Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romberg
7
5/14/2018 SeitenAusKeinePanikVorRegelungstechnik.-.Kari-DieterTieste,OliverRomb... http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste- VII Inhaltsverzeichnis Inhaltsverzeichnis VII 1 Eine geregelte Einführung 1 2 Modellbildung (nicht zu verwechseln mit gebildeten Models) 2.1 Der Regekres, de kresende Regel . . . . . . . . . 9 2.2 Der kene" Untersched: Steuerung und Regelung 11 2.3 Beschrebung von Übertragungsgledern 12 2.3.1 Orgna und Fäschung . . . . . . . . . 12 2.3.2 Lnearserung, aber we? . . . . . . . . 18 2.3.3 Lneare zetnvarante Engrößensysteme 20 2.3.4 Hn und Her: Dynamsches Verhalten . . 22 2.3.4.1 De Übertragungsfunkton und Sprungantwort 29 2.3.4.2 Nur für Schlägertypen: De Impulsantwort . 31 2.3.4.3 Fatung: Jensets der Sprünge und Impulse 33 2.3.5 Übertragung von perodschen Sgnalen . . . . . . . . 35 2.3.6 Lapace: Der Rechenscheber" für de Rätseltechnk 38 2.3.6.1 Lapace ansformaton . . . . . . 40 2.3.6.2 Rechenregen für Bockschaltbder 49 2.3.7 Darstellungsformen m Bldberech 54 2.3.7.1 De Ortskurve . . . . . . . . . 54 2.3.7.2 Das BodeDagramm . . . . . . 55 2.3.7.3 De PoNullstellenVertelung . 57 2.3.8 De wchtgsten Übertragungsgleder . . 60 2.3.8.1 Das PSystem (gaaanz trva) 60 2.3.8.2 Das ISystem (ene Tasse Kaee) 62 2.3.8.3 Das PTSystem (schon weder?) 66 2.3.8.4 Das PT2System (jetzt wrd's so rchtg kom plex) . . . . . . . . . . . . . . . . . . . . . . 69 2.3.8.5 Wr schagen de Zet tot: Das TotzetSystem (oder: Totzet macht den Regler tot) . . . . . 100
Transcript of Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romberg

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
VII
Inhaltsverzeichnis
Inhaltsverzeichnis VII
1 Eine geregelte Einführung 1
2 Model lbildung (nicht zu verwechseln mit gebildeten Models)
2 . 1 Der Regekres , de kresende Regel . . . . . . . . . 9
2 . 2 Der kene" Untersched: Steuerung und Regelung 1 12 .3 Beschrebung von Übertragungsgledern 12
2 . 3 . 1 Orgna und Fäschung . . . . . . . . . 1 2
2 . 3 . 2 Lnearserung, aber we? . . . . . . . . 18
2 . 3 . 3 Lneare zetnvarante Engrößensysteme 20
2. 3. 4 Hn und Her: Dynamsches Verhalten . . 22
2 .3 .4 .1 De Übertragungsfunkton und Sprungantwort 29
2 .3 . 4 . 2 Nur für Schlägertypen: De Impulsantwort . 3 1
2 . 3 . 4 . 3 Fatung: Jensets der Sprünge und Impulse 332 . 3 . 5 Übertragung von perodschen Sgnalen . . . . . . . . 35
2 . 3 . 6 Lapace: Der Rechenscheber" für de Rätseltechnk 38
2 .3 . 6 . 1 Lapaceansformaton . . . . . . 40
2 .3 . 6 . 2 Rechenregen für Bockschaltbder 49
2 . 3 . 7 Darstellungsformen m Bldberech 54
2 .3 . 7 . 1 De Ortskurve . . . . . . . . . 54
2. 3 . 7. 2 Das BodeDagramm . . . . . . 55
2 . 3. 7. 3 De PoNullstellenVertelung . 572. 3.8 De wchtgsten Übertragungsgleder . . 60
2 . 3 . 8 . 1 Das PSystem (gaaanz trva) 60
2 .3 . 8 . 2 Das ISystem (ene Tasse Kaee) 62
2. 3. 8. 3 Das PT System (schon weder?) 66
2 .3 . 8 . 4 Das PT2System (jetzt wrd' s so rchtg kom
plex) . . . . . . . . . . . . . . . . . . . . . . 69
2 .3 . 8 . 5 Wr schagen de Zet tot : Das TotzetSystem
(oder: Totzet macht den Regler tot) . . . . . 10 0

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
VIII Inhaltsverzeichnis
2 3 8 6 D as DT 1 System (Ableiten rauscht ) 10 3
2 3 8 7 Das allgemeine Übertragungsglied (ganz ab
strakt) 106
Stabilität von Regelkreisen
3 1 Das urwitzKriter ium 1 16
3 2 Jenseits von Kalle Blomquist : Das NyquistKriterium 122
4 Auslegung von Reglern
4 1 Der CDRegelkreis
4 2
41 1 Modellbildung
4 1 2 PRegler ein Versuch?4 1 3 Anforderungen an den Regler
4 1 4 Stellgrößenaufschaltung
4 1 5 Re elung mit einem PIRegler
4 1 6 Regelung mit einem PIDRegler .
Einstellregeln für PIDRegler . . . .
129
131
138142
145
146
148
152
4 2 1 Einstellregeln nach ZieglerNichols: Methode des Sta
bi litätsrandes 152
4 2 2 Einstellregeln nach ZieglerNichols : Methode der Sprungantwort 153
4 2 3 Einstellregeln nach Chien, Hrones und Reswi Me-
thode der Sprungantwort 155
Nieder mit der Schwerkraft: Es schwebe die Kugel
5 1 Die schöne Kugel und der alte Elektromagnet
5 2 Modellbildung . . . . . . . . . . . . . . .
5 3 Die Sensorik . . . . . . . . . . . . . . . .
5 .4
5 5
5 6
5 . 7
5 8
5 9
5 3 1 Operationsverstärker gaaanz einfach
5 3 2 Lampe, Solarzelle und Kugel
Die Spannungsversor ung .
Der Regler . . . . . . . . . . .
Der Verstärker für den Magneten
Aufau der Schaltung: Bestücken und Löten .
Die Inbetriebnahme: Einschalten und riechen!
Erweiterung der Schaltung .
158
161
165166
168
172
176
180
184
189
191

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
IX
Wir kriegen Zustände: Der Zustandsraum 93
201
203
6 . 1 Das Abeze des Zustandsraumes . . . .
6 . 1 . 1 Antreb für enen Druckkopf . . . . .
6 . 1 . 2 Zurück zur Übertragungsfunkton . . 209
6 . 1 . 3 Stabler Charakter: Das c arakterstsche Polynom 2 1 1
6 . 1 . 4 Lneare Zustandstra sfor aton . . . . . . . 2 1 2
6 . 1 . 5 Gaaanz normal: De Regelungsnormalform . . . . 2 14
6 . 1. 6 Fast norma: De Beobachtungsnormalform 2 16
6 . 1 . 7 Total schräg: De Dagonalform oder Jordanform 219
6. 1 . 8 Beobachtbark t und Steuerbarket 221
6 . 2 D e Zustandsregelung . . . . . . 223
6 .3 Das Verfahren de r Pozuw su g 225
6 .4 Beobachter . . . . . . . . . . . . 229
7 Alles geregelt?
8 Tainingseinheiten
8 . 1 Aso jetzt erstmal en paar agen . . .
8 . 2 . . . und her de Antworten . . . . . . .
8 .3 Aufgaben mt Lösungsweg . . . . . .8. 3. 1 Aufgaben zum Abschntt Modellbldung
8 .3 . 2 Aufgaben zum Abschntt Stabl tät . . .
8 . 3 . 3 Aufgaben zum Abschntt Reglerauslegung
8 .3 .4 Aufgaben zum Abschntt Schwebende Kugel .
8 . 3 . 5 Aufgaben zum Abschntt Zustandsraum
Literaturverzeichnis
Index
234
237
239
245
260261
282
288
290
296
300
302

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
96 2 Modellbi ldung (nicht zu verwechseln mit gebildeten Mode ls
Ortskurve, Sprungantwort und BodeDiagramm geben Auskunft über das
komplette Verhalten des Systems . Die Information über die Verstärkung fehlt
hingegen bei der Pol-Nullstellen-Verteilung. Dafür gibt die sie sehr an
schauich Auskunft über das dynamische Verhaten , also das Stabilitäts und
Schwingungsverhalten des Systems.
A
= " �\ __r�ticr i
JMUG FP-Ft 1 oRTE syr€ !
, , ' I/ f
I
, I : I\\ : (S0
\
. · ' : - -
. _
J(S)
vD :Qo�-D
'(s)
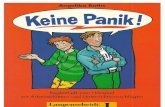
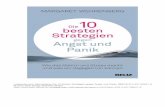
Abbildung .46 Bestimmung der Kenngrößen des P-T2-Systems aus der Lageder Polstellen
Das PT2System besitzt im Nenner der Übertragungsfunktion ein Polynom
2. Ordnung , somit weist das PT2 System zwei Polstellen auf. Die Lage dieserPolstellen legt das dynamische Verhalten fest, siehe Abbildung 2.46. Bei ei-
nem nicht schwingungsfähigen System besitzt die charakteristische Gleichung
zwei reelle Lösungen. Damit liegn die Polstellen auf der reellen Achse. Jeweiter eine Polstelle links zu liegen kommt (die Polstelle besitzt einen klei-
neren Realteil), umso schneller klingt die Eigenfunktion ab.
Wenn das PT2System hingegen schwingungsfähig ist, dann besitzt es eine
komplexe Lösung, die Postellen sind dann konjugiert komplex zueinander.
Aus der Lage der Polstellen lassen sich direkt die Eigenkreisfrequenz wo dieKreisfrequenz des gedämpften Systems wd sowie die D ämpfung D ablesen

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
83 Aufgaben mit Lösungsweg 269
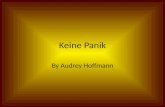
l Aufgabe 4 Sprungantworten
ie Systeme a) i) besitzen jeweils die skizzierte Sprungantwort Gib den
Systemtyp, die Übertragungsfunktion sowie ihre Kenngrößen an!
h(t)Xe @
ht}
t
t
ösung
a) Start mit einem Knick, dann erfolgt eine allmähliche Annäherung an den
stationären Endwert:
P-TSystem, G(s) = +'1 8 , Parameter: V, T .
b) Waagerechter Anfang, dann Annäherung an den stationären Endwert, kein
Üb erschwingen :
zwei in Reihe geschaltete PT-Systeme,
G(s) =
( +T1 s�
l+T2s ) 'Parameter: V, T , T .

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
270
Oder ein PT2System mit einer Dämpfung von D ; 1
G(s ) v- 1+ 2D s+ 82 '
wo �
Parameter: V, wo , D ; 1 .
8 ainingseinheiten
c) Die Sprungantwort startet erst nach einer Totzeit mit einem Knick dann
erfolgt eine allmähliche Annäherung an den stationären Endwert:
PTSystem in Reihe mit einem Totzeitglied
G( ) _ sr V8 e l+ s '
Parameter: V, Tr, T1 .
d) Linearer Anstieg der Sprungantwort:
I-SystemG(s ) Ts 'Parameter: TI .
e) ngedämpfte Schwingung:
P-T2-System mit sehr geringer Dämpfung (D � 0)
G(s ) -v
- l+ 2D s+ 82 >wo �
Parameter: V, wo , D.
f ) Gedämpfte Schwingung Dämpfung und Eigenkreisfrequenz lassen sich ausder Höhe des Überschwingers bestimmen
PT2System mit einer Dämpfung von (D 0 1 . . 0 2 )
G(s ) v
- l 2D 8 s2 'wo �
Parameter: V, wo , D.
g) Sofortiger Sprung dann Abkingen:
D-T-System
G( )_
vs
8 - l+1 s 'Parameter : TD , T1 . Anfangs-Sprunghöhe:
h) Waagerechter Anfang dann folgt ein linearer Anstieg:
Verzögernder Integrator I-T-System
G (8) T;s +�l s 'Parameter: TI , T1 .
i) Die Ausgangsgröße fogt direkt der Eingangsgröße:
PGlied G(s )
V , Parameter: V.

5/14/2018 Seiten Aus Keine Panik Vor Regelungstechnik.-.Kari-Dieter Tieste, Oliver Romb...
http://slidepdf.com/reader/full/seiten-aus-keine-panik-vor-regelungstechnik-kari-dieter-tieste-
8 .3 Augaben mit Lösungsweg
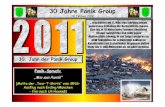
l Aufgabe 5 Filterschaltung
Ein eektrischer Vierpo besteht aus zwei Widerständen = 3 k sowie einem Kondensator von C = 2 , 2 nF
· · U (s)Berechne die Ubertragungsunktion F(s ) = u�s) .
Lösung
271
1 k und
Kotepunktrege um oberen Knoten Ae Ströme die in den Knoten hinein
ießen, zähen positiv.
Die Summe der Ströme muss geich Nu sein
(8 24 )
1 2 Beim Naofarad hadelt es sich icht um eie wizigen Drahtesel, soder um eieKapazität mit der Eiheit [As/V].