






Sprachen
Seiten
Rechtliche

Gruppe 8m Björn BaumeierJan Auffenberg
1
Protokoll zu Versuch M3: Elastizität
1. Einleitung
Wirken äußere Kräfte auf einen festen Körper, so verformt sich dieser auf verschie-
dene Weisen. Man spricht dabei von elastischer Verformung, wenn diese reversibel
ist, d.h. ohne die äußere Kraft der Ausgangszustand wieder eingenommen wird.
Insbesondere werden im folgenden die Biegung und die Torsion untersucht.
2. Theorie
2.1 Elastische Biegung
Zur Beschreibung einer Dehnung des Festkörpers durch eine äußere Kraft verwen-
det man das Hook’sche Gesetz. Dieses besagt, daß die elastische Zugspannung im
Material proportional zur relativen Längenänderung des Materials ist, d.h.
εσ E=
wobei: σ : Zugspannung
L
L∆=ε rel. Längenänderung
E: Elastizitätsmodul
Gleichzeitig mit der Längenänderung verkürzt sich auch die Querabmessung R (z.B.
Radius, Durchmesser) des Materials. Die Querkontraktionszahl µ beschreibt das
Verhältnis von relativer Querverkürzung zur relativen Längenänderung, also:
LL
RR
∆
∆−=µ
Betrachtet man nun einen einseitig eingespannten Stab, an dessen freiem Ende ein
Gewicht gehängt wird, so wirkt dadurch ein äußeres Drehmoment, das an der Ein-
spannstelle maximal und am freien Ende Null ist. Dieses wird durch:
FzLM a )( −=
Gruppe 8m Björn BaumeierJan Auffenberg
2
beschrieben.
Um die Durchbiegung als Funktion von Material, Form und wirkender Kraft zu be-
rechnen, müssen die Größen ε und σ näher bestimmt werden.
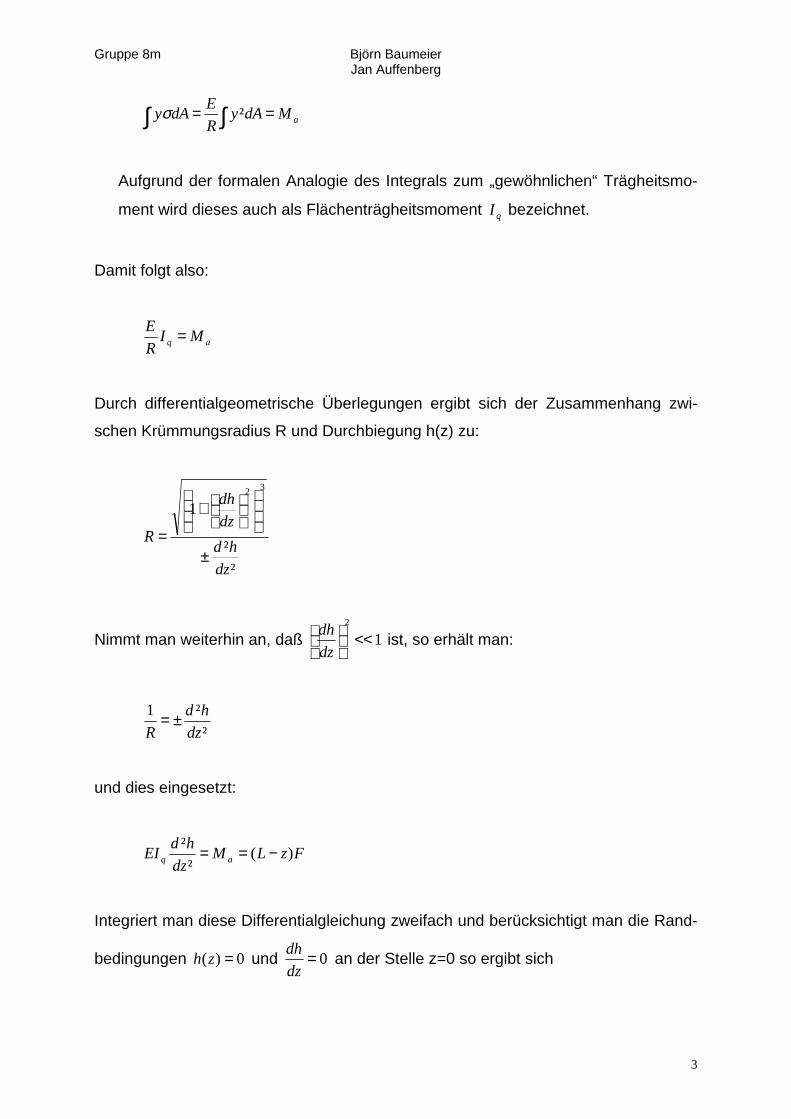
Zunächst betrachtet man dazu die Abbil-
dungen 1 und 2. Hieraus kann man erken-
nen, daß
R
y
dz
dl ==ε
ist.
Somit ergibt sich als Zwischenlösung:
R
yE=σ
An die Zugspannung innerhalb des Materials werden nun zwei Bedingungen gestellt:
a) Es soll reine Biegung vorliegen, d.h. daß das Flächenintegral der Zugspannung
über die Querschnittsfläche keine Komponente in Richtung Stabachse besitzt, al-
so:
0=== ∫∫∫ ydAR
EdA
R
yEdAσ
Dies bedeutet, daß die neutrale Faser, d.h. die Faser des Materials die weder ge-
dehnt noch verkürzt wird, durch die horizontale Hauptachse des Querschnitts,
welche den Flächenschwerpunkt enthält, geht.
b) Die Zugspannung soll ein inneres Drehmoment liefern, das das äußere gerade
ausgegleicht, d.h.
Gruppe 8m Björn BaumeierJan Auffenberg
3
∫ ∫ == aMdAyR
EdAy ²σ
Aufgrund der formalen Analogie des Integrals zum „gewöhnlichen“ Trägheitsmo-
ment wird dieses auch als Flächenträgheitsmoment qI bezeichnet.
Damit folgt also:
aq MIR
E =
Durch differentialgeometrische Überlegungen ergibt sich der Zusammenhang zwi-
schen Krümmungsradius R und Durchbiegung h(z) zu:
²
²
1
32
dz
hd
dz
dh
R±
+
=
Nimmt man weiterhin an, daß 12
<<
dz
dh ist, so erhält man:
²
²1
dz
hd
R±=
und dies eingesetzt:
FzLMdz
hdEI aq )(
²
² −==
Integriert man diese Differentialgleichung zweifach und berücksichtigt man die Rand-
bedingungen 0)( =zh und 0=dz
dh an der Stelle z=0 so ergibt sich
Gruppe 8m Björn BaumeierJan Auffenberg
4
−=
6
³
2
²)(
zzL
EI
Fzh
q
Maximale Biegung des Stabes liegt an dessen freien Ende, also bei z = L, vor, Dar-
aus folgt:
qEI
FLh
3
³max =
Die Flächenträgheitsmomente für die Geometrien der im Versuch betrachteten Stäbe
lauten:
64
4dI Kreis
π= und 12
³Re
abI chteck =
2.2 Elastische Torsion
Wirken auf einen Würfel äußere Kräfte so ein, daß dieser elastisch geschert wird, so
treten im Würfel Schubspannungen τ auf. Diese sind dem Scherwinkel α proportio-
nal, die Proportionalitätskonstante wird als Schubmodul G bezeichnet, also ist:
ατ G=
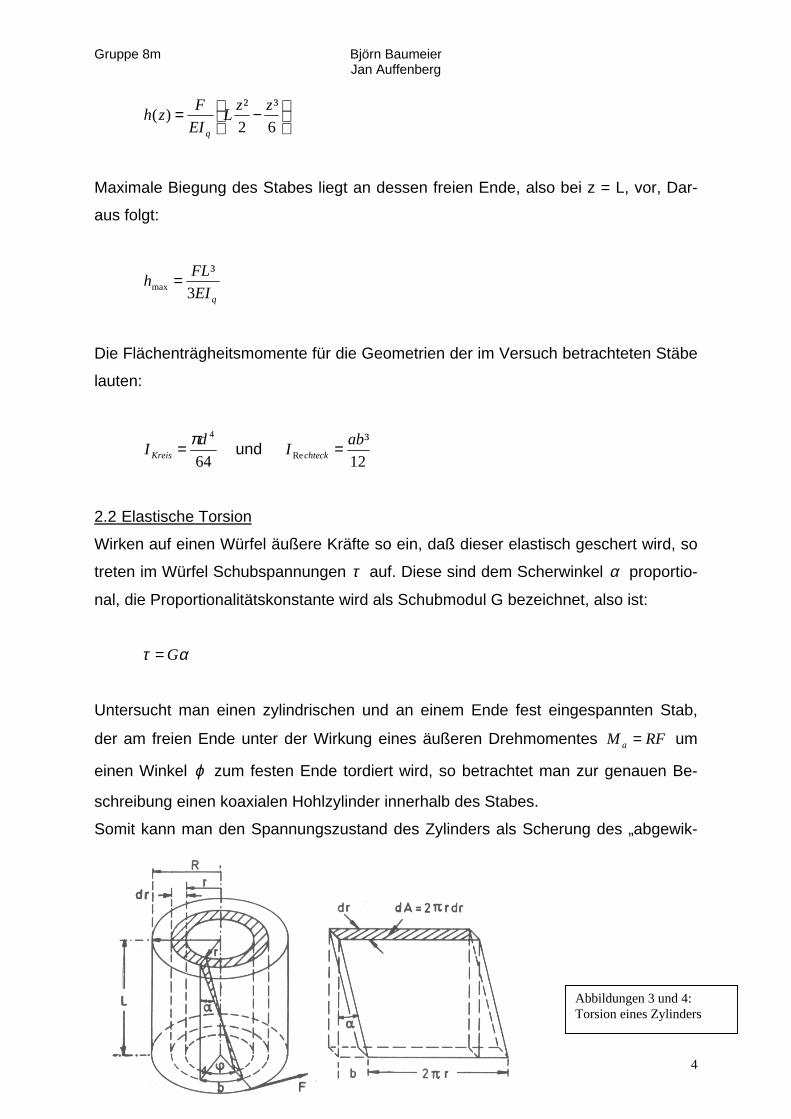
Untersucht man einen zylindrischen und an einem Ende fest eingespannten Stab,
der am freien Ende unter der Wirkung eines äußeren Drehmomentes RFM a = um
einen Winkel ϕ zum festen Ende tordiert wird, so betrachtet man zur genauen Be-
schreibung einen koaxialen Hohlzylinder innerhalb des Stabes.
Somit kann man den Spannungszustand des Zylinders als Scherung des „abgewik-
Abbildungen 3 und 4:Torsion eines Zylinders

Gruppe 8m Björn BaumeierJan Auffenberg
5
kelten“ Hohlzylinders ansehen.
Aus den Abbildungen 3 und 4 kann man erkennen, daß sich der Scherwinkel α auch
schreiben läßt als:
L
r
L
b ϕα ==
Und damit auch:
L
rG
ϕτ =
Ähnlich wie bei der elastischen Biegung muß auch hier das durch die Schubspan-
nungen wirkende innere Drehmoment gleich dem äußeren sein, also:
∫ ∫ ==R
aMrdrL
rGrdAr
0
2πϕτ
Löst man dieses Integral, so führt das auf:
ϕπL
GRM a 2
4
=
Diese Formel beschreibt die Abhängigkeit des Torsionswinkels von dem Material und
den Abmessungen des Stabes sowie von dem äußeren Drehmoment.
Formal ist dieser Ausdruck analog zu:
DxF −=
dem Hook’schen Gesetz für lineare Veränderungen, z.B. bei Federn.
Gruppe 8m Björn BaumeierJan Auffenberg
6
2.3 Torsionsschwingungen
Läßt man den unter 2.2 beschriebenen, tordierten Stab los, so führt dieser Torsions-
schwingungen aus.
Nimmt man an, daß diese rein elastisch und ungedämpft sind, so ergibt sich die Be-
wegungsgleichung zu:
0*
=+••
ϕϕJ
D
wobei *D die Proportionalitätskonstante zwischen aM und ϕ ist, welche sich aus
der in 2.2 hergeleiteten Formel zu
L
GRD
2
4* π=
ergibt.
Die Bewegungsgleichung beschreibt eine harmonische Schwingung, deren Peri-
odendauer
*2
D
JT π=
ist. Damit läßt sich G berechnen mit Hilfe von:
²
84TR
LJG
π=
2.4 Trägheitsmomente
Bei den im Versuch untersuchten Torsionsschwingungen werden die Trägheitsmo-
mente im wesentlichen durch Körper, die an einen tordierten Draht angehängt sind,
bestimmt.
Gruppe 8m Björn BaumeierJan Auffenberg
7
Zunächst betrachten wir das Trägheitsmoment einer zylindrischen Scheibe entlang
ihrer Schwerpunktsachse. Ist zm die Masse der Scheibe und zR ihr Radius, so erhält
man als Trägheitsmoment:
2
2
1zzz RmJ =
Setzt man dies in die Gleichung für das Schubmodul ein, so folgt:
²
44
2
TR
RLmG zzπ=
Im zweiten Teil des Versuchs wird diese Scheibe durch eine Hantel ersetzt. Das
Trägheitsmoment dieser Hantel setzt sich zusammen aus den Trägheitsmomenten
der einzelnen Bauteile.
Die einzelnen Trägheitsmomente berechnen sich mit Hilfe des Steiner‘schen Satzes,
der das Trägheitsmoment eines Körpers bezüglich einer Nicht-Schwerpunktsachse
beschreibt. Es ist:
maJJ S ²+=
Dabei ist SJ das Trägheitsmoment bezüglich der Schwerpunktsachse und a der Ab-
stand der Drehachse von der Schwerpunktsachse.
Bezüglich der im Versuch realisierten Drehachse ergeben sich für die Bauteile fol-
gende Trägheitsmomente:
- Hantelachse:
+= 2
12111 4
1
12
1rlmJ
- Hantelscheiben:
( )
++= 2
12
22222 4
1
12
1rrlmJ
Gruppe 8m Björn BaumeierJan Auffenberg
8
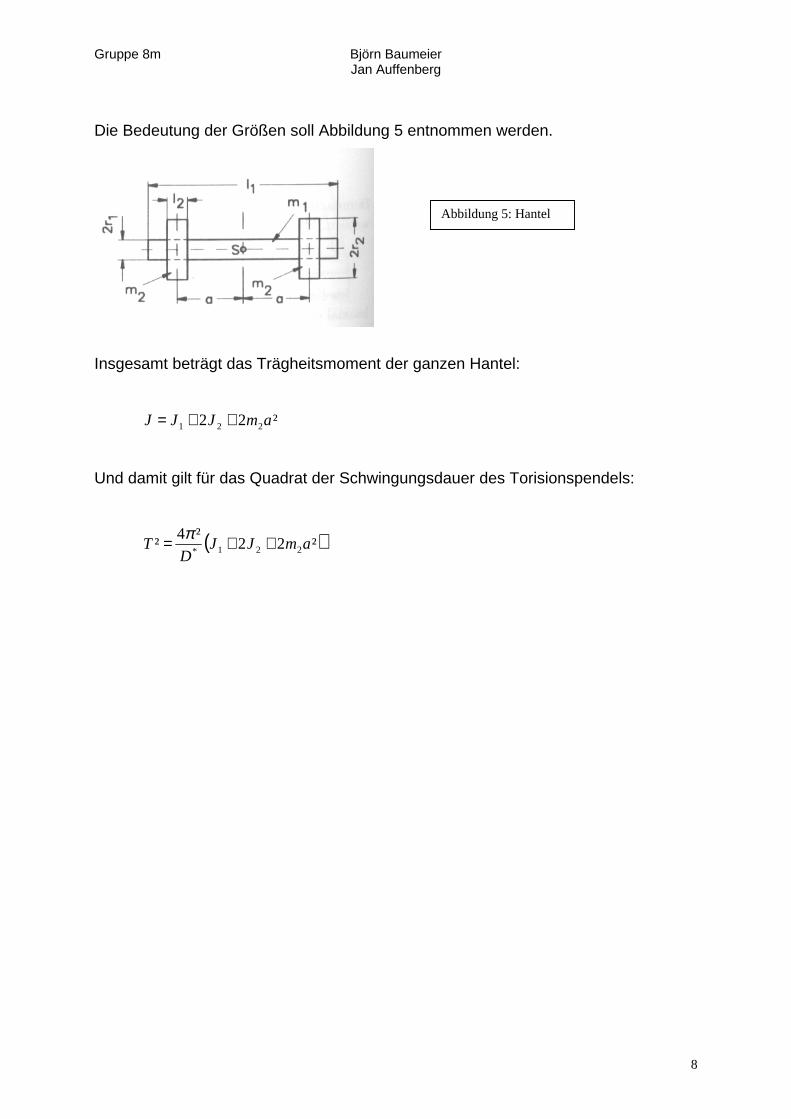
Die Bedeutung der Größen soll Abbildung 5 entnommen werden.
Insgesamt beträgt das Trägheitsmoment der ganzen Hantel:
²22 221 amJJJ ++=
Und damit gilt für das Quadrat der Schwingungsdauer des Torisionspendels:
( )²22²4
² 221*amJJ
DT ++= π
Abbildung 5: Hantel
Gruppe 8m Björn BaumeierJan Auffenberg
9
3. Beschreibung der Apparatur
3.1 Zubehör
- 1 Biegeapparatur mit Metallstäben
- 1 Gewichtssatz
- 1 Torsionsdraht mit angehängter Scheibe
- 1 Hantel
- 1 Stahlbandmaß
- 1 Mikrometerschraube
- 1 Schraubenzieher
- 1 Stoppuhr
3.2 Aufbau des Versuchs
Zur Bestimmung der Durchbiegungen der einzelnen Stäbe werden diese in einer
Einspannvorrichtung eingespannt und am freien Ende mit Gewichten behängt.
Bei den Untersuchungen der Torsionsschwingungen werden die jeweiligen Körper
(Scheibe, Hantelachse mit/ohne Hantelscheiben) an einen vertikal befestigten Draht
gehängt. Man lenkt die Körper anschließend um etwa 180° aus und misst die Dauern
für 3 Schwingungen.
Gruppe 8m Björn BaumeierJan Auffenberg
10
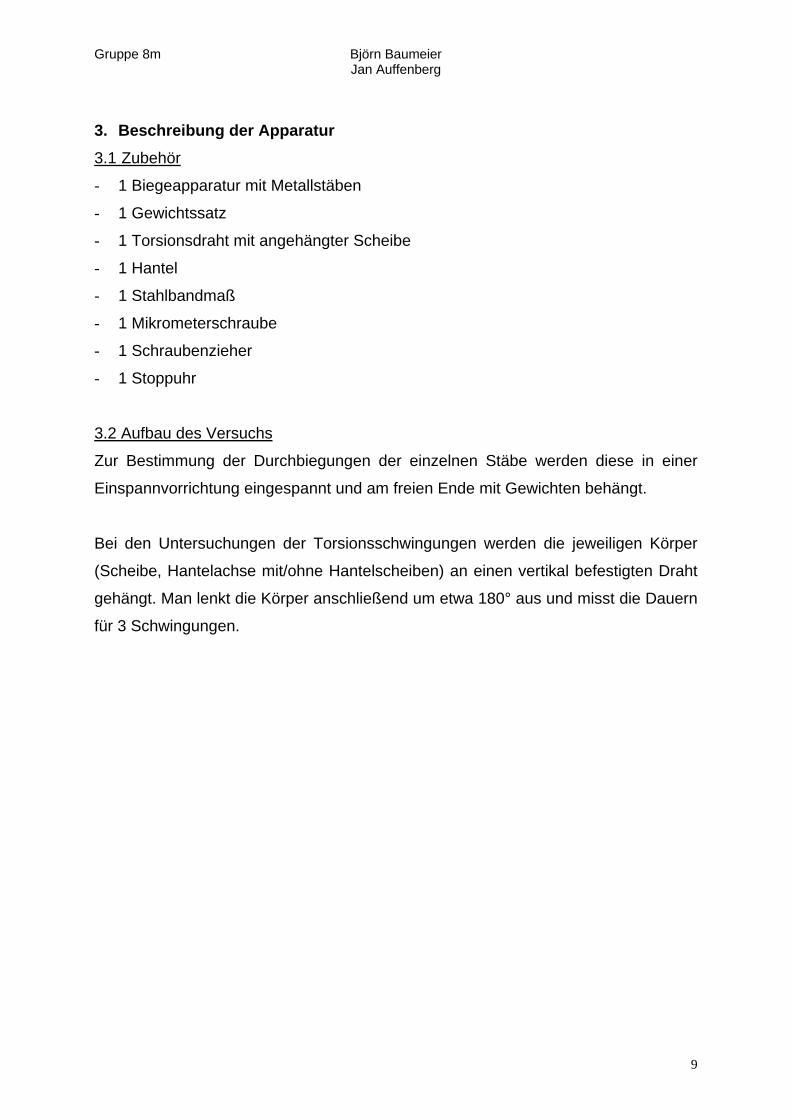
4. Durchführung des Versuchs
4.1 Messung der Durchbiegung von Metallstäben
Im folgenden werden die Ergebnisse der Messung der Durchbiegung der einzelnen
Metallstäbe in Abhängigkeit von den angehängten Gewichten dargestellt.
Auch wurden die Abmessungen der einzelnen Stäbe bestimmt, wobei der Durch-
messer jeweils drei Mal an fünf verschiedenen Stellen gemessen wurde.
a) Stabvermessung
Stab 1
1d
Stab 2
2d
Stab 3
3d
Stab 4Ld 4
Stab 4Kd 4
2,96 mm 2,97 mm 2,97 mm 4,98 mm 1,98 mm
2,97 mm 2,96 mm 2,98 mm 4,99 mm 1,99 mm
2,96 mm 2,97 mm 2,96 mm 4,99 mm 1,98 mm
2,96 mm 2,96 mm 2,98 mm 4,99 mm 1,99 mm
2,97 mm 2,96 mm 2,98 mm 4,99 mm 1,98 mm
2,96 mm 2,96 mm 2,98 mm 4,99 mm 1,98 mm
2,96 mm 2,97 mm 2,97 mm 4,98 mm 1,98 mm
2,96 mm 2,96 mm 2,97 mm 5,00 mm 1,99 mm
2,97 mm 2,96 mm 2,98 mm 4,99 mm 1,98 mm
2,96 mm 2,98 mm 2,98 mm 4,99 mm 1,98 mm
2,95 mm 2,96 mm 2,98 mm 5,00 mm 1,98 mm
2,96 mm 2,98 mm 2,98 mm 4,99 mm 1,98 mm
2,96 mm 2,97 mm 2,98 mm 4,99 mm 1,98 mm
2,96 mm 2,97 mm 2,98 mm 4,99 mm 1,99 mm
2,95 mm 2,97 mm 2,97 mm 4,99 mm 1,97 mm
Längen:
Stab 1: cmcml 1,01,291 ±=
Stab 2: cmcml 1,05,292 ±=
Stab 3: cmcml 1,07,283 ±=
Stab 4: cmcml 1,09,284 ±=
Gruppe 8m Björn BaumeierJan Auffenberg
11
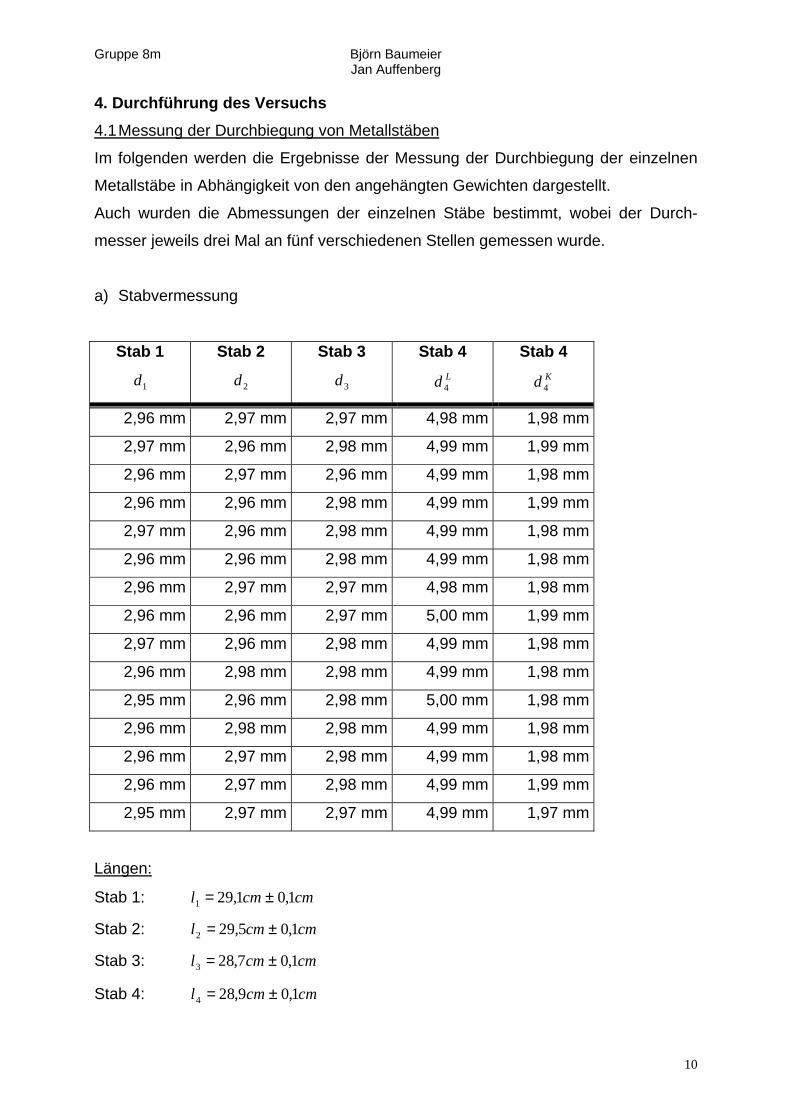
b) Durchbiegung
m 1h 2h 3h Kh4Lh4
h∆
10 g 2 mm 2 mm 1 mm 1 mm 4 mm ± 1 mm
20 g 5 mm 5 mm 3 mm 2 mm 8 mm ± 1 mm
30 g 8 mm 9 mm 5 mm 3 mm 10 mm ± 1 mm
50 g 14 mm 16 mm 8 mm 5 mm 15 mm ± 1 mm
100 g 28 mm 32 mm 16 mm 9 mm 28 mm ± 1 mm
4.2 Abmessungen der Körper für Torsionsschwingung
Hier werden die Ergebnisse der Bestimmung der Abmessungen der einzelnen für die
Untersuchung von Torsionsschwingungen benötigten Bauteile dargestellt:
a) Durchmesser des Torsionsdrahts
MessungTd
1 0,50 mm
2 0,48 mm
3 0,50 mm
4 0,48 mm
5 0,49 mm
6 0,48 mm
7 0,49 mm
8 0,49 mm
9 0,49 mm
10 0,49 mm
11 0,48 mm
12 0,48 mm
13 0,48 mm
14 0,49 mm
15 0,48 mm
Gruppe 8m Björn BaumeierJan Auffenberg
12
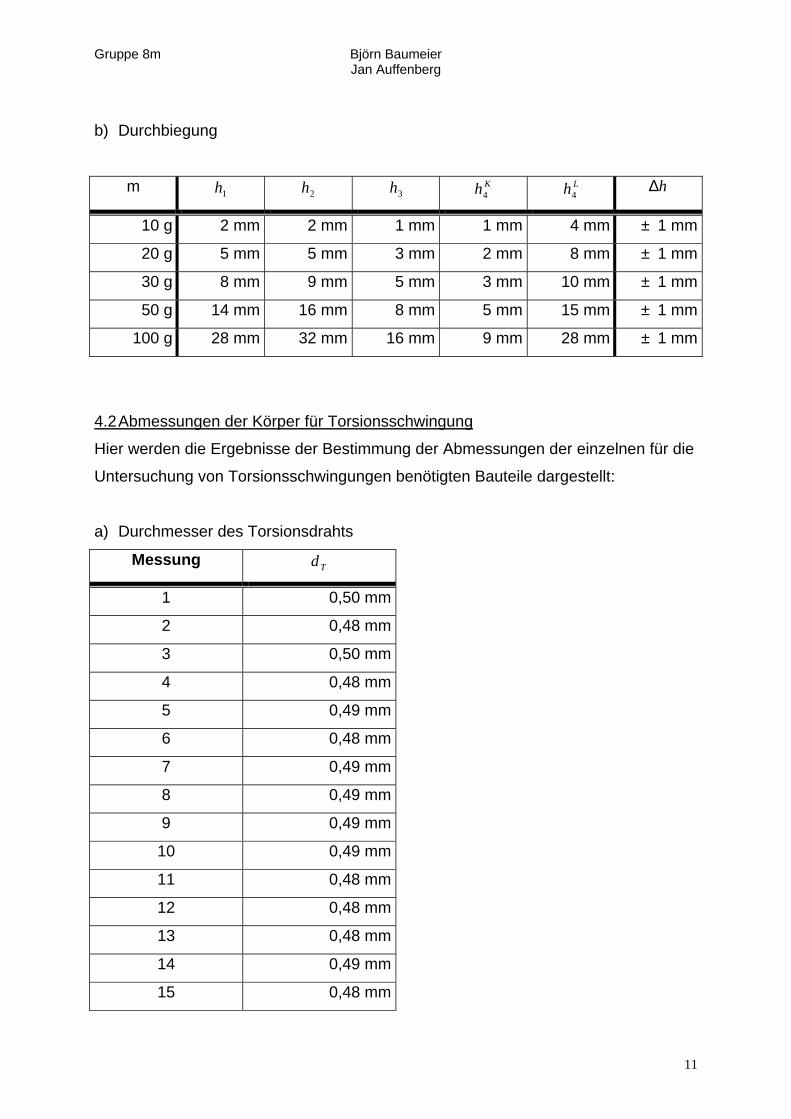
b) Messung der Scheibe
gm 2648=
cmcmd S 1,07,14 ±=
c) Messung der Hantel:
cmcml 1,01,251 ±=
mmmml 01,077,202 ±=
gm 2371 =
gm 1,3052 =
mmmmd 01,093,101 ±=
cmcmd 1,00,52 ±=
cmcma 1,03,111 ±=
cmcma 1,01,92 ±=
cmcma 1,08,63 ±=
cmcma 1,03,44 ±=
cmcma 1,00,25 ±=
4.3 Messung der Schwingungsdauern
Im folgenden werden die Ergebnisse der Messungen der Schwingungsdauer des
Torisonspendels dargestellt. Damit diese genauer bestimmt werden kann, wurde die
Dauer für 3 Schwingungen gemessen.
a) Pendel mit Scheibe
Messung T T∆
1 99,9 s s1,0±
2 99,5 s s1,0±
3 99,1 s s1,0±
Gruppe 8m Björn BaumeierJan Auffenberg
13
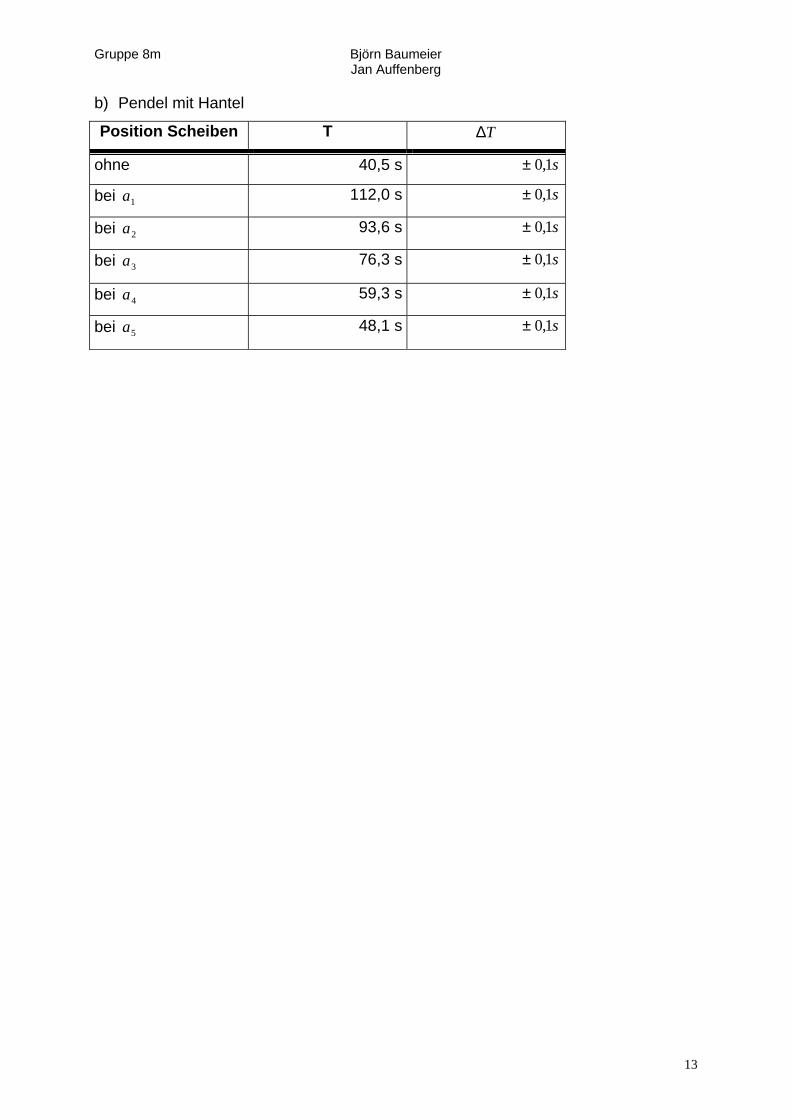
b) Pendel mit Hantel
Position Scheiben T T∆
ohne 40,5 s s1,0±
bei 1a 112,0 s s1,0±
bei 2a 93,6 s s1,0±
bei 3a 76,3 s s1,0±
bei 4a 59,3 s s1,0±
bei 5a 48,1 s s1,0±
Gruppe 8m Björn BaumeierJan Auffenberg
14
5 Auswertung
5.1 Berechnung der Flächenträgheitsmomente
Zunächst muß aus den Messungen für die Durchmesser der einzelnen Drähte deren
Mittelwert mit dessen Fehler über die Standardabweichung berechnet werden.
Führt man dies durch so erhält man:
%)1,01(96,21 ±= mmd
%)1,01(97,22 ±= mmd
%)1,01(98,23 ±= mmd
%)1,01(98,14 ±= mmd K
%)1,01(99,44 ±= mmd L
Für die ersten 3 Stäbe berechnet sich das Flächenträgheitsmoment durch:
64
4dI Kreis
π=
zu:
%)4,01(77,3 41 ±= mmI
%)4,01(82,3 42 ±= mmI
%)4,01(87,3 43 ±= mmI
Für den rechteckigen Stab gilt:
12
³Re
abI chteck =
Damit folgt:
Gruppe 8m Björn BaumeierJan Auffenberg
15
%)4,01(50,20 44 ±= mmI K
%)4,01(23,3 44 ±= mmI L
5.2 Bestimmung der Elastizitätsmodule
Im weiteren sollen die Elastizitätsmodule der einzelnen Stäbe graphisch bestimmt
werden. Dazu wird in den folgenden 5 Diagrammen jeweils die Durchbiegung h ge-
gen die durch die angehängten Gewichte wirkende Kraft F aufgetragen.
Die Steigungen der eingezeichneten linearen Ausgleichsgeraden sind also F
hc = .
Benutzt man die unter 2.1 zuvor hergeleitete Formel
qEI
FLh
3
³max =
und stellt diese um, so erhält man:
qI
L
cE
3
³1=
Mit Hilfe dieser Gleichung wird im folgenden das Elastizitätsmodul bestimmt. Der
Fehler dieser Größe ergibt sich nach dem Gesetz über Größtfehler zu:
q
q
I
I
L
L
c
c
E
E ∆+∆+∆=∆
3
Dabei wird der Fehler der Steigung c
c∆ jeweils graphisch durch einzeichnen von
steilsten und flachsten Geraden, die noch innerhalb der Fehlerkreuze liegen be-
stimmt. Aus Übersichtsgründen werden diese Geraden nicht mit ins Protokoll abge-
druckt.
Gruppe 8m Björn BaumeierJan Auffenberg
16
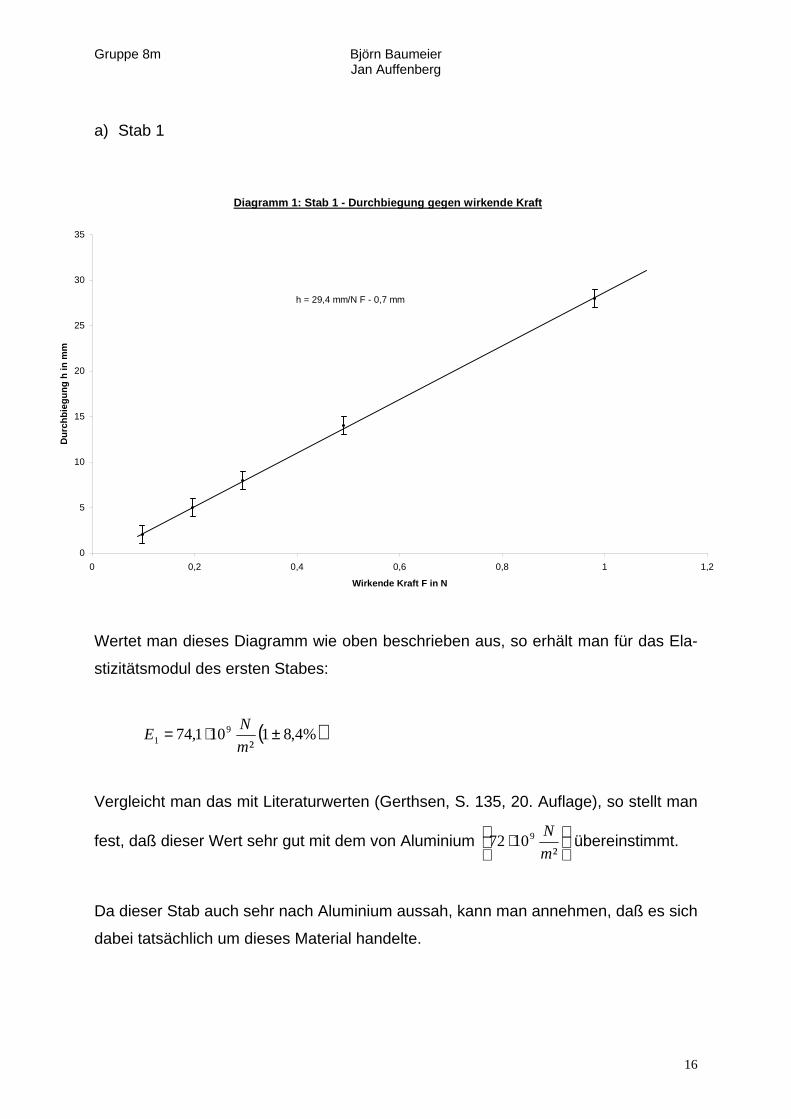
a) Stab 1
Wertet man dieses Diagramm wie oben beschrieben aus, so erhält man für das Ela-
stizitätsmodul des ersten Stabes:
( )%4,81²
101,74 91 ±⋅=
m
NE
Vergleicht man das mit Literaturwerten (Gerthsen, S. 135, 20. Auflage), so stellt man
fest, daß dieser Wert sehr gut mit dem von Aluminium
⋅
²1072 9
m
N übereinstimmt.
Da dieser Stab auch sehr nach Aluminium aussah, kann man annehmen, daß es sich
dabei tatsächlich um dieses Material handelte.
Diagramm 1: Stab 1 - Durchbiegung gegen wirkende Kraft
h = 29,4 mm/N F - 0,7 mm
0
5
10
15
20
25
30
35
0 0,2 0,4 0,6 0,8 1 1,2
Wirkende Kraft F in N
Dur
chbi
egun
g h
in m
m
Gruppe 8m Björn BaumeierJan Auffenberg
17
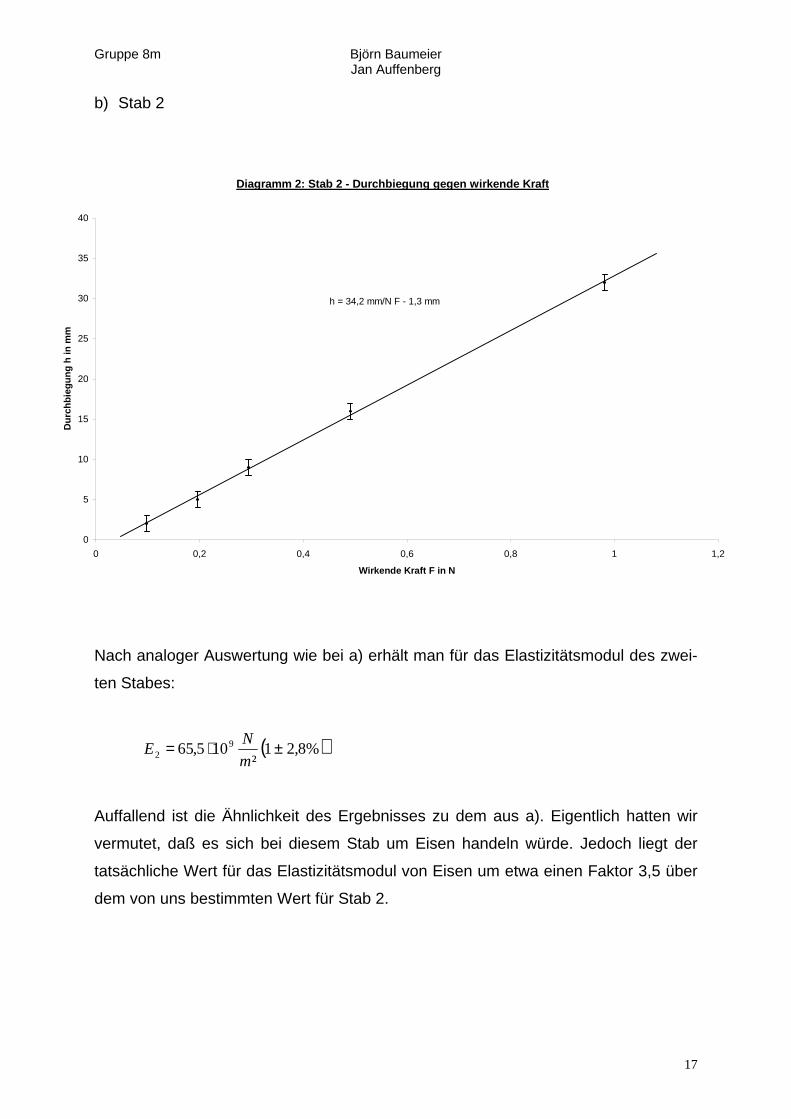
b) Stab 2
Nach analoger Auswertung wie bei a) erhält man für das Elastizitätsmodul des zwei-
ten Stabes:
( )%8,21²
105,65 92 ±⋅=
m
NE
Auffallend ist die Ähnlichkeit des Ergebnisses zu dem aus a). Eigentlich hatten wir
vermutet, daß es sich bei diesem Stab um Eisen handeln würde. Jedoch liegt der
tatsächliche Wert für das Elastizitätsmodul von Eisen um etwa einen Faktor 3,5 über
dem von uns bestimmten Wert für Stab 2.
Diagramm 2: Stab 2 - Durchbiegung gegen wirkende Kraft
h = 34,2 mm/N F - 1,3 mm
0
5
10
15
20
25
30
35
40
0 0,2 0,4 0,6 0,8 1 1,2
Wirkende Kraft F in N
Dur
chbi
egun
g h
in m
m
Gruppe 8m Björn BaumeierJan Auffenberg
18
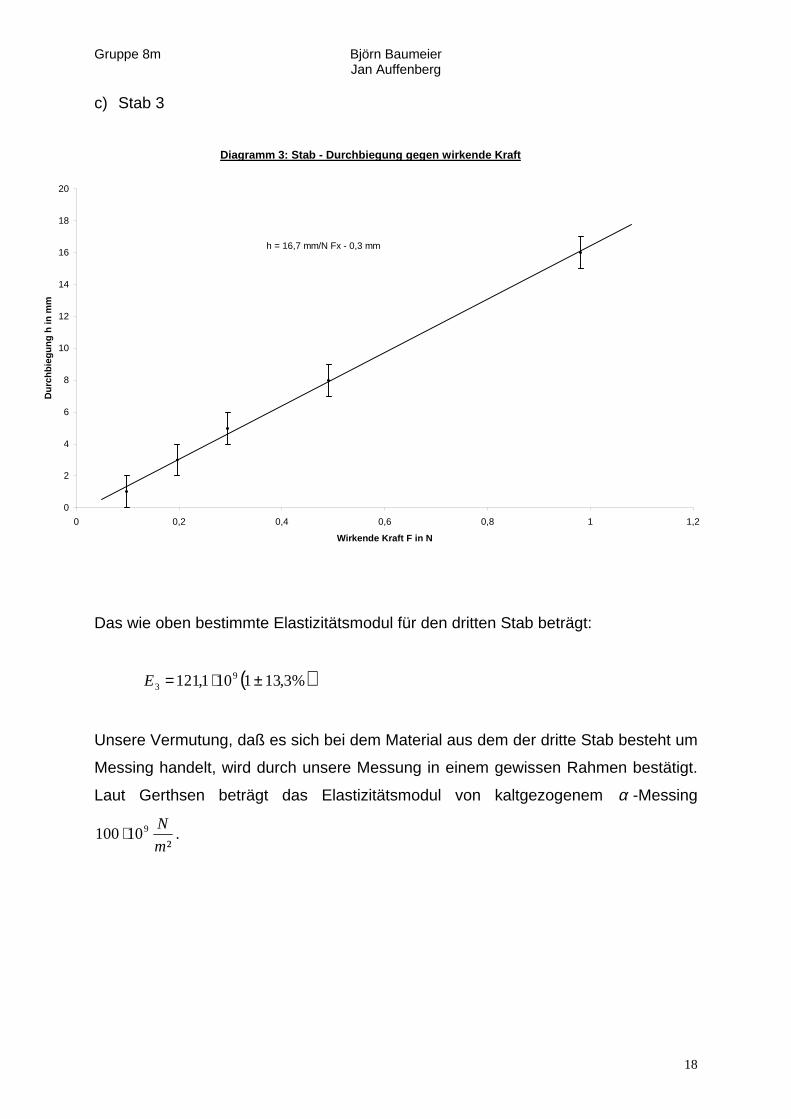
c) Stab 3
Das wie oben bestimmte Elastizitätsmodul für den dritten Stab beträgt:
( )%3,131101,121 93 ±⋅=E
Unsere Vermutung, daß es sich bei dem Material aus dem der dritte Stab besteht um
Messing handelt, wird durch unsere Messung in einem gewissen Rahmen bestätigt.
Laut Gerthsen beträgt das Elastizitätsmodul von kaltgezogenem α -Messing
²10100 9
m
N⋅ .
Diagramm 3: Stab - Durchbiegung gegen wirkende Kraft
h = 16,7 mm/N Fx - 0,3 mm
0
2
4
6
8
10
12
14
16
18
20
0 0,2 0,4 0,6 0,8 1 1,2
Wirkende Kraft F in N
Dur
chbi
egun
g h
in m
m
Gruppe 8m Björn BaumeierJan Auffenberg
19
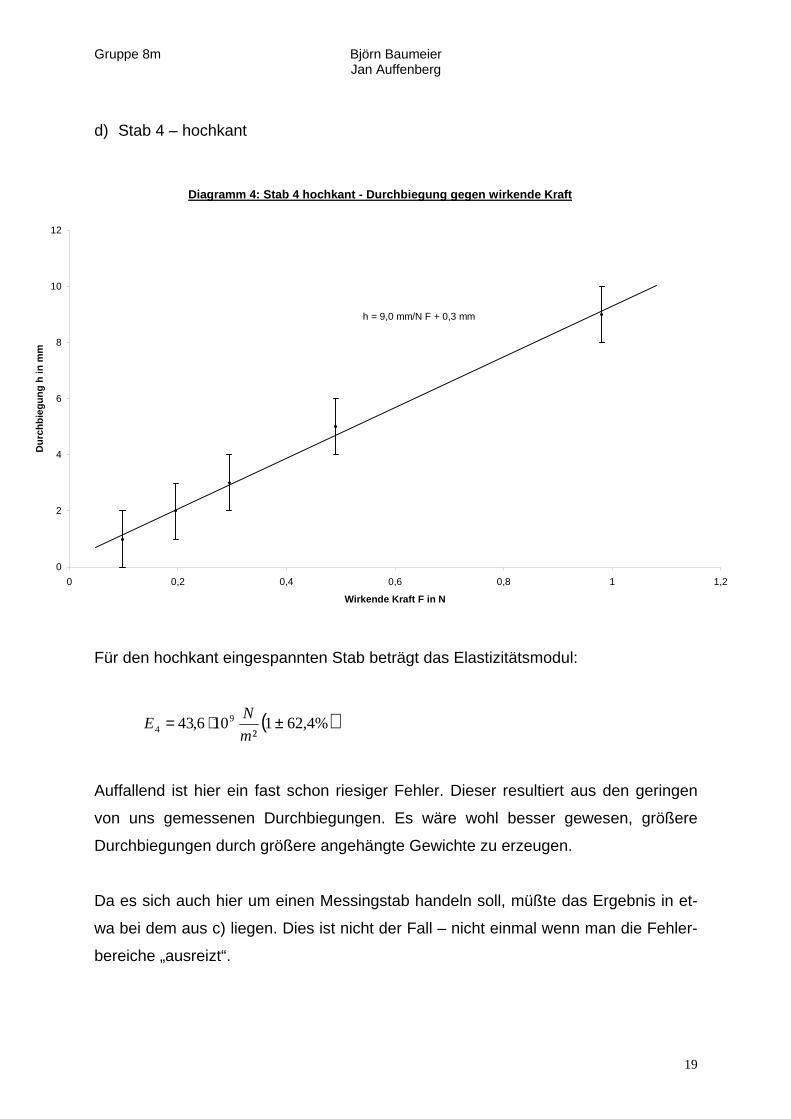
d) Stab 4 – hochkant
Für den hochkant eingespannten Stab beträgt das Elastizitätsmodul:
( )%4,621²
106,43 94 ±⋅=
m
NE
Auffallend ist hier ein fast schon riesiger Fehler. Dieser resultiert aus den geringen
von uns gemessenen Durchbiegungen. Es wäre wohl besser gewesen, größere
Durchbiegungen durch größere angehängte Gewichte zu erzeugen.
Da es sich auch hier um einen Messingstab handeln soll, müßte das Ergebnis in et-
wa bei dem aus c) liegen. Dies ist nicht der Fall – nicht einmal wenn man die Fehler-
bereiche „ausreizt“.
Diagramm 4: Stab 4 hochkant - Durchbiegung gegen wirkende Kraft
h = 9,0 mm/N F + 0,3 mm
0
2
4
6
8
10
12
0 0,2 0,4 0,6 0,8 1 1,2
Wirkende Kraft F in N
Dur
chbi
egun
g h
in m
m
Gruppe 8m Björn BaumeierJan Auffenberg
20
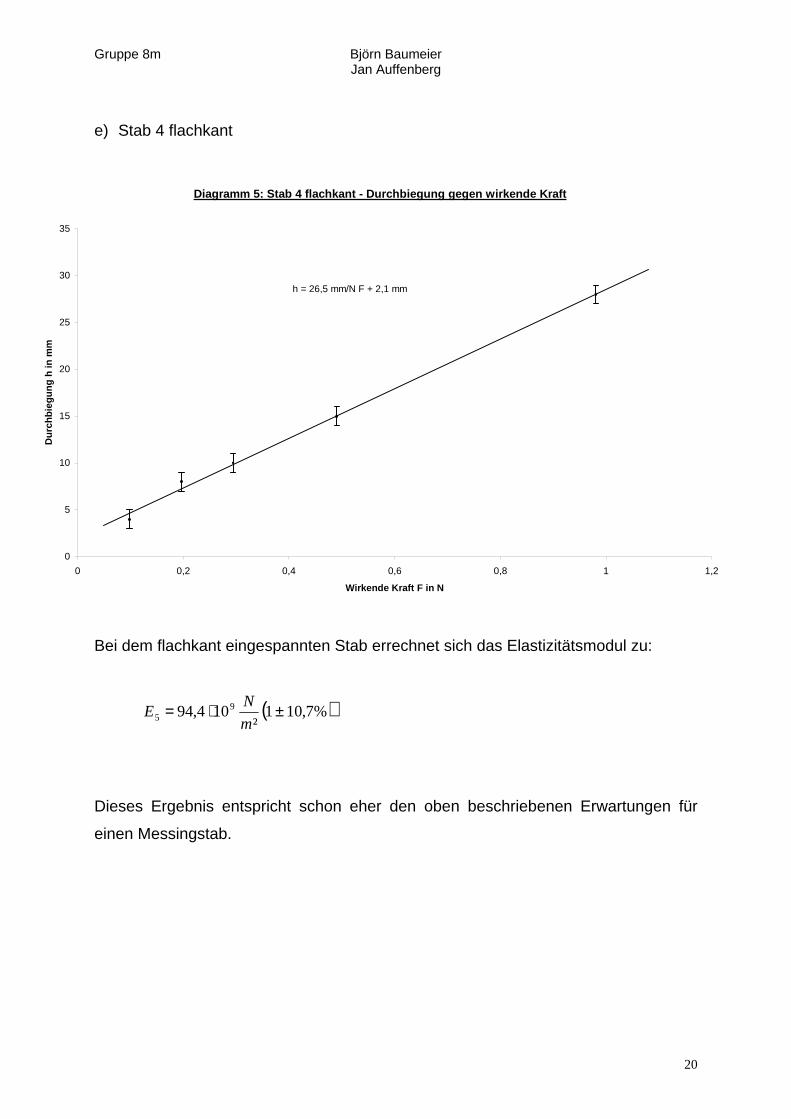
e) Stab 4 flachkant
Bei dem flachkant eingespannten Stab errechnet sich das Elastizitätsmodul zu:
( )%7,101²
104,94 95 ±⋅=
m
NE
Dieses Ergebnis entspricht schon eher den oben beschriebenen Erwartungen für
einen Messingstab.
Diagramm 5: Stab 4 flachkant - Durchbiegung gegen wirkende Kraft
h = 26,5 mm/N F + 2,1 mm
0
5
10
15
20
25
30
35
0 0,2 0,4 0,6 0,8 1 1,2
Wirkende Kraft F in N
Dur
chbi
egun
g h
in m
m

Gruppe 8m Björn BaumeierJan Auffenberg
21
5.3 Berechnung des Schubmoduls
Um aus den unter 4.2 und 4.3 aufgeführten Messungen der Scheibe und der
Schwingungsdauer der Torsionsschwingung das Schubmodul G des tordierten
Drahtes zu berechnen, muß man zunächst den Mittelwert der Schwingungsdauern
mitsamt dessen Unsicherheit berechnen. Tut man dies so erhält man:
( )%2,015,99 ±= sT für 3 Schwingungen, also:
%)2,01(2,330 ±= sT für 1 Schwingung.
Analog wird zur Bestimmung des Radius des Torsionsdrahtes zuerst der Mittelwert
des Durchmessers bestimmt:
( )%4,0149,0 ±= mmd
Also beträgt der Radius:
%)4,01(25,0 ±= mmRZ
Um aus diesen Werten und den bestimmten Abmessungen der Scheibe jetzt das
Schubmodul zu errechnen, verwendet man:
²
44
2
TR
RLmG zzπ=
Der Größtfehler für G beträgt:
T
T
R
R
R
R
G
G
Z
Z ∆+∆+∆
+∆242
Es ergibt sich:
Gruppe 8m Björn BaumeierJan Auffenberg
22
( )%1,41²
106,84 9 ±⋅=m
NG
Vergleicht man dieses Ergebnis wieder mit Literaturwerten (Gerthsen, S. 135, 20.
Auflage), so sieht man, daß dieser Wert darauf schließen läßt, daß der Torsionsdraht
aus α -Eisen besteht
⋅
²1084 9
m
N.
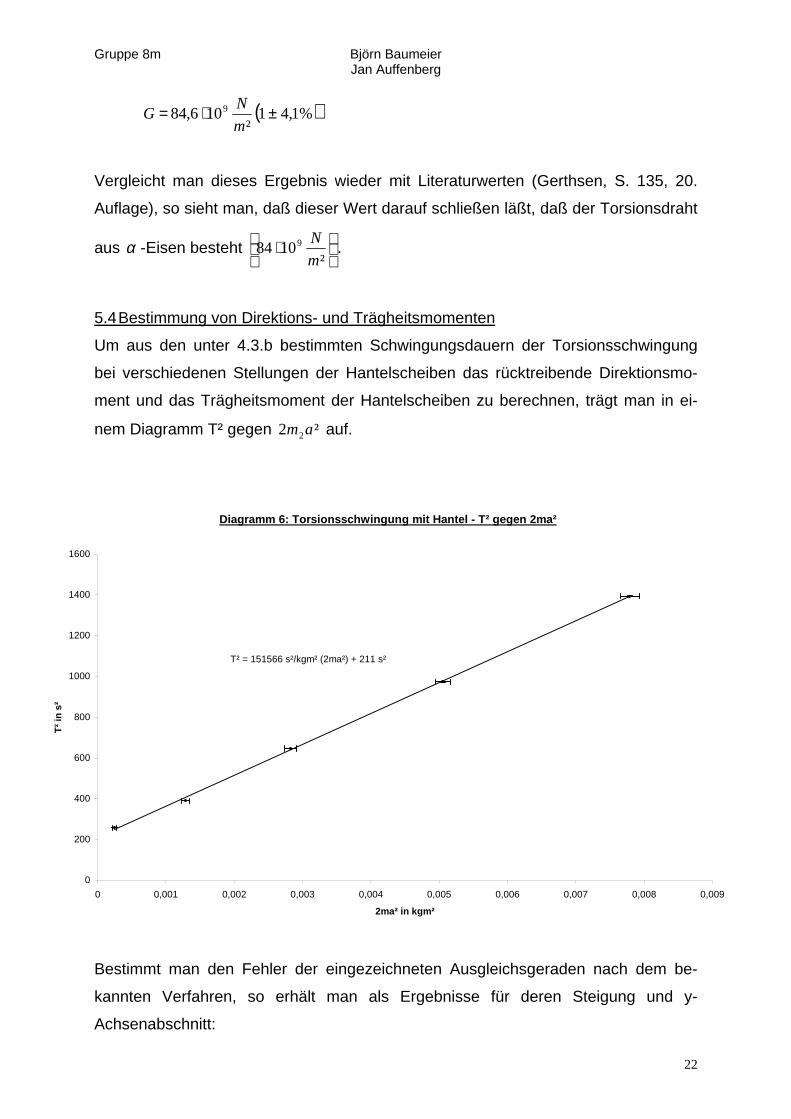
5.4 Bestimmung von Direktions- und Trägheitsmomenten
Um aus den unter 4.3.b bestimmten Schwingungsdauern der Torsionsschwingung
bei verschiedenen Stellungen der Hantelscheiben das rücktreibende Direktionsmo-
ment und das Trägheitsmoment der Hantelscheiben zu berechnen, trägt man in ei-
nem Diagramm T² gegen ²2 2am auf.
Bestimmt man den Fehler der eingezeichneten Ausgleichsgeraden nach dem be-
kannten Verfahren, so erhält man als Ergebnisse für deren Steigung und y-
Achsenabschnitt:
Diagramm 6: Torsionsschwingung mit Hantel - T² gegen 2ma²
T² = 151566 s²/kgm² (2ma²) + 211 s²
0
200
400
600
800
1000
1200
1400
1600
0 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009
2ma² in kgm²
T²
in s
²

Gruppe 8m Björn BaumeierJan Auffenberg
23
( )%4,21²
²151566 ±=
kgm
sc
( )%4,21²211 ±= sy
Mit Hilfe dieser beiden Größen lassen sich nun das rücktreibende Direktionsmoment
und das Trägheitsmoment der Hantelscheiben berechnen.
Geht man von der Formel (siehe 2.4)
( )²22²4
² 221*amJJ
DT ++= π
aus und formt diese um zu:
²2²4
)2(²4
² 2*21*am
DJJ
DT
ππ ++=
so erkennt man, daß
)2(²4
21*JJ
Dy += π
und*
²4
Dc
π= .
Aus der Gleichung für die Steigung läßt sich also Direktionsmoment bestimmen zu:
( )%4,21106,2²4 4* ±⋅== − Nm
cD
π
Setzt man dieses Ergebnis in die Gleichung für y ein und setzt c
TJ
21
1 = (wobei 1T die
Schwingungsdauer der Torsionsschwingung mit der Hantelachse ohne aufgelegte
Scheiben ist), so ergibt sich für das Trägheitsmoment der Hantelscheiben 2J :

Gruppe 8m Björn BaumeierJan Auffenberg
24
( ) ( ) ²104,2105,9%7,251²105,92
5552
12 kgmkgm
c
TyJ −−− ⋅±⋅=±⋅=
−=
Dabei hat sich der Fehler gemäß dem Gesetz über die Fortpflanzung von Größtfeh-
lern berechnet.
c
c
Ty
Ty
J
J ∆+−−∆
=∆
2)(
21
21
2
2
Berechnet man 1J gemäß c
TJ
21
1 = , so erhält man:
( )%9,21²102,1 31 ±⋅= − kgmJ
Um diese Werte für die Trägheitsmomente einschätzen zu können, muß man diese
auch aus den Abmessungen ermitteln und die jeweiligen Ergebnisse vergleichen.
Es ist:
( )%8,01²102,1 31 ±⋅= − kgmJ
( )%2,31²100,6 52 ±⋅= − kgmJ
Es fällt auf, daß die Ergebnisse für das Trägheitsmoment der Hantelachse nach bei-
den Methoden übereinstimmen, während dies für das Trägheitsmoment der Hantel-
scheiben nicht gilt – selbst wenn man die Fehlerbereiche berücksichtigt.
Gruppe 8m Björn BaumeierJan Auffenberg
25
6. Diskussion
Will man die von uns während des Versuches erhaltenen Ergebnisse diskutieren, so
muß man zunächst zwischen den beiden Versuchsteilen unterscheiden.
Bei der Messung der Durchbiegung der Metallstäbe und der nachfolgenden Bestim-
mung der jeweiligen Elastizitätsmodule ist auffällig, daß einige Werte sehr gut den
Erwartungen entsprechen, andere jedoch überhaupt nicht. Letzteres gilt insbesonde-
re für den – vermuteten – Eisenstab (Stab 2) und den hochkant eingespannten Mes-
singstab (Stab 4). Auch hier müssen beide Fälle gesondert diskutiert werden.
Leider fällt uns keine sinnvolle Erklärung der Abweichung unseres Ergebnisses von
dem erwarteten Wert für den „Eisenstab“ ein, um den Verdacht von uns zu lenken.
Aufgrund der frappierenden Ähnlichkeit der Ergebnisse unter 5.2.a) und 5.2.b) liegt
die Vermutung äußerst nahe, daß es sich bei dem angenommenen Eisenstab gar
nicht um diesen handelte. Stattdessen muß beinahe davon ausgegangen werden,
daß Stab 1 von uns irrtümlich doppelt vermessen wurde. (Peinlich) Dies ist deswe-
gen möglich, da wir nach den ersten Messungen mögliche Ungereimtheiten bei der
zuvor durchgeführten Bestimmung der Durchmesser der einzelnen Stäbe durch er-
neutes Vermessen ausräumen mußten. Dabei haben wir wohl nicht nur aus- sondern
auch umgeräumt, wodurch der Eisenstab als bereits untersucht eingeordnet wurde.
Der viel zu geringe Wert des Elastizitätsmoduls des hochkant eingespannten Mes-
singstabes ist vermutlich auch unsere Schuld. Es wäre sicherlich für die Exaktheit der
Messung bei weitem günstiger gewesen, größere Gewichte an diesen Stab zu hän-
gen, um größere und damit genauere Durchbiegungen hervorzurufen.
Betrachtet man unsere Resultate bezüglich der untersuchten Torsionsschwingungen,
so fällt erfreulicherweise auf, daß wir nicht nur Fehler gemacht haben. Der Wert für
das Schubmodul läßt darauf schließen, daß es sich bei dem Draht um einen Eisen-
draht handelte, was auch unseren Beobachtungen nach sehr wahrscheinlich ist.
Gruppe 8m Björn BaumeierJan Auffenberg
26
Auch beide auf verschiedene Weisen berechneten Trägheitsmomente 1J für die
Hantelachse stimmen exakt überein.
Leider gilt dieses nicht für das Trägheitsmoment 2J der Hantelscheiben. Allerdings
ist dieses nicht allzu erstaunlich, da die Bestimmung mit Hilfe des Diagramms doch
auf einigen Umwegen im Vergleich zur direkten Bestimmung aus den Abmessungen
geschieht. Dieses wird auch durch den bestimmten Fehler von 25,7% zum Ausdruck
gebracht. Dennoch reicht dieser Fehlerbereich nicht aus, um zu sagen, daß beide
Ergebnisse übereinstimmen. Das könnte zum einen an nicht ganz genauen Messun-
gen liegen, zum anderen ist der graphisch von uns bestimmte Fehler der Ausgleichs-
geraden möglicherweise etwas zu niedrig. Man muß sich nur die Skalierungen der
Achsen vor Augen halten, um zu erkennen, daß geringste Variationen der zur Feh-
lerbestimmung benutzten steilsten und flachsten Geraden durch die Fehlerbalken
größere Unsicherheiten zur Folge hätten.
Top Related