
SINAMICS G120 FAQ y März 2013 - Siemens AG · SMC20 für SIN/COS Inkrementalgeber, EnDat...
53
Service & Support Answers for industry. Migration CU240E/S nach CU240B/E-2 und CU250S-2 (Firmware > V4.5) SINAMICS G120 FAQ März 2013
Transcript of SINAMICS G120 FAQ y März 2013 - Siemens AG · SMC20 für SIN/COS Inkrementalgeber, EnDat...
Service & Support
Answers for industry.
Migration CU240E/S nach CU240B/E-2 und CU250S-2 (Firmware > V4.5)
SINAMICS G120
FAQ März 2013

Fragestellung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 2
Dieser Beitrag stammt aus dem Service&Support Portal der Siemens AG, Sector Industry, Industry Automation and Drive Technologies. Es gelten die dort genannten Nutzungsbedingungen (www.siemens.com/nutzungsbedingungen). Durch den folgenden Link gelangen Sie direkt zur Downloadseite dieses Dokuments. http://support.automation.siemens.com/WW/view/de/70021820
Frage Was muss ich beachten, wenn ich eine Control Unit CU240E oder ein Mitglied der CU240S-Familie (CU240S, CU240S DP, CU240S DP-F, CU240S PN oder CU240S PN-F) des SINAMICS G120 durch eine Control Unit der 2ten Generation (Firmware > V4.5) ersetzen will?
Antwort Folgen Sie zur umfassenden Beantwortung dieser Frage den in diesem Dokument aufgeführten Handlungsanweisungen und Hinweisen.
Inhaltsverzeichnis
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 3
Inhaltsverzeichnis 1 Migration der Control Unit CU240E/S auf die Control Units
CU240B/E-2 und CU250S-2 ............................................................................ 5 2 Hardware ......................................................................................................... 6
2.1 Vergleich Abmessungen .................................................................... 6 2.2 Mengengerüst Ein- und Ausgänge ..................................................... 6 2.2.1 Control Unit CU240B-2 ...................................................................... 6 2.2.2 Control Unit CU240E-2 ...................................................................... 6 2.2.3 Control Unit CU240E-2 F ................................................................... 7 2.2.4 Control Unit CU250S-2 ...................................................................... 7 2.3 Übersicht Anschlussklemmen ............................................................ 8
3 Geberanschluss ........................................................................................... 11
3.1 Anschluss an der Klemmleiste ......................................................... 11 3.2 Anschluss am Sub-D Stecker .......................................................... 11 3.3 Anschluss mit Drive CliQ ................................................................. 12 3.4 Kombination von Gebern für die Drehzahl- und die
Lageregelung .................................................................................. 13 4 Operator Panel BOP-2 und IOP .................................................................... 14
4.1 Handbetrieb mit BOP-2 / IOP ........................................................... 14 4.2 Statussignale der BOP-2 / IOP Bedienelemente .............................. 15
5 Parametrierung ............................................................................................. 16 5.1 Schnellinbetriebnahme .................................................................... 16 5.2 Anwenderdefinierte Parameter......................................................... 16 5.3 Makro Antriebsgerät ........................................................................ 17 5.3.1 Control Unit CU240B-2 .................................................................... 17 5.3.2 Control Unit CU240E-2 .................................................................... 18 5.3.3 Control Unit CU250S-2 .................................................................... 21 5.4 Erweiterung Befehls- / Antriebsdatensätze ....................................... 23 5.5 Auswahl Motor typ ........................................................................... 23 5.5.1 Control Unit CU240B-2 und CU240E-2 ............................................ 23 5.5.2 Control Unit CU250S-2 .................................................................... 24 5.6 Wahl des Geber Typs ...................................................................... 24 5.7 Auswahl technologische Einheit ....................................................... 25 5.8 Betriebsstundenzähler ..................................................................... 26 5.9 Digitale Eingänge ............................................................................ 26 5.9.1 Control Unit CU240B/E-2 ................................................................. 26 5.9.2 Control Unit CU250S-2 .................................................................... 28 5.9.3 Vorwärts-/Rückwärtsparametrierung ................................................ 29 5.9.4 Änderung bei den fehlersicheren Eingänge (F-DI) ............................ 29 5.9.5 Status der F-DI über PROFIsafe übertragen .................................... 29 5.9.6 Simulationsbetrieb ........................................................................... 30 5.9.7 Überwachung der Last / der Drehzahl über Digitaleingang ............... 30 5.10 Digitale Ausgänge ........................................................................... 32 5.10.1 Geänderte Parameternummern ....................................................... 32 5.10.2 Hardwareänderung .......................................................................... 32 5.11 Analoge Eingänge ........................................................................... 33 5.11.1 Simulationsbetrieb ........................................................................... 33 5.11.2 Totzone ........................................................................................... 34 5.12 Normierung des Sollwertkanals........................................................ 34 5.13 Motorpotenziometer ......................................................................... 34 5.14 Änderung bei zweite Rampenfunktion über JOG Hochlaufgeber ...... 35 5.15 Fangen ............................................................................................ 35

Inhaltsverzeichnis
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 4
5.16 Wiedereinschaltautomatik ................................................................ 35 5.17 Erweiterung Motorhaltebremse Funktion .......................................... 36 5.18 Einstellung Widerstandsbremsen ..................................................... 36 5.19 Regelungsarten ............................................................................... 36 5.20 Spannungsanhebung ....................................................................... 37 5.21 Drehzahlabhängige Regler Adaption ................................................ 37 5.22 Motordatenidentifikation ................................................................... 38 5.23 Änderung bei Bezugsgrößen ........................................................... 38 5.24 Freie Funktionsbausteine ................................................................. 38 5.25 Technologieregler ............................................................................ 39 5.26 Frei nutzbare Festsollwerte .............................................................. 39 5.27 Änderung BF-LED deaktivieren........................................................ 40 5.28 Wegfall Wobbelgenerator ................................................................ 40 5.29 Wegfall Positionierende Rücklauframpe ........................................... 40 5.30 Speicherkarte .................................................................................. 40 5.30.1 Projektübernahme mit Speicherkarte ............................................... 40 5.30.2 Speicherkarten Handling .................................................................. 40
6 Performance Vektorregelung ....................................................................... 41
6.1 Geberlose Vektorregelung SLVC ..................................................... 41 6.2 Vektorregelung mit Geber ................................................................ 41 6.3 Erhöhung der Robustheit der Vektorregelung................................... 42
7 Kommunikation ............................................................................................ 43
7.1 GSD-Dateien ................................................................................... 43 7.2 Routing durch eine CPU .................................................................. 43 7.3 Teleservice ...................................................................................... 44 7.3.1 Teleservice über eine CPU .............................................................. 44 7.3.2 Teleservice direkt auf den Feldbus................................................... 45 7.4 Querverkehr .................................................................................... 45 7.5 Direkte HMI Anbindung .................................................................... 45
8 Sicherheitsfunktionen .................................................................................. 46
8.1 Neue und erweiterte Sicherheitsfunktionen ...................................... 47 8.1.1 Erweiterung SS1 (Sicherer Stop 1) .................................................. 47 8.1.2 Erweiterung SLS (Safe Limited Speed) ............................................ 48 8.1.3 Neue Sicherheitsfunktion SDI (Safe Direction) ................................. 49 8.1.4 Neue Sicherheitsfunktion SSM (Safe Speed Monitor)....................... 49 8.2 Einheitliche STARTER Parametriermasken ..................................... 50 8.3 Vereinfachung der Parametrierung .................................................. 50 8.4 Offline Safety Parametrierung .......................................................... 50 8.5 Abnahmeprotokoll ............................................................................ 50 8.6 Änderung der Bezugsgröße ............................................................. 50 8.7 Gruppenantriebe.............................................................................. 50 8.8 Änderungen im PROFIsafe Telegramm ........................................... 51 8.8.1 Bisheriges CU240E/S PROFIsafe Telegramm 30............................. 51 8.8.2 Neues CU240B/E-2, CU250S-2 PROFIsafe Telegramm 30.............. 51 8.8.3 Neues CU240B/E-2, CU250S-2 PROFIsafe Telegramm 900 ............ 52 8.9 Status der F-DI über PROFIsafe übertragen .................................... 52
9 Antriebsfehlermeldungen ............................................................................ 53

1 Migration der Control Unit CU240E/S auf die Control Units CU240B/E-2 und CU250S-2
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 5
1 Migration der Control Unit CU240E/S auf die Control Units CU240B/E-2 und CU250S-2 Die Control Unit CU240E lässt sich ohne größere Probleme auf die Control Units der 2ten Generation migrieren. Je nach Umfang der verwendeten Ein- und Ausgänge kommt entweder die CU240B-2 oder die CU240E-2 zum Einsatz.
Abbildung 1-1: Migration CU240E auf die Control Units der 2ten Generation
Mit der neu hinzugekommenen Control Unit CU250S-2 ist es nun möglich, auch alle Anwendungen der Control Unit CU240S abzulösen. Je nach Anzahl der benötigten analogen Ein- und Ausgänge, der digitalen Ein- und Ausgänge, der fehlersicheren digitalen Eingänge, des eingesetzten Gebers, der Safety Funktionalität und der verwendeten Buskommunikation ergibt sich eine der drei Grundvarianten der Control Units der 2ten Generation.
Abbildung 1-2: Migration CU240S auf die Control Units der 2ten Generation

2 Hardware
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 6
2 Hardware 2.1 Vergleich Abmessungen
CU240E CU240S CU240B-2 CU240E-2 CU250S-2
Höhe 195mm 177mm 199mm 199mm 199mm
Breite 73mm 73mm 73mm 73mm 73mm
Tiefe mit BOP 31mm 63mm 53mm 53mm 68mm
Tiefe mit IOP - - 63mm 63mm 78mm
Abbildung 2-1: Abmessungen der Control Units
2.2 Mengengerüst Ein- und Ausgänge
2.2.1 Control Unit CU240B-2
Die Control Unit CU240B-2 bietet die folgenden Ein- und Ausgänge: digitale Eingänge, potentialgetrennt, PNP/NPN schaltend 1 digitaler Ausgang (Relais DC30V/0,5A) 1 analoger Eingang 0 – 10V, 0/4 – 20mA 1 analoger Ausgang 0 – 10V, 0/4 – 20mA 1 Motortemperatursensoreingang für PTC, KTY, Thermo-Click Anschluss +24V extern, Ausgang +24V/200mA, Ausgang +10V/10mA
Die Control Unit CU240B-2 ist mit zwei verschiedenen Kommunikationsarten lieferbar:
RS485 mit USS-Protokoll, Modbus/RTU PROFIBUS DP
2.2.2 Control Unit CU240E-2
Die Control Unit CU240B-2 bietet die folgenden Ein- und Ausgänge: 6 digitale Eingänge, potentialgetrennt, PNP/NPN schaltend Wahlweise 2 digitale Eingänge als F-DI digitale Ausgänge (2 Relais DC30V/0,5A, 1 Transistor DC30V/0,5A)
2 Hardware
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 7
2 analoge Eingänge 0 – 10V, 0/4 – 20mA 2 analoge Ausgänge 0 – 10V, 0/4 – 20mA 1 Motortemperatursensoreingang für PTC, KTY, Thermo-Click Anschluss +24V extern, Ausgang +24V/200mA, Ausgang +10V/10mA
Die Control Unit CU240E-2 ist mit drei verschiedenen Kommunikationsarten lieferbar:
RS485 mit USS-Protokoll, Modbus/RTU PROFIBUS DP PROFINET
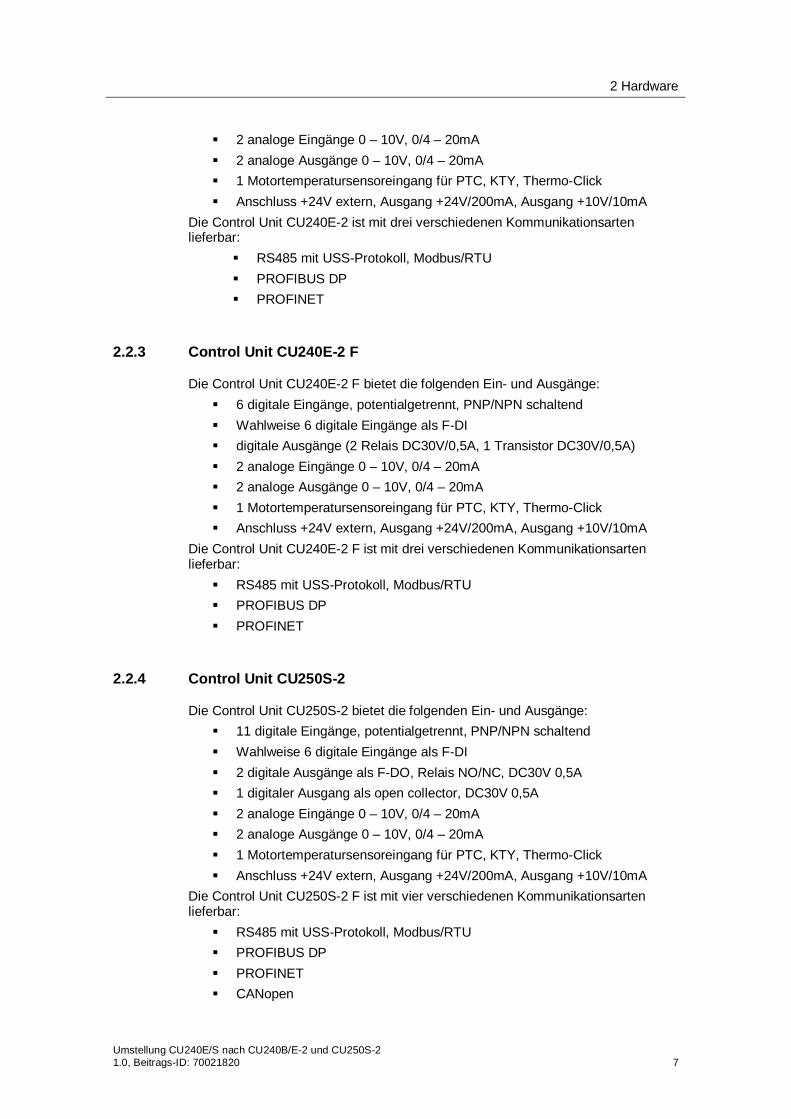
2.2.3 Control Unit CU240E-2 F
Die Control Unit CU240E-2 F bietet die folgenden Ein- und Ausgänge: 6 digitale Eingänge, potentialgetrennt, PNP/NPN schaltend Wahlweise 6 digitale Eingänge als F-DI digitale Ausgänge (2 Relais DC30V/0,5A, 1 Transistor DC30V/0,5A) 2 analoge Eingänge 0 – 10V, 0/4 – 20mA 2 analoge Ausgänge 0 – 10V, 0/4 – 20mA 1 Motortemperatursensoreingang für PTC, KTY, Thermo-Click Anschluss +24V extern, Ausgang +24V/200mA, Ausgang +10V/10mA
Die Control Unit CU240E-2 F ist mit drei verschiedenen Kommunikationsarten lieferbar:
RS485 mit USS-Protokoll, Modbus/RTU PROFIBUS DP PROFINET
2.2.4 Control Unit CU250S-2
Die Control Unit CU250S-2 bietet die folgenden Ein- und Ausgänge: 11 digitale Eingänge, potentialgetrennt, PNP/NPN schaltend Wahlweise 6 digitale Eingänge als F-DI 2 digitale Ausgänge als F-DO, Relais NO/NC, DC30V 0,5A 1 digitaler Ausgang als open collector, DC30V 0,5A 2 analoge Eingänge 0 – 10V, 0/4 – 20mA 2 analoge Ausgänge 0 – 10V, 0/4 – 20mA 1 Motortemperatursensoreingang für PTC, KTY, Thermo-Click Anschluss +24V extern, Ausgang +24V/200mA, Ausgang +10V/10mA
Die Control Unit CU250S-2 F ist mit vier verschiedenen Kommunikationsarten lieferbar:
RS485 mit USS-Protokoll, Modbus/RTU PROFIBUS DP PROFINET CANopen

2 Hardware
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 8
2.3 Übersicht Anschlussklemmen
Die Baugruppen der 2ten Generation sind mit steckbaren Klemmen ausgerüstet. Die Klemmenbezeichnung ist identisch zur CU240E und CU240S. Das nachfolgende Bild zeigt den Unterschied in der Klemmenanordnung der CU240S und der CU250S-2 .
Abbildung 2-2: Vergleich der Anordnung der Anschlussklemmen

2 Hardware
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 9
Abbildung 2-3: Vergleich Klemmenbelegung CU240E gegenüber CU240B/E-2

2 Hardware
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 10
Abbildung 2-4: Vergleich Klemmenbelegung CU240S gegenüber CU240B/E-2 und CU250S-2
3 Geberanschluss
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 11
3 Geberanschluss Die Control Unit CU250S-2 bietet die Möglichkeit, bis zu zwei Geber für die Drehzahl- und die Lageerfassung anzuschließen.
3.1 Anschluss an der Klemmleiste
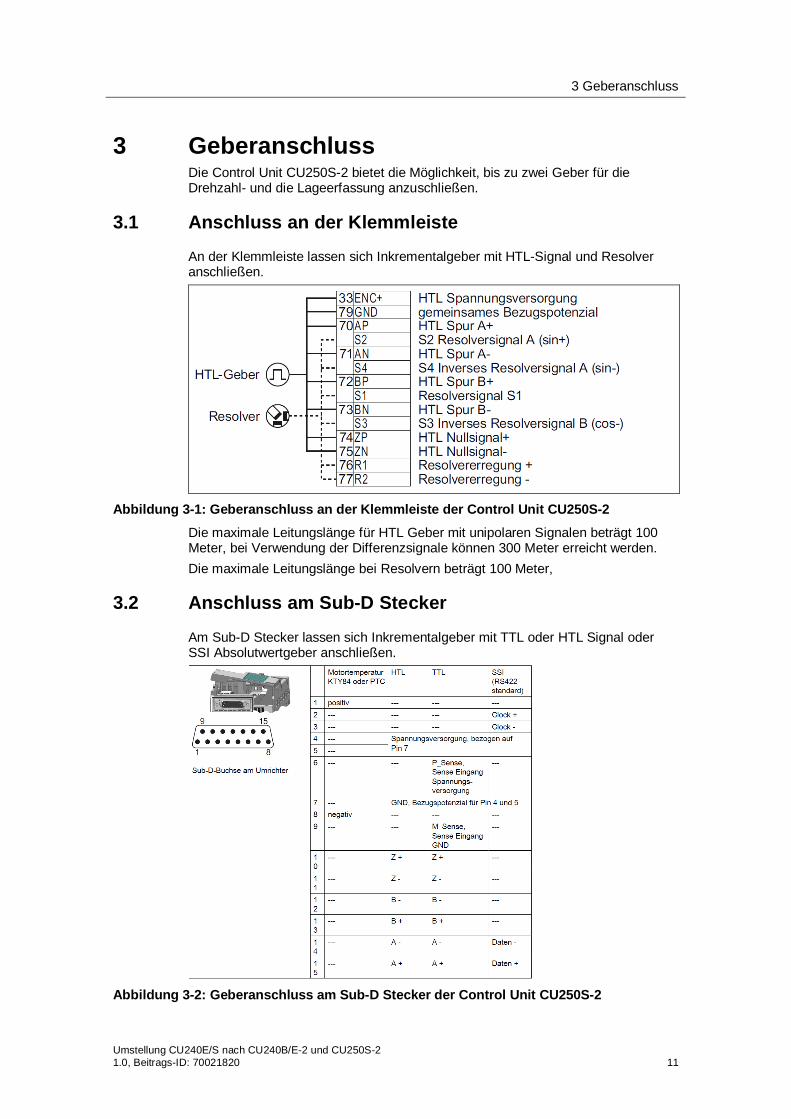
An der Klemmleiste lassen sich Inkrementalgeber mit HTL-Signal und Resolver anschließen.
Abbildung 3-1: Geberanschluss an der Klemmleiste der Control Unit CU250S-2
Die maximale Leitungslänge für HTL Geber mit unipolaren Signalen beträgt 100 Meter, bei Verwendung der Differenzsignale können 300 Meter erreicht werden. Die maximale Leitungslänge bei Resolvern beträgt 100 Meter,
3.2 Anschluss am Sub-D Stecker
Am Sub-D Stecker lassen sich Inkrementalgeber mit TTL oder HTL Signal oder SSI Absolutwertgeber anschließen.
Abbildung 3-2: Geberanschluss am Sub-D Stecker der Control Unit CU250S-2
3 Geberanschluss
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 12
Die maximale Leitungslänge für HTL Geber mit unipolaren Signalen beträgt 100 Meter, bei Verwendung der Differenzsignale können 300 Meter erreicht werden. Mit TTL Gebern ist eine maximale Leitungslänge von 100 Meter möglich. SSI Absolutwertgeber können bis zu einer Leitungslänge von 100 Metern angeschlossen werden.
3.3 Anschluss mit Drive CliQ
Die Control Unit CU250S-2 besitzt einen Drive CliQ Anschluss, an den alle Drive CliQ Geber und Gebermodule angeschlossen werden können. Mögliche Gebertypen:
Resolver HTL/TTL Inkrementalwertgeber SIN/COS Inkrementalwertgeber EnDat Absolutwertgeber SSI Absolutwertgeber Drive CliQ Geber
Anschließbare Drive CliQ Module: SMC10 für 2- und mehrpolige Resolver SMC20 für SIN/COS Inkrementalgeber, EnDat Absolutwertgeber, SSI
Absolutwertgeber mit SIN/COS Inkrementalsignal SMC30 für TTL/HTL Inkrementalgeber, SSI Absolutwertgeber mit/ohne
TTL/HTL Signale SME20 für inkrementelle Messsysteme SME25 für absolute Messsysteme SME120 für inkrementelle Messsysteme SME125 für absolute Messsysteme
3 Geberanschluss
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 13
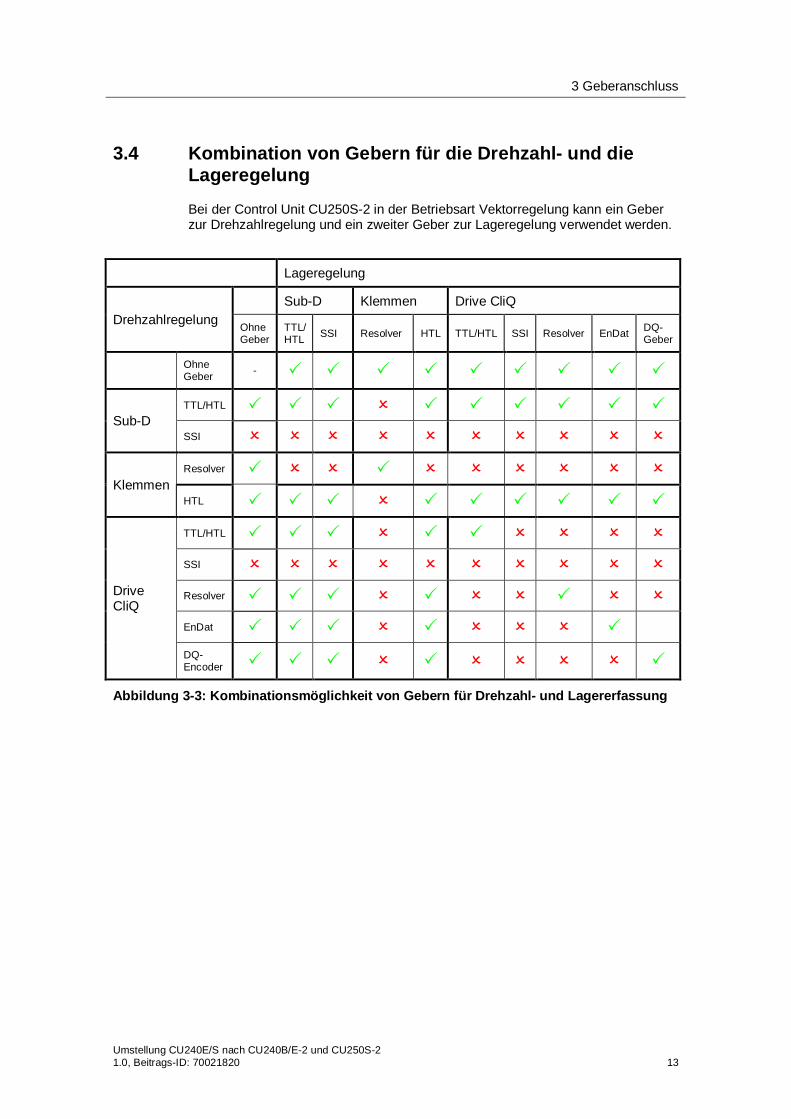
3.4 Kombination von Gebern für die Drehzahl- und die Lageregelung
Bei der Control Unit CU250S-2 in der Betriebsart Vektorregelung kann ein Geber zur Drehzahlregelung und ein zweiter Geber zur Lageregelung verwendet werden.
Lageregelung
Drehzahlregelung Sub-D Klemmen Drive CliQ
Ohne Geber
TTL/ HTL SSI Resolver HTL TTL/HTL SSI Resolver EnDat DQ-
Geber
Ohne Geber -
Sub-D TTL/HTL
SSI
Klemmen Resolver
HTL
Drive CliQ
TTL/HTL
SSI
Resolver
EnDat
DQ-Encoder
Abbildung 3-3: Kombinationsmöglichkeit von Gebern für Drehzahl- und Lagererfassung

4 Operator Panel BOP-2 und IOP
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 14
4 Operator Panel BOP-2 und IOP Das bei CU240E und CU240S verwendete BOP wurde durch den Nachfolger BOP-2 ersetzt. BOP BOP-2
Für eine komfortable Bedienung und durch Assistenten geführte Inbetriebnahme steht zusätzlich noch das IOP bereit. IOP
4.1 Handbetrieb mit BOP-2 / IOP
Der Handbetrieb wurde bei den Control Units CU240E und CU240S über eine Umschaltung der Befehlsdatensätze realisiert. Bei den Control Units der 2ten Generation erfolgt die Umschaltung auf Handbetrieb über den Hand-Button des BOP-2 / IOP. Beim Aktivieren des Handbetriebs wird die Steuerungshoheit vom BOP-2 / IOP übernommen, die parametrierten / aktiven Befehls- und Sollwertquellen werden dadurch abgekoppelt.
Hinweis Über den Parameter p0806 kann der Handbetrieb über IOP / BOP-2 gesperrt werden. Diese Sperrung kann dauerhaft aber auch über einen Digitaleingang oder ein Feldbussignal anwählt werden.
Hinweis Der Handbetrieb über BOP-2 / IOP ist nicht dauerhaft aktiv, er muss nach Netz Ein erneut aktiviert werden.

4 Operator Panel BOP-2 und IOP
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 15
4.2 Statussignale der BOP-2 / IOP Bedienelemente
Die Operator Panel BOP-2 und IOP verhalten sich von der Steuerungsseite wie Computer mit der Bediensoftware STARTER. Eine BiCo-Verknüpfung auf Steuerworte ist nicht mehr vorhanden.
Hinweis Die BOP-2 / IOP Bedienelemente sind nicht mehr wie bei CU240E und CU240S über das BOP Steuerwort r0019 als BICO Quellen nutzbar.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 16
5 Parametrierung Eine direkte Migration von Projekten mit CU240E und CU240S auf die Control Units der 2ten Generation ist auf Grund der geänderten Parameterstruktur nicht möglich.
Hinweis Der Antrieb muss über BOP-2, IOP oder STARTER neu in Betrieb genommen werden.
5.1 Schnellinbetriebnahme
Der Parameter p0010 „Antrieb Inbetriebnahme Filter“ wurde vom Funktionsumfang erweitert.
Parameter Aktion P0010 0: Bereit
1: Schnellinbetriebnahme 2: Leistungsteil-Inbetriebnahme 3: Motor-Inbetriebnahme 4: Geber-Inbetriebnahme 5: Technologische Applikation/Einheiten 11: Funktionsmodule 15: Datensätze 17: Einfachpositionierung-Inbetriebnahme 25: Lageregelung-Inbetriebnahme 29: Nur Siemens-intern 30: Parameter-Reset 95: Safety Integrated Inbetriebnahme
Abbildung 5-1: Varianten der Schnellinbetriebnahme
5.2 Anwenderdefinierte Parameter
Die Funktion „Anwenderdefinierte Parameter“ mit 20 frei definierbaren Kundenparametern wurde durch die Funktion Know How Schutz abgelöst. Der Know-how-Schutz dient dazu, dass z.B. ein Maschinenhersteller sein Projektierungs-Knowhow verschlüsseln und gegen Änderung oder Vervielfältigung schützen kann. Den Know-how-Schutz gibt es in folgenden Ausprägungen:
Know-how-Schutz ohne Kopierschutz (mit oder ohne Speicherkarte möglich)
Know-how-Schutz mit Kopierschutz (nur mit Siemens-Speicherkarte möglich)
Für den Know-how-Schutz ist ein Passwort erforderlich. Bei aktivem Know-how-Schutz sind die STARTER-Dialogmasken gesperrt. Sie können die Werte der Beobachtungsparameter allerdings aus der Expertenliste auslesen. Die Werte der Einstellparameter werden nicht angezeigt und können nicht verändert werden. Nachfolgend aufgeführte Aktionen können auch bei aktivem Know-how-Schutz ausgeführt werden:
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 17
Werkseinstellungen wiederherstellen Meldungen quittieren Meldungen anzeigen Alarmhistorie anzeigen Diagnosepuffer auslesen Umschalten auf Steuertafel (komplette Steuertafelfunktionalität:
Steuerhoheit holen, alle Buttons und Einstellparameter) Upload (nur Parameter die trotz Know-how-Schutz zugänglich sind)
Nachfolgend aufgeführte Aktionen können bei aktivem Know-how-Schutz nicht ausgeführt werden:
Download Export/Import Trace Funktionsgenerator Messfunktionen Automatische Regler Einstellung Stehende/drehende Messung Alarmhistorie löschen
5.3 Makro Antriebsgerät
Die Vorbelegung der Klemmen der Control Units über die Makroparameter p0700 „Wahl der Befehlsquelle“, p1000 „Wahl des Frequenzsollwertes, und des Kombinationsparameters p0719 „Wahl der Befehls- und Sollwertquelle“ wird durch die in Parameter p0015 hinterlegten Makros ersetzt.
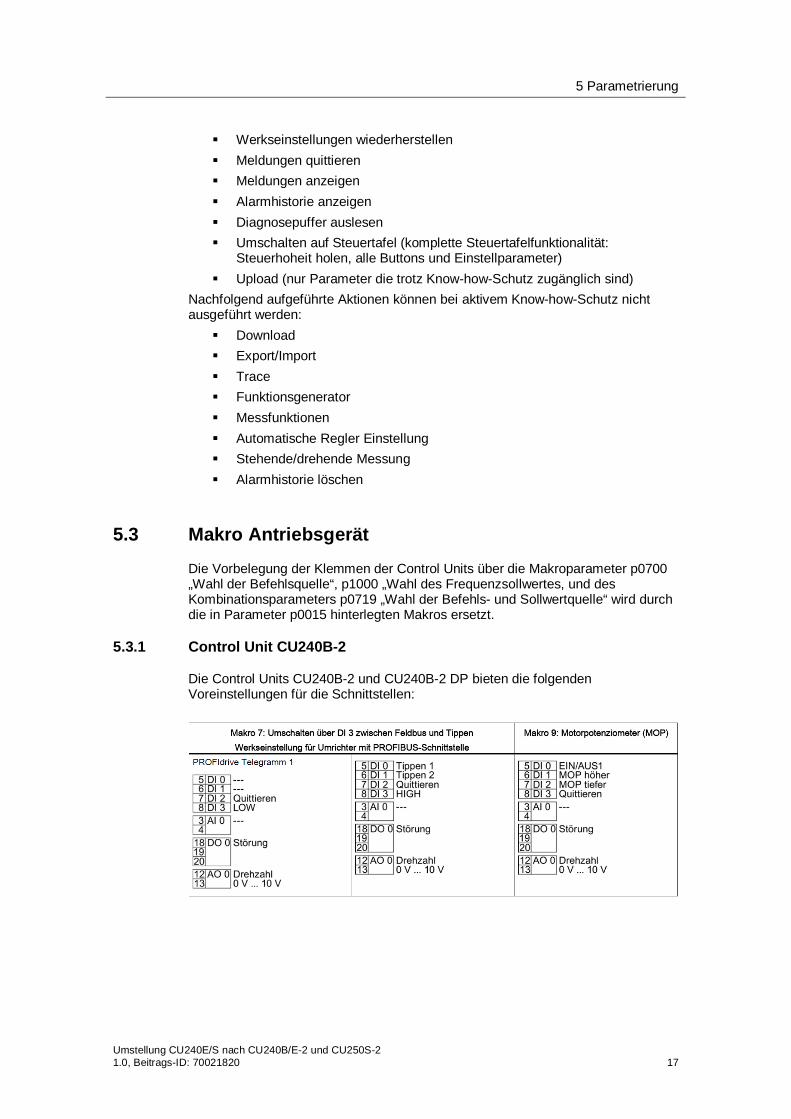
5.3.1 Control Unit CU240B-2
Die Control Units CU240B-2 und CU240B-2 DP bieten die folgenden Voreinstellungen für die Schnittstellen:
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 18
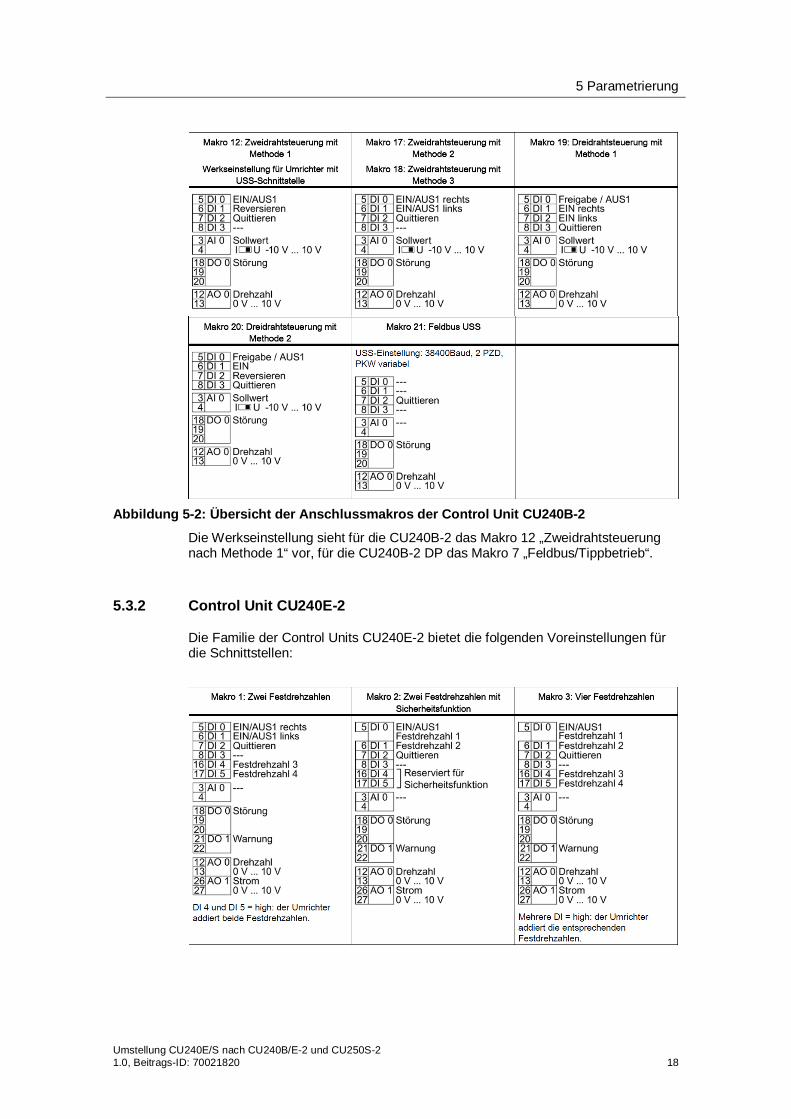
Abbildung 5-2: Übersicht der Anschlussmakros der Control Unit CU240B-2
Die Werkseinstellung sieht für die CU240B-2 das Makro 12 „Zweidrahtsteuerung nach Methode 1“ vor, für die CU240B-2 DP das Makro 7 „Feldbus/Tippbetrieb“.
5.3.2 Control Unit CU240E-2
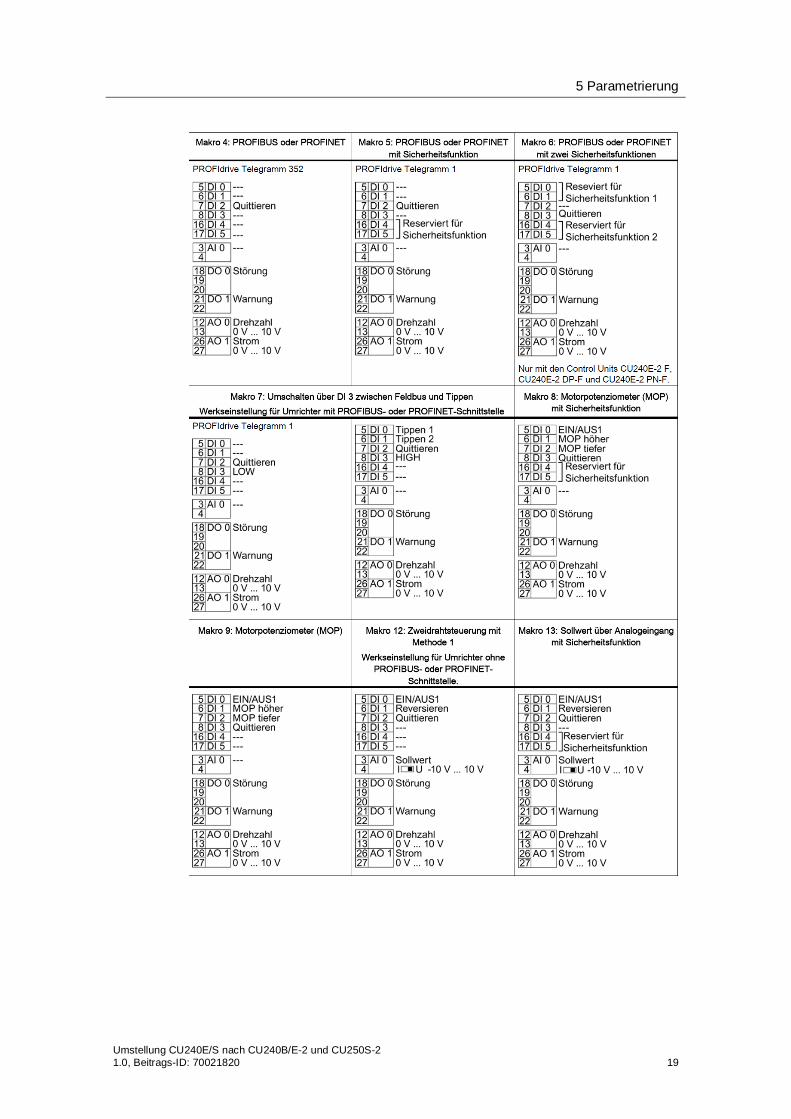
Die Familie der Control Units CU240E-2 bietet die folgenden Voreinstellungen für die Schnittstellen:
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 19
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 20
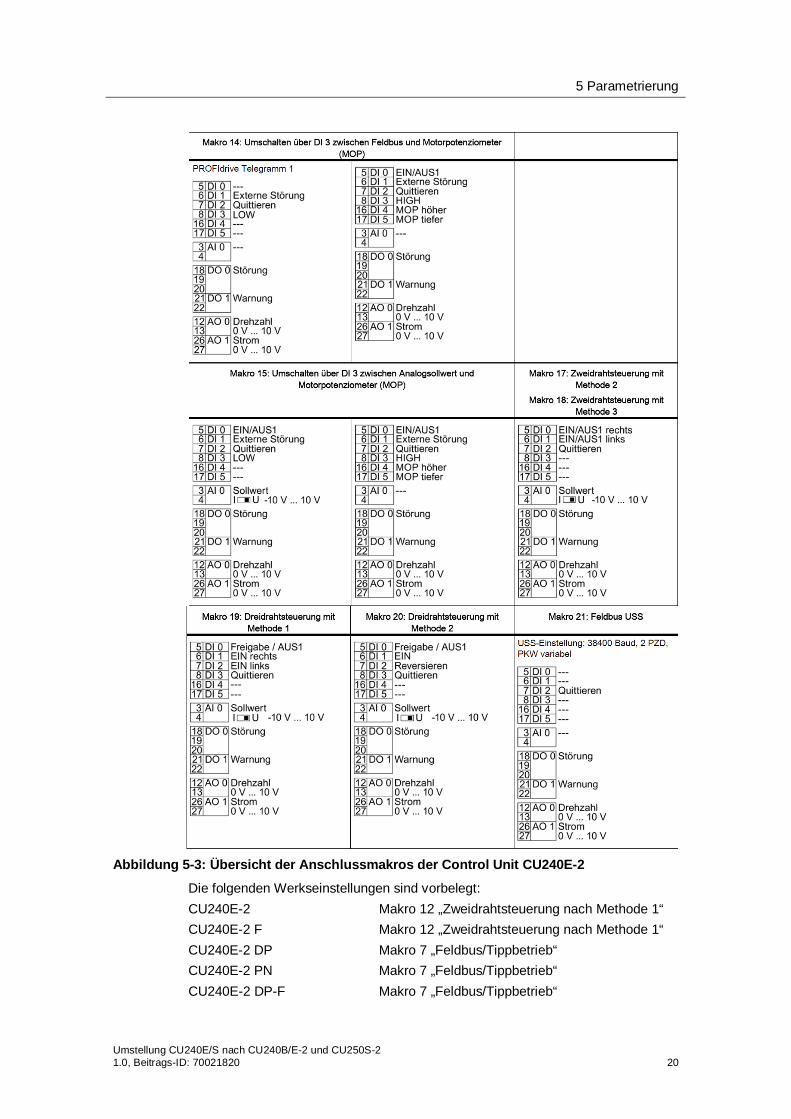
Abbildung 5-3: Übersicht der Anschlussmakros der Control Unit CU240E-2
Die folgenden Werkseinstellungen sind vorbelegt: CU240E-2 Makro 12 „Zweidrahtsteuerung nach Methode 1“ CU240E-2 F Makro 12 „Zweidrahtsteuerung nach Methode 1“ CU240E-2 DP Makro 7 „Feldbus/Tippbetrieb“ CU240E-2 PN Makro 7 „Feldbus/Tippbetrieb“ CU240E-2 DP-F Makro 7 „Feldbus/Tippbetrieb“
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 21
CU240E-2 PN-F Makro 7 „Feldbus/Tippbetrieb“
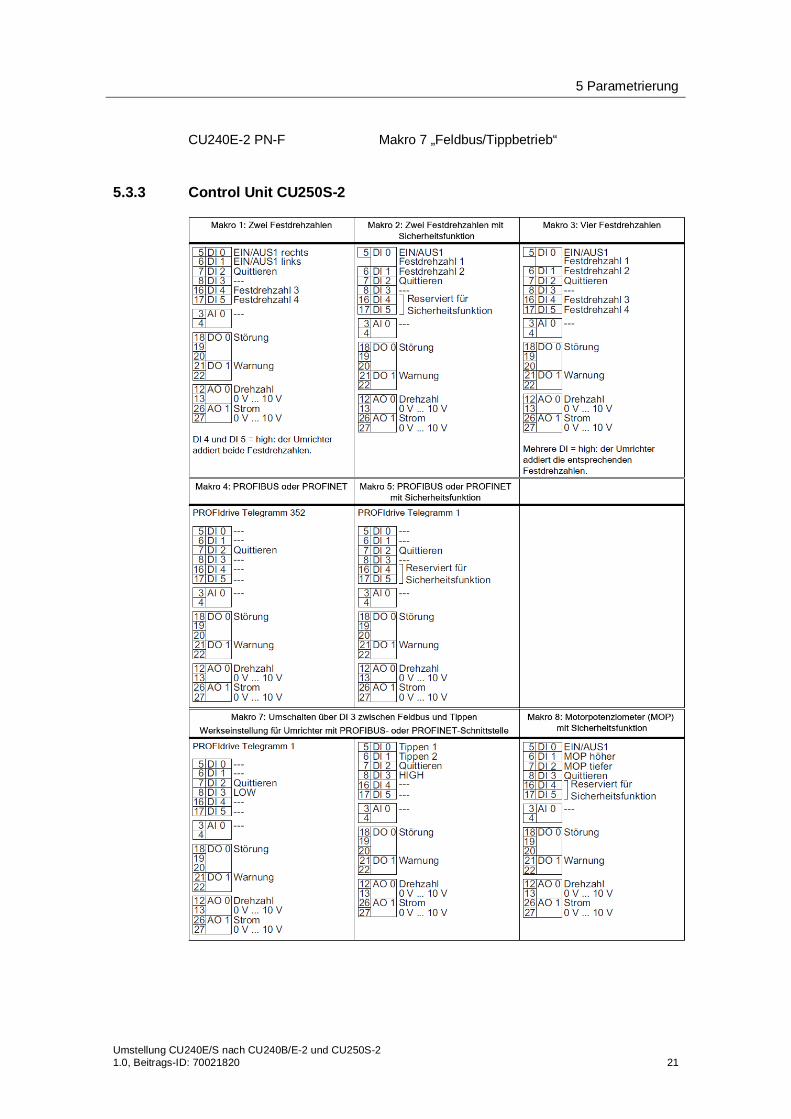
5.3.3 Control Unit CU250S-2

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 22
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 23
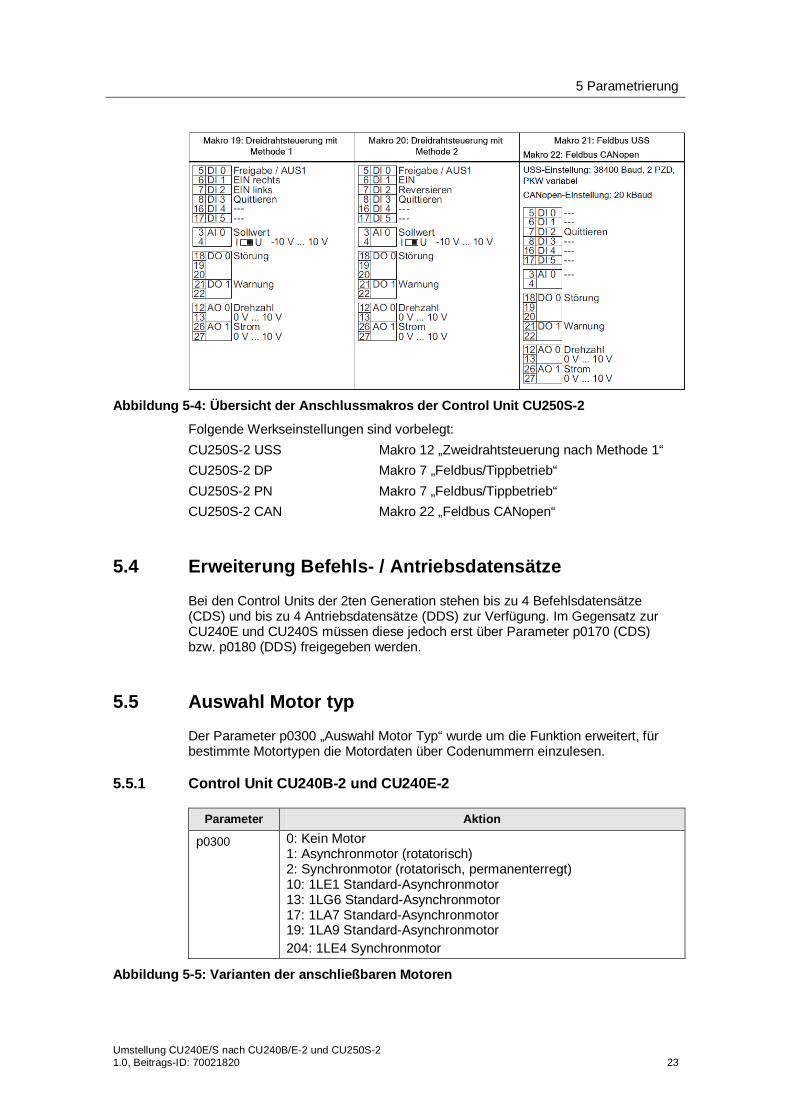
Abbildung 5-4: Übersicht der Anschlussmakros der Control Unit CU250S-2
Folgende Werkseinstellungen sind vorbelegt: CU250S-2 USS Makro 12 „Zweidrahtsteuerung nach Methode 1“ CU250S-2 DP Makro 7 „Feldbus/Tippbetrieb“ CU250S-2 PN Makro 7 „Feldbus/Tippbetrieb“ CU250S-2 CAN Makro 22 „Feldbus CANopen“
5.4 Erweiterung Befehls- / Antriebsdatensätze
Bei den Control Units der 2ten Generation stehen bis zu 4 Befehlsdatensätze (CDS) und bis zu 4 Antriebsdatensätze (DDS) zur Verfügung. Im Gegensatz zur CU240E und CU240S müssen diese jedoch erst über Parameter p0170 (CDS) bzw. p0180 (DDS) freigegeben werden.
5.5 Auswahl Motor typ
Der Parameter p0300 „Auswahl Motor Typ“ wurde um die Funktion erweitert, für bestimmte Motortypen die Motordaten über Codenummern einzulesen.
5.5.1 Control Unit CU240B-2 und CU240E-2
Parameter Aktion
p0300 0: Kein Motor 1: Asynchronmotor (rotatorisch) 2: Synchronmotor (rotatorisch, permanenterregt) 10: 1LE1 Standard-Asynchronmotor 13: 1LG6 Standard-Asynchronmotor 17: 1LA7 Standard-Asynchronmotor 19: 1LA9 Standard-Asynchronmotor 204: 1LE4 Synchronmotor
Abbildung 5-5: Varianten der anschließbaren Motoren

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 24
Mittels Parameter p0300 kann ein Motor aus der Motorparameterliste ausgewählt werden. Bei Änderung der Codenummer (außer auf den Wert 0) werden alle Motorparameter aus den intern vorliegenden Parameterlisten vorbelegt.
Hinweis Es sind nur Codenummern von Motoren einstellbar, die dem in p0300 gewählten Motor Typ entsprechen.
5.5.2 Control Unit CU250S-2
Parameter Aktion
p0300 0: Kein Motor 1: Asynchronmotor (rotatorisch) 2: Synchronmotor (rotatorisch, permanenterregt) 10: 1LE1 Standard-Asynchronmotorreihe 13: 1LG6 Standard-Asynchronmotorreihe 17: 1LA7 Standard-Asynchronmotorreihe 19: 1LA9 Standard-Asynchronmotorreihe 100: 1LE1 Standard-Asynchronmotor 104: 1PH4 Asynchronmotor 107: 1PH7 Asynchronmotor 108: 1PH8 Asynchronmotor
Abbildung 5-6: Varianten der anschließbaren Motoren
Mittels Parameter p0300 kann ein Motor aus der Motorparameterliste ausgewählt werden. Bei Änderung der Codenummer (außer auf den Wert 0) werden alle Motorparameter aus den intern vorliegenden Parameterlisten vorbelegt.
Hinweis Es sind nur Codenummern von Motoren einstellbar, die dem in p0300 gewählten Motor Typ entsprechen.
5.6 Wahl des Geber Typs
Bei der Control Unit CU250S-2 ist der Anschluss von verschiedenen Gebertypen möglich. Beim Anschluss der bei der Control Unit CU240S üblichen TTL und HTL Inkrementalgeber sind neue Einstellungen zu beachten.
Parameter Aktion
p0400 3001: 1024 HTL A/B R 3002: 1024 TTL A/B R 3003: 2048 HTL A/B R 3005: 1024 HTL A/B 3006: 1024 TTL A/B 3007: 2048 HTL A/B 3008: 2048 TTL A/B 3009: 1024 HTL A/B unipolar 3011: 2048 HTL A/B unipolar 9999: Benutzerdefiniert
Abbildung 5-7: Auswahl anschließbare Inkrementalgeber
Abweichende Inkrementalgeber können benutzerdefiniert über die Parameter p0401 bis p0487 eingegeben werden.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 25
5.7 Auswahl technologische Einheit
Mit Parameter p0595 lassen sich technologische Einheiten auswählen, auf die der Technologieregler referenziert.
Parameter Aktion
p0595 1: % 2: 1 bezogen, dimensionslos 3: bar 4: °C 5: Pa 6: ltr/s 7: m³/s 8: ltr/min 9: m³/min 10: ltr/h 11: m³/h 12: kg/s 13: kg/min 14: kg/h 15: t/min 16: t/h 17: N 18: kN 19: Nm 20: psi 21: °F 22: gallon/s 23: inch³/s 24: gallon/min 25: inch³/min 26: gallon/h 27: inch³/h 28: lb/s 29: lb/min 30: lb/h 31: lbf 32: lbf ft 33: K 34: 1/min 35: parts/min 36: m/s 37: ft³/s 38: ft³/min 39: BTU/min 40: BTU/h 41: mbar 42: inch wg 43: ft wg 44: m wg 45: % r.h. 46: g/kg
Abbildung 5-8: Einstellbare Dimensionen für den Technologieregler
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 26
Mittels Parameter p0596 werden die technologischen Werte intern auf 100 % normiert.
5.8 Betriebsstundenzähler
Über p0650 können die aktuellen Betriebsstunden ausgelesen und in p0651 ein Wartungsintervall aktiviert werden. Nach Ablauf der Zeit in p0651 wird die Warnung A1590 aktiviert.
5.9 Digitale Eingänge
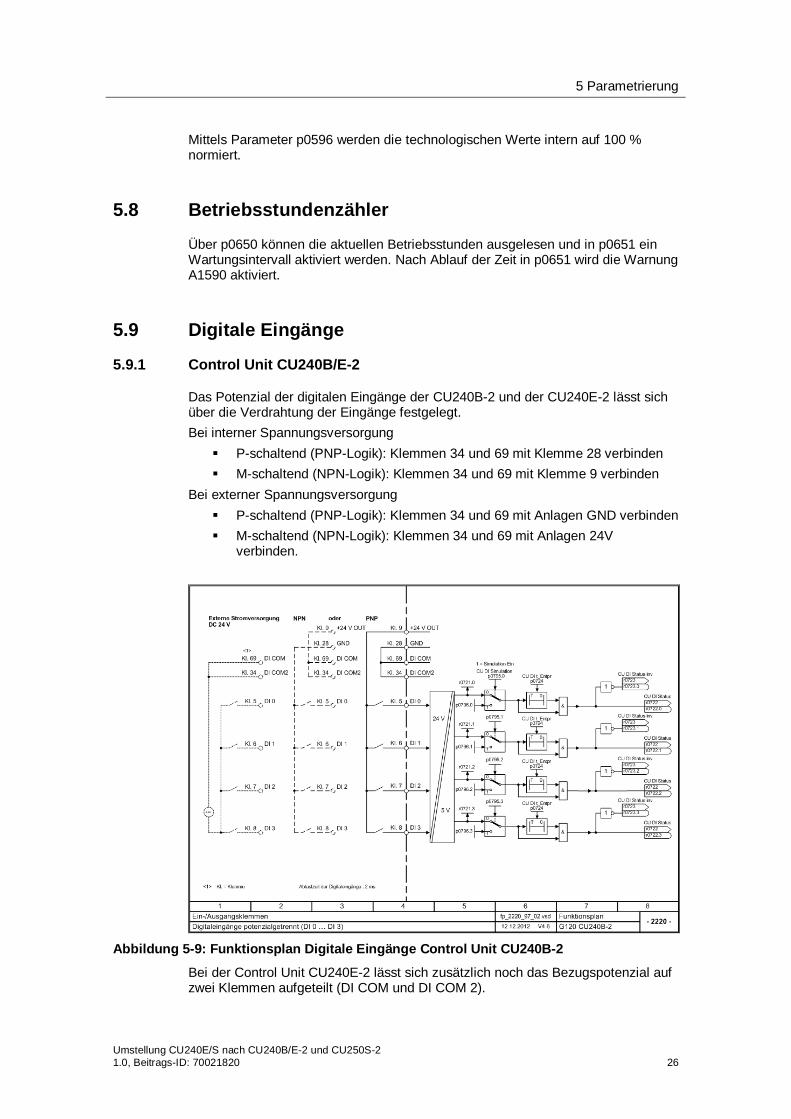
5.9.1 Control Unit CU240B/E-2
Das Potenzial der digitalen Eingänge der CU240B-2 und der CU240E-2 lässt sich über die Verdrahtung der Eingänge festgelegt. Bei interner Spannungsversorgung
P-schaltend (PNP-Logik): Klemmen 34 und 69 mit Klemme 28 verbinden M-schaltend (NPN-Logik): Klemmen 34 und 69 mit Klemme 9 verbinden
Bei externer Spannungsversorgung P-schaltend (PNP-Logik): Klemmen 34 und 69 mit Anlagen GND verbinden M-schaltend (NPN-Logik): Klemmen 34 und 69 mit Anlagen 24V
verbinden.
Abbildung 5-9: Funktionsplan Digitale Eingänge Control Unit CU240B-2
Bei der Control Unit CU240E-2 lässt sich zusätzlich noch das Bezugspotenzial auf zwei Klemmen aufgeteilt (DI COM und DI COM 2).
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 27
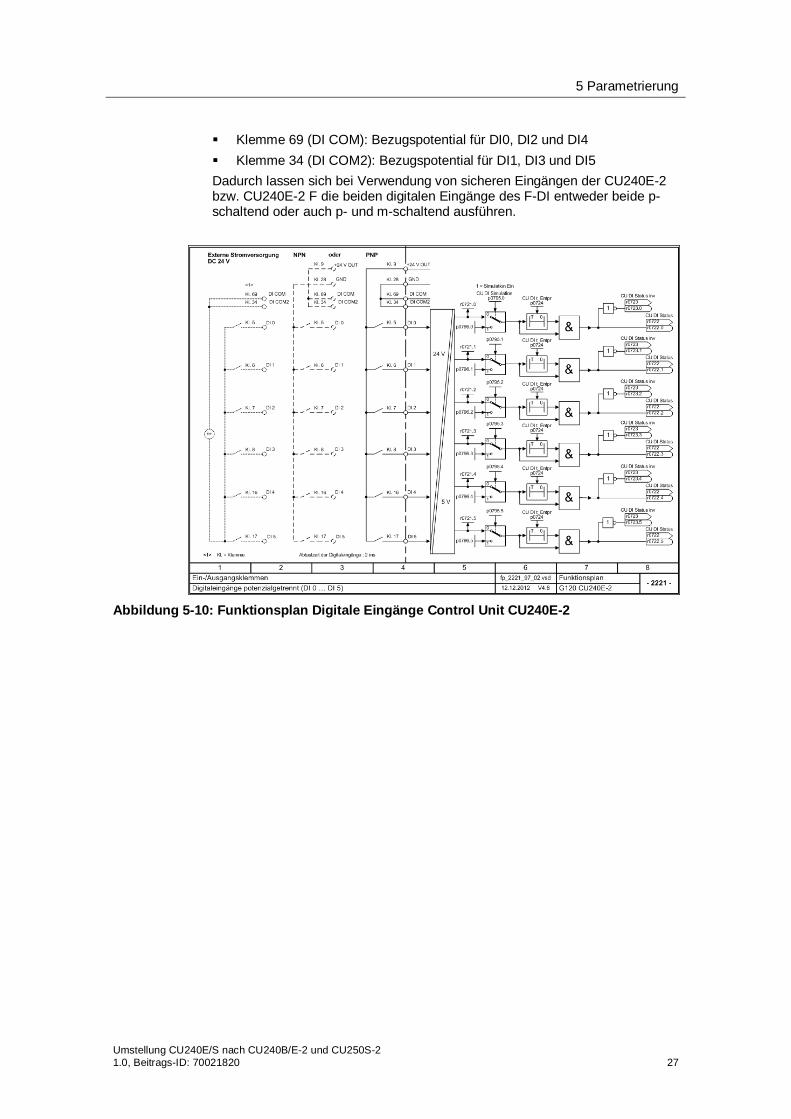
Klemme 69 (DI COM): Bezugspotential für DI0, DI2 und DI4 Klemme 34 (DI COM2): Bezugspotential für DI1, DI3 und DI5
Dadurch lassen sich bei Verwendung von sicheren Eingängen der CU240E-2 bzw. CU240E-2 F die beiden digitalen Eingänge des F-DI entweder beide p-schaltend oder auch p- und m-schaltend ausführen.
Abbildung 5-10: Funktionsplan Digitale Eingänge Control Unit CU240E-2
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 28
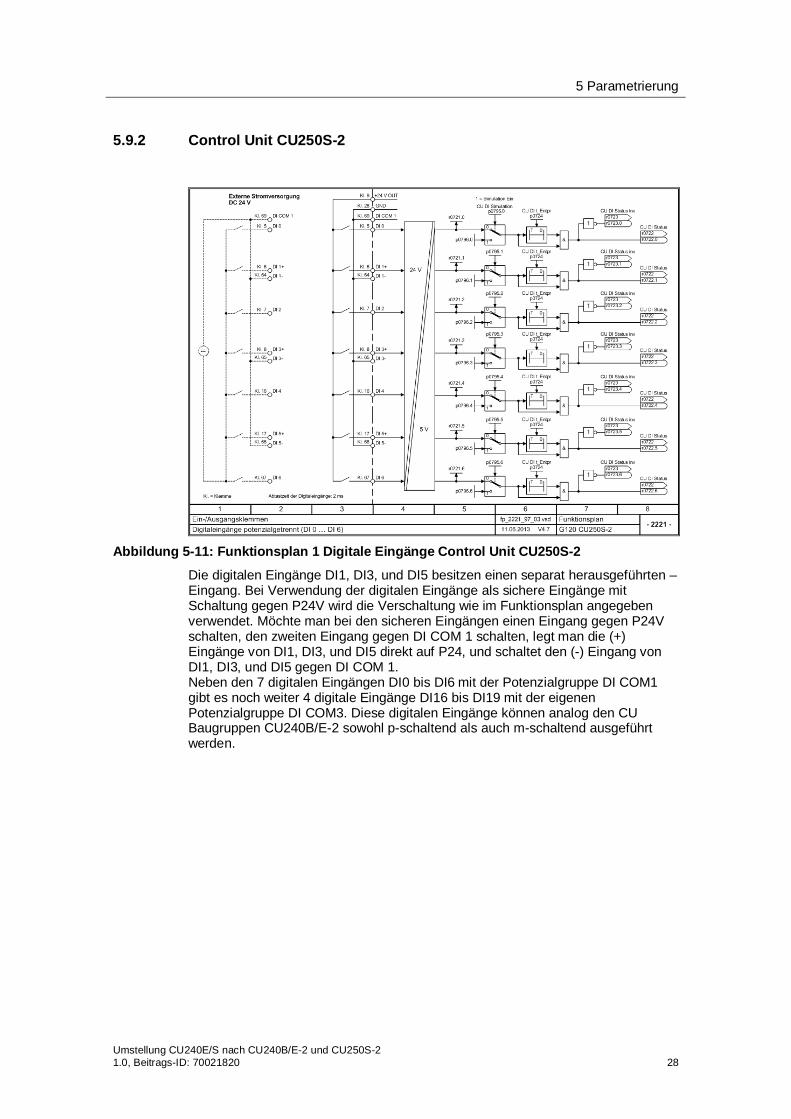
5.9.2 Control Unit CU250S-2
Abbildung 5-11: Funktionsplan 1 Digitale Eingänge Control Unit CU250S-2
Die digitalen Eingänge DI1, DI3, und DI5 besitzen einen separat herausgeführten – Eingang. Bei Verwendung der digitalen Eingänge als sichere Eingänge mit Schaltung gegen P24V wird die Verschaltung wie im Funktionsplan angegeben verwendet. Möchte man bei den sicheren Eingängen einen Eingang gegen P24V schalten, den zweiten Eingang gegen DI COM 1 schalten, legt man die (+) Eingänge von DI1, DI3, und DI5 direkt auf P24, und schaltet den (-) Eingang von DI1, DI3, und DI5 gegen DI COM 1. Neben den 7 digitalen Eingängen DI0 bis DI6 mit der Potenzialgruppe DI COM1 gibt es noch weiter 4 digitale Eingänge DI16 bis DI19 mit der eigenen Potenzialgruppe DI COM3. Diese digitalen Eingänge können analog den CU Baugruppen CU240B/E-2 sowohl p-schaltend als auch m-schaltend ausgeführt werden.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 29
Abbildung 5-12: Funktionsplan 2 Digitale Eingänge Control Unit CU250S-2
5.9.3 Vorwärts-/Rückwärtsparametrierung
Bei der Control Unit CU240E und CU240S war es möglich, die digitalen Eingänge einmal direkt über die Parameter p0701 bis p0706 auf vorgegebene Funktionen vorwärts zu verdrahten, auf der anderen Seite über die Funktion BiCo-Verdrahtung (Anwahl p0701… p0706 = 99) rückwärts beliebig zu verdrahten. Bei den Baugruppen der 2ten Generation ist die Vorwärtsverdrahtung nicht mehr möglich, die digitalen Eingänge werden mittels des Beobachtungsparameter r0722.0 … 27 in die gewünschten Funktionen verdrahtet. Zusätzlich stehen in Parameter r0723.0 … 27 die invertierten Eingänge zur Verfügung.
5.9.4 Änderung bei den fehlersicheren Eingänge (F-DI)
Die Control Units der 2ten Generation haben im Gegensatz zur CU240S Familie keine separaten fehlersicheren Digitaleingänge. Die F-DI werden bei den Control Units der 2ten Generation jeweils aus zwei Standard DI gebildet
CU240E-2: 2 Standardeingänge als 1 F-DI CU240E-2 F: 6 Standardeingänge als 3 F-DI CU250S-2: 6 Standardeingänge als 3 F-DI
5.9.5 Status der F-DI über PROFIsafe übertragen
Bei Nutzung von PROFIsafe können bei den Control Units der 2ten Generation der Status der F-DI fehlersicher an die F-CPU übertragen werden und stehen dieser somit als dezentrale F-Peripherie zur Verfügung. Dies gilt sowohl für die Control Units mit PROFBUS, PROFINET und Safety Integrated als auch die Control Unit CU240E-2 DP.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 30
5.9.6 Simulationsbetrieb
Über den Parameter p0795.x lassen sich die digitalen Ein- und Ausgänge simulieren.
STARTER In der Bediensoftware STARTER lassen sich die digitalen Ein- und Ausgänge auf den Zustand Simulation setzen.
Abbildung 5-13: Simulation der digitalen Ein-/Ausgänge mit dem STARTER
Operator Panel IOP Auch mit dem Operator Panel IOP können die digitalen Ein- und Ausgänge simuliert werden. Angezeigt werden nur zwei DI, durch Drehen des Wählrades lassen sich aber alle vorhandenen digitalen Ein- und Ausgänge selektieren.
Abbildung 5-14: Simulation der digitalen Ein-/Ausgänge mit dem IOP
In der Mitte wird der aktuelle Zustand des DI angezeigt, durch Eintrag von „true“ bei Simulation wird der DI gesetzt, sobald „Simulation aktivieren“ gedrückt wurde.
5.9.7 Überwachung der Last / der Drehzahl über Digitaleingang
Die Funktion überwacht die Drehzahl oder Geschwindigkeit einer Maschinenkomponente, z.B.:
Getriebeüberwachung bei Fahrantrieben oder Hebezeugen Überwachung des Antriebsriemens bei Lüftern oder Förderbändern Blockierschutz
Überwachung Drehzahl oder Geschwindigkeit in der Anwendung können auf zwei Arten überwacht werden:
Lastausfall: Der Umrichter wertet aus, ob ein Gebersignal vorhanden ist.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 31
Drehzahlabweichung: Der Umrichter berechnet aus dem Signal eines angeschlossenen Gebers eine Drehzahl und vergleicht sie mit der Motordrehzahl.
Für die Drehzahlüberwachung ist ein Signalgeber, z. B. ein Näherungsschalter, erforderlich. Der Umrichter wertet das Gebersignal über einen Digitaleingang aus.
Lastausfall
Abbildung 5-15: Überwachung auf Lastausfall mittels Digitaleingang
Abbildung 5-16: Parametrierung der Lastüberwachung über Digitaleingang
Drehzahlabweichung Diese Funktion steht nur bei den Control Units CU240E-2… zur Verfügung. Der Überwachungssensor muss am Digitaleingang 3 angeschlossen sein. Der Umrichter kann eine Impulsfolge von maximal 32 kHz verarbeiten.
Abbildung 5-17: Überwachung auf Drehzahlabweichung
Die Berechnung der Drehzahl aus dem Impulssignal des Digitaleingangs geschieht im "Messtaster". Der Umrichter vergleicht die berechnete Drehzahl mit dem Drehzahlistwert r2169. Die Reaktion des Umrichters bei zu großer Abweichung ist mit p2181 einstellbar.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 32
Abbildung 5-18: Parametrierung der Drehzahlüberwachung über Digitaleingang
5.10 Digitale Ausgänge
5.10.1 Geänderte Parameternummern
Die Parameternummern der DO´s sind in der Expertenliste um eine Stelle verschoben (z.B. DO0: CU240S = p731, CU240E-2 = p730).
5.10.2 Hardwareänderung
Die Control Units CU240E und CU240S besitzen drei Relaisausgänge, die jeweils mit DC 30V, 0,5A ohmsch belastbar sind. Die digitalen Ausgänge DO0 und DO2 besitzen Schließer und Öffner, DO1 nur einen Schließer. Die Control Units der 2ten Generation sind folgendermaßen bestückt:
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 33
CU240B-2: DO0, Schließer und Öffner, DC 30V, 0,5A CU240E-2: DO0, Schließer und Öffner, DC 30V, 0,5A
DO1, Transistorausgang positiv, DC 30V, 0,5A DO2, Schließer und Öffner, DC 30V, 0,5A
CU250S-2: DO0, Schließer und Öffner, DC 30V, 0,5A DO1, Schließer, DC 30V, 0,5A DO2, Schließer und Öffner, DC 30V, 0,5A
5.11 Analoge Eingänge
5.11.1 Simulationsbetrieb
Über den Parameter p0797.x lassen sich die analogen Eingänge simulieren.
STARTER In der Bediensoftware STARTER lassen sich die analogen Eingänge auf den Zustand Simulation setzen.
Abbildung 5-19: Simulation der analogen Eingänge mit dem STARTER
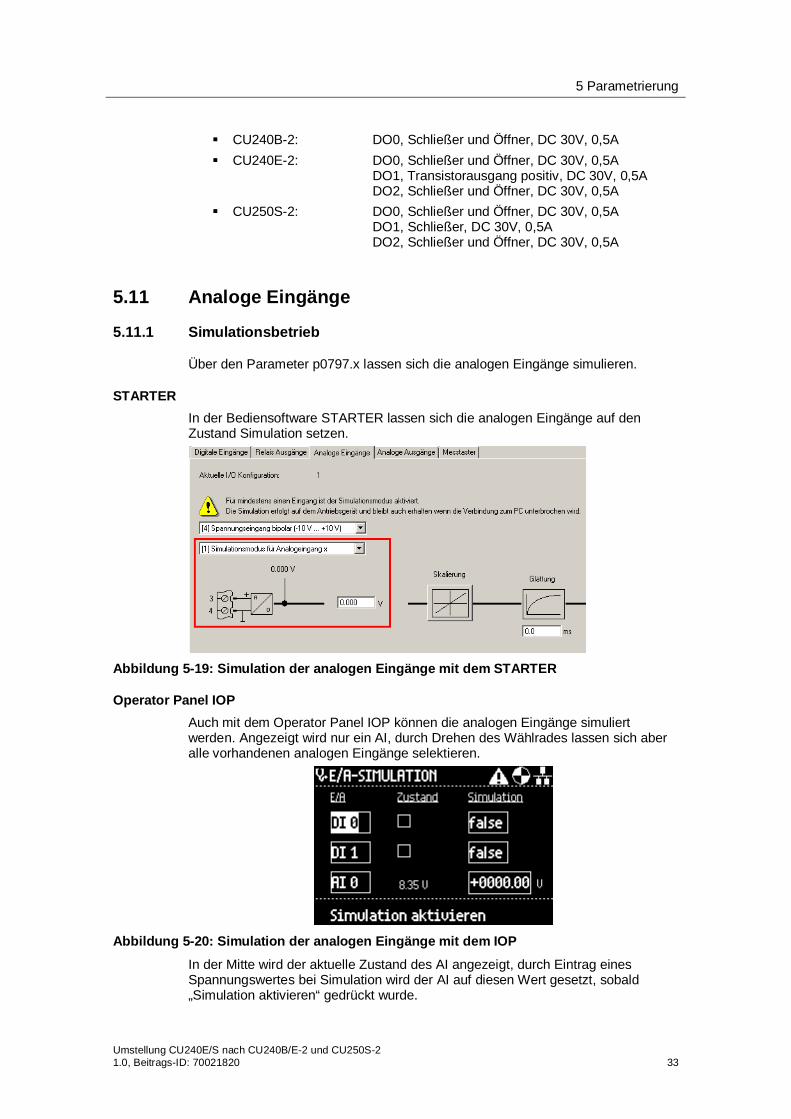
Operator Panel IOP Auch mit dem Operator Panel IOP können die analogen Eingänge simuliert werden. Angezeigt wird nur ein AI, durch Drehen des Wählrades lassen sich aber alle vorhandenen analogen Eingänge selektieren.
Abbildung 5-20: Simulation der analogen Eingänge mit dem IOP
In der Mitte wird der aktuelle Zustand des AI angezeigt, durch Eintrag eines Spannungswertes bei Simulation wird der AI auf diesen Wert gesetzt, sobald „Simulation aktivieren“ gedrückt wurde.
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 34
5.11.2 Totzone
Bei den Control Units CU240E und CU240S muss bei Verwendung von analogen Eingängen mit 2 … 10V bzw. 4 … 20mA zusätzlich zur Auswahl des analogen Einganges über p0756.x noch eine Totzone mittels p0761 eingegeben werden, damit der Sollwert bei Werten kleiner 2V/4mA nicht in negative Richtung läuft. Bei den Control Units der 2ten Generation ist dies nicht mehr notwendig, über den Parameter p0761 kann jetzt die Ansprechschwelle für die Drahtbruchüberwachung eingestellt werden.
Hinweis Für Anwendungen, bei denen die Totzone z.B. zur Ausblendung von Störspannungen auf dem Analogsignal verwendet wurde, gibt es ab der SINAMICS Firmware Version V4.6 die Möglichkeit, mittels Parameter p0764.x eine Totzone am analogen Eingang zu parametrieren.
5.12 Normierung des Sollwertkanals
Der Sollwertkanal ist im Gegensatz zu den Control Units CU240E und CU240S nicht mehr in Hz, sondern in 1/min normiert. Dies setzt voraus, dass bei der Schnellinbetriebnahme Nenndrehzahl und Nennfrequenz korrekt eingegeben werden.
5.13 Motorpotenziometer
Das Motorpotenziometer bietet nun die Möglichkeit, analoge Sollwerte abzuspeichern. Bei Ausfall des Analogwertes z.B. durch Drahtbruch kann dann direkt auf den letzten Sollwert zugegriffen werden, eine weitere Änderung erfolgt durch die Höher-/Tiefertasten.
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 35
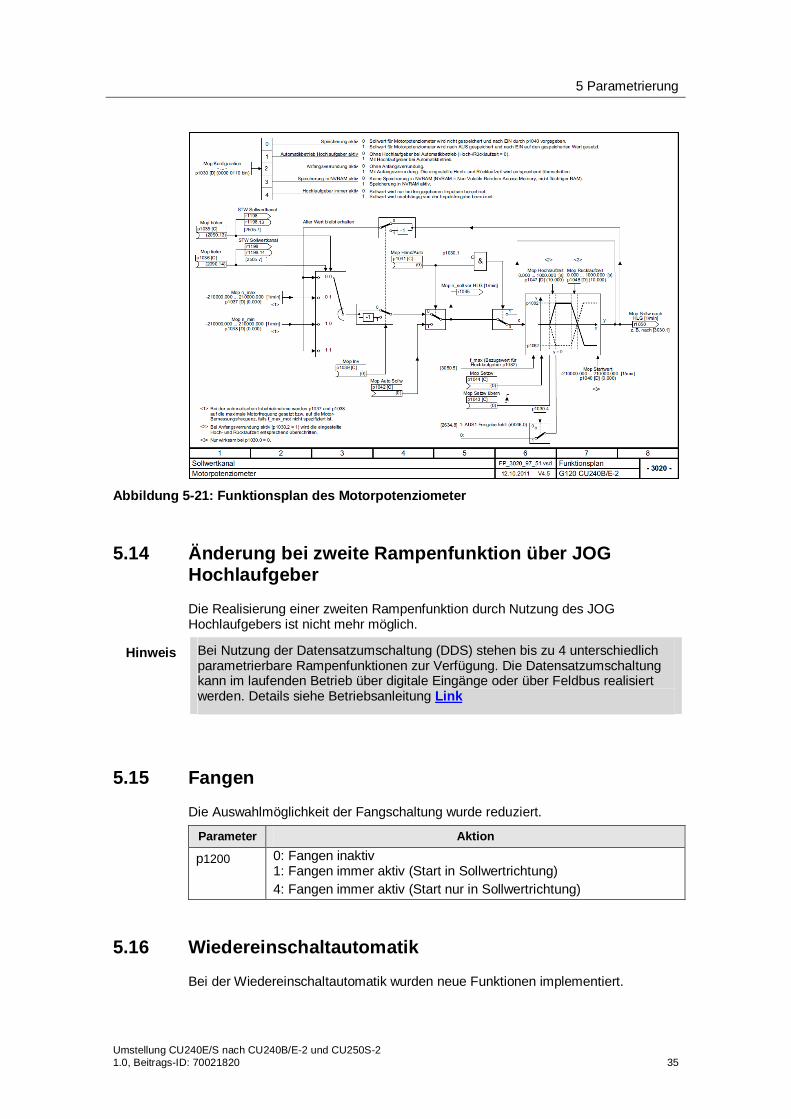
Abbildung 5-21: Funktionsplan des Motorpotenziometer
5.14 Änderung bei zweite Rampenfunktion über JOG Hochlaufgeber
Die Realisierung einer zweiten Rampenfunktion durch Nutzung des JOG Hochlaufgebers ist nicht mehr möglich.
Hinweis Bei Nutzung der Datensatzumschaltung (DDS) stehen bis zu 4 unterschiedlich parametrierbare Rampenfunktionen zur Verfügung. Die Datensatzumschaltung kann im laufenden Betrieb über digitale Eingänge oder über Feldbus realisiert werden. Details siehe Betriebsanleitung Link
5.15 Fangen
Die Auswahlmöglichkeit der Fangschaltung wurde reduziert.
Parameter Aktion
p1200 0: Fangen inaktiv 1: Fangen immer aktiv (Start in Sollwertrichtung) 4: Fangen immer aktiv (Start nur in Sollwertrichtung)
5.16 Wiedereinschaltautomatik
Bei der Wiedereinschaltautomatik wurden neue Funktionen implementiert.
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 36
Parameter Aktion
p1210 0: Wiedereinschaltautomatik sperren 1: Quittieren aller Störungen ohne Wiedereinschalten 4: Wiedereinschalten nach Netzausfall ohne weitere Anlaufversuche 6: Wiedereinschalten nach Störung mit weiteren Anlaufversuchen 14: Wiedereinschalten nach Netzausfall nach manueller Quittierung 16: Wiedereinschalten nach Störung nach manueller Quittierung 26: Quittieren aller Störungen und Wiedereinschalten bei EIN-Befehl
Abbildung 5-22: Einstellmöglichkeiten für die Wiedereinschaltautomatik
Über Parameter p1206 lassen sich bis zu 10 Störmeldungen einstellen, bei denen die Wiedereinschaltautomatik nicht startet.
5.17 Erweiterung Motorhaltebremse Funktion
Die Parametrierung der Motorhaltebremse wurde erweitert. Es stehen nun verschiedene Modi zur Verfügung, mit denen die Bremse wie bisher vom Prozess, aber auch dauerhaft bzw. in Abhängigkeit von einem externen Signal geöffnet und geschlossen werden kann.
Hinweis Lediglich die Control Unit CU250S-2 unterstützt die Sicherheitsfunktion SBC (Safe Brake Control).
5.18 Einstellung Widerstandsbremsen
Bei den Control Units der 2ten Generation ist der Bremschopper bei Verwendung eines PM240 automatisch aktiviert. Der Bremswiderstand muss extern gegen Überlast geschützt werden.
Thermofühler des Bremswiderstandes auf einen DI des FU verdrahten und diesen Eingang mit dem Parameter p2106 „Externe Störung 1“ verschalten. In Folge wird bei einer Übertemperatur der Fehler F07860 „Externe Störung 1“ aktiviert.
Hinweis Bei Verwendung des Bremswiderstandes ist der VDCmax Regler zu deaktivieren (bei Vektor Regelung: p1240 = 0, bei U/f: p1280 = 0).
Ab der Firmware Version V4.6 existiert der Parameter p0219, mit dem die maximal zulässige Bremsleistung festgelegt wird. Dieser Parameter setzt automatisch die generatorische Leistung und die Rücklauframpe, außerdem sperrt er den Vdcmax-Regler.
5.19 Regelungsarten
Regelungsarten Die Auswahl der Regelungsarten über Parameter p1300 wurde durch ECO-Varianten mit Flussabsenkung ergänzt.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 37
Parameter Aktion
p1300 0: U/f-Steuerung mit linearer Charakteristik 1: U/f-Steuerung mit linearer Charakteristik und FCC 2: U/f-Steuerung mit parabolischer Charakteristik 3: U/f-Steuerung mit parametrierbarer Charakteristik 4: U/f-Steuerung mit linearer Charakteristik und ECO 5: U/f-Steuerung für frequenzgenauen Antrieb (Textilbereich) 6: U/f-Steuerung für frequenzgenauen Antrieb und FCC 7: U/f-Steuerung für parabolische Charakteristik und ECO 19: U/f-Steuerung mit unabhängigem Spannungssollwert 20: Drehzahlregelung (geberlos) 21: Drehzahlregelung (mit Geber) 22: Drehmomentregelung (geberlos) 23: Drehmomentregelung (mit Geber)
Abbildung 5-23: Anwählbare Regelungsarten
Hinweis Die geberbehafteten Regelungsarten 21 (Drehzahlregelung mit Geber) und 23 (Drehmomentenregelung mit Geber) sind nur bei der Control Unit CU250S-2 möglich.
Parametrierbare u/f Kennlinie Die Control Units CU240E und CU240S besitzen je 3 Spannungs- / Frequenz Stützpunkte. Im Gegensatz dazu haben die Control Units der 2ten Generation jeweils 4 Spannungs- / Frequenz Stützpunkte, wodurch die Kennlinie feiner parametriert werden kann.
Wenn die zusätzlichen Stützpunkte nicht benötigt werden, die Stützpunkte 3 und 4 auf den gleichen Wert setzen.
5.20 Spannungsanhebung
Die eingestellte Spannungsanhebung bei u/f-Kennlinien mit linearer oder quadratischer Charakteristik wird je nach Kennlinienwahl bis in den Nennpunkt hinein verlängert. Die Anhebungsendfrequenz, die über Parameter p1316 einstellbar war, gibt es nicht mehr.
Hinweis Wegen der unterschiedlichen Ausführung der Spannungsanhebung sollte man die Einstellungen überprüfen, um eine unnötige Motorerwärmung zu vermeiden.
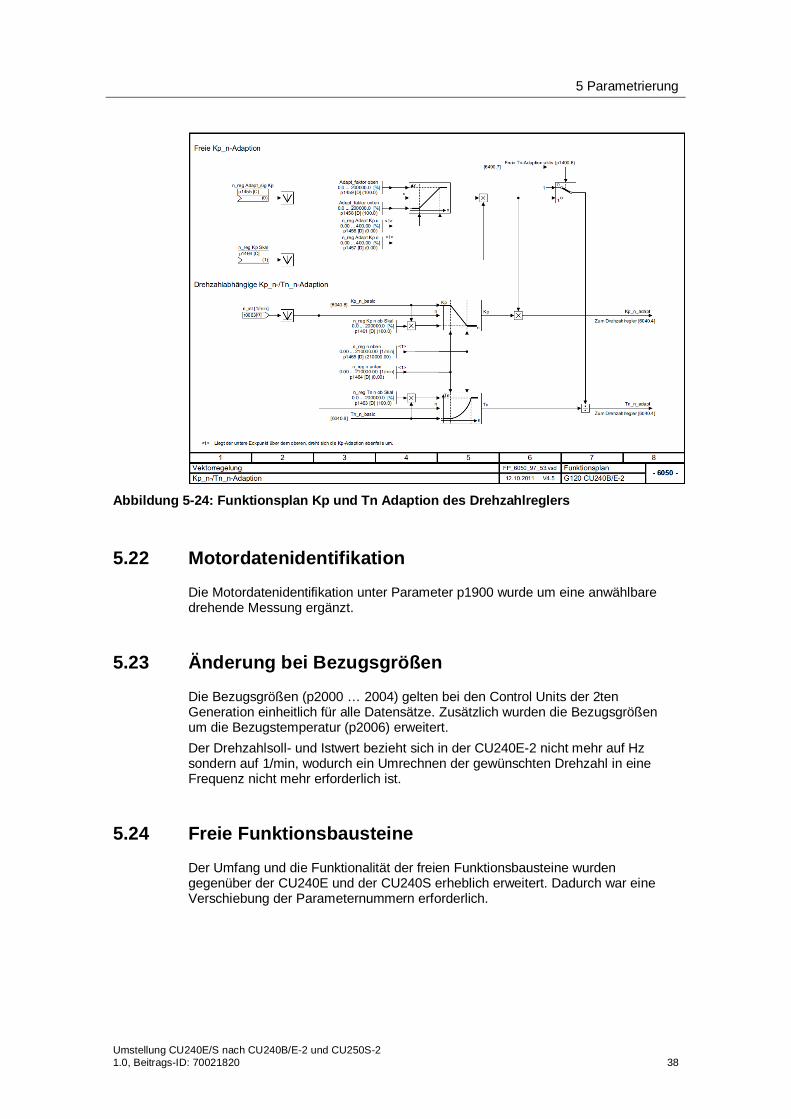
5.21 Drehzahlabhängige Regler Adaption
Der Kp und Tn Anteil des Drehzahlreglers kann bei den Control Units der 2ten Generation in Abhängigkeit von der Drehzahl oder einem freien Wert adaptiert werden.
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 38
Abbildung 5-24: Funktionsplan Kp und Tn Adaption des Drehzahlreglers
5.22 Motordatenidentifikation
Die Motordatenidentifikation unter Parameter p1900 wurde um eine anwählbare drehende Messung ergänzt.
5.23 Änderung bei Bezugsgrößen
Die Bezugsgrößen (p2000 … 2004) gelten bei den Control Units der 2ten Generation einheitlich für alle Datensätze. Zusätzlich wurden die Bezugsgrößen um die Bezugstemperatur (p2006) erweitert. Der Drehzahlsoll- und Istwert bezieht sich in der CU240E-2 nicht mehr auf Hz sondern auf 1/min, wodurch ein Umrechnen der gewünschten Drehzahl in eine Frequenz nicht mehr erforderlich ist.
5.24 Freie Funktionsbausteine
Der Umfang und die Funktionalität der freien Funktionsbausteine wurden gegenüber der CU240E und der CU240S erheblich erweitert. Dadurch war eine Verschiebung der Parameternummern erforderlich.
5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 39
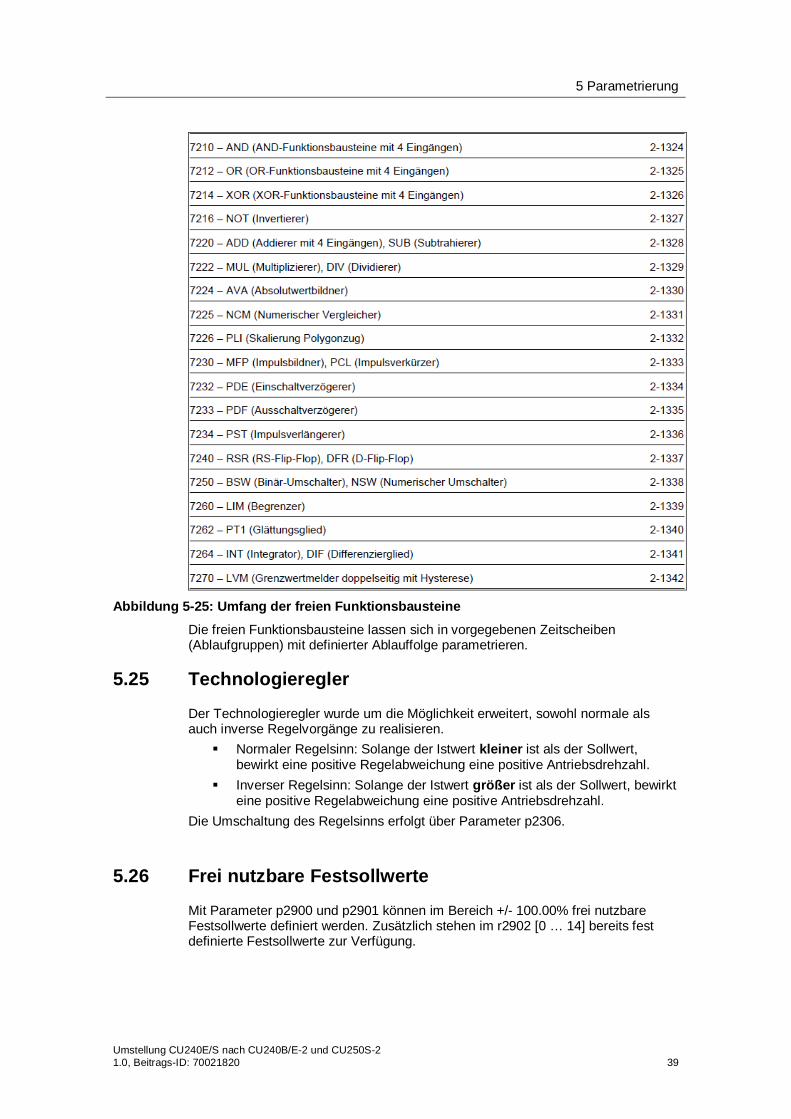
Abbildung 5-25: Umfang der freien Funktionsbausteine
Die freien Funktionsbausteine lassen sich in vorgegebenen Zeitscheiben (Ablaufgruppen) mit definierter Ablauffolge parametrieren.
5.25 Technologieregler
Der Technologieregler wurde um die Möglichkeit erweitert, sowohl normale als auch inverse Regelvorgänge zu realisieren.
Normaler Regelsinn: Solange der Istwert kleiner ist als der Sollwert, bewirkt eine positive Regelabweichung eine positive Antriebsdrehzahl.
Inverser Regelsinn: Solange der Istwert größer ist als der Sollwert, bewirkt eine positive Regelabweichung eine positive Antriebsdrehzahl.
Die Umschaltung des Regelsinns erfolgt über Parameter p2306.
5.26 Frei nutzbare Festsollwerte
Mit Parameter p2900 und p2901 können im Bereich +/- 100.00% frei nutzbare Festsollwerte definiert werden. Zusätzlich stehen im r2902 [0 … 14] bereits fest definierte Festsollwerte zur Verfügung.

5 Parametrierung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 40
5.27 Änderung BF-LED deaktivieren
Wird kein Feldbus genutzt, so kann die BF-LED über den Parameter p2030 0 deaktiviert werden. Nähere Informationen siehe Link
5.28 Wegfall Wobbelgenerator
Der in der CU240E und CU240S verfügbare Wobbelgenerator steht nicht mehr zur Verfügung.
5.29 Wegfall Positionierende Rücklauframpe
Die positionierende Rücklauframpe der CU240E und CU240S (Parameter p2480 … p2488) steht nicht mehr zur Verfügung.
Realisierung über eine Eil- / Schleichgangumschaltung unter Nutzung der freien Funktionsbausteine.
5.30 Speicherkarte
Im Gegensatz zur CU240S, bei der nur MMC-Karten eingesetzt werden konnten können jetzt MMC und SD-Karten verwendet werden.
5.30.1 Projektübernahme mit Speicherkarte
Projekte einer CU240S auf MMC Karte können auf Grund der geänderten Parameterstruktur nicht in eine CU240B/E-2 oder CU250S-2 übernommen werden.
5.30.2 Speicherkarten Handling
Das Beschreiben der MMC / SD-Karte wurde erheblich vereinfacht. Parameteränderungen werden automatisch auf der Speicherkarte gespeichert. Details siehe Betriebsanleitung im Kapitel 4.6 (siehe Link) und FAQ (siehe Link).
6 Performance Vektorregelung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 41
6 Performance Vektorregelung 6.1 Geberlose Vektorregelung SLVC
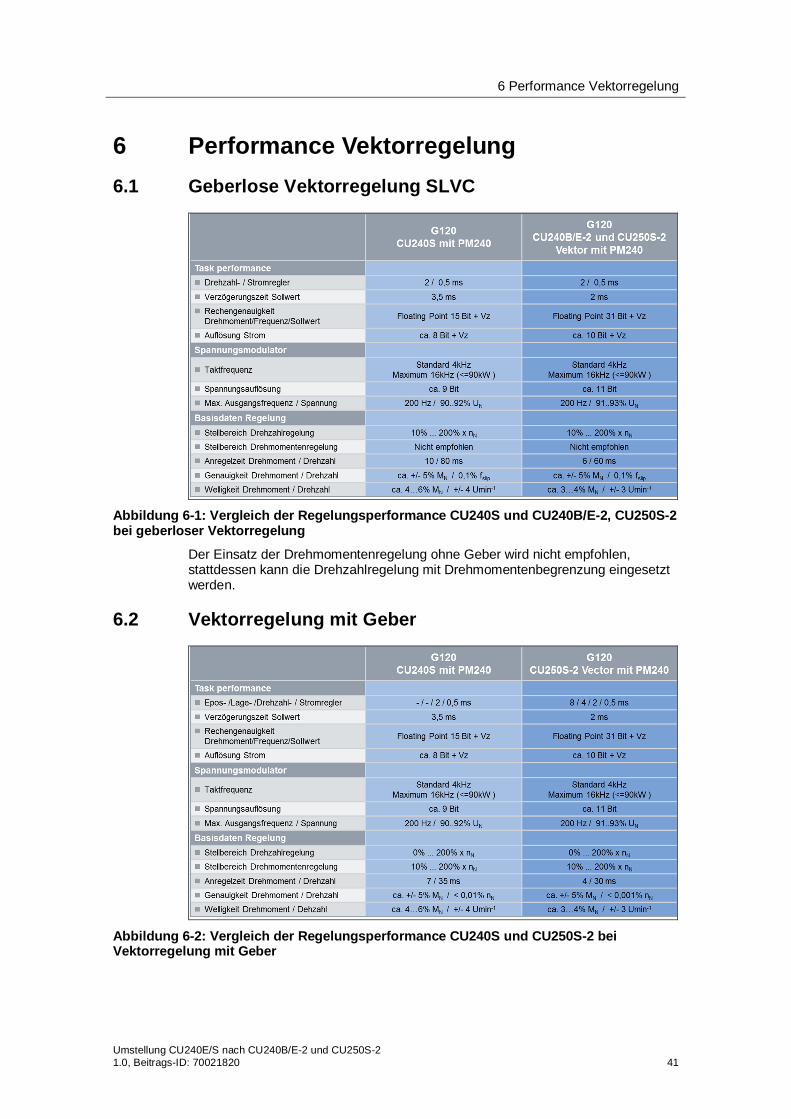
Abbildung 6-1: Vergleich der Regelungsperformance CU240S und CU240B/E-2, CU250S-2 bei geberloser Vektorregelung
Der Einsatz der Drehmomentenregelung ohne Geber wird nicht empfohlen, stattdessen kann die Drehzahlregelung mit Drehmomentenbegrenzung eingesetzt werden.
6.2 Vektorregelung mit Geber
Abbildung 6-2: Vergleich der Regelungsperformance CU240S und CU250S-2 bei Vektorregelung mit Geber

6 Performance Vektorregelung
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 42
6.3 Erhöhung der Robustheit der Vektorregelung
Bei der geberlosen Vektorregelung der CU240S musste bei kritischen Anwendungen wie Heben und Senken die Optimierung der Motordaten mehrfach unter Berücksichtigung der Ersatzschaltbilddaten durchgeführt werden. Versuche an Hallenkranen haben gezeigt, dass die Ersatzschaltbilddaten bei den Control Units CU240E-2 bereits bei der ersten MotID präzise ermittelt wurden, eine Nachoptimierung war nicht erforderlich. Dies zeigt, dass die Vektorregelung des SINAMICS Pools deutlich stabiler ist als die Vektorregelung des alten Software Pools.
7 Kommunikation
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 43
7 Kommunikation Bestehende Programme für die Ansteuerung eines SINAMICS G120 mit CU240S über Feldbus von einer PLC können in den meisten Fällen für die Control Units der 2ten Generation weiter verwendet werden. Lediglich wenn z.B. über zyklische bzw. azyklische Kommunikation auf Parameter zugegriffen wird, ist eventuell eine Anpassung durch geänderte Parameternummern erforderlich. Sicherheitsprogramme in einer F-CPU müssen zum Nutzen der neuen bzw. erweiterten Sicherheitsfunktionen entsprechend angepasst werden (siehe Kapitel 8)
7.1 GSD-Dateien
Für die Control Units der 2ten Generation sind neue GSG-Dateien erforderlich. Diese stehen unter dem folgenden Link zum Download bereit Link
7.2 Routing durch eine CPU
Für Routing über Netzwerkgrenzen hinweg (IE nach PROFIBUS DP) muss die CPU das Protokoll Datensatz Routing unterstützen. Zusätzlich ist wie bisher Drive ES Basic erforderlich oder auch der STARTER ab Version V4.3 mit Service Pack SP2. Folgende CPU´s unterstützen Datensatz Routing:
- ET200S IM151-8 PN/DP CPU in Verbindung mit DP-Mastermodul
- SIMATIC S7-300 CPU313C-2 DP ab Version V3.3 CPU314C-2 DP ab Version V3.3 CPU314C-2 PN/DP ab Version V3.3 CPU315-2 DP ab Version V3.0 CPU315-2 PN/DP ab Version V3.1 CPU317-2 DP ab Version V3.3 CPU317-2 PN/DP ab Version V3.1 CPU319-3 PN/DP ab Version V2.7
- SIMATIC S7-400 CPU´s ab Version V5.1 - WinAC RTX ab Version 2010, Update 1 mit CP5603,
CP5613 oder CP5623 Folgende Systeme unterstützen das Datensatz Routing z. Z. nicht:
- SIMATIC S7-1200 - WinAC MP - SIMOTION
7 Kommunikation
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 44
7.3 Teleservice
7.3.1 Teleservice über eine CPU
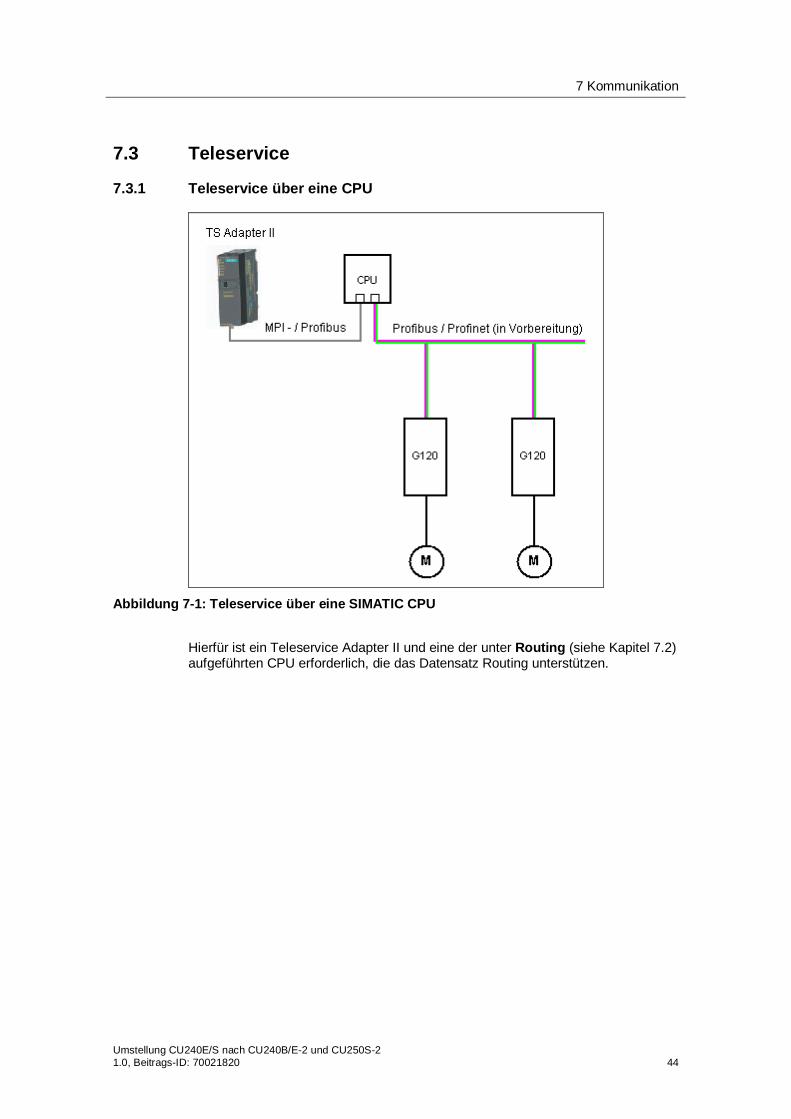
Abbildung 7-1: Teleservice über eine SIMATIC CPU
Hierfür ist ein Teleservice Adapter II und eine der unter Routing (siehe Kapitel 7.2) aufgeführten CPU erforderlich, die das Datensatz Routing unterstützen.

7 Kommunikation
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 45
7.3.2 Teleservice direkt auf den Feldbus
Abbildung 7-2: Teleservice über Feldbus
Bei diesem Aufbau wird der Teleservice Adapter direkt am Feldbus angeschlossen. Dadurch ist es unerheblich, ob die CPU Datensatz Routing unterstützt.
Bei den Control Units mit PROFINET Anschluss CU240E-2 PN und CU250S-2 PN ist Teleservice über den Teleservice Adapter IE Basic möglich.
Hinweis Bei PROFIBUS ist der Teleservice zurzeit nicht möglich, da der Teleservice Adapter II die Funktionalität nicht unterstützt.
7.4 Querverkehr Neue Funktion Mit dem "Querverkehr", auch "Slave-Slave-Kommunikation" oder "Data Exchange Broadcast" genannt, ist ein schneller Datenaustausch zwischen den Umrichtern (Slaves) ohne direkte Beteiligung des Masters möglich, zum Beispiel um den Istwert eines Umrichters als Sollwert für andere Umrichter vorzugeben (Nähere Informationen siehe Betriebsanleitung (Kapitel 6.1.4.4) Link
7.5 Direkte HMI Anbindung
Eine direkte Anbindung, ohne zwischen geschaltete CPU, eines HMI zum Auslesen und Verändern von Antriebsparametern wird nicht unterstützt.
Hinweis Die Parameter müssen über die CPU aus dem Umrichter ausgelesen werden, und von dort an das HMI weitergeleitet werden.

8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 46
8 Sicherheitsfunktionen Die aus der CU240S bekannten Sicherheitsfunktionen wurden erweitert. Die nachfolgende Tabelle liefert einen Überblick über die verfügbaren Sicherheitsfunktionen und die Art der möglichen Ansteuerung.
Abbildung 8-1: Sicherheitsfunktionen der SINAMICS Firmware V4.6

8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 47
Nähere Informationen zu den Sicherheitsfunktionen finden Sie im Funktions-handbuch Safety Integrated, siehe Link, oder auf der folgenden Internetseite, siehe Link
Hinweis Für die Sicherheitsfunktionen ist wie bisher keine Drehzahlerfassung über einen Drehzahlgeber erforderlich. STO ist für alle Applikationen, wo eine Not-Halt Funktionalität gefordert ist, zulässig. SS1, SLS, SSM und SDI sind für durchziehende und dauerhaft regenerative Lasten nicht zulässig (siehe auch Funktionshandbuch Safety Integrated, Kapitel 2.2 Link). Die F-DI´s werden durch die Kombination von 2 Standard DI´s per Parametrierung gebildet.
8.1 Neue und erweiterte Sicherheitsfunktionen
8.1.1 Erweiterung SS1 (Sicherer Stop 1)
Abbildung 8-2: Funktionsdiagramm Sicherer Stop 1 Die Sicherheitsfunktion SS1 wurde im Vergleich zur CU240S Familie erweitert. Das Abbremsen des Motors nach Aktivierung von SS1 kann nun über die Parametrierung wie folgt eingestellt werden:
Bremsrampenüberwachung: Der Antrieb verzögert nach Anwahl von SS1 automatisch mit der OFF3-Rampe. Die Verzögerung wird über die SBR-Rampe (Safe Brake Ramp) überwacht. Bei Erreichen der Stillstandüberwachung wird STO aktiviert
Beschleunigungsüberwachung: Der Antrieb verzögert nach Anwahl von SS1 nicht an der OFF3-Rampe, sondern kann autark verzögert werden. Die Drehzahl wird sicher auf eine Beschleunigung hin überwacht Bei Erreichen der „Abschaltgeschwindigkeit SS1“ bzw. nach Ablauf der „SS1 Verzögerungszeit“ wird STO aktiviert
Weitere Änderungen: Die SS1 Rampenzeit (Modus Bremsrampenüberwachung) wurde von 99
Sekunden (bezogen auf 200Hz) auf 1000 Sekunden (bezogen auf die Referenzgeschwindigkeit z.B. 1500 1/min) vergrößert.
Sicheres Stoppen von großen Schwungmassen. Bei der CU240S Familie war es möglich, SS1 abzubrechen, in dem die
SS1 Anforderung vor Erreichen der SS1 Stillstandserkennungsfrequenz
8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 48
wieder zurückgenommen wurde. Dies ist bei CU240E-2 und CU250S-2 nicht mehr möglich. Die Anforderung SS1 bleibt bis zur internen Aktivierung von STO bestehen.
8.1.2 Erweiterung SLS (Safe Limited Speed)
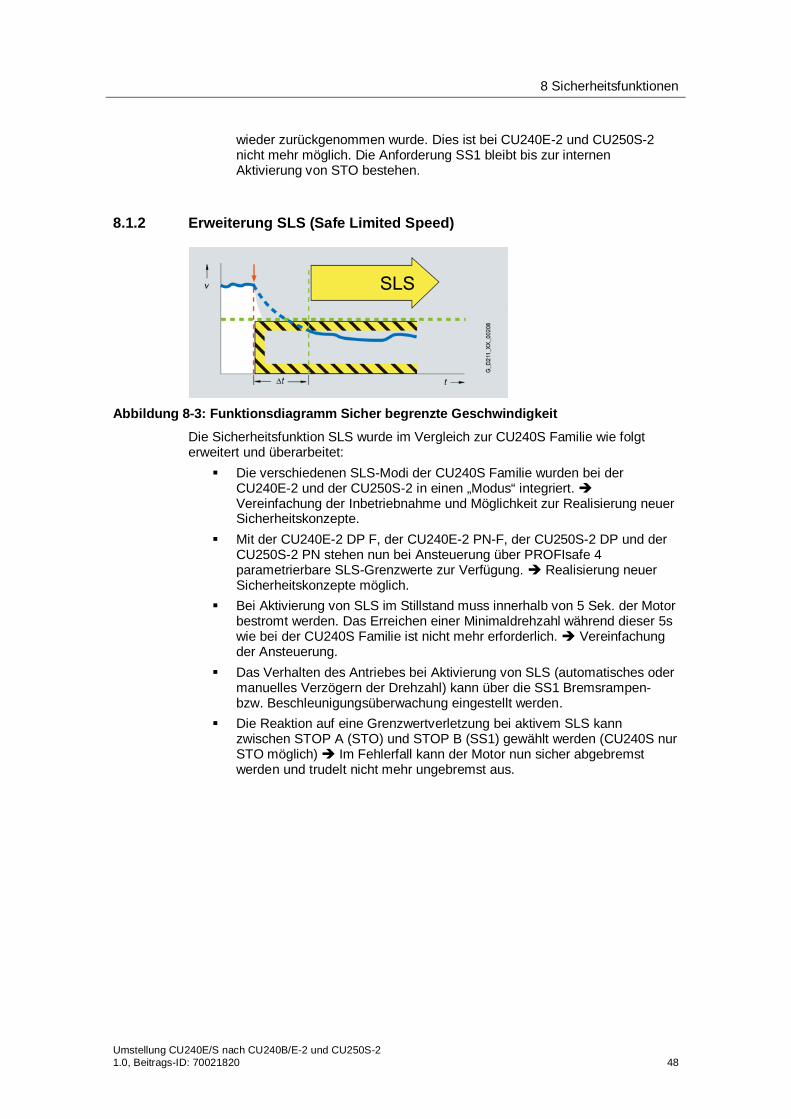
Abbildung 8-3: Funktionsdiagramm Sicher begrenzte Geschwindigkeit
Die Sicherheitsfunktion SLS wurde im Vergleich zur CU240S Familie wie folgt erweitert und überarbeitet:
Die verschiedenen SLS-Modi der CU240S Familie wurden bei der CU240E-2 und der CU250S-2 in einen „Modus“ integriert. Vereinfachung der Inbetriebnahme und Möglichkeit zur Realisierung neuer Sicherheitskonzepte.
Mit der CU240E-2 DP F, der CU240E-2 PN-F, der CU250S-2 DP und der CU250S-2 PN stehen nun bei Ansteuerung über PROFIsafe 4 parametrierbare SLS-Grenzwerte zur Verfügung. Realisierung neuer Sicherheitskonzepte möglich.
Bei Aktivierung von SLS im Stillstand muss innerhalb von 5 Sek. der Motor bestromt werden. Das Erreichen einer Minimaldrehzahl während dieser 5s wie bei der CU240S Familie ist nicht mehr erforderlich. Vereinfachung der Ansteuerung.
Das Verhalten des Antriebes bei Aktivierung von SLS (automatisches oder manuelles Verzögern der Drehzahl) kann über die SS1 Bremsrampen- bzw. Beschleunigungsüberwachung eingestellt werden.
Die Reaktion auf eine Grenzwertverletzung bei aktivem SLS kann zwischen STOP A (STO) und STOP B (SS1) gewählt werden (CU240S nur STO möglich) Im Fehlerfall kann der Motor nun sicher abgebremst werden und trudelt nicht mehr ungebremst aus.
8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 49
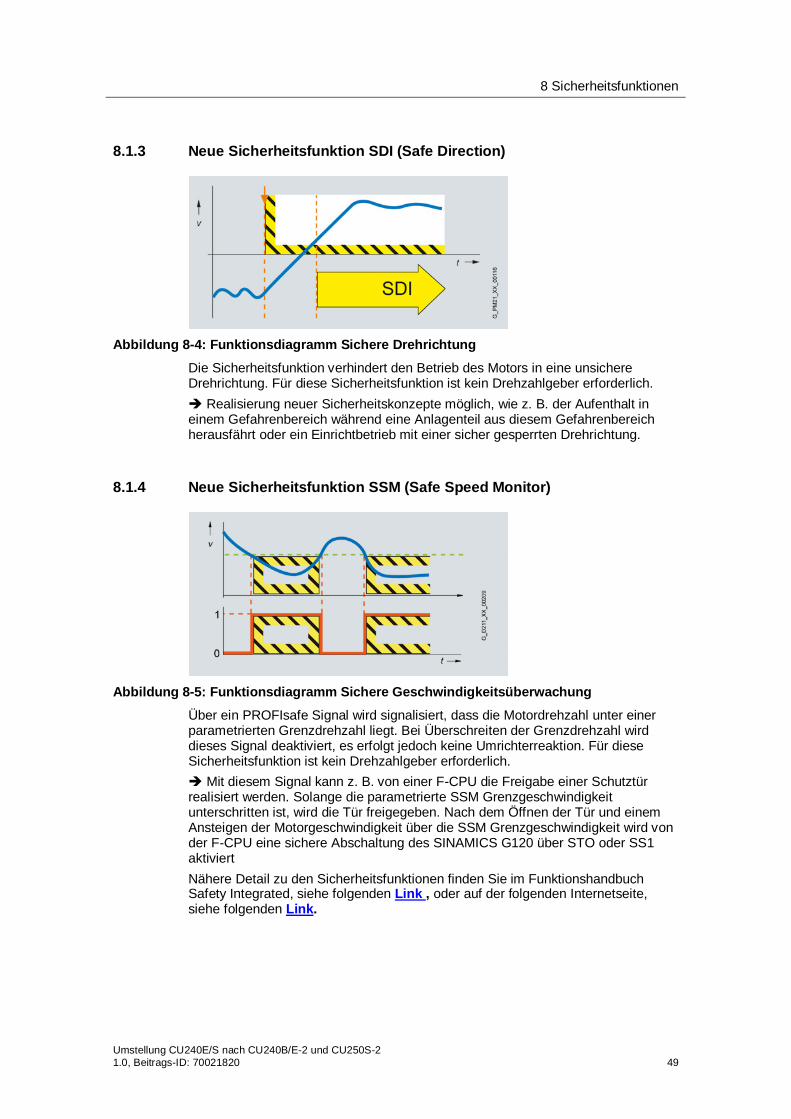
8.1.3 Neue Sicherheitsfunktion SDI (Safe Direction)
Abbildung 8-4: Funktionsdiagramm Sichere Drehrichtung
Die Sicherheitsfunktion verhindert den Betrieb des Motors in eine unsichere Drehrichtung. Für diese Sicherheitsfunktion ist kein Drehzahlgeber erforderlich.
Realisierung neuer Sicherheitskonzepte möglich, wie z. B. der Aufenthalt in einem Gefahrenbereich während eine Anlagenteil aus diesem Gefahrenbereich herausfährt oder ein Einrichtbetrieb mit einer sicher gesperrten Drehrichtung.
8.1.4 Neue Sicherheitsfunktion SSM (Safe Speed Monitor)
Abbildung 8-5: Funktionsdiagramm Sichere Geschwindigkeitsüberwachung
Über ein PROFIsafe Signal wird signalisiert, dass die Motordrehzahl unter einer parametrierten Grenzdrehzahl liegt. Bei Überschreiten der Grenzdrehzahl wird dieses Signal deaktiviert, es erfolgt jedoch keine Umrichterreaktion. Für diese Sicherheitsfunktion ist kein Drehzahlgeber erforderlich.
Mit diesem Signal kann z. B. von einer F-CPU die Freigabe einer Schutztür realisiert werden. Solange die parametrierte SSM Grenzgeschwindigkeit unterschritten ist, wird die Tür freigegeben. Nach dem Öffnen der Tür und einem Ansteigen der Motorgeschwindigkeit über die SSM Grenzgeschwindigkeit wird von der F-CPU eine sichere Abschaltung des SINAMICS G120 über STO oder SS1 aktiviert Nähere Detail zu den Sicherheitsfunktionen finden Sie im Funktionshandbuch Safety Integrated, siehe folgenden Link , oder auf der folgenden Internetseite, siehe folgenden Link.

8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 50
8.2 Einheitliche STARTER Parametriermasken
Die STARTER Parametriermasken für die beschriebenen Sicherheitsfunktionen des SINAMICS G120 sind nun einheitlich zu den Parametriermasken des SINAMICS S110 und S120 gestaltet.
Einarbeitung bei Umstellung auf andere SINAMICS Umrichter entfällt
8.3 Vereinfachung der Parametrierung
Wie bei SINAMICS S110 und S120 erfolgt die Parametrierung des SINAMICS G120 nun einkanalig und wird erst am Ende der IBS auf Tastendruck für den zweiten Kanal dupliziert. Es ist somit nicht mehr erforderlich, die Safety Parameter zweikanalig einzugeben (z.B. Hz und kHz). Ebenso ist es nicht mehr erforderlich, die Checksumme zu bestätigen.
Vereinfachung der Inbetriebnahme und Vermeidung von Fehlparametrierungen
8.4 Offline Safety Parametrierung
Wie bei SINAMICS S110 und S120 ist eine Parametrierung der Safety Funktionen beim SINAMICS G120 nun auch Offline möglich.
Safety Parametrierung kann bereits im Büro vorbereitet werden.
8.5 Abnahmeprotokoll
Mit Hilfe der Parametriersoftware STARTER kann ein Abnahmeprotokoll der Sicherheitsfunktionen generiert werden, in dem automatisch alle relevanten Parameterwerte eingetragen werden
Zu finden im STARTER unter dem Antriebsgerät im Ordner Dokumentation Der Abnahmetext wird mit einer skriptbasierenden Applikation unterstützt, siehe Link.
8.6 Änderung der Bezugsgröße
Die Geschwindigkeitsbezogenen Safety Werte beziehen sich nicht mehr auf Hz sondern auf 1/min. Zusätzlich kann ein Getriebefaktor parametriert werden.
Eine Umrechnung zwischen der Parametrierung und der resultierenden Motordrehzahl ist somit nicht mehr erforderlich.
8.7 Gruppenantriebe
Die Sicherheitsfunktionen STO, SS1, SLS, SDI und SSM können in Verbindung mit Gruppenantrieben (Betrieb von mehr als ein Motor an einem Umrichter) genutzt werden.
8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 51
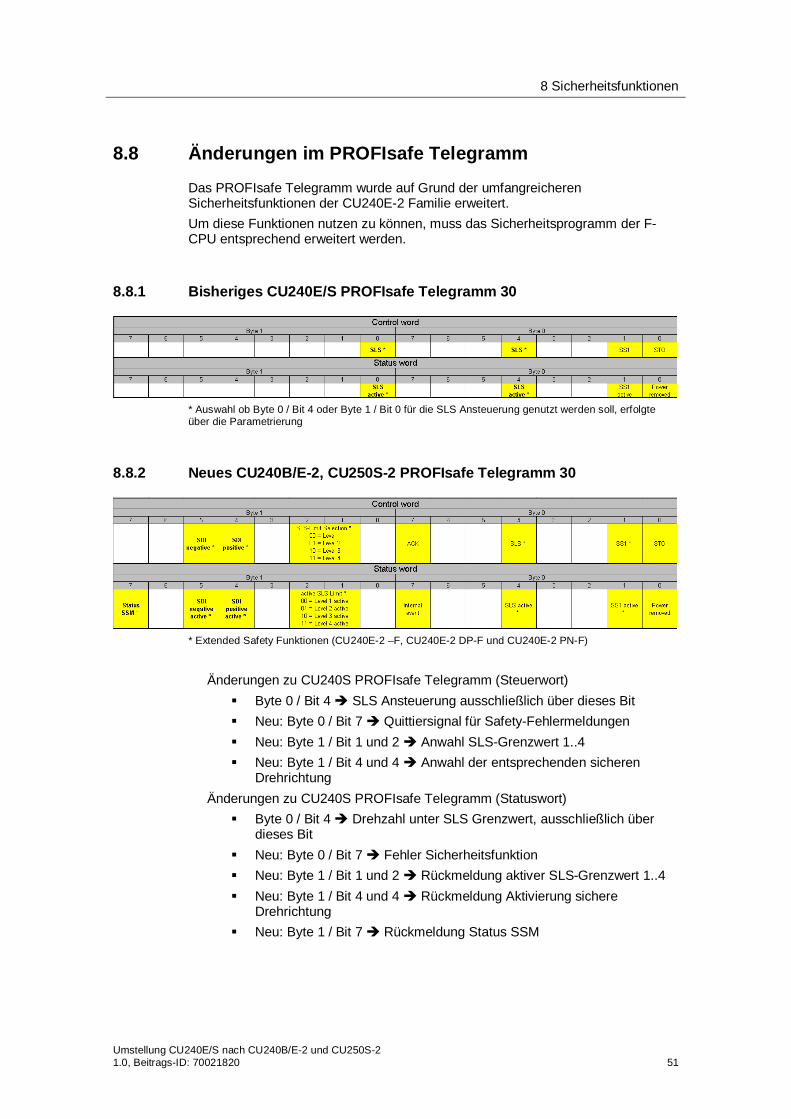
8.8 Änderungen im PROFIsafe Telegramm
Das PROFIsafe Telegramm wurde auf Grund der umfangreicheren Sicherheitsfunktionen der CU240E-2 Familie erweitert. Um diese Funktionen nutzen zu können, muss das Sicherheitsprogramm der F-CPU entsprechend erweitert werden.
8.8.1 Bisheriges CU240E/S PROFIsafe Telegramm 30
* Auswahl ob Byte 0 / Bit 4 oder Byte 1 / Bit 0 für die SLS Ansteuerung genutzt werden soll, erfolgte über die Parametrierung
8.8.2 Neues CU240B/E-2, CU250S-2 PROFIsafe Telegramm 30
* Extended Safety Funktionen (CU240E-2 –F, CU240E-2 DP-F und CU240E-2 PN-F)
Änderungen zu CU240S PROFIsafe Telegramm (Steuerwort)
Byte 0 / Bit 4 SLS Ansteuerung ausschließlich über dieses Bit Neu: Byte 0 / Bit 7 Quittiersignal für Safety-Fehlermeldungen Neu: Byte 1 / Bit 1 und 2 Anwahl SLS-Grenzwert 1..4 Neu: Byte 1 / Bit 4 und 4 Anwahl der entsprechenden sicheren
Drehrichtung Änderungen zu CU240S PROFIsafe Telegramm (Statuswort)
Byte 0 / Bit 4 Drehzahl unter SLS Grenzwert, ausschließlich über dieses Bit
Neu: Byte 0 / Bit 7 Fehler Sicherheitsfunktion Neu: Byte 1 / Bit 1 und 2 Rückmeldung aktiver SLS-Grenzwert 1..4 Neu: Byte 1 / Bit 4 und 4 Rückmeldung Aktivierung sichere
Drehrichtung Neu: Byte 1 / Bit 7 Rückmeldung Status SSM

8 Sicherheitsfunktionen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 52
8.8.3 Neues CU240B/E-2, CU250S-2 PROFIsafe Telegramm 900
* Extended Safety Funktionen (CU240E-2 –F, CU240E-2 DP-F und CU240E-2 PN-F)
Das PROFIsafe Telegramm 900 unterscheidet sich zum PROFIsafe Telegramm 30 dahingehend, dass bei diesem Telegramm der Status der fehlersicheren digitalen Eingänge mit übertragen wird (Byte 3, Bit 0…2)
8.9 Status der F-DI über PROFIsafe übertragen Neue Funktion Bei Nutzung von PROFIsafe kann bei der CU240E-2 DP-F, der CU240E-2 PN-F, der CU250S-2 DP und der CU250S-2 PN der Status der F-DIs fehlersicher an die F-CPU übertragen werden, und steht dieser somit als dezentrale F-Peripherie zur Verfügung.
9 Antriebsfehlermeldungen
Umstellung CU240E/S nach CU240B/E-2 und CU250S-2 1.0, Beitrags-ID: 70021820 53
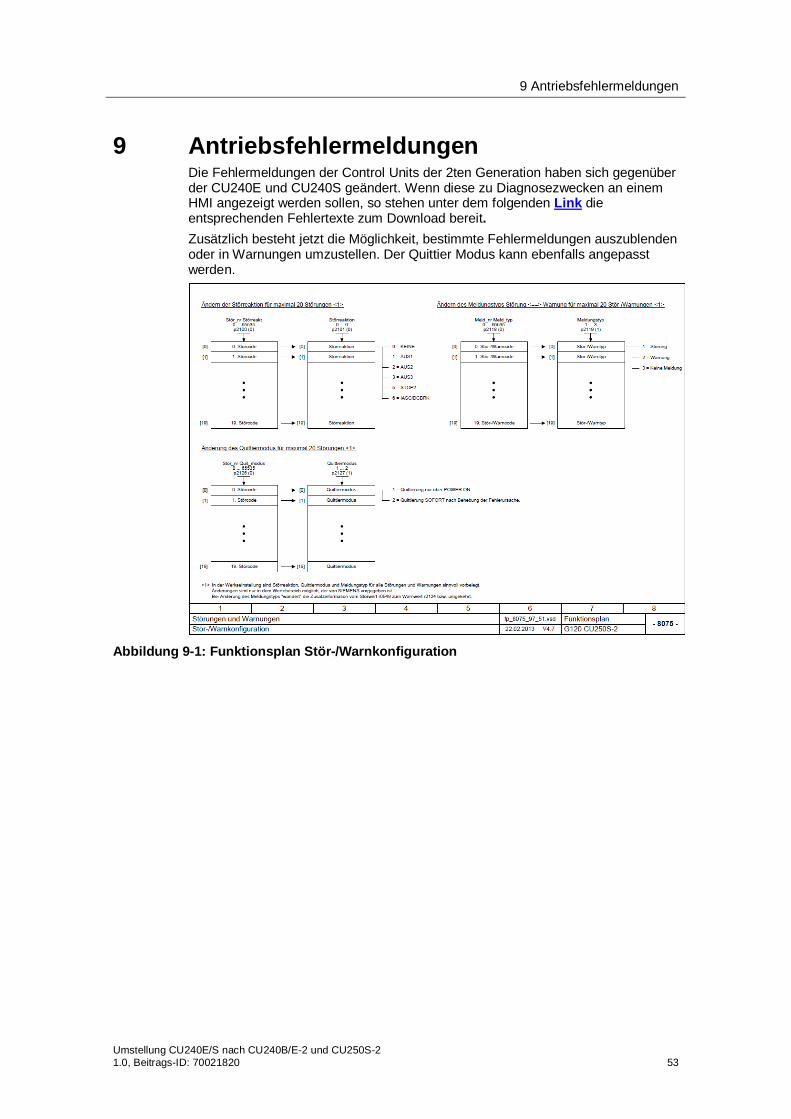
9 Antriebsfehlermeldungen Die Fehlermeldungen der Control Units der 2ten Generation haben sich gegenüber der CU240E und CU240S geändert. Wenn diese zu Diagnosezwecken an einem HMI angezeigt werden sollen, so stehen unter dem folgenden Link die entsprechenden Fehlertexte zum Download bereit. Zusätzlich besteht jetzt die Möglichkeit, bestimmte Fehlermeldungen auszublenden oder in Warnungen umzustellen. Der Quittier Modus kann ebenfalls angepasst werden.
Abbildung 9-1: Funktionsplan Stör-/Warnkonfiguration


















