Rasterkraftmikroskopie - physik.kit.edu · über die Veränderung von Oberflächenstrukturen bis...
23
Fortgeschrittenenpraktikum für Lehramtskandidaten Rasterkraftmikroskopie
Transcript of Rasterkraftmikroskopie - physik.kit.edu · über die Veränderung von Oberflächenstrukturen bis...

Fortgeschrittenenpraktikum für Lehramtskandidaten
Rasterkraftmikroskopie

Inhaltsverzeichnis1
1. Einleitung und Funktionsprinzip
2. Theorie 2.1 Einführung 2.2 Cantilever 2.3 Wechselwirkung zwischen Probenoberfläche und Spitze 2.4 Detektion der Cantileverauslenkung mittels Reflektion 2.5 Messmethoden 2.6 Kraft-Abstandskurven 2.7 Interpretation von Messdaten
3. Aufgaben 3.1 Topographie-Aufnahmen 3.2 Kraft-Abstandskurve und maximale Adhäsionskraft
1 Die Bilder und wesentliche Textbestandteile wurden aus der Anleitung der Firma Thorlabs
entnommen.

Kapitel 1 Einleitung und Funktionsprinzip
Die Rasterkraftmikroskopie bietet einen faszinierenden Einblick in Strukturen unterhalb der Auflösungsgrenze der Lichtmikroskopie und somit in die Welt der Nanostrukturen. Mit der Entwicklung der Rastersondenmikroskopie wurde die abbildende Darstellung von Nanostrukturen ermöglicht. Die Messmethode beruht auf einer feinen Messspitze (Spitzenradius unterhalb 10 nm) welche die Oberfläche einer Probe abtastet. Die Auslenkung der Spitze wird aufgezeichnet und es entsteht zeilenweise ein Höhenprofil der Oberfläche. Typischerweise werden die Höhenwerte in Graustufen wie in Abbildung 1 zu sehen, bzw. mit einer Farbskala dargestellt (z.B. durch Bildnachbearbeitung).
Abbildung 1: Mit dem Rasterkraftmikroskop gemessene Oberfläche von der mitgelieferten Mikrostruktur im Constant-Force-Modus (a) und im Lateralkraft-Modus (b), einer CD (c) und
Co-Nanopartikel2 (d).
2 PELCO® AFM Tip and Resolution Test Specimen. Diese Probe dient zur Überprüfung der
Spitzenqualität. Eine einzelne Lage von Kobalt-Partikeln ist dafür eine geeignete Struktur. Der Hersteller beschreibt die Partikel als abgeflachte Halbkreise mit einem Radius etwas größer als die Partikelhöhe. Die Partikelhöhe variiert zwischen 1 und 5 nm. Die gemessene Breite hängt vom Spitzenradius ab.
(a) (b)
(c) (d)

3
Das Messprinzip beruht auf einer Messspitze, die an einem Steg, dem sogenannten Cantilever angebracht ist. An einem Block befestigt, kann sich der Cantilever in gewissem Maße verbiegen bzw. auslenken. Kommen Probe und Spitze sehr nah aneinander, treten folgende Kräfte auf:
- Elektrostatische Kräfte
- Kapillarkräfte (Luftfeuchtigkeit)
- Van-der-Waals-Kräfte
- Kräfte aufgrund des Pauli-Prinzips
Verallgemeinert formuliert führt das Zusammenspiel der Kräfte zu einer Anziehung der Spitze an die Probe, bis die abstoßenden Kräfte diese ausgleichen (Kontaktmodus). In diesem Gleichgewicht der Kräfte wird die Spitze über die Oberfläche gezogen und die Auslenkung des Cantilevers durch die Höhenunterschiede der Probe gemessen.
Das Funktionsprinzip ist schematisch in Abbildung 2 dargestellt, Abb. 3 zeigt den Aufbau. Licht einer Laserquelle wird durch einen Lichtleiter mit entsprechender Halterung und Optik auf den Cantilever fokussiert. Das reflektierte Licht trifft auf den positionssensitiven Detektor (Viersegment-Photodiode). Bewegt sich der Cantilever beim Abrastern der Probe durch eine Höhenänderung der Oberfläche, wird die entsprechende Auslenkung des Laserstrahls gemessen (Constant-Height-Modus) und anschließend im digitalen Signalprozessor (DSP) ausgelesen oder weiterverarbeitet. Der DSP kann ein Feedback-Signal ausgeben, um die Auslenkung des Cantilevers konstant zu halten (Constant-Force-Modus). In diesem Modus wird das Feedback-Signal des DSP an den Z-Piezo, also die Höhennachregelung, so eingestellt, dass die Auslenkung auf der Photodiode Null ist. Die Bewegung der Probe in Z-Richtung (Spannung am Z-Piezo) wird als Messsignal aufgezeichnet. Im Constant-Height-Modus wird die auslenkungs-abhängige Spannung an der Photodiode als Höheninformation aufgezeichnet. Das Abrastern der Probe wird über die Verschiebung der Positioniereinheit der Probe durchgeführt.
Die Probe wird in horizontaler Ebene von der Positioniereinheit in einem Raster bewegt. Für jede Position wird eine Höheninformation aufgenommen. Das Messsignal der jeweiligen Spitzen-Position wird auf dem Computer graphisch in der EDU-AFM-Software dargestellt und ergibt somit ein Abbild der Oberflächenstruktur.

Abbildung 2: Schematische Darstellung der Versuchsanordnung des Rasterkraftmikroskops.
In Abbildung 3 ist der gesamte Versuchsaufbau zu sehen.
Abbildung 3: Rasterkraftmikroskop mit Laserquelle (a), Positioniereinheit (b), Viersegment-Photodetektor (c), Signalprozessor (DSP), Piezocontroller mit Feedback-Controllern (d).
Piezo-gesteuerte Positioniereinheit
DAQ-Karte
PC Controller
Cantilever
Laserquelle
Faser
X YY
DSP + Z
(a)
(b)
(c)
(d)

5
Kapitel 2 Theorie
2.1 Einführung
Das Rasterkraftmikroskop ist dem Bereich der Rastersondenmikroskopie zuzuordnen. Dieses hat seinen Ursprung in den Anfängen der 80er-Jahre, als Binnig und Rohrer die Mikroskopie mit ihrer Erfindung des Rastertunnelmikroskops revolutionierten. Die Entwicklung wurde 1986 mit dem Nobelpreis in Physik ausgezeichnet und stellte den Beginn einer neuen Art von Mikroskopen dar. Diese wurden in den folgenden Jahrzehnten immer wieder weiterentwickelt und verbessert. Das Rasterkraftmikroskop (auch „Atomic Force Microscope“ – AFM) wurde als zweites Mikroskop dieser Familie von G. Binnig, C. Quate und C. Gerber
3 entwickelt.
Rasterkraftmikroskope erstellen Aufnahmen der Topographie einer Probe, indem sie mit Hilfe einer Sonde die Oberfläche untersuchen. An dieser Sonde befindet sich eine winzige Spitze, die den Kern des Mikroskops darstellt. Mit ihr wird die Oberfläche der Probe Zeile für Zeile abgetastet. Die Struktur der Oberfläche und die wirkenden atomaren Kräfte führen zur Auslenkung der Sonde, da die Spitze "Berge" und "Täler" durchläuft. Diese Auslenkung kann dann mit verschiedenen Methoden gemessen werden.
Das Rasterkraftmikroskop dient jedoch nicht nur zur Aufnahme der Topographie von verschiedenen Materialien, sondern findet seinen Einsatz auch als Werkzeug in Forschung und Entwicklung. Dieser erstreckt sich in der Industrie von der Qualitätskontrolle von Halbleitern, Chips und optischen oder magnetischen Tonträgern über die Veränderung von Oberflächenstrukturen bis hin zur Verwendung in der Biologie zur zerstörungsfreien Untersuchung von lebenden Zellen oder der Beobachtung biologischer Prozesse.
2.2 Cantilever
Die Sonde des Rasterkraftmikroskops wird als "Cantilever" bezeichnet. Dabei handelt es sich um eine rechteckige Blattfeder, die in der Regel aus Silizium oder Silizium-Nitrid besteht. An deren Unterseite befindet sich an einem Ende eine Spitze, die die Probenoberfläche abtastet und mit dieser in Wechselwirkung tritt (siehe Abbildung 4). Der Cantilever ist so an einem Chip angebracht, dass er sich bei einer auf ihn wirkenden Kraft vertikal verbiegen kann.
3 Binnig, G. ; Quate, C.F. ; Gerber, Ch.: Atomic Force Microscope. In: Physical Review Letters 56
(1986), S. 930-933

Abbildung 4: Elektronenmikroskop-Aufnahmen eines BudgetSensors-Cantilevers. (a) Übersichtsbild, (b) Seitenansicht der Spitze, (c) Frontansicht.
4
Der Cantilever muss einige Anforderungen erfüllen. Eine kleine Federkonstante ermöglicht es, geringfügige Kräfte zu messen. Eine große Resonanzfrequenz verringert den Einfluss von mechanischen Schwingungen auf den Cantilever. Dies macht sowohl eine geringe Masse als auch eine kleine Größe des Cantilevers notwendig.
5
Bei der Annäherung der Probe an die Spitze treten Wechselwirkungen auf, die zu einer Verbiegung der Feder führen. Für diese Kraft ergibt sich nach dem Hooke'schen Gesetz
�⃗� = − 𝑘 ⋅ 𝑧
mit der Auslenkung 𝑧 aus der Gleichgewichtslage und der Federkonstanten 𝑘 des
Cantilevers.6 Letztere ist im Datenblatt der mitgelieferten Cantilever mit 0,2
N
m angegeben.
Nimmt man eine Auslenkung von 1 µm an, so beläuft sich die Kraft auf
|�⃗�| = |−𝑘 ⋅ 𝑧| = 0,2 µN.
An diesem Beispiel wird deutlich, dass die auftretenden Kräfte sehr klein sind.
4 Zur Verfügung gestellt von http://www.budgetsensors.com/
5 Meyer, E.: Atomic Force Microscopy. In: Progress in Surface Science 41 (1992), S. 3-49
6 Cappella, B.; Dietler, G.: Force-distance curves by atomic force microscopy. In: Surface Science
Reports 34 (1999), S. 1-104
(a) (b)
(c)

7
2.3 Wechselwirkung zwischen Probenoberfläche und Spitze
Für die Funktion des Rasterkraftmikroskops ist die Wechselwirkung zwischen der Probenoberfläche und der Spitze des Cantilevers ausschlaggebend. Diese setzt sich aus einer Vielzahl an Kräften zusammen und wird aufgrund ihrer Wirkung in Abhängigkeit vom Abstand Spitze-Oberfläche unterteilt. Zu den kurzreichweitigen Kräften zählen solche, die ausschließlich auf einer Entfernung von unter 1 nm wirken. Die Kräfte, deren Reichweite zwischen 1 nm und 100 nm liegt, bezeichnet man als langreichweitig. Zu diesen zählen unter anderem die Van-der-Waals-, die elektrostatischen und die Kapillarkräfte.
Für die Art der auftretenden Wechselwirkung sind verschiedene Faktoren verantwortlich, darunter fallen der Abstand zwischen Probenoberfläche und Cantileverspitze, die umgebende Atmosphäre (Vakuum, Luft, Flüssigkeiten) und das verwendete Material der Probe sowie der Cantileverspitze.
2.3.1 Elektrostatische Kräfte
Laden sich bei der Messung die Cantileverspitze und die Probenoberfläche elektrostatisch auf, so kann es zu erheblichen Störungen der Messung kommen. Diese können unter Umständen sogar so stark sein, dass eine Durchführung der Messung unmöglich wird. Die dabei wirkende Kraft ist die Coulomb-Kraft.
2.3.2 Kapillarkräfte
Findet die Messung bei normalen Umgebungsbedingungen in Luft statt, befindet sich auf Festkörpern ein permanenter dünner Wasserfilm. Dieser entsteht durch die Kondensation der Luftfeuchtigkeit auf der Probenoberfläche und bewirkt eine zusätzliche Kraft: die Kapillarkraft. Nähert sich die Spitze der Probenoberfläche an, so tritt sie zuerst in Kontakt mit dem Wasserfilm, bevor sie die Probe berührt. Es bildet sich ein Wassermeniskus um die Spitze aus, welcher die Ursache für eine attraktive Kraft ist. Die Kapillarkräfte können sich je nach Messbedingungen und Beschaffenheit des Probenmaterials unterschiedlich stark auf die Messung der Topographie und vor allem auf die Kraft-Abstands-Messungen auswirken.
2.3.3 Van-der-Waals-Kräfte
Eine weitere Wechselwirkung, die zwischen Cantileverspitze und Probenoberfläche auftritt, wenn diese nur noch einige Nanometer voneinander entfernt sind, wird durch die Van-der-Waals-Kräfte beschrieben. Diese zählen zu den attraktiven Kräften und werden je nach Natur ihrer auftretenden Wechselwirkung in drei Arten unterteilt:
Dipol-Dipol-Wechselwirkung (Keesom-Kraft)
Dipolinduzierte Wechselwirkung (Debye-Kraft)
Dispersionswechselwirkung (London-Kraft)

Während die ersten beiden Wechselwirkungen nur bei polaren Molekülen auftreten, wirkt die Londonsche Dispersionskraft auch zwischen neutralen Atomen und ist somit immer vorhanden. Sie lässt sich mit Hilfe von Ladungsfluktuationen erklären. Befinden sich zwei Moleküle in unmittelbarer Nähe zueinander, so kommt es aufgrund der Abstoßung zwischen den negativen Ladungen in der Elektronenhülle zur Ausbildung eines temporären Dipols. Dieser wechselwirkt wiederum mit anderen Dipolen, die entweder von diesem induziert wurden oder auf die gleiche Weise entstanden sind.
Alle drei Kräfte haben das Van-der-Waals-Wechselwirkungspotential der Form:
𝑈𝑣𝑑𝑊 = −𝐶2
𝑟6
Dabei ist 𝐶2 die Wechselwirkungskonstante und 𝑟 der Abstand zwischen den
wechselwirkenden Molekülen.7 Das Potential lässt sich nach Demtröder
8 wie folgt
herleiten: Man betrachtet ein Atom A mit einer Ladungsverteilung, die im zeitlichen Mittel kugelsymmetrisch ist. Dieses besitzt im zeitlichen Mittel ein Dipolmoment 𝑝𝐴 = 0. Da die
momentane Ladungsverteilung aber fluktuieren kann, besitzt das Atom A ein Dipolmoment, welches kurzzeitig ungleich null ist. Mit diesem geht ein elektrisches
Feld �⃗⃗�𝐴 einher, das wiederum in Atom B mit der Polarisierbarkeit 𝛼𝐵 ein induziertes
Dipolmoment bedingen kann:
𝑝𝐵𝑖𝑛𝑑 = 𝛼𝐵 ⋅ �⃗⃗�𝐴
Als Folge dieses Vorgangs weist Atom B ebenfalls ein elektrisches Feld �⃗⃗�𝐵 auf, welches wiederum induzierte Dipolmomente in seiner Umgebung und somit auch an der Stelle von Atom A hervorruft. Dadurch beeinflussen sich die beiden Atome dauerhaft und es tritt eine Störung der symmetrischen Ladungsverteilung auf. Diese führt dazu, dass das Dipolmoment im zeitlichen Mittel nicht mehr null ist. Da die beiden Dipolmomente parallel zur Verbindungsachse der Atome A und B stehen, ergeben sich für die potentielle Wechselwirkungsenergie:
𝑈𝑝𝑜𝑡(𝑟) = −𝑝𝐵𝑖𝑛𝑑 ⋅ �⃗⃗�𝐴 = −𝑝𝐴
𝑖𝑛𝑑 ⋅ �⃗⃗�𝐵
Diese Gleichung kann mit Hilfe der Polarisierbarkeiten 𝛼𝑖 umgeschrieben werden zu:
𝑈𝑝𝑜𝑡(𝑟) = −𝛼𝐴 ⋅ 𝛼𝐵 ⋅ |�⃗⃗�𝐴|2
Mit Hilfe des elektrischen Feldes eines Dipolmoments
�⃗⃗� ∝|𝑝|
𝑟3⋅ �̂�
mit Einheitsvektor �̂� in Richtung der Verbindungsachse erhält man das Potential der Van-
der-Waals'schen Wechselwirkung
7 Bowen, W. R. ; Hilal, N.: Atomic force microscopy in process engineering. 1. Auflage. Elsevier/
Butterworth-Heinemann, 2009 8 Demtröder, W.: Experimentalphysik 3: Atome, Moleküle und Festkörper. 3. Auflage. Springer
Verlag, 2005

9
𝑈𝑣𝑑𝑊 = −𝐶1
𝛼𝐴 ⋅ 𝛼𝐵
𝑟6 = −𝐶2
𝑟6
mit den Konstanten 𝐶1 und 𝐶2.
2.3.4 Repulsive Kräfte
Befindet sich die Spitze nur noch wenige Ångström über der Probenoberfläche, so treten starke repulsive Kräfte auf. Sie wirken ausschließlich auf die nächstgelegenen Atome der Probe und sind somit sehr punktuell. Die auftretende repulsive Wechselwirkung beruht auf quantenmechanischen Eigenschaften der Atomhüllen. Das Pauli-Prinzip verbietet, dass sich zwei Elektronen im selben quantenmechanischem Zustand befinden. Überlapp von abgeschlossenen Atomschalen würden Elektronen in höhere Energiezustände zwingen. Dies verursacht eine hohe repulsive Kraft. Sehr kleine Atomhüllenabstände erzeugen dadurch eine starke Abstoßung.
9
2.3.5 Lennard-Jones-Potential
Zum besseren Verständnis der Wechselwirkung zwischen Cantileverspitze und Probenoberfläche kann das Lennard-Jones-Potential betrachtet werden. Dieses dient eigentlich zur Beschreibung der Wechselwirkung zwischen zwei Molekülen, kann aber im Bereich der Rasterkraftmikroskopie als gute Näherung für die auftretenden atomaren Kräfte herangezogen werden
10:
𝑈𝐿𝐽 = 4 𝜖 [(𝜎
𝑟)
12
− (𝜎
𝑟)
6
]
Hierbei bezeichnet 𝜖 die "Tiefe" der Potentialmulde und 𝜎 den Abstand, an dem das
Potential null ist. Das Lennard-Jones-Potential (siehe Abbildung 5) beschreibt einerseits
die starken repulsiven Kräfte in der Nähe der Probenoberfläche (𝑟 < 𝜎), die eine 𝑟−12-
Abhängigkeit aufweisen. Es berücksichtigt aber auch die 𝑟−6-Abhängigkeit, die die
Anziehung durch die bei größeren Abständen überwiegenden Van-der-Waals-Kräfte beschreibt.
11
9 Goodman, F.O. ; Garcia, N.: Roles of attractive and repulsive forces in atomic force microscopy.
In: Physical Review B 43 (1991), S. 4728-4731 10
Sarid, D.: Scanning Force Microscopy. Oxford University Press, 1994 11
Bowen, W. R. ; Hilal, N.: Atomic force microscopy in process engineering. 1. Auflage. Elsevier/ Butterworth-Heinemann, 2009

Abbildung 5: Lennard-Jones-Potential zusammengesetzt aus attraktiven und repulsiven Anteilen. (Graphik aus Feigl, D
12)
Für die Kraft, die von den Atomen der Probenoberfläche auf die Spitze ausgeübt wird, gilt dann
𝐹 = −∇ 𝑈𝐿𝐽
Sie wirkt im Bereich von 𝑟 > 1,12𝜎 anziehend und für 𝑟 < 1,12𝜎 abstoßend (bei 𝑟 =1,12𝜎 ist das Potentialminimum bzw. die Gleichgewichtslage). Da es sich beim Lennard-
Jones-Potential um eine Näherung handelt, bei der nur die repulsiven und die Van-der-Waals-Kräfte berücksichtigt werden, muss beachtet werden, dass bei geladenen Proben das Coulomb-Potential zusätzlich betrachtet werden muss. Bei Messungen, die unter Umgebungsbedingungen stattfinden, müssen außerdem die Kapillarkräfte bedacht werden.
2.4 Detektion der Cantileverauslenkung mittels Reflektion
Die Auslenkung des Cantilevers wird mit Hilfe der Position des reflektierten Laserstrahls auf der Viersegment-Photodiode gemessen (Constant-Height-Modus). Zusätzlich kann ein digitaler Signalprozessor im Controller der Viersegment-Photodiode aus der Auslenkung ein Rückkopplungssignal ausgeben (Constant-Force-Modus).
Die hier verwendete Viersegment-Photodiode besteht aus dem Halbleitermaterial Silizium und kann materialbedingt im Wellenlängenbereich von 400 - 1050 nm detektieren. Um eine gute Ausleuchtung der Photodiode zu bekommen, sollte der Laserspot-Durchmesser den der Photodiode (7,8 mm) nicht überschreiten und trotzdem
12 Feigl, D.: Das Rasterkraftmikroskop im Praktikum, Karlsruher Institut für Technologie, Staatsexamensarbeit, 2012
11
deutlich die Segmentgrenzen überlappen (0,2 mm). Es werden Laserspotgrößen zwischen 1 - 3,9 mm empfohlen.
13
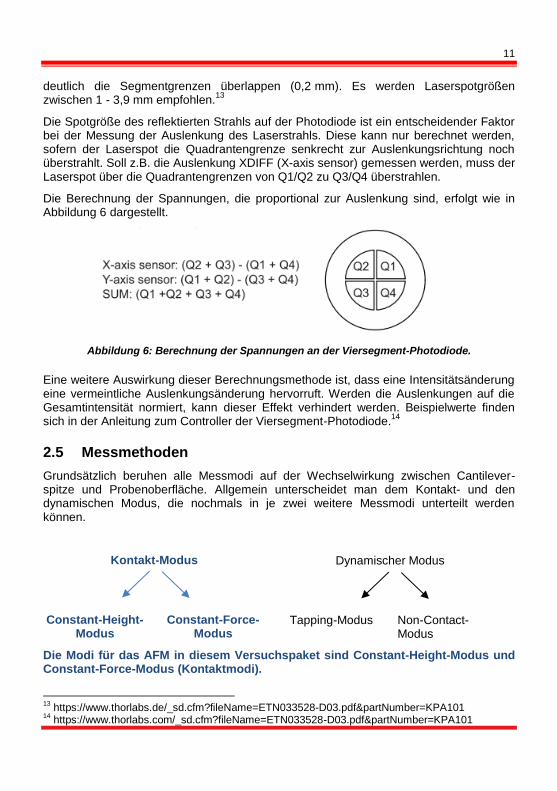
Die Spotgröße des reflektierten Strahls auf der Photodiode ist ein entscheidender Faktor bei der Messung der Auslenkung des Laserstrahls. Diese kann nur berechnet werden, sofern der Laserspot die Quadrantengrenze senkrecht zur Auslenkungsrichtung noch überstrahlt. Soll z.B. die Auslenkung XDIFF (X-axis sensor) gemessen werden, muss der Laserspot über die Quadrantengrenzen von Q1/Q2 zu Q3/Q4 überstrahlen.
Die Berechnung der Spannungen, die proportional zur Auslenkung sind, erfolgt wie in Abbildung 6 dargestellt.
Abbildung 6: Berechnung der Spannungen an der Viersegment-Photodiode.
Eine weitere Auswirkung dieser Berechnungsmethode ist, dass eine Intensitätsänderung eine vermeintliche Auslenkungsänderung hervorruft. Werden die Auslenkungen auf die Gesamtintensität normiert, kann dieser Effekt verhindert werden. Beispielwerte finden sich in der Anleitung zum Controller der Viersegment-Photodiode.
14
2.5 Messmethoden
Grundsätzlich beruhen alle Messmodi auf der Wechselwirkung zwischen Cantilever-spitze und Probenoberfläche. Allgemein unterscheidet man dem Kontakt- und den dynamischen Modus, die nochmals in je zwei weitere Messmodi unterteilt werden können.
Kontakt-Modus
Dynamischer Modus
Constant-Height- Modus
Constant-Force- Modus
Tapping-Modus Non-Contact- Modus
Die Modi für das AFM in diesem Versuchspaket sind Constant-Height-Modus und Constant-Force-Modus (Kontaktmodi).
13
https://www.thorlabs.de/_sd.cfm?fileName=ETN033528-D03.pdf&partNumber=KPA101 14
https://www.thorlabs.com/_sd.cfm?fileName=ETN033528-D03.pdf&partNumber=KPA101

Die Bereiche der verschiedenen Messmodi sind in Abbildung 5 eingezeichnet – zur besseren Einordnung des vorliegenden Aufbaus gehen wir im Folgenden kurz auf die verschiedenen Modi ein.
Abbildung 5: Bereiche der Messmodi in Abhängigkeit des Abstands r. 15
Die einfachste Messmethode ist der Kontakt-Modus. Bei diesem bleiben die Probenoberfläche und die Spitze des Cantilevers während der gesamten Messung in Berührung. Im Fall des Kontakt-Modus wird folglich im Bereich der repulsiven Kräfte gearbeitet, die zu einer Verbiegung des Cantilevers führen. Dies kann sich in manchen Fällen als nachteilig erweisen. Aufgrund der starken Kräfte, die in diesem Bereich anzutreffen sind, können Verformungen, Beschädigungen oder Zerstörungen der Probe bzw. der Cantileverspitze nicht ausgeschlossen werden. Des Weiteren wird in diesem Modus das Auflösungsvermögen durch den Kontaktbereich zwischen Probenoberfläche und Spitze begrenzt, was eine atomare Auflösung nicht möglich macht. Im Kontakt-Modus kann man zwei verschiedene Messmethoden unterscheiden - den Constant-Force-Modus und den Constant-Height-Modus.
2.5.1 Constant-Height-Modus
Der Constant-Height-Modus stellt die einfachste Messmethode dar, da er keine Rückkopplungselektronik benötigt. Wie der Name schon besagt, wird die Messung bei einer konstanten Höhe durchgeführt. Das bedeutet, dass sich der Abstand zwischen dem Chip des Cantilevers und dem Probentisch nicht verändert. Der Cantilever selbst wird beim Rastern je nach Verlauf der Oberflächenstruktur unterschiedlich stark verbogen (Abbildung 8). Diese Auslenkung wird detektiert und in eine Topographie-Aufnahme umgewandelt. Der Modus kann nur bei flachen Proben verwendet werden.
15
Feigl, D.: Das Rasterkraftmikroskop im Praktikum, Karlsruher Institut für Technologie, Staatsexamensarbeit, 2012

13
Tiefere Strukturen können zu Kontaktverlust oder zu einer Beschädigung oder Verformung der Spitze oder der Probe führen.
16
Abbildung 8: Funktionsprinzip des Constant-Height-Modus.17
2.5.2 Constant-Force-Modus
Der Constant-Force-Modus funktioniert mit Hilfe eines Rückkopplungsmechanismus, der die Auslenkung des Cantilevers und somit die Kraft auf diesen konstant hält (siehe Abbildung 9). Dies erfolgt durch die Detektion der Auslenkung des Cantilevers und der daraus resultierenden Nachregelung der Probenhöhe. Das Regelsignal wird aufgezeich-net und ergibt als Funktion der (𝑥, 𝑦)-Koordinaten die Topographie-Aufnahme. Der
Constant-Force-Modus erlaubt es, Proben mit tieferen Oberflächenstrukturen zu untersuchen. Ein Kontaktverlust oder eine Beschädigung der Probe oder Spitze wird eingeschränkt, da die Kraft, welche auf den Cantilever einwirkt, konstant ist.
Abbildung 9: Funktionsprinzip des Constant-Force-Modus.
16
Bowen, W. R. ; Hilal, N.: Atomic force microscopy in process engineering. 1. Auflage. Elsevier/ Butterworth-Heinemann, 2009 17
Feigl, D.: Das Rasterkraftmikroskop im Praktikum, Karlsruher Institut für Technologie, Staatsexamensarbeit, 2012
2.5.3 Überblick: Dynamische Modi (nicht im Praktikumsversuch)
Im Tapping-Modus wird der Cantilever nahe seiner Resonanzfrequenz zu Schwingungen
angeregt. Dabei berührt er immer wieder kurzzeitig die Probenoberfläche, was eine Einschränkung der Schwingung und somit sowohl eine Veränderung der Amplitude als auch eine Phasenverschiebung zwischen Anregung und Cantileverschwingung nach sich zieht. Diese wird genutzt, um über eine Rückkopplung die Probenhöhe zu verändern und die Amplitude somit konstant zu halten.
Im Non-Contact-Modus wird der Cantilever zu einer Schwingung mit kleiner Amplitude angeregt. Die Spitze ist dabei so weit von der Probenoberfläche entfernt, dass nur langreichweitige Kräfte wie die Van-der-Waals- oder elektrostatischen Kräfte auf sie wirken. Sie verursachen eine messbare Verschiebung der Frequenz der Schwingung bzw. eine Veränderung der Amplitude. Diese wird als Regelsignal verwendet, um die Position der Probe zu kontrollieren. Der Non-Contact-Modus führt zur höchsten Auflösung, die mit einem Rasterkraftmikroskop erzielt werden kann.
18
2.6 Kraft-Abstands-Kurven
Neben der Topographie können Rasterkraftmikroskope auch Kraft-Abstands-Kurven aufnehmen. Diese sind ein wichtiges Werkzeug im Bereich vieler Wissenschaften wie beispielsweise der Biochemie oder der Biologie.
19 Aus den Kraft-Abstands-Kurven
lassen sich Elastizitätsmoduln von verschiedenen Stoffen, aber auch beispielsweise von mikrobischen Zellen bestimmen.
20 Bei der Durchführung einer Kraft-Abstands-Messung
wird die Probe mit Hilfe der piezoelektrischen Steuerung des Probentischs an die Spitze des Cantilevers angenähert und wieder zurückgezogen. Aufgrund der auftretenden Kräfte kommt es dabei zu einer Auslenkung des Cantilevers. Diese wird in Abhängigkeit vom Abstand gemessen.
Im Folgenden werden die Eigenschaften einer idealisierten Kraft-Abstands-Kurve näher betrachtet. Eine solche zeigt Abbildung 10, während in Abbildung 11 die dazugehörigen Auswirkungen auf die Position des Cantilevers zu sehen sind.
18
Bowen, W. R. ; Hilal, N.: Atomic force microscopy in process engineering. 1. Auflage. Elsevier Butterworth-Heinemann, 2009 19
Cappella, B. ; Dietler, G.: Force-distance curves by atomic force microscopy. In: Surface Science Reports 34 (1999), S. 1-104 20
Touhami, A. ; Nysten, B. ; Y.F.Dufrene: Nanoscale mapping of the Elasticity of Microbial Cells by Atomic Force Microscopy. In: Langmuir 19 (2003), S. 4539-4543
15
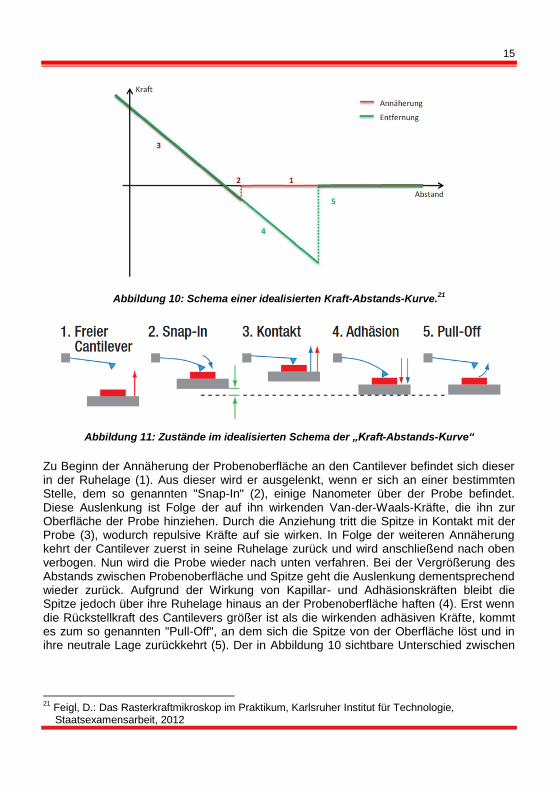
Abbildung 10: Schema einer idealisierten Kraft-Abstands-Kurve.21
Abbildung 11: Zustände im idealisierten Schema der „Kraft-Abstands-Kurve“
Zu Beginn der Annäherung der Probenoberfläche an den Cantilever befindet sich dieser in der Ruhelage (1). Aus dieser wird er ausgelenkt, wenn er sich an einer bestimmten Stelle, dem so genannten "Snap-In" (2), einige Nanometer über der Probe befindet. Diese Auslenkung ist Folge der auf ihn wirkenden Van-der-Waals-Kräfte, die ihn zur Oberfläche der Probe hinziehen. Durch die Anziehung tritt die Spitze in Kontakt mit der Probe (3), wodurch repulsive Kräfte auf sie wirken. In Folge der weiteren Annäherung kehrt der Cantilever zuerst in seine Ruhelage zurück und wird anschließend nach oben verbogen. Nun wird die Probe wieder nach unten verfahren. Bei der Vergrößerung des Abstands zwischen Probenoberfläche und Spitze geht die Auslenkung dementsprechend wieder zurück. Aufgrund der Wirkung von Kapillar- und Adhäsionskräften bleibt die Spitze jedoch über ihre Ruhelage hinaus an der Probenoberfläche haften (4). Erst wenn die Rückstellkraft des Cantilevers größer ist als die wirkenden adhäsiven Kräfte, kommt es zum so genannten "Pull-Off", an dem sich die Spitze von der Oberfläche löst und in ihre neutrale Lage zurückkehrt (5). Der in Abbildung 10 sichtbare Unterschied zwischen
21
Feigl, D.: Das Rasterkraftmikroskop im Praktikum, Karlsruher Institut für Technologie, Staatsexamensarbeit, 2012

Gleichgewichtszustand und Minimum der Kurve wird als Adhäsion bezeichnet.22
Auf diese soll im folgenden Unterkapitel näher eingegangen werden.
2.6.1 Adhäsion
Der Begriff der Adhäsion fasst viele Phänomene zusammen. Hier wird die Wirkung von Oberflächenkräften auf die Spitze des Cantilevers, wenn dieser von der Probe zurückgezogen wird, als Adhäsion bezeichnet wie auch bei Mizes et al. und Butt et al.
23
Das bedeutet, dass die Adhäsionskraft der Kraft entspricht, die notwendig ist, um die Cantileverspitze von der Probenoberfläche zu lösen. Allgemein ist die Adhäsionskraft eine Kombination aus elektrostatischen, Van-der-Waals- und Kapillarkräften. Hinzu kommen Kräfte, die auf chemischen Bindungen oder Säure-Base-Wechselwirkungen beruhen. Die einzelnen Kräfte haben je nach Umgebung einen größeren oder geringeren Einfluss auf die auftretende Adhäsion.
Für die Beschreibung der Adhäsion gibt es verschiedene Modelle, welche auf unterschiedlichen Annahmen beruhen. Man kann zwischen zwei fundamental verschiedenen Methoden unterscheiden: Die eine beruht auf der Betrachtung von Van- der-Waals-Kräften, die zur Adhäsion führen. Die andere basiert auf einer reinen Kontakt-Mechanik, die die elastische Wechselwirkung von Körpern behandelt. Die klassische Kontaktmechanik wurde in erster Linie von Heinrich Hertz
24 geprägt, auf dessen
Ergebnis bis heute alle folgenden Modelle basieren. Hertz berücksichtigt in seinem Konzept weder die Oberflächenkräfte noch die Adhäsion (auf Basis der Modelle, die über die Betrachtung von Van-der-Waals-Kräften gehen). Wir verwenden hier dieses Kontaktmechanik-Modell, das für AFM-Messungen häufig verwendet wird. Als Ausgangspunkt zur Beschreibung der Adhäsion dient eine Oberfläche. Diese weist, auch wenn sie noch so glatt scheint, Unebenheiten auf, welche sich durch Erhebungen und Senken ergeben. Werden zwei Oberflächen in Kontakt gebracht, so treffen die Unebenheiten aufeinander. Dabei ist die eigentliche Kontaktfläche zwischen den Materialien kleiner als die scheinbare, da nur die Erhebungen miteinander in Kontakt treten. Dazwischen befinden sich Spalte aufgrund der Senken in der Oberfläche. Die Adhäsion tritt nur zwischen den Erhebungen auf.
Letztlich wird im Experiment aus der Kraft-Abstandskurve die maximale Adhäsionskraft 𝐹𝑎𝑑 mithilfe des Hookeschen Feder-Gesetzes gemessen und berechnet:
𝐹𝑎𝑑 = 𝑘 ⋅ 𝛥𝑧
Dabei beschreibt 𝑘 die Federkonstante und Δ𝑧 die Auslenkung des Cantilevers vom
„Snap-In“ bis zum „Pull-Off“. Näheres zur Auswertung finden Sie in der Bedienungsanleitung des AFM.
22
Mizes, H.A. ; Loh, K.G. ; Miller, J.D. ; Ahuja, S.K. ; Grabowski, E.F.:Submicron probe of polymer adhesion with atomic force microscopy: Dependence on topography and material inhomogeneities. In: Applied Physics Letters 59 (1991), S. 2901-2903 23
Butt, H.-J. ; Cappella, B. ; Kappl, M.: Force measurement with the atomic force microscope: Technique, interpretation and applications. In: Surface Science Reports 59 (2005), S. 1-152 24
Hertz, H.: Über die Berührung fester elastischer Körper. In: Journal für die reine und angewandte Mathematik 92 (1881), S. 156-171
17
Man beachte: Die „Adhäsionskraft“ ist natürlich je nach Modell anders definiert, es kann daher leicht zu Begriffsverwirrungen kommen. In unserem Modell ist die Kraft 𝐹𝑎𝑑 allgemein die Kraft, mit der eine Kugel mit Radius 𝑅 auf eine flache Oberfläche gedrückt
wird, sie wird auch als "Adhäsionskraft" bezeichnet. Diese kann man recht leicht aus der Kraft-Abstandskurve ermitteln, weshalb wir diese Methode hier verwenden. Man kann daraus Rückschlüsse auf die Oberflächenbeschaffenheit der Probe ziehen, sie ist aber nur eine vieler Möglichkeiten, dies zu untersuchen. Bei tieferem Interesse an dieser Theorie kann man die genauen Zusammenhänge bei Prokopovich et. al. nachlesen.
25
2.7 Interpretation von Messdaten
Wie bei allen physikalischen Messmethoden bedürfen die gesammelten Daten der Interpretation. Im Folgenden werden die für die Analyse der Messdaten des Rasterkraftmikroskops wichtigen Aspekte dargestellt.
2.7.1 Spitzenartefakte
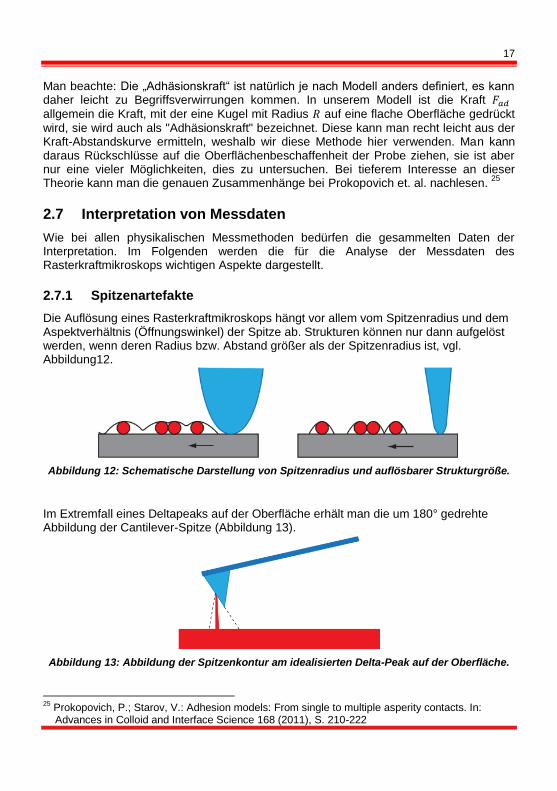
Die Auflösung eines Rasterkraftmikroskops hängt vor allem vom Spitzenradius und dem Aspektverhältnis (Öffnungswinkel) der Spitze ab. Strukturen können nur dann aufgelöst werden, wenn deren Radius bzw. Abstand größer als der Spitzenradius ist, vgl. Abbildung12.
Abbildung 12: Schematische Darstellung von Spitzenradius und auflösbarer Strukturgröße.
Im Extremfall eines Deltapeaks auf der Oberfläche erhält man die um 180° gedrehte Abbildung der Cantilever-Spitze (Abbildung 13).
Abbildung 13: Abbildung der Spitzenkontur am idealisierten Delta-Peak auf der Oberfläche.
25
Prokopovich, P.; Starov, V.: Adhesion models: From single to multiple asperity contacts. In: Advances in Colloid and Interface Science 168 (2011), S. 210-222

Solche geometrischen Effekte, die das Messergebnis verfälschen, heißen Spitzenartefakte. Diese können auch durch Beschädigungen und Verschmutzungen der Spitze hervorgerufen werden. Da Artefakte immer im gleichen Winkel auftreten, lassen sie sich zum Teil durch einen zweiten Scan der Probe aufdecken. Unter einem anderen Drehwinkel (oder einer anderen Scanrichtung), erscheinen die Artefakte dann an anderer Stelle.
Abbildung 14: Einfluss der Spitzengeometrie auf das Messsignal.
Der in der Software zu diesem Aufbau durchführbare Vorwärts- und Rückwärtsscan eröffnet die bessere Einschätzung von Spitzenartefakten.
Eine realistische Größenordnung für den Spitzenradius sind 7 – 10 Nanometer für die beigelegten BudgetSensors-Cantilever mit einem Öffnungswinkel von 10 – 25°. Dadurch erscheinen also grundsätzlich gemessene Objekte um ca. 14 – 20 nm breiter. Dreidimensionale Darstellungen
Die aufgenommenen Messdaten können sowohl numerisch als auch in Bildform in viele andere Freeware-Programme importiert werden. Wir empfehlen das Programm Gwyddion
26, das in der Mikroskopie-Community häufig verwendet wird.
Diese Programme bieten oft auch die Möglichkeit, die Graustufen als dreidimensionale Darstellung zu betrachten und zu drehen. Dies lässt aber den häufigen Fehler zu, das dreidimensionale Bild als ein reales Abbild der Oberflächenstruktur zu interpretieren!
26 http://gwyddion.net/

19
Kapitel 3 Fragen zur Vorbereitung und Aufgaben
Im Folgenden finden Sie die im Praktikumsversuch zu bearbeitenden Aufgaben. Konkrete Anleitungen zur Durchführung können Sie im Extra-Dokument „AFM Bedie-nungsanleitung“ nachlesen.
Fragen zur Vorbereitung (VOR der Versuchsdurchführung zu bearbeiten)
1. Welche Vorteile besitzt das Rasterkraftmikroskop gegenüber dem Raster-tunnelmikroskop?
2. Welche Anforderungen muss ein Cantilever erfüllen?
3. Was ist der wesentliche Unterschied zwischen dem Constant-Height- und dem Constant-Force-Modus und für welche Proben sind die Modi geeignet?
4. Geben Sie einen kurzen Überblick über die zwischen Probenoberfläche und Cantilever-Spitze auftretenden repulsiven und attraktiven Kräfte.
5. Erklären Sie die wichtigsten Stellen einer typischen Kraft-Abstands-Kurve.
6. Einfluss der Spitze mit Radius 𝑅 (s. Abb.15): Schätzen Sie geometrisch ab, wie
groß der Radius 𝑟 einer topographischen Struktur sein muss, damit deren
gemessene Größe nicht mehr als 10% zu groß erscheint (also 𝑟𝑚𝑒𝑠𝑠 ≤ 1,1 ∙ 𝑟).
Schätzen Sie dazu das nötige Verhältnis 𝑟
𝑅 ab.
Abb. 15: Hilfsskizze zur Abschätzung des Einflusses der AFM-Spitze

Aufgaben
3.1 Topographie-Aufnahmen
In den folgenden Abschnitten finden Sie einige Aufgaben und Probenoberflächen, die Sie mit Hilfe des Rasterkraftmikroskops behandeln können. Des Weiteren werden die Aufnahme und die Auswertung von Kraft-Abstandskurven genauer erläutert.
Während die Topographieaufnahmen direkt als Bilder (.png) abgespeichert und angesehen werden können, wird die Auswertung der Daten mithilfe der Gwyddion- Software durchgeführt. Sie können die Software über http://gwyddion.net/ herunterladen und installieren. Eine zusammenfassende Anleitung dazu finden Sie in der Bedienungsanleitung zum Rasterkraftmikroskop. Sie werden diese Software zur Bearbeitung einiger Aufgaben benötigen.
3.1.1 Aufgabe 1: Kalibrierung, Messmodi und Spitzenartefakte
Die vorhandene Mikrostruktur aus dem Nanosurf-Paket besitzt Strukturen mit einem Höhenunterschied von 85 nm.
Aufgabe 1.1: Auswirkung der x-y-Nachregelung
Messen Sie die Mikrostrukturprobe in einem 20 x 20 µm-Scanfenster im Constant-Force- Modus. Benutzen Sie die Scan-Parameter 250 x 250 Pixel. Nehmen Sie das Bild mit und ohne aktivierter Strain-Gauge-Nachregelung auf. Welche Unterschiede stellen Sie fest?
Aufgabe 1.2: Höhenkalibrierung
Führen Sie eine Höhenkalibrierung durch: Um die Höhe Ihrer gemessenen Strukturen bestimmen zu können, müssen Sie einem jeweils erhaltenen Spannungswert einen Höhenwert zuordnen können. Diese Information können Sie einer Struktur bekannter Höhe entnehmen. Sie können dazu eine Messung der Mikrostruktur-Probe mit aktivierter Nachregelung aus Aufgabe 1.1 verwenden.
Durchführung: siehe Bedienungsanleitung des Rasterkraftmikroskops
Aufgabe 1.3: Spitzenartefakte
Nehmen Sie geeignete Bilder von der Chip-Struktur aus dem Nanosurf-Paket auf, auf der Sie die hohen Strukturen gut erkennen können (20 x 20 µm). Die Chip-Strukturen haben rechtwinklige Kanten. Messen Sie dann die Höhenprofile in Gwyddion aus. Wie macht sich hier der Einfluss der Messspitze bemerkbar?

21
3.1.2 Aufgabe 2: CD
Aufgabe 2.1: Nehmen Sie im Constant-Force-Modus ein Bild einer CD mit 10 x 10 µm
Seitenlänge auf.
Aufgabe 2.2: Nehmen Sie im Constant-Force-Modus ein Bild einer DVD mit 5 x 5 µm
Seitenlänge auf.
Aufgabe 2.3: Bestimmen Sie Spurbreite, Spurabstand, minimale und maximale Pit-
Länge der CD und DVD mit Gwyddion und vergleichen Sie die jeweiligen Ergebnisse mit technischen Herstellerdaten, die Sie im Internet finden können.
Aufgabe 2.4: Bestimmen Sie jeweils die Pit-Tiefe mit der Profilfunktion von Gwyddion.
3.1.3 Aufgabe 3: Mottenauge
Da die Rasterkraftmikroskopie nicht auf elektrische Leitfähigkeit von Proben oder Ultrahoch-Vakuum angewiesen ist, sind biologische Proben ohne Präparationsaufwand sehr einfach zu untersuchen. Gerade die interessante Oberflächen-Struktur von Insekten ist hier hervorzuheben. Ein Beispiel ist das Mottenauge, welches in der gewölbten Oberflächenstruktur noch einzelne lichtempfindliche Zapfen zeigt. Dies führt zu einer um den Faktor 10 reduzierten Reflektivität durch das Brechungsindexprofil an der Chitin-Luft-Grenze, was zu einer hohen Nachtsichtfähigkeit der Motten führt.
27 Solche
Strukturen werden mittlerweile technisch hergestellt und als Lichtabsorptionsfolie verarbeitet.
Aufgabe 3.1: Nehmen Sie im Constant-Force-Modus ein Bild der technischen
Mottenaugenstruktur zunächst mit 5 x 5 µm Seitenlänge auf. Zoomen Sie zu geeigneten kleineren Abschnitten und nehmen Sie weitere Bilder auf. Können Sie die Zapfen im Auge beobachten? Welche Größe haben die Zapfen? Vermessen Sie dazu die Strukturen mit Gwyddion.
3.1.4 Aufgabe 4: Gore-Tex
Bei dem Markennamen Gore-Tex handelt es sich um ein Produkt, das in der Bekleidungsindustrie Verwendung findet. Aus dem Material wird wasserundurchlässige aber atmungsaktive Kleidung hergestellt. Aufgabe 4.1: Nehmen Sie im Constant-Force-Modus ein Bild der Gore-Tex-Membran
zunächst mit 20 x 20 µm Seitenlänge auf. Zoomen Sie ggf. zu geeigneten kleineren Abschnitten und nehmen Sie weitere Bilder auf. Können Sie aufgrund der Struktur, die Sie beobachten, die Funktion der Membran erklären?
27
Parker, Andrew R. and Helen E. Townley. "Biomimetics of photonic nanostructures." Nature nanotechnology 2.6 (2007): 347-353.
3.2 Kraft-Abstandskurven und maximale Adhäsionskraft
Aufgabe 5.1: Messen Sie die Kraft-Abstandskurve von mindestens 3 verschiedenen
Proben (z.B. Metallprobe, Tesafilm, Gore-Tex, Schlangenhaut). Beschriften Sie die verschiedenen Bereiche einer Kraft-Abstandskurve. Vergleichen Sie die Kurven – wo gibt es Unterschiede und warum?
Aufgabe 5.2: Bestimmen Sie die maximale Adhäsionskraft der obigen Proben.