1 Holomorphe Funktionen - Mathematisches Seminar · Mathematik f¨ur Physiker IV, SS 2013 Mittwoch...
12
Mathematik f¨ ur Physiker IV, SS 2013 Mittwoch 17.4 $Id: holo.tex,v 1.8 2013/04/17 14:16:59 hk Exp $ $Id: cauchy.tex,v 1.3 2013/04/17 15:59:07 hk Exp hk $ §1 Holomorphe Funktionen 1.5 Konforme Abbildungen In diesem kurzen Abschnitt wollen wir eine weitere, eher geometrische, Interpretation holomorpher Funktionen besprechen. Wir orientieren uns dabei am Beispiel der Expo- nentialfunktion. In Satz 1 hatten wir eingesehen das exp : C → C\{0} den Streifen R × (-π,π) bijektiv auf die geschlitzte Ebene abbildet. Um die Exponentialfunktion besser zu verstehen stellen wir uns nun die Menge vor die entsteht indem im Streifen R × [-π,π] die obere und untere Begrenzung miteinander verklebt werden, auf diese Weise entsteht ein Zylinder und da die Exponentialfunktion auf den beiden Randlini- en von R × [-π,π] dieselben Werte annimmt k¨ onnen wir sie uns als eine auf diesem Zylinder definierte Funktion denken. Die waagerechten Geraden Im z = const entspre- chen dabei den Mantellinien des Zylinders und die Vertikalen Re z = const werden zu Kreisen. Re=const Im=const Re=const Im=const –6 –4 –2 0 2 4 6 –6 –4 –2 2 4 6 F¨ ur jedes t ∈ R ist exp(t + iπ)= -e t , also werden auch die negativen reellen Zahlen als Werte angenommen und wir k¨ onnen uns die Exponentialfunktion als eine bijektive Abbildung von unserem Zylinders auf die punktierte Ebene C\{0} denken. Um sich zu veranschaulichen wie diese Bijektion funktioniert, denkt man sich zun¨ achst den oberen Deckel des Zylinders im Unendlichen zu einem Punkt zusammengezogen, dabei ent- steht ein Kegel dessen Spitze nicht zur Menge geh¨ ort, und dieser Kegel wird dann zur punktierten Ebene aufgebogen. Die Waagerechten Im z = const entsprechen im Kegel weiterhin den Mantellinien und die Vertikalen sind weiterhin waagerechte Kreise. Beim 4-1
Transcript of 1 Holomorphe Funktionen - Mathematisches Seminar · Mathematik f¨ur Physiker IV, SS 2013 Mittwoch...

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
$Id: holo.tex,v 1.8 2013/04/17 14:16:59 hk Exp $$Id: cauchy.tex,v 1.3 2013/04/17 15:59:07 hk Exp hk $
§1 Holomorphe Funktionen
1.5 Konforme Abbildungen
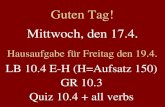
In diesem kurzen Abschnitt wollen wir eine weitere, eher geometrische, Interpretationholomorpher Funktionen besprechen. Wir orientieren uns dabei am Beispiel der Expo-nentialfunktion. In Satz 1 hatten wir eingesehen das exp : C → C\{0} den StreifenR × (−π, π) bijektiv auf die geschlitzte Ebene abbildet. Um die Exponentialfunktionbesser zu verstehen stellen wir uns nun die Menge vor die entsteht indem im StreifenR × [−π, π] die obere und untere Begrenzung miteinander verklebt werden, auf dieseWeise entsteht ein Zylinder und da die Exponentialfunktion auf den beiden Randlini-en von R × [−π, π] dieselben Werte annimmt konnen wir sie uns als eine auf diesemZylinder definierte Funktion denken. Die waagerechten Geraden Im z = const entspre-chen dabei den Mantellinien des Zylinders und die Vertikalen Re z = const werden zuKreisen.
Re=const
Im=const
Re=const
Im=const
–6
–4
–2
0
2
4
6
–6 –4 –2 2 4 6
Fur jedes t ∈ R ist exp(t + iπ) = −et, also werden auch die negativen reellen Zahlenals Werte angenommen und wir konnen uns die Exponentialfunktion als eine bijektiveAbbildung von unserem Zylinders auf die punktierte Ebene C\{0} denken. Um sich zuveranschaulichen wie diese Bijektion funktioniert, denkt man sich zunachst den oberenDeckel des Zylinders im Unendlichen zu einem Punkt zusammengezogen, dabei ent-steht ein Kegel dessen Spitze nicht zur Menge gehort, und dieser Kegel wird dann zurpunktierten Ebene aufgebogen. Die Waagerechten Im z = const entsprechen im Kegelweiterhin den Mantellinien und die Vertikalen sind weiterhin waagerechte Kreise. Beim
4-1

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
Aufbiegen zur Ebene werden die Mantellinien dann zu den vom Nullpunkt ausgehen-den Halbgeraden und die waagerechten Kreise werden zu Kreisen in der Ebene mitMittelpunkt im Nullpunkt.
Dieses”Aufbiegen“ ist tatsachlich genau das was die Exponentialabbildung tut, ist
c ∈ R, so ist fur alle t ∈ R stets exp(t + ci) = et · exp(ic), d.h. die Menge exp(R + ic)ist die von Null ausgehende Halbgerade die zur x-Achse den Winkel c hat, und ebensoist fur alle t ∈ R auch exp(c + it) = ec · (cos t + i sin t), d.h. exp(c + iR) ist der Kreismit Mittelpunkt Null und Radius ec.
Beachte das die Bilder der Waagerechten und der Vertikalen im Zylinder, im Kegelund dann auch in C\{0} immer senkrecht aufeinander stehen. Dies ist kein Zufallsondern eine allgemeine Eigenschaft holomorpher Funktionen. Um genauer zu sagenwas hiermit gemeint ist, benotigen wir ein paar kleine Definitionen. Zunachst definierenwir den Winkel ](z, w) zwischen zwei Vektoren z, w ∈ C\{0} = R2\{0} durch dieFormel
cos ](z, w) =〈z|w〉
||z||2 · ||w||2.
Haben wir weiter zwei differenzierbare Kurven γ : [a, b] → C, δ : [a′, b′] → C mita, b, a′, b′ ∈ R, a < b, a′ < b′ und schneiden sich die beiden Kurven in einem Punktp, also p = γ(t) = δ(s) mit t ∈ [a, b], s ∈ [a′, b′] und sind zusatzlich die beidenTangentenvektoren γ′(t) 6= 0 und δ′(s) 6= 0 nicht Null, so sagen wir das die beidenKurven sich im Punkt p mit dem Winkel ](γ′(t), δ′(s)) schneiden.
Sind jetzt weiter U ⊆ C eine offene Menge, f : U → R2 eine stetig differenzier-bare Funktion mit det f ′(p) 6= 0 und verlaufen die beiden Kurven γ, δ ganz in U , soschneiden sich die Bildkurven f ◦ γ und f ◦ δ in f(p) = f(γ(t)) = f(δ(s)) mit denTangentialvektoren
(f ◦ γ)′(t) = f ′(p)γ′(t) und (f ◦ δ)′(s) = f ′(p)δ′(s).
Nun ist f ′(p) invertierbar und damit sind auch diese beiden Vektoren von Null ver-schieden. Der Schnittwinkel der beiden Bildkurven ist damit
](f ′(p)γ′(t), f ′(p)δ′(s)).
Wir nennen die Abbildung f jetzt eine konforme oder winkeltreue Abbildung, wenn sieSchnittwinkel erhalt, wenn also in der obigen Situation immer
](f ′(p)γ′(t), f ′(p)δ′(s)) = ](γ′(t), δ′(s))
gilt. Da alle Vektoren als Tangentialvektoren vorkommen gilt
f ist konform ⇐⇒ Fur jedes p ∈ U ist f ′(p) invertierbar und winkeltreu.
Ob eine Abbildung konform ist konnen wir also an ihren Ableitungen sehen, und daherist es sinnvoll erst einmal lineare Abbildungen zu betrachten. Was sind jetzt also die
4-2

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
winkeltreuen linearen Abbildungen? Eine invertierbare Matrix T ∈ R2×2 ist winkeltreuwenn fur alle u, v ∈ R2\{0} stets
](Tu, Tv) = ](u, v) also〈Tu|Tv〉
||Tu||2 · ||Tv||2=
〈u|v〉||u||2 · ||v||2
gilt. Um diese Bedingung besser auszuwerten, schreiben wir sie komplex. Sind z = x+iyund w = u + iv zwei komplexe Zahlen, so haben wir
zw = (x+iy)·(u−iv) = xu+yv+i(yu−xv), zw = (x−iy)·(u+iv) = xu+yv+i(xv−yu),
also wird das Skalarprodukt zu
〈z|w〉 =zw + zw
2.
Damit ist unsere lineare Abbildung T genau dann winkeltreu wenn
TzTw + TzTw
|Tz| · |Tw|=
zw + zw
|z| · |w|
fur alle z, w ∈ C\{0} gilt. Da diese Bedingung noch immer ziemlich unubersichtlichist, schreiben wir auch die lineare Abbildung T in einer komplexen Form.
Lemma 1.8: Sei T : C → C eine uber R lineare Abbildung. Dann existieren eindeutigbestimmte a, b ∈ C mit
Tz = az + bz
fur alle z ∈ C.
Beweis: Schreibe u := T (1) ∈ C und v := T (i) ∈ C. Wir beginnen mit der Eindeutig-keit. Seien also a, b ∈ C mit Tz = az + bz fur alle z ∈ C. Dann sind insbesondere
u = T (1) = a + b = b + a und v = T (i) = ai− bi = (a− b)i, d.h. b− a = −1
iv = iv
und es folgen2b = u + iv und 2a = u− iv.
Damit sind a und b eindeutig als
a =u− iv
2und b =
u + iv
2
festgelegt. Um auch die Existenz einzusehen definieren wir a, b ∈ C durch diese beidenGleichungen. Sei z ∈ C und schreibe z = x + iy mit x, y ∈ R. Dann haben wir
az + bz =1
2(u− iv) · (x + iy) +
1
2(u + iv) · (x− iy)
=1
2(xu + yv + yiu− xiv + xu + yv − yiu + xiv)
= xu + yv = xT (1) + yT (i) = T (x + iy) = Tz,
4-3

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
und somit haben a, b die verlangte Eigenschaft.
Setzen wir jetzt unsere Uberlegung zur Bestimmung winkeltreuer linearer Abbildungenfort, so schreiben wir T in der Form des Lemmas als Tz = az + bz fur alle z ∈ C, wobeia, b ∈ C zwei komplexe Konstanten sind. Setzen wir diese Darstellung in die linke Seiteder die Winkeltreue kennzeichnenden Formel ein, so wird fur alle z, w ∈ C\{0}
TzTw + TzTw
|Tz| · |Tw|=
(az + bz)(aw + bw) + (az + bz)(aw + bw)
|az + bz| · |aw + bw|=
|a|2(zw + zw) + |b|2(zw + zw) + 2abzw + 2abzw
|az + bz| · |aw + bw|=
(|a|2 + |b|2)〈z|w〉+ 4 Re(abzw)
|az + bz| · |aw + bw|
und damit ist T genau dann winkeltreu wenn
(|a|2 + |b|2)〈z|w〉+ 4 Re(abzw)
|az + bz| · |aw + bw|=
〈z|w〉|z| · |w|
fur alle z, w ∈ C\{0} gilt. Ist z ∈ C\{0} und setzen wir speziell w = iz, so ist 〈z|w〉 = 0und wir erhalten die Bedingung Re(iabz2) = 0 fur alle z ∈ C\{0}. Mit z = 1 besagtdies Im(ab) = 0 und mit z =
√i ergibt sich auch Re(ab) = 0, es muss also ab = 0 sein,
und dies bedeutet a = 0 oder b = 0. Umgekehrt impliziert a = 0 oder b = 0 auch dieWinkeltreue von T , d.h. insgesamt haben wir eingesehen
T ist winkeltreu ⇐⇒{
Es gibt ein a ∈ C\{0} mit Tz = az furalle z ∈ C oder Tz = az fur alle z ∈ C.
Wir konnen dieses Ergebnis auch noch etwas weiter interpretieren. Hierzu schreibenwir in der obigen Darstellung von T die Konstante a ∈ C\{0} als a = u + iv. Wiebereits gesehen ist die Matrix der linearen Abbildung T : C → C; z 7→ az bezuglichder reellen Basis 1, i von C dann gegeben als
T =
(u −vv u
),
und geometrisch ist dies die Kombination der Drehung um das Argument von a undder Streckung um den Betrag von a, eine sogenannte Drehstreckung. Als Determinantevon T ergibt sich det T = u2 + v2 > 0. Die andere der beiden linearen Abbildungen,also T : C → C; z 7→ az, hat die Matrix
T =
(u −vv u
)·(
1 00 −1
)=
(u vv −u
),
und geometrisch ist dies zuerst eine Spiegelung an der x-Achse gefolgt von einer Dreh-streckung. Als Determinante ergibt sich diesmal det T = −(u2 + v2) < 0. Die win-keltreuen linearen Abbildungen sind also genau diejenigen die man gleich sind, also
4-4

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
Kombinationen von Streckungen, Drehungen und eventuell noch einer Geradenspiege-lung.
Da die Ableitung einer holomorphen Funktion in jedem Punkt die Multiplikationmit einer komplexen Zahl ist, sind holomorphe Funktionen mit nullstellenfreier Ablei-tung damit immer auch konforme Abbildungen. Es gibt aber auch andere konformeFunktionen deren Ableitungen auch einen Spiegelungsanteil enthalten, zum Beispieldie komplexe Konjugation. Um auch diesen Typ konformer Abbildungen zu erfassen,fuhrt man die sogenannten antiholomorphen Funktionen ein.
Definition 1.5 (Antiholomorphe Funktionen)Sei U ⊆ C eine offene Menge. Eine Funktion f : U → C heißt dann antiholomorphwenn die Funktion
f : U → C; z 7→ f(z)
holomorph ist.
Diese Bedingung konnen wir auch in Termen der Wirtinger-Ableitungen ausdrucken,ist f : U → C stetig reell differenzierbar so wissen wir bereits
∂f
∂z=
∂f
∂z.
Da mit f auch f stetig reell differenzierbar ist, ist f damit genau dann antiholomorphwenn f stetig reell differenzierbar mit ∂f/∂z = 0 ist, wenn f also sozusagen
”nur von z
abhangt“. Die holomorphen und die antiholomorphen Funktionen sind nun genau diekonformen Abbildungen.
Satz 1.9 (Bestimmung der konformen Abbildungen)Seien U ⊆ C offen und zusammenhangend und f : U → C eine reell stetig differenzier-bare Funktion mit det f ′(z) 6= 0 fur alle z ∈ U . Dann ist f genau dann konform wennf holomorph oder antiholomorph ist.
Beweis: ”=⇒” Sei z ∈ U . Dann ist die Ableitung f ′(z) winkeltreu, und wie wir unsbereits uberlegt gibt es damit eine komplexe Zahl a(z) ∈ C\{0} so, dass entwederf ′(z)w = a(z)w fur alle w ∈ C oder f ′(z) = a(z)w fur alle w ∈ C gilt. Im ersten Fallist dabei det f ′(z) > 0 und im zweiten Fall haben wir det f ′(z) < 0. Da die Funktion fals stetig differenzierbar vorausgesetzt ist, ist die Ableitung f ′ stetig und damit ist dieDeterminante det f ′ : U → R ebenfalls stetig. Folglich sind die Mengen
U1 := {z ∈ U | det f ′(z) > 0} und U2 := {z ∈ U | det f ′(z) < 0}
beide offen, und da U zusammenhangend ist und U = U1 ∪ U2 mit U1 ∩ U2 = ∅ gilt,ist entweder U = U1 oder U = U2. Im Fall U = U1 gilt f ′(z)w = a(z)w fur jedes z ∈ Uund alle w ∈ C, also ist f nach Satz 2 in jedem Punkt z ∈ U komplex differenzierbarund somit holomorph. Nun nehmen wir U2 = U an und betrachten die stetig reelldifferenzierbare Funktion g := f . Ist dann z ∈ U = U2, so folgt mit der KettenregelII.§8.Satz 17
g′(z)w = f ′(z)w = a(z)w = a(z)w,
4-5

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
d.h. g ist wieder nach Satz 2 in jedem Punkt z ∈ U komplex differenzierbar und somitholomorph. Diese bedeutet aber gerade das f antiholomorph ist.”⇐=” Zunachst sei f als holomorph vorausgesetzt. Wir mussen zeigen, dass die reelleAbleitung f ′(z) fur jedes z ∈ U winkeltreu ist. Sei also z ∈ U und bezeichne a ∈C die komplexe Ableitung von f in z. Fur alle w ∈ C ist dann f ′(z)w = aw undda f ′(z) invertierbar ist muss insbesondere a 6= 0 gelten. Damit ist f ′(z) fur jedesz ∈ U winkeltreu und f ist eine konforme Abbildung. Nun nehmen wir an, dass fantiholomorph ist das also g := f holomorph ist. Sei dann wieder z ∈ U und bezeichnea die komplexe Ableitung von g in z. Fur jedes w ∈ C gilt dann g′(z)w = aw und eineerneute Anwendung der Kettenregel auf f = g liefert f ′(z) = g′(z)w = a · w fur allew ∈ C. Da f ′(z) invertier ist, ist a 6= 0 und f ′(z) winkeltreu. Also ist f auch in diesemFall eine konforme Abbildung.
Es ist in diesem Satz tatsachlich notig die Menge U als zusammenhangend anzu-nehmen, sonst konnten wir U = U1 ∪ U2 disjunkt in zwei offene Teilmengen zerlegenund eine konforme Abbildung f : U → C ist eventuell auf U1 holomorph aber auf U2
antiholomorph.
0
1
2
3
4
5
6
x
–1.5
–1
–0.5
0
0.5
1
1.5
y
0
1
2
–2
–1
1
2
–2 –1 1 2
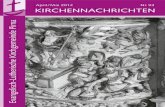
Plot von | sin z| Konformer Plot des Sinus
Zum Abschluß dieses Abschnitts wollen wir noch zwei der moglichen graphischen Dar-stellungen holomorpher Funktionen erwahnen. Konkret wollen wir uns diese am Bei-spiel der komplexen Sinus Funktion anschauen. Die erste Moglichkeit ist es das soge-nannte
”analytische Gebirge“ zu zeichnen, dies meint einfach den Graphen des Betrags
der Funktion. Wie dies fur den Sinus aussieht ist oben links gezeigt, das Tal entsprichtdabei einer Nullstelle des Sinus. Die zweite Moglichkeit ist die konforme Darstellung.Hier werden die Bilder der waagerechten Geraden zu konstanten Imaginarteil und dervertikalen Geraden zu konstanten Realteil gezeichnet, da holomorphe Funktionen win-kelerhaltend sind, stehen diese senkrecht aufeinander. Fur den Sinus ist dies oben rechts
4-6

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
gezeigt. Sei namlich c ∈ R. Um zu sehen wie die waagerechten Geraden abgebildet wer-den, rechnen wir
sin(t + ic) = sin t cos(ic) + cos t sin(ic) = cosh(c) · sin t + i sinh(c) · sin t,
d.h. die waagerechten Geraden werden auf Ellipsen mit Halbachsen der Lange cosh(c)und | sinh(c)| abgebildet. Fur die vertikalen Geraden haben wir dagegen
sin(c + it) = sin(c) cosh t + i sin(c) sinh t,
diese werden also auf Hyperbelaste abgebildet.
§2 Der Cauchysche Integralsatz
Im ersten Kapitel haben wir die Elemente der Funktionentheorie bereitgestellt, alsoden Begriff einer holomorphen Funktion eingefuhrt, komplexe Logarithmen, Potenzenund Wurzeln behandelt und die verschiedenen Grundfunktionen im Komplexen defi-niert. Dies sind die Grundobjekte von denen die Funktionentheorie handeln wird. ZurBegrundung der eigentlichen Theorie der holomorphen Funktionen gibt es verschie-dene mogliche Angriffsrichtungen. Man kann die konformen Abbildungen als Start-punkt verwenden, dies wird gelegentlich als Riemannsche Funktionentheorie bezeich-net, man kann die Potenzreihen als die zentralen Objekte verwenden, der sogenannteWeierstrasssche Zugang, oder schließlich den Weg uber die nun einzufuhrenden komple-xen Kurvenintegrale gehen, dies ist dann die Cauchysche Funktionentheorie. KomplexeKurvenintegrale sind eine kleine Variante der im vorigen Semester in III.§7.3 behan-delten vektoriellen Kurvenintegrale. Tatsachlich hangen die komplexen Kurvenintegraleund diese vektoriellen Kurvenintegrale eng miteinander zusammen und wir werden die-sen Zusammenhang benutzen um einige der Hauptsatze uber komplexe Kurvenintegralezu beweisen. Wir beginnen mit einem Abschnitt in dem die komplexen Kurvenintegraledefiniert und ihre Grundeigenschaften bewiesen werden.
2.1 Komplexe Kurvenintegrale
Bei einem komplexen Kurvenintegral wird eine komplexwertige stetige Funktion f :U → C definiert auf einer offenen Menge U ⊆ C langs einer in U verlaufenden Kurveintegriert und das Ergebnis ist eine komplexe Zahl. Die genaue Definition erfolgt inzwei Schritten, zuerst wird eine auf einem Intervall definierte komplexwertige Funktionintegriert und im zweiten Schritt wird die Parametrisierung der Kurve eingesetzt umzum komplexen Kurvenintegral zu kommen. Im ersten Schritt konnten wir uns aufstetige Integranden beschranken, da etwas anderes gar nicht vorkommen wird, da aberbeweistechnisch keine grossen Unterschiede auftreten behandeln wir gleich allgemeineRiemann-integrierbare Funktionen.
4-7

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
Definition 2.1 (Komplexe Integrale)Seien a, b ∈ R mit a < b und eine Funktion f : [a, b] → C gegeben. Dann heißt fRiemann-integrierbar wenn sowohl der Realteil Re f als auch der Imaginarteil Im fbeide Riemann-integrierbar sind. In diesem Fall definieren wir das Integral von f als∫ b
a
f(t) dt :=
∫ b
a
Re f(t) dt + i ·∫ b
a
Im f(t) dt.
Wir schauen uns einmal zwei kleine Beispiele an und beginnen mit dem Integral∫ π/2
0
eit dt.
Der Integrand zerlegt sich hier fur alle t ∈ R als
eit = cos t + i · sin t
in Real- und Imaginarteil und somit wird∫ π/2
0
eit dt =
∫ π/2
0
cos t dt + i ·∫ π/2
0
sin t dt = 1 + i.
Das zweite Beispiel ist schon etwas komplizierter, hier berechnen wir das Integral∫ 1
0
dt
t + i.
Zerlegen wir den Integranden in Real- und Imaginarteil, so wird fur jedes t ∈ R
1
t + i=
t− i
t2 + 1=
t
t2 + 1− 1
t2 + 1· i.
Als Integral ergibt sich damit∫ 1
0
dt
t + i=
∫ 1
0
t
t2 + 1dt− i ·
∫ 1
0
dt
t2 + 1=
1
2ln(t2 + 1)
∣∣∣∣10
− i · arctan(t)
∣∣∣∣10
=1
2ln 2− i
π
4.
Auch fur das komplexe Integral gelten die ublichen Grundeigenschaften des Riemann-Integrals.
Lemma 2.1 (Grundeigenschaften des komplexen Integrals)Seien a, b ∈ R mit a < b gegeben. Dann gelten:
(a) Sind f, g : [a, b] → C beide Riemann-integrierbar so ist auch f + g : [a, b] → CRiemann-integrierbar und es gilt∫ b
a
(f(t) + g(t)) dt =
∫ b
a
f(t) dt +
∫ b
a
g(t) dt.
4-8

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
(b) Sind f : [a, b] → C Riemann-integrierbar und z ∈ C ein komplexer Skalar, so istauch die Funktion zf : [a, b] → C Riemann-integrierbar mit∫ b
a
zf(t) dt = z ·∫ b
a
f(t) dt.
(c) Sind f : [a, b] → C eine Funktion und c ∈ R mit a < c < b, so ist f genaudann Riemann-integrierbar wenn die Einschrankungen f |[a, c] und f |[c, b] beideRiemann-integrierbar und in diesem Fall gilt∫ b
a
f(t) dt =
∫ c
a
f(t) dt +
∫ b
c
f(t) dt.
(d) Sind f : [a, b] → C stetig und F : [a, b] → C stetig differenzierbar mit F ′ = f , soist f : [a, b] → C auch Riemann-integrierbar mit∫ b
a
f(t) dt = F (b)− F (a).
(e) Ist f : [a, b] → C Riemann-integrierbar, so ist auch der Betrag |f | : [a, b] → RRiemann-integrierbar und es gilt die Dreiecksungleichung∣∣∣∣∫ b
a
f(t) dt
∣∣∣∣ ≤ ∫ b
a
|f(t)| dt.
Beweis: (a) Dies ist klar indem wir die entsprechende reelle Eigenschaft II.§2.Lemma5.(a) auf Real- und Imaginarteil von f anwenden.(b) Wir schreiben z = c + id mit c, d ∈ R und f = u + iv also u = Re f und v = Im f .Fur jedes t ∈ [a, b] gilt dann
zf(t) = (c + id) · (u(t) + iv(t)) = cu(t)− dv(t) + i · (cv(t) + du(t)),
es sind also Re(zf) = cu − dv und Im(zf) = cv + du. Nach II.§2.Lemma 5a,b sindReal- und Imaginarteil von zf damit beide Riemann-integrierbar und es gelten∫ b
a
Re(zf(t)) dt = c
∫ b
a
u(t) dt− d
∫ b
a
v(t) dt,∫ b
a
Im(zf(t)) dt = c
∫ b
a
v(t) dt + d
∫ b
a
u(t) dt.
Damit ist auch zf Riemann-integrierbar und wir haben∫ b
a
zf(t) dt =
(c
∫ b
a
u(t) dt− d
∫ b
a
v(t) dt
)+ i ·
(c
∫ b
a
v(t) dt + d
∫ b
a
u(t) dt
)= (c + id) ·
(∫ b
a
u(t) dt + i ·∫ b
a
v(t) dt
)= z ·
∫ b
a
f(t) dt.
4-9

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
(c) Dies ist klar indem wir die entsprechende reelle Eigenschaft II.§2.Lemma 4.(c) aufReal- und Imaginarteil von f anwenden.(d) Dies ist klar indem wir den Hauptsatz der Differential- und Integralrechnung inder Form des II.§2.Korollar 10 auf Real- und Imaginarteil von f anwenden.(e) Wir zeigen zunachst, dass der Betrag |f | uberhaupt Riemann-integrierbar ist. Seiε > 0 gegeben. Da die beiden Funktionen u := Re f und v := Im f beide Riemann-integrierbar sind, gibt es nach II.§2.Lemma 3 Konstanten δ1, δ2 > 0 mit
S(u; α)− S(u; α) <ε
2
fur jede Zerlegung α von [a, b] mit δ(α) < δ1 und
S(v; α)− S(v; α) <ε
2
fur jede Zerlegung α von [a, b] mit δ(α) < δ2. Wahle jetzt eine Zerlegung α = (t0, . . . , tr)von [a, b] mit δ(α) < min{δ1, δ2}. Ist 1 ≤ j ≤ r, so gilt fur alle t, s ∈ [tj−1, tj] stets∣∣|f(t)| − |f(s)|
∣∣ ≤ |f(t)− f(s)| ≤ |u(t)− u(s)|+ |v(t)− v(s)|≤ ∆(u; [tj−1, tj]) + ∆(v; [tj−1, tj]),
also ist auch
∆(|f |; [tj−1, tj]) = supt,s∈[tj−1,tj ]
∣∣∣∣|f(t)| − |f(s)|∣∣ ≤ ∆(u; [tj−1, tj]) + ∆(v; [tj−1, tj]).
Mit III.§4.Lemma 1.(f) ergibt sich damit
S(|f |; α)− S(|f |; α) =r∑
j=1
∆(|f |; [tj−1, tj]) · (tj − tj−1)
≤r∑
j=1
∆(u; [tj−1, tj]) · (tj − tj−1) +r∑
j=1
∆(v; [tj−1, tj]) · (tj − tj−1)
= S(u; α)− S(u; α) + S(v; α)− S(v; α) < ε.
Nach II.§2.Lemma 3 ist |f | damit eine Riemann-integrierbare Funktion, und es verbleibtnur noch die Dreiecksungleichung einzusehen. Zu diesem Zweck wahle ein z ∈ C mit|z| = 1 und z ·
∫ b
af(t) dt ∈ R≥0. Dann haben wir nach (b)∣∣∣∣∫ b
a
f(t) dt
∣∣∣∣ = z ·∫ b
a
f(t) dt =
∫ b
a
zf(t) dt,
und da dies eine reelle Zahl ist folgt weiter∣∣∣∣∫ b
a
f(t) dt
∣∣∣∣ = Re
(∫ b
a
zf(t) dt
)=
∫ b
a
Re(zf(t)) dt.
4-10

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
Fur jedes t ∈ [a, b] gilt nun
Re(zf(t)) ≤ |Re(zf(t))| ≤ |zf(t)| = |z| · |f(t)| = |f(t)|,
und somit liefert II.§2.Lemma 5.(c) schließlich∣∣∣∣∫ b
a
f(t) dt
∣∣∣∣ =
∫ b
a
Re(zf(t)) dt ≤∫ b
a
|f(t)| dt.
Damit haben wir auch die Dreiecksungleichung bewiesen.
Teil (d) dieses Lemmas erlaubt es uns auch die komplexen Integrale wie gewohntmittels Stammfunktionen zu berechnen, und damit kann oftmals vermieden werden dieZerlegung in Real- und Imaginarteil wirklich durchzufuhren. Um uns dieses Vorgeheneinmal anzuschauen, rechnen wir die beiden obigen Beispiele noch einmal, diesmal uberdie jeweiligen Stammfunktionen. Die Rechnung im ersten Beispiel wird dann zu∫ π/2
0
eit dt =1
ieit
∣∣∣∣π/2
0
=i− 1
i= 1 + i.
Fur das zweite Beispiel beachten wir das fur jedes 0 ≤ t ≤ 1 stets t + i ∈ C− gilt, undsomit wird
d
dtln(t + i) =
1
t + i,
also erhalten wir erneut∫ 1
0
dt
t + i= ln(t + i)
∣∣∣∣10
= ln(1 + i)− ln(i) = ln√
2 + iπ
4− i
π
2=
1
2ln 2− i
π
4.
Nach diesen Vorbereitungen konnen wir schließlich auch das komplexe Kurvenintegraldefinieren
Definition 2.2 (Komplexe Kurvenintegrale)Seien U ⊆ C offen, f : U → C eine stetige Funktion und γ : [a, b] → U eine stuckweiseC1-Kurve in U . Dann heißt∫
γ
f(ζ) dζ :=
∫ b
a
f(γ(t)) · γ′(t) dt ∈ C
das komplexe Kurvenintegral der Funktion f langs der Kurve γ.
Meist ist aus dem Kontext heraus klar das wir komplexe Kurvenintegrale betrachtenund dann lassen wir den Zusatz
”komplex“ einfach weg. Im obigen Integranden steht
”·“ naturlich fur die Multiplikation komplexer Zahlen. Ist (t0, . . . , tr) eine C1-Zerlegung
von γ, so ist γi := γ|[ti−1, ti] fur jedes 1 ≤ i ≤ r stetig differenzierbar und damit sindReal- und Imaginarteil von∫
γ
f(ζ) dζ =r∑
i=1
∫ ti
ti−1
f(γi(t))γ′i(t) dt
4-11

Mathematik fur Physiker IV, SS 2013 Mittwoch 17.4
jeweils Riemann-Integrale stetiger Funktionen. Wir rechnen zunachst einige kleine Bei-spiele. Im ersten Beispiel verwenden wir als Integrationsweg das Geradenstuck vomNullpunkt zum Punkt 1 + 2i, also γ(t) = t + 2ti = (1 + 2i)t fur 0 ≤ t ≤ 1. Die Ablei-tung von γ ist dann konstant γ′(t) = 1 + 2i fur alle 0 ≤ t ≤ 1. Integrieren wollen wirdie Funktion f(z) = z und erhalten∫
γ
ζ dζ =
∫ 1
0
(1 + 2i)2t dt = (1 + 2i)2
∫ 1
0
t dt =1
2(4i− 3) = 2i− 3
2.
Im zweiten Beispiel verwenden wir fur die Kurve γ einen Halbkreis mit Radius r > 0und Mittelpunkt 0, also γ(t) = reit fur 0 ≤ t ≤ π. Die Ableitung ist γ′(t) = ireit furalle 0 ≤ t ≤ π und damit wird wieder mit dem Integranden f(z) = z∫
γ
ζ dζ =
∫ π
0
reit · ireit dt = ir2 ·∫ π
0
e2it dt =ir2
2ie2it
∣∣∣∣π0
= 0.
Nehmen wir anstelle dessen fur γ nur den Viertelkreis, schranken also den Parameterauf 0 ≤ t ≤ π/2 ein, so wird∫
γ
ζ dζ =r2
2e2it
∣∣∣∣π/2
0
=r2
2(eiπ − 1) = −r2.
Wir kommen zum dritten und wichtigsten Beispiel. Wir geben uns einen Punkt a ∈C und einen Exponenten n ∈ Z vor und betrachten die Funktion f(z) = (z − a)n
definiert fur z ∈ C\{a}. Weiter sei r > 0 und bezeichne γ den Kreis mit Radius r undMittelpunkt a, also γ(t) = a + reit fur 0 ≤ t ≤ 2π. Die Ableitung ist γ′(t) = ireit fur0 ≤ t ≤ 2π und somit∫
γ
(ζ − a)n dζ =
∫ 2π
0
(reit
)n · ireit dt = irn+1
∫ 2π
0
ei(n+1)t dt.
Nun konnen zwei verschiedene Falle auftreten.Fall 1. Zunachst sei n 6= −1, also n + 1 6= 0. Dann haben wir∫
γ
(ζ − a)n dζ =rn+1
n + 1ei(n+1)t
∣∣∣∣2π
0
= 0
da e2πi(n+1) = 1 ist.Fall 2. Ist dagegen n = −1, so wird∫
γ
dζ
ζ − a=
∫γ
(ζ − a)n dζ = i
∫ 2π
0
dt = 2πi.
4-12