Stellantriebs-Steuerung AUMATIC AC 01.2/ACExC 01.2 Profibus DP · 4.3. Profibus DP-V1 Dienste 40...
92
Stellantriebs-Steuerung AUMATIC AC 01.2/ACExC 01.2 Profibus DP Geräteintegration Feldbus Handbuch
Transcript of Stellantriebs-Steuerung AUMATIC AC 01.2/ACExC 01.2 Profibus DP · 4.3. Profibus DP-V1 Dienste 40...

Stellantriebs-Steuerung
AUMATIC AC 01.2/ACExC 01.2
Profibus DP
Geräteintegration FeldbusHandbuch
Anleitung zuerst lesen!● Sicherheitshinweise beachten.
Zweck des Dokumentes:
Dieses Dokument enthält Informationen für Inbetriebnahmepersonal der Leittechnik und leittechnischeProgrammierer. Es soll helfen, den Antrieb über die Feldbus Schnittstelle in die Leittechnik zu integrieren.
Referenzunterlagen:● Betriebsanleitung (Montage, Bedienung, Inbetriebnahme) zum Stellantrieb● Handbuch (Betrieb und Einstellung) AUMATIC AC 01.2 Profibus DP
Referenzunterlagen sind erhältlich über Internet: www.auma.com oder direkt bei AUMA (siehe <Adressen>).
Inhaltsverzeichnis Seite
41. Sicherheitshinweise...............................................................................................................41.1. Grundlegende Hinweise zur Sicherheit41.2. Anwendungsbereich51.3. Warnhinweise51.4. Hinweise und Symbole
62. Allgemeines über Profibus DP..............................................................................................62.1. Grundlegende Eigenschaften62.2. Profibus DP Grundfunktionen 62.3. Übertragungstechnik 62.4. Buszugriff72.5. Funktionalität 72.6. Schutzfunktionen 72.7. Gerätetypen
83. Inbetriebnahme.......................................................................................................................83.1. Einführung93.2. Parametrierung
103.3. Busadresse (Slaveadresse)103.4. Konfiguration der Profibus DP Schnittstelle113.5. Start der Kommunikation 113.6. User-Parameter (AUMA spezifische Parameter)113.6.1. Prozessabbild Eingang Anordnung (User-Parameter)123.6.2. Einstellbare (benutzerdefinierbare) Meldungen173.6.3. Zusätzliche (benutzerdefinierbare) User-Parameter (optional) 183.6.4. Weitere Anpassungsoptionen 183.7. Überwachung der Kommunikation183.7.1. Verbindungsüberwachung der Profibus DP Kommunikation183.7.2. Fail-Safe und Global Control Clear Telegramme193.8. I&M Funktion
204. Beschreibung der Datenschnittstelle ..................................................................................204.1. Eingangsdaten (Prozessabbild Eingang) – Meldungen204.1.1. Prozessabbild Eingang (Standard Prozessabbild) 224.1.2. Beschreibung der Bytes im Prozessabbild Eingang344.2. Ausgangsdaten (Prozessabbild Ausgang)344.2.1. Prozessabbild Ausgang Anordnung364.2.2. Beschreibung der Ausgangsdaten
2
Stellantriebs-SteuerungInhaltsverzeichnis AC 01.2/ACExC 01.2 Profibus DP
404.3. Profibus DP-V1 Dienste414.4. Redundanz414.4.1. Redundantes Verhalten gemäß AUMA Redundanz434.4.2. Redundantes Verhalten gemäß Profibus DP-V2 Redundanz nach PNO Guideline 2.212
444.5. Profibus DP-V2 Funktionen454.5.1. Profibus DP-V2 Redundanz474.5.2. Profibus DP-V2 Uhrzeitsynchronisation mit Zeitstempelung
525. Beschreibung Profibus DP Platine.......................................................................................525.1. Anzeigen (Melde- und Diagnose LEDs)
546. Störungsbehebung................................................................................................................546.1. Fehlersuche556.2. Diagnose
577. Technische Daten...................................................................................................................577.1. Profibus DP Schnittstelle
598. Anhang....................................................................................................................................598.1. Schaltungsvorschlag für externe Sensoren, 2-Leiter Technik608.2. Schaltungsvorschlag für externe Sensoren, 3-Leiter Technik618.3. Schaltungsvorschlag für externe Sensoren, 4-Leiter Technik628.4. Parameter
89Stichwortverzeichnis.............................................................................................................
90Adressen.................................................................................................................................
3
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inhaltsverzeichnis
1. Sicherheitshinweise
1.1. Grundlegende Hinweise zur Sicherheit
Normen/Richtlinien AUMA Produkte werden nach anerkannten Normen und Richtlinien konstruiert undgefertigt. Dies wird durch eine Original-Einbauerklärung und durch eineEG-Konformitätserklärung bescheinigt.
In Bezug auf Montage, elektrischen Anschluss, Inbetriebnahme und Betrieb amInstallationsort müssen der Anlagenbetreiber und der Anlagenbauer darauf achten,dass alle rechtlichen Anforderungen, Richtlinien, Vorschriften, nationale Regelungenund Empfehlungen beachtet werden.
Hierzu gehören u.a. entsprechende Aufbaurichtlinien für Feldbusanwendungen.
Sicherheitshinweise/Warnungen
An diesem Gerät arbeitende Personen müssen sich mit den Sicherheits- undWarnhinweisen in dieser Anleitung vertraut machen und die gegebenen Anweisungeneinhalten. Sicherheitshinweise und Warnschilder am Produkt müssen beachtetwerden um Personen- oder Sachschäden zu vermeiden.
Personenqualifikation Montage, elektrischer Anschluss, Inbetriebnahme, Bedienung und Wartung darf nurdurch ausgebildetes Fachpersonal erfolgen, das vom Anlagenbetreiber oderAnlagenbauer dazu autorisiert wurde.
Vor Arbeiten an diesem Produkt muss das Personal diese Anleitung gelesen undverstanden haben sowie anerkannte Regeln zur Arbeitssicherheit kennen undbeachten.
Inbetriebnahme Vor der Inbetriebnahme ist es wichtig, dass alle Einstellungen daraufhin überprüftwerden, ob sie mit den Anforderungen der Anwendung übereinstimmen. Bei falscherEinstellung können anwendungsbedingte Gefahren ausgehen wie z.B. dieBeschädigung der Armatur oder der Anlage. Für eventuell hieraus resultierendeSchäden haftet der Hersteller nicht. Das Risiko trägt allein der Anwender.
Betrieb Voraussetzungen für einen einwandfreien und sicheren Betrieb:
● Sachgemäßer Transport, fachgerechte Lagerung, Aufstellung, Montage undsorgfältige Inbetriebnahme.
● Produkt nur in einwandfreiem Zustand, unter Beachtung dieser Anleitung be-treiben.
● Störungen und Schäden umgehend melden und beseitigen (lassen).● Anerkannte Regeln für Arbeitssicherheit beachten.● Nationale Vorschriften beachten.● Im Betrieb erwärmt sich das Gehäuse und es können Oberflächentemperaturen
> 60 °C entstehen. Zum Schutz gegen mögliche Verbrennungen empfehlenwir vor Arbeiten am Gerät die Oberflächentemperatur mit geeignetem Tempe-raturmessgerät zu prüfen und ggf. Schutzhandschuhe zu tragen.
Schutzmaßnahmen Für notwendige Schutzmaßnahmen vor Ort, wie z.B. Abdeckungen, Absperrungenoder persönliche Schutzeinrichtungen für das Personal, ist der Anlagenbetreiberbzw. der Anlagenbauer verantwortlich.
Wartung Veränderungen am Gerät sind nur mit Zustimmung des Herstellers erlaubt.
1.2. Anwendungsbereich
AUMA Stellantriebs-Steuerungen sind ausschließlich für die Betätigung von AUMAStellantrieben bestimmt.
Andere Anwendungen sind nur mit ausdrücklicher (schriftlicher) Bestätigung desHerstellers erlaubt. Nicht zulässig ist der Einsatz z. B. für:
● Ansteuerung von Motoren● Ansteuerung von PumpenBei unsachgemäßem oder nicht bestimmungsgemäßem Einsatz wird keine Haftungübernommen.
4
Stellantriebs-SteuerungSicherheitshinweise AC 01.2/ACExC 01.2 Profibus DP
Zur bestimmungsgemäßen Verwendung gehört auch die Beachtung dieser Anleitung.
1.3. Warnhinweise
Um sicherheitsrelevante Vorgänge in dieser Anleitung hervorzuheben, gelten folgendeWarnhinweise die mit einem entsprechenden Signalwort (GEFAHR, WARNUNG,VORSICHT, HINWEIS) gekennzeichnet sind.
Unmittelbar gefährliche Situation mit hohem Risiko. Falls der Warnhinweisnicht beachtet wird können Tod oder schwere gesundheitliche Schäden dieFolge sein.
Mögliche gefährliche Situation mit mittlerem Risiko. Falls der Warnhinweisnicht beachtet wird können Tod oder schwere gesundheitliche Schäden dieFolge sein.
Mögliche gefährliche Situation mit geringem Risiko. Falls der Warnhinweisnicht beachtet wird können leichte oder mittlere Verletzungen die Folge sein.Kann auch in Verbindung mit Sachschäden verwendet werden.
Mögliche gefährliche Situation. Falls der Warnhinweis nicht beachtet wirdkönnen Sachschäden die Folge sein.Wird nicht bei Personenschäden verwen-det.
Struktur und typografischer Aufbau der Warnhinweise
Art der Gefahr und ihre Quelle!
Mögliche Folge(n) bei Nichtbeachtung (optional)
→ Maßnahme zur Vermeidung der Gefahr→ Weitere Maßnahme(n)
Das Sicherheitszeichen warnt vor Verletzungsgefahr.
Das Signalwort (hier GEFAHR) gibt den Grad der Gefährdung an.
1.4. Hinweise und Symbole
Folgende Hinweise und Symbole werden in dieser Anleitung verwendet:
Information Der Begriff Information vor dem Text gibt wichtige Anmerkungen und Informationen.
Symbol für ZU (Armatur geschlossen)
Symbol für AUF (Armatur offen)
Wissenswertes vor dem nächsten Schritt. Dieses Symbol besagt was für den nächstenSchritt vorausgesetzt wird oder was vorbereitet bzw. beachtet werden sollte.
Über das Menü zum Parameter
Beschreibt den Pfad im Menü zum Parameter. Über die Drucktaster derOrtssteuerstelle kann damit der gesuchte Parameter im Display schnell gefundenwerden.
< > Verweis auf weitere Textstellen
Begriffe die mit diesen Zeichen eingeklammert sind verweisen im Dokument aufweitere Textstellen zu diesem Thema. Diese Begriffe sind im Index, einer Überschriftoder im Inhaltsverzeichnis angegeben und können so schnell gefunden werden.
5
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Sicherheitshinweise
2. Allgemeines über Profibus DP
Für den Informationsaustausch der Automatisierungssysteme untereinander sowiemit den angeschlossenen dezentralen Feldgeräten werden heute vorwiegend serielleFeldbusse als Kommunikationssystem eingesetzt. In vielen tausend erfolgreichenAnwendungen wurde eindrucksvoll nachgewiesen, dass durch den Einsatz derFeldbustechnik Kosteneinsparungen von bis zu 40 % bei Verkabelung,Inbetriebnahme und Wartung im Vergleich zur konventionellen Technik erzielt werden.Während in der Vergangenheit oftmals herstellerspezifische, untereinanderinkompatible Feldbusse zum Einsatz kamen, werden heute nahezu ausschließlichoffene, standardisierte Systeme angewendet. Dadurch wird der Anwender unabhängigvon einzelnen Lieferanten und kann aus einer großen Produktpalette das beste undpreiswerteste Produkt auswählen.
Profibus DP ist das führende offene Feldbus System in Europa, das weltweiterfolgreich eingesetzt wird. Der Anwendungsbereich umfasst die Fertigungs-, Prozess-und Gebäudeautomatisierung. Profibus DP ist ein internationaler, offenerFeldbusstandard, der in den Feldbusnormen IEC 61158 und IEC 61784 standardisiertwurde. Dadurch sind die Investitionen von Herstellern und Anwendern optimalgeschützt, und die Herstellerunabhängigkeit ist garantiert.
2.1. Grundlegende Eigenschaften
Profibus DP legt die technischen und funktionellen Merkmale eines seriellen FeldbusSystems fest, mit dem verteilte digitale Automatisierungsgeräte miteinander vernetztwerden können. Profibus DP unterscheidet Master- und Slave-Geräte.
Profibus DP ist für den schnellen Datenaustausch in der Feldebene konzipiert. Hierkommunizieren die zentralen Steuergeräte, wie z. B. SPS oder PC, über eine schnelle,serielle Verbindung mit dezentralen Feldgeräten wie Ein-/Ausgangsgeräte, Ventileund Antriebe.
Der Datenaustausch mit diesen dezentralen Geräten erfolgt zyklisch. Die dafürbenötigten Kommunikationsfunktionen sind durch die Profibus DP Grundfunktionengemäß IEC 61158 und IEC 61784 festgelegt.
Master-Geräte Master-Geräte bestimmen den Datenverkehr auf dem Bus. Ein Master darfNachrichten ohne externe Aufforderung aussenden. Master werden im ProfibusProtokoll auch als “aktive Teilnehmer” bezeichnet.
Slave-Geräte Slave-Geräte wie z. B. AUMA Profibus DP Antriebe sind Peripheriegeräte. TypischeSlave-Geräte sind Ein-/Ausgangsgeräte, Ventile, Antriebe und Messumformer. Sieerhalten keine Buszugriffsberechtigung, d. h. sie dürfen nur empfangene Nachrichtenquittieren oder auf Anfrage eines Masters Nachrichten an diesen übermitteln. Slaveswerden auch als “passive Teilnehmer” bezeichnet.
2.2. Profibus DP Grundfunktionen
Der Master liest zyklisch die Eingangsinformationen von den Slaves und schreibtdie Ausgangsinformationen zyklisch an die Slaves. Neben dieser zyklischenDatenübertragung des Prozessabbildes stehen bei Profibus DP auch leistungsfähigeFunktionen für Diagnose und Inbetriebnahme zur Verfügung. Der Datenverkehr wirddurch Überwachungsfunktionen auf Master- und Slave-Seite überwacht.
2.3. Übertragungstechnik
● RS-485 verdrillte Zweidrahtleitung oder Lichtwellenleiter● AUMA Stellantriebe unterstützen Baudraten bis 1,5 Mbits/s.
2.4. Buszugriff
● Token-Passing-Verfahren zwischen den Mastern und Pollen zwischen Masterund Slave
● Mono-Master oder Multi-Master Systeme möglich● Master und Slave Geräte: max. 126 Teilnehmer an einem Bus
6
Stellantriebs-SteuerungAllgemeines über Profibus DP AC 01.2/ACExC 01.2 Profibus DP
2.5. Funktionalität
● Punkt-zu-Punkt (Nutzdatenverkehr) oder Multicast (Steuerkommandos an alleSlaves)
● Zyklischer Nutzdatentransfer zwischen DP-Master und DP-Slaves● Zusätzlich azyklischer Datenaustausch zwischen DP-Master und DP-Slaves
bei Profibus DP mit V1-Diensten● DP-V2 Redundanz nach PNO Guideline 2.212● DP-V2 Zeitstempelung nach PNO Guideline 2.192 bzw. nach IEC 61158 / 64784● Prüfen der Konfiguration der DP-Slaves● Synchronisation der Eingänge und/oder der Ausgänge
2.6. Schutzfunktionen
● Alle Nachrichten werden mit Hamming Distanz HD=4 übertragen.● Ansprechüberwachung bei den DP-Slaves (Watchdog)● Zugriffsschutz für Eingänge/Ausgänge der DP-Slaves (Sync und Freeze)● Überwachung des Nutzdatenverkehrs mit einstellbarem Überwachungs-Timer
beim Master● Einstellbares Sicherheitsverhalten
2.7. Gerätetypen
● DP-Master Klasse 2 (DPM2), z.B. Programmier-/Projektierungsgeräte● DP-Master Klasse 1 (DPM1), z.B. zentrale Automatisierungsgeräte wie SPS,
PC● DP-Slave z. B. AUMA Profibus DP Geräte. Geräte mit binären oder analogen
Eingängen/Ausgängen, Antriebe, Ventile
7
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Allgemeines über Profibus DP
3. Inbetriebnahme
3.1. Einführung
Bei der Inbetriebnahme eines Profibus DP Netzwerks müssen die Geräte am ProfibusDP mit der Projektiersoftware der Steuerung (Profibus-Konfigurator) parametriertund konfiguriert werden.
Die Projektiersoftware liest zuerst die GSD-Datei (GeneralStationData) der einzelnenAntriebe ein. Die GSD-Datei enthält Informationen über die Eigenschaften des Geräts,die vom Master benötigt werden.
Danach kann der Anwender das Gerät am Profibus DP für das Projektierprogrammder Leittechnik konfigurieren und parametrieren.
Diese Informationen werden in der Steuerung (DP Master) abgelegt und bei jedemStart der zyklischen Kommunikation an die Antriebe (DP Slaves) gesendet.
Die Ansteuerung des Antriebs sowie die Rückmeldungen erfolgen über dieProzessabbild Input- und Output-Bytes. Wird eine Konfiguration mit konsistentenDaten ausgewählt, so müssen bei manchen SPS spezielle Funktionsbausteine zurAnsteuerung der Profibus DP Slaves benutzt werden.
Zertifizierung AUMA Stellantriebe mit Profibus DP sind von der Profibus Nutzerorganisation (PNO)zertifiziert.
Ident-Nummer Jeder DP-Slave und jeder DP Master hat eine individuelle Ident-Nummer. Diese wirdbenötigt, damit ein DP Master ohne signifikanten Protokoll-Overhead die Typen derangeschlossenen Geräte identifizieren kann. Der Master vergleicht die Ident-Nummerder angeschlossenen DP Geräte mit den Ident-Nummern in den vorgegebenenProjektierungsdaten. Der Nutzdatentransfer wird nur dann begonnen, wenn dierichtigen Geräte-Typen mit den richtigen Stationsadressen am Bus angeschlossenwurden. Dadurch wird eine hohe Sicherheit gegenüber Projektierungsfehlern erreicht
Die PNO verwaltet die Ident-Nummern zusammen mit den Gerätestammdaten (GSD).
AUMA Stellantriebe mit Stellantriebs-Steuerungen AC 01.2 werden unter folgendenIdent-Nummern bei der PNO geführt:
● Ident-Nr. der Standardausführung: 0x0C4F mit Funktionen für:- einkanalige Profibus DP Schnittstelle (nicht redundant)- redundante Profibus DP Schnittstelle gemäß AUMA Redundanz (I oder II)- optionale Profibus DP-V1 Dienste
● Ident-Nr. der erweiterten Ausführung: 0x0CBD mit Funktionen für:- redundante Profibus DP Schnittstelle gemäß Profibus DP-V2 Redundanz- Zeitstempelung und Alarme gemäß Profibus DP-V2- optionale Profibus DP-V1 Dienste
Gerätestammdaten(GSD)
Bei Profibus DP werden die Leistungsmerkmale der Geräte in Form einesGerätedatenblattes und einer Gerätestammdatendatei von den Herstellerndokumentiert und den Anwendern zur Verfügung gestellt. Aufbau, Inhalt undKodierung dieser Gerätestammdatendatei (GSD) sind standardisiert. Sie ermöglichendie komfortable Projektierung beliebiger DP Slaves mit Projektierungsgerätenverschiedener Hersteller.
Für AUMA Stellantriebe mit Stellantriebs-Steuerungen AC 01.2 sind folgendeGSD-Dateien verfügbar:
● Standardausführung: AUMA0C4F.GSD mit Funktionen für:- einkanalige Profibus DP Schnittstelle (nicht redundant)- redundante Profibus DP Schnittstelle gemäß AUMA Redundanz- optionale Profibus DP-V1 Dienste
8
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
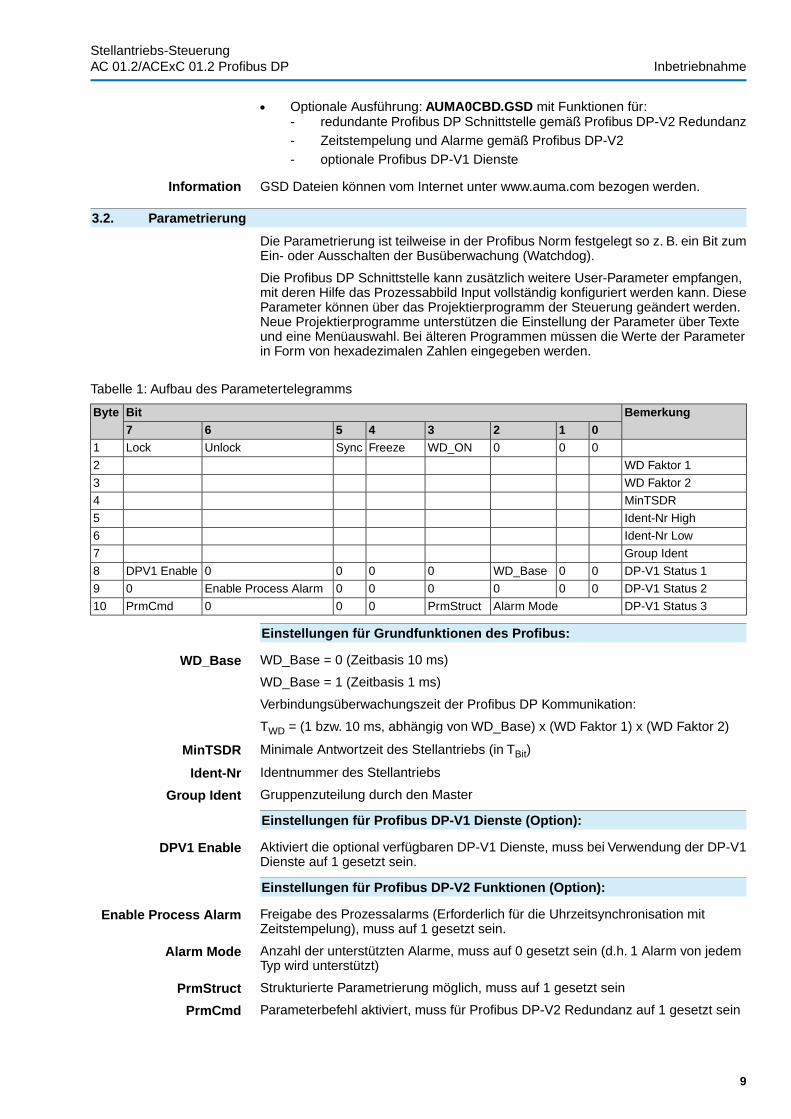
● Optionale Ausführung: AUMA0CBD.GSD mit Funktionen für:- redundante Profibus DP Schnittstelle gemäß Profibus DP-V2 Redundanz- Zeitstempelung und Alarme gemäß Profibus DP-V2- optionale Profibus DP-V1 Dienste
Information GSD Dateien können vom Internet unter www.auma.com bezogen werden.
3.2. Parametrierung
Die Parametrierung ist teilweise in der Profibus Norm festgelegt so z. B. ein Bit zumEin- oder Ausschalten der Busüberwachung (Watchdog).
Die Profibus DP Schnittstelle kann zusätzlich weitere User-Parameter empfangen,mit deren Hilfe das Prozessabbild Input vollständig konfiguriert werden kann. DieseParameter können über das Projektierprogramm der Steuerung geändert werden.Neue Projektierprogramme unterstützen die Einstellung der Parameter über Texteund eine Menüauswahl. Bei älteren Programmen müssen die Werte der Parameterin Form von hexadezimalen Zahlen eingegeben werden.
Tabelle 1: Aufbau des Parametertelegramms
BemerkungBitByte01234567000WD_ONFreezeSyncUnlockLock1
WD Faktor 12
WD Faktor 23
MinTSDR4
Ident-Nr High5
Ident-Nr Low6
Group Ident7
DP-V1 Status 100WD_Base0000DPV1 Enable8
DP-V1 Status 2000000Enable Process Alarm09
DP-V1 Status 3Alarm ModePrmStruct000PrmCmd10
Einstellungen für Grundfunktionen des Profibus:
WD_Base WD_Base = 0 (Zeitbasis 10 ms)
WD_Base = 1 (Zeitbasis 1 ms)
Verbindungsüberwachungszeit der Profibus DP Kommunikation:
TWD = (1 bzw. 10 ms, abhängig von WD_Base) x (WD Faktor 1) x (WD Faktor 2)
MinTSDR Minimale Antwortzeit des Stellantriebs (in TBit)
Ident-Nr Identnummer des Stellantriebs
Group Ident Gruppenzuteilung durch den Master
Einstellungen für Profibus DP-V1 Dienste (Option):
DPV1 Enable Aktiviert die optional verfügbaren DP-V1 Dienste, muss bei Verwendung der DP-V1Dienste auf 1 gesetzt sein.
Einstellungen für Profibus DP-V2 Funktionen (Option):
Enable Process Alarm Freigabe des Prozessalarms (Erforderlich für die Uhrzeitsynchronisation mitZeitstempelung), muss auf 1 gesetzt sein.
Alarm Mode Anzahl der unterstützten Alarme, muss auf 0 gesetzt sein (d.h. 1 Alarm von jedemTyp wird unterstützt)
PrmStruct Strukturierte Parametrierung möglich, muss auf 1 gesetzt sein
PrmCmd Parameterbefehl aktiviert, muss für Profibus DP-V2 Redundanz auf 1 gesetzt sein
9
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
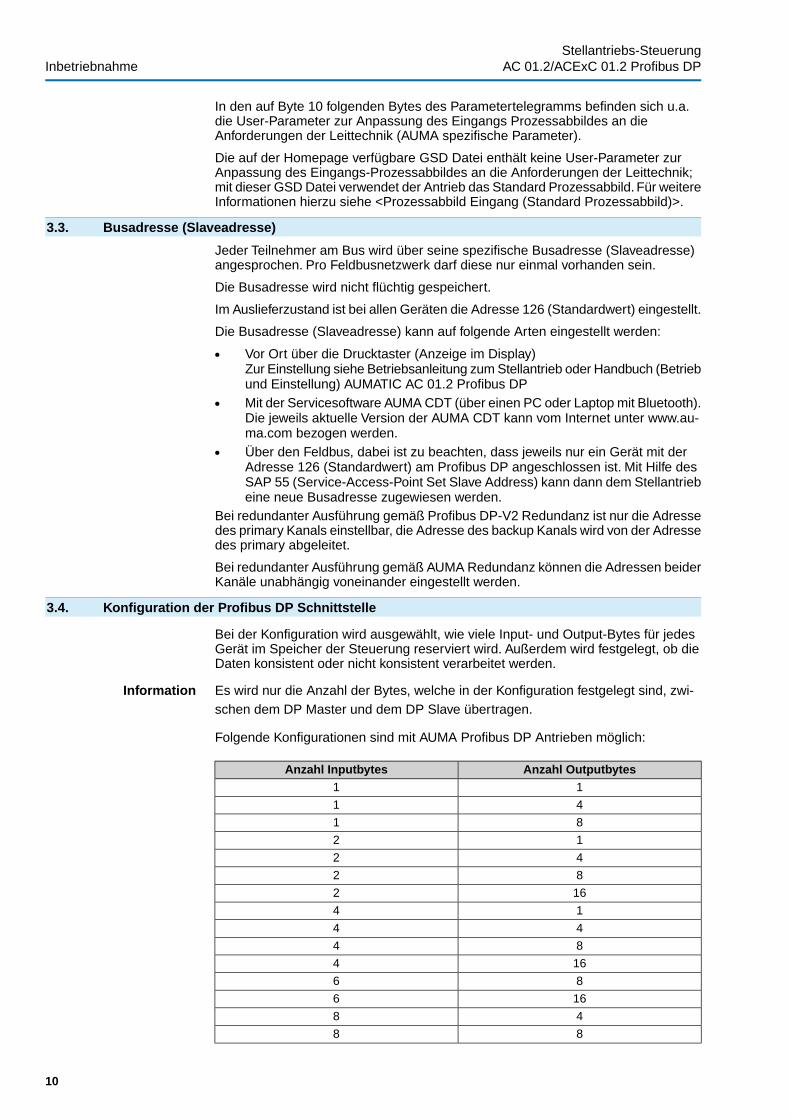
In den auf Byte 10 folgenden Bytes des Parametertelegramms befinden sich u.a.die User-Parameter zur Anpassung des Eingangs Prozessabbildes an dieAnforderungen der Leittechnik (AUMA spezifische Parameter).
Die auf der Homepage verfügbare GSD Datei enthält keine User-Parameter zurAnpassung des Eingangs-Prozessabbildes an die Anforderungen der Leittechnik;mit dieser GSD Datei verwendet der Antrieb das Standard Prozessabbild. Für weitereInformationen hierzu siehe <Prozessabbild Eingang (Standard Prozessabbild)>.
3.3. Busadresse (Slaveadresse)
Jeder Teilnehmer am Bus wird über seine spezifische Busadresse (Slaveadresse)angesprochen. Pro Feldbusnetzwerk darf diese nur einmal vorhanden sein.
Die Busadresse wird nicht flüchtig gespeichert.
Im Auslieferzustand ist bei allen Geräten die Adresse 126 (Standardwert) eingestellt.
Die Busadresse (Slaveadresse) kann auf folgende Arten eingestellt werden:
● Vor Ort über die Drucktaster (Anzeige im Display)Zur Einstellung siehe Betriebsanleitung zum Stellantrieb oder Handbuch (Betriebund Einstellung) AUMATIC AC 01.2 Profibus DP
● Mit der Servicesoftware AUMA CDT (über einen PC oder Laptop mit Bluetooth).Die jeweils aktuelle Version der AUMA CDT kann vom Internet unter www.au-ma.com bezogen werden.
● Über den Feldbus, dabei ist zu beachten, dass jeweils nur ein Gerät mit derAdresse 126 (Standardwert) am Profibus DP angeschlossen ist. Mit Hilfe desSAP 55 (Service-Access-Point Set Slave Address) kann dann dem Stellantriebeine neue Busadresse zugewiesen werden.
Bei redundanter Ausführung gemäß Profibus DP-V2 Redundanz ist nur die Adressedes primary Kanals einstellbar, die Adresse des backup Kanals wird von der Adressedes primary abgeleitet.
Bei redundanter Ausführung gemäß AUMA Redundanz können die Adressen beiderKanäle unabhängig voneinander eingestellt werden.
3.4. Konfiguration der Profibus DP Schnittstelle
Bei der Konfiguration wird ausgewählt, wie viele Input- und Output-Bytes für jedesGerät im Speicher der Steuerung reserviert wird. Außerdem wird festgelegt, ob dieDaten konsistent oder nicht konsistent verarbeitet werden.
Information Es wird nur die Anzahl der Bytes, welche in der Konfiguration festgelegt sind, zwi-schen dem DP Master und dem DP Slave übertragen.
Folgende Konfigurationen sind mit AUMA Profibus DP Antrieben möglich:
Anzahl OutputbytesAnzahl Inputbytes11
41
81
12
42
82
162
14
44
84
164
86
166
48
88
10
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
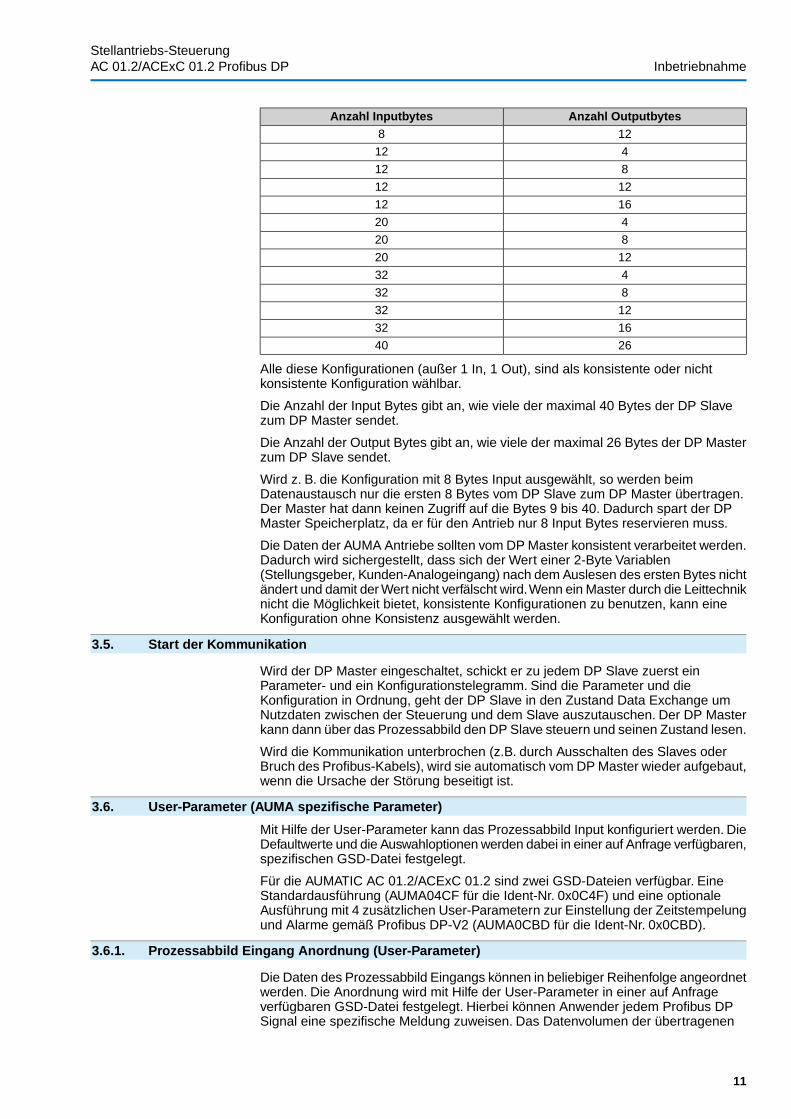
Anzahl OutputbytesAnzahl Inputbytes128
412
812
1212
1612
420
820
1220
432
832
1232
1632
2640
Alle diese Konfigurationen (außer 1 In, 1 Out), sind als konsistente oder nichtkonsistente Konfiguration wählbar.
Die Anzahl der Input Bytes gibt an, wie viele der maximal 40 Bytes der DP Slavezum DP Master sendet.
Die Anzahl der Output Bytes gibt an, wie viele der maximal 26 Bytes der DP Masterzum DP Slave sendet.
Wird z. B. die Konfiguration mit 8 Bytes Input ausgewählt, so werden beimDatenaustausch nur die ersten 8 Bytes vom DP Slave zum DP Master übertragen.Der Master hat dann keinen Zugriff auf die Bytes 9 bis 40. Dadurch spart der DPMaster Speicherplatz, da er für den Antrieb nur 8 Input Bytes reservieren muss.
Die Daten der AUMA Antriebe sollten vom DP Master konsistent verarbeitet werden.Dadurch wird sichergestellt, dass sich der Wert einer 2-Byte Variablen(Stellungsgeber, Kunden-Analogeingang) nach dem Auslesen des ersten Bytes nichtändert und damit der Wert nicht verfälscht wird.Wenn ein Master durch die Leittechniknicht die Möglichkeit bietet, konsistente Konfigurationen zu benutzen, kann eineKonfiguration ohne Konsistenz ausgewählt werden.
3.5. Start der Kommunikation
Wird der DP Master eingeschaltet, schickt er zu jedem DP Slave zuerst einParameter- und ein Konfigurationstelegramm. Sind die Parameter und dieKonfiguration in Ordnung, geht der DP Slave in den Zustand Data Exchange umNutzdaten zwischen der Steuerung und dem Slave auszutauschen. Der DP Masterkann dann über das Prozessabbild den DP Slave steuern und seinen Zustand lesen.
Wird die Kommunikation unterbrochen (z.B. durch Ausschalten des Slaves oderBruch des Profibus-Kabels), wird sie automatisch vom DP Master wieder aufgebaut,wenn die Ursache der Störung beseitigt ist.
3.6. User-Parameter (AUMA spezifische Parameter)
Mit Hilfe der User-Parameter kann das Prozessabbild Input konfiguriert werden. DieDefaultwerte und die Auswahloptionen werden dabei in einer auf Anfrage verfügbaren,spezifischen GSD-Datei festgelegt.
Für die AUMATIC AC 01.2/ACExC 01.2 sind zwei GSD-Dateien verfügbar. EineStandardausführung (AUMA04CF für die Ident-Nr. 0x0C4F) und eine optionaleAusführung mit 4 zusätzlichen User-Parametern zur Einstellung der Zeitstempelungund Alarme gemäß Profibus DP-V2 (AUMA0CBD für die Ident-Nr. 0x0CBD).
3.6.1. Prozessabbild Eingang Anordnung (User-Parameter)
Die Daten des Prozessabbild Eingangs können in beliebiger Reihenfolge angeordnetwerden. Die Anordnung wird mit Hilfe der User-Parameter in einer auf Anfrageverfügbaren GSD-Datei festgelegt. Hierbei können Anwender jedem Profibus DPSignal eine spezifische Meldung zuweisen. Das Datenvolumen der übertragenen
11
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
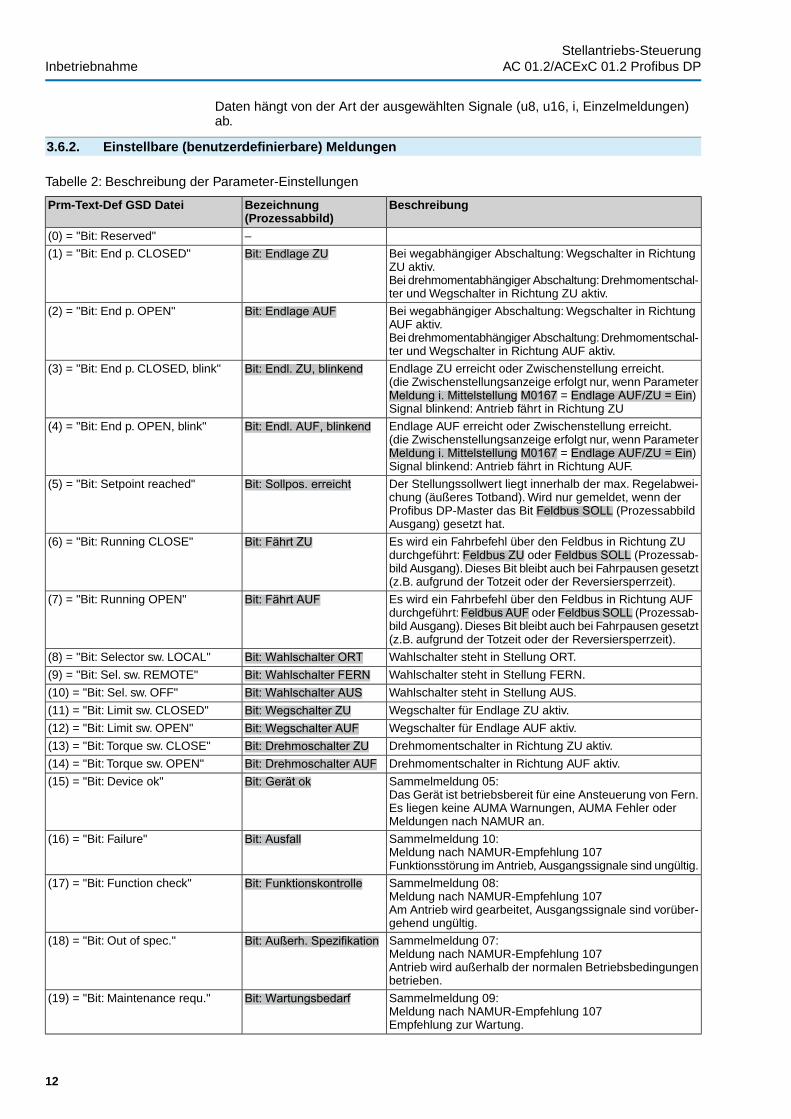
Daten hängt von der Art der ausgewählten Signale (u8, u16, i, Einzelmeldungen)ab.
3.6.2. Einstellbare (benutzerdefinierbare) Meldungen
Tabelle 2: Beschreibung der Parameter-Einstellungen
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
–(0) = "Bit: Reserved"
Bei wegabhängiger Abschaltung: Wegschalter in RichtungZU aktiv.Bei drehmomentabhängiger Abschaltung: Drehmomentschal-ter und Wegschalter in Richtung ZU aktiv.
Bit: Endlage ZU(1) = "Bit: End p. CLOSED"
Bei wegabhängiger Abschaltung: Wegschalter in RichtungAUF aktiv.Bei drehmomentabhängiger Abschaltung: Drehmomentschal-ter und Wegschalter in Richtung AUF aktiv.
Bit: Endlage AUF(2) = "Bit: End p. OPEN"
Endlage ZU erreicht oder Zwischenstellung erreicht.(die Zwischenstellungsanzeige erfolgt nur, wenn ParameterMeldung i. Mittelstellung M0167 = Endlage AUF/ZU = Ein)Signal blinkend: Antrieb fährt in Richtung ZU
Bit: Endl. ZU, blinkend(3) = "Bit: End p. CLOSED, blink"
Endlage AUF erreicht oder Zwischenstellung erreicht.(die Zwischenstellungsanzeige erfolgt nur, wenn ParameterMeldung i. Mittelstellung M0167 = Endlage AUF/ZU = Ein)Signal blinkend: Antrieb fährt in Richtung AUF.
Bit: Endl. AUF, blinkend(4) = "Bit: End p. OPEN, blink"
Der Stellungssollwert liegt innerhalb der max. Regelabwei-chung (äußeres Totband). Wird nur gemeldet, wenn derProfibus DP-Master das Bit Feldbus SOLL (ProzessabbildAusgang) gesetzt hat.
Bit: Sollpos. erreicht(5) = "Bit: Setpoint reached"
Es wird ein Fahrbefehl über den Feldbus in Richtung ZUdurchgeführt: Feldbus ZU oder Feldbus SOLL (Prozessab-bild Ausgang). Dieses Bit bleibt auch bei Fahrpausen gesetzt(z.B. aufgrund der Totzeit oder der Reversiersperrzeit).
Bit: Fährt ZU(6) = "Bit: Running CLOSE"
Es wird ein Fahrbefehl über den Feldbus in Richtung AUFdurchgeführt:Feldbus AUF oder Feldbus SOLL (Prozessab-bild Ausgang). Dieses Bit bleibt auch bei Fahrpausen gesetzt(z.B. aufgrund der Totzeit oder der Reversiersperrzeit).
Bit: Fährt AUF(7) = "Bit: Running OPEN"
Wahlschalter steht in Stellung ORT.Bit: Wahlschalter ORT(8) = "Bit: Selector sw. LOCAL"
Wahlschalter steht in Stellung FERN.Bit: Wahlschalter FERN(9) = "Bit: Sel. sw. REMOTE"
Wahlschalter steht in Stellung AUS.Bit: Wahlschalter AUS(10) = "Bit: Sel. sw. OFF"
Wegschalter für Endlage ZU aktiv.Bit: Wegschalter ZU(11) = "Bit: Limit sw. CLOSED"
Wegschalter für Endlage AUF aktiv.Bit: Wegschalter AUF(12) = "Bit: Limit sw. OPEN"
Drehmomentschalter in Richtung ZU aktiv.Bit: Drehmoschalter ZU(13) = "Bit: Torque sw. CLOSE"
Drehmomentschalter in Richtung AUF aktiv.Bit: Drehmoschalter AUF(14) = "Bit: Torque sw. OPEN"
Sammelmeldung 05:Das Gerät ist betriebsbereit für eine Ansteuerung von Fern.Es liegen keine AUMA Warnungen, AUMA Fehler oderMeldungen nach NAMUR an.
Bit: Gerät ok(15) = "Bit: Device ok"
Sammelmeldung 10:Meldung nach NAMUR-Empfehlung 107Funktionsstörung im Antrieb, Ausgangssignale sind ungültig.
Bit: Ausfall(16) = "Bit: Failure"
Sammelmeldung 08:Meldung nach NAMUR-Empfehlung 107Am Antrieb wird gearbeitet, Ausgangssignale sind vorüber-gehend ungültig.
Bit: Funktionskontrolle(17) = "Bit: Function check"
Sammelmeldung 07:Meldung nach NAMUR-Empfehlung 107Antrieb wird außerhalb der normalen Betriebsbedingungenbetrieben.
Bit: Außerh. Spezifikation(18) = "Bit: Out of spec."
Sammelmeldung 09:Meldung nach NAMUR-Empfehlung 107Empfehlung zur Wartung.
Bit: Wartungsbedarf(19) = "Bit: Maintenance requ."
12
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
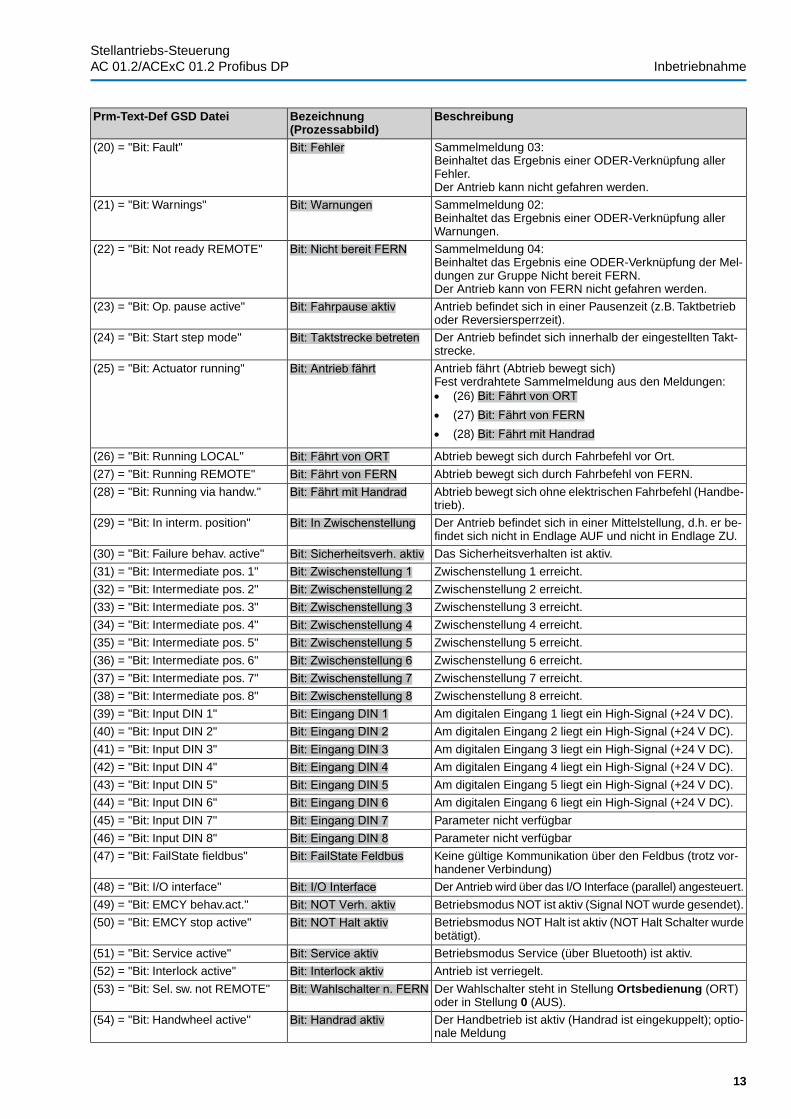
Sammelmeldung 03:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerFehler.Der Antrieb kann nicht gefahren werden.
Bit: Fehler(20) = "Bit: Fault"
Sammelmeldung 02:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerWarnungen.
Bit: Warnungen(21) = "Bit: Warnings"
Sammelmeldung 04:Beinhaltet das Ergebnis eine ODER-Verknüpfung der Mel-dungen zur Gruppe Nicht bereit FERN.Der Antrieb kann von FERN nicht gefahren werden.
Bit: Nicht bereit FERN(22) = "Bit: Not ready REMOTE"
Antrieb befindet sich in einer Pausenzeit (z.B. Taktbetrieboder Reversiersperrzeit).
Bit: Fahrpause aktiv(23) = "Bit: Op. pause active"
Der Antrieb befindet sich innerhalb der eingestellten Takt-strecke.
Bit: Taktstrecke betreten(24) = "Bit: Start step mode"
Antrieb fährt (Abtrieb bewegt sich)Fest verdrahtete Sammelmeldung aus den Meldungen:● (26) Bit: Fährt von ORT● (27) Bit: Fährt von FERN● (28) Bit: Fährt mit Handrad
Bit: Antrieb fährt(25) = "Bit: Actuator running"
Abtrieb bewegt sich durch Fahrbefehl vor Ort.Bit: Fährt von ORT(26) = "Bit: Running LOCAL"
Abtrieb bewegt sich durch Fahrbefehl von FERN.Bit: Fährt von FERN(27) = "Bit: Running REMOTE"
Abtrieb bewegt sich ohne elektrischen Fahrbefehl (Handbe-trieb).
Bit: Fährt mit Handrad(28) = "Bit: Running via handw."
Der Antrieb befindet sich in einer Mittelstellung, d.h. er be-findet sich nicht in Endlage AUF und nicht in Endlage ZU.
Bit: In Zwischenstellung(29) = "Bit: In interm. position"
Das Sicherheitsverhalten ist aktiv.Bit: Sicherheitsverh. aktiv(30) = "Bit: Failure behav. active"
Zwischenstellung 1 erreicht.Bit: Zwischenstellung 1(31) = "Bit: Intermediate pos. 1"
Zwischenstellung 2 erreicht.Bit: Zwischenstellung 2(32) = "Bit: Intermediate pos. 2"
Zwischenstellung 3 erreicht.Bit: Zwischenstellung 3(33) = "Bit: Intermediate pos. 3"
Zwischenstellung 4 erreicht.Bit: Zwischenstellung 4(34) = "Bit: Intermediate pos. 4"
Zwischenstellung 5 erreicht.Bit: Zwischenstellung 5(35) = "Bit: Intermediate pos. 5"
Zwischenstellung 6 erreicht.Bit: Zwischenstellung 6(36) = "Bit: Intermediate pos. 6"
Zwischenstellung 7 erreicht.Bit: Zwischenstellung 7(37) = "Bit: Intermediate pos. 7"
Zwischenstellung 8 erreicht.Bit: Zwischenstellung 8(38) = "Bit: Intermediate pos. 8"
Am digitalen Eingang 1 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 1(39) = "Bit: Input DIN 1"
Am digitalen Eingang 2 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 2(40) = "Bit: Input DIN 2"
Am digitalen Eingang 3 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 3(41) = "Bit: Input DIN 3"
Am digitalen Eingang 4 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 4(42) = "Bit: Input DIN 4"
Am digitalen Eingang 5 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 5(43) = "Bit: Input DIN 5"
Am digitalen Eingang 6 liegt ein High-Signal (+24 V DC).Bit: Eingang DIN 6(44) = "Bit: Input DIN 6"
Parameter nicht verfügbarBit: Eingang DIN 7(45) = "Bit: Input DIN 7"
Parameter nicht verfügbarBit: Eingang DIN 8(46) = "Bit: Input DIN 8"
Keine gültige Kommunikation über den Feldbus (trotz vor-handener Verbindung)
Bit: FailState Feldbus(47) = "Bit: FailState fieldbus"
Der Antrieb wird über das I/O Interface (parallel) angesteuert.Bit: I/O Interface(48) = "Bit: I/O interface"
Betriebsmodus NOT ist aktiv (Signal NOT wurde gesendet).Bit: NOT Verh. aktiv(49) = "Bit: EMCY behav.act."
Betriebsmodus NOT Halt ist aktiv (NOT Halt Schalter wurdebetätigt).
Bit: NOT Halt aktiv(50) = "Bit: EMCY stop active"
Betriebsmodus Service (über Bluetooth) ist aktiv.Bit: Service aktiv(51) = "Bit: Service active"
Antrieb ist verriegelt.Bit: Interlock aktiv(52) = "Bit: Interlock active"
Der Wahlschalter steht in Stellung Ortsbedienung (ORT)oder in Stellung 0 (AUS).
Bit: Wahlschalter n. FERN(53) = "Bit: Sel. sw. not REMOTE"
Der Handbetrieb ist aktiv (Handrad ist eingekuppelt); optio-nale Meldung
Bit: Handrad aktiv(54) = "Bit: Handwheel active"
13
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
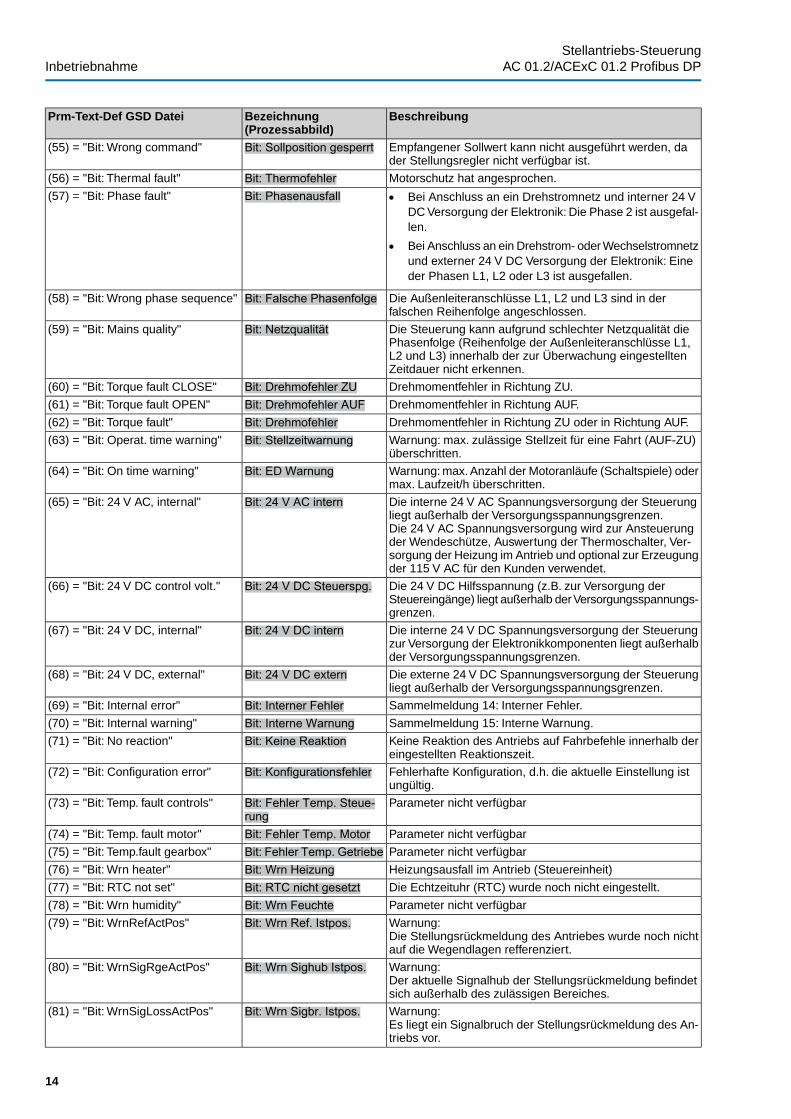
Empfangener Sollwert kann nicht ausgeführt werden, dader Stellungsregler nicht verfügbar ist.
Bit: Sollposition gesperrt(55) = "Bit: Wrong command"
Motorschutz hat angesprochen.Bit: Thermofehler(56) = "Bit: Thermal fault"
● Bei Anschluss an ein Drehstromnetz und interner 24 VDC Versorgung der Elektronik: Die Phase 2 ist ausgefal-len.
● Bei Anschluss an ein Drehstrom- oder Wechselstromnetzund externer 24 V DC Versorgung der Elektronik: Eineder Phasen L1, L2 oder L3 ist ausgefallen.
Bit: Phasenausfall(57) = "Bit: Phase fault"
Die Außenleiteranschlüsse L1, L2 und L3 sind in derfalschen Reihenfolge angeschlossen.
Bit: Falsche Phasenfolge(58) = "Bit: Wrong phase sequence"
Die Steuerung kann aufgrund schlechter Netzqualität diePhasenfolge (Reihenfolge der Außenleiteranschlüsse L1,L2 und L3) innerhalb der zur Überwachung eingestelltenZeitdauer nicht erkennen.
Bit: Netzqualität(59) = "Bit: Mains quality"
Drehmomentfehler in Richtung ZU.Bit: Drehmofehler ZU(60) = "Bit: Torque fault CLOSE"
Drehmomentfehler in Richtung AUF.Bit: Drehmofehler AUF(61) = "Bit: Torque fault OPEN"
Drehmomentfehler in Richtung ZU oder in Richtung AUF.Bit: Drehmofehler(62) = "Bit: Torque fault"
Warnung: max. zulässige Stellzeit für eine Fahrt (AUF-ZU)überschritten.
Bit: Stellzeitwarnung(63) = "Bit: Operat. time warning"
Warnung: max. Anzahl der Motoranläufe (Schaltspiele) odermax. Laufzeit/h überschritten.
Bit: ED Warnung(64) = "Bit: On time warning"
Die interne 24 V AC Spannungsversorgung der Steuerungliegt außerhalb der Versorgungsspannungsgrenzen.Die 24 V AC Spannungsversorgung wird zur Ansteuerungder Wendeschütze, Auswertung der Thermoschalter, Ver-sorgung der Heizung im Antrieb und optional zur Erzeugungder 115 V AC für den Kunden verwendet.
Bit: 24 V AC intern(65) = "Bit: 24 V AC, internal"
Die 24 V DC Hilfsspannung (z.B. zur Versorgung derSteuereingänge) liegt außerhalb der Versorgungsspannungs-grenzen.
Bit: 24 V DC Steuerspg.(66) = "Bit: 24 V DC control volt."
Die interne 24 V DC Spannungsversorgung der Steuerungzur Versorgung der Elektronikkomponenten liegt außerhalbder Versorgungsspannungsgrenzen.
Bit: 24 V DC intern(67) = "Bit: 24 V DC, internal"
Die externe 24 V DC Spannungsversorgung der Steuerungliegt außerhalb der Versorgungsspannungsgrenzen.
Bit: 24 V DC extern(68) = "Bit: 24 V DC, external"
Sammelmeldung 14: Interner Fehler.Bit: Interner Fehler(69) = "Bit: Internal error"
Sammelmeldung 15: Interne Warnung.Bit: Interne Warnung(70) = "Bit: Internal warning"
Keine Reaktion des Antriebs auf Fahrbefehle innerhalb dereingestellten Reaktionszeit.
Bit: Keine Reaktion(71) = "Bit: No reaction"
Fehlerhafte Konfiguration, d.h. die aktuelle Einstellung istungültig.
Bit: Konfigurationsfehler(72) = "Bit: Configuration error"
Parameter nicht verfügbarBit: Fehler Temp. Steue-rung
(73) = "Bit: Temp. fault controls"
Parameter nicht verfügbarBit: Fehler Temp. Motor(74) = "Bit: Temp. fault motor"
Parameter nicht verfügbarBit: Fehler Temp. Getriebe(75) = "Bit: Temp.fault gearbox"
Heizungsausfall im Antrieb (Steuereinheit)Bit: Wrn Heizung(76) = "Bit: Wrn heater"
Die Echtzeituhr (RTC) wurde noch nicht eingestellt.Bit: RTC nicht gesetzt(77) = "Bit: RTC not set"
Parameter nicht verfügbarBit: Wrn Feuchte(78) = "Bit: Wrn humidity"
Warnung:Die Stellungsrückmeldung des Antriebes wurde noch nichtauf die Wegendlagen refferenziert.
Bit: Wrn Ref. Istpos.(79) = "Bit: WrnRefActPos"
Warnung:Der aktuelle Signalhub der Stellungsrückmeldung befindetsich außerhalb des zulässigen Bereiches.
Bit: Wrn Sighub Istpos.(80) = "Bit: WrnSigRgeActPos"
Warnung:Es liegt ein Signalbruch der Stellungsrückmeldung des An-triebs vor.
Bit: Wrn Sigbr. Istpos.(81) = "Bit: WrnSigLossActPos"
14
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
Warnung: Istposition Antrieb.Sammelmeldung aus:● (79) Bit: Wrn Ref. Istpos.● (80) Bit: Wrn Sighub Istpos.● (81) Bit: Wrn Sigbr. Istpos.
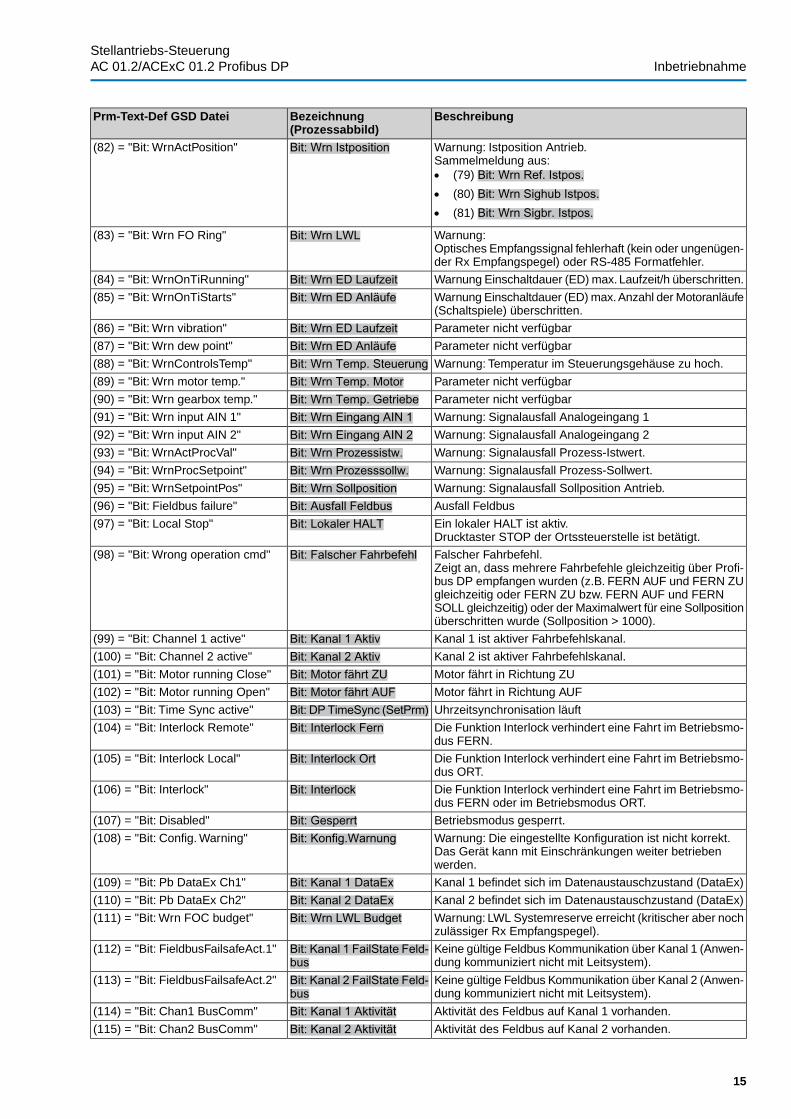
Bit: Wrn Istposition(82) = "Bit: WrnActPosition"
Warnung:Optisches Empfangssignal fehlerhaft (kein oder ungenügen-der Rx Empfangspegel) oder RS-485 Formatfehler.
Bit: Wrn LWL(83) = "Bit: Wrn FO Ring"
Warnung Einschaltdauer (ED) max. Laufzeit/h überschritten.Bit: Wrn ED Laufzeit(84) = "Bit: WrnOnTiRunning"
Warnung Einschaltdauer (ED) max. Anzahl der Motoranläufe(Schaltspiele) überschritten.
Bit: Wrn ED Anläufe(85) = "Bit: WrnOnTiStarts"
Parameter nicht verfügbarBit: Wrn ED Laufzeit(86) = "Bit: Wrn vibration"
Parameter nicht verfügbarBit: Wrn ED Anläufe(87) = "Bit: Wrn dew point"
Warnung: Temperatur im Steuerungsgehäuse zu hoch.Bit: Wrn Temp. Steuerung(88) = "Bit: WrnControlsTemp"
Parameter nicht verfügbarBit: Wrn Temp. Motor(89) = "Bit: Wrn motor temp."
Parameter nicht verfügbarBit: Wrn Temp. Getriebe(90) = "Bit: Wrn gearbox temp."
Warnung: Signalausfall Analogeingang 1Bit: Wrn Eingang AIN 1(91) = "Bit: Wrn input AIN 1"
Warnung: Signalausfall Analogeingang 2Bit: Wrn Eingang AIN 2(92) = "Bit: Wrn input AIN 2"
Warnung: Signalausfall Prozess-Istwert.Bit: Wrn Prozessistw.(93) = "Bit: WrnActProcVal"
Warnung: Signalausfall Prozess-Sollwert.Bit: Wrn Prozesssollw.(94) = "Bit: WrnProcSetpoint"
Warnung: Signalausfall Sollposition Antrieb.Bit: Wrn Sollposition(95) = "Bit: WrnSetpointPos"
Ausfall FeldbusBit: Ausfall Feldbus(96) = "Bit: Fieldbus failure"
Ein lokaler HALT ist aktiv.Drucktaster STOP der Ortssteuerstelle ist betätigt.
Bit: Lokaler HALT(97) = "Bit: Local Stop"
Falscher Fahrbefehl.Zeigt an, dass mehrere Fahrbefehle gleichzeitig über Profi-bus DP empfangen wurden (z.B. FERN AUF und FERN ZUgleichzeitig oder FERN ZU bzw. FERN AUF und FERNSOLL gleichzeitig) oder der Maximalwert für eine Sollpositionüberschritten wurde (Sollposition > 1000).
Bit: Falscher Fahrbefehl(98) = "Bit: Wrong operation cmd"
Kanal 1 ist aktiver Fahrbefehlskanal.Bit: Kanal 1 Aktiv(99) = "Bit: Channel 1 active"
Kanal 2 ist aktiver Fahrbefehlskanal.Bit: Kanal 2 Aktiv(100) = "Bit: Channel 2 active"
Motor fährt in Richtung ZUBit: Motor fährt ZU(101) = "Bit: Motor running Close"
Motor fährt in Richtung AUFBit: Motor fährt AUF(102) = "Bit: Motor running Open"
Uhrzeitsynchronisation läuftBit: DP TimeSync (SetPrm)(103) = "Bit: Time Sync active"
Die Funktion Interlock verhindert eine Fahrt im Betriebsmo-dus FERN.
Bit: Interlock Fern(104) = "Bit: Interlock Remote"
Die Funktion Interlock verhindert eine Fahrt im Betriebsmo-dus ORT.
Bit: Interlock Ort(105) = "Bit: Interlock Local"
Die Funktion Interlock verhindert eine Fahrt im Betriebsmo-dus FERN oder im Betriebsmodus ORT.
Bit: Interlock(106) = "Bit: Interlock"
Betriebsmodus gesperrt.Bit: Gesperrt(107) = "Bit: Disabled"
Warnung: Die eingestellte Konfiguration ist nicht korrekt.Das Gerät kann mit Einschränkungen weiter betriebenwerden.
Bit: Konfig.Warnung(108) = "Bit: Config. Warning"
Kanal 1 befindet sich im Datenaustauschzustand (DataEx)Bit: Kanal 1 DataEx(109) = "Bit: Pb DataEx Ch1"
Kanal 2 befindet sich im Datenaustauschzustand (DataEx)Bit: Kanal 2 DataEx(110) = "Bit: Pb DataEx Ch2"
Warnung: LWL Systemreserve erreicht (kritischer aber nochzulässiger Rx Empfangspegel).
Bit: Wrn LWL Budget(111) = "Bit: Wrn FOC budget"
Keine gültige Feldbus Kommunikation über Kanal 1 (Anwen-dung kommuniziert nicht mit Leitsystem).
Bit: Kanal 1 FailState Feld-bus
(112) = "Bit: FieldbusFailsafeAct.1"
Keine gültige Feldbus Kommunikation über Kanal 2 (Anwen-dung kommuniziert nicht mit Leitsystem).
Bit: Kanal 2 FailState Feld-bus
(113) = "Bit: FieldbusFailsafeAct.2"
Aktivität des Feldbus auf Kanal 1 vorhanden.Bit: Kanal 1 Aktivität(114) = "Bit: Chan1 BusComm"
Aktivität des Feldbus auf Kanal 2 vorhanden.Bit: Kanal 2 Aktivität(115) = "Bit: Chan2 BusComm"
15
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
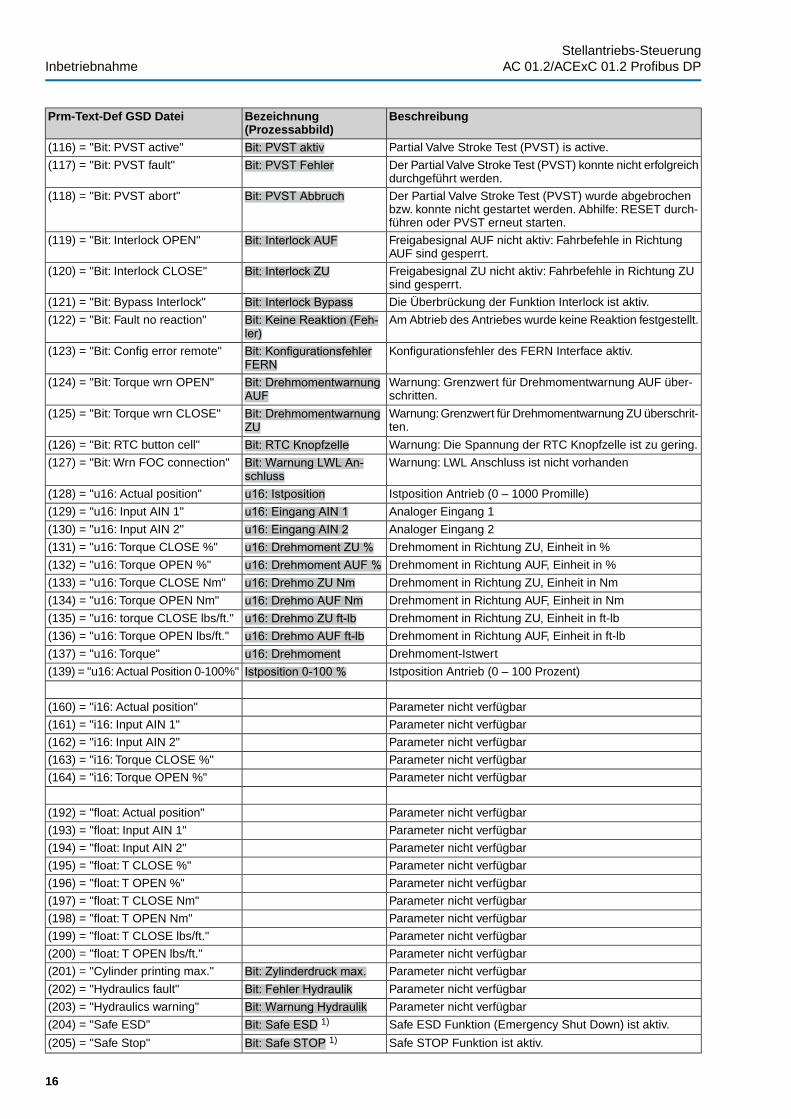
Partial Valve Stroke Test (PVST) is active.Bit: PVST aktiv(116) = "Bit: PVST active"
Der Partial Valve Stroke Test (PVST) konnte nicht erfolgreichdurchgeführt werden.
Bit: PVST Fehler(117) = "Bit: PVST fault"
Der Partial Valve Stroke Test (PVST) wurde abgebrochenbzw. konnte nicht gestartet werden. Abhilfe: RESET durch-führen oder PVST erneut starten.
Bit: PVST Abbruch(118) = "Bit: PVST abort"
Freigabesignal AUF nicht aktiv: Fahrbefehle in RichtungAUF sind gesperrt.
Bit: Interlock AUF(119) = "Bit: Interlock OPEN"
Freigabesignal ZU nicht aktiv: Fahrbefehle in Richtung ZUsind gesperrt.
Bit: Interlock ZU(120) = "Bit: Interlock CLOSE"
Die Überbrückung der Funktion Interlock ist aktiv.Bit: Interlock Bypass(121) = "Bit: Bypass Interlock"
Am Abtrieb des Antriebes wurde keine Reaktion festgestellt.Bit: Keine Reaktion (Feh-ler)
(122) = "Bit: Fault no reaction"
Konfigurationsfehler des FERN Interface aktiv.Bit: KonfigurationsfehlerFERN
(123) = "Bit: Config error remote"
Warnung: Grenzwert für Drehmomentwarnung AUF über-schritten.
Bit: DrehmomentwarnungAUF
(124) = "Bit: Torque wrn OPEN"
Warnung: Grenzwert für Drehmomentwarnung ZU überschrit-ten.
Bit: DrehmomentwarnungZU
(125) = "Bit: Torque wrn CLOSE"
Warnung: Die Spannung der RTC Knopfzelle ist zu gering.Bit: RTC Knopfzelle(126) = "Bit: RTC button cell"
Warnung: LWL Anschluss ist nicht vorhandenBit: Warnung LWL An-schluss
(127) = "Bit: Wrn FOC connection"
Istposition Antrieb (0 – 1000 Promille)u16: Istposition(128) = "u16: Actual position"
Analoger Eingang 1u16: Eingang AIN 1(129) = "u16: Input AIN 1"
Analoger Eingang 2u16: Eingang AIN 2(130) = "u16: Input AIN 2"
Drehmoment in Richtung ZU, Einheit in %u16: Drehmoment ZU %(131) = "u16: Torque CLOSE %"
Drehmoment in Richtung AUF, Einheit in %u16: Drehmoment AUF %(132) = "u16: Torque OPEN %"
Drehmoment in Richtung ZU, Einheit in Nmu16: Drehmo ZU Nm(133) = "u16: Torque CLOSE Nm"
Drehmoment in Richtung AUF, Einheit in Nmu16: Drehmo AUF Nm(134) = "u16: Torque OPEN Nm"
Drehmoment in Richtung ZU, Einheit in ft-lbu16: Drehmo ZU ft-lb(135) = "u16: torque CLOSE lbs/ft."
Drehmoment in Richtung AUF, Einheit in ft-lbu16: Drehmo AUF ft-lb(136) = "u16: Torque OPEN lbs/ft."
Drehmoment-Istwertu16: Drehmoment(137) = "u16: Torque"
Istposition Antrieb (0 – 100 Prozent)Istposition 0-100 %(139) = "u16: Actual Position 0-100%"
Parameter nicht verfügbar(160) = "i16: Actual position"
Parameter nicht verfügbar(161) = "i16: Input AIN 1"
Parameter nicht verfügbar(162) = "i16: Input AIN 2"
Parameter nicht verfügbar(163) = "i16: Torque CLOSE %"
Parameter nicht verfügbar(164) = "i16: Torque OPEN %"
Parameter nicht verfügbar(192) = "float: Actual position"
Parameter nicht verfügbar(193) = "float: Input AIN 1"
Parameter nicht verfügbar(194) = "float: Input AIN 2"
Parameter nicht verfügbar(195) = "float: T CLOSE %"
Parameter nicht verfügbar(196) = "float: T OPEN %"
Parameter nicht verfügbar(197) = "float: T CLOSE Nm"
Parameter nicht verfügbar(198) = "float: T OPEN Nm"
Parameter nicht verfügbar(199) = "float: T CLOSE lbs/ft."
Parameter nicht verfügbar(200) = "float: T OPEN lbs/ft."
Parameter nicht verfügbarBit: Zylinderdruck max.(201) = "Cylinder printing max."
Parameter nicht verfügbarBit: Fehler Hydraulik(202) = "Hydraulics fault"
Parameter nicht verfügbarBit: Warnung Hydraulik(203) = "Hydraulics warning"
Safe ESD Funktion (Emergency Shut Down) ist aktiv.Bit: Safe ESD 1)(204) = "Safe ESD"
Safe STOP Funktion ist aktiv.Bit: Safe STOP 1)(205) = "Safe Stop"
16
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
BeschreibungBezeichnung(Prozessabbild)
Prm-Text-Def GSD Datei
Ein SIL-Fehler ist aufgetreten (Sammelmeldung).Bit: SIL Fehler 1)(206) = "SIL fault"
Eine SIL-Funktion ist aktiv.Bit: SIL Funktion aktiv 1)(207) = "SIL function active"
PVST (Partial Valve Stroke Test) sollte durchgeführt werden.Bit: PVST erforderlich(208) = "PVST required"
Wartungsbedarf Mechanik.Bit: Wartung Mechanik(209) = "Mechanic lifetime"
Wartungsbedarf Dichtungen.Bit: Wartung Dichtungen(210) = "Seal lifetime"
Wartungsbedarf Schmierstoff.Bit: Wartung Schmierstoff(211) = "Seal lifetime"
Wartungsbedarf Schütze.Bit: Wartung Schütz(212) = "Contactor lifetime"
Das eingestellte Wartungsintervall ist abgelaufen.Bit: Wartung Intervall(213) = "Maintenance interval"
Wartung erforderlich.Bit: Wartg erforderlich(214) = "Maintenance required"
Die Meldungen zur Sicherheitsfunktion über den Feldbus haben rein informativen Charakter, sie dürfen nicht als Bestandteil einer Si-cherheitsfunktion verwendet werden. Hierfür sind die digitalen I/O Signale der SIL-Baugruppe zu verwenden.
1)
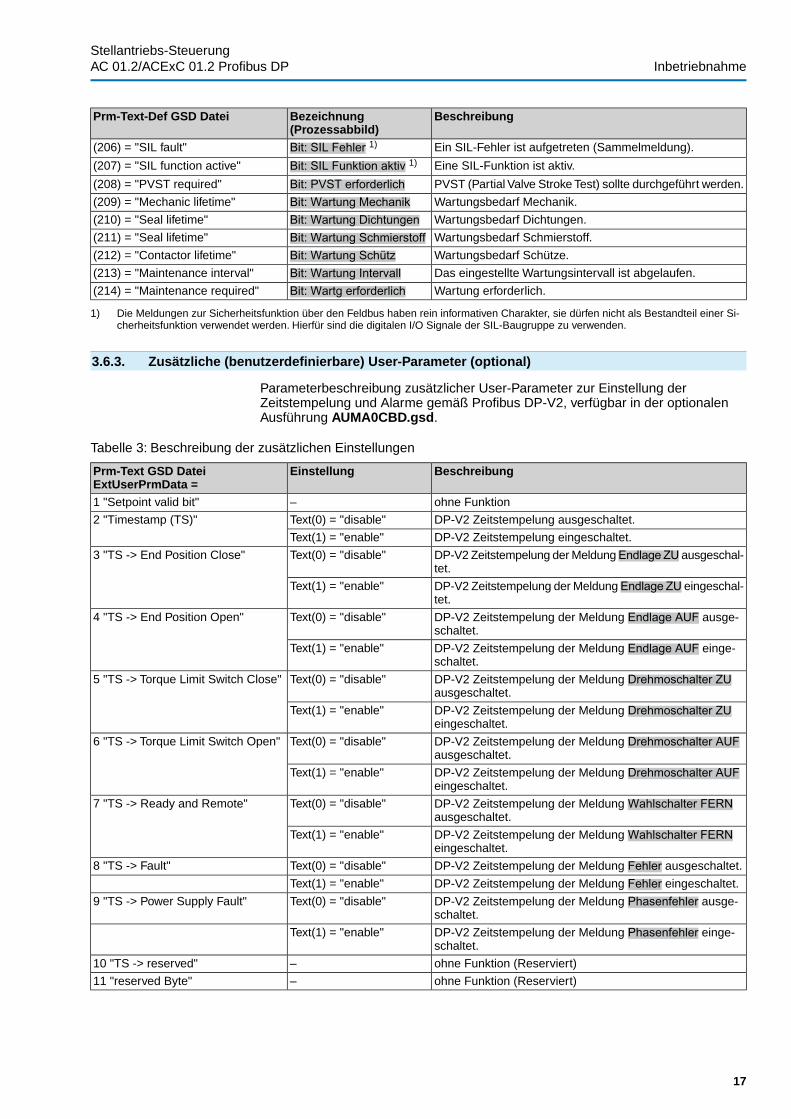
3.6.3. Zusätzliche (benutzerdefinierbare) User-Parameter (optional)
Parameterbeschreibung zusätzlicher User-Parameter zur Einstellung derZeitstempelung und Alarme gemäß Profibus DP-V2, verfügbar in der optionalenAusführung AUMA0CBD.gsd.
Tabelle 3: Beschreibung der zusätzlichen Einstellungen
BeschreibungEinstellungPrm-Text GSD DateiExtUserPrmData =
ohne Funktion–1 "Setpoint valid bit"
DP-V2 Zeitstempelung ausgeschaltet.Text(0) = "disable"2 "Timestamp (TS)"
DP-V2 Zeitstempelung eingeschaltet.Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Endlage ZU ausgeschal-tet.
Text(0) = "disable"3 "TS -> End Position Close"
DP-V2 Zeitstempelung der Meldung Endlage ZU eingeschal-tet.
Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Endlage AUF ausge-schaltet.
Text(0) = "disable"4 "TS -> End Position Open"
DP-V2 Zeitstempelung der Meldung Endlage AUF einge-schaltet.
Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Drehmoschalter ZUausgeschaltet.
Text(0) = "disable"5 "TS -> Torque Limit Switch Close"
DP-V2 Zeitstempelung der Meldung Drehmoschalter ZUeingeschaltet.
Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Drehmoschalter AUFausgeschaltet.
Text(0) = "disable"6 "TS -> Torque Limit Switch Open"
DP-V2 Zeitstempelung der Meldung Drehmoschalter AUFeingeschaltet.
Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Wahlschalter FERNausgeschaltet.
Text(0) = "disable"7 "TS -> Ready and Remote"
DP-V2 Zeitstempelung der Meldung Wahlschalter FERNeingeschaltet.
Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Fehler ausgeschaltet.Text(0) = "disable"8 "TS -> Fault"
DP-V2 Zeitstempelung der Meldung Fehler eingeschaltet.Text(1) = "enable"
DP-V2 Zeitstempelung der Meldung Phasenfehler ausge-schaltet.
Text(0) = "disable"9 "TS -> Power Supply Fault"
DP-V2 Zeitstempelung der Meldung Phasenfehler einge-schaltet.
Text(1) = "enable"
ohne Funktion (Reserviert)–10 "TS -> reserved"
ohne Funktion (Reserviert)–11 "reserved Byte"
17
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
3.6.4. Weitere Anpassungsoptionen
Ab der Firmware 04.05.xx bietet die Stellantriebs-Steuerung die Möglichkeit sich anvorhandene Leittechnikkonfigurationen der Stellantriebsbaureihe AC 01.1/ACExC 01.1anzupassen. Dabei kann die Stellantriebs-Steuerung der BaureiheAC 01.2/ACExC 01.2 so eingestellt werden, dass sie die Standardanordnung desProfibus DP-V0 Prozessabbilds Eingang der AC 01.1/ACExC 01.1 unterstützt, ohnedass an der Leittechnik eine Änderung der Profibus-Konfiguration durchgeführtwerden muss.
Die Einstellung erfolgt mit folgendem Parameter:Gerätekonfiguration>Profibus>Verbindungstyp = AUMATIC .1
Information ● Es wird nur die Profibus DP-V0 Standardanordnung des Prozessabbilds Eingangder AC 01.1/ACExC 01.1 unterstützt, davon abweichende Anordnungen desProfibus DP-V0 Prozessdaten Eingangs erfordern die Verwendung/Installationder AUMA04CF.gsd bzw. der AUMA0CBD.gsd Datei in der Leittechnik.
● Mit dem Verbindungstyp = AUMATIC.1 liefert die AC 01.2/ACExC 01.2 keinerleiNAMUR NE 107 Diagnoseinformationen im zyklischen Prozessdatenabbild.
● Zur azyklischen Kommunikation über Profibus DP-V1 mit derAC 01.2/ACExC 01.2 muss zwingend die EDD bzw. das DTM derAC 01.2/ACExC 01.2 verwendet werden!
● Einstellung bei Auslieferung: Verbindungstyp = AUMATIC.2
3.7. Überwachung der Kommunikation
3.7.1. Verbindungsüberwachung der Profibus DP Kommunikation
Zur Überwachung des Masters und der Leitungsverbindung zwischen Master undStellantrieb muss die Verbindungsüberwachung im Master aktiviert werden(Parametertelegramm Byte 1, Bit 3, WD_ON = 1).
Nur bei aktiver Verbindungsüberwachung kann der Stellantrieb beiKommunikationsausfall nach Ablauf der ebenfalls im Master eingestelltenÜberwachungszeit reagieren.
Die Reaktion des Stellantriebs ist abhängig von der Einstellung desSicherheitsverhaltens bzw. des NOT Verhaltens.
3.7.2. Fail-Safe und Global Control Clear Telegramme
Eine weitere Möglichkeit den Slave im Fehlerfall in einen sicheren Zustand zu bringensind Fail-Safe-Telegramme (Telegramme mit der Datenlänge = 0). WerdenFail-Safe-Telegramme empfangen, bleibt der Antrieb im Zustand Data Exchangeund kann in Abhängigkeit der jeweiligen Einstellung das Sicherheitsverhalten bzw.das NOT Verhalten auslösen. Der Fail-Safe Zustand wird verlassen, sobald gültigeTelegramme mit der Datenlänge ≠ 0 empfangen werden.
Außerdem kann mit Hilfe der Master Telegramme Global Control Clear (GC Clear)ebenfalls das Sicherheitsverhalten bzw. das NOT Verhalten ausgelöst werden. DieserZustand kann mit einem Global Control Operate Telegramm (GC Operate) wiederaufgehoben werden.
Bei aktiviertem NOT Verhalten:
Antrieb kann aufgrund eines NOT Signals oder eines Kommunikationsausfallsanfahren!
Personenschäden oder Schäden an Armatur möglich.
→ Bei Inbetriebnahme und Wartungsarbeiten: Wahlschalter in Stellung 0 (AUS)stellen. Die Ansteuerung des Motors kann ausschließlich in dieser Wahlschal-terstellung unterbrochen werden.
→ Fährt der Antrieb unerwartet los: sofort Wahlschalter in Stellung 0 (AUS) stellen.
18
Stellantriebs-SteuerungInbetriebnahme AC 01.2/ACExC 01.2 Profibus DP
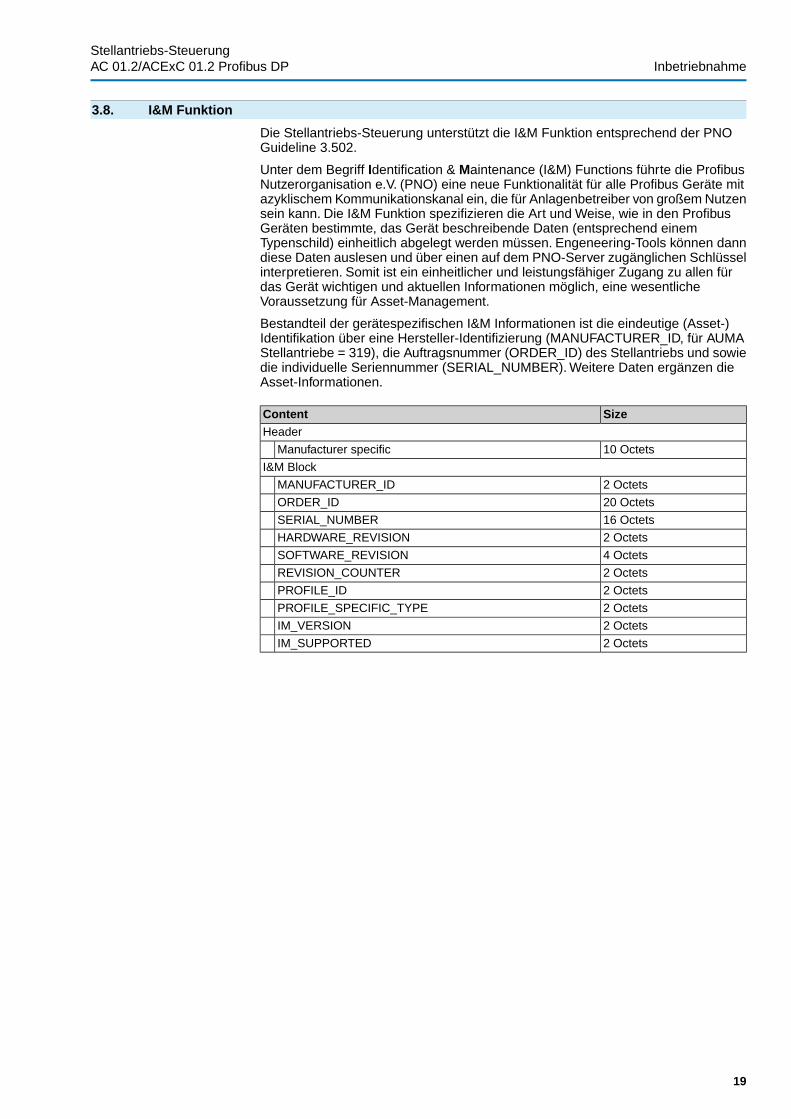
3.8. I&M Funktion
Die Stellantriebs-Steuerung unterstützt die I&M Funktion entsprechend der PNOGuideline 3.502.
Unter dem Begriff Identification & Maintenance (I&M) Functions führte die ProfibusNutzerorganisation e.V. (PNO) eine neue Funktionalität für alle Profibus Geräte mitazyklischem Kommunikationskanal ein, die für Anlagenbetreiber von großem Nutzensein kann. Die I&M Funktion spezifizieren die Art und Weise, wie in den ProfibusGeräten bestimmte, das Gerät beschreibende Daten (entsprechend einemTypenschild) einheitlich abgelegt werden müssen. Engeneering-Tools können danndiese Daten auslesen und über einen auf dem PNO-Server zugänglichen Schlüsselinterpretieren. Somit ist ein einheitlicher und leistungsfähiger Zugang zu allen fürdas Gerät wichtigen und aktuellen Informationen möglich, eine wesentlicheVoraussetzung für Asset-Management.
Bestandteil der gerätespezifischen I&M Informationen ist die eindeutige (Asset-)Identifikation über eine Hersteller-Identifizierung (MANUFACTURER_ID, für AUMAStellantriebe = 319), die Auftragsnummer (ORDER_ID) des Stellantriebs und sowiedie individuelle Seriennummer (SERIAL_NUMBER). Weitere Daten ergänzen dieAsset-Informationen.
SizeContentHeader
10 OctetsManufacturer specific
I&M Block
2 OctetsMANUFACTURER_ID
20 OctetsORDER_ID
16 OctetsSERIAL_NUMBER
2 OctetsHARDWARE_REVISION
4 OctetsSOFTWARE_REVISION
2 OctetsREVISION_COUNTER
2 OctetsPROFILE_ID
2 OctetsPROFILE_SPECIFIC_TYPE
2 OctetsIM_VERSION
2 OctetsIM_SUPPORTED
19
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Inbetriebnahme
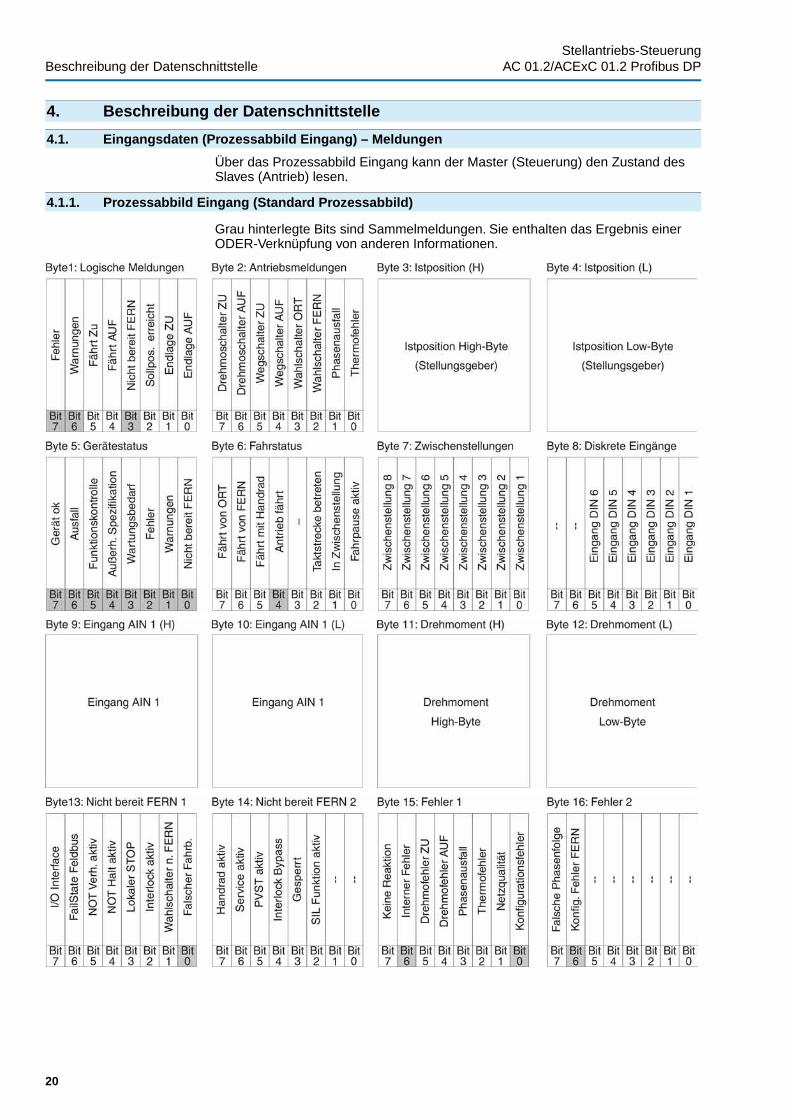
4. Beschreibung der Datenschnittstelle
4.1. Eingangsdaten (Prozessabbild Eingang) – Meldungen
Über das Prozessabbild Eingang kann der Master (Steuerung) den Zustand desSlaves (Antrieb) lesen.
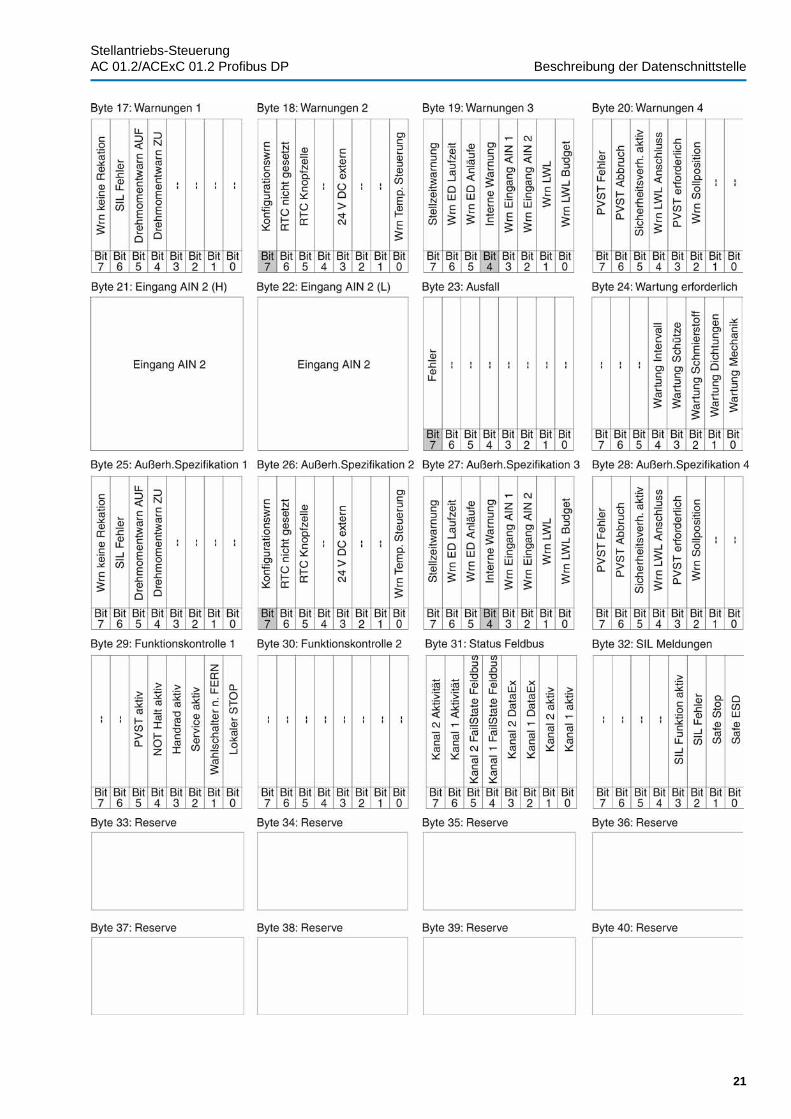
4.1.1. Prozessabbild Eingang (Standard Prozessabbild)
Grau hinterlegte Bits sind Sammelmeldungen. Sie enthalten das Ergebnis einerODER-Verknüpfung von anderen Informationen.
20
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
21
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
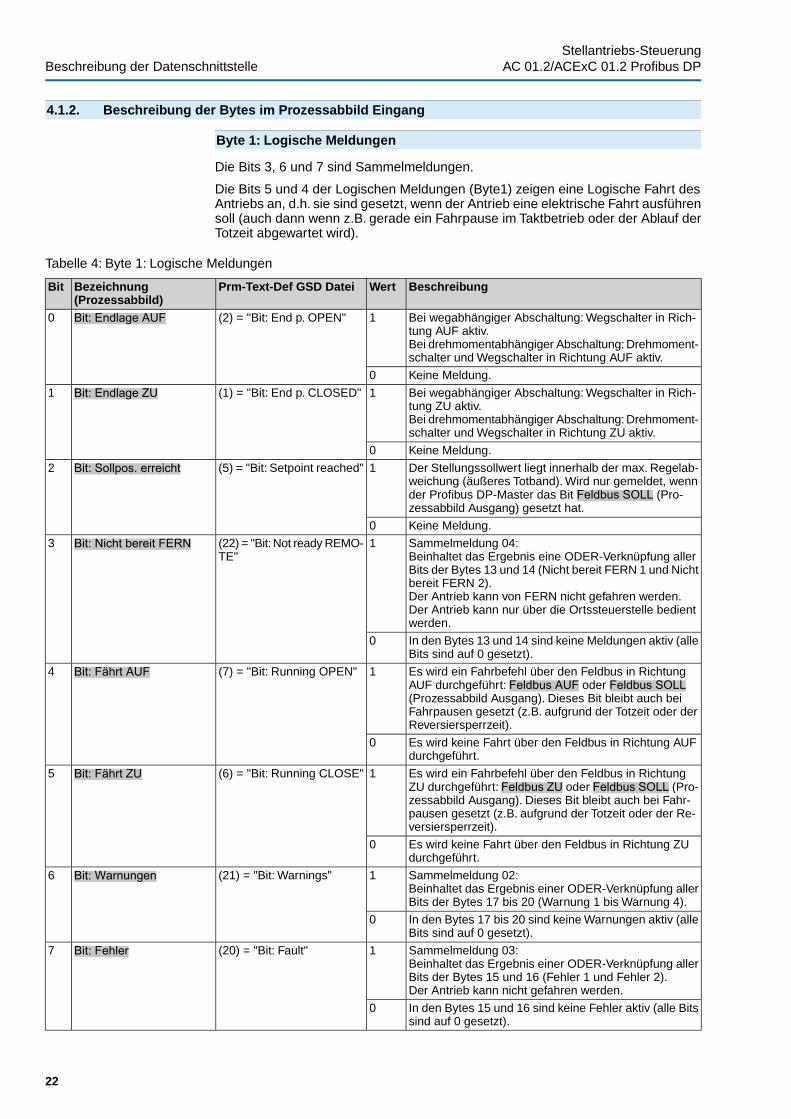
4.1.2. Beschreibung der Bytes im Prozessabbild Eingang
Byte 1: Logische Meldungen
Die Bits 3, 6 und 7 sind Sammelmeldungen.
Die Bits 5 und 4 der Logischen Meldungen (Byte1) zeigen eine Logische Fahrt desAntriebs an, d.h. sie sind gesetzt, wenn der Antrieb eine elektrische Fahrt ausführensoll (auch dann wenn z.B. gerade ein Fahrpause im Taktbetrieb oder der Ablauf derTotzeit abgewartet wird).
Tabelle 4: Byte 1: Logische Meldungen
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Bei wegabhängiger Abschaltung: Wegschalter in Rich-tung AUF aktiv.Bei drehmomentabhängiger Abschaltung: Drehmoment-schalter und Wegschalter in Richtung AUF aktiv.
1(2) = "Bit: End p. OPEN"Bit: Endlage AUF0
Keine Meldung.0
Bei wegabhängiger Abschaltung: Wegschalter in Rich-tung ZU aktiv.Bei drehmomentabhängiger Abschaltung: Drehmoment-schalter und Wegschalter in Richtung ZU aktiv.
1(1) = "Bit: End p. CLOSED"Bit: Endlage ZU1
Keine Meldung.0
Der Stellungssollwert liegt innerhalb der max. Regelab-weichung (äußeres Totband). Wird nur gemeldet, wennder Profibus DP-Master das Bit Feldbus SOLL (Pro-zessabbild Ausgang) gesetzt hat.
1(5) = "Bit: Setpoint reached"Bit: Sollpos. erreicht2
Keine Meldung.0
Sammelmeldung 04:Beinhaltet das Ergebnis eine ODER-Verknüpfung allerBits der Bytes 13 und 14 (Nicht bereit FERN 1 und Nichtbereit FERN 2).Der Antrieb kann von FERN nicht gefahren werden.Der Antrieb kann nur über die Ortssteuerstelle bedientwerden.
1(22) = "Bit: Not ready REMO-TE"
Bit: Nicht bereit FERN3
In den Bytes 13 und 14 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Es wird ein Fahrbefehl über den Feldbus in RichtungAUF durchgeführt: Feldbus AUF oder Feldbus SOLL(Prozessabbild Ausgang). Dieses Bit bleibt auch beiFahrpausen gesetzt (z.B. aufgrund der Totzeit oder derReversiersperrzeit).
1(7) = "Bit: Running OPEN"Bit: Fährt AUF4
Es wird keine Fahrt über den Feldbus in Richtung AUFdurchgeführt.
0
Es wird ein Fahrbefehl über den Feldbus in RichtungZU durchgeführt: Feldbus ZU oder Feldbus SOLL (Pro-zessabbild Ausgang). Dieses Bit bleibt auch bei Fahr-pausen gesetzt (z.B. aufgrund der Totzeit oder der Re-versiersperrzeit).
1(6) = "Bit: Running CLOSE"Bit: Fährt ZU5
Es wird keine Fahrt über den Feldbus in Richtung ZUdurchgeführt.
0
Sammelmeldung 02:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 17 bis 20 (Warnung 1 bis Warnung 4).
1(21) = "Bit: Warnings"Bit: Warnungen6
In den Bytes 17 bis 20 sind keine Warnungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 03:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 15 und 16 (Fehler 1 und Fehler 2).Der Antrieb kann nicht gefahren werden.
1(20) = "Bit: Fault"Bit: Fehler7
In den Bytes 15 und 16 sind keine Fehler aktiv (alle Bitssind auf 0 gesetzt).
0
22
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
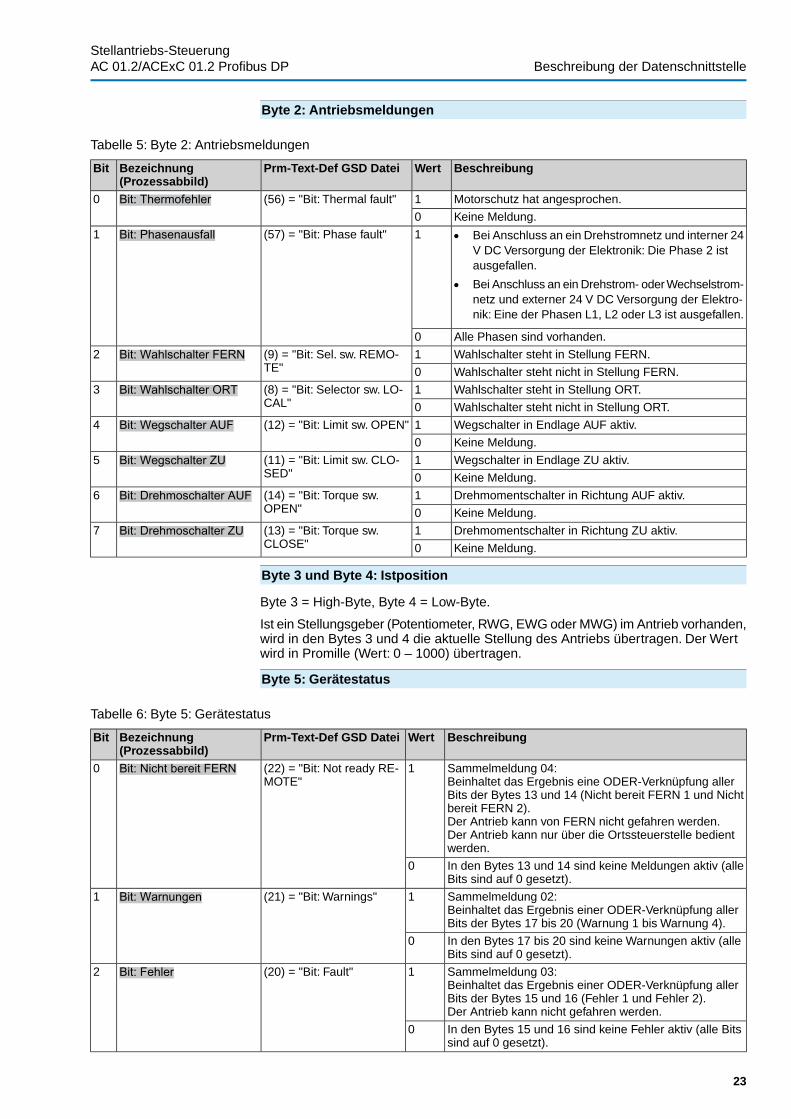
Byte 2: Antriebsmeldungen
Tabelle 5: Byte 2: Antriebsmeldungen
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Motorschutz hat angesprochen.1(56) = "Bit: Thermal fault"Bit: Thermofehler0
Keine Meldung.0● Bei Anschluss an ein Drehstromnetz und interner 24
V DC Versorgung der Elektronik: Die Phase 2 istausgefallen.
● Bei Anschluss an ein Drehstrom- oder Wechselstrom-netz und externer 24 V DC Versorgung der Elektro-nik: Eine der Phasen L1, L2 oder L3 ist ausgefallen.
1(57) = "Bit: Phase fault"Bit: Phasenausfall1
Alle Phasen sind vorhanden.0
Wahlschalter steht in Stellung FERN.1(9) = "Bit: Sel. sw. REMO-TE"
Bit: Wahlschalter FERN2
Wahlschalter steht nicht in Stellung FERN.0
Wahlschalter steht in Stellung ORT.1(8) = "Bit: Selector sw. LO-CAL"
Bit: Wahlschalter ORT3
Wahlschalter steht nicht in Stellung ORT.0
Wegschalter in Endlage AUF aktiv.1(12) = "Bit: Limit sw. OPEN"Bit: Wegschalter AUF4
Keine Meldung.0
Wegschalter in Endlage ZU aktiv.1(11) = "Bit: Limit sw. CLO-SED"
Bit: Wegschalter ZU5
Keine Meldung.0
Drehmomentschalter in Richtung AUF aktiv.1(14) = "Bit: Torque sw.OPEN"
Bit: Drehmoschalter AUF6
Keine Meldung.0
Drehmomentschalter in Richtung ZU aktiv.1(13) = "Bit: Torque sw.CLOSE"
Bit: Drehmoschalter ZU7
Keine Meldung.0
Byte 3 und Byte 4: Istposition
Byte 3 = High-Byte, Byte 4 = Low-Byte.
Ist ein Stellungsgeber (Potentiometer, RWG, EWG oder MWG) im Antrieb vorhanden,wird in den Bytes 3 und 4 die aktuelle Stellung des Antriebs übertragen. Der Wertwird in Promille (Wert: 0 – 1000) übertragen.
Byte 5: Gerätestatus
Tabelle 6: Byte 5: Gerätestatus
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Sammelmeldung 04:Beinhaltet das Ergebnis eine ODER-Verknüpfung allerBits der Bytes 13 und 14 (Nicht bereit FERN 1 und Nichtbereit FERN 2).Der Antrieb kann von FERN nicht gefahren werden.Der Antrieb kann nur über die Ortssteuerstelle bedientwerden.
1(22) = "Bit: Not ready RE-MOTE"
Bit: Nicht bereit FERN0
In den Bytes 13 und 14 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 02:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 17 bis 20 (Warnung 1 bis Warnung 4).
1(21) = "Bit: Warnings"Bit: Warnungen1
In den Bytes 17 bis 20 sind keine Warnungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 03:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 15 und 16 (Fehler 1 und Fehler 2).Der Antrieb kann nicht gefahren werden.
1(20) = "Bit: Fault"Bit: Fehler2
In den Bytes 15 und 16 sind keine Fehler aktiv (alle Bitssind auf 0 gesetzt).
0
23
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
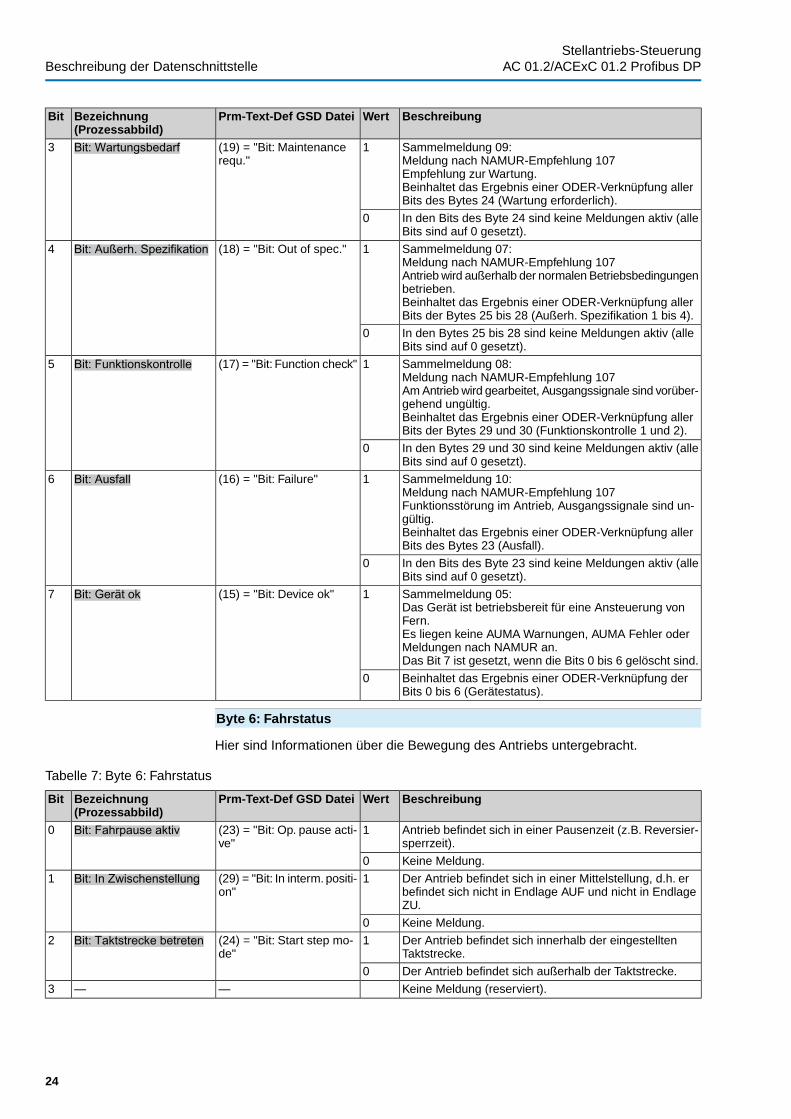
Sammelmeldung 09:Meldung nach NAMUR-Empfehlung 107Empfehlung zur Wartung.Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits des Bytes 24 (Wartung erforderlich).
1(19) = "Bit: Maintenancerequ."
Bit: Wartungsbedarf3
In den Bits des Byte 24 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 07:Meldung nach NAMUR-Empfehlung 107Antrieb wird außerhalb der normalen Betriebsbedingungenbetrieben.Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 25 bis 28 (Außerh. Spezifikation 1 bis 4).
1(18) = "Bit: Out of spec."Bit: Außerh. Spezifikation4
In den Bytes 25 bis 28 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 08:Meldung nach NAMUR-Empfehlung 107Am Antrieb wird gearbeitet, Ausgangssignale sind vorüber-gehend ungültig.Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 29 und 30 (Funktionskontrolle 1 und 2).
1(17) = "Bit: Function check"Bit: Funktionskontrolle5
In den Bytes 29 und 30 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 10:Meldung nach NAMUR-Empfehlung 107Funktionsstörung im Antrieb, Ausgangssignale sind un-gültig.Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits des Bytes 23 (Ausfall).
1(16) = "Bit: Failure"Bit: Ausfall6
In den Bits des Byte 23 sind keine Meldungen aktiv (alleBits sind auf 0 gesetzt).
0
Sammelmeldung 05:Das Gerät ist betriebsbereit für eine Ansteuerung vonFern.Es liegen keine AUMA Warnungen, AUMA Fehler oderMeldungen nach NAMUR an.Das Bit 7 ist gesetzt, wenn die Bits 0 bis 6 gelöscht sind.
1(15) = "Bit: Device ok"Bit: Gerät ok7
Beinhaltet das Ergebnis einer ODER-Verknüpfung derBits 0 bis 6 (Gerätestatus).
0
Byte 6: Fahrstatus
Hier sind Informationen über die Bewegung des Antriebs untergebracht.
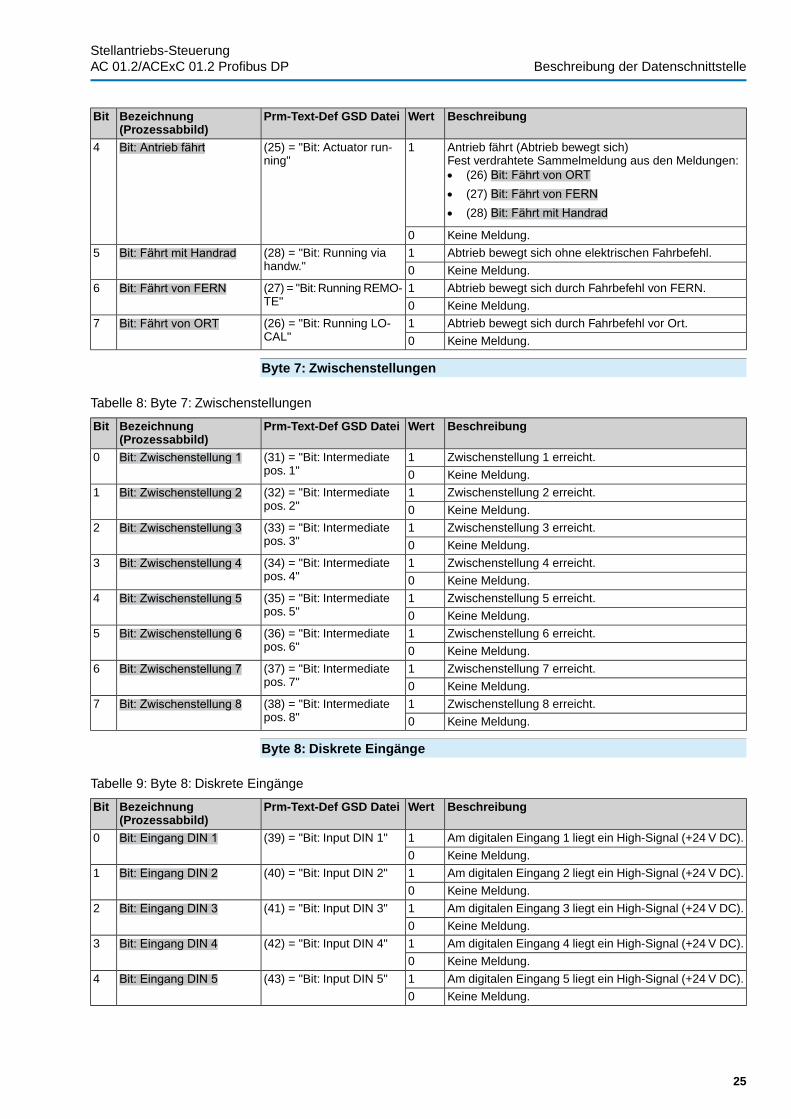
Tabelle 7: Byte 6: Fahrstatus
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Antrieb befindet sich in einer Pausenzeit (z.B. Reversier-sperrzeit).
1(23) = "Bit: Op. pause acti-ve"
Bit: Fahrpause aktiv0
Keine Meldung.0
Der Antrieb befindet sich in einer Mittelstellung, d.h. erbefindet sich nicht in Endlage AUF und nicht in EndlageZU.
1(29) = "Bit: In interm. positi-on"
Bit: In Zwischenstellung1
Keine Meldung.0
Der Antrieb befindet sich innerhalb der eingestelltenTaktstrecke.
1(24) = "Bit: Start step mo-de"
Bit: Taktstrecke betreten2
Der Antrieb befindet sich außerhalb der Taktstrecke.0
Keine Meldung (reserviert).——3
24
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Antrieb fährt (Abtrieb bewegt sich)Fest verdrahtete Sammelmeldung aus den Meldungen:● (26) Bit: Fährt von ORT● (27) Bit: Fährt von FERN● (28) Bit: Fährt mit Handrad
1(25) = "Bit: Actuator run-ning"
Bit: Antrieb fährt4
Keine Meldung.0
Abtrieb bewegt sich ohne elektrischen Fahrbefehl.1(28) = "Bit: Running viahandw."
Bit: Fährt mit Handrad5
Keine Meldung.0
Abtrieb bewegt sich durch Fahrbefehl von FERN.1(27) = "Bit: Running REMO-TE"
Bit: Fährt von FERN6
Keine Meldung.0
Abtrieb bewegt sich durch Fahrbefehl vor Ort.1(26) = "Bit: Running LO-CAL"
Bit: Fährt von ORT7
Keine Meldung.0
Byte 7: Zwischenstellungen
Tabelle 8: Byte 7: Zwischenstellungen
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Zwischenstellung 1 erreicht.1(31) = "Bit: Intermediatepos. 1"
Bit: Zwischenstellung 10
Keine Meldung.0
Zwischenstellung 2 erreicht.1(32) = "Bit: Intermediatepos. 2"
Bit: Zwischenstellung 21
Keine Meldung.0
Zwischenstellung 3 erreicht.1(33) = "Bit: Intermediatepos. 3"
Bit: Zwischenstellung 32
Keine Meldung.0
Zwischenstellung 4 erreicht.1(34) = "Bit: Intermediatepos. 4"
Bit: Zwischenstellung 43
Keine Meldung.0
Zwischenstellung 5 erreicht.1(35) = "Bit: Intermediatepos. 5"
Bit: Zwischenstellung 54
Keine Meldung.0
Zwischenstellung 6 erreicht.1(36) = "Bit: Intermediatepos. 6"
Bit: Zwischenstellung 65
Keine Meldung.0
Zwischenstellung 7 erreicht.1(37) = "Bit: Intermediatepos. 7"
Bit: Zwischenstellung 76
Keine Meldung.0
Zwischenstellung 8 erreicht.1(38) = "Bit: Intermediatepos. 8"
Bit: Zwischenstellung 87
Keine Meldung.0
Byte 8: Diskrete Eingänge
Tabelle 9: Byte 8: Diskrete Eingänge
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Am digitalen Eingang 1 liegt ein High-Signal (+24 V DC).1(39) = "Bit: Input DIN 1"Bit: Eingang DIN 10
Keine Meldung.0
Am digitalen Eingang 2 liegt ein High-Signal (+24 V DC).1(40) = "Bit: Input DIN 2"Bit: Eingang DIN 21
Keine Meldung.0
Am digitalen Eingang 3 liegt ein High-Signal (+24 V DC).1(41) = "Bit: Input DIN 3"Bit: Eingang DIN 32
Keine Meldung.0
Am digitalen Eingang 4 liegt ein High-Signal (+24 V DC).1(42) = "Bit: Input DIN 4"Bit: Eingang DIN 43
Keine Meldung.0
Am digitalen Eingang 5 liegt ein High-Signal (+24 V DC).1(43) = "Bit: Input DIN 5"Bit: Eingang DIN 54
Keine Meldung.0
25
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
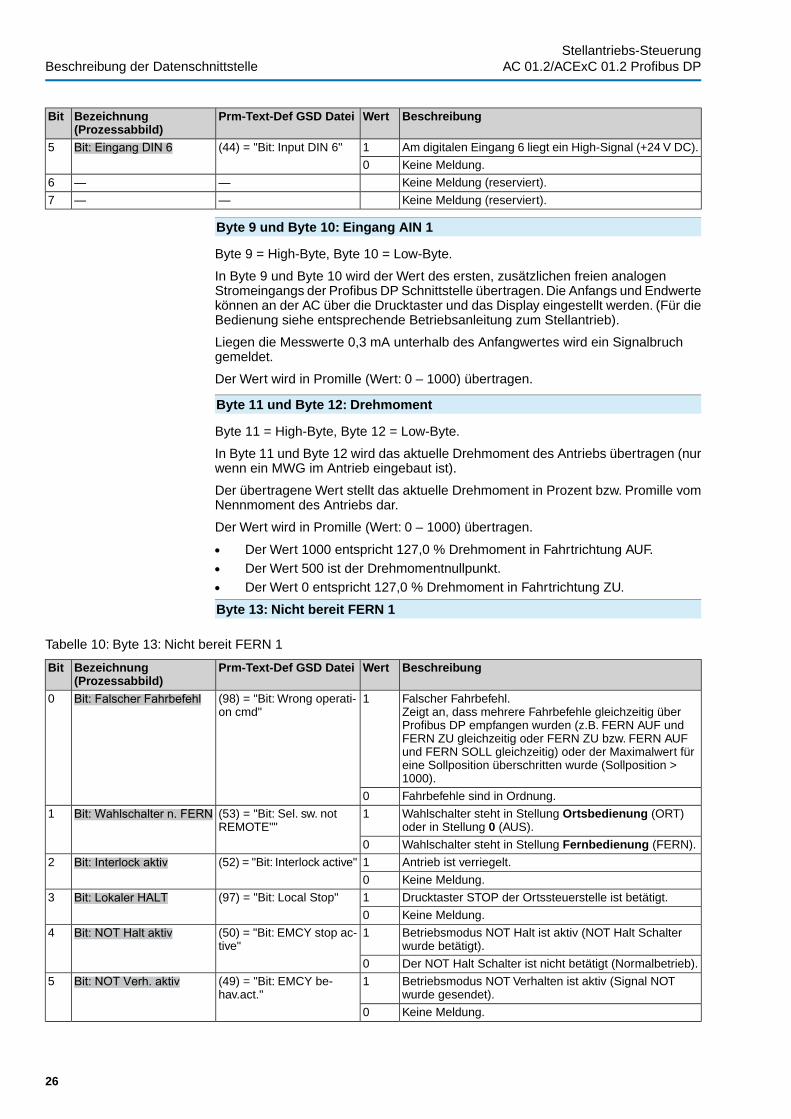
Am digitalen Eingang 6 liegt ein High-Signal (+24 V DC).1(44) = "Bit: Input DIN 6"Bit: Eingang DIN 65
Keine Meldung.0
Keine Meldung (reserviert).——6
Keine Meldung (reserviert).——7
Byte 9 und Byte 10: Eingang AIN 1
Byte 9 = High-Byte, Byte 10 = Low-Byte.
In Byte 9 und Byte 10 wird der Wert des ersten, zusätzlichen freien analogenStromeingangs der Profibus DP Schnittstelle übertragen. Die Anfangs und Endwertekönnen an der AC über die Drucktaster und das Display eingestellt werden. (Für dieBedienung siehe entsprechende Betriebsanleitung zum Stellantrieb).
Liegen die Messwerte 0,3 mA unterhalb des Anfangwertes wird ein Signalbruchgemeldet.
Der Wert wird in Promille (Wert: 0 – 1000) übertragen.
Byte 11 und Byte 12: Drehmoment
Byte 11 = High-Byte, Byte 12 = Low-Byte.
In Byte 11 und Byte 12 wird das aktuelle Drehmoment des Antriebs übertragen (nurwenn ein MWG im Antrieb eingebaut ist).
Der übertragene Wert stellt das aktuelle Drehmoment in Prozent bzw. Promille vomNennmoment des Antriebs dar.
Der Wert wird in Promille (Wert: 0 – 1000) übertragen.
● Der Wert 1000 entspricht 127,0 % Drehmoment in Fahrtrichtung AUF.● Der Wert 500 ist der Drehmomentnullpunkt.● Der Wert 0 entspricht 127,0 % Drehmoment in Fahrtrichtung ZU.
Byte 13: Nicht bereit FERN 1
Tabelle 10: Byte 13: Nicht bereit FERN 1
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Falscher Fahrbefehl.Zeigt an, dass mehrere Fahrbefehle gleichzeitig überProfibus DP empfangen wurden (z.B. FERN AUF undFERN ZU gleichzeitig oder FERN ZU bzw. FERN AUFund FERN SOLL gleichzeitig) oder der Maximalwert füreine Sollposition überschritten wurde (Sollposition >1000).
1(98) = "Bit: Wrong operati-on cmd"
Bit: Falscher Fahrbefehl0
Fahrbefehle sind in Ordnung.0
Wahlschalter steht in Stellung Ortsbedienung (ORT)oder in Stellung 0 (AUS).
1(53) = "Bit: Sel. sw. notREMOTE""
Bit: Wahlschalter n. FERN1
Wahlschalter steht in Stellung Fernbedienung (FERN).0
Antrieb ist verriegelt.1(52) = "Bit: Interlock active"Bit: Interlock aktiv2
Keine Meldung.0
Drucktaster STOP der Ortssteuerstelle ist betätigt.1(97) = "Bit: Local Stop"Bit: Lokaler HALT3
Keine Meldung.0
Betriebsmodus NOT Halt ist aktiv (NOT Halt Schalterwurde betätigt).
1(50) = "Bit: EMCY stop ac-tive"
Bit: NOT Halt aktiv4
Der NOT Halt Schalter ist nicht betätigt (Normalbetrieb).0
Betriebsmodus NOT Verhalten ist aktiv (Signal NOTwurde gesendet).
1(49) = "Bit: EMCY be-hav.act."
Bit: NOT Verh. aktiv5
Keine Meldung.0
26
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
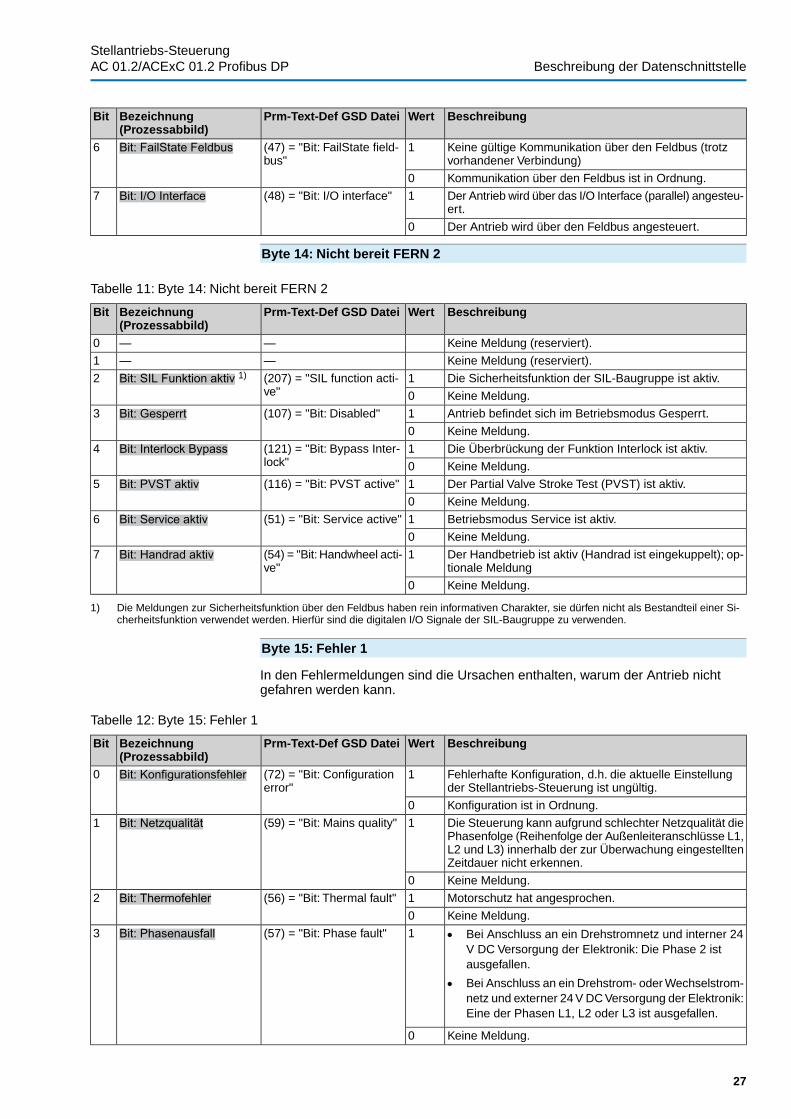
Keine gültige Kommunikation über den Feldbus (trotzvorhandener Verbindung)
1(47) = "Bit: FailState field-bus"
Bit: FailState Feldbus6
Kommunikation über den Feldbus ist in Ordnung.0
Der Antrieb wird über das I/O Interface (parallel) angesteu-ert.
1(48) = "Bit: I/O interface"Bit: I/O Interface7
Der Antrieb wird über den Feldbus angesteuert.0
Byte 14: Nicht bereit FERN 2
Tabelle 11: Byte 14: Nicht bereit FERN 2
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Die Sicherheitsfunktion der SIL-Baugruppe ist aktiv.1(207) = "SIL function acti-ve"
Bit: SIL Funktion aktiv 1)2
Keine Meldung.0
Antrieb befindet sich im Betriebsmodus Gesperrt.1(107) = "Bit: Disabled"Bit: Gesperrt3
Keine Meldung.0
Die Überbrückung der Funktion Interlock ist aktiv.1(121) = "Bit: Bypass Inter-lock"
Bit: Interlock Bypass4
Keine Meldung.0
Der Partial Valve Stroke Test (PVST) ist aktiv.1(116) = "Bit: PVST active"Bit: PVST aktiv5
Keine Meldung.0
Betriebsmodus Service ist aktiv.1(51) = "Bit: Service active"Bit: Service aktiv6
Keine Meldung.0
Der Handbetrieb ist aktiv (Handrad ist eingekuppelt); op-tionale Meldung
1(54) = "Bit: Handwheel acti-ve"
Bit: Handrad aktiv7
Keine Meldung.0
Die Meldungen zur Sicherheitsfunktion über den Feldbus haben rein informativen Charakter, sie dürfen nicht als Bestandteil einer Si-cherheitsfunktion verwendet werden. Hierfür sind die digitalen I/O Signale der SIL-Baugruppe zu verwenden.
1)
Byte 15: Fehler 1
In den Fehlermeldungen sind die Ursachen enthalten, warum der Antrieb nichtgefahren werden kann.
Tabelle 12: Byte 15: Fehler 1
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Fehlerhafte Konfiguration, d.h. die aktuelle Einstellungder Stellantriebs-Steuerung ist ungültig.
1(72) = "Bit: Configurationerror"
Bit: Konfigurationsfehler0
Konfiguration ist in Ordnung.0
Die Steuerung kann aufgrund schlechter Netzqualität diePhasenfolge (Reihenfolge der Außenleiteranschlüsse L1,L2 und L3) innerhalb der zur Überwachung eingestelltenZeitdauer nicht erkennen.
1(59) = "Bit: Mains quality"Bit: Netzqualität1
Keine Meldung.0
Motorschutz hat angesprochen.1(56) = "Bit: Thermal fault"Bit: Thermofehler2
Keine Meldung.0● Bei Anschluss an ein Drehstromnetz und interner 24
V DC Versorgung der Elektronik: Die Phase 2 istausgefallen.
● Bei Anschluss an ein Drehstrom- oder Wechselstrom-netz und externer 24 V DC Versorgung der Elektronik:Eine der Phasen L1, L2 oder L3 ist ausgefallen.
1(57) = "Bit: Phase fault"Bit: Phasenausfall3
Keine Meldung.0
27
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
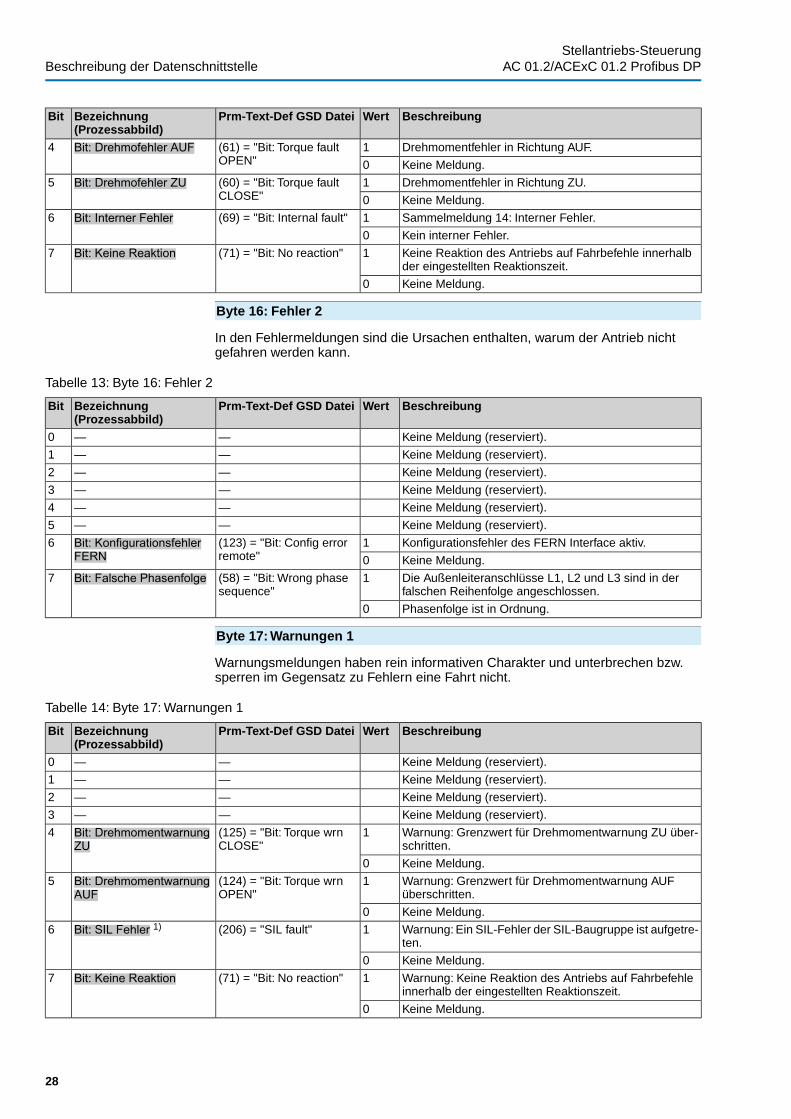
Drehmomentfehler in Richtung AUF.1(61) = "Bit: Torque faultOPEN"
Bit: Drehmofehler AUF4
Keine Meldung.0
Drehmomentfehler in Richtung ZU.1(60) = "Bit: Torque faultCLOSE"
Bit: Drehmofehler ZU5
Keine Meldung.0
Sammelmeldung 14: Interner Fehler.1(69) = "Bit: Internal fault"Bit: Interner Fehler6
Kein interner Fehler.0
Keine Reaktion des Antriebs auf Fahrbefehle innerhalbder eingestellten Reaktionszeit.
1(71) = "Bit: No reaction"Bit: Keine Reaktion7
Keine Meldung.0
Byte 16: Fehler 2
In den Fehlermeldungen sind die Ursachen enthalten, warum der Antrieb nichtgefahren werden kann.
Tabelle 13: Byte 16: Fehler 2
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Keine Meldung (reserviert).——3
Keine Meldung (reserviert).——4
Keine Meldung (reserviert).——5
Konfigurationsfehler des FERN Interface aktiv.1(123) = "Bit: Config errorremote"
Bit: KonfigurationsfehlerFERN
6
Keine Meldung.0
Die Außenleiteranschlüsse L1, L2 und L3 sind in derfalschen Reihenfolge angeschlossen.
1(58) = "Bit: Wrong phasesequence"
Bit: Falsche Phasenfolge7
Phasenfolge ist in Ordnung.0
Byte 17: Warnungen 1
Warnungsmeldungen haben rein informativen Charakter und unterbrechen bzw.sperren im Gegensatz zu Fehlern eine Fahrt nicht.
Tabelle 14: Byte 17: Warnungen 1
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Keine Meldung (reserviert).——3
Warnung: Grenzwert für Drehmomentwarnung ZU über-schritten.
1(125) = "Bit: Torque wrnCLOSE"
Bit: DrehmomentwarnungZU
4
Keine Meldung.0
Warnung: Grenzwert für Drehmomentwarnung AUFüberschritten.
1(124) = "Bit: Torque wrnOPEN"
Bit: DrehmomentwarnungAUF
5
Keine Meldung.0
Warnung: Ein SIL-Fehler der SIL-Baugruppe ist aufgetre-ten.
1(206) = "SIL fault"Bit: SIL Fehler 1)6
Keine Meldung.0
Warnung: Keine Reaktion des Antriebs auf Fahrbefehleinnerhalb der eingestellten Reaktionszeit.
1(71) = "Bit: No reaction"Bit: Keine Reaktion7
Keine Meldung.0
28
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
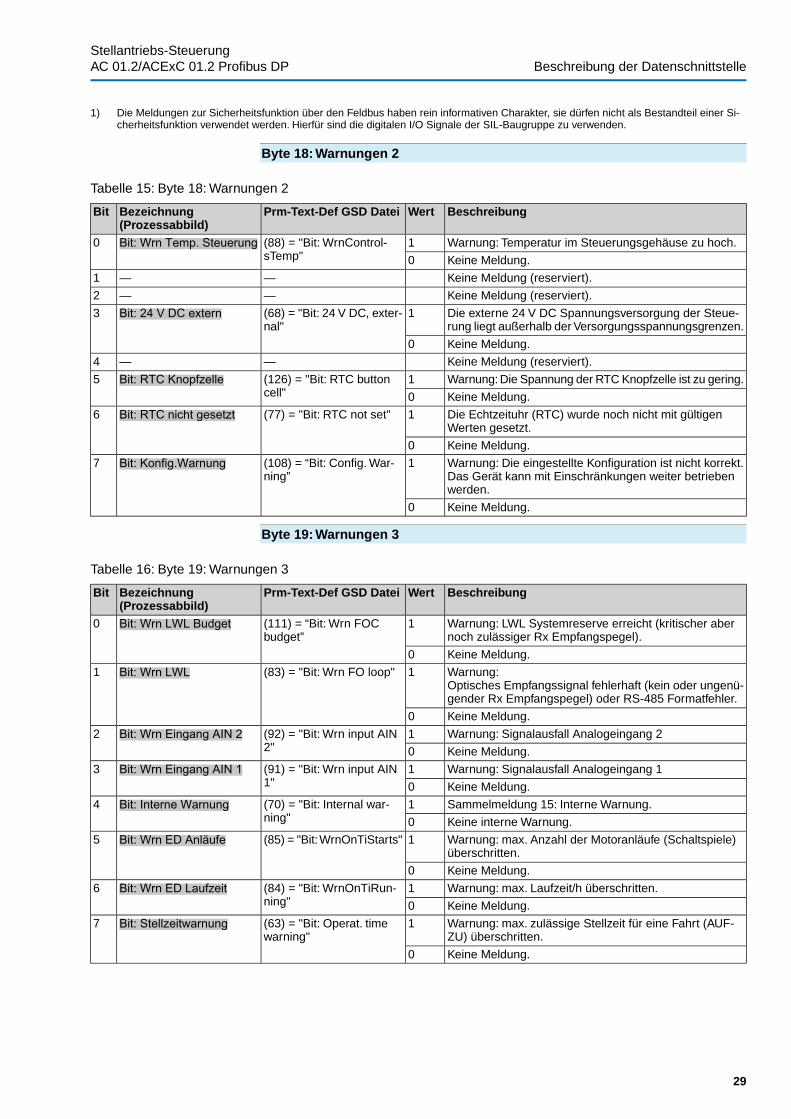
Die Meldungen zur Sicherheitsfunktion über den Feldbus haben rein informativen Charakter, sie dürfen nicht als Bestandteil einer Si-cherheitsfunktion verwendet werden. Hierfür sind die digitalen I/O Signale der SIL-Baugruppe zu verwenden.
1)
Byte 18: Warnungen 2
Tabelle 15: Byte 18: Warnungen 2
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Warnung: Temperatur im Steuerungsgehäuse zu hoch.1(88) = "Bit: WrnControl-sTemp"
Bit: Wrn Temp. Steuerung0
Keine Meldung.0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Die externe 24 V DC Spannungsversorgung der Steue-rung liegt außerhalb der Versorgungsspannungsgrenzen.
1(68) = "Bit: 24 V DC, exter-nal"
Bit: 24 V DC extern3
Keine Meldung.0
Keine Meldung (reserviert).——4
Warnung: Die Spannung der RTC Knopfzelle ist zu gering.1(126) = "Bit: RTC buttoncell"
Bit: RTC Knopfzelle5
Keine Meldung.0
Die Echtzeituhr (RTC) wurde noch nicht mit gültigenWerten gesetzt.
1(77) = "Bit: RTC not set"Bit: RTC nicht gesetzt6
Keine Meldung.0
Warnung: Die eingestellte Konfiguration ist nicht korrekt.Das Gerät kann mit Einschränkungen weiter betriebenwerden.
1(108) = “Bit: Config. War-ning”
Bit: Konfig.Warnung7
Keine Meldung.0
Byte 19: Warnungen 3
Tabelle 16: Byte 19: Warnungen 3
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Warnung: LWL Systemreserve erreicht (kritischer abernoch zulässiger Rx Empfangspegel).
1(111) = “Bit: Wrn FOCbudget”
Bit: Wrn LWL Budget0
Keine Meldung.0
Warnung:Optisches Empfangssignal fehlerhaft (kein oder ungenü-gender Rx Empfangspegel) oder RS-485 Formatfehler.
1(83) = "Bit: Wrn FO loop"Bit: Wrn LWL1
Keine Meldung.0
Warnung: Signalausfall Analogeingang 21(92) = "Bit: Wrn input AIN2"
Bit: Wrn Eingang AIN 22
Keine Meldung.0
Warnung: Signalausfall Analogeingang 11(91) = "Bit: Wrn input AIN1"
Bit: Wrn Eingang AIN 13
Keine Meldung.0
Sammelmeldung 15: Interne Warnung.1(70) = "Bit: Internal war-ning"
Bit: Interne Warnung4
Keine interne Warnung.0
Warnung: max. Anzahl der Motoranläufe (Schaltspiele)überschritten.
1(85) = "Bit:WrnOnTiStarts"Bit: Wrn ED Anläufe5
Keine Meldung.0
Warnung: max. Laufzeit/h überschritten.1(84) = "Bit: WrnOnTiRun-ning"
Bit: Wrn ED Laufzeit6
Keine Meldung.0
Warnung: max. zulässige Stellzeit für eine Fahrt (AUF-ZU) überschritten.
1(63) = "Bit: Operat. timewarning"
Bit: Stellzeitwarnung7
Keine Meldung.0
29
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
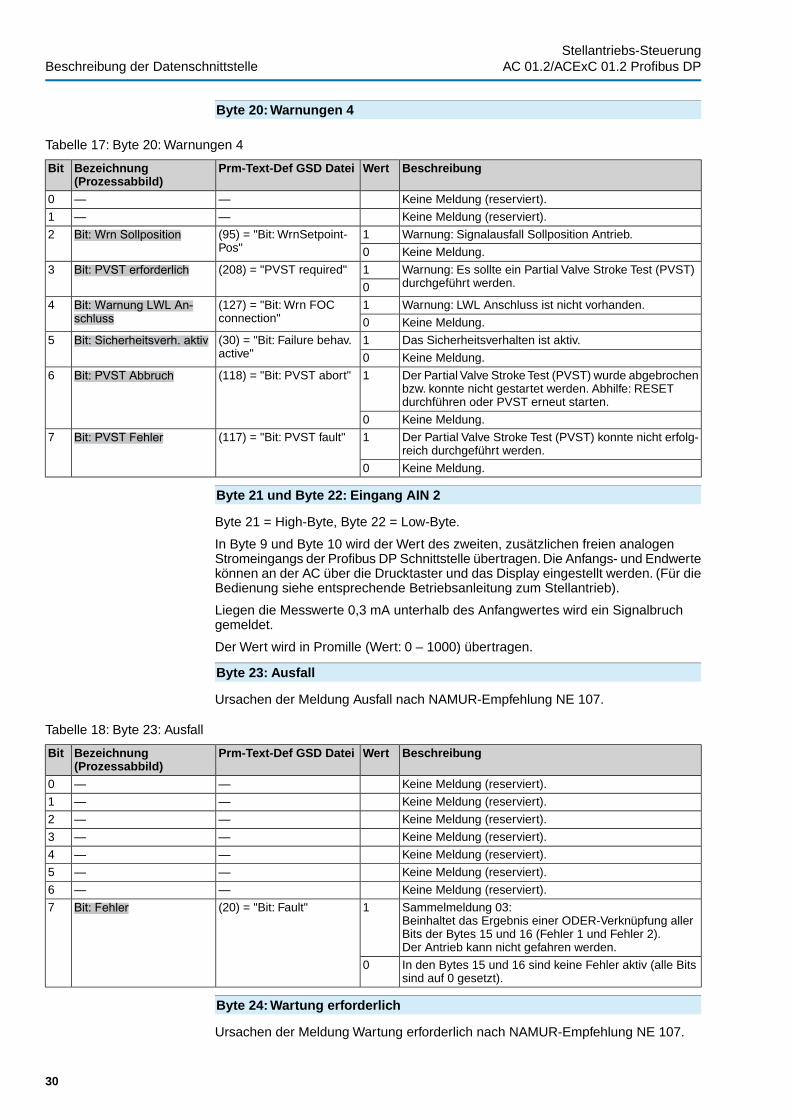
Byte 20: Warnungen 4
Tabelle 17: Byte 20: Warnungen 4
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Warnung: Signalausfall Sollposition Antrieb.1(95) = "Bit: WrnSetpoint-Pos"
Bit: Wrn Sollposition2
Keine Meldung.0
Warnung: Es sollte ein Partial Valve Stroke Test (PVST)durchgeführt werden.
1(208) = "PVST required"Bit: PVST erforderlich3
0
Warnung: LWL Anschluss ist nicht vorhanden.1(127) = "Bit: Wrn FOCconnection"
Bit: Warnung LWL An-schluss
4
Keine Meldung.0
Das Sicherheitsverhalten ist aktiv.1(30) = "Bit: Failure behav.active"
Bit: Sicherheitsverh. aktiv5
Keine Meldung.0
Der Partial Valve Stroke Test (PVST) wurde abgebrochenbzw. konnte nicht gestartet werden. Abhilfe: RESETdurchführen oder PVST erneut starten.
1(118) = "Bit: PVST abort"Bit: PVST Abbruch6
Keine Meldung.0
Der Partial Valve Stroke Test (PVST) konnte nicht erfolg-reich durchgeführt werden.
1(117) = "Bit: PVST fault"Bit: PVST Fehler7
Keine Meldung.0
Byte 21 und Byte 22: Eingang AIN 2
Byte 21 = High-Byte, Byte 22 = Low-Byte.
In Byte 9 und Byte 10 wird der Wert des zweiten, zusätzlichen freien analogenStromeingangs der Profibus DP Schnittstelle übertragen. Die Anfangs- und Endwertekönnen an der AC über die Drucktaster und das Display eingestellt werden. (Für dieBedienung siehe entsprechende Betriebsanleitung zum Stellantrieb).
Liegen die Messwerte 0,3 mA unterhalb des Anfangwertes wird ein Signalbruchgemeldet.
Der Wert wird in Promille (Wert: 0 – 1000) übertragen.
Byte 23: Ausfall
Ursachen der Meldung Ausfall nach NAMUR-Empfehlung NE 107.
Tabelle 18: Byte 23: Ausfall
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Keine Meldung (reserviert).——3
Keine Meldung (reserviert).——4
Keine Meldung (reserviert).——5
Keine Meldung (reserviert).——6
Sammelmeldung 03:Beinhaltet das Ergebnis einer ODER-Verknüpfung allerBits der Bytes 15 und 16 (Fehler 1 und Fehler 2).Der Antrieb kann nicht gefahren werden.
1(20) = "Bit: Fault"Bit: Fehler7
In den Bytes 15 und 16 sind keine Fehler aktiv (alle Bitssind auf 0 gesetzt).
0
Byte 24: Wartung erforderlich
Ursachen der Meldung Wartung erforderlich nach NAMUR-Empfehlung NE 107.
30
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
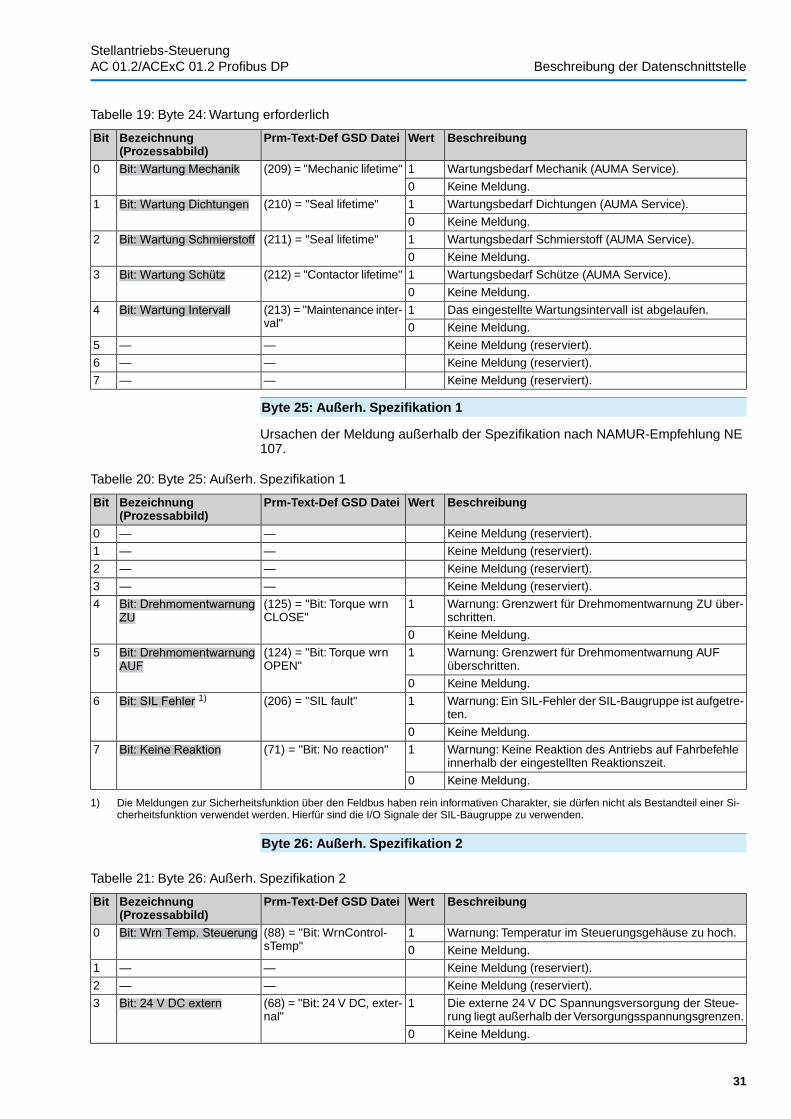
Tabelle 19: Byte 24: Wartung erforderlich
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Wartungsbedarf Mechanik (AUMA Service).1(209) = "Mechanic lifetime"Bit: Wartung Mechanik0
Keine Meldung.0
Wartungsbedarf Dichtungen (AUMA Service).1(210) = "Seal lifetime"Bit: Wartung Dichtungen1
Keine Meldung.0
Wartungsbedarf Schmierstoff (AUMA Service).1(211) = "Seal lifetime"Bit: Wartung Schmierstoff2
Keine Meldung.0
Wartungsbedarf Schütze (AUMA Service).1(212) = "Contactor lifetime"Bit: Wartung Schütz3
Keine Meldung.0
Das eingestellte Wartungsintervall ist abgelaufen.1(213) = "Maintenance inter-val"
Bit: Wartung Intervall4
Keine Meldung.0
Keine Meldung (reserviert).——5
Keine Meldung (reserviert).——6
Keine Meldung (reserviert).——7
Byte 25: Außerh. Spezifikation 1
Ursachen der Meldung außerhalb der Spezifikation nach NAMUR-Empfehlung NE107.
Tabelle 20: Byte 25: Außerh. Spezifikation 1
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Keine Meldung (reserviert).——3
Warnung: Grenzwert für Drehmomentwarnung ZU über-schritten.
1(125) = "Bit: Torque wrnCLOSE"
Bit: DrehmomentwarnungZU
4
Keine Meldung.0
Warnung: Grenzwert für Drehmomentwarnung AUFüberschritten.
1(124) = "Bit: Torque wrnOPEN"
Bit: DrehmomentwarnungAUF
5
Keine Meldung.0
Warnung: Ein SIL-Fehler der SIL-Baugruppe ist aufgetre-ten.
1(206) = "SIL fault"Bit: SIL Fehler 1)6
Keine Meldung.0
Warnung: Keine Reaktion des Antriebs auf Fahrbefehleinnerhalb der eingestellten Reaktionszeit.
1(71) = "Bit: No reaction"Bit: Keine Reaktion7
Keine Meldung.0
Die Meldungen zur Sicherheitsfunktion über den Feldbus haben rein informativen Charakter, sie dürfen nicht als Bestandteil einer Si-cherheitsfunktion verwendet werden. Hierfür sind die I/O Signale der SIL-Baugruppe zu verwenden.
1)
Byte 26: Außerh. Spezifikation 2
Tabelle 21: Byte 26: Außerh. Spezifikation 2
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Warnung: Temperatur im Steuerungsgehäuse zu hoch.1(88) = "Bit: WrnControl-sTemp"
Bit: Wrn Temp. Steuerung0
Keine Meldung.0
Keine Meldung (reserviert).——1
Keine Meldung (reserviert).——2
Die externe 24 V DC Spannungsversorgung der Steue-rung liegt außerhalb der Versorgungsspannungsgrenzen.
1(68) = "Bit: 24 V DC, exter-nal"
Bit: 24 V DC extern3
Keine Meldung.0
31
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
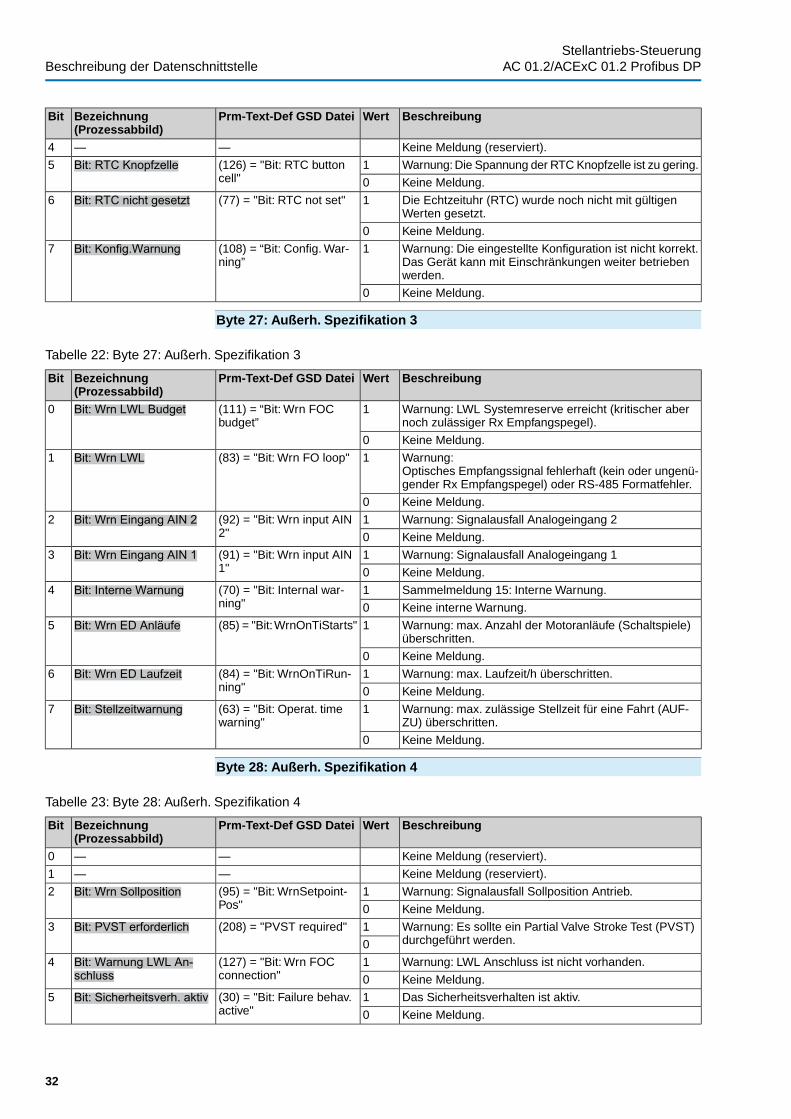
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——4
Warnung: Die Spannung der RTC Knopfzelle ist zu gering.1(126) = "Bit: RTC buttoncell"
Bit: RTC Knopfzelle5
Keine Meldung.0
Die Echtzeituhr (RTC) wurde noch nicht mit gültigenWerten gesetzt.
1(77) = "Bit: RTC not set"Bit: RTC nicht gesetzt6
Keine Meldung.0
Warnung: Die eingestellte Konfiguration ist nicht korrekt.Das Gerät kann mit Einschränkungen weiter betriebenwerden.
1(108) = “Bit: Config. War-ning”
Bit: Konfig.Warnung7
Keine Meldung.0
Byte 27: Außerh. Spezifikation 3
Tabelle 22: Byte 27: Außerh. Spezifikation 3
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Warnung: LWL Systemreserve erreicht (kritischer abernoch zulässiger Rx Empfangspegel).
1(111) = “Bit: Wrn FOCbudget”
Bit: Wrn LWL Budget0
Keine Meldung.0
Warnung:Optisches Empfangssignal fehlerhaft (kein oder ungenü-gender Rx Empfangspegel) oder RS-485 Formatfehler.
1(83) = "Bit: Wrn FO loop"Bit: Wrn LWL1
Keine Meldung.0
Warnung: Signalausfall Analogeingang 21(92) = "Bit: Wrn input AIN2"
Bit: Wrn Eingang AIN 22
Keine Meldung.0
Warnung: Signalausfall Analogeingang 11(91) = "Bit: Wrn input AIN1"
Bit: Wrn Eingang AIN 13
Keine Meldung.0
Sammelmeldung 15: Interne Warnung.1(70) = "Bit: Internal war-ning"
Bit: Interne Warnung4
Keine interne Warnung.0
Warnung: max. Anzahl der Motoranläufe (Schaltspiele)überschritten.
1(85) = "Bit:WrnOnTiStarts"Bit: Wrn ED Anläufe5
Keine Meldung.0
Warnung: max. Laufzeit/h überschritten.1(84) = "Bit: WrnOnTiRun-ning"
Bit: Wrn ED Laufzeit6
Keine Meldung.0
Warnung: max. zulässige Stellzeit für eine Fahrt (AUF-ZU) überschritten.
1(63) = "Bit: Operat. timewarning"
Bit: Stellzeitwarnung7
Keine Meldung.0
Byte 28: Außerh. Spezifikation 4
Tabelle 23: Byte 28: Außerh. Spezifikation 4
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine Meldung (reserviert).——0
Keine Meldung (reserviert).——1
Warnung: Signalausfall Sollposition Antrieb.1(95) = "Bit: WrnSetpoint-Pos"
Bit: Wrn Sollposition2
Keine Meldung.0
Warnung: Es sollte ein Partial Valve Stroke Test (PVST)durchgeführt werden.
1(208) = "PVST required"Bit: PVST erforderlich3
0
Warnung: LWL Anschluss ist nicht vorhanden.1(127) = "Bit: Wrn FOCconnection"
Bit: Warnung LWL An-schluss
4
Keine Meldung.0
Das Sicherheitsverhalten ist aktiv.1(30) = "Bit: Failure behav.active"
Bit: Sicherheitsverh. aktiv5
Keine Meldung.0
32
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
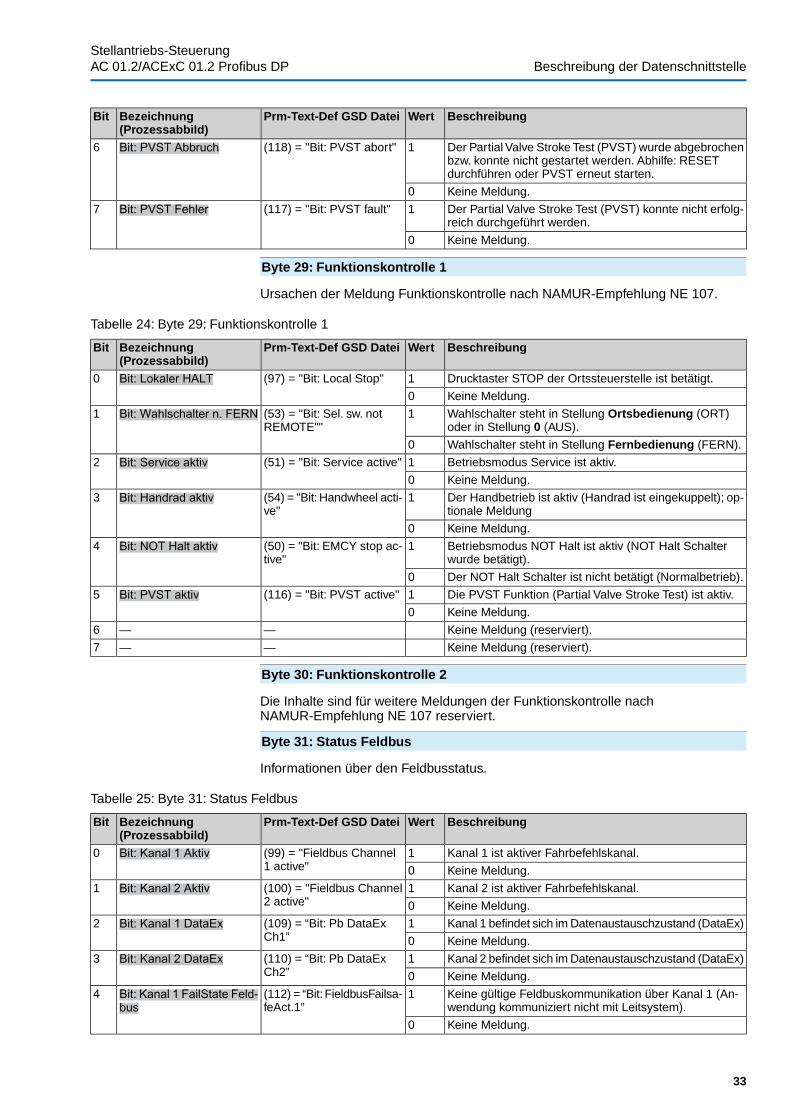
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Der Partial Valve Stroke Test (PVST) wurde abgebrochenbzw. konnte nicht gestartet werden. Abhilfe: RESETdurchführen oder PVST erneut starten.
1(118) = "Bit: PVST abort"Bit: PVST Abbruch6
Keine Meldung.0
Der Partial Valve Stroke Test (PVST) konnte nicht erfolg-reich durchgeführt werden.
1(117) = "Bit: PVST fault"Bit: PVST Fehler7
Keine Meldung.0
Byte 29: Funktionskontrolle 1
Ursachen der Meldung Funktionskontrolle nach NAMUR-Empfehlung NE 107.
Tabelle 24: Byte 29: Funktionskontrolle 1
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Drucktaster STOP der Ortssteuerstelle ist betätigt.1(97) = "Bit: Local Stop"Bit: Lokaler HALT0
Keine Meldung.0
Wahlschalter steht in Stellung Ortsbedienung (ORT)oder in Stellung 0 (AUS).
1(53) = "Bit: Sel. sw. notREMOTE""
Bit: Wahlschalter n. FERN1
Wahlschalter steht in Stellung Fernbedienung (FERN).0
Betriebsmodus Service ist aktiv.1(51) = "Bit: Service active"Bit: Service aktiv2
Keine Meldung.0
Der Handbetrieb ist aktiv (Handrad ist eingekuppelt); op-tionale Meldung
1(54) = "Bit: Handwheel acti-ve"
Bit: Handrad aktiv3
Keine Meldung.0
Betriebsmodus NOT Halt ist aktiv (NOT Halt Schalterwurde betätigt).
1(50) = "Bit: EMCY stop ac-tive"
Bit: NOT Halt aktiv4
Der NOT Halt Schalter ist nicht betätigt (Normalbetrieb).0
Die PVST Funktion (Partial Valve Stroke Test) ist aktiv.1(116) = "Bit: PVST active"Bit: PVST aktiv5
Keine Meldung.0
Keine Meldung (reserviert).——6
Keine Meldung (reserviert).——7
Byte 30: Funktionskontrolle 2
Die Inhalte sind für weitere Meldungen der Funktionskontrolle nachNAMUR-Empfehlung NE 107 reserviert.
Byte 31: Status Feldbus
Informationen über den Feldbusstatus.
Tabelle 25: Byte 31: Status Feldbus
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Kanal 1 ist aktiver Fahrbefehlskanal.1(99) = "Fieldbus Channel1 active"
Bit: Kanal 1 Aktiv0
Keine Meldung.0
Kanal 2 ist aktiver Fahrbefehlskanal.1(100) = "Fieldbus Channel2 active"
Bit: Kanal 2 Aktiv1
Keine Meldung.0
Kanal 1 befindet sich im Datenaustauschzustand (DataEx)1(109) = “Bit: Pb DataExCh1”
Bit: Kanal 1 DataEx2
Keine Meldung.0
Kanal 2 befindet sich im Datenaustauschzustand (DataEx)1(110) = “Bit: Pb DataExCh2”
Bit: Kanal 2 DataEx3
Keine Meldung.0
Keine gültige Feldbuskommunikation über Kanal 1 (An-wendung kommuniziert nicht mit Leitsystem).
1(112) = “Bit: FieldbusFailsa-feAct.1”
Bit: Kanal 1 FailState Feld-bus
4
Keine Meldung.0
33
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
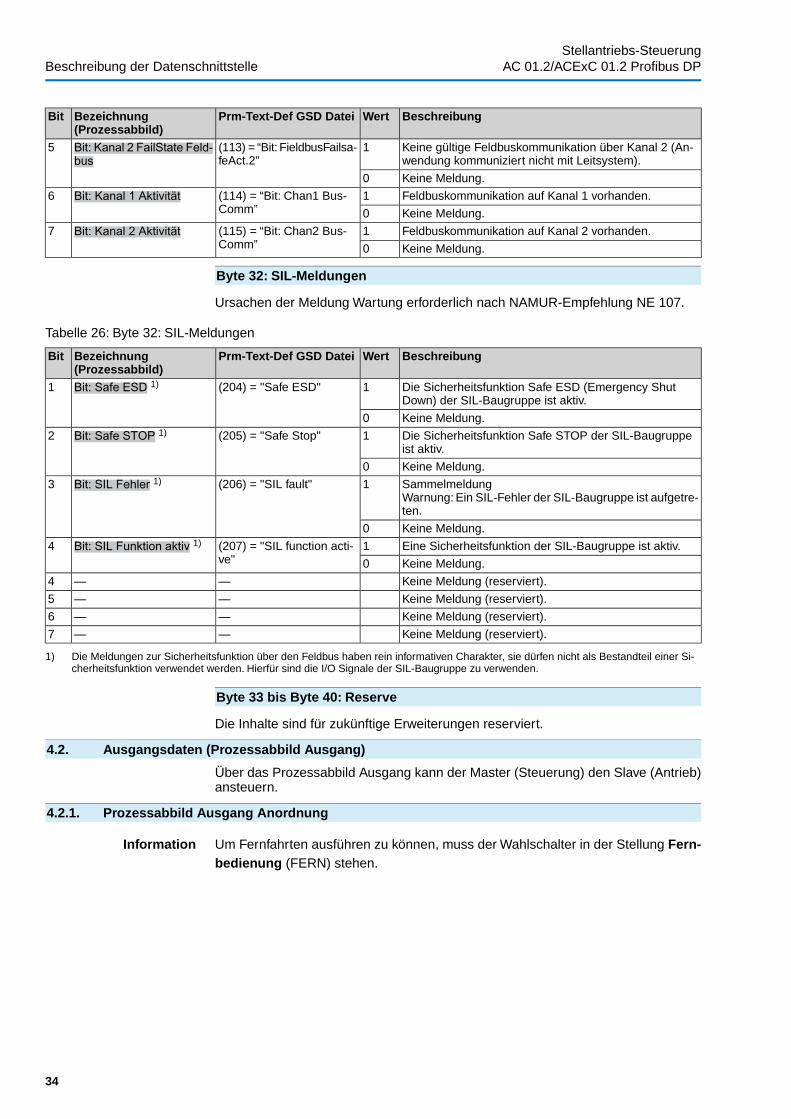
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Keine gültige Feldbuskommunikation über Kanal 2 (An-wendung kommuniziert nicht mit Leitsystem).
1(113) = “Bit: FieldbusFailsa-feAct.2”
Bit: Kanal 2 FailState Feld-bus
5
Keine Meldung.0
Feldbuskommunikation auf Kanal 1 vorhanden.1(114) = “Bit: Chan1 Bus-Comm”
Bit: Kanal 1 Aktivität6
Keine Meldung.0
Feldbuskommunikation auf Kanal 2 vorhanden.1(115) = “Bit: Chan2 Bus-Comm”
Bit: Kanal 2 Aktivität7
Keine Meldung.0
Byte 32: SIL-Meldungen
Ursachen der Meldung Wartung erforderlich nach NAMUR-Empfehlung NE 107.
Tabelle 26: Byte 32: SIL-Meldungen
BeschreibungWertPrm-Text-Def GSD DateiBezeichnung(Prozessabbild)
Bit
Die Sicherheitsfunktion Safe ESD (Emergency ShutDown) der SIL-Baugruppe ist aktiv.
1(204) = "Safe ESD"Bit: Safe ESD 1)1
Keine Meldung.0
Die Sicherheitsfunktion Safe STOP der SIL-Baugruppeist aktiv.
1(205) = "Safe Stop"Bit: Safe STOP 1)2
Keine Meldung.0
SammelmeldungWarnung: Ein SIL-Fehler der SIL-Baugruppe ist aufgetre-ten.
1(206) = "SIL fault"Bit: SIL Fehler 1)3
Keine Meldung.0
Eine Sicherheitsfunktion der SIL-Baugruppe ist aktiv.1(207) = "SIL function acti-ve"
Bit: SIL Funktion aktiv 1)4
Keine Meldung.0
Keine Meldung (reserviert).——4
Keine Meldung (reserviert).——5
Keine Meldung (reserviert).——6
Keine Meldung (reserviert).——7
Die Meldungen zur Sicherheitsfunktion über den Feldbus haben rein informativen Charakter, sie dürfen nicht als Bestandteil einer Si-cherheitsfunktion verwendet werden. Hierfür sind die I/O Signale der SIL-Baugruppe zu verwenden.
1)
Byte 33 bis Byte 40: Reserve
Die Inhalte sind für zukünftige Erweiterungen reserviert.
4.2. Ausgangsdaten (Prozessabbild Ausgang)
Über das Prozessabbild Ausgang kann der Master (Steuerung) den Slave (Antrieb)ansteuern.
4.2.1. Prozessabbild Ausgang Anordnung
Information Um Fernfahrten ausführen zu können, muss der Wahlschalter in der Stellung Fern-bedienung (FERN) stehen.
34
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
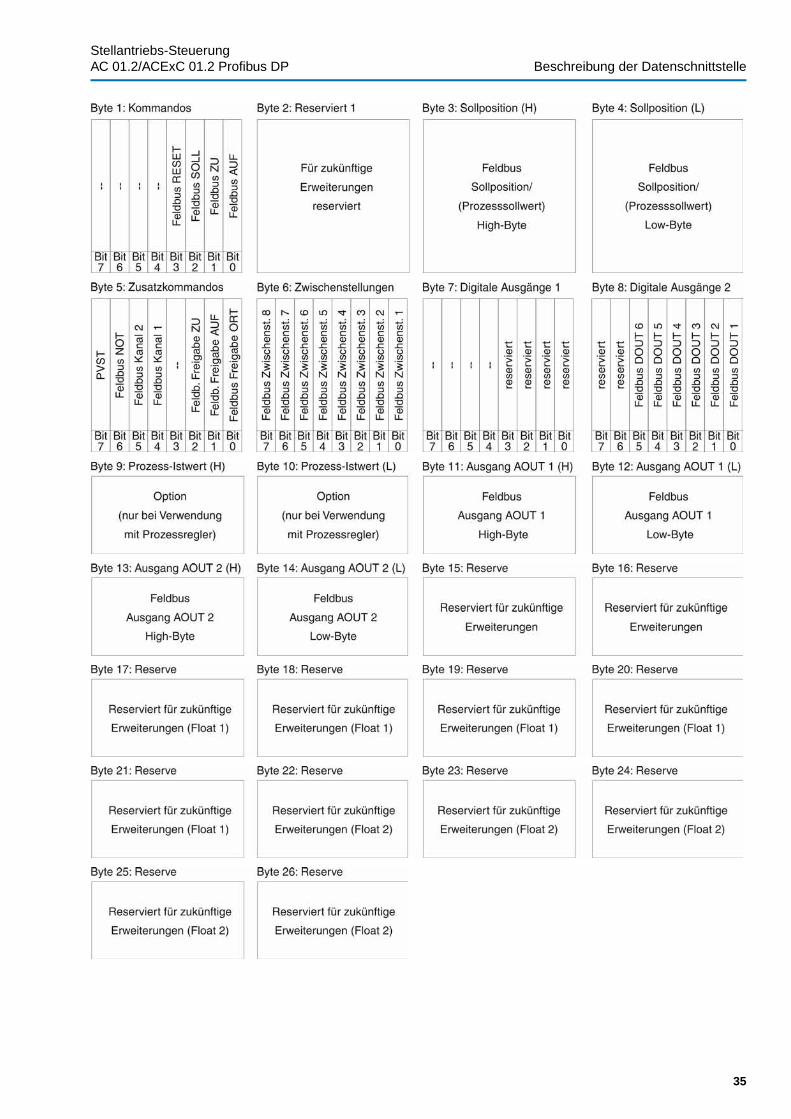
35
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
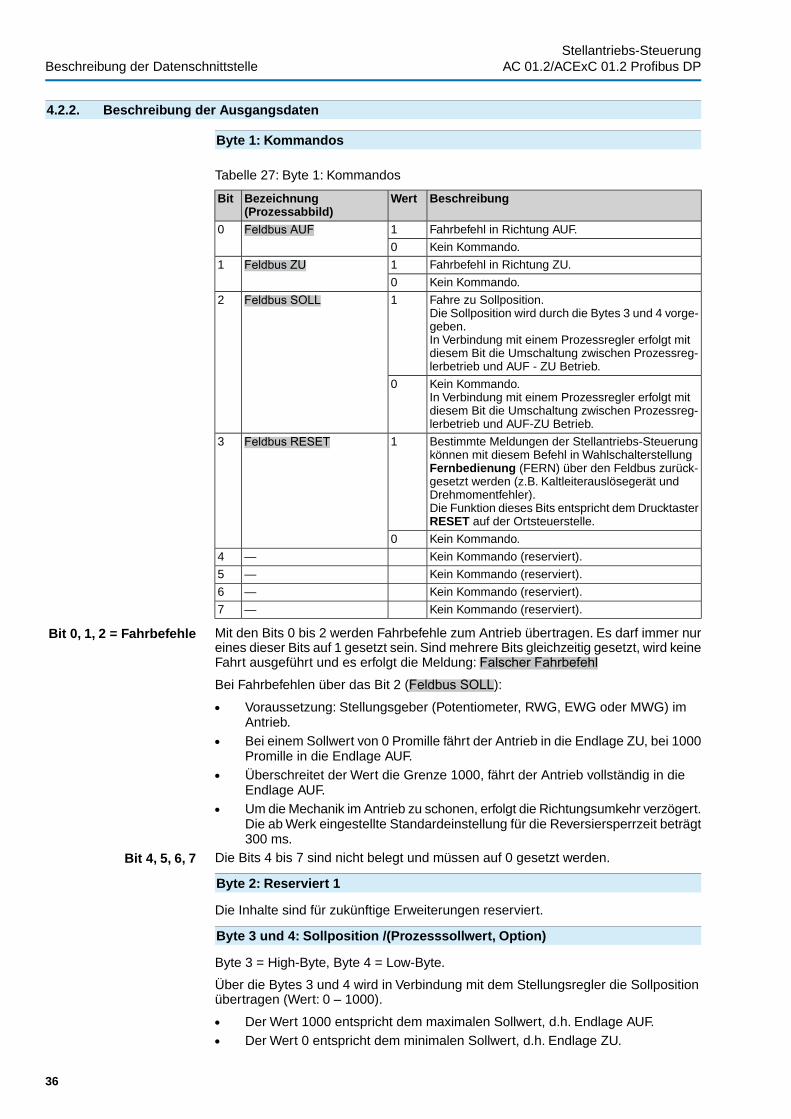
4.2.2. Beschreibung der Ausgangsdaten
Byte 1: Kommandos
Tabelle 27: Byte 1: Kommandos
BeschreibungWertBezeichnung(Prozessabbild)
Bit
Fahrbefehl in Richtung AUF.1Feldbus AUF0
Kein Kommando.0
Fahrbefehl in Richtung ZU.1Feldbus ZU1
Kein Kommando.0
Fahre zu Sollposition.Die Sollposition wird durch die Bytes 3 und 4 vorge-geben.In Verbindung mit einem Prozessregler erfolgt mitdiesem Bit die Umschaltung zwischen Prozessreg-lerbetrieb und AUF - ZU Betrieb.
1Feldbus SOLL2
Kein Kommando.In Verbindung mit einem Prozessregler erfolgt mitdiesem Bit die Umschaltung zwischen Prozessreg-lerbetrieb und AUF-ZU Betrieb.
0
Bestimmte Meldungen der Stellantriebs-Steuerungkönnen mit diesem Befehl in WahlschalterstellungFernbedienung (FERN) über den Feldbus zurück-gesetzt werden (z.B. Kaltleiterauslösegerät undDrehmomentfehler).Die Funktion dieses Bits entspricht dem DrucktasterRESET auf der Ortsteuerstelle.
1Feldbus RESET3
Kein Kommando.0
Kein Kommando (reserviert).—4
Kein Kommando (reserviert).—5
Kein Kommando (reserviert).—6
Kein Kommando (reserviert).—7
Bit 0, 1, 2 = Fahrbefehle Mit den Bits 0 bis 2 werden Fahrbefehle zum Antrieb übertragen. Es darf immer nureines dieser Bits auf 1 gesetzt sein. Sind mehrere Bits gleichzeitig gesetzt, wird keineFahrt ausgeführt und es erfolgt die Meldung: Falscher FahrbefehlBei Fahrbefehlen über das Bit 2 (Feldbus SOLL):
● Voraussetzung: Stellungsgeber (Potentiometer, RWG, EWG oder MWG) imAntrieb.
● Bei einem Sollwert von 0 Promille fährt der Antrieb in die Endlage ZU, bei 1000Promille in die Endlage AUF.
● Überschreitet der Wert die Grenze 1000, fährt der Antrieb vollständig in dieEndlage AUF.
● Um die Mechanik im Antrieb zu schonen, erfolgt die Richtungsumkehr verzögert.Die ab Werk eingestellte Standardeinstellung für die Reversiersperrzeit beträgt300 ms.
Bit 4, 5, 6, 7 Die Bits 4 bis 7 sind nicht belegt und müssen auf 0 gesetzt werden.
Byte 2: Reserviert 1
Die Inhalte sind für zukünftige Erweiterungen reserviert.
Byte 3 und 4: Sollposition /(Prozesssollwert, Option)
Byte 3 = High-Byte, Byte 4 = Low-Byte.
Über die Bytes 3 und 4 wird in Verbindung mit dem Stellungsregler die Sollpositionübertragen (Wert: 0 – 1000).
● Der Wert 1000 entspricht dem maximalen Sollwert, d.h. Endlage AUF.● Der Wert 0 entspricht dem minimalen Sollwert, d.h. Endlage ZU.
36
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
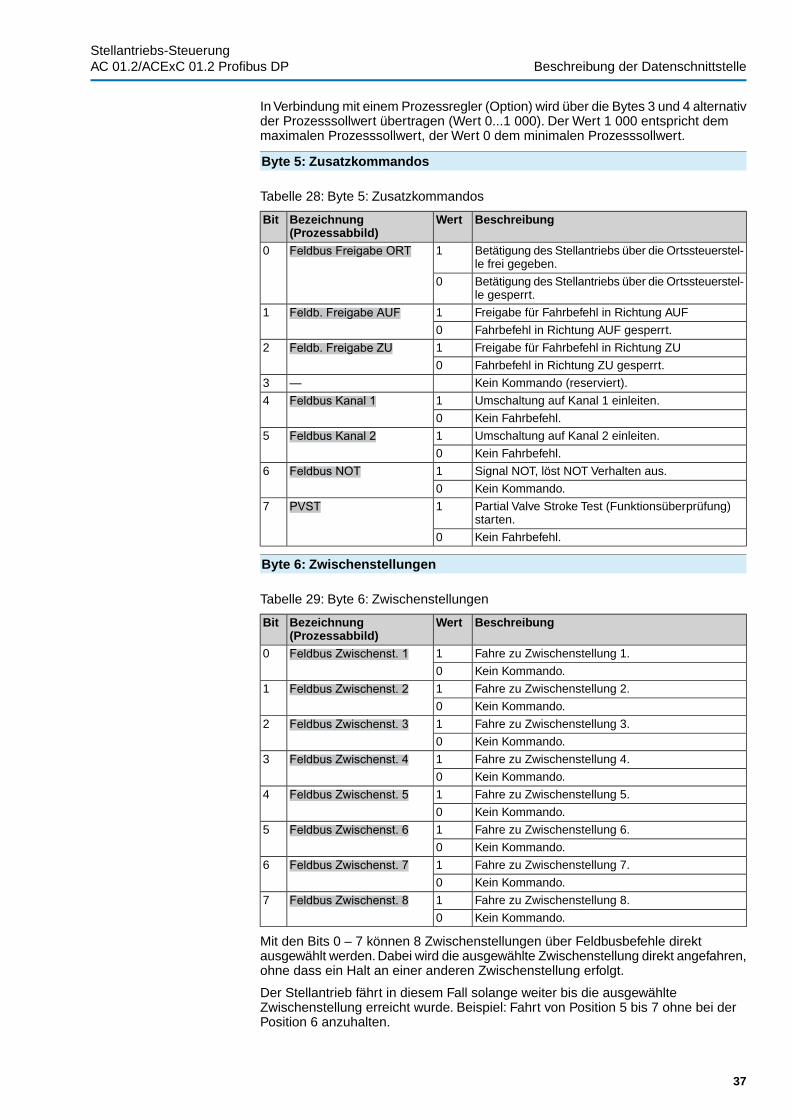
In Verbindung mit einem Prozessregler (Option) wird über die Bytes 3 und 4 alternativder Prozesssollwert übertragen (Wert 0...1 000). Der Wert 1 000 entspricht demmaximalen Prozesssollwert, der Wert 0 dem minimalen Prozesssollwert.
Byte 5: Zusatzkommandos
Tabelle 28: Byte 5: Zusatzkommandos
BeschreibungWertBezeichnung(Prozessabbild)
Bit
Betätigung des Stellantriebs über die Ortssteuerstel-le frei gegeben.
1Feldbus Freigabe ORT0
Betätigung des Stellantriebs über die Ortssteuerstel-le gesperrt.
0
Freigabe für Fahrbefehl in Richtung AUF1Feldb. Freigabe AUF1
Fahrbefehl in Richtung AUF gesperrt.0
Freigabe für Fahrbefehl in Richtung ZU1Feldb. Freigabe ZU2
Fahrbefehl in Richtung ZU gesperrt.0
Kein Kommando (reserviert).—3
Umschaltung auf Kanal 1 einleiten.1Feldbus Kanal 14
Kein Fahrbefehl.0
Umschaltung auf Kanal 2 einleiten.1Feldbus Kanal 25
Kein Fahrbefehl.0
Signal NOT, löst NOT Verhalten aus.1Feldbus NOT6
Kein Kommando.0
Partial Valve Stroke Test (Funktionsüberprüfung)starten.
1PVST7
Kein Fahrbefehl.0
Byte 6: Zwischenstellungen
Tabelle 29: Byte 6: Zwischenstellungen
BeschreibungWertBezeichnung(Prozessabbild)
Bit
Fahre zu Zwischenstellung 1.1Feldbus Zwischenst. 10
Kein Kommando.0
Fahre zu Zwischenstellung 2.1Feldbus Zwischenst. 21
Kein Kommando.0
Fahre zu Zwischenstellung 3.1Feldbus Zwischenst. 32
Kein Kommando.0
Fahre zu Zwischenstellung 4.1Feldbus Zwischenst. 43
Kein Kommando.0
Fahre zu Zwischenstellung 5.1Feldbus Zwischenst. 54
Kein Kommando.0
Fahre zu Zwischenstellung 6.1Feldbus Zwischenst. 65
Kein Kommando.0
Fahre zu Zwischenstellung 7.1Feldbus Zwischenst. 76
Kein Kommando.0
Fahre zu Zwischenstellung 8.1Feldbus Zwischenst. 87
Kein Kommando.0
Mit den Bits 0 – 7 können 8 Zwischenstellungen über Feldbusbefehle direktausgewählt werden. Dabei wird die ausgewählte Zwischenstellung direkt angefahren,ohne dass ein Halt an einer anderen Zwischenstellung erfolgt.
Der Stellantrieb fährt in diesem Fall solange weiter bis die ausgewählteZwischenstellung erreicht wurde. Beispiel: Fahrt von Position 5 bis 7 ohne bei derPosition 6 anzuhalten.
37
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
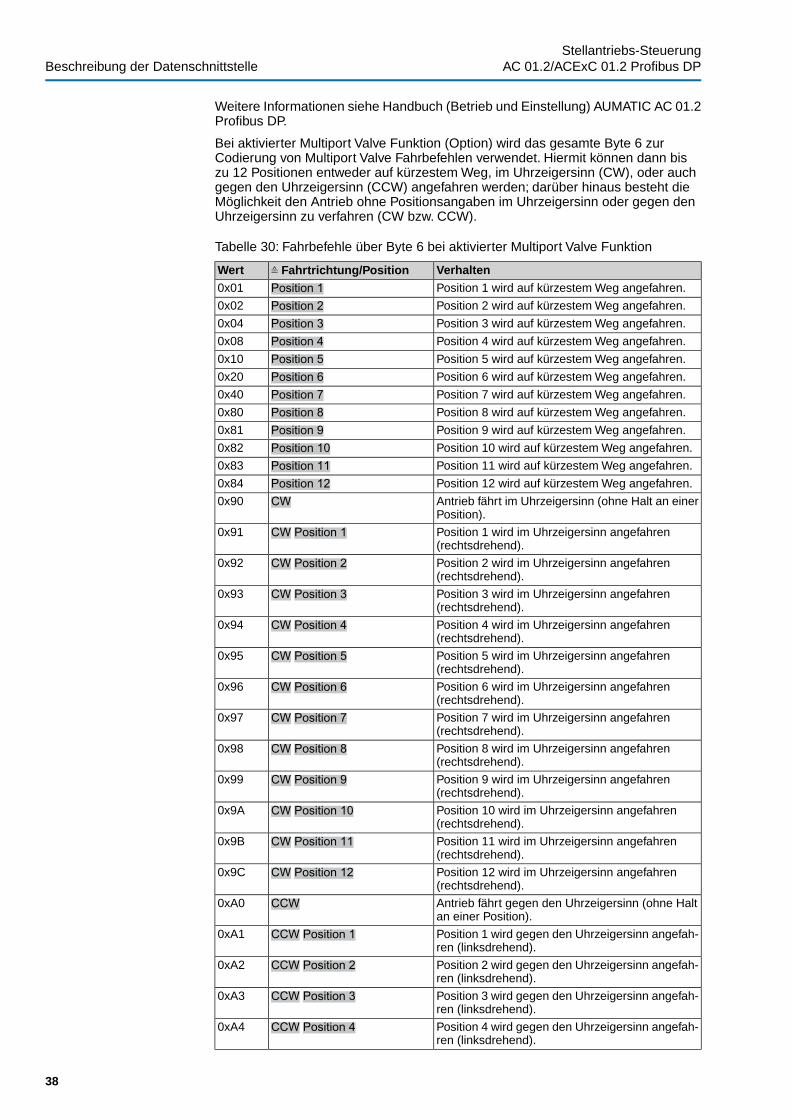
Weitere Informationen siehe Handbuch (Betrieb und Einstellung) AUMATIC AC 01.2Profibus DP.
Bei aktivierter Multiport Valve Funktion (Option) wird das gesamte Byte 6 zurCodierung von Multiport Valve Fahrbefehlen verwendet. Hiermit können dann biszu 12 Positionen entweder auf kürzestem Weg, im Uhrzeigersinn (CW), oder auchgegen den Uhrzeigersinn (CCW) angefahren werden; darüber hinaus besteht dieMöglichkeit den Antrieb ohne Positionsangaben im Uhrzeigersinn oder gegen denUhrzeigersinn zu verfahren (CW bzw. CCW).
Tabelle 30: Fahrbefehle über Byte 6 bei aktivierter Multiport Valve Funktion
Verhalten≙ Fahrtrichtung/PositionWertPosition 1 wird auf kürzestem Weg angefahren.Position 10x01
Position 2 wird auf kürzestem Weg angefahren.Position 20x02
Position 3 wird auf kürzestem Weg angefahren.Position 30x04
Position 4 wird auf kürzestem Weg angefahren.Position 40x08
Position 5 wird auf kürzestem Weg angefahren.Position 50x10
Position 6 wird auf kürzestem Weg angefahren.Position 60x20
Position 7 wird auf kürzestem Weg angefahren.Position 70x40
Position 8 wird auf kürzestem Weg angefahren.Position 80x80
Position 9 wird auf kürzestem Weg angefahren.Position 90x81
Position 10 wird auf kürzestem Weg angefahren.Position 100x82
Position 11 wird auf kürzestem Weg angefahren.Position 110x83
Position 12 wird auf kürzestem Weg angefahren.Position 120x84
Antrieb fährt im Uhrzeigersinn (ohne Halt an einerPosition).
CW0x90
Position 1 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 10x91
Position 2 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 20x92
Position 3 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 30x93
Position 4 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 40x94
Position 5 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 50x95
Position 6 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 60x96
Position 7 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 70x97
Position 8 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 80x98
Position 9 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 90x99
Position 10 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 100x9A
Position 11 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 110x9B
Position 12 wird im Uhrzeigersinn angefahren(rechtsdrehend).
CW Position 120x9C
Antrieb fährt gegen den Uhrzeigersinn (ohne Haltan einer Position).
CCW0xA0
Position 1 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 10xA1
Position 2 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 20xA2
Position 3 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 30xA3
Position 4 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 40xA4
38
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
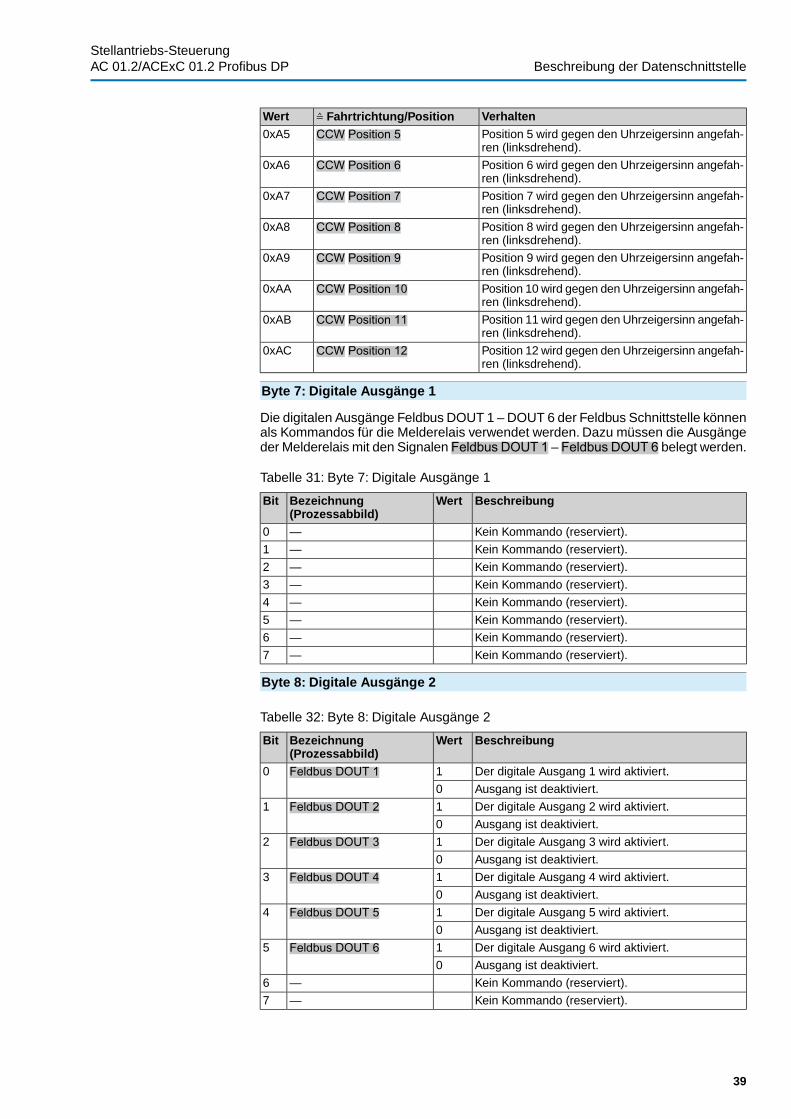
Verhalten≙ Fahrtrichtung/PositionWertPosition 5 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 50xA5
Position 6 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 60xA6
Position 7 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 70xA7
Position 8 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 80xA8
Position 9 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 90xA9
Position 10 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 100xAA
Position 11 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 110xAB
Position 12 wird gegen den Uhrzeigersinn angefah-ren (linksdrehend).
CCW Position 120xAC
Byte 7: Digitale Ausgänge 1
Die digitalen Ausgänge Feldbus DOUT 1 – DOUT 6 der Feldbus Schnittstelle könnenals Kommandos für die Melderelais verwendet werden. Dazu müssen die Ausgängeder Melderelais mit den Signalen Feldbus DOUT 1 – Feldbus DOUT 6 belegt werden.
Tabelle 31: Byte 7: Digitale Ausgänge 1
BeschreibungWertBezeichnung(Prozessabbild)
Bit
Kein Kommando (reserviert).—0
Kein Kommando (reserviert).—1
Kein Kommando (reserviert).—2
Kein Kommando (reserviert).—3
Kein Kommando (reserviert).—4
Kein Kommando (reserviert).—5
Kein Kommando (reserviert).—6
Kein Kommando (reserviert).—7
Byte 8: Digitale Ausgänge 2
Tabelle 32: Byte 8: Digitale Ausgänge 2
BeschreibungWertBezeichnung(Prozessabbild)
Bit
Der digitale Ausgang 1 wird aktiviert.1Feldbus DOUT 10
Ausgang ist deaktiviert.0
Der digitale Ausgang 2 wird aktiviert.1Feldbus DOUT 21
Ausgang ist deaktiviert.0
Der digitale Ausgang 3 wird aktiviert.1Feldbus DOUT 32
Ausgang ist deaktiviert.0
Der digitale Ausgang 4 wird aktiviert.1Feldbus DOUT 43
Ausgang ist deaktiviert.0
Der digitale Ausgang 5 wird aktiviert.1Feldbus DOUT 54
Ausgang ist deaktiviert.0
Der digitale Ausgang 6 wird aktiviert.1Feldbus DOUT 65
Ausgang ist deaktiviert.0
Kein Kommando (reserviert).—6
Kein Kommando (reserviert).—7
39
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
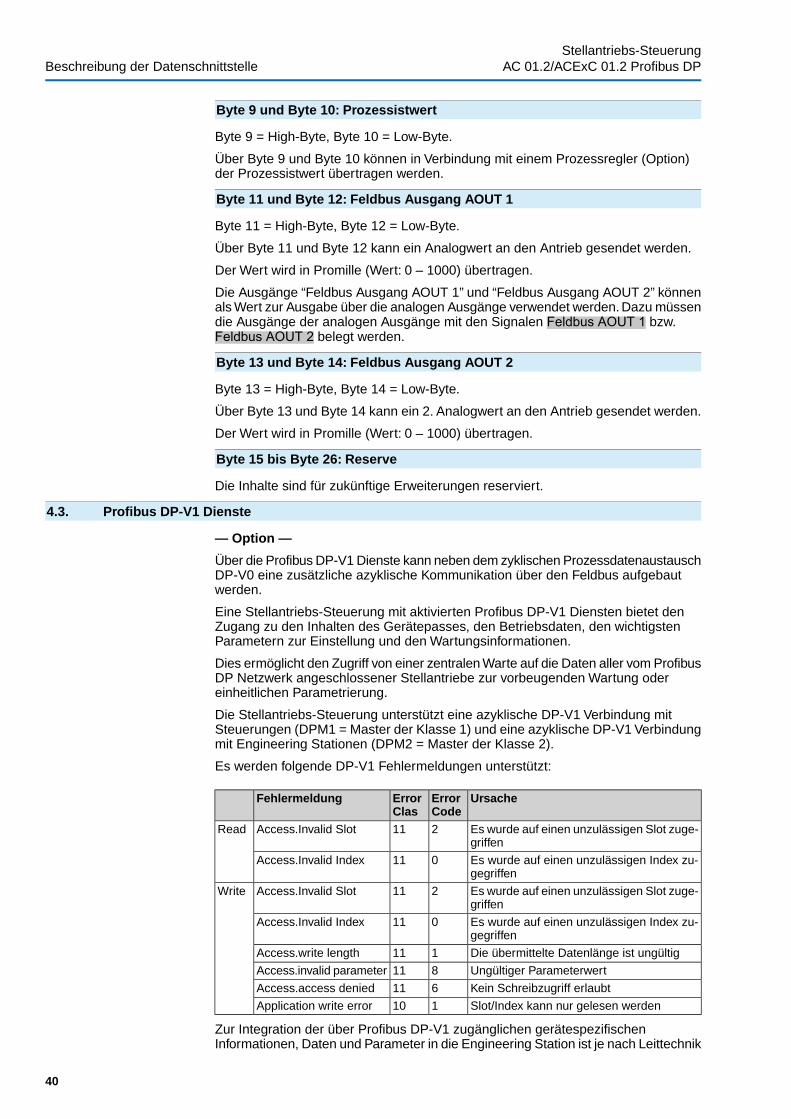
Byte 9 und Byte 10: Prozessistwert
Byte 9 = High-Byte, Byte 10 = Low-Byte.
Über Byte 9 und Byte 10 können in Verbindung mit einem Prozessregler (Option)der Prozessistwert übertragen werden.
Byte 11 und Byte 12: Feldbus Ausgang AOUT 1
Byte 11 = High-Byte, Byte 12 = Low-Byte.
Über Byte 11 und Byte 12 kann ein Analogwert an den Antrieb gesendet werden.
Der Wert wird in Promille (Wert: 0 – 1000) übertragen.
Die Ausgänge “Feldbus Ausgang AOUT 1” und “Feldbus Ausgang AOUT 2” könnenals Wert zur Ausgabe über die analogen Ausgänge verwendet werden. Dazu müssendie Ausgänge der analogen Ausgänge mit den Signalen Feldbus AOUT 1 bzw.Feldbus AOUT 2 belegt werden.
Byte 13 und Byte 14: Feldbus Ausgang AOUT 2
Byte 13 = High-Byte, Byte 14 = Low-Byte.
Über Byte 13 und Byte 14 kann ein 2. Analogwert an den Antrieb gesendet werden.
Der Wert wird in Promille (Wert: 0 – 1000) übertragen.
Byte 15 bis Byte 26: Reserve
Die Inhalte sind für zukünftige Erweiterungen reserviert.
4.3. Profibus DP-V1 Dienste
— Option —
Über die Profibus DP-V1 Dienste kann neben dem zyklischen ProzessdatenaustauschDP-V0 eine zusätzliche azyklische Kommunikation über den Feldbus aufgebautwerden.
Eine Stellantriebs-Steuerung mit aktivierten Profibus DP-V1 Diensten bietet denZugang zu den Inhalten des Gerätepasses, den Betriebsdaten, den wichtigstenParametern zur Einstellung und den Wartungsinformationen.
Dies ermöglicht den Zugriff von einer zentralen Warte auf die Daten aller vom ProfibusDP Netzwerk angeschlossener Stellantriebe zur vorbeugenden Wartung odereinheitlichen Parametrierung.
Die Stellantriebs-Steuerung unterstützt eine azyklische DP-V1 Verbindung mitSteuerungen (DPM1 = Master der Klasse 1) und eine azyklische DP-V1 Verbindungmit Engineering Stationen (DPM2 = Master der Klasse 2).
Es werden folgende DP-V1 Fehlermeldungen unterstützt:
UrsacheErrorCode
ErrorClas
Fehlermeldung
Es wurde auf einen unzulässigen Slot zuge-griffen
211Access.Invalid SlotRead
Es wurde auf einen unzulässigen Index zu-gegriffen
011Access.Invalid Index
Es wurde auf einen unzulässigen Slot zuge-griffen
211Access.Invalid SlotWrite
Es wurde auf einen unzulässigen Index zu-gegriffen
011Access.Invalid Index
Die übermittelte Datenlänge ist ungültig111Access.write length
Ungültiger Parameterwert811Access.invalid parameter
Kein Schreibzugriff erlaubt611Access.access denied
Slot/Index kann nur gelesen werden110Application write error
Zur Integration der über Profibus DP-V1 zugänglichen gerätespezifischenInformationen, Daten und Parameter in die Engineering Station ist je nach Leittechnik
40
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
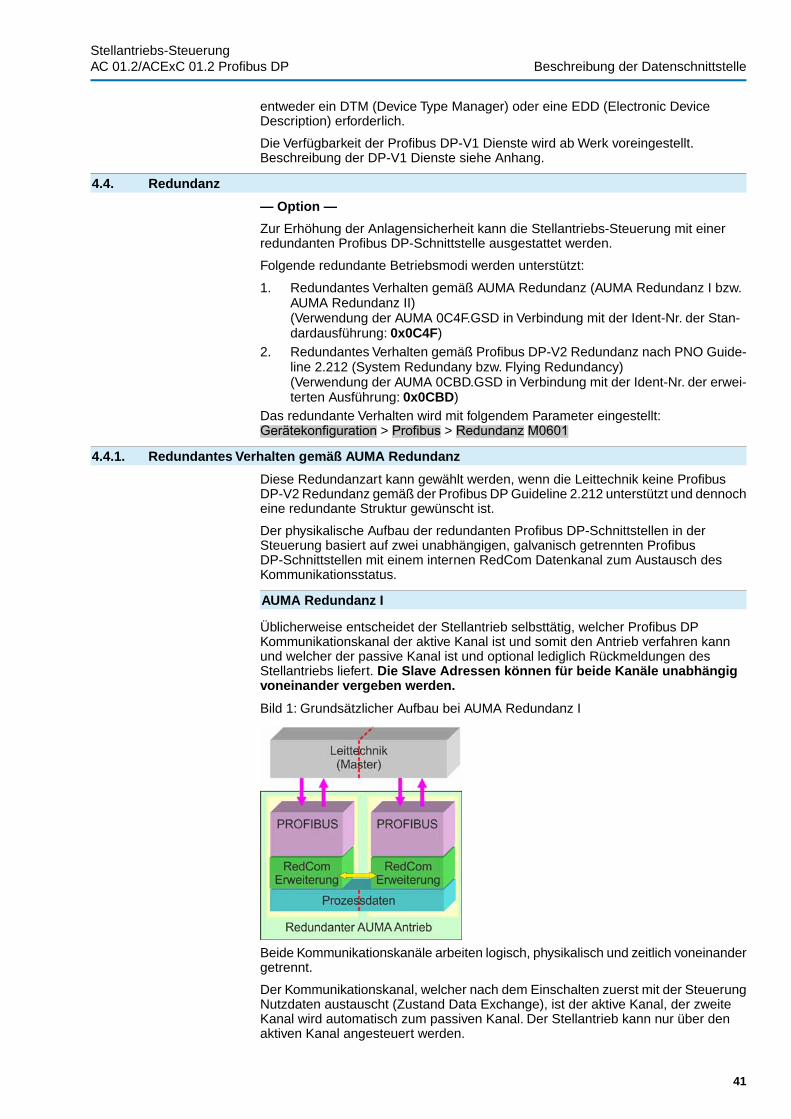
entweder ein DTM (Device Type Manager) oder eine EDD (Electronic DeviceDescription) erforderlich.
Die Verfügbarkeit der Profibus DP-V1 Dienste wird ab Werk voreingestellt.Beschreibung der DP-V1 Dienste siehe Anhang.
4.4. Redundanz
— Option —
Zur Erhöhung der Anlagensicherheit kann die Stellantriebs-Steuerung mit einerredundanten Profibus DP-Schnittstelle ausgestattet werden.
Folgende redundante Betriebsmodi werden unterstützt:
1. Redundantes Verhalten gemäß AUMA Redundanz (AUMA Redundanz I bzw.AUMA Redundanz II)(Verwendung der AUMA 0C4F.GSD in Verbindung mit der Ident-Nr. der Stan-dardausführung: 0x0C4F)
2. Redundantes Verhalten gemäß Profibus DP-V2 Redundanz nach PNO Guide-line 2.212 (System Redundany bzw. Flying Redundancy)(Verwendung der AUMA 0CBD.GSD in Verbindung mit der Ident-Nr. der erwei-terten Ausführung: 0x0CBD)
Das redundante Verhalten wird mit folgendem Parameter eingestellt:Gerätekonfiguration > Profibus > Redundanz M0601
4.4.1. Redundantes Verhalten gemäß AUMA Redundanz
Diese Redundanzart kann gewählt werden, wenn die Leittechnik keine ProfibusDP-V2 Redundanz gemäß der Profibus DP Guideline 2.212 unterstützt und dennocheine redundante Struktur gewünscht ist.
Der physikalische Aufbau der redundanten Profibus DP-Schnittstellen in derSteuerung basiert auf zwei unabhängigen, galvanisch getrennten ProfibusDP-Schnittstellen mit einem internen RedCom Datenkanal zum Austausch desKommunikationsstatus.
AUMA Redundanz I
Üblicherweise entscheidet der Stellantrieb selbsttätig, welcher Profibus DPKommunikationskanal der aktive Kanal ist und somit den Antrieb verfahren kannund welcher der passive Kanal ist und optional lediglich Rückmeldungen desStellantriebs liefert. Die Slave Adressen können für beide Kanäle unabhängigvoneinander vergeben werden.
Bild 1: Grundsätzlicher Aufbau bei AUMA Redundanz I
Beide Kommunikationskanäle arbeiten logisch, physikalisch und zeitlich voneinandergetrennt.
Der Kommunikationskanal, welcher nach dem Einschalten zuerst mit der SteuerungNutzdaten austauscht (Zustand Data Exchange), ist der aktive Kanal, der zweiteKanal wird automatisch zum passiven Kanal. Der Stellantrieb kann nur über denaktiven Kanal angesteuert werden.
41
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
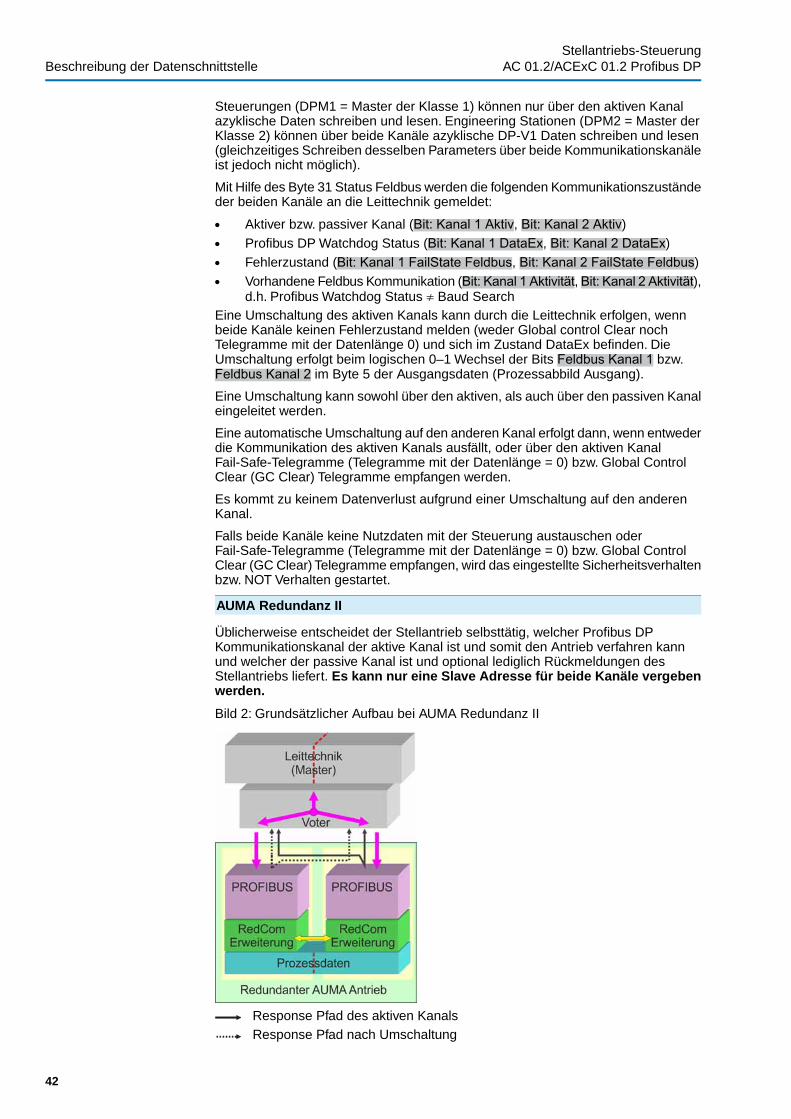
Steuerungen (DPM1 = Master der Klasse 1) können nur über den aktiven Kanalazyklische Daten schreiben und lesen. Engineering Stationen (DPM2 = Master derKlasse 2) können über beide Kanäle azyklische DP-V1 Daten schreiben und lesen(gleichzeitiges Schreiben desselben Parameters über beide Kommunikationskanäleist jedoch nicht möglich).
Mit Hilfe des Byte 31 Status Feldbus werden die folgenden Kommunikationszuständeder beiden Kanäle an die Leittechnik gemeldet:
● Aktiver bzw. passiver Kanal (Bit: Kanal 1 Aktiv, Bit: Kanal 2 Aktiv)● Profibus DP Watchdog Status (Bit: Kanal 1 DataEx, Bit: Kanal 2 DataEx)● Fehlerzustand (Bit: Kanal 1 FailState Feldbus, Bit: Kanal 2 FailState Feldbus)● Vorhandene Feldbus Kommunikation (Bit: Kanal 1 Aktivität, Bit: Kanal 2 Aktivität),
d.h. Profibus Watchdog Status ≠ Baud SearchEine Umschaltung des aktiven Kanals kann durch die Leittechnik erfolgen, wennbeide Kanäle keinen Fehlerzustand melden (weder Global control Clear nochTelegramme mit der Datenlänge 0) und sich im Zustand DataEx befinden. DieUmschaltung erfolgt beim logischen 0–1 Wechsel der Bits Feldbus Kanal 1 bzw.Feldbus Kanal 2 im Byte 5 der Ausgangsdaten (Prozessabbild Ausgang).
Eine Umschaltung kann sowohl über den aktiven, als auch über den passiven Kanaleingeleitet werden.
Eine automatische Umschaltung auf den anderen Kanal erfolgt dann, wenn entwederdie Kommunikation des aktiven Kanals ausfällt, oder über den aktiven KanalFail-Safe-Telegramme (Telegramme mit der Datenlänge = 0) bzw. Global ControlClear (GC Clear) Telegramme empfangen werden.
Es kommt zu keinem Datenverlust aufgrund einer Umschaltung auf den anderenKanal.
Falls beide Kanäle keine Nutzdaten mit der Steuerung austauschen oderFail-Safe-Telegramme (Telegramme mit der Datenlänge = 0) bzw. Global ControlClear (GC Clear) Telegramme empfangen, wird das eingestellte Sicherheitsverhaltenbzw. NOT Verhalten gestartet.
AUMA Redundanz II
Üblicherweise entscheidet der Stellantrieb selbsttätig, welcher Profibus DPKommunikationskanal der aktive Kanal ist und somit den Antrieb verfahren kannund welcher der passive Kanal ist und optional lediglich Rückmeldungen desStellantriebs liefert. Es kann nur eine Slave Adresse für beide Kanäle vergebenwerden.
Bild 2: Grundsätzlicher Aufbau bei AUMA Redundanz II
Response Pfad des aktiven KanalsResponse Pfad nach Umschaltung
42
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
Beide Kommunikationskanäle arbeiten physikalisch voneinander getrennt, sindlogisch und zeitlich synchronisiert.
Der Kommunikationskanal, welcher nach dem Einschalten zuerst mit der SteuerungNutzdaten austauscht (Zustand Data Exchange), ist der aktive Kanal, der zweiteKanal wird automatisch zum passiven Kanal. Der Stellantrieb kann nur über denaktiven Kanal angesteuert werden.
Steuerungen (DPM1 = Master der Klasse 1) können nur über den aktiven Kanalazyklische Daten schreiben und lesen. Engineering Stationen (DPM2 = Master derKlasse 2) können über beide Kanäle azyklische DP-V1 Daten schreiben und lesen(gleichzeitiges Schreiben desselben Parameters über beide Kommunikationskanäleist jedoch nicht möglich).
Mit Hilfe des Byte 31 Status Feldbus werden die folgenden Kommunikationszuständeder beiden Kanäle an die Leittechnik gemeldet:
● Aktiver bzw. passiver Kanal (Bit: Kanal 1 Aktiv, Bit: Kanal 2 Aktiv)● Profibus DP Watchdog Status (Bit: Kanal 1 DataEx, Bit: Kanal 2 DataEx)● Fehlerzustand (Bit: Kanal 1 FailState Feldbus, Bit: Kanal 2 FailState Feldbus)● Vorhandene Feldbus Kommunikation (Bit: Kanal 1 Aktivität, Bit: Kanal 2 Aktivität),
d.h. Profibus Watchdog Status ≠ Baud SearchEine Umschaltung des aktiven Kanals kann durch die Leittechnik erfolgen, wennbeide Kanäle keinen Fehlerzustand melden (weder Global control Clear nochTelegramme mit der Datenlänge 0) und sich im Zustand DataEx befinden. DieUmschaltung erfolgt beim logischen 0–1 Wechsel der Bits Feldbus Kanal 1 bzw.Feldbus Kanal 2 im Byte 5 der Ausgangsdaten (Prozessabbild Ausgang).
Eine Umschaltung kann sowohl über den aktiven, als auch über den passiven Kanaleingeleitet werden.
Es kommt zu keinem Datenverlust aufgrund einer Umschaltung auf den anderenKanal.
Falls beide Kanäle keine Nutzdaten mit der Steuerung austauschen oderFail-Safe-Telegramme (Telegramme mit der Datenlänge = 0) bzw. Global ControlClear (GC Clear) Telegramme empfangen, wird das eingestellte Sicherheitsverhaltenbzw. NOT Verhalten gestartet.
Die Besonderheit der AUMA Redundanz II liegt in der absolut zeitsynchronen Antwort(Response) der Profibus DP Telegramme über beide Kommunikationskanäle mitgleichzeitiger Überwachung des passiven Kanals auf Basis der empfangenen DataExRequest Telegramme. Dieses Redundanzverhalten ist in Verbindung mit Leitsystemenzwingend erforderlich, welche einen Profibus Stack mit Hilfe eines Voters auf zweiredundante Kanäle aufsplitten.
Das Senden der Antworttelegramme über den passiven Kanal kann mit Hilfe desParameters Verhalten Tx beeinflusst werden:
Tx aktiver Kanal Antworttelegramme werden nur über den aktiven Kanal gesendet.
Tx beide Kanäle Antworttelegramme werden über beide Kanäle, den aktiven und den passiven Kanalgesendet.
4.4.2. Redundantes Verhalten gemäß Profibus DP-V2 Redundanz nach PNO Guideline 2.212
Diese Redundanzart kann gewählt werden, wenn die Leittechnik Profibus DP-V2Redundanz gemäß der Profibus DP Guideline 2.212 unterstützt.
Der physikalische Aufbau der redundanten Profibus DP Schnittstellen im Antriebentspricht dem Aufbau bei AUMA Redundanz; zwei unabhängige galvanisch getrennteProfibus DP-Schnittstellen mit einem internen RedCom Datenkanal zum Austauschdes Kommunikationsstatus.
43
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
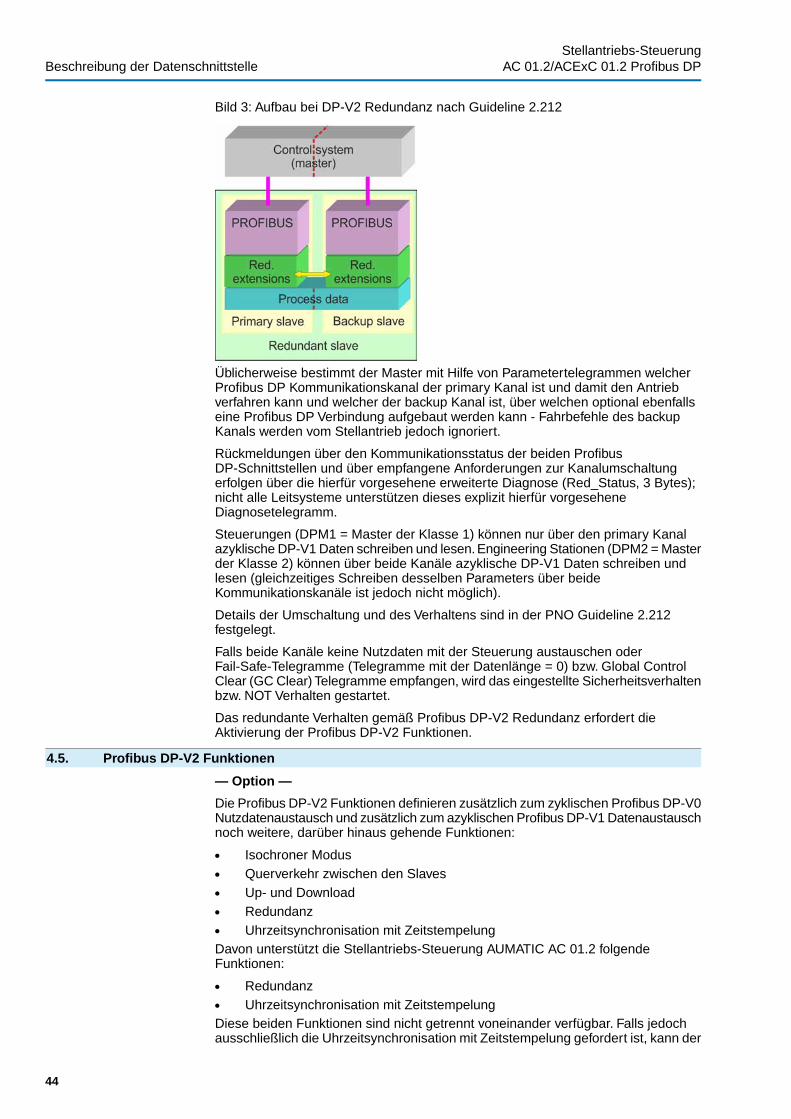
Bild 3: Aufbau bei DP-V2 Redundanz nach Guideline 2.212
Üblicherweise bestimmt der Master mit Hilfe von Parametertelegrammen welcherProfibus DP Kommunikationskanal der primary Kanal ist und damit den Antriebverfahren kann und welcher der backup Kanal ist, über welchen optional ebenfallseine Profibus DP Verbindung aufgebaut werden kann - Fahrbefehle des backupKanals werden vom Stellantrieb jedoch ignoriert.
Rückmeldungen über den Kommunikationsstatus der beiden ProfibusDP-Schnittstellen und über empfangene Anforderungen zur Kanalumschaltungerfolgen über die hierfür vorgesehene erweiterte Diagnose (Red_Status, 3 Bytes);nicht alle Leitsysteme unterstützen dieses explizit hierfür vorgeseheneDiagnosetelegramm.
Steuerungen (DPM1 = Master der Klasse 1) können nur über den primary Kanalazyklische DP-V1 Daten schreiben und lesen. Engineering Stationen (DPM2 = Masterder Klasse 2) können über beide Kanäle azyklische DP-V1 Daten schreiben undlesen (gleichzeitiges Schreiben desselben Parameters über beideKommunikationskanäle ist jedoch nicht möglich).
Details der Umschaltung und des Verhaltens sind in der PNO Guideline 2.212festgelegt.
Falls beide Kanäle keine Nutzdaten mit der Steuerung austauschen oderFail-Safe-Telegramme (Telegramme mit der Datenlänge = 0) bzw. Global ControlClear (GC Clear) Telegramme empfangen, wird das eingestellte Sicherheitsverhaltenbzw. NOT Verhalten gestartet.
Das redundante Verhalten gemäß Profibus DP-V2 Redundanz erfordert dieAktivierung der Profibus DP-V2 Funktionen.
4.5. Profibus DP-V2 Funktionen
— Option —
Die Profibus DP-V2 Funktionen definieren zusätzlich zum zyklischen Profibus DP-V0Nutzdatenaustausch und zusätzlich zum azyklischen Profibus DP-V1 Datenaustauschnoch weitere, darüber hinaus gehende Funktionen:
● Isochroner Modus● Querverkehr zwischen den Slaves● Up- und Download● Redundanz● Uhrzeitsynchronisation mit ZeitstempelungDavon unterstützt die Stellantriebs-Steuerung AUMATIC AC 01.2 folgendeFunktionen:
● Redundanz● Uhrzeitsynchronisation mit ZeitstempelungDiese beiden Funktionen sind nicht getrennt voneinander verfügbar. Falls jedochausschließlich die Uhrzeitsynchronisation mit Zeitstempelung gefordert ist, kann der
44
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
redundante Kanal unbeschaltet bleiben (Anschluss mit Profibus DP Master nichtzwingend erforderlich).
Die Profibus DP-V2 Funktionen können mit folgendem Parameter aktiviert werden:Gerätekonfiguration > Anwendungsfunktionen > Aktivierung > Profibus DP-V2M0587
4.5.1. Profibus DP-V2 Redundanz
Das Verhalten und die Zustände eines redundanten Slaves ist in der “SpecificationSlave Redundancy 2.212” definiert (siehe auch <Redundantes Verhalten gemäßProfibus DP-V2 Redundanz nach PNO Guideline 2.212 >). Dabei wird zwischeneinem primary Kanal und einem backup Kanal differenziert, mit unterschiedlichenAuswirkungen auf die Eigenschaften der Profibus DP Kommunikation:
● Zyklische Profibus DP-V0 Kommunikation- Fahrbefehle des primary Kanals werden vom Stellantrieb verarbeitet und
ausgeführt, Fahrbefehle des backup Kanals werden ignoriert, die Kommu-nikation des backup Kanals dient lediglich der Überwachung
- Rückmeldungen des Stellantriebs können über beide Kanäle gesendetwerden
- Diagnose Rückmeldungen des primary Kanals enthalten die Diagnosezu-standsdaten sowohl des primary als auch des backup Kanals
● Azyklische Profibus DP-V1 Dienste der Steuerungen (DPM1 – Master Klasse1) werden nur vom primary Kanal unterstützt
● Azyklische Profibus DP-V1 Dienste der Engineering Stationen (DPM2 – MasterKlasse 2) werden von beiden Kanälen unterstützt
Weiterhin wird innerhalb der Profibus DP-V2 Redundanz zwischen zweiKonfigurationsarten unterschieden:
Flying Redundanz (FR) ● Die Slave Adresse des primären Kanals unterscheidet sich von der Adressedes backup Kanals (Slave Adresse backup = Slave Adresse primary + 64, dahermuss die Slave Adresse des primary < 62 sein)
● Es muss lediglich die Slave Adresse des primary Kanals eingestellt werden● Der Master kommuniziert nie über den backup Kanal mit dem Slave
System Redundanz (SR) ● Die Slave Adresse des primären Kanals stimmt mit der Slave Adresse desbackup Kanals überein
● Der Master kann beide Kanäle konfigurieren und kann über beide Kanäle einezyklische DP-V0 Verbindung aufbauen
45
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
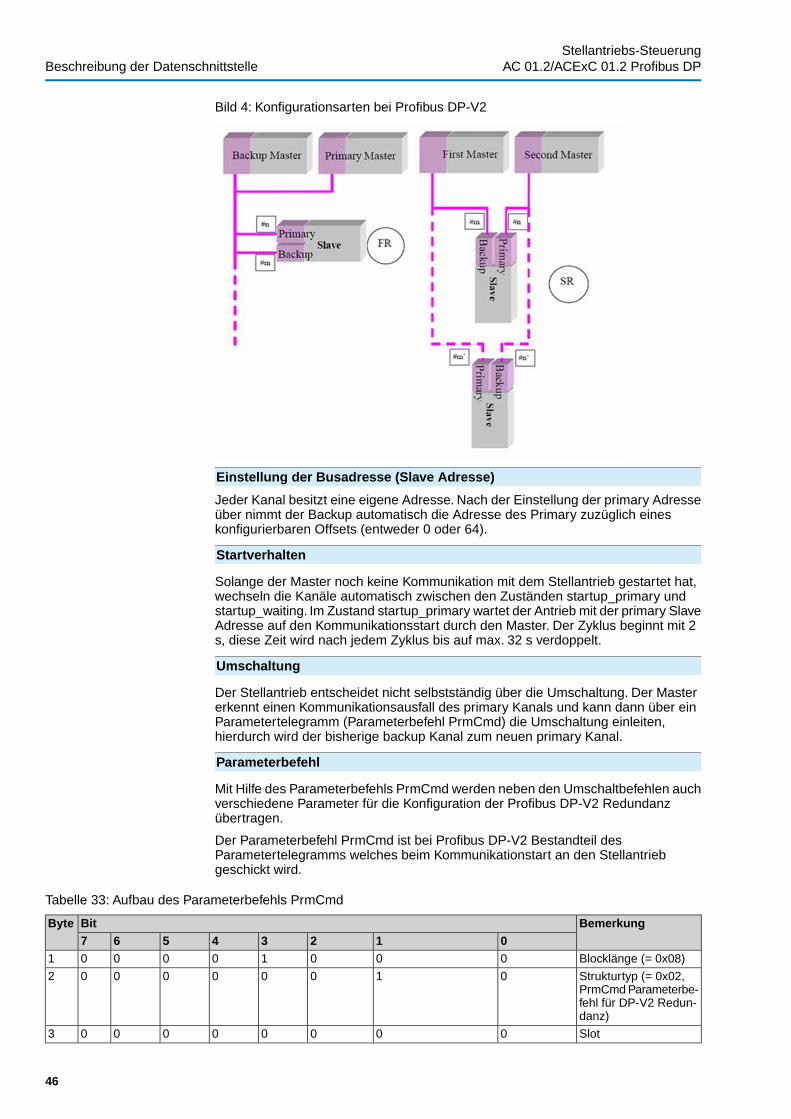
Bild 4: Konfigurationsarten bei Profibus DP-V2
Einstellung der Busadresse (Slave Adresse)
Jeder Kanal besitzt eine eigene Adresse. Nach der Einstellung der primary Adresseüber nimmt der Backup automatisch die Adresse des Primary zuzüglich eineskonfigurierbaren Offsets (entweder 0 oder 64).
Startverhalten
Solange der Master noch keine Kommunikation mit dem Stellantrieb gestartet hat,wechseln die Kanäle automatisch zwischen den Zuständen startup_primary undstartup_waiting. Im Zustand startup_primary wartet der Antrieb mit der primary SlaveAdresse auf den Kommunikationsstart durch den Master. Der Zyklus beginnt mit 2s, diese Zeit wird nach jedem Zyklus bis auf max. 32 s verdoppelt.
Umschaltung
Der Stellantrieb entscheidet nicht selbstständig über die Umschaltung. Der Mastererkennt einen Kommunikationsausfall des primary Kanals und kann dann über einParametertelegramm (Parameterbefehl PrmCmd) die Umschaltung einleiten,hierdurch wird der bisherige backup Kanal zum neuen primary Kanal.
Parameterbefehl
Mit Hilfe des Parameterbefehls PrmCmd werden neben den Umschaltbefehlen auchverschiedene Parameter für die Konfiguration der Profibus DP-V2 Redundanzübertragen.
Der Parameterbefehl PrmCmd ist bei Profibus DP-V2 Bestandteil desParametertelegramms welches beim Kommunikationstart an den Stellantriebgeschickt wird.
Tabelle 33: Aufbau des Parameterbefehls PrmCmd
BemerkungBitByte01234567
Blocklänge (= 0x08)000100001
Strukturtyp (= 0x02,PrmCmd Parameterbe-fehl für DP-V2 Redun-danz)
010000002
Slot000000003
46
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
BemerkungBitByte01234567
SpecifierReservedSequenz nummer4
FunctionResPrimary RequestStopMSAC1S
StartMSAC1S
CheckProper-ties
ResMasterStateClear
Res5
PropertiesPrimaryReq_MS0_MS1used
Start/ Stop MSAC1Sused
AddressChange
AddressOffset64
Reserved6
Output Hold Time high7
Output Hold Time low8
Output Hold Time Bei einer Umschaltung werden die Ausgänge während dieser Zeit nicht verändert(Zeitbasis = 10 ms)
Address Offset64/Adress Change
Umschaltung zwischen Flying Redundanz und System Redundanz
AddressOffset64 = 1 und AddressChange = 1, > Flying Redundanz wird ausgewählt
AddressOffset64 = 0 und AddressChange = 1, > System Redundanz wird ausgewählt
Erweiterte Diagnose
Bei aktivierter Profibus DP-V2 Redundanz sendet der primary Kanal des Antriebsein hochpriores Antworttelegramm, daraufhin liest der Master die erweitertenDiagnosedaten Red_Status (Status_Type = 0x9F) mit den neuen Zuständen.
Bei Übertragung des Parameterbefehls PrmCmd durch den Master antwortet derStellantrieb mit Prm_Cmd_Ack (Status_Type = 0x9E).
Mit Red_Status/ Prm_Cmd_Ack meldet der Stellantrieb die Zustände sowohl desprimary als auch des backup Kanals.
Tabelle 34: Prm_Cmd_Ack/ Red_Status
BemerkungBitByte01234567
Header (0x08)000100001
Status_Type0x9E = Prm_Cmd_Ack0x9F = Red_Status
2
Slot000000003
SpecifierReservedSequenz nummer4
FunctionResPrimary Re-quest
StopMSAC1S
StartMSAC1S
Check Pro-perties
ResMasterState Clear
Res5
Red_State_1(Zustand Primary)
BackupPrimaryHardwaredefekt
Data Ex-change
MasterState Clear
Baudrategefunden
OutputHold Timegestartet
Res6
Red_State_2(Zustand Backup)
BackupPrimaryHardwaredefekt
Data Ex-change
MasterState Clear
Baudrategefunden
OutputHold Timegestartet
Res7
Red_State_3Nicht verwendet8
4.5.2. Profibus DP-V2 Uhrzeitsynchronisation mit Zeitstempelung
Bestimmte Ereignisse im Stellantrieb können mit einem Zeitstempel versehen werden.Dieses Ereignis wird mit Hilfe eines Alarmsignals an den Master übermittelt welcherdann das Ereignis mit Zeitstempel vom Stellantrieb liest.
47
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
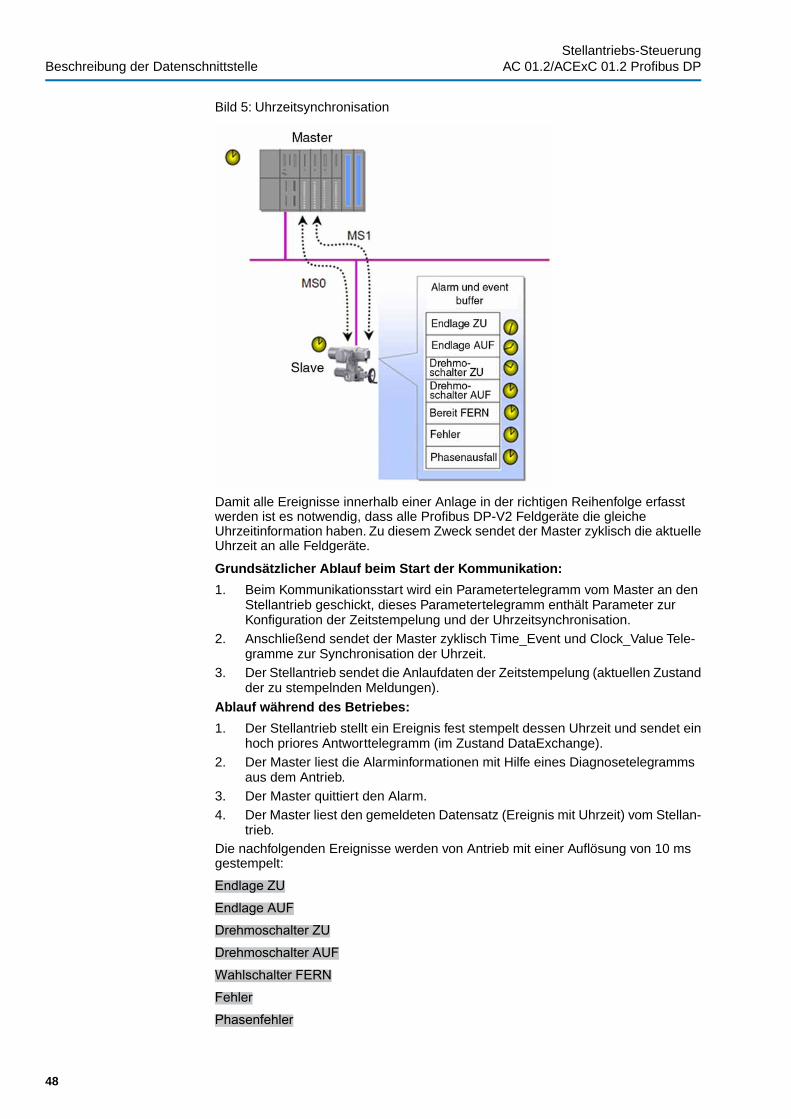
Bild 5: Uhrzeitsynchronisation
Damit alle Ereignisse innerhalb einer Anlage in der richtigen Reihenfolge erfasstwerden ist es notwendig, dass alle Profibus DP-V2 Feldgeräte die gleicheUhrzeitinformation haben. Zu diesem Zweck sendet der Master zyklisch die aktuelleUhrzeit an alle Feldgeräte.
Grundsätzlicher Ablauf beim Start der Kommunikation:
1. Beim Kommunikationsstart wird ein Parametertelegramm vom Master an denStellantrieb geschickt, dieses Parametertelegramm enthält Parameter zurKonfiguration der Zeitstempelung und der Uhrzeitsynchronisation.
2. Anschließend sendet der Master zyklisch Time_Event und Clock_Value Tele-gramme zur Synchronisation der Uhrzeit.
3. Der Stellantrieb sendet die Anlaufdaten der Zeitstempelung (aktuellen Zustandder zu stempelnden Meldungen).
Ablauf während des Betriebes:
1. Der Stellantrieb stellt ein Ereignis fest stempelt dessen Uhrzeit und sendet einhoch priores Antworttelegramm (im Zustand DataExchange).
2. Der Master liest die Alarminformationen mit Hilfe eines Diagnosetelegrammsaus dem Antrieb.
3. Der Master quittiert den Alarm.4. Der Master liest den gemeldeten Datensatz (Ereignis mit Uhrzeit) vom Stellan-
trieb.Die nachfolgenden Ereignisse werden von Antrieb mit einer Auflösung von 10 msgestempelt:
Endlage ZUEndlage AUFDrehmoschalter ZUDrehmoschalter AUFWahlschalter FERNFehlerPhasenfehler
48
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
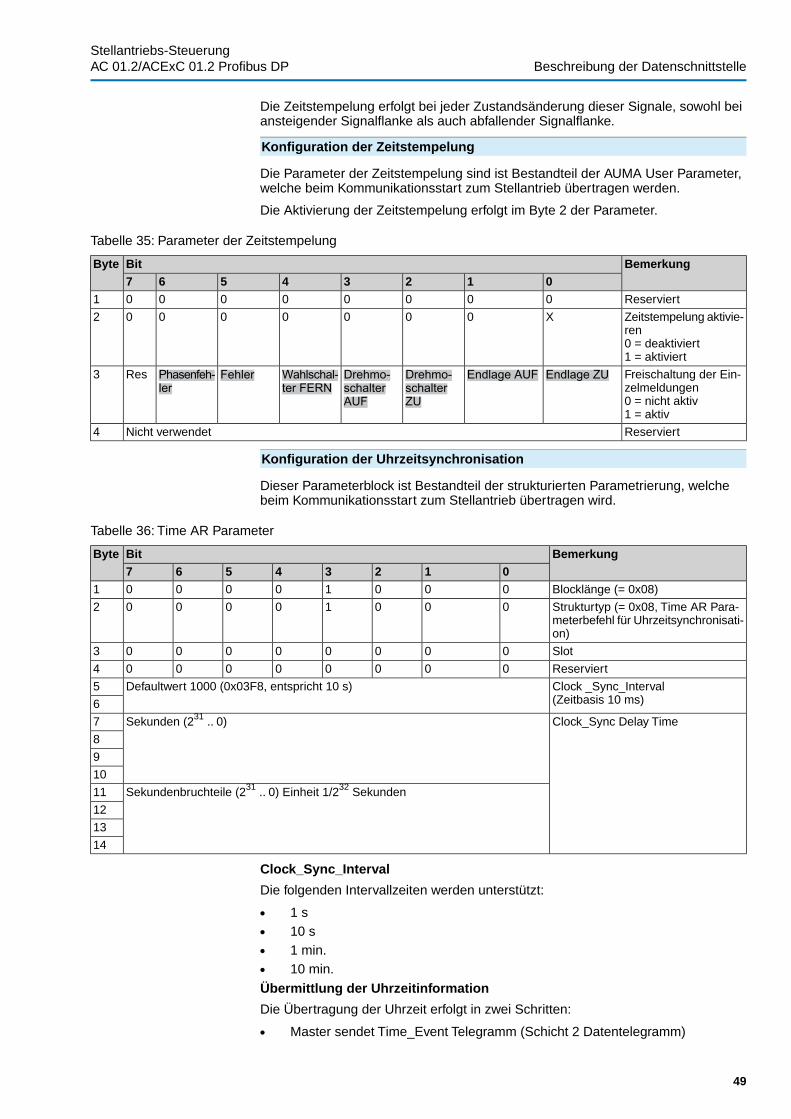
Die Zeitstempelung erfolgt bei jeder Zustandsänderung dieser Signale, sowohl beiansteigender Signalflanke als auch abfallender Signalflanke.
Konfiguration der Zeitstempelung
Die Parameter der Zeitstempelung sind ist Bestandteil der AUMA User Parameter,welche beim Kommunikationsstart zum Stellantrieb übertragen werden.
Die Aktivierung der Zeitstempelung erfolgt im Byte 2 der Parameter.
Tabelle 35: Parameter der Zeitstempelung
BemerkungBitByte01234567
Reserviert000000001
Zeitstempelung aktivie-ren0 = deaktiviert1 = aktiviert
X00000002
Freischaltung der Ein-zelmeldungen0 = nicht aktiv1 = aktiv
Endlage ZUEndlage AUFDrehmo-schalterZU
Drehmo-schalterAUF
Wahlschal-ter FERN
FehlerPhasenfeh-ler
Res3
ReserviertNicht verwendet4
Konfiguration der Uhrzeitsynchronisation
Dieser Parameterblock ist Bestandteil der strukturierten Parametrierung, welchebeim Kommunikationsstart zum Stellantrieb übertragen wird.
Tabelle 36: Time AR Parameter
BemerkungBitByte01234567
Blocklänge (= 0x08)000100001
Strukturtyp (= 0x08, Time AR Para-meterbefehl für Uhrzeitsynchronisati-on)
000100002
Slot000000003
Reserviert000000004
Clock _Sync_Interval(Zeitbasis 10 ms)
Defaultwert 1000 (0x03F8, entspricht 10 s)5
6
Clock_Sync Delay TimeSekunden (231 .. 0)7
8
9
10
Sekundenbruchteile (231 .. 0) Einheit 1/232 Sekunden11
12
13
14
Clock_Sync_Interval
Die folgenden Intervallzeiten werden unterstützt:
● 1 s● 10 s● 1 min.● 10 min.
Übermittlung der Uhrzeitinformation
Die Übertragung der Uhrzeit erfolgt in zwei Schritten:
● Master sendet Time_Event Telegramm (Schicht 2 Datentelegramm)
49
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle

● Master sendet Clock_Value Telegramm mit genauer Zeitangabe, wann dasTime Event gesendet wurde
Tabelle 37: Clock Value Telegramm
BemerkungBitByte01234567
Clock_value von Time_Event (TE)Sekunden (231 .. 0) seit 1.1.1900 0:00,00oderfalls Wert < 0x9DFF4400 seit 7.2.2036 6:28,16
1
2
3
4
Sekundenbruchteile (231 .. 0) Einheit 1/232 Sekunden5
6
7
8
Clock_value des vorherigen Ti-me_Events (TE)
Sekunden (231 .. 0) seit 1.1.1900 0:00,00oderfalls Wert < 0x9DFF4400 seit 7.2.2036 6:28,16
9
10
11
12
Sekundenbruchteile (231 .. 0) Einheit 1/232 Sekunden13
14
15
16
Clock_Value_Status1ReserviertCVC17
Clock_Value_Status2SYFReserviertCRResSWTANH18
Die Informationen von Clock_Value_Status1 und Clock_Value_Status2, dienen derÜbermittlung von Zeitkorrekturen (C und CV), des Synchronisationsstatus (SYF),der Sommerzeitinformationen (ANH und SWT) sowie der Genauigkeit (CR).
Prozessalarm
Mit Hilfe des Diagnosetelegramms wird dem Master signalisiert, dass einzeitgestempeltes Event erfasst wurde. Der Stellantrieb unterstützt lediglichProzessalarme.
Tabelle 38: Prozessalarm
BemerkungBitByte01234567
Header (0x08)000100001
Alarm_Type0x02 = Time Stamped Process Alarm
010000002
Slot000000003
Specifier000Sequenz nummer4
Zustand ZeitstempelungBuffer Overrun = Interne Buffer voll,Zeitstempelung angehaltenRestarted = Zeitstempelung neu ge-startet
Buffer Over-run
Restarted5
Index des Datensatz (Wertebereich100 bis 115)
6
Anzahl der Meldungen im Datensatz(Wertebereich 1 – 17)
7
Typ des DatensatzFest auf 0x0D: Delta_Trigger_Dis-crete
101100008
50
Stellantriebs-SteuerungBeschreibung der Datenschnittstelle AC 01.2/ACExC 01.2 Profibus DP
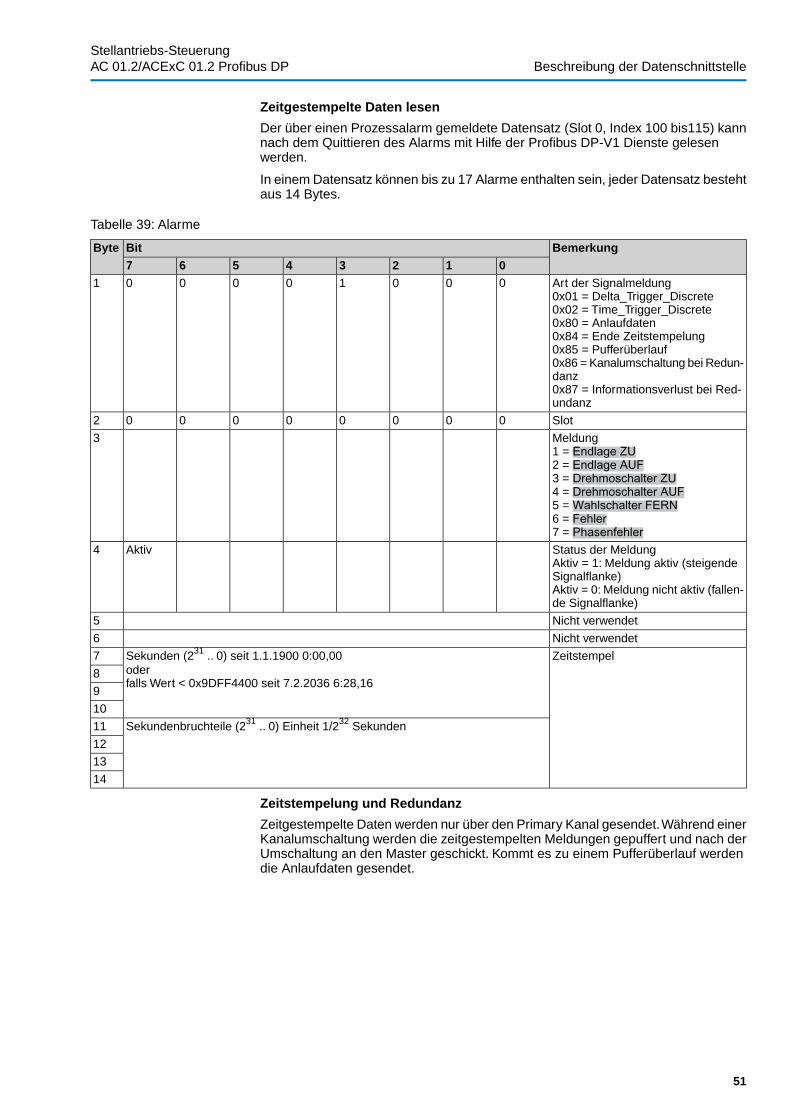
Zeitgestempelte Daten lesen
Der über einen Prozessalarm gemeldete Datensatz (Slot 0, Index 100 bis115) kannnach dem Quittieren des Alarms mit Hilfe der Profibus DP-V1 Dienste gelesenwerden.
In einem Datensatz können bis zu 17 Alarme enthalten sein, jeder Datensatz bestehtaus 14 Bytes.
Tabelle 39: Alarme
BemerkungBitByte01234567
Art der Signalmeldung0x01 = Delta_Trigger_Discrete0x02 = Time_Trigger_Discrete0x80 = Anlaufdaten0x84 = Ende Zeitstempelung0x85 = Pufferüberlauf0x86 = Kanalumschaltung bei Redun-danz0x87 = Informationsverlust bei Red-undanz
000100001
Slot000000002
Meldung1 = Endlage ZU2 = Endlage AUF3 = Drehmoschalter ZU4 = Drehmoschalter AUF5 = Wahlschalter FERN6 = Fehler7 = Phasenfehler
3
Status der MeldungAktiv = 1: Meldung aktiv (steigendeSignalflanke)Aktiv = 0: Meldung nicht aktiv (fallen-de Signalflanke)
Aktiv4
Nicht verwendet5
Nicht verwendet6
ZeitstempelSekunden (231 .. 0) seit 1.1.1900 0:00,00oderfalls Wert < 0x9DFF4400 seit 7.2.2036 6:28,16
7
8
9
10
Sekundenbruchteile (231 .. 0) Einheit 1/232 Sekunden11
12
13
14
Zeitstempelung und Redundanz
Zeitgestempelte Daten werden nur über den Primary Kanal gesendet.Während einerKanalumschaltung werden die zeitgestempelten Meldungen gepuffert und nach derUmschaltung an den Master geschickt. Kommt es zu einem Pufferüberlauf werdendie Anlaufdaten gesendet.
51
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung der Datenschnittstelle
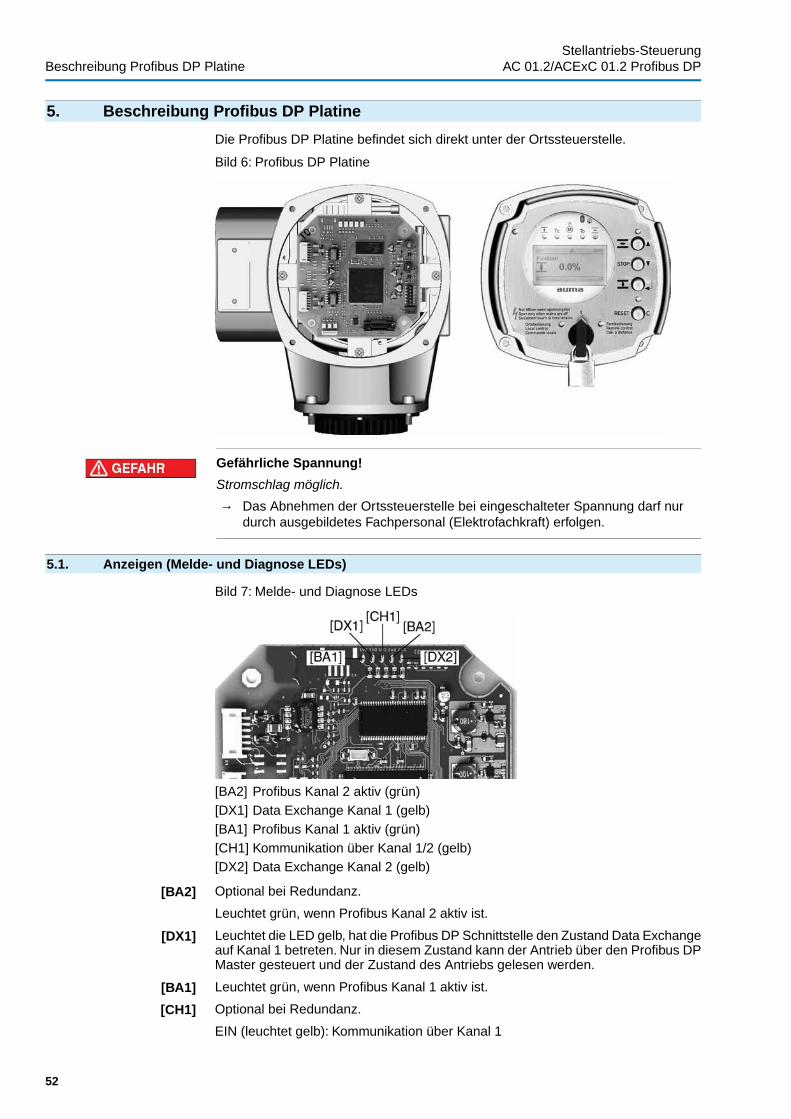
5. Beschreibung Profibus DP Platine
Die Profibus DP Platine befindet sich direkt unter der Ortssteuerstelle.
Bild 6: Profibus DP Platine
Gefährliche Spannung!
Stromschlag möglich.
→ Das Abnehmen der Ortssteuerstelle bei eingeschalteter Spannung darf nurdurch ausgebildetes Fachpersonal (Elektrofachkraft) erfolgen.
5.1. Anzeigen (Melde- und Diagnose LEDs)
Bild 7: Melde- und Diagnose LEDs
[BA2] Profibus Kanal 2 aktiv (grün)[DX1] Data Exchange Kanal 1 (gelb)[BA1] Profibus Kanal 1 aktiv (grün)[CH1] Kommunikation über Kanal 1/2 (gelb)[DX2] Data Exchange Kanal 2 (gelb)
[BA2] Optional bei Redundanz.
Leuchtet grün, wenn Profibus Kanal 2 aktiv ist.
[DX1] Leuchtet die LED gelb, hat die Profibus DP Schnittstelle den Zustand Data Exchangeauf Kanal 1 betreten. Nur in diesem Zustand kann der Antrieb über den Profibus DPMaster gesteuert und der Zustand des Antriebs gelesen werden.
[BA1] Leuchtet grün, wenn Profibus Kanal 1 aktiv ist.
[CH1] Optional bei Redundanz.
EIN (leuchtet gelb): Kommunikation über Kanal 1
52
Stellantriebs-SteuerungBeschreibung Profibus DP Platine AC 01.2/ACExC 01.2 Profibus DP
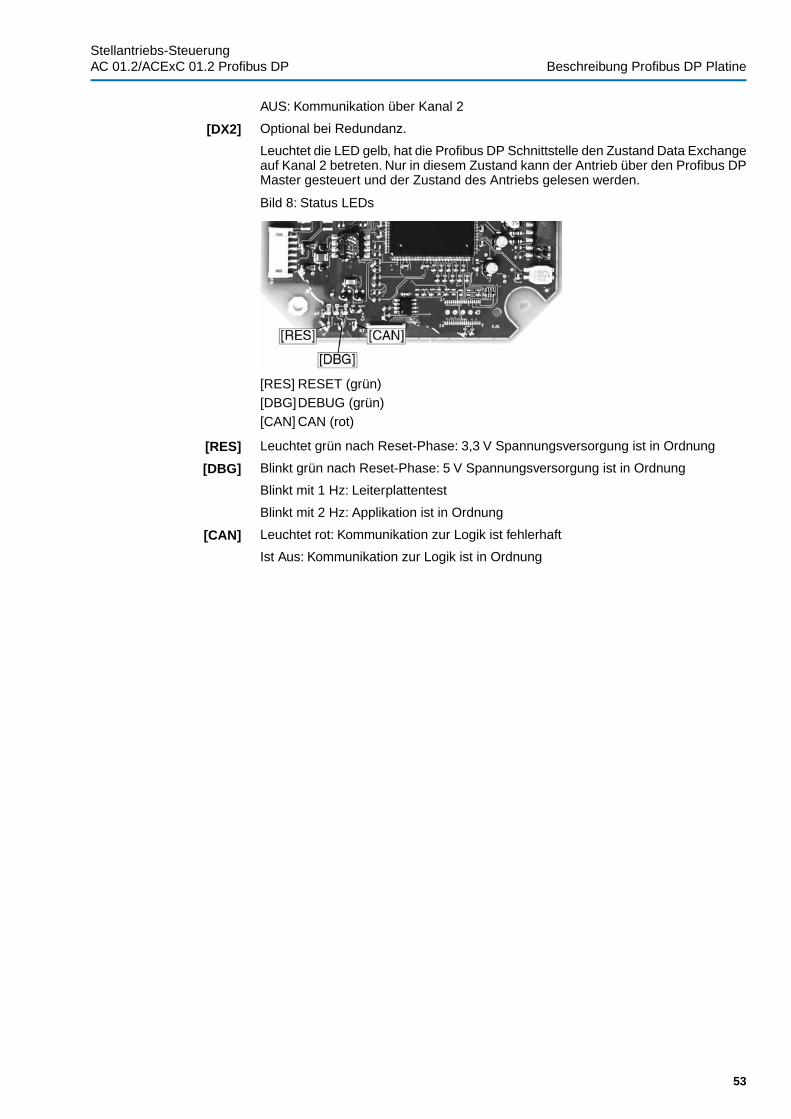
AUS: Kommunikation über Kanal 2
[DX2] Optional bei Redundanz.
Leuchtet die LED gelb, hat die Profibus DP Schnittstelle den Zustand Data Exchangeauf Kanal 2 betreten. Nur in diesem Zustand kann der Antrieb über den Profibus DPMaster gesteuert und der Zustand des Antriebs gelesen werden.
Bild 8: Status LEDs
[RES] RESET (grün)[DBG]DEBUG (grün)[CAN] CAN (rot)
[RES] Leuchtet grün nach Reset-Phase: 3,3 V Spannungsversorgung ist in Ordnung
[DBG] Blinkt grün nach Reset-Phase: 5 V Spannungsversorgung ist in Ordnung
Blinkt mit 1 Hz: Leiterplattentest
Blinkt mit 2 Hz: Applikation ist in Ordnung
[CAN] Leuchtet rot: Kommunikation zur Logik ist fehlerhaft
Ist Aus: Kommunikation zur Logik ist in Ordnung
53
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Beschreibung Profibus DP Platine
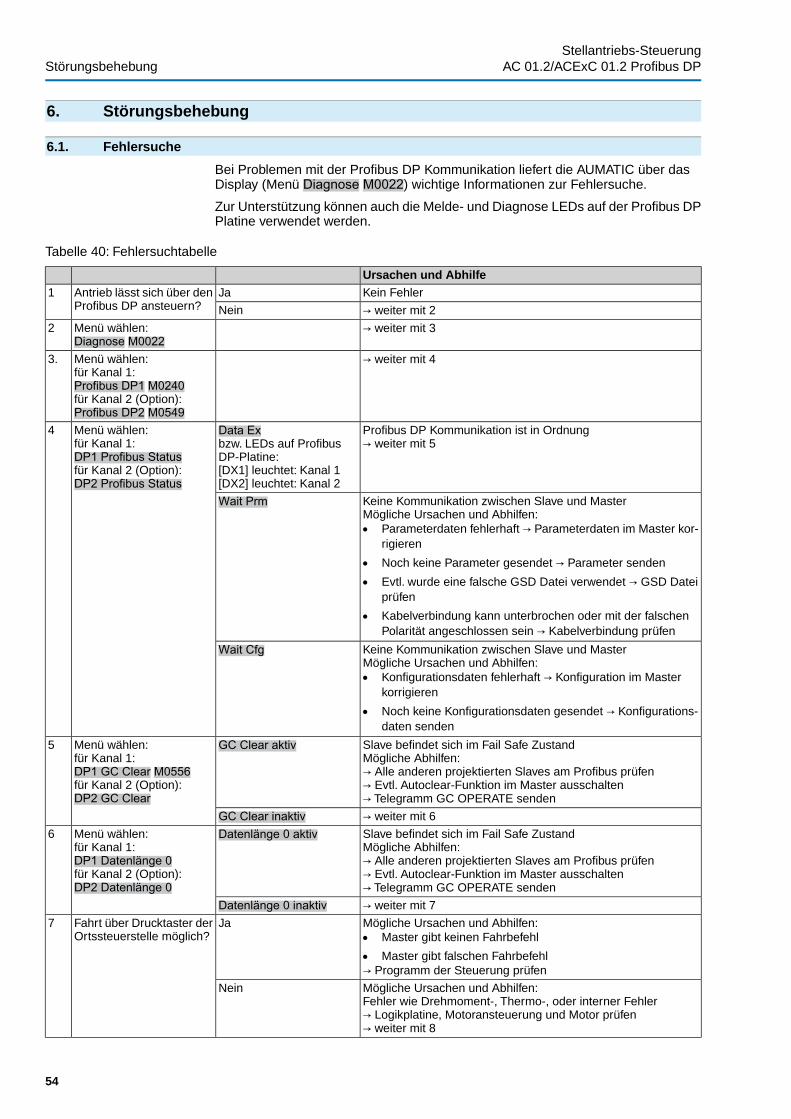
6. Störungsbehebung
6.1. Fehlersuche
Bei Problemen mit der Profibus DP Kommunikation liefert die AUMATIC über dasDisplay (Menü Diagnose M0022) wichtige Informationen zur Fehlersuche.
Zur Unterstützung können auch die Melde- und Diagnose LEDs auf der Profibus DPPlatine verwendet werden.
Tabelle 40: Fehlersuchtabelle
Ursachen und AbhilfeKein FehlerJaAntrieb lässt sich über den
Profibus DP ansteuern?1
→ weiter mit 2Nein
→ weiter mit 3Menü wählen:Diagnose M0022
2
→ weiter mit 4Menü wählen:für Kanal 1:Profibus DP1 M0240für Kanal 2 (Option):Profibus DP2 M0549
3.
Profibus DP Kommunikation ist in Ordnung→ weiter mit 5
Data Exbzw. LEDs auf ProfibusDP-Platine:[DX1] leuchtet: Kanal 1[DX2] leuchtet: Kanal 2
Menü wählen:für Kanal 1:DP1 Profibus Statusfür Kanal 2 (Option):DP2 Profibus Status
4
Keine Kommunikation zwischen Slave und MasterMögliche Ursachen und Abhilfen:● Parameterdaten fehlerhaft → Parameterdaten im Master kor-
rigieren
● Noch keine Parameter gesendet → Parameter senden
● Evtl. wurde eine falsche GSD Datei verwendet → GSD Dateiprüfen
● Kabelverbindung kann unterbrochen oder mit der falschenPolarität angeschlossen sein → Kabelverbindung prüfen
Wait Prm
Keine Kommunikation zwischen Slave und MasterMögliche Ursachen und Abhilfen:● Konfigurationsdaten fehlerhaft → Konfiguration im Master
korrigieren
● Noch keine Konfigurationsdaten gesendet → Konfigurations-daten senden
Wait Cfg
Slave befindet sich im Fail Safe ZustandMögliche Abhilfen:→ Alle anderen projektierten Slaves am Profibus prüfen→ Evtl. Autoclear-Funktion im Master ausschalten→ Telegramm GC OPERATE senden
GC Clear aktivMenü wählen:für Kanal 1:DP1 GC Clear M0556für Kanal 2 (Option):DP2 GC Clear
5
→ weiter mit 6GC Clear inaktivSlave befindet sich im Fail Safe ZustandMögliche Abhilfen:→ Alle anderen projektierten Slaves am Profibus prüfen→ Evtl. Autoclear-Funktion im Master ausschalten→ Telegramm GC OPERATE senden
Datenlänge 0 aktivMenü wählen:für Kanal 1:DP1 Datenlänge 0für Kanal 2 (Option):DP2 Datenlänge 0
6
→ weiter mit 7Datenlänge 0 inaktivMögliche Ursachen und Abhilfen:● Master gibt keinen Fahrbefehl
● Master gibt falschen Fahrbefehl→ Programm der Steuerung prüfen
JaFahrt über Drucktaster derOrtssteuerstelle möglich?
7
Mögliche Ursachen und Abhilfen:Fehler wie Drehmoment-, Thermo-, oder interner Fehler→ Logikplatine, Motoransteuerung und Motor prüfen→ weiter mit 8
Nein
54
Stellantriebs-SteuerungStörungsbehebung AC 01.2/ACExC 01.2 Profibus DP
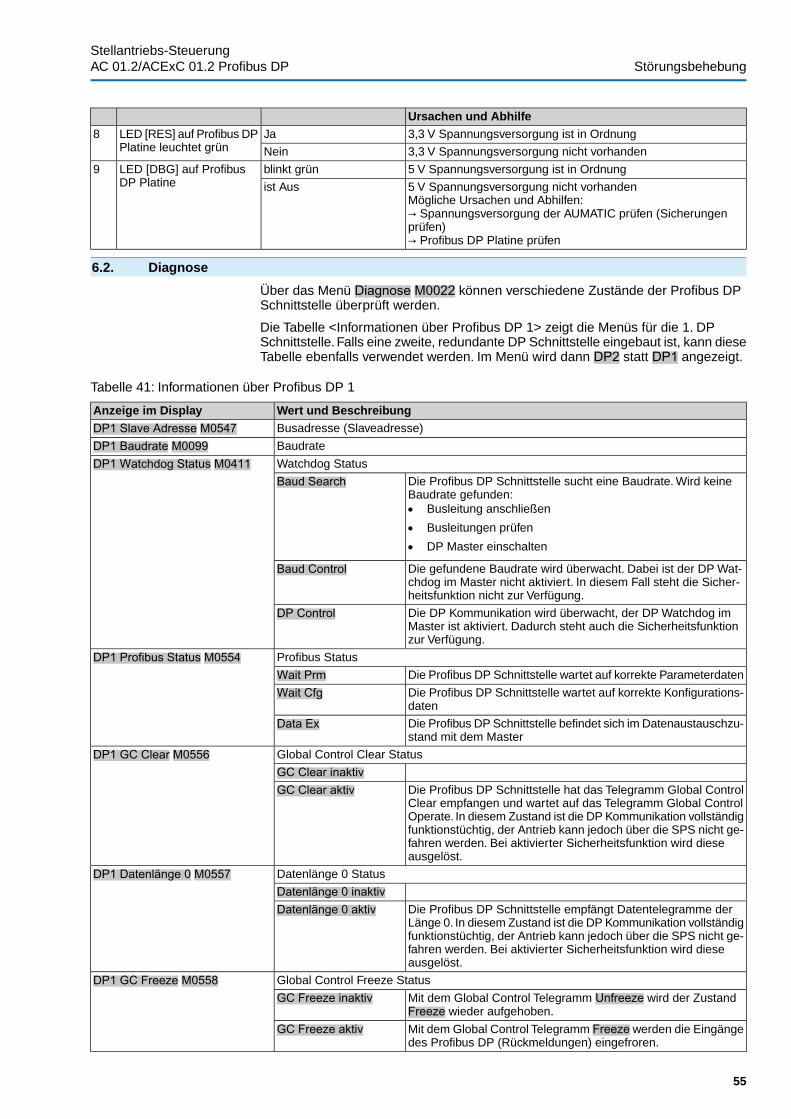
Ursachen und Abhilfe3,3 V Spannungsversorgung ist in OrdnungJaLED [RES] auf Profibus DP
Platine leuchtet grün8
3,3 V Spannungsversorgung nicht vorhandenNein
5 V Spannungsversorgung ist in Ordnungblinkt grünLED [DBG] auf ProfibusDP Platine
9
5 V Spannungsversorgung nicht vorhandenMögliche Ursachen und Abhilfen:→ Spannungsversorgung der AUMATIC prüfen (Sicherungenprüfen)→ Profibus DP Platine prüfen
ist Aus
6.2. Diagnose
Über das Menü Diagnose M0022 können verschiedene Zustände der Profibus DPSchnittstelle überprüft werden.
Die Tabelle <Informationen über Profibus DP 1> zeigt die Menüs für die 1. DPSchnittstelle. Falls eine zweite, redundante DP Schnittstelle eingebaut ist, kann dieseTabelle ebenfalls verwendet werden. Im Menü wird dann DP2 statt DP1 angezeigt.
Tabelle 41: Informationen über Profibus DP 1
Wert und BeschreibungAnzeige im DisplayBusadresse (Slaveadresse)DP1 Slave Adresse M0547BaudrateDP1 Baudrate M0099Watchdog StatusDP1 Watchdog Status M0411
Die Profibus DP Schnittstelle sucht eine Baudrate. Wird keineBaudrate gefunden:● Busleitung anschließen
● Busleitungen prüfen
● DP Master einschalten
Baud Search
Die gefundene Baudrate wird überwacht. Dabei ist der DP Wat-chdog im Master nicht aktiviert. In diesem Fall steht die Sicher-heitsfunktion nicht zur Verfügung.
Baud Control
Die DP Kommunikation wird überwacht, der DP Watchdog imMaster ist aktiviert. Dadurch steht auch die Sicherheitsfunktionzur Verfügung.
DP Control
Profibus StatusDP1 Profibus Status M0554Die Profibus DP Schnittstelle wartet auf korrekte ParameterdatenWait PrmDie Profibus DP Schnittstelle wartet auf korrekte Konfigurations-daten
Wait Cfg
Die Profibus DP Schnittstelle befindet sich im Datenaustauschzu-stand mit dem Master
Data Ex
Global Control Clear StatusDP1 GC Clear M0556GC Clear inaktiv
Die Profibus DP Schnittstelle hat das Telegramm Global ControlClear empfangen und wartet auf das Telegramm Global ControlOperate. In diesem Zustand ist die DP Kommunikation vollständigfunktionstüchtig, der Antrieb kann jedoch über die SPS nicht ge-fahren werden. Bei aktivierter Sicherheitsfunktion wird dieseausgelöst.
GC Clear aktiv
Datenlänge 0 StatusDP1 Datenlänge 0 M0557Datenlänge 0 inaktiv
Die Profibus DP Schnittstelle empfängt Datentelegramme derLänge 0. In diesem Zustand ist die DP Kommunikation vollständigfunktionstüchtig, der Antrieb kann jedoch über die SPS nicht ge-fahren werden. Bei aktivierter Sicherheitsfunktion wird dieseausgelöst.
Datenlänge 0 aktiv
Global Control Freeze StatusDP1 GC Freeze M0558Mit dem Global Control Telegramm Unfreeze wird der ZustandFreeze wieder aufgehoben.
GC Freeze inaktiv
Mit dem Global Control Telegramm Freeze werden die Eingängedes Profibus DP (Rückmeldungen) eingefroren.
GC Freeze aktiv
55
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Störungsbehebung
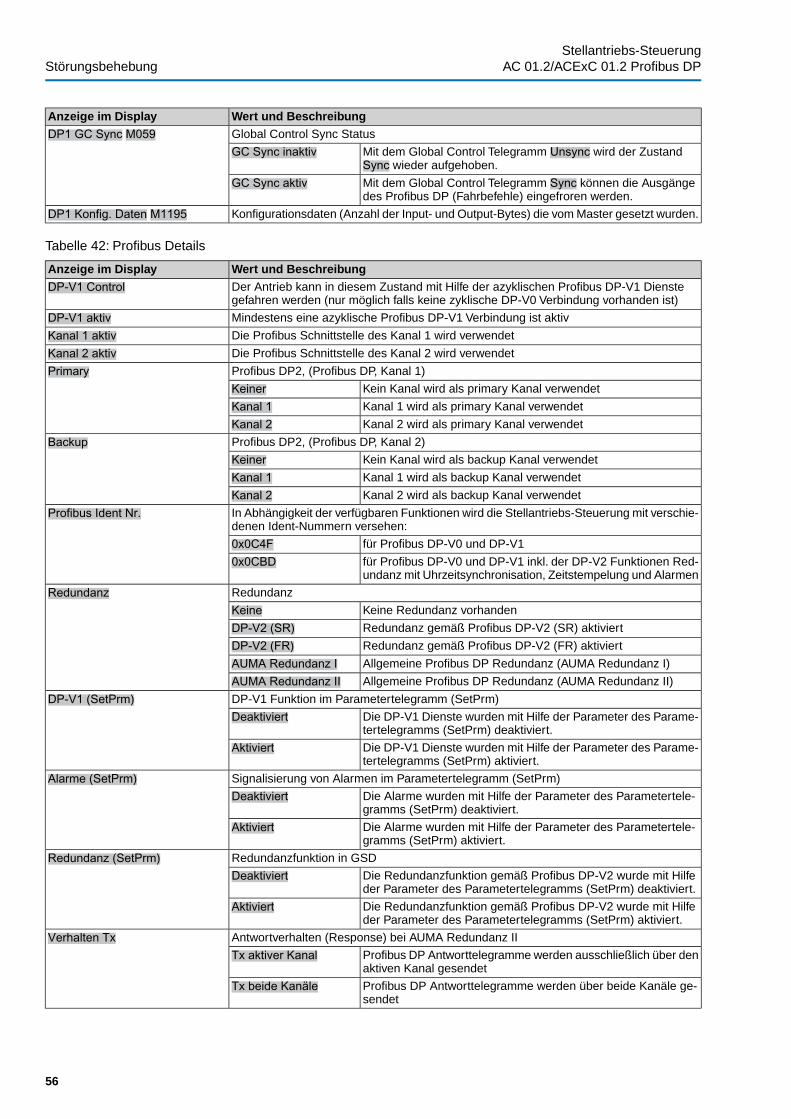
Wert und BeschreibungAnzeige im DisplayGlobal Control Sync StatusDP1 GC Sync M059
Mit dem Global Control Telegramm Unsync wird der ZustandSync wieder aufgehoben.
GC Sync inaktiv
Mit dem Global Control Telegramm Sync können die Ausgängedes Profibus DP (Fahrbefehle) eingefroren werden.
GC Sync aktiv
Konfigurationsdaten (Anzahl der Input- und Output-Bytes) die vom Master gesetzt wurden.DP1 Konfig. Daten M1195
Tabelle 42: Profibus Details
Wert und BeschreibungAnzeige im DisplayDer Antrieb kann in diesem Zustand mit Hilfe der azyklischen Profibus DP-V1 Dienstegefahren werden (nur möglich falls keine zyklische DP-V0 Verbindung vorhanden ist)
DP-V1 Control
Mindestens eine azyklische Profibus DP-V1 Verbindung ist aktivDP-V1 aktivDie Profibus Schnittstelle des Kanal 1 wird verwendetKanal 1 aktivDie Profibus Schnittstelle des Kanal 2 wird verwendetKanal 2 aktivProfibus DP2, (Profibus DP, Kanal 1)Primary
Kein Kanal wird als primary Kanal verwendetKeinerKanal 1 wird als primary Kanal verwendetKanal 1Kanal 2 wird als primary Kanal verwendetKanal 2
Profibus DP2, (Profibus DP, Kanal 2)BackupKein Kanal wird als backup Kanal verwendetKeinerKanal 1 wird als backup Kanal verwendetKanal 1Kanal 2 wird als backup Kanal verwendetKanal 2
In Abhängigkeit der verfügbaren Funktionen wird die Stellantriebs-Steuerung mit verschie-denen Ident-Nummern versehen:
Profibus Ident Nr.
für Profibus DP-V0 und DP-V10x0C4Ffür Profibus DP-V0 und DP-V1 inkl. der DP-V2 Funktionen Red-undanz mit Uhrzeitsynchronisation, Zeitstempelung und Alarmen
0x0CBD
RedundanzRedundanzKeine Redundanz vorhandenKeineRedundanz gemäß Profibus DP-V2 (SR) aktiviertDP-V2 (SR)Redundanz gemäß Profibus DP-V2 (FR) aktiviertDP-V2 (FR)Allgemeine Profibus DP Redundanz (AUMA Redundanz I)AUMA Redundanz IAllgemeine Profibus DP Redundanz (AUMA Redundanz II)AUMA Redundanz II
DP-V1 Funktion im Parametertelegramm (SetPrm)DP-V1 (SetPrm)Die DP-V1 Dienste wurden mit Hilfe der Parameter des Parame-tertelegramms (SetPrm) deaktiviert.
Deaktiviert
Die DP-V1 Dienste wurden mit Hilfe der Parameter des Parame-tertelegramms (SetPrm) aktiviert.
Aktiviert
Signalisierung von Alarmen im Parametertelegramm (SetPrm)Alarme (SetPrm)Die Alarme wurden mit Hilfe der Parameter des Parametertele-gramms (SetPrm) deaktiviert.
Deaktiviert
Die Alarme wurden mit Hilfe der Parameter des Parametertele-gramms (SetPrm) aktiviert.
Aktiviert
Redundanzfunktion in GSDRedundanz (SetPrm)Die Redundanzfunktion gemäß Profibus DP-V2 wurde mit Hilfeder Parameter des Parametertelegramms (SetPrm) deaktiviert.
Deaktiviert
Die Redundanzfunktion gemäß Profibus DP-V2 wurde mit Hilfeder Parameter des Parametertelegramms (SetPrm) aktiviert.
Aktiviert
Antwortverhalten (Response) bei AUMA Redundanz IIVerhalten TxProfibus DP Antworttelegramme werden ausschließlich über denaktiven Kanal gesendet
Tx aktiver Kanal
Profibus DP Antworttelegramme werden über beide Kanäle ge-sendet
Tx beide Kanäle
56
Stellantriebs-SteuerungStörungsbehebung AC 01.2/ACExC 01.2 Profibus DP
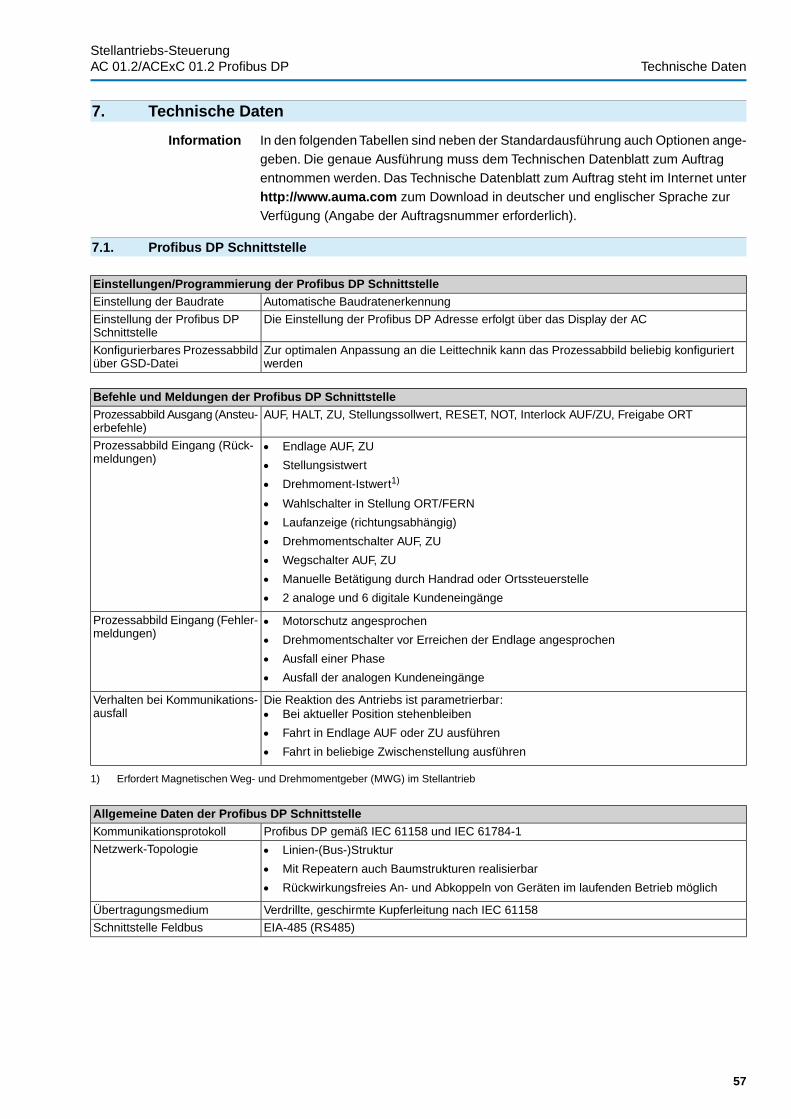
7. Technische Daten
Information In den folgenden Tabellen sind neben der Standardausführung auch Optionen ange-geben. Die genaue Ausführung muss dem Technischen Datenblatt zum Auftragentnommen werden. Das Technische Datenblatt zum Auftrag steht im Internet unterhttp://www.auma.com zum Download in deutscher und englischer Sprache zurVerfügung (Angabe der Auftragsnummer erforderlich).
7.1. Profibus DP Schnittstelle
Einstellungen/Programmierung der Profibus DP SchnittstelleAutomatische BaudratenerkennungEinstellung der Baudrate
Die Einstellung der Profibus DP Adresse erfolgt über das Display der ACEinstellung der Profibus DPSchnittstelle
Zur optimalen Anpassung an die Leittechnik kann das Prozessabbild beliebig konfiguriertwerden
Konfigurierbares Prozessabbildüber GSD-Datei
Befehle und Meldungen der Profibus DP SchnittstelleAUF, HALT, ZU, Stellungssollwert, RESET, NOT, Interlock AUF/ZU, Freigabe ORTProzessabbild Ausgang (Ansteu-
erbefehle)● Endlage AUF, ZU
● Stellungsistwert
● Drehmoment-Istwert1)
● Wahlschalter in Stellung ORT/FERN
● Laufanzeige (richtungsabhängig)
● Drehmomentschalter AUF, ZU
● Wegschalter AUF, ZU
● Manuelle Betätigung durch Handrad oder Ortssteuerstelle
● 2 analoge und 6 digitale Kundeneingänge
Prozessabbild Eingang (Rück-meldungen)
● Motorschutz angesprochen
● Drehmomentschalter vor Erreichen der Endlage angesprochen
● Ausfall einer Phase
● Ausfall der analogen Kundeneingänge
Prozessabbild Eingang (Fehler-meldungen)
Die Reaktion des Antriebs ist parametrierbar:● Bei aktueller Position stehenbleiben
● Fahrt in Endlage AUF oder ZU ausführen
● Fahrt in beliebige Zwischenstellung ausführen
Verhalten bei Kommunikations-ausfall
Erfordert Magnetischen Weg- und Drehmomentgeber (MWG) im Stellantrieb1)
Allgemeine Daten der Profibus DP SchnittstelleProfibus DP gemäß IEC 61158 und IEC 61784-1Kommunikationsprotokoll● Linien-(Bus-)Struktur
● Mit Repeatern auch Baumstrukturen realisierbar
● Rückwirkungsfreies An- und Abkoppeln von Geräten im laufenden Betrieb möglich
Netzwerk-Topologie
Verdrillte, geschirmte Kupferleitung nach IEC 61158Übertragungsmedium
EIA-485 (RS485)Schnittstelle Feldbus
57
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Technische Daten
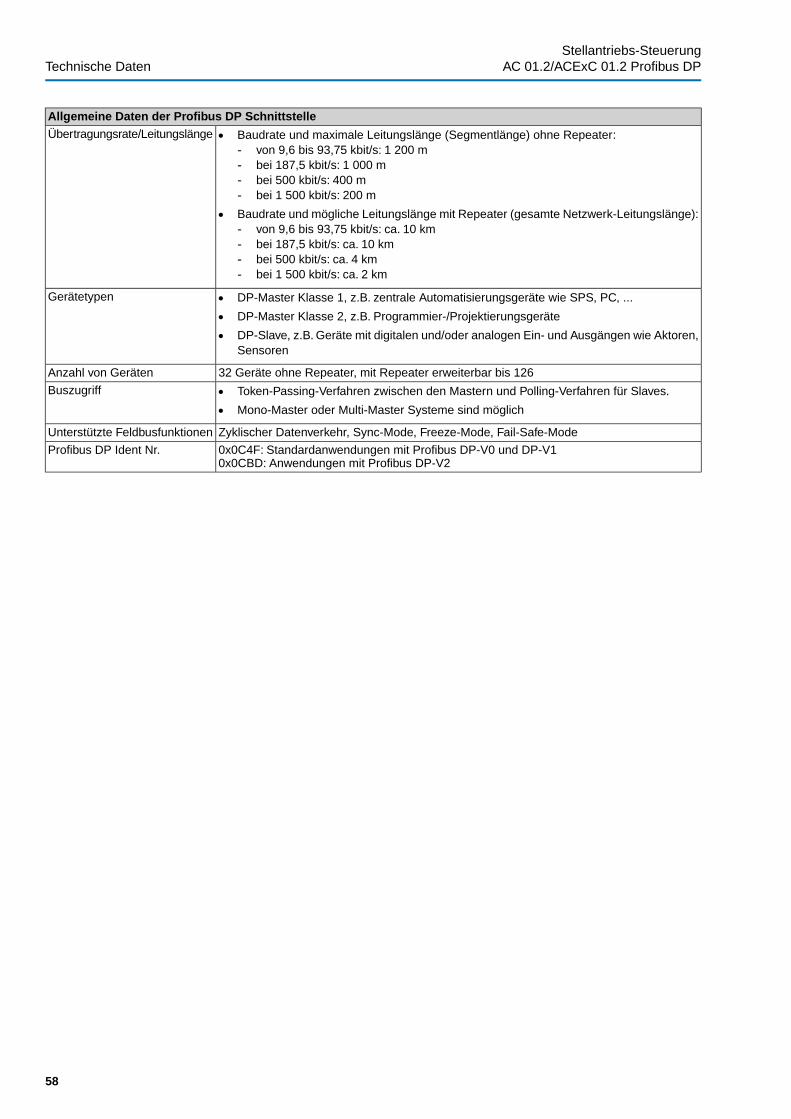
Allgemeine Daten der Profibus DP Schnittstelle● Baudrate und maximale Leitungslänge (Segmentlänge) ohne Repeater:
- von 9,6 bis 93,75 kbit/s: 1 200 m- bei 187,5 kbit/s: 1 000 m- bei 500 kbit/s: 400 m- bei 1 500 kbit/s: 200 m
● Baudrate und mögliche Leitungslänge mit Repeater (gesamte Netzwerk-Leitungslänge):- von 9,6 bis 93,75 kbit/s: ca. 10 km- bei 187,5 kbit/s: ca. 10 km- bei 500 kbit/s: ca. 4 km- bei 1 500 kbit/s: ca. 2 km
Übertragungsrate/Leitungslänge
● DP-Master Klasse 1, z.B. zentrale Automatisierungsgeräte wie SPS, PC, ...
● DP-Master Klasse 2, z.B. Programmier-/Projektierungsgeräte
● DP-Slave, z.B. Geräte mit digitalen und/oder analogen Ein- und Ausgängen wie Aktoren,Sensoren
Gerätetypen
32 Geräte ohne Repeater, mit Repeater erweiterbar bis 126Anzahl von Geräten● Token-Passing-Verfahren zwischen den Mastern und Polling-Verfahren für Slaves.
● Mono-Master oder Multi-Master Systeme sind möglich
Buszugriff
Zyklischer Datenverkehr, Sync-Mode, Freeze-Mode, Fail-Safe-ModeUnterstützte Feldbusfunktionen
0x0C4F: Standardanwendungen mit Profibus DP-V0 und DP-V10x0CBD: Anwendungen mit Profibus DP-V2
Profibus DP Ident Nr.
58
Stellantriebs-SteuerungTechnische Daten AC 01.2/ACExC 01.2 Profibus DP
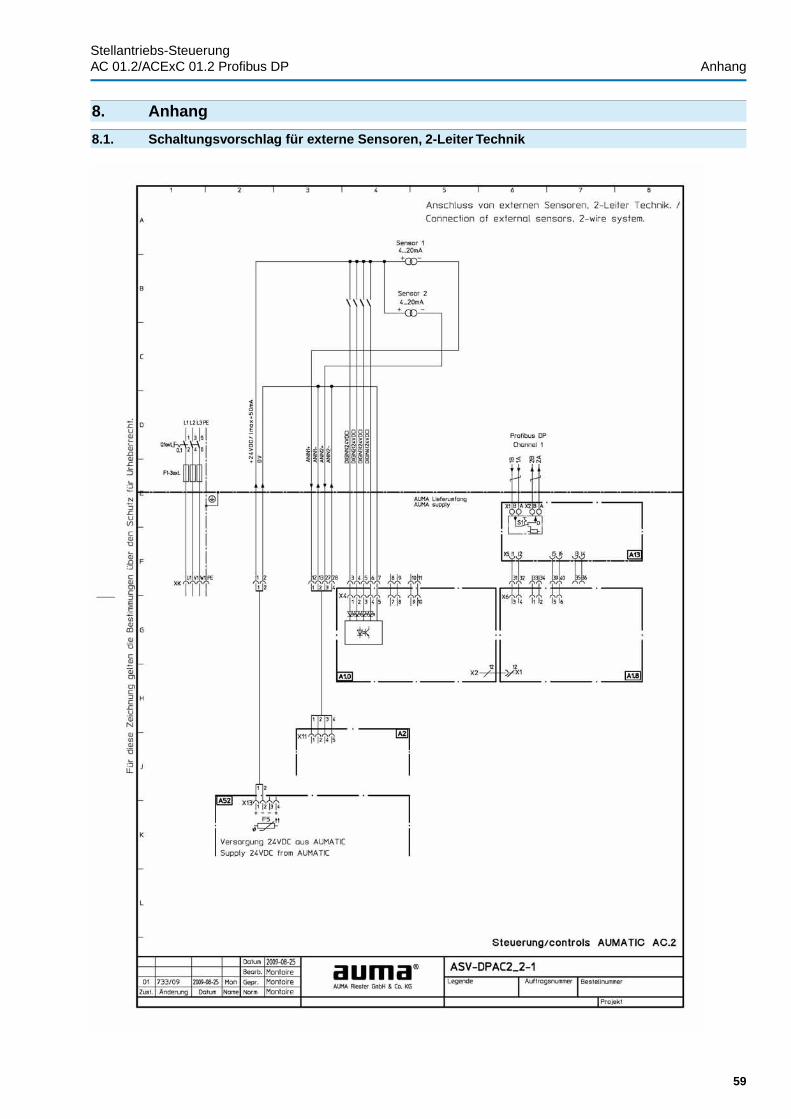
8. Anhang
8.1. Schaltungsvorschlag für externe Sensoren, 2-Leiter Technik
59
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
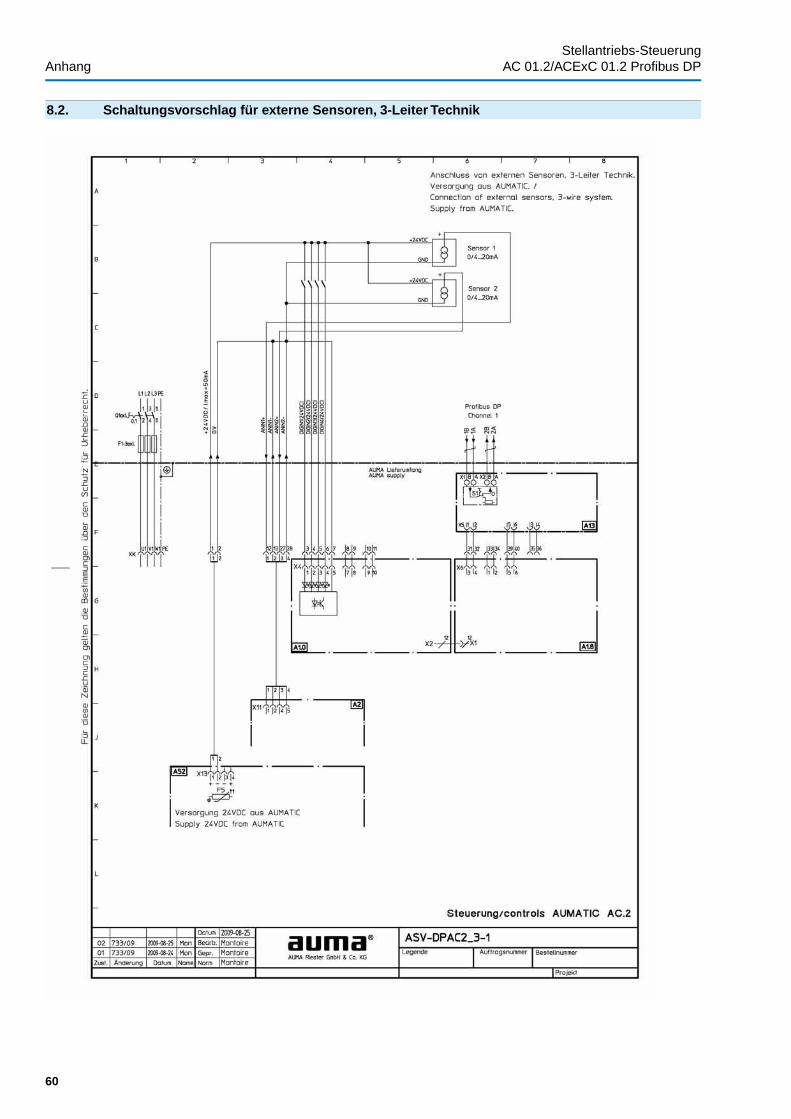
8.2. Schaltungsvorschlag für externe Sensoren, 3-Leiter Technik
60
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
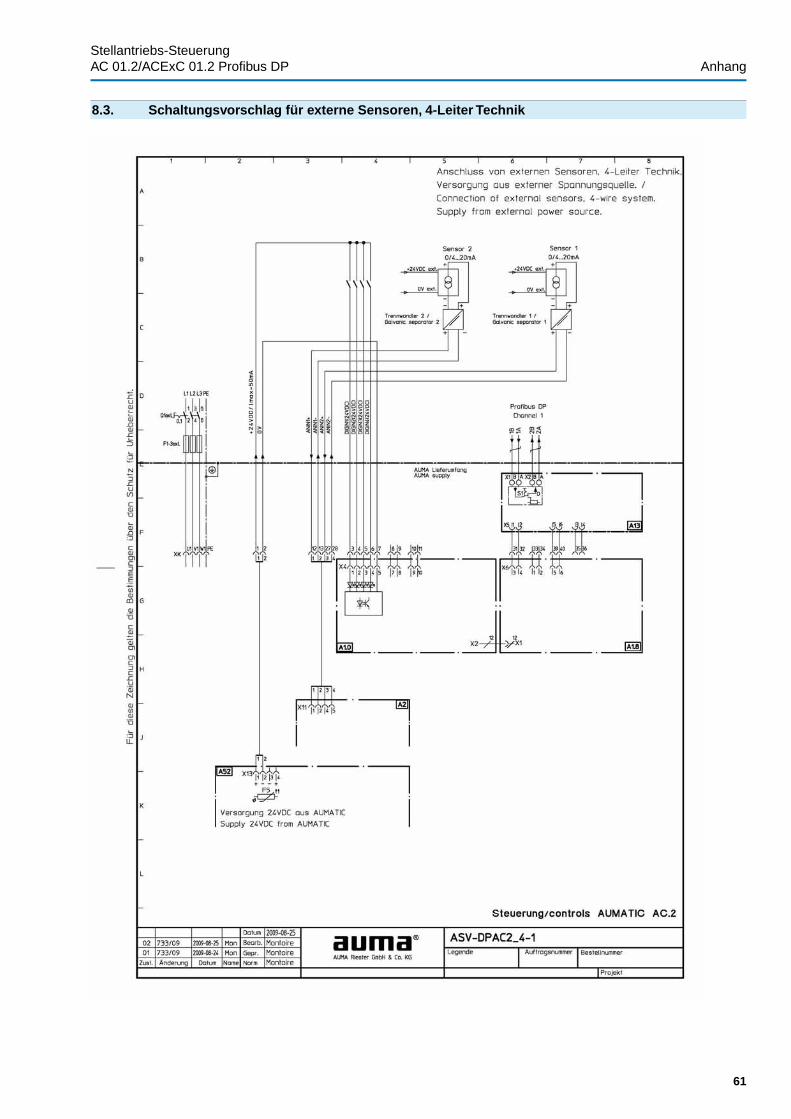
8.3. Schaltungsvorschlag für externe Sensoren, 4-Leiter Technik
61
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
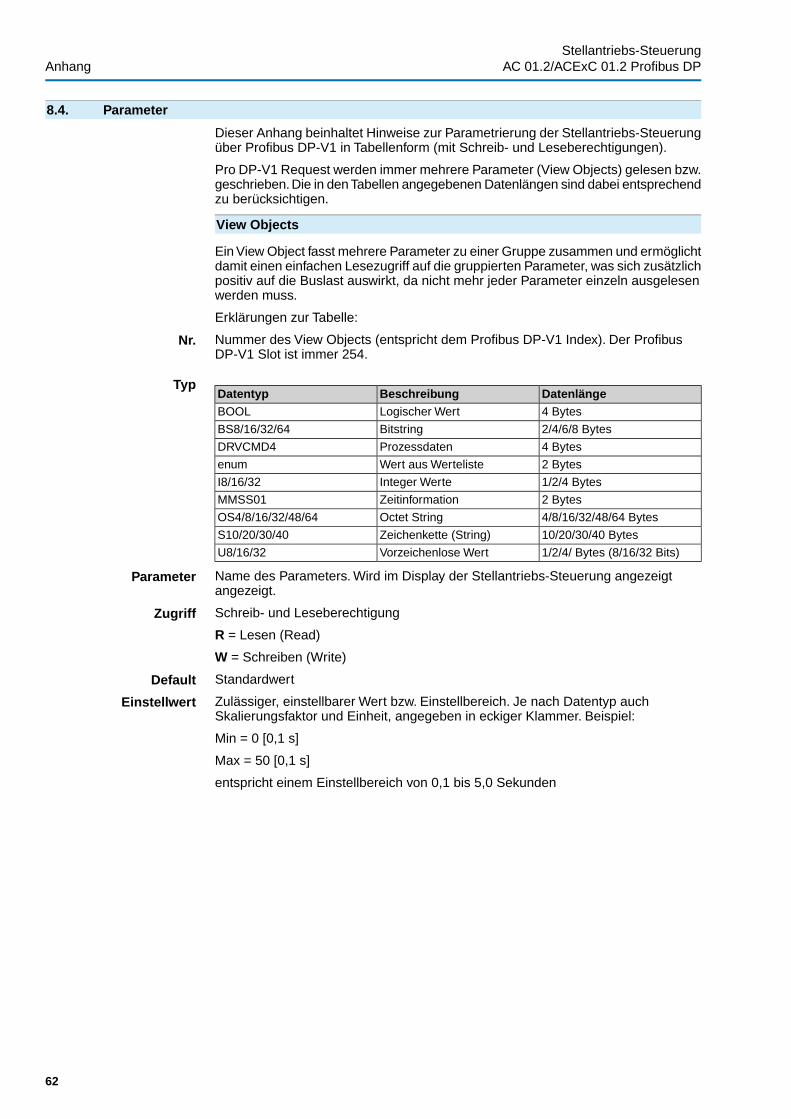
8.4. Parameter
Dieser Anhang beinhaltet Hinweise zur Parametrierung der Stellantriebs-Steuerungüber Profibus DP-V1 in Tabellenform (mit Schreib- und Leseberechtigungen).
Pro DP-V1 Request werden immer mehrere Parameter (View Objects) gelesen bzw.geschrieben. Die in den Tabellen angegebenen Datenlängen sind dabei entsprechendzu berücksichtigen.
View Objects
Ein View Object fasst mehrere Parameter zu einer Gruppe zusammen und ermöglichtdamit einen einfachen Lesezugriff auf die gruppierten Parameter, was sich zusätzlichpositiv auf die Buslast auswirkt, da nicht mehr jeder Parameter einzeln ausgelesenwerden muss.
Erklärungen zur Tabelle:
Nr. Nummer des View Objects (entspricht dem Profibus DP-V1 Index). Der ProfibusDP-V1 Slot ist immer 254.
TypDatenlängeBeschreibungDatentyp4 BytesLogischer WertBOOL
2/4/6/8 BytesBitstringBS8/16/32/64
4 BytesProzessdatenDRVCMD4
2 BytesWert aus Wertelisteenum
1/2/4 BytesInteger WerteI8/16/32
2 BytesZeitinformationMMSS01
4/8/16/32/48/64 BytesOctet StringOS4/8/16/32/48/64
10/20/30/40 BytesZeichenkette (String)S10/20/30/40
1/2/4/ Bytes (8/16/32 Bits)Vorzeichenlose WertU8/16/32
Parameter Name des Parameters. Wird im Display der Stellantriebs-Steuerung angezeigtangezeigt.
Zugriff Schreib- und Leseberechtigung
R = Lesen (Read)
W = Schreiben (Write)
Default Standardwert
Einstellwert Zulässiger, einstellbarer Wert bzw. Einstellbereich. Je nach Datentyp auchSkalierungsfaktor und Einheit, angegeben in eckiger Klammer. Beispiel:
Min = 0 [0,1 s]
Max = 50 [0,1 s]
entspricht einem Einstellbereich von 0,1 bis 5,0 Sekunden
62
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
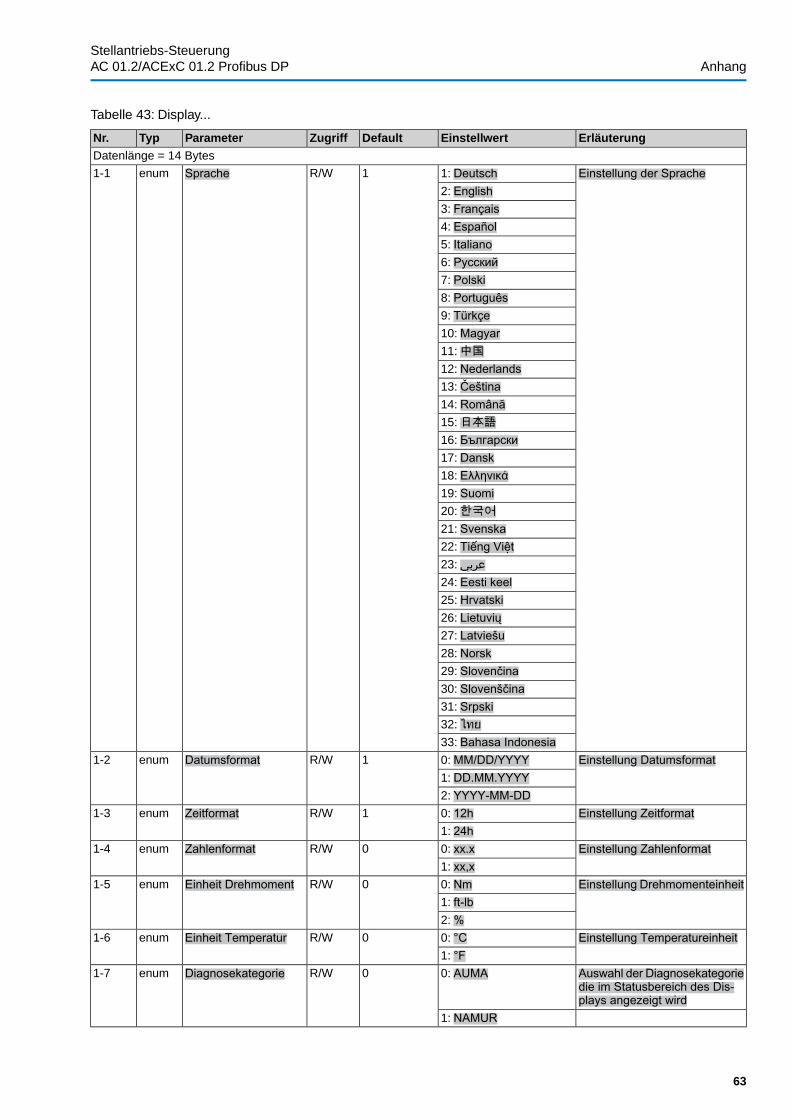
Tabelle 43: Display...
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 14 Bytes
Einstellung der Sprache1: Deutsch1R/WSpracheenum1-1
2: English3: Français4: Español5: Italiano6: Pусский7: Polski8: Português9: Türkçe10: Magyar11: 中国12: Nederlands13: Čeština14: Română15: 日本語16: Български17: Dansk18: Ελληνικά19: Suomi20: 한국어21: Svenska22: Tiếng Việt23: عربي24: Eesti keel25: Hrvatski26: Lietuvių27: Latviešu28: Norsk29: Slovenčina30: Slovenščina31: Srpski32: ไทย33: Bahasa Indonesia
Einstellung Datumsformat0: MM/DD/YYYY1R/WDatumsformatenum1-2
1: DD.MM.YYYY2: YYYY-MM-DD
Einstellung Zeitformat0: 12h1R/WZeitformatenum1-3
1: 24hEinstellung Zahlenformat0: xx.x0R/WZahlenformatenum1-4
1: xx,xEinstellung Drehmomenteinheit0: Nm0R/WEinheit Drehmomentenum1-5
1: ft-lb2: %
Einstellung Temperatureinheit0: °C0R/WEinheit Temperaturenum1-6
1: °FAuswahl der Diagnosekategoriedie im Statusbereich des Dis-plays angezeigt wird
0: AUMA0R/WDiagnosekategorieenum1-7
1: NAMUR
63
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
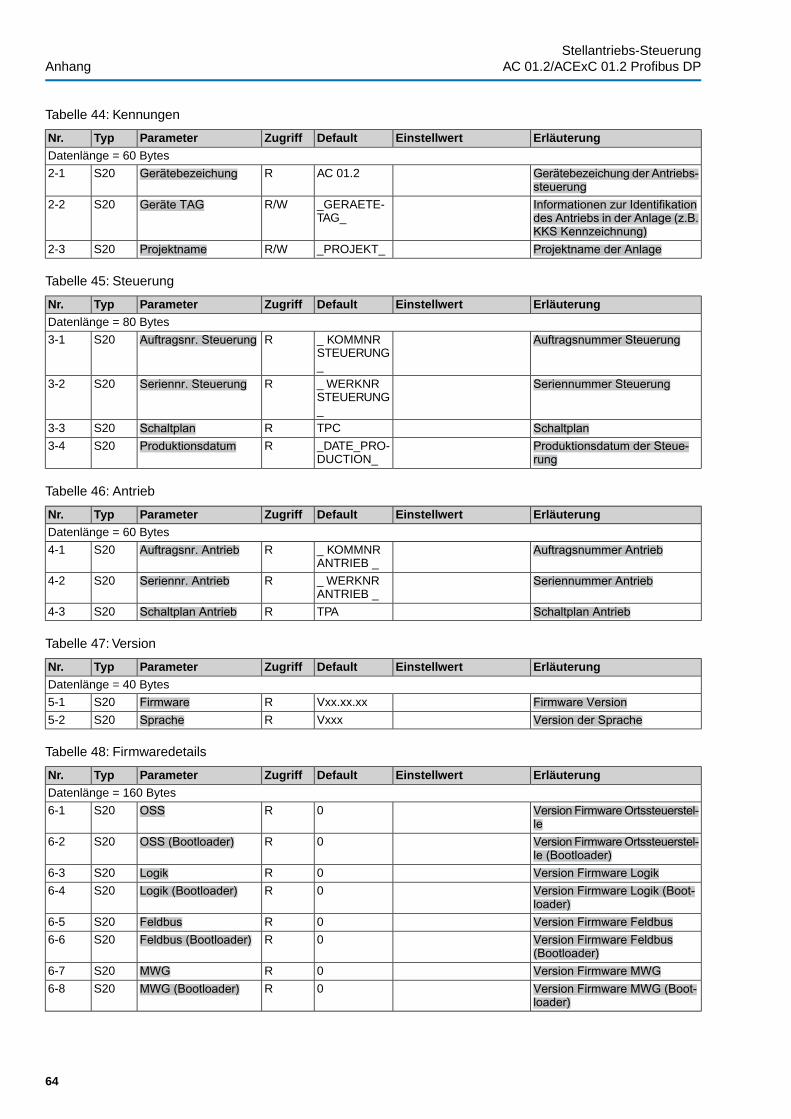
Tabelle 44: Kennungen
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 60 Bytes
Gerätebezeichung der Antriebs-steuerung
AC 01.2RGerätebezeichungS202-1
Informationen zur Identifikationdes Antriebs in der Anlage (z.B.KKS Kennzeichnung)
_GERAETE-TAG_
R/WGeräte TAGS202-2
Projektname der Anlage_PROJEKT_R/WProjektnameS202-3
Tabelle 45: Steuerung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 80 Bytes
Auftragsnummer Steuerung_ KOMMNRSTEUERUNG_
RAuftragsnr. SteuerungS203-1
Seriennummer Steuerung_ WERKNRSTEUERUNG_
RSeriennr. SteuerungS203-2
SchaltplanTPCRSchaltplanS203-3
Produktionsdatum der Steue-rung
_DATE_PRO-DUCTION_
RProduktionsdatumS203-4
Tabelle 46: Antrieb
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 60 Bytes
Auftragsnummer Antrieb_ KOMMNRANTRIEB _
RAuftragsnr. AntriebS204-1
Seriennummer Antrieb_ WERKNRANTRIEB _
RSeriennr. AntriebS204-2
Schaltplan AntriebTPARSchaltplan AntriebS204-3
Tabelle 47: Version
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 40 Bytes
Firmware VersionVxx.xx.xxRFirmwareS205-1
Version der SpracheVxxxRSpracheS205-2
Tabelle 48: Firmwaredetails
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 160 Bytes
Version FirmwareOrtssteuerstel-le
0ROSSS206-1
Version FirmwareOrtssteuerstel-le (Bootloader)
0ROSS (Bootloader)S206-2
Version Firmware Logik0RLogikS206-3
Version Firmware Logik (Boot-loader)
0RLogik (Bootloader)S206-4
Version Firmware Feldbus0RFeldbusS206-5
Version Firmware Feldbus(Bootloader)
0RFeldbus (Bootloader)S206-6
Version Firmware MWG0RMWGS206-7
Version Firmware MWG (Boot-loader)
0RMWG (Bootloader)S206-8
64
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
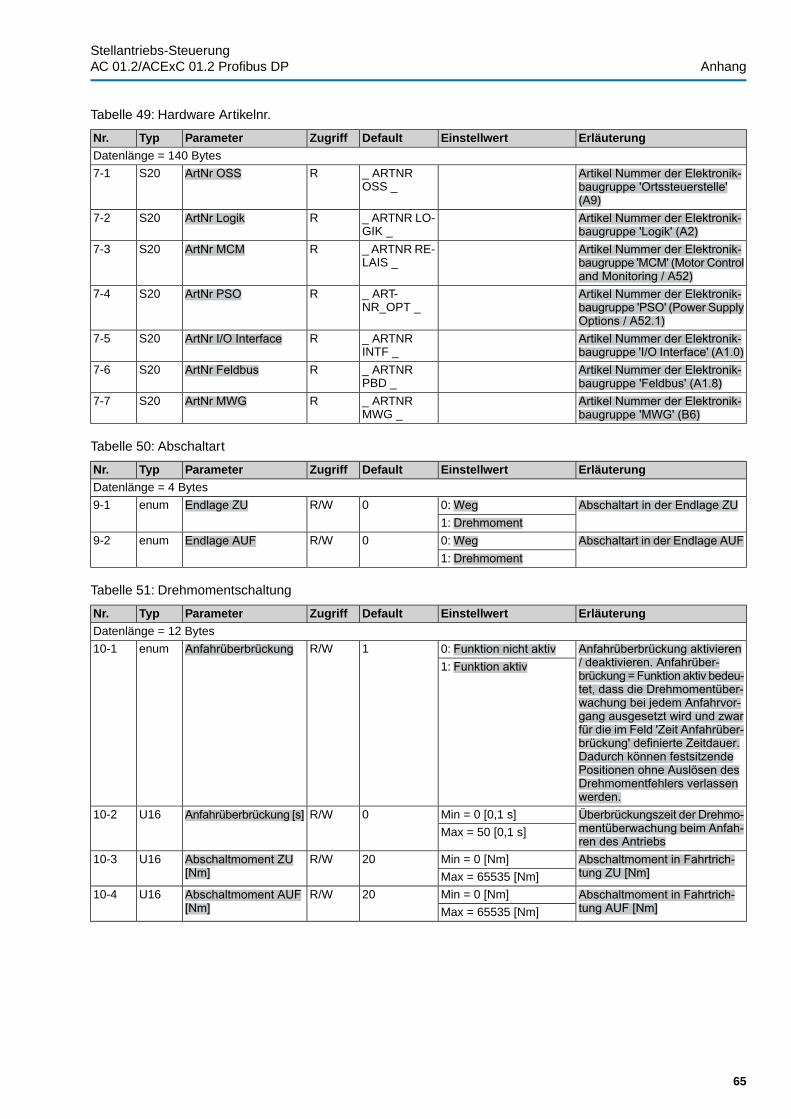
Tabelle 49: Hardware Artikelnr.
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 140 Bytes
Artikel Nummer der Elektronik-baugruppe 'Ortssteuerstelle'(A9)
_ ARTNROSS _
RArtNr OSSS207-1
Artikel Nummer der Elektronik-baugruppe 'Logik' (A2)
_ ARTNR LO-GIK _
RArtNr LogikS207-2
Artikel Nummer der Elektronik-baugruppe 'MCM' (Motor Controland Monitoring / A52)
_ ARTNR RE-LAIS _
RArtNr MCMS207-3
Artikel Nummer der Elektronik-baugruppe 'PSO' (Power SupplyOptions / A52.1)
_ ART-NR_OPT _
RArtNr PSOS207-4
Artikel Nummer der Elektronik-baugruppe 'I/O Interface' (A1.0)
_ ARTNRINTF _
RArtNr I/O InterfaceS207-5
Artikel Nummer der Elektronik-baugruppe 'Feldbus' (A1.8)
_ ARTNRPBD _
RArtNr FeldbusS207-6
Artikel Nummer der Elektronik-baugruppe 'MWG' (B6)
_ ARTNRMWG _
RArtNr MWGS207-7
Tabelle 50: Abschaltart
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Abschaltart in der Endlage ZU0: Weg0R/WEndlage ZUenum9-1
1: DrehmomentAbschaltart in der Endlage AUF0: Weg0R/WEndlage AUFenum9-2
1: Drehmoment
Tabelle 51: Drehmomentschaltung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 12 Bytes
Anfahrüberbrückung aktivieren/ deaktivieren. Anfahrüber-brückung =Funktion aktiv bedeu-tet, dass die Drehmomentüber-wachung bei jedem Anfahrvor-gang ausgesetzt wird und zwarfür die im Feld 'Zeit Anfahrüber-brückung' definierte Zeitdauer.Dadurch können festsitzendePositionen ohne Auslösen desDrehmomentfehlers verlassenwerden.
0: Funktion nicht aktiv1R/WAnfahrüberbrückungenum10-1
1: Funktion aktiv
Überbrückungszeit der Drehmo-mentüberwachung beim Anfah-ren des Antriebs
Min = 0 [0,1 s]0R/WAnfahrüberbrückung [s]U1610-2
Max = 50 [0,1 s]
Abschaltmoment in Fahrtrich-tung ZU [Nm]
Min = 0 [Nm]20R/WAbschaltmoment ZU[Nm]
U1610-3
Max = 65535 [Nm]
Abschaltmoment in Fahrtrich-tung AUF [Nm]
Min = 0 [Nm]20R/WAbschaltmoment AUF[Nm]
U1610-4
Max = 65535 [Nm]
65
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
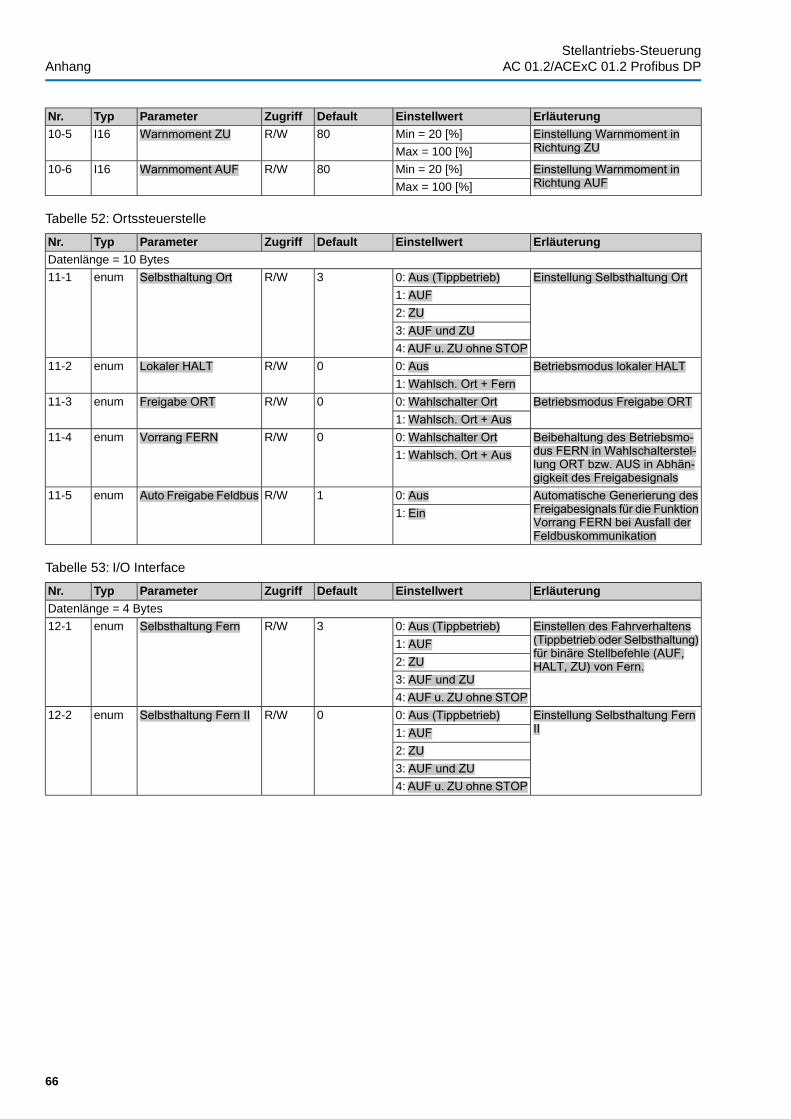
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Einstellung Warnmoment inRichtung ZU
Min = 20 [%]80R/WWarnmoment ZUI1610-5
Max = 100 [%]
Einstellung Warnmoment inRichtung AUF
Min = 20 [%]80R/WWarnmoment AUFI1610-6
Max = 100 [%]
Tabelle 52: Ortssteuerstelle
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 10 Bytes
Einstellung Selbsthaltung Ort0: Aus (Tippbetrieb)3R/WSelbsthaltung Ortenum11-1
1: AUF2: ZU3: AUF und ZU4:AUF u. ZU ohne STOP
Betriebsmodus lokaler HALT0: Aus0R/WLokaler HALTenum11-2
1: Wahlsch. Ort + FernBetriebsmodus Freigabe ORT0: Wahlschalter Ort0R/WFreigabe ORTenum11-3
1: Wahlsch. Ort + AusBeibehaltung des Betriebsmo-dus FERN in Wahlschalterstel-lung ORT bzw. AUS in Abhän-gigkeit des Freigabesignals
0: Wahlschalter Ort0R/WVorrang FERNenum11-4
1: Wahlsch. Ort + Aus
Automatische Generierung desFreigabesignals für die FunktionVorrang FERN bei Ausfall derFeldbuskommunikation
0: Aus1R/WAuto Freigabe Feldbusenum11-5
1: Ein
Tabelle 53: I/O Interface
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Einstellen des Fahrverhaltens(Tippbetrieb oder Selbsthaltung)für binäre Stellbefehle (AUF,HALT, ZU) von Fern.
0: Aus (Tippbetrieb)3R/WSelbsthaltung Fernenum12-1
1: AUF2: ZU3: AUF und ZU4:AUF u. ZU ohne STOP
Einstellung Selbsthaltung FernII
0: Aus (Tippbetrieb)0R/WSelbsthaltung Fern IIenum12-2
1: AUF2: ZU3: AUF und ZU4:AUF u. ZU ohne STOP
66
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
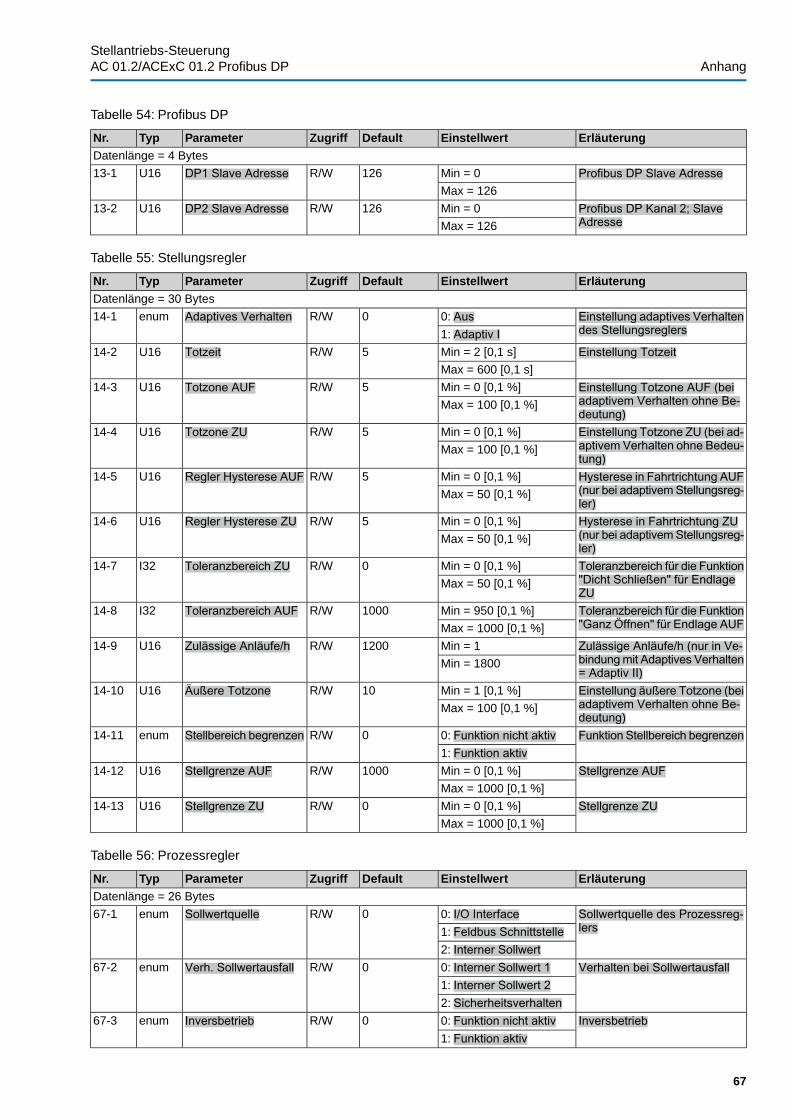
Tabelle 54: Profibus DP
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Profibus DP Slave AdresseMin = 0126R/WDP1 Slave AdresseU1613-1
Max = 126
Profibus DP Kanal 2; SlaveAdresse
Min = 0126R/WDP2 Slave AdresseU1613-2
Max = 126
Tabelle 55: Stellungsregler
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 30 Bytes
Einstellung adaptives Verhaltendes Stellungsreglers
0: Aus0R/WAdaptives Verhaltenenum14-1
1: Adaptiv IEinstellung TotzeitMin = 2 [0,1 s]5R/WTotzeitU1614-2
Max = 600 [0,1 s]
Einstellung Totzone AUF (beiadaptivem Verhalten ohne Be-deutung)
Min = 0 [0,1 %]5R/WTotzone AUFU1614-3
Max = 100 [0,1 %]
Einstellung Totzone ZU (bei ad-aptivem Verhalten ohne Bedeu-tung)
Min = 0 [0,1 %]5R/WTotzone ZUU1614-4
Max = 100 [0,1 %]
Hysterese in Fahrtrichtung AUF(nur bei adaptivemStellungsreg-ler)
Min = 0 [0,1 %]5R/WRegler Hysterese AUFU1614-5
Max = 50 [0,1 %]
Hysterese in Fahrtrichtung ZU(nur bei adaptivemStellungsreg-ler)
Min = 0 [0,1 %]5R/WRegler Hysterese ZUU1614-6
Max = 50 [0,1 %]
Toleranzbereich für die Funktion"Dicht Schließen" für EndlageZU
Min = 0 [0,1 %]0R/WToleranzbereich ZUI3214-7
Max = 50 [0,1 %]
Toleranzbereich für die Funktion"Ganz Öffnen" für Endlage AUF
Min = 950 [0,1 %]1000R/WToleranzbereich AUFI3214-8
Max = 1000 [0,1 %]
Zulässige Anläufe/h (nur in Ve-bindungmit Adaptives Verhalten= Adaptiv II)
Min = 11200R/WZulässige Anläufe/hU1614-9
Min = 1800
Einstellung äußere Totzone (beiadaptivem Verhalten ohne Be-deutung)
Min = 1 [0,1 %]10R/WÄußere TotzoneU1614-10
Max = 100 [0,1 %]
Funktion Stellbereich begrenzen0: Funktion nicht aktiv0R/WStellbereich begrenzenenum14-11
1: Funktion aktivStellgrenze AUFMin = 0 [0,1 %]1000R/WStellgrenze AUFU1614-12
Max = 1000 [0,1 %]
Stellgrenze ZUMin = 0 [0,1 %]0R/WStellgrenze ZUU1614-13
Max = 1000 [0,1 %]
Tabelle 56: Prozessregler
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 26 Bytes
Sollwertquelle des Prozessreg-lers
0: I/O Interface0R/WSollwertquelleenum67-1
1: Feldbus Schnittstelle2: Interner Sollwert
Verhalten bei Sollwertausfall0: Interner Sollwert 10R/WVerh. Sollwertausfallenum67-2
1: Interner Sollwert 22: Sicherheitsverhalten
Inversbetrieb0: Funktion nicht aktiv0R/WInversbetriebenum67-3
1: Funktion aktiv
67
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
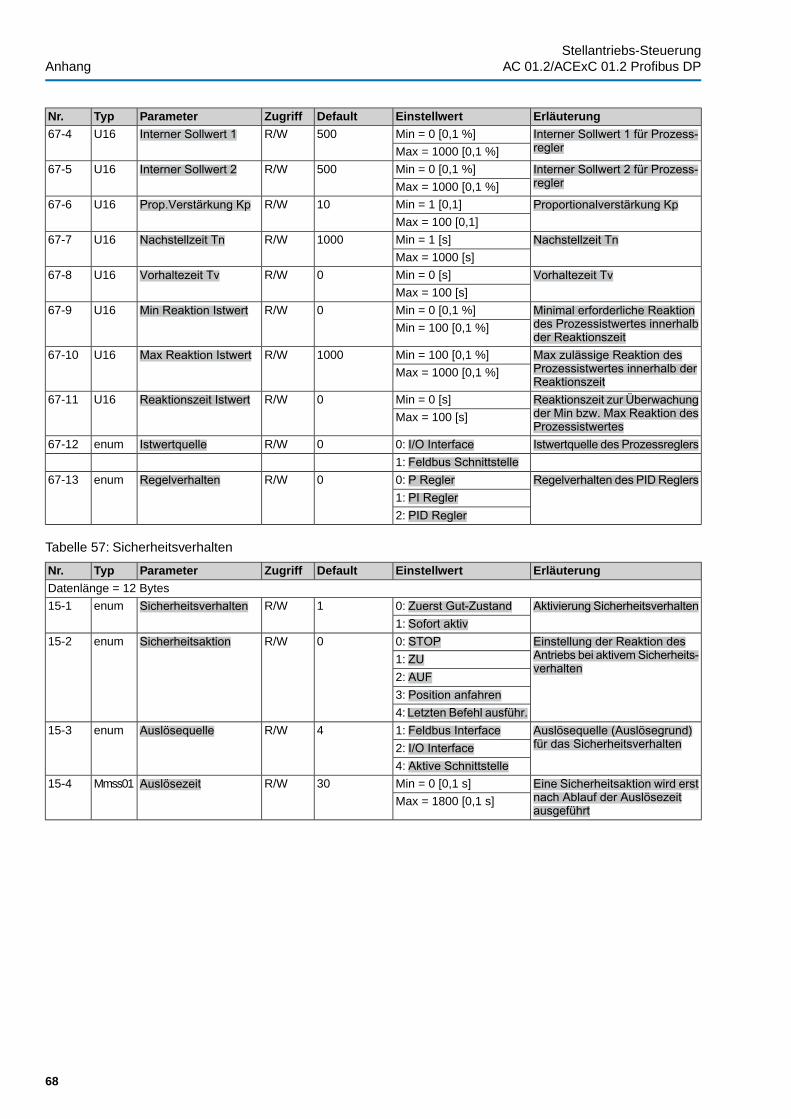
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Interner Sollwert 1 für Prozess-regler
Min = 0 [0,1 %]500R/WInterner Sollwert 1U1667-4
Max = 1000 [0,1 %]
Interner Sollwert 2 für Prozess-regler
Min = 0 [0,1 %]500R/WInterner Sollwert 2U1667-5
Max = 1000 [0,1 %]
Proportionalverstärkung KpMin = 1 [0,1]10R/WProp.Verstärkung KpU1667-6
Max = 100 [0,1]
Nachstellzeit TnMin = 1 [s]1000R/WNachstellzeit TnU1667-7
Max = 1000 [s]
Vorhaltezeit TvMin = 0 [s]0R/WVorhaltezeit TvU1667-8
Max = 100 [s]
Minimal erforderliche Reaktiondes Prozessistwertes innerhalbder Reaktionszeit
Min = 0 [0,1 %]0R/WMin Reaktion IstwertU1667-9
Min = 100 [0,1 %]
Max zulässige Reaktion desProzessistwertes innerhalb derReaktionszeit
Min = 100 [0,1 %]1000R/WMax Reaktion IstwertU1667-10
Max = 1000 [0,1 %]
Reaktionszeit zur Überwachungder Min bzw. Max Reaktion desProzessistwertes
Min = 0 [s]0R/WReaktionszeit IstwertU1667-11
Max = 100 [s]
Istwertquelle des Prozessreglers0: I/O Interface0R/WIstwertquelleenum67-12
1: Feldbus SchnittstelleRegelverhalten des PID Reglers0: P Regler0R/WRegelverhaltenenum67-13
1: PI Regler2: PID Regler
Tabelle 57: Sicherheitsverhalten
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 12 Bytes
Aktivierung Sicherheitsverhalten0: Zuerst Gut-Zustand1R/WSicherheitsverhaltenenum15-1
1: Sofort aktivEinstellung der Reaktion desAntriebs bei aktivemSicherheits-verhalten
0: STOP0R/WSicherheitsaktionenum15-2
1: ZU2: AUF3: Position anfahren4:Letzten Befehl ausführ.
Auslösequelle (Auslösegrund)für das Sicherheitsverhalten
1: Feldbus Interface4R/WAuslösequelleenum15-3
2: I/O Interface4: Aktive Schnittstelle
Eine Sicherheitsaktion wird erstnach Ablauf der Auslösezeitausgeführt
Min = 0 [0,1 s]30R/WAuslösezeitMmss0115-4
Max = 1800 [0,1 s]
68
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
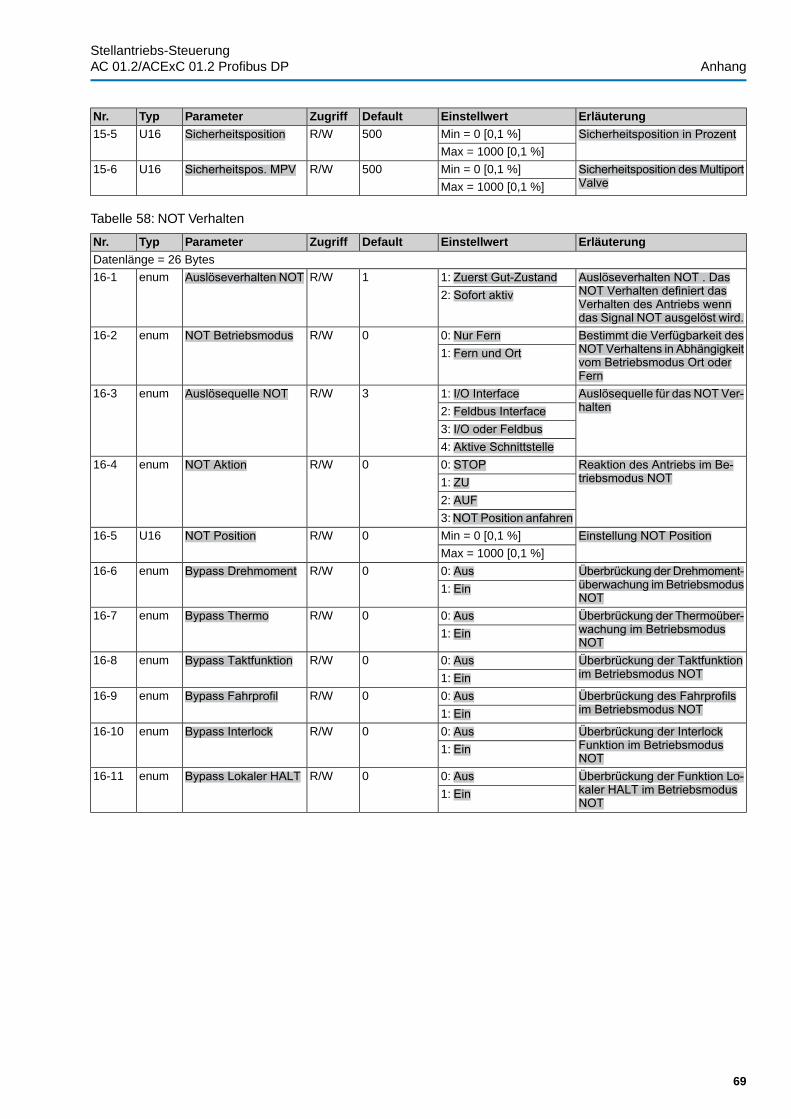
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Sicherheitsposition in ProzentMin = 0 [0,1 %]500R/WSicherheitspositionU1615-5
Max = 1000 [0,1 %]
Sicherheitsposition desMultiportValve
Min = 0 [0,1 %]500R/WSicherheitspos. MPVU1615-6
Max = 1000 [0,1 %]
Tabelle 58: NOT Verhalten
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 26 Bytes
Auslöseverhalten NOT . DasNOT Verhalten definiert dasVerhalten des Antriebs wenndas Signal NOT ausgelöst wird.
1: Zuerst Gut-Zustand1R/WAuslöseverhalten NOTenum16-1
2: Sofort aktiv
Bestimmt die Verfügbarkeit desNOT Verhaltens in Abhängigkeitvom Betriebsmodus Ort oderFern
0: Nur Fern0R/WNOT Betriebsmodusenum16-2
1: Fern und Ort
Auslösequelle für das NOT Ver-halten
1: I/O Interface3R/WAuslösequelle NOTenum16-3
2: Feldbus Interface3: I/O oder Feldbus4: Aktive Schnittstelle
Reaktion des Antriebs im Be-triebsmodus NOT
0: STOP0R/WNOT Aktionenum16-4
1: ZU2: AUF3:NOT Position anfahren
Einstellung NOT PositionMin = 0 [0,1 %]0R/WNOT PositionU1616-5
Max = 1000 [0,1 %]
Überbrückung der Drehmoment-überwachung imBetriebsmodusNOT
0: Aus0R/WBypass Drehmomentenum16-6
1: Ein
Überbrückung der Thermoüber-wachung im BetriebsmodusNOT
0: Aus0R/WBypass Thermoenum16-7
1: Ein
Überbrückung der Taktfunktionim Betriebsmodus NOT
0: Aus0R/WBypass Taktfunktionenum16-8
1: EinÜberbrückung des Fahrprofilsim Betriebsmodus NOT
0: Aus0R/WBypass Fahrprofilenum16-9
1: EinÜberbrückung der InterlockFunktion im BetriebsmodusNOT
0: Aus0R/WBypass Interlockenum16-10
1: Ein
Überbrückung der Funktion Lo-kaler HALT im BetriebsmodusNOT
0: Aus0R/WBypass Lokaler HALTenum16-11
1: Ein
69
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
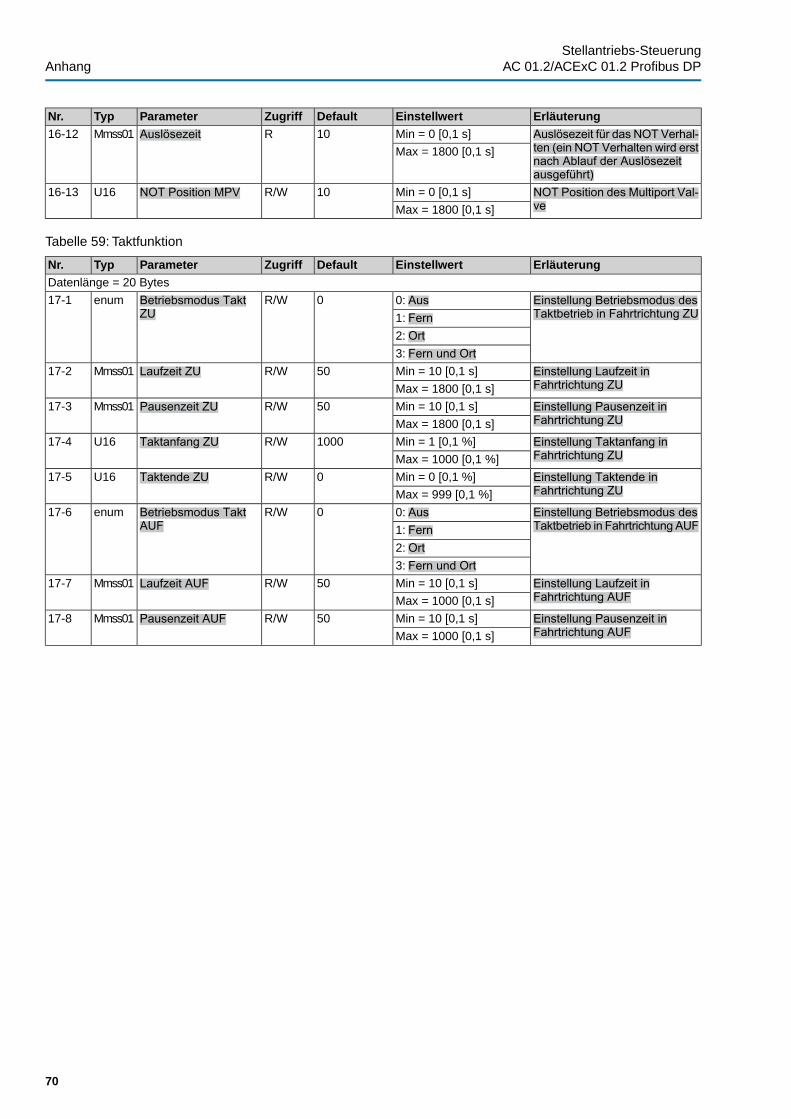
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Auslösezeit für das NOT Verhal-ten (ein NOT Verhalten wird erstnach Ablauf der Auslösezeitausgeführt)
Min = 0 [0,1 s]10RAuslösezeitMmss0116-12
Max = 1800 [0,1 s]
NOT Position des Multiport Val-ve
Min = 0 [0,1 s]10R/WNOT Position MPVU1616-13
Max = 1800 [0,1 s]
Tabelle 59: Taktfunktion
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 20 Bytes
Einstellung Betriebsmodus desTaktbetrieb in Fahrtrichtung ZU
0: Aus0R/WBetriebsmodus TaktZU
enum17-1
1: Fern2: Ort3: Fern und Ort
Einstellung Laufzeit inFahrtrichtung ZU
Min = 10 [0,1 s]50R/WLaufzeit ZUMmss0117-2
Max = 1800 [0,1 s]
Einstellung Pausenzeit inFahrtrichtung ZU
Min = 10 [0,1 s]50R/WPausenzeit ZUMmss0117-3
Max = 1800 [0,1 s]
Einstellung Taktanfang inFahrtrichtung ZU
Min = 1 [0,1 %]1000R/WTaktanfang ZUU1617-4
Max = 1000 [0,1 %]
Einstellung Taktende inFahrtrichtung ZU
Min = 0 [0,1 %]0R/WTaktende ZUU1617-5
Max = 999 [0,1 %]
Einstellung Betriebsmodus desTaktbetrieb in Fahrtrichtung AUF
0: Aus0R/WBetriebsmodus TaktAUF
enum17-6
1: Fern2: Ort3: Fern und Ort
Einstellung Laufzeit inFahrtrichtung AUF
Min = 10 [0,1 s]50R/WLaufzeit AUFMmss0117-7
Max = 1000 [0,1 s]
Einstellung Pausenzeit inFahrtrichtung AUF
Min = 10 [0,1 s]50R/WPausenzeit AUFMmss0117-8
Max = 1000 [0,1 s]
70
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
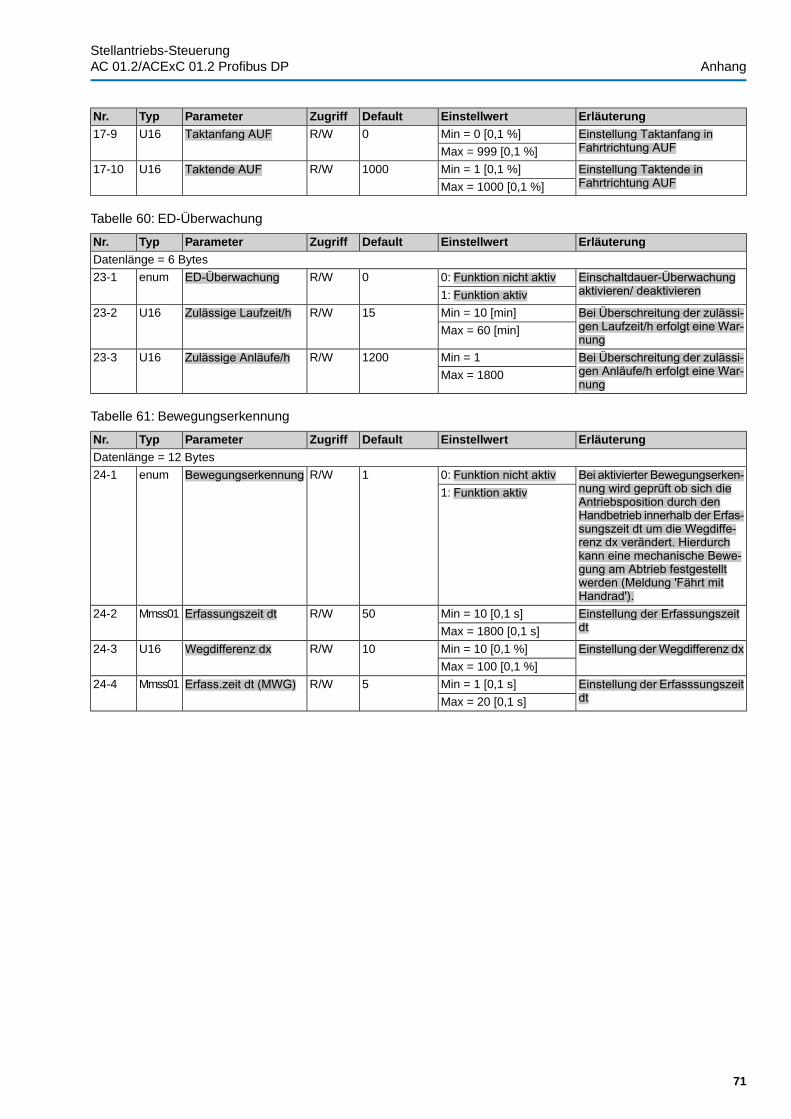
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Einstellung Taktanfang inFahrtrichtung AUF
Min = 0 [0,1 %]0R/WTaktanfang AUFU1617-9
Max = 999 [0,1 %]
Einstellung Taktende inFahrtrichtung AUF
Min = 1 [0,1 %]1000R/WTaktende AUFU1617-10
Max = 1000 [0,1 %]
Tabelle 60: ED-Überwachung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 6 Bytes
Einschaltdauer-Überwachungaktivieren/ deaktivieren
0: Funktion nicht aktiv0R/WED-Überwachungenum23-1
1: Funktion aktivBei Überschreitung der zulässi-gen Laufzeit/h erfolgt eine War-nung
Min = 10 [min]15R/WZulässige Laufzeit/hU1623-2
Max = 60 [min]
Bei Überschreitung der zulässi-gen Anläufe/h erfolgt eine War-nung
Min = 11200R/WZulässige Anläufe/hU1623-3
Max = 1800
Tabelle 61: Bewegungserkennung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 12 Bytes
Bei aktivierter Bewegungserken-nung wird geprüft ob sich dieAntriebsposition durch denHandbetrieb innerhalb der Erfas-sungszeit dt um die Wegdiffe-renz dx verändert. Hierdurchkann eine mechanische Bewe-gung am Abtrieb festgestelltwerden (Meldung 'Fährt mitHandrad').
0: Funktion nicht aktiv1R/WBewegungserkennungenum24-1
1: Funktion aktiv
Einstellung der Erfassungszeitdt
Min = 10 [0,1 s]50R/WErfassungszeit dtMmss0124-2
Max = 1800 [0,1 s]
Einstellung der Wegdifferenz dxMin = 10 [0,1 %]10R/WWegdifferenz dxU1624-3
Max = 100 [0,1 %]
Einstellung der Erfasssungszeitdt
Min = 1 [0,1 s]5R/WErfass.zeit dt (MWG)Mmss0124-4
Max = 20 [0,1 s]
71
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
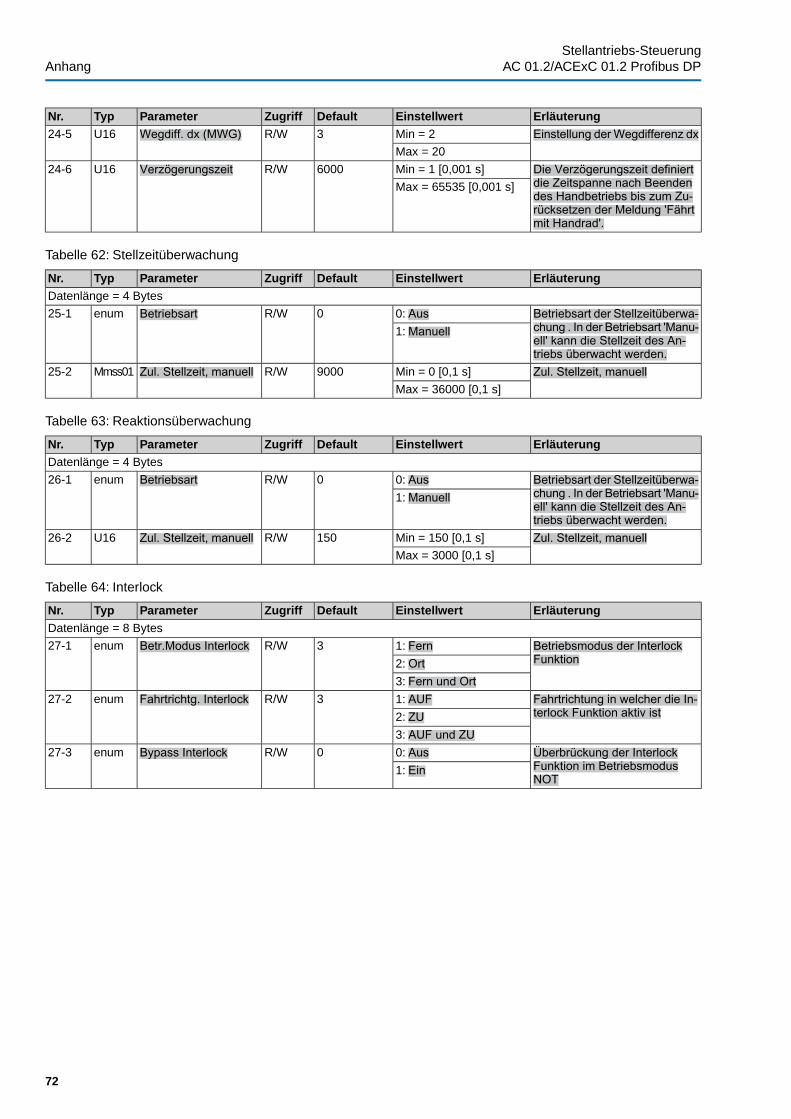
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Einstellung der Wegdifferenz dxMin = 23R/WWegdiff. dx (MWG)U1624-5
Max = 20
Die Verzögerungszeit definiertdie Zeitspanne nach Beendendes Handbetriebs bis zum Zu-rücksetzen der Meldung 'Fährtmit Handrad'.
Min = 1 [0,001 s]6000R/WVerzögerungszeitU1624-6
Max = 65535 [0,001 s]
Tabelle 62: Stellzeitüberwachung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Betriebsart der Stellzeitüberwa-chung . In der Betriebsart 'Manu-ell' kann die Stellzeit des An-triebs überwacht werden.
0: Aus0R/WBetriebsartenum25-1
1: Manuell
Zul. Stellzeit, manuellMin = 0 [0,1 s]9000R/WZul. Stellzeit, manuellMmss0125-2
Max = 36000 [0,1 s]
Tabelle 63: Reaktionsüberwachung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Betriebsart der Stellzeitüberwa-chung . In der Betriebsart 'Manu-ell' kann die Stellzeit des An-triebs überwacht werden.
0: Aus0R/WBetriebsartenum26-1
1: Manuell
Zul. Stellzeit, manuellMin = 150 [0,1 s]150R/WZul. Stellzeit, manuellU1626-2
Max = 3000 [0,1 s]
Tabelle 64: Interlock
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 8 Bytes
Betriebsmodus der InterlockFunktion
1: Fern3R/WBetr.Modus Interlockenum27-1
2: Ort3: Fern und Ort
Fahrtrichtung in welcher die In-terlock Funktion aktiv ist
1: AUF3R/WFahrtrichtg. Interlockenum27-2
2: ZU3: AUF und ZU
Überbrückung der InterlockFunktion im BetriebsmodusNOT
0: Aus0R/WBypass Interlockenum27-3
1: Ein
72
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
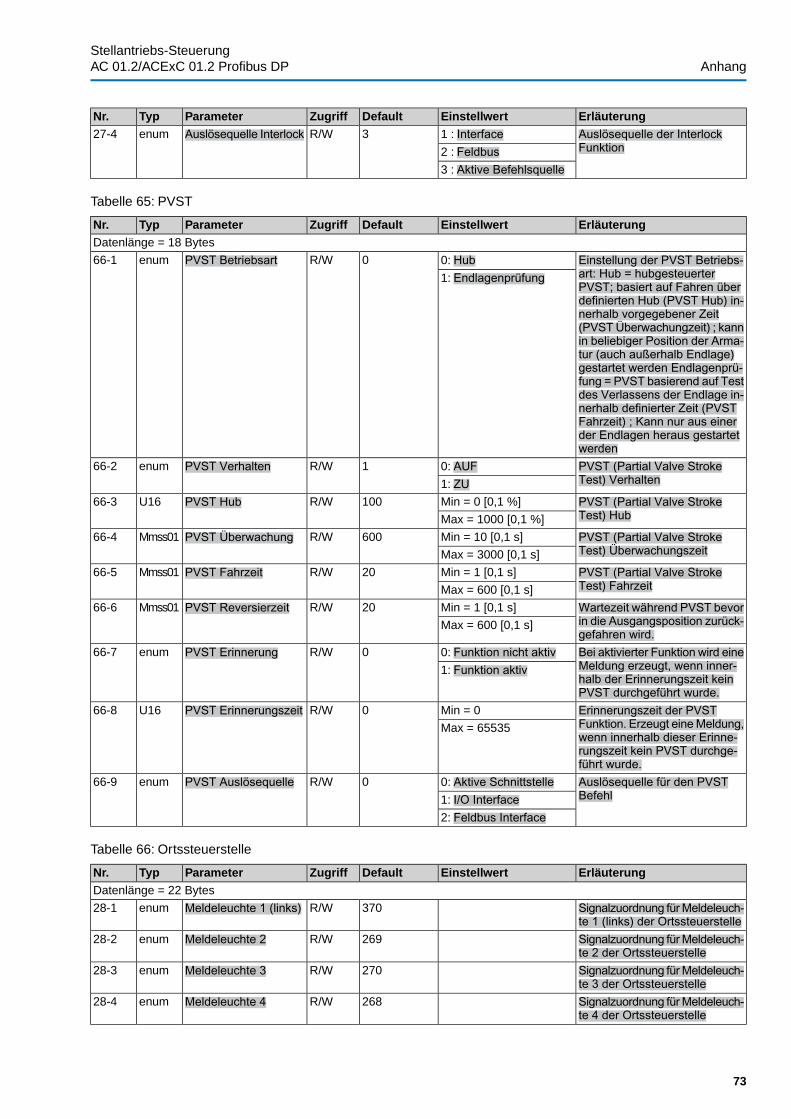
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Auslösequelle der InterlockFunktion
1 : Interface3R/WAuslösequelle Interlockenum27-4
2 : Feldbus3 : Aktive Befehlsquelle
Tabelle 65: PVST
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 18 Bytes
Einstellung der PVST Betriebs-art: Hub = hubgesteuerterPVST; basiert auf Fahren überdefinierten Hub (PVST Hub) in-nerhalb vorgegebener Zeit(PVSTÜberwachungzeit) ; kannin beliebiger Position der Arma-tur (auch außerhalb Endlage)gestartet werden Endlagenprü-fung = PVST basierend auf Testdes Verlassens der Endlage in-nerhalb definierter Zeit (PVSTFahrzeit) ; Kann nur aus einerder Endlagen heraus gestartetwerden
0: Hub0R/WPVST Betriebsartenum66-1
1: Endlagenprüfung
PVST (Partial Valve StrokeTest) Verhalten
0: AUF1R/WPVST Verhaltenenum66-2
1: ZUPVST (Partial Valve StrokeTest) Hub
Min = 0 [0,1 %]100R/WPVST HubU1666-3
Max = 1000 [0,1 %]
PVST (Partial Valve StrokeTest) Überwachungszeit
Min = 10 [0,1 s]600R/WPVST ÜberwachungMmss0166-4
Max = 3000 [0,1 s]
PVST (Partial Valve StrokeTest) Fahrzeit
Min = 1 [0,1 s]20R/WPVST FahrzeitMmss0166-5
Max = 600 [0,1 s]
Wartezeit während PVST bevorin die Ausgangsposition zurück-gefahren wird.
Min = 1 [0,1 s]20R/WPVST ReversierzeitMmss0166-6
Max = 600 [0,1 s]
Bei aktivierter Funktion wird eineMeldung erzeugt, wenn inner-halb der Erinnerungszeit keinPVST durchgeführt wurde.
0: Funktion nicht aktiv0R/WPVST Erinnerungenum66-7
1: Funktion aktiv
Erinnerungszeit der PVSTFunktion. Erzeugt eineMeldung,wenn innerhalb dieser Erinne-rungszeit kein PVST durchge-führt wurde.
Min = 00R/WPVST ErinnerungszeitU1666-8
Max = 65535
Auslösequelle für den PVSTBefehl
0: Aktive Schnittstelle0R/WPVST Auslösequelleenum66-9
1: I/O Interface2: Feldbus Interface
Tabelle 66: Ortssteuerstelle
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 22 Bytes
Signalzuordnung fürMeldeleuch-te 1 (links) der Ortssteuerstelle
370R/WMeldeleuchte 1 (links)enum28-1
Signalzuordnung fürMeldeleuch-te 2 der Ortssteuerstelle
269R/WMeldeleuchte 2enum28-2
Signalzuordnung fürMeldeleuch-te 3 der Ortssteuerstelle
270R/WMeldeleuchte 3enum28-3
Signalzuordnung fürMeldeleuch-te 4 der Ortssteuerstelle
268R/WMeldeleuchte 4enum28-4
73
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
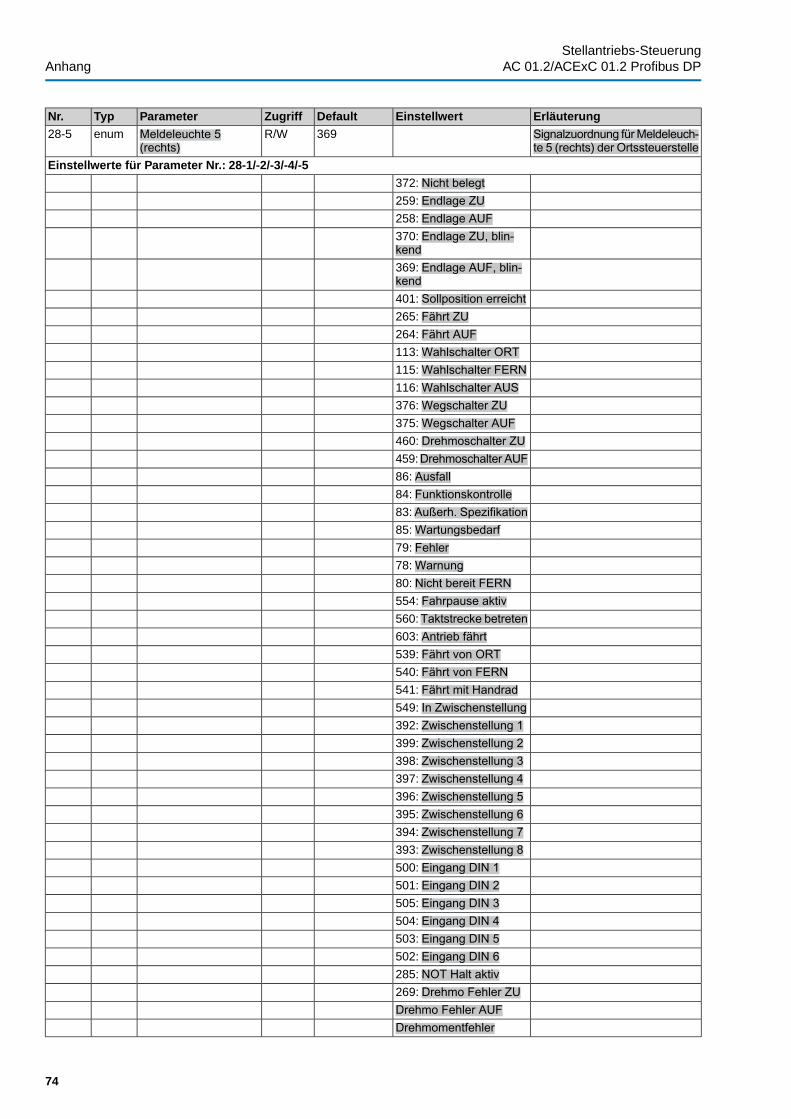
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Signalzuordnung fürMeldeleuch-te 5 (rechts) der Ortssteuerstelle
369R/WMeldeleuchte 5(rechts)
enum28-5
Einstellwerte für Parameter Nr.: 28-1/-2/-3/-4/-5372: Nicht belegt259: Endlage ZU258: Endlage AUF370: Endlage ZU, blin-kend369: Endlage AUF, blin-kend401: Sollposition erreicht265: Fährt ZU264: Fährt AUF113: Wahlschalter ORT115: Wahlschalter FERN116: Wahlschalter AUS376: Wegschalter ZU375: Wegschalter AUF460: Drehmoschalter ZU459:Drehmoschalter AUF86: Ausfall84: Funktionskontrolle83:Außerh. Spezifikation85: Wartungsbedarf79: Fehler78: Warnung80: Nicht bereit FERN554: Fahrpause aktiv560:Taktstrecke betreten603: Antrieb fährt539: Fährt von ORT540: Fährt von FERN541: Fährt mit Handrad549: In Zwischenstellung392: Zwischenstellung 1399: Zwischenstellung 2398: Zwischenstellung 3397: Zwischenstellung 4396: Zwischenstellung 5395: Zwischenstellung 6394: Zwischenstellung 7393: Zwischenstellung 8500: Eingang DIN 1501: Eingang DIN 2505: Eingang DIN 3504: Eingang DIN 4503: Eingang DIN 5502: Eingang DIN 6285: NOT Halt aktiv269: Drehmo Fehler ZUDrehmo Fehler AUFDrehmomentfehler
74
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
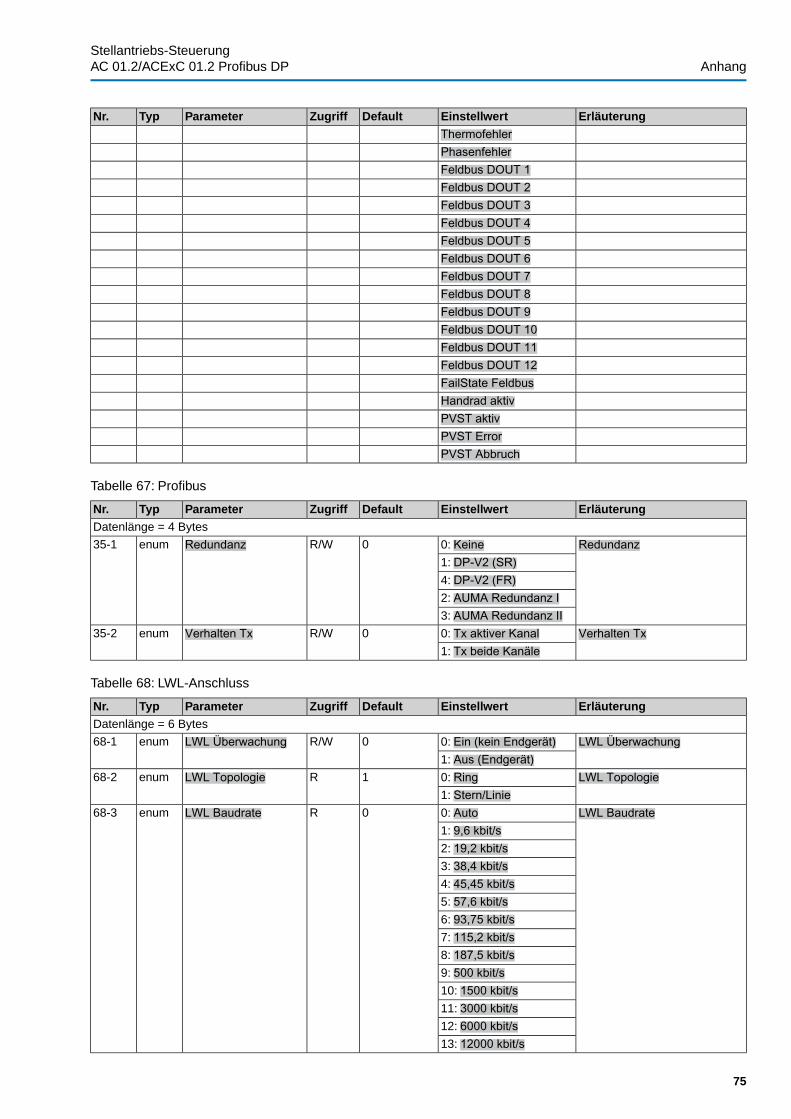
ErläuterungEinstellwertDefaultZugriffParameterTypNr.ThermofehlerPhasenfehlerFeldbus DOUT 1Feldbus DOUT 2Feldbus DOUT 3Feldbus DOUT 4Feldbus DOUT 5Feldbus DOUT 6Feldbus DOUT 7Feldbus DOUT 8Feldbus DOUT 9Feldbus DOUT 10Feldbus DOUT 11Feldbus DOUT 12FailState FeldbusHandrad aktivPVST aktivPVST ErrorPVST Abbruch
Tabelle 67: Profibus
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Redundanz0: Keine0R/WRedundanzenum35-1
1: DP-V2 (SR)4: DP-V2 (FR)2: AUMA Redundanz I3: AUMA Redundanz II
Verhalten Tx0: Tx aktiver Kanal0R/WVerhalten Txenum35-2
1: Tx beide Kanäle
Tabelle 68: LWL-Anschluss
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 6 Bytes
LWL Überwachung0: Ein (kein Endgerät)0R/WLWL Überwachungenum68-1
1: Aus (Endgerät)LWL Topologie0: Ring1RLWL Topologieenum68-2
1: Stern/LinieLWL Baudrate0: Auto0RLWL Baudrateenum68-3
1: 9,6 kbit/s2: 19,2 kbit/s3: 38,4 kbit/s4: 45,45 kbit/s5: 57,6 kbit/s6: 93,75 kbit/s7: 115,2 kbit/s8: 187,5 kbit/s9: 500 kbit/s10: 1500 kbit/s11: 3000 kbit/s12: 6000 kbit/s13: 12000 kbit/s
75
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
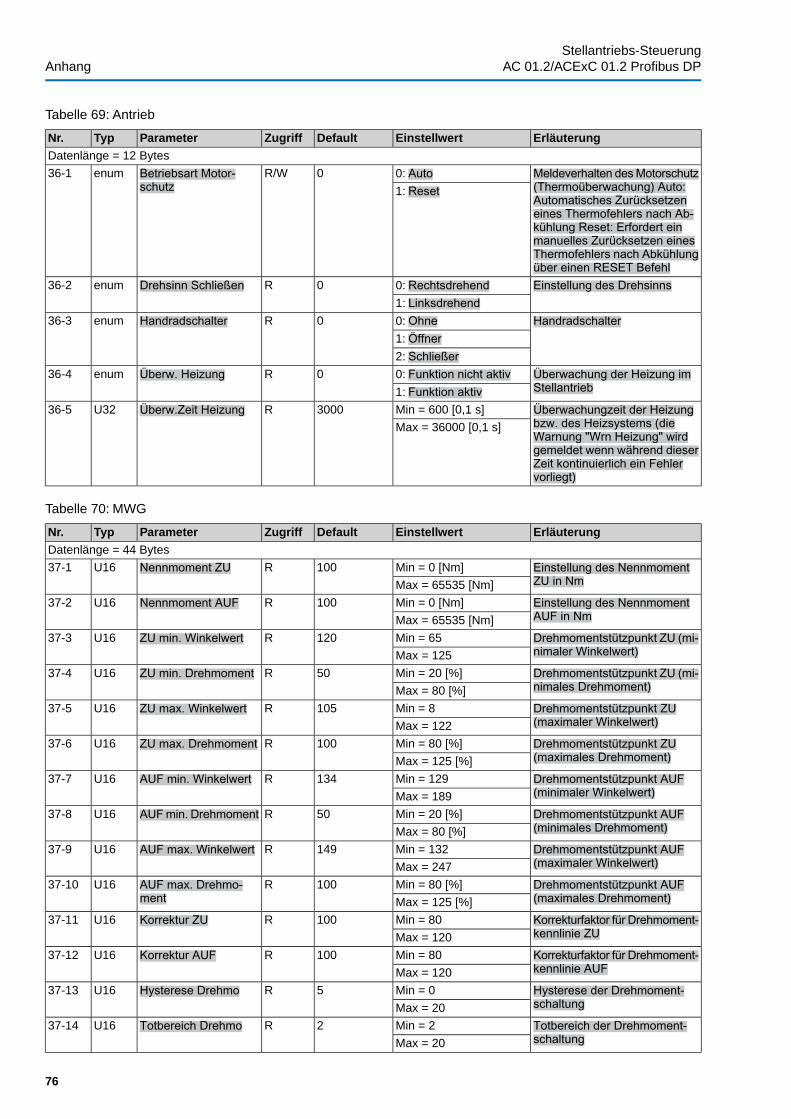
Tabelle 69: Antrieb
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 12 Bytes
Meldeverhalten desMotorschutz(Thermoüberwachung) Auto:Automatisches Zurücksetzeneines Thermofehlers nach Ab-kühlung Reset: Erfordert einmanuelles Zurücksetzen einesThermofehlers nach Abkühlungüber einen RESET Befehl
0: Auto0R/WBetriebsart Motor-schutz
enum36-1
1: Reset
Einstellung des Drehsinns0: Rechtsdrehend0RDrehsinn Schließenenum36-2
1: LinksdrehendHandradschalter0: Ohne0RHandradschalterenum36-3
1: Öffner2: Schließer
Überwachung der Heizung imStellantrieb
0: Funktion nicht aktiv0RÜberw. Heizungenum36-4
1: Funktion aktivÜberwachungzeit der Heizungbzw. des Heizsystems (dieWarnung "Wrn Heizung" wirdgemeldet wenn während dieserZeit kontinuierlich ein Fehlervorliegt)
Min = 600 [0,1 s]3000RÜberw.Zeit HeizungU3236-5
Max = 36000 [0,1 s]
Tabelle 70: MWG
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 44 Bytes
Einstellung des NennmomentZU in Nm
Min = 0 [Nm]100RNennmoment ZUU1637-1
Max = 65535 [Nm]
Einstellung des NennmomentAUF in Nm
Min = 0 [Nm]100RNennmoment AUFU1637-2
Max = 65535 [Nm]
Drehmomentstützpunkt ZU (mi-nimaler Winkelwert)
Min = 65120RZU min. WinkelwertU1637-3
Max = 125
Drehmomentstützpunkt ZU (mi-nimales Drehmoment)
Min = 20 [%]50RZU min. DrehmomentU1637-4
Max = 80 [%]
Drehmomentstützpunkt ZU(maximaler Winkelwert)
Min = 8105RZU max. WinkelwertU1637-5
Max = 122
Drehmomentstützpunkt ZU(maximales Drehmoment)
Min = 80 [%]100RZU max. DrehmomentU1637-6
Max = 125 [%]
Drehmomentstützpunkt AUF(minimaler Winkelwert)
Min = 129134RAUF min. WinkelwertU1637-7
Max = 189
Drehmomentstützpunkt AUF(minimales Drehmoment)
Min = 20 [%]50RAUFmin. DrehmomentU1637-8
Max = 80 [%]
Drehmomentstützpunkt AUF(maximaler Winkelwert)
Min = 132149RAUF max. WinkelwertU1637-9
Max = 247
Drehmomentstützpunkt AUF(maximales Drehmoment)
Min = 80 [%]100RAUF max. Drehmo-ment
U1637-10
Max = 125 [%]
Korrekturfaktor für Drehmoment-kennlinie ZU
Min = 80100RKorrektur ZUU1637-11
Max = 120
Korrekturfaktor für Drehmoment-kennlinie AUF
Min = 80100RKorrektur AUFU1637-12
Max = 120
Hysterese der Drehmoment-schaltung
Min = 05RHysterese DrehmoU1637-13
Max = 20
Totbereich der Drehmoment-schaltung
Min = 22RTotbereich DrehmoU1637-14
Max = 20
76
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
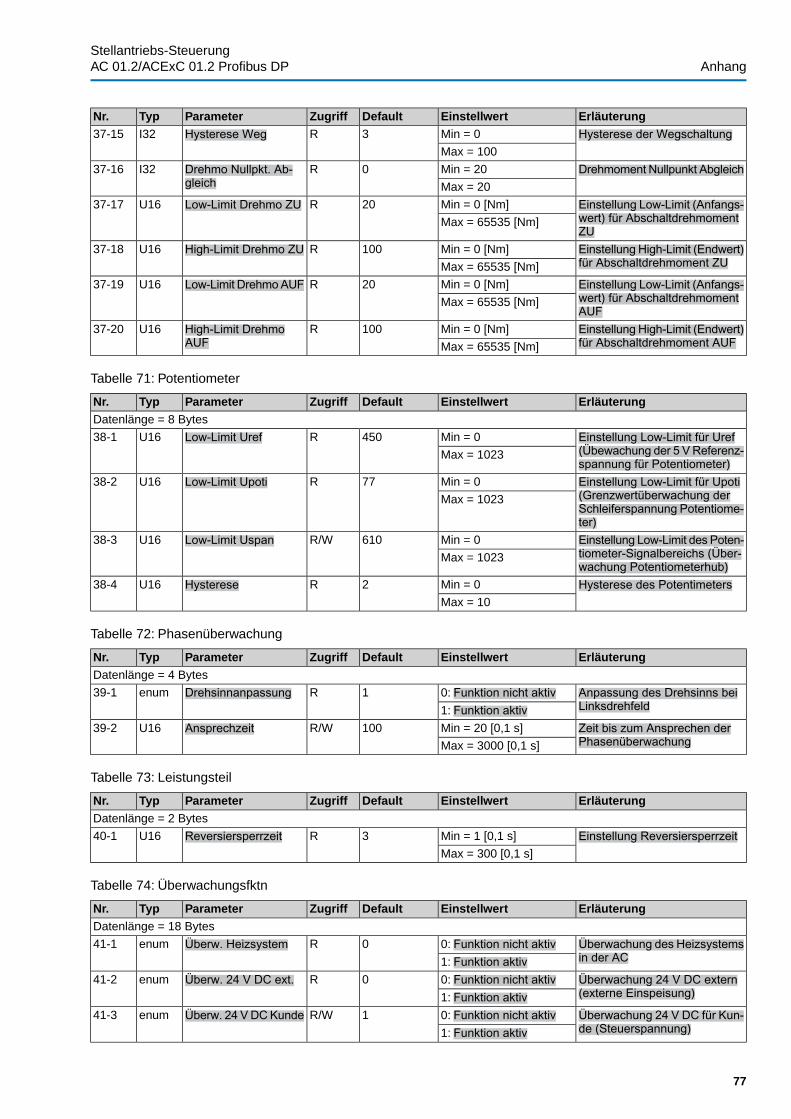
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Hysterese der WegschaltungMin = 03RHysterese WegI3237-15
Max = 100
Drehmoment Nullpunkt AbgleichMin = 200RDrehmo Nullpkt. Ab-gleich
I3237-16
Max = 20
Einstellung Low-Limit (Anfangs-wert) für AbschaltdrehmomentZU
Min = 0 [Nm]20RLow-Limit Drehmo ZUU1637-17
Max = 65535 [Nm]
Einstellung High-Limit (Endwert)für Abschaltdrehmoment ZU
Min = 0 [Nm]100RHigh-Limit Drehmo ZUU1637-18
Max = 65535 [Nm]
Einstellung Low-Limit (Anfangs-wert) für AbschaltdrehmomentAUF
Min = 0 [Nm]20RLow-Limit DrehmoAUFU1637-19
Max = 65535 [Nm]
Einstellung High-Limit (Endwert)für Abschaltdrehmoment AUF
Min = 0 [Nm]100RHigh-Limit DrehmoAUF
U1637-20
Max = 65535 [Nm]
Tabelle 71: Potentiometer
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 8 Bytes
Einstellung Low-Limit für Uref(Übewachung der 5 V Referenz-spannung für Potentiometer)
Min = 0450RLow-Limit UrefU1638-1
Max = 1023
Einstellung Low-Limit für Upoti(Grenzwertüberwachung derSchleiferspannung Potentiome-ter)
Min = 077RLow-Limit UpotiU1638-2
Max = 1023
Einstellung Low-Limit des Poten-tiometer-Signalbereichs (Über-wachung Potentiometerhub)
Min = 0610R/WLow-Limit UspanU1638-3
Max = 1023
Hysterese des PotentimetersMin = 02RHystereseU1638-4
Max = 10
Tabelle 72: Phasenüberwachung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Anpassung des Drehsinns beiLinksdrehfeld
0: Funktion nicht aktiv1RDrehsinnanpassungenum39-1
1: Funktion aktivZeit bis zum Ansprechen derPhasenüberwachung
Min = 20 [0,1 s]100R/WAnsprechzeitU1639-2
Max = 3000 [0,1 s]
Tabelle 73: Leistungsteil
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 2 Bytes
Einstellung ReversiersperrzeitMin = 1 [0,1 s]3RReversiersperrzeitU1640-1
Max = 300 [0,1 s]
Tabelle 74: Überwachungsfktn
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 18 Bytes
Überwachung des Heizsystemsin der AC
0: Funktion nicht aktiv0RÜberw. Heizsystemenum41-1
1: Funktion aktivÜberwachung 24 V DC extern(externe Einspeisung)
0: Funktion nicht aktiv0RÜberw. 24 V DC ext.enum41-2
1: Funktion aktivÜberwachung 24 V DC für Kun-de (Steuerspannung)
0: Funktion nicht aktiv1R/WÜberw. 24 VDCKundeenum41-3
1: Funktion aktiv
77
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
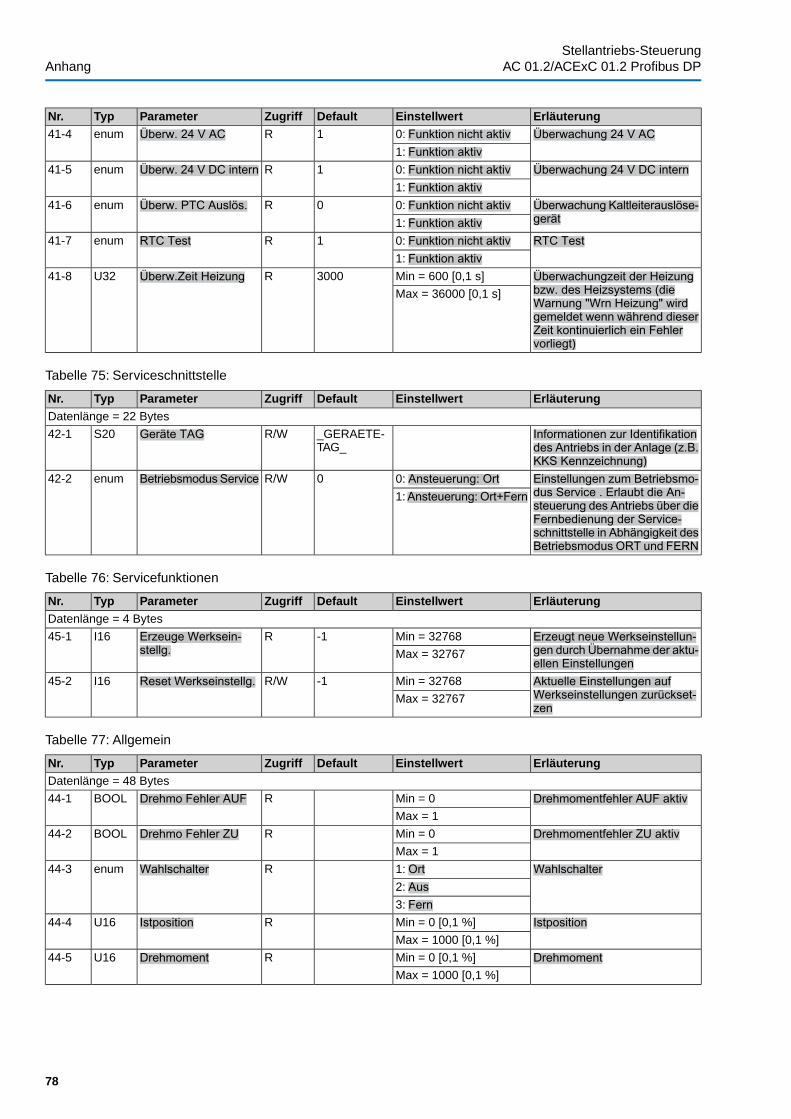
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Überwachung 24 V AC0: Funktion nicht aktiv1RÜberw. 24 V ACenum41-4
1: Funktion aktivÜberwachung 24 V DC intern0: Funktion nicht aktiv1RÜberw. 24 V DC internenum41-5
1: Funktion aktivÜberwachung Kaltleiterauslöse-gerät
0: Funktion nicht aktiv0RÜberw. PTC Auslös.enum41-6
1: Funktion aktivRTC Test0: Funktion nicht aktiv1RRTC Testenum41-7
1: Funktion aktivÜberwachungzeit der Heizungbzw. des Heizsystems (dieWarnung "Wrn Heizung" wirdgemeldet wenn während dieserZeit kontinuierlich ein Fehlervorliegt)
Min = 600 [0,1 s]3000RÜberw.Zeit HeizungU3241-8
Max = 36000 [0,1 s]
Tabelle 75: Serviceschnittstelle
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 22 Bytes
Informationen zur Identifikationdes Antriebs in der Anlage (z.B.KKS Kennzeichnung)
_GERAETE-TAG_
R/WGeräte TAGS2042-1
Einstellungen zum Betriebsmo-dus Service . Erlaubt die An-steuerung des Antriebs über dieFernbedienung der Service-schnittstelle in Abhängigkeit desBetriebsmodus ORT und FERN
0: Ansteuerung: Ort0R/WBetriebsmodus Serviceenum42-2
1:Ansteuerung: Ort+Fern
Tabelle 76: Servicefunktionen
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 4 Bytes
Erzeugt neue Werkseinstellun-gen durch Übernahme der aktu-ellen Einstellungen
Min = 32768-1RErzeuge Werksein-stellg.
I1645-1
Max = 32767
Aktuelle Einstellungen aufWerkseinstellungen zurückset-zen
Min = 32768-1R/WReset Werkseinstellg.I1645-2
Max = 32767
Tabelle 77: Allgemein
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 48 Bytes
Drehmomentfehler AUF aktivMin = 0RDrehmo Fehler AUFBOOL44-1
Max = 1
Drehmomentfehler ZU aktivMin = 0RDrehmo Fehler ZUBOOL44-2
Max = 1
Wahlschalter1: OrtRWahlschalterenum44-3
2: Aus3: Fern
IstpositionMin = 0 [0,1 %]RIstpositionU1644-4
Max = 1000 [0,1 %]
DrehmomentMin = 0 [0,1 %]RDrehmomentU1644-5
Max = 1000 [0,1 %]
78
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
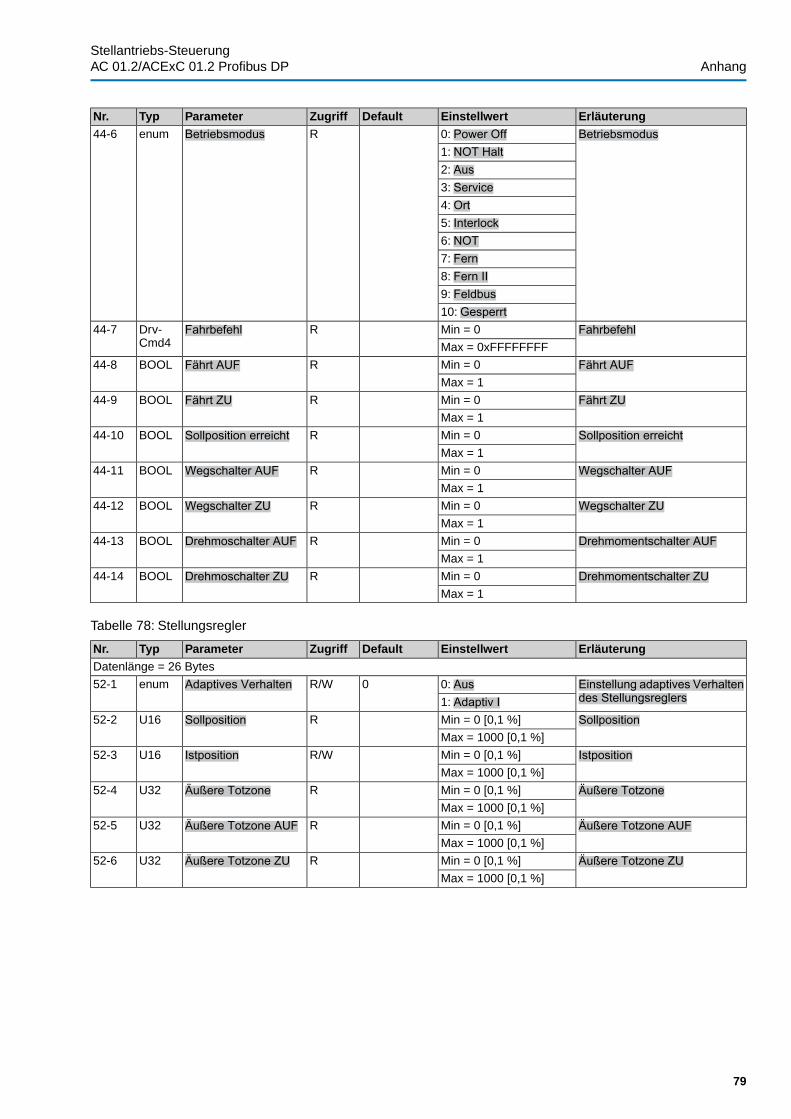
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Betriebsmodus0: Power OffRBetriebsmodusenum44-6
1: NOT Halt2: Aus3: Service4: Ort5: Interlock6: NOT7: Fern8: Fern II9: Feldbus10: Gesperrt
FahrbefehlMin = 0RFahrbefehlDrv-Cmd4
44-7
Max = 0xFFFFFFFF
Fährt AUFMin = 0RFährt AUFBOOL44-8
Max = 1
Fährt ZUMin = 0RFährt ZUBOOL44-9
Max = 1
Sollposition erreichtMin = 0RSollposition erreichtBOOL44-10
Max = 1
Wegschalter AUFMin = 0RWegschalter AUFBOOL44-11
Max = 1
Wegschalter ZUMin = 0RWegschalter ZUBOOL44-12
Max = 1
Drehmomentschalter AUFMin = 0RDrehmoschalter AUFBOOL44-13
Max = 1
Drehmomentschalter ZUMin = 0RDrehmoschalter ZUBOOL44-14
Max = 1
Tabelle 78: Stellungsregler
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 26 Bytes
Einstellung adaptives Verhaltendes Stellungsreglers
0: Aus0R/WAdaptives Verhaltenenum52-1
1: Adaptiv ISollpositionMin = 0 [0,1 %]RSollpositionU1652-2
Max = 1000 [0,1 %]
IstpositionMin = 0 [0,1 %]R/WIstpositionU1652-3
Max = 1000 [0,1 %]
Äußere TotzoneMin = 0 [0,1 %]RÄußere TotzoneU3252-4
Max = 1000 [0,1 %]
Äußere Totzone AUFMin = 0 [0,1 %]RÄußere Totzone AUFU3252-5
Max = 1000 [0,1 %]
Äußere Totzone ZUMin = 0 [0,1 %]RÄußere Totzone ZUU3252-6
Max = 1000 [0,1 %]
79
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
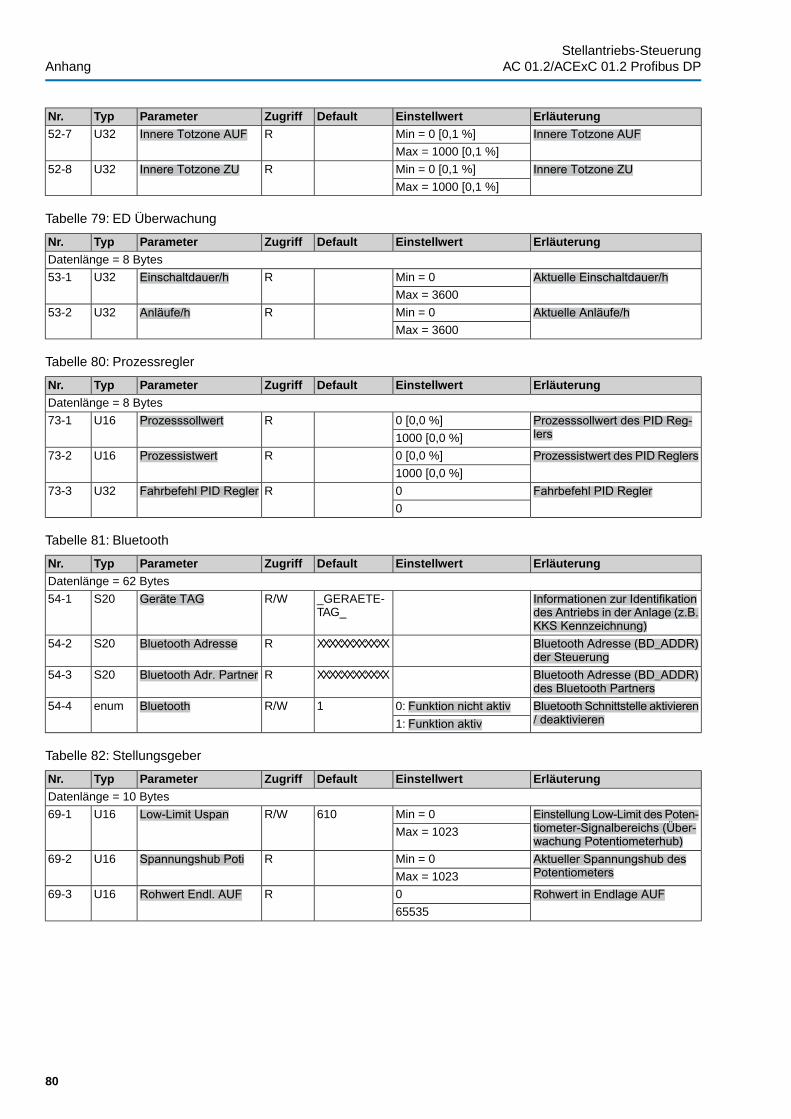
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Innere Totzone AUFMin = 0 [0,1 %]RInnere Totzone AUFU3252-7
Max = 1000 [0,1 %]
Innere Totzone ZUMin = 0 [0,1 %]RInnere Totzone ZUU3252-8
Max = 1000 [0,1 %]
Tabelle 79: ED Überwachung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 8 Bytes
Aktuelle Einschaltdauer/hMin = 0REinschaltdauer/hU3253-1
Max = 3600
Aktuelle Anläufe/hMin = 0RAnläufe/hU3253-2
Max = 3600
Tabelle 80: Prozessregler
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 8 Bytes
Prozesssollwert des PID Reg-lers
0 [0,0 %]RProzesssollwertU1673-1
1000 [0,0 %]
Prozessistwert des PID Reglers0 [0,0 %]RProzessistwertU1673-2
1000 [0,0 %]
Fahrbefehl PID Regler0RFahrbefehl PID ReglerU3273-3
0
Tabelle 81: Bluetooth
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 62 Bytes
Informationen zur Identifikationdes Antriebs in der Anlage (z.B.KKS Kennzeichnung)
_GERAETE-TAG_
R/WGeräte TAGS2054-1
Bluetooth Adresse (BD_ADDR)der Steuerung
XX:XX:XX:XX:XX:XXRBluetooth AdresseS2054-2
Bluetooth Adresse (BD_ADDR)des Bluetooth Partners
XX:XX:XX:XX:XX:XXRBluetooth Adr. PartnerS2054-3
Bluetooth Schnittstelle aktivieren/ deaktivieren
0: Funktion nicht aktiv1R/WBluetoothenum54-4
1: Funktion aktiv
Tabelle 82: Stellungsgeber
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 10 Bytes
Einstellung Low-Limit des Poten-tiometer-Signalbereichs (Über-wachung Potentiometerhub)
Min = 0610R/WLow-Limit UspanU1669-1
Max = 1023
Aktueller Spannungshub desPotentiometers
Min = 0RSpannungshub PotiU1669-2
Max = 1023
Rohwert in Endlage AUF0RRohwert Endl. AUFU1669-3
65535
80
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
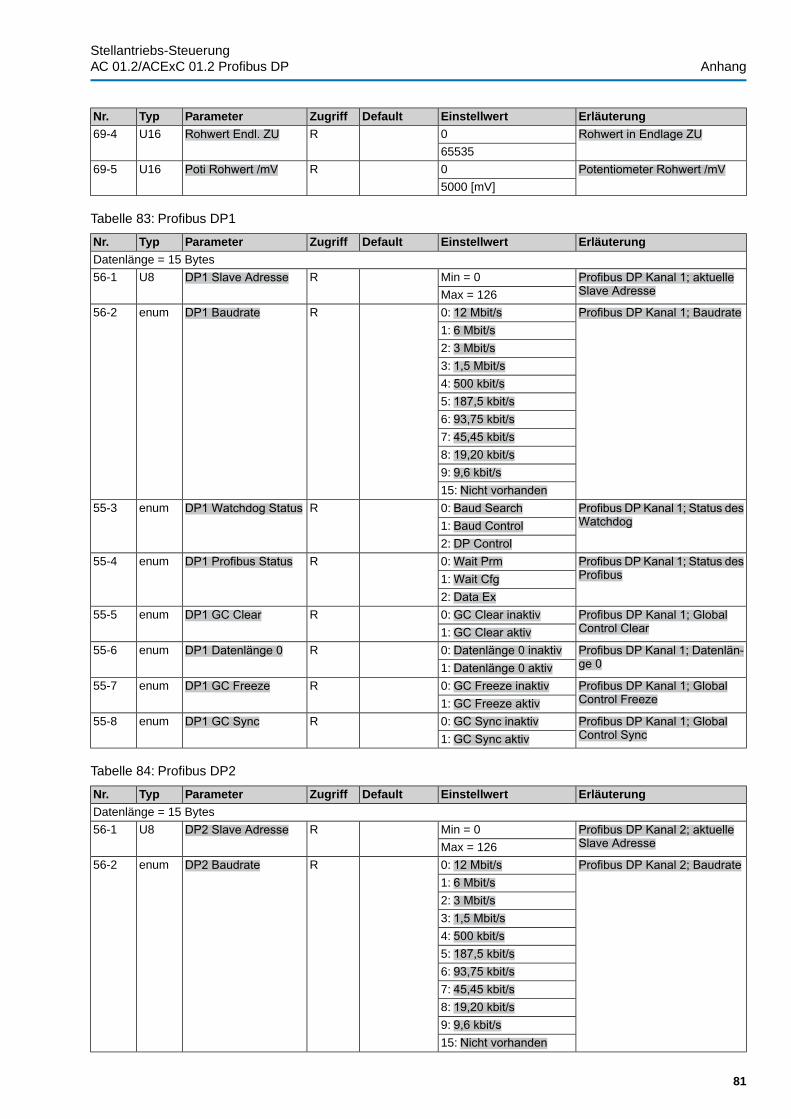
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Rohwert in Endlage ZU0RRohwert Endl. ZUU1669-4
65535
Potentiometer Rohwert /mV0RPoti Rohwert /mVU1669-5
5000 [mV]
Tabelle 83: Profibus DP1
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 15 Bytes
Profibus DP Kanal 1; aktuelleSlave Adresse
Min = 0RDP1 Slave AdresseU856-1
Max = 126
Profibus DP Kanal 1; Baudrate0: 12 Mbit/sRDP1 Baudrateenum56-2
1: 6 Mbit/s2: 3 Mbit/s3: 1,5 Mbit/s4: 500 kbit/s5: 187,5 kbit/s6: 93,75 kbit/s7: 45,45 kbit/s8: 19,20 kbit/s9: 9,6 kbit/s15: Nicht vorhanden
Profibus DP Kanal 1; Status desWatchdog
0: Baud SearchRDP1 Watchdog Statusenum55-3
1: Baud Control2: DP Control
Profibus DP Kanal 1; Status desProfibus
0: Wait PrmRDP1 Profibus Statusenum55-4
1: Wait Cfg2: Data Ex
Profibus DP Kanal 1; GlobalControl Clear
0: GC Clear inaktivRDP1 GC Clearenum55-5
1: GC Clear aktivProfibus DP Kanal 1; Datenlän-ge 0
0: Datenlänge 0 inaktivRDP1 Datenlänge 0enum55-6
1: Datenlänge 0 aktivProfibus DP Kanal 1; GlobalControl Freeze
0: GC Freeze inaktivRDP1 GC Freezeenum55-7
1: GC Freeze aktivProfibus DP Kanal 1; GlobalControl Sync
0: GC Sync inaktivRDP1 GC Syncenum55-8
1: GC Sync aktiv
Tabelle 84: Profibus DP2
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 15 Bytes
Profibus DP Kanal 2; aktuelleSlave Adresse
Min = 0RDP2 Slave AdresseU856-1
Max = 126
Profibus DP Kanal 2; Baudrate0: 12 Mbit/sRDP2 Baudrateenum56-2
1: 6 Mbit/s2: 3 Mbit/s3: 1,5 Mbit/s4: 500 kbit/s5: 187,5 kbit/s6: 93,75 kbit/s7: 45,45 kbit/s8: 19,20 kbit/s9: 9,6 kbit/s15: Nicht vorhanden
81
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
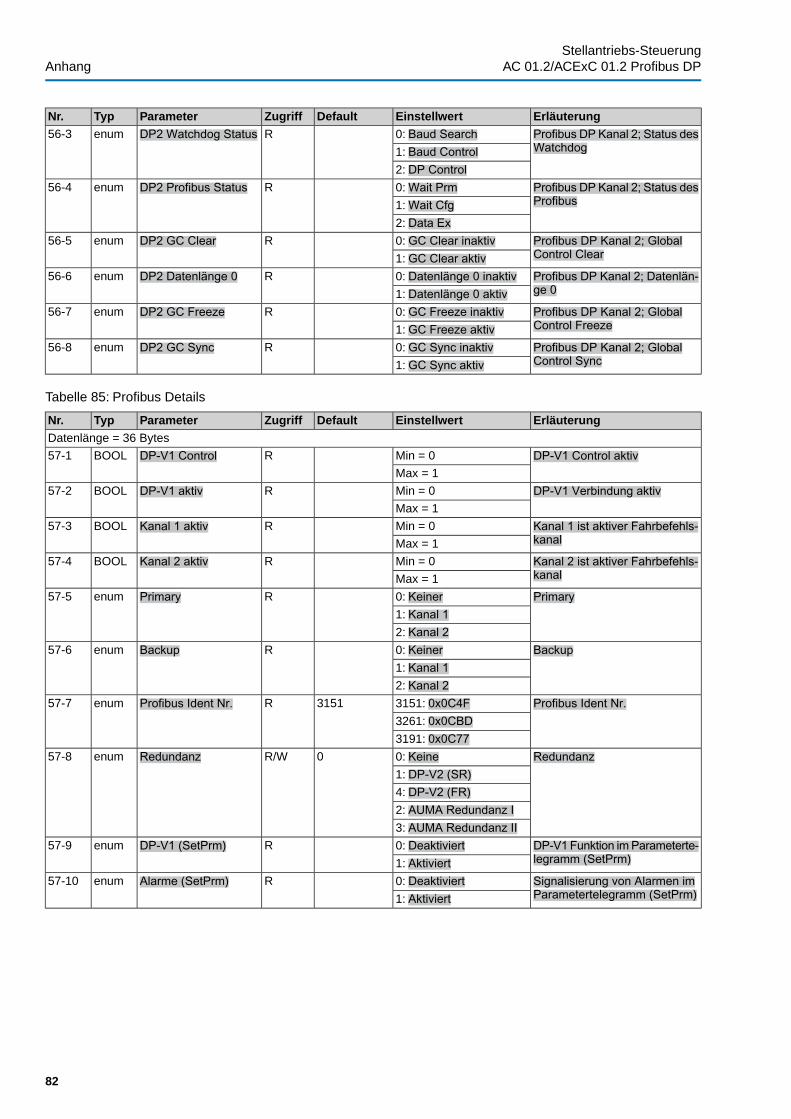
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Profibus DP Kanal 2; Status desWatchdog
0: Baud SearchRDP2 Watchdog Statusenum56-3
1: Baud Control2: DP Control
Profibus DP Kanal 2; Status desProfibus
0: Wait PrmRDP2 Profibus Statusenum56-4
1: Wait Cfg2: Data Ex
Profibus DP Kanal 2; GlobalControl Clear
0: GC Clear inaktivRDP2 GC Clearenum56-5
1: GC Clear aktivProfibus DP Kanal 2; Datenlän-ge 0
0: Datenlänge 0 inaktivRDP2 Datenlänge 0enum56-6
1: Datenlänge 0 aktivProfibus DP Kanal 2; GlobalControl Freeze
0: GC Freeze inaktivRDP2 GC Freezeenum56-7
1: GC Freeze aktivProfibus DP Kanal 2; GlobalControl Sync
0: GC Sync inaktivRDP2 GC Syncenum56-8
1: GC Sync aktiv
Tabelle 85: Profibus Details
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 36 Bytes
DP-V1 Control aktivMin = 0RDP-V1 ControlBOOL57-1
Max = 1
DP-V1 Verbindung aktivMin = 0RDP-V1 aktivBOOL57-2
Max = 1
Kanal 1 ist aktiver Fahrbefehls-kanal
Min = 0RKanal 1 aktivBOOL57-3
Max = 1
Kanal 2 ist aktiver Fahrbefehls-kanal
Min = 0RKanal 2 aktivBOOL57-4
Max = 1
Primary0: KeinerRPrimaryenum57-5
1: Kanal 12: Kanal 2
Backup0: KeinerRBackupenum57-6
1: Kanal 12: Kanal 2
Profibus Ident Nr.3151: 0x0C4F3151RProfibus Ident Nr.enum57-7
3261: 0x0CBD3191: 0x0C77
Redundanz0: Keine0R/WRedundanzenum57-8
1: DP-V2 (SR)4: DP-V2 (FR)2: AUMA Redundanz I3: AUMA Redundanz II
DP-V1 Funktion imParameterte-legramm (SetPrm)
0: DeaktiviertRDP-V1 (SetPrm)enum57-9
1: AktiviertSignalisierung von Alarmen imParametertelegramm (SetPrm)
0: DeaktiviertRAlarme (SetPrm)enum57-10
1: Aktiviert
82
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
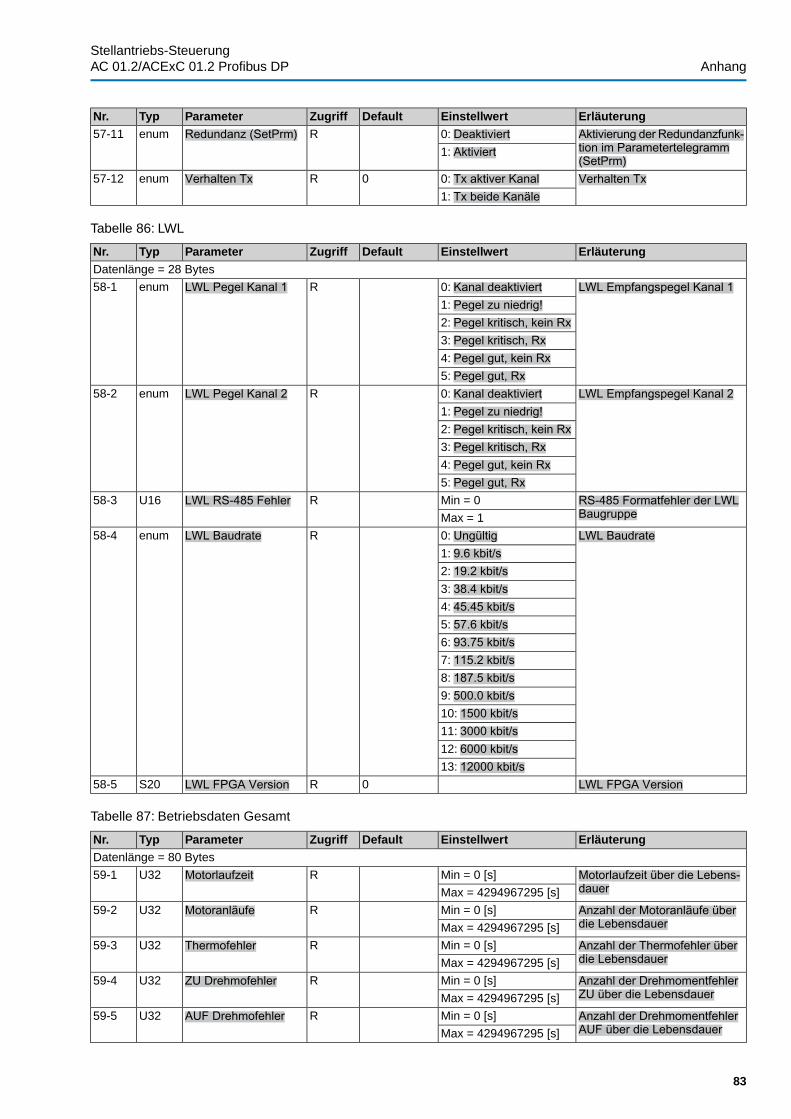
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Aktivierung der Redundanzfunk-tion im Parametertelegramm(SetPrm)
0: DeaktiviertRRedundanz (SetPrm)enum57-11
1: Aktiviert
Verhalten Tx0: Tx aktiver Kanal0RVerhalten Txenum57-12
1: Tx beide Kanäle
Tabelle 86: LWL
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 28 Bytes
LWL Empfangspegel Kanal 10: Kanal deaktiviertRLWL Pegel Kanal 1enum58-1
1: Pegel zu niedrig!2: Pegel kritisch, kein Rx3: Pegel kritisch, Rx4: Pegel gut, kein Rx5: Pegel gut, Rx
LWL Empfangspegel Kanal 20: Kanal deaktiviertRLWL Pegel Kanal 2enum58-2
1: Pegel zu niedrig!2: Pegel kritisch, kein Rx3: Pegel kritisch, Rx4: Pegel gut, kein Rx5: Pegel gut, Rx
RS-485 Formatfehler der LWLBaugruppe
Min = 0RLWL RS-485 FehlerU1658-3
Max = 1
LWL Baudrate0: UngültigRLWL Baudrateenum58-4
1: 9.6 kbit/s2: 19.2 kbit/s3: 38.4 kbit/s4: 45.45 kbit/s5: 57.6 kbit/s6: 93.75 kbit/s7: 115.2 kbit/s8: 187.5 kbit/s9: 500.0 kbit/s10: 1500 kbit/s11: 3000 kbit/s12: 6000 kbit/s13: 12000 kbit/s
LWL FPGA Version0RLWL FPGA VersionS2058-5
Tabelle 87: Betriebsdaten Gesamt
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 80 Bytes
Motorlaufzeit über die Lebens-dauer
Min = 0 [s]RMotorlaufzeitU3259-1
Max = 4294967295 [s]
Anzahl der Motoranläufe überdie Lebensdauer
Min = 0 [s]RMotoranläufeU3259-2
Max = 4294967295 [s]
Anzahl der Thermofehler überdie Lebensdauer
Min = 0 [s]RThermofehlerU3259-3
Max = 4294967295 [s]
Anzahl der DrehmomentfehlerZU über die Lebensdauer
Min = 0 [s]RZU DrehmofehlerU3259-4
Max = 4294967295 [s]
Anzahl der DrehmomentfehlerAUF über die Lebensdauer
Min = 0 [s]RAUF DrehmofehlerU3259-5
Max = 4294967295 [s]
83
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
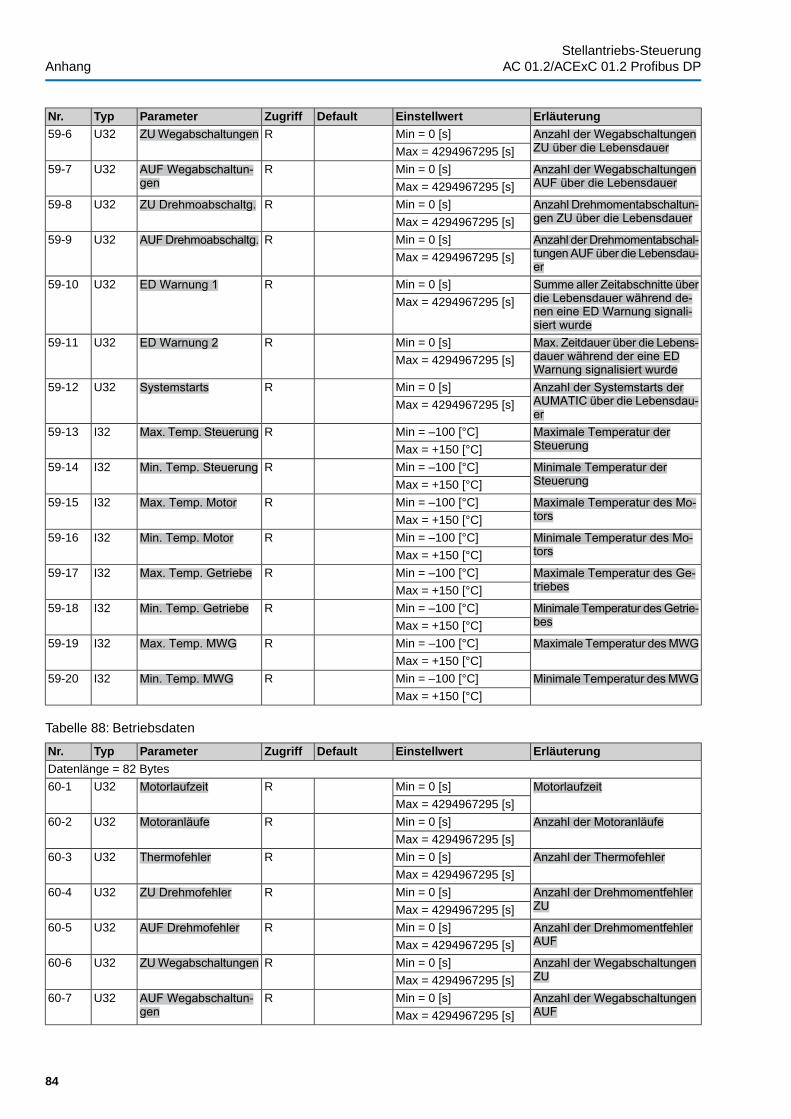
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Anzahl der WegabschaltungenZU über die Lebensdauer
Min = 0 [s]RZUWegabschaltungenU3259-6
Max = 4294967295 [s]
Anzahl der WegabschaltungenAUF über die Lebensdauer
Min = 0 [s]RAUF Wegabschaltun-gen
U3259-7
Max = 4294967295 [s]
Anzahl Drehmomentabschaltun-gen ZU über die Lebensdauer
Min = 0 [s]RZU Drehmoabschaltg.U3259-8
Max = 4294967295 [s]
Anzahl derDrehmomentabschal-tungenAUFüber die Lebensdau-er
Min = 0 [s]RAUFDrehmoabschaltg.U3259-9
Max = 4294967295 [s]
Summe aller Zeitabschnitte überdie Lebensdauer während de-nen eine ED Warnung signali-siert wurde
Min = 0 [s]RED Warnung 1U3259-10
Max = 4294967295 [s]
Max. Zeitdauer über die Lebens-dauer während der eine EDWarnung signalisiert wurde
Min = 0 [s]RED Warnung 2U3259-11
Max = 4294967295 [s]
Anzahl der Systemstarts derAUMATIC über die Lebensdau-er
Min = 0 [s]RSystemstartsU3259-12
Max = 4294967295 [s]
Maximale Temperatur derSteuerung
Min = –100 [°C]RMax. Temp. SteuerungI3259-13
Max = +150 [°C]
Minimale Temperatur derSteuerung
Min = –100 [°C]RMin. Temp. SteuerungI3259-14
Max = +150 [°C]
Maximale Temperatur des Mo-tors
Min = –100 [°C]RMax. Temp. MotorI3259-15
Max = +150 [°C]
Minimale Temperatur des Mo-tors
Min = –100 [°C]RMin. Temp. MotorI3259-16
Max = +150 [°C]
Maximale Temperatur des Ge-triebes
Min = –100 [°C]RMax. Temp. GetriebeI3259-17
Max = +150 [°C]
Minimale Temperatur desGetrie-bes
Min = –100 [°C]RMin. Temp. GetriebeI3259-18
Max = +150 [°C]
Maximale Temperatur desMWGMin = –100 [°C]RMax. Temp. MWGI3259-19
Max = +150 [°C]
Minimale Temperatur desMWGMin = –100 [°C]RMin. Temp. MWGI3259-20
Max = +150 [°C]
Tabelle 88: Betriebsdaten
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 82 Bytes
MotorlaufzeitMin = 0 [s]RMotorlaufzeitU3260-1
Max = 4294967295 [s]
Anzahl der MotoranläufeMin = 0 [s]RMotoranläufeU3260-2
Max = 4294967295 [s]
Anzahl der ThermofehlerMin = 0 [s]RThermofehlerU3260-3
Max = 4294967295 [s]
Anzahl der DrehmomentfehlerZU
Min = 0 [s]RZU DrehmofehlerU3260-4
Max = 4294967295 [s]
Anzahl der DrehmomentfehlerAUF
Min = 0 [s]RAUF DrehmofehlerU3260-5
Max = 4294967295 [s]
Anzahl der WegabschaltungenZU
Min = 0 [s]RZUWegabschaltungenU3260-6
Max = 4294967295 [s]
Anzahl der WegabschaltungenAUF
Min = 0 [s]RAUF Wegabschaltun-gen
U3260-7
Max = 4294967295 [s]
84
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
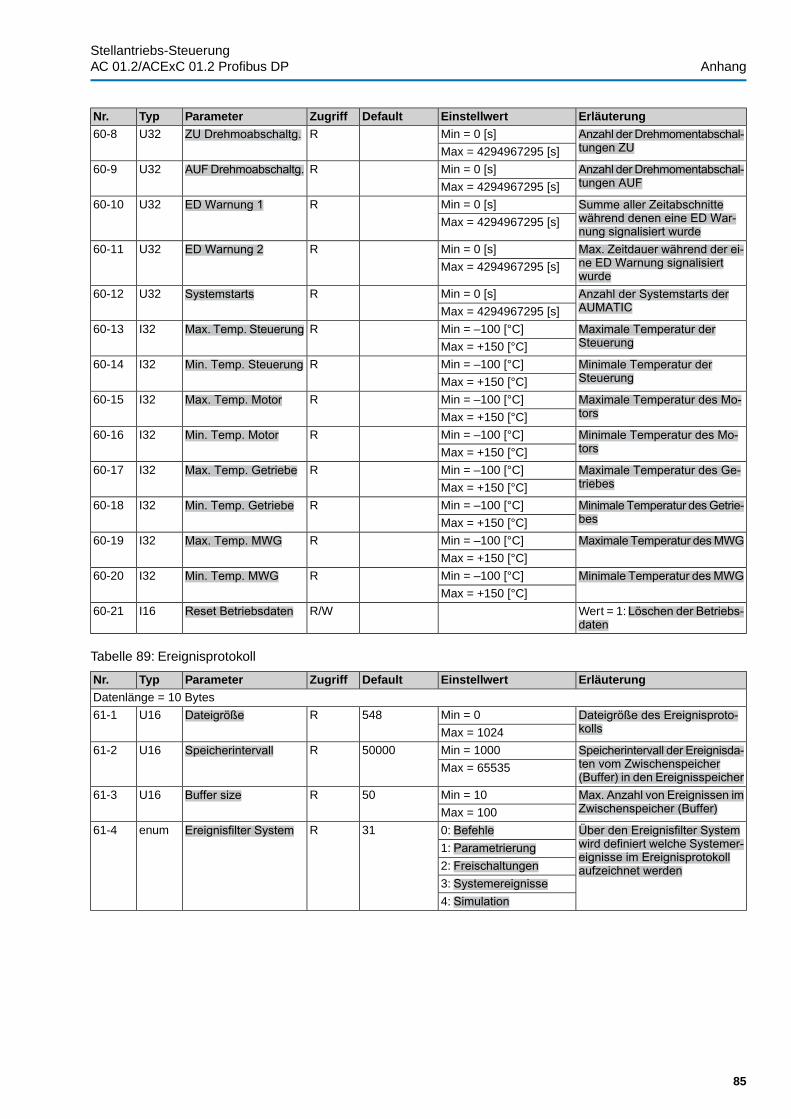
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Anzahl derDrehmomentabschal-tungen ZU
Min = 0 [s]RZU Drehmoabschaltg.U3260-8
Max = 4294967295 [s]
Anzahl derDrehmomentabschal-tungen AUF
Min = 0 [s]RAUFDrehmoabschaltg.U3260-9
Max = 4294967295 [s]
Summe aller Zeitabschnittewährend denen eine ED War-nung signalisiert wurde
Min = 0 [s]RED Warnung 1U3260-10
Max = 4294967295 [s]
Max. Zeitdauer während der ei-ne ED Warnung signalisiertwurde
Min = 0 [s]RED Warnung 2U3260-11
Max = 4294967295 [s]
Anzahl der Systemstarts derAUMATIC
Min = 0 [s]RSystemstartsU3260-12
Max = 4294967295 [s]
Maximale Temperatur derSteuerung
Min = –100 [°C]RMax. Temp. SteuerungI3260-13
Max = +150 [°C]
Minimale Temperatur derSteuerung
Min = –100 [°C]RMin. Temp. SteuerungI3260-14
Max = +150 [°C]
Maximale Temperatur des Mo-tors
Min = –100 [°C]RMax. Temp. MotorI3260-15
Max = +150 [°C]
Minimale Temperatur des Mo-tors
Min = –100 [°C]RMin. Temp. MotorI3260-16
Max = +150 [°C]
Maximale Temperatur des Ge-triebes
Min = –100 [°C]RMax. Temp. GetriebeI3260-17
Max = +150 [°C]
Minimale Temperatur desGetrie-bes
Min = –100 [°C]RMin. Temp. GetriebeI3260-18
Max = +150 [°C]
Maximale Temperatur desMWGMin = –100 [°C]RMax. Temp. MWGI3260-19
Max = +150 [°C]
Minimale Temperatur desMWGMin = –100 [°C]RMin. Temp. MWGI3260-20
Max = +150 [°C]
Wert = 1: Löschen der Betriebs-daten
R/WReset BetriebsdatenI1660-21
Tabelle 89: Ereignisprotokoll
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 10 Bytes
Dateigröße des Ereignisproto-kolls
Min = 0548RDateigrößeU1661-1
Max = 1024
Speicherintervall der Ereignisda-ten vom Zwischenspeicher(Buffer) in den Ereignisspeicher
Min = 100050000RSpeicherintervallU1661-2
Max = 65535
Max. Anzahl von Ereignissen imZwischenspeicher (Buffer)
Min = 1050RBuffer sizeU1661-3
Max = 100
Über den Ereignisfilter Systemwird definiert welche Systemer-eignisse im Ereignisprotokollaufzeichnet werden
0: Befehle31REreignisfilter Systemenum61-4
1: Parametrierung2: Freischaltungen3: Systemereignisse4: Simulation
85
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
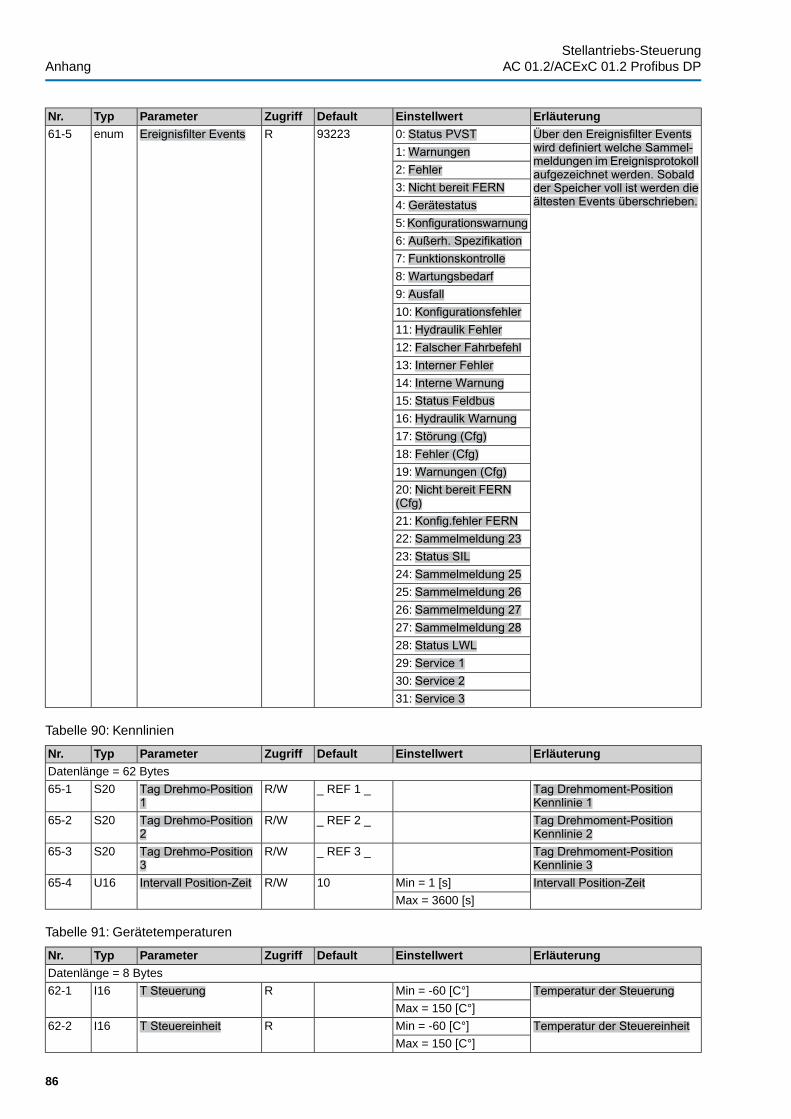
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Über den Ereignisfilter Eventswird definiert welche Sammel-meldungen im Ereignisprotokollaufgezeichnet werden. Sobaldder Speicher voll ist werden dieältesten Events überschrieben.
0: Status PVST93223REreignisfilter Eventsenum61-5
1: Warnungen2: Fehler3: Nicht bereit FERN4: Gerätestatus5:Konfigurationswarnung6: Außerh. Spezifikation7: Funktionskontrolle8: Wartungsbedarf9: Ausfall10: Konfigurationsfehler11: Hydraulik Fehler12: Falscher Fahrbefehl13: Interner Fehler14: Interne Warnung15: Status Feldbus16: Hydraulik Warnung17: Störung (Cfg)18: Fehler (Cfg)19: Warnungen (Cfg)20: Nicht bereit FERN(Cfg)21: Konfig.fehler FERN22: Sammelmeldung 2323: Status SIL24: Sammelmeldung 2525: Sammelmeldung 2626: Sammelmeldung 2727: Sammelmeldung 2828: Status LWL29: Service 130: Service 231: Service 3
Tabelle 90: Kennlinien
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 62 Bytes
Tag Drehmoment-PositionKennlinie 1
_ REF 1 _R/WTag Drehmo-Position1
S2065-1
Tag Drehmoment-PositionKennlinie 2
_ REF 2 _R/WTag Drehmo-Position2
S2065-2
Tag Drehmoment-PositionKennlinie 3
_ REF 3 _R/WTag Drehmo-Position3
S2065-3
Intervall Position-ZeitMin = 1 [s]10R/WIntervall Position-ZeitU1665-4
Max = 3600 [s]
Tabelle 91: Gerätetemperaturen
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 8 Bytes
Temperatur der SteuerungMin = -60 [C°]RT SteuerungI1662-1
Max = 150 [C°]
Temperatur der SteuereinheitMin = -60 [C°]RT SteuereinheitI1662-2
Max = 150 [C°]
86
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP
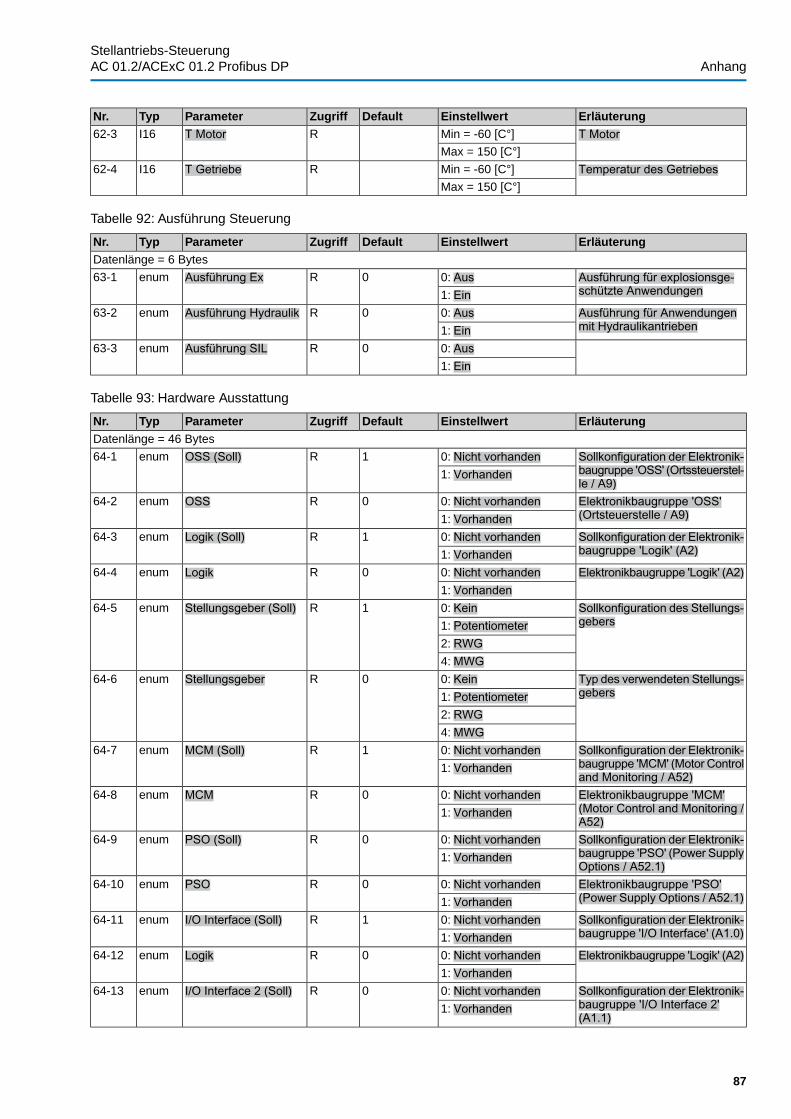
ErläuterungEinstellwertDefaultZugriffParameterTypNr.T MotorMin = -60 [C°]RT MotorI1662-3
Max = 150 [C°]
Temperatur des GetriebesMin = -60 [C°]RT GetriebeI1662-4
Max = 150 [C°]
Tabelle 92: Ausführung Steuerung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 6 Bytes
Ausführung für explosionsge-schützte Anwendungen
0: Aus0RAusführung Exenum63-1
1: EinAusführung für Anwendungenmit Hydraulikantrieben
0: Aus0RAusführung Hydraulikenum63-2
1: Ein0: Aus0RAusführung SILenum63-3
1: Ein
Tabelle 93: Hardware Ausstattung
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Datenlänge = 46 Bytes
Sollkonfiguration der Elektronik-baugruppe 'OSS' (Ortssteuerstel-le / A9)
0: Nicht vorhanden1ROSS (Soll)enum64-1
1: Vorhanden
Elektronikbaugruppe 'OSS'(Ortsteuerstelle / A9)
0: Nicht vorhanden0ROSSenum64-2
1: VorhandenSollkonfiguration der Elektronik-baugruppe 'Logik' (A2)
0: Nicht vorhanden1RLogik (Soll)enum64-3
1: VorhandenElektronikbaugruppe 'Logik' (A2)0: Nicht vorhanden0RLogikenum64-4
1: VorhandenSollkonfiguration des Stellungs-gebers
0: Kein1RStellungsgeber (Soll)enum64-5
1: Potentiometer2: RWG4: MWG
Typ des verwendeten Stellungs-gebers
0: Kein0RStellungsgeberenum64-6
1: Potentiometer2: RWG4: MWG
Sollkonfiguration der Elektronik-baugruppe 'MCM' (Motor Controland Monitoring / A52)
0: Nicht vorhanden1RMCM (Soll)enum64-7
1: Vorhanden
Elektronikbaugruppe 'MCM'(Motor Control and Monitoring /A52)
0: Nicht vorhanden0RMCMenum64-8
1: Vorhanden
Sollkonfiguration der Elektronik-baugruppe 'PSO' (Power SupplyOptions / A52.1)
0: Nicht vorhanden0RPSO (Soll)enum64-9
1: Vorhanden
Elektronikbaugruppe 'PSO'(Power Supply Options / A52.1)
0: Nicht vorhanden0RPSOenum64-10
1: VorhandenSollkonfiguration der Elektronik-baugruppe 'I/O Interface' (A1.0)
0: Nicht vorhanden1RI/O Interface (Soll)enum64-11
1: VorhandenElektronikbaugruppe 'Logik' (A2)0: Nicht vorhanden0RLogikenum64-12
1: VorhandenSollkonfiguration der Elektronik-baugruppe 'I/O Interface 2'(A1.1)
0: Nicht vorhanden0RI/O Interface 2 (Soll)enum64-13
1: Vorhanden
87
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Anhang
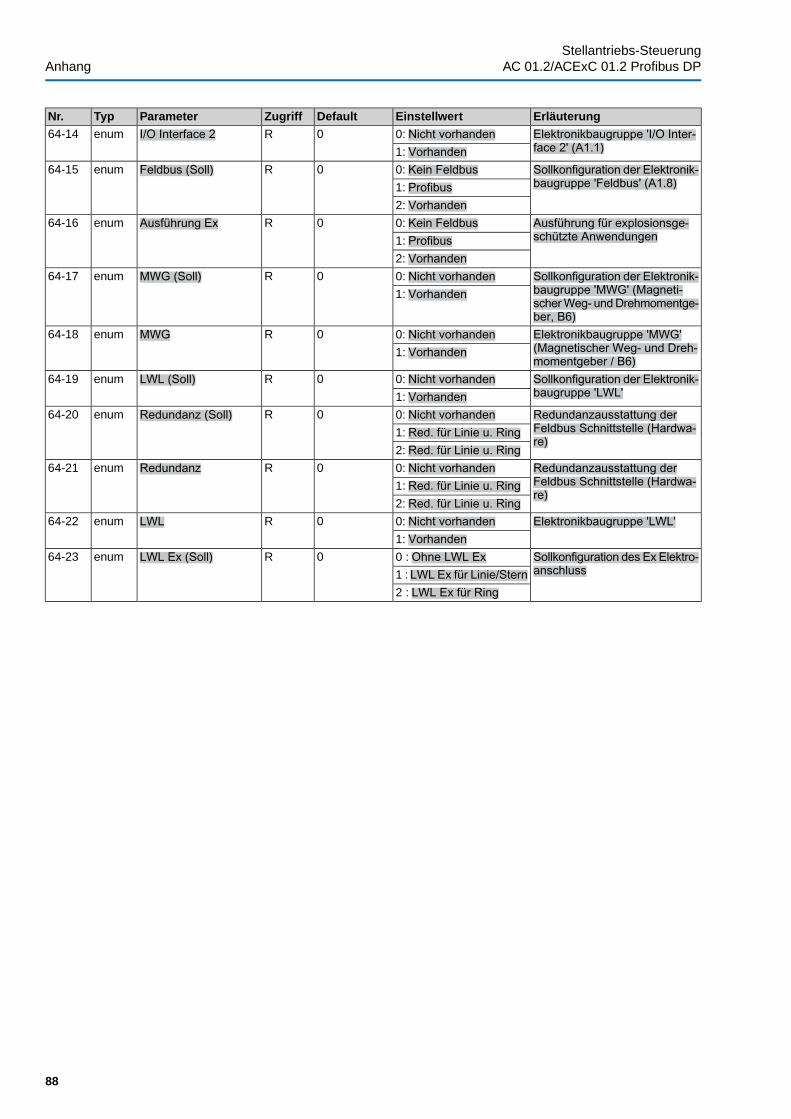
ErläuterungEinstellwertDefaultZugriffParameterTypNr.Elektronikbaugruppe 'I/O Inter-face 2' (A1.1)
0: Nicht vorhanden0RI/O Interface 2enum64-14
1: VorhandenSollkonfiguration der Elektronik-baugruppe 'Feldbus' (A1.8)
0: Kein Feldbus0RFeldbus (Soll)enum64-15
1: Profibus2: Vorhanden
Ausführung für explosionsge-schützte Anwendungen
0: Kein Feldbus0RAusführung Exenum64-16
1: Profibus2: Vorhanden
Sollkonfiguration der Elektronik-baugruppe 'MWG' (Magneti-scherWeg- undDrehmomentge-ber, B6)
0: Nicht vorhanden0RMWG (Soll)enum64-17
1: Vorhanden
Elektronikbaugruppe 'MWG'(Magnetischer Weg- und Dreh-momentgeber / B6)
0: Nicht vorhanden0RMWGenum64-18
1: Vorhanden
Sollkonfiguration der Elektronik-baugruppe 'LWL'
0: Nicht vorhanden0RLWL (Soll)enum64-19
1: VorhandenRedundanzausstattung derFeldbus Schnittstelle (Hardwa-re)
0: Nicht vorhanden0RRedundanz (Soll)enum64-20
1: Red. für Linie u. Ring2: Red. für Linie u. Ring
Redundanzausstattung derFeldbus Schnittstelle (Hardwa-re)
0: Nicht vorhanden0RRedundanzenum64-21
1: Red. für Linie u. Ring2: Red. für Linie u. Ring
Elektronikbaugruppe 'LWL'0: Nicht vorhanden0RLWLenum64-22
1: VorhandenSollkonfiguration des Ex Elektro-anschluss
0 : Ohne LWL Ex0RLWL Ex (Soll)enum64-23
1 : LWL Ex für Linie/Stern2 : LWL Ex für Ring
88
Stellantriebs-SteuerungAnhang AC 01.2/ACExC 01.2 Profibus DP

Stichwortverzeichnis
AAnhang 59AUMA Redundanz 41Ausgangsdaten 34
BBetrieb 4Busadresse 10 , 46Buszugriff 6
CControl Clear Telegramm 18
DDatenschnittstelle Beschrei-bung
20
Diagnose 55DP-V2 Funktionen 44
EEingangsdaten 20
FFail-Safe Telegramm 18Fehlersuche 54Flying Redundanz (FR) 45Funktionalität 7
GGerätestammdaten (GSD) 8Gerätetypen 7
II&M Funktion 19Ident-Nummer 8Inbetriebnahme 4 , 8
MMeldungen 20Multiport Valve Funktion 38
NNormen 4
PParameter (Tabellen) 62Parametrierung 9Personenqualifikation 4Profibus DP-V1 Index 62Profibus DP-V1 Slot 62Prozessabbild Ausgang 34Prozessabbild Eingang 20Prozessalarm 50
RRedundanz 41 , 45Richtlinien 4
SSchutzfunktionen 7Schutzmaßnahmen 4Sicherheitshinweise 4Sicherheitshinweise/Warnun-gen
4
Slaveadresse 10 , 55Slave Adresse 46Störungsbehebung 54System Redundanz (SR) 45
TTechnische Daten 57Telegramm 9
UÜbertragungstechnik 6Überwachung der Kommuni-kation
18
Uhrzeitsynchronisation 47User-Parameter 11
VVerbindungsüberwachung 18View Objects 62
WWartung 4
ZZeitstempelung 47Zertifizierung 8
89
Stellantriebs-Steuerung AC 01.2/ACExC 01.2 Profibus DP Stichwortverzeichnis
Europa
AUMA Riester GmbH & Co. KG
Werk MüllheimDE 79373 MüllheimTel +49 7631 809 - [email protected]
Werk Ostfildern-NellingenDE 73747 OstfildernTel +49 711 34803 - [email protected]
Service-Center BayernDE 85386 EchingTel +49 81 65 9017- [email protected]
Service-Center KölnDE 50858 KölnTel +49 2234 2037 - [email protected]
Service-Center MagdeburgDE 39167 NiederndodelebenTel +49 39204 759 - [email protected]
AUMA-Armaturenantriebe Ges.m.b.H.AT 2512 TribuswinkelTel +43 2252 [email protected]
AUMA BENELUX B.V. B. A.BE 8800 RoeselareTel +32 51 24 24 [email protected]
ProStream Group Ltd.BG 1632 SofiaTel +359 2 [email protected]
OOO “Dunkan-Privod”BY 220004 MinskTel +375 29 [email protected]
AUMA (Schweiz) AGCH 8965 BerikonTel +41 566 [email protected]
AUMA Servopohony spol. s.r.o.CZ 250 01 Brandýs n.L.-St.BoleslavTel +420 326 396 [email protected]
GRØNBECH & SØNNER A/SDK 2450 København SVTel +45 33 26 63 [email protected]
IBEROPLAN S.A.ES 28027 MadridTel +34 91 [email protected]
AUMA Finland OyFI 02230 EspooTel +358 9 5840 [email protected]
AUMA France S.A.R.L.FR 95157 Taverny CedexTel +33 1 [email protected]
AUMA ACTUATORS Ltd.GB Clevedon, North Somerset BS21 6THTel +44 1275 [email protected]
D. G. Bellos & Co. O.E.GR 13673 Acharnai, AthensTel +30 210 [email protected]
APIS CENTAR d. o. o.HR 10437 BestovjeTel +385 1 6531 [email protected]
Fabo Kereskedelmi és Szolgáltató Kft.HU 8800 NagykanizsaTel +36 93/[email protected]
Falkinn HFIS 108 ReykjavikTel +00354 540 [email protected]
AUMA ITALIANA S.r.l. a socio unicoIT 20023 Cerro Maggiore (MI)Tel +39 0331 [email protected]
AUMA BENELUX B.V.LU Leiden (NL)Tel +31 71 581 40 [email protected]
NB Engineering ServicesMT ZBR 08 ZabbarTel + 356 2169 [email protected]
AUMA BENELUX B.V.NL 2314 XT LeidenTel +31 71 581 40 [email protected]
SIGUM A. S.NO 1338 SandvikaTel +47 [email protected]
AUMA Polska Sp. z o.o.PL 41-219 SosnowiecTel +48 32 783 52 [email protected]
AUMA-LUSA Representative Office, Lda.PT 2730-033 BarcarenaTel +351 211 307 [email protected]
SAUTECHRO 011783 BucurestiTel +40 372 [email protected]
OOO PRIWODY AUMARU 141402 Khimki, Moscow regionTel +7 495 221 64 [email protected]
OOO PRIWODY AUMARU 125362 MoscowTel +7 495 787 78 [email protected]
ERICHS ARMATUR ABSE 20039 MalmöTel +46 40 [email protected]
ELSO-b, s.r.o.SK 94901 NitraTel +421 905/[email protected]
Auma Endüstri Kontrol Sistemleri LimitedSirketiTR 06810 AnkaraTel +90 312 217 32 [email protected]
AUMA Technology Automations LtdUA 02099 KievTel +38 044 [email protected]
Afrika
Solution Technique Contrôle CommandeDZ Bir Mourad Rais, AlgiersTel +213 21 56 42 09/[email protected]
A.T.E.C.EG CairoTel +20 2 23599680 - [email protected]
SAMIREGMA 203000 CasablancaTel +212 5 22 40 09 [email protected]
MANZ INCORPORATED LTD.NG Port HarcourtTel [email protected]
90
AUMA weltweit
AUMA South Africa (Pty) Ltd.ZA 1560 SpringsTel +27 11 [email protected]
Amerika
AUMA Argentina Rep.OfficeAR Buenos AiresTel +54 11 4737 [email protected]
AUMA Automação do Brazil ltda.BR Sao PauloTel +55 11 [email protected]
TROY-ONTOR Inc.CA L4N 8X1 Barrie, OntarioTel +1 705 [email protected]
AUMA Chile Representative OfficeCL 9500414 BuinTel +56 2 821 [email protected]
Ferrostaal de Colombia Ltda.CO Bogotá D.C.Tel +57 1 401 [email protected]
Transcontinental Trading Overseas SA.CU Ciudad HabanaTel +53 7 208 9603 / 208 [email protected]
AUMA Región Andina & CentroaméricaEC QuitoTel +593 2 245 [email protected]
Corsusa International S.A.C.PE Miraflores - LimaTel +511444-1200 / 0044 / [email protected]
Control Technologies LimitedTT Marabella,Trinidad, W.I.Tel + 1 868 658 1744/5011www.ctltech.com
AUMA ACTUATORS INC.US PA 15317 CanonsburgTel +1 724-743-AUMA (2862)[email protected]
SuplibarcaVE Maracaibo, Estado, ZuliaTel +58 261 7 555 [email protected]
Asien
AUMA Actuators UAE Support OfficeAE 287 Abu DhabiTel +971 [email protected]
AUMA Actuators Middle EastBH 152 68 SalmabadTel +97 3 [email protected]
Mikuni (B) Sdn. Bhd.BN KA1189 Kuala BelaitTel + 673 3331269 / [email protected]
AUMA Actuators (China) Co., Ltd.CN 215499 TaicangTel +86 512 3302 [email protected]
PERFECT CONTROLS Ltd.HK Tsuen Wan, KowloonTel +852 2493 [email protected]
PT. Carakamas Inti AlamID 11460 JakartaTel +62 [email protected]
AUMA INDIA PRIVATE LIMITED.IN 560 058 BangaloreTel +91 80 2839 [email protected]
ITG - Iranians Torque GeneratorIR 13998-34411 [email protected]
Trans-Jordan Electro Mechanical SuppliesJO 11133 AmmanTel +962 - 6 - [email protected]
AUMA JAPAN Co., Ltd.JP 211-0016 Kawasaki-shi, KanagawaTel +81-(0)[email protected]
DW Controls Co., Ltd.KR 153-702 Gasan-dong, GeumChun-Gu,,SeoulTel +82 2 2624 [email protected]
Al-Arfaj Engineering Co WLLKW 22004 SalmiyahTel [email protected]
TOO “Armaturny Center”KZ 060005 AtyrauTel +7 7122 454 [email protected]
Network EngineeringLB 4501 7401 JBEIL, BeirutTel +961 9 [email protected]
AUMA Malaysia OfficeMY 70300 Seremban, Negeri SembilanTel +606 633 [email protected]
Mustafa Sultan Science & Industry Co LLCOM RuwiTel +968 24 [email protected]
FLOWTORK TECHNOLOGIESCORPORATIONPH 1550 Mandaluyong CityTel +63 2 532 [email protected]
M & C Group of CompaniesPK 54000 Cavalry Ground, Lahore CanttTel +92 42 3665 0542, +92 42 3668 [email protected]
Petrogulf W.L.LQA DohaTel +974 [email protected]
AUMA Saudi Arabia Support OfficeSA 31952 Al KhobarTel + 966 5 5359 [email protected]
AUMA ACTUATORS (Singapore) Pte Ltd.SG 569551 SingaporeTel +65 6 [email protected]
NETWORK ENGINEERINGSY Homs+963 31 231 [email protected]
Sunny Valves and Intertrade Corp. Ltd.TH 10120 Yannawa, BangkokTel +66 2 [email protected]
Top Advance Enterprises Ltd.TW Jhonghe City,Taipei Hsien (235)Tel +886 2 2225 [email protected]
AUMA Vietnam Hanoi ROVN Hanoi+84 4 [email protected]
Australien
BARRON GJM Pty. Ltd.AU NSW 1570 ArtarmonTel +61 2 8437 [email protected]
91
AUMA weltweit
AUMA Riester GmbH & Co. KG
Werk MüllheimPostfach 1362DE 79373 MüllheimTel +49 7631 809 - 0Fax +49 7631 809 - [email protected]
Werk Ostfildern-NellingenPostfach 1151DE 73747 OstfildernTel +49 711 34803 - 0Fax +49 711 34803 - [email protected]
Service-Center KölnDE 50858 KölnTel +49 2234 2037 - 900Fax +49 2234 2037 - [email protected]
Y004.942/001/de/1.14
Detaillierte Informationen zu den AUMA Produkten finden Sie im Internet unter: www.auma.com