
Wolfgang Hackbusch - mis.mpg.de · 8.8.7 Die M¨ortelmethode(“mortarfiniteelements”) .....158...
253
Wolfgang Hackbusch Theorie und Numerik elliptischer Differentialgleichungen Copyright beim Autor
Transcript of Wolfgang Hackbusch - mis.mpg.de · 8.8.7 Die M¨ortelmethode(“mortarfiniteelements”) .....158...

Wolfgang Hackbusch
Theorie und Numerik elliptischer Differentialgleichungen
Copyright beim Autor

ii

Inhaltsverzeichnis
Vorwort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viiNotationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
1 Partielle Differentialgleichungen und ihre Einteilung in Typen 11.1 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Typeneinteilungen bei Gleichungen zweiter Ordnung . . . . . . . . . . . . . . . . . . . . . . . 41.3 Typeneinteilungen bei Systemen erster Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Unterschiedliche Eigenschaften der verschiedenen Typen . . . . . . . . . . . . . . . . . . . . . 6
2 Die Potentialgleichung 92.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Singularitatenfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Mittelwerteigenschaft und Maximumprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Stetige Abhangigkeit von den Randdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Die Poisson-Gleichung 193.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Losungsdarstellung mit der Greenschen Funktion . . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Die Greensche Funktion fur die Kugel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.4 Die Neumann-Randwertaufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.5 Die Integralgleichungsmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Differenzenmethode fur die Poisson-Gleichung 274.1 Einfuhrung: Der eindimensionale Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.2 Funfpunktformel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.3 M-Matrizen, Matrixnormen, positiv definite Matrizen . . . . . . . . . . . . . . . . . . . . . . 324.4 Eigenschaften der Matrix Lh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.5 Konvergenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.6 Differenzenverfahren hoherer Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.7 Die Diskretisierung der Neumann-Randwertaufgabe . . . . . . . . . . . . . . . . . . . . . . . 47
4.7.1 Einseitige Differenz fur ∂u/∂n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.7.2 Symmetrische Differenz fur ∂u/∂n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.7.3 Symmetrische Differenz fur ∂u/∂n im verschobenen Gitter . . . . . . . . . . . . . . . . 514.7.4 Beweis des Stabilitatsatzes 4.7.7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.8 Diskretisierung der Poisson-Gleichung im beliebigen Gebiet . . . . . . . . . . . . . . . . . . . 57

iv Inhaltsverzeichnis
4.8.1 Shortley-Weller-Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 574.8.2 Interpolation in randnahen Punkten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5 Allgemeine Randwertaufgaben 615.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiter Ordnung . . . . . . . . 61
5.1.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 615.1.2 Maximumprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.1.3 Eindeutigkeit der Losung und stetige Abhangigkeit . . . . . . . . . . . . . . . . . . . . 645.1.4 Differenzenverfahren fur die allgemeine Differentialgleichung zweiter Ordnung . . . . . 665.1.5 Greensche Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.2 Allgemeine Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.2.1 Formulierung der Randwertaufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 705.2.2 Differenzenverfahren bei allgemeinen Randbedingungen . . . . . . . . . . . . . . . . . 71
5.3 Randwertaufgaben hoherer Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 745.3.1 Die biharmonische Differentialgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . 745.3.2 Allgemeine lineare Differentialgleichung der Ordnung 2m . . . . . . . . . . . . . . . . 745.3.3 Diskretisierung der biharmonischen Differentialgleichung . . . . . . . . . . . . . . . . . 76
6 Exkurs uber Funktionalanalysis 796.1 Banach-Raume und Hilbert-Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6.1.1 Normierte Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 796.1.2 Operatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806.1.3 Banach-Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806.1.4 Hilbert-Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
6.2 Sobolev-Raume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.2.1 Der Raum L2(Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.2.2 Die Raume Hk(Ω) und Hk
0 (Ω) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 846.2.3 Fourier-Transformation und Hk(Rn) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 866.2.4 Hs(Ω) fur reelles s ≥ 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876.2.5 Spur- und Fortsetzungssatze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.3 Dualraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.3.1 Dualraum eines normierten Raumes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.3.2 Adjungierte Operatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 946.3.3 Skalen von Hilbert-Raumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.4 Kompakte Operatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 966.5 Bilinearformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
7 Variationsformulierung 1037.1 Historische Bemerkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.2 Gleichungen mit homogenen Dirichlet-Randbedingungen . . . . . . . . . . . . . . . . . . . . . 1047.3 Inhomogene Dirichlet-Randbedingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1087.4 Naturliche Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
8 Die Methode der finiten Elemente 1158.1 Das Ritz-Galerkin-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
8.1.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1158.1.2 Diskussion der diskreten Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1178.1.3 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188.1.4 Diskrete inf-sup-Bedingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
8.2 Fehlerabschatzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1208.2.1 Quasioptimalitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1208.2.2 Konvergenz der Ritz-Galerkin-Losungen . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.2.3 Ritz-Projektion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1228.2.4 Weitere Stabilitats- und Fehlerabschatzungen . . . . . . . . . . . . . . . . . . . . . . . 123
8.3 Finite Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124

Inhaltsverzeichnis v
8.3.1 Einfuhrung: Lineare Elemente fur Ω = (a, b) . . . . . . . . . . . . . . . . . . . . . . . . 1248.3.2 Lineare Elemente fur Ω ⊂ R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1268.3.3 Bilineare Elemente fur Ω ⊂ R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1288.3.4 Quadratische Elemente fur Ω ⊂ R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1298.3.5 Elemente fur Ω ⊂ R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1308.3.6 Behandlung von Nebenbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
8.4 Fehlerabschatzungen bei Finite-Elemente-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . 1328.4.1 Vorbereitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1338.4.2 Eigenschaften von Folgen von Finite-Element-Raumen . . . . . . . . . . . . . . . . . . 1358.4.3 H1-Abschatzungen fur lineare Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . 1358.4.4 L2-Abschatzungen fur lineare Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . 137
8.5 Verallgemeinerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1398.5.1 Fehlerabschatzungen fur andere Elemente . . . . . . . . . . . . . . . . . . . . . . . . . 1398.5.2 Finite Elemente fur Gleichungen hoherer Ordnung . . . . . . . . . . . . . . . . . . . . 1398.5.3 Finite Elemente fur Nichtpolygon-Gebiete . . . . . . . . . . . . . . . . . . . . . . . . . 141
8.6 A-posteriori-Fehlerabschatzungen, Adaptivitat . . . . . . . . . . . . . . . . . . . . . . . . . . 1438.6.1 A-posteriori-Fehlerabschatzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1438.6.2 Effizienz der Finite-Element-Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . 1468.6.3 Adaptive Finite-Element-Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
8.7 Eigenschaften der Systemmatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1498.7.1 Zusammenhang von L und Lh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1498.7.2 Normaquivalenzen und Massematrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1508.7.3 Inverse Abschatzung und Kondition von L . . . . . . . . . . . . . . . . . . . . . . . . . 1518.7.4 Elementmatrizen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1538.7.5 Positivitat, Maximumprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
8.8 Weitere Hinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1548.8.1 Nichtkonforme Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1548.8.2 Nichtzulassige Triangulationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1568.8.3 Trefftz-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1568.8.4 Finite-Element-Verfahren fur singulare Losungen . . . . . . . . . . . . . . . . . . . . . 1578.8.5 Hierarchische Basen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1578.8.6 Superkonvergenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1588.8.7 Die Mortelmethode (“mortar finite elements”) . . . . . . . . . . . . . . . . . . . . . . 1588.8.8 Verwandte Diskretisierungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
9 Regularitat 1619.1 Losungen der Randwertaufgabe in Hs(Ω), s > m . . . . . . . . . . . . . . . . . . . . . . . . . 161
9.1.1 Das Regularitatsproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1619.1.2 Regularitatssatze fur Ω = Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1629.1.3 Regularitatssatze fur Ω = Rn
+ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1689.1.4 Regularitatssatze fur allgemeines Ω ⊂ Rn . . . . . . . . . . . . . . . . . . . . . . . . . 1709.1.5 Regularitat bei konvexem Gebiet und Gebieten mit Ecken . . . . . . . . . . . . . . . . 1739.1.6 Regularitat im Inneren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
9.2 Regularitatseigenschaften der Differenzengleichungen . . . . . . . . . . . . . . . . . . . . . . . 1769.2.1 Diskrete H1-Regularitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1769.2.2 Konsistenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1809.2.3 Optimale Fehlerabschatzungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1859.2.4 H2
h-Regularitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
10 Spezielle Differentialgleichungen 18910.1 Differentialgleichungen mit unstetigen Koeffizienten . . . . . . . . . . . . . . . . . . . . . . . . 189
10.1.1 Formulierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18910.1.2 Diskretisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
10.2 Ein singular gestortes Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19110.2.1 Die Konvektionsdiffusionsgleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191

vi Inhaltsverzeichnis
10.2.2 Stabile Differenzenschemata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19310.2.3 Finite Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
11 Eigenwertprobleme elliptischer Operatoren 19911.1 Formulierung der Eigenwertprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19911.2 Finite-Element-Diskretisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
11.2.1 Diskretisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20011.2.2 Qualitative Konvergenzresultate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20111.2.3 Quantitative Konvergenzresultate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20411.2.4 Komplementare Probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
11.3 Diskretisierung durch Differenzenverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
12 Stokes-Gleichungen 21512.1 Elliptische Differentialgleichungssysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21512.2 Variationsformulierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
12.2.1 Schwache Formulierung der Stokes-Gleichungen . . . . . . . . . . . . . . . . . . . . . . 21712.2.2 Sattelpunktprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21812.2.3 Existenz und Eindeutigkeit der Losung eines Sattelpunktproblems . . . . . . . . . . . 22012.2.4 Losbarkeit und Regularitat des Stokes-Problems . . . . . . . . . . . . . . . . . . . . . 22312.2.5 Eine V0-elliptische Variationsformulierung der Stokes-Gleichung . . . . . . . . . . . . . 225
12.3 Gemischte Finite-Element-Methode fur das Stokes-Problem . . . . . . . . . . . . . . . . . . . 22612.3.1 Finite-Element-Diskretisierung eines Sattelpunktproblems . . . . . . . . . . . . . . . . 22612.3.2 Stabilitatsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22712.3.3 Stabile Finite-Element-Raume fur das Stokes-Problem . . . . . . . . . . . . . . . . . . 228
Literaturverzeichnis 233
Index 238

Vorwort
Die partiellen Differentialgleichungen vom elliptischen Typ fuhren zu einer Reihe von Aufgaben, die in derfolgenden Skizze dargestellt werden.
A:Theorie derelliptischenGleichungen
B: Diskretisierungen(Differenzen-verfahren, finiteElemente, etc.)
C:Numerische Analyse:Konvergenz,Stabilitat
↓ ↓ ↓elliptischeRandwert-aufgabe
——————−→ diskrete Gleichung
E:Theorie derIterations-verfahren
——————−→
D:Gleichungsauflosung:a) direkt oder mittelsb) Iterationsverfahren
Die Theorie der elliptischen Differentialgleichungen (A) beschaftigt sich unter anderem mit den Fragennach der Existenz, Eindeutigkeit und Eigenschaften der Losung der Randwertaufgaben. Das erste Problemder Numerik ist die Beschreibung von Diskretisierungsverfahren (B), die endlichdimensionale Gleichungenfur Naherungen der Losung ergeben. Der anschließende Teil der Numerik ist die numerische Analyse (C)der entsprechenden Verfahren. Insbesondere ist zu klaren, ob und wie schnell die Naherung gegen die exakteLosung konvergiert. Die Auflosung der endlichdimensionalen Gleichungen (D,E) ist im Allgemeinen keineinfaches Problem, da die Zahl der Unbekannten eine Million oder mehr betragen kann. Die Diskussion derAufgabenbereiche D, E ist hier ausgespart, da es das Thema der Monographie Hackbusch [42] ist.
Die Beschreibung der Diskretisierungsverfahren und ihre Analyse steht in engem Zusammenhang mitentsprechenden Kapiteln aus der Theorie der elliptischen Differentialgleichungen. Außerdem ist eine fundiertenumerische Analyse ohne Grundkenntnisse der Theorie der elliptischen Gleichungen nicht moglich. Damitbietet es sich an, die Theorie und die Numerik gemeinsam zu prasentieren
Das Buch ist zunachst als eine Einfuhrung in die Behandlung elliptischer Randwertaufgaben gedacht. Essoll den Leser aber auch an weiterfuhrende Literatur zu speziellen Themen und an anwendungsorientierteAufgaben heranfuhren. Absichtlich wurden Kapitel, die haufig zu kurz behandelt werden (z.B. Eigenwert-aufgaben) ausfuhrlicher dargestellt.
Die Darstellungen beschranken sich grundsatzlich auf lineare elliptische Gleichungen. Damit ist die Dis-kussion der fur die Anwendungen in der Stromungsmechanik wichtigen Navier-Stokes-Gleichung zwar ausge-
viii Vorwort
schlossen, aber man findet den Zugang hierzu uber die Stokes-Gleichung, die als ein Beispiel eines elliptischenSystems eingehend behandelt wird.
Die aufgefuhrten Ubungsaufgaben, die auch als Bemerkungen ohne Beweis verstanden werden konnen, sindintegrierter Bestandteil der Darstellung. Wird dieses Buch als Grundlage einer Vorlesung benutzt, konnensie als Ubungen dienen. Der Leser sollte aber auch versuchen, sein Verstandnis der Lekture an den Aufgabenzu testen.
Das Buch entstand aus Vorlesungen an der Ruhr-Universitat Bochum und an der Christian-Albrechts-Universitat zu Kiel. Es wurden zwei Auflagen vom Teubner-Verlag Stuttgart publiziert ([43]). Anstelle einerdritten Buchauflage wird nun eine uberarbeitete und stellenweise erweitere Version des Buches den inter-essierten Lesern elektronisch bereitgestellt. Als Papierversion ist daruber hinaus die englische Ubersetzung[45] erhaltlich.
Der Autor dankt insbesondere Herrn J. Burmeister (Kiel) fur die Zuarbeit beim Erstellen der Latex-Version.
Leipzig, Sommer 2005 W. Hackbusch
Erste Fassung: 15.07.2005
Notationen
Lateinisches Alphabet:
a(·, ·) Bilinearform (vgl. Seite 98)aλ(·, ·) verschobene Bilinearform (vgl. Seite 201)b(·, ·) Bilinearform in §12.2 (vgl. Seite 218)bi Finite-Element-Basisfunktionen (vgl. Seite 125)B unter anderem Symbol fur Randdifferentialoperator (vgl. Seiten 70 und 110)C,C′, C0, . . . KonstantenC Menge der komplexen ZahlenC0(D) Menge der stetigen Funktionen definiert auf DCk(D), C∞(D) Menge der k-fach bzw. unendlich oft stetig differenzierbaren Funktionen auf DC∞0 (Ω) C∞-Funktionen mit kompaktem Trager in Ω (vgl. Seite 83)Cλ(D) Menge der Holder-stetigen Funktionen auf D (vgl. Seite 21)Ct, Ck,1 Menge von Gebieten mit entsprechenden Glattheitsbedingungen (vgl. Seite 90)CE Koerzivitatskonstante (vgl. Seite 101)CS Stabilitatskonstante (vgl. Seite 115)cond2(. . .) Spektralkondition (vgl. Seite 78)d(u, VN ) Abstand zwischen Funktion u und Unterraum VN (vgl. Seite 121)Dν |ν|-fache partielle Ableitung (vgl. (3.2.5b))det Determinantenfunktiondiag{aαα : α ∈ I} Diagonalmatrix mit Diagonalelementen aαα
div Divergenz(operator)e, ej Einheitsvektore in §8 oft Fehler der Finite-Element-Losung (vgl. Seite 137), in §11: Eigenvektore∗ in §11: Eigenvektor des adjungierten Problems (Linkseigenvektor)eh, e∗h in §11: Eigenvektor und Linkseigenvektor der Finite-Element-DiskretisierungE(λ), E∗(λ) Eigenraume (vgl. Seite 199)F Fourier-Transformation (vgl. Seite 86)grad Gradient (auch ∇; vgl. Seite 11)h Schrittweite des Differenzenverfahrens (vgl. Seite 29), ahnlich fur finite Elemente (vgl. Seite
135)Hk(Ω), Hs(Ω) Sobolev-Raume (vgl. Seite 84)Hk
0 (Ω), Hs0(Ω) Sobolev-Raume mit Nullrandbedingung (vgl. Seite (85)
Hs(Ω), Hs0(Ω) Sobolev-Raume der vektorwertigen Funktionen (vgl. Seite 217)
I Einheitsmatrix

x Notationen
I Indexmenge fur Vektoren und Matrizen (vgl. Seite 30)K Korper K = R oder K = CKR(x) offene Kugel (in Rn) um x mit Radius Rlog naturlicher LogarithmusL Differentialoperator (vgl. Seite 5)Lh Matrix des Differenzenoperators (vgl. Seite 29)LN , Lh Operator zur Bilinearform auf VN , Vh (vgl. Seite 117)L Finite-Element-Matrix (vgl. Seite 116)L2(Ω) Menge der quadratintegrablen Funktionen (vgl. Seite 82)L2
0(Ω) Unterraum von L2(Ω) (vgl. Seite 217)L∞(Ω) Menge der beschrankten Funktionen (vgl. Seite 80)L(X,Y ) lineare und beschrankte Abbildungen von X nach Y (vgl. Seite 80)−→n Normalenvektor (vgl. Seite 11)N Menge der naturlichen Zahlen {1, 2, . . .}N0 Menge der naturlichen Zahlen mit Null: N0 = N∪{0}O NullmatrixO(·) Landau-Symbolp in §12 Druckkomponente aus der Stokes-GleichungenP Prolongation der Vektoren in die Finite-Element-Funktionen (vgl. Seite 116)Ph Prolongation der Gitterfunktionen in kontinuierliche Funktionen (vgl. Seite 187)QN orthogonale Projektion auf VN (vgl. Seite 122)R Menge der reellen ZahlenRn
+ Halbraum von Rn (vgl. (6.2.18))Rh, Rh Restriktion, Abbildung von Funktion in Gitterfunktion (vgl. Seite 43)s(x,y) Singularitatenfunktion (vgl. Seite 10)SN , Sh Ritz-Projektion (vgl. Seite 122)Spur Spur einer Matrix (vgl. Seite 63)�t Tangentialrichtung (vgl. Seite 223)T Finite-Element-Triangulation (vgl. Seite 126)T, Ti Dreiecke (oder allgemeinere Elemente) aus T (vgl. Seite 126)Tr(u) Trager der Funktion u (vgl. Seite 83)u Standardbezeichnung fur die Losung der partielle Differentialgleichungux, uy, ux1, uxx, . . . partielle Ableitungen der Funktion u. Kurzschreibweise fur ∂u/∂x usw.uh Gitterfunktion auf Ωh (vgl. Seite 28)uN , uh Finite-Element-Losung aus VN bzw. Vh (vgl. Seite 116)u Koeffizientenvektor zu Finite-Element-Funktion (vgl. Seite 116)V ab §8 Raum, in dem die Bilinearform definiert ist (vgl. Seite 115)VN , Vh Finite-Element-Raum der Dimension N bzw. zur maximalen Schrittweite h (vgl. Seite 115)W, Wh Finite-Element-Raum fur die Druckkomponente in §12 (vgl. Seite 12.2.4b)x = (x1, x2, . . . , xn) unabhangige Variable aus dem Rn (vgl. Seite 4). Die Komponenten fur n = 2 sind
x = (x, y) (vgl. Seite 1), fur n = 3 : x = (x, y, z) (vgl. Seite 10)x1, x2, . . . , xn Komponenten von x im allgemeinen Fall (vgl. Anmerkungen zu x)x, y, z siehe xZ Menge der ganzen ZahlenZ = Z(λ), Zh = Zh(λ) spezielle Abbildungen aus (11.2.6a,b)
Griechisches Alphabet:
γ unter anderem Spurabbildung von Funktionen (vgl. Seite 88)Γ Rand ∂Ω des Gebietes Ω (vgl. Seite 9)Γh Menge der Randgitterpunkte bei Differenzenverfahren (vgl. Seiten 29 und 57)Γ(x) Gamma-FunktionΔ Laplace-Operator (vgl. Seite 9).Δh diskreter Laplace-Operator (vgl. Seite 29)η(h) siehe Lemma 11.2.7 auf Seite 202
Notationen xi
λ unter anderem Eigenwert, insbesondere in §11λh unter anderem Eigenwert (vgl. Seite 200)ν Multiindex aus Nn
0 (vgl. Seite 21)ρ(A) Spektralradius einer Matrix A (vgl. Seite 34)ϕ haufig verwendet fur die Randwerte (vgl. Seite 19)ωn Oberflache der n-dimensionalen Einheitskugel (vgl. Seite 11)ω(λ), ωh(λ) spezielle Großen in §11 (vgl. Seite 201)Ω Gebiet der Randwertaufgabe, Teilmenge von Rn (vgl. Seite 2)Ωh Gitter fur Differenzenverfahren (Menge der inneren Punkte) (vgl. (4.1.5a), (4.2.1a) und Seite
51)Ωh Gitter fur Differenzenverfahren (Menge der inneren und Randpunkte) (vgl. (4.1.5b), (4.2.1c))
Zeichensymbole:
a∗ adjungierte Bilinearform (vgl. Seite 98)A ≥ B, A ≤ B, A > B, A < B fur Matrizen A,B komponentenweise Ungleichung (vgl. Seite 32)A� transponierte Matrix zu AU⊥ Orthogonalkomplement zu U (vgl. Seite 82)X ′ Dualraum zu X (vgl. Seite 93)T ′ Dualabbildung zu T (vgl. Seite 93)T ∗ adjungierte Abbildung zu T (vgl. Seite 94)∂X Rand von X∂/∂x partielle Ableitung nach x∂/∂n Normalenableitung (vgl. Seite 11)∇u Gradient von u (vgl. Seite 11)∂+, ∂− Vorwarts-, Ruckwartsdifferenz (vgl. Seite 27)∂0 symmetrische Differenz (vgl. Seite 27)∂−n , ∂
0n Differenz in Normalenrichtung (vgl. Seiten 47 und 50)∫
. . . dΓ Oberflachenintegration (vgl. Seite 11)X Abschluss einer Menge Xu Fourier-Transformierte von u (vgl. Seite 86)〈x,y〉 Euklidisches Skalarprodukt (vgl. Seite 11)(·, ·) = (·, ·)X Skalarprodukt eines Hilbert-Raumes X (vgl. Seite 82)(·, ·)0 Skalarprodukt L2(Ω) (vgl. Seite 82)〈x, x′〉X×X′ Dualform (vgl. Seite 93)|ν| Lange des Multiindex ν (vgl. (3.2.5a))|x| Euklidische Norm des Vektors x ∈ Rn (vgl. (2.2.2))|u| spezielle Bedeutung in §4.3 (vgl. Seite 35)|u|s Sobolev-Norm in Hs(Ω) (vgl. Seiten 82 und 88)
|u|ˆs uber Fourier-Transformation definierte Sobolev-Norm (vgl. (6.2.15), (6.2.16a))|u|k,0 Seminorm zu |u|k (vgl. (6.2.9))‖·‖∞ Maximumnorm fur Funktionen und Vektoren, Zeilensummennorm fur Matrizen (vgl. Seiten
16, 36)‖·‖2 Euklidische Norm und Spektralnorm (vgl. Seite 37)‖·‖X Norm zu X (vgl. Seite 79)‖T ‖Y←X Operatornorm (vgl. Seite 80)u|Γ Beschrankung der Funktion auf Γ1 Vektor bestehend aus 1-Komponenten (vgl. Seite 36)⎡⎣ 1
1 −4 11
⎤⎦ usw. Sternschreibweise fur Differenzenoperator (vgl. Seite 31)

1Partielle Differentialgleichungen und ihre Einteilung inTypen
Eine gewohnliche Differentialgleichungen bestimmt eine Funktion, die von nur einer Variablen abhangt. Diephysikalischen Großen hangen aber im Allgemeinen von drei Raumvariablen und der Zeit ab. Auch wenndie Zeitabhangigkeit fur stationare Prozesse entfallt und sich durch spezielle geometrische Annahmen ofteine Raumdimension einsparen lasst, bleiben noch zwei unabhangige Variablen. Damit ergeben sich partielleDifferentialgleichungen, d.h. Gleichungen, die die ersten partiellen Ableitungen
uxi = uxi(x1, x2, . . . , xn) = ∂u(x1, x2, . . . , xn)/∂xi (1 ≤ i ≤ n)
oder auch hoheren partiellen Ableitungen uxixj , usw. enthalten.Anders als gewohnliche Differentialgleichungen lassen sich partielle Differentialgleichungen nicht einheit-
lich analysieren. Vielmehr unterscheidet man drei Typen von Gleichungen, die verschiedene Eigenschaftenbesitzen und auch unterschiedliche numerische Methoden erfordern.
Bevor die Typenmerkmale definiert werden, sollen zunachst Beispiele partieller Differentialgleichungenvorgefuhrt werden.
1.1 Beispiele
Alle folgenden Beispiele werden nur zwei unabhangige Variablen x, y enthalten. Die beiden ersten Beispielesind partielle Differentialgleichungen erster Ordnung, da nur erste partielle Ableitungen auftreten.
Beispiel 1.1.1 Gesucht ist eine Losung u(x, y) von
uy(x, y) = 0. (1.1.1)
Offenbar muss u(x, y) von y unabhangig sein, d.h. die Losung hat die Form u(x, y) = ϕ(x). Andererseits istu(x, y) = ϕ(x) fur beliebiges ϕ eine Losung von (1.1.1).
Gleichung (1.1.1) ist ein Spezialfall von
Beispiel 1.1.2 Gesucht ist eine Losung u(x, y) von
cux(x, y) − uy(x, y) = 0 (c Konstante) . (1.1.2)
u sei eine Losung. Man fuhre neue Koordinaten ξ := x+ cy, η := y ein und definiere
v(ξ, η) := u(x(ξ, η), y(ξ, η))

2 1. Partielle Differentialgleichungen und ihre Einteilung in Typen
mit Hilfe von x(ξ, η) = ξ − cη, y(ξ, η) = η. Da vη = uxxη + uyyη (Kettenregel) und xη = −c, yη = 1,folgt vη(ξ, η) = 0 aus (1.1.2). Diese Gleichung stimmt mit (1.1.1) uberein, und Beispiel 1.1.1 zeigt, dassv(ξ, η) = ϕ(ξ). Ersetzt man ξ, η wieder durch x, y, erhalt man die Darstellung
u(x, y) = ϕ(x+ cy). (1.1.3)
Umgekehrt ist durch (1.1.3) eine Losung von (1.1.2) gegeben, sobald ϕ einmal stetig differenzierbar ist.
Um die Losung einer gewohnlichen Differentialgleichung u′− f(u) = 0 eindeutig festzulegen, braucht maneine Anfangswertvorgabe u(x0) = u0. Die partielle Differentialgleichung (1.1.2) kann man vervollstandigendurch die Anfangswertvorgabe
u(x, y0) = u0(x) fur x ∈ R (1.1.4)
auf der Geraden y = y0 (y0 fest). Der Vergleich von (1.1.3) und (1.1.4) zeigt ϕ(x + cy0) = u0(x). Damit istϕ festgelegt: ϕ(x) = u0(x− cy0). Die eindeutige Losung des Anfangswertproblems (1.1.2) und (1.1.4) lautet
u(x, y) = u0(x− c (y0 − y)). (1.1.5)
Die folgenden drei Beispiele sind Differentialgleichungen zweiter Ordnung.
Beispiel 1.1.3 (Potentialgleichung) Sei Ω eine offene Teilmenge des R2. Gesucht ist eine Losung von
uxx + uyy = 0 in Ω. (1.1.6)
Identifiziert man (x, y) ∈ R2 mit der komplexen Zahl z = x+ iy ∈ C, so lasst sich die Menge der Losungensofort angeben: Die Real- und Imaginarteile jeder in Ω holomorphen Funktion f(z) sind Losungen von(1.1.6). Beispiele sind e z0 = 1, e z2 = x2 − y2 und e log(z − z0) = log
√(x− x0)2 + (y − y0)2, falls
z0 /∈ Ω. Zur eindeutigen Festlegung der Losung braucht man Randwerte u(x, y) = ϕ(x, y) fur alle (x, y) aufden Rand Γ = ∂Ω von Ω.
Ein anderer Name fur die Potentialgleichung (1.1.6) lautet “Laplace1-Gleichung”.
Beispiel 1.1.4 (Wellengleichung) Alle Losungen von
uxx − uyy = 0 in Ω. (1.1.7)
sind gegeben durchu(x, y) = ϕ(x + y) + ψ(x− y), (1.1.8)
wobei ϕ und ψ beliebige, zweifach stetig differenzierbare Funktionen sind. Geeignete Anfangswertvorgabensind zum Beispiel
u(x, 0) = u0(x), uy(x, 0) = u1(x) fur x ∈ R, (1.1.9)
wobei u0 und u1 gegebene Funktionen sind. Setzt man (1.1.8) in (1.1.9) ein, findet man u0 = ϕ + ψ,u1 = ϕ′ − ψ′ (ϕ′, ψ′: Ableitungen von ϕ und ψ) und folgert
ϕ′ = (u′0 + u1) /2, ψ′ = (u′0 − u1) /2.
Hieraus lassen sich ϕ und ψ bis auf zwei Integrationskonstanten bestimmen. Eine Integrationskonstante kannbeliebig festgesetzt werden (z.B. durch ϕ(0) = 0), die zweite ist durch u(0, 0) = u0(0) = ϕ(0) +ψ(0) gegeben.
Ubungsaufgabe 1.1.5 Man beweise, dass jede Losung der Wellengleichung (1.1.7) die Darstellung (1.1.8)besitzt. Hinweis: Man verwende ξ = x+ y und η = x− y als neue Variablen.
Die nachste Gleichung beschreibt die Warmeleitung (in einem eindimensionalen Draht von −∞ bis +∞),wenn man u als Temperatur und y als Zeit interpretiert.
1Pierre-Simon Laplace, geb. am 23. Marz 1749 in Beaumont-en-Auge, Normandy, gest. am 5. Marz 1827 in Paris

1.1 Beispiele 3
Beispiel 1.1.6 (Warmeleitungsgleichung) Gesucht ist die Losung von
uxx − uy = 0 fur x ∈ R, y ≥ 0. (1.1.10)
Der Separationsansatz u(x, y) = v(x)w(y) liefert fur jedes c ∈ R eine Losung
u(x, y) = sin(cx) exp(−c2y). (1.1.11a)
Eine weitere Losung von (1.1.10) fur y > 0 ist
u(x, y) =1√4πy
∫ ∞−∞
u0(ξ) exp
(− (x− ξ)2
4y
)dξ, (1.1.11b)
wobei u0(·) eine beliebige, stetige und beschrankte Funktion ist. Die zu Gleichung (1.1.10) passende Anfangs-bedingung enthalt anders als (1.1.9) nur eine Vorgabe:
u(x, 0) = u0(x) fur x ∈ R. (1.1.12)
Die Losung (1.1.11b), die zunachst nur fur y > 0 definiert ist, lasst sich stetig in y = 0 fortsetzen und erfulltdort die Anfangswertvorgabe (1.1.12).
Ubungsaufgabe 1.1.7 u0 sei beschrankt in R und stetig in x. Man beweise, dass die rechte Seite in(1.1.11b) fur y ↘ 0 gegen u0(x) strebt. Hinweis: Man zeige zunachst, dass
u(x, y) = u0(x) +1√4πy
∫ ∞−∞
[u0(ξ) − u0(x)] exp
(− (x− ξ)2
4y
)dξ,
und zerlege das Integral in Integrale uber [x− δ, x+ δ] und (−∞, x− δ) ∪ (x + δ,∞).
Wie bei gewohnlichen Differentialgleichungen lassen sich Gleichungen hoherer Ordnung in Systeme vonGleichungen erster Ordnung umschreiben. Im Folgenden geben wir einige Beispiele an.
Beispiel 1.1.8 Das Paar (u, v) sei Losung des Systems
ux + vy = 0, vx + uy = 0. (1.1.13)
Falls u und v zweifach differenzierbar sind, liefert Differentiation von (1.1.13) die Gleichungen uxx+vxy = 0und vxy+uyy = 0, die zusammen uxx−uyy = 0 ergeben. Damit ist u eine Losung der Wellengleichung (1.1.7).Gleiches lasst sich fur v zeigen.
Beispiel 1.1.9 (Cauchy-Riemann-Differentialgleichungen) 2 Erfullen u und v das System
ux + vy = 0, vx − uy = 0 in Ω ⊂ R2, (1.1.14)
so ergibt die gleiche Uberlegung wie in Beispiel 1.1.8, dass sowohl u als auch v der Potentialgleichung (1.1.6)genugen.
Beispiel 1.1.10 Erfullen u und v das System
ux + vy = 0, vx + u = 0, (1.1.15)
so lost v die Warmeleitungsgleichung (1.1.10).
Ein in der Stromungsmechanik interessantes System findet sich in
2Augustin Louis Cauchy, geb. am 21. August 1789 in Paris, gest. am 23. Mai 1857 in Sceaux (bei Paris)

4 1. Partielle Differentialgleichungen und ihre Einteilung in Typen
Beispiel 1.1.11 (Stokes-Gleichungen) 3 In dem System
uxx + uyy − wx = 0, (1.1.16a)vxx + vyy − wy = 0, (1.1.16b)
ux + vy = 0, (1.1.16c)
bedeuten u und v die Stromungsgeschwindigkeiten in x- und y-Richtung, wahrend w den Druck bezeichnet.Man beachte, dass das System von zweiter Ordnung bezuglich u und v ist, aber keine zweite Ableitung vonw auftritt.
1.2 Typeneinteilungen bei Gleichungen zweiter Ordnung
Die allgemeine lineare Differentialgleichung zweiter Ordnung in zwei Variablen lautet
a(x, y)uxx + 2b(x, y)uxy + c(x, y)uyy + d(x, y)ux + e(x, y)uy + f(x, y)u+ g(x, y) = 0. (1.2.1)
Definition 1.2.1 (a) Gleichung (1.2.1) heißt elliptisch in (x, y), falls
a(x, y)c(x, y) − b2(x, y) > 0. (1.2.2a)
(b) Gleichung (1.2.1) heißt hyperbolisch in (x, y), falls
a(x, y)c(x, y) − b2(x, y) < 0. (1.2.2b)
(c) Gleichung (1.2.1) heißt parabolisch in (x, y), falls4
ac− b2 = 0 und Rang
[a b db c e
]= 2 in (x, y). (1.2.2c)
(d) Gleichung (1.2.1) heißt elliptisch (hyperbolisch, parabolisch) in Ω ∈ R2, falls sie in allen (x, y) ∈ Ωelliptisch (hyperbolisch, parabolisch) ist.
Wenn fur verschiedene (x, y) ∈ Ω unterschiedliche Falle vorliegen, spricht man von einer “Gleichung vomgemischten Typ”.
Beispiel 1.2.2 Die Potentialgleichung (1.1.6) ist elliptisch, die Wellengleichung (1.1.7) ist vom hyperbo-lischen Typ, wahrend die Warmeleitungsgleichung (1.1.10) parabolisch ist.
Die Typendefinition kann leicht fur den Fall verallgemeinert werden, dass mehr als zwei unabhangigeVariable x1, . . . , xn auftreten. Die allgemeine lineare Differentialgleichung zweiter Ordnung in n Variablenx = (x1, . . . , xn) lautet
n∑i,j=1
aij(x)uxixj +n∑
i=1
ai(x)uxi + a(x)u = f(x). (1.2.3)
Da fur zweifach stetig differenzierbare Funktionen uxixj = uxjxi gilt, darf in (1.2.3) ohne Beschrankung derAllgemeinheit
aij(x) = aji(x) (1 ≤ i, j ≤ n) (1.2.4a)
angenommen werden. Damit definieren die Koeffizienten aij(x) eine symmetrische n× n-Matrix
A(x) = (aij(x))i,j=1,...,n , (1.2.4b)
die demnach nur reelle Eigenwerte besitzt.
3George Gabriel Stokes, geb. am 13. August 1819 in Skreen, County Sligo, Irland, gest. am 1. Februar 1903 in Cambridge4Gelegentlich wird der parabolische Typ nur durch ac − b2 = 0 definiert. Aber die Gleichung uxx(x, y) + ux(x, y) = 0 oder
gar die rein algebraische Gleichung u(x, y) = 0 mochte man nicht als parabolisch bezeichnen.

1.3 Typeneinteilungen bei Systemen erster Ordnung 5
Definition 1.2.3 (a) Gleichung (1.2.3) heißt elliptisch in x, falls alle n Eigenwerte der Matrix A(x) dasgleiche Vorzeichen (±1) besitzen (d.h. falls A(x) positiv oder negativ definit ist).
(b) Gleichung (1.2.3) heißt hyperbolisch in x, falls n− 1 Eigenwerte von A(x) gleiches Vorzeichen (±1)besitzen und ein Eigenwert das entgegengesetzte Vorzeichen hat.
(c) Gleichung (1.2.3) heißt parabolisch in x, falls ein Eigenwert verschwindet, die ubrigen n−1 Eigenwertedas gleiche Vorzeichen besitzen und Rang(A(x), a(x)) = n, wobei a(x) = (a1(x), . . . , an(x))�.
(d) Gleichung (1.2.3) heißt elliptisch in Ω ∈ Rn, wenn sie in allen x ∈ Ω elliptisch ist.
Die Definition 1.2.3 macht deutlich, dass die drei genannten Typen keineswegs alle Falle abdecken. Eineunklassifizierte Gleichung liegt z.B. vor, wenn A(x) zwei positive und zwei negative Eigenwerte besitzt.
Anstelle von (1.2.3) schreibt man auchLu = f, (1.2.5)
wobei
L =n∑
i,j=1
aij(x)∂2
∂xi∂xj+
n∑i=1
ai(x)∂
∂xi+ a(x) (1.2.6)
einen linearen Differentialoperator zweiter Ordnung darstellt. Als Hauptteil von L bezeichnet man denOperator
L0 =n∑
i,j=1
aij(x)∂2
∂xi∂xj,
der nur noch die hochsten Ableitungen von L enthalt.
Bemerkung 1.2.4 Die Elliptizitat bzw. Hyperbolizitat der Gleichung (1.2.3) hangt nur vom Hauptteil desDifferentialoperators ab.
Ubungsaufgabe 1.2.5 (Typinvarianz bei Koordinatenwechsel) Gleichung (1.2.3) sei in x ∈ Ω de-finiert. Die Transformation Φ : Ω ⊂ Rn → Ω′ ⊂ Rn habe in x eine nichtsingulare FunktionalmatrixS = ∂Φ/∂x ∈ C1(Ω). Man beweise: Gleichung (1.2.3) andert ihren Typ in x nicht, wenn sie in den neuenKoordinaten ξ = Φ(x) geschrieben wird. Hinweis: Die Matrix A = (aij) wird nach der Transformation zuSAS�. Man verwende Bemerkung 1.2.4 und den Tragheitssatz von Sylvester (vgl. Gantmacher [31, p. 273]).
1.3 Typeneinteilungen bei Systemen erster Ordnung
Die Beispiele 1.1.8-10 sind Spezialfalle des allgemeinen linearen Systems erster Ordnung in zwei Variablen:
ux(x, y) −A(x, y)uy(x, y) +B(x, y)u(x, y) = f(x, y). (1.3.1)
Hierbei ist u = (u1, . . . , um)� eine Vektorfunktion, und A,B sind m×m-Matrizen. Anders als in Abschnitt1.2 kann A nichtsymmetrisch sein und komplexe Eigenwerte besitzen. Falls die Eigenwerte λ1, . . . , λm reellsind und eine Zerlegung A = S−1DS mit D = diag{λ1, . . . , λm} existiert, heißt A reell-diagonalisierbar.
Definition 1.3.1 (a) Das System (1.3.1) heißt hyperbolisch in (x, y), falls A(x, y) reell-diagonalisierbar ist.(b) System (1.3.1) heißt elliptisch in (x, y), falls kein Eigenwert von A(x, y) reell ist.
Falls A symmetrisch ist oderm verschiedene reelle Eigenwerte besitzt, ist das System hyperbolisch, da dieseBedingungen hinreichend fur reelle Diagonalisierbarkeit sind. Insbesondere ist eine einzelne reelle Gleichungstets hyperbolisch.
Gemaß der vorangehenden Bemerkung enthalten die Beispiele 1.1.1 und 1.1.2 hyperbolische Gleichungen.Das System (1.1.13) aus Beispiel 1.1.8 hat die Form (1.3.1) mit
A =[
0 −1−1 0
]Es ist hyperbolisch, da A reell-diagonalisierbar ist:
A =[
1 1−1 1
]−1 [−1 0
0 1
] [1 1
−1 1
].

6 1. Partielle Differentialgleichungen und ihre Einteilung in Typen
Das eng mit der Potentialgleichung (1.1.6) zusammenhangende Cauchy-Riemann-System (1.1.14) ist ellip-tisch, da es die Form (1.3.1) mit
A =[
0 −11 0
]hat und A die Eigenwerte ±i besitzt.
Das der (parabolischen) Warmeleitungsgleichung entsprechende System (1.1.15) lasst sich als System(1.3.1) mit
A =[
0 −10 0
]schreiben. Die Eigenwerte (λ1 = λ2 = 0) sind zwar reell, aber A ist nicht diagonalisierbar. Damit ist dasSystem (1.1.15) weder hyperbolisch noch elliptisch.
Ein allgemeineres System als (1.3.1) ist
A1ux +A2uy +Bu = f. (1.3.2)
Falls A1 regular ist, ergibt die Multiplikation mit A−11 die Gestalt (1.3.1) mit A = −A−1
1 A2. Sonst mussman das verallgemeinerte Eigenwertproblem det(λA1 + A2) = 0 untersuchen. Allerdings kann das System(1.3.2) mit singularen A1 nicht elliptisch sein, wie aus dem Folgenden hervorgeht (vgl. (1.3.4) mit ξ1 = 1und ξ2 = 0).
Eine Verallgemeinerung von (1.3.2) auf n unabhangige Variable stellt das System
A1ux1 +A2ux2 + . . .+Anuxn +Bu = f (1.3.3)
mit m×m-MatrizenAi = Ai(x) = Ai(x1, . . . , xn) und B = B(x) dar. Als Spezialfall einer spateren Definition(vgl. Abschnitt 12.1) erhalten wir die
Definition 1.3.2 Das System (1.3.3) heißt elliptisch in x, falls
det
(n∑
i=1
ξiAi(x)
)�= 0 fur alle 0 �= (ξ1, . . . , ξn) ∈ Rn. (1.3.4)
1.4 Unterschiedliche Eigenschaften der verschiedenen Typen
u, uy u, uy��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ΩΩu u
(b)(a)
Abb. 1.4.1. (a) Anfangswertvorgabe und (b) An-fangsrandwertvorgabe fur hyperbolische Probleme
Die Unterscheidung partieller Differentialgleichungen inverschiedene Typen ware gegenstandslos, wenn nicht jederTyp grundlegend andere Eigenschaften hatte. Bei der Dis-kussion der Beispiele in §1.1 wurde schon erwahnt, dass dieLosung eindeutig bestimmt ist, falls Anfangs- bzw. Rand-werte vorgeschrieben werden. In Beispiel 1.1.2 wird diehyperbolische Differentialgleichung (1.1.2) durch die Vor-gabe (1.1.4) von u auf der Geraden y = const erganzt (sieheAbbildung 1.4.1a). Im Falle der hyperbolischen Wellengleichung (1.1.7) muss auch uy vorgeschrieben werden(vgl. (1.1.9)), da die Gleichung von zweiter Ordnung ist.
Es genugt auch, die Werte u und uy auf einem endlichen Intervall [x1, x2] vorzugeben, wenn u zusatzlichauf den seitlichen Randern des Bereiches Ω von Abbildung 1.4.1b vorgeschrieben wird. Diese sogenannteAnfangsrandwertvorgabe tritt z.B. bei folgendem physikalischen Problem auf. Eine schwingende Saite wirdbeschrieben durch die Auslenkung u(x, t) im Punkt x ∈ [x1, x2] zur Zeit t. Die Funktion u erfullt dieWellengleichung (1.1.7), wobei die Koordinate y der Zeit t entspricht. Zum Anfangszeitpunkt t = t0 ist dieAuslenkung u(x, 0) und die Geschwindigkeit ut(x, 0) fur x1 < x < x2 vorgegeben. Unter der Annahme,dass die Saite an den Randpunkten x1 und x2 fest eingespannt ist, erhalt man die zusatzlichen Randdatenu(x1, t) = u(x2, t) = 0 fur alle t.
1.4 Unterschiedliche Eigenschaften der verschiedenen Typen 7
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
u u
u
(a) (b)
u
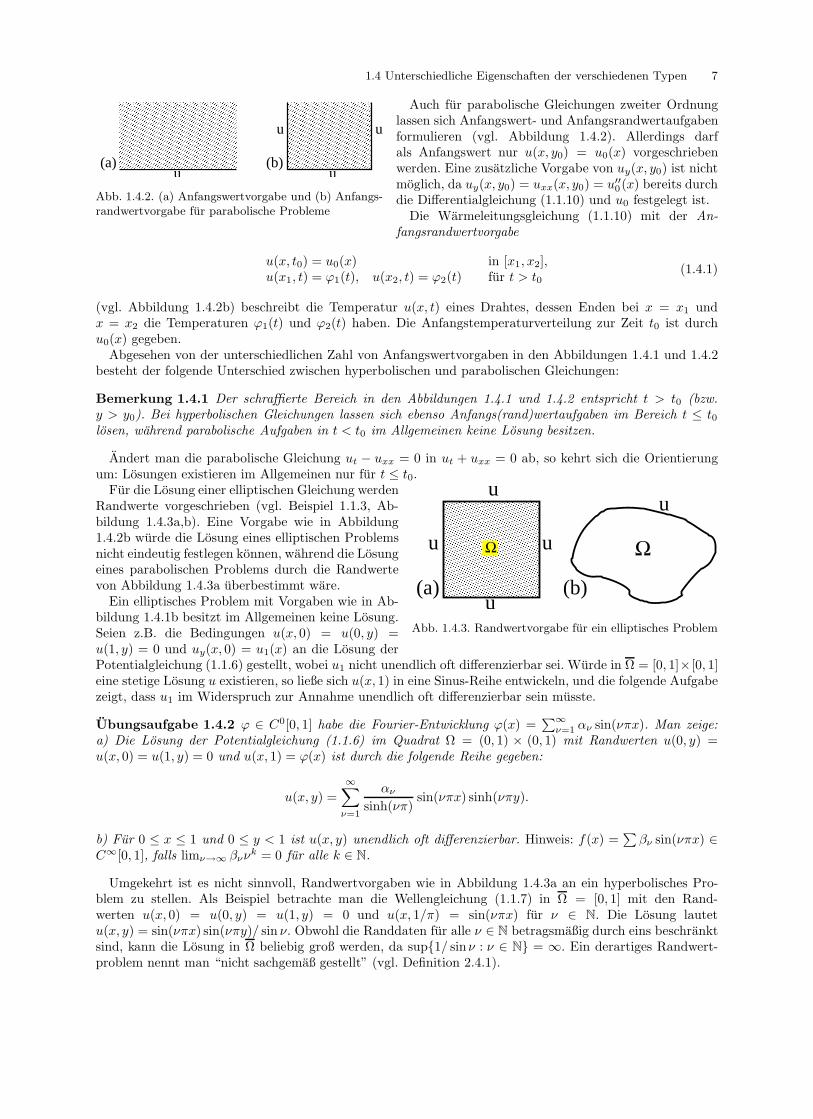
Abb. 1.4.2. (a) Anfangswertvorgabe und (b) Anfangs-randwertvorgabe fur parabolische Probleme
Auch fur parabolische Gleichungen zweiter Ordnunglassen sich Anfangswert- und Anfangsrandwertaufgabenformulieren (vgl. Abbildung 1.4.2). Allerdings darfals Anfangswert nur u(x, y0) = u0(x) vorgeschriebenwerden. Eine zusatzliche Vorgabe von uy(x, y0) ist nichtmoglich, da uy(x, y0) = uxx(x, y0) = u′′0(x) bereits durchdie Differentialgleichung (1.1.10) und u0 festgelegt ist.
Die Warmeleitungsgleichung (1.1.10) mit der An-fangsrandwertvorgabe
u(x, t0) = u0(x) in [x1, x2],u(x1, t) = ϕ1(t), u(x2, t) = ϕ2(t) fur t > t0
(1.4.1)
(vgl. Abbildung 1.4.2b) beschreibt die Temperatur u(x, t) eines Drahtes, dessen Enden bei x = x1 undx = x2 die Temperaturen ϕ1(t) und ϕ2(t) haben. Die Anfangstemperaturverteilung zur Zeit t0 ist durchu0(x) gegeben.
Abgesehen von der unterschiedlichen Zahl von Anfangswertvorgaben in den Abbildungen 1.4.1 und 1.4.2besteht der folgende Unterschied zwischen hyperbolischen und parabolischen Gleichungen:
Bemerkung 1.4.1 Der schraffierte Bereich in den Abbildungen 1.4.1 und 1.4.2 entspricht t > t0 (bzw.y > y0). Bei hyperbolischen Gleichungen lassen sich ebenso Anfangs(rand)wertaufgaben im Bereich t ≤ t0losen, wahrend parabolische Aufgaben in t < t0 im Allgemeinen keine Losung besitzen.
Andert man die parabolische Gleichung ut − uxx = 0 in ut + uxx = 0 ab, so kehrt sich die Orientierungum: Losungen existieren im Allgemeinen nur fur t ≤ t0.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Ω
(a)
u
u
u
u
u
Ω
(b)
Abb. 1.4.3. Randwertvorgabe fur ein elliptisches Problem
Fur die Losung einer elliptischen Gleichung werdenRandwerte vorgeschrieben (vgl. Beispiel 1.1.3, Ab-bildung 1.4.3a,b). Eine Vorgabe wie in Abbildung1.4.2b wurde die Losung eines elliptischen Problemsnicht eindeutig festlegen konnen, wahrend die Losungeines parabolischen Problems durch die Randwertevon Abbildung 1.4.3a uberbestimmt ware.
Ein elliptisches Problem mit Vorgaben wie in Ab-bildung 1.4.1b besitzt im Allgemeinen keine Losung.Seien z.B. die Bedingungen u(x, 0) = u(0, y) =u(1, y) = 0 und uy(x, 0) = u1(x) an die Losung derPotentialgleichung (1.1.6) gestellt, wobei u1 nicht unendlich oft differenzierbar sei. Wurde in Ω = [0, 1]× [0, 1]eine stetige Losung u existieren, so ließe sich u(x, 1) in eine Sinus-Reihe entwickeln, und die folgende Aufgabezeigt, dass u1 im Widerspruch zur Annahme unendlich oft differenzierbar sein musste.
Ubungsaufgabe 1.4.2 ϕ ∈ C0[0, 1] habe die Fourier-Entwicklung ϕ(x) =∑∞
ν=1 αν sin(νπx). Man zeige:a) Die Losung der Potentialgleichung (1.1.6) im Quadrat Ω = (0, 1) × (0, 1) mit Randwerten u(0, y) =u(x, 0) = u(1, y) = 0 und u(x, 1) = ϕ(x) ist durch die folgende Reihe gegeben:
u(x, y) =∞∑
ν=1
αν
sinh(νπ)sin(νπx) sinh(νπy).
b) Fur 0 ≤ x ≤ 1 und 0 ≤ y < 1 ist u(x, y) unendlich oft differenzierbar. Hinweis: f(x) =∑βν sin(νπx) ∈
C∞[0, 1], falls limν→∞ βννk = 0 fur alle k ∈ N.
Umgekehrt ist es nicht sinnvoll, Randwertvorgaben wie in Abbildung 1.4.3a an ein hyperbolisches Pro-blem zu stellen. Als Beispiel betrachte man die Wellengleichung (1.1.7) in Ω = [0, 1] mit den Rand-werten u(x, 0) = u(0, y) = u(1, y) = 0 und u(x, 1/π) = sin(νπx) fur ν ∈ N. Die Losung lautetu(x, y) = sin(νπx) sin(νπy)/ sin ν. Obwohl die Randdaten fur alle ν ∈ N betragsmaßig durch eins beschranktsind, kann die Losung in Ω beliebig groß werden, da sup{1/ sinν : ν ∈ N} = ∞. Ein derartiges Randwert-problem nennt man “nicht sachgemaß gestellt” (vgl. Definition 2.4.1).

8 1. Partielle Differentialgleichungen und ihre Einteilung in Typen
Ubungsaufgabe 1.4.3 Man beweise: Die Menge {sin ν : ν ∈ N} ist dicht in [−1, 1].
Ein weiteres unterscheidendes Merkmal ist die Regularitat (Glattheit) der Losung. Sei u Losung derPotentialgleichung (1.1.6) in Ω ⊂ R2. Wie in Beispiel 1.1.3 behauptet, ist u Realteil einer in Ω holomorphenFunktion. Da holomorphe Funktionen unendlich oft differenzierbar sind, gilt diese Eigenschaft auch fur u.
Im Falle der parabolischen Warmeleitungsgleichung (1.1.10) mit Anfangswerten u(x, 0) = u0 ist die Losungu durch (1.1.11b) dargestellt. Fur y > 0 ist u unendlich oft differenzierbar. Die Glattheit von u0 spielt beidieser Uberlegung ebensowenig eine Rolle wie die Glattheit der Randwerte im Falle der Potentialgleichung.
Ein vollkommen anderes Resultat findet man fur die hyperbolische Wellengleichung (1.1.7). Die Losunglautet u(x, y) = φ(x+ y) + ψ(x− y), wobei sich φ und ψ direkt aus den Anfangsdaten (1.1.9) ergeben. Manpruft nach, dass u k-fach differenzierbar ist, falls u0 k-fach und u1 (k − 1)-fach differenzierbar ist.
Wie schon in diesem Abschnitt erwahnt wurde, spielt die Variable y in den hyperbolischen und para-bolischen Gleichungen (1.1.1), (1.1.2), (1.1.7), (1.1.10) haufig die Rolle der Zeit. Man bezeichnet deshalbdie durch hyperbolische oder parabolische Gleichungen beschriebenen Prozesse als instationar. ElliptischeGleichungen, die als Variablen nur Raumkoordinaten enthalten, werden stationar genannt. Deutlicher alsDefinition 1.2.1b,c zeigt Definition 1.2.3b,c die Auszeichnung einer einzigen Variablen (Zeit), die dem Eigen-wert λ = 0 bei der parabolischen und dem Eigenwert mit entgegengesetztem Vorzeichen bei hyperbolischenGleichungen entspricht.
Der Zusammenhang der verschiedenen Typen wird leichter verstandlich, wenn man elliptische Gleichungenin den Variablen x1, . . . , xn in Beziehung setzt zu parabolischen und hyperbolischen Gleichungen in denVariablen x1, . . . , xn, t.
Bemerkung 1.4.4 L sei ein Differentialoperator (1.2.6) in den Variablen x = (x1, . . . , xn) und habe ellip-tischen Typ. L sei so skaliert, dass die Matrix A(x) aus (1.2.4b) nur negative Eigenwerte besitzt. Dannist
ut + Lu = 0 (1.4.2)
eine parabolische Gleichung fur u(x, t) = u(x1, . . . , xn, t). Dagegen ist
utt + Lu = 0 (1.4.3)
vom hyperbolischen Typ.
Umgekehrt fuhren die instationaren Probleme (1.4.2) oder (1.4.3) zu der elliptischen Gleichung Lu = 0,wenn man Losungen von (1.4.2) oder (1.4.3) sucht, die von der Zeit t unabhangig sind. Aufgaben vom ellip-tischen Typ erhalt man auch, wenn man Losungen von (1.4.2) oder (1.4.3) mit Hilfe eines Separationsansatzesu(x, t) = ϕ(t)v(x) sucht. Es ergibt sich
u(x, t) = e−λtv(x) im Falle (1.4.2),u(x, t) = e±i
√λtv(x) im Falle (1.4.3),
(1.4.4)
wobei v(x) Losung der elliptischen Eigenwertaufgabe
Lv = λv
ist (diese Eigenwertaufgaben werden in §11 diskutiert werden).
2Die Potentialgleichung
2.1 Problemstellung
Die Potentialgleichung aus Beispiel 1.1.3 lautet
Δu = 0 in Ω ⊂ Rn, (2.1.1a)
wobei Δ = ∂2/∂x21 + . . . + ∂2/∂x2
n der Laplace-Operator ist. In der Physik beschreibt Gleichung (2.1.1a)die Potentiale, z.B. das elektrische Potential, wenn Ω keine elektrischen Ladungen enthalt, das magnetischePotential bei verschwindender Stromdichte, das Geschwindigkeitspotential usw. Gleichung (2.1.1a) wird auchLaplace-Gleichung genannt, da sie von P. S. Laplace in seinem funfbandigen Werk “Mecanique celeste”(geschrieben 1799-1825) beschrieben wurde. Zuerst wurde die Potentialgleichung allerdings 1752 von Euler1
erwahnt.Auf den Zusammenhang zwischen der Potentialgleichung fur n = 2 und der Funktionentheorie ist schon in
Beispiel 1.1.3 hingewiesen worden. Der Laplace-Operator ist nicht nur ein Beispiel fur einen elliptischenDifferentialoperator, sondern sogar der Prototyp (eine sogenannte Normalform). Durch Variablentrans-formation lasst sich ein elliptischer Differentialoperator zweiter Ordnung so umformen, dass der Hauptteilder Laplace-Operator ist (vgl. Hellwig [46, p. 64f]).
Im Folgenden wird Ω stets ein Gebiet sein.
Definition 2.1.1 (Gebiet) Ω ⊂ Rn heißt Gebiet, falls Ω offen und zusammenhangend 2 ist.
Die Existenz zweiter Ableitungen von u wird nur in Ω, nicht auf dem Rand
Γ = ∂Ω
von Ω gefordert. Damit eine Randwertvorgabe
u = ϕ auf Γ (2.1.1b)
sinnvoll ist, muss die Stetigkeit von u auf Ω = Ω ∪ Γ vorausgesetzt werden.Die Kombination einer (elliptischen) Differentialgleichung (hier (2.1.1a)) mit einer Randbedingung (hier
(2.1.1b)) nennt man Randwertaufgabe.
1Leonhard Euler, geb. 15. April 1707 in Basel, gest. 18. Sept. 1783 in St. Petersburg2Ω heißt zusammenhangend, wenn es fur alle x, y ∈ Ω eine stetige Kurve in Ω gibt, die x mit y verbindet, d.h. γ ∈ C([0, 1])
mit γ : s ∈ [0, 1] �→ γ(s) ∈ Ω und γ(0) = x, γ(1) = y.

10 2. Die Potentialgleichung
Definition 2.1.2 (harmonisch) u heißt harmonisch in Ω, falls u zu C2(Ω) ∩ C0(Ω) gehort und derPotentialgleichung (2.1.1a) genugt.
Dabei bezeichnet C0(D) [Ck(D), C∞(D)] die Menge der auf D stetigen [k-fach stetig differenzierbarenbzw. unendlich oft differenzierbaren] Funktionen.
Im Allgemeinen kann man nicht erwarten, dass die Losung von (2.1.1a,b) in C2(Ω) liegt, wie das folgendeBeispiel zeigt.
Beispiel 2.1.3 Sei Ω = (0, 1) × (0, 1) (vgl. Abbildung 1.4.3a). Die Randwerte seien ϕ(x, y) = x2 fur(x, y) ∈ Γ . Eine Losung der Randwertaufgabe existiert, gehort aber nicht zu C2(Ω).
Beweis. Die Existenz einer Losung u wird in Satz 7.3.7 behandelt werden. Ware u ∈ C2(Ω), so galteuxx(x, 0) = ϕxx(x, 0) = 2 fur x ∈ [0, 1] und insbesondere uxx(0, 0) = 2. Aus dem analogen Resultatuyy(0, 0) = ϕyy(0, 0) = 0 erhielte man Δu(0, 0) = 2 im Widerspruch zu Δu = 0 in Ω.
Γ1
Γ0
Γ0
Γ1
Γ1
Γ1
Abb. 2.1.1. L-Gebiet
Im vorliegenden Fall kann man noch u ∈ C1(Ω) zeigen. Dass auch diese Aussageim Allgemeinen falsch ist, beweist das nachste Beispiel, in dem Ω das sogenannteL-Gebiet aus Abbildung 2.1.1 ist.
Beispiel 2.1.4 Im Gebiet Ω = (− 12 ,
12 )× (− 1
2 ,12 ) \ [0, 1
2 )× [0, 12 ) fuhre man Polar-
koordinaten ein:x = r cosϕ, y = r sinϕ. (2.1.2)
Die Funktion u(r, ϕ) = r2/3 sin((2ϕ − π)/3) (π/2 < ϕ < 2π) ist Losung derPotentialgleichung (2.1.1a) und besitzt glatte Randwerte auf Γ (insbesondere gilt u = 0 auf Γ0 ⊂ Γ). Trotzdemsind die ersten Ableitungen in r = 0 unbeschrankt, d.h. u �∈ C1(Ω).
Beweis. Mit ux, uy musste auch ur = ux cosϕ + uy sinϕ beschrankt sein. Jedoch gilt ur = O(r−1/3) furr → 0. Um nachzuprufen, dass Δu = 0, benutze man folgende Ubungsaufgabe.
Ubungsaufgabe 2.1.5 Man zeige: a) Bezuglich der Polarkoordinaten (2.1.2) des R2 lautet der Laplace-Operator
Δ =∂2
∂r2+
1r
∂
∂r+
1r2
∂2
∂ϕ2. (2.1.3)
b) Bezuglich der drei-dimensionalen Polarkoordinaten
x = r cosϕ sinψ, y = r sinϕ sinψ, z = r cosψ
gilt
Δ =∂2
∂r2+
2r
∂
∂r+
1r2
[1
sin2 ψ
∂2
∂ϕ2+ cotψ
∂
∂ψ+
∂2
∂ψ2
]. (2.1.4)
Anmerkung. Im allgemeinen n-dimensionalen Fall fuhrt die Transformation auf Polarkoordinaten zu
Δ =∂2
∂r2+n− 1r
∂
∂r+
1r2B,
wobei der sogenannte Beltrami-Operator B nur Ableitungen bezuglich der Winkelvariablen enthalt.
2.2 Singularitatenfunktion
Als Singularitatenfunktion oder Fundamentallosung bezeichnet man die Funktion
s(x,y) =
⎧⎪⎪⎨⎪⎪⎩− 1ω2
log |x − y| fur n = 2,
|x − y|2−n
(n− 2)ωnfur n > 2,
(2.2.1a)

2.2 Singularitatenfunktion 11
von x,y ∈ Rn, wobei
ωn = 2 Γ(12 )n/Γ(n
2 ), insbesondere ω2 = 2π, ω3 = 4π, (Γ: Gammafunktion) (2.2.1b)
die Oberflache der n-dimensionalen Einheitskugel ist. Mit
|x| =√∑n
i=1x2
i (2.2.2)
wird die Euklidische Norm des Rn bezeichnet.
Lemma 2.2.1 Fur festes y ∈ Rn lost s(x,y) bezuglich x die Potentialgleichung in Rn\{y}.
Beweis. Der Beweis lasst sich direkt durchfuhren. Einfacher ist es aber, Polarkoordinaten mit y als Zentrumeinzufuhren und (1.1.5) anzuwenden, da s(x,y) nur von r = |x − y| abhangt.
Zur Vorbereitung des nachsten Satzes muss die Normalenableitung ∂/∂n eingefuhrt werden. Sei Ω einGebiet mit glattem Rand Γ. Der Vektor −→n (x) ∈ Rn bezeichnet die außere Normalenrichtung in x ∈ Γ, d.h. −→nist ein Einheitsvektor senkrecht zur Tangentialhyperebene in x und zeigt nach außen. Die Normalenableitungvon u in x ∈ Γ ist definiert als
∂u(x)∂n
= 〈−→n ,∇u〉 , (2.2.3a)
wobei∇u = gradu = (ux1 , . . . , uxn)� (2.2.3b)
der Gradient von u und
〈x,y〉 =n∑
i=1
xiyi (2.2.3c)
das Skalarprodukt des Rn sind. Im Falle der Kugel KR(y) (vgl. (2.2.7)) ist die Normalenrichtung radial.∂u/∂n wird zu ∂u/∂r bezuglich r = |x − y|, wenn man Polarkoordinaten mit Zentrum in y verwendet. Da∂s(x,y)/∂r = −|x−y|1−n/ωn, folgt
∂s(x,y)∂n
= −R1−n
ωnfur alle x ∈ ∂KR(y). (2.2.4)
Die erste Greensche3 Formel (vgl. Green [34])∫Ω
u(x)Δv(x) dx = −∫
Ω
〈∇u(x),∇v(x)〉 dx +∫
∂Ω
u(x)∂v(x)∂n
dΓ (2.2.5a)
gilt fur u ∈ C1(Ω), v ∈ C2(Ω), wenn das Gebiet Ω geeignete Voraussetzungen erfullt. Dabei bezeichnet∫∂Ω. . .dΓ das Oberflachenintegral.
Gebiete, fur die (2.2.5a) gultig ist, heißen Normalgebiete. Hinreichende Bedingungen hierfur findet man inKellogg [49, §IV] und Hellwig [46, p. 11].
Funktionen u, v ∈ C2(Ω) in einem Normalgebiet Ω erfullen die zweite Greensche Formel∫Ω
u(x)Δv(x) dx =∫
Ω
v(x)Δu(x) dx +∫
∂Ω
[u(x)
∂v(x)∂n
− v(x)∂u(x)∂n
]dΓ. (2.2.5b)
Satz 2.2.2 Ω sei Normalgebiet, und u ∈ C2(Ω) sei dort harmonisch. Dann gilt
u(y) =∫
∂Ω
[s(x,y)
∂u(x)∂n
− u(x)∂s(x,y)∂nx
]dΓx fur alle y ∈ Ω. (2.2.6)
Die Symbole ∂∂nx
und dΓx beziehen sich dabei auf die Variable x.
3George Green, geb. im Juli 1793 in Sneinton, Nottingham, gest. am 31. Mai 1841 in Sneinton, Nottingham

12 2. Die Potentialgleichung
Beweis. MitKr(y) = {x ∈ Rn : |x − y| < r} (2.2.7)
bezeichnen wir den Kreis um y mit Radius r. Da die Singularitatenfunktion s(·,y) in x = y nicht differen-zierbar ist, kann die Greensche Formel nicht direkt angewandt werden. Sei
Ωε := Ω \Kε(y),
wobei ε so klein sei, dass Kε(y) ⊂ Ω. Da Ωε wieder Normalgebiet ist, folgt aus Δu = Δs = 0 in Ωε (vgl.Lemma 2.2.1) und (2.2.5b) mit v = s(·,y), dass∫
∂Ωε
[u(x)
∂s(x,y)∂nx
− s(x,y)∂u(x)∂n
]dΓx = 0. (2.2.8a)
Es ist ∂Ωε = ∂Ω ∪ ∂Kε(y). In x ∈ ∂Kε(y) unterscheiden sich jedoch die Normalenrichtungen von ∂Ωε
und ∂Kε(y) durch das Vorzeichen. Gleiches gilt fur die Normalenableitung, sodass sich das Integral aus(2.2.8a) zerlegen lasst in
∫∂Ωε
. . . =∫
∂Ω. . . −
∫∂Kε(y)
. . .. Die Behauptung des Satzes ware bewiesen,wenn
∫∂Kε(y)
. . . → −u(y) fur ε → 0 gezeigt werden konnte. ∂u/∂n ist auf ∂Kε(y) beschrankt, und∫∂Kε(y)
s(x,y)dΓ strebt wie O(ε| log ε|)) bzw. O(ε) gegen null, wie man aus (2.2.1) und∫
∂Kε(y)dΓ = εn−1ωn
abliest. Somit folgt ∫∂Kε(y)
s(x,y)∂u(x)∂n
dΓx → 0 (ε→ 0). (2.2.8b)
Aus∫
∂Kε(y) dΓ = εn−1ωn und (2.2.4) schließt man∫∂Kε(y)
u(y)∂s(x,y)∂nx
dΓx = −u(y). (2.2.8c)
Die Stetigkeit von u in y liefert∣∣∣∣∣∫
∂Kε(y)
[u(x) − u(y)]∂s(x,y)∂nx
dΓx
∣∣∣∣∣ ≤ maxx∈∂Kε(y)
|u(x) − u(y)| → 0 fur ε→ 0. (2.2.8d)
(2.2.8b,c,d) zeigen∫
∂Kε(y)[u ∂
∂ns− s ∂∂nu]dΓ → −u(y) (ε→ 0), sodass (2.2.8a) den Satz beweist.
Jede Funktion der Formγ(x,y) = s(x,y) + Φ(x,y) (2.2.9)
heißt Grundlosung (der Potentialgleichung) in Ω, wenn fur festes y ∈ Ω die Funktion Φ(·,y) harmonisch inΩ ist und zu C2(Ω) gehort.
Zusatz 2.2.3 Unter den Voraussetzungen von Satz 2.2.2 gilt fur jede Grundlosung in Ω:
u(y) =∫
∂Ω
[γ(x,y)
∂u(x)∂n
− u(x)∂γ(x,y)∂nx
]dΓx (y ∈ Ω) . (2.2.10)
Beweis. (2.2.5b) impliziert∫
∂Ω[Φ∂u/∂n− u∂Φ/∂n]dΓ = 0.
Wegen einer moglichen Abschwachung der Bedingung Φ = γ − s ∈ C2(Ω) auf Φ(·,y) ∈ C1(Ω) ∩ C2(Ω)vergleiche man Hellwig [46, p. 34].
Ubungsaufgabe 2.2.4 (Green-Funktion auf Kreisen) Es sei Ω = KR(y). Man definiere
γ(x, ξ) =
⎧⎪⎨⎪⎩1
(n−2)ωn
[|x − ξ|2−n −
(|ξ−y|
R |x− ξ′|)2−n
]fur n > 2,
− 12π
[log |x − ξ| − log
(|ξ−y|
R |x − ξ′|)]
fur n = 2,(2.2.11a)
mit x, ξ ∈ Ω, ξ′ = y +R2|ξ − y|−2(ξ − y) und zeige:a) γ ist Grundlosung in Ω,b) γ(x, ξ) = γ(ξ,x),c) auf der Kugeloberflache Γ = ∂KR(y) gilt
∂
∂nξγ(x, ξ) =
∂
∂nξγ(ξ,x) = − 1
Rωn
R2 − |x − y|2
|x− ξ|n (ξ ∈ Γ) . (2.2.11b)

2.3 Mittelwerteigenschaft und Maximumprinzip 13
2.3 Mittelwerteigenschaft und Maximumprinzip
Definition 2.3.1 (Mittelwerteigenschaft) Eine Funktion u besitzt die Mittelwerteigenschaft in Ω, fallsu ∈ C0(Ω) und falls fur alle x ∈ Ω und alle R > 0 mit KR(x) ⊂ Ω die Darstellung
u(x) =1
ωnRn−1
∫∂KR(x)
u(ξ)dΓξ (2.3.1)
gultig ist.
Da∫
∂KR(x) dΓ = ωnRn−1, ist die rechte Seite in (2.3.1) der uber die Kugeloberflache gemittelte Wert von
u. Eine aquivalente Charakterisierung ergibt sich, wenn man uber die Kugel KR(x) mittelt:
Ubungsaufgabe 2.3.2 u ∈ C0(Ω) besitzt die zweite Mittelwerteigenschaft in Ω, wenn
u(x) =n
Rnωn
∫KR(x)
u(ξ)dξ fur alle x ∈ Ω, R > 0 mit KR(x) ⊂ Ω.
Man zeige, dass die zweite Mittelwerteigenschaft aquivalent zur Mittelwerteigenschaft (2.3.1) ist. Hinweis:∫KR(x)
u(ξ)dξ =∫ R
0
(∫∂KR(x)
u(ξ)dΓξ
)dr.
Funktionen mit der Mittelwerteigenschaft erfullen ein Maximumprinzip, wie es aus der Funktionentheoriefur holomorphe Funktionen bekannt ist:
Satz 2.3.3 (Maximum-Minimum-Prinzip) Ω sei ein Gebiet und u ∈ C0(Ω) sei eine nichtkonstanteFunktion, die die Mittelwerteigenschaft besitzt. Dann nimmt u in Ω weder ein Maximum noch Minimum an.
Beweis. 1) Es genugt, den Fall des Maximums zu untersuchen, da ein Minimum von u ein Maximum von−u ist und −u ebenfalls die Mittelwerteigenschaft besitzt.
2) Zur indirekten Beweisfuhrung nehmen wir an, es gabe ein Maximum in y ∈ Ω:
u(y) = M ≥ u(x) fur alle x ∈ Ω.
In 3) werden wir u(y′) = M fur beliebiges y′ ∈ Ω zeigen, d.h. u ≡ M im Widerspruch zur Voraussetzungu �≡ const.
3) Beweis von u(y′) = M . Sei y′ ∈ Ω. Da Ω zusammenhangend ist, existiert eine in ω verlaufendeVerbindung von y und y′, d.h. es gibt ein stetiges ϕ : [0, 1] → Ω mit ϕ(0) = y, ϕ(1) = y′. Wir setzen
I := {s ∈ [0, 1] : u(ϕ(t)) = M fur alle 0 ≤ t ≤ s}.
I enthalt mindestens 0 und ist abgeschlossen, da u und ϕ stetig sind. Damit existiert s� = max{s ∈ I},und die Definition von I zeigt I = [0, s�]. In 4) wird s� = 1 nachgewiesen, sodass y′ = ϕ(1) ∈ I und somitu(y′) = M folgt.
4) Beweis von s� = 1. Die gegenteilige Annahme s� < 1 kann zum Widerspruch gefuhrt werden, indemu(x) = M in einer Umgebung von x� := ϕ(s�) nachgewiesen wird. Da x� ∈ Ω, existiert R > 0 mitKR(x�) ⊂ Ω. Offenbar folgt u = M in KR(x�), wenn u = M auf ∂Kr(x�) fur alle 0 < r ≤ R gezeigt wird.
5) Beweis von u = M auf ∂Kr(x�). Gleichung (2.3.1) in x� lautet
M = u(x�) =1
ωnrn−1
∫∂Kr(x∗)
u(ξ)dΓξ .
Generell gilt u(ξ) ≤ M . Ware u(ξ′) < M fur ein ξ′ ∈ ∂KR(x�) und damit u < M in einer Umgebung vonξ′, ergabe sich auf der rechten Seite ein Mittelwert kleiner als M . Dies beweist u = M auf ∂KR(x�).
Einfache Folgerungen aus Satz 2.3.3 enthalt der

14 2. Die Potentialgleichung
Zusatz 2.3.4 Ω sei beschrankt. (a) Eine Funktion mit Mittelwerteigenschaft nimmt ihr Maximum und Mini-mum auf ∂Ω an. (b) Stimmen zwei Funktionen mit Mittelwerteigenschaft auf dem Rand ∂Ω uberein, so sindsie identisch.
Beweis. (a) Die Extrema werden auf Ω = Ω∪ ∂Ω angenommen, da Ω kompakt ist. Ω kommt nach Satz 2.3.3fur ein Extremum nicht in Frage, wenn u nicht auf einer Zusammenhangskomponente von Ω konstant ist.Aber auch in diesem Fall ist die Behauptung offensichtlich.
(b) Erfullen u und v mit u = v auf ∂Ω die Mittelwerteigenschaft, so ist diese auch fur w := u− v erfullt.Da w = 0 auf ∂Ω, zeigt Teil (a), dass maxw = minw = 0. Also u = v in Ω.
Lemma 2.3.5 Harmonische Funktionen besitzen die Mittelwerteigenschaft.
Beweis. Sei u harmonisch in Ω und y ∈ KR(y) ⊂ Ω. Wir wenden die Darstellung (2.2.6) fur KR(y) anstellevon Ω an. Der konstante Wert von s(x,y) auf ∂KR(y) sei mit σ(R) bezeichnet. Wegen (2.2.4) wird Gleichung(2.2.6) zu
u(y) = σ(R)∫
∂KR(y)
∂u(ξ)∂n
dΓ +1
ωnRn−1
∫∂KR(y)
u(ξ)dΓ.
Die Gleichung stimmt mit (2.3.1) uberein, wenn das erste Integral verschwindet. Letzteres folgt aus demfolgenden Lemma.
Lemma 2.3.6 Sei u ∈ C2(Ω) harmonisch in einem Normalgebiet Ω. Dann gilt∫∂Ω
∂u
∂ndΓ = 0. (2.3.2)
Beweis. Man setze in der Greenschen Formel (2.2.5a) 1 und u anstelle von u und v ein.Lemma 2.3.5, Satz 2.3.3 und Zusatz 2.3.4 ergeben die nachsten Satze 2.3.7 und 2.3.8.
Satz 2.3.7 (Maximum-Minimum-Prinzip fur harmonische Funktionen) Die Funktion u sei har-monisch im Gebiet Ω und nicht konstant. Dann existiert kein Maximum und kein Minimum in Ω.
Satz 2.3.8 (Eindeutigkeit) Ω sei beschrankt. Eine in Ω harmonische Funktion nimmt ihr Maximum undMinimum auf ∂Ω an und ist durch die Werte auf ∂Ω eindeutig bestimmt.
Die Darstellung (2.3.1) von u(y) durch die Werte auf ∂KR(y) ist ein Spezialfall folgender Formel, die amEnde dieses Abschnittes bewiesen werden wird und fur x = y die Gleichung (2.3.1) liefert.
Satz 2.3.9 (Poissonsche Integralformel) 4 Sei ϕ ∈ C0(∂KR(y)) und n ≥ 2. Die Losung der Randwert-aufgabe
Δu = 0 in KR(y), u = ϕ auf ∂KR(y), (2.3.3)
ist gegeben durch die Funktion
u(x) =R2 − |x − y|2
Rωn
∫∂KR(y)
ϕ(ξ)|x − ξ|n dΓξ fur x ∈ KR(y), (2.3.4)
die zu C∞(KR(y)) ∩ C0(KR(y)) gehort.
Die Mittelwerteigenschaft setzt nur u ∈ C0(Ω) voraus, wahrend harmonische Funktionen zu C2(Ω)∩C0(Ω)gehoren. Um so erstaunlicher ist die folgende Aussage:
Satz 2.3.10 Eine Funktion ist genau dann harmonisch in Ω, wenn sie dort die Mittelwerteigenschaft besitzt.
Beweis. Wegen Lemma 2.3.5 bleibt zu zeigen, dass eine Funktion v mit Mittelwerteigenschaft harmonischist. Sei x ∈ KR(x) ⊂ Ω beliebig vorgegeben. Nach Satz 2.3.9 existiert eine in KR(x) harmonische Funktionu mit
Δu = 0 in KR(y), u = v auf ∂KR(y).
4Simeon Denis Poisson, geb. 21. Juni 1781 in Pithiviers, gest. 25. April 1840 in Sceaux

2.3 Mittelwerteigenschaft und Maximumprinzip 15
Gemaß Lemma 2.3.5 besitzt u ebenso wie v die Mittelwerteigenschaft, und Zusatz 2.3.4b beweist u = v inKR(x), d.h. v ist in KR(x) harmonisch. Da KR(x) ⊂ Ω beliebig, ist v in Ω harmonisch.
Eine wichtige Anwendung des Satzes 2.3.10 ist die folgende Aussage.
Satz 2.3.11 (Harnack)5 Sei u1, u2, . . . eine Folge in Ω harmonischer Funktionen, die in Ω gleichmaßigkonvergieren. Dann ist u = limk→∞ uk harmonisch in Ω.
Beweis. Wegen der gleichmaßigen Konvergenz ist die Grenzfunktion stetig: u ∈ C0(Ω). Der Limesprozessangewandt auf uk(x) =
∫∂KR(x) uk(ξ)dΓξ/(ωnR
n−1) liefert Gleichung (2.3.1) fur u; d.h. u besitzt die Mittel-werteigenschaft. Nach Satz 2.3.10 ist u auch harmonisch in Ω.
Die Satze 2.3.3 und 2.3.7 uber das Maximum-Minimum-Prinzip beziehen sich auf globale Extrema. DerBeweis von Satz 2.3.3 schließt noch keine lokalen Extrema im Inneren aus. Er zeigt nur, dass u dann in einemKreis KR(y) ⊂ Ω konstant ist. Wie aus der Funktionentheorie bekannt, lasst sich hieraus u(x) = M in Ωableiten, wenn u analytisch ist, d.h. in der Umgebung jedes x ∈ Ω eine konvergente Potenzreihenentwicklunggestattet. In der Tat gilt der folgende Satz, dessen Beweis man z.B. in Hellwig [46, p. 93] findet:
Satz 2.3.12 Eine in Ω harmonische Funktion ist dort analytisch.
Es bleibt der Beweis der Poissonschen Integralformel nachzutragen.Beweis zu Satz 2.3.9. a) Zunachst ist zu zeigen, dass u aus (2.3.4) eine in KR(y) harmonische Funktion ist,d.h. Δu = 0 erfullt. Da der Integrand zweimal stetig differenzierbar und der Integrationsbereich Γ = ∂KR(y)kompakt ist, darf der Laplace-Operator unter das Integralzeichen gezogen werden:
Δu(x) =1
Rωn
∫Γ
ϕ(ξ) Δ[(R2 − |x− y|2
)|x − ξ|−n
]dΓξ fur x ∈ KR(y). (2.3.5)
Gemaß Ubungsaufgabe 2.2.4 gibt es eine Grundlosung γ(x, ξ), sodass
R2 − |x − y|2
|x − ξ|nRωn= −∂γ(x, ξ)
∂nξ= −∂γ(ξ,x)
∂nξfur ξ ∈ Γ, x ∈ KR(y). (2.3.6)
Γ1
Γ1Γ1
Γ0
Γ0
y
R
z
ρ ρ/2
Abb. 2.3.1. Γ und die Kreise Kρ(z), Kρ/2(z)
Aus Δx∂γ/∂nξ = ∂∂nξ
Δxγ(x, ξ) = 0 und (2.3.5) schließt manΔu = 0.
b) Die Darstellung (2.3.4) definiert u(x) zunachst nur furx ∈ KR(y). Es bleibt noch zu zeigen, dass u eine stetige Fort-setzung auf KR(y) = KR(y) ∪ Γ besitzt (d.h. u ∈ C0(KR(y)))und dass die stetig fortgesetzten Werte mit den Randwerten ϕubereinstimmen:
limKR(y)�x→z
u(x) = ϕ(z) fur z ∈ Γ. (2.3.7)
Wegen Gleichung (2.3.6) liefert Zusatz 2.2.3 fur die Wahl u ≡ 1die Identitat
R2 − |x − y|2
Rωn=
∫Γ
dΓξ
|x − ξ|n = 1 fur x ∈ KR(y). (2.3.8)
Sei z ∈ Γ beliebig. Dank Gleichung (2.3.8) lasst sich schreiben:
u(x) − ϕ(z) =R2 − |x − y|2
Rωn
∫Γ
u(ξ) − ϕ(z)|x− ξ|n dΓξ. (2.3.9a)
Wir definieren Γ0 = Γ ∩Kρ(z), Γ1 = Γ/Γ0 (siehe Abbildung 2.3.1) und zerlegen den Ausdruck (2.3.9a) inu(x) − ϕ(z) = I0 + I1 wobei
Ii =R2 − |x − y|2
Rωn
∫Γi
u(ξ) − ϕ(z)|x − ξ|n dΓξ fur i = 0, 1.
5Carl Gustav Axel Harnack, 1851-1888, Promotion 1875 an der Universitat Erlangen.

16 2. Die Potentialgleichung
Da ∣∣∣∣∫Γ0
u(ξ) − ϕ(z)|x − ξ|n dΓξ
∣∣∣∣ ≤ maxξ∈Γ0
|u(ξ) − ϕ(z)|∫
Γ0
dΓξ
|x − ξ|n ≤ maxξ∈Γ0
|u(ξ) − ϕ(z)|∫
Γ
dΓξ
|x − ξ|n ,
folgt aus Gleichung (2.3.8), dassI0 ≤ max
ξ∈Γ0|u(ξ) − ϕ(z)| . (2.3.9b)
Wegen der Stetigkeit von ϕ kann ρ > 0 so gewahlt werden, dass
I0 ≤ ε/2 (2.3.9c)
fur vorgegebenes ε > 0.Man setze Cϕ := maxξ∈Γ |ϕ(ξ)| und wahle x ∈ KR(y) so nah an z, dass
|x − z| ≤ δ(ε) :=ε
2
(ρ2
)n 14CϕRn−1
und |x − z| ≤ ρ/2. Die letzte Ungleichung impliziert
|x − ξ| ≥ ρ
2fur ξ ∈ Γ1 (siehe Abbildung 2.3.1).
Zusammen mit R2 − |x − y|2 = (R+ |x − y|)(R − |x − y|) ≤ 2R(R− |x − y|) ≤ 2R|z− x| ≤ 2Rδ(ε) ergibtsich
|I1| =
∣∣∣∣∣R2 − |x − y|2
Rωn
∫Γ1
u(ξ) − ϕ(z)|x − ξ|n dΓξ
∣∣∣∣∣ ≤ 2ωn
δ(ε)2Cϕ
(ρ/2)n
∫Γ1
dΓ.
Aus∫Γ1
dΓ ≤∫Γ dΓ = Rn−1ωn und der Definition von δ(ε) folgt
|I1| ≤ ε/2 . (2.3.9d)
Damit existiert zu jedem ε > 0 ein δ(ε) > 0, sodass die Ungleichung |x − z| ≤ δ(ε) die Abschatzung|u(x) − ϕ(z)| = |I0 + I1| ≤ |I0| + |I1| ≤ ε impliziert (vgl. (2.3.9c,d)). Also ist (2.3.7) bewiesen, und die stetigeFortsetzung von u auf KR(y) fuhrt zu u ∈ C0(KR(y)).
Ubungsaufgabe 2.3.13 Man beweise: Die durch die Poissonsche Integralformel (2.3.4) definierte Funktionu gehort zu C∞(KR(y)) und lost Δu = 0 in KR(y), auch wenn ϕ nur als eine auf Γ = ∂KR(y) integrierbareFunktion vorausgesetzt wird. Fur jeden Stetigkeitspunkt z ∈ Γ von ϕ gilt u(x) → ϕ(z) (KR(y) � x → z).
Ubungsaufgabe 2.3.14 Ω sei beschrankt. u1 und u2 seien harmonisch in Ω mit Randwerten ϕ1 und ϕ2
auf Γ = ∂Ω. Man beweise: a) ϕ1 ≤ ϕ2 auf Γ impliziert u1 ≤ u2 in Ω. b) Ist außerdem Ω zusammenhangendund gilt ϕ1(x) < ϕ2(x) in mindestens einem Punkt x ∈ Γ, so folgt u1 < u2 uberall in Ω.
2.4 Stetige Abhangigkeit von den Randdaten
Definition 2.4.1 Eine abstrakte Aufgabe der Form
A(x) = y, x ∈ X, y ∈ Y,
heißt sachgemaß gestellt, wenn sie fur alle y ∈ Y eine eindeutige Losung x ∈ X besitzt und diese stetig vony abhangt.
Es ist wichtig, eine mathematische Fragestellung als sachgemaß gestellt zu erkennen, da andernfalls prinzi-pielle Schwierigkeiten bei der numerischen Losung zu erwarten sind. Im Falle der Randwertaufgabe (2.1.1a,b)sind X ⊂ C2(Ω)∩C0(Ω) der Raum der in Ω harmonischen Funktionen und Y = C0(Γ) die Menge der stetigenRanddaten auf Γ = ∂Ω. Die Topologien von X und Y sind durch die Supremumsnormen gegeben:
‖u‖∞ := supx∈Ω
|u(x)| bzw. ‖ϕ‖∞ := supx∈Γ
|ϕ(x)| . (2.4.1)
Die Frage der Existenz einer Losung von (2.1.1a,b) muss noch zuruckgestellt werden (siehe §7). Dagegenist die Eindeutigkeit schon in Satz 2.3.8 bestatigt worden, wenn Ω beschrankt ist. Dass die Beschranktheitvon Ω nicht ohne Weiteres gestrichen werden kann, zeigt

2.4 Stetige Abhangigkeit von den Randdaten 17
Beispiel 2.4.2 Die Funktionen
u(x1, x2) = x1 in Ω = (0,∞) × R,
u(x1, x2) = log(x2
1 + x22
)in Ω = R2\K1(0),
u(x1, x2) = sin(x1) sinh(x2) in Ω = (0, π) × (0,∞)(2.4.2)
erfullen ebenso wie die triviale Losung u = 0 die Randwertaufgabe Δu = 0 in Ω, u = 0 auf Γ = ∂Ω.
Fur beschranktes Ω hangen die harmonischen Funktionen (Losungen von (2.1.1a,b)) nicht nur stetig,sondern auch Lipschitz-stetig6 von den Randdaten ab:
Satz 2.4.3 Ω sei beschrankt. Sind uI und uII Losungen von
ΔuI = ΔuII = 0 in Ω, uI = ϕI und uII = ϕII auf Γ = ∂Ω,
so gilt‖uI − uII‖∞ ≤ ‖ϕI − ϕII‖∞. (2.4.3)
Beweis. v := uI − uII ist Losung von Δv = 0 in Ω und v = ϕI − ϕII auf Γ. Nach Satz 2.3.8 nimmt v seinMaximum und Minimum auf Γ an:
−‖ϕI − ϕII‖∞ ≤ v(x) ≤ ‖ϕI − ϕII‖∞ fur alle x ∈ Ω.
Die Definition (2.4.1) von ‖ · ‖∞ liefert (2.4.3).Gilt ‖ϕn − ϕ‖∞ → 0 fur eine Folge von Randwerten, so zeigt Satz 2.4.3, dass die zugehorigen Losungen
‖un − u‖∞ → 0 erfullen. Der folgende Satz besagt, dass die Existenz einer Losung von Δu = 0 in Ω, u = ϕauf Γ nicht vorausgesetzt zu werden braucht.
Satz 2.4.4 Ω sei beschrankt. ϕn ∈ C0(Γ) sei eine Folge von Randdaten, die gleichmaßig gegen ϕ konver-gieren: ‖ϕn − ϕ‖∞ → 0. un seien die Losungen von Δun = 0 in Ω, un = ϕn auf Γ. Dann konvergieren dieFunktionen gleichmaßig in Ω gegen ein u ∈ C2(Ω) ∩ C0(Ω), und u lost die Randwertaufgabe Δu = 0 in Ω,u = ϕ auf Γ.
Beweis. Da ‖ ·‖∞ ≤ ‖ϕn − ϕm‖∞ nach Satz 2.4.3, ist die Folge un Cauchy-konvergent. Da C0(Ω) vollstandigist, konvergiert un gleichmaßig gegen ein u ∈ C0(Ω). Gemaß Satz 2.3.11 ist u harmonisch (d.h. Δu = 0).Offensichtlich ist auch u = ϕ auf Γ erfullt.
Ω Ω Ω’’’
Abb. 2.4.1. Approximation von Ω durch Ω′ und Ω′′
Eine fur die numerische Behandlung ebenso wichtigeFrage wird in der Literatur seltener behandelt: Hangt dieLosung auch stetig von der Gestalt des Randes Γ ab? Ab-bildung 2.4.1 zeigt Gebiete Ω′ und Ω′′, die Ω approximieren.Ein Polygongebiet, wie z.B. Ω′′ tritt bei der Methode derfiniten Elemente auf (siehe §8.5.3).
Sei Ωn eine Folge von Gebieten mit Γn = ∂Ωn. Wir sagen,dass Γn → Γ, falls dist(Γn,Γ) → 0. Dabei ist dist(Γn,Γ) :=sup{dist(x,Γ) : x ∈ Γn}, dist(x,Γ) := inf{|x − y| : y ∈ Γ}.Weiter ist zu erklaren, wann ϕn ∈ C0(Γn) gleichmaßig gegen ϕ ∈ C0(Γ) konvergiert. Wir definieren diegleichmaßig Konvergenz fur ϕn und fur un:ϕn ∈ C0(Γn) konvergiert gleichmaßig gegen ϕ ∈ C0(Γ), falls fur jedes ε > 0 Zahlen N(ε) und δ(ε) > 0
existieren, sodass folgende Implikation gilt:
n ≥ N(ε), x ∈ Γ, |x − y| ≤ δ(ε) =⇒ |ϕn(y) − ϕ(x)| ≤ ε. (2.4.4a)
un ∈ C0(Ωn) konvergiert gleichmaßig gegen u ∈ C0(Ω), falls
limn→∞
[sup {|un(x) − u(x)| : x ∈ Ωn ∩ Ω}] = 0. (2.4.4b)
6Rudolf Otto Sigismund Lipschitz, geb. 14. Mai 1832 in Konigsberg, gest. 7. Okt. 1903 in Bonn

18 2. Die Potentialgleichung
Bemerkung 2.4.5 a) K sei eine kompakte Menge (d.h. abgeschlossen und beschrankt) mit Γ ⊂ K, Γn ⊂ Kfur alle n. φn ∈ C0(K) konvergiere gleichmaßig auf K gegen φ. Wenn ϕn = φn auf Γn und ϕ = φ auf Γ, soist (2.4.4a) erfullt.
b) Es gelte Ωn⊂Ω fur alle n, und un sei folgende (unstetige) Fortsetzung von un auf Ω: un = un auf Ωn,un =u auf Ω\Ωn. Dann ist (2.4.4b) aquivalent mit der gleichmaßigen Konvergenz un → u auf Ω.
Satz 2.4.6 Seien Ω beschrankt, Ωn ⊂ Ω und Γn → Γ. Die in Ωn harmonischen Funktionen un seienLosungen von
Δun = 0 in Ωn, un = ϕn auf Γn. (2.4.5a)
ϕn ∈ C0(Γn) konvergiere im Sinne von (2.4.4a) gleichmaßig gegen ϕ ∈ C0(Γ). Dann gelten die folgendenAussagen: (a) Wenn eine Losung u ∈ C2(Ω) ∩ C0(Ω) von
Δu = 0 in Ω, u = ϕ auf Γ. (2.4.5b)
existiert, gilt un → u im Sinne von (2.4.4b).(b) Ist umgekehrt un → u ∈ C0(Ω) im Sinne von (2.4.4b) erfullt, ist u die Losung von (2.4.5b).
Beweis. a) Die Fortsetzung un sei wie in Bemerkung 2.4.5b definiert. Da u gleichmaßig stetig auf Ω ist,existiert δu(ε) > 0 fur alle ε > 0, sodass
|u(x) − u(y)| ≤ ε2 , wenn |x − y| ≤ δu( ε
2 ). (2.4.6a)
Man setze δ�(ε) := min{δu( ε2 ), δ( ε
2 )} mit der Schranke δ aus (2.4.4a). Wegen Γn → Γ existiert NΓ(ε), sodassdist(Γn,Γ) ≤ δ�(ε) fur n ≥ NΓ(ε). Fur
n ≥ N�(ε) := max{NΓ(ε), N(ε/2)} (N aus (2.4.4a))
auf alle x ∈ Ω wollen wir |un(x) − u(x)| ≤ ε zeigen. Fur x ∈ Ωn ist die Abschatzung trivial wegenun(x) = u(x) . Fur alle x ∈ Ωn ⊂ Ω gilt dagegen
|un(x) − u(x)| = |un(x) − u(x)| ≤ maxx∈Γn
|un(x) − u(x)| (2.4.6b)
(vgl. Satz 2.3.8), weil un − u harmonisch in ωn ist. Es bleibt |un(x) − u(x)| fur x ∈ Γn abzuschatzen. Zux ∈ Γn mit n ≥ N�(ε) existiert y ∈ Γ mit |x − y| ≤ δ(ε/2). Somit erhalten wir
|un(x) − u(x)| = |ϕn(x) − u(x)| ≤ |ϕn(x) − ϕ(y)| + |ϕ(y) − u(x)|≤ |ϕn(x) − ϕ(y)| + |u(y) − u(x)| ≤ ε
2 + ε2 = ε
aus (2.4.4a) und (2.4.6a). Da x ∈ Γn beliebig, folgt |un−u| ≤ ε auf Γn, und (2.4.6b) beweist die gleichmaßigeKonvergenz un → u auf Ω. Nach Bemerkung 2.4.5b ist (2.4.4b) erfullt.
b) Sei K ⊂ Ω eine kompakte Menge. Da Γn → Γ, gibt es ein N(K), sodass K ⊂ Ωn fur n ≥ N(K).Damit konvergiert {un : n ≥ N(K)} im ublichen Sinne gleichmaßig auf K gegen u, sodass sich Satz 2.3.11anwenden lasst: u ist in K harmonisch. Da K ⊂ Ω beliebig gewahlt werden konnte, folgt u ∈ C2(Ω). NachVoraussetzung gilt bereits u ∈ C0(Ω). Die Annahme der Randwerte u = ϕ auf Γ folgert man aus ϕn → ϕund Γn → Γ.
In Satz 2.4.4 konnte die Existenz der Losung u von (2.4.5b) schon aus ϕn → ϕ abgeleitet werden. DieserSchluss ist im Falle von Ωn �= Ω nicht moglich, wie das folgende Beispiel zeigt.
Sei Ωn := K1(0)\K1/n(0) ⊂ Ω := K1(0)\{0} ⊂ R2. Die Rander sind Γn = ∂K1(0) ∪ ∂K1/n(0), Γ =∂K1(0) ∪ {0} und erfullen Γn → Γ. Die Randwerte
ϕ = ϕn = 0 auf ∂K1(0), ϕn = 1 auf ∂K1/n(0), ϕ(0, 0) = 1
genugen der Bedingung ϕn → ϕ (vgl. (2.4.4a) und Bemerkung 2.4.5a)). Die Losungen un von (2.4.5a) lassensich explizit angeben:
un(x) = log (|x|) / log (1/n) .
Offenbar gilt punktweise un(x) → u(x) := 0, aber u = 0 erfullt weder (2.4.4b) noch die Randwertaufgabe(2.4.5b). Im Umkehrschluss folgert man aus Satz 2.4.6a die
Bemerkung 2.4.7 Die Potentialgleichung hat in Ω = K1(0)/{0} ⊂ R2 keine Losung u ∈ C2(Ω) ∩ C0(Ω),die die Randwerte u(x) = 0 auf ∂K1(0) und u(x) = 1 in x = 0 annimmt.

3Die Poisson-Gleichung
3.1 Problemstellung
Die Poisson-Gleichung lautet
Δu = f in Ω (3.1.1a)
mit vorgegebenem f ∈ C0(Ω). In der physikalischen Interpretation ist f der Quellterm [z.B. die Ladungs-dichte im Falle eines elektrischen Potentials u]. Zur eindeutigen Festlegung der Losung braucht man eineRandwertvorgabe, zum Beispiel die Dirichlet1-Bedingung
u = ϕ (3.1.1b)
Definition 3.1.1 u heißt klassische Losung der Randwertaufgabe (3.1.1a,b), falls u ∈ C2(Ω) ∩ C0(Ω) dieGleichungen (3.1.1a,b) punktweise erfullt.
Bis zur Einfuhrung schwacher Losungen in §7 werden wir mit “Losung” stets die “klassische Losung”meinen.
Die Losung des Randwertproblems (3.1.1a,b) wird im Allgemeinen nicht mehr die Mittelwerteigenschaftund das Maximumprinzip erfullen. Wohl aber gelten diese Eigenschaften fur Differenzen zweier Losungen u1
und u2 der Poisson-Gleichung, da Δ(u1 − u2) = f − f = 0. Damit folgt sofort die Eindeutigkeit der Aufgabe(3.1.1a,b), und der Satz 2.4.3 lasst sich ubertragen.
Satz 3.1.2 Ω sei beschrankt. (a) Die Losung von (3.1.1a) ist eindeutig bestimmt. (b) Sind uI und uII
Losungen der Poisson-Gleichung zu Randwerten ϕI und ϕII so gilt
‖uI − uII‖∞ ≤ ‖ϕI − ϕII‖∞. (3.1.2)
Beweis. (b) Der Beweis des Satzes 2.4.3 kann wortlich wiederholt werden.(a) Sind uI und uII zwei Losungen von (3.1.1a), so zeigt (3.1.2), dass
∥∥uI − uII∥∥∞ ≤
∥∥ϕI − ϕII∥∥∞ = 0.
Also uI = uII .
Ebenso lassen sich die Satze 2.4.4 und 2.4.6 sinngemaß ubertragen.
1Johann Peter Gustav Lejeune Dirichlet, am 13 Februar 1805 in Duren (damals Frankreich) geboren, am 5 May 1859 inGottingen gestorben.

20 3. Die Poisson-Gleichung
3.2 Losungsdarstellung mit der Greenschen Funktion
Lemma 3.2.1 Die Losung von (3.1.1a) gehore zu C2(Ω), wobei Ω ein Normalgebiet sei. Dann gestattet udie Darstellung
u(x) = −∫
Ω
γ(ξ,x) f(ξ) dξ +∫
Γ
[γ(ξ,x)
∂
∂nu(ξ) − u(ξ)
∂
∂nξγ(ξ,x)
]dΓξ (3.2.1)
fur jede Grundlosung γ aus (2.2.9).
Der Beweis ist der gleiche wie in Satz 2.2.2 bzw. Zusatz 2.2.3. Der Term∫ΩεγΔudξ mit Ωε = Ω\Kε(x)
wird zu∫Ωεγfdξ. Da die Singularitat von γ(ξ,x) bei ξ = x integrierbar ist, konvergiert
∫Ωεγfdξ gegen∫
Ωγfdξ, wenn ε→ 0.
Ubungsaufgabe 3.2.2 a) Sei Ω ⊂ Rn beschrankt, x0 ∈ Ω, f ∈ C0(Ω\x0) und |f(x)| ≤ C |x − x0|−s furs < n. Man zeige:
∫Ω f(x)dx existiert als uneigentliches Integral.
b) Sei Ω ⊂ Rn beschrankt, und x0(ξ) ∈ Ω hange stetig von ξ ∈ D (D kompakt) ab. f(x, ξ) sei stetigin (x, ξ) ∈ Ω × D mit x �= x0(ξ) und erfulle |f(x, ξ)| ≤ C |x − x0(ξ)|−s, s < n. Man beweise, dassF (ξ) :=
∫Ω f(x, ξ)dx stetig ist: F ∈ C0(D).
Im Randintegral von (3.2.1) laßt sich u(ξ) durch ϕ(ξ) ersetzen (vgl. (3.1.1b)). Dagegen ist ∂u/∂n auf Γunbekannt und darf auch nicht beliebig vorgegeben werden, da die Randwerte (3.1.1b) die Losung schoneindeutig festlegen (vgl. Satz 3.1.2). Um
∫Γ γ∂u/∂ndξ zum Verschwinden zu bringen, muss man die Grund-
losung so wahlen, dass γ(ξ,x) = 0 fur ξ ∈ Γ,x ∈ Ω.
Definition 3.2.3 Eine Grundlosung g aus (2.2.9) heißt Greensche Funktion (erster Art), wenn g(ξ,x) = 0fur alle ξ ∈ Γ, x ∈ Ω.
Die Existenz einer Greenschen Funktion hangt eng mit der Losbarkeit der Randwertaufgabe fur diePotentialgleichung zusammen:
Bemerkung 3.2.4 Die Greensche Funktion existiert, wenn fur alle x ∈ Ω die Randwertaufgabe ΔΦ = 0 inΩ und Φ = −s(·,x) auf Γ eine Losung Φ ∈ C2(Ω) besitzt.
Die vorhergehenden Uberlegungen ergeben den
Satz 3.2.5 Ω sei Normalgebiet. Die Randwertaufgabe (3.1.1a) besitze eine Losung u ∈ C2(Ω). Die Existenzder Greenschen Funktion erster Art sei vorausgesetzt. Dann lasst sich u explizit darstellen durch
u(x) = −∫
Ω
g(ξ,x) f(ξ) dξ −∫
Γ
ϕ(ξ)∂
∂nξg(ξ,x)dΓξ . (3.2.2)
Im Folgenden wollen wir den Schluss umkehren. Die Existenz der Greenschen Funktion sei vorausgesetzt.Reprasentiert dann die durch Gleichung (3.2.2) definierte Funktion u die klassische Losung der Randwert-aufgabe (3.1.1a,b)? Hierzu ist insbesondere nachzuweisen, dass u ∈ C2(Ω) und Δu = f . Zunachst ist nochnicht einmal offensichtlich, dass die durch Gleichung (3.2.2) definierte Funktion u(x) stetig von x abhangt,denn die Definition einer Grundlosung γ(ξ,x) verlangt nicht die Stetigkeit bezuglich des zweiten Argumentesx. Trotzdem ist die Greensche Funktion g(ξ,x) bezuglich x aus C2(Ω\{ξ}), wie das folgende Resultat zeigt(vgl. [56, p. 67]).
Ubungsaufgabe 3.2.6 Ω sei Normalgebiet. Die Greensche Funktion fur Ω existiere, und fur festes y ∈ Ωgelte g(·,y) ∈ C2(Ω\{y}) (schwachere Voraussetzungen sind moglich!). Man beweise
g(x,y) = g(y,x) fur x,y ∈ Ω . (3.2.3)
Hinweis: Man wende die Greensche Formel (2.2.5b) mit Ωε = Ω\[Kε(x′) ∪ Kε(x′′)], x′,x′′ ∈ Ω,u(x) := g(x,x′) , v(x) := g(x,x′′) an und benutze (2.2.10).

3.2 Losungsdarstellung mit der Greenschen Funktion 21
Will man die Aussage des Satzes 3.2.5 umkehren, stoßt man auf die uberraschende Schwierigkeit, praziseBedingungen an den Quellterm f zu stellen. Notwendig fur u ∈ C2(Ω) ist die naturliche Forderung f ∈ C0(Ω).Diese ist aber nicht ausreichend, wie der folgende Satz zeigt, dessen Beweis am Ende dieses Abschnittesnachgetragen wird.
Satz 3.2.7 Auch wenn der Rand Γ und die Randwerte ϕ hinreichend glatt sind und die Greensche Funktionexistiert, gibt es Funktionen f ∈ C0(Ω), denen keine Losungen u ∈ C2(Ω) entsprechen.
Satz 3.2.7 zeigt, dass Gleichung (3.2.2) fur f ∈ C0(Ω) keineswegs eine klassische Losung darzustellenbraucht. Eine ausreichende Bedingung an f ist dagegen die Holder2-Stetigkeit.
Definition 3.2.8 (Holder-Stetigkeit) f ∈ C0(Ω) heißt Holder-stetig in Ω zum Exponenten λ ∈ (0, 1),falls eine Konstante C = C(f) existiert, sodass
|f(x) − f(y)| ≤ C |x − y|λ fur x,y ∈ Ω . (3.2.4a)
Wir schreiben f ∈ Cλ(Ω) und definieren die Norm ‖f‖Cλ(Ω) mit Hilfe der kleinsten Konstanten C, die(3.2.4a) und |f(x)| ≤ C erfullt:
‖f‖Cλ(Ω) := max
{sup
{ |f(x) − f(y)||x − y|λ
: x,y ∈ Ω, x �= y}, ‖f‖∞
}(3.2.4b)
f ∈ Ck(Ω) heißt k-fach Holder-stetig differenzierbar in Ω (zum Exponenten λ), falls Dνf ∈ Cλ(Ω) fur alle|ν| ≤ k. Dabei sind ν ein Multiindex vom Betrag |ν| ,
ν = (ν1, . . . , νn) mit νi ∈ N0, |ν| = ν1 + . . .+ νn, (3.2.5a)
und Dν ein |ν|-facher partieller Ableitungsoperator:
Dν =∂|ν|
∂xν11 ∂x
ν22 . . . ∂xνn
n. (3.2.5b)
Die k-fach Holder-stetig differenzierbaren Funktionen bilden den linearen Raum Ck+λ(Ω) mit der Norm
‖f‖Ck+λ(Ω) = max{‖Dνf‖Cλ(Ω) : |ν| ≤ k
}. (3.2.4c)
Wenn s = k + λ, wird auch Cs(Ω) fur Ck+λ(Ω) geschrieben. Die k-fach Lipschitz-stetig differenzierbarenFunktionen f ∈ Ck,1(Ω) ergeben sich fur die Wahl λ = 1 in (3.2.4a,b). Der Vollstandigkeit halber seihinzugefugt, dass
‖f‖Ck(Ω) = max {‖Dνf‖∞ : |ν| ≤ k} (3.2.4d)
als Norm in Ck(Ω) fur ganzzahliges k ≥ 0 gewahlt wird.
Ubungsaufgabe 3.2.9 a) f heißt lokal Holder-stetig in Ω, falls fur jedes x ∈ Ω eine Umgebung Kε(x)existiert, sodass f ∈ Cλ(Kε(x) ∩ Ω). Man beweise: Ist Ω kompakt, so folgt f ∈ Cλ(Ω) aus der lokalenHolder-Stetigkeit in Ω. Man formuliere und beweise entsprechende Aussagen fur Ck+λ(Ω) und Ck,1(Ω).
b) Sei s > 0. Man zeige |x|s ∈ Cs(KR(0)) falls s �∈ N, sonst |x|s ∈ Cs−1,1(KR(0)). Hinweis: 1−ts ≤ (1−t)s
fur 0 ≤ t ≤ 1, s ≥ 0.
Die Funktion u aus Gleichung (3.2.2) kann in u1 + u2 zerlegt werden, wobei u1 = −∫Ω gfdξ und
u2 = −∫Γϕ∂g/∂ndΓ. u ist Losung der Randwertaufgabe (3.1.1a), falls wir zeigen konnen, dass u1 und
u2 Losungen von
Δu1 = f in Ω, u1 = 0 auf Γ, Δu2 = 0 in Ω, u1 = ϕ auf Γ
sind.
2Otto Ludwig Holder, geb. am 22. Dez. 1859 in Stuttgart, gest. am 29. Aug. 1937 in Leipzig

22 3. Die Poisson-Gleichung
Satz 3.2.10 Falls die Greensche Funktion existiert und geeignete Bedingungen erfullt, ist
u(x) = −∫
Γ
ϕ(ξ)∂
∂nξg(ξ,x)dΓξ . (3.2.6)
klassische Losung von Δu = 0 in Ω und u = ϕ auf Γ.
Der Beweis verlauft im Prinzip wie fur Satz 2.3.9 (vgl. Leis [56, p. 69]).
Satz 3.2.11 Die Greensche Funktion g(·,x) ∈ C2(Ω\{x}), x ∈ Ω, existiere, und es sei f ∈ Cλ(Ω). Dannist
u(x) = −∫
Ω
f(ξ) g(ξ,x) dξ (3.2.7)
eine klassische Losung von Δu = f in Ω und u = 0 auf Γ.
Beweis. Die Randbedingung u(x) = 0 fur x ∈ Γ folgt leicht aus g(x, ξ) = 0 und (3.2.3). Die Eigenschaftu ∈ C1(Ω) und die Darstellung uxi(x) = −
∫Ω f(ξ)gxi(ξ,x)dξ ergeben sich aus der
Ubungsaufgabe 3.2.12 Seien Ω ⊂ Rn beschrankt und A := {(ξ,x) ∈ Ω × Ω : ξ �= x}. Fur die Ableitungenvon f nach x gelte Dν
xf ∈ C0(A) und |Dνxf(ξ,x)| ≤ C |x− ξ|−s) mit s < n fur alle |ν| ≤ k. Man beweise
F (x) :=∫Ωf(ξ,x)dξ ∈ Ck(Ω) und DνF (x) =
∫ΩDν
xf(ξ,x)dξ, |ν| ≤ k.
Zum Beweis von u ∈ C2(Ω) lasst sich dieser Schluss nicht wiederholen, denn gxixj = O(|ξ − x|−n) hateine nicht-integrierbare Singularitat. Wir schreiben die erste Ableitung in der Form
uxi(x) = −∫
Ω
[f(ξ) − f(x)] gxi(ξ,x) dξ − f(x)∫
Ω
gxi(ξ,x) dξ . (3.2.8a)
Sei ∂F (x) der Differenzenquotient (F (xε)− F (x))/ε mit xεj = xj + ε und xε
i = xi (i �= j). Die Produktregel∂j(FG)(x) = G(x)∂jF (x) + F (xε)∂jG(x) angewandt auf Gleichung (3.2.8a) liefert
∂juxi(x) = −∫
Ω
[f(ξ) − f(xε)] ∂jgxi(ξ,x) dξ − f(xε)∂j∂
∂xi
∫Ω
g(ξ,x) dξ .
Da [f(ξ) − f(x)]gxixj(ξ,x) = O(|ξ − x|λ−n) integrierbar ist, ergibt der Grenzprozess ε→ 0 die Darstellung
uxixj(x) = −∫
Ω
[f(ξ) − f(x)] gxixj (ξ,x) dξ − f(x)∂j∂2
∂xi∂xj
∫Ω
g(ξ,x) dξ . (3.2.8b)
Gleichung (3.2.8b) impliziert Δu =∫Ω[f(ξ) − f(x)]Δgdξ − f(x)Δ
∫Ωgdξ = −f(x)Δ
∫Ωg(ξ,x)dξ, sodass
Δ∫Ω gdξ = −1 zu zeigen bleibt. Man wahle KR(z) so, dass x ∈ KR(z) ⊂ Ω. Die Greensche Funktion hat die
Form (2.2.9): g = s+ Φ. Die ersten beiden Terme in∫Ω
g(ξ,x) dξ =∫
Ω\KR(z)
g(ξ,x) dξ +∫
KR(z)
Φ(ξ,x) dξ +∫
KR(z)
s(ξ,x) dξ
sind harmonisch in KR(z), sodass Δ∫
KR(z)s(ξ,x)dξ = −1 zu beweisen ist. σ(r) sei durch s(ζ,x) = σ(|ζ − x|)
erklart (vgl. (2.2.1)). Fur festes r > 0 sei
v(x) :=1
ωnrn−1
∫∂Kr(z)
s(ξ,x) dΓξ (3.2.8c)
gesetzt. Fur alle x �∈ ∂Kr(z) (d.h. |x − z| �= r) ist v harmonisch, weil s(ζ,x) auf ∂Kr(z) nicht-singular istund Δxs(ζ,x) = 0 erfullt. Da s(·,x) in Kr(z) fur r < |z − x| harmonisch ist, gilt die Mittelwerteigenschaft(2.3.1), die sich jetzt als
v(x) = s(z,x) = σ(|z − x|) fur |z − x| > r (3.2.8d)
schreibt. Gemaß Ubungsaufgabe 3.2.2b ist v(x) stetig in Rn, sodass auch
v(x) = σ(r) fur |z − x| = r (3.2.8e)

3.2 Losungsdarstellung mit der Greenschen Funktion 23
gilt. v ist in Kr(x) harmonisch mit den konstanten Randwerten (3.2.8e). Die eindeutige Losung lautet daher
v(x) = σ(r) fur |z − x| ≤ r (3.2.8f)
Die Gleichungen (3.2.8c,d,f) ergeben∫∂Kr(z)
s(ξ,x) dΓξ = ωnrn−1σ(max{r, |z − x|})
und wegen 0 < |z − x| < R∫Kr(z)
s(ξ,x) dξ =∫ R
0
∫∂Kr(z)
s(ξ,x) dΓξ dr
= ωn
∫ |z−x|
0
rn−1σ(|z − x|) dr + ωn
∫ R
|z−x|rn−1σ(r) dr
= ωn|z − x|n
nσ(|z− x|) + ωn
rn
nσ(r)
∣∣∣∣R|z−x|
− ωn
∫ R
|z−x|
rn
nσ′(r) dr
=ωn
nRnσ(R) − ωn
∫ R
|z−x|
rn
n(−r
1−n
ωn) dr =
ωn
nRnσ(R) +
∫ R
|z−x|
r
ndr
=ωn
nRnσ(R) +
R2
2n− |z− x|2
2n.
Unabhangig von R, n und z ergibt sich hieraus Δ∫
KR(z) s(ζ,x)dζ = −1.
Die Satze 3.2.10 und 3.2.11 ergeben den
Satz 3.2.13 Unter den Voraussetzungen der Satze 3.2.10 und 3.2.11 stellt (3.2.2) die klassische Losung derRandwertaufgabe (3.1.1a) dar.
Abschließend seien zwei Ungleichungen fur die Greensche Funktion als Ubung gestellt:
Ubungsaufgabe 3.2.14 a) In Ω moge die Greensche Funktionen g existieren. Man zeige
0 ≤ g(x,y) ≤ s(x,y) fur x,y ∈ Ω ⊂ Rd, d ≥ 3. (3.2.9)
Welche Ungleichung entsteht fur n = 2?b) Seien g1, g2 Greensche Funktionen in Ω1 ⊂ Ω2. Man beweise
g1(x,y) ≤ g2(x,y) fur x,y ∈ Ω1 ⊂ Ω2. (3.2.10)
Hinweis: Ubungsaufgabe 2.3.14.
Beweis des Satzes 3.2.7. Aufgrund eines spateren Satzes (Satz 6.1.13) folgt Satz 3.2.7 aus Satz 3.2.15:
Satz 3.2.15 Die Losung u hangt nicht stetig von f ab, wenn die Supremumsnorm (2.4.1) als Norm inC0(Ω) und jene aus (3.2.4d) als Norm in C2(Ω) verwendet werden.
Beweis. Sei Ω = K1(0) ⊂ R2 und ϕ = 0. Der Kreis Ω ist ein Normalgebiet, fur das die Greensche Funktionbekannt ist (vgl. Satz 3.3.1). Gemaß Satz 3.2.11 existieren Losungen un ∈ C2(Ω) von Δun = fn in Ω, un = 0auf Γ fur die Funktionen
fn(x) =x2
2 − x21
r2ρn(r), r := |x| , ρn(r) := min
{nr, 1/
∣∣∣logr
2
∣∣∣} ,die zu C0(Ω) gehoren und gleichmaßig beschrankt sind: ‖fn‖∞ = 1/ log 2. Nach Satz 3.2.11 giltun(x) = −
∫Ω g(ξ,x)fn(ξ)dξ . Da |fn(ξ)| ≤ n |ξ|, folgt aus Ubungsaufgabe 3.2.12
unx1x1
(x) = −∫
Ω
gx1x1(ξ,x) fn(ξ)dξ = −∫
Ω
Φx1x1(ξ,x) fn(ξ)dξ −∫
Ω
sx1x1(ξ,x) fn(ξ)dξ in x = 0,

24 3. Die Poisson-Gleichung
wobei g = Φ+s. Das erste Integral ist beschrankt, weil Φ ∈ C2(Ω). Die Ableitung der Singularitatenfunktionlautet sx1x1(ξ, 0) = (ξ21 − ξ22)/ |ξ|4. Die spezielle Wahl von fn liefert fur x = 0
unx1x1
(0) = −∫
Ω
Φx1x1(ξ, 0) fn(ξ)dξ −∫
Ω
[ξ21 − ξ22
]2 |ξ|−6ρn(|ξ|) dξ.
Das Oberflachenintegral K :=∫
∂Kr(0)[ξ21 − ξ22 ]2 |ξ|−5 dξ > 0 ist von r ∈ (0, 1] unabhangig, sodass das zweite
Integral die Form In := K∫ 1
0 r−1ρn(r)dr annimmt. Da
∫ 1
ε
[r| log( r
2 )|]−1 dr fur ε→ 0 divergiert, erhalten wir
In → ∞ fur n → ∞. Wegen ‖un‖C2(Ω) ≥∣∣un
x1x1(0)
∣∣, ist die Abbildung f �→ u nicht beschrankt, also nichtstetig.
3.3 Die Greensche Funktion fur die Kugel
Satz 3.3.1 Die Greensche Funktion fur die Kugel KR(y) ist durch die Funktion aus (2.2.11a) gegeben.Fur f ∈ Cλ(Ω) und ϕ ∈ C2+λ(Γ) mit 0 < λ < 1 definiert die Darstellungsformel (3.2.2) eine Losungu ∈ C2+λ(Ω) der Randwertaufgabe Δu = f in Ω, u = ϕ auf Γ.
Den Beweis des Satzes liefert ein Resultat von Schauder3, das im Satz 9.1.24 zitiert wird.Im Falle n = 2 lasst sich der R2 mit C vermoge (x, y) ↔ z = x + iy identifizieren. Die folgenden
Uberlegungen basieren auf
Ubungsaufgabe 3.3.2 Die Abbildung Φ : z = x + iy ∈ Ω �→ ζ = ξ + iη = Φ(z) ∈ Ω′ sei holomorph. Manzeige
Δzu(Φ(z)) = |Φ′|2 Δζu(ζ), Φ′ = ξx + iηx (3.3.1)fur u ∈ C2(Ω′).
Gleichung (3.3.1) zeigt insbesondere, dass eine holomorphe Koordinatentransformation harmonische Funk-tionen wieder in harmonische Funktionen abbildet. Ein beliebiges, einfach zusammenhangendes Gebiet mitmindestens zwei Randpunkten lasst sich dank des Riemannschen Abbildungssatzes durch eine konformeAbbildung Φz0 : z ∈ Ω �→ Φz0(z) ∈ K1(0) so auf den Einheitskreis abbilden, dass Φz0(z0) = 0 fur jedes vor-gegebene z0 ∈ Ω. Sei g(ζ, ζ′) die Greensche Funktion in K1(0). Man pruft nach, dass G(z, z0) := g(Φz0(z), 0)wieder Grundlosung ist. z ∈ ∂Ω impliziert Φz0(z) ∈ ∂K1(0), d.h. G(z, z0) = 0. Also ist G(z, z0) GreenscheFunktion in Ω. Dies beweist
Satz 3.3.3 Sei Ω ⊂ R2 einfach zusammenhangend mit mindestens zwei Randpunkten. Dann existiert dieGreensche Funktion erster Art fur Ω.
Die explizite Darstellung verschiedener Greenscher Funktionen findet man z.B. bei [89, p. 348]. Vonnumerischem Interesse ist gelegentlich die Tatsache, dass man durch konforme Abbildungen storende (z.B.einspringende) Ecken in Ω beseitigen kann (vgl. [33, p. 70]).
Beispiel 3.3.4 Sei Ω das L-Gebiet aus Beispiel 2.1.4. Wahle Φ(z) = z2/3 : Ω �→ Ω′. Φ ist konform inΩ. Die Winkelseiten Γ0 ⊂ ∂Ω (vgl. Abbildung 2.1.1) werden in eine einzige Strecke abgebildet, sodass Ω′
keine einspringende Ecke mehr hat. Der Poisson-Gleichung Δu = f in Ω entspricht die Gleichung Δv(ζ) =94 |ζ| f(ζ) in Ω′.
3.4 Die Neumann-Randwertaufgabe
In (3.1.1b) wie auch (2.1.1b) wurden die Randwerte u = ϕ auf Γ vorgeschrieben. Diese sogenannte Dirichlet-Bedingung oder “Randbedingung erster Art” ist nicht die einzige Moglichkeit. Eine Alternative ist die Neu-mann4-Bedingung
∂
∂nu(x) = ϕ(x) auf Γ. (3.4.1)
3Juliusz Pawel Schauder, geb. am 21. Sept. 1899 in Lvov (Galizien, Osterreich), gest. im Sept. 1943 in Lvov.4Carl Gottfried Neumann, am 7. Mai 1832 in Konigsberg geboren und am 27. Marz 1925 in Leipzig gestorben.

3.5 Die Integralgleichungsmethode 25
In der Physik tritt diese zweite Randbedingung, wie sie auch genannt wird, haufiger auf als die Dirichlet-Bedingung. Ist z.B. u das Geschwindigkeitspotential eines Gases, so bedeutet ∂u/∂n = 0, dass sich das Gasam Rande γ nur tangential bewegen kann (d.h. die Wand nicht durchdringen kann).
Bis auf Ausnahmefalle ist die Randwertaufgabe Lu = f in Ω und ∂u/∂n = ϕ auf Γ eindeutig losbar. EinAusnahmefall liegt aber gerade fur L = Δ vor:
Satz 3.4.1 Ω sei Normalgebiet. Die Poisson-Gleichung Δu = f mit der Neumann-Randbedingung (3.4.1)kann nur losbar sein, wenn ∫
Γ
ϕ(ξ)dΓξ =∫
Ω
f(x)dx. (3.4.2)
Existiert eine Losung u, so ist auch u+ c fur jede Konstante c ∈ C eine Losung.
Beweis. i) Man wiederhole den Beweis von Lemma 2.3.6 fur Δu = f .ii) Offenbar erfullt u+ c ebenfalls die Gleichungen.
Spater (in Beispiel 7.4.8) werden wir zeigen, dass die Neumann-Randwertaufgabe fur die Poisson-Gleichunggenau dann eine Losung besitzt, wenn (3.4.2) erfullt ist, und dass sich zwei Losungen nur um eine Konstanteunterscheiden konnen.
In der Darstellung (3.2.1) treten sowohl die Werte u(ξ), ξ ∈ Γ, als auch die Normalenableitung ∂u/∂nauf. Die Greensche Funktion erster Art war so gewahlt, dass g(ξ,x) = 0 fur ξ ∈ Γ. Im Falle der zweitenRandbedingung (3.4.1) macht man den Ansatz ∂γ(ξ,x)/∂nξ = c (c : Konstante), d.h.
∂
∂nξΦ(ξ,x) = c− ∂
∂nξs(ξ,x)
fur Φ = γ − s. Zusatz 2.2.3 mit u ≡ 1 und γ = s liefert∫Γ
∂
∂nξΦ(ξ,x)dΓξ = cL+ 1 mit L :=
∫Γ
dΓ .
Da Φ harmonisch sein muss (d.h. f := ΔΦ = 0), ist gemaß Gleichung (3.4.2) cL + 1 = 0 eine notwendigeBedingung fur die Existenz von Φ. Damit lautet die Bedingung an die Greensche Funktion zweiter Art furdie Potentialgleichung
∂
∂nxγ(ξ,x) = −1 /
∫Γ
dΓ .
Damit wird der Term∫Γu ∂γ/∂n dΓ in (3.2.1) zu const ·
∫ΓudΓ. Da u nur bis auf eine Konstante bestimmt
ist (vgl. Satz 3.4.1), kann man diese Konstante durch die zusatzliche Bedingung∫Γ udΓ = 0 festlegen. Damit
ergibt sich folgendes Resultat, wenn wir g fur γ schreiben:
u(x) = −∫
Ω
f(ξ)g(ξ,x)dξ +∫
Γ
ϕ(ξ)g(ξ,x)dΓξ .
Die Greensche Funktion zweiter Art fur die Kugel KR(0) ⊂ R3 ist bei Leis [56, p. 79] angegeben.
3.5 Die Integralgleichungsmethode
In der Darstellung (3.2.1) der Poisson-Losung kann die Singularitatenfunktion s insbesondere als γ gewahltwerden. Setzt man außerdem die vorgegebenen Neumann-Daten ϕ aus (3.4.1) ein, erhalt man
u(x) = −∫
Γ
k(x, ξ)u(ξ)dΓξ + g(x) fur x ∈ Ω (3.5.1)
mit der Kernfunktion k(x, ξ) := ∂s(ξ,x)/∂nξ und der folgenden Funktion g:
g(x) := g1(x) + g2(x), g1(x) :=∫
Γ
s(x, ξ)ϕ(ξ)dΓξ , g2(x) :=∫
Ω
s(ξ,x)f(ξ)dξ .

26 3. Die Poisson-Gleichung
Die rechte Seite von Gleichung (3.5.1) mit der noch unbekannten Randbelegung u(ξ), ξ ∈ Γ, kann man alsLosungsansatz verwenden:
Φ(x) = −∫
Γ
k(x, ξ)u(ξ)dΓξ + g(x). (3.5.2)
Der erste Summand der rechten Seite in (3.5.2) heißt Doppelschichtpotential (Dipolpotential), g1 ist einEinfachschichtpotential, wahrend g2 ein Volumenpotential darstellt.
Fur jedes u ∈ C0(Γ) ist Φ aus (3.5.2) eine Losung der Poisson-Gleichung (3.1.1a) in Ω. Φ ist aber auch furArgumente x im Außenraumgebiet Rn\Ω definiert. Eine genauere Untersuchung der Kernfunktion k(x, ζ)zeigt, dass diese fur glatte Rander Γ nur schwach singular ist. Damit ist Φ auch fur x ∈ Γ erklart. Dienunmehr auf dem gesamten Rn definierte Funktion Φ ist in den Punkten des Randes unstetig. In x0 ∈ Γexistieren sowohl der innere Grenzwert Φ−(x0) fur Ω � x → x0 als auch der außere Grenzwert Φ+(x0) furRn\Ω � x → x0. Als drittes existiert der Funktionswert Φ(x0) von (3.5.2). Ihr Zusammenhang ist durch diefolgenden Sprungrelationen gegeben (vgl. Hackbusch [44, Satz 8.2.8]):
Φ+(x0) − Φ−(x0) = −u(x0) fur x0 ∈ Γ, (3.5.3a)Φ+(x0) + Φ−(x0) = 2Φ(x0) fur x0 ∈ Γ, (3.5.3b)
Damit der Ansatz (3.5.2) die Losung u aus (3.5.1) ergibt, mussen die (aus dem Inneren fortgesetzten)Randwerte Φ− mit der unter dem Integral eingesetzten Funktion u ubereinstimmen: Φ− = u. Die Gleichungen(3.5.3a,b) lost man nach Φ− auf: Φ−(x0) = Φ(x0) + 1
2u(x0). Die Randbedingung Φ− = u fuhrt somit auf
u(x0) = 2Φ(x0) = −2∫
Γ
k(x, ξ)u(ξ)dΓξ + 2g(x) fur x0 ∈ Γ. (3.5.4)
Gleichung (3.5.4) nennt man eine Fredholmsche Integralgleichung zweiter Art fur die unbekannte Funktionu ∈ C0(Γ). Das ursprungliche Neumann-Randwertproblem (3.1.1a), (3.4.1) und die Integralgleichung (3.5.4)sind in folgendem Sinne aquivalent:
(a) Ist u die Losung des Neumann-Randwertproblems, so erfullen die Randwerte u(ζ), ζ ∈ Γ, die Integral-gleichung (3.5.4).
(b) Ist u ∈ C0(Γ) eine Losung der Integralgleichung (3.5.4), so liefert die Darstellung (3.5.1) die Losung von(3.1.1a), (3.4.1) im gesamten Gebiet Ω.
Die Integralgleichung (3.5.4) ist nur ein Beispiel mehrerer moglicher Integralgleichungsformulierungen, diesich hinsichtlich der Kernfunktion k(x, ξ) unterscheiden. Da k von der Singularitatenfunktion abgeleitet wird,ist diese Methode auf alle Differentialgleichungen mit bekannter Singularitatenfunktion anwendbar.
Die Uberfuhrung einer Randwertaufgabe in eine Integralgleichung und die anschließende Losung derIntegralgleichung nennt man Integralgleichungsmethode. Sie erlaubt zum Beispiel einen neuen Zugang zuExistenzaussagen, indem man die Losbarkeit von (3.5.4) nachweist.
Zur numerischen Losung der Integralgleichung (3.5.4) gibt es mehrere Zugange. Wie bei der Finite-Element-Methode (siehe §8) ersetzt man u durch eine Ansatzfunktion eines n-dimensionalen Raumes Vn,z.B. durch eine stuckweise lineare Funktion, die uber einer Zerlegung der Oberflache Γ in Dreiecksfacettendefiniert ist. Fordert man dann die Gleichheit (3.5.4) fur alle x0, die den n Ecken der Dreiecke entsprechen,erhalt man die Kollokationsmethode. Integriert man dagegen die Gleichung (3.5.4) mit den Basisfunktionenbj ∈ Vn, ergibt sich die Galerkin-Methode, die direkt dem Vorgehen in §8 entspricht. Beide Diskretisierungs-verfahren werden unter dem Namen “Randelementmethode” (oft abgekurzt als BEM fur “boundary elementmethod”) zusammengefasst.
Anders als bei der Finite-Element-Methode in §8 hat man bei der Randelementmethode kompliziertereIntegrationen durchzufuhren (Oberflachen als Integrationsbereich, singulare Integranden), die aber trotzdemnumerisch effizient durchfuhrbar sind.
Literatur zur Integralgleichungs- und Randelementmethode findet man z.B. bei Hackbusch [44, §§7-9],Kreß [54] und Sauter-Schwab [72].

4Differenzenmethode fur die Poisson-Gleichung
4.1 Einfuhrung: Der eindimensionale Fall
Bevor Differenzenverfahren fur die Poisson-Gleichung entwickelt werden, wollen wir zunachst an die Diskre-tisierung gewohnlicher Differentialgleichungen erinnern. Die Differentialgleichung zweiter Ordnung
a(x)u′′(x) + b(x)u′(x) + c(x)u(x) = f(x)
kann durch Anfangswerte u(x1) = u1, u′(x1) = u′1 oder Randwerte u(x1) = u1, u(x2) = u2 erganztwerden. Die gewohnlichen Anfangswertaufgaben entsprechen den hyperbolischen und parabolischen Anfangs-wertproblemen, wahrend man ein gewohnliches Randwertproblem als elliptische Randwertaufgabe in einerVariablen auffassen kann. Insbesondere ist
−u′′(x) = f(x) in x ∈ (0, 1) , (4.1.1a)u(0) = ϕ0, u(1) = ϕ1, (4.1.1b)
als die eindimensionale Poisson-Gleichung −Δu = f im Gebiet Ω = (0, 1) mit Dirichlet-Werten auf demRand Γ = {0, 1} anzusehen.
Die Differenzenverfahren sind dadurch charakterisiert, dass Ableitungen durch Differenzenquotienten(dividierte Differenzen) ersetzt werden, die im Folgenden nur “Differenzen” genannt werden. Die ersteAbleitung u′(x) kann durch verschiedene (sogenannte “erste”) Differenzen approximiert werden, z.B. durch
• die Vorwarts- oder rechtsseitige Differenz(∂+u
)(x) := [u(x+ h) − u(x)] /h, (4.1.2a)
• die Ruckwarts- oder linksseitige Differenz(∂−u
)(x) := [u(x) − u(x− h)] /h, (4.1.2b)
(rechts- und linksseitige Differenzen werden gemeinsam als einseitige Differenzen bezeichnet),
• die symmetrische Differenz (∂0u
)(x) := [u(x+ h) − u(x− h)] / (2h) , (4.1.2c)
wobei h > 0 die Schrittweite genannt wird.

28 4. Differenzenmethode fur die Poisson-Gleichung
Eine naheliegende zweite Differenz fur u′′(x) ist(∂−∂+u
)(x) := [u(x+ h) − 2u(x) + u(x− h)] /h2. (4.1.2d)
Man bezeichnet ∂+, ∂−, ∂0, ∂+∂− auch als Differenzenoperatoren. ∂−∂+ lasst sich als Produkt ∂− ◦ ∂+ oderauch ∂+ ◦ ∂− deuten, d.h. (∂+∂−)u(x) = ∂+(∂−u(x)).
Lemma 4.1.1 Sei [x− h, x+ h] ⊂ Ω. Es gilt
(∂+u
)(x) = u′(x) + hR mit |R| ≤ 1
2‖u‖C2(Ω) , falls u ∈ C2(Ω), (4.1.3a)(
∂0u)(x) = u′(x) + h2R mit |R| ≤ 1
6‖u‖C3(Ω) , falls u ∈ C3(Ω), (4.1.3b)(
∂−∂+u)(x) = u′′(x) + h2R mit |R| ≤ 1
12‖u‖C4(Ω) , falls u ∈ C4(Ω), (4.1.3c)
Beweis. Der Beweis wird nur fur (4.1.3c) vorgefuhrt. Setzt man die Taylor1-Formel
u(x± h) = u(x) ± hu′(x) + h2u′′(x)/2 ± h3u′′′(x)/6 + h4R4 (4.1.4a)
mit R4 =h−4
3!
∫ x+h
x
u′′′′(ξ)(x ± h− ξ)3dξ =14!u′′′′(ξ ± ϑh) (4.1.4b)
und ϑ ∈ (0, 1) in Gleichung (4.1.2d) ein, folgt (4.1.3c) wegen R = [u′′′′(x+ ϑ1h) + u′′′′(x− ϑ2h)]/24.
Ω. . . . . . .. . . . . . . .. ΩΩ
h
h
Abb. 4.1.1. Gitter fur h = 1/8
Wir ersetzen Ω = (0, 1) und Ω = [0, 1] durch die Gitter
Ωh = {h, 2h, . . . , (n− 1)h = 1 − h} , (4.1.5a)
Ωh = {0, h, 2h, . . . , 1 − h, 1} (4.1.5b)
der Schrittweite h = 1/n (vgl. Abbildung 4.1.1). Fur x ∈ Ωh
enthalt ∂−∂+u(x) nur die Werte von u bei x, x±h ∈ Ωh. Unter derVoraussetzung, dass die Losung u von Gleichung (4.1.1a,b) zu C4(Ω) gehort, liefert (4.1.3c) die Gleichungen
−∂−∂+u(x) = f(x) + O(h2) fur x ∈ Ωh. (4.1.6)
Streicht man in Gleichung (4.1.6) den Restterm O(h2), ergibt sich
−∂−∂+uh(x) = h−2 [−uh(x− h) + 2uh(x) − uh(x+ h)] = f(x) fur x ∈ Ωh. (4.1.7a)
Diesen n − 1 Gleichungen stehen n + 1 Unbekannte {un(x) : x ∈ Ωh} gegenuber. Die fehlenden zweiGleichungen ergeben sich aus der Randbedingung (4.1.1b):
uh(0) = ϕ0, uh(1) = ϕ1. (4.1.7b)
uh ist eine auf Ωh definierte Gitterfunktion. Ihre Einschrankung auf Ωh ergibt den Vektor
uh =
⎛⎜⎜⎜⎝uh(h)uh(2h)
...uh(1 − h)
⎞⎟⎟⎟⎠ .
Eliminiert man in (4.1.7a) die Komponenten uh(0) und uh(1) mit Hilfe von Gleichung (4.1.7b), bleibt dasGleichungssystem
Lhuh = qh (4.1.8a)
1Brook Taylor, geb. 18. Aug. 1685 in Edmonton, Middlesex, England, gest. 29. Dez. 1731 in Somerset House, London

4.2 Funfpunktformel 29
mit
Lh = h−2
⎡⎢⎢⎢⎢⎢⎢⎢⎣
2 −1−1 2 −1
−1 2 −1. . .
. . .. . .
−1 2 −1−1 2
⎤⎥⎥⎥⎥⎥⎥⎥⎦, qh =
⎡⎢⎢⎢⎢⎢⎢⎢⎣
f(h) + h−2ϕ0
f(2h)f(3h)...f(1 − 2h)f(1 − h) + h−2ϕ1
⎤⎥⎥⎥⎥⎥⎥⎥⎦. (4.1.8b)
4.2 Funfpunktformel
Punkte von Punkte von
Ωh
Γh
x
y
Abb. 4.2.1. Zweidimensionales Gitter
Wir wahlen zunachst das Einheitsquadrat
Ω = {(x, y) : 0 < x < 1, 0 < y < 1}
als zugrundeliegendes Gebiet. Allgemeinere Gebiete werdenin §4.8 diskutiert werden. Bei der Diskretisierung wird Ωersetzt durch das Gitter
Ωh = {(x, y) ∈ Ω : x/h, y/h ∈ Z} (4.2.1a)
zur aquidistanten2 Schrittweite h = 1/n (n ∈ N) (vgl. Ab-bildung 4.2.1). Die diskreten Randpunkte bilden die Menge
Γh = {(x, y) ∈ Γ : x/h, y/h ∈ Z} . (4.2.1b)
Wie in (4.1.1b) setzen wirΩh = Ωh ∪ Γh =
{(x, y) ∈ Ω : x/h, y/h ∈ Z
}(4.2.1c)
In der Poisson-Gleichung
−Δu ≡ −uxx − uyy = f in Ω, (4.2.2a)u = ϕ auf Γ (4.2.2b)
lassen sich die doppelten Ableitungen uxx und uyy jeweils durch die Differenz (4.1.3c) in x- bzw. y-Richtungersetzen:
(Δhu) (x, y) :=(∂−x ∂
+x + ∂−y ∂
+y
)u(x, y)
= h−2 [u(x− h, y) + u(x+ h, y) + u(x, y − h) + u(x, y + h) − 4u(x, y)] .(4.2.3)
Da auf der rechten Seite von (4.2.3) die Funktion u an funf Punkten ausgewertet wird, heißt Δh auchFunfpunktformel. Die Diskretisierung der Randwertaufgabe (4.2.2a,b) mit Hilfe von Δh fuhrt auf dieDifferenzengleichungen
−Δhuh(x) = f(x) fur x ∈ Ωh, (4.2.4a)uh(x) = ϕ(x) fur x ∈ Γh. (4.2.4b)
Durch (4.2.4a,b) erhalt man eine Gleichung pro Gitterpunkt x = (x, y) ∈ Ωh und damit eine Gleichungpro Komponente der Gitterfunktion uh = (uh(x))x∈Ωh
. Anders als im eindimensionalen Fall gibt es keinenaturliche Anordnung der Gitterpunkte, sodass man nicht sofort zu einer Matrixdarstellung wie in (4.1.8b)gelangt. Die einzig naturliche Indizierung von un ist die durch x ∈ Ωh oder das Paar (i, j) ∈ N2 mitx = (x, y) = (ih, jh). Die Matrixelemente seien durch
Lh,xξ := Lxξ :=
⎧⎨⎩4h−2 falls x = ξ ∈ Ωh,
−h−2 falls x ∈ Ωh, ξ ∈ Ωh, x− ξ =(
0±h
)oder x− ξ =
(±h0
),
0 sonst(4.2.5)
2Die im Folgenden beschriebenen Differenzenverfahren besitzen stets aquidistante Schrittweiten. Eine Variante mit allge-meineren Gittern sind die sogenannten Box-Schemata (vgl. §8.8.8.3). Sie sind andererseits eng verwandt mit Finite-Element-Verfahren.

30 4. Differenzenmethode fur die Poisson-Gleichung
erklart. Fur x = ξ ist Lxx ein Diagonalelement; im zweiten Falle (wenn Lxξ = −h−2) heißen x und ξbenachbart. Eliminiert man die Komponenten uh(x) fur alle x ∈ Γh mit Hilfe von Gleichung (4.2.4b), nimmtGleichung (4.2.4a) die folgende Form an:∑
ξ∈Ωh
Lxξuh(ξ) = qh(x) fur x ∈ Ωh, (4.2.6a)
wobei qh := fh + ϕh, fh(x) := f(x), ϕh(x) := −∑ξ∈Γh
Lxξ uh(ξ) = −∑ξ∈Γh
Lxξ ϕ(ξ). (4.2.6b)
Zum Beweis spalte man die Summe
−Δhuh(x) =∑
ξ∈Ωh
Lxξuh(ξ)
in∑
ξ∈Ωh. . . und
∑ξ∈Γh
. . . auf. Die zweite Teilsumme ist −ϕh aus (4.2.6b) und wird auf die rechte Seiteder Gleichung gebracht.
Bemerkung 4.2.1 fh ist die Beschrankung von f auf das Gitter Ωh. Fur alle randfernen Punkte giltϕh(x) = 0; dabei heißt x ∈ Ωh randfern, falls alle Nachbarn x ± (0, h) und x ± (h, 0) zu Ωh gehoren.Im Falle homogener Randwerte ϕ = 0 ist qh = fh.
Das Gleichungssystem (4.2.6a) schreibt man wieder in der Form (4.1.8a):
Lhuh = qh,
wobei die MatrixLh = (Lxξ)x,ξ∈Ωh
(4.2.5’)
und die Gitterfunktionen uh = (uh(x))x∈Ωhund qh = (qh(x))x∈Ωh
durch ihre Komponenten beschriebensind (vgl. (4.2.5), (4.2.6b)). Genaugenommen ist Lh keine Matrix, sondern eine lineare Abbildung, da dieIndizes x ∈ Ωh nicht angeordnet sind.
Ubungsaufgabe 4.2.2 a) Eine N ×N -Matrix P heißt Permutationsmatrix, falls w := Pv fur alle v ∈ RN
die Koeffizienten wi = vπ(i), 1 ≤ i ≤ N , besitzt, wobei π eine Permutation der Indizes {1, . . . , N} ist. Manzeige: P ist unitar, d.h. P−1 = P�.
b) I sei eine Indexmenge mit N Elementen. Die “Matrix”-Koeffizienten Aαβ (α, β ∈ I) seien gegeben.Der Anordnung α1, . . . , αN der Indizes entspricht die N × N -Matrix A = (aij)i,j=1,...,N mit aij = Aαi,αj .Sei A die Matrix, die zu einer zweiten Anordnung α1, . . . , αN von I gehort. Man beweise: Es gibt einePermutationsmatrix P , sodass A = PAP�.
c) Sei Aαβ = Aβα fur alle α, β ∈ I. Man zeige: Fur jede Anordnung der Indizes ist die zugehorige Matrixsymmetrisch.
Eine mogliche lineare Aufzahlung der Indizes x ∈ Ωh ist durch die lexikographische Anordnung
(h, h), (2h, h), (3h, h), . . . (1 − h, h),(h, 2h), (2h, 2h), (3h, 2h), . . . (1 − h, 2h),
...(h, 1 − h), (2h, 1 − h), (3h, 1 − h), . . . (1 − h, 1 − h),
(4.2.7)
gegeben. Allgemein geht der Punkt x = (x1, . . . , xd) dem Punkt y = (y1, . . . , yd) in der lexikographischenAnordnung voraus (d.h. “x < y”), wenn fur ein j ∈ {1, . . . , d} die Bedingungen xi = yi (fur alle i > j) undxj < yj zutreffen. Jede Zeile in (4.2.7) entspricht einer sogenannten x-Linie im Gitter Ωh (vgl. Abbildung4.2.1). Ein Vektor uh, dessen (n−1)2 Komponenten in der Reihenfolge (4.2.7) aufgezahlt sind, zerfallt daherin n − 1 Blocke (sogenannte x-Blocke). Die Blockzerlegung der Vektoren erzeugt eine Blockzerlegung derMatrix Lh, die in (4.2.8) angegeben ist.

4.2 Funfpunktformel 31
Ubungsaufgabe 4.2.3 a) Bei lexikographischer Nummerierung der Gitterpunkte hat die Matrix Lh dieGestalt
Lh = h−2
⎡⎢⎢⎢⎢⎢⎣T −I−I T −I
. . . . . . . . .−I T −I
−I T
⎤⎥⎥⎥⎥⎥⎦ , T =
⎡⎢⎢⎢⎢⎢⎣4 −1−1 4 −1
. . . . . . . . .−1 4 −1
−1 4
⎤⎥⎥⎥⎥⎥⎦ , (4.2.8)
wobei T eine (n−1)×(n−1)-Matrix ist und Lh (n−1)2 Blocke enthalt. I ist die (n−1)×(n−1)-Einheitsmatrix.b) Ω sei das Rechteck Ω = (0, a) × (0, b) = {(x, y) : 0 < x < a, 0 < y < b}. Die Schrittweite h erfulle die
Bedingungen a = nh und b = mh. Man zeige: Die Diskretisierung (4.2.4a,b) in dem entsprechenden GitterΩh fuhrt zu einer Matrix, die ebenfalls die Gestalt (4.2.8) besitzt. Dabei enthalt Lh aber (m− 1)2 Blocke derGroße (n− 1) × (n− 1).
Eine weitere, haufig verwendete Anordnung ist das Schachbrettmuster. Hierzu teilt man Ωh in die “weißen”und “schwarzen” Felder auf:
Ωwh := {(x, y) : (x+ y) /h ungerade},
Ωsh := {(x, y) : (x+ y) /h gerade}.
(4.2.9)
Man nummeriert zunachst die weißen Felder (x, y) ∈ Ωwh lexikographisch durch, danach diejenigen von Ωs
h.Die Zerlegung (4.2.9) induziert eine Zerlegung der Vektoren in 2 Blocke und eine Zerlegung der Matrix Lh
in 2 · 2 = 4 Blocke.
Ubungsaufgabe 4.2.4 Bezuglich der Schachbrettanordnung nimmt die Matrix Lh die Form
Lh = h−2
4. . . A
44
A�. . .
4
(4.2.10)
an, wobei A eine im Allgemeinen rechteckige Blockmatrix ist, weil fur gerades n Ωwh und Ωs
h verschieden vielePunkte enthalten.
Die vollstandige (n − 1)2 × (n − 1)2 -Matrix Lh aus (4.2.8) oder (4.2.10) wird weder fur die theore-tischen Untersuchungen des Gleichungssystems Lhuh = qh noch fur ihre numerische Auflosung benotigt.Alle im Folgenden betrachteten Eigenschaften von Lh sind invariant gegenuber einer Umnummerierung derGitterpunkte. Numerische Verfahren zur Auflosung von Lhuh = qh benutzen zwar implizit eine Anordnungder Gitterpunkte (ausgenommen spezielle Algorithmen fur Parallelrechner), sie verwenden aber nie die voll-standige (n−1)2×(n−1)2-Matrix Lh. Jeder brauchbare Algorithmus muss berucksichtigen, dass Lh schwachbesetzt ist, d.h. wesentlich mehr Null- als Nichtnullelemente besitzt.
Im Folgenden werden wir wieder zur Indizierung mittels x ∈ Ωh zuruckkehren. Trotzdem werden wir vonder durch (4.2.5) definierten Matrix Lh sprechen.
Der Differenzenoperator Δh wird auch durch den “ Stern”
Δh = h−2
⎡⎣ 11 −4 1
1
⎤⎦ (4.2.11)
beschrieben. Die allgemeine Definition eines Differenzensternes (mit variablen Koeffizienten) lautet⎡⎢⎢⎢⎢⎢⎢⎣
...c−1,1(x, y) c0,1(x, y) c1,1(x, y)
. . . c−1,0(x, y) c0,0(x, y) c1,0(x, y) . . .c−1,−1(x, y) c0,−1(x, y) c1,−1(x, y)
...
⎤⎥⎥⎥⎥⎥⎥⎦uh(x, y) :=∑i,j
cij(x, y)uh(x+ ih, y + jh), (4.2.12)

32 4. Differenzenmethode fur die Poisson-Gleichung
wobei nicht angeschriebene Koeffizienten Nullen darstellen. Die Summation erstreckt sich uber alle angege-benen Koeffizienten.Achtung. Der Stern (4.2.11) stellt keine Untermatrix von Lh dar! Die Koeffizienten des Sterns erscheinenin jeder Zeile von Lh (die Koeffizienten entfallen, wenn (x+ ih, y + jh) nicht mehr zu Ωh gehort).
Bemerkung 4.2.5 Man beachte, dass der Differenzenoperator −Δh nicht mit der Matrix Lh gleichgesetztwerden kann, da Δh keine Informationen uber Art und Ort der Randbedingungen enthalt. Wir werden Lh alsdie zu einem Differenzenstern (4.2.12) gehorende Matrix bezeichnen, wenn das Gleichungssystem Lhuh = qhaus den Differenzengleichungen in x ∈ Ωh nach Elimination der Dirichlet-Randwerte uh(x) = ϕ(x) (x ∈ Γh)entsteht. Auch wenn der Vektor uh in Lhuh = qh nur Komponenten uh(x) fur innere Gitterpunkte x ∈ Ωh
enthalt, wird uh gelegentlich mit der Gitterfunktion auf uh gleichgesetzt, die auf Γh die vorgeschriebenenRandwerte (4.2.4b) annimmt.
4.3 M-Matrizen, Matrixnormen, positiv definite Matrizen
Die Elemente der Matrix A werden im Folgenden mit aαβ (α, β ∈ I) bezeichnet. Damit treten A und dieIndexmenge I an die Stelle von Lh und Ωh. Wir schreiben
A ≥ B, falls aαβ ≥ bαβ fur alle α, β ∈ I,
und definieren analog A ≤ B, A > B, A < B. Mit O wird die Nullmatrix bezeichnet.
Definition 4.3.1 A heißt M-Matrix, wenn
aαα > 0 fur alle α, β ∈ I, aαβ ≤ 0 fur alle α �= β, (4.3.1a)
A nichtsingular und A−1 ≥ O. (4.3.1b)
Die Ungleichungen (4.3.1a) lassen sich sofort fur Lh nachweisen (vgl. (4.2.5)). Dagegen brauchen wir nochKriterien und Hilfssatze, um (4.3.1b) zu beweisen.
Ein Index α ∈ I heißt direkt mit β ∈ I verbunden, falls aαβ �= 0. Der Index α ∈ I heißt mit β ∈ Iverbunden, falls eine “Verbindung” (Kette von direkten Verbindungen)
α = α0, α1, . . . , αk = β mit aαi−1αi �= 0 (1 ≤ i ≤ k) (4.3.2)
existiert. Die Indexmenge I zusammen mit den direkten Verbindungen bildet den Graphen (Matrixgraphen)von A (vgl. Abbildung 4.3.1). Haufig hat A eine symmetrische Struktur, d.h. aαβ �= 0 gilt genau dann, wennaβα �= 0. In diesem Falle ist α mit β genau dann (direkt) verbunden, falls β mit α (direkt) verbunden ist.
Matrix: A =
⎡⎣ 1 1 00 1 11 0 1
⎤⎦ Graph:↗ 2
1 ↓↖ 3
(1, 2, 3 : Indizes−→ : direkte Verbindung
)
Abb. 4.3.1. Graph der irreduziblen Matrix A
Definition 4.3.2 (irreduzibel) Eine Matrix A heißt irreduzibel, falls jedes α ∈ I mit jedem β ∈ I ver-bunden ist.
Im Falle der Matrix A = Lh aus (4.2.5’) sind zwei Indizes x,y ∈ Ωh genau dann direkt verbunden,wenn y = x oder wenn y Nachbar von x. Offensichtlich lassen sich beliebige x,y ∈ Ωh durch eine Kettex = x(0),x(1), . . . ,x(k) = y von benachbarten Punkten verbinden. Also ist Lh irreduzibel.
Ubungsaufgabe 4.3.3 Man beweise: A ist genau dann irreduzibel, wenn es keine Anordnung der Indizes
gibt, sodass die entstehende Matrix die Gestalt A =[A11 A12
O A22
]hat, wobei A11 und A22 quadratische
n1 × n1- bzw. n2 × n2-Matrizen (n1 ≥ 1, n2 ≥ 1) und A12 eine n1 × n2-Untermatrix sind.
Die wichtige Frage, ob A = Lh nichtsingular ist, lasst sich als Spezialfall der folgenden Aussage behandeln.

4.3 M-Matrizen, Matrixnormen, positiv definite Matrizen 33
Kriterium 4.3.4 (Gerschgorin)3 Mit Kr(z) sei der offene Kreis {ζ ∈ C : |z − ζ| < r} um z und mitKr(z) := {ζ ∈ C : |z − ζ| ≤ r} der abgeschlossene Kreis bezeichnet. (a) Alle Eigenwerte von A liegen in⋃
α∈I
Krα(aαα) mit rα =∑
β∈I\{α}|aαβ | .
(b) Falls A irreduzibel ist, liegen die Eigenwerte sogar in( ⋃α∈I
Krα(aαα))
∪( ⋂
α∈I
∂Krα(aαα)).
Beweis. (a) Seien λ ein Eigenwert von A und u ein zugehoriger Eigenvektor, der ohne Beschrankung derAllgemeinheit ‖u‖∞ = 1 erfulle, wobei
‖u‖∞ := max{|uα| : α ∈ I} (4.3.3)
die Maximumnorm ist. Es gibt (mindestens) einen Index γ ∈ I mit |uγ | = 1.
Hilfsbehauptung 1: |uγ | = 1 impliziert
|λ− aγγ | ≤∑
β∈I\{γ}|aγβ| |uβ| ≤
∑β∈I\{γ}
|aγβ| = rβ . (*)
Aus (∗) folgt λ ∈ Krγ (aγγ) und damit die Behauptung. Zum Beweis der Hilfsbehauptung verwende man diezum Index γ gehorende Gleichung aus Au = λu:
λuγ =∑β∈I
aγβ uβ , d.h. (λ− aγγ) uγ =∑
β∈I\{γ}aγβ uβ.
Aus |uγ | = 1 ergibt sich |λ− aγγ | = |(λ − aγγ)uγ | ≤ |∑
β �=γ aγβuβ|. Indem man den Betrag in die Summezieht und |uβ| ≤ ‖u‖∞ = 1 benutzt, folgt (∗).
(b) A sei irreduzibel und λ ein beliebiger Eigenwert von A mit zugehorigem Eigenvektor u, der wiederdurch ‖u‖ = 1 normiert sei. Der Fall λ ∈
⋃α∈I Krα(aαα) fuhrt sofort zur Behauptung. Sei deshalb
λ �∈⋃
α∈I Krα(aαα) angenommen.
Hilfsbehauptung 2: Sei aγβ �= 0 (d.h. γ direkt mit β verbunden). |uγ | = 1 und |λ− aγγ | = rγ implizieren|uβ| = 1 und |λ− aββ | = rβ .
Teil (a) beweist die Existenz eines γ ∈ I mit |uγ | = 1 und |λ− aγγ | ≤ rγ . Nach Annahme muss |λ− aγγ | =rγ gelten, sodass die Hilfsbehauptung 2 auf γ anwendbar ist. Da A irreduzibel ist, existiert fur ein beliebigesβ ∈ I eine Verbindung (2) von γ mit β: α0 = γ, α1, . . . , αk = β, aαi−1αi �= 0. Hilfsbehauptung 2 zeigt
|uαi | = 1 und |λ− aαiαi | = rαi fur alle i = 0, . . . , k ;
insbesondere λ ∈ ∂Krβ(aββ) fur β = αk. Da β beliebig gewahlt wurde, folgt λ ∈
⋂∂Krα(aαα), und die
Behauptung ist bewiesen.Beweis der Hilfsbehauptung 2. Neben der Ungleichungskette (∗) gilt |λ− aγγ | = rγ , sodass alle Un-
gleichungen in (∗) zu Gleichungen werden. Insbesondere muss∑β∈I\{γ}
|aγβ| |uβ | =∑
β∈I\{γ}|aγβ|
gelten. Da |uβ| ≤ ‖u‖∞ = 1, muss sogar fur jeden Summanden |aγβ| |uβ| = |aγβ| erfullt sein. aγβ �= 0impliziert daher |uβ| = 1. Die Anwendung der Hilfsbehauptung 1 auf β liefert |λ− aββ| ≤ rβ . Die Annahmeλ �∈
⋃α∈I Krα(aαα) beweist |λ− aββ| = rβ .
3Semjon Aranowitsch Gerschgorin, geb. am 24. August 1901 in Pruzhany, Belarus, gest. am 30. Mai 1933

34 4. Differenzenmethode fur die Poisson-Gleichung
Ubungsaufgabe 4.3.5 Sei Iα := {β ∈ I : es existiert eine Verbindung (4.3.2) von α zu β}. Man zeige: DieEigenwerte von A liegen in ⋃
α∈I
{Krα(aαα) ∪
⋂β∈Iα
∂Krβ(aββ)
}.
Definition 4.3.6 (Diagonaldominanz) (a) A heißt diagonaldominant, falls∑β∈I\{α}
|aαβ | < |aαα| (4.3.4a)
fur alle α ∈ I. (b) A heißt irreduzibel diagonaldominant, falls A irreduzibel ist, Ungleichung (4.3.4a) furmindestens einen Index α ∈ I gilt und∑
β∈I\{α}|aαβ | ≤ |aαα| fur alle α ∈ I. (4.3.4b)
Man beachte, dass eine Matrix, die irreduzibel und diagonaldominant ist, zwar irreduzibel diagonal-dominant ist, die Umkehrung jedoch nicht zu gelten braucht.
Die Matrix Lh aus §4.2 ist nicht diagonaldominant, aber irreduzibel diagonaldominant, denn Lh istirreduzibel und erfullt (4.3.4b). In allen randnahen Punkten - das sind solche x ∈ Ωh, die einen Randpunkty ∈ Γh als Nachbarn haben - gilt dagegen (4.3.4a):
∑β �=α |aαβ | ≤ 3h−2 < 4h−2 = aαα.
Der Spektralradius ρ(A) einer Matrix A ist durch den großten Betrag aller Eigenwerte gegeben:
ρ(A) := max{|λ| : λ Eigenwert von A}. (4.3.5)
Im Folgenden spalten wir A in
A = D −B, D := diag{aαα : α ∈ I}, (4.3.6a)
auf, wobei D der Diagonalanteil von A ist:
dαα = aαα, dαβ = 0 fur α �= β. (4.3.6b)
B := D −A ist der Außerdiagonalanteil:
bαα = 0, bαβ = −aαβ fur α �= β. (4.3.6c)
Kriterium 4.3.7 Es gelte (4.3.6a-c). Hinreichende Bedingungen fur
ρ(D−1B) < 1 (4.3.7)
sind die Diagonaldominanz oder die irreduzible Diagonaldominanz von A.
Beweis. 1) Die Koeffizienten von C := D−1B lauten
cαβ = −aαβ/aαα (α �= β), cαα = 0.
Aus der Diagonaldominanz (4.3.4a) folgt rα :=∑
β �=α |cαβ | < 1 fur alle α ∈ I. Auf Grund des Gerschgorin-Kriteriums 4.3.4a liegen alle Eigenwerte λ von C in
⋃α∈I Krα(cαα) =
⋃α∈I Krα(0), sodass |λ| ≤ max rα < 1
und damit auch ρ(C) = ρ(D−1B) < 1 folgen.2) Ist A irreduzibel diagonaldominant, so gilt rβ ≤ 1 fur alle β ∈ I und rα < 1 fur mindestens ein α.
Gemaß Kriterium 4.3.4b liegen alle Eigenwerte von C in⋃
β∈I Krβ(0) ∪ (
⋂β∈I ∂Krβ
(0)). Diese Menge liegtin K1(0), falls
⋂β∈I ∂Krβ
(0)) ⊂ K1(0). Sei zunachst angenommen, dass alle rβ ubereinstimmen: rβ = r furalle β. Da rα < 1 fur ein α ∈ I, folgt r < 1 und
⋂β∈I ∂Krβ
(0)) = ∂Kr(0) ⊂ K1(0). Sind aber nicht alle rβgleich, so ist
⋂β∈I ∂Krβ
(0)) leer. In beiden Fallen gilt daher λ ∈ K1(0), und (4.3.7) ist bewiesen.

4.3 M-Matrizen, Matrixnormen, positiv definite Matrizen 35
Ubungsaufgabe 4.3.8 a) Man definiere folgende Abschwachung der irreduziblen Diagonaldominanz. Aerfulle die Ungleichungen (4.3.4b), und fur alle β ∈ I existiere eine Verbindung (4.3.2) zu einem Indexα ∈ I, fur den die echte Ungleichung (4.3.4a) zutrifft. Man beweise, dass auch unter dieser Voraussetzungρ(D−1B) < 1 gilt. Hinweis: Man benutze Ubungsaufgabe 4.3.5.b) Man zeige: Die geometrische Reihe S =
∑∞ν=0 C
ν konvergiert genau dann, wenn ρ(C) < 1. Es giltS = (I − C)−1. Hinweis: Man stelle C in der Form QRQ� dar (Q: unitar, R: obere Dreiecksmatrix) undzeige ‖Cν‖∞ ≤ K[ρ(C)]ν .c) u sei Vektor. Wir definieren |u| als Vektor (!) mit den Koeffizienten |u|α := |uα|. Fur zwei Vektoren wirdv ≤ w geschrieben, falls vα ≤ wα (α ∈ I). Man zeige:
1) AB ≥ O, falls A ≥ O und B ≥ O; AB > O, falls A > O und B > O;2) AD > O, falls A > O und D ≥ O nichtsingulare Diagonalmatrix;3) Av ≤ Aw, falls A ≥ O und v ≤ w; ‖v‖∞ ≤ ‖w‖∞, falls 0 ≤ v ≤ w;4) Au ≤ |Au| ≤ A |u|, falls A ≥ O.
Die Bedeutung der Ungleichung (4.3.7) ergibt sich aus
Lemma 4.3.9 A erfulle (4.3.1a). D und B seien durch (4.3.6a-c) definiert. A ist genau dann eine M-Matrix,wenn ρ(D−1B) < 1.
Beweis. 1) C := D−1B erfulle ρ(C) < 1. Dann konvergiert die geometrische Reihe S :=∑∞
ν=0 Cν (vgl.
Ubungsaufgabe 4.3.8b). Aus D−1 ≥ O und B ≥ O schließt man C ≥ O, Cν ≥ O und S ≥ O. DaI = S(I − C) = SD−1(D −B) = SD−1A , hat A die Inverse A−1 = SD−1. D−1 ≥ O und S ≥ O ergebenA−1 ≥ O. Damit ist auch (4.3.1b) gezeigt, d.h. A ist M-Matrix.
2) A sei eine M-Matrix. Zu einem Eigenwert A von D−1B wahle man einen Eigenvektor u �= 0. GemaßUbungsaufgabe 4.3.8c gilt
|λ| |u| = |λu| =∣∣D−1Bu
∣∣ ≤ D−1B |u| .Wegen A−1D ≥ O (vgl. (4.3.1a,b)) erhalt man −A−1DD−1B |u| ≤ −A−1D |λ| |u|, sodass
|u| = A−1 (D −B) |u| = A−1D(I −D−1B
)|u| ≤ A−1D |u| −A−1D |λ| |u| = (1 − |λ|)A−1D |u|
folgt. Fur |λ| ≥ 1 ergabe sich die Ungleichung |u| ≤ 0, d.h. u = 0 im Widerspruch zur Annahme u �= 0.Hieraus folgt |λ| < 1 fur jeden Eigenwert von C = D−1B, also ρ(D−1B) < 1.
Kriterium 4.3.7 und Lemma 4.3.9 ergeben das
Kriterium 4.3.10 Ist eine Matrix A mit der Eigenschaft (4.3.1a) diagonaldominant oder irreduzibeldiagonaldominant, so ist A eine M-Matrix.
Satz 4.3.11 Eine irreduzible M-Matrix A hat eine (elementweise) positive Inverse: A−1 > O.
Beweis. Seien α, β ∈ I beliebig gewahlt. Es existiert eine Verbindung (4.3.2): α = α0, α1, . . . , αk = β. SeiC := D−1B . Da cαi−1αi > 0, folgt
(Ck)αβ =∑
γ1,...,γk−1∈I
cαγ1 cγ1γ2 · · · cγk−1β ≥ cαα1 cα1α2 · · · cαk−1β > 0.
Gemaß Lemma 4.3.9 gilt ρ(C) < 1, sodass S :=∑∞
ν=0 Cν konvergiert. Da Sαβ ≥ (Ck)αβ > 0 und α, β ∈ I
beliebig, ist S > O bewiesen. Die Behauptung ergibt sich aus A−1 = SD−1 > O (vgl. Beweis des Lemmas4.3.9).
Im Folgenden wollen wir Normabschatzungen fur A−1 herleiten.
Definition 4.3.12 V sei ein linearer Raum (Vektorraum) uber dem Korper der reellen Zahlen (K := R)oder der komplexen Zahlen (K := C). ‖·‖ heißt Norm in V , falls
‖u‖ = 0 nur fur 0 �= u ∈ V, (4.3.8a)‖u+ v‖ ≤ ‖u‖ + ‖v‖ fur alle u, v ∈ V, (4.3.8b)
‖λu‖ = |λ| ‖u‖ fur alle λ ∈ K, u ∈ V. (4.3.8c)

36 4. Differenzenmethode fur die Poisson-Gleichung
Beispiel. Sei V = R#I (#I := Anzahl der Elemente der Indexmenge I). Die in (4.3.3) definierte Maximum-norm erfullt die Normaxiome (4.3.8a-c).
Sieht man die Elemente u ∈ V als Vektoren an, nennt man ‖·‖ auch Vektornorm. Aber auch die Matrizenbilden einen linearen Raum. Im letzten Falle nennt man ‖·‖ eine Matrixnorm. Eine spezielle Klasse vonMatrixnormen enthalt die
Definition 4.3.13 (zugeordnete Matrixnorm) V sei Vektorraum mit Vektornorm ‖·‖. Dann bezeichnetman
||| A ||| := sup{‖Au‖ / ‖u‖ : 0 �= u ∈ V } (4.3.9)
als die der Vektornorm ‖·‖ zugeordnete Matrixnorm.
Ubungsaufgabe 4.3.14 ||| · ||| sei durch (4.3.9) definiert. Man zeige: (a) ||| · ||| ist eine Norm; (b) es gilt
||| AB ||| ≤||| A ||| ||| B |||, (4.3.10a)||| I ||| = 1 (I: Einheitsmatrix), (4.3.10b)‖Au‖ ≤||| A ||| ‖u‖ fur alle u ∈ V, (4.3.10c)
||| A ||| ≥ ρ(A). (4.3.10d)
Es ist ublich, die zugeordnete Matrixnorm mit dem gleichen Normsymbol zu bezeichnen, d.h. statt ||| · |||wird ‖·‖ geschrieben und Indizes “xyz”, die in ‖·‖xyz eine spezielle Vektornorm charakterisieren, werden inder gleichen Form ‖·‖xyz fur die zugeordnete Matrixnorm ubernommen.
Beispiel. Die der Maximumnorm ‖·‖∞ (vgl. (4.3.3)) zugeordnete Matrixnorm heißt Zeilensummennorm undwird ebenfalls mit ‖·‖∞ bezeichnet. Sie hat die explizite Darstellung
‖A‖∞ = maxα∈I
{∑β∈I
|aαβ|}. (4.3.11)
Ubungsaufgabe 4.3.15 a) Man beweise (4.3.11). b) Fur Matrizen O ≤ B ≤ C gilt ‖B‖∞ ≤ ‖C‖∞ .
Im nachsten Satz bezeichnen wir mit 1 den Vektor, der nur Einsen als Komponenten besitzt:
1α = 1 fur alle α ∈ I.
Zur Schreibweise v ≤ w vergleiche man Ubungsaufgabe 4.3.8c.
Satz 4.3.16 A sei eine M-Matrix, und es gebe einen Vektor w mit Aw ≥ 1. Dann gilt ‖A−1‖∞ ≤ ‖w‖∞.
Beweis. Wie im Beweis von Lemma 4.3.9 sei |u| der Vektor mit den Komponenten |uα|. Fur jedes u ist|u| ≤ ‖u‖∞ 1 ≤ ‖u‖∞Aw. Da A−1 ≥ O, erhalten wir
|A−1u| ≤ A−1|u| ≤ ‖u‖∞A−1Aw = ‖u‖∞w
(vgl. Ubungsaufgabe 4.3.8c) und ‖A−1u‖∞/ ‖u‖∞ ≤ ‖w‖∞. Definition 4.3.13 liefert ‖A−1u‖∞ ≤ ‖w‖∞.
Wie man mit Hilfe einer majorisierenden Matrix abschatzen kann, zeigt
Satz 4.3.17 A und A′ seien M-Matrizen mit A′ ≥ A. Dann gelten die Ungleichungen
O ≤ A′ −1 ≤ A−1 und∥∥A′ −1
∥∥∞ ≤ ‖A−1‖∞. (4.3.12)
Beweis. A′−1 ≤ A−1 folgt aus A−1 − A′−1 = A−1(A′ − A)A′−1 und A−1 ≥ O, A′ − A ≥ O, A′−1 ≥ O. DerRest ergibt sich aus Ubungsaufgabe 4.3.15b.
Ubungsaufgabe 4.3.18 Man beweise (4.3.12) unter den folgenden schwacheren Voraussetzungen: A istM-Matrix, A′ erfullt (4.3.1a) und A′ ≥ A. Hinweis: Man wiederhole die Uberlegungen aus dem ersten Teildes Beweises von Lemma 4.3.9 mit den zu A′ gehorenden Matrizen D′ und B′.

4.3 M-Matrizen, Matrixnormen, positiv definite Matrizen 37
Ubungsaufgabe 4.3.19 B sei eine Hauptuntermatrix von A, d.h. es gibt eine Teilmenge I ′ ⊂ I, sodass Bdurch die Koeffizienten bαβ = aαβ (α, β ∈ I ′) definiert ist. Man beweise: Ist A eine M-Matrix, so auch Bund es gilt O ≤ (B−1)αβ ≤ (A−1)αβ fur alle α, β ∈ I ′. Hinweis: Man wende Ubungsaufgabe 4.3.18 auf diefolgende Matrix A′ an: a′αβ = aαβ fur α, β ∈ I ′, a′αα = aαα fur α ∈ I\I ′ und a′αβ = 0 sonst.
Eine weitere, wohlbekannte Vektornorm ist die Euklidische Norm
‖u‖2 :=√c∑
α∈I|uα|2 (4.3.13)
mit fester Skalierungskonstanten c > 0 (z.B. fuhrt die Wahl c = h2 im Zusammenhang mit den Gitter-funktionen aus §4.2 dazu, dass c
∑α∈I eine Naherung fur die Integration
∫Ω
darstellt). Die ‖·‖2 zugeordneteMatrixnorm ist unabhangig vom Faktor c. Sie heißt Spektralnorm und wird ebenfalls mit ‖·‖2 bezeichnet.Der Name leitet sich aus der folgenden Charakterisierung ab.
Ubungsaufgabe 4.3.20 Man beweise: (a) Fur symmetrische Matrizen gilt ‖A‖2 = ρ(A) (vgl. (4.3.5)).(b) Fur jede (reelle) Matrix gilt
‖A‖2 =√ρ(A�A) = [maximaler Eigenwert von A�A ]1/2.
(c) Fur jede Matrix gilt ‖A‖22 ≤ ‖A‖2
∥∥A�∥∥2. Hinweis: (b) und (4.3.10d).
Beim Beweis der Ubungsaufgabe macht man Gebrauch vom Skalarprodukt
〈u, v〉 = c∑
α∈Iuαvα (4.3.14a)
(c wie in (4.3.13)) und seinen Eigenschaften
〈u, u〉 = ‖u‖22 , 〈Au, v〉 =
⟨u,A�v
⟩, |〈u, v〉| ≤ ‖u‖2 ‖v‖2 . (4.3.14b)
Dabei ist der Fall K = R zugrundegelegt: Alle Matrizen und Vektoren seien reell. (Im Falle K = C ist vα in(4.3.14a) durch vα und A� in (4.3.14b) durch AH zu ersetzen).
Definition 4.3.21 (positiv definit) Eine Matrix A heißt positiv definit, falls sie symmetrisch ist und
〈Au, u〉 > 0 fur alle u �= 0. (4.3.15)
Ubungsaufgabe 4.3.22 Man beweise: (a) Eine symmetrische Matrix ist genau dann positiv definit, wennalle Eigenwerte positiv sind.
(b) Alle Hauptuntermatrizen einer positiv definiten Matrix sind positiv definit (vgl. Ubungsaufgabe 4.3.19).(c) Die Diagonalelemente aαα einer positiv definiten Matrix sind positiv.(d) A heißt positiv semidefinit, falls (4.3.15) mit ≤ anstelle von > gilt. Eine positiv semidefinite Matrix
A besitzt genau eine positiv semidefinite Quadratwurzel B = A1/2, die B2 = A erfullt. Ist A positiv definit,so auch A1/2.
Eine Folgerung aus der Ubungsaufgabe 4.3.22a ist
Lemma 4.3.23 Eine positiv definite Matrix ist nichtsingular und besitzt eine positiv definite Inverse.
Die Eigenschaft “A−1 positiv definit” ist weder hinreichend noch notwendig fur die Eigenschaft “A−1 ≥ O ”einer M-Matrix. In beiden Fallen ist jedoch die (irreduzible) Diagonaldominanz hinreichend (vgl. Kriterium4.3.10 und das nachfolgende Kriterium).
Kriterium 4.3.24 Ist eine symmetrische Matrix mit positiven Diagonalelementen diagonaldominant oderirreduzibel diagonaldominant, so ist sie positiv definit.
Beweis. Da rα < aαα bzw. rα ≤ aαα, schneiden die Gerschgorin-Kreise aus Kriterium 4.3.4 nicht dieHalbachse (−∞, 0], sodass alle Eigenwerte positiv sein mussen. Gemaß Ubungsaufgabe 4.3.22a ist A positivdefinit.

38 4. Differenzenmethode fur die Poisson-Gleichung
Lemma 4.3.25 λmin und λmax seien der minimale bzw. maximale Eigenwert einer positiv definiten MatrixA. Dann gilt
‖A‖2 = λmax , ‖A−1‖2 = λmin . (4.3.16)
Beweis. Ubungsaufgabe 4.3.20a zeigt ‖A‖2 = ρ(A) und ‖A−1‖ = ρ(A−1). Aus (4.3.5) ergeben sich dieGleichungen ρ(A) = λmax und ρ(A−1) = 1/λmin, da λmin > 0.
4.4 Eigenschaften der Matrix Lh
Satz 4.4.1 Die in (4.2.5) definierte Matrix Lh (Funfpunktformel) hat die folgenden Eigenschaften:
Lh ist M-Matrix, (4.4.1a)Lh ist positiv definit, (4.4.1b)
‖Lh‖∞ ≤ 8h−2, ‖L−1h ‖∞ ≤ 1/8, (4.4.1c)
‖Lh‖2 ≤ 8h−2 cos2(πh
2) < 8h−2, (4.4.1d)
‖L−1h ‖2 ≤ 1
8h2 sin−2(
πh
2) =
12π2
+ O(h2) ≤ 1/16. (4.4.1e)
Beweis. a) In §4.3 wurde bereits erwahnt, dass Lh irreduzibel diagonaldominant ist und den Ungleichungen(4.3.1a) genugt. Gemaß Kriterium 4.3.10 ist Lh eine M-Matrix.
b) Da Lh symmetrisch und irreduzibel diagonaldominant ist, folgt (4.4.1b) aus Kriterium 4.3.24.c) ‖Lh‖ ≤ 8h−2 liest man aus (4.2.5) und (4.3.11) ab. Zur Abschatzung von L−1
h wende man Satz 4.3.16mit w(x, y) = x(1 − x)/2 an. Es gilt Lhw ≥ 1 [sogar (Lhw)(x, y) = 1 bis auf y = h und y = 1 − h] und‖w‖∞ ≤ w(1/2, y) = 1/8.
d) Die Ungleichungen (4.4.1d,e) ergeben sich aus Lemma 4.3.25 und dem nachfolgenden Lemma.
Lemma 4.4.2 Die (n− 1)2 Eigenvektoren von Lh sind uνμ (1 < ν, μ < n− 1):
uνμ(x, y) = sin(νπx) sin(μπy) ((x, y) ∈ Ωh). (4.4.2a)
Die zugehorigen Eigenwerte sind
λνμ = 4h−2
(sin2(
νπh
2) + sin2(
μπh
2)), 1 ≤ ν, μ ≤ n− 1. (4.4.2b)
Beweis. Seien Ω1Dh das eindimensionale Gitter (4.1.5a) und uν(x) := sin(νπx). Fur jedes x ∈ Ω1D
h gilt
∂−∂+uν(x) = h−2 [sin(νπ(x − h)) + sin(νπ(x + h)) − 2 sin(νπx)] = 2h−2 sin(νπx) [cos(νπx) − 1]
wegen sin(νπ(x ± h)) = sin(νπx) cos(νπh) ± cos(νπx) sin(νπh). Die Identitat 1 − cos ξ = 2 sin 2(ξ/2) liefert
−∂−∂+uν(x) = 4h−2 sin2(νπh
2)uν(x), x ∈ Ω1D
h . (4.4.2c)
Sei L1Dh die Matrix (4.1.8b). Man beachte, dass (∂−∂+u)(h) im Gegensatz zu (L1D
h u)(h) noch den Randwertu(0) enthalt; ebenso hangt (∂−∂+u)(1 − h) von u(1) ab. Da u(0) = sin(0) = 0 und u(1) = sin(νπ) = 0, giltjedoch L1D
h uν = −∂−∂+uν , und (4.4.2c) ubertragt sich:
L1Dh uν = 4h−2 sin2(
νπh
2)uν , 1 ≤ ν ≤ n− 1. (4.4.2d)
Die zweidimensionale Gitterfunktion uνμ aus (4.4.2a) lasst sich als (Tensor-)Produkt uν(x)uμ(y) schreiben.(Lhu
νμ)(x, y) stimmt mit der Summe uμ(y)(L1Dh uν)(x) + uν(x)(L1D
h uμ)(y) uberein, sodass (4.4.2b) aus(4.4.2d) folgt.
Im Weiteren wollen wir die Parallelen zwischen den Eigenschaften der Poisson-Gleichung (4.2.2) und derdiskreten Funfpunktformel (4.2.4a,b) aufzeigen.

4.4 Eigenschaften der Matrix Lh 39
Das Analogon der Mittelwerteigenschaft (2.3.1) ist die Gleichung
uh(x, y) =14
[uh(x− h, y) + uh(x+ h, y) + uh(x, y − h) + uh(x, y + h)] (4.4.3)
Aus (4.2.3) und (4.2.4a) mit f = 0 ergibt sich die
Bemerkung 4.4.3 Die Losung uh der diskreten Potentialgleichung (4.2.4a) mit f = 0 erfullt Gleichung(4.4.3) in allen Gitterpunkten (x, y) ∈ Ωh.
Wie im kontinuierlichen Falle leitet man aus der Mittelwerteigenschaft (4.4.3) das Maximum-Minimum-Prinzip ab.
Bemerkung 4.4.4 Sei uh eine nichtkonstante Losung der diskreten Potentialgleichung (4.2.4a) (mitf = 0 ). Die Extrema max{uh(x) : x ∈ Ωh} und min{uh(x) : x ∈ Ωh} werden nicht auf Ωh, sondernauf Γh angenommen.
Beweis. Ware uh maximal in (x, y) ∈ Ωh, mussen wegen Gleichung (4.4.3) alle Nachbarpunkte (x±h, y) und(x, y±h) den gleichen Wert tragen. Da sich je zwei Punkte durch eine Kette von Nachbarpunkten verbindenlassen, folgt hieraus uh = const im Widerspruch zur Voraussetzung.
Der letzte Beweis benutzt indirekt, dass Lh irreduzibel ist. Die Irreduzibilitat von Lh entspricht derVoraussetzung in Satz 2.3.7, dass Ω ein Gebiet ist, also zusammenhangend ist.
Die Ubertragung der Satze 2.4.3 und 3.1.2 lautet wie folgt.
Satz 4.4.5 a) Seien u1h und u2
h zwei Losungen von (4.2.4a): −Δhuih = f zu verschiedenen Randwerten
uih = ϕi (i = 1, 2). Dann gilt
‖u1h − u2
h‖∞ ≤ maxx∈Γh
∣∣ϕ1(x) − ϕ2(x)∣∣ , (4.4.4a)
u1h ≤ u2
h in Ωh,falls ϕ1 ≤ ϕ2 auf Γh. (4.4.4b)
b) Eine Losung uh von −Δhuh = f ≥ 0 mit Randwerten uh = ϕ ≥ 0 erfullt im gesamten Gitter uh ≥ 0.
Beweis. a) Sei wh := u2h −u1
h. 1) Im Falle von ϕ1 ≤ ϕ2 hat man wh ≥ 0 auf Γh und −Δhwh = 0. Bemerkung4.4.4 beweist wh = const ≥ 0 oder wh > 0 und damit (4.4.4b).
a2) Sei M die rechte Seite von (4.4.4a). −M ≤ wh ≤M auf Γh impliziert −M ≤ wh ≤M auf Ωh.b) f ≥ 0, ϕ ≥ 0 implizieren qh ≥ 0 in (4.2.6b). Die M-Matrixeigenschaft (4.4.1a) zeigt uh = L−1
h qh ≥ 0.Das diskrete Analogon der Greenschen Funktion g(x, ξ) ist durch h−2L−1
h gegeben. Sei δξ der skalierteEinheitsvektor
δξ(x) ={h−2 falls x = ξ,0 falls x �= ξ,
(x, ξ ∈ Ωh). (4.4.5a)
Die Spalte der Matrix h−2L−1h zum Index ξ ∈ Ωh ist durch
gh(·, ξ) := L−1h δξ (ξ ∈ Ωh) (4.4.5b)
gegeben. Fur festes ξ ∈ Ωh ist gh(·, ξ) eine auf Ωh definierte Gitterfunktion. Der Definitionsbereich wird aufΩh × Ωh erweitert:
gh(x, ξ) ={gh(x, ξ) falls x, ξ ∈ Ωh,0 falls x ∈ Γh oder ξ ∈ Γh (x, ξ ∈ Ωh).
(4.4.5c)
gh(x, ξ) sind die Koeffizienten von h−2L−1h : gh(x, ξ) = h−2(L−1
h )xξ. Die Symmetrie von Lh beweist die
Bemerkung 4.4.6 gh(x, ξ) = gh(ξ,x) fur alle x, ξ ∈ Ωh (vgl. (3.2.3)).
An die Darstellung (3.2.7) erinnert die
Bemerkung 4.4.7 Die Losung uh des Gleichungssystems (4.2.4a) mit Randwerten ϕ = 0 lautet
uh(x) = h2∑
ξ∈Ωh
gh(x, ξ)f(ξ) fur x ∈ Ωh. (4.4.6)

40 4. Differenzenmethode fur die Poisson-Gleichung
Gleichung (4.4.6) ist die komponentenweise Darstellung der Gleichung uh = L−1h fh. Der Faktor h2 kom-
pensiert h−2 aus (4.4.5a). Er wurde eingefuhrt, damit die Summation h2∑
in (4.4.6) das Integral∫Ω
appro-ximiert. Da in §3.2 die Poisson-Gleichung Δu = f , hier jedoch −Δu = f betrachtet wird, unterscheiden sichdie rechten Seiten in (3.2.7) und (4.4.6) durch das Vorzeichen.
Auch die diskrete Greensche Funktion ist positiv (vgl. (3.2.9)):
Bemerkung 4.4.8 0 < gh(x, ξ) ≤ h−2/8 fur x, ξ ∈ Ωh.
Beweis. Die obere Schranke folgt aus gh(x, ξ) ≤ ‖gh(·, ξ)‖∞ ≤ ‖L−1h ‖∞ ‖δξ‖∞, ‖δξ‖∞ = h−2 und (4.4.1c).
gh > 0 schließt man aus L−1h > 0 (vgl. Satz 4.3.11).
Die Abschatzung gh(x, ξ) ≤ h−2/8 ist zu pessimistisch und kann erheblich verbessert werden.
Lemma 4.4.9 Die diskrete Greensche Funktion gh aus (4.4.5b) erfullt die Abschatzung
0 < gh(x, ξ) ≤ log 24 log 3
⎛⎝1 −log
(|x − ξ|2 + h2/2
)log 2
⎞⎠ ≤log 2
h
log 9fur alle x, ξ ∈ Ωh. (4.4.7)
Die Abschatzung durch O(|log h|) spiegelt die logarithmische Singularitat der Singularitatenfunktion s(x, ξ) =− log(|x − ξ|2)/4π wider.
Beweis. Zum Beweis der Ungleichung (4.4.7) definiere man
sh(x, ξ) :=log 24 log 3
⎛⎝1 −log
(|x − ξ|2 + h2/2
)log 2
⎞⎠ . (4.4.8a)
a) Zunachst soll sh(x, ξ) ≥ 0 fur alle x ∈ Ωh, ξ ∈ Ωh gezeigt werden. Da ξ ∈ Ωh ein innerer Gitterpunktist, folgt |xi − ξi| ≤ 1− h (i = 1, 2) und damit |x − ξ|2 ≤ 2 (1 − h)2 . Da 1/2 die grobstmogliche Schrittweiteist, variiert h in (0, 1/2]. Hierfur gilt
|x − ξ|2 + h2/2 ≤ 2 (1 − h)2 +12h2 < 2,
und fur sh aus (4.4.8a) folgt die Zwischenbehauptung:
sh(x, ξ) >log 24 log 3
(1 − log 2
log 2
)= 0 fur alle x ∈ Ωh, ξ ∈ Ωh.
b) Wir setzen uh(x) := sh(x, 0), wobei formal alle x ∈ {(νh, μh) : ν, μ ∈ Z} zugelassen werden. DieFunfpunktformel angewandt auf uh liefert
−Δhuh =1
4 log 3Δh log
(|·|2 + h2/2
). (4.4.8b)
Fur die Auswertung am Ursprung x = 0 beachte man log(|x|2 + h2/2) = log(h2/2
)fur x = 0 und
log(|x′|2 + h2/2) = log(h2 + h2/2
)= log
(3h2/2
)= log 3 + log
(h2/2
)fur alle Nachbargitterpunkten x′ von
x = 0, sodass gemaß (4.4.8b)
− (Δhuh) (0) =h−2
4 log 3(−4 log
(h2/2
)+ 4 log
(3h2/2
))= h−2− log
(h2/2
)+ log
(3h2/2
)log 3
= h−2. (4.4.8c)
c) Fur die Auswertung von −Δhuh in allgemeinen Gitterpunkten x = (x, y) erhalt man
−Δhuh(x) =h−2
4 log 3
⎛⎜⎜⎜⎝log
(x2 + (y + h)2 + h2
2
)+ log
((x− h)2 + y2 + h2
2
)− 4 log
(x2 + y2 + h2
2
)+ log
((x+ h)2 + y2 + h2
2
)+ log
(x2 + (y − h)2 + h2
2
)⎞⎟⎟⎟⎠
=h−2
4 log 3log
((x+ h)2 + y2 + h2
2
)((x− h)2 + y2 + h2
2
)(x2 + (y + h)2 + h2
2
)(x2 + (y − h)2 + h2
2
)(x2 + y2 + h2
2
)4 .

4.4 Eigenschaften der Matrix Lh 41
Zum Nachweis von −Δhuh ≥ 0 ist((x+ h)2 + y2 + h2
2
)((x− h)2 + y2 + h2
2
)(x2 + (y + h)2 + h2
2
)(x2 + (y − h)2 + h2
2
)≥
(x2 + y2 + h2
2
)4
zu zeigen. Diese Ungleichung folgt aber aus der Identitat((x+ h)2 + y2 + h2
2
)((x− h)2 + y2 + h2
2
)(x2 + (y + h)2 + h2
2
)(x2 + (y − h)2 + h2
2
)−
(x2 + y2 + h2
2
)4
= 5h8 + 4h6x2 + 4h6y2 + 16h4x2y2 ≥ 0.
d) Wegen sh(x, ξ) = uh(x − ξ) folgt aus den Teilen b) und c), dass − (Δhsh(·, ξ)) (x) ≥ 0 und− (Δhsh(·,x)) (x) = h−2. Fur φξ := sh(·, ξ) − gh(·, ξ) erhalt man
−Δhφξ(x) = −Δh [sh(·, ξ) − gh(·, ξ)] (x){
= h−2 − h−2 = 0 fur x = ξ ∈ Ωh ,≥ 0 − 0 = 0 fur x �= ξ ∈ Ωh .
Am Rand (d.h. fur x ∈ Γh) gilt nach Teil a)
φξ(x) = sh(x, ξ) − gh(x, ξ) = sh(x, ξ) ≥ 0.
Satz 4.4.5b zeigt φξ ≥ 0 in Ωh, also gh(x, ξ) ≤ sh(x, ξ), womit (4.4.7) bewiesen ist.Sei ϕh wie in (4.2.6b) definiert. Die Losung der diskreten Potentialgleichung
−Δhuh = 0 in Ωh, uh = ϕ auf Γh
ist durch uh := L−1h ϕh gegeben (wenn man die zunachst nur auf Ωh definierte Gitterfunktion durch ϕ auf
Γh fortsetzt; vgl. Bemerkung 4.2.5). Die Darstellung mit Hilfe von gh lautet
uh(x) = h2∑
ξ∈Ωh
gh(ξ,x)ϕ(ξ) (x ∈ Ωh).
Da ϕh(x) in allen randfernen Punkten x verschwindet, genugt es, die Summe uber die randnahen Punktezu erstrecken. Summiert man uber die benachbarten Randpunkte von
Γ′h := {ξ ∈ Γh : ξ ist kein Eckpunkt (0, 0) , (1, 0) , (0, 1) , (1, 1)}
statt uber die randnahen Punkte, so ergibt die Definition von ϕh die Darstellung
uh(x) = −h∑ξ∈Γ′
h
∂−n gh(ξ,x)ϕ(ξ) (x ∈ Ωh), (4.4.9)
wobei ∂−n die Ruckwartsdifferenz bezuglich der Normalenrichtung �n ist:
∂−n gh(ξ,x) = h−1 [gh(ξ,x) − gh(ξ − h�n,x)]
(man beachte gh(ξ,x) = 0 fur ξ ∈ Γ′h ⊂ Γh). Das Argument ξ − h�n durchlauft alle randnahen Punkte.
Bemerkung 4.4.10 Gleichung (4.4.9) entspricht der Darstellung in Satz 3.2.10. Die Summation h∑
ξ∈Γ′h
approximiert das dortige Integral∫Γ.
Abschließend soll die Abschatzung der Losung uh = L−1h qh durch ‖uh‖∞ ≤ ‖L−1
h ‖∞ ‖qh‖∞ ≤ ‖qh‖∞ /8(vgl. (4.4.1c)) genauer betrachtet werden. Gemaß (4.2.6b) enthalt qh = fh +ϕh die rechte Seite fh(x) = f(x)der diskreten Poisson-Gleichung und die in ϕh versteckten Randwerte ϕ(x), x ∈ Γh. Der folgende Satz gibteine Abschatzung an, in der diese Anteile separiert sind.
Satz 4.4.11 qh = fh +ϕh sei gemaß (4.2.6b) aus f und ϕ konstruiert. Die diskrete Losung uh = L−1h qh der
Poisson-Randwertaufgabe lasst sich abschatzen durch
‖uh‖∞ ≤ ‖L−1h ‖∞ max
x∈Ωh
|f(x)| + maxξ∈Γ′
h
|ϕ(ξ)| ≤ 18
maxx∈Ωh
|f(x)| + maxξ∈Γ′
h
|ϕ(ξ)| . (4.4.10)

42 4. Differenzenmethode fur die Poisson-Gleichung
Beweis. Setze u′h := L−1h fh und u′′h := L−1
h ϕh. Die Abschatzung des ersten Summanden in uh = u′h + u′′hergibt den ersten Summanden in (4.4.10). Zur Abschatzung von u′′h verwende man Ungleichung (4.4.4a) mitu1
h = u′′h, ϕ1 = ϕ und u2h = 0, ϕ2 = 0.
Die entsprechende Ungleichung‖uh‖∞ ≤ C ‖f‖∞ + ‖ϕ‖∞ (4.4.11)
fur die Losung der Randwertaufgabe (4.2.2a,b) wurde bisher noch nicht erwahnt, wird aber in allgemeineremZusammenhang in §5.1.3 bewiesen werden.
Die Maximumnorm ‖·‖∞ lasst sich in (4.4.10) durch die Euklidischen Normen
‖uh‖2,Ωh:=
√h2
∑x∈Ωh
|uh(x)|2, ‖ϕ‖2,Γ′h
:=√h2
∑ξ∈Γ′
h
|ϕ(ξ)|2
ersetzen. Dabei entsprechen sich jeweils h2∑
Ωhund
∫Ω
einerseits und h∑
Γ′h
und∫Γ
andererseits.
Satz 4.4.12 Unter den Voraussetzungen des Satzes 4.4.11 gilt
‖uh‖2,Ωh≤ ‖L−1
h ‖2 ‖fh‖2,Ωh+
1√2‖ϕ‖2,Γ′
h≤ 1
16‖fh‖2,Ωh
+1√2‖ϕ‖2,Γ′
h. (4.4.12)
Beweis. 1) Es genugt, den Fall der Potentialgleichung (d.h. f = 0) zu betrachten. Die Beschrankung von ϕauf Γ′h ergebe die Gitterfunktion φh : φh(x) = ϕ(x) fur x ∈ Γ′h. Die Abbildung φh → uh = L−1
h ϕh sei durchdie rechteckige Matrix A vermittelt: uh = Aφh. Gemaß Gleichung (4.4.9) lauten die Koeffizienten von A
axξ = −h∂−n gh(ξ,x) = gh(ξ − h�n,x) = gh(x, ξ − h�n) fur x ∈ Ωh, ξ ∈ Γ′h.
Da A ≥ 0 (vgl. Bemerkung 4.4.8), erhalt man die Zeilensummennorm ‖A‖∞ := maxx
∑ξ axξ als ‖Aφh‖∞
fur die Wahl φh(x) = 1 in allen x ∈ Γ′h. Die Losung vh = Aφh lautet dann vh = 1 (warum?), sodass
‖A‖∞ = ‖Aφh‖∞ = ‖1‖∞ = 1
folgt.2) Die Spaltensummen von A sind s(ξ) :=
∑x∈Ωh
axξ =∑
x∈Ωhgh(x, ξ−h�n) fur ξ ∈ Γ′h. Die Gitterfunktion
vh := h−2L−1h 1 hat in den randnahen Punkten ξ−hn die Werte
s(ξ) = vh(ξ − h�n) (ξ ∈ Γ′h, �n Normalenrichtung)
wie sich aus Bemerkung 4.4.7 ergibt. Sei ξ = (ξ1, ξ2) ∈ Γ′h ein Punkt des linken oder rechten Randes (d.h.ξ1 = 0 oder 1). Wie im Beweis von (4.4.1c) erwahnt, gilt hwh ≥ 1 fur wh(x, y) := x(1 − x)/2. Da L−1
h ≥ 0,ist auch wh ≥ L−1
h 1 und somit vh < h−2wh. Insbesondere folgt die Abschatzung
s(ξ) = vh(ξ − h�n) ≤ h−2wh(ξ − h�n) = h−2h (1 − h) /2 ≤ h−1/2
im randnahen Punkt ξ−hn = (h, ξ2) oder (1−h, ξ2). Fur einen Punkt ξ aus dem unteren oder oberen Randerhalt man die gleiche Abschatzung, wenn man wh(x, y) := y(1 − y)/2 verwendet. Da die Spaltensummens(ξ) die Zeilensummen von A� sind, haben wir
‖A�‖∞ = max{s(ξ) : ξ ∈ Γ′h} ≤ h−1/2
bewiesen.3) Es ist ‖A�A‖2 = ρ(A�A) ≤ ‖A�A‖∞ ≤ ‖A�‖∞ ‖A‖∞ ≤ h−1/2 (vgl. Ubungsaufgabe 4.3.20a, (4.3.10d),
(4.3.10a)), sodass die Losung uh = L−1h ϕh = Aφh folgender Abschatzung genugt:
‖uh‖22,Ωh
= h2∑
x∈Ωh
|uh(x)|2 = h2∑
x∈Ωh
|(Aφh)(x)|2 = h2∑
x∈Γ′h
φh(x)(A�Aφh)(x)
≤ h2∥∥A�A∥∥
2
∑x∈Γ′
h
φ2h(x) ≤ h
2
∑x∈Γ′
h
φ2h(x) =
12‖φh‖2
2,Γ′h.
Da ‖ϕ‖2,Γ′h
= ‖φh‖2,Γ′h, folgt die Behauptung.

4.5 Konvergenz 43
4.5 Konvergenz
Uh sei der Vektorraum der Gitterfunktionen auf Ωh. Die diskrete Losung uh ∈ Uh und die kontinuierlicheLosung u ∈ C0(Ω) lassen sich wegen der verschiedenen Definitionsbereiche nicht unmittelbar vergleichen.Bei Differenzenverfahren ist es ublich, beide Funktionen auf dem Gitter Ωh zu vergleichen. Dazu hat mandie Losung u mittels einer “Restriktion”
u �→ Rhu ∈ Uh (u: kontinuierliche Losung) (4.5.1)
in Uh abzubilden. Im Folgenden werden wir Rh als Beschrankung auf Ωh wahlen:
(Rhu) (x) = u(x) fur alle x ∈ Ωh. (4.5.2)
Der Grenzubergang h → 0 wird wie folgt prazisiert. Sei H ⊂ R+ eine Teilmenge mit Haufungspunkt null:0 ∈ H . Zum Beispiel bilden die bisher betrachteten Schrittweiten die Menge H = {1/n : n ∈ N}. Fur jedesh ∈ H sei Uh mit einer Norm ‖·‖h versehen.
Definition 4.5.1 (Konvergenz) Die diskreten Losungen uh ∈ Uh konvergieren (bezuglich des Normen-systems ‖·‖h, h ∈ H) gegen u, falls
‖uh −Rhu‖h → 0. (4.5.3a)
Konvergenz der Ordnung k liegt vor, wenn
‖uh −Rhu‖h = O(hk). (4.5.3b)
Der Nachweis der Konvergenz wird ublicherweise mit Hilfe der Begriffe “Stabilitat” und “Konsistenz”gefuhrt. Ungleichungen der Form ‖uh −Rhu‖h ≤ . . . , wie sie in diesem Abschnitt auftreten, nennt manauch Fehlerabschatzungen, da uh −Rhu der Diskretisierungsfehler ist.
Die Diskretisierung {Lh : h ∈ H} heißt stabil bezuglich ‖·‖∞, falls
suph∈H
‖L−1h ‖∞ <∞. (4.5.4)
Fur die in §4.2 definierte Diskretisierung ist die Stabilitat in (4.4.1c) bezuglich der Zeilensummennorm undin (4.4.1d) bezuglich der Spektralnorm nachgewiesen worden. Die Gitterfunktion fh in −Δhuh = fh ist dieRestriktion
fh = Rhf (4.5.5a)
von f , wobei in (4.2.6b) Rh als die Beschrankung auf Ωh gewahlt wurde:
(Rhf)(x) = f(x) fur alle x ∈ Ωh. (4.5.5b)
Die Schreibweise Rh soll deutlich machen, dass eine Wahl Rh �= Rh moglich ist.Die Formulierung der Konsistenz wird einfacher, wenn man anstelle der Matrix Lh den zugrundeliegenden
Differenzenoperator −Δh betrachtet (vgl. Bemerkung 4.2.5). Es sei Dh ein allgemeiner Differenzenoperator,d.h. −Dhuh = fh diskretisiere −Δu = f . Die durch das Tripel (Dh, Rh, Rh) beschriebene Diskretisierungheißt bezuglich ‖·‖∞ konsistent von der Ordnung k (konsistent zum Laplace-Operator), falls
‖DhRhu− RhΔu‖∞ ≤ Khk ‖u‖Ck+2(Ω) (4.5.6)
fur alle u ∈ Ck+2(Ω). Dabei ist die Konstante K von h und u unabhangig.
Bemerkung 4.5.2 Rh und Rh seien durch (4.5.2) und (4.5.5b) gegeben. Die Funfpunktformel Δh ist kon-sistent von der Ordnung 2: Abschatzung (4.5.6) gilt mit k = 2 und K = 1/6.
Beweis. Die Entwicklung (4.1.3c) laßt sich in x- und y-Richtung anwenden und liefert
ΔhRhu(x, y) = Δu(x, y) + h2(Rx +Ry) mit |Rx| , |Ry| ≤112
‖u‖C4(Ω) . (4.5.7)

44 4. Differenzenmethode fur die Poisson-Gleichung
Satz 4.5.3 Die Diskretisierung (Dh, Rh, Rh) sei konsistent von der Ordnung k. Die zum DifferenzenoperatorDh gehorende Matrix Lh (vgl. Bemerkung 4.2.5) sei stabil bezuglich ‖·‖∞. Dann ist das Verfahren konvergentvon der Ordnung k, falls u ∈ Ck+2(Ω).
Beweis. wh := uh −Rhu erfullt die Differenzengleichungen
−Dhwh = Dhuh −DhRhu = fh +DhRhu = Rhf +DhRhu = DhRhu− RhΔu in Ωh.
Wegen der homogenen Randbedingung wh = 0 auf Γh gilt wh = L−1h (DhRhu − RhΔu) (vgl. Bemerkung
4.2.1). (4.5.4) und (4.5.6) liefern (4.5.3b).
Setzt man die konkreten Werte∥∥L−1
h
∥∥∞ ≤ 1/8 und K = 1/6 ein, ergibt sich der
Zusatz 4.5.4 Die kontinuierliche Losung des Randwertproblems (4.2.2a,b) gehore zu C4(Ω). uh sei die in(4.2.4a,b) definierte diskrete Losung. Dann konvergiert uh von zweiter Ordnung gegen u:
‖uh −Rhu‖∞ ≤ h2
48‖u‖C4(Ω) . (4.5.8)
Die Voraussetzung u ∈ C4(Ω) laßt sich abschwachen:
Zusatz 4.5.5 Unter der Voraussetzung u ∈ C3,1(Ω) gilt ebenfalls
‖uh −Rhu‖∞ ≤ h2
48‖u‖C3,1(Ω) . (4.5.8’)
Beweis. Der Restterm R4 aus (4.1.4b) kann auch als
R4 = h−4
∫ x±h
x
[u′′′(ξ) − u′′′(x)](x ± h− ξ)2
2!dξ
geschrieben werden. Die Lipschitz-Abschatzung |u′′′(ξ) − u′′′(x)| ≤ |ξ − x| ‖u‖C3,1(Ω) liefert R4 ≤ ‖u‖C3,1(Ω)
4! ,sodass in (4.5.7), (4.5.6) und (4.5.8) die Norm ‖u‖C4(Ω) durch ‖u‖C3,1(Ω) ersetzt werden kann.
Schwacht man dagegen u ∈ C3,1(Ω) durch u ∈ Cs(Ω) mit 2 < s < 4 weiter ab, erhalt man eine schwachereKonvergenzordnung.
Zusatz 4.5.6 Unter der Voraussetzung u ∈ Cs(Ω), 2 < s ≤ 4, konvergiert uh von der Ordnung s− 2:
‖uh −Rhu‖∞ ≤ Kshs−2 ‖u‖Cs(Ω) , (4.5.8”)
wobei Ks := 1/[2s(s− 1)] fur 2 ≤ s ≤ 3 und Ks := 1/[2s(s− 1)(s− 2)] fur 3 ≤ s ≤ 4.
Der Beweis ergibt sich aus
Ubungsaufgabe 4.5.7 Man zeige ‖ΔhRhu− RhΔu‖∞ ≤ 8Kshs−2 ‖u‖Cs(Ω), 2 < s ≤ 4.
Wenn auch die Konvergenzbeweise einfach sind, so sind die Resultate doch unbefriedigend. Wie schon ausBeispiel 2.1.3 hervorgeht, erfullt die kontinuierliche Losung der Randwertaufgabe (4.2.2a,b) im Allgemeinennicht einmal u ∈ C2(Ω), obwohl mindestens u ∈ Cs(Ω) mit s > 2 in Zusatz 4.5.6 fur die Konvergenz benotigtwird. Zu starkeren Resultaten fuhrt eine Analyse, die in §9.2 behandelt wird. Dass auch unter geringerenVoraussetzungen Fehler der Großenordnung O(h2) auftreten, zeigt das folgende
Beispiel 4.5.8 Lost man die Differenzengleichung (4.2.4a,b) fur −Δu = 1 in Ω = (0, 1) × (0, 1) und u = 0auf Γ, so erhalt man im Mittelpunkt x = y = 1/2 die Werte uh(1/2, 1/2), die in der ersten Spalte der Tabelle 1wiedergegeben sind. Die exakte Losung u(1/2, 1/2) = 0.0736713 . . . ergibt sich aus einer Darstellung, die manin Beispiel 8.1.12 findet. Die Quotienten εh/ε2h der Fehler εh = u(1/2, 1/2) − uh(1/2, 1/2) approximieren1/4. Dies beweist uh(1/2, 1/2) = u(1/2, 1/2) + O(h2), obwohl u �∈ C2(Ω). In (1/2, 1/2) hat uh außerdem

4.6 Differenzenverfahren hoherer Ordnung 45
die asymptotische Entwicklung uh(1/2, 1/2) = u(1/2, 1/2)+h2e(1/2, 1/2)+O(h4). Den von h unabhangigenFehlerterm e(1/2, 1/2) eliminiert man durch die Richardson4-Extrapolation
uh,2h(1/2, 1/2) :=13
[4uh(1/2, 1/2)− u2h(1/2, 1/2)] .
Die extrapolierten Werte sind schon fur h = 1/16 sehr genau (vgl. letzte Spalte der Tabelle 4.5.1).
h uh(12 ,
12 ) uh,2h(1
2 ,12 ) εh Quotient εh,2h Quotient
1/8 0.0727826 8.8910-41/16 0.07344576 0.0736668 2.2610-4 0.250 4.510-61/32 0.0736147373 0.07367106 5.6610-5 0.251 2.710-7 0.061/64 0.0736571855 0.07367133 1.4110-5 0.249
Tabelle 4.5.1. Differenzenlosung zu Beispiel 4.5.8 (εh[,2h] := |u( 12, 1
2) − uh[,2h](
12, 1
2)|)
4.6 Differenzenverfahren hoherer Ordnung
Die Funfpunktformel (4.2.11) ist von zweiter Ordnung. Auch wenn die Losung u zu Cs(Ω) mit s > 4 gehort,ergibt sich keine bessere Schranke fur ΔhRhu − RhΔu als O(h2). Eine naheliegende Methode, Differenzen-verfahren hoherer Ordnung zu konstruieren, ist die folgende. Als Ansatz fur eine Diskretisierung der zweitenAbleitung u′′ wahlt man
(Dhuh) (x) = h−2k∑
ν=−k
cνuh(x+ νh).
Die Taylor-Entwicklung liefert
(DhRhuh) (x) =2k∑
μ=0
aμhμ−2u(μ)(x) + O(h2k−1), aμ =
1μ!
k∑ν=−k
cννk.
Die 2k + 1 Gleichungen a0 = a1 = a3 = a4 = . . . = a2k = 0 und a2 = 1 bilden ein lineares System fur die2k+ 1 unbekannten Koeffizienten cν . Fur k = 1 erhalt man die ubliche Differenzenformel (4.1.3c), fur k = 2ergibt sich eine Differenz vierter Ordnung:
h2 (Dhuh) (x) = − 112
[uh(x− 2h) + uh(x+ 2h)] +43
[uh(x− h) + uh(x+ h)] − 52uh(x).
Wendet man diese Naherung fur u′′ auf die x- und y-Koordinaten an, ergibt sich fur −Δ der Differenzenstern
h−2
12
⎡⎢⎢⎢⎢⎣1
−161 −16 60 −16 1
−161
⎤⎥⎥⎥⎥⎦ (4.6.1)
(vgl. (4.2.12)). Das Differenzenschema (4.6.1) ist zwar von vierter Ordnung, bereitet aber Schwierigkeiten inden randnahen Punkten. Um zum Beispiel in (h, h) ∈ Ωh die Differenzenformel aufzustellen, benotigt manWerte uh(−h, h) und uh(h,−h) außerhalb von Ωh (vgl. Abbildung 4.6.1). Eine Moglichkeit ware, das Schema(4.6.1) nur in randfernen Punkten zu verwenden und in randnahen Punkten die Funfpunktformel (4.2.11)zu benutzen.
Die eben beschriebenen Komplikationen treten nicht auf, wenn man sich auf kompakte Neunpunktformelnbeschrankt; als solche bezeichnet man Differenzenverfahren (4.2.12), die durch
cαβ �= 0 nur fur − 1 ≤ α, β ≤ 1
4Lewis Fry Richardson, geb. 11. Okt. 1881 in Newcastle upon Tyne, gest. 30. Sept. 1953 in Kilmun (Schottland)

46 4. Differenzenmethode fur die Poisson-Gleichung
kompakte NeunpunktformelDifferenzenschema (4.6.1)
Abb. 4.6.1. Differenzenschema (4.6.1) und kompakte Neunpunktformel
charakterisiert sind (vgl. Abbildung 4.6.1). Ein Ansatz mit den 9 freien Parametern cα,β (−1 ≤ α, β ≤ 1)liefert allerdings ein negatives Resultat: Es gibt keine kompakte Neunpunktformel mit Dhu = −Δu+O(h3).In diesem Sinne ist die Funfpunktformel schon optimal. Dennoch lassen sich Neunpunktverfahren vierterOrdnung erreichen, wenn man auch die rechte Seite fh des Gleichungssystems (4.2.6a,b) geeignet wahlt.Wendet man das kompakte Neunpunktschema
Dh :=h−2
6
⎡⎣−1 −4 −1−4 20 −4−1 −4 −1
⎤⎦ (4.6.2)
auf u ∈ C8(Ω) an, ergibt die Taylor-Entwicklung
−Dhu = −Δu− h2
12Δ2u− h4
360
[∂4
∂x4+ 4
∂4
∂x2∂y2+
∂4
∂y4
]Δu+ O(h6). (4.6.3)
Wesentlich ist, dass sich der Fehlerterm durch −Δu und damit durch f ausdrucken lasst. Fur die spezielleWahl der Restriktion Rh durch
fh = Rhf :=16
⎡⎣ 1/21/2 4 1/2
1/2
⎤⎦ f, (4.6.4)
d.h.
fh(x, y) =(Rhf
)(x, y) :=
112
[f(x− h, y) + f(x+ h, y) + f(x, y − h) + f(x, y + h) + 8f(x, y)] (4.6.4’)
erhalt man die Entwicklung
fh(x, y) = f(x, y) +h2
12Δf(x, y) + O(h4), (4.6.5)
die wegen f = −Δu bis auf O(h4) mit (4.6.3) ubereinstimmt. Die Matrix Lh des Gleichungssystems, dassich nach Elimination der Randwerte uh(x) = ϕ(x), x ∈ Γh, ergibt, hat die Koeffizienten
Lxξ = h−2
⎧⎪⎪⎨⎪⎪⎩20/6 falls x = ξ,−1/6 falls x − ξ = (±h,±h) oder x − ξ = (±h,∓h) ,−4/6 falls x − ξ = (±h, 0) oder x − ξ = (0,±h) ,0 sonst.
(4.6.6)
Die rechte Seite des Gleichungssystems Lhuh = qh ist
qh := fh + ϕh, fh = Rhf gemaß (4.6.4’), ϕh :=∑ξ∈Γh
Lxξϕ(ξ). (4.6.7)
Die Diskretisierung (Dh, Rh, Rh) mit Dh aus (4.6.2), Rh aus (4.5.2), Rh aus (4.6.4’) heißt Mehrstellen-verfahren (vgl. Collatz [25]).
Ubungsaufgabe 4.6.1 Dh und Lh seien durch (4.6.2) bzw. (4.6.6) definiert. Man beweise:a) Lh ist eine M-Matrix;b)
∥∥L−1h
∥∥∞ ≤ 1/8 (Stabilitat), ‖Lh‖ ≤ 20h−2/3,
c) ‖DhRhu−RhΔu‖∞ ≤ − 11h4
180 ‖u‖C6(Ω), falls u ∈ C6(Ω) (Konsistenz).

4.7 Die Diskretisierung der Neumann-Randwertaufgabe 47
Satz 4.6.2 (Konvergenz des Mehrstellenverfahrens) Ωh sei wie in §4.2 definiert. uh sei die Losungdes Mehrstellenverfahrens Lhuh = qh (Lh aus (4.6.6), qh aus (4.6.7)). Die Losung u der Randwertaufgabe(4.2.2a,b) gehore zu C6(Ω) oder C5,1(Ω). Dann gilt die Fehlerabschatzung
‖uh −Rhu‖∞ ≤ 11 h4
1440‖u‖C6(Ω) bzw. ‖uh −Rhu‖∞ ≤ 11 h4
1440‖u‖C5,1(Ω) (4.6.8a)
Im Falle der Potentialgleichung (d.h. f = 0) gilt sogar
‖uh −Rhu‖∞ ≤ Kh6 ‖u‖C8(Ω) , ‖uh −Rhu‖∞ ≤ Kh6 ‖u‖C7,1(Ω) , (4.6.8b)
falls u ∈ C8(Ω) bzw. u ∈ C7,1(Ω).
Beweis. (4.6.8a) ergibt sich wie in Satz 4.5.3 aus Ubungsaufgabe 4.6.1b,c. Im Falle f = 0 verschwindet auchder O(h4)-Term in (4.6.3).
4.7 Die Diskretisierung der Neumann-Randwertaufgabe
Die Dirichlet-Randbedingung u(x) = ϕ(x) wurde direkt im Differenzenverfahren verwendet, eine Diskreti-sierung erubrigte sich. Anders ist es bei der Neumann-Randwertaufgabe
−Δu = f in Ω = (0, 1) × (0, 1) ,∂u
∂n= ϕ auf Γ. (4.7.1)
Die Normalenableitung, die explizit
∂u∂n = −uy fur x = (x1, 0) ∈ Γ, ∂u
∂n = uy fur x = (x1, 1) ∈ Γ,∂u∂n = −ux fur x = (0, x2) ∈ Γ, ∂u
∂n = ux fur x = (1, x2) ∈ Γ(4.7.2)
lautet, muss ebenso wie der Laplace-Operator durch eine Differenz ersetzt werden. Wir werden drei unter-schiedliche Diskretisierungen untersuchen.
4.7.1 Einseitige Differenz fur ∂u/∂n
Diskretisierung
Diskretisierung
der Poisson−Gleichun
der Neumann−Beding
Abb. 4.7.1. Diskretisierungen der Differentialgleichungund der Neumann-Randbedingung
Die Poisson-Gleichung fuhrt auf die (n−1)2 = (1/h−1)2
Gleichungen
(−Δhuh) (x) = f(x) fur alle x ∈ Ωh, (4.7.3)
die die Werte von uh(x) fur alle x ∈ Ω′h benotigen, wobei
Ω′h := Ωh ∪ Γ′h, Γ′h := Γh\{(0, 0) , (0, 1) , (1, 0) , (1, 1)}.
Um weitere 4(n − 1) Gleichungen fur {uh(x) : x ∈ Γ′h}zu erhalten, ersetzen wir in allen x ∈ Γ′h die Normalen-ableitung ∂u/∂n = ϕ durch die Ruckwartsdifferenz(
∂−n uh
)(x) =
1h
[uh(x) − uh(x − h�n)] = ϕ(x) fur x ∈ Γ′h. (4.7.4)
Setzt man die entsprechenden Normalenrichtungen n fur die vier Quadratseiten ein, erhalt man
1h [uh(x, 0) − uh(x, h)] = ϕ(x, 0)1h [uh(x, 1) − uh(x, 1 − h)] = ϕ(x, 1)
}fur x = h, 2h, . . . , 1 − h,
1h [uh(0, y) − uh(h, y)] = ϕ(0, y)1h [uh(1, y) − uh(1 − h, y)] = ϕ(1, y)
}fur y = h, 2h, . . . , 1 − h.
(4.7.4’)
Die Gleichungen (4.7.3) und (4.7.4) ergeben (n+ 1)2 − 4 Gleichungen fur ebenso viele Unbekannte.

48 4. Differenzenmethode fur die Poisson-Gleichung
Ubungsaufgabe 4.7.1 Nach einer Umskalierung der Gleichungen (4.7.4) zu h−1∂−n uh(x) = h−1ϕ(x),x ∈ Γ′h , bilden diese Gleichungen zusammen mit (4.7.3) ein System Lhuh = qh. Man zeige: Lh ist symme-trisch und erfullt (4.3.1a).
Wie beim Dirichlet-Problem konnen die Variablen uh(x), x ∈ Γ′h, mit Hilfe von (4.7.4) aus (4.7.3) eliminiertwerden. Beispielsweise wird Gleichung (4.7.3) im randnahen Punkt (h, y) zu
1h2
[3uh(h, y) − uh(h, y − h) − uh(h, y + h) − uh(2h, y)] = f(h, y) +1hϕ(0, y).
Der Stern h−2
[−1−1
4−1−1
]wird demnach zu
h−2
⎡⎣ −10 3 −1
−1
⎤⎦ , h−2
⎡⎣ −1−1 3 0
−1
⎤⎦ , h−2
⎡⎣ 0−1 3 −1
−1
⎤⎦ , h−2
⎡⎣ −1−1 3 −1
0
⎤⎦in der Nahe des linken, rechten, oberen bzw. unteren Randes. In den Eckpunkten sind sogar zwei Randwertezu ersetzen, sodass z.B. in (h, h) ∈ Ωh der Stern h−2
[0−1
20−1
]lautet. Abgesehen vom Sonderfall h = 1/2
erhalt man fur die (n− 1)2 Werte uh(x), x ∈ Ωh, das Gleichungssystem
Lhuh = qh mit (4.7.5a)
Lxx =
⎧⎨⎩ 4/h2 falls x ∈ Ωh randfern,2/h2 falls x ∈ {(h, h) , (h, 1 − h) , (1 − h, h) , (1 − h, 1 − h)} ,3/h2 sonst,
Lxξ ={
−1/h2 falls x, ξ ∈ Ωh benachbart sind,0 sonst fur x �= ξ,
(4.7.5b)
qh = fh + ϕh, fh(x) =(Rhf
)(x) := f(x), ϕh(x) = −h
∑ξ∈Γh
Lxξϕ(ξ). (4.7.5c)
Bemerkung 4.7.2 (a) Lh ist symmetrisch und erfullt die Vorzeichenbedingung (4.3.1a). (b) Bei lexiko-graphischer Anordnung der Gitterpunkte von Ωh hat Lh die Gestalt
Lh = h−2
⎡⎢⎢⎢⎢⎢⎣T − I −I−I T −I
. . . . . . . . .−I T −I
−I T − I
⎤⎥⎥⎥⎥⎥⎦ , T =
⎡⎢⎢⎢⎢⎢⎣3 −1−1 4 −1
. . . . . . . . .−1 4 −1
−1 3
⎤⎥⎥⎥⎥⎥⎦ .
Die Matrix Lh ist singular, denn das System Lhuh = qh ist im Allgemeinen ebenso wie das kontinuierlicheRandwertproblem (4.7.1) nicht losbar. Das Analogon des Satzes 3.4.1 lautet wie folgt.
Satz 4.7.3 Das Gleichungssystem (4.7.5a) ist genau dann losbar, wenn
−h2∑x∈Ωh
f(x) = h∑x∈Γ′
h
ϕ(x). (4.7.6)
Je zwei Losungen von (4.7.5a) konnen sich nur um eine Konstante unterscheiden: u1h − u2
h = c1, c ∈ R.
Beweis. Offenbar gilt Lh1 = 0, d.h. 1 ∈ Kern(Lh). Aus Satz 4.7.4 wird dim(Kern(Lh)) = 1 folgen. Diesbeweist
Kern(Lh) = {c1 : c ∈ R} (4.7.7)
und damit den zweiten Teil der Behauptung. (4.7.5a) ist genau dann losbar, wenn das Skalarprodukt 〈v, qh〉fur alle v ∈ Kern(L�h ) = Bild(Lh)⊥ verschwindet. Wegen L�h = Lh und (4.7.7) ist
〈1, qh〉 = 0, d.h.∑x∈Ωh
qh(x) = 0 (4.7.6’)

4.7 Die Diskretisierung der Neumann-Randwertaufgabe 49
hinreichend und notwendig. Nach Definition (4.7.5c) stimmen (4.7.6) und (4.7.6’) uberein.
Die Bedingung (4.7.6) sei erfullt. Das System (4.7.5a) kann wie folgt gelost werden. Man wahle ein belie-biges x0 ∈ Ωh und normiere die (nur bis auf eine Konstante bestimmte) Losung uh durch
uh(x0) = 0. (4.7.8)
Sei uh der Vektor uh ohne die Komponente uh(x0). Lh sei die Untermatrix von Lh, in der man die Zeile undSpalte zum Index x0 gestrichen hat. Ebenso sei qh. konstruiert. Dann ist
Lhuh = qh (4.7.9)
ein System mit (n− 1)2 − 1 Gleichungen und Unbekannten.
Satz 4.7.4 Das Gleichungssystem (4.7.9) ist losbar; insbesondere ist Lh eine symmetrische M-Matrix. Unterder Voraussetzung (4.7.6) ergibt uh = L−1
h qh erganzt durch (4.7.8) die Losung uh des Systems (4.7.5a).
Beweis. 1) Als Hauptuntermatrix von Lh ist Lh symmetrisch. Auch in Ωh\{x0} lassen sich je zwei Gitter-punkte durch eine Kette von Nachbarpunkten verbinden, sodass Lh irreduzibel ist. Fur alle x ∈ Ωh\{x0}gilt (4.3.4b), in Nachbarpunkten von x0 sogar (4.3.4a), sodass Lh irreduzibel diagonaldominant ist. GemaßKriterium 4.3.10 ist Lh eine M-Matrix, also nichtsingular.
2) Ist uh Losung von (4.7.5a), lasst sich ohne Beschrankung der Allgemeinheit (4.7.8) annehmen, sodassuh beschrankt auf Ωh\{x0} auch Gleichung (4.7.9) lost und mit der eindeutigen Losung uh ubereinstimmenmuss.
Als Folgerung aus Satz 4.7.4 erhalt man Rang(Lh) ≥ Rang(Lh) = (n− 1)2 − 1, d.h. dim(Kern(Lh)) = 1und somit (4.7.7).
Eine weitere Moglichkeit zur Losung der Gleichung (4.7.5a) ist der Ubergang zu einem erweitertenGleichungssystem
Lhuh = qh mit (4.7.10a)
Lh =[Lh 11� 0
], uh =
[uh
λ
], qh =
[qhσ
], (4.7.10b)
wobei σ beliebig vorgegeben werden kann.
Satz 4.7.5 Gleichung (4.7.10a) ist stets losbar. Ist die letzte Komponente λ der Losung uh gleichnull, so ist Bedingung (4.7.6) erfullt und uh stellt jene Losung des Systems (4.7.5a) dar, die durch1�uh =
∑x∈Ωh
uh(x) = σ normiert ist. Gilt dagegen λ �= 0, laßt sich uh als Losung von Lhuh = qh inter-pretieren, wobei qh = qh − λ1 zu f(x) := f(x) − λ gehort, und f und ϕ der Bedingung (4.7.6) genugen.
Beweis. 1 ist linear unabhangig von den Spalten von Lh, sodass Rang[Lh,1] = Rang(Lh) + 1 = (n − 1)2.Ebenso ist (1�, 0) linear unabhangig von den Zeilen von [Lh,1], sodass Rang(Lh) = (n − 1)2 + 1, d.h. Lh
ist nichtsingular. Die weiteren Aussagen liest man aus (4.7.10b) ab.
Empfehlung. Man sollte entweder Gleichung (4.7.10a,b) verwenden oder aber Gleichung (4.7.9), nachdemman zuvor explizit qh durch qh := qh − (1�qh/1�1)1 ersetzt hat.
Zur Begrundung dieser Empfehlung beachte man, dass die Losbarkeitsbedingung des kontinuierlichenProblems
∫Ω fdx +
∫Γ ϕdΓ = 0 lautet und keinesfalls die diskrete Losbarkeitsbedingung (4.7.6) impliziert.
Fur glatte Funktionen f und ϕ lasst sich Gleichung (4.7.6) bis auf einen Rest O(h) zeigen. Somit ist es imAllgemeinen unumganglich fh und qh durch fh − λ1 und qh − λ1 (λ = 1�qh/1�1) zu ersetzen. Im Falleder Gleichung (4.7.10a,b) wird diese Korrektur implizit durchgefuhrt. Wird dagegen Gleichung (4.7.9) ohnejede Korrektur verwendet, so lasst sich die entstehende Losung interpretieren als Losung von Lhuh = qh mitqh(x) = qh(x) fur x �= x0 und qh(x0) := −
∑x �=x0
qh(x). Das heißt, auch hier wird implizit eine Korrekturvon qh vorgenommen, nur wird die Korrektur nicht wie zuvor auf alle Komponenten verteilt, sondern aufqh(x0) konzentriert. Wenn Gleichung (4.7.6) bis auf O(h) erfullt ist, unterscheiden sich qh(x0) und qh(x0)um O(h−1). Demgemaß enthalt die Losung uh der Gleichung (4.7.9) eine Singularitat im Punkte x0.

50 4. Differenzenmethode fur die Poisson-Gleichung
Satz 4.7.6 (Konvergenz) Sei u ∈ C3,1(Ω) Losung des Neumann-Problems (4.7.1). uh =(uh
λ
)sei die
Losung der Gleichung (4.7.10a). Dann gibt es ein c ∈ R und von u und h unabhangige Konstanten C,C′,sodass
|λ| ≤ C′h ‖u‖C0,1(Ω) , ‖uh −Rhu− c1‖∞ ≤ C[h ‖u‖C1,1(Ω) + h2 ‖u‖C3,1(Ω)
]. (4.7.11)
Beweis. 1) Es ist λ = 1�qh/1�1 = (h2∑
Ωhf(x)+ h
∑Γ′
hϕ(x))h−2(n− 1)2. Der erste Faktor besteht wegen∫
Ω fdx +∫Γ ϕdΓ = 0 nur aus dem Quadraturfehler O(h ‖u‖C0,1(Ω)).
2) Gemaß Satz 4.7.5 ist uh Losung von Lhuh = qh := qh − λ1. Dies entspricht den Differenzengleichungen
−Δhuh = fh := fh − λ1 in Ωh, ∂−n uh = ϕ auf Γ′h.
Die Differenz wh := uh −Rhu erfullt
−Δhwh = −Δhuh + ΔhRhu = ΔhRhu+ fh − λ1 = ΔhRhu− RhΔu− λ1 =: ch in Ωh, (4.7.12a)
∂−n wh = ∂−n uh − ∂−n Rhu = ϕ− ∂−n Rhu =∂u
∂n− ∂−n Rhu =: ψ auf Γ′h. (4.7.12b)
Die Konsistenzfehler betragen
‖ch‖∞ ≤ 16h2 ‖u‖C3,1(Ω) (vgl. Bemerkung 4.5.2),
|ψ(x)| ≤ 12h ‖u‖C1,1(Ω) + |λ| (vgl. Lemma 4.1.1).
Da die Losung wh existiert, ist die Bedingung (4.7.6) fur ch und ψ erfullt: h2∑
Ωhch(x) + h
∑Γ′
hψ(x) = 0.
wh := wh−c1 mit c = 1�wh/1�1 ist die durch 1�wh = 0 normierte Losung von (4.7.12a,b). Die Anwendungdes folgenden Satzes 4.7.7 auf Gleichung (4.7.12a, b) liefert Ungleichung (4.7.11) (vgl. Bemerkung 4.5.2).
Satz 4.7.7 (Stabilitat) Bedingung (4.7.6) sei erfullt. Die Losung uh von (4.7.3), (4.7.4) sei mittels1�uh = 0 normiert. Dann gibt es von u und h unabhangige Konstanten Cl, C2, sodass
‖uh‖∞ ≤ C1 maxx∈Ωh
|f(x)| + C2 maxx∈Γ′
h
|ϕ(x)| . (4.7.13)
Der Beweis dieses Satzes, der dem Satz 4.4.11 entspricht, wird in §4.7.4 nachgetragen.
4.7.2 Symmetrische Differenz fur ∂u/∂n
Wie aus Satz 4.7.6 hervorgeht, verursacht die einseitige Differenz ∂−n den Fehlerterm O(h). Es liegt nahe, ∂−ndurch eine symmetrische Differenz zu ersetzen. Hierzu wird die Funfpunktdiskretisierung in allen Punktenx ∈ Ωh = Ωh ∪ Γh (vgl. (4.2.1c)) aufgestellt:
−Δhuh = fh := Rhf in Ωh, (4.7.14a)
wobei Rh die Beschrankung auf Ωh ist. Die symmetrische Differenz ∂0n ist definiert durch(
∂0nuh
)(x) :=
12h
[uh(x + h�n) − uh(x − h�n)] = ϕ(x) fur x ∈ Γh. (4.7.14b)
Den Eckpunkten werden dabei zwei Normalenrichtungen zugeordnet, sodass fur die Eckpunkte je zweiGleichungen der Form (4.7.14b) aufgestellt werden konnen. In der Ecke x = (0, 0) hat man zum Beispiel dieNormalen �n =
(0−1
), �n =
(−10
). Die entsprechenden Gleichungen (4.7.14b) fuhren auf unterschiedliche Werte
ϕ(0+, 0) = limx↘0
ϕ(x, 0) und ϕ(0, 0+) = limy↘0
ϕ(0, y).
Fur x ∈ Γh benotigt die Differenzenformel (4.7.14a) die Werte in Punkten x + h�n außerhalb von Ωh. Dieselassen sich mit Hilfe von (4.7.14b) eliminieren, sodass ein Gleichungssystem Lhuh = qh fur die (n + 1)2
Komponenten uh(x), x ∈ Ωh, ubrigbleibt.

4.7 Die Diskretisierung der Neumann-Randwertaufgabe 51
Ubungsaufgabe 4.7.8 a) Bei lexikographischer Anordnung der Gitterpunkte von Ωh hat Lh die Gestalt
Lh = h−2
⎡⎢⎢⎢⎢⎢⎣T −2I−I T −I
. . . . . . . . .−I T −I
−2I T
⎤⎥⎥⎥⎥⎥⎦ , T =
⎡⎢⎢⎢⎢⎢⎣4 −2−1 4 −1
. . . . . . . . .−1 4 −1
−2 4
⎤⎥⎥⎥⎥⎥⎦ .
b) Lh ist nicht symmetrisch, aber DhLh mit Dh = diag{d(x)d(y)}, d(0) = d(1) = 1/2, d(·) ≡ 1 sonst, istsymmetrisch.
Die sinngemaße Ubertragung des Satzes 4.7.3 lautet:
Satz 4.7.9 Gleichung (4.7.14a,b) ist genau dann losbar, wenn 1�Dhqh = 0 fur Dh aus Ubungsaufgabe4.7.8b. Je zwei Losungen konnen sich nur um eine Konstante unterscheiden. Die Formulierung von1�Dhqh = 0 mit Hilfe von f und ϕ lautet
−h2∑
(x,y)∈Ωh
d(x)d(y)f(x, y) = 2h∑
(x,y)∈Γh
d(x)d(y)ϕ(x, y), (4.7.15)
wobei in der zweiten Summe der Summand fur Eckpunkte doppelt auftritt und die beiden (verschiedenen)Grenzwerte von ϕ berucksichtigt.
Bemerkung 4.7.10 Die Summen in (4.7.15) sind summierte Trapezformeln5. Aus∫Ω fdx +
∫Γ ϕdΓ = 0
folgt daher Gleichung (4.7.15) bis auf einen Rest O(h2 ‖u‖C1,1(Ω)).
Ohne Schwierigkeiten lassen sich die Satze 4.7.4 und 4.7.5 ubertragen. Der Konvergenzsatz 4.7.6 wird zu
Satz 4.7.11 Sei u ∈ C3,1(Ω) eine Losung von (4.7.1). uh =(uh
λ
)sei Losung von Lhuh =
(Dhqh
0
)mit der
Matrix Lh =[
DhLh
1�10
]. Es liegt Konvergenz der Ordnung 2 vor:
|λ| ≤ C′h2 ‖u‖C1,1(Ω) , ‖uh −Rhu− c1‖∞ ≤ Ch2 ‖u‖C3,1(Ω) . (4.7.16)
Beweis. Der Beweis ist im Wesentlichen der gleiche wie fur Satz 4.7.6. Eine zusatzliche, technische Schwierig-keit besteht darin, dass der Konsistenzfehler ΔhRhu − RhΔu auch in x ∈ Γh zu bestimmen ist, obwohl unur in Ω definiert ist. Statt wie in (4.7.12a,b) die Differenzengleichung und die Randdiskretisierung getrenntzu behandeln, analysiere man direkt die Gleichungen Lhuh = qh, aus denen die Werte uh(x+ h�n) außerhalbvon Ω bereits eliminiert worden sind.
4.7.3 Symmetrische Differenz fur ∂u/∂n im verschobenen Gitter
Verschiebt man das bisherige Gitter um h/2 in x- und y-Richtung, ergibt sich das Gitter
Ωh :={
(x, y) ∈ Ω :x
h− 1
2∈ Z,
y
h− 1
2∈ Z
}aus Abbildung 4.7.2. Die randnahen Punkte von Ωh haben den Abstand h/2 von Γ. Wir setzen
Γh :={
(x, y) ∈ Γ :x
h− 1
2∈ Z oder
y
h− 1
2∈ Z
}(vgl. Abbildung 4.7.2). Jedem randnahen Punkt x − h�n/2 (x ∈ Γh) entspricht ein außenliegender Nachbarx + h�n/2. Die Diskretisierung der Neumann-Aufgabe (4.7.1) lautet
−Δhuh(x) = f(x) in x ∈ Ωh, (4.7.17a)
h−1 [uh(x + h�n/2) − uh(x − h�n/2)] = ϕ(x) fur x ∈ Γ′h. (4.7.17b)
5vgl. Stoer [77, §3.1].

52 4. Differenzenmethode fur die Poisson-Gleichung
Abb. 4.7.2. Verschobenes Gitter, •:innerer Punkt von Ωh, o: außererGitterpunkt, ×: Randpunkt auf Γh
Die Differenz (4.7.17b) ist symmetrisch bezuglich des Randpunktes xund stimmt trotzdem mit der Ruckwartsdifferenz ∂−n im Gitterpunktx + h�n/2 uberein.
Bemerkung 4.7.12 Nach Elimination der Werte uh(x+h�n/2), x ∈ Γh,ergibt sich ein Gleichungssystem Lhuh = qh, wobei Bemerkung 4.7.2 auchauf diese Matrix Lh zutrifft. Anders als in §4.7.1 hat Lh die Große n2×n2.
Die Satze 4.7.3, 4.7.4, 4.7.5, 4.7.7 gelten sinngemaß. Satz 4.7.6 gilt mitUngleichung (4.7.16) anstelle von (4.7.11).
4.7.4 Beweis des Stabilitatsatzes 4.7.7
Im Falle von Dirichlet-Randwerten folgt die Stabilitatsaussage des Satzes4.4.11 sofort aus dem Maximumprinzip und der Abschatzung von L−1
h .Dagegen ist die entsprechende Aussage des Satzes 4.7.7 fur Neumann-Randwerte nicht so einfach nachzuweisen. In der Literatur findet mannur schwachere Abschatzungen, die auf der rechten Seite der Gleichung (4.7.13) einen zusatzlichen Faktor|log h| enthalten. Dieser Faktor ist nur dann nicht zu vermeiden, wenn man die Gleichung (4.7.9), Lhuh = qh,verwendet, wenn die Bedingung (4.7.6) nicht erfullt ist.
Die diskrete Greensche Funktion6 (zweiter Art) gh(x, ξ), x ∈ Ωh ∪ Γh, ξ ∈ Ωh, sei durch
−Δhgh(x, ξ) = δ(x, ξ) :={h−2 fur x = ξ0 sonst
}−
{h−1/ (4 − 4h) falls x randnah0 falls x randfern
}, (4.7.18a)(
∂−n gh
)(x, ξ) = 0 fur x ∈ Γ′h (4.7.18b)
definiert, wobei Δh und ∂−n auf x wirken. gh existiert, da∑
x∈Ωhδ(x, ξ) = 0 die Losbarkeitsbedingung (4.7.6’)
beweist.
Lemma 4.7.13 Fur beliebiges qh mit 1�qh = 0 (vgl. (4.7.6’)) stellt
uh(x) := h2∑
ξ∈Ωh
qh(ξ)gh(x, ξ) (4.7.19)
eine Losung von Lhuh = qh dar.
Beweis. In randfernen x ∈ Ωh ist (Lhuh)(x) = −Δhuh(x) = qh(x). In randnahen x ∈ Ωh hat man
(Lhuh) (x) = (−Δhuh) (x) = qh(x) − 1/h4 − 4h
∑ξ∈Ωh
qh(ξ) = qh(x)
wegen ∂−n uh = 0 und (4.7.6’).
Satz 4.7.14 Die Gleichungen (4.7.18a,b) bestimmen gh nur bis auf eine Konstante. Die Greensche Funktiongh(x, ξ) kann so gewahlt werden, dass
|gh(x, ξ)| ≤ C [1 + |log(|x − ξ| + h)|] fur x, ξ ∈ Ωh. (4.7.20)
Diese Ungleichung entspricht der Abschatzung (4.4.7) im Dirichlet-Fall. Bevor Satz 4.7.14 bewiesen wird,soll gezeigt werden, dass hieraus Satz 4.7.7 folgt.Beweis zu Satz 4.7.7. Analog zu
∫Ω[1 + |log |x − ξ||]dx ≤ K1 und
∫Γ[1 + |log |x − ξ||]dΓx ≤ K2 ergibt sich
h2∑
ξ∈Ωh
[1 + |log(|x− ξ| + h)|] ≤ K ′1, h∑x∈Γ′
h
[1 + |log(|x − ξ| + h)|] ≤ K ′2.
6Die diskrete Greensche Funktion aus (4.4.5b,c) gehorte zur Dirichlet-Randwertaufgabe. Wie in §3.4 im Falle der kontinuier-lichen Greenschen Funktion muss fur das Neumann-Problem eine Modifikation verwendet werden.

4.7 Die Diskretisierung der Neumann-Randwertaufgabe 53
Aus (4.7.19), (4.7.20) und qh = fh + ϕh (vgl. (4.7.5c)) folgt daher die Abschatzung
|uh(x)| ≤ K1 ‖fh‖∞ + hK2 ‖ϕh‖∞ ≤ K1 maxx∈Ωh
|f(x)| + 2K2 maxx∈Γ′
h
|ϕ(x)|.
Ist uh := uh − 1�uh/1�1 die durch 1�uh = 0 normierte Losung von Lhuh = qh, so uberlegt man sich, dass
‖uh‖∞ ≤ 2 inf {‖uh − c1‖∞ : c ∈ R} ≤ 2 ‖uh‖∞sodass Ungleichung (4.7.11) und Satz 4.7.7 bewiesen sind.
Es bleibt Satz 4.7.14 zu beweisen. Die Konstruktion der im folgenden Lemma postulierten Funktion Gh
ist Gegenstand der nachsten Seiten.
Lemma 4.7.15 e sei einer der Einheitsvektoren (1, 0) oder (0, 1). ξ ∈ Ωh sei derart, dass auch ξ+he ∈ Ωh.Fur alle diese e und ξ existiere eine Funktion Gh(x) = Gh(x; ξ, e) mit den Eigenschaften
−ΔhGh(x) = h−2
⎧⎨⎩1 falls x = ξ
−1 falls x = ξ + he0 sonst
⎫⎬⎭ in Ωh, (4.7.21a)
∂−n Gh = 0 auf Γ′h, (4.7.21b)|Gh(x)| ≤ hC′/ (|x − ξ| + h) , (4.7.21c)
wobei C′ nicht von e und ξ abhange. Dann gilt Satz 4.7.14 (und somit auch Satz 4.7.7).
Beweis. Fur ξ, ξ′ ∈ Ωh sei gh(x, ξ, ξ′) definiert als Losung von
∂−n gh(·, ξ, ξ′) = 0 auf Γ′h, −Δhgh(·, ξ, ξ′) = h−2
⎧⎨⎩1 falls x = ξ
−1 falls x = ξ′
0 sonst
⎫⎬⎭ in Ωh.
Fur ξ′ = ξ + he stimmt gh(·,ξ,ξ′) mit Gh aus Lemma 4.7.15 uberein. Fur beliebige ξ,ξ′ findet man eineVerbindung ξ = ξ0, ξ1, . . . , ξ� = ξ′ mit ξk+1 − ξk = ±hek, ek = (1, 0) oder (0, 1). Da gh(·, ξ, ξ′) =∑�
k=1 gh(·, ξk−1, ξk), liefert (4.7.21c) die Abschatzung
|gh(x, ξ, ξ′)| ≤ h
�∑k=1
C′/(|x − ξk−1| + h
).
Betrachtet man zunachst den Fall x1 = ξ1 = ξ′1, x2 ≤ ξ2 < ξ′2 und verwendet man
k2∑k=k1
1/k ≤ const · (1 + log(k2h) − log(k1h)),
so erhalt man|gh(x, ξ, ξ′)| ≤ C′′ [1 + |log(|x − ξ| + h)| + |log(|x − ξ′| + h)|] .
Diese Abschatzung ergibt sich auch im allgemeinen Fall, nur hat man die Verbindung ξk so zu wah1en, dass|x − ξk| ≥ min{|x− ξ| , |x − ξ′|}. Da h
∑ξ′∈Γ′
h|log(|x− ξ′| + h|) ≤ const fur alle x ∈ Ωh, erfullt
gh(x, ξ) :=h
4 − 4h
∑ξ′∈Γ′
h
gh(x, ξ, ξ′)
die Ungleichung (4.7.20). Wegen∑
Γ′h
1 = (4 − 4h)/h sind auch die Gleichungen (4.7.18a,b) erfullt, d.h.gh(x, ξ) ist die Greensche Funktion.
Die in Lemma 4.7.15 benotigte Funktion Gh soll explizit konstruiert werden. Grundbaustein ist die diskreteSingularitatenfunktion sh(x, ξ) auf dem Gitter Qh des R2:
Qh :={(x, y) ∈ R2 : x/h, y/h ∈ Z
}.

54 4. Differenzenmethode fur die Poisson-Gleichung
Lemma 4.7.16 Die durch sh(x, ξ) := σh(x − ξ) und
σh(x) :=1
16π2
∫ π
−π
∫ π
−π
ei(x1η1+x2η2)/h − 1sin2(η1/2) + sin2(η2/2)
dη1dη2 =1
8π2
∫ π
−π
∫ π
−π
sin2((x1η1 + x2η2) / (2h))sin2(η1/2) + sin2(η2/2)
dη1dη2
fur alle x, ξ ∈ Qh definierte Singularitatenfunktion hat die Eigenschaft −Δhsh(x, ξ) = h−2 fur x = ξ und−Δhsh = 0 sonst.
Beweis. Sei e(x, η) := exp(i(x1η1 + x2η2)/h). Man beachte, dass
−Δh(e(x, η) − 1) = 4h−2e(x, η)[sin2(η1/2) + sin2(η2/2)]
und∫ π
π
∫ π
π e(x, η)dη ={
4π2 fur x = 00 fur x �= 0
}.
Fur Multiindizes α = (α1, α2) ∈ N2 mit α1, α2 ≥ 0 definiert man die partiellen Differenzenoperatoren derOrdnung |α| = α1 + α2 durch
∂α =(∂+
x
)α1 (∂+
y
)α2. (4.7.22)
Ausgehend von der Darstellung in Lemma 4.7.16 beweist Thomee [82] das
Lemma 4.7.17 Es gilt |(∂ασh) (x)| ≤ C (|x| + h)−|α| fur alle x ∈ Qh.
Zur Konstruktion der Funktion Gh aus Lemma 4.7.15 wahlen wir ohne Beschrankung der Allgemeinheite = (1, 0) und halten ξ ∈ Ωh mit ξ + he ∈ Ωh fest. Die Funktion
G′h(x) := h(∂−x σh
)(x − ξ) = σh(x − ξ) − σh(x − ξ − he) (4.7.23)
erfullt zwar (4.7.21a), nicht aber die Randbedingung (4.7.21b). Die Symmetrisierungsoperatoren Sx und Sy
seien definiert durch
Sxuh(x, y) :=12
[uh(x, y) − uh(h− x, y)] , Syuh(x, y) :=12
[uh(x, y) − uh(x, h− y)]
fur (x, y) ∈ Qh. Die FunktionG′′h := 4SxSyG
′h (4.7.24)
ist symmetrisch bezuglich der Spiegelachsen y = h/2 und x = h/2. Daher gilt (4.7.21b) am linken undunteren Rand:
∂−n G′′h(0, y) = ∂−n G
′′h(x, 0) = 0. (4.7.25)
Außerdem erfullt G′′h ebenso wie G′h die Bedingung (4.7.21a). Fur jedes β ∈ N2 definieren wir den OperatorPβ durch
(Pβuh) (x, y)
=14
[uh(x+ β1L, y + β2L) + uh(x− β1L, y + β2L) + uh(x+ β1L, y − β2L) + uh(x− β1L, y − β2L)] ,
wobei L = 2 − 2h, und setzenGβ
h(x) := (PβG′′h) (x) − (PβG
′′h) (0). (4.7.26)
Lemma 4.7.18 Fur β = (β1, β2) mit ‖β‖∞ ≥ 2 gilt∣∣∣∂αGβh(x)
∣∣∣ ≤ hK/ |β|3 fur alle |α| ≤ 2, x ∈ Ωh. (4.7.27)
Dabei ist K unabhangig von der Wahl der ξ, ξ + he ∈ Ωh.
Beweis. Definitionsgemaß giltGβ
h(0, 0) = 0. (4.7.28a)

4.7 Die Diskretisierung der Neumann-Randwertaufgabe 55
Der Operator Pβ erhalt die Symmetrie: uh = Sxuh impliziert Pβuh = SxPβuh. Daher gelten die IdentitatenGβ
h = SxGβh = SyG
βh und haben zur Folge, dass
∂+x G
βh(0, 0) = ∂+
y Gβh(0, 0) = 0. (4.7.28b)
Gβh(x) ist Linearkombination von h∂−x σh(x − ξ) fur verschiedene ξ mit |x − ξ| + h ≥ K ′ |β|, wenn x ∈ Ωh.
Gemaß Lemma 4.7.17 ist ∣∣∣∂αGβh(x)
∣∣∣ ≤ hCK ′′/ |β|3 fur alle |α| ≤ 2, x ∈ Ωh, (4.7.28c)
sodass (4.7.27) fur |α| = 2 folgt. Sei |α| = 1. ∂αGh(x) kann man in der Form
∂αGβh(0) +
�∑k=1
[∂αGβ
h(xk) − ∂αGβh(xk−1)
]mit x0 = x, x� = x,
∥∥xk − xk−1∥∥∞ = h
schreiben. Jeder Summand hat die Gestalt ±h∂γGβh mit |γ| = 2, sodass (4.7.28b,c) die Abschatzung (4.7.28d)
ergibt: ∣∣∣∂αGβh(x)
∣∣∣ ≤ 2hCK ′′/ |β|3 fur |α| = 1, x ∈ Ωh. (4.7.28d)
Ebenso folgert man aus (4.7.28a) und (4.7.28d) die Ungleichung (4.7.27) fur |α| = 0, womit das Lemma4.7.18 bewiesen ist.
Da∑
β∈Z2\(0,0) |β|−3
<∞, existiert die unendliche Summe
Gh(x) :=∑β∈Z2
Gβh(x). (4.7.29)
Da −ΔhGβh(x) = 0 in Ωh fur alle β �= (0, 0), erfullt auch Gh die Gleichung (4.7.21a). Wie schon beim Beweis
von (4.7.28b) erwahnt, gilt Gh = SxGh = SyGh, sodass auch Gh der Gleichung (4.7.25) genugt: ∂−n Gh = 0am linken und unteren Rand. Der Nachweis von ∂−n Gh = 0 an den anderen Randern erfordert das
Lemma 4.7.19 Gh ist L-periodisch: Gh(x, y) = Gh(x+ L, y) = Gh(x, y + L).
Beweis. Sei G′′h(x+β1L, y+β2L)−G′′h(β1L, β2L) durch γβ(x, y) abgekurzt. Definition (4.7.29) besagt, dass7
Gh = limk→∞
∑|β1|≤k
∑|β2|≤k
γβ . (4.7.30a)
γβ kann man als Summe uber die Differenzen
h∂+h G′′h(x+ β1L, β2L+ νh) mit νh = 0 bis νh = y
und h∂+h G′′h(β1L+ νh, β2L) mit νh = 0 bis νh = x
schreiben. Fur |β1| ≥ 2 ist der Abstand der Argumente von ξ und ξ+he stets ≤ (|β1| − 1)h. Jeder Summandist daher gemaß Lemma 4.7.17 durch O(h2/(|β1|−1)2) = O(h2/β2
1) beschrankt. γβ als Summe dieser Großenist abschatzbar durch
|γβ | ≤ O(h2/β21) fur |β1| ≥ 2. (4.7.30b)
Wir wollen nun zeigen, dass auch die Darstellung (4.7.30c) gilt:
Gh = limk→∞
∑|β1−1|≤k
∑|β2−1|≤k
γβ = limk→∞
∑1−k≤β1≤1+k
∑|β2−1|≤k
γβ . (4.7.30c)
7Die PartialsummenP|β1|≤k
P|β2|≤k Gβ
h(x) undP|β1|≤k
P|β2|≤k γβ(x) sind identisch. Man beachte, dass die Summe
(4.7.29) unbedingt konvergiert. Dagegen konvergiertP
γβ nur bedingt. (4.7.30a) beschreibt die Konvergenz vonP
γβ fur einespezielle Summationsreihenfolge. Dies erklart, warum die Identitat in (4.7.30c) keine Trivialitat ist.

56 4. Differenzenmethode fur die Poisson-Gleichung
Die Summen (4.7.30a/c) unterscheiden sich um
Dh :=∑|β2|≤k
[ γ(1+k,β2) − γ(−k,β2) ] .
Die beiden β1-Werte 1+k und −k erfullen |β1| ≤ k ≤ 2 fur k ≤ 2. Der Betrag der SummeDh ist nach (4.7.30b)durch
∑|β2|≤k O(h/k2) = (2k+1)O(h/k2) = O(h/k) beschrankt, sodass die Grenzwerte der Doppelsummen
in (4.7.30a) und (4.7.30c) ubereinstimmen. Umbenennungen von β1 in β1 − 1 uberfuhrt (4.7.30c) in
Gh(x, y) = limk→∞
∑−k≤β1,β2≤k
[G′′h(x+ β1L+ L, y + β2L) −G′′h(β1L+ L, β2L)] . (4.7.30d)
Der erste Teil der Identitat
k∑β1,β2=−k
[G′′h(β1L, β2L) −G′′h(β1L+ L, β2L)] =k∑
β2=−k
[G′′h(−kL, β2L) −G′′h(kL+ L, β2L)]
=k∑
β2=−k
[G′′h(h+ kL, β2L) −G′′h(kL+ L, β2L)] (4.7.30e)
ist elementar, der zweite ergibt sich aus der Symmetrie G′′h = SxG′′h. Wie oben lassen sich die Summanden
in der letzten Summe durch O(h/k2) abschatzen, sodass (4.7.30e) fur k → ∞ verschwindet. Zusammen mit(4.7.30d) erhalt man
Gh(x, y) = limk→∞
∑−k≤β1,β2≤k
[G′′h(x+ β1L+ L, y + β2L) −G′′h(β1L, β2L)]
= limk→∞
∑−k≤β1,β2≤k
γβ(x+ L, y) = Gh(x+ L, y).
Der Nachweis von Gh(x, y) = Gh(x, y + L) ist analog.
Beweis von Satz 4.7.14. Da L = 2 − 2h, ergeben die Symmetrie Gh = SxGh und die Periodizitat
Gh(1, y) = Gh(h− 1, y) = Gh(h− 1 + L, y) = Gh(1 − h, y),
d.h. ∂−n Gh(1, y) = 0 auf dem oberen Rand (1, y) ∈ Γ′h. Ebenso zeigt man ∂−n Gh(x, 1) = 0 auf dem rechtenRand. Damit ist auch (4.7.21b) nachgewiesen. Es bleibt, (4.7.21c) zu zeigen:
|Gh(x)| ≤ hC/(|x − ξ| + h) in Ωh.
Die Gβh fur ‖β‖∞ ≤ 1 sind Linearkombinationen von h∂−x σh(x − ξ) fur ξ = ξ und andere ξ �∈ Ωh, die durch
Sx, Sy und Pβ erzeugt werden. Fur alle ξ gilt |x − ξ| ≥ |x− ξ|, sodass aus Lemma 4.7.17∣∣∣Gβh(x)
∣∣∣ ≤ hC′/(|x − ξ| + h) fur ‖β‖∞ ≤ 1, x ∈ Ωh
folgt. Andererseits zeigt Lemma 4.7.18, dass∣∣∣∣∣∣∑
‖β‖∞≥2
Gβh(x)
∣∣∣∣∣∣ ≤ h∑
‖β‖∞≥2
K
|β|3= hK ′ ≤ hK ′′/(|x − ξ| + h).
Somit sind die Voraussetzungen des Lemmas 4.7.15 erfullt: Gh mit (4.7.21a-c) existiert. Damit sind die Satze4.7.14 und 4.7.7 bewiesen.

4.8 Diskretisierung der Poisson-Gleichung im beliebigen Gebiet 57
4.8 Diskretisierung der Poisson-Gleichung im beliebigen Gebiet
4.8.1 Shortley-Weller-Approximation
Ωh
Ωh
Γh
hsh
randnahe Punkte vonrandferne Punkte von
Randpunkte von
Abb. 4.8.1. Ωh und Γh
Die Randwertaufgabe
−Δu = f in Ω, u = ϕ auf Γ (4.8.1)
sei fur ein beliebiges Gebiet Ω gegeben. Legt manein quadratisches Gitter der Schrittweite h uber Ω,erhalt man
Ωh := {(x, y) ∈ Ω : x/h ∈ Z und y/h ∈ Z} (4.8.2)
als Menge der Gitterpunkte. Dagegen hat man dieMenge Γh der Randpunkte anders als im Falle desQuadrates zu definieren. Der linke Nachbarpunktvon (x, y) ∈ Ωh lautet (x − h, y). Falls die Verbindungsstrecke {(x − ϑh, y) : ϑ ∈ (0, 1]} nicht vollstandig inΩ liegt, gibt es einen Randpunkt
(x− sh, y) ∈ Γ mit (x, y) ∈ Ωh, s ∈ (0, 1], (x− ϑh, y) ∈ Ω fur alle ϑ ∈ [0, s), (4.8.3a)
der nun anstelle von (x − h, y) als linker Nachbarpunkt von (x, y) bezeichnet wird (vgl. Abbildung 4.8.1).Entsprechend konnen rechte, untere und obere Nachbarpunkte Randpunkte der folgenden Gestalt sein:
(x+ sh, y) ∈ Γ mit (x, y) ∈ Ωh, s ∈ (0, 1], (x+ ϑh, y) ∈ Ω fur alle ϑ ∈ [0, s), (4.8.3b)(x, y − sh) ∈ Γ mit (x, y) ∈ Ωh, s ∈ (0, 1], (x, y − ϑh) ∈ Ω fur alle ϑ ∈ [0, s), (4.8.3c)(x, y + sh) ∈ Γ mit (x, y) ∈ Ωh, s ∈ (0, 1], (x, y + ϑh) ∈ Ω fur alle ϑ ∈ [0, s). (4.8.3d)
Wir setzenΓh := {Randpunkte, die eine der Bedingungen (4.8.3a-d) erfullen} (4.8.4)
Ein Gitterpunkt (x, y) ∈ Ωh, der einen Nachbarn aus Γh besitzt, heißt randnah. Alle anderen Punkte vonΩh heißen randfern. Wie aus Abbildung 4.8.1 hervorgeht, kann ein Punkt randnah sein, obwohl (x ± h, y)und (x, y ± h) zu Ωh gehoren (wenn namlich nicht die gesamte Verbindungsstrecke in Ω verlauft).
Ubungsaufgabe 4.8.1 Fur ein konvexes Gebiet Ω zeige man
Γh = {(x, y) ∈ Γ : x/h ∈ Z oder y/h ∈ Z} .
Warum gilt diese Charakterisierung nicht im Allgemeinen ohne die Konvexitatsvoraussetzung?
Will man die zweite Ableitung u′′(x) mit Hilfe der Werte von u bei x′ < x < x′′ approximieren, so kannman die Newtonschen8 dividierten Differenzen verwenden:
u′′(x) = 2[u(x′′) − u(x)
x′′ − x− u(x) − u(x′)
x− x′
]/ (x′′ − x′) + Rest. (4.8.5)
Ubungsaufgabe 4.8.2 Man zeige: (a) Taylor-Entwicklung liefert
|Rest| ≤ 13
(x′′ − x)2 + (x− x′)2
x′′ − x′‖u‖C3([x′,x′′]) ≤
max{x′′ − x, x− x′}3
‖u‖C3([x′,x′′]) (4.8.6)
fur den Rest aus Gleichung (4.8.5), falls u ∈ C3([x′, x′′]).(b) In Gleichung (4.8.6) lasst sich die Norm von C3([x′, x′′]) durch die von C2,1([x′, x′′]) ersetzen.(c) Falls x′′ = x + h und x′ = x − h, stimmt die Differenz in (4.8.5) mit der ublichen zweiten Differenz
∂−∂+u(x) uberein.
8Sir Isaac Newton, geb. 4. Jan. 1643 in Woolsthorpe, gest. 31. Marz 1727 in London

58 4. Differenzenmethode fur die Poisson-Gleichung
Um die Differenzengleichung fur −Δu = f in (x, y) ∈ Ωh aufzustellen, verwenden wir wieder die vierNachbarpunkte
(x− s�h, y) , (x+ srh, y) , (x, y − suh) , (x, y + soh) ∈ Ωh ∪ Γh, 0 < s∗ ≤ 1,
die oben definiert wurden. Fur randferne Punkte gilt s� = 1; fur randnahe Punkte (x, y) liegt mindestensein Nachbar auf Γh, und der entsprechende Abstand s�h kann kleiner als h sein. Gleichung (4.8.5) mitx′ = x − s�h und x′′ = x + srh liefert eine Approximation fur uxx. Analog kann uyy durch eine dividierteDifferenz ersetzt werden. Insgesamt erhalt man das Differenzenschema von Shortley und Weller [76]:
−Dhu(x, y) := (4.8.7)
1h2
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
− 2so (so + su)
u(x, y + soh)
− 2s� (s� + sr)
u(x− s�h, y) +(
2s�sr
+2
suso
)u(x, y) − 2
sr (s� + sr)u(x+ srh, y)
− 2su (so + su)
u(x, y − suh)
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎭Bemerkung 4.8.3 Sobald s� = sr = su = so = 1, stimmt Dh mit der Standard-Funfpunktformel Δh
uberein.
Das diskrete Randwertproblem erhalt die Gestalt
−Dhuh = fh := Rhf auf Ωh mit(Rhf
)(x) = f(x), (4.8.8a)
uh = ϕ auf Γh. (4.8.8b)
Die funf Koeffizienten in der rechten Seite der Gleichung (4.8.7) definieren die Matrixelemente Lxξ fur ξ = xund fur die vier Nachbarn ξ von x. Sonst wird Lxξ = 0 gesetzt. Die rechte Seite des Gleichungssystems
Lhuh = qh, (4.8.9a)
in der uh als Gitterfunktion auf Ωh (nicht Ωh ∪ Γh) aufgefasst wird, ist durch
qh = fh + ϕh, ϕh(x) := −∑ξ∈Γh
Lxξϕ(ξ) (4.8.9b)
gegeben. Wieder gilt ϕh(x) = 0 fur randferne x ∈ Ωh.
Satz 4.8.4 Ω sei beschrankt und in einem Streifen (x0, x0+d)×R oder R×(y0, y0+d) der Breite d enthalten.Fur die zur Shortley-Weller-Diskretisierung gehorende Matrix Lh gilt:a) Lh ist im Allgemeinen nicht symmetrisch;b) Lh ist eine M-Matrix mit
‖L−1h ‖∞ ≤ d2/8. (4.8.10)
Beweis. a) Sei x = (x, y) ∈ Ωh randnah wegen (x − s�h, y) ∈ Γh, aber der Nachbar x′ = (x + h, y) ∈ Ωh
randfern. Dann gilt Lxx′ = −2h−2/(1 + s�) �= −h−2 = Lx′x, sobald s� < 1. Anders als in Ubungsaufgabe4.7.1 lasst sich im Allgemeinen keine Skalierung finden, sodass DhLh (Dh diagonal) symmetrisch wird.
b) Lh braucht nicht notwendig irreduzibel und damit irreduzibel diagonaldominant zu sein. Aber dieschwachere Bedingung aus Ubungsaufgabe 4.3.8 ist erfullt und beweist die M-Matrix-Eigenschaft.
c) Zum Beweis von (4.8.10) wird Satz 4.3.16 verwendet. Liegt Ω im Streifen (x0, x0 + d) × R, wahlen wirwh(x, y) := Rhw,w := (x− x0)(x0 + d− x)/2. Der Rest in Gleichung (4.8.5) enthalt nur dritte Ableitungen,die fur w verschwinden. Daher stimmt Dhwh mit Δw = −1 uberein:
−Dhuh = 1 in Ωh, wh ≥ 0 auf Γh.
Das entsprechende Gleichungssystem lautet Lhwh = qh := fh + ϕh mit fh = 1 und qh ≥ 0. Daher giltLhwh ≥ 1 und Satz 4.3.16 beweist
∥∥L−1h
∥∥∞ ≤ ‖wh‖∞ ≤ (d/2)2/2 = d2/8.

4.8 Diskretisierung der Poisson-Gleichung im beliebigen Gebiet 59
Ubungsaufgabe 4.8.5 Man beweise das Analogon der Abschatzung (4.4.10):
‖uh‖∞ ≤∥∥L−1
h
∥∥∞ ‖fh‖∞ + max
ξ∈Γh
|ϕ(ξ)| ≤ d2
8maxx∈Ωh
|f(x)| + maxξ∈Γh
|ϕ(ξ)| .
Mit (4.8.10) ist die Stabilitat nachgewiesen. Dagegen ist die Konsistenzordnung nur noch 1, denn inrandnahen Punkten hat
ch := DhRhu− RhΔu
wegen der nichtsymmetrischen Differenz nur die Großenordnung O(h1). Dabei ist Rh die Beschrankung aufΩh ∪ Γh. Rh wurde in (4.8.8a) definiert. Wir wollen zeigen, dass trotzdem Konvergenz der zweiter Ordnungvorliegt. Die Differenz wh := uh − Rhu der diskreten Losung uh = L−1
h qh und der Losung u ∈ C3,1(Ω) von(4.8.1) erfullt
−Dhwh = −Dhuh +DhRhu = Rhf +DhRhu = DhRhu− RhΔu = ch in Ωh, (4.8.11a)wh = 0 auf Γh, (4.8.11b)
sodass wh = L−1h ch folgt. ch lasst sich schreiben als cxh + cyh, wobei cxh (cyh) der Diskretisierungsfehler der
x-Differenz (y-Differenz) ist. cxh wird wiederum in cxh = cx,1h + cx,2
h aufgespalten:
cx,2h (x, y) :=
{cxh(x, y), falls s� = sr = 10 sonst
}, cx,1
h := cxh − cx,2h .
Analog definiert man cy,1h und cy,2
h und setzt
c1h = cx,1h + cy,1
h , c2h = cx,2h + cy,2
h , wih := L−1
h cih (i = 1, 2) .
Die Fehler c2h werden durch (4.5.7) beschrieben:
‖w2h‖∞ ≤
∥∥L−1h
∥∥∞ ‖c2h‖∞, ‖c2h‖∞ ≤ 1
6h2 ‖u‖C3,1(Ω) . (4.8.12a)
Mit K := 13h
3 ‖u‖C2,1(Ω) definiere man
vh = K1 in Ωh, vh = 0 auf Γh, ch := Lhvh.
In randfernen x ∈ Ωh ist ch(x) = 0, in randnahen x ∈ Ωh gilt dagegen
ch(x) = K∑
ξ∈Ωh
Lxξ = −K∑ξ∈Γh
Lxξ (x ∈ Ωh randnah) .
Man betrachte zum Beispiel den Fall x = (x, y) ∈ Ωh randnah, ξ = (x−s�h, y) ∈ Γh. Gemaß Ubungsaufgabe4.8.2a,b gehort zur x-Differenz der Fehler
|cx,1h (x)| ≤ h
3s2r + s2�sr + s�
‖u‖C2,1(Ω) = h−2 s2r + s2�sr + s�
K ≤ K2h−2
s� (sr + s�)= −KLxξ.
Die analoge Abschatzung fur cy,1h (x) ergibt
∣∣c1h(x)∣∣ ≤ ch(x). Wegen c1h(x) = ch(x) = 0 in randfernen x ∈ Ωh
hat man −ch ≤ chh1 ≤ ch. Da L−1
h ≥ 0, folgt −vh ≤ w1h ≤ vh, d.h.
‖w1h‖∞ ≤ K =
13h3 ‖u‖C2,1(Ω) . (4.8.12b)
(4.8.12a,b) zusammen mit w1h + w2
h = wh = uh −Rhu beweist den folgenden Satz.
Satz 4.8.6 (Konvergenz des Shortley-Weller-Verfahrens) Ω erfulle die Voraussetzung des Satzes4.8.4. Das Shortley-Weller-Verfahren konvergiert von zweiter Ordnung, falls u ∈ C3,1(Ω):
‖uh −Rhuh‖∞ ≤ 13h3 ‖u‖C2,1(Ω) + ‖L−1
h ‖∞16h2 ‖u‖C3,1(Ω) ≤
(13h3 +
d2
48h2
)‖u‖C3,1(Ω) . (4.8.13)
Ubungsaufgabe 4.8.7 Man zeige: Verwendet man die Shortley-Weller-Diskretisierung fur alle randnahenGitterpunkte, aber das Mehrstellenverfahren aus Abschnitt 4.6 fur alle randfernen Punkte, so ergibt sich einVerfahren der dritter Konvergenzordnung: ‖uh −Rhu‖∞ = O(h3).

60 4. Differenzenmethode fur die Poisson-Gleichung
4.8.2 Interpolation in randnahen Punkten
Statt in randnahen Gitterpunkten x ∈ Ωh die Poisson-Gleichung zu diskretisieren, kann man auch versuchen,uh(x) durch Interpolation aus den Nachbarpunkten zu bestimmen. Ist z.B. x = (x, y) ∈ Ωh randnah,(x− s�h, y) ∈ Γh und (x+ srh, y) ∈ Ωh ∪ Γh, so ergibt lineare Interpolation den Wert
uh(x, y) = [s�uh(x+ srh, y) + sruh(x − s�h, y)] / (sr + s�) .
Daher wird im Punkte x die Gleichung
(sr + s�)uh(x, y) − s�uh(x+ srh, y) − sruh(x− s�h, y) = 0 (4.8.14a)
aufgestellt. Da ξ = (x − s�h, y) Randpunkt sein sollte, lasst sich uh(ξ) durch ϕ(ξ) ersetzen. Ist dagegen(x, y + soh) oder (x, y − suh) ein Randpunkt, wahlen wir die Interpolation in y-Richtung:
(su + so)uh(x, y) − suuh(x+ soh, y) − souh(x− suh, y) = 0 (4.8.14b)
In allen randfernen x ∈ Ωh wird die Funfpunktformel (4.2.3) verwendet:
− (Δhuh) (x) = fh(x) = Rhf(x) = f(x) (x randfern) . (4.8.14c)
Satz 4.8.8 Ω erfulle die Voraussetzungen des Satzes 4.8.4. Die Diskretisierung sei durch (4.8.14a-c) gegeben,wobei die Wahl zwischen (4.8.14a) und (4.8.14b) so getroffen wird, dass stets (mindestens) ein Randpunktfur die Interpolation benutzt wird. Das nach der Elimination der Randwerte uh(ξ) = ϕ(ξ), ξ ∈ Γh, ent-stehende Gleichungssystem sei Lhuh = qh. Lh ist eine (im Allgemeinen unsymmetrische) M-Matrix, die derAbschatzung (4.8.10) genugt. Die diskreten Losungen uh konvergieren von der Ordnung 2, falls u ∈ C3,1(Ω):
‖uh −Rhuh‖∞ ≤ h2 ‖u‖C1,1(Ω) + ‖L−1h ‖∞
16h2 ‖u‖C3,1(Ω) . (4.8.15)
Beweis. 1) Die M-Matrix-Eigenschaft und (4.8.10) beweist man wie in Satz 4.8.4.2) x ∈ Ωh sei ein randnaher Punkt, in dem (4.8.14a) verwendet wird. Der Interpolationsfehler betragt
c1h(x, y) := (sr + s�)Rhu(x, y) − s�Rhu(x+ srh, y) − srRhu(x− s�h, y),∣∣c1h(x, y)∣∣ ≤ 1
2srs� (sr + s�)h2 ‖u‖C1,1(Ω) .
Mit diesem c1h und K := h2 ‖u‖C1,1(Ω) lasst sich der Beweis zu Satz 4.8.6 sinngemaß wiederholen.
Indem man die Gleichungen (4.8.14a,b) umskaliert und addiert, erhalt man
1h2
{(sr + s�
srs�+so + su
sosu
)uh(x, y) − 1
s�uh(x− s�h, y) (4.8.16)
− 1sruh(x+ srh, y) −
1souh(x, y + soh) − 1
suuh(x, y − suh)
}= 0.
Hierdurch lasst sich auch bei beliebigem Ω eine symmetrische Matrix Lh erreichen.
Ubungsaufgabe 4.8.9 Man zeige: Die Diskretisierung (4.8.14c), (4.8.16) fuhrt zu einer symmetrischenM-Matrix. Die Konvergenzabschatzung lautet
‖uh −Rhuh‖∞ ≤ 2h2 ‖u‖C1,1(Ω) +16d2h2 ‖u‖C3,1(Ω) .
In (4.8.14a,b) wurde die lineare Interpolation gewahlt, weil hierzu die Werte der Nachbarpunkte ausreichen.Konstante Interpolation durch
u(x, y) = uh(x− s�h, y) = ϕ(x− s�h, y), falls (x, y) ∈ Ωh, (x− s�h, y) ∈ Γh,
ist ungunstiger, da sie nur Konvergenz erster Ordnung liefert: ‖uh −Rhu‖∞ = O(h). Dagegen ist Inter-polation hoherer Ordnung durchaus anwendbar (vgl. Pereyra-Proskurowski-Widlund [67]). Sie wird aberdurch eine Gleichung beschrieben, die auch Punkte in einem Abstand ≥ 2h enthalt. Hohere Randapproxima-tionen sind insbesondere dann notwendig, wenn man Extrapolationsverfahren anwenden will (vgl. Marchuk-Shaidurov [61, p. 162ff]).

5Allgemeine Randwertaufgaben
5.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiterOrdnung
5.1.1 Problemstellung
In §1.2 wurde bereits die allgemeine lineare Differentialgleichung zweiter Ordnung formuliert:
Lu = f in Ω mit L =n∑
i,j=1
aij(x)∂2
∂xi∂xj+
n∑i=1
ai(x)∂
∂xi+ a(x). (5.1.1a)
Es wurde erwahnt, dass ohne Beschrankung der Allgemeinheit
aij(x) = aji(x) (i, j ∈ {1, . . . , n}, x ∈ Ω) (5.1.1b)
vorausgesetzt werden kann, sodass die Matrix
A(x) = (aij(x))i,j=1,...,n (5.1.1c)
symmetrisch ist. Ein scheinbar allgemeinerer Differentialoperator als (5.1.1a) ist
L =n∑
i,j=1
[aI
ij
∂2
∂xi∂xj+
∂
∂xjaII
ij
∂
∂xi+
∂2
∂xi∂xjaIII
ij
]+
n∑i=1
[aI
i
∂
∂xi+
∂
∂xiaII
i
]+ a(x). (5.1.2)
Da aber z.B. ∂∂xj
(aIIij
∂∂xi
u) = aIIijuxixj + (∂aII
ij/∂xj)uxi lasst sich der Operator (5.1.2) in der Form (5.1.1a)schreiben, wenn nur die Koeffizienten hinreichend oft differenzierbar sind. Nach Definition 1.2.3 ist Gleichung(5.1.1a) elliptisch in Ω, falls alle Eigenwerte von A(x) das gleiche Vorzeichen besitzen. Ohne Einschrankungder Allgemeinheit kann angenommen werden, dass alle Eigenwerte positiv sind, sodass A(x) positiv definitist (vgl. Ubungsaufgabe 4.3.22a). Damit ist L in Ω elliptisch, wenn
n∑i,j=1
aij(x)ξiξj > 0 fur alle x ∈ Ω, 0 �= ξ ∈ Rn. (5.1.3a)
Fur alle x ∈ Ω existiert c(x) := min{aij(x)ξiξj : |ξ| = 1} und muss positiv sein (c(x) ist der kleinsteEigenwert von A(x)). Somit kann man (5.1.3a) auch in der Form (5.1.3a’) schreiben:
n∑i,j=1
aij(x)ξiξj ≥ c(x) |ξ|2 , c(x) > 0 fur alle x ∈ Ω, 0 �= ξ ∈ Rn. (5.1.3a’)

62 5. Allgemeine Randwertaufgaben
Definition 5.1.1 Gleichung (5.1.1a) bzw. der Operator L heißen gleichmaßig elliptisch in Ω, wenn
inf{c(x) : x ∈ Ω} > 0 (c(x) aus (5.1.3a′)) . (5.1.3b)
Bemerkung 5.1.2 Wenn L stetige Koeffizienten im Gebiet Ω besitzt und dort elliptisch ist, ist L in jedemKompaktum K ⊂ Ω gleichmaßig elliptisch.
Beweis. a) Da L in K elliptisch ist, gilt c(x) > 0 in K.b) Nach Voraussetzung ist c(·) stetig und nimmt daher auf K ein Minimum an, das nach a) positiv sein
muss.Auf Γ = ∂Ω wird die Dirichlet-Randwertbedingung gestellt:
u = ϕ auf Γ. (5.1.4)
Ubungsaufgabe 5.1.3 Sei x �→ Φ(x) := x′ := x0 + Sx (S: regulare n × n-Matrix) eine affine Abbildungvon Ω auf Ω′. Man zeige, dass der Operator L′ der transformierten Differentialgleichung wieder die gleichenElliptizitatseigenschaften besitzt und a′(Φ(x)) = a(x) fur den Koeffizienten der nullten Ableitung in L′ =∑n
i,j=1 a′ij(x
′) ∂2
∂x′i∂x′
j+
∑ni=1 a
′i(x′) ∂
∂x′i+ a′(x′) gilt. Hinweis: Ubungsaufgabe 1.2.5.
5.1.2 Maximumprinzip
Im Allgemeinen wird fur die Gleichung Lu = f weder das Maximumprinzip gelten, noch ist die Losung derRandwertaufgabe (5.1.3a), (5.1.4) eindeutig bestimmt.
Beispiel 5.1.4 Seien Ω = (0, π) × (0, π), ϕ = 0, f = 0, L = Δ + 2. Dann sind sowohl u = 0 als auchu(x, y) = sin(x) sin(y) Losungen der Randwertaufgabe. Die zweite Losung nimmt ihr striktes Maximum indem inneren Punkt (π/2, π/2) ∈ Ω an.
Im vorliegenden Beispiel hat der Koeffizient a(x) = 2 (vgl. (5.1.1b)) das “falsche” Vorzeichen. Sobalda ≤ 0, ist die folgende Aussage anwendbar, die auf Hopf1 zuruckgeht.
Satz 5.1.5 (Maximum-Minimum-Prinzip) Die Koeffizienten des elliptischen Operators (5.1.1a) seienstetig in Ω. u ∈ C2(Ω) erfulle Lu = f . Fur jedes Kompaktum K ⊂ Ω mit a(x) ≤ 0 in K und u ∈ C0(K)gilt:
a) Sind f ≤ 0 und u ≤ 0 in K, so nimmt u sein Minimum auf ∂K an.b) Sind f ≥ 0 und u ≥ 0 in K, so nimmt u sein Maximum auf ∂K an.
Beweis. 1) Es reicht, den Teil a) zu beweisen, da b) nach Ubergang zu −u mit a) identisch ist.2) Wir fuhren den Beweis indirekt. Da K kompakt ist, nimmt u in K ein globales Minimum an. Wenn
dieses nicht auf ∂K liegt, besitzt u in x� ∈ K (Inneres von K) ein lokales (und globales) Minimum
u(x�) < minx∈∂K
u(x) ≤ 0. (5.1.5a)
Folglich verschwinden die ersten Ableitungen: uxi(x�) = 0, und die Hesse2-Matrix B := (uxixj(x�))i,j=1,...,n
ist positiv semidefinit (d.h. B = B� und 〈ξ, Bξ〉 ≥ 0 fur alle ξ ∈ Rn). Auswertung der Differentialgleichungin x� liefert
0 ≥ f(x�) = (Lu) (x�) =n∑
i,j=1
aij(x�)uxixj (x�)︸ ︷︷ ︸
≥0
+ a(x�)︸ ︷︷ ︸≤0
u(x�)︸ ︷︷ ︸<0
≥ 0. (5.1.5b)
Von den unterlegten Ungleichungen ist lediglich Spur (A(x�)B) =∑n
i,j=1 aij(x�)uxixj (x�) ≥ 0 noch zuzeigen. Dies wird Gegenstand der Ubungsaufgabe 5.1.6 sein.
Verstarken wir die Annahme f ≤ 0 zu f < 0, liefert (5.1.5b) den Widerspruch 0 > f(x�) = . . . ≥ 0.
1Eberhard Frederich Ferdinand Hopf, geb. am 4. April 1902 in Salzburg, gest. am 24. Juli 19832Ludwig Otto Hesse, geb. am 22. April 1811 in Konigsberg, gest. am 4. August 1874 in Munchen

5.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiter Ordnung 63
3) Es bleibt der Fall f ≤ 0 zu untersuchen. O.B.d.A. durfen wir annehmen, dass K in {x ∈ Rn : ‖x‖2 ≥ 1}liegt (vgl. Ubungsaufgabe 5.1.3). Die Funktion q(x) := exp(α‖x‖2
2) (α ∈ R) hat die Eigenschaften
q(x) > 0, Lq(x) =
⎛⎝4α2n∑
i,j=1
aij(x)xixj + 2αn∑
i=1
aii(x) + 2αn∑
i=1
ai(x)xi + a(x)
⎞⎠ q(x). (5.1.5c)
Wegen ‖x‖2 ≥ 1 (x ∈ K) ist die quadratische Form∑n
i,j=1 aij(x)xixj positiv, wenn wir voraussetzen, dass Lnicht nur elliptisch, sondern auch gleichmaßig elliptisch ist. Fur hinreichend großes |α| uberwiegt der Anteil4α2
∑ni,j=1 aij(x)xixj und die Klammer in (5.1.5c) ist positiv. Mit dieser Wahl ist Lq > 0 in K. Wir setzen
v(x) := u(x) − cq(x) mit c > 0. (5.1.5d)
v erfullt die Differentialgleichung Lv = g := f − cLq und die Bedingung v ≤ 0. Wegen Lq > 0 ist g < 0.Die Ungleichung aus (5.1.5a) gilt auch fur v, wenn c > 0 hinreichend klein gewahlt wird. Damit gelten die
Ungleichungen v ≤ 0 und Lv = g < 0 in K, aber das Minimum von v wird nicht auf dem Rand ∂Kρ(x�)angenommen. Dies ist ein Widerspruch zum Resultat aus Beweisteil 2), da das dortige f jetzt das g < 0 ist.
4) Wenn L in Ω nicht gleichmaßig elliptisch ist, gilt die Aussage des Satz immer noch fur KompaktaK ′ ⊂ Ω (vgl. Bemerkung 5.1.2). Indem wir K ⊂ Ω von innen ausschopfen:
K1 ⊂ K2 ⊂ . . . ⊂ K, Ki = Ki, dist(Ki, ∂K) → 0,
erhalten wir Minima u(xi) = minx∈Ki u(x) mit xi ∈ ∂Ki. Da dist(xi, ∂K) → 0, konvergiert eine Teilfolgegegen ein x� ∈ ∂K mit u(x�) = minx∈K u(x), sodass die Aussage insgesamt bewiesen ist.
Ubungsaufgabe 5.1.6 Es ist Spur(A) :=∑n
i=1 aii. Man beweise:a) aii ≥ 0 und Spur(A) ≥ 0, wenn A positiv semidefinit ist.b) Spur(AB) = Spur(BA) =
∑ni,j=1 aijbji.
c) Spur(AB) ≥ 0, falls A und B positiv semidefinit sind.Hinweis zu c): B1/2AB1/2 ist positiv semidefinit; Ubungsaufgabe 4.3.22d.
Das Maximum-Minimum-Prinzip aus Satz 2.3.3 im Falle der Laplace-Gleichung ist weitergehend, da dortein Maximum bzw. Minimum im Inneren impliziert, dass die Losung u konstant sein muss. Dies bezeichnetman auch als starkes Maximum-Minimum-Prinzip.
Zusatz 5.1.7 Unter den Voraussetzungen von Satz 5.1.5 gilt auch das starke Maximum-Minimum-Prinzip:Werden die Extrema im Inneren von K angenommen, so gilt u = const in K.
Beweis. Wir beschranken uns auf den Fall eines Minimum in Inneren von K, wobei Lu = f ≤ 0 und u ≤ 0in K vorausgesetzt ist. In x0 ∈ K werde das globale Minimum angenommen:
u(x0) = m := min{u(x) : x ∈ K}.
Falls die Mengeω := {x ∈ K : u(x) > m}
leer ist, folgt die Behauptung u = m in K. Zum indirekten Beweis sei deshalb ω �= ∅ angenommen.Da ω offen (relativ zu K) ist, kann es keine Teilmenge von ∂K sein. ∂ω ⊂ ∂K kann ebenfalls aus-
geschlossen werden (da sonst ω = K im Widerspruch zu x0 ∈ K und x0 /∈ ω). Also existiert ein x′ ∈ ∂ω\∂Kmit d := dist(x′, ∂K) > 0. Sei y ∈ ω ein Punkt in der d/3-Umgebung von x′. Offenbar gilt
δ := dist(y, ∂ω) ≤ d/3 < 2d/3 ≤ dist(y, ∂K).
Die offene Kugel Kδ := Kδ(y) erfullt nach Konstruktion von δ
Kδ ⊂ ω, Kδ ⊂ K (d.h. Kδ ∩ ∂K = ∅), Kδ ∩ (∂ω\∂K) �= ∅,
d.h. es existiert ein z ∈ ∂Kδ ∩ ∂ω\∂K ⊂ K\ω. Nach Definition der Mengen gilt
u(y) > m, u(z) = m.

64 5. Allgemeine Randwertaufgaben
δ
δ/2
δω
z
u(x)>m
u(z)=m
R
y=0
ω
Abb. 5.1.1. Skizze zum Beweis
O.B.d.A. kann (nach geeigneter affiner Transformation, vgl.Ubungsaufgabe 5.1.3) die Situation aus Abbildung 5.1.1 angenom-men werden:
y = 0, z = δe (e: Einheitsvektor in x1-Richtung).
Die Abbildung zeigt weiterhin die Kugel Kδ/2 := Kδ/2(y) ⊂ Kδ und das(offene) Ringgebiet R := Kδ\Kδ/2. Der Rand ∂R ist die Vereinigung von ∂Kδ/2 und ∂Kδ. Auf ∂Kδ/2 istwegen ∂Kδ/2 ⊂ ω
min{u(x) : x ∈ ∂Kδ/2} > m,
wahrend u(x) ≥ m fur alle x ∈ ∂Kδ mit dem Minimum u(z) = m in z ∈ ∂Kδ.Die Funktion q aus dem Beweis von Satz 5.1.5 wird geringfugig variiert:
p(x) := exp(−α‖x‖22) − exp(−αδ2) mit α > 0 fur δ/2 ≤ ‖x‖2 ≤ δ (d.h. x ∈ R)
Weiterhin gilt Lp ≥ 0 und p ≥ 0 in R fur hinreichend großes α > 0. Damit erfullt w := u− cp fur c ≥ 0 dieVorzeichenbedingungen Lw =: g ≤ 0 und w ≤ 0. Nach Satz 5.1.5 nimmt w als Funktion auf R sein Minimumauf ∂R = ∂Kδ/2 ∪ ∂Kδ an.
Fur hinreichend kleines c > 0 ist weiterhin
min{w(x) : x ∈ ∂Kδ/2} > m,
wahrend p(x) = 0 auf ∂Kδ zu w|∂Kδ= u|∂Kδ
und damit
min{w(x) : x ∈ ∂Kδ} = min{u(x) : x ∈ ∂Kδ} = u(z) = w(z) = m
fuhrt. Insbesondere erzwingt das Maximum-Minimum-Prinzip w(x) ≥ m in R.Da w (beschrankt auf R) in z ein Randminimum besitzt, muss (in dem Koordinatensystem der Abbildung)
∂∂x1
w(z) ≤ 0 gelten. Einsetzen der Definition w = u− cp liefert
∂u(z)∂x1
≤ c∂p(z)∂x1
= −2cδαe−αδ2< 0.
Andererseits ist z ∈ ∂Kδ ⊂ K ein lokales Minimum von u, sodass ∂u(z)∂x1
= 0 im Widerspruch zur vorherigenUngleichung gelten muss.
Zusatz 5.1.8 Falls der Koeffizient a(x) von L (vgl. (5.1.1a)) identisch verschwindet, konnen in Satz 5.1.5und Zusatz 5.1.7 die Bedingungen u ≤ 0 (fur ein Minimum) bzw. u ≥ 0 (fur ein Maximum) entfallen.
Beweis. Die Vorzeichenbedingungen werden nur benotigt, damit das Produkt au das richtige Vorzeichenbesitzt, was durch a = 0 ebenfalls gesichert ist.
Bemerkung 5.1.9 Die Stetigkeit der Koeffizienten aij , ai, a von L kann in Satz 5.1.5 und Zusatz 5.1.7ersetzt werden durch die Annahme a < 0 in Ω oder durch die Voraussetzung: In jeder kompakten MengeK ⊂ Ω seien aij , ai und a beschrankt und L gleichmaßig elliptisch.
5.1.3 Eindeutigkeit der Losung und stetige Abhangigkeit
Lemma 5.1.10 Ω sei beschrankt, die Koeffizienten von L seien stetig, es gelte (5.1.3a) und a ≤ 0 in Ω.u1, u2 ∈ C2(Ω) ∩ C0(Ω) seien Losungen der Randwertaufgaben
Lui = fi in Ω, ui = ϕi auf Γ (i = 1, 2). (5.1.6)
Ist f1 ≥ f2 in Ω und ϕ1 ≤ ϕ2 auf Γ, so ist auch u1 ≤ u2 in Ω.
Beweis. v := u2 − u1 erfullt Lv = f2 − f1 ≤ 0 in Ω und v = ϕ2 −ϕ1 ≥ 0 auf Γ. Aus Satz 5.1.5 und v ≥ 0 aufΓ schließt man, dass kein negatives Minimum von v existiert. Also v ≥ 0, d.h. u2 ≥ u1.

5.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiter Ordnung 65
Satz 5.1.11 (Eindeutigkeit) Unter den Voraussetzungen des Lemmas 5.1.10 ist die Losung der Rand-wertaufgabe Lu = f in Ω und u = ϕ auf Γ eindeutig bestimmt.
Beweis. Seien u1, u2 zwei Losungen. Lemma 5.1.10 mit f1 = f2 = f , ϕ1 = ϕ2 = ϕ zeigt u1 ≤ u2 ebenso wieu2 < u1. Also u1 = u2.
Der nachste Satz besagt, dass die Losung Lipschitz-stetig von f und ϕ abhangt.
Satz 5.1.12 L sei gleichmaßig elliptisch in Ω. Unter den Voraussetzungen des Lemmas 5.1.10 gilt
‖u1 − u2‖∞ ≤ ‖ϕ1 − ϕ2‖∞ +M ‖f1 − f2‖∞ (5.1.7)
fur Losungen u1, u2 von (5.1.6). Dabei hangt die Zahl M nur von K := sup{|aij(x)| , |ai(x)| , |a(x)| : x ∈ Ω},von der Elliptizitatskonstante m := inf{c(x) : x ∈ Ω} > 0 (vgl. (5.1.3b)) und vom Durchmesser des BereichsΩ ab.
Beweis. Sei Ω ⊂ KR(z). Fur alle x ∈ Ω gilt z1 −R ≤ x1 ≤ z1 +R. Wir wahlen α ≥ 0 so, dass
mα2 −K (α+ 1) ≥ 1
und definierenw(x) := ‖ϕ1 − ϕ2‖∞ +
(e2Rα − eα(x1−z1+R)
)‖f1 − f2‖∞ .
Wir vergleichen w mit der Losung v := u1 − u2 von Lv = f1 − f2 in Ω, v = ϕ1 − ϕ2 auf Γ. Nach Wahl vonKR(z) gilt
w(x) ≥ v(x) fur x ∈ Γ.
Ferner erhalt man nach Wahl von α:
(Lw) (x) = a(x) ‖ϕ1 − ϕ2‖∞︸ ︷︷ ︸≤0
+ {ae2Rα︸ ︷︷ ︸≤0
− eα(x1−z1+R)︸ ︷︷ ︸[≥1
a11(x)︸ ︷︷ ︸≥m
α2 + a1(x)︸ ︷︷ ︸≥−K
α+ a(x)︸︷︷︸≥−K
]} ‖f1 − f2‖∞
≤ −{mα2 −K (α+ 1)
}‖f1 − f2‖∞ ≤ −‖f1 − f2‖∞ ≤ f1(x) − f2(x) = (Lv) (x).
Wendet man Lemma 5.1.10 mit u1 = v, u2 = w an, ergibt sich v ≤ w in Ω, d.h.
u1(x) − u2(x) = v(x) ≤ w(x) ≤ ‖w‖∞ ≤ ‖ϕ1 − ϕ2‖∞ +M ‖f1 − f2‖∞ ,
wobei M := e2Rα. Analog beweist man −w ≤ v, sodass (5.1.7) folgt.
Ubungsaufgabe 5.1.13 a) Ω sei beschrankt, die Koeffizienten von L seien stetig in Ω. Man zeige: L istgenau dann gleichmaßig elliptisch in Ω, wenn L in Ω elliptisch ist.b) Satz 5.1.12 gilt fur den Spezialfall f1 = f2 ohne die Voraussetzung gleichmaßiger Elliptizitat.c) Ein Streifen im Rn sei beschrieben durch
S = {x ∈ Rn : 0 ≤ 〈η,x − x∗〉 ≤ δ} ,
wobei x� ∈ Rn ein Randpunkt von S, η ∈ Rn mit |η| = 1 ein Einheitsvektor und δ die Streifenbreite sind.Man zeige: Ungleichung (5.1.7) gilt mit M := eδα, wenn Ω ⊂ S und α wie im Beweis des Satzes 5.1.12.d) Unter den Voraussetzungen des Satzes 5.1.12 zeige man
‖u‖∞ ≤ ‖ϕ‖∞ +M ‖f‖∞ . (5.1.8)
Ubungsaufgabe 5.1.14 Die Koordinatentransformation Φ : x ∈ Ω �→ ξ ∈ Ω′und die Inverse Φ−1 : Ω
′ → Ωseien stetig differenzierbar. Dem Operator L (in den x-Koordinaten) entspreche L′ in den ξ-Koordinaten.Man zeige: Erfullt L die Voraussetzungen des Lemmas 5.1.7 bzw. des Satzes 5.1.12, so auch L′.
Die rechte Seite f und die Randwerte ϕ sind nicht die einzigen Parameter, von denen die Losung u abhangt.Im Folgenden wird untersucht, wie die Losung von den Koeffizienten aij , ai, a des Differentialoperators Labhangt.

66 5. Allgemeine Randwertaufgaben
Satz 5.1.15 Die Koeffizienten von LI und LII seien aIij , a
Ij , a
I bzw. aIIij , a
IIj , a
II . uI und uII seien Losungenvon
LIuI = LIIuII = f in Ω, uI = uII = ϕ auf Γ.
LI erfulle die Voraussetzungen des Satzes 5.1.12 und uII gehore zu C2(Ω). Mit M aus (5.1.7) gilt dann
‖uI −uII‖∞ ≤M{ n∑
i,j=1
‖aIij −aII
ij‖∞‖uII‖C2(Ω) +n∑
i=1
‖aIi −aII
i ‖∞‖uII‖C1(Ω) +‖aIi −aII
i ‖∞‖uII‖∞}. (5.1.9)
Falls aIij = aII
ij , genugt die Voraussetzung uII ∈ C1(Ω) ∩ C2(Ω); falls auch aIi = aII
i , reicht sogar uII ∈C0(Ω) ∩C2(Ω).
Beweis. Setze f ′ := LIuII . ‖f ′ − f‖∞ = ‖(LI − LII)uII‖∞ ist durch die rechte Seite von (5.1.9) ohneden Faktor M abschatzbar. Satz 5.1.12 angewandt auf LIuII = f ′ und LIuII = f liefert die Ungleichung‖uI − uII‖∞ ≤M‖f ′ − f‖∞.
5.1.4 Differenzenverfahren fur die allgemeine Differentialgleichung zweiter Ordnung
Aus schreibtechnischen Grunden beschranken wir uns auf den zweidimensionalen Fall n = 2. AllgemeineGebiete Ω ∈ R2 erfordern die in Abschnitt 4.8 erlauterten speziellen Diskretisierungen am Rand. Hier sollennur die Differenzenformeln in randfernen Punkten diskutiert werden. Deshalb genugt es, im Folgenden dasEinheitsquadrat
Ω = (0, 1) × (0, 1)
zugrundezulegen.L sei durch (5.1.1a) gegeben. Will man ein Differenzenverfahren der Konsistenzordnung 2 erreichen, liegt
folgende Wahl nahe, die aus Stabilitatsgrunden spater modifiziert wird.
a11(x, y)∂+x ∂−x + 2a12∂
0x∂
0y + a22(x, y)∂+
y ∂−y + a1(x, y)∂0
x + a2(x, y)∂0y + a(x, y)
= h−2
⎡⎣−a12(x, y)/2 a22(x, y) a12(x, y)/2a11(x, y) −2 [a11(x, y) + a22(x, y)] a11(x, y)a12(x, y)/2 a22(x, y) −a12(x, y)/2
⎤⎦ (5.1.10)
+12h−1
⎡⎣ 0 a2(x, y) 0−a1(x, y) 0 a1(x, y)
0 −a2(x, y) 0
⎤⎦ +
⎡⎣0 0 00 a(x, y) 00 0 0
⎤⎦ .
Bemerkung 5.1.16 Das Differenzenverfahren (5.1.10) ist ein Neunpunktschema der Konsistenzordnung 2.
Sei Lh die zu (5.1.10) gehorige Matrix des Systems
Lhuh = qh (5.1.11)
der Differenzengleichungen in Ωh (vgl. Bemerkung 4.2.5). Die Losbarkeit von (5.1.11) (fur beliebige qh)ist aquivalent zur Eindeutigkeit. Im kontinuierlichen Fall war die Eindeutigkeit im Wesentlichen durch dieBedingung a ≤ 0 und die Elliptizitat a11a22 > a2
12 gegeben (vgl. Satz 5.1.11). Diese Bedingungen reichen imAllgemeinen nicht aus, um die Losbarkeit der Gleichung (5.1.11) zu garantieren. Wir ersetzen (5.1.10) daherdurch eine andere Diskretisierung.
Satz 5.1.17 Fur die Koeffizienten von L gelte (5.1.3a,b),
|a12(x, y)| ≤ min{a11(x, y), a22(x, y)} (5.1.12)
und a(x, y) ≤ 0 in Ω. Dann gibt es zu L ein Siebenpunktdifferenzenverfahren der Konsistenzordnung 1,sodass die zugehorige Matrix Lh bis auf das Vorzeichen eine M-Matrix ist. Insbesondere ist die entstehendeGleichung (5.1.11) losbar.

5.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiter Ordnung 67
Man beachte, dass die Bedingung (5.1.12) nur dann aus (5.1.3a) folgt, wenn a11 = a22 > 0.Beweis. Im Gitterpunkt (x, y) ∈ Ωh (vgl. (4.2.1a)) kurzen wir die Koeffizienten aij(x, y), ai(x, y), a(x, y) durchaij , ai, a ab. Der Hauptteil
∑aij∂
2/∂xi∂xj (x1 = x, x2 = y) wird durch die folgenden Differenzenstermediskretisiert:
∂2
∂x21
: h−2
⎡⎣ 01 −2 1
0
⎤⎦ , ∂2
∂x22
: h−2
⎡⎣ 10 −2 0
1
⎤⎦ ,
∂2
∂x1∂x2:
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
12h−2
⎡⎣ 0 −1 1−1 2 −1
1 −1 0
⎤⎦ , falls a12 ≥ 0,
12h−2
⎡⎣ −1 1 01 −2 10 1 −1
⎤⎦ , falls a12 ≥ 0.
(5.1.13)
Fur a12 ≥ 0 erhalt man somit
2∑i,j=1
aij∂2
∂x1∂x2: h−2
⎡⎣ 0 a22 − a12 a12
a11 − a12 2 (a12 − a11 − a22) a11 − a12
a12 a22 − a12 0
⎤⎦ .
Fuhrt man a+12 := max{a12, 0} und a−12 := min{a12, 0} ein, so ergibt sich fur a12 ≥ 0 wie auch a12 < 0 der
Siebenpunktstern
h−2
⎡⎣ −a−12 a22 − |a12| a+12
a11 − |a12| 2 (|a12| − a11 − a22) a11 − |a12|a+12 a22 − |a12| −a−12
⎤⎦ . (5.1.13’)
Ubungsaufgabe 5.1.18 Sei Lh die zur Differenzenformel (5.1.13’) gehorende Matrix (man beachte, dassdie Koeffizienten in (5.1.13’) ortsabhangig sind). Es gelte (5.1.3) und (5.1.12). Man beweise, dass −Lh dieVoraussetzungen der Ubungsaufgabe 4.3.8a erfullt.
Die ersten Ableitungsterme ai∂/∂xi werden durch die Vor- bzw. Ruckwartsdifferenz ai∂±xi
ersetzt, wennai ≶ 0:
2∑i=1
ai∂
∂xi+ a : h−1
⎡⎣ a+2
a−1 − |a1| − |a2| a+1
−a−2
⎤⎦ +
⎡⎣ a
⎤⎦ , (5.1.14)
wobei a±i wie a±12 definiert ist. Wegen a ≤ 0 ist das Diagonalelement negativ, die anderen nichtnega-tiv. Addiert man diese Terme zu (5.1.13’), erfullt die entstehende Matrix −Lh die Voraussetzungen derUbungsaufgabe 4.3.8a. Folglich ist −Lh eine M-Matrix.
Man uberzeugt sich leicht, dass die Differenzenformel (5.1.13’) von zweiter Konsistenzordnung ist; dagegenenthalt (5.1.14) die einseitigen Differenzen, sodass die Diskretisierung insgesamt nur von erster Ordnung ist.
Die Bedingung (5.1.12) lasst sich vermeiden, wenn man großere Differenzensterne in Kauf nimmt, dienoch die Werte u(x1 ± νh, x2 ± μh) fur feste ν, μ ∈ N (aber im Allgemeinen |ν| , |μ| > 1) enthalten (vgl.Bramble-Hubbard [15]).
Um ein Verfahren der Konsistenzordnung 2 zu erzielen, hat man∑ai∂/∂xi wie in (5.1.10) zu diskretisieren.
Der folgende Zusatz zeigt, dass auch dann −Lh eine M-Matrix ist, wenn nur hai klein genug ist.
Zusatz 5.1.19 Zusatzlich zu den Voraussetzungen des Satzes 5.1.17 gelte
aii > |a12| +h
2|ai| (i = 1, 2). (5.1.15)
Dann fuhrt die Diskretisierung von∑ai∂/∂xi aus (5.1.10) zusammen mit (5.1.13’) zu einem Siebenpunkt-
differenzenverfahren zweiter Konsistenzordnung, sodass −Lh eine M-Matrix ist.
Beweis. −Lh erfullt (4.3.1a) und ist irreduzibel diagonaldominant.

68 5. Allgemeine Randwertaufgaben
Ubungsaufgabe 5.1.20 Die Bedingung aii ≥ |a12| + h |ai| /2 anstelle von (5.1.15) ist nicht ausreichend.Man konstruiere ein Gegenbeispiel mit a11 = a22 = 1, a12 = 0, h = 1/3, ai(x, y) variabel, |ai| = 6, sodassLh singular ist.
Wesentlich schwachere Voraussetzungen fur die Nichtsingularitat von Lh als in Satz 5.1.17 und Zusatz5.1.19 werden in §9.2 gebraucht (vgl. Ubungsaufgabe 9.2.6, Folgerung 11.3.5).
Im Allgemeinen ist Lh keine symmetrische Matrix. Symmetrie von Lh ist nur dann zu erwarten, wennauch L symmetrisch ist: L = L′. Dabei ist der formal adjungierte Operator L′, der zu L aus (5.1.2) gehort,durch
L′ =n∑
i,j=1
[aIII
ij
∂2
∂xi∂xj+
∂
∂xiaII
ij
∂
∂xj+
∂2
∂xi∂xjaI
ij
]−
n∑i=1
[aII
i
∂
∂xi+
∂
∂xiaI
i
]+ a (5.1.16)
definiert. Man uberlegt sich leicht, dass ein symmetrischer Operator stets in der Form
L =n∑
i,j=1
∂
∂xiaij(x)
∂
∂xj+ a(x), aij(x) = aji(x), (5.1.17)
geschrieben werden kann. Ein Differenzenverfahren hierfur ist im Falle n = 2 und a12 = 0 durch denFunfpunktstern
h−2
⎡⎢⎢⎣0 a22(x, y + h
2 ) 0
a11(x− h2 , y)
{−a11(x− h
2 , y) − a11(x+ h2 , y)
−a22(x, y + h2 ) − a22(x, y − h
2 )
}a11(x + h
2 , y)
0 a22(x, y − h2 ) 0
⎤⎥⎥⎦ +
⎡⎣0 0 00 a 00 0 0
⎤⎦ (5.1.18)
gegeben.
Satz 5.1.21 Seien a11, a22 ∈ C2,1(Ω). Das Differenzenverfahren (5.1.18) ist konsistent von der Ordnung 2.Die zugehorige Matrix Lh ist symmetrisch. Sind aii > 0 (Elliptizitat) und a ≤ 0, so ist −Lh eine positivdefinite M-Matrix.
Beweis. a) Zum Konsistenznachweis entwickle man
v(x+h
2) := a11(x+
h
2, y) [u(x+ h, y) + u(x, y)] (y fest)
um x+ h/2 und danach v(x + h/2)− v(x − h/2) um x.b) Die Symmetrie ergibt sich aus Lxξ = Lξx, x, ξ ∈ Ωh (vgl. Ubungsaufgabe 4.2.2c).c) Lh ist irreduzibel diagonaldominant, sodass die Kriterien 4.3.10 und 4.3.24 anwendbar sind.
Der gemischte Term ∂∂xa12(x, y) ∂
∂y + ∂∂ya12(x, y) ∂
∂x lasst sich durch
12h−2
⎡⎣ −a12(xA) − a12(xB) a12(xB) + a12(xC) 02a12(xA) 2 [a12(xA) + a12(xC)] 2a12(xC)
0 a12(xA) + a12(xD) −a12(xC) − a12(xD)
⎤⎦ (5.1.19)
mit
xA =(x− h
2, y
), xB =
(x− h
2, y + h
), xC =
(x+
h
2, y
), xD =
(x+
h
2, y − h
)diskretisieren. Eine andere Schreibweise fur (5.1.19) ist
12
[∂+
y b(· −h
2, ·)∂−x + ∂+
x b(· −h
2, ·)∂−y + ∂−y b(· +
h
2, ·)∂+
x + ∂+x b(· +
h
2, ·)∂−y
]wobei b := a12.
Ubungsaufgabe 5.1.22 a) Fur die Koeffizienten von L aus (5.1.17) gelte a11 > 0, a22 > 0, a12 = a21 ≤ 0,a11 + a12 > 0, 2a22(x, y+ h/2) + a12(x− h/2, y+ h) + al2(x+ h/2, y) > 0, a ≤ 0. Man zeige, dass das durch(5.1.18) und (5.1.19) beschriebene Differenzenschema die Konsistenzordnung 2 besitzt und die zugehorigeMatrix −Lh eine symmetrische, irreduzibel diagonaldominante und positiv definite M-Matrix ist.b) Wie lautet die fur den Fall a12 ≥ 0 geeignete Diskretisierung?

5.1 Dirichlet-Randwertaufgaben fur lineare Differentialgleichungen zweiter Ordnung 69
Ubungsaufgabe 5.1.23 Die Differenzenformel aus Satz 5.1.17 fur den Operator L lautet
a11∂+x ∂−x + a12(∂+
x ∂+y + ∂−x ∂
−y ) + a22∂
+y ∂−y + a1∂
+x + a2∂
+y + a,
wenn a12 ≥ 0, a1 ≥ 0, a2 ≥ 0. Die zugehorige Matrix sei Lh. Man beweise: Die transponierte Matrix L�hbeschreibt ein Differenzenverfahren fur den adjungierten Operator L′ und besitzt ebenfalls die Konsistenz-ordnung 1.
Allgemeiner laßt sich fur regelmaßige Differenzenverfahren zeigen, dass L�h eine Diskretisierung von L′ ist.Die Rolle der Regelmaßigkeit veranschaulicht das
Beispiel 5.1.24 Sei Lu := u′′ + au′ in Ω = (−1, 1) mit a(x) ≤ 0 fur x ≤ 0 und a(x) ≥ 0 fur x > 0. Gemaß(5.1.14) wird au′ in x ≤ 0 durch a(x)∂+u(x) und in x > 0 durch a(x)∂−u(x) diskretisiert. Die zugehorigeMatrix sei Lh = Lh,2 + Lh,1, wobei Lh,2 und Lh,1 jeweils den Termen u′′ und au′ entsprechen. Nach denvorangehenden Uberlegungen sollte L�h,1vh eine Diskretisierung von −(av)′ sein. Die Differenzen L�h,1vh inx = 0 und x = h lauten aber
h−1 [a(−h)vh(−h) − a(0)vh(0) − a(h)vh(h)] = − (av)′ − h−1a(0)vh(0) + O(h),
h−1 [a(0)vh(0) − a(h)vh(h) − a(2h)vh(2h)] = − (av)′ + h−1a(0)vh(0) + O(h),
und sind daher nicht konsistent. Trotzdem ist L�h eine mogliche Diskretisierung von L′v = v′′ − (av)′, dennes lasst sich zeigen, dass der Fehler vh −Rhv die Großenordnung O(h) besitzt.
Zum Nachweis der Stabilitat hat man ‖L−1h ‖∞ ≤ const zu beweisen. Offenbar genugt es, diese Ungleichung
fur hinreichend kleines h nachzuweisen. Im Beweis des Satzes 5.1.12 haben wir davon Gebrauch gemacht,dass
−Lw ≥ 1 in Ω, w ≥ 0 auf Γ
fur w(x) := exp(2Rα) − exp(α(x1 − z1 + R)). Seien Dhuh(x) die Differenzengleichungen, aus denen Lhuh
nach Elimination der Randwerte entsteht. Wir setzen wh := 2Rhw (d.h. wh(x) = 2w(x) fur x ∈ Ωh). Es gilt
−Dhwh = −2(DhRh − RhL
)w − 2RhLw ≥ 2 − 2
(DhRh − RhL
)w.
Jedes konsistente Differenzenverfahren erfullt ‖(DhRh − RhL)w‖∞ → 0. Fur hinreichend kleines h hat mansomit
−Dhwh(x) ≥ 1 (x ∈ Ωh, h ≤ h0) .
Diese Ungleichung stimmt fur randferne x ∈ Ωh mit −Lhwh(x) ≥ 1 uberein. Fur randnahe x ∈ Ωh
enthalt −Dhwh(x) noch die Summe −∑
ξ∈ΓhLxξwh(ξ), die in −Lhwh(x) nicht enthalten ist. Fur die Dis-
kretisierungen aus Satz 5.1.17, Zusatz 5.1.19, Satz 5.1.21 und Ubungsaufgabe 5.1.22 gilt jedoch Lxξ ≥ 0(x ∈ Ωh, ξ ∈ Γh), sodass wegen wh ≥ 0 auf Γh
−Lhwh ≥ −Dhwh ≥ 1 (h ≤ h0)
fur alle Gitterpunkte zutrifft. Satz 4.3.16 beweist den folgenden Satz.
Satz 5.1.25 Die Diskretisierungen aus Satz 5.1.17, Zusatz 5.1.19, Satz 5.1.21 und Ubungsaufgabe 5.1.22sind unter den dort gestellten Voraussetzungen stabil, d.h. ‖L−1
h ‖∞ ≤ const fur alle Schrittweiten h ∈ H ={1/n : n ∈ N}. Gemaß Satz 4.5.3 konvergieren die Verfahren. Die Konvergenzordnung stimmt mit derjeweiligen Konsistenzordnung uberein.
5.1.5 Greensche Funktion
Das Konzept der Losungsdarstellung durch die Greensche Funktion lasst sich fur die allgemeine Differential-gleichung (5.1.1a) wiederholen. Die Greensche Funktion (erster Art) g(ξ,x) ist in ξ = x singular und erfullt
Lxg(ξ,x) = 0, L′ξg(ξ,x) = 0 fur x, ξ ∈ Ω, x �= ξ,
g(ξ,x) = 0 fur x ∈ Γ oder ξ ∈ Γ.

70 5. Allgemeine Randwertaufgaben
Dabei ist L′ der adjungierte Differentialoperator (5.1.16). Sobald L �= L′, ist auch g nicht mehr symmetrisch:g(x, ξ) �= g(ξ,x). Unter geeigneten Voraussetzungen ist die Losung von (5.1.1a), (5.1.4) durch
u(x) = −∫
Ω
g(ξ,x)f(ξ)dξ −∫
Γ
ϕ(ξ)Bξg(ξ,x)dΓξ
darstellbar, wobei B = Bξ =∑n
i,j=1 nj∂
∂ξiaij ein Rand-Differentialoperator (Konormalenableitung) ist (nj
sind die Komponenten des Normalenvektors �n = �n(ξ), ξ ∈ Γ). Nur wenn der Hauptteil von L mit Δubereinstimmt, ist B die Normalenableitung.
Im diskreten Fall entspricht die Inverse L−1h wieder der Greenschen Funktion g(·, ·).
5.2 Allgemeine Randbedingungen
5.2.1 Formulierung der Randwertaufgabe
Die Differentialgleichung sei durch (5.1.1a) gegeben. Die Dirichlet-Randbedingung (5.1.4) kann in der Form
Bu = ϕ auf Γ (5.2.1a)
geschrieben werden, wobei B die Identitat (genauer: die Beschrankung auf Γ) darstellt. Allgemeiner kann Bein Differentialoperator - ein sogenannter Rand-Differentialoperator - der Ordnung 1 sein:
B =n∑
i=1
bi(x)∂
∂xi+ b0(x) (x ∈ Γ) . (5.2.1b)
Fuhrt man den Vektor b(x) = (b1(x), . . . , bn(x))� ein, laßt sich Bu in der Form
Bu = 〈b(x),∇u(x)〉 + b0(x)u(x) oder B = b�∇ + b0 (5.2.1b’)
schreiben.
Beispiel 5.2.1 (a) Fur b = 0 und b0(x) �= 0 ergibt sich die Dirichlet-Bedingung u = ϕ/b0 auf Γ, die aucherste Randbedingung genannt wird.(b) Die Wahl b = �n, b0 = 0 charakterisiert die Neumann-Bedingung, auch zweite Randbedingung genannt.(c) Gleichung (5.2.1a) mit 〈b, �n〉 �= 0, b0 �= 0 heißt dritte Randbedingung (Robin-Randbedingung).
Bemerkung 5.2.2 Der Fall 〈b, �n〉 = 0 wird im Allgemeinen ausgeschlossen. Fur 〈b, �n〉 = 0 ist b�∇ eineTangentialableitung. Die Randbedingung Bu = ϕ ist dann einer Dirichlet-Bedingung sehr ahnlich. Die Be-dingung “u = ϕ auf Γ” impliziert “Bu = ϕ := Bϕ auf Γ” (Warum ist Bϕ definiert?).
2
1γ
γ
Ω: Δu=0
: du/dn=0 : u=0γ1
1
Ω: Δ u=0
γγ
: u=0: u=02
Abb. 5.2.1. a) Randwertproblem mit wechselndem Randbe-dingungstyp, b) Dirichlet-Problem im geschlitzten Kreis
Die Normalenableitung B = ∂/∂n (d.h. b = �n)tritt insbesondere im Zusammenhang mit L = −Δauf. Fur den allgemeinen Operator L aus (5.1.1b)ist die sogenannte konormale Ableitung B mit
b = A�n (A = (aij)ni,j=1 mit aij aus (5.1.1b))
von großerer Bedeutung, wie wir in Abschnitt 7.4sehen werden. Aussagen uber Existenz und Eindeu-tigkeit der Losung hangen stets von L und B ab.Wir haben schon gesehen, dass fur L = −Δ, B = I(Dirichlet-Bedingung) Eindeutigkeit gewahrleistetist (vgl. Satz 3.1.2), wahrend das zu L = −Δ,B = �n�∇ = ∂/∂n gehorende Problem im Allgemeinen nicht losbar ist (vgl. Satz 3.4.1). Die Koeffizien-ten von B sind ortsabhangig. Selbstverstandlich darf B(x) = 0, d.h. b(x) = 0 und b0(x) = 0, fur kein x ∈ Γauftreten. Aber es ist moglich, dass b(x) = 0 (und b0 �= 0) in γ ⊂ Γ und b(x) �= 0 in Γ\γ. Dann liegt eineDirichlet-Bedingung u = ϕ/b0 im Teilstuck γ und eine Randbedingung erster Ordnung auf dem restlichenRandstuck Γ\γ vor. An den Kontaktstellen zwischen γ und Γ\γ ist die Losung im Allgemeinen nicht glatt(sie hat Singularitaten in den Ableitungen).

5.2 Allgemeine Randbedingungen 71
Beispiel 5.2.3 Ω sei der obere Halbkreis um x = y = 0 mit Radius 1. Differentialgleichung und Rand-bedingungen seien wie in Abbildung 5.2.1a angegeben. Die Randbedingung andert ihre Ordnung in x = y = 0.Die Losung lautet in den Polarkoordinaten: u =
√r sin(ϕ/2) (vgl. (2.1.3)). Man rechnet nach, dass
ux = O(1/√r) und uy = O(1/
√r).
1
2
γΩ
Ω
Abb. 5.2.2. Bezug-lich γ spiegelsym-metrisches Gebiet
Die gleiche Singularitat wie in Beispiel 5.2.3 tritt bei dem in Abbildung 5.2.1b beschrie-benen Problem auf; die Losung ist ebenfalls r1/2 sin(ϕ/2). Diese Dirichlet-Aufgabe undBeispiel 5.2.3 hangen eng miteinander zusammen.
Beispiel 5.2.4 Sei Ω = Ω1∪Ω2∪γ (Ω1∩Ω2 = ∅) wie in Abbildung 5.2.2: Spiegelung vonΩ1 an γ ergebe Ω2. Sucht man eine Losung von Lu = f in Ω, Bu = ϕ auf ∂Ω, und istmit u auch die an γ gespiegelte Funktion u eine Losung, so erwartet man u = u. DieseLosung erfullt dann Lu = f in Ω1, Bu = ϕ auf ∂Ω1\γ, ∂u/∂n = 0 auf γ.
γ γ1 2
1(x −h,y)2
1x 2x
(x ,y)
Abb. 5.2.3. Diskretisierung beiperiodischen Randbedingungen
Wahrend die Randbedingung Bu = ϕ auf ∂Ω physikalischen Ursprungssein mag, zeigt Beispiel 5.2.4, dass eine Neumann-Bedingung auch geome-trische Grunde haben kann. Eine andere, geometrisch begrundete Randbe-dingung ist die folgende. Sei Ω wie in Abbildung 5.2.3: γ1 und γ2 sind Teilevon Γ = ∂Ω mit
γ = {(xi, y) : y1 ≤ y ≤ y2} (i = 1, 2).
Dann lasst sich neben Bu = ϕ auf Γ\(γ1 ∪ γ2) die periodische Randbedin-gung
u (x1, y) = u (x2, y) , ux (x1, y) = ux (x2, y) fur y1 ≤ y ≤ y2 (5.2.2)
fur γ1 und γ2 formulieren. Die Losung ist in x-Richtung periodisch fortsetzbar (Periode: x2 − x1). Einemogliche Herkunft periodischer Randbedingungen wird im folgenden Beispiel diskutiert.
Beispiel 5.2.5 a) Sei Ω′ ein Ringsektor, der durch die Polarkoordinaten r ∈ (r1, r2), ϕ ∈ [0, 2π) beschriebenwird. Transformation der Differentialgleichung auf Polarkoordinaten ergibt als Bildgebiet das Rechteck Ω =(r1, r2) × (0, 2π). Die ursprunglichen Randbedingungen auf Ω′ werden zu Randbedingungen am oberen undunteren Rand, wahrend (5.2.2) die Periodizitat der Winkelvariablen x ∈ (0, 2π) beschreibt.
b) Statt auf Ω′ ⊂ R2 kann eine Randwertaufgabe auch auf einem Teil der 2-dimensionalen Oberflacheeines 3-dimensionalen Korpers definiert werden. Liegt Ω′ z.B. auf der Oberflache des Zylinders {ξ ∈ R3 :ξ21 + ξ22 ≤ r2, ξ3 ∈ R}, so ergibt die Auffaltung von Ω′ ein Gebiet Ω wie in Abbildung 5.2.3. Auch hier ist(5.2.2) dadurch begrundet, dass x die Rolle einer Winkelvariablen spielt.
c) Sucht man Losungen im unbeschrankten Streifen Ω′ = R × (y1, y2), kann man stattdessen periodischeLosungen in Ω = (0, 2π) × (y1, y2) mit der Randbedingung (5.2.2) suchen, da diese (nach periodischerFortsetzung) auch Losungen der ursprunglichen Aufgabe sind. Losungen mit periodischer Randbedingung inx- und y-Richtung lassen sich sogar auf Ω′ = R2 fortsetzen.
5.2.2 Differenzenverfahren bei allgemeinen Randbedingungen
Die geringsten Schwierigkeiten stellen die periodischen Randbedingungen dar. Man definiere Ωh als die Mengeder Gitterpunkte in Ω und auf γ1 (aber nicht auf γ2 ; vgl. Abbildung 5.2.3). Die Differenzengleichung in einemGitterpunkt (x1, y) ∈ γ1 hat einen linken Nachbarn (x1 − h, y) außerhalb von Ω. uh(x1 − h, y) ersetze manin der Differenzengleichung durch uh(x2 − h, y). Damit hat man die Periodizitat auf die Differenzenlosungubertragen, ohne Gleichung (5.2.2) explizit zu diskretisieren. Selbstverstandlich muss die Schrittweite sogewahlt sein, dass x2 − x1 ein Vielfaches von h ist.
Ubungsaufgabe 5.2.6 Bei periodischen Randbedingungen andert sich die Struktur der Matrix Lh. SeiL = −Δ im Quadrat Ω = (0, 1)× (0, 1). Fur den oberen und unteren Rand seien Dirichlet-Bedingungen, furdie seitlichen Rander die periodische Bedingung (5.2.2) gegeben. In Analogie zu (4.2.8) gebe man die Gestaltder Matrix Lh bei lexikographischer Anordnung der Gitterpunkte an.

72 5. Allgemeine Randwertaufgaben
x− y−( , ) x− y−( +h, )x− y~( +h, )
x− y−( +h, +h)
y−x−b ( −x)
2ΓGerade
1−b ( −y)=0
aussen innen
Abb. 5.2.4. Diskretisierung von Bu = ϕ
Die Diskretisierung der Randbedingung B = �n�∇ = ∂/∂n habenwir in Abschnitt 4.7 fur den Fall beschrieben, dass Ω ein Rechteckist und Γ mit dem Gitternetz ubereinstimmt. In der gleichen Situa-tion kann man die allgemeine Randbedingung (5.2.1a,b) wie folgtdiskretisieren. Sei (x, y) ∈ Γh = Ωh ∩ Γ ein Gitterpunkt auf Γ. Derin Abbildung 5.2.4 eingezeichnete Schnittpunkt (x + h, y) ist durchy = y + hb2(x, y)/b1(x, y) gegeben. Man beachte, dass b1 �= 0, dab�∇ keine tangentiale Ableitung sein soll. Fur u ∈ C2(Ω) wird dieRichtungsableitung b�∇u = 〈b,∇u〉 in (x, y) durch
[u(x, y) − u(x+ h, y)] /√h2 + (y − y) =
(b�∇u
)(x, y) + O(h) (5.2.3a)
approximiert. Andererseits ergibt sich u(x + h, y) unter der gleichen Voraussetzung durch Interpolation bisauf O(h2):
u(x+ h, y) =y − y
hu(x+ h, y + h) +
y + h− y
hu(x+ h, y) + O(h2). (5.2.3b)
Kombination von (5.2.3a) und (5.2.3b) fuhrt zur Differenzenformel
(Bhuh) (x, y) :=uh(x, y) − y+h−y
h uh(x+ h, y) − y−yh uh(x+ h, y + h)√
h2 + (y − y) + b0(x, y)uh(x, y)= ϕ(x, y) (5.2.3c)
mit y − y = hb2(x, y)/b1(x, y).
Lemma 5.2.7 Rh sei die Beschrankung auf die Gitterpunkte Ωh. Fur u ∈ C2(Ω) gilt
Bh(uh −Rhu)(x, y) = ϕ(x, y) −BhRhu(x, y) = O(h ‖u‖C2(Ω)),
d.h. die Randdiskretisierung hat die Konsistenzordnung 1.
Gleichung (5.2.3c) hat die Gestalt
(Bhuh) (x, y) = c0uh(x, y) − c1uh(x+ h, y) − c1uh(x+ h, y + h). (5.2.3c’)
Wir nehmen an, dass die Differenzengleichungen∑
ξ∈ΩhLxξuh(ξ) = fh(x) [vor der Elimination der Werte
uh(ξ), ξ ∈ Γh] die Ungleichungen
Lxξ ≤ 0 (x �= ξ) , Lxx ≥ −∑ξ �=x
Lxξ
(x ∈ Ωh, ξ ∈ Ωh
)(5.2.4a)
erfullen. Lxx > 0 und Lxξ ≤ 0 entsprechen der Vorzeichenbedingung (4.3.1a). Die zweite Ungleichung in(5.2.4a) stimmt mit (4.3.4b) uberein. Die entsprechenden Ungleichungen fur (5.2.3c’) lauten
c1 ≥ 0, c2 ≥ 0, c0 ≥ c1 + c2. (5.2.4b)
Die Differenzengleichungen in x ∈ Ωh und die Randgleichungen (5.2.3c’) fur (x, y) ∈ Γh seien zusammenge-fasst in Ahuh = gh. Die Ungleichungen (5.2.4a,b) implizieren
axξ ≤ 0 (x, ξ ∈ Ωh), axx ≥ −∑ξ �=x
axξ (x ∈ Ωh).
Damit ist Ah eine M-Matrix, wenn Ah irreduzibel ist und fur mindestens ein x ∈ Ωh (4.3.4a) gilt.Die vorangehenden Uberlegungen begrunden, warum die Randdiskretisierung die Bedingungen (5.2.4b)
erfullen sollte. Fur den Fall b0 = 0 gilt (5.2.4b) genau dann, wenn b2/b1 ∈ [0, 1]. Falls b2/b1 ∈ [−1, 0], lasstsich (5.2.4b) erfullen, wenn man zwischen y und y−h (statt y und y+h) interpoliert. Ist dagegen |b2| > |b1|,uberwiegt also die tangentiale Komponente, konnte man zwischen (x+h, y) und (x+h, y±kh) interpolieren,wobei |b2/b1| ≤ k. Geschickter ist es jedoch, im Falle von b2/b1 ≥ 1 im Punkt (x, y + h) zwischen (x, y + h)und (x + h, y + h) zu interpolieren. Allgemein wahle man als Interpolationspunkt den Schnittpunkt derGeraden mit dem gestrichelten Streckenzug aus Abbildung 5.2.4.
Bei der bisherigen Diskussion sind wir vom Fall Ω = (0, 1) × (0, 1) ausgegangen. Ist Ω ein allgemeinesGebiet, bieten sich wieder zwei Diskretisierungstechniken an (vgl. §4.8.1 und §4.8.2).

5.2 Allgemeine Randbedingungen 73
(x,y−h)
Gerade(x,y)+t
Γ (x,y+h)
(x,y)(x,y)
^
^ ~
^^^
b
^
^
^ ^
− −(x,y) =l(x+s h,y)
Abb. 5.2.5. erste Randdiskretisierung
Erste Diskretisierungsmoglichkeit. Ωh und Γh seien wie in §4.8.1gewahlt. Die Differentialgleichung wird in randnahen Punkten durchein Differenzenschema approximiert, das im Falle L = −Δ demShortley-Weller-Verfahren entspricht. Hierzu benotigt man die Wertevon uh in den Randpunkten ξ ∈ Γh. Wie in Abbildung 5.2.5 sei(x, y) = (x − s�h, y) ∈ Γh ein Randpunkt. Wieder lassen sich zu(5.2.3a-c) analoge Gleichungen aufstellen. In Abbildung 5.2.5 hat(x, y) die gleiche Position wie (x + h, y) in Abbildung 5.2.4. Im All-gemeinen hat man den Schnittpunkt der Geraden, die auch durch(x, y) + tb (t ∈ R) dargestellt wird, mit dem in Abbildung 5.2.5 ge-strichelt gezeichneten Streckenzug zu verwenden.
Γ
− −(x,y)^^(x,y)
(x+h,y)
Gerade
(x+h,y)^
~ (x,y)+t
^
^b
Abb. 5.2.6. zweite Randdiskretisierung
Zweite Diskretisierungsmoglichkeit. Ωh sei das oben verwendeteGitter Ωh. Ωh bestehe jetzt aus allen randfernen Punkten von Ωh.Fur alle (x, y) ∈ Ωh sind Differenzengleichungen (mit aquidistantenSchrittweiten) erklart, die {uh(ξ) : ξ ∈ Ωh} enthalten. Fur jedenPunkt (x, y) ∈ Γh := Ωh\Ωh ist eine Randdiskretisierung zu finden(vgl. Abbildung 5.2.6). Gleichung (5.2.3a) lasst sich mit (x, y) und(x+ h, y) anstelle von (x, y) und (x+ h, y) aufstellen. Die Argumen-te der Koeffizienten b1 und b2 sind (x, y). Dieser Punkt ergibt sichimplizit aus den beiden Bedingungen
b2(x, y) (x− x) = b1(x, y) (y − y) , (x, y) ∈ Γ. (5.2.5)
Bemerkung 5.2.8 a) Die erste Diskretisierung erfordert in den randnahen Gitterpunkten ein Differenzen-schema fur Lu = f mit nichtaquidistanten Schrittweiten. Die zweite Diskretisierung verlangt eine Approxi-mation des nichtlinearen Problems (5.2.5). Programmtechnisch sind beide Verfahren wegen der notwendigenFallunterscheidungen unbequem.
b) Nahert sich der Vektor b aus B der Tangentialrichtung, versagen beide Verfahren, da die Gerade nichtmehr den Streckenzug aus den Abbildungen 5.2.5 und 5.2.6 schneidet. Dabei versagt die zweite Diskretisierungfruher als die erste.
Eine weitere Moglichkeit, die den geschilderten Schwierigkeiten aus dem Weg geht, besteht darin, zumin-dest in Randnahe Variationsdifferenzengleichungen zu verwenden (vgl. Bemerkung 8.5.5).
Gelegentlich ist es auch moglich, die Randbedingungen durch Koordinatentransformationen zu verein-fachen. Sei Bu = ϕ auf γ ⊂ Γ vorgeschrieben. Findet man eine Transformation (x, y) ↔ (ξ, η) derart, dassξ = 0 und b2xξ = b1yξ auf γ erfullt sind, so gilt fur das transformierte Problem Bu ≡ σ∂u/∂n + b0u = ϕ(∂/∂n = −∂/∂ξ) auf einem vertikalen Randstuck. Die Diskretisierung kann wie in §4.7 beschrieben durch-gefuhrt werden. Die gleiche Argumentation wie in den vorangegangenen Abschnitten beweist Stabilitat undKonvergenz:
Bemerkung 5.2.9 Das Differenzenverfahren Dhuh = fh erfulle die Voraussetzungen des Satzes 5.1.25,sodass −Dhwh ≥ 1 fur wh := K1 + wh gilt (K > 0: Konstante, wh: wie im Beweis des Satzes 5.1.25). DieRanddiskretisierung (5.2.3c’) erfulle
c0 − c1 − c2 = b0(x) ≥ ε > 0 fur alle x ∈ Γh.
Fur hinreichend großes K ist dann (Bhwh)(x) ≥ 1 fur x ∈ Γh Damit folgt Ahwh ≥ 1, wobei Ah dieanschließend an Gleichung (5.2.4b) definierte M-Matrix ist. Da ‖A−1
h ‖∞ ≤ const (vgl. Satz 4.3.16), ist dieStabilitat bewiesen. Die Konvergenzordnung ist das Minimum von 1 (Konsistenzordnung von Bh; vgl. Lemma5.2.7) und der Konsistenzordnung von Dhuh = fh.
Im Allgemeinen ist es nicht moglich , b�∇ durch symmetrische Differenzen zu approximieren. Um trotzdemeine Diskretisierung von Bu = ϕ mit Konsistenzordnung 2 zu konstruieren, setze man an:
Bhuh(x, y) := c0uh(x, y) −3∑
i=1
ciuh(xi, yi) = g(x, y), (x, y) ∈ Γh,

74 5. Allgemeine Randwertaufgaben
wobei (xi, yi) drei Punkte aus Ωh seien. Benutzt man zum Abgleich in der Taylor-Entwicklung die Differential-gleichung Lu = f in (x, y) und die Tangentialableitung von Bu = ϕ, findet man eine Diskretisierung derOrdnung 2. Fur den Spezialfall L = Δ, B = ∂/∂n + b0 weisen Bramble-Hubbard [16] nach, dass die dreiPunkte (xi, yi) so gewahlt werden konnen, dass die Ungleichungen ci ≥ 0, c0 ≥ c1 + c2 + c3 gelten und Sta-bilitat garantieren. Die (xi, yi) liegen jedoch im Allgemeinen nicht in der unmittelbaren Nachbarschaft von(x, y) ∈ Γh. Die Konstruktion der Diskretisierung scheint allerdings zu kompliziert, als dass sie fur praktischeZwecke empfohlen werden konnte.
5.3 Randwertaufgaben hoherer Ordnung
5.3.1 Die biharmonische Differentialgleichung
In der Elastomechanik fuhrt die freie Stabschwingung zu (gewohnlichen) Differentialgleichungen zweiterOrdnung, wenn es sich um Langsschwingungen (= Dehnungsschwingungen) oder um Torsionsschwingungenhandelt. Dagegen ergeben Querschwingungen (= Biegungsschwingungen) eine Gleichung der Ordnung 4.Entsprechend fuhrt die Biegungsschwingung einer Platte auf eine partielle Differentialgleichung der Ordnung4. Es ist die biharmonische Gleichung (Plattengleichung)
Δ2u = f in Ω (5.3.1)
(Δ2 = ∂4/∂x4+2∂4/∂x2∂y2+∂4/∂y4). u beschreibt dabei die Auslenkung der Platte vertikal zur Oberflache.Ist die Platte am Rand fest eingespannt, erhalt man die Randbedingungen
u = ϕ1 und∂u
∂n= ϕ2 auf Γ (5.3.2)
mit ϕ1 = ϕ2 = 0. Ein biharmonisches Problem (5.3.1), (5.3.2) entsteht ebenfalls durch Umformung desStokes-Gleichungen in Ω ⊂ R2 (vgl. Bemerkung 12.1.5). Die Differentialgleichung (5.3.1) lasst sich mitanderen Randwerten als (5.3.2) kombinieren. Ein Beispiel ist
u = ϕ1 und Δu = ϕ2 auf Γ (5.3.3)
(einfach unterstutzte Platte), weitere Beispiele findet man in (7.4.12b,e).
Ubungsaufgabe 5.3.1 Man zeige: Lost man die Poisson-Gleichung Δv = f in Ω, v = ϕ2 auf Γ undanschließend Δu = v in Ω und u = ϕ1 auf Γ, so ist u die Losung der Randwertaufgabe (5.3.1), (5.3.3).Warum lasst sich das Problem (5.3.1), (5.3.2) nicht ebenso behandeln?
Bemerkung 5.3.2 Die Losungen von Δ2u = 0 erfullen kein Maximum-Minimum-Prinzip (Gegenbeispiel:u = x2 + y2 in Ω = KR(0)).
5.3.2 Allgemeine lineare Differentialgleichung der Ordnung 2m
Die partielle Ableitung Dα(α ∈ Nn0 : Multiindex) der Ordnung |α| = α1 + . . .+αn ist in (3.2.5) definiert. Ein
Differentialoperator der Ordnung 2m lautet3
L =∑|α|≤2m
aα(x)Dα (x ∈ Ω) (5.3.4a)
und definiert die Differentialgleichung der Ordnung 2m:
Lu = f in Ω. (5.3.4b)
Die Elliptizitat wurde bisher nur fur Gleichungen zweiter Ordnung erklart (vgl. Definition 1.2.3).
3Die NotationP|α|≤2m (oder
P|α|=2m usw.) bedeutet stets die Summation uber alle Multiindizes α ∈ Nd
0 mit der angege-benen Nebenbedingung.

5.3 Randwertaufgaben hoherer Ordnung 75
Definition 5.3.3 Der Differentialoperator L aus (5.3.4a) (mit reellwertigen Koeffizienten aα) heißt ellip-tisch (von der Ordnung 2m) in x ∈ Ω, wenn
∑|α|=2m
aα(x)ξα �= 0 fur alle 0 �= ξ ∈ Rn. (5.3.5a)
Dabei ist ζα die Abkurzung fur das Polynom ζα11 ζα2
2 . . . ζαnn vom Grad |α|. Wir setzen P (x, ζ) :=∑
|α|=2m aα(x)ζα. Offenbar ist (5.3.5a) aquivalent zu P (x, ζ) �= 0 fur alle ζ ∈ Rn mit |ζ| = 1. Aus Stetig-keitsgrunden muss entweder P (x, ζ) > 0 oder P (x, ζ) < 0 gelten. Ohne Beschrankung der Allgemeinheitkonnen wir P (x, ζ) > 0 annehmen; sonst skalieren wir mit dem Faktor −1 (Ubergang von Lu(x) = f(x) zu−Lu(x) = −f(x)). Da die Menge {ζ ∈ Rn : |ζ| = 1} kompakt ist, folgt c(x) := min{P (x, ζ) : |ζ| = 1} > 0und begrundet die Formulierung von (5.3.5a) durch
∑|α|=2m
aα(x)ξα ≥ c(x) |ξ|2m fur alle ξ ∈ Rn mit c(x) > 0. (5.3.5b)
Definition 5.3.4 Der Differentialoperator L heißt gleichmaßig elliptisch in Ω, falls inf{c(x) : x ∈ Ω} > 0fur c(x) aus (5.3.5b).
Ubungsaufgabe 5.3.5 (a) Man ubersetze L aus (5.1.1b) in die Schreibweise (5.3.4a). Wie lauten die Ko-effizienten aα fur L = Δ2?
(b) Man beweise: Der biharmonische Operator Δ2 ist gleichmaßig elliptisch.(c) aα seien reellwertig. Warum gibt es keine elliptischen Operatoren L ungerader Ordnung?(d) Sind die Koeffizienten aα hinreichend glatt, so lasst sich der Operator L aus (5.3.4a) in der Form
L =∑|α|≤m
∑|β|≤m(−1)|β|Dβaαβ(x)Dα schreiben (vgl. (5.1.1b) und (5.1.2)).
Fur m = 1 (Gleichung der Ordnung 2) haben wir eine Randbedingung gebraucht; fur die biharmonischeGleichung (m = 2) treten zwei Randbedingungen auf. Allgemein benotigt man m Randbedingungen
(Bju)(x) :=∑|α|≤mj
bjα(x)Dαu(x) = ϕj(x) fur x ∈ Γ. (5.3.6)
mit Rand-Differentialoperatoren Bj der Ordnung 0 ≤ mj < 2m.
Bemerkung 5.3.6 Die Randoperatoren Bj konnen nicht beliebig gewahlt werden, sondern mussen un-abhangig voneinander sein (ein sogenanntes “ normales System” bilden; vgl. Lions-Magenes [58, p. 113]und Wloka [89, p. 214]). Insbesondere mussen die Ordnungen mj paarweise verschieden sein.
Eine Dirichlet-Randbedingung liegt vor, wenn die Randoperatoren Bj = ∂j−1/∂nj−1 = (∂/∂n)j−1 furj = 1, . . . ,m lauten (vgl. (5.3.2)). Auf die Darstellung der Losung mit Hilfe der Greenschen Funktion sollhier nicht eingegangen werden. Bemerkenswert ist jedoch, dass die Greensche Funktion (und insbesondere dieSingularitatenfunktion) zu L stetig ist, sobald 2m > n. Fur L = Δ2 in R2 lautet die Singularitatenfunktionbeispielsweise 1
8π |x − y|2 log |x− y| (vgl. Wloka [89, p. 349]).In Satz 2.4.6 wurde die Frage nach der Stetigkeit der Randwertaufgabe bezuglich Anderungen des Gebietes
Ω diskutiert. Das dortige Resultat ist fur Differentialgleichungen zweiter Ordnung richtig. Fur das hiervorliegende Randwertproblem vierter Ordnung muss die Anderung von Ω glatter sein: Die Metrik, die dieAnderung von Ω misst, muss die Krummung des Randes berucksichtigen. Verwendet man dagegen die ublicheHausdorff-Norm, stellt das sogenannte Babuska-Paradoxon ein schones Gegenbeispiel dar. Hierzu betrachtetman die biharmonische Gleichung (5.3.1) mit der Randbedingung u = Δu = 0 auf dem gleichmaßigen n-EckΩn, das dem Einheitskreis Ω einbeschrieben ist. Offenbar konvergiert Ωn in der Hausdorff-Norm gegen Ω.Aber die Losungen un auf Ωn konvergieren nicht gegen die Losung u auf Ω (vgl. Babuska [4] und Rannacher[69]).

76 5. Allgemeine Randwertaufgaben
5.3.3 Diskretisierung der biharmonischen Differentialgleichung
Die einfachste Differenzenformel fur L = Δ2 ist das 13-Punkt-Differenzenverfahren
Dh = Δ2h = h−4
⎡⎢⎢⎢⎢⎣1
2 −8 21 −8 20 −8 1
2 −8 21
⎤⎥⎥⎥⎥⎦ , (5.3.7)
das sich als Quadrat des Funfpunktsterns Δh aus (4.2.3) darstellen lasst. Das Gitter Ωh ⊂ Ω und die RanderΓh ⊂ Γ, γh ⊂ R2\Ω seien wie in Abbildung 5.3.1 definiert (• fur innere und o fur außere Gitterpunkte, ×fur Randpunkte). Die Differenzengleichung
Dhuh = fh in Ωh (5.3.8a)
benotigt die Werte von uh in Ωh := Ωh ∪ Γh ∪ γh. Diese sind durch die Randbedingungen
uh(x) = ϕ1(x) fur x ∈ Γh, (5.3.8b)
∂0nuh(x) :=
12h
[uh(x + h�n) − uh(x − h�n)] = ϕ2(x) fur x ∈ Γh, x + h�n ∈ γh (5.3.8c)
bestimmt (vgl. (5.3.2)). Dabei werden wie in Gleichung (4.7.14b) den Eckpunkten je zwei Normalenrichtungenzugeordnet. Dementsprechend gehoren zu jedem Eckpunkt zwei Gleichungen (5.3.8c). Man beachte, dass zwei(m = 2) Randschichten Γh und γh auftreten und zwei Randbedingungen gegeben sind.
Bemerkung 5.3.7 Eliminiert man mit Hilfe von (5.3.8b,c) in Gleichung (5.3.8a) die Unbekannten {uh(ξ) :ξ ∈ Γh∪γh}, so ergibt sich ein Gleichungssystem Lhuh = qh fur {uh(ξ) : ξ ∈ Ωh}. Lh ist keine M-Matrix, dadie Vorzeichenbedingung (4.3.1a) verletzt ist. Aber auch L−1
h ist im Allgemeinen nicht ≥ 0 (vgl. (4.3.1b)).
Ω
Γ
γ
h
h
h
Abb. 5.3.1. Gitter fur die biharmonischeGleichung in Ω = (0, 1) × (0, 1)
Damit lassen sich die Beweismethoden des Abschnittes 4 nichtwiederholen. Stattdessen werden wir das Analogon des Satzes4.4.12 beweisen.
Satz 5.3.8 uh sei die durch (5.3.8a-c) definierte diskrete Losungder biharmonischen Gleichung im Quadrat Ω = (0, 1)× (0, 1). Diein Bemerkung 5.3.7 erklarte Matrix Lh ist symmetrisch und positivdefinit. Sie erfullt
‖Lh‖2 ≤ 64h−4, ‖L−1h ‖2 ≤ 1/256. (5.3.9a)
Wenn ϕ1 = 0 auf Γh (vgl. (5.3.8b)), so lasst sich uh durch
‖uh‖Ωh≤ 1
256‖fh‖Ωh
+h−1/2
16√
2|ϕ2|Γh
(5.3.9b)
abschatzen, wobei die Normen wie folgt definiert seien:
‖uh‖Ωh:=
√h2
∑x∈Ωh
|uh(x)|2, |ϕ|Γh:=
√h
∑x∈Γh
|ϕ(x)|2. (5.3.9c)
Die Summe∑
x∈Γhin |ϕ2|Γh
soll die Eckpunkte zweimal enthalten, wobei z.B. in x = (0, 0) der Wert ϕ(x)einmal als ϕ2(0+, 0), einmal als ϕ2(0, 0+) zu interpretieren ist (vgl. Kommentar zu (5.3.8c)).
Beweis. Wir beschranken uns auf den wichtigsten Teil, die Ungleichung (5.3.9b). Im unbeschrankten GitterQh := {(x, y) ∈ R2 : x/h, y/h ∈ N} setzen wir
uh(x) := uh(x) fur x ∈ Ωh, uh(x) := 0 fur x ∈ Qh\Ωh.

5.3 Randwertaufgaben hoherer Ordnung 77
Man erhalt ∑x∈Ωh
uh(x)fh(x) =∑
x∈Qh
uh(x)Δ2huh(x) =
∑x∈Qh
Δhuh(x)Δhuh(x)
nach partieller Summation (man uberlege sich zunachst die Identitaten∑v(x)∂+∂−u(x) =
−∑
(∂−v)(x)(∂−u)(x) =∑
(∂+∂−v)(x)u(x) im eindimensionalen Fall). Nach Definition von uh ist Δuh = 0auf Qh\(Ωh ∪ Γh). Auf Γh hat man uh = uh = 0 und
uh(x − h�n) = uh(x − h�n), uh(x + h�n) = 0, uh(x + h�n) = uh(x − h�n) + 2hϕ2(x)
fur x ∈ Γh. Setzt man ∂−n uh(x) := [uh(x) − uh(x − h�n)]/h = −uh(x − h�n)/h auf x ∈ Γh, so zeigt
Δhuh(x) = −h−1∂−n uh(x), Δhuh(x) = −2h−1∂−n uh(x) + 2h−1ϕ2(x) in x ∈ Γh,
dass (uh, Lhuh)Ωh= (uh, fh)Ωh
= ‖Δhuh‖2Ωh
+2h−1 |∂−n uh|2Γh− 2h−1(∂−n uh, ϕ2)Γh
, wobei (·, ·)Γhund (·, ·)Ωh
die zu den Normen (5.3.9c) gehorenden Skalarprodukte sind. Gemaß
ab ≤ a2 + b2/4 (a, b ∈ R) (5.3.10)
schatzt man ab:(∂−n uh, ϕ2)Γh
≤∣∣∂−n uh
∣∣Γh
|ϕ2|Γh≤
∣∣∂−n uh
∣∣2Γh
+ |ϕ2|2Γh/4.
Somit erhalt man
‖Δhuh‖2Ωh
+ 2h−1∣∣∂−n uh
∣∣2Γh
≤ (uh, fh)Ωh+ 2h−1(∂−n uh, ϕ2)Γh
(5.3.11)
≤ ‖uh‖Ωh‖fh‖Ωh
+ 2h−1∣∣∂−n uh
∣∣2Γh
+ h−1 |ϕ2|2Γh/2.
Satz 4.4.12 beweist ‖uh‖Ωh≤ ‖Δhuh‖Ωh
/16. Fur ϕ2 = 0 liefert (5.3.11) daher ‖uh‖2Ωh
≤ 16−2 ‖Δhuh‖2Ωh
≤16−2 ‖uh‖Ωh
‖fh‖Ωh, also
‖uh‖Ωh≤ 16−2 ‖fh‖Ωh
. (5.3.12a)
Fur fh = 0 liefert (5.3.11) die Ungleichung ‖Δhuh‖2Ωh
≤ (2h)−1 |ϕ2|2Γh, also
‖uh‖Ωh≤ 1
16‖Δhuh‖Ωh
≤ 116
(2h)−1/2 |ϕ2|Γh. (5.3.12b)
Im allgemeinen Fall schreiben wir uh als uIh + uII
h , wobei ϕI2 = 0, ϕII
2 = ϕ2, f Ih = fh und f II
h = 0 dieSummanden definieren. ‖uh‖Ωh
≤∥∥uI
h
∥∥Ωh
+∥∥uII
h
∥∥Ωh
zusammen mit (5.3.12a,b) ergibt (5.3.9b).
Satz 5.3.9 (Konvergenz) Die Losung der biharmonischen Randwertaufgabe (5.3.1) und (5.3.2) inΩ = (0, 1) × (0, 1) erfulle u ∈ C5,1(Ω). Die diskrete Losung der Gleichungen (5.3.8a-c) konvergiert dann(mindestens) von der Ordnung 2
3 :
‖uh −Rhu‖Ωh≤ C1h
2 ‖u‖C5,1(Ω) + C2h3/2 ‖u‖C2,1(Ω) (5.3.13)
(Rh: Beschrankung auf Ωh ∪ Γh).
Beweis. Taylor-Entwicklung zeigt
ΔhRhu = Δu+h2
4!(uxxxx + uyyyy) + h4R, |R| ≤ 1
360‖u‖C5,1(Ω) in Ωh. (5.3.14)
Außerhalb von Ωh kann man Rhu nach Belieben erklaren, da diese Werte nicht in (5.3.13) erscheinen. In γh
setzen wir
Rhu(x + h�n) := u(x − h�n) + 2hϕ2(x) +2h3
3!∂3u(x)∂n3
− 2h4
4!∂4u(x)∂n4
+2h5
5!∂5u(x)∂n5
(x ∈ Γh) .
Die Wahl ist so getroffen, dass (5.3.14) auch in x ∈ Γh gilt. Anwendung von Δh auf ΔhRhu liefert
Δ2hRhu = DhRhu = RhΔ2u+ O(h2 ‖u‖C5,1(Ω)) in Ωh.

78 5. Allgemeine Randwertaufgaben
(Rh: Beschrankung auf Ωh). Die Differenz wh := uh −Rhu (in Ωh definiert) erfullt
Dhwh = Dhuh −DhRhu = Rh
(f − Δ2u
)+ O(h2 ‖u‖C5,1(Ω)) =: gh, (5.3.15a)
wh(x) = uh(x) − (Rhu)(x) = ϕ1(x) − u(x) = 0 fur x ∈ Γh, (5.3.15b)
∂0nwh(x) = ∂0
nuh(x) − ∂0nRhu(x) = ϕ2(x) −
[ϕ2(x) + O(h2 ‖u‖C2,1(Ω))
]=: ψh fur x ∈ Γh. (5.3.15c)
Setzt man gh = O(h2 ‖u‖C5,1(Ω)) und ψh = O(h2 ‖u‖C2,1(Ω)) anstelle von fh und ϕ2 in Satz 5.3.8 ein (manbeachte ϕ1 = 0!), so liefert (5.3.9b) die Behauptung (5.3.13).
Mit komplizierteren Mitteln lasst sich der Faktor h−1/2 in (5.3.13) durch C(ε)h−ε (ε > 0 beliebig) ersetzen,sodass die Konvergenzordnung O(h2−ε) - also fast 2 - ist.
Bemerkung 5.3.10 Ungleichung (5.3.9a) zeigt cond2(Lh) := ‖Lh‖2
∥∥L−1h
∥∥2
= O(h−4). Im Allgemeinenfuhrt ein Differenzenverfahren fur eine Differentialgleichung der Ordnung 2m auf die Kondition
cond2(Lh) = O(h−2m) (5.3.16)
Dies weist auf eine großere Rundungsfehlerempfindlichkeit bei hoheren Ordnungen 2m hin (vgl. [77, §4.4]).Differenzenverfahren fur Randwertaufgaben vierter Ordnung mit variablen Koeffizienten und allgemeinen
Gebieten Ω werden in einem Aufsatz von Zlamal [95] behandelt. Auch dort wird Konvergenz der OrdnungO(h3/2) gezeigt. O(h2)-Konvergenz wird dagegen von Bramble [14] fur den 13-Punkt-Stern (5.3.7) in einemallgemeinen Gebiet Ω bewiesen, wenn man die Randbedingungen geeignet diskretisiert.

6Exkurs uber Funktionalanalysis
Damit auch Leser ohne eingehende Vorkenntnisse aus der Funktionalanalysis den nachsten Kapiteln folgenkonnen, werden hier diejenigen Definitionen und Resultate zusammengestellt, die spater benotigt werden.
6.1 Banach-Raume und Hilbert-Raume
6.1.1 Normierte Raume
X sei ein linearer Raum (andere Bezeichnung: Vektorraum) uber K, wobei K = R oder K = C . Im Folgendenwird stets der Normalfall K = R zugrundegelegt. Nur im Zusammenhang mit der Fourier-Transformationentritt K = C auf.
Die Norm ‖·‖ : X → [0,∞) ist in Definition 4.3.12 erklart. Der mit einer Norm versehene lineare RaumX heißt normierter Raum und wird durch das Paar (X, ‖·‖) bezeichnet. Sobald zweifelsfrei feststeht, welcheNorm zu X gehort, wird diese Norm ‖·‖X genannt und nur X anstelle von (X, ‖·‖X) geschrieben.
Beispiel 6.1.1 a) Die Euklidische Norm |·| aus (4.3.13) wie auch die Maximumnorm (4.3.3) sind Normendes Rn.
b) Die stetigen Funktionen bilden den (unendlich-dimensionalen) Raum C0(Ω). Wenn Ω beschrankt ist,sind alle u ∈ C0(Ω) beschrankt, sodass die Supremumsnorm (2.4.1) erklart ist und die Normaxiome erfullt.Ist Ω unbeschrankt, bilden die beschrankten, stetigen Funktionen eine echte Teilmenge (C0(Ω), ‖·‖C0(Ω)) vonC0(Ω). Anstelle von ‖·‖C0(Ω) benutzen wir die traditionelle Schreibweise ‖·‖∞.
c) Die in Definition 3.2.8 eingefuhrten Holder-stetigen Funktionen bilden den normierten Raum(Cs(Ω), ‖·‖Cs(Ω).
Mit der Norm ist auf X eine Topologie definiert: A ⊂ X ist offen, falls fur alle x ∈ A ein ε > 0 existiert,sodass die “Kugel” Kε(x) = {y ∈ X : ‖x− y‖ < ε} in A enthalten ist. Wir schreiben
xn → x oder x = limn→∞
xn, falls ‖xn − x‖ → 0.
Beispiel 6.1.2 Seien fn, f ∈ C0(Ω). Der Grenzprozess fn → f (bezuglich ‖·‖∞) bedeutet die aus derAnalysis bekannte gleichmaßige Konvergenz.
Ubungsaufgabe 6.1.3 Die Norm ‖·‖ : X → [0,∞) ist stetig; insbesondere gilt die umgekehrte Dreiecks-ungleichung ∣∣∣ ‖x‖ − ‖y‖
∣∣∣ ≤ ‖x− y‖ fur alle x, y ∈ X. (6.1.1)

80 6. Exkurs uber Funktionalanalysis
Wie Beispiel 6.1.1a zeigt, konnen auf X mehrere Normen definiert werden. Zwei Normen ‖·‖ und ||| · ||| aufX heißen aquivalent, falls eine Zahl 0 < C <∞ existiert, sodass
1C
‖x‖ ≤ |||x||| ≤ C ‖x‖ fur alle x ∈ X. (6.1.2)
Ubungsaufgabe 6.1.4 Aquivalente Normen fuhren zu der gleichen Topologie auf X.
6.1.2 Operatoren
X und Y seien normierte Raume mit den Normen ‖·‖X bzw. ‖·‖Y . Eine lineare Abbildung T : X → Y nenntman Operator. Wenn die Operatornorm
‖T ‖Y←X := sup {‖Tx‖Y / ‖x‖X : 0 �= x ∈ X} (6.1.3)
endlich ist, heißt T beschrankt (vgl. (4.3.9)).
Ubungsaufgabe 6.1.5 a) T ist genau dann beschrankt, wenn es stetig ist. b) ‖·‖Y←X ist Norm.
Mit der Addition (T1 +T2)x = T1x+T2x und der skalaren Multiplikation bilden die beschrankten Opera-toren einen linearen Raum, den man mit L(X,Y ) bezeichnet. (L(X,Y ), ‖·‖Y←X) ist ein normierter Raum.Mit der zusatzlichen Multiplikation (T1T2)x = T1(T2x) bildet L(X,X) sogar eine Algebra mit Eins-ElementI, da ‖I‖X←X = 1. Mit I wird stets die Identitat bezeichnet: Ix = x.
Ubungsaufgabe 6.1.6 Man beweise:
‖Tx‖Y ≤ ‖T ‖Y←X ‖x‖X fur alle x ∈ X, T ∈ L(X,Y ).
Fur T1 ∈ L(Y, Z) und T2 ∈ L(X,Y ) gilt T1T2 ∈ L(X,Z) mit
‖T1T2‖Z←X ≤ ‖T1‖Z←Y ‖T2‖Y←X .
Wir schreiben Tn → T fur T, Tn ∈ L(X,Y ), falls ‖T − Tn‖Y←X → 0 (Konvergenz in der Operatornorm).
6.1.3 Banach-Raume
Eine Folge {xn ∈ X : n ≥ 1} heißt Cauchy-Folge, wenn sup{‖xn − xm‖X : n,m ≥ k} → 0 fur k → ∞. EinRaum X heißt vollstandig, wenn jede Cauchy-Folge gegen ein x ∈ X konvergiert. Ein Banach-Raum1 ist einnormierter und vollstandiger Raum.
Beispiel 6.1.7 a) Rn ist vollstandig, Qn dagegen nicht (Q: rationale Zahlen). b) Sei D ⊂ Rn. (C0(D), ‖·‖∞)ist Banach-Raum.
Beweis. Ist {un} Cauchy-Folge, so existiert u�(x) := limun(x) fur alle x ∈ D. Da un gleichmaßig gegen u�
konvergiert, muss u� stetig sein, d.h. u� ∈ C0(D). c) (Ck(D), ‖·‖Ck(D)) fur k ∈ N und die Holder-Raume(Cs(D), ‖·‖Cs(D)), s > 0, sowie (Ck,1(D), ‖·‖Ck,1(D)) sind vollstandig, also Banach-Raume.
Mit L∞(D) bezeichnet man die Menge der auf D beschrankten und lokal integrierbaren Funktionen. Dabeiwird nicht zwischen Funktionen unterschieden, die fast uberall ubereinstimmen. Die Supremumsnorm wirdin diesem Fall durch
‖u‖L∞(D) := inf {sup {|u(x)| : x ∈ D\A} : A Menge vom Maß null}
erklart. (L∞(D), ‖·‖L∞(D)) ist Banach-Raum.
Ubungsaufgabe 6.1.8 X sei normierter Raum und Y Banach-Raum. Man zeige: L(X,Y ) ist Banach-Raum.
1Stefan Banach, geb. 30. Marz 1892 in Krakau, gest. 31. Aug. 1945 in Lemberg (Lwow)

6.1 Banach-Raume und Hilbert-Raume 81
Ubungsaufgabe 6.1.9 X sei Banach-Raum und Z ⊂ X ein abgeschlossener Unterraum. Der Quotienten-raum X/Z hat als Elemente die Klassen x = {x + z : z ∈ Z}. Man zeige: X/Z mit der Norm‖x‖ = inf{‖x+ z‖X : z ∈ Z} ist Banach-Raum.
Eine Menge A heißt dicht in (X, ‖·‖X), falls A ⊂ X und A = X , d.h. jedes x ∈ X ist Grenzwert einerFolge an ∈ A. Ist (X, ‖·‖X) ein normierter, aber nicht vollstandiger Raum, so bezeichnet man (X, ‖·‖X) alsVervollstandigung von X , falls X dicht in X und ‖x‖X = ‖x‖X fur alle x ∈ X . Die Vervollstandigung ist bisauf Isomorphie eindeutig bestimmt und kann ebenso konstruiert werden, wie Q zu R vervollstandigt wird.
Lemma 6.1.10 (X, ‖·‖X) sei normierter linearer Raum und Unterraum eines Banach-Raumes (Y, ‖·‖Y )mit ‖x‖Y ≤ C ‖x‖X fur alle x ∈ X ⊂ Y . Jede Cauchy-Folge {xn} in X mit ‖xn‖Y → 0 erfulle auch‖xn‖X → 0. Dann existiert eine Vervollstandigung X von X in Y , d.h. X ⊂ X ⊂ Y .
Haufig ist es nicht leicht, das Bild Tx eines Operators T ∈ L(X,Y ) fur alle Elemente x des Banach-RaumesX zu beschreiben. Der folgende Satz erlaubt eine erhebliche Vereinfachung: Es genugt T auf einer dichtenMenge X0 ⊂ X zu untersuchen.
Satz 6.1.11 X0 sei dichter Unterraum (oder dichte Teilmenge) des normierten Raum-es X. Y sei Banach-Raum. a) Ein auf X0 definierter Operator T0 ∈ L(X0, Y ) mit‖T0‖Y←X0
= sup{‖T0x‖Y / ‖x‖X : 0 �= x ∈ X0} hat eine eindeutige Fortsetzung T ∈ L(X,Y ) mit Tx = T0xfur alle x ∈ X0.
b) Fur xn → x (xn ∈ X0, x ∈ X) gilt Tx = limn→∞ T0xn.c) Es ist ‖T ‖Y←X = ‖T0‖Y←X0
.
Beweis. Beweis. Fur x ∈ X0 ist T durch Tx = T0x definiert, wahrend fur x ∈ X\X0 eine Folge X0 � xn → xexistiert und Tx = limn→∞ Txn = limn→∞ T0xn festlegt. Es bleibt zu zeigen, dass limT0xn existiertund unabhangig von der Auswahl der Folge xn ∈ X0 ist. Da ‖T0xn − T0xm‖Y ≤ ‖T0‖Y←X ‖xn − xm‖X ,ist T0xn eine Cauchy-Folge. Wegen der Vollstandigkeit von Y existiert y ∈ Y mit T0xn → y. Fur einezweite Folge x′n ∈ X0 mit x′n → x existiert aus dem gleichen Grunde ein y′ ∈ Y , sodass T0x
′n → y′. Da
y′ − y = lim(T0x′n − T0xn) und ‖T0x
′n − T0xn‖Y ≤ ‖T0(x′n − xn)‖Y ≤ ‖T0‖Y←X0
‖x′n − xn‖X → 0, ist Txdurch b) wohldefiniert. Teil (c) folgt aus ‖Tx‖Y / ‖x‖X = lim ‖T0xn‖Y / ‖xn‖X fur xn → x, xn ∈ X0.
Ubungsaufgabe 6.1.12 X0 sei dicht in (X, ‖·‖). Eine zweite, auf X0 definierte Norm |‖·‖| sei mit ‖·‖ aufX0 aquivalent. Man zeige: Die Vervollstandigung von X0 bezuglich ||| · ||| ergibt (X, ||| · |||), und ‖·‖ und ||| · |||sind auch auf X aquivalent.
Eine Folgerung des “Satzes von der offenen Abbildung” (vgl. Yosida [91, §II.5]) liefert das folgende, wichtigeResultat:
Satz 6.1.13 X,Y seien Banach-Raume. T ∈ L(X,Y ) sei bijektiv. Dann gilt auch T−1 ∈ L(Y,X).
Ubungsaufgabe 6.1.14 X,Y seien Banach-Raume, T ∈ L(X,Y ) sei injektiv. Man zeige:a) Y0 := Bild(T ) := {Tx : x ∈ X} mit ‖·‖Y als Norm ist ein Banach-Unterraum von Y .b) T−1 existiert auf Y0 und ist beschrankt: T−1 ∈ L(Y0, X).
X und Y seien Banach-Raume mit X ⊂ Y . Offenbar ist die durch I bezeichnete Inklusion I : x ∈ X �→x ∈ Y eine lineare Abbildung. Wenn sie beschrankt ist:
I ∈ L(X,Y ), d.h. ‖x‖Y ≤ C ‖x‖X fur alle x ∈ X, (6.1.4)
nennt manX stetig eingebettet in Y . IstX außerdem dicht in (Y, ‖·‖Y ), so heißtX dicht und stetig eingebettetin Y .
Ubungsaufgabe 6.1.15 X ⊂ Y ⊂ Z seien Banach-Raume. Man zeige: Ist X [dicht und] stetig in Y undist Y [dicht und] stetig in Z eingebettet, so ist auch X [dicht und] stetig in Z eingebettet.
82 6. Exkurs uber Funktionalanalysis
6.1.4 Hilbert-Raume
Die Abbildung (·, ·) : X ×X → K (K = R oder K = C) heißt Skalarprodukt auf X , falls
(x, x) > 0 fur alle 0 �= x ∈ X,(λx+ y, z) = λ (x, z) + (y, z) fur alle λ ∈ K, x, y, z ∈ X,
(x, y) = (y, x) fur alle x, y ∈ X,
(6.1.5)
wobei λ die komplex konjugierte Zahl zu λ ∈ C ist.
Ubungsaufgabe 6.1.16 Man zeige: a) ‖x‖ := (x, x)1/2 ist Norm auf X. Zum Beweis verwende man:b) Es gilt die Schwarzsche2 Ungleichung
|(x, y)| ≤ ‖x‖ ‖y‖ fur alle x, y ∈ X. (6.1.6)
Hinweis: Betrachte ‖x− λy‖ ≥ 0 fur λ = ‖x‖2/(x, y), falls (x, y) �= 0.
c) (·, ·) : X ×X → K ist stetig.
Ein Banach-Raum X heißt Hilbert 3-Raum, wenn ein Skalarprodukt (·, ·)X auf X existiert, sodass‖x‖X = (x, x)1/2
X fur alle x ∈ X .x ∈ X und y ∈ X heißen orthogonal (in Zeichen: x⊥y), falls (x, y)X = 0. Ist A ⊂ X eine Teilmenge des
Hilbert-Raumes X , so definiert der Orthogonalraum A⊥ := {x ∈ X : (x, a)X = 0 fur alle a ∈ A} einenabgeschlossenen Unterraum von X .
Lemma 6.1.17 U sei ein abgeschlossener Unterraum eines Hilbert-Raumes X. Dann lasst sich X in diedirekte Summe X = U ⊕U⊥ zerlegen, d.h. alle x ∈ X haben eine eindeutige Zerlegung x = u+ v mit u ∈ Uund v ∈ U⊥. Ferner gilt ‖x‖2
X = ‖u‖2X + ‖v‖2
X .
Ubungsaufgabe 6.1.18 Sei A eine Teilmenge des Hilbert-Raumes X. Man beweise die Aquivalenz derfolgenden Aussagen: (a) A liegt dicht in X; (b) A⊥ = {0}; (c) Aus x ∈ X und (a, x)X = 0 fur alle a ∈ Afolgt x = 0; (d) zu jedem 0 �= x ∈ X existiert ein a ∈ A mit (a, x)X �= 0.
6.2 Sobolev-Raume
Im Folgenden ist Ω stets eine offene Teilmenge des Rn.
6.2.1 Der Raum L2(Ω)
Zu L2(Ω) gehoren alle Lebesgue4-messbaren Funktionen, deren Quadrate auf Ω Lebesgue-integrierbar sind.Zwei Funktionen u, v ∈ L2(Ω) werden als gleich betrachtet (u = v), wenn u(x) = v(x) fur fast alle x ∈ Ω,d.h. fur alle x ∈ Ω\A, wobei die Ausnahmemenge A das Lebesgue-Maß μ(A) = 0 besitzt.
Satz 6.2.1 L2(Ω) bildet einen Hilbert-Raum mit dem Skalarprodukt
(u, v)0 :=∫
Ω
u(x) v(x) dx fur alle u, v ∈ L2(Ω) (6.2.1)
und der Norm
|u|0 := ‖u‖L2(Ω) :=
√∫Ω
|u(x)|2 dx. (6.2.2)
2Hermann Amandus Schwarz, geb. am 25. Jan. 1843 in Hermsdorf, gest. am 30. Nov. 1921 in Berlin3David Hilbert, am 23 Januar 1862 in Konigsberg (Preußen) geboren und am 14 Februar 1943 in Gottingen gestorben4Henri Leon Lebesgue, geb. 28. Juni 1875 in Beauvais, Oise, Picardie, Frankreich, gest. 26. Juli 1941 in Paris

6.2 Sobolev-Raume 83
Lemma 6.2.2 Die Raume C∞(Ω) ∩ L2(Ω) und C∞0 (Ω) liegen dicht in L2(Ω). Dabei ist
C∞0 (Ω) := {u ∈ C∞(Ω) : Tr(u) kompakt, Tr(u) ⊂⊂ Ω} . (6.2.3)
Tr(u) := {x ∈ Ω : u(x) �= 0} bezeichnet den Trager von u. Die doppelte Inklusion Ω′ ⊂⊂ Ω bedeutet, dass Ω′
im Inneren von Ω liegt (d.h. Ω′ ⊂ Ω und Ω′ ∩ ∂Ω = ∅).
Dα sei der partielle Ableitungsoperator (3.2.5b). Im Folgenden benotigen wir sogenannte schwache Ab-leitungen Dαu, die in nichtklassischer Weise definiert werden.
Definition 6.2.3 u ∈ L2(Ω) besitzt eine (schwache) Ableitung v := Dαu ∈ L2(Ω), falls fur dieses v ∈ L2(Ω)gilt:
(w, v)0 = (−1)|α| (Dαw, u)0 fur alle w ∈ C∞0 (Ω). (6.2.4)
Ubungsaufgabe 6.2.4 Man zeige: a) u besitze eine schwache Ableitung Dαu ∈ L2(Ω). Existiert in Ω′ ⊂ Ωdie klassische Ableitung Dαu, so stimmt sie dort (fast uberall) mit der schwachen uberein.
b) Besitzt u die schwache Ableitung vα = Dαu ∈ L2(Ω), und hat vα die schwache Ableitung vα+β =Dβvα ∈ L2(Ω), so ist vα+β auch die schwache Dα+β-Ableitung von u, d.h. Dα+βu = Dβ(Dαu).
c) Ω ⊂ Rn sei beschrankt und 0 ∈ Ω. u(x) := |x|σ hat erste schwache Ableitungen in L2(Ω), falls σ = 0oder 2σ + n > 2.
d) Fur uν ∈ C∞(Ω) gelte uν → u ∈ L2(Ω) und Dαuν → v ∈ L2(Ω) bezuglich der L2(Ω)-Norm. Dann istv = Dαu.
Fur spatere Anwendungen betrachten wir das
Beispiel 6.2.5 Sei Ω =⋃N
i=1 Ωi, wobei die beschrankten Teilgebiete Ωi disjunkt seien und einen stuckweiseglatten Rand besitzen. Sei k ∈ N. Eine Funktion u ∈ Ck−1(Ω) mit Beschrankungen uΩi ∈ Ck(Ωi) (1 ≤ i ≤ N)besitzt eine (schwache) k-fache Ableitung vα = Dαu ∈ L2(Ω), |α| ≤ k, die in
⋃Ωi mit der klassischen
ubereinstimmt.
Beweis. Die (k − 1)-fachen Ableitungen existieren als klassische Ableitungen, sodass die Behauptung nurnoch fur k = 1 zu zeigen ist. Sei Dα = ∂/∂xj, w ∈ C∞0 (Ω). Die Behauptung folgt durch partielle Integration:
− (Dαw, u)0 = −(wxj , u
)0
= −∫
Ω
wxjudx = −N∑
i=1
∫Ωi
wxjudx =N∑
i=1
[∫Ωi
wuxj dx−∫
∂Ωi
wun(i)j dΓ
],
wobei n(i)j die j-te Komponente des Normalenvektors �n(i) bezuglich Ωi ist. Fur Punkte x ∈ ∂Ωi ∩ ∂Ωk
(i �= k) sind die Vorzeichen entgegengesetzt: �n(i) = −�n(k). Daher fallen in∑N
i=1
∫∂Ωi
wun(i)j dΓ die Beitrage
der inneren Seiten heraus. Randbeitrage von ∂Ω verschwinden ebenfalls, da w = 0 auf ∂Ω. Damit folgt
− (Dαw, u)0 =N∑
i=1
∫Ωi
wuxj dx =N∑
i=1
∫Ωi
wvαdx =∫
Ω
wvαdx = (w, vα)0 ,
wobei vα ∈ L2(Ω) auf allen Teilbereichen Ωi mit uxj ubereinstimmt.Die Ungleichung |(u, v)0| ≤ |u|0 |v|0 (vgl. (6.1.6)) lautet explizit∣∣∣∣∫
Ω
u(x)v(x)dx∣∣∣∣ ≤
√∫Ω
|u(x)|2 dx∫
Ω
|v(x)|2 dx . (6.2.5a)
Fur v = 1 ergibt sich ∣∣∣∣∫Ω
u(x)dx∣∣∣∣ ≤ √
μ(Ω)
√∫Ω
|u(x)|2 dx (μ(Ω) : Maß von Ω) . (6.2.5b)
Fur a ∈ L∞(Ω) und u, v ∈ L2(Ω) hat man∣∣∣∣∫Ω
a(x)u(x)v(x)dx∣∣∣∣ ≤ ‖a‖L∞(Ω) ‖u‖L2(Ω) ‖v‖L2(Ω) = ‖a‖∞ |u|0 |v|0 . (6.2.5c)
84 6. Exkurs uber Funktionalanalysis
6.2.2 Die Raume Hk(Ω) und Hk0 (Ω)
Sei k ∈ N0. Hk(Ω) ⊂ L2(Ω) sei die Menge aller Funktionen, die schwache Ableitungen Dαu ∈ L2(Ω) fur|α| ≤ k besitzen:
Hk(Ω) ={u ∈ L2(Ω) : Dαu ∈ L2(Ω) fur |α| ≤ k
}.
Der hier mit Hk(Ω) bezeichnete Sobolev5-Raum wird auch mit W k2 (Ω) oder W k,2(Ω) bezeichnet.
Beispiel 6.2.6 Sei Ω ={(x, y) ∈ R2 : x2 + y2 < 1
}der Einheitskreis. Man zeige, dass die Funktion
u(x, y) = log(log 2√x2+y2
) zu H1(Ω) gehort, aber unstetig ist.
Satz 6.2.7 Hk(Ω) bildet einen Hilbert-Raum mit dem Skalarprodukt
(u, v)k := (u, v)Hk(Ω) :=∑|α|≤k
(Dαu,Dαv)L2(Ω) (6.2.6)
und der (Sobolev-)Norm
|u|k := ‖u‖Hk(Ω) :=√ ∑|α|≤k
‖Dαu‖2L2(Ω). (6.2.7)
Lemma 6.2.8 C∞(Ω) ∩Hk(Ω) liegt dicht in Hk(Ω).
Lemma 6.2.8, dessen Beweis beispielsweise bei Wloka [89, p. 74] zu finden ist, gestattet eine zweite Defi-nition des Sobolev-Raumes Hk(Ω):
Bemerkung 6.2.9 Sei X0 := {u ∈ C∞(Ω) : |u|k < ∞}. Die Vervollstandigung von X0 in L2(Ω) bezuglichder Norm (6.2.7) ergibt Hk(Ω).
Definition 6.2.10 Die Vervollstandigung von C∞0 (Ω) in L2(Ω) bezuglich der Norm (6.2.7) wird mit Hk0 (Ω)
bezeichnet.
Satz 6.2.11 Der Hilbert-Raum Hk0 (Ω) ist ein Unterraum von Hk(Ω) mit dem gleichen Skalarprodukt (6.2.6)
und gleicher Norm (6.2.7). C∞0 (Ω) liegt dicht in Hk0 (Ω). Fur k = 0 gilt
H00 (Ω) = H0(Ω) = L2(Ω). (6.2.8)
Beweis. 1) C∞0 (Ω) ⊂ X0 (vgl. Bemerkung 6.2.9) impliziert Hk0 (Ω) ⊂ Hk(Ω) ⊂ L2(Ω).
2) Definitionsgemaß ist C∞0 (Ω) dicht in Hk0 (Ω).
3) Fur k = 0 stimmen die Normen (6.2.2) und (6.2.7) uberein. Lemma 6.2.2 beweist H00 (Ω) = L2(Ω).
Wegen Hk0 (Ω) ⊂ Hk(Ω) ⊂ L2(Ω) (k ∈ N0 beliebig) folgt (6.2.8).
Lemma 6.2.12 Fur beschranktes Ω sind ‖·‖Hk(Ω) und
|u|k,0 :=√ ∑|α|=k
‖Dαu‖2L2(Ω) (6.2.9)
aquivalente Normen in Hk0 (Ω).
Beweis. 1) Offenbar ist |·|k,0 ≤ ‖·‖Hk(Ω).2) Sei u ∈ C∞0 (Ω). Fur ein α mit |α| = k−1 setze man v := Dαu ∈ C∞0 (Ω). Es gibt ein R mit Ω ⊂ KR(0).
Fur jedes x ∈ Ω ist x1 ∈ [−R,R], sodass
|v(x)|2 =
∣∣∣∣∣∣x1∫−R
vx1(ξ, x2, . . . , xn)dξ
∣∣∣∣∣∣2
≤(6.2.5b)
(x1 +R)
x1∫−R
|vx1(ξ, x2, . . . , xn)|2dξ ≤ 2R
R∫−R
|vx1(ξ, x2, . . . , xn)|2dξ.
5Sergei Lwowitsch Sobolew, geb. am 6. Oktober 1908 in St. Petersburg, gest. am 3. Januar 1989 in Leningrad

6.2 Sobolev-Raume 85
Integration uber x ∈ Ω liefert |v|20 ≤ 4R2 |vx1 |20 ≤ 4R2 |u|2k,0, da vx1 k-fache Ableitung von u ist. Die
Summation uber alle α mit |α| = k − 1 ergibt |u|2k−1,0 ≤ Ck−1 |u|2k,0. Ebenso folgt |u|2j−1,0 ≤ Cj−1 |u|2j,0 furalle 1 ≤ j ≤ k und somit |u|2j,0 ≤ CjCj+1 · · ·Ck−1 |u|2k,0. Da |u|2k ≤
∑kj=0 |u|
2j,0 ≤ C |u|2k,0 fur alle u ∈ C∞0 (Ω),
folgt die Behauptung mit Ubungsaufgabe 6.1.12.Die Konstante cΩ in der sogenannten Poincare6-Friedrichs7-Ungleichung ‖u‖L2(Ω) ≤ cΩ |u|k,0 , die im
Beweis als√CjCj+1 · · ·Ck−1 gewahlt ist, wird entsprechend Poincare-Friedrichs-Konstante genannt.
Ubungsaufgabe 6.2.13 Man zeige: a) Fur beschranktes Ω und k ≥ 1 sind Hk(Ω) und Hk0 (Ω) verschieden.
Hinweis: Man betrachte die konstante Funktion u(x) = 1 und verwende Lemma 6.2.12.b) Lemma 6.2.12 gilt auch, wenn Ω in einer Richtung beschrankt ist, d.h. wenn Ω in einem Streifen
{x ∈ Rn : |xk| < R} fur ein k ∈ {1, . . . , n} liegt.
Satz 6.2.14 Sei m ≥ 1. Es gibt Konstanten C = C(m) und η(ε) = η(ε,m), sodass
|u|k ≤ C |u|k/mm |u|(m−k)/m
0 fur alle 0 ≤ k ≤ m, u ∈ Hm0 (Ω), (6.2.10a)
|u|k ≤ ε |u|m + η(ε) |u|0 fur alle ε > 0, 0 ≤ k < m, u ∈ Hm0 (Ω). (6.2.10b)
Beweis. 1) Fur die n Multiindizes α mit |α| = 1 zeigt partielle Integration, dass |Dαu|20 = (Dαu,Dαu)0 =−(D2αu, u)0 ≤ |D2αu|0 |u|0 ≤ |u|2 |u|0. Da auch |u|20 ≤ |u|2 |u|0, folgt |u|21 ≤ (n + 1) |u|2 |u|0. Ersetzt man udurch Dβu mit |β| = 1, ergibt sich ebenso
|u|2� ≤ C |u|�+1 |u|�−1 fur alle 0 ≤ � < m, u ∈ Hm0 (Ω). (6.2.10c)
2) Sei u �= 0 fest. Setze v� := log |u|�, w� := [[�vm + (m − �)v0]/m und z� := v� − w�. (6.2.10c) fuhrt auf2z� − z�−1 − z�+1 ≤ c := log C, wobei z0 = zm = 0. Fur z = (z1, . . . , zm−1)� ergibt sich Az ≤ c1. Dabei istA die M-Matrix (4.1.8b) fur h = 1. A−1 ≥ 0 beweist z ≤ c := c A−11. v� = z� + w� ≤ c� + w� (1 ≤ � < m)impliziert |u|� = exp(v�) ≤ exp(c� + w�), also (6.2.10a) mit C := exp(c‖A−11‖∞).
3) Elementare Rechnung zeigt: Fur jedes ε > 0, 0 ≤ Θ ≤ Θ0 < 1 gibt es ein η(ε) = η(ε,Θ0), sodass
aΘb1−Θ ≤ εa+ η(ε)b fur alle a, b ≥ 0. (6.2.10d)
(6.2.10b) ist eine Folgerung aus (6.2.10a,d).Mit ahnlichen Mitteln (zusammen mit (5.3.10)) beweist man(
Dαu,Dβu)0≤ ε |u|2m +
14ε
|u|2k fur ε > 0, |α| ≤ m, |β| ≤ k ≤ m, u ∈ Hm(Ω), (6.2.10e)(Dαu,Dβu
)0≤ ε |u|2m + η(ε) |u|20 fur ε > 0, |α| ≤ m, |β| < m, u ∈ Hm
0 (Ω), (6.2.10f)
Bemerkung 6.2.15 Die Menge {u ∈ C∞(Ω) : Tr(u) kompakt, |u|k <∞} liegt dicht in Hk(Ω).
Beweis. Seien u ∈ Hk(Ω) und ε > 0. Gemaß Lemma 6.2.8 gibt es ein uε ∈ C∞(Ω) mit |u− uε|k ≤ ε/2.Es gibt a ∈ C∞(Rn) mit a(x) = 1 fur |x| ≤ 1 und a(x) = 0 fur |x| ≤ 2. Fur hinreichend großes R hat man|uε(x) − a(x/R)uε(x)|k ≤ ε/2. Damit existiert v(x) = a(x/R)uε(x) ∈ C∞0 (Ω) mit |u− v|k ≤ ε.
Da “Tr(u) kompakt” schon “Tr(u) ⊂⊂ Rn ” impliziert, folgt der
Zusatz 6.2.16 Hk0 (Rn) = Hk(Rn) fur alle k ≥ 0.
Die Leibnizsche8 Ableitungsregel fur Produkte beweist
Satz 6.2.17 ‖au‖Hk(Ω) ≤ Ck ‖a‖Ck(Ω) ‖u‖Hk(Ω) fur alle a ∈ Ck(Ω) und u ∈ Hk(Ω).
Satz 6.2.17 zusammen mit der Substitutionsregel fur Volumenintegrale beweist den folgenden Satz.
6Jules Henri Poincare, geb. 29. April 1854 in Nancy, Lorraine, gest. 17 Juli 1912 in Paris7Kurt Otto Friedrichs, geb. 28. Sept. 1901 in Kiel, gest. 31.Dez. 1982 in New Rochelle (N.Y., USA)8Gottfried Wilhelm von Leibniz, geb. am 1. Juli 1646 in Leipzig, gest. am 14. Nov. 1716 in Hannover

86 6. Exkurs uber Funktionalanalysis
Satz 6.2.18 (Transformationssatz) Sei T ∈ Cmax(k,1)(Ω) : Ω → Ω′ bijektiv mit |det dT/dx| ≥ δ > 0 inΩ. Wir schreiben v = u◦T fur v(x) = u(T (x)). Dann impliziert u ∈ Hk(Ω′) [u ∈ Hk
0 (Ω′)] auch u◦T ∈ Hk(Ω)[u ◦ T ∈ Hk
0 (Ω)] und‖u ◦ T ‖Hk(Ω) ≤ Ck ‖T ‖Ck(Ω) ‖u‖Hk(Ω) /
√δ. (6.2.11)
6.2.3 Fourier-Transformation und Hk(Rn)
Fur u ∈ C∞0 (Rn) definiert man die Fourier-transformierte Funktion u mittels
u(ξ) := (Fu) (ξ) := (2π)−n/2∫
Rn
e−i〈ξ,x〉u(x)dx (ξ ∈ Rn) . (6.2.12)
Man beachte, dass u durch ein eigentliches Integral beschrieben wird, da der Trager von u beschrankt ist.
Lemma 6.2.19 Sei u ∈ C∞0 (Rn). Fur R → ∞ konvergiert
IR(u; y) := (2π)−n∫|ξ|∞≤R
[ ∫Rn
e−i〈ξ,x−y〉u(x)dx]
dξ
gleichmaßig auf Tr(u) gegen u(y). Genauer gilt IR(u; y) = u(y) + O(1/R).
Beweis. Es genugt, den Fall n = 1 zu behandeln (Satz von Fubini). Integration bezuglich ξ ergibt
IR(u; y) =1π
∫R(x− y)−1 sin(R(x − y))u(x)dx.
Es ist IR(1; y) = (1/π)∫
R t−1 sin(t)dt = 1 fur alle R > 0. Da u ∈ C∞(Rn), gehort auch die Funktion
w(x, y) := [u(x)−u(y)]/(x−y) zu C∞(R2n). Die Abschatzungen w(x, y) = O(1/ [1 + |x− y|]) und wx(x, y) =O(1/ [1 + |x− y|]2) gelten gleichmaßig auf y ∈ Tr(u). Partielle Integration liefert
IR(u(·) − u(y); y) = IR((· − y)w(·, y); y) =1π
∫R
sin(R(x− y))w(x, y)dx
= − 1πR
∫R
cos(R(x− y))wx(x, y)dx = O(1/R).
Die Behauptung folgt aus IR(u; y) = u(y)IR(1; y) + IR(u(·) − u(y); y) = u(y) + O(1/R).
Lemma 6.2.20 u ∈ L2(Rn) und |u|0 = |u|0 fur alle u ∈ C∞0 (Rn).
Beweis.∫
|ξ|∞≤R
|u(ξ)|2 dξ = (2π)−n ∫|ξ|∞≤R
[ ∫Rn
e−i〈ξ,x〉u(x)dx] [ ∫
Rn
ei〈ξ,y〉u(y)dy]
dξ =∫
Rn
IR(u; y)u(y)dy →∫Rn |u(y)|2 dy gemaß Lemma 6.2.19.
Lemma 6.2.21 Die inverse Fourier-Transformation F−1u = u ist fur u ∈ C∞0 (Rn) definiert durch
(F−1u)(x) := (2π)−n/2∫
Rn
ei〈ξ,x〉u(ξ)dξ := (2π)−n/2 limR→∞
∫|ξ|∞≤R
ei〈ξ,x〉u(ξ)dξ (6.2.13)
Beweis. (2π)−n/2∫
|ξ|∞≤R
ei〈ξ,x〉u(ξ)dξ = (2π)−n∫
|ξ|∞≤R
∫Rn
ei〈ξ,x−y〉u(y)dydξ =Lemma 6.2.19
u(x) + O(1/R).
Satz 6.2.22 a) F ,F−1 ∈ L(L2(Rn), L2(Rn)) mit ‖F‖L2(R2)←L2(Rn) = ‖F−1‖L2(Rn)←L2(Rn) = 1.b) Das Skalarprodukt erfullt (u, v)0 = (u, v)0 fur alle u, v ∈ L2(Rn).
Beweis. a) Da C∞0 (Rn) dicht in L2(Rn) liegt (vgl. Lemma 6.2.2), lasst sich F zu F : L2(Rn) → L2(Rn)fortsetzen (vgl. Satz 6.1.11). Die Normabschatzung folgt aus Lemma 6.2.20. Die Rollen von F und F−1
lassen sich vertauschen (vgl. (6.2.12) und (6.2.13)); also gilt auch F−1 ∈ L(L2(Rn), L2(Rn)).b) (u, v)0 = 1
2
(|u+ v|20 − |u|20 − |v|20
)= 1
2
(|u+ v|20 − |u|20 − |v|20
)= (u, v)0 dank Lemma 6.2.20.

6.2 Sobolev-Raume 87
Ubungsaufgabe 6.2.23 Man beweise: a) Mit ξα = ξα11 . . . ξαn
n gilt
F(Dαu)(ξ) = i|α|ξαu(ξ) fur u ∈ C∞0 (Rn). (6.2.14)
b) Es gibt C = C(k), sodass 1C (1 + |ξ|2)k ≤
∑|α|≤k |ξα|2 ≤ C(1 + |ξ|2)k fur alle ξ ∈ Rn.
Lemma 6.2.24 a) Es gilt |u|k =∣∣∣√∑
|α|≤k |ξα|2u(ξ)∣∣∣0
fur alle u ∈ Hk(Rn).
b) Eine zu |·|k aquivalente Norm auf Hk(Rn) ist
|u|ˆk :=∣∣∣(1 + |ξ|2)ku(ξ)
∣∣∣0. (6.2.15)
Beweis. a) Es genugt, die Behauptung fur u ∈ C∞0 (Rn) zu zeigen (vgl. Zusatz 6.2.16, Satz 6.1.11):
|u|2k =∑|α|≤k
|Dαu|20 =∑|α|≤k
|FDαu|20 =∑|α|≤k
|ξαu(ξ)|20 =∣∣∣∣√∑
|α|≤k|ξα|2u(ξ)
∣∣∣∣0
.
b) Die zweite Behauptung folgt aus Ubungsaufgabe 6.2.23b.
Lemma 6.2.25 ∂h,j sei der Differenzenoperator
∂h,ju(x) := [u(x+h
2ej) − u(x− h
2ej)]/h, h > 0, ej : j-ter Einheitsvektor.
Wenn u ∈ Hk(Rn) und |∂h,ju|k ≤ C fur alle h > 0, 1 ≤ j ≤ n, so gilt u ∈ Hk+1(Rn). Umgekehrt gilt|∂h,ju|k ≤ |u|k+1 fur alle u ∈ Hk+1(Rn).
Beweis. a) Aus u(· + δej) = exp(−iδξj)u(ξ) folgt ∂h,ju(ξ) = 2ih sin(ξjh/2)u(ξ). Da 4h−2 sin2(ξjh/2) ≥ ξ2j fur
h ≤ 1/ |ξ| , folgt |∂h,ju|2 ≥ ξ2j |u|2 fur |ξ| ≤ 1/h. Summation uber j und Integration uber ξ liefern wegen
(1 + |ξ|2)k+1 = (1 + |ξ|2)k + (1 + |ξ|2)k |ξ|2(|u|ˆk+1
)2
=∫
Rn
(1 + |ξ|2)k+1 |u(ξ)|2 dξ =∫
Rn
(1 + |ξ|2)k |u(ξ)|2 dξ +∫
Rn
(1 + |ξ|2)k |ξ|2 |u(ξ)|2 dξ
≤(|u|ˆk
)2
+∫|ξ|≥1/h
(1 + |ξ|2)k |ξ|2 |u(ξ)|2 dξ +∫|ξ|≤1/h
(1 + |ξ|2)k∣∣∣∂h,ju(ξ)
∣∣∣2 dξ
=(|u|ˆk
)2
+(|∂h,ju|ˆk
)2
+∫|ξ|≥1/h
. . . .
Das Integral uber |ξ| ≥ 1/h verschwindet fur h→ 0, sodass die Behauptung folgt.b) Fur die Umkehrung verwende man (∂hju)(x) =
∫ 1/2
−1/2uxj(x + thej)dt.
6.2.4 Hs(Ω) fur reelles s ≥ 0
Sei s ≥ 0. Fur Ω = Rn lassen sich das folgende Skalarprodukt (6.2.16a) und die Sobolev-Norm (6.2.16b) furalle u ∈ C∞0 (Rn) definieren:
(u, v)ˆs :=∫
Rn
(1 + |ξ|2)s u(ξ) v(ξ) dξ, (6.2.16a)
|u|ˆs := ‖(1 + |ξ|2)s/2 u(ξ)‖L2(Rn). (6.2.16b)
Die Vervollstandigung in L2(Rn) definiert den Sobolev-RaumHs(Rn) auch fur eine nichtganzzahlige Ordnungs. Auf Grund von Lemma 6.2.24b und Ubungsaufgabe 6.1.12 stimmen die neu definierten Hs(Rn) fur s ∈ N0
mit den bisherigen Sobolev-Raumen uberein.

88 6. Exkurs uber Funktionalanalysis
Sei Ω ⊂ Rn ein Teilgebiet. s ≥ 0 wird zerlegt in s = k + λ mit k ∈ N0 und 0 < λ < 1. Wir definieren
(u, v)s :=∑|α|≤k
⎡⎣∫Ω
Dαu(x)Dαv(x)dx +∫∫
Ω×Ω
[Dαu(x) −Dαu(y)] [Dαv(x) −Dαv(y)]
|x− y|n+2λdxdy
⎤⎦ , (6.2.17a)
|u|s := ‖u‖Hs(Ω) :=√
(u, u)s (s = k + λ, 0 < δ < 1) . (6.2.17b)
|·|s heißt die Sobolev-Slobodeckij-Norm. In der gleichen Weise wie im Fall s = k ∈ N erklart man die Hilbert-Raume Hs(Ω) und Hs
0(Ω). Die Eigenschaften dieser Raume sind im folgenden Satz zusammengefasst (vgl.Adams [1], Wloka [89]):
Satz 6.2.26 Sei s ≥ 0. a) Fur Ω = Rn sind die Normen (6.2.16b) und (6.2.17b) aquivalent, d.h. beideNormen definieren den gleichen Raum Hs(Rn) = Hs
0 (Rn).b){u ∈ C∞(Ω) : Tr(u) kompakt, |u|s <∞} liegt dicht in Hs(Ω).c) C∞0 (Ω) liegt dicht in Hs
0 (Ω).d) aDα(bu) ∈ Hs−|α|(Ω), falls |α| ≤ s, u ∈ Hs(Ω), a ∈ Ct−|α|(Ω), b ∈ Ct(Ω), wobei t = s ∈ N0 oder t > s.e) Hs(Ω) ⊂ Ht(Ω), Hs
0(Ω) ⊂ Ht0(Ω) fur s ≥ t.
f) In (6.2.10a,b) konnen k und m reell sein.g) In (6.2.11) ist ‖T ‖Ck(Ω) durch ‖T ‖Ct(Ω) mit t > k zu ersetzen, falls k �∈ N.
Ubungsaufgabe 6.2.27 Man prufe in beiden Normen (6.2.16b) und (6.2.17b) nach, dass die charakteris-tische Funktion u(x) = 1 in [−1, 1], u(x) = 0 fur |x| > 1 genau dann zu Hs(R) gehort, wenn 0 ≤ s < 1/2.
6.2.5 Spur- und Fortsetzungssatze
Die Natur der Randwertaufgaben verlangt, dass man sinnvoll Randwerte u|Γ (Beschrankung oder sogenannteSpur von u auf Γ = ∂Ω) bilden kann. Eine Holder-stetige Funktion u ∈ Cs(Ω) hat, wie man leicht einsieht,eine Beschrankung u|Γ ∈ Cs(Γ), wenn nur Γ hinreichend glatt ist. Aus u ∈ Hs(Γ) folgt aber keineswegsu|Γ ∈ Hs(Γ). Da die Gleichheit u = v in Hs(Ω) nur bedeutet, dass u(x) = v(x) fast uberall in Ω, aber Γeine Menge vom Maß null ist, kann u(x) �= v(x) uberall auf Γ gelten. Der Randwert u(x) (x ∈ Γ) kannauch nicht durch stetige Fortsetzung definiert werden, da z.B. u ∈ H1(Ω) nicht stetig zu sein braucht (vgl.Ubungsaufgabe 6.2.4c).
Das inverse Problem zur Definition von u|Γ ist die Fortsetzung: Existiert zu einem gegebenen Randwert ϕauf Γ eine Funktion u ∈ Hs(Ω), sodass ϕ = u|Γ? Im negativen Falle kann es auch keine Losung u ∈ Hs(Ω)des Dirichlet-Randwertproblems geben. Wir werden diese Fragestellungen zunachst an dem Halbraum
Ω = Rn+ := {(x1, . . . , xn) ∈ Rn : xn > 0} mit Γ = ∂Ω = Rn−1 × {0} (6.2.18)
studieren. u ∈ Hs(Rn+) wird zunachst zu u ∈ Hs(Rn) fortgesetzt, bevor u auf Γ beschrankt wird.
Satz 6.2.28 Sei s ≥ 0. Es gibt einen Fortsetzungsoperator φs ∈ L(Hs(Rn+), Hs(Rn)), sodass fur alle
u ∈ Hs(Rn+) die Fortsetzung u = φsu mit u auf Rn
+ ubereinstimmt: u|Rn+
= u.
Beweis. Fur s = 0 setze man u = u auf Rn+ und u = 0 sonst. Da ‖u‖L2(Rn) = ‖u‖L2(Rn
+), ist die durchφ0u := u definierte Abbildung beschrankt: ‖φ0‖L2(Rn)←L2(Rn
+) = 1. Fur s ≤ 1 erklare man φsu = u durch
u = u auf Rn+, u(x1, . . . , xn−1,−xn) = u(x1, . . . , xn−1, xn) fur xn > 0
(d.h. durch Spiegelung an Γ). Fur s = 1 ergibt sich z.B. |u|1 =√
2 |u|1, d.h. φs ∈ L(Hs(Rn+), Hs(Rn)). Fur
großere s benutzt man fur u(. . . ,−xn) hohere Interpolationsformeln (vgl. Ubungsaufgabe 9.1.17, vgl. Wloka[89, p. 105]).
Die Beschrankung u|Γ wird im Folgenden als γu notiert. Zunachst wird γ nur auf C∞0 (Rn) definiert:
γ : C∞0 (Rn) → C∞0 (Γ) ⊂ L2(Rn−1), (γu) (x) := u(x) fur alle x ∈ Γ. (6.2.19)
Wir schreiben x = (x′, xn) mit x′ = (x1, . . . , xn−1) ∈ Rn−1. Der Rand Γ wird mit Rn−1 identifiziert, d.h.Hs(Γ) = Hs(Rn−1).

6.2 Sobolev-Raume 89
Satz 6.2.29 Sei s > 1/2. γ aus (6.2.19) ist fortsetzbar zu γ ∈ L(Hs(Rn), Hs−1/2(Rn−1)). Insbesondere gilt|γu|s−1/2 ≤ Cs |u|s fur u ∈ Hs(Rn). Im Falle n = 1 (d.h. γu = u(0)) gilt |γu| ≤ Cs |u|s.
Beweis. Es genugt |γu|s−1/2 ≤ C′s |u|s fur u ∈ C∞0 (Rn) zu zeigen (vgl. Satz 6.1.11 und Satz 6.2.26a). DieFourier-Transformierten zu u ∈ C∞0 (Rn) und w := γu ∈ C∞0 (Rn−1) seien u = Fnu und w = Fn−1w (Fk:k-dimensionale Fourier-Transformation). Fn kann als Produkt F1◦Fn−1 geschrieben werden, wobei Fn−1 aufx′ ∈ Rn−1 und F1 auf xn wirkt. Daher hat W (·, xn) := Fn−1u(·, xn) die Eigenschaften u(ξ′, ·) = F1W (ξ′, ·)und w = W (·, 0). Laut Lemma 6.2.21 hat w(ξ′) = W (ξ′, 0) = [F−1
1 u(ξ′, ·)]|xn=0 die Darstellung
w(ξ′) = (2π)−1/2∫
Rn
u(ξ′, ξn)dξn fur alle ξ′ ∈ Rn−1. (6.2.20)
Da u ∈ Hs(Rn), liegt U(ξ′, ξn) := (1 + |ξ′|2 + ξ2n)s/2u(ξ′, ξn) in L2(Rn) (vgl. Lemma 6.2.24b). Ungleichung(6.2.5a) liefert
2π |w(ξ′)|2 =∣∣∣∣∫
Rn
u(ξ′, ξn)dξn
∣∣∣∣2 ≤∫
Rn
(1 + |ξ′|2 + ξ2n)sdξn∫
Rn
∣∣∣U(ξ′, ξn)∣∣∣2 dξn.
Der erste Faktor errechnet sich zu Ks(1 + |ξ′|2)1/2−s mit Ks =∫
R(1 + x2)−sdx < ∞, da s > 1/2. Derzweite Faktor lautet V (ξ′) := ‖U(ξ′, ·)‖L2(R) ∈ L2(Rn−1), weil ‖V ‖L2(Rn−1) = ‖U‖L2(Rn) (Satz von Fubini).Zusammen:
(1 + |ξ′|2)s−1/2 |w(ξ′)|2 ≤ Ks
2πV (ξ′)2 fur ξ′ ∈ Rn−1.
Integration uber ξ′ ∈ Rn−1 ergibt∫Rn−1
(1 + |ξ′|2)s−1/2 |w(ξ′)|2 dξ′ ≤ Ks
2π|V |20 =
Ks
2π|U |20 =
Ks
2π
∫Rn
(1 + |ξ|2)s |u(ξ)|2 dξ.
Somit ist |w|s−1/2 ≤ C′s |u|s mit C′s = (Ks/(2π))1/2 bewiesen (vgl. (6.2.16b)). Im Falle n = 1 stellt w(ξ′)schon γu = u(0) dar, und die Integration uber ξ′ entfallt.
Satz 6.2.29 beschreibt die Beschrankung u(·, 0) = γu auf xn = 0. Selbstverstandlich gilt ebenso|u(·, xn)|s−1/2 ≤ Cs |u|s fur jedes andere xn ∈ R mit der gleichen Konstanten Cs. Die Abbildungxn �→ u(·, xn) ist im folgenden Sinne stetig bzw. Holder-stetig.
Satz 6.2.30 Fur s > 1/2 gilt
limyn→xn
‖u (·, xn) − u (·, yn)‖Hs−1/2(Rn−1) = 0 fur alle xn ∈ R, u ∈ Hs(Rn), (6.2.21a)
‖u (·, xn) − u (·, yn)‖Hs−1/2(Rn−1) ≤ Ks,λ |xn − yn| ‖u‖Hs(Rn)
fur u ∈ Hs(Rn), 0 ≤ λ < 1 (und fur λ = 1, falls s > 3/2) .(6.2.21b)
Beweis. 1) Sei uν ∈ C∞0 (Rn) eine Folge mit uν → u ∈ Hs(Rn) und setze ϕν(x) := ‖uν(·, x)‖Hs−1/2(Rn−1).Die Funktion ϕν ist stetig in R und konvergiert gleichmaßig gegen ‖u(·, x)‖Hs−1/2(Rn−1), da|uν(·, x) − u(·, x)|s−1/2 ≤ Cs |uν − u|s fur alle x ∈ R. Also folgt (6.2.21a).
2) uε(·, xn) := u(·, xn+ε)−u(·, xn) hat die Fourier-Transformierte uε(ξ) = uε(ξ′, ξn) = [exp(iξnε)−1]u(ξ),sodass |uε(ξ)|2 = 4 sin2(ξnε/2) |u(ξ)|2. Wie im Beweis zu Satz 6.2.29 setze man W (·, xn) := Fn−1uε(·, xn)und w = W (·, 0). Das erste Integral in der Abschatzung von 2π|w(ξ′)|2 lautet jetzt∫
Rn
(1 + |ξ′|2 + ξ2n)−s sin2(ξnε/2)dξn = (1 + |ξ′|2 + ξ2n)1/2−s
∫Rn
(1 + t2
)sin2(ηt)dt
mit η = ε2 (1 + |ξ′|2)1/2. Die Zerlegung des letzten Integrals in die Teilintegrale uber |t| ≤ 1/η und |t| ≥ 1/η
zeigt∫
R(1 + t2)−s sin2(ηt)dt ≤ Cs,λη2λ. Die weitere Argumentation verlauft wie im Beweis zu Satz 6.2.29.
Bisher wurde Hs(Rn) durch Vervollstandigung von C∞0 (Rn) in L2(Rn) gewonnen. Der nachste Satz zeigt,dass man fur hinreichend großes s auch in C0(Rn) ∩ L2(Rn) vervollstandigen kann, sodass Hs(Rn) nurklassische Funktionen (d.h. stetige, Holder-stetige, [Holder-]stetig differenzierbare Funktionen) enthalt.

90 6. Exkurs uber Funktionalanalysis
Satz 6.2.31 (Sobolevsche Einbettung) Es gilt Hs(Rn) ⊂ Ck(Rn) fur k ∈ N0, s > k + n/2 undHs(Rn) ⊂ Ct(Rn) fur 0 < t �∈ N, s ≥ t+ n/2.
Beweis. 1) Sei s ≥ t + n/2, 0 < t < 1, u ∈ Hs(Rn). Fur vorgegebene x, y ∈ Rn soll |u(x) − u(y)| ≤C |x− y|t gezeigt werden (C unabhangig von x, y). Die Koordinaten des Rn konnen so gedreht werden,dass x = (x1, 0, . . . , 0), y = (y1, 0, . . . , 0). (n− 1)-fache Anwendung des Satzes 6.2.29 auf u(·), u(·, 0),u(·, 0, 0) usw. ergibt u(·, 0, 0, . . . , 0) ∈ Hs−(n−1)/2(R). Satz 6.2.30 liefert die gewunschte Abschatzung mitC = Ks−(n−1)/2,t |u(·, 0, . . . , 0)|s−(n−1)/2 ≤ C′ |u|s, also u ∈ Ct(Rn) und ‖·‖Ct(Rn) ≤ C ‖·‖Hs(Rn). Die Be-hauptung u ∈ C0(Rn) folgt aus Ct(Rn) ⊂ C0(Rn).
2) Sei s ≥ t+ n/2, 1 < t < 2 und u ∈ Hs(Rn). Auf Dαu ∈ Hs−1(Rn) (vgl. Satz 6.2.26d,e) mit |α| ≤ 1 istTeil 1) anwendbar: Dαu ∈ Ct−1(Rn) fur |α| ≤ 1. Also u ∈ Ct(Rn). Usw.
Wir kehren zu den Aussagen der Satze 6.2.28, 6.2.29 zuruck. Fur alle u ∈ C∞0 (Rn+) stimmt die Be-
schrankung γu = u(·, 0) mit γφsu uberein. Vervollstandigung in Hs(Rn+) liefert
‖γ‖Hs−1/2(Rn−1)←Hs(Rn+) ≤ ‖γ‖Hs−1/2(Rn−1)←Hs(Rn) ‖φs‖Hs(Rn)←Hs(Rn
+) .
Dies beweist das
Zusatz 6.2.32 Sei s > 1/2. Fur γu := u(·, 0) gilt γ ∈ L(Hs(Rn+), Hs−1/2(Rn−1)).
Bei der Beschrankung auf xn = 0 verliert man offenbar eine halbe Differentiationsordnung. Umgekehrtgewinnt man eine halbe Ordnung, wenn man w ∈ Hs−1/2(Rn−1) geeignet in Rn fortsetzt.
Satz 6.2.33 Seien s > 1/2 und w ∈ Hs−l/2(Rn−1). Es gibt ein u ∈ Hs(Rn) [u ∈ Hs(Rn+)], sodass
|u|s ≤ Cs |w|s−1/2 und γu = w, d.h. w = u(·, 0).
Beweis. Seien u = Fnu und w = Fn−1w die Fourier-Transformierten. γu = w ist aquivalent zu (6.2.20). Fur
u(ξ) = u(ξ′, ξn) := w(ξ′)(1 + |ξ′|2)s−1/2(1 + |ξ′|2 + ξ2n)−s/Ks, Ks =∫
Rn
(1 + t2
)−sdt,
pruft man nach, dass (6.2.20) und |u|ˆs = K−1/2s |w|ˆs−1/2 gelten. Beschrankung von u ∈ Hs(Rn) auf Rn
+
beweist den Klammerzusatz.Ersetzt man Rn
+ durch ein allgemeines Gebiet Ω ⊂ Rn, wird Rn−1 ∼= Rn−1 × {0} = ∂Rn+ zu Γ = ∂Ω, und
es ergibt sich die Notwendigkeit, den Sobolev-Raum Hs(Γ) zu definieren. Wir beginnen mit der
Definition 6.2.34 Sei 0 < t ∈ R ∪ {∞} [bzw. k ∈ N0]. Wir schreiben Ω ∈ Ct [bzw. Ω ∈ Ck,1], falls zujedem x ∈ Γ := ∂Ω eine Umgebung U ⊂ Rn existiert, sodass es eine bijektive Abbildung φ : U → K1(0) ={ξ ∈ Rn : |ξ| < 1} gibt mit
φ ∈ Ct(U), φ−1 ∈ Ct(K1(0)) [φ ∈ Ck,1(U ), φ−1 ∈ Ck,1(K1(0))], (6.2.22a)φ(U ∩ Γ) = {ξ ∈ K1(0) : ξn = 0}, (6.2.22b)φ(U ∩ Ω) = {ξ ∈ K1(0) : ξn > 0}, (6.2.22c)
φ(U ∩ (Rn\Ω)) = {ξ ∈ K1(0) : ξn < 0}. (6.2.22d)
K1(0) ist ein Kreis (Kugel), wenn |·| die Euklidische Norm ist. Fur die Maximumnorm |·|∞ ist K1(0) einQuadrat (Quader). Ebenso gut kann K1(0) durch jeden anderen Kreis KR(z) oder jeden anderen Quader(x′1, x
′′2 ) × . . .× (x′n, x
′′n) ersetzt werden.
Beispiel 6.2.35 Ω sei der Kreis K1(0) ⊂ R2. Eine Umgebung von x� = (1, 0) ist U1 aus Abbildung 6.2.1. DieAbbildung x ∈ U1 �→ φ(x) := ξ ∈ (−1, 1)× (−1, 1) mit x1 = (1− ξ2/2) cos(πξ1/2), x2 = (1− ξ2/2) sin(πξ1/2)ist bijektiv und erfullt (6.2.22a-d) mit t = ∞. Entsprechendes gilt fur jedes x ∈ Γ. Damit ist Ω ∈ C∞.
Ubungsaufgabe 6.2.36 a) Das Rechteck Ω = (x′1, x′′1 )×(x′2, x
′′2 ) sowie das L-Gebiet aus Beispiel 2.1.4 sind
Gebiete Ω ∈ C0,1.b) Der geschlitzte Kreis aus Abbildung 5.2.1b gehort nicht zu C0,1.

6.2 Sobolev-Raume 91
U0
U4U 3
U2
U1Ω
Abb. 6.2.1. Uberdeckende Umgebungen von Γ und Ω
Lemma 6.2.37 Ω ∈ Ct [Ω ∈ Ck,1] sei ein beschranktes Gebiet. Dann gibt es N ∈ N, U i (0 ≤ i ≤ N), Ui,αi (1 ≤ i ≤ N) mit
U i offen, beschrankt (0 ≤ i ≤ N),N⋃
i=0
U i ⊃ Ω, U0 ⊂⊂ Ω, (6.2.23a)
Ui := U i ∩ Γ (1 ≤ i ≤ N),N⋃
i=0
Ui = Γ, (6.2.23b)
αi : Ui → αi(Ui) ⊂ Rn−1 bijektiv fur alle i = 1, . . . , N, (6.2.23c)
αi ◦ α−1j ∈ Ct(αj(Ui ∩ Uj)) bzw. αi ◦ α−1
j ∈ Ck,1(αj(Ui ∩ Uj)). (6.2.23d)
Auf U i (1 ≤ i ≤ N) sind Abbildungen φi mit den Eigenschaften (6.2.22a-d) definiert.
Beweis. Zu jedem x ∈ Γ existieren U = U(x) und φ = φx gemaß Definition 6.2.34. αx sei die Beschrankungvon φx auf U(x)∩Γ. V i (i ∈ N) seien die offenen Mengen {x ∈ Ω : dist(x,Γ) > 1/i} ⊂⊂ Ω.
⋃x∈ΓU(x)∪
⋃i V
i
ist eine offene Uberdeckung der kompakten Menge Ω. Daher existiert eine endliche Uberdeckung durchU i := U(xi) (1 ≤ i ≤ N) und hochstens ein V j , das mit U0 bezeichnet wird. Setzt man Ui := U i ∩ Γ,αi = αxi , φi = φxi , folgen die Aussagen aus (6.2.23a-d).
Eine Paarmenge {(Ui, αi) : 1 ≤ i ≤ N} mit (6.2.23b-d) heißt Ct- bzw. Ck,1-Koordinatensystem von Γ.In Beispiel 6.2.35 hat man N = 4. α−1
1 ist durch α−11 (ξ1) = (cos(πξ1/2), sin(πξ1/2)) ∈ U1 beschrieben;
ebenso α−14 (ξ1) = (cos((3+ξ1)π/2), sin((3+ξ1)π/2) ∈ U4, wobei jeweils −1 < ξ1 < 1. Auf α1(U1∩U4) ergibt
sich α4(α−11 (ξ1)) = ξ1 + 1.
Lemma 6.2.38 (Partition der Eins) {U i : 0 ≤ i ≤ N} erfulle (6.2.23a). Es existieren Funktionenσi ∈ C∞0 (Rn) , 0 ≤ i ≤ N , mit
Tr(σi) ⊂ U i,
N∑i=0
σ2i (x) = 1 fur alle x ∈ Ω . (6.2.24)
Die allgemeine Konstruktion der σi findet sich z.B. bei Wloka [89, p. 14]. Im speziellen Fall von Abbildung6.2.1 kann man wie folgt vorgehen. Sei σ(t) := 0 fur |t| ≥ 1 und σ(t) := exp(1/(t2 − 1)) fur t ∈ (−1, 1). Esgilt σ ∈ C∞0 (R) und Tr(σ) = [−1, 1]. In U i aus Abbildung 6.2.1 definiere man z.B.
ψ0(x) := σ(9 |x|2 /4), ψ1(x) := σ(2r − 2)σ(2ϕ/π) fur x = r
(cosϕsinϕ
), etc.
σi(x) := ψi(x)/√∑
ψ2i (x) erfullt (6.2.24).
Eine Funktion u auf Γ kann in der Form∑σ2
i u geschrieben werden. Jeder Summand σ2i u ist uber αi(Ui) ⊂
Rn−1 parametrisierbar: (σ2i u) ◦ α−1
i : αi(Ui) ⊂⊂ Rn−1 → R. Dies ermoglicht die
Definition 6.2.39 Sei Ω ∈ Ct [∈ Ck,1]. (Ui, αi) und σi erfullen (6.2.23b-d) und (6.2.24). Sei s ≤ t ∈ N[s ≤ k + 1] oder s < t �∈ N, t > 1. Der Sobolev-Raum Hs(Γ) sei die Menge aller Funktionen u : Γ → R,sodass (σiu) ◦ α−1
i ∈ Hs0(Rn−1) (1 ≤ i ≤ N).

92 6. Exkurs uber Funktionalanalysis
Satz 6.2.40 a) Hs(Γ) ist ein Hilbert-Raum mit dem Skalarprodukt
(u, v)s := (u, v)Hs(Γ) :=N∑
i=1
((σiu) ◦ α−1
i , (σiv) ◦ α−1i
)Hs(Rn−1)
.
b) Ist {(Ui, αi) : 1 ≤ i ≤ N} ein anderes Ct- [Ck,1-]Koordinatensystem von Γ und {σi} eine andere Zerlegungder Eins, so ist der hierdurch definierte Raum Hs(Γ) mengenmaßig mit Hs(Γ) gleich. Die Normen von Hs(Γ)und Hs(Γ) sind aquivalent.
Beweis zu b). Man verwende Transformationssatz 6.2.18 bzw. Satz 6.2.26g. Fur Ω ∈ C0,1 vgl. Wloka [89,p. 90].
Die Spur- und Fortsetzungssatze (Zusatz 6.2.32 und Satz 6.2.33) lassen sich auf ein hinreichend glattbe-randetes Gebiet ubertragen. γ bezeichnet die Beschrankung auf Γ = ∂Ω : γu = u|Γ.
Satz 6.2.41 Sei Ω ∈ Ct mit 1/2 < s < t ∈ N oder 1/2 < s < t [bzw. Ω ∈ Ck,1, 1/2 < s = k + 1 ∈ N].a) Die Beschrankung γu von u ∈ Hs(Ω) gehort zu Hs−1/2(Γ): γ ∈ L(Hs(Ω), Hs−1/2(Γ)).b) Zu jedem w ∈ Hs−1/2(Γ) existiert ein u ∈ Hs(Ω) mit w = γu, |u|s ≤ Cs |w|s−1/2.c) Zu jedem w ∈ Hs(Ω) existiert eine Fortsetzung Ew ∈ Hs(Rn) mit E ∈ L(Hs(Ω), Hs(Rn)).
Die Beweise folgen jeweils dem gleichen Muster. U i, Ui und φi, αi seien wie in Lemma 6.2.37. Der Summandui = σ2
i u aus u =∑σ2
i u (bzw. wi = σ2iw) hat seinen Trager in U i (bzw. Ui) und kann mittels φi (bzw. αi)
auf Rn+ (bzw. Rn−1 ∼= Rn−1 ×{0} = ∂Rn) abgebildet werden. Dort gelten Zusatz 6.2.32 und Satz 6.2.33. Die
Beschrankung auf Rn−1 (bzw. Fortsetzung auf Rn+ oder Rn) kann zuruck abgebildet werden. Im Detail wird
die erste Aussage des Satzes bewiesen.Seien ui := σ2
i u und ui := ui ◦φ−1i . Auf Grund der Satze 6.2.18, 6.2.26g gehort ui zu Hs(Rn
+). Damit liegtdie Beschrankung γ+ui := ui(·, 0) in Hs−1/2(Rn−1) (vgl. Zusatz 6.2.32) und hat αi(Ui) als Trager. Setzewi := (γ+ui) ◦ αi auf Ui, wi := 0 auf Γ\Ui. Gemaß Definition 6.2.39 gehort w :=
∑wi zu Hs−1/2(Γ). Da αi
die Beschrankung von φi auf Ui darstellt, findet man fur alle u ∈ Ct(Ω) (Ct(Ω) ist dicht in Hs(Ω)):
w(x) =∑
i
wi(x) =∑
i
(γ+ui(αi(x))) =∑
i
ui(φi(x)) =∑
i
(σ2
i u)(x) = u(x) fur x ∈ Γ.
Da alle Teilabbildungen beschrankt sind, findet man |γu|s−1/2 = |w|s−1/2 ≤ Cs |u|s.
Bemerkung 6.2.42 a) Unter der Voraussetzung des Satzes 6.2.41 und der zusatzlichen Bedingungs > |α| + 1/2 existiert die Beschrankung γDαu ∈ Hs−|α|−1/2(Γ) der Ableitung von u ∈ Hs(Ω).b) Fur jedes u ∈ Hs
0(Ω) mit s < �+ 1/2 gilt γDαu = 0, wenn |α| ≤ �.
Satz 6.2.43 Fur Ω ∈ C0,1 gilt H10 (Ω) = {u ∈ H1(Ω) : u|Γ = 0}.
Beweis. a) u ∈ H10 (Ω) ist Limes von uν ∈ C∞0 (Ω), die samtlich uν |Γ = 0 erfullen. Da uν |Γ → u|Γ bezuglich
H1/2(Γ), folgt u ∈ H1(Ω) und u|Γ = 0.b) Sei umgekehrt u ∈ H1(Ω) und u|Γ = 0. Der Beweis von u ∈ H1
0 (Ω) lasst sich wie folgt gliedern :ba) Indem man von der Partition der Eins uber {U i : 0 ≤ i ≤ N} (vgl. Lemma 6.2.38) Gebrauch macht,
reduziert sich die Behauptung auf den Fall Ω = Rn+.
bb) Ohne Beschrankung der Allgemeinheit lasst sich n = 1 annehmen: Ω = R+.bc) Nach Bemerkung 6.2.15 gibt es zu jedem ε > 0 ein uε ∈ C∞(R+) mit endlichem Trager, sodass
|u− uε|1 ≤ η/2. Zu jedem η > 0 existiert ϕη ∈ C∞(R+) mit
ϕη(x) = 0 fur x ≤ η/2, ϕη(x) = 1 fur x ≥ η,∣∣ϕ′η(x)
∣∣ ≤ 3/η, 0 ≤ ϕη(x) ≤ 1.
uε := uε − (1 − ϕ1)uε(0) erfullt 1) uε ∈ C∞(R+), 2) uε(0) = 0, 3) Tr(uε) endlich und 4) |u− uε|1 ≤ Cε.Damit liegt X := {v ∈ C∞(R+) : v(0) = 0, T r(v) endlich} dicht in {u ∈ H1(R+) : u(0) = 0}.
bd) Die Behauptung ware bewiesen, wenn auch C∞0 (R+) bezuglich |·|1 dicht in X liegt. Sei v ∈ X . Offenbargilt vη := ϕηv ∈ C∞0 (R+) fur alle η > 0. Man setze Θ(η) := ‖v′‖L2(0,η) und beachte Θ(η) → 0 fur η → 0.

6.3 Dualraume 93
Da v(x) = vη(x) fur x ≥ η, bleiben die Großen ‖v − vη‖L2(0,η) und ‖v′ − v′η‖L2(0,η) abzuschatzen. Wegenv′η − v′ = ϕ′ηv + (ϕη − 1)v′ ergibt sich
‖v′η − v′‖L2(0,η) ≤ ‖ϕ′η‖L∞(0,η)‖v‖L2(0,η) + ‖ϕη − 1‖L∞(0,η)‖v′‖L2(0,η) ≤3η‖v‖L2(0,η) + Θ(η).
Da |v(x)| ≤∫ x
0 v′(ζ)dζ, liefert (6.2.5b) die Abschatzung |v(x)| ≤ √
ηΘ(η) fur 0 ≤ x ≤ η und damit‖v‖L2(0,η) ≤ ηΘ(η). Uber |v − vη|21 ≤ ‖v − vη‖2
L2(0,η) + ‖v′− v′η‖2L2(0,η) ≤ CΘ2(η) → 0 folgt die Behauptung.
Wenn Ω ∈ C1, existiert in allen Randpunkten die Normalenrichtung �n. In Analogie zu Satz 6.2.43 beweistman
Zusatz 6.2.44 Fur Ω ∈ C1 und k ∈ N gilt
Hk0 (Ω) =
{u ∈ Hk(Ω) : ∂�u/∂n�|Γ = 0 fur alle 0 ≤ � ≤ k − 1
}=
{u ∈ Hk(Ω) : Dαu|Γ = 0 fur alle 0 ≤ |α| ≤ k − 1
}.
6.3 Dualraume
6.3.1 Dualraum eines normierten Raumes
X sei ein normierter, linearer Raum uber R. Als Dualraum X ′ bezeichnet den Raum aller beschrankten,linearen Abbildungen von X auf R:
X ′ = L(X,R).
Gemaß Ubungsaufgabe 6.1.8 ist X ′ ein Banach-Raum mit der Norm (Dualnorm)
‖x′‖X′ := ‖x′‖R←X = sup {|x′(x)| / ‖x‖X : 0 �= x ∈ X} . (6.3.1)
Die Elemente x′ ∈ X ′ nennt man lineare Funktionale auf X . Statt x′(x) (Anwendung von x′ auf x) schreibtman auch 〈x, x′〉X×X′ oder 〈x′, x〉X′×X und nennt 〈·, ·〉X×X′ die Dualform auf X ×X ′:
〈x, x′〉X×X′ = 〈x′, x〉X′×X = x′(x).
Lemma 6.3.1 Der Banach-Raum X sei dicht und stetig im Banach-Raum Y eingebettet. Dann ist Y ′ stetigin X ′ eingebettet.
Beweis. 1) Sei y′ ∈ Y ′. Wegen X ⊂ Y ist y′ auf X definiert.2) Da X ein dichter Teilraum von Y ist, gilt nach Satz 6.1.11 und (6.1.4) fur jedes y′ ∈ Y ′:
‖y′‖Y ′ = sup0�=x∈X
|y′(x)| / ‖x‖Y ≥ 1C
supx
|y′(x)| / ‖x‖X =1C
‖y′‖X′ ,
d.h. Y ′ ist stetig in X ′ eingebettet.Der transponierten Matrix im endlich-dimensionalen Fall entspricht die Dualabbildung (oder der Dual-
operator).
Lemma 6.3.2 Seien X und Y normiert und T ∈ L(X,Y ). Fur jedes y′ ∈ Y ′ definiert die Gleichung
〈Tx, y′〉Y×Y ′ = 〈x, x′〉X×X′ auf alle x ∈ X (6.3.2)
ein eindeutiges x′ ∈ X ′. Die lineare Abbildung y′ �→ x′ definiert den Dualoperator T ′ : Y ′ → X ′ mitT ′y′ = x′. Es gilt T ′ ∈ L(Y ′, X ′) und
‖T ′‖X′←Y ′ = ‖T ‖Y←X . (6.3.3)

94 6. Exkurs uber Funktionalanalysis
Beweis. Schreibt man (6.3.2) in der Form y′(Tx) = x′(x), so sieht man, dass x′ = y′ ◦ T . Aus
‖T ′‖X′←Y ′ = supy′ �=0
‖T ′y′‖X′ / ‖y′‖Y ′ = supx �=0,y′ �=0
〈x, T ′y′︸︷︷︸=x′
〉X×X′/ [‖x‖X ‖y′‖Y ′ ]
= supx �=0,y′ �=0
〈Tx, y′〉Y×Y ′ / [‖x‖X ‖y′‖Y ′ ] = supx′ �=0
‖Tx‖Y / ‖x‖X = ‖T ‖Y←X
folgt (6.3.3) nach Definition der Normen.
Beispiel 6.3.3 Seien Ω = (0, 1), X = (C0(Ω), ‖·‖∞) und sei x ∈ Ω fest gewahlter Punkt. Die Abbildungδx : u ∈ C0(Ω) �→ u(x) ∈ R ist ein Funktional: δx ∈ C0(Ω)′ (die sogenannte Diracsche Deltafunktion). DerLaplace-Operator Δ gehort zu L(C2(Ω), C0(Ω)). Die Dualabbildung Δ′ ∈ L(C0(Ω)′, C2(Ω)′) ist auf δx an-wendbar: Δ′δx ist durch (Δ′δx)u = Δu(x) fur alle u ∈ C2(Ω) charakterisiert.
Ubungsaufgabe 6.3.4 Seien S ∈ L(X,Y ) und T ∈ L(Y, Z). Man zeige: (TS)′ = S′T ′.
Ubungsaufgabe 6.3.5 Man zeige: Ist T ∈ L(X,Y ) surjektiv, so ist T ′ injektiv.
6.3.2 Adjungierte Operatoren
X sei ein Hilbert-Raum (uber R). Jedes y ∈ X definiert durch
fy(x) := (x, y)X
ein lineares Funktional fy ∈ X ′ mit ‖fy‖X′ = ‖y‖X . Die Umkehrung gilt ebenfalls (vgl. Yosida [91, §III.6]):
Satz 6.3.6 (Darstellungssatz von Riesz) X sei Hilbert-Raum und f ∈ X ′ ein Funktional. Dann existiertgenau ein yf ∈ X, sodass
f(x) = (x, y)X fur alle x ∈ X und ‖f‖X′ = ‖yf‖X .
Folgerung 6.3.7 (Riesz-Isomorphismus) X sei Hilbert-Raum. a) Es existiert eine eineindeutige Zuord-nung (der sogenannte Riesz9-Isomorphismus) JX ∈ L(X,X ′) mit JXy = fy, J−1
X f = yf , die die Normerhalt: ‖JX‖X′←X = ‖J−1
X ‖X←X′ = 1.b) X ′ ist ein Hilbert-Raum mit dem Skalarprodukt (x′, y′)X′ = (J−1
X x′, J−1X y′)X . Die Dualnorm ‖x′‖X′ aus
(6.3.1) stimmt mit der durch (x′, x′)1/2X induzierten Norm uberein.
c) Man identifiziert stets X mit X ′′ vermoge x(x′) := x′(x). Hieraus folgt
JX′ = J−1X , JX = J ′X und T ′′ = T fur T ∈ L(X,Y ),
wenn auch Y = Y ′′ Hilbert-Raum ist.d) Man kann X und X ′ identifizieren: X = X ′, JX = I.
Seien X,Y Hilbert-Raume und T ∈ L(X,Y ). Die durch T � := J−1X T ′JY ∈ L(Y,X) definierte Abbildung
heißt der zu T adjungierte Operator und erfullt
(Tx, y)Y = (x, T ∗y)X fur alle x ∈ X, y ∈ Y, ‖T ‖Y←X = ‖T ∗‖X←Y . (6.3.4)
Der adjungierte und der duale Operator fallen nur dann zusammen (d.h. T � = T ′), wenn jeweils dieDualraume X ′, Y ′ mit X , Y identifiziert werden. T ∈ L(X,X) heißt selbstadjungiert (oder symmetrisch),wenn T = T �. Der Operator T ∈ L(X,X) heißt Projektion, wenn T 2 = T . Eine orthogonale Projektion liegtvor, wenn T außerdem selbstadjungiert ist.
Bemerkung 6.3.8 Sei X0 ein abgeschlossener Unterraum des Hilbert-Raumes X. Durch Tx := y ∈ X0 mit
‖x− y‖X := inf {‖x− η‖X : η ∈ X0} (6.3.5)
wird eine orthogonale Projektion beschrieben. Ist umgekehrt T ∈ L(X,X) eine orthogonale Projektion mitdem Bild X0 := {Tx : x ∈ X}, so gilt (6.3.5) fur y = Tx. Eine orthogonale Projektion hat stets die Norm‖T ‖X←X ≤ 1.
9Frigyes Riesz, geb. am 22. Januar 1880 in Gyor, gest. am 28. Februar 1956 in Budapest (nicht zu verwechseln mit seinemBruder Marcel, der ebenfalls Mathematiker war)

6.3 Dualraume 95
Beweis. 1) x lasst sich eindeutig in x = y + z (y ∈ X0, z ∈ X⊥0 ) zerlegen (vgl. Lemma 6.1.17). y isteindeutige Losung von (6.3.5). x ∈ X0 impliziert y = x, also T 2 = T . Die analoge Zerlegung x′ = y′ + z′
zeigt (x, T �x′) = (Tx, x′) = (y, x′) = (y, y′ + z′) = (y, y′) = (y + z, y′) = (x, Tx′), somit T = T �.2) Sei nun T eine orthogonale Projektion mit dem Bild X0. x = y + z sei wie oben zerlegt. T 2 = T zeigt
Ty = y. Fur jedes y′ ∈ X0 gilt (Tz, y′) = (z, T �y′) = (z, T y′) = (z, y′) = 0, also Tz ∈ X⊥0 . Zusammen mitTz ∈ X0 folgt Tz = 0, sodass Tx = Ty + Tz = y.
3) Tx = y und ‖x‖2X = ‖y‖2
X + ‖z‖2x ≥ ‖y‖2
X beweisen ‖T ‖X←X ≤ 1.
6.3.3 Skalen von Hilbert-Raumen
Wir setzen voraus:
V ⊂ U seien zwei Hilbert-Raume mit stetiger und dichter Einbettung. (6.3.6)
Lemma 6.3.9 Unter der Voraussetzung (6.3.6) ist U ′ stetig und dicht in V ′ eingebettet.
Beweis. Die Stetigkeit der Einbettung U ′ ⊂ V ′ wurde in Lemma 6.3.1 festgestellt. Zum Beweis, dass U ′
dicht in V ′ liegt, verwenden wir Ubungsaufgabe 6.1.18d (A := U ′, X := V ′). Seien 0 �= v′ ∈ V ′ beliebigund u := J−1
V v′ ∈ V ⊂ U . Definitionsgemaß ist u′ := JUu ∈ U ′ ⊂ V ′ durch u′(x) = (x, u)U fur alle x ∈ Ucharakterisiert. Fur x := u = J−1
V v′ ∈ V folgt
(v′, u′)V ′ =(J−1
V v′, J−1V u′
)V
=(u, J−1
V u′)V
= u′(u) = (u, u)U > 0
und damit insbesondere (v′, u′)V ′ �= 0. Somit trifft die Charakterisierung aus Ubungsaufgabe 6.1.18d zu.Gemaß Folgerung 6.3.7d lassen sich U und U ′ identifizieren. Damit erhalt man den Gelfand10-Dreier
V ⊂ U ⊂ V ′ (V ⊂ U stetig und dicht eingebettet). (6.3.7)
Folgerung 6.3.10 In einem Gelfand-Dreier (6.3.7) sind auch V und U stetig und dicht in V ′ eingebettet.
Beweis. Zu U ⊂ V ′ vergleiche man Lemma 6.3.9, V ⊂ V ′ folgt mit Ubungsaufgabe 6.1.15.Achtung. Man konnte ebenso gut V mit V ′ identifizieren und erhielte U ′ ⊂ V ′ = V ⊂ U . Es ist aber
nicht moglich, gleichzeitig U mit U ′ und V mit V ′ zu identifizieren. Im ersten Falle interpretiert manx(y) = 〈y, x〉U×U ′ fur x, y ∈ U (insbesondere fur x, y ∈ V ⊂ U) als (y, x)U , im zweiten Falle als (y, x)V .
Ubungsaufgabe 6.3.11 Es gelte (6.3.7). Man setze W := {J−1V u : u ∈ U} und definiere (x, y)W :=
(JV X, JV y)U als Skalarprodukt auf W . Man zeige: a) W ist Hilbert-Raum,b) W ⊂ V ist stetige und dichte Einbettung,c) (v, w)V = (v, JV w)U fur alle v ∈ V,w ∈ W ,d) |(x, y)V | ≤ ‖x‖U ‖y‖W (x, y ∈W ).
Das Skalarprodukt (x, y)U kann wegen U = U ′ auch in der Form y(x) = 〈x, y〉U×U ′ geschrieben werden.Ist x ∈ V , so gilt auch y(x) = 〈x, y〉V×V . Das heißt, dass (x, y)U = 〈x, y〉V×V ′ fur alle x ∈ V , y ∈ U ⊂ V ′.Ebenso erhalt man (x, y)U = 〈x, y〉V ′×V fur alle x ∈ U und y ∈ V . Die dichte und stetige Einbettung V ⊂ V ′
beweist die
Bemerkung 6.3.12 V ⊂ U ⊂ V ′ sei ein Gelfand-Dreier (6.3.7). Die stetige Fortsetzung des Skalar-produktes (·, ·)U auf V ×V ′ [V ′×V ] ergibt die Dualform 〈·, ·〉V×V ′ [〈·, ·〉V ′×V ]. Deshalb ist folgende Schreib-weise sinnvoll:
〈x, y〉V×V ′ = (x, y)U fur x ∈ V, y ∈ V ′, 〈x, y〉V ′×V = (x, y)U fur x ∈ V ′, y ∈ V.
Im Zusammenhang mit Sobolev-Raumen wird stets U := L2(Ω) gewahlt, sodass die Einbettungen wiefolgt lauten:
Hs0(Ω) ⊂ L2(Ω) ⊂ (Hs
0(Ω))′ (s ≥ 0) , (6.3.8)
Hs(Ω) ⊂ L2(Ω) ⊂ (Hs(Ω))′ (s ≥ 0) , (6.3.9)
10Israil Moiseevic Gelfand, am 2 Sept. 1913 in Krasnye Okny, Odessa, Ukraine geboren.

96 6. Exkurs uber Funktionalanalysis
Ubungsaufgabe 6.3.13 Man zeige: (6.3.8) und (6.3.9) sind Gelfand-Dreier.
Den Dualraum von Hs0(Ω) bezeichnet man auch mit H−s(Ω) oder H−s
0 (Ω):
H−s0 (Ω) := H−s(Ω) := (Hs
0 (Ω))′ (s ≥ 0) .
Die Norm von H−s(Ω) lautet gemaß (6.3.1):
|u|−s := sup{∣∣(u, v)L2(Ω)
∣∣ / |v|s : 0 �= v ∈ Hs0(Ω)},
wobei (u, v)L2(Ω) die Dualform auf Hs0 (Ω) ×H−s(Ω) bezeichnet (vgl. Bemerkung 6.3.12).
Bemerkung 6.3.14 a) Sei Ω = Rn. Die zu |·|ˆs gehorige Dualnorm |u|ˆ−s := sup0�=v∈Hs(Rn |(u, v)0| / |v|ˆs istaquivalent zu |·|−s und hat die Darstellung (6.2.16b) (mit −s statt s).b) Die Fourier-Transformation zeigt Dα ∈ L(Hs(Rn), Hs−|α|(Rn)) fur alle s ∈ R.c) Es ist au ∈ Hs(Ω), falls u ∈ Hs(Ω), a ∈ Ct(Ω), wobei entweder t = |s| ∈ N0 oder t > |s|.
6.4 Kompakte Operatoren
Definition 6.4.1 Eine Teilmenge K eines Banach-Raumes heißt prakompakt [ kompakt], falls jede Folgexi ∈ K (i ∈ N) eine konvergente Teilfolge xik
enthalt [und limk→∞ xik∈ K].
Eine andere Definition der Kompaktheit lautet: Jede offene Uberdeckung von K enthalt bereits eineendliche Uberdeckung von K. Beide Definitionen sind in metrischen Raumen aquivalent (vgl. Pflaumann-Unger [68, p. 66]).
Bemerkung 6.4.2 a) K ⊂ Rn ist genau dann prakompakt [kompakt], wenn K beschrankt [und abgeschlos-sen] ist.b) X sei Banach-Raum. Die Einheitskugel {x ∈ X : ‖x‖ ≤ 1} ist genau dann kompakt, wenn dim(X) <∞.
Definition 6.4.3 X und Y seien Banach-Raume. Eine Abbildung T ∈ L(X,Y ) heißt kompakt, falls{Tx : x ∈ X, ‖x‖X ≤ 1} (Bild der Einheitskugel in X) prakompakt in Y ist.
Ubungsaufgabe 6.4.4 Wann ist die Identitat I ∈ L(X,X) kompakt?
Lemma 6.4.5 X,Y, Z seien Banach-Raume. a) Eine der Abbildungen T1 ∈ L(X,Y ), T2 ∈ L(Y, Z) seikompakt. Dann ist auch T2T1 ∈ L(X,Z) kompakt.b) T ∈ L(X,Y ) ist genau dann kompakt, wenn T ′ ∈ L(Y ′, X ′) kompakt ist.
Beweis. a) Sei K1 := {x ∈ X : ‖x‖X ≤ 1}. Ist T1 kompakt, d.h. T1(K1) prakompakt, so ist auch T2(T1(K1))prakompakt und damit T2T1 kompakt. Ist dagegen T2 kompakt, beweist man die Behauptung wie folgt. Daeine Skalierung die Kompaktheit nicht andert, kann ohne Beschrankung der Allgemeinheit ‖T1‖Y←X ≤ 1angenommen werden. Damit ist T1(K1) eine Teilmenge der Einheitskugel in Y und somit T2(T1(K1))prakompakt.
b) Man vergleiche Yosida [91, §X].Eine spezielle kompakte Abbildung ist die kompakte Einbettung:
Definition 6.4.6 X ⊂ Y sei eine stetige Einbettung. X heißt kompakt eingebettet in Y , falls die InklusionI ∈ L(X,Y ), Ix = x, kompakt ist.
Zusammen mit den Definitionen 6.4.1 und 6.4.3 erhalt man: X ⊂ Y ist kompakt eingebettet, falls jedeFolge xi ∈ X mit ‖xi‖X ≤ 1 eine in Y konvergente Teilfolge enthalt.
Beispiel 6.4.7 Ω sei beschrankt. Cs(Ω) ⊂ C0(Ω) ist fur s > 0 eine kompakte Einbettung.
Beweis. Funktionen ui ∈ Cs(Ω) mit ‖ui‖Cs(Ω) ≤ 1 sind gleichgradig stetig und gleichmaßig beschrankt. DieBehauptung folgt nach dem Satz von Arzela-Ascoli (vgl. Yosida [91, §III.3]).
Analoge Resultate erhalt man fur Sobolev-Raume (vgl. Adams [1, p. 144], Wloka [89, p. 117ff]]):

6.4 Kompakte Operatoren 97
Satz 6.4.8 Ω ⊂ Rn sei offen und beschrankt. a) Die Einbettungen Hs0(Ω) ⊂ Ht
0(Ω) (s, t ∈ R, s > t) sindkompakt.
b) Sei zudem Ω ∈ C0,1. Die Einbettungen Hk(Ω) ⊂ H l(Ω) (k, l ∈ N0, k > l) sind kompakt.c) Sei 0 < t < s und Ω ∈ Cr (r > t, r > 1) oder Ω ∈ Ck,1 (k + 1 > t). Dann ist die Einbettung
Hs(Ω) ⊂ Ht(Ω) kompakt.
Bemerkung 6.4.9 In Satz 6.4.8b kann Ω ∈ C0,1 durch die “gleichmaßige Kegelbedingung” ersetzt werden(vgl. Wloka [89, p. 45]). Hinreichend fur Ω ∈ C0,1 ist, dass der Rand ∂Ω stuckweise glatt ist und derInnenwinkel der moglichen Ecken kleiner als 2π ausfallt.
Einspringende Ecken (vgl. Abbildung 2.1.1) sind damit zugelassen, ein geschlitztes Gebiet (vgl. Abbildung5.2.1b) ist dagegen ausgeschlossen.
In Abschnitt 6.5 wird die folgende Situation entstehen:
V ⊂ U ⊂ V ′, T ∈ L(V ′, V ). (6.4.1)
Wegen der stetigen Einbettungen gehort T auch zu L(V ′, V ′), L(U,U), L(V, V ) und L(U, V ).
Satz 6.4.10 Es gelte (6.4.1). V ⊂ U sei eine kompakte Einbettung. Dann sind T ∈ L(V ′, V ′), T ∈ L(U,U),T ∈ L(V, V ), T ∈ L(V ′, U) und T ∈ L(U, V ) kompakt.
Beweis. Als Beispiel sei T ∈ L(U, V ) vorgefuhrt. Mit der Inklusion I ∈ L(V, U) ist auch I ∈ L(U, V ) kompakt(vgl. Lemma 6.4.5b). T ∈ L(U, V ) als Produkt der kompakten Abbildung I ∈ L(U, V ′) mit T ∈ L(V ′, V ) istkompakt (vgl. Lemma 6.4.5a).
Ubungsaufgabe 6.4.11 Seien dimX <∞ oder dimY <∞. Man zeige: T ∈ L(X,Y ) ist kompakt.
Die Bedeutung kompakter Operatoren T ∈ L(X,X) liegt darin, dass die Gleichung Tx−λx = y (x, y ∈ X ,y gegeben, x gesucht) analoge Eigenschaften wie im endlich-dimensionalen Falle hat.
Satz 6.4.12 (Riesz-Schauder-Theorie) X sei ein Banach-Raum; T ∈ L(X,X) sei kompakt. a) Fur jedesλ ∈ C\{0} gilt eine der folgenden Alternativen:
i) (T − λI)−1 ∈ L(X,X) oder ii) λ ist Eigenwert.
Im Falle i) hat die Gleichung Tx − λx = y fur alle y ∈ X eine eindeutige Losung x ∈ X. Im Falle ii) gibtes einen endlich-dimensionalen Eigenraum E(λ, T ) := Kern(T − λI) �= {0}. Alle x ∈ E(λ, T ) losen dasEigenwertproblem Tx = λx.
b) Das Spektrum σ(T ) von T besteht definitionsgemaß aus allen Eigenwerten und, falls nichtT−1 ∈ L(X,X) , λ = 0. Es gibt hochstens abzahlbar viele Eigenwerte, die sich nur in null haufen konnen.Es gilt λ ∈ σ(T ) genau dann, wenn λ ∈ σ(T ′). Ferner ist dim(E(λ, T )) = dim(E(λ, T ′)) <∞.
c) Fur λ ∈ σ(T )\{0} hat Tx− λx = y genau dann mindestens eine Losung x ∈ X, wenn 〈y, x′〉X×X′ = 0fur alle x′ ∈ E(λ, T ′).
In Lemma 6.5.18 werden wir das folgende Lemma benotigen.
Lemma 6.4.13 X ⊂ Y ⊂ Z seien stetig eingebettete Banach-Raume, wobei X ⊂ Y kompakt eingebettet sei.Dann gibt es zu jedem ε > 0 ein Cε, sodass
‖x‖Y ≤ ε ‖x‖X + Cε ‖x‖Z fur alle x ∈ X. (6.4.2)
Beweis. Sei ε > 0 fest. Die Negation von (6.4.2) lautet: Es gibt xi ∈ X mit (‖xi‖Y − ε ‖xi‖X) / ‖xi‖Z → ∞.Fur yi := (ε ‖xi‖X)−1
xi ∈ X gilt somit (‖yi‖Y − 1) / ‖yi‖Z → ∞. Hieraus folgert man ‖yi‖Z → 0 und‖yi‖Y > 1 fur hinreichend große i. Da ‖yi‖X < 1/ε und X ⊂ Y kompakt, konvergiert eine Teilfolge yik
gegeny∗ ∈ Y . ‖yi‖Y > 1 impliziert ‖y∗‖Y ≥ 1, d.h. y∗ �= 0. Andererseits konvergiert yik
auch in Z gegen y∗, daY ⊂ Z stetig eingebettet ist. ‖yi‖Z → 0 liefert den Widerspruch: y∗ = 0.

98 6. Exkurs uber Funktionalanalysis
6.5 Bilinearformen
Im Folgenden sei angenommen, dass V ein Hilbert-Raum ist. Die Abbildung a(·, ·) : V × V → R heißtBilinearform, falls
a(x+ λy, z) = a(x, z) + λa(y, z), a(x, y + λz) = a(x, y) + λa(x, z) fur alle λ ∈ R, x, y, z ∈ V
(im komplexen Falle, wobei a(x, λy) = λa(x, y), spricht man von Sesquilinearformen).a(·, ·) heißt stetig (oder beschrankt), falls ein CS existiert, sodass
|a(x, y)| ≤ CS ‖x‖V ‖y‖V fur alle x, y ∈ V. (6.5.1)
Lemma 6.5.1 a) Einer stetigen Bilinearform kann man eineindeutig einen Operator A ∈ L(V, V ′) zu-ordnen, sodass
a(x, y) = 〈Ax, y〉V ′×V fur alle x, y ∈ V, ‖A‖V ′←V ≤ CS . (6.5.2)
Umgekehrt ist CS := ‖A‖V ′←V die beste Schranke in (6.5.1).b) V1 und V2 seien dicht in V . a(·, ·) sei auf V1 × V2 definiert und erfulle (6.5.1) mit “x ∈ V1, y ∈ V2”
statt “x, y ∈ V ”. Dann ist a(·, ·) eindeutig auf V × V stetig fortsetzbar, sodass (6.5.1) mit gleichem CS furalle x, y ∈ V gilt.
Beweis. a) x ∈ V sei fest. ϕx(y) := a(x, y) definiert ein Funktional ϕx ∈ V ′ mit ‖ϕx‖V ′ ≤ CS ‖x‖V . Dax �→ ϕx eine lineare Abbildung ist, lasst sich Ax := ϕx fur x ∈ V definieren. ‖Ax‖V ′ ≤ CS ‖x‖V beweist‖A‖V ′←V ≤ CS . Die Definitionen zeigen 〈Ax, y〉V ′×V = 〈ϕx, y〉V ′×V = ϕx(y) = a(x, y). Umgekehrt istfur jedes A ∈ L(V, V ′) auch a(x, y) := 〈Ax, y〉V ′×V eine Bilinearform mit 〈Ax, y〉V ′×V ≤ ‖Ax‖V ′ ‖y‖V ≤‖A‖V ′←V ‖x‖V ‖y‖V .
b) Gemaß Satz 6.1.11 lasst sich A auch dann eindeutig festlegen, wenn a(·, ·) nur auf V1 × V2 erklart ist.〈Ax, y〉V ′×V stellt dann die stetige Fortsetzung dar.
Der Beweis zeigt‖A‖V ′←V = sup {|a(x, y)| : x, y ∈ V, ‖x‖V = ‖y‖V = 1} . (6.5.3)
A heißt der a(·, ·) zugeordnete oder zu a(·, ·) gehorende Operator.Die zu a(·, ·) adjungierte Bilinearform a�(·, ·) ist durch a�(x, y) := a(y, x) (x, y ∈ V ) gegeben. Die Bi-
linearform heißt symmetrisch, falls a(·, ·) = a�(·, ·).
Ubungsaufgabe 6.5.2 a) Gehort A zu a(·, ·), so A′ zu a�(·, ·). b) Ist a(·, ·) symmetrisch, so gilt A = A′.
Lemma 6.5.3 (inf-sup-Bedingungen) A ∈ L(V, V ′) sei der zu einer stetigen Bilinearform a(·, ·) ge-horende Operator. Dann sind die folgenden Aussagen (i), (ii), (iii) aquivalent:
• (i) A−1 ∈ L(V ′, V ) existiert;
• (ii) Es existieren ε, ε′ > 0, sodass
infx∈V, ‖x‖V =1
supy∈V, ‖y‖V =1
|a(x, y)| = ε > 0, (6.5.4a)
infy∈V, ‖y‖V =1
supx∈V, ‖x‖V =1
|a(x, y)| = ε′ > 0. (6.5.4b)
• (iii) Es gelten die Ungleichungen (6.5.4a) und (6.5.4c):
supx∈V, ‖x‖V =1
|a(x, y)| > 0 fur alle y ∈ V. (6.5.4c)
Gilt eine der Aussagen (i)-(iii), so ist
ε = ε′ = 1/∥∥A−1
∥∥V←V ′ (ε, ε′ aus (6.5.4a,b)). (6.5.4d)

6.5 Bilinearformen 99
Aus der Gleichung (6.5.4a) folgt trivialerweise die Ungleichung
infx∈V, ‖x‖V =1
supy∈V, ‖y‖V =1
|a(x, y)| ≥ ε > 0. (6.5.4e)
Umgekehrt folgt (6.5.4a) aus (6.5.4e) mit einem eventuell großeren ε > 0. (6.5.4e) nennt man auch dieBabuska-Bedingung (oder auch die inf-sup-Bedingung). (6.5.4e) ist aquivalent zu
supy∈V, ‖y‖V =1
|a(x, y)| ≥ ε ‖x‖V fur alle x ∈ V, (6.5.4e’)
denn (6.5.4e) ist gleichbedeutend mit (6.5.4e’) fur alle x ∈ V , ‖x‖V = 1. Die Normierungsbedingung ‖x‖V = 1kann man offenbar fallen lassen. Die linke Seite in (6.5.4e’) stimmt mit der Definition der Dualnorm von Axuberein, sodass (6.5.4e) und (6.5.4e’) auch zu (6.5.4e”) aquivalent sind:
‖Ax‖V ′ ≥ ε ‖x‖V fur alle x ∈ V. (6.5.4e”)
Beweis des Lemmas 6.5.3. a) “(i) ⇒ (ii)”: Die Inverse A−1 ∈ L(V ′, V ) existiere. (6.5.4a) folgt aus
infx∈V‖x‖V =1
supy∈V‖y‖V =1
|a(x, y)| = infx∈Vx �=0
supy∈Vy �=0
|a(x, y)|‖x‖V ‖y‖V
= infx∈Vx �=0
supy∈Vy �=0
|〈Ax, y〉V ′×V |‖x‖V ‖y‖V
=x=A−1x′
infx′∈V ′x′ �=0
supy∈Vy �=0
∣∣〈AA−1x′, y〉V ′×V
∣∣‖A−1x′‖V ‖y‖V
= infx′∈V ′x′ �=0
(1
‖A−1x′‖V
supy∈Vy �=0
|〈x′, y〉V ′×V |‖y‖V
)
= infx′∈V ′x′ �=0
1‖A−1x′‖V
‖x′‖V ′ = 1/ supx′∈V ′x′ �=0
∥∥A−1x′∥∥
V
‖x′‖V ′= 1/
∥∥A−1∥∥
V←V ′ =: ε
und zeigt uberdies die Charakterisierung von ε aus (6.5.4d). Ebenso zeigt man (6.5.4b) mit ε′ =1/‖A′−1‖V←V ′ . Wegen A′−1 = (A−1)′, (6.3.3) und V ′′ = V folgt ε = ε′.
b) “(ii) ⇒ (iii)”: (6.5.4c) ist eine Abschwachung von (6.5.4b).c) “(iii) ⇒ (i)”: ε > 0 in (6.5.4a) beweist, dass A injektiv ist. Um auch Surjektivitat nachzuweisen, wollen
wir zunachst zeigen, dass das Bild W := {Ax : x ∈ V } ⊂ V ′ abgeschlossen ist. Fur eine Folge {wν} mit‖w� − wν‖V ′ → 0 ist daher w� ∈ W zu zeigen. Nach Definition von W gibt es xν ∈ V mit Axν = wν . Von(6.5.4a) schließt man uber (6.5.4e) und (6.5.4e”) (mit x := xν − xμ) auf ‖xν − xμ‖V ≤ ‖wν − wμ‖V ′ /ε.Da {wν} eine Cauchy-Folge ist, ubertragt sich diese Eigenschaft auf {xν}. Es existiert ein x� ∈ V mitxν → x� in V . Die Stetigkeit von A ∈ L(V, V ′) beweist wν = Axν → Ax�, sodass w� = Ax� ∈ W . GemaßLemma 6.1.17 lasst sich V ′ in W ⊕ W⊥ zerlegen. Ware A nicht surjektiv (also W �= V ′), gabe es einw ∈ W⊥ mit w �= 0. y := JV ′w = J−1
V ′ w ∈ V wurde y �= 0 erfullen (vgl. Satz 6.3.6, Folgerung 6.3.7). Daa(x, y) = 〈Ax, x〉V ′×V = (Ax,w)V ′ = 0 fur alle x ∈ V , ergabe sich ein Widerspruch zu (6.5.4c). Also ist Aauch surjektiv, und Satz 6.1.13 beweist A−1 ∈ L(V ′, V ).
d) (6.5.4d) ergab sich bereits aus Teil a) des Beweises.
Es wird sich herausstellen, dass fur die interessanten Falle die Bedingungen (6.5.4a) und (6.5.4b) aquivalentsind (vgl. Lemma 6.5.17). Ein besonders einfacher Fall liegt vor in
Ubungsaufgabe 6.5.4 Man zeige: Ist dimV < ∞, so impliziert (6.5.4a) die Aussage (6.5.4b) mit ε′ = εund umgekehrt.
Definition 6.5.5 (V -Elliptizitat) Eine Bilinearform heißt V-elliptisch, falls sie auf V × V stetig ist undeine Zahl CE > 0 existiert, sodass
a(x, x) ≥ CE ‖x‖2V fur alle x ∈ V. (6.5.5)
In der Bezeichnung “V-elliptisch” ist V als eine Textvariable fur einen Hilbert-Raum anzusehen. Im Fallevon V = H1
0 (Ω) heißt die Bilinearform beispielsweise H10 (Ω)-elliptisch.

100 6. Exkurs uber Funktionalanalysis
Ubungsaufgabe 6.5.6 Man zeige: a) Ist W ⊂ V ein Hilbert-Unterraum mit gleicher (oder aquivalenter)Norm wie in V , so ist eine V-elliptische Bilinearform auch W -elliptisch.
b) a(·, ·) : V × V → R sei stetig. Gilt a(x, x) ≥ CE ‖x‖2V fur alle x ∈ V0, wobei V0 dicht in V , so folgt
(6.5.5) mit gleichem CE.c) a(·, ·) : V × V → R sei stetig, symmetrisch, nichtnegativ (a(v, v) ≥ 0 fur alle v ∈ V ) und erfulle
(6.5.4a,c). Dann ist a(·, ·) V-elliptisch mit CE ≥ ε2/CS (ε aus (6.5.4a,b), CS aus (6.5.1)). Hinweis: Manbeweise zunachst |a(u, v)| ≤ [a(u, u)a(v, v)]l/2 (vgl. Ubungsaufgabe 6.1.16).
Lemma 6.5.7 V-Elliptizitat (6.5.5) impliziert (6.5.1) und (6.5.4a,b) mit ε = ε′ ≥ CE.
Beweis. Sei x ∈ V , ‖x‖V = 1. sup{|a(x, y)| : y ∈ V, ‖y‖V = 1} ≥ |a(x, x)| ≥ CE beweist (6.5.4a) mit ε ≥ CE .Analog folgt (6.5.4b).
Die Zusammenfassung der Lemmata 6.5.1, 6.5.3, 6.5.7 zusammen mit∥∥A′−1
∥∥V←V ′ =
∥∥A−1∥∥
V←V ′ (vgl.Lemma 6.3.2) beweist den
Satz 6.5.8 Die Bilinearform sei V-elliptisch [oder erfulle (6.5.1), (6.5.4a,c)]. Dann genugt der zugehorigeOperator A den Bedingungen
A ∈ L(V, V ′), ‖A′‖V ′←V = ‖A‖V ′←V ≤ CS ,
A−1 ∈ L(V ′, V ), ‖A′−1‖V←V ′ = ‖A−1‖V←V ′ ≤ C′(6.5.6)
mit CS aus (6.5.1) und C′ = 1/CE [ bzw. C′ = 1/ε = 1/ε′].
Mit Hilfe der Bilinearform a(·, ·) und eines Funktionals f ∈ V ′ lasst sich das folgende Variationsproblemformulieren:
suche x ∈ V mit a(x, y) = f(y) fur alle y ∈ V. (6.5.7)
Gemaß Lemma 6.5.1 kann man (6.5.7) in der Form 〈Ax−f, y〉V ′×V = 0 fur alle y ∈ V schreiben, d.h. Ax = fin V ′. Die Gleichung Ax = f ist genau dann fur alle f ∈ V ′ losbar, wenn A−1 ∈ L(V ′, V ). Somit erhalt manden
Satz 6.5.9 Die Bilinearform sei stetig (vgl. (6.5.1)) und erfulle die Stabilitatsbedingung (6.5.4a,c) [hin-reichend ist, dass a(·, ·) V-elliptisch ist]. Dann hat das Problem (6.5.7) genau eine Losung x := A−1f . Dieseerfullt ‖x‖V ≤ C ‖f‖V ′ mit C = 1/ε = 1/ε′ [ bzw. C = 1/CE].
Zusatz 6.5.10 (adjungierte Aufgabe) Unter den Voraussetzungen des Satzes 6.5.9 gilt die analoge Aus-sage mit der gleichen Abschatzung fur das adjungierte Variationsproblem
suche x∗ ∈ V mit a∗(x∗, y) = f(y) fur alle y ∈ V. (6.5.8)
Beweis. ‖A−1‖V←V ′ = ‖A′−1‖V←V ′ (vgl. Ubungsaufgabe 6.5.2a und Satz 6.5.8).
Ubungsaufgabe 6.5.11 a(·, ·) : V × V → R sei stetig. V0 sei dicht in V . Man zeige: Die Losung x ∈ Vvon (6.5.7) ist schon durch “a(x, y) = f(y) fur alle y ∈ V0” eindeutig bestimmt. Gleiches gilt fur (6.5.8).
Das Problem (6.5.7) kann einem Minimierungsproblem aquivalent sein:
Satz 6.5.12 a(·, ·) sei V-elliptisch und symmetrisch, ferner sei f ∈ V ′. Dann nimmt
J(x) := a(x, x) − 2f(x) (x ∈ V ) (6.5.9)
sein eindeutiges Minimum fur die Losung x der Aufgabe (6.5.7) an.
Beweis. Sei x die Losung von (6.5.7). Fur ein beliebiges z ∈ V setze man y := z − x. Aus
J(z) = J(x+ y) = a(x+ y, x+ y) − 2f(x+ y) = a(x, x) + a(x, y) + a(y, x) + a(y, y) − 2f(x) − 2f(y)
=Symmetrie
J(x) + a(y, y) + 2[a(x, y) − f(y)︸ ︷︷ ︸=0, da x Losung
] = J(x) + a(y, y) ≥ J(x) + CE ‖y‖2V = J(x) + CE ‖z − x‖2
V

6.5 Bilinearformen 101
liest man J(z) > J(x) fur alle z �= x ab.Die Bezeichnung “V-elliptisch” scheint anzudeuten, dass den elliptischen Randwertproblemen V-elliptische
Bilinearformen entsprechen. Dies ist im Allgemeinen nicht der Fall. Den elliptischen Randwertaufgabenwerden V-koerzive Formen zugeordnet sein. Ihre Definition erfordert die Einfuhrung eines Gelfand-Dreiers(vgl. (6.3.7): V ⊂ U ⊂ V ′, U = U ′, V ⊂ U stetig und dicht eingebettet).
Definition 6.5.13 (V-Koerzivitat) V ⊂ U ⊂ V ′ sei ein Gelfand-Dreier. Eine Bilinearform a(·, ·) heißtV-koerziv, wenn sie stetig ist und wenn es Konstanten CK ∈ R und CE > 0 gibt, sodass
a(x, x) ≥ CE ‖x‖2V − CK ‖x‖2
U fur alle x ∈ V. (6.5.10)
Offenbar unterscheidet sich die V-Koerzivitat von der V-Elliptizitat durch den Term CK ‖x‖2U , wobei an
CK keine Vorzeichenbedingungen gestellt werden. Entscheidend ist, dass die U -Norm wegen V ⊂ U schwacherals die V-Norm ist.
Ubungsaufgabe 6.5.14 Setze a(x, y) := a(x, y) + CK(x, y)U mit CK aus (6.5.10). Man zeige:a) Die Koerzivitatsbedingung (6.5.10) ist aquivalent zur V-Elliptizitat von a.b) I : V → V ′ sei die Inklusion. Gehort A ∈ L(V, V ′) zu a(·, ·), so A := A + CKI zu a(·, ·). Warum gilt
A ∈ L(V, V ′)?
Die Ergebnisse der Riesz-Schauder-Theorie (Satz 6.4.12) ubertragen sich auf A, sobald die EinbettungV ⊂ U nicht nur stetig, sondern auch kompakt ist.
Satz 6.5.15 V ⊂ U ⊂ V ′ sei ein Gelfand-Dreier mit kompakter Einbettung V ⊂ U . Die Bilinearform a(·, ·)sei V-koerziv mit zugehorigem Operator A. I : V → V ′ sei die Inklusion. a) Fur jedes λ ∈ C gilt eine derAlternativen i), ii):
i) (A− λI)−1 ∈ L(V ′, V ) und (A′ − λI)−1 ∈ L(V ′, V ) oder ii) λ ist Eigenwert.
Im Falle i) ist sowohl Ax − λx = f als auch A′x∗ − λx∗ = f fur alle f ∈ V ′ eindeutig losbar (d.h.a(x, y) − λ(x, y)U = f(y) und a�(x�, y) − λ(x�, y)U = f(y) fur alle y ∈ V ). Im Falle ii) gibt es endlich-dimensionale Eigenraume {0} �= E(λ) := Kern(A− λI) und {0} �= E′(λ) := Kern(A′ − λI), sodass
Ax = λx fur x ∈ E(λ), d.h. a(x, y) = λ (x, y)U fur alle y ∈ V,
A′x∗ = λx∗ fur x∗ ∈ E′(λ), d.h. a∗(x∗, y) = λ (x∗, y)U fur alle y ∈ V.(6.5.11)
b) Das Spektrum σ(A) von A besteht aus hochstens abzahlbar vielen Eigenwerten, die sich in C nichthaufen konnen. Es ist λ ∈ σ(A) genau dann, wenn λ ∈ σ(A′). Ferner ist dimE(λ) = dimE′(λ) <∞.
c) Fur λ ∈ σ(A) hat Ax − λx = f ∈ V ′ genau dann mindestens eine Losung x ∈ V , wenn f ⊥E′(λ),d.h. wenn 〈f, x�〉V ′×V = (f, x�)U = 0 fur alle x� ∈ E′(λ).
Beweis. Mit V ⊂ U ist auch V ⊂ V ′ eine kompakte Einbettung, d.h. die Inklusion I : V → V ′ ist kompakt.A + CKI mit CK aus (6.5.10) erfullt A + CKI ∈ L(V, V ′), (A + CKI)−1 ∈ L(V ′, V ) (vgl. Ubungsaufgabe6.5.14a). Lemma 6.4.5 zeigt, dass K := (A + CKI)−1I : V → V kompakt ist. Somit ist die Riesz-Schauder-Theorie auf K − μI anwendbar. Da
K −μI = −μ(I − 1μK) = −μ(A+CKI)−1{A+CKI − 1
μI} = −μ(A+CKI)−1(A−λI) mit λ = −CK + 1μ ,
ubertragen sich die Aussagen des Satzes 6.4.12 uber K − μI auf A− λI = −μ−1(A+ CKI)(K − μI).
Bemerkung 6.5.16 Das Spektrum ⊂ (A) hat das Maß null, sodass unter den Voraussetzungen des Satzes6.5.15 die Losbarkeit von Ax− λx = f fur fast alle λ garantiert wird. Das Problem (6.5.7) ist losbar, wennnicht “zufallig” 0 ∈ σ(A).
Lemma 6.5.17 Unter den Voraussetzungen des Satzes 6.5.15 sind die Ungleichungen (6.5.4a,b) aquivalent.
Beweis. (6.5.4a) beweist, dass A injektiv ist, d.h. 0 �∈ σ(A). Satz 6.5.15a zeigt A−1 ∈ L(V ′, V ), sodass diezweite Bedingung (6.5.4b) aus Lemma 6.5.3 folgt. Analog folgt (6.5.4a) aus (6.5.4b).
Offenbar bleibt a(·, ·) V-koerziv, wenn man const · (·, ·)U addiert. Generell gilt das

102 6. Exkurs uber Funktionalanalysis
Lemma 6.5.18 a(·, ·) sei V-koerziv, wobei V ⊂ U ⊂ V ′. Dann ist a(,·)+ b(·, ·) ebenfalls V-koerziv, wenn dieBilinearform b(·, ·) eine der folgenden Bedingungen a-c erfullt: a) Zu jedem ε > 0 existiert Cε, sodass
|b(x, x)| ≤ ε ‖x‖2V + Cε ‖x‖2
U fur alle x ∈ V. (6.5.12a)
b) Die Einbettungen V ⊂ X und V ⊂ Y seien stetig, und mindestens eine von ihnen sei kompakt. Fernergelte
|b(x, x)| ≤ CB ‖x‖X ‖x‖Y fur alle x ∈ V. (6.5.12b)
c) Die Einbettungen V ⊂ X, V ⊂ Y seien stetig. Es gelte (6.5.12b). Fur ‖·‖X oder ‖·‖Y sei vorausgesetzt:Zu jedem ε > 0 existiere ein C′ε, sodass
‖x‖X ≤ ε ‖x‖V + C′ε ‖x‖U oder ‖x‖Y ≤ ε ‖x‖V + C′ε ‖x‖U (x ∈ V ) . (6.5.12c)
Beweis. a) Wahle ε = CE/2 in (6.5.12a) mit CE aus (6.5.10). Dann erfullt a(·, ·)+ b(·, ·) die V-Koerzivitats-bedingung mit CE/2 > 0 und CK + Cε anstelle von CE und CK .
b) Lemma 6.4.13 beweist (6.5.12c), sodass nur noch Teil c) zu beweisen ist.c) Es gelte z.B. die erste Ungleichung aus (6.5.12c). Da V ⊂ Y stetig, existiert CY mit ‖x‖Y ≤ CY ‖x‖V .
Wahle ε′ = ε/(2CBCY ) in (6.5.12c):
|b(x, x)| ≤(6.5.12b,c)
CB (ε′ ‖x‖V + C′ε′ ‖x‖U )CY ‖x‖V ≤(5.3.10)
ε
2‖x‖2
V +12εK2 ‖x‖2
U mit K := CBCY C′ε.
Damit ist (6.5.12a) gezeigt.

7Variationsformulierung
7.1 Historische Bemerkungen
In den vorangegangenen Kapiteln konnte noch nicht einmal fur das Dirichlet-Problem der Potentialgleichung(2.1.1a,b) geklart werden, ob beziehungsweise unter welcher Bedingung eine klassische Losung u ∈ C2(Ω) ∩C0(Ω) existiert. Green [34] war der Ansicht, dass seine 1828 beschriebene Greensche Funktion stets existiertund die Losung explizit liefert. Dies trifft nicht zu. Lebesgue bewies 1913, dass fur gewisse Gebiete dieGreensche Funktion nicht existiert.
Von Thomson (1847), Kelvin (1847) und Dirichlet stammt eine andere Argumentation. Das DirichletscheIntegral
J(u) :=∫
Ω
|∇u|2 dx =∫
Ω
n∑i=1
u2xi
(x)dx (7.1.1)
beschreibt in der Physik die Energie. Bei vorgegebenen Randwerten u = ϕ auf Γ sucht man J(u) zu mini-mieren. Dieses Variationsproblem ist aquivalent zu
I(u, v) :=∫
Ω
〈∇u,∇v〉dx =∫
Ω
n∑i=1
uxi(x)vxi(x)dx fur alle v mit v = 0 auf Γ. (7.1.2)
Der Beweis der Aquivalenz ergibt sich aus J(u + v) = J(u) + 2I(u, v) + J(v) und I(v) ≥ 0 fur alle v (vgl.Satz 6.5.12). Die Greensche Formel (2.2.5a) liefert I(u, v) =
∫Ω vΔudx = 0 fur alle v mit v = 0 auf Γ, sodass
Δu = 0 folgt. Somit ist das Variationsproblem J(u) = min wie auch (7.1.2) aquivalent zum Dirichlet-ProblemΔu = 0 in Ω, u = ϕ auf Γ.
Das sogenannte Dirichletsche Prinzip besagt, dass J(u), da es nach unten durch I(u) ≥ 0 beschrankt ist,fur ein u minimal werden muss. Nach den vorangehenden Uberlegungen wurde damit die Existenz einerLosung des Dirichlet-Problems gesichert.
Weierstraß1 wandte 1870 gegen diese Argumentation ein, dass zwar das Infimum von J(u) uber {u ∈C2(Ω)∩C0(Ω) : u = ϕ auf Γ} existieren mag, aber nicht notwendigerweise in dieser Menge angenommen zuwerden braucht. Beispielsweise nimmt das Integral J(u) :=
∫ 1
0 u2(x)dx in {u ∈ C0([0, 1]): u(0) = 0, u(1) = 1}
nie den Wert inf J(u) = 0 an.Das folgende Beispiel von Hadamard2 zeigt zudem, dass kein endliches Infimum des Dirichletschen Integrals
zu existieren braucht. r und ϕ seien die Polarkoordinaten im Kreis Ω = K1(0). Die Funktion u(r, ϕ) =∑∞n=1 r
n!n−2 sin(n!ϕ) ist in Ω harmonisch, aber das Integral J(u) existiert nicht.
1Karl Theodor Wilhelm Weierstraß, geb. 31. Okt. 1815 in Ostenfelde, gest. 19. Febr. 1897 in Berlin2Jacques Salomon Hadamard, am 8 Dez. 1865 in Versailles geboren und am 17 Okt. 1963 in Paris gestorben.

104 7. Variationsformulierung
Die geschilderten Schwierigkeiten verschwinden, wenn man die Losungen in den dazu geeigneten Sobolev-Raumen statt in C2(Ω) ∩ C0(Ω) sucht.
7.2 Gleichungen mit homogenen Dirichlet-Randbedingungen
Wir untersuchen im Folgenden die elliptische Gleichung
Lu = g in Ω, (7.2.1a)
L =∑|α|≤m
∑|β|≤m
(−1)|β|Dβaαβ(x)Dα (7.2.1b)
der Ordnung 2m (vgl. Abschnitt 5.3.2, Ubungsaufgabe 5.3.5d). Der Hauptteil von L ist
L = (−1)m∑
|α|=|β|=m
Dβaαβ(x)Dα. (7.2.2)
Gemaß Definition 5.3.4 ist L gleichmaßig elliptisch in Ω, falls ε > 0 existiert, sodass∑|α|=|β|=m
aαβ(x)ξα+β ≥ ε |ξ|2m fur alle x ∈ Ω und ξ ∈ Rn. (7.2.3)
Sobald nur aαβ ∈ L∞(Ω) vorausgesetzt wird, ist “fur alle x ∈ Ω” durch “fur fast alle x ∈ Ω” zu ersetzen.Als Randbedingungen werden die homogenen Dirichlet-Randwerte
u = 0,∂u
∂n= 0,
(∂
∂n
)2
u = 0, . . . ,
(∂
∂n
)m−1
u = 0 auf Γ (7.2.4)
verlangt, die allerdings nur sinnvoll sind, falls Γ = ∂Ω hinreichend glatt ist (andersfalls ist die Normalen-richtung �n nicht definiert). Man beachte, dass fur den Standardfall m = 1 (Gleichung zweiter Ordnung)Bedingung (7.2.4) zu u = 0 wird.
Da mit u = 0 auf Γ auch die Tangentialableitungen verschwinden, sind nicht nur die k-fachen Normalen-ableitungen (k ≤ m− 1), sondern samtliche Ableitungen der Ordnung ≤ m− 1 gleich null:
Dαu = 0 in x ∈ Γ fur |α| ≤ m− 1. (7.2.4’)
Bedingung (7.2.4’) verlangt nicht mehr die Existenz einer Normalenrichtung. Gemaß Zusatz 6.2.44 lasst sich(7.2.4’) auch durch
u ∈ Hm0 (Ω) (7.2.4”)
formulieren.Sei u ∈ c2m(Ω) ∩Hm
0 (Ω) eine klassische Losung von (7.2.1a) und (7.2.4). Zur Herleitung der Variations-formulierung bilden wir fur ein beliebiges v ∈ C∞0 (Ω) das Skalarprodukt
(Lu, v)0 =∑|α|≤m
∑|β|≤m
(−1)|β|∫
Ω
v(x)Dβaαβ(x)Dαu(x)dx.
Da v ∈ C∞0 (Ω), verschwindet der Integrand in der Nahe von Γ, sodass man partiell integrieren kann, ohnedass ein Randintegral auftritt:
(−1)|β|∫
Ω
v(x)Dβaαβ(x)Dαu(x)dx =∫
Ω
aαβ(x) [Dαu(x)][Dβv(x)
]dx.
Damit erreicht man die Variationsformulierung∑|α|≤m
∑|β|≤m
∫Ω
aαβ(x) [Dαu(x)][Dβv(x)
]dx =
∫Ω
g(x)v(x)dx fur alle v ∈ C∞0 (Ω), (7.2.5)

7.2 Gleichungen mit homogenen Dirichlet-Randbedingungen 105
da Lu = g.Erfullt umgekehrt u ∈ C2m(Ω) mit Randbedingung (7.2.4) die Forderung (7.2.5), so lasst sich die par-
tielle Integration ruckgangig machen, und∫Ω(g − Lu)vdx = 0 fur alle v ∈ C∞0 (Ω) beweist Lu = g. Das
heißt, eine klassische Losung des Variationsproblems (7.2.5) mit Randbedingung (7.2.4) ist auch Losungder ursprunglichen Randwertaufgabe. Somit sind die Differentialgleichung (7.2.1a,b) und die Variations-formulierung (7.2.5) bezuglich klassischer Losungen aquivalent. Wir fuhren die Bilinearform
a(u, v) :=∑|α|≤m
∑|β|≤m
∫Ω
aαβ(x) [Dαu(x)] [Dβv(x)]dx (7.2.6)
und das Funktionalf(v) :=
∫Ω
g(x)v(x)dx (7.2.7)
ein. Wie oben bemerkt, bedeutet die Randbedingung (7.2.4) fur klassische Losungen u ∈ C2m(Ω) ∩Hm(Ω),dass u ∈ Hm
0 (Ω). Damit lautet die “Variationsformulierung” oder “schwache Formulierung” der Randwert-aufgabe (7.2.1), (7.2.4) wie folgt:
Suche u ∈ Hm0 (Ω) mit a(u, v) = f(v) fur alle v ∈ C∞0 (Ω). (7.2.8)
Eine Losung der Aufgabe (7.2.8), die definitionsgemaß in Hm0 (Ω), aber nicht notwendigerweise in C2m(Ω)
liegt, heißt schwache Losung.
Ubungsaufgabe 7.2.1 a) Ω sei beschrankt. Man zeige: Eine klassische Losung u ∈ C2m(Ω) ∩ Cm(Ω) istauch eine schwache Losung.
b) Anhand des Beispiels 2.4.2 zeige man, dass diese Aussage fur unbeschrankte Gebiete falsch wird.
Satz 7.2.2 Seien aαβ ∈ L∞(Ω). Die durch (7.2.6) definierte Bilinearform ist auf Hm0 (Ω) × Hm
0 (Ω) be-schrankt.
Beweis. Seien u, v ∈ C∞0 (Ω). Die Ungleichung (6.2.5c) liefert
|a(u, v)| ≤∑|α|≤m
∑|β|≤m
‖aαβ‖L∞(Ω) |Dαu|0
∣∣Dβv∣∣0≤ const |u|m |v|m .
Da C∞0 (Ω) dicht in Hm0 (Ω) (vgl. Satz 6.2.11), ist a(·, ·) auf Hm
0 (Ω)×Hm0 (Ω) fortsetzbar und durch die gleiche
Konstante beschrankt (vgl. Lemma 6.5.1b).Auch f(v) ist fur v ∈ Hm
0 (Ω) definiert und beschrankt, wenn z.B. g ∈ L2(Ω). Gemaß Ubungsaufgabe6.5.11 ist die Variationsformulierung (7.2.8) aquivalent zu der folgenden Variation uber Hm
0 (Ω):
Suche u ∈ Hm0 (Ω) mit a(u, v) = f(v) fur alle v ∈ Hm
0 (Ω). (7.2.9)
Die Form Lu = f gewinnt man zuruck, wenn man Lemma 6.5.1 anwendet. L ∈ L(Hm0 (Ω), H−m(Ω)) und
f ∈ H−m(Ω) = (Hm0 (Ω))′ seien durch a(u, v) = 〈Lu, v〉H−m(Ω)×Hm
0 (Ω) und f(v) = 〈f, v〉H−m(Ω)×Hm0 (Ω) fur
alle v ∈ Hm0 (Ω) definiert. Gleichung (7.2.9) besagt, dass
Lu = f. (7.2.9’)
Wahrend (7.2.1a) eine Gleichung Lu = g in C0(Ω) (d.h. fur eine klassische Losung) darstellt, ist (7.2.9’) eineGleichung in H−m(Ω).
Satz 6.5.9 garantiert die eindeutige Losbarkeit der Gleichung (7.2.9), falls a(·, ·) Hm0 (Ω)-elliptisch ist. Wir
untersuchen zunachst den Standardfall m = 1 (Gleichungen der Ordnung 2m = 2).
Satz 7.2.3 Seien Ω beschrankt, m = 1 und aαβ ∈ L∞(Ω). L erfulle (7.2.3) (gleichmaßige Elliptizitat) undstimme mit dem Hauptteil L0 uberein, d.h. aαβ = 0 fur |α| + |β| ≤ 1. Dann ist die Bilinearform a(·, ·)H1
0 (Ω)-elliptisch:a(u, u) ≥ ε′ |u|21 fur alle u ∈ H1
0 (Ω), wobei ε′ > 0. (7.2.10)

106 7. Variationsformulierung
Beweis. Da |α| = |β| = 1, lassen sich α und β gemaß Dα = ∂/∂xi, Dβ = ∂/∂xj mit Indizes i, j ∈ {1, . . . , n}identifizieren. Fur festes x ∈ Ω wende man (7.2.3) mit ξ = ∇u(x) an:
∑|α|=|β|=1
aαβ(x)ξα+β =n∑
i,j=1
aij(x)ξiξj ≥(7.2.3)
ε |ξ|2 = ε |∇u(x)|2 .
Integration uber Ω liefert a(u, u) ≥ ε∫Ω |∇u|2 dx. Da
∫Ω |∇u|2 dx ≥ CΩ |u|21 (vgl. Lemma 6.2.12), folgt
(7.2.10) mit ε′ = εCΩ.
Zusatz 7.2.4 Die Bedingung “Ω beschrankt” kann entfallen, wenn fur α = β = 0 Positivitat von a00(x) ≥η > 0 (anstelle von a00 = 0 in Satz 7.2.3) vorausgesetzt wird.
Beispiel 7.2.5 Die Helmholtz3-Gleichung −Δu+ u = f in Ω fuhrt auf die Bilinearform
a(u, v) :=∫
Ω
n∑i=1
[uxi(x)vxi(x) + u(x)v(x)] dx =∫
Ω
n∑i=1
[〈∇u,∇v〉 + uv] dx.
a(u, v) ist das Skalarprodukt in H10 (Ω) (und H1(Ω)). a(u, u) = |u|21 beweist die H1
0 (Ω)-Elliptizitat.
Ubungsaufgabe 7.2.6 Die Voraussetzungen des Satzes 7.2.3 oder des Zusatzes 7.2.4 seien erfullt, ausge-nommen, dass die Koeffizienten aα0 und a0β (|α| = |β| = 1) der ersten Ableitungen beliebige Konstantenseien. Man zeige, dass Ungleichung (7.2.10) unverandert gilt.
Satz 7.2.3 lasst sich nicht ohne Weiteres auf m > 1 ausdehnen.
Satz 7.2.7 Die Hauptteilkoeffizienten seien konstant: aαβ = const fur |α| = |β| = m. Außerdem gelteaαβ = 0 fur 0 < |α|+ |β| ≤ 2m− 1 und a00(x) ≥ 0 fur α = β = 0. L sei gleichmaßig elliptisch (vgl. (7.2.3)).Ferner gelte entweder, dass Ω beschrankt ist oder dass a00 ≥ η > 0. Dann ist a(·, ·) Hm
0 (Ω)-elliptisch.
Beweis. Wir setzen u ∈ Hm0 (Ω) durch u = 0 auf Rn fort. Satz 6.2.22b und Ubungsaufgabe 6.2.23 zeigen
a(u, u) −∫
Ω
a00u2dx =
∑|α|=|β|=m
∫Ω
aαβDαuDβvdx =
∑|α|=|β|=m
aαβ
∫Rn
Dαu(x)Dβv(x)dx
=∑
|α|=|β|=m
aαβ ·(Dαu,Dβv
)0
=∑
|α|=|β|=m
aαβ ·(Dαu, Dβv
)0
=∑
|α|=|β|=m
aαβ
∫Rn
[(iξ)αu(ξ)] (iξ)β
v(ξ) dξ
=∫
Rn
⎡⎣ ∑|α|=|β|=m
aαβξα+β
⎤⎦ |u(ξ)|2 dξ ≥(7.2.3)
ε
∫Rn
|ξ|2m |u(ξ)|2 dξ.
Sei a00 ≥ η > 0 angenommen. Es gibt ein ε′ > 0, sodass ε |ξ|2m ≥ ε′∑|α|≤m |ξα|2−η fur alle ξ ∈ Rn. Hieraus
folgt ε∫|ξ|2m |u(ξ)|2 dξ ≥ ε′ |u|2m − η |u|20 (vgl. Lemma 6.2.24a) und a(u, u) ≥ ε′ |u|2m. Falls Ω beschrankt ist,
benutze man Lemma 6.2.12.Auf Hm
0 (Ω)-elliptische Formen a(·, ·) ist Satz 6.5.9 anwendbar:
Satz 7.2.8 (Existenz und Eindeutigkeit schwacher Losungen) Ist die Bilinearform a(·, ·) Hm0 (Ω)-
elliptisch, so existiert genau eine Losung u ∈ Hm0 (Ω) der Aufgabe (7.2.9). Sie erfullt
|u|m ≤ 1CE
|f |−m (CE aus (6.5.5)) . (7.2.11)
Da (7.2.11) fur alle f ∈ H−m(Ω) und u = L−1f gilt (vgl. (7.2.9’)), ist Ungleichung (7.2.11) aquivalent zu∥∥L−1∥∥
Hm0 (Ω)←H−m(Ω)
≤ C := 1/CE . (7.2.11’)
Die Variationsaufgabe (7.2.9) kann in eine Minimierungsaufgabe ubergehen:
3Hermann Ludwig Ferdinand von Helmholtz, geb. am 31. August 1821 in Potsdam, gest. am 8. Sept. 1894 in Berlin

7.2 Gleichungen mit homogenen Dirichlet-Randbedingungen 107
Satz 7.2.9 a(·, ·) sei eine Hm0 (Ω)-elliptische und symmetrische Bilinearform. Dann ist (7.2.9) aquivalent
zum Minimierungsproblem
Suche u ∈ Hm0 (Ω), sodass J(u) ≤ J(v) fur alle v ∈ Hm
0 (Ω), (7.2.12a)
wobei J(v) :=12a(v, v) − f(v). (7.2.12b)
Achtung. Falls a(·, ·) nicht Hm0 (Ω)-elliptisch oder unsymmetrisch ist, bleibt das Problem (7.2.9) sinnvoll,
obwohl seine Losung das Funktional J(u) nicht minimiert.
Beispiel 7.2.10 Die Poisson-Gleichung −Δu = f in Ω, u = 0 auf Γ, fuhrt auf die Bilinearform
a(u, v) =∫
Ω
〈∇u(x),∇u(x)〉dx.
Fur ein beschranktes Gebiet Ω ist a(·, ·) H10 (Ω)-elliptisch (vgl. Satz 7.2.3), sodass fur jedes f ∈ H−1(Ω) genau
eine (schwache) Losung u ∈ H10 (Ω) der Poisson-Gleichung existiert. Diese ist auch Losung des Variations-
problems 12
∫Ω|∇u|2 dx− f(u) = min.
Eine schwachere Bedingung als dieHm0 (Ω)-Elliptizitat ist dieHm
0 (Ω)-Koerzivitat : a(u, u) ≥ ε |u|2m−C |u|20.
Satz 7.2.11 Sei m = 1. Die Koeffizienten aαβ ∈ L∞(Ω) mogen die Bedingung (7.2.3) der gleichmaßigenElliptizitat erfullen. Dann ist a(·, ·) H1
0 (Ω)-koerziv.
Beweis. Wir schreiben L als L = LI +LII , wobei LI die Annahmen des Satzes 7.2.3 bzw. des Zusatzes 7.2.4erfulle und LII nur Ableitungen der Ordnung ≤ 1 enthalte. Dann lasst sich Lemma 7.2.12 anwenden.
Lemma 7.2.12 Sei a(·, ·) = a′(·, ·)+ a′′(·, ·) so zerlegt, dass a′(·, ·) Hm0 (Ω)-elliptisch oder auch nur Hm
0 (Ω)-koerziv ist, wahrend
a′′(u, v) =∑
|α|≤m, |β|≤m|α|+|β|<2m
∫Ω
aαβ(x) [Dαu(x)][Dβv(x)
]dx
mit aαβ ∈ L∞(Ω) nur Ableitungen der Ordnung ≤ 2m− 1 enthalt. Dann ist auch a(·, ·) Hm0 (Ω)-koerziv.
Beweis. (6.5.12c) folgt aus (6.2.10b) mit X = H|α|0 (Ω), Y = H
|β|0 (Ω), V = Hm
0 (Ω) und U = L2(Ω), sodassLemma 6.5.18c die Behauptung beweist.
Die Verallgemeinerung des Satzes 7.2.11 auf beliebiges m ≥ 1 verlangt starkere Voraussetzungen an dieKoeffizienten des Hauptteils.
Satz 7.2.13 (Garding) Es gelte (7.2.3) und aαβ ∈ L∞(Ω). Außerdem seien die Koeffizienten aαβ mit|α| = |β| = m gleichmaßig stetig in Ω. Dann ist a(·, ·) Hm
0 (Ω)-koerziv. Gilt umgekehrt aαβ ∈ C(Ω) fur|α| = |β| = m und aαβ ∈ L∞(Ω) sonst, so folgt aus der Hm
0 (Ω)-Koerzivitat die gleichmaßige Elliptizitat(7.2.3).
Der Beweis kann z.B. bei Wloka [89, p. 282] nachgelesen werden. Fur den ersten Teil des Satzes verwendetman die Zerlegung der Eins.
Die Bedeutung der Koerzivitat liegt in der folgenden Aussage.
Satz 7.2.14 Sei Ω beschrankt und a(·, ·) Hm0 (Ω)-koerziv. Dann gilt eine der folgenden Alternativen:
(i) Das Problem (7.2.9) hat genau eine (schwache) Losung u ∈ Hm0 (Ω).
(ii) Die Kerne E = Kern(L) und E� = Kern(L′) sind k-dimensional fur ein k ∈ N, d.h.
a(e, v) = 0, a(v, e∗) fur alle e ∈ E, e∗ ∈ E∗, v ∈ Hm0 (Ω).
Ferner hat die Eigenwertaufgabe
a(e, v) = λ (e, v)L2(Ω) fur alle v ∈ Hm0 (Ω) (7.2.13)
abzahlbar viele Eigenwerte, die sich nicht in C haufen.
Beweis. Da fur beschranktes Ω die Einbettung V := Hm0 (Ω) ⊂ U := L2(Ω) kompakt ist, ist Satz 6.5.15
anwendbar.

108 7. Variationsformulierung
7.3 Inhomogene Dirichlet-Randbedingung
Als Nachstes betrachten wir die Randwertaufgabe
Lu = g in Ω, u = ϕ auf Γ, (7.3.1)
wobei L ein Differentialoperator zweiter Ordnung sei (d.h. m = 1). Die Variationsformulierung der Rand-wertaufgabe (7.3.1) lautet:
Suche u ∈ H1(Ω) mit u = ϕ auf Γ, sodass a(u, v) = f(v) fur alle v ∈ H10 (Ω). (7.3.2)
Gemaß Abschnitt 6.2.5 ist die Beschrankung u|Γ von u ∈ H1(Ω) auf Γ aber wohldefiniert als Funktion desH1/2(Γ). Daher ist “u = ϕ auf Γ” als die Gleichheit u|Γ = ϕ in H1/2(Γ) zu verstehen. Im Gegensatz zumvorhergehenden Abschnitt wird a(·, ·) in (7.3.2) als Bilinearform auf H1(Ω)×H1
0 (Ω) benutzt. Man uberzeugtsich leicht, dass a(·, ·) auf diesem Produkt wohldefiniert und beschrankt ist.
Bemerkung 7.3.1 Notwendig fur die Losbarkeit der Aufgabe (7.3.2) ist:
es existiert ein u0 ∈ H1(Ω) mit u0|Γ = ϕ. (7.3.3)
Ist eine Funktion u0 mit der Eigenschaft (7.3.3) bekannt, ergibt sich eine zweite Charakterisierung derschwachen Losung:
u0 erfulle (7.3.3), suche w ∈ H10 (Ω), sodass (7.3.4a)
a(w, v) = f ′(v) := f(v) − a(u0, v) fur alle v ∈ H10 (Ω). (7.3.4b)
Bemerkung 7.3.2 Die Variationsaufgaben (7.3.2) und (7.3.4a,b) sind aquivalent. Sind u0 und w die Losungvon (7.3.4a,b), so erfullt u = u0 +w die Aufgabe (7.3.2). Ist u eine Losung von (7.3.2), erfullen z.B. u0 = uund w = 0 die Aufgabe (7.3.4a,b).
Ubungsaufgabe 7.3.3 Man zeige f ′ ∈ H−1(Ω) fur f ′ aus (7.3.4b) und
|f ′|−1 ≤ |f |−1 + CS |u0|1 (7.3.5)
mit CS aus |a(u, v)| ≤ CS |u|1 |v|1 (vgl. (6.5.1)).
Bemerkung 7.3.4 Die Aufgabe (7.3.1) und die Variationsformulierung (7.3.2) haben die gleichen klas-sischen Losungen, falls solche existieren.
Beweis. Es genugt v ∈ C∞0 (Ω) in (7.3.2) anzunehmen. Die partielle Integration lasst sich wie in Abschnitt7.2 durchfuhren und beweist die Behauptung.
Satz 7.3.5 (Existenz und Eindeutigkeit) Die Aufgabe (7.2.9) (mit homogenen Randwerten) sei fur allef ∈ H−1(Ω) eindeutig losbar. Dann ist Bedingung (7.3.3) hinreichend und notwendig fur die eindeutigeLosbarkeit der Aufgabe (7.3.2).
Beweis. Existiert eine Losung u ∈ H1(Ω) von (7.3.2), so ist (7.3.3) erfullt. Gilt dagegen (7.3.3), erhalt manmittels (7.3.4a,b) eine eindeutige Losung, da (7.3.4b) mit (7.2.9) ubereinstimmt.
Bemerkung 7.3.6 Unter der Bedingung Ω ∈ C0,1 ist (7.3.3) aquivalent zu
ϕ ∈ H1/2(Γ). (7.3.6)
Beweis. Ist ϕ ∈ H1/2(Γ), so garantiert der Satz 6.2.41 eine Fortsetzung u0 ∈ H1(Ω) auf Ω mit u0|Γ = ϕ und
|u|1 ≤ C |ϕ|1/2 . (7.3.7)
Erfullt umgekehrt u0 die Bedingung (7.3.3), so zeigt gleiche Satz, dass ϕ ∈ H1/2(Γ).Es gelte Ungleichung (7.2.11’) im Falle homogener Randwerte. Gleichung (7.3.5) zeigt |u|1 ≤ |u0|1 + |w|1 ≤
|u0|+ (|f |−1 + C′ |u0|1)/ε fur die Losung der Aufgabe (7.3.4a,b). Abschatzung (7.3.7) beweist den

7.4 Naturliche Randbedingungen 109
Satz 7.3.7 Sei Ω ∈ C0,1. Die Bilinearform sei auf H1(Ω) ×H10 (Ω) beschrankt und erfulle (7.2.11’). Dann
existiert zu jedem f ∈ H−1(Ω) und ϕ ∈ H1/2(Γ) genau eine Losung u ∈ H1(Ω) der Aufgabe (7.3.2) mit
|u|1 ≤ C[|f |−1 + |ϕ|1/2
]. (7.3.8)
Ubungsaufgabe 7.3.8 a(·, ·) sei symmetrisch und H10 (Ω)-elliptisch. Man zeige:Aufgabe (7.3.2) mit f=0 ist
aquivalent zum Variationsproblem: Suche u ∈ H1(Ω) mit u|Γ = ϕ, sodass a(u, u) minimal ist (vgl. (7.1.1)).
7.4 Naturliche Randbedingungen
Die in (7.2.6) definierte Bilinearform a(·, ·) ist auch auf Hm(Ω)×Hm(Ω) wohldefiniert. In Analogie zu Satz7.2.2 gilt der
Satz 7.4.1 Seien aαβ ∈ L∞(Ω). Die durch (7.2.6) definierte Bilinearform ist auf Hm(Ω) × Hm(Ω) be-schrankt: |a(u, v)| ≤
∑α,β ‖aαβ‖L∞(Ω) |u|m |v|m fur alle u, v ∈ Hm(Ω).
f sei jetzt ein Funktional aus (Hm(Ω))′. (7.2.7) mit g ∈ L2(Ω) beschreibt z.B. ein solches Funktional,aber (7.2.7) ist nur ein Spezialfall des nachfolgend in (7.4.1a) definierten Funktionals f , das wir im Weiterenzugrundelegen wollen.
Ubungsaufgabe 7.4.2 Γ sei hinreichend glatt, und es gelte g ∈ L2(Ω), ϕ ∈ L2(Γ). Man zeige, dass durch
f(v) :=∫
Ω
g(x)v(x)dx +∫
Γ
ϕ(x)v(x)dΓ(v ∈ H1(Ω)
)(7.4.1a)
ein Funktional aus (H1(Ω))′ mit ‖f‖(H1(Ω))′ ≤ C(‖g‖L2(Ω) + ‖ϕ‖L2(Γ)) gegeben ist. Dies impliziert f ∈(Hm(Ω))′ fur alle m > 1. Genauer gilt sogar
‖f‖(H1(Ω))′ ≤ C[‖g‖(H1(Ω))′ + ‖ϕ‖H−1/2(Γ)
]. (7.4.1b)
Haufig haben Variationsprobleme zu Differentialgleichung der Ordnung 2m die einfache Form:
suche u ∈ Hm(Ω), sodass a(u, v) = f(v) fur alle v ∈ Hm(Ω). (7.4.2)
Im Gegensatz zur Bedingung u ∈ Hm0 (Ω) aus Abschnitt 7.2 enthalt u ∈ Hm(Ω) keine Randbedingung.
Trotzdem hat die Aufgabe (7.4.2) eine eindeutige Losung, wenn a(·, ·) Hm(Ω)-elliptisch ist. Diese Bedingungist leicht zu erfullen.
Satz 7.4.3 Unter den Voraussetzungen des Zusatzes 7.2.4 ist a(·, ·) H1(Ω)-elliptisch: a(u, u) ≥ ε |u|21 furalle u ∈ H1(Ω). Aufgabe (7.4.2) (mit m = 1) hat genau eine Losung, die der Abschatzung (7.4.3) genugt:
|u|1 ≤ 1ε ‖f‖(H1(Ω))′ . (7.4.3)
Beweis. Ebenso wie fur Zusatz 7.2.4 und Satz 7.2.8.
Zusatz 7.4.4 a) Eine eindeutige Losung, die die Abschatzung (7.4.3) erfullt, existiert auch, wenn mananstelle der H1(Ω)-Elliptizitat voraussetzt: a(·, ·) ist H1(Ω)-koerziv, Ω ∈ C0,1 ist beschrankt und λ = 0 istkein Eigenwert (d.h. a(u, v) = 0 fur alle v ∈ H1(Ω) impliziert u = 0).
b) Die Kombination der Ungleichungen (7.4.3) und (7.4.1b) ergibt
|u|1 ≤ C[‖g‖(H1(Ω))′ + ‖ϕ‖H−1/2(Γ)
]fur die Losung von (7.4.2), wenn f durch (7.4.1a) mit g ∈ (H1(Ω))′ und ϕ ∈ H−1/2(Γ) definiert ist.

110 7. Variationsformulierung
Beweis. Gemaß Satz 6.4.8b ist H1(Ω) kompakt in L2(Ω) eingebettet, sodass sich die Aussage des Satzes7.2.14 ubertragen lasst. Ist λ = 0 kein Eigenwert, so gilt L−1 ∈ L((H1(Ω))′, H1(Ω)) (vgl. Satz 6.4.12).
Um herauszufinden, welche klassische Randwertaufgabe der Variationsformulierung (7.4.2) entspricht,nehmen wir an, dass (7.4.2) eine klassische Losung u ∈ Hm(Ω)∩C2m(Ω) besitzt. Weiterhin kann v ∈ C∞(Ω)angenommen werden (vgl. Lemma 6.5.1b). Der Einfachheit halber beschranken wir uns auf den Fall m = 1.Unter der Voraussetzung aαβ ∈ C1(Ω) und unter geeigneten Bedingungen an Ω ist die folgende allgemeineGreensche Formel anwendbar:
a(u, v) =∫Ω
⎡⎣ n∑i,j=1
aijuxivxj +n∑
i=1
a0iuvxi +n∑
i=1
ai0uxiv + a00uv
⎤⎦dx (7.4.4)
=∫Ω
⎡⎣− n∑i,j=1
(aijuxi)xj−
n∑i=1
(a0iu)xi+
n∑i=1
ai0uxi + a00u
⎤⎦ vdx+∫Γ
⎡⎣ n∑i,j=1
njaijuxi +n∑
i=1
nia0iu
⎤⎦ vdΓ.
Dabei sind ni die Komponenten der Normalenrichtung �n = �n(x), x ∈ Γ. Wir definieren den Rand-Differentialoperator
B :=n∑
i,j=1
njaij∂
∂xi+
n∑i=1
nia0i, (7.4.5)
wahrend L durch (7.2.1b) beschrieben sei. Gleichung (7.4.4) wird zu a(u, v) =∫Ω vLudx+
∫Γ vBudΓ. Nach
Aufgabenstellung stimmt a(u, v) mit f(v) aus (7.4.1a) uberein. Wahlen wir zunachst v ∈ H10 (Ω) ⊂ H1(Ω),
so entfallen die Randintegrale, und wir erhalten Lu = g als notwendige Bedingung wie in Abschnitt 7.2.Damit reduziert sich die Identitat a(u, v) = f(v) zu
∫ΓvBudΓ =
∫ΓϕvdΓ fur alle v ∈ H1(Ω). Nach Satz
6.2.41b durchlauft v|Γ die Menge H1/2(Γ), wenn v den Raum H1(Ω) durchlauft, sodass∫Γ ψ(Bu−ϕ)dΓ = 0
fur alle ψ ∈ H1/2(Γ) gilt; also Bu = ϕ. Dies beweist den
Satz 7.4.5 Γ sei hinreichend glatt. Eine klassische Losung der Aufgabe (7.4.2) mit f aus (7.4.1a) ist auchklassische Losung der Randwertaufgabe
Lu = g in Ω, Bu = ϕ auf Γ (7.4.6)
und umgekehrt.
Die Bedingung Bu = 0 nennt man die naturliche Randbedingung. Sie ergibt sich aus der Tatsache, dass in(7.4.2) (anders als in (7.2.9)) die Funktion v beliebige Randwerte annehmen kann. Im Gegensatz dazu nenntman die Dirichlet-Bedingung u|Γ = 0 auch gelegentlich eine Zwangsrandbedingung, da sie durch die Wahlu ∈ H1
0 (Ω) aufgezwungen wird. Man beachte, dass die Bilinearform sowohl L als auch B festlegt.
Ubungsaufgabe 7.4.6 Man zeige: Die Bilinearform aus Beispiel 7.2.10 fur −Δu = g hat als naturlicheRandbedingung die Neumann-Bedingung −∂u/∂n = 0.
Satz 7.4.7 Seien Ω ∈ C0,1 beschrankt und a(·, ·) Hm(Ω)-koerziv. Dann gelten die Aussagen des Satzes7.2.14 mit Hm(Ω) anstelle von Hm
0 (Ω).
Beispiel 7.4.8 Ω ∈ C0,1 sei ein beschranktes Gebiet. Die zur Helmholtz-Gleichung
−Δu+ cu = f in Ω mit c > 0, ∂u/∂n = ϕ auf Γ
gehorende Bilinearform a(u, v) =∫Ω [〈∇u,∇v〉 + cuv] dx ist H1(Ω)-elliptisch, da a(u, u) ≥ min(1, c) |u|21. Fur
c = 0 ist a(·, ·) dagegen nur H1(Ω)-koerziv. Wie aus Satz 3.4.1 bekannt, ist die Neumann-Randwertaufgabefur die Poisson-Gleichung (d.h. fur c = 0) nicht eindeutig losbar. Gemaß Alternative (ii) aus 7.2.14 gibt eseinen nichttrivialen Kern E = Kern(L). u ∈ E erfullt a(u, u) =
∫Ω〈∇u,∇u〉dx = 0, also ∇u = 0. Da Ω
zusammenhangend ist, folgt u(x) = const und somit dimE = 1. Da a(·, ·) symmetrisch ist, stimmt E� :=Kern(L′) mit E uberein. Nach Satz 7.4.7 ist die Neumann-Randwertaufgabe a(u, v) = f(v) (v ∈ H1(Ω))genau dann losbar, wenn f⊥E, d.h. f(1) = 0. Falls f(v) :=
∫Ω g(x)v(x)dx, liest sich f(1) = 0 als
∫Ω gdx = 0.
Ist f dagegen durch (7.4.1a) gegeben, lautet die Integrabilitatsbedingung f(1) =∫Ωgdx+
∫ΓϕdΓ = 0 (das ist
Gleichung (3.4.2), in der f durch −g zu ersetzen ist).

7.4 Naturliche Randbedingungen 111
Bemerkung 7.4.9 Wahrend die klassische Formulierung einer Randbedingung wie ∂u/∂n = 0 Voraus-setzungen an den Rand Γ erfordert, kann die Aufgabe (7.4.2) fur beliebige, messbare Ω formuliert werden.
Im Folgenden wollen wir den umgekehrten Weg gehen und fragen: Gibt es zu einem klassisch formulier-ten Randwertproblem Lu = g in Ω, Bu = ϕ auf Γ mit vorgegebenen L und B eine Bilinearform a(·, ·),sodass (7.4.2) die zugehorige Variationsformulierung ist? Dies wurde bedeuten, dass der frei vorgegebeneRandoperator B die naturliche Randbedingung darstellt.
Fur m = 1 lautet die allgemeine Form eines Randoperators
B =n∑
i=1
bi(x)∂
∂xi+ b0(x) (x ∈ Γ). (7.4.7)
Mit �b� = (b1, . . . , bn) lasst sich auch B = �b�∇ + b0 schreiben (vgl. (5.2.1b,b’)). Wir mussen ausschließen,dass �b�∇ eine Tangentialableitung darstellt (vgl. Bemerkung 5.2.2):⟨
�b(x), �n(x)⟩�= 0 fur alle x ∈ Γ. (7.4.8)
Bemerkung 7.4.10 Sei m = 1. Es gelte (7.4.8). A(x) sei die Matrix A = (aij) (vgl. (5.1.1c)).Durch den Ubergang von Bu = ϕ zur aquivalenten, skalierten Gleichung σBu = σϕ mit σ(x) =〈�n(x), A(x)�n(x)〉/
⟨�b(x), �n(x)
⟩lasst sich 〈�n, σ�b〉 = 〈�n,A�n〉 erreichen. Daher wird im Weiteren stets an-
genommen, dass �b bereits 〈�n,�b〉 = 〈�n,A�n〉 erfullt.
Beweis. Wegen (7.4.8) ist σ wohldefiniert. Damit Bu = ϕ und σBu = σϕ aquivalent sind, muss σ �= 0 gelten.Dies wird durch die gleichmaßige Elliptizitat garantiert: 〈n,An〉 ≥ ε |n|2 = ε.
Satz 7.4.11 (Konstruktion der Bilinearform) Sei m = 1. L und B seien durch (7.2.1b) und (7.4.7)vorgegeben, wobei �b Bedingung (7.4.8) erfulle. Dann gibt es eine Bilinearform a(·, ·) auf H1(Ω) × H1(Ω),sodass der Variationsaufgabe (7.4.2) die klassische Formulierung Lu = g in Ω, Bu = ϕ auf Γ entspricht.
Beweis. Die gesuchte Bilinearform ist keineswegs eindeutig festgelegt. Wir werden zwei verschiedene Kon-struktionsmoglichkeiten angeben. Zunachst wird der absolute Term in (7.4.7) diskutiert. Auf Grund derBemerkung 7.4.10 wird 〈�n,�b〉 = 〈�n,A�n〉 angenommen.
1) Die Vektorfunktion β(x) := (β1(x), . . . , βn(x)) ∈ C1(Ω) sei beliebig. Der Differentialoperator
L1 := −n∑
i=1
∂
∂xiβi +
n∑i=1
βi∂
∂xi+
n∑i=1
(βi)xi
bildet jedes u ∈ C1(Ω) in null ab: L1u = 0 (Produktregel der Differentiation). Daher darf L durch L + L1
ersetzt werden, ohne die Randwertaufgabe zu andern. Sei a(·, ·) gemaß (7.2.6) aus den Koeffizienten vonL+ L1 konstruiert. Gleichung (7.4.5) zeigt, dass der zu a(·, ·) gehorende Randoperator den absoluten Term
n∑i=1
ni (a0i + βi) (7.4.9)
besitzt. Falls b0 = 0, fuhrt die Wahl βi = −a0i zum Ziel. Andernfalls stehen zwei Moglichkeiten offen.1a) Man wahle βi so, dass auf Γ βi(x) = b0(x)ni(x)−a0i(x) gilt. Da |n| = 1, stimmt dann der Term (7.4.9)
mit b0(x) uberein. Die praktische Schwierigkeit dieser Methode besteht darin, eine glatte Fortsetzung derRandwerte βi(x), x ∈ Γ, auf Ω zu konstruieren.
1b) Man setze βi = −a0i und fuge ein geeignetes Randintegral hinzu:
a(u, v) :=∫
Ω
⎧⎨⎩n∑
i,j=1
aijuxivxj +n∑
i=1
(ai0 − a0i)uxiv +
[a00 +
n∑i=1
(a0i)xi
]uv
⎫⎬⎭dx+∫
Γ
b0uvdΓ. (7.4.10)
Die oben beschriebene partielle Integration zeigt, dass der zu (7.4.10) gehorende Randoperator
B =n∑
i,j=1
njaij∂
∂xi+ b0 (7.4.11)

112 7. Variationsformulierung
lautet.2) Der Operator (7.4.11) lasst sich in der Form B = b�∇ + b0 mit b = A�n schreiben. Da schon 〈�n, b〉 =
〈�n,A�n〉 = 〈�n,�b〉 vorausgesetzt war, ist d := �b − b orthogonal zu �n. Um b in �b zu andern, gibt es wieder zweiKonstruktionsmoglichkeiten.
2a) Definiere die n × n-Matrix As auf Γ durch As = dn� − nd�, d.h. asij = dinj − nidj . As(x) ist
schiefsymmetrisch: As� = −As. Man setze die Matrix As(x), die zunachst nur auf Γ definiert ist, zu einerschiefsymmetrischen Matrix As ∈ C1(Ω) fort. [Hier liegt die gleiche praktische Schwierigkeit wie im Schritt1a).] Die Koeffizienten von As definieren
L2 :=n∑
i,j=1
[− ∂
∂xjas
ij
∂
∂xi+
(as
ij
) ∂
∂xi
].
Wieder gilt L2u = 0 fur alle u ∈ C2(Ω), da
−(as
ijuxi
)xj
−(as
jiuxj
)xi
+(as
ij
)xjuxi +
(as
ji
)xiuxj = −as
ijuxixj − asjiuxjxi = 0.
Somit kann L durch L + L2 ersetzt werden, ohne die Randwertaufgabe zu andern. Die zu L + L2 ge-horenden Koeffizienten ergeben einen Randoperator B, dessen Ableitungsterme
∑i,j nj(aij + as
ij)∂/∂xi =[(A + As)�n]�∇ lauten. Nach Konstruktion von As gilt As�n = (d�n� − �nd�)�n = d = �b − b, da 〈�n, �n〉 = 1und 〈d, �n〉 = 0. Zusammen mit A�n = b ergibt sich der Ableitungsterm in B wie gewunscht zu �b�∇. DerUbergang L→ L+ L2 andert den absoluten Term in B nicht, sodass aus (7.4.11) B = �b�∇ + b0 folgt.
2b) Gegeben sei B = �b�∇ + b0 (vgl. (7.4.11)), sodass d = �b − b orthogonal zu �n ist. Damit ist derRandoperator T := d�∇ eine Richtungsableitung in Tangentialrichtung (falls n = 2) bzw. in der Tangential-hyperebene (falls n ≥ 3). Ist f hinreichend glatt, so ist die Beschrankung v|Γ von v ∈ H1(Ω) ein Elementdes H1/2(Γ). Auf Grund von Bemerkung 6.3.14a lasst sich zeigen, dass T ∈ L(H1/2(Γ), H−1/2(Γ)). DaT (u|Γ) ∈ H−1/2(Γ), ist
∫ΓψT (u|Γ)dΓ fur ψ ∈ H1/2(Γ) wohldefiniert, insbesondere fur ψ = v|Γ, wenn
v ∈ H1(Ω). Somit ist
b(u, v) :=∫
Γ
(v|Γ)T (u|Γ)dΓ
eine auf H1(Ω) ×H1(Ω) beschrankte Bilinearform. Wir addieren b(·, ·) zu a(·, ·) aus (7.4.10). Partielle Inte-gration liefert den Randoperator B + T = b�∇ + b0 + (�b− b)�∇ = �b�∇ + b0 = B.
Satz 7.4.12 Die Bilinearform (7.2.6) sei H1(Ω)-koerziv (vgl. Satz 7.4.3). Ihre Koeffizienten ebenso wie derRand Γ seien hinreichend glatt (∈ C1). Dann ergeben die Konstruktionen des vorhergehenden Beweiseswieder eine H1(Ω)-koerzive Form.
Beweis. 1) Im Schritt 1a) werden nur Terme niedriger Ordnung addiert, sodass Lemma 7.2.12 anwendbarist. Bezuglich 1b) vergleiche 2b).
2a) Im Teil 2a) wird b(u, v) :=∫Ω
∑i,j [a
sijuxivxj + (as
ij)xjvuxi ]dx addiert. Auch hier ist Lemma 7.2.12anwendbar, denn die Schiefsymmetrie von As ergibt b(u, u) =
∫Ω
∑(as
ij)xjuuxidx.2b) Im Falle der Konstruktion im Teil 2b) ist Lemma 7.2.12 sinngemaß anwendbar. Man macht sich
das am einfachsten im Falle von n = 2 klar. Γ sei durch {(x1(s), x2(s)) : 0 ≤ s ≤ 1} beschrieben. Sindx1, x2 ∈ C1([0, 1]) und x′i(0) = x′i(1), und gilt d ∈ C1(Γ) fur d aus T = d�∇, so hat b(·, ·) die Dar-stellung b(u, v) =
∫ 1
0 v(s)τ(s)u′(s)ds, wobei u(s) = u(x1(s), x2(S)), v(s) = v(x1(s), x2(s)), τ ∈ C1([0, 1]).
Auf Grund der Periodizitat ergibt partielle Integration b(u, v) = −∫ 1
0(τ v)′uds ohne Randterme, sodass
b(u, u) = 12 [∫ 1
0 uτ u′ds−
∫ 1
0 (τu)′uds] = − 12
∫ 1
0 τ′u2ds folgt. Das impliziert
|b(u, u)| ≤ 12‖τ‖C1([0,1]) ‖u|Γ‖
2L2(Ω) ≤ C ‖τ‖C1([0,1]) ‖u|Γ‖
2Hs(Γ)
fur jedes s ∈ (1/2, 1) (vgl. Satz 6.2.41a). Da |u|2s ≤ ε |u|21 − C |u|20, lasst sich Lemma 6.5.18c anwenden.Der Fall m ≥ 2 wurde (abgesehen von Satz 7.4.1) in diesem Abschnitt ausgeklammert. Randwertaufgaben
der Ordnung 2m brauchen m Randbedingungen Bju = ϕj auf Γ (j = 1, . . . ,m) (vgl. Abschnitt 5.3). Furm ≥ 2 wird der Nachweis der Hm(Ω)-Koerzivitat komplizierter. Um Satz 7.2.13 zu ubertragen, braucht manzusatzlich die sogenannte Bedingung von Agmon (vgl. Wloka [89, p. 286], Lions-Magenes [58, p. 210]).
Die entstehenden Komplikationen lassen sich anhand der biharmonischen Gleichung veranschaulichen.

7.4 Naturliche Randbedingungen 113
Beispiel 7.4.13 a) Dem Variationsproblem: suche u ∈ H2(Ω) mit
a(u, v) :=∫
Ω
ΔuΔvdx = f(v) :=∫
Ω
g(x)v(x)dx +∫
Γ
(ϕ1(x)
∂v(x)∂n
− ϕ2(x)v(x))
dΓ fur alle v ∈ H2(Ω)
(7.4.12a)entspricht die klassische Formulierung
Δ2u = g in Ω, Δu = ϕ1 und∂
∂nΔu = ϕ2 auf Γ. (7.4.12b)
Aber die Bilinearform a(·, ·) ist nicht H2(Ω)-koerziv.b) Dem Variationsproblem: suche u ∈ H2(Ω) ∩H1
0 (Ω) mit
a(u, v) = f(v) :=∫
Ω
g(x)v(x)dx +∫
Γ
ϕ∂v
∂ndΓ fur alle v ∈ H2(Ω) ∩H1
0 (Ω) (7.4.12c)
(a(·, ·) wie in (7.4.12a)) entspricht die klassische Formulierung
Δ2u = g in Ω, Δu = 0 und Δu = ϕ auf Γ. (7.4.12d)
Die Bilinearform ist H2(Ω) ∩H10 (Ω)-koerziv.
c) Die Randbedingungen in
Δ2u = g in Ω, u = 0 und∂
∂nΔu = ϕ auf Γ. (7.4.12e)
sind zulassig. Trotzdem kann diese Randwertaufgabe nicht in der bisherigen Form als Variationsproblemgeschrieben werden. Eine Variationsformulierung fur (7.4.12e) lautet:
suche u ∈ H2(Ω) ∩H10 (Ω), sodass a(u, v) = f(v) :=
∫Ω
gvdx+∫
Γ
ϕvdΓ fur alle v ∈ H2(Ω) mit∂v
∂n= 0
(7.4.12f)(a(·, ·) wie in (7.4.12a)). Diese entspricht aber nicht dem bisherigen Konzept, da u und v aus verschiedenenRaumen stammen.
Beweis. Die Aquivalenz der Variations- und klassischen Formulierung zeigt man durch partielle Integration:
a(u, v) =∫
Ω
vΔ2udx+∫
Γ
[Δu
∂v
∂n− ∂Δu
∂nv
]dΓ.
Die Nichtkoerzivitat im Teil a) ergibt sich wie folgt. Ω ⊂ Rn sei beschrankt. Fur alle α ∈ R liegtuα(x1, . . . , xn) = sin(αx1) exp(αx2) in H2(Ω) und erfullt Δuα = 0, also auch a(uα, uα) = 0. Ware a(·, ·)koerziv, gabe es ein C mit 0 = a(uα, uα) ≥ ε |uα|2 − C |uα|0 fur alle α, d.h. |uα|2 ≤ (C/ε) |uα|0. DerWiderspruch ergibt sich aus |uα|2 ≥
∣∣∂2uα/∂x21
∣∣0
= α2 |uα|0 fur hinreichend großes α.Die naturlichen und Zwangsrandbedingungen konnen zusammen auftreten. In Beispiel 7.4.13b ist u = 0
eine Zwangsbedingung und ∂Δu/∂n = ϕ die naturliche Randbedingung. Aber auch im Falle m = 1 konnenbeide Arten der Randbedingung auftreten.
Beispiel 7.4.14 Sei γ eine nichtleere, echte Teilmenge von Γ. Die Randwertaufgabe
−Δu = g in Ω, u = 0 auf γ,∂
∂nu = ϕ auf Γ\γ. (7.4.13)
lautet in der Variationsformulierung wie folgt: Suche u ∈ H1γ(Ω), sodass
a(u, v) :=∫
Ω
〈∇u,∇v〉dx = f(v) :=∫
Ω
gvdx+∫
Γ\γϕvdΓ fur alle v ∈ H1
γ(Ω),
wobei H1γ(Ω) := {u ∈ H1(Ω) : u = 0 auf γ}. Die Randbedingung in (7.4.13) wird eine gemischte Bedingung
genannt.

114 7. Variationsformulierung
Ubungsaufgabe 7.4.15 Die Bilinearform a(u, v) :=∫Ω[〈∇u,∇v〉 + auv]dx mit a > 0 sei auf V × V mit
V := {u ∈ H1(Ω) : u konstant auf Γ} definiert. Man zeige:a) a(·, ·) ist V-elliptisch.b) Die schwache Formulierung u ∈ V , a(u, v) =
∫Ωgvdx+
∫ΓϕvdΓ fur alle v ∈ V, entspricht dem Problem
−Δu+ au = g in Ω, u konstant auf Γ mit∫
Γ
∂u
∂ndΓ =
∫Γ
ϕdΓ, (7.4.14)
das auch Adler-Problem genannt wird.
Abschließend soll auf die Schwierigkeiten, eine schwache Losung klassisch zu interpretieren, hingewiesenwerden. In der Variationsformulierung (7.4.2) werden die rechten Seiten g und ϕ der Differentialgleichungund der Randbedingung zu dem Funktional f zusammengezogen. In der Variationsformulierung sind die Be-standteile g und ϕ nicht unterscheidbar! u ∈ H1(Ω) besitzt erste Ableitungen in L2(Ω), deren Beschrankungauf Γ nicht sinnvoll erklarbar zu sein braucht. Deshalb ist Bu im Allgemeinen nicht definierbar; Bu = ϕlasst sich nicht als Gleichheit im Raum H−1/2(Γ) verstehen, obwohl ϕ ∈ H−1/2(Γ) (vgl. Zusatz 7.4.4b).
Aber auch wenn eine klassische Losung vorliegt, gibt es folgendes Paradoxon. Sei u eine klassische Losungvon Lu = 0 in Ω, Bu = ϕ auf Γ. Gemaß (7.4.1a) sei fϕ ∈ (H1(Ω))′ durch fϕ(v) :=
∫ΓϕvdΓ definiert. Man
kann u ebenso als Losung von Lu = fϕ in Ω, Bu = 0 auf Γ auffassen. Diese Gleichungen lassen sich sogarin folgender Weise klassisch interpretieren. Es gibt fν ∈ C∞(Ω) (ν ∈ N) mit fν → fϕ in (H1(Ω))′. uν seidie klassische Losung von Luν = fν , Buν = 0. Dann strebt uν in H1(Ω) gegen die oben erwahnte klassischeLosung u.
Die Verlagerung der Randwerte Bu = ϕ in die Differentialgleichung Lu = fϕ entspricht einer Um-formung des diskretisierten Problems, die standig in Kapitel 4 angewandt wurde. Die DifferenzengleichungenDhuh = fh in Ωh (innere Gitterpunkte) und die Randbedingungen uh = ϕ auf Γh ergaben das Gleichungs-system Lhuh = qh := fh + ϕh (vgl. (4.2.6b)). Definiert man uh durch uh = uh in Ωh, uh = 0 auf Γh, soerfullt uh die Gleichungen Dhuh = qh in Ωh, uh = 0 auf Γh. So wie sich das Funktional f nicht eindeutigin g und ϕ trennen lasst, lassen sich fh und ϕh nicht aus qh rekonstruieren. Anders als im diskreten Fallist die Trennung von f in g und ϕ jedoch moglich, sobald starkere Bedingungen an g gestellt werden alsg ∈ (H1(Ω))′ (z.B. g ∈ L2(Ω)).

8Die Methode der finiten Elemente
In Kapitel 7 wurde die Variationsformulierung zunachst nur fur den Zweck eingefuhrt, die Existenz einer(schwachen) Losung zu beweisen. Es wird sich jetzt herausstellen, dass die Variationsformulierung eine neueDiskretisierungsmethode begrundet.
8.1 Das Ritz-Galerkin-Verfahren
8.1.1 Grundlagen
Das Randwertproblem sei in der Variationsformulierung gegeben:
suche u ∈ V, sodass a(u, v) = f(v) fur alle v ∈ V, (8.1.1)
wobei wir insbesondere an V = Hm0 (Ω) und V = H1(Ω) denken (vgl. Abschnitte 7.2 und 7.4). Selbst-
verstandlich ist vorausgesetzt, dass a(·, ·) eine auf V × V definierte und beschrankte Bilinearform ist unddass f ∈ V ′:
|a(u, v)| ≤ CS ‖u‖V ‖v‖V fur u, v ∈ V, f ∈ V ′. (8.1.2)
Die Differenzenverfahren entstanden durch Diskretisierung des Differentialoperators. Jetzt wird der ina(·, ·) verborgene Differentialoperator unverandert gelassen. Die Ritz1-Galerkin2-Diskretisierung besteht dar-in, den unendlich-dimensionalen Raum V durch einen endlich-dimensionalen Unterraum VN zu ersetzen:
VN ⊂ V mit dimVN = N <∞. (8.1.3)
VN versehen mit der Norm ‖·‖V ist wieder ein Banach-Raum. Da VN ⊂ V , sind sowohl a(u, v) als auchf(v) fur u, v ∈ VN definiert. Damit lasst sich die Aufgabe (8.1.4) stellen, die aus (8.1.1) entsteht, indem manV durch VN ersetzt:
suche uN ∈ VN , sodass a(uN , v) = f(v) fur alle v ∈ VN . (8.1.4)
Der Ubergang von (8.1.1) zu (8.1.4) heißt Ritz-Galerkin- oder kurz Galerkin-Diskretisierung. Genauer handeltes sich um eine konforme Galerkin-Diskretisierung, da die Unterraumbedingung VN ⊂ V auf Grund von(8.1.3) gegeben ist.
1Das Verfahren geht auf Ritz [70] (1908) zuruck, wobei allerdings dort anstelle des allgemeinen Variationsproblems (8.1.1)ein Minimierungsproblem (7.2.12a,b) zugrundegelegt wurde. In diesem Fall spricht man auch vom Ritz - oder Rayleigh-Ritz -Verfahren. Die Verallgemeinerung auf (8.1.1) stammt von Galerkin.
2Boris Grigorievich Galerkin, am 4 Marz 1871 in Polotsk (Weißrussland) geboren, am 12 Juni 1945 in Moskau gestorben.

116 8. Die Methode der finiten Elemente
Die Losung von (8.1.4), falls sie existiert, heißt die (zu VN gehorende) Ritz-Galerkin-Losung der Rand-wertaufgabe (8.1.1).
Zur konkreten Berechnung der Losung uN benotigt man eine Basis von VN . Sei {b1, . . . , bN} eine solcheBasis, d.h.
VN = span{b1, . . . , bN}. (8.1.5)
Fur jeden Koeffizientenvektor v = (v1, . . . , vN )� ∈ RN (CN ebenso moglich) definieren wir die Abbildung3
P : RN → VN ⊂ V, Pv =N∑
i=1
vibi . (8.1.6)
Bemerkung 8.1.1 P ist ein Isomorphismus zwischen RN und VN . Die inverse Abbildung P−1 : VN → RN
ist daher auf VN wohldefiniert.
Lemma 8.1.2 Unter der Voraussetzung (8.1.5) ist das Problem (8.1.4) aquivalent zu
suche uN ∈ VN , sodass a(uN , bi) = f(bi) fur alle i = 1, . . . , N. (8.1.7)
Beweis. a) “(8.1.7)⇒(8.1.4)” Sei v =∑N
i=1 vibi ∈ VN beliebig. Linearitat von a(uN , ·) und f ergeben (8.1.4):
a(uN , v) − f(v) = a
(uN ,
N∑i=1
vibi
)− f
( N∑i=1
vibi
)=
N∑i=1
vi
[a(uN , bi) − f(bi)
]= 0.
b) “(8.1.4)⇒(8.1.7)” v = bi in (8.1.4) ergibt die Bedingung (8.1.7).Wir suchen nun den Vektor u ∈ RN , der uber uN = Pu die Ritz-Galerkin-Losung produziert. Der folgende
Satz uberfuhrt das Problem (8.1.4) bzw. (8.1.7) in ein lineares Gleichungssystem.
Satz 8.1.3 Es gelte (8.1.5). Die N × N -Matrix L = (Lij)i,j=1,...,N und der N -Vektor f = (f1, . . . , fN)�
seien definiert durch
Lij := a(bj, bi) (i, j = 1, . . . , N) , (8.1.8a)fi := f(bi) (i = 1, . . . , N) . (8.1.8b)
Dann sind das Problem (8.1.4) und das Gleichungssystem
Lu = f (8.1.9)
aquivalent. Ist u eine Losung von (8.1.9), so lost uN := Pu das Problem (8.1.4). Ist umgekehrt uN Losungvon (8.1.4), so ist u := P−1uN (vgl. Bemerkung 8.1.1) Losung von (8.1.9).
Beweis. (8.1.4) ist aquivalent zu (8.1.7). In (8.1.7) machen wir den Ansatz uN = Pu =∑ujbj :
a(uN , bi) = a
( N∑j=1
ujbj , bi
)=
∑j
uj a(bj , bi) =∑
j
Lijuj = f(bi) = fi,
und erhalten Lu = f . Umgekehrt fuhrt die Losung von Lu = f zur Losung a(uN , bi) = f(bi).In ingenieurtechnischen Anwendungen, wo die Randwertaufgaben aus der Kontinuumsmechanik stam-
men, nennt man L die Steifigkeitsmatrix. Im Folgenden nennen wir diese Matrix neutraler als Systemmatrix(“FEM-Matrix” ware eine Alternative). Der Zusammenhang zwischen L und a(, ·) einerseits und f und f(·)andererseits wird deutlich in
Bemerkung 8.1.4 〈u,v〉 :=∑
i uivi sei das ubliche Skalarprodukt im RN . Den Vektoren u,v ∈ RN seiendie Funktionen u = Pu, v = Pv zugeordnet. Dann gilt a(u, v) = 〈Lu,v〉, f(v) = 〈f ,v〉.
Eine triviale Folgerung aus Satz 8.1.3 lautet:
Zusatz 8.1.5 Die Ritz-Galerkin-Diskretisierung (8.1.4) hat genau dann fur jedes f ∈ V ′ eine eindeutigeLosung uN , wenn die Matrix L aus (8.1.8a) nichtsingular ist.
3Der Buchstabe P steht fur “Prolongation”, da bei den spateren Anwendungen die Werte vi die Knotenwerte an bestimmtenPunkten xi sein werden, die mittels Pv zu einer Funktion aus VN fortgesetzt werden.

8.1 Das Ritz-Galerkin-Verfahren 117
8.1.2 Diskussion der diskreten Gleichung
Definition 8.1.6 (Diskretisierung durch Projektion) Seien Π : V ′ → V ′N = VN eine beliebige Projek-tion auf VN und L der zu a(·, ·) gehorige Operator. Die zur Aufgabe (8.1.1) aquivalente Gleichung Lu = fwird ersetzt durch die projizierte Gleichung ΠLuN = Πf fur ein zu bestimmendes uN ∈ VN .
Die diskrete Gleichung ΠLuN = Πf kann mit Hilfe der Bilinearform als a(uN ,Π∗v) = f(Π∗v) fur allev ∈ V geschrieben werden. Letzteres ist aquivalent zu a(uN , w) = f(w) fur alle w ∈ Bild(Π∗). Man beachte,dass im Allgemeinen Bild(Π∗) �= Bild(Π) = VN . Das Galerkin-Verfahren (8.1.4) ergibt sich als speziellesProjektionsverfahren fur die Wahl von Π als orthogonale Projektion auf VN (d.h. Π∗ = Π).
Im Folgenden wird das diskrete Problem Lu = f mit Hilfe des Operators LN formuliert, der zur Bi-linearform a(·, ·) beschrankt auf VN × VN gehort. Ferner wird die orthogonale Projektion auf VN explizitkonstruiert.
Dem Gelfand-Dreier V ⊂ U ⊂ V ′ entspricht im endlich-dimensionalen Falle VN ⊂ UN ⊂ V ′N , wobei dieseRaume mengenmaßig ubereinstimmen:
VN = UN = V ′N , (8.1.10a)
jedoch drei unterschiedliche Normen tragen:
VN = (VN , ‖·‖V ) , UN = (UN , ‖·‖U ) , V ′N =(V ′N , ‖·‖V ′
N
). (8.1.10b)
VN hat ‖·‖V und UN hat ‖·‖U als Norm, wahrend die Dualnorm definitionsgemaß
‖v‖V ′N
:= sup {|(v, u)U | / ‖u‖V : 0 �= u ∈ VN} fur v ∈ V ′N = VN (8.1.10c)
lautet. ‖·‖V ′N
ist auch auf V ′ definiert (da u ∈ VN ⊂ V ), stellt dort aber keine Norm dar, da ‖v‖V ′N
= 0 furjedes zu VN orthogonale v. Ein Zusammenhang zwischen ‖·‖V ′
Nund ‖·‖V ′ ist gegeben durch
Bemerkung 8.1.7 Es gilt ‖f‖V ′N≤ ‖f‖V ′ fur alle f ∈ V ′.
Beweis. Definitionsgemaß ist ‖f‖V ′N
das Supremum von |(f, u)U | / ‖u‖V fur alle u ∈ VN\{0}. Vergroßert manVN\{0} zu V \{0}, vergroßert sich auch das Supremum, das jetzt ‖f‖V ′ definiert.
Gemaß Lemma 6.5.1 gibt es zu a(·, ·) : VN × VN → R einen zugehorigen Operator4
LN : VN → V ′N , sodass a(u, v) = (LNu, v)U fur alle u, v ∈ VN . (8.1.11a)
Hierbei schreiben wir (·, ·)U fur 〈·, ·〉V ′N×VN
(vgl. Bemerkung 6.3.12).P : RN → VN kann wegen VN ⊂ V auch als Abbildung P : RN → V angesehen werden. Die zu P
adjungierte Abbildung P � ∈ L(V ′,RN ) ist durch
〈P ∗u,v〉 = (u, Pv)U fur alle u ∈ V ′, v ∈ RN . (8.1.11b)
definiert (vgl. (6.3.4)).
Ubungsaufgabe 8.1.8 a) Man zeige: Der Kern von P � ist V ⊥N ⊂ U (Orthogonalraum von VN ⊂ U bezuglichdes Skalarproduktes (·, ·)U ). P �|VN : VN → RN ist ein Isomorphismus. Der Vektor P ∗u ∈ RN hat dieKomponenten (P ∗u)j = (u, bj)U mit dem Basiselement bj aus (8.1.5).
b) Da P−1 : VN → RN existiert (vgl. Bemerkung 8.1.1), konnen wir
Cp := ‖P−1‖RN←UN= max
{‖P−1u‖RN/ ‖u‖U : 0 �= u ∈ VN
}(8.1.12)
definieren, wobei ‖·‖ = ‖·‖RN die Euklidische Norm des RN ist. Man zeige: Die Matrix P �P : RN → RN hateine Inverse mit der Spektralnorm ‖(P �P )−1‖ ≤ C2
P .c) Man zeige:
QN := P (P �P )−1P � : U → U (8.1.13)
ist die (bezuglich ‖·‖U ) orthogonale Projektion auf UN = VN . Weiterhin gilt QN ∈ L(V ′, V ).
4Schreibt man aN (·, ·) fur die Beschrankung von a(·, ·) auf VN × VN , so wird augenfalliger, dass a und aN zu verschiedenenOperatoren L und LN fuhren. Zur Vereinfachung verwenden wir jedoch in beiden Fallen das Symbol a(·, ·).

118 8. Die Methode der finiten Elemente
Lemma 8.1.9 Seien LN ∈ L(VN , V′N ) der zu a(·, ·) : VN × VN → R und L ∈ L(V, V ′) der zu a(·, ·) :
V ×V → R gehorige Operator. Zwischen den Operatoren LN , L und der Systemmatrix L gelten die folgendenBeziehungen:
L = P ∗LP = P ∗LNP : V → V ′, (8.1.14a)
LN = P ∗−1LP−1 : VN → V ′N , (8.1.14b)LN ist die Beschrankung von QNL und QNLQN auf VN . (8.1.14c)
Die ersten beiden Gleichungen entsprechen dem folgenden kommutativen Diagramm:
VL−→ V ′ (kontinuierliche Ebene)
P ↑ ↓ P ∗
RN L−→ RN (Abbildung als Matrix, Diskretisierungsebene)P ↓↑ P−1 P ∗ ↓↑ P ∗−1
VNLN−→ V ′N (abstrakte Abbildung, Diskretisierungsebene)
Beweis. a) Fur alle u,v ∈ RN gilt
〈Lu,v〉 =Bemerkung 8.1.4
a(Pu, Pv) ={
(LNPu, Pv)U = 〈P ∗LNPu,v〉 ,(LPu, Pv)U = 〈P ∗LPu,v〉 ,
was (8.1.14a) beweist.b) Sei u ∈ VN . Da das Bild von QNLu in V ′N = UN liegt, ist (LNu, v)U = (QNLu, v)U fur alle v ∈ UN
nachzuweisen, was aus (LNu, v)U = a(u, v) und (QNLu, v)U =QN=Q∗
N
(Lu,QNv)U =v∈UN
(Lu, v)U = a(u, v)folgt.
Gemaß Bemerkung 6.3.12 schreiben wir (f, v)U fur f(v). Wenn v = Pv, folgt f(v) = (f, Pv)U = 〈P �f,v〉aus (8.1.11b). Mit Bemerkung 8.1.4 ergibt sich somit
f = P ∗f (8.1.15)
fur die rechte Seite f in Gleichung (8.1.9) (vgl. Ubungsaufgabe 8.1.8a).Im Falle des kontinuierlichen Variationsproblems garantierte die V-Elliptizitat die eindeutige Losbarkeit.
Die gleiche Bedingung reicht auch im diskreten Fall:
Satz 8.1.10 Es gelte (8.1.3). Die Bilinearform sei V-elliptisch: a(u, u) ≥ CE ‖u‖2V fur alle u ∈ V mit
CE > 0. Dann ist die Systemmatrix L aus Gleichung (8.1.9) nichtsingular und die Ritz-Galerkin-LosunguN ∈ VN erfullt
‖uN‖V ≤ 1CE
‖f‖V ′N≤ 1CE
‖f‖V ′ . (8.1.16)
Beweis. L ist nichtsingular, da fur jedes u �= 0 auch Pu �= 0, also
〈Lu,u〉 = a(Pu,Pu) ≥ CE ‖Pu‖2V > 0
und damit insbesondere Lu �= 0. Nach Ubungsaufgabe 6.5.6a ist a(·, ·) auch VN -elliptisch mit der gleichenKonstanten CE . Gemaß Satz 6.5.8 gilt ‖L−1
N ‖V ′N←VN
≤ 1/CE, d.h. ‖uN‖V = ‖L−1N f‖V ≤ C−1
E ‖f‖V ′N
. Diezweite Ungleichung in (8.1.16) ergibt sich aus Bemerkung 8.1.7.
Ubungsaufgabe 8.1.11 Man zeige: a) Ist a(·, ·) symmetrisch, so ist auch die Matrix L symmetrisch.b) Ist a(·, ·) symmetrisch und V-elliptisch, so ist L positiv definit. Unter den gleichen Voraussetzungen ist
die Ritz- Galerkin-Losung uN die Losung des folgenden Minimierungsproblems (vgl. Satz 6.5.12):
J(uN ) ≤ J(u) := a(u, u) − 2f(u) fur alle u ∈ VN .
8.1.3 Beispiele
Die folgenden, sehr niederdimensionalen Beispiele sollen das Prinzip der Galerkin-Diskretisierung illustrieren.

8.1 Das Ritz-Galerkin-Verfahren 119
Beispiel 8.1.12 Die Randwertaufgabe laute
−Δu = 1 in Ω = (0, 1) × (0, 1) , u = 0 auf Γ.
Die schwache Formulierung ist durch (8.1.1) mit
V = H10 (Ω), a(u, v) =
∫Ω
〈∇u,∇v〉dx =∫ 1
0
∫ 1
0
(uxvx + uyvy) dxdy, f(v) =∫ 1
0
∫ 1
0
vdxdy
gegeben. Die Funktionen
b1(x, y) = sin(πx) sin(πy), b2(x, y) = sin(3πx) sin(πy),b3(x, y) = sin(πx) sin(3πy), b4(x, y) = sin(3πx) sin(3πy)
erfullen die Randbedingung u = 0 auf Γ und gehoren somit zu V = H10 (Ω). Sie bilden die Basis von VN =
V4 := span{b1, . . . , b4} ⊂ V . Die Matrixelemente Lii = a(bi, bi) errechnet man zu
L11 = π2/2, L22 = L33 = 5π2/2, L44 = 9π2/2.
Im Ubrigen erweist sich die gewahlte Basis als a(·, ·)-orthogonal:
Lij = 0 fur i �= j,
sodass die Systemmatrix L diagonal ist. Weiter findet man fur fi = f(bi) =∫Ωbi(x, y)dxdy die Werte
f1 = 4/π2, f2 = f3 = 4/(3π2), f4 = 4/(9π2).
u = L−1f ergibt sich folglich zu
u1 = 8/π4, u2 = u3 = 8/(15π4), u4 = 8/(81π4),
und die Ritz-Galerkin-Losung lautet
uN (x, y) =8π4
[sin(πx) sin(πy) +
115
(sin(3πx) sin(πy) + sin(πx) sin(3πy)
)+
181
sin(3πx) sin(3πy)].
Die Ritz-Galerkin-Losung und die exakte Losung ausgewertet in x = y = 1/2 ergeben
uN(12,12) =
2848405
π−4 = 0.072 191 40 . . . ,
u(12,12) =
∞∑ν,μ=0
16π4
(−1)ν+μ
(1 + 2ν) (1 + 2μ)[(1 + 2ν)2 + (1 + 2μ)2
] = 0.073 671 3 . . .
Beispiel 8.1.13 (naturliche Randbedingungen) Die Randwertaufgabe sei
−Δu = π2 cos(πx) in Ω = (0, 1)× (0, 1) , ∂u/∂n = 0 auf Γ.
Die Losung lautet u = cosπx+ const. Die schwache Formulierung ist durch (8.1.1) mit
V = H1(Ω), a(u, v) =∫ 1
0
∫ 1
0
(uxvx + uyvy) dxdy, f(v) = π2
∫ 1
0
∫ 1
0
v(x, y) cos(πx)dxdy
gegeben. Die Randwertaufgabe hat eine eindeutige Losung in W := {v ∈ V :∫Ω vdxdy = 0}. Die Basis-
funktionenb1(x, y) := x− 1
2 , b2(x, y) :=(x− 1
2
)3
liegen in W . Die Systemmatrix L und der Vektor f lauten
L =[
1 1/41/4 9/80
], f =
[−2
− 32 + 12
π2
], sodass u = L−1f =
[3 − 60/π2
−20 + 240/π2
].
Die Ritz-Galerkin-Losung ist uN(x, y) = (3− 60/π2)(x− 1/2)− (20− 240/π2)(x− 1/2)3. Die Losung erfulltdie Randbedingung ∂u/∂n = 0 ebenso wie die Differentialgleichung nur naherungsweise:
∂uN/∂n = 12 − 120/π2 = −0.158 54 . . .
In x = 1/4 lautet die Naherung: uN (1/4, y) = −7/16 + 45/(4π2) = 0, 702 36 . . ., wahrend u(1/4, y) =cosπ/4 = 0, 707 1 . . . die exakte Losung ist.

120 8. Die Methode der finiten Elemente
8.1.4 Diskrete inf-sup-Bedingung
Im Folgenden untersuchen wir den Fall, dass a(·, ·) zwar nicht mehr V-elliptisch, aber noch V-koerziv ist. DieV-Koerzivitat von a(·, ·) garantierte, dass entweder das Problem (8.1.1) losbar oder λ = 0 ein Eigenwert ist.Setzt man die V-Koerzivitat und die Losbarkeit der Aufgabe (8.1.1) voraus, so kann man daraus noch nichtdie Losbarkeit des diskreten Problems (8.1.4) ableiten.
Beispiel 8.1.14 Sei Ω = (0, 1) . a(u, v) :=∫ 1
0 (u′v′−10uv)dx ist H10 (0, 1)-koerziv und das Variationsproblem
a(u, v) = f(v) :=∫ 1
0gvdx (v ∈ H1
0 (0, 1)) ist eindeutig losbar. VN sei durch b1(x) = x(1 − x) ∈ V = H10 (0, 1)
aufgespannt (d.h. N = 1). Das diskrete Problem (8.1.4) ist wegen L = 0 nicht losbar.
Ersetzt man in (6.5.4a) aus Lemma 6.5.3 den Raum V durch VN , so erhalt man die Bedingung
infu∈VN , ‖u‖V =1
supv∈VN , ‖v‖V =1
|a(u, v)| = εN > 0. (8.1.17)
Lemma 6.5.3 zusammen mit Ubungsaufgabe 6.5.4 beweist den
Satz 8.1.15 Das Problem (8.1.4) ist genau dann fur alle f ∈ V ′ losbar, wenn (8.1.17) fur ein εN > 0 gilt.Aus (8.1.17) folgt die Abschatzung (8.1.16) mit εN statt CE:
‖uN‖V ≤ 1εN
‖f‖V ′N≤ 1εN
‖f‖V ′ . (8.1.18)
Da (8.1.4) aquivalent zum Gleichungssystem (8.1.9) ist, hat man den
Zusatz 8.1.16 Die Matrix L ist genau dann nicht singular, wenn (8.1.17) fur ein εN > 0 gilt.
Ubungsaufgabe 8.1.17 Bedingung (8.1.17) ist aquivalent zu (8.1.17’) wie auch zu (8.1.17”):
‖u‖V ≤ 1εN
supv∈VN , ‖v‖V =1
|a(u, v)| fur alle u ∈ VN , (8.1.17’)
‖L−1N ‖VN←V ′
N=
1εN
(LN aus (8.1.11a)). (8.1.17”)
Achtung. Die Bedingung (8.1.17) fur VN folgt nicht aus der analogen Bedingung (6.5.4a) fur V . Manbeachte aber die asymptotische Aussage aus Satz 8.2.8.
Die Abschatzung (8.1.17”) garantiert zwar die Existenz von L−1, sagt aber nichts uber die Matrixkonditioncond(L) = ‖L‖ ‖L−1‖ aus, die fur die Empfindlichkeit des Gleichungssystems Lu = f entscheidend ist. Wahltman z.B. fur a(u, v) :=
∫ 1
0u′v′dx die Monombasis bi = xi (i = 1, . . . , N), so erhalt man die sehr schlecht
konditionierte Matrix Lij = ij/(i + j − 1). Die Kondition von L wurde optimal, wenn man die Basisa(·, ·)-orthogonal wahlt: a(bi, bj) = δij , wie es in Beispiel 8.1.12 bis auf einen Skalierungsfaktor der Fall ist.
8.2 Fehlerabschatzungen
8.2.1 Quasioptimalitat
Im Falle der Differenzenverfahren sind die Losung u und die Gitterfunktion uh auf verschiedenen Mengendefiniert. Die Ritz-Galerkin-Losung uN ist dagegen direkt mit u vergleichbar. Man kann den Diskretisierungs-fehler durch ‖u − uN‖V oder auch ‖u − uN‖U messen. Wir werden zunachst nur die V-Norm verwenden.Fehlerabschatzungen mit ‖·‖U werden in §8.4.4 folgen.
Sei u die Losung von (8.1.1): a(u, v) = f(v) fur v ∈ V . Gehort (zufallig oder auf Grund geschickter Wahlvon VN ) u auch zu VN , so erfullt uN := u auch (8.1.4). Das heißt: Der Diskretisierungsfehler ist null, wennu ∈ VN . Wir werden nun zeigen: Je “naher” u an VN , desto kleiner ist der Diskretisierungsfehler.
Satz 8.2.1 (Cea) Es gelte (8.1.2), (8.1.3), (8.1.17). u ∈ V sei eine Losung der Aufgabe (8.1.1), wahrenduN ∈ VN die Ritz-Galerkin-Losung von (8.1.4) sei. Dann gilt die Abschatzung
‖u− uN‖V ≤(
1 +CS
εN
)inf
w∈VN
‖u− w‖V (CS aus (8.1.2), εN aus (8.1.17)). (8.2.1)

8.2 Fehlerabschatzungen 121
Die Aussage (8.2.1) bedeutet die Quasioptimalitat der diskreten Losung uN , da ihr Fehler bis auf einenFaktor mit dem bestmoglichen ubereinstimmt. Dies ist einerseits eine sehr starke Aussage (weil der Fehlerhochstens noch um einen Faktor verbesserbar ware), andererseits ist die Aussage schwach, da der Best-approximationsfehler infw∈VN ‖u− w‖V unbekannt bleibt. infw∈VN ‖u− w‖V ist der Abstand der Funktionu von VN und wird im Folgenden abgekurzt durch
d(u, VN ) := infw∈VN
‖u− w‖V . (8.2.2)
Beweis von Satz 8.2.1. u erfullt a(u, v) = f(v) fur alle v ∈ V , also insbesondere auch fur v ∈ VN ⊂ V . Daauch a(uN , v) = f(v) fur v ∈ VN , folgt
a(u− uN , v) = 0 fur alle v ∈ VN . (8.2.3)
Fur beliebige v, w ∈ VN mit ‖v‖V = 1 schließt man deshalb auf
a(uN − w, v) = a([uN − u
]+ [u− w] , v
)= a (u− w, v)
und∣∣a(uN − w, v)
∣∣ ≤ CS ‖u− w‖V ‖v‖V = CS ‖u− w‖V . (*)
(8.1.17’) zeigt ∥∥uN − w∥∥
V≤ 1
εNsup
v∈VN , ‖v‖V =1
∣∣a(uN − w, v)∣∣ ≤
(∗)
CS
εN‖u− w‖V .
Die Dreiecksungleichung liefert
‖u− uN‖V ≤ ‖u− w‖V + ‖w − uN‖V ≤(
1 +CS
εN
)‖u− w‖V .
Da w ∈ VN beliebig ist, folgt Behauptung (8.2.1).Man beachte, dass in Satz 8.2.1 nicht die eindeutige Losbarkeit der Aufgabe (8.1.1), sondern nur die
Existenz mindestens einer Losung vorausgesetzt wurde. In Satz 8.2.2 wird die (eindeutige) Existenz einerLosung von Lu = f auf den Voraussetzungen (8.1.17) an die diskreten Aufgaben folgen.
8.2.2 Konvergenz der Ritz-Galerkin-Losungen
Wenn der Diskretisierungsfehler gegen null streben soll, braucht man eine Folge von Unterraumen VNi ⊂ V ,die im folgenden Sinne gegen V streben:
Satz 8.2.2 V (i) := VNi ⊂ V (i ∈ N) sei eine Folge von Unterraumen mit
limi→∞
d(u, V (i)) = 0 fur alle u ∈ V. (8.2.4a)
Bedingung (8.1.17) gelte mit εNi ≥ ε > 0 fur alle i ∈ N. Ferner sei (8.1.2) (Stetigkeit von a(·, ·)) vorausge-setzt. Dann existiert eine eindeutige Losung u der Aufgabe (8.1.1), und die Ritz-Galerkin-Losung u(i) := uNi
konvergiert gegen u:‖u− u(i)‖V → 0 fur i→ ∞ .
Hinreichend fur (8.2.4a) ist
V (1) ⊂ V (2) ⊂ . . . ⊂ V (i−1) ⊂ V (i) ⊂ . . . ⊂ V,
∞⋃i=1
V (i) dicht in V. (8.2.4b)
Beweis. 1) Es sei zunachst die Existenz einer Losung u angenommen.1a) Abschatzung (8.2.1) beweist die Konvergenz: ‖u−u(i)‖V ≤ (1+ CS
εNi)d(u, V (i)) ≤ (1+ CS
ε )d(u, V (i)) → 0.
1b) Wir wollen nun zeigen, dass (8.2.4a) aus (8.2.4b) folgt. Die Inklusion V (i−1) ⊂ V (i) impliziertd(u, V (i)) ≤ d(u, V (i−1)). d(u, V (i)) ware daher Nullfolge, wenn zu jedem ε > 0 ein i mit d(u, V (i)) ≤ ε

122 8. Die Methode der finiten Elemente
existierte. Nach Voraussetzung (8.2.4b) gibt es zu jedem u ∈ V und ε > 0 ein w ∈⋃
i V(i) mit ‖u− w‖V ≤ ε.
Damit gilt w ∈ V (i) fur ein i ∈ N, und d(u, V (i)) ≤ ‖u− w‖V ≤ ε beweist (8.2.4a). Die Konvergenz u(i) → ubeweist die Eindeutigkeit der Losung u.
2) Als Nachstes ist zu zeigen, dass das Bild W := {Lv : v ∈ V } ⊂ V ′ des zu a(·, ·) gehorenden OperatorsL : V → V ′ abgeschlossen ist. Fur jedes f ∈ W gibt es ein u ∈ V mit Lu = f , sodass Teil 1) desBeweises die Konvergenz u(i) → u beweist. Da ‖u(i)‖V ≤ ‖f‖V ′ /ε, folgt ‖u‖V = lim ‖u(i)‖V ≤ ‖f‖V ′ /ε.Sei fν ∈ W eine Folge mit fν → f� in V ′ und fν = Luν. Die Cauchy-Konvergenz ‖fν − fμ‖V ′ → 0 beweist‖uν − uμ‖V ≤ ‖fν − fμ‖V ′ /ε → 0, sodass u� = limuν ∈ V existiert. Die Stetigkeit von L ∈ L(V, V ′) zeigtf� = lim fν = limLuν = Lu� und somit f� ∈W . Also ist W abgeschlossen.
3) Um die Existenz einer Losung u der Aufgabe (8.1.1) zu beweisen, ist die Surjektivitat von L : V → V ′
zu zeigen. Ware L nicht surjektiv (d.h. W �= V ′), gabe es ein f ∈ W⊥ mit ‖f‖V ′ = 1. JV : V → V ′ sei derRiesz-Isomorphismus (vgl. Folgerung 6.3.7). Man setze v := −J−1
V f ∈ V . Es gilt
f(v) = 〈f, v〉V ′×V = − (f, f)V ′ = −1, a(u, v) = 〈Lu, v〉V ′×V = − (Lu, f)V ′ =f∈W⊥ 0 fur alle u ∈ V.
u(i) ∈ V (i) seien die Ritz-Galerkin-Losungen. Auch fur sie musste a(u(i), v) = 0 gelten, d.h.
a(u(i), v) − f(v) = 1.
Wir zerlegen v in v(i) + w(i), wobei v(i) ∈ V (i) und w(i)⊥V (i). Gemaß (8.2.4a) (mit v anstelle von u) kann‖w(i)‖V → 0 garantiert werden. Dies zeigt
1 = a(u(i), v) − f(v) = a(u(i), v(i)) − f(v(i)) + a(u(i), w(i)) − f(w(i)) = a(u(i), w(i)) − f(w(i))
und 1 =∣∣∣a(u(i), v) − f(v)
∣∣∣ ≤ [CS‖u(i)‖V + ‖f‖V ′
]‖w(i)‖V .
Da ‖u(i)‖V ≤ ‖f‖V ′ /ε gleichmaßig beschrankt ist und ‖w(i)‖V → 0, ergibt sich ein Widerspruch. Also mussL surjektiv sein, sodass zu jedem f ∈ V ′ eine Losung u von Lu = f , d.h. der Aufgabe (8.1.1), existiert.
Zusatz 8.2.3 Die Bedingung (8.1.17) mit εNi ≥ ε > 0 aus Satz 8.2.2 ist mit ε := CE erfullt, falls a(·, ·)V-elliptisch mit der Konstanten CE > 0 ist: a(u, u) ≥ CE ‖u‖2
V .
Ubungsaufgabe 8.2.4 Man zeige: (8.2.4a) impliziert, dass⋃∞
i=1 V(i) und
⋃∞i=1 Vi dicht in V liegen.
8.2.3 Ritz-Projektion
QN sei die orthogonale Projektion auf VN (vgl. Ubungsaufgabe 8.1.8c). Die Faktoren L : V → V ′,QN : V ′ → V ′N = VN und L−1
N : V ′N = VN → VN ⊂ V ergeben die Komposition
SN := L−1N QNL : V → VN ⊂ V. (8.2.5)
Ubungsaufgabe 8.2.5 Man beweise die Darstellung
SN = PL−1P ∗L . (8.2.5’)
Lemma 8.2.6 (Ritz-Projektion) SN ist Projektion auf VN und wird Ritz-Projektion genannt. Sie bildetdie Losung u der Aufgabe (8.1.1) in die Ritz-Galerkin-Losung uN ∈ VN ab: uN = SNu. Unter den Voraus-setzungen (8.1.2) und (8.1.17) gilt die Abschatzung
‖SN‖V←V ≤ CS/εN (CS aus (8.1.2), εN aus (8.1.17)). (8.2.6)
Eine zu (8.2.5) aquivalente Definition von SN lautet
SNu ∈ VN und a(SNu, v) = a(u, v) fur alle v ∈ VN , u ∈ V. (8.2.7)
Beweis. Da a(u, v) = 〈Lu, v〉V ′×V = (Lu, v)U = (Lu,QNv)U = (QNLu, v)U fur alle v ∈ VN , ist SNu aus(8.2.7) die Ritz-Galerkin-Losung zur rechten Seite f := QNLu ∈ V ′, d.h. SNu = L−1
N QNLu. Umgekehrtschließt man analog und beweist so die Aquivalenz der Definitionen (8.2.5) und (8.2.7).
2) (8.2.7) zeigt, dass u ∈ VN zu SNu = u fuhrt. Somit ist S2N = SN , d.h. SN ist eine Projektion.
Abschatzung (8.2.6) ergibt sich aus ‖SNu‖V ≤ ‖QNLu‖V ′N/εN (vgl. Beweis von (8.1.16)) und ‖QNLu‖V ′
N=
‖Lu‖V ′N≤ ‖Lu‖V ′ ≤ CS ‖u‖V mit CS aus (8.1.2) (vgl. Bemerkung 8.1.7).

8.2 Fehlerabschatzungen 123
Bemerkung 8.2.7 a(·, ·) sei V-elliptisch und symmetrisch. |||v|||V :=√a(v, v) ist eine zu ‖·‖V aquivalente
Norm. Die Ritz-Projektion SN ist bezuglich ||| · |||V eine orthogonale Projektion auf VN . Insbesondere gilt
|||SN |||V←V ≤ 1. (8.2.8)
Beweis. Das zu ||| · |||V gehorige Skalarprodukt ist a(·, ·), sodass a(SNv, w) = a(v, SNw) zu zeigen ist. DieDefinition (8.2.7) beweist a(SNv, SNw) = a(v, SNw), da SNw ∈ VN . Symmetrie von a(·, ·) und Vertauschungvon v und w liefert a(SNv, w) = a(w, SNv) = a(SNw, SNv) = a(SNv, SNw), sodass a(SNv, w) = a(v, SNw).(8.2.8) ergibt sich aus Bemerkung 6.3.8.
Bemerkung 8.2.7 zeigt noch einmal, dass die Ritz-Galerkin-Losung uN = SNu die im Sinne der Norm||| · |||V beste Approximation von u in VN ist. Diese Aussage ist aquivalent mit der Variationsformulierung alsMinimierungsaufgabe J(uN ) ≤ J(v) fur alle v ∈ VN (vgl. Ubungsaufgabe 8.1.11b). Die Stabilitatsbedingung(8.1.17) mit εN ≥ ε > 0 ist außer fur V-elliptische Bilinearformen schwer nachweisbar. Der folgende Satzzeigt jedoch, dass diese Bedingung fur hinreichend gut approximierende Unterraume gilt.
Satz 8.2.8 Die Bilinearform a(·, ·) sei V-koerziv, wobei V ⊂ U ⊂ V ′ stetige, dichte und kompakte Ein-bettungen sind. Das Problem (8.1.1) sei fur alle f ∈ V ′ losbar. Fur die Unterraume VNi ⊂ V gelte (8.2.4a).Fur hinreichend große i ist dann die Stabilitatsbedingung (8.1.17) mit εNi ≥ ε > 0 erfullt. Der Beweis wirdim Anschluss an Lemma 11.2.7 nachgeholt werden.
8.2.4 Weitere Stabilitats- und Fehlerabschatzungen
In der Variationsformulierung (8.1.1) konnen sowohl die rechte Seite f als auch die Bilinearform a gestortwerden:
suche uN ∈ VN , sodass a(uN , vN ) = f(vN ) fur alle vN ∈ VN , (8.2.9a)
wobei
a(zN , vN ) = a(zN , vN ) + δa(zN , vN ), f(vN ) = f(vN ) + δf(vN ) fur alle zN , vN ∈ VN . (8.2.9b)
Die Storungen δa und δf brauchen nur auf VN × VN bzw. VN definiert sein.Eine ubliche Quelle der Storung ist numerische Quadratur: Das Integral
∫Ωfvdx wird durch eine
Quadraturformel ersetzt (vgl. Ubungsaufgabe 8.3.5), die auf Punktauswertungen des Integranden fv be-ruht. Dies ist offenbar nur moglich, wenn fv stetig ist. Da v ∈ V fur d ≥ 2 keine Stetigkeit garantiert(vgl. Beispiel 6.2.6), ist die Storung δf in der Norm ‖·‖−1 unbeschrankt. Ansatzfunktionen vN ∈ VN habendagegen bessere Glattheitseigenschaften. Allerdings muss die Norm ‖·‖−1 durch ‖·‖V ′
Naus (8.1.10c) ersetzt
werden. Entsprechendes gilt fur δa.
Satz 8.2.9 (Erstes Lemma von Strang) Neben (8.1.2) und (8.1.3) seien δa : VN × VN → R undδf : VN → R stetig. Ferner sei a = a + δa VN -elliptisch. u und uN seien die Losungen von (8.1.1) und(8.1.4). Dann gilt fur die Losung uN des gestorten Problems (8.2.9a)
‖u− uN‖V ≤ const[‖δf‖V ′
N+ inf
zN∈VN
{‖u− zN‖V + ‖δa(zN , ·)‖V ′
N
} ]. (8.2.10)
Beweis. Fur beliebige zN , vN ∈ VN gilt
a(uN − zN , vN ) = a(uN , vN ) − a(zN , vN ) − δa(zN , vN ) =(8.2.9a)
f(vN ) − a(zN , vN ) − δa(zN , vN )
= f(vN ) + a(u, vN ) − f(vN )︸ ︷︷ ︸=0 nach (8.1.1)
− a(zN , vN ) − δa(zN , vN )
= δf(vN ) + a(u− zN , vN ) − δa(zN , vN ).
Mit vN := uN − zN folgt
CE‖uN − zN‖2V ≤ a(uN − zN , uN − zN) = δf(uN − zN) + a(uN − zN , uN − zN) − δa(zN , uN − zN )
= ‖δf‖V ′N‖uN − zN‖V + CS‖u− zN‖V ‖uN − zN‖V + ‖δa(zN , ·)‖V ′
N‖uN − zN‖V .

124 8. Die Methode der finiten Elemente
Nach Kurzen beider Seiten durch ‖uN − zN‖V folgt
CE‖uN − zN‖V ≤ ‖δf‖V ′N
+ CS‖u− zN‖V + ‖δa(zN , ·)‖V ′N.
Da zN ∈ VN beliebig ist, folgt (8.2.10) aus ‖u − uN‖V ≤ ‖u − zN‖V + ‖zN − uN‖V und der vorherigenUngleichung.
8.3 Finite Elemente
Ein Spezialfall des Ritz-Galerkin-Verfahrens ist die Finite-Elemente-Methode (oft mit FEM abgekurzt). ZumZweck der Einfuhrung wird zunachst der eindimensionale Fall behandelt.
8.3.1 Einfuhrung: Lineare Elemente fur Ω = (a, b)
Sobald die Dimension N = dimVN großer wird, zeigt sich ein entscheidender Nachteil des allgemeinen Ritz-Galerkin-Verfahrens. Die Matrix L ist im Allgemeinen vollbesetzt, d.h. es ist Lij �= 0 fur alle i, j = 1, . . . , N .Man braucht somit N2 Integrationen, um Lij = a(bj , bi) =
∫Ω. . . exakt oder naherungsweise zu bestimmen.
Die abschließende Auflosung des Gleichungssystems Lu = f wurde O(N3) Rechenoperationen benotigen.Sobald N nicht mehr klein ist, erweist sich das allgemeine Ritz-Galerkin-Verfahren daher als unbrauchbar.Ein Blick auf die Differenzenverfahren zeigt, dass die dort auftretenden Matrizen schwach besetzt sind.Damit liegt es nahe zu fragen, ob es moglich ist, die Basis {b1, . . . , bN} so zu wahlen, dass die SystemmatrixLij = a(bj , bi) ebenfalls schwach besetzt ist. Die gunstigste Situation lage vor, wenn bi bezuglich a(·, ·)orthogonal ware: a(bj , bi) = 0 fur i �= j. Eine solche Basis lasst sich aber nur fur spezielle Modellproblemewie etwa in Beispiel 8.1.12 finden. Stattdessen grunden sich die weiteren Uberlegungen auf
Bemerkung 8.3.1 Die Bilinearform a(·, ·) sei durch (7.2.6) gegeben. Bi sei das Innere des Tragers Tr(bi)der Basisfunktion bi, d.h. Bi := Tr(bi)\∂Tr(bi). Eine hinreichende Bedingung fur Lij = a(bj , bi) = 0 istBi ∩Bj = ∅.
Beweis. Die Integration a(bj , bi) =∫Ω. . . kann auf Bi ∩Bj reduziert werden.
x1 x2 x3 x4
y
x0
1(b)
(a)
(b)
0 x =b5a=x
Abb. 8.3.1. a) stuckweise lineare Funk-tion, b) Basisfunktionen zu x1 und x4
Um Bemerkung 8.3.1 anwenden zu konnen, sollten die Basis-funktionen moglichst kleine Trager haben. Bei der Konstruktion gehtman im Allgemeinen umgekehrt vor: Man definiert Zerlegungen von Ωin kleine Teilstucke, die sogenannten finiten Elemente, aus denen sichdie Trager von bi zusammensetzen werden. Zur Einfuhrung untersuchenwir die eindimensionale Randwertaufgabe
−u′′(x) = g(x) fur a < x < b, u(a) = u(b) = 0. (8.3.1)
Eine Zerlegung des Intervalles [a, b] sei durch a = x0 < x1 < . . . < xN+1 = b gegeben. Die Teilintervalle seienmit Ii := (xi−1, xi) (1 ≤ i ≤ N + 1) bezeichnet. Als Unterraum VN ⊂ H1
0 (a, b) wahlen wir die stuckweiselinearen Funktionen:
VN ={u ∈ C0([a, b]) : u|Ii linear fur alle 1 ≤ i ≤ N + 1 und u(a) = u(b) = 0
}(8.3.2)
(vgl. Abbildung 8.3.1). Die Stetigkeit “u ∈ C0([a, b])” ist gleichbedeutend mit der Stetigkeit in den Knoten-punkten xi (1 ≤ i ≤ N): u(xi + 0) = u(xi − 0).
Bemerkung 8.3.2 u ∈ VN ist eindeutig durch die Knotenwerte u(xi) (1 ≤ i ≤ N) gegeben:
u(x) = [u(xi) (xi+1 − x) + u(xi+1) (x− xi)] / [xi+1 − xi] fur x ∈ Ii+1, 0 ≤ i ≤ N, (8.3.3a)
wobei u(x0) = u(xN+1) = 0. Aus Satz 6.2.43 ergibt sich VN ⊂ H10 (a, b). Die (schwache) Ableitung u′ ∈
L2(a, b) ist stuckweise konstant:
u′(x) = [u(xi+1) − u(xi)] / [xi+1 − xi] fur x ∈ Ii+1, 0 ≤ i ≤ N. (8.3.3b)

8.3 Finite Elemente 125
Die Basisfunktionen konnen durch
bi(x) =
⎧⎨⎩ (x− xi−1) / (xi − xi−1) fur xi−1 < x ≤ xi
(xi+1 − x) / (xi+1 − xi) fur xi < x < xi+1
0 sonst
⎫⎬⎭ (1 ≤ i ≤ N) (8.3.4)
definiert werden (vgl. Abbildung 8.3.1b). Bemerkung 8.3.2 beweist die
Bemerkung 8.3.3 Es gilt die Darstellung u =∑N
i=1 u(xi)bi. Die Trager der Basisfunktionen bi sindTr(bi) = Ii−1 ∪ Ii = [xi−1, xi+1] . Bi aus Bemerkung 8.3.1 ist Bi = (xi−1, xi+1).
Die zur Randwertaufgabe (8.3.1) gehorende schwache Formulierung lautet a(u, v) = f(v) mit
a(u, v) :=∫ b
a
u′v′dx, f(v) :=∫ b
a
gvdx fur u, v ∈ H10 (a, b).
Gemaß Bemerkung 8.3.1 gilt fur die Matrixelemente Lij = 0, sobald |i− j| ≥ 2, da dann Bi ∩ Bj = ∅. Fur|i− j| ≤ 1 erhalt man
Li,i−1 = a(bi−1, bi) =∫ xi
xi−1
−1xi − xi−1
1xi − xi−1
dx =−1
xi − xi−1, (8.3.5a)
Li,i = a(bi, bi) =∫ xi
xi−1
(xi − xi−1)−2 dx+
∫ xi+1
xi
(xi+1 − xi)−2 dx =
1xi − xi−1
+1
xi+1 − xi,
Li,i+1 = a(bi+1, bi) = Li+1,i =−1
xi+1 − xi.
Die rechte Seite f = (f1, . . . , fN)� ist durch (8.3.5b) gegeben:
fi = f(bi)∫ xi+1
xi−1
gbidx =1
xi − xi−1
∫ xi
xi−1
g(x) (x− xi−1) dx+1
xi+1 − xi
∫ xi+1
xi
g(x) (xi+1 − x) dx. (8.3.5b)
Bemerkung 8.3.4 Das durch (8.3.5a,b) definierte Gleichungssystem Lu = f ist tridiagonal, also ins-besondere schwach besetzt. Fur eine aquidistante Unterteilung xi := a+ ih mit h := (b − a)/(N + 1) lautendie Koeffizienten
Li,i±1 = −1/h, Lii = 2/h, fi = h
∫ 1
0
[g(xi + th) + g(xi − th)](1 − t)dt.
Falls g ∈ C0(a, b), gilt nach dem Zwischenwertsatz fi = hg(xi + Θih), |Θ| < 1. Damit ist das Gleichungs-system Lu = f bis auf eine Skalierung identisch mit der Differenzengleichung Lhuh = fh aus Abschnitt 4.1,wenn man fh durch fh(xi) := fi = g(xi + Θih) statt durch fh(xi) = g(xi) definiert: L = hLh, f = hfh.
Dieses Beispiel zeigt, dass es moglich ist, Basisfunktionen mit kleinen Tragern zu finden, sodass Lverhaltnismaßig leicht berechenbar ist. Außerdem zeigt sich eine Ahnlichkeit der entstehenden Diskreti-sierung mit Differenzenverfahren. Abschließend sei auf die numerische Berechnung der Integrale (8.3.5b)hingewiesen.
Ubungsaufgabe 8.3.5 Man zeige: Die Gauß-Quadraturformel5 fur∫ xi+1
xi−1gbidx mit bi als Gewichtsfunktion
und einer Stutzstelle lautet:
fi :=xi+1 − xi−1
2g
(xi+1 + xi + xi−1
3
). (8.3.5c)
Was ergibt sich fur eine aquidistante Intervallunterteilung?
Ersetzt man die Dirichlet-Randbedingung in (8.3.1) durch die Neumann-Bedingung, so ist V = H1(a, b).Der Unterraum VN ⊂ H1(a, b) ergibt sich aus (8.3.2) nach Streichung der Bedingung u(a) = u(b) = 0.Damit dimVN = N gilt, muss die Nummerierung geandert werden: Die Zerlegung von (a, b) lautet jetzta = x1 < x2 < . . . < xN = b.
5Johann Carl Friedrich Gauß, geb. 30. April 1777 in Braunschweig, gest. 23. Feb. 1855 in Gottingen

126 8. Die Methode der finiten Elemente
Ubungsaufgabe 8.3.6 Sei ∂u(a)/∂n = ga, ∂u(b)/∂n = gb und a(·, ·) wie vorher. Die Zerlegung von (a, b)sei aquidistant: xi = a+ (b − a)i/N . Wie lautet die Gleichung Lu = f? Man zeige: Lu = f hat mindestenseine Losung, falls
∫ b
a g(x)dx + ga + gb = 0.
In §8.3.2-8.3.4 diskutieren wir typische Beispiele fur Finite-Element-Funktionen in zwei Dimensionen.Weitere findet man bei Braess [12, Tabelle 2 auf Seite 63].
8.3.2 Lineare Elemente fur Ω ⊂ R2
t=12N=10 (22)t=30
N=5 (21)N=0 (8)t=6
Abb. 8.3.2. Triangulation von Ω; t:Anzahl der Dreiecke, N : Anzahl derinneren Knoten (aller Knoten)
Wir nehmen an:Ω ⊂ R2 sei Polygon. (8.3.6)
Wie in Abbildung 8.3.2 in drei Versionen angedeutet, zerlegen wir Ωin Dreiecke (“finite Elemente”). Die Zerlegung wird Triangulation ge-nannt, wobei der Name auch beibehalten wird, wenn spater andereElemente (Vierecke, Tetraeder usw.) verwendet werden.
Definition 8.3.7 T := {T1, . . . , Tt} heißt zulassige Triangulation von Ω, falls die folgenden Bedingungenerfullt sind:
Ti (1 ≤ i ≤ t) sind offene Dreiecke, (8.3.7a)Ti sind disjunkt: Ti ∩ Tj = ∅ fur i �= j, (8.3.7b)⋃
i=1,...,tT i = Ω, (8.3.7c)
fur i �= j ist T i ∩ T j
⎧⎨⎩i) entweder leer oderii) gemeinsame Seite der Elemente Ti, Tj oderiii) gemeinsame Ecke der Elemente Ti, Tj .
(8.3.7d)
Bemerkung 8.3.8 a) Die Bedingungen (8.3.7a) und (8.3.7c) implizieren die Polygongestalt von Ω, d.h. dieVoraussetzung (8.3.6).
b) Abbildung 8.3.2 zeigt nur zulassige Triangulationen. Eine unzulassige Triangulation lage z.B. vor, wennein Quadrat wie folgt zerlegt wird: , da die halbe Diagonale nicht Seite beider sich beruhrenden Dreieckeist.
T sei eine zulassige Triangulation. x heißt Knoten (von T ), falls x Eckpunkt eines Dreieckes T ∈ Tist. Dabei unterscheidet man innere und Rand-Knoten, je nachdem ob x ∈ Ω oder x ∈ ∂Ω. Sei N dieGesamtanzahl der inneren Knoten. Wir definieren VN als den Unterraum der stuckweise linearen Funktionen:
VN ={u ∈ C0(Ω) : u = 0 auf ∂Ω, auf jedem Dreieck T ∈ T stimmt u|T mit einer
linearen Funktion uberein, d.h. u(x, y) = aT,1 + aT,2x+ aT,3y auf T
}(8.3.8)
Bemerkung 8.3.2 ubertragt sich auf den vorliegenden zweidimensionalen Fall:
Bemerkung 8.3.9 a) Es gilt VN ⊂ H10 (Ω). b) Jede Funktion u ∈ VN ist durch ihre Knotenwerte u(xi) in
den inneren Knoten xi, 1 ≤ i ≤ N , eindeutig festgelegt.
Beweis. a) Beispiel 6.2.5 zeigt VN ⊂ H1(Ω). Da u = 0 auf ∂Ω, beweist Satz 6.2.43, dass VN ⊂ H10 (Ω).
b) Seien x,x′,x′′ die drei Eckpunkte von T ∈ T . Die lineare Funktion u(x, y) = ai1 + ai2x+ ai3y ist durchdie Werte u(x), u(x′), u(x′′) in T eindeutig bestimmt.
Die Umkehrung der Bemerkung 8.3.9b lautet wie folgt:
Bemerkung 8.3.10 xi (1 ≤ i ≤ N) seien die inneren Knoten von T . Fur beliebige ui (1 ≤ i ≤ N) existiertgenau ein u ∈ VN mit u(xi) = ui. Es ist dargestellt durch u =
∑Ni=1 uibi, wobei die Basisfunktionen bi durch
bi(xi) = 1, bi(xj) = 0 fur alle i �= j (1 ≤ i, j ≤ N) (8.3.9a)

8.3 Finite Elemente 127
charakterisiert sind. Ist T ∈ T ein Dreieck mit den Eckpunkten xi = (xi, yi) [xi wie in (8.3.9a)] undx′ = (x′, y′), x′′ = (x′′, y′′), so ist
bi(x, y) =(x− x′)(y′′ − y′) − (y − y′)(x′′ − x′)(xi − x′)(y′′ − y′) − (yi − y′)(x′′ − x′)
auf T. (8.3.9b)
Auf allen Dreiecken T ∈ T , die xi nicht als Eckpunkt besitzen, gilt bi|T = 0.
Beweis. Offenbar ist mit (8.3.9b) eine auf allen T ∈ T lineare Funktion gefunden, die (8.3.9a) erfullt. (8.3.9a)erzwingt die Stetigkeit in allen Knotenpunkten. Sind die Ecken xj und xk durch eine Dreieckskante direktverbunden, ergibt (8.3.9b) als Beschrankung auf die Kante die lineare Funktion bi(xj + s(xk − xj)) =sbi(xk)+ (1− s)bi(xj) mit s ∈ [0, 1] fur beide Dreiecke, die diese Kante gemeinsam haben. Damit ist bi auchauf den Kantenlinien stetig, sodass bi ∈ C0(Ω). Die Anwendung dieser Uberlegungen auf zwei Randknotenx′,x′′ mit bi(x′) = bi(x′′) = 0 ergibt bi = 0 auf ∂Ω. Folglich gehort bi zu VN .
Bemerkung 8.3.11 a) Die Dimension des durch (8.3.8) beschriebenen Unterraumes ist die Anzahl derinneren Knotenpunkte von Tb) Trager der Basisfunktion bi zum Knoten xi ist
Tr(bi) =⋃{
T : T ∈ T hat xi als Ecke}.
c) Bi sei das Innere von Tr(bi). Bi ∩Bj = ∅ gilt genau dann, wenn die Knoten xi und xj nicht direkt durcheine Kante verbunden sind.
Folgerung 8.3.12 a(u, v) =∫Ω〈∇u,∇v〉dx ist die zur Poisson-Gleichung gehorende Bilinearform. Die Inte-
grale Lij = a(bj , bi) =∑
k
∫Tk〈∇bj ,∇bi〉dx sind uber folgende Dreiecke Tk zu erstrecken:
alle Tk mit xi als Ecke, falls i = j,alle Tk mit xi und xj als Ecke, falls i �= j.
Es gilt Lij = 0, falls xi und xj nicht direkt durch eine Dreiecksseite verbunden sind.
Abb. 8.3.3. Stuckweise lineareBasisfunktion; links: Dreiecke desTragers, rechts: Funktionsskizze
Eine besonders regelmaßige Triangulation liegt vor, wenn manzunachst in Quadrate der Seitenlange h zerlegt, die anschließend in zweiDreiecke unterteilt werden ( ). Die erste und zweite Triangulation inAbbildung 8.3.2 ist von dieser Art. Wir bezeichnen sie als die “Quadrat-gittertriangulation”. Die zugehorige Basisfunktion ist in Abbildung 8.3.3wiedergegeben. Sie hat einen aus sechs Dreiecken bestehenden Trager.Man erwartet deshalb, dass die Matrix L einer Siebenpunktformel ent-spricht. Fur den Laplace-Operator erhalt man trotzdem die aus Ab-schnitt 4.2 wohlbekannte Funfpunktformel (4.2.11):
Ubungsaufgabe 8.3.13 T sei eine Quadratgittertriangulation. Ferner sei a(u, v) =∫Ω〈∇u,∇v〉dx. Die
Basisfunktionen sind durch Abbildung 8.3.3 beschrieben. Man zeige: Fur die Systemmatrix L gilt
Lii = 4, Lij = −1, falls xi − xj ∈ {(0, h) , (0,−h) , (h, 0) , (−h, 0)} , Lij = 0 sonst,
d.h. L stimmt mit der Matrix h2Lh aus (4.2.8) uberein.
Wenn auch L = h2Lh im Falle der Poisson-Gleichung −Δu = g gilt, so stimmen die Finite-Element-Diskretisierung und das Differenzenverfahren doch nicht uberein, denn h2fh hat h2g(xi) als Komponentenund weicht somit von fi =
∫Ω gbidx ab.
Die Integration∫
Ti. . .dx uber die (im Allgemeinen verschieden geformten) Dreiecke Ti ∈ T scheint
zunachst umstandlich. Fur alle i kann man jedoch∫
Ti. . . dx durch ein Integral uber das Referenzdreieck
T aus Abbildung 8.3.4 ausdrucken. Die Details finden sich in
Ubungsaufgabe 8.3.14 xi = (xi, yi) (i = 1, 2, 3) seien die Ecken von T ∈ T , und T sei das Einheitsdreieckaus Abbildung 8.3.4. Man zeige:

128 8. Die Methode der finiten Elemente
a) Φ : (ξ, η) �→ x1 + ξ(x2 − x1
)+ η
(x3 − x1
)bildet T auf T ab.
b) detΦ′ (ξ, η) = (x2 − x1) (y3 − y1) − (y2 − y1) (x3 − x1) fur alle ξ, η ∈ R ist eine Konstante.c) Die Substitutionsregel liefert∫
T
v(x, y)dxdy = [(x2 − x1) (y3 − y1) − (y2 − y1) (x3 − x1)]∫
T
v(Φ (ξ, η))dξdη. (8.3.10)
x1
x2
x3
x(0,0)
(0,1)
T
η
ξ
Φ
Φ−1
y
T~
(1,0)
Abb. 8.3.4. Referenzdreieck T
Im Allgemeinen wird man das Integral∫
T . . . dξdη uber dem Ein-heitsdreieck numerisch auswerten. Beispiele fur Integrationsformeln fin-det man bei Schwarz [75, p. 107] und Ciarlet [22, §4.1]. Die erforder-liche Ordnung der Quadraturformel wird an gleicher Stelle von Ciar-let [22] und von Witsch [88] diskutiert. Anders als Differenzenverfahrenbietet die Finite-Element-Diskretisierung die Moglichkeit, die Dreiecks-große lokal zu verandern. Die dritte Triangulation aus Abbildung 8.3.2enthalt Dreiecke, die sich mit zunehmender Nahe zur einspringenden Ecke verkleinern. Diese Flexibilitatder Finite-Element-Methode ist ein wesentlicher Vorteil. Andererseits erhalt man komplizierter strukturierteGleichungssysteme Lu = f , denn (a) u lasst sich nicht mehr in einem zweidimensionalen Array speichern,(b) L lasst sich nicht durch einen Stern (4.2.12) charakterisieren.
Bemerkung 8.3.15 Ersetzt man die Dirichlet-Bedingung u = 0 auf ∂Ω durch eine naturliche Randbedin-gung, so ergeben sich folgende Anderungen:
a) N = dimVN ist die Anzahl aller Knoten (innerer und Randknoten).b) VN ⊂ H1(Ω) ist durch (8.3.8) ohne die Einschrankung “u = 0 auf ∂Ω” gegeben.c) In den Bemerkungen 8.3.9-11 muss es “Knoten” anstelle von “innere Knoten” heißen.d) Die in Ubungsaufgabe 8.3.13 berechneten Matrixelemente Lij gelten nur fur innere Knoten xi. Im Falle
eines Neumann-Randwertproblems im Quadrat Ω = (0, 1)× (0, 1), stimmt L mit h2DhLh aus Ubungsaufgabe4.7.8b uberein.
e) Bei der Berechnung von fi = f(bi) hat man noch eventuell auftretende Randintegrale uber ∂Ω ∩ Tr(bi)zu berucksichtigen, falls Tr(bi) ∩ ∂Ω �= ∅.
8.3.3 Bilineare Elemente fur Ω ⊂ R2
Abb. 8.3.5. Zerlegung von Ωin Parallelogramme
Die Differenzenverfahren im quadratischen Gitter legen eine Zerlegung von Ω inQuadrate der Seitenlange h nahe (siehe linke Abbildung 8.3.5). Ersetzt man dieQuadrate allgemeiner durch Parallelogramme, erhalt man Zerlegungen wie inAbbildung 8.3.5, was allerdings nur fur spezielle Polygone Ω moglich ist. Einezulassige Parallelogrammzerlegung ist durch die Bedingungen (8.3.7a-d) be-schrieben, wenn in (8.3.7a) die Bezeichnung “Dreieck” durch “Parallelogramm”ersetzt wird.
(0,1)
(0,0) (1,0)
Φ
Φ
y
x
(1,1)
P~
−1
ξ
η
x
x
x
x
1
2
3
4
Abb. 8.3.6. Einheitsquadrat alsReferenzparallelogramm
Wurde man den Unterraum VN dadurch definieren, dass u in jedemParallelogramm eine lineare Funktion ist, waren nur noch drei der vierEckwerte beliebig vorgebbar. Fur eine Zerlegung wie in Abbildung 8.3.5(rechts) kann man sich uberlegen, dass die einzige stuckweise lineareFunktion u mit u = 0 auf ∂Ω die Nullfunktion ist. In jedem Parallelo-gramm muss u daher eine Funktion sein, die vier freie Parameter enthalt.Wir betrachten zunachst den Fall eines achsenparallelen Rechtecks P =(x1, x2) × (y1, y4) und definieren eine bilineare Funktion auf P mittels
u(x, y) := aP,1 + aP,2x+ aP,3y + aP,4xy in P. (8.3.11a)
u ist in jeder achsenparallelen Richtung – also insbesondere auf den Rechtecksseiten – linear. Fur ein be-liebiges Parallelogramm P wie in Abbildung 8.3.6 ist die Beschrankung der Funktion (8.3.11a) auf eineParallelogrammseite jedoch eine im Allgemeinen quadratische Funktion. Daher verallgemeinert man dieDefinition wie folgt. Sei
Φ : (ξ, η) �→ x1 + ξ(x2 − x1
)+ η
(x4 − x1
)∈ R2 (8.3.11b)

8.3 Finite Elemente 129
die Abbildung des Einheitsquadrates (0, 1) × (0, 1) auf das Parallelogramm P (vgl. Abbildung 8.3.6). Einebilineare Funktion auf P ist durch
u(x, y) := v(Φ−1(x, y)), v(ξ, η) := α+ βξ + γη + δξη (8.3.11c)
definiert. Es ist nicht notwendig, v(Φ−1(·, ·)) explizit auszurechnen, da sich alle Integrationen uber demEinheitsquadrat (0, 1) × (0, 1) als Referenzparallelogramm ausfuhren lassen (vgl. Ubungsaufgabe 8.3.14).
Abb. 8.3.7. Kom-bination von Drei-ecken und Paralle-logrammen
Ist π = {P1, . . . , Pt} eine zulassige Zerlegung in Parallelogramme, so definiert manVN ⊂ H1(Ω) bzw. VN ⊂ H1
0 (Ω) durch
VN = {u ∈ C0(Ω) : auf allen P ∈ π ist u eine bilineare Funktion} (8.3.12a)
bzw.VN = {u ∈ C0(Ω) : u = 0 auf Γ = ∂Ω, auf allen P ∈ π
stimmt u mit einer bilinearen Funktion uberein}. (8.3.12b)
Dabei ist N = dimVN die Anzahl der aller Knoten (Fall (8.3.12a)) bzw. der innerenKnoten (Fall (8.3.12b)). Eine auf P ∈ π bilineare Funktion ist entlang jeder Seite von Plinear. Stetigkeit in den Knotenpunkten impliziert daher schon Stetigkeit in Ω.
Bemerkung 8.3.16 Die Bemerkungen 8.3.8a, 8.3.9-11 gelten sinngemaß.
Ubungsaufgabe 8.3.17 Sei a(u, v) =∫Ω〈∇u,∇v〉dx die zu −Δ gehorende Bilinearform. Ω = (0, 1)× (0, 1)
sei wie in Abbildung 8.3.5 (links) in Quadrate der Seitenlange h zerlegt. Wie lauten die durch (8.3.9a) charak-
terisierten Basisfunktionen? Man zeige: L stimmt mit dem Differenzenstern 13
⎡⎣ −1 −1 −1−1 8 −1−1 −1 −1
⎤⎦ uberein.
Bemerkung 8.3.18 Die Dreiecks- und Parallelogrammzerlegungen lassen sich auch kombiniert anwenden.Ein Polygongebiet Q kann in Dreiecke und Parallelogramme zerlegt werden (vgl. Abbildung 8.3.7). VN istin diesem Fall durch {u ∈ C0(Ω) : u linear auf den Dreiecken, bilinear auf den Parallelogrammen} (miteventueller Nullrandbedingung) zu definieren.
8.3.4 Quadratische Elemente fur Ω ⊂ R2
T sei eine zulassige Triangulation eines Polygongebietes Ω. Wir wollen die Dimension des Finite-Element-Unterraumes dadurch vergroßern, dass wir anstelle linearer nun quadratische Funktionen
u(x, y) = aT,1 + aT,2x+ aT,3y + aT,4x2 + aT,5xy + aT,6y
2 auf T ∈ T (8.3.13)
zulassen:VN = {u ∈ C0(Ω) : u = 0 auf Γ = ∂Ω, auf jedem Ti ∈ T
stimmt u mit einer quadratischen Funktion uberein}. (8.3.14)
Lemma 8.3.19 a) x1,x2,x3 seien die Ecken eines Dreiecks T ∈ T , wahrend x4,x5,x6 die Seitenmittel-punkte6 seien (vgl. Abbildung 8.3.8a). Jede auf T quadratische Funktion ist eindeutig durch die Werte{u(xj) : j = 1, . . . , 6
}beschrieben.
b) Die Beschrankung der Funktion (8.3.13) auf eine Seite von T ∈ T ergibt eine eindimensionale quadra-tische Funktion, die eindeutig durch die drei auf dieser Seite liegenden Knotenwerte (z.B. u(x1), u(x4), u(x2)in Abbildung 8.3.8a) bestimmt wird.
c) Ist u auf jedem T ∈ T quadratisch und stetig in allen Knotenpunkten (d.h. Dreiecksecken und Seiten-mittelpunkte), so ist u stetig auf Ω.
Beweis. a) Die quadratische Funktion ergibt sich als eindeutig definiertes Interpolationspolynom der Form(8.3.13). Auch Teil b) ist elementar.
c) T und T seien die benachbarten Dreiecke aus Abbildung 8.3.8a. Da u|T und u|T in x1,x4,x2
ubereinstimmen, stellen sie nach Teil b) die gleiche quadratische Funktion auf der gemeinsamen Seite von Tund T dar.
6Statt der Seitenmittelpunkte konnte jeder andere Punkt der Seite (ohne die Eckpunkte) gewahlt werden. Die Wahl mussaber fur beide an dieser Seite anliegenden Dreiecke ubereinstimmen.

130 8. Die Methode der finiten Elemente
x1 x2
x4
x6
x3
x5
x7
x8 P
(b)T
x4
x2
x5
x6
x1 x3
T
(a)
Abb. 8.3.8. Knoten fur einen quadra-tischen Ansatz (a) auf einem Drei-eck, (b) der Serendipity-Klasse aufeinem Parallelogramm
Als (innere) Knoten bezeichnen wir jetzt alle (inneren) Dreieckseckenund (inneren) Seitenmittelpunkte. Nach Lemma 8.3.19a konnen wir zujedem inneren Knoten xi eine Basisfunktion bi finden, die auf jedemT ∈ T quadratisch ist und bi(xi) = 1, bi(xj) = 0 fur j �= i erfullt.Gemaß Lemma 8.3.19c gehort bi zu VN . Dies beweist:
Bemerkung 8.3.20 Die Anzahl der inneren Knoten ist die Dimensionvon VN aus (8.3.14).
Jedes u ∈ VN hat die Darstellung u =∑N
i=1 u(xi)bi, wobei die zumKnoten xi gehorende Basisfunktion durch (8.3.9a) charakterisiert ist.
Im Weiteren wollen wir annehmen, dass wie in Abbildung 8.3.7 sowohl Dreiecke als auch Parallelogrammebei der Zerlegung verwendet werden. Auf den Dreiecken seien die Funktionen u ∈ VN quadratisch. DieAnsatzfunktion auf den Parallelogrammen P muss folgenden Bedingungen genugen:
(α) u(x, y)|P muss durch die Werte in den 4 Ecken und 4 Seitenmitten eindeutig bestimmt sein (vgl.Abbildung 8.3.8b).
(β) Die Beschrankung auf eine Seite von P stellt eine (eindimensionale) quadratische Funktion (der Bogen-lange) dar.
Wegen Bedingung (α) muss der Ansatz genau 8 Koeffizienten besitzen. Die quadratische Funktion (8.3.13)besitzt nur 6 Koeffizienten, wahrend ein biquadratischer Ansatz
∑0≤i,j≤2 aijξ
iηj einen Parameter zuvielenthalt. Lasst man im biquadratischen Ansatz den Term ξ2η2 weg, ergibt sich fur das Einheitsquadrat dieFunktion
v(ξ, η) := a1 + a2ξ + a3η + a4ξ2 + a5ξη + a6η
2 + a7ξ2η + a7ξη
2, (8.3.15)
der sogenannte quadratische Ansatz der Serendipity-Klasse. Die Beschrankungen auf die vier Seiten ξ = 0,ξ = 1 bzw. η = 0, η = 1 ergeben eine quadratische Funktion in η bzw. in ξ. Die Abbildung Φ aus (8.3.11b)(vgl. Abbildung 8.3.6a,b) ergibt die auf dem Parallelogramm P definierte Funktion u(x, y) = v(Φ−1(x, y)),die weiterhin die Forderungen (α), (β) erfullt.
Wurde man den vollen, biquadratischen Ansatz verwenden, braucht man einen weiteren Knoten, denman als Parallelogrammschwerpunkt wahlen kann. Ebenso lassen sich kubische Ansatze in Dreiecken undParallelogrammen durchfuhren (vgl. Schwarz [75]).
8.3.5 Elemente fur Ω ⊂ R3
Im dreidimensionalen Fall sei anstelle von (8.3.6) vorausgesetzt:
Ω ⊂ R3 sei Polyeder. (8.3.16)
Der Triangulation aus §8.3.2 entspricht jetzt eine Zerlegung von Ω in Tetraeder. Die Zerlegung heißt zulassig,falls (8.3.7a-d) sinngemaß gelten: (8.3.7a) wird zu “Ti (1 ≤ i ≤ t) sind offene Tetraeder”, in (8.3.7d) musses nun heißen “Fur i �= j ist Ti ∩ Tj entweder leer oder eine gemeinsame Ecke, Kante oder Seite von Ti undTj”. Jede lineare Funktion a1 + a2x+ a3y+ a4z ist eindeutig durch die Werte in den 4 Ecken des Tetraedersbestimmt. Als Basis des Raumes
VN ={u ∈ C0(Ω) : u = 0 auf ∂Ω, u linear auf jedem Tetraeder Ti (1 ≤ i ≤ t)
}wahlt man bi mit der Eigenschaft (8.3.9a): bi(xi) = 1, bi(xj) = 0 (j �= i). Der Trager von bi besteht ausallen Tetraedern, die xi als Eckpunkt teilen. Die Dimension N = dim VN ist wieder die Anzahl der innerenKnotenpunkte (d.h. Tetraederecken). Wie im zweidimensionen Fall lasst sich der lineare Ansatz durch einenquadratischen ersetzen. Anstelle des Tetraeders kann auch ein Parallelepiped oder ein dreieckiges Prismamit entsprechenden Funktionsansatzen verwendet werden (vgl. Schwarz [75]).

8.3 Finite Elemente 131
8.3.6 Behandlung von Nebenbedingungen
Mitunter ist der zugrundeliegende Raum V eine Teilmenge eines einfacher diskretisierbaren Raumes W ⊃ V .Dabei gehore eine Funktion w ∈W zu V , falls gewisse Nebenbedingungen erfullt sind. Bevor diese Situationin allgemeiner Form beschrieben wird, seien zwei Beispiele als Illustration vorgefuhrt.
Beispiel 8.3.21 Will man die Neumann-Randwertaufgabe −Δu = g in Ω und ∂u/∂n = ϕ auf Γ durch dieNebenbedingung
∫Ωu(x)dx = 0 eindeutig losbar machen, kann man den Raum V als
V ={u ∈ H1(Ω) :
∫Ω
u(x)dx = 0}
(8.3.17a)
wahlen. Bei beschranktem Ω ist die Form a(u, v) :=∫Ω〈∇u,∇v〉dx V-elliptisch. Der schwachen Formulierung
(8.1.1) mit f(v) :=∫Ω gvdx+
∫−ΓϕvdΓ entspricht die Gleichung −Δu = g, ∂u/∂n = ϕ, falls g und ϕ der
Integrabilitatsbedingung f(1) = 0 genugen (vgl. (3.4.2)). Aber auch wenn f(1) �= 0, existiert eine schwacheLosung, die zur korrigierten Gleichung −Δu = g, g(x) := g(x) − [
∫Ω gdx+
∫Γ ϕdΓ]/
∫Ω dx gehort.
Beispiel 8.3.22 Das Adler-Problem aus Ubungsaufgabe 7.4.15 benutzt
V ={u ∈ H1(Ω) : u konstant auf Γ
}(8.3.17b)
In beiden Fallen ist W = H1(Ω) eine echte Obermenge von V . Sei T eine Triangulation von Ω mit Iininneren Knoten und IR Randknoten. Wh ⊂W sei der Raum der linearen Dreieckselemente7 (vgl. Bemerkung8.3.15). Seine Dimension ist
Nh := dimWh = Iin + IR. (8.3.18a)
Die Basisfunktionen {bi : 1 ≤ i ≤ Nh} ⊂ Wh seien wie ublich durch bi(xj) = δij beschrieben (vgl. (8.3.9a)).Als Finite-Element-Raum zu V definieren wir Vh := Wh ∩ V , der eine kleinere Dimension besitzt. DieDifferenz Mh entspricht die Anzahl der Nebenbedingungen:
Vh := Wh ∩ V, Mh := Nh − dimVh. (8.3.18b)
In den Beispielen 8.3.21 und 8.3.22 gilt Mh = 1 bzw. Mh = IR − 1. Die Schwierigkeit bei der numerischenLosung des diskreten Problems
bestimme uh ∈ Vh mit a(uh, v) = f(v) fur alle v ∈ Vh (8.3.19)
beginnt bei der Wahl einer Basis von Vh. Es ist nicht moglich, eine Teilmenge der Funktionen b1, . . . , bNhzu
verwenden. So gehort etwa in Beispiel 8.3.21 kein bi zu V und damit auch nicht zu Vh, denn∫Ω bidx > 0.
Im Prinzip ist es moglich, im Falle von (8.3.17a) Linearkombinationen bi := αbi1 + βbi2 ∈ Vh als neueBasisfunktionen zu konstruieren, die wieder einen lokalen (aber etwas verbreiterten) Trager besitzen. ImFalle von (8.3.17b) ist es noch relativ einfach, eine praktikable Basis von Vh zu finden: Die Basisfunktionenbi ∈ Wh, die zu inneren Knoten gehoren, liegen auch in Vh, da bi ∈ H1
0 (Ω) ⊂ V . Als weiteres Elementverwende man b0 :=
∑′bj wobei
∑′ die Summe uber alle Randknoten bezeichnet. Trotzdem ware es auchin diesem Fall prinzipiell einfacher, konnte man mit der Standardbasis von Wh arbeiten.
Um die Aufgabe (8.3.19) mit Hilfe der bi ∈Wh zu behandeln, fuhren wir wieder die Schreibweise wh = Pwein (w ∈ RNh Koeffizientenvektor, wh ∈Wh und P aus (8.1.6)). Jedes v ∈ Vh ⊂Wh hat die Darstellung Pvmit v aus V := {v ∈ RNh : Pv ∈ Vh} = P−1Vh. Aufgabe (8.3.19) ist daher aquivalent zu
bestimme u ∈ V mit a(Pu, Pv) = f(Pv) fur alle v ∈ V. (8.3.19’)
Nach (8.3.18a,b) gilt dimV = dimVh = Nh −Mh = dimWh −Mh. Vh bzw. V seien durch Mh lineareNebenbedingungen
Nh∑j=1
cijwj = 0 (1 ≤ i ≤Mh) (8.3.20)
7Wir verwenden hier die (maximale) Schrittweite h als Index von Vh, Wh und Mh, da die Dimension in den Fallen mit undohne Nebenbedingung verschieden ist.

132 8. Die Methode der finiten Elemente
beschrieben:V = Kern(C) =
{w ∈ RNh : Cw = 0
}, (8.3.21)
wobei C = (cij) die Mh × Nh-Matrix der Koeffizienten aus (8.3.20) darstellt. Im Falle des Beispiels 8.3.21ist
Mh = 1, c1j =∫
Ω
bj(x)dx (1 ≤ j ≤ Nh) .
Im Falle des Beispiels 8.3.22 seien x0, . . . ,xMh mit Mh = IR − 1 die Randknoten. Dann kann C wie folgtdefiniert werden:
Mh = IR − 1, cii = 1 (1 ≤ i ≤Mh) , ci,i+1 = −1 (1 ≤ i < Mh) , cMh,0 = −1, cij = 0 sonst.
Die Variation uber v ∈ V in (8.3.19’) kann man durch die Variation uber w ∈ RNh ersetzen, wenn man dieNebenbedingungen (8.3.20) mit Hilfe von Lagrange-Faktoren8 λi (1 ≤ i ≤ Mh) ankoppelt, die zum Vektorλ = (λ1, . . . , λMh
) zusammengefasst seien. Die resultierende Aufgabe lautet:
bestimme u ∈ RNh und λ ∈ RMh mit Cu = 0 und (8.3.22a)
a(Pu, Pw) + 〈λ,Cw〉 = f(Pw) fur alle w ∈ RMh , (8.3.22b)
wobei 〈λ, μ〉 =∑λiμi das Skalarprodukt des RMh ist.
Satz 8.3.23 Die Aufgaben (8.3.19) und (8.3.22a,b) sind in folgendem Sinne aquivalent. Ist u, λ ein Losungs-paar von (8.3.22a,b), so lost u auch (8.3.19’) und Pu ist Losung von (8.3.19). Ist umgekehrt uh = Pu eineLosung von (8.3.19), so existiert genau ein λ ∈ RMh , sodass u und λ die Aufgabe (8.3.22a,b) losen.
Bevor wir den Satz beweisen, geben wir eine zu (8.3.22a,b) aquivalente Matrixformulierung an.
Bemerkung 8.3.24 L und f seien wie in (8.1.8a,b) definiert. Ferner sei B := C� mit C aus (8.3.21).Dann ist (8.3.22a,b) aquivalent zum Gleichungssystem[
L BB� O
] [uλ
]=
[f0
]. (8.3.22’)
Beweis. Lu + Bλ = f ist aquivalent zu a(Pu, Pw) + 〈λ,Cw〉 = 〈Lu,w〉 + 〈Bλ,w〉 = 〈f ,w〉 = f(Pw) furalle w ∈ RNh . B�u = 0 stimmt mit der Nebenbedingung Cu = 0 uberein.
Beweis des Satzes 8.3.23. a) u, λ lose (8.3.22a,b). Cu = 0 impliziert u ∈ V und uh := Pu ∈ Vh. (8.3.22b)gilt insbesondere fur alle w ∈ V, sodass wegen Cw = 0 (8.3.19’) folgt.
b) (8.3.19’) impliziert f − Lu ∈ V⊥. Da V⊥ = (Kern(C))⊥ = (Kern(B�))⊥ = Bild(B), existiert einλ ∈ RMh mit f −Lu = Bλ, sodass (8.3.22’) und damit auch (8.3.22a,b) erfullt sind. Fur die Nh×Mh-MatrixB mit Rang(B) = Mh gilt aber auch Kern(B) = {0}, sodass die Losung λ eindeutig ist.
Man beachte, dass im Falle des Beispiels 8.3.21 das Gleichungssystem (8.3.22’) im Wesentlichen mit(4.7.10a,b) identisch ist.
8.4 Fehlerabschatzungen bei Finite-Elemente-Verfahren
In diesem Unterkapitel beschranken wir uns auf die linearen Elemente des Abschnitts 8.3.2 und setzen deshalbvoraus:
T sei eine zulassige Triangulation von Ω ⊂ R2, (8.4.1a)
VN sei durch (8.3.8) definiert, falls V = H10 (Ω), (8.4.1b)
VN sei wie in Bemerkung 8.3.15b, falls V = H1(Ω). (8.4.1c)
8Joseph-Louis Lagrange, geb. 25. Jan. 1736 in Turin, gest. 10. April 1813 in Paris

8.4 Fehlerabschatzungen bei Finite-Elemente-Verfahren 133
8.4.1 Vorbereitungen
Nach Satz 8.2.1 hat man die charakteristische Große d(u, VN ) = inf{|u− w|1 : w ∈ VN} zu bestimmen. Dazuuntersucht man zunachst das Referenzdreieck aus Abbildung 8.3.4. Die rechte Seite in (8.4.2) besteht ausden Werte von u in den Eckpunkten von T und aus der L2-Norm der zweiten partiellen Ableitungen.
Lemma 8.4.1 Sei T = {(ξ, η) : ξ, η ≥ 0, ξ + η ≤ 1} das Einheitsdreieck. Fur alle u ∈ H2(T ) gilt
‖u‖2H2(T ) ≤ C
⎡⎣|u(0, 0)|2 + |u(1, 0)|2 + |u(0, 1)|2 +∑|α|=2
‖Dαu‖2L2(T )
⎤⎦ . (8.4.2)
Beweis. Zunachst soll gezeigt werden, dass die Bilinearform
a(u, v) := u(0, 0)v(0, 0) + u(1, 0)v(1, 0) + u(0, 1)v(0, 1) +∑|α|=2
(Dαu,Dαv)L2(T )
auf H2(T ) × H2(T ) stetig und H2(T )-koerziv ist. Die Stetigkeit ergibt sich aus der stetigen EinbettungH2(T ) ⊂ C0(T ) , die zu |u(x)| ≤ C |u|2 fur alle x ∈ T fuhrt (vgl. Satz 6.2.31). Somit folgt die Schranke|a(u, v)| ≤ (1 + 3C) |u|2 |v|2 . Da T ∈ C0,1, ist Satz 6.4.8b anwendbar: H2(T ) ist kompakt eingebettet inH1(T ). Gemaß Lemma 6.4.13 existiert eine Konstante C1/2, sodass
|u|21 ≤(
12|u|2 + C1/2 |u|0
)2
≤ 12|u|22 + 2C2
1/2 |u|20 fur alle u ∈ H2(T ). (*)
Da∑|α|=2 |Dαu|20 = |u|22 − |u|21 , zeigt die Abschatzung a(u, u) ≥ |u|22 − |u|21 ≥
(∗)12 |u|
22 − 2C2
1/2 |u|20, dass a(·, ·)
H2(T )-koerziv ist.2) Da auch die Einbettung H2(T ) ⊂ L2(T ) kompakt ist, lasst sich Satz 6.5.15 anwenden: Der zu a(·, ·)
gehorende Operator A ∈ L(H2(T ), H2(T )′) hat entweder eine Inverse A−1 ∈ L(H2(T )′, H2(T )) oder λ = 0ist ein Eigenwert, zu dem eine Eigenfunktion 0 �= e ∈ H2(T ) existiert. Im letztgenannten Fall muss einsbesondere die Gleichung a(e, e) = 0 erfullen. Hieraus folgt aber Dαe = 0 fur alle |α| = 2, sodass e linearsein muss: e(x, y) = α+ βx+ γy. Ferner schließt man aus a(e, e) = 0 auch auf e(0, 0) = e(1, 0) = e(0, 1) = 0,sodass e = 0 im Widerspruch zur Annahme. Uber Lemma 6.5.3 und Ubungsaufgabe 6.5.6c beweist man dieH2(T )-Elliptizitat: a(u, u) ≥ CE |u|22 mit CE := 1/[‖A−1‖2
H2(T )←H2(T )′(1 + 3C)] > 0 und der Konstanten Caus dem ersten Beweisteil. Somit ergibt sich Behauptung (8.4.2) mit C := 1/CE.
Das Lemma 8.4.1 ist auf den Fall der linearen Elemente zugeschnitten, da nach einer geeigneten linearenInterpolation der Fehler in (0, 0), (1, 0), (0, 1) verschwindet. Die Verallgemeinerung auf hohere Elementelautet wie folgt: Seien xi ∈ T (1 ≤ i ≤ q) Stutzstellen, die ein Interpolationspolynom vom Grad ≤ t − 1
eindeutig bestimmen. Dann sind die Normen ‖u‖Ht(T ) und√∑q
i=1 |u(xi)|2 +∑|α|=t ‖Dαu‖2
L2(T ) aquivalent.Abschatzung (8.4.2) ist auch fur andere Dreiecke T als das Einheitsdreieck gultig, aber die Konstante C
hangt von T ab. In Lemma 8.4.2 wird zunachst nur ein skaliertes Einheitsdreieck untersucht. Man beachte,dass die verschiedenen Ableitungsterme unterschiedlich skalieren. Darum wird nicht ‖u‖2
H2(Th), sondern einhomogener Ausdruck ‖Dβu‖2
L2(T ) abgeschatzt.
Lemma 8.4.2 Seien h > 0 und Th := hT := {(x, y) : x, y ≥ 0, x+ y ≤ h}. Fur jedes u ∈ H2(Th) gilt
∥∥Dβu∥∥2
L2(T )≤ C
⎧⎨⎩h2−2|β|[|u(0, 0)|2 + |u(1, 0)|2 + |u(0, 1)|2
]+ h4−2|β|
∑|α|=2
‖Dαu‖2L2(T )
⎫⎬⎭ (8.4.3)
fur alle β ∈ N20 mit |β| ≤ 2. C ist die Konstante aus (8.4.2) und damit unabhangig von u, β und h.

134 8. Die Methode der finiten Elemente
Beweis. Sei v(ξ, η) := u(ξh, ηh) ∈ H2(T ). Die Ableitungen nach (x, y) und (ξ, η) = (x, y)/h sind durchDβ
x,y = h−|β|Dβξ,η verknupft. Fur jedes |β| ≤ 2 ergibt die Substitutionsregel
∥∥Dβu∥∥2
L2(Th)=
∫∫Th
∣∣Dβx,yu
∣∣2 dxdy =∫∫
T
∣∣∣h−|β|Dβξ,ηv
∣∣∣2 h2dξdη = h2−2|β| ∥∥Dβv∥∥2
L2(T )(**)
≤ h2−2|β| ‖v‖2H2(T ) ≤
Lemma 8.4.1Ch2−2|β|
⎡⎣|v(0, 0)|2 + |v(1, 0)|2 + |v(0, 1)|2 +∑|α|=2
‖Dαv‖2L2(T )
⎤⎦ .Da v(0, 0) = u(0, 0), v(1, 0) = u(h, 0), v(0, 1) = u(0, h) und ‖Dα
ξ,ηv‖2L2(T ) = h2‖Dα
x,yu‖2L2(Th) wegen (**) mit
β := α und |α| = 2, erhalt man die Behauptung (8.4.3).
Lemma 8.4.3 T sei ein beliebiges Dreieck mit
Seitenlange ≤ hmax, Innenwinkel ≥ α0 > 0. (8.4.4)
Fur jedes u ∈ H2(T ) gilt
∥∥Dβu∥∥2
L2(T )≤ C(α0)
⎧⎨⎩h2−2|β|max
∑x Ecke von T
|u(x)|2 + h4−2|β|max
∑|α|=2
‖Dαu‖2L2(T )
⎫⎬⎭ fur alle |β| ≤ 2, (8.4.5)
wobei C(α0) nur von α0, nicht aber von u, β oder h abhangt.
Beweis. Seien h ≤ hmax eine der Seitenlangen von T und Th das Dreieck aus Lemma 8.4.2. Ahnlichwie in Ubungsaufgabe 8.3.14a sei Φ : Th → T die lineare Abbildung, die Th auf T abbildet. v(ξ, η) :=u(Φ(ξ, η)) gehort zu H2(Th). Unter der Bedingung (8.4.4) ist die Determinante |detΦ| ∈ [1/K(α0),K(α0)]nach oben und unten beschrankt. Aus ‖Dβ
x,yu‖2L2(T )
≤ C1(α0)∑|β′|=|β| ‖D
β′ξ,ηv‖2
L2(Th), (8.4.3) und∑|α|=2 ‖Dα
ξ,ηv‖2L2(Th) ≤ C2(α0)
∑|α|=2 ‖Dα
x,yu‖2L2(T )
folgt (8.4.5).
Aus Lemma 8.4.3 ergibt sich Satz 8.4.4 als Hauptresultat. In (8.4.6) trittH2(Ω)∩V auf. Fur V = H1(Ω) istdies H2(Ω), nur bei V = H1
0 (Ω) sind in H2(Ω) ∩H10 (Ω) die zusatzlichen Nullrandbedingungen zu beachten.
Satz 8.4.4 Voraussetzung (8.4.1a-c) gelte fur T , VN und V . α0 > 0 sei der kleinste Innenwinkel aller T ∈ T ,wahrend h die maximale Seitenlange aller T ∈ T sei. Dann ist
infv∈VN
‖u− v‖Hk(Ω) ≤ C′(α0)h2−k ‖u‖H2(Ω) fur alle k ∈ {0, 1, 2} und u ∈ H2(Ω) ∩ V. (8.4.6)
Beweis. Zu u ∈ H2(Ω) wahlt man v :=∑
i u(xi)bi ∈ VN , d.h. v ∈ VN mit v(xi) = u(xi) an den Knoten xi.Da w := u − v an den Ecken jedes Ti ∈ T verschwindet (wegen Interpolationseigenschaft bzw. eventuellerNullrandbedingung) und Dαw = Dαu fur |α| = 2 (wegen Dαv = 0 fur alle linearen(!) Funktionen v ∈ VN ),liefert (8.4.5) die Abschatzung∥∥Dβw
∥∥2
L2(Ω)=
∑Ti∈T
∥∥Dβw∥∥2
L2(Ti)≤
(8.4.5)
∑Ti∈T
C(α0)h4−2|β|∑|α|=2
‖Dαu‖2L2(Ti)
= C(α0)h4−2|β|∑|α|=2
‖Dαu‖2L2(Ω) ≤ C(α0)h4−2|β| ‖u‖2
H2(Ω) .
Summation uber |β| ≤ k beweist die Ungleichung (8.4.6).Die Interpolation v(xi) = u(xi) aus dem vorhergehenden Beweis ist nur fur stetige Funktionen sinnvoll.
Da die Sobolev-Einbettung H2(Ω) ⊂ C0(Ω) fur die (physikalisch realistischen) Dimensionen d ≤ 3 richtig ist(vgl. Satz 6.2.31), lasst sich die Aussage von Satz 8.4.4 auch noch auf stuckweise lineare Funktionsansatze inTetraedern erweitern. Will man dagegen die Ungleichung (8.4.6) fur Raumdimensionen d ≥ 4 erreichen oderwill man auf der rechten Seite von (8.4.6) die H2(Ω)-Norm durch eine schwachere ersetzen, muss man dieInterpolationsabbildung durch den Clement-Operator ersetzen (vgl. Clement [23] und Braess [12, §II.6,9]).

8.4 Fehlerabschatzungen bei Finite-Elemente-Verfahren 135
8.4.2 Eigenschaften von Folgen von Finite-Element-Raumen
8.4.2.1 Uniforme, formregulare Triangulationsfolgen und K-Gitter
Fur die Diskussion der Konvergenz von Finite-Element-Losungen benotigt man eine Folge von Finite-Element-Raumen. Im Fall der Differenzenverfahren ist die Schrittweite h ein eindeutiger Parameter, dergegen null strebt. Fur Finite-Element-Raume ist die Dimension N dagegen nur eine partielle Information.
Sei {Tν : ν ∈ N} eine Folge von Triangulationen (“Triangulation” ist hier wortlich gemeint: Tν enthaltDreiecke ⊂ Ω ⊂ R2). Die zugehorigen Finite-Element-Raume seien VNν mit der Dimension Nν → ∞. Zujedem T ∈ Tν sei
ρT,aussen := inf{ρ : T ⊂ Kρ(x), ρ > 0, x ∈ R2} (8.4.7a)
der Radius des Umkreises zu T. Entsprechend sei
ρT,innen := sup{ρ : T ⊃ Kρ(x), ρ > 0, x ∈ R2} (8.4.7b)
der Radius des Innenkreises. Ferner seien
hT := diam(T ) und{hmax,ν := hmax(Tν) := max{hT : T ∈ Tν},hmin,ν := hmin(Tν) := min{hT : T ∈ Tν}.
(8.4.7c)
Offenbar gilt ρT,innen ≤ hT ≤ ρT,aussen fur alle T ∈ Tν .Fur spatere Schlussfolgerungen benotigt man verschiedene Eigenschaften:
• Die Folge {Tν}ν∈N heißt uniform, wenn sup{hmax,ν/hmin,ν : ν ∈ N} <∞.• Die Folge {Tν}ν∈N heißt formregular, wenn sup{ρT,aussen/ρT,innen : T ∈ Tν , ν ∈ N} <∞.• Eine Triangulation T hat die K-Gittereigenschaft, wenn die Ungleichung
hmax,T1 ≤ Khmax,T2 fur alle Paare von benachbarten Dreiecken T1, T2 ∈ T , T1 ∩ T2 �= ∅
gilt. Eine Folge {Tν}ν∈N erfullt die K-Gittereigenschaft, wenn alle Tν K-Gitter sind.Im Falle der uniformen Folge {Tν}ν∈N haben alle Dreiecke T ∈ Tν einen Durchmesser, der von hν nur
um den festen Faktor C := sup{hmax,ν/hmin,ν : ν ∈ N} abweichen kann. Lokale Verfeinerungen wie in derrechten Abbildung 8.3.2 sind damit nur eingeschrankt moglich.
Dagegen braucht eine lokale Verfeinerung die Formregularitat nicht zu verschlechtern. In der rechten Ab-bildung 8.3.2 gilt ρT,aussen/ρT,innen ≤ 2 auch bei weiteren Verfeinerungen. In §8.6.3.3 wird der Zusammenhangzwischen Formregularitat und K-Gittereigenschaft diskutiert werden.
Die Formregularitat kann statt mit den Um- und Innenkreisen auch mit dem kleinsten Innenwinkel αT
eines Dreiecks T beschrieben werden: inf{αT : T ∈ Tν , ν ∈ N} < ∞. Die letzte Bedingung ist in (8.4.4)verwendet worden.
8.4.2.2 Maximalwinkelbedingung
Die Bedingung “αT ≥ α0 > 0” aus (8.4.4) ist starker als notwendig. Da die Summe aller Dreieckswinkel πbetragt, folgt aus (8.4.4), dass
αT,max := maximaler Innenwinkel von T ≤ α < π. (8.4.8)
Der Umkehrschluss gilt nicht: Die Winkel α1 = π/2, α2 = π/2−ε, α3 = ε eines flachen, rechtwinkligen Drei-ecks erfullen (8.4.8) mit α = π/2 < π, trotzdem kann α3 beliebig klein werden. Eine genauere Abschatzungder Transformationen in Lemma 8.4.3 zeigt, dass schon die schwachere Maximalwinkelbedingung (8.4.8) aus-reicht, eine Abschatzung (8.4.6) zu beweisen, in der C′(α0) durch ein Funktion C(α) ersetzt werden kann,die nur von α abhangt (vgl. [52, §3.4.2]).
8.4.3 H1-Abschatzungen fur lineare Elemente
Sei hT die langste Seite von T ∈ T gemaß (8.4.7c). h := max{hT : T ∈ T } ist die großte in der TriangulationT auftretende Kantenlange. h wird als Parameter zur Indizierung verwendet: T = Th.
Bei der Konstruktion der Triangulationen ist darauf zu achten, dass mit zunehmender Verfeinerung(hν → 0) die Formregularitat erhalten bleibt. Strategien zur systematischen Konstruktion von formregularenFolgen Vhν findet man in §8.6.3.3.
Der Fall k = 1 aus Satz 8.4.4 lasst sich nun wie folgt schreiben:

136 8. Die Methode der finiten Elemente
Satz 8.4.5 Voraussetzung (8.4.1a-c) gelte fur eine Folge formregularer Triangulationen Tν . Dann existierteine Konstante C, sodass fur alle h = hν und Vh = Vhν die folgende Abschatzung gilt:
infv∈Vh
|u− v|1 ≤ Ch |u|2 fur alle u ∈ H2(Ω) ∩ V. (8.4.6’)
Die Kombination dieses Satzes mit Satz 8.2.1 ergibt
Satz 8.4.6 Voraussetzung (8.4.1a-c) gelte fur eine Folge formregularer Triangulationen Tν . Die Bilinearformerfulle (8.1.2) und (8.1.17). Die Konstanten εN =: εhν > 0 aus (8.1.17) seien nach unten durch εhν ≥ ε > 0beschrankt (vgl. Zusatz 8.2.3). Aufgabe (8.1.1) habe eine Losung u ∈ H2(Ω) ∩ V . uh ∈ Vh sei die Finite-Element-Losung. Dann gibt es eine von u, h = hν und v unabhangige Konstante C, sodass∣∣uh − u
∣∣1≤ Ch |u|2 . (8.4.9)
Die Kombination der Satze 8.4.5 und 8.2.2 lautet:
Satz 8.4.7 Voraussetzung (8.4.1a-c) gelte fur eine Folge formregularer Triangulationen Tν mit hν → 0. DieBilinearform genuge (8.1.2) und (8.1.17) mit εhν ≥ ε > 0. Dann hat die Aufgabe (8.1.1) eine eindeutigeLosung u ∈ V , und die Finite-Element-Losung uhν ∈ Vh konvergiert gegen u:∣∣uhν − u
∣∣1→ 0 fur ν → ∞. (8.4.10)
Beweis. u ∈ V und ε > 0 seien beliebig. DaH2(Ω)∩V dicht in V , existiert uε ∈ H2(Ω)∩V mit |u− uε|1 ≤ ε/2.Wegen (8.4.6) und hν → 0 gibt es einen Index ν und eine Funktion vε ∈ Vhν mit |uε − vε|1 ≤ ε/2, also|u− vε|1 ≤ ε. Dies beweist (8.2.4a).
Satz 8.4.7 beweist Konvergenz ohne einschrankende Voraussetzungen an u. Die Konvergenzordnung O(h)in Abschatzung (8.4.9) benotigt dagegen die Annahme, dass die Losung u ∈ V in H2(Ω) liegt. Wie sichherausstellen wird, ist diese Annahme keineswegs in jedem Fall erfullt. Eine schwachere Voraussetzung istu ∈ V ∩Hs(Ω) mit s ∈ (1, 2). Das entsprechende Resultat lautet wie folgt.
Satz 8.4.8 In den Voraussetzungen des Satzes 8.4.6 sei u ∈ V ∩H2(Ω) durch u ∈ V ∩ Hs(Ω) mit einems ∈ [1, 2] ersetzt. Ω sei hinreichend glatt. Dann gilt∣∣uh − u
∣∣1≤ Chs−1 |u|s . (8.4.11)
Der Beweis benutzt eine Verallgemeinerung des Satzes 8.4.4 mit k = 1:
Lemma 8.4.9 Unter den Voraussetzungen des Satzes 8.4.4 und geeigneten Voraussetzungen an Ω gilt
infv∈Vh
|u− v|1 ≤ C′′(α0)hs−1 ‖u‖Hs(Ω) fur alle s ∈ [1, 2] und u ∈ Hs(Ω) ∩ V. (8.4.12)
Der Beweis beruht auf einem hier nicht naher erlauterten Interpolationsargument. (8.4.12) gilt fur s = 2(vgl. (8.4.9)) und s = 1, da inf |u− v|1 ≤ |u− 0|1 = |u|1. Hieraus folgt (8.4.12) fur s ∈ (1, 2) mit der Norm|·|s des Interpolationsraumes [H1(Ω) ∩ V,H2(Ω) ∩ V ]s−1 (vgl. Lions-Magenes [58]), der unter geeignetenVoraussetzungen an Ω mit Hs(Ω) ∩ V ubereinstimmt.
Fur s = 1 wird die rechte Seite in (8.4.12) zu const · |u|1. In der Tat ist die Abschatzung durchinf{|u− v|1 : v ∈ Vh} ≤ |u|1 die bestmogliche. Zum Beweis wahle man u⊥Vh (Orthogonalitat bezuglich |·|1).Auf der anderen Seite ist s = 2 der maximale Wert, fur den die Abschatzungen (8.4.9) und (8.4.12) gultigsind. Auch u ∈ C∞(Ω) erlaubt keine bessere Approximationsordnung als O(h)!
Die in (8.2.5) eingefuhrte Ritz-Projektion SN : V → VN sei jetzt als Sh : V → Vh geschrieben. Ungleichung(8.4.11) wird zu |u− Shu|1 / |u|s ≤ Chs−1 und beweist die
Folgerung 8.4.10 Voraussetzung (8.4.1a-c) gelte fur T , Vh und V . Die Bilinearform erfulle (8.1.2) und(8.1.17). Dann genugt die Ritz-Projektion Sh der Abschatzung
‖I − Sh‖H1(Ω)←H2(Ω)∩V ≤ Ch1. (8.4.13)
Unter der Voraussetzung von Lemma 8.4.9 gilt
‖I − Sh‖H1(Ω)←Hs(Ω)∩V ≤ Chs−1 fur alle s ∈ [1, 2] . (8.4.13’)

8.4 Fehlerabschatzungen bei Finite-Elemente-Verfahren 137
8.4.4 L2-Abschatzungen fur lineare Elemente
Nach Satz 8.4.6 ist O(h) die optimale Konvergenzordnung. Dies Ergebnis scheint im Widerspruch zurO(h2)-Konvergenz der Funfpunktformel zu stehen (vgl. Abschnitt 4.5), denn das Finite-Element-Verfahrenmit spezieller Triangulation ist fast identisch mit der Funfpunktformel (vgl. Ubungsaufgabe 8.3.13). DerGrund hierfur ist, dass der Finite-Element-Fehler uh − u in der |·|1-Norm gemessen wird. Die Abschatzunginf{|u− v|0 : v ∈ Vh} ≤ Ch2 |u|2 aus Satz 8.4.4 legt die Vermutung nahe, dass die |·|0-Norm des Fehlers vonder Ordnung O(h2) ist: |u− uh|0 ≤ Ch2 |u|2. Diese Aussage ist jedoch ohne weitere Voraussetzungen falsch.
Bisher wurde nur die Existenz einer schwachen Losung u ∈ V (zum Beispiel V = H10 (Ω) oder V =
H1(Ω))) garantiert. In Satz 8.4.6 benotigen wir jedoch die starkere Annahme u ∈ H2(Ω) ∩ V . Eine analogeRegularitatsbedingung stellen wir auch an das zu (8.1.1) adjungierte Problem
suche u ∈ V mit a�(u, v) = f(v) fur alle v ∈ V, (8.4.14)
das die adjungierte Bilinearform a�(u, v) := a(v, u) benutzt. Fur f ∈ L2(Ω) ⊂ V ′ wird f(v) zu (f, v)L2(Ω).Die benotigte Regularitatsannahme ist die H2-Regularitat fur das adjungierte Problem:
Fur alle f ∈ L2(Ω) habe das Problem (8.4.14) eine Losung u ∈ H2(Ω) ∩ V mit |u|2 ≤ CR |f |0 . (8.4.15)
In Kapitel 9 werden wir sehen, dass diese Aussage fur hinreichend glatte Gebiete Ω zutrifft.
Satz 8.4.11 (Aubin-Nitsche) Es gelte (8.4.15), (8.1.2), (8.1.17) mit εN = εh ≥ ε > 0 und
infv∈Vh
|u− v|1 ≤ C0h |u|2 fur alle u ∈ H2(Ω) ∩ V. (8.4.16)
Die Aufgabe (8.1.1) habe eine Losung u ∈ V . uh ∈ Vh ⊂ V sei die Finite-Element-Losung. Dann gilt∣∣uh − u∣∣0≤ C1h |u|1 (8.4.17a)
mit einer von u und h unabhangigen Konstante C1. Falls die Losung u auch zu H2(Ω) ∩ V gehort, gibt eseine von u und h unabhangige Konstante C2, sodass∣∣uh − u
∣∣0≤ C2h
2 |u|2 . (8.4.17b)
[Hinreichend fur Bedingung (8.4.16) ist nach Satz 8.4.4, dass Vh der Finite-Element-Raum zu einer zu-lassigen und formregularen Triangulation ist.]
Beweis (vgl. Nitsche [66]). Zu e := uh − u ∈ L2(Ω) definiere man w ∈ H2(Ω) ∩ V als Losung von (8.4.14)fur f := e:
a(v, w) = (e, v)L2(Ω) fur alle v ∈ V. (8.4.18a)
Zu w gibt es auf Grund von (8.4.16) ein wh ∈ Vh mit∣∣wh − w∣∣1≤ C0h |w|2 ≤
(8.4.15)C0CRh |e|0 . (8.4.18b)
Gleichung (8.2.3) lautet a(e, v) = 0 fur alle v ∈ Vh, also gilt insbesondere
a(e, wh) = 0. (8.4.18c)
Die bisherigen Resultate ergeben
|e|20 = (e, e)L2(Ω) =(8.4.18a)
a(e, w) =(8.4.18c)
a(e, w − wh) ≤(8.1.2)
CS |e|1∣∣wh − w
∣∣1
≤(8.4.18b)
CS |e|1 C0CRh |e|0 ,
also|e|0 ≤ CSC0CRh |e|1 . (8.4.18d)
Aus (8.2.1) leitet man
|e|1 =∥∥uh − u
∥∥V≤
(1 +
CS
εN
)inf
v∈VN
‖u− v‖V ≤(
1 +CS
ε
)‖u‖V
ab, sodass (8.4.17a) mit C1 := CSC0CR(1 + CS/ε) folgt. Falls u ∈ H2(Ω) ∩ V, kann man die Ungleichung(8.4.9), das ist
∣∣uh − u∣∣1≤ Ch |u|2 , benutzen und erhalt (8.4.17b) mit C2 := CSC0CRC.

138 8. Die Methode der finiten Elemente
Zusatz 8.4.12 Die Ungleichungen (8.4.17a) und (8.4.17b) sind gleichbedeutend mit den Eigenschaften(8.4.19) der Ritz-Projektion Sh:
‖I − Sh‖L2(Ω)←V ≤ C1h, ‖I − Sh‖L2(Ω)←H2(Ω)∩V ≤ C2h2. (8.4.19)
Die Abschatzungen (8.4.19) lassen sich auch direkt beweisen. Die Definition von Sh und der Zusammenhangzwischen Sh und Sh finden sich in
Ubungsaufgabe 8.4.13 Zu a(·, ·) gehore der Operator L : V → V ′, die Ritz-Projektion Sh und die System-matrix L. Man zeige: a) Zur adjungierten Bilinearform a�(·, ·) gehoren die Systemmatrix L� und die Ritz-Projektion
Sh = P(L�
)−1P ∗L∗. (8.4.20a)
b) Es gilt der ZusammenhangSh = L−1ShL (8.4.20b)
Zweiter Beweis zu Satz 8.4.11. Sei
H2� (Ω) := {u ∈ H2(Ω) : u ist Losung von (8.4.14) zu einem f ∈ L2(Ω)} ⊂ V
das Bild von L�−1 ∈ L(L2(Ω), H2(Ω)). H2� (Ω) wird mit der Norm |·|2 versehen. L�−1 ∈ L(L2(Ω), H2
� (Ω)) istwegen L2(Ω)′ = L2(Ω) mit L−1 ∈ L(H2
� (Ω)′, L2(Ω)) aquivalent (vgl. Lemma 6.3.2), sodass es ein Cα mit
‖L−1‖L2(Ω)←H2(Ω)′ ≤ Cα (8.4.21a)
gibt. Die Voraussetzungen (8.1.2) und (8.1.17) aus Satz 8.4.11 ubertragen sich ohne Anderung der Konstantenauf das adjungierte Problem, sodass sich die Aussage des Satzes 8.2.1 in der Form ‖I − Sh‖V←H2
(Ω) ≤ Cβhschreiben lasst. Fur den adjungierten Operator ergibt sich
‖(I − Sh)∗‖H2(Ω)′←V ′ ≤ Cβh. (8.4.21b)
Die Grundvoraussetzung (8.1.2) schreibt sich als
‖L‖V ′←V ≤ CS . (8.4.21c)
Der Gleichung (8.4.20b) entnimmt man die Darstellung
I − Sh = I − L−1S�hL = L−1(I − S�
h)L = L−1(I − Sh)�L.
Auf Grund von (8.4.21a-c) erhalt man hieraus
‖I − Sh‖L2(Ω)←V ≤ ‖L−1‖L2(Ω)←H2(Ω)′‖(I − Sh)∗‖H2
(Ω)′←V ′ ‖L‖V ′←V ≤ CαCβhCS . (8.4.21d)
Damit ist die erste Ungleichung in (8.4.19) mit C1 = CαCβCS bewiesen. Mit Sh ist auch I − Sh Projektion,sodass
‖I − Sh‖L2(Ω)←H2(Ω)∩V = ‖ (I − Sh)2 ‖L2(Ω)←H2(Ω)∩V ≤ ‖I − Sh‖L2(Ω)←V ‖I − Sh‖V←H2(Ω)∩V .
Die erste Ungleichung in (8.4.19) und (8.4.13) ergeben die zweite Ungleichung in (8.4.19).Die Regularitatsbedingung (8.4.15) wird im folgenden Satz abgeschwacht bzw. verallgemeinert.
Satz 8.4.14 Es gelte (8.1.2), (8.1.17) mit εN = εh ≥ ε > 0 sowie Ungleichung (8.4.12) fur alle 1 ≤ s ≤ 2.Anstelle von (8.4.15) setzen wir fur ein t ∈ [0, 1] die H2−t-Regularitat voraus: Falls V = H1(Ω), gelteL�−1 ∈ L(Ht(Ω)′, H2−t(Ω)); falls V = H1
0 (Ω), gelte L�−1 ∈ L(H−t(Ω), H2−t(Ω) ∩ V ). Dann genugt dieFinite-Element-Losung der Ungleichung∣∣uh − u
∣∣t≤ Ct,sh
s−t |u|s (0 ≤ t ≤ 1 ≤ s ≤ 2) . (8.4.22)
Die Ritz-Projektion erfullt
‖I − Sh‖Ht(Ω)←Hs(Ω)∩V ≤ Ct,shs−t (0 ≤ t ≤ 1 ≤ s ≤ 2) . (8.4.23)

8.5 Verallgemeinerungen 139
Beweis. Zur Vereinfachung wird nur der Fall V = H1(Ω) behandelt. In (8.4.21a-c) ersetze man L2(Ω) durchHt(Ω), H2
� (Ω)′ durch H2−t� (Ω)′ mit H2−t
� (Ω) := {u ∈ H2−t(Ω) : u Losung zu f ∈ Ht(Ω)′}. (8.4.21b) wirdwegen (8.4.13’) [mit s ersetzt durch 2 − t] zu
‖(I − Sh)∗‖H2−t (Ω)′←V ′ = ‖I − Sh‖V←H2−t
(Ω) ≤ Cβh1−t.
Wie in (8.4.21d) zeigt man ‖I − Sh‖Ht(Ω)←V ≤ Ch1−t. Zusammen mit ‖I − Sh‖V←Hs(Ω)∩V ≤ Chs−1 (vgl.(8.4.13’)) folgt (8.4.23) und hieraus (8.4.22).
Im Zusammenhang mit nichtlinearen Randwertproblemen werden Fehlerabschatzungen bezuglich weitererNormen (z.B. L∞(Ω), Lp(Ω)) interessant. Hierzu sei auf Ciarlet [22, §3.3] und Schatz [73] verwiesen.
8.5 Verallgemeinerungen
8.5.1 Fehlerabschatzungen fur andere Elemente
Die in Abschnitt 8.4 fur lineare Funktionen auf Dreieckselementen bewiesenen Fehlerabschatzungen geltenebenso fur die bilinearen Funktionen auf Parallelogrammen und die Kombination beider Elemente (vgl.Abbildung 8.3.7). Die Beweise verlaufen analog. Auch fur die Tetraederelemente eines dreidimensionalenGebietes Ω ⊂ R3 lassen sich diese Resultate ubertragen. Beim Beweis beachte man, dass u ∈ H2(Ω) auch furΩ ⊂ R3 noch wohldefinierte Knotenwerte u(xi) besitzt, da 2 > n/2 die Sobolev-Einbettung sichert (n = 3:Dimension von Ω; vgl. Satz 6.2.31).
Bei quadratischen Elementen (vgl. Abschnitt 8.3.4) erwartet man eine entsprechend gesteigerte Konver-genzordnung. Allgemein lasst sich nachweisen: Ist die Ansatzfunktion in jedem T ∈ T ein Polynom vomGrad k ≥ 1 (d.h. u(x) =
∑|ν|≤k ανxν auf T ), so gilt
d(u, Vh) ≡ inf {|u− v|1 : v ∈ Vh} ≤ Chk |u|k+1 fur alle u ∈ Hk+1(Ω) ∩ V (8.5.1)
(vgl. Ciarlet [22, Theorem 3.2.1]). Legt man Parallelogramme zugrunde und verwendet Ansatzfunktionen,die mindestens Polynome vom Grad k enthalten, gilt (8.5.1) ebenfalls. Zum Beispiel erfullen biquadratischeElemente oder quadratische Ansatze der Serendipity-Klasse diese Bedingung fur k = 2. Das folgende demSatz 8.4.6 entsprechende Resultat folgt auf Grund von Satz 8.2.1:
Satz 8.5.1 Vh erfulle (8.5.1). Die Bilinearform erfulle (8.1.2) und (8.1.17) mit εN =: εh ≥ ε > 0. Aufgabe(8.1.1) habe eine Losung u ∈ V ∩Hk+1(Ω). Dann genugt die Finite-Element-Losung uh ∈ Vh der Abschatzung∣∣uh − u
∣∣1≤ C′hk |u|k+1 . (8.5.2)
Die Ritz-Projektion erfullt ‖I − Sh‖V←Hk+1(Ω)∩V ≤ Chk.
Die Abschatzung (8.4.11) gilt jetzt fur s ∈ [1, k], wenn u ∈ Hs(Ω) ∩ V . Unter geeigneten Regularitats-bedingungen ergeben sich wie in Satz 8.4.11 die Fehlerschranken∣∣uh − u
∣∣0≤ Chk+1 |u|k+1 , (8.5.3a)∥∥uh − u
∥∥Hk+1(Ω)′ ≤ Ch2k |u|k+1 . (8.5.3b)
Fur (8.5.3b) benotigt man beispielsweise die Hk+1-Regularitat: Fur jedes f ∈ Hk−1(Ω) habe das adjungierteProblem (8.4.14) eine Losung u ∈ Hk+1(Ω).
Bemerkung 8.5.2 Unter geeigneten Voraussetzungen gilt Ungleichung (8.4.22) fur 1 − k ≤ t ≤ 1 ≤ s ≤k + 1. Fur negative t ist darin |·|t als Dualnorm von H−t(Ω) zu interpretieren.
8.5.2 Finite Elemente fur Gleichungen hoherer Ordnung
8.5.2.1 Einfuhrung: Eindimensionale biharmonische Gleichung
Alle bisher konstruierten Finite-Element-Raume Vh sind fur Gleichungen der Ordnung 2m > 2 unbrauchbar,da dann Vh �⊂ Hm(Ω). Gemaß Beispiel 6.2.5 ist es fur Vh ⊂ H2(Ω) notwendig, dass sich nicht nur die

140 8. Die Methode der finiten Elemente
Funktion u, sondern auch deren Ableitungen uxi (1 ≤ i ≤ n) zwischen den Elementen stetig andern. DieAnsatzfunktionen mussen daher stuckweise glatt und insgesamt aus C1(Ω) sein.
Als Modellproblem stellen wir die eindimensionale biharmonische Gleichung
u′′′′(x) = g(x) fur 0 < x < 1, u(0) = u′(0) = u(1) = u′(1) = 0
vor, deren schwache Formulierung wie folgt lautet:
a(u, v) = f(v) fur alle v ∈ H20 (0, 1), wobei a(u, v) :=
∫ 1
0
u′′v′′dx, f(v) :=∫ 1
0
gvdx. (8.5.4)
(a) (b) (c)
Abb. 8.5.1. a) B-Spline, b,c) Hermite-Basisfunktionen
Das Intervall Ω = (0, 1) sei aquidistant in Teil-intervalle der Lange h zerlegt. Die bisher verwendetenstuckweise linearen Funktionen (siehe Abbildung 8.3.1)konnen als lineare Splinefunktion angesehen werden, so-dass es nun naheliegt, Vh als Raum der kubischen Spli-nes (mit u = u′ = 0 bei x = 0 und x = 1) anzusetzen (vgl. Stoer [77, §2.4]). Als Basisfunktionenkonnen die B-Splines dienen, deren Trager im Allgemeinen aus vier Teilintervallen bestehen (vgl. Abbildung8.5.1a). Da kubische Splinefunktionen zu C2(0, 1) gehoren, liegen sie nicht nur in H2
0 (0, 1), sondern so-gar in H3(0, 1) ∩ H2
0 (0, 1). Einfacher als mit Splinefunktionen arbeitet man mit der kubischen Hermite9-Interpolation:
Vh :={u ∈ C1(0, 1) : u kubisch auf jedem Teilintervall, u(0) = u′(0) = u(1) = u′(1) = 0
}. (8.5.5)
Zu jedem inneren Knoten xj = jh gibt es zwei Basisfunktionen b1i und b2i mit b1i(xi) = 1, b′1i(xi) = 0,b2i(xi) = 0, b′2i(xi) = 1, bki(xj) = b′ki(xj) = 0 fur k = 1, 2, j �= i (vgl. Abbildung 8.5.1b,c). Der Tragerbesteht aus nur zwei Teilintervallen. Ihre Darstellung lautet
b1i(x) = (h− |x− xi|)2 (h+ 2 |x− xi|) /h3 fur xi−1 ≤ x ≤ xi+1,
b2i(x) = (h− |x− xi|)2 (x− xi) /h2 fur xi−1 ≤ x ≤ xi+1,b1i(x) = b2i(x) = 0 fur x /∈ [xi−1, xi+1].
Ubungsaufgabe 8.5.3 u1i und u2i seien die Koeffizienten der Darstellung uh =∑1/h−1
i=1 [u1ib1i + u2ib2i] ∈Vh. Man zeige: Die Koeffizienten der Finite-Element-Losung von Aufgabe (8.5.4) sind durch die Gleichungen
h−3 [−12u1,i−1 + 24u1,i − 12u1,i+1] + h−2 [−6u2,i−1 + 6u2,i+1] = f1,i,h−2 [6u1,i−1 − 6u1,i+1] + h−1 [2u2,i−1 + 8u2,i + 2u2,i+1] = f2,i
(8.5.6)
gegeben, wobei f1i :=∫ xi+1
xi−1b1igdx, f2i :=
∫ xi+1
xi−1b2igdx, xi = ih.
Das System (8.5.6) unterscheidet sich vollig von den Differenzengleichungen (vgl. Abschnitt 5.3.3), denn inGleichung (8.5.6) erscheinen Knotenwerte u1i der Funktion gemeinsam mit Knotenwerten u2i der Ableitung.
8.5.2.2 Der zweidimensionale Fall
Der Ansatz (8.5.5) lasst sich auf Ω ⊂ R2 ubertragen, wenn man eine Zerlegung in Rechteckselemente zugrundelegt (wie z.B. links in Abbildung 8.3.5 auf Seite 128). Die Ansatzfunktion ist bikubisch:
Vh :={u ∈ C1(Ω) : u =
∂u
∂n= 0 auf Γ, u =
∑3
ν,μ=0ανμx
νyμ auf jedem Teilrechteck der Zerlegung}.
Zu jedem inneren Knotenpunkt (Ecken x ∈ Ω der Rechteckselemente) kann man die vier Werte u, ux,uy, uxy vorschreiben. Entsprechend gehoren zu jedem Knoten vier Unbekannte und vier Basisfunktionenb1i(x, y), . . . , b4i(x, y). Letztere ergeben sich als die Produkte bji(x)bki(y) (j, k = 1, 2) der in §8.5.2.1 be-schriebenen, eindimensionalen Basisfunktionen (vgl. Meis-Marcowitz [62, p. 248], Schwarz [75, p. 126]).
9Charles Hermite, geb. am 24. Dez. 1822 in Dieuze, Lorraine, gest. am 14. Januar 1901 in Paris

8.5 Verallgemeinerungen 141
Geht man von einer Triangulation T aus, so fuhrt ein Ansatz funften Grades zum Ziel: u(x) =∑|ν|≤5 ανxν
auf allen T ∈ T . Die Anzahl der Freiheitsgrade ist 21 (Anzahl der ν ∈ N20 mit |ν| ≤ 5). Als Knoten wahlt man
die Punkte x1, . . . ,x6 aus Abbildung 8.3.8a (auf Seite 130). In den Ecken x1,x2,x3 schreibt man pro Punktdie 6 Werte {Dμu(xj) : |μ| ≤ 2} vor. Die 3 verbleibenden Freiheitsgrade ergeben sich aus der Vorgabe derNormalenableitung ∂u(xj)/∂n in den Seitenmitten x4,x5,x6. Man uberlegt sich: Wenn zwei benachbarteDreiecke (siehe T und T in Abbildung 8.3.8a) gemeinsame Eckwerte {Dμu(xj) : |μ| ≤ 2, j = 1, 2} undubereinstimmende Normalenableitungen in x4 besitzen, so sind u und ∇u an der gemeinsamen Seite stetig,d.h. Vh ⊂ H2(Ω). Je nachdem ob V = H2
0 (Ω), V = H2(Ω) ∩H10 (Ω) oder V = H2(Ω), hat man u bzw. deren
erste Ableitungen an den Randknoten xi auf null zu setzen.
Bemerkung 8.5.4 Die hier beschriebenen Finite-Element-Raume Vh ⊂ H2(Ω) lassen sich selbst-verstandlich auch fur Differentialgleichungen der Ordnung 2m = 2 verwenden.
8.5.2.3 Fehlerabschatzung
Anstelle von (8.5.1) erhalt man
inf {|u− v|m : v ∈ Vh} ≤ Chk+1−m |u|k+1 fur alle u ∈ Hk+1(Ω) ∩ V, (8.5.7)
wobei k ≥ m vom Grad des Polynomansatzes abhangt (z.B. k = 3 fur kubische Splines, kubische bzw.bikubische Hermite-Interpolation). Dabei ist m = 2 im Falle der biharmonische Gleichung. Wie in Satz 8.5.1folgt aus (8.5.7) die Fehlerabschatzung ∣∣uh − u
∣∣m
≤ Chk+1−m |u|k+1 (8.5.8a)
fur die Finite-Element-Losung uh ∈ Vh. Unter geeigneten Regularitatsvoraussetzungen erhalt man∣∣uh − u∣∣t≤ Ct,sh
s−t |u|s (2m− k − 1 ≤ t ≤ m ≤ s ≤ k + 1) (8.5.8b)
(vgl. Bemerkung 8.5.2). Die maximale Konvergenzordnung 2(k−m)+2 ergibt sich fur s = k+1, t = 2m−k−1und erfordert u ∈ Hk+1(Ω) ∩ V . Außerdem muss jede Losung des adjungierten Problems (8.4.14) mitf ∈ Hk+1−2m(Ω) zu Hk+1(Ω) gehoren.
8.5.3 Finite Elemente fur Nichtpolygon-Gebiete
Da die Vereinigung von Dreiecken oder Parallelogrammen nur Polygongebiete erzeugt, war in (8.3.6) diePolygongestalt vorausgesetzt worden. Die Finite-Element-Methode ist aber keineswegs auf diese Gebiete be-schrankt. Im Gegenteil, finite Elemente lassen sich krummlinigen Randern leicht anpassen. Hierzu diskutierenwir zwei Zugange. Der erste versucht, Ω mit ublichen finiten Elementen auszuschopfen. Um die gewohntenFehlerabschatzungen zu erhalten, muss man allerdings im Allgemeinen die isoparametrischen Elemente deszweiten Zuganges verwenden.
B
Γ
Τ Τ
Γ
B
Γ
Τ
(a) (c)(b)
Abb. 8.5.2. Krummlinige Rander
Seien Ω beliebig und V = H1(Ω). Die Triangulation Tkann so gewahlt werden, dass (8.3.7a,b,d) gelten und die“außeren” Dreiecke wie in Abbildung 8.5.2 zwei Ecken aufΓ = ∂Ω haben. Im konvexen Fall von Abbildung 8.5.2aerweitert man die auf T definierte lineare Funktion aufT := T ∪ B. Fur den Fall, dass der Rand konkav ist (vgl.Abbildung 8.5.2b), ist T durch T := T \B zu ersetzen. Ent-sprechend geht man in der Situation von Abbildung 8.5.2 vor. Die Knotenpunkte und die Darstellung derBasisfunktionen werden durch diese Modifikation nicht beruhrt. Ω ist die Vereinigung der Abschlusse allerinneren Dreiecke Ti ∈ T und aller modifizierten, außeren Dreiecke T . Alle Eigenschaften und Resultate ausden Abschnitten 8.3-8.4 ubertragen sich auf die neue Situation. Die einzige Schwierigkeit ist von praktischerArt: Zur Berechnung von L und f hat man Integrale uber die Bogendreiecke T auszuwerten.
Sei nun V = H10 (Ω). Die vorherige Konstruktion fuhrt nicht zum Ziel, da die Fortsetzung der linearen
Funktion auf T nicht auf dem Randstuck Γ∩ ∂T von T verschwindet. Somit ware Vh ⊂ H10 (Ω) nicht erfullt.
Solange das Gebiet Ω konvex ist, tritt nur die Situation von Abbildung 8.5.2a auf, und uh wird auf B ⊂ T

142 8. Die Methode der finiten Elemente
x1 x2
x3
x4
x5x6
T~
T~
T
Φ (b)(a)
Abb. 8.5.3. a) Abbildung des Referenzdreiecks T auf das Bogendreieck T ; b) isoparametrische Dreieckszerlegung
durch uh = 0 fortgesetzt. Im Falle von Abbildung 8.5.2b muss man auch den inneren Knoten von T aufden Wert null setzen, sodass uh = 0 auf T = T \B und insbesondere uh = 0 auf Γ ∩ ∂(T \B). Insgesamtergibt sich, dass der Trager aller uh ∈ Vh ein Ω einbeschriebenes Polygongebiet darstellt. Eine Interpretationware die folgende: In der Randwertaufgabe wird Ω durch ein approximierendes Polygongebiet Ωh ⊂ Ωersetzt (vgl. Satz 2.4.6). Die beschriebene Finite-Element-Losung stimmt mit der uberein, die sich fur daskleinere Polygongebiet Ωh ergabe. Die Fehlerabschatzung aus Satz 8.4.4 gilt aber nur fur das TeilgebietΩh: infv∈Vh
‖u− v‖H1(Ωh) ≤ Ch ‖u‖H2(Ω). Wegen v = 0 auf Ω\Ωh fur v ∈ Vh, ist zusatzlich ‖u‖H1(Ω\Ωh)
abzuschatzen. Ω\Ωh ist in dem Streifen
Sδ = {x ∈ Ω : dist(x,Γ) ≤ δ} der Breite δ := max{dist(x,Γ) : x ∈ Ω\Ωh}enthalten. Man kann wie folgt abschatzen:
infv∈Vh
‖u− v‖H1(Ω\Ωh) = ‖u‖H1(Ω\Ωh) ≤ ‖u‖H1(Sδ) ≤ C√δ ‖u‖H2(Ω) fur u ∈ H2(Ω) ∩H1
0 (Ω).
Besteht Ω\Ωh nur aus den Bogenstucken B der Abbildung 8.5.2a (wie zum Beispiel im Falle eineskonvexen Gebietes) und ist Ω ∈ C1,1, so ist δ = O(h2). Hieraus folgt die gleichlautende Abschatzunginfv∈Vh
‖u− v‖H1(Ω) ≤ Ch1 ‖u‖H2(Ω) wie fur ein Polygongebiet. Falls aber wie in Abbildung 8.5.2bdas gesamte Dreieck T zu Ω\Ωh gehort, wird δ zu O(h) und die Approximation verschlechtert sich zuinfv∈Vh
‖u− v‖H1(Ω) ≤ Ch1/2 ‖u‖H2(Ω) (vgl. Strang-Fix [78, p. 192]).Um die Dreiecks- oder Parallelogramm-Elemente dem krummlinigen Rand besser anzupassen, kann man
die Technik der isoparametrischen finiten Elemente verwenden. Aus Abbildung 8.3.4 (Seite 128) geht hervor,dass eine affine Transformation Φ : (ξ, η) �→ x1+ξ(x2−x1)+η(x3−x1) das Referenzdreieck T in ein beliebigesDreieck T ∈ T abbildet. Die lineare [bzw. im Falle von §8.3.4 quadratische] Funktion u(x) uber T kann durchv(ξ, η) = u(Φ(ξ, η)) als Bild einer linearen [bzw. quadratischen] Funktion v uber T dargestellt werden. Wirersetzen die affine Dreieckstransformation Φ nun durch eine allgemeinere, quadratische Abbildung
Φ(ξ, η) :=[
a1 + a2ξ + a3η + a4ξ2 + a5ξη + a6η
2
a7 + a8ξ + a9η + a10ξ2 + a11ξη + a12η
2
]: T −→ T ⊂ R2.
Das Bild T ist ein Bogendreieck. Die Koeffizienten a1, . . . , a12 sind eindeutig durch die Knoten x1, . . . ,x6
von T festgelegt, die sich als Bilder der Eckpunkte und Seitenmitten des Referenzdreiecks T ergeben sollen(vgl. Abbildung 8.5.3a). Die bisherige Triangulation T kann man durch eine “Triangulation” T mit Bogen-dreiecken ersetzen, wenn benachbarte Elemente den gleichen Bogen als gemeinsamen Rand besitzen und auchdie Mittelknoten zusammenfallen. Die Ansatzfunktionen auf T ∈ T haben die Gestalt u(x) = v(Φ−1(x)),wobei v(ξ, η) linear [bzw. quadratisch] in ξ, η ist. Der entstehende Finite-Element-Raum ist der Raumder isoparametrischen, linearen [bzw. quadratischen] Elemente (vgl. Jung-Langer [47, §4.5.6], Knabner-Angermann [52, §3.8], Strang-Fix [78, p. 192], Ciarlet [22], Schwarz [75], Zienkiewicz [94]). Im Allgemeinenbesteht kein Anlass, im Inneren von Ω gekrummte Bogendreiecke zu verwenden. Wie in Abbildung 8.5.3bwahlt man ubliche Dreiecke im Inneren (d.h. die quadratische Transformation Φ wird wieder affin gewahlt:a4 = a5 = a6 = a10 = a11 = a12 = 0). Ein Randdreieck, wie zum Beispiel T aus Abbildung 8.5.3b, wirddagegen wie folgt definiert: x1 und x2 seien die Ecken von T , die auf Γ liegen. Man wahlt einen weiterenRandpunkt x4 zwischen x1 und x2 und verlangt, dass der Dreiecksrand ∂T den Gebietsrand Γ in x1,x4,x2
interpoliert.
Bemerkung 8.5.5 Abschnitt 5.2.2 zeigte, dass im Falle von anderen als Dirichlet-Randbedingungen dieKonstruktion von Differenzenschemata zunehmend kompliziert wird. Stattdessen kann man die ublichenDifferenzenverfahren auch auf die inneren Gitterpunkte beschranken und in Randnahe das Randwertpro-blem durch (z.B. isoparametrische) finite Elemente diskretisieren.

8.6 A-posteriori-Fehlerabschatzungen, Adaptivitat 143
8.6 A-posteriori-Fehlerabschatzungen, Adaptivitat
Die folgenden Uberlegungen betreffen zwei unterschiedlichen Aufgabenstellungen. Der erste Wunsch ist eineAussage uber die Qualitat der erzielten Finite-Element-Losung. Diese Frage wird in §8.6.1 diskutiert werden.Die zweite Frage zielt auf die Effizienz der Finite-Element-Diskretisierung und wird in §8.6.2 behandelt. Wiesich herausstellen wird, sind beide Aufgaben miteinander verbunden; zumindest versucht man die Effizienzmit Hilfe der A-posteriori-Fehlerabschatzungen zu erzielen.
8.6.1 A-posteriori-Fehlerabschatzungen
8.6.1.1 Kritik der bisherigen Fehlerbetrachtungen
Die bisher beschriebenen Fehlerabschatzungen fur die Finite-Element-Losung (aber auch fur die Losungen derDifferenzenverfahren) werden samtlich a priori bestimmt, d.h. ohne dass Information uber die berechneteLosung einfließt. Da die Abschatzungen von der Form ‖Fehler‖ ≤ α(h) · |||u||| sind, erfahrt man hierausetwas uber das asymptotische Verhalten, wenn h gegen null strebt: ‖Fehler‖ ≤ O(α(h)). Ferner deutet dieUngleichung (auch fur festes h) an, wie der Fehler von der Glattheit von u abhangt, wenn diese durch dieNorm ||| · ||| ausgedruckt wird. Obwohl dies interessante Aussagen sind, bleiben andere Fragen offen.• Die Fehlerschranke ist im Allgemeinen nur qualitativ gegeben, d.h. Konstanten bleiben unbekannt. Damit
ist die folgende konkrete Frage nicht beantwortbar:
gilt ‖Fehler‖ ≤ 0.001 ? (8.6.1)
Selbst wenn der Faktor α(h) quantitativ gegeben ware, bliebe das folgende Problem:• Der Faktor |||u||| ist die Norm einer (zumindest vor der Berechnung, also a priori) unbekannten Funktion
und somit selbst unbekannt.Generell gilt fur jede Art der Abschatzung, auch fur (8.6.1), dass sie viel zu pessimistisch sein kann (es ware
nicht befriedigend, wenn (8.6.1) nachgewiesen wird, aber in Wirklichkeit ‖Fehler‖ = 10−6 gilt). Schließlichkann man die Frage nach der• Wahl der Normen
stellen. Die bisher verwandten Normen sind gewahlt worden, weil sich die Abschatzungen dann am ein-fachsten ergeben. Man kann Grunde angeben, warum die verwendeten Sobolev-Normen nicht optimal sind:Regularitatsanalysen in §9.1.6 werden zeigen, dass Losungen von Lu = f (f glatt) im Inneren des Gebietes(entfernt vom Rand) glatter sind als in Randnahe. Es ware daher angemessen, Normen fur u zu verwenden,die auf dieses Verhalten eingehen und die Glattheit nicht wie die Sobolev-Raumes ortlich gleichmaßig messen.
Man kann noch weiter gehen und fragen, warum uberhaupt Normen verwendet werden. In vielen Fallenist man nicht an der Losung u als Funktion interessiert, sondern mochte nur Funktionswerte an speziellenStellen oder Mittelwerte etc. Die allgemeine Formulierung ware ein (lineares) Funktional φ(u). Statt desallgemeinen Fehlers u− uh mochte man dann etwas uber φ(u− uh) erfahren.
8.6.1.2 Konzept der A-posteriori-Fehlerabschatzungen
Der Name besagt, dass man den Fehler e := u− uh untersuchen mochte, nachdem man uh bestimmt hat.Eine mogliche Losung dieser Frage konnte wie folgt aussehen. Seien u die Losung von Lu = f (z.B. mit
Nullrandbedingung) und uh die Finite-Element-Losung (ebenfalls mit Nullrandbedingung). Dann gilt
Le = L(u− uh
)= Lu− Luh = f − Luh =: r. (8.6.2)
Die rechte Seite r (Defekt oder Residuum genannt) gehort zum DualraumH−10 (Ω). Falls es gelange, ‖r‖−1 ≤ ε
mit einem konkreten Wert ε abzuschatzen, erhielte man ‖e‖1 ≤ ‖L−1‖1←−1ε. Falls weiterhin ‖L−1‖1←−1 ≤ Cmit einer berechenbaren Große C nachweisbar ware, hatte man das Ziel erreicht: ‖e‖1 ≤ Cε stellt eine Fehler-abschatzung mit bekannter Schranke auf der rechten Seite dar.
Die Abschatzung von r durch ‖r‖−1 ≤ ε ist im strikten Sinne unmoglich: ‖r‖−1 = supv∈H10 (Ω) (r, v) / ‖v‖1
ist nicht mit endlichem Rechenaufwand erhaltlich. Der naheliegende Versuch, die Testfunktionen v ∈ H10 (Ω)
auf den Finite-Element-Raum Vh zu beschranken, scheitert vollig, da r senkrecht auf Vh steht (vgl. (8.2.3)).

144 8. Die Methode der finiten Elemente
Schon die Berechnung der L2-Norm einer rechten Seite r ist mit endlich vielen Daten unmoglich. Jede Ab-schatzung von ‖r‖−1 erfordert daher A-priori-Annahmen uber f und uber die Koeffizienten von L. Dagegenist ‖L−1‖1←−1 ≤ C mit gewissen Einschrankungen berechenbar.10
Im folgenden Abschnitt wird die Abschatzung von ‖e‖1 mittels r direkt ausgefuhrt.
8.6.1.3 Beispiel eines Residuum-Fehlerschatzers
Es sei der Modellfall−Δu = f in Ω, u = 0 auf Γ, (8.6.3)
angenommen, sodass a(u, v) = f(v) aus Beispiel 7.2.10 fur alle v ∈ V := H10 (Ω) die Variationsformulierung
darstellt. Sei T eine zulassige Triangulation (vgl. Definition 8.3.7). Wir fuhren die folgenden Notationen ein:Die drei Dreiecksseiten von T ∈ T bilden die Kantenmenge E(T ), wahrend die drei Ecken des Dreiecks T ∈ Tdie Knotenmenge N (T ) ausmachen. Ihre Vereinigung liefert
E :=⋃
T∈TE(T ), N :=
⋃T∈T
N (T ).
Die Anteile des Dirichlet-Randes sind ED := {E ∈ E : E ⊂ Γ} , das Komplement ist EΩ := {E ∈ E : E ⊂ Ω} .Zu einer Kante E ∈ E gehoren zwei Knoten als Endpunkte: sie bilden die Menge N (E).
ωT
ωE
ΕT
Abb. 8.6.1. ωT und ωE
Die Dreiecksmenge, die die Nachbarschaft eines Dreiecks T ∈ T , einerKante E ∈ E und eines Knotens x ∈ N ausmacht, wird wie folgt bezeich-net:
ωT :=⋃
T ′:E(T )∩E(T ′) �=∅T ′, ωE :=
⋃T ′:E∈E(T ′)
T ′
(vgl. Abbildung 8.6.1). Jeder Kante E ∈ E wird eine Normalenrichtung�nE zugeordnet (das Vorzeichen darf beliebig fixiert werden; wenn T und T ′ die gemeinsame KanteE ∈ E(T ) ∩ E(T ′) besitzen, ist �nE somit nur bezuglich eines Dreiecks die ubliche außere Normalenrichtung).Da die Ableitungen der Finite-Element-Funktionen an den Kanten E ∈ EΩ unstetig sein konnen, treten zweiGrenzwerte ϕ(x± t�nE) fur t↘ 0 auf. Ihre Differenz wird mit dem Symbol [·] bezeichnet:
[ϕ]E (x) := limt↘0
ϕ(x + t�nE) − limt↘0
ϕ(x− t�nE) fur x ∈ E ∈ EΩ.
Auf beiden Seiten der kontinuierlichen Gleichung a(u, v) = f(v) subtrahiere man a(uh, v) :∫Ω
⟨∇
(u− uh
),∇v
⟩dx =
∫Ω
fvdx−∫
Ω
⟨∇uh,∇v
⟩dx fur alle v ∈ V = H1
0 (Ω). (8.6.4)
Die rechte Seite reprasentiert das Residuum r aus (8.6.2) mittels r(v) :=∫Ωfvdx−
∫Ω
⟨∇uh,∇v
⟩dx.
Lemma 8.6.1 Sei cΩ die Poincare-Friedrichs-Konstante aus ‖v‖L2(Ω) ≤ cΩ |v|1,0 fur v ∈ H10 (Ω) (vgl.
Lemma 6.2.12). Dann ist der Diskretisierungsfehler ‖u− uh‖H1(Ω) beidseitig mittels r abschatzbar:
‖r‖−1 ≤ ‖u− uh‖H1(Ω) ≤(1 + c2Ω
)‖r‖−1 , ‖r‖−1 = sup
v∈V =H10 (Ω)
‖v‖H1(Ω)=1
∣∣∣∣∫Ω
fvdx−∫
Ω
⟨∇uh,∇v
⟩dx
∣∣∣∣ . (8.6.5)
Beweis. Sei w ∈ H10 (Ω). supv∈H1
0 (Ω), ‖v‖H1(Ω)=1
∣∣∫Ω〈∇w,∇v〉 dx
∣∣ = ‖∇w‖L2(Ω) = |w|1,0 erfullt nach Voraus-setzung ‖w‖L2(Ω) ≤ cΩ |w|1,0 , sodass
|w|21,0 ≤ ‖w‖2H1(Ω) ≤
(1 + c2Ω
)|w|21,0. (8.6.6)
10Die Norm ‖L−1‖1←−1 ist als Eigenwertproblem formulierbar. Seine approximative Losung ist zwar nicht notwendigerweiseeine obere Schranke, aber eine gute Naherung der rechten Seite in ‖L−1‖1←−1 ≤ C ist genauso brauchbar.

8.6 A-posteriori-Fehlerabschatzungen, Adaptivitat 145
Da |u− uh|1,0 = ‖∇(u− uh
)‖L2(Ω) = sup‖v‖H1(Ω)=1
∣∣∫Ω
⟨∇
(u− uh
),∇v
⟩dx
∣∣ , ist einerseits
‖r‖−1 = sup0�=v∈H1
0 (Ω)
|r(v)|‖v‖H1(Ω)
=(8.6.4)
sup0�=v∈H1
0 (Ω)
∣∣∫Ω
⟨∇
(u− uh
),∇v
⟩dx
∣∣‖v‖H1(Ω)
≤(8.6.6)
sup0�=v∈H1
0 (Ω)
∣∣∫Ω
⟨∇
(u− uh
),∇v
⟩dx
∣∣‖∇v‖L2(Ω)
= ‖∇(u− uh
)‖L2(Ω) ≤ ‖u− uh‖H1(Ω)
und andererseits
‖u− uh‖H1(Ω) ≤(8.6.6)
√1 + c2Ω|u− uh|21,0 =
√1 + c2Ω sup
0�=v∈H10 (Ω)
∣∣∫Ω
⟨∇
(u− uh
),∇v
⟩dx
∣∣‖∇v‖L2(Ω)
=(8.6.4)
√1 + c2Ω sup
0�=v∈H10 (Ω)
|r(v)||v|1,0
≤(8.6.6)
(1 + c2Ω
)sup
0�=v∈H10 (Ω)
|r(v)|‖v‖H1(Ω)
=(1 + c2Ω
)‖r‖−1 .
Zusammen ergibt sich die Behauptung.In (8.6.5) wird
∫Ω fvdx−
∫Ω
⟨∇uh,∇v
⟩dx partiell integriert. Fur jedes T gilt∫
T
⟨∇uh,∇v
⟩dx = −
∫T
(Δuh
)vdx −
∑E∈E(T )
∫E
∂uh
∂nvdx fur alle v ∈ H1(T ).
Nach der Aufsummation uber alle T ∈ T ergibt sich
∫Ω
fvdx−∫
Ω
⟨∇uh,∇v
⟩dx =
∑T∈T
⎡⎣∫T
(f − Δuh
)vdx−
∑E∈EΩ(T )
∫E
[⟨∇uh, �nE
⟩]Evdx
⎤⎦ fur alle v ∈ H10 (T )
(8.6.7)(man beachte, dass das Skalarprodukt
[⟨∇uh, �nE
⟩]E
zwar von der Vorzeichenwahl von �nE abhangt, aberauch die Differenz [·]E , sodass der Ausdruck
[⟨∇uh, �nE
⟩]E
unabhangig von der Wahl von �nE ist). DieKanten E ⊂ Γ werden ausgenommen, da dort v = 0 (außerdem ware dort die Differenz [·]E undefiniert).
Fur stuckweise lineare finite Elemente gilt in unserem Beispiel Δuh = 0 in jedem T. In den Abschatzungenwird f pro Dreieck durch eine Konstante fT ersetzt, die im optimalen Fall als Mittelwert
fT,exakt :=1
Flache(T )
∫T
fdx (konstante Funktion auf T )
zu wahlen ist. Die lokale Große
ηT :=
√√√√h2T ‖fT ‖2
L2(T ) +12
∑E∈EΩ(T )
hE ‖[〈∇uh, �nE〉]E‖2
L2(E) mit{hT = diam(T ),hE = Lange(E) (8.6.8)
wird im Folgenden eine zentrale Rolle spielen.
Satz 8.6.2 Seien u die Losung von (8.6.3) und uh die Losung fur stuckweise lineare Elemente zur Triangu-lation T . Dann gibt es Konstanten c und c, die nur von Ω und der Formregularitat der Triangulation Tabhangen, sodass
‖u− uh‖H1(Ω) ≤ c
√∑T∈T
η2T +
∑T∈T
h2T ‖f − fT‖2
L2(T ) (8.6.9a)
und ηT ≤ c
√‖u− uh‖2
H1(ωT ) +∑
T ′⊂ωT
‖f − fT ′‖2L2(T ′). (8.6.9b)
Beweis. Wir verwenden die Darstellung (8.6.7) von r(v) und verwenden die Galerkin-Gleichung r(vh) = 0fur alle vh ∈ Vh.

146 8. Die Methode der finiten Elemente
Zusammen mit Δuh = 0 liefert die Identitat
r(v) = r(v − vh) =∑T∈T
⎡⎣∫T
f(v − vh
)dx−
∑E∈EΩ(T )
∫E
[⟨∇uh, �nE
⟩]E
(v − vh
)dx
⎤⎦ fur alle vh ∈ Vh.
Fur vh verwendet man die Clement-Interpolierende von v (vgl. [23], Ende von §8.4.1). Hierfur gilt∥∥v − vh∥∥
L2(T )≤ C1hT ‖u‖H1( fωT ),
∥∥v − vh∥∥
L2(E)≤ C2
√hE‖u‖H1( fωE)
(siehe [23]), wobei ωT :=⋃
T ′:N (T )∩N (T ′) �=∅ T′ ⊃ ωT und ωE :=
⋃T ′:N (E)∩N (T ′) �=∅ T
′ ⊃ ωE . Die Konstan-ten C1, C2 hangen nur von der Formregularitat (d.h. dem kleinesten Innenwinkel) ab. Wir erhalten dieAbschatzung
|r(v)| ≤ C1
∑T∈T
hT ‖f‖L2(T ) ‖v‖H1( fωT ) + C2
∑E∈EΩ(T )
√hE
∥∥[⟨∇uh, �nE
⟩]E
∥∥L2(E)
‖v‖H1( fωE)
≤Cauchy-Schwarz-Ungleichung
C3‖v‖H1(Ω)
⎡⎣∑T∈T
h2T ‖f‖2
L2(T ) +∑
E∈EΩ(T )
hE
∥∥[⟨∇uh, �nE
⟩]E
∥∥2
L2(E)
⎤⎦fur alle v ∈ H1
0 (Ω). Der Term ‖f‖2L2(T ) ist durch 2 ‖fT ‖2
L2(T ) + 2 ‖f − fT ‖2L2(T ) abschatzbar. Zusammen mit
(8.6.5) und (8.6.8) erhalten wird die Aussage (8.6.9a).Die zweite Ungleichung (8.6.9b) verwendet eine spezielle Wahl von v. Details konnen bei Verfurth [85,
Seiten 15-17] nachgelesen werden.Der Satz bietet mit (8.6.9a) eine Fehlerabschatzung an, die im Wesentlichen die lokalen Großen ηT ver-
wendet. Wichtig ist, dass ηT a posteriori, d.h. nach der Berechnung von uh vollstandig berechenbar ist. Esverbleibt f − fT , deren Schranke ‖f − fT ‖L2(T ) a priori bekannt sein muss. Annahmen uber f sind nach derDiskussion in §8.6.1.2 unvermeidbar.
Die zweite Ungleichung (8.6.9b) zeigt, dass ηT bis auf den Term O(h2 ‖f − fT ‖L2(ωT )) auch nach obendurch den Fehler ‖u− uh‖2
H1(ωT ) mit einer etwas großeren Umgebung ωT ⊃ T abschatzbar ist. Summationaller η2
T liefert ∑T∈T
η2T ≤ C
[‖u− uh‖2
H1(Ω) +∑T∈T
‖f − fT ‖2L2(T )
].
Damit sind modulo∑
T∈T ‖f − fT ‖2L2(T ) der Fehlerschatzer η :=
√∑T∈T η
2T und der Fehler ‖u− uh‖H1(Ω)
aquivalent.Einen Fehlerschatzer η nennt man zuverlassig, wenn ‖u − uh‖H1(Ω) ≤ const · η + (. . .) mit einem A-
priori-Term (. . .) wie z.B.∑
T∈T ‖f − fT ‖2L2(T ) . Um eine Uberschatzung infolge von ‖u− uh‖H1(Ω) ! η zu
vermeiden, benotigt man die umgekehrte Ungleichung. Ein Schatzer η mit η ≤ const · ‖u− uh‖H1(Ω) + (. . .)heißt effizient. Damit eine Aussage wie (8.6.1) beantwortbar wird, muss die Große von const in (8.6.9a)bekannt sein. Der optimale Fall liegt vor, wenn const = 1 in beiden Ungleichungen gilt oder zumindestasymptotisch ‖u− uh‖H1(Ω)/η → 1 fur h→ 0 gilt. Dann heißt η asymptotisch exakt.
Mehr zu Fehlerschatzern erfahrt man in der Einfuhrung von Verfurth [85]. Man vergleiche auch [29], [36,§4.8] und Knabner-Angermann [52, §4.2]. Die Frage der Konvergenz wird von Dorfler [28] behandelt.
Fehlerschatzer fur Funktionale φ(u−uh) anstelle von Normen werden zum Beispiel von Becker-Rannacher[9] diskutiert.
8.6.2 Effizienz der Finite-Element-Methode
8.6.2.1 Maß fur die Gute einer Diskretisierung
Jede (konsistente und konvergente) Diskretisierung bestimmt auf die eine oder andere Art eine Naherung uh
von u. Die Frage liegt nahe, wie man zwei Diskretisierungen vergleicht. Bei den zu vergleichenden Diskre-tisierungen kann es sich um verschiedene Diskretisierungsmethoden handeln, aber auch um gleiche Finite-Element-Ansatze auf verschiedenen Triangulationen.
8.6 A-posteriori-Fehlerabschatzungen, Adaptivitat 147
Zwei unterschiedliche Ziele bieten sich als Kriterium an: (a) moglichst kleiner Rechenaufwand (z.B. ge-messen als Laufzeit des Computerprogramms) oder (b) moglichst kleiner Fehler (gemessen in irgendeinerNorm). Da beide Ziele gegenlaufig sind, mussen Aufwand und Genauigkeit verknupft werden. Dies fuhrt aufzwei Fragestellungen, die die Effizienz der Diskretisierung vergleichen:
(i) Gegeben ein ε > 0. Welches Verfahren liefert eine Naherung u mit ‖u− u‖ ≤ ε mit dem kleinstenRechenaufwand?
(ii) Seien uI und uII die Resultate zweier Verfahren bei gleichem Rechenaufwand. Welche Naherung istgenauer?
Der Rechenaufwand als Maß bringt eine neue Schwierigkeit mit sich, da er sich notwendigerweise auf einenAlgorithmus zur Berechnung der Losung bezieht und dieser nicht durch die Diskretisierungsmethode fest-geschrieben ist. Letztere beschreibt das zu losende Gleichungssystem. Hierfur stehen viele Verfahren zurVerfugung, die sich in der Rechenzeit wesentlich unterscheiden konnen (vgl. [42]). Nachdem aber guteGleichungsloser eine Rechenzeit aufweisen, die proportional zur Dimension n des Gleichungssystems ist,bietet sich der Ausweg an, die Dimension n als Maß des Rechenaufwandes zu verwenden.11
8.6.2.2 Konsistenzordnung
Wenn wir die obige Formulierung (ii) aufnehmen, haben wir ε = ε(n) als Funktion der Dimension n zudiskutieren. Stuckweise lineare finite Elemente fuhrten auf einen Fehler ε = O(h2) in der L2-Norm. Fureine uniforme Triangulation und die Raumdimension d (Ω ⊂ Rd) gilt h = O(n−1/d), sodass ε = O(n−2/d).Verwendet man allgemeiner stuckweise Polynome12 vom Grad p, so ergibt sich fur den Fehler
ε = O(n−(p+1)/d).
Hierbei ist jeweils u ∈ Hp+1(Ω) ∩ V (z.B. mit V = H10 (Ω)) unterstellt. Die Frage (ii) lasst sich damit
asymptotisch (fur große n) eindeutig beantworten: Verfahren hoher Konsistenzordnung sind besser als solchemit niedrigerer Ordnung.
8.6.2.3 Wahl der Triangulation
Legt man den lokalen Polynomgrad p fest, bleibt die Frage, wie die Triangulation T zu wahlen ist. Dasich das Fehlerquadrat ‖e‖2
L2(Ω) (e := u − uh) als Summe der ‖e‖2L2(T ) (T ∈ T ) zusammensetzt, liegt das
heuristische Prinzip der Fehleraquilibrierung nahe: Alle Fehlerbeitrage ‖e‖L2(T ) sollten von vergleichbarerGroße sein. Dieses Prinzip wird als konstruktives Kriterium verwendet, um in §8.6.3 die Triangulation adaptivzu konstruieren.
8.6.3 Adaptive Finite-Element-Methode
8.6.3.1 Aufgabenstellung
Wir gehen von der Zielstellung (i) aus: Gegeben eine gewunschte Fehlertoleranz ε > 0 in einer gewissenNorm ‖·‖ ist eine Finite-Element-Diskretisierung mit moglichst kleiner Dimension n gesucht, die diese Fehler-toleranz einhalt.
11Bei dieser Vereinfachung darf nicht vergessen werden, dass die Rechenzeit fur die Gleichungsauflosung nicht nur von derDimension, sondern auch von der Struktur abhangt (wie schwachbesetzt ist die Matrix?). Ein anderes Maß fur den Aufwandware der Speicherbedarf. Man mache sich aber klar, dass ein Differenzenverfahren bei gleicher Dimension wesentlich wenigerSpeicher verbraucht als eine Finite-Element-Methode.
12Aus numerischen Grunden sind passende Polynombasen zu verwenden. Mogliche Probleme demonstrieren die Polynomebν(x) = xν/ν (ν = 1, . . . , N) fur das eindimensionale Randwertproblem u′′ = f in Ω = (0, 1), u(0) = 0, u′(1) = 0 (naturlicheRandbedingung). Die Systemmatrix ist die Hilbert-Matrix Aij = 1/ (i + j − 1) , die ein Beispiel fur extrem schlechte Konditionist (vgl. Maeß [60, S. 108]).

148 8. Die Methode der finiten Elemente
8.6.3.2 Adaptive Gitterverfeinerung
Beispielsweise mit Hilfe der Fehlerschatzer aus §8.6.1.3 seien Großen η(T ) definiert, die jedem Element vonT eine Fehlerschatzgroße zuordnen. Die heuristische Annahme ist, dass eine Gitterverfeinerung in ElementenT mit großen Werten von η(T ) den Gesamtfehler starker verkleinert, als wenn man Elemente mit kleinerenη(T ) verfeinert. Da man im Sinne der Effizienz den Fehler verkleinern, aber n moglichst wenig vergroßernmochte, wahlt man die Teilmenge der zu verfeinernden Elemente wie folgt aus:
Schritt I : Sei ϑ ∈ (0, 1) ein fester Wert. Bestimme ηmax := max {η(T ) : T ∈ T } und setzeTverfeinern := {T ∈ T : η(T ) ≥ ϑηmax} .
Schritt II : Man verfeinere alle Elemente aus Tverfeinern gemaß des Verfahrens aus §8.6.3.3.Schritt III : Man bestimme die Losung uh und die η(T ) zur neuen Triangulation Tneu.
Schritt IV: Wenn die A-posteriori-Fehlerschatzung eine hinreichende Genauigkeit anzeigt,akzeptiere man uh als Resultat, sonst wiederhole man den Prozess bei Schritt I.
Falls der Fehlerschatzer η(T ) schon aquilibriert ist, d.h. alle η(T ) die ahnliche Große haben, konnte furϑ = 1/2 die Teilmenge Tverfeinern = T resultieren. Die Verfeinerung ware dann uniform. Sind die Werte η(T )dagegen ungleich verteilt, werden eventuell nur wenige Elemente verfeinert (d.h. #Tverfeinern ! #T ).
Das obige Verfahren unterscheidet nur zwischen den Alternativen Verfeinern und Nicht-Verfeinern. Alter-nativ kann eine lokal zu erzielende Schrittweite pro T angegeben werden, sodass Elemente eventuell mehrfachunterteilt werden.
8.6.3.3 Gitterverfeinerungstechniken
Die Grundaufgabe lautet: Ausgehend von einer Teilmenge Tv von T mochte man eine neue Triangula-tion Tneu berechnen, die anstelle aller T ∈ Tv kleinere Elemente aufweist und ansonsten mit T moglichstubereinstimmt. Dabei ist Folgendes zu bedenken:
a) Je mehr Elemente in T ∩ Tneu liegen, umso weniger Neuberechnungen von Matrixkoeffizienten sindnotig.
b) Wenn keine hangenden Knoten in Kauf genommen werden sollen, erzwingt die Verfeinerung einesDreiecks T ∈ Tv unter Umstanden die seines Nachbarn.
c) Die Formregularitat erfordert Vorkehrungen, die verhindern, dass zum Beispiel die Innenwinkel derDreiecke bei jedem Verfeinerungsschritt kleiner werden.
d) Wenn die K-Gittereigenschaft noch nicht aus der Formregularitat folgt, ist ihre Einhaltung zusatzlichzu beachten.
d)
a)
c)
b)
Abb. 8.6.2. K-Gitter mit K = 2, c) wird verworfen
Zunachst eine Anmerkung zu d). Im eindimensionalenFall, wenn die Elemente Intervalle sind, gibt es keine Form-regularitat. Abbildung 8.6.2 zeigt eine Verfeinerungsfolgein Ω = (0, 1), bei der jeweils alle Teilintervalle in (0, 1/4)verfeinert werden sollen. Die erste Verfeinerung fuhrt aufein K-Gitter mit K = 2. Die zweite, rein lokale Halbierungder Teilintervalle in (0, 1/4) liefert K = 4, da die Intervalle[3/16, 4/16] und [1/4, 1/2] mit dem Langenverhaltnis 4 benachbart sind. Will man K = 2 erhalten, mussauch [1/4, 1/2] halbiert werden.
Zur Einhaltung der Formregularitat gibt es ein einfaches hinreichendes Kriterium. Wenn wahrend desVerfeinerungsalgorithmus nur Dreiecke erzeugt werden, die zu Dreiecken der Ausgangstriangulation T kon-gruent sind, verandern sich die Winkel nicht – insbesondere bleibt der minimale Winkel konstant. Daherist die Standardverfeinerung (“Typ A”) eine Zerlegung von T ∈ Tv in vier kongruente Teildreiecke halberSeitenlange (vgl. Abbildung 8.6.3a).
Ein Problem ergibt sich, wenn T ∈ Tv ein Nachbardreieck T ′ ∈ T \Tv besitzt (vgl. Abbildung 8.6.3b),da ein hangender Knoten auftritt (vgl. §8.8.2). Wurde man auch T ′ gemaß Typ A zerlegen, breitet sich dieVerfeinerung in der gesamten Zusammenhangskomponente aus und man erhielte eine uniforme Verfeinerung.Deshalb wird ein T ′ ∈ T \Tv nur dann gemaß Typ A zerlegt, wenn es zwei verfeinerte Nachbarn besitzt(vgl. gestricheltes Dreieck in Abbildung 8.6.4b). Andernfalls sieht die Verfeinerungsstrategie nach Bank [7]vor, dass T ′ gemaß Abbildung 8.6.4a halbiert wird (Verfeinerung vom “Typ B”). Dieser Schritt verkleinert

8.7 Eigenschaften der Systemmatrix 149
eventuell den kleinsten Innenwinkel. Damit diese Winkelverkleinerung nicht wiederholt wird, werden in einemnachsten Verfeinerungsschritt zunachst die Verfeinerungen vom Typ B ruckgangig gemacht.
(a) (b)
Abb. 8.6.3. (a) Typ A: Regelmaßige Zerlegung eines Dreiecks, (b) Hangende Knoten nach lokaler Verfeinerung.
(a) (b)
Abb. 8.6.4. (a) Typ B: Zerlegung eines Dreiecks durch eine Seitenhalbierende, (b) Resultat der Verfeinerung
Man vergleiche auch Knabner-Angermann [52, §4.1].
8.6.3.4 Adaptive Gittervergroberung
Bisher sind wir davon ausgegangen, dass die Ausgangstriangulation grob ist und verfeinert werden muss. Beieinigen Aufgabenstellungen hat man dagegen eine Ausgangstriangulation, in der Elemente kleiner sind alserforderlich. In Analogie zum obigen Verfeinerungsverfahren kann man eine Teilmenge Tvergrobern ermitteln(z.B. mittels η(T ) ≤ ηmin) und dort lokal das Gitter vergrobern. Dazu ist es notwendig, die vorher aus-gefuhrten Verfeinerungsschritte in einer Baumstruktur zu speichern. Dabei sind die Teildreiecke jeweils dieSohne des Vaterdreiecks. Die Verfeinerung bedeutet dann, dass ein Blattknoten (d.h. ein bisher unverfei-nertes Dreieck) neue Sohne bekommt, wahrend bei der Vergroberung Blatter, die Sohne eines Vaterknotenssind, entfernt werden. Wie bei der Verfeinerung muss darauf geachtet werden, dass keine hangenden Knotenubrig bleiben.
8.6.3.5 hp-Methoden
Bisher war der Polynomgrad p der stuckweisen Finite-Element-Funktionen fixiert, und die Elementgroße hwar als die Große angesehen worden, die theoretisch gegen null streben soll. Bei einer konkreten Finite-Element-Berechnung sind naturgemaß h und p fixiert. Im Zug der Verfeinerung kann man aber die Fragestellen, was gunstiger ist: die (lokale) Verkleinerung von h oder die (lokale) Anhebung des Polynomgradesp. Gemaß §8.6.2.2 sollte die Vergroßerung von p vorteilhaft sein, wenn die Losung hinreichend glatt ist. DasVorgehen aus §8.6.3.2 ist in Schritt II dadurch zu modifizieren, dass zusatzlich vorgeschlagen werden muss,ob h oder p oder beide verandert werden sollen. (Vgl. Großmann-Roos [36, §4.9.2]).
8.7 Eigenschaften der Systemmatrix
8.7.1 Zusammenhang von L und Lh
Bei Differenzenverfahren wurden die Eigenschaften der Matrix eingehend untersucht, da hiervon dieLosbarkeit der Differenzengleichungen und die Konvergenzanalyse abhangen. Im Fall der Finite-Element-

150 8. Die Methode der finiten Elemente
Diskretisierung erhalten wir die entsprechenden Aussagen auf andere Weise. Maßgebend fur Losbarkeit undKonvergenz ist der Unterraum Vh bzw. der zur Bilinearform a(·, ·) : Vh × Vh → R gehorende OperatorLh : Vh → Vh, der in (8.1.11a) als LN eingefuhrt wurde.
Die Systemmatrix L hangt bei festem Vh von der gewahlten Basis {b1, . . . , bNh} ab. Dabei sei
Nh := dim(Vh).
Der in (8.1.6) definierte Isomorphismus P : RNh → Vh bildet den Koeffizientenvektor v in Pv =∑Nh
i=1 vibi ∈Vh ab. Bei finiten Elementen stimmen die Koeffizienten im Allgemeinen mit den Knotenwerten uberein:vi = (Pv)(xi), 1 ≤ i ≤ Nh. Der Zusammenhang zwischen der Matrix L und dem Operator Lh : Vh → Vh istgemaß Lemma 8.1.9 durch
L = P ∗LhP, Lh = P ∗−1LP−1 (8.7.1)
gegeben. Die Definition von P � durch (8.1.11b): 〈P �u, v〉 = (u, Pv)L2(Ω) hangt noch von der Wahl desSkalarproduktes 〈·, ·〉 im RNh ab. Hier sei wie ublich gewahlt:
〈u,v〉 =Nh∑i=1
uivi . (8.7.2a)
In Ubungsaufgabe 8.1.11 wurden bereits die folgenden Eigenschaften von L festgestellt: Wenn a(·, ·) sym-metrisch [und V-elliptisch] ist, so ist L symmetrisch [und positiv definit]. Man beachte, dass Differenzen-verfahren diese Eigenschaft nicht immer haben. Zum Poisson-Problem gehort eine symmetrische Form,trotzdem ist die Matrix Lh aus Abschnitt 4.8.1 nicht symmetrisch (vgl. Satz 4.8.4).
8.7.2 Normaquivalenzen und Massematrix
Fur die Gleichungsauflosung von Lu = f spielt die Kondition cond(L) eine wichtige Rolle. Wir wollenzeigen, dass unter Standardannahmen cond(L) = O(h−2m) gilt (vgl. Bemerkung 5.3.10). Zuvor ist aber diezugrundeliegende Norm des RNh festzulegen. Bis auf den Skalierungsfaktor hn/2 ist
‖u‖h :=
√hn
∑Nh
i=1|ui|2 (n: Dimension von Ω ⊂ Rn) (8.7.2b)
die zum Skalarprodukt (8.7.2a) gehorende Euklidische Norm. Die zugehorige Matrixnorm
‖L‖ := sup{‖Lv‖h / ‖v‖h : 0 �= v ∈ RNh} (8.7.2c)
ist die ubliche Spektralnorm von L (sie ist unabhangig vom Skalierungsfaktor in ‖·‖h). Als Alternative zu‖·‖h aus (8.7.2b) sei die Norm
‖u‖P := ‖Pu‖L2(Ω) fur u ∈ RNh (8.7.3)
eingefuhrt.Fur wichtige Falle sind ‖·‖P und ‖·‖h aquivalent (gleichmaßig bezuglich h). Als Beispiel wahlen wir die
linearen Elemente aus.
Satz 8.7.1 {Th} sei eine formregulare, uniforme Folge von Triangulationen. Vh sei der in (8.3.8) defi-nierte Raum der linearen Elemente mit der ublichen Knotenbasis (vgl. (8.3.9a)). Dann gibt es eine von hunabhangige Konstante CP , sodass
1CP
‖u‖P ≤ ‖u‖h ≤ CP ‖u‖P . (8.7.4)
Konkrete Schranken in der Ungleichung (8.7.4) werden von Wathen [87] fur verschiedene Elemente ange-geben. Der Beweis des Satzes verwendet als Grundlage das folgende Lemma.
Lemma 8.7.2 T = {(ξ, η) : ξ, η ≥ 0, ξ + η ≤ 1} sei das Einheitsdreieck (vgl. Abbildung 8.3.4). Ist u linearauf T , so gilt
124
[u(0, 0)2 + u(1, 0)2 + u(0, 1)2
]≤
∫∫T
u(ξ, η)2dξdη ≤ 16[u(0, 0)2 + u(1, 0)2 + u(0, 1)2
]. (8.7.5)

8.7 Eigenschaften der Systemmatrix 151
Beweis. u(ξ, η) = u1 +(u2−u1)ξ+(u3−u1)η mit den Knotenwerten u1 := u(0, 0), u2 := u(1, 0), u3 := u(0, 1)fuhrt auf ∫∫
T
u(ξ, η)2dξdη =124
[u1 u2 u3]
⎡⎣ 2 1 11 2 11 1 2
⎤⎦⎡⎣ u1
u2
u3
⎤⎦ .
Die Eigenwerte der symmetrischen 3 × 3-Matrix sind λ1 = λ2 = 1 und λ3 = 4. Daher ist die rechte Seite≥
∑3i=1 u
2i /24 und ≤ 4
∑u2
i /24.
Beweis des Satzes 8.7.1. Man stellt ‖u‖2P als
∫Ω(Pu)2dx =
∑Ti∈Th
∫Ti
(Pu)2dx dar. Sei Φi : T → Ti dielineare Transformation (aus Ubungsaufgabe 8.3.14a) von T auf Ti. u1, u2, u3 seien die Werte von u = Pu inden Ecken von Ti. Die Ungleichung 0 < C1h
2 ≤ |detΦ′i| ≤ C2h2 und Lemma 8.7.2 zeigen
C1h2
24(u2
1 + u22 + u2
3
)≤
∫Ti
(Pu)2dx = |det Φ′i|∫∫
T
[(Pu)(Φi(ξ, η))]2 dξdη ≤ C2h
2
6(u2
1 + u22 + u2
3
). (8.7.6)
Nach Definition einer formregularen Triangulation sind alle Dreieckswinkel ≥ α0 > 0. Sei N � M ≥ 2π/α0.Jeder Knoten gehort deshalb zu mindestens einem und hochstens M Dreiecken. Da u1, u2, u3 Koeffizientendes Vektors u sind, liefert die Summation von Gleichung (8.7.6) uber alle Ti ∈ Th
C1
24‖u‖2
h ≤ ‖u‖2P =
∑Ti∈Th
∫Ti
(Pu)2dx ≤ MC2
6‖u‖2
h ,
sodass Ungleichung (8.7.4) mit CP :=√
max(MC2/6, 24/C1) erfullt ist.
Ubungsaufgabe 8.7.3 Vh ⊂ H10 (Ω) basiere auf der Quadratgittertriangulation (vgl. Ubungsaufgabe 8.3.13).
Man zeige:√
4/3 ‖u‖P ≤ ‖u‖h ≤√
8 ‖u‖P .
Die MatrixM := P ∗P, d.h. Mij =
∫Ω
bi(x)bj(x)dx, (8.7.7)
heißt in ingenieurtechnischen Anwendungen Massematrix.
Bemerkung 8.7.4 a) Ungleichung (8.7.4) ist aquivalent zu
‖M‖ ≤ C2Ph
n, ‖M−1‖ ≤ C2Ph−n.
b) Es gelten die Ungleichungen ‖u‖P ≤ ‖h−nM‖1/2 ‖u‖h und ‖u‖h ≤ ‖hnM−1‖1/2 ‖u‖P .
Beweis. 1) ‖u‖2P =
∫Ω(Pu)2dx = (Pu, Pu)0 = 〈P �Pu,u〉 = 〈Mu,u〉 ≤ ‖M‖ 〈u,u〉 = ‖M‖h−n ‖u‖2
h
beweist die erste Ungleichung in b). Die zweite folgt aus
‖u‖2h = hn〈u,u〉 = hn〈M1/2u,M−1M1/2u〉≤ ‖hnM−1‖〈M1/2u,M1/2u〉 = ‖hnM−1‖〈Mu, u〉 = ‖hnM−1‖ ‖u‖2
P ,
da M positiv definit ist.2) h−n ‖M‖ ≤ C2
P und hn‖M−1‖ ≤ C2P implizieren wegen b) die Ungleichung (8.7.4). Umgekehrt
zeigt 〈Mu,u〉1/2 = ‖u‖P ≤ CP ‖u‖h = CPhn/2〈u,u〉1/2, dass h−n ‖M‖ ≤ C2, da M positiv definit ist
(vgl. Lemma 4.3.25). Ebenso folgt hn‖M−1‖ ≤ C2P aus ‖u‖h ≤ CP ‖u‖P .
8.7.3 Inverse Abschatzung und Kondition von L
Die H1-Norm kann nicht durch die L2-Norm abgeschatzt werden, d.h. sup{|u|1 / |u|0 : 0 �= u ∈ V } = ∞. Fureinen endlich-dimensionalen Raum Vh ist dagegen Ch := sup{|u|1 / |u|0 : 0 �= u ∈ Vh} endlich. Man sagt, Vh
erfulle die inverse Abschatzung, wenn Ch = O(h−1), d.h.
|u|1 ≤ CIh−1 |u|0 fur alle u ∈ Vh, (8.7.8)
wobei CI unabhangig von h ist, wenn h→ 0.

152 8. Die Methode der finiten Elemente
Satz 8.7.5 {Th} sei eine Folge formregularer, uniformer Triangulationen. Der in (8.3.8) eingefuhrte RaumVh der linearen finiten Elemente erfullt die inverse Abschatzung.
Beweis. Wie in Satz 8.7.1 erfolgt der Nachweis durch Transformation der Integrale∫
Ti|Dα(Pu)|2 dx fur
Ti ∈ Th und |α| ≤ 1 auf Integrale uber dem Einheitsdreieck T . Hierbei ist zusatzlich D = Dx auf Dξ,η zutransformieren (vgl. Beweis zu Lemma 8.4.2).
Satz 8.7.6 Sei Ω ⊂ Rn. Es gelte (8.1.2), (8.7.8) und ‖u‖P ≤ CP ‖u‖h. Dann gilt
‖L‖ ≤ hn−2CSC2PC
2I . (8.7.9)
Beweis. Die Ungleichung
〈u,Lv〉 = a(Pu, Pv) ≤ CS |Pu|1 |Pv|1 ≤ CSC2Ih−2 |Pu|0 |Pv|0 ≤ CSC
2I h−2C2
P ‖u‖h ‖v‖h
multipliziere man mit hn und setze u := Lv:
‖Lv‖2h = hn 〈Lv,Lv〉 ≤ CSC
2Ih
n−2C2P ‖Lv‖h ‖v‖h ,
also ‖Lv‖h ≤ CSC2Ih−2C2
P ‖v‖h fur alle v, d.h. (8.7.9).
Satz 8.7.7 Sei Ω ⊂ Rn. Es gelte (8.1.17) mit εh ≥ ε > 0 und ‖·‖h ≤ CP ‖·‖P . Dann gilt
‖L−1‖ ≤ C2Ph−n/ε. (8.7.10)
Beweis. Es ist L−1 = P−1L−1h P �−1 und
∥∥L−1h
∥∥Vh←V ′
h
≤ 1/εh ≤ 1/ε (vgl. Abschnitt 8.1), sodass
‖L−1f‖h ≤ CP ‖L−1f‖P = CP
∣∣PL−1f∣∣0
= CP
∣∣L−1h P �−1f
∣∣0≤ CP ‖L−1
h P �−1f‖Vh≤ (CP /ε)‖P �−1f‖V ′
h.
Da
‖P �−1f‖V ′h
= sup0�=v∈Vh
∣∣(v, P �−1f)0
∣∣ / |v|1 = sup0�=v∈Vh
∣∣⟨P−1v, f⟩∣∣ / |v|1 = sup
v �=0|〈v, f〉| / |Pv|1
≤ supv �=0
h−n ‖v‖h ‖f‖h / |Pv|0 ≤ CP supv �=0
h−n ‖v‖h ‖f‖h / ‖v‖h = CPh−n ‖f‖h ,
ergibt sich ‖L−1f‖h ≤ C2Ph−n ‖f‖h /ε fur alle f , also (8.7.10).
Die Kombination der Satze 8.7.6 und 8.7.7 fuhrt auf
Satz 8.7.8 Es gelte (8.1.2), (8.1.17) mit εh ≥ ε > 0, (8.7.4), m = 1 und (8.7.8). Dann gilt
cond(L) ≤ h−2CSC4PC
2I /ε . (8.7.11)
Die Beweisideen lassen sich im Prinzip auf den Fall 2m > 2, d.h. fur Randwertaufgaben hoherer Ordnungubertragen. Die inverse Abschatzung wird zu
|u|m ≤ CIh−m |u|0 fur alle u ∈ Vh. (8.7.12)
Damit die Normaquivalenz (8.7.4) gilt, muss man bei der Definition der Norm ‖·‖h vorsichtig vorgehen.Wenn alle Koeffizienten ui von u Knotenwerte (Pu)(xi) darstellen (wie beispielsweise beim Splineansatzfur Vh ⊂ H2(Ω)), lasst sich ‖·‖h wie in (8.7.2b) erklaren. Sobald aber Koeffizienten ui von u Ableitungen(DαPu)(xi) darstellen, ist u2
i in (8.7.2b) durch (h|α|ui)2 zu ersetzen. Beispielsweise hat u fur die Hermite-Funktionen aus (8.5.5) die Koeffizienten u1i und u2i (vgl. Ubungsaufgabe 8.5.3), wobei u1i = (Pu)(xi) undu2i = d
dx(Pu)(xi). Die geeignete Definition von ‖·‖h lautet ‖u‖2h := hn
∑i(u
21i + h2u2
2i) mit n = 1, da(0, 1) ⊂ R1.
Ubungsaufgabe 8.7.9 V ⊂ U ⊂ V ′ sei ein Gelfand-Dreier. Vh ⊂ V sei ein endlich-dimensionaler Unter-raum. Man zeige: Die inverse Abschatzung
‖u‖V ≤ CIh−m ‖u‖U fur alle u ∈ Vh (8.7.13a)
impliziert
‖u‖U ≤ CIh−m ‖u‖V ′ und ‖u‖V ≤ C2
Ih−2m ‖u‖V ′ fur alle u ∈ Vh . (8.7.13b)

8.7 Eigenschaften der Systemmatrix 153
8.7.4 Elementmatrizen
Die noch zu definierenden Elementmatrizen dienen zur Darstellung der Systemmatrix L. Abgesehen davon,dass hierdurch L berechnet werden kann, hat die Darstellung von L uber die Elementmatrizen verschiedeneVorteile im Zusammenhang mit Parallelisierungsalgorithmen oder der Gebietszerlegungsmethode.
Sei T ∈ Th ein Element (im einfachsten Fall ein Dreieck) mit den Knotenpunkten xT,1,xT,2, . . . ,xT,m ∈ T(die Zahl m der Knotenpunkte darf von T abhangen). Die Integranden in Lij = a(bj , bi) =
∫ΩϕΩ(bj , bi)dx+∫
Γ ϕΓ(bj , bi)dΓ (vgl. (8.1.8a)) seien durch (7.4.10) definiert. Die Integrale lassen sich als Summen vonElementbeitragen schreiben:
Lij =∑
T∈Th
{∫T
ϕΩ(bj , bi)dx +∫
Γ∩T
ϕΓ(bj , bi)dΓ}
(1 ≤ i, j ≤ n) . (8.7.14)
Dabei tritt das Randintegral nur fur die T ∈ Th auf, die den Rand beruhren.Die (einfachen) Knotenwerte von bi sind die Funktionswerte bi(xT,ν) fur 1 ≤ ν ≤ m. Fur kompliziertere
Finite-Element-Ansatze konnen auch Ableitungen Dαbi(xT,ν) oder Richtungsableitungen auftreten. Zur Ver-einfachung der Darstellung lassen wir im Folgenden nur Funktionswerte bi(xT,ν) als Funktionale zu. NachDefinition der Finite-Element-Funktionen bi gilt fur den Trager Tr(bi) ∩ T �= ∅ genau dann, wenn einer derKnotenwerte bi(xT,ν ) von null verschieden ist. Damit bietet sich das folgende Vorgehen an.
Die Beschrankung der Finite-Element-Funktionen aus Vh auf T ergebe den Raum VT (z.B. bestehendaus linearen Funktionen in (8.3.8), bilinearen in (8.3.12a,b), quadratischen in (8.3.13) und dem speziellenUnterraum in (8.3.15)). Die Interpolation in den Knotenpunkten xT,ν sei eindeutig (notwendig: dimVT = m).Zu T ∈ Th und 1 ≤ ν ≤ m sei φT
ν die Lagrange-Basisfunktion, d.h.
φTν ∈ VT , φT
ν (xT,μ) = δν,μ (1 ≤ ν, μ ≤ m) .
Damit gilt insbesondere fur die Basisfunktion bi ∈ Vh, dass
bi|T =m∑
ν=1
bi(xT,ν)φTν . (8.7.15)
Zu jedem T ∈ Th definiert man die m×m-Matrix ET mit den Koeffizienten
ET,νμ =∫
T
ϕΩ(φTμ , φ
Tν )dx +
∫Γ∩T
ϕΓ(φTμ , φ
Tν )dΓ (1 ≤ ν, μ ≤ m) . (8.7.16)
Zu ihrer praktischen Berechnung verwendet man die diskutierte Abbildung auf das Einheitselement (vgl.Ubungsaufgabe 8.3.14). Man beachte, dass der Teil
∫Γ∩T
. . . fur Dirichlet-Randwertaufgaben entfallt undauch sonst nur fur Elemente T auftritt, die Γ beruhren.
Die Kombination von (8.7.15) und (8.7.16) zusammen mit der Definition (8.7.14) von L liefert die Dar-stellung
Lij =∑
T∈Th
m∑ν=1
m∑μ=1
bi(xT,ν) bj(xT,μ)ET,νμ. (8.7.17)
Die dreifache Summe sieht abschreckend aus, aber die Summe uber T ∈ Th kann auf T ⊂ Tr(bi) ∩ Tr(bj)beschrankt werden. Die ν- und μ-Summen reduzieren sich im Allgemeinen auf einen einzigen Term, dabi(xT,ν ) ublicherweise nur fur ein ν den Wert 1 und sonst den Wert 0 annimmt.13
Bemerkung 8.7.10 a) Wenn die Matrix L zum Zweck der Matrixvektormultiplikation v ∈ Rn �→ Lvbenotigt wird, kann man stattdessen direkt von den Elementmatrizen Gebrauch machen.
b) Die Elementmatrizen (ET )T∈Thbrauchen mehr Speicherplatz als L. Im Fall der Quadratgittertriangu-
lation von Ω = (0, 1)2 (vgl. Abbildung 8.3.2) ist die Zahl der Dreieck etwa 2n. Bei stuckweise linearen Ele-menten ist m = 3 die Zahl der Knoten, sodass die Elementmatrizen 18n Speicherplatze brauchen, wahrendL wegen der 5 Nichtnullelemente pro Zeile mit 5n auskommt.
c) Wahrend man aus (ET )T∈Thdie Matrix L berechnen kann, ist es nicht moglich, aus L die Element-
beitrage (ET )T∈Thzuruckzugewinnen.
13Bei Konstruktionen mit hangenden Knoten (vgl. §8.8.2) gibt es Abweichungen von diesem Normalfall.

154 8. Die Methode der finiten Elemente
Aus verschiedenen Grunden (z.B. bei Gebietszerlegungsverfahren, siehe [42, §11.2]) kann es vorkommen,dass man das Gebiet Ω als disjunkte Vereinigung von zwei (oder mehr) Teilgebieten Ω1 und Ω2 (vgl. Ab-bildung 10.1.1 auf Seite 189) beschreiben und auf beiden Teilgebieten die Randwertaufgaben und die zu-gehorigen Matrizen L1 und L2 verwenden mochte, die sich formal aus der Ersetzung von
∫Ω
in der Definitionder Bilinearform durch
∫Ω1
und∫Ω2
ergeben. Unter der stillschweigenden Voraussetzung, dass die ElementeT ∈ Th nur jeweils einem Teilgebiet angehoren, lasst sich L1 aus (8.7.17) gewinnen, indem man
∑T∈Th
durch∑T∈Th, T⊂Ω1
ersetzt. Wegen Bemerkung 8.7.10 ist es aber nicht moglich, L1 und L2 aus L zu gewinnen.
8.7.5 Positivitat, Maximumprinzip
Es sei vorausgesetzt, dass das Maximumprinzip fur die (kontinuierliche) Differentialgleichung gelte. Bei derKonstruktion der Differenzenverfahren wird haufig versucht, die Vorzeichenbedingungen (4.3.1a) einzuhalten,um uber die M-Matrixeigenschaft zum einen Stabilitat und zum anderen das (diskrete) Maximumprinzip zusichern. Bisher wurden die Vorzeichen des Finite-Element-Matrixelements Lij noch nicht diskutiert. Hierzugibt es zunachst eine negative Aussage: Das kontinuierliche Maximumprinzip impliziert nicht automatischdas diskrete Maximumprinzip. Insbesondere konnen Außerdiagonalkoeffizienten Lij das “falsche” Vorzeichenbesitzen.
’α
α’’
jx
ix
T’
T’’
Abb. 8.7.1. Winkel α und α′
Fur die Finite-Element-Diskretisierung von L = −Δ mit stuckweise linea-ren Elementen lasst sich die folgenden Darstellung finden: Zu den Indizesi, j mogen zwei verbundene Dreieckspunkte xi und xj gehoren. Damit be-steht der Schnitt der Trager der Basisfunktionen bi und bj aus den beidenDreiecken T ′ und T ′′ aus Abbildung 8.7.1. Seien α′ und α′′ die Winkel inT ′ und T ′′, die der Seite xixj jeweils gegenuberliegen. Dann gilt
Lij =∫
T ′∪T ′′〈∇bi,∇bj〉 dx = −1
2sin (α′ + α′′)
sin (α′) sin (α′′),
wie in Knabner-Angermann [52, §3.9] bewiesen wird. Damit liegt das gewunschte Vorzeichen Lij ≤ 0 genaudann vor, wenn α′+α′′ ≤ π. Fur Dreiecke, die den Rand schneiden, werden in [52, Seite 161] noch zusatzlicheBedingungen genannt.
8.8 Weitere Hinweise
Auf viele Details und Modifikationen der Finite-Element-Methode kann hier nicht eingegangen werden. ImFolgenden seien einzelne Punkte stichwortartig erwahnt.
8.8.1 Nichtkonforme Elemente
Die Bedingung (8.1.3), Vh ⊂ V , charakterisiert die konformen Finite-Element-Methoden. Diskretisierungen,die auf Vh �⊂ V beruhen, nennt man nichtkonform. Ein Beispiel fur ein nichtkonformes Element ist das“Wilsonsche Rechteck”. Dabei wird eine Zerlegung in Rechtecke Ri = (xi1, xi2)× (y1i, y2i) zu Grunde gelegtund die Funktion auf Ri quadratisch angesetzt:
Vh := {u quadratisch auf jedem Ri, u stetig in allen Ecken der Rechtecke Ri} .
Man beachte, dass u ∈ Vh nur in den Knotenpunkten (Ecken der Ri), aber nicht in Ω stetig zu sein braucht.Eine Funktion, die entlang einer Seite von Ri unstetig ist, kann nicht zu H1(Ω) gehoren: Vh �⊂ V = H1(Ω).Eine mogliche Basis fur Vh ist die folgende. Zu jedem der 4 Knoten xj sei bj die zu den bilinearen Elementengehorende Basisfunktion (z.B. b(1)i (x, y) := (x2i−x)(y2i−y)
(x2i−x1i)(y2i−y1i), vgl. §8.3.3). Der hier gewahlte quadratische An-
satz enthalt zwei zusatzliche Freiheitsgrade. Deshalb wahlt man zu jedem Rechteck Ri = (x1i, x2i)×(y1i, y2i)die zwei weiteren Basisfunktionen
b(5)i (x, y) := (x− x1i) (x2i − x) , b
(6)i (x, y) := (y − y1i) (y2i − y) ,

8.8 Weitere Hinweise 155
die in allen vier Eckpunkten von Ri verschwinden, sodass dort die Stetigkeit gesichert ist, wenn b(5)i und b(6)i
außerhalb von Ri durch null fortgesetzt werden.Das erste Problem, das sich fur nichtkonforme Elemente stellt, ist die Definition der Systemmatrix L.
Eine Erklarung durch Lij = a(bj , bi) wie in (8.1.8a) ist wegen bj, bi �∈ V zunachst nicht definiert! Manmuss daher neben der Diskretisierung von V durch Vh auch a(·, ·) durch eine Vh-abhangige Bilinearformah(·, ·) : Vh × Vh → R ersetzen und Lij := ah(bj , bi) definieren. Im Falle der Zerlegung von Ω in RechteckeRi wird ah(·, ·) durch
ah(u, v) :=∑|α|≤m
∑|β|≤m
∑i
∫Ri
aαβ(x) [Dαu(x)] [Dβv(x)]dx
erklart, wenn a(·, ·) durch (7.2.6) gegeben ist, d.h. die Integration∫Ω wird durch
∑i
∫Ri
ersetzt. Man beachtea(u, v) = ah(u, v) fur u, v ∈ V .
Konforme Finite-Element-Verfahren ergeben stets konsistente Diskretisierungen. Bei nichtkonformen Ver-fahren ist Konsistenz nicht in jedem Fall gewahrleistet. Zu diesem Problem, insbesondere zu dem soge-nannten “Patchtest” vergleiche man Strang-Fix [78, p. 174], Ciarlet [22, §4.2], Stummel [80], Gladwell-Wait[33, pp. 83-92], Thomasset [81]. Dass sinnvoll erscheinende Ansatze fur Vh vollig falsche Diskretisierungenerzeugen konnen, zeigt
Ubungsaufgabe 8.8.1 T sei eine zulassige Triangulation. Es sei Vh := {u konstant auf jedem T ∈ T }.Man zeige: a) Vh �⊂ V := H1(Ω).
b) inf{|u− v|0 : v ∈ Vh} ≤ Ch |u|1 fur alle u ∈ V (eine Art von Konsistenz, die hier aber nicht hilft).c) Seien a(u, v) :=
∫Ω [〈∇u,∇v〉 + uv] dx und ah(u, v) :=
∑T∈T
∫T [〈∇u,∇v〉 + uv] dx. Was ergibt sich
fur Lij = ah(bj , bi)?
Nichtkonforme Elemente sind insbesondere fur Gleichungen hoherer Ordnung von Interesse. Konformefinite Elemente aus V = H2(Ω) mussen stetig differenzierbar aneinanderstossen, was sie recht kompliziertmacht. Vereinfachungen fuhren notwendigerweise zu Vh �⊂ V.
Genaugenommen gehoren auch die isoparametrischen finiten Elemente aus Abschnitt 8.5.3 im Falle vonV = H1
0 (Ω) zu den nichtkonformen Methoden, da die Elemente aus Vh auf Γ zwar null approximieren,aber im Allgemeinen nicht verschwinden, sodass Vh �⊂ V = H1
0 (Ω). Allerdings gilt Vh ⊂ H1(Ω), sodass dieBilinearform a(·, ·) nicht in ah(·, ·) verandert werden muss.
Fur die folgende Fehlerabschatzung nichtkonformer Galerkin-Verfahren muss ah auf Zh×Zh stetig definiertsein, wobei Zh := V + Vh = {v + vh : v ∈ V, vh ∈ Vh}.
Satz 8.8.2 (zweites Lemma von Strang) Die Bilinearform ah sei stetig, symmetrisch und positiv definitauf Zh ×Zh, sodass |||z|||h :=
√ah(z, z) eine Norm auf Zh definiert. Seien uh ∈ Vh und u ∈ V die Losungen
von ah(uh, v) = fh(v) (v ∈ Vh) bzw. (8.1.1). Dann gilt
|||u− uh|||h ≤ const
{‖fh − ah(u, ·)‖V ′
N+ inf
zh∈Vh
|||u− zh|||h}.
Beweis. Fur alle zh, vh ∈ Vh gilt
ah(uh − zh, vh) = ah(u − zh, vh) + ah(uh, vh) − ah(u, vh) = ah(u− zh, vh) + fh(vh) − ah(u, vh).
Mit vh := uh − zh erhalt man
|||uh − zh|||2h = ah(uh − zh, uh − zh) = ah(u − zh, uh − zh) + fh(uh − zh) − ah(u, uh − zh)
≤ Ch|||u− zh|||h|||uh − zh|||h + ‖fh − ah(u, ·)‖V ′N|||uh − zh|||h,
wobei Ch die Schranke von ah ist. Nach Kurzen folgt |||uh − zh|||h ≤ Ch|||u− zh|||h + ‖fh − ah(u, ·)‖V ′N. In
|||u− uh|||h ≤ |||u− zh|||h + |||zh − uh|||h ≤ (Ch + 1) |||u− zh|||h + ‖fh − ah(u, ·)‖V ′N
werden die Dreiecksungleichung und die vorherige Abschatzung verwendet, was die Behauptung beweist.

156 8. Die Methode der finiten Elemente
8.8.2 Nichtzulassige Triangulationen
Triangulationen mit unzulassigen Dreiecken seien hier an Hand des Beispiels von Abbildung 8.8.1 diskutiert.Die gezeigte Triangulation entsteht, indem man in der regelmaßigen und zulassigen Triangulation die mitt-leren Dreiecke in jeweils vier kleinere zerlegt. Die Zulassigkeitsbedingungen (8.3.7a-d) werden zum Beispielverletzt, da T0 ∩ T1 zwar eine Seite von T1, aber nicht von T0 ist. Eine andere Verletzung der Zulassigkeitbetrifft den Punkt P = T0 ∩ T2, der Eckpunkt von T2, aber nicht von T0 ist. Die Punkte P,Q,R, S, diedie Zulassigkeitsbedingungen verletzen, nennt man “hangende Knoten”. Die anderen Knoten xi sind in derAbbildung durch i = 1, . . . , 17 bezeichnet.
T0
T1
T2
T3
1 2 3 4
56 7 8
9 10 1112
13 14 15 16
17P
Q
R
S
Abb. 8.8.1. Unzulassige Triangulation
Wie bisher lasst sich der Finite-Element-Raum durch (8.3.8) defi-nieren (hier ohne Nullrandbedingung):
Vh ={u ∈ C0(Ω) : u|T linear fur alle T ∈ Th
}.
Der Unterschied zu einer zulassigen Triangulation wird bei der Fragenach der Dimension dimVh deutlich. Da insbesondere u|T0 linear ist,ergibt sich der Knotenwert u(P ) eindeutig aus u(x6) und u(x10):
u(P ) =12(u(x6) + u(x10)
). (8.8.1)
Anders als in Bemerkung 8.3.10 kann man somit nicht beliebige Wertevon u in allen Knoten der Triangulation vorgeben, sondern nur inden regularen, d.h. nicht-hangenden Knoten x1, . . . ,x17. Dement-sprechend ist die Basis von Vh durch {b1, . . . , b17} gegeben, wobeibi(xj) = δij (1 ≤ i, j ≤ 17). Bei der Berechnung der Systemmatrixaus den Elementmatrizen tritt hier der Fall auf, dass die Gewichte
bi(xT,ν ) in (8.7.17) einen Wert verschieden von 0 und 1 annehmen.
Bemerkung 8.8.3 a) Auch wenn die Triangulation Th unzulassig ist, lasst sich der (konforme) Finite-Element-Raum Vh konstruieren. Bei der Definition der Basisfunktionen hat man zwischen regularen undhangenden Knoten zu unterscheiden.
b) Fur Finite-Element-Raume Vh, bei denen keine Stetigkeit zwischen den Elementen verlangt wird 14
(zum Beispiel bei stuckweise konstanten Funktionen), braucht man nicht zwischen regularen und hangendenKnoten zu unterscheiden, d.h. in diesem Fall kann die Zulassigkeitsbedingung entfallen.
x1
T0
T1
T2
T3
P Q
R
Abb. 8.8.2.
Bei zulassigen Triangulationen lassen sich einfache Aussagen uber die Tragerder Basisfunktionen machen. Bemerkung 8.3.11 besagt, dass alle am Trager vonbi beteiligten Dreiecke am Knotenpunkt xi hangen. Dies gilt nicht in der Gegen-wart hangender Knoten. Abbildung 8.8.2 zeigt einen Ausschnitt der Triangula-tion, wobei P,Q,R hangende Knoten sind. Die Basisfunktion b1 im regularenKnoten x1 hat in P auf Grund von (8.8.1) den Wert b1(P ) = 1/2. Dies induziertin Q den Wert b1(Q) = 1/4 und weiter in R den Wert b1(R) = 1/8. Damitgehoren die Dreiecke T1, T2, T3 zum Trager von b1, obwohl diese Dreiecke nurindirekt mit x1 verbunden sind. Den hiermit verbundenen Komplikationen beider Implementierung des Finite-Element-Verfahrens entgeht man mit der Zulassigkeitsvoraussetzung. Gele-gentlich wird ein Kompromiss gemacht: Man erlaubt nur hangende Knoten ersten Grades (d.h. das DreieckT1 darf keinen weiteren hangenden Knoten Q enthalten, der ein hangender Knoten zweiten Grades ware).
8.8.3 Trefftz-Verfahren
In Satz 6.5.12 wurde festgestellt, dass fur symmetrische und V-elliptische Bilinearformen die schwache For-mulierung (8.1.1) des Randwertproblems zum Minimierungsproblem
suche u ∈ V mit J(u) := min{J(v) : v ∈ V } (8.8.2)
14Da stuckweise konstante Elemente nicht in H1(Ω) liegen, treten sie nicht fur die hier behandelten Differentialgleichungenauf. Verwendung finden sie dagegen bei Finite-Element-Approximationen von Integralgleichungen.

8.8 Weitere Hinweise 157
aquivalent ist (vgl. auch Satz 7.2.9, Ubungsaufgabe 7.3.8). Das Maximierungsproblem
suche w ∈W mit K(w) := max{K(w) : w ∈W} (8.8.3)
nennt man ein zu (8.8.2) duales (oder komplementares) Variationsproblem, falls beide die gleiche Losungu = w ∈ V ∩W besitzen. Beispielsweise fuhrt das Poisson-Problem −Δu = f ∈ L2(Ω) in Ω, u = 0 auf Γ aufJ(v) =
∫Ω |∇v|2 dx fur v ∈ V := H1
0 (Ω). Ein spezielles duales Variationsproblem stammt von Trefftz (1926):
K(w) := −∫
Ω
|∇w|2 dx fur w ∈ W := {v ∈ H1(Ω) : −Δv = f}
(vgl. Velte [84, p. 91]]). Man beachte, dass die Funktionen v ∈ V die Randbedingung v = 0 auf Γ erfullen,wahrend w ∈W keine Randbedingung, aber dafur die Differentialgleichung Lw = f erfullen muss.
8.8.4 Finite-Element-Verfahren fur singulare Losungen
Die bisherigen Fehlerabschatzung wie zum Beispiel (8.4.9) beruhen auf der Annahme u ∈ H2(Ω)∩ V , die inAbschnitt 9.1 naher diskutiert werden wird. Dass diese Voraussetzung nicht stets zu gelten braucht, zeigt
Beispiel 8.8.4 a) Die Laplace-Gleichung Δu = 0 im L-Gebiet Ω aus Beispiel 2.1.4 hat die Losung15
u = r2/3 sin((2ϕ− π)/3) . Diese Funktion gehort nur zu Hs(Ω) mit s < 1 + 2/3.b) Die Losung u = r1/2 sin(ϕ/2) aus Beispiel 5.2.3 gehort nur zu Hs(Ω) mit s < 3/2.
Ersetzt man zum Beispiel im L-Gebiet Ω die Laplace-Gleichung durch die allgemeinere Poisson-GleichungΔu = f in Ω, u = 0 auf Γ, so lasst sich noch zeigen, dass sich fur f ∈ L2(Ω) die Losung u zerlegen lasst in
u = u0 + αχ(r) r2/3 sin((2ϕ− π)/3) mit u0 ∈ H2(Ω) ∩H10 (Ω) und α ∈ R
(vgl. Strang-Fix [78, p. 257ff]). Dabei ist χ(r) ∈ C∞(Ω) eine vorgebbare “Abschneidefunktion” mit χ(r) = 1in 0 ≤ r ≤ 1/4, χ(r) = 0 fur r ≥ 1/2, sodass χ(r)r2/3 sin((2ϕ− π)/3) ∈ H1
0 (Ω) gewahrleistet ist.Eine ubliche Diskretisierung durch lineare Dreieckselemente erreicht nur |u − uh|1 = O(hs), s < 2/3.
Nimmt man jedoch die Funktion χ(r)r2/3 sin(. . .) oder ahnliche Funktionen noch zu Vh hinzu, lasst sich dieApproximation von u in Vh verbessern: d(u, Vh) = O(h), sodass |u−uh|1 = O(h). Zu diesem Themenkomplexsei auf Babuska-Rosenzweig [6] und Blum-Dobrowolski [10] verwiesen. Man vergleiche auch Gladwell-Wait[33, p. 119], Hackbusch [40].
Ein anderer Zugang, der traditionelle finite Elemente verwendet und ohne explizite Kenntnisse der Sin-gularitat auskommt, ist der folgende. T sei eine Triangulation, deren Dreiecke sich dort verfeinern, wo dieSingularitat der Losung erwartet wird, z.B. an der einspringenden Ecke (vgl. Abbildungen 2.1.1 und 5.2.1).Zur Fehleranalyse vergleiche man Schatz-Wahlbin [74].
8.8.5 Hierarchische Basen
0 1 0 1
b 2 b 3b 1 b 4 b 5 b 6 b 7
(a) h=1/2 (b) h=1/4
0 1/2
(c) h=1/8
1
Abb. 8.8.3. Hierarchische Basis
Die zugrundeliegende Idee sei am eindimensionalen Fallvorgestellt. Vh ⊂ H1
0 (0, 1) sei wie in (8.3.2) der Raumder stuckweise linearen Funktionen bei aquidistanter Unter-teilung des Intervalles Ω = (0, 1) in Teile der Lange h. Furh = 1/2 ist dim(V1/2) = 1 und b1 aus Abbildung 8.8.3a isteinzige Basisfunktion. Offenbar gilt V1/4 ⊂ V1/2. Als Basis-funktion in V1/4 ubernimmt man b1 ∈ V1/2 und fugt die Funk-tionen b2, b3 aus Abbildung 8.8.3b hinzu. {b1, b2, b3} ist Basisdes V1/4. Ebenso gilt V1/8 ⊂ V1/4. b1, b2, b3 erganzt durch b4, . . . , b7 (vgl. Abbildung 8.8.3c) ergeben eine Basisdes V1/8, die sogenannte hierarchische Basis. Im Gegensatz zu den bisher benutzten Basisfunktionen sinddie Trager der bi nicht notwendig von der Lange O(h), zum Beispiel ist Tr(b1) = [0, 1]. Hieraus folgt, dassdie Systemmatrix L starker aufgefullt ist als sonst ublich. Trotzdem hat diese Basiswahl wichtige Vorteile:
15Ein Gebiet mit Innenwinkel ω ∈ (0, 2π) fuhrt zu einer Losung mit dem Faktor rπ/ω. Sie gehort zu Hs(Ω) fur alle s < 1+π/ω.

158 8. Die Methode der finiten Elemente
(i) Eine zuvor berechnete Matrix L = L(2h) zu V2h bildet eine Hauptuntermatrix der SystemmatrixL = L(h) zu Vh, sodass eine (globale oder lokale) Verfeinerung der Zerlegung nur minimale zusatzlicheRechnungen erfordert.
(ii) Die Kondition cond(L) = ‖L‖ ‖L−1‖ der Systemmatrix ist wesentlich besser als im Standardfall (z.B.cond(L) = O(log h) statt O(h−2) im zweidimensionalen Fall Ω ⊂ R2; vgl. Abschnitt 8.7).
(iii) Zur Auflosung des Gleichungssystems Lu = f stehen geeignete Verfahren bereit. Naheres hierzu findetman bei Yserentant [92], Bank-Dupont-Yserentant [8] und Hackbusch [42].
8.8.6 Superkonvergenz
Bei Differenzenverfahren wurde der Fehler durch die Gitterfunktion uh − Rhu (uh: Differenzenlosung, u:exakte Losung) beschrieben, wahrend bei der Finite-Element-Methode die Losung uh auf dem gesamtenGebiet Ω definiert ist und deshalb uh − u als Fehler verwendet wird.
Eine Gitterfunktion uh konnte man im Prinzip zu einer auf Ω definierten Funktion uh fortsetzen, indemman die Werte uh(xi) (xi: Gitterpunkte von Ωh) als Knotenwerte zum Beispiel der stuckweise linearen oderbilinearen finiten Elemente wahlt und somit uh durch uh := Puh interpoliert (zu P vergleiche man (8.1.6)).Zu den Fehlern uh −Rhu in den Gitterpunkten kamen dann die Interpolationsfehler u− PRhu hinzu:
uh − u = Puh − u = P (uh −Rhu) − (u− PRhu).
Sobald die Interpolationsfehler mindestens die gleiche Großenordnung haben wie uh − Rhu, erhalt man furPuh − u die gleiche Konvergenzaussage, andernfalls zeigt Puh − u schlechtere Konvergenz als uh −Rhu.
Umgekehrt kann man bei Finite-Element-Verfahren danach fragen, welche Fehlerabschatzungen man furdie Knotenwerte uh = {uh(xi) : xi Knoten} oder geeignet gemittelte Werte bekommt. Erhalt man bessereKonvergenz als fur uh − u, spricht man von Superkonvergenz. Dieser Begriff kann sich auch auf Differenzen-quotienten von Knotenwerten beziehen, wenn diese genauer sind als |Dαuh −Dαu|0 ≤ |uh − u|1 (|α| = 1).Man vergleiche hierzu Wahlbin [86] und z.B. Lesaint-Zlamal [57], Bramble-Schatz [17], Thomee [83], Louis[59], Großmann-Roos [36, §4.9.1]. Superkonvergenzresultate fur Gradienten bilden u.a. die Basis fur Feh-lerschatzer (vgl. Verfurth [85, Seiten 36ff]).
Gelegentlich wird auch die Fehleraussage (8.5.8b) fur negatives t, die um den Faktor h−t besser als dieAussage fur t = 0 ist, als Superkonvergenz bezeichnet.
8.8.7 Die Mortelmethode (“mortar finite elements”)
8.8.7.1 Einleitung
ΩΩΓ12
1
2
Abb. 8.8.4. Unabhangige Tri-angulationen in zwei Teilge-bieten
Bisher wurde stets vorausgesetzt, dass das gesamte Gebiet Ω einheitlichvon einem zusammenhangenden Finite-Elemente-Gitter uberdeckt wird. DerZusammenhang ist zum Beispiel durch die Bedingung der Zulassigkeit der Tri-angulation gegeben. Selbst wenn hangende Knoten auftreten, gibt es zum Bei-spiel noch gemeinsame Eckpunkte. Abbildung 8.8.4 zeigt ein Gebiet Ω, das inzwei Teilgebiete Ω1 und Ω2 zerlegt ist. Der gemeinsame interne Rand (“inter-face”) sei mit Γ12 := Ω1 ∩ Ω2 bezeichnet. In beiden Teilgebieten werden Tri-angulationen T1 und T2 unabhangig voneinander konstruiert. Da Ti zulassigeTriangulation von Ωi sei soll, folgt aus (8.3.7c), dass
⋃T∈Ti
T = Ωi (hierzumuss angenommen werden, dass Ωi ein Polygon ist). Damit muss Γ12 in derVereinigung der Dreiecksseiten von T ∈ Ti enthalten sein. Da dies fur i = 1und i = 2 gilt, besteht zwischen T1 und T2 der Zusammenhang, dass beide Γ12
mit ihren Dreiecksseiten uberdecken. Dagegen gibt es keinen Zusammenhangzwischen den auf Γ12 liegenden Eckpunkten beider Triangulationen.
Grunde, auf eine durchgehend zulassige Triangulation zu verzichten, konnten sein:• Ω1 und Ω2 werden unabhangig von einander modelliert und diskretisiert und erst in einem spaterenKonstruktionsschritt zusammengesetzt.• Ω1 und Ω2 sind Teilgebiete, deren Daten auf einem Parallelrechner unterschiedlichen Prozessoren zuge-wiesen sind. Mogliche Gitterverfeinerungen wurden Kommunikation erfordern, wenn ein global zulassigesGitter resultieren soll. Der Verzicht auf diese Bedingung erspart die Kommunikation (an dieser Stelle).

8.8 Weitere Hinweise 159
• Bei instationaren Problemen kann sich das Gebiet Ω zeitlich verandern. Beispielsweise konnte sich dasTeilgebiet Ω2 vertikal bewegen, wahrend Ω1 fixiert ist. Ein global zulassiges Gitter musste dann in jedemZeitschritt neu konstruiert und die Daten transferiert werden. Diese Schwierigkeit entfallt, wenn die Zulassig-keitsbedingung nur lokal fur Ω1 und Ω2 gefordert wird.
Um die Notation nicht zunotig aufzublahen, sei die Poisson-Gleichung −Δu = f in Ω ⊂ R2
mit der Dirichlet-Randbedingung u = 0 auf ∂Ω angenommen. Auf kontinuierlicher Stufe genugen dieUbergangsbedingungen u(1)|Γ12 = u(2)|Γ12 und ∂u(1)/∂n|Γ12 = ∂u(2)/∂n|Γ12 , um zwei Losungen u(i) von−Δu(i) = f |Ωi , u
(i)|∂Ωi\Γ12 = 0 so zu verbinden, dass u mit u|Ωi = u(i) (i = 1, 2) die Losung des globalenProblems ist.
Auf der Finite-Element-Ebene werden keine direkten Ubergangsbedingungen an die Dirichlet- undNeumann-Randwerte formuliert. Statt dessen wird die Verbindung durch eine weitere Variationsformulierunghergestellt, die der Methode den Namen gegeben hat. Die Variationsformulierung wird zunachst fur das kon-tinuierliche Problem definiert.
8.8.7.2 Variationsformulierung im kontinuierlichen Fall
Seien X := {v ∈ L2(Ω) : v|Ωi ∈ H1(Ωi) fur i = 1, 2 mit v|∂Ω = 0} und M =(H1/2(Γ12)
)′. Man beachte,
dass Funktionen v ∈ X zwei Arten von Randwerten auf Γ12 besitzen: Da die Beschrankung v(1) := v|Ω1
zu H1(Ω1) gehort, definiert sie Randwerte v(1)|Γ12 ∈ H1/2(Γ12). Die Randwerte v(2)|Γ12 ∈ H1/2(Γ12) vonv(2) := v|Ω2 werden im Allgemeinen von v(1)|Γ12 verschieden sein. Der Sprung
[v] := v(1)|Γ12 − v(2)|Γ12 ∈ H1/2(Γ12)
wird in der zweiten der folgenden Bilinearformen verwendet:
a(u, v) :=∑2
k=1
∫Ωk
〈∇u(x),∇v(x)〉 dx, fur u, v ∈ X,
b(v, μ) := (μ, [v])L2(Γ12) = 〈μ, [v]〉(H1/2(Γ12))′×H1/2(Γ12). fur v ∈ X und μ ∈M.
Wir suchen nun das Paar (u, λ) ∈ X ×M , sodass
a(u, v) + b(v, λ) = (f, v)L2(Ω) fur alle v ∈ X,
b(u, μ) = 0 fur alle μ ∈M,(8.8.4)
Nehmen wir u ∈ H2(Ω) ∩H10 (Ω) an, so liefert der erste Teil von (8.8.4) nach partieller Integration
−∫
Ω
vΔudx+∫
Γ12
(v(1) ∂u
(1)
∂n− v(2) ∂u
(2)
∂n+ [v]λ
)dΓ =
∫Ω
fvdx
(u(i) sind wie oben als u|Ωi definiert; die Normalenrichtung −→n ist bezuglich Ω1 festgelegt). Hieraus liest man−Δu = f in Ω ab. Das Γ12-Integral liefert
0 =∫
Γ12
(v(1) ∂u
(1)
∂n− v(2) ∂u
(2)
∂n+
(v(1) − v(2)
)λ
)dΓ
=∫
Γ12
{v(1)
(∂u(1)
∂n− ∂u(2)
∂n
)+
(v(1) − v(2)
)(∂u(2)
∂n+ λ
)}dΓ.
Da v(1), v(2) unabhangig voneinander gewahlt werden konnen, folgen die Gleichungen
∂u(1)
∂n=∂u(2)
∂nund λ = −∂u
(2)
∂nauf Γ12.
Der zweite Teil in (8.8.4) liefert [u] = 0, d.h. u(1) = u(2) auf Γ12.
8.8.7.3 Diskrete Variationsformulierung
Xh sei der Teilraum von X, der beschrankt auf Ωi der Finite-Element-Raum der stuckweise linearen Poly-nomen auf der Triangulation Ti ist.

160 8. Die Methode der finiten Elemente
Sei T12 die Beschrankung der Triangulation T1 auf Γ12. Das eindimensionale Gitter T12 besteht aus allenStrecken E ∩ Γ12 (E: Dreieckskante von T ∈ T1) und allen Knotenpunkten von T1, die auf Γ12 liegen. Derdiskrete Raum Mh besteht aus allen auf T12 stuckweise linearen Funktionen, die in den Endpunkten von Γ12
verschwinden. (Man beachte, dass die Konstruktion nicht symmetrisch ist: T21 als Beschrankung von T2 aufΓ12 liefert ein anderes Gitter auf Γ12).
Die Variationsformulierung (8.8.4) mit Xh, Mh statt X, M liefert das zu losende diskrete Problem.
8.8.7.4 Verallgemeinerung
Statt der einfachen Poisson-Gleichung konnen allgemeinere Differentialgleichungen mit allgemeineren Rand-bedingungen behandelt werden. Insbesondere konnen statt zwei der Teilgebiete eine Zerlegung von Ω in kTeilgebiete erlaubt werden. Der Leser sei auf Wohlmuth [90] (zweidimensionaler Fall) und Kim-Lazarov-Pasciak-Vassilevski [51] verwiesen. Zur Stabilitat der Methode vergleiche man u.a. Braess-Dahmen [13] undDahmen-Faermann-Graham-Hackbusch-Sauter [27] bewiesen.
8.8.8 Verwandte Diskretisierungen
Neben der Standard-Galerkin-Methode gibt es weitere Varianten, die hier stichwortartig erwahnt seien.
8.8.8.1 Galerkin-Verfahren fur Kleinste-Quadrate-Formulierung
Die Standarddiskretisierung minimiert die Energienorm, wenn das Problem symmetrisch und V -koerziv ist.Wie bei der Kleinste-Quadrate-Minimierung kann man von dem Ansatz Lu− f = 0 ausgehen, den man aufden Ansatzraum u ∈ VN beschrankt (z.B. mit VN ⊂ H1
0 (Ω)). Damit stellt sich die Minimierungsaufgabe:Minimiere ‖Lu− f‖L2(Ω) uber alle u ∈ VN (vgl. [71, S. 249]).
8.8.8.2 Unstetiges Galerkin-Verfahren
Finite-Element-Funktionen aus H1(Ω) sind stetig. Auch im Falle der nichtkonformen Elementen gibt es nochstetige Ubergange in speziellen Knoten. Ansatze mit vollstandig unstetigen Ansatzen pro Dreieck erlaubeneine großere Flexibilitat und fuhren auf die mit DGFEM (“discontinuous Galerkin finite element method”)bezeichnete Methode (vgl. den Konferenzband [24] und z.B. [71, S. 255]).
8.8.8.3 Petrov-Galerkin- und Finite-Volumen-Verfahren
Ein Petrov-Galerkin-Verfahren liegt vor, wenn verschiedene Unterraume fur die Test- und Ansatzfunktionenverwendet werden:
Finde uN ∈ VN , sodass a(uN , w) = f(w) fur alle w ∈WN ,
wobei dimVN = dimWN zunachst der einzige Zusammenhang zwischen dem Ansatzraum VN und demTestraum WN ist. Damit diese Diskretisierung sinnvoll ist, muss die Stabilitat nachgewiesen werden.
Ist ω ⊂ Ω ein Teilstuck von Ω und Lu = div a(x) gradu der Differentialoperator, liefert die partielleIntegration
∫ωwLudx =
∫∂ωa(x)w(x) ∂u
∂ndΓ −∫
ωa(x) 〈gradw, gradu〉dx. Man wahlt nun w(x) als die cha-
rakteristische Funktion von ω: w = 1 auf ω und w = 0 außerhalb:∫∂ω
a(x)∂u
∂ndΓ =
∫ω
f dx fur alle Volumina ω ∈ TfV ,
wobei die Menge TfV der finiten Volumen noch zu definieren ist (traditionell spricht man Volumen, auchwenn Flachen vorliegen).
Ist VN der ubliche Raum der stuckweise linearen Elemente auf Dreiecken der Triangulation T . Die Dimen-sion N = dimVN ist durch die Anzahl der Knoten von T gegeben. Wegen dimVN = dimWN wahlt man einduales Gitter TfV , das zu jedem Knoten x ∈ T ein “finites Volumen” ωx enthalt (dies ist im Allgemeinenein Polygon; vgl. Knabner-Angermann [52, §8] und Großmann-Roos [36, §2.4.2]).
Fur Ω ⊂ R2 ist der Name “Box-Methode” ein Synonym fur Finite-Volumen-Methode. Fur Differential-operatoren L = div a(x) grad, die nur aus dem Hauptteil bestehen, und unter geeigneten Voraussetzungenan den Koeffizienten a stellt sich heraus, dass die Box-Methode und das Standard-Galerkin-Verfahren furstuckweise lineare Ansatzfunktionen identische Systemmatrizen liefern (vgl. Hackbusch [41]).

9Regularitat
9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m
9.1.1 Das Regularitatsproblem
Die schwache Formulierung des Randwertproblems
Lu = g in Ω, Bu = ϕ auf Γ (2m Ordnung des Differentialoperators L) (9.1.1)
durchu ∈ V, a(u, v) = f(v) fur alle v ∈ V (9.1.2)
war in Kapitel 7 die Grundlage, auf der die Frage nach der Existenz und Eindeutigkeit der Losung beantwortetwerden konnte. Mit der Existenz einer Losung ist dabei die Existenz einer schwachen Losung u ∈ V gemeint.
Die Fehlerabschatzungen in Abschnitt 8.4 haben deutlich gemacht, dass die Aussage u ∈ V fur nume-rische Zwecke nicht ausreichend ist. Unter dieser Voraussetzung lasst sich nur ‖uh − u‖V → 0 zeigen. Dieinteressantere quantitative Abschatzung ‖uh − u‖V = O(h) wie z.B. in Satz 8.4.6 fur V = H1
0 (Ω) oderV = H1(Ω) erfordert die Annahme u ∈ H2(Ω) ∩ V . Die Bedingung u ∈ H2(Ω) oder allgemeiner u ∈ Hs(Ω)ist eine Regularitatsaussage, d.h. eine Aussage uber die Glattheit der Losung, die in diesem Abschnitt naheruntersucht werden soll.
Die Regularitatsbeweise der folgenden Abschnitte sind sehr technisch. Um die Beweisstrategie durch-sichtiger zu machen, sei zunachst der Beweis der nachfolgenden Ungleichung (9.1.4), |u|s ≤ C′s |f |s−m , furdie Helmholtz-Gleichung −Δu+ u = f in Ω ⊂ R2, u = 0 auf Γ, skizziert. Man beachte die Unterscheidungnach Ω = Rn, Ω = Rn
+, Ω beliebig (hier: n = 2).
1. Schritt: Ω = R2. Da die zugehorige Bilinearform a(u, v) =∫Ω〈∇u,∇v〉dx +
∫Ωuvdx H1(R2)-elliptisch
ist, gilt (9.1.4) fur s = m = 1. Durch Induktion soll (9.1.4) fur s = 1, 2, 3, . . . bewiesen werden. Dazu leiten wirdie Differentialgleichung nach x ab, wobei x = (x, y): −Δux +ux = fx. Falls f ∈ Hs−2(Ω), ist fx ∈ Hs−3(Ω)und die Gleichung −Δv + v = fx hat nach Induktionsannahme eine eindeutige Losung v ∈ Hs−1(Ω) mit|v|s−1 ≤ C′s−1 |fx|s−3 ≤ C′s−1 |f |s−2. Stellt man diese Ungleichung fur v = ux und analog fur v = uy auf,ergibt sich |u|s ≤ |u|s−1 + |ux|s−1 + |uy|s−1 ≤ 3C′s−1 |f |s−2. Also ist (9.1.4) auch fur s gezeigt.
2. Schritt: Ω = R2+ := R × (0,∞). Wie oben kann man zur Abschatzung |ux|s−1 ≤ C′s−1 |f |s−2 gelangen,
denn auch ux erfullt −Δux +ux = fx und die Randbedingung ux = 0 auf Γ. Fur uy trifft dies nicht zu. Aberux ∈ Hs−1(R2
+) impliziert uxx ∈ Hs−2(R2+) und uxy ∈ Hs−2(R2
+). u ∈ Hs(R2+) wurde gelten, wenn auch
uyy ∈ Hs−2(R2+) gezeigt werden konnte. Diese Eigenschaft ergibt sich jedoch aus der Differentialgleichung:
uyy = Δu− uxx = u− f − uxx ∈ Hs−2(R2+).

162 9. Regularitat
3. Schritt: Ω sei beliebig, aber hinreichend glatt. Wie in Abbildung 6.2.1 wird Ω in (uberlappende) Teil-gebiete Ωi zerlegt, die jeweils in R2 bzw. R2
+ abgebildet werden konnen. Entsprechend wird die Losung u in∑χiu aufgespalten (χi: Zerlegung der Eins). Die Uberlegungen aus den Schritten 1 und 2 beweisen dann
Abschatzungen fur |χiu|s, die zusammen (9.1.4) ergeben.Die obigen Beweisschritte sind noch unvollstandig. Kann z.B. die Gleichung −Δux + ux = fx in R2 nicht
eine Losung ux ∈ L2(R2) besitzen, die nicht zu H1(R2) gehort und damit nicht mit der Losung v ∈ H1(R2)von −Δv + v = fx zusammenfallt?
Sei im Folgenden stets s ≥ m. Das Randwertproblem (9.1.2) mit V = H10 (Ω) heißt Hs-regular, wenn jede
Losung u ∈ H10 (Ω) der Aufgabe (9.1.2) mit f ∈ Hs−2m(Ω) zu Hs(Ω) ∩H1
0 (Ω) gehort und der Abschatzung
|u|s ≤ Cs
[|f |s−2m + |u|m
](9.1.3)
genugt. Ist L der zu a(·, ·) gehorende Operator, so heißt auch L Hs-regular.
Bemerkung 9.1.1 m sei wie in (9.1.1) definiert. a) Hm-Regularitat gilt immer.b) Das Variationsproblem (9.1.2) habe fur alle f ∈ H−m(Ω) eine eindeutige Losung u ∈ Hm
0 (Ω) mit|u|m ≤ C0 |f |−m. Ist das Randwertproblem Hs-regular, so erfullt die schwache Losung von (9.1.2) mitf ∈ Hs−2m(Ω) die Ungleichung
|u|s ≤ C′s |f |s−m . (9.1.4)
c) L sei der zu a(·,·) gehorende Operator. (9.1.4) ist zu L−1∈L(Hs−2m(Ω), Hs(Ω)) und (9.1.4’) aquivalent:
‖L−1‖Hs(Ω)←Hs−2m(Ω) ≤ C′s. (9.1.4’)
Beweis. a) Ungleichung (9.1.3) gilt stets mit Cm = 1. b) In (9.1.3) schatze man |u|m durch C0 |f |−m ab undbenutze, dass wegen s ≥ m die Einbettung Hs−2m(Ω) ⊂ H−m(Ω) stetig ist, sodass |f |−m ≤ C′ |f |s−2m.Damit folgert man (9.1.4) mit der Konstanten C′s = Cs(1 + C0C
′).Die folgende Bemerkung zeigt, dass eine Storung von a(·, ·) durch einen glatten Term der Ordnung < 2m
die Hs-Regularitat nicht andert.
Bemerkung 9.1.2 Seien m ≤ s und m, s ∈ N. L sei fur alle t ∈ {m,m+ 1, . . . , s} Ht-regular. δL sei einOperator der Ordnung ≤ 2m−1, d.h. δL ∈ L(Hr(Ω)∩Hm
0 (Ω), Hr+1−2m(Ω)) fur alle r ∈ {m,m+1, . . . , s−1}.Dann ist auch L+ δL Ht-regular fur t = m,m+1, . . . , s. Die Annahme uber δL trifft insbesondere dann zu,wenn δL zur Bilinearform a′′(·, ·) aus Lemma 7.2.12 gehort und deren Koeffizienten aαβ hinreichend glattsind: aαβ ∈ Cmax{0,s−2m+|β|}.
Beweis. Wir verwenden Induktion. Fur s = m folgt die Aussage aus Bemerkung 9.1.1a. Die Behauptungsei fur s − 1 angenommen. u sei schwache Losung von (L + δL)u = f ∈ Hs−2m(Ω), also auch Losung vonLu = f := f − δLu. Nach Induktionsannahme gilt bereits |u|s−1 ≤ C′s−1[|f |s−2m−1 + |u|m], sodass
|f |s−2m ≤ |f |s−2m + ‖δL‖s−2m←s−1 |u|s−1 ≤ C′′s−1[|f |s−2m + |u|m].
Auf Grund der Hs-Regularitat von L gehort u zu Hs(Ω) und erfullt |u|s ≤ C′s[|f |s−2m + |u|m]. Zusammenergeben diese Ungleichungen die Behauptung (9.1.4).
9.1.2 Regularitatssatze fur Ω = Rn
Das Gebiet Ω = Rn zeichnet sich dadurch aus, dass es keinen Rand besitzt, sodass auch keine Rand-bedingungen auftreten.
Satz 9.1.3 (Regularitatssatz) Seien m ∈ N und Ω = Rn. Die Bilinearform
a(u, v) :=∑|α|≤m
∑|β|≤m
∫Ω
aαβ(x) [Dαu(x)] [Dβv(x)]dx (9.1.5)
sei Hm(Rn)-koerziv. Fur ein k ∈ N gelte
Dγaαβ ∈ L∞(Ω) fur alle α, β, γ mit |γ| ≤ max{0, k + |β| −m}. (9.1.6)

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 163
Dann gehort jede schwache Losung u ∈ Hm(Rn) der Aufgabe
a(u, v) = (f, v)0 fur alle v ∈ Hm(Rn) (9.1.7)
mit f ∈ H−m+k(Rn) zu Hm+k(Rn) und erfullt die Abschatzung
|u|m+k ≤ Ck
[|f |−m+k + |u|m
]. (9.1.8)
Zusatz 9.1.4 Anstelle der Ungleichung (9.1.8) konnte auch (9.1.8’) verwendet werden:
|u|m+k ≤ Ck,k−1
[|f |−m+k + |u|m+k−1
]. (9.1.8’)
Beweis. a) (9.1.8)⇒(9.1.8’) ergibt sich aus |u|m ≤ |u|m+k−1 wegen k ≥ 1.b) Gilt Satz 9.1.3 fur k, so auch fur 1, . . . , k− 1 anstelle von k. Die Kombination der Aussagen (9.1.8’) fur
k, k − 1, . . . , 1 liefert
|u|m+k ≤ Ck,k−1
{|f |−m+k + |u|m+k−1
}≤ Ck,k−1
{|f |−m+k + Ck−1,k−2
[|f |−m+k−1 + |u|m+k−1
]}≤ . . . ≤ C′
k∑�=0
|f |−m+k−� + C′′ |u|m
und damit (9.1.8) wegen |f |−m+k−� ≤ |f |−m+k fur � ≥ 0.
Lemma 9.1.5 Sei a(·, ·) die Bilinearform (9.1.5) mit Koeffizienten aαβ , die (9.1.6) erfullen. Seien � ∈{0, . . . , k} und u ∈ Hm+�(Rn) fest gewahlt.
a) Dann ist F := a(u, ·) ein Funktional aus H−m+�(Rn) mit der Abschatzung
a(u, v) ≤ C|u|m+�|v|m−�.
b) Falls a0(u, v) :=∑|α|+|β|<2m
∫Ω aαβD
αuDβvdx (d.h. a(·, ·) ohne den Hauptteil), gilt die starkereAbschatzung
a0(u, v) ≤ C0|u|m+�|v|m−�−1.
c) Sei Dγ mit |γ| = 1 eine erste Ableitung. Dann definiert a(Dγu, v) = −a(u,Dγv) + bγ(u, v) eineBilinearform bγ(·, ·) bzw. ein Funktional bγ(u, ·) mit
bγ(u, v) ≤ C|u|m+�|v|m−�.
Beweis. a) Sei b(u, v) :=∫
Rn aαβDαuDβvdx einer der Terme von a(u, v) und u ∈ Hm+�(Rn). Wir unter-
scheiden drei Falle aα) bis aγ).aα) Sei |β| ≤ m− �. Es gilt bereits |b(u, v)| ≤ ‖aαβ‖∞|u||α||v||β| ≤|α|≤m+� ‖aαβ‖∞|u|m+�|v|m−�.aβ) Sei m − |β| + 1 ≤ � ≤ m. Sei γ ein Multiindex mit |γ| = |β| −m + � ∈ [1, |β|] und γ ≤ β. Partielle
Integration liefert
b(u, v) = (−1)|γ|∫
Rn
Dγ (aαβDαu)Dβ−γvdx .
Nach Voraussetzung (9.1.6) bleiben die Ableitungen von aαβ beschrankt, sodass
|b(u, v)| ≤ C|u||α+γ||v||β−γ| ≤ C|u|m+�|v|m−�.
aγ) Sei � > m. Mit γ := β liefert die obige Darstellung
b(u, v) = (−1)|β|∫
Rn
Dβ (aαβDαu) vdx = (g, v)0 mit g := (−1)|β|Dβ (aαβD
αu) ∈ Hm+�−|α|−|β|(Rn).
Da |α| ≤ m und � > m ≥ |β| , folgt m+ �− |α| − |β| ≥ �−m, sodass |b(u, v)| ≤ |g|−m+� |v|m−�. Mit
|g|−m+� ≤∣∣Dβ (aαβD
αu)∣∣−m+�
≤ C |u||α|+|β|−m+� ≤|α|+|β|≤2m
C |u|m+�

164 9. Regularitat
hat man auch in diesem Fall |b(u, v)| ≤ C|u|m+�|v|m−� nachgewiesen.Summation uber alle α, β liefert das gewunschte Resultat |a(u, v)| ≤ C|u|m+�|v|m−�.
b) Gelte beispielsweise |α| ≤ m und |β| ≤ m− 1 fur b(u, v) :=∫
Rn aαβDαuDβvdx. Falls |β| ≤ m− �− 1,
folgt direkt |b(u, v)| ≤ C0|u|m+�|v|m−�−1. Falls m−|β| ≤ � ≤ m−1, werden |β|−m+ �+1 ∈ [1, |β|] partielleIntegrationen durchgefuhrt und liefern wegen |α| + |β| + 1 −m+ � ≤ 2m−m+ � = m+ � die Abschatzung|b(u, v)| ≤ C|u|m+�|v|m−�. Der Fall |α| ≤ m− 1 und |β| ≤ m ist dem Leser uberlassen.
c) Sei bαβ(u, v) :=∫
Rn aαβDαuDβvdx ein Summand der Bilinearform a(u, v). Partielle Integration zeigt
bαβ,γ(u, v) = −∫
Rn
(Dγaαβ) (Dαu)(Dβv
)dx fur bαβ,γ(u, v) := bαβ(Dγu, v) + bαβ(u,Dγv).
Summation uber α, β und die zu Teil a) analogen Uberlegungen zeigen bγ(u, v) ≤ C|u|m+�|v|m−�.Hinsichtlich der Glattheit der Koeffizienten aαβ gilt: Die Bilinearform bγ(·, ·) enthalt neue Koeffizienten
aαβ,γ := Dγaαβ , die (9.1.6) fur k − 1 statt k erfullen.In Satz 9.1.3 ist a(·, ·) nur als Hm(Rn)-koerziv angenommen, sodass eine existierende Losung nicht ein-
deutig zu sein braucht. Um Eindeutigkeit zu sichern, benotigt man z.B. Hm(Rn)-Elliptizitat, die im Teil b)des nachsten Lemmas diskutiert wird.
Lemma 9.1.6 Es gelte (9.1.5) und (9.1.6). Sei aH(u, v) :=∑|α|,|β|=m
∫Rn aαβD
αuDβvdx.a) Gilt Satz 9.1.3 fur aH(·, ·) und k = 1 so auch fur die allgemeine Bilinearform (9.1.5) und k = 1.b) O.B.d.A. darf in Satz 9.1.3 a(·, ·) durch aΛ(u, v) = a(u, v)+Λ
∫Rn uvdx und Hm(Rn)-Koerzivitat durch
Hm(Rn)-Elliptizitat ersetzt werden. Die gleiche Erganzung ist in Teil a) moglich, d.h. aH(u, v) kann durchaH(u, v) + Λ(u, v)0 ersetzt werden.
Beweis. b) Fur Λ ≥ CK (CK aus der Koerzivitatsungleichung (6.5.10)) wird die Hm(Rn)-koerzive Bilinear-form a(·, ·) zu einer Hm(Rn)-elliptischen Form aΛ(·, ·). Sei Satz 9.1.3 fur aΛ(·, ·) angenommen. Ferner seiu eine schwache Losung von (9.1.7): a(u, v) = (f, v)0 . Offenbar ist u die (wegen der Hm(Rn)-Elliptizitat)eindeutige Losung von
aΛ(u, v) = FΛ(v) := (f + Λu, v)0 .
Wegen |FΛ(v)| ≤ |f |−m+k||v|m−k + |Λ| |u|−m+k|v|m−k ≤ [|f |−m+k| + |Λ| |u|−m+k] |v|m−k gehort auch FΛ zuH−m+k(Rn). Nach Annahme (Satz 9.1.3 fur aΛ(·, ·)) folgt die Regularitatsabschatzung (9.1.8’) in der Form|u|m+k ≤ Ck,k−1
[|FΛ|−m+k + |u|m+k−1
]. Mit |FΛ|−m+k ≤ |f |−m+k| + |Λ| |u|−m+k schließt man auf
|u|m+k ≤ Ck,k−1
[|f |−m+k| + |Λ| |u|−m+k + |u|m+k−1
]≤ C′k,k−1
[|f |−m+k| + |u|m+k−1
]wegen |u|−m+k ≤ |u|m+k−1. Damit ist die Aussage des Satzes 9.1.3 fur a(·, ·) erreicht.
Ersetzung von a(·, ·) durch aH(·, ·) zeigt, dass auch in Teil a) o.B.d.A. Λ (u, v)0 addiert werden darf.a) Sei die Gultigkeit von Satz 9.1.3 fur aH(·, ·) und k = 1 angenommen, wobei gemaß Teil b) die Hm(Rn)-
Elliptizitat von aH(·, ·) gesichert sei. Ferner sei a0(·, ·) := a(·, ·) − aH(·, ·). Eine Losung u ∈ Hm(Rn) vonaH(u, v) = (f, v)0 ist die eindeutige Losung von
aH(u, v) = FH(v) := (f, v)0 + a0(u, v) fur alle v ∈ Hm(Rn).
Lemma 9.1.5b mit � = 0 und | (f, v)0 | ≤ |f |−m+1||v|m−1 ergeben |FH(v)| ≤ [|f |−m+1| + C0|u|m] |v|m−1 unddamit F0 ∈ H−m+1(Rn). Dank
|u|m+1 ≤ C1
[|FH |−m+1 + |u|m
]≤ C1 [|f |−m+1| + C0|u|m + |u|m] ≤ C′1 [|f |−m+1| + |u|m]
ist (9.1.8) mit k = 1 fur a(·, ·) anstelle von aH(·, ·) gezeigt.
Lemma 9.1.7 Es gelte (9.1.5) und (9.1.6). Gilt (9.1.8) fur ein � ∈ {1, . . . , k − 1} anstelle von k, so auchfur �+ 1.
Beweis. Sei u Losung von (9.1.7). Nach Voraussetzung gilt u ∈ Hm+�(Rn) und |u|m+� ≤ C�
[|f |−m+� + |u|m
].
Sei Dγ mit |γ| = 1 eine erste Ableitung und bγ die Bilinearform aus Lemma 9.1.5. Offenbar ist w := DγuLosung von
a(w, v) = a(Dγu, v) = −a(u,Dγv) + bγ(u, v) = (f,Dγv)0 + bγ(u, v) =: Fγ(v).

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 165
Da | (f,Dγv)0 | ≤ |f |−m+k|Dγv|m−k ≤ |f |−m+k|v|m−k+1 ≤ |f |−m+k|v|m−� und |bγ(u, v)| ≤ C|u|m+�|v|m−�,folgt Fγ ∈ H−m+�(Rn) mit |Fγ |−m+� ≤ |f |−m+k + C|u|m+�.
Satz 9.1.3 mit � und Fγ anstelle von k und f zeigt w ∈ Hm+�(Rn) und
|w|m+� ≤ C�
[|Fγ |−m+� + |w|m
]≤ C� [|f |−m+k + C|u|m+� + |Dγu|m] ≤ C� [|f |−m+k + C′|u|m+�]
Da der Multiindex γ mit |γ| = 1 in w := Dγu beliebig ist, folgt u ∈ Hm+�+1(Rn) und die Ungleichung
|u|m+�+1 ≤ (n+ 1)C� [|f |−m+k + C′|u|m+�] .
Zusammen mit der vorausgesetzten Regularitatsabschatzung |u|m+� ≤ C�
[|f |−m+� + |u|m
]erhalten wir
|u|m+�+1 ≤ C�+1 [|f |−m+k + |u|m] , d.h. die Regularitatsaussage fur �+ 1.
Beweis des Satzes 9.1.3. 1) Induktionsanfang k = 1. Gemaß Lemma 9.1.6a darf a(·, ·) durch den HauptteilaH(u, v) :=
∑|α|,|β|=m
∫Rn aαβD
αuDβvdx ersetzt werden. Sei ∂h,i der Differenzenoperator1
∂h,iu(x) :=1h
[u
(x +
h
2ei
)− u
(x− h
2ei
)], ei: i-ter Einheitsvektor, 1 ≤ i ≤ n.
u sei die Losung von (9.1.7). Fur v ∈ Hm(Rn) setze man
di(u, v) := d(u, v) := a(u, ∂h,iv) + a(∂h,iu, v) fur alle v ∈ Hm(Rn). (9.1.9a)
Man beachte, dass di(u, v) wegen ∂h,iv, ∂h,iu ∈ Hm(Rn) wohldefiniert ist. Es sei w±(x) := w(x ± hei/2).∫Rn
au∂h,ivdx =1h
∫Rn
au[v+ − v−
]dx =
1h
∫Rn
[a−u− − a+u+
]vdx
= −∫
Rn
av∂h,iudx +1h
∫Rn
[(a− − a
)u− +
(a− a+
)u+
]vdx
(mit den Ersetzungen a� aαβ, u� Dαu, v � Dβv) zeigt
d(u, v) = −∑|α|=m
∑|β|=m
∫Rn
1h
{(aαβ − a−αβ
)Dαu− +
(a+
αβ − aαβ
)Dαu+
}Dβvdx . (9.1.9b)
Da |aαβ − a±αβ |/h ≤ ‖∂aαβ/∂xi‖L∞ ≤ const auf Grund von max{0, k + |β| −m} = k ≥ 1 (vgl. (9.1.6)), gilt
|d(u, v)| ≤ C |u|m |v|m fur alle v ∈ Hm(Rn). (9.1.9c)
Wegen der Hm(Rn)-Koerzivitat gibt es Konstanten CE > 0 und CK (vgl. (6.5.10)) mit
CE |∂h,iu|2m ≤ a(∂h,iu, ∂h,iu) + CK |∂h,iu|20 = −a(u, ∂2h,iu) + d(u, ∂h,iu) + CK |∂h,iu|20 (9.1.10a)
(hier wird v := ∂h,iu ∈ Hm(Rn) ausgenutzt!). Der erste Summand kann gemaß (9.1.7) umgeformt werden:a(u, ∂2
h,iu) = (f, ∂2h,iu)0 und durch |f |−m+1 |∂2
h,iu|m−1 abgeschatzt werden. Die Ungleichung |∂h,iv|s ≤ |v|s+1
fur s = m− 1 und v = ∂h,iu liefert ∣∣a(u, ∂2h,iu)
∣∣ ≤ |f |−m+1 |∂h,iu|m . (9.1.10b)
Wegen (9.1.9c) lautet die Abschatzung des zweiten Summanden in (9.1.10a):
|d(u, ∂h,iu)| ≤ Cd|u|m|∂h,iu|m . (9.1.10c)
Schließlich ist|∂h,iu|20 ≤ |∂h,iu|m−1 |∂h,iu|m ≤ |u|m |∂h,iu|m . (9.1.10d)
1Eigentlich wurde man lieber die Ableitung ∂u/∂xi verwenden. Da wir aber nicht wissen, ob diese zu V = Hm(Rn) gehort,wird die Differenz ∂h,iu als Ersatz genommen.

166 9. Regularitat
Die Schranken (9.1.10a-d) liefern
|∂h,iu|m ≤[|f |−m+1 + (Cd + CK) |u|m
]/CE fur alle h > 0, 1 ≤ i ≤ n.
Lemma 6.2.25 beweist u ∈ Hm+1(Rn) und Ungleichung (9.1.8) fur k = 1.2) Der Induktionsschritt ist durch Lemma 9.1.7 gegeben.
Zusatz 9.1.8 Die Hm(Rn)-Koerzivitat in Satz 9.1.3 lasst sich ersetzen: (a) durch die hinreichenden Bedin-gungen aus Satz 7.2.11 oder (b) durch die Annahme, dass fur ein λ die Bilinearform aH(u, v) + λ(u, v)0 dieVoraussetzung (6.5.4a,b) erfullt.
Zusatz 9.1.9 Ist zusatzlich a(·, ·) Hm(Rn)-elliptisch oder erfullt a(·, ) die Bedingung (6.5.4a,b), so ist inSatz 9.1.3 die Abschatzung (9.1.8) durch (9.1.11) ersetzbar:
|u|m+k ≤ Ck |f |−m+k . (9.1.11)
Beweis. Folgt nach Bemerkung 9.1.2.
Zusatz 9.1.10 a(·, ·) sei Hm(Rn)-koerziv. Die Bedingungen (9.1.6) und f ∈ Hk−m(Rn) seien fur ein k ∈ Nmit k > s+ n/2 > n/2 erfullt. Dann gehort die schwache Losung u von (9.1.7) zu Cs(Rn). Fur s > 2m istdamit die schwache Losung auch eine klassische Losung.
Beweis. Die Behauptung ergibt sich aus dem Sobolevschen Einbettungsatz 6.2.31.
Zusatz 9.1.11 a(·, ·) sei Hm(Rn)-koerziv. Die Bedingungen (9.1.6) und f ∈ Hk−m(Rn) seien fur alle k ∈ Nerfullt. Dann gehort die schwache Losung der Aufgabe (9.1.7) zu C∞(Rn). Die Voraussetzungen sind ins-besondere dann erfullt, wenn f zu C∞0 (Rn) gehort und die Koeffizienten aαβ konstant sind.
Die Verallgemeinerung von u ∈ Hm+k(Rn) mit k ∈ N auf u ∈ Hm+s(Rn) mit reellem s > 0 lautet wiefolgt:
Satz 9.1.12 a(·, ·) aus (9.1.5) sei Hm(Rn)-koerziv. Seien
s = k + Θ, k ∈ N0, 0 < Θ < ϑ < 1, t := k + ϑ.
Fur die Koeffizienten gelte (mit Ω = Rn):
aαβ ∈{Ct+|β|−m(Ω) falls k + |β| ≥ m,L∞(Ω) sonst.
(9.1.12)
Dann gehort jede schwache Losung von (9.1.7) mit f ∈ H−m+s(Rn) zu Hm+s(Rn) und erfullt die Ab-schatzung
|u|m+s ≤ Cs
[|f |−m+s + |u|m
]. (9.1.13)
Beweis. Der Induktionsanfang ist durch k = 0, d.h. 0 < s < t < 1 gegeben. Der Differenzenquotient ∂ = ∂h,i
ist durch eine Approximation seiner Potenz ∂s zu ersetzen:
Ru(x) := Rh,ju(x) := h−s∞∑
μ=0
e−μh (−1)μ(s
μ
)u(x + μhej) (ej : j-ter Einheitsvektor).
Dabei ist(
s0
)= 1,
(sμ
)= (−1)μ (−s) (1 − s)(2 − s) · . . . · (μ− 1 − s)/μ! der Binomialkoeffizient.
Ubungsaufgabe 9.1.13 Sei 0 < s < 1. Man zeige: a) Der zu Rh,j adjungierte Operator ist
R∗u(x) = R∗h,ju(x) = h−s∞∑
μ=0
e−μh (−1)μ(s
μ
)u(x− μhej).
b) Fur alle z ∈ C mit |z| < 1 ist (1 − z)s =∑∞
μ=0
(sμ
)(−z)μ.

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 167
c) Fur die Fourier-Transformierten gilt
(Rh,ju)(ξ) =[(
1 − e−h+iξjh)/h
]su(ξ), (R∗h,ju)(ξ) =
[(1 − e−h−iξjh
)/h
]su(ξ).
Hinweis: u(· + δej)(ξ) = eiξjδu(ξ).d) |Rh,ju|τ ≤ Cτ |u|τ+s fur alle τ ∈ R, h > 0, 1 ≤ j ≤ n, u ∈ Hτ+s(Rn); ebenso |R∗h,ju|τ ≤ Cτ |u|τ+s.
Hinweis: Man verwende die Normen |·|ˆτ , |·|ˆτ+s (vgl. (6.2.15)) und zeige |(Ru)(ξ)| ≤ (1 + |ξ|2)s/2 |u(ξ)|.
In Analogie zu (9.1.9a) erhalt man (o.B.d.A. ist die Bilinearform auf den Hauptteil beschrankt)
d(u, v) := a(u,Rh,jv) + a(R∗h,ju, v)
= −∑
|α|=|β|=m
h−s∞∑
μ=1
e−μh (−1)μ
(s
μ
)∫Rn
[aαβ(x − μhej) − aαβ(x)]Dαu(x − μhej)Dβv(x)dx ,
da der erste Summand in
(aαβDαu)(x − μhej) = aαβ(x)Dαu(x− μhej) + [aαβ(x − μhej) − aαβ(x)]Dαu(x − μhej)
zu aH(R�u, v) gehort. Da |aαβ(x − μhej) − aαβ(x)| ≤ C(μh)t, folgt
|d(u, v)| ≤ C |u|m |v|m
[1 + ht−s
∞∑μ=1
e−μh (−1)μ
(s
μ
)μt
]≤ C′ |u|m |v|m ,
denn es gilt(
sμ
)= O(μ−s−1) und
∑∞μ=1 e−μhμt−s−1 = O(hs−t).
Die gleichen Uberlegungen wie im Beweis des Satzes 9.1.3 ergeben∣∣R∗h,ju∣∣m
≤ C[|Rh,jf |−m + |u|m
]≤ C′
[|f |−m+s + |u|m
]fur alle h > 0, 1 ≤ j ≤ n
(vgl. Ubungsaufgabe 9.1.13d). Um dieselbe Abschatzung fur |u|m+s zu erreichen, schreiben wir (|u|ˆm+s)2 als∫
|ξ|≤1/h
(1 + |ξ|2
)m+2
|u(ξ)|2 dξ +∫|ξ|≥1/h
(1 + |ξ|2
)m+2
|u(ξ)|2 dξ .
Das zweite Integral strebt fur h→ 0 gegen null. Das erste lasst sich durch |u|2m plus
Cn∑
j=1
∣∣R∗h,ju∣∣2m
≥ C′∫|ξ|≤1/h
(1 + |ξ|2
)m n∑j=1
∣∣∣R∗h,ju(ξ)∣∣∣2 dξ
=Ubungsaufgabe 9.1.13c
C′∫|ξ|≤1/h
(1 + |ξ|2
)m n∑j=1
∣∣(1 − e−h−iξjh)/h
∣∣2s |u(ξ)|2 dξ
= C′∫|ξ|≤1/h
(1 + |ξ|2
)m n∑j=1
∣∣∣∣sin(ξjh)h
∣∣∣∣2s
|u(ξ)|2 dξ
≥C′′∫|ξ|≤1/h
(1 + |ξ|2
)m
|ξ|2s |u(ξ)|2 dξ
abschatzen. Wie in Lemma 6.2.25 folgen u ∈ Hm+s(Rn) und (9.1.13).2) Die Induktion uber k verlauft analog zum Beweis des Satzes 9.1.3.
Ubungsaufgabe 9.1.14 Man verallgemeinere Zusatz 9.1.10 mit Hilfe des Satzes 9.1.12.

168 9. Regularitat
9.1.3 Regularitatssatze fur Ω = Rn+
Der Halbraum Rm+ aus (6.2.18) ist durch xn > 0 charakterisiert. Wie in Kapitel 7 beschranken wir uns auf
die folgenden zwei Falle: Entweder ist ein Dirichlet-Problem fur beliebiges m ≥ 1 gegeben oder die naturlicheRandbedingung ist fur m = 1 gestellt.
Satz 9.1.15 (homogenes Dirichlet-Problem) Der Satz 9.1.3 gilt sinngemaß fur das Dirichlet-Problem
u ∈ Hm0 (Rn
+), a(u, v) = (f, v)0 fur alle v ∈ Hm0 (Rn
+). (9.1.14)
Auch Satz 9.1.12 lasst sich ubertragen, wenn man die Werte s = 1/2, 3/2, ..., m− 1/2 ausnimmt.
Zum Beweis benotigen wir die folgende, sehr technische Hilfsbehauptung:
Lemma 9.1.16 Sei s > 0, s �∈ {1/2, 3/2, . . . ,m− 1/2}. Die Norm |·|s von Hs(Rn+) ist aquivalent zu
|||u|||s :=√|u|20 +
∑|α|=m
|Dαu|2s−m. (9.1.15)
Beweis. Der relativ elementare Fall s ≥ m ist dem Leser uberlassen. Auch fur 0 < s < m ware derBeweis wesentlich einfacher, wenn in (9.1.15) die Dualnorm |·|s−m von (Hm−s
0 (Rn+))′ durch diejenige von
(Hm−s(Rn+))′ ersetzt wurde.
1) Zunachst soll die Behauptung fur Ω = Rn statt Ω = Rn+ bewiesen werden. Gemaß Satz 6.2.26a ist fur
Ω = Rn die Norm ||| · |||s zu
|||u|||ˆs :=
√|u|20 +
∑|α|=m
(|Dαu|ˆs−m
)2
aquivalent. Da (|||u|||ˆs)2 =∫
Rn [1 + (∑|α|=m |ξα|2)(1 + |ξ|2)s−m] |u(ξ)|2 dξ und
0 < C0
(1 + |ξ|2
)s
≤ [1 +∑|α|=m
|ξα|2 (1 + |ξ|2)s−m ≤ C1(1 + |ξ|2)s,
sind auch |||u|||ˆs und |·|ˆs aquivalent.2) Zum Ubergang auf Ω = Rn
+ ist die folgende Fortsetzung φ : Hs(Rn+) → Hs(Rn) zu untersuchen, wobei
x = (x′, xn) ∈ Rn:
(φu) (x) := u(x) fur x ∈ Rn+ (d.h. xn > 0)
(φu) (x′, xn) :=L∑
ν=1
aν [u(x′,−νxn) + u(x′,−xn/ν)] fur xn < 0,
wobei die Koeffizienten aν in der folgenden Ubungsaufgabe definiert sind.
Ubungsaufgabe 9.1.17 Die Koeffizienten aν von φ seien als Losung des linearen Gleichungssystems
L∑ν=1
aν(νk + ν−k) = (−1)k (0 ≤ k ≤ L− 1)
gewahlt. Man zeige:a) u ∈ CL−1(Rn
+) ergibt φu ∈ CL−1(Rn).b) φ ∈ L(Hk(Rn
+), Hk(Rn)) fur k = 0, 1, . . . , L.c) Der zu φ adjungierte Operator lautet
(φ∗u) (x′, xn) = u(x′, xn) +L∑
ν=1
aν
[1νu(x′,−xn/ν) + νu(x′,−νxn)+
]fur xn > 0.
d) (∂/∂xn)k (φ∗u) (x′, 0) = 0 und u ∈ Ck(Rn) fur k = 0, 1, . . . , L− 2.e) φ∗ ∈ L(Hk(Rn), Hk
0 (Rn+)) fur k = 0, 1, . . . , L− 1. Hinweis: vgl. Korollar 6.2.44.
f) φ ∈ L(Hk(Rn+), Hk(Rn)) fur s = 1 − L, 2 − L, . . . , 0, 1, . . . , L.

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 169
3) ||| · |||s ≤ C |·|s ergibt sich aus Dα ∈ L(Hs0(Rn
+), Hs−m(Rn+)) (durch Fortsetzungsargumente aus Be-
merkung 6.3.14b beweisbar), sodass |·|s ≤ ||| · |||s zu zeigen bleibt.4) |u|s ≤ |φu|s ≤ |||φu|||s gilt nach Beweisteil 1). Die Ungleichung |||φu|||s ≤ C|||u|||s, die den Beweis
abschließen wurde, reduziert sich auf
|Dαφu|s−m ≤ C |Dαu|s−m fur |α| = m, u ∈ Hk(Rn+). (9.1.16)
Fur
(φαu) (x′, xn) :={u(x′, xn) fur xn > 0,∑L
ν=1 aν
[(−ν)αn u(x′,−νxn) +
(−1ν
)αnu(x′,−xn/ν)
]sonst
}mit |α| = m
verifiziert man Dαφ = φαDα. Wie in Ubungsaufgabe 9.1.17f zeigt man φα ∈ L(Hs(Rn
+), Hs(Rn)) fur s =1 + m − L, 2 + m − L, . . . , L − m. Dieses Resultat lasst sich auf reelle s ∈ [1 + m − L,L − m] bis aufdie Ausnahmen 1
2 − s ∈ N (d.h. s = −1/2,−3/2, . . .) ubertragen (vgl. Lions-Magenes [58, p. 54ff]). SeiL ≥ 2m+1 und v ∈ Hm−s(Rn). Da φ�
αv ∈ Hm−s0 (Rn
+), folgert man aus (Dαφu, v)L2(Rn) = (Dαu, φ�αv)L2(Rn
+)
die Abschatzung
(Dαφu, v)0 = |Dαu|s−m ‖φ�α‖Hm−s
0 (Rn+)←Hm−s(Rn) |v|m−s fur alle v ∈ Hm−s(Rn),
also (9.1.16) mit C := ‖φ�α‖Hm−s
0 (Rn+)←Hm−s(Rn) = ‖φα‖Hs−m(Rn)←Hs−m(Rn
+) .
Beweis des Satzes 9.1.15. 1) Sei zunachst k = s = 1. Der Beweis des Satzes 9.1.3 ist fur die Differenzen∂h,ju (j = 1, . . . , n−1) wiederholbar und impliziert die Existenz der Ableitungen ∂u/∂xj ∈ Hm
0 (Rn+), j �= n.
Damit hat man Dαu ∈ H1(Rn+) fur alle |α| = m bis auf α = (0, . . . , 0,m).
2) Wir setzen
α := (0, . . . , 0,m) ∈ Zn, w := aααDαu, Fα(v) :=
∫Rn
+
w(x)Dαv(x)dx fur |α| = m,
wobei aαα der Koeffizient aus der Bilinearform (9.1.5) ist. Der weitere Beweisgang verlauft wie folgt. Wirwerden in Teil 3) zeigen, dass
|Fα(v)| ≤ C |v|m−1 fur |α| = m, v ∈ Hm−s(Rn+). (9.1.17)
Da Fα(v) = (w,Dαv)0 = (−1)m(Dαw, v)0, bedeutet (9.1.17), dass Dαw ∈ H1−m(Rn+) und |Dαw|1−m ≤ C
fur |α| = m. Gemaß Lemma 9.1.16 folgt w ∈ H1(Rn+). Die Koerzivitat von a(·, ·) impliziert die gleichmaßige
Elliptizitat von L =∑|α|=|β|=m(−1)mDβaαβD
α, d.h.∑aαβξ
α+β ≥ ε |ξ|2m (vgl. Satz 7.2.13). Fur ξ =(0, . . . , 0, 1) erhalt man aαα(x) ≥ ε. Damit folgt Dαu ∈ H1(Rn
+) aus w ∈ H1(Rn+) und Dγaαα ∈ L∞(Rn
+),|γ| = 1. Nach Teil 1) gehoren alle ubrigen Ableitungen Dαu (|α| ≤ m, α �= α) ohnehin zu H1(Rn
+), sodassu ∈ Hm−1(Rn
+) bewiesen ist.3) Nachweis von (9.1.17). Fur jedes α �= α gibt es ein γ mit |γ| = 1, γn = 0, 0 ≤ γ ≤ α (komponentenweise
Ungleichungen). Partielle Integration liefert
Fα(v) = −∫
Rn+
[(Dγaαα)
(Dαu
) (Dα−γv
)+ aαα
(Dα+γu
) (Dα−γv
)]dx fur alle v ∈ C∞0 (Rn
+),
also |Fα(v)| ≤ Cα |v|m−1 mit Cα := C [|u|m + |Dγu|m] fur alle v ∈ C∞0 (Rn+). Hierbei wurde ausgenutzt, dass
Dγu ∈ Hm(Rn+) nach Teil 1). Da C∞0 (Rn
+) dicht in Hm−10 (Rn
+) liegt, folgt (9.1.17) fur α �= α.Es bleibt α = α zu untersuchen. Wir schreiben
Fα(v) = a(u, v) − a(u, v) mit a(u, v) :=∑′
∫Rn
+
aαβ (Dαu)(Dβv
)dx,
wobei∑′ die Summation uber alle Paare (α, β) �= (α, α) darstellt. Zu jedem (α, β) �= (α, α) gibt es ein γ mit
|γ| = 1, 0 ≤ γ ≤ β, α+ γ �= (0, . . . , 0,m+ 1) .

170 9. Regularitat
Wie oben integriert man jeden Summanden mit |β| = m partiell:∫Rn
+
aαβ (Dαu)(Dβv
)dx = −
∫Rn
+
(Dγaαβ) (Dαu)(Dβ−γv
)dx −
∫Rn
+
aαβ
(Dα+γu
) (Dβ−γv
)dx
fur v ∈ C∞0 (Rn+), und schatzt durch C |v|m−1 mit C = C(u) ab. Insgesamt erhalt man |α(u, v)| ≤ C |v|m−1.
Zusammen mit |a(u, v)| = |(f, v)0| ≤ |f |−m+1 |v|m−1 folgt (9.1.17) auch fur α = α.4) Durch Induktion (k = 2, . . .) beweist man ebenso |Fα(v)| ≤ C |v|m−k und hieraus u ∈ Hk+m(Rn
+). Furreelle s > 0, s �= 1/2, . . . ,m− 1/2, beweist man entsprechend |Fα(v)| ≤ C |v|m−s und u ∈ Hs+m(Rn
+).Die Verallgemeinerung des Satzes 9.1.15 auf inhomogene Randwerte lautet wie folgt.
Satz 9.1.18 Die Bilinearform a(·, ·) aus (9.1.5) sei Hm0 (Rn
+)-koerziv. Fur ein s > 0, s �∈ {1/2, . . . ,m−1/2},gelte entweder (9.1.6), falls s = k ∈ N, oder (9.1.12), falls s �∈ N. u ∈ Hm(Rn
+) sei schwache Losung desinhomogenen Dirichlet-Problems
a(u, v) = (f, v)0 fur alle v ∈ Hm0 (Rn
+), (9.1.18a)
∂�u/∂n� = ϕ� auf Γ = ∂Rn+ fur � = 0, 1, . . . ,m− 1, (9.1.18b)
wobeif ∈ H−m+s(Rn
+), ϕ� ∈ Hm+s−�−1/2(Γ) (0 ≤ � ≤ m− 1) . (9.1.19)
Dann gehort u zu Hm+s(Rn+) und genugt der Ungleichung
|u|m+s ≤ Cs
[|f |−m+s +
m−1∑�=0
|ϕ�|m+s−�−1/2 + |u|m
]. (9.1.20)
Beweis. Fur m = 1 garantiert Satz 6.2.33 die Existenz eines u0 ∈ Hm+s(Rn+), das die Randbedingungen
(9.1.18b) erfullt (fur m > 1 vgl. Wloka [89, p. 133]). w := u − u0 ist die Losung des homogenen Problemsa(w, v) = F (v) := (f, v)0−a(u0, v) (vgl. Bemerkung 7.3.2). Satz 9.1.15 lasst sich auch fur die hier vorliegenderechte Seite F (v) (anstelle von (f, v)0) ubertragen und liefert w ∈ Hm+s(Rn
+).Mit ahnlichen Mitteln beweist man
Satz 9.1.19 (naturliche Randbedingungen) Die Bilinearform a(·, ·) aus (9.1.5) sei H1(Rn+)-koerziv.
Fur ein s > 0 gelte entweder (9.1.6), falls s = k ∈ N, oder (9.1.12), falls s �∈ N. u ∈ H1(Rn+) sei schwache
Losung der Aufgabe
a(u, v) = f(v) :=∫
Rn+
g(x)v(x)dx +∫
�ϕ(x)v(x)dΓ fur alle v ∈ H1(Rn
+),
wobei
g ∈ Hs−1 :={Hs−1(Rn
+) fur s ≥ 1(H1−s(Rn
+))′ fur s < 1
}, ϕ ∈ Hs−1/2(Γ).
Dann gehort u zu H1+s(Rn+) und genugt der Abschatzung
|u|1+s ≤ Cs
[‖g‖Hs−1 + |ϕ|s−1/2 + |u|1
]. (9.1.21)
Ist ein Randwertproblem in der Form (9.1.1): Lu = g, Bu = ϕ mit B = bT Δ + b0, |bn(x)| ≥ ε > 0 aufΓ = ∂Rn
+ gegeben, so kann man gemaß Satz 7.4.11 eine zugehorige Variationsformulierung finden und Satz9.1.19 anwenden.
9.1.4 Regularitatssatze fur allgemeines Ω ⊂ Rn
Die folgenden Satze zeigen, dass die bisherigen Regularitatsaussagen auch fur Ω ⊂ Rn gultig sind, wenn Ωhinreichend glatt berandet ist.

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 171
Satz 9.1.20 Sei Ω ∈ Ct+m fur ein t ≥ 0. Die Bilinearform (9.1.5) sei Hm0 (Ω)-koerziv. s ≥ 0 erfulle
s+ 1/2 /∈ {1, 2, . . . ,m}, 0 ≤ s ≤ t, falls t ∈ N, 0 ≤ s < t, falls t /∈ N.
Fur die Koeffizienten gelte
Dγaαβ ∈ L∞(Ω) fur alle α, β, γ mit |γ| ≤ max{0, t+ |β| −m}, falls t /∈ N,
aαβ ∈{Ct+|β|−m(Ω) fur |β| > m− tL∞(Ω) sonst
}, falls t ∈ N.
(9.1.22)
Dann gehort jede schwache Losung u ∈ Hm0 (Ω) der Aufgabe
a(u, v) =∫
Ω
f(x)v(x)dx fur alle v ∈ Hm0 (Ω)
mit f ∈ H−m+s(Ω) zu Hm+s(Ω) ∩Hm0 (Ω) und erfullt die Abschatzung
|u|m+s ≤ Cs
[|f |−m+s + |u|m
]. (9.1.23)
Bei inhomogenen Randbedingungen
∂�u/∂n� = ϕ� mit ϕ� ∈ Hm+s−�−1/2(Γ) fur � = 0, 1, . . . ,m− 1
anstelle von u ∈ Hm0 (Ω), impliziert u ∈ Hm(Ω) die Aussage u ∈ Hm+s(Ω) und die Abschatzung (9.1.20).
Beweis. 1) {U i : i = 0, 1, . . . , N} mit U i ⊂ Ω sei eine Uberdeckung von Ω wie in Lemma 6.2.37. {χi} mitχi = σ2
i ∈ C∞(Ω), Tr(χi) ⊂ U i, sei die zugehorige Partition der Eins aus Lemma 6.2.38. Es gibt Abbildungenαi ∈ Ct(U i), die U i (i ≥ 1) in Rn
+ abbilden, sodass αi(∂U i ∩Γ) ⊂ ∂Rn+. Dagegen liegt U0 im Inneren von Ω,
sodass Γ ∩ ∂U0 = ∅.Die Losung u lasst sich als
∑i χiu darstellen. In Teil 2) werden wir χ0u, in Teil 3) χiu fur i ≥ 1 untersuchen.
2) Wir setzendi(u, v) := a(χiu, v) − a(u, χiv) (i = 0, 1, . . . , N)
und wollen die Abschatzung
|d0(u, v)| ≤ Cd |u|m |v|m−s (u ∈ Hm0 (Ω), v ∈ Hm−s
0 (Ω), s ≥ 1) (9.1.24)
fur s = 1 zeigen. Jeder Summand von d0(u, v) hat die Form∫U0aαβ(x)
[(Dα(χ0u))
(Dβv
)− (Dαu)
(Dβ (χ0v)
)]dx .
Da Dα(χ0u) = χ0Dαu+niedrigere Ableitungen von u, gilt[
(Dα(χ0u))(Dβv
)− (Dαu)
(Dβ (χ0v)
)]=
∑γ,δ
cγδDγuDδv mit |γ| , |δ| ≤ m, |γ| + |δ| ≤ 2m− 1.
Den Term∫
U0 aαβcγδDγuDδvdx mit |δ| = m integriert man partiell und erhalt eine Abschatzung durch
C |u|m |v|m−1, woraus (9.1.24) folgt.Die Koeffizienten aαβ lassen sich so auf Rn fortsetzen, dass sie die entsprechenden Bedingungen (9.1.22)
auf Rn erfullen. Die entstehende Bilinearform sei mit a0(u, v) bezeichnet. Da χ0 ∈ C∞(Ω) einen TragerTr(χ0) ⊂ U0 besitzt, bereitet die Fortsetzung von χ0u durch (χ0u) (x) = 0 fur x ∈ Rn\U0 keine Schwierig-keiten. d0(u, v) kann formal fur v ∈ Hm−s(Rn) erklart werden, da nur die Beschrankung von v auf U0 eineRolle spielt. Wegen (9.1.24) lasst sich d0(u, v) fur festes u ∈ Hm
0 (Ω) in der Form
d0(u, v) = (d0, v)L2(Rn) mit d0 ∈ Hs−m(Rn), |d0|s−m ≤ Cd |u|m
schreiben. χ0u ist schwache Losung von
a0(χ0u, v) = a(χ0u, v) = a(u, χ0v)+d0(u, v) = (f, χ0v)0 +(d0, v)0 = (χ0f + d0, v)L2(Rn) (v ∈ Hm(Rn)) .

172 9. Regularitat
Satze 9.1.3 bzw. 9.1.12 beweisen χ0u ∈ Hm+s(Rn) (damit auch χ0u ∈ Hm+s(Ω)) und
|χ0u|m+s ≤ C[|χ0f |s−m + |d0|s−m + |χ0u|m
](9.1.25a)
≤ C′[|f |s−m + Cd |u|m + C0 |u|m
]≤ C′′
[|f |s−m + |u|m
],
wobei s zunachst noch durch s ≤ 1 beschrankt ist.3) Die gleichen Uberlegungen fur χiu (i = 1, . . . , N) zeigen
a(χiu, v) = (χif + di, v)0 fur alle v ∈ Hm(Rn) mit |di|s−m ≤ Cd |u|m .
Nach Voraussetzung gehoren die Abbildung αi : U i → Rn+ und ihre Inverse (αi)−1 zu Ct+m(U i) bzw.
Ct+m(αi(U i)). Setze u(x) := u(x) fur x = αi(x), d.h. u = u ◦ (αi)−1. Ebenso seien aαβ, χi, f , di definiert. In
a(χiu, v) =∑α,β
∫αi(Ui)
aαβDαx (χiu)Dβ
x v∣∣∣det
(αi
)′∣∣∣−1
dx
kann man wegen t ≥ 0 die Ableitungen Dαx , D
βx durch Ableitungen nach den neuen Koordinaten x ausdrucken
und erhalt damit eine Form
ai(χiu, v) =∑α,β
∫αi(Ui)
aαβDα(χiu)Dβ vdx,
die wiederum Hm0 (αi(U i))-koerziv ist und deren neue Koeffizienten aαβ die (9.1.22) entsprechenden Bedin-
gungen erfullen. Wie in 2) lassen sich aαβ so auf Rn+ ⊃ αi(U i) fortsetzen, dass die entstehende Bilinearform
ai(·, ·) Hm0 (Rn
+)-koerziv ist. Auf
ai(χiu, v) = ai(χiu, v) = a(χiu, v) = (χif + di, v)0 =
(χif + di
| det (αi)′ |, v
)L2(Hm
0 (Rn+))
fur v ∈ Hm0 (Rn
+)
ist Satz 9.1.15 anwendbar und liefert χiu ∈ Hm+s(Rn+) und
|χiu|m+s ≤ Cs
[|f |s−m + |di|s−m + |χiu|m
].
Rucktransformation (vgl. Satze 6.2.18, 6.2.26g) ergibt
|χiu|m+s ≤ Cs
[|f |s−m + |di|s−m + |χiu|m
]≤ Cs
[|f |s−m + Cd |u|m + C |u|m
],
also|χiu|m+s ≤ Cs
[|f |s−m + |u|m
]fur alle 1 ≤ i ≤ N, 0 ≤ s ≤ 1. (9.1.25b)
4) (9.1.25a,b) gelten fur s ≤ 1. Da |u|m+s = |∑
i χiu|m+s ≤∑
i |χiu|m+s, ist Abschatzung (9.1.23) furs ≤ 1 bewiesen. Falls die Voraussetzungen des Satzes ein s ∈ (1, 2] zulassen, beweist man (9.1.23) wie folgt.Da schon u ∈ Hm+1(Ω) nachgewiesen ist, kann man die Formen di(u, v) nach einer weiteren partiellenIntegration durch |di(u, v)| ≤ Cd |u|m+1 |v|m−s abschatzen. Dementsprechend gilt di(u, v) = (di, v)0 mitdi ∈ H−m+s(Ω) und |di|−m+s ≤ Cd |u|m+1. Setzt man die bisherige Abschatzung (9.1.23) fur s = 1 ein,erhalt man (9.1.25a,b) und damit auch (9.1.23) fur 1 < s ≤ 2. Weitere Induktion liefert (9.1.23) fur diezulassigen s ∈ (k, k + 1].
5) Der Fall inhomogener Randwerte wird wie in Satz 9.1.18 behandelt.Analog beweist man
Satz 9.1.21 (naturliche Randbedingungen) Sei Ω ∈ Ct+1 mit t ≥ 0. Solange 0 ≤ s ≤ t ∈ N oder0 ≤ s < t /∈ N, kann in Satz 9.1.19 Rn
+ durch Ω ersetzt werden.
Ubungsaufgabe 9.1.22 Man ubertrage die Zusatze 9.1.9, 9.1.10, 9.1.11 auf die Situation der Satze 9.1.20und 9.1.21. Welche Bedingungen an Ω kommen hinzu?

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 173
Zusatz 9.1.23 Ω und die Koeffizienten von a(·, ·) mogen die Voraussetzungen aus Satz 9.1.20 bzw. 9.1.21erfullen. Eine Eigenfunktion, d.h. eine Losung u ∈ V (V = Hm
0 (Ω) im Falle von Satz 9.1.20, V = H1(Ω)im Falle von Satz 9.1.21) von
a(u, v) = 0 fur alle v ∈ V, u �= 0 (9.1.26)
gehort zu Hm+s(Ω) fur alle 0 ≤ s ≤ t ∈ N oder 0 ≤ s < t �∈ N.
Beweis. Man wende Satz 9.1.20 (9.1.21) fur f = 0 (und ϕ = 0) an.Gemaß Satz 6.2.31 (Lemma von Sobo1ev) erhalt man uber Ck+λ(Ω) ⊃ Hk+λ+n/2(Ω) hinreichende Bedin-
gungen dafur, dass u eine klassische Losung aus Ck+λ(Ω) ist.Die minimalen Bedingungen fur u ∈ Ck+λ(Ω) ergeben sich aus einem anderen theoretischen Zugang, der
im Wesentlichen auf Schauder zuruckgeht. Der folgende Satz findet sich z.B. bei Miranda [63, p. 166]. Erzeigt die Ck+λ-Regularitat des Operators L aus (5.1.1a).
Satz 9.1.24 Seien k ≥ 2 und 0 < λ < 1. Ω ∈ Ck+λ sei ein beschranktes Gebiet. Der Differential-operator L =
∑aij∂
2/∂xi∂xj +∑ai∂/∂xi + a sei gleichmaßig elliptisch in Ω (d.h. (5.1.3a) gelte). Es gelte
aij , ai, a ∈ Ck−2+λ(Ω) und f ∈ Ck−2+λ(Ω), ϕ ∈ Ck+λ(Γ). Dann hat die Randwertaufgabe Lu = f in Ω,u = ϕ auf Γ entweder eine eindeutige (klassische) Losung u ∈ Ck+λ(Ω), oder es existiert ein endlich-dimensionaler Eigenraum {0} �= E ⊂ Ck+λ(Ω), sodass fur alle e ∈ E gilt: Le = 0 in Ω, e = 0 auf Γ. Fallsa ≤ 0, trifft stets die erste Alternative zu.
Die Voraussetzung Ω ∈ Ct+m aus Satz 9.1.20 ist starker als notwendig. Fur das Dirichlet-Problem reichtschon die Lipschitz-Stetigkeit von Γ, um das folgende Resultat zu erhalten.
Satz 9.1.25 (Necas [64]) Ω ∈ C0,1 sei ein beschranktes Gebiet. Die Bilinearform (9.1.5) sei Hm0 (Ω)-
koerziv. Es gelte1/2 ≥ t > s > 0.
Die Koeffizienten aαβ ∈ L∞(Ω) mussen zu Ct(Ω) gehoren, falls |β| = m. Dann gehort die schwache Losungu ∈ Hm
0 (Ω) der Aufgabe
a(u, v) :=∫
Ω
f(x)v(x)dx fur alle v ∈ Hm0 (Ω)
mit f ∈ H−m+s(Ω) zu Hm+s0 (Ω) und erfullt die Abschatzung (9.1.23).
Die Voraussetzung der Hm0 (Ω)-Koerzivitat kann durch die gleichmaßige Elliptizitat (7.2.3) ersetzt werden
(vgl. Satze 7.2.11, 7.2.13). Die Aussage des Satzes 9.1.25 lasst sich nicht auf s ≥ 1/2 erweitern, da sonstu ∈ Hm+s
0 (Ω) eine weitere Randbedingung beinhalten wurde.Der Beweis des Satzes 9.1.25 benutzt einen mit Rh,j (vgl. Beweis von Satz 9.1.12) verwandten Iso-
morphismus R = R� zwischen Hm+s0 (Ω) und Hm
0 (Ω) sowie zwischen Hm0 (Ω) und Hm−s
0 (Ω), sodass dieForm b(u, v) := a(Ru,Rv) Hm+s
0 (Ω)-koerziv ist. Man hat nun nachzuweisen, dass auch b(u, v) := a(u,R2v)Hm+s
0 (Ω)-koerziv ist. f ∈ H−m+s(Ω) impliziert f := R2f ∈ H−m−s(Ω). Jede Losung von a(u, v) = (f, v)0ist auch Losung von a(u,R2v) = b(u, v) = (f , v)0 = (f,R2v)0, sodass u ∈ Hm+s
0 (Ω) folgt.
9.1.5 Regularitat bei konvexem Gebiet und Gebieten mit Ecken
Ein Gebiet Ω ist konvex, falls mit x′,x′′ ∈ Ω auch x′ + t(x′′ − x′) fur alle 0 ≤ t ≤ 1 zu Ω gehort. KonvexeGebiete gehoren insbesondere zu C0,1, erlauben aber starkere Regularitatsaussagen als Satz 9.1.25.
Satz 9.1.26 (Kadlec [48]) Ω sei beschrankt und konvex. Die Bilinearform (9.1.5) sei H10 (Ω)-koerziv. Die
Koeffizienten des Hauptteiles seien Lipschitz-stetig:
aαβ ∈ C0,1(Ω) fur alle |α| = |β| = 1,
fur die ubrigen gelte:
aαβ ∈ L∞(Ω) fur alle α, β, γ mit γ ≤ |β| , |α| + |β| ≤ 1.

174 9. Regularitat
Dann gehort jede schwache Losung u ∈ H10 (Ω) der Aufgabe
a(u, v) :=∫
Ω
f(x)v(x)dx fur alle v ∈ H10 (Ω)
mit f ∈ L2(Ω) zu H2(Ω) ∩H10 (Ω) und erfullt die Abschatzung
|u|2 ≤ C1 [|f |0 + |u|1] . (9.1.27)
Die Konstante C1 ist nur vom Durchmesser von Ω abhangig.
Zum Beweis verweisen wir auf die Originalarbeit oder Grivard [35]. Der Beweis fur den Spezialfall ausZusatz 9.1.27 wird explizit vorgefuhrt.
Die H2-Regularitat wurde in Abschnitt 8.4.4 benotigt. Eine Verallgemeinerung der Aussage (9.1.27) in derForm der Hm+1-Regularitat fur die biharmonische Differentialgleichung mit m = 2 ist fur konvexe Polygonebekannt (vgl. Blum-Rannacher [11]). Fur den Fall der Poisson-Gleichung lasst sich die Ungleichung (9.1.27)hinsichtlich der Konstanten konkreter formulieren.
Zusatz 9.1.27 Fur die Losung der Poisson-Gleichung −Δu = f ∈ L2(Ω) im konvexen Gebiet Ω mit u = 0auf Γ gilt √ ∑
|α|=2
|Dαu|20 ≤ |f |0 . (9.1.28)
Ahnlich wie in Lemma 8.4.1 zeigt man, dass die linke Seite von (9.1.28) eine zu |·|2 aquivalente Norm vonH2(Ω) ∩H1
0 (Ω) ist. Somit folgt (9.1.27). Als Modell des Beweises von Satz 9.1.26 fuhren wir den Beweis zuZusatz 9.1.27 fur den Fall Ω ⊂ R2 durch.Beweis des Zusatzes 9.1.27. 1) Zunachst sei vorausgesetzt, dass das konvexe Gebiet glatt ist: Ω ∈ C∞. NachSatz 9.1.20 hat −Δu = f ∈ L2(Ω) eine Losung u ∈ H2(Ω) ∩H1
0 (Ω). Wir wollen
|||u|||22 :=∑|α|=2
|Dαu|20 ≤ |Δu|20 fur alle u ∈ H2(Ω) ∩H10 (Ω) (9.1.29)
zeigen. Dazu genugt es, (9.1.29) fur alle u aus der dichten Teilmenge {u ∈ C∞(Ω) : u = 0 auf Γ} =C∞(Ω) ∩H1
0 (Ω) nachzuweisen. Partielle Integration liefert∫∫Ω
|Δu|2 dxdy =∫∫
Ω
(u2
xx + u2yy + 2uxxuyy
)dxdy =partielle Integration des dritten Terms bezuglich y
=∫∫
Ω
(u2
xx + u2yy − 2uxxyuy
)dxdy + 2
∫Γ
uxxuynydΓ =partielle Integration bezuglich x
=∫∫
Ω
(u2
xx + u2yy + 2u2
xy
)dxdy + 2
∫Γ
uxxuynydΓ − 2∫
Γ
uxyuynxdΓ
= |||u|||22 + 2∫
Γ
(uxxny − uxynx)uydΓ,
wobei �n = (nx, ny) der Normalenvektor ist. Die Tangentenrichtung ist durch �t = (−ny, nx) gegeben.uxxny − uxynx = −(ux)t ist die negative Tangentialableitung. ux und uy lassen sich durch ut und un aus-drucken. Da mit u auch ut auf Γ verschwindet, ist ux = nxun und uy = nyun. Das Randintegral wird somitzu
2∫
Γ
(uxxny − uxynx)uydΓ = −2∫
Γ
(nxun)t nyundΓ = −∫
Γ
[2u2
nny (nx)t + nxny
(u2
n
)t
]dΓ.
Partielle Integration des zweiten Summanden ergibt
−∫
Γ
[2u2
nny (nx)t + nxny
(u2
n
)t
]dΓ =
∫Γ
u2n
[(ny)t nx − (nx)t ny
]dΓ.
Die eckige Klammer in der letzten Darstellung ist die Krummung von Γ in x ∈ Γ, die fur ein konvexes Gebietstets ≥ 0 ist. Damit ist das Integral nichtnegativ und (9.1.28) bewiesen.

9.1 Losungen der Randwertaufgabe in Hs(Ω), s > m 175
2) Jedes konvexe Gebiet Ω kann durch konvexe Ων ∈ C∞ monoton approximiert werden:
Ω1 ⊂ Ω2 ⊂ . . . ⊂ Ω,⋃
νΩν = Ω.
Wir fassen Vν := {u ∈ H10 (Ω) : Tr(u) ⊂ Ων} als Ritz-Galerkin-Raum Vν ⊂ H1
0 (Ω) auf. Jedes u ∈ C∞0 (Ω)liegt in Vμ fur hinreichend großes μ. Mit C∞0 (Ω) ist deshalb auch
⋃ν Vν eine dichte Teilmenge von H1
0 (Ω).Fur jedes ν liefert die Ritz-Galerkin-Aufgabe die Losung uν ∈ H1
0 (Ων) von −Δuν = f in Ων , uν = 0 auf∂Ων . In Ω\Ων wird uν durch uν = 0 fortgesetzt. Satz 8.2.2, der auch im Falle dimVν = ∞ anwendbar ist,beweist |uν − u|1 → 0, wobei u ∈ H1
0 (Ω) die Losung von −Δu = f in Ω ist. Satz 9.1.30 wird zeigen, dass furjedes μ die Beschrankung von u auf Ωμ zu H2(Ωμ) gehort. Fur jedes v ∈ Vμ ⊂ Vν , ν ≥ μ, ist∣∣∣∣∣
∫Ωμ
uxxvdxdy
∣∣∣∣∣ =
∣∣∣∣∣∫
Ωμ
uxvxdxdy
∣∣∣∣∣ =
∣∣∣∣∣ limν→∞ν≥μ
∫Ωμ
(uν)x vxdxdy
∣∣∣∣∣ =
∣∣∣∣∣ limν→∞
∫Ωμ
(uν)x vxdxdy
∣∣∣∣∣=
∣∣∣∣∣ limν→∞
∫Ωμ
(uν)xx vdxdy
∣∣∣∣∣ ≤ supν≥μ
‖(uν)xx‖L2(Ωμ)‖v‖L2(Ωμ) .
Hieraus schließt man∑|α|=2 ‖Dαu‖2
L2(Ωμ) ≤ supν≥μ
∑|α|=2 ‖Dαuν‖2
L2(Ωμ) ≤ ‖f‖2L2(Ωμ) ≤ ‖f‖2
L2(Ω) (vgl.(9.1.29)) und erhalt (9.1.28).
Welche Rolle die H2-Regularitat fur die H10 (Ω)-Projektion auf einen Unterraum Vh ⊂ H1
0 (Ω) spielt, zeigt
Ubungsaufgabe 9.1.28 Der Unterraum Vh ⊂ H10 (Ω) erfulle
inf{|u− v|1 : v ∈ Vh} ≤ C0h |u|2 fur alle u ∈ H2(Ω) ∩H10 (Ω)
(vgl. (8.4.16)). Das Poisson-Problem sei H2-regular (hinreichend ist nach Satz 9.1.25, dass Ω konvex ist).QV : H1
0 (Ω) → Vh ⊂ H10 (Ω) sei die bezuglich |·|1 orthogonale Projektion auf Vh. Man zeige: Es gibt ein C1,
sodass|u−QV u|0 ≤ C1h |u|1 fur alle u ∈ H1
0 (Ω).
Hinweise: 1) Mit dem Poisson-Problem ist auch die Randwertaufgabe −Δu+ u = f in Ω und u = 0 auf ΓH2-regular (vgl. Bemerkung 9.1.2). Die zugehorige Bilinearform a(·, ·) ist das Skalarprodukt in H1
0 (Ω).2) QV stimmt mit der Ritz-Projektion Sh fur a(·, ·) uberein.3) Man wende Zusatz 8.4.12 an.Im Zusammenhang mit finiten Elementen betrachtet man haufig Polygongebiete Ω. Da Polygone zu C0,1
gehoren, ist die Dirichlet-Aufgabe nach Satz 9.1.25 H1+s-regular mit 0 ≤ s < 1/2. Ist das Polygon konvex(d.h. sind die Innenwinkel ≤ π), so trifft H2-Regularitat zu. Resultate zwischen H3/2 und H2 erhalt man,wenn der maximale Innenwinkel des Polygons zwischen π und 2π liegt (vgl. Schatz-Wahlbin [74]). Sobald Ωeine einspringende Ecke besitzt, kann das Randwertproblem (mit m = 1) nicht mehr H2-regular sein (vgl.Beispiel 2.1.4; bei einem Innenwinkel α gehort die Losung zu H1+s(Ω) mit s < π/α). Allerdings lassen sichhohere Regularitatseigenschaften erzielen, wenn in den Ecken spezielle Vertraglichkeitsbedingungen erfulltsind (vgl. Kondrat’ev [53]).
Beispiel 9.1.29 u sei Losung der Poisson-Gleichung −Δu = f im Quadrat Ω = (0, 1) × (0, 1) mit u = 0auf Γ. f ∈ Hs−2(Ω) fuhrt nur fur s < 3 zu u ∈ Hs(Ω). Unter der zusatzlichen Vertraglichkeitsbedingung,dass f in allen Ecken verschwindet: f(0, 0) = f(0, 1) = f(1, 0) = f(1, 1) = 0, kann man dagegen auch furf ∈ Hs−2(Ω) mit 3 < s < 4 auf u ∈ Hs(Ω) schließen.
9.1.6 Regularitat im Inneren
Bisher bezogen sich die Regularitatsaussagen auf das Gesamtgebiet Ω. Stattdessen kann man auch nach derRegularitat der Losung u in Ω0 ⊂⊂ Ω fragen. Der folgende Satz zeigt, dass die Antwort weder von derGlattheit des Randes noch von der Art der Randbedingung abhangt.
Satz 9.1.30 Seien Ω0 ⊂⊂ Ω1 ⊂ Ω und s ≥ 0. Die Bilinearform (9.1.5) sei Hm0 (Ω1)-koerziv. Fur die
Koeffizienten gelte Bedingung (9.1.22) mit Ω1 statt Ω und mit t ≥ s ∈ N oder t > s. Sei u ∈ V ⊂ Hm(Ω)

176 9. Regularitat
eine schwache Losung der Aufgabe a(u, v) =∫Ω fvdx fur alle v ∈ V , wobei die Beschrankung f |Ω1 zu
H−m+s(Ω1) gehore. Dann gehort die Beschrankung von u auf Ω0 zu Hm+s(Ω0) und erfullt
‖u‖Hm+s(Ω0) ≤ C(s,Ω0,Ω1,Ω)[‖f‖H−m+s(Ω1) + ‖u‖Hm+s(Ω)
].
Beweis. Eine spezielle Uberdeckung von Ω ist durch U0 = Ω1, U1 = Ω\Ω0 gegeben. Damit ergibt sich dieBehauptung aus Teil 2) des Beweises zu Satz 9.1.20.
9.2 Regularitatseigenschaften der Differenzengleichungen
Die Konvergenzabschatzungen aus Abschnitt 4.4 fur Differenzengleichungen lauteten zum Beispiel‖u− uh‖∞ ≤ Ch2 ‖u‖C4(Ω) unter der Voraussetzung, dass u ∈ C4(Ω) oder u ∈ C3,1(Ω). Diese Regula-ritatsannahme ist oft nicht erfullt (vgl. Beispiele 2.1.3-2.1.4). Ein Vergleich mit der fur die Finite-Element-Methode bewiesene Fehlerabschatzung |u− uh|k ≤ Ch2−k |u|2 (k = 0, 1) legt die Vermutung nahe, dass eineahnliche Ungleichung auch fur Differenzenlosungen existiert. Um diese zu gewinnen, muss man die Stabi-litatsabschatzung
∥∥L−1h
∥∥2≤ C (oder
∥∥L−1h
∥∥∞ ≤ C), die L−1 ∈ L(L2(Ω), L2(Ω)) entspricht, durch starkere
Abschatzungen ersetzen, die L−1 ∈ L(H−1(Ω), H10 (Ω)) oder L−1 ∈ L(L2(Ω), H2(Ω)) entsprechen.
9.2.1 Diskrete H1-Regularitat
Fur Ω ⊂ Rn werden ein unendliches Gitter Qh und ein in Ω enthaltenes Gitter Ωh definiert:
Qh := {x ∈ Rn : xi = νih, νi ∈ Z} , Ωh := Ω ∩Qh. (9.2.1)
Eine auf Ωh definierte Gitterfunktion vh wird auf Qh durch vh = 0 erweitert:
vh(x) := 0 fur alle x ∈ Qh\Ωh. (9.2.2)
Der Vektorraum aller Gitterfunktionen vh mit (9.2.2) wird mit L2h = L2
h(Ωh) bezeichnet. Die EuklidischeNorm kann jetzt als L2
h-Norm interpretiert werden:
|vh|0 := ‖vh‖L2h
:=√hn
∑x∈Qh
|vh(x)|2. (9.2.3a)
Sie gehort zum L2h-Skalarprodukt
(vh, wh)0 := (vh, wh)L2h
:= hn∑
x∈Qh
vh(x)wh(x) . (9.2.3b)
Das diskrete Analogon von H10 (Ω) ist H1
h mit der Norm
|vh|1 := ‖vh‖H1h
:=
√√√√|vh|20 +n∑
i=1
∣∣∂+i vh
∣∣20
(man beachte vh = 0 auf Qh\Ωh) , (9.2.3c)
wobei ∂+i die Vorwartsdifferenz in xi-Richtung ist. Die Dualnorm lautet
|vh|−1 := ‖vh‖H−1h
:= sup {|(vh, wh)0| / |wh|1 : wh �= 0 erfulle (9.2.2)} . (9.2.3d)
Die zugehorigen Matrixnormen ‖Lh‖H1h←H−1
h= |Lh|1←−1, ‖Lh‖H1
h←L2h
= |Lh|1←0, usw. sind durch
|Lh|i←−j := sup{|Lhvh|i / |vh|j : 0 �= vh erfulle (9.2.2)
}fur i, j ∈ {−1, 0, 1} (9.2.3e)
definiert.

9.2 Regularitatseigenschaften der Differenzengleichungen 177
Ubungsaufgabe 9.2.1 Man zeige: a) |Lh|0←0 ist die Spektralnorm von Lh (vgl. §4.3).b) Es gelten die inversen Abschatzungen
|vh|i ≤ Cijhj−i |vh|j fur 1 ≥ i ≥ j ≥ −1. (9.2.3f)
Der Differenzenoperator Lh gibt Anlass zur Bilinearform
ah (vh, wh) := (Lhvh, wh)L2h. (9.2.4a)
ah(·, ·) heißt H1h-elliptisch, falls ein CE > 0 existiert, sodass
ah (uh, uh) ≥ CE |uh|21 fur alle uh und alle h > 0. (9.2.4b)
Entsprechend heißt ah(·, ·) H1h-koerziv, wenn CE > 0 und CK ∈ R mit
ah (uh, uh) ≥ CE |uh|21 − CK |uh|20 fur alle uh und alle h > 0 (9.2.4c)
existieren. Wie in Abschnitt 4.5 definiert, heißt Lh (bzw. ah(·, ·)) L2h-stabil, falls∣∣L−1
h
∣∣0←0
≤ C0 fur alle h > 0. (9.2.4d)
Wir nennen Lh daruber hinaus H1h-regular , falls∣∣L−1
h
∣∣1←−1
≤ C1 fur alle h > 0. (9.2.4e)
Ubungsaufgabe 9.2.2 a) H1h-Regularitat impliziert L2
h-Stabilitat.b) |Ah|i←j = |A�h |−j←−i fur alle i, j ∈ {−1, 0, 1}.c) Ist Lh H
1h-regular, so auch L�h .
d) Sind Lh und L�h stabil bezuglich |·|∞, d.h. ‖Lh‖∞ ≤ C∞, ‖L�h ‖∞ ≤ C1, so folgt die L2h-Stabilitat
(9.2.4d) mit C0 :=√C1C∞.
e) H1h-Elliptizitat impliziert H1
h-Regularitat.
Die folgende Aussage ahnelt der Alternative aus Satz 6.5.15.
Satz 9.2.3 Ist ah(·, ) H1h-koerziv, und ist Lh L
2h-stabil, so ist Lh auch H1
h-regular.
Beweis. Im Folgenden ist uh beliebig, aber fest. Sei fh := L�h uh, sodass ah(uh, uh) = (uh, L�h uh)0 = (uh, fh)0.
Die Koerzivitat liefert
|uh|21 ≤[ah (uh, uh) + CK |uh|20
]/CE =
[(uh, fh)0 + CK |uh|20
]/CE ≤ C′ [|fh|0 + CK |uh|0] |uh|0 .
Auf Grund der Stabilitatsabschatzung |uh|0 ≤ C0 |fh|0 ergibt sich |uh|21 ≤ C′′ |fh|20. Hieraus schließt man∣∣L−�h
∣∣1←0
≤√C′′ =: C� und somit
∣∣L−1h
∣∣0←−1
≤ C� (vgl. Ubungsaufgabe 9.2.2b).2) Sei nun fh := Lhuh. Nach Teil 1) gilt |uh|0 ≤ C� |fh|−1. Indem man
|ah(uh, uh)| = |(fh, uh)0| ≤ |fh|−1 |uh|1
gemaß (5.3.10) durch 12CE |uh|21 + 1
2C−1E |fh|2−1 abschatzt, ergibt sich die Koerzivitat
|uh|21 ≤ ah(uh, uh) + CK |uh|20CE
≤12CE |uh|21 + 1
2C−1E |fh|2−1 + CK |uh|20CE
=12|uh|21 +
12C−1E + CK (C∗)2
CE|fh|2−1
und daher∣∣L−1
h
∣∣1←−1
≤ C1 mit C1 := C−2E + 2CK (C�)2 C−1
E .
Anstelle der L2h-Stabilitat in Satz 9.2.3 kann man auch die Losbarkeit des kontinuierlichen Problems und
eine Konsistenzbedingung voraussetzen (vgl. Folgerung 11.3.5).In Analogie zu Lemma 7.2.12 beweist man

178 9. Regularitat
Ubungsaufgabe 9.2.4 Ist Lh H1h-koerziv, und enthalt δLh := a0 +
∑i bi∂
±i +
∑i ∂±i ci mit |a0|, |bi|, |ci| ≤
const hochstens erste Differenzen, so ist auch Lh + δLh H1h-koerziv.
Gemaß Ubungsaufgabe 9.2.4 reicht es, den Hauptteil eines Differenzenoperators auf Koerzivitat zu unter-suchen.
Beispiel 9.2.5 Ω ⊂ R2 sei beschrankt. Auf Ωh sei Lh durch das Differenzenverfahren (5.1.18) (mit a = 0)gegeben. Dazu seien die Koeffizienten a11, a22 auf R2 fortgesetzt angenommen (wesentlich sind nur die Werte,die in (9.2.5) fur (x, y) ∈ Ωh auftreten):
(Lhuh) (x, y) = ∂−x
(a11
(x+
h
2, y
)∂+
x uh(x, y))
+ ∂−y
(a22
(x, y +
h
2
)∂+
y uh(x, y)), (9.2.5)
wobei uh(x, y) = 0 fur (x, y) ∈ Qh\Ωh gemaß (9.2.2). Dabei gelte −a11,−a22 ≥ ε > 0 in Ω. Dann ist ah(·, ·)H1
h-elliptisch und Lh H1h-regular.
Beweis. 1) Fur beliebige auf Qh definierte Gitterfunktionen vh, wh gelten die partiellen Summationsregeln(vh, ∂
+xiwh
)0
= −(∂−xi
vh, wh
)0,
(vh, ∂
−xiwh
)0
= −(∂+
xivh, wh
)0. (9.2.6)
2) Da im Skalarprodukt (Lhuh, wh)0 die Werte (Lhuh)(x, y) fur (x, y) ∈ Qh\Ωh wegen (9.2.2) mitwh (x.y) = 0 multipliziert werden, konnen die eventuell undefinierten Koeffizienten a11, a22 nach Beliebenerklart werden. Es folgt
ah(uh, uh) = (Lhuh, uh)0 = −(a11
(· + h
2, ·)∂+
x uh, ∂+x uh
)0
−(a22
(·, · + h
2
)∂+
y uh, ∂+y uh
)0
≥ ε[∣∣∂+
x uh
∣∣20
+∣∣∂+
y uh
∣∣20
].
Wie in Lemma 6.2.12 beweist man, dass die Normen |·|1 und |uh|1,0 := [|∂+x uh|20 + |∂+
y uh|20]1/2 fur be-schranktes Ω aquivalent sind (gleichmaßig bezuglich h), sodass (9.2.4b) folgt. Die H1
h-Regularitat ergibt sichaus Ubungsaufgabe 9.2.2e.
Ubungsaufgabe 9.2.6 Ω ⊂ R2 sei beschrankt. Die Gleichung
(a11ux)x + (a12uy)x + (a12ux)y + (a22uy)y = f
sei auf Ωh durch die Differenzensterne (5.1.18-5.1.18) gegeben, wobei uh = 0 in Qh\Ωh. Die Differential-gleichung sei gleichmaßig elliptisch in Ω: aii < 0, a11a22 − a12a21 ≥ −ε(a11 + a22) > 0. Ferner gelteaij ∈ C0(Ω). Man zeige: Fur hinreichend kleines h ist die zugehorige Matrix Lh H1
h-regular. Ferner ist Lh
fur alle h > 0 H1h-koerziv. Hinweis: Fur hinreichend kleines h gilt fur alle d1, d2 ∈ R, dass
−a11
(x+
h
2, y
)d21 − a22
(x, y +
h
2
)d22 −
[a12
(x+
h
2, y + h
)+ a12
(x+
h
2, y
)]d1d2 ≥ ε
2(d21 + d2
2
).
Die bisher konstruiertenH1h-koerziven Differenzenverfahren bleibenH1
h-koerziv, wenn Differenzen niedrigerOrdnung hinzugenommen werden (vgl. Ubungsaufgabe 9.2.4) oder wenn der Hauptterm (a11ux)x + . . . durcha11uxx + . . . mit a11 ∈ C1(Ω) ersetzt wird. Die erwahnten Differenzenverfahren werden in randnahen wierandfernen Gitterpunkten durch ein und denselben Differenzenoperator beschrieben. Die homogene Dirichlet-Randbedingung wird durch (9.2.2): “uh = 0 auf Qh\Ωh” diskretisiert. Will man die Randbedingung genauerapproximieren, muss man in den randnahen Punkten von Ωh spezielle Diskretisierungen wahlen (vgl. Ab-schnitte 4.8.1-2). Man erhalt somit eine Unregelmaßigkeit, die einen Beweis derH1
h-Regularitat wie in Beispiel9.2.5 erschwert.
Wir beginnen mit dem eindimensionalen Fall.
Lemma 9.2.7 Lh sei die Matrix der eindimensionalen Shortley-Weller-Diskretisierungen von −u′′ = f aufΩ und der Randbedingung u = 0 auf ∂Ω:
h−2
{2s�sr
uh(x) − 2s� (s� + sr)
uh(x− s�h) − 2sr (s� + sr)
uh(x + srh)}
= f(x) fur x ∈ Ωh, (9.2.7)

9.2 Regularitatseigenschaften der Differenzengleichungen 179
wobei 0 < s�, sr ≤ 1 (vgl. (4.8.7)) im Allgemeinen den Wert 1 haben und nur fur den ersten [letzten]Gitterpunkt x ∈ Ωh die Werte so definiert sind, dass x − s�h ∈ ∂Ω [x + srh ∈ ∂Ω]. In den Randpunktenξ ∈ ∂Ω wird uh(ξ) = 0 gesetzt. Fur beliebiges Ω ⊂ R gilt (vh, Lhvh)0 ≥ 1
2 |∂+vh|20, wenn vh = 0 auf Qh\Ωh
und h hinreichend klein. Fur beschranktes Ω ist Lh daher H1h -regular.
Beweis. 1) Zunachst sei Ω als zusammenhangend angenommen. Die Gitterpunkte von Ωh seien
xj := x0 + jh ∈ Ω fur j = 0, . . . , k > 0.
Die Randpunkte von Ω seien x0 − s�,0h und xk + sr,kh mit s�,0, sr,k ∈ (0, 1]. Die weiteren Faktoren derGleichung (9.2.7) in x = xi sind s�,i = sr,i = 1. Beachtet man vh = 0 auf R\Ω, erhalt man folgendeIdentitat:
(vh, Lhvh)0 = h
k∑j=0
vh(xj) (Lhvh)(xj) (9.2.8a)
=∣∣∂+vh
∣∣20+
1h
⎧⎨⎩vh(x0)[(
2s�
− 2)vh(x0) +
(1 − 2
1+s�
)vh(x1)
]+vh(xk)
[(2sr
− 2)vh(xk) +
(1 − 2
1+sr
)vh(xk−1)
]⎫⎬⎭ ,
wobei s� := s�,0 und sr := sr,k. Da vh(x0) = h∂+vh(x−1) und vh(x1) = h[∂+vh(x−1) + ∂+vh(x0)] wegenvh(x−1) = 0, lasst sich der erste Summand der geschweiften Klammer als
1hvh(x0)
[(2s�
− 2)vh(x0) +
(1 − 2
1 + s�
)vh(x1)
](9.2.8b)
= h1 − s�
1 + s�vh(x0)
[2 + s�
s�
(∂+vh(x−1)
)2 − ∂+vh(x−1)∂+vh(x0)]
schreiben. Fur α := ∂+vh(x−1), β := ∂+vh(x0) wendet man die Ungleichung −αβ ≥ −λ2α
2 − 12λβ
2 mitλ2 = (2 + s�)/s� an (vgl. (5.3.10)): 2+s�
s�α2 − αβ ≥ − 1/4
λ/2β2 = − 1
4s�
s�+2β2. Da
s(1 − s)/[4(1 + s)(2 + s)] ≤ 0.018
(Maximum bei s = (√
3− 1)/2), folgt, dass der Ausdruck (9.2.8b) durch ≥ 0.018hβ2 nach unten beschranktist. Analog behandelt man den zweiten Summanden der geschweiften Klammer und erhalt
(vh, Lhvh)0 ≥∣∣∂+vh
∣∣20− 0.018h
[(∂+vh(x0)
)2 +(∂+vh(xk−1)
)2]. (9.2.8c)
2) In Teil 1) wurde k > 0 angenommen. Fur k = 0 ist
(vh, Lhvh)0 =1h
2s�sr
(vh(x0))2 =
h
s�sr
[(∂+vh(x0)
)2 +(∂+vh(x−1)
)2]≥
∣∣∂+vh
∣∣20,
sodass (9.2.8c) ebenfalls gilt.3) Sei Ω beliebig. Die Zusammenhangskomponenten seien die Intervalle Ii = (ai, bi) (i ∈ Z) mit bi ≤ ai+1.
L(i)h sei die zu Ii gehorende Diskretisierungsmatrix. Jedes vh mit Trager in Ωh = Qh ∩ Ω kann als
∑i v
(i)h
geschrieben werden, wobei v(i)h = 0 außerhalb von Ii. Seien x
(i)0 und x
(i)k(i) der erste und letzte Gitterpunkt
von Ω(i)h := Ωh ∩ Ii. Sei h hinreichend klein, sodass 0.018h ≤ 1/2. Die Abschatzung
∣∣∂+vh
∣∣20≤ 2
∑i
{∣∣∂+vh
∣∣20− 0.018h
[(∂+vh(x(i)
0 ))2
+(∂+vh(x(i)
k(i)−1))2
]}≤ 2
∑i
(v(i)h , L
(i)h v
(i)h
)0
= 2 (vh, Lhvh)0
beweist die Behauptung.

180 9. Regularitat
Satz 9.2.8 Ω ⊂ R2 sei beschrankt. Lh sei die zur Shortley-Weller-Diskretisierung der Poisson-Gleichunggehorende Matrix (vgl. Abschnitt 4.8.1). Dann ist Lh H
1h-regular.
Beweis. Sei Lxh (Ly
h) der Anteil der x-Differenzen (y-Differenzen), sodass Lh = Lxh + Ly
h. Die Beschrankungvon Lh auf eine “Gitterlinie” {(νh, y) ∈ Ω : ν ∈ Z} (y fest) entspricht der Matrix Lh aus Lemma 9.2.7.Somit erhalt man (vh, L
xhvh)0 ≥ 1
2 |∂+x vh|20. Mit der analogen Ungleichung (vh, L
yhvh)0 ≥ 1
2 |∂+y vh|20 ergibt sich
2(vh, Lhvh)0 ≥ |∂+x vh|20 + |∂+
y vh|20 = |vh|21 − |vh|20 ≥ εΩ |vh|21, also∥∥L−1
h
∥∥1←−1
≤ 1/(2εΩ).
Satz 9.2.9 Ω ⊂ R2 sei beschrankt. Die Poisson-Gleichung sei mit Hilfe der Funfpunktformel (4.8.14c) inrandfernen und durch die Interpolation (4.8.16) in randnahen Punkten diskretisiert. Die zugehorige Matrixist H1
h-regular.
Beweis. Die entsprechenden, eindimensionalen Formeln stimmen bis auf den Skalierungsfaktor sr + s� ≤ 2mit (9.2.7) uberein, sodass sich der Beweis des Satzes 9.2.8 leicht ubertragen lasst.
Ubungsaufgabe 9.2.10 Man zeige: Fur ein konvexes Gebiet Ω ⊂ R2 erfullt die Matrix Lh der Shortley-Weller-Diskretisierung die Ungleichung
(vh, Lhvh)0 ≥ 0.982[∣∣∂+
x vh
∣∣20+
∣∣∂+y vh
∣∣20
].
Die Satze 9.2.8 und 9.2.9 lassen sich in folgender Weise verstarken:
Zusatz 9.2.11 Lh sei wie in Satz 9.2.8 oder 9.2.9. Dh = diag{d(x) : x ∈ Ωh} sei die Diagonalmatrix mit
d(x) = min {2s�sr, 2sosu, 1} (x ∈ Ωh),
wobei s�, sr, so, su aus (4.8.7) bzw. (4.8.16) stammen. Fur randferne x ∈ Ωh gilt offenbar d(x) = 1. DieMatrix
L′h := DhLh,
die zum umskalierten System L′huh = f ′h := Dhfh gehort, ist ebenfalls H1h-regular:
∣∣L′h−1∣∣1←−1
≤ C.
Beweis. Im Falle des Shortley-Weller-Verfahrens (4.8.7) hat man die Korrekturterme (9.2.8b) fur die x-und y-Richtungen zusammenzufassen. Es ergibt sich, dass sie ≥ − 1
2 [|∂+x vh|20 + |∂+
y vh|20] bleiben, sodass dieUngleichung (vh, L
′hvh)0 ≥ 1
2 [|∂+x vh|20 + |∂+
y vh|20] ≥ ε |vh|21 mit ε > 0 folgt. Eine analoge Abschatzung erhaltman fur das Differenzenverfahren aus Abschnitt 4.8.2.
9.2.2 Konsistenz
Im Folgenden wollen wir die fur Finite-Element-Fehlerabschatzung |uh − u|1 ≤ Ch |u|2 ≤ C′h |f |0 aufDifferenzenverfahren ubertragen. Dazu ist die Konsistenzbedingung∣∣∣LhRh − RhL
∣∣∣−1←2
:=∥∥∥LhRh − RhL
∥∥∥H−1
h ←H2(Ω)≤ CKh (9.2.9)
fur geeignete Restriktionen
Rh : H2(Ω) ∩H10 (Ω) → H2
h, Rh : L2(Ω) → L2h
zu beweisen. Zur Konstruktion der Restriktionen wird zunachst u ∈ H2(Ω) in u := E2u ∈ H2(R2) fortgesetzt.Gemaß Satz 6.2.41c wird
u := E2u = u auf Ω, ‖E2u‖H2(R2) ≤ C ‖u‖H2(Ω) fur alle u ∈ H2(Ω) (9.2.10a)
angenommen. Eine analoge Fortsetzung E0 : L2(Ω) → L2(R2) mit
f := E0f = f auf Ω, ‖E0f‖L2(R2) ≤ C ‖f‖L2(Ω) fur alle f ∈ L2(Ω) (9.2.10b)

9.2 Regularitatseigenschaften der Differenzengleichungen 181
ist z.B. durch f = 0 auf R2\Ω gegeben. Die Operatoren σxh, σ
yh : C∞0 (R2) → C0(R2) seien durch
(σxhu) (x, y) :=
1h
∫ h/2
−h/2
u(x+ ξ, y)dξ, (σyhu) (x, y) :=
1h
∫ h/2
−h/2
u(x, y + η)dη (9.2.11)
definiert. Die Restriktionen Rh, Rh werden wie folgt gewahlt:
Rh := σxhσ
yhE2, d.h. (Rhu) = h−2
∫ h/2
−h/2
∫ h/2
−h/2
u(x+ ξ, y + η)dξdη mit u := E2u, (9.2.12a)
Rh := (σxhσ
yh)2 E0, (9.2.12b)
d.h.(Rhu
)= h−4
∫ h/2
−h/2
∫ h/2
−h/2
∫ h/2
−h/2
∫ h/2
−h/2
f(x + ξ + ξ′, y + η + η′)dξdξ′dηdη′ mit f := E0f.
Die charakteristischen Eigenschaften der Faltungen σxh , σ
yh sind Gegenstand der
Ubungsaufgabe 9.2.12 ∂x sei die symmetrische Differenz (∂xu)(x, y) := [u(x+h/2, y)−u(x−h/2, y)]/h.∂y ist analog definiert. Man zeige:a) σx
hσyh = σy
hσxh, ∂x = ∂
∂xσxh = σx
h∂∂x , ∂y = ∂
∂yσyh = σy
h∂∂y .
b) ‖σxh‖Hk(R2)→Hk(R2) ≤ C, ‖σy
h‖Hk(R2)→Hk(R2)≤ C (insbesondere fur k = 0,±1, 2).
c) ‖σxhσ
yhv‖L2
h≤
√∑x∈Ωh
|(σxhσ
yhv) (x)|2 ≤ ‖v‖L2(R2) fur alle v ∈ L2(R2).
d) Fur a ∈ C0,1(R2) gilt ‖aσxhσ
yh − σx
hσyha‖L2
h←L2(R2) ≤ Ch ‖a‖C0,1(R2). Dabei sind
(aσxhu) (x) = a(x) ((σx
hu) (x)) und (σxhau) (x) = (σx
h (au)) (x).
e)∥∥a (σx
h)ν (σyh)μ − (σx
h)ν (σyh)μ
a∥∥
L2h←L2(R2)
≤ Cνμh ‖a‖C0,1(R2) fur ν, μ ∈ N.
f)∥∥u− (σx
h)ν (σyh)μ
u∥∥
Hk(R2)≤ Cνμh ‖u‖Hk+1(R2) fur u ∈ Hk+1(R2).
Der Differentialoperator sei
L =n∑
i,j=1
aij(x)∂2
∂xi∂xj+
n∑i=1
ai(x)∂2
∂xi+ a(x). (9.2.13a)
Wir nehmen zunachst Ω = Rn an und diskretisieren L durch den regelmaßigen Differenzenoperator
Lh =n∑
i,j=1
aij(x)∂±xi∂±xj
+n∑
i=1
ai(x)∂±xi+ a(x) (9.2.13b)
bei beliebiger Kombination der ±-Vorzeichen.
Lemma 9.2.13 Sei Ω = Rn. Es gelte aij , aj , a ∈ C0,1(Rn). L und Lh seien durch (9.2.13a,b) gegeben. Danngilt die Konsistenzabschatzung (9.2.9).
Beweis. Zur Vereinfachung der Notation sei n = 2 angenommen. Es ist
Rha11uxx(x) = (σxhσ
yh)2 a11uxx(x) = a11(x) (σx
hσyh)2 uxx(x) − δ1
mit ‖δ1‖L2h
≤ Ch ‖a11‖C0,1(R2) |u|2 (vgl. Ubungsaufgabe 9.2.12e,b). Der a11uxx entsprechende Term in(9.2.13b) sei z.B. a11(x)∂+
x ∂+x . Ubungsaufgabe 9.2.12a zeigt
a11 (σxhσ
yh)2 uxx(x, y) = a11∂x∂xσ
yhσ
yhu(x, y) = a11∂
+x ∂
+x σ
yhσ
yhu(x− h, y) = a11∂
+x ∂
+x σ
yhσ
yhu(x, y) − a11∂
+x δ2
mit δ2(x, y) := −∂+x σ
yhσ
yh[u(x− h, y) − u(x, y)] = −σx
hσyhσ
yh[ux(x − h, y) − ux(x, y)] und
‖δ2‖2 ≤ ‖σyh[ux(x− h, y) − ux(x, y)]‖L2(R2) ≤ h |u|2

182 9. Regularitat
(vgl. Ubungsaufgabe 9.2.12c,b). Da ∂x∂x = ∂+x ∂−x , entfiele der Fehlerterm δ2, wenn man a11uxx durch
a11(x)∂+x ∂−x approximiert. Schließlich hat man
a11∂+x ∂
+x σ
yhσ
yhu = a11∂
+x ∂
+x Rhu+ a11∂
+x ∂
+x [σy
hσyh − σx
hσyh]u
= a11∂+x ∂
+x Rhu+ a11∂
+x σ
xhσ
yh [σy
h − σxh ]ux = a11∂
+x ∂
+x Rhu− a11∂
+x δ3
mit ‖δ3‖L2h
= ‖σxhσ
yh[σy
h − σxh]ux‖L2
h≤ ‖[σy
h − σxh]ux‖L2(R2) ≤ Ch |u|2 (vgl. Ubungsaufgabe 9.2.12c,f). Zu-
sammen ergibt sich [a11∂
±x ∂±x Rh − Rha11
∂2
∂x2
]u = δ1 + a11∂
±x (δ2 + δ3) .
Fur den ersten Fehlerterm gilt
‖δ1‖H−1h
≤ ‖δ1‖L2h≤ Ch ‖a11‖C0,1(R2) |u|2 . (9.2.14a)
Fur beliebiges vh ∈ H1h ist (
vh, a11∂±x (δ2 + δ3)
)L2
h
= −(∂∓x [a11vh] , δ2 + δ3
)L2
h
. (9.2.14b)
Aus a ∈ C0,1(R2) folgt ‖∂±x [avh]‖L2h≤ ‖a‖C0,1(R2) ‖vh‖L2
h+ ‖a‖C0(R2) ‖vh‖H1
h≤ C ‖vh‖H1
h, sodass
∥∥a11∂±x (δ2 + δ3)
∥∥H−1
h
= sup0�=vh∈H1
h
∣∣∣(∂∓x [a11vh] , δ2 + δ3)L2
h
∣∣∣ / |vh|1 ≤ C ‖δ2 + δ3‖L2h≤ C′h |u|2 . (9.2.14c)
(9.2.14a,c) beweisen ∥∥∥∥a11∂±x ∂±x Rh − Rha11
∂2
∂x2
∥∥∥∥H−1
h ←H2(R2)
≤ Ch. (9.2.14d)
Analog zeigt man ∥∥∥∥aij∂±xi∂±xj
Rh − Rhaij∂2
∂xi∂xj
∥∥∥∥H−1
h ←H2(R2)
≤ Ch. (9.2.14e)
Fur ai∂±xiRh − Rhai∂/∂xi ergeben die gleichen Uberlegungen eine O(h)-Abschatzung fur die Normen
‖·‖H−1h ←H1(R2) und ‖·‖L2
h←H2(R2). Beide sind abschatzbar durch die großere Norm ‖·‖H−1h ←H2(R2), sodass∥∥∥ai∂
±xiRh − Rhai∂/∂xi
∥∥∥H−1
h ←H2(R2)≤ Ch. (9.2.14f)
Ebenso ist ∥∥∥aRh − Rha∥∥∥
H−1h ←H2(R2)
≤ Ch. (9.2.14g)
(9.2.14e,f,g) beweisen die Behauptung (9.2.9).Bei der Verallgemeinerung der Konsistenzabschatzung auf allgemeinere Gebiete Ω ⊂ R2 tritt die folgende
Schwierigkeit auf. Die Koeffizienten der Matrix Lh nach (4.8.7) oder (4.8.16) sind nicht durch Ch−2 be-schrankt. In randnahen Punkten geht vielmehr die Inverse des Abstandes zum Randpunkt ein, und dieserAbstand kann beliebig klein sein. Ein Ausweg besteht darin, die Diskretisierung so zu formulieren, dassdie Entfernungen zwischen Rand- und randnahen Punkten z.B. ≥ h/2 bleiben. Eine zweite Moglichkeit isteine geeignete Definition von Rh, sodass das in (9.2.9) erscheinende Produkt LhRh abschatzbar wird (vgl.Hackbusch [38]). Hier soll ein dritter Ausweg beschritten werden: Lh wird durch die umskalierte MatrixL′h = DhLh aus Zusatz 9.2.11 ersetzt.
Satz 9.2.14 Sei Ω ∈ C2 (oder konvex) und beschrankt. Zur Diskretisierung von Lu = f fur L = −Δ auf Ωmit u = 0 auf Γ werde die Diskretisierung Lhuh = fh gemaß (4.8.7) oder (4.8.16) verwendet. L′h = DhLh
sei wie in Zusatz 9.2.11 definiert. Dann gilt die Konsistenzabschatzung∣∣∣L′hRh −DhRhL∣∣∣−1←2
≤ Ch. (9.2.15)

9.2 Regularitatseigenschaften der Differenzengleichungen 183
Die Matrix Lh aus (4.8.7) bzw. (4.8.16) ist hier nur als Beispiel genommen. Der Beweis wird zeigen, dassdie Abschatzung (9.2.9) bzw. (9.2.15) auch fur andere Lh gilt, wenn (Lhuh)(x), x randnah, eine zweiteDifferenz darstellt. Zunachst werden zwei Lemmata benotigt.γh ⊂ Ωh sei die Menge der randnahen Punkte. Ist vh eine auf Ωh definierte Gitterfunktion, so bezeichnen
wir mit vh|γhdie Beschrankung der Funktion auf γh :
(vh|γh) (x) = vh(x) fur x ∈ γh, (vh|γh
) (x) = 0 fur x ∈ Ωh\γh.
Lemma 9.2.15 Sei Ω ∈ C0,1 beschrankt. Dann gibt es ein von h unabhangiges C = C(Ω), sodass
|vh|γh|0 ≤ C |vh|γh
|1 . (9.2.16)
Beweis. Aus Ω ∈ C0,1 folgt: Es gibt Zahlen K ∈ N und h0 > 0, sodass fur alle x ∈ γh mit h ≤ h0 nichtalle Gitterpunkte {x + (νh, μh) : −K ≤ ν, μ ≤ K} in Ω liegen. Sei zum Beispiel x + (ν0h, μ0h) �∈ Ω.Dann definieren wir die Funktionen wνμ
h (−K ≤ ν, μ ≤ K) in x durch wν0μ0h (x) := vh(x), wνμ
h (x) = 0 fur(ν, μ) �= (ν0, μ0). Damit ist
∑Kν,μ=−K wνμ
h = vh|γheine Zerlegung mit wνμ
h (x) = vh(x) oder wνμh (x) = 0.
Ohne Beschrankung der Allgemeinheit seien ν > 0 und μ > 0 angenommen. Zu x ∈ Ωh definieren wir diePunktkette
x0 = x, x1 = x + (h, 0) , . . . , xν = x + (νh, 0) , xν+1 = x + (νh, h) , . . . , xν+μ = x + (νh, μh) .
Definitionsgemaß gilt wνμh (x) = 0 oder xν+μ �∈ Ω, d.h. wνμ
h (xν+μ) = 0 (vgl. (9.2.2)). In beiden Fallen hatman
|wνμh (x)| ≤
∣∣wνμh (x0) − wνμ
h (xν+μ)∣∣ = h
∣∣∣∣1h [wνμ
h (x0) − wνμh (x1)
]+
1h
[wνμ
h (x1) − wνμh (x2)
]+ . . .
∣∣∣∣≤ h
[ ∣∣∂−x wνμh (x1)
∣∣ +∣∣∂−x wνμ
h (x2)∣∣ + . . .+
∣∣∂−x wνμh (xν)
∣∣ +∣∣∂−y wνμ
h (xν+1)∣∣ + . . .+
∣∣∂−y wνμh (xν+μ)
∣∣ ]und daher |wνμ
h |0 ≤ h[√ν |∂+
x wνμh |0 +
√μ∣∣∂+
y wνμh
∣∣0] ≤
√2Kh |wνμ
h |1. Summation uber ν, μ liefert dieAbschatzung (9.2.16) fur vh|γh
=∑wνμ
h .
In den meisten Fallen ist schon ein direkter Nachbarpunkt von x ∈ γh in R2\Ω, sodass (9.2.16) mit C =√
2folgt. Dies gilt insbesondere fur konvexe Gebiete.
Lemma 9.2.16 Rh sei durch (9.2.12a) definiert. E2 erfulle (9.2.10a). Dann gilt
(Rhu) (ξ) ≤ Ch ‖E2u‖H2(Kh/2(ξ)) fur alle ξ ∈ Γ, u ∈ H10 (Ω) ∩H2(Ω), (9.2.17)
wobei Kh/2(ξ) :={ξ + x ∈ R2 : x ∈ (−h/2, h/2)× (−h/2, h/2)
}.
Beweis. 1) Sei Q = (− 12 ,
12 ) × (− 1
2 ,12 ). Fur v ∈ H2(Q) zeigt man∣∣∣∣v(0) −∫
Q
v(x)dx∣∣∣∣ ≤ C
√∫Q
(v2
xx + 2v2xy + v2
yy
)dxdy,
da die linke Seite fur lineare Funktionen u(x, y) = α+ βx+ γy verschwindet. Der Beweis ist ahnlich wie fur(8.4.2). Transformation von Q auf Qh := (−h
2 ,h2 ) × (−h
2 ,h2 ) liefert∣∣∣∣h2v(0) −
∫Qh
v(x)dx∣∣∣∣ ≤ Ch3
√∫Q
(v2
xx + 2v2xy + v2
yy
)dxdy. (9.2.18)
2) Sei ξ ∈ Γ. Die Behauptung (9.2.17) folgt aus (9.2.18) mit v(x) := u(ξ+hx) = (E2u) (ξ+hx), da u(ξ) = 0wegen ξ ∈ Γ.Beweis des Satzes 9.2.14. 1)Ungleichung (9.2.15) ist bewiesen, falls∣∣∣(vh,
[L′hRh −DhRhL
]u)
0
∣∣∣ ≤ Ch (9.2.19a)

184 9. Regularitat
fur alle vh ∈ H1h und u ∈ H2(Ω) ∩H1
0 (Ω) mit |vh|1 = |u|2 = 1. Zu diesem Zweck wird vh in
vh = v′h + v′′h mit v′h := vh|γh
zerlegt. In Teil 2) wird ∣∣∣(v′′h, [L′hRh −DhRhL]u)
0
∣∣∣ ≤ C1h (9.2.19b)
gezeigt werden. Die weiteren Beweisschritte 3) und 4) werden∣∣∣(v′h, [L′hRh −DhRhL]u)
0
∣∣∣ ≤ C2h (9.2.19c)
ergeben, sodass (9.2.19a) mit C = C1 + C2 folgt.2) Lemma 9.2.15 zeigt
|v′h|0 ≤ C3h |vh|1 = C3h. (9.2.19d)
Fur v′′h erhalt man |v′′h |1 ≤ |vh|1 + |v′h|1 = 1 + |v′h|1. Die inverse Abschatzung (9.2.3f) liefert |v′h|1 ≤Ch−1 |v′h|0 ≤ CC3, also
|v′′h |1 ≤ C4. (9.2.19e)
Lh sei der (regelmaßige) Differenzenoperator auf dem unendlichen Gitter Qh = {(νh, μh) : ν, μ ∈ Z}.Da der Trager von v′′h aus Qh\γh besteht, gilt (v′′h , L
′hwh)0 = (v′′h, Lhwh)0 fur alle wh. Außerdem ist
(v′′h , Dhwh)0 = (v′′h , wh)0 . Dies beweist die erste Gleichheit in∣∣∣(v′′h, [L′hRh −DhRhL]u)
0
∣∣∣ =∣∣∣(v′′h , [LhRh −DhRhL
]u)
0
∣∣∣ ≤ C5h |v′′h |1 |u|2 ≤ C5hC4C6 =: C1h
wobei u := E2u die Fortsetzung von u auf R2 ist. Die weiteren Ungleichungen ergeben sich aus Lemma9.2.13, (9.2.19e) und
|u|2 = ‖u‖H2(R2) ≤ C6 ‖u‖H2(Ω) = C6 (9.2.19f)
(vgl. (9.2.10a)). Satz 6.2.41c garantiert die Existenz einer Fortsetzung u mit (9.2.19f), falls Ω ∈ C2. Eineweitere hinreichende Bedingung fur (9.2.19f) ist die Konvexitat von Ω.
3) Die linke Seite von (9.2.19c) wird in (v′h, L′hRhu)0 und (v′h, DhRhLu)0 aufgespalten. Der erste Term
wird in Teil 4) abgeschatzt. Ubungsaufgabe 9.2.12c und (9.2.19d) ergeben fur den zweiten Term∣∣∣(v′h, DhRhLu)0∣∣∣ ≤ |v′h|0
∣∣∣DhRhLu∣∣∣0≤ C3hC
′ |Lu|0 ≤ C7h |u|2 = C7h. (9.2.19g)
4) Wir setzen wh := (L′hRhu)|γh. Da der Trager von v′h in γh enthalten ist, gilt (v′h, L
′hRhu)0 = (v′h, wh)0.
L′h enthalt Differenzen bezuglich der x- und y-Richtung. Dementsprechend schreiben wir wh = wxh +wy
h. ImWeiteren beschranken wir uns (a) auf die Shortley-Weller-Diskretisierung, (b) auf den Term wx
h und (c) aufden Fall, dass
x ∈ γh, xr = x + (srh, 0) ∈ Ωh (d.h. sr = 1), x� = x − (s�h, 0) ∈ Γ.
Die anderen Falle sind analog abzuhandeln. Wir setzen
u := Rhu = σxhσ
yhE2u ∈ H2(R2).
Die Shortley-Weller-Differenz in x-Richtung lautet
wxh(x) = dx
[u(x) − u(xr)
hsr− u(x�) − u(x)
hs�
]/(s� + sr) h
2,
wobei dx das Diagonalelement von Dh ist. Da in der Gleichung L′huh = fh die Variablen uh(ξ), ξ ∈ Γ (z.B.ξ = x�), bereits eliminiert sind, hat wx
h(x) die Gestalt
wxh(x) = wx
h(x) +2dx
h2s� (s� + sr)u(x�)

9.2 Regularitatseigenschaften der Differenzengleichungen 185
Der Faktor 2dx/[h2s�(s� + sr)] bleibt nach Definition von Dh durch 4h−2 beschrankt. Aus Lemma 9.2.16und Kh/2(x�) ⊂ K3h/2(x) schließt man
|wxh(x) − wx
h(x)| ≤ 4h−2∣∣u(x�)
∣∣ ≤ Ch−1 ‖u‖H2(K3h/2(x)) . (9.2.19h)
Die zweite dividierte Differenz wxh in x = (x, y) lasst sich (wegen sr = 1) durch
wxh(x, y) = dx
∫ h
−hs�
g(t)uxx(x+ t, y)dt mit g(t) =
⎧⎨⎩ 2 (t− h) /(h2 + s�h
2)
fur 0 ≤ t ≤ h,−2 (s�h+ t) /
(s�h
2 (1 + s�))
fur − s�h ≤ t ≤ 0,0 sonst,
darstellen. Hieraus schließt man
|wxh(x, y)| ≤ dx
√∫ h
−hs�
g2(t)dt
√∫ h
−hs�
u2xx(x+ t, y)dt ≤ 2
h
√∫ h
−h
u2xx(x+ t, y)dt ≤ C
h‖u‖H2(K 3h
2(x)) (9.2.19i)
(vgl. (6.2.5a)). Aus (9.2.19h,i) und der entsprechenden Abschatzung fur wyh erhalt man die Schranke
|wh(x)| ≤ C8h−1 ‖u‖H2(K3h/2(x)) , sodass
|wh|20 = h2∑x∈γh
|wh(x)|2 ≤ C28
∑x∈γh
‖u‖H2(K3h/2(x)) ≤ 9C28 ‖u‖H2(R2) ≤ (3C8C6)
2 =: C29 .
Damit ist|(v′h, L′hRhu)0| ≤ |(v′h, wh)0| ≤ |v′h|0 |wh|0 ≤ C3hC9 =: C10h (9.2.19j)
bewiesen. (9.2.19g) und (9.2.19j) ergeben die fehlende Ungleichung (9.2.19c).
Bemerkung 9.2.17 Die Beweisschritte zu Satz 9.2.14 lassen sich ebenso fur allgemeinere Differenzen-gleichungen (z.B. mit variablen Koeffizienten wie in Lemma 9.2.13) durchfuhren.
9.2.3 Optimale Fehlerabschatzungen
Die diskrete Losung uh = L−1h fh wird im Folgenden mit der Restriktion u�
h := Rhu der exakten Losungu = L−1f verglichen. Aus der Darstellung
uh − u�h = L−1
h fh −Rhu = L−1h
(fh − Rhf
)+ L−1
h Rhf −Rhu (9.2.20)
= L−1h
(fh − Rhf
)− L−1
h
(LhRh − RhL
)u
erhalt man sofort den
Satz 9.2.18 Es gelte u ∈ H2(Ω) fur die Losung von Lu = f . Die rechte Seite fh der diskreten GleichungLhuh = fh sei so gewahlt, dass ∣∣∣fh − Rhf
∣∣∣−1
≤ Cfh . (9.2.21)
Ist außerdem Lh H1h-regular, und gilt die Konsistenzbedingung (9.2.9) mit der Konstanten CK , so genugt uh
der Fehlerabschatzung|uh − u�
h|1 ≤ C1 (Cf + CK |u|2)h . (9.2.22)
Beweis. |uh − u�h|1 ≤ |L−1
h |1←−1(|fh − Rhf |−1 + |LhRh − RhL|−1←2 |u|2).
Zusatz 9.2.19 a) Ungleichung (9.2.21) ist insbesondere dann erfullt, wenn fh := Rhf gewahlt wird.b) Die Wahl fh(x) := f(x) fur x ∈ Ωh (vgl. (4.2.6b)) fuhrt auf (9.2.21), falls f ∈ C0,1(Ω) oder f ∈ H2(Ω).
In diesen Fallen gilt sogar∣∣∣fh − Rhf∣∣∣0≤ C
∥∥∥fh − Rhf∥∥∥∞
≤ C′h ‖f‖C0,1(Ω) bzw.∣∣∣fh − Rhf
∣∣∣0≤ Ch2 |f |2 . (9.2.23)

186 9. Regularitat
c) In Satz 9.2.18 lassen sich die H1h-Regularitat von Lh durch jene von L′h = DhLh (vgl. Zusatz 9.2.11),
(9.2.9) durch (9.2.15) und (9.2.21) durch
|Dhfh −DhRhf |−1 ≤ Cfh (9.2.21’)
ersetzen.
Beweis. Der Beweis von (9.2.23) basiert auf der Ungleichung (9.2.18).Fehlerabschatzungen der Ordnung O(h2) lassen sich auf die gleiche Weise ableiten, wenn man Konsistenz-
bedingungen zweiter Ordnung hat. Diese waren z.B. (9.2.24a) oder (9.2.24b):
|LhRh − RhL|−2←2 ≤ Ch2, (9.2.24a)
|LhRh − RhL|−1←3 ≤ Ch2, (9.2.24b)
Bemerkung 9.2.20 Falls Ωh = Qh (d.h. Ω = R2) oder Ω = (x′, x′′)×(y′, y′′), lassen sich die Ungleichungen(9.2.24a,b) ahnlich wie in Lemma 9.2.13 zeigen.
Beispiel 9.2.21 Das Differenzenverfahren aus Beispiel 4.5.8 zeigt quadratische Konvergenz. Dieser Falllasst sich wie folgt analysieren. Gemaß Bemerkung 9.2.20 zeigt man (9.2.24a). Im folgenden Abschnittbeweisen wir die H2
h-Regularitat∣∣L−1
h
∣∣2←0
≤ C, die fur die vorliegende symmetrische Matrix Lh mit∣∣L−1h
∣∣0←−2
≤ C aquivalent ist (vgl. (6.3.3)). Darstellung (9.2.20) fuhrt auf
|uh − u�h|0 ≤ Ch2 |u|2 . (9.2.25a)
Die entsprechende Abschatzung|uh − u�
h|1 ≤ Ch2 |u|3 ,die auf (9.2.24b) basiert, scheitert daran, dass die Losung aus Beispiel 4.5.8 nicht zu H3(Ω) gehort (vgl.Beispiel 9.1.29).
Die Verifikation von (9.2.24b) in Anwesenheit von unregelmaßigen Diskretisierungen am Rande wird kom-plizierter.
9.2.4 H2h-Regularitat
Unter geeigneten Voraussetzungen an Ω hat Lu = f ∈ L2(Ω) eine Losung u ∈ H2(Ω) ∩H10 (Ω): |u|2 ≤ C |f |0
(vgl. z.B. Satz 9.1.22). Fur die diskrete Losung von Lhuh = fh stellt sich die entsprechende Frage: Gilt|uh|2 ≤ C |fh|0? Zunachst ist die Norm |·|2 von H2
h zu definieren.Falls Ω = R2 oder falls der Rand Γ mit Gitterlinien zusammenfallt, lasst sich
|uh|2 :=√|uh|21 + h2
∑x∈Ωh
[∣∣∂+x ∂−x uh(x)
∣∣2 +∣∣∂+
y ∂−y uh(x)
∣∣2]definieren. Im Allgemeinen muss man dagegen am Rand unregelmaßige Differenzen verwenden. In randfernenPunkten x ∈ Ωh\γh sei Dxxuh(x) = ∂+
x ∂−x uh(x). In einem randnahen Gitterpunkt x = (x, y) ∈ γh zum
Beispiel mit den Nachbarn x� := (x− s�h, y) ∈ Γ, xr := (x+h, y) ∈ Ωh lage es nahe, die dividierte Differenz(4.8.5) zu verwenden. Dann ware jedoch die inverse Abschatzung |uh|2 ≤ Ch−1 |uh|1 im Allgemeinen verletzt,da s� beliebig klein werden kann. Deshalb wird Dxxuh(x) mit Hilfe der Gitterpunkte (x− s�h, y), (x+ h, y),(x+ 2h, y) definiert:
Dxxuh(x) :=2
(2 + s�)h
[uh(x+ 2h, y)− uh(x+ h, y)
h− uh(x+ h, y) − uh(x− s�h, y)
(1 + s�)h
],
wobei uh(x− s�h, y) = 0.Falls Γ nicht nur zwischen (x − s�h, y) und (x, y), sondern auch zwischen (x + h, y) und (x + 2h, y)
verlauft, ist x+ 2h durch x + h+ srh zu ersetzen. Falls auch (x + h, y) nicht mehr zu Ω gehort, setze manDxxuh(x) := h−2uh(x). Entsprechend wird die zweite Differenz Dyy definiert. Die gemischte Differenz lautet

9.2 Regularitatseigenschaften der Differenzengleichungen 187
im Inneren Dxy := ∂−x ∂−y . In Randnahe sind verschiedene Festlegungen von Dxy moglich. Die Definition von
|·|2 lautet
|uh|2 :=√|uh|21 + h2
∑x∈Ωh
[|Dxxuh(x)|2 + |Dyyuh(x)|2
].
Ubungsaufgabe 9.2.22 Man beweise die inverse Abschatzung |·|2 ≤ Ch−1 |·|1.
Wir nennen Lh H2h-regular, falls
∣∣L−1h
∣∣2←0
≤ C. Eine aquivalente Formulierung ist |uh|2 ≤ C |fh|0 furuh = L−1
h fh, fh ∈ L2h.
Ubungsaufgabe 9.2.23 Lh sei H2h-regular, Lh + δLh H
1h-regular und |δLh|0←1 ≤ C fur alle h. Man zeige:
Auch Lh + δLh ist H2h-regular.
Zum Nachweis derH2h-Regularitat kann man in Analogie zum Beweis des Zusatzes 9.1.27 das Skalarprodukt
(Lhuh, Lhuh)0 partiell summieren, um die Aquivalenz von |fh|20 = |Lhuh|20 und |uh|22 zu zeigen. Diese Technikist allerdings nur fur ein Rechteck Ω anwendbar. Hier wird ein einfacherer Beweis benutzt, der auch furallgemeine Gebiete durchfuhrbar ist.Ph : L2
h → L2(Ω) sei die folgende stuckweise konstante Interpolation:
(Phuh) (x) :=
{ (Phuh
)(x) falls x ∈ Ω,
0 falls x /∈ Ω,(9.2.26a)
Phuh(x, y) := uh(x′, y′) ∈ Ωh und x′ − h/2 < x ≤ x′ + h/2, y′ − h/2 < y ≤ y′ + h/2, (9.2.26b)
wobei uh(x) = 0 fur x ∈ Qh\Ωh (vgl. (9.2.2)).
Lemma 9.2.24 Es sei Ω ∈ C0,1. Dann gilt
|RhPh − I|−1←0 ≤ Ch, (9.2.27a)|Ph|0←0 ≤ C, (9.2.27b)|Rh|2←2 ≤ C. (9.2.27c)
Beweis. 1) Die Abschatzung (9.2.27a) ist zu |P �h R
�h − I|0←1 ≤ Ch aquivalent (vgl. (6.3.3)). Daher ist
|wh|0 ≤ Ch |uh|1 fur wh := (P �h R
�h − I)uh
zu zeigen. Aus der nachfolgenden Ubungsaufgabe 9.2.25 ergibt sich die Darstellung
wh(x) =(σx
hσyh [σx
hσyh − I] Phuh
)(x) fur wh :=
(P �
hR�h − I
)uh, x ∈ Ωh.
Ubungsaufgabe 9.2.12c zeigt |wh|0 ≤ |w|L2(R2) fur w := (σxhσ
yh−I)Phuh. Fur jedes ξ ∈ (0, 1)× (0, 1) definiere
man die Gitterfunktion
wh,ξ ∈ L2h mit wh,ξ(x) := w(x + ξ) fur x ∈ Qh.
Man pruft nach, dass wh,ξ(x, y) eine gewichtete Summe von ersten Differenzen uh(x, y)−uh(x′, y′) ist, wobei(x′, y′) ∈ {(x± h, y), (x, y ± h), (x± h, y ± h)}. Daher gilt |wh,ξ|0 ≤ h |uh|1 fur alle ξ, woraus man
|w|20 =∫
R2|w(x)|2 dx = h2
∫(0,1)×(0,1)
∑x∈Ωh
|w(x + ξh)|2 dξ =∫
(0,1)×(0,1)
∑x∈Ωh
|wh,ξ|20 dξ ≤ h2 |uh|1 ,
also |wh|0 ≤ |w|0 ≤ h |uh|1 schließt. Aus
wh − wh = (P �h − P �
h )R�huh = (P �
h − P �h )σx
hσyhPhuh = (P �
h − P �h )σx
hσyhPh(uh|γh
)
mit γh = {x ∈ Ωh : K3h/2(x) ∩ Γ �= ∅} folgert man
|wh − wh|0 ≤∣∣∣(P �
h − P �h
)σx
hσyh
∣∣∣0←0
∣∣∣Ph
∣∣∣0←0
|uh|γh|0 ≤ C |uh|γh
|0 ≤ C′h |uh|1

188 9. Regularitat
(vgl. zweiten Beweisteil und Lemma 9.2.15, in dem γh durch γh ersetzt werden darf). Zusammen mit|wh|0 ≤ h |uh|1 erhalt man |wh|0 ≤ (C′ + 1)h |uh|1.
2) (9.2.27b) mit C = 1 folgt aus |Phuh|0 = |uh|0.3) Zweite Differenzen von u = Rhu sind bereits in (9.2.19i) abgeschatzt worden. (9.2.19i) liefert
|uh|2 ≤ C |u|2 , d.h. (9.2.27c).
Ubungsaufgabe 9.2.25 Man zeige: Die adjungierten Operatoren zu Ph und Rh sind P �h : L2(R2) → L2
h
und R�h : L2
h → L2(R2) mit(P �
hu)
(x) = (σxhσ
yhu) (x) und
(R�
huh
)(x) =
(σx
hσyhPhuh
)(x) fur x ∈ Qh.
Ferner gilt (σxhσ
yhPhuh)(x) = uh(x) fur alle x ∈ Qh.
Die IdentitatL−1
h = RhL−1Ph − L−1
h
[(LhRh − RhL
)L−1Ph +
(RhPh − I
)]liefert die Abschatzung∣∣L−1
h
∣∣2←0
≤ |Rh|2←2
∣∣L−1∣∣2←0
|Ph|0←0
+ |I|2←1
∣∣L−1h
∣∣1←−1
[∣∣∣LhRh − RhL∣∣∣−1←2
∣∣L−1∣∣2←0
|Ph|0←0 +∣∣∣RhPh − I
∣∣∣−1←0
].
Die inverse Abschatzung aus Ubungsaufgabe 9.2.22 ergibt |I|2←1 ≤ Ch−1 fur die Identitat I : H1h → H2
h.Zusammen mit den Ungleichungen (9.2.27a-c) folgt
Satz 9.2.26 Lh sei H1h-regular und erfulle die Konsistenzbedingung (9.2.9). Ω sei konvex oder aus C2, und
L sei H2-regular (d.h. |L−1|2←0 ≤ C). Dann ist Lh auch H2h-regular.
Als Voraussetzung an Ω wurde Ω ∈ C0,1 genugen, um (9.2.27a-c) zu garantieren. Andererseits entsprichtdie angegebene Bedingung den Voraussetzungen fur Satz 9.2.14 und fur die H2-Regularitat von L.
Zusatz 9.2.27 In Satz 9.2.26 konnen (9.2.9) und die H1h-Regularitat von Lh durch (9.2.15) und die H1
h-Regularitat von L′h ersetzt werden. Resultat ist die H2
h-Regularitat sowohl von Lh als auch L′h.
Beweis. Zum Nachweis der H2h-Regularitat von L′h definiere man Phuh(x) := 0 fur x ∈ Kh/2(x), x ∈ γh, und
beachte∣∣∣Dh(RhPh − I)D−1
h
∣∣∣−1←0
≤ Ch.
Ubungsaufgabe 9.2.28 Ist Ω ⊂ Rn (n ≤ 3) beschrankt und Lh H2h-regular, so ist Lh bezuglich der Zeilen-
summennorm stabil:∥∥L−1
h
∥∥∞ ≤ C. Hinweis: Man verwende C−1 |uh|0 ≤ ‖uh‖∞ ≤ C |uh|2.
Fur allgemeine Lipschitz-Gebiete Ω wie zum Beispiel das L-Gebiet aus Beispiel 2.1.4 kann L (Lh) nichtH2-regular (H2
h-regular) sein. Satz 9.1.25 garantiert jedoch die H1+s0 (Ω)-Regularitat fur s ∈ [0, 1/2). Fur Lh
kann in analoger Weise die H1+sh -Regularitat definiert und bewiesen werden (vgl. Hackbusch [37]).

10Spezielle Differentialgleichungen
Haben die Randwertaufgaben spezielle Eigenschaften, braucht man haufig auch spezielle Diskretisierungen.Wir geben hierzu zwei Beispiele in den Abschnitten 10.1 und 10.2. Fur das erste Beispiel ist die Variations-formulierung von entscheidender Bedeutung.
10.1 Differentialgleichungen mit unstetigen Koeffizienten
10.1.1 Formulierung
Die selbstadjungierte Differentialgleichungn∑
i,j=1
∂
∂xi
(aij(x)
∂
∂xju
)+ a(x)u(x) = f in Ω (10.1.1a)
(vgl. (5.1.17)) tritt haufig in der Physik auf. Sie lasst sich auch als
div(A(x) gradu) + au = f mit A(x) := (aij(x))i,j=1,...,n
schreiben, sodass fur a = 0 und f = 0 die Erhaltungsform divφ = 0 fur φ := A gradu resultiert.
Ωγ
n
Ω1
2
Abb. 10.1.1. innerer Randγ = Γ1 ∩ Γ2
In den physikalischen Anwendungen sind die Koeffizienten aij im All-gemeinen Materialkonstanten. Die Funktionen aij konnen variabel sein,wenn die Materialzusammensetzung ortsabhangig ist. Sobald aber ver-schiedene Materialien aneinanderstoßen, sind die Koeffizienten aij(x) ander Beruhrungsgrenze γ (vgl. Abbildung 10.1.1) unstetig.
Die Gleichung (10.1.1a) lasst sich nur dann im klassischen Sinne ver-stehen, wenn aij ∈ C1(Ω). Fur unstetige aij ist deshalb die Variations-formulierung anzuwenden. Erganzt man Gleichung (10.1.1a) durch dieDirichlet-Bedingung
u = 0 auf Γ, (10.1.1b)
so lautet die schwache Formulierung:
suche u ∈ H10 (Ω) mit a(u, v) = (f, v)L2(Ω) fur alle v ∈ H1
0 (Ω), (10.1.2a)
wobei
a(u, v) :=∫
Ω
⎡⎣a(x)u(x)v(x) −n∑
i,j=1
aij(x)∂u
∂xj
∂v
∂xi
⎤⎦ dx . (10.1.2b)

190 10. Spezielle Differentialgleichungen
Man beachte, dass die Gleichungen (10.1.2a,b) anders als (10.1.1a) fur beliebige aij ∈ L∞(Ω) definiert sind.Im Weiteren nehmen wir die Situation von Abbildung 10.1.1 an: Ω ist durch die Trennlinie γ in die
Teilgebiete Ω1 und Ω2 zerlegt. Die Koeffizienten aij seien stuckweise glatt: aij ∈ C1(Ωk) fur k = 1, 2.Entlang γ konnen die Koeffizienten unstetig sein, sodass die einseitigen Grenzwerte
a(1)ij (x) := lim
Ω1�y→xaij(x), a
(2)ij (x) := lim
Ω2�y→xaij(x) (x ∈ γ)
verschieden sein konnen, Ferner setzen wir voraus, dass die Losung u stetig ist: u ∈ C0(Ω), aber nur stuckweiseglatt ist: u ∈ C1(Ω1), u ∈ C1(Ω2). Die einseitigen Grenzwerte der Ableitungen sind durch u(1)
xj (x) und u(2)xj (x)
(x ∈ γ) gekennzeichnet. Unter diesen Voraussetzungen liefert partielle Integration von −∫Ω1aijvxiuxjdx das
Resultat∫Ω1v(auxj )xidx −
∫γ va
(1)ij u
(1)xj nidΓ. Da �n = (n1, n2, . . .) aus Abbildung 10.1.1 die außere Normale
bezuglich Ω1 aber die innere Normale bezuglich Ω2 ist, ergibt sich in Ω2 fur die gleiche Richtung �n, dass−
∫Ω2aijvxiuxjdx =
∫Ω2v(aijuxj)xidx+
∫γva
(2)ij u
(2)xj nidΓ. Zusammen erhalt man
a(u, v) =∫
Ω
⎡⎣a(x)u(x) −n∑
i,j=1
∂
∂xi
(aij(x)
∂u
∂xj
)⎤⎦ v(x)dx +∫
γ
n∑i,j=1
[a(2)ij u
(2)xj
− a(1)ij u
(1)xj
]nivdΓ.
Aus der Variationsgleichung (10.1.2a) folgt daher neben der Differentialgleichung (10.1.1a) auch die Uber-gangsbedingung
n∑i,j=1
a(1)ij u
(1)xjni =
n∑i,j=1
a(2)ij u
(2)xjni auf γ. (10.1.3)
Damit ist das folgende Lemma bewiesen:
Lemma 10.1.1 Sei aij ∈ C1(Ωk), k = 1, 2. Ist die schwache Losung u von (10.1.2a) in Ω stetig undstuckweise in Ω1 und Ω2 differenzierbar, so ist sie klassische Losung der Differentialgleichung (10.1.1a) inΩ1 ∪ Ω2 = Ω\γ. Außerdem erfullt sie neben der Randbedingung (10.1.1b) auf Γ die Ubergangsbedingung(10.1.3) auf dem inneren Rand γ.
Zusatz 10.1.2 Sind die Koeffizienten unstetig, so gehort die Losung u der Gleichung (10.1.2a) im Allge-meinen nicht zu C2(Ω), sondern hat unstetige Ableitungen in γ. Lediglich die Tangentialableitung entlang γkann stetig sein.
Beispiel 10.1.3 Sei ξ ∈ (0, 1) . Der Koeffizient von a(u, v) :=∫ 1
0a(x)u′v′dx sei durch a(x) = 1 in (0, ξ)
und a(x) = 2 in (ξ, 1) gegeben. Fur dieses eindimensionale Beispiel ersetzt der Punkt ξ die Kurve γ. DieLosung der Aufgabe (10.1.2a) mit f(x) = 1 lautet
u(x) =12
[1 + ξ2
1 + ξx− x2
]in Ω1 = (0, ξ), u(x) =
14
[1 + 2ξ − ξ2
1 + ξ(1 − x) − (1 − x)2
]in Ω2 = (ξ, 1).
Sie erfullt −au′′ = 1 in (0, ξ)∪ (ξ, 1), u(0) = u(1) = 0 und die Ubergangsbedingung 1 ·u′(ξ−0) = 2 ·u′(ξ+0).
Wie anfangs erwahnt, lasst sich die Differentialgleichung in der Form divφ = f in Ω1∪Ω2 schreiben, wobeiφ := A(x) gradu in Ω und u = 0 auf Γ. Die Ubergangsbedingung (10.1.3) besagt, dass 〈φ, �n〉 in γ stetig ist.Da auch 〈φ,�t〉 fur jede Tangentialrichtung t stetig ist, ist φ in γ und damit in Ω stetig.
Die Regularitatsbeweise des Abschnitt 9.1 lassen sich auf den vorliegenden Fall ubertragen. Die Glattheits-voraussetzungen an die Koeffizienten von a(·, ·) sind jeweils stuckweise in Ω1 und Ω2 zu fordern, ferner mussdie Trennlinie (-hyperflache) γ hinreichend glatt sein. Dann ergibt sich die stuckweise Regularitatsaussageu ∈ Hm+s(Ω1), u ∈ Hm+s(Ω2) anstelle von u ∈ Hm+s(Ω). Zusammen mit der Ubergangsbedingung (10.1.3)erhalt man φ = A(x) gradu ∈ Hm+s−1(Ω) im Gesamtgebiet.
10.1.2 Diskretisierung
Bei einer Diskretisierung durch finite Elemente stoßt man auf folgende Schwierigkeiten:

10.2 Ein singular gestortes Problem 191
Bemerkung 10.1.4 Lineare oder bilineare Elemente ergeben eine Finite-Element-Losung mit der Fehler-abschatzung |u− uh|1 = O(h1/2). Die L2(Ω)-Fehlerschranke ist im Allgemeinen nicht besser als |u− uh|0 =O(h).
Beweis. Ωγ := ∪{t ∈ τ : τ ∩ γ �= ∅} besteht aus allen finiten Elementen, die von γ getroffen werden. Da uunstetige Ableitungen auf γ besitzt, kann man auf Ωγ keine bessere Abschatzung als ∇u−∇v = O(1) (v ∈ Vh)erwarten. Die Flache von Ωγ betragt O(h), sodass sich |u− v|1 = O(h1/2) ergibt. Zur |u−uh|0-Abschatzungvergleiche man das folgende Beispiel.
Beispiel 10.1.5 In Beispiel 10.1.3 wahle man ξ = (1 + h)/2 und diskretisiere durch stuckweise lineareElemente der Intervalllange h. Dann ergibt sich der Fehler in x = 1/2 zu u(x) − uh(x) = αh + O(h2) mitα ≈ 0, 00463. Da u− uh in (0, 1/2) linear verlauft, erhalt man den Fehler O(h) nicht nur fur die L2-Norm|u− uh|0, sondern auch fur die Maximumnorm |u− uh|∞ und die L1-Norm ‖u− uh‖L1(0,1).
Die ublichen Fehlerschranken |u − uh|1 = O(h) und |u − uh|0 = O(h2) lassen sich jedoch erreichen.Dazu hat man die Geometrie der Triangulation der Kurve γ anzupassen. Ist die Trennlinie γ stuckweiselinear, muss man die Triangulation so wahlen, dass γ mit (inneren) Dreiecksseiten ubereinstimmt. Furdie Fehlerabschatzung in Abschnitt 8.4.3 wird nur die Glattheit der Beschrankungen von u auf die finitenElemente t ∈ τ benotigt. Stuckweise Glattheit u ∈ Hm+s(Ωk) (k = 1, 2) und t ⊂ Ωk fur genau ein k reichtdaher aus, um die gleichen Fehlerabschatzungen zu beweisen. Ist γ eine gekrummte Kurve, lasst sie sichdurch isoparametrische Elemente approximieren (vgl. §8.5.3).
Die analoge Aussage gilt fur das Differenzenschema (5.1.18).
Beispiel 10.1.6 Sei ξ aus Beispiel 10.1.3 ein Gitterpunkt, d.h. ξ/h ∈ N. Dann ist das Differenzenschema(5.1.18), das hier die Gestalt
1h2
[a
((ν +
12)h
)(uν+1 − uν) − a
((ν − 1
2)h
)(uν − uν−1)
]= 1
(1 ≤ ν ≤ 1
h− 1
)annimmt, fur die Gleichung aus Beispiel 10.1.3 geeignet. Im Allgemeinen betragt der Fehler O(h2). Da hierdie Losung der Differentialgleichung stuckweise quadratisch ist, wird sie durch die Differenzenlosung exaktwiedergegeben. Ist dagegen ξ kein Gitterpunkt, betragt der Fehler O(h).
Im zweidimensionalen Fall erhalt man O(h2)-Differenzenlosungen, wenn γ mit den Gitterlinienubereinstimmt. Andernfalls verschlechtert sich der Fehler auf O(h). Eine weitere Moglichkeit der Differenzen-approximation besteht darin, die Differentialgleichungen in Ω1 und Ω2 getrennt zu approximieren und furdie unbekannten Werte auf γ die Ubergangsbedingung (10.1.3) zu diskretisieren.
10.2 Ein singular gestortes Problem
10.2.1 Die Konvektionsdiffusionsgleichung
Im Folgenden betrachten wir das Randwertproblem
−εΔu+n∑
i=1
ci∂u
∂xi= f in Ω, u = 0 auf Γ (10.2.1)
fur ε > 0. Den Hauptteil −εΔu bezeichnet man als Diffusionsterm und∑ciuxj = 〈c,∇u〉 als Konvektions-
anteil. Die entsprechende Variationsformulierung ist∫Ω
[ε 〈∇u,∇v〉 +
n∑i=1
ci∂u
∂xiv
]dx =
∫Ω
fvdx. (10.2.1’)
Gleichung (10.2.1) ist fur alle ε > 0 elliptisch. Die eindeutige Losbarkeit folgt aus Satz 5.1.11 (vgl. auchUbungsaufgabe 10.2.1). Die Losung sei mit uε bezeichnet.
Im Folgenden soll analysiert werden, was passiert, wenn ε klein wird, d.h. wenn der Konvektionstermdominiert.

192 10. Spezielle Differentialgleichungen
Ubungsaufgabe 10.2.1 Die Koeffizienten ci seien konstant. Gleichung (10.2.1) lasst sich durch die Trans-formation v(x) := u(x) exp(−
∑cixi/2ε) = u(x) exp(−〈c,x〉 /2ε) in die symmetrische H1
0 (Ω)-elliptischeGleichung (10.2.1’) umwandeln:
−εΔv +
(n∑
i=1
c2i4ε
)v = f exp(−〈c,x〉 /2ε) in Ω, v = 0 auf Γ. (10.2.1”)
Zur Konvergenz von uε fur ε→ 0 ergibt sich zunachst ein negatives Resultat.
Bemerkung 10.2.2 uε kann nicht in der Norm ‖·‖H1(Ω) konvergieren.
Beweis. Andernfalls konnte man in Gleichung (10.2.1’) den Grenzprozess ε→ 0 durchfuhren und erhielte furu0 := limuε die Variationsgleichung
∫Ω
∑ni=1 ci
∂u0∂xi
vdx =∫Ωfvdx und die Differentialgleichung
ci∂u0
∂xi= f in Ω (10.2.2)
erster Ordnung. Diese Gleichung vom hyperbolischen Typ ist nicht aber mit der Randbedingung u = 0 aufΓ vertraglich (vgl. §1.4), d.h. Gleichung (10.2.2) hat im Allgemeinen keine Losung mit u0 = 0 auf Γ.
Gleichung (10.2.2) heißt die “reduzierte Gleichung”. Die Gleichungen (10.2.1) und (10.2.2) unterscheidensich um den “Storungsterm” −εΔu. Da Gleichung (10.2.1) und Gleichung (10.2.2) von verschiedenem Typsind, spricht man von einer “singularen” Storung. Ein anderes Beispiel einer singular gestorten Gleichung istdie Reaktions-Diffusionsgleichung −εΔu + au = f. Ein Ubergang vom elliptischen zum parabolischen Typliegt bei −εuxx−uyy +ux = f vor. Auch εΔ2u−Δu = f ist singular gestort, da diese Gleichungen fur ε > 0und ε = 0 zwar beide elliptisch sind, aber unterschiedlich viele Randbedingungen benotigen.
u 0
u ε
u ε
u 0
0
1 1
001 0 1
Abb. 10.2.1. a) Losung aus Beispiel 10.2.3a und b) Losung aus Beispiel 10.2.3b
Das folgende Bei-spiel wird zeigen,dass der punktweiseLimes u0 = limuε
in Ω existiert undGleichung (10.2.2)erfullt, dass aberdie Randbedingungu0 = 0 nur aufeinem Teil Γ0 desRandes Γ gilt.
Beispiel 10.2.3 a) Die Losung der gewohnlichen Randwertaufgabe
−εu′′ + u′ = 1 in Ω := (0, 1) , u(0) = u(1) = 0, (10.2.3a)
lautet uε(x) = x−(ex/ε−1)/(e1/ε−1). In [0, 1) konvergiert uε(x) punktweise gegen u0(x) = x. Diese Funktionerfullt die reduzierte Gleichung (10.2.2): u′ = 1 und die linke Randbedingung u0(0) = 0, nicht jedoch rechteRandbedingung u0(1) = 0.
b) Die Losung von−εu′′ − u′ = 0 in Ω := (0, 1) , u(0) = 0, u(1) = 1, (10.2.3b)
lautet uε(x) = (1 − e−x/ε)/(1 − e−1/ε). u0(x) := limε→0 uε(x) = 1 erfullt Gleichung (10.2.2): −u′ = 0 undu0(1) = 1, nicht jedoch die linke Randbedingung bei x = 0.
Welche Randbedingungen erfullt werden, hangt in den Gleichungen (10.2.3a,b) vom Vorzeichen desKonvektionsterms ±u′ ab. Im mehrdimensionalen Fall entscheidet hieruber die Richtung des Vektorsc = (c1, . . . , cn).
In den Abbildungen 10.2.1a,b sind die Losungen aus Beispiel 10.2.3 skizziert. Im Inneren liegt uε nahe anu0, nur in der Umgebung von x = 1 (Abbildung 10.2.1a) bzw. x = 0 (Abbildung 10.2.1b) weicht uε von u0 ab,um die zweite Randbedingung zu erfullen. Diese Umgebungen, in denen uε Ableitungen der GroßenordnungO(1/ε) erreicht, nennt man die Randschicht. Fur Beispiel 10.2.3 betragt die Randschichtbreite O(ε).

10.2 Ein singular gestortes Problem 193
x 0 1/32 2/32 3/32 4/32 . . . 30/32 31/32 1ε0.5 1 0.93 0.87 0.81 0.75 . . . 0.04 0.02 00.1 1 0.97 0.95 0.92 0.89 . . . 0.22 0.13 00.05 1 0.99 0.97 0.96 0.94 . . . 0.47 0.31 00.02 1 0.99 0.99 0.98 0.98 . . . 0.82 0.73 00.01 1 1.00 0.99 0.99 0.99 . . . 0.87 1.11 0110-3 1 1.03 0.99 1.04 0.99 . . . 0.23 1.89 0110-4 1 4.95 0.95 5.00 0.90 . . . 0.08 5.88 0110-5 1 48.6 0.94 48.7 0.88 . . . 0.06 49.6 0110-7 1 4859.5 0.94 4859.6 0.88 . . . 0.06 4860.4 0
Tabelle 10.2.1. Werte uε,h(x, 1/2) der Losung von Gleichung (10.2.4)
Ubungsaufgabe 10.2.4 Das Intervall [1−ξ, 1], in dem die Funktion (ex/ε−1)/(ex/ε−1) den Wert 0 < η < 1uberschreitet, hat die Breite ξ = O(ε |log η|).
Eine ausfuhrliche Analyse der singular gestorten Probleme findet man z.B. in der Monographie Roos-Stynes-Tobiska [71] (vgl. auch Großmann-Roos [36, §7]).
10.2.2 Stabile Differenzenschemata
Der Spezialfall der Gleichung (10.2.1) fur c = (1, 0) lautet
−εΔu+ ux = f in Ω, u = ϕ auf Γ. (10.2.4)
Die symmetrische Differenzenformel (5.1.10) fur Gleichung (10.2.4) lautet
Lh = h−2
⎡⎣ −ε−ε− h/2 4ε −ε− h/2
−ε
⎤⎦ . (10.2.5)
Fur festes ε ist Lh von der Konsistenzordnung 2. Aus Korollar 5.1.19 folgt die folgende Bemerkung.
Bemerkung 10.2.5 Sobald h < 2ε, fuhrt das Differenzenschema (10.2.5) zu einer M-Matrix.
Die M-Matrix-Eigenschaft wurde in Abschnitt 5.1.4 benutzt, um die Losbarkeit der diskreten Gleichungnachzuweisen. Es zeigt sich, dass die Differenzengleichungen auch fur h ≥ 2ε losbar sind. Aber mit steigendemVerhaltnis h/ε entwickelt sich eine Instabilitat, die in Tabelle 10.2.1 veranschaulicht wird.
Tabelle 10.2.1 enthalt die Werte uε,h(x, 1/2) der Differenzenlosung uε,h zu Gleichung (10.2.4) im Einheits-quadrat Ω = (0, 1) × (0, 1) mit f = 0 und ϕ(x, y) = (1 − x) sin(πy). Die Gitterweite ist h = 1/32. Solangeε > h/2 = 1/64 = 0.015625, ist Lh eine (irreduzibel diagonaldominante) M-Matrix. Auf Grund des diskretenMaximumprinzips (vgl. Bemerkung 4.4.4) liegen die Werte zwischen minϕ = 0 und maxϕ = 1. Die Losungder reduzierten Gleichung (10.2.2) ist u0(x, y) = limε→0 uε(x, y) = sinπy. Dementsprechend nahern sich dieWerte uε,h(x, 1/2) aus dem ersten Teil der Tabelle 10.2.1 dem Grenzwert sinπ/2 = 1.
Im zweiten Teil der Tabelle ist ε < h/2. Lh ist daher keine M-Matrix. Man beobachtet uε,h(31/32, 1/2)> 1,d.h. auch das Maximumprinzip gilt nicht mehr. Außerdem erkennt man, dass uε,h(x, 1/2) fur gradzahligeVielfache x = νh gegen 1− x konvergiert, also nicht gegen u0(x, y) = sinπy. Dazwischen entwickeln sich furungradzahlige Vielfache x = νh Oszillationen der Hohe O(h2/2ε).
Die sich ergebende Problematik ist der bei Anfangswertaufgaben fur steife (gewohnliche) Differential-gleichungen ahnlich: Halt man ε fest und lasst h gegen null streben, so gelten alle Konvergenzaussagen desAbschnitt 5.1.4. Ist aber ε sehr klein, lasst sich die Bedingung h < 2ε, ohne die man keine vernunftige Losungerhalt, praktisch nicht erfullen.
Ein Ausweg wurde bereits in Abschnitt 5.1.4 beschrieben: Man muss den Konvektionsterm∑n
i=1 ci∂u∂xi
(hier mit n = 2) durch geeignete einseitige Differenzen (5.1.14) approximieren:
Lh = h−2
⎡⎣ −ε+ hc−2−ε− hc+1 4ε+ h |c1| + h |c2| −ε+ hc−1
−ε− hc+2
⎤⎦ , wobei{c+i := max{0, ci},c−i := min{0, ci}.
(10.2.6)

194 10. Spezielle Differentialgleichungen
Im Falle von c1, c2 ≥ 0, d.h. Lh = h−2
⎡⎣ −ε−ε− hc1 4ε+ hc1 + hc2 −ε
−ε− hc2
⎤⎦, treten beispielsweise nurRuckwartsdifferenzen auf.
Bemerkung 10.2.6 Diskretisiert man Gleichung (10.2.1) mit Hilfe von (10.2.6), so erhalt man fur alleε > 0 und h > 0 eine M-Matrix Lh. Fur festes ε hat das Schema die Konsistenzordnung 1.
Ubungsaufgabe 10.2.7 Die (10.2.6) entsprechende Diskretisierung der Gleichung (10.2.3b) lautet Lh =h−2[−ε 2ε+ h − ε− h] und ergibt die diskrete Losung uh(x) = [1 − (1 + h/ε)−x/h]/[1 − (1 + h/ε)−1/h].
Wendet man den Differenzenoperator (10.2.6) auf eine glatte Funktion an, ergibt die Taylor-Entwicklung
Lhu = Lu− [|c1|uxx + |c2|uyy]h/2 + O(h2). (10.2.7)
Den O(h)-Term (h/2) (|c1|uxx + |c2|uyy) nennt man numerische Viskositat (oder numerische Elliptizitat),da er den Hauptteil verstarkt. Man beachte die Abhangigkeit von der “Stromlinienrichtung” c = (c1, c2) .Falls beispielsweise c2 = 0 (Konvektion nur in x-Richtung), so ist die numerische Viskositat eine zweiteAbleitung nur in x-Richtung.
Ein zweiter Ausweg besteht darin, den Parameter ε bei der Diskretisierung durch εh ≥ ε zu ersetzen.Wahlt man
εh := max{ε,h
2|c1| ,
h
2|c2|
}oder εh := ε+
h
2‖c‖∞ , (10.2.8)
fuhrt das symmetrische Differenzenverfahren
Lh = εhh−2
⎡⎣ −1−1 4 −1
−1
⎤⎦ +12h−1
⎡⎣ c2−c1 0 c1
−c2
⎤⎦ (10.2.9)
zu einer M-Matrix. Zwar wird der Konvektionsterm von zweiter Konsistenzordnung diskretisiert, jedochbetragt der Fehler des Diffusionsterms O(εh − ε), der fur den praktisch relevanten Fall h > 2ε/ ‖c‖∞ mitO(h) ubereinstimmt. Anstelle von (10.2.7) erhalt man
Lhu = Lu− (εh − ε)Δu+ O(h2). (10.2.10)
Der Differenzbetrag −(εh − ε)Δu heißt kunstliche Viskositat. Anders als in (10.2.7) verschlechtert man dieKonsistenz gleichmaßig in allen Richtungen.
Im eindimensionalen Fall unterscheiden sich die Ansatze mit numerischer und kunstlicher Viskositat nicht:
Bemerkung 10.2.8 Wahlt man im eindimensionalen Fall εh gemaß der zweiten Alternative in (10.2.8), sostimmen die Differenzenformeln (10.2.6) und (10.2.9) uberein.
10.2.3 Finite Elemente
Die im vorigen Abschnitt beschriebene Problematik ist nicht auf Differenzenverfahren beschrankt. Zuerstwird das Standard-Galerkin-Verfahren und seine Problematik gezeigt. In §10.2.3.2 wird eine an das Problemangepasste Variante des Galerkin-Verfahrens, das Stromlinien-Diffusionsverfahren vorgestellt.
10.2.3.1 Standard-Galerkin-Verfahren
Die schwache Formulierung der Konvektionsdiffusionsgleichung lautet
suche u ∈ H10 (Ω) mit a(u, v) = f(v) fur alle v ∈ H1
0 (Ω), wobei (10.2.11a)
a(u, v) :=∫
Ω
{ε 〈∇u(x),∇v(x)〉 + 〈c(x),∇u(x)〉 v(x) + auv}dx, f(v) =∫
Ω
f(x)v(x)dx, (10.2.11b)
und c = (ci)i=1,...,n . Im ersten Teil beschranken wir uns auf a = 0 in (10.2.11b).

10.2 Ein singular gestortes Problem 195
Ubungsaufgabe 10.2.9 Man zeige: a) Lineare finite Elemente uber einer Quadratgittertriangulation ange-wandt auf Gleichung (10.2.4) ergeben eine Diskretisierung, die mit dem Differenzenverfahren
Lh = ε
⎡⎣ −1−1 4 −1
−1
⎤⎦ + h
⎡⎣ 0 −1/6 1/6−1/3 0 1/3−1/6 1/6 0
⎤⎦ (10.2.12a)
identisch ist (vgl. Ubungsaufgabe 8.3.13).b) Fur bilineare Elemente (vgl. Ubungsaufgabe 8.3.17) erhalt man
Lh =ε
3
⎡⎣ −1 −1 −1−1 8 −1−1 −1 −1
⎤⎦ +h
12
⎡⎣ −1 0 +1−4 0 +4−1 0 +1
⎤⎦ . (10.2.12b)
c) Eindimensionale lineare Elemente fur −εu′′ + u′ = f fuhren zur zentralen Differenzenformel
Lh = εh−1 [−1 2 − 1] + [−1 0 1] . (10.2.12c)
Die Ubungsaufgaben 10.2.9b,c zeigen, dass Finite-Element-Verfahren den zentralen Differenzenformelnentsprechen und damit ebenfalls zur Instabilitat fuhren konnen.
Dem Verfahren der kunstlichen Viskositat entspricht die Finite-Element-Losung der Gleichung −εhΔu +〈c, gradu〉 = f mit geeignetem εh. Wie in Ubungsaufgabe 10.2.9b beweist man
Bemerkung 10.2.10 Setzt man εh := max{ε, |c1|h, |c2|h} und wendet bilineare Elemente an, so fuhrt dieDiskretisierung der Gleichung (10.2.1) zu einer M-Matrix.
Dagegen hat die Matrix (10.2.12a) fur alle ε > 0 unterschiedliche Vorzeichen in der Nebendiagonale, sodasssich fur kein εh eine M-Matrix erreichen lasst.
Das Analogon der einseitigen Differenzen ist schwieriger zu konstruieren. Ein Zugang besteht in der Kom-bination einer Finite-Element-Methode fur den Diffusionsterm mit einem (einseitigen) Differenzenverfahrenfur den Konvektionsterm (vgl. Thomasset [81, §2.4]).
Eine zweite Moglichkeit ist die Verallgemeinerung des Galerkin-Verfahrens zum Petrov-Galerkin-Verfahren,bei dem die diskrete Losung des allgemeinen Problems (8.1.1) durch Aufgabe (10.2.13) definiert wird:
suche u ∈ Vh, sodass a(u, v) = f(v) fur alle v ∈Wh (10.2.13)
(vgl. Fletcher [30, §7.2], Thomasset [81, §2.2]). Dabei ist
dimVh = dimWh, aber im Allgemeinen Vh �= Wh.
10.2.3.2 Stromlinien-Diffusionsverfahren
Wir folgen im Wesentlichen der Darstellung in [71, §III.3.2.1] und gehen von der schwachen Formulierunga(u, v) = f(v) aus (10.2.11a,b) aus. Die (schwache) Losung u erfullt die Gleichung −εΔu+ 〈c,∇u〉+ cu = fin H−1(Ω). Wenn wir f ∈ L2(Ω) voraussetzen, konnen beide Seiten der Gleichung mit dem Ausdruck〈c,∇v〉 ∈ L2(Ω) fur eine Testfunktion v ∈ H1
0 (Ω) und einer Gewichtsfunktion ω multipliziert werden:∫Ω
ω(x) (−εΔu+ 〈c,∇u〉 + cu) 〈c,∇v〉 dx =∫
Ω
f(x) 〈c,∇v〉 dx .
Addiert man diese Gleichung, die allerdings nur fur die Losung von (10.2.11a) gilt, zu der ursprunglichenVariationsformulierung (10.2.11a), erhalt man
aSD(u, v) = fSD(v) fur alle v ∈ H10 (Ω) mit (10.2.14a)
aSD(u, v) :=∫
Ω
{ε 〈∇u,∇v〉 + 〈c,∇u〉 v + auv + ω(x) (−εΔu+ 〈c,∇u〉 + cu) 〈c,∇v〉}dx,
(10.2.14b)
fSD(v) :=∫
Ω
f(x) (v + 〈c,∇v〉) dx. (10.2.14c)

196 10. Spezielle Differentialgleichungen
Trotz der Anderung der schwachen Formulierung gilt: Die Losung von (10.2.11a) ist auch Losung von(10.2.14a).
Bei der Diskretisierung mit finiten Elementen tritt ein Problem auf. Da im Allgemeinen nur Vh ⊂ V =H1
0 (Ω), aber nicht Vh ⊂ H10 (Ω) ∩H2(Ω) gilt, gehort Δuh im Allgemeinen nicht zu L2(Ω). Im Inneren jedes
Dreieckes T der Finite-Element-Triangulierung T ist uh|T ein Polynom, sodass Δuh|T wiederum ein Polynomund somit beliebig glatt ist. Uber die Dreiecksrander springt die Ableitung (wenn nicht Vh ⊂ H2(Ω)), sodassdie zweite Ableitung Δuh eine Distribution mit Trager in
⋃T∈T ∂T ist. Die Diskretisierung, die nun vorgestellt
werden soll, ignoriert den Distributionsbeitrag in Δuh und berucksichtigt nur die Integrale mit Δuh|T . DieGewichtsfunktion wir konstant pro Dreieck gewahlt, sodass ein individueller Faktor ωT auftritt. Gesucht isteine Losung uh ∈ Vh von
aSDh (uh, v) = fSD
h (v) fur alle v ∈ Vh mit (10.2.15a)
aSDh (uh, v) :=
∫Ω
{ε⟨∇uh,∇v
⟩+
⟨c,∇uh
⟩v + auhv
}dx (10.2.15b)
+∑T∈T
ωT
∫T
(εΔuh +
⟨c,∇uh
⟩+ auh
)|T 〈c,∇v〉 dx
fSDh (v) := fSD
h (v) =∫
Ω
f(x) (v + 〈c,∇v〉) dx. (10.2.15c)
Wegen der speziellen Behandlung des Δuh-Terms gilt – anders als im kontinuierlichen Fall – nicht, dass dieFinite-Element-Losung von (10.2.11a) auch eine Losung von (10.2.15a) ware. Im Gegenteil soll die Diskreti-sierung (10.2.15a) stabiler ausfallen, wie noch zu prufen ist.
Bemerkung 10.2.11 Im einfachsten Fall der stuckweise linearen finiten Elemente gilt Δuh = 0, sodass dieSumme in (10.2.15b) verschwindet.
Die Diskretisierung (10.2.15a) nennt man die Stromlinien-Diffusionsmethode, da sie der Stabilisierungdurch einseitige Differenzen im Falle der Differenzenverfahren entspricht. Um den letztgenannten Effekt zusehen, nehmen wir zur Vereinfachung an, dass das Finite-Element-Gitter die regelmaßige Quadratgittertrian-gulierung aus Abbildung 8.3.3 ist und stuckweise lineare Elemente gewahlt werden. Zudem habe der Vektornur eine Komponente in der Koordinatenrichtung x:
⟨c,∇uh
⟩= c1∂u
h/∂x, wobei c1 konstant sei. Wegen Be-merkung 10.2.11 entfallt der Δuh-Term. Sei T ein Dreieck mit den Eckpunkten (x, y), (x+ h, y) , (x, y + h) .Da uh und v auf T linear sind, sind die Ableitungen konstant und stimmen mit den Differenzenquotientenuberein: ∫
T
⟨c,∇uh
⟩〈c,∇v〉dx =
∫T
c21∂uh
∂x
∂v
∂xdxdy = c21
h2
2∂+
x,huh (x, y) ∂+
x,hv (x, y) .
Fur das anliegende Dreieck mit den Ecken (x, y), (x, y + h) , (x+ h, y + h) gilt entsprechend∫
T. . . =
c21μ(T )∂+x,hu
h (x+ h, y)∂+x,hv (x+ h, y) . In der Finite-Element-Matrix L ergibt sich damit ein zusatzlicher
Anteil, der dem Differenzenstern
c212
⎡⎣ 0 0 0−1 2 −1
0 0 0
⎤⎦entspricht. Es wird also eine zweite Differenz (Diffusionsterm) nur in Richtung der Stromlinien (das ist dieRichtung c = (c1, 0)) addiert, wie es auch bei der einseitigen Differenz (10.2.6) (fur c2 = 0) der Fall ist.
Die Stabilitat der Stromlinien-Diffusionsmethode wird durch eine Ungleichung bewiesen, die der V-Elliptizitat nahekommt. Hierzu werden einige Voraussetzungen benotigt. Fur die Koeffizienten c und aaus (10.2.11b) gelte
a− 12
div c ≥ c0 > 0 in Ω. (10.2.16a)
Im Falle konstanter Koeffizienten ist diese Bedingung aquivalent zu a > 0. Die Bedeutung der Ungleichung(10.2.16a) ergibt sich aus
Lemma 10.2.12 Es gelte (10.2.16a). Dann gilt fur alle u ∈ H10 (Ω) die Abschatzung∫
Ω
{au+ 〈c,∇u〉} u dx ≥ c0 ‖u‖2L2(Ω) .

10.2 Ein singular gestortes Problem 197
Beweis. Aus∫Ωci
∂u∂xi
udx = 12
∫Ωci
∂u2
∂xidx = − 1
2
∫Ωu2 ∂ci
∂xidx (wegen u2 = 0 auf ∂Ω) folgt die Behauptung.
Eine Abschatzung von a nach oben wird fur jedes Dreieck formuliert:
cT := maxx∈T
|a(x)| . (10.2.16b)
Wir definierenhT := Durchmesser des Dreiecks T. (10.2.16c)
Auf T ist v ∈ Vh ein Polynom festen Grades. Hierfur gilt die inverse Abschatzung
‖Δv‖L2(T ) ≤μ
hT‖∇v‖L2(T ) fur alle T ∈ Th und alle v ∈ Vh. (10.2.16d)
Dabei ist ‖∇v‖2L2(T ) =
∑ni=1 ‖∂v/∂xi‖2
L2(T ) . Wegen Bemerkung 10.2.11 gilt (10.2.16d) fur stuckweise lineareElemente mit μ = 0.
Im Zusammenhang mit der Bilinearform aSDh (·, ·) spielt
|||v|||SD :=√ε ‖∇v‖2
L2(Ω) + c0 ‖v‖2L2(Ω) +
∑T∈T
ωT ‖〈c,∇v〉‖2L2(T )
die Rolle der Energienorm.
Satz 10.2.13 (Stabilitat) Es gelte (10.2.16a-d) mit den dort definierten Konstanten. Die Gewicht ωT
mogen
0 < ωT ≤ min{c0c2T,h2
T
εμ
}fur alle T ∈ Th (10.2.17)
erfullen. Dann genugt die Bilinearform aSDh (·, ·) : Vh × Vh → R der Ungleichung
aSDh (v, v) ≥ 1
2|||v|||2SD fur alle v ∈ Vh. (10.2.18)
Beweis. Mit Lemma 10.2.12 erhalt man
aSDh (v, v) ≥ ε ‖∇v‖2
L2(Ω) + c0 ‖v‖2L2(Ω) +
∑T∈T
ωT ‖〈c,∇v〉‖2L2(T ) +
∑T∈T
ωT
∫T
(εΔv + av) |T 〈c,∇v〉 dx .
Mit der Ungleichung αβ ≤ 12α
2 + 12β
2 schatzt man den letzten Term ab:∣∣∣∣∣∑T∈T
ωT
∫T
(εΔv + av) |T 〈c,∇v〉 dx
∣∣∣∣∣ ≤ ∑T∈T
ωT
[12‖εΔv + av‖2
L2(T ) +12‖〈c,∇v〉‖2
L2(T )
]≤
∑T∈T
ωT
[‖εΔv‖2
L2(T ) + ‖av‖2L2(T ) +
12‖〈c,∇v〉‖2
L2(T )
]≤
∑T∈T
ωT
[ε2 ‖Δv‖2
L2(T ) + c2T ‖v‖2L2(T ) +
12‖〈c,∇v〉‖2
L2(T )
].
Die Kombination beider Ungleichungen die gewunschte Abschatzung.
Fur μ = 0 ist h2T
εμ = ∞ und damit min{
c0c2
T,
h2T
εμ
}= c0
c2T
in (10.2.17).Das folgende Lemma beschreibt die Konsistenz der Stromlinien-Diffusionsmethode.
Lemma 10.2.14 Die Voraussetzungen von Satz 10.2.13 und (10.2.17) seien erfullt. Im Falle von μ = 0sei εωT ≤ Ch2
T explizit vorausgesetzt1. Vh enthalte stuckweise alle Polynomen vom Grad ≤ k (k ≥ 1) . DieLosung u von (10.2.1’) gehore zu Hk+1(Ω). Rh : Hk+1(Ω) ∩H1
0 (Ω) ⊂ V → Vh sei die Beschrankung auf dieKnotenpunkte, d.h. Rhu ∈ Vh ist die Interpolierende. Dann lautet der Konsistenzfehler
|||Rhu− uh|||SD ≤ Chk
√∑T∈T
[ε+ ωT + h2T /ωT + h2
T ] ‖u‖2Hk+1(T ). (10.2.19)
1Andernfalls folgt die Ungleichung aus (10.2.17).

198 10. Spezielle Differentialgleichungen
Beweis. 1) Rhu− uh eingesetzt in (10.2.18) liefert die erste Ungleichung in
12|||Rhu− uh|||2SD ≤ aSD
h (Rhu− uh, Rhu− uh) = aSDh (Rhu− u,Rhu− uh). (10.2.20a)
Die zweite Gleichheit beruht auf der Projektionseigenschaft aSDh (uh − u, v) = 0 fur alle v ∈ Vh, die sich aus
der Kombination von (10.2.14a) und (10.2.15a) ergibt.2) In jedem Dreieck T ∈ T gilt ‖Rhu− u‖H1(T ) ≤ Chk ‖u‖Hk+1(T ) . Stuckweise Abschatzung der Terme
aus aSDh (Rhu− u,Rhu− uh) zusammen mit der Schwarzschen Ungleichung liefert
a)∫
Ω
ε⟨∇ (Rhu− u) ,∇
(Rhu− uh
)⟩dx ≤
√εhk |u|k+1 |||Rhu− uh|||SD, (10.2.20b)
b)∫
Ω
[〈c,∇ (Rhu− u)〉
(Rhu− uh
)+ a (Rhu− u)
(Rhu− uh
)]dx
=∫
Ω
[(a− div c) (Rhu− u)
(Rhu− uh
)− (Rhu− u)
⟨c,∇
(Rhu− uh
)⟩]dx
≤
⎧⎨⎩C√∑
T∈T‖u‖2
L2(T ) +
√∑T∈T
1ωT
‖u‖2L2(T )
⎫⎬⎭ |||Rhu− uh|||SD
≤ C′hk
√∑T∈T
h2T (1 + 1/ωT ) ‖u‖2
Hk+1(T ) |||Rhu− uh|||SD, (10.2.20c)
c)
∣∣∣∣∣∑T∈T
ωT
∫T
[−εΔ (Rhu− u) + 〈c,∇ (Rhu− u)〉 + a (Rhu− u)]⟨c,∇
(Rhu− uh
)⟩dx
∣∣∣∣∣≤ C
∑T∈T
√ωT
[εhk−1
T + hkT + hk+1
T
]‖u‖Hk+1(T )
√ωT
∥∥⟨c,∇ (Rhu− uh
)⟩∥∥L2(T )
≤ mit εωT≤Ch2T
≤ C′√∑
T∈T(ε+ ωT )h2k
T ‖u‖2Hk+1(T ) |||Rhu− uh|||SD. (10.2.20d)
Die Kombination der Abschatzungen (10.2.20a-d) nach Kurzen mit |||Rhu− uh|||SD zeigt (10.2.19).Die bewiesene Ungleichung (10.2.19) legt nahe, die Gewichte so zu wahlen, dass die drei Großen ε, ωT ,
h2T /ωT von ahnlicher Großenordnung sind, wobei allerdings die Ungleichungen (10.2.17) zu beachten sind.
Dies fuhrt auf
ωT ={δ0hT falls ‖c‖L∞(T ) hT > 2ε (uberwiegende Konvektion),δ0h
2T /ε falls ‖c‖L∞(T ) hT ≤ 2ε (uberwiegende Diffusion). (10.2.21)
Stabilitat zusammen mit der Konsistenz des Verfahrens liefert das folgende Konvergenzresultat (vgl. [71,Theorem 3.30] fur den Beweis).
Satz 10.2.15 (Konvergenz) Die Voraussetzungen des Lemmas 10.2.14 und (10.2.21) seien erfullt. Danngenugt die Losung uh der Stromlinien-Diffusionsmethode (10.2.15a) der Fehlerabschatzung
|||u− uh|||SD ≤ C(√
ε+√h)hk |u|k+1 .
Beweis. Die Kombination von |||Rhu − uh|||SD ≤ C(√ε +
√h)hk |u|k+1 aus (10.2.19) und der aus
‖Rhu− u‖H1(T ) ≤ Chk ‖u‖Hk+1(T ) folgenden Ungleichung |||Rhu − u|||SD ≤ C(√ε +
√h)hk |u|k+1 zeigt
die Behauptung.Man vergleiche auch Knabner-Angermann [52, §9].

11Eigenwertprobleme elliptischer Operatoren
11.1 Formulierung der Eigenwertprobleme
Die klassische Formulierung eines Eigenwertproblems lautet
Le = λe in Ω, Bje = 0 auf Γ (j = 1, . . . ,m) . (11.1.1)
Dabei ist L ein elliptischer Differentialoperator der Ordnung 2m, und Bj sind Randoperatoren. Eine Losunge von (11.1.1) heißt Eigenfunktion, falls e �= 0. In diesem Fall ist λ der (zu e gehorende) Eigenwert.
Wie in Kapitel 7 kann man die klassische Darstellung (11.1.1) durch eine Variationsformulierung ersetzen,wobei eine geeignete Bilinearform a(·, ·) : V × V → R an die Stelle von {L,Bj} tritt :
suche e ∈ V, sodass a(e, v) = λ(e, v)0 fur alle v ∈ V. (11.1.2a)
(u, v)0 =∫Ω uvdx ist das L2(Ω)-Skalarprodukt. Eigentlich hat man (·, ·)0 durch (·, ·)U zu ersetzen, wobei U
der Hilbert-Raum des Gelfand-Dreiers V ⊂ U ⊂ V ′ ist (vgl. Abschnitt 6.3.3). Wir beschranken uns hier aberauf den Standardfall U = L2(Ω).
Als adjungiertes Eigenwertproblem bezeichnet man die Aufgabe
suche e∗ ∈ V, sodass a(v, e∗) = λ(v, e∗)0 fur alle v ∈ V. (11.1.2b)
Definition 11.1.1 Sei λ ∈ C. Mit E(λ) wird der Unterraum aller e ∈ V bezeichnet, die Gleichung (11.1.1)bzw. (11.1.2a) erfullen. E(λ) heißt der Eigenraum zu λ. Mit E�(λ) bezeichnet man den entsprechendenEigenraum von Gleichung (11.1.2b). λ heißt Eigenwert, falls dimE(λ) ≥ 1.
Die Satze 6.5.15 und 7.2.14 enthalten bereits die folgenden Aussagen:
Satz 11.1.2 V ⊂ L2(Ω) sei stetig, dicht und kompakt eingebettet [z.B. sei V = Hm0 (Ω) mit beschranktem
Ω]. a(·, ·) sei V-koerziv. Dann haben die Aufgaben (11.1.2a,b) abzahlbar viele Eigenwerte λ ∈ C, die sich nurin ∞ haufen. Fur alle λ ∈ C gilt
dimE(λ) = dimE∗(λ) <∞. (11.1.3)
Ubungsaufgabe 11.1.3 Zusatzlich zu den Voraussetzungen des Satzes 11.1.2 sei a(·, ·) symmetrisch. Manzeige: Alle Eigenwerte sind reell, und die Aufgaben (11.1.2a), (11.1.2b) sind identisch, sodass E(λ) = E�(λ).
Fur gewohnliche Differentialgleichungen zweiter Ordnung (d.h. Ω ⊂ R1, m = 1) weiß man, dass alleEigenwerte einfach sind: dimE(λ) = 1. Diese Aussage ist fur partielle Differentialgleichungen falsch, wie dasfolgende Beispiel zeigt.

200 11. Eigenwertprobleme elliptischer Operatoren
Beispiel 11.1.4 (Vielfachheit der Eigenwerte) Die Poisson-Gleichung −Δe = λe im Rechteck (0, a) ×(0, b) mit Dirichlet-Randwerten e = 0 auf Γ hat die Eigenwerte
λ = (νπ/a)2 + (μπ/b)2 fur alle ν, μ ∈ N.
Die zugehorige Eigenfunktion lautet e(x, y) = eν,μ(x, y) := sin(νπx/a) sin(μπy/b). Im Falle des Quadratesa = b ergeben sich fur ν �= μ Eigenwerte λ = λν,μ = λμ,ν , die mindestens die Vielfachheit 2 haben, da eν,μ
und eμ,ν linear unabhangige Eigenfunktionen zum gleichen Eigenwert sind. Ein dreifacher Eigenwert liegtz.B. fur a = b, λ = 50π2/a2 vor: E(λ) = span{e1,7, e7,1, e5,5}.
Die Eigenfunktionen e ∈ E(λ) gehoren definitionsgemaß zu V . Die Regularitatsuntersuchungen des Ab-schnittes 9.1 ergeben sofort hohere Regularitat.
Satz 11.1.5 Es seien V = Hm0 (Ω) oder V = Hm(Ω). Im zweiten Falle sei m = 1. Unter den Voraus-
setzungen der Satze 9.1.20 bzw. 9.1.21 gilt E(λ) ⊂ Hm+s(Ω).
Beweis. Mit a(·, ·) erfullt auch aλ(u, v) := a(u, v)−λ(u, v)0 die Voraussetzungen. Da aλ(e, v) = 0 fur e ∈ E(λ),v ∈ V , folgt die Behauptung aus Korollar 9.1.23.
Neben der Standardform (11.1.2a) gibt es verallgemeinerte Eigenwertaufgaben. Ein Beispiel ist das Steklov-Problem
−Δe = 0 in Ω, ∂e/∂n = λe auf Γ,
dessen Variationsformulierung e ∈ H1(Ω),∫Ω〈∇e,∇v〉dx = λ
∫ΓevdΓ (v ∈ H1(Ω)) lautet. Es lasst sich
zeigen, dass alle Eigenwerte reell sind und die Aussagen des Satzes 11.1.2 gelten.
11.2 Finite-Element-Diskretisierung
11.2.1 Diskretisierung
Vh ⊂ V sei ein (Finite-Element-)Unterraum. Die Ritz-Galerkin- (bzw. Finite-Element-)Diskretisierungen derEigenwertprobleme (11.1.2a,b) lauten
suche eh ∈ Vh, sodass a(eh, v) = λh(eh, v)0 fur alle v ∈ Vh. (11.2.1a)
suche e∗h ∈ Vh, sodass a(v, e∗h) = λh(v, e∗h)0 fur alle v ∈ Vh. (11.2.1b)
Die diskreten Eigenraume Eh(λh), E�(λh) werden von den Losungen der Aufgaben (11.2.1a) bzw. (11.2.1b)aufgespannt. In Analogie zu Satz 11.1.2 gilt dimEh(λh) = dimE�(λh). Falls a(·, ·) symmetrisch ist, giltEh(λh) = E�(λh).
Wie in Abschnitt 8.1 lasst sich die Formulierung (11.2.1a,b) in Matrizenschreibweise umsetzen.
Bemerkung 11.2.1 e und e� seien die Koeffizientenvektoren zu eh = Pe und e�h = Pe� (vgl. (8.1.6)). DieEigenwertaufgaben (11.2.1a,b) sind aquivalent zu
Le = λhMe, L�e� = λhMe�, (11.2.1’)
wobei die Systemmatrix L wie in Satz 8.1.3 und die Massematrix M durch (8.7.7) definiert sind. Da imAllgemeinen M �= I, handelt es sich bei (11.2.1’) um verallgemeinerte Eigenwertprobleme.
Ubungsaufgabe 11.2.2 Man zeige: 1) M ist positiv definit und besitzt eine Zerlegung M = A�A (z.B.A = M1/2 oder Cholesky-Faktor).
2) Das erste Problem in (11.2.1’) lasst sich aquivalent als Standard-Eigenwertproblem Le = λhe mitL := (A�)−1LA−1, e = Ae formulieren. Die zweite Aufgabe in (11.2.1’) entspricht L�e� = λhe� mite� = Ae�.
Bei der Konvergenzuntersuchung hat man folgende Schwierigkeiten zu beachten:(i) Eine gleichmaßige Approximation samtlicher Eigenwerte und -funktionen durch diskrete Eigenwerte
und -funktionen ist nicht moglich, da den unendlich vielen Eigenwerten von (11.1.2a) nur endlich viele von

11.2 Finite-Element-Diskretisierung 201
(11.2.1a) gegenuberstehen. Es ist nur moglich, einen festen Eigenwert λ von (11.1.2a) als Haufungspunktdiskreter Eigenwerte {λh : h > 0} zu charakterisieren und Abschatzungen fur |λ− λh| aufzustellen.
(ii) Sind λ und λh die kontinuierlichen bzw. diskreten Eigenwerte, so braucht keinesfallsdimE(λ) = dimEh(λh) zu gelten. Man beschrankt sich daher gerne auf den Fall einfacher Eigenwerte,wo dimE(λ) = dimEh(λh) = 1. Falls dimE(λ) = k > 1, muss man damit rechnen, dass der mehrfacheEigenwert λ durch mehrere diskrete Eigenwerte λ(i)
h (i = 1, . . . , k) approximiert wird, wobei dimE(λ) =∑ki=1 dimEh(λ(i)
h ). Die Fehlerabschatzungen von |λ− λ(i)h | sind dann im Allgemeinen schlechter als bei ein-
fachen Eigenwerten. Lediglich fur den Mittelwert λh := 1k
∑ki=1 λ
(i)h erhalt man die ublichen Abschatzungen
(vgl. Babuska-Aziz [5, p. 338]).
Ubungsaufgabe 11.2.3 Das Eigenwertproblem sei wie in Beispiel 11.1.4 mit a = b und λ = 50π2/a2. Vh
bestehe aus linearen Elementen uber einer Quadratgittertriangulation. Man zeige: Dem angegebenen dreifa-chen Eigenwert λ entsprechen ein doppelter Eigenwert λ(1)
h und ein davon verschiedener einfacher EigenwertA
(2)h mit limh→0 λ
(i)h = λ. Hinweis: Die Knotenwerte der diskreten Eigenfunktionen stimmen mit den konti-
nuierlichen Eigenfunktionen e1,7, e7,1 und e5,5 uberein.
11.2.2 Qualitative Konvergenzresultate
In diesem Abschnitt geht es um die Frage, ob λh → λ und eh → e fur h→ 0. Die Konvergenzgeschwindigkeitwird in Abschnitt 11.2.3 diskutiert werden. Grundvoraussetzung sei im Folgenden:
a(·, ·) : V × V → C sei V-koerziv, (11.2.2a)
V ⊂ L2(Ω) sei stetig, dicht und kompakt eingebettet, (11.2.2b)
sodass die Riesz-Schauder-Theorie (Satz 11.1.2) anwendbar ist. Außerdem sei eine Folge von UnterraumenVhi (hi → 0) gegeben, die V zunehmend approximieren (vgl. (8.2.4a)):
limh→0
inf{‖u− v‖V : v ∈ Vh} = 0 fur alle u ∈ V. (11.2.2c)
Wir definieren
aλ(·, ·) : V × V → C, aλ(u, v) := a(u, v) − λ (u, v)0 , (11.2.3a)ω(λ) := inf
u∈V, ‖u‖V =1sup
v∈V, ‖v‖V =1
|aλ(u, v)| , (11.2.3b)
ωh(λ) := infu∈Vh, ‖u‖V =1
supv∈Vh, ‖v‖V =1
|aλ(u, v)| . (11.2.3c)
Die Interpretation der Großen ω(λ) und ωh(λ) ist Gegenstand der folgenden Ubungsaufgabe.
Ubungsaufgabe 11.2.4 L und Lh seien die zu a(·, ·) : V × V → R und a(·, ·) : Vh × Vh → R gehorendenOperatoren (vgl. (8.1.11a)). Man zeige:
(i) Ist λ kein Eigenwert, so gilt
ω(λ) = 1/∥∥∥(L− λI)−1
∥∥∥V←V ′
, ωh(λ) = 1/∥∥∥(Lh − λI)−1
∥∥∥Vh←V ′
h
(11.2.4)
(vgl. Lemma 6.5.3 und Ubungsaufgabe 8.1.17).(ii) ω(λ) und ωh(λ) sind stetig in λ ∈ C.(iii) Ersetzt man in (11.2.3b,c) aλ(u, v) durch aλ(v, u), erhalt man die Großen ω�(λ) und ω�
h(λ), die demadjungierten Problem entsprechen. Es gilt ω�(λ) = ω(λ) und ω�
h(λ) = ωh(λ). Hinweis: Lemma 6.5.17.
Mit Hilfe von (11.2.4) und Satz 6.5.15 beweist man den folgenden Zusammenhang zwischen ω(λ), ωh(λ)und den Eigenwertproblemen.
Bemerkung 11.2.5 Es gelte (11.2.2a,b). λ ist genau dann Eigenwert von (11.1.2a), wenn ω(λ) = 0. λh istgenau dann Eigenwert von (11.2.1a), wenn ωh(λh) = 0.

202 11. Eigenwertprobleme elliptischer Operatoren
Lemma 11.2.6 a(·, ·) sei V-koerziv (vgl. (11.2.2a)). Dann gibt es ein μ ∈ R, sodass aμ(·, ·) V-elliptisch ist.Es gilt ω(μ) ≥ 1/CE und ωh(μ) ≥ 1/CE mit CE > 0 aus Definition 6.5.13.
Lemma 11.2.7 Λ ⊂ C sei kompakt. Es gelte (11.2.2a-c). Dann gibt es von λ ∈ Λ unabhangige Zahlen C > 0und η(h) > 0 mit lim η(h) = 0, sodass
ωh(λ) ≥ Cω(λ) − η(h), ω(λ) ≥ Cωh(λ) − η(h). (11.2.5)
Beweis. Die Operatoren Z = Z(λ) : V → V und Zh = Zh(λ) : V → Vh seien wie folgt definiert:
z := Z(λ)u ∈ V sei Losung von aμ(z, v) = (λ− μ) (u, v)0 fur alle v ∈ V, (11.2.6a)
zh := Zh(λ)u ∈ V sei Losung von aμ(zh, v) = (λ− μ) (u, v)0 fur alle v ∈ Vh, (11.2.6b)
wobei μ gemaß Lemma 11.2.6 gewahlt ist. Nach Lemma 11.2.6 gibt es ein CZ mit
‖Z(λ)‖V←V ′ ≤ CZ , ‖Zh(λ)‖V←V ′ ≤ CZ fur alle λ ∈ Λ . (11.2.6c)
Aus aλ(u, v) = a(u, v) − λ (u, v)0 = a(u, v) − μ (u, v)0 − (λ− μ) (u, v)0 = aμ(u, v) − aμ(z, v) = aμ(u − z, v)(z := Z(λ)u) und der Definition von ω(λ) folgert man
ω(λ) ‖u‖V ≤ supv∈V, ‖v‖V =1
|aλ(u, v)| = supv∈V, ‖v‖V =1
|aμ(u− z, v)| ≤ CS ‖u− z‖V (11.2.6d)
mit CS := ‖L− μI‖V ′←V . Fur u ∈ Vh schließt man aus aλ(u, v) = aμ(u − zh, v) fur zh = Zh(λ)u, Lemma11.2.6 und (11.2.6d), dass
supv∈Vh, ‖v‖V =1
|aλ(u, v)| = supv∈Vh, ‖v‖V =1
∣∣aλ(u− zh, v)∣∣ ≥ C−1
E
∥∥u− zh∥∥
V≥ C−1
E
[‖u− z‖V −
∥∥z − zh∥∥
V
]≥ C−1
E
[C−1
S ω(λ) − ‖Z − Zh‖V←V
]‖u‖V fur alle u ∈ Vh .
Hieraus folgt der erste Teil von (11.2.5) mit C = (CECS)−1 > 0 und η(h) = ‖Z − Zh‖V←V /CE , falls
limh→0
supλ∈Λ
‖Z − Zh‖V←V = 0. (11.2.6e)
Der Beweis von (11.2.6e) wird indirekt gefuhrt. Die Negation lautet: Es gibt ε > 0, λi ∈ Λ, hi → 0 mit‖Z(λi) − Zhi(λi)‖V←V ≥ ε > 0. Dann existieren ui ∈ V mit
‖ui‖V = 1, ‖[Z(λi) − Zh(λi)] ui‖V ≥ ε/2 > 0. (11.2.6f)
Wegen (11.2.2b) und der Kompaktheit von Λ gibt es eine Teilfolge λj ∈ Λ, uj ∈ V mit limλj = λ� undlimuj = u� ∈ V ′ in V ′. (11.2.2c) und Satz 8.2.2 zeigen
∥∥[Z(λ�) − Zhj (λ�)]u�∥∥
V→ 0. Zusammen mit
(11.2.6c) ergibt sich∥∥[Z(λj) − Zhj(λj)]uj
∥∥V≤ ‖[Z(λj) − Z(λ∗)]uj‖V +
∥∥[Zhj (λ∗) − Zhj (λj)
]uj
∥∥V
+ ‖Z(λ∗) [uj − u∗]‖V +∥∥Zhj (λ
∗) [uj − u∗]∥∥
V+
∥∥[Z(λ∗) − Zhj (λ∗)
]u∗
∥∥V
≤ 2C |λj − λ∗| + 2CZ ‖uj − u∗‖V ′ +∥∥[Z(λ∗) − Zhj (λ
∗)]u∗
∥∥V→ 0
im Widerspruch zu (11.2.6f).Zum Beweis des zweiten Teils von (11.2.5) ersetzt man (11.2.6d) und die nachfolgende Abschatzung durch
ωh(λ)∥∥uh
∥∥V≤ sup
v∈Vh, ‖v‖V =1
∣∣aμ(uh − zh, v)∣∣ ≤ CS
∥∥uh − zh∥∥
Vfur alle uh ∈ Vh,
und supv∈Vh, ‖v‖V =1
∣∣aλ(uh, v)∣∣ = sup
v∈Vh, ‖v‖V =1
∣∣aλ(uh − z, v)∣∣ ≥ C−1
E
∥∥uh − z∥∥
V
≥ C−1E
[C−1
S ωh(λ) − ‖Z(λ) − Zh(λ)‖V←V
] ∥∥uh∥∥
Vfur alle uh ∈ Vh.

11.2 Finite-Element-Diskretisierung 203
Sei u ∈ V mit ‖u‖V = 1 so gewahlt, dass supv∈V, ‖v‖V =1
|aλ(u, v)| = infu∈V, ‖u‖V =1
supv∈V, ‖v‖V =1
|aλ(u, v)| = ω(λ).
Da sup∣∣aλ(u− uh, v)
∣∣ ≤ CS
∥∥u− uh∥∥
V, folgt fur beliebiges uh ∈ Vh:
ω(λ) ≥ Cωh(λ) − ‖Z(λ) − Zh(λ)‖V←V − CS
∥∥u− uh∥∥
V.
Aus (11.2.2c) und (11.2.6e) folgt der zweite Teil von (11.2.5).Eine Folgerung aus Lemma 11.2.7 ist der Satz 8.2.8. Falls Problem (8.1.1) fur alle f ∈ V ′ losbar ist, kann
λ = 0 kein Eigenwert sein, d.h. ω(0) > 0. Somit folgt fur εNi aus Satz 8.2.8, dass εNi ≥ ωNi(0) ≥ ε :=12Cω(λ) > 0 fur hinreichend großes i.
Eine zweite Folgerung betrifft die Konvergenz der diskreten Eigenwerte.
Satz 11.2.8 Es gelte (11.2.2a-c). Sind λhi (i → ∞, hi → 0) diskrete Eigenwerte von (11.2.1a) mitλhi → λ0 , so ist λ0 ein Eigenwert von (11.1.2a).
Beweis. Ware λ0 kein Eigenwert, so ware ω(λ) ≥ η0 > 0 in der ε-Umgebung Kε(λ0), da ω(λ) stetig ist (vgl.Ubungsaufgabe 11.2.4ii). Es gabe h0 > 0, sodass η(h) ≤ Cη0/2 fur alle h ≤ h0 (C und η(h) aus (11.2.5)).Fur alle λhi ∈ Kε(λ0) mit hi ≤ h0 folgt der Widerspruch
0 = ωhi(λhi) ≥ Cω(λhi) − η(hi) ≥ Cη0 −12Cη0 =
12Cη0 > 0
aus (11.2.5).
Lemma 11.2.9 (Minimumprinzip) Es gelte (11.2.2a,b). Die Funktionen ω(λ) und ωh(λ) haben imInneren von Λ ⊂ C kein eigentliches, positives Minimum.
Beweis. L sei der zu a(·, ·) gehorende Operator. λ� mit ω(λ�) > 0 sei beliebig aus dem Inneren von Λgewahlt. Fur hinreichend kleines ε > 0 gilt Kε(λ�) ⊂ Λ und ω(λ) > 0 in Kε(λ�). Damit ist (L − λI)−1 inKε(λ�) erklart und holomorph. Fur beliebige, aber feste u, v ∈ V ′ ist damit Ω(λ) :=
⟨(L− λI)−1u, v
⟩V×V ′
ebenfalls in Λ holomorph. Da Betrage holomorpher Funktionen ihr Maximum auf dem Rand annehmen, ist|Ω(λ)| ≤ maxζ∈∂Kε(λ) |Ω(ζ)|. Fur ‖u‖V ′ = ‖v‖V ′ = 1 ist |Ω(ζ)| ≤ ‖ (L− ζI)−1 ‖V←V ′ , sodass
|Ω(λ)| ≤ maxζ∈∂Kε(λ)
∥∥∥(L− ζI)−1∥∥∥
V←V ′= max
ζ∈∂Kε(λ)
1ω(ζ)
.
Da 1ω(λ) = ‖ (L− λI)−1 ‖V←V ′ das Infimum von |Ω(λ)| uber alle u, v ∈ V ′ mit ‖u‖V ′ = ‖v‖V ′ = 1 ist, folgt
1ω(λ)
=∥∥∥(L− λI)−1
∥∥∥V←V ′
≤ maxζ∈∂Kε(λ)
∥∥∥(L− ζI)−1∥∥∥
V←V ′= max
ζ∈∂Kε(λ)
1ω(ζ)
,
d.h. ω(λ) ≥ min{ω(ζ) : ζ ∈ ∂Kε(λ)} (vgl. Ubungsaufgabe 11.2.4i). Somit kann ω(λ) in Kε(λ�) kein eigent-liches Minimum annehmen. Fur ωh(λ) schließt man ebenso.
Die Umkehrung des Satzes 11.2.8 enthalt der
Satz 11.2.10 Es gelte (11.2.2a-c). λ0 sei Eigenwert von (11.1.2a). Dann existieren diskrete Eigenwerte λh
von (11.2.1a) [fur alle h], sodass limh→0 λh = λ0.
Beweis. Sei ε > 0 beliebig. Gemaß Satz 11.1.2 ist λ0 isolierter Eigenwert: ω(λ) > 0 fur 0 < |λ− λ0| ≤ ε(ε hinreichend klein). Da ω(λ) stetig und ∂Kε(λ0) kompakt, ist ρε := min{ω(λ) : |λ− λ0| = ε} positiv.Wegen (11.2.5) und ω(λ0) = 0 erhalt man fur hinreichend kleine h:
ωh(λ) ≥ Cω(λ) − η(h) ≥ Cρε − η(h) > η(h)/C ≥ ωh(λ0) fur alle λ ∈ ∂Kε(λ0).
Damit muss ωh(λ) in Kε(λ0) ein eigentliches Minimum besitzen. Wegen Lemma 11.2.9 ist der Minimalwertnull.
Damit existiert ein λh ∈ Kε(λ0), das diskreter Eigenwert ist: ωh(λh) = 0.Die Konvergenz der Eigenfunktionen erhalt man aus

204 11. Eigenwertprobleme elliptischer Operatoren
Satz 11.2.11 Es gelte (11.2.2a-c). eh ∈ Eh(λh) sei eine Folge diskreter Eigenfunktionen mit ‖eh‖V = 1und limλh = λ0. Dann existiert eine Teilfolge ehi , die in V gegen eine Eigenfunktion e ∈ E(λ0) konvergiert:
e ∈ E(λ0),∥∥ehi − e
∥∥V→ 0 (i→ ∞) , ‖e‖V = 1.
Beweis. Die Funktionen eh sind in V gleichmaßig beschrankt. Da V ⊂ L2(Ω) kompakt eingebettet ist(vgl. (11.2.2b)), existiert eine Teilfolge ehi , die in L2(Ω) gegen ein e ∈ L2(Ω) konvergiert:∥∥e− ehi
∥∥L2(Ω)
→ 0 (i→ ∞) . (11.2.7a)
Wir definieren z = Z(λ0)e, zhi = Zhi(λ0)e gemaß (11.2.6a,b). Nach Satz 8.2.2 gibt es ein h1(ε) > 0, sodass∥∥z − zhi∥∥
V≤ ε/2 fur hi ≤ h1(ε). (11.2.7b)
ehi lostaμ(ehi , v) = (λhi − μ)
(ehi , v
)0
fur alle v ∈ Vhi . (11.2.7c)
Kombination von zhi = Zhj(λ0)e [d.h. (11.2.6b) fur λ = λ0] und (11.2.7c) liefert
aμ(zhi − ehi , v) = Fi(v) := (λ0 − μ)(e− ehi, v
)0− (λhi − λ0)
(ehi , v
)0
fur alle v ∈ Vhi . (11.2.7d)
Da ‖Fi‖V ′ → 0 wegen λhi → λ0 und (11.2.7a), gibt es ein h2(ε) > 0, sodass ‖Fi‖V ′ ≤ ε/[2CE] (CE ausLemma 11.2.6) und ∥∥zhi − ehi
∥∥V≤ ε/2 fur hi ≤ h2(ε). (11.2.7e)
(11.2.7b) und (11.2.7e) zeigen ‖z − ehi‖V ≤ ε fur hi ≤ min{h1(ε), h2(ε)}, also limi→∞
ehi = z in V . Damit gilt
aber auch lim ehi = z in L2(Ω) ⊂ V . (11.2.7a) beweist z = e ∈ V , sodass e = z = Z(λ0)e zu a(e, v) = λ0(e, v)0wird. Somit ist e = lim ehi Eigenfunktion von (11.1.2a). Insbesondere ist ‖e‖V = lim
∥∥ehi∥∥
V= 1.
Ubungsaufgabe 11.2.12 Es gelte (11.2.2a-c). λh, eh, λ0 und e seien wie in Satz 11.2.11. Man zeige:
a) Wenn dimE(λ0) = 1, so auch limh→0 dimEh(λh) = 1.b) Es sei dimE(λ0) = 1. Dann gilt lim eh = e in V fur eh := eh/(eh, e)V , falls
∣∣(eh, e)V
∣∣ ≥ 1/2, und eh := eh
sonst.
11.2.3 Quantitative Konvergenzresultate
Die geometrische und algebraische Vielfachheit eines Eigenwertes λ0 von (11.1.2a) stimmen uberein, falls1
dimKern(L− λ0I) = dimKern((L− λ0I)2
). (11.2.8)
Lemma 11.2.13 Es gelte (11.2.2a,b) und dimE(λ0) = 1. Dann ist (11.2.8) aquivalent zu (e, e�)0 �= 0 fure ∈ E(λ0)\{0}, 0 �= e� ∈ E�(λ0)\{0}.
Beweis. Es ist Kern(L − λ0I) = E(λ0) = span{e}. dimKern(L − λ0I)2 > 1 gilt genau dann, wenn eineLosung v ∈ V zu (L − λ0I)v = e existiert. Nach Satz 6.5.15c hat diese Gleichung genau dann eine Losung,wenn (e, e�)0 = 0. Damit ist (11.2.8) zu (e, e�)0 �= 0 aquivalent.
Seien E(λ0) = span{e} und E�(λ0) = span{e�}. Unter der Voraussetzung (11.2.8) konnen e und e� sonormiert werden, dass
(e, e�)0 = 1. (11.2.8’)
1Die Vielfachheiten stimmen nicht uberein, wenn die Jordan-Normalform von L − λ0I einen echten k × k-Jordan-Block
J =
26664
0 1
. . .. . .
0 10
37775 enthalt, d.h. wenn k ≥ 2. Da dimKern(J) = 1 < dimKern(J2) = 2, folgt die Aussage.

11.2 Finite-Element-Diskretisierung 205
Wir definieren V := {v ∈ V : (v, e�)0 = 0}, V ′ = {v′ ∈ V ′ : (v′, e�)0 = 0}. ‖·‖V ′ sei die Dualnorm zu‖·‖V = ‖·‖V . Zum Problem (11.2.9):
zu f ∈ V ′ suche u ∈ V mit aλ(u, v) = (f, v)0 fur alle v ∈ V , (11.2.9)
definiert man die (11.2.3b) entsprechende Große
ω(λ) := infu∈V , ‖u‖V =1
supv∈V , ‖v‖V =1
|aλ(u, v)| . (11.2.10)
Lemma 11.2.14 Es gelte (11.2.2a,b), (11.2.8) und dimE(λ0) = 1. Dann gibt es ein ε > 0, sodassω(λ) ≥ C > 0 fur alle |λ− λ0| ≤ ε. Aufgabe (11.2.9) hat genau dann, wenn ω(λ) > 0, eine Losung u ∈ V .Diese erfullt
‖u‖V ≤ ‖f‖V ′ /ω(λ).
Beweis. L : V → V ′ sei der zu a(·, ·) : V × V → C gehorende Operator. Fur 0 < |λ− λ0| < ε (ε hinreichendklein) hat (L− λI)u = f eine eindeutige Losung u ∈ V . Aus f ∈ V ′ folgt
0 = (f, e�)0 = ([L− λI]u, e�)0 = (u, [L− λI]� e�)0 =(λ0 − λ
)(u, e�)0,
d.h. u ∈ V . Somit existiert (L − λI)−1 : V ′ → V als Beschrankung von (L − λI)−1 auf V ′ ⊂ V ′. Furλ = λ0 hat Aufgabe (11.2.9) gemaß Satz 6.5.15c eine eindeutige Losung. Damit existiert (L− λI)−1 fur alleλ ∈ Kε(λ0). Nach Bemerkung 11.2.5 (mit V statt V ) muss ω(λ) in Kε(λ0) positiv sein. Die Stetigkeit vonω(λ) beweist ω(λ) ≥ C > 0. In Analogie zu (11.2.4) hat man ‖u‖V = ‖u‖V ≤ ‖f‖V ′ /ω(λ). Die Abschatzungdurch ‖f‖V ′ /ω(λ) ergibt sich aus der folgenden Ubungsaufgabe.
Ubungsaufgabe 11.2.15 Man zeige: ‖f‖V ′ ≤ ‖f‖V ′ fur alle f ∈ V ′.
Lemma 11.2.16 Es gelte (11.2.2a-c), dimE(λ0) = 1 und (11.2.8). Seien λh diskrete Eigenwerte mitlimλh = λ0. Nach Ubungsaufgabe 11.2.12b gibt es
eh ∈ Eh(λh) und e�h ∈ E�h(λh) mit eh → e ∈ E(λ0), e�h → e� ∈ E�(λ0), (e, e�)0 = 1.
Damit lassen sich der Raum Vh := {vh ∈ Vh : (vh, eh)0 = 0} und die Große
ωh(λ) := infu∈Vh, ‖u‖V =1
supv∈Vh, ‖v‖V =1
|aλ(u, v)|
konstruieren. Dann gibt es ein von h und λ ∈ C unabhangiges C > 0, sodass ωh(λ) ≥ Cωh(λ). Fur hin-reichend kleine ε > 0 und h ist ωh(λ) ≥ η > 0 fur alle |λ− λ0| ≤ ε.
Beweis. 1) 1. Behauptung: Es gibt h0 > 0 und C > 0, sodass
min{∥∥v + αe�h
∥∥V
: α ∈ C}≥ C ‖v‖V fur alle v ∈ Vh und alle 0 < h ≤ h0. (*)
Der Beweis wird indirekt gefuhrt. Die Negation lautet: Es gibt eine Folge αi ∈ C, hi → 0, vi ∈ Vhi mit‖vi‖V = 1 und ‖vi + αie
�hi‖V → 0. Damit existieren Teilfolgen mit αi → α�, vi → v� in L2(Ω). Offenbarmuss wi := vi + αie
�hi den Grenzwert w� = limwi = v� + α�e� in L2(Ω) besitzen. Da
‖w�‖L2(Ω) = lim ‖wi‖L2(Ω) ≤ C lim ‖wi‖V = 0,
folgt w� = 0, also v� = −α�e�. Aus 0 = lim(vi, e�hi)0 = (v�, e�)0 = −α� ‖e�‖2
0 schließt man α� = 0. Damitergibt sich der Widerspruch aus 1 = lim ‖vi‖V ≤ lim sup ‖wi‖V + lim sup ‖αie
�hi‖V = lim ‖wi‖V = 0.2) 2. Behauptung: ωh(λ) ≥ Cωh(λ) mit C aus 1). Dies folgt aus
ωh(λ) =(11.2.10)
infu∈Vh\{0}
supv∈Vh\{0}
|aλ(u, v)|‖u‖V ‖v‖V
≥(∗) und aλ(u,v)=aλ(u,v+αeh) fur u∈Vh
C infu∈Vh\{0}
supv∈Vh\{0}
maxα∈C
∣∣aλ(u, v + αe�h)∣∣
‖u‖V ‖v + αe�h‖V
=Vh={v+αeh:v∈Vh,α∈C}
C infu∈Vh\{0}
supw∈Vh\{0}
|aλ(u,w)|‖u‖V ‖w‖V
≥Vh⊂Vh
C infu∈Vh\{0}
supw∈Vh\{0}
|aλ(u,w)|‖u‖V ‖w‖V
= Cωh(λ).

206 11. Eigenwertprobleme elliptischer Operatoren
3) ε > 0 sei so gewahlt, dass λ0 einziger Eigenwert in Kε(λ0) ist. Fur hinreichend kleines h ist λh einzigerdiskreter Eigenwert in Kε(λ0). Im Beweis des Satzes 10 wurde bereits ωh(λ) ≥ η′ > 0 fur λ ∈ ∂K(λ0),h ≤ h0(ε) benutzt. Aus Teil 2) folgt ωh(λ) ≥ η := η′C > 0 fur λ ∈ ∂Kε(λ0). Nach Ubungsaufgabe 11.2.12aist aλ(u, v) = (f, v)0 (v ∈ Vh) fur jedes f ∈ Vh und alle λ ∈ Kε(λ0) losbar, sodass ωh(λ) = 0 ausgeschlossenist. Lemma 11.2.9 zeigt ωh(λ) ≥ η > 0 in Kε(λ0).
Ubungsaufgabe 11.2.17 Es gelte (11.2.2a,b). Die Funktionen u, v ∈ V mogen (u, v)0 �= 0 erfullen. d(·, Vh)sei wie in (8.2.2) definiert. Man zeige: Ist d(u, Vh) hinreichend klein, so gibt es ein uh ∈ Vh mit∥∥uh − u
∥∥V≤ 2d(u, Vh) mit der Normierung
(uh − u, v
)0
= 0.
Lemma 11.2.18 Es gelte (11.2.2a-c). λ0 sei Eigenwert mit den Eigenschaften (11.2.8) und dimE(λ0) = 1.Fur hinreichend kleines h gibt es eh ∈ Eh(λh) mit∥∥eh − e
∥∥V≤ C [ |λ0 − λh| + d(e, Vh) ] .
Beweis. zh := Zh(λ0)e sei die Losung von (11.2.6b). Da e = Z(λ0)e, hat man∥∥e− zh∥∥
V≤ C1d(e, Vh). (11.2.11a)
Sei μ der Wert aus Lemma 11.2.6. Fur alle v ∈ Vh ist
aμ(zh − eh, v) = aμ(zh, v) − aμ(eh, v) =(11.2.6b)
(λ0 − μ) (e, v)0 − aμ(eh, v) =(11.2.1a)
= (λ0−μ) (e, v)0−(λh−μ)(eh,v
)0
= (λ0−λh) (e,v)0+(λh−μ)(e−zh,v
)0+(λh−μ)
(zh−eh, v
)0,
sodass
aλh(zh−eh,v) = aμ(zh−eh,v)−(λh−μ)
(zh−eh,v
)0
= (λ0−λh) (e,v)0+(λh−μ)(e−zh, v
)0. (11.2.11b)
Wegen Lemma 11.2.13 und eh → e, e�h → e� (vgl. Lemma 11.2.16) gilt∣∣(e, e�h)0
∣∣ , ∣∣(eh, e�h)0∣∣ ≥ η > 0
fur hinreichend kleines h. Damit kann eh so skaliert werden, dass (zh − eh, e�h)0 = 0. Folglich entspricht(11.2.11b) der Aufgabe (11.2.9) mit Vh statt V , zh − eh statt u und (λ0 − λh) e+ (λh − μ)
(e− zh
)statt f.
Lemma 11.2.14 beweist∥∥zh − eh∥∥
V≤ ωh(λh)−1C
[|λ0 − λh| +
∥∥e− zh∥∥
V
]≤
(11.2.11a)C′ [ |λ0 − λh| + d(e, Vh)] .
Mit ‖eh − e‖V ≤ ‖e− zh‖V + ‖zh − eh‖V und (11.2.11a) erhalt man die Behauptung.
Satz 11.2.19 Es gelte (11.2.2a-c). λ0 sei Eigenwert mit den Eigenschaften (11.2.8) und dimE(λ0) = 1.Seien e ∈ E(λ0), e� ∈ E�(λ0) mit ‖e‖V = 1, (e, e�)0 = 1. Dann gibt es diskrete Eigenwerte λh mit
|λ0 − λh| ≤ Cd(e, Vh)d(e�, Vh). (11.2.12)
Beweis. uh sei gemaß Ubungsaufgabe 11.2.17 so gewahlt, dass ‖e� − uh‖V ≤ 2d(e�, Vh), (e� − uh, e)0 = 0.Diskrete Eigenwerte λh → λ0 existieren nach Satz 11.2.10. Aus
0 = aλ0(eh, e∗) = aλh
(eh, e∗) − (λ0 − λh) (eh, e∗)0= aλh
(eh, e∗ − uh) − (λ0 − λh) (eh, e∗)0 (wegen aλh(eh, vh) = 0 fur alle vh ∈ Vh)
= aλh(eh − e, e∗ − uh) − (λ0 − λh)
[(eh, e∗)0 −
(e, e∗ − uh
)0
] (fur alle v ∈ V gilt 0 = aλ(e, v)= aλh
(e, v) + (λh − λ0) (e, v)0
)= aλh
(eh − e, e∗ − uh) − (λ0 − λh)[(e, e∗)0︸ ︷︷ ︸
=1
+(eh − e, e∗
)0−
(e, e∗ − uh
)0︸ ︷︷ ︸
=0 nach Voraussetzung
]
folgt |λ0 − λh| ≤ C‖eh−e‖V ‖e�−uh‖V + |λ0 − λh| ‖eh−e‖V ‖e∗‖V ≤ C′‖eh−e‖V
[‖e� − uh‖V + |λ0 − λh|
].
Nach Lemma 11.2.18 gibt es ein eh ∈ Eh(λh), sodass
|λ0 − λh| ≤ C′C′′ [|λ0 − λh| + d(e, Vh)] [|λ0 − λh| + 2d(e∗, Vh)] .
Hieraus erhalt man (11.2.12) mit C = 3C′C′′ fur hinreichend kleines h, da |λ0 − λh| → 0, d(e, Vh) → 0,d(e�, Vh) → 0.

11.2 Finite-Element-Diskretisierung 207
Satz 11.2.20 Unter den Voraussetzungen des Satzes 11.2.19 gibt es zu e ∈ E(λ0) und e� ∈ E�(λ0) diskreteEigenfunktionen eh ∈ Eh(λh), e�h ∈ E�(λh) mit
‖eh − e‖V ≤ Cd(e, Vh), ‖e�h − e�‖V ≤ Cd(e�, Vh) (11.2.13)
Beweis. Man setze (11.2.12) mit d(e�, Vh) ≤ const in Lemma 11.2.18 ein. Die zweite Abschatzung in (11.2.13)ergibt sich analog.
Sei im Weiteren V ⊂ H1(Ω). Satz 11.1.5 beweist unter den dortigen Voraussetzungen
E(λ0) ⊂ H1+s(Ω), E∗(λ0) ⊂ H1+s(Ω). (11.2.14a)
Ferner gelte (11.2.14b) (vgl. (8.4.12)):
d(u, Vh) ≤ Chs ‖u‖H1+s(Ω) fur alle u ∈ E(λ0) ∪ E∗(λ0). (11.2.14b)
Folgerung 11.2.21 Es gelte (11.2.2a), (11.2.2c) und (11.2.14a,b). λ0 sei Eigenwert mit den Eigenschaften(11.2.8) und dimE(λ0) = 1. Dann gibt es λh, eh ∈ Eh(λh) und e�h ∈ E�(λh), sodass
|λ0 − λh| ≤ Ch2s, ‖eh − e‖V ≤ Chs, ‖e�h − e�‖V ≤ Chs. (11.2.15)
Gelegentlich konnen Eigenfunktionen bessere Regularitat besitzen, als fur ubliche Randwertaufgaben be-wiesen werden kann. Sei zum Beispiel −Δe = λe im Quadrat Ω = (0, 1) × (0, 1) und e = 0 auf Γ. Zunachstergibt Satz 11.1.5 e ∈ H2(Ω)∩H1
0 (Ω), also e ∈ C0(Ω) (vgl. Satz 6.2.31). Damit gilt e = 0 auch in den Eckenvon Ω. Nach Beispiel 9.1.29 folgt e ∈ Hs(Ω) fur s < 4.
Wie in Abschnitt 8.4.4 erhalt man bessere Fehlerabschatzungen fur e − eh in der L2-Norm. Der Beweisdes folgenden Satzes wird anschließend an Korollar 11.2.29 nachgeholt werden.
Satz 11.2.22 Es gelte (11.2.2a-c), (11.2.8), dimE(λ0) = 1 und (11.2.14a,b) mit s = 1. a(·, ·) und a�(·, ·)seien H2-regular, d.h. fur f ∈ L2(Ω) haben aμ(u, v) = (f, v)0 und aμ(v, u�) = (v, f)0 (v ∈ Vh, μ ausLemma 11.2.6) Losungen u, u� ∈ H2(Ω). Seien e ∈ E(λ0) und e� ∈ E�(λ0). Dann gibt es λh, e
h ∈ Eh(λh),e�h ∈ E�(λh) mit
‖eh − e‖L2(Ω) ≤ Ch2, ‖e�h − e�‖L2(Ω) ≤ C′h2.
Gilt (11.2.14a,b) außerdem mit einem s > 1, darf man C′h2 durch C′h1+s ersetzen.
11.2.4 Komplementare Probleme
In Aufgabe (11.2.9) trat bereits eine singulare Gleichung auf, die trotzdem losbar war. Im Folgenden sei λ0
einziger Eigenwert im Kreis Kr(λ0) (gilt stets fur hinreichend kleines r). Die Gleichung
aλ(u, v) = (f, v)0 fur alle v ∈ V (11.2.16a)
ist fur λ = λ0 singular. Fur λ ≈ λ0 ist Gleichung (11.2.16a) schlecht konditioniert. Es soll im Weiterengezeigt werden, dass Gleichung (11.2.16a) wohldefiniert und gut konditioniert ist, falls die rechte Seite f imorthogonalen Komplement von E�(λ0) liegt:
f ⊥E�(λ0) (d.h. (f, e∗)0 = 0 fur alle e∗ ∈ E�(λ0)). (11.2.16b)
Im Falle von λ = λ0 ist mit u auch u + e (e ∈ E(λ0)) Losung. Die Eindeutigkeit der Losung erhalt manunter den Bedingungen (11.2.8) und (11.2.16c):
u⊥E�(λ0). (11.2.16c)
Bemerkung 11.2.23 Es gelte (11.2.2a,b) und (11.2.8). λ0 sei einziger Eigenwert in Kr(λ0). Dann hat(11.2.16a,b) fur alle |λ− λ0| ≤ r genau eine Losung u, die (11.2.16c) erfullt. Es gibt ein von f und λunabhangiges C, sodass ‖u‖V ≤ C ‖f‖V .

208 11. Eigenwertprobleme elliptischer Operatoren
Beweis. Folgt nach Lemma 11.2.14, in dem die Voraussetzung E(λ0) = 1 nicht benotigt wird.Die Finite-Element-Diskretisierung der Gleichung (11.2.16a) lautet:
suche uh ∈ Vh mit aλ(uh, v) = (f, v)0 fur alle v ∈ Vh . (11.2.17)
Gleichung (11.2.17) kann auch unter der Voraussetzung (11.2.16b) nicht wohldefiniert zu sein.Der Einfachheit halber beschranken wir uns im Folgenden auf einfache Eigenwerte: dimE(λ0) = 1.
Gleichung (11.2.17) ersetzen wir durch (11.2.18a):
suche uh ∈ Vh mit aλ(uh, v) = (f (h), v)0 fur alle v ∈ Vh (11.2.18a)
wobei f (h) ⊥E�h(λh), (11.2.18b)
uh ⊥E�h(λh). (11.2.18c)
Zur praktischen Behandlung von Nebenbedingungen sei auf Abschnitt 8.3.6 verwiesen.
Ubungsaufgabe 11.2.24 Man zeige: Sei Vh = Vh ∩E�h(λn)⊥ wie in Lemma 11.2.16. Aufgabe (11.2.18a-c)
ist aquivalent zu: Suche uh ∈ Vh mit aλ(uh, v) = (f (h), v)0 fur alle v ∈ Vh .
Lemma 11.2.16 beweist die
Bemerkung 11.2.25 Es gelte (11.2.2a-c), (11.2.8) und dimE(λ0) = 1. λ0 sei einziger Eigenwert inKr(λ0). Dann gibt es ein h0 > 0, sodass die Aufgabe (11.2.18a,b) fur alle h ≤ h0 und alle λ ∈ Kr(λ0)eine eindeutige Losung uh = uh(λ) besitzt, die die Zusatzbedingung (11.2.18c) erfullt. Ferner gibt es einvon h, λ und f (h) unabhangiges C, sodass ‖uh‖V ≤ C‖f (h)‖V . Sobald E�
h(λh) �= E�(λ0), braucht f aus(11.2.16b) die Bedingung (11.2.18b) nicht zu erfullen. Ist 0 �= e�h ∈ E�
h(λh) bekannt, so lasst sich
f (h) := Q∗hf := f − (f, e�h)0(e�h, e�h)0
e�h (11.2.19)
definieren. f (h) erfullt (11.2.18b), da Q∗h die orthogonale Projektion auf E�h(λh)⊥ darstellt.
Ubungsaufgabe 11.2.26 Sei u⊥E(λ0), dimE(λ0) = dimEh(λh) = 1, ‖e�h‖V = 1 und (eh, e�h)0 = 1. Man
zeige:
d(u, Vh ∩E�h(λn)⊥) = inf
vh ⊥Eh(λn)
∥∥u− vh∥∥
V≤ C
[d(u, Vh) + ‖u‖V inf
e∗∈E∗(λ0)
∥∥e∗h − e∗∥∥
V
].
Satz 11.2.27 Es gelte (11.2.2a-c), (11.2.8) und dimE(λ0) = dimEh(λh) = 1. λ0 sei einziger Eigenwertin Kr(λ0). h sei hinreichend klein, sodass (gemaß Bemerkung 11.2.25) die Aufgabe (11.2.18a-c) losbar ist.Fur die Losungen u und uh von (11.2.16a-c) und (11.2.18a-c) gilt die Fehlerabschatzung
∥∥uh − u∥∥
V≤ C
[d(u, Vh) + ‖f (h) − f‖V ′ + ‖f‖V ′ inf
e∗∈E∗(λ0)‖e∗h − e∗‖V
](11.2.20)
mit C unabhangig von f , f (h) und h.
Beweis. Man wiederhole den Beweis des Satzes 8.2.1 fur aλ(·, ·) statt a(·, ·). Dabei muss w ∈ Vh mitw⊥E�
h(λh) gewahlt werden. Außerdem wird (8.2.3) zu
aλ(uh − u, v) = (f (h) − f, v)0 fur alle v ∈ Vh.
εN stimmt mit ωh(λ) ≥ η > 0 (λ ∈ Kr(λ0)) uberein (vgl. Lemma 11.2.16). ‖u− w‖V wird mit Hilfe vonUbungsaufgabe 11.2.26 abgeschatzt, wobei ‖u‖V ≤ C ‖f‖V ′ hinzukommt.
Zusatz 11.2.28 Ist f (h) durch (11.2.19) definiert, so wird Ungleichung (11.2.20) zu
∥∥uh − u∥∥
V≤ C′
[d(u, Vh) + ‖f‖V ′ inf
e∗∈E∗(λ0)
∥∥e∗h − e∗∥∥
V
]. (11.2.21a)

11.3 Diskretisierung durch Differenzenverfahren 209
Beweis.∥∥f (h) − f
∥∥V ′ ≤ C
∣∣(f, e�h)0∣∣ = C
∣∣(f, e� − e�h)0∣∣ ≤ C ‖f‖V ′
∥∥e� − e�h∥∥
V.
Zusatz 11.2.29 Gelten zusatzlich die Voraussetzungen u ∈ H1+s(Ω), (11.2.14a) und d(u, Vh) ≤ Chs |u|1+s
fur u ∈ H1+s(Ω), so ergibt (11.2.21a) die Abschatzung∥∥uh − u∥∥
V≤ Chs |u|H1+s(Ω) . (11.2.21b)
Nachzutragen bleibt der
Beweis des Satzes 11.2.22. Zu e ∈ E(λ0) gibt es eh ∈ Eh(λh) mit f := e − eh ⊥E(λ0) und |f |1 = ‖f‖V ≤Chs = Ch. Nach Bemerkung 11.2.25 hat die Aufgabe aλ0(v, w) = (v, f)0 fur alle v ∈ V eine Losungw⊥E�(λ0). Die Regularitatsannahme liefert w ∈ H2(Ω) und |w|2 ≤ C |f |0, sodass wh ∈ Vh mit wh ⊥E�
h(λh),∣∣w − wh∣∣1≤ Ch |w|2 ≤ C′h |f |0 existiert. Die Große
aλ0(f,wh) = aλ0(e,w
h)−aλ0(eh,wh) = 0−aλ0(e
h,wh) = (λ0−λh) (eh,wh)0−aλh(eh,wh) = (λ0−λh) (eh,wh)0
lasst sich durch Ch2|wh|0|eh|0 ≤ C′h2 |f |0 abschatzen (vgl. (11.2.15)). Aus
|f |20 = (f, f)0 = aλ0(f, w) = aλ0(f, w − wh) + (λ0 − λh) (eh, wh)0 ≤ C[C′h |f |1 |f |0 + h2 |f |20
]und |f |1 ≤ Ch schließt man |f |0 < C′h2. Ebenso verfahrt man fur |e� − e�h|0.
Ubungsaufgabe 11.2.30 Man formuliere die Voraussetzungen und den Beweis fur die Fehlerabschatzung∥∥u− uh∥∥
L2(Ω)≤ Ch2 |u|2 (u, uh aus Zusatz 11.2.28). Hinweis: Man zerlege u−uh in f1 +f2 mit f1 ⊥E�(λ0)
und f2 ∈ E(λ0).
11.3 Diskretisierung durch Differenzenverfahren
Im Folgenden beschranken wir uns auf den Fall eines Differenzenoperators der Ordnung 2m = 2. DieDifferentialgleichung Lu = f mit homogener Dirichlet-Randbedingung wird wie in den Kapiteln 4 und 5durch die Differenzengleichung Lhuh = fh ersetzt. Die Eigenwertgleichungen Le = λe, L�e� = λe∗ werdendurch
Lheh = λheh, L∗he∗h = λhe
∗h (11.3.1)
diskretisiert. L�h ist die transponierte und komplex konjugierte Matrix zu Lh.
Die generellen Voraussetzungen der folgenden Analyse sind:
V = H10 (Ω), Ω ∈ C0,1 beschrankt, (11.3.2a)
a(u, v) = (Lu, v)0 ist H10 (Ω)-koerziv, (11.3.2b)
|LhRh − RhL|−1←2 ≤ Ch (Konsistenzbedingung). (11.3.2c)
Bedingung (11.3.2c) ist in Abschnitt 9.2.2 diskutiert worden. Weiterhin sei angenommen, dass Lh H1h-koerziv
ist. Fur geeignetes μ ∈ R ist daher
Lμ,h := Lh − μI (I: Einheitsmatrix)
H1h-regular:
(Lμ,hvh, vh)0 ≥ CE |vh|21 fur alle vh. (11.3.2d)
Ferner seiLμ := L− μI H2(Ω)-regular, (11.3.2e)
d.h.∣∣L−1
μ
∣∣2←0
≤ C. Die Beschranktheit von L und Lh lauten
|L|−1←1 ≤ C, |Lh|−1←1 ≤ C. (11.3.2f)

210 11. Eigenwertprobleme elliptischer Operatoren
In (9.2.26a,b) wurden Prolongationen Ph : L2h → L2(R2) und Ph : L2
h → L2(Ω) eingefuhrt. Jetzt wird eineAbbildung Ph : H1
h → H10 (Ω) benotigt:
u(x) :={Phuh(x) falls Kh/2(x) ⊂ Ω,0 sonst,
Phuh(x) := (σxhσ
yhu) (x) (x ∈ Ω),
wobei Kh/2(x) = {y ∈ R2 : ‖x − y‖∞ < h/2}, Ph gemaß (9.2.26b) und σxhσ
yh gemaß (9.2.11) definiert sind.
Man pruft nach, dass Phuh ∈ H10 (Ω) und
|Ph|1←1 ≤ C. (11.3.2g)
Rh und Rh seien wie in (9.2.12a,b) definiert. Sie erfullen
|Rh|0←0 ≤ C, |Rh|1←1 ≤ C, |Rh|0←0 ≤ C. (11.3.2h)
Ubungsaufgabe 11.3.1 Man zeige:
|Rh − Rh|0←1 ≤ Ch, |I −RhPh|0←1 ≤ Ch, |P ∗h −Rh|0←1 ≤ Ch, (11.3.2i)
|I − P ∗hPh|0←1 ≤ Ch, |I − RhPh|0←1 ≤ Ch, |I − R∗hRh|0←1 ≤ Ch (11.3.2j)
Die erste Ungleichung in (11.3.2j) ist aquivalent zu
|(Phuh, Phvh)0 − (uh, vh)0| ≤ Ch |uh|0 |vh|1 . (11.3.2j*)
Hinweis: Ubungsaufgabe 9.2.12 und Lemma 9.2.15.
Lemma 11.3.2 Es gelte (11.3.2a,c,g,h,i). a) Es gilt
limh→0
|u− PhRhu|1 = limh→0
|u− R∗hRhu|1 = 0 fur alle u ∈ H10 (Ω), (11.3.2k)
limh→0
|(Rh −Rh)u|0 = 0 fur alle u ∈ L2(Ω), (11.3.2l)
limh→0
|[Lh,λRh − RhLλ]u|−1 = 0 fur alle u ∈ H10 (Ω), λ ∈ C. (11.3.2m)
b) Ist u ∈ H10 (Ω) und limh→0 |Rhu|0 = 0, so gilt u = 0.
Beweis. a) Der Nachweis von (2k, l,m) folgt demselben Muster, das anhand von (2l) vorgefuhrt wird. Zuε > 0 ist |(Rh − Rh)u| ≤ ε fur h ≤ h(ε) zu zeigen. Da H1
0 (Ω) dicht in L2(Ω) liegt, gibt es u ∈ H10 (Ω)
mit |u− u|0 ≤ ε/[2|Rh −Rh|0←0] , sodass |(Rh −Rh)(u− u)|0 ≤ ε/2. Wegen (11.3.2i) folgt die Abschatzung|(Rh −Rh)u|0 ≤ Ch |u|1 ≤ ε/2 fur h ≤ h(ε) := ε/[2C |u|1]. Zusammen ergibt sich |(Rh −Rh)u|0 ≤ ε.
b)Aus (11.3.2k) schließt man 0 = limh→0(Rhu, P�hu)0 = limh→0(PhRhu, u)0 = (u, u)0, also u = 0.
Ubungsaufgabe 11.3.3 Es sei Λh := I − ∂+x ∂−x − ∂+
y ∂−y und Λ := I − Δ. Man zeige:
|u|1 = (Λu, u)0 , |uh|1 = (Λhuh, uh)0 ,|Lλu|2−1 = (v, Lλu)0 fur u ∈ H1
0 (Ω) und v = Λ−1Lλu ∈ H10 (Ω),
|Lλ,huh|2−1 = (vh, Lλ,huh)0 fur uh ∈ H1h und vh = Λ−1
h Lλ,huh ∈ H1h,
limh→0 |(ΛhRh − RhΛ)u|−1 = 0 fur alle u ∈ H10 (Ω).
Die folgende Analyse ist auf die Eigenschaften der vorliegenden Differenzenverfahren zugeschnitten. Eineabstraktere Theorie, die sowohl fur finite Elemente wie auch Differenzenverfahren anwendbar ist, sollte hiervermieden werden. Man findet derartige Zugange bei Stummel [79] und Chatelin [21].
Die Große ωh(λ) wird jetzt durch
ωh(λ) := inf|uh|1=1
sup|vh|1=1
| (Lλ,huh, vh)0 | = inf|uh|1=1
|Lλ,huh|−1 (11.3.3)
definiert. Wie in Ubungsaufgabe 11.2.4 gilt
ωh(λ) ={
0 falls λ Eigenwert von Lh,1/|Lλ,h|1←−1 sonst. (11.3.3’)
Das Analogon zu Lemma 11.2.7 lautet

11.3 Diskretisierung durch Differenzenverfahren 211
Lemma 11.3.4 K ⊂ C sei kompakt. Es gelte (11.3.2a,b,c,d,f). Dann gibt es von λ ∈ K unabhangige GroßenC > 0 und η(h) → 0 (h→ 0), sodass
ωh(λ) ≥ Cω(λ) − η(h), ω(λ) ≥ Cωh(λ) − η(h) fur alle λ ∈ K, h > 0. (11.3.4)
Beweis. 1) Da K kompakt, ω(λ) stetig und ωh(λ) gleichgradig stetig in λ sind, genugt es, die Ungleichungenlimh→0 ωh(λ) ≥ Cω(λ), ω(λ) ≥ C limh→0 ωh(λ) fur alle λ ∈ K mit C > 0 zu zeigen.
2) Zu λ ∈ K und uh mit |uh|1 = 1 und |Lλ,huh|−1 = ωh(λ) definiere man
u := Phuh, zh := (λ− μ)L−1μ,huh, z := (λ− μ)L−1
μ uh mit μ aus (11.3.2e).
Ohne Beschrankung der Allgemeinheit kann μ /∈ K vorausgesetzt werden. Es ist
|u− z|1 = |Ph (uh − zh) + Phzh − z|1 ≤ |Ph|1←1 |uh − zh|1 + |Phzh − z|1 ,|Phzh − z|1 = |Ph [zh −Rhz]− [I − PhRh] z|1
≤ |Ph|1←1 |λ− μ|∣∣∣L−1
μ,h[RhLμ − Lμ,hRh]L−1μ u+ L−1
μ,h[I − RhPh]uh
∣∣∣1
+ |[I − PhRh] z|1 → 0 fur h→ 0
(vgl. (11.3.2g,j,m)), sodass|uh − zh|1 ≥ C1 |u− z|1 − o(1), C1 > 0. (11.3.5a)
Wie in (11.2.6d) erhalt man|u− z|1 ≥ C2ω(λ) |u|1 , C2 > 0. (11.3.5b)
Ausωh(λ) = |Lλ,huh|−1 = |Lμ,huh + (μ− λ) uh|−1 ≥ (Lμ,huh + (μ− λ) uh, uh)0
≥ − |μ− λ| |uh|20 + (Lμ,huh, uh)0 ≥ −Cμ |uh|20 + CE |uh|21 = −Cμ |uh|20 + CE
mit Cμ := max{|μ− λ| : λ ∈ K} > 0 folgt
|uh|20 ≥ C−1μ [CE − ωh(λ)] .
Entweder ist ωh(λ) ≥ CE/2, woraus sich die Behauptung direkt ergibt, oder ωh(λ) ≤ CE/2 liefert
|uh|0 ≥ C0 = C0 |uh|1 mit C0 :=√CE/ (2Cμ). (11.3.5c)
Wir wollen zeigen, dass es h0 > 0 und CP = CP (C0) gibt, sodass
|uh|1 ≤ CP |Phuh|1 fur alle uh mit |uh|0 ≥ C0 |uh|1 und h ≤ h0 . (11.3.5d)
Die Negation von (11.3.5d) lautet: Es gibt uh mit |uh|1 = 1, |uh|0 ≥ C0 und |Phuh|1 → 0 (h → 0). Aus|RhPhuh|0 ≤ |RhPhuh|1 ≤ C |Phuh|1 → 0 und |uh −RhPhuh|0 ≤ |I −RhPh|0←1 |uh|1 ≤ Ch → 0 folgt|uh|0 → 0 im Widerspruch zu |uh|0 ≥ C0. Also gilt (11.3.5d).
Zusammen mit Lμ,h(uh − zh) = Lλ,huh ergeben (11.3.2d) und (11.3.5a,b,d) die erste Ungleichung in(11.3.4):
ωh(λ) = |Lλ,huh|−1 = |Lμ,h (uh − zh) |−1 ≥ CE |uh − zh|1 ≥ CEC1|u− z|1 − o(1)≥ CEC1C2ω(λ)|u|1 − o(1) ≥ Cω(λ) − o(1) mit C := CEC1C2/CP > 0.
3) Sei ε > 0 beliebig. u ∈ H10 (Ω) mit |uh|1 = 1 kann so gewahlt werden, dass ω(λ) ≥ |Lλu|−1 − ε. Man setze
uh := Rhu. Gemaß Ubungsaufgabe 11.3.3 gilt
|Lλu|2−1 = (v, Lλu)0 fur v := Λ−1Lλu ∈ H10 (Ω), wobei Λ = I − Δ,
|Lλ,huh|2−1 = (vh, Lλ,huh)0 fur vh := Λ−1h Lλ,huh.
Aus

212 11. Eigenwertprobleme elliptischer Operatoren
Rhv − vh = Λ−1h
[ΛhRh − RhΛ
]Λ−1Lλu+ Λ−1
h
[RhLλ − Lλ,hRh
]u→ 0 fur h→ 0,
RhLλu− Lλ,huh =[RhLλ − Lλ,hRh
]u→ 0 fur h→ 0,
(v, Lλu)0 −(Rhv, RhLλu
)0
=([I − R∗hRh
]v, Lλu
)0→ 0 fur h→ 0
(vgl. (11.3.2m), (11.3.2k)) schließt man |Lλ,huh|−1 → |Lλu|−1 und
ω(λ) ≥ |Lλu|−1 − ε ≥ |Lλ,huh|−1 − ε− o(1) ≥ ωh(λ) − ε− o(1) (h→ 0)
fur jedes ε > 0. Somit ist ω(λ) ≥ limh→0ωh(λ) bewiesen.
Folgerung 11.3.5 Unter den Voraussetzungen des Lemmas 11.3.4 gilt: Existiert L−1λ fur alle λ ∈ K, so
gibt es ein h0 > 0 derart, dass Lλ,h fur alle λ ∈ K und h ≤ h0 H10 -regular ist:
sup{∣∣∣L−1
λ,h
∣∣∣1←−1
: λ ∈ K, h ≤ h0
}≤ C.
Beweis. Nach Voraussetzung ist ω(λ) > 0 in K, also max{ω(λ) : λ ∈ K} =: η > 0. Man wahle h0 gemaßLemma 11.3.4 so, dass ωh(λ) ≥ Cω(λ) − 1
2Cη ≥ 12Cη fur h ≤ h0. Dann ist |L−1
λ,h|1→−1 ≤ 2/(Cη) fur alleλ ∈ K, h ≤ h0.
Der Beweis des Satzes 11.2.8 lasst sich ohne Anderung ubertragen und ergibt den
Satz 11.3.6 Es gelte (11.3.2a,b,c,d,f ). Sind λhi (hi → 0) diskrete Eigenwerte der Aufgabe (11.3.1) mitλhi → λ0, so ist λ0 ein Eigenwert von (11.1.2a).
Auch Lemma 11.2.9 und Satz 11.2.10 lassen sich ohne Anderung ubertragen:
Satz 11.3.7 Es gelte (11.3.2a,b,c,d,f). λ0 sei Eigenwert von (11.1.2a). Dann existieren diskrete Eigenwerteλh von (11.3.1) [fur alle h], sodass limh→0 λh = λ0.
Satz 11.3.8 Es gelte (11.3.2a,b,c,d,f). eh seien diskrete Eigenfunktionen mit |eh|1 = 1 zu λh, wobei λh → λ0
(h → 0). Dann existiert eine Teilfolge ehi , sodass Phiehi in H10 (Ω) gegen eine Eigenfunktion 0 �= e ∈ E(λ0)
konvergiert. Ferner gilt |ehi −Rhie|1 → 0.
Beweis. Wegen |Pheh|1 ≤ C (vgl. (11.3.2g)) sind die Funktionen eh := Pheh gleichmaßig beschrankt. H10 (Ω)
ist kompakt in L2(Ω) eingebettet (vgl. (11.3.2a) und Satz 6.4.8a), sodass eine Teilfolge ehi in L2(Ω) gegenein e ∈ L2(Ω) konvergiert:
∣∣ehi − e∣∣0→ 0. Insbesondere gilt auch
|Rhe− eh|0 ≤ |Rh (e− eh) − (RhPh − I) eh|0 → 0 (h = hi → 0).
Abschatzung (11.3.2c) liefert
|Rhz − zh|0 ≤ |Rhz − zh|1 ≤ Ch |e|0 → 0 fur z := (λ0 − μ)L−1λ e, zh := (λ0 − μ)L−1
λ,hRhe.
Aus Lμ,h(zh−eh) = (λ0−μ)(Rhe−eh)+(λh−λ)eh → 0 in H−1h folgt |zh − eh|1 → 0, sodass |Rh(e− z)|0 → 0
(h = hi → 0) resultiert. Lemma 11.3.2b zeigt e = z ∈ H10 (Ω), und e = 0 ist wegen |limRhie|1 = |lim eh|1 = 1
ausgeschlossen.
Satz 11.3.9 Es gelte (11.3.2a,h,c,d,f ). e�h sei Losung der diskreten Eigenwertaufgabe L�
he�h = λhe
�h mit
|e�h|1 = 1, limh→0 λh = λ0. Dann existiert eine Teilfolge e�
hi, sodass Phie
�hi
in H10 (Ω) gegen eine Eigenfunktion
0 �= e� ∈ E�(λ0) konvergiert. Ferner gilt |e�hi
−Rhie�|1 → 0.
Beweisskizze. Der Beweis ist nicht analog zu dem des Satzes 11.3.8, da die Konsistenzbedingung (11.3.2a,m)nicht notwendig die entsprechenden Aussagen fur die adjungierten Operatoren impliziert. Man hat folgendeSchritte durchzufuhren:
1) e�h := Phe�h → e� konvergiert in L2(Ω) fur eine Teilfolge h = hi → 0.
2) Fur z = (λ0 − μ)L�−1μ e� und zh := (λ0 − μ)L�−1
μ,h e�h gilt
z − R∗hzh = (λ0 − μ)L�−1μ
[(e� −R∗he
�h) +
(R∗hL
∗μ,h − L∗μR
∗h
)L�−1
μ,h e�h
].

11.3 Diskretisierung durch Differenzenverfahren 213
Fur jedes v ∈ L2(Ω) ergibt sich
(v, z − R∗hzh
)0
= (λ0 − μ)
{ (L−1
μ v, e� − e�h
)0+
([P ∗h −Rh]L−1
μ v, e�h
)0
+(L−1
μ,h
[Lμ,hRh − RhLμ
]L−1
μ v, e�h
)0
}→ 0
fur h = hi → 0 (vgl. (11.3.2i), (11.3.2c)).3) |zh − e�
h|1→ 0 schließt man aus L�μ,h(zh−e�
h) = (λ0−λh)e�h → 0. Insbesondere gilt (v, R�
hzh−R�he
�h)0→ 0
fur jedes v ∈ L2(Ω).4) (v, R�
he�h −R�
he�h)0 = ([Rh −Rh]v, e�
h)0 → 0 fur jedes v ∈ L2(Ω) (vgl. (11.3.2l)).5) (v,R�
he�h − e�)0 → 0 fur h = hi → 0.
6) Aus 2) bis 5) folgt (v, z − e�)0 = 0, also z = e� ∈ E�(λ0), wobei e� �= 0.
Ubungsaufgabe 11.3.10 Man ubertrage Ubungsaufgabe 11.2.12.
In Lemma 11.2.16 wurde ωh(λ) definiert. Jetzt setze man
Vh := {uh : (uh, e∗h)0 = 0} = {e∗h}
⊥, L∗he
�h = λhe
�h, λh → λ0,
ωh(λ) := inf0�=uh∈Vh
sup0�=vh∈Vh
∣∣(Lλ,huh, vh)0 / (|uh|1 |vh|1)∣∣ . (11.3.6)
Grundvoraussetzung fur das Weitere ist
dimEh(λh) = 1, Eh(λh) = span{eh}, E∗h(λh) = span{e∗h}. (11.3.7)
Dabei ist
Eh(λh) :={uh ∈ H1
h : Lhuh = λhuh
}, E∗h(λh) :=
{uh ∈ H1
h : L∗huh = λhuh
}Aus Ubungsaufgabe 11.3.10 geht hervor, dass (11.3.7) fur h ≤ h0 zutrifft, wenn dimE(λ0) = 1.
Lemma 11.3.11 Es gelte (11.3.2a,b,c,d,f), dimE(λ0) = 1 und (11.2.8). Dann gibt es h0 > 0 und ein vonh ≤ h0 und λ ∈ C unabhangiges C > 0, sodass ωh(λ) ≥ Cωh(λ) fur h ≤ h0. Fur hinreichend kleines ε > 0und h ist ωh(λ) ≥ η > 0 fur alle |λ− λ0| ≤ ε.
Beweis. 1) Es gibt ein C > 0, sodass
|vh + αe∗h|1 ≥ |vh|1 /C fur alle vh ∈ Vh, α ∈ C, h > 0.
Sei zunachst h fixiert. Man uberzeugt sich leicht, dass die Quotientenraumnorm |||vh|||1 := inf{|vh + αe∗h|1 :α ∈ C} und |·|1 zwei Normen auf Vh sind. Wegen der Aquivalenz der Normen auf endlichdimensionalenVektorraumen, ist die Behauptung mit einer eventuell von h abhangigen Konstanten C = C(h) richtig,sodass nur das Verhalten h→ 0 zu untersuchen ist.
Indirekter Beweis: Es sei angenommen, es gabe eine Folge vhi mit hi → 0, |vhi |1 = 1, αi ∈ C, whi :=vhi + αie
�hi
, |whi |1 → 0. Fur eine Teilfolge von {hi} konvergieren
αi → α∗, Phivhi → v∗ und Phie∗hi
→ e∗ �= 0 in L2(Ω), Phiwhi → w∗ := v∗ + α∗e∗ = 0.
Aus0 =
(vhi , e
∗hi
)0
=(vhi ,
[I − P ∗hi
Phi
]e∗hi
)0
+(Phivhi , Phie
∗hi
)0→ (v, e∗)0
schließt man (v�, e�)0 = 0, α� = (w�, e�)0/(e�, e�)0 = 0, v� = 0. Der Widerspruch ergibt sich aus 1 =lim |vhi |1 = lim |whi |1 = 0.
2) Der weitere Beweisgang ist wie zu Lemma 11.2.16.
Lemma 11.3.12 Es gelte (11.3.2a-m), dimE(λ0) = 1 und (11.2.8). 0 �= e ∈ E(λ0) und eh ∈ Eh(λh) lassensich so wahlen, dass |Rhe− eh|1 ≤ C[h+ |λ0 − λh|] fur alle h > 0.

214 11. Eigenwertprobleme elliptischer Operatoren
Beweis. Es ist e = (λ0 − μ)L−1μ e ∈ H2(Ω) ∩ H1
0 (Ω). Sei zh := (λ0 − μ)L−1μ,hRhe. Die Abschatzung (9.2.22)
liefert |Rhe− zh|1 ≤ Ch |e|2 . Fur hinreichend kleine h ist (eh, e�h) �= 0, sodass eh so skaliert werden kann,
dass (eh − zh, e�h)0 = 0. Aus
Lλ,h (eh − zh) = (λh − λ0) Rhe+(λh − μ) (zh−Rhe) = (λh − λ0) Rhe+(λh − μ)[(zh −Rhe) + (Rh − Rh)e
]schließt man |eh − zh|1 ≤ C[|λh − λ0| + h] (vgl. Lemma 11.3.11), da |(Rh − Rh)e|−1 = O(h). Hieraus folgtdie Behauptung.
Lemma 11.3.13 Unter den Voraussetzungen von Lemma 11.3.12 gilt |λh − λ0| ≤ Ch.
Beweis. Man wahle eh, e�h so, dass (Rhe − eh, e
�h)0 = (eh, Rhe
� − e�h)0 = 0. Fur den Rayleigh-Quotienten
λh := (LhRhe,Rhe�)0/(Rhe,Rhe
�)0 gilt dann∣∣∣λh − λh
∣∣∣ ≤ C |Rhe− eh|1 |Rhe� − e�
h|1 ≤ εh [h+ |λh − λ0|] mit εh := C |Rhe� − e�
h|1 .
Aus (11.3.2c,j) schließt man
(LhRhe,Rhe�)0 − (Le, e∗)0 =
([LhRh − RhL
]e,Rhe
�)
0+
(Le,
[R∗hRh − I
]e�
)0
= O(h)
und |λh − λ0| = O(h), sodass |λh − λ0| ≤ Ch+ εh |λh − λ0|. Fur hinreichend kleines h ist εh ≤ 12 (vgl. Satz
11.3.9, Ubungsaufgabe 11.3.10), also |λh − λ0| ≤ 2Ch.Lemmata 11.3.12 und 11.3.13 ergeben
Satz 11.3.14 Es gelte (11.3.2a-m), E(λ0) = span{e} und (11.2.8). Fur alle h > 0 existieren eh ∈ Eh(λh)mit |Rhe− eh|1 ≤ Ch.
Da |Rhe� − e�
h|1 = o(1) oder sogar |Rhe� − e�
h|1 = O(h), erwartet man nach Satz 11.2.19, dass |λ0 − λh| =o(h) bzw. O(h2). Diese Abschatzung ist im Allgemeinen falsch, wie das folgende Gegenbeispiel zeigt.
Beispiel 11.3.15 Die Eigenwertaufgabe −u′′ + u′ = λu in (0, 1) mit u(0) = u(1) = 0 hat die Losungu(x) = exp(x/2) sin(πx). Ein Eigenwert ist λ0 = π2 + 1/4. Man rechnet nach, dass die Diskretisierung−∂−∂+u+ ∂+u = λu den Eigenwert
λh = h−2[2 − cos(πh)
(eΛ
′h + e−Λ′h)− i sin(πh)
(eΛ
′h − e−Λ′h)]
+ h−1[cos(πh)eΛ
′h − 1 + i sin(πh)eΛ′h]
= π2 +14
+1 − 3π2
8h+ O(h2) mit Λ′ :=
log(1 − h)2h
besitzt, sodass |λ0 − λh| nicht besser als O(h) ausfallt.

12Stokes-Gleichungen
12.1 Elliptische Differentialgleichungssysteme
In Beispiel 1.1.11 wurden bereits die Gleichungen von Stokes fur Ω ⊂ R2 angegeben:
−Δu1 + ∂p/∂x1 = f1, (12.1.1a1)−Δu2 + ∂p/∂x2 = f2, (12.1.1a2)
−∂u1/∂x1 − ∂u2/∂x2 = 0. (12.1.1b)
Im Falle von Ω ⊂ R3 ist eine weitere Gleichung −Δu3 + ∂p/∂x3 = f3 hinzuzufugen, und die linke Seite von(12.1.1b) ist durch −∂u3/∂x3 zu erganzen. Eine von der Dimension unabhangige Darstellung erreicht man,wenn man (u1, u2) bzw. (u1, u2, u3) zum Vektor u zusamenfasst:
−Δu + ∇p = f in Ω, (12.1.2a)− div u = 0 in Ω, (12.1.2b)
Dabei ist div der Divergenzoperator
div u =n∑
i=1
∂ui
∂xi.
n ist sowohl die Dimension von Ω ⊂ Rn als auch die Anzahl der Komponenten von u(x) ∈ Rn. Von physikali-schem Interesse ist nur n ≤ 3. In der Stromungsmechanik beschreibt die Stokes-Gleichung die Stromung einesinkompressiblen Mediums bei Vernachlassigung der Tragheitsterme. u beschreibt das Geschwindigkeitsfeld:In x ∈ Rn ist ui(x) die Geschwindigkeit des Mediums in xi-Richtung. Die Funktion p bezeichnet den Druck.
Bisher wurden noch keine Randbedingungen formuliert. Wir beschranken uns im Folgenden auf Dirichlet-Randwerte:
u = 0 auf Γ . (12.1.3)
Sie besagen, dass die Stromung am Rand ruht. Fur p wird keine Randbedingung gegeben. Da mit dem Paar(u, p) auch (u, p+ const) das Stokes-Problem (12.1.2a,b), (12.1.3) lost, erhalt man die
Bemerkung 12.1.1 Durch die Stokes-Gleichung (12.1.2a,b) und die Randbedingungen (12.1.3) ist p nurbis auf eine Konstante bestimmt.
Die Stokes-Gleichungen sind als ein Beispiel fur ein System von Differentialgleichungen ausgewahlt. Esbleibt zu untersuchen, ob Gleichungen (12.1.2a,b) in einem geeignet zu definierendem Sinne elliptisch ist.Zwar sind die Funktionen ui bei vorgegebenen p Losungen der elliptischen Poisson-Gleichungen −Δui =

216 12. Stokes-Gleichungen
fi − ∂p/∂xi, aber fur die ebenfalls zu bestimmende Funktion p findet man in (12.1.2a,b) keine im bisherigenSinne elliptische Gleichung.
Ein allgemeines System von q Differentialgleichungen fur q Funktionen u1, . . . , uq kann man in der Form
q∑j=1
Lij uj = fi in Ω ⊂ Rn (1 ≤ i ≤ q) (12.1.4a)
mit DifferentialoperatorenLij =
∑|α|≤kij
cαDα (1 ≤ i, j ≤ q) (12.1.4b)
schreiben. Die Gleichungen (12.1.4a) werden zu Lu = f zusammengefasst, wobei L die Matrix (Lij) vonDifferentialoperatoren ist und u = (u1, . . . , uq)�, f = (f1, . . . , fq)�. Die Ordnung des Operators Lij isthochstens kij . Zahlen m1, . . . ,mq,m
′j, . . . ,m
′q seien so gewahlt, dass
kij = mi +m′j (1 ≤ i, j ≤ q) . (12.1.5)
Als Hauptteil von Lij definiert man LPij :=
∑|α|=mi+m′
jcαD
α. Das zu Lij gehorende charakteristischePolynom lautet
LPij(ξ;x) :=
∑|α|=mi+m′
j
cα(x)ξα (ξ ∈ Rn, x ∈ Ω)
und bildet die MatrixfunktionLP (ξ;x) =
(LP
ij(ξ;x))
i,j=1,...,q.
Definition 12.1.2 (Agmon-Douglis-Nirenberg [2]) Es gelte (12.1.5) fur mi,m′j. Der Differential-
operator L = (Lij) heißt elliptisch in x ∈ Ω, falls
detLP (ξ;x) �= 0 fur alle 0 �= ξ ∈ Rn. (12.1.6a)
L heißt gleichmaßig elliptisch in Ω, falls ein ε > 0 existiert, sodass
∣∣detLP (ξ;x)∣∣ ≥ ε |ξ|2m fur alle x ∈ Ω, ξ ∈ Rn mit 2m :=
q∑i=1
(mi +m′i). (12.1.6b)
Genauer musste man L elliptisch hinsichtlich der Indizes mi,m′j nennen, da die Definition von LP von
mi,m′j abhangt. Zu diesem Problem sowie wegen einer zusatzlichen Bedingung fur x ∈ Γ, q = 2 vergleiche
man die Originalarbeit Agmon-Douglas-Nirenberg [2]. Eine weitere Diskussion dieses Themas findet man beiCosner [26].
Ubungsaufgabe 12.1.3 Man zeige: a) Die Zahlen mi,m′j sind nicht eindeutig. Erfullen mi und m′j die
Ungleichung (12.1.5), so auch mi − k,m′j + k. Die Definition von LPij ist von k unabhangig.
b) Fur q = 1, d.h. fur den Fall einer einzigen Gleichung erhalt man aus (12.1.6a) die Definitionen 1.2.3abzw. (5.1.3a) zuruck. (12.1.6b) entspricht (5.1.3a’).
c) Fur ein System erster Ordnung (d.h. kij = 1,mi = 1,m′j = 0) ergibt (12.1.6a) die Definition 1.3.2.
Um die Stokes-Gleichungen in der Form (12.1.4a,b) zu schreiben, setzen wir
q := n+ 1, u = (u1, . . . , un, p)� , f = (f1, . . . , fn, 0)� ,
Lii = −Δ, Liq = −Lqi = ∂/∂xi fur 1 ≤ i ≤ n, Lij = 0 sonst.
Die Ordnungen sind kii = 2, kiq = kqi = 1 (i ≤ n), kij = 0 sonst. Die Zahlen
mi = m′i ={
1 fur 1 ≤ i ≤ n = q − 1,0 fur i = q
}erfullen (12.1.5). LP
ij stimmt mit Lij uberein und ist von x unabhangig:
LPii(ξ) = − |ξ|2 , LP
iq(ξ) = −LPqi(ξ) = ξi fur i ≤ n, LP
ij(ξ) = 0 sonst.

12.2 Variationsformulierung 217
Damit ist
∣∣detLP (ξ;x)∣∣ =
∣∣∣∣∣∣∣∣∣det
⎡⎢⎢⎢⎣− |ξ|2 ξ1
. . .− |ξ|2 ξn
−ξ1 . . . −ξn 0
⎤⎥⎥⎥⎦∣∣∣∣∣∣∣∣∣ = |ξ|2m mit 2m = 2n,
sodass (12.1.6b) mit ε = 1 erfullt ist.
Ubungsaufgabe 12.1.4 (Lame-Gleichungen) In der Elastizitatstheorie1 wird die sogenannte Verschie-bungsfunktion u : Ω ⊂ R3 → R3 durch das System von Lame beschrieben:
μΔu + (λ+ μ) graddiv u = f in Ω, u = ϕ auf Γ
(μ, λ > 0). Man zeige, dass dieses System von drei Gleichungen gleichmaßig elliptisch ist, wobei∣∣detLP (ξ)∣∣ = μ2(2μ+ λ) |ξ|6 .
Zur Behandlung der Stokes-Gleichungen werden wir zum nachsten Abschnitt eine Variationsformulierungverwenden. Der Vollstandigkeit halber sei auf folgende Umformung hingewiesen.
Bemerkung 12.1.5 Es sei n = 2 und somit u = (u1, u2). Wegen div u = 0 gibt es eine sogenannteStromfunktion Φ mit u1 = ∂Φ/∂x2, u2 = −∂Φ/∂x1. Einsetzen in Gleichungen (12.1.1a1,a2) ergibt diebiharmonische Gleichung Δ2Φ = ∂f2/∂x1 − ∂f1/∂x2. Die Randbedingung (12.1.3) bedeutet ∇Φ = 0 auf Γ.Dies ist aquivalent zu ∂Φ/∂n = 0 und ∂Φ/∂t = 0 auf Γ, wobei ∂/∂t die Tangentialableitung sei. ∂Φ/∂t = 0impliziert Φ = const auf Γ. Da die Konstante beliebig gewahlt werden kann, setzt man Φ = ∂Φ/∂n = 0 aufΓ.
12.2 Variationsformulierung
12.2.1 Schwache Formulierung der Stokes-Gleichungen
Da u = (u1, . . . , un) eine vektorwertige Funktion ist, fuhren wir
H10(Ω) := H1
0 (Ω) ×H10 (Ω) × . . .×H1
0 (Ω) (n-faches Produkt)
ein. Eine entsprechende Definition gilt fur H−1(Ω), H2(Ω) usw. Die zu H10(Ω) gehorende Norm wird weiterhin
mit |·|1 bezeichnet.Nach Bemerkung 12.1.1 ist die Druckkomponente p des Stokes-Problems nicht eindeutig bestimmt. Um
die Konstante in p = p + const eindeutig festzulegen, normieren wir p durch die Forderung∫Ωpdx = 0.
Deshalb wird im Folgenden p stets zum Unterraum L20(Ω) ⊂ L2(Ω) gehoren:
L20(Ω) :=
{p ∈ L2(Ω) :
∫Ω
p(x)dx = 0}.
Zur Herleitung der schwachen Formulierung gehen wir wie in Abschnitt 7.1 vor und nehmen an, dass u undp klassische Losungen des Stokes-Problems (12.1.2a,b) sind. Multiplikation der i-ten Gleichung in (12.1.2a)mit vi ∈ C∞0 (Ω) und anschließende Integration liefert∫
Ω
fi(x)vi(x)dx =∫
Ω
[−Δui(x) + ∂p(x)/∂xi] vi(x)dx (12.2.1a)
=∫
Ω
[〈∇ui(x),∇vi(x)〉 − p(x)∂vi(x)/∂xi] dx fur vi ∈ C∞0 (Ω)
1Eine detaillierte Beschreibung der verschiedenen Differentialgleichungen in der Elastizitatstheorie findet man in Braess [12,§VI.3].

218 12. Stokes-Gleichungen
mit v = (vi)i=1,...,n . Summation uber i ergibt∫Ω
[〈∇u(x),∇v(x)〉 − p(x) div v(x)] dx =∫
Ω
〈f(x),v(x)〉 dx, (12.2.1a’)
wobei die Abkurzung
〈∇u,∇v〉 :=n∑
i=1
〈∇ui,∇vi〉 :=n∑
i,j=1
∂ui
∂xj
∂vi
∂xj
verwendet wird. Gleichung (12.1.2b) wird mit einem q ∈ L20(Ω) multipliziert und integriert:
−∫
Ω
q(x) div u(x) = 0 fur alle q ∈ L20(Ω). (12.2.1b)
Mit den Bilinearformen
a(u,v) :=∫
Ω
[〈∇u(x),∇v(x)〉 − p(x) div v(x)] dx fur u,v ∈ H10(Ω), (12.2.2a)
b(p,v) := −∫
Ω
p(x) div v(x)dx fur p ∈ L20(Ω), v ∈ H1
0(Ω) (12.2.2b)
erhalten wir die schwache Formulierung des Stokes-Problems durch (12.2.3a-c):
suche u ∈ H10(Ω) und p ∈ L2
0(Ω), sodass (12.2.3a)
a(u,v) + b(p,v) = f(v) :=∫
Ω
〈f(x),v(x)〉 dx fur alle v ∈ H10(Ω), (12.2.3b)
b(q,u) = 0 fur alle q ∈ L20(Ω). (12.2.3c)
In (12.2.3b) ist zunachst “v ∈ H10 (Ω)” durch “v ∈ C∞0 (Ω)” zu ersetzen. Da beide Seiten von (12.2.3b)
stetig von v ∈ H10 (Ω) abhangen und C∞0 (Ω) dicht in H1
0 (Ω) liegt, folgt (12.2.3b) fur alle v ∈ H10 (Ω).
Bemerkung 12.2.1 Eine klassische Losung u ∈ C2(Ω) ∩H10 (Ω), p ∈ C1(Ω) ∩ L2
0(Ω) des Stokes-Problems(12.1.2a,b), (12.1.3) ist auch schwache Losung, d.h. Losung von (12.2.3a-c). Hat umgekehrt (12.2.3a-c)eine Losung mit u ∈ C2(Ω), p ∈ C1(Ω), so ist sie auch klassische Losung der Randwertaufgabe (12.1.2a,b),(12.1.3).
Beweis. a) Die vorangehenden Uberlegungen beweisen den ersten Teil.b) Gleichung (12.2.3c) impliziert div u = 0. Sei i ∈ {1, . . . , n}. In Gleichung (12.2.3b) kann man v mit
vi ∈ C∞0 (Ω), vj = 0 fur j �= i wahlen. Partielle Integration liefert (12.2.1a) zuruck und damit die i-teGleichung aus (12.1.2a).
12.2.2 Sattelpunktprobleme
Die Situation in (12.2.3a-c) ist ein Spezialfall des folgenden Problems. Die Raume H10 (Ω) und L2
0(Ω) in(12.2.3a-c) ersetzen wir durch zwei Hilbert-Raume V und W . Es seien
a(·, ·) : V × V → R eine stetige Bilinearform auf V × V, (12.2.4a)b(·, ·) : W × V → R eine stetige Bilinearform auf W × V, (12.2.4b)f1 ∈ V ′, f2 ∈ W ′. (12.2.4c)
In Verallgemeinerung von (6.5.1) heißt b(·, ·) : W × V → R stetig (oder beschrankt), wenn ein Cb ∈ Rexistiert, sodass
|b(w, v)| ≤ Cb ‖w‖W ‖v‖V fur alle w ∈W, v ∈ V.
Gegenstand dieses Kapitels ist das Problem (12.2.5):
Suche v ∈ V und w ∈ W mit{a(v, x) + b(w, x) = f1(x) fur alle x ∈ V,b(y, v) = f2(y) fur alle y ∈ W.
(12.2.5)

12.2 Variationsformulierung 219
Formal lasst sich (12.2.5) in die bisherige Form
suche u ∈ X mit c(u, z) = f(z) fur alle z ∈ X (12.2.6a)
bringen, wenn man setzt:
X := V ×W,
{c(u, z) := a(v, x) + b(w, x) + b(y, z)f(z) := f1(x) + f2(y)
}fur u =
(v
w
), z =
(x
y
). (12.2.6b)
Ubungsaufgabe 12.2.2 Man zeige: a) c(·, ·) : X ×X → R ist eine stetige Bilinearform.b) Die Probleme (12.2.5) und (12.2.6a,b) sind aquivalent.
Dass die Variationsprobleme (12.2.5) bzw. (12.2.6a) anders als in Kapitel 7 behandelt werden mussen,deutet die folgende Bemerkung an.
Bemerkung 12.2.3 Die Bilinearform c(·, ·) aus (12.2.6b) kann nicht X-elliptisch sein.
Beweis. Es ist c(u, u) = 0 fur alle u =(
0w
).
In Analogie zu (6.5.9) setzen wir
J(v, w) := a(v, v) + 2b(w, v) − 2f1(v) − 2f2(w),
also J(v, w) = c(u, u) − 2f(u) fur u =(
vw
). Fur v ∈ V und w ∈ W ist J(v, w) weder von unten noch von
oben beschrankt. Die Losung v�, w� von (12.2.5) minimiert J daher nicht. Unter geeigneten Bedingungen istv�, w� jedoch ein Sattelpunkt, wie er durch (12.2.7) charakterisiert ist.
Satz 12.2.4 Es gelte (12.2.4a-c). a(·, ·) sei symmetrisch und V-elliptisch. Das Paar v� ∈ V , w� ∈ W istgenau dann eine Losung der Aufgabe (12.2.5), wenn
J(v�, w) ≤ J(v�, w�) ≤ J(v, w�) fur alle w ∈W, v ∈ V. (12.2.7)
Eine weitere, aquivalente Charakterisierung ist
J(v�, w�) = minv∈V
J(v, w�) = maxw∈W
minv∈V
J(v, w). (12.2.8)
Beweis. 1a) v�, w� lose (12.2.5). Wegen der Symmetrie von a(·, ·) ist a(v� − v, v� − v) − 2a(v�, v� − v) =−a(v�, v�) − a(v, v�) + a(v�, v) + a(v, v) = a(v, v) − a(v�, v�). Die eckige Klammer in
J(v, w�) − J(v�, w�) = a(v� − v, v� − v) + 2 [a(v�, v� − v) + b(w�, v� − v) − f1(v� − v)]
verschwindet wegen der ersten Gleichung in (12.2.5). Da a(v� − v, v� − v) > 0 fur alle v� �= v ∈ V , folgt diezweite Ungleichung in (12.2.7). Wie in Satz 6.5.12 beweist man auch die Umkehrung: Ist J(v, w�) fur v = v�
minimal, so erhalt man die erste Gleichung aus (12.2.5) zuruck.1b) Ist v� Losung der zweiten Gleichung in (12.2.5), verschwindet
J(v�, w�) − J(v�, w) = 2 [b(w� − w, v�) − f2(w� − w)]
fur alle w und beweist den ersten Teil von (12.2.7) in der verstarkten Form der Gleichheit J(v�, w) =J(v�, w�). Fur die Umkehrung definiere man w± = w� ± w. Der erste Teil von (12.2.7) impliziert
0 ≤ J(v�, w�) − J(v�, w±) = ±2 [b(w, v�) − f2(w)]
fur beide Vorzeichen, sodass b(w, v�) = f2(w). Da w ∈ W beliebig, ist die zweite Gleichung aus (12.2.5)zuruckgewonnen.
2a) Wir setzenj(w) := min
v∈VJ(v, w).
Gemaß Satz 6.5.12 ist j(w) = J(vw, w), wobei vw ∈ V die Losung der oberen Gleichung in (12.2.5) ist. Sindvw und vw′ die Losungen zu w und w′, so folgt
a(vw − vw′ , x) = F (x) := b(w − w′, x) fur alle x ∈ X.

220 12. Stokes-Gleichungen
Da ‖F‖V ′ ≤ Cb ‖w − w′‖V und ‖vw − vw′‖V ≤ C′ ‖F‖V ′ , erhalt man
‖vw − vw′‖V ≤ C ‖w − w′‖V fur alle w,w′ ∈W. (12.2.9a)
2b) Unter Ausnutzung der Definition von vw durch die obere Gleichung aus (12.2.5) formen wir um:
J(v�, w�) − J(vw, w) = (wegen a(v�, v�) − a(vw , vw) = −2a(vw, vw − v�) + a(vw − v�, vw − v�))= [a(v�, v�) + 2b(w�, v�) − 2f1(v�) − 2f2(w�)] − [a(vw, vw) + 2b(w, vw) − 2f1(vw) − 2f2(w)]= 2 [f1(vw−v�) − b(w, vw−v�) − a(vw, vw−v�)] + a(vw−v�, vw−v�) + 2 [b(w�−w, v�) − f2(w�−w)]= a(vw − v�, vw − v�) + 2 [b(w� − w, v�) − f2(w� − w)] . (12.2.9b)
2c) Sei v�, w� eine Losung von (12.2.5). Wegen der zweiten Gleichung aus (12.2.5) verschwindet die eckigeKlammer in (12.2.9b), und es ist
J(v�, w�) = J(vw , w) + a(vw − v�, vw − v�) ≥ J(vw, w) = j(w).
Die obere Gleichung in (12.2.5) beweist vw = v�, sodass
J(v�, w�) = j(w�) = maxw∈W
j(w), (12.2.9c)
d.h. (12.2.8) gilt.2d) Sei nun v�, w� eine Losung von (12.2.8). Setzt man in (12.2.9b) w = w�, vw = vw , ergibt sich aus
J(v�, w�) = j(w�), dass v� = vw . Damit hangt a(vw − v�, vw − v�) = a(vw − vw , vw − vw), quadratischvon ‖w − w�‖V ab (vgl. (12.2.9a)). Die Variation uber w := w� − λy (λ ∈ R, y ∈W beliebig) liefert
0 =ddλ
j(w� − λy)|λ=0 = 2 [b(y, v�) − f2(y)] ,
sodass die untere Gleichung in (12.2.5) bewiesen ist. Die obere Gleichung aus (12.2.5) ist bereits mit v� = vw
gezeigt.
12.2.3 Existenz und Eindeutigkeit der Losung eines Sattelpunktproblems
Um das Sattelpunktproblem (12.2.5) etwas durchsichtiger zu machen, fuhren wir die zu den Bilinearformengehorenden Operatoren ein:
A ∈ L(V, V ′) mit a(v, x) = 〈Av, x〉V ′×V fur alle v, x ∈ V, (12.2.10a)
B ∈ L(W,V ′), B∗ ∈ L(V,W ′) mit b(w, x) = 〈Bw, x〉V ′×V = 〈w,B∗x〉W×W ′ , (12.2.10b)
C ∈ L(X,X ′) mit c(u, z) = 〈Cu, z〉X′×X fur alle u, z ∈ X, (12.2.10c)
Damit hat Aufgabe (12.2.6a,b) die Gestalt Cu = f , wahrend sich (12.2.5) als
Av +Bw = f1, (12.2.11a)B∗v = f2 (12.2.11b)
schreiben lasst. Nimmt man die Existenz von A−1 ∈ L(V ′, V ) an, kann man (12.2.11a) nach v auflosen:
v = A−1 (f1 −Bw) (12.2.12a)
und in (12.2.11b) einsetzen:B∗A−1Bw = B∗A−1f1 − f2. (12.2.12b)
Die Invertierbarkeit von A ist fur die Losbarkeit des Sattelpunktproblems keineswegs notwendig (die genaueBedingung wird in Satz 12.2.7 diskutiert). Sie vereinfacht jedoch die Analyse und ist im Falle des Stokes-Problems gegeben.

12.2 Variationsformulierung 221
Bemerkung 12.2.5 a) Unter den Voraussetzungen
A−1 ∈ L(V ′, V ), B∗A−1B ∈ L(W ′,W ) (12.2.13)
sind das Sattelpunktproblem (12.2.5) bzw. die Gleichungen (12.2.11a,b) eindeutig losbar.b) Eine notwendige Bedingung fur die Existenz von (B�A−1B)−1 ist
B ∈ L(W,V ′) ist injektiv. (12.2.14)
Beweis. a) Unter der Voraussetzung (B�A−1B)−1 ∈ L(W ′,W ) ist (12.2.12b) eindeutig nach w auflosbar,und (12.2.12a) ergibt v.
b) Die Injektivitat von B�A−1B impliziert (12.2.14).Achtung. Im Allgemeinen ist B : W → V ′ nicht bijektiv, sodass eine Darstellung von (B�A−1B)−1 als
B−1AB�−1 nicht moglich ist.
Anhand der 3 × 3-Matrix C =[
A BB� 0
]mit A =
[1 −1
−1 1
]und B =
[11
]sieht man, dass ein
System der Form (12.2.11a,b) auch bei singularer Matrix A auflosbar sein kann. Deshalb ist die VoraussetzungA−1 ∈ L(V ′, V ) nicht notwendig. Eine genauere Betrachtung benutzt den Unterraum
V0 := Kern(B∗) = {v ∈ V : b(y, v) = 0 fur alle y ∈W} ⊂ V, (12.2.15)
der, wie schon vermerkt ist, im Allgemeinen nicht trivial ist. Der Kern einer stetigen Abbildung ist abge-schlossen, sodass sich V nach Lemma 6.1.17 als Summe von Orthogonalraumen darstellen lasst:
V = V0 ⊕ V⊥ mit V⊥ := (V0)⊥. (12.2.16a)
Ubungsaufgabe 12.2.6 Es gelte (12.2.16a). Man zeige: a) Der Dualraum V ′ lasst sich darstellen als
V ′ = V ′0 ⊕ V ′⊥ (12.2.16b)
wobei
V ′0 := {v′ ∈ V ′ : v′(v) = 0 fur alle v ∈ V⊥} , V ′⊥ := {v′ ∈ V ′ : v′(v) = 0 fur alle v ∈ V0} . (12.2.16c)
Als Norm auf V ′0 und V ′⊥ wird ‖·‖V ′ verwendet.b) Der Riesz-Isomorphismus JV : V → V ′ bildet V0 auf V ′0 und V⊥ auf V ′⊥ ab.c) V ′0 und V ′⊥ sind Orthogonalraume bezuglich der Dualnorm ‖·‖V ′ .d) Es gilt
‖v′‖2V ′ = ‖v′0‖
2V ′ + ‖v′⊥‖
2V ′ fur alle v′ = v′0 + v′⊥ ∈ V ′, wobei v′0 ∈ V ′0 , v
′⊥ ∈ V ′⊥ . (12.2.16d)
Die Zerlegungen (12.2.16a,b) von V und V ′ definieren eine Blockzerlegung des Operators A:
A =[A00 A0⊥A⊥0 A⊥⊥
], mit
{A00 ∈ L(V0, V
′0), A0⊥ ∈ L(V⊥, V ′0),
A⊥0 ∈ L(V0, V′⊥), A⊥⊥ ∈ L(V⊥, V ′⊥).
Dabei ist zum Beispiel A00 wie folgt definiert:
A00v0 = v′0 fur v0 ∈ V0, falls Av0 = v′0 + v′⊥, v′0 ∈ V ′0 , v
′⊥ ∈ V ′⊥ .
Die entsprechende Zerlegung von B� in (B�0 , B
�⊥) schreiben wir als (0, B�), da B�
0 = 0 nach Definition vonV0. Umgekehrt gilt Bild(B) ⊂ V ′⊥, sodass B =
(0B
). Aus dem System (12.2.11a,b) wird daher
A00v0 + A0⊥v⊥ = f10 , (12.2.17a)A⊥0v0 +A⊥⊥v⊥ +Bw = f1⊥ , (12.2.17b)
B∗v⊥ = f2 , (12.2.17c)
wobei v = v0 + v⊥, v0 ∈ V0, v⊥ ∈ V⊥, f1 = f10 + f1⊥, f10 ∈ V ′0 , f1⊥ ∈ V ′⊥.

222 12. Stokes-Gleichungen
Satz 12.2.7 Es gelte (12.2.4a-c). V0 sei durch (12.2.15) definiert. Notwendig und hinreichend fur die ein-deutige Losbarkeit des Sattelpunktproblems (12.2.5) fur alle f1 ∈ V ′ ist die Existenz der Inversen
A−100 ∈ L(V ′0 , V0) und B−1 ∈ L(V ′⊥,W ). (12.2.18)
Beweis. 1) (12.2.17a-c) stellt ein gestaffeltes Gleichungssystem dar: (12.2.18) impliziert B�−1 = (B−1)� ∈L(W ′, V⊥), sodass man (12.2.17c) nach v⊥ = B�−1f2 auflosen kann. v0 ∈ V0 erhalt man aus (12.2.17a):v0 = A−1
00 (f10 −A0⊥v⊥). Schließlich ergibt sich w aus (12.2.17b).2) Um zu zeigen, dass (12.2.18) notwendig ist, wahlen wir f10 ∈ V ′0 beliebig, f1⊥ = 0 und f2 = 0. Nach
Voraussetzung existiert hierzu eine Losung (v0, v⊥, w) ∈ V0 × V⊥ ×W . B�v⊥ = 0 impliziert v⊥ ∈ V0, sodassv⊥ = 0 wegen V0 ∩ V⊥ = {0}. Somit hat A00v0 = f10 fur jedes f10 ∈ V ′0 eine eindeutige Losung v0 ∈ V0.Also ist A00 : V0 → V ′0 bijektiv und beschrankt, und Satz 6.1.13 zeigt, dass A−1
00 ∈ L(V ′0 , V0). Wahlt manf1⊥ ∈ V ′⊥ beliebig und f10 = 0, f2 = 0, folgert man v⊥ = 0 und v0 = 0, sodass Bw = f1⊥ eine eindeutigeLosung w ∈ W besitzt. Wie fur A00 schließt man, dass auch B−1 ∈ L(V ′⊥,W ).
Die Formulierung der Bedingungen (12.2.18) mit Hilfe der Bilinearformen ergibt die Babuska-Brezzi-Bedingungen:
infv0∈V0 mit ‖v0‖V =1
supx0∈V0 mit ‖x0‖V =1
|a(v0, x0)| ≥ α > 0, (12.2.19a)
supx0∈V0 mit ‖x0‖V =1
|a(x0, v0)| > 0 fur alle 0 �= v0 ∈ V0, (12.2.19b)
infw∈W mit ‖w‖W =1
supx∈V mit ‖v‖V =1
|b(w, x)| ≥ β > 0. (12.2.19c)
Ubungsaufgabe 12.2.8 Man zeige: (12.2.19a) und (12.2.19c) sind jeweils aquivalent zu
supx0∈V0 mit ‖x0‖V =1
|a(v0, x0)| ≥ α‖v0‖V fur alle v0 ∈ V0, (12.2.19a’)
supx∈V mit ‖v‖V =1
|b(w, x)| ≥ β‖w‖W fur alle w ∈W. (12.2.19c’)
Lemma 12.2.9 Es gelte (12.2.4a,b). V0 sei durch (12.2.15) definiert. Dann sind die Bedingungen (12.2.18)und (12.2.19a-c) aquivalent. Dabei gilt ‖A−1
00 ‖V0←V ′0≤ 1/α, ‖B−1‖W←V ′
⊥ ≤ 1/β.
Beweis. Wegen (12.2.16b) und b(w, x) = 0 fur x ∈ V0 kann (12.2.19c) in der Form
infw∈W mit ‖w‖W =1
supx∈V⊥ mit ‖v‖V =1
|b(w, x)| ≥ β > 0 (12.2.19d)
geschrieben werden. Fur 0 �= x ∈ V⊥ gilt x �∈ V0, daher nach (12.2.15):
supw∈W mit ‖w‖W =1
|b(w, x)| > 0 fur alle 0 �= x ∈ V⊥ . (12.2.19e)
Wie im Beweis des Lemmas 6.5.3 ergibt sich die Aquivalenz von (12.2.19a,b) mit A−100 ∈ L(V ′0 , V0) und von
(12.2.19d,e) mit B−1 ∈ L(V ′⊥,W ).
Zusatz 12.2.10 a) Die Bedingung (12.2.19b) erubrigt sich, falls a(·, ·) auf V0 × V0 symmetrisch ist oderLemma 6.5.17 zutrifft.
b) Jede der folgenden Bedingungen ist hinreichend fur (12.2.19a,b) und damit auch fur A−100 ∈ L(V ′0 , V0):
a(·, ·) : V0 × V0 → R ist V0-elliptisch: a(v0, v0) ≥ α‖v0‖2V fur alle v0 ∈ V0 , (12.2.20a)
a(·, ·) : V × V → R ist V − elliptisch. (12.2.20b)
Beweis. a) Wie in Lemma 6.5.17. b) (12.2.20b) impliziert (12.2.20a). (12.2.20a) ergibt (12.2.19a,b).
Ubungsaufgabe 12.2.11 Man zeige: Unter der Voraussetzung (12.2.4a-c) ist (12.2.18) auch aquivalentzur Existenz von C−1 ∈ L(X ′, X) (vgl. (12.2.10c)). Man gebe eine Schranke fur ‖C−1‖X←X′ mit Hilfe von‖A−1
00 ‖V0←V ′0, ‖A‖V ′←V ′ und ‖B−1‖W←V ′
⊥ an.

12.2 Variationsformulierung 223
12.2.4 Losbarkeit und Regularitat des Stokes-Problems
Die Bedingungen (12.2.19a,b) (d.h. A−100 ∈ L(V ′0 , V0)) sind fur das Stokes-Problem leicht erfullbar:
Lemma 12.2.12 Ω sei beschrankt. Dann erfullen die Formen (12.2.2a,b), die das Stokes-Problem be-schreiben, die Bedingungen (12.2.4a,b) und (12.2.19a,b).
Beweis. (12.2.4a,b) ist offensichtlich. Nach Beispiel 7.2.10 ist∫Ω〈∇u,∇v〉dx H1
0 (Ω)-elliptisch. Hieraus ergibtsich die H1
0(Ω)-Elliptizitat von a(·, ·). Korollar 12.2.10b beweist (12.2.19a,b).Es bleibt die Bedingung (12.2.19c) zu beweisen, die fur das Stokes-Problem die Gestalt
supu∈H1
0(Ω) mit |u|1=1
∣∣∣∣∫Ω
w(x) div u(x)dx∣∣∣∣ ≥ β|w|0 fur alle w ∈ L2
0(Ω) (12.2.21)
oder die aquivalente Form
‖∇w‖H−1(Ω) ≥ β ‖w‖L2(Ω) fur alle w ∈ L20(Ω) (12.2.21’)
annimmt.
Lemma 12.2.13 Hinreichend und notwendig fur (12.2.21) ist, dass fur jedes w ∈ L20(Ω) ein u ∈ H1
0(Ω)existiert, sodass
w = div u, |u|1 ≤ 1β|w|0 . (12.2.21”)
Beweis. 1)Zu w ∈ L20(Ω) wahle u mit (12.2.21”) und setze u := u/ |u|1. Die linke Seite in (12.2.21) ist
≥∫Ωw(x) div u(x)dx = |w|20 / |u|1 ≥ β |w|0.
2) Gilt (12.2.21), so folgert man wie in Abschnitt 12.2.3 die Bijektivitat von B� : V⊥ → W mit‖B�−1‖V⊥←W ≤ 1/β. Daher erfullt u := B�−1w die Bedingung (12.2.21”).
Necas [65] beweist den
Satz 12.2.14 Bedingung (12.2.21) ist erfullt, falls Ω ∈ C0,1 beschrankt ist. Unter dieser Voraussetzung hatdamit die Stokes-Aufgabe
−Δu+ ∇p = f, − divu = g in Ω, u = 0 auf Γ (12.2.22)
fur f ∈ H−1(Ω) und g ∈ L20(Ω) eine eindeutige Losung (u, p) ∈ H1
0(Ω) × L20(Ω) mit
|u|1 + |p|0 ≤ CΩ
[|f |−1 + |g|0
]. (12.2.23a)
Bemerkung 12.2.15 Unter den Voraussetzungen, dass n = 2 und dass Ω ∈ C2 ein beschranktes Gebiet ist,kann der Existenzbeweis wie folgt gefuhrt werden.
Beweis. Es ist (12.2.21”) nachzuweisen. Zu w ∈ L20(Ω) lose −Δϕ = w in Ω, ϕ = 0 auf Γ. Satz 9.1.20 zeigt
ϕ ∈ H2(Ω). Da ∇ϕ ∈ H1(Ω) und �n(x) ∈ C1(Γ), folgt g := ∂ϕ/∂n ∈ H1/2(Γ) (vgl. Satz 6.2.41a). Aus(3.4.2) schließt man
∫ΓgdΓ =
∫Ωwdx = 0, da w ∈ L2
0(Ω). Integration von g uber Γ liefert G ∈ H3/2(Γ) mit∂G/∂t = g, wobei ∂/∂t die Tangentialableitung ist. Es existiert eine Funktion ψ ∈ H2(Ω) mit ψ = G und∂ψ/∂n = 0 auf Γ und |Ψ|2 ≤ C |G|3/2 ≤ C′ |g|1/2 ≤ C′′ |ϕ|2 ≤ C′′′ |w|0. Wir setzen
u1 := −ϕx − ψy, u2 := −ϕy + ψx .
Offenbar gilt u1, u2 ∈ H1(Ω). Die Normalenrichtung in x ∈ Γ sei �n(x) = (n1(x), n2(x))�. Die Tangential-richtung ist daher �t(x) := (n2(x),−n1(x))�. Fur u = (u1, u2)� erhalt man
〈u, �n〉 = −ϕxn1 − ψyn1 − ϕyn2 + ψxn2 = −∂ϕ/∂n+ ∂ψ/∂t = −g + ∂G/∂t = 0,⟨u,�t
⟩= −ϕxn2 − ψyn2 − ϕyn1 + ψxn1 = −∂ϕ/∂t− ∂ψ/∂n = 0,
denn ϕ = 0 auf Γ impliziert ∂ϕ/∂t = 0, wahrend ∂ψ/∂n = 0 nach Definition gilt. 〈u, �n〉 = 〈u,�t〉 = 0 ergibtu = 0 auf Γ, sodass u = (u1, u2)� ∈ H1
0(Ω) bewiesen ist. Man verifiziert, dass
div u = ∂u1/∂x+ ∂u2/∂y = (−ϕxx − ψyx) + (−ϕyy + ψxy) = −Δϕ = w
mit |u|1 ≤ |ϕ|2 + |ψ|2 ≤ C |w|0 .

224 12. Stokes-Gleichungen
ε
+10−1
Ω
}ε
Abb. 12.2.1. Gebiet Ωε
Der vorgefuhrte Beweis benutzt die H2-Regularitat des Poisson-Problemsund benotigt entsprechende Voraussetzungen an Ω. Auch Satz 12.2.14 setztΩ ∈ C0,1 voraus. Da die Poisson-Gleichung −Δu = f fur jedes Gebiet Ω, dasim Kreis KR(0) oder auch nur im Streifen {x ∈ Rn : |x1| < R} enthalten ist,losbar ist und die Ungleichung |u|1 ≤ CR |f |−1 ergibt, mag man vermuten, dassein ahnliches Resultat fur das Stokes-Problem zutrifft.
Beispiel 12.2.16 (Gegenbeispiel) Fur ε ∈ (0, 1) sei das Gebiet Ωε durch{(x, y) : −1 < x < 1, 0 < y < ε + (1 − ε) |x|} beschrieben (vgl. Abbildung12.2.1). Alle Ωε ∈ C0,1 liegen im Rechteck (−1, 1) × (0, 1). Trotzdem gibt es kein β > 0, sodass (12.2.21”)fur alle ε > 0, w ∈ L2(Ωε) gilt.
Beweis. Wir wahlen w ∈ L20(Ωε) als w(x, y) = 1 fur x > 0, w(x, y) = −1 fur x ≤ 0. Ungleichung (12.2.21”)
gelte fur Ωε mit βε > 0. u ∈ H10(Ωε) mit |u|1 ≤ |w|0 /βε sei gemaß Lemma 12.2.13 gewahlt. Wir setzen u
durch u = 0 auf R2 fort. Fur die Beschrankung auf x = 0 gilt nach Satz 6.2.29
‖u1(0, ·)‖L2(R) ≤ ‖u1(0, ·)‖H1/2(R) ≤ C |u|1 ≤ C |w|0 /βε ≤ 2C/βε.
Sei χ(y) = 1 fur 0 < y < ε und χ(y) = 0 sonst. Da u1(0, y) = u1(0, y)χ(y) und |χ|0 =√ε, hat man∣∣∣∣∫ ε
0
u1(0, y)dy∣∣∣∣ =
∣∣∣∣∫Ru1(0, y)χ(y)dy
∣∣∣∣ ≤ |u1(0, ·)|0 |χ|0 ≤ 2C√ε/βε.
Seien Ω+ε = {(x, y) ∈ Ωε : x > 0} und γ := {(x, y) : x = 0, 0 < y < ε} = ∂Ω+
ε \∂Ωε. Wegen w = 1 in Ω+ε und
auf Grund der Eigenschaft div u = w ist
12≤
∫Ω+
ε
|w(x)|2 dx =∫
Ω+ε
w div udx =∫
Ω+ε
div udx =∫
γ
〈u, �n〉dΓ = −∫
γ
u1dΓ = −∫ ε
0
u1(0, y)dy.
Die beiden letzten Ungleichungen ergeben 1/2 ≤ 2C√ε/βε, woraus man schließt, dass βε nicht unabhangig
von ε nach unten durch ein β0 > 0 beschrankt sein kann.
Ubungsaufgabe 12.2.17 Man konstruiere ein im Streifen R×(0, 1) gelegenes Gebiet Ω, in dem die Stokes-Gleichungen nicht losbar sind. Hinweis: Man setze die Gebiete Ω1/ν (ν ∈ N) aus Abbildung 12.2.1 aneinander.
Ebenso wie fur skalare Differentialgleichungen erhalt man hohere Regularitat der Stokes-Losung u, p, fallsmehr als f ∈ H−1(Ω) vorausgesetzt wird.
Satz 12.2.18 Ω sei beschrankt und hinreichend glatt. u und p seien die (schwache) Losung des Stokes-Problems (12.2.22) mit f ∈ Hk(Ω), g ∈ Hk+1(Ω) ∩ L2
0(Ω) fur ein k ∈ N0. Dann gilt u ∈ Hk+2(Ω) ∩H10 (Ω),
p ∈ Hk+1(Ω) ∩ L20(Ω), und es gibt ein nur von Ω abhangiges C, sodass
|u|k+2 + |p|k+1 ≤ C[|f |k + |g|k+1
]. (12.2.23b)
Beweis. Vgl. Ladyzenskaja [55, Kap. III, §5].In Analogie zu Satz 9.1.26 reicht es aus, die Konvexitat von Ω vorauszusetzen, um u ∈ H2(Ω) und
p ∈ H1(Ω) aus f ∈ L2(Ω) zu erhalten.
Satz 12.2.19 (Kellogg-Osborn [50]) Ω ⊂ R2 sei ein konvexes Polygongebiet. Ist f ∈ L2(Ω), so besitztdie Stokes-Gleichung (12.1.2a,b) eine eindeutige Losung u ∈ H2(Ω) ∩ H1
0(Ω), p ∈ H1(Ω) ∩ L20(Ω), die der
Abschatzung|u|2 + |p|1 ≤ C |f |0
genugen. Fur das allgemeinere Problem (12.2.22) mit g �= 0 erfullt die Losung
|u|2 + |p|1 ≤ C[‖f‖L2(Ω) + ‖g‖H1
δ(Ω)
],
wenn f ∈ L2(Ω) und g ∈ L20(Ω) ∩ H1
δ (Ω). Dabei ist H1δ (Ω) der Unterraum von H1(Ω) mit der folgenden
(starkeren) Norm:
‖g‖H1δ (Ω) :=
√ ∑|α|=1
‖Dαg‖2L2(Ω) + ‖δ−1g‖2
L2(Ω) mit δ(x) := min{|x − e| : e ∈ Γ Ecken des Polynoms Ω}.

12.2 Variationsformulierung 225
12.2.5 Eine V0-elliptische Variationsformulierung der Stokes-Gleichung
V0 ⊂ H10(Ω) ist in (12.2.15) durch V0 := {u ∈ H1
0(Ω) : div u = 0} definiert worden. Als Kern der AbbildungB� = − div ∈ L(H1
0(Ω), L20(Ω)) ist V0 ein abgeschlossener Unterraum von H1
0(Ω), also wieder ein Hilbert-Raum zur gleichen Norm |·|1, Im Folgenden untersuchen wir die Aufgabe
suche u ∈ V0 mit a(u, v) = f(v) fur alle v ∈ V0 , (12.2.24)
wobei a(u, v) :=∫Ω〈∇u(x),∇v(x)〉dx. Aufgabe (12.2.24) hat die gleiche Form wie die schwache Formulierung
der Poisson-Gleichungen −Δui = fi (i = 1, . . . , n), nur ist hier H10(Ω) durch V0 ersetzt.
Lemma 12.2.20 Ω sei ein beschranktes Gebiet (oder sei in einer Richtung beschrankt; vgl. Ubungsaufgabe6.2.13b). Die Form a(·, ·) ist V0-elliptisch. Die Konstante CE > 0 in a(u, u) ≥ CE |u|21 hangt nur vomDurchmesser von Ω ab. Insbesondere hat Aufgabe (12.2.24) fur f ∈ V ′0 eine eindeutige Losung u ∈ V0 mit|u|1 ≤ C−1
E |f |V ′0.
Beweis. Die H10 (Ω)-Elliptizitat von a(·, ·)(vgl. Lemma 12.2.12) ubertragt sich auf V0 ⊂ H1
0 (Ω) (vgl.Ubungsaufgabe 6.5.6a). Hieraus ergeben sich die ubrigen Aussagen (vgl. Satz 6.5.9).
Satz 12.2.21 Ω ∈ C0,1 sei ein beschranktes Gebiet. Es gelte f ∈ H−1(Ω). Dann stimmt die Losung u ∈ V0
der Aufgabe (12.2.24) mit der Losungskomponente u der gemischten Formulierung (12.1.3) uberein.
Beweis. V0 und V⊥ = (V0)⊥ seien wie in (12.2.16a). Gemaß Ubungsaufgabe 12.2.6 lasst sich f ∈ H−1(Ω) so
aufspalten, dass
f = f0 + f⊥ , f0 ∈ V ′0 , f⊥ ∈ V ′, f0(v⊥) = 0 fur v⊥ ∈ V⊥ , f⊥(v) = 0 fur v ∈ V0 .
In (12.2.24) kann f(v) durch f0(v) ersetzt werden. u ∈ V0 ⊂ H10(Ω) ergibt −Δu ∈ H−1(Ω). Der zu V ′⊥
gehorende Teil von −Δu ist g⊥ ∈ V ′⊥ mit
g⊥(v⊥) := a(u, v⊥) fur alle v⊥ ∈ V⊥ = (V0)⊥.
Satz 12.2.14 beweist die Bedingung (12.2.21’), die die Bijektivitat von B : L20(Ω) → V ′⊥ fur B = ∇ nach sich
zieht (vgl. Lemma 12.2.13). p := B−1(f⊥ − g⊥) erfullt definitionsgemaß
b(p, v⊥) = 〈Bp, v⊥〉H−1(Ω)×H−10 (Ω) = f⊥(v⊥) − g⊥(v⊥) = f⊥(v⊥) − a(u, v⊥) fur alle v⊥ ∈ V⊥ .
Da div v0 = 0 fur v0 ∈ V0, folgt ferner
b(p, v0) = 0 fur alle v0 ∈ V0 .
Fur beliebiges v ∈ H10(Ω), das in v = v0 + v⊥ mit v0 ∈ V0 und v⊥ ∈ V⊥ zerlegt sei, hat man wegen (12.2.24):
b(p, v) = b(p, v0) + b(p, v⊥) = f⊥(v⊥) − a(u, v⊥) = f⊥(v⊥) − a(u, v) + a(u, v0)= f(v⊥) − a(u, v) + f(v0) = f(v) − a(u, v).
Da auch b(w, u) = 0 fur alle w ∈ L20(Ω) wegen u ∈ V0, erfullen u und p die Variationsformulierung (12.2.3a-c)
des Stokes-Problems.Man beachte, dass Aufgabe (12.2.24) fur alle beschrankten Gebiete losbar ist, obwohl Aufgabe (12.2.3a-c)
empfindlicher von Ω abhangt (vgl. Beispiel 12.2.16). Satz 12.2.21 zeigt, dass nur die Komponente p einegebietsabhangige Schranke |p|0 ≤ CΩ |f |−1 besitzt, wahrend |u|1 ≤ C |f0|−1 ≤ C |f |−1 fur alle Ω ⊂ KR(0)gilt.
Die Variationsaufgabe (12.2.24) ist insofern nicht aquivalent zum Stokes-Problem, als zum Beispiel fur Ωaus Ubungsaufgabe 12.2.17 die Stokes-Gleichungen nicht losbar sind, wogegen Aufgabe (12.2.24) sehr wohleine Losung besitzt.
Die ursprungliche Formulierung (12.2.3a-c) kann aufgefasst werden als die Gleichung (12.2.24), bei derman die “Nebenbedingung” div u = 0 mit Hilfe der Lagrange-Funktion p einfuhrt (vgl. Abschnitt 8.3.6).

226 12. Stokes-Gleichungen
12.3 Gemischte Finite-Element-Methode fur das Stokes-Problem
12.3.1 Finite-Element-Diskretisierung eines Sattelpunktproblems
Eine ubliche Ritz-Galerkin-Diskretisierung lage vor, wenn man in der Variationsformulierung (12.2.24) denRaum V0 durch einen endlich-dimensionalen Unterraum Vh ⊂ V0 ersetzen wurde. Dies ist aber nicht soeinfach realisierbar.
Ubungsaufgabe 12.3.1 Das Quadrat Ω = (0, 1)×(0, 1) sei wie in den Abbildungen 8.3.2, 8.3.5a regelmaßigtrianguliert bzw. in Gitterquadrate zerlegt. V (1)
h ⊂ H10 (Ω) sei der Raum der stuckweise linearen Dreiecks-
elemente (vgl. (8.3.8)) bzw. der bilinearen Elemente (vgl. (8.3.12b)). Den entsprechenden Unterraum fur dasStokes-Problem definiere man als Vh := {u = (u1, u2) : u1, u2 ∈ V
(1)h und div u = 0} ⊂ V0. Man zeige: Vh
enthalt nur die Nullfunktion.
Daher orientiert sich das weitere Vorgehen an der schwachen Formulierung (12.2.3a-c). Der RaumX = V ×W wird durch Xh = Vh ×Wh ersetzt. Das diskrete Problem
suche vh ∈ Vh und wh ∈Wh mit{a(vh, x) + b(wh, x) = f1(x) fur alle x ∈ Vh,b(y, vh) = f2(y) fur alle y ∈Wh.
(12.3.1)
nennt man ein gemischtes Ritz-Galerkin-Problem [bzw. eine gemischte Finite-Element-Aufgabe, wenn Vh
und Wh aus finiten Elementen gebildet werden]. Der Formulierung (12.2.6a,b) entspricht die zu (12.3.1)aquivalente Schreibweise:
suche xh ∈ Xh mit c(xh, z) = f(z) fur alle z ∈ Xh. (12.3.1’)
Im Falle der Stokes-Gleichungen liefert (12.2.3a-c) die gewunschte Losung, die die Nebenbedingungdiv u = 0 erfullt. Die Finite-Element-Losung von (12.3.1) genugt dagegen der Bedingung div uh = 0 im All-gemeinen nicht. Man kann vh aus (12.3.1) als Losung einer nichtkonformen Finite-Element-Diskretisierungvon (12.2.24) ansehen, wie die folgende Ubung zeigt.
Ubungsaufgabe 12.3.2 Sei f2 = 0 in der unteren Gleichung von (12.3.1). Ferner sei V0,h := {x ∈ Vh :b(y, x) = 0 fur alle y ∈W} gesetzt. Man zeige: Jede Losung vh aus (12.3.1) ist auch Losung von
suche vh ∈ V0,h mit a(vh, x) = f1(x) fur alle x ∈ V0,h . (12.3.2)
Da im Allgemeinen V0,h �⊂ V0 (vgl. (12.2.15)), ist (12.3.2) eine nichtkonforme Diskretisierung von (12.2.24).Seien {bV1 , . . . , bVNV,h
} und {bW1 , . . . , bWNW,h} geeignete Basen von Vh und Wh, wobei
NV,h := dimVh, NW,h := dimWh. (12.3.3a)
Die Koeffizienten von v ∈ Vh und w ∈Wh seien v und w:
v = PV v :=NV,h∑i=1
vibVi , w = PW w :=
NW,h∑i=1
wibWi . (12.3.3b)
Wie in Abschnitt 8.1 beweist man den
Satz 12.3.3 Das Variationsproblem (12.3.1) ist zum Gleichungssystem[Ah Bh
B�h 0
] [vw
]=
[f1f2
](12.3.4a)
aquivalent, wobei die Matrizen und Vektoren durch
Ah,ij := a(bVj , bVi ), Bh,ik := b(bWk , bVi ) fur 1 ≤ i, j ≤ NV,h, 1 ≤ k ≤ NW,h,
f1,i := f1(bVi ), f2,k := f2(bWk ), fur 1 ≤ i, j ≤ NV,h, 1 ≤ k ≤ NW,h(12.3.4b)

12.3 Gemischte Finite-Element-Methode fur das Stokes-Problem 227
gegeben sind. Der Zusammenhang zwischen (12.3.1) und (12.3.4a-b) ist durch vh = PV v, wh = PWwbeschrieben. Fur u :=
(vw
), f :=
(f1f2
)erhalt man das Gleichungssystem
Chu = f mit Ch :=[
Ah Bh
B�h 0
], (12.3.4a’)
das der Formulierung (12.3.1’) entspricht.
12.3.2 Stabilitatsbedingungen
Bei der Wahl der Unterraume Vh und Wh muss man vorsichtig vorgehen, denn auch scheinbar vernunftigeRaume fuhren zu singularen oder aber instabilen Gleichungssystemen (12.3.1). Der erste Fall liegt beimfolgenden Beispiel vor.
Beispiel 12.3.4 Das Stokes-Problem sei fur das L-Gebiet aus Abbildung 8.3.2 vorgelegt. Fur alle drei Kom-ponenten u1, u2 und p verwenden wir stuckweise lineare Dreieckselemente uber der Triangulation T , diedurch das zweite oder dritte Bild der Abbildung 8.3.2 gegeben sei. Dabei gelte u1 = u2 = 0 auf Γ, wahrendp ∈ Wh die Nebenbedingung p ∈ L2
0(Ω), d.h.∫Ωpdx = 0, erfulle. Dann ist das diskrete Variationsproblem
(12.3.1) nicht losbar.
Beweis. Die zweite (dritte) Triangulation aus Abbildung 8.3.2 hat 5 (10) innere Knoten xi, die je einenWert u1(xi) und u2(xi) tragen. Daher gilt dimVh = 2 · 5 = 10 (dimVh = 20). Wegen der Nebenbedingung∫Ω pdx = 0 ist die Dimension von Wh um eins kleiner als die Anzahl der inneren und Randknoten: dimWh =
21 − 1 = 20 (dimWh = 21). In beiden Fallen ergibt sich die Behauptung aus dem folgenden Lemma.
Lemma 12.3.5 Notwendig fur die Losbarkeit von (12.3.1) ist NV,h ≥ NW,h, d.h. dimVh ≥ dimWh.
Beweis. Gemaß Satz 12.3.3 ist die Losbarkeit von (12.3.1) aquivalent zur Nichtsingularitat der Matrix Ch aus(12.3.4a’). Elementare Uberlegungen zeigen Rang(Ch) ≤ NV,h +Rang(Bh). Da Bh eine NV,h×NW,h-Matrixist, folgt aus NV,h < NW,h, dass Rang(Ch) < NV,h +NW,h und damit Ch singular ist.
Eine Erhohung der Dimension von Wh fuhrt daher nicht zu einer immer besseren Approximation vonw ∈W . Die Wahl von Vh und Wh mussen aufeinander abgestimmt sein. Die Ungleichung dim Vh ≥ dimWh
entspricht der Forderung, dass B aus (12.2.10b) zwar injektiv, aber nicht notwendig surjektiv zu sein braucht.Um die erforderlichen Stabilitatsbedingungen zu formulieren, definieren wir
V0,h := {v ∈ Vh : b(y, v) = 0 fur alle y ∈Wh} (12.3.5)
(vgl. Ubungsaufgabe 12.3.2). V0,h ist das diskrete Analogon des Raumes V0 aus (12.2.15). Die auf Brezzi [18]zuruckgehenden Bedingungen lauten:
infv0∈V0,h mit ‖v0‖V =1
supx0∈V0,h mit ‖x0‖V =1
|a(v0, x0)| ≥ αh > 0, (12.3.6a)
infw∈Wh mit ‖w‖W =1
supx∈Vh mit ‖v‖V =1
|b(w, x)| ≥ βh > 0. (12.3.6b)
Satz 12.3.6 Es gelte (12.2.4a-c) und dimVh < ∞. Die Brezzi-Bedingungen (12.3.6a-b) sind hinreichendund notwendig fur die Losbarkeit des diskreten Problems (12.3.1). Die Losung uh = (vh, wh) ∈ Vh ×Wh
erfullt
‖uh‖X :=√‖vh‖2
V + ‖wh‖2W ≤ Ch‖f‖X′ := Ch
√‖f1‖2
V ′ + ‖f2‖2W ′ , (12.3.7)
wobei Ch von αh, βh und den Schranken Ca und Cb von |a(v, x)| ≤ Ca ‖v‖V ‖x‖V und |b(w, x)| ≤Cb ‖w‖W ‖x‖V abhangt. Wenn
αh ≥ α > 0, βh ≥ β > 0 (12.3.6c)
fur alle Parameter h einer Folge von Diskretisierungen gilt, heißt die Diskretisierung stabil und Ch bleibtbeschrankt: Ch ≤ C fur alle h.

228 12. Stokes-Gleichungen
Beweis. Satz 12.2.7 und Lemma 12.2.9 sind anwendbar mit V0,h, Vh, Wh anstelle von V0, V , W . (12.2.19a,c)stimmen dann mit (12.3.6a,b) uberein, wahrend (12.2.19b) wegen dimV0,h < ∞ aus (12.2.19a) folgt (vgl.Ubungsaufgabe 6.5.4).
Die Bedingung (12.3.6a) ist fur das Stokes-Problem trivial:
Ubungsaufgabe 12.3.7 Man zeige: Bedingung (12.3.6a) ist stets mit einer von h unabhangigen Konstanteαh erfullt, wenn a(·, ·) : V × V → R V-elliptisch ist.
12.3.3 Stabile Finite-Element-Raume fur das Stokes-Problem
12.3.3.1 Stabilitatskriterium
Fur das Stokes-Problem muss Vh ⊂ H10 (Ω), Wh ⊂ L2
0(Ω) gelten. Im beschrankten Gebiet ist a(·, ·) H10 (Ω)-
elliptisch, sodass (12.3.6a) mit αh ≥ CE > 0 erfullt ist. Schwieriger ist es, die Bedingungen (12.3.6b,c)nachzuprufen, die fur das Stokes-Problem die Form
supu∈Vh mit |u|1=1
|b(p, u)| ≥ β |p|0 fur alle p ∈Wh (12.3.6d)
annehmen, worin β > 0 von p und h unabhangig sein muss. Einfacher lasst sich die modifizierte Bedingung
supu∈Vh mit |u|0=1
|b(p, u)| ≥ β |p|1 fur alle p ∈Wh (12.3.8)
(β > 0 unabhangig von p und h) nachweisen, bei der die Rollen der |·|0- und |·|1-Normen vertauscht sind.Da in (12.3.8) die Norm |p|1 auftritt, erfordert diese Bedingung einen Finite-Element-Raum Wh ⊂ H1(Ω).Damit sind insbesondere stuckweise konstante finite Elemente ausgeschlossen.
Zusammen mit ublichen Voraussetzungen ist die Bedingung (12.3.8) hinreichend fur die Stabilitat.
Satz 12.3.8 Ω ∈ C0,1 sei beschrankt. Das Poisson-Problem sei H2-regular (hinreichend ist, dass Ω konvexist; vgl. Satz 9.1.26). Vh erfulle die Approximationseigenschaft
infuh∈Vh
∣∣u− uh∣∣1≤ CAh |u|2 fur alle u ∈ H2(Ω) ∩ H1
0(Ω) (12.3.9a)
und die inverse Abschatzung ∣∣uh∣∣1≤ C1h
−1∣∣uh
∣∣0
fur alle uh ∈ Vh . (12.3.9b)
Dann ist Bedingung (12.3.8) hinreichend fur die Brezzi-Bedingung (12.3.6b,c).
Beweis. 1) Zu gegebenem p ∈ Wh gibt es u ∈ H10(Ω) mit |u|1 = 1 und b(p, u) ≥ β |p|0 (vgl. Satz 12.2.14
und (12.2.21)). Gemaß Ubungsaufgabe 9.1.28 erfullt die orthogonale H10(Ω)-Projektion uh von u auf Vh die
Bedingungenu = uh + e, |uh|1 ≤ |u|1 = 1, |e|0 ≤ Ch|u|1 = Ch.
Aus b(p, uh) = b(p, u) − b(p, e) ≥ β |p|0 − b(p, e) ≥ β |p|0 − |p|1 |e|0 ≥ β |p|0 − Ch |p|1 und |uh|1 ≤ 1 schließtman
supvh∈Vh mit |vh|1=1
∣∣b(p, vh)∣∣ ≥ β |p|0 − Ch |p|1 . (12.3.10)
2) Wegen (12.3.8) und (12.3.9b) gibt es ein u� ∈ Vh mit |u�|0 = 1 und
|b(p, u�)| ≥ β |p|1 = β |p|1 |u�|0 ≥(β/C1
)h |p|1 |u�|1 .
Hieraus folgtsup
vh∈Vh mit |vh|1=1
∣∣b(p, vh)∣∣ ≥ βh |p|1 mit β := β/C1. (12.3.11)
Multipliziert man (12.3.10) mit β/(C + β) und (12.3.11) mit C/(C + β), so lautet die Summe
supvh∈Vh mit |vh|1=1
∣∣b(p, vh)∣∣ ≥ β := ββ/
(C + β
). (12.3.12)
Da β unabhangig von p und h ist, ist (12.3.6d) [d.h. (12.3.6b,c)] bewiesen.

12.3 Gemischte Finite-Element-Methode fur das Stokes-Problem 229
12.3.3.2 Finite-Element-Diskretisierungen mit der Blasenfunktion
Sei im Folgenden Ω ein Polygongebiet und Th eine zulassige Triangulation. Beispiel 12.3.4 zeigt, dass lineareDreieckselemente fur u und p nicht sinnvoll sind. Wir vergroßern die Dimension von Vh, indem wir zu Vh diesogenannten Blasenfunktionen (englisch “bubble functions” oder “bulb functions”) hinzunehmen.
Auf dem Referenzdreieck T = {(ξ, η) : ξ, η > 0, ξ + η < 1} ist die Blasenfunktion durch
u(ξ, η) := ξη(1 − ξ − η) in T, u = 0 außerhalb, (12.3.13a)
definiert. Der Name leitet sich daraus ab, dass u nur in T positiv ist und auf ∂T sowie außerhalb verschwindet.Die Transformation φ : T → T auf ein allgemeines T ∈ Th (vgl. Ubungsaufgabe 8.3.14) ergibt die Darstellung
uT (x, y) := u(φ−1(x, y)) (12.3.13b)
der Blasenfunktion auf T .
Ubungsaufgabe 12.3.9 Th sei eine uniforme Triangulation. Man zeige: Es gibt ein von h unabhangigesC > 0, sodass
∫TuT (x, y)dxdy ≥ C
∫T
dxdy fur alle T ∈ Th.
Wir setzen
V 1h : Linearkombination der linearen Elemente in H1
0 (Ω) und der Blasenfunktionen zu allen T ∈ Th,
Vh := V 1h × V 1
h , Wh : lineare Elemente in L20(Ω). (12.3.14)
Bezuglich der Nebenbedingung Wh ⊂ L20(Ω) sei auf Abschnitt 8.3.6 verwiesen. Da uT ∈ H1
0 (Ω), ist Vh ⊂H1
0(Ω).
Satz 12.3.10 Th sei quasiuniforme Triangulation auf einem beschrankten Polygongebiet Ω. Vh und Wh
seien durch (12.3.14) gegeben. Dann ist die Stabilitatsbedingung (12.3.8) erfullt. Unter den weiteren Voraus-setzungen Ω ∈ C0,1 und “Poisson-Problem H2(Ω)-regular” gilt auch die Brezzi-Bedingung (12.3.6b,c).
Beweis. 1) Sei p ∈Wh beliebig. Auf jedem T ∈ Th ist ∇p konstant: ∇p = (px|T , py|T ). Wir setzen
v :=∑
T∈Th
(px|T uT
py|T uT
)∈ Vh, v :=
1|v|0
v (uT Blasenfunktion (12.3.13b) auf T ),
sodass |v|0 = 1. Ubungsaufgabe 12.3.9 liefert
b(p, v) =∫Ω
〈∇p, v〉dx =∑
T∈Th
(|px|T |
2 + |py|T |2)∫
T
uT dxdy ≥ C∑
T∈Th
∫T
(|px|T |
2 + |py|T |2)
dxdy = C |∇p|20 .
Da |∇p|0 und |p|1 auf dem Unterraum H1(Ω)∩L20(Ω) aquivalente Normen sind, folgt |b(p, v)| ≥ C′|p|1 |∇p|0
und |b(p, v)| ≥ C′ |p|1 |∇p|0 / |v|0. Ahnlich zeigt man |v|0 ≤ C′′ |∇p|0 und erhalt |b(p, v)| ≥ β |p|1 mitβ := C′/C′′ unabhangig von h. Die linke Seite in (12.3.8) ist ≥ |b(p, v)|, sodass (12.3.8) folgt.
2) (12.3.9a) ist fur Vh erfullt (vgl. Satz 8.4.5). Ebenso gilt die inverse Abschatzung (12.3.9b) (vgl. Satz8.7.5). Daher folgt (12.3.6b,c) aus Satz 12.3.8.
Ein allgemeines Resultat zur Stabilisierung durch Blasenfunktionen findet sich bei Brezzi-Pitkaranta [20].
12.3.3.3 Stabile Diskretisierungen mit linearen Elementen in Vh
T~
T~
T~
T~
T~1 2
3
4
Abb. 12.3.1. Triangulationen Th undTh/2
Will man ohne Blasenfunktionen auskommen, hat man die Dimensionvon Vh auf andere Weise zu erhohen. In diesem Abschnitt werden wir furVh und Wh zwei verschiedene Triangulationen Th/2 und Th betrachten.Indem jedes T ∈ Th wie in Abbildung 12.3.1 durch Halbierung der Seitenin vier ahnliche Dreiecke zerlegt wird, erhalt man Th/2. Wir definieren:
Vh ⊂ H10(Ω): lineare Elemente zur Triangulation Th/2, (12.3.15)
Wh ⊂ H1(Ω) ∩ L20(Ω): lineare Elemente zur Triangulation Th,

230 12. Stokes-Gleichungen
oderVh ⊂ H1
0(Ω): quadratische Elemente zur Triangulation Th,
Wh ⊂ H1(Ω) ∩ L20(Ω): lineare Elemente zur Triangulation Th.
(12.3.16)
Satz 12.3.11 Satz 12.3.10 gilt sinngemaß fur Vh ×Wh aus (12.3.15) oder (12.3.16).
Beweis. 1) Vh ×Wh sei durch (12.3.15) gegeben. Zu jeder inneren Dreiecksseite γ der Triangulation Th gibtes zwei Dreiecke T1γ , T2γ ∈ Th mit γ = T1γ ∩ T2γ (vgl. Abbildung 12.3.2).∂/∂t sei die Ableitung in Richtungder Strecke γ, ∂/∂n sei die dazu senkrechte Richtungsableitung. Es gibt aγ und bγ mit
a2γ + b2γ = 1,
∂
∂x= aγ
∂
∂n+ bγ
∂
∂t,
∂
∂y= bγ
∂
∂n− aγ
∂
∂t.
1γT2T γγ
d/dnd/dt
Abb. 12.3.2. γ, T1γ , T2γ
Im Gegensatz zu ∂p/∂n ist ∂p/∂t auf T1γ ∪ T2γ ∪ γ konstant. Wir bezeichnendiesen Wert mit pt|γ Der Mittelpunkt xγ von γ ist ein Knoten von Th/2. Wirdefinieren die stuckweise lineare Funktion uγ uber Th/2 durch die Knotenwerte
uγ(xγ) = pt|γ , uγ(xj) = 0 in den ubrigen Knoten (12.3.17a)
und setzen
v :=∑
γ
(bγ−aγ
)pt|γ uγ ∈ Vh, v :=
1|v|0
v. (12.3.17b)
Die Summe∑
γ erstreckt sich uber alle inneren Seiten von Th. In T1γ ∪ T2γ gilt⟨∇p,
(bγ
−aγ
)⟩pt|γ = |pt|γ |2 ,
sodass
b(p, v) =∑
γ
∫T1γ∪T2γ
⟨∇p,
(bγ−aγ
)pt|γ uγ
⟩dx =
∑γ
|pt|γ |2∫
T1γ∪T2γ
uγdx ≥ Ch2∑
γ
|pt|γ |2 .
Sind γ1, γ2, γ3 die Seiten von T ∈ Th (Th quasiuniform!), so ist∫
T|∇p|2 dx ≤ C′h2
∑3i=1 |pt|γi|2. Hieraus
schließt man b(p, v) ≥ C′′ |p|1 |∇p|0 wie im Beweis des Satzes 12.3.10 und fuhrt den Beweis analog weiter.2) Im Falle (12.3.16) der quadratischen Elemente hat man die gleichen Knoten wie in 1) (vgl. die Ab-
bildungen 8.3.8a und 12.3.1). Man benutze (12.3.17a,b) zur Definition der quadratischen Funktion v ∈ Vh
und setze den Beweis wie in 1) fort.
12.3.3.4 Fehlerabschatzungen
Die Bedingung (8.1.17) ist im Folgenden durch die Stabilitatsbedingung (12.3.6a-c) zu ersetzen. An die Stelleder Approximationseigenschaft (8.4.6’) treten die Ungleichungen
infvh∈Vh
∣∣v − vh∣∣1≤ Ch |v|2 fur alle v ∈ H2(Ω) ∩ H1
0(Ω), (12.3.18a)
infph∈Wh
∣∣p− ph∣∣1≤ Ch |p|1 fur alle p ∈ H1(Ω) ∩ L2
0(Ω). (12.3.18b)
Die Bedingung (12.3.18a) ist aquivalent zur Bedingung (12.3.9a) aus Satz 12.3.8.Der folgende Satz trifft fur allgemeine Sattelpunktprobleme zu und kann auf Satz 8.2.1 zuruckgefuhrt
werden.
Satz 12.3.12 u =(vp
)∈ X = V ×W sei Losung von (12.2.5) bzw. (12.3.6a). Das diskrete Problem (12.3.1)
mit Xh = Vh ×Wh ⊂ X erfulle die Brezzi-Bedingung (12.3.6a-c) und habe die Losung uh = (vh, wh). Danngibt es ein von h unabhangiges C, sodass
‖u− uh‖X ≤ C infxh∈Xh
∣∣u− xh∣∣1. (12.3.19)

12.3 Gemischte Finite-Element-Methode fur das Stokes-Problem 231
Beweis. Die Brezzi-Bedingung (vgl. Satz 12.3.6) liefert ‖uh‖X ≤ C ‖f‖X′ fur alle rechten Seiten f ∈ X ′ in(12.2.5), insbesondere fur alle f ∈ Xh = X ′h. Die vorherige Ungleichung bedeutet ‖L−1
h ‖Xh←X′h≤ C fur den
Operator Lh : Xh → X ′h der zu c(·, ) : Xh×Xh → R gehort. Nach Ubungsaufgabe 8.1.17 ist ‖L−1h ‖Xh←X′
h≤ C
aquivalent zur Bedingung (8.1.17) fur c(·, ·) : X ×X → R [anstelle von a(·, ·) : V × V → R] mit εN = 1/C.Satz 8.2.1 liefert die Behauptung (12.3.19).
Fur das Stokes-Problem mit den Bezeichnungen(up
),(uh
ph
)anstelle von u =
(vp
), uh =
(vh
ph
)schreibt sich
Ungleichung (12.3.19) wie folgt um:
|u− uh|21 + |p− ph|20 ≤ C2 inf{|u− vh|21 + |p− qh|20 : vh ∈ Vh, q
h ∈ Wh
}(12.3.20a)
und|u− uh|1 + |p− ph|0 ≤
√2C inf
{|u− vh|1 + |p− qh|0 : vh ∈ Vh, q
h ∈ Wh
}. (12.3.20b)
Satz 12.3.13 Die Stokessche Gleichung (12.1.2a,b) habe eine Losung mit u ∈ H2(Ω) ∩ H10(Ω) und p ∈
H1(Ω) ∩ L20(Ω) (vgl. Satz 12.2.19). Fur die Unterraume Vh ⊂ H1
0(Ω) und Wh ⊂ L20(Ω) seien die Brezzi-
Bedingung (12.3.6a-c) und die Approximationsbedingungen (12.3.18a,b) erfullt. Dann genugt die diskreteLosung uh, ph der Abschatzung
|u− uh|1 + |p− ph|0 ≤ C′h [|u|2 + |p|1] . (12.3.21)
Beweis. Man kombiniere die Ungleichungen (12.3.20a,b) und (12.3.18a,b).Mit der gleichen Argumentation wie im zweiten Beweis zu Satz 8.4.11 mit c(·, ·) anstelle von a(·, ·) beweist
man den
Satz 12.3.14 Fur jedes f ∈ L2(Ω), g ∈ L20(Ω)∩H1(Ω) habe das Stokes-Problem −Δu+∇p = f , − div u = g
eine Losung u ∈ H2(Ω)∩H10(Ω), p ∈ H1(Ω)∩L2
0(Ω) mit |u|2+|p|1 ≤ C[|f |0+|g|1]. Unter den Voraussetzungendes Satzes 12.3.13 gelten dann die Abschatzungen
|u− uh|0 + |p− ph|−1 ≤ C′h [|u|1 + |p|0] , (12.3.22a)
|u− uh|0 + |p− ph|−1 ≤ C′′h2 [|u|2 + |p|1] . (12.3.22b)
fur die Finite-Element-Losungen. |p|−1 ist dabei die Dualnorm zu H1(Ω) ∩ L20(Ω).
Zusatz 12.3.15 Als Kombination von (12.3.22b) und (12.3.21) erhalt man
|u− uh|0 + h|p− ph|0 ≤ C′h2 [|u|2 + |p|1] .
Eine ausfuhrliche Darstellung der gemischten Finite-Element-Diskretisierung bietet die MonographieBrezzi-Fortin [19].

232 12. Stokes-Gleichungen

Literaturverzeichnis
[1] R. Adams: Sobolev spaces. Academic Press, New York, 1975.
[2] S. Agmon, A. Douglis und L. Nirenberg: Estimates near the boundary for solutions of elliptic partialdifferential equations satisfying general boundary conditions II. Comm. Pure Appl. Math. 17 (1964),35–92.
[3] A. Aziz (Hrsg.): The mathematical foundation of the finite element method with applications to partialdifferential equations. Academic Press, New York, 1972.
[4] I. Babuska: The theory of small changes in the domain of existence in the theory of partial differentialequations and its applications. Differential Equations and Their Applications (I. Babuska und M. Zlamal,Hrsg.), Czech. Academy of Sciences, 1963. (auch Acad. Press, New York 1963), pp. 13–26 (Prag, Sept.1962).
[5] I. Babuska und A. Aziz: Survey lectures on the mathematical foundations of the finite element method.In Aziz [3], pp. 3–363.
[6] I. Babuska und H. Rosenzweig: A finite element scheme for domains with corners. Numer. Math. 20(1972), 1–21.
[7] R. E. Bank: A software package for solving elliptic partial differential equations. Users’ guide 6.0. SIAM,Philadelphia, 1990.
[8] R. E. Bank, T. F. Dupont und H. Yserentant: The hierarchical basis multigrid method. Math. Comp.52 (1988), 427–458.
[9] R. Becker und R. Rannacher: An optimal control approach to a posteriori error estimation in finiteelement methods. Acta Numerica 2001, Cambridge University Press, 2001, pp. 1-102.
[10] H. Blum und K. Dobrowolski: On finite element methods for elliptic equations on domains with corners.Computing 28 (1982), 53–63.
[11] H. Blum und R. Rannacher: On the boundary value problem of the biharmonic operator on domainswith angular corners. Math. Meth. Appl. Sci. 2 (1980), 556–581.
[12] D. Braess: Finite Elemente: Theorie, schnelle Loser und Anwendungen in der Elastizitatstheorie.2. Auflage. Springer-Verlag, Berlin, 1997.

234 Literaturverzeichnis
[13] D. Braess und W. Dahmen: Stability estimates of the mortar finite element method for 3-dimensionalproblems. East-West J. Numer. Math. 6 (1998), 249–264.
[14] J. H. Bramble: A second order finite element analog of the first biharmonic boundary value problem.Numer. Math. 9 (1966), 236–249.
[15] J. H. Bramble und B. Hubbard: A theorem on error estimation for finite difference analogues of theDirichlet problem for elliptic equations. Contributions to Diff. Eq. 2 (1963), 319–340.
[16] : Approximation of solutions of mixed boundary value problems for Poisson’s equation by finitedifferences. J. Assoc. Comput. Mach. 12 (1965), 114–123.
[17] J. H. Bramble und A. H. Schatz: Higher order local accuracy by averaging in the finite element method.Math. Comp. 31 (1977), 94–111.
[18] F. Brezzi: On the existence, uniqueness and approximation of saddle-point problems arising from La-grangian multiplies. RAIRO Anal. Numer. 8 (1974), 129–151.
[19] F. Brezzi und M. Fortin: Mixed and hybrid finite element methods. Springer-Verlag, Berlin, 1991.
[20] F. Brezzi und J. Pitkaranta: On the stability of the finite element approximations to the Stokes equations.In Hackbusch [39], pp. 11–29. (Kiel, Jan. 1984).
[21] F. Chatelin: Spectral approximation of linear operators. Academic Press, New York, 1983.
[22] P. G. Ciarlet: The finite element method for elliptic problems. North-Holland, Amsterdam, 1978.
[23] P. Clement: Approximation by finite element functions using local regularization. RAIRO Anal. Numer.9, R-2 (1975), 77–84.
[24] B. Cockburn, G. Karniadakis und C.-W. Shu (Hrsg.): Discontinuous Galerkin Methods. Theory, Compu-tation and Applications. Lecture Notes in Computational Science and Engineering 11. Springer-Verlag,Berlin, 2000. (Newport, Mai 1999).
[25] L. Collatz: The Numerical treatment of differential equations. Springer-Verlag, Berlin, 1966.
[26] C. Cosner: On the definition of ellipticity for systems of partial differential equations. J. Math. Anal.Appl. 158 (1991), 80–93.
[27] W. Dahmen, B. Faermann, I. G. Graham, W. Hackbusch und S. A. Sauter: Inverse inequalities onnon-quasiuniform meshes and applications to the mortar element method. Math. Comp. 73 (2004),1107–1138.
[28] W. Dorfler: A convergent adaptive algorithm for Poisson’s equation. SIAM J. Numer. Anal., 33 (1996),1106–1124.
[29] K. Eriksson, D. Estep, P. Hansbo und C. Johnson: Introduction to adaptive methods for differentialequations. Acta Numerica (1995), 105–158.
[30] C. Fletcher: Computational Galerkin methods. Springer-Verlag, New York, 1984.
[31] F. R. Gantmacher: Matrizenrechnung, Band I. Deutscher Verlag der Wissenschaften, Berlin, 1958.
[32] D. Gilbarg und N. Trudinger: Elliptic partial differential equations of second order. Springer-Verlag,Berlin, 1983.
[33] L. Gladwell und R. Wait (Hrsg.): A survey of numerical methods for partial differential equations.Clarendon Press, Oxford, 1979.
[34] G. Green: An assay on the application of mathematical analysis in the theories of electricity and mag-netism. Nottingham, 1828.

Literaturverzeichnis 235
[35] P. Grivard: Elliptic problems in nonsmooth domains. Pitman, Boston, 1985.
[36] C. Großmann und H.-G. Roos: Numerik partieller Differentialgleichungen. Teubner, Stuttgart, 1992.
[37] W. Hackbusch: On the regularity of difference schemes. Ark. Mat. 19 (1981), 71–95.
[38] : On the regularity of difference schemes Part II: regularity estimates for linear and nonlinearproblems. Ark. Mat. 21 (1983), 3–28.
[39] (Hrsg.): Efficient solvers for elliptic systems. Notes on Numerical Fluid Mechanics 10. Vieweg-Verlag, Braunschweig, 1984. (Kiel, Jan. 1984).
[40] : Local defect correction method and domain decomposition techniques. Comput. Suppl. 5 (1984),89–113.
[41] : On first and second order box schemes. Computing 41 (1989), 277–296.
[42] : Iterative Losung großer schwachbesetzter Gleichungssysteme. 2. Auflage. Teubner, Stuttgart,1993.
[43] : Theorie und Numerik elliptischer Differentialgleichungen. 2. Auflage. Teubner, Stuttgart, 1996.
[44] : Integralgleichungen. Theorie und Numerik. 2. Auflage. Teubner, Stuttgart, 1997.
[45] : Elliptic differential equations. Theory and numerical treatment. 2. Auflage. SCM 18. Springer-Verlag, Berlin, 2003.
[46] G. Hellwig: Partielle Differentialgleichungen. Teubner, Stuttgart, 1960.
[47] M. Jung und U. Langer: Methode der finiten Elemente fur Ingenieure. Teubner, Stuttgart, 2001.
[48] J. Kadlec: Uber die Regularitat der Losung der Poisson-Gleichung in einem Gebiet, dessen Rand demeines konvexen Gebietes ahnlich ist. Czech. Math. J. 14 (1964), 386–393. in Russisch.
[49] O. D. Kellogg: Foundations of potential theory. Springer-Verlag, Berlin, 1929.
[50] R. Kellogg und J. Osborn: A regularity result for the Stokes problem in a convex polygon. J. of FunctionalAnalysis 21 (1976), 397–431.
[51] C. Kim, R. Lazarov, J. E. Pasciak und P. Vassilevski: Multiplier spaces for the mortar finite elementmethod in three dimensions. SIAM J. Numer. Anal. 39 (2001), 519–538.
[52] P. Knabner und L. Angermann: Numerik partieller Differentialgleichungen. Springer-Verlag, Berlin,2000.
[53] V. Kondrat’ev: Boundary value problems for elliptic equations in domains with conical or angular points.Trans. Moscow Math. Society 16 (1967), 227–313.
[54] R. Kreß: Linear integral equations. Springer-Verlag, Berlin, 1989.
[55] O. Ladyzenskaja: Funktionalanalytische Untersuchungen der Navier-Stokesschen Gleichungen. Akade-mie-Verlag, Berlin, 1965.
[56] R. Leis: Vorlesungen uber partielle Differentialgleichungen zweiter Ordnung. B.I.-Hochschultaschenbuch,Mannheim, 1967.
[57] P. Lesaint und M. Zlamal: Superconvergence of the gradient of finite element solutions. RAIRO Anal.Numer. 13 (1979), 139–166.
[58] J. Lions und E. Magenes: Non-homogeneous boundary value problems and applications. Vol. I. Springer-Verlag, Berlin, 1972.
236 Literaturverzeichnis
[59] A. Louis: Acceleration of convergence for finite element solutions of the Poisson equation. Numer. Math.33 (1979), 43–53.
[60] G. Maeß: Vorlesungen uber numerische Mathematik. I. Lineare Algebra. Birkhauser, Basel, 1985.
[61] G. Marchuk und V. Shaidurov: Difference methods and their extrapolation. Springer-Verlag, New York,1983.
[62] T. Meis und U. Marcowitz: Numerische Behandlung partieller Differentialgleichungen. Springer-Verlag,Berlin, 1978.
[63] C. Miranda: Partial differential equations of elliptic type. Springer-Verlag, Berlin, 1970.
[64] J. Necas: Sur la coercivite des formes sesqui-lineares elliptiques. Rev. Roumaine Math. Pures Appl. 9(1964), 47–69.
[65] : Equations aux derivees partielles. Presse de l’Universite de Montreal, 1965.
[66] J. Nitsche: Ein Kriterium fur die Quasi-Optimalitat des Ritzschen Verfahrens. Numer. Math. 11 (1968),346–348.
[67] V. Pereyra, W. Proskurowski und O. B. Widlund: High order fast Laplace solvers for the Dirichletproblem on general regions. Math. Comp. 31 (1977), 1–16.
[68] E. Pflaumann und H. Unger: Funktionalanalysis I. Bibliographisches Institut, Mannheim, 1968.
[69] R. Rannacher: Approximation of simply supported plates and the Babuska paradox. ZAMM 59 (1979),T73–T76.
[70] W. Ritz: Uber eine neue Methode zur Losung gewisser Variationsprobleme der mathematischen Physik.J. Reine Angew. Math. 135 (1908), 1–61.
[71] H.-G. Roos, M. Stynes und L. Tobiska: Numerical methods for singularly perturbed differential equations:Convection-diffusion and flow problems. SCM 24. Springer-Verlag, Berlin, 1996.
[72] S. A. Sauter und C. Schwab: Randelementmethoden. Teubner, Stuttgart, 2004.
[73] A. H. Schatz: A weak discrete maximum principle and stability in the finite element method in l∞ onplane polygonal domains. Math. Comp. 34 (1980), 77–91.
[74] A. H. Schatz und L. Wahlbin: Maximum norm estinates in the finite element method on plane polygonaldomains. Part 2, refinements. Math. Comp. 33 (1979), 465–492.
[75] H. Schwarz: Methode der finiten Elemente. Teubner, Stuttgart, 1980.
[76] G. Shortley und R. Weller: Numerical solution of Laplace’s equation. J. Appl. Phys. 9 (1938), 334–348.
[77] J. Stoer: Einfuhrung in die Numerische Mathematik I. 5. Auflage. Springer-Verlag, Berlin, 1989.
[78] G. Strang und G. Fix: An analysis of the finite element method. Prentice-Hall, Englewood Cliffs, 1973.
[79] F. Stummel: Diskrete Konvergenz linearer Operatoren I. Math. Ann. 190 (1970), 45–92.
[80] : The generalized patch test. SIAM J. Numer. Anal. 16 (1979), 449–471.
[81] F. Thomasset: Implementation of finite element methods for Navier-Stokes equations. Springer-Verlag,New York, 1981.
[82] V. Thomee: Discrete interior Schauder estimates for elliptic difference operators. SIAM J. Numer. Anal.5 (1968), 626–645.
[83] : High order local approximations to derivatives in the finite element method. Math. Comp. 31(1977), 652–660.

Literaturverzeichnis 237
[84] W. Velte: Direkte Methoden der Variationsrechnung. Teubner, Stuttgart, 1976.
[85] R. Verfurth: A review of a posteriori error estimation and adaptive mesh-refinement techniques. J. Wileyund Teubner, Stuttgart, 1996.
[86] L. Wahlbin: Superconvergence in Galerkin finite element methods. Lect. Notes Math. 1605. Springer-Verlag, Berlin, 1995.
[87] A. J. Wathen: Realistic eigenvalue bounds for the Galerkin mass matrix. IMA J. Numer. Anal. 7 (1987),449–457.
[88] K. Witsch: Numerische Quadratur bei Projektionsverfahren. Numer. Math. 30 (1978), 185–206.
[89] J. Wloka: Partielle Differentialgleichungen. Sobolevraume und Randwertaufgaben. Teubner, Stuttgart,1982.
[90] B. Wohlmuth: Discretization methods and iterative solvers based on domain decomposition. Habilita-tionsschrift. Universitat Augsburg, 1999 und LNSC 17, Springer-Verlag, Berlin, 2001.
[91] K. Yosida: Functional analysis. Springer-Verlag, Berlin, 1968.
[92] H. Yserentant: On the multi-level splitting of finite element spaces. Numer. Math. 49 (1986), 379–412.
[93] E. Zeidler (Hrsg.): Teubner-Taschenbuch der Mathematik. 2. Auflage. Vol. I. Teubner, Stuttgart, 2003.
[94] O. Zienkiewicz: Methode der finiten Elemente. Carl Hanser Verlag, Munchen, 1984.
[95] M. Zlamal: Discretisation and error estimates for elliptic boundary value problems of the fourth order.SIAM J. Numer. Anal. 4 (1967), 626–639.

Index
Ableitungklassische, 83konormale, 70Normalen-, 11schwache, 83Tangential-, 70, 104, 111, 174, 190, 217
Adler-Problem, 114, 131Anfangsrandwertvorgabe, 6, 7Anfangswertvorgabe, 2Anordnung
lexikographische, 30Schachbrett-, 31
B-Splines, 140Babuska-Bedingung, 99Babuska-Brezzi-Bedingungen, 222Babuska-Paradoxon, 75Banach-Raum, 80Basisfunktionen, siehe Finite-Element-Basis-
funktionenBedingung von Agmon, 112Beltrami-Operator, 10BEM, 26Bestapproximation, 121Bilinearform, 98, 105–107, 109–115, 117, 118, 123,
124, 133, 136, 139, 162–164, 166, 170,171, 173, 175, 177, 197, 199, 218, 219
adjungierte, 98, 137, 138beschrankte, 98fur die biharmonische Gleichung, 113fur die Helmholtz-Gleichung, 106, 110fur die Poisson-Gleichung, 107Operator assoziiert zur, 98stetige, 98symmetrische, 98
V -elliptische, 99V -koerzive, 101Vh-abhangige, 155
Blasenfunktion, 229Box-Methode, 160bubble function, siehe Blasenfunktion
Cauchy-Folge, 80Cauchy-Riemann-Differentialgleichungen, 3, 6Cholesky-Zerlegung, 200
DGFEM, 160Diagonaldominanz, 34, 35, 37
irreduzible, 34, 35, 37, 68dicht, 81, siehe EinbettungDifferentialgleichung
biharmonische, 74–76, 112, 139, 174, 217Cauchy-Riemann-, 3der Ordnung 2m, 74elliptische, 4–6, 7–9, 61, 75, 191, 216gleichmaßig elliptische, 62, 216hyperbolische, 4, 5, 6–8instationare, 8mit unstetigen Koeffizienten, 189parabolische, 4, 5, 7, 8, 192partielle, 1
erster Ordnung, 1, 3, 5, 216zweiter Ordnung, 2, 4, 61
singular gestorte, 191stationare, 8
Differentialgleichungssystemelliptisches, 5, 215, 216hyperbolisches, 5
Differentialoperator, 61adjungierter, 70

Index 239
der Ordnung 2m, 74elliptischer, siehe Differentialgleichunggleichmaßig elliptischer, 75Hauptteil des, siehe Hauptteillinearer, 5Rand-, 70, 110
Differenzdividierte, 27, 58einseitige, 27, 193linksseitige, 27rechtsseitige, 27Ruckwarts-, 27, 41symmetrische, 27, 50, 51Vorwarts-, 27zweite, 28
Differenzenoperator, 28, 31, 87, 181, 209Differenzenstern, siehe SternDifferenzenverfahren, 66, 71, 176, 193, siehe Funf-,
Neun-, Siebenpunktformelfur die biharmonische Gleichung, 76fur die Poisson-Gleichung, 27fur Eigenwertprobleme, 209Shortley-Weller-, 57
Diffusion, 191direkte Summe, 82Dirichlet-Randwertvorgabe, 19, 62, 70, 75
homogene, 104, 168inhomogene, 108
Dirichletsches Integral, 103Diskretisierung, siehe Differenzenverfahren, finite
Elemente, Galerkin-VerfahrenEffizienz der, 146hoherer Ordnung, 45Shortley-Weller-, 57stabile, siehe Stabilitat
Diskretisierungsfehler, 43Divergenzoperator, 215Doppelschichtpotential, 26Dreiecksungleichung
umgekehrte, 79Dualabbildung, Dualoperator, 93Dualform, 93Dualnorm, 93Dualraum, 93
Effizienz einer Diskretisierung, 146Eigenfunktionen, 199
Konvergenz der diskreten, 203Eigenraum, 199Eigenwertaufgabe, 97, 101, 107
adjungierte, 199elliptische, 8, 199verallgemeinerte, 6, 200
EigenwerteKonvergenz der diskreten, 203
Vielfachheit der, 200Einbettung
dichte, 81kompakte, 96stetige, 81
Eindeutigkeit der Losung, 14, 19, 64, 106, 108, 207,220
Einfachschichtpotential, 26Elementmatrizen, 153Elliptizitat, numerische, 194Existenz einer Losung, 106, 108Extrapolationsverfahren, 45, 60
Fehlerabschatzungbei Differenzenverfahren, 77
Fehlerabschatzunga posteriori, 143a priori, 143bei Differenzenverfahren, 43, 47, 59, 60bei Finite-Elemente-Verfahren, 132bei Galerkin-Verfahren, 120
Fehleraquilibrierung, 147Fehlerschatzer, 144
asymptotisch exakter, 146effizienter, 146zuverlassiger, 146
FEM, 124finite Elemente
bikubische, 140bilineare, 128der Serendipity-Klasse, 130isoparametrische, 142lineare, 124, 126quadratische, 129
finite Volumen, 160Finite-Element-Basisfunktionen
hierarchische, 157stuckweise lineare, 125, 126
Finite-Element-Methode, 115adaptive, 147fur Eigenwertprobleme, 200fur Sattelpunktprobleme, 226gemischte, 226nichtkonforme, 154
FormBilinear-, siehe BilinearformDual-, 93Sesquilinear-, 98
Formregularitat, siehe TriangulationFortsetzung, 81Fortsetzung(soperator), 88Fourier-Transformation, 86
inverse, 86Fredholmsche Integralgleichung zweiter Art, 26Fundamentallosung, siehe Singularitatenfunktion

240 Index
Funfpunktformel, 29, 68, 127Funktional (lineares), 93, 109
Galerkin-Verfahren, 26konformes, 115unstetiges, 160
Gauß-Quadratur, 125Gebiet, 9
konvexes, 57, 173Normal-, 11unbeschranktes, 17, 105, 106
Gebietszerlegungsverfahren, 154Gelfand-Dreier, 95Gitter, 28, 29, 51, 57
formregulares, 135K-, siehe K-Gitteruniformes, 135
Gitterfunktion, 28, 43Gitterpunkt
benachbarter, 30randferner, 30randnaher, 57
Gitterverfeinerung, 148adaptive, 148
Gittervergroberung, 149Gleichungssystem, 28, 30, 48, 116, 132, 227
Losbarkeit des, 48schwach besetztes, 31
Gradient, 11Greensche Formel
erste, 11zweite, 11
Greensche Funktion, 12, 20, 69, 103diskrete, 39, 52fur die Kugel, 24zweiter Art, 25
Grundlosung, 12, 20
harmonische Funktion, 10, 11, 14, 15, 24, 103Hauptteil, 5, 9, 104, 178, 216Helmholtz-Gleichung, 106, 110Hermite-Interpolation, 140Hesse-Matrix, 62hierarchische Basis, 157Hilbert-Matrix, 147Hilbert-Raum, 82Holder-Stetigkeit, 21, 89holomorph, 2, 13, 24
inf-sup-Bedingung, 98diskrete, 120
Integralgleichungsmethode, 25, 26inverse Abschatzung, 151
K-Gitter, 135
Kegelbedingung, gleichmaßige, 97klassische Losung, 19, 21–23, 105, 110, 166, 173,
218Kleinste-Quadrate-Minimierung, 160Knoten, siehe Knotenpunkte
hangende, 156innere, 126Rand-, 126
Knotenpunkte, 124Knotenwerte, 124Koeffizientenvektor, 116Kollokationsmethode, 26kompakte Abbildung, 96kompakte Menge, 96Kondition, 78, 120, 150, 151, 158, 207Konormalenableitung, siehe Ableitung, konormaleKonvektion, 191Konvergenz, 43
der Ordnung k, 43gleichmaßige, 79Super-, 158
Koordinatentransformation, 5, 24, 62, 65, 73, 86
L-Gebiet, 10, 24, 90, 157, 188, 227Lagrange-Faktoren, 132Lame-Gleichungen, 217Laplace-Gleichung, siehe Potentialgleichung, 9Laplace-Operator, 9, 10lexikographische Anordnung, 30Losung
klassische, siehe klassische Losungschwache, 105
M-Matrix, 32, 38, 46, 49, 58, 60, 66–68, 72, 73,154, 193–195
Massematrix, 150Matrix
diagonaldominante, siehe DiagonaldominanzHesse-, 62Hilbert-, 147irreduzibel diagonaldominante, siehe Diago-
naldominanzirreduzible, 32, 33, 35, 39M-, siehe M-Matrixpositiv definite, 37, 61, 68, 76, 118, 200positiv semidefinite, 62schwach besetzte, 31
Matrixgraph, 32Matrixnorm, 36
zugeordnete, 36Maximumnorm, siehe Supremumsnorm, Norm,
33, 36Maximumprinzip, 13, 14, 39, 62, 74, 154, 193
starkes, 63Mehrstellenverfahren, 46

Index 241
Methode der finiten Elemente, siehe Finite-Element-Methode
Minimierungsproblem, 100, 107, 118, 123, 156Minimumprinzip, 203Mittelwerteigenschaft, 13, 14
diskrete, 39zweite, 13
Nebenbedingungen, 131Neumann-Randwertvorgabe, 24, 25, 47, 71, 110,
128Neunpunktformel, 45, 66
kompakte, 45nicht sachgemaß gestellte Aufgabe, 7Norm, 35
aquivalente, 80Dual-, 93Euklidische, 11, 37Matrix-, siehe MatrixnormOperator-, 80Sobolev-Slobodeckij-, 88Spektral-, 37Supremums-, siehe SupremumsnormZeilensummen-, 36
Normalenableitung, 11, 25normales System, 75Normalgebiet, 11normierter Raum, 79
Operator, 80adjungierter, 94beschrankter, 80Dual-, 93einer Bilinearform zugeordneter, 98Fortsetzung eines, 81Fortsetzungs-, 88kompakter, 96stetiger, 80
Operatornorm, 80orthogonal, Orthogonalraum, 82
Partition der Eins, 91Patchtest, 155Permutationsmatrix, 30Petrov-Galerkin-Verfahren, 160Plattengleichung, 74Poincare-Friedrichs-Ungleichung, 85Poisson-Gleichung, 19, 27, 107, 174Poissonsche Integralformel, 14, 16Polarkoordinaten, 10, 11, 71Potentialgleichung, 2–4, 7, 8, 9, 47, 157
diskrete, 39, 41prakompakt, 96Problem, siehe VariationsproblemProjektion, 94
orthogonale, 94, 117Ritz-, 122, 136, 138
Prolongation, 116
Quadratgittertriangulation, 127Quasioptimalitat, 121Quotientenraum, 81
Randbedingung, siehe Dirichlet-Randwertvor-gabe, Neumann-Randwertvorgabe
dritte, 70erste, 70naturliche, 109, 128Robin-, 70zweite, 70
Randdifferentialoperator, siehe Differential-operator
Randelementmethode, 26Randschicht, 192Randwertaufgabe, 9
der Ordnung 2m, 112Variationsformulierung einer, 103
Randwertvorgabe, 2, 6, 7, 9Dirichlet-, siehe Dirichlet-RandwertvorgabeNeumann-, siehe Neumann-Randwertvorgabeperiodische, 71
RaumBanach-, 80Dual-, 93Hilbert-, 82normierter, 79Orthogonal-, 82Quotienten-, 81Vervollstandigung eines, 81vollstandiger, 80
Reaktions-Diffusionsgleichung, 192reduzierte Gleichung, 192Referenzdreieck (Referenzelement), 127, 129, 133Regularitat
der Differenzengleichungen, 176Regularitat, 161
H2-, 137Hs-, 162
Restriktion, 43Riesz-Isomorphismus, 94Riesz-Schauder-Theorie, 97, 101Ritz-Galerkin-Verfahren, 115
gemischtes, 226Ritz-Projektion, 122, 136, 138Robin-Randbedingung, 70Ruckwartsdifferenz, 27
sachgemaß gestellte Aufgabe, 16Sattelpunkt, 219Sattelpunktproblem, 218

242 Index
SatzRiemannscher Abbildungs-, 24Rieszscher Darstellungs-, 94Sobolevscher Einbettungs-, 90Transformations-, 86von Aubin-Nitsche, 137von Cea, 120von der offenen Abbildung, 81von Garding, 107von Gerschgorin, 33von Harnack, 15
Schachbrettanordnung, 31Schrittweite, 27schwache Ableitung, 83schwache Formulierung (einer Randwertaufgabe),
siehe VariationsformulierungSchwarzsche Ungleichung, 82Sesquilinearform, 98Shortley-Weller-Differenzenschema, 57Siebenpunktformel, 66Singularitatenfunktion, 10, 75
diskrete, 53Skalarprodukt, 11, 37, 82, 84, 87, 92, 95, 175Sobolev-Raum, 82Sobolev-Slobodeckij-Norm, 88Spektralnorm, 37Spektralradius, 34Spektrum, 97Splines, kubische, 140Spur einer Funktion, 88Spur einer Matrix, 63Stabilitat, 43, 69Steifigkeitsmatrix, 116, 149Steklov-Problem, 200Stern, 31stetige Abhangigkeit der Losung
gegenuber Gebietsvariation, 17, 75von den Koeffizienten, 66von den Randwerten, 16, 65
Stokes-Gleichungen, 4, 74, 215Strang
erstes Lemma von, 123zweites Lemma von, 155
Stromlinien-Diffusionsverfahren, 195Superkonvergenz, 158Supremumsnorm, 16, 79, 80Systemmatrix, 116, 149
Tangentialableitung, siehe AbleitungTrager (einer Funktion), 83Trapezformel, 51Trefftz-Verfahren, 156Triangulation, 126
formregulare, 135, 148uniforme, 135
zulassige, 126Typeneinteilung der partiellen Differential-
gleichungen, 1, 4, 5
V -Elliptizitat, 99V -Koerzivitat, 101Variationsformulierung (einer Randwertaufgabe),
103, 115, 161, 189Variationsproblem, 100
adjungiertes, 100, 137duales oder komplementares, 157
Vervollstandigung, 81Viskositat
kunstliche, 194numerische, 194
Vollstandigkeit, 80Volumenpotential, 26Vorwartsdifferenz, 27
Warmeleitungsgleichung, 3, 6–8Wellengleichung, 2–4, 6–8Wilsonsches Rechteck, 154
Zeilensummennorm, 36


















