Wen 1Kap SteuerGrundl - web.bs-cham.deweb.bs-cham.de/wiki/images/f/fe/Systemgrundl.pdf · System...
28
MoMEL e-learning system L. Wenzl 2003 1 1. Grundlagen technischer Systeme Das Transfersystem MoMecS (Modulares Mechatronisches System) ist aus vielen unterschiedlichen Anlagenteilen und Komponenten aufgebaut. Diese Anlagenteile werden korrekt als „Einrichtungen“ bezeichnet: - Profile mit Gurtführung und Gurtumlenkung - mechanische Grundkonstruktion aus Profilschienen - Elektromotor mit Getriebeeinheit - Bedienpult mit Leuchttastern und Not-Aus-Schlagtaster - Elektroplatte mit Klemmleiste, Schützen und Motorschutzschalter Daneben sind an dem abgebildeten Transfersystem noch diverse Sensoren angebracht: - eine Reflexlichtschranke - induktive Näherungsinitiatoren Auch die einzelnen „Einrichtungen“ sind häufig aus einer großen Zahl „Gruppen“ und „Elementen“ (=Einzelteilen) aufgebaut. (s. Bild unten) So besteht beispielsweise die mechanische Grundkonstruktion neben den Profilschienen aus zahlreichen Verbindungselementen. Das Winkelgetriebe zwischen Elektromotor und Gurtförderung ist von außen überhaupt nicht einsehbar, seine Funktion und sein Aufbau können nur mit entsprechenden Vorkenntnissen erklärt werden. Alle Einrichtungen, Gruppen und Elemente erfüllen bestimmte Aufgaben. Erst das geordnete Zusammenwirken aller Anlagenteile bewirkt die gewünschte Funktion. Gesamtheit der selbstständig verwend- nicht mehr selbstständig kleinste, unteilbare Einrichtungen zur bare Einheit innerhalb verwendbare Einheit Einheit in einer Gruppe Auftragserfüllung eines Systems z.B. Motor innerhalb der Einrichtung z. B. Schraube Bild: Modulares Mechatronisches System MoMecS System Einrichtung Gruppe Element
Transcript of Wen 1Kap SteuerGrundl - web.bs-cham.deweb.bs-cham.de/wiki/images/f/fe/Systemgrundl.pdf · System...

MoMEL e-learning system L. Wenzl 2003 1
1. Grundlagen technischer Systeme
Das Transfersystem MoMecS (Modulares Mechatronisches System) ist aus vielen unterschiedlichen Anlagenteilen und Komponenten aufgebaut. Diese Anlagenteile werden korrekt als „Einrichtungen“ bezeichnet: - Profile mit Gurtführung und Gurtumlenkung
- mechanische Grundkonstruktion aus Profilschienen - Elektromotor mit Getriebeeinheit - Bedienpult mit Leuchttastern und Not-Aus-Schlagtaster - Elektroplatte mit Klemmleiste, Schützen und Motorschutzschalter
Daneben sind an dem abgebildeten Transfersystem noch diverse Sensoren angebracht:
- eine Reflexlichtschranke - induktive Näherungsinitiatoren
Auch die einzelnen „Einrichtungen“ sind häufig aus einer großen Zahl „Gruppen“ und „Elementen“ (=Einzelteilen) aufgebaut. (s. Bild unten) So besteht beispielsweise die mechanische Grundkonstruktion neben den Profilschienen aus zahlreichen Verbindungselementen. Das Winkelgetriebe zwischen Elektromotor und Gurtförderung ist von außen überhaupt nicht einsehbar, seine Funktion und sein Aufbau können nur mit entsprechenden Vorkenntnissen erklärt werden. Alle Einrichtungen, Gruppen und Elemente erfüllen bestimmte Aufgaben. Erst das geordnete Zusammenwirken aller Anlagenteile bewirkt die gewünschte Funktion. Gesamtheit der selbstständig verwend- nicht mehr selbstständig kleinste, unteilbare Einrichtungen zur bare Einheit innerhalb verwendbare Einheit Einheit in einer Gruppe Auftragserfüllung eines Systems z.B. Motor innerhalb der Einrichtung z. B. Schraube
Bild: Modulares Mechatronisches System MoMecS
System
Einrichtung
Gruppe Element
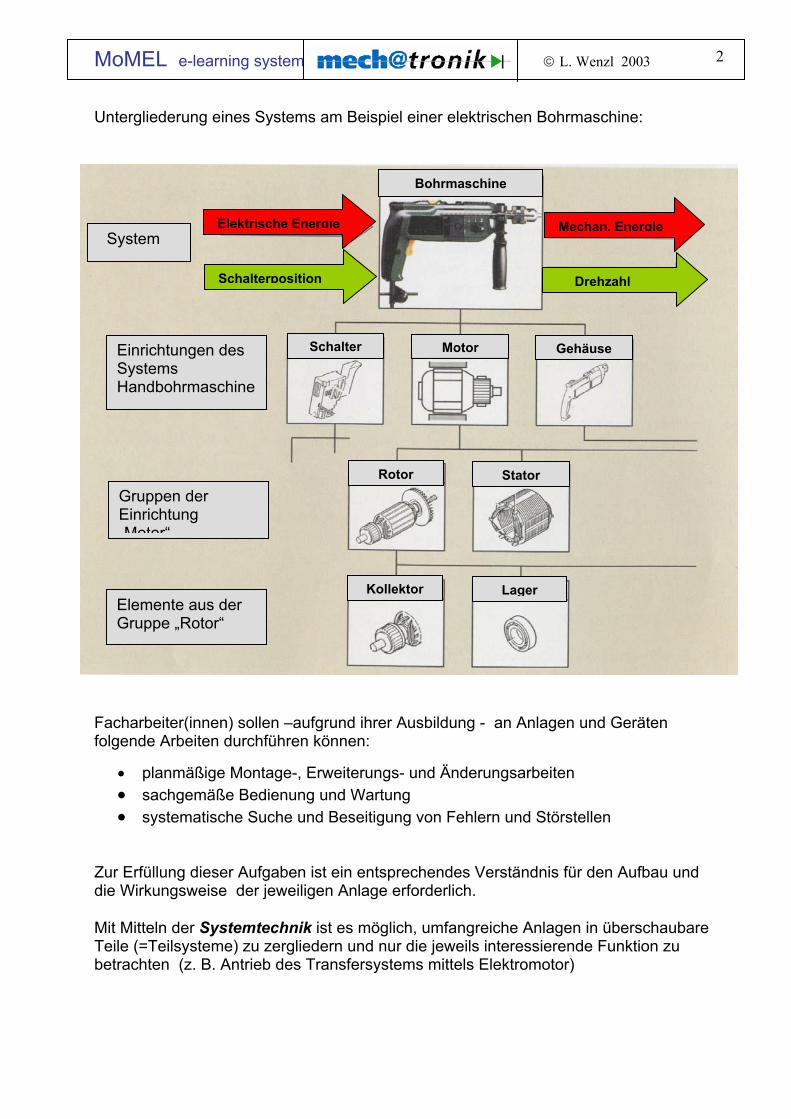
MoMEL e-learning system L. Wenzl 2003 2 Untergliederung eines Systems am Beispiel einer elektrischen Bohrmaschine: Facharbeiter(innen) sollen –aufgrund ihrer Ausbildung - an Anlagen und Geräten folgende Arbeiten durchführen können:
• planmäßige Montage-, Erweiterungs- und Änderungsarbeiten • sachgemäße Bedienung und Wartung • systematische Suche und Beseitigung von Fehlern und Störstellen
Zur Erfüllung dieser Aufgaben ist ein entsprechendes Verständnis für den Aufbau und die Wirkungsweise der jeweiligen Anlage erforderlich. Mit Mitteln der Systemtechnik ist es möglich, umfangreiche Anlagen in überschaubare Teile (=Teilsysteme) zu zergliedern und nur die jeweils interessierende Funktion zu betrachten (z. B. Antrieb des Transfersystems mittels Elektromotor)
Elektrische Energie Mechan. Energie
Schalterposition Drehzahl
Einrichtungen des Systems Handbohrmaschine
Gruppen der Einrichtung Motor“
Elemente aus der Gruppe „Rotor“
System
Bohrmaschine
Schalter Motor Gehäuse
StatorRotor
Kollektor Lager

MoMEL e-learning system L. Wenzl 2003 3
1.1 Systemtechnische Grundlagen 1.1.1 Begriffsdefinition „System“ Die Systemtechnik ist eine Betrachtungsweise, mit deren Hilfe sich komplizierte technische Zusammenhänge vereinfacht darstellen lassen. Anlagen, Maschinen und Geräte werden hierbei als Systeme bezeichnet. Symbolisch werden diese Systeme meist mit einem Kasten gekennzeichnet. Zugeführte bzw. abgegebene Größen werden durch Pfeile dargestellt. Größe x Größe y Anwendungsbeispiel Elektromotor: Technische Systeme können in ihrem Aufbau und in ihrer Funktion sehr unterschiedlich beschaffen sein. Nachfolgende Beispiele verdeutlichen dies: Bild: Beispiele technischer Systeme
System
Technische Systeme sind Anordnungen von Anlagenteilen, die durch ihr Zusammenwirken eine vorgegebene Funktion ausführen.
System Kühl-schrank
System Elektro-motor
System Mobil-telefon
System Personal-computer
System MoMecS (Transfer- system)
System
Elektromotor M
3~
Elektrische Energie Mechanische Energie
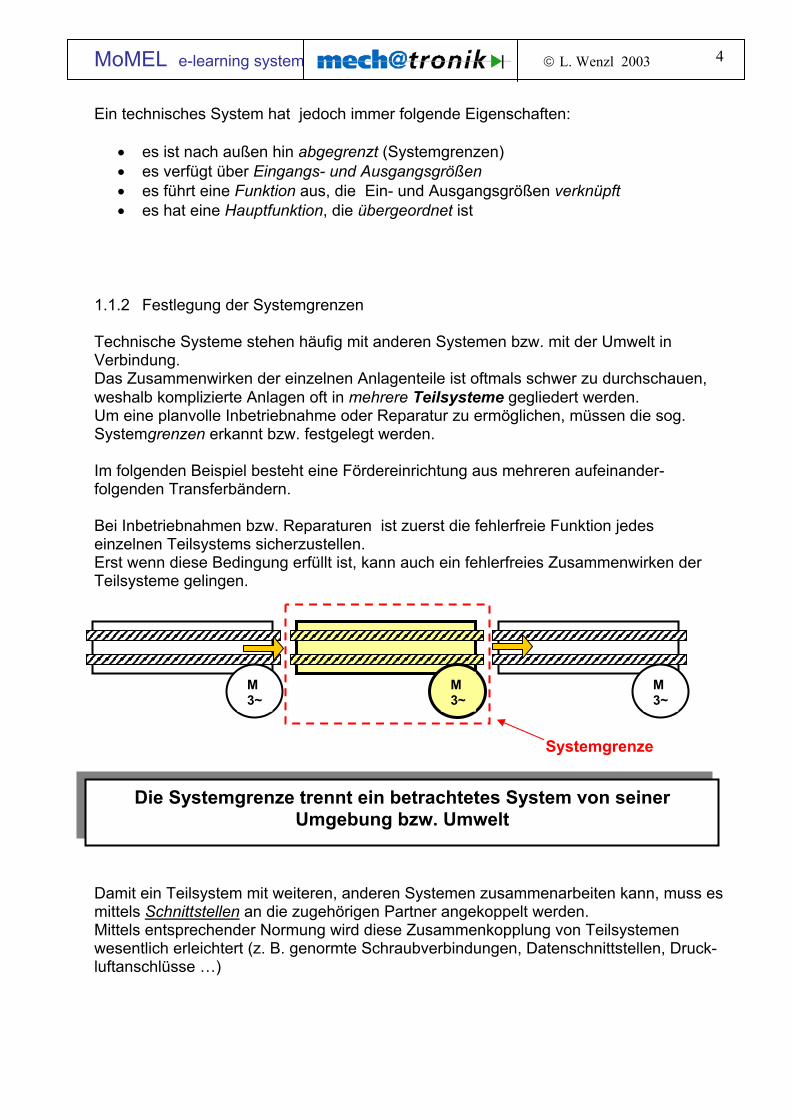
MoMEL e-learning system L. Wenzl 2003 4 Ein technisches System hat jedoch immer folgende Eigenschaften:
• es ist nach außen hin abgegrenzt (Systemgrenzen) • es verfügt über Eingangs- und Ausgangsgrößen • es führt eine Funktion aus, die Ein- und Ausgangsgrößen verknüpft • es hat eine Hauptfunktion, die übergeordnet ist
1.1.2 Festlegung der Systemgrenzen Technische Systeme stehen häufig mit anderen Systemen bzw. mit der Umwelt in Verbindung. Das Zusammenwirken der einzelnen Anlagenteile ist oftmals schwer zu durchschauen, weshalb komplizierte Anlagen oft in mehrere Teilsysteme gegliedert werden. Um eine planvolle Inbetriebnahme oder Reparatur zu ermöglichen, müssen die sog. Systemgrenzen erkannt bzw. festgelegt werden. Im folgenden Beispiel besteht eine Fördereinrichtung aus mehreren aufeinander-folgenden Transferbändern. Bei Inbetriebnahmen bzw. Reparaturen ist zuerst die fehlerfreie Funktion jedes einzelnen Teilsystems sicherzustellen. Erst wenn diese Bedingung erfüllt ist, kann auch ein fehlerfreies Zusammenwirken der Teilsysteme gelingen. Systemgrenze Damit ein Teilsystem mit weiteren, anderen Systemen zusammenarbeiten kann, muss es mittels Schnittstellen an die zugehörigen Partner angekoppelt werden. Mittels entsprechender Normung wird diese Zusammenkopplung von Teilsystemen wesentlich erleichtert (z. B. genormte Schraubverbindungen, Datenschnittstellen, Druck-luftanschlüsse …)
M 3~
M 3~
M 3~
Die Systemgrenze trennt ein betrachtetes System von seiner Umgebung bzw. Umwelt

MoMEL e-learning system L. Wenzl 2003 5 1.1.3 Eingangs- und Ausgangsgrößen von Systemen An den Systemgrenzen erfolgt ein Austausch mit anderen Systemen bzw. mit der Umwelt. Deshalb stellen die Systemgrenzen Schnittstellen dar, die häufig gewissen Vorgaben entsprechen müssen. Die Beschaffenheit dieser Schnittstellen kann sehr unterschiedlich sein:
- mechanische Schnittstellen (Maße, Toleranz, Kupplungen, Befestigungen...) - elektrische Schnittstellen (Spannungspegel, Potential, Verbindungstechnik...) - pneumatische und hydraulische Schnittstellen (Druck, Anschluss...) - Datenschnittstellen (Übertragungsprotokoll, Übertragungsmedium, Anschluss...)
Prinzipiell lassen sich die Signale an den Systemgrenzen in drei Klassen unterteilen:
• Energie (z. B. elektrische Energie, Druckenergie, Drehmoment) • Stoff (z. B. Druckluft, Treibstoff, Rohstoffe) • Information (z. B. Schaltsignale, Anzeigewerte, Messergebnisse)
Eingangsgröße Hauptfunktion Ausgangsgröße Energieumsetzung Elektr. Energie Druckenergie Umgebungsluft Druckluft Schaltsignale Druckanzeige Beispiel: Eingangs- und Ausgangssignale an einem Druckluftkompressor Häufig treten die Fehler in mechatronischen Systemen an den Schnittstellen zwischen einzelnen Teilsystemen auf:
- mechanische Staus, Abnutzung, Reibung, Bruch, Lockerung - leckende Hydraulik- und Pneumatikverbindungen - Wackelkontakte, Übergangswiderstände, Erdschlüsse - Datenübertragungsfehler, Datenverlust - ....
System
Druckluft-kompressor
Energie Energie
Stoff Stoff
Information Information

MoMEL e-learning system L. Wenzl 2003 6 Andererseits bieten Schnittstellen an den Systemgrenzen auch die Möglichkeit, Teilsysteme auf ihre korrekte Funktion hin zu überprüfen:
- mechanische Deformierungen, Abnutzung, Schlupf, Drehzahl ... - Eingangs- bzw. Ausgangsdruck der Pneumatik bzw. Hydraulik - Eingangs- bzw. Ausgangsspannung der elektrischen Energie - Aufzeichnung der eingehenden bzw. gesendeten Daten - Messung von Schaltsignale an Initiatoren, Gebern
1.1.4 Hauptfunktionen technischer Systeme Technische Systeme werden nach ihrer Hauptfunktion in drei Klassen eingeteilt. Hauptfunktion → ↓Umsetzungsart
Energieumsetzung
Stoffumsetzung
Informations-
umsetzung Umwandeln Ändern der Energieart
z. B. Elektromotor
Ändern der Stoff- zusammensetzung z. B. Härteofen
Umwandeln von Informationen z. B. Mikroprozessor
Umformen Ändern der Größe einer Energieart z. B. Transformator
Ändern der äußeren Form eines Stoffes z. B. Presse
Verändern des Trägers der Information z. B. Modem
Transport Übertragen der Energie zu anderem Ort z. B. Leitungen
Fördern eines Stoffes zu einem anderen Ort z. B. Förderband, Aufzug
Übertragen von In-formationen zu anderem Ort z. B. Bussysteme
Speichern Speichern der Energiez. B. Akkumulator, Kondensator
Lagern von Stoff z. B. Flüssigtank, Silo
Festhalten von Informationen z. B. CD, Diskette
Tabelle: Arten der Umsetzung in technischen Systemen
Energieumsatz Informationsumsatz Stoffumsatz
Technische Systeme

MoMEL e-learning system L. Wenzl 2003 7 1.1.5 Erläuterung der Hauptfunktion „Stoffumsatz“ Maschinen, die Stoffe transportieren zählen zu den Stoff umsetzenden Systemen. Derartige Systeme verändern zwar die Stoffe (Grundstoffe, Halbzeuge, Fertigprodukte) nicht in Ihrer äußeren Form bzw. in ihrer Zusammensetzung. Sie können jedoch die Lage bzw. den Aufbewahrungsort dieser Stoffe ändern. In flexiblen Fertigungssystemen erfolgt der Stofffluss durch:
- Transport (Förderbänder, Förderschnecken, Pumpen, Gebläse …) - Lagern (Hochregallager, Magazine, Silos, Tanks …) - Handhaben (Roboter, Greifersysteme…)
Transportieren und Handhaben an einer Umsetzeinheit (bestehend aus Transportband und 3-achsiger, pneumatischer Linearfördereinheit)
MoMEL e-learning system L. Wenzl 2003 8
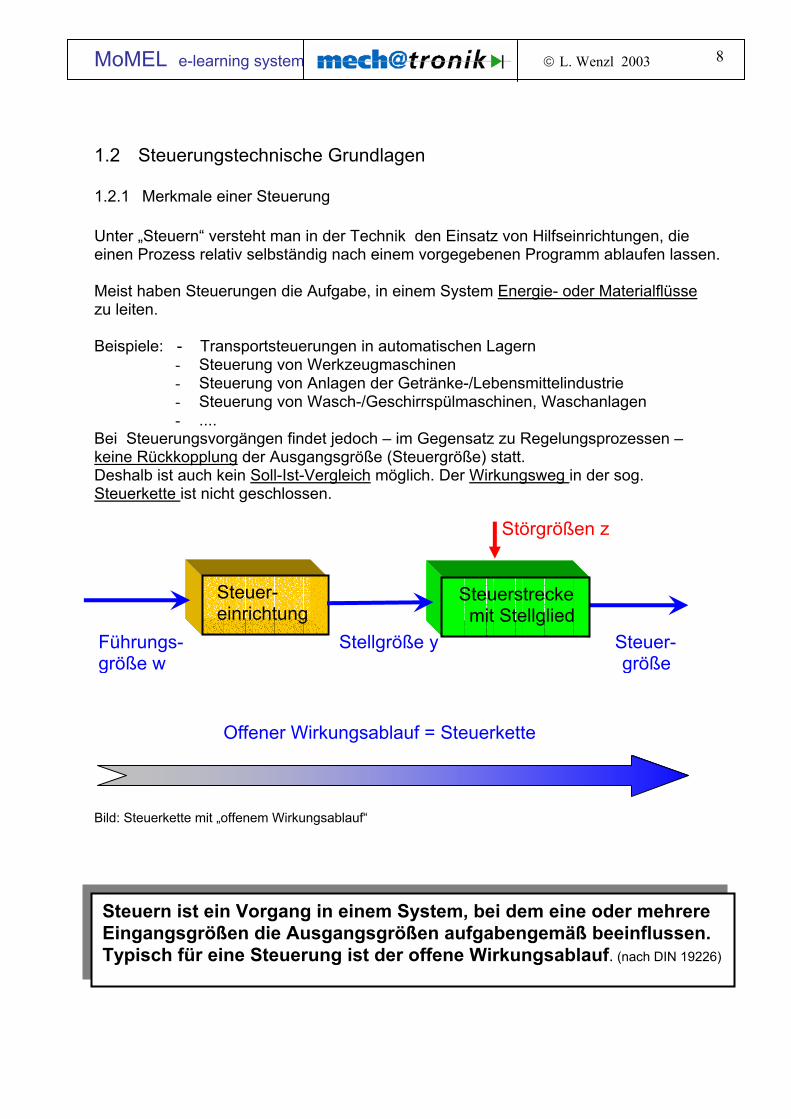
Steuern ist ein Vorgang in einem System, bei dem eine oder mehrere Eingangsgrößen die Ausgangsgrößen aufgabengemäß beeinflussen. Typisch für eine Steuerung ist der offene Wirkungsablauf. (nach DIN 19226)
Führungs- Stellgröße y Steuer-größe w größe
1.2 Steuerungstechnische Grundlagen 1.2.1 Merkmale einer Steuerung Unter „Steuern“ versteht man in der Technik den Einsatz von Hilfseinrichtungen, die einen Prozess relativ selbständig nach einem vorgegebenen Programm ablaufen lassen. Meist haben Steuerungen die Aufgabe, in einem System Energie- oder Materialflüsse zu leiten. Beispiele: - Transportsteuerungen in automatischen Lagern
- Steuerung von Werkzeugmaschinen - Steuerung von Anlagen der Getränke-/Lebensmittelindustrie - Steuerung von Wasch-/Geschirrspülmaschinen, Waschanlagen - ....
Bei Steuerungsvorgängen findet jedoch – im Gegensatz zu Regelungsprozessen – keine Rückkopplung der Ausgangsgröße (Steuergröße) statt. Deshalb ist auch kein Soll-Ist-Vergleich möglich. Der Wirkungsweg in der sog. Steuerkette ist nicht geschlossen. Störgrößen z
Bild: Steuerkette mit „offenem Wirkungsablauf“
Offener Wirkungsablauf = Steuerkette
Steuerstrecke mit Stellglied
Steuer- einrichtung
MoMEL e-learning system L. Wenzl 2003 9 Eine oder mehrere Eingangsgrößen wirken über eine Steuereinrichtung auf die Strecke. Eine Rückführung oder Rückmeldung des Ausgangssignals x auf den Eingang findet nicht statt. Kennzeichen für die Steuerung ist der offene Wirkungsweg über die Übertragungsglieder oder die Steuerkette. Greifen an der Steuerstrecke Störgrößen z an, so bewirken diese eine Abweichung der Steuergröße x vom beabsichtigten Sollwert w. Da diese Abweichung – wegen der fehlenden Istwerterfassung – nicht erkannt wird, kann auch kein Ausgleich der Störung erfolgen. Im System liegt eine Sollwertabweichung vor, die evtl. Bedienereingriffe notwendig macht. Vorteile von Steuerketten:
• Ausgangsgröße (Steuergröße) wird nicht gemessen, → Verringerung des Schaltungsaufwandes
• Offene Wirkungsabläufe sind einfacher zu durchschauen als geschlossene Kreisläufe → einfachere Fehlersuche und Störungsbeseitigung
• Bei Auftreten von Störgrößen z kann ohne Zeitverzögerung in den Ablauf ein- gegriffen werden. Dies ist bei Regelungen (s. u.) nicht ohne weiteres möglich bzw. erlaubt
Nachteile von Steuerketten:
• Der Prozess muss bekannt sein, bevor in das Verhalten des Steuerungsablaufes Eingegriffen werden kann
• Treten Störgrößen auf, so müssen diese gemessen werden. Nur so kann der Bediener angemessen auf diese reagieren
• Es gibt keine Rückmeldung, ob durch einen Steuereingriff die gewünschte Änderung der Steuergröße erreicht wurde

MoMEL e-learning system L. Wenzl 2003 10 Anwendungsbeispiel: Steuerung eines Kreissägen-Motors
z = Störgröße(n) Aufgabengröße (Steuergröße) Stellglied Steuerstrecke x Energiefluss y = Stellgröße Steuerein- richtung w = Führungsgröße Schalter= Steuereinrichtung Laststrom
-K1
Schütz = Stellglied
-K1 M 3~ Motor = Steuerstrecke Beschreibung: Die obige Steuerung des Elektromotors ist in diesem Fall relativ einfach, da es nur die beiden Zustände EIN/AUS gibt. Selbstverständlich gilt das obige Blockschaltbild auch für aufwändigere Steuerungsaufgaben (z. B. Wendeschütz, Stern-Dreieck-Schaltung, Frequenzumrichter..) Mittels der Steuereinrichtung (hier Schalter) wird der Sollwert (EIN/ max. Drehzahl und Drehmoment) gegeben. Der Steuerstrom (=Stellgröße) bewirkt ein Schließen des Motorschütz (=Stellglied). Dies hat ein Einschalten des Laststromes zur Folge, was die Drehzahl (=Steuergröße) auf von Stillstand auf die Nenndrehzahl anhebt, die Kreissäge kann benutzt werden.

MoMEL e-learning system L. Wenzl 2003 11 1.2.2 Unterscheidungsmerkmale von Steuerungen Steuerungen können sich in ihrer technischen Ausführung in vielfältiger Weise unterscheiden.
- nach der Form der Hilfsenergie - nach dem Programmablauf - nach der Art der technischen Realisierung (kontaktlos, kontaktbehaftet) - nach der Signalform (analog, binär, digital)
a) Unterscheidung nach der verwendeten Hilfsenergie Als gröbstes Unterscheidungsmerkmal kann die Form der Hilfsenergie dienen: - Mechanische Steuerungen - Pneumatische Steuerungen - Hydraulische Steuerungen - Elektrische/ elektronische Steuerungen - Getriebe - Stoppeinrichtungen - Pressvorgänge - Schützsteuerung - Kupplungen - Umsetzer - Hubeinrichtungen - SPS-Steuerung - Pendel-Uhr - explosinsgefährdete Bereiche Vergleich der Eigenschaften der drei häufigsten Steuerungs-Hilfsenergien: Medium: Elektrischer Strom Pneumatik Hydraulik Speicherfähigkeit nur mit hohen
Verlusten sehr gut mit geringen
Verlusten Transportfähigkeit sehr weite Ent-
fernungen möglich weite Entfernungen möglich
nur kurze Ent-fernungen möglich
Erzielbare Geschwindigkeit
sehr schnell 0,1 - 10 m/s
sehr schnell bis 1,5 m/s
schnell bis 0,5 m/s
Stoffeigenschaften saubere Energie-form, universell umwandelbar und einsetzbar
auch in explosions-gefährd. Bereichen möglich, nur geringe Kräfte möglich, da kompressibel
gute Materialver-träglichkeit, wegen geringer Kompression hohe Krartübertragung
Ausführungsformen von Steuerungen Unterschieden nach der Form der Hilfsenergie
Mechanische Steuerung
Pneumatische
Steuerung
Hydraulische
Steuerung
Elektrische, elektronsiche
Steuerung

MoMEL e-learning system L. Wenzl 2003 12 Anwendungsbeispiel: Mechanische Steuerung der Absturzsicherung (Fangvorrichtung) in Aufzugsanlagen Aufzugsanlagen müssen nach Sicherheitsvorgaben so konstruiert sein, dass ein Absturz der Kabine ausgeschlossen ist. Dabei muss von den ungünstigsten Bedingungen ausgegangen werden:
• Ausfall der Versorgungsspannung • Riss sämtlicher Drahtseile (bei Seilaufzügen) • Platzen der Hydraulikleitung (in hydraulischen Aufzügen)
Die sog. Fangvorrichtung funktioniert aus diesen Gründen auch weiterhin einzig nach mechanischen Prinzipien: Es handelt sich um eine mechanische Steuerung, deren Auslösung durch einen mechanischen Fliehkraft-Betätiger (=Sensor) erfolgt. Als Aktoren dienen Fangkeile (=Bremsbacken) , die sich - auf Grund der Schwerkraft- selbsthemmend zwischen Aufzugskabine und Führungsschienen klemmen.
Funktionsweise: Die Fahrgastkabine (1) würde abstürzen, wenn sämtliche Tragseile (2) reißen. Da diese redundant (=mehrfach) mit entsprechenden Sicherheitszuschlägen vorhanden sind, ist dies sehr unwahrscheinlich. In diesem Fall würde das Reglerseil (3) eine höhere Geschwindigkeit als üblich erfahren. Der mechanische Fliehkraft-Betätiger (4) würde auslösen und eine Sperrklinke in die obere Umlenkrolle einfahren. Das Reglerseil (3) bleibt stehen, was an der Aufzugskabine die sog. Fangvorrichtung aktiviert: Zwischen Aufzugskabine (1) und Führungssschienen (5) werden Fangkeile(6) eingeschoben, welche die abstürzende Kabine nicht schlagartig sondern mit einer gewissen Verzögerung stoppen, damit die Fahrgäste keine Wirbelverletzungen
erleiden. Der TÜV überprüft im Abstand von zwei Jahren das Auslösen der Fangvorrichtung bei voll beladenem Aufzug (Nennlast). Man kann nach der Überprüfung an den Fangschienen ca. 5-10 cm lange Kratzspuren feststellen, die das Ansprechen der Fangvorrichtung belegen.
n>
1
2
4
3
5
6
5

MoMEL e-learning system L. Wenzl 2003 13 b) Unterscheidung nach der Art der Programmbearbeitung Weiterhin kann man unterscheiden, ob eine Steuerung ein vorgegebenes Programm strikt abarbeitet, oder ob sie flexibel auf Ereignisse reagieren kann.
• Autowaschanlage • Geschirrspüler • NC-Fertigunsgsprozesse • …
Ablaufsteuerungen arbeiten nach einem zwangsläufig schrittweisen Ablauf.
• flexible Fertigungssysteme • Lager- und Transportsysteme • Aufzugsanlagen • …
Verknüpfungssteuerungen verknüpfen die Eingabesignale und ordnen das Ergebnisse den programmäßig zuge- ordneten Ausgabesignalen zu.
Der Fortschritt innerhalb des Steuerungsprozesses kann
Bei den Verknüpfungssteuerungen werden die Eingangssignal anhand des
-ereignisabhängig (z. B. Temperatur) oder -zeitabhängig (z. B. Aufwärmzeit) sein Ablaufsteuerungen werden zumeist anhand sog. „Zustandsdiagramme“ dokumentiert. Programmes bewertet. Anahd der Ergebnisse erfolgt eine Ansteuerung der Ausgabesignale (Aktoren)
Hierzu werden in erster Linie - Logische Verknüpfungsfunktionen (UND, ODER, NICHT, NAND, NOR ..) - Zeitfunkttionen (TIMER) - Zählfunktionen (COUNTER) - Speicherfunktionen (MERKER) verwendet.
Die Programmierung kann anhand sog. Schrittketten erfolgen. Hierbei wird ein Schritt nach dem anderen ausgeführt. Der Übergang zum jeweils nächsten Schritt erfolgt erst, wenn die sog. Transitionen (Weiterschaltbe-dingungen) erfüllt sind.
Die Programmierung kann dabei zumweist in - alphanumerischem Code (z. B. Anweisungliste AWL, Assembler..) oder - graphisch ( z. B. Funktionsplan FUP, Kontaktplan KOP) erfolgen
Programmablauf
Ablaufsteuerung Verknüpfungssteuerung
ereignisgesteuert zeitgesteuert

MoMEL e-learning system L. Wenzl 2003 14
- Mikroprozessor-gesteuert - Programmspeicherung in ROM, RAM, EPROM, EEPROM - genormte Schnittstellen und Spannungspegel bei Anbindung der Peripherie
c) Unterscheidung nach der technischen Realisierung Am Beispiel elektrischer Steuerungen sollen Unterscheidungsmerkmale zwischen fest verdrahteten Steuerungen (VPS) und programmierbaren Steuerungen (SPS) aufgezeigt werden.
Elektrische Steuerungen lassen sich grob in zwei Gruppen einteilen:
d) Unterscheidung nach der Signalform Steuerungen kommunizieren mit der Peripherie (=Umgebung) mittels Signalaustausch. Die physikalische Beschaffenheit (elektrisch, pneumatisch, hydraulisch) hängt von der verwendeten Hilfsenergie ab. Die Art der Hilfsenergie ist allerdings nicht das einzige Kriterium für die Beschaffenheit der Signale. Auch die Form in der die Signale aufbereitet werden ist wichtig, damit die einzelnen Steuerungskomponenten (Sensoren, Automatisierungsgerät, Aktoren) „die gleiche Sprache“ sprechen. Vor allem die elektrischen Signale bieten eine große Anzahl genormter Signalformen, die durch Signalpegel (physikalisch z. B. Spannungshöhe) und Protokolle (datentechnischer, zeitlicher ÜBertragungsablauf) festgelegt sind.
Elektrische Steuerungen
Verbindungsprogrammiert (VPS)
Speicherprogrammiert (SPS)
- Schütz-/Relaissteuerungen -fest verdrahtete Schaltungen (z. B. Wire-wrap, Termipoint) - kontaktlose Steuerungen (z. B. logische Gatter auf elektronischen Baugruppen)
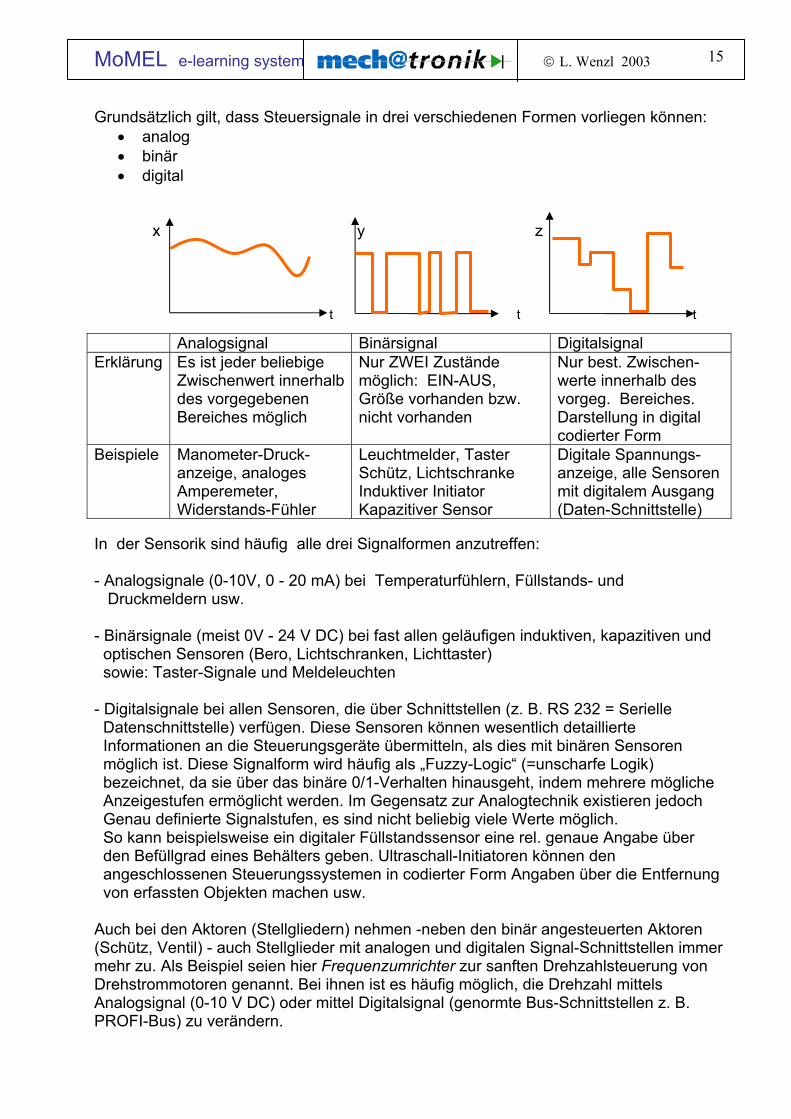
MoMEL e-learning system L. Wenzl 2003 15 Grundsätzlich gilt, dass Steuersignale in drei verschiedenen Formen vorliegen können:
• analog • binär • digital
x y z t t t
In der Sensorik sind häufig alle drei Signalformen anzutreffen: - Analogsignale (0-10V, 0 - 20 mA) bei Temperaturfühlern, Füllstands- und Druckmeldern usw. - Binärsignale (meist 0V - 24 V DC) bei fast allen geläufigen induktiven, kapazitiven und optischen Sensoren (Bero, Lichtschranken, Lichttaster) sowie: Taster-Signale und Meldeleuchten - Digitalsignale bei allen Sensoren, die über Schnittstellen (z. B. RS 232 = Serielle Datenschnittstelle) verfügen. Diese Sensoren können wesentlich detaillierte Informationen an die Steuerungsgeräte übermitteln, als dies mit binären Sensoren möglich ist. Diese Signalform wird häufig als „Fuzzy-Logic“ (=unscharfe Logik) bezeichnet, da sie über das binäre 0/1-Verhalten hinausgeht, indem mehrere mögliche Anzeigestufen ermöglicht werden. Im Gegensatz zur Analogtechnik existieren jedoch Genau definierte Signalstufen, es sind nicht beliebig viele Werte möglich. So kann beispielsweise ein digitaler Füllstandssensor eine rel. genaue Angabe über den Befüllgrad eines Behälters geben. Ultraschall-Initiatoren können den angeschlossenen Steuerungssystemen in codierter Form Angaben über die Entfernung von erfassten Objekten machen usw. Auch bei den Aktoren (Stellgliedern) nehmen -neben den binär angesteuerten Aktoren (Schütz, Ventil) - auch Stellglieder mit analogen und digitalen Signal-Schnittstellen immer mehr zu. Als Beispiel seien hier Frequenzumrichter zur sanften Drehzahlsteuerung von Drehstrommotoren genannt. Bei ihnen ist es häufig möglich, die Drehzahl mittels Analogsignal (0-10 V DC) oder mittel Digitalsignal (genormte Bus-Schnittstellen z. B. PROFI-Bus) zu verändern.
Analogsignal Binärsignal Digitalsignal Erklärung Es ist jeder beliebige
Zwischenwert innerhalb des vorgegebenen Bereiches möglich
Nur ZWEI Zustände möglich: EIN-AUS, Größe vorhanden bzw. nicht vorhanden
Nur best. Zwischen- werte innerhalb des vorgeg. Bereiches. Darstellung in digital codierter Form
Beispiele Manometer-Druck-anzeige, analoges Amperemeter, Widerstands-Fühler
Leuchtmelder, Taster Schütz, Lichtschranke Induktiver Initiator Kapazitiver Sensor
Digitale Spannungs-anzeige, alle Sensoren mit digitalem Ausgang (Daten-Schnittstelle)
MoMEL e-learning system L. Wenzl 2003 16
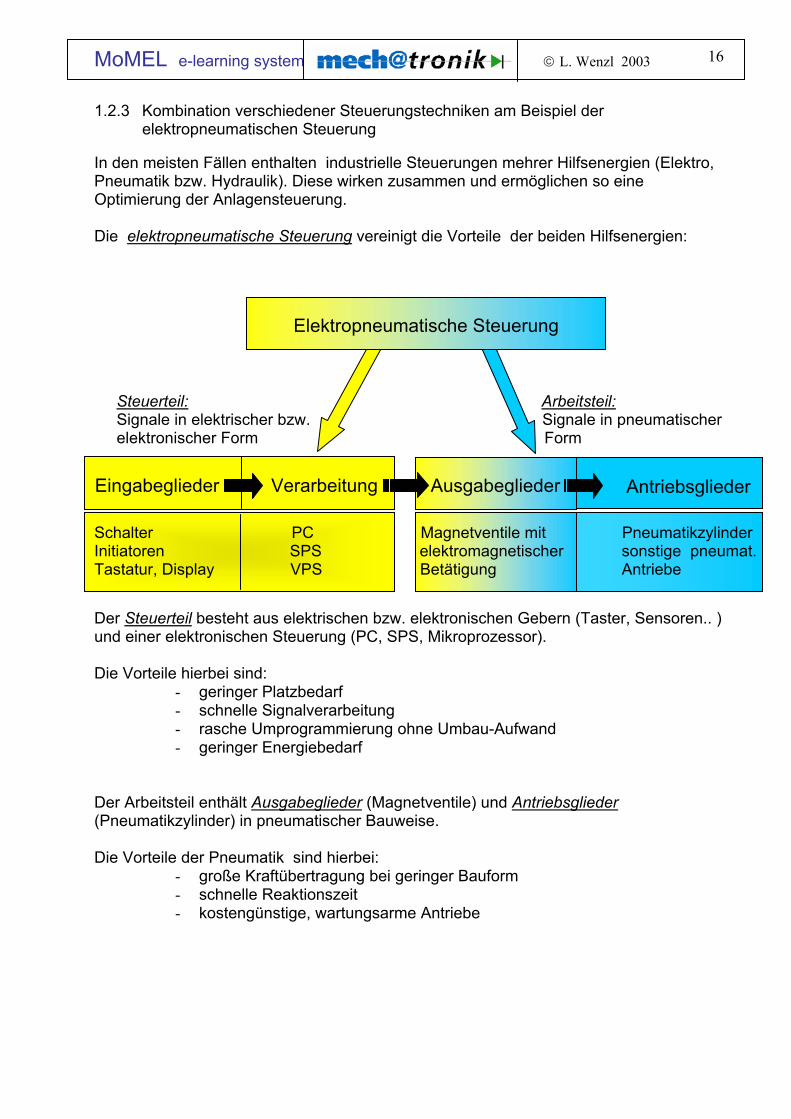
Eingabeglieder Verarbeitung
Antriebsglieder
Elektropneumatische Steuerung
Ausgabeglieder
1.2.3 Kombination verschiedener Steuerungstechniken am Beispiel der
elektropneumatischen Steuerung In den meisten Fällen enthalten industrielle Steuerungen mehrer Hilfsenergien (Elektro, Pneumatik bzw. Hydraulik). Diese wirken zusammen und ermöglichen so eine Optimierung der Anlagensteuerung. Die elektropneumatische Steuerung vereinigt die Vorteile der beiden Hilfsenergien: Steuerteil: Arbeitsteil: Signale in elektrischer bzw. Signale in pneumatischer elektronischer Form Form
Schalter PC Magnetventile mit Pneumatikzylinder Initiatoren SPS elektromagnetischer sonstige pneumat. Tastatur, Display VPS Betätigung Antriebe Der Steuerteil besteht aus elektrischen bzw. elektronischen Gebern (Taster, Sensoren.. ) und einer elektronischen Steuerung (PC, SPS, Mikroprozessor). Die Vorteile hierbei sind:
- geringer Platzbedarf - schnelle Signalverarbeitung - rasche Umprogrammierung ohne Umbau-Aufwand - geringer Energiebedarf
Der Arbeitsteil enthält Ausgabeglieder (Magnetventile) und Antriebsglieder (Pneumatikzylinder) in pneumatischer Bauweise. Die Vorteile der Pneumatik sind hierbei:
- große Kraftübertragung bei geringer Bauform - schnelle Reaktionszeit - kostengünstige, wartungsarme Antriebe

MoMEL e-learning system L. Wenzl 2003 17
Digital Input Eingabe CPU + Speicher Verar- beitung Digital Output Ausgabe
1.2.4 Vergleich VPS – SPS Bei Verbindungsprogrammierten Steuerungen (= VPS) ist die Steuerfunktion (Programm) durch die Art der Verdrahtung realisiert. Eine Änderung des Steuerablaufes führt deshalb fast immer zu einer Schaltungs-änderung, was kosten- und zeitintensiv sein kann. Bei Speicherprogrammierbaren-Steuerungen (SPS) werden alle Geber (Sensoren) und Stellglieder (Aktoren) der Reihe nach an die Steuerung angeschlossen. Eine bestimmte Schaltungslogik ist hierbei nicht zu beachten. Die Zusammenschaltung zwischen Sensoren und Aktoren wird vom Programm realisiert. Deshalb ist bei Funktionsänderungen ein Hardwareeingriff in den meisten Fällen nicht er-forderlich. An nachfolgendem Beispiel sieht man, dass Hilfskontakte nicht notwendig sind, da diese über das Programm realisiert werden können. Ebenso erübrigen sich - gegenüber konventionellen Steuerungen - separate Zeitrelais. SPS-Steuerungen enthalten nämlich bereits zahlreiche Timer-Funktionen, mittels derer sich zeitabhängige Steuerungsbefehle programmieren lassen, ohne dass dafür separate Hardware erforderlich würde. L+ L+ -S0 -S1 - S0 - S1 -K1 -K1 Motorschütz -K1 Motorschütz GND GND Verbindungsprogrammierte Speicherprogrammierte Steuerung (VPS) Steuerung (SPS) Steuerungs-typ
VPS
SPS Vorteile robust, störunempfindlich,
zuverlässig, weit verbreitet, geringe Hardwarekosten
Nachteile großer Platz- und Energiebedarf nur binäre Funktionen möglich z.T. langsame Signalverarbeitung hoher Verdrahtungsaufwand Steuerfunktionen fest verdrahtet → aufwändige Umverdrahtung bei Programm-Änderungen mechanischer Verschleiß, Wartung
geringer Platzbedarf, wartungsarm hohe Zuverlässigkeit, kein Verschleißschneller Komponentenwechsel geringer Verdrahtungsaufwand einfache Änderung der Steuerfunk- tion mittels Software, Überwachung und Test mittels Visualisierung, Anbindung mittels Schnittstellen
Hohe Hardwarekosten bei kleinen Anlagen, serieller Programmablauf

MoMEL e-learning system L. Wenzl 2003 18 1.3 Regelungstechnische Grundlagen Im Kapitel „Steuerungstechnische Grundlagen“ haben Sie sich über die prinzipielle Funktion von Steuerungsvorgängen informiert. Die folgenden Teile des Kurses sollen Ihnen den Unterschied zwischen „Steuern“ und „Regeln“ verdeutlichen. Bei der Arbeit mit dem MoMecS werden Sie überwiegend mit Steuerungsvorgängen zu tun haben. Da es jedoch Teil Ihrer Ausbildung ist, auch regelungstechnische Vorgänge zu betreuen wird an dieser Stelle auf die Regelungstechnik eingegangen. Zudem sind in der heutigen Automatisierungstechnik Steuer- und Regelungsvorgänge eng miteinander gekoppelt, weshalb es wichtig ist, beide Prinzipien unterscheiden zu können. 1.3.1 Unterscheidung Steuerung - Regelung Wie Sie bereits wissen sollten, laufen Steuerungsvorgänge in einem offenen Wirkungsweg (Steuerkette) ab. Eine oder mehrere Eingangsgrößen wirken über eine Steuereinheit auf die Strecke. Eine Rückführung oder Rückmeldung des Ausgangssignals xa auf den Eingang xe findet nicht statt.
Bild: Steuerung; Steuerkette - offener Wirkungsweg Die Regelung unterscheidet sich von der Steuerung dadurch, dass der Regelungs- vorgang in einem geschlossenen Kreis, dem sog. Regelkreis abläuft. Eine zu regelnde Größe x (Istwert) wird fortlaufend erfasst, mit der Führungsgröße w (Sollwert) verglichen und - falls erforderlich - so abgeändert, dass zwischen Sollwert und Istwert keine Abweichung existiert. Bild: Regelung; Regelkreis - geschlossener Wirkungsweg
Regler
Strecke
z 1 z 3z 2
yw
x
Steuer-einheit Strecke
xa
x e1
x en..
Steuer-einheit
Regler
Strecke
Strecke
MoMEL e-learning system L. Wenzl 2003 19 Anwendungsbeispiel 1: Klimaanlage im Auto Steuerung: Einfache Klimaanlagen werden mittels des Kalt-Warm- Stellers im Pkw eingestellt. Dadurch ergibt sich ein gewisser Kältestrom, der sich jedoch nicht an ver- änderte Bedingungen (z. B. Aussentemperatur steigt/fällt) anpasst. Die Temperatur des Innenraumes muss durch Verändern des Kalt-Warm-Stellers an die Bedürfnisse der Fahrzeuginsassen angepasst werden. Hierbei erfüllt der Mensch den Regler, der die aktuelle Temperatur fühlt, diese mit seinem „Wunsch-Sollwert“ vergleicht, und letztendlich den Kalt-Warm-Steller (= Stellglied) verändert. Eine konstante Temperatur, die über längere Zeit hinweg konstant bleibt, wird sich mit diesen „ungeregelten“ Klimaanlagen in den seltensten Fällen erzielen lassen. Deshalb ist zumeist händisches Nachstellen erforderlich. Regelung: Höherwertige Fahrzeuge besitzen eine „geregelte
Klimaanlage“ („Climatronic“). Hierbei wird vom Fahrer ein Sollwert vorgegeben (z. B. 21 oC) auf dem sich die Innentemperatur einstellen soll. Durch fortwährenden Soll-Ist-Vergleich wird ent- sprechend den Erfordernissen gekühlt (Sommer) bzw. geheizt (Winter). Die Temperatur der Fahrgastkabine (=Regelstrecke) wird so lange beeinflusst, bis die aktuelle Temperatur ( =Istwert) an den Vorgabewert (= Sollwert) angeglichen ist.
Bei Veränderung der Bedingungen (Aussentemperatur, Verändern der Wunschtemperatur) reagiert die Regelung unmittelbar mit vermehrtem Kühlen bzw. Heizen. Somit werden derartige äußere Störungen (=Störgrößen z) eliminiert, d. h. in diesem Fall ausgeglichen. Anwendungsbeispiel 2: Steuerung und Regelung von hydraulischen Aufzügen Personen und Lastenaufzüge werden meist über hydraulische Druckkolben gefahren Steuerung: Das Anfahren der einzelnen Stockwerke erfolgt anhand von Steuerungs- vorgängen. Die Benutzer geben durch Tastendruck Fahrbefehle, die Halte- befehle werden durch Sensoren gegeben, sobald der Lift bestimmte Positionen erreicht hat. Regelung: Damit der Lift sanft anfährt und auch wieder ruckfrei hält, sorgt eine Regelung im Hydraulikkreis für den erforderlichen Druck im Kolben. Dieser wird durch die Beladung (Anzahl von Personen) bereits ohne sonstiges Zutun verändert. Die Regelung muss dafür sorgen, dass nun dieser Kolbendruck an die entsprechenden Erfordernisse angepasst wird.
kalt warm
21 oC +
-

MoMEL e-learning system L. Wenzl 2003 20
Stellgröße y
Regelgröße x
Rückführgröße r (=Istwert)
w (=Sollwert) Führungsgröße
Störgrößen z1 z2 z3
Regeln ist ein Vorgang bei dem die zu regelnde Größe ständig gemessen und mit dem Sollwert (Führungsgröße) verglichen wird. Dieser Soll-Ist-Vergleich findet in einem geschlossenen Wirkungs-ablauf (Regelkreis) statt. Bei Abweichungen zwischen Soll- und Istwert erfolgt eine Angleichung der Regelgröße. Im Gegensatz zur Steuerung kann der Einfluss von Störgrößen verringert werden.
1.3.2 Funktionsprinzip des Regelkreislaufes Die einzelnen Bestandteile eines Regelkreises sind mit Fachbegriffen gekennzeichnet. Auch die Signale erhalten genormte Bezeichnungen, die das rasche Erfassen der Zusammenhänge in den sog. Blockschaltbildern ermöglichen. Derartige Blockschaltpläne werden auch als „Wirkungspläne“ bezeichnet. Sie stellen die funktionalen Zusammenhänge anschaulich dar.
Bild: Regelkreis in Blockdarstellung (Wirkungsplan)
Regelstrecke mit Stellglied
Geschlossener Wirkungsablauf = Regelkreis
Regler
Messum- former
(Wandler)
Führungs- größen- geber

MoMEL e-learning system L. Wenzl 2003 21
Regelkreissignale:
Regelgröße x:
Größe der Regelstrecke, die geregelt werden soll. Beispiele von Regelgrößen sind: Temperatur, Druck, Drehzahl, Füllstand usw. Aufgabe der Regelung ist es, a) die Regelgröße auf einem konstanten Wert zu halten (z. B. Temperatur = 21o C) oder b) die Regelgröße anhand einer vorgegebenen Sollwertkurve zu beeinflussen, siehe Folgeregelung. Anwendungsbeispiel Heizung: Die Zimmertemperatur soll durch entsprechendes Anpassen der Vorlauftemperatur auf einem konstanten Wert gehalten werden. In der Nacht wird jedoch die Führungsgröße verringert, was als Nachtabsenkung bezeichnet wird.
Führungsgröße w:
Veränderlicher Wert, der der Regelung von außen zugeführt wird. Sie stellt den Sollwert dar, auf den dir Regelgröße angeglichen werden soll. Die Führungsgröße kann
a) ein fester Wert sein (s. Festwertregelung) b) ein variabler Wert sein (s. Folgeregelung und Zeitpunktregelung)
Stellgröße y:
Ausgangsgröße der Regeleinrichtung, die der Regelstrecke zugeführt wird. Stellgrößen können sein: Ausgangssignal eines Reglers, Ventilhub, Drehwinkel am Mischer, Massen- und Volumenströme, usw. Stellbereich Yh:
Größtmögliche Änderung der Stellgröße. Störgröße z:
Von außen wirkende Größe, die die beabsichtigte Beeinflussung in der Regelung beeinträchtigt. Istwert xi:
Momentaner Wert der Regelgröße Regelabweichung xw = x – w:
Abweichung von der Führungsgröße.
Regeldifferenz xd = w - x: bzw. e = w - r
Negative Regelabweichung; wird auch häufig als e bezeichnet.
MoMEL e-learning system L. Wenzl 2003 22
Regelstrecke Stellglied
Störgrößen z1 z2 z3
Stellgröße y
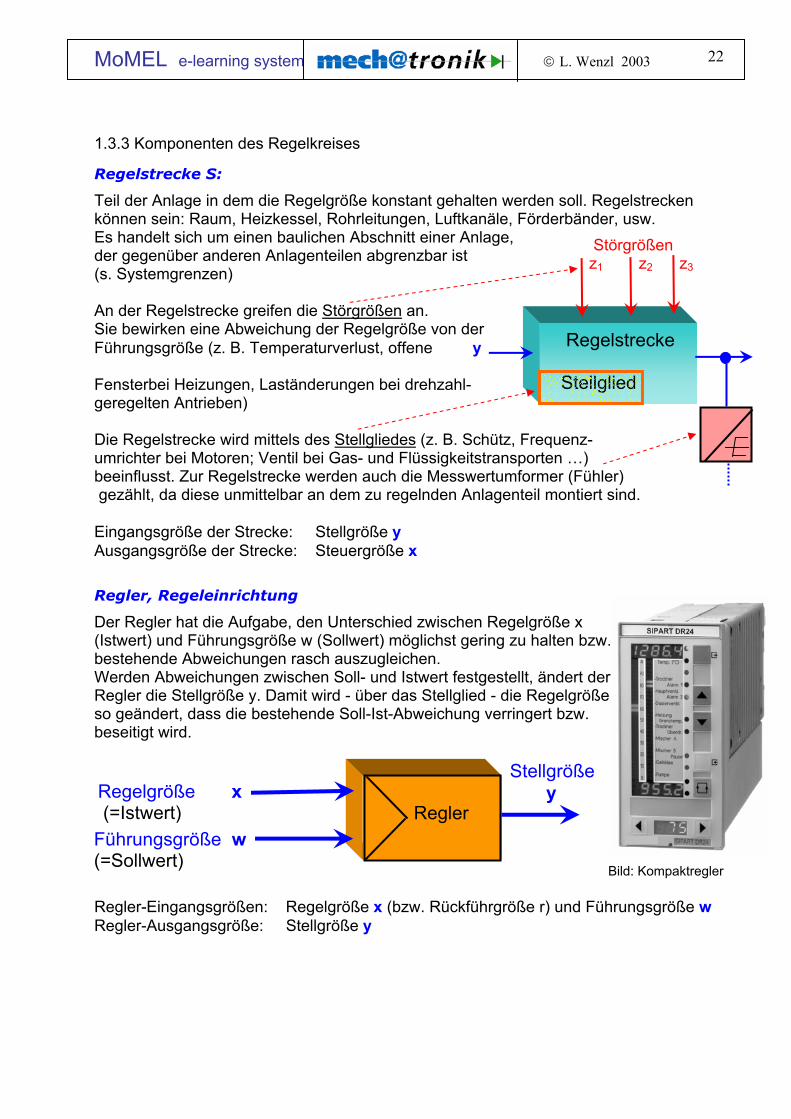
1.3.3 Komponenten des Regelkreises Regelstrecke S:
Teil der Anlage in dem die Regelgröße konstant gehalten werden soll. Regelstrecken können sein: Raum, Heizkessel, Rohrleitungen, Luftkanäle, Förderbänder, usw. Es handelt sich um einen baulichen Abschnitt einer Anlage, der gegenüber anderen Anlagenteilen abgrenzbar ist (s. Systemgrenzen) An der Regelstrecke greifen die Störgrößen an. Sie bewirken eine Abweichung der Regelgröße von der Führungsgröße (z. B. Temperaturverlust, offene y Fensterbei Heizungen, Laständerungen bei drehzahl- geregelten Antrieben) Die Regelstrecke wird mittels des Stellgliedes (z. B. Schütz, Frequenz- umrichter bei Motoren; Ventil bei Gas- und Flüssigkeitstransporten …) beeinflusst. Zur Regelstrecke werden auch die Messwertumformer (Fühler) gezählt, da diese unmittelbar an dem zu regelnden Anlagenteil montiert sind. Eingangsgröße der Strecke: Stellgröße y Ausgangsgröße der Strecke: Steuergröße x
Regler, Regeleinrichtung
Der Regler hat die Aufgabe, den Unterschied zwischen Regelgröße x (Istwert) und Führungsgröße w (Sollwert) möglichst gering zu halten bzw. bestehende Abweichungen rasch auszugleichen. Werden Abweichungen zwischen Soll- und Istwert festgestellt, ändert der Regler die Stellgröße y. Damit wird - über das Stellglied - die Regelgröße so geändert, dass die bestehende Soll-Ist-Abweichung verringert bzw. beseitigt wird. Bild: Kompaktregler Regler-Eingangsgrößen: Regelgröße x (bzw. Rückführgröße r) und Führungsgröße w Regler-Ausgangsgröße: Stellgröße y
Regler
Führungsgröße w (=Sollwert)
Regelgröße x (=Istwert)

MoMEL e-learning system L. Wenzl 2003 23 Der Regler hat im Grunde drei verschiedene Aufgaben: Vergleich von Soll- und Istwert zur Bildung der Regeldifferenz e bzw. xd
Zeitliche Beeinflussung der Reglerausgangsgröße (Reaktionszeit)
Verstärkung des Ausgangssignal zur Ansteuerung des Stellgliedes
w e U
t
Neben dem eigentlichen Regler selbst, taucht in der Fachsprache auch der Begriff „Regeleinrichtung“ auf. Die Regeleinrichtung besteht aus - Sollwertsteller, der die Führungsgröße vorgibt
- Vergleichsglied das meist im Regler enthalten ist - Reglerglied, der das zeitliche Verhalten des Ausgangssignals (Stellgröße)
bestimmt - Steller, der das Reglersignal so verstärkt und aufbereitet, dass es zu
Ansteuerung des Stellgliedes geeignet ist.
w xd y x
- r
Regeleinrichtung Regelstrecke
Bild: Gliederung in Regeleinrichtung und Regelstrecke
Regler
Steller
Stell-glied
Strecke
Mess-umformer
Vergleichs- glied
Führungs-größen-geber

MoMEL e-learning system L. Wenzl 2003 24
Anwendungsbeispiel: Drehzahlregelung eines elektrischen Antriebes
Die Drehzahl n des Motors soll konstant gehalten werden, weshalb die Drehzahl vom Tachogenerator erfasst wird. Sobald sie vom Sollwert abweicht, gibt der Regler ein Signal an den Pulsgenerator. Dieser verändert die Steuerimpulse der Thyristorbrücke, was den effektiven Strom durch den Motor verändert. Dies hat eine Drehzahländerung in gewünschter Richtung zur Folge.
1.3.4 Signalverarbeitung im Regelkreislauf a) Signalverzweigung Um die Regelgröße zu messen, wird das Signal an einer geeigneten Stelle abgegriffen. Man nennt derartige Stellen Verzeigungsstellen. Die Verzweigungsstellen dienen lediglich der Istwert-Messung, sie beeinflussen die Regelgröße nicht. Verzweigungsstellen werden als ausgefüllte Knotenpunkte dargestellt. Verzweigungsstelle: x
Pulsgenera-tor = Steller
Thyristorsatz = Stellglied
Tachogenerator
Strecke
Mess-umformer
Regel- strecke = Antrieb

MoMEL e-learning system L. Wenzl 2003 25
Messumformer
b) Signalumformung Regler arbeiten meist mit elektrischen Signalen. Ist die Regelgröße eine nichtelektrische Größe, so muss zur Messung und Verarbeitung eine Umformung dieser Größen in elektrische Signale erfolgen. Dies geschieht in der so genannten „Messeinrichtung“. Messumformer liefern meist elektrische Einheitssignale (z. B. 0...10 V / 2...10 V / 0...20 mA / 4...20 mA). Die Schnittstellen der Regler sind auf diese elektrischen Einheitssignale ausgelegt. Regelt man elektrische/elektronische Größen, so benötigt man keine Messwertumformer, da ja die Regelgröße bereits in elektrischer Form vorliegt. Meist sind jedoch die Regelgrößen (Strom/Spannung) relativ hoch, so dass sie auf Signalgröße herabgesetzt werden müssen. Dies erledigen so genannte Wandler (Strom-, Spannungswandler). Wird die Regelgröße x umgeformt, so bezeichnet man dieses Signal nach dem Umformen mit Rückführgröße r
x n r
Bild: Umformung der Regelgröße „Drehzahl“ in ein elektrisches Einheitssignal
Beispiele: Art des Umformers Messzweck Eingangsgröße Ausgangsgröße Tachogenerator Erfassung der Drehzahl von
Motoren, Wellen etc. Drehzahl durch mechanische Kopplung
Signalspannung bzw. Signalstromals Einheitssign.
Füllstands-Sonde Erfassung des Füllstandes von Tanks bzw. Silos die mit Flüssigkeiten oder Granulat befüllt sind.
Füllstand wird kapazitiv oder mittels Radar-reflektion gemessen
Signalspannung bzw. Signalstromals Einheitssign. bzw. direkt auf Digitalanzeige

MoMEL e-learning system L. Wenzl 2003 26
Rückführgröße r (=Istwert)
w (=Sollwert) Führungsgröße
c) Signalvergleich Die beiden Regelkreissignale w und r werden am Eingang des Reglers miteinander verglichen. Dieser Vergleich erfolgt an der so genannten Additionsstelle. Man spricht auch vom Vergleicher oder Vergleichsglied. Additionsstelle (Vergleicher) r w
e
Ein Vergleichsglied wird durch einen kleinen Kreis dargestellt. Es ist auch auf die Vorzeichen zu achten. Am mit Minus (-) gekennzeichneten Eingang erfolgt die Subtraktion der entsprechenden Größe. Das Vergleichsglied kann in der Praxis beispielsweise durch einen Operationsverstärker (Differenzverstärker) realisiert werden. An der Additionsstelle wird die Rückführgröße r von der Führungsgröße w subtrahiert (abgezogen). Als Ergebnis entsteht im Regler die Regeldifferenz e. Die Regeldifferenz wird auch häufig mit xd bezeichnet.
Regeldifferenz:
In der Fachliteratur trifft man - wegen unterschiedlicher Bezeichnungen - alle drei obigen Formeln an. Die Regeldifferenz wird anschließend im Regler zur Stellgröße weiterverarbeitet, bevor sie das Stellglied ansteuern kann.
Regler mit Vergleicher
Messum- former
(Wandler)
Führungs- größen- geber
e = w - r xd = w - r xd = w - x

MoMEL e-learning system L. Wenzl 2003 27
1.3.5 Begriffe aus der Regelungstechnik
Folgeregelung:
Regelgröße folgt der von außen vorgegebenen, zeitlich veränderlichen Führungsgröße, wie z.B. bei der witterungsgeführten Heizkreisregelung. Wenn der Außenfühler einen starken Abfall der Außentemperatur feststellt, muss die Heizungsanlage entsprechend mit einer Erhöhung der Vorlauftemperatur (Heizwasser-kreislauf) reagieren. Bei zu niedriger Kesseltemperatur könnte das Gebäude bei großer Kälte nicht ausreichend beheizt werden. Andererseits würde eine zu hohe Vorlauftemperatur bei milder Witterung zu hohen Verlusten führen. Zeitpunktregelung:
Führungsgröße wird nach einem Zeitplan vorgegeben. Ein Beispiel wäre die tages- oder wochenweise Programmierung einer Heizungs- oder Lüftungsanlage. In Heizungsanlagen wird zumeist die Vorlauftemperatur während der Nacht abgesenkt, um Energie zu sparen (Nachtabsenkung)
Festwertregelung:
Führungsgröße ist auf einen festen Wert eingestellt, bzw. innerhalb des Führungsbereiches einstellbar. Anwendungsbeispiel: Konstante Regelung der Drehzahl an einem elektrischen Antrieb. Die Störgrößen stellen hierbei Lastschwankungen und Spannungsschwankungen dar. 1.3.6 Arten von Reglern
1.3.7 Übersicht und Einstellparameter bei Stetigen Reglern
Regler
Stetige Regler
Unstetige Regler
Bei einer stetigen Eingangsgröße (Regeldifferenz) bildet dieser Reglertyp auch eine stetige Ausgangsgröße (Stellgröße)
Dieser Reglertyp ist ein schaltender Regler, dessen Ausgangssignal stufig ist (z. B. Bimetallregler → EIN/AUS Schwimmschalter → EIN/AUS)

MoMEL e-learning system L. Wenzl 2003 28