Theoretische Physik II: Analytische Mechanik und Thermodynamikplehn/pics/theorie2_sw.pdf · i...
112
Theoretische Physik II: Analytische Mechanik und Thermodynamik Version SS 2019 — Tilman Plehn Original von Matthias Bartelmann 7. Juli 2019
Transcript of Theoretische Physik II: Analytische Mechanik und Thermodynamikplehn/pics/theorie2_sw.pdf · i...
Theoretische Physik II: AnalytischeMechanik und Thermodynamik
Version SS 2019 — Tilman PlehnOriginal von Matthias Bartelmann
7. Juli 2019
i
• stellen Sie Fragen!
• sollten Sie Werbung fur die Fachschaft oder anderes studentischesEngagement machen wollen, dann melden Sie sich gerne bei mir.
• Informationen zum Beispiel zur Organisation der Vorlesung undder Ubungen gibt es in der Vorlesung.
• Ubungsblatter konnen gerne in Kleingruppen bearbeitet werden.Die Losungen werden einzeln abgegeben, und mussen in derUbungsgruppe vorgerechnet werden konnen.
• die letzte Vorlesung findet am 10.7. statt.
• die Woche des 15.7. dient der Klausurvorbereitung (study week).
• 60% der Ubungspunkte sind die Voraussetzung fur die Klausur-zulassung.
• die beste Vorbereitung fur die Klausur sind die Ubungsblatter.
• es gibt nur eine Klausur
• zur Klausur konnen Sie ein doppelseitig beschriebenes oder. be-drucktes DIN-A4-Blatt mitnehmen, weitere Hilfsmittel werdennicht benotigt.
• es gibt eine Nachklausur am Ende der Semesterferien. Wer zumBeispiel aus Krankheitsgrunden nur einen Teil der ersten Klau-sur(en) schreiben konnte melde sich bitte bei Susanne Westhoff.
Herzlichen Dank an viele Studentinnen und Studenten, die das Skriptkommentiert und korrigiert haben und damit sehr dazu beigetragen ha-ben, es zu verbessern und verstandlicher zu machen!
Inhaltsverzeichnis
I Analytische Mechanik 1
1 Schwingungen gekoppelter Systeme 2
1.1 Parametrisierte Koordinaten . . . . . . . . . . . . . . 3
1.2 Normalkoordinaten . . . . . . . . . . . . . . . . . . . 5
1.2.1 Transformation auf Normalkoordinaten . . . . 5
1.2.2 Bestimmung der Normalkoordinaten . . . . . . 7
1.2.3 Stabilitat . . . . . . . . . . . . . . . . . . . . 8
1.2.4 Gekoppelte Pendel . . . . . . . . . . . . . . . 9
2 Systeme mit Nebenbedingungen 11
2.1 Vorbereitung . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Verallgemeinerte Koordinaten . . . . . . . . . 11
2.1.2 Lagrange-Multiplikatoren . . . . . . . . . . . 12
2.2 Das d’Alembertsche Prinzip . . . . . . . . . . . . . . 14
2.2.1 Zwangskrafte im Gleichgewicht . . . . . . . . 14
2.2.2 Dynamische Systeme . . . . . . . . . . . . . . 16
2.2.3 Lagrange-Gleichungen erster Art . . . . . . . 17
3 Lagrange-Formulierung 20
3.1 Lagrange-Gleichungen zweiter Art . . . . . . . . . . . 20
3.1.1 Herleitung . . . . . . . . . . . . . . . . . . . 20
3.2 Anwendungen . . . . . . . . . . . . . . . . . . . . . . 22
3.2.1 Beschleunigte Bezugssysteme . . . . . . . . . 22
3.2.2 Kraftefreier symmetrischer Kreisel . . . . . . . 24
ii
INHALTSVERZEICHNIS iii
3.2.3 Kreisel im Schwerefeld . . . . . . . . . . . . . 26
4 Extremalprinzipien 28
4.1 Prinzip der stationaren Wirkung . . . . . . . . . . . . 28
4.1.1 Das Fermatsche Prinzip . . . . . . . . . . . . 28
4.1.2 Hamiltons Prinzip . . . . . . . . . . . . . . . 29
4.2 Hamilton-Funktion . . . . . . . . . . . . . . . . . . . 31
4.2.1 Die kanonischen Gleichungen . . . . . . . . . 31
4.2.2 Hamilton-Funktion und Energie . . . . . . . . 33
4.2.3 Nicht-konservative Krafte . . . . . . . . . . . 34
4.2.4 Hamilton-Gleichungen und Wirkungsprinzip . 35
5 Symmetrien und Erhaltungssatze 37
5.1 Galilei-Invarianz . . . . . . . . . . . . . . . . . . . . 37
5.2 Noether-Theoreme . . . . . . . . . . . . . . . . . . . 39
5.3 Lorentz-Invarianz . . . . . . . . . . . . . . . . . . . . 41
6 Phasenraum 47
6.1 Kanonische Transformationen . . . . . . . . . . . . . 47
6.1.1 Bahnen im erweiterten Phasenraum . . . . . . 47
6.1.2 Kanonische Transformationen . . . . . . . . . 48
6.1.3 Hamilton-Jacobi-Gleichung . . . . . . . . . . 49
6.1.4 Harmonischer Oszillator . . . . . . . . . . . . 51
6.1.5 Bewegung des freien Massenpunkts . . . . . . 52
6.1.6 Losung der Hamilton-Jacobi-Gleichung . . . . 52
6.2 Liouvillescher Satz, Poisson-Klammern . . . . . . . . 54
6.2.1 Liouvillescher Satz . . . . . . . . . . . . . . . 54
6.2.2 Poisson-Klammern . . . . . . . . . . . . . . . 55
7 Stabilitat und Chaos 56
7.1 Stabilitat . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.1.1 Bewegung in der Nahe des Gleichgewichts . . 56
INHALTSVERZEICHNIS iv
7.1.2 Asymmetrischer Kreisel . . . . . . . . . . . . 58
7.1.3 Satze zur Stabilitat . . . . . . . . . . . . . . . 60
7.1.4 Attraktoren und van-der-Pol-Gleichung . . . . 61
7.2 Chaos in der Himmelsmechanik . . . . . . . . . . . . 61
7.2.1 Saturnmond Hyperion . . . . . . . . . . . . . 61
7.2.2 Chaotisches Taumeln auf der Ellipsenbahn . . 63
II Statistik und Thermodynamik 65
8 Statistische Physik 66
8.1 Grundpostulat . . . . . . . . . . . . . . . . . . . . . . 66
8.1.1 Mikro- und Makrozustande . . . . . . . . . . . 66
8.1.2 Phasenraum . . . . . . . . . . . . . . . . . . . 67
8.1.3 Der Liouvillesche Satz . . . . . . . . . . . . . 68
8.1.4 Ubergang ins Gleichgewicht . . . . . . . . . . 69
8.1.5 Anzahl zuganglicher Zustande . . . . . . . . . 70
8.2 Wechselwirkungen zwischen Systemen . . . . . . . . 71
8.2.1 Mechanische Arbeit und Warme . . . . . . . . 71
8.2.2 Unvollstandige Differentiale . . . . . . . . . . 72
8.2.3 Quasistatische Zustandsanderungen . . . . . . 74
9 Temperatur und Entropie 76
9.1 Thermisches Gleichgewicht . . . . . . . . . . . . . . . 76
9.1.1 Reversible Zustandsanderungen . . . . . . . . 76
9.1.2 Temperatur . . . . . . . . . . . . . . . . . . . 77
9.1.3 Energieverteilung . . . . . . . . . . . . . . . . 79
9.2 Entropie . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.2.1 Definition . . . . . . . . . . . . . . . . . . . . 80
9.2.2 Erster Hauptsatz . . . . . . . . . . . . . . . . 81
9.3 Maxwell-Boltzmann-Verteilung . . . . . . . . . . . . 83
9.3.1 Maxwell-Verteilung . . . . . . . . . . . . . . 83
INHALTSVERZEICHNIS v
9.3.2 Boltzmann-Verteilung . . . . . . . . . . . . . 84
10 Thermodynamik 85
10.1 Thermodynamische Beziehungen . . . . . . . . . . . . 85
10.1.1 Eindeutigkeit der Entropie . . . . . . . . . . . 85
10.1.2 Thermisches und mechanisches Gleichgewicht 86
10.1.3 Warmekapazitat und spezifische Warme . . . . 87
10.2 Ideales Gas . . . . . . . . . . . . . . . . . . . . . . . 88
10.2.1 Zustandsgleichung . . . . . . . . . . . . . . . 88
10.2.2 Spezifische Warmen und Entropie . . . . . . . 89
10.2.3 Adiabatische Expansion . . . . . . . . . . . . 91
10.3 Thermodynamische Funktionen . . . . . . . . . . . . 92
10.3.1 Legendre-Transformationen . . . . . . . . . . 92
10.3.2 Enthalpie, freie Energie und freie Enthalpie . . 94
10.3.3 Maxwell-Relationen . . . . . . . . . . . . . . 95
11 Phasenubergange 97
11.1 Phasengleichgewicht . . . . . . . . . . . . . . . . . . 97
11.1.1 Extremaleigenschaften . . . . . . . . . . . . . 97
11.1.2 Chemisches Potential . . . . . . . . . . . . . . 99
11.1.3 Gibbs’sche Phasenregel . . . . . . . . . . . . 100
11.1.4 Reaktionsgleichgewichte . . . . . . . . . . . . 101
11.2 Phasenubergang im Van-der-Waals-Gas . . . . . . . . 102
11.2.1 Van-der-Waals-Gas . . . . . . . . . . . . . . . 102
11.2.2 Kritische Isotherme . . . . . . . . . . . . . . . 104
11.2.3 Latente Warme . . . . . . . . . . . . . . . . . 106
Teil I
Analytische Mechanik
1
Kapitel 1
Schwingungen gekoppelterSysteme
Im vergangenen Semester haben wir uns physikalisch vor allem mit derBewegung punktformiger Korper in Raum und Zeit befasst. Die ent-sprechenden Kapitel behandelten zum Beispiel:
• Newtonsche Axiome und den freien Fall
• Bahnkurven, Energieerhaltung und konservative Krafte
• beschleunigte Bezugssysteme
• Bewegung starrer Korper
• Tragheit
• harmonische Oszillatoren
• Pendel
Die formale Grundlage aller dieser Systeme waren die NewtonschenAxiome, vor allem die Losung der Differentialgleichung zweiter Ord-nung, F = mx, die also Ergebnis einer Tajektorie x(t) definiert. Als alter-nativen Weg zur Beschreibung eines sich bewegenden Teilchens habenwir Erhaltungssatze genutzt. Ein Beispiel war Energieerhaltung, die wiruber Newtonsche Mechanik und einen integrierenden Faktor abgeleite-te hatten. Zwei Aspekte haben wir nicht wirklich zufriedenstellend be-handeln konnen: allgemeine Randbedingungen und Systeme mit mehrals einem Teilchen. In diesem Semester werden wir einen Formalismusentwickeln, der die Newtonschen Axiome ersetzt.
2
KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 3
1.1 Parametrisierte Koordinaten
Bei der Diskussion des Pendels war uns bereits ein Fall begegnet, indem die Koordinaten ~x durch einen Winkel φ ausgedruckt wurden, weilsich ein Massenpunkt auf einer Kreislinie in einer Ebene bewegt. Da-durch wird die Anzahl der Freiheitsgrade von allgemein drei auf einenrelevanten Freiheisgrad reduziert. Ein weiteres Beispiel sind zwei Pen-del, die durch eine Stange zwischen ihren beiden Massen verbundensind. Die Kopplung zwischen den Pendeln reduziert die sechs Freiheits-grade ebenfalls auf einen. Die Frage ist, wie man diese Reduktion aufdie kleinste Zahl notwendiger Freiheitsgrade formalisieren kann.
• Wir betrachten N Massenpunkte, die so aneinander gekoppeltsind, so dass ihnen f Freiheitsgrade der Bewegung bleiben. Dasheisst zur Beschreibung der Bewegung brauchen wir f Parameterqk(t), von denen alle Raumkoordinaten x j(t) abhangen,
x j = x j[qk(t)] ⇒ x j =∂x j
∂qkqk (1.1)
Wir konnen auch die qk durch die Koordinaten x j darstellen,
qk =∂qk
∂x jx j oder
∂qk
∂x j=∂qk
∂x j. (1.2)
• Ebenso konnen wir die kinetische und die potentielle Energiedurch die qk auszudrucken. Die kinetische Energie eines einzel-nen Massenpunkts mi ist
Ti =mi
2~x2
i =mi
2∂~xi
∂q jq j
∂~xi
∂qkqk =
mi
2∂~xi
∂q j
∂~xi
∂qkq jqk , (1.3)
mit j, k = 1, ..., f . Die gesamte kinetische Energie ergibt sichdurch die Summe
T (~q) =
N∑i=1
mi
2∂~xi
∂q j
∂~xi
∂qk
q jqk . (1.4)
• Nach dem zweiten Newtonschen Axiom lautet die Bewegungs-gleichung fur die Koordinate x j des Massenpunkts mi in einemkonservativen Kraftfeld
F j = mi x j = −∂V(~x)∂x j
. (1.5)
Mithilfe der kinetischen Energie des Massenpunkts lasst sich die-se Bewegungsgleichung durch
ddt∂Ti
∂x j= −
∂V(~x)∂x j
(1.6)
KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 4
ausdrucken. Eine ganz ahnlich Relation hatten wir fur den inte-grierenden Faktor bei der Ableitung des Energiesatzes verwendet.Wenn wir hier die Parameter qk einfuhren, dann wird aus dieserRelation
ddt∂Ti(~q)∂qk
∂qk
∂x j= −
∂V(~q)∂qk
∂qk
∂x j. (1.7)
Wir setzen nun voraus, dass ∂q j/∂xk zeitunabhangig ist und er-halten mit (1.2)
ddt∂Ti
∂qk
∂qk
∂x j=
(ddt∂Ti
∂qk
)∂qk
∂x j= −
∂V(~q)∂q j
∂qk
∂x j. (1.8)
Das ist allgemein nur moglich ist wenn
ddt∂Ti(~q)∂qk
= −∂V(~q)∂qk
(1.9)
ist. Die Bewegungsgleichungen fur die Parameter qk enspricht al-so (1.6) fur die Koordinaten x j.
• In der Gleichgewichtslage des Systems durfen sich die Parameterqk nicht andern, qk = 0. Da die kinetische Energie T nach (1.4)eine quadratische Form in den verallgemeinerten Geschwindig-keiten qk ist, ist dort auch ∂T/∂qk = 0,
0 =ddt∂Ti(~q)∂qk
= −∂V(~q)∂qk
, (1.10)
Das heisst die verallgemeinerten Kraftkomponenten
Qk = −∂V∂qk
(1.11)
verschwinden im Gleichgewicht.
• Wir definieren den Ursprung qk = 0 als Gleichgewichtslage undtaylorn die potentielle Energie bis zur 2. Ordnung in qk,
V(~q) = V
∣∣∣∣∣∣q=0
+
f∑j=1
∂V∂q j
∣∣∣∣∣∣q=0
q j +12
f∑j,k=1
∂2V∂q j∂qk
∣∣∣∣∣∣q=0
q jqk + O(q3)
=:12
f∑j,k=1
V jk q jqk + O(q3) , (1.12)
Wir erinnern uns dass eine Konstante im Potential gleich Nullgesetzt werden kann. Analog wird die kinetische Energie naheder Gleichgewichtslage
T =12
f∑j,k=1
N∑i=1
mi
(∂~xi
∂q j
∂~xi
∂qk
)q jqk =:
12
f∑j,k=1
T jk q jqk . (1.13)
KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 5
• Die quadratischen Formen T und V konnen durch Matrizen aus-gedruckt werden,
~q :=
q1...
q f
, T :=
T11 · · · T1 f...
...T f 1 · · · T f f
= T T
V :=
V11 · · · V1 f...
...V f 1 · · · V f f
= VT . (1.14)
Fur beliebige ~q ist
~q TT ~q =
N∑i=1
mi
f∑j,k=1
∂~xi
∂q jq j∂~xi
∂qkqk =
N∑i=1
mi
f∑j=1
∂~xi
∂q jq j
2
≥ 0 .
(1.15)Die kinetische Energie kann nicht negativ werden, T eine positiv-semidefinite Matrix. Wir nehmen im folgenden an, dass T positivdefinit ist. Aus (1.9) folgen dann wieder unter der Bedingung dassdie Relation der Koordinaten zeitlich konstant ist,
ddtT ~q = −V~q ⇒ T ~q +V~q = 0 , (1.16)
Diese Bewegungsgleichungen sind offensichtlich eine Verallge-meinerung der harmonischen Schwingungsgleichung x+ω2
0x = 0.
1.2 Normalkoordinaten
Wir haben gelernt, dass man Systeme mit N Massenpunkten undkomplizierten Randbedingungen durch parametrisierte Koordinaten be-schrieben kann, die im wesentlichen den bekannten Bewegungsglei-chungen gehorchen, und mit deren Hilfe man die kinetische und poten-tielle Energie genau wie in Ortskoordinaten schreiben kann. Nachdemwir Matrizen diagonalisieren konnen stellt sicht die Frage, ob man auchdie quadratischen Formen T oderV durch eine geeignete Koordinaten-wahl vereinfachen kann.
1.2.1 Transformation auf Normalkoordinaten
• Da T positiv definit ist, gibt es eine Matrix B so, dass
T = BTB (1.17)
gilt. Zum Beweis benutzen wir, dass sich T diagonalisieren lasst.Seien t1, . . . , t f die Eigenwerte, also die Diagonalelemente nach
KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 6
der Diagonalisierung. Dann gibt es eine orthogonale Koordina-tentransformation R so, dass
T = RT diag(t j)R
= RT diag(√
t j) diag(√
t j)R (T positiv definit)
=: BTB . (1.18)
Dabei ist
detB =
f∏j=1
√t j > 0 , (1.19)
und B ist nur bis auf eine orthogonale Transformation S festge-legt, denn
(SB)TSB = BT(STS
)B = BTB = T . (1.20)
Wir nutzen diese Form von T und transformieren in einem erstenSchritt die kinetische Energie
T =12~q TT ~q =
12~q TBTB~q =
12~ξ T ~ξ , (1.21)
mit den neuen Parametern ~ξ = B~q.
• Fur die potentiellen Energie invertieren wir zunachst B,
~q = B−1~ξ =: B~ξ
⇒ V =12~q TV~q =
12~ξ TB
TVB~ξ . (1.22)
Um diese Form zu vereinfachen konnen wir nun B von links miteiner orthogonalen Matrix S multiplizieren,
B = B−1 = (SB′)−1 =(B′
)−1S−1 =: B
′
ST . (1.23)
Der Ausdruck fur die kinetischen Energie andert sich wie obenbeschrieben nicht, aber wir erhalten fur die potentielle Energie
V =12~ξ T S
[(B′)TVB
′]ST ~ξ . (1.24)
Mit einer geeigneten Wahl von S und den zu berechnenden Ei-genwerten λ j wird die potentielle Energie
V =12~ξ T diag(λ j) ~ξ . (1.25)
• Die kinetische und die potentielle Energie lassen sich also als
T =12
f∑j=1
ξ2j und V =
12
f∑j=1
λ jξ2j (1.26)

KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 7
schreiben. Die Bewegungsgleichungen lauten dann
ddt∂T∂ξ j
+∂V∂ξ j
=ddtξ j + λ jξ j = ξ j + λ jξ j = 0 (1.27)
fur alle 1 ≤ j ≤ f . In den Parametern ξ j entkoppeln also dieBewegungsgleichungen und beschreiben f unabhangige harmo-nische Oszillatoren. Die ξ j heißen Normalkoordinaten.
1.2.2 Bestimmung der Normalkoordinaten
• Normalkoordinaten sind nur hilfreich, wenn wir sie fur ein gege-benes System einfach konstruieren konnen. Zunachst bestimmenwir nach Gleichung (1.22) die Eigenwerte λ j uber das charakteri-
stische Polynom von BTVB,
det(B
TVB − λ
)= 0
⇔ det[BT
(B
TVB − λ
)B
]= 0
⇔ det (V − λT ) = 0 (1.28)
d.h. die λ j sind auch die Eigenwerte von V bezuglich T . Außer-dem gilt
BTVB =diag(λ j)
⇔ VB =BT diag(λ j)
=BT (BB−1) diag(λ j) = TB diag(λ j) . (1.29)
• Um die Eigenvektoren zu den Eigenwerten λ j zu erhalten zerle-gen wir die Matrix B in Spaltenvektoren ~b j,
B =(~b1, . . . , ~b f
)(1.30)
und erhalten damit aus (1.29) die Eigenwertgleichung
V~b j = λ j T~b j , (1.31)
in der T an die Stelle der Einheitsmatrix tritt.
• Die Satze uber das gewohnliche Eigenwertproblem sindvollstandig auf das Eigenwertproblem ubertragbar, in dem T dieRolle der Einheitsmatrix ubernimmt. T ist dann der metrischeTensor des Eigenwertproblems. Zum Beispiel sind die ~b j ortho-normal bezuglich T , denn
BTTB = B
TBTBB = 1 ⇒ ~bT
j T~bk = δ jk . (1.32)
Daraus ergibt sich folgende Vorschrift fur die Konstruktion derMatrix B und fur die Transformation auf Normalkoordinaten ~ξ:
KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 8
1. Zunachst das Eigenwertproblem (V − λT )~b = 0 losen undein vollstandiges, bezuglich T orthonormales System vonEigenvektoren ~b j bestimmen,
2. danach mittels
~q =
f∑j=1
~b j ξ j = B~ξ (1.33)
auf Normalkoordinaten transformieren.
1.2.3 Stabilitat
• Die Losungen der Bewegungsgleichungen (1.27) sind
ξ j ∼
e±i√λ jt (λ j , 0)
ξ j (λ j = 0)(1.34)
Wie konnen als zwei Falle unterscheiden:
1. Alle λ j > 0, also λ j =: ω2j ; dann sind die Losungen harmo-
nische Schwingungen,
ξ j(t) = C j cos(ω jt − δ j) (1.35)
mit konstanten C j und δ j. Das System ist also genau dannstabil, wennV strikt positiv ist, d.h. wenn die Potentialfunk-tion in der Ruhelage ein striktes Minimum hat.
2. Mindestens ein λ j ≤ 0, dann kann ξ j im Rahmen der be-trachteten Naherung unbegrenzt wachsen und das Systemist instabil. Wenn mindestens ein Eigenwert λ j = 0 und dieanderen λk ≥ 0 sind, mussen fur die Stabilitatsanalyse Ter-me hoherer Ordnung herangezogen werden.
• Im stabilen Fall ist die allgemeine Losung der Bewegungsglei-chung fur das Gesamtsystem nach (1.33) und (1.35)
~q(t) =
f∑j=1
~b j ξ j(t) =
f∑j=1
~b jC j cos(ω jt − δ j) . (1.36)
Die ω j sind die Eigenfrequenzen und werden auch Normalfre-quenzen genannt. Bei Normalschwingungen ist nur eine Normal-koordinate angeregt, z.B. ξ j, und die anderen sind in Ruhe. Dannist
~q(t) = ~b jC j cos(ω jt − δ j) (1.37)
ohne Summation uber j.

KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 9
• Die Konstanten C j und δ j werden wie immer durch die Anfangs-bedingungen bestimmt,
~q0 = ~q(t = 0) =
f∑j=1
~b jC j cos δ j
~q0 = ~q(t = 0) =
f∑j=1
~b jC jω j sin δ j . (1.38)
Wegen der Orthonormalitat der ~a j bezuglich T ist
~b Tj T~q0 = C j cos δ j und ~b T
j T ~q0 = C jω j sin δ j , (1.39)
woraus C j und δ j bestimmt werden konnen.
• Bemerkung: Das System kehrt nie in seine Anfangslage zuruck,wenn die ω j nicht in rationalen Verhaltnissen zueinander stehen.
1.2.4 Gekoppelte Pendel
Nachdem wir atypisch fur diese Vorlesung die Normalkoordinaten erstformal eingefuhrt haben fehlt uns noch ein illustratives Beispiel.
• Gegeben seien zwei gleiche ebene Pendel der Lange l, andenen Massenpunkte der Masse m hangen. Der Abstand derAufhangungspunkte sei x0, und die Pendel seien durch eine Fe-der mit der Federkonstanten k und der Ruhelange x0 aneinandergekoppelt.
• Geeignete Parameter zur Beschreibung dieses Systems sind diebeiden Auslenkwinkel q1 = ϕ1 und q2 = ϕ2. Damit lautet diekinetische Energie
T =m2
(l2ϕ2
1 + l2ϕ22
)⇒ T = ml2
(1 00 1
). (1.40)
Die potentielle Energie setzt sich aus den Beitragen des Schwere-felds und der Feder zusammen,
V = − mgl[cosϕ1 + cosϕ2
]+
k2
[ √(x1 − x2)2 + (y1 − y2)2 − x0
]2. (1.41)
Fur kleine Auslenkungen konnen die y1,2 gegenuber den x1,2
vernachlassigt werden. Außerdem konnen x1 = l sinϕ1 ≈ lϕ1,

KAPITEL 1. SCHWINGUNGEN GEKOPPELTER SYSTEME 10
x2 = x0 + lϕ2 und cosϕ j ≈ 1 − ϕ2j/2 genahert werden. Damit
lautet die potentielle Energie
V = mgl(ϕ2
1
2+ϕ2
2
2
)+
k2
l2 (ϕ1 − ϕ2)2
⇒ V = mgl(
1 00 1
)+ kl2
(1 −1−1 1
). (1.42)
wobei die Konstante −2mgl weggelassen wurde.
• Die Gleichung det(V − λT ) = 0 bestimmt das charakteristischePolynom
(mgl + kl2 − ml2λ)2 − k2l4 = 0 , (1.43)
mit den Losungen
λ1 =g
lund λ2 =
g
l+ 2
km
(1.44)
Die beiden entsprechend (1.32) normierten Eigenvektoren sind
~b1 =1√
2ml
(11
), ~b2 =
1√
2ml
(1−1
), (1.45)
d.h. die Normalschwingungen entsprechen solchen Schwingun-gen, bei denen die beiden Pendel entweder gleichphasig oder ge-genphasig schwingen.
Kapitel 2
Systeme mit Nebenbedingungen
Im vorigen Kapitel haben wir gelernt, dass geeignete Koordinaten furdie Freiheitsgrade eines Systems gezielt konstruieren kannn. Bei derKonstruktion der Freiheitsgrade spielen Neben- oder Zwangbedingun-gen eine zentrale Rolle. In diesem Kapitel verfolgen wir weiter die Ab-strahierung von Koordinaten und die Konstruktion von Bewegungsglei-chungen, aber im Hinblick auf Zwangsbedingungen.
2.1 Vorbereitung
2.1.1 Verallgemeinerte Koordinaten
• Neben- oder Zwangsbedingungen konnen auf verschiedene Wei-sen formuliert werden. Oft ist es moglich, sie fur N Massenpunktsund ihre Ortsvektoren ~xi durch Gleichungen der Art
gi(~x1, . . . , ~xN , t) = 0 , 1 ≤ i ≤ r (2.1)
auszudrucken. In diesem Fall haben wir r Bedingungen, also re-duziert sich die Anzahl der Freiheitsgrade auf f = 3N − r. Wirnehmen an, dass die gi genugend oft differenzierbar sind. Beispie-le fur Zwangsbedingungen dieser Art sind:
– Eine Bewegung auf einer Ebene erfullt die Bedingung ~x·~n =
0, wenn ~n der Normalenvektor der Ebene ist.
– Eine Bewegung auf einer Kugel stellt die Bedingung |~x| =
R = konst., also |~x| − R = 0.
Zwangsbedingungen dieses Typs heißen holonom. Ein Beispielfur eine nichtholonome Zwangsbedingung ist die Bewegung in-nerhalb einer Kugel, also |~x| ≤ R. Bedingungen, die die Zeit ex-plizit enthalten, heißen rheonom, anderenfalls skleronom (rheos,fließend; skleros, starr).
11

KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 12
• Der Konfigurationsraum eines Systems ist der Teil des 3N-dimensionalen Raums, der von den Koordinaten der N Massen-punkte erreicht werden kann. Die r Bedingungsgleichungen gi de-finieren eine (3N − r)-dimensionale sogenannte Untermannigfal-tigkeit im Konfigurationsraum. Dort kann die Lage des Systemsdurch f = 3N−r unabhangige Koordinaten q j angegeben werden.Wir kennen sie als parametrisierte oder verallgemeinerte Koordi-naten.
• Zum Beispiel ist der Konfigurationsraum eines freien Massen-punkts der dreidimensionale reelle Raum R3. Die Zwangsbe-dingung |~x| = R definiert eine zweidimensionale Untermannig-faltigkeit, namlich eine Kugelschale. So zum Beispiel kann dieZwangsbedingung fur die Bewegung eines Massenpunktes aufder Oberflache einer Kugel mit Radius R, |~x| − R = 0, durch
~x = R ·
sinϑ cosϕsinϑ sinϕ
cosϑ
(2.2)
mit 0 ≤ ϑ ≤ π, 0 ≤ ϕ ≤ 2π angegeben werden, d.h. (q1, q2)konnen durch die Winkel (ϑ, ϕ) reprasentiert werden.
2.1.2 Lagrange-Multiplikatoren
• Unsere Beschreibung lauft darauf hinaus, gegebene Großen unterRandbedingungen zu optimieren. Dafur gibt es etablierte Verfah-ren. Als Beispiel betrachten einen Zylinder mit dem Radius R undder Hohe H, dessenVolumen V fest ist. Die holonome Zwangsbe-dingung lautet
πR2H − V = 0 , (2.3)
und in R und H ist die Richtung einer erlaubten Anderung durchdie totale Ableitung
0 =∂
∂R
(πR2H − V
)dR +
∂
∂H
(πR2H − V
)dH
= 2πRH dR + πR2 dH (2.4)
gegeben. Wenn wir diese Gleichung zum Beispiel nach dR/dHauflosen, dann definiert diese Differentialgleichung eine Linie,auf der die Zwangsbedingung erfullt ist.
• Wir wollen jetzt die Oberflache A = 2πRH + 2πR2 als Funktionvon R und H minimieren. Ihre Anderung ist ebenfalls durch einetotale Ableitung gegeben,
0 =∂A∂R
dR +∂A∂H
dH
= (2πH + 4πR) dR + 2πR dH (2.5)
KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 13
Aus den beiden Gleichungen (2.4) und (2.5) wollen wir nun dieVerknupfung zwischen H und R bestimmen, die der minimalenOberflache bei konstantem Volumen entspricht. Wir konnen zumBeispiel zunachst dH eliminieren und erhalten dann
−2πRHπR2 dR = −
2πH + 4πR2πR
dR
⇔ 4πRH = 2πRH + 4πR2 ⇔ R =H2. (2.6)
• Es gibt eine andere Methode, die sich leichter auf komplexereSysteme erweitern lasst. Sie beruht auf der Beobachtung, dassin der oben beschriebenen Rechnung dR und dH nicht bestimmtwerden, man also die beiden Bedingungen (2.4) und (2.5) furallgemeine dH und dR losen kann. Wir kombinieren die beidenGleichungen zunachst mit Hilfe eines unbestimmten Faktors oderLagrange-Multiplikators λ ∈ R,
0 = (2πH + 4πR + λ 2πRH) dR +(2πR + λ πR2
)dH (2.7)
und erhalten zwei Bedingungen. Aus der ersten bestimmen wir λ,
2πR + λπR2 = 0 ⇔ λ = −2R, (2.8)
und danach die Korrelation von R und H
0 = 2πH + 4πR −2R
2πRH
= 2πH + 4πR − 4πH⇔ H = 2R . (2.9)
• Diesen Zugang fur die Suche nach Extrema von Funktionen unterNebenbedingungen verallgemeinern wir nun. Fur eine Funktionf (~x) folgen wir Linien mit konstantem Funktionswert, wenn derPfad senkrecht auf dem Gradienten steht oder die totale Ableitungverschwindet,
d f = ~∇ f · d~x = 0 . (2.10)
Gleichzeitig reduziert eine holonome Nebenbedingung die An-zahl der Freiheitsgrade um einen und ist durch g(~x) = 0 beschrie-ben. Entlang unseres Pfades darf sich auch g(~x) nicht andern, also
dg = ~∇g · d~x = 0 . (2.11)
Zusammen spannen ~∇ f und ~∇g also eine Ebene senkrecht zu d~xauf, wobei wir aber noch nicht berucksichtigt haben, dass f (~x)nicht nur konstant, sondern extremal sein soll. Um das Extremumzu suchen folgen wir in dieser Ebene so lange der Richtung ~∇ f ,bis die Nebenbedingung dies nicht mehr zulasst. Das geschieht

KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 14
wenn ~∇ f in dieselbe Richtung zeigt wie ~∇g, also mit Hilfe einesLagrange-Multiplikator gilt
~∇ f + λ~∇g = 0 . (2.12)
Wir konnen einen Term herausgreifen um λ zu bestimmen,
∂ f∂x3
+ λ∂g
∂x3= 0 , (2.13)
solange ∂g/∂x3 , 0. Ebenso mussen die beiden anderen Ablei-tungen separat verschwinden,
∂ f∂x j
+ λ∂g
∂x j= 0 ( j = 1, 2) (2.14)
Aus diesen Bedingungen erhalten wir die erlaubte Koordinaten-flache.
• Wenn r Bedingungen gi = 0 (1 ≤ i ≤ r) zu erfullen sind, wird jedemit einem eigenen Lagrange-Multiplikator λi berucksichtigt, sodass dann die Bedingungen fur Extrema unter Nebenbedingungen
∂ f∂x j
+
r∑i=1
λi∂gi
∂x j= 0 (1 ≤ j ≤ N) (2.15)
lauten.
2.2 Das d’Alembertsche Prinzip
Im vorigen Kapitel haben wir die Bewegung von Teilchen unterZwangsbedingungen mit Hilfe geeigneter Koordinaten beschrieben. DieNewtonsche Mechanik und insbesondere Krafte haben hier keine Rollegespielt. Das wird auch so bleiben, allerdings werden wir vorher nocheinen kurzen Blick auf die Verbindung zwischen Zwangsbedingungenund entsprechenden Zwangskraften werfen.
2.2.1 Zwangskrafte im Gleichgewicht
Jean Baptiste le Rond d’Alembert• Als Beispiel betrachten wir eine Kugel, die unter dem Einfluss
der Schwerkraft ~F reibungsfrei in einer Rohre in der y-z-Ebenegleite, beschrieben durch die holonome Zwangsbedingung
g(y, z) = 0 (2.16)
Die Tangentialkomponente von ~F relativ zur Rohre verursacht ei-ne Bewegung, wahrend die Normalkomponente ~F · ~n durch eineZwangskraft ~Z kompensiert wird,
~Z = −( ~F · ~n)~n . (2.17)
KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 15
Im Gleichgewicht haben wir die komplette Kompensation
~F + ~Z = ~0 . (2.18)
• Wir wollen die Gleichgewichtsbedingung in allgemeinen Fallenfinden. Dazu denken wir uns eine virtuelle Verruckung δ~x
δ~x =
(δyδz
). (2.19)
Wenn der Massenpunkt in der Rohre bleibt, dann darf sich g indiese Richtung nicht andern,
0 = ~∇g · δ~x =∂g(y, z)∂y
δy +∂g(y, z)∂z
δz . (2.20)
Die virtuelle Verruckung erfordert eine virtuelle Arbeit, die imGleichgewicht wegen (2.18) verschwindet,
δA = ( ~F + ~Z) · δ~x = ~0 · δ~x = 0 . (2.21)
Die Gleichgewichtslage ist also dadurch charakterisiert, dass dortvirtuelle Verruckungen keine virtuelle Arbeit verrichten. Da im-mer δ~x tangential und ~Z normal zur Rohre ist, gilt ~Z · δ~x = 0, dieZwangskraft leistet nie virtuelle Arbeit. In der Gleichgewichts-lage konnen also auch die außeren Krafte keine virtuelle Arbeitleisten
~F · δ~x = 0 und ~∇g · δ~x = 0 (2.22)
gelten. Das ist das Prinzip der virtuellen Arbeit oder dasd’Alembertsche Prinzip, und es zeigt unter anderem die Grenzenunseres Krafte-Zugangs.
• Wir wissen schon, dass wir die beiden Bedingungen (2.22) mitHilfe eines Lagrange-Multiplikators λ erfullen konnen,
0 = ( ~F + λ~∇g) · δ~x
=
(Fy + λ
∂g
∂y
)δy +
(Fz + λ
∂g
∂z
)δz . (2.23)
Dies gibt uns die Gleichgewichtslage. Die beiden Koordinaten δyund δz sind zunachst unabhangig, werden aber durch die Zwangs-bedingung miteinander verknupft. Wenn wir g(y, z) = 0 ebenfallserfullen, dann definiert (2.23) drei Gleichungen fur drei Unbe-kannte.
• Als Beispiel betrachten wir einen Massenpunkt, der langs einerParabel in der y-z-Ebene gleitet, also
g(y, z) = z − y2 = 0 ⇒ ~∇g(y, z) =
(−2y
1
). (2.24)
KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 16
Die Schwerkraft ist
~F(y, z) = −mg~ez =
(0−mg
)(2.25)
Das Prinzip der virtuellen Arbeit liefert zunachst(~F + λ~∇g(y, z)
)· δ~x =
[(0−mg
)+ λ
(−2y
1
)]·
(δyδz
)= 0 ,
(2.26)woraus
− 2λyδy = 0 und (−mg + λ)δz = 0 (2.27)
folgen. Wenn die δy und δz beliebig sein durfen, erhalten wir
λ = mg und y = 0 . (2.28)
In der Gleichgewichtslage mit y = 0 muss wegen der Zwangsbe-dingung auch z = 0 sein.
2.2.2 Dynamische Systeme
• Wir erweitern nun Schritt fur Schritt unseren Zugang von stati-schen auf dynamische Systeme. Gegeben seien N Massenpunktemit den Ortsvektoren ~xi, 1 ≤ i ≤ N, die sich unter dem Ein-fluss der außeren Krafte ~Fi bewegen. Zwangsbedingungen wer-den zunachst wieder durch Zwangskrafte ~Z dargestellt. Eine vir-tuelle Verruckung δxi sei unendlich klein, mit den Zwangsbedin-gungen vertraglich und sonst willkurlich. Nach (2.22) folgt imGleichgewicht
N∑i=1
~Fi · δ~xi = −
N∑i=1
~Zi · δ~xi = 0 , (2.29)
weil dort die virtuelle Arbeit der außeren Krafte verschwindet.
• Abseits vom Gleichgewicht lauten die N Bewegungsgleichungen
~pi = ~Fi + ~Zi . (2.30)
Wenn die Zwangskrafte ebenfalls (2.29) erfullen, dann gilt offen-bar das d’Alembertsche Prinzip in der Form
N∑i=1
( ~Fi − ~pi) · δ~xi = 0 . (2.31)
Die −~pi erscheinen also als Krafte, sogenannte Tragheitskrafte.Die Bewegung verlauft also so, dass die virtuelle Arbeit der Sum-me von außeren und Tragheitskraften verschwindet.

KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 17
• Als Beispiel bewege sich ein Massenpunkt der Masse m an einemEnde einer masselosen Stange der Lange l, die in ihrem anderenEnde drehbar aufgehangt ist. Sein Ortsvektor, seine Geschwin-digkeit und seine Beschleunigung sind
~x =
(yz
)= l
(sinϕ− cosϕ
)~x =lϕ
(cosϕsinϕ
)~x =lϕ
(cosϕsinϕ
)+ lϕ2
(− sinϕcosϕ
). (2.32)
Zum Beispiel erzeugt dann eine konstanter Winkelgeschwindig-keit, ϕ = 0, die Tragheitskraft
− ~p = −m~x = −mlϕ2(− sinϕcosϕ
)= mlϕ2~x =
mv2
l~xl, (2.33)
da v = |~x | = lϕ. Das ist die Zentrifugalkraft.
• Wenn wir nun die Gewichtskraft ~F = −mg~ez hinzufugen, dannkonnen wir mit dem d’Alembertsche Prinzip das mathematischePendel beschreiben. Eine virtuelle Verruckung δ~x, die mit derZwangsbedingung in (2.32) vertraglich ist, muss
δ~x = lδϕ(
cosϕsinϕ
)(2.34)
erfullen. Aus dem d’Alembertschen Prinzip (2.31) mit der allge-meinen Tragheitskraft (2.32) erhalten wir[−mg
(01
)− mlϕ
(cosϕsinϕ
)− mlϕ2
(− sinϕcosϕ
)]· δ~x = 0 (2.35)
oder mit (2.34)
(−mgl sinϕ − ml2ϕ) δϕ = 0 . (2.36)
Da die virtuelle Verruckung δϕ beliebig ist, folgt daraus
ϕ = −g
lsinϕ ≈ −
g
lϕ . (2.37)
Fur kleine Auslenkungen ϕ 1 ist dies offensichtlich die be-kannte Gleichung eines harmonischen Oszillators.
2.2.3 Lagrange-Gleichungen erster Art
• Wie schon vorher verallgemeinern wir diese Argumentation nun.Gegeben seien wieder Massenpunkten. Zur Vereinfachung der

KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 18
Notation betrachten wir die 3N Koordinaten xi der Massenpunk-te. Das System erfahre die außeren Krafte Fi, 1 ≤ i ≤ 3N, undunterliege r holonomen Zwangsbedingungen g j(x1, . . . , x3N) = 0,1 ≤ j ≤ r. Das d’Alembertsche Prinzip besagt dann fur einen Satzvirtualle Verruckungen δxi
3N∑i=1
(Fi − mi xi) δxi = 0 , (2.38)
wobei die δxi die Gleichungen3N∑i=1
∂g j
∂xiδxi = 0 j = 1, ..., r (2.39)
erfullen mussen. Die beiden Gleichungen lassen sich wiederdurch r Lagrange-Multiplikatoren λ j kombinieren,
3N∑i=1
Fi − mi xi +
r∑j=1
λ j∂g j
∂xi
δxi = 0 . (2.40)
• Die λ j konnen nun so gewahlt werden, dass die Vorfaktoren derr abhangigen Verruckungen in (2.40) verschwinden. Nehmen wiran, das seien die ersten r Verruckungen, dann folgt
r∑j=1
λ j∂g j
∂xi= −Fi + mi xi i = 1, ...r , (2.41)
oder, in Matrix-Schreibweise,
F ~λ = ~Q , (2.42)
wobei die Abkurzungen
F = (Fi j) :=(∂g j
∂xi
), ~Q = (Qi) := mi xi − Fi (2.43)
mit i, j = 1, ..., r. Nun ist (2.42) ein lineares Gleichungssy-stem fur die r Multiplikatoren λ j, das eindeutig losbar ist, wenndetF , 0 gilt, was wir voraussetzen. Also sind die Lagrange-Multiplikatoren
~λ = F −1 ~Q . (2.44)
• Diese λ j werden nun in die verbleibenden 3N−r Gleichungen furdie unabhangigen und beliebigen Verruckungen eingesetzt undergeben
3N∑i=r+1
Fi − mi xi +
r∑j=1
λ j∂g j
∂xi
δxi = 0
Fi − mi xi +
r∑j=1
λ j∂g j
∂xi= 0 (2.45)
fur i = r + 1, ..., 3N. Dies sind die Lagrange-Gleichungen ersterArt.

KAPITEL 2. SYSTEME MIT NEBENBEDINGUNGEN 19
• Beispiel: Eine Perle gleite reibungslos auf einem masselosenDraht, der sich um eines seiner Enden dreht und dabei die x-y-Ebene uberstreicht. Die Zwangsbedingung ist, dass die Perle denDraht nicht verlassen kann,
g(x, y) = y cosϕ − x sinϕ = 0 (2.46)
Ohne außeren Krafte folgt aus dem d’Alembertschen Prinzip(2.38) mit dem einen Lagrange-Multiplikator λ
− m(
xy
)+ λ~∇g = −m
(xy
)+ λ
(− sinϕcosϕ
)= 0 . (2.47)
Der naheliegende Ansatz x = r cosϕ, y = r sinϕ gibt(xy
)= r
(cosϕsinϕ
)+ rϕ
(− sinϕcosϕ
)(2.48)(
xy
)= (r − rϕ2)
(cosϕsinϕ
)+ (2rϕ + rϕ)
(− sinϕcosϕ
).
Wenn wir dies in (2.47) einsetzen erhalten wir
(r − rϕ2)(
cosϕsinϕ
)+ (2rϕ + rϕ)
(− sinϕcosϕ
)=λ
m
(− sinϕcosϕ
).
(2.49)Indem wir zum Beispiel diese Gleichung einmal mit(− sinϕ, cosϕ) und einmal mit (cosϕ, sinϕ) multiplizieren,folgen die beiden unabhangigen Bedingungen
r − rϕ2 = 0 . undλ
m= 2rϕ + rϕ (2.50)
Die erste Gleichung ist die Bewegungsgleichung. Die Zentrifu-galkraft mrϕ2 tritt als Tragheitskraft auf, die die Perle radial nachaußen treibt.

Kapitel 3
Lagrange-Formulierung
An dieser Stelle verlassen wir die Newtonsche Mechanik mit ihrer Be-trachtung von Kraften und wenden uns einer Formulierung ausschließ-lich uber die Lagrange-Gleichung und ihre verallgemeinerten Koordina-ten zu. Wie im vergangenen Kapitel beschrieben kann man naturlich dieKrafte weiterhin bestimmen, aber wir werden sehen dass sie bei der Be-rechung von dynamischen Systemen keine Rolle mehr spielen. Stattdes-sen entwickeln wir unseren Formalimus in Richtung Erhaltungsgroßenund schreiben das d’Alembertsche Prinzip mit Hilfe der potentiellenand kinetischen Energie.
3.1 Lagrange-Gleichungen zweiter Art
3.1.1 Herleitung
Joseph Louis Lagrange• Statt der kartesischen Koordinaten benutzen wir nun f = 3N − r
verallgemeinerten Koordinaten qi. Die kartesischen Koordinatenlassen sich immer noch in der Form xi(~q; t) schreiben, und dievirtuelle Arbeit der außeren Krafte in (2.38) wird
δAe =
3N∑i=1
Fi δxi =
3N∑i=1
Fi
f∑j=1
∂xi
∂q jδq j
=
f∑j=1
3N∑i=1
Fi∂xi
∂q j
δq j =:f∑
j=1
Q jδq j , (3.1)
wobei wir verallgemeinerten Kraftkomponenten mit Hilfe einesPotentials definieren,
Q j =
3N∑i=1
Fi∂xi
∂q j= −
3N∑i=1
∂V(~x; t)∂xi
∂xi
∂q j= −
∂V(~x(~q; t); t)∂q j
(3.2)
20
KAPITEL 3. LAGRANGE-FORMULIERUNG 21
• Die virtuelle Arbeit der Tragheitskrafte ebenfalls in (2.38) ist
δAt = −
3N∑i=1
mi xiδxi
= −
f∑j=1
3N∑i=1
mi xi∂xi
∂q j
δq j
= −
f∑j=1
ddt
3N∑i=1
mi xi∂xi
∂q j
− 3N∑i=1
mi xiddt∂xi
∂q j
δq j . (3.3)
Die Zeitableitung im zweiten Term konnen wir vereinfachen,
ddt∂xi(~q; t)∂q j
=∂2xi
∂t∂q j+
f∑k=1
∂2xi
∂q j∂qkqk (3.4)
=∂
∂q j
∂xi
∂t+
f∑k=1
∂xi
∂qkqk
=∂
∂q j
dxi
dt=∂xi
∂q j.
Weiterhin nutzen wir (1.2) oder ∂xi/∂q j = ∂xi/∂q j, dann wird
δAt = −
f∑j=1
ddt
3N∑i=1
mi xi∂xi
∂q j
− 3N∑i=1
mi xi∂xi
∂q j
δq j
= −
f∑j=1
(ddt∂T∂q j−∂T∂q j
)δq j , (3.5)
hier mit der kinetische Energie
T =12
3N∑i=1
mi x2i . (3.6)
• Nach dem d’Alembertschen Prinzip muss die gesamte virtuelleArbeit der außeren und der Tragheitskrafte verschwinden, also
0 = δAe + δAt =
f∑j=1
(Q j −
ddt∂T∂q j
+∂T∂q j
)δq j . (3.7)
Fur beliebige δq j folgen die Lagrange-Gleichungen zweiter Art,
ddt∂T∂q j−∂T∂q j
= Q j = −∂V∂q j
. (3.8)
Definieren wir die Lagrange-Funktion durch
L = T − V = T (q, q, t) − V(q, t) , (3.9)
dann lauten die Lagrange-Gleichungen zweiter Art einfach
ddt∂L∂q j−∂L∂q j
= 0 . (3.10)
KAPITEL 3. LAGRANGE-FORMULIERUNG 22
In dieser Form werden sie gewohnlich als Lagrange-Gleichungenbezeichnet. Mit ihrer Hilfe lost sich die Mechanik von den kar-tesischen Koordinaten. Die Lagrange-Gleichungen zeigen dann,wie sich aus Ableitungen der Lagrange-Funktion die Bewegungs-gleichungen in den verallgemeinerten Koordinaten ergeben.
• Fur einen Massenpunkt der Masse m im Feld einer vorgegebenenPotentialkraft ist die Lagrange-Funktion
L = T − V =m2
3∑i=1
x2i − V . (3.11)
Hieraus folgen die Bewegungsgleichungen
ddt
mxi +∂V∂xi
= mxi +∂V∂xi
= 0 . (3.12)
• Im Falle einer Zentralkraft wahlen wir ebene Polarkoordinaten(r, ϕ) als verallgemeinerte Koordinaten. Das Potential ist V =
V(r), und wegen ~x 2 = r2 + r2ϕ2 ist die Lagrange-Funktion
L =m2
(r2 + r2ϕ2) − V(r) . (3.13)
Fur r und ϕ erhalten wir die Lagrange-Gleichungen
d(mr2ϕ)dt
= 0 und mr − mrϕ2 +∂V∂r
= 0 . (3.14)
Die erste Gleichung formuliert die Drehimpuls-Erhaltung, diezweite ist die Bewegungsgleichung.
3.2 Anwendungen
Die Relevanz der Lagrange-Gleichungen in der Physik ist riesig. Wirillustrieren ihre Bedeutung mit einer Reihe Anwendungen, die jeweilsunsere fruheren Methoden an ihre Grenzen gebracht haben.
3.2.1 Beschleunigte Bezugssysteme
• Ein Problem fur unseren alten Zugang waren Scheinkrafte in be-schleunigten Bezugssystemen. Sei also ein (ungestrichenes) Be-zugssystem gegeben, das sich relativ zu einem (gestrichenen) In-ertialsystem dreht und bewegt, so dass zwischen gestrichenen undungestrichenen Ortsvektoren die Beziehung
~x ′ = R(~a + ~x) (3.15)

KAPITEL 3. LAGRANGE-FORMULIERUNG 23
besteht, wobei ~a der zeitlich konstante Ortsvektor des Ursprungsdes Inertialsystems aus der Sicht des beschleunigten Systems ist.Zwischen den Geschwindigkeiten in beiden Systemen bestehtdann die Beziehung
~x ′ = R[~x + ~ω × (~a + ~x)
], (3.16)
wie im ersten Teil der Vorlesung gezeigt wurde.
• Die Lagrange-Funktion im gestrichenen Inertialsystem ist dann
L =m2
[~x + ~ω × (~a + ~x)
]2− V(~x)
=m2
~x 2 + 2~x ·
[~ω × (~a + ~x)
]+
[~ω × (~a + ~x)
]2− V(~x) . (3.17)
Die partielle Ableitung nach xi ergibt
∂L∂xi
+∂V∂xi
=m2
∂
∂xi
2x jε jklωk(a + x)l + ε jklε jmnωk(a + x)lωm(a + x)n
=
m2
2x jε jkiωk + ε jkiε jmnωkωm(a + x)n + ε jklε jmiωk(a + x)lωm
= mx jε jkiωk +
m2ε jkiε jmnωkωm(a + x)n +
m2ε jklε jmiωk(a + x)lωm
= mx jε jkiωk +m2ε jkiε jmnωkωm(a + x)n +
m2ε jknε jmiωk(a + x)nωm
= mx jε jkiωk + mε jkiε jmnωkωm(a + x)n
= mx jε jkiωk + mεi jk
(ε jmnωm(a + x)n
)ωk
= m(~x × ~ω)i + m[[~ω × (~a + ~x)
]× ~ω
]i , (3.18)
Die partielle Ableitung nach ~x liefert
∂L∂xi
= mxi + m(~ω × (~a + ~x)
)i , (3.19)
und damit die Lagrange-Gleichungen
0 = mddt
[~x + ~ω × (~a + ~x)
]− m~x × ~ω − m
[~ω × (~a + ~x)
]× ~ω + ~∇V
= m~x + m~ω × (~a + ~x) + m~ω × ~x
+ m~ω × ~x − m(~ω × ~a
)× ~ω − m
(~ω × ~x
)× ~ω + ~∇V
= m~x + m~ω × (~a + ~x) + 2m~ω × ~x
+ m~ω ×(~ω × ~a
)+ m~ω ×
(~ω × ~x
)+ ~∇V , (3.20)
in Ubereinstimmung mit dem ersten Teil der Vorlesung.

KAPITEL 3. LAGRANGE-FORMULIERUNG 24
3.2.2 Kraftefreier symmetrischer Kreisel
Als Anwendung der Lagrange-Gleichungen auf physikalische Systemenutzen wir auch Kreisel. Offensichtlich sind dort kartesische Koordi-naten ungeeignet, und die Bewegungen konnen je nach Kraft komplexgenugend komplex sein, um als Beispiele fur den neuen Formalismuszu dienen und uns dann in Richtung von Erhaltungsgroßen zu fuhren.
• Die gesamte Energie des kraftefreien Kreisels setzt sich aus derRotation und der Translation zusammen. Wir wahlen zunachst einBezugssystem, in dem der Schwerpunkt des Kreisels ruht. Wirhatten im ersten Teil der Vorlesung gesehen, dass die kinetischeEnergie der Rotation eines starren Korpers
Trot =12~ωT Θ ~ω (3.21)
ist, wobei Θ der Tragheitstensor ist. Wir konnen die Rotations-energie in einem beliebigen Bezugssystem auswerten, weil sieals Skalar unabhangig vom Bezugssystem ist. Dafur bietet sichdas Hauptachsensystem des starren Korpers an,
Θ = diag(Θ1,Θ2,Θ3) . (3.22)
Nehmen wir der Einfachheit halber weiter an, dass der starreKorper symmetrisch gegenuber Drehungen um die x3-Achse ist,also Θ1 = Θ2. Die Lagrange-Funktion lautet dann
L =Θ1
2
(ω2
1 + ω22
)+
Θ3
2ω2
3 . (3.23)
• Außerdem hatten wir die drei Euler-Winkel (ϕ, ϑ, ψ) eingefuhrtund gezeigt, dass sich die Winkelgeschwindigkeit ~ω eines starrenKorpers allgemein durch
ω1 = ϕ sinϑ sinψ + ϑ cosψ ,ω2 = ϕ sinϑ cosψ − ϑ sinψ ,ω3 = ϕ cosϑ + ψ (3.24)
darstellen lasst. Die drei Euler-Winkel sind die nachstliegendenverallgemeinerten Koordinaten, durch die die drei Rotationsfrei-heitsgrade des starren Korpers ausgedruckt werden konnen. Da-mit wird die Lagrange-Funktion
L(ϕ, ϑ, ψ, ϕ, ϑ, ψ) =Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2.(3.25)
• Allgemein muss immer die Energie erhalten bleiben. Außerdemhangt L nicht von ϕ und ψ ab. Wir finden also aus der Lagrange-Gleichung und der expliziten Form der Lagrange-Funktion drei
KAPITEL 3. LAGRANGE-FORMULIERUNG 25
Erhaltungsgroßen
E := Trot = L
pψ :=∂L∂ψ
= Θ3
(ϕ cosϑ + ψ
)pϕ :=
∂L∂ϕ
= Θ1ϕ sin2 ϑ + Θ3
(ϕ cosϑ + ψ
)cosϑ , (3.26)
die sogenannten konjugierten Impulse. Die Energie kennen wirschon, der zweite Term ist offensichtlich gleich Θ3ω3, also derDrehimpuls in x3-Richtung, und der dritte Term ist der gesamteDrehimpuls.
• Um diese Bewegung zu beschreiben konnen wir zunachst ψ auspϕ eliminieren,
pϕ =Θ1ϕ sin2 ϑ + pψ cosϑ
⇔ ϕ =pϕ − pψ cosϑ
Θ1 sin2 ϑ. (3.27)
Damit konnen wir die erhaltene Energie durch
E =Θ1
2
(pϕ − pψ cosϑ
Θ1 sin2 ϑ
)2
sin2 ϑ +Θ1
2ϑ2 +
p2ψ
2Θ3
⇔2
Θ1
E −p2ψ
2Θ3
=
(pϕ − pψ cosϑ
Θ1 sin2 ϑ
)2
sin2 ϑ + ϑ2 (3.28)
ausdrucken. Diese Gleichung enthalt weder ϕ noch ψ und ist einegewohnliche Differentialgleichung erster Ordnung fur ϑ. Um siezu losen, fuhren wir einige Abkurzungen ein, namlich
α :=2
Θ1
E −p2ψ
2Θ3
a :=pψΘ1
b :=pϕΘ1
. (3.29)
Außerdem fuhren wir y := cosϑ ein. Dann ist y = − sinϑϑ, und(3.28) lautet
α =
(pϕ − pψ cosϑ
Θ1
)2 1sin2 ϑ
+y2
sin2 ϑ
= (b − ay)2 11 − y2 +
y2
1 − y2
⇔ y2 =α(1 − y2) − (b − ay)2 . (3.30)
Ihre implizite Losung erhalten wir durch Separation der Varia-blen,
t − t0 =
∫ y(t)
y0
dy√α(1 − y2) − (b − ay)2
. (3.31)
Man kann solche Gleichungen numerisch losen, aber analytischkommen wir an dieser Stelle nicht weiter.
KAPITEL 3. LAGRANGE-FORMULIERUNG 26
• Wir wissen schon, dass in vielen Fallen Erhaltungsgroßen unshelfen ein System zu verstehen. Wie man aus der Definition derkonjugierten Impulse sieht gilt das auch wenn wir die Lagranga-Gleichungen benutzen. Hier wird die Betrachtung mit Hilfe derDrehimpulserhaltung einfacher, wenn man das Inertialsystem soorientiert, dass die x′3-Achse in Richtung des konstanten gesamtenDrehimpulses ~L′ zeigt. Der Euler-Winkel ϑ gibt an um welchenWinkel die Symmetrieachse des Kreisels aus der x′3-Richtung ver-kippt ist,
L3 = |~L′| cosϑ . (3.32)
Da sowohl |~L′| als auch L3 Konstanten der Bewegung sind, mussauch ϑ konstant sein, also
ϑ = 0 . (3.33)
Fur die ϕ-Richtung folgt aus (3.27) dass der Kreisel sich umdie x′3-Achse des Inertialsystems mit der konstanten Winkelge-schwindigkeit
ϕ =pϕ − pψ cosϑ
Θ1 sin2 ϑ. (3.34)
dreht. Aus der Konstanz von pψ folgt schließlich mithilfe von(3.26) die konstante Winkelgeschwindigkeit des kraftefreienKreisels um seine eigene Achse,
ψ =pψΘ3− ϕ cosϑ . (3.35)
3.2.3 Kreisel im Schwerefeld
• Als Beispiel fur einen Kreisel mit Potential untersuchen wir un-seren symmetrischen Kreisel der Masse m im Schwerefeld derErde, der außerhalb seines Schwerpunkts, aber auf der Figuren-achse unterstutzt wird. Der Vektor vom Unterstutzungspunkt zumSchwerpunkt sei ~s. Er definiert eine zweite (mogliche) Drehbe-wegung. Die nach unten zeigende Schwerkraft ~g ubt dann dasDrehmoment
~M = m~s × ~g (3.36)
auf den Kreisel aus.
• Die Lagrange-Funktion (3.25) enthalt nun auch die potentielleEnergie V = −m~g · ~s = mgs cosϑ,
L =Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2−mgs cosϑ . (3.37)
Wieder kommen ϕ und ψ nicht in der Lagrange-Funktion vor, sodass pϕ und pψ wie in (3.26) Konstanten der Bewegung bleiben.
KAPITEL 3. LAGRANGE-FORMULIERUNG 27
Damit bleibt auch (3.27) fur ϕ, aber die Energie ist
E = T + V = L + 2V (3.38)
=Θ1
2
(ϕ2 sin2 ϑ + ϑ2
)+
Θ3
2
(ϕ cosϑ + ψ
)2+ mgs cosϑ .
Der Term V = mgs cosϑ kommt also auch auf der rechten Seiteder erhaltenen Energie (3.28) dazu. Definieren wir zusatzlich zuden Abkurzungen (3.29) noch
β :=2mgsΘ1
, (3.39)
verandert sich die Differentialgleichung (3.30) zu
y2 = (α − βu)(1 − u2) − (b − au)2 , (3.40)
deren implizite Losung im Allgemeinen auf elliptische Integra-le fuhrt. Wie schon in (3.31) sind wir an dieser Stelle am Endeunserer analytischen Moglichkeiten angelangt.
• Den Effekt der Gewichtskraft konnen wir leichter unter der An-nahme untersuchen, dass sie eine kleine Storung der oben be-schriebenen Bewegung ist. Wenn der Kreisel außerdem schnellum seine Figurenachse rotiert, dann ist auch der gesamte Dre-himpulsvektor nahe der Figurenachse. Unter dieser Annahme ist~s ′ etwa parallel zu ~L′, also
~s ′
s′≈~L′
L′. (3.41)
Die Anderung der Richtung des gesamten Drehimpulses ~L′ durchdie Gewichtskraft ist dann
~M′ =d~L′
dt= m(~s ′ × ~g ′) ≈
ms′
L′(~L′ × ~g ′)
⇒ ~L′(t + dt) ≈~L′(t) +ms′
L′(~L′ × ~g ′
)dt . (3.42)
Das ist eine infinitesimalen Drehung mit der Winkelgeschwindig-keit −ms′/L′ × ~g ′. Der Drehimpulsvektor weicht also bei gleich-bleibender Lange senkrecht zur Schwerkraft aus. Die Figuren-achse des um sich selbst rotierenden Kreisels folgt im wesent-lichen dem Drehimpulsvektor. Man kann zeigen dass je rascherder Kreisel rotiert, desto langsamer prazediert er, weil dann seinepotentielle gegenuber seiner kinetischen Energie immer unwich-tiger wird.
Kapitel 4
Extremalprinzipien
Im vorigen Kapitel haben wir die Lagrange-Gleichungen abgeleitetund damit ein Werkzeug eingefuhrt, das mit leichten Modifikationenin der aktuellen Forschung eine wichtige Rolle einnimmt. Lagrange-Funktionen sind in der Hochenergiephysik das Bindeglied zwischen ex-perimentellen Messungen und theoretischen Annahmen. In diesem Ka-pitel geht es nun nicht darum, diesen Mechanismus weiterzuentwickeln,sondern darum, ahnlich universelle Zugange fur andere Felder der Phy-sik anzuleiten. Wir werden zeigen, dass sowohl das Prinzip der Stati-onaren Wirkung als auch die Hamilton-Gleichungen auivalent zu denLagrange-Gleichungen sind.
4.1 Prinzip der stationaren Wirkung
In einem ersten Schritt fuhren wir ein neues Konzept in die Mechanikein, das Extremalprinzip. Wir werden zeigen, dass fur eine entsprechenddefinierte Wirkung die Lagrange-Gleichungen aquivalent sind zur Aus-sage, dass diese Wirkung extremal ist.
4.1.1 Das Fermatsche Prinzip
• Bisher haben wir mechanische Systeme differentiell beschrieben:Aus dem Zustand zur Zeit t wurde eine Anderung innerhalb derZeit dt vorhergesagt. Jetzt bereiten wir eine Beschreibung vor, diedie gesamte Bahn eines Systems zur Grundlage nimmt. Gegebensei dazu ein System mit f Freiheitsgraden und verallgemeinertenKoordinaten (q1, . . . , q f ). Diese mogen in einem Bereich B ∈ R f
variieren, dem so genannten Konfigurationsraum. Durch die Be-wegung des Systems zwischen den t0 und t1 > t0 wird eine Kurveim Konfigurationsraum durchlaufen, die als Bahn des Systemsbezeichnet wird.
28

KAPITEL 4. EXTREMALPRINZIPIEN 29
• Wir nehmen an, dass die Bewegungsgleichungen des Systems auseiner Lagrange-Funktion L(~q,~q, t) ableitbar seien. Wodurch un-terscheidet sich dann die wirkliche Bahn ~q(t), t0 ≤ t ≤ t1, zwi-schen den zwei festen Punkten P0 und P1 von allen denkbarenanderen Bahnen ~q′(t) mit ~q′(t0) = ~q(t0) und ~q′(t1) = ~q(t1)? EinBeispiel liefert das Fermatsche Prinzip der geometrischen Optik,das besagt, dass langs des tatsachlich realisierten Lichtstrahls dieLichtlaufzeit extremal wird.
• Betrachten wir den Ubergang eines Lichtstrahls aus dem linkenHalbraum mit dem Brechungsindex n1 in den rechten Halbraummit dem Brechungsindex n2. Der Lichtstrahl soll zwischen zweifesten Punkten ~x1 und ~x2 verlaufen, und seine Bahnebene sei diex-y-Ebene. Das Licht folgt in beiden Halbraumen Geraden. DerUbergang vom linken in den rechten Halbraum finde im Punkt(0, y) statt. Die gesamte Lichtlaufzeit ist dann
τ =n1
c
√x2
1 + (y − y1)2 +n2
c
√x2
2 + (y2 − y)2 , (4.1)
weil die Lichtgeschwindigkeit durch die Brechungsindizes aufc/n1,2 reduziert ist. Fermats Prinzip besagt
δτ = 0 , (4.2)
weil die Lichtlaufzeit extremal werden soll. Wir konnen dieStorung δτ als Funktion der Koordinate y parametrisieren, also
δτ = δydτdy
= 0
⇔n1
cy − y1√
x2 + (y − y1)2−
n2
cy2 − y√
x2 + (y2 − y)2= 0 (4.3)
oder, mit den Winkeln α1,2 der Lichtstrahlen bezuglich der Nor-malen zur Trennflache zwischen den beiden Halbraumen,
n1 sinα1 = n2 sinα2 . (4.4)
Das ist das Brechungsgesetz, abgeleitet aus einer Extremalbedin-gung.
4.1.2 Hamiltons Prinzip
William Rowan Hamilton• In der Mechanik postulieren wir dass entlang der wirklichen Bahn
die Wirkung
S [~q(t)] :=∫ t1
t0L(~q, ~q, t) dt (4.5)
KAPITEL 4. EXTREMALPRINZIPIEN 30
extremal wird. Sie hat die Dimension Energie × Zeit und ist einFunktional der Kurve ~q(t), d.h. eine Funktion einer Funktion. DasHamiltonsche Prinzip der stationaren Wirkung lautet dann
δS [~q(t)] = δ
[∫ t1
t0L(~q, ~q, t)dt
]= 0 . (4.6)
• Wie man das Extremum eines Funktionals findet, ist Gegenstandder Variationsrechnung von Leonhard Euler, die uns wieder andie totale Ableitunge und entsprechende Differentiale erinnernwird. Seien ~q(t) die wahre und ~q′(t) = ~q(t) + δ~q(t) eine leichtgestorte Bahn. Dann muss δS in erster Ordnung von δ~q ver-schwinden,
δS =
∫ t1
t0L(~q + δ~q, ~q + δ~q, t)dt −
∫ t1
t0L(~q, ~q, t)dt = 0 . (4.7)
Wir taylorn zunachst die Lagrange-Funktion langs der gestortenBahn bis zur ersten Ordnung in δ~q,
L(~q + δ~q, ~q + δ~q, t) =L(~q, ~q, t) +
f∑j=1
(∂L∂q j
δq j +∂L∂q j
δq j
)
⇔ δS =
∫ t1
t0
f∑j=1
(∂L∂q j
δq j +∂L∂q j
δq j
)dt = 0 . (4.8)
Partielle Integration des zweiten Terms nach der Zeit gibt∫ t1
t0
(∂L∂q j
δq j
)dt =
∂L∂q j
δq j
∣∣∣∣∣∣t1t0
−
∫ t1
t0
(ddt∂L∂q j
)δq jdt . (4.9)
Der Oberflachenterm verschwindet, wenn die Endpunkte derBahn festgehalten werden, δq j(t0) = 0 = δq j(t1). Daher folgt
δS =
∫ t1
t0dt
f∑j=1
(∂L∂q j−
ddt∂L∂q j
)δq j = 0 . (4.10)
Fur beliebige δq j gibt uns das die bekannten Lagrange-Gleichungen
ddt∂L∂q j−∂L∂q j
= 0 . (4.11)
Da jeder der vorangegangenen Rechenschritte reversibel war, istdas Hamiltonsche Prinzip der stationaren Wirkung aquivalent zuden Lagrange-Gleichungen.
• Das Wirkungsprinzip zeigt auch, dass die Lagrange-Funktionnicht eindeutig ist: Wenn man die Lagrange-Funktion L durch
KAPITEL 4. EXTREMALPRINZIPIEN 31
einen Term erganzt, der die totale Zeitableitung einer beliebigenFunktion f (~q, ~q, t) der Koordinaten und der Zeit ist,
L→ L +d f (~q, ~q, t)
dt⇒ S → S + f (~q1, t1) − f (~q0, t0) . (4.12)
Die Wirkung andert sich dadurch um eine Konstante, die bei derVariation verschwindet. Die Bewegungsgleichungen bleiben da-durch unverandert. Das ist ein sehr einfaches Beispiel fur eine sogenannte Eichinvarianz, die in der Feldtheorie eine entscheidendwichtige Rolle spielt.
4.2 Hamilton-Funktion
In einem zweiten Schritt entwickeln wir eine weitere, zu den Lagrange-Gleichungen aquivalente Methode. Sie fuhrt uns auf die Hamilton-Funktion, die in der Quantenmechanik oder der Festkorperphysik einezentrale Rolle spielt.
4.2.1 Die kanonischen Gleichungen
• Die Lagrange-Funktion des freien Teilchens und ihre Ableitungsind
Lfrei =m2
(x2
1 + x22 + x2
3
)∂Lfrei
∂x j=mx j = p j . (4.13)
Weil die Lagrange-Funktion ohne Potentialterm die kinetischeEnergie beschreibt, ist es naheliegend die Ableitung ∂Lfrei/∂x j
wie schon in (3.26) mit dem zu x j gehorigen Impuls zu identi-fizieren.
• Analog wird anhand der verallgemeinerten Koordinaten ein ver-allgemeinerter Impuls definiert,
p j :=∂L∂q j
. (4.14)
Er heißt der zu q j kanonisch konjugierte Impuls. Er hat im Allge-meinen nicht die Dimension eines Impulses, aber q j p j behalt dieDimension einer Wirkung, also Energie × Zeit. Seine Zeitablei-tung kann durch die Lagrange-Gleichungen vereinfacht werden,
p j =ddt∂L∂q j
=∂L∂q j
. (4.15)

KAPITEL 4. EXTREMALPRINZIPIEN 32
Wenn die Transformation von q j auf p j umkehrbar ist, konnendie q j durch p j ersetzt werden. Die verallgemeinerten Koordina-ten ~q und ihre kanonisch konjugierten Impulse ~p spannen einen2 f -dimensionalen Raum auf, den sogenannten Phasenraum. In-dem sich das gesamte System zeitlich verandert, werden diese 2 fWerte einen Bereich P ⊂ R2 f des gesamten Phasenraums uber-streichen. Einer Kurve im Phasenraum entspricht eine Bahn imKonfigurationsraum B ⊂ R f . Damit stellt sich die Frage wie nundie Bewegungsgleichungen ausgedruckt in (~q, ~p) aussehen?
• Wir definieren zuerst ohne weitere Motivation die Hamilton-Funktion
H(~q, ~p, t) := ~q~p − L(~q, ~q, t) (4.16)
und ersetzen ~q durch ~p. Die totale Ableitung nach der Zeit ist
dH =
f∑j=1
∂H∂q j
dq j +
f∑j=1
∂H∂p j
dp j +∂H∂t
dt
=
f∑j=1
(−∂L∂q j
dq j +∂qi
∂p jpidp j + q jdp j −
∂L∂qi
∂qi
∂p jdp j
)−∂L∂t
dt
=
f∑j=1
(−∂L∂q j
dq j + pidqi + q jdp j −∂L∂qi
dqi
)−∂L∂t
dt
=
f∑j=1
(q jdp j −
∂L∂q j
dq j
)−∂L∂t
dt . (4.17)
Daraus konnen wir die drei partiellen Ableitungen der Hamilton-Funktion
∂H∂p j
= q j∂H∂q j
= −∂L∂q j
= −p j∂H∂t
= −∂L∂t
(4.18)
ablesen. Die ersten beiden Gleichungen heißen Hamiltonschenkanonischen Gleichungen. Sie sind wiederum aquivalent mit denLagrange-Gleichungen. Wir hatten schon bemerkt, dass der zu q j
konjugierte Impuls p j erhalten ist, wenn L nicht explizit von q j
abhangt. Solche Koordinaten heißen zyklisch.
• Zum Beispiel ist die Lagrange-Funktion des harmonischen Oszil-lators in einer Dimension
L(x, x) =m2
x2 −k2
x2 =m2
(x2 − ω2
0x2)
⇒∂L∂x
=mx = p . (4.19)
Er beschreibt eine Ellipse im zweidimensionalen Phasenraum,(xp
)=
(x
mx
)= A0
(cos(ω0t − δ0)
−mω0 sin(ω0t − δ0)
). (4.20)

KAPITEL 4. EXTREMALPRINZIPIEN 33
Wir erhalten die Hamilton-Funktion
H(x, p) = xp − L(x, x)
=pm
p −p2
2m+
m2ω2
0x2 =p2
2m+
m2ω2
0x2 (4.21)
und die Hamilton-Gleichungen
x =pm
und p = mx = −mω20x . (4.22)
Die erste Gleichung ist identisch mit der Definition des Impulses,und die zweite ist die Bewegungsgleichung.
4.2.2 Hamilton-Funktion und Energie
• Die totale zeitliche Anderung der Hamiltonfunktion ist
dHdt
=
f∑j=1
(∂H∂q j
q j +∂H∂p j
p j
)+∂H∂t
=
f∑j=1
(−p jq j + q j p j
)+∂H∂t
=∂H∂t
, (4.23)
Wenn also H nicht explizit von der Zeit abhangt, ist es eine Er-haltungsgroße.
Anhand eines Beispiels konnen wir diese Erhaltungsgroße er-raten: Fur einen Massenpunkt der Masse m, der im Feld einerPotentialkraft die potentielle Energie V(x1, x2, x3) hat, lautet dieLagrange-Funktion
L =m2
(x21 + x2
2 + x23) − V(x1, x2, x3)
⇒ p j =∂L∂x j
= mx j
⇒ H =
3∑j=1
p j x j − L =
3∑j=1
p2j
2m+ V = E . (4.24)
Die Hamiltonfunktion sollte die Gesamtenergie sein.
• Sei allgemein ein konservatives System von N Massenpunktengegeben. Es unterliege r holonom-skleronomen Zwangsbedin-gungen g j(~xi) = 0. Diese werden durch Einfuhrung von f =
3N − r verallgemeinerten Koordinaten ~q erfullt. Wegen der skle-ronomen Zwangsbedingungen kommt in der Relation zwischenden ~xi und ~q die Zeit nicht explizit vor. Fur die kinetische Energie
KAPITEL 4. EXTREMALPRINZIPIEN 34
gilt wir schon in (1.14)
~xi =
f∑j=1
∂~xi
∂q jq j , 1 ≤ i ≤ N
T =
N∑i=1
mi
2~x 2
i =
f∑j,k=1
N∑i=1
mi
2∂xi
∂q j
∂xi
∂qk
q jqk . (4.25)
Sie ist eine homogene Funktion zweiten Grades in q j. Weiter-hin hange V nicht explizit von q j ab, dann erhalten with aus derLagrange-Funktion L = T (~q, ~q) − V(~q) die kanonischen Impulse
p j =∂L∂q j
=∂T∂q j
(4.26)
und damit die Hamiltonfunktion
H =
f∑j=1
p jq j − L =
f∑j=1
q j∂T∂q j− T + V (4.27)
Wenn die kinetische Energie ausschliesslich quadratische Termein q hat, dann gilt offensichtlich
f∑j=1
q j∂T∂q j
= 2T ⇒ H = 2T − T + V = T + V = E . (4.28)
Wenn H nicht explizit von der Zeit abhangt, folgt die Erhaltungder Gesamtenergie, Das bedeutet dass wir im Hamilton-Zuganguber die Hamilton-Funktion physikalische Aussagen uber unserSystem machen konnen, selbst wenn wir in keinem der Zugangedie Bewegungsgleichungen losen konnen oder wollen.
4.2.3 Nicht-konservative Krafte
Es gibt zahlreiche weitere Extremalprinzipien; als Beispiel verallgemei-nern wir nun das Hamiltonsche Prinzip auf nichtkonservative Systeme.Seien N Massenpunkte gegeben, die r < 3N holonomen Zwangsbedin-gungen unterliegen. Fur solche Systeme verschwindet die Variation
δ
∫ t1
t0T (~q, ~q, t)dt +
∫ t1
t0δAedt = 0 , (4.29)
Wobei wie vorher angenommen wird, dass die Bahnen im Konfigurati-onsraum dieselben Anfangs- und Endpunkte durchlaufen,
δ~q(t0) = ~0 = δ~q(t1) . (4.30)
KAPITEL 4. EXTREMALPRINZIPIEN 35
Unter Verwendung der verallgemeinerten Kraft in (3.1) lautet die Varia-tion (4.29) ∫ t1
t0dt
f∑j=1
[∂T∂q j
δq j +∂T∂q j
δq j + Q jδq j
]= 0 , (4.31)
woraus nach partieller Integration∫ t1
t0dt
f∑j=1
[∂T∂q j
+ Q j −ddt∂T∂q j
]δq j +
∂T∂q j
δq j
∣∣∣∣∣∣t1t0
(4.32)
folgt. Die Randterme in (4.32) verschwinden wegen (4.30), und da dieδq j beliebig sind, folgt
ddt∂T∂q j−∂T∂q j− Q j = 0 . (4.33)
Das sind die Lagrange-Gleichungen 2. Art fur den Fall nichtkonserva-tiver Krafte. Die Umkehrung erfolgt vollig analog, wodurch gezeigt ist,dass das Extremalprinzip (4.29) zu den Lagrange-Gleichungen 2. Art(4.33) aquivalent ist, auch im Falle niche konservativer Krafte.
4.2.4 Hamilton-Gleichungen und Wirkungsprinzip
• Bislang haben wir gezeigt, dass das Prinzip der stationaren Wir-kung auivalent zu den Lagrange-Gleichungen ist, und dass dieHamilton-Gleichungen aquivalent zu den Lagrange-Gleichungensind. Zur Illustration zeigen wir jetzt die verbleibende direkte Ver-knupfung zwischen der Wirkung und den Hamilton-Gleichungen.
• Entsprechend der Definition der Hamiltonfunktion lasst sich dieWirkung auch in die Form
S =
∫ t1
t0L(~q, ~q, t)dt =
∫ t1
t0
[~q~p − H(~q, ~p, t)
]dt (4.34)
bringen. Die Variation der Wirkung fuhrt dann auf
0 = δS =
f∑j=1
∫ t1
t0
[p jδq j + q jδp j −
∂H∂q j
δq j −∂H∂p j
δp j
]dt .
(4.35)Der erste Term in eckigen Klammern kann partiell integriert wer-den,
f∑j=1
∫ t1
t0p jδq jdt =
f∑j=1
p jδq j
∣∣∣∣∣∣∣t1
t0
−
f∑j=1
∫ t1
t0p jδq j = −
f∑j=1
∫ t1
t0p jδq j.
(4.36)
KAPITEL 4. EXTREMALPRINZIPIEN 36
Damit erhalt man
0 = δS =
f∑j=1
∫ t1
t0
[(q j −
∂H∂p j
)δp j −
(p j +
∂H∂q j
)δq j
]dt . (4.37)
Es folgen die Hamilton-Gleichungen, weil die Variationen imPhasenraum δq j und δp j beliebig sind.
Kapitel 5
Symmetrien undErhaltungssatze
Bei der Losung von Bewegungsgleichungen in der Newtonschen Me-chanik (Energie) oder in der Struktur der Lagrange-Gleichungen (Im-puls) sind wir fast beilaufig auf Erhaltungsgroßen gekommen. Wir ha-ben auch gesehen, dass sich manche Probleme wie der Kreisel sehr ein-fach mit Hilfe von Erhaltungsgroßen losen lassen. Es wird daher Zeit,dass wir uns diesem Problem systematisch nahern. Dies wird es uns er-lauben, uber die Analyse der Lagrange-Funktion Symmetrien unseresSystems und Erhaltungsgroßen zu verknupfen.
5.1 Galilei-Invarianz
• Inertialsysteme haben wir al Idealfall eingefuhrt, in dem einfachePhysik-Gesetze gelten. Die naheliegende Frage ist, ob ein Beob-achter in einem abgeschlossenen Kasten feststellen kann, ob seinReferenzsystem ein Inertialsystem ist. Offensichtlich wird er/siezunachst uberprufen, welche Form die Bewegungsgleichungen inseinem System annehmen.
Man betrachte also N Massenpunkte der Massen mi an den Or-ten ~xi, zwischen denen Potentialkrafte wirken, d.h. die potenti-elle Energie des Massenpunkts i relativ zum Massenpunkt j seiV ji(|~xi − ~x j|), und damit ist die Kraft des j-ten auf den i-ten Mas-senpunkt durch ~F ji(~xi) = −~∇iV ji(|~xi − ~x j|) gegeben. Das Systemlasst sich also durch eine Lagrange-Funktion beschreiben,
ddt∂L(~x, ~x, t)∂xi, j
−∂L(~x, ~x, t)∂xi, j
= 0 , (5.1)
mit 1 ≤ i ≤ N and j = 1, 2, 3.
37

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 38
• Das Beobachtungssystem sei wie immer (t, ~x ), ein sicherlich exi-stierendes Inertialsystem (t′, ~x ′). Allgemein gilt dann
t′ = t + τ und ~x ′ = ~a(t) + R(t) · ~x(t) . (5.2)
Falls der bewegte Beobacher keine Bewebung feststellen kannmussen R(t) und ~a(t) ≡ ~v konstant sein, denn sonst traten Schein-krafte zum Beispiel bei einem Foucaultschen Pendel auf. Die all-gemeine Form der Transformationen, die im Beobachtersystemnicht nachweisbar sind, weil sie die Bewegungsgleichungen in-variant lassen, ist also
t′ = t + τ ~x ′ = ~a0 +~vt + R · ~x ~a0 = ~v = R = konst. (5.3)
mit den zehn freien Parameter τ,~a0,~v und R.
• Damit konnen wir die Lagrange-Funktion vom Inertialsystem insBeobachtersystem umrechnen,
~x ′2 =(~v(t) + R~x(t)
)2= ~v(t)2 + 2~vT (t)R~x(t) + ~x(t)2
L =12
N∑i=1
mi~x ′2i −∑j,i
V ji(|~x′i − ~x′j|)
=
12
N∑i=1
mi~x 2i −
∑j,i
V ji(|~xi − ~x j|)
+~vTN∑
i=1
miR~xi +~v 2
2
N∑i=1
mi .
(5.4)
In der ersten Zeile haben wir benutzt, dass die Rotation R dieLange des Vektors ~x erhalt.
• Nach (4.12) kann man zur Lagrange-Funktion die totale Zeita-bleitung einer beliebigen Funktion f (~x, t) addieren, ohne die Phy-sik zu andern. Dies ist die einzige Willkur, die die Lagrange-Funktion erlaubt. Falls es also eine Funktion f (x, t) gibt, derentotale zeitliche Ableitung die zusatzlichen Terme in (5.4) darstel-len kann, dann sind die beobachteten Bewegungsgleichungen mitdenen im Inertialsystem identisch,
d f (~x, t)dt
=∂ f (~x, t)∂t
+
N∑i=1
~x Ti ·
~∇i f (~x, t)
= ~vTN∑
i=1
miR~xi +~v 2
2
N∑i=1
mi
=~v 2
2
N∑i=1
mi +
N∑i=1
~x Ti miRT~v . (5.5)
Nach der ~x-Abhangigkeit ist das (genau dann) der Fall, wenn
∂ f (~x, t)∂t
=~v 2
2
N∑i=1
mi und ~∇i f (~x, t) = miRT~v . (5.6)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 39
~a(t) = ~a0 + ~vt Damit hat (5.6) eine einfache Stammfunktion,namlich die Translation
f (~x, t) =~v 2t2
N∑i=1
mi +~vTN∑
i=1
miR~xi , (5.7)
und wir konnen die Transformationen in (5.3) in der Tat in einephysikalisch nicht relevante Umdefinition der Lagrange-Funktionabsorbieren.
• Diese Methode ist charakteristisch fur die moderne Physik: Wirhaben aus der Eichinvarianz der klassischen Mechanik, ausge-druckt durch (4.12), ihre Symmetrie gegenuber der so definiertenzehnparametrigen Galilei-Gruppe gefolgert. Mit ihren zehn Para-metern oder sogenannten Generatoren hat sie den physikalischenGehalt:
1. t′ = t + τ und ~x ′ = ~x entspricht einer Nullpunktsverschie-bung der Zeit. Die Invarianz bedeutet Homogenitat der Zeit.
2. t′ = t und ~x ′ = ~x + ~a0 entsprechen der Wahl des Koor-dinatenursprungs. Die Invarianz bedeutet Homogenitat desRaums.
3. t′ = t und ~x ′ = R·~x ist eine Drehung der Koordinatenachsen.Die Invarianz bedeutet Isotropie des Raums.
4. t′ = t und ~x ′ = ~x + ~vt ist eine geradlinig-gleichformigerBewegung. Eine beschleunigte Bewegung ware feststellbar.
5.2 Noether-Theoreme
Nachdem wir Symmetrien der Lagrange-Funktion fur die Galilei-Transformationen verstanden haben, gehen wir einen Schritt weiter undverknupfen sie mit Erhaltungssatzen, von denen wir ja wissen wie siemit den Lagrange-Gleichungen zusammenhangen.
• Wir beginnen mit infinitesimale Koordinaten-Transformationender Art (5.3), die die Lagrange-Funktion nur um eine totale zeit-liche Ableitung andern,
t →t′ = t + δt~x(t)→~x ′(t′) = ~x(t) + δ~x(t)
L(~x, ~x, t)→L(~x′, ~x′, t′) = L(~x, ~x, t) +d f (~x, t)
dt. (5.8)
KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 40
Durch die Koordinatentransformation andert sich das Wirkungs-integral zu
S ′ =
∫ t′1
t′0
dt′L(~x ′, ~x ′, t′)
= S +
∫ t1
t0dt
[∂L∂x j
(~x ′ − ~x) j +∂L∂x j
(~x ′ − ~x) j
]+ δt
[L(~x(t1), ~x(t1), t1
)− L
(~x(t0), ~x(t0), t0
)], (5.9)
mit j = 1, 2, 3. Partielle Integration und die Euler-Lagrange-Gleichungen geben wie schon einmal∫ t1
t0dt∂L∂x j
(~x ′ − ~x) j =∂L∂x j
(~x ′ − ~x) j
∣∣∣∣∣∣t1t0
−
∫ t1
t0dt
ddt∂L∂x j
(~x ′ − ~x) j
=∂L∂x j
(~x ′ − ~x) j
∣∣∣∣∣∣t1t0
−
∫ t1
t0
∂L∂x j
(~x ′ − ~x) jdt
⇒ S ′ =S +
[∂L∂x j
(~x ′(t) − ~x(t)) j + L(~x, ~x, t)δt]t1
t0
.
(5.10)
• Schließlich gilt entlang der Trajektorie eines Massenpunktes
~x ′(t′) =~x ′(t + δt) = ~x(t) + δ~x
⇔ ~x ′(t) =~x(t − δt) + δ~x = ~x(t) − ~x(t)δt + δ~x , (5.11)
womit sich der Term in eckigen Klammern in (5.10) zu
∂L∂x j
(~x ′ − ~x) j + L(~x, ~x, t)δt =∂L∂x j
δx j −
(∂L∂x j
x j − L)δt
=~pδ~x −(~p~x − L
)δt
=~pδ~x − Hδt (5.12)
umformen lasst, wobei wir den konjugierten Impuls p = ∂L/∂xund der Hamilton-Funktion H = px − L verwenden. Fur die Wir-kung heißt das unter der Annahme, dass wir die Physik nichtandern
S ′ = S +
[~pδ~x − Hδt
]t1
t0
=S +
[δ f
]t1
t0
⇔
[~pδ~x − Hδt − δ f
]t1
t0
=0 (5.13)
Nach (5.6) hat die infinitesimale Verschiebung der Lagrange-Funktion fur N Massenpunkte die Form
δ f =~v 2
2
N∑i=1
mi
δt +~vTN∑
i=1
miR δ~xi . (5.14)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 41
Weil t0 und t1 beliebige Zeitpunkte waren muss alsoN∑
i=1
~piδ~xi −~vT
N∑i=1
miR δ~xi − Hδt −~v 2
2
N∑i=1
mi
δt (5.15)
erhalten sein.
Emmy Noether (1882-1935)
• Zu welchen Erhaltungsgroßen fuhrt daher die Symmetrie unterder Galilei-Gruppe?
1. Zeittranslationen t′ = t + δt mit δ~xi = 0 und~v = 0 fuhren aufH =konst. Die Homogenitat der Zeit fuhrt also zur Energie-erhaltung.
2. Ortstranslationen ~x ′ = ~x + δ~x mit δt = 0 und ~v = 0 bedeuten~pi = konst, die Homogenitat des Raums fuhrt zur Impulser-haltung.
3. Rotationen δ~x = δ~ϕ × ~x um den infinitesimalen Drehwinkelδ~ϕ mit δt = 0 und ~v = 0 geben uns
N∑i=1
~pi · (δ~ϕ × ~xi) = δ~ϕ ·
N∑i=1
(~xi × ~pi) = konst. (5.16)
Da δ~ϕ konstant ist, folgt aus der Isotropie des Raums dieDrehimpulserhaltung.
4. Seien schließlich δt = 0 und δ~x = ~v t ohne Rotation. Dannerhalten wir wir fuer kleine ~v aus (5.7) die Erhaltungsgroße
N∑i=1
~piδ~xi −~vT
N∑i=1
miR ~xi =
N∑i=1
~pi~vt −~vTN∑
i=1
mi~xi
=~vT
t N∑i=1
~pi −
N∑i=1
mi~xi
,= − M~vT
(~X − t
∑Ni=1 ~pi
M
), (5.17)
also die geradlinig-gleichformige Bewegung des Schwer-punkts.
Die zehn Parameter der Galilei-Gruppe gehoren also zu zehnErhaltungsgroßen: Eine ist die Energie, drei garantieren dieTragheitsbewegung des Schwerpunkts, und jeweils drei die Er-haltung des Impulses und des Drehimpulses.
5.3 Lorentz-Invarianz
Wir konnen das Argument, dass physikalische Gesetze in allen Intertial-systemen gelten sollen noch weiterfuhren und damit einen ersten Blickauf die speziellen Relativitatstheorie werfen.
KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 42
• Das zugrundeliegendes Axiom der spezielle Relativitatstheorie istdas spezielle Relativitatsprinzip, bestehend aus 3 Aussagen:
A1 Gegeben ein Inertialsystem Σ, dann ist jedes weitere Sy-stem Σ′ genau dann ein Inertialsystem, wenn es durch eineoder mehrere der Galileo-Transformationen aus Σ hervor-geht. Die Transformationen hangen von 10 kontinuierlichenParametern ab:
Λ : Σ→ Σ′ mit Λ(τ,~a0,R,~v) (5.18)
Fur unser Argument betrachten wir vorwiegend die letzteTransformation Λ(~v).
A2 Mathematisch sollen die Transformationen Λ eine Gruppebilden. Es gibt also eine Multiplikation
ΣΛ(~v)−→ Σ′
Λ(~v′)−→ Σ′′ mit Σ
Λ(~v′)·Λ(~v)−→ Σ′′ (5.19)
und ein inverses Element
Λ(−~v) = Λ−1(~v) (5.20)
A3 Physikalische Gesetze gelten in jedem Inertialsystem, oderanders gesagt alle Gleichungen sind forminvariant unter Λ.
Wir werden zeigen dass die Form von Λ durch A1 and A2 eindeu-tig bis auf eine Konstante bestimmt wird. Empirische Informati-on ist dann allein zur Bestimmung der Konstante erforderlich, imEinklang mit A3.
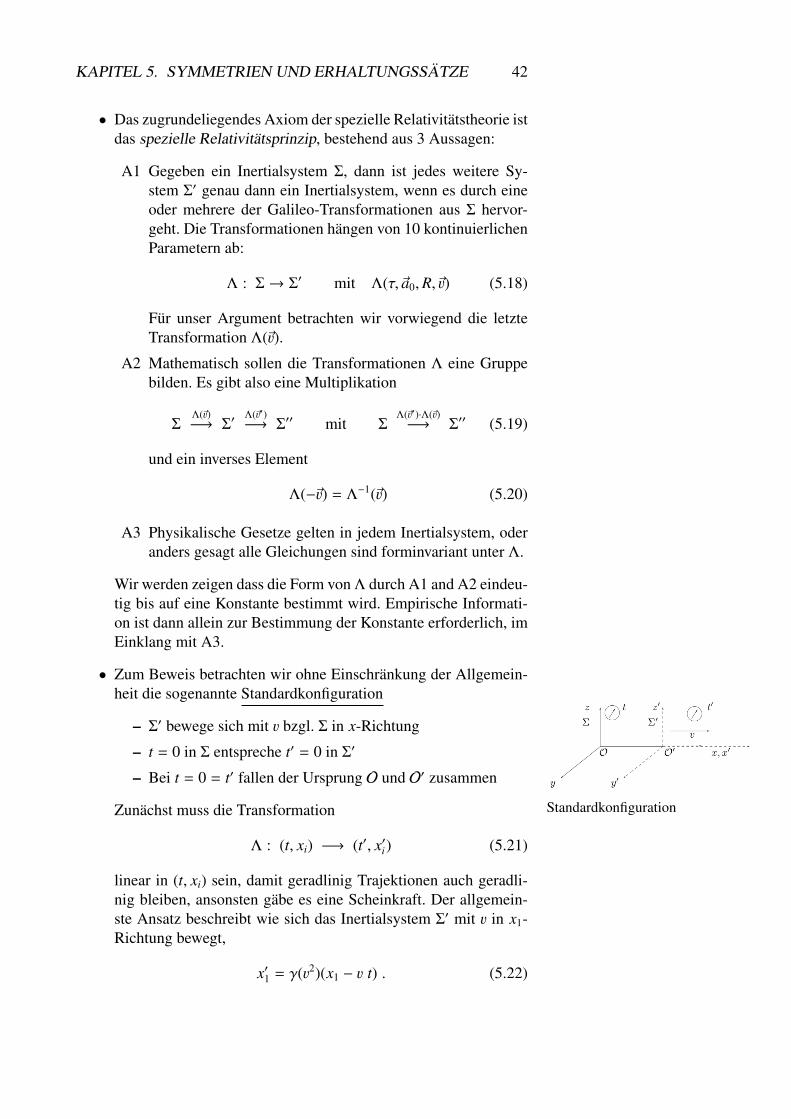
• Zum Beweis betrachten wir ohne Einschrankung der Allgemein-heit die sogenannte Standardkonfiguration
– Σ′ bewege sich mit v bzgl. Σ in x-Richtung
– t = 0 in Σ entspreche t′ = 0 in Σ′
– Bei t = 0 = t′ fallen der Ursprung O und O′ zusammen
StandardkonfigurationZunachst muss die Transformation
Λ : (t, xi) −→ (t′, x′i) (5.21)
linear in (t, xi) sein, damit geradlinig Trajektionen auch geradli-nig bleiben, ansonsten gabe es eine Scheinkraft. Der allgemein-ste Ansatz beschreibt wie sich das Inertialsystem Σ′ mit v in x1-Richtung bewegt,
x′1 = γ(v2)(x1 − v t) . (5.22)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 43
In die beiden anderen Richtungen erzwingt die Isotropie und Ho-mogenitat erzwingt gleiche Vorfaktoren,
x′2 = β(v2)x2 und x′3 = β(v2)x3 (5.23)
Fur die Zeit-Transformation haben wir wieder den allgemeinenlinearen Ansatz
t′ = α(v2)[t − η(v2)v x1
](5.24)
Die drei Parameter α, β, γ sind dimensionslos, die einzige Einheitist
[η] =1
[Geschwindigkeit]2 (5.25)
Weiterhin hangen α, β, γ, η von der Geschwindigkeit zwischenden Inertialsystemen v ab, wegen der Isotropie aber nur von v2 undnicht von der Vektor-Richtung oder in unserem Fall vom Vorzei-chen. Das gewahlte Vorzeichen im Term ηv ist Konvention. Mankann diese lineare Transformation zwischen zwei Intertialsyste-men auch als Matrix schreiben,
t′
x′1x′2x′3
=
α −αηv 0 0−vγ γ 0 0
0 0 β 00 0 0 β
tx1
x2
x3
. (5.26)
Der wichtige Schritt gegenuber der klassischen Mechanik ist,dass wir die Zeit als nullte Koordinate betrachten und daher ineiner (3+1)-dimensionalen Raum-Zeit arbeiten.
• Wir bestimmen jetzt diese Parameter im Einklang mit derGruppen-Bedingung A2. Unserer physikalischen Interpretationsagt dass das inverse Element Λ(−v) = Λ−1(v) ist, also die inverseTransformation
x1 = γ(v2)(x′1 + vt′) x2 = β(v2)x′2 x3 = β(v2)x′3t = α(v2)
[t′ + η(v2)v x′1
](5.27)
Kombiniert man die Transformation und ihre Inverse fur x2, danngilt fur β
x2 = β(v2)x′2 = β(v2)β(v2)x2 ⇒ β2 = 1 ⇒ β = ±1
β(v2 = 0) = 1 ⇒ β = 1(5.28)
Analog erhalten wir in x1-Richtung
x1 = γ(x′1 + vt′)= γ
[γ(x1 − vt) + αv(t − ηvx1)
]= γ(γ − αηv2) x1 + γ(α − γ) vt , (5.29)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 44
und damit aus den beiden Koeffizienten
α = γ und γ2 =1
1 − ηv2 (5.30)
Dieselben drei Bedingungen garantieren ebenfalls die korrekte in-verse Transformation auf x3 und t, und unsere Matrix-Darstellungwird
t′
x′1x′2x′3
=
γ −γηv 0 0−vγ γ 0 0
0 0 1 00 0 0 1
tx1
x2
x3
. (5.31)
• Jetzt fehlt uns noch eine Bedingung fur die dimensionsbehafteteGroße η. Die Verknupfung der beiden Transformationen
Λ(v) : t′ = γ(t − ηvx1) Λ(v′) : t′′ = γ′(t′ − η′v′x′1)x′1 = γ(x1 − vt) x′′1 = γ′(x′1 − v
′t) (5.32)
zu einer Verschiebung um v′′ ergibt
t′′ = γγ′[t − ηvx1 − v
′η′(x1 − vt)]=γ′′(t − η′′v′′x1)
x′′1 = γγ′[x1 − vt − v′(t − vηx1)
]=γ′′(x1 − v
′′t) (5.33)
Der Koeffizientenvergleich fur t in der ersten oder fur x1 in derzweiten Gleichung ergibt sofort
γ′′ = γγ′(1 + η v v′) ⇔γγ′
γ′′=
11 + ηvv′
(5.34)
Zwei weitere Bedingungen erhalten wir fur die verbleibenden Ko-effizienten,
γ′′v′′ = γγ′[η
η′′v +
η′
η′′v′]
γ′′v′′ = γγ′[v′ + v
]⇒
η′
η′′= 1 =
η
η(5.35)
Das heisst unabhangig von v muss η(v2) = η(v′2) = η(v′′2) gelten.Da η aber eine Einheit hat heisst das
η =1c2 (5.36)
mit einer dimensionsbehaftete Konstanten oder konstanten uni-versellen Geschwindigkeit c.
• Um die Physik der Transformationen besser zu verstehen schrei-ben wir (5.34) dann weiter als
v′′ = γγ′v′ + v
γ′′=
v + v′
1 + ηvv′=
v + v′
1 +vv′
c2
(5.37)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 45
Die Bedingung in (5.30) wird
γ2 =1
1 −v2
c2
⇒ γ =1√
1 −v2
c2
(5.38)
Hier ist das Vorzeichen durch den Grenzfall γ(v = 0) = 1 gege-ben. Fur die Interpretation von c folgt nun dass
1. c die Dimension einer Geschwindigkeit hat, es sich also umeine universelle, konstante Geschwindigkeit handelt;
2. wenn alle Geschwindigkeiten klein sind, dann gilt
v′′ =v + v′
1 +vv′
c2
≈ v + v′ , (5.39)
genau wie wir von der klassischen Physik erwarten.
3. ein Massenpunkt mit der Geschwindigkeit v′ → c in Σ′ ineinem um v verschobenen System Σ die Geschwindigkeit
v′′ →c + v
1 +vcc2
= c2 c + v
c2 + vc= c (5.40)
hat, c also in jedem System Σ die maximal mogliche Grenz-geschwindigkeit ist;
4. der Wert von c nicht festgelegt ist. An dieser Stelle brau-chen wir Experimente, die einen endlichen reellen Wert0 < c < ∞ bestatigen. Wir finden dann in der Tat die Licht-geschwindigkeit im Vakuum mit dem numerischen Wertc ≈ 3 ·108 m/s. Die Tatsache dass sich das Licht in jedem In-ertialsystem gleich schnell ausbreitet entspricht dem AxiomA3.
5. die Verbindung von c zur Geschwindigkeit von Licht oderelektromagnetischen Wellen im Vakuum werden Sie in derElektrodynamik herleiten.
• Wenn wir nun noch anders als das vorige β die Geschwindigkeitals
β :=v
c< 1 (5.41)
definieren, dann finden in unserer Matrix-Formct′
x′1x′2x′3
=
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
ctx1
x2
x3
. (5.42)

KAPITEL 5. SYMMETRIEN UND ERHALTUNGSSATZE 46
Die symmetrische Form der Matrix bestatigt dass ct nichts alseine weitere Koordinate analog zu x1, x2 und x3 ist, wenn wirannehmen dass Koordinatentransformationen eine Gruppe bilden.Die entsprechende Transformation in der Raum-Zeit nennen wirBoost. In der Relativitatstheorie werden wir sehen, wie man ausdieser Eigenschaft eine Metrik fur die Raum-Zeit ableiten kann.
Kapitel 6
Phasenraum
In den vergangenen Kapiteln haben wir in verschiedenen Zugangen undim Detail die Bahnen von Korpern durch ihre Bewegungsgleichungenbestimmt. Dabei war der Konfigurationsraum durch die Koordinaten qdefiniert, der Phasenraum durch die Kombination von Orts- und Impuls-koordinaten (q, p). Die Bahnen von Korpern waren als Funktionen derZeit q(t) gegeben, woraus auch immer die Impulse p(t) als Funktion derZeit folgen. Diese Zeitabhangigkeit der Bahnen im Phasenraum (q, p, t)betrachten wir in diesem Kapitel.
6.1 Kanonische Transformationen
6.1.1 Bahnen im erweiterten Phasenraum
• Wir erinnern und kurz an unser mechanisches System mit f Frei-heitsgraden und den f verallgemeinerten Koordinaten q j. DieLagrange-Funktion ist L(~q, ~q, t), mit
ddt∂L∂q j−∂L∂q j
= 0 . (6.1)
Die zu den q j kanonisch konjugierten Impulse sind
p j =∂L∂q j
. (6.2)
Wenn sich diese Gleichungen nach q j auflosen lassen, konnen dieq j durch die p j dargestellt werden. In diesem Fall kann man dieHamiltonfunktion
H(~q, ~p, t) = p jq j − L(~q, ~q, t) (6.3)
mit q j = q j(~q, ~p, t) explizit ausschreiben. Die Bewegungsglei-chungen sind dann
q j =∂H∂p j
und p j = −∂H∂q j
. (6.4)
47
KAPITEL 6. PHASENRAUM 48
• Das in (5.13) benutzte Differential der Wirkung kann man eben-falls mit Hilfe der Hamilton-Funktion schreiben,
dS := p jdq j − Hdt =(p jq j − H
)dt . (6.5)
Das System werde zu zwei Zeiten t1, t2 > t1 bei den Lagekoordi-naten ~q1,2 mit den Impulsen ~p1,2 untersucht, d.h. an zwei PunktenP1,2 im erweiterten Phasenraum (q, p, t). Wir behaupten, dass diewirkliche Bewegung des Systems so verlauft, dass
δ
∫ P2
P1
dS = δ
∫ P2
P1
(p jq j − H
)dt = 0 (6.6)
gilt. Das ist das Hamiltonsche Prinzip der stationren Wirkung aufBahnen im Phasenraum.
• Zum Beweis geben wir die wirkliche Bahn vor, q j = q j(t),p j = p j(t). Dazu fuhren wir leicht gestorte Vergleichsbahnen~q′ = ~q(t)+δ~q(t) mit ~p′ = ~p(t)+δ~p(t) ein, ohne dabei die Anfangs-und Endpunkte zu verandern, δ~q(t1) = ~0 = δ~q(t2). Anderungender Anfangs- und Endimpulse, δ~p(t1) und δ~p(t2), sind zugelassen.Die Variation des Wirkungs-Differentials ist dann
0 =
∫ t2
t1
[(p j + δp j)(q j + δq j) − H(~q + δ~q, ~p + δ~p, t)
]dt
−
∫ t2
t1
[p jq j − H(~q, ~p, t)
]dt
=
∫ t2
t1
[(p j δq j + q j δp j
)−
(∂H∂q j
δq j +∂H∂p j
δp j
)]dt
=
∫ t2
t1
[(p j
dδq j
dt+ q jδp j
)−
(∂H∂q j
δq j +∂H∂p j
δp j
)]dt
=
∫ t2
t1
[(− p j −
∂H∂q j
)δq j +
(q j −
∂H∂p j
)δp j
]dt , (6.7)
wo wir im letzten Schritt wieder partiell integriert haben und dieOberflachenterme verschwinden. Da δq j und δp j beliebig waren,folgen die Hamiltonschen kanonischen Gleichungen. Die Um-kehrung ist in jedem Schritt moglich, also beschreibt (6.6) diewahre Bahn des Systems im erweiterten Phasenraum.
6.1.2 Kanonische Transformationen
• Aus der Verknupfung von Wirkung und Lagrange-Formalismushatten wir die Freiheit abgeleitet, zur Lagrange-Funktion einentotale Zeitableitung zu addieren. Welche Transformationen las-sen nun die Hamiltonschen Gleichungen invariant? Zunachstsind der Lagrange- und Hamiltonformalismus vollig unabhangig

KAPITEL 6. PHASENRAUM 49
von der speziellen Wahl der verallgemeinerten Koordinaten, alsokonnen wir beliebige neue verallgemeinerte Koordinaten q′j(~q, t)einfuhren. Wenn die Funktionaldeterminante∣∣∣∣∣∣∂(q′1, . . . , q
′f )
∂(q1, . . . , q f )
∣∣∣∣∣∣ (6.8)
nicht verschwindet, konnen wir eindeutig auf die q j(~q′, t) zuruck-transformieren. Wegen
p′j =∂L∂q′j
=∂qk
∂q′j
∂L∂qk
= a jk pk (6.9)
induziert der Ubergang zu neuen verallgemeinerten Koordinatenq′j eine lineare Transformation der dazu konjugierten Impulse.Die Lagrange-Gleichungen bleiben ebenso unverandert wie dieHamiltonschen Gleichungen.
• Wir erinnern uns an die Herleitung von (4.12). Dort hatten wirausgenutzt dass eine Transformation, die die Endpunkte der Bahnim erweiterten Phasenraum nicht variiert, das Variationsprinzipnicht verandert, also
δ
∫dS = δ
∫dS ′ fur δp j(t1) = 0 = δp j(t2) . (6.10)
Die Idee war diese Transformation durch eine Funktion Φ so zubeschreiben, dass∫
dS =
∫dS ′ +
∫dΦ =
∫dS ′ + (Φ2 − Φ1) , (6.11)
oder aquivalent dass sich die Differentiale dS aus (6.5) vor undnach einer Transformation
q′j(~q, ~p, t) und p′j(~p, ~q, t) (6.12)
nur um das vollstandige Differential von Φ unterscheiden,
dS = p jdq j − Hdt = p′jdq′j − H′dt + dΦ = dS ′ + dΦ . (6.13)
Wenn das so ist, bleiben die Hamiltonschen Gleichungen erhaltenund die Transformation des erweiterten Phasenraums heißt kano-nisch. Fur eine eventuelle Anwendung stellt sich nun die Frage,wie man eine solche Funktion Φ konstruiert.
6.1.3 Hamilton-Jacobi-Gleichung
Carl Gustav Jakob Jacobi• Wir nehmen zunachst an, dass Φ neben den verallgemeinerten
Koordinaten q j auch von weiteren f Parametern q′j und von der

KAPITEL 6. PHASENRAUM 50
Zeit t abhangt. Wenn wir eine geeigneten Wahl von Φ(~q, ~q′, t) in-direkt durch
p j =∂Φ
∂q jund p′j = −
∂Φ
∂q′j(6.14)
oder~p = ~∇qΦ und ~p′ = −~∇q′Φ (6.15)
definieren, dann konnen wir zeigen, dass die Transformation ka-nonisch ist. Die einzige Bedingung ist dass
det ∂2Φ
∂q j∂q′j
, 0 (6.16)
sei, d.h. die Determinante der Krummungsmatrix von Φ mogenicht verschwinden.
• Fur den Beweis betrachten wir das totale Differential von Φ
dΦ =∂Φ
∂tdt +
∂Φ
∂q jdq j +
∂Φ
∂q′jdq′j
=∂Φ
∂tdt + p jdq j − p′jdq′j
=∂Φ
∂tdt + dS + Hdt − p′jdq′j . (6.17)
Wir konnen dies analog zu (6.13) umschreiben als
dS =p′jdq′j −(H +
∂Φ
∂t
)dt + dΦ
=p′jdq′j − H′dt + dΦ ⇔ H′ = H +∂Φ
∂t. (6.18)
Die Transformation (6.14) mit der entsprechenden Definition vonH′ ist also in der Tat kanonisch. Die Funktion Φ heißt in diesemFall erzeugende Funktion der Transformation.
• Die neue Hamiltonfunktion H′ verschwindet offenbar fur eine ge-eignete Zeitanhangigkeit von Φ, beschrieben durch die Hamilton-Jacobi-Gleichung
H(~q, ~∇qΦ, t
)+∂Φ(~q, ~q′, t)
∂t= 0 . (6.19)
Wenn immer H′ ≡ 0 gilt, dann sind nach den Hamilton-Gleichungen auch
q′j = 0 = p′j . (6.20)
Man nennt dies eine ”Transformation auf Ruhe“. Diese abstrakteHerleitung verlangt offensichtlich nach Beispielen.

KAPITEL 6. PHASENRAUM 51
6.1.4 Harmonischer Oszillator
• Die Lagrange-Funktion des harmonischen Oszillator ist zum Bei-spiel nach (4.19)
L(q, q) =m2
(q2 − ω2q2
), (6.21)
Der kanonisch konjugierte Impuls ist p = mq, und damit lautetdie Hamilton-Funktion
H(q, p) =p2
2m+
mω2
2q2 . (6.22)
• Wir betrachten nun die erzeugende Funktion
Φ(q, q′) =m2ωq2 cot q′ . (6.23)
Sie ist nicht von der Zeit abhangig, wir werden also keine Trans-formation auf Ruhe konstruieren, sondern ein anderes geeignetesKoordinatensystem. Die Impulse ergeben sich aus (6.14) zu
p =∂Φ
∂q= mωq cot q′ (6.24)
p′ = −∂Φ
∂q′=
m2ωq2 1
sin2 q′⇔ q =
√2p′
mωsin q′
p =√
2p′mω cos q′,
wobei (cot x)′ = − sin−2 x verwendet wurde. Da Φ(q, q′) nicht ex-plizit von der Zeit abhangt, ist H′ = H.
• Wenn man q und p in der Hamilton-Funktion ersetzt, folgt
H′ = H =1
2m2p′mω cos2 q′ +
mω2
22p′
mωsin2 q′ = p′ω . (6.25)
Da H′ nicht von q′ abhangt, ist q′ offenbar zyklisch und
p′(t) = −∂H′
∂q′= 0 ⇒ p′(t) = konst. =: p′0 . (6.26)
Außerdem folgt nach der zweiten Hamilton-Gleichung
q′(t) =∂H′
∂p′= ω ⇒ q′(t) = ωt + q′0 . (6.27)
Damit ist in den gestrichenen Koordinaten das System nicht mehroszillierend, sondern eine lineare Bewegung mit konstantem Im-puls und Geschwindigkeit.
• Setzt man dies wieder in q aus (6.24) ein, folgt im originalen,ungestrichenen System
q(t) =
√2p′
mωsin(ωt + q′0) (6.28)
Unsere beiden neuen Koordinaten beschreiben die Freiheitsgradedes harmonischen Oszillators, q′ ist das zeitabhangige Argumentder Schwingung und p′ ist die (konstante) Amplitude.

KAPITEL 6. PHASENRAUM 52
6.1.5 Bewegung des freien Massenpunkts
• Als weiteres Beispiel betrachten wir die kraftefreie Bewegung ei-nes Massenpunkts m mit kartesischen Koordinaten q j = x j. DieLagrange- und die Hamilton-Funktion sind
L =m2~q 2 und H =
12m
~p 2 . (6.29)
In diesem Fall wollen wir das System auf Ruhe transformieren.Die Hamilton-Jacobi-Gleichung (6.19) mit der Ersetzung p →∂Φ/∂q lautet
12m
( ∂Φ
∂q1
)2
+
(∂Φ
∂q2
)2
+
(∂Φ
∂q3
)2 +∂Φ
∂t= 0 . (6.30)
Zu ihrer Losung verwenden wir den Ansatz
Φ(~q, ~q′, t) = q′1q1 + q′2q2 + q′3q3 − Et = ~q′ · ~q − Et (6.31)
mit einer weiteren Konstanten E. Offenbar ist damit die Voraus-setzung (6.16) erfullt, denn die Krummungsmatrix von Φ ist dieEinheitsmatrix,
∂2Φ
∂q j∂q′j=∂q′j∂q′j
= δi j . (6.32)
• Die Hamilton-Jacobi-Gleichung verlangt dann
12m
[(q′1)2 + (q′2)2 + (q′3)2
]− E = 0 ⇒ E =
~q′2
2m(6.33)
⇒ Φ =~q′ · ~q −~q′2
2mt
Fur die konjugierten Impulse erhalten wir nach (6.14)
p j =∂Φ
∂q j= q′j
p′j = −∂Φ
∂q′j= −q j +
p j
mt . (6.34)
Aus den Bedingungen q′j = 0 = p′j folgt dass p j erhalten ist, E istoffenbar die Energie, und
q j =p j
mt + konst . (6.35)
6.1.6 Losung der Hamilton-Jacobi-Gleichung
• Im Raum (~q, t) seien ~q0 die Koordinaten des Systems zu einemfesten Zeitpunkt t0. Weiterhin sei Φ eine beliebige Funktion der

KAPITEL 6. PHASENRAUM 53
Koordinaten ~q0, die noch von f weiteren Parametern q′j abhangeund fur die die Unabhangigkeitsrelation
det ∂2Φ
∂q0,i∂q′j
, 0 (6.36)
gelte. Orte und Impulse zur Zeit t0 sind durch
~q(t0) = ~q0 und ~p(t0) = ~∇qΦ|q=q0 (6.37)
gegeben. Wir suchen diejenige Bewegung des mechanischen Sy-stems, die zur Zeit t0 an den Orten q0 mit den Impulsen p0 beginnt.Sie ist durch Integration der Hamiltonschen kanonischen Glei-chungen (6.4) gegeben. Eine Losung existiert nach dem Cauchy-schen Existenz- und Eindeutigkeitssatz fur gewohnliche Differen-tialgleichungen. Damit wird jedem Punkt q0 eine Bahn des Sy-stems zugeordnet. Zu einem anderen Zeitpunkt t wird durch je-den Punkt q genau eine der so konstruierten Bahnen gehen, wennt nahe bei t0 liegt und H sich genugend gut verhalt.
• Motiviert durch (6.11) wahlen wir den Ansatz
Φ(~q, ~q′, t) = Φ0(~q0, ~q′) +
∫ t
t0L[~q(t′), ~q(t′), t′
]dt′ . (6.38)
Φ ist dann gleich einer beliebigen Funktion Φ0 am Ort q0, ver-mehrt um das Wirkungsintegral langs der Bahn von q0 nach q.Diese Funktion lost die Hamilton-Jacobi-Gleichung, wenn
δΦ =∂Φ0
∂q j0δq j0 + p jδq j − H(q, p, t)δt − p j0δq j0
= p jδq j − Hδt =∂Φ
∂q jδq j +
∂Φ
∂tδt . (6.39)
Dies ist analog zu (6.5), und im zweiten Schritt haben wir∂Φ/∂qi0 = pi0 verwendet. Daraus folgen
p j =∂Φ
∂q jund
∂Φ
∂t+ H = 0 , (6.40)
Φ genugt also tatsachlich der Hamilton-Jacobi-Gleichung.
• Damit haben wir eine allgemeine Losung fur die Hamilton-Jacobi-Gleichung konstruiert und gezeigt, dass sich jedes mecha-nische System ”auf Ruhe“ transformieren lasst. Dieses Verfah-ren hat sich als grundlegend fur die Pfadintegral-Methode in derQuantenmechanik erwiesen.
KAPITEL 6. PHASENRAUM 54
6.2 Liouvillescher Satz, Poisson-Klammern
Zum Abschluss diskutieren wir noch zwei Eigenschaften des Phasen-raums, die erstens die Bedeutung des Konzepts unterstreichen und zwei-tens in der statistischen Physik, der Quantenmechanik, und der Quan-tenfeldtheorie wichtig werden.
6.2.1 Liouvillescher Satz
• Gegeben sei ein Ensemble von Systemen, deren Bahnen bei t =
t0 einen Bereich σ0 des Phasenraums uberdecken. Der Satz vonLiouville besagt, dass das Volumen des uberdeckten Phasenraumskonstant bleibt,
Volumen[σ(t)] = konst (6.41)
oder in Form des Integralmaßes∫σ(t)
d~q d~p = konst . (6.42)
• Zum Beweis dieses wichtigen Satzes gehen wir in zwei Schrit-ten vor: Erstens haben wir oben gesehen, dass sich jedes Ha-miltonsche mechanische System durch eine geeignete kanonischeTransformation auf Ruhe transformieren lasst. Diese Transforma-tion wird im Allgemeinen von der Zeit abhangen. Mit ihrer Hilfelasst sich eine Schar von Trajektorien im erweiterten Phasenraumin ein Geradenbundel transformieren, das parallel zur Zeitachseverlauft. Dieses Geradenbundel schließt ein festes Phasenraum-volumen ein.
• Das beweist den Satz von Liouville noch nicht, weil die kano-nische Transformation das Phasenraumvolumen bereits geanderthaben kann. Wir brauchen also zweitens die Aussage, dass ka-nonische Transformationen das Phasenraumvolumen unverandertlassen. Dies wird dadurch ausgedruckt, dass bei kanonischenTransformationen (q, p, t)→ (q′, p′, t) die Funktionaldeterminan-te immer gleich eins ist, ∣∣∣∣∣∣ ∂(~q, ~p)
∂(~q′, ~p′)
∣∣∣∣∣∣ = 1 , (6.43)
was wir hier ohne Beweis verwenden. Fur den freien Massen-punkt hatten wir dies aber explizit gesehen. Das druckt geradeden benotigten Sachverhalt aus, dass kanonische Transformatio-nen das Volumenelement im Phasenraum konstant lassen.

KAPITEL 6. PHASENRAUM 55
6.2.2 Poisson-Klammern
• Sei ρ(q, p, t) die Dichteverteilung des Ensembles im Phasenraum,d.h. ρ(q, p, t)dqdp ist die Anzahl der Ensemblemitglieder zur Zeitt im Phasenraumelement zwischen [q, q + dq] und [p, p + dp].Die Systeme konnen im erweiterten Phasenraum nicht verlorengehen,
ρ(q, p, t)dqdp = ρ(q0, p0, t0)dq0dp0 (6.44)
woraus mithilfe des Liouvilleschen Satzes
ρ(q, p, t) = ρ(q0, p0, t0) (6.45)
folgt. Wenn die Dichteverteilung konstant ist, dann bedeutet das,dass die totale Ableitung der Dichte ρ verschwinden muss,
0 =∂ρ
∂t+
f∑j=1
(q j∂ρ
∂q j+ p j
∂ρ
∂p j
)
=∂ρ
∂t+
f∑j=1
(∂H∂p j
∂ρ
∂q j−∂H∂q j
∂ρ
∂p j
). (6.46)
Diese Art von Gleichungen nennen wir Kontinuitatsgleichung, siewird uns zum Beispiel in der Elektrodynamik und Quantenme-chanik wieder begegnen. Den Ausdruck in Klammern nennen wirPoisson-Klammer. Sie ist allgemein durch
f , g :=f∑
j=1
(∂ f∂p j
∂g
∂q j−∂ f∂q j
∂g
∂p j
)(6.47)
definiert und erfullt folgende Eigenschaften:
f , g = −g, f (6.48) f , g1 + g2 = f , g1 + f , g2
f , g1g2 = g1 f , g2 + g2 f , g1
0 = f , g1, g2 + g1, g2, f + g2, f , g1 ;
die letzte Gleichung heißt Jacobis Identitat.
• Mithilfe der Poisson-Klammern lautet (6.46)
∂ρ
∂t+ H, ρ = 0 , (6.49)
und die Hamiltonschen kanonischen Gleichungen lauten leichtpompos geschrieben
q j = H, q j p j = H, p j . (6.50)
In dieser Form wurden sie grundlegend fur die HeisenbergscheFormulierung der Quantenmechanik.
Kapitel 7
Stabilitat und Chaos
Bislang waren wir bei allen unseren Analysen implizit davon ausgegan-gen, dass uns die Kenntnis des Systems zu einem gegebenen Zeitpunktzu einem Verstandnis des Systems zu spatereren Zeiten verhilft. Dasmuss nicht der Fall sein, und man kann die Systeme, fur die dies giltdurch ihre Stabilitat charakterisieren. Beschrieben wird sie durch dasVerhalten eines Systems im Phasenraum. In diesem Kapitel werden wirverschiedene Systeme in ihrem Phasenraum analysieren und dabei ver-schiedene Muster finden. Chaotische Systeme zeichnen sich dadurchaus, dass man Kenntnis des Systems zu einem Zeitpunkt nicht nutzenkann, um Vorhersagen bei spateren Zeiten zu machen.
7.1 Stabilitat
Nicht-konservative Systeme heißen dissipativ. Wir wissen schon, dasssie Energie verlieren, indem sie auf irgendeine Weise an ihre Umgebungoder an andere Systeme ankoppeln. Zentral fur das Verhalten dissipati-ver Systeme ist die Starke dieser Kopplung, zum Beispiel der Reibungs-konstante λ beim gedampften harmonischen Oszillator. In diesem Ka-pitel werden wir untersuchen, ob und wann bei kritischen Werten dieserKopplung wesentliche Anderungen im Verhalten des Systems auftreten.
7.1.1 Bewegung in der Nahe des Gleichgewichts
• Ein Systems wird durch den Phasenfluss beschrieben, die Ge-samtheit der Trajektorien des Systems die durch alle moglichenAnfangsbedingungen und Kopplungsparameter erlaubt werden.Die Frage ist ob es kritische Werte der Kopplung gibt, bei denensich die Eigenschaften des Phasenflusses wesentlich andern.
56

KAPITEL 7. STABILITAT UND CHAOS 57
• Wir gehen von Bewegungsgleichungen der Form
~z = ~F(~z, t) (7.1)
aus. Wir hatten im ersten Semester gesehen, dass sich Bewe-gungsgleichungen zweiter Ordnung immer in diese Form bringenlassen. Zum Beispiel fur den gedampften harmonischen Oszilla-tor ist
x + 2λx + ω2x = 0 . (7.2)
Wir fuhren ~z := (x, x) ein und erhalten eine Kombination der De-finition und der Bewegungsgleichung(
z1
z2
)=
(z2
−2λz2 − ω2z1
). (7.3)
Die Gleichgewichtslage ~z0 ist durch ~F(~z0) = 0 bestimmt. All-gemein heißen Punkte ~z0, fur die ~F(~z0) = 0 gilt, singulare oderkritische Punkte von ~F. Um diese Punkte kann man in einer Tay-lorreihe entwickeln,
~z = ~F(~z0) +∂~F∂z j
∣∣∣∣∣∣~z=~z0
(~z −~z0) j + O((~z −~z0)2
)⇔ ~y =
∂~F∂z j
∣∣∣∣∣∣~z=~z0
y j + O(~y2
)(7.4)
mit ~y := ~z −~z0.
• Verallgemeinert auf den dynamischen Fall sei ~ζ(t) eine Losungs-kurve von ~z = ~F(~z, t) und ~y(t) := ~z(t) − ~ζ(t), dann ist offenbar
~y + ~ζ = ~F(~y + ~ζ, t)
⇔ ~y = − ~ζ + ~F(~y + ~ζ, t)
= − ~F(~ζ, t) + ~F(~y + ~ζ, t) =∂~F∂z j
∣∣∣∣∣∣~z=~ζ
y j + · · · (7.5)
In der Umgebung einer Losungskurve ~ζ hat die Bewegungsglei-chung also in die Form
~y = A · ~y mit Ai j =∂Fi
∂z j
∣∣∣∣∣∣~z=~ζ
. (7.6)
• Die Losung dieser Gleichung ist
~y(t) = exp [A(t − t0)] · ~y0 . (7.7)
Die Exponentialfunktion einer Matrix A definiert man uber ihreTaylorreihe. Wenn A in Diagonalform gebracht wird und die Ei-genwerte αi hat, dann ist auch exp[A(t− t0)] in Diagonalform undhat die Eigenwerte exp[αi(t−t0)]. Sie heißen kritische Exponentendes Vektorfeldes ~F entlang der Losungskurve ~ξ.

KAPITEL 7. STABILITAT UND CHAOS 58
• Als Beispiel betrachten wir ein ebenes Pendel mit der Bewe-gungsgleichung
x = −ω2x (7.8)
fur kleine Auslenkungen. Mit y1 = x und y2 = x ist(y1
y2
)=
(y2
−ω2y1
)=
(0 1−ω2 0
) (y1
y2
)≡ A
(y1
y2
). (7.9)
Aus dem charakteristischen Polynom α2 + ω2 = 0 erhalten wirdie Eigenwerte α1,2 = ±iω von A. Beide kritische Exponentensind imaginar und beschreiben daher Schwingungen des Pendelsund nicht ein exponentielles Weglaufen aus dem Gleichgewicht.
• Mit Reibung enthalt die Bewegungsgleichung den Pendels einenweiteren Parameter,
x + 2λx + ω2x = 0 . (7.10)
Mit derselben Definition von y1,2 folgt(y1
y2
)=
(y2
−2λy2 − ω2y1
)=
(0 1
−ω2 −2λ
) (y1
y2
)≡ A
(y1
y2
).
(7.11)Das charakteristische Polynom ergibt die Eigenwerte
0 =α(α + 2λ) + ω2 = α2 + 2λα + ω2
⇔ α1,2 = − λ ± i√ω2 − λ2 . (7.12)
Nur fur λ > 0 und t → ∞ lauft das System ins Gleichgewichtx = 0, wahrend es sich fur λ < 0 exponentiell vom Gleichgewichtweg bewegt.
7.1.2 Asymmetrischer Kreisel
• Als Beispiel fur unseren gesamten Zugang nutzen wir die Krei-selbewegung in drei Dimensionen. Im Inertialsystem ~x′ bewirkeauf den i-ten Massenpunkt die außere Kraft ein Drehmoment
~M′ =d~L′
dt(7.13)
Das kreiselfesten System ~x rotiert relativ zum Inertialsystem, undals Vektoren transformieren ~M′ = R ~M und ~L′ = R~L. Mit derWinkelgeschwindigkeit ~ω der Rotation gilt fur die Zeitableitungdes Drehimpulses
~M′ =ddt~L′ = R
(~L + ~ω × ~L
)= R ~M , (7.14)
KAPITEL 7. STABILITAT UND CHAOS 59
und mit der Definition des Tragheitstensors erhalten wir dieEuler-Gleichungen
~L = Θ~ω ⇒ ~M =~L + ~ω × ~L = Θ~ω + ~ω × Θ~ω , (7.15)
Im Hauptachsensystem mit den Eigenwerten 0 < Θ1 < Θ2 < Θ3
nehmen wir nun an, dass sich der Kreisel kraftefrei bewegt, ~M′ =
0 = ~M. Mit der Definition zi := ωi erhalten wir dann
0 = Θizi + εi jk Θk z jzk (7.16)
oder komponentenweise mit der Definition zi = Fi aus (7.1)
Θ1F1 =Θ1z1 = −z2z3 (Θ3 − Θ2)Θ2F2 =Θ2z2 = z1z3 (Θ3 − Θ1)Θ3F3 =Θ3z3 = −z1z2 (Θ2 − Θ1) . (7.17)
Die Bewegungsgleichung ist dann durch die Ableitungsmatrixaus (7.6) beschrieben
A =
(∂Fi
∂z j
)=
0 −
Θ3 − Θ2
Θ1z3 −
Θ3 − Θ2
Θ1z2
Θ3 − Θ1
Θ2z3 0
Θ3 − Θ1
Θ2z1
−Θ2 − Θ1
Θ3z2 −
Θ2 − Θ1
Θ3z1 0
.
(7.18)
• Die drei Gleichgewichtslagen des Systems sind durch die Bedin-gung Fi = 0 fur (7.17) gegeben,
~z0,1 =
ω00 ~z0,2 =
0ω0
~z0,3 =
00ω
, (7.19)
wobei ω jeweils eine beliebige Konstante ist. Um jede von ihnenkonnen wir taylorn. Zum Beispiel um ~z0,1 erhalten wir nach (7.6)
~y = A · ~y =
0 0 0
0 0Θ3 − Θ1
Θ2ω
0 −Θ2 − Θ1
Θ30
ω y1
y2
y3
. (7.20)
Die charakteristischen Exponenten zur Gleichgewichtslage ~x0,1
ergeben sich aus det(A − α1,iI) = 0, also
α1,i
(α2
1,i + ω2 Θ3 − Θ1
Θ2
Θ2 − Θ1
Θ3
)= 0
(7.21)
⇒ α1,1 = 0 α1,2 = −α1,3 = iω[(Θ2 − Θ1)(Θ3 − Θ1)
Θ2Θ3
]1/2
.
KAPITEL 7. STABILITAT UND CHAOS 60
• Auf vollig analoge Weise oder durch zyklische Vertauschung fin-det man ebenfalls
α2,1 =0 α2,2 = − α2,3 = ω
[(Θ3 − Θ2)(Θ2 − Θ1)
Θ1Θ3
]1/2
α3,1 =0 α3,2 = − α3,3 = iω[(Θ3 − Θ2)(Θ3 − Θ1)
Θ1Θ2
]1/2
(7.22)
um die anderen beiden Gleichgewichtslagen. Die Eigenwerte α2,2
und α2,3 sind nicht virtuell, die Bewegung des Kreisels um dieHauptachse mit dem mittleren Eigenwert entspricht also keinerRotation. Insbesondere ist α2,2 positiv, die Drehungen des krafte-freien, asymmetrischen Kreisels um die Achse mit dem mittlerenHaupttragheitsmoment sind instabil.
7.1.3 Satze zur Stabilitat
• Diese Uberlegungen motivieren die folgenden Definitionen:
1. Ein Punkt ~z0 auf der Losungskurve eines Systems heißt Lia-punov-stabil, wenn zu jeder Umgebung U von ~z0 eine Um-gebung V von ~z0 existiert so, dass die Losungskurve, die zurZeit t = 0 durch V geht, fur alle t ≥ 0 in U liegt. Mathema-tisch formuliert: ~z ∈ V : ζ~z(t) ∈ U (t ≥ 0).
2. Der Punkt ~z0 heißt asymptotisch stabil, wenn es zu ~z0 eineUmgebung U gibt so, dass die Losungskurve durch ein be-liebiges ~z ∈ U fur t → ∞ nach ~z0 lauft. Ein asymptotischstabiler Punkt ist auch Liapunov-stabil.
• Folgende Satze beschreiben die Stabilitat:
1. Sei ~z0 ein Gleichgewichtspunkt von ~F, ferner sei<(αi) < 0fur alle αi, dann existiert eine Umgebung U von ~z0 so, dassder Fluss dort fur alle positiven Zeiten definiert ist. Weiter-hin gebe es ein c > 0 mit |<(αi)| > c und ein d ∈ R so, sodass fur alle ~z ∈ U und alle t ≥ 0 gilt∣∣∣∣~ζ~z ∣∣∣∣ ≤ de−ct
∣∣∣~z −~z0
∣∣∣ (7.23)
(exponentielle, gleichmaßige Konvergenz nach ~z0).
2. Wenn ~z0 stabil ist, hat keiner der Eigenwerte von A einenpositiven Realteil.
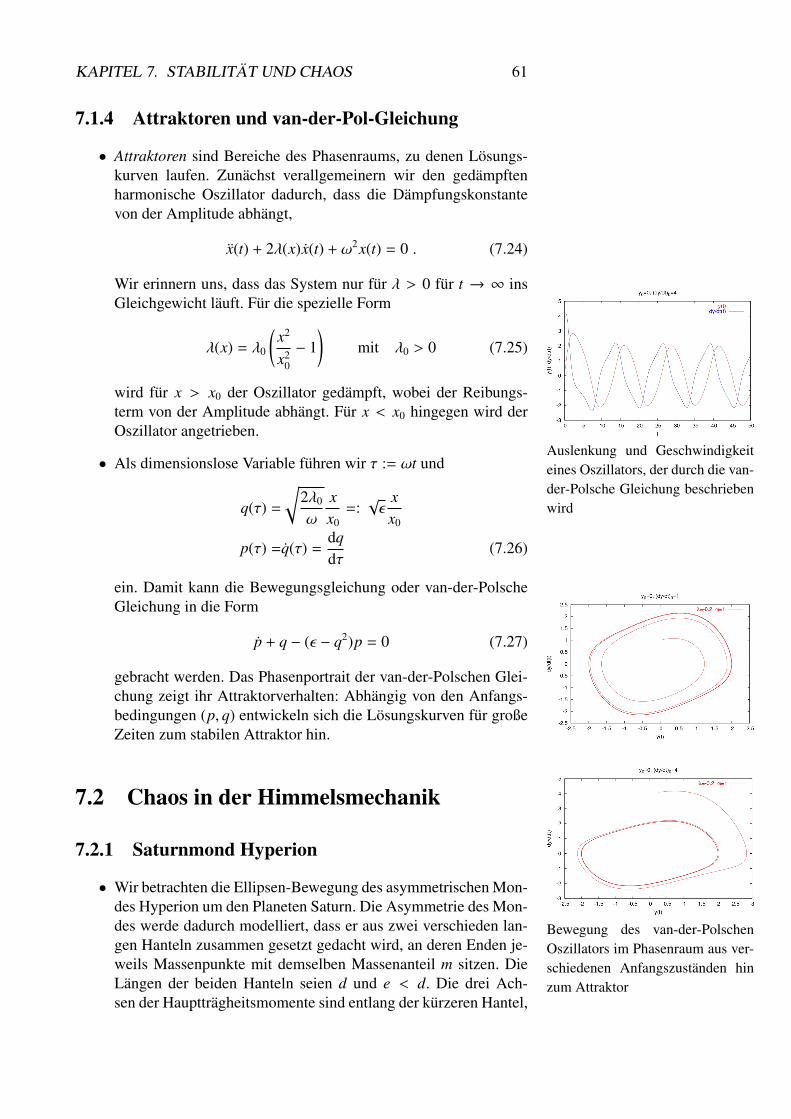
KAPITEL 7. STABILITAT UND CHAOS 61
7.1.4 Attraktoren und van-der-Pol-Gleichung
• Attraktoren sind Bereiche des Phasenraums, zu denen Losungs-kurven laufen. Zunachst verallgemeinern wir den gedampftenharmonische Oszillator dadurch, dass die Dampfungskonstantevon der Amplitude abhangt,
x(t) + 2λ(x)x(t) + ω2x(t) = 0 . (7.24)
Wir erinnern uns, dass das System nur fur λ > 0 fur t → ∞ insGleichgewicht lauft. Fur die spezielle Form
λ(x) = λ0
(x2
x20
− 1)
mit λ0 > 0 (7.25)
wird fur x > x0 der Oszillator gedampft, wobei der Reibungs-term von der Amplitude abhangt. Fur x < x0 hingegen wird derOszillator angetrieben.
Auslenkung und Geschwindigkeiteines Oszillators, der durch die van-der-Polsche Gleichung beschriebenwird
• Als dimensionslose Variable fuhren wir τ := ωt und
q(τ) =
√2λ0
ω
xx0
=:√ε
xx0
p(τ) =q(τ) =dqdτ
(7.26)
ein. Damit kann die Bewegungsgleichung oder van-der-PolscheGleichung in die Form
p + q − (ε − q2)p = 0 (7.27)
gebracht werden. Das Phasenportrait der van-der-Polschen Glei-chung zeigt ihr Attraktorverhalten: Abhangig von den Anfangs-bedingungen (p, q) entwickeln sich die Losungskurven fur großeZeiten zum stabilen Attraktor hin.
Bewegung des van-der-PolschenOszillators im Phasenraum aus ver-schiedenen Anfangszustanden hinzum Attraktor
7.2 Chaos in der Himmelsmechanik
7.2.1 Saturnmond Hyperion
• Wir betrachten die Ellipsen-Bewegung des asymmetrischen Mon-des Hyperion um den Planeten Saturn. Die Asymmetrie des Mon-des werde dadurch modelliert, dass er aus zwei verschieden lan-gen Hanteln zusammen gesetzt gedacht wird, an deren Enden je-weils Massenpunkte mit demselben Massenanteil m sitzen. DieLangen der beiden Hanteln seien d und e < d. Die drei Ach-sen der Haupttragheitsmomente sind entlang der kurzeren Hantel,

KAPITEL 7. STABILITAT UND CHAOS 62
entlang der langeren Hantel und senkrecht auf beiden gerichtet.Die Haupttragheitsmomente sind
Θe =m2
e2 < Θd =m2
d2 < Θ3 =m2
(d2 + e2) . (7.28)
Fur unsere Stabilitatsbetrachtung betrachten wir die Rotation umdie 3-Achse mit dem zeitabhangigen Winkel φ. Beim asymmetri-schen Kreisel war diese Rotation mit dem großten Tragheitsmo-ment stabil,
M =L = Θ3ω = Θ3φ (7.29)
In dieser skalaren Form haben wir den Einheitsvektor ~e3 auf bei-den Seiten vernachlassigt. Zum Drehmoment durch die Anzie-hungskraft des Saturns das Drehmoment tragen nach (7.28) allevier Massenpunkte auf den beiden Achsen d und e bei.
• Beginnen wir mit der langeren der beiden Achsen. Deren Dreh-moment Md kommt durch die an den beiden Massepunkten anlie-gende Anziehungskraft
~Fi = −GMm
r3i
~ri mit ~r1,2 = ~r ±~d2. (7.30)
Wegen d |~r| gilt
r31,2 =
~r ± ~d
2
23/2
= r3[1 ±
dr
cosα +d2
4r2
]3/2
≈r3[1 ±
3d2r
cosα + O
(d2
r2
)]⇒ ~F1,2 ≈ −
GMmr3
(1 ∓
3d2r
cosα) ~r ± ~d
2
, (7.31)
wobei α der Winkel zwischen ~r und ~d ist. Die Betrage der Kreuz-produkte im ensprechenden Drehmoment
~Md =~d2× ( ~F1 − ~F2) (7.32)
sind damit∣∣∣∣∣∣∣ ~d2 × ~F1,2
∣∣∣∣∣∣∣ ≈ − GMm2r3
(1 ∓
3d2r
cosα) ∣∣∣∣~d × (
~r ± ~d)∣∣∣∣
≈ −GMm
2r3
(1 ∓
3d2r
cosα)
dr sinα
⇒ ~Md = −GMm
2r3
(−
3dr
cosα)
dr sinα~e3
=GMm
2r3 3d2 sin(2α)2
~e3 =3GM2r3 Θd sin(2α)~e3 . (7.33)
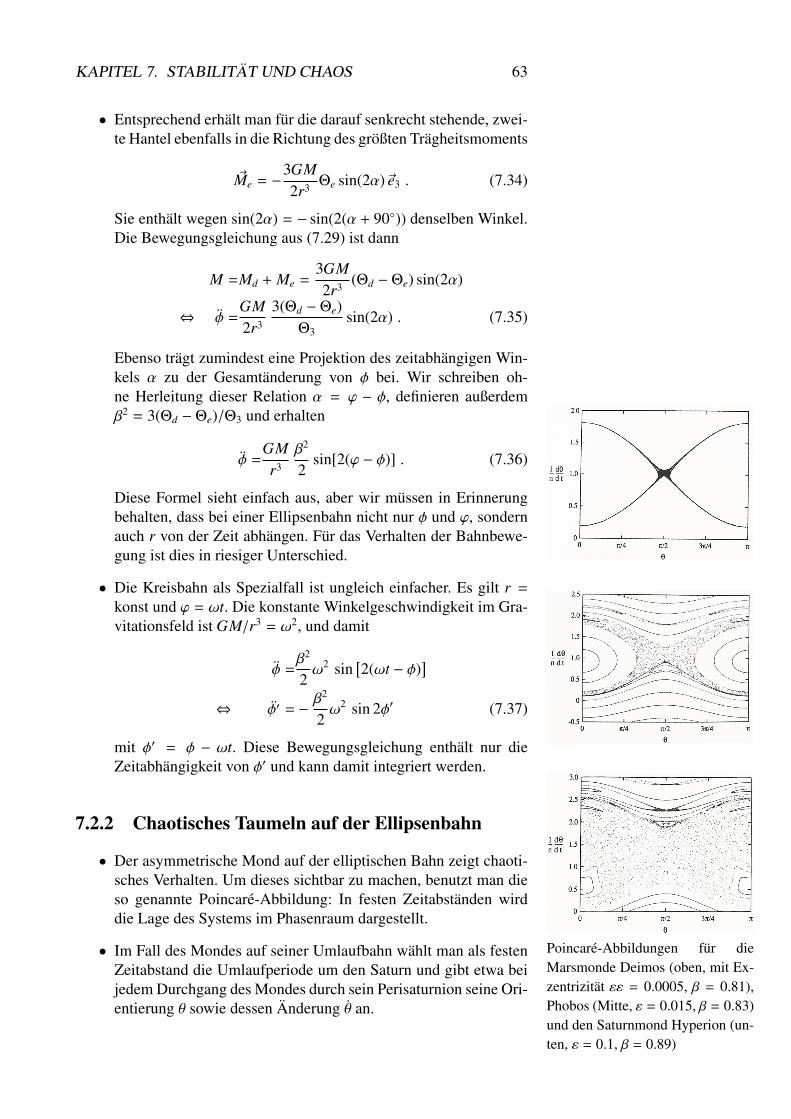
KAPITEL 7. STABILITAT UND CHAOS 63
• Entsprechend erhalt man fur die darauf senkrecht stehende, zwei-te Hantel ebenfalls in die Richtung des großten Tragheitsmoments
~Me = −3GM2r3 Θe sin(2α)~e3 . (7.34)
Sie enthalt wegen sin(2α) = − sin(2(α + 90)) denselben Winkel.Die Bewegungsgleichung aus (7.29) ist dann
M =Md + Me =3GM2r3 (Θd − Θe) sin(2α)
⇔ φ =GM2r3
3(Θd − Θe)Θ3
sin(2α) . (7.35)
Ebenso tragt zumindest eine Projektion des zeitabhangigen Win-kels α zu der Gesamtanderung von φ bei. Wir schreiben oh-ne Herleitung dieser Relation α = ϕ − φ, definieren außerdemβ2 = 3(Θd − Θe)/Θ3 und erhalten
φ =GMr3
β2
2sin[2(ϕ − φ)] . (7.36)
Diese Formel sieht einfach aus, aber wir mussen in Erinnerungbehalten, dass bei einer Ellipsenbahn nicht nur φ und ϕ, sondernauch r von der Zeit abhangen. Fur das Verhalten der Bahnbewe-gung ist dies in riesiger Unterschied.
Poincare-Abbildungen fur dieMarsmonde Deimos (oben, mit Ex-zentrizitat εε = 0.0005, β = 0.81),Phobos (Mitte, ε = 0.015, β = 0.83)und den Saturnmond Hyperion (un-ten, ε = 0.1, β = 0.89)
• Die Kreisbahn als Spezialfall ist ungleich einfacher. Es gilt r =
konst und ϕ = ωt. Die konstante Winkelgeschwindigkeit im Gra-vitationsfeld ist GM/r3 = ω2, und damit
φ =β2
2ω2 sin
[2(ωt − φ)
]⇔ φ′ = −
β2
2ω2 sin 2φ′ (7.37)
mit φ′ = φ − ωt. Diese Bewegungsgleichung enthalt nur dieZeitabhangigkeit von φ′ und kann damit integriert werden.
7.2.2 Chaotisches Taumeln auf der Ellipsenbahn
• Der asymmetrische Mond auf der elliptischen Bahn zeigt chaoti-sches Verhalten. Um dieses sichtbar zu machen, benutzt man dieso genannte Poincare-Abbildung: In festen Zeitabstanden wirddie Lage des Systems im Phasenraum dargestellt.
• Im Fall des Mondes auf seiner Umlaufbahn wahlt man als festenZeitabstand die Umlaufperiode um den Saturn und gibt etwa beijedem Durchgang des Mondes durch sein Perisaturnion seine Ori-entierung θ sowie dessen Anderung θ an.

KAPITEL 7. STABILITAT UND CHAOS 64
• Fuhrt man dies fur einige zufallig gewahlte Anfangswerte θ0
und θ0 durch und betrachtet die Poincare-Abbildung nach sehrvielen Umlaufen, zeigt sich ein charakteristisches Bild: Berei-chen, in denen geordnetes Verhalten auftritt, stehen Bereiche ge-genuber, in denen sich die Position des Systems im Phasenraumvon Umlauf zu Umlauf unkontrollierbar andert: Der asymmetri-sche Mond taumelt. Die Abbildungen zeigen die Poincare-Ab-bildungen fur die Marsmonde Phobos und Deimos und fur denSaturnmond Hyperion.
Teil II
Statistik und Thermodynamik
65
Kapitel 8
Statistische Physik
In den vergangenen Kapiteln haben wir unsere Techniken zur Beschrei-bung von physikalischen Korpern immer weiter verfeinert. Im letztenSchritt haben wir den Phasenraum eingefuhrt und aus dem zeitlichenVerlauf von Losungen im Phasenraum grundsatzliche Aspekte unseresSystems analysiert. Bei der Interpretation von Scharen von Trjektori-en haben wir bemerkt dass uns bislang eine Beschreibung von Syste-men von mehr als einem Massenpunkt im Phasenraum fehlt. Aus derEinfuhrung zur Statistik erwarten wir dass Systeme mit eine kleinenAnzahl von Massenpunkten am schwersten zu beschreiben sind. Wirverallgemeinern unsere Methoden also direkt zu großen Systemen, diewir (hoffentlich) statistisch beschreiben konnen.
8.1 Grundpostulat
8.1.1 Mikro- und Makrozustande
• Wenn man zum Beispiel die Hamiltonschen Bewegungsgleichun-gen fur ein beliebig komplexes nicht-chaotisches System gelosthatte, dann waren die verallgemeinerten Koordinaten qi und diedazu kanonisch konjugierten Impulse pi zu jedem Zeitpunkt be-kannt, wenn sie zu einem Zeitpunkt bekannt waren. Fur ein Sy-stem mit f Freiheitsgraden spannen sie den 2 f -dimensionalenPhasenraum auf. Je großer die Anzahl f der Freiheitsgrade wird,desto eher konnen wir die Physik aus einer statistischen Behand-lung erhalten. Betrachten wir zum Beispiel einen Liter eines Ga-ses. Es enthalt unter Normalbedingungen
N =1
22.4mol =
6.022 × 1023
22.4= 2.69 × 1022 (8.1)
Punktteilchen, also ist f = 8.07 × 1022. Offensichtlich sind hierder Ort und der Impuls jedes einzelnen Teilchens nicht relevant.
66
KAPITEL 8. STATISTISCHE PHYSIK 67
• Einerseits ist also der genaue mechanische Zustand des Systems,die genauen Phasenraumkoordinaten, fur unser physikalischesVerstandnis unwichtig. Andererseits wird allein er durch die me-chanischen Gleichungen beschrieben. Statt seiner sind wir amMakrozustand des Systems interessiert, also an den physikali-schen Eigenschaften des Gesamtsystems, die durch wenige, ma-kroskopisch messbare Parameter x j ausgedruckt werden sollen.Solche makroskopischen Parameter konnen zum Beispiel die Ge-samtenergie, das Volumen, oder der Druck eines Gases sein.
• Um den Makrozustand physikalisch zu beschreiben gliedern wirden 2 f -dimensionalen Phasenraum in n Zellen gleicher Große,
δqiδp j = h0 , (8.2)
wobei h0 in der klassischen Mechanik beliebig klein gewahlt wer-den kann. Das System kann nun durch die Angabe der Zelle ngekennzeichnet werden, in der es sich gerade befindet. Uber dieGroße h0 stellen wir ein, wie prazise wir das System verstehenwollen. Jede Phasenraumzelle kennzeichnet einen Mikrozustanddes Systems.
8.1.2 Phasenraum
• Wir erwarten dass sich unser System bei einem vorgegebenenMakrozustand x j in verschiedener Phasenraumzellen oder Mikro-zustanden aufhalten kann. Wir nennen sie die dem System unterden gegebenen Bedingungen zuganglichen Mikrozustande. Siebeschreiben ein Ensemble physikalischer Systeme, die makrosko-pisch gleichartig sind. Uns interessiert dann die Wahrscheinlich-keit pn, dass sich unser System mit makroskopischen Zustandspa-rametern x j in in einer Phasenraum-Zelle n befindet. Wir erwartenalso in einem Ensemble aus N makroskopisch gleichartigen Sy-stemen die mittlere Anzahl
Nn = pn N (8.3)
von Systemen im Zustand n zu finden.
• Ohne weitere Kenntnisse konnen wir uber die Wahrscheinlich-keiten pn nichts aussagen. Wir konnen aber zum Beispiel hoffenzu interessanten Aussagen zu gelangen, wenn wir uns auf Syste-me beschranken, fur die sich die Wahrscheinlichkeiten pn zeitlichnicht andern. Solche Systeme sind im Gleichgewicht, das Ensem-ble andert sich zeitlich nicht. Fur isolierte Systeme im Gleichge-wicht mit konstanter Gesamtenergie E fuhren wir das folgendeplausible Postulat ein:
KAPITEL 8. STATISTISCHE PHYSIK 68
Isolierte Systeme im Gleichgewicht halten sich mit gleicher Wahr-scheinlichkeit in jedem ihnen zuganglichen Zustand auf.
Wir kennzeichnen sie durch ihre Energie E und bezeichnen dieAnzahl der ihnen zuganglichen Zustande als mikrokanonische Zu-standssumme
Ω(E) := Anzahl zuganglicher Zustande bei Energie E . (8.4)
Da wir den Phasenraum in Zellen endlicher Große eingeteilt ha-ben, wird die Energie nicht genau einen beliebigen Wert E anneh-men konnen. Deswegen ist mit solchen Aussagen immer gemeint,dass die Energie zwischen E und E + δE liegen soll.
• Analog konnen wir beschreiben welchen mittleren Wert ein be-stimmter Parameter des Systems einnehmen wird. Seien x j al-le moglichen Werte, die dieser Parameter in dem betrachtetenSystem annehmen kann. Wir betrachten denjenigen Bereich deszuganglichen Phasenraums, in dem der Parameter einen festenWert xk annimmt. Die Anzahl der Zustande in diesem Bereichbezeichnen wir analog mit Ω(E; xk). Dann sind die Wahrschein-lichkeit, dass xk angenommen wird und der Mittelwert von x
p(xk) =Ω(E; xk)
Ω(E)
x =∑
k
xk p(xk) =
∑k xkΩ(E; xk)
Ω(E). (8.5)
8.1.3 Der Liouvillesche Satz
• Wir sollten zeigen dass dieses Postulat nicht nur physikalischplausibel, sondern mit der klassischen Mechanik vertraglich ist.Dazu nutzen wir den Liouvillesche Satz aus 6.3.1. Betrachten wirein Ensemble aus einer großen Zahl gleichartiger physikalischerSysteme, deren Mikrozustand durch die 2 f Phasenraumkoordi-naten (~q, ~p) gekennzeichnet ist. Einige der Systeme werden sichzur Zeit t zwischen qi und qi + dqi und zwischen p j und p j + dp j
befinden. Diese Anzahl von Systemen im Ensemble bezeichnenwir mit
ρ(~q, ~p, t) d~qd~p . (8.6)
Der Liouvillesche Satz besagt, dass ihr Volumen im Phasenraumzeitlich konstant ist, also
0 =dρdt
=∂ρ
∂t+∂ρ
∂qiqi +
∂ρ
∂p jp j . (8.7)
Das einmal vom System eingenommene Volumen im Phasenraumkann sich durchaus verschieben und deformieren, aber sein Inhaltverandert sich nicht.

KAPITEL 8. STATISTISCHE PHYSIK 69
• Wenn jeder zugangliche Zustand mit gleicher Wahrscheinlichkeitauftritt, dann ist die erwartete Anzahl der Systeme in jedem die-ser Zustande gleich groß oder null, also beschrieben durch diePhasenraumkoordinaten
∂ρ
∂qi= 0 =
∂ρ
∂p j(1 ≤ i, j ≤ f ) . (8.8)
Daher ist wegen des Liouvilleschen Satzes (8.7)
∂ρ
∂t= 0 . (8.9)
Wenn also einmal die Situation eingetreten ist, dass alle Zustandegleich wahrscheinlich sind, dann andert sie sich in der klassi-schen Mechanik nicht mehr. Das entspricht unserer Definition desGleichgewichts.
8.1.4 Ubergang ins Gleichgewicht
• Betrachten wir ein isoliertes System, das anfanglich im Gleichge-wicht ist. Das bedeutet, dass es sich mit gleicher Wahrscheinlich-keit pn in jedem ihm zuganglichen Zustande aufhalten kann. Ineinem Ensemble aus einer großen Zahl N gleichartiger Systemekonnen wir nach (8.3) erwarten Nn Systeme in jedem einzelnender Zustande zu finden.
• Welche Zustande im Phasenraum dem System zuganglich sind,wird durch die makroskopischen Parameter x j vorgegeben. Dadas System isoliert ist, wird seine Energie E konstant sein.Andern wir einen der anderen makroskopischen Parameter so,dass sich der zugangliche Bereich im Phasenraum andert, wirddas System aus dem Gleichgewicht gebracht.
Wenn sich der zugangliche Bereich vergroßert, gibt es nachherzugangliche Zustande im Phasenraum, die im Ensemble der Sy-steme unbesetzt sind. Um wieder ins Gleichgewicht zu kommen,mussen Wechselwirkungen zwischen den Komponenten des Sy-stems dafur sorgen, dass auch bislang unbesetzte Zustande er-reicht werden. Wie lange dieser Vorgang dauert, hangt von derStarke der Wechselwirkung ab.
Wenn sich der zugangliche Bereich im Phasenraum verkleinert,muss fur jetzt ausgeschlossenen Zustande die Wahrscheinlich-keit auf Null sinken, dass sich das System dort aufhalt. Dement-sprechend großer muss die Wahrscheinlichkeit an den weiter-hin zuganglichen Stellen des Phasenraums werden. Wiederummussen die Wechselwirkungen zwischen den Komponenten desSystems fur diese Entwicklung sorgen.
KAPITEL 8. STATISTISCHE PHYSIK 70
• Ein Beispiel fur solche Vorgange ist ein isoliertes Volumen, daszunachst durch eine undurchlassige Wand in zwei Halften geteiltwird. Nur eine Halfte sei anfanglich mit Gas gefullt. Wenn jetztdie Wand entfernt wird, verdoppelt sich bei gleich bleibender Ge-samtenergie der Gasteilchen das zugangliche Volumen. Umge-kehrt kann das einem Gas zugangliche Volumen in einem Zylin-der dadurch verringert werden, dass ein Kolben in den Zylindergeschoben wird.
8.1.5 Anzahl zuganglicher Zustande
• Wie groß die Anzahl der zuganglichen Zustande eines makro-skopischen Systems aus sehr vielen Teilchen sein kann, zeigenwir am Beispiel eines idealen Gases. Ideal heißt ein Gas, dessenTeilchen nur durch direkte Stoße miteinander wechselwirken undkeine innere Struktur haben. Ohne innere Struktur ergibt eine Ro-tation keinen Sinn und jedes Teilchen hat drei Freiheitsgrade derTranslation. Die gesamte Energie ist also
E = T + V = T =
N∑i=1
~p 2i
2m. (8.10)
Die potentielle Energie verschwindet wenn wir den Stoss nichtmit einem Potential verknupfen.
• Die Anzahl der Zustande, die dem System bei vorgegebener Ener-gie E zuganglich sind, ist gleich dem zuganglichen Volumen imPhasenraum, geteilt durch die Zellengroße h f
0 ,
Ω(E) =1
h f0
∫ E+δE
Ed~qd~p , (8.11)
streng genommen im Grenzfall δE → 0. Das Integral uber dieverallgemeinerten Koordinaten ist einfach auszufuhren, wenn wirjedes einzelne Gasteilchen im Ortsraum betrachten∫
dq1dq2dq3 = V ⇒
∫d~q = VN . (8.12)
• Das Integral uber die Impulse ist mit der Energie verbunden. Wirbetrachten zunachst die Anzahl Φ der Zustande mit einer Energie≤ E und nutzen fur kleine δE die Taylorreihe
Ω(E) = Φ(E + δE) − Φ(E) =∂Φ(E)∂E
δE . (8.13)
Wegen (8.10) ist eine konstante Energie im f -dimensionalen Im-pulsraum durch eine Kugelschale mit Radius
Rp =
√√N∑
i=1
~p 2i =√
2mE (8.14)
KAPITEL 8. STATISTISCHE PHYSIK 71
gegeben. Das Volumen dieser Kugel ist analog zum 3-dimensional Raum proportional zu R f
p, die Proportionalitatskon-stante ist fur unsere Betrachtung uninteressant. Also haben wir
Φ(E) ∝(2mE) f /2
⇒ Ω(E) ∝VN ×f2
2m (2mE) f /2−1 δE . (8.15)
Wir ziehen daraus drei wesentliche Schlusse. Erstens ist Ω(E)proportional zu δE, zweitens ist Ω(E) proportional zur riesigenAnzahl der Freiheitsgrade f , und drittens nimmt Ω(E) extremsteil wie E f /2−1 ≈ E f /2 zu. Auf diese Eigenschaften von Ω(E)werden wir spater wieder zuruckkommen.
8.2 Wechselwirkungen zwischen Systemen
Bei der Entwicklung unseres Formalismus fur Systeme mit einersehr grossen Anzahl elementarer Freiheitsgrade ist offensichtlich derSchlussel zur mikrokopischen Physik die Wechselwirkung zwischenden einzelnen Teilchen. Makroskopisch ist nach dem bisherigen Gangder Vorlesung nicht klar, welche Eigenschaften des Systems wir wie mitMessungen verknupfen wollen. Andererseits sind diese Eigenschaftenhistorisch durch die Thermodynamik schon lange definiert.
8.2.1 Mechanische Arbeit und Warme
• Nach der Definition der Hamiltonfunktion wird die Energie einesSystems im Zustand n durch alle Parameter x j beeinflusst, die inseiner Hamiltonfunktion auftauchen,
En = En(x1, . . . , x j, . . .) . (8.16)
Das gilt auch wenn die Parameter x j den Makrozustand beschrei-ben, sie heißen dann außere Parameter oder Zustandsparameter.Beispiele dafur sind das Volumen eines Gases, ein von außen an-gelegtes elektrisches oder magnetisches Feld, usw.
• Wir wissen schon dass wir allgemein Wechselwirkungen, in derenVerlauf die x j nicht verandert werden, von solchen unterscheidensollten, in denen sie sich andern. Wir stellen uns dazu zwei Syste-me A und B vor, die gemeinsam gegenuber ihrer Umwelt isoliertsind, zwischen denen aber Energie ausgetauscht werden kann.Wenn die Zustandsparameter unverandert bleiben, dann muss dieGesamtenergie der beiden Systeme erhalten bleiben,
∆EA + ∆EB = 0 oder ∆EA,B = ±Q . (8.17)
KAPITEL 8. STATISTISCHE PHYSIK 72
Dabei bezeichnen wir mit Q die Energie oder Warmemenge, dieohne Veranderung der Zustandsparameter von einen an das ande-re System abgegeben wird.
• Alternativ konnen wir den direkten Energieaustausch zwischenden beiden Systemen unterbinden, aber eine mechanische Wech-selwirkung zulassen. Das klassische Beispiel ist ein Gasvolumen,das durch eine bewegliche Wand in zwei Halften A und B unter-teilt wird. Indem das Gas in einem Teilvolumen die Wand zumanderen hin verschiebt, verrichtet es mechanische Arbeit am an-deren System. Damit andern sich fur beide Teilsysteme zumin-dest einige Zustandsparameter, und daher auch deren Energie um∆EA,B. Diese mechanische Energieanderung wird mit einer me-chanischen Arbeit W identifiziert,
∆EA,B + WA,B = 0 oder ∆E = −W . (8.18)
• Im Allgemeinen wird die Energie jedes der beiden Systeme sichsowohl durch direkten Energieaustausch als auch durch mechani-sche Arbeit verandern. Mit (8.17) und (8.18) gilt also, wenn wirdie Inzides unterdrucken
∆E = −W + Q . (8.19)
Diese Gleichung verknupft die Warmemenge Q, die ohneVeranderung der Zustandsparameter aufgenommen oder abgege-ben wird mit der vom System verrichtete mechanische Arbeit W.
Fur eine kontinuierlichen Energie des Systems definieren wirinfinitesimale Anderungen dE. Fur eine von außen ubertrageneWarmemenge oder mechanische Arbeit ist das eventuell nicht of-fensichtlich. Wir schreiben daher der Sicherheit halber die infini-tesimale Version von (8.19) als
dQ = dE + dW (8.20)
mit quergestrichenem d.
8.2.2 Unvollstandige Differentiale
• Um die Unterscheidung zwischen dE und dQ oder dW zu verste-hen erinnern wir uns an das vollstandige Differential einer Funk-tion F(x, y),
dF =∂F(x, y)∂x
dx +∂F(x, y)∂y
dy =: A(x, y)dx + B(x, y)dy . (8.21)
Beginnen wir umgekehrt mit zwei Funktionen C(x, y) undD(x, y), dann konnen wir immer
dG(x, y) := C(x, y)dx + D(x, y)dy (8.22)
KAPITEL 8. STATISTISCHE PHYSIK 73
definieren. Ein vollstandiges Differential ist es, wenn es dadurchdefiniert eine Funktion G(x, y) gibt, fur die
C(x, y) =∂G(x, y)∂x
und D(x, y) =∂G(x, y)∂y
(8.23)
gilt. Das muss nicht immer gelten. Als Beispiel setzen wir
C(x, y) = C0 und D(x, y) =xy. (8.24)
und erhalten mit (8.23) die beiden partiellen Stammfunktionen
G(x, y) =C0x + g(y)G(x, y) =x ln y + h(x) . (8.25)
Die unbestimmten Funktionen g(y) und h(x) hangen eweils nurvon einem Argument ab. Bei h(x) = C0x funktioniert das, aber mitdem Term x ln y konnen nicht beide Gleichungen (8.25) erfulltwerden. Das ist dG zwar eine infinitesimal klein, kann aber nichtals infinitesimale Differenz zwischen infinitesimal benachbartenWerten einer Funktion G aufgefasst werden. Es heißt unvoll-standiges Differential.
• Ein vollstandiges Differential hangt nicht vom Weg ab, analog zurDefinition konservativer Krafte im vorigen Semester. Nach (8.21)ist also ∫ 2
1dF =
∫ (x2,y1)
(x1,y1)A(x, y)dx +
∫ (x2,y2)
(x2,y1)B(x, y)dy
= F(x2, y2) − F(x1, y1) (8.26)
eindeutig bestimmt. Dadurch wird der Zusammenhang zwischenvollstandigen Differentialen und Funktionen hergestellt, die alsGradient eines Potentials dargestellt werden konnen, wie wir sieim Zusammenhang mit konservativen Kraftfeldern besprochenhatten. Im Gegensatz dazu kann das Integral∫ 2
1dG (8.27)
von (x1, y1) zu (x2, y2) naturlich immer als Summe uber infinite-simale Großen verstanden und berechnet werden. Es wird aberallgemein vom Integrationsweg abhangen.
• In diesem Sinn sind dQ und dW unvollstandige Differentiale: Siesind infinitesimal kleine Großen, aber im allgemeinen nicht alsAbleitungen zweier Funktionen Q und W darstellbar. Die zwi-schen zwei Systemen ausgetauschte Warme dQ oder die von ei-nem System an einem anderen verrichtete mechanische ArbeitdW sind nur wahrend des jeweiligen Vorgangs definiert, aber
KAPITEL 8. STATISTISCHE PHYSIK 74
nicht als Unterschied zwischen zwei ”Warmemengen“ Q2 und Q1
oder zwei ”Arbeitsmengen“ W2 und W1.
Die wahrend eines endlichen Prozesses ausgetauschte Warme-menge oder die gesamte dabei verrichtete mechanische Arbeit
Q12 =
∫ 2
1dQ oder W12 =
∫ 2
1dW (8.28)
werden daher davon abhangen, entlang welches Wegs der Pro-zess vom Zustand 1 zum Zustand 2 gefuhrt wird. Wenn allerdingswahrend des Prozesses die außeren Zustandsparameter konstantgehalten werden, so dass zum Beispiel dW = 0 und dQ = dEgilt, muss Q12 von der Prozessfuhrung unabhangig werden, weildE ein vollstandiges Differential ist. Gleiches gilt fur den FalldW = dE.
8.2.3 Quasistatische Zustandsanderungen
• Wir hatten auch schon die Relevanz von Gleichgewichts-zustanden angesprochen. Wenn sich die außeren Parameter x j ei-nes Systems andern, werden sich die Energien En aller Zustanden andern. Was genau geschieht, hangt davon ab wie schnelldie Zustandsanderung geschieht. Wenn sie so langsam ablauft,dass das System nach jedem infinitesimal kleinen Schritt Gele-genheit hat, sein Gleichgewicht wieder zu finden, dann konnenwir wahrend der gesamten Zustandsanderung als Vereinfachungannehmen, dass das System eine Folge von Gleichgewichts-zustanden durchlauft.
• Zunachst bewirkt eine infinitesimale Anderung der außeren Zu-standsparameter eine Anderung der Energie En um
dEn =∂En
∂x jdx j . (8.29)
Wenn das System im Zustand n bleibt, kompensiert es die Ener-gieanderung durch die außeren Parameter x j zum Beispiel nach(8.20), indem es die mechanische Arbeit
dWn = −dEn = −∂En
∂x jdx j =: Xn, jdx j , (8.30)
verrichtet, wobei wir die verallgemeinerten Krafte
Xn, j := −∂En
∂x j(8.31)
eingefuhrt haben. Fur ein Ensemble gleichartiger Systeme, derenaußere Zustandsparameter sich in derselben Weise andern, und
KAPITEL 8. STATISTISCHE PHYSIK 75
die nach unserem Postulat jeden Zustand n mit gleicher Wahr-scheinlichkeit fullen, erhalten wir die mittlere vom System ver-richtete Arbeit, indem wir uber alle zuganglichen Zustande mit-teln,
dW = −∂En
∂x jdx j = −
∑n
pn∂En
∂x jdx j = X jdx j . (8.32)
• Als Beispiel betrachten wir die mechanische Arbeit, die durcheinen konstanten Druck verrichtet wird. Ein isolierter, gasgefull-ter Zylinder der Querschnittsflache A werde durch einen rei-bungsfrei beweglichen Kolben verschlossen. Da wegen der Iso-lierung keine Warme aufgenommen oder abgegeben wird, istdQ = 0 oder
dE = −dW . (8.33)
Verschiebt das Gas den Kolben um einen kleinen Weg ds, verrich-tet es nach Definition die mechanische Arbeit, dW = Kraft ·Weg.Die Kraft ist das Produkt aus Druck P und Flache A, also gilt
dW = (PA) ds = P (Ads) = P dV = −dE . (8.34)
Der veranderliche außere Parameter ist also das Volumen, undder Druck die (negative) zum Volumen gehorige verallgemeinerteKraft,
P = −∂E∂V
. (8.35)
Kapitel 9
Temperatur und Entropie
Aus dem letzten Kapitel wissen wir, dass Systeme sich aus mikroskopi-scher Sicht im Gleichgewicht befinden wenn jeder erlaubte Zustand be-setzt ist. Fur makroskopisch betrachtete Systeme hatten wir das Grund-postulat der statistischen Physik eingefuhrt, nach dem jeder zugangli-che Zustand mit gleicher Wahrscheinlichkeit angenommen wird. Wasuns fehlt ist eine makroskopische Beschreibung von Gleichgewicht. Mitanderen Worten, wir haben den Begriff der Temperatur noch nicht defi-niert. Ebenso fehlt uns der Begriff der Entropie. Im Folgenden werdenwir beide aus der Sichtweise der statistischen Physik definieren, bevorwir sie dann als thermodynamische Großen nutzen.
9.1 Thermisches Gleichgewicht
9.1.1 Reversible Zustandsanderungen
• Betrachten wir ein isoliertes System, das bestimmten Zwangenunterliegt, zum Beispiel ein isoliertes Volumen, das durch ei-ne isolierende Wand in zwei Teilvolumina unterteilt ist, von de-nen nur eines gasgefullt ist. Dieses isolierte System befinde sichzunachst im Gleichgewicht. Unmittelbar nach der Entfernungder Wand kann das System nicht im Gleichgewicht sein, weilsich der ihm zugangliche Bereich des Phasenraums um einenTeil vergroßert hat. Aber nach einiger Zeit wird es wieder einenGleichgewichtszustand erreichen, in dem nun die Anzahl der ihmzuganglichen Zustande großer ist als vorher.
• Die Zwangsbedingung kann durch feste außeren Parameter x j =
v j formuliert werden. Wenn sie wegfallt, dann vergroßert sich inder Regel die Anzahl der zuganglichen Zustande, Ωf > Ωi (”final“und ”initial“). Allgemein erlauben wir auch, dass sich ein System
76

KAPITEL 9. TEMPERATUR UND ENTROPIE 77
nicht wesentlich andert, so dass
Ωf ≥ Ωi . (9.1)
gilt. Im ersten Fall wird das System nicht in seinen Ausgangs-zustand zuruckkehren konnen, wenn die Wand wieder eingefuhrtwird. Im zweiten Fall hangt der Zustand des Gesamtsystems nichtvon der Lage der Wand ab. Mit (9.1) konnen wir eine prazise De-finition formulieren: Eine Zustandsanderung eines isolierten Sy-stems ist reversibel, wenn sich die Anzahl der ihm zuganglichenZustande nicht verandert, und irreversibel, wenn sie zunimmt.
• Nach dem statistischen Grundpostulat ist im Gleichgewicht dieWahrscheinlichkeit, fur xk einen Wert vk zu messen, proportionalzur Anzahl der ensprechenden zuganglichen Zustande
p(xk = vk) ∝ Ω(xk = vk) . (9.2)
In einem großen Ensemble wird daher mit großter Wahrschein-lichkeit derjenige Wert von xk gemessen, zu dem die großte Zahlzuganglicher Zustande gehort. Die außeren Parameter eines iso-lierten Systems werden sich also dahin entwickeln, dass die An-zahl der dadurch ermoglichten, zuganglichen Zustande maximalwird. Aus dem statistischen Grundpostulat folgt also direkt einExtremalprinzip.
9.1.2 Temperatur
• Betrachten wir nun zwei makroskopische Systeme, die gemein-sam isoliert sind und keine mechanische Arbeit aneinander ver-richten, aber in thermischen Kontakt gebracht werden und sichins thermischen Gleichgewicht entwickeln. Die Gesamtenergie Ebleibt dabei konstant. Wenn wir die Energie E1 als einen ausserenParameter ansehen, dann ist sie zunachst konstant und darf durchden thermischen Kontakt variieren. Fur jeden Zustand, den daserste System unter der Vorgabe von E1 einnehmen kann, Ω1(E1),kann das zweite System jeden Zustand mit E2 = E − E1 einneh-men. Also ist kombiniert
Ω(E, E1) = Ω1(E1)Ω2(E − E1) . (9.3)
Die Wahrscheinlichkeit, das Gesamtsystem in einem Zustand zufinden, in dem sich die Gesamtenergie E in die Teile E1 und E−E1
aufteilt, ist gleich dem Produkt der Wahrscheinlichkeiten, dassdas eine Teilsystem die Energie E1 und das andere die EnergieE − E1 hat.
KAPITEL 9. TEMPERATUR UND ENTROPIE 78
• Der neue Gleichgewichtszustand wird erreicht, wenn E1 die An-zahl der zuganglichen Zustande maximiert. Nach (8.15) nimmtΩ(E) extrem steil mit E zu. Mit zunehmendem E1 wird der ersteFaktor sehr schnell zu-, der zweite sehr schnell abnehmen. Zu-sammen definieren sie ein extrem scharfes Maximum. Weiterhinwird das Produkt (9.3) eine sehr große Zahl sein, weswegen wirden streng monotonen Logarithmus ln Ω = ln Ω1 + ln Ω2 betrach-ten. Wir bestimmen E1 also so, dass
0 =∂ ln Ω1(E′)
∂E′
∣∣∣∣∣E′=E1
−∂ ln Ω2(E′)
∂E′
∣∣∣∣∣E′=E−E1
(9.4)
Wir definierenβ(E) :=
∂ ln Ω(E′)∂E′
∣∣∣∣∣E′=E
, (9.5)
und erhalten mit (8.15)
β(E) =∂ ln Ω(E′)
∂E′
∣∣∣∣∣E′=E≈
f2∂ ln E∂E
∣∣∣∣∣E′=E
=f
2E. (9.6)
Die Variable β ist also, bis auf einen Faktor 2, die inverse Ener-gie pro Freiheitsgrad. Damit lautet die Gleichgewichtsbedingung(9.4)
β1(E1) = β2(E − E1) . (9.7)
• Empirisch soll gleiche Temperatur T ein thermisches Gleich-gewicht zwischen zwei Systemen kennzeichnen. Diese Relationmuss durch (9.7) ausgedruckt werden, die Temperatur muss ei-ne Funktion von β sein. Wenn die Temperatur mit zunehmenderEnergie zunehmen sollte, ist es sinnvoll
β =1
kT⇒ kT =
1β≈
2Ef. (9.8)
zu identifizieren. Die Energie pro Freiheitsgrad im Gleichge-wicht ist von der Ordnung kT . Die Proportionalitatskonstante kmit der Dimension Energie pro Temperatur ist die so genannteBoltzmann-Konstante
k = 1.38 × 10−16 ergK
(9.9)
Wenn Ω mit E steil zunimmt, ist β positiv und damit T ≥ 0. Nega-tive Temperaturen treten nur auf, wenn aufgrund spezieller auße-rer Umstande die Anzahl zuganglicher Zustande mit der Ener-gie abnimmt. Solche Situationen sind sehr außergewohnlich. Dazumindest im Prinzip die Anzahl der Zustande in einem isolier-ten System bei vorgegebener Energie abzahlbar ist, konnen Ω(E)und β bestimmt werden. Daher legen (9.5) und (9.8) eine absoluteTemperaturskala fest, die in Kelvin (K) gemessen wird.
KAPITEL 9. TEMPERATUR UND ENTROPIE 79
9.1.3 Energieverteilung
• Wir hatten gesehen, dass das Maximum im Produkt (9.3) der Zu-standszahlen extrem scharf sein musse. Da die Energie E1 durchdie Lage dieses Maximums von Ω bestimmt wird, interessiert unswie scharf es bestimmt ist. Wir taylorn um das Maximum bei Eund definieren dazu
ε := E1 − E und λ := −∂2 ln Ω
∂E2
∣∣∣∣∣∣E=E
= −∂β
∂E
∣∣∣∣∣E=E
.
(9.10)Damit wird bis zur zweiten Ordnung
ln Ω(E) = ln Ω(E) + βε −λ
2ε2 + O(ε3) . (9.11)
Mit den beiden Faktoren in (9.3) gibt uns das
ln Ω(E1) = ln [Ω1(E1)Ω2(E − E1)]= ln Ω1(E1) + ln Ω2(E − E1)
= ln Ω(E) + (β1 − β2)ε −ε2
2(λ1 + λ2) + O(ε3) . (9.12)
Im Gleichgewicht ist β1 = β2. Mir λ := λ1 + λ2 folgt dann
ln Ω(E1) = ln Ω(E) −λ
2ε2 + O(ε3)
⇔ Ω(E1) ≈Ω(E) exp[−λ
2(E1 − E)2
]. (9.13)
• In der Nahe des Maximums bei E1 = E nimmt Ω(E1) die Formeiner Gaußverteilung an. Ihre Breite konnen wir mithilfe von (9.6)abschatzen,
σ =1√λ
=
(−∂β
∂E
)−1/2
≈
(f
2E2
)−1/2
= E
√2f. (9.14)
Die relative Abweichung der mittleren Energie E1 vom Maximum
|E1 − E|E
≈σ
E≈
√2f
(9.15)
ist wegen der großen Anzahl der Freiheitsgrade extrem klein. Imthermischen Gleichgewicht wird ein makroskopisches System da-her mit fantastischer Genauigkeit die Energie einnehmen, die derLage des Maximums von Ω entspricht.
KAPITEL 9. TEMPERATUR UND ENTROPIE 80
9.2 Entropie
9.2.1 Definition
• Nach allem was wir bislang gesehen haben ist die Zustandssum-me Ω eine zentrale Große um Systeme mikrospopisch und ma-kroskopisch zu verstehen. In der statistischen Physik definierenwir daher die Entropie S mit einer Proportionalitatskonstante,namlich der Boltzmann-Konstante, als
S := k ln Ω ⇒∂S∂E
= k∂ ln Ω
∂E=
1T. (9.16)
Sie gibt an wie viele Zustande einem isolierten System unter dengegebenen Bedingungen zuganglich sind, sie als ein ”Maß fur dieUnordnung“ zu bezeichnen, ist mindestens irrefuhrend. Als einMaß fur die Anzahl moglicher Mikrozustande bei vorgegebenemMakrozustand ist sie eine Art ”Gestaltenfulle“ eines Systems un-ter gegebenen außeren Bedingungen.
• Wenn ein isoliertes System durch den Wegfall von Zwangsbedin-gungen von einem in ein anderes Gleichgewicht ubergeht, ist imreversible Fall die Anzahl der verfugbaren Zustande konstant, an-derenfalls nimmt sie zu. Dasselbe folgt nach der Definition fur dieEntropie,
∆S ≥ 0 . (9.17)
• Betrachten wir nun zwei Systeme im thermischen Gleichgewicht,von denen das eine sehr viel ”großer“ als das andere ist, oder
E2 E1 . (9.18)
Die Temperatur T1 oder β1 des großen Systems werden sich kaumandern, wenn das kleine mit ihm in thermischen Kontakt gebrachtwird. Mit der ubertragene Energie oder Warmemenge Q als Re-ferenz heisst das ∣∣∣∣∣∂β1(E1)
∂E1
∣∣∣∣∣ ∣∣∣∣∣β1(E1)Q
∣∣∣∣∣ . (9.19)
Das große System 1 wird dann als Warmereservoir oder Warme-bad bezeichnet. In dem Fall konnen wir die Taylor-Entwicklung
ln Ω1(E1 + Q) ≈ ln Ω1(E1) + β1Q (9.20)
nach der ersten Ordnung abbrechen. Multiplizieren wir die Glei-chung mit k, dann erhalten wir die Entropieanderung
∆S =QT1
. (9.21)
Die Entropie des Warmereservoirs andert sich im Kontakt mit ei-nem sehr viel kleineren System um die ausgetauschte Warme-menge, geteilt durch die Temperatur des Reservoirs.

KAPITEL 9. TEMPERATUR UND ENTROPIE 81
• Dasselbe Ergebnis konnen wir durch die entsprechenden Diffe-rentiale erhalten. Die Entropie eines isolierten Systems wird vonseiner Energie und den außeren Parametern x j abhangen. Wennnur Warme ausgetauscht wird, ist dW = 0 und dE = dQ. Wegen(9.16) ist dann
dS =∂S∂E
dE =dET
=dQT
. (9.22)
Die infinitesimale Entropieanderung eines Systems ist die ihmzugefuhrte Warmemenge pro Temperatur. Je heißer das Systemschon war, desto weniger wird seine Entropie erhoht, wenn ihmweitere Warme zugefuhrt wird.
9.2.2 Erster Hauptsatz
• Allgemein hangt die Zustandssumme nicht nur von der Ener-gie ab, sondern auch von den außeren Parametern x j. Wenn wiruns auf einen außeren Parameter x beschranken, dann wird dasvollstandige Differential von ln Ω
d ln Ω =∂ ln Ω
∂EdE +
∂ ln Ω
∂xdx = βdE +
∂ ln Ω
∂xdx . (9.23)
Die Energie jedes Zustands n hangt nun allgemein von x ab,
En = En(x) ⇒ dEn =∂En(x)∂x
dx =: Yndx . (9.24)
Wir konnen alle Zustande auch nach ihrem Wert Yn organisieren.Dann bezeichnen wir mit ΩY(E) die Anzahl aller Zustande zwi-schen E und E +δE, deren Energie sich nach (9.24) außerdem umYdx verandert. Die gesamte Anzahl Ω(E) und der Mittelwert vonY sind entsprechend
Ω(E) =∑
Y
ΩY(E) ⇒ Y(E) =1
Ω(E)
∑Y
YΩY(E) . (9.25)
• Durch die Energieanderung der Zustande mit x werden einigeZustande in das Energieband zwischen E und E+δE eintreten undeinige austreten. Die Anzahl der Zustande pro Energieeinheit istΩ(E)/δE. Wenn sich die Energien der zuganglichen Zustande imMittel um Y(E)dx verandern, treten durch die Energieverschie-bung in den unteren Rand des Energiebands
dΩ+ =Ω(E − δE)
δEY(E − δE)dx (9.26)
Zustande ein. Am oberen Rand treten entsprechend
dΩ− =Ω(E)δE
Y(E)dx (9.27)
KAPITEL 9. TEMPERATUR UND ENTROPIE 82
Zustande aus. Die Anzahl zuganglicher Zustande im Energiebandandert sich also insgesamt um
dΩ =dΩ+ − dΩ−
=(ΩY)(E − δE) − (ΩY)(E)
δEdx
= −∂(ΩY)(E)
∂Edx
⇔∂Ω
∂x= −
∂(ΩY)∂E
= −Y∂Ω
∂E−Ω
∂Y∂E
. (9.28)
Wir wissen dass Ω proportional zu f E f /2, Y hat keine relevantenSkalierungeigenschaften. Damit ist der erste Term proportionalzu f 2E f /2, der zweite Term zu Ω ∝ f E f /2, also
∂Ω
∂x= −Y
∂Ω
∂E. (9.29)
Die Ableitungen der Energie nach den außeren Parametern hattenwir schon in (8.31) bzw. (8.32) als verallgemeinerte Krafte iden-tifiziert, demnach ist Y = −X. Wir verallgemeinern schließlichunser Ergebnis auf beliebig viele außere Parameter x j, teilen aufbeiden Seiten durch Ω(E) und verwenden (9.5), so dass schließ-lich folgt
∂ ln Ω
∂x j= X j
∂ ln Ω
∂E= βX j . (9.30)
Wir erinnern uns noch dass wir annehmen mussen dass die Wech-selwirkung quasistatisch erfolgt, so dass die verallgemeinertenKrafte X j definiert sind, und zwei Gleichgewichtszustande mit-einander verbindet.
• Wenn wir jetzt (9.30) in (9.23) einsetzen, dann folgt
d ln Ω =β (dE + X jdx j) =1
kT(dE + X jdx j)
⇔ TdS =dE + dW = dQ . (9.31)
Die Beziehung (9.21) bleibt also auch dann gultig, wenn durchdie Wechselwirkung zweier Systeme nicht nur Warme ausge-tauscht, sondern auch auf quasi-statische Weise mechanische Ar-beit verrichtet wird. Die Relation (9.31) heisst auch der ErsteHauptsatz der Thermodynamik.
• Wird in einem Prozess keine Warme ausgetauscht, heißt er adia-batisch. Ist dies bei einem quasistatischen Prozess der Fall, istwegen (9.31) auch dS = 0. Das zeigt, dass sich die Entropieauch dann nicht andert, wenn an einem isolierten System aufquasi-statische Weise eine endliche Menge Arbeit verrichtet wird.Damit sind solche endlichen, adiabatischen und quasi-statischenProzesse auch reversibel. Die Entropie kann auch bei adiabati-schen Prozessen aber durchaus zunehmen kann, wenn der Prozessnicht quasi-statisch gefuhrt wird.
KAPITEL 9. TEMPERATUR UND ENTROPIE 83
9.3 Maxwell-Boltzmann-Verteilung
9.3.1 Maxwell-Verteilung
• Eine offensichtliche Frage in der statistischen Physik ist wie dieEnergien oder Geschwindigkeiten der Teilchen eines (idealen)Gases verteilt ist. Wir suchen eine Verteilungsfunktion so dass
f (vx, vy, vz)dvxdvydvz (9.32)
die Wahrscheinlichkeit angibt, ein Teilchen mit einer Geschwin-digkeit zwischen (vx, vy, vz) und (vx+dvx, vy+dvy, vz+dvz) zu finden.
• Von Maxwell stammt folgende elegante Uberlegung: In ei-nem Gas im thermodynamischen Gleichgewicht wird die Ge-schwindigkeitsverteilung nicht von der Richtung der Bewegungabhangen, weil alle Richtungen gleich wahrscheinlich sind. Alsokann die Verteilung nur von ~v 2 abhangen. Weiterhin mussen dieWahrscheinlichkeiten in die unabhangigen Raumrichtung fakto-risieren,
f (~v 2) = f (v2x + v2
y + v2z ) = f (v2
x) f (v2y) f (v2
z ) . (9.33)
Die einzige Funktion f , die dieser Forderung genugt, ist die Ex-ponentialfunktion. Wir mussen also
f (~v 2) = C exp(−a~v 2) (9.34)
fordern. Die Faktoren C und a sind vorerst beliebig, fur eine nor-mierbare Verteilung muss aber a > 0 sein. Damit ist die Vertei-lung eine Gaußverteilung im Geschwindigkeitsraum mit Mittel-wert vx = vy = vz = 0 und der Standardabweichung oder Wurzelaus der Varianz
σ2v = v2
i =1
2a. (9.35)
Die Normierung als Wahrscheinlichkeit ergibt dann
C =1
(2πσ2v )3/2 . (9.36)
• Die Bedeutung von a erhalten wir aus dem Argument dass dieStreuung der Geschwindigkeitskomponente der mittlere kineti-sche Energie ε eines Teilchens entsprechen muss,
ε =m2
(v2
x + v2y + v2
z
)=
3m2v2
x =3m2σ2v (9.37)
Die Energie eines idealen Gases mit N Teilchen mit jeweils dreiFreiheitsgraden ist nach (9.8)
E =32
NkT ⇒ ε =32
kT ⇒ σ2v =
kTm
(9.38)

KAPITEL 9. TEMPERATUR UND ENTROPIE 84
Wir erhalten damit die Maxwellsche Geschwindigkeitsverteilung
f (~v 2) =
( m2πkT
)3/2exp−
m~v 2
2kT∝ exp−
EkT
. (9.39)
9.3.2 Boltzmann-Verteilung
• Motiviert durch das Auftauchen der Energie in (9.39) konnen wirdiese Frage mit Hilfe der statistischen Physik stellen. Um thermi-sches Gleichgewicht eines Systems zu garantieren nehmen diesesSystem im Warmebad an. Wir betrachen also ein isoliertes Ge-samtsystem der Energie E, das aus einem Warmereservoir A1 derEnergie E1 und einem Teilsystem A2 mit der Energie E2 = E−E1
besteht. Beide sind im thermischen Gleichgewicht, und wir hattenschon die Zustandssumme Ω(E1) berechnet. Jetzt konnen wir dieWahrscheinlichkeit ausrechnen, das System A2 im Zustand n beider Energie En zu finden
• Nach dem statistischen Grundpostulat ist diese Wahrscheinlich-keit proportional zur Anzahl der dem Gesamtsystem zugangli-chen Zustande. Da das System A2 gerade in dem einen festen Zu-stand n sein soll, ist
pn ∝ Ω1(E − En) . (9.40)
• Da En E sein muss, weil es sich bei A1 um ein Warmereservoirhandelt, konnen wir ln Ω1(E − En) wieder um die GesamtenergieE entwickeln,
ln Ω1(E − En) ≈ ln Ω1(E) − β1En
⇒ Ω1(E − En) = Ω1(E) e−β1En ⇒ pn ∝ e−βEn = e−En/(kT ) ,(9.41)
wobei T die Temperatur des Warmereservoirs (und damit auchdes Systems A2) ist. Die Proportionalitatskonstante folgt aus derBedingung, dass die Wahrscheinlichkeiten auf eins normiert seinmussen,
pn =e−En/(kT )∑n e−En/(kT ) . (9.42)
Dieses sehr allgemein gultige Ergebnis ist die Boltzmann-Verteilung. Sie zeigt, dass die Besetzung der Zustande eines Sy-stems, das sich im thermischen Gleichgewicht mit einem Warme-bad befindet, exponentiell von dem Verhaltnis der Zustandsener-gie En zur thermischen Energie kT abhangt.
Kapitel 10
Thermodynamik
In diesem Kapitel werden wir die Grundbegriffe der Thermodynamikherleiten und ihre Verknupfungen betrachten. Das beste Beispiel isttypischerweise das ideale Gas. Bei der gesamten Begriffsbildung derThermodynamik sollten wir aber nicht vergessen, dass wir immer aufdie exakten Definitionen mit Hilfe der statistischen Physik und speziellder Zustandssumme Ω zuruckgreifen konnen. Ein Teil der Begriffe, diewir in diesem Kapitel einfuhren gehort zu den Grundkenntnissen, ohnedass wir sie in dieser Vorlesung weiter benotigen.
10.1 Thermodynamische Beziehungen
10.1.1 Eindeutigkeit der Entropie
• Nach (9.16) ist die Entropie ist ein logarithmisches Maß fur dieAnzahl der Zustande, die ein isoliertes System einnehmen kann.Ihre Zahl hangt von unserer Wahl der Konstante h0 in (8.2) ab,
Ω =1
h f0
∫ f∏i=1
dqi
∫ f∏j=1
dp j =:Γ
h f0
⇒ S =k ln Ω = k ln Γ − k f ln h0 (10.1)
Die Große Γ ist das gesamte zugangliche Phasenraumvolumen.In der klassischen Physik ist die Entropie nur bis auf eine addi-tive Konstante festgelegt. In der Quantenmechanik gibt es einenaturliche Wahl fur h0, namlich das Plancksche Wirkungsquan-tum h. Damit verliert die Entropie eines Quantensystems ihre Un-eindeutigkeit.
• Nimmt die Energie eines Systems ab, verringert sich das ihmzugangliche Phasenraumvolumen Γ. Fur E → 0 bleiben nur ei-ner oder wenige Zustande ubrig, die das System einnehmen kann,
85
KAPITEL 10. THERMODYNAMIK 86
sodass ln Γ → 0. Nach (10.1) wird die Entropie im Allgemeinennicht gegen Null gehen. Die Konstante kann aber so gewahlt wer-den, dass S → 0 fur E → 0. Damit nahert sich auch die Tempe-ratur ihrem absoluten Nullpunkt an,
T0 = 0Kelvin = −273.15 Celsius . (10.2)
Die AussageS → 0 fur T → 0 (10.3)
bezeichnet man als den dritten Hauptsatz der Thermodynamik.
• Eine aufgenommene oder abgegebene Warmemenge dQ hattenwir als unvollstandiges Differential identifiziert. Im Gegensatz da-zu muss das Differential der Entropie vollstandig sein, weil dieEntropie als Zustandsgroße des Systems nur den Anfangs- undEndzustand einer quasi-statischen Zustandsanderung kennzeich-net,
S f − S i =
∫ f
idS =
∫ f
i
dQT
. (10.4)
Der Faktor 1/T ist offenbar ein integrierender Faktor fur d Q.
10.1.2 Thermisches und mechanisches Gleichgewicht
• Betrachten wir zwei gemeinsam isolierte Systeme, die unterein-ander Warme austauschen und dadurch mechanische Arbeit an-einander verrichten konnen, dass sie ihre Teilvolumina andern.Der einzige außere Zustandsparameter ist demnach die Auftei-lung des Volumens V . Wir konnen die Entropie in der Form
S (E,V) = S 1(E1,V1) + S 2(E − E1,V − V1) (10.5)
schreiben. Im Folgenden nehmen wir an, dass (9.31) oder der er-ste Hauptsatz der Thermodynamik
TdS = dQ = dE + dW (10.6)
erfullt ist. Nach (8.34) gilt
TdS = dQ = dE + dW = dE + PdV ⇒∂S∂V
=PT. (10.7)
• Das Gleichgewicht wird wie gewohnt durch maximale EntropieS (E,V) bestimmt, also
0 = dS =∂S 1
∂E1dE1 +
∂S 2
∂E2dE2 +
∂S 1
∂V1dV1 +
∂S 2
∂V2dV2
=
(1T1−
1T2
)dE1 +
(P1
T1−
P2
T2
)dV1
⇔1T1−
1T2
=0 undP1
T1−
P2
T2= 0 . (10.8)
Außer den Temperaturen gleichen sich also auch die Drucke inden beiden Systemen aneinander an.

KAPITEL 10. THERMODYNAMIK 87
10.1.3 Warmekapazitat und spezifische Warme
• Die Aufnahmefahigkeit eines Systems fur Warme wird durch dieWarmekapazitat
Cx :=(dQdT
)x
(10.9)
beschrieben. Dabei ist in dieser Notation x ein außerer Zustand-sparameter, der wahrend der Warmeaufnahme konstant gehaltenwird. Die Angabe der konstant zu haltenden Große ist in der Ther-modynamik wichtig, weil oft ganz andere Großen als die naturli-chen unabhangigen Variablen der thermodynamischen Funktio-nen konstant gehalten werden mussen. Eine Materialgroße erhal-ten wir mit der spezifische Warme cx, indem wir Cx entwederdurch die Molzahl ν oder die Masse m teilen. Das Ergebnis ist
cx =Cx
νoder cx =
Cx
m, (10.10)
mit den Einheiten erg K−1 mol−1 im ersten und erg K−1 g−1 imzweiten Fall.
• Damit konnen wir berechnen, welche Temperatur Tm sich einstel-len wird, wenn zwei gemeinsam isolierte Systeme in thermischenKontakt gebracht werden. Wenn keine mechanische Arbeit aus-geubt wird, gilt
0 = Q1 + Q2 = m1
∫ Tm
T1
cV1(T ) dT +m2
∫ Tm
T2
cV2(T ) dT , (10.11)
wenn cV die spezifische Warme pro Masse bei konstantem Teilvo-lumen ist. Wenn zudem cV von der Temperatur zumindest in guterNaherung unabhangig ist, erhalten wir daraus die Mischungstem-peratur,
m1cV1(Tm − T1) + m2cV2(Tm − T2) =0
⇔ Tm =m1cV1T1 + m2cV2T2
m1cV1 + m2cV2.
(10.12)
Ebenso konnen wir die Entropieanderung ∆S berechnen, die mitder Warmeaufnahme einhergeht. Bei einer quasistatischen Tem-peraturanderung von Ti zu Tf gilt bei konstantem Zustandspara-meter x
∆S = S f − S i =
∫ f
i
dQT
=
∫ Tf
Ti
CxdTT
= Cx lnTf
Ti, (10.13)
wenn die Warmekapazitat Cx wieder naherungsweise temperatu-runabhangig ist.

KAPITEL 10. THERMODYNAMIK 88
10.2 Ideales Gas
10.2.1 Zustandsgleichung
• Nach ihrer Definition heißen Gase ideal, wenn ihre Teilchen nurdurch direkte Stoße miteinander wechselwirken und als Punktteil-chen behandelt werden konnen. Dann ist die Anzahl der zugang-lichen Zustande im Phasenraum nach (8.11) und mit f = 3N
Ω =VNω(E)
h3N0
⇒ S =kN ln V + k lnω(E) − 3Nk ln h0 , (10.14)
wobei ω(E) eine Funktion der Energie allein ist, die unter ande-rem den bekannten Term (2mE) f /2 unserer mikroskopischen Dar-stellung enthalt. Nach (10.7) ist die Zustandsgleichung
PT
=∂S∂V
=kNV
⇒ PV = NkT . (10.15)
Die Temperatur, nach (9.16) durch
1T
=∂S∂E
=k
ω(E)∂ω(E)∂E
(10.16)
bestimmt, hangt nur von der Energie, aber nicht vom Volumenab. Umgekehrt ist die Energie eines idealen Gases eine Funktionallein der Temperatur, E = E(T ).
• Alternativ konnen wir die Zustandsgleichung (10.15) als expe-rimentell gegeben ansehen und aus thermodynamischen Zusam-menhangen Schlusse uber ideale Gase ziehen. Wir schreibenzunachst die Entropie S = S (T,V) als Funktion von Tempera-tur und Volumen, sodass
dS =∂S∂T
dT +∂S∂V
dV. (10.17)
Mit (10.15) und dem ersten Hauptsatz der Thermodynamik giltausserdem
dS =dET
+P dV
T(10.18)
Nun drucken wir auch die Energie E = E(T,V) als Funktion derTemperatur und des Volumens aus. Wir bekommen
dE(T,V) =
(∂E∂T
)V
dT +
(∂E∂V
)T
dV
⇒ dS (T,V) =1T
(∂E∂T
)V
dT +
(PT
+1T
(∂E∂V
)T
)dV (10.19)
KAPITEL 10. THERMODYNAMIK 89
und damit(∂S∂T
)V
=1T
(∂E∂T
)V(
∂S∂V
)T
=PT
+1T
(∂E∂V
)T
=NkV
+1T
(∂E∂V
)T, (10.20)
wobei wir im letzten Schritt die Zustandsgleichung (10.15) ver-wendet haben.
• Die gemischten Ableitungen der Entropie mussen aber uberein-stimmen. Daraus folgt
∂2S∂T∂V
=1T
∂2E∂V∂T
(10.21)
!=
∂2S∂V∂T
=∂
∂T
(1T∂E∂V
)= −
1T 2
(∂E∂V
)T
+1T
∂2E∂T∂V
und damit (∂E∂V
)T
= 0. (10.22)
Die Energie eines thermodynamischen Systems mit der gemes-senen Zustandsgleichung (10.15) kann daher nicht vom Volumenabhangen. Aus der Zustandsgleichung und den thermodynami-schen Gesetzen schließen wir also, dass die Teilchen des Systemsnur durch direkte Stoße wechselwirken konnen und nicht zumBeispiel durch langreichweitige Krafte.
10.2.2 Spezifische Warmen und Entropie
• Fur die spezifische Warme pro Mol bei konstantem Volumen, cV ,erhalten wir aus ihrer Definition und dem ersten Hauptsatz
cV =1ν
(dQdT
)V
=1ν
(dE + PdV
dT
)V
=1ν
∂E∂T
⇒ dE =∂E∂T
dT = νcVdT , (10.23)
denn die Energie hangt nur von der Temperatur ab. Wenn wir stattdes Volumens den Druck konstant halten, dann mussen wir erlau-ben, dass sich das Volumen andern kann. Die spezifische Warmepro Mol bei konstantem Druck ist analog
cP =1ν
dE + PdVdT
= cV +PdVνdT
= cV +NkdTνdT
= cV +Nkν
=cV + R mit R := NAk = 8.31 × 107 ergmol K
(10.24)
wegen der Zustandsgleichung (10.15) und mit der so definier-ten Gaskonstanten R. Die spezifische Warme bei konstantem

KAPITEL 10. THERMODYNAMIK 90
Druck ist großer als die spezifische Warme bei konstantem Vo-lumen, weil das Gas bei konstantem Druck außer einer Tempera-turerhohung auch mechanische Arbeit verrichten kann, indem essein Volumen vergroßert. Es muss also mehr Energie zugefuhrtwerden, um ein ideales Gas bei konstanten Druck zu erwarmen,als bei konstantem Volumen.
• Auf der mikroskopischen Ebene konnen wir die beiden Warme-kapazitaten ausrechnen. Wir beginnen mit der Zustandssumme
Ω ∝VN E f /2 = VN E3N/2
⇒ S =kN ln V +3kN
2ln E + konst.
⇒1T
=∂S∂E
=3Nk2E
⇔ E =32
NkT. (10.25)
Nun ist nach (10.23) und nach dem ersten Hauptsatz bei dV = 0
cV =1ν
∂E∂T
=32
Nkν
=32
R und cP =52
R . (10.26)
• Auf ahnliche Weise erhalten wir die Entropie, zumindest bis aufeine Konstante. Wegen (10.23) gilt
TdS =dE + PdV = νcVdT + PdV
⇒ dS =νcVdTT
+NkV
dV = νcVdTT
+ νRdVV
. (10.27)
• Wir betrachten ν0 = 1 Mol eines idealen Gases mit einer Tem-peratur T0 und einem Volumen V0. Ein Gas mit derselben Tem-peratur T0 und ν Mol hat das Volumen (ν/ν0)V0, weil das Volu-men eine extensive Große ist, die sich bei der Verbindung zweierSysteme addiert. Nun gehen wir zunachst bei konstanter Tempe-ratur zum Volumen V und anschließend bei konstantem Volumenzur Temperatur T . Wenn wir dies quasi-statisch tun, dann bleibt(10.27) gultig. Die vom Weg unabhangige Entropieanderung istnach (10.27)
∆S = νcV
∫ T
T0
dT ′
T ′+ νR
∫ V
(ν/ν0)V0
dV ′
V ′
= νcV lnTT0
+ νR lnV
(ν/ν0)V0
= νcV lnTT0
+ νR lnVV0− νR ln
ν
ν0. (10.28)
Indem wir die Molzahlen ν durch Teilchenzahlen N = νNA erset-zen und R = kNA verwenden, erhalten wir
∆S =3Nk
2ln
TT0
+ Nk lnVV0− Nk ln
NNA
. (10.29)

KAPITEL 10. THERMODYNAMIK 91
• Dieses Ergebnis ist wegen des letzten Terms problematisch. Den-ken wir uns ein Gasvolumen mit N Teilchen gefullt und betrach-ten jeweils eine Halfte der Teilchen. Wir erwarten aus der Defini-tion der Zustandssummen, dass die gesamte Entropie gleich derSumme der Entropien der beiden Halften ist. Gleichung (10.29)skaliert aber nicht auf diese Weise. Stattdessen finden wir fur dieSumme der Entropieanderungen in den beiden Halften
2∆S N/2 =3Nk
2ln
TT0
+ Nk lnVV0− 2
Nk2
lnN
2NA
=3Nk
2ln
TT0
+ Nk lnVV0− 2
Nk2
(ln
NNA− ln 2
)=∆S N + Nk ln 2 (10.30)
Dies ist das Gibbssche Paradoxon, das uns spater noch beschafti-gen wird.
10.2.3 Adiabatische Expansion
• Wenn ein ideales Gas im Kontakt mit einem Warmereservoir ex-pandiert, dann bleibt seine Temperatur konstant. Aufgrund derZustandsgleichung ist damit
PV = NkT = konst. (10.31)
Anders verlauft die Expansion, wenn das ideale Gas thermischisoliert ist. Diese adiabatische Expansion erfullt
0 = dQ = dE + PdV = νcVdT + PdV . (10.32)
Die Zustandsgleichung sagt uns außerdem
d(PV) = VdP + PdV = NkdT = νRdT . (10.33)
Eliminieren wir dT zwischen den beiden Gleichungen (10.32)und (10.33), folgt
cV
R(VdP + PdV) + PdV = 0
⇔cV
RVdP = −
cV + RR
PdV = −cP
RPdV , (10.34)
mit (10.24). Trennung der Variablen und Integration fuhrt schließ-lich zu
dPP
= −cP
cV
dVV
⇒ P ∝V−γ mit γ :=cP
cV=
53
(10.35)
• Uber die Zustandsgleichung PV = νRT fuhrt (10.35) auf einenZusammenhang zwischen dem Volumen und der Temperatur,
PVγ = (PV)Vγ−1 = νRTVγ−1 = konst. ⇒ TVγ−1 = konst.(10.36)
KAPITEL 10. THERMODYNAMIK 92
10.3 Thermodynamische Funktionen
10.3.1 Legendre-Transformationen
• Bisher hatten wir ausgehend vom ersten Hauptsatz die Energieals Funktion der Entropie und des Volumens betrachtet,
dE = TdS − PdV =
(∂E∂S
)V
dS +
(∂E∂V
)S
dV . (10.37)
Identifizieren wir die beiden Darstellungen, erhalten wir die Re-lationen (
∂E∂S
)V
= T und(∂E∂V
)S
= −P . (10.38)
Diese Beziehungen gelten, weil dE ein vollstandiges Differentialist, sodass die verschiedenen partiellen Ableitungen von E nichtunabhangig sein konnen. Aus demselben Grund konnen wir diegemischten zweiten Ableitungen von E miteinander identifizie-ren,
∂2E∂V∂S
=∂2E∂S ∂V
. (10.39)
Das bedeutet ausgeschrieben(∂
∂V
)S
(∂E∂S
)V
=
(∂
∂S
)V
(∂E∂V
)S. (10.40)
Mit den Identifikationen (10.38) erhalten wir(∂T∂V
)S
= −
(∂P∂S
)V. (10.41)
Solche Arten von Beziehungen werden uns gleich sehr nutzlichwerden.
• In der experimentellen Praxis kann der Druck oft besser kontrol-liert werden als das Volumen. Experimente in offenen Behalternlaufen beispielsweise bei konstantem außeren Druck ab. Es lohntsich dann, das System nicht als Funktion der Entropie und desVolumens, sondern der Entropie und des Drucks zu beschreiben,also die Variablentransformation (S ,V)→ (S , P) durchzufuhren.
Nach (10.38) ist der Druck als die zum Volumen gehorende ver-allgemeinerte Kraft gerade die (negative) Ableitung der Energienach dem Volumen. Die Transformation von V nach P ist also einBeispiel fur Transformationen, bei der eine Funktion f (x) in eineFunktion g(u) uberfuhrt werden soll, wobei die neue Variable ugerade durch
u = ±d f (x)
dx(10.42)

KAPITEL 10. THERMODYNAMIK 93
bestimmt ist. Das Vorzeichen spielt fur die Transformation selbstkeine wesentliche Rolle, sodass wir der Einfachheit halber dasMinuszeichen ignorieren.
• Wenn die vollstandigen Differentiale von f (x) und g(u) durch
d f =d f (x)
dxdx = u dx , dg =
dg(u)du
du = −x du (10.43)
festgelegt werden, gilt
dg = −x du = u dx − (u dx + x du) = d f − d(ux) . (10.44)
Durch Integration erhalten wir (bis auf eine Konstante)
g = f − ux bzw. g(u) = f [x(u)] − ux(u) (10.45)
Die Funktion g(u) heißt Legendre-Transformierte der Funktionf (x). Wenn x(u) nicht eindeutig bestimmt ist, wird die Legendre-Transformation allgemein bestimmt durch
g(u) = infx f [x(u)] − ux(u) . (10.46)
• Als Beispiel betrachten wir
f (x) = x2 + 1 ⇒ u(x) =2x ⇒ x(u) =u2
⇒ g(u) = f(u2
)−
u2
2= 1 −
u2
4. (10.47)
und
f (x) =x3
6−
x2
2⇒ u(x) =
x2
2− x
⇒ x(u) =1 ±√
1 + 2u (10.48)
Die Legendre-Transformierte von f (x) ist im zweiten Fall durchdie kleinere der beiden Losungen x(u) definiert.
• Eine Legendre-Transformation war uns schon bei der Hamilton-Formulierung der klassischen Mechanik begegnet. Dort ha-ben wir die Argumente Ort und Geschwindigkeit durch Ortund kanonisch-konjugierten Impuls ersetzt. Der kanonisch-konjugierte Impuls ist nach p = ∂L/∂q gerade die Ableitung derLagrange-Funktion nach der Geschwindigkeit, also nach der zuersetzenden Variablen. Die Hamilton-Funktion war dann
H(q, p) = qp − L(q, q) , (10.49)
was bis auf ein unerhebliches Vorzeichen der Form (10.45) ent-spricht.
KAPITEL 10. THERMODYNAMIK 94
10.3.2 Enthalpie, freie Energie und freie Enthalpie
• Mit Hilfe der Legendre-Transformation konnen wir ausgehendvon der Energie E(S ,V) eine Funktion H(S , P) der Entropie unddes Drucks definieren, die Enthalpie
H(S , P) = E(S ,V) + PV mit P = −
(∂E∂V
)S. (10.50)
In diesem Fall ist das positive Vorzeichen physikalisch sinnvoll.Das vollstandige Differential der Enthalpie ist
dH = d(PV) + dE = VdP + PdV + TdS − PdV = TdS + VdP ,(10.51)
woraus zunachst(∂H∂S
)P
= T und(∂H∂P
)S
= V (10.52)
folgen. Wenn dH ein vollstandiges Differential ist, mussen wiederBeziehungen zwischen den partiellen Ableitungen der Enthalpiegelten. Wir identifizieren die zweiten Ableitungen nach S und P,
∂2H∂S ∂P
=∂2H∂P∂S
, (10.53)
und erhalten daraus(∂
∂S
)P
(∂H∂P
)S
=
(∂
∂P
)S
(∂H∂S
)P, (10.54)
oder mit Hilfe von (10.52)(∂V∂S
)P
=
(∂T∂P
)S. (10.55)
• Als nachstes Argument mochten wir die Entropie durch dieTemperatur ersetzen, (S ,V) → (T,V). Uber eine Legendre-Transformation definieren wir die freie Energie
F(T,V) = E(S ,V) − TS mit T =
(∂E∂S
)V. (10.56)
Ihr vollstandiges Differential ist
dF(T,V) = dE−d(TS ) = TdS−PdV−S dT−TdS = −PdV−S dT ,(10.57)
woraus wir (∂F∂V
)T
= −P und(∂F∂T
)V
= −S (10.58)
KAPITEL 10. THERMODYNAMIK 95
erhalten. Gleichsetzen der gemischten zweiten Ableitungen derfreien Energie,
∂2F∂T∂V
=∂2F∂V∂T
, (10.59)
fuhrt uns mit (10.58) auf die Beziehung(∂P∂T
)V
=
(∂S∂V
)T. (10.60)
• Schließlich suchen wir eine letzte Große, um Systeme zu be-schreiben, bei denen Temperatur und Druck experimentell kon-trolliert werden konnen. Eine Legendre-Transformation der frei-en Energie fuhrt uns auf die freie Enthalpie
G(T, P) = F(T,V)+PV = E(S ,V)−TS +PV mit P = −
(∂F∂V
)T.
(10.61)mit vollstandigem Differential
dG = dF+VdP+PdV = −PdV−S dT +VdP+PdV = VdP−S dT.(10.62)
Die nun schon gewohnte Prozedur der Gleichsetzung der ge-mischten zweiten Ableitungen fuhrt mit(
∂G∂T
)P
= −S ,
(∂G∂P
)T
= V (10.63)
auf die Relation (∂S∂P
)T
= −
(∂V∂T
)P. (10.64)
10.3.3 Maxwell-Relationen
• Fassen wir zusammen: Wir hatten anfanglich Systeme durch ihreEnergie E gekennzeichnet, mit dem Volumen V als alleinigemaußeren Parameter. Die Entropie S (E,V) hatten wir eingefuhrt alsein logarithmisches Maß dafur, wie viele Zustande dem Systemunter Vorgabe von E und V zuganglich sind. Fur quasi-statischeZustandsanderungen waren wir damit auf den ersten Hauptsatzgekommen, in dem die unvollstandigen Differentiale d Q und dWmithilfe der Temperatur und des Drucks durch die vollstandigenDifferentiale TdS der Entropie und PdV des Volumens ersetztwerden konnten.
• Spater hatten wir umgekehrt die Entropie als Zustandsgroße ver-wendet und die Energie E(S ,V) als Funktion der Entropie unddes Volumens aufgefasst. Davon ausgehend haben wir nun durchvier verschiedene Legendre-Transformationen die unabhangigen

KAPITEL 10. THERMODYNAMIK 96
Großen durch andere ersetzt. Diese Legendre-Transformationenuberfuhren entweder S → T oder V → P. Dadurch entstehenneue thermodynamische Funktionen, die alle die Dimension ei-ner Energie haben:
Energie E(S ,V)freie Energie F(T,V) = E(S ,V) − TSEnthalpie H(S , P) = E(S ,V) + PVfreie Enthalpie G(T, P) = F(T,V) + PV = E(S ,V) − TS + PV .
Funktionen, in denen die Temperatur statt der Entropie un-abhangig ist, heißen “frei”; Funktionen, in denen der Druck an-stelle des Volumens unabhangig ist, heißen “Enthalpie”.
James Clerk MaxwellDie jeweiligen vollstandigen Differentiale sind
dE = TdS − PdVdF = −S dT − PdVdH = TdS + VdPdG = −S dT + VdP. (10.65)
Da alle diese Differentiale vollstandig sein mussen, gelten dieMaxwell-Relationen(
∂T∂V
)S
= −
(∂P∂S
)V
,
(∂T∂P
)S
=
(∂V∂S
)P,(
∂S∂V
)T
=
(∂P∂T
)V
,
(∂S∂P
)T
= −
(∂V∂T
)P. (10.66)
Diese Relationen folgen letztendlich daraus, dass die Entropie ei-ne Funktion ist, die den Zustand eines Systems kennzeichnet undderen Differential deshalb vollstandig sein muss. Sie sind sehrnutzlich, wenn es darum geht, unbekannte oder experimentellkaum bestimmbare Ableitungen durch anschaulichere oder bes-ser messbare Abhangigkeiten zu ersetzen.
Kapitel 11
Phasenubergange
Im vergangenen Kapitel haben wir im Rahmen der Thermodynamikverschiedene Arten der Veranderung von Zustandsgroßen kennenge-lernt, zum Beispiel unter Wechselwirkung mit einem Warmebad oderentlang einer Adiabate. Solche Prozesse beruhten darauf, das Systemmoglichst homogen kontinuierlich zu verandern. Nun wenden wir unsder Frage zu, wie wir in einem System drastische Veranderungen erzeu-gen konnen. Die Abkuhlung von Wasser zum Beispiel wird schließlichzur Umwandlung in Eis fuhren. In diesem Kapitel werden wir uns sol-chen drastischen Veranderungen, den Phasenubergangen, in der Spra-che der statistischen Thermodynamik widmen.
11.1 Phasengleichgewicht
11.1.1 Extremaleigenschaften
• Wir hatten schon gesehen, dass die Wahrscheinlichkeit, in einemEnsemble gleichartiger Systeme fur einen bestimmten Parameterx den Wert X zu messen, proportional ist zur Anzahl der mit Xvertraglichen Zustande im Phasenraum,
p(X) ∝ Ω(X) = exp(S (X)
k
). (11.1)
Im Gleichgewicht wird also mit großter Wahrscheinlichkeit derWert von x gemessen werden, der Ω(X) maximiert. Ein isoliertesSystem wird sich deshalb so einstellen, dass auch die Entropiemaximal wird,
dS = 0 und∂2S∂x2
j
≤ 0 (11.2)
fur alle ausseren Parameter x j. Diese Aussage stellt im Lich-te der Wahrscheinlichkeitsinterpretation der Entropie beinahe ei-ne Trivialitat dar: Das System wird seine außeren Parameter im
97
KAPITEL 11. PHASENUBERGANGE 98
Gleichgewicht so einstellen, dass sie ihm einen moglichst großenBereich im Phasenraum erlauben, weil dann die Wahrschein-lichkeit moglichst groß wird, das System dort zu finden. Daskonnte man in der Formulierung ”wahrscheinlich geschieht im-mer das Wahrscheinlichste“ zusammenfassen. Diese fundamen-tale Aussage beruht jedoch auf dem Postulat gleicher a-priori-Wahrscheinlichkeiten und der Tatsache, dass die Entropie alslogarithmisches Maß des Phasenraumvolumens eine Zustands-funktion physikalischer Systeme darstellt. Die Maximierung derEntropie im Gleichgewicht isolierter Systeme ist deswegen so-wohl eine Aussage uber Wahrscheinlichkeiten als auch uber dieaußeren physikalischen Parameter dieser Systeme.
• Fur isolierte Systeme ist die Energie konstant und es wird keineArbeit am oder vom System verrichtet. Dann sind (E,V) vorge-geben, und der Gleichgewichtszustand ist durch (11.2) gekenn-zeichnet, dS = 0. In thermischem Kontakt mit einem Warme-reservoir der Temperatur T stellt sich ein anderes Gleichgewichtein. Sei S 1 die Entropie des Reservoirs, S 2 die Entropie des Sy-stems und S die Entropie des Gesamtsystems, so gilt
0 = dS =dS 1 + dS 2 =dQ1
T+ dS 2
=−dE2 + TdS 2
T=−dF2
T, (11.3)
weil die Warmeanderung d Q1 des Reservoirs allein die Energiedes Systems verandert und die Temperatur durch die Wechsel-wirkung mit dem Reservoir konstant ist. Das Differential dF =
−PdV − S dT kennen wir aus (10.57). Bei vorgegebener Tempe-ratur und festem Volumen stellt sich das System also so ein, dassauch die freie Energie F(T,V) extremal wird. Das Minuszeichenin (11.3) hat zur Folge, dass maximale Entropie minimale freieEnergie bedeutet.
• Ebenso gut konnen wir statt des Volumens V den Druck P vorge-ben. Um in den Gleichgewichtszustand zu kommen, muss das Sy-stem aus dem Reservoir soviel Warme entnehmen, dass es nichtnur seine Energie, sondern auch sein Volumen anpassen kann.Jetzt gilt nicht mehr dQ1 = −dE2 wie in (11.3), sondern
dQ1 = − dQ2 = −dE2 − P2dV2
⇒ 0 = dS = dS 1 + dS 2 =d Q1
T+ dS 2
=−dE2 − P2dV2 + TdS 2
T=−dG2
T. (11.4)
Hier nutzen wir die freie Enthalpie G aus (10.61). Bei festemDruck und vorgegebener Temperatur stellt sich das Gleichge-
KAPITEL 11. PHASENUBERGANGE 99
wicht des Systems so ein, dass die freie Enthalpie G(T, P) mini-mal wird. Auch das ist eine Konsequenz der Extremaleigenschaftder Entropie.
11.1.2 Chemisches Potential
• Erlauben wir jetzt außer Veranderungen von Volumen oder Druckund Temperatur oder Energie auch Anderungen der TeilchenzahlN. Dann ist die Energie E = E(S ,V,N) und es tritt eine weitereverallgemeinerte Kraft im Sinne von (8.31) auf,
µ :=(∂E∂N
)S ,V
. (11.5)
Sie heißt chemisches Potential und gibt an, wie sich die Ener-gie andert, wenn sich N andert. Das vollstandige Differential derEnergie lautet mit Hilfe der drei verallgemeinerten Krafte
dE =
(∂E∂S
)V,N
dS +
(∂E∂V
)S ,N
dV +
(∂E∂N
)S ,V
dN
= TdS − PdV + µdN, (11.6)
und entsprechend bekommen wir fur die Entropie
dS =dET
+PdV
T−µdN
T. (11.7)
• Betrachten wir nun ein isoliertes System, das aus zwei Phasen be-steht. Als Phase wird ein chemisch und physikalisch homogenerBereich bezeichnet. Im Falle eines Eiswurfel im Wasserglas sindWasser und Eis zwar chemisch homogen, physikalisch homogensind aber nur der Eiswurfel und das flussige Wasser fur sich ge-nommen. Beide Phasen seien durch (E1,V1,N1) und (E2,V2,N2)gekennzeichnet, allerdings mit konstanten Gesamtgroßen, sodass
E2 = E − E1 , V2 = V − V1 , N2 = N − N1 . (11.8)
Das Gleichgewicht stellt sich ein fur
0 = dS = dS 1 + dS 2 (11.9)
=
(∂S 1
∂E1−∂S 2
∂E2
)dE1 +
(∂S 1
∂V1−∂S 2
∂V2
)dV1 +
(∂S 1
∂N1−∂S 2
∂N2
)dN1.
Fur beliebige Anderungen dE1, dV1 und dN1 sind also
T1 = T2 , P1 = P2 , µ1 = µ2 . (11.10)
Die ersten beiden Bedingung kennen wir schon als Bedingungenfur thermisches und mechanisches Gleichgewicht, die dritte istneu und beschreibt das so genannte Phasengleichgewicht. Pha-sengleichgewicht herrscht also dann, wenn die chemischen Po-tentiale der beteiligten Phasen gleich sind.
KAPITEL 11. PHASENUBERGANGE 100
11.1.3 Gibbs’sche Phasenregel
• Erweitern wir nun das System weiter, indem wir mehrere Kom-ponenten zulassen. Komponenten sind die verschiedenen che-mischen Stoffe, aus denen eine Phase zusammengesetzt ist. EinBeispiel fur ein System aus zwei Komponenten und zwei Pha-sen ist ein flussiges Alkohol-Wasser-Gemisch in einem offenenGlas. Wir bezeichnen das chemische Potential fur die Kompo-nente i = 1, . . . , nK in der Phase j = 1, . . . , np als µ(i)
j . Fur dieGesamtenergie gilt dann statt (11.6)
dE = TdS − PdV +∑
i, j
µ(i)j dN(i)
j . (11.11)
Die Bedingung fur das Phasengleichgewicht muss jetzt separatfur jede Komponente in allen Phasen gelten,
µ(i)1 = µ(i)
2 = . . . = µ(i)nP. (11.12)
Dies sind nP−1 Gleichungen. Da sie fur jede Komponente i geltenmussen, entsteht ein System aus (nP − 1)nK Gleichungen.
• Die beteiligten Variablen sind der gemeinsame Druck, die ge-meinsame Temperatur, sowie die Teilchenzahlen der Komponen-ten in jeder Phase, N(1)
j , . . . ,N(nK )j . Von diesen nK Teilchenzahlen
sind (nK − 1) unabhangig, wenn die Gesamtzahl aller Teilchenfestgehalten wird. Um diese insgesamt 2 + nP(nK − 1) Werte derVariablen zu bestimmen, stehen uns die (nP − 1)nK Gleichungenzur Verfugung. Die Anzahl der unbestimmten Freiheitsgrade istdaher
nF = 2 + nP(nK − 1) − (nP − 1)nK = 2 − nP + nK . (11.13)
Das ist die Gibbs’sche Phasenregel.
• Als Anwendung betrachten wir ein System, das nur aus Wasserbesteht, sodass nK = 1. Wasser kann in drei Phasen vorliegen -fest, flussig oder gasformig. Wenn gleichzeitig zwei Phasen auf-treten sollen, also fur nP = 2, bleibt dem System
nF = 2 − 2 + 1 = 1 (11.14)
Freiheitsgrad. Das Gleichgewicht zwischen den beiden Phasenlegt also zum Beispiel nur den Druck als Funktion der Tempe-ratur fest, bei denen beide Phasen im Gleichgewicht koexistie-ren konnen. Die Dampfdruckkurve des Wassers ist ein Beispieldafur. Sollen die drei Phasen gleichzeitig im Gleichgewicht ste-hen, nP = 3, bleibt kein Freiheitsgrad ubrig,
nF = 2 − 3 + 1 = 0 . (11.15)
Eine Koexistenz der drei Phasen ist nur am Tripelpunkt moglich.
w
KAPITEL 11. PHASENUBERGANGE 101
11.1.4 Reaktionsgleichgewichte
• Im ersten Teil der Vorlesung waren uns homogene Funktionenvom Grad k begegnet, definiert durch
f (λ~x) = λk f (~x) . (11.16)
Extensive thermodynamische Großen mussen homogen vomGrad k = 1 sein, sodass
E(λS , λV, λNi) = λE(S ,V,Ni) . (11.17)
Wenn ein System beispielsweise halbiert wird, mussen sich auchseine Entropie, seine Energie, und seine Teilchenzahl(en) hal-bieren. Damit gilt aber auch der Eulersche Satz uber homogeneFunktionen,
~x · ~∇ f (~x) = k f (~x) . (11.18)
Er besagt im Fall der Energie E(S ,V,Ni) fur k = 1, dass
S(∂E∂S
)V,N
+ V(∂E∂V
)S ,N
+ Ni
(∂E∂Ni
)S ,V
= E(S ,V,Ni). (11.19)
Ersetzen wir die Ableitungen durch die thermodynamischenGroßen, die sie darstellen, folgt die Gibbs-Duhem-Beziehung
TS − PV + µiNi = E(S ,V,Ni) oder G(T, P,Ni) = µiNi ,(11.20)
wenn wir die freie Enthalpie G = E + PV − TS einfuhren. FurSysteme aus nur einer Komponente ist also µ = G/N.
• Gleichgewicht zwischen zwei Phasen einer Komponente setzt
µ1 = µ2 oder dµ1 = dµ2 (11.21)
voraus. Aus der Gibbs-Duhem-Beziehung und (10.65) wissen wir
dµi =dGi
Ni=−S idT + VidP
Ni= − sidT + vidP
N1=N2=N⇔ −s1dT + v1dP = − s2dT + v2dP
⇔dPdT
=s1 − s2
v1 − v2. (11.22)
wobei si = S i/N und vi = Vi/N Entropie und Volumen pro Teil-chen sind. Wir drucken den Entropieunterschied zwischen denbeiden Phasen durch die Verdampfungswarme pro Teilchen aus,s1 − s2 = |Q|/(NT ), und erhalten die Clausius-Clapeyron’sche-Gleichung
dPdT
=|Q|
T (V1 − V2). (11.23)
Daraus kann man den Verlauf der Siedepunktskurve PSP = P(TSP)berechnen. Fur Wasser gilt: Eine Anderung des Drucks um40 mbar verschiebt den Siedepunkt TSP um etwa 1 Grad Kelvin.
KAPITEL 11. PHASENUBERGANGE 102
• Reaktionsgleichungen von chemischen Elementen A j wie zumBeispiel bei der Verbrennung von Wasserstoff zu Wasser,
2H2 + O2 → 2H2O , (11.24)
lassen sich in die Gestalt
ν jA j = 0 (11.25)
bringen, wenn ν j die beteiligten Molzahlen sind und Reaktions-produkte mit negativen ν j gekennzeichnet werden. Fur die Was-serstoffverbrennung sind νH2 = 2, νO2 = 1 und νH2O = −2. DieAnderungen in den Teilchenzahlen sind proportional zu den Mol-zahlen ν j,
dN j = λν j . (11.26)
Deswegen konnen wir die Bedingung dG = 0 fur das Reaktions-gleichgewicht durch
0 = dG =∂G∂Ni
dNi = µidNi = µiλνi ⇔ µiνi = 0
(11.27)darstellen.
11.2 Phasenubergang im Van-der-Waals-Gas
11.2.1 Van-der-Waals-Gas
• Die Zustandsgleichung des idealen Gases muss modifiziert wer-den, wenn langreichweitige Wechselwirkung zwischen den Gas-teilchen und deren eigenes, endliches Volumen berucksichtigtwerden. Fur das Van-der-Waals-Gas lautet die Zustandsgleichung(
P +aν2
V2
)(V − νb) = νRT , (11.28)
(statt PV = νRT wie beim idealen Gas). Die Konstante a be-schreibt, wie stark der Druck aufgrund der Wechselwirkung zwi-schen den Gasteilchen erhoht wird. Die Konstante b quantifiziertdas Volumen der Gasteilchen.
• Wir berechnen zunachst die Energie des Van-der-Waals-Gases alsFunktion von T und V . Mit dem totalen Differential der Entropie,
dS =
(∂S∂T
)V
dT +
(∂S∂V
)T
dV Maxwell=
CV
TdT +
(∂P∂T
)V
dV (11.29)
KAPITEL 11. PHASENUBERGANGE 103
konnen wir das Differential der Energie schreiben als
dE = TdS − PdV = T[CV
TdT +
(∂P∂T
)V
dV]− PdV
= CVdT +
[T
(∂P∂T
)V− P
]dV. (11.30)
Fur das Van-der-Waals-Gas sind die differentiellen Ableitungender Energie also(
∂E∂T
)V
= CV ,(∂E∂V
)T
= T(∂P∂T
)V− P
= T(∂
∂T
)V
(νRT
V − νb−
aν2
V2
)− P
= TνR
V − νb−
(νRT
V − νb−
aν2
V2
)=
aν2
V2 . (11.31)
Integriert erhalten wir die Energie des Van-der-Waals-Gases, be-zogen auf eine Referenz-Temperatur T0 und das entsprechendeVolumen V0, als
E(T,V) =
∫ T
T0
CV(T ′)dT ′ + aν2∫ V
V0
dV ′
V ′2
= CV(T − T0) − aν2(
1V−
1V0
), (11.32)
wobei wir im zweiten Schritt annehmen, dass CV nicht von derTemperatur abhangt. Die Energie hangt jetzt ausser der Tempe-ratur auch vom Volumen ab. In der Wechselwirkung der Gasteil-chen steckt potentielle Energie, die zunimmt, wenn die Gasteil-chen sich voneinander entfernen.
• Nun betrachten wir die Temperaturanderung eines Van-der-Waals-Gases bei einer thermisch isolierten Expansion. Weil dieEnergie (anders als beim idealen Gas) von der Temperatur undvom Volumen abhangt, erhalten wir wegen (11.32) die Beziehung
CV(T1 − T0) − aν2(
1V1−
1V0
)= CV(T2 − T0) − aν2
(1V2−
1V0
)und daraus die Temperaturanderung
T1 − T2 =aν2
CV
(1V1−
1V2
). (11.33)
Im Van-der-Waals-Gas sorgen die langreichweitigen Wechselwir-kungen der Gasteilchen untereinander fur eine Abkuhlung, wenndas Gas sich frei ausdehnt. Dies nennt man den Joule-Thompson-Effekt.
KAPITEL 11. PHASENUBERGANGE 104
11.2.2 Kritische Isotherme
• Um eine besondere Eigenschaft der Van-der-Waals-Gleichung(11.28) zu erkennen, leiten wir beide Seiten bei konstanter Tem-peratur nach dem Volumen V ab. Wir erhalten damit[(
∂P∂V
)T−
2aν2
V3
](V − νb)+
(P +
aν2
V2
)= 0
⇔
(∂P∂V
)T
= −νRT
(V − νb)2 +2aν2
V3 . (11.34)
Fur jede feste Temperatur Tiso beschreibt die Variation des Drucksmit der Temperatur aufintegriert eine Kurve P(V,Tiso) im P − V-Diagramm, eine Isotherme. Setzen wir die Ableitung gleich Null,erhalten wir diejenigen Punkte langs der Isothermen, bei denender Druck als Funktion des Volumens extremal wird,
2aν2
V3 =νRT
(V − νb)2 ⇔(1 − v)2
v3 =RTb2a
, (11.35)
wo v := V/(νb) das Verhaltnis das Gasvolumens zum Volumenseiner Teilchen ist.
Bei v = 3 hat die Funktion (1 − v)2/v3 ein Maximum der Hohe4/27. Die hochste Temperatur, bei der die Gleichung (11.35)erfullt sein kann, ist also durch
Tkrit =8a
27Rb(11.36)
gegeben. Sie heißt kritische Temperatur. Die durch sie definiertekritische Isotherme P(V,Tkrit) hat im P-V-Diagramm bei vkrit = 3und Pkrit = a/(27b2) ein Maximum. Die Gleichung (11.35) lasstsich mithilfe der kritischen Temperatur in eine dimensionsloseForm bringen,
(1 − v)2
v3 =4t27
mit t :=T
Tkrit. (11.37)
Die Zustandsgleichung ist dann von der Form
p :=P
Pkrit=
8t(v − 1)
−27v2 . (11.38)
Einige Isothermen eines Van-der-Waals-Gases unterhalb der kriti-schen Temperatur. Rot markiert istdie Kurve, die die Maxima und dieMinima der Isothermen verbindet.
• Der Kurze halber bezeichnen wir das Maximum der Isothermenfur t < 1 als Punkt 1 mit den Koordinaten (v1, p1) und das Mini-mum als Punkt 2 mit den Koordinaten (v2, p2).
Bewegen wir uns entlang der Isothermen von großem Volumenkommend auf das Maximum 1 zu. Das Volumen nimmt ab, derDruck nimmt langsam zu, bis das Maximum erreicht ist. Danach
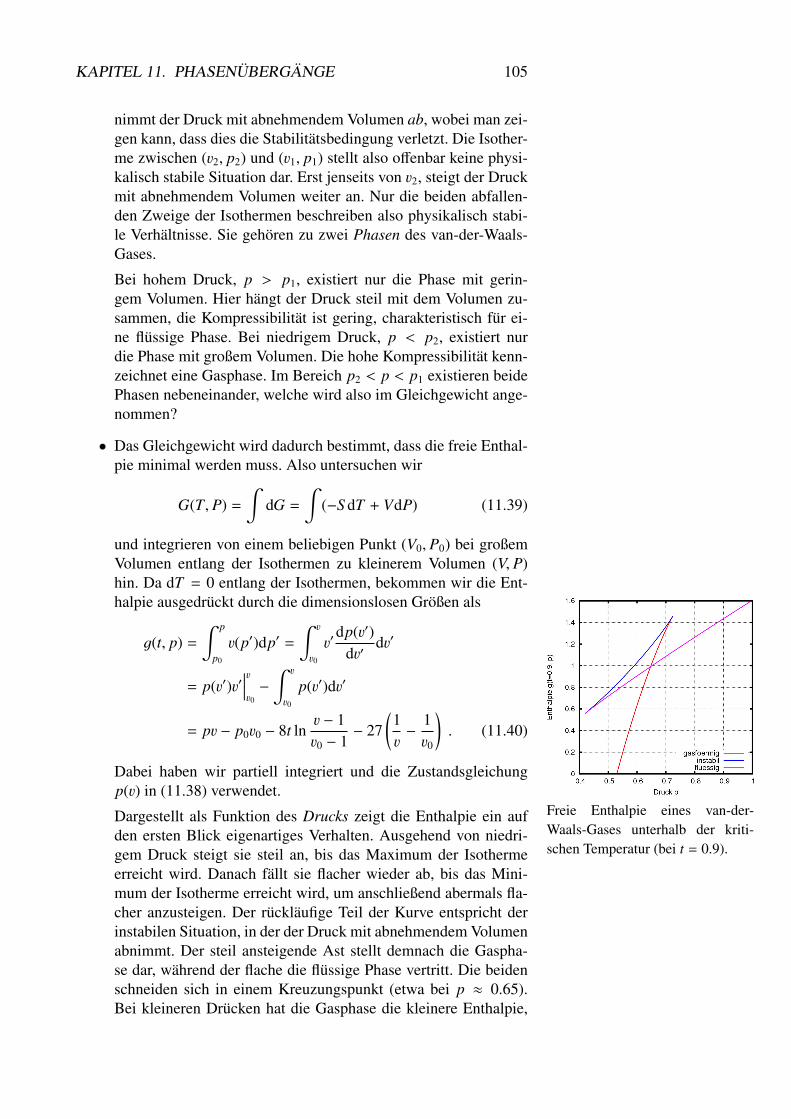
KAPITEL 11. PHASENUBERGANGE 105
nimmt der Druck mit abnehmendem Volumen ab, wobei man zei-gen kann, dass dies die Stabilitatsbedingung verletzt. Die Isother-me zwischen (v2, p2) und (v1, p1) stellt also offenbar keine physi-kalisch stabile Situation dar. Erst jenseits von v2, steigt der Druckmit abnehmendem Volumen weiter an. Nur die beiden abfallen-den Zweige der Isothermen beschreiben also physikalisch stabi-le Verhaltnisse. Sie gehoren zu zwei Phasen des van-der-Waals-Gases.
Bei hohem Druck, p > p1, existiert nur die Phase mit gerin-gem Volumen. Hier hangt der Druck steil mit dem Volumen zu-sammen, die Kompressibilitat ist gering, charakteristisch fur ei-ne flussige Phase. Bei niedrigem Druck, p < p2, existiert nurdie Phase mit großem Volumen. Die hohe Kompressibilitat kenn-zeichnet eine Gasphase. Im Bereich p2 < p < p1 existieren beidePhasen nebeneinander, welche wird also im Gleichgewicht ange-nommen?
• Das Gleichgewicht wird dadurch bestimmt, dass die freie Enthal-pie minimal werden muss. Also untersuchen wir
G(T, P) =
∫dG =
∫(−S dT + VdP) (11.39)
und integrieren von einem beliebigen Punkt (V0, P0) bei großemVolumen entlang der Isothermen zu kleinerem Volumen (V, P)hin. Da dT = 0 entlang der Isothermen, bekommen wir die Ent-halpie ausgedruckt durch die dimensionslosen Großen als
g(t, p) =
∫ p
p0
v(p′)dp′ =
∫ v
v0
v′dp(v′)
dv′dv′
= p(v′)v′∣∣∣∣vv0−
∫ v
v0
p(v′)dv′
= pv − p0v0 − 8t lnv − 1v0 − 1
− 27(1v−
1v0
). (11.40)
Dabei haben wir partiell integriert und die Zustandsgleichungp(v) in (11.38) verwendet.
Freie Enthalpie eines van-der-Waals-Gases unterhalb der kriti-schen Temperatur (bei t = 0.9).
Dargestellt als Funktion des Drucks zeigt die Enthalpie ein aufden ersten Blick eigenartiges Verhalten. Ausgehend von niedri-gem Druck steigt sie steil an, bis das Maximum der Isothermeerreicht wird. Danach fallt sie flacher wieder ab, bis das Mini-mum der Isotherme erreicht wird, um anschließend abermals fla-cher anzusteigen. Der rucklaufige Teil der Kurve entspricht derinstabilen Situation, in der der Druck mit abnehmendem Volumenabnimmt. Der steil ansteigende Ast stellt demnach die Gaspha-se dar, wahrend der flache die flussige Phase vertritt. Die beidenschneiden sich in einem Kreuzungspunkt (etwa bei p ≈ 0.65).Bei kleineren Drucken hat die Gasphase die kleinere Enthalpie,
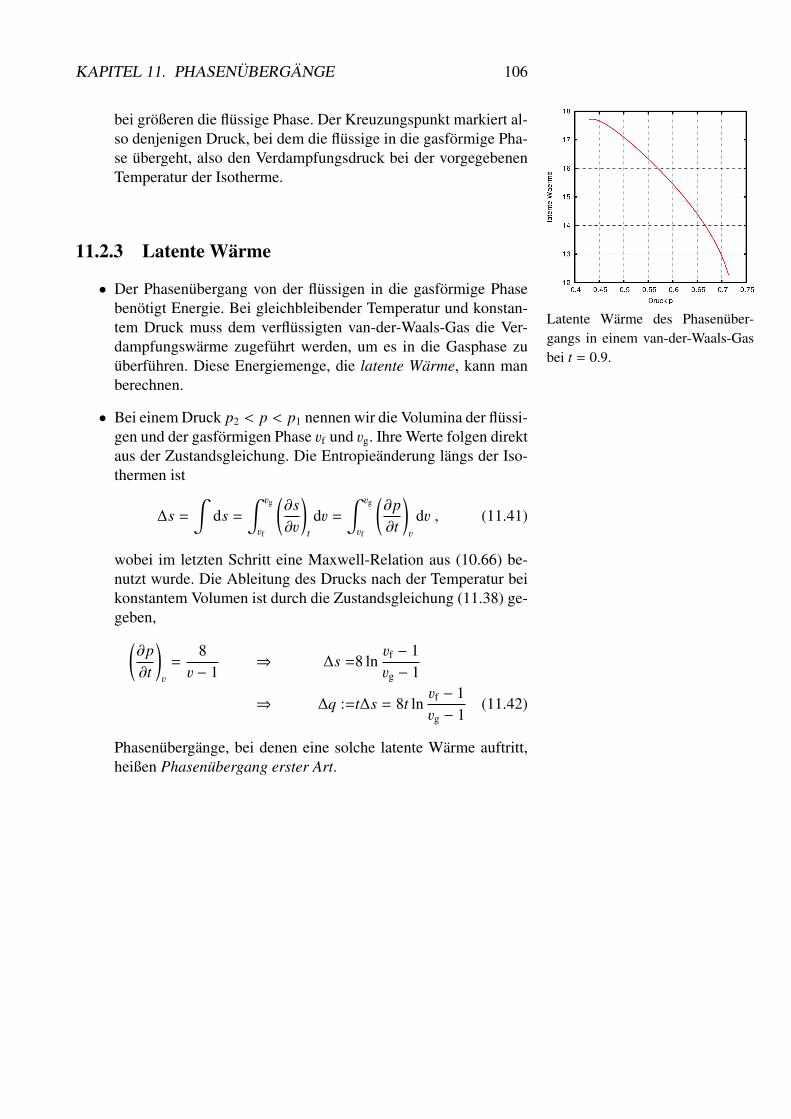
KAPITEL 11. PHASENUBERGANGE 106
bei großeren die flussige Phase. Der Kreuzungspunkt markiert al-so denjenigen Druck, bei dem die flussige in die gasformige Pha-se ubergeht, also den Verdampfungsdruck bei der vorgegebenenTemperatur der Isotherme.
Latente Warme des Phasenuber-gangs in einem van-der-Waals-Gasbei t = 0.9.
11.2.3 Latente Warme
• Der Phasenubergang von der flussigen in die gasformige Phasebenotigt Energie. Bei gleichbleibender Temperatur und konstan-tem Druck muss dem verflussigten van-der-Waals-Gas die Ver-dampfungswarme zugefuhrt werden, um es in die Gasphase zuuberfuhren. Diese Energiemenge, die latente Warme, kann manberechnen.
• Bei einem Druck p2 < p < p1 nennen wir die Volumina der flussi-gen und der gasformigen Phase vf und vg. Ihre Werte folgen direktaus der Zustandsgleichung. Die Entropieanderung langs der Iso-thermen ist
∆s =
∫ds =
∫ vg
vf
(∂s∂v
)tdv =
∫ vg
vf
(∂p∂t
)v
dv , (11.41)
wobei im letzten Schritt eine Maxwell-Relation aus (10.66) be-nutzt wurde. Die Ableitung des Drucks nach der Temperatur beikonstantem Volumen ist durch die Zustandsgleichung (11.38) ge-geben,(
∂p∂t
)v
=8
v − 1⇒ ∆s =8 ln
vf − 1vg − 1
⇒ ∆q :=t∆s = 8t lnvf − 1vg − 1
(11.42)
Phasenubergange, bei denen eine solche latente Warme auftritt,heißen Phasenubergang erster Art.