19.09.18 2. Balkensysteme - wandinger.userweb.mwn.dewandinger.userweb.mwn.de/TM2/v4_2.pdf · Prof....
47
Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-1 19.09.18 2. Balkensysteme 2.1 Statisch bestimmte Balkensysteme 2.2 Statisch unbestimmte Balkensysteme 2.3 Zusammengesetzte Beanspruchung
Transcript of 19.09.18 2. Balkensysteme - wandinger.userweb.mwn.dewandinger.userweb.mwn.de/TM2/v4_2.pdf · Prof....

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-1
19.09.18
2. Balkensysteme
2.1 Statisch bestimmte Balkensysteme
2.2 Statisch unbestimmte Balkensysteme
2.3 Zusammengesetzte Beanspruchung

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-2
19.09.18
2.1 Statisch bestimmte Balkensysteme
● Beispiel: Abgesetzte Welle
– Gegeben:● Abmessung a● Biegesteifigkeit EIy
● Kraft F
– Gesucht:● Biegewinkel ϕA und ϕC
aa a
2EIy
EIy
F
A B
C
x
z

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-3
19.09.18
2.1 Statisch bestimmte Balkensysteme
– Lagerkräfte:
– Biegemoment:
aa aF
A
B
C
x
z
Az
Cz
∑ M C=0 : 2 a F−3 a A z=0
→ Az=23
F
∑ M A=0 : −a F +3 A C z=0
→ C z=13
F
M y( x)=−(−x Az+ ⟨ x−a ⟩ F )=( 23
x− ⟨ x−a ⟩)F

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-4
19.09.18
2.1 Statisch bestimmte Balkensysteme
– Wegen der veränderlichen Biegesteifigkeit müssen die wei-teren Integrationen abschnittsweise durchgeführt werden.
– Abschnitt AB: 0 < x < 2a
2 E I ydwdx =−( 1
3x2
−12
⟨ x−a ⟩2+c1)F
2 E I y w=−( 19
x3−
16
⟨ x−a ⟩3+c1 x+c 2)F
w(0)=0 → c 2=0

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-5
19.09.18
2.1 Statisch bestimmte Balkensysteme
– Abschnitt BC: 2a < x < 3a
E I ydwdx =−(1
3x2
−12
( x−a )2+c3)F
E I y w=−(19
x3−
16
( x−a )3+c3 x+c 4)F
w(3 a)=0 : 279
a3−
86
a3+3 c3 a+c 4=0
→ 9 a c 3+3 c 4=−5 a3 (1)

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-6
19.09.18
2.1 Statisch bestimmte Balkensysteme
– Anschlussbedingungen: An der Stelle B müssen die Biege-linie und ihre Ableitung stetig sein.
dwdx (2 a−0)=
dwdx (2 a+0) :
43
a2−
12
a2+c1=2( 4
3a2
−12
a2+c3)
→ 6 c1−12 c3=5 a2 (2)
w (2 a−0)=w(2 a+0) :
89
a3−
16
a3+2 c1 a=2 (8
9a3
−16
a3+2 c3 a+c 4)
→ 36 a c1−72 a c3−36 c4=13 a3 (3)

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-7
19.09.18
2.1 Statisch bestimmte Balkensysteme
– Auflösen nach den Konstanten:
– Biegewinkel:
ϕA=−dwdx (0)=
c1 F2 E I y
=−827
F a2
E I y
ϕC=−dwdx (3 a)=(3−2−
77108 )
F a2
E I y=
31108
F a2
E I y
(1) : 9 a c3 + 3 c 4 = −5 a3
(2) : 6 a c1 − 12 a c3 = 5 a3
(3) : 36 a c1 − 72 a c3 − 36 c 4 = 13 a3
→ c1=−1627
a2 , c3=−77108
a2 , c 4=1736
a3

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-8
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Vorgehen:
– Das System wird in statisch bestimmte Teilsysteme zerlegt.
– Die Verschiebungen an den Schnittstellen zwischen den Teilsystemen werden in Abhängigkeit von den unbekannten Zwischenreaktionen ermittelt.
– Die Zwischenreaktionen werden aus den kinematischen Verträglichkeitsbedingungen an den Schnittstellen be-stimmt.
– Die Verschiebungen an den Schnittstellen lassen sich oft durch Superposition unter Verwendung von Biegelinienta-bellen ermitteln.

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-9
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Beispiel: Abgestützter Kragbalken
– Gegeben:● Abmessung a● Biegesteifigkeit EIy
● Dehnsteifigkeit EA● Kraft F
– Gesucht:● Normalkraft NBC im Stab BC
● Vertikalverschiebung wD am Lastangriffspunkt D
2a a
a EI
yx
zEA
F
A B
C
D

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-10
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Kragbalken als statisch bestimmtes Teilsystem:● Zu bestimmen:
– Lastfall 1: Kraft F
2a a
x
z
F
A B DN
BC
wD (N BC ) , wB(N BC)
2a a
x
z
F
A B D
wB1
wD1
w1( x)=F (3 a)
3
6 E I y [3(x
3 a )2
−(x
3 a )3
]=
F a3
6 E I y [9(xa )
2
−(xa )
3
]

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-11
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Lastfall 2: Stabkraft NBC
wB 1=w1(2 a)=F a3
6 E I y( 9⋅4−8 )=
143
F a3
E I y
wD 1=w1(3 a)=F a3
6 E I y(9⋅9−27 )=9
F a3
E I y
2a a
x
z
A B D
NBC
wB2
wD2
w2(x)=N BC (3 a)
3
6 E I y [2 (x
3 a )2
−(x
3 a )3
+⟨ x3 a−
23 ⟩
3
]

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-12
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Kinematische Verträglichkeitsbedingung:
w2( x)=N BC a3
6 E I y [6(xa )
2
−(xa )
3
+⟨ xa −2⟩
3
]
wB 2=w2(2 a)=N BC a3
6 E I y(6⋅4−8 )=
83
N BC a3
E I y
wD 2=w2(3 a)=N BC a3
6 E I y(6⋅9−27+1 )=
143
N BC a3
E I y
wB=wB 1+wB 2=−Δ LBC=−N BC aE A

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-13
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Einsetzen ergibt:
– Für lange schlanke Balken gilt:
143
F a3
E I y+
83
N BC a3
E I y=−
N BC aE A
N BC (8 a2
I y+
3A )=−14
F a2
I y→ N BC
a2
I y (8+3 I y
a2 A )=−14 F a2
I y
→ N BC=−14 F
8+3 I y /(a2 A)
I y
a2 A≪1 → N BC≈−
74
F

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-14
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Vertikalverschiebung von Punkt D:
– Für lange schlanke Balken gilt:
– Die Lagerreaktionen an der Einspannung A und die Schnitt-lasten im Balken AD können nun aus den Gleichgewichts-bedingungen ermittelt werden.
wD=wD 1+wD 2=F a3
E I y (9−143
148+3 I y /(a2 A))
=F a3
3 E I y (27−196
8+3 I y /(a2 A))
wD≈F a3
3 E I y(27−
1968 )=
56
F a3
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-15
19.09.18
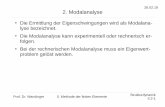
2.2 Statisch unbestimmte Balkensysteme
I y
a2 A=0,1

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-16
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Beispiel: Gerberträger
– Gegeben:● Länge a● Biegesteifigkeit EIy
● Kraft F● Streckenlast q0
a aG
a
F q0
A B x
z
– Gesucht:● Kraft im Gelenk G● Vertikalverschiebung wG
des Gelenks

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-17
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Teilsysteme:● Linker Kragbalken:
– Linker Kragbalken:
● Rechter Kragbalken:
a
GF
A
x1
z1
G a
G
a
q0
Bx2
z2
G
wGL=
( F−G ) a3
3 E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-18
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Rechter Kragbalken:● Lastfall 1:
● Lastfall 2:
a
G
aBx
2
z2
G
wG 1R
=G (2 a)
3
3 E I y=
83
G a3
E I y
a
G
a
q0
Bx2
z2
wG 2R
=q0(2 a)
4
24 E I y
123 (4−
12 )
=7
24q0 a4
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-19
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Kinematische Verträglichkeitsbedingung:
– Vertikalverschiebung des Gelenks:
wGL=wG
R=wG 1
R+wG 2
R
( F−G ) a3
3 E I y=
83
G a3
E I y+
724
q0 a4
E I y→ 8 F−7 q0 a=8 (8+1 ) G=72 G
→ G=8 F−7 q0 a
72
wG=wGL=
a3
3 E I y
(72−8 ) F +7 q0 a72
=64 F a3
+7 q0 a4
216 E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-20
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Der Biegewinkel ist am Gelenk G unstetig:
ϕGL=−
(F−G ) a2
2 E I y=−
(72−8 ) F a2+7q0 a3
144 E I y=−
64 F a2+7 q0 a3
144 E I y
ϕGR=
G (2 a)2
2 E I y+
q0 a3
6 E I y=
2 G a2
E I y+
q0 a3
6 E I y
=8 F a2
−7 q0 a3+6 q0 a3
36 E I y=
8 F a2−q0 a3
36 E I y
Δϕ=ϕGR−ϕG
L=
(32+64)F a2+(7−4)q0 a3
144 q0 a3 =32 F a2
+q0 a3
48 E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-21
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Beispiel: Mit starren Stäben verbundene Kragbalken
– Gegeben:● Abmessung a● Biegesteifigkeit EIy
● Streckenlast q0
– Gesucht:● Normalkräfte NBE und NCF
in den Stäben BE bzw. CF● Vertikalverschiebung wF von Punkt F
starr
a a
a
A B C
D E F
EIy
2EIy
q0

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-22
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Oberer Kragbalken:
● Lastfall 0: Streckenlast a aA B CN
BE
x1
z1
NCF
q0
w0AC
(x1)=q0(2 a)
4
24 E I y [6(x1
2 a )2
−4 (x1
2 a )3
+(x1
2 a )4
]=
q0 a4
24 E I y [24(x1
a )2
−8(x1
a )3
+(x1
a )4
]
wB 0=w0AC
(a)=q0 a4
24 E I y(24−8+1 )=
1724
q0 a4
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-23
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Lastfall 1: NCF
wC 0=w0AC
(2 a)=q0 a4
24 E I y(24⋅4−8⋅8+16 )=2
q0 a4
E I y
w1AC
(x1)=N CF (2 a)
3
6 E I y [3(x1
2 a )2
−(x1
2 a )3
]= N CF a3
6 E I y [6(x1
a )2
−(x1
a )3
]
wB 1=w1AC
(a)=N CF a3
6 E I y(6−1 )=
56
N CF a3
E I y
wC 1=w1O(2 a)=
N CF a3
6 E I y(6⋅4−8 )=
83
N CF a3
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-24
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Lastfall 2: NBE
w2AC
(x1)=N BE (2 a)
3
6 E I y [ 32 (
x1
2 a )2
−(x1
2 a )3
+⟨ x1
2 a−12 ⟩
3
]=
N BE a3
6 E I y [3(x1
a )2
−(x1
a )3
+⟨ x1
a −1⟩3
]
wB 2=w2AC
(a)=N BE a3
6 E I y(3−1 )=
13
N BE a3
E I y
wC 2=w2AC
(2 a)=N BE a3
6 E I y(3⋅4−23
+1 )=56
N BE a3
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-25
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Unterer Kragbalken:
● Lastfall 1: NCF
aa
D E FN
BEN
CFx2
z2
w1DF
(x2)=−N CF (2 a)
3
12 E I y [3(x2
2 a )2
−(x2
2 a )3
]=−N CF a3
12 E I y [6(x2
a )2
−(x2
a )3
]
wE 1=w1DF
(a)=−N CF a3
12 E I y(6−1 )=−
512
N CF a3
E I y=−
12
w B 1
wF 1=w1DF
(2 a)=−N CF a3
12 E I y(6⋅4−8 )=−
43
N CF a3
E I y=−
12
wC 1

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-26
19.09.18
2.2 Statisch unbestimmte Balkensysteme
● Lastfall 2: NBE
w2DF
(x2)=−N BE (2 a)
3
12 E I y [ 32 (
x2
2 a )2
−(x2
2 a )3
+⟨ x2
2 a−12 ⟩
3
]=−
N BE a3
12 E I y [3(x2
a )2
−(x2
a )3
+⟨ x2
a −1⟩3
]
wE 2=w2DF
(a)=−N BE a3
12 E I y(3−1 )=−
16
N BE a3
E I y=−
12
w B 2
wF 2=w2DF
(2 a)=−N BE a3
12 E I y(3⋅4−23
+1 )=−5
12N BE a3
E I y=−
12
wC 2

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-27
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Kinematische Verträglichkeitsbedingungen:
wB=w E : wB 0+wB 1+w B 2=w E 1+wE 2
1724
q0 a4
E I y+
56
N CF a3
E I y+
13
N BE a3
E I y=−
512
N CF a3
E I y−
16
N BE a3
E I y
→ 30 N CF+12 N BE=−17 q0 a
wC=wF : wC 0+wC 1+wC 2=w F 1+wF 2
2q0 a4
E I y+
83
N CF a3
E I y+
56
N BE a3
E I y=−
43
N CF a3
E I y−
512
N BE a3
E I y
→ 48 N CF+15 N BE=−24 q0 a

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-28
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Auflösen nach den Stabkräften:
– Verschiebung von Punkt F:
30 N CF + 12 N BE = −17 q0 a16 N CF + 5 N BE = −8 q0 a
→ N CF=−1142
q0 a , N BE=−1621
q0 a
wF=w F 1+wF 2=−43
N CF a3
E I y−
512
N BE a3
E I y=(
43⋅
1142
+5
12⋅
1621 )
q0 a4
E I y
=(2263
+2063 )
q0 a4
E I y=
4263
q0 a4
E I y=
23
q0 a4
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-29
19.09.18
2.2 Statisch unbestimmte Balkensysteme

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-30
19.09.18
2.2 Statisch unbestimmte Balkensysteme
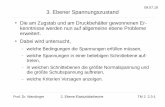
● Beispiel: Rahmen
– Gegeben:● Abmessung a● Biegesteifigkeit EIy
● konstante Streckenlast q0
● Die Balken sind dehn-starr.
2a a
A B
C
q0
EIy EI
y
– Gesucht:● Schnittlasten im Punkt B

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-31
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Teilsysteme:
– Kinematische Verträglichkeitsbedingungen:● Da die Balken dehnstarr sind, gilt: uB = vB = 0● Der Biegewinkel muss im Punkt B stetig sein: ϕAB
B = ϕCBB
q0
A B
By
By
Bx
Bx
MB
MB
x, u
y, v
ϕ
B
C

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-32
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Balken AB:
2a
q0
A Bv
B0
φABB0
x1
z1
vB 0=−q0(2 a)
4
8 E I y=−2
q0 a4
E I y
ϕB 0AB
=−q0 (2 a)
3
6 E I y=−
43
q0 a3
E I y
2aA B
vB1
φABB1x
1
z1
By vB 1=
B y(2 a)3
3 E I y=
83
B y a3
E I y
ϕB 1AB
=B y(2 a)
2
2 E I y=2
B y a2
E I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-33
19.09.18
2.2 Statisch unbestimmte Balkensysteme
2aA B
vB2
φABB2
x1
z1
MB vB 2=
M B (2 a)2
2 E I y=2
M B a2
E I y
ϕB 2AB
=2M B aE I y
vB=vB 0+vB 1+vB 2=0 : −2 q0 a4+
83
B y a3+2 M B a2
=0
ϕBAB
=ϕB 0AB
+ϕB 1AB
+ϕB 2AB
=a
E I y(− 4
3q0 a2
+2 By a+2 M B)

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-34
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Balken CB:
a
Bx
B
C z2
x2
uB1
ϕCBB1
uB 1=−B x a3
3 E I y
a
MB
B
C z2
x2
uB2
ϕCBB2
ϕB 1CB
=B x a2
2 E I y
uB 2=M B a2
2 E I y
ϕB 2CB
=−M B aE I y

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-35
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Aus den kinematischen Bedingungen folgt ein Gleichungs-system zur Bestimmung der Schnittlasten:
uB=uB 1+uB 2=0 : −13
B x a3+
12
M B a2=0
ϕBCB
=ϕB 1CB
+ϕB 2CB
=a
E I y(12
B x a−M B)
vB=0 : 8 B y a + 6 M B = 6 q0 a2 (1)uB=0 : −2 B x a + 3 M B = 0 (2)
ϕBAB
=ϕBCB : −3 B x a + 12 By a + 18 M B = 8 q0 a2 (3)
ϕBAB
=ϕBCB : −
43
q0 a2+2 By a+2 M B=
12
B x a−M B

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-36
19.09.18
2.2 Statisch unbestimmte Balkensysteme
– Auflösen des Gleichungssystems:
(1) → By a=34
q0 a2−
34
M B
(2) → B x a=32
M B
in (3) → (−92−
34⋅12+18)M B=(8−
34⋅12)q0 a2
=−q0 a2
→ M B=−29
q0 a2
→ B x=32⋅−29
q0 a=−13
q0 a , B y=( 34+
34⋅
29 )q0 a=
1112
q0 a

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-37
19.09.18
2.2 Statisch unbestimmte Balkensysteme

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-38
19.09.18
2.3 Zusammengesetzte Beanspruchung
● In der Praxis werden Balken häufig durch eine Normal-kraft, durch Querkräfte und Biegemomente sowie ein Tor-sionsmoment belastet.
● In einem ungestörten Querschnitt liegt näherungsweise ein ebener Spannungszustand vor:
– Die Normalspannung berechnet sich aus der Normalkraft und den Biegemomenten.
– Die Schubspannung berechnet sich aus den Querkräften und dem Torsionsmoment.
– Die Bewertung der Beanspruchung erfolgt mithilfe von Fes-tigkeitshypothesen.

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-39
19.09.18
2.3 Zusammengesetzte Beanspruchung
● Bei langen schlanken Balken können die aus den Quer-kräften berechneten Schubspannungen in der Regel ver-nachlässigt werden.

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-40
19.09.18
2.3 Zusammengesetzte Beanspruchung
● Beispiel:
– Gegeben:● a = 3 m, b = 1 m● F1 = 3 kN, F2 = 2 kN,
F3 = 10 kN, F4 = 2 kN
● Balken AB: Kreisquer-schnitt, R = 50 mm
– Gesucht:● Spannungen an der Ein-
spannstelle A
A
B
C
a
b
F1
F2
xy
z
F3
F4
● Bewertung nach der Gestaltänderungshypo-these und der Normal-spannungshypothese

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-41
19.09.18
A
B
C
a
b
F1
F2
xy
z
N
Qz Q
y
Mx
Mz
My
F3
F4
2.3 Zusammengesetzte Beanspruchung
– Schnittlasten in A:
∑ F x=0 :−N +F 2+F 3=0→ N =F 2+F 3
∑ F y=0 : Q y=0
∑ F z=0 : −Q z+F 1−F 4=0 → Q z=F 1−F 4
∑ M xA=0 : −M x−b F 1=0 → M x=−b F 1
∑ M yA=0 : −M y−a F 1+a F 4=0 → M y=−a ( F 1−F 4 )
∑ M zA=0 : −M z+b F 2=0 → M z=b F 2

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-42
19.09.18
2.3 Zusammengesetzte Beanspruchung
– Zahlenwerte:
– Querschnittskennwerte:
N =12 kN , Q z=1 kN
A=π R2=π⋅502 mm2
=7854 mm2
I y=I z=14
A R2=
14⋅7854 mm2
⋅502 mm2=4,909⋅106 mm4
I T=12
A R2=2 I y=9,817⋅106 mm4
M x=−3 kNm , M y=−3 kNm , M z=2 kNm

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-43
19.09.18
2.3 Zusammengesetzte Beanspruchung
– Normalspannung:
– Zahlenwerte:
σ x(y , z)= NA +
M y
I yz−
M z
I zy
NA =
12000 N7854 mm2 =1,528 MPa
M y
I y=
−3⋅106 Nmm4,909⋅106 mm4 =−0,6111
MPamm
M z
I z=
2⋅106 Nmm4,909⋅106 mm4 =0,4074
MPamm

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-44
19.09.18
ϕy
zNulllinie
P
ϕ
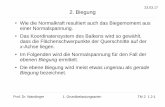
2.3 Zusammengesetzte Beanspruchung
– Nulllinie: z=I y
I z
M z
M yy−
I y
AN
M y
z=−23
y+4,909⋅106 mm4
7854 mm2
12 kN3⋅103 kNmm
=−0,6667 y+2,500 mm
tan (ϕ)=0,6667
cos(ϕ)=0,8321, sin (ϕ)=0,5547

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-45
19.09.18
2.3 Zusammengesetzte Beanspruchung
– Größte Normalspannung im Punkt P:
– Schubspannung aus Torsion:● Die größte Schubspannung tritt am Umfang auf. Sie hat den
Wert:
yP=−50 mm⋅sin (ϕ)=−27,74 mmzP=−50 mm⋅cos(ϕ)=−41,61 mm
σmax=1,528 MPa+0,6111⋅41,61 MPa+0,4074⋅27,74 MPa=38,26 MPa
τT=M x
I TR=
−3⋅106 Nmm⋅50 mm9,817⋅106 mm4 =−15,28 MPa

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-46
19.09.18
2.3 Zusammengesetzte Beanspruchung
– Schubspannung aus Querkraft:● Die Schubspannung aus der Querkraft hat die Größenord-
nung
– Bewertung:● Bei einem duktilen Werkstoff kann die Vergleichsspannung
nach der Gestaltänderungshypothese verwendet werden:
τQ≈Q z
A =1000 N
7854 mm2 =0,127 MPa≪τT
σV ,GH=√σmax2
+3 τT2=√38,262
+3⋅15,282 MPa=46,52 MPa

Prof. Dr. Wandinger 4. Tragwerke TM 2 4.2-47
19.09.18
2.3 Zusammengesetzte Beanspruchung
● Bei einem spröden Werkstoff muss die Normalspannungshy-pothese verwendet werden:
● Bei diesem Beispiel ist die Beanspruchung durch die Normal-kraft klein im Vergleich zur Beanspruchung durch die Bie-gung.
σV , NH=σ1=σmax
2+√ σmax
2
4+τT
2=
12
(σmax+√σmax2
+4 τT2 )
σV , NH=38,26+√38,262
+4⋅15,282
2MPa=43,61 MPa