Zyklische Ortung mit dem Medaillon GMD-11 DAKS Release 7 HiPath DAKS V3 R0 Stand: 27. März 2008.
Upload
wibeke-lehenbauerCategory
view
109download
3
Robin Gruber
Abschlussvortrag
Räumliche Ortung und Separation von Geräuschquellen für den Bereich der
mobilen Servicerobotik

Inhalt
Motivation, Umfang und Besonderheiten Bisherige Ansätze Subtraktiver Beamformer Hardware Software Ergebnise

Motivation
Schallquelle stellt immer ein Hindernis dar. Steuerung eines simulierten Richtmikrofons
auf einen Sprecher Sprachliche Steuerung eines Roboters

Umfang
Hardware Mikrofonständer Verstärker
Software Schallortung Sprachaktivitätsdetektor Simuliertes Richtmikrofon

Besonderheiten
Störgeräusche durch den Roboter Körperschall / Vibrationen Zu ortende Schallquellen und Roboter nicht
statisch „Elektisch laute“ Umgebung Ortung verschiedenster Geräusche Praktisch omnidirektionale Ortung erforderlich Low-Cost-Lösung

Bisherige Ansätze
Steered BeamformerSuche eines simulierten Richtmikrofons nach der
Richtung der maximalen einfallenden Schallenergie

Bisherige Ansätze
Steered Beamformer

Bisherige Ansätze
Laufzeitdifferenzschätzung (TDOA)Messen der Zeitdifferenz zwischen den
ankommenden Signalen z.B. durch Kreuzkorrelation Phasenkreuzkorrelation Adaptive Filter

Subtraktiver Beamformer
Verschiebung der gefensterten Signale gegeneinander mit Differenzbildung und Suche nach dem Minimum

Subtraktiver Beamformer
Entspricht einem Beamformer mit Differenzbildung der Mikrofonsignale
22
2
21 ])2
][[]
2
][[(
M
Mt
MM
Ttx
TtxE

Subtraktiver Beamformer
Minimum bei Differenz steiler als Maximum bei Summe

Subtraktiver Beamformer
Zweidimensionale Ortung durch Kombination von sechs Mikrofonpaaren aus vier Mikrofonen
23
1
4 2
2
)]),([)],([(),( mmn nm
M
Mt
nn TtxTtxE

Subtraktiver Beamformer
Vorteile: Einfacher Algoritmus Keine Iteration erforderlich Ausschließen von Raumbereichen möglich

Aufbau der Hardware
Verwendung von vier sehr kleinen Mikrofonen mit jeweils gleichem Abstand (20cm) untereinander (Tetraeder) zur Bildung von sechs Mikrofon-Paaren
Vorverstärker direkt am Mikrofon

Aufbau der Hardware
Lagerung des Mikrofonständers auf einer Masse-Feder-Körperschalldämpfung
Regelbarer Nachverstärker mit Sync-Signal-Generator
Zwei synchronisierte Soundkarten

Software
Soundbibliothek Liest die Daten von den Soundkarten oder aus einer
Datei Soundapplikationen können sich „einhängen“ und
erhalten Sounddaten in individuellen Fensterbreiten Plugins für
Ortung Virtuelles Richtmikrofon (Beamformer) Sprachaktivitätsdetektion Oszilloskop und Aussteuerungsanzeige
Richtcharakteristiksimulation Vierspur-Rekorder Synchronitäts-Messung

Ergebnisse
Ortung von Sprache in einem stark verhallten Raum mit einigen Computern als Störgeräuschquellen
Abweichungen von mehr als ±4° wurden als falsch gewertet
Trefferquoten:1m Abstand zur Quelle: 82%2m Abstand zur Quelle: 59%4m Abstand zur Quelle: 27%


Spektren
Spektrum eines Sprachsignals
Spektrum eines Musiksignals

Verzögerungen

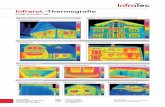
Richtcharakteristik
Richtcharakteristik bei Verwendung von vier Mikrofonen










![Abschlussvortrag Diplomarbeit Neighbor Explorer ... · Recommender Systems (2004) • [4] Pampalk, Goto: Musicsun: A new approach to artist recommendation (ISMIR 2007) • [5] Swearingen](https://static.fdokument.com/doc/165x107/6059a2f959444b19143eb810/abschlussvortrag-diplomarbeit-neighbor-explorer-recommender-systems-2004-a.jpg)