4. Torsion - wandinger.userweb.mwn.dewandinger.userweb.mwn.de/TM2/v1_4.pdf · Prof. Dr. Wandinger...
23
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-1 06.04.16 4. Torsion ● Die Belastung eines Balkens durch ein Moment um die x- Achse wird als Torsion bezeichnet. ● Das Torsionsmoment M x resultiert aus einer über den Querschnitt verteilten Schubspannung. ● Für Kreis- und Kreisringquerschnitte kann die Verteilung der Schubspannung einfach ermittelt werden. ● Im Folgenden werden kreiszylindrische Wellen mit kon- stantem oder nur schwach veränderlichem Radius be- trachtet. ● Sie werden z. B. bei Antriebswellen verwendet, die zur Übertragung von Drehmomenten eingesetzt werden.
Transcript of 4. Torsion - wandinger.userweb.mwn.dewandinger.userweb.mwn.de/TM2/v1_4.pdf · Prof. Dr. Wandinger...
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-1
06.04.16
4. Torsion
● Die Belastung eines Balkens durch ein Moment um die x-Achse wird als Torsion bezeichnet.
● Das Torsionsmoment Mx resultiert aus einer über den Querschnitt verteilten Schubspannung.
● Für Kreis- und Kreisringquerschnitte kann die Verteilung der Schubspannung einfach ermittelt werden.
● Im Folgenden werden kreiszylindrische Wellen mit kon-stantem oder nur schwach veränderlichem Radius be-trachtet.
● Sie werden z. B. bei Antriebswellen verwendet, die zur Übertragung von Drehmomenten eingesetzt werden.

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-2
06.04.16
4. Torsion
● Beispiel: Antriebsstrang

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-3
06.04.16
4. Torsion
4.1 Spannungsermittlung
4.2 Beispiele
4.3 Zulässige Spannung

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-4
06.04.16
4.1 Spannungsermittlung
● Kinematik:
– Die Querschnitte drehen sich um die x-Achse, ohne dabei ihre Form zu ändern.
– Es tritt keine Verschiebung in x-Richtung auf.
AB
A'B'
x
Mx

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-5
06.04.16
4.1 Spannungsermittlung
● Scherung:
– Der Querschnitt an der Stelle x verdreht sich um den Winkel θ.
– Der Querschnitt an der Stelle x + dx verdreht sich um den Winkel θ + dθ.
– Aus der Zeichnung kann abgelesen wer-den:
dθ
r
dx
x
P
P' Q
Q'
θ
γ
γ dx=r d θ
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-6
06.04.16
4.1 Spannungsermittlung
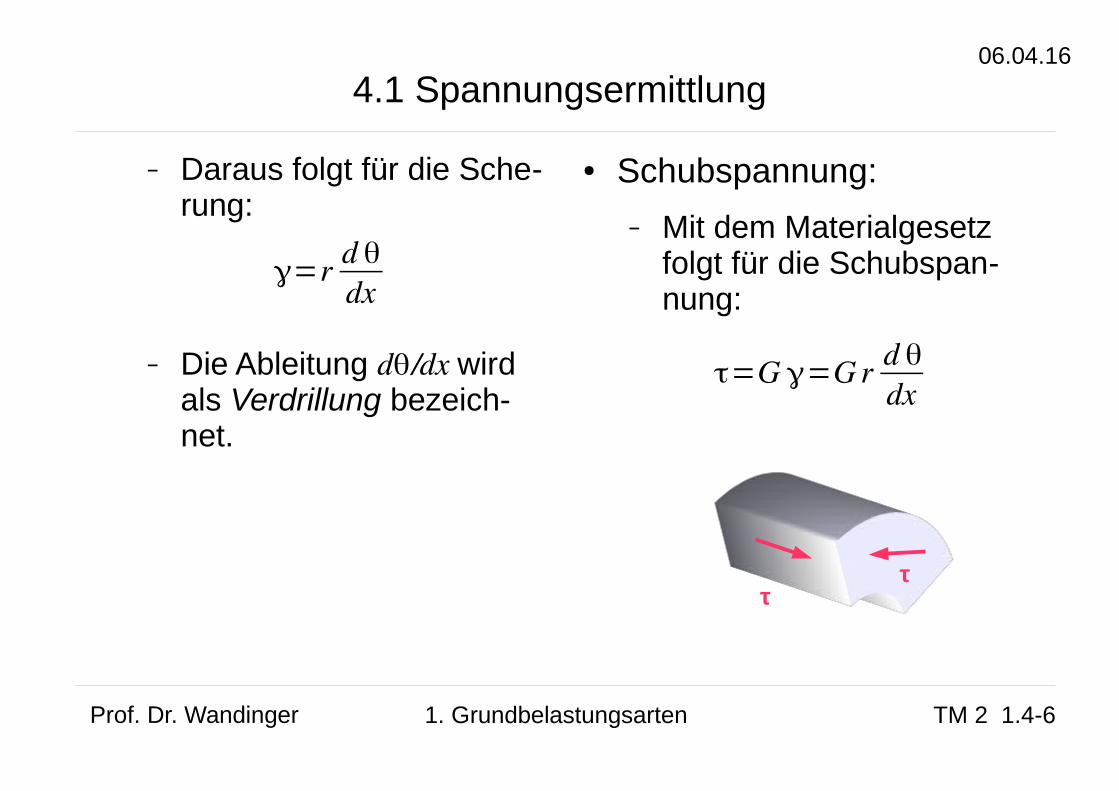
– Daraus folgt für die Sche-rung:
– Die Ableitung dθ/dx wird als Verdrillung bezeich-net.
γ=r d θ
dx
● Schubspannung:
– Mit dem Materialgesetz folgt für die Schubspan-nung:
τ=G γ=G r d θ
dx
ττ

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-7
06.04.16
4.1 Spannungsermittlung
– Das resultierende Moment der Schubspannung ist gleich dem Torsionsmoment:
– Mit dem Torsionsträgheitsmoment
gilt:
– Die Größe GIT wird als Torsionssteifigkeit bezeichnet.
r
τ
z
y
R
dA
M x=∫A
r τ dA=G d θ
dx ∫Ar 2 dA
I T=∫A
r2 dA
M x=G I Td θ
dx

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-8
06.04.16
4.1 Spannungsermittlung
– Mit
folgt für die Schubspannung:
– Die maximale Schubspannung tritt für r = R auf:
– Dabei ist WT das Torsionswiderstandsmoment.
d θ
dx=
M x
G I T
τ=M x
I T
r
τmax=M x
I T
R=M x
W T
mit W T=I T
R

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-9
06.04.16
4.1 Spannungsermittlung
● Verdrehung:
– Der Winkel, um den sich zwei Querschnitte an den Stellen xA und xB gegeneinander verdrehen, berechnet sich zu
– Bei konstantem Torsionsmoment und konstanter Torsions-steifigkeit gilt:
Δθ=θB−θA=∫x A
x B
d θdx
dx=∫xA
xB M x
G I T
dx
θB−θA=M x LAB
G I T
mit LAB=xB−xA

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-10
06.04.16
4.1 Spannungsermittlung
● Torsionsträgheitsmoment:
– Kreisquerschnitt:
– Kreisringquerschnitt:
R
r
dA
dA=2 π r dr
I T=∫A
r2 dA=2 π∫0
R
r3 dr=12
π R4
W T=12
π R3
I T=12
π ( Ra4−R i
4 ) , W T=12
πRa
( Ra4−Ri
4 )
Ra
Ri
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-11
06.04.16
4.1 Spannungsermittlung
– Beim Kreis und beim Kreisring stimmt das Torsionsträg-heitsmoment mit dem polaren Flächenträgheitsmoment überein. Das polare Flächenträgheitsmoment ist ein geome-trischer Kennwert des Querschnitts.
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-12
06.04.16
4.1 Spannungsermittlung
● Allgemeine Querschnitte:
– Bei einem allgemeinen Querschnitt stimmt das Torsions-trägheitsmoment nicht mit dem polaren Flächenträgheits-moment überein.
– Zusätzlich tritt eine Verschiebung in x-Richtung auf, die als Verwölbung bezeichnet wird.
– Die Formeln für die Schubspannung und die Verdrillung gel-ten weiterhin.
– Torsionsträgheitsmoment und Torsionswiderstandsmoment sind jedoch komplizierter zu berechnen.

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-13
06.04.16
4.2 Beispiele
● Konische Welle
– Die abgebildete konische Antriebswelle mit Kreis-querschnitt wird durch das Antriebsmoment Mx belastet.
– Gegeben:
● Abmessungen L und r0
● Schubmodul G● Antriebsmoment Mx
2r0
r0
L 3L L
Mx
A B C DMx
x
– Gesucht:● Maximale Schubspan-
nung● Verdrehungen relativ zu
Querschnitt A

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-14
06.04.16
4.2 Beispiele
– Das Torsionsmoment ist in jedem Querschnitt gleich und hat den Wert Mx .
– Größte Schubspannung:● Die größte Schubspannung tritt im Abschnitt CD auf.● Mit dem Torsionswiderstandsmoment
gilt:
W TCD
=12
π r 03
τmax=M x
W TCD =
2 M x
π r03
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-15
06.04.16
4.2 Beispiele
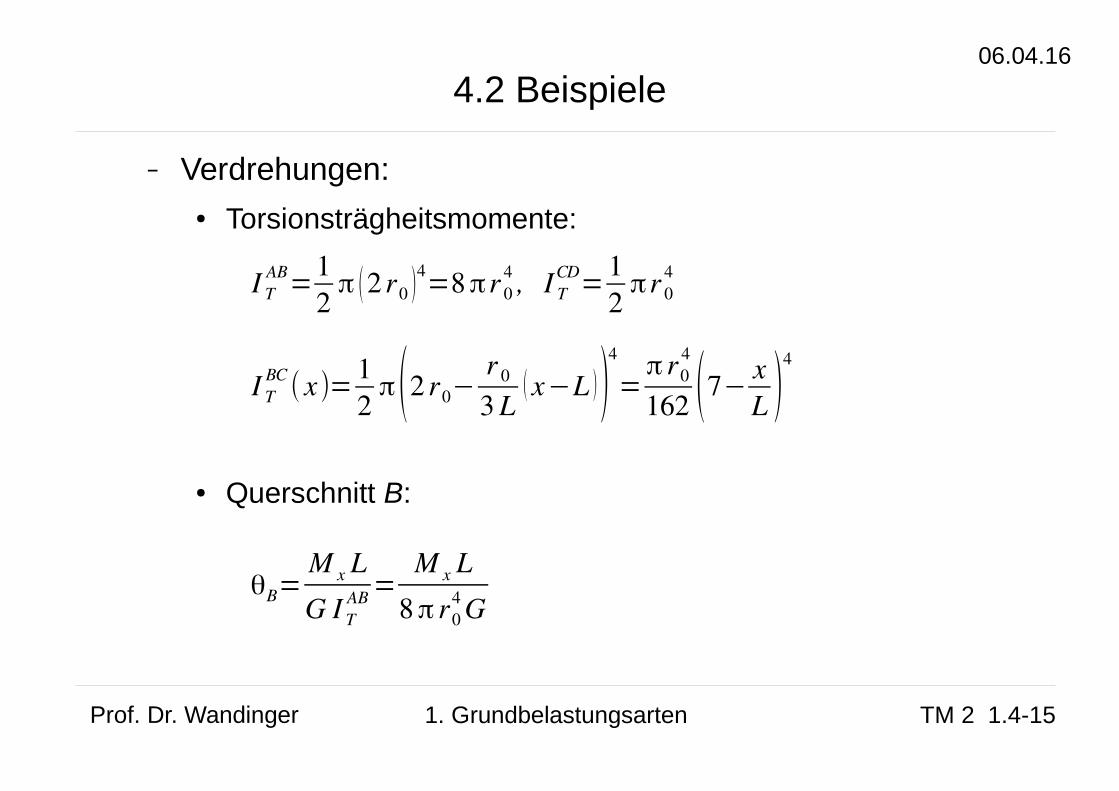
– Verdrehungen:● Torsionsträgheitsmomente:
● Querschnitt B:
I TAB
=12
π (2 r0 )4=8π r 0
4 , I TCD
=12
π r 04
I TBC
( x )=12
π(2 r0−r 0
3 L( x−L ))
4
=π r0
4
162 (7−xL )
4
θB=M x L
G I TAB =
M x L
8π r04 G
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-16
06.04.16
4.2 Beispiele
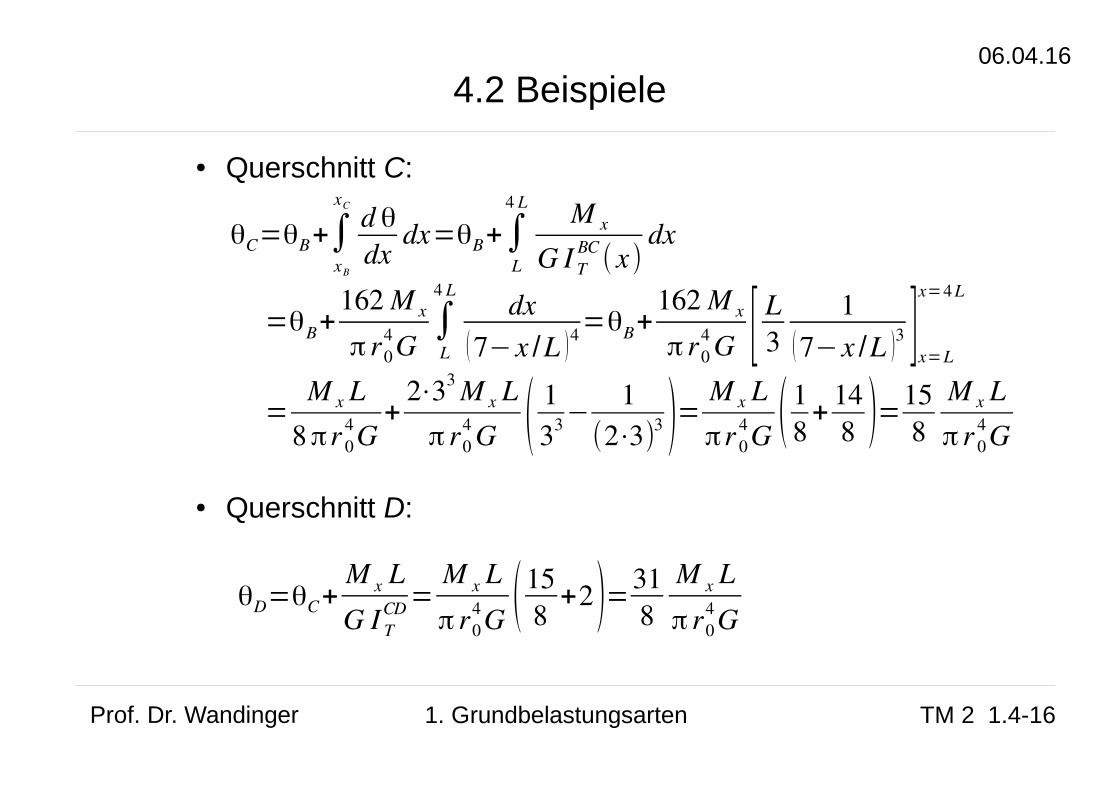
● Querschnitt C:
● Querschnitt D:
θC=θB+∫xB
xC
d θ
dxdx=θB+∫
L
4 L M x
G I TBC
( x )dx
=θB+162 M x
π r04 G
∫L
4 Ldx
(7−x /L )4=θB+
162 M x
π r04 G [ L
31
(7−x /L )3 ]x=L
x=4 L
=M x L
8π r 04 G
+2⋅33 M x L
π r04 G ( 1
33−1
(2⋅3)3 )=
M x L
π r 04 G ( 1
8+
148 )=15
8M x L
π r 04 G
θD=θC+M x L
G I TCD =
M x L
π r04 G (15
8+2)=31
8M x L
π r04 G

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-17
06.04.16
4.2 Beispiele
● Radsatz
– Die beiden Räder A und C sind durch Hohlwellen mit der starren Antriebsschei-be B verbunden.
– Gegeben:
● Abmessungen L1< L2 und D
● Antriebsmoment MB
● Zulässige Spannung τzul
D
L1
L2
A B CMB
– Gesucht:
● Verhältnis IT1/IT2 so, dass beide Räder das gleiche Moment übertragen
● Innendurchmesser d1 und d2

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-18
06.04.16
4.2 Beispiele
– Momentengleichgewicht:
– Torsionsmoment:● Abschnitt AB (Gleichgewicht für linke Teilachse):
● Abschnitt BC (Gleichgewicht für rechte Teilachse):
L1
L2
A B CMB
MA
MA
x
∑ M x=0 :−2 M A+M B=0
→ M A=12
M B
M x 1=M A
M x 2=−M A

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-19
06.04.16
4.2 Beispiele
– Verträglichkeitsbedingung:● Es tritt keine Verdrehung von Rad C relativ zu Rad A auf:
– Innendurchmesser:● Die größere Schubspannung tritt im Abschnitt AB auf:
0=M x 1 L1
G I T 1
+M x 2 L2
G I T 2
=M A
G ( L1
I T 1
−L2
I T 2) →
I T 1
I T 2
=L1
L2
τ zul≥M A
W T 1
=M B
2Dπ
16D4
−d14 =
8π
M B D
D4−d1
4
τ zul ( D4−d1
4 )≥ 8π M B D → d1≤
4√D4−
8π
M B Dτ zul

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-20
06.04.16
4.2 Beispiele
● Aus folgt
und daraus:
L1
L2
=I T 1
I T 2
=D4
−d14
D4−d2
4
L1
L2(D4
−d 24 )=D4
−d14
d24=D4−
L2
L1(D4−d1
4 )=L2
L1
d14+(1−
L2
L1)D4
→ d 2=4√ L2
L1
d14+(1− L2
L1)D4

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-21
06.04.16
4.3 Zulässige Spannung
● Duktile Werkstoffe:
– Bei duktilen Werkstoffen kann Fließen oder Bruch auftreten.
– Mit dem Torsionsmoment MxF bei Fließbeginn und dem Tor-sionsmoment MxB bei Bruch wird eine Torsionsfließgrenze und eine Torsionsfestigkeit definiert:
● Torsionsfließgrenze:
● Torsionsfestigkeit:
τtF=M xF
W T
=12
Re
τtB=M xB
W T

Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-22
06.04.16
4.3 Zulässige Spannung
● Spröde Werkstoffe:
– Bei spröden Werkstoffen kann nur Versagen durch Bruch auftreten.
– Die Torsionsfestigkeit τtB entspricht der Zugfestigkeit Rm .
● Sicherheit und zulässige Spannung:
– Gegen Fließen:
– Gegen Bruch:
S F=τtFτ , τzul=
τ tF
S F
S B=τ tBτ , τ zul=
τtB
S B
Prof. Dr. Wandinger 1. Grundbelastungsarten TM 2 1.4-23
06.04.16
4.3 Zulässige Spannung
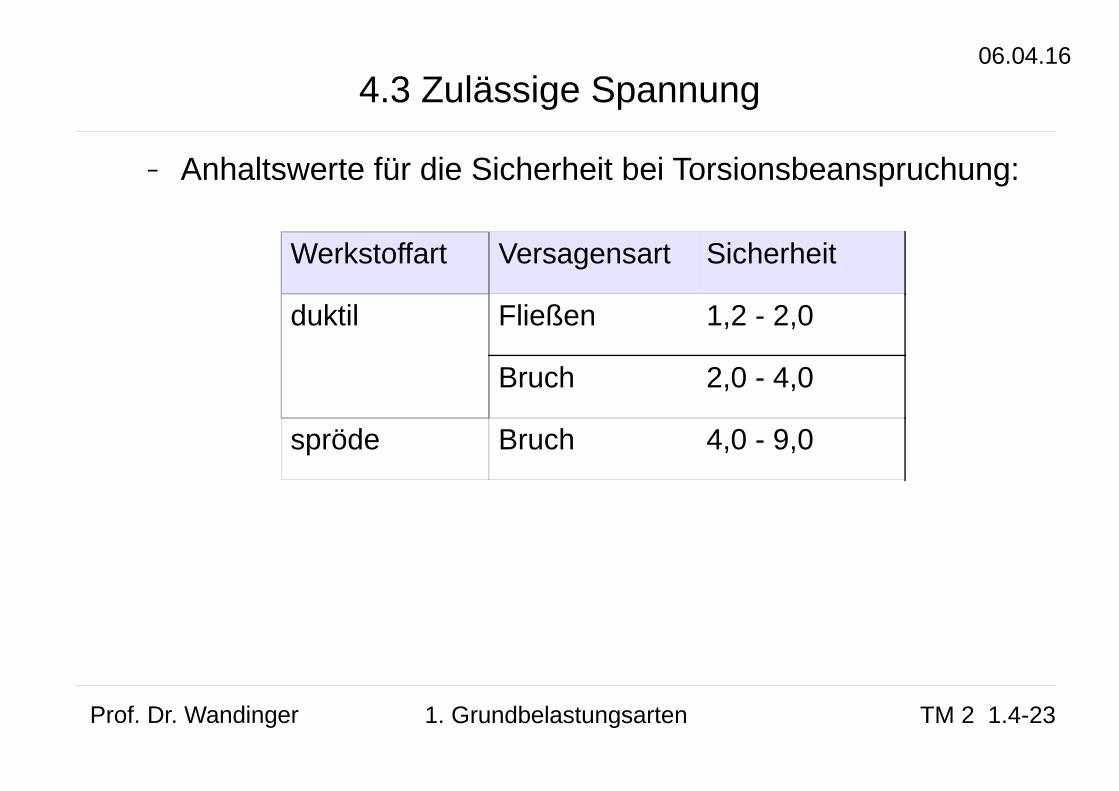
– Anhaltswerte für die Sicherheit bei Torsionsbeanspruchung:
Werkstoffart Versagensart Sicherheit
duktil Fließen 1,2 - 2,0
Bruch 2,0 - 4,0
spröde Bruch 4,0 - 9,0