安川電機 - toshiba-sol.co.jp · という5つ目の視点からe-bom(製品構成管理)とプロジェクト管 理を柱としたpdmパッケージの導入を決めた。
������� � ����
Spring 2010Spring 2010 No. 290No. 290������ ��� はお客様と安川電機を結ぶ��情報誌です。
特集
p 2
p 12
展示会�����
技術コラム
「・・・の違い」シリーズ 非公開ネットワークとオープンネットワークの違いは?
「安川電機 現在の技術」 アンローダ用センサレス振れ止め制御
新製品・新技術 p 6
この製品のここに注目 p 10
パネコンでも、オープンネットワークに接続可能! ・・・・・・ マシンコントローラ MP2000シリーズ
パネル一体形マシンコントローラMP2500の高い拡張性
水、粉じん、油のある環境でも安心! ・・・・・・ 安川インバータ V1000シリーズ
小形ベクトル制御インバータ V1000シリーズの全閉防水形
p 9
p 14
陸上部ニュース
p 15 コラム
トピックス
社会貢献 「������未来クラブ」の活動
器用で素早い、新世代ロボットに新ラインアップ
小形双腕ロボット MOTOMAN-SDA5D
移動ロボットを市場投入、サービス用途も視野に
自律走行可能な移動ロボット RoboPorter(ロボポータ)
ピッキング・パッキング・パレタイジングのトータルソリューション
小物製品搬送用ロボット MOTOMAN-MPK/MPL
当社初! �����~�����の大容量インバータをリリース 安川インバータ A1000 ����級を機種拡充
オープンなセンサレベルネットワーク ������� に対応可能
マシンコントローラ MP2000用 �������マスタモジュール
��!国際ロボット展
システムコントロールフェア(�") ��!
「ロボットワールド安川電機」が登場
「QMETドライブ」を 第#回 �� $���� で��
当社オフィシャルサイトに新コンテンツ
「ロボットワールド安川電機」が登場
��・%��用モータドライブシステム
「QMETドライブ」を 第#回 �� $���� で��
リーズを機種拡充 機種をラインアップし、可搬質量#��&~'��&までシリーズ化
真空ロボット SEMISTAR-Vシリーズを機種拡充
� ������� ���� � ��� ������� ���� � ���
当社は鉄鋼プラントや水処理プラントなどの
設備に応じたトータル的なシステムエンジニア
リングを行っています。設備の計画段階から
プロジェクトに参画し、技術提案から基本設計、
製造、据付工事・試運転、アフターサービスまで
設備のライフサイクルを通してサポートを行い、
お客様から高い信頼と評価をいただいています。
今回は当社が提案するいくつかのシステム
事例を紹介します。
鉄鋼 プラント
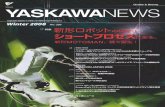
鉄鋼プラントにおいて、当社は国内外の高炉設備、連続鋳造設備、圧延、プロセスラインなど各種設備
に最適な制御システムを提供し、高い信頼性による安定した連続操業に貢献しています。
また、当社のドライブ技術をいかし、各鉄鋼設備の省エネ、���削減にも積極的に取り組んでいます。
安定した連続操業と設備の省エネルギーに貢献します。
アンローダ
岸壁において鉄鉱石や石炭など
バラ積みの貨物を陸揚げします。
直接高炉に入れられない
細かな鉄鉱石を焼き固め、
大きな塊を作ります。
石炭を蒸し焼きにして
コークスを作ります。
銑鉄を精錬して
鋼を作ります。
蒸し焼きしたコークスを
窒素で冷やします。
また、回収した熱をボイラで
水蒸気にし、発電所へ送ります。
鉄鉱石、コークスを層状に装入して、
千数百度の熱風を吹き込むことで、
鉄鉱石を溶かし銑鉄を作ります。
溶鋼を鋳型で鋳込んでスラブ、
ブルームなどの鋼塊を作ります。
コイルになった板を
冷間で圧延して
更に薄い板を作ります。
鍍金、焼鈍、コーディングなど
鋼板の処理を行います。
コイルなどの
自動運搬を行います。
アンローダで荷降ろしした原料を
コンベヤで搬送し、鉄鉱石や石炭
など各原料ごとに山を作ります。
また、山から焼結工場やコークス
工場へ原料を搬送します。
原料ヤード 焼結工場
コークス工場
コークス乾式消化
高炉 転炉 連続鋳造 冷間圧延 天井クレーン プロセスライン
スラブを千度程度に過熱、圧延して
薄くて長い板を作ります。
巻き取ってコイル状にします。
熱間圧延
リール ミル
高性能なコントローラと���により構成された���統合システムは快適なオペレーション環境を提供します。 また、二重化ネットワーク、二重化コントローラによりシステムの信頼性を向上させます。
高炉制御���*統合システム
メディアコントローラ ソース セレクタ
VTR
ITV
大形スクリーン
ITVモニタ
情報系���
����������リアルタイムコアネットワーク
制御系���
����������
制御系���
(二重化)
計装��� 高速・大容量 システムコントローラ
CP-3550
高速・ 中・大容量 システムコントローラ CP-317Mエンジニアリング
ワークステーション CP-717
エンジニアリング ワークステーション CP-717
EIC統合プラント オペレータシステム CP-5800
ヒューマンマシン インタフェース
CP-519
最適なシステムエンジニアリングを支える
システム用製品群
統括監視制御
主幹制御
装置制御
���統合プラント オペレータシステム CP-5800
小容量、CP言語 システムコントローラ CP-312
低圧システムインバータ FSDrive-LV1HM(小容量引き出し形)
低圧システムインバータ FSDrive-LV1HS(大容量スリム形)
高圧インバータ FSDrive-MV1S (スーパー省エネ)
高圧マトリクスコンバータ FSDrive-MX1(電源回生付き)
中・大容量、CP言語 システムコントローラ CP-317M
大容量、CP言語 システムコントローラ CP-3550
大容量、���言語対応 システムコントローラ CP-F3000
ヒューマン・マシン インタフェース CP-519
エンジニアリング ワークステーション CP-717
IEC言語対応 エンジニアリング ワークステーション CP-F7000
リール用 モータ
国内高炉のすべて(約�基)に当社のシステムが採用され安定稼働しています。
高性能システムインバータ
��������� !�(低圧)、
���������"!�(高圧)の採用により、あらゆるモータドライブシステムに対応し、設備の高精度、高効率、省エネ運転が可能です。
冷間圧延システム
#��� #���
�����$%&� �&'���� �����(&'��
*システムコントローラCPシリーズ
用途、規模に応じて、拡張性の高いオペレーションと保全性を提供します。
システム用ドライブ装置 FSDriveシリーズ
小容量から大容量まで、あらゆるモータドライブの高効率・省エネ運転を実現します。
New
NewNew
New
世界初
上位 コンピュータ
*: �+�'���'&+ '���+,- ��,��$%���&��� &�. �%/$���,
(電気制御、計装制御、コンピュータ制御)の略です。
注) ��������は(株)富士ゼロックス様の登録商標です。
高圧 マトリクスコンバータ FSDrive-MX1H
ミル用 モータ
低圧 システムインバータ
FSDrive-LV1H
荷積み操作は、センサレスで熟練オペレータ並みに最短時間の自動運転を実現しました。 詳細は本誌/!�の技術コラム 「アンローダ用センサレス振れ止め制御」をご覧ください。
#���
振れ止め制御技術
� ������� ���� � �� ������� ���� � �� �
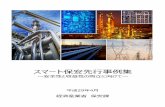
水処理プラントにおいて、設備の高効率運転、省エネ・省資源・水質向上・災害防止に欠かせない
シミュレーション技術の開発はもちろんのこと、当社は監視制御システムにおける広域化・高度化
ネットワークの構築にも積極的に取り組んでいます。
下水
放流水
再生水 利用
生汚泥
余剰汚泥
返送汚泥
反応タンク
活性汚泥活性汚泥 (微生物微生物)活性汚泥 (微生物)
最終沈殿池
凝集沈殿池 ろ過装置 オゾン
水処理装置
塩素混和池 最初沈殿池
空気 消毒剤
汚泥処理施設
高度な運転管理・維持管理をサポートします。
����
広域監視制御システム
広域に分散した遠方施設を���によりリアルタイムに監視制御が可能です。
風力・太陽光ハイブリッド発電システム クリーンエネルギーを活用したエコシステムを 上下水道施設、公園、学校などへ提案しています。
メール受信
ネットワーク機器
��電話
��電話 アクセスポイント
小規模コントローラ
CP-316H
ネットワーク機器
ネットワーク 機器
ネットワーク機器 ���言語対応 システムコントローラ CP-F3000
プリンタ
プリンタ
���サーバ
情報系���
制御系���
情報系���
制御系���
ネットワーク 機器
イントラネット インターネット
��電話 ネットワーク カメラ
���言語対応 システムコントローラ CP-F3000
リアルタイムコアネットワーク
管理事務所・自宅
小形ポンプ場
水処理 プラント
下水道施設
河川や海に流入する雨水や汚水を
浄化することで、水質汚染を防止したり、再生処理水
としても活用しています。
スクリーン 沈砂池
雨水排水機場
大雨時、支流河川を堰き止め、
エンジンポンプにより、本流河川
へ雨水を排水し、洪水を防ぎます。
夾雑物の除去 有機物の除去
浮遊物の除去 脱色、脱臭、殺菌
消毒 支流 本流
行き場がなくなり、溢れそう
になる支流の水をポンプで
本流へ押し出します。
大雨時、本流の水位が上がり、支流への
逆流を防ぐため、河川ゲートを閉めます。
イントラネット インターネット
遠方一括 監視装置
本庁
発電情報表示パネル
発電量 ���削減量
監視モニタ
ネットワーク機器
受電盤 蓄電装置 商用電源
配電盤 制御盤 モータ ポンプ
モータ ファン 制御盤
・光
・����
・����
・����網
・無線 など
普段、支流の水位が高いため、
水は支流から本流に流れ込みます。
風力 発電
太陽光 発電
グリッド制御
ヒューマンマシン インタフェース CP-519
ネットワーク機器
高圧インバータ FSDrive-MV1S
インテリジェント コントロールセンタ
モータ モータ
ヒューマンマシン インタフェース CP-519
支流
河川ゲート 本流
除塵機 ポンプ
エンジン
風車制御盤 (電力変換装置)
パワーコンディショナ (電力変換装置)
注) 風車は(株)ウインドレンズ様の製品です。
広域ネットワークサービス
本庁・役場
大形ポンプ場
���
クライアント 端末
���
クライアント 端末
���クライアント端末 ���クライアント 端末
河川ゲート
本流 支流
お問い合わせ先: システムエンジニアリング事業部 システム工場 技術管理課 ��� ���������� !" ������#$�
����
電気・計装システム
高性能・多機能・高信頼の電気・計装監視制御システムを構築し、プラントの安定、確実な運転を実現します。
下水道施設
� ������� ���� � ��
新 製 品
■お問合せ先: ロボット事業部 事業企画部 �������������� ��������������
�機種をラインアップし、可搬質量���~����までシリーズ化
真空ロボット SEMISTAR-Vシリーズを機種拡充 主な特長 最近の有機EL基板製造業界では基板の大形化が進み、G4
サイズ(730mm×920mm)ガラス基板の装置開発が盛んになり、G6サイズ(1,850mm×1,500mm)ガラス基板の装置開発も予想されています。当社はこのようなニーズに応え、大形ガラス基板
搬送に最適な2種類の真空ロボット「SEMISTAR-V35D-G4」と「SEMISTAR-V40D-G6」を開発し、2009年11月21日より販売開始しました。これにより、SEMISTAR-Vシリーズの可搬質量範囲は10kgから75kgまでとなり、市場対応を強化しています。
・SEMISTAR-V35-G4・最大G4クラスのガラス基板の搬送が可能。 ・放出ガスが極めて少なく、高真空中での搬送が可能。 ・高剛性アームにより可搬能力35kg/アームを実現。 ・繰り返し位置決め精度±0.3mmと高精度。 ・長短2機種のストローク(短:2,050mm、長:2,357mm)を用意し、使用状況に応じて選択可能。
・SEMISTAR-V40D-G6・最大G6クラスのガラス基板の搬送が可能。 ・放出ガスが極めて少なく、高真空中での搬送が可能。 ・高剛性アームにより可搬能力40kg/アームを実現。 ・繰り返し位置決め精度±0.5mmと高精度。 ・ロボット本体のアーム部と胴体部を分割可能で、装置への組み付けが容易に。システムの早期立ち上げが可能。 真空ロボット SEMISTAR-V35-G4
パレタイジングロボットMOTOMAN-MPL160
パレタイジングロボット MOTOMAN-MPK2
パレタイジングロボット MOTOMAN-MPK50
ピッキング・パッキング・パレタイジングのトータルソリューション
小物製品搬送用ロボットMOTOMAN-MPK/MPL主な特長 食品・薬品・化粧品などに代表される小物製品の搬送において、
多くの人手が必要とされています。これらの製品単体の箱詰め
(ピッキング)から、輸送単位での箱詰め(パッキング)・箱積み
(パレタイジング)の自動化を実現するために、当社はこのたび、
各工程で必要とされる搬送ロボットMOTOMAN-MPK/MPLを開発し、2009年11月1日より販売開始しました。これによりトータルで物流自動化搬送システムの提供が可能となりました。
・ピッキングロボット MOTOMAN-MPK2(可搬質量2kg) ・食品・薬品・化粧品など清潔性を求められる製品を直接に扱う工程なので、ロボットは汚れが付着しにくい表面形状を採用し、耐洗浄塗装と防水仕様IP67を実現。 ・製品を流すコンペア上にビジョンセンサを取り付けることで、ロボットは無作為に流れてくる製品のピックアップ、搬送中の整列作業を正確に行うことが可能。 ・コンパクト設計で、複数台の設置が容易。天吊りや壁掛けが可能で柔軟なライン構築に貢献。
・パッキングロボット MOTOMAN-MPK50(可搬質量50kg) ・手首軸を大幅に強化し、重量物搬送時の高速整列動作が可能で、パッキング作業を効率化。 ・幅寸法、最小旋回半径はクラス最小を実現し、ラインの高密度配置が可能。
・パレタイジングロボット MOTOMAN-MPL160(可搬質量160kg)
・重量物でありながら、傷つきやすいものや変形しやすいものを持つことが多く、ロボットには柔らかな把持と強い力が求められ、エアー駆動・吸着装置が多く利用される。これらの大容量配管を大口径の中空構造の手首軸に収め、周辺機器やロボットアームとの干渉を回避可能。
・アーム最大到達距離3,159mmとクラス最大を実現。高さ方向への積み上げも容易。
������� ���� �� ��
新 製 品
器用で素早い、新世代ロボットに新ラインアップ
小形双腕ロボット MOTOMAN-SDA5D
主な特長
当社は人間に近い形や動きをし、人が行っていた作業をその
ままロボットに置き換えられる新世代ロボットを、業界初めて
市場投入しました。以来、組立工程、物流プロセスの工程間搬送
において、大変好評をいただいております。 このたび、従来のラインアップ(10kg可搬/アーム、20kg可搬/アーム)に、新たに5kg可搬/アームの双腕ロボットMOTOMAN-SDA5Dを追加し、2009年12月1日より受注開始しました。MOTOMAN-SDA5Dはよりコンパクトな設備レイアウトを実現しているので、小物部品の組立・搬送用途に
ご活用いただけます。
・スリムボディ&スリムアーム 小物部品の組立現場は作業効率を追求するために作業
環境を狭く設計されている。これに対応するために、
ロボットの肩幅を486mm、設置床面積を280mm×280mm(A4用紙サイズの1枚半)とし、ボディをスリム化。 更に、手首部分に直径80mmの新開発の小形アクチュエータを適用し、アームをスリム化。
・器用で素早い動作性能 小物部品の組立工程では、高い精度を伴った細かい作業
が多く器用で素早い動きが必要。それに対応するために、
ロボットの各軸の動作速度を最大54%アップ(当社類似機種比)し、繰り返し位置決め精度も向上。 更にアーム関節機構への工夫で、可動範囲拡大を実現。
移動ロボットを市場投入、サービス用途も視野に
自律走行可能な移動ロボット RoboPorter(ロボポータ)
主な特長
一般の産業用ロボットは、溶接・塗装・組立などの生産ライン
の各工程に設置・固定され、送られてくるワーク(加工対象)に
対して作業を行っています。このたび当社は工程間に移動可能
なロボットRoboPorterを開発し、2009年12月10日より受注を開始しました。今後は、人手不足が深刻化するサービス用途も
視野に入れて事業拡大を図ります。
・空間認知による軌道補正機能 ビジョンセンサによる空間認知と、ロボット本体に記憶
された軌道データを比較し、位置・方向の補正をしながら
正確な軌道上移動を実現。また、レーザ距離センサによる
測長で目的地周辺での精細な位置決めが可能。
・経路計画機能 空間認知により多岐にわたるルート設定が容易で、現在
位置から任意のポイントへの最短軌道を、ロボット自身
が判断可能。また、通信機能を搭載しており、ホストPCによる効率的な運行管理を実現し、複数台運用時の
モニタリングやデッドロック*回避が可能。 *:狭い通路での離合や十字路など軌道が交差する場所で、複数のロボットが接近する時に、お互いが道を譲り合い動けなくなる状態。
・電源管理 バッテリ交換が容易
にできる構造設計で、
ロボットの休止時間
を最小限にし、継続的
な設備稼働が可能。 また、接触式給電装置を準備し(オプション)、ロボット
自身の自動充電により、生産ラインの自動化に貢献。
・安全機能 レーザ距離センサ、光電センサにより障害物及び障害物
の除去状況を検知し、自動的に減速・停止・走行再開可能。
万一障害物と接触があった場合には、接触検知センサで
速やかに減速・停止可能。また、非常停止ボタンを装備し、
駆動モータ主回路電源を強制的に遮断、停止可能。
タッチパネルディスプレイ
荷台
移動部ユニット
レーザ距離 センサ
光電 センサ
接触センサ
ビジョン センサ
移動ロボット RoboPorter
� ������� ���� � ��
新 製 品
当社初! ����~����の大容量インバータをリリース
安川インバータ A1000 400V級を機種拡充
主な特長
オープンなセンサレベルネットワーク ������に対応可能
マシンコントローラ MP2000 用CompoNetマスタモジュール
マシンコントローラMP2000シリーズは、通信用オプションモジュールとして開発されたCompoNetマスタモジュールを採用することで、ODVA(Open DeviceNet Vender Association Inc.の略です)より一般公開されたセンサ&アクチュエータレベルのネットワークであるCompoNetに対応しました。 CompoNetは、1,000点約1msの高速応答で、最大ノード数384台、最大入出力点数2,560点を制御することが可能なネットワークです。また、使用ケーブルには、低コストで汎用性の高い丸形(VCTF)ケーブルと、圧接加工で施工性に優れたフラットケーブルの2種類があり、高速通信・配線性・情報化・コストパフォーマンスに優れたネットワークです。 この対応により、小点数のセンサを多数制御することが可能となり、制御システムの
形態の自由度を高めます。
主な特長
■お問合せ先: インバータ事業部 マーケティング課 ��� ���������� ��� ����������
����
�
��
����
����
(この�容量に関して、�
�年度は見積対応です)
����
���
���
��
�
��
A1000��
����!
従来の大容量スリム インバータ ��
�
��!
体積比
�"ダウン
・小点数のセンサを多数制御することが可能 最大ノード数384台、最大入出力点数2,560点。
・オープンなネットワークなので豊富なスレーブ機器が選択可能 ODVAは仕様を公開しているオープンなネットワークなので多数のメーカー製品を選択可能。
・高い配線性 丸形ケーブルからフラットケーブルへの分岐やリピータ
など用途に合わせて分岐方法を選択可能。
・配線工数の削減可能 フラットケーブル採用によるコネクタ接続で施工時間
を大幅に削減可能。
CompoNetマスタモジュール265IF-01(オプション)
A1000と大容量スリムインバータの体積比
(単位:��!
・大容量でもスリム&コンパクト この容量に対応していた従来
の大容量スリムインバータに
比べ、体積比80%ダウンを実現。 しかも、直流リアクトルを内蔵
しているので、省配線を実現。
・悪環境でも安心使用 従来製品はコンバータや高調波対策として
直流リアクトルなどの周辺機器が必要なので、
悪環境下での設置は困難。A1000はコンバータ回路と直流リアクトルを内蔵し、耐振・
耐ガスなどの耐環境向上仕様も準備している
ので、設置する環境に影響されない。
2008年6月リリース以来、「最先端のモータドライブ技術」、「省エネ・耐環境性」、「コン
パクト設計」などの特長で大好評いただいて
いる安川インバータA1000シリーズは、今回400V級2機種 450kW~630kWの4容量を拡充し、受注開始しました。大容量でもスリム&コンパクトを実現し、耐環境性にも優れています。 機能・操作性においては0.4kW~630kWまで同様です。お客様の最適なシステム構築に向けて、A1000シリーズの新たな可能性が広がります。
左: A1000 �����! 右: A1000����!
■ お問い合わせ先: モーションコントロール事業部 営業企画部 マーケティング課 ���# ��!��������� ���# ��!���������
������� ���� �� �� �
展示会 展示会 ReportReport
2009国際ロボット展 ���国際ロボット展が去る
月�日から�日までの�日間、東京ビックサイト東ホールにおいて盛大に開催されました。
出展者数は�社と��機関・団体、総来場者数は�万名といずれ
も前回並みだったものの、当社は他社を圧倒する規模と展示内容
で多くのお客様のご注目を集め、過去最高の受付数(����名)と
集客率(��)となり、大変好評をいただきました。
出展社中最大ブーススペースを誇る当社は、「MOTOMANが導くモノづくり新時代」をテーマに、「人にやさしい」「環境」をコン
セプトにした新たなモノづくりの提案
を行いました。ハイブリッド車や電気
自動車などのエコカー製造や、環境・
エネルギー分野での太陽電池製造など、
これからのエコ社会を支える産業の新た
なモノづくりに最適なロボットソリュー
ションの実演を行いました。
具体的には、
・MOTOMAN-SDAシリーズと自走搬送台車による工程間搬送を含めた
組立てデモを中心に、太陽光パネル
搬送・パネルモジュール組立て
・自動車の新素材・新骨格に対する
アーク溶接・レーザー溶接・スポット
溶接・塗装
・小物製品の高速ピッキング・パッキング・パレタイズ
・双腕ロボットとホイストクレーンの組合せによる重量物搬送
・将来人々の生活支援が期待されるサービスロボット
などの実演で、当社技術総合力の高さを来場者にご覧いただきました。
また、国内外の各種報道機関にも注目していただき、多くの取材
を受け、�������及びMOTOMANの名が日本、世界へと発信されました。当社製品がより多くの事業分野で貢献することにより、
ブランド力を高めていきたいと思います。
システムコントロールフェア(SCF)2009 システムコントロールフェア��������が
月�日から�日
までの�日間、東京ビッグサイト西ホールにて開催されました。
当社は「���� ��� ��!"#$� %&�' ������� ~人と環境に
やさしい新提案~」をテーマに、��サーボドライブΣ-V INDEXERモジュールやエンコーダレス位置決めインバータドライブC1000などの新製品を中心とした展示を行いました。メインステージでは
Σ-Vサーボや1000シリーズインバータの製品と環境エネルギーへの取り組み
を紹介し、多くのお客様にお集まり
いただきました。
また、ギヤ一体形アクチュエータや
ピストンモーションアクチュエータなど
のリリース前の製品も、多くのお客様
の関心を引くところとなりました。
��()�*� +���� ���で好評
いただいたコントローラ体験コーナを
拡充し、サーボ(INDEXERモジュール)とインバータ(DriveWorksEZ)を追加し多くのお客様に各製品を体験
いただきました。
なお、実際のデモ機の動きを動画で
ご覧いただける「バーチャル展示会」を当社技術情報サイト「�,
メカサイト」にて公開しています。今回ブースをご覧になられなかった
方は、ぜひ覗いてみてください。
今後とも各種展示会やウェブを通して当社の製品/ソリューション
を紹介していきますのでご期待ください。
(�,メカサイト: '��-.//%%%�,!�$'"���#&$�$�!/)
MOTOMAN-SDAによる組立てデモ
C1000による エンコーダレス位置決めデモ
当社出展ブース(メインステージ)
当社出展ブース(メインステージ)
コントローラ 体験コーナ
小物製品の高速搬送デモ
■ お問い合わせ先: モーションコントロール事業部 営業推進課 0�1. ������,���� ��2. ������,���
■お問合せ先: ロボット事業部 事業企画部 0�3��������,���� �"4�������,���
�� ������� ��� �� ��
パネル一体形マシンコントローラMP2500の高い拡張性 パネコンでも、オープンネットワークに接続可能!
MP2500シリーズ マシンコントローラ
機械装置のシステムネットワーク制御において、パネルコン
ピュータとコントローラの融合により、システムの機能集約、小形化、
情報のビジュアル化が実現でき、多くの装置に採用されています。
しかし、通常のパネルコンピュータは���の拡張性がなく、各種
オープンネットワークに接続できないという課題が残りました。
当社のパネル一体形マシンコントローラMP2500シリーズは、そのような課題をクリアしました。一体形MP2500MEは、専用のラック拡張用I/Fを用いて、最大�個まで拡張ラックが接続でき、
MP2000シリーズのすべてのオプションモジュールを装着、使用可能です。また、分離形のMP2500Bは�スロットオプションが基本ユニットに標準装備し、拡張ラックを使用すると、MP2500MEと同様の拡張ラック構成で使用可能です。
今回は、通常のパネルコンピュータでは実現できない、
MP2500シリーズの���や通信対応の高い拡張性に焦点を当てて紹介します。
MP2500のラック拡張よるモジュール拡張
MP2500へのオプションモジュールの適用
MP2500(パネル一体形、���� ����)MP2500(パネル一体形、�� ����)
MP2500(パネル分離形、���� ����) MP2500(パネル分離形、���� ����)
モーションモジュール��枚着装時、最大で���軸までの
制御が可能。
各種オープンネットワークへの対応が可能:
�������、���������、��� �!"�、##$%��&(スレーブ)、
����������、 '$���。システムに最適な入出力モジュール(���)が選択可能:
デジタル入出力、アナログ入出力、パルス入出力など。
オプションモジュール着装により、
以下のシステム拡張を実現。
■ お問い合わせ先: モーションコントロール事業部 営業企画部 マーケティング課 (') *��+���$�,�� �-) *��+���$���
MP2500B-OP/MP2500MB-OPMP2500ME
MP2000シリーズオプションモジュール
MP2000シリーズ オプションモジュール
拡張ラック*
拡張ラック
*: ラック拡張により�~��枚のオプションモジュール の着装が可能
�スロットオプション*
*: ラック拡張モジュールにより、MP2500MEと同様の拡張 ラック構成での使用が可能。
-��� ケーブル
-��� ケーブル
-��� ケーブル
最大�ラック接続可能
■お問合せ先: インバータ事業部 マーケティング課 ��� ��������� �� ����������
���� ���� ��� ��� ��
水、粉じん、油のある環境でも安心!
小形ベクトル制御インバータ V1000シリーズの全閉防水形 「スゴ! 簡単! 世界最小!」、小形インバータで電流ベクトル制御
を初めて採用した安川インバータ V1000シリーズに、全閉防水形があるのをご存じですか? 全閉防水形インバータ(�����
���*������タイプ)は設置場所を選ばず、水や粉じん、油の
多い厳しい環境でもご使用いただけます。
機能、性能、操作性は、もちろんV1000シリーズと同一仕様で、電流ベクトル制御の採用によって、誘導モータはもちろん、同期
モータも駆動可能です。
更に、使いやすさにもこだわりました。オペレータの押しボタン
が大きいので操作しやすく、インバータの表面から直接操作可能で、
素早くセットアップできます。また、制御盤に収納する必要がない
ので、分散設置が可能です。更に、オプションユニットで������ 、
!"#�$"�"%、�&'��()��!�、���*"�の通信に対応できます。
V1000シリーズ 安川インバータ
(V1000 NEMA4X/IP66タイプ)
その他の用途
規格名
保護の程度
���
�
���
����
保護の内容
・粉じんが内部に侵入しない。
・いかなる方向からの強い
水の直接噴流によっても、
水が浸入しない。
(注)水中でのご使用は不可。
����級
���級
(三相電源用)
(単相電源用)
(三相電源用)
���~��� �
���~ ��� �
���~��� �
・塩酸(濃度��+以下)
・硫酸(濃度��+以下)
・硝酸(濃度��+以下)
・アンモニア水
・食塩
・メタノール
・エタノール
・シリコーン系油
・水グリコール系油
・植物油
・鉱油
・大豆油
規格の種類と内容
���������タイプ
耐性薬品及び溶剤
(注)�. この他の耐性薬品及び溶剤については、ご照会ください。
�� 上記の薬品・溶剤が常時、直接噴射される環境では、インバータを
使用しないでください。インバータが損傷する恐れがあります。
*: �,%���,- �-"$%.�$,- �,�/0,$%/.".1 11�$�,%���の略です。アメリカ電機工業会により標準化された規格です。
食品加工機械 印刷機 木工機械
製茶機 金属工作機械 繊維機械
NEMA 4X(IP66)
コンベヤの用途例
薬品 溶剤
漁港で引き上げされた魚を コンベヤで運びます。(イメージ)
V1000NEMA4X / IP66
������� ���� �� �� � ������� ���� �� ��
産業用途でのネットワークは、「省配線」・「情報化」することを目的に、複数の配線を使用した制御
信号(アナログ・パルス)を通信化することにより、発達してきました。
その中で、「非公開ネットワーク」とは、各デバイスメーカーが自社の機器をネットワークで接続する
ために独自に開発したネットワークを指します。デバイスメーカーが独自に通信規格を決定し、一般に
公開されていないため、他のデバイスメーカーは接続する機器を開発することができません。
一方、通信の規格を公開(オープン化)し、異なるデバイスメーカーの機器同士が相互に接続可能な
ネットワークは、オープンネットワークと言います。通信をオープン化し標準化することで、ユーザーに
とってのメリットは、デバイスメーカーに拘わらず、デザインや機能、価格などを判断基準にして任意の
機器を選択して使用できるところがあります。デバイスメーカーにとっても、自社デバイスを規格に準拠
させることにより、汎用デバイスとしてより広い市場に適用できるメリットがあります。
現在、制御システムの流れは、接続機器や制御項目の制約が多い方式から、マルチベンダ採用可能な、
オープンネットワーク方式へ移行する動きが出ています。
非公開ネットワークと オープンネットワークの違いは?
アンローダ用 センサレス振れ止め制御 クレーンは、様々な形態の製品や原材料などを移送する手段
として産業界に不可欠な設備です。工場内の天井クレーン、
ビルやダムの建設クレーン、港湾のアンローダやコンテナ
クレーンなど多種多様です。これらのクレーンには古くから
自動化のニーズがあり、コンテナクレーンや天井クレーンなど
一部では自動化が進んでいます。
ここでは、アンローダを自動化するためのセンサレス振れ止め
制御について紹介します。
「・・の違い」 シリーズ (第�回)
安川電機 現在の技術 (第�回)
アンローダについて 振れ止め制御の課題
センサレス振れ止め制御の開発
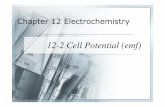
アンローダは、船から鉱石や石炭などのばら荷を
陸揚げするクレーンの一種で、このうち橋形アンローダ
は、グラブバケットの支持・開閉、トロリの横行、クレーン
ガーダを昇降する起伏、脚の走行の�軸で構成されて
います。
その動作は、つり具であるグラブバケットで荷を
つかみ、搬送高さまで巻き上げながら、トロリでホッパ上
まで移動して荷卸しします。荷卸し後は、再び荷つかみ
位置まで戻り、同様の動作を繰り返します。グラブ
バケットは、ワイヤロープで支持されているため、トロリ
の横行動作で振れが発生します。
当社はこれまで、初期振れや風の影響による残留振れ
の発生を防止した振れ止め制御を開発し、天井クレーン
やコンテナクレーンの無人制御システムを実現して
きました。この振れ止め制御は、振れ角センサを用いた
クローズドループ制御方式(振れ角ダンピング制御
方式と呼ぶ)のため、安定した制御が可能です。
コンテナクレーンの場合は、コンテナ専用のつり具
(スプレッダ)に振れ角センサを取付けることができます。
しかし、アンローダではグラブバケットをつり具とし、
支持・開閉ロープの繰り出し量の差を利用して荷つかみ
動作を行っており、荷つかみ時の衝撃、振動、粉じんなど
の環境面からつり具部への振れ角センサの取付けは
困難なため、外乱の影響を受けやすいオープンループ
方式での振れ止め制御が主流となっていました。
当社は、振れ角ダンピング制御方式の技術を活用し、
振れ角センサを使わないクローズドループ方式のアン
ローダ用センサレス振れ止め制御を開発しました。
従来の振れ角ダンピング制御方式では、つり具の
振れを振れ角センサで検出し、それにダンピング係数
を乗じたものを速度補正信号としてベースの速度信号
から減ずることにより振れ止め制御を行っていました。
センサレス振れ止め制御は、制御ブロックに示すように、
負荷トルクオブザーバで振れ角を推定します。すなわち、
振れ角センサが検出する振れ角の代わりに負荷トルク
オブザーバで推定演算した振れ角に置き換えた振れ
止め制御方式です。
センサレス振れ止め制御では、ホッパ上でトロリを
精度よく停止させるのではなく、熟練オペレータの操作
と同様、トロリを移動させながらホッパ上でのグラブ
バケットの振れを抑制できるため、荷こぼれなくホッパ
に荷卸しすることができます。
トロリ
ホッパ
脚
船
グラブ バケット
クレーン ガーダ
荷つかみ
巻上げ
ホッパへ荷卸し
荷つかみ位置へ グラブバケット移動
横行速度 振れ止め 制御部
速度 制御部
速度帰還
トルク指令
センサレス振れ止め制御ブロック 橋形アンローダ動作
負荷トルク オプザーバ
指令
+ +
+ -
�社
�社 �社
�社 �社 �社
���
コントローラ
センサ インバータ サーボ ���
�社 �社 �社
センサ インバータ サーボ ���
�社
コントローラ
�社
�社 �社
�社
���
コントローラ コントローラ
! !
・サーボはB社のほうを採用したいのに、つながらない・・・
・このセンサが欲しいのに、A社にはない・・・
・コストダウンしたいけど、
A社しかつながらないので、
値段交渉がむずかしい・・・
・サーボはE社がよいな! → O.K.
・このD社のセンサが欲しい! → O.K.
・コストダウンしたいから、
B社とC社をコンペしようか。。 → O.K.
���を�社にすると、 ���・サーボも�社製でないとつながらない。
���を�社にしても、 ���・サーボなどはお好きな製品を選択できる。
海行き 陸行き
E
B
非公開ネットワーク オープンネットワーク
インバータ部
�� ������� ��� �� ��
ト ピ ッ ク ス
当社オフィシャルサイトに新コンテンツ
「ロボットワールド安川電機」が登場
�・��用モータドライブシステム
「QMETドライブ」を 第�回� �����で��
「ロボットワールド安川電機」トップページ
■お問合せ先: 東京総務部 広報グループ ��� ������������ ��� ������������
� !"##$$$�%�&'�$��(�)!#
安川電機 オフィシャルサイト トップページ
ロボットワールド 安川電機 検 索
入り口は こちら
���年��月、当社のオフィシャルサイトにロボットについて楽しく
学べる新コンテンツ「ロボットワールド 安川電機」を公開しました。
このコンテンツは、次世代ロボットSmartPal V(スマートパルファイブ)とSmartGuide(スマートガイド)案内役になり、当社産業用ロボットMOTOMANについてわかりやすく解説していきます。
子どもから大人まで楽しめる内容になっていますので、ぜひ
お子さんと一緒にご家族みなさんでご覧ください。
当社は産業用モータドライブのパイオニアとして、長年培って
きたモータ技術・インバータ技術をいかし、電気自動車(�)・
ハイブリッド電気自動車(��)に最適なモータドライブシステム
「QMET*(クメット)ドライブ」を開発しました。 「QMETドライブ」とは、当社独自の電子式巻線切替方式により低速から高速まで必要なトルクの確保と高効率を両立し、スムーズ
な加減速を実現した自動車用モータドライブシステムです。
今年�月��日(水)~��(金)の�日間、東京ビッグサイトで開催
された「第�回�・�� 駆動システム技術展(� �����)」に
出展し、自動車業界へ向けて新事業をPRしました。
会場では「QMETドライブ」のシミュレータを展示し、多くのお客様にその加減速性能を実際に体感していただきました。
当社は産業で培ったメカトロニクス技術をベースに、今後予想
される電気自動車の普及に向け、取り組みを更に加速させます。
*: *+��,-,�. /�01� ���( 21,( �2�1&3,&&,1の略です。
MOTOMANは どんなところで 働いているのかな?
MOTOMANが 動く仕組みを みてみよう!
MOTOMANは どのようにして 作られるんだろう?
人とロボットが 暮らす未来って どうなるのかな?
QMETドライブシミュレータ インバータ モータ
�������� 詳細情報は �����
����
����������������������������������� で公開しています。
��� ��� ���� ��� !"# $%
◆!##"年$#月~!#$#年$月の主な戦績
日 程 大 会 名 実 績
九州一周駅伝
九州実業団毎日駅伝
福岡国際マラソン
防府読売マラソン
ニューイヤー駅伝
(全日本実業団駅伝)
朝日駅伝
&名の選手が福岡県代表として出場し、全員区間賞を獲得。
平野護選手が'回区間賞で大会()*獲得
アンカー勝負を制し、総合力で逆転優勝。
下森直選手が日本人トップの"位。
$#��の部に&名が出場し、上位+位までを独占。
!+位。小畑昌之選手が!区で日本人トップの区間成績。
+区飛松誠選手も区間,位の好走。
'位。
$#月
$$月
$$月
$!月
$!月
$月
$月
!"日
+日
!,日
.日
!#日
$日
$$日
コ ラ ム
社会貢献の取り組み
■お問合せ先: 人事総務部 総務・法務グループ /�� #",�.'%�&$ 0� #",�.,$�&&,+
「�������未来クラブ」の活動
九州実業団毎日駅伝で優勝のテープを切る中野良平選手(左) 福岡国際マラソンでゴールする下森直選手(右)
当社の社会貢献活動の一環である、��� ���未来クラブの
活動について、その一部をご紹介します。��� ���未来クラブ
では、当社の本社がある北九州市の海岸清掃ボランティア活動を
実施しました。この活動には北九州近郊事業所のグループ会社
従業員及びその家族が参加し、秋晴れに恵まれた休日の午前中に
約%#名のおとなとこどもが集まり市内の海水浴場を清掃しました。
活動を通じて、海岸をきれいにすることはもちろんのこと、
こどもたちに積極的に参加
してもらうことで「ゴミを
捨てる人」ではなく「ゴミを
拾う人」になって欲しいと
いう願いが込められています。
また、参加者の中には、
市内に住みながらはじめて
市内の海水浴場に訪れた
人がいました。きれいに
なった砂浜を眺めながら「家族でまた来よう」と言う方もいて、
地域の環境に関心を持つ市内再発見の機会でもありました。
��� ���未来クラブでは、趣旨に賛同した従業員の給与の
一部を継続して拠出してもらい、集まった資金を「青少年の健全
育成」「医療・福祉」「環境保護・緑化運動」に役立てていただいて
います。寄付活動だけではなく、具体的なボランティア活動を
通じ新たな企業文化を創造してまいります。
~
選手の声: ここ一番に結果を残す、真の実力者になれるように頑張ります。今後も
応援お願いします。 中野 良平
駅伝シーズンが終わりました。前半は好調でしたが、後半
は残念ながら失速してしまいました。
駅伝前半戦は九州一周駅伝から始まりました。当社から&名
の選手が出場し、全員区間賞を獲得。平野護選手は'回走り
すべて区間賞、うち$回は区間新記録で大会()*に輝くなど、
当社の選手が福岡県の'連覇に大きく貢献しました。
ニューイヤー駅伝の九州地区予選となる九州実業団毎日駅伝
では、旭化成、トヨタ自動車九州との三つ巴の争いとなりました。
展開としては、$区で旭化成から大きく出遅れ、!・,区で徐々に
追い上げ、'・%区で追いつき並走。.区で先頭に立ち、+区アンカー
で旭化成とトヨタ自動車九州にいったん追いつかれるも、絶妙の
ロングスパートで勝利をものにしました。,年ぶり!度目の優勝です。
後半戦となる本番のニューイヤー駅伝では、選手の調子を
合わせることができずベストメンバが組めませんでした。$・!
区までは好調だったのですが、,区以降で失速し、挽回の機会が
ないままに!+位の結果に終わりました。
続く成人の日恒例の朝日駅伝でも故障者が多数出てしまい、
ベストメンバが組めず、'位に沈みました。
一方、個人戦に目を向けると、下森直選手が今シーズン福岡
国際マラソン一本に絞り込んで取り組み、見事9位の日本人トップ
でゴールすることができました。過去7回走ったマラソンの練習
内容などを反省し、地道な練習を積み重ねた結果だけに、当社
としても感極まるものがありました。
駅伝シーズンが終わり、これからはマラソン、ロードレースなどの
個人戦へと舞台を移していきます。次号では、これらの大会結果
のうれしい報告ができればと思い、選手・スタッフ一同精進して
まいります。
発行 平成��年�月�日/発行所 株式会社 安川電機 東京都港区海岸������ ニューピア竹芝サウスタワー�階 〒�������� �(��)���������/編集責任者 石倉 守人/制作 安川オビアス株式会社
「����年度日本産業広告賞」で第�席を受賞しました。 このたび、日刊工業新聞社主催の「����年度日本産業広告賞」において、「ECOiPMドライブ」の広告が 雑誌部門第�部第�席を受賞しました。(下記広告は、受賞作品をリサイズしたものです。) ●企画:(株)安川電機 営業統括本部業務部/安川オビアス(株) ●デザイン・制作:安川オビアス(株) ●掲載誌:「機械設計」(日刊工業新聞社発行)����年�月号