
Was ist neu in SIMOTION V4.3 SP1? · Projekte der V4.2: Die neuerzeugten Übersetzungsergebnisse...
46
Was ist neu in SIMOTION V4.3 SP1?
Transcript of Was ist neu in SIMOTION V4.3 SP1? · Projekte der V4.2: Die neuerzeugten Übersetzungsergebnisse...

Was ist neu in SIMOTION V4.3 SP1?
Übersicht
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 2/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Was ist neu bei SIMOTION V4.3 SP1 Was ist neu bei SIMOTION V4.3 SP1 ....................................................................................2
Übersicht.................................................................................................................................3
1 SIMOTION SCOUT allgemein.........................................................................................4
2 Vergleichsfunktionen...................................................................................................13
3 Sprachen und Editoren................................................................................................13
4 Diagnose und Test .......................................................................................................19
5 Technologiefunktionen................................................................................................23
6 SIMOTION V4.3 SP1 und SINAMICS Safety Integrated Funktionen mit SINAMICS V4.5 .............................................................................................................27
7 Runtime- Systemfunktionen........................................................................................29
8 Diagnose und Service mit SIMOTION IT DIAG...........................................................30
9 PROFINET .....................................................................................................................31
10 Neue Hardware .........................................................................................................35
11 Lizenzen ....................................................................................................................41
12 Projektgenerator SIMOTION Easy Project .............................................................42
13 SIMOTION Utilities & Applications..........................................................................43
14 SIMOTION CLib Studio.............................................................................................45
Übersicht
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 3/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Übersicht
SIMOTION V4.3 SP1 ist seit Juni 2012 lieferbar.
Die wichtigsten neuen Funktionen sind:
• Vervollständigung der SIMOTION D4xx-2 Reihe um D410-2, D425-2 und D435-2 • Antriebsnahe, hochkanalige Peripheriemodule mit schneller Motion-Control-
Technologie an PROFINET IO mit IRT über SIMOTION TMC (Terminal Module Compact)
• Erweiterung der Funktionen für Handling • PROFINET Kommunikation für hohe Mengengerüste, stoßfreie Medienredundanz
(MRPD) und 2 PROFINET IO Schnittstellen • Viele Abrundungen in SCOUT V4.3 SP1 (z. B. Watchtabellen, Projektvergleich, lokale
Suche in KOP/FUP) • Erweiterungen bei Utilities & Applications auf der SCOUT DVD Documentation,
Utilities & Applications
Wichtige Informationen zur Hochrüstung auf SIMOTION V4.3 SP1 finden Sie in einem FAQ Hochrüstung auf der Utilities & Applications DVD.
SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
1 SIMOTION SCOUT allgemein
Unterstützte Betriebssysteme • Windows 7 Professional / Ultimate 64 Bit • Windows 7 Professional / Ultimate 32 Bit • Windows XP SP3 Diagnoseanzeige Systemauslastung Die Diagnoseanzeigen (Lasche Systemauslastung in der Gerätediagnose) für SIMOTION-Geräte wurden verbessert und erweitert (nur für CPUs mit Firmware ab V4.3 SP1). Die Speicherauslastung und Systemauslastung wurden auf zwei Laschen verteilt.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 4/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
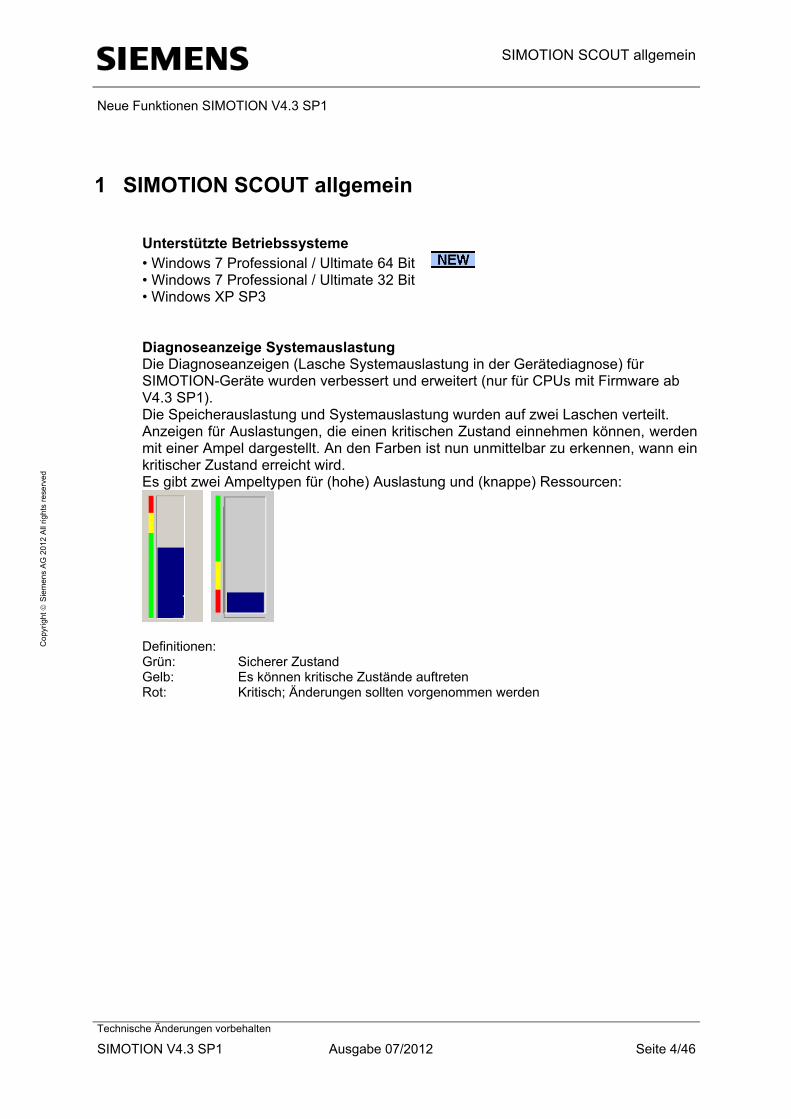
Anzeigen für Auslastungen, die einen kritischen Zustand einnehmen können, werden mit einer Ampel dargestellt. An den Farben ist nun unmittelbar zu erkennen, wann ein kritischer Zustand erreicht wird. Es gibt zwei Ampeltypen für (hohe) Auslastung und (knappe) Ressourcen:
Definitionen: Grün: Sicherer Zustand Gelb: Es können kritische Zustände auftreten Rot: Kritisch; Änderungen sollten vorgenommen werden

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 5/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Die Onlinehilfe enthält detaillierte Maßnahmen zur Verbesserung von kritischen Zuständen. Verbesserung der Wartungsszenarien mit SCOUT V4.3 SP1 Online-Diagnose von SIMOTION V3.2 bis V4.2 SP1 Projekten mit SCOUT V4.3 SP1. Online-Diagnose ohne Projekt-Änderungen: - Projekte mit V3.2, V4.0, V4.1 und V4.2:
Das Projekt ist online konsistent. Ein Online Beobachten (auch in der Watchtabelle, Einzelschritt, Statusprogramm) ist möglich.
Änderungen mit SCOUT V4.3 SP1 werden durchgeführt und in des Zielgerät geladen. Anschließend wird das Projekt mit „Speichern im alten Projektformat... “ wieder im ursprünglichen Projektformat gespeichert: - Projekte der V3.2 und V4.0:
Die neuerzeugten Übersetzungsergebnisse werden in SCOUT V4.3 SP1 beim „Speichern im alten Projektformat... “gelöscht. Darauf wird durch Infos in der Detailanzeige hingewiesen. Projekt mit SCOUT V3.2 bzw. V4.0 öffnen. Komponenten ohne Übersetzungsergebnisse werden Online inkonsistent angezeigt. Ein Online Beobachten (auch in der Watchtabelle), Einzelschritt, Statusprogramm ist erst nach einem erneuten Übersetzen und Laden (dann wieder Online konsistent) möglich.
- Projekte der V4.1: Die neuerzeugten Übersetzungsergebnisse bleiben in SCOUT V4.3 SP1 beim „Speichern im alten Projektformat... “erhalten.

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 6/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Projekt mit SCOUT V4.1 öffnen. Geänderte ST-Quellen sind Online konsistent. Geänderte KOP/FUP und MCC-Quellen werden Online inkonsistent angezeigt. Übersetzen und Laden der inkonsistenten Quellen ist notwendig, damit das Projekt Online konsistent wird. Danach ist ein Online Beobachten (auch in der Watchtabelle), Einzelschritt, Statusprogramm möglich.
- Projekte der V4.2: Die neuerzeugten Übersetzungsergebnisse bleiben in SCOUT V4.3 SP1 beim „Speichern im alten Projektformat... “erhalten. Projekt mit SCOUT V4.2 öffnen. Das Projekt ist Online konsistent. Ein Online Beobachten (auch in der Watchtabelle), Einzelschritt, Statusprogramm ist direkt möglich. Hinweis zu Konsistenzanzeige: Sollten Objekte inkonsistent dargestellt werden (z. B. wenn unter SCOUT V4.3 SP1 neue I/O-Variablen oder TO’s angelegt wurden), ist es in der Regel ausreichend, nur ein „Projekt speichern und Änderungen übersetzen“ auszuführen. Dabei erfolgt ein Update der Verwaltungsinformationen und die Objekte sind anschließend Online-konsistent. Eine Diagnose auch dieser Objekte ist dann ohne einen Download möglich. Beachten Sie bitte hierbei, dass nicht in 100% der Fälle eine Online-Konsistenz gewährleistet werden kann. Dies betrifft vor allem Änderungen der Compiler-Ergebnisse durch die Verwendung neuer Funktionen oder durch Fehlerbehebungen. Bleiben Objekte auch nach einem „Projekt speichern und Änderungen übersetzen“ Online-inkonsistent („rot“), ist für die Online-Konsistenz ein Download notwendig.
SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
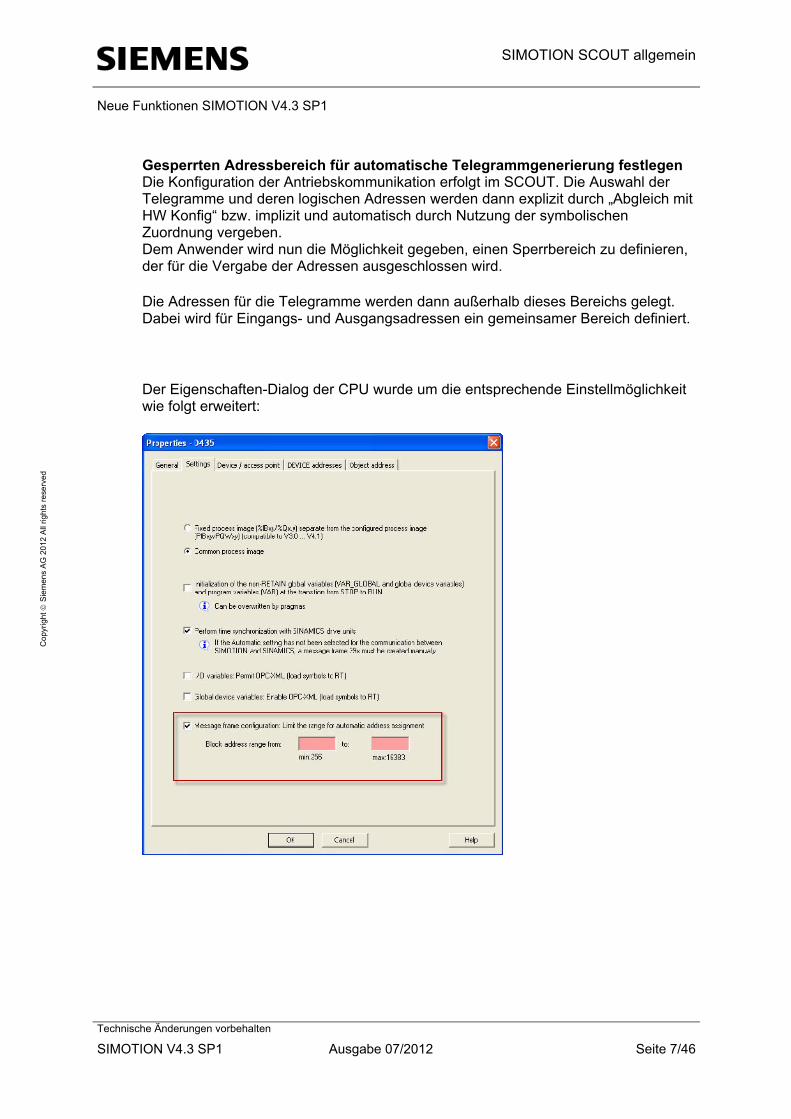
Gesperrten Adressbereich für automatische Telegrammgenerierung festlegen Die Konfiguration der Antriebskommunikation erfolgt im SCOUT. Die Auswahl der Telegramme und deren logischen Adressen werden dann explizit durch „Abgleich mit HW Konfig“ bzw. implizit und automatisch durch Nutzung der symbolischen Zuordnung vergeben. Dem Anwender wird nun die Möglichkeit gegeben, einen Sperrbereich zu definieren, der für die Vergabe der Adressen ausgeschlossen wird.
Die Adressen für die Telegramme werden dann außerhalb dieses Bereichs gelegt. Dabei wird für Eingangs- und Ausgangsadressen ein gemeinsamer Bereich definiert.
Der Eigenschaften-Dialog der CPU wurde um die entsprechende Einstellmöglichkeit wie folgt erweitert:
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 7/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Anzeige des POE-Typs im Projektnavigator (PNV) An den POE-Einträgen im PNV ist der Typ der POE (Programmorganisationseinheit) direkt erkennbar. Folgende neuen Symbole werden verwendet:
Beispiel für die Darstellung im PNV:
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 8/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Optimierung Doppelklick-Verhalten im Projektnavigator (PNV) Das Doppelklick-Verhalten wurde vereinheitlicht: - Ist der Baum im PNV noch geschlossen, wird dieser bei Doppelklick aufgeklappt
und gegebenenfalls die dazugehörige Maske/HW-Konfig etc. geöffnet (keine Änderung des bisherigen Verhaltens)
- Ist der Baum im PNV bereits geöffnet und wird per Doppelklick eine Maske/HW-Konfig etc. aufgerufen, bleibt der Baum aufgeklappt
- Zuklappen eines Baums erfolgt nur noch über das „-“-Zeichen Optimierung Drag&Drop Die Bedienbarkeit des Drag&Drop in SCOUT wurde in allen Listen verbessert:
o Beim ersten Einfachklick (egal wo auf der Zelle): Markieren einer Zelle und Mehrfachmarkieren möglich (wie im SCOUT V4.2)
o Beim zweiten Einfachklick (egal wo auf der Zelle): Drag&Drop Initiierung (Änderung zum Verhalten in SCOUT V4.2; dort war Drag&Drop Initiierung nur in einem schmalen Rahmen der Zelle möglich)
D.h. Drag&Drop ist mit dem zweiten Einfachklick im gesamten Zellbereich möglich. Dies gilt auch für die Markierung mehrerer Zellen/Zeilen/Spalten.

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Trace-Parametrierung mit Drag&Drop Drag&Drop von Variablen insbesondere aus dem Symbolbrowser und aus Watchtabellen in den Dialog der Trace-Parametrierung beschleunigt die Auswahl bzw. erspart die Suche nach den Variablen im Variablen-Browser des Trace. Mehrfachselektion ist möglich. Projekt speichern unter Der Eintrag „Speichern unter…“ im Hauptmenü „Projekt“ wurde umbenannt in „Speichern und Kopie anlegen“ Dadurch ist erkennbar, dass auch die aktuelle Projektversion gespeichert wird.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 9/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
TCP-Verbindungsüberwachung abschaltbar Die TCP-Verbindungsüberwachung (PING) kann für die Gesamtheit aller Online-Verbindungen eines SCOUT abgeschaltet werden. Dies ist günstig bei Remote-Zugriffen, weil ggf. Netzwerkkomponenten den PING nicht durchlassen.
Unterstützung des OPC-Formats ATI OPC-Daten können in dem neuen Format ATI erzeugt werden. Der ATI-Server von SIMATIC NET ermöglicht gegenüber dem STI-Server einen performanteren Zugriff. Der OPC-Export bietet im entsprechenden Dialog folgende Export-Versionen an

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
• STI-Server ("SIMATIC NET V7.x/V8.0") • ATI-Server ("SIMATIC NET V8.1.1 (.ati)"). (neuer Eintrag)
Der ATI-Server ist nur bei SIMATIC NET V8.1.1 (Betriebssystem Windows 7 32/64 Bit) verfügbar.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 10/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
OPC UA über SIMATIC NET V8.1.1 ATI-Server ist Voraussetzung für OPC UA über SIMATIC NET V8.1.1 OPC UA Data Acces (DA)
PC mit SIMATIC NET V 8.1.1
S7 - Kommunikation

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Gerätenamen – Auswirkung von Syntaxänderungen
Gerätenamen müssen nicht mehr den ST-Namenskonventionen genügen. Damit werden insbesondere die DNS-Namenskonventionen, die für PN IO - Geräte gelten, nicht mehr eingeschränkt.
Die von STEP 7 V5.5 akzeptierten Namen werden nun auch vom SCOUT V4.3 SP1 akzeptiert. Hierzu wurde der gültige Zeichensatz erweitert und es entfallen Regeln wie z. B. die, dass ein Name mit einem Buchstaben oder einem Unterstrich beginnen muss. Dies gilt für alle Geräteversionen. Geräte werden prinzipiell in STEP7/HWKonfig angelegt. Die Regeln für Gerätenamen sind, sofern es nicht PNIO-Geräte sind: ASCII-Zeichen, incl. Umlaute (ä,ü,ö), außer | & \ * ? < > : “
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 11/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
DNS-Namen dürfen nur Buchstaben, Ziffern und die Sonderzeichen Bindestrich (-) und Punkt (.) enthalten. Der Punkt dient dabei als Strukturierungsmittel: <CPU-Name>.<Nummer der Schnittstelle>.<IO-Systemname> <Nummer der Schnittstelle>, falls das Gerät mehrere PN-IO-SSen hat <IO-Systemname>, optional, kann vom Anwender so gewählt werden, s.u. Hinweis: Neben dem definierten Zeichenvorrat gibt es für DNS-Namen weitere Regeln; Auszug aus der Hilfe für STEP7-classic: • Beschränkung auf 127 Zeichen insgesamt (Buchstaben, Ziffern, Bindestrich oder Punkt) • Ein Namensbestandteil innerhalb des Gerätenamens, d. h. eine Zeichenkette zwischen
zwei Punkten, darf max. 63 Zeichen lang sein. • Keine Sonderzeichen wie Umlaute, Klammern, Unterstrich, Schrägstrich, Blank etc. Der
Bindestrich ist das einzige erlaubte Sonderzeichen. • Der Gerätename darf nicht mit den Zeichen "-" oder "." beginnen und auch nicht mit
diesem Zeichen enden. • Der Gerätename darf nicht mit Ziffern beginnen. • Der Gerätename darf nicht die Form n.n.n.n haben (n = 0...999). • Der Gerätename darf nicht mit der Zeichenfolge "port-xyz-" beginnen (x,y,z = 0...9). Werden dementsprechnde Namen verwendet, wird der Name in Hochkomma in entsprechenden Editoren (z.B. Watchtabelle) angezeigt. Aurocomplete berücksichtigt dies automatisch. Beispiel für Schreibweise nach DNS-Konventionen:

SIMOTION SCOUT allgemein
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Spezifische und verbesserte Fehlermeldungen, wenn CPU den geforderten Betriebszustand nicht einnehmen kann Es werden beim Ändern des Betriebszustandes verschiedene Szenarien unterschieden (z. B. Timeout, Programmfehler in StartupTask, Debug-Modus) und ensprechend spezifische Fehlermeldungen ausgegeben.
Toolbar-Erweiterungen Für den Fall, dass der Platz für das komplette Darstellen der Toolbar nicht mehr ausreicht, können über das Menü „View>Toolbars...“ und ausführen von „Anordnen“ die Elemente neu angeordnete werden.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 12/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Zu den einzelnen Editoren werden dynamisch die passenden Toolbars eingeblendet und wieder ausgeblendet, wenn der passende Kontext verlassen wird (Default). Suche über „Erreichbare Teilnehmer“ In SCOUT V4.2 wurden nur direkt erreichbare Teilnehmer gefunden und Teilnehmer die nur über Routing erreichbar wurden nicht angezeigt. In SCOUT V4.3 SP1 wurde der Suchalgorithmus verbessert und somit werden nun auch Teilnehmer über Routing gefunden. Wenn die Vernetzung den Zugang zum Gerät über zwei verschiedene Pfade (direkt und Routing) ermöglicht, zeigt der Dialog „Zielgeräte zuordnen“ die IP-Adresse des Gerätes zweimal an.

Vergleichsfunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 13/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
2 Vergleichsfunktionen
Projektvergleich mit im Projekt enthaltenen Bibliotheken Der On-Offline-Vergleich dauerte u.U. sehr lange, wenn große Bibliotheken verwendet werden. Hier wurde eine deutliche Performanceverbesserung erzielt.
3 Sprachen und Editoren
3.1 Erweiterungen der Spracheditoren allgemein
Horizontal Scrollen In den MCC-, KOP/FUP- bzw. ST-Editoren besteht die Möglichkeit, den Inhalt des aktiven Fensters bzw. die Deklarationstabellen mit „Shift + Mausrad“ horizontal zu scrollen. Das horizontale Scrollen funktioniert auch in der Detailvergleich-Sicht bei MCC, KOP/FUP, ST und Deklarationstabellen.
Compileroption „Quelle nicht neu übersetzen, wenn globale Compilereinstellungen geändert wurden“ Mit der Compileroption „Quelle nicht neu übersetzen, wenn globale Compilereinstellungen geändert wurden“ (–e local) kann verhindert werden, dass Quellen oder Bibliotheken übersetzt werden, falls die globalen Compilereinstellungen verändert wurden. Dies ist insbesondere bei KnowHow-Stufe3-geschützten Bibliotheken erforderlich, die nur dann übersetzt werden können, wenn das Passwort eingegeben wird. Die Compilereinstellung muss, damit vollständig wirksam, an allen unterlagerten Quellen der Bibliothek eingestellt werden.

Sprachen und Editoren
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 14/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Zusätzlich erscheint bei Anwahl von Know-how-Schutz für Bibliotheken ein Dialog mit dem Hinweis, dass die Compilereinstellungen zuvor auf lokal gesetzt werden müssen.

Sprachen und Editoren
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Aufgerufenen Baustein Öffnen Bei aktivem STATUS Programm ist es möglich, einen Baustein zu markieren und dann über Kontextmenü zu öffnen. In KOP/FUP ist dies in V4.3 SP1 noch nicht möglich.
3.2 Erweiterungen ST
Autocomplete in ST Verbesserung der kontextsensitiven Filterung und der prinzipiellen Mechanismen für Autocomplete. Ermittlung der Enum-Werte für die Programmierung in ST
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 15/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
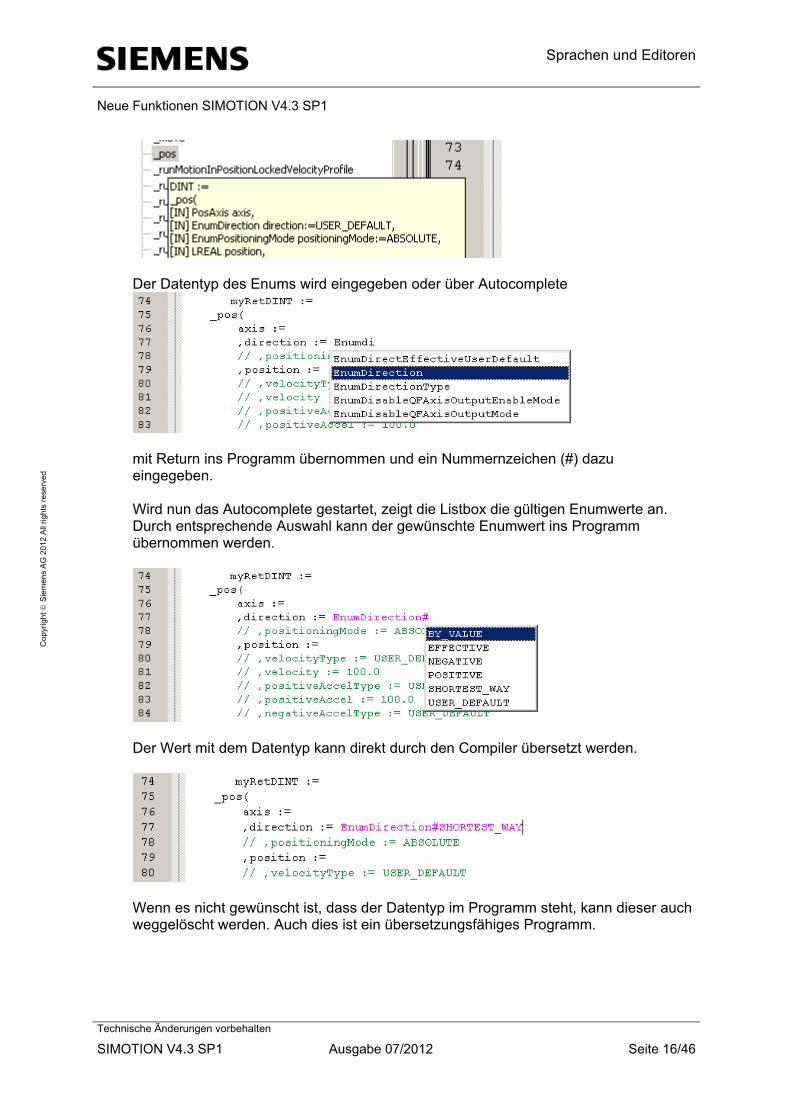
Häufig steht der Programmierer vor dem Problem die gültigen Enum-Werte zu ermitteln. Die System-Enums sind in der Online-Hilfe beschrieben. Dabei muss nach dem Befehl oder dem Enum-Wert in der Hilfe gesucht werden. Bei anwenderdefinierten Enums trägt dieses Vorgehen jedoch nicht, da diese in der Online-Hilfe nicht beschrieben sind. Enum-Werte können jedoch auch durch den Autocomplete-Mechanismus angezeigt werden. Dazu ist folgendes Vorgehen notwendig: Zum Beispiel wird ein Befehl _pos aus der Befehlsbibliothek in ST verwendet. Dazu wird der Befehl in der Befehlsbibliothek markiert und per Drag&Drop in das ST-Programm gezogen.
Es erscheint die Darstellung des Befehls im ST-Programm. Nun soll die Verfahrrichtung mit den entsprechenden Enumwert belegt werden. Dazu müssen die Kommentarzeichen entfernt werden.
Um nun die gültigen Enumwerte im Autocompletefenster zu sehen, kann der Datentyp des Enums im Programm hinterlegt werden. Das geht natürlich auch über Autocomplete. Der Datentyp ist beim Befehl im Tooltip (EnumDirection) zu erkennen.
Sprachen und Editoren
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Der Datentyp des Enums wird eingegeben oder über Autocomplete
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 16/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
mit Return ins Programm übernommen und ein Nummernzeichen (#) dazu eingegeben. Wird nun das Autocomplete gestartet, zeigt die Listbox die gültigen Enumwerte an. Durch entsprechende Auswahl kann der gewünschte Enumwert ins Programm übernommen werden.
Der Wert mit dem Datentyp kann direkt durch den Compiler übersetzt werden.
Wenn es nicht gewünscht ist, dass der Datentyp im Programm steht, kann dieser auch weggelöscht werden. Auch dies ist ein übersetzungsfähiges Programm.

Sprachen und Editoren
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Kennzeichnung von Pragmas Pragmas werden farblich hinterlegt
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 17/46
Co
pyr
igh
t S
iem
AG
20
12
All
righ
ts r
ese
rve
d .
3.3 Erweiterungen MCC
en
s
Neue MCC-Befehlsgruppe „Befehle für Bahninterpolation“ Erweiterungen bei den Bahnbefehlen / Geometrisches Überschleifen:
• Die MCC-Befehle „Fahre Bahn linear“, „Fahre Bahn zirkular“, „Fahre Bahn polynomial“, bzw. „Stoppe Bahnbewegung“ wurden mit Eingabefeldern für den Auswahl des Koordinatensystems (Auswahl Basis- oder Objektkoordinatensystem, OCS-Nummer) erweitert.
• Die MCC-Befehle „Fahre Bahn linear“, „Fahre Bahn zirkular“ bzw. „Fahre Bahn polynomial“ wurden mit einer neuen Lasche „Überschleifen“ und den Parametern des automatischen Überschleifens erweitert.
• Der MCC-Befehl „Setze Bahnbewegung fort“ wurden mit einer neuen Lasche „Dynamik“ erweitert. Einstellbar ist entweder die Dynamik des unterbrochenen Befehls oder eine spezifische Dynamik fürs Fortsetzen der Bahnbewegung.

Sprachen und Editoren
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
3.4 Erweiterungen KOP/FUP
KOP/FUP: Lokales Suchen/Ersetzen Die Bearbeitung erfolgt wie in ST und MCC. Innerhalb des Menüs „Bearbeiten“ des KOP/FUP -Editors sind folgende neuen Einträge verfügbar: - Suchen... - Find... - Weitersuchen... - Find again... - Ersetzen... - Replace...
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 18/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed

Diagnose und Test
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
4 Diagnose und Test
4.1 Watchtabellen
Einfügen von Variablen Aktueller Zustand: Variablen können durch das Kontextmenü aus allen Listen, die im Symbolbrowser dargestellt werden, in eine Watchtabelle eingefügt werden. Variable können auch über freies Editieren in die Watchtabelle eingetragen werden. Erweiterungen: Die bisherigen Möglichkeiten Variablen in eine Watchtabelle einzufügen bleiben erhalten. Zusätzlich ist möglich:
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 19/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
- Einfügen per Kontextmenü Einträge können per Kontextmenü in eine Watchtabelle aufgenommen werden (aus Symbolbrowser, Adressliste, Expertenliste, Watchtabelle, Deklarationstabellen von MCC- und KOP/FUP-Units, Deklarationstabellen von MCC- und KOP/FUP -POEs, Programmeditoren).
- Einfügen per copy/paste - Einfügen per Drag&Drop - Einfügen über freies Editieren
o Über „Strg + Leertaste“ kann eine Unterstützung durch Autocomplete erfolgen. Vorausgesetzt der Name beginnt immer mit einem Device-Namen.
o Kontextübernahme mittels Shortcut Mit „Strg + Alt + Leertaste“ kann man den Kontext der vorhergehenden Zeile übernehmen. Beispiele:
Kompletter Eintrag Kontext - C230_2.io_1 - C230_2.
- C230_2._to.Achse_1.reset - C230_2._to.Achse_1.
- C230_2\ST_1.ind5 - C230_2\ST_1.
- SINAMICS_S120_CU310_DP_1._to.control_unit.p3111
- SINAMICS_S120_CU310_DP_1._to.control_unit.
- C230_2.backgroundtask.kreisberechnungen.str2.s33.ars[0]
- C230_2.backgroundtask.kreisberechnungen2.str2.s33.ars[]
Kopie erstellen Eine Watchtabelle kann dupliziert und unter einem anderen Namen ablegt werden. Hierfür steht ein neuer Button im Funktionsbereich der Watchtabelle zur Verfügung.
Diagnose und Test
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
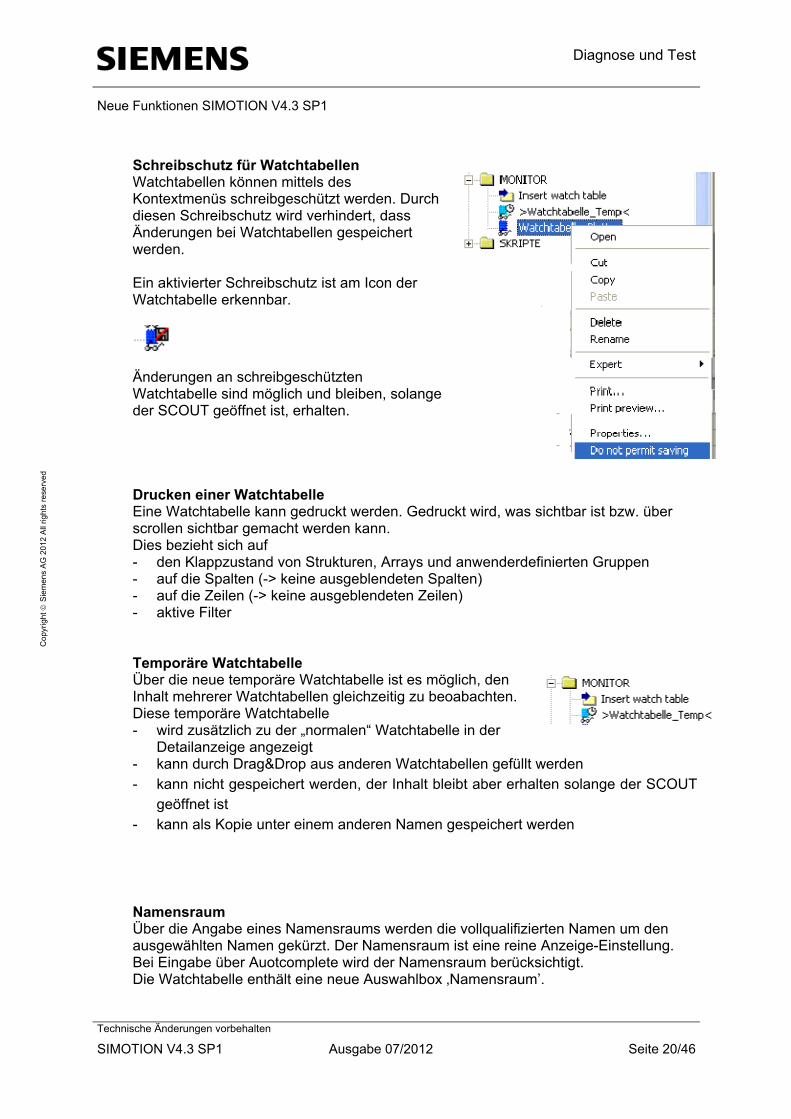
Schreibschutz für Watchtabellen Watchtabellen können mittels des Kontextmenüs schreibgeschützt werden. Durch diesen Schreibschutz wird verhindert, dass Änderungen bei Watchtabellen gespeichert werden. Ein aktivierter Schreibschutz ist am Icon der Watchtabelle erkennbar.
Änderungen an schreibgeschützten Watchtabelle sind möglich und bleiben, solange der SCOUT geöffnet ist, erhalten.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 20/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Drucken einer Watchtabelle Eine Watchtabelle kann gedruckt werden. Gedruckt wird, was sichtbar ist bzw. über scrollen sichtbar gemacht werden kann. Dies bezieht sich auf - den Klappzustand von Strukturen, Arrays und anwenderdefinierten Gruppen - auf die Spalten (-> keine ausgeblendeten Spalten) - auf die Zeilen (-> keine ausgeblendeten Zeilen) - aktive Filter Temporäre Watchtabelle Über die neue temporäre Watchtabelle ist es möglich, den Inhalt mehrerer Watchtabellen gleichzeitig zu beoabachten. Diese temporäre Watchtabelle - wird zusätzlich zu der „normalen“ Watchtabelle in der
Detailanzeige angezeigt - kann durch Drag&Drop aus anderen Watchtabellen gefüllt werden - kann nicht gespeichert werden, der Inhalt bleibt aber erhalten solange der SCOUT
geöffnet ist - kann als Kopie unter einem anderen Namen gespeichert werden Namensraum Über die Angabe eines Namensraums werden die vollqualifizierten Namen um den ausgewählten Namen gekürzt. Der Namensraum ist eine reine Anzeige-Einstellung. Bei Eingabe über Auotcomplete wird der Namensraum berücksichtigt. Die Watchtabelle enthält eine neue Auswahlbox ‚Namensraum’.

Diagnose und Test
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Ist die Auswahlbox leer, ist kein Namensraum ausgewählt. Nicht verfügbare Listenelemente Nichtverfügbare Listenelemente werden nicht mehr automatisch gelöscht, sondern entsprechend gekennzeichnet. Über „kein gültiger Bezeichner“
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 21/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
oder „rot“ markierten Text
4.2 Adressliste
Zusätzliche Spalten: Filter und Filterkategorie. Darüber ist es möglich Einträge in der Adressliste zu ordnen und selektiv anzuzeigen.
4.3 Allgemein
Puffer für Tracedaten Um die Aufzeichnungsdauer für einen Trace zu erhöhen, wurde der bisherige Tracepuffer für allen SIMOTION Baugruppen die mit V4.3 SP1 unterstützt werden, auf 512 KB erhöht.

Diagnose und Test
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Diagnoseadressen an Systemfunktionen Anpassung von Systemfunktionen von SIMOTION aufgrund des geänderten Verhaltens von STEP 7 in Bezug auf Diagnoseadressen. STEP 7 V5.5 vergibt die Diagnoseadressen anders als STEP 7 V5.4.x. Dadurch können Diagnoseadressen nun auch logische Ausgangsadressen sein (bisher waren Diagnoseadressen immer Eingangsadressen). In SIMOTION gibt es einige Systemfunktionen, die bisher voraussetzen, dass die Diagnoseadressen immer Eingangsadressen sind. Folgende Systemfunktionen wurden erweitert, so dass diese auch Ausgangsadressen als Diagnoseadressen in ihren Aufruf- bzw. Rückgabeparametern verarbeiten können (optionaler Aufruf-Parameter ioId):
• _deactivateDpSlave
• _activateDpSlave
• _getStateOfDpSlave
• _getStateOfSingleDpSlave
• _getDpStationAddressFromLogDiagnosticAddress
• _getLogDiagnosticAddressFromDpStationAddress
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 22/46
Co
pyr
igh
t e
ns
AG
20
12
All
righ
ts r
ese
rve
d
• _getStateOfAllDpStations Selbstschutzfunktion Übertemperatur Die Selbstschutzfunktion Übertemperatur wird über Diagnosepuffereintrag angezeigt.
S
iem
4.4 Debug-Modus
Anzeige der Variablen am Haltepunkt Wird an einem aktiven Haltepunkt gestoppt, zeigt der SCOUT im Detailfenster „Status Variablen“ den aktuellen Zustand der Variablen an. Die Anzeige schließt auch temporäre Variablen mit ein.

Technologiefunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 23/46
Co
p
Sie
me
ns
AG
20
12
All
righ
ts r
ese
rve
d
yrig
ht
5.2 Gleichlauf
5 Technologiefunktionen
5.1 Achse
Software-Endschalter Wenn die Achse z. B. durch Umkonfigurieren des Software-Endschalters hinter dem Software-Endschalter steht oder die Achse im drehzahlgeregeltem Modus den Software-Endschalter überfahren hat, wird der Alarm 40107 „SW-Endschalter wurde überfahren“ ausgegeben. Die lokale Fehlerreaktion bei Alarm 40107 wurde um die Einstellmöglichkeit "FEEDBACK_EMERGENCY_STOP" erweitert. Bisher war nur RELEASE_DISABLE auswählbar, womit immer die Reglerfreigabe weggenommen wurde. FEEDBACK_EMERGENCY_STOP bedeutet:
• Bewegungsstopp an vorparametrierter Bremsrampe. • Antrieb und Lageregler bleibt aktiv. • Nach Fehler Quittierung mit _resetError() und rücksetzen der Achse mit
_resetAxis() kann die Achse aus dem Endschalterbereich verfahren werden.
Zusätzlich verschaltbare Objekttypen am Gleichlaufobjekt Mit SCOUT V4.3 SP1 werden zusätzliche Objekttypen am Gleichlaufobjekt als verschaltbare Objekte angezeigt:
- Bahnobjekt - Reglerobjekt - Sensorobjekt - Drehzahlachse
5.3 Bahn-Interpolation
Ergänzung Systemvariablen für das Bahnobjekt Ergänzung von Systemvariablen am Bahnobjekt, z.B. - Auskunft über aktives Geschwindigkeitsprofil mit Referenz auf aktive Kurvenscheibe
(specificVelocityProfile) - Anzahl der Befehl im Befehlsbuffer (motionBuffer) - Information über verschaltete Objekte (connection) - Information über aktuelles Koordinatensystem (StructPathData)

Technologiefunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Dynamikplanung im TO über 3 Sätze Ab SIMOTION V4.3 SP1 werden drei vorgegebene Sätze (aktueller, nächster und übernächster Verfahrsatz) in die Dynamikplanung am TO Bahninterpolation einbezogen. Wird infolge der Verwendung des Geometrischen Überschleifens zwischen 2 Anwendersätzen ein Übergangssegment eingefügt, erfolgt die Dynamikplanung über die 2 Anwender-Sätze (aktueller und nächster Satz) und das Übergangssegment. Die bahnsynchrone Achse wird in die Dynamikplanung über 3 Sätze einbezogen. Mit der Funktion können kurze Zwischenbefehle ohne Geschwindigkeitsreduzierung überschliffen werden.
Bewegungsrichtung
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 24/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
3. Bewegungsbefehl
2. Bewegungsbefehl
1. Bewegungsbefehl
Neues Konfigdatum: Erweiterung StructPathInterpolationConfigInfo um das Element:
commandsForPathDynamics: - Systemvoreinstellung: 2 (Kompatibilität) - Zulässige Werte: 2 und 3
Beim Anlegen eines neuen Bahnobjektes wird die Bahnplanung auf 3 Sätze gesetzt.
Technologiefunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
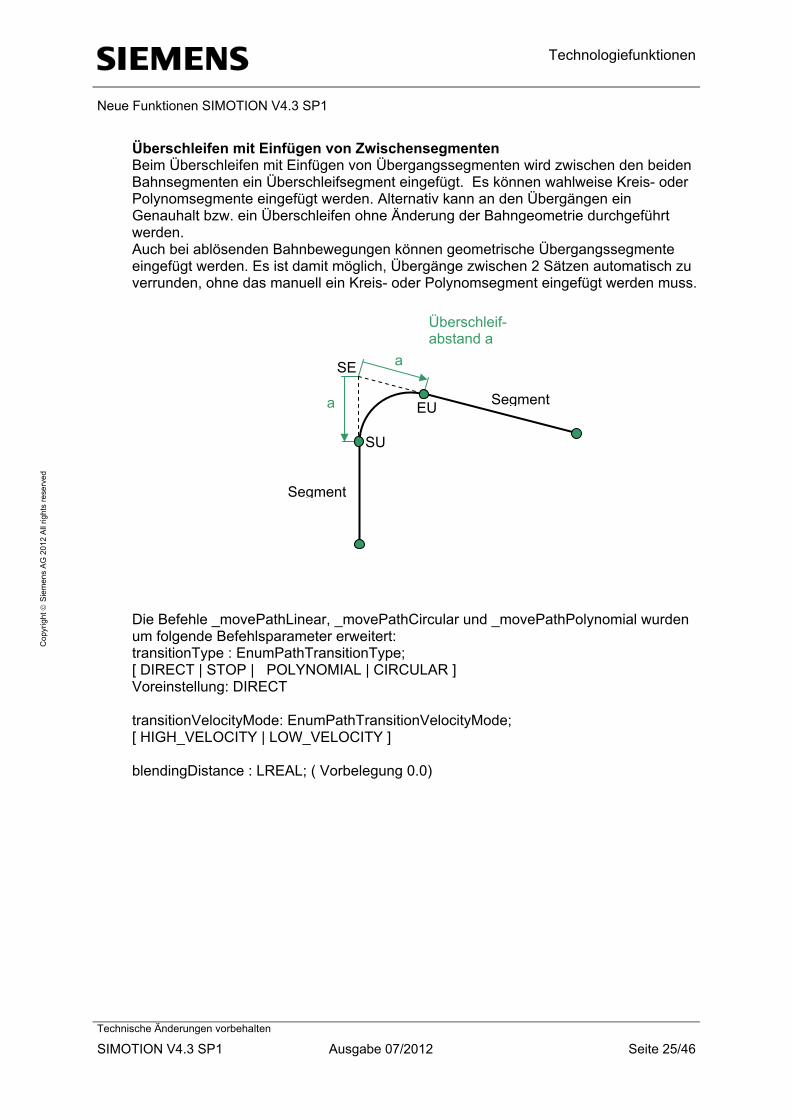
Überschleifen mit Einfügen von Zwischensegmenten Beim Überschleifen mit Einfügen von Übergangssegmenten wird zwischen den beiden Bahnsegmenten ein Überschleifsegment eingefügt. Es können wahlweise Kreis- oder Polynomsegmente eingefügt werden. Alternativ kann an den Übergängen ein Genauhalt bzw. ein Überschleifen ohne Änderung der Bahngeometrie durchgeführt werden. Auch bei ablösenden Bahnbewegungen können geometrische Übergangssegmente eingefügt werden. Es ist damit möglich, Übergänge zwischen 2 Sätzen automatisch zu verrunden, ohne das manuell ein Kreis- oder Polynomsegment eingefügt werden muss.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 25/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
gSe ment
Überschleif- abstand a
a
a
SE
EU
SU
Segment Die Befehle _movePathLinear, _movePathCircular und _movePathPolynomial wurden um folgende Befehlsparameter erweitert: transitionType : EnumPathTransitionType; [ DIRECT | STOP | POLYNOMIAL | CIRCULAR ] Voreinstellung: DIRECT transitionVelocityMode: EnumPathTransitionVelocityMode; [ HIGH_VELOCITY | LOW_VELOCITY ] blendingDistance : LREAL; ( Vorbelegung 0.0)

Technologiefunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 26/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Die existierenden MCC-Befehle für Bahninterpolation wurden entsprechend erweitert. o Die MCC-Befehle „Fahre Bahn linear“, „Fahre Bahn zirkular“ bzw. „Fahre Bahn
polinomial“ werden mit einer neuen Lasche „Überschleifen“ erweitert, in dem man die Parameter des automatischen Überschleifens einstellen kann
o Die MCC-Befehle „Fahre Bahn linear“, „Fahre Bahn zirkular“, „Fahre Bahn polinomial“, bzw. „Stoppe Bahnbewegung“ werden mit Eingabefeldern für den Auswahl des Koordinatensystems (Auswahl Basis- oder Objektkoordinatensystem, OCS-Nummer) erweitert.
o Der MCC-Befehl „Setze Bahnbewegung fort“ wird mit einer neue Lasche „Dynamik“ erweitert. Hierbei kann entweder die Dynamik des unterbrochenen Befehls verwendet, oder eine spezifische Dynamik fürs Fortsetzen der Bahnbewegung eingestellt werden.
SIMOTION V4.3 SP1 und SINAMICS Safety Integrated
Funktionen mit SINAMICS V4.5
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 27/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
6 SIMOTION V4.3 SP1 und SINAMICS Safety Integrated Funktionen mit SINAMICS V4.5
64 Achsen für F-Proxy mit neuen PROFIsafe-Telegrammen Mit SIMOTION V4.3 SP1 werden neue PROFIsafe-Telegramme eingeführt, um die neuen antriebsintegrierten Safety-Funktionen ansteuern bzw. Informationen vom Antrieb an die F-Steuerung übertragen zu können. Diese PROFIsafe-Telegramme können bei der Konfiguration des F-Proxy verwendet werden. Es sind 64 Achsen als F-Proxy möglich. Weiterhin ist es mit SIMOTION V4.3 SP1 möglich, F-Proxy Achsen alternativ auf beiden PN IO-Interfaces einer D4x5-2 DP/PN zu projektieren (PN onboard und CBE30-2). Das gleichzeitige Anlegen von F-Proxy Achsen auf beiden PN IO-Interfaces ist nicht möglich. Erweiterung des PROFIsafe Routings mit PROFINET bei SIMOTION Neben dem bisherigen Telegramm 30 werden die zusätzlichen PROFIsafe-Telegramme 31 und 901 durch SIMOTION an die unterlagerten Antriebe geroutet. Achtung: Die zusätzlichen PROFIsafe-Telegramme sind mit SIMOTION D410-2 und Firmware V4.3 SP1 noch nicht verwendbar. Hinweis zu PROFIsafe über PROFIBUS: Die PROFIsafe-Telegramme 31 und 901 über PROFIBUS werden erst ab S7 F ConfigurationPack V5.5 SP9 Upd1 unterstützt. Der Einsatz oben genannter Telegramme in älteren S7 F ConfigurationPack Versionen ist nicht zulässig. Zum Freigabezeitpunkt von SIMOTION V4.3 SP1 HF1 konnte S7 F ConfigurationPack V5.5 SP9 Upd1 nicht in den Test einbezogen werden und ist daher in Zusammenhang mit SIMOTION V4.3 SP1 HF1 nicht freigegeben. Für die Nutzung der PROFIsafe-Telegramme 31 und 901 über PROFINET ist V5.5 SP9 Upd1 nicht erforderlich. Daher ist diese Nutzung mit SIMOTION V4.3 SP1 HF1 freigegeben.
SS1 ohne AUS3 In dieser Variante des SS1 erfolgt die Stopp-Reaktion durch SIMOTION. Daher ist es notwendig, die Information über die Anwahl des SS1 im SIMOTION Anwenderprogramm auszuwerten. Die Information über die Anwahl von SS1 ist im Safety Datenblock (Systemvariable driveData.driveSafetyExtendedFunctionsInfoData.state) enthalten. Voraussetzung: SS1 muss als Safety Integrated Extended Function projektiert werden.
SLS-Grenzwertübertragung über PROFIsafe mit PROFINET Ab SIMOTION Firmware V4.3 SP1 ist es möglich, die SLS-Grenzwertstufe 1 mit einem Faktor 0 - 100 % zu bewerten. Dieser Faktor kann online über PROFIsafe in 16 Bit-Auflösung von der F-CPU an den Antrieb übertragen werden. Hierzu muss das neue PROFIsafe-Telegramm 901 verwendet werden. Mit dieser neuen Funktion ist es z. B. möglich, den Grenzwert der sicheren Geschwindigkeitsüberwachung prozessabhängig nachzuführen.

SIMOTION V4.3 SP1 und SINAMICS Safety Integrated
Funktionen mit SINAMICS V4.5
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 28/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Das PROFIsafe-Telegramm 901 über PROFIBUS ist nicht freigegeben (s.o).
SDI – Sichere Bewegungsrichtung Die Funktion SDI stellt sicher, dass sich der Antrieb nur in die freigegebene Richtung bewegen kann. Es können beide Bewegungsrichtungen wahlweise überwacht werden (SDI pos. / SDI neg.) Bei der Anwahl von SDI muss im SIMOTION Anwenderprogramm entsprechend reagiert werden. Die aktuelle Bewegung muss (falls Bewegung in der falschen Richtung) gestoppt werden. Danach darf die Bewegung nur noch in die freigegebene Richtung erfolgen.
Im SIMOTION Anwenderprogramm kann die Information über die Anwahl von SDI+ und SDI- über den erweiterten Safety Datenblock ausgewertet werden. Systemvariable driveData.driveSafetyExtendedFunctionsInfoData.state:
- SDI_P (Safe Direction Positive) angewählt - Bit 12 - SDI_N (Safe Direction Negative) angewählt - Bit 13
Sichere Bewegungsüberwachung ohne Anwahl Die Funktionen „sicher begrenzte Geschwindigkeit (SLS)“ und „sichere Bewegungsrichtung (SDI)“ können per Parametrierung permanent angewählt werden, benötigen also keine Anwahl über einen fehlersicheren Eingang des TM54F oder von einer F-CPU über PROFIsafe.
SLP - Sicher begrenzte Position Mit dieser Funktion wird sicher überwacht, dass sich die Achse in einem definierten Verfahrbereich bewegt. Es ist möglich, zwischen zwei Verfahrbereichen umzuschalten. Zur Ermittlung einer sicheren Referenzposition ist ein sicheres Referenzieren mit Anwenderzustimmung erforderlich. Die Information über die Anwahl von SLP ist im SIMOTION Safety Datenblock (Systemvariable driveData.driveSafetyExtendedFunctionsInfoData.state) nicht enthalten. Die Begrenzung des Verfahrbereichs bei Aktivierung von SLP muss im Anwenderprogramm realisiert werden. Achtung: Diese Funktion steht nur auf den SINAMICS Control Units CU310-2 oder CU320-2 zur Verfügung. Für die integrierten Antriebe einer D4xx-2 mit Firmware V4.3 SP1 ist diese Funktion nicht freigegeben und darf nicht verwendet werden!
Übertragung sicherer Positionsistwerte über PROFIsafe Diese Funktion stellt die antriebsintern ermittelten sicheren Positionsistwerte über PROFIsafe einer F-CPU zur Verfügung. Hier können z. B. sichere Nocken berechnet werden. Neben den sicheren Positionswerten wird auch ein Zeitstempel übertragen, so dass in der F-CPU auch sichere Geschwindigkeitsistwerte berechnet werden können. Die sicheren Positionswerte werden im Telegramm 901 in 16 Bit-Auflösung übertragen. Zur Ermittlung einer sicheren Referenzposition ist ein sicheres Referenzieren mit Anwenderzustimmung erforderlich. Achtung: Diese Funktionalität steht nur auf den SINAMICS Control Units CU310-2 oder

Runtime- Systemfunktionen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 29/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
CU320-2 zur Verfügung. Für die integrierten Antriebe einer D4xx-2 mit Firmware V4.3 SP1 ist diese Funktion nicht freigegeben und darf nicht verwendet werden!
Neue Runtime-Lizenzen „MultiAxes und Safety Package“ Siehe Kapitel 11 Lizenzen.
7 Runtime- Systemfunktionen
Sichern der Retain-Daten von SINAMICS Integrated, CX32-2 und CU3x0-2 Für SINAMICS Integrated, CX32-2 und SINAMICS S120 CU310-2/CU320-2 ab SINAMICS FW-Stand V4.5 erfolgt die Sicherung der SINAMICS-Retain-Daten (NVRAM-Daten) durch Setzen des CU-Parameters p7775 auf den Wert 1. Beim SINAMICS Integrated/CX32-2 werden die Daten auf die CF Card von SIMOTION D gesichert. Bei CU310-2/CU320-2 erfolgt die Sicherung auf die CF Card der jeweiligen Control Unit. Die Rücksicherung ● erfolgt automatisch im Falle eines Baugruppentauschs
Ein Baugruppentausch wird anhand der Seriennummer erkannt. ● kann manuell erfolgen
Durch Setzen des CU-Parameters p7775 auf den Wert 2 kann die Rücksicherung manuell veranlasst werden.
Baugruppentausch (D4xx-2) Ab SIMOTION V4.3 SP1 wird ein Baugruppentausch automatisch erkannt. Bei einem Baugruppentausch wird eine CF Card, die mit
• _savePersistentMemoryData (SIMOTION-Daten) bzw. • CU-Parameter p7775 = 1 (SINAMICS-Daten)
gesicherte Retain-Daten enthält, in ein neues Gerät selben Typs gesteckt. Ein Baugruppentausch wird anhand der Seriennummer erkannt. Die auf der CF Card gesicherten Daten werden dadurch automatisch in das neue Gerät übernommen. Uhrzeit-Synchronisation SIMOTION - SINAMICS Um die Konsistenz der Diagnosepuffereinträge sicher zu stellen, werden negative Zeitsprünge bei der Kompensation von Laufzeitabweichungen nicht nachgestellt. Um Zeitumstellungen gezielt vornehmen zu können, wird ab SIMOTION V4.3 SP1 / SINAMICS V4.5 bei großen negativen Zeitsprüngen außerhalb eines definierten Toleranzbandes (p3109) die Uhrzeit des SINAMICS zurückgestellt. Anwendung: z. B. Uhrzeitumstellung Systemvariable RTC Power Failure / Retain Failure Der Status der Retain-Daten und RTC (Uhrzeit) kann für alle SIMOTION Geräte einheitlich über Systemvariablen abgefragt werden:

Diagnose und Service mit SIMOTION IT DIAG
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 30/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
• device.persistentDataPowerMonitoring.rtcFailure • device.persistentDataPowerMonitoring.retainDataFailure
Geräte hochrüsten Analog zu den SIMOTION D4x5 Control Units können auch die D4x5-2 Control Units per USB-Stick (über das Geräte Update Tool) hochgerüstet werden.
8 Diagnose und Service mit SIMOTION IT DIAG
Systemtrace mit D4x5-2 Baugruppen Die Funktion "Systemtrace" wurde zu SIMOTION V4.2 eingeführt. Damit kann auch ein Geräte übergreifender Web-Trace für Geräte innerhalb eines Projektes aber auch aus unterschiedlichen Projekten (über I-Device gekoppelt) durchgeführt werden. Ab SIMOTION V4.3 SP1 sind zwei PROFINET-Schnittstellen bei den D4x5-2 DP/PN Baugruppen möglich (PN onboard und CBE30-2). Der Systemtrace wurde hierfür erweitert, damit auch ein Trace von Baugruppen erfolgen kann, die an verschiedenen PROFINET-Schnittstellen angeschlossen sind.

PROFINET
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
9 PROFINET
Zwei PROFINET IO Schnittstellen für D4x5-2 DP/PN Bei den SIMOTION D4x5-2 DP/PN Varianten wird die Unterstützung von zwei PROFINET-Schnittstellen ermöglicht. Die D4x5-2 DP/PN haben PROFINET immer onboard. Zusätzlich kann eine CBE30-2 gesteckt werden. Hinweis: Bei den D4x5-2 DP Varianten wird das Stecken einer CBE30-2 nicht unterstützt. Die taktsynchrone Kopplung zweier getrennter IRT-Netzwerke/IRT Domänen (Verbindungsnetzwerk und lokales Netzwerk im Modul) ist möglich. Der Betrieb mit zwei PROFINET-Schnittstellen lässt verschiedene Rollenverteilungen zu.
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 31/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
o Es kann an beiden Schnittstellen ein Takt vorgegeben werden (Master - gesteuerter Master)
o Es kann ein Takt von einem übergeordneten Master übernommen und an ein unterlagertes Netz weitergegeben werden (Slave - gesteuerter Master).
o Beide Interfaces können auch gleichzeitig I-Device sein. Bei Verwendung von zwei PROFINET IO-Schnittstellen verdoppelt sich der IO-Bereich (Adressraum 8 kByte) und die mögliche Anzahl von IO-Devices auf maximal 128. Bei Aktivierung des 2. Servo-Taktes wird die integrierte PROFINET Schnittstelle (X150) im ServoFast-Takt, die zweite Schnittstelle (CBE30-2, X1400) im Servo-Takt betrieben.

PROFINET
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Medienredundanz (MRP und MRPD) Über das sogenannte Media Redundancy Protocol (MRP) ist es möglich redundante Netze aufzubauen. Redundante Übertragungsstrecken (Ringtopologie) sorgen dafür, dass bei Ausfall einer Übertragungsstrecke ein alternativer Kommunikationsweg zur Verfügung gestellt wird. Die PROFINET-Geräte, die Teil dieses redundanten Netzes sind, bilden eine MRP-Domain. MRP garantiert Medienredundanz bei einer Störung im Ring. Die Umschaltung des Rings erfolgt durch den Redundanz-Manager. Seamless Media Redundancy (MRPD - Medien Redundanz für IRT-Frames) MRPD (Media Redundancy Planed) ist ein Verfahren für die stoßfreie Medienredundanz bei PROFINET IO mit IRT. MRPD setzt zusätzlich MRP voraus. Die Kombination von MRP mit MRPD stellt einen stoßfreien PROFINET-Betrieb für kurze Zykluszeiten bei einer Störung im Ring sicher. MRPD basiert auf IRT und stellt die
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 32/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Stoßfreiheit dadurch sicher, dass der Provider die zyklischen Daten in beide Richtungen im Ring sendet und die Consumer die Daten zweimal empfangen. Wird der Ring an einer Stelle (z. B. durch Ausfall eines Ringteilnehmers) unterbrochen, so ist der Empfang der zyklischen Daten über die ungestörte Seite des Rings weiterhin garantiert.
Non-Seamless Media Redundancy (MRP - Media Redundancy Protocol) MRP garantiert Medienredundanz bei einer Störung im Ring. Die Umschaltung des Rings erfolgt durch den Redundanz-Manager. Die typische Rekonfigurierzeit der Kommunikationswege bei TCP/IP- und RT-Frames im Fehlerfall beträgt < 200 ms.

PROFINET
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 33/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Die Umschaltzeit von MRP liegt in den meisten Anlagen weit über der PROFINET-Aktualisierungszeit für zyklische Daten, so dass für zyklische Daten ein Ausfall erkannt wird. Die PROFINET-Verbindung fällt dadurch aus und wird nach Umschalten des Redundanz-Managers wieder neu aufgebaut. Damit kann ein Fehler am Netz behoben werden, während die Anlage stoßbehaftet weiterläuft. Standard-Ethernet-Schnittstellen unterstützen PROFINET Basisdienste Die Standard-Ethernet-Schnittstellen der SIMOTION CPUs unterstützen ab V4.3 SP1 die PROFINET-Basisdienste. Bei SIMOTION D4xx-2 sind diese Schnittstellen auf der Control Unit daher auch mit PN/IE-NET, PN/IE-OP bzw. PN/IE bezeichnet (in HW Konfig wird der „/“ aufgrund von Namenskonventionen als „x“ dargestellt). Die PROFINET-Basisdienste (DCP, LLDP, SNMP) stellen einheitliche Funktionen für Adressvergabe und Diagnose zur Verfügung, sie ermöglichen aber keine PROFINET IO Kommunikation zum Anschluss von z. B. Antrieben oder Peripheriebaugruppen. Funktionalität: Ermittlung der Nachbarschafts-Information über LLDP (Link Layer Discovery
Protocol). Bei SIMOTION verwenden Sie dazu die Systemfunktion _getPnPortNeighbour.
Falls eine STEP 7-Diagnoseadresse vorhanden ist, können Sie für die Ethernet-Schnittstelle eine Diagnose aus dem Anwenderprogramm durchführen.
Sie können den Gerätenamen (NameOfStation) entweder über DCP oder über das Anwenderprogramm vergeben
Sie können die IP-Adresse entweder über DCP oder über das Anwenderprogramm vergeben. Dadurch wird verhindert, dass Vorgaben aus dem Projekt versehentlich überschrieben werden.
Bereitstellung von Topologie-Information über SNMP (Simple Network Management Protocol) (z. B. über den STEP 7-Topologieeditor)
Sie können eine Soll-Topologie projektieren. Online Diagnose der Schnittstelle und der Ports über die Gerätediagnose von
STEP 7. Vorteile: einheitliches Verhalten von PROFINET-Geräten am Ethernet schnellere Inbetriebnahme und Diagnose durch verbesserte Systemeigenschaften einheitliche Darstellung in STEP 7 mit Diagnoseadressen Volle Unterstützung von 1 Gbit (nur bei HW, die dieses unterstützt; z. B. D4x5-2)

PROFINET
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Die Schnittstellen werden in HW Konfig wie folgt angezeigt:
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 34/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
① Standard-Ethernet-Schnittstelle mit einem Port
② PROFINET-IO-Schnittstelle mit drei Ports
Antriebsanbindung SINAMICS S120 CU320-2 PN mit 250 µs Bustakt
Eine CU320-2 PN kann über PROFINET mit einem Takt von 250 µs im ServoFast Takt an einer SIMOTION D435-2 DP/PN, D445-2 DP/PN oder D455-2 DP/PN betrieben werden.
S120 mit ALM + 4 Achsen mit der Einstellung
P112 = 4 Abtastzeiten [4] High (62,5 µs Stromreglertakt und Drehzahlreglertakt)
S120 mit ALM + 6 Achsen mit der Einstellung
P112 = 3 Abtastzeiten [3] Standard (125 µs Stromreglertakt und Drehzahlreglertakt)
Die 6 Antriebe müssen auf 2 DRIVE-CLiQ Linien aufgeteilt werden.

Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
10 Neue Hardware
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 35/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
10.1 SIMOTION D - Vervollständigung der SIMOTION D4x5-2 Reihe
• SIMOTION D4x5-2 DP/PN mit 3 PROFINET - Ports onboard • Abrundung nach oben mit D455-2 DP/PN; für max. 128 Motion Control Achsen • Mehr PLC- und Motion-Control-Performance für größere Achsmengengerüste,
mehr Anwenderprogramm und kürzere Zykluszeiten (Details siehe SIZER V3.7) • Schnelle I/O-Verarbeitung (minimale Zykluszeit: 250 µs) 1) • ServoFast und IPOFast als weitere Laufzeitebenen 1)
Analog zur D445-2 DP/PN / D455-2 DP/PN kann auch mit einer D435-2 DP/PN der ServoFast/IPOFast mit einem minimalen Takt von 250 µs verwendet werden.
• Innovierter Antrieb integriert (SINAMICS V4.5) • Erhöhung des RAM-Speichers und des Speichers für Retain-Daten • Retain-Speicher ohne Batterie reduziert Wartungskosten • PROFINET: CBE30-2 als 2. PROFINET-Schnittstelle
1) nur D435-2 DP/PN, D445-2 DP/PN und D455-2 DP/PN

Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
Umfangreiche Schnittstellen inkl. Technologie I/Os 16 Technologie I/Os, davon:
• max. 16 Messtastereingänge (1 µs Auflösung)
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 36/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
• max. 8 Nockenausgänge (1 µs Auflösung)
Untersetzung Servo-Takt zu DP-Takt Analog zu den SIMOTION D4x5 Control Units kann auch bei den D4x5-2 Control Units der Servo-Takt zum DP-Takt untersetzt werden. Speicherausbau D4x5-2 D425-2 D435-2 D445-2 D455-2 RAM-Disk 31 MB 41 MB 56 MB 76 MB Anwender-RAM 48 MB 64 MB 128 MB 256 MB Remanente Anwender-Variablen
364 KB 364 KB 512 KB 512 KB
Dem Anwender zur Ver-fügung stehende Spei-chergrösse auf CF
300 MB 300 MB 300 MB 300 MB
Arbeitsspeicher für Java-Applikationen
20 MB 20 MB 20 MB 20 MB

Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION CX32-2
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 37/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
• Innovierter Antrieb integriert (SINAMICS V4.5) • 2 DI zusätzlich • Schnellerer Hochlauf CX32-2; verbesserte Usability • Erhöhung Mengengerüst CX32-2
Control Unit Anzahl CX32-2
(neu) Anzahl (bisher)
D425-2 DP, DP/PN 3 (1)
0 (mit D425)
D435-2 DP, DP/PN 5 (1)
2 (mit D435)
D445-2 DP/PN 5 (1)
4 (mit D445-1)
D455-2 DP/PN 5 (1)
--- (1) Eine 6. CX32-2 (bzw. 4. CX32-2 bei D425-2) ist einsetzbar, sofern am SINAMICS
Integrated keine Antriebe angeschlossen werden Modulare Maschinen
• Verbesserter I/O-Stecker; bis 1,5 mm² (bisher 0,5 mm²)

Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
10.2 SIMOTION D - neue Control Unit SIMOTION D410-2 Hinweis Die SIMOTION D410-2 Control Units werden Mitte 2012 auf Basis von einem Hotfix freigegeben. Informationen über die Verfügbarkeit entnehmen Sie bitte den Product Support Seiten im Internet. http://support.automation.siemens.com/WW/view/de/10805436/133400 SIMOTION D410-2 Features • D410-2 DP 2 x PROFIBUS • D410-2 DP/PN 1 x PROFIBUS + 2 Ports PROFINET • Zusätzliche Ethernet Schnittstelle (HMI, Engineering, Diagnose, WEB-Funktionalität) • Innovierter Antrieb integriert (SINAMICS V4.5)
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 38/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
• Mehr Performance und min. Zykluszeit von 1 ms. • Onboard I/Os mehr als verdoppelt • Safety Integrated Extended Functions auch über Onboard-Klemmen (3 F-DI, 1 F-
DO) • Um 15 mm reduzierte Bautiefe • Zusätzliche Achsen können jetzt über CU305 / CU310-2 durch D410-2 geregelt
werden (Lizenzierung der weiteren Achsen erforderlich)
Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
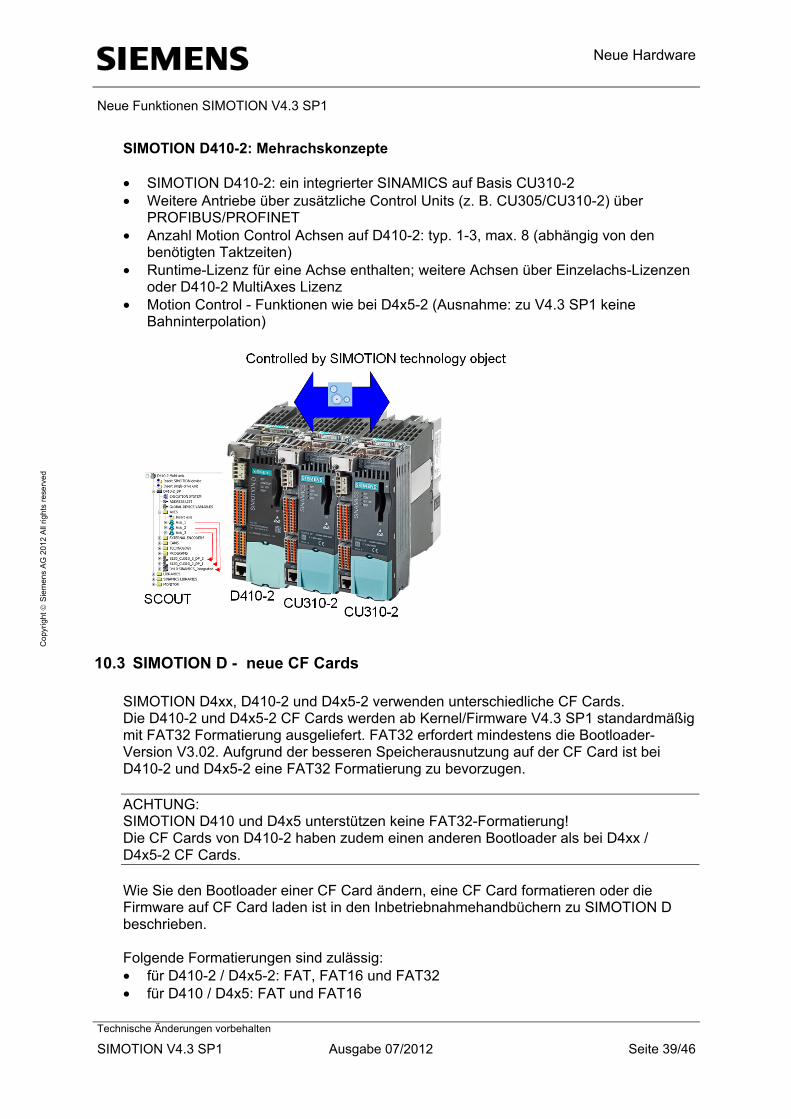
SIMOTION D410-2: Mehrachskonzepte • SIMOTION D410-2: ein integrierter SINAMICS auf Basis CU310-2 • Weitere Antriebe über zusätzliche Control Units (z. B. CU305/CU310-2) über
PROFIBUS/PROFINET • Anzahl Motion Control Achsen auf D410-2: typ. 1-3, max. 8 (abhängig von den
benötigten Taktzeiten) • Runtime-Lizenz für eine Achse enthalten; weitere Achsen über Einzelachs-Lizenzen
oder D410-2 MultiAxes Lizenz • Motion Control - Funktionen wie bei D4x5-2 (Ausnahme: zu V4.3 SP1 keine
Bahninterpolation)
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 39/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
10.3 SIMOTION D - neue CF Cards SIMOTION D4xx, D410-2 und D4x5-2 verwenden unterschiedliche CF Cards. Die D410-2 und D4x5-2 CF Cards werden ab Kernel/Firmware V4.3 SP1 standardmäßig mit FAT32 Formatierung ausgeliefert. FAT32 erfordert mindestens die Bootloader-Version V3.02. Aufgrund der besseren Speicherausnutzung auf der CF Card ist bei D410-2 und D4x5-2 eine FAT32 Formatierung zu bevorzugen. ACHTUNG: SIMOTION D410 und D4x5 unterstützen keine FAT32-Formatierung! Die CF Cards von D410-2 haben zudem einen anderen Bootloader als bei D4xx / D4x5-2 CF Cards. Wie Sie den Bootloader einer CF Card ändern, eine CF Card formatieren oder die Firmware auf CF Card laden ist in den Inbetriebnahmehandbüchern zu SIMOTION D beschrieben. Folgende Formatierungen sind zulässig: • für D410-2 / D4x5-2: FAT, FAT16 und FAT32 • für D410 / D4x5: FAT und FAT16

Neue Hardware
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
10.4 SIMOTION TMC*: antriebsnahe Motion Control I/Os Hinweis Die TMC 1080 PN und TMC 1180 PN werden Herbst 2012 auf Basis von einem Hotfix freigegeben. Informationen über die Verfügbarkeit entnehmen Sie bitte den Product Support Seiten im Internet. http://support.automation.siemens.com/WW/view/de/10805436/133400 * TMC: Terminal Module Compact
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 40/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
• Aufbauform SINAMICS S120 Compact • Anschluss über PROFINET IRT (min. 250 µs) • 2 Ports PROFINET zur Vernetzung • Hohe Geschwindigkeit und Genauigkeit • Digitalbaugruppe
TMC 1080 PN / 1180 PN (75 mm Breite) - 80 Kanäle - 32 DI, 16 DO, 32 DIO
Unterstützung verschiedener Verdrahtungsvarianten
Lizenzen
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 41/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
11 Lizenzen
Mit Freigabe der Version SIMOTION V4.3 SP1 stehen folgende neue Runtime-Lizenzen zur Verfügung: MultiAxes Package MultiAxes Package für SIMOTION D410-2 Einfach-Lizenz für ein Zielgerät Bestell-Nummer: 6AU1820-0AA41-0AB0 Vorlizenzierung einer CompactFlash Card über Z-Option: M41 MultiAxes und Safety Package Lizenz wie M42/M43/M44-Lizenz, jedoch zusätzlich inklusive Lizenzierung der Safety Integrated Extended Functions für alle Antriebe am SINAMICS Integrated/CX32-2 MultiAxes and Safety Integrated Extended Functions Package für SIMOTION D425/D425-2 Einfach-Lizenz für ein Zielgerät Bestell-Nummer: 6AU1820-0AS42-0AB0 Vorlizenzierung einer CompactFlash Card über Z-Option: S42 MultiAxes and Safety Integrated Extended Functions Package für SIMOTION D435/D435-2 Einfach-Lizenz für ein Zielgerät Bestell-Nummer: 6AU1820-0AS43-0AB0 Vorlizenzierung einer CompactFlash Card über Z-Option: S43 MultiAxes and Safety Integrated Extended Functions Package für SIMOTION D445/D445-1/D445-2/D455-2 Einfach-Lizenz für ein Zielgerät Bestell-Nummer: 6AU1820-0AS44-0AB0 Vorlizenzierung einer CompactFlash Card über Z-Option: S44
Projektgenerator SIMOTION Easy Project
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 42/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
12 Projektgenerator SIMOTION Easy Project
Grundfunktionalitäten, die in praktisch jeder Applikation benötigt werden, können mit Hilfe des SIMOTION Project Generator schnell und komfortabel in ein neues oder sogar in ein existierendes Projekt eingebunden werden. Projektgenerator SIMOTION easyProject V1.1.1 Erweiterungen der Version V1.1.1 sind:
- Einbindung von SINAMICS Stationen (fertig parametriert ohne Safety) - Einbindung realer SIMOTION Achsen - Zuordnung SIMOTION Achsen mit SINAMICS Antrieben - Modul SINAMICS Energieverbrauchsanzeige - Projektgenerierung auch für SIMATC Steuerungen mit Standardbausteinen
wie OMAC und LCom

SIMOTION Utilities & Applications
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 43/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
13 SIMOTION Utilities & Applications
Die kostenlosen SIMOTION Utilities & Applications stellen Ihnen viele wichtige Informationen rund um SIMOTION, Werkzeuge, spezielle Funktionen, Bausteine und SIMOTION-Beispielprojekte sowie fertige Standardapplikationen zur Verdeutlichung oder Verwendung in Ihren Projekten zur Verfügung. Neue Inhalte der SIMOTION Utilities & Applications V4.3 SP1 Applikationen Der Projektgenerator SIMOTION Easy Project wurde erheblich erweitert und ist nun in der Version 1.1.1 verfügbar. Converting
• Die Converting Bibliothek wurde auf die Version 1.2.3 aktualisiert. • Die Applikation Wickler wurde auf die Version 2.2.3 aktualisiert. • Die Applikation Verleger wurde auf die Version 3.1.2 aktualisiert. • Die Applikation Zugregelung wurde neu aufgenommen. • Die Applikation Automatisches Spleißen wurde entfernt.
Umformtechnik Der bisherige Menüpunkt Hydraulik wurde in Umformtechnik umbenannt. Verpackung Die Branche Verpackung ist jetzt als eigener Menüpunkt vorhanden. Branchenübergreifende Lösungen
• Der Achs-Funktionsbaustein wurde auf die Version 1.2 aktualisiert. • Die DPV1 Dienste wurden auf die Version 4.1.16 aktualisiert. • Die Bibliothek zur TCP/IP Kommunikation wurde auf die Version 1.1.2
aktualisiert. • Die Applikation Kurvenscheibenerstellung zur Laufzeit wurde neu aufgenommen. • Außerdem ist eine ganz neue PROFIenergy Bibliothek verfügbar. • Die Applikation zur Messung von Ventilkennlinien wurde auf die Version 2.0.3
aktualisiert.
Beispiele Das Einsteiger-Beispiel wurde überarbeitet. Ausgewählte Programmierbeispiele SIMATIC T-CPU sind hinzugefügt worden. FAQs Der FAQ zum Onlineverbindungen einrichten ist ebenso wie der FAQ zu SIMOTION Easy Basics und Messen auf virtueller Achse aktualisiert worden.
SIMOTION Utilities & Applications
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 44/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Der FAQ zur LCOM Bibliothek wurde in die Applikation zur TCP/IP Kommunikation eingebunden. Skripte Das Skript Export/Import ausgewählter Projektdaten wurde zwecks Fehlerbehebung auf Version 1.1 aktualisiert. Zusätzlich ist für dieses Skript nun eine Kurzbeschreibung verfügbar. Das Skript Achssimulation aktivieren/deaktivieren wurde erweitert und ist nun in Version 1.0.3 verfügbar. SIMOTION IT Die Handbücher für den Fernzugriff über WAN sind nun direkt über die SIMOTION Utilities & Applications einsehbar. Der Web Trace Viewer wurde auf die Version 2.2 aktualisiert. Tools und Dokumentationen Die Signalflusspläne des Technologieobjekts Achse wurden erneuert.
SIMOTION CLib Studio
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
14 SIMOTION CLib Studio
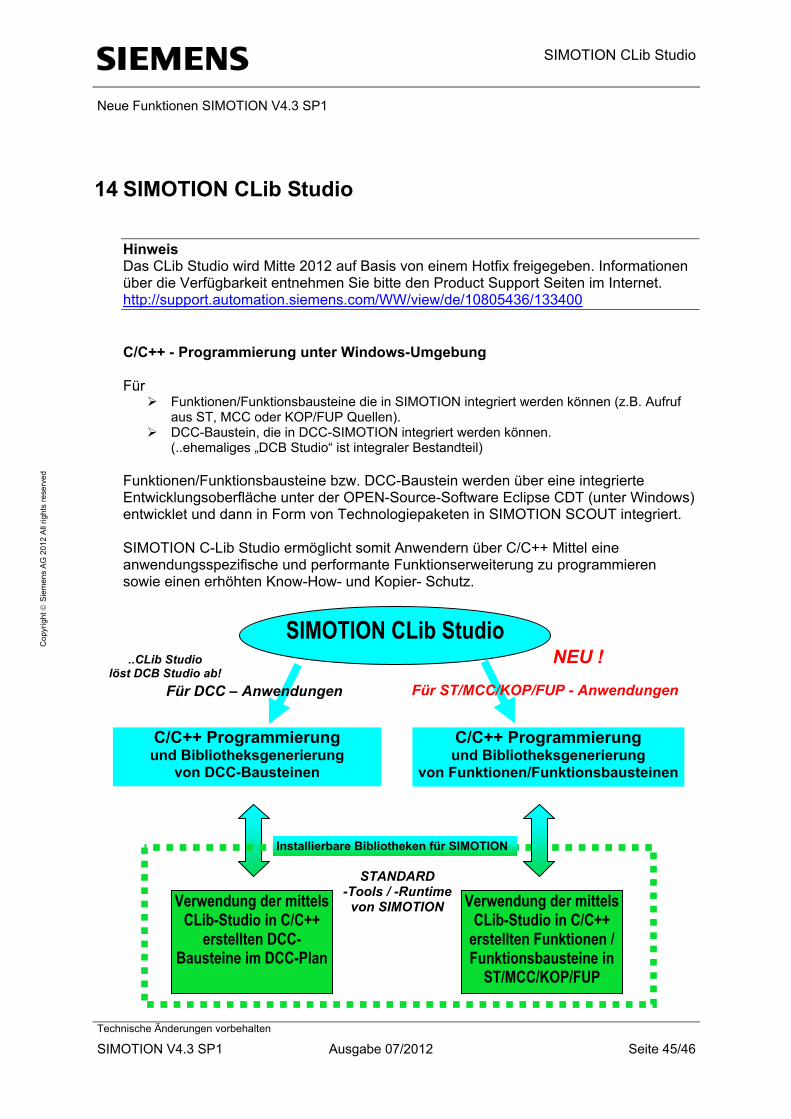
Hinweis Das CLib Studio wird Mitte 2012 auf Basis von einem Hotfix freigegeben. Informationen über die Verfügbarkeit entnehmen Sie bitte den Product Support Seiten im Internet. http://support.automation.siemens.com/WW/view/de/10805436/133400
C/C++ - Programmierung unter Windows-Umgebung Für
Funktionen/Funktionsbausteine die in SIMOTION integriert werden können (z.B. Aufruf aus ST, MCC oder KOP/FUP Quellen).
DCC-Baustein, die in DCC-SIMOTION integriert werden können. (..ehemaliges „DCB Studio“ ist integraler Bestandteil)
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 45/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Funktionen/Funktionsbausteine bzw. DCC-Baustein werden über eine integrierte Entwicklungsoberfläche unter der OPEN-Source-Software Eclipse CDT (unter Windows) entwicklet und dann in Form von Technologiepaketen in SIMOTION SCOUT integriert. SIMOTION C-Lib Studio ermöglicht somit Anwendern über C/C++ Mittel eine anwendungsspezifische und performante Funktionserweiterung zu programmieren sowie einen erhöhten Know-How- und Kopier- Schutz.
SIMOTION CLib Studio
Verwendung der mittels CLib-Studio in C/C++
erstellten DCC-Bausteine im DCC-Plan
C/C++ Programmierung und Bibliotheksgenerierung
von DCC-Bausteinen
NEU !
C/C++ Programmierung und Bibliotheksgenerierung
von Funktionen/Funktionsbausteinen
Für DCC – Anwendungen
..CLib Studio löst DCB Studio ab!
Für ST/MCC/KOP/FUP - Anwendungen
Installierbare Bibliotheken für SIMOTION
STANDARD -Tools / -Runtime
von SIMOTION Verwendung der mittels CLib-Studio in C/C++
erstellten Funktionen / Funktionsbausteine in
ST/MCC/KOP/FUP

SIMOTION CLib Studio
Neue Funktionen SIMOTION V4.3 SP1
Technische Änderungen vorbehalten
SIMOTION V4.3 SP1 Ausgabe 07/2012 Seite 46/46
Co
pyr
igh
t S
iem
en
s A
G 2
01
2 A
ll rig
hts
re
serv
ed
Siemens AG
Industry Sector
I DT MC PMA
Frauenauracher Str. 80
D-91056 Erlangen
Fax: +49-9131-98-1297
mailto: [email protected]


















