
Regelung Mechatronischer Systeme, Regelungs- und ... · Regelung Mechatronischer Systeme,...
35
Regelung Mechatronischer Systeme, Regelungs- und Systemtechnik 3 Kapitel 2: Zustandsraumdarstellung und Zustandsregelung (Wiederholung) Prof. Dr.-Ing. habil. Pu Li Fachgebiet Prozessoptimierung
Transcript of Regelung Mechatronischer Systeme, Regelungs- und ... · Regelung Mechatronischer Systeme,...
Regelung Mechatronischer Systeme,Regelungs- und Systemtechnik 3
Kapitel 2: Zustandsraumdarstellung und Zustandsregelung (Wiederholung)
Prof. Dr.-Ing. habil. Pu Li
Fachgebiet Prozessoptimierung
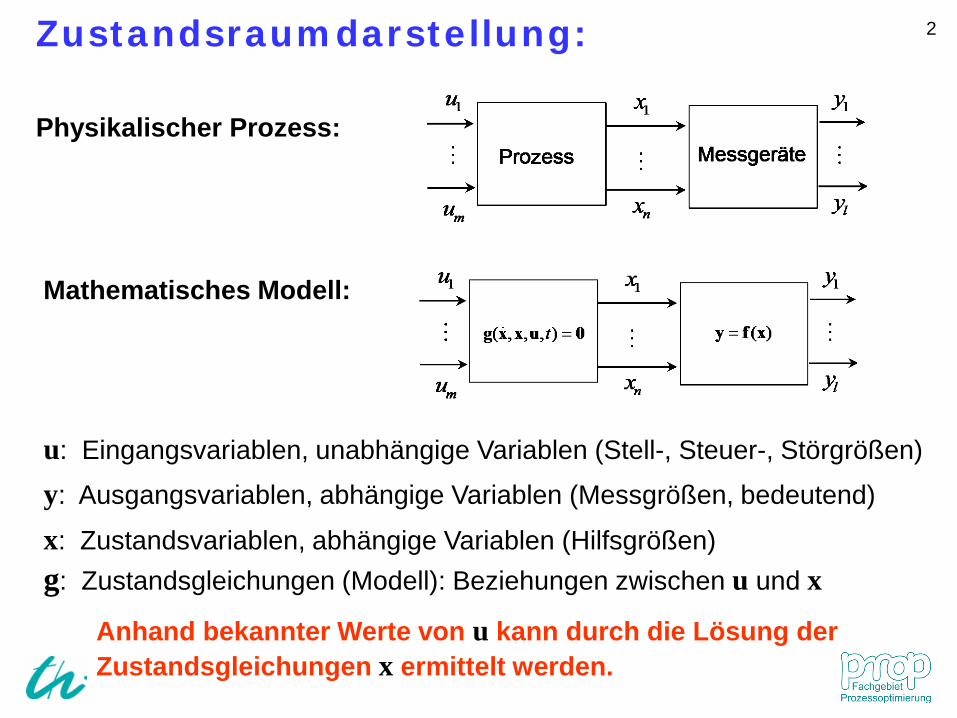
2Zustandsraumdarstellung:
u: Eingangsvariablen, unabhängige Variablen (Stell-, Steuer-, Störgrößen)y: Ausgangsvariablen, abhängige Variablen (Messgrößen, bedeutend)
x: Zustandsvariablen, abhängige Variablen (Hilfsgrößen)g: Zustandsgleichungen (Modell): Beziehungen zwischen u und x
Anhand bekannter Werte von u kann durch die Lösung der Zustandsgleichungen x ermittelt werden.
Physikalischer Prozess:
Mathematisches Modell:
3
BASFBayerDegussaHenkelLindeWackerThyssen…
4
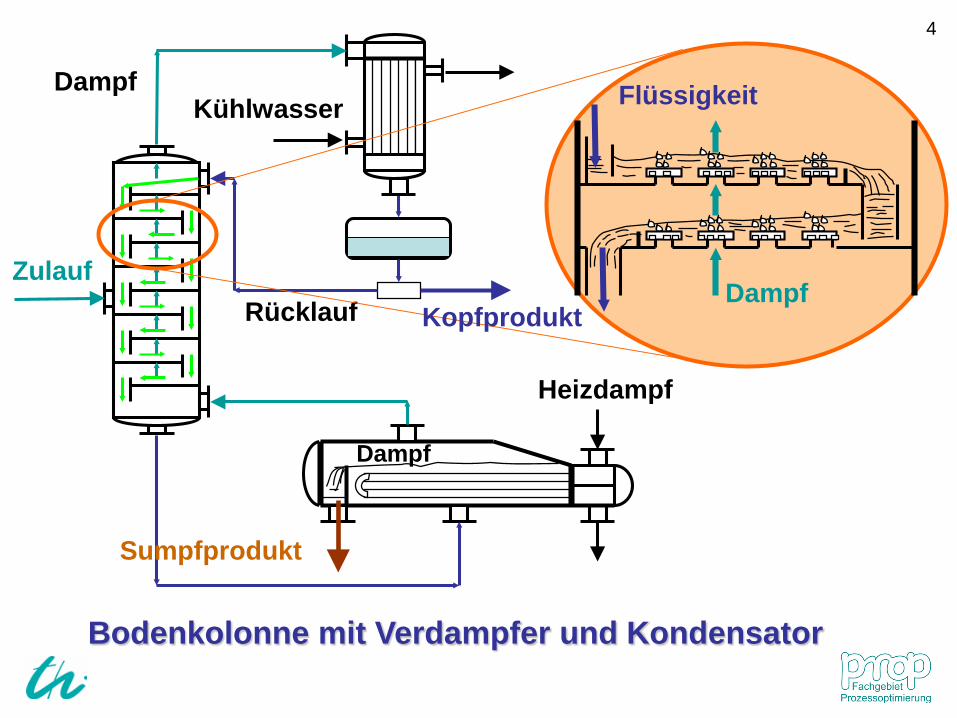
Zulauf
Dampf
Dampf
Heizdampf
Kühlwasser
Rücklauf Dampf
Bodenkolonne mit Verdampfer und Kondensator
Flüssigkeit
Kopfprodukt
Sumpfprodukt
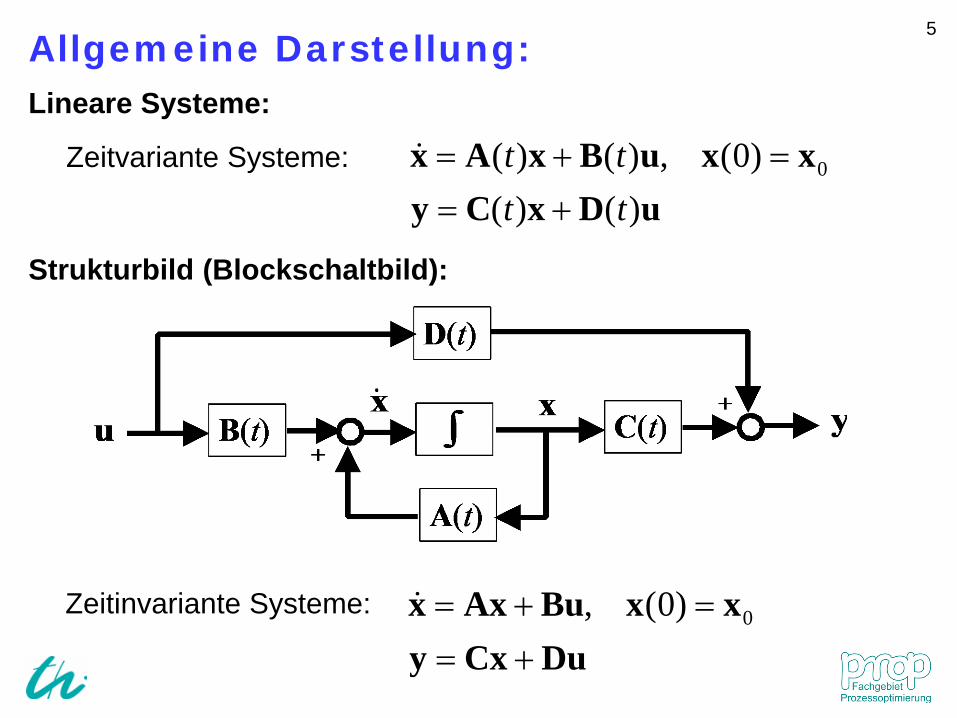
5Allgemeine Darstellung: Lineare Systeme:
uDxCyxxuBxAx
)()()0(,)()( 0
tttt
+==+=Zeitvariante Systeme:
DuCxyxxBuAxx
+==+= 0)0(,Zeitinvariante Systeme:
Strukturbild (Blockschaltbild):
6Allgemeine Darstellung:
Eigenschaften der Zustandsgleichungen:• Zustandsgleichungen sind Differentialgleichungen.• Die Anzahl der linear unabhängigen Zustandsgleichungen ist
gleich der Anzahl der Zustandsvariablen.• Es gibt mehre Möglichkeiten, die Zustandsvariablen zu wählen,
die zu unterschiedlichen Formen der Zustandsgleichungen führen.
Nichtlineare Systeme:
0)0(),,( xxuxfx ==
0)0(,),,,( xx0uxxg ==tImplizite Form:
Explizite Form:
Linearisierung wird benötigt, um die lineare Zustandsraumdarstellung zu ermitteln.
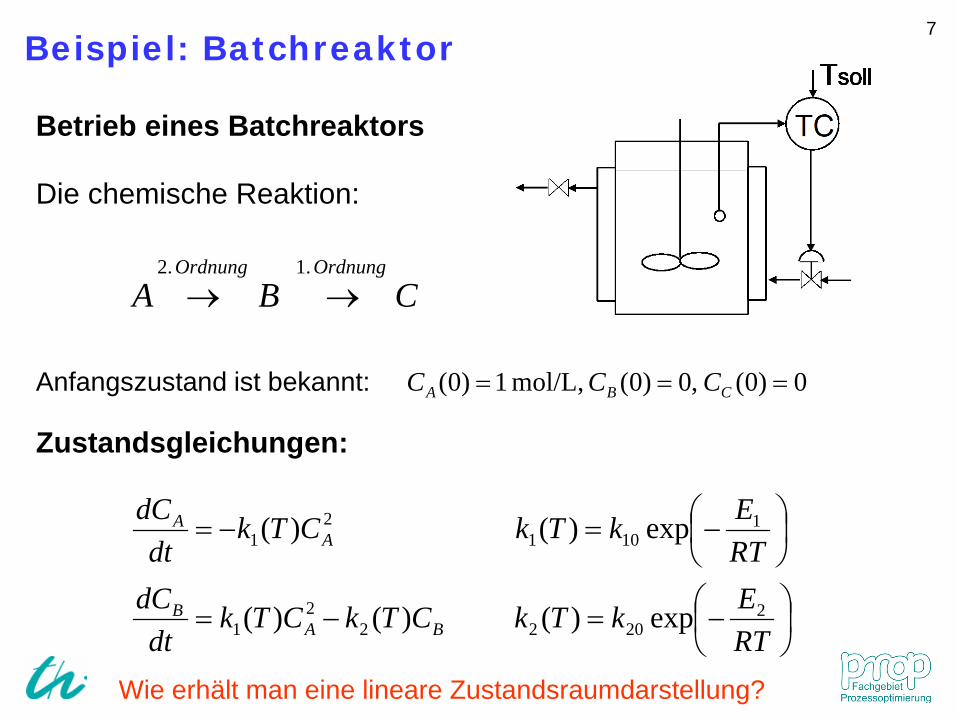
7Beispiel: Batchreaktor
Betrieb eines Batchreaktors
Die chemische Reaktion:
CBAOrdnungOrdnung .1.2→→
Anfangszustand ist bekannt: 0)0(,0)0(mol/L,1)0( === CBA CCC
Zustandsgleichungen:
−=−=
−=−=
RTEkTkCTkCTk
dtdC
RTEkTkCTk
dtdC
BAB
AA
22022
21
1101
21
exp)()()(
exp)()(
Wie erhält man eine lineare Zustandsraumdarstellung?
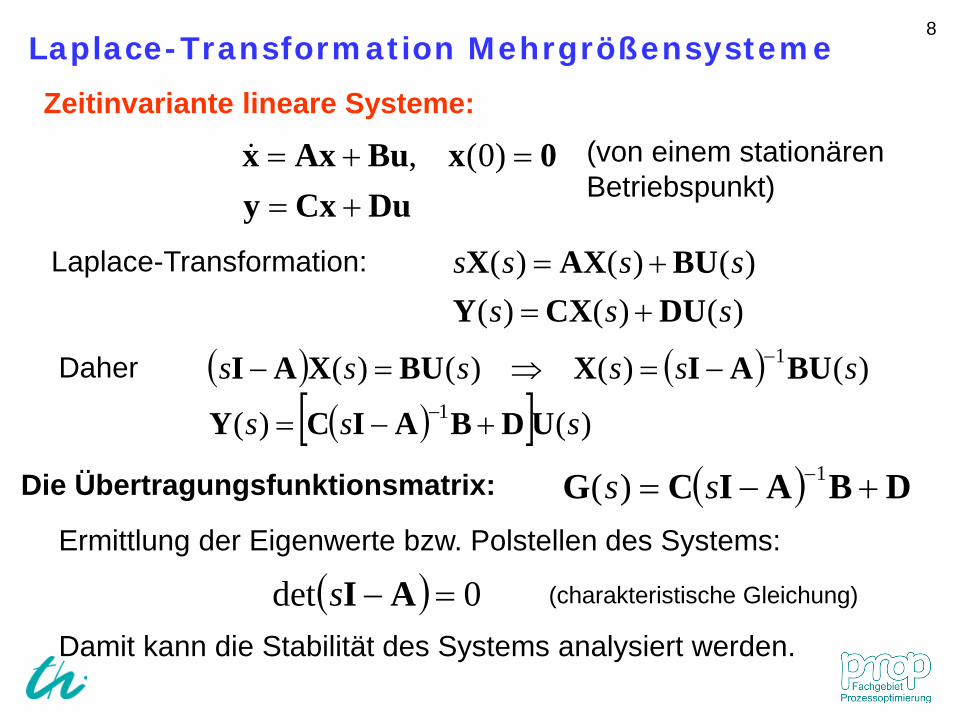
8Laplace-Transformation Mehrgrößensysteme
DuCxy0xBuAxx
+==+= )0(,
Zeitinvariante lineare Systeme:
)()()()()()(
sssssss
DUCXYBUAXX
+=+=Laplace-Transformation:
( ) ( )( )[ ] )()(
)()()()(1
1
sss
ssssss
UDBAICY
BUAIXBUXAI
+−=
−=⇒=−−
−Daher
( ) DBAICG +−= −1)( ssDie Übertragungsfunktionsmatrix:
( ) 0det =−AIsErmittlung der Eigenwerte bzw. Polstellen des Systems:
(von einem stationären Betriebspunkt)
Damit kann die Stabilität des Systems analysiert werden.
(charakteristische Gleichung)
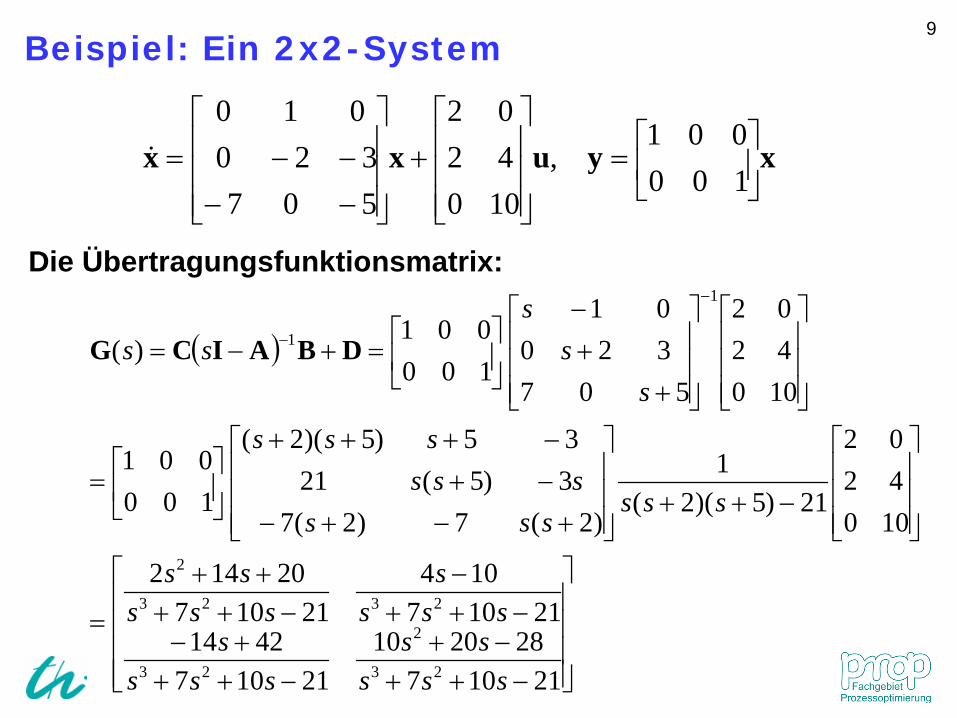
9Beispiel: Ein 2x2-System
xyuxx
=
+
−−−−=
100001
,1040
022
507320
010
( )
−++−+
−+++−
−++−
−++++
=
−++
+−+−−+−+++
=
++−
=+−=
−
−
21107282010
211074214
21107104
2110720142
1040
022
21)5)(2(1
)2(7)2(73)5(2135)5)(2(
100001
1040
022
50732001
100001
)(
23
2
23
2323
2
1
1
sssss
ssss
ssss
sssss
ssssss
ssssss
ss
sss DBAICG
Die Übertragungsfunktionsmatrix:
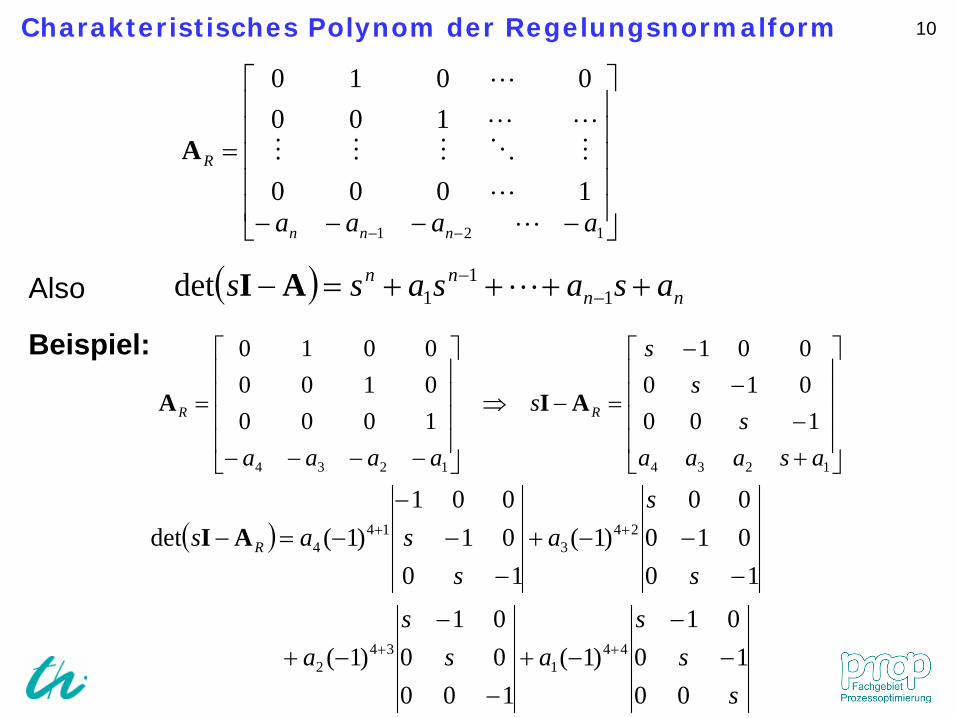
10Charakteristisches Polynom der Regelungsnormalform
Also
−−−−
=
−− 121
1000
1000010
aaaa nnn
R
A
( ) nnnn asasass ++++=− −−
11
1det AI
Beispiel:
+−
−−
=−⇒
−−−−
=
12341234
100010001
100001000010
asaaas
ss
s
aaaa
RR AIA
( )
ss
sas
sa
s
sa
ssas R
0010
01)1(
1000001
)1(
1001000
)1(10
01001
)1(det
441
342
243
144
−−
−+−
−−+
−−−+
−−
−−=−
++
++AI
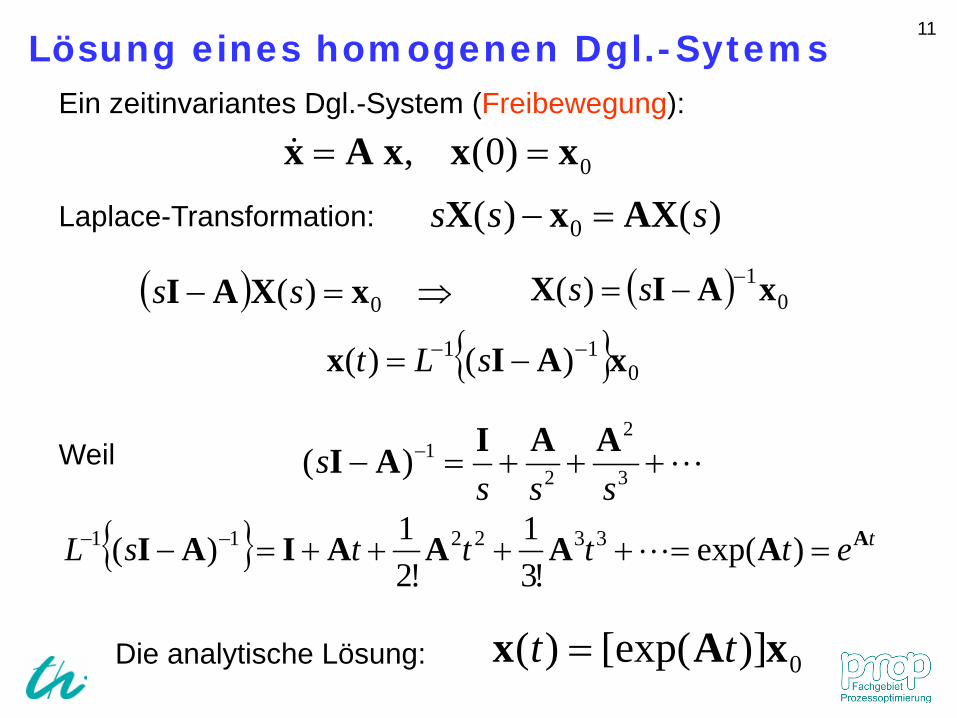
11Lösung eines homogenen Dgl.-Sytems
0)0(, xxxAx ==Ein zeitinvariantes Dgl.-System (Freibewegung):
)()( 0 sss AXxX =−Laplace-Transformation:
( ) ⇒=− 0)( xXAI ss ( ) 01)( xAIX −−= ss
{ } 011 )()( xAIx −− −= sLt
Weil+++=− −
3
2
21)(
ssss AAIAI
{ } tettttsL AAAAAIAI ==++++=− −− )exp(!3
1!2
1)( 332211
0)][exp()( xAx tt =Die analytische Lösung:
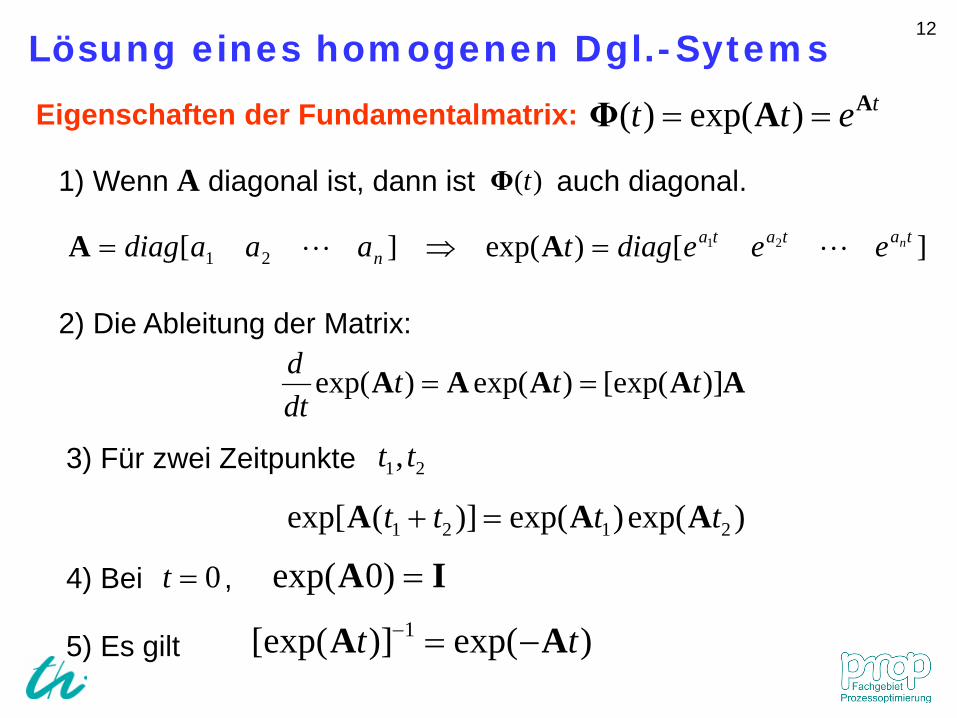
12Lösung eines homogenen Dgl.-Sytems
tett AAΦ == )exp()(Eigenschaften der Fundamentalmatrix:
)(tΦ1) Wenn A diagonal ist, dann ist auch diagonal.
)exp()exp()](exp[ 2121 tttt AAA =+
3) Für zwei Zeitpunkte
][)exp(][ 2121
tatatan
neeediagtaaadiag =⇒= AA
AAAAA )][exp()exp()exp( tttdtd
==
2) Die Ableitung der Matrix:
21, tt
4) Bei ,0=t IA =)0exp(
)exp()][exp( 1 tt AA −=−5) Es gilt
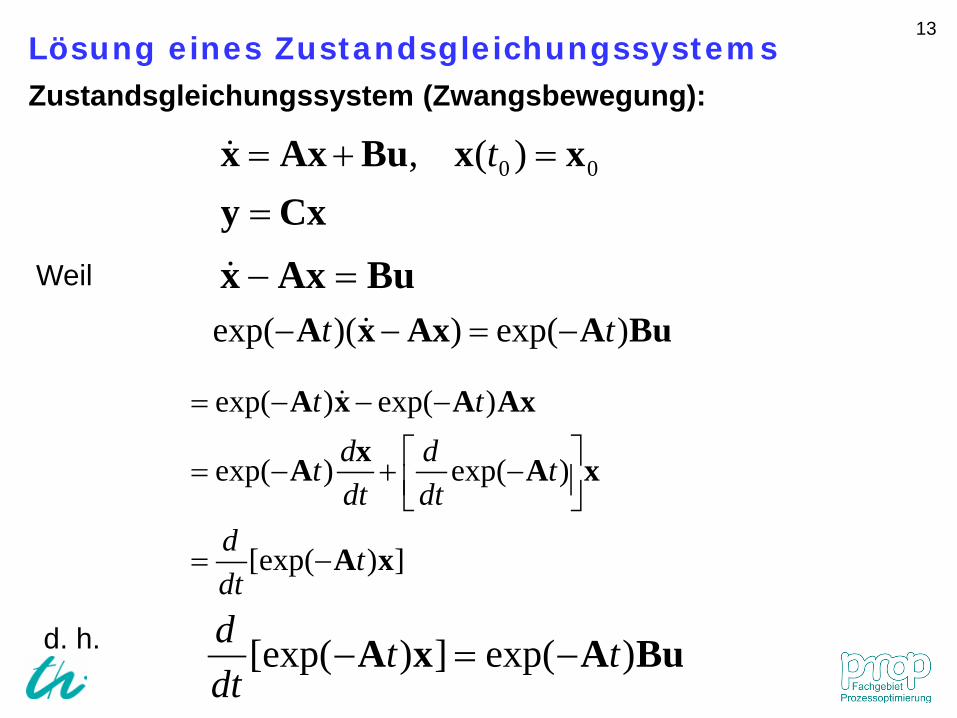
13Lösung eines Zustandsgleichungssystems
CxyxxBuAxx
==+= 00 )(, t
Zustandsgleichungssystem (Zwangsbewegung):
BuAxx =−Weil
BuAAxxA )exp())(exp( tt −=−−
])[exp(
)exp()exp(
)exp()exp(
xA
xAxA
AxAxA
tdtd
tdtd
dtdt
tt
−=
−+−=
−−−=
d. h. BuAxA )exp(])[exp( ttdtd
−=−
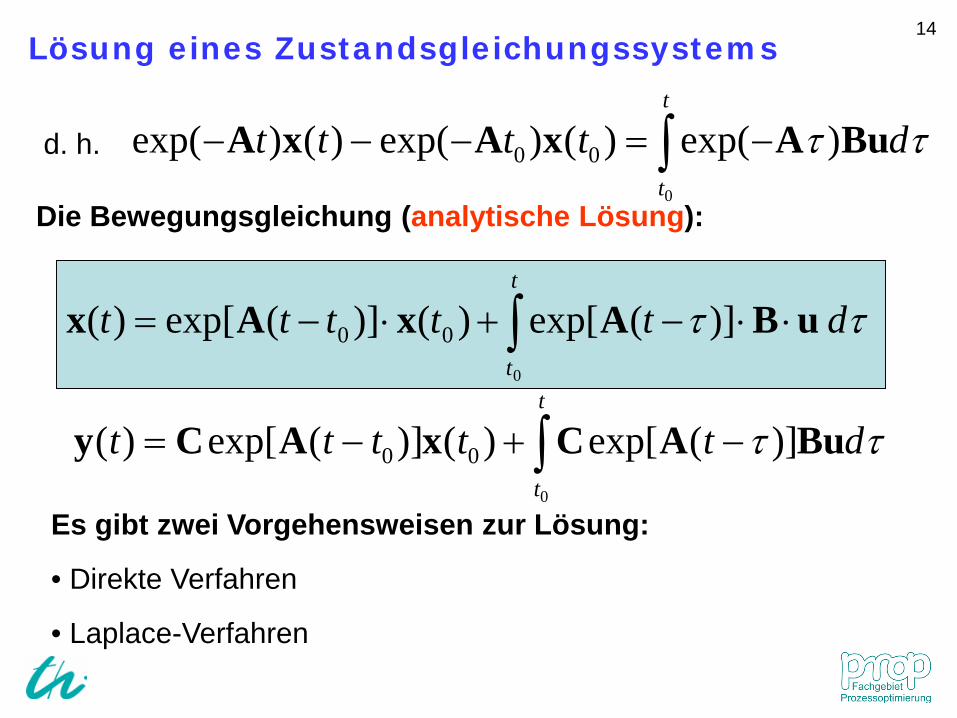
14Lösung eines Zustandsgleichungssystems
d. h. ∫ −=−−−t
t
dtttt0
)exp()()exp()()exp( 00 ττ BuAxAxA
∫ −+−=t
t
dttttt0
)](exp[)()](exp[)( 00 ττ BuACxACy
∫ ⋅⋅−+⋅−=t
t
dttttt0
)](exp[)()](exp[)( 00 ττ uBAxAx
Es gibt zwei Vorgehensweisen zur Lösung:
• Direkte Verfahren
• Laplace-Verfahren
Die Bewegungsgleichung (analytische Lösung):
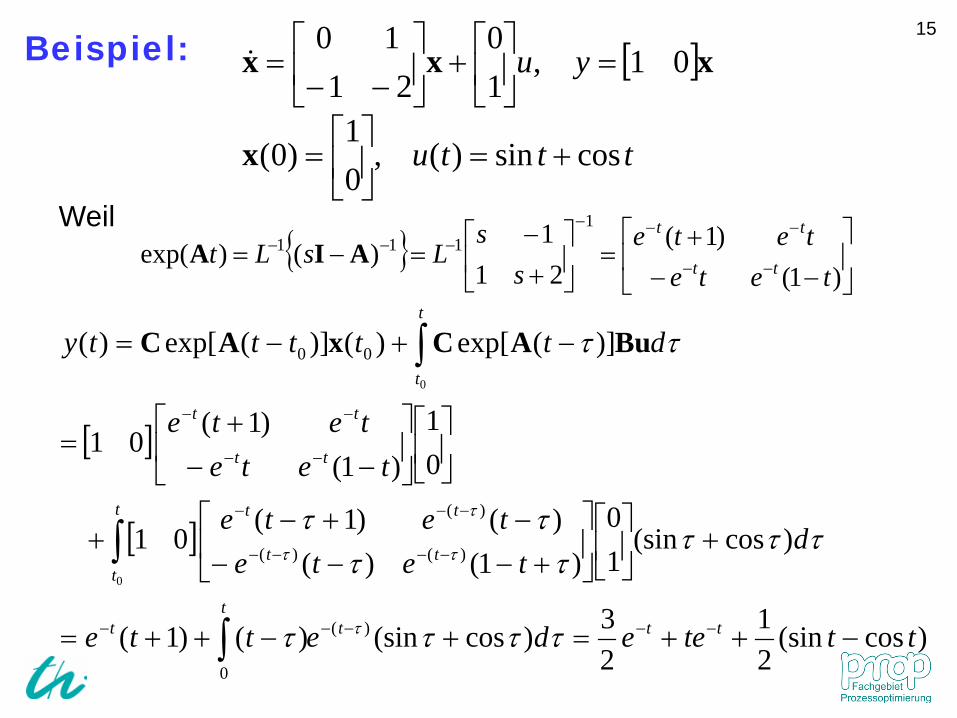
15Beispiel: [ ]
tttu
yu
cossin)(,01
)0(
01,10
2110
+=
=
=
+
−−
=
x
xxx
Weil{ }
−−+
=
+−
=−=−−
−−−−−−
)1()1(
211
)()exp(1
111
tetetete
ss
LsLt tt
tt
AIA
[ ]
[ ]
)cos(sin21
23)cos(sin)()1(
)cos(sin10
)1()()()1(
01
01
)1()1(
01
)](exp[)()](exp[)(
)(
0
)()(
)(
00
0
0
ttteedette
dtete
tete
tetetete
dttttty
tttt
t
t
ttt
tt
tt
tt
t
t
−++=+−++=
+
+−−−−+−
+
−−+
=
−+−=
−−−−−
−−−−
−−−
−−
−−
∫
∫
∫
ττττ
τττττ
ττ
ττ
τ
ττ
τ
BuACxAC
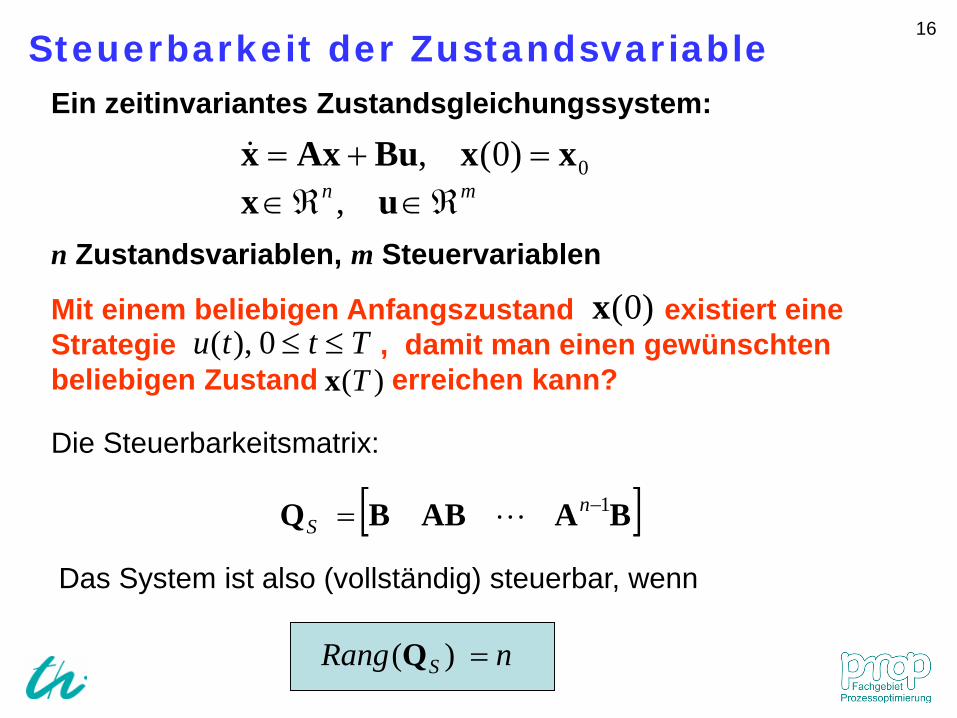
16
Ein zeitinvariantes Zustandsgleichungssystem:
Mit einem beliebigen Anfangszustand existiert eine Strategie , damit man einen gewünschtenbeliebigen Zustand erreichen kann? )(Tx
Tttu ≤≤0),()0(x
Steuerbarkeit der Zustandsvariable
n Zustandsvariablen, m Steuervariablen
mn ℜ∈ℜ∈=+=
uxxxBuAxx
,)0(, 0
[ ]BAABBQ 1−= nS
Die Steuerbarkeitsmatrix:
Das System ist also (vollständig) steuerbar, wenn
nRang S =)(Q
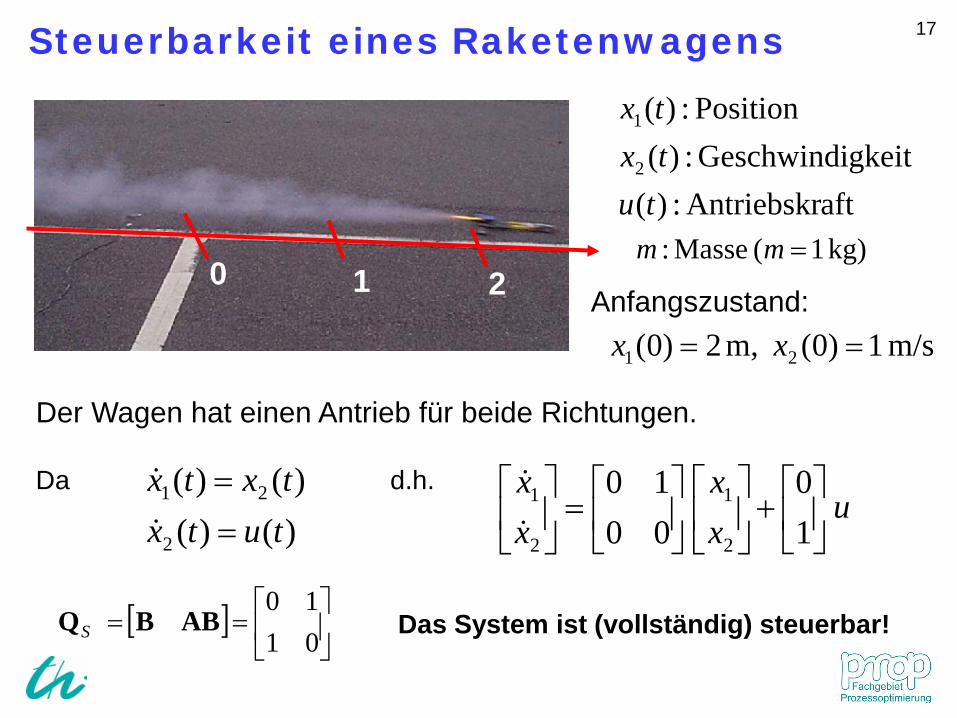
17Steuerbarkeit eines Raketenwagens
Da
)()()()(
2
21
tutxtxtx
==
uxx
xx
+
=
10
0010
2
1
2
1
d.h.
0 21
aftAntriebskr:)(gkeitGeschwindi:)(
Position:)(
2
1
tutxtx
Anfangszustand:m/s1)0( m,2)0( 21 == xx
kg) 1( Masse: =mm
[ ]
==
0110
ABBQS Das System ist (vollständig) steuerbar!
Der Wagen hat einen Antrieb für beide Richtungen.
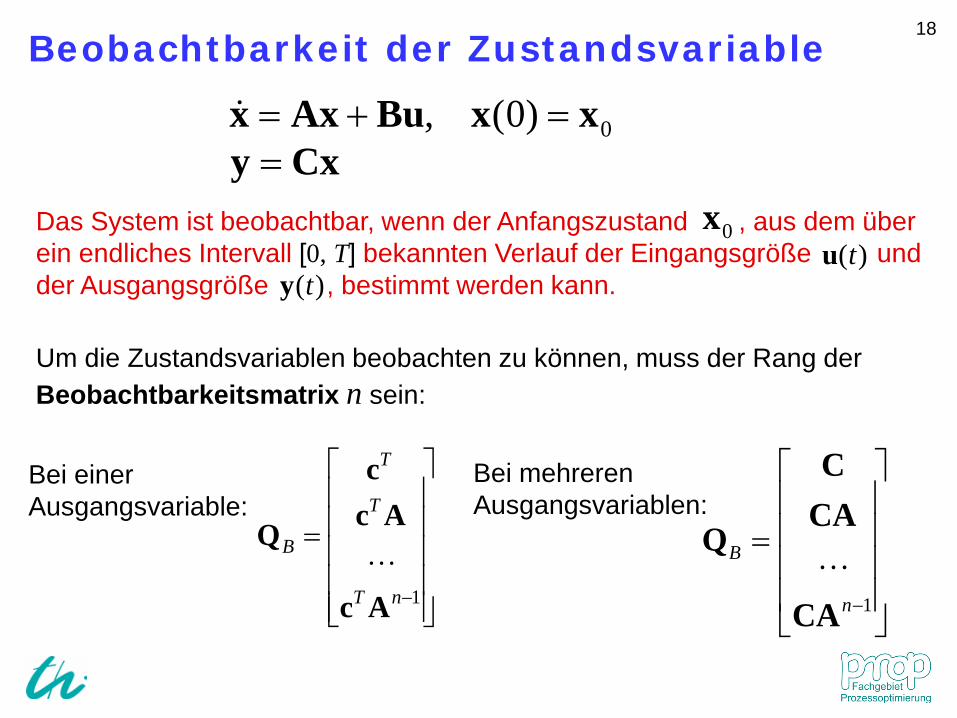
18
CxyxxBuAxx
==+= 0)0(,
Das System ist beobachtbar, wenn der Anfangszustand , aus dem über ein endliches Intervall [0, T] bekannten Verlauf der Eingangsgröße und der Ausgangsgröße , bestimmt werden kann.
0x)(tu
)(ty
Beobachtbarkeit der Zustandsvariable
Um die Zustandsvariablen beobachten zu können, muss der Rang der Beobachtbarkeitsmatrix n sein:
=
−1nT
T
T
B
Ac
Acc
Q
=
−1n
B
CA
CAC
Q
Bei mehreren Ausgangsvariablen:
Bei einer Ausgangsvariable:
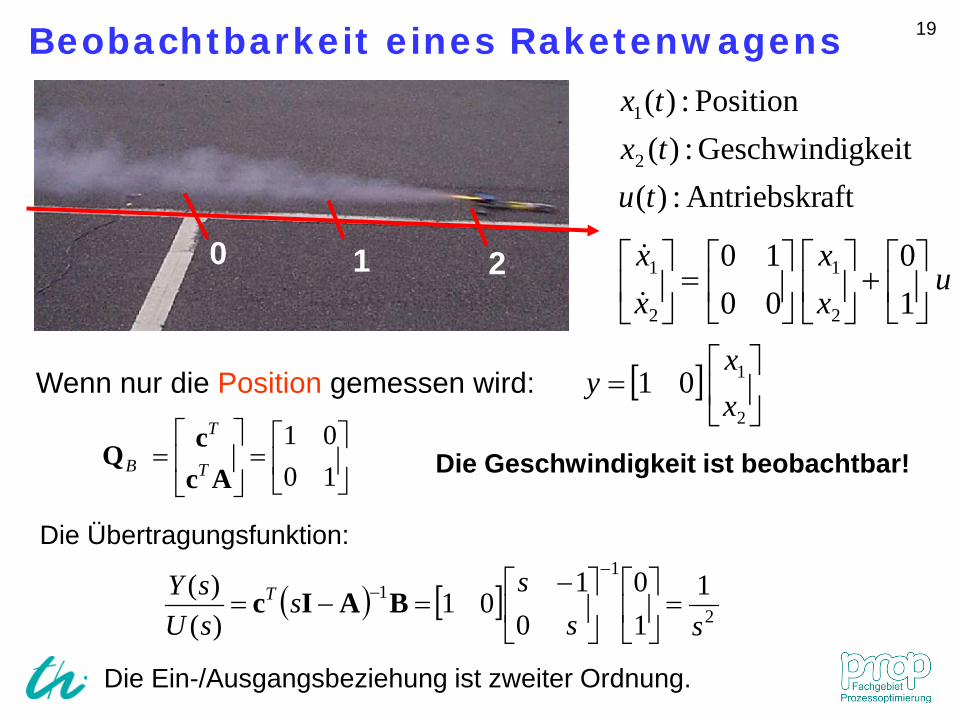
19Beobachtbarkeit eines Raketenwagens
uxx
xx
+
=
10
0010
2
1
2
1
0 21
aftAntriebskr:)(gkeitGeschwindi:)(
Position:)(
2
1
tutxtx
Wenn nur die Position gemessen wird:
=
=
1001
AccQ T
T
B Die Geschwindigkeit ist beobachtbar!
[ ]
=
2
101xx
y
Die Übertragungsfunktion:
( ) [ ] 2
11 1
10
01
01)()(
sss
ssUsY T =
−=−=
−− BAIc
Die Ein-/Ausgangsbeziehung ist zweiter Ordnung.
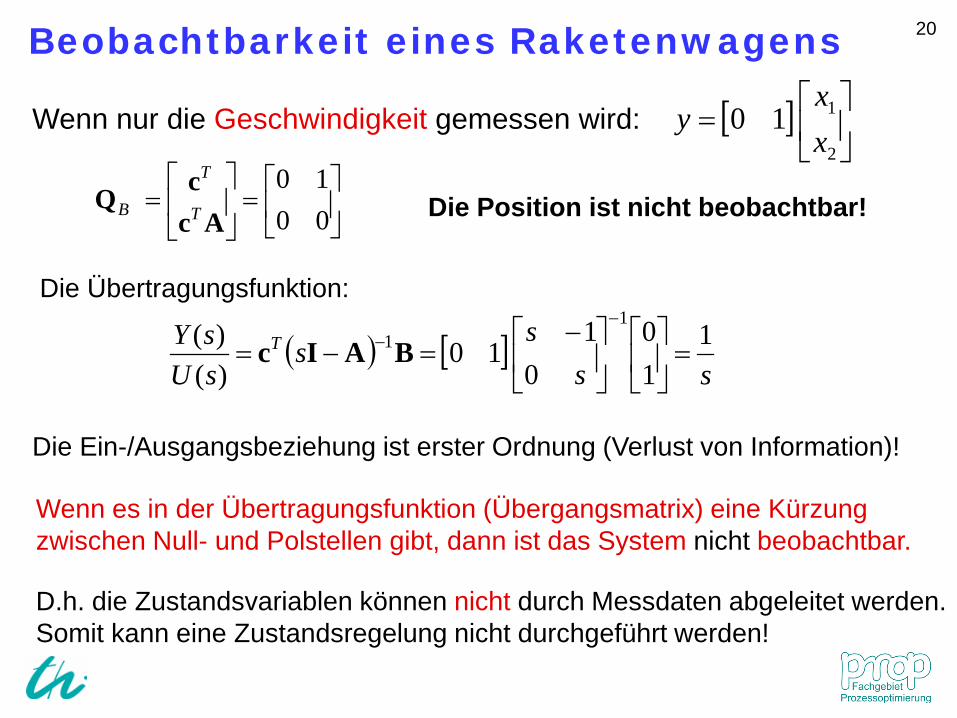
20Beobachtbarkeit eines Raketenwagens
Wenn nur die Geschwindigkeit gemessen wird: [ ]
=
2
110xx
y
=
=
0010
AccQ T
T
B Die Position ist nicht beobachtbar!
Die Übertragungsfunktion:
( ) [ ]ss
ss
sUsY T 1
10
01
10)()(
11 =
−=−=
−− BAIc
Die Ein-/Ausgangsbeziehung ist erster Ordnung (Verlust von Information)!
Wenn es in der Übertragungsfunktion (Übergangsmatrix) eine Kürzung zwischen Null- und Polstellen gibt, dann ist das System nicht beobachtbar.
D.h. die Zustandsvariablen können nicht durch Messdaten abgeleitet werden. Somit kann eine Zustandsregelung nicht durchgeführt werden!
21Zusammenfassung
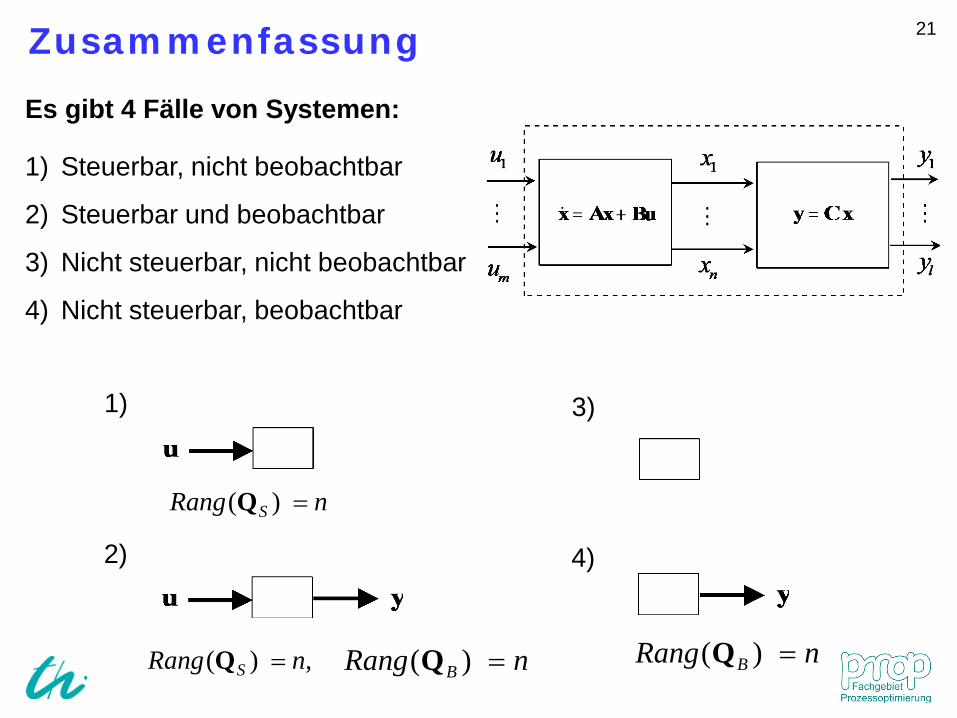
Es gibt 4 Fälle von Systemen:
1) Steuerbar, nicht beobachtbar
2) Steuerbar und beobachtbar
3) Nicht steuerbar, nicht beobachtbar
4) Nicht steuerbar, beobachtbar
nRang B =)(Q
nRang S =)(Q
,)( nRang S =Q nRang B =)(Q
1) 3)
2) 4)
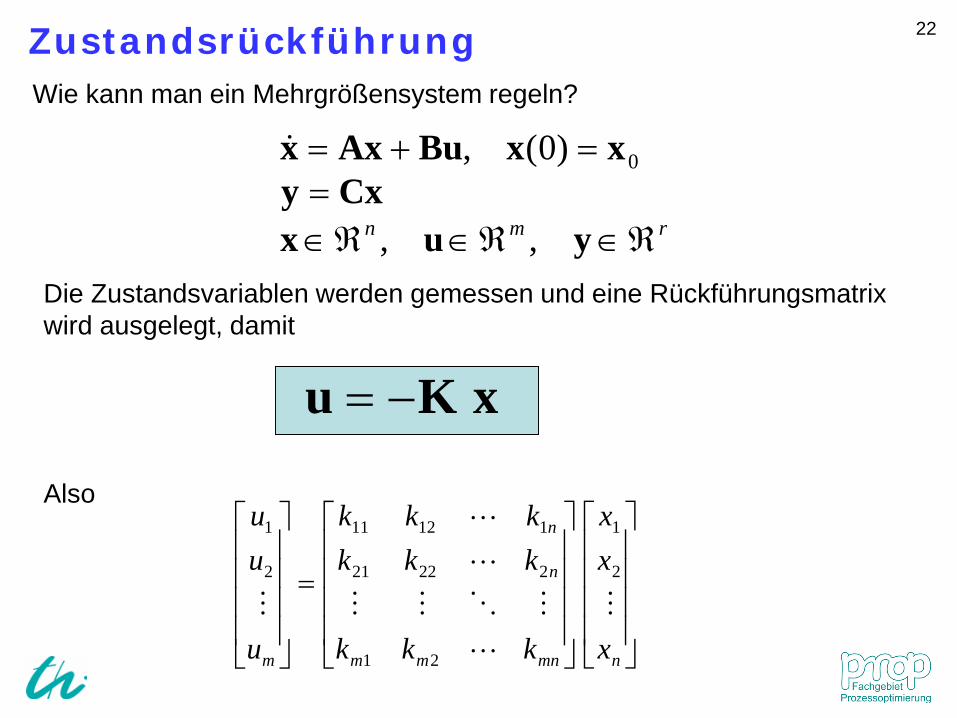
22Zustandsrückführung Wie kann man ein Mehrgrößensystem regeln?
rmn ℜ∈ℜ∈ℜ∈=
=+=
yuxCxy
xxBuAxx
,,
)0(, 0
=
nmnmm
n
n
m x
xx
kkk
kkkkkk
u
uu
2
1
21
22221
11211
2
1
Die Zustandsvariablen werden gemessen und eine Rückführungsmatrix wird ausgelegt, damit
Also
xKu −=
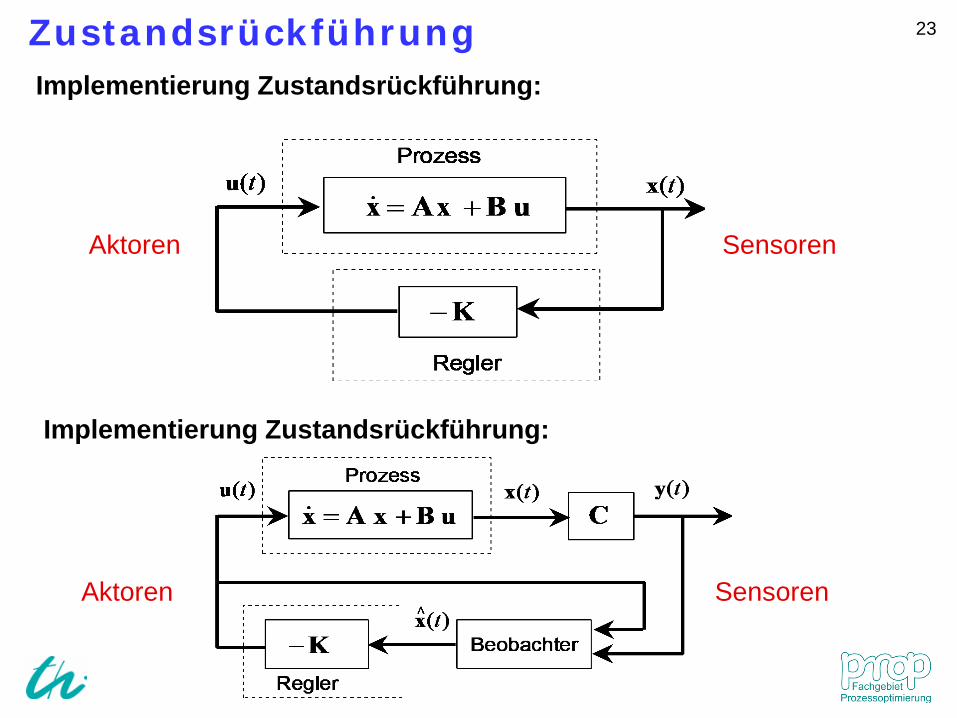
23
Aktoren Sensoren
Implementierung Zustandsrückführung:
Zustandsrückführung
Aktoren Sensoren
Implementierung Zustandsrückführung:
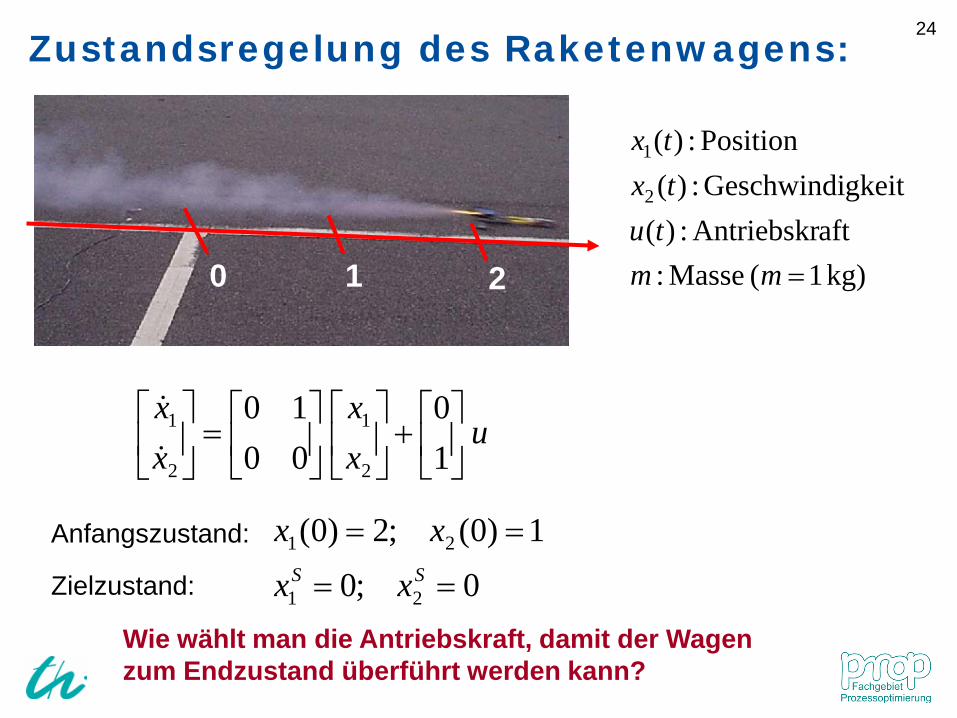
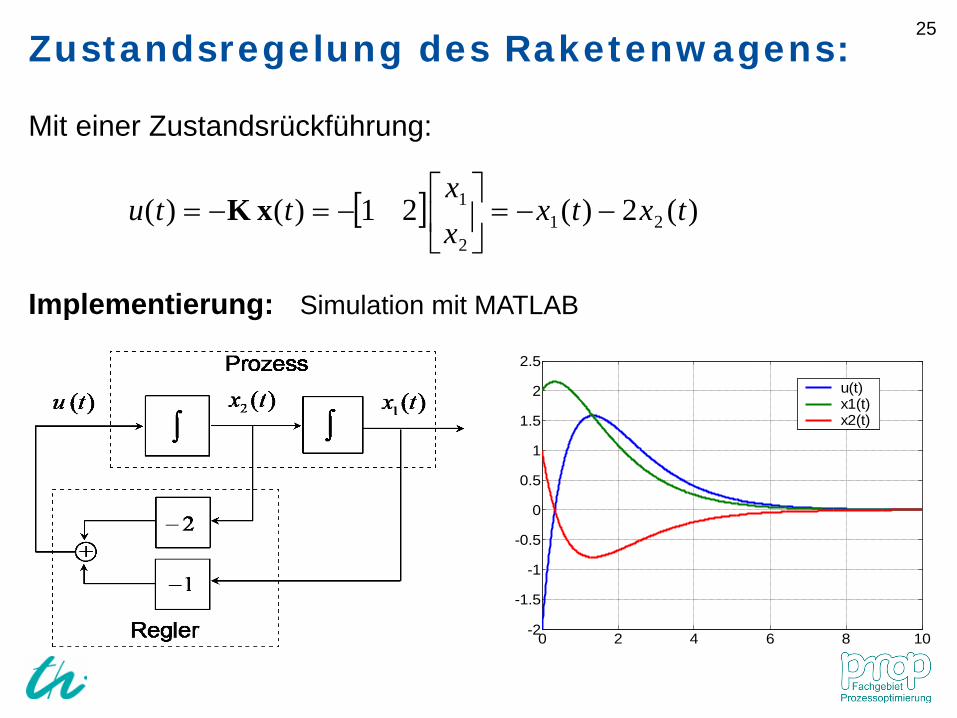
24Zustandsregelung des Raketenwagens:
kg) 1( Masse:aftAntriebskr:)(
gkeitGeschwindi:)(Position:)(
2
1
=mmtutxtx
uxx
xx
+
=
10
0010
2
1
2
1
Anfangszustand:
0;01)0(;2)0(
21
21
==
==SS xxxx
Zielzustand:
0 21
Wie wählt man die Antriebskraft, damit der Wagen zum Endzustand überführt werden kann?
25
Implementierung: Simulation mit MATLAB
0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
u(t)x1(t)x2(t)
[ ] )(2)(21)()( 212
1 txtxxx
ttu −−=
−=−= xK
Mit einer Zustandsrückführung:
Zustandsregelung des Raketenwagens:
26
Reglerentwurf mittels Polzuweisung Wie bestimmt man die Matrix K?
xKu −=
BuAxx += ⇒ BKxAxx −=
Die charakteristische Gleichung des geschlossenen Systems
[ ] 0)(det)( =−−= BKAIssf
Die gewünschten Polstellen:
)())(()( 21 nsssssssf −−−=
nsss ,,, 21
Durch Vergleichen der zwei Polynome wird die K-Matrix festgelegt.
Wo soll man die Pole platzieren?
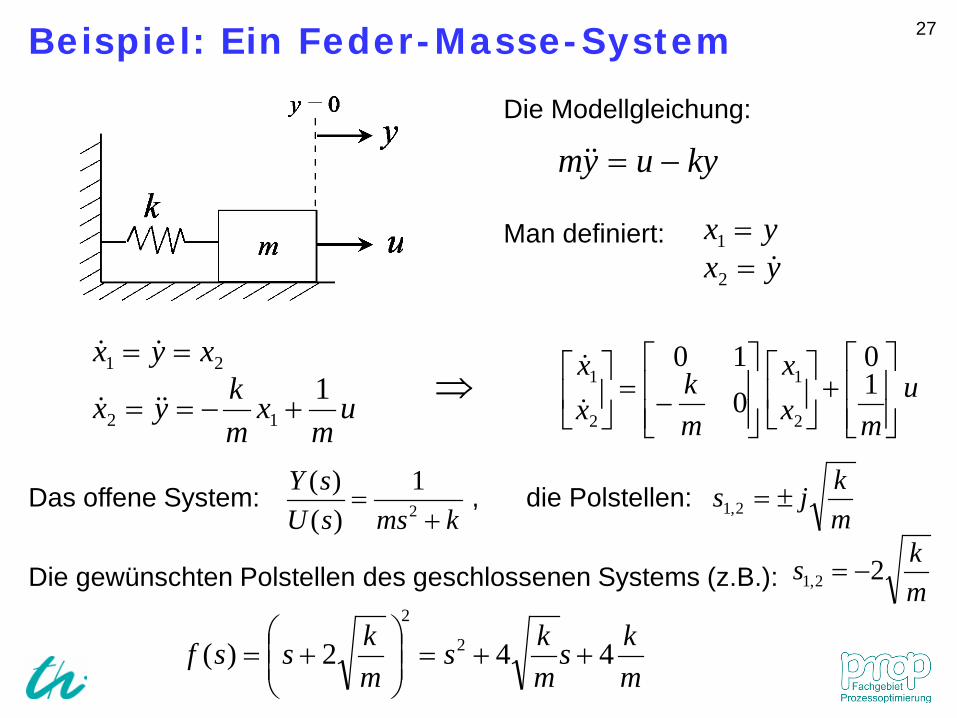
27Beispiel: Ein Feder-Masse-System
Die Modellgleichung:
yxyx=
=2
1
kyuym −=
kmssUsY
+= 2
1)()(
um
xmkyx
xyx1
12
21
+−==
==
⇒ umx
x
mk
xx
+
−=
10
010
2
1
2
1
Das offene System: ,mkjs ±=2,1die Polstellen:
Die gewünschten Polstellen des geschlossenen Systems (z.B.): mks 22,1 −=
mks
mks
mkssf 442)( 2
2
++=
+=
Man definiert:
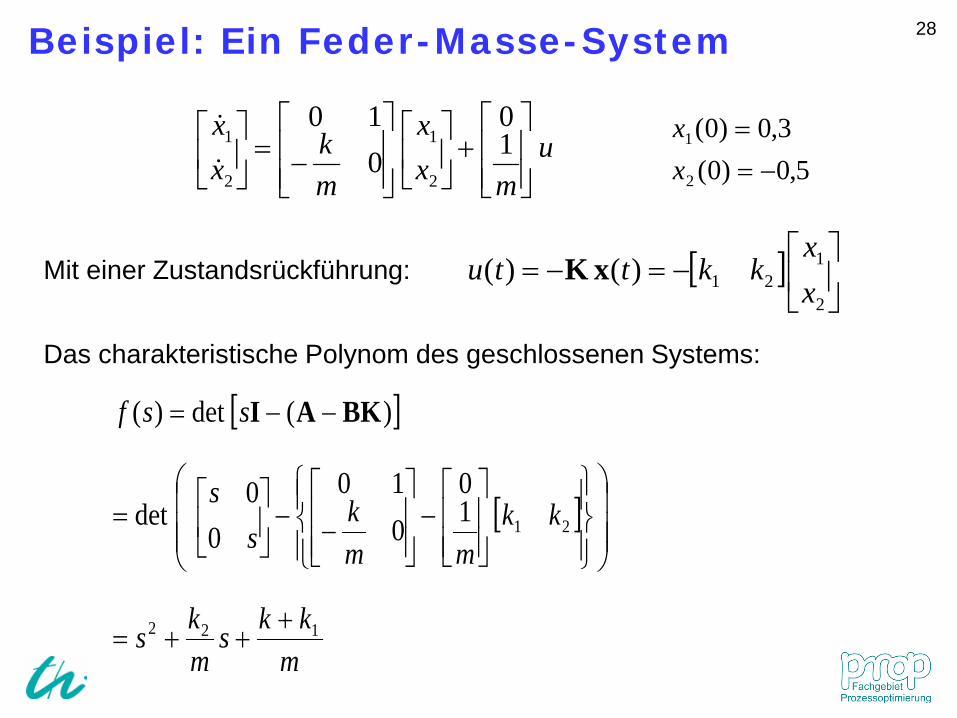
28Beispiel: Ein Feder-Masse-System
Mit einer Zustandsrückführung:
umx
x
mk
xx
+
−=
10
010
2
1
2
1
[ ]
−=−=
2
121)()(
xx
kkttu xK
Das charakteristische Polynom des geschlossenen Systems:
[ ]
[ ]
mkks
mks
kkmm
ks
s
ssf
122
2110
010
00
det
)(det)(
+++=
−
−−
=
−−= BKAI
5,0)0(3,0)0(
2
1
−==
xx
29
Gewünscht:mks
mkssf 44)( 2 ++=
Beispiel: Ein Feder-Masse-System
Daher
+
++=m
kksmkssf 122)(Zu realisieren:
mkkkk 4,3 21 ==
(mit )1=mk
Implementierung: Simulation mit MATLAB
Übungsaufgabe: Vergleich Open-Loop und Closed-Loop
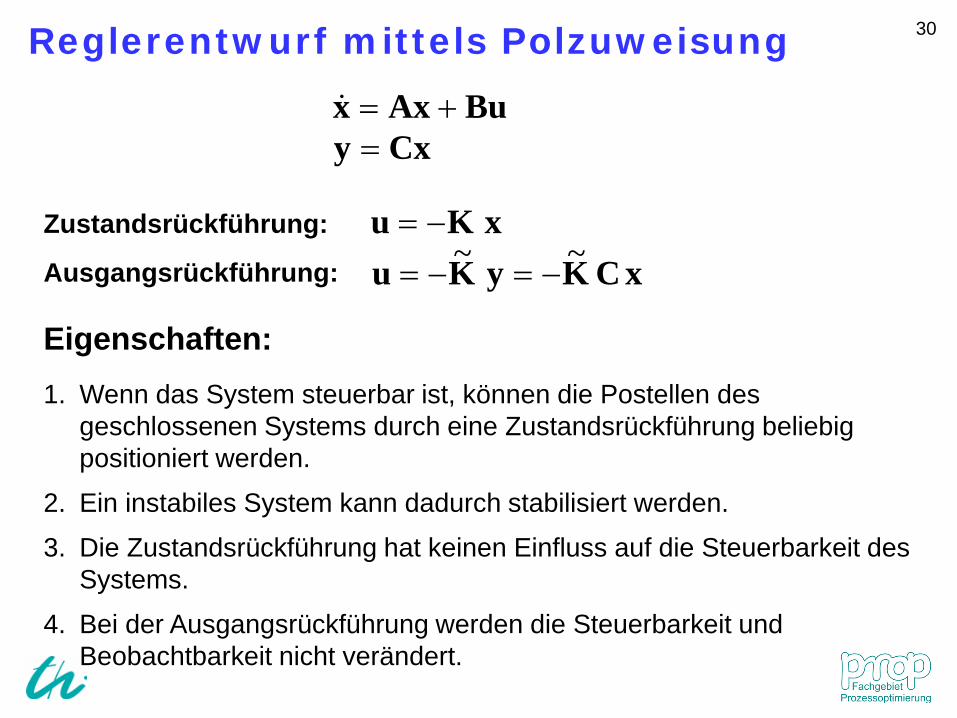
30Reglerentwurf mittels Polzuweisung
xKu −=
CxyBuAxx
=+=
1. Wenn das System steuerbar ist, können die Postellen des geschlossenen Systems durch eine Zustandsrückführung beliebig positioniert werden.
2. Ein instabiles System kann dadurch stabilisiert werden.3. Die Zustandsrückführung hat keinen Einfluss auf die Steuerbarkeit des
Systems.4. Bei der Ausgangsrückführung werden die Steuerbarkeit und
Beobachtbarkeit nicht verändert.
Zustandsrückführung:
xCKyKu ~~ −=−=Ausgangsrückführung:
Eigenschaften:
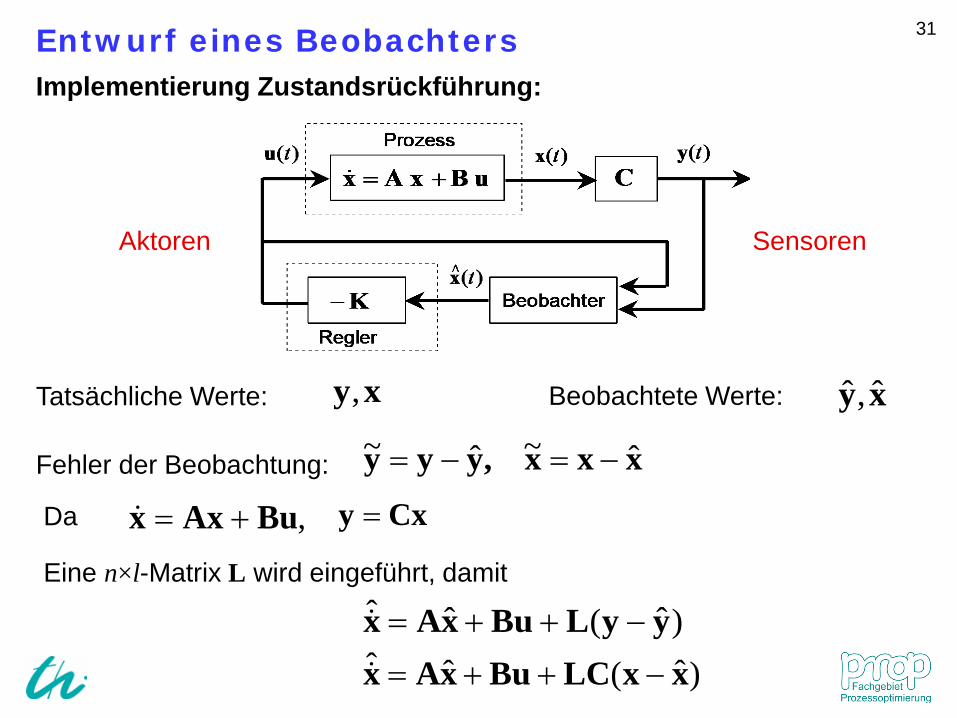
31Entwurf eines Beobachters
xy, xy ˆ,ˆ
xxx,yyy ˆ~ˆ~ −=−=
)ˆ(ˆˆ yyLBuxAx −++=
)ˆ(ˆˆ xxLCBuxAx −++=
Tatsächliche Werte: Beobachtete Werte:
Fehler der Beobachtung:
,BuAxx += Cxy =
Aktoren Sensoren
Implementierung Zustandsrückführung:
Eine n×l-Matrix L wird eingeführt, damit
Da
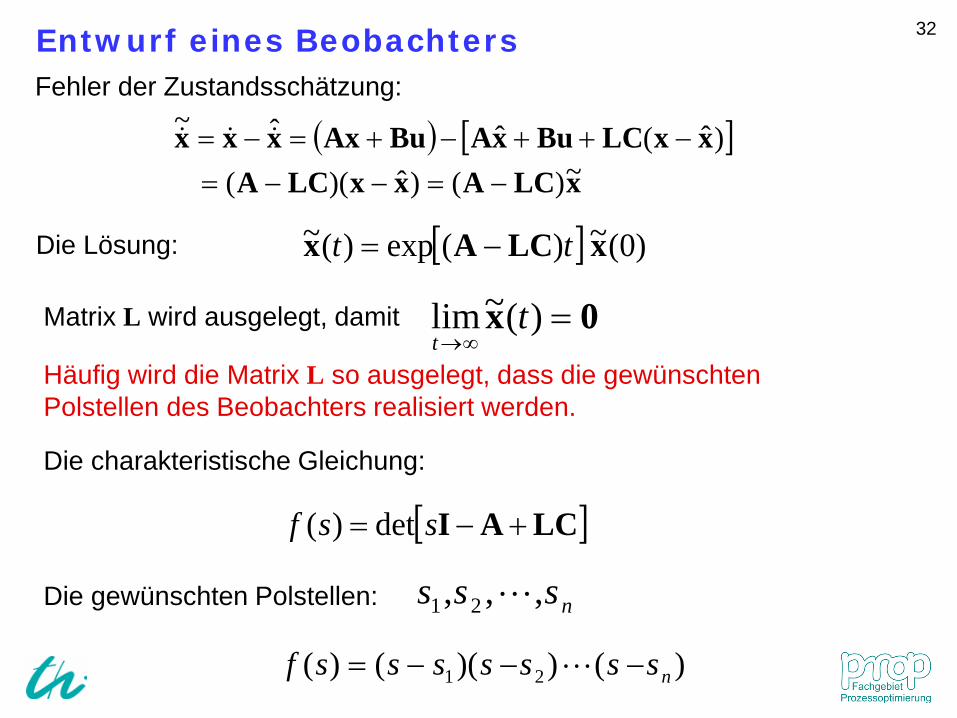
32Entwurf eines Beobachters
[ ] )0(~)(exp)(~ xLCAx tt −=
0x =∞→
)(~lim tt
Die Lösung:
Matrix L wird ausgelegt, damit
( ) [ ]xLCAxxLCA
xxLCBuxABuAxxxx~)()ˆ)((
)ˆ(ˆˆ~
−=−−=−++−+=−=
Fehler der Zustandsschätzung:
Häufig wird die Matrix L so ausgelegt, dass die gewünschten Polstellen des Beobachters realisiert werden.
[ ]LCAI +−= ssf det)(
Die charakteristische Gleichung:
Die gewünschten Polstellen:
)())(()( 21 nsssssssf −−−=
nsss ,,, 21
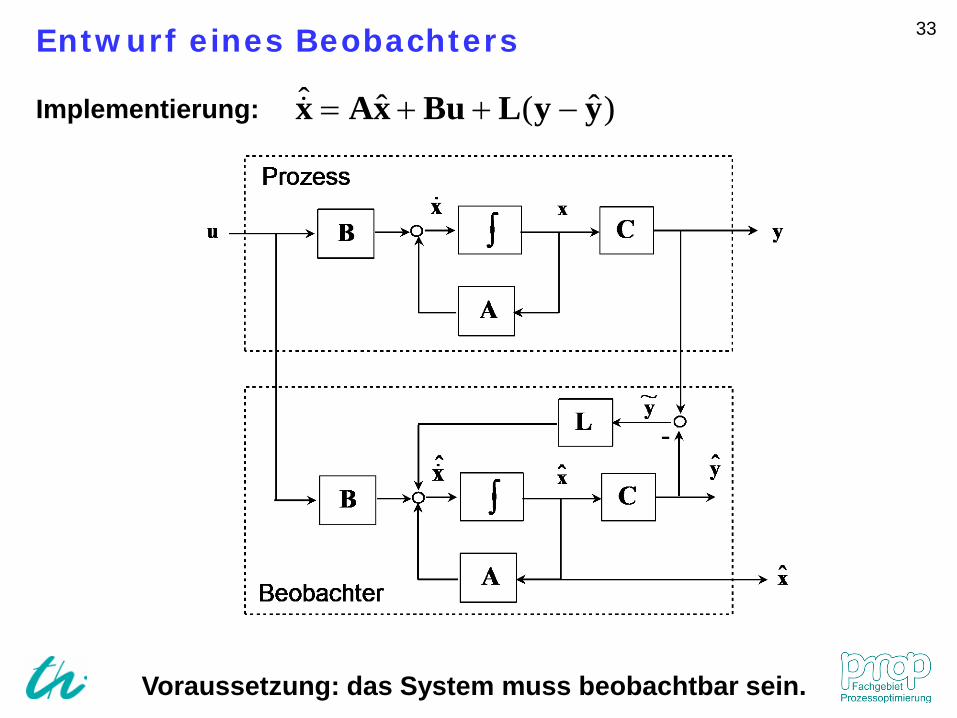
33Entwurf eines Beobachters
Implementierung: )ˆ(ˆˆ yyLBuxAx −++=
Voraussetzung: das System muss beobachtbar sein.
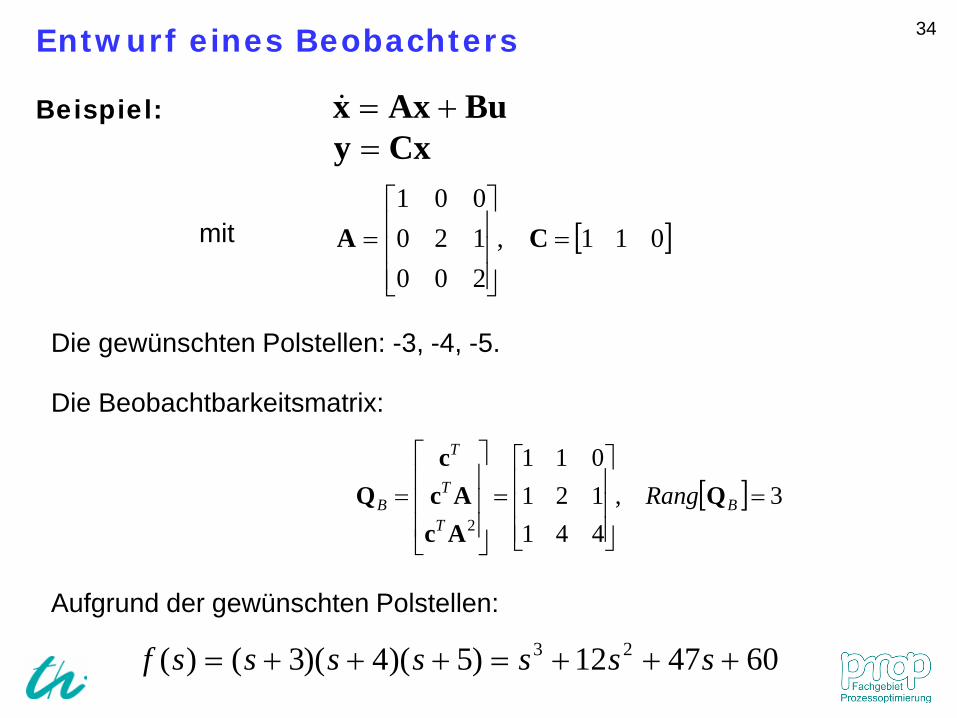
34Entwurf eines Beobachters
CxyBuAxx
=+=Beispiel:
[ ]011,200120001
=
= CAmit
Die gewünschten Polstellen: -3, -4, -5.
[ ] 3,441121011
2=
=
= BT
T
T
B Rang QAcAc
cQ
Die Beobachtbarkeitsmatrix:
604712)5)(4)(3()( 23 +++=+++= sssssssf
Aufgrund der gewünschten Polstellen:
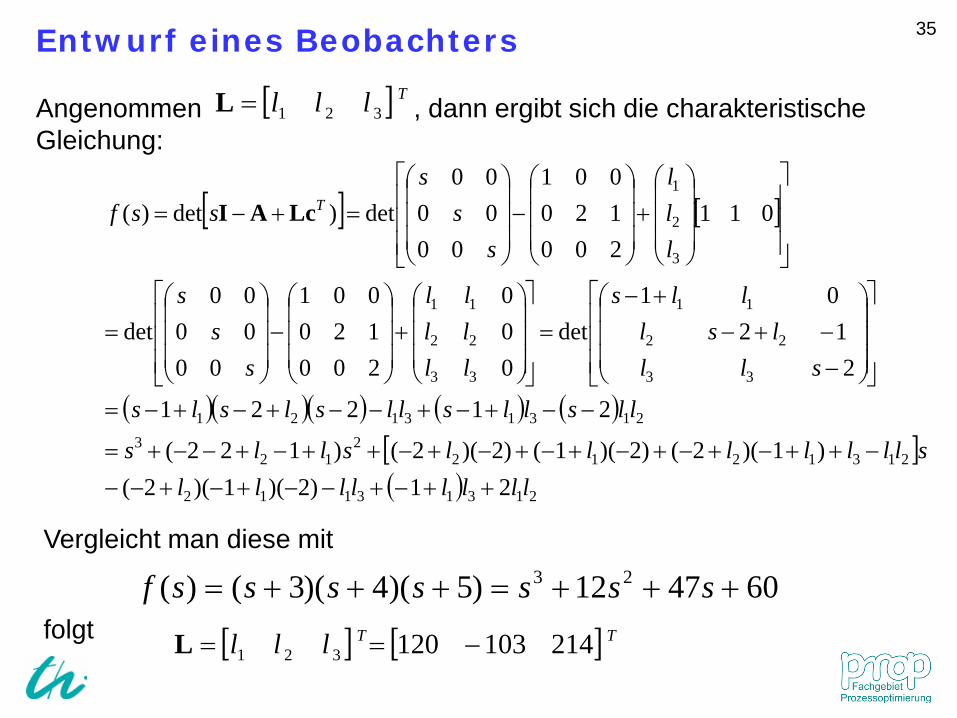
35Entwurf eines Beobachters
[ ] [ ]
( )( )( ) ( ) ( )[ ]( ) 21313112
21312122
123
21313121
33
22
11
33
22
11
3
2
1
21)2)(1)(2()1)(2()2)(1()2)(2()122(
21221
212
01det
000
200120001
000000
det
011200120001
000000
det)det)(
llllllllslllllllslls
llsllsllslsls
slllsl
lls
llllll
ss
s
lll
ss
sssf T
++−+−−+−+−−−++−+−+−+−+−+−++−+−−+=
−−+−+−−+−+−=
−−+−
+−=
+
−
=
+
−
=+−= LcAI
Angenommen , dann ergibt sich die charakteristische Gleichung:
Vergleicht man diese mit
[ ] Tlll 321=L
604712)5)(4)(3()( 23 +++=+++= sssssssffolgt [ ] [ ] TTlll 214103120321 −==L


















