∞∑
n=0
cn · (z − a)n mit cn =
∫
γ
f(ζ)
(ζ − a)n+1dζ
Beweis: Da γ∗ kompakt ist, ist r = d(a, γ∗) > 0. Fur z ∈ Kr(a), und ζ ∈ γ∗
z
s
ra
γ∗
gilt
1
ζ − z=
1
(ζ − a)− (z − a)=
1
ζ − a· 1
1− z−aζ−a
=1
ζ − a·
∞∑
n=0
(z − a
ζ − a
)n,
letzeres weil | z−aζ−a | < 1. Setzen wir
fn(ζ) =f(ζ)(z − a)n
(ζ − a)n+1
gilt |fn(ζ)| ≤‖ f ‖ |z−a|nrn+1 = ‖f‖
r·(
|z−a|r
)n. Da |z−a|
r< 1, konvergiert die Reihe∑
fn gleichmaßig bzgl. ζ. Wir erhalten
∫
γ
f(ζ)
ζ − zdζ =
∫
γ
∞∑
n=0
f(ζ)(z − a)n
(ζ − a)n+1dζ
5.15=
∞∑
n=0
(z − a)n∫
γ
f(ζ)
(ζ − a)n+1dζ
=∞∑
n=0
cn · (z − a)n
�
5.17 Definition und Satz: Sei γ : [a, b] → C eine stuckweise glatte Schleifeund z /∈ γ∗. Dann ist
Umγ(z) :=1
2πi
∫
γ
dζ
ζ − z
34

eine ganze Zahl, genannt Umlaufzahl der Schleife γ bzgl. z.
Beweis: Sei a = t0 < . . . < tn = b eine Unterteilung von [a, b], so dass γ aufjedem Teilstuck glatt ist. Wir setzen
m =
∫
γ
dζ
ζ − z=
∞∑
n=1
ti∫
ti−1
γ′(t)
γ(t)− zdt
Behauptung: em = 1 (daraus folgt der Satz, weil ez = 1 ⇐⇒ z = 2πinmit n ∈ Z).
Wir betrachten die Funktion
ϕ : [a, b] → C, t 7→ ϕ(ti−1) · expt∫
ti−1
γ′(s)
γ(s)− zds t ∈ [ti−1, ti]
wobei ϕ(t0) = 1. Wir mussen zeigen, dass ϕ(b) = em = 1.
Auf ]ti−1, ti[ gilt
·ϕ′(t) =γ′(t)
γ(t)− z· ϕ(t)
und damit(
ϕ
γ − z
)′(t) =
ϕ′(t) · (γ(t)− z)− ϕ(t) · γ′(t)(γ(t)− z)2
= 0
Also ist ϕ
γ−z auf jedem Teilintervall ]ti−1, ti[ konstant. Daϕ
γ−z auch stetig in
t ist, ist sie auf ganz [a, b] konstant, d.h.
ϕ(t)
γ(t)− z=
ϕ(a)
γ(a)− z=
1
γ(a)− z.
Da γ eine Schleife ist, also γ(a) = γ(b) ist, folgt
ϕ(b) =γ(b)− z
γ(a)− z= 1.
�
5.18 Satz: Umγ(z) : C\γ∗ → Z ist stetig.
Fur den Beweis benotigen wir
35

5.19 Satz: Sei γ : [a, b] → C stuckweise glatt, A ⊂ C und
f : A× γ∗ → C
stetig. Dann ist
g : A→ C z 7→∫
γ
f(z, ζ) dζ
stetig auf A.
Beweis: g(z) =b∫a
f(z, γ(t)) · γ′(t) dt. Wir durfen voraussetzen, dass γ global
glatt ist. Der Integrand ist auf A× [a, b] stetig. Daher folgt der Satz aus dementsprechenden Ergebnis der reellen Analysis. �
Beweis von 5.18: Die Funktion
f : (C\γ∗)× γ∗ → C, (z, ζ) 7→ 1
ζ − z
ist stetig. Damit ist auch Umγ : C\γ∗ → Z ⊂ C stetig. �
5.20 Beispiel: Fur γ : [0, 2π] → C mit γ(t) = a+ r · eit gilt
Umγ(z) =
{1 fur z ∈ Kr(a)0 fur z /∈ Kr(a)
a
γz
Beweis: Nach 5.18 ist Umγ auf Kr(a) und auf C\Kr(a) konstant. Da
Umγ(a) =1
2πi
∫
γ
dζ
ζ − a=
1
2πi
2π∫
0
1
γ(t)− aγ′(t) dt =
1
2πi
2π∫
0
rieit
reitdt = 1
folgt die erste Ausage.
Da fur |z − a| > 3r gilt
0 ≤ |Umγ(z)| ≤1
2π
∣∣∫
γ
1
ζ − zdζ∣∣ ≤ 1
2π· 1
2r· L(γ) = 1
2< 1,
a
a+ eit
z> 2r ist Umγ(z) = 0 und die zweite Aussagefolgt.
36

�
Wenden wir uns wieder dem Existenzproblem fur Stammfunktionen zu.
5.21 Definition: Sei G ⊂ C ein Gebiet. Eine stetige Funktion f : G → C
heißt wegunabhangig integrierbar, wenn fur je zwei stuckweise glatte Wege γ1und γ2 mit denselben Anfangs- und Endpunkten stets gilt
∫
γ1
f dz =
∫
γ2
f dz
Nach 5.6 kann f nur dann eine Stammfunktion besitzen, falls f wegun-abhangig integrierbar ist.
5.22 Eine stetige Funktion f : G → C auf dem Gebiet G ⊂ C ist genaudann wegunabhangig integrierbar, wenn fur jede stuckweise glatte Schleifeγ : [a, b] → G gilt ∫
γ
f dz = 0
Beweis: Sei f wegunabhangig integrierbar und γ1 : [a, b] → G eine stuck-weise glatte Schleife. Dann hat
γ2 : [a, b] → G, γ2(t) = γ1(a) ∀t ∈ [a, b]
denselben Anfangs- und Endpunkt wie γ1. Also
∫
γ1
f dz =
∫
γ2
f dz =
b∫
a
f(γ1(a)) · 0 dz = 0
Sind umgekehrt
γ1 : [a, b] → G, γ2 = [c, d] → G
zwei stuckweise glatte Wege mitz1 = γ1(a) = γ2(c),z2 = γ1(b) = γ2(d),dann ist γ1 − γ2 eine stuckweiseglatte Schleife, also (nach 5.10.3)
γ1
z2
z1
γ2
0 =
∫
γ1−γ2
f dz =
∫
γ1
f dz −∫
γ2
f dz
37

�
Mit Hilfe des Losungsansatzes von 5.6 wollen wir nun die Existenz vonStammfunktionen zeigen. Dazu benotigen wir noch
5.23 Je zwei Punkte eines Gebietes G ⊂ C lassen sich durch einen Polygon-zug und damit durch einen stuckweise glatten Weg miteinander verbinden.
Beweis: Sei z0 ∈ G und B = {z ∈ G; z kann mit z0 durch ein Polygonverbunden werden}. B 6= ∅, da z0 ∈ B. Weiter ist B offen.
z z0
z′Denn ist z ∈ B, dann existiertein Polygon von z0 nach z unddamit auch von z0 zu jedemz′ ∈ Kr(z) mit Kr(z) ⊂ G. Esfolgt Kr(z) ⊂ B.
B ist auch abgeschlossen in G. Denn
sei z ∈ G ein Haufungspunkt von B, und Kr(z) ⊂ G. Dann enthalt Kr(z)ein z′ ∈ B. Also laßt sich z mit z0 durch ein Polygon verbinden.
Da B 6= ∅, offen und abgeschlossen ist, folgt B = G, weil G zusammenhan-gend ist. �
Wir kommen nun zur Umkehrung des Satzes 5.6.
5.24 Satz: Eine stetige Funktion f : G → C auf einem Gebiet G besitztgenau dann eine Stammfunktion, wenn sie wegunabhangig integrierbar ist.
Beweis: Sei f wegunabhanging integrierbar (die andere Beweisrichtung ist5.6). Wahle z0 ∈ G fest und definiere
g(z) :=
∫
γ
f dz
wobei γ ein stuckweise glatter Weg von z0 nach z ist. g ist wohldefiniert, daf wegunabhangig integrierbar ist.
Es ist zu zeigen, dass g in jedem z1 ∈ G differenzierbar und g′(z1) = f(z1)ist. Zu gegebenem s > 0 suchen wir ein r > 0, so dass
∣∣g(z)− g(z1)
z − z1− f(z1)
∣∣ < s ∀z ∈ Kr(z1).
Wahle zunachst r > 0, so dass
Kr(z1) ⊂ Kr(z1) ⊂ G
38

und einen stuckweise glatten Weg
γ : [a, b] → G
von z0 nach z1. Die Strecke ν : [0, 1] → C von z1 nach z ∈ Kr(z1) ist gegebendurch ν(t) = t · z + (1− t) · z1
z1
z
z0
Kr(z1)
γ
Es folgt
|g(z)− g(z1)− f(z1)(z − z1)| =∣∣ ∫γ+ν
f dz −∫γ
f dz − f(z1)(z − z1)∣∣
=∣∣∫ν
f dz − f(z1)(z − z1)∣∣ =
∣∣∫ν
f dz −∫ν
f(z1) dz∣∣ =
∣∣∫ν
(f − f(z1))dz∣∣
≤5.11
M(r) · |z − z1|, wobei M(r) = max{|f(z)− f(z1)|; z ∈ Kr(z1)}Da f stetig ist, gibt es zu jedem s > 0 ein r > 0 mit |f(z) − f(z1)| < s∀z ∈ Kr(z1), also M(r) < s. Es folgt
∣∣g(z)− g(z1)
z − z1− f(z1)
∣∣ ≤M(r) < s ∀z ∈ Kr(z1)
�
Bemerkung: Ist G ein konvexes Gebiet, gibt es einen ausgezeichneten Wegvon z0 nach z ∈ G, namlich die Strecke [z0, z] : [0, 1] → G, t 7→ (1− t)z0+ tz1.Definieren wir
g(z) :=
∫
[z0,z]
f dz,
so ist g wohldefiniert. Um den Beweis 5.24 mit dieser Definition durch-zufuhren, benotigen wir nur, dass
g(z) =
∫
[z0,z]
f dz!=
∫
[z0,z1]
f dz +
∫
[z1,z]
f dz
oder ∫
[z0,z1]+[z1,z]+[z,z0]
f dz = 0
39
5.25 Bezeichnung: Mit [z0, z1, z2] bezeichnen wir die Schleife
[z0, z1] + [z1, z2] + [z2, z0].
Mit 5.6 erhalten wir
5.26 Satz: Eine stetige Funktion f : G → C auf einem konvexen Gebiet Gbesitzt genau dann eine Stammfunktion, wenn fur z0, z1, z2 ∈ G gilt
∫
[z0,z1,z2]
f dz = 0
�
Wir wollen nun untersuchen, wann die Bedingung des Satzes 5.26 erfulltist. Man beachte: Ist G konvex und sind z0, z1, z2 ∈ G, dann liegt auch dasDreieck △(z0, z1, z2) ganz in G.
5.27 Satz: Sei A ⊂ C offen, △(a, b, c) ⊂ A, p ∈ A und f : A → C stetigund auf A\{p} holomorph. Dann gilt
∫
[a,b,c]
f dz = 0
Beweis (nach E. Goursat (1858-1936))
1. Fall p /∈ △. Sei ε > 0 gegeben und L die Lange der Schleife [a, b, c]. UnterAusnutzung der Differenzierbarkeit von f in allen z ∈ △ wollen wirzeigen, dass
J :=
∫
[a,b,c]
f dz ≤ ε · L2.
Dazu zerlegen wir durch Halbieren der Kanten das Dreieck in 4 kleinereDreiecke mit Randlange 1
2L. Wahlen wir die Wegrichtung der Rander
40
△(3)
△(2)
△(1) △(4)
a
c
b
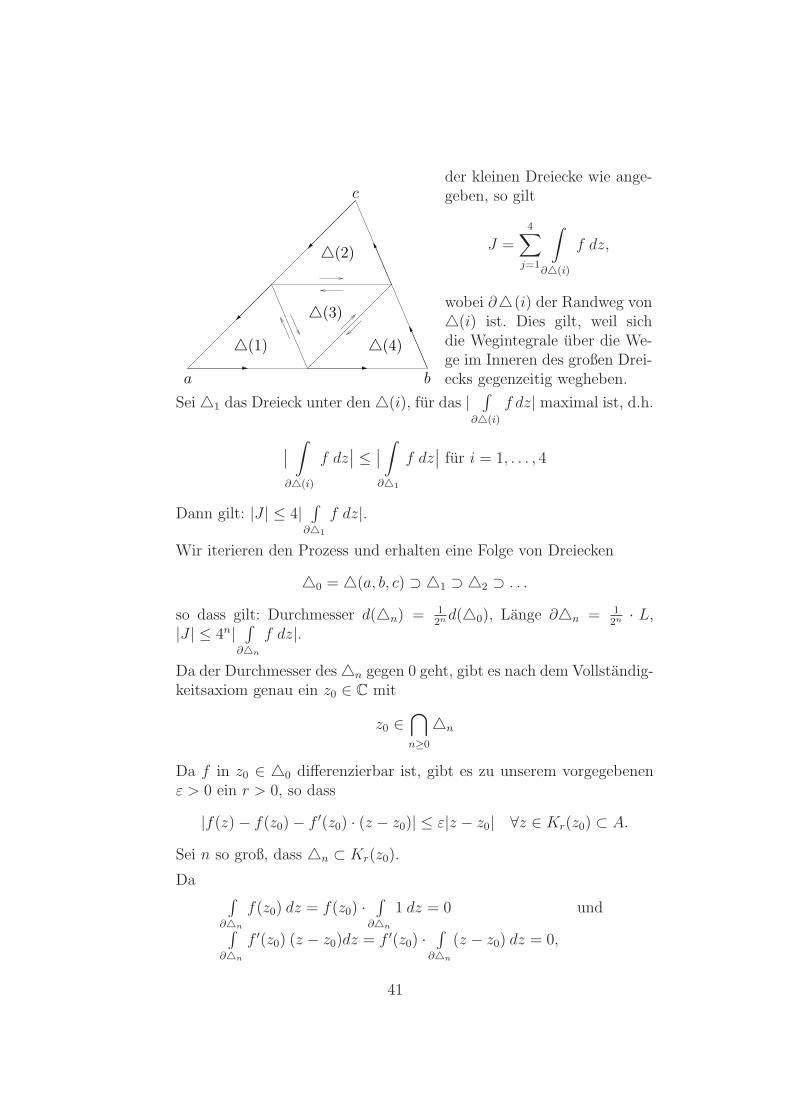
der kleinen Dreiecke wie ange-geben, so gilt
J =4∑
j=1
∫
∂△(i)
f dz,
wobei ∂△(i) der Randweg von△(i) ist. Dies gilt, weil sichdie Wegintegrale uber die We-ge im Inneren des großen Drei-ecks gegenzeitig wegheben.
Sei △1 das Dreieck unter den △(i), fur das |∫
∂△(i)
f dz| maximal ist, d.h.
∣∣∫
∂△(i)
f dz∣∣ ≤
∣∣∫
∂△1
f dz∣∣ fur i = 1, . . . , 4
Dann gilt: |J | ≤ 4|∫∂△1
f dz|.
Wir iterieren den Prozess und erhalten eine Folge von Dreiecken
△0 = △(a, b, c) ⊃ △1 ⊃ △2 ⊃ . . .
so dass gilt: Durchmesser d(△n) = 12nd(△0), Lange ∂△n = 1
2n· L,
|J | ≤ 4n|∫
∂△n
f dz|.
Da der Durchmesser des△n gegen 0 geht, gibt es nach dem Vollstandig-keitsaxiom genau ein z0 ∈ C mit
z0 ∈⋂
n≥0
△n
Da f in z0 ∈ △0 differenzierbar ist, gibt es zu unserem vorgegebenenε > 0 ein r > 0, so dass
|f(z)− f(z0)− f ′(z0) · (z − z0)| ≤ ε|z − z0| ∀z ∈ Kr(z0) ⊂ A.
Sei n so groß, dass △n ⊂ Kr(z0).
Da∫
∂△n
f(z0) dz = f(z0) ·∫
∂△n
1 dz = 0 und∫
∂△n
f ′(z0) (z − z0)dz = f ′(z0) ·∫
∂△n
(z − z0) dz = 0,
41

denn 1 und (z − z0) haben Stammfunktionen, folgt
∣∣ ∫∂△n
f dz∣∣ =
∣∣ ∫∂△n
(f − f(z0)− f ′(z0)(z − z0)) dz∣∣
≤5.11
ε · d(△n) · L(△n) ≤ ε · L(△n)2
Also |J | ≤ 4n∣∣ ∫∂△n
f dz∣∣ ≤ 4n · ε · ( 1
2nL)2 = ε · L2.
2. Fall p = a.
b
△(3)
p = a
△(1) △(2)
c
Wahle ε > 0. Unterteile △ derart, dass L∂ △ (1) < ε. Dann gilt
∫
∂△
f dz =
∫
∂△(1)
f dz +
∫
∂△(2)
f dz +
∫
∂△(3)
f dz
︸ ︷︷ ︸0 nach Fall 1
Es folgt
|∫∂△
f dz| = |∫
∂△(1)
f dz| ≤ max{|f(z)|; z ∈ △}︸ ︷︷ ︸M
·L(∂ △ (1)) ≤M · ε.
3. Fall p ∈ △: Mache p durch unterteilen zum Eckpunkt und wende Fall 2an:
p bzw. p
�
5.28 Cauchy’scher Integralsatz (A.L. Cauchy (1789-1857))
42

Sei G ⊂ C ein konvexes Gebiet, p ∈ G, f : G → C stetig und auf G\{p}differenzierbar. Dann besitzt f eine Stammfunktion, und es folgt
∫
γ
f dz = 0
fur jede stuckweise glatte Schleife γ in G.
Dies folgt aus 5.26 und 5.27.
Wir fragen uns nun, ob die Voraussetzungen abgeschwacht werden konnen.Auf die Holomorphiebedingung kann man nicht verzichten, wie wir spatersehen werden. Wir wollen die Bedingungen an das Gebiet G abschwachen.
5.29 Jeder Weg γ1 : [a, b] → C kann reparametrisiert werden zu einem Wegγ2 = γ1 ◦ ϕ : [0, 1] → [a, b] → C. Es folgt
∫γ2
f dz =∫γ1
f dz.
Beweis: Nehme ϕ(t) := (1− t)a+ tb. �
Es genugt also, Wege [0, 1] → C zu betrachten.
5.30 Definition: Zwei (stuckweise glatte) Wege γ0, γ1 : [0, 1] → A ⊂ C vonz0 nach z1 heißen homotop in A, wenn es eine stetige Abbildung
H : [0, 1]× [0, 1] → A ⊂ C
gibt, so dass
(1) H(t, 0) = γ0(t) ∀t ∈ [0, 1]
(2) H(t, 1) = γ1(t) ∀t ∈ [0, 1]
(3) H(0, t) = z0 ∀t ∈ [0, 1]
(4) H(1, t) = z1 ∀t ∈ [0, 1]
Ein Gebiet G ⊂ C heißt einfach zusammenhangend, wenn zwei Wege γ0, γ1 :[0, 1] → C mit γ0(0) = γ1(0), γ0(1) = γ1(1) immer in G homotop sind.
5.31 Satz: Sei G ein einfach zusammenhangendes Gebiet und P ⊂ G eineendliche Punktmenge. Dann hat jede stetige Funktion f : G → C, die aufG\P holomorph ist, eine Stammfunktion.
Der Beweis wird als etwas schwierigere Aufgabe dem Horer uberlassen. Manzeigt:
43

5.32 Aufgabe: Sei A ⊂ C offen, P ⊂ A endlich. f : A → C stetig undauf A\P holomorph. Dann gilt fur zwei stuckweise glatte homotope Wegeγ1, γ2 : [0, 1] → A von z0 nach z1 in A
∫
γ1
f dz =
∫
γ2
f dz
5.33 Bezeichnung: Zur Vereinfachung der Schreibweise fuhren wir folgendeBezeichnung ein: f ∈ H(A) bedeutet: A ⊂ C ist offen und f : A → C istholomorph.
44

Teil II
Lokale Eigenschaftenholomorpher Funktionen
Holomorphe Funktionen sind durch ihre Werte auf verhaltnismaßig kleinenTeilmengen ihres Definitionsbereichs eindeutig bestimmt. Ein erstes Ergebnisin dieser Richtung ist die Cauchy’sche Integralformel.
6 Cauchy’sche Integralformel
6.1 Definition: Sei A ⊂ C. Eine Schleife γ : [0, 1] → A heißt nullhomotopin A, wenn γ in A homotop zur konstanten Schleife
[0, 1] → A, t 7→ γ(0) ∀t ∈ [0, 1]
ist.
6.2 Cauchy’sche Integralformel: Sei f : G→ C eine holomorphe Funk-tion auf einem Gebiet G, und γ : [0, 1] → G eine stuckweise glatte, nullho-motope Schleife. Dann gilt
1
2πi
∫
γ
f(ζ)
ζ − zdζ = Umγ(z) · f(z) ∀z ∈ G\γ∗.
Beweis: Sei z ∈ G\γ∗ und sei g : G→ C definiert durch
g(ζ) :=
f(ζ)− f(z)
ζ − zζ 6= z
f ′(z) ζ = z
Dann ist g auf G stetig und auf G\{z} holomorph. Aus 5.3.1 folgt
0 =
∫
γ
g dζ =
∫
γ
f(ζ)
ζ − zdζ − f(z)
∫
γ
dζ
ζ − z
︸ ︷︷ ︸f(z)·2πi·Umγ(z)
da γ nullhomotop ist. �
Fur die folgenden Anwendungen des Satzes hatte es genugt, dass G ein kon-vexes Gebiet ist. Wir hatten dann 5.28 benutzen konnen, also nicht auf dieAufgabe 5.32 zururckgreifen mussen.
45

6.3 Korollar: Sind f1, f2 : G → C holomorphe Funktionen auf dem GebietG und Kr(z0) ⊂ G. Sei f1|Sr(z0) = f2|Sr(z0). Dann gilt
f1|Kr(z0) = f2|Kr(z0)
Beweis: Sei γ : [0, 1] → G, t 7→ z0 + r · e2πit. Dann ist γ nullhomotop undγ∗ = Sr(z0). Fur z ∈ Kr(z0) gilt nach 5.20 Umγ(z) = 1. Also
2πi · f1(z) =∫
γ
f1(ζ)
ζ − zd ζ =
∫
γ
f2(ζ)
ζ − zd ζ = 2πif2(z)
�
6.4 Satz: Sei A ⊂ C offen und f : A→ C holomorph. Dann ist f analytisch,insbesondere also beliebig oft differenzierbar. Genauer gilt: Ist a ∈ A undKr(a) ⊂ A, dann ist f um a in eine Potenzreihe entwickelbar, die auf ganzKr(a) absolut und lokal gleichmassig konvergiert. Es gilt
f(z) =∞∑
n=0
cn · (z − a)n mit cn =1
2πi
∫
Sr(a)
f(ζ)
(ζ − a)n+1dζ ∀z ∈ Kr(a).
Dies zeigt, dass die Holomorphiebedingung beim Stammfunktionenproblemnicht abgeschwacht werden kann.
Beweis: Sei a ∈ A und γ wie im Beweis von Korollar 6.3. Dann gilt wie eben
f(z) =1
2πi
∫
γ
f(ζ)
ζ − zdζ ∀z ∈ Kr(a)
Nach 5.16 ist aber
g : Kr(a) → C z 7→∫
γ
f(ζ)
ζ − zdζ
analytisch, und es gilt
g(z) =∞∑
n=0
dn · (z − a)n mit dn =
∫
γ
f(ζ)
(ζ − a)n+1dζ.
Fur z ∈ Ks(a) mit s < r gilt (vergl. Beweis von 5.16)
|dn · (z − a)n| = sn ·∣∣∣∣∫
γ
f(ζ)
(ζ − a)n+1dζ
∣∣∣∣ ≤ sn · ||f ||rn+1
· L(γ) = 2π · ||f || · sn
rn
nach 5.11. Da sr< 1 konvergiert g und damit f auf Ks(a) absolut und
gleichmassig nach dem Majorantenkriterium 3.6. �
46

6.5 Satz von Morera: (G. Morera 1856-1909) Sei A ⊂ C offen, f :A → C stetig, und fur alle Dreiecke △ ⊂ A gelte
∫∂△
f dz = 0. Dann ist f
holomorph.
Beweis: Sei z0 ∈ A, r > 0, so dass Kr(z0) ⊂ A. Nach 5.26 besitzt f |Kr(z0)eine Stammfunktion g. Nach 6.4 ist g|Kr(z0) analytisch, insbesondere alsoauch g′ = f |Kr(z0). Also ist f homomorph. �
Sei f : G → C eine holomorphe Funktion auf einem Gebiet G. Wir wissen,dass f beliebig oft differenzierbar ist und fragen nach einer Integralformelfur die Ableitungen.
6.6 Satz: Sei f : G → C eine holomorphe Funktion auf dem Gebiet G undγ : [0, 1] → G eine stuckweise glatte, nullhomotope Scheife in G. Dann gilt
Umγ(z) · f (n)(z) =n!
2πi
∫
γ
f(ζ)
(ζ − z)n+1dζ auf G\γ∗.
Beweis: Nach 6.2 gilt fur z ∈ G\γ∗
Umγ(z) · f(z) =1
2πi· g(z) mit g(z) =
∫
γ
f(ζ)
ζ − zdζ.
Sei nun z0 ∈ G\γ∗ und r > 0 derart, dass K2r(z0)∩γ∗ = ∅. Nach dem Beweisvon 5.16 gilt fur z ∈ Kr(z0):
g(z) =∞∑
n=0
cn(z − z0)n mit cn :=
∫
γ
f(ζ)
(ζ − z0)n+1dζ.
Nach 5.19 ist Umγ(z) = Umγ(z0) fur alle z ∈ Kr(z0). Also folgt durchDifferenzieren (Umγ(z) ist konstant!)
Umγ(z0) · f (n)(z0) =1
2πig(n)(z0) =
n!
2πi· cn =
n!
2πi
∫
γ
f(ζ)
(ζ − z0)n+1dζ.
�
Wir benutzten 6.6, um die hoheren Ableitungen abzuschatzen:
6.7 Cauchysche Ungleichung: Sei r > 0 und f eine auf einer UmgebungU von Kr(z0) holomorphe Funktion. SeiM = max{|f(z)|; |z−z0| = r}. Danngilt
|f (n)(z0)| ≤n! ·Mrn
47

Beweis: Sei γ : [0, 1] → U , t 7→ z0 + r · e2πit. Dann ist Umγ(z0) = 1 nach5.19, also nach 6.6
|f (n)(z0)| ≤n!
2π·∣∣∣∫
γ
f(ζ)
(ζ − z0)n+1dζ∣∣∣5.10
≤ n!
2π· M
rn+1· L(γ) = n! ·M
rn
�
Wir kommen nun zu Anwendungen
6.8 Definition: Eine auf der ganzen komplexen Ebene holomorphe Funkti-on f : C → C heißt ganze Funktion.
6.9 Satz: Eine ganze Funktion f ist um jeden Punkt z0 ∈ C in die Taylor-reihe entwickelbar, die fur alle z konvergiert.
Beweis: Sei γ : [0, 1] → C, γ(t) = z0 + r · e2πit. Dann ist Umγ(z) = 1 fur allez ∈ Kr(z0), und aus dem Beweis von 6.6 folgt fur diese z
f(z) =1
2πi
∞∑
n=0
cn · (z − z0)n mit cn = 2πi
f (n)(z0)
n!.
Da r > 0 beliebig gewahlt werden kann, folgt der Satz. �
6.10 Satz: Sei f ∈ H(C). Dann gilt: f ist genau dann ein Polynom vonGrad ≤ n, wenn es positive Zahlen R und M gibt, so dass
|f(z)| ≤M · |z|n fur |z| ≥ R.
Beweis: Angenommen, f ist ein Polynom vom Grad ≤ n,
f(z) =n∑
k=0
ak · zk
dann gilt
|f(z)| =∣∣∣∣n∑
k=0
ak · zk∣∣∣∣ ≤
n∑
k=0
|ak| · |zk| ≤(
n∑
k=0
|ak|)
· |z|n
falls |z| ≥ 1. Nehme R = 1 und M =
(n∑k=0
|ak|).
Umgekehrt betrachten wir die Taylorreihe von f um den Nullpunkt
f(z) =∞∑
k=0
f (k)(0)
k!zk.
48

Nach der Cauchyschen Ungleichung gilt fur r ≥ R
ak :=∣∣f
(k)(0)
k!
∣∣ ≤ M · rnrk
Geht r gegen Unendlich, folgt ak = 0 fur k > n. �
Fur n = 0 erhalten wir als Folgerung
6.11 Satz von J. Lionville (1809-1882): Eine ganze beschrankte Funk-tion ist konstant.
Als weitere Folgerung erhalten wir den
6.12 Fundamentalsatz der Algebra: Jedes nicht-konstante komplexePolynom besitzt eine Nullstelle. Folglich lasst sich jedes solche Polynom inLinearfaktoren zerlegen.
Beweis: Sei p(z) =n∑k=0
ak · zk mit an 6= 0, n ≥ 1. Angenommen p(z) 6= 0 fur
alle z ∈ C, dann ist1
p: C → C
eine ganze Funktion. Setzen wir A = |a0| + |a1| + . . . + |an−1|, dann gilt fur|z| ≥ 1
|p(z)| =
∣∣∣∣an · zn +n−1∑k=0
ak · zk∣∣∣∣ ≥ |an| · |z|n −
∣∣∣∣n−1∑k=0
ak · zk∣∣∣∣
≥ |an| · |z|n −n−1∑k=0
|ak| · |z|k ≥ |an| · |z|n −n−1∑k=0
|ak| · |z|n−1
≥ |an| · |z|n − A · |z|n−1
Es folgt
|p(z)| ≥ |p(z)||z|n−1
≥ |an| · |z| − A
Wahle ein R ≥ 1, so dass fur alle |z| ≥ R gilt |z| · |an| − A ≥ 1. Es folgt
∣∣∣∣1
p(z)
∣∣∣∣ ≤ 1 fur |z| ≥ R.
Da |1p| als stetige Funktion auf KR(0) beschrankt ist, ist die Funktion auf
ganz C beschrankt. Nach 6.10 ist 1pkonstant, also auch p konstant. �
49

Wir haben in 5.14 gesehen, dass das Wegintegral einer gleichmassig konver-genten Funktionenreihe die Reihe der Wegintegrale ist. Jetzt untersuchen wirden entsprechenden Sachverhalt fur die Differentiation.
6.13 Definition: Sei A ⊂ C offen und (fn : A → C)n≥0 eine Funktionen-folge. (fn) konvergiert gleichmassig auf kompakten Teilen, wenn die Folge(fn|K)n≥0 fur alle kompakte Teilmengen K ⊂ A auf K gleichmassig konver-giert.
6.14 Satz (K. Weierstraß 1815-1887): Sei A ⊂ C offen und (fn :A → C) eine Folge holomorpher Funktionen, die auf kompakten Teilengleichmassig gegen f konvergiert. Dann ist f holomorph, und die Folge(f ′n : A→ C) konvergiert auf kompakten Teilen gleichmassig gegen f ′.
Beweis: Sei z ∈ A. Dann existiert r > 0, so dass Kr(z) ⊂ A. Auf Kr(z)konvergiert (fn) gleichmassig gegen f . Also ist f | Kr(z) stetig und somitstetig in z. Sei △ ein Dreieck in A. Dann gilt wegen der Stetigkeit von
∫∂△
∫
∂△
f dz = limn→∞
∫
∂△
fn dz = 0
nach 5.6. Also ist f nach dem Satz von Morera 6.5 holomorph. Sei K ⊂ Akompakt. Da K kompakt und C\A abgeschlossen ist und C\A∩K = ∅, gibtes bekanntlich ein r > 0, so dass
|z − z1| ≥ r ∀ z ∈ K, ∀ z1 /∈ A.
Sei L = {z ∈ C; ∃ z1 ∈ K mit |z − z1| ≤ r2}. Dann ist L abgeschlossen und
beschrankt, also kompakt und L ⊂ A. Weiter gilt furalle z ∈ K
K r2(z) ⊂ L.
Nach 6.7 gilt fur z ∈ K
|f ′(z)−f ′j(z)| = |(f −fj)′(z)| ≤
2
r·maxw∈L
|(f −fj)(w)|.
A
K
Da L kompakt ist, existiert dieses Maximum. Da fj nach Voraussetzung aufL gleichmassig gegen f konvergiert, ist lim
j→∞maxw∈L
|(f − fj)(w)| = 0. Es folgt
limj→∞
f ′j = f auf K. �
6.15 Identitatssatz fur holomorphe Funktionen: SeiG ⊂ C ein Gebietund seien f, g : G → C holomorph. Hat N := {z ∈ G; f(z) = g(z)} in Geinen Haufungspunkt z0, so gilt f = g auf G.
50

Beweis: Nach 6.4 ist f − g analytisch auf G. Also folgt der Satz aus 3.15. �
7 Isolierte Singularitaten
Im Cauchy’schen Integralsatz hatten wir vorausgesetzt, dass f : G → C
stetig, aber nur auf G\{p} holomorph ist. In p konnte f daher singularesVerhalten aufweisen. Wir konnten dann aber zeigen, dass f auch in p holo-morph sein muss, falls G einfach zusammenhangend ist, dass sich p also vonden anderen Punkten nicht unterscheidet. Wir wollen nun Funktionen unter-suchen, die in einem Punkt des Gebietes tatsachlich Besonderheiten haben.
7.1 Definition: Sei A ⊂ C offen, p ∈ A und f : A\{p} → C holomorph.Wir sagen dann: f hat bei p eine isolierte Singularitat. Konnen wir f aufganz A holomorph fortsetzen, d.h. gibt es ein holomorphes g : A → C, sodass g|(A\{p}) = f , heißt die Singularitat hebbar.
7.2 Hebbarkeitssatz (B. Riemann, 1826-1866): Sei A offen, p ∈ Aund f : A\{p} → C holomorph. Dann ist die Singularitat bei p genau dannhebbar, wenn es ein r > 0 gibt, so dass Kr(p) ⊂ A und f | Kr(p)\{p}beschrankt ist.
Beweis: Ist die Singularitat hebbar, kann f zu einer holomorphen Funktionauf A erweitert werden. Sei r > 0 derart, dass Kr(p) ⊂ A. Dann ist fauf Kr(p) stetig und damit auch beschrankt, weil Kr(p) kompakt ist. Seiumgekehrt r > 0, so dass Kr(p) ⊂ A und
|f(z)| ≤M ∀z ∈ Kr(p), z 6= p.
Definiere
h : A→ C, z 7→{
(z − p)2 · f(z) z 6= p0 z = p
.
Dann ist h in allen z 6= p differenzierbar. Fur p gilt∣∣∣∣h(z)− h(p)
z − p
∣∣∣∣ = |z − p| · |f(z)| ≤M · |z − p| ∀z 6= p aus Kr(p).
und damit h′(p) = limz→p
h(z)−h(p)z−p = 0.
Also ist h holomorph und somit nach 6.4 analytisch, hat also um p einePotenzreihenentwicklung, d.h. es gibt ein s > 0, so dass
h(z) =∞∑
n=0
cn · (z − p)n ∀z ∈ A mit |z − p| < s.
51

Da h(p) = h′(p) = 0, sind c0 = 0 und c1 = 0, d.h.
h(z) = (z − p)2 ·∞∑
n=0
cn+2(z − p)n
︸ ︷︷ ︸=:g(z)
∀z ∈ Ks(p).
Fur z 6= p in Ks(p) folgt:
(z − p)2f(z) = h(z) = (z − p)2 · g(z) also f(z) = g(z)
g ist auf Ks(p) holomorph, hebt somit die Singularitat von f in p. �
7.3 Definition: Sei A ⊂ C offen, p ∈ A, f : A\{p} → C holomorph. f hatin p einen Pol der Ordnung m, wenn es c1, . . . , cm ∈ C gibt, so dass cm 6= 0und
f −Q mit Q(z) =m∑
i=1
ci(z − p)i
in p eine hebbare Singularitat besitzt. Q heißt Hauptteil von f in p.
Der folgende Satz zeigt, dass Singularitaten, die weder hebbar noch Pole sind,sich wirklich verruckt verhalten.
7.4 Satz: Sei A ⊂ C offen, p ∈ A, f : A\{p} → C holomorph. Dann gilt
entweder (1) f hat in p eine hebbare Singularitatoder (2) f hat in p einen Pol der Ordnung m ≥ 1oder (3) Zu jedem w ∈ C gibt es eine Folge (zn) in A\{p}, so
dass limn→∞
zn = p und limn→∞
f(zn) = w.
7.5 Definition: Eine Singularitat von f vom Typ 7.4.3 heißt wesentlicheSingularitat.
Hat f in p eine wesentliche Singularitat, so ist jedes w ∈ C Grenzwert einerFolge im Bild von f |(Kr(p)\{p}), wobei Kr(p) eine beliebige kleine Kreis-scheibe um p ist. Es folgt
7.6 f hat in p genau dann eine wesentliche Singularitat, wenn fur jedeUmgebung U von p in A gilt: f(U\{p}) ist dicht in C.
Beweis 7.4: Angenommen f hat in p keine wesentliche Singularitat. Nach7.6 existiert ein r > 0, so dass f(Kr(p)\{p}) nicht dicht in C ist, d.h. es gibtein w ∈ C und ein s > 0, so dass
Ks(w) ∩ f(Kr(p)\{p}) = ∅
52

d.h. |f(z)− w| ≥ s ∀z mit 0 < |z − p| < r.
Definiere
g : Kr(p)\{p} → C, z 7→ 1
f(z)− w.
Da |g(z)| ≤ 1sauf Kr(p)\{p}, hat g in p eine hebbare Singularitat 7.2, lasst
sich also zu einer holomorphen Funktion
g : Kr(p) → C
erweitern.
1. Fall: g(p) 6= 0. Dann it g(z) 6= 0 in Kr(p) und somit hat
f(z) = w +1
g(z)
in p eine hebbare Singularitat.
2. Fall: g(p) = 0. Da g nach 6.4 analytisch ist, gilt in einer Umgebung von p
g(z) =∞∑
n=0
cn(z − p)n = (z − p)m ·∞∑
n=0
cm+n(z − p)n
︸ ︷︷ ︸=:g1(z)
falls c0 = c1 = . . . = cm−1 = 0 und cm 6= 0. Beachte c0 = 0, da g(p) = 0 undg1(p) 6= 0. Da g1 holomorph ist, ist 1
g1in einer Umgebung von p holomorph,
besitzt also um p eine Potenzreihenentwicklung
1
g1(z) =
∞∑
n=0
bn(z − p)n b0 6= 0
Es folgt fur z 6= p
f(z) = w +1
g(z)= w +
1
(z − p)m·
∞∑
n=0
bn(z − p)n
= w +m∑
i=1
bm−i(z − p)i
+∞∑
n=0
bm+n(z − p)n
Damit hat f −m∑i=1
bm−i
(z−p)i in p eine hebbare Singulariat, f also in p einen Pol
der Ordnung m ≥ 1. �
7.7 Beispiel: (1) sin zz
hat in z = 0 eine hebbare Singularitat.
53

(2) f : C\{0, i} → C, z 7→ 1z(z−i)2 hat in 0 einen Pol der Ordnung 1 und in
i einen Pol der Ordnung 2.
(3) e1z : C\{0} → C hat in 0 eine wesentliche Singularitat.
Beweis: (1) sin zz
= 1z
( ∞∑n=0
(−1)n z2n+1
(2n+1)!
)=
∞∑n=0
(−1)n z2n
(2n+1)!=: g(z)
g(z) ist auf ganz C holomorph.
(2) Ansatz: 1z·(z−i)2 = a
z+ b
(z−i) +c
(z−i)2
Dann gilt:
1 = a(z − i)2 + bz(z − i) + c · z = az2 − 2aiz − a+ bz2 − biz + cz= (a+ b)z2 + (c− 2ai− bi)z − a
Es folgt a = −1, b = 1, c = −i.Also f(z) = −1
z+ 1
z−i − i(z−i)2
Somit hat
f + 1z= 1
z−i − i(z−i)2 in 0 eine hebbare Singularitat, und −1
zist der Hauptteil
von f in 0.
f −(
1z−i − i
(z−i)2
)= 1
zhat in i eine hebbare Singularitat, und 1
z−i − i(z−i)2 ist
der Hauptteil von f in i.
Den Beweis von (3) stellen wir zuruck. �
7.8 Definition: f ∈ H(A\{p}) habe in p einen Pol mit Hauptteilm∑i=1
ci(z−p)i .
Dann heißt c1, das Residuum von f in p, bezeichnet c1 = Res(f, p).
7.9 Residuensatz: Sei A ein einfach zusammenhangendes Gebiet,
p1, . . . , pk ∈ A seien verschiedene Punkte. f ∈ H(A\{p1 . . . , pk}) habe Polein den pi. Dann gilt fur jede stuckweise glatte Schleife γ in A\{p1 . . . , pk}.
1
2πi
∫
γ
f dz =k∑
j=1
Res(f, pj) · Umγ(pj)
Beweis: Sei Qj =nj∑l=1
cjl(z−pj)l der Hauptteil von f in pj.
54

Dann kann f −k∑j=1
Qj zu einer holomorphen Funktion auf A erganzt werden.
Nach dem Cauchy’schen Integralsatz 5.31 gilt.
∫
γ
(f −
k∑
j=1
Qj
)dz = 0.
Also1
2πi
∫
γ
f dz = 12πi
k∑
j=1
∫
γ
Qj dzs.u.=
1
2πi
k∑
j=1
·cj1∫
γ
dz
(z − pj)
=k∑
j=1
(Res(f, pj) · Umγ(pj))
Denn z 7→ 1(z−p)n , n > 1, hat − 1
(n−1)(z−p)n−1 als Stammfunktion, d.h.
7.10 Ist γ eine stuckweise glatte Schleife in C und n ≥ 2, so gilt
∫
γ
dζ
(ζ − z)n= 0 ∀z ∈ C\γ∗.
�
8 Die lokale Abbildung
Mit Hilfe der Ergebnisse der Paragraphen 6 und 7 wollen wir das lokaleVerhalten holomorpher Funktionen untersuchen.
8.1 Definition: f ∈ H(A) hat in p ∈ A eine Nullstelle m-ter Ordnung,wenn es ein f1 ∈ H(A) gibt, so dass f1(p) 6= 0 und f(z) = (z − p)m · f1(z).Eine m-fache Nullstelle von f − w, w ∈ C, heißt m-fache w-Stelle.
8.2 Satz: f ∈ H(A) habe in p ∈ A eine Nullstelle der Ordnung m ≥ 0.Dann hat f ′
fin p einen Pol der Ordnung 1 mit Res(f
′
f, p) = m.
Beweis: f = (z − p)m · g mit g ∈ H(A), g(p) 6= 0. Es folgt
f ′ = m(z − p)m−1 · g + (z − p)m · g′.
Also f ′
f= m
z−p +g′
gund g′
gist holomorph in p. �
55

8.3 Definition: Sei G ⊂ C ein Gebiet, f ∈ H(G), K ⊂ G. Sei {z ∈K; f(z) = 0} = {p1, . . . , pn} eine endliche Menge. Wir nennen
n∑
i=1
(Ordnung der Nullstelle pi)
die Anzahl der Nullstellen von f in K.
Nullstellen werden also einschließlich ihrer Ordnungen gezahlt.
8.4 Satz: Sei G ein Gebiet und f ∈ H(G) nicht konstant. Sei p ∈ G, w0 =f(p), und f habe in p eine w0-Stelle der Ordnung m ≥ 1. Dann gibt es eins > 0 und V ⊂ G, so dass gilt:
(1) V ist offen und p ∈ V
(2) f(V ) = Ks(w0)
(3) Zu jedem w ∈ Ks(w0) gibt es genau m verschiedene w-Stellen in V .
8.5 Beispiel: f : C → C, z 7→ zm, m ≥ 1, p = 0, w0 = 0. Nehme V = C
und s = ∞, d.h. Ks(w0) = C. Dann ist 0 eine Nullstelle der Ordnung m, und
fur w = r · e2πiϕ 6= 0 gilt f(zk) = w fur zk = m√r · e2πiϕ+k
m , k = 1, . . . ,m.
Beweis 8.4: Da f nicht konstant ist, ist f−1 nicht die Nullfunktion. Nach6.15 sind die Nullstellen von f −w0 und f
′ isoliert. Es gibt also ein r > 0, sodass K2r(p) außer p keine Nullstelle von f − w0 und von f ′ enthalt.
w0
G
f
f ◦ γ = Γ
p2r
γ
Sei γ : [0, 1] → G, t 7→ p + r · e2πit. Sei Γ = f ◦ γ. Da Γ∗ kompakt undw0 /∈ Γ∗ ist, gibt es ein s > 0 mit d(w0,Γ
∗) = s, d.h. Ks(w0) ⊂ C\Γ∗. Dannist V = f−1(Ks(w0)) ∩Kr(p) offen. Sei nun w 6= w0, w ∈ Ks(w0).
Behauptung: Die Anzahl A der Nullstellen von f − w in V ist m.
Beweis: Da w /∈ f(Kr(p) − V ), ist A auch die Anzahl der Nullstellen von
f − w in Kr(p). Es gilt A = 12πi
∫γ
f ′(z)f(z)−w dz, denn hat f − w in v ∈ Kr(p)
56

eine Nullstelle der Ordnung k ≥ 1, so hat f ′
f−w in v eine Pol der Ordnung
1 mit Res( f ′
f−w , v) = k. Da Umγv = 1 fur alle v ∈ Kr(p), folgt aus demResiduensatz 7.8 die Gleichung.
Mit der Substitutionsregel 5.12 folgt (setze g = f und f(z) = z)
A =1
2πi
∫
γ
dζ
ζ − w= Umγ(w) = Umγ(w0)
letzteres weil Umγ stetig ist. Nun ist nach derselben Rechnung
Umγ(w0) = (Anzahl der Nullstellen von f − w0 in Kr(p)) = m,
da f − w0 in p eine Nullstelle der Ordnung m hat und somit keine weitereNullstelle in K2r(p).
Da m ≥ 1, liegt w im Bild von f , also folgt insbesondere f(V ) = Ks(w0).
Der Satz folgt nun, weil jede Nullstelle von f − w, w ∈ Ks(w0)\{w0}, dieOrdnung 1 hat. Denn (f − w)′ = f ′ 6= 0 auf V \{p} ⊂ Kr(p). Da f − w =(z − p)k · f1 mit f1(p) 6= 0, und f ′ = k(z − p)k−1f1 + (z − p)kf ′
1. muss k = 1sein. �
Eine m-fache Nullstelle entsteht also genau dadurch, dass m verschiedeneeinfache w-Stellen zusammenwandern. Es kann also nicht vorkommen, dasszwei doppelte w-Stellen zu einer vierfachen zusammenwandern. Im Reellenist dieser Satz falsch, wie das Beispiel f = x4 zeigt.
8.6 Gebietstreue: Sei G ein Gebiet und f ∈ H(G) nicht konstant. Dannist f(G) ebenfalls ein Gebiet.
Beweis: f(G) ist zusammenhangend, weil G zusammenhangend und f stetigist. Sei jetzt w0 ∈ f(G) und p ∈ G mit f(p) = w0. Nach 8.4 gibt es eins > 0 und eine offene Umgebung V von p mit f(V ) = Ks(w0). Also istKs(w0) ⊂ f(G) und somit f(G) offen. �
8.7 Folgerung: Sei G ein Gebiet und f ∈ H(G). Ist eine der folgendenBedingungen erfullt, sind f konstant:
(1) Re f konstant
(2) Im f konstant
(3) |f | konstant
57

Beweis: Ist eine dieser Bedingungen erfullt, so ist f(G) nicht offen. �
Wir beweisen noch weitere interessante Folgerungen.
8.8 Satz: Sei f ∈ H(A).
(1) Es gibt genau dann eine offene Umgebung V von p ∈ A, die durch fbijektiv auf eine offene Umgebung W von f(p) abgebildet wird, wennf ′(p) 6= 0.
(2) Ist f : A → C injektiv, und B = f(A), dann ist B offen und f−1 ∈H(B).
Beweis: (1) Sei f(p) = w0 und f ′(p) 6= 0. Dann ist p eine einfache w0-Stellevon f , wie wir am Ende des Beweises 8.4 gesehen haben. Nach 8.4 gibt eseine offene Umgebung V von p, so dass W = f(V ) offen ist und jedes w ∈ Wnur einfache w-Stelle von f |V ist.
Gibt es umgekehrt offene Umgebungen V von p und W von w0 = f(p), sodass f : V → W bijektiv ist, so ist f ′(p) 6= 0, denn andernfalls wurde ausder Potenzreihenentwicklung von f um p folgen, dass f in p eine mehrfachew0-Stelle hat:
f(z) = w0 + f ′(p) · (z − p) + (z − p)2∞∑
n=2
f (n)(p)
n!(z − p)n−2
Also kann f nach 8.4 nicht bijektiv sein.
(2) f ist nicht konstant. A ist die Vereinigung von Gebieten. Also ist nach8.6 auch B ⊂ f(A) Vereinigung von Gebieten und damit offen.
g = f−1 : B → A ist stetig: Denn ist g(b) = a und Kr(a) ⊂ A, so istg−1(Kr(a)) = f(Kr(a)) nach 8.6 offen. Nach (1) ist f ′(a) 6= 0 ∀a ∈ A. Alsoist g ∈ H(B) nach 2.17. �
8.9 Maximum-Prinzip: Sei G ein Gebiet und f ∈ H(G). Besitzt |f | inp ∈ G ein lokales Maximum, so ist f konstant. Ist G beschrankt, f : G→ C
stetig und auf G holomorph, dann nimmt |f | auf ∂G := G\G das Maximuman, d.h. es gibt ein z0 ∈ ∂G, so dass
|f(z)| ≤ |f(z0)| ∀z ∈ G.
Beweis: |f | habe bei p ∈ G ein lokales Maximum. Dann existiert r > 0, sodass Kr(p) ⊂ G und
f(Kr(p)) ⊂ {w ∈ C; |w| ≤ |f(p)|}.
58

Also ist f(Kr(p)) keine Umgebung von f(p). Ist f nicht konstant, ware dasein Widerspruch zu 8.6.
Der zweite Teil folgt aus dem ersten. �
8.10 Minimum-Prinzip: Sei G ein Gebiet und f ∈ H(G).
(1) Hat |f | in p ∈ G ein lokales Minimum, so ist f(p) = 0 oder f konstant.
(2) Ist G beschrankt, f : G → C stetig und auf G holomorph, dann hat fin G Nullstellen oder |f | nimmt das Minimum auf ∂G an, d.h. ∃z0 ∈ ∂Gmit
|f(z)| ≥ |f(z0)| ∀z ∈ G.
Beweis: (1) Hat |f | in p ein lokales Minimum und ist f(p) 6= 0, so gibt esein r > 0 mit
f(z) 6= 0 ∀z ∈ Kr(p).
Also ist 1fauf Kr(p) definiert und | 1
f| hat in p ein lokales Maximum. Nach
8.9 ist 1fund damit f auf Kr(p) konstant. Nach dem Identitatssatz 6.15 ist
f auf ganz G konstant. Der zweite Teil folgt wieder aus dem ersten. �
8.11 Lemma (H. Schwarz, 1843-1921): Sei f ∈ H(K1(0)), f(0) = 0und |f | ≤ 1. Dann gilt
|f(z)| ≤ |z| ∀z ∈ K1(0) und |f ′(0)| ≤ 1.
Falls |f ′(0)| = 1 oder |f(z0)| = |z0| fur ein z0 6= 0, dann gibt es ein λ ∈ C, sodass
f(z) = λ · z ∀z ∈ K1(0) und |λ| = 1.
Beweis: Definiere g : K1(0) → C, g(z) =
{f(z)z
z 6= 0f ′(0) z = 0
Dann ist g stetig und auf K1(0)\{0} holomorph. Nach 5.28 besitzt g eineStammfunktion und ist somit holomorph 6.4. Fur 0 < r < 1 und z ∈ Sr(0)gilt
|g(z)| =∣∣∣∣f(z)
z
∣∣∣∣ ≤1
r.
Nach dem Maximumprinzip ist
|g(z)| ≤ 1
r∀z ∈ Kr(0), 0 < r < 1.
Es folgt|g(z)| ≤ 1 ∀z ∈ K1(0).
59

Also|f(z)| ≤ |z| ∀z ∈ K1(0) und |f ′(0)| ≤ 1.
Ist nun |f(z0)| = |z0| fur ein z0 6= 0 oder |f ′(0)| = 1, so nimmt |g(z)| in einemPunkt von K1(0) sein Maximum an. Folglich ist |g| nach dem Maximumprin-zip konstant 1, |g(z)| = 1. Nach 8.7 ist g konstant, g = λ mit |λ| = 1. Esfolgt
f(z) = λz ∀z 6= 0,
und fur 0 gilt die Gleichung offensichtlich. �
9 Anwendungen auf reelle Integrale
Wir wollen mit Hilfe des Residuensatzes reelle Intergrale berechnen. Die Ideeist, das reelle Integrationsintervall zu einer Schleife in der komplexen Ebenezu erganzen und das Integral mit Hilfe des Residuensatzes auszuwerten. Mankann damit oft Integrale berechnen, fur deren Integrand keine Stammfunkti-on explizit angegeben werden kann. Voraussetzung dabei ist naturlich, dassder Integrand von einer holomorphen komplexen Funktion kommt. Insbeson-dere muss er also reell-analytisch sein.
9.1 Bespielklasse: Sei f : R → R eine rationale Funktion, d.h.
f(x) =p(x)
q(x)
mit Polynomen p und q, so dass q(x) 6= 0 ∀x ∈ R. Sei grad q ≥ grad p + 2.Dann gilt
∞∫
−∞
f dx = 2πik∑
j=1
Res(f, qj)
wobei q1, . . . , qk die Nullstellen von q(z) in C sind, fur die Im qi > 0.
Beweis: Wegen der Gradbedingungen existiert das unbestimmte Integral.Fur hinreichend große r liegen die Nullstellen von q mit positiven Imaginarteil“innerhalb” von γ = [−r, r] + γr.
−r r
γr
60

Wir werden gleich zeigen, dass Umγ(z) = 1 fur alle Punkte z “innerhalb”von γ. Es folgt nun aus dem Residuensatz:
∞∫
−∞
f dx = limr→∞
r∫
−r
f dx mit
r∫
−r
f dx+
∫
γr
f(z) dz =
∫
γ
f(z) dz) = 2πik∑
j=1
Res(f, qj)
Sei grad p = n und grad q = m. Dann gibt es ein c > 0, so dass fur große |z|gilt
|f(z)| ≤ c · 1
|z|m−n ≤ c
|z|2 .
Es folgt |∫γr
f dz| ≤ cr2
· πr = c·πr
fur genugend großes r. Mit r → ∞ folgt
∞∫
−∞
f dx = 2πik∑
j=1
Res(f, qj)
Es bleibt noch zu zeigen:
9.2 Sei γ = [−r, r] + γr mit γr : [0, 1] → C, t 7→ r · eπit. Dann gilt fur jedesz “innerhalb” von γ: Umγ(z) = 1.
Sei γ : [a, b] → C eine beliebige stuckweise glatte Schleife. Dann ist γ∗ kom-pakt, also insbesondere beschrankt. Folglich hat C\γ∗ eine unbeschrankteKomponente.
9.3 Ist z ∈ C\γ∗ aus der unbeschrankten Komponente, so gilt Umγ(z) = 0.
Beweis: Sei z1 aus der unbeschrankten Komponente so gewahlt, dass r =min{|z1 − ζ|; ζ ∈ γ∗} > L(γ)
2π. Dann gilt
|Umγ(z)| = |Umγ(z1)| =1
2π
∣∣∣∣∣∣
∫
γ
dζ
ζ − z1
∣∣∣∣∣∣≤ 1
2π· 1r· L(γ) < 1
Es folgt Umγ(z) = 0. �
Beweis 9.2: Sei z innerhalb von γ. Dann gibt es ein s > 0, so dass Ks(z)innerhalb von γ liegt. Zerlege γ wie angedeutet.
61

Sei δ = γ1 + γ2 + γ3 − γ4 + γ6 und ρ = −γ6 − γ5 − γ3 + γ8 + γ7. Dann gilt
−r rγ7 γ1
zγ5
γr
γ8
γ4
γ3
γ6
γ2
∫
γ
=
∫
γ1+γ2
+
∫
γ8+γ7
=
∫
δ
−
∫
γ3
−∫
γ4
+
∫
γ6
+
∫
ρ
−
−
∫
γ6
−∫
γ5
−∫
γ3
=∫ρ
+∫δ
+∫
γ4+γ5
. Also Umγ(z) = Umδ(z) + Umρ(z) + Umγ4+γ5(z).
Nach 9.3 ist Umδ(z) = Umρ(z) = 0 und nach 5.19 ist Umγ4+γ5(z) = 1. �
9.4 Beispiel:∞∫
−∞
11+x2
dx = π
Die Nullstellen von x2 + 1 sind ±i. Nach 9.1 ist Res(
11+z2
, i)zu berechnen.
Es gilt1
1 + z2=
1
2i(z − i)− 1
2i(z + i).
Der Hauptteil bei i ist also 12i· 1(z−i) . Also Res
(1
1+z2, i)= 1
2i. �
9.5 Beispielklasse: Sei H = {z ∈ C; Im z > 0} und −H = {z ∈ C; Im z <0}. Seien V,W ⊂ C offen, so dass H ⊂ V und −H = {z; Im z ≤ 0} ⊂ W .Seien P ⊂ H und Q ⊂ −H endliche Punktmengen. Beachte P ∩R = Q∩R =∅. Seien f : V \P → C und g : W\Q → C holomorph, so dass lim
|z|→∞|f(z)| =
lim|z|→∞
|g(z)| = 0. f habe in P und g in Q Pole. Dann gilt
∞∫−∞
f(x)eix dx = 2πi∑p∈P
Res(f(z) · eiz, p)∞∫
−∞g(x)e−ix dx = −2πi
∑q∈Q
Res(f(z) · e−iz, q)
Beweis: Wahle r > 0, s > 0 so groß, dass P im angegebenen Rechteck liegt.Sei γ = γ1+γ2+γ3+γ4. Wie im Beweis von 9.2 zeigt man, dass Umγ(p) = 1
62

fur alle p ∈ P . Dann folgt aus dem Residuensatz
−r r
γ2γ1
γ4
γ3is
r∫
−r
f(x) · eix dx− 2πi∑
p∈PRes(f(z) · eiz, p) = −
∫
γ1+γ2+γ3
f(x)eiz dz
Nach Vorausetzung gibt es zu jedem C ein R, so dass
|f(z) < C| ∀|z| ≥ R.
Wahlen wir r, s > R, so folgt
|f(z) · eiz| = |f(z)| · |eiz| = |f(z)| · e− Im z < C · e− Im z.
Da Im z = s, weil z ∈ γ∗2 ist, folgt nach 5.11∣∣∣∣∣∣
∫
γ2
f(z) · eizdz
∣∣∣∣∣∣≤ C · e−s · 2r.
Weiter gilt ∣∣∣∣∣∫γ1
f(z) · eizdz∣∣∣∣∣
(1)=
∣∣∣∣1∫0
|f(r + tis)| · eir−ts · is dt∣∣∣∣
(2)
≤1∫0
|f(r + tis) · eir−ts · is| dt
=1∫0
|f(r + tis)| · s · e−tsdt
≤ C · s ·1∫0
e−tsdt = C · (1− 1es) < C
(1) gilt, weil γ1 : [0, 1] → C durch γ1(t) = i · s · t gegeben ist, also γ′1(t) = i · s;Ungleichung (2) ist eine Ubung.
Genauso gilt
∣∣∣∣∣∫γ3
f(z) · eizdz∣∣∣∣∣ < C. Es folgt
J :=
∣∣∣∣∣r∫
−rf(x) · eixdx− 2πi
∑p∈P
Res(f(z) · eiz, p)∣∣∣∣∣
≤ 2C · res+ C + C = 2C(1 + r
es).
63

Sei nun ε > 0 gegeben. Wahle zu C = ε4ein R. Wahle nun r, s > R so groß,
dass P innerhalb von γ liegt. Mache dabei s so groß, dass res< 1. Dann ist
J ≤ ε.
Analog beweist man den zweiten Teil. �
9.6 Folgerung: Seien P, V und f wie in 9.5. Zusatzlich sei f(x) ∈ R fur allex ∈ R. Dann gilt
∞∫−∞
f(x) · cos x dx = −2π Im
(∑p∈P
Res(f(x) · eiz, p))
∞∫−∞
f(x) · sin dx = −2πRe
(∑p∈P
Res(f(x) · eiz, p))
Beweis: −2π Im
(∑p∈P
Res(f(z) · eiz, p))
9.5= Re
∞∫−∞
f(x)eix dx
def.=
∞∫−∞
Re(f(x) · eix) dx Vor=
∞∫−∞
f(x) cos x dx.
Den zweiten Teil zeigt man genauso. �
9.7 Beispiel:∞∫
−∞
cos x dx
a2 + x2=π
a· e−a fur a > 0.
Beweis: z 7→ 1
a2 + z2erfullt die Anforderungen von 9.6 mit P = {ia} :
1
a2 + z2=
1
2ai(z − ia)− 1
2ai(z + ia)
eiz
a2 + z2=
1
2ai(z − ia)·
∞∑
n=0
(exp iz)(n)(ia)
n!(z − ia)n − eiz
2ai(z + ia)
(hierbei ist (exp iz)(n)(ia) der Wert der Funktion (exp iz)(n) an der Stelle ia).
Es folgt: Res
(eiz
a2 + z2, ia
)=e−a
2ia.
Nach 9.6 ist das Integral also −2π · Im e−a
2ia= −2π Im
(−e
−a
2a· i)
=π · e−aa
.
�
9.8 Beispielklasse: Sei R eine komplexe Funktion in zwei Veranderlichen,so dass
F : V \P → C, z 7→ R
(1
2(z +
1
2),
1
2i(z − 1
z)
)
64

holomorph ist, wobei V eine offene Umgebung von K1(0) und P ⊂ K1(0)eine endliche Menge von Polen von F ist.
Eine rationale Funtkion R, die auf S1(0) keine Pole hat, erfullt diese Bedin-gung.
Dann gilt2π∫
0
R(cos t, sin t) dt = 2π∑
p∈PRes
(1
zF (z), p
)
Beweis:
J =
2π∫
0
R(cos t, sin t) dt =
2π∫
0
R
(1
2(eit + e−it),
1
2i(eit − e−it)
)dt
=
∫
S1(0)
R
(1
2
(z +
1
z
),1
2i
(z − 1
z
))1
izdz
denn S1(0) = γ mit γ : [0, 2π] → C, t 7→ eit, und γ′ = i · eit. Es folgt nachdem Residuensatz
J = 2π∑
p∈PRes
(1
z· F (z), p
).
�
9.9 Beispiel:
2π∫
0
dt
a+ cos t=
2π√a2 − 1
fur a > 1.
Beweis: R(x, y) =1
a+ x,
1
z· F (z) = 1
a+1
2(z +
1
2)· 1z=
2
z2 + 2az + 1
z2 + 2az + 1 = (z − z1) · (z − z0) mit z1 = −a +√a2 − 1 ∈ K1(0) und
z2 = −a−√a2 − 1 /∈ K1(0).
Fur z2 ist das klar. Fur z1 gilt
0 < |z1| = a−√a2 − 1 = a−
√(a+ 1)(a− 1) < a−
√(a− 1)2 = 1
2
z2 + 2az + 1=
2
(z − z1)(z − z2)=
1√a2 − 1
· 1
z − z1− 1√
a2 − 1· 1
z − z2.
Also Res(1zF (z), z1) =
1√a2−1
und das Resultat folgt aus 9.8.
�
Es gibt noch weitere Beispielklassen, darunter auch solche, die Pole auf Rerlauben. Aus Zeitgrunden wollen wir nicht darauf eingehen.
65

10 Der Logarithmus
Fur die Definition des Logarithmus beweisen wir zunachst einen allgemeinenSatz fur einfach zusammenhangende Gebiete.
10.1 Satz: Fur ein einfach zusammenhangendes Gebiet gilt:
(1) Ist f ∈ H(G) und γ eine stuckweise glatte Schleife in G, dann gilt∫
γ
f dz = 0.
(2) Zu f ∈ H(G) gibt es ein g ∈ H(G) mit g′ = f .
(3) Sei f ∈ H(G), f(z) 6= 0 fur alle z ∈ G. Dann existiert ein g ∈ H(G)mit
f(z) = eg(z) ∀z ∈ G.
(4) Sei f ∈ H(G), f(z) 6= 0 fur alle z ∈ G. Sei n ≥ 1 aus N. Dann gibt esein g ∈ H(G) mit gn(z) = f(z) fur alle z ∈ G.
Beweis: (1) ist Aufgabe 5.3.1.
(1) ⇒ (2) ist 5.22 und 5.24.
(2) ⇒ (3): Da f(z) 6= 0 ∀z ∈ G, ist f ′
f∈ H(G). Also existiert g ∈ H(G) mit
g′ = f ′
f. Es gilt
(f · e−g)′ = f ′ · e−g − f · g′ · e−g = f ′ · e−g − f · f′
f· e−g = 0
Also ist f · e−g eine Konstante c ∈ C. Da f(z) 6= 0 und e−g(z) 6= 0 fur allez ∈ C, ist c 6= 0. Es gibt somit ein a ∈ C mit ea = c nach 4.7. Also ist
f = ea · eg = ea+g
(3) ⇒ (4): Nach (3) besitzt f eine Darstellung
f = eh
mit h ∈ H(G). Dann ist g = e1n·h ∈ H(G) und gn(z) = (e
1n·h)n = eh = f . �
10.2 Definition: Sei G ⊂ C∗ ein Gebiet und g ∈ H(G), so dass eg(z) =z ∀z ∈ G. Dann heißt g Zweig von log z auf G.
Sei α ∈ C fest und g Zweig von log z auf G. Dann heißt eαg Zweig derFunktion zα.
66

10.3 Ist f : G → C Zweig des Logarithmus auf dem Gebiet G, so ist finjektiv.
f(z1) = f(z2) ⇒ z1 = ef(z1) = ef(z2) = z2 �
10.4 Ist f : G → C Zweig des Logarithmus auf dem Gebiet G, dann gilt:g : G→ C ist Zweig des Logarithmus auf G ⇐⇒ ∃n ∈ Z mit g = f +2πin.
Beweis: “⇐” eg(z) = ef(z)+2πin = ef(z) · e2πin = z.
“⇒” ef(z)−g(z) =ef(z)
eg(z)=z
z= 1. Also ist f(z)− g(z) = 2πik nach 4.7(1) mit
k = k(z) ∈ Z. Da f und g stetig sind, ist auch k stetig. Also ist k konstantauf G, weil G zusammenhangend ist. �
10.3 gibt Auskunft uber die Eindeutigkeit des Logarithmus. Nun zu seinerExistenz. Fur einfach zusammenhangende Gebiete folgt diese aus 10.1.
10.5 Definition und Satz: Auf dem Gebiet C/R− = {z ∈ C; z 6= −|z|}gibt es einen Zweig des Logarithmus g, so dass g(1) = 0. Dieser nach 10.4eindeutig gegebene Zweig heißt Hauptzweig und wird
Log : C\R− → C
bezeichnet.
Beweis: Nach 4.7 ist
exp : P = {z ∈ C; | Im z| < π} → C\R−
bijektiv und holomorph. Also besitzt exp nach 8.8 eine holomorphe Umkehr-funktion
g : C\R− → P ⊂ C,
den Hauptzweig der Logarithmus; denn g(1) = 0, da exp(0) = 1. �
10.6 Bemerkung: Der Begriff Hauptzweig ist dadurch gerechtfertigt, dassLog |R∗
+ = ln, der naturliche Logarithmus R∗+ → R ist.
Wir wenden uns nun der Frage zu, auf welchen Gebieten es einen Zweig gebenkann.
10.7 Satz: Fur ein Gebiet G ⊂ C∗ = C\{0} sind aquivalent:
(1) Auf G existiert ein Zweig des Logarithmus.
67

(2) 1zbesitzt auf G eine Stammfunktion.
(3) Fur jede stuckweise glatte Schleife γ in G gibt Umγ(0) = 0.
Beweis: (1) ⇒ (2) Sei f Zweig des Logarithmus. Dann gilt nach 2.17
f ′(z) =1
exp′w=
1
expw=
1
zfur z = ew
(2) ⇒ (1) Sei g Stammfunktion von 1z. Dann gilt
(z · e−g(z))′ = e−g(z) − z · g′(z) · e−g(z) = 0.
Also ist z · e−g(z) konstant c, und c 6= 0, da z 6= 0, d.h. c ist nach 4.7 von derForm c = ea. Es folgt:
z = ea · eg(x) = eg(z)+a.
Also ist a+ g(z) Zweig des Logarithmus.
(2)) ⇐⇒ (3) Fur stuckweise glatte Schleifen γ gilt: Umγ(0) = 0 ∀γ def⇐⇒∫γ
dzz−0
= 0 ∀γ 5.22⇐⇒ 1zwegunabhangig integrierbar
5.24⇐⇒ 1zbesitzt auf G
eine Stammfunktion. �
10.8 Zusammenfassung:
(1) Ist f Zweig des Logarithmus auf dem Gebiet G ⊂ C∗, so gilt
f ′(z) =1
z.
(2) Ist G ⊂ C∗ ein einfach zusammenhangendes Gebiet, besitzt es einenZweig des Logarithmus.
(3) C∗ = C\{0} hat keinen Zweig des Logarithmus.
Beweis: (1) wurde in Beweis 10.7 gezeigt.
(2) folgt aus 10.1 und 10.7.3.
(3) Ist γ : [0, 2π] → C, t 7→ eit, so ist Umγ(0) = 1. �
Da in C\R− jeder Punkt z = |z| ·eiα mit α ∈]−π, π[ mit 1 durch eine Streckeverbunden werden kann, erhalten wir
10.9 Fur den Hauptzweig des Logarithmus gilt
Log z =
∫
[1,z]
dζ
ζ.
68

Benutzen wir stattdessen die Strecke von 1 nach |z| ∈ R+ und dann denBogen bz : [0, 1] → C\R−, t 7→ |z| · eiαt, von |z| nach z, erhalten wir
10.10 Fur z = |z| · eiα, −π < α < π, gilt
Log z =
∫
[1,|z|]
dζ
ζ+
∫
bz
dζ
ζ= ln |z|+
1∫
0
|z| · i · α · eiαt|z| · eiαt dt = ln |z|+ iα
Es folgt:
10.11 Fur z1 = |z1| · eiα1 , z2 = |z2| · eiα2 mit −π < α1, α2 < π und −π <α1 + α2 < π gilt
Log(z1 · z2) = Log(z1) + Log(z2)
da Log(z1 · z2) = ln(|z1| · |z2|) + i(α1 + α2)
Regel 10.11 ist nicht allgemein gultig:
10.12 Beispiel: (1) i = eπ2i. Da π
2i im Parallelstreifen P liegt, ist Log(i) =
π2i. Aber Log(i · i) ist nicht definiert, da i2 = −1 /∈ C\R−.
(2) i− 1 =√2 e
34πi = eln
√2 · e 3
4πi = eln
√2+ 3
4πi
Log(i− 1) = ln√2 +
3
4πi
(i− 1)2 = −1− 2i+ 1 = −2i = 2 · e−π2i. Also
Log(i− 1)2 = ln 2− π
2i.
Aber Log(i− 1) + Log(i− 1) = 2 ln√2 + 3
2πi = ln 2 + 3
2πi.
Da der Hauptzweig die holomorphe Fortsetzung des reellen Logarithmus ist,erhalten wir aus dessen Taylorreihe die Potenzreihenentwicklung von Log(das Resultat benutzt naturlich den Identitatssatz fur holomorphe Funktio-nen 6.15).
10.13 Log(1 + z) =∞∑
n=1
(−1)n+1 zn
nfur |z| < 1.
10.14 Aufgabe: Sei G ⊂ C∗ ein Gebiet und
f : G→ R
eine stetige Funktion derart, dass z = |z| · eif(z) ∀z ∈ G. Zeigen Sie:
69

(1) Fur jedes einfach zusammenhangende Gebiet gibt es eine solche Funk-tion f .
(2) Sei γ : [a, b] → C∗ eine glatte Schleife. Sei a = t0 < t1 < . . . < tn ≤ beine Zerlegung von [a, b], so dass γ([ti, ti+1]) ganz in einer KreisscheibeKi+1 ⊂ C∗ liegt. Definiere Funktionen
fi : Ki → R
wie in (1), so dass fi(γ(ti)) = fi−1(γ(ti)). Sei
ϕ : [a, b] → R, t 7→ fi(γ(t)) fur t ∈ [ti, ti+1].
Zeigen Sie:
2π · Umγ(0) = ϕ(b)− ϕ(a). Geben Sie eine geometrische Interpretation.
70

Teil III
Reihen- undProduktentwicklungen
Jede holomorphe Funktion ist analytisch. Jede Funktion mit Polen wird ana-lytisch, wenn man den Hauptteil abzieht. Der Residuensatz hat uns uberra-schende Resultate uber Funktionen und Losungsstrategien fur reelle Integralegeliefert. Diese Ergebnisse legen es nahe, sich auch mit Reihenentwicklungenvon Funktionen mit Polen zu beschaftigen.
11 Laurentreihen
11.1 Vorbemerkung: Wir betrachten Reihen der Form
∞∑
n=−∞cn · (z − a)n
auf Kreisringen
Kr,R(a) = {z ∈ C; r < |z − a| < R}, wobei 0 ≤ r < R.
Wir setzenγr,a : [0, 1] → C, t 7→ a+ r · e2πit.
11.2 Sei G ⊂ C ein Gebiet, f ∈ H(G) und H : [0, 1] × [0, 1] → G eineAbbildung, so dass ρi : [0, 1] → G, t 7→ H(i, t), und γi : [0, 1] → G, s 7→H(s, i), i = 0, 1 stuckweise glatte Wege sind. Dann gilt:
γ0 H
ρ1
ρ0
γ1(1)
∫γ0
f dz −∫γ1
f dz =∫ρ0
f dz −∫ρ1
f dz
(2) Sind insbesondere γ0 und γ1 Schleifen undρ0 = ρ1, so gilt
∫
γ0
f dz =
∫
γ1
f dz
71

Beweis: Betrachte
ρ0
ρ1
G
z1
z0
Hϕ γ0 γ1γ1
ρ0
ρ1
γ0
z0 = γ0(0) = ρ0(0) z1 = γ1(1) = ρ1(1)
Dann ist H ◦ ϕ eine Homotopie von Wegen. Also nach Aufgabe 5.32∫
γ0+ρ1
f dz =
∫
ρ0+γ1
f dz
�
11.3 Satz: Sei f ∈ H(Kr,R(a)). Dann gilt fur r < r0 < r1 < R, γ0 = γr0,aund γ1 = γr1,a:
(1)
∫
γ0
f dz =
∫
γ1
f dz
(2) f(z) =1
2πi
∫
γ1
f(ζ)
ζ − zdz − 1
2πi
∫
γ0
f(ζ)
ζ − zdz ∀z ∈ Kr0,r1(a)
Beweis: (1) Sei H : [0, 1]× [0, 1] → K1,R(a), (s, t) 7→ a+((1− t)r0+ tr1)e2πis.Dann ist H(s, i) = γi(s), i = 0, 1, H(0, t) = H(1, t). Also folgt (1) aus 11.2.1.
(2) Sei z ∈ Kr0,r1(a) fest gewahlt. Da f holomorph ist, hat
ζ 7→ g(ζ) =f(ζ)− f(z)
ζ − z
in z eine hebbare Singularitat, so dass g ∈ H(Kr,R(a)). Also folgt aus (1)
1
2πi
∫
γ1
f(ζ)
ζ − zdz − f(z)
2πi
∫
γ1
dζ
ζ − z
︸ ︷︷ ︸Umγ1 (z)·f(z)
=1
2πi
∫
γ1
g(ζ) dζ(1)=
1
2πi
∫
γ0
g(ζ) dζ
=1
2πi
∫
γ0
f(ζ)
ζ − zdz − f(z)
2πi
∫
γ0
dζ
ζ − z
︸ ︷︷ ︸Umγ0 (z)·f(z)
72

Da z “innerhalb” von γ1 und “außerhalb” von γ0 liegt, ist Umγ1(z) = 1 undUmγ0(z) = 0. �
11.4 Folgerung: Sei f ∈ H(Kr,R(a)). Dann sind
f1 : U1 := C\Kr(a) → C
z 7→∫
γs,a
f(ζ)
ζ − zdζ
s < |z − a|, r < s < R
f2 : U2 := KR(a) → C s > |z − a|, r < s < R
holomorph. Fur s wie oben haben wir
f1(z) =∞∑
n=1
dn(z − a)n
mit dn = −∫
γs,a
f(ζ) · (ζ − a)n−1 dζ ∀z ∈ U1,
f2(z) =∞∑
n=0
cn · (z − a)n mit cn
∫
γs,a
f(ζ)
(ζ − a)n+1dζ ∀z ∈ U2
f(z) =1
2πif2(z)−
1
2πif1(z) fur z ∈ Kr,R(a) = U1 ∩ U2
=∞∑
n=−∞an(z − a)n
mit an =1
2πi
∫
γs,a
f(ζ)
(ζ − a)n+1dζ und r < s < R.
11.5 Bemerkung: Wir nennen die Reihe∞∑
n=−∞an(z − a)n (lokal gleich-
maßig) konvergent auf G, wenn die Reihen
∞∑
n=0
an(z − a)n und−∞∑
n=−1
an(z − a)n
(lokal gleichmaßig) konvergieren.
Beweis 11.4: Nach 11.3.1 ist die Definition von f1 bzw. f2 unabhangig vonder speziellen Wahl von s. Nach 11.3.2 gilt f = 1
2πif2 − 1
2πif1 auf Kr,R(a).
Fur f2 folgt der zweite Teil aus 5.16 und dessen Beweis. Die Konvergenz folgtaus:
|cn|5.11
≤ M(s)
sn+1· 2πs mit M(s) = max{f(ζ)|; ζ ∈ γ∗s,a}.
73

Also
|cn| · |(z − a)|n ≤ 2πM(s) ·∣∣∣∣z − a
s
∣∣∣∣n
und
∣∣∣∣z − a
s
∣∣∣∣ < 1.
Fur f1 konnen wir diesen Schluß nicht machen. Es gilt aber fur s < |z − a|1
ζ − z=
1
(ζ − a)− (z − a)= − 1
z − a· 1
1− ζ−az−a
.
Da∣∣ ζ−az−a∣∣ = s
|z−a| < 1, konvergiert die Reihe − 1z−a
∞∑n=0
(ζ−az−a)n
lokal gleichmaßig
gegen 1ζ−z . Gliedweise Integration liefert nun das Ergebnis.
Die Aussage uber die an stellen wir zuruck (s. 11.7). �
11.6 Definition:∞∑
n=−∞cn ·(z−a)n heißt Laurent-Reihe (nach P.A. Laurent,
1813-1854). Die Reihenentwicklung 11.4 heißt Laurent-Reihe von f . Die Reihe−∞∑n=−1
cn · (z − a)n heißt Hauptteil, die Reihe∞∑n=0
cn · (z − a)n Nebenteil der
Laurent-Reihe.
Gegeben sei eine Laurent-Reihe
∞∑
n=−∞cn · (z − a)n.
Sei r1 der Konvergenzradius der Reihe∞∑n=1
c−n(z− a)n. Dann konvergiert die
Reihe ∞∑
n=1
c−n · (z − a)−n fur |z − a| > 1
r1=: r
und stellt auf C\Kr(a) eine holomorphe Funktion f1 dar. Ist R der Konver-genzradius von
∞∑
n=0
cn(z − a)n,
so wird durch dieser Potenzreihe eine holomorphe Funktion f2 auf KR(a)definiert. Die Funktion
f := f1 + f2 : Kr,R(a) → C
wird damit durch die gegebene Laurent-Reihe dargestellt.
Nach 11.4 wird jedes f ∈ H(Kr,R(a)) durch eine Laurent-Reihe dargestellt.
74

11.7 Identitatssatz fur Laurent-Reihen: Stellen L1(z) =∞∑
n=−∞bn · (z−
a)n und L2(z) =∞∑
n=−∞cn · (z − a)n auf Kr,R(a) dieselbe Funktion f dar, so
giltbn = cn ∀n ∈ Z.
Beweis: Fur r < s < R konvergiert
f(z)
(z − a)k+1=
−∞∑
n=−1
bn+k+1(z − a)n +∞∑
n=0
bn+k+1(z − a)n
gleichmaßig auf Ss(a). Gliedweise Integration liefert nach 5.15∫
γs,a
f(z)
(z − a)k+1dz =
∫
γs,a
bkz − a
dz = bk · 2πi · Umγs,a(a) = bk · 2πi
denn alle anderen Summanden haben Stammfunktionen, so dass das entspre-chende Integral verschwindet.
Wenden wir dieselbe Uberlagerung auf L2(z) an, erhalten wir bk = ak �
Aus diesem Beweis folgt fur die an aus 11.4, dass
an =1
2πi
∫
γs,a
f(ζ)
(ζ − a)n+1dζ
11.8 Satz: Sei G ein Gebiet, a ∈ G und f ∈ H(G\{a}). Sei
f(z) =∞∑
n=−∞bn(z − a)n z ∈ K0,R(a)
die Laurent-Entwicklung von f bei a, R > 0. Dann hat f in a
(1) eine hebbare Singularitat ⇐⇒ bn = 0 fur n < 0,
(2) einen Pol der Ordnung m ≥ 1 ⇐⇒ b−m 6= 0 und bn = 0 fur n < −m,
(3) eine wesentliche Singularitat ⇐⇒ fur endlich viele n < 0 ist bn 6= 0.
Beweis: Die Laurent-Entwicklung von f bei a ist eindeutig.
f hat in a Pol der Ordnung m ≥ 0 (m = 0 entspricht einer hebbaren Singu-laritat) ⇐⇒ ∃ Polnom Q ∈ C[X] vom Grad m, so dass f(z) − Q
(1
z−a)in
a eine hebbare Singularitat hat ⇐⇒ ∃ konvergente Potenzereihe P mit
f(z) = Q
(1
z − a
)+ P (z − a).
Die rechte Seite ist aber eine Laurent-Reihe. �
75

11.9 Beispiel: Wir holen den Beweis nach, dass e1z in 0 eine wesentliche
Singularitat hat. Die Laurent-Reihe von e1z bei 0 ist
e1z =
∞∑
n=0
1
n!zn= 1 +
−∞∑
n=−1
1
|n|!zn.
12 Unendliche Produkte
Wahrend der letzte Paragraph Auskunft uber Pole gibt, wollen wir uns indiesem Abschnitt mit Nullstellen beschaftigen. Nullstellen konstruiert manam einfachsten durch Produktbildung. So hat
f(z) =k∏
n=1
(z − an)rn
in an eine Nullstelle der Ordnung rn. Schwieriger ist es schon, falls wir unend-lich viele Nullstellen behandeln wollen. Das ist Inhalt dieses Paragraphen.
12.1 Definition: Sei (un)n≥1 eine Folge in C und pn :=n∏k=1
(1 + uk). Falls
limn→∞
pn existiert und den Wert p hat, sagen wir:∞∏j=1
(1 + uj) konvergiert, und
∞∏j=1
(1 + uj) = p.
12.2 Lemma: Seien u1, . . . , un ∈ C, pn =n∏j=1
(1+uj) und p∗n =
n∏j=1
(1+ |uj|).Dann gilt:
(1) p∗n ≤ exp
(n∑j=1
|uj|)
(2) |pn − 1| ≤ p∗n − 1
Beweis: Fur x ∈ R, x ≥ 0 gilt
1 + x ≤ ex.
Also 1 + |uj| ≤ e|uj | und∏j
(1 + |uj|) ≤∏j
e|uj | = e∑
j |uj |.
Teil (2) beweisen wir durch Induktion nach n.
76

Fur n = 1 gilt |1 + u1 − 1| = |u1| = p∗1 − 1.
Induktionsschritt: pn+1−1 = pn(1+un+1)−1 = (pn−1)(1+un+1)+un+1.Also
|pn+1 − 1| ≤ |pn − 1| · (1 + |un+1|) + |un+1|≤ (p∗n − 1)(1 + |un+1|) + |un+1| = p∗n+1 − 1
�
12.3 Definition: Sei A ⊂ C und (fn : A → C)n≥1 eine Folge von Funk-
tionen. Wir sagen:∞∏n=1
(1 + fn) konvergiert punktweise (gleichmaßig, lokal
gleichmaßig, auf kompakten Teilen gleichmaßig), wenn die Folge der Teilpro-dukte dies tut.
12.4 Satz: Sei A ⊂ C und (fn : A → C)n≥1 eine Folge von Funktionen, so
dass∞∑n=1
|fn| gleichmaßig konvergiert und die Grenzfunktion g beschrankt ist.
Dann gilt:
(1)∞∏n=1
(1 + fn) konvergiert gleichmaßig
(2)∞∏n=1
(1 + fn(z0)) = 0 ⇐⇒ ∃ k mit fk(z0) = −1
(3) Ist ϕ : N → N bijektiv, dann gilt∞∏n=1
(1 + fϕ(n)) =∞∏n=1
(1 + fn),
d.h. wir durfen das Produkt umordnen.
Beweis: Nach Voraussetzung existiert C mit |g(z)| ≤ C. Da die Reihegleichmaßig konvergiert, gibt es zu jedem ε1 > 0 ein N ∈ N, so dass
∞∑
n=N
|fn(z)| < ε1 ∀z ∈ A (∗)
Dan∑j=1
|fj(z)| ≤∞∑j=1
|fj(z)| = g(z), gilt nach 12.2
|pn(z)| ≤ p∗n(z) ≤ eg(z) ≤ eC .
Sei M ≥ maxϕ−1({1, . . . , N}). Dann gilt {1, . . . , N} ⊂ ϕ({1, . . . ,M}). Sei
L = ϕ({1, . . . ,M})\{1, . . . , N}
77

∣∣∣∣M∏
j=1
(1 + fϕ(j)(z))
︸ ︷︷ ︸=:qM (z)
−N∏
j=1
(1 + fj(z))
︸ ︷︷ ︸pN (z)
∣∣∣∣ = |pN(z)| ·∣∣∏l∈L
(1 + fl(z))− 1∣∣
≤ |pN(z)| ·(∏l∈L
(1 + |fl(z)|)− 1
)nach 12.2 fur
∏l∈L
≤ |pN(z)| ·(exp(
∑l∈L
|fl(z)|)− 1
)≤ |pN(z)| ·
(exp
∑l>N
|fl(z)| − 1
)
(∗)≤ |pN(z)| · (eε1 − 1) ≤ eC · (eε1 − 1)
Wahle nun zu vorgegebenem ε > 0 ein ε1, derart, dass eC · (eε1 − 1) < ε, und
zu diesem ε1 dann N . Dann gilt
|qM(z)− pN(z)| < ε ∀z ∈ A (∗∗)
(a) Fur ϕ = id gilt fur M ≥ N : |pM(z)− pN(z)| < ε ∀z ∈ A.
Nach Cauchy’s Kriterium ist die Folge der pN gleichmaßig konvergent.
(b) “⇐” trivial
“⇒” |pN(z| − |pM(z)| ≤ |pM(z)− pN(z)| ≤ |pN(z)| · (eε1 − 1)
Also
|pM(z)| ≥ |pN(z)| · (1− (eε1 − 1)) = |pN(z)| · (2− eε1),
also |p(z)| ≥ |pN(z)| · (2− eε1).
Fur genugend kleines ε1 ist 2− eε1 > 0. Also kann p(z) nur dann Nullsein, wenn bereits ein endliches Produkt 0 ist.
(c) Da (pn) konvergent ist mit Grenzwert p, folgt aus (∗∗) die Behauptung.
�
12.5 Satz: Sei G ⊂ C ein Gebiet, (fn)n≥1 eine Folge in H(G), so dass die
Nullstellenmenge von jedem fn diskret ist. Sei∞∑j=1
|fj − 1| gleichmaßig kon-
vergent auf kompakten Teilen von G. Dann ist∞∏j=1
fj gleichmaßig konvergent
auf kompakten Teilen. Die Grenzfunktion f ist holomorph, und die Ordnungeiner Nullstelle z0 von f ist die Summe der Nullstellenordnungen der fn in z0.
78

Beweis: SeiK ⊂ G kompakt. Nach Voraussetzung konvergiert∞∑j=1
|fj−1| aufK gleichmaßig gegen eine Grenzfunktion g. Da g stetig und K kompakt ist,
ist g auf K beschrankt. Nach 12.4 konvergiert somit∞∏j=1
fj auf K gleichmaßig
gegen eine Grenzfunktion f . Nach 6.14 ist f holomorph. Die Aussage uberdie Nullstellen folgt aus 12.4.2. �
Wir wollen diesen Satz benutzen um holomorphe Funktionen auf C mit vor-gegebenen Nullstellen zu konstruieren. Daoch zunachst noch eine Erganzung:
12.6 Satz: Die Voraussetzungen und Bezeichnungen seien wie in 12.5. Sei
N ⊂ G die Nullstellenmenge von f . Dann ist∞∑n=1
f ′nfn
gleichmaßig konvergent
auf kompakten Teilen von G\N mit Grenzfunktion f ′
f.
Beweis: pn :=n∏j=1
fj . Dann gilt p′npn
=n∑j=1
f ′nfn
nach der Produktregel.
Nach 6.14 gilt auf kompakten Teilern pn f gleichmaßig, p′n f ′ gleich-maßig. �
12.7 Bezeichnung: f ′
fheißt logarithmische Ableitung von f , weil (log f)′ =
f ′
f.
Wir fuhren nun Hilfsfunktionen ein, auf die wir Satz 12.5 anwenden konnen.
12.8 Bezeichnung: Sei En : C → C definiert durch
En(z) :=
{1− z fur n = 0
(1− z) exp(z + z2
2+ . . .+ zn
n) fur n > 0.
12.9 Lemma: Fur |z| ≤ 1 gilt |1− En(z)| ≤ |z|n+1.
Beweis: |1− E0(z)| = |1− (1− z)| = |z|. Fur n > 0 gilt
E ′n(z) = − exp(z + z2
2+ . . .+ zn
n)+
(1− z)(1 + z + . . .+ zn−1
︸ ︷︷ ︸1−zn
1−z
) · exp(z + z2
2+ . . .+ zn
n)
= −zn exp(z + z2
2+ . . .+ zn
n)
Ist∞∑n=0
anzn die Reihenentwicklung von exp(z + z2
2+ . . .+ zn
n), so gilt
E ′n(z) = −
∞∑
j=0
ajzn+j mit a0 = exp(0) = 1, aj ∈ R+
79

(denn die Reihe von ez hat nur Koeffizienten in R+).
Durch gliedweise Integration erhalten wir
1− En(z) =∫
[0,z]
(−E ′n(ζ))dζ =
[∞∑j=0
ζn+j+1 ajn+j+1
]z
0
= zn+1 ·∞∑j=0
ajn+j+1
· zj(∗)
Fur |z| ≤ 1 folgt
∣∣∣∣1− En(z)
zn+1
∣∣∣∣ ≤∞∑
j=0
ajn+ j + 1
· |zj| ≤∞∑
j=0
ajn+ j + 1
(∗)= 1− En(1) = 1− 0 = 1
�
12.10 Weierstraß’scher Produktsatz: Sei (zn)n≥1 eine Folge in C∗mit
limn→∞
|zn| = ∞. Sei (sn)n≥1 eine Folge in N, so dass∞∑n=1
(r
|zn|
)1+snfur jedes
r > 0 konvergiert. Dann konvergiert
∞∏
n=1
Esn
(z
zn
)
gleichmaßig auf kompakten Teilen von C gegen eine holomorphe Funktion f .f hat seine Nullstellen genau in den zn. Die Ordnung der Nullstellen bei zjist die Anzahl der zn mit zn = zj.
12.11 Bemerkung: (1) Eine Folge (sn) kann man immer finden, etwasn = n−1. Da lim
n→∞|zn| = ∞, gilt es ein n(r), so dass r
|zn| <12∀n ≥ n(r).
Also ist ∞∑
n=n(r)
(r
|zn|
)1+sn
≤∞∑
n=n(r)
(1
2
)n≤ 1
(2) Der Satz erlaubt es uns, holomorphe Funktionen mit vorgegebenenNullstellen mit gegebener Ordnung zu konstruieren: Haben diese Null-stellen einen Haufungspunkt, so muss die holomorphe Funktion nach6.15 die Nullfunktion sein. Also sind nur isolierte Nullstellen von In-teresse. Fur endliche viele ist das Problem trivial. Da jede kompakteMenge nur endlich viele isolierte Nullstellen enthalten kann, kann manunendlich viele Nullstellen von gegebener Ordnung mit ihren Vielfach-heiten zu einer Folge (zn) wie in 12.10 ordnen.
80

Beweis von 12.10: Sei K ⊂ C kompakt und r so groß, dass K ⊂ Kr(0).Sei N so groß, dass |zn| > r fur alle n ≥ N . Fur z ∈ K gilt dann | z
zn| < 1 fur
n ≥ N , und folglich nach 12.9
∞∑
n=N
∣∣∣∣Esn(z
zn
)− 1
∣∣∣∣ ≤∞∑
n=N
∣∣∣∣z
zn
∣∣∣∣sn+1
≤∞∑
n=N
(r
|zn|
)sn+1
,
Also konvergiert die Funktionenreihe∞∑n=1
∣∣∣Esn(zzn
)− 1∣∣∣ auf K gleichmaßig.
Da En(z) genau in 1 eine Nullstelle hat, deren Ordnung 1 ist, folgt 12.10 aus12.5. �
Zum Schluß untersuchen wir die Eindeutigkeit der Konstruktion 12.10.
12.12 Satz: Seien f, g ∈ H(C) nicht die Nullfunktionen. Dann haben f undg genau dann dieselben Nullstellen (einschließlich ihrer Ordnungen), wenn esein h ∈ H(C) gibt, so dass f = g · eh.
Beweis: Da eh(z) 6= 0 ∀z ∈ C, ist die eine Richtung trivial.
Haben f und g dieselben Nullstellen, N = f−1(0), dann hat f
g: C\N → C
in N hebbare Singularitaten, kann also zu einer holomorphen Funktion F :C → C ohne Nullstellen erweitert werden. Da C einfach zusammenhangendist, gibt es nach 10.1 ein h ∈ H(C) mit f
g= eh. �
12.13 Aufgabe: Sei N ⊂ C eine diskrete Menge und ϕ : N → N eineFunktion. Konstruieren Sie eine Funktion f : C\N → C, die in den Punktenaus N Pole erster Ordnung und in p ∈ N den Hauptteil
z 7→ ϕ(p)
z − p
hat.
13 Beispiele Sinus und Cotangens
Die Nullstellenmenge von sin πz ist Z, denn
sin πz = 0 ⇐⇒ 1
2i(eiπz−e−iπz) = 0 ⇐⇒ eiπz = e−iπz ⇐⇒ e2iπz = 1 ⇐⇒ z ∈ Z.
Die Nullstellen sind einfach, denn
(sin πz)′ = π cos πz 6= 0 fur z ∈ Z
81

Die Funktion sinπzπz
hat in z 6= 0 eine hebbare Singularitat 7.7.1 und kanndurch den Funktionswert 1 in 0 zu einer holomorphen Funktion erganzt wer-den. Sie hat einfache Nullstellen in Z\{0}. Wir ordnen sie zu einer Folge(zn)n≥1 mit z2n = n und z2n−1 = −n. Dann konvergiert
∞∑
n=1
(r
|zn|
)2
= 2∞∑
n=1
( rn
)2< 2r2 + 2
∞∫
1
r2
x2dx = 2r2 + 2r2
[−1
x
]∞
1
= 4r2
�������������������������
�������������������������
���������������
���������������
���������������������������������������������
���������������������������������������������
r2
x2
1 2 3
r
Damit hat sinπzπz
nach demWeierstraß‘schen Produktsatz dieselben Nullstellenwie
f =∞∏
n=1
E1
(z
zn
)=∏
n∈Z\0
((1− z
n
)· e z
n
)=∏′ (
1− z
n
)· e z
n .
Nach dem Eindeutigkeitssatz gibt es ein g ∈ H(C) mit
sin πz
πz= eg(z) · f(z).
Wir bestimmen g(z) mit Hilfe der logarithmischen Ableitung
(sinπzπz
)′sinπzπz
=πz
sin πz· π cos πz · πz − π sin πz
π2z2= π
cos πz
sin πz− 1
z(eg(z) · f(z)
)′
eg(z) · f(z) =g′(z) · eg(z) · f(z)
eg(z) · f(z) +f ′(z) · eg(z)f(z) · eg(z)
= g′(z) +∑
n∈Z\0
− 1n· e z
n + 1n
(1− z
n
)· e z
n
(1− z
n
)· e z
n
︸ ︷︷ ︸−1+1− z
nn−z
= zn(z−n)
= 1z−n
+ 1n
nach 12.6
= g′(z) +∑
n 6=0
(1
z − n+
1
n
)
82

Also π · cosπzsinπz
= g′(z) + 1z+∑n 6=0
(1
z−n + 1n
).
Wir leiten nochmals ab (benutze 6.14).
π · −π sin2 πz − π cos2 πz
sin2 πz= − π2
sin2 πz= g′′(z)− 1
z2+∑
n 6=0
−1
(z − n)2.
Also π2
sin2 πz= −g′′(z) + ∑
n∈Z
1(z−n)2 .
Setze h(z) =∑n∈Z
1(z−n)2 .
Behauptung 1: g′′ ist beschrankt.
Beweis: h(z + 1) = h(z), und π2
sin2 π(z+1)= π2
sin2 πz. Also hat g′′ die Periode
1 und muss nur auf [0, 1] × R · i untersucht werden: Sei K = {z = x + iy;0 ≤ x ≤ 1, |y| ≥ 1}
| sin2 πz| =∣∣ 12i(eπix · e−πy − e−πix · eπy)
∣∣2
≥ 14||eπix · e−πy| − |e−πix · eπy||2
= 14|e−πy − eπy|2 ≥ 1
4
(eπ|y| − 1
)2 ∞ fur |y| ∞ (∗)
��������������������������������������������������������
��������������������������������������������������������
����������������������������������������������������������������
����������������������������������������������������������������
0 1• Pole von
π2
sin2 πzund h(z)
i
iK
K
Also ist π2
sin2 πzauf K beschrankt. Weiter gilt fur z ∈ K
|z − n| ≥ |Re z − n| ≥ |n| − 1
∣∣∣∣1
z − n
∣∣∣∣2
≤(
1
|n| − 1
)2
fur |n| > 1
Es folgt∑n∈Z
∣∣∣ 1(z−n)
∣∣∣2
≤1∑
n=−1
1|z−n|2 +
∑|n|>1
(1
|n|−1
)2≤ 3+
∑|n|>1
(1
|n|−1
)2, letzteres
weil | Im z| ≥ 1.
83

Also konvergiert die Reihe von h(z) absolut und gleichmaßig auf K gegeneine beschrankte Funktion. Also ist g′′ auf [0, 1] × R · i und damit auf ganzC beschrankt, da g′′ holomorph ist.
Nach dem Satz von Liouville 6.11 ist g′′ konstant: g′′(z) = c fur ein cinC undalle z ∈ C. Wegen der gleichmaßigen Konvergenz auf K gibt es zu ε > 0 einN , so dass ∣∣∣h(z)−
∑
|n|>N
1
(z − n)2
∣∣∣ < ε ∀z ∈ K.
Es folgt
|c| = |g′′(iy)| ≤∣∣∣∣
π2
sin2 πiy
∣∣∣∣+ |h(iy)|
(∗)≤ 4π2
(eπ|y| − 1)
���O�O
+
∑
|n|≤N
1
|iy − n|2
���O�O
0 0
+∣∣∣h(iy)−
∑
|n|>N
1
(z − n)2
∣∣∣︸ ︷︷ ︸
<ε
fur y ∈ R, |y| ∞.
Es folgt: g′′ = 0.
13.1 Satz:(
πsinπz
)2=
∞∑n=−∞
1(z−n)2
Behauptung 2: g′ = 0
Beweis: g′ ist konstant, g′(z) = b, da g′′ = 0
g′(z) = πcos πz
sin πz−(1
z+∑
n 6=0
(1
z − n+
1
n
))
ist ungerade. Das ist klar fur π cosπzsinπz
. Weiter gilt fur k(z) = 1z+∑n 6=0
(1
z−n + 1n
)
k(−z) = −1z+∑n 6=0
(1
−z−n + 1n
)= −1
z− ∑
n 6=0
(1
z−(−n) +1−n
)
= −(
1z+∑n 6=0
(1
z−n + 1n
))
= −k(z)
Es folgt b = 0. Wir erhalten
13.2 Partialbruchentwicklung des Cotangens:
84

π · cot πz = 1z+
∞∑n=−∞n 6=0
(1
z−n + 1n
)
Da g′ = 0, ist g konstant a. Also
sin πz
πz= ea ·
∏
n∈Z\0
[(1− z
n
)· e z
n
]
Setzen wir z = 0, erhalten wir: 1 = ea · 1. Also ea = 1:
13.3 Satz: sinπzπz
=∞∏n∈Zn 6=0
[(1− z
n
)· e z
n
]=
∞∏n=1
(1− z2
n2
)
Beweis der 2. Gleichung: Nach 12.4.3 durfen wir das Produkt umordnen.Fassen wir positive und negative n zusammen, erhalten wir
(1− z
n
)e
zn
(1 +
z
n
)e−
zn =
(1− z2
n2
)
�
13.4 Wallis’sche Produktdarstellung von π:
π
2=
∞∏
n=1
(2n)2
(2n− 1)(2n+ 1)=
22
1 · 3 · 42
3 · 5 · 62
5 · 7 · · · ·
Beweis: Fur z = 12liefert 13.3
1(π2
) =∞∏
n=1
n2 − 14
n2. Also
π
2=
∞∏
n=1
4n2
4n2 − 1=
∞∏
n=1
(2n)2
(2n+ 1)(2n− 1)�
Dieses Produkt konvergiert recht langsam gegen π2. Hier ist eine kurze nume-
rische Liste:22
1 · 3 = 1, 333 . . .
22
1 · 3 · 42
3 · 5 =64
45= 1, 4222 . . .
22
1 · 3 · 42
3 · 5 · 62
5 · 7 =2304
1575= 1, 4628 . . .
Dagegen ist π2= 1, 570796 . . ..
14 Die Γ-Funktion
Ziel dieses Abschnitts ist es, eine moglichst einfache Funktion zu finden, diedie Fakultaten interpoliert, fur die also
85

14.1f(n) = (n− 1)! n = 1, 2, . . .
(dass man nicht f(n) = n! verlangt, hat zufallige historische Grunde). Dadann
f(n+ 1) = n! = n · (n− 1)! = n · f(n),fordern wir die Funktionalgleichung
14.2 f(z + 1) = z · f(z), f(1) = 1
Induktiv folgt
14.3f(z + n) = z · (z + 1) · . . . · (z + n− 1) · f(z)
Also
(z + n) · f(z) = f(z + n+ 1)
z · (z + 1) · . . . · (z + n− 1).
Setzen wir voraus, dass f im Defintionsbereich holomorph ist, insbesonderealso stetig, erhalten wir durch Ubergang zum Grenzwert
limz→−n
(z + n) · f(z) = f(1)
(−1)n · n! =(−1)n
n!.
Es folgt
14.4 f muss bei −n, n ∈ N, einfache Pole haben und Res(f,−n) = (−1)n
n!.
g = 1fhat somit in −n einfache Nullstellen. Inspiriert durch den Weier-
straß‘schen Produktsatz machen wir den Ansatz
g(z) = eh(z) · z ·G(z) mit G(z) =∞∏
n=1
(1 +z
n) · e− z
n
wobei der Faktor z fur die Nullstelle 0 sorgt.
(Da die Nullstellen in −N liegen, genugt wie im Abschnitt 13 die Folge sn =1). Wegen der Funktionalgleichung 14.1 sollte g folgende Funktionalgleichungerfullen:
z · g(z + 1) = z · 1
f(z + 1)= z · 1
z · f(z) = g(z), g(1) = 1.
Setzen wir
gn(z) = eh(z) · z ·n∏
j=1
(1 +z
j) · e− z
j =1
n!eh(z)−z
∑nj=1
1j · z ·
n∏
j=1
(j + z),
86

erhalten wir als Bedingung
1 =z · g(z + 1)
g(z)= lim
n→∞
z · gn(z + 1)
gn(z)
= limn→∞
z · 1n!· (z + 1) · eh(z+1)−(z+1)·∑n
j=11j ·∏n
j=1(z + j + 1)
1n!· z · eh(z)−z
∑nj=1
1j ·∏n
j=1(z + j)
= limn→∞
exp
[h(z + 1)− h(z)−
n∑
j=1
1
j
]· (z + n+ 1)
Da (z + n+ 1) = n · (1 + z+1n) = elog n · (1 + z+1
n) ist, folgt
1 = limn→∞
exp
[h(z + 1)− h(z)−
n∑
j=1
1
j+ log n
]·(1 +
z + 1
n
)
= exp [h(z + 1)− h(z)− γ] mit
14.5 Definition: γ = limn→∞
(n∑j=1
1j− log n
)heißt Euler‘sche Konstante.
Also ist die Funktionalgleichung fur g erfullt, wenn
h(z + 1) = h(z) + γ,
und dies ist furh(z) = γ · z z ∈ C
sicherlich richtig.
14.6 Definition: Die Funktion
Γ : C\(−N) → C, z 7→ e−γz · 1z·
∞∏
n=1
(1 +
z
n
)−1
· e zn
heißt Gamma-Funktion.
14.7 Eigenschaften:
(1) Γ ist im Definitionsbereich holomorph mit einfachen Polen vom Resi-
duum (−1)n
n!in −n.
87

(2) Γ hat keine Nullstellen.
(3) Γ(z + 1) = z · Γ(z)
(4) Γ(1) = 1, Γ(n) = (n− 1)! n ∈ N\{0}
(5) Γ(z) · Γ(1− z) = πsinπz
(6) Γ(12) =
√π
Beweis: (1), (2), (3) folgen aus der Konstruktion, denn g hat keine Pole.
(4) Die Gleichung
z · eγ(z+1) · (z + 1) ·G(z + 1) = z · g(z + 1) = g(z) = eγz · z ·G(z)
gilt fur alle z. Also haben wir fur z 6= 0
eγ · (z + 1) ·G(z + 1) = G(z).
Da G stetig, ist, gilt diese Geleichung auch in z = 0. Also
eγ ·G(1) = 1
Es folgt: Γ(1) = e−γ · 1 ·G(1)−1 = 1.
(5) g(z) · g(−z) = −z2 ·∞∏n=1
(1− z2
n2
)= −z sinπz
πnach 13.3.
Γ(z) · Γ(1− z)(3)= Γ(z) · (−z) · Γ(−z) = −z · 1
g(z)· 1g(−z) =
πsinπz
.
(6) Fur z = 12folgt:
(Γ(1
2))2
= πsin π
2= π. Da Γ(1
2) > 0, folgt (6). �
88
Teil IV
Biholomorphe Abbildungen
In diesem Kapitel wollen wir holomorphe Abbildungen unter geometrischenGesichtspunkten behandeln. Jedes nicht-konstante holomorphe f bildet offe-ne Mengen auf offene Mengen ab 8.6 und besitzt genau dann eine holomorpheUmkehrfunktion, wenn f ′ keine Nullstelle besitzt 8.8. Wir wollen nun f aufweitere Eigenschaften hin untersuchen, etwa der winkeltreue.
15 Konforme Abbildungen
15.1 Definition: f ∈ H(A) heißt lokal biholomorph, wenn es zu jedema ∈ A eine offene Umgebung U ⊂ A gibt, so dass
f : U → f(U)
eine holomorphe Umkehrfunktion besitzt. Besitzt f eine holomorphe Um-kehrfunktion, heißt f biholomorph.
15.2 Sei γ : [0, s] → A ein Weg mit γ(0) = z0. “γ hat in z0 ein Tangente”,wenn
limt→0
γ(t)− z0|γ(t)− z0|
existiert. Wenn dieser Grenzwert existiert, hat er den Betrag 1, ist also vonder Form eiϕ. Seien γ1 und γ2 zwei solche Wege mit Anfgangspunkt z0 undGrenzwerten eiϕ1 bzw. eiϕ2 , dann heißt
∡(γ1, γ2) := ϕ2 − ϕ1
der orientierte Winkel zwischen γ1 und γ2. Beachte 0 ≤ ϕ1, ϕ2 < 2π.
Ist γ in 0 differenzierbar und γ′(0) 6= 0, so gilt (da t > 0)
limt→0
γ(t)− z0|γ(t)− z0|
= limt→0
γ(t)− γ(0)
t− 0·∣∣∣∣
t− 0
γ(t)− γ(0)
∣∣∣∣ =γ′(0)
|γ′(0)|15.3 Konvention: In diesem Abschnitt betrachten wir nur Wege, die inihrem Anfangspunkt eine Tangente haben.
15.4 Definition: Sei G ⊂ C ein Gebiet. f ∈ H(G) heißt lokal konform,wenn gilt:
89

(1) Ist γ ein Weg in G mit Tangente in γ(0), so ist f ◦ γ ein Weg mitTangente in f ◦ γ(0).
(2) Sind γ1, γ2 zwei Wege in G mit Anfangspunkt z0 und Tangenten in z0,so ist
∡(f ◦ γ1, f ◦ γ2) = ∡(γ1, γ2).
Ist außerdem f injektiv, heißt f konform.
f ∈ H(G) habe in z0 ∈ G eine k-fache w0-Stelle, d.h.
f(z) = w0 + (z − z0)k · g(z)
mit g(z0) 6= 0. Sei γ ein Weg mit Anfangspunkt z0. Dann gilt
f ◦ γ(t)− w0
|f ◦ γ(t)− w0|=
(γ(t)− z0|γ(t)− z0|
)k
�� �O�O�O
· g(γ(t))
|(γ(t))|
���O�O�O
(eiϕ)k · eiτ = eiϕk+iτ
(∗)
Es folgt
15.5 Satz: Hat f ∈ H(G) in z0 eine k-fache w0-Stelle und sind γ1, γ2 zweiWege in G mit Anfangspunkt z0, so gilt
∡(f ◦ γ1, f ◦ γ2) = k · ∡(γ1, γ2)
15.6 Satz: Sei f ∈ H(G). Dann gilt
(1) f lokal konform ⇐⇒ f lokal biholomorph
(2) f konform ⇐⇒ f biholomorph
Beweis: (2) folgt aus (1). Beweis von (1):
“⇐” In z0 ∈ G hat f nur eine einfache w0 = f(z0)-Stelle. Nach (∗) hat f ◦ γeine Tangente in w0, wenn γ eine Tangente in z0 hat, und f erhalt Winkel.
“⇒” Da f Winkel erhalt, kann es in jedem z0 ∈ G nur eine einfache f(z0)-Stelle haben. Nach 8.4 ist f somit lokal injektiv und damit nach 8.8 lokalbiholomorph. �
Als nachstes bestimmen wir alle biholomorphen Abbildungen auf C.
90

15.7 Satz: Jede biholomorphe Abbildung f : C → C auf C ist ganz linear;d.h. es gibt a, b ∈ C mit
f(z) = az + b ∀z ∈ C
Zunachst zeigen wir eine uberraschende Besonderheit holomorpher Funktio-nen auf C, die keine Polynome sind.
15.8 Satz: Ist f ∈ HC kein Polynom (eine solche Funktion heißt ganz tran-zendent), dann gibt es zu jedem w0 ∈ C eine Folge (zn) in C mit
limn→∞
|zn| = ∞ und limn→∞
f(zn) = w0
Insbesondere ist f(C\Kr(0)) dicht in C fur jedes r > 0.
Beweis: Angenommen es gibt ein w0 ∈ C, fur das es keine solche Folge (zn)gibt. Dann gibt es ein R > 0 und ein ε > 0, so dass
|f(z)− w0| ≥ ε ∀z ∈ C mit |z| > R. (∗)
Wir durfen R ≥ 1 annehmen.
Da f nicht konstant w0 sein kann, hat f nur isolierte w0-Stellen, also nurendlich viele in der kompakten Menge KR(0), etwa a1, . . . , an mit Ordnungenk1, . . . , kn. Außerhalb von KR(0) hat f nach (∗) keine w0-Stelle, so dass
g : C → C g(z) =f(z)− w0n∏j=1
(z − aj)kj
in den aj hebbare Singularitat hat, also global definiert und nullstellenfreiist. Es folgt
1
g: C → C
ist holomorph. Da R ≥ 1, existiert nach dem Beweis von 6.10 ein M mit
∣∣∣∣∣
n∏
j=1
(z − aj)kj
∣∣∣∣∣ ≤M · |z|k mit k = k1 + . . .+ kn fur |z| ≥ R.
Wegen (∗) folgt ∣∣∣∣1
g(z)
∣∣∣∣ ≤M
ε· |z|k fur |z| ≥ R.
91

Nach 6.10 ist 1gein Polynom. Da 1
gnullstellenfrei ist, muss es nachdem Fun-
damentalsatz der Algebra konstant sein. Dann ist aber g konstant und somitist f ein Polynom. �
Beweis von 15.7: Sei f : C → C biholomorph. Angenommen f ist ganztranzendent. Dann ist f(C\K1(0)) dicht in C. Nach 8.6 ist so f(K1(0)) offen,also
f(K1(0)) ∩ f(C\K1(0)) 6= ∅im Widerspruch zur Injektivitat. Also ist f ein Polynom. Ist grad f > 1, hatf mehrere Nullstellen oder eine Nullstelle der Ordnung > 1. In beiden Fallenist f nicht injektiv (vergl. 8.4). �
15.9 Satz: (1) Sei a ∈ C, |a| < 1. Dann ist
ϕa : K1(0) → K1(0), z 7→ z − a
1− az
biholomorph.
(2) Jede biholomorphe Abbildung f : K1(0) → K1(0) ist von der Form
f = b · ϕa mit |b| = 1, |a| < 1.
Beweis: (1) Fur z ∈ K1(0) und |a| < 1 ist 1−az 6= 0. Also ist ϕa holomorphauf K1(0). Weiter gilt fur z ∈ K1(0)
|ϕa(z)|2 ≤ 1 ⇐⇒ 0 ≤ 1− |ϕa(z)|2 = 1− ϕa(z) · ϕa(z) ⇐⇒
0 ≤ 1− (z − a)(z − a)
(1− az)(1− az)=
1− az − az + aazz − zz + az + az − aa
(1− az)(1− az)
=1− aa− zz + aazz
|1− az|2 =(1− zz) · (1− aa)
|1− az|2 =(1− |z|2)(1− |a|2)
|1− az|2
Also ist Bildϕa ⊂ K1(0). Weiter ist ϕa biholomorph, denn
ϕ−a ◦ ϕa(z) = ϕ−a
(z − a
1− az
)=
z−a1−az + a
1 + a z−a1−az
=z − a+ a− aaz
1− az + az − aa= z
Also ist ϕ−a ◦ ϕa = id und entsprechend ϕa ◦ ϕ−a = id.
(2) Sei f : K1(0) → K1(0) biholomorph. Dann existiert a ∈ K1(0) mitf(a) = 0. Definiere
g = f ◦ ϕ−a
92

g(0) = f ◦ ϕ−a(0) = f(a) = 0, und |g(z)| ≤ 1, da Bild g ⊂ K1(0).
Sei h die Umkehrabbildung von g. Dann gilt
1 = (h ◦ g)′(0) = h′(g(0)) · g′(0) = h′(0) · g′(0) (∗)Da h(0) = 0 und |h(z)| ≤ 1, folgt nach dem Schwartz’schen Lemma fur gund h
|h′(0)| ≤ 1 |g′(0)| ≤ 1.
Aus (∗) folgt |g′(0)| = 1. Also folgt aus dem Schwarz’schen Lemma
g(z) = b · z mit |b| = 1,
und damit: f = g ◦ ϕa = b · ϕa. �
15.10 Bemerkung: Im Gegensatz zum entsprechenden reellen Fall gibt es
keine biholomorphe Funktion Cf→ K1(0), denn f ware beschrankt und
somit nach dem Satz von Liouville konstant.
15.11 Satz: Sei G ein Gebiet und (fn) eine Folge injektiver Funktionen inH(G), die auf kompakten Teilen gleichmaßig gegen f konvergiert. Dann istf injektiv oder konstant.
Beweis: Sei f nicht konstant, und seien z1 6= z2 aus G mit f(z1) = f(z2) = a.
z1
z2
Gγ
Dann gibt es ein r > 0, so dass
Kr(z1) ∩Kr(z2) = ∅, Kr(zi) ⊂ G
und f(z) 6= a ∀z ∈ Kr(z1)∪Kr(z2), z 6=z1, z2, letzteres, weil die a-Stellen von fdiskret sind. Sei γ1 = Sr(z1). Nach 8.2ist die Ordnung k der a-Stelle z1 das
Residuum Res(
f ′
f−a , z1
).
Also nach dem Residuensatz
k =1
2πi
∫
γ1
f ′(ζ)
f(ζ)− adζ, da Umγ1(z1) = 1.
= limn→∞
kn mit kn =1
2πi
∫
γ1
f ′n(ζ)
fn(ζ)− adζ
kn ist die Summe der Ordnungen der a-Stellen von fn in Kr(z1). Da knganzzahlig ist, gilt fur n ≥ n0 mit geeignetem n0
1
2πi
∫
γ1
f ′(ζ)
f(ζ)− adζ =
1
2πi
∫
γ1
f ′n(ζ)
fn(ζ)− adζ
93

Da die linke Seite großer als 1 ist, hat fn mindestens eine a-Stelle in Kr(z1).Analog hat fn fur genugend großes n eine a-Stelle inKr(z2). Das widersprichtaber der Injektivitat von fn. �
16 Der Riemann’sche Abbildungssatz
In diesem Abschnitt bestimmen wir alle Gebiete G, die zuK1(0) biholomorphsind. Ziel ist der Beweis des folgenden Satzes.
16.1 Riemann’scher Abbildungssatz: Sei G ⊂ C, G 6= C, ein Gebietmit folgender Eigenschaft: Ist f ∈ H(G) und f(z) 6= 0 ∀z ∈ G, dann existiertein g ∈ H(G) mit g2 = f . Dann gibt es eine biholomorphe Funktion h : G→K1(0).
16.2 Folgerung: Sei G ⊂ C ein Gebiet. Genau dann ist G biholomorph zuK1(0), wenn G 6= C und G einfach zusammenhangend ist.
Beweis: Ist G einfach zusammenhangend, hat es nach 10.1 die gewunsch-te Eigenschaft. Ist G 6= C, so ist G biholomorph zu K1(0) nach 16.1. Istumgekehrt G biholomorph zu K1(0), so ist G einfach zusammenhangend,weil K1(0) dies ist. Weiter ist G 6= C, da jede nicht-konstante holomorpheFunktion C → C nicht beschrankt ist. �
Fur den Beweis von 16.1 benotigen wir ein allgemeines Resultat uber Raumekomplexer Funktionen.
16.3 Definition: Eine Teilmenge F ⊂ H(A) heißt normal, falls jede Folge(fn)n∈N in F eine auf kompakten Teilen gleichmaßig konvergente Teilfolgebesitzt.
16.4 Definition: Sei A ⊂ C beliebig. Eine Menge F von Funktionen A→ C
heißt gleichgradig stetig, wenn es zu jedem s > 0 ein r > 0 gibt, so dass
|f(z1)− f(z2)| < s ∀z1, z2 ∈ A mit |z1 − z2| < r und ∀f ∈ F .
16.5 Satz: Sei F ⊂ H(A). Zu jeder kompakten Teilmenge K ⊂ A gebe esein M(K) ∈ R mit
|f(z)| ≤M(K) ∀z ∈ K ∀f ∈ F .
Dann gilt:
(1) Ist K ⊂ A kompakt, dann ist F|K = {f |K; f ∈ F} gleichgradig stetig.
94

(2) (P. Montel, 1876-1975): F ist normal.
Beweis (1): Sei K ⊂ A kompakt. Da A offen ist, gibt es ein r > 0, so dassfur jedes z ∈ K, gilt
Kr(z) ⊂ A
Fur z1, z2 ∈ K mit |z1 − z2| < r2und γ = Sr(z1) gilt nach der Cauchy‘schen
Integralformel (Umγ(z1) = Umγ(z2) = 1)
|f(z1)− f(z2)|= | 12πi
∫γ
f(ζ)ζ−z1 dζ −
12πi
∫γ
f(ζ)ζ−z2 dζ|
= | 12πi
∫γ
(ζ)(
1ζ−z1 −
1ζ−z2
)dζ|
= | z1−z22πi
·∫γ
f(ζ)(ζ−z1)(ζ−z2) dζ|
≤ |z1−z2|2π
· M(K)r· r
2· L(γ)
= 2·M(K)r
· |z1 − z2|
z2r2
z1
> r2
r
γ
Die gleichgradige Stetigkeit folgt.
Beweis (2): Sei (fn)n≥0 eine Folge in F und sei {z1, z2, . . .} ⊂ A eineabzahlbare dichte Teilmenge in A. (Da Q abzahlbar ist, konnte man A ∩{a + bi, a, b ∈ Q} nehmen). Sei z ∈ A. Da {z} kompakt ist, ist die Fol-ge (fn(z)) nach Voraussetzung beschrankt. Jede beschrankte Folge besitztaber einen Haufungswert und somit eine konvergente Teilfolge. Nach diesenUberlegungen konnen wir nun induktiv Teilfolgen (fkn,i
)n≥0 von (fn) derartkonstruieren, dass
(1) (fkn,i(zi))n≥0 konvergiert
(2) (fkn,i+1)n≥0 Teilfolge von (fkn,i
)n≥0 ist.
Beachte: kn,i ≥ n, da (fkn,i)n≥0 Teilfolge von (fn) ist,
kn,i+1 ≥ kn,i, da (fkn,i+1)n≥0 Teilfolge von (fn,i) ist,
Behauptung: (fkn,n)n≥0 konvergiert gleichmaßig auf kompakten Teilen
von A.
Beweis: Sei s > 0 gegeben und K ⊂ A kompakt. Nach Teil (1) gibt es einr > 0 mit
|f(z)− f(z′)| < s ∀z, z′ ∈ K mit |z − z′| < r, ∀f ∈ F
95

Da {z1, z2, . . .} ⊂ A dicht ist, gilt
K ⊂⋃
zi∈KKr(zi).
DaK kompakt ist, genugen schon endlich viele dieser Kreisscheiben, umK zuuberdecken, etwa die von zi1 , . . . , zip . Nach Konstruktion unserer Teilfolgengibt es ein N ∈ N, so dass
|fkm,m(zi)− fkn,n
(zi)| < s ∀m,n > N ∀i ∈ {i1, . . . , ip}.
Ist nun z ∈ K, gibt es ein i ∈ {i1, . . . , ip} mit |z − zi| < r. Es folgt
|fkm,m(z)− fkn,n
(z)| ≤ |fkm,m(z)− fkm,m
(zi)|+ |fkm,m(zi)− fkn,n
(zi)|
+|fkn,n(zi)− fkn,n
(z)| < 3s
�
Wir kommen zum Beweis des Riemann’schen Abbildungssatzes.
Behauptung 1: Σ := {ψ ∈ H(G); ψ(G) ⊂ K1(0), ψ injektiv} 6= ∅Beweis: Nach Voraussetzung existiert ein z0 ∈ C\G. Da
z 7→ z − z0
in G keine Nullstelle hat, gibt es nach Voraussetzung ein g ∈ H(G) mit
g(z)2 = z − z0
g ist injektiv: g(z1) = g(z2) ⇒ z1− z0 = g(z1)2 = g(z2)
2 = z2− z0 ⇒ z1 = z2.
w ∈ g(G) ⇒ −w /∈ g(G) : Sei w = g(z1) und −w = g(z2). Dann gilt
z1 − z0 = g(z1)2 = w2 = g(z2)
2 = z2 − z0
Also z1 = z2 und w = −w, d.h. w = 0. Aber g hat keine Nullstelle in G.
Wahle nun a ∈ g(G). Da g(G) offen ist 8.6, gibt es ein r mit 0 < r < |a|, sodass
Kr(a) ⊂ g(G).
Dann istf : G→ C, z 7→ r
g(z) + a
aus Σ. Beachte: f ist wohldefiniert, da −a /∈ g(G). Weiter ist f injektiv, weilg injektive ist. Es bleibt noch zu zeigen, dass
|f(z)| < 1 ∀z ∈ G.
96

Angenommen, |f(z)| ≥ 1. Dann gilt
|a− (−g(z))| ≤ r, d.h. − g(z) ∈ Kr(a).
Also −g(z) ∈ g(G) im Widerspruch zu dem eben gezeigten. �
Behauptung 2: Wahle z0 ∈ G fest. Σ0 = {ψ ∈ Σ; ψ(z0) = 0} 6= ∅Beweis: Sei g ∈ Σ und g(z0) = a ∈ K1(0). Dann ist
ϕa : K1(0) → K1(0), z 7→ z − a
1− az
nach 15.9.1 biholomorph. Also ist f = ϕa ◦ g ∈ Σ und
f(z0) = ϕa(a) = 0.
�
Behauptung 3: Sei f ∈ Σ0 und f(g) 6= K1(0). Dann gibt es ein f1 ∈ Σ0 mit
|f ′1(z0)| > |f ′(z0)| > 0
letzteres nach 8.8.1, da f injektiv ist.
Die Suche nach f1 ist durch das Schwarz’sche Lemma motiviert: Angenom-men, es gibt eine biholomorphe Abbildung h : G → K1(0) mit h(z0) = 0dann macht F : f ◦ h−1 das Diagramm
Gh //
f ''NNNNNNNNNNNNN K1(0)
F��
f(G)
kommutativ und F (0) = f(z0) = 0. Nach dem Schwarz’schen Lemma gilt|F ′(0)| ≤ 1. Also
|f ′(z0)| = |F ′(h(z0)) · h′(z0)| = |F ′(0)| · |h′(z0)| ≤ h′(z0)|
Das gesuchte h erfullt also die Bedingung
|h′(z0)| = max{|f ′(z0)|, f ∈ Σ0}.
Beweis 3: Sei a ∈ K1(0)\f(G). Dann ist
ϕa ◦ f(z) 6= 0 ∀z ∈ G,
97

da a die einzige Nullstelle von ϕa ist und a /∈ Bild f . Nach Voraussetzungexistiert g ∈ H(G) mit
g(z)2 = ϕa ◦ f(z) ∀z ∈ G.
Sei g(z0) = b. Definere nun
f1 := ϕb ◦ g : G→ K1(0)
Offensichtlich ist Bild f1 ⊂ K1(0). Weiter ist f1 injektiv. Der Beweis ist wiein Behauptung 1.
Wegen f1(z0) = ϕb(b) = 0 ist f1 ∈ Σ0.
Sei nunq : K1(0) → K1(0), q(z) = z2
Dann gilt, da ϕ−1a = ϕ−a,
f(z) = ϕ−a ◦ g(z)2 = ϕ−a ◦ q ◦ g(z) = ϕ−a ◦ q ◦ ϕ−b︸ ︷︷ ︸=:F
◦f1(z).
Dann gilt: F : K1(0) → K1(0) und 0 = f(z0) = F (f1(z0)) = F (0).
F ist nicht biholomorph. Denn sonst ware auch q biholomorph im Wider-spruch zu 8.8.1, denn q′(0) = 0. Also ist F nicht von der Form F (z) = λ · zmit |λ| = 1. Aus dem Schwarz‘schen Lemma 8.11 folgt somit
|F ′(0)| < 1
Also: |f ′(z0)| = |(F ◦ f1)′(z0)| = |F ′(0)| · |f ′1(x0)| < |f ′
1(z0)|.
Konstruktion von h: Sei M = sup{|f ′(z0)|; f ∈ Σ0}. Dann gibt es eineFolge (fn) in Σ0 mit lim
n→∞|f ′n(z0)| =M . Die Funktionen in Σ0 sind holomorph
und ihr Bild ist beschrankt, da es in K1(0) liegt. Nach dem Satz von Montel16.5.2 ist Σ0 normal. Also gibt es eine Teilfolge von (fn), die auf kompaktenTeilen von G gleichmaßig gegen ein h konvergiert. Nach 6.14 ist h ∈ H(G).Sei (gn) die konvergente Teilfolge. Dann gilt nach 6.14
|h′(z0)| = limn→∞
|g′n(z0)| =M, h(z0) = limn→∞
gn(z0) = 0
|h(z)| = limn→∞
|gn(z0)| ≤ 1
Also ist h(G) ⊂ K1(0). Da aber h(G) offen ist 8.6, folgt h(G) ⊂ K1(0). Weiterist h injektiv: h ist nicht konstant, da |h′(z0)| =M > 0. Als Limes injektiverFunktionen ist h nach 15.11 injektiv. Also ist h ∈ Σ0. Dann muss
Bildh = K1(0)
98

sein, da es sonst nach Behauptung 3 ein h1 gibt mit |h′1(z0)| > |h′(z0)| =M ,ein Widerspruch. �
Wir haben h so konstruiert, dass h(z0) = 0 fur ein fest gewahltes z0 ∈ G.Dadurch ist h bis auf eine Konstante festgelegt:
16.6 Erganzung zum Riemann’schen Abbildungssatz: In 16.1 kannh so gewahlt werden, dass fur ein fest gegebenes z0 ∈ G gilt
h(z0) = 0.
Ist h1 ein weiteres solches h, dann gibt es ein b ∈ C mit |b| = 1 und h1 = b ·h.
Beweis: f = h1 ◦ h−1 : K1(0) → K1(0) ist biholomorph und f(0) = 0. Nach15.9.2 gibt es ein b mit |b| = 1 und ein a mit |a| < 1, so dass
f = b · ϕa
0 = f(0) = b · ϕa(0) = b · (−a). Es folgt a = 0 und ϕa = id. Also
f(z) = h1 ◦ h−1(z) = b · z ∀z ∈ K1(0).
Sei z = h(w), also h−1(z) = w. Dann gilt
h1(w) = b · h(w) w ∈ G.
�
99

Teil V
Riemannsche Flachen
17 Analytische Fortsetzungen
In diesem Kapitel wollen wir uns mit Problemen folgender Art beschaftigen:
(1) Seien G1, G2 Gebiete, so dass G1 ∩G2 6= ∅ und f ∈ H(G1). Gibt es eing ∈ H(G1 ∪G2) mit g|G1 = f?
Ein solches g ist nach dem Identitatssatz eindeutig.
(2) Da G1 = C\R− und G2 = C\R+ einfach zusammenhangend sind, gibtes auf ihnen Zweige des Logarithmus log1 und log2. Diese konnen wirso wahlen, dass
log1 | H = log2 | H,wobei H die obere offene Halbebene ist. Dennoch wissen wir, dass diebeiden Funktionen nicht “zusammenpassen”. Auf der unteren Halbebe-ne unterscheiden sie sich um 2πi; es gibt keine Zweig des Logarithmusauf G1 ∪G2 = C∗.
Dieses Beispiel zeigt auch, dass Problem 1 nicht immer eine Losunghat. Wir wollen auch nach einer Theorie fragen, in der das Phanomendes Beispiels 2 besser verstanden werden kann. Zunachst ist fur uns derLogarithmus eine mehrdeutige Funktion: Global gesprochen, d.h. aufC∗, ist ein Funktionswert nur bis auf Vielfache von 2πi bestimmt.
17.1 Definition: Ein Funktionselement ist ein Paar (f, A), A ⊂ C offenf ∈ H(A). Fz bezeichne die Menge der Funktionenelemente (f, A) mit z ∈ A.
Wir fuhren auf Fz eine Aquivalenzrelation ein:
(f, A) ∼ (g, B) ⇐⇒ ∃(h,C) ∈ Fz mit C ⊂ A ∩B und f | C = h = g | C.17.2 Definition: Eine Aquivalenzklasse in Fz heißt Funktionenkeim in z.
Ein Funktionskeim beschreibt eine Funktion lokal um einen Punkt: Ist (f, A)aquivalent zu (g, B) und sind f und g holomorph, so gilt nach dem Iden-titatssatz: f und g sind auf jedem Gebiet G ⊂ A ∩ B mit z ∈ G gleich.
17.3 Bezeichnung: Kz =Menge der Funktionenkeime in z. Sei K =⋃z∈C
Kz,
und (f, A)z bezeichnet die Aquivalenzklasse von (f, A) ∈ Fz
100

17.4 Definition: Sei w : [a, b] → C ein Weg (stetig!) und u : [a, b] → Keine Abbildung, so dass u(t) ∈ Kw(t) ∀t ∈ [a, b]. Dann heißt u analytischeFortsetzung von u(a) langs w, wenn gilt: Zu jedem t ∈ [a, b] und jedem(f, A) ∈ Fw(t) mit (f, A)w(t) = u(t) gibt es ein r > 0, so dass
(f, A)w(t′) = u(t′) ∀t′ ∈ [a, b] mit |t− t′| < r
Was besagt diese abstrakte Definition? Zunachst wissen wir, dass u(t) lokalum w(t) eine Funktion beschreibt. Ist (f, A) ein reprasentierendes Funktions-element von w(t), so besagt die Definition, dass (f, A) auch reprasentierendesFunktionselement von u(t′) fur t′ nahe genug bei t ist. Da [a, b] kompakt ist,wird also u schon durch endlich viele Funktionselemente reprasentiert.
17.5 Lemma: Sei w : [a, b] → C ein Weg, a ≤ t0 < t1 < . . . < tn = b eineZerlegung von [a, b]. Seien (fk, Ak) Funktionselemente, k = 1, . . . , n, so dassw([tk−1, tk]) ⊂ Ak und (fk−1, Ak−1)w(tk−1) = (fk, Ak)w(tk−1). Dann ist
u : [a, b] → K, t 7→ (fk, Ak)w(t) t ∈ [tk−1, tk]
eine analytische Fortsetzung von (f1, A1)w(a) = u(a)
Beweis: Sei tk−1 < t < tk und (g, B) ∈ Fw(t), so dass (g, B)w(t) = u(t) =(Ak, fk)w(t). Dann gibt es eine offene Kreisscheibe C ⊂ B ∩ Ak mit Zentrumw(t). Wahle r derart, dass 0 < r und [t− r, t + r] ⊂ [tk−1, tk] mit w(t′) ∈ C∀t′ mit |t− t′| < r. Dann gilt fur diese t′:
C AkB
w(t)
(g, B)w(t′) = (g, C)w(t′) = (fk, C)w(t′) = (fk, Ak)w(t′).
Ist t = tk ein Zerlegungspunkt, machen wir dieselbe Uberlegung fur die dreiFunktionselemente (g, B), (fk, Ak) und (fk−1, Ak−1). �
17.5 hat eine offensichtliche Umkehrung.
101

17.6 Lemma: Ist w : [a, b] → A ein Weg, A ⊂ C offen und u : [a, b] → Keine analytische Fortsetzung von u(a) langs w. Dann gibt es eine Zerlegunga = t0 < t1 < . . . < t2n = b von [a, b] und offene Kreisscheiben K2i ⊂ Amit Zentrum w(t2i), i = 0, . . . , n und Funktionselemente (f2i, K2i), so dassw([t2i−1, t2i+1]) ⊂ K2i und
u(t) = (f2i, K2i)w(t) fur t ∈ [t2i−1, t2i+1]
Beweis: Sei u(t) = (ft, At)w(t) mit einem Reprasentanten (ft, At). Sei Kt ⊂At ∩ A eine offene Kreisscheibe mit Zentrum w(t). Dann gilt
u(t) = (ft, Kt)w(t).
Wahle zu (ft, Kt) ein r(t) > 0, so dass
(ft, Kt)w(t′) = u(t′) ∀t′ ∈ [a, b] mit |t− t′| < r(t) (∗)Es gilt:
[a, b] ⊂⋃
t∈[a,b]]t− r(t), t+ r(t)[ und w([a, b]∩]t− r(t), t+ r(t)[) ⊂ Kt
Da [a, b] kompakt ist, gibt es endlich viele ti, a = t0 < t2 < . . . < t2n = b, sodass
[a, b] ⊂n⋃
i=0
]t2i − r(t2i), t2i + r(t2i+2)[.
Wahle t2i+1 ∈]t2i, t2i + r(t2i)[ ∩ ]t2i+2 − r(t2i+2), t2i+2[
w(t0)w(t4)
w(t6)w(t2)
Aus (∗) folgt nun die Behauptung. �
Die beiden Lemmata legen die Vermutung nahe, dass eine analytische Fort-setzung langs w eine Funktion in einer Umgebung des Anfangspunktes von wauf eine Umgebung des Bildes von w erweitert. Das ist aber nicht so: Ist z.B.w(t1) =
w(t1) = w(t2)
w(t2) fur t1 < t2, definiert die analyti-sche Fortsetzung durch u(t1) und u(t2)zwei Funktionenkeime um w(t1). Eines un-serer Probleme wird es sein festzustellen,wie verschieden diese beiden Keime seinkonnen.
102

17.7 Satz: Sei w : [a, b] → C ein Weg und u(a) ∈ Kw(a). Dann gibt eshochstens eine analytische Fortsetzung von u(a) langs w.
Beweis: Seien u und v analytische Fortsetzungen von u(a) langs w. SeiB = {t ∈ [a, b]; u(t) = v(t)}. Es ist B 6= ∅, da a ∈ B.
B ist offen: Sei t ∈ B. Nach Definition gibt es zu (f, A) ∈ Fw(t) mit(f, A)w(t) = u(t) = v(t) ein r > 0, so dass
u(t′) = (f, A)w(t′) = v(t′) ∀t′ ∈ [a, b] mit |t− t′| < r.
Also sind alle t′ ∈ [a, b] mit |t− t′| < r in B.
B ist abgeschlossen: Sei t = lim tn mit tn ∈ B. Seien (f, A), (g,D) ∈ Fw(t)
mit (f, A)w(t) = u(t) und (g,D)w(t) = v(t). Nach Definition gibt es ein r > 0,so dass
(f, A)w(t′) = u(t′) (g,D)w(t′) = v(t′) ∀t′ ∈ [a, b], |t− t′| < r
Wahle N so groß, dass |t− tn| < r ∀n ≥ N . Fur diese tn gilt
u(tn) = (f, A)w(tn) v(tn) = (g,D)w(tn),
insbesondere also f(w(tn)) = g(w(tn)) ∀n ≥ N , weil u(tn) = v(tn), also g undf bei tn lokal ubereinstimmen. Damit stimmen g und f auf einer Teilmengevon A∩D mit Haufungspunkt t uberein. Also folgt f = g in einer Umgebungvon w(t) nach dem Identitatssatz. Also u(t) = v(t).
Da [a, b] zusammenhangend ist, folgt B = [a, b]. �
17.8 Satz: Sei H : [0, 1] × [0, 1] → C eine Homotopie des Weges w0 (vergl.5.30). Sei ws : [0, 1] → C, t 7→ H(t, s). Sei u(0) ∈ Kw0(0) und us eine analyti-sche Fortsetzung von u(0) langs ws. Dann gilt
u0(1) = u1(1).
Beweis: Da [0, 1] zusammenhangend ist, mussen wir nur fur jedes s ∈ [0, 1]ein r > 0 finden, so dass
us(1) = us′(1) ∀s′ ∈ [0, 1] mit |s− s′| < r.
Nach 17.6 gibt es eine Zerlegung 0 ≤ t0 < . . . t2n = 1 von [0, 1] und Funkti-onselemente (f2i, K2i), K2i offene Kreisscheiben mit Zentrum w(t2i), so dass
ws([t2i−1, t2i+1]) ⊂ K2i
103

us(t) = (f2i, K2i)ws(t) fur t ∈ [t2i−1, t2i+1].
Da K2i offen ist, gibt es ein δi > 0, so dass H(t, s′) ∈ K2i ∀t ∈ [t2i−1, t2i+1]und |s− s′| < δi, insbesondere also
ws′([t2i−1, t2i+1]) ⊂ K2i
Fur r = min(δ0, . . . , δn) und |s− s′| < r gilt dann
ws′([t2i−1, t2i+1]) ⊂ K2i ∀i = 0, . . . , n
ws′
ws
Nach 17.5 istvs′(t) := (f2i, K2i)ws′ (t)
t ∈ [t2i−1, t2i+1]
eine analytische Fortsetzung von u(0) langs ws′ . Nach 17.7 ist vs′ = us′ . Alsous′(1) = (f2n, K2n)ws′ (1)
= (f2n, K2n)ws(1) = us(1), da ws′(1) = ws(1). �
17.9 Monodromiesatz: Voraussetzungen:(1) G ist ein einfach zusammenhangendes Gebiet und u ∈ Kz0 .(2) Zu jedem Weg w : [0, 1] → G mit w(0) = z0 gibt es eine analytischeFortsetzung von u langs w.Behauptung: Es gibt genau ein g ∈ H(G) mit (g,G)z0 = u.
Beweis: Sei z1 ∈ G und w ein Weg von z0 und z1. Sei v die Fortsetzung vonu langs w. Definiere
g(z1) = f(z1), wobei (f, A) Reprasentant von v(1) ist, also z1 ∈ A.
Dann ist g nach 17.8 eindeutig definiert, da je zwei Wege von z0 und z1homotop sind. �
Wir wollen uns jetzt mit der Existenz analytischer Fortsetzungen beschafti-gen.
17.10 Satz: Sei f ∈ H(A) und w : [0, 1] → A ein stetiger Weg. Sei D0 ⊂ Aeine offene Kreisscheibe mit Zentrum w(0) und F0 ∈ H(D0) definiert durch
F0(z) =
∫
[w(0),z]
f dζ
(F0 existiert nach 5.28). Dann laßt sich (F0, D0)w(0) langs w analytisch fort-setzen.
104

Beweis: Wie in Lemma 17.6 unterteilen wir [0, 1] in 0 ≤ t0 < . . . < t2n = 1und wahlen offene Kreisscheiben K2i mit Zentrum w(t2i), so dass
w([t2i−1, t2i+1]) ⊂ K2i ⊂ A
und starten mit K0 = D0. Wir konstruieren durch Induktion nach i Funkti-onselemente (Fi, K2i) so dass
Fi+1(z) = Fi(z) ∀z ∈ K2i ∩K2i+2
beginnend mit dem gegebenen (F0, K0).
Fi+1(z) = Fi(w(t2i+1)) +
∫
[w(t2i+1),z]
f dζ z ∈ K2i+1.
Da K2i+2 konvex ist, existiert das Integral. Sei nun z ∈ K2i ∩ K2i+1. NachKonstruktion gilt
Fi(z) = Fi−1(w(t2i−1)) +∫
[w(t2i−1),z]
f dζ
Fi+1(z) = Fi−1(w(t2i−1)) +∫
[w(t2i−1),(t2i+1)]
f dζ +∫
[w(t2i+1),z]
f dζ
(∗)= Fi−1(w(t2i−1)) +
∫[w(t2i−1),z]
f dζ = Fi(z)
(∗) gilt, weil w(t2i−1), w(t2i+1) und z im konvexen K2i liegen 5.27. �
In “Verallgemeinerung” zum Wegeintegral 5.7 definieren wir
17.11 Definition: Sei f ∈ H(A) und w : [0, 1] → A ein stetiger Weg. Seiu0 = (F0, D0)w(0) mit (F0, D0) wie in 17.10. Sei u : [0, 1] → K die analytischeFortsetzung von u0 langs w und (F1, A1) ein Reprasentant von u(1). Danndefinieren wir ∫
w
f dz = F1(w(1)).
Bemerkung: Wir fordern hier nur die Stetigkeit des Wegs, benotigen dafuraber ein holomorphes f auf einer Umgebung von w∗, dem Bild von w. Furstuckweise glatte Wege stimmt diese Definition mit 5.7 uberein.
Als einfache Anwendung von Satz 17.8 erhalten wir folgende Verallgemeine-rung der Aufgabe 5.32.
105

17.12 Cauchy’scher Integralsatz: Sei f ∈ H(A) und seien v, w : [0, 1] →A homotope Wege. Dann gilt
∫
v
f dz =
∫
w
f dz.
17.13 Aufgabe: Sei G ⊂ C ein Gebiet. Zeigen Sie: G ist genau dann einfachzusammenhangend, wenn fur jedes f ∈ H(G) und jede stuckweise glatteSchleife γ in G gilt ∫
γ
f dz = 0
(Fur G = C ist das klar. Fur G 6= C zeigt man fur die Ruckrichtung, dassdie Voraussetzung des Riemannschen Abbildungssatzes erfullt ist.
18 Der Begriff “Riemannsche Flache”
18.1 Definition: Sei X eine Menge
(1) Eine Karte fur X ist ein Tripel c = (V, ϕ, U) mit V ⊂ X, U ⊂ C offenund
ϕ : V → U
bijektiv. V heißt Definitionsbereich von c, ϕ heißt Koordinatenfunktion.
(2) Zwei Karten c = (V, ϕ, U) und c′ = (V ′, ϕ′, U ′) heißen vertraglich, wenngilt:
(i) ϕ(V ∩ V ′) ist offen in C
(ii) die Ubergangsfunktion ϕ′ ◦ ϕ−1 : ϕ(V ∩ V ′) → ϕ′(V ∩ V ′) istbiholomorph.
(3) Eine Menge A von Karten fur X heißt Atlas, wenn je zwei Karten ausA vertraglich sind und jedes x ∈ X im Definitionsbereich mindestenseiner Karte liegt.
Atlanten A und B heißen aquivalent, wenn A∪B wieder ein Atlas ist.Eine Aquivalenzklasse von Atlanten fur X heißt komplexe Struktur.
18.2 Definition: Sei D eine komplexe Struktur auf X. Eine MengeM ⊂ Xheißt offen, wenn sie Vereinigung von Definitionsbereichen von Karten ausD ist.
106

D heißt separierend, wenn es zu x 6= y in X Karten (V, ϕ, U) und (V ′, ϕ′, U ′)gibt, so dass x ∈ V , y ∈ V ′ und V ∩ V ′ = ∅.Eine Riemannsche Flache ist ein Paar (X,D), wobei D eine separierendekomplexe Struktur auf X ist ((X,D) heißt auch 1-dimensionale komplexeMannigfaltigkeit).
18.3 Beispiel: Sei D ⊂ C offen. Dann ist (D, id,D) eine Karte fur D undA = {(D, id,D)} ein Atlas fur D. Sei AD die zugehorige komplexe Struktur.Dann ist (D,AD) eine Riemannsche Flache:
In der Aquivalenzklasse von A liegt der Atlas aller Karten (A, id, A) mitA ⊂ D offen. Die Ubergangsfunktionen sind Identitaten, also biholomorph.Der neue Atlas separiert.
18.4 Beispiel: Definiere auf C2\{(0, 0)} eine Aquivalenzrelation durch
(z0, z1) ∼ (w0, w1) ⇐⇒ ∃ λ ∈ C∗ mit z0 = λw0, z1 = λw1.
Die Menge der Aquivalenzklassen heißt (eindimensionaler komplexer projek-tiver Raum) und wird CP 1 bezeichnet. Sei [z0, z1] die Aquivalenzenklasse von(z0, z1), und seien
U0 = {[z0, z1] ∈ CP 1; z0 6= 0} U1 = {[z0, z1] ∈ CP 1; z1 6= 0}
Dann ist CP 1 = U0 ∪ U2. Wir definieren nun
ϕ0 : U0 → C, [z0, z1] 7→z1z0
ϕ1 : U1 → C, [z0, z1] 7→z0z1
ϕ0 ist bijektiv, denn zψ7→ [1, z] ist eine Umkehrfunktion:
ψ ◦ ϕ0([z0, z1]) =[1, z1
z0
]= [z0, z1], da z0 6= 0
ϕ0 ◦ ψ(z) = z
Also ist (U0, ϕ0,C) eine Karte. Dasselbe gilt fur (U1, ϕ1,C).
Vertraglichkeit: ϕ0(U0 ∩ U1) = C∗ = ϕ1(U0 ∩ U1). Die Ubergangsfunktion
ϕ1 ◦ ϕ−10 : C∗ −→ U0 ∩ U1 −→ C∗
z 7−→ [1, z] 7−→ 1z
ist holomorph. Also ist A = {(U0, ϕ0,C), (U1, ϕ1,C)} ein Atlas. Die zugehori-ge komplexe Struktur ist separierend. Der Beweis ist wie in 18.3.
CP 1 mit dieser komplexen Struktur heißt auch Riemannsche Zahlenkugel.
107

Beachte: (z0, z1) ∼ (z, 1) fur z1 6= 0 mit z = z0z1
∼ (1, 0) fur z1 = 0
Also kann CP 1 als C mit unendlich fernen Punkten [1, 0] aufgefaßt werden.
18.5 Definition: Seien (X,D) und (Y, C) zwei Riemannsche Flachen. EineAbbildung f : X → Y heißt holomorph, wenn fur jede Karte (V ′, ϕ′, U ′) vonC die Menge f−1(V ′) offen in X ist und fur jede Karte (V, ϕ, U) von D mitf(V ) ⊂ V ′ gilt:
ϕ′ ◦ f ◦ ϕ−1 : Uϕ−1
// Vf // V ′ ϕ′
// U ′
∩ ∩C C
ist holomorph.
18.6 Aufgabe: Definieren Sie auf der 2-Sphare S2 eine komplexe Strukturund eine Abbildung f : CP 1 → S2, so dass f bijektiv und f und f−1 holo-morph sind.
(Dies rechtfertigt die Bezeichnung “Zahlenkugel” fur CP 1.)
18.7 Definition: Sei (X,D) eine Riemannsche Flache. Eine holomorpheAbbildung f : (X,D) → CP 1 heißt auch meromorphe Funktion auf (X,D).
18.8 Satz: Sei G ⊂ C ein Gebiet (also eine Riemannsche Flache nach 18.3).Die meromorphen Funktionen auf G ungleich der konstanten Funktion nach[0, 1] ∈ CP 1 entsprechen umkehrbar eindeutig den holomorphen Funktionen
f : G\A→ C,
wobei A ⊂ G diskret ist und f in den Punkten von A Pole hat.
Beweis: Sei f : G → CP 1 eine meromorphe Funktion. Sei U0 = {[z0, z1] ∈CP 1; z0 6= 0}. Nach Definition ist
f0 : f−1(U0)
f // U0ϕ0 // C
holomorph. Dasselbe gilt fur
f1 : f−1(U1)
f // U1ϕ1 // C.
Da CP 1\U0 = {[0, 1]}, ist G\f−1(U0) = f−1([0, 1]) = f−11 (0), denn
ϕ1([0, 1]) = 0. Da f1 nicht konstant 0 ist, ist f−11 (0) diskret, d.h. A :=
G\f−1(U0) ist diskret. Da
f0(z) =1
f1(z)∀z ∈ f−1(U0 ∩ U1),
108

hat f0 Pole in z ∈ A = f−11 (0). Die gesuchte Bijektion ist
f 7−→ f0.
Ist umgekehrt eine holomorphe Funktion g : G\A→ C gegeben mit Polen inA, definieren wir
f : G→ CP 1, z 7→{ϕ−10 ◦ g(z) z /∈ A
[0, 1] z ∈ A
Dann ist f−1(U0) = G\A, f−1(U1) = A ∪ g−1(C∗)
f0 : G\A f−→ U0ϕ0−→ C ist g
f1 : g−1(C∗)\A −→ C ist 1
g, f1|A = 0
Da f−1(ϕ−11 (0)) = A und g in A Pole hat, ist f1 in A holomorph. �
18.9 Satz: Jeder C-lineare Isomorphismus f : C2 → C2 definiert eine biho-lomorphe Abbildung
Pf : CP 1 → CP 1, [z0, z1] 7→ [f(z0, z1)]
Beweis: f(z0, z1) = (a00z0 + a01z1, a10z0 + a11z1) mit aij ∈ C.
ϕ0(U0 ∩ Pf−1(U0))ϕ−10−→ U0 ∩ Pf−1(U0)
Pf−→ U0ϕ0−→ C
z 7−→ ϕ0Pf([1, z]) = ϕ0[a00 + a01z, a10 + a11z] =a11z + a10a01z + a00
Diese Abbildung ist holomorph. Ahnliche Formeln erhalt man fur die anderenKombinationen U0 ∩ Pf−1(U1), U1 ∩ Pf−1(U0) und U1 ∩ Pf−1(U1). NachAufgabe 18.11.2 genugt das. �
18.10 Satz: Jede biholomorphe Abbildung h := CP−1 → CP−1 ist von derForm h = Pf fur einen C-linearen Isomorphismus f : C2 → C2.
Beweis: Sei h[1, 0] = [a, b] und h[0, 1] = [c, d]. Da h bijektiv ist, ist [a, b] 6=[c, d]. Insbesondere gibt es kein λ ∈ C mit (a, b) = λ · (c, d), d.h. (a, b) und(c, d) bilden eine Basis von C2. Also gibt es einen linearen Isomorphismusg : C2 → C2 mit g(a, b) = (1, 0), g(c, d) = (0, 1). Es folgt
Pg ◦ h([1, 0]) = [1, 0] und Pg ◦ h([0, 1] = [0, 1].
Wir erinnern: U1 = CP 1\{[1, 0]}
Cϕ−11
∼=// U1
Pg◦h∼=
// U1
ϕ−11
∼=// C
109

Da Pg und h biholomorph sind, ist ϕ1 ◦ Pg ◦ h ◦ ϕ−11 : C → C biholomorph
und damit nach 15.7 ganz linear, d.h.
ϕ1 ◦ Pg ◦ h ◦ ϕ−11 (z) = α · z + β α, β ∈ C, α 6= 0
ϕ1 ◦ Pg ◦ h ◦ ϕ−11 (0) = ϕ1 ◦ Pg ◦ h([0, 1]) = ϕ1([0, 1]) = 0.
Also β = 0 und
ϕ−11 (α · z) = [αz, 1] = Pg ◦ h ◦ ϕ−1
1 (z) = Pg ◦ h([z, 1])Folglich ist
Pg ◦ h | U1 = Pk | U1
mit k(z0, z1) = (αz0, z1). Offensichtlich ist k ein linearer Isomorphismus und
Pg ◦ h = Pk,
denn Pg ◦ h([1, 0]) = [1, 0] = [α, 0] = Pk[1, 0]. Also
h = (Pg)−1 ◦ Pk = P (g−1 ◦ k).�
18.11 Aufgabe: Zeigen Sie:
(1) Sind (X,D)f→ (Y, C) g→ (Z,F) holomorphe Abbildungen Riemann-
scher Flachen, dann ist auch g ◦ f : (X,D) → (Z,F) holomorph.
(2) Sei A ein Atlas von X und B ein Atlas von Y . Fur jede Karte (V, ϕ, U)von A und (V ′, ϕ′, U ′) von B gelte
ϕ′ ◦ f ◦ ϕ−1 : ϕ(V ∩ f−1(V ′))ϕ−1
−→ V ∩ f−1(V ′)f−→ V ′ ϕ′
−→ U ′
ist holomorph. Dann ist f holomorph.
18.12 Aufgabe: Sei (X,D) eine Riemannsche Flache und p : X → Y einesurjektive, lokal injektive Abbildung. D.h. zu jedem x ∈ X gibt es eine offeneMenge Ux, so dass p : Ux → p(Ux) bijektiv ist. Sei (V, ϕ, U) eine Karte in D,so dass p|V bijektiv ist. Sei
ψV : p(V )p−1
// Vϕ // U.
Zeigen Sie: Die Menge aller dieser Tripel (p(V ), ψV , U) bilden einen At-las B fur Y . Die durch B definierte komplexe Struktur macht Y zu einerRiemannschen Mannigfaltigkeit, so dass p : X → Y holomorph ist.
18.13 Aufgabe: Sei (X,D) eine Riemannsche Flache und U ⊂ X offen.Dann ist (U,D|U) eine Riemannsche Flache und U ⊂ X ist holomorph.
110

19 Elliptische Funktionen
Wir haben im vorausgegangenen Abschnitt die offenen Mengen von C undals komplizierteres Beispiel den CP 1 als Riemannsche Flachen kennenge-lernt. Beide sind gewissen Typen holomorpher Funktionen zugeordnet. Of-fene Mengen sind Definitionsbereiche holomorpher Funktionen. HolomorpheAbbildungen nach CP 1 entsprechen holomorphen Abbildungen nach C mitPolen.
In diesem Abschnitt wollen wir Riemannsche Flachen konstruieren, die mitzwei anderen Typen holomorpher Abbildungen in Beziehung stehen. Wirbeginnen mit dem einfacheren Fall der periodischen Funktionen.
19.1 Definition: Eine Funktion f : C → C heißt periodisch mit Periodee ∈ C∗, wenn f(z + e) = f(z) ∀z ∈ C.
19.2 Beispiel: Die Exponentialfunktion exp : C → C ist periodisch mit derPeriode 2πi.
sin und cos sind periodisch mit der Periode 2π.
Periodische Funktionen lassen sich am schonsten uber einen bestimmten TypRiemannscher Flachen beschreiben. Sei e 6= 0 aus Z
Z = {k · e; k ∈ Z}.
Dann ist (Z,+) eine zu (Z,+) isomorphe Untergruppe von (C,+). Sei C/Zdie Faktorgruppe und
p : C → C/Z, z 7→ [z] (Zylinder)
die Projektion. p ist lokal bijektiv und somit C/Z nach 18.12 eine Riemann-sche Flache.
Explizite Beschreibung: Sei U ⊂ C offen, so dass (p|U) injektiv ist. Sei
ϕU : p(U) → U
die Umkehrabbildung von p|U . Dann ist (p(U), ϕU , U) eine Karte fur C/Z.
Vertraglichkeit: Fur Karten (p(U), ϕU , U) und (p(V ), ϕV , V ) ist
ϕU(p(U) ∩ p(V )) = U ∩ ϕU(p(V )) = U ∩∐
k∈Z(V + ke) offen
ϕV ◦ϕ−1U : ϕU(p(U)∩p(V )) = U∩
∐
k∈Z(V+ke) −→ ϕV (p(U)∩p(V )) = V ∩
∐
k∈Z(U+ke)
111

ist durch z 7→ z + k(z)e mit k(z) ∈ Z definiert. Da k stetig in z ist, istϕV ◦ ϕ−1
U holomorph.
Beachte: A ⊂ C/Z offen ⇐⇒ p−1(A) offen.
Ist nun f : C → C periodisch mit Periode e 6= 0, so ist
F : C/Z → C, [z] → f(z)
wohldefiniert.
19.3 Satz: Die periodischen Funktionen f : C → C mit Periode e 6= 0entsprechen umkehrbar eindeutig den Funktionen F : C/Z → C. Weiter istf genau dann holomorph, wenn F holomorph ist.
Beweis: Die Zuordnung f 7→ F ist bijektiv mit Umekhrarbildung F 7→ F ◦p.Es ist nur der zweite Teil zu zeigen.
Sei f holomorph und (p(U), ϕU , U) eine Karte von C/Z. Dann ist
F ◦ ϕ−1U : U
p // p(U) // C
holomorph, da F ◦ ϕ−1U = F ◦ p = f .
Ist F holomorph, so auch f ; denn es gilt
19.4 p : C → C/Z ist holomorph.
Beweis 19.4: Sei (p(U), ϕU , U) eine Karte in C/Z. Dann ist p−1(p(U)) =∐k∈Z
U + ke offen. Sei V ⊂ C offen und p(V ) ⊂ p(U), d.h. V ⊂ ∐k∈Z
U + ke.
Dann istϕU ◦ p : V // p(U)
ϕU // U
von der Form z 7→ z+k(z)e, k(z) ∈ Z. Wie oben ist die Abbildung holomorph.
�
19.5 Definition: Seien e1, e2 ∈ C R-linear unabhangig. Dann heißt
G : {k · e1 + l · e2; k, l ∈ Z}
Gitter in C.
19.6 Ein Gitter G ist eine zu Z× Z isomorphe Untergruppe von (C,+).
112

Die Projektion p : C → C/G auf die Faktorgruppe ist lokal injektiv. NachAufgabe 18.12 hat C/G eine kanonische komplexe Struktur, und p ist holo-morph.
Veranschaulichung:
e1
e2
z1 ∼ z2 ⇐⇒ z1 − z2 ∈ G
Also gibt es zu jedem z ∈C einen Reprasentanten imstraffierten Parallelogramm.Zwei Punkte im Paralle-logramm sind genau dannaquivalent, wenn sie sich imRand “entsprechen”. Topolo-gisch gesehen ist also C/G einTorus.
Wie im Beweis von 19.3 folgt nun:
19.7 Satz: Sei X eine Riemannsche Flache. Die Abbildungen F : C/G → Xentsprechen umkehrbar eindeutig den Abbildungen.
f : C → X
mit der Eigenschaft, dass f(z + g) = f(z) ∀z ∈ C, ∀g ∈ G, d.h. fur die gilt:
f(z + e1) = f(z) = f(z + e2) ∀z ∈ C.
f ist genau dann holomorph, wenn F holomorph ist.
19.8 Definition: Sei G ⊂ C ein Gitter. Eine Funktion f : C → X mitf(z + g) = f(z) ∀z ∈ C, ∀g ∈ G heißt doppelt periodisch. Eine doppeltperiodische holomorphe Funktion
C → CP 1
heißt elliptische Funktion.
Wir wollen uns mit elliptischen Funktionen beschaftigen. Der nachste Satzzeigt, dass es keine holomorphen doppelt periodischen Funktionen C → C
gibt, außer den Konstanten. Gerade das macht die elliptischen Funktionenreizvoll (beachte C ⊂ CP 1, etwa als U0 = CP 1\[0, 1]).
19.9 Satz: Jede holomorphe Funktion F : C/G → C ist konstant.
113

Beweis: f : F ◦ p : Cp→ C/G F→ C ist holomorph und doppelt periodisch.
Sei P das durch e1 und e2 aufgespannte abgeschlossene Parallelogramm. DaP kompakt ist, ist f auf P beschrankt, also ist f auf ganz C beschrankt unddamit nach dem Satz von Liouville konstant. �
Damit gibt es keine nicht konstante holomorphe doppelt periodische Funktion
f : C → C.
Wir haben aber mehr Freiheit, da wir doppelt periodische Abbildungen nachCP 1 betrachten, also Abbildungen mit Polen. Nach 19.7 werden elliptischeAbbildungen am sinnvollsten als holomorphe Abbildungen
C/G → CP 1
beschrieben. Wir wollen daher den Begriff w-Stelle fur w ∈ CP 1 auf solcheAbbildungen ubertragen. Wir erinnern an Satz 18.7.
19.10 Definition: Fur w ∈ CP 1 hat F : C/G → CP 1 in [z] ∈ C/G einek-fache w-Stelle, wenn fur eine Karte (p(U), ϕU , U) um [z] gilt:
f : U\p−1(F−1[0, 1])p // p(U)\F−1([0, 1])
F // CP 1\[0, 1] ϕ0 // C
hat in z eine k-fache ϕ0(w)-Stelle fur w 6= [0, 1] bzw. in z ∈ p−1(F−1[0, 1])einen k-fachen Pol fur w = [0, 1].
Folgendes Resultat lasst an der Existenz nicht-konstanter elliptischer Funk-tionen zweifeln:
19.11 Satz: Es sei F : C/G → CP 1 eine holomorphe Funktion mit hochstenseiner [0, 1]-Stelle. Hat diese die Ordnung 1, dann ist F konstant.
Wir ubersetzen dieses Resultat: Sei P := {t1e1 + t2e2; 0 ≤ ti < 1} das halb-offene Periodenparallelogramm und f : C → CP 1 eine elliptische Funktion,d.h.
f : C\A→ C A = f−1([0, 1])
und f hat in A Pole. Besteht A ∩ P aus hochstens einem Punkt und hat fdort einen Pol der Ordnung 1, so ist f konstant.
Dieser Satz folgt aus
19.12 Satz: Sei f : C\A→ C eine elliptische Funkion mit Polen a1, . . . , ak ∈P . Dann ist
k∑n=1
Res(f, an) = 0.
114

Beweis: Wir nehmen zunachst an, dass kein ai auf dem Rand ∂P von Pliegt. Dann gilt nach dem Residuensatz 7.8
k∑n=1
Res(f, an)=1
2πi
∫∂P
f dz = 12πi
(∫w1
f dz +∫w4
f dz −∫w3
f dz −∫w2
f dz
)
=0,
weil f auf gegenuberliegenden Punkten von ∂P denselben Wert hat.
w2P
e2w3
w4
e1w1
Liegt ein ai auf dem Rand, kann durch eine kleine Parallelverschiebung vonP erreicht werden, dass alle im Inneren liegen. Fur das verschobene Paralle-logramm gilt derselbe Schluß. �
Gilt nun fur die nicht-konstante elliptische Funktion f : C\A→ C mit Polenin A, dass A ∩ P = {a}, dann gilt nach 19.12
Res(f, a) = 0.
Also kann f in a keinen Pol der Ordnung 1 haben, da sonst Res(f, a) 6= 0.Ist A = ∅, dann ist f nach 19.9 konstant.
Wir wollen eine weitere wichtige Folgerung aus 19.12 ziehen. Dazu benotigenwir zunachst
19.13 Lemma: Sei G ein Gebiet, a ∈ G und f ∈ H(G\{a}). Hat f in aeinen Pol der Ordnung m ≥ 1, so hat f ′
fin a einen Pol der Ordnung 1 und
Res
(f ′
f, a
)= −m.
Beweis: Nach 11.8 hat f bei a die Laurentreihenentwicklung
f(z) =∞∑
n=−mbn · (z − a)n
Also ist
g : G→ C, z 7→{
(z − a)mf(z) z 6= ab−m 6= 0 z = a
115

eine holomorphe Funktion. Es gilt fur z ∈ G\{a}
g′(z) = m(z − a)m−1 · f(z) + (z − a)m · f ′(z)(z − a)m · f ′(z) = g′(z)−m(z − a)m−1f(z)
Division durch g(z) = (z − a)m · f(z) ergibtf ′
f(z) =
g′(z)
g(z)− m
z − a.
�
Ist f : G\A→ C doppelt periodisch und holomorph, dann auch f ′ : G\A→C und somit auch
f ′
f: G\B → C,
wobei B = A∪ f−1(0). Nach 8.2 hat f ′
feinen einfachen Pol mit Residuum m
in allen m-fachen Nullstellen von f und einen einfachen Pol mit Residuum−m in allen Polen der Ordnung m von f . Nach 19.12 ist aber
∑
b∈BRes
(f ′
f, b
)= 0.
Also ist die Summe der Nullstellen von f minus der Summe der Pole, gezahltmit ihren Ordnungen, gleich 0. Wenden wir das auf f − w0 an, w0 ∈ C fest,so hat f genausoviele w0-Stellen wie Pole (einschließlich ihrer Ordnungen).Bedenken wir, dass Pole den Elementen mit Bild [0, 1] unter
f : C → CP 1
entsprechen, erhalten wir
19.14 Satz: Eine nicht-konstante elliptische Funktion
F : C/G → CP 1
nimmt jeden Wert w0 ∈ CP 1, gezahlt einschließlich Ordnung, gleich oft an.
Wollen wir also eine moglichst einfache elliptische Funktion konstruieren,mussen wir nach einer doppelt periodischen Funktion
C → CP 1
suchen, die entweder einen Pol der Ordnung 2 mit Residuum 0 in P hat oderdie zwei einfache Pole mit Residuensumme 0 in P hat. Wir versuchen es mitdem ersten Fall.
116

19.15 Satz und Definition: Sei G = {ke1 + le2; k, l ∈ Z} ein Gitter in C.Dann ist die Reihe
p(z) =1
z2+
∑
w∈G\{0}
(1
(z − w)2− 1
w2
)
lokal gleichmaßig konvergent in C\G und definiert eine elliptische Funktion,genannt Weierstrass’sche p-Funktion.
Beweis: Konvergenz: Sei |z| ≤ R. Dann gilt fur alle bis auf endlich vielew ∈ G mit |w| ≥ 2R
∣∣∣∣1
(z − w)2− 1
w2
∣∣∣∣ =|w2 − z2 + 2zw − w2|
|w|2 · |z − w|2 =|z| · |2w − z||w|2 · |z − w|2
≤ R · 3|w||w|2 |w|2
4
≤ const.1
|w|3
denn |2w − z| ≤ 2|w|+R < 3|w|
|z − w| ≥ |w| −R ≥ |w|2.
Wir mussen also zeigen
z1
z22R
w
R
�
Hilfssatz:∑′ 1|w|3 <∞, wobei
∑′ =∑w∈Gw 6=0
.0
G2
Beweis: Sei Gn = {ke1 + le2; max{|k|, |l|} = n}. Gn hat 8n Elemente: Ist|k| = n haben wir 2n+ 1 Moglichkeiten fur l, namlich −n, . . . ,+n. Dasselbegilt fur |l| = n, also 8n+ 4, dabei sind aber die Ecken doppelt gezahlt.
w ∈ Gn ⇒ |w| ≥ n ·M mit M = min{|e1|, |e2|}. Also∑‘ 1
|w|3 =∞∑
n=1
∑
w∈Gn
1
|w|3 ≤ 1
M3
∞∑
n=1
8n
n3=
8
M3·
∞∑
n=1
1
n2
Periodiziat: Gliedweise Differentation liefert
p′(z) = −21
z3−∑‘
21
(z − w)3= −2
∑
w∈G
1
(z − w)3
117

Fur w0 ∈ G ist dann
p′(z + w0) = −2∑
w∈G
1
(z − (w − w0))3= −2
∑
w∈G
1
(z − w)3= p′(z),
da G eine Gruppe ist, also Translation mit −w0 bijektiv ist. Es folgt
p(z + w0) = p(z) + c c ∈ C konstant.
Fur z = −w0
2folgt p(w0
2) = p(−w0
2) + c. Aber p ist eine gerade Funktion, so
dass p(w0
2) = p(−w0
2) und somit c = 0. �
19.16 Laurentreihe von p(z) bei 0:
p(z) = 1z2
+ h(z) mit h(z) =∑′(
1(z−w)2 − 1
w2
). Also ist h bei 0 holomorph
und dort in eine Potenzreihe entwickelbar:
h(z) =∞∑
n=0
an · zn.
Da p gerade ist, ist auch h gerade. Also
h(z) = h(−z) =∞∑
n=0
(−1)n · an · zn.
Aus der Eindeutigkeit von Potenzreihen folgt
an = 0 fur n ungerade.
Weiter ist h(0) = 0, also aucha0 = 0.
Weiter wissen wir
an =h(n)(0)
n!.
Da(
1(z−w)2 − 1
w2
)(n)= (−1)n(n + 1)! 1
(z−w)n+2 fur n ≥ 1, liefert gliedweise
Differentiation:
p(z) =1
z2+ a2 · z2 + a4 · z4 + . . . mit a2n = (2n+ 1)
∑′ 1
w2n+2
19.17 Differentialgleichung der p-Funktion:
(p′(z))2 = 4p(z)3 − g2p(z)− g3 mit g2 = 20a2, g3 = 28a4
118

Beweis: (p′(z))2 =
(− 2
z3+ 2a2z + 4a4z
3 + . . .
)2
=4
z6− 8a2
z2− 16a4 + hohere Terme z
p(z)3 =1
z6+
3a2z2
+ 3a4 + hohere Terme z
p′(z)2 − 4p(z)3 = −20a2z2
− 28a4 + hohere Terme z
Also hat p′(z)2−4p(z)3+20a2p(z)+28a4 =: f(z) im Periodenparallelogramm(halboffen) hochstens einen Pol im Nullpunkt.
Die Laurentreihenentwicklung zeigt aber, dass f in 0 eine hebbare Singula-ritat hat mit f(0) = 0. Nach 19.9 ist f konstant 0. �
p hat im Periodenparallelogramm P genau einen Pol und dieser hat die Ord-nung 2. Nach 19.14 nimmt p|P jeden Wert von CP 1 genau zweimal an. EinWert mit der Vielfachheit 2 liegt dort vor, wo p′ verschwindet.
p′ ist doppelt periodisch, holomorph und ungerade. Es hat in P genau einenPol und dieser hat die Ordnung 3. Also hat p′ in P auch nur 3 Nullstellen.Ist z0 ∈ P eine Nullstelle, P das Parallelogramm mit Eckpunkt 0, so sindalso auch
p′(e1 − z0), p′(e2 − z0), p′(e1 + e2 − z0)
Nullstellen. Also muss z0 einer der Werte e1 − z0, e2 − z0, e1 + e2 − z0 sein.Es folgt
ρ1 =e12, ρ2 =
e22, ρ3 =
e1 + e22
sind die einzig moglichen Nullstellen. Anderseits sind dies tatsachlich Null-stellen, da z.B.
−p′(e12
)= p′
(−e1
2
)= p′
(e1 −
e12
)= p′
(e12
).
Setzen wir nunci = p(ρi),
so ist ρi nach den eben gemachten Bemerkungen eine doppelte ci-Stelle. Ins-besondere sind die ci also alle verschieden, da sonst p 4-fach-Stellen hatte.Definiere
f(z) := p′(z)2 − 4(p(z)− c1)(p(z)− c2) · (p(z)− c3)
f ist eine elliptische Funktion. In der Laurententwicklung verschwindet derTerm 4
z6von p′(z)2; somit hat f in P hochstens einen Pol der Ordnung 4.
119

Anderseits hat f in den ci Nullstellen mindestens 2. Ordnung. Aus 19.14folgt, dass f konstant ist. Wir erhalten
19.18 p′(z)2 = 4(p(z)−c1)(p(z)−c2)·(p(z)−c3), mit c1 = p(e12
), c2 = p
(e22
),
c3 = p(e1+e2
2
).
Die ci lassen sich nun mit 19.17 ausrechnen.
19.19 Satz: Sei f eine elliptische Funktion zum Gitter G = G(e1, e2). Danngibt es rationale Funktionen P (z) und Q(z), so dass
f(z) = P (p(z)) + p′(z) ·Q(p(z))
Beweis: f(z) =1
2(f(z) + f(−z))︸ ︷︷ ︸
=:g(z)
+1
2(f(z)− f(−z))︸ ︷︷ ︸
=:u(z)
g(z) ist gerade und u(z) ungerade. Da p′(z) ungerade ist, ist dann u(z)/p′(z)gerade. Daher genugt es zu zeigen:
Behauptung: Ist f eine gerade elliptische Funktion, dann gibt es eine ra-tionale Funktion Q(z), so dass f(z) = Q(p(z)).
Sei f nicht konstant. Dann hat f ′ im Periodenparallelogramm P nur endlichviele Nullstellen. Da f jeden Wert gleich oft annimmt, etwa m-mal, wirdjeder Wert w0 ∈ C nach 19.14 an genau m verschiedenen Punkten von Pangenommen, außer den Wertern w0 = f(z0) mit f ′(z0) = 0. Sei nun w0 einsolcher Wert und f(a) = w0. Dann gilt f(−a) = w0, da f gerade ist.
Behauptung: a 6∼ −a mod G.Denn sonst existiert ein g ∈ G mit a = −a+ g, also
f(a+ z) = f(−a+ g + z) = f(−a+ z) = f(a− z) ∀z ∈ C\A,
dann folgt f ′(a + z) = −f ′(a− z), somit f ′(a) = −f ′(a), und f ′(a) = 0, einWiderspruch.
Also gibt es m = 2k verschiedene w0-Stellen in P
a1, . . . , ak, a′1, . . . , a′k mit a′j = −aj + gj, gj ∈ G geeignet, , j = 1, . . . k.
Sei v0 6= w0 ein weiterer Wert, der an m verschiedenen Stellen
b1, . . . , bk b′1 . . . , b′k
angenommen wird. Dann sind
F (z); =f(z)− w0
f(z)− v0H(z) :=
k∏
j=1
p(z)− p(aj)
p(z)− p(bj)
120

elliptische Funktionen mit einfachen Nullstellen in a1, . . . , ak, a′1, . . . , a
′k und
einfachen Polen in b1, . . . , bk, b′1 . . . , b
′k. Nach 19.9 muss die holomorphe ellip-
tische Funktion FH
konstant sein.
F
H= c
Also f − w0 = (f − v0) · c ·H−w0 + v0cH = f · (c ·H − 1)
f =−w0 + cv0H
cH − 1�
19.20 Bemerkung: Wir haben im Beweis 19.19 folgende einfache Tatsa-chen benutzt:
(1) Ist X eine Riemannsche Flache, dann bilden die meromorphen Funktio-nen X → CP 1 unter der Addition und Multiplikation der zugehorigenFunktionen X\A→ C, A = f−1([0, 1]) einen Korper.
(2) Die rationalen Funktionen nach C bilden einen Korper.
(3) Die elliptischen Funktionen zum Gitter G bilden einen Korper K(G),der die Konstanten enthalt. f ∈ K(G) ⇒ f ′ ∈ K(G).Beachte K(G) ist der Korper der meromorphen Funktionen C/G →CP 1.
19.21 Satz: Sei C(x) der Korper der rationalen Funktionen auf C und C(x)[y]der Polynomring uber C(x). Dann ist
ϕ : C(x)[y]/(y2 − 4x3 + g2x+ g3) −→ K(G)n∑k=0
Qk(x) · yk 7−→ f(z) =n∑k=0
Qk(p(z)) · p′(z)k
ein Isomorphismus. Hier ist (y2 − 4x3 + g2x+ g3) das von y2 − 4x3 + g2x+ g3
erzeugte Ideal.
Beweis: Die Abbildung ϕ : C(x)[y] → K(G), die durch x 7→ p(z), y 7→ p′(z)gegeben ist, ist ein Ringhomomorphismus, der ϕ induziert.
ϕ ist nach 19.19 surjektiv und hat nach 19.17 den angegebenen Kern. �
121

19.22 Satz: Sei K = {(x, y) ∈ C× C; y2 = 4x3 − g2x− g3}. Ein solches Knennt man komplexe Kurve. Betrachte
Ch //
p ��444
44K = K ∪ {∞}
C/GH
DD
h(z) = (p(z), p′(z))
Dann ist H bijektiv.
Beweis: ∞ wird von 0 getroffen, da p und p′ in 0 Pole haben.
Sei (x, y) ∈ K. Da p im Periodenparallelogramm P jeden Wert zweimalannimmt, gibt es ein z ∈ P mit p(z) = x. Nach 19.17 ist p′(z)2 = 4x3−g2x−g3 = y2, also p′(z) = ±y. Ist p′(z) = y, sind wir fertig. Ist p′(z) = −y, gilt
(p(−z), p′(−z)) = (p(z),−p′(z)) = (x, y).
Seien nun z0 6= z1 aus P mit h(z0) = h(z1). Da p|P jeden Wert genau zweimalannimmt und p gerade ist, ist −z0 ∼ z0 oder −z0 ∼ z1. Im ersten Fall gilt
−p′(z0) = p′(−z0) = p′(z0).
Also ist z0 Nullstelle von p′ und somit z0 ∈{e12, e2, e1+e2
2
}. z1 muss eine andere
Nullstelle sein, aber dann ist p(z0) 6= p(z1), wie wir bereits gezeigt haben.
Also ist nur−z0 ∼ z1 moglich. Dann sind aber z0 und z1 einfache p(z0)-Stellenund somit nicht Nullstellen von p′. Also
0 6= p′(z1) = p′(−z0) = −p′(z0) 6= p′(z0).
�
19.23 Zusammenfassung:
• Sei G = G(e1, e2) ein Gitter. Dann gibt es einen Isomorphismus
C(x)[y]/(y2 − 4x3 + g2x+ g3) ∼= K(G)
vom algebraischen Funktionenkorper C(x)[y]/(y2−4x3+g2x+g3) zumKorper K(G) der holomorphen Funktionen C/G → CP 1
• Jeder komplexe Torus C/G(e1, e2) definiert eine komplexe KurveK{(x, y) ∈C× C; y2 = 4x3 − g2x− g3}.
Die Werte g1, g2 lassen sich mit 19.17 aus e1, e2 berechnen.
122

20 Die Riemannsche Flache eines Funktionen-
keims
Wir kehren zur Fragestellung des Paragraphen 17 zuruck. Riemannsche Flacheneignen sich zur Beschreibung maximaler analytischer Fortsetzungen und hel-fen uns, Funktionen wie etwa den Logarithmus besser zu verstehen.
20.1 Definition: (1) Sei Y ein Riemannsche Flache. Ein RiemannscheFlache uber Y ist ein Paar (X,ϕ), bestehend aus einer zusammenhangen-den Riemannschen Flache X und einer holomorphen Abbildung ϕ :X → Y .
(2) (X,ϕ) heißt unverzweigt, wenn ϕ lokal injektiv ist.
20.2 Beispiel: X = Y = C und ϕ : C → C, z → zn, n ≥ 1. Dann ist (C, ϕ)bei 0 verzweigt (vergl. 8.4 und Beispiel 20.18).
20.3 Definition: Sei U ⊂ C ein Gebiet und i : U → C die Inklusion. Sei f ∈H(U). Eine maximale Fortsetzung von (f, U) besteht aus einer unverzweigtenRiemannschen Flache (X,ϕ) uber C und einer holomorphen Funktion j :U → X, so dass
(1) ϕ ◦ j = i (d.h. j(U) → U ist bijektiv mit Inversen j)
(2) es gibt eine holomorphe Funktion g : X → C mit g ◦ j = f
Xg //
ϕ
��
C
C Uooj
``@@@@@@@@f
OO
(3) Genugen (X1, ϕ1, j1) den Bedingungen (1) und (2), dann gibt es genaueine holomorphe Funktion h : X1 → X mit ϕ ◦ h = ϕ1, j = h ◦ j1
U
j ��@@@
@@@@
@f
))TTTTTTTTTTTTTTTTTTTTT
j1
~~}}}}
}}}}
X1∃|h //_______
ϕ1 AAA
AAAA
A X g//
ϕ��~~
~~~~
~~C
C
Erlauterung zum ersten Diagramm: U wird durch j holomorph und um-kehrbar stetig auf ein “uber U liegendes” Teilgebiet von X abgebildet;g erweitert die nach j(U) ubertragende Funktion f auf ganz X.
123

20.4 Satz: Es gibt bis auf Isomorphie genau eine maximale Fortsetzung von(f, U).
Eindeutigkeit: Seien (X1, ϕ1, j1) und (X2, ϕ2, j2) zwei maximale Fortset-zungen. Nach (3) gibt es eindeutige holomorphe Abbildungen h1, h2, so dass
Uj1
ttjjjjjjjjjjjjjjjjjjjjj
j2
~~}}}}
}}}}
j1
AAA
AAAA
Aj2
**TTTTTTTTTTTTTTTTTTTTT
X1h1 //______
ϕ1
**TTTTTTTTTTTTTTTTTTTTT X2h2 //_______
ϕ2
AAA
AAAA
AX1
h1 //______
ϕ1
~~}}}}
}}}}
X2
ϕ2
ttjjjjjjjjjjjjjjjjjjjjj
C
Aus der Eindeutigkeit folgt h2 ◦ h1 = id, h1 ◦ h2 = id.
Fur den Exixtensbeweis zeigen wir zunachst:
20.5 Satz: Die Menge der Funktionenkeim K =⋃z∈C
Kz, Kz = Menge der
Funktionenkeime in z, hat die Struktur einer Riemannschen Flache.
Beweis: Sei (g, A) ein Funktionselement, z ∈ A, so dass (g, A)z ∈ Kz. Sei
K(g, A) := {(g, A)z; z ∈ A} ⊂ Kϕ(g, A) : K(g, A) → A, (g, A)z 7→ z.
Offensichtlich ist ϕ(g, A) bijektiv, so dass (K(g, A), ϕ(g, A), A) eine Karte furK ist.
Vertraglichkeit: Ist (K(h,B), ϕ(h,B), B) eine weitere Karte, haben wir
ϕ(h,B) ◦ ϕ(g, A)−1 : A ∩ B id−→ A ∩ B
Also bilden die Karten einen Atlas und definieren damit eine komplexe Struk-tur.
Separierend: Seien (g, A)z1 6= (h,B)z2 ∈ K.
1. Fall: z1 6= z2. Dann gibt es offene Umgebungen U1 von z1 und U2 von z2,so dass U1 ∩ U2 = ∅. Die Karten K(g, A ∩ U1) und K(h,B ∩ U2) enthalten(g, A)z1 bzw. (h,B)z2 und separieren, d.h.
K(g, A ∩ U1) ∩ K(h,B ∩ U2) = ∅
124

2. Fall: z1 = z2 = z. Sei U = Kr(z) ⊂ A ∩ B.Dann gilt K(g, U) ∩ K(h,B) = ∅. Andernfallsgibt es ein u ∈ U mit (g, U)u = (h, U)u.Nach dem Identitatsatz ist g = h in einerUmgebung von u, damit auch in U , so dass(g, U)z = (h, U)z. Aber (g, U)z = (g, A)z und(h, U)z = (h,B)z.
Uu
z
�
20.6 p : K → C, (g, A)z 7→ z ist holomorph und lokal injektiv.
Beweis: Sei K(g, A) eine Karte. Dann ist p|K(g, A) = ϕ(g, A), also injektiv.Da {(C, idC)} Atlas von C ist, mussen wir nach 18.10.2 nur prufen, dass furjede Karte (K(g, A), ϕ(g, A), A) von K gilt, dass
Aϕ(g,A)−1
// K(g, A)p // C
holomorph ist. Diese Abbildung ist aber z 7→ z. �
20.7 E : K → C, (g, A)z 7→ g(z) ist holomorph.
Beweis: Aϕ(g,A)−1
// K(g, A) E // C , a → (g, A)a → g(a) ist holomorph, da
g ∈ H(A). �
Existenz maximaler Fortsetzungen von (f ,U).
Sei X =⋃{V ⊂ K; V zusammenhangend, K(f, U) ⊂ V }. Dann ist X selbst
zusammenhangend, denn es gilt
20.8 Ubung: Ist X =⋃j
Aj eine beliebige Vereiniung zusammenhangender
Mengen und ist⋂j
Aj 6= ∅, so ist X zusammenhangend.
Nach Konstruktion ist X die großte zusammenhangende Teilmenge von K,die K(f, U) enthalt. Beachte, K(f, U) ist selbst zusammenhangend, daK(f, U) homoomorph zu U ist und U ein Gebiet ist. Also ist X 6= ∅.X ist offen in K: Sei x ∈ X und K(g, A) eine Karte um x mit zusam-menhangendem A. Es gibt ein V mit x ∈ V . Nach 20.8 ist V ∪ K(g, A)zusammenhangend, also K(g, A) ⊂ X.
Als offene Teilmenge einer Riemannschen Flache ist X selbst eine Riemann-sche Flache. Mehr noch, aus K(g, A) ∩ X 6= ∅ und A ein Gebiet, folgt
125

K(g, A) ⊂ X. Wir definieren:
ϕ = p|X : X → C
g = E|X : X → C
j : U → X, u 7→ (f, U)u ∈ K(f, U)
Behauptung: (X,ϕ, j) ist eine maximale Fortsetzung von (f, U).
Beweis:
(1) ϕ ◦ j(u) = p((f, U)u) = u = i(u), i : U → C
(2) g ◦ j(u) = E((f, U)u) = f(u)
(3) Gegeben sei eine Fortsetzung (X1, ϕ1, j1)
Uj1 // X1
ϕi // C
Wir konsturieren eine holomorphe Abbildung
h : X1 → X
wie folgt: Sei x ∈ X1. Da (X1, ϕ1) unverzweigt ist, ist ϕ1 lokal injektiv. Alsogibt es eine offene Umgebung U(x) von x, so dass
ϕ = ϕ1|U(x) : U(x) → ϕ1(U(x)) =: V (x)
biholomorph ist. Insbesondere ist V (x) ⊂ C offen, und somit (U(x), ϕ, V (x))eine Karte fur X1.
Sei g1 : X1 → C eine holomorphe Funktion mit g ◦ j1 = f , die ja nach 20.3.2existiert. Wir setzen
h(x) := (g1 ◦ ϕ−1, V (x))ϕ1(x).
Wir haben damit h zunachst als Abbildung nach K definiert. h
ist holomorph:
Die (U(x), ϕ, V (x)) bilden einen Atlas fur X1. Beachte, dass
h(U(x)) = K(g1 ◦ ϕ−1, V (x))
V (x) U(x)ϕ1
∼=oo h // K(g1 ◦ ϕ−1, V (x))
ϕ(g1◦ϕ−1,V (x)) // V (x)
ist die Identitat.
126

Insbesondere ist h stetig, so dass h(X1) zusammenhangend ist, weil X1 perDefinition zusammenhangend ist.
K(f ,U) ⊂ h(X1) : Wegen ϕ1 ◦ j1(u) = u ist ϕ1|j1(U) injektiv, also biholo-morph mit Inversen j1. Es folgt mit U1 = j1(U)
h(U1) = K(g1 ◦ (ϕ|U1)−1, U) = K(g1 ◦ j1, U) = K(f, U).
Nach Konstruktion von X ist h(X1) ⊂ X, also
h : X1 → X
holomorph. Wie eben gesehen, gilt
h(j1(u)) = (g1 ◦ j1, U)u = (f, U)u = j(u)
undϕ ◦ h(x) = ϕ(g1 ◦ ϕ−1, V (x))ϕ1(x) = ϕ1(x).
Damit genugt h den Bedingungen 20.3.3.
Ist k : X1 → X eine weitere solche Abbildung, dann gilt k|U1 = h|U1 wegenk ◦ j1 = j = h ◦ j1. Damit folgt h = k, denn es gilt
20.9 Satz: Sind f, g : X → Y holomorphe Abbildungen RiemannscherFlachen, ist X zusammenhangend und gilt f |N = g|N auf einer MengeN ⊂ X mit einem Haufungspunkt x ∈ X, so gilt f = g.
Der Beweis ist fast wortlich derselbe wie der Beweis 3.15. Aus 6.15 folgtdirekt, dass f und g auf jeder Karte um x ubereinstimmen. Der Rest istwortlich der zweite Teil des Beweises von 3.15. �
20.10 Folgerung: Die Abbildung g in 20.3.2 ist eindeutig �
20.11 Riemannsche Flache des Logarithmus:
Sei U ⊂ C∗ eine offene Teilmenge, auf der ein Zweig j von log definiert ist,d.h.
exp(j(u)) = u ∀u ∈ U
j : U → C ist injektiv und (C, exp) ist maximale Fortsetzung von (j, U)(vergl. 20.3):
Cid //
exp
��
C
C∗ U
j
ffNNNNNNNNNNNNNj=log z
OO
? _ioo
127

Ist namlich
U j
i
��000
0000
0000
0000 j1
@@@
@@@@
@ j
%%I
Xg //
ϕ
��II
C
expuuk k k k k k k k k k
C
eine Fortsetzung von j = log, dann gibt es wegen der Fortsetzungseigenschaftein g wie im Diagramm. Fur z = j1(u) ∈ j1(u) gilt dann ϕ(z) = exp(g(z)),denn
u = exp(j(u)) = exp(g ◦ ji(u)) = exp(g(z)) undu = ϕ ◦ j1(u) = ϕ(z)
Also stimmen ϕ und exp ◦g auf der offenen Menge j1(U) ⊂ X uberein. DaX zusammenhangend ist, kommutieren die Dreiecke I und II nach 20.9. �
20.12 Satz: Sei U ⊂ C ein Gebiet, (f, U) ein Funktionselement und U0 ⊂ Uein Teilgebiet. Ist (X,ϕ, j, g) die maximale Fortsetzung von (f, U), dann ist(X,ϕ, j0, g) mit j0 = j|U0 die maximale Fortsetzung von (f |U0, U0). D.h. diemaximale Fortsetzung ist fur Funktionskeime definiert.
Beweis: Sei (X1, ϕ1, j1) maximale Fortsetzung von (f |U0, U0)
U
j
��
⊃ U0
j1��
j0
wwooooooooooooooof |U0
&&MMMMMMMMMMMMM
X
ϕ
''PPPPPPPPPPPPPPP∃h //_______ X1
ϕ1
��
g1 // C
C
Betrachte nun
Uf
&&NNNNNNNNNNNNN
h◦j��X1
g1 //
ϕ1
��
C
C
Da ϕ1 ◦ h ◦ j = ϕ ◦ j = id, ist h ◦ j injektiv Furu ∈ U0 gilt weiterhin
g1 ◦ h ◦ j(u) = g1 ◦ h ◦ j0(u) = g1 ◦ j1(u) = f(u)
Also sind f und g1◦h◦j auf U0 gleich und somitauf ganz U gleich, weil U zusammenhangend ist.
128

Also ist (X1, ϕ1, h ◦ j) eine Fortsetzung von (f, U). Somit gibt es genau eink : X1 → X, so dass
Uh◦j
~~}}}}
}}}} j
��@@@
@@@@
@
X1k //
ϕ1 AAA
AAAA
A
y
X
ϕ��~~
~~~~
~~
C
kommutativ ist. Aus der Eindeutigkeit folgt h ◦ k = id und k ◦ h = id. �
20.13 Satz: Sei w : [a, b] → C ein stetiger Weg und x ∈ Kw(a) ein Funkti-onskeim. Dann gilt: u : [a, b] → K ist analytische Fortsetzung von x langsw ⇐⇒ u ist ein stetiger Weg, so dass u(a) = x und p ◦ u = w.
Beweis: (Uberlagerungssituation)
{a} x // Kp
��
⋂
[a, b]
u
88pp
pp
pp
pw // C
Sei K(g, A) eine Karte um u(t). D.h. u(t) =(g, A)w(t). Nach Definition der analytischen Fort-setzung gibt es ein r > 0, so dass (g, A)w(t′) = u(t′)∀t′ mit |t− t′| < r.
Da w(t′) ∈ A; ist u(t′) = (g, A)w(t′) ∈ K(g, A). �
20.14 Beispiel Wurzelfunktionen: Sei k > 1 und U ⊂ C∗ einfach zu-sammenhangend. Nach 10.1 gibt es ein f ∈ H(U) mit
fk(z) = z.
D.h. f ist ein Zweig von k√z.
Behauptung:
Uf
**TTTTTTTTTTTTTTTTTTTTT
f
AAA
AAAA
Aj
i
��000
0000
0000
0000
C∗ � � //
ϕ=zk
��
C
C
ist maximale Fortsetzung von (f, U).
129

Beweis: Sei X ⊂ K die maximale Fortsetzung, wie wir sie im Existenzbeweisvon 20.4 konstruiert haben. Nach 20.3.3 haben wir ein Diagramm
U f
$$
j
""DDD
DDDD
Df
��~~~~
~~~~
C∗ h //
ϕ��@
@@@@
@@@ X(f) E //
p||zz
zzzz
zzC
C
Sei x = j(u) = (f, U)u ∈ j(U), y = (g, V )z0 ∈ E−1(0), V ein Gebiet und v :[0, 1] → X ein stetiger Weg von x und y. Dann ist v analytische Fortsetzungvon (f, U)u langs w := p ◦ v. Da
fk(z) = z ∀z ∈ U,
folgt aus dem Identitatssatz, dass auch
gk(z) = z ∀z ∈ V.
Fur z0 ∈ V gilt daher g(z0) = 0, da E(g, V )z0 = g(z0) = 0. Es folgt (beachtek > 1)
1 = k · gk−1(z)g′(z) ∀z ∈ V
aber gk−1(z0) · g′(z0) = 0, ein Widerspruch.
Also ist E−1(0) = ∅ und E : X → C∗. Jetzt folgt wie im Beispiel 20.11, dassE zu h invers ist. �
20.15 Bemerkung: Die abstrakte Definition der maximalen Fortsetzungverschleiert den geometrischen intuitiven Hintergrund: Bildϕ = C∗ und einmaximales Gebiet auf dem ϕ injektiv ist, ist
Sectk := {r · eiϕ; r > 0, 0 < ϕ <2π
k}.
Es wird biholomorph auf die geschlizte Ebene C\R+ abgebildet.
Verkleben gibt uns eine k-fache Uberlagerung.
20.16 Definition: Sei f : X → Y holomorphe Abbildung RiemannscherFlachen. Sei (V, ϕ, U) Karte um x ∈ X mit ϕ(x) = 0 und (V ′, ϕ′, U ′) Karteum f(x), so dass ϕ′(f(x)) = 0 und f(V ) ⊂ V ′. Die Ordnung k der Nullstellevon
ϕ′ ◦ f ◦ ϕ−1 : U → U ′ in z = 0
heißt Verzweigungsordnung von f in x ∈ X. Ist k > 1, heißt x Verzweigungs-punkt von f .
130
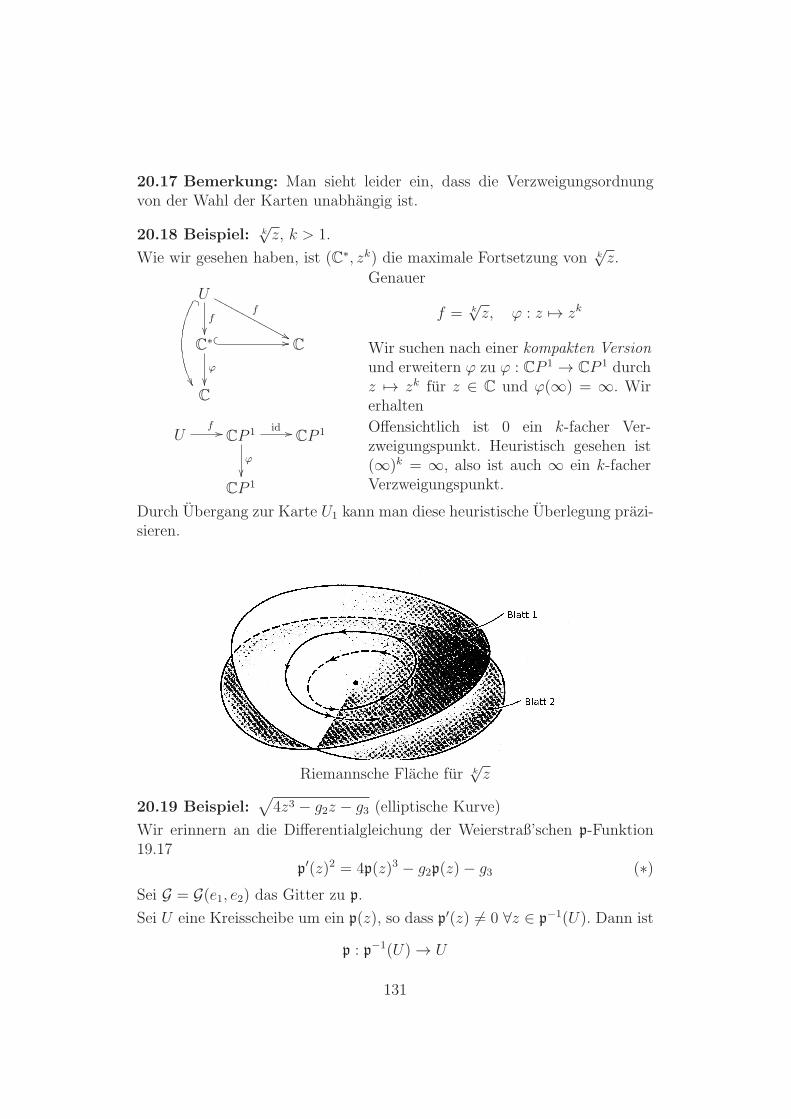
20.17 Bemerkung: Man sieht leider ein, dass die Verzweigungsordnungvon der Wahl der Karten unabhangig ist.
20.18 Beispiel: k√z, k > 1.
Wie wir gesehen haben, ist (C∗, zk) die maximale Fortsetzung von k√z.
Uf
&&NNNNNNNNNNNNN
f
��
t T
��
C∗ � � //
ϕ
��
C
C
Genauer
f = k√z, ϕ : z 7→ zk
Wir suchen nach einer kompakten Versionund erweitern ϕ zu ϕ : CP 1 → CP 1 durchz 7→ zk fur z ∈ C und ϕ(∞) = ∞. Wirerhalten
Uf // CP 1 id //
ϕ
��
CP 1
CP 1
Offensichtlich ist 0 ein k-facher Ver-zweigungspunkt. Heuristisch gesehen ist(∞)k = ∞, also ist auch ∞ ein k-facherVerzweigungspunkt.
Durch Ubergang zur Karte U1 kann man diese heuristische Uberlegung prazi-sieren.
Riemannsche Flache fur k√z
20.19 Beispiel:√
4z3 − g2z − g3 (elliptische Kurve)
Wir erinnern an die Differentialgleichung der Weierstraß’schen p-Funktion19.17
p′(z)2 = 4p(z)3 − g2p(z)− g3 (∗)Sei G = G(e1, e2) das Gitter zu p.
Sei U eine Kreisscheibe um ein p(z), so dass p′(z) 6= 0 ∀z ∈ p−1(U). Dann ist
p : p−1(U) → U
131

nach 8.8 biholomorph, d.h. p−1 ist auf der offenen Menge U definiert. Be-trachte
Cp′
))TTTTTTTTTTTTTTTTTTTT
p
��U
p−1
55kkkkkkkkkkkkkkkkkkkk j //v�
i
))RRRRRRRRRRRRRRRRRC/G p′ //
p
��
CP 1
CP 1 = C ∪ {∞}
(p′(p−1(z)))2 = (p′(j(z)))2(∗)= 4p(p−1(z))3−g2p(p−1(z))−g3 = 4z3−g2z−g3.
Also ist p′ ◦ p−1 ein Zweig von√
4z3 − g2z − g3.
p : C/G → CP 1 hat vier Verzweigungspunkte, alle von der Ordnung 2,namlich den Pol in z = 0 und die Doppelpunkte in
e12,
e22,
e1 + e22
.
�
Wir schließen mit einer geometrisch intuitiven Interpretation der maximalenFortsetzung des Logarithmus.
20.20 Riemannsche Flache des Logarithmus
Sei
V+ =
{z ∈ C∗; | arc z| < 3
4π
}, V− =
{z ∈ C∗; | arc z − π| < 3
4π
}.
Sei f0 der Hauptzweig des Logarithmus auf V+ und g0 der Zweig des Loga-rithmus auf V− mit g0(−1) = πi. Fur n ∈ Z setzen wir
fn = f0 + 2πin gn = g0 + 2πin.
Die Keime, die aus f0 durch analytische Fortsetzung entlang von Wegen inC∗ entstehen, sind gerade die Keime der Funktionen fn und gn. Sei
U+n = K(fn, V+), U−
n = K(gn, V−).
Wir erinnern daran, dass
X =⋃
{V ⊂ K; V zusammenhangend, K(f0, V+) ⊂ V }
132

Die in K offenen Mengen U+n und U−
n uberdecken X = X(log). Weiter gilt
fn = gn auf W+ = {z; π4< arc z < 3
4π}
gn = fn+1 auf W− = {z;−34π < arc z < −1
4π}
U+n ∩ U−
n = K(fn,W+) U−n ∩ U+
n+1 = K(gn,W−)
Da alle anderen Durchschnitte von Mengen U+k und U−
l leer sind, kann manX aus den U+
n und U−n wie folgt aufbauen. Fur jedes n ∈ Z nehme man eine
Kopie U+n von V+ und eine Kopie von U−
n von V− und verklebe sie uber W+
undW− miteinander. Es entsteht eine unendliche “Wendeltreppe” uber C (s.Bild). Die Funktion
g : X → C
die f0 fortsetzt, ist gegeben durch
g =
{fn ◦ p auf U+
n
gn ◦ p auf U−n
(mit p : X ⊂ K → C)
133
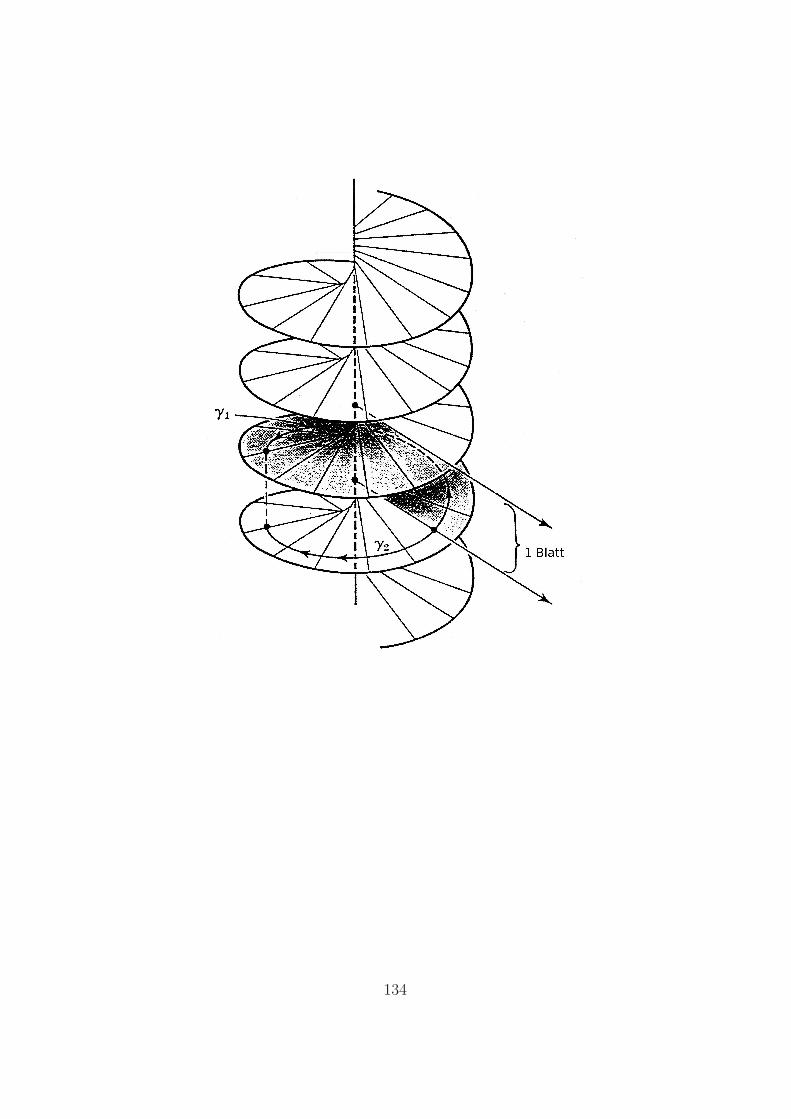
134