
3 Grundlagen der linearen Elastizi- tätstheorie · 3-2 Grundlagen der linearen...
81
F. U. Mathiak 3-1 3 Grundlagen der linearen Elastizi- tätstheorie An dieser Stelle sollen die Grundgleichungen der linearen Elastizitätstheorie zusammenge- stellt werden, was bedeutet, dass wir uns einerseits auf kleine Verformungen und kleine 1. Ableitungen der Verformungen beschränken (geometrische Linearität), andererseits soll ein linear elastisches Werkstoffgesetz in Betracht gezogen werden (physikalische Linearität). 3.1 Der räumliche Spannungszustand Abb. 3-1 Der Spannungsvektor Die Spannung 1 n) s(r, ist ein dem Flächenelement ∆A mit Ortsvektor r und dem Stellungs- vektor n zugeordneter Vektor, der als Grenzwert dA d A ∆ ∆ lim 0 A ∆ F F n) s(r, = = → Gl. 3-1 definiert ist (Abb. 3-1). ∆F ist dabei der zur Fläche ∆A im Allgemeinen schief gerichtete Kraftvektor. 1 Augustin Louis Baron Cauchy, franz. Mathematiker, 1789-1857
Transcript of 3 Grundlagen der linearen Elastizi- tätstheorie · 3-2 Grundlagen der linearen...
F. U. Mathiak 3-1
3 Grundlagen der linearen Elastizi-tätstheorie An dieser Stelle sollen die Grundgleichungen der linearen Elastizitätstheorie zusammenge-stellt werden, was bedeutet, dass wir uns einerseits auf kleine Verformungen und kleine 1. Ableitungen der Verformungen beschränken (geometrische Linearität), andererseits soll ein linear elastisches Werkstoffgesetz in Betracht gezogen werden (physikalische Linearität).
3.1 Der räumliche Spannungszustand
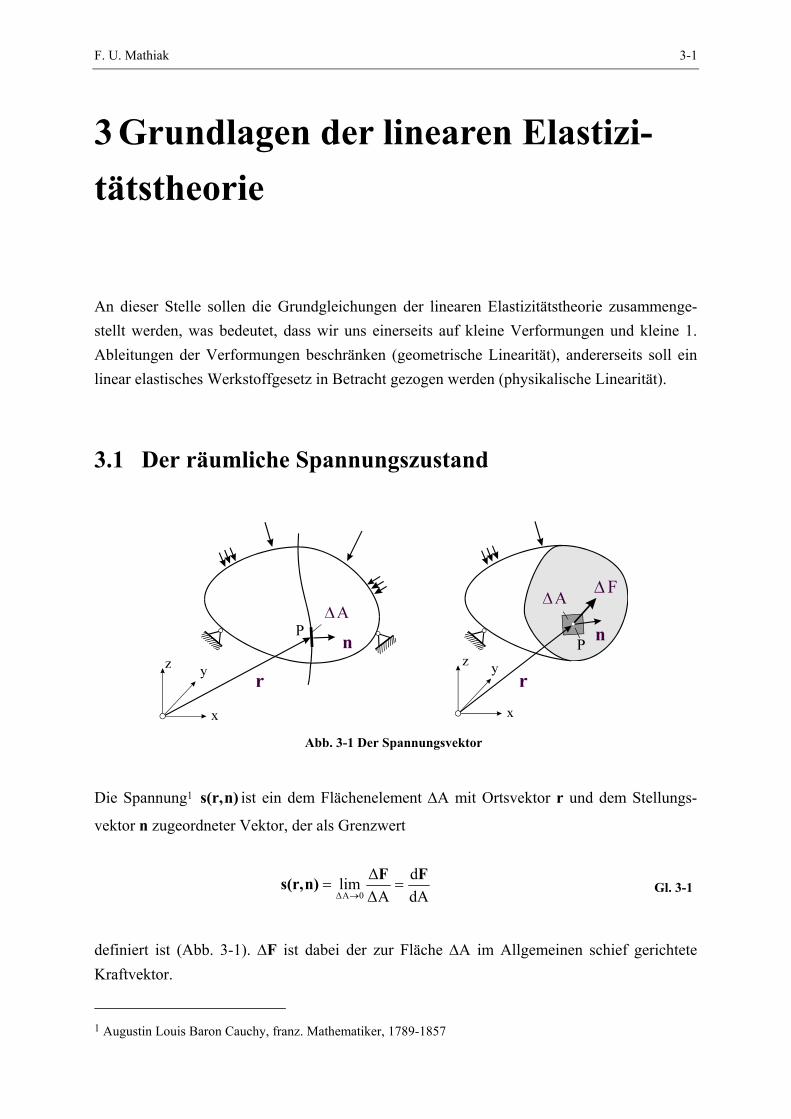
Abb. 3-1 Der Spannungsvektor
Die Spannung1 n)s(r, ist ein dem Flächenelement ∆A mit Ortsvektor r und dem Stellungs-
vektor n zugeordneter Vektor, der als Grenzwert
dAd
A∆∆lim
0A∆
FFn)s(r, ==→
Gl. 3-1
definiert ist (Abb. 3-1). ∆F ist dabei der zur Fläche ∆A im Allgemeinen schief gerichtete Kraftvektor.
1 Augustin Louis Baron Cauchy, franz. Mathematiker, 1789-1857
3-2 Grundlagen der linearen Elastizitätstheorie
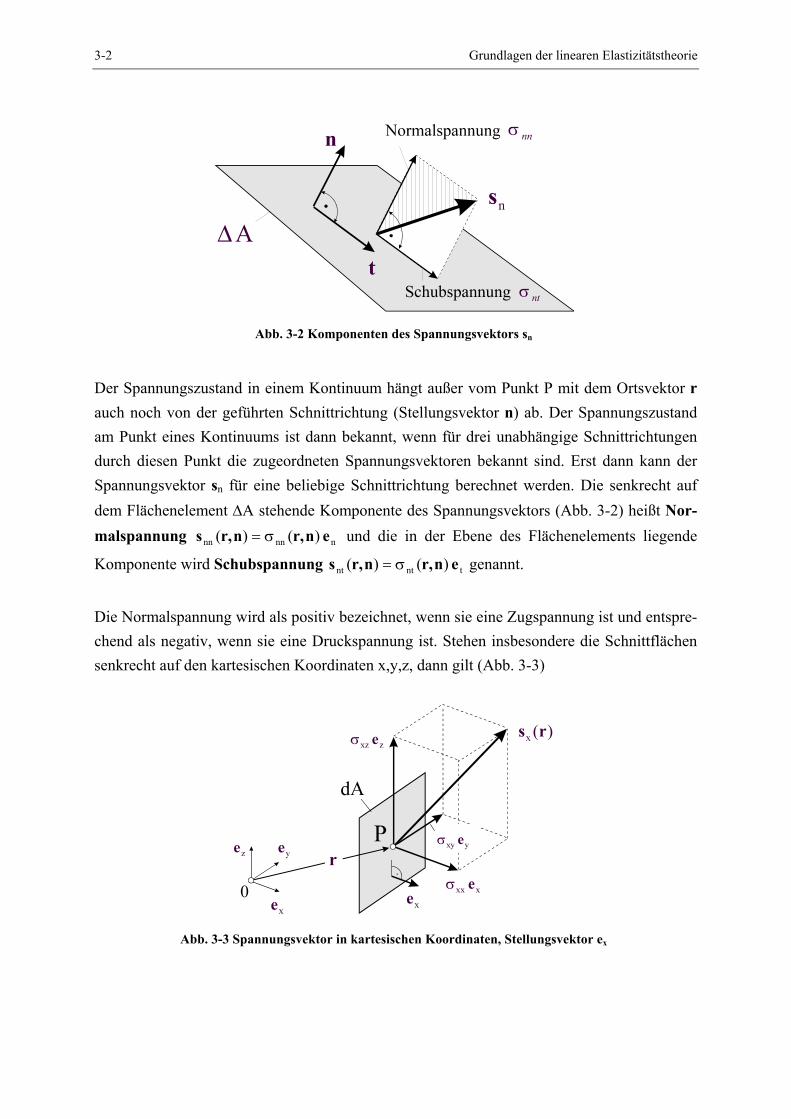
Abb. 3-2 Komponenten des Spannungsvektors sn
Der Spannungszustand in einem Kontinuum hängt außer vom Punkt P mit dem Ortsvektor r auch noch von der geführten Schnittrichtung (Stellungsvektor n) ab. Der Spannungszustand am Punkt eines Kontinuums ist dann bekannt, wenn für drei unabhängige Schnittrichtungen durch diesen Punkt die zugeordneten Spannungsvektoren bekannt sind. Erst dann kann der Spannungsvektor sn für eine beliebige Schnittrichtung berechnet werden. Die senkrecht auf dem Flächenelement ∆A stehende Komponente des Spannungsvektors (Abb. 3-2) heißt Nor-malspannung nnnnn )()( enr,nr,s σ= und die in der Ebene des Flächenelements liegende
Komponente wird Schubspannung tntnt )()( enr,nr,s σ= genannt.
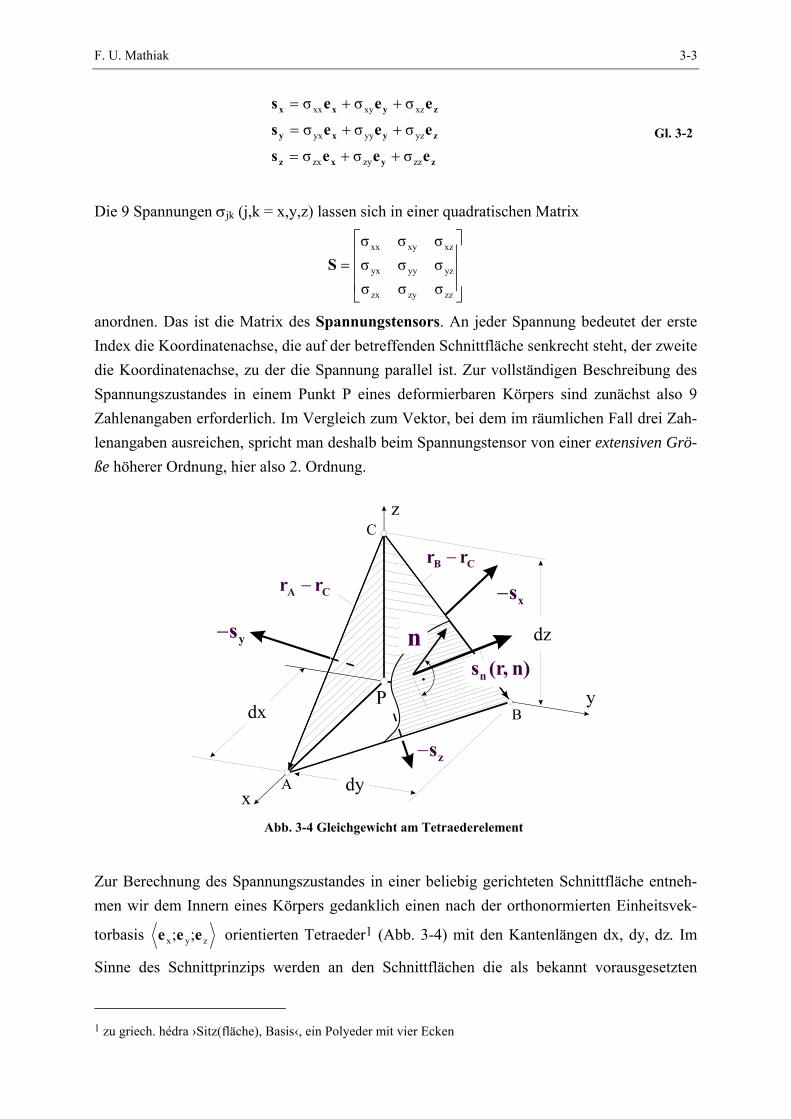
Die Normalspannung wird als positiv bezeichnet, wenn sie eine Zugspannung ist und entspre-chend als negativ, wenn sie eine Druckspannung ist. Stehen insbesondere die Schnittflächen senkrecht auf den kartesischen Koordinaten x,y,z, dann gilt (Abb. 3-3)
Abb. 3-3 Spannungsvektor in kartesischen Koordinaten, Stellungsvektor ex
F. U. Mathiak 3-3
zyxz
zyxy
zyxx
eees
eees
eees
zzzyzx
yzyyyx
xzxyxx
σσσ
σσσ
σσσ
++=
++=
++=
Gl. 3-2
Die 9 Spannungen σjk (j,k = x,y,z) lassen sich in einer quadratischen Matrix
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zzzyzx
yzyyyx
xzxyxx
σσσσσσσσσ
S
anordnen. Das ist die Matrix des Spannungstensors. An jeder Spannung bedeutet der erste Index die Koordinatenachse, die auf der betreffenden Schnittfläche senkrecht steht, der zweite die Koordinatenachse, zu der die Spannung parallel ist. Zur vollständigen Beschreibung des Spannungszustandes in einem Punkt P eines deformierbaren Körpers sind zunächst also 9 Zahlenangaben erforderlich. Im Vergleich zum Vektor, bei dem im räumlichen Fall drei Zah-lenangaben ausreichen, spricht man deshalb beim Spannungstensor von einer extensiven Grö-ße höherer Ordnung, hier also 2. Ordnung.
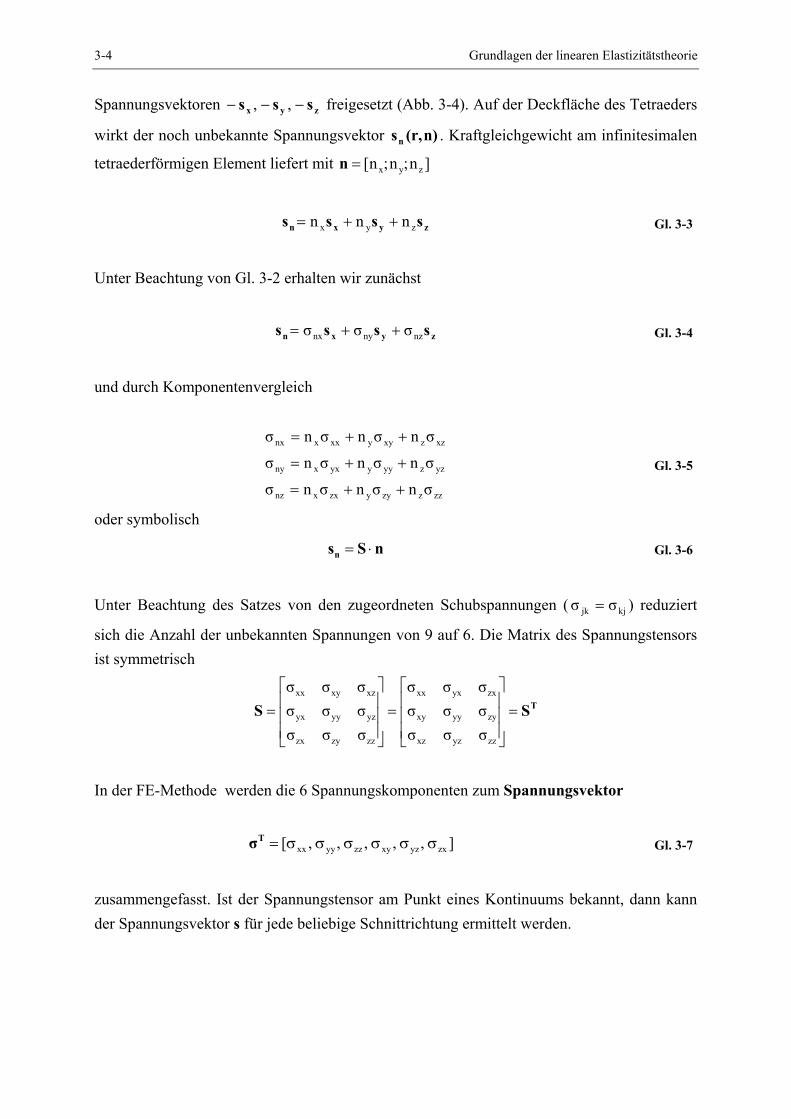
Abb. 3-4 Gleichgewicht am Tetraederelement
Zur Berechnung des Spannungszustandes in einer beliebig gerichteten Schnittfläche entneh-men wir dem Innern eines Körpers gedanklich einen nach der orthonormierten Einheitsvek-
torbasis zyx ;; eee orientierten Tetraeder1 (Abb. 3-4) mit den Kantenlängen dx, dy, dz. Im
Sinne des Schnittprinzips werden an den Schnittflächen die als bekannt vorausgesetzten
1 zu griech. hédra ›Sitz(fläche), Basis‹, ein Polyeder mit vier Ecken
3-4 Grundlagen der linearen Elastizitätstheorie
Spannungsvektoren zyx sss −−− ,, freigesetzt (Abb. 3-4). Auf der Deckfläche des Tetraeders
wirkt der noch unbekannte Spannungsvektor n)(r,sn . Kraftgleichgewicht am infinitesimalen
tetraederförmigen Element liefert mit ]n;n;n[ zyx=n
zyxn ssss zyx nnn ++= Gl. 3-3
Unter Beachtung von Gl. 3-2 erhalten wir zunächst
zyxn ssss nznynx σσσ ++= Gl. 3-4
und durch Komponentenvergleich
zzzzyyzxxnz
yzzyyyyxxny
xzzxyyxxxnx
σnσnσnσ
σnσnσnσ
σnσnσnσ
++=
++=
++=
Gl. 3-5
oder symbolisch
nSsn ⋅= Gl. 3-6
Unter Beachtung des Satzes von den zugeordneten Schubspannungen ( kjjk σσ = ) reduziert
sich die Anzahl der unbekannten Spannungen von 9 auf 6. Die Matrix des Spannungstensors ist symmetrisch
TSS =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zzyzxz
zyyyxy
zxyxxx
zzzyzx
yzyyyx
xzxyxx
σσσσσσσσσ
σσσσσσσσσ
In der FE-Methode werden die 6 Spannungskomponenten zum Spannungsvektor
],,,,,[ zxyzxyzzyyxx σσσσσσ=Tσ Gl. 3-7
zusammengefasst. Ist der Spannungstensor am Punkt eines Kontinuums bekannt, dann kann der Spannungsvektor s für jede beliebige Schnittrichtung ermittelt werden.
F. U. Mathiak 3-5
3.1.1 Die statische Grundgleichung
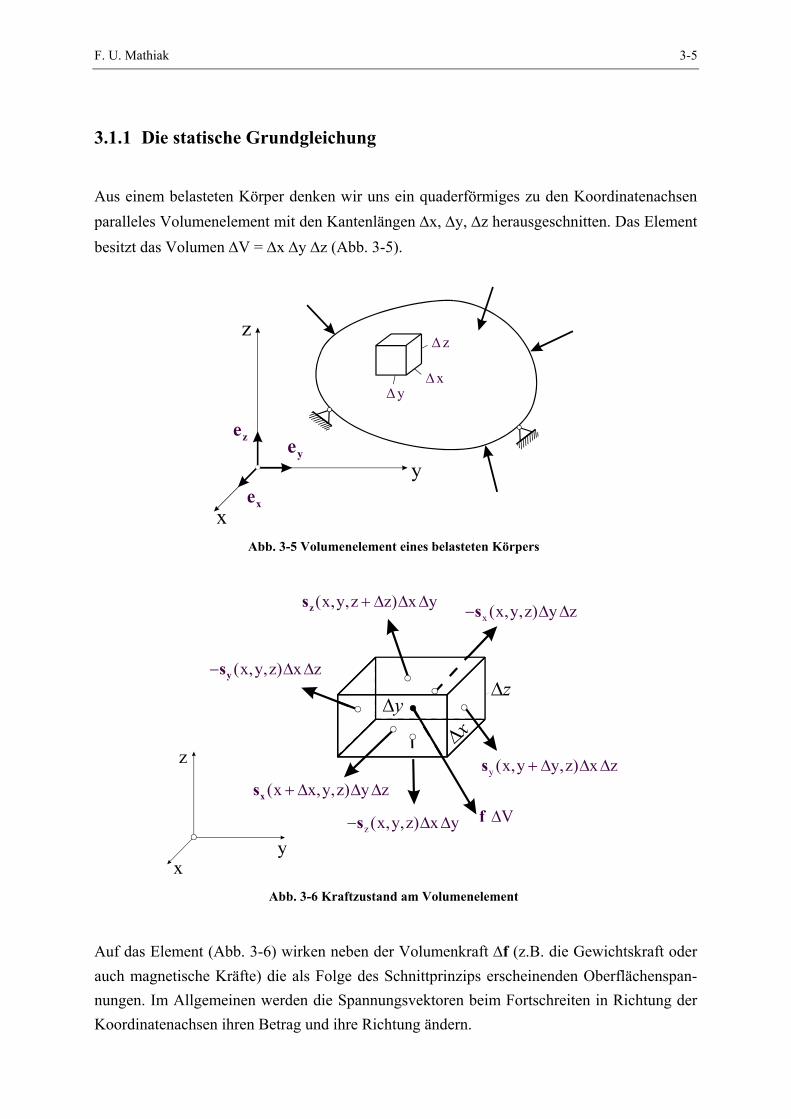
Aus einem belasteten Körper denken wir uns ein quaderförmiges zu den Koordinatenachsen paralleles Volumenelement mit den Kantenlängen ∆x, ∆y, ∆z herausgeschnitten. Das Element besitzt das Volumen ∆V = ∆x ∆y ∆z (Abb. 3-5).
Abb. 3-5 Volumenelement eines belasteten Körpers
Abb. 3-6 Kraftzustand am Volumenelement
Auf das Element (Abb. 3-6) wirken neben der Volumenkraft ∆f (z.B. die Gewichtskraft oder auch magnetische Kräfte) die als Folge des Schnittprinzips erscheinenden Oberflächenspan-nungen. Im Allgemeinen werden die Spannungsvektoren beim Fortschreiten in Richtung der Koordinatenachsen ihren Betrag und ihre Richtung ändern.

3-6 Grundlagen der linearen Elastizitätstheorie
Im statischen Fall muss das Kraftgleichgewicht erfüllt sein, d.h. die Resultierende aller auf das Volumenelement einwirkenden Kräfte muss verschwinden. Das führt auf die wichtige statische Grundgleichung
0fsss zyx =+
∂∂
+∂
∂+
∂∂
zyx Gl. 3-8
Mit Einführung des Gradienten in kartesischen Koordinaten
zyx zyxeee
∂∂
+∂∂
+∂∂
=∇ Gl. 3-9
der ein symbolischer Vektor ist und Nablaoperator1 genannt wird, kann Gl. 3-8 noch kürzer geschrieben werden
0fS =+⋅∇ Gl. 3-10
Gl. 3-8 ist eine Vektorgleichung, die drei skalaren Gleichungen entspricht. Unter Beachtung von zyx eeef (x,y,z)f(x,y,z)f(x,y,z)f zyx ++= folgt aus Gl. 3-8
0fzσ
yσ
xσ
0fzσ
yσ
xσ
0fzσ
yσ
xσ
zzzyzxz
yzyyyxy
xzxyxxx
=+∂
∂+
∂
∂+
∂∂
=+∂
∂+
∂
∂+
∂
∂
=+∂
∂+
∂
∂+
∂∂
Gl. 3-11
3.1.2 Der Spannungszustand in Zylinderkoordinaten
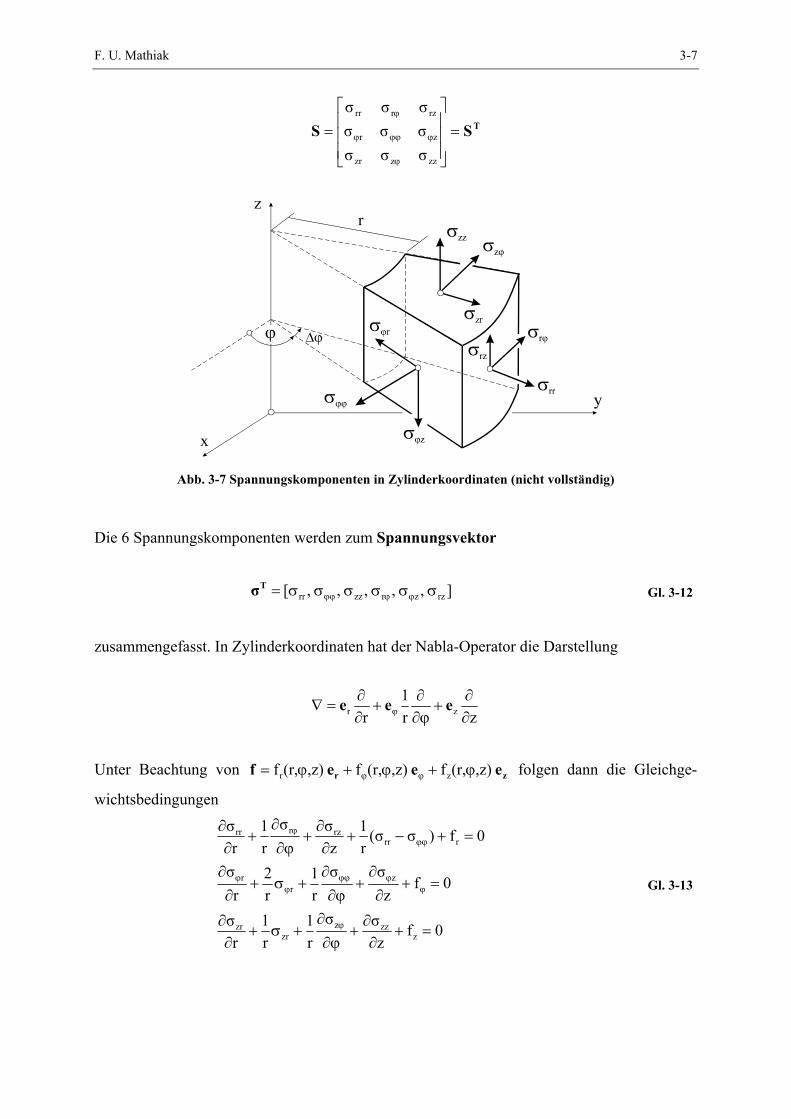
Der Spannungstensors in Zylinderkoordinaten hat die Form (Abb. 3-7)
K+⊗σ+⊗σ+⊗σ= ϕϕϕ zrrzrrrrrr eeeeeeS
und in Matrixdarstellung
1 griech. nábla(s), Name eines Saiteninstruments.
F. U. Mathiak 3-7
TSS =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
ϕ
ϕϕϕϕ
ϕ
zzzzr
zr
rzrrr
σσσσσσσσσ
Abb. 3-7 Spannungskomponenten in Zylinderkoordinaten (nicht vollständig)
Die 6 Spannungskomponenten werden zum Spannungsvektor
],,,,,[ rzzrzzrr σσσσσσ= ϕϕϕϕTσ Gl. 3-12
zusammengefasst. In Zylinderkoordinaten hat der Nabla-Operator die Darstellung
zr1
r zr ∂∂
+∂ϕ∂
+∂∂
=∇ ϕ eee
Unter Beachtung von zr eeef ,z)(r,f,z)(r,f,z)(r,f zr ϕ+ϕ+ϕ= ϕϕ folgen dann die Gleichge-
wichtsbedingungen
0fzσσ
r1
r1
rσ
0fzσσ
r1
r2
rσ
0f)σσ(r1
zσσ
r1
rσ
zzzz
zrzr
zr
r
rrrrzrrr
=+∂
∂+
∂ϕ∂
+σ+∂
∂
=+∂
∂+
∂ϕ∂
+σ+∂
∂
=+−+∂
∂+
∂ϕ∂
+∂
∂
ϕ
ϕϕϕϕ
ϕϕ
ϕϕϕ
Gl. 3-13
3-8 Grundlagen der linearen Elastizitätstheorie
3.1.3 Der ebene Spannungszustand
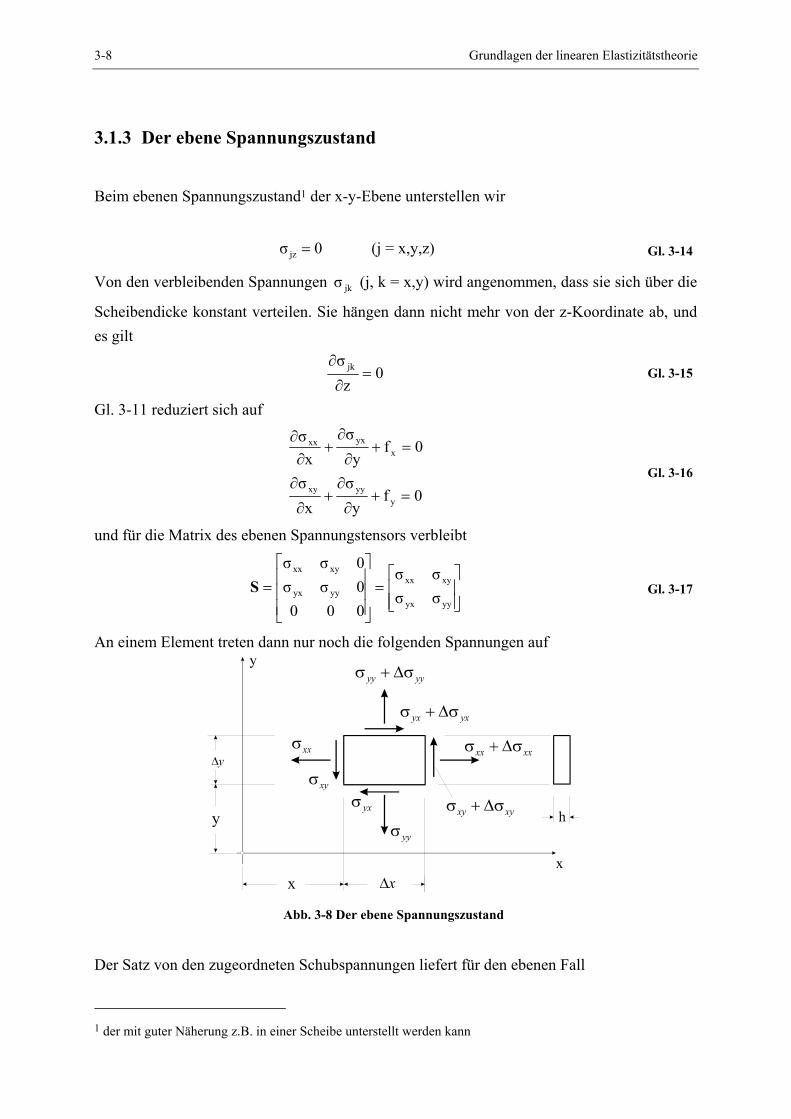
Beim ebenen Spannungszustand1 der x-y-Ebene unterstellen wir
0σ jz = (j = x,y,z) Gl. 3-14
Von den verbleibenden Spannungen jkσ (j, k = x,y) wird angenommen, dass sie sich über die
Scheibendicke konstant verteilen. Sie hängen dann nicht mehr von der z-Koordinate ab, und es gilt
0zσ jk =∂
∂ Gl. 3-15
Gl. 3-11 reduziert sich auf
0fyσ
xσ
0fyσ
xσ
yyyxy
xyxxx
=+∂
∂+
∂
∂
=+∂
∂+
∂∂
Gl. 3-16
und für die Matrix des ebenen Spannungstensors verbleibt
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
yyyx
xyxxyyyx
xyxx
σσσσ
0000σσ0σσ
S Gl. 3-17
An einem Element treten dann nur noch die folgenden Spannungen auf
Abb. 3-8 Der ebene Spannungszustand
Der Satz von den zugeordneten Schubspannungen liefert für den ebenen Fall
1 der mit guter Näherung z.B. in einer Scheibe unterstellt werden kann
F. U. Mathiak 3-9
xyyx σσ = Gl. 3-18
womit noch drei unbekannte Funktionen y)(x,σy),(x,σy),(x,σ yyxyxx zu bestimmen wären,
die wir im Spannungsvektor
]σ,σ,σ[ xyyyxx=Tσ Gl. 3-19
zusammenfassen können. Hängen die Spannungen nicht vom Ort ab, so heißt der Spannungs-zustand homogen, sonst inhomogen.
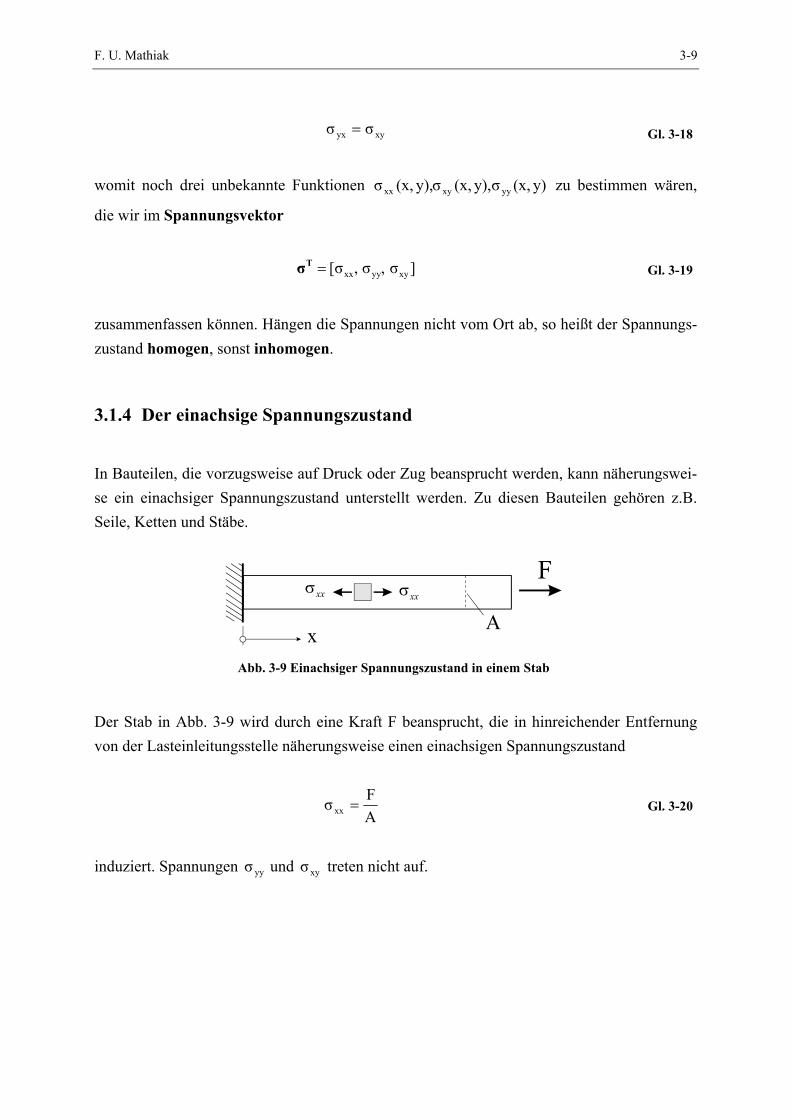
3.1.4 Der einachsige Spannungszustand
In Bauteilen, die vorzugsweise auf Druck oder Zug beansprucht werden, kann näherungswei-se ein einachsiger Spannungszustand unterstellt werden. Zu diesen Bauteilen gehören z.B. Seile, Ketten und Stäbe.
Abb. 3-9 Einachsiger Spannungszustand in einem Stab
Der Stab in Abb. 3-9 wird durch eine Kraft F beansprucht, die in hinreichender Entfernung von der Lasteinleitungsstelle näherungsweise einen einachsigen Spannungszustand
AFσ xx = Gl. 3-20
induziert. Spannungen yyσ und xyσ treten nicht auf.
3-10 Grundlagen der linearen Elastizitätstheorie
3.2 Verschiebungen und Verzerrungen
3.2.1 Die Verschiebungen
Infolge einer Belastung wird ein realer Körper deformiert. Zur (relativen) Beschreibung der
auftretenden Formänderungen wird eine Bezugskonfiguration (BK) eingeführt, von der aus
die Bewegung gemessen wird. In dieser Platzierung muss der kinematische Zustand des Kör-
pers bekannt sein, denn sämtliche Änderungen des kinematischen Zustandes werden auf diese
Referenzkonfiguration bezogen. Die Bewegung endet in der Endkonfiguration (EK), wobei
wir im Rahmen einer linearen Theorie unterstellen, dass Bezugs- und Endkonfiguration dicht
benachbart sind.
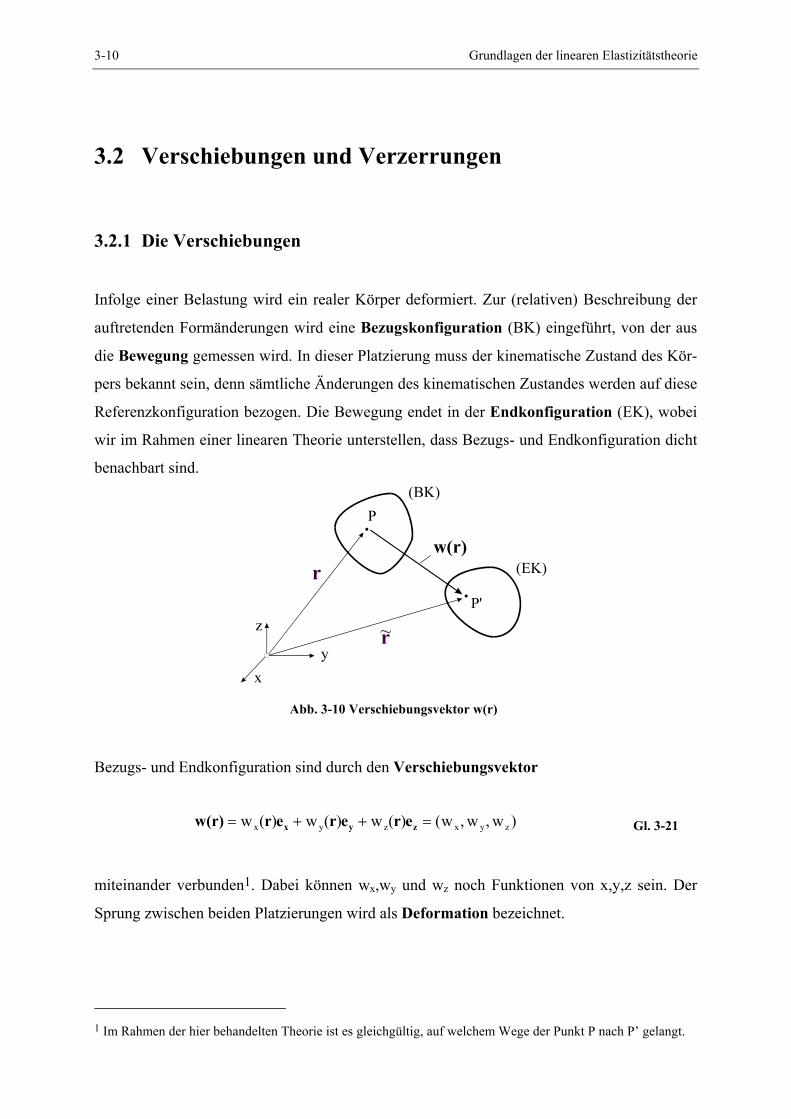
Abb. 3-10 Verschiebungsvektor w(r)
Bezugs- und Endkonfiguration sind durch den Verschiebungsvektor
)w,w,w()(w)(w)(w zyxzyx =++= zyx erererw(r) Gl. 3-21
miteinander verbunden1. Dabei können wx,wy und wz noch Funktionen von x,y,z sein. Der
Sprung zwischen beiden Platzierungen wird als Deformation bezeichnet.
1 Im Rahmen der hier behandelten Theorie ist es gleichgültig, auf welchem Wege der Punkt P nach P’ gelangt.
F. U. Mathiak 3-11
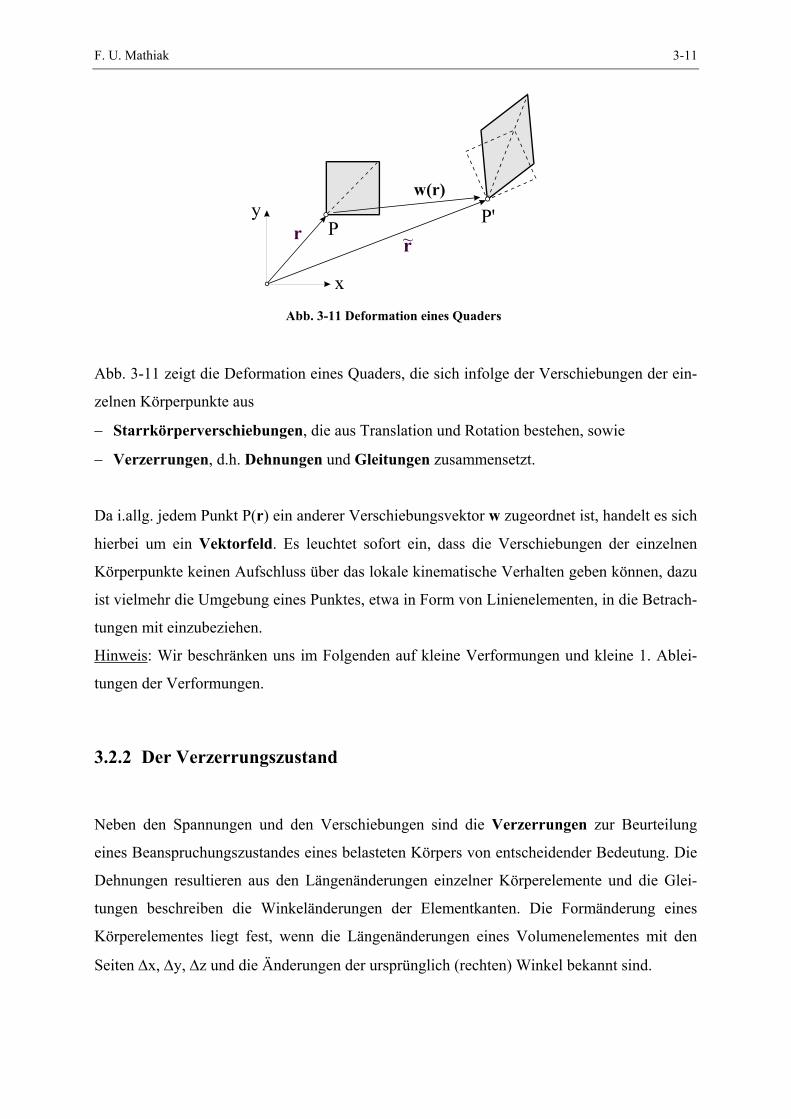
Abb. 3-11 Deformation eines Quaders
Abb. 3-11 zeigt die Deformation eines Quaders, die sich infolge der Verschiebungen der ein-
zelnen Körperpunkte aus
− Starrkörperverschiebungen, die aus Translation und Rotation bestehen, sowie
− Verzerrungen, d.h. Dehnungen und Gleitungen zusammensetzt.
Da i.allg. jedem Punkt P(r) ein anderer Verschiebungsvektor w zugeordnet ist, handelt es sich
hierbei um ein Vektorfeld. Es leuchtet sofort ein, dass die Verschiebungen der einzelnen
Körperpunkte keinen Aufschluss über das lokale kinematische Verhalten geben können, dazu
ist vielmehr die Umgebung eines Punktes, etwa in Form von Linienelementen, in die Betrach-
tungen mit einzubeziehen.
Hinweis: Wir beschränken uns im Folgenden auf kleine Verformungen und kleine 1. Ablei-
tungen der Verformungen.
3.2.2 Der Verzerrungszustand
Neben den Spannungen und den Verschiebungen sind die Verzerrungen zur Beurteilung
eines Beanspruchungszustandes eines belasteten Körpers von entscheidender Bedeutung. Die
Dehnungen resultieren aus den Längenänderungen einzelner Körperelemente und die Glei-
tungen beschreiben die Winkeländerungen der Elementkanten. Die Formänderung eines
Körperelementes liegt fest, wenn die Längenänderungen eines Volumenelementes mit den
Seiten ∆x, ∆y, ∆z und die Änderungen der ursprünglich (rechten) Winkel bekannt sind.

3-12 Grundlagen der linearen Elastizitätstheorie
3.2.2.1 Kartesische Koordinaten
Verschiebungsvektor: )w,w,w( zyx=w
Dehnungen: zzyyxx ,, εεε
Halbe Gleitungen: zxzxyzyzxyxy 21;
21;
21
γ=εγ=εγ=ε
Der Verzerrungstensor hat dann die Form
K+⊗ε+⊗ε+⊗ε= zxxzyxxyxxxx eeeeeeE
oder in Matrixform
TEE =
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
zzzyzx
yzyyyx
xzxyxx
zzzyzx
yzyyyx
xzxyxx
εγ21γ
21
γ21εγ
21
γ21γ
21ε
εεεεεεεεε
Gl. 3-22
Auch diese Matrix ist symmetrisch. Die 6 Größen werden im Verzerrungsvektor
],,,,,[ zxyzxyzzyyxxT γγγεεε=ε Gl. 3-23
zusammengefasst. Die Verzerrungs-Verschiebungsrelationen sind
⎟⎠⎞
⎜⎝⎛
∂∂
+∂
∂=ε⎟⎟
⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
=ε⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
=ε
∂∂
=ε∂
∂=ε
∂∂
=ε
zw
xw
21
zw
yw
21
xw
yw
21
zw
yw
xw
xzzx
yzyz
yxxy
zzz
yyy
xxx
Gl. 3-24
die unter Beachtung der Differentiationsoperatormatrix
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
xy0
z00
0zx
0y
0
z0
y00
xTL Gl. 3-25
auch in die Darstellung
F. U. Mathiak 3-13
Lwε = Gl. 3-26
gebracht werden können. Sind die drei Verschiebungen wx,wy,wz bekannt, dann lassen sich
daraus 6 Verzerrungen berechnen. Umgekehrt gehören zu 6 Verzerrungen genau 3 Verschie-
bungskomponenten. Soll das Verschiebungsfeld eindeutig sein, dann können die 6 Verzer-
rungen nicht beliebig sein, sie müssen den sog. Kompatibilitäts- oder
Verträglichkeitsbedingungen genügen, die hier angegeben werden, auf deren Herleitung
jedoch nicht näher eingegangen wird.
0yxzyzxz
,0xz
2zx
0xzyxyzy
,0zy
2yz
0zyxzxyx
,0yx
2xy
zz2
zx2
zy2
2xy
2zx
2
2xx
2
2zz
2
yy2
yz2
yx2
2zx
2yz
2
2zz
2
2yy
2
xx2
xy2
xz2
2yz
2xy
2
2yy
2
2xx
2
=∂∂ε∂
−∂∂ε∂
+∂∂
ε∂+
∂
ε∂−=
∂∂ε∂
−∂
ε∂+
∂ε∂
=∂∂
ε∂−
∂∂
ε∂+
∂∂
ε∂+
∂ε∂
−=∂∂
ε∂−
∂ε∂
+∂
ε∂
=∂∂ε∂
−∂∂
ε∂+
∂∂ε∂
+∂
ε∂−=
∂∂
ε∂−
∂
ε∂+
∂ε∂
Gl. 3-27
3.2.2.2 Zylinderkoordinaten
Verschiebungsvektor: )w,w,w( zr ϕ=w
Dehnungen: zzrrr ,, εεε ϕ
Halbe Gleitungen: zrzrzzrr 21;
21;
21
γ=εγ=εγ=ε ϕϕϕϕ
Die Dehnungen und Gleitungen bilden den symmetrischen Verzerrungstensor
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
ϕ
ϕϕϕϕ
ϕ
ϕ
ϕϕϕϕ
ϕ
zzzzr
zr
rzrrr
zzzzr
zr
rzrrr
εγ21γ
21
γ21εγ
21
γ21γ
21ε
εεεεεεεεε
E Gl. 3-28
Die 6 Größen werden im Verzerrungsvektor
],,,,,[ zrzrzzrrT γγγεεε= ϕϕϕϕε Gl. 3-29
zusammengefasst. Die Verzerrungs-Verschiebungsrelationen sind
3-14 Grundlagen der linearen Elastizitätstheorie
⎟⎠⎞
⎜⎝⎛
∂∂
+∂
∂=ε
⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ∂
∂+
∂∂
=ε
⎟⎟⎠
⎞⎜⎜⎝
⎛−
∂∂
+ϕ∂
∂=ε
∂∂
=εϕ∂
∂+=ε
∂∂
=ε
ϕϕ
ϕϕϕ
ϕϕϕ
zw
rw
21
wr1
zw
21
rw
rww
r1
21
zw;
wr1
rw;
rw
rzzr
zz
rr
zzz
rrrr
Gl. 3-30
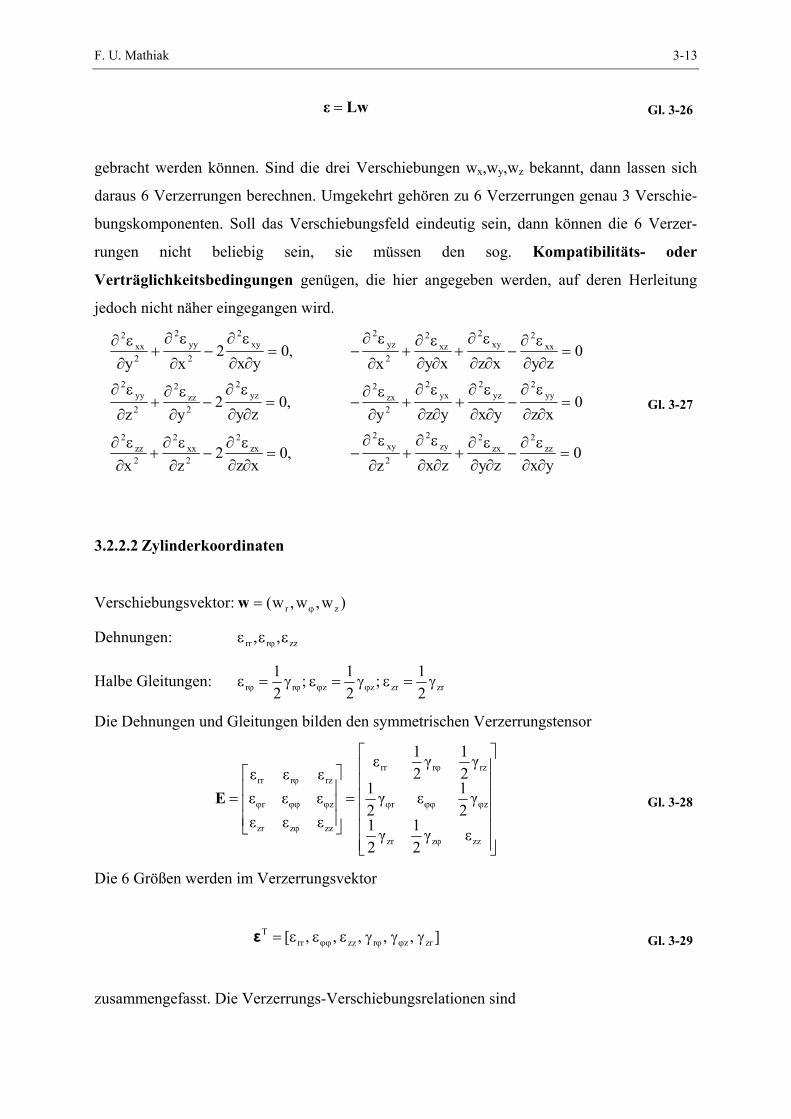
3.2.2.3 Der ebene Verzerrungszustand
Ein ebener Verzerrungszustand wird in langgestreckten Körpern unterstellt, für die Geometrie und Belastung in Längsrichtung nahezu konstant sind. Das trifft zum Beispiel bei der in Abb. 3-12 dargestellten Stützmauer mit guter Näherung zu.
Abb. 3-12 Stützmauer, ebener Verzerrungszustand
Ein ebener Verzerrungszustand in der x,y-Ebene wird durch 0(x,y,z)wz = definiert. Punkte
der x,y-Ebene sollen sich auch nur in dieser Ebene verschieben können. Von Gl. 3-21 ver-bleibt
( )y)(x,wy),(x,w yx=w Gl. 3-31
und damit
0εεε zzyzxz === Gl. 3-32
Gl. 3-22 geht über in
F. U. Mathiak 3-15
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=yyyx
xyxx
εγ2
1
γ2
1εE Gl. 3-33
und der Verzerrungsvektor Gl. 3-23 reduziert sich auf
( )xyyyxxT ,, γεε=ε Gl. 3-34
Von der Differentiationsoperatormatrix Gl. 3-25 verbleibt
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
=
xy0
y0
xTL Gl. 3-35
3.3 Materialgesetz
Nach der Einführung der beiden Begriffe Spannungen und Verzerrungen sind zwischen bei-den Definition Beziehungen herzustellen, die vom verwendeten Material abhängen. Die Glei-chungen, die die Verzerrungen und die Spannungen miteinander verknüpfen, heißen Materi-al- oder auch Stoffgleichungen. Zur Bestimmung der in den Stoffgleichungen auftretenden Werkstoffkennwerte werden Experimente benötigt. Für die folgenden Untersuchungen beschränken wir uns auf den einfachsten Fall der homo-genen, linear-elastischen, isotropen Stoffe. Dabei bedeuten im Einzelnen homogen: Das Material besitzt überall dieselben, vom Ort unabhängigen Materi-
alkonstanten linear-elastisch: Zwischen den Verzerrungen und den Spannungen besteht ein linearer
Zusammenhang isotrop: Die Richtungen der Hauptspannungen und Hauptverzerrungen fallen
zusammen und gleiche Hauptspannungen führen bei beliebig gedreh-tem Material zu gleichen Dehnungen.
3-16 Grundlagen der linearen Elastizitätstheorie
3.3.1 Das Elastizitätsgesetz für den räumlichen Spannungszustand Der einfachste Zusammenhang zwischen den Spannungen S und den Verzerrungen E ist line-ar. Das linear-elastische Verhalten homogener isotroper Materialien erfordert die Angabe der Materialkonstanten E, ν und αΤ. Die Konstante E heißt Elastizitätsmodul. Der Elastizitäts-modul ist ein Maß für den Widerstand des Materials gegen Normalspannungsbeanspruchung. Je größer E ist, umso kleiner werden die Dehnungen oder Stauchungen bei einer vorgegebe-nen Spannung. Der E-Modul kann unterhalb der Proportionalitätsgrenze wegen der dort gülti-
gen Beziehung Etan =α=εσ der Spannungs-Dehnungskurve eines einaxialen Zugversuches
entnommen werden.
[ ] 2212 m/NsmkgEinheit
)Zeit(LängeMasseE =
⋅= −−
∞≤≤ E0 Gl. 3-36
Die positive Konstante ν wird Querkontraktionszahl genannt.
210 ≤ν≤ Gl. 3-37
Der Wert 21=ν bedeutet Volumenkonstanz1. Wird der Körper um T Kelvin gegenüber ei-
ner beliebigen Ausgangstemperatur erwärmt, so vergrößert sich jedes beliebig orientierte Li-nienelement der Länge l um das Maß TTα=∆ ll , wobei Tα den linearen Temperatur-
ausdehnungskoeffizienten bezeichnet. Zu jeder beliebigen Richtung ergibt sich dann zusätz-lich eine Temperaturdehnung. Das Hookesche2 Gesetz lautet in Tensorschreibweise unter Einbeziehung des Lastfalls Temperatur
IISE T1E
1Tα+⎥⎦
⎤⎢⎣⎡ σ
ν+ν
−ν+
= Gl. 3-38
In Gl. 3-38 bezeichnen zzyyxx σ+σ+σ=σ die Spur des Spannungstensors und
1 Für Baustahl und die meisten metallischen Werkstoffe kann ν = 1/3 gesetzt werden. 2 Robert Hooke fand dieses Gesetz auf empirischem Wege und veröffentlichte seine Ergebnisse im Jahre 1678.
F. U. Mathiak 3-17
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
αα
α=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡α=α
T000T000T
100010001
TT
T
T
T
TT I Gl. 3-39
den linearen Wärmedehnungstensor. Lösen wir Gl. 3-38 nach den Spannungen auf, dann er-halten wir
IIESν−
α−⎥⎦
⎤⎢⎣⎡ ε
ν−ν
−ν+
=21TE
211E T Gl. 3-40
In obiger Gleichung ist zzyyxx ε+ε+ε=ε die Spur des Verzerrungstensors
3.3.1.1 Kartesische Koordinaten
In kartesischen Koordinaten sind die Dehnungen und Gleitungen
( )[ ]
( )[ ]
( )[ ] TE1
TE1
TE1
Tyyxxzzzz
Tzzxxyyyy
Tzzyyxxxx
α+σ+σν−σ=ε
α+σ+σν−σ=ε
α+σ+σν−σ=ε
Gl. 3-41
zxzxyzyzxyxy E1
E1
E1
σν+
=εσν+
=εσν+
=ε Gl. 3-42
sowie die Spannungen
( )
( )
( ) ⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
Tyyxxzzzz
Tzzxxyyyy
Tzzyyxxxx
Gl. 3-43
yzyzyz
xzxzxz
xyxyxy
G1
E
G1
E
G1
E
γ=εν+
=σ
γ=εν+
=σ
γ=εν+
=σ
Gl. 3-44
3-18 Grundlagen der linearen Elastizitätstheorie
wobei in Gl. 3-44 zur Abkürzung der Schubmodul
)1(2EG
ν+= Gl. 3-45
eingeführt wurde, der allerdings keine neue Materialkonstante darstellt, da es sich durch E und ν ausdrücken lässt. Die Dimension des Schubmoduls ist
[ ] 2212 m/NsmkgEinheit
)Zeit(LängeMasseG =
⋅= −−
und es gilt wegen Gl. 3-36 und Gl. 3-37
2EG
3E
G0
≤≤
∞≤≤ Gl. 3-46
Unter Beachtung von Gl. 3-7 und Gl. 3-23 lautet das Werkstoffgesetz Gl. 3-43 und Gl. 3-44 in Matrizenschreibweise
Dεσ = Gl. 3-47
wobei
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−
−
−
−+=
2ν2100000
02ν210000
002ν21000
000ν1νν
000νν1ν
000ννν1
ν)21ν)(1(ED Gl. 3-48
die symmetrische Materialmatrix des räumlichen Spannungszustandes für den isothermen Fall bezeichnet.
3.3.1.2 Zylinderkoordinaten
F. U. Mathiak 3-19
( )[ ]
( )[ ]
( )[ ] TE1
TE1
TE1
Trrzzzz
Tzzrr
Tzzrrrr
α+σ+σν−σ=ε
α+σ+σν−σ=ε
α+σ+σν−σ=ε
ϕϕ
ϕϕϕϕ
ϕϕ
Gl. 3-49
zrzrzzrr E1
E1
E1
σν+
=εσν+
=εσν+
=ε ϕϕϕϕ Gl. 3-50
( )
( )
( ) ⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
ϕϕ
ϕϕϕϕ
ϕϕ
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
Trrzzzz
Tzzrr
Tzzrrrr
Gl. 3-51
zrzrzr
zzz
rrr
G1
E
G1
E
G1
E
γ=εν+
=σ
γ=εν+
=σ
γ=εν+
=σ
ϕϕϕ
ϕϕϕ
Gl. 3-52
3.3.1.3 Zylinderkoordinaten bei Rotationssymmetrie
Bei axialsymmetrischen Systemen, deren Geometrie und Belastung Rotationssymmetrie zu einer Achse aufweisen, etwa bei zylindrischen Behältern unter Flüssigkeitsdruck, können die voranstehenden Gleichungen noch reduziert werden. Ist die z-Achse die Symmetrieachse, dann ist nämlich 0)z,,r(w =ϕϕ und sämtliche Änderungen der Zustandsgrößen in tangentia-
ler Richtung müssen ebenfalls verschwinden ( 0=ϕ∂∂ ). Von Gl. 3-30 verbleibt dann
0;0z
wr
w21
zw;0
rw;
rw
zr
rzzr
zzz
rrrr
=ε=ε
⎟⎠⎞
⎜⎝⎛
∂∂
+∂
∂=ε
∂∂
=ε≠=ε∂
∂=ε
ϕϕ
ϕϕ
Gl. 3-53
3-20 Grundlagen der linearen Elastizitätstheorie
Als unbekannte Verschiebungen bleiben nur die planaren Komponenten wr(r,z) und wz(r,z). Das Materialgesetz aufgelöst nach den Spannungen ist dann
( )
( )
( ) ⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
⎥⎦⎤
⎢⎣⎡ α
ν−ν+
−ε+εν−
ν+ε
ν−ν+ν−
=σ
ϕϕ
ϕϕϕϕ
ϕϕ
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
T11
1)21)(1(E)1(
Trrzzzz
Tzzrr
Tzzrrrr
Gl. 3-54
zrzrzr G1
Eγ=ε
ν+=σ Gl. 3-55
Mit dem Spannungs- und Verzerrungsvektor
( ) ( )ϕϕϕϕ εεεε=σσσσ= ,,,,,, zrrrzzT
zrrrzzT εσ Gl. 3-56
und der symmetrischen Materialmatrix für den isothermen Fall
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ν−ν
ν−ν
ν−ν−
ν−ν
ν−ν
ν−ν
ν−ν
ν−ν+ν−
=
1011
0)1(2
21001
011
10
11
)21)(1(E)1(
AXD Gl. 3-57
kann das Werkstoffgesetz für axialsymmetrische Systeme in Matrizenschreibweise wie folgt notiert werden
εDσ AX= Gl. 3-58
3.3.2 Das Elastizitätsgesetz für den ebenen Spannungszustand
Für den ebenen Spannungszustand galt ( )x,y,zj0σ jz == . Es verbleibenden somit die
Spannungen (x,y)σσ;(x,y)σσ;(x,y)σσ xyxyyyyyxxxx === . Durch die Reduktion der zu ermit-
telnden Spannungsfunktionen σjk von 6 auf 3 lässt sich, im Vergleich zum räumlichen Fall,

F. U. Mathiak 3-21
das Aufstellen der Grundgleichungen des ebenen Spannungszustandes erheblich vereinfa-chen. Von den Dehnungen verbleiben
( )
( )
( ) 0TασσEνε
TανσσE1ε
TανσσE1ε
Tyyxxzz
Txxyyyy
Tyyxxxx
≠++−=
+−=
+−=
Gl. 3-59
und entsprechend von den Gleitungen
xyxy σG1
=γ Gl. 3-60
Lösen wir die obigen Gleichungen nach den Spannungen auf, dann erhalten wir
( )[ ]
( )[ ]xyxy
Txxyy2yy
Tyyxx2xx
Gσ
Tαν1νεεν1
Eσ
Tαν1νεεν1
Eσ
γ=
+−+−
=
+−+−
=
Gl. 3-61
Mit dem Spannungs- und Verzerrungsvektor ( ) ( )xyyyxx
Txyyyxx
T ,γε,ε,σσ,σ == εσ Gl. 3-62
und der symmetrischen Materialmatrix für den isothermen Fall
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
=
s
xxy
xyx
2
D000DD0DD
2ν100
01ν
0ν1
ν1E
ESD Gl. 3-63
mit
G)ν1(2
ED;Dν1ED;
ν1ED sx2xy2x =
+=ν=
−ν
=−
= Gl. 3-64
kann das Werkstoffgesetz für den ebenen Spannungszustand in Matrizenschreibweise wie folgt notiert werden
εDσ ES= Gl. 3-65

3-22 Grundlagen der linearen Elastizitätstheorie
F. U. Mathiak 3-23
3.3.3 Das Elastizitätsgesetz für den ebenen Verzerrungszustand
Wegen Gl. 3-32 verbleibt von Gl. 3-44
0σ0σ
Gγ2Gεσ
yz
xz
xyxyxy
=
=
==
Gl. 3-66
Aus der 3. Beziehung von Gl. 3-41 erhalten wir zunächst wegen 0ε zz =
0TEα)σν(σσ Tyyxxzz ≠−+= Gl. 3-67
Einsetzen in die beiden ersten Gleichungen von Gl. 3-41 liefert
( )
( )
0ε
Tαν1σν1
νσEν1ε
Tαν1σν1
νσEν1ε
zz
Txxyy
2
yy
Tyyxx
2
xx
=
++⎥⎦⎤
⎢⎣⎡
−−
−=
++⎥⎦⎤
⎢⎣⎡
−−
−=
Gl. 3-68
Von den Gleitungen verbleibt nur
xyxyxy σG1γε2 == Gl. 3-69
Lösen wir Gl. 3-68 nach den Spannungen auf, dann erhalten wir
[ ]
[ ]
[ ]Tαν)(1)εν(εν)2ν)(1(1
Eσ
Tαν)(1νεεν)(1ν)2ν)(1(1
Eσ
Tαν)(1νεεν)(1ν)2ν)(1(1
Eσ
Tyyxxzz
Txxyyyy
Tyyxxxx
+−+−+
=
+−+−−+
=
+−+−−+
=
Gl. 3-70
und
xyxy Gγ=σ Gl. 3-71

3-24 Grundlagen der linearen Elastizitätstheorie
oder in Matrizenschreibweise unter Beachtung von Gl. 3-62 für den isothermen Fall
εDσ EV= Gl. 3-72
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
−+=
2ν2100
0ν1ν
0νν1
)ν21)(ν1(E
EVD Gl. 3-73
3.3.4 Das Elastizitätsgesetz für den Stab
Wir unterstellen einen einachsigen Spannungszustand (Abb. 3-9) in x-Richtung, für den gilt
xxxx Eε=σ Gl. 3-74
oder in Matrizenschreibweise
εDσ ST= Gl. 3-75
wobei
][ xxσ=σ und ][ xxε=ε Gl. 3-76
gesetzt wurde. Die Materialmatrix für den Stab ist dann
[ ]E=STD Gl. 3-77
3.3.5 Das Elastizitätsgesetz für den schubstarren Balken
Die Momenten-Krümmungs-Beziehung für den schubstarren Balken lautet bekanntlich
(x)wEI(x)M yyy ′′−= Gl. 3-78
F. U. Mathiak 3-25
oder in Matrizenschreibweise
κ= BADM Gl. 3-79
wobei
]M[ y=M und ]w[ ′′−=κ Gl. 3-80
gesetzt wurde. Die Materialmatrix für den schubstarren Balken ist dann
]EI[ yy=BAD Gl. 3-81

3-26 Grundlagen der linearen Elastizitätstheorie
F. U. Mathiak 4-1
4 Grundgleichungen der Scheiben-theorie
4.1 Voraussetzung
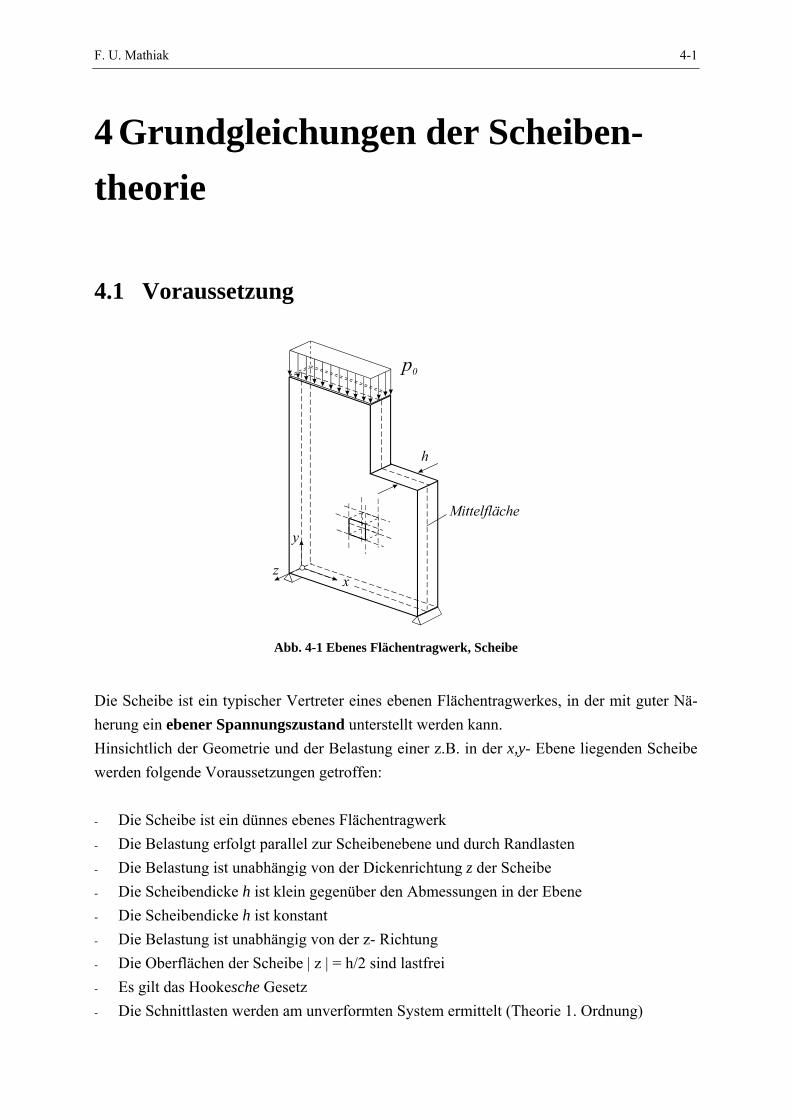
Abb. 4-1 Ebenes Flächentragwerk, Scheibe
Die Scheibe ist ein typischer Vertreter eines ebenen Flächentragwerkes, in der mit guter Nä-herung ein ebener Spannungszustand unterstellt werden kann. Hinsichtlich der Geometrie und der Belastung einer z.B. in der x,y- Ebene liegenden Scheibe werden folgende Voraussetzungen getroffen: - Die Scheibe ist ein dünnes ebenes Flächentragwerk - Die Belastung erfolgt parallel zur Scheibenebene und durch Randlasten - Die Belastung ist unabhängig von der Dickenrichtung z der Scheibe - Die Scheibendicke h ist klein gegenüber den Abmessungen in der Ebene - Die Scheibendicke h ist konstant - Die Belastung ist unabhängig von der z- Richtung - Die Oberflächen der Scheibe | z | = h/2 sind lastfrei - Es gilt das Hookesche Gesetz - Die Schnittlasten werden am unverformten System ermittelt (Theorie 1. Ordnung)
4-2 Grundgleichungen der Scheibentheorie
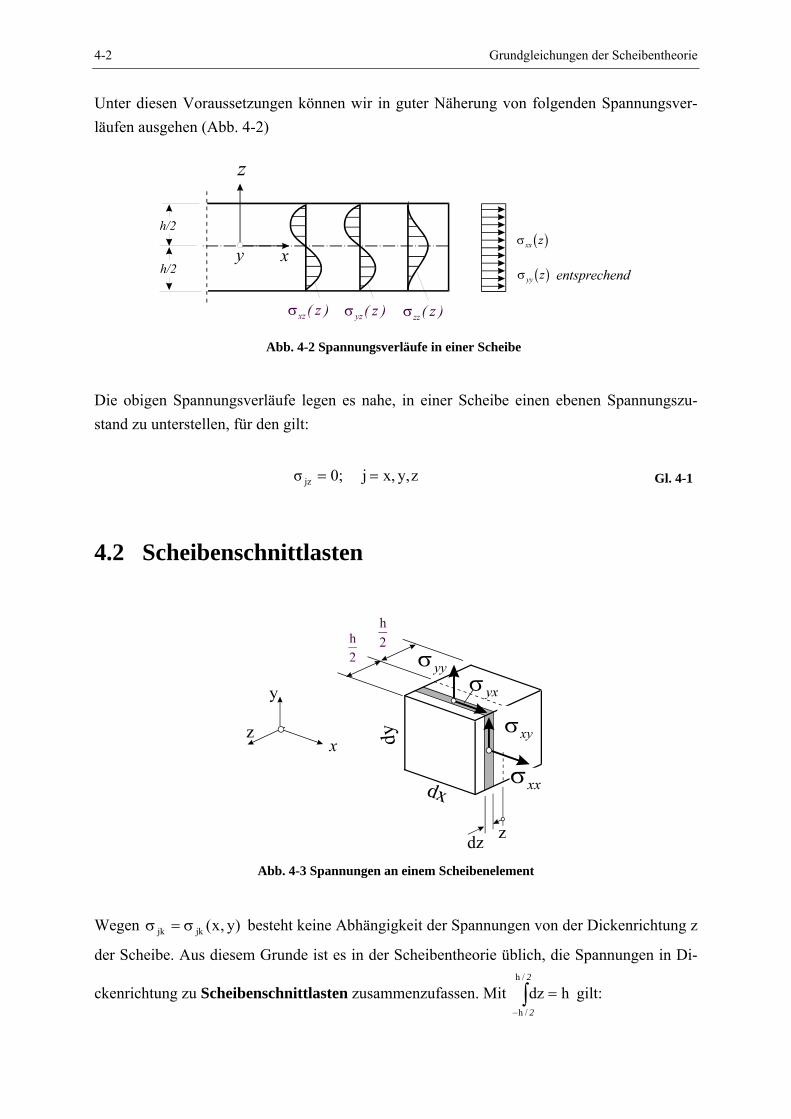
Unter diesen Voraussetzungen können wir in guter Näherung von folgenden Spannungsver-läufen ausgehen (Abb. 4-2)
Abb. 4-2 Spannungsverläufe in einer Scheibe
Die obigen Spannungsverläufe legen es nahe, in einer Scheibe einen ebenen Spannungszu-stand zu unterstellen, für den gilt:
zy,x,j0;σ jz == Gl. 4-1
4.2 Scheibenschnittlasten
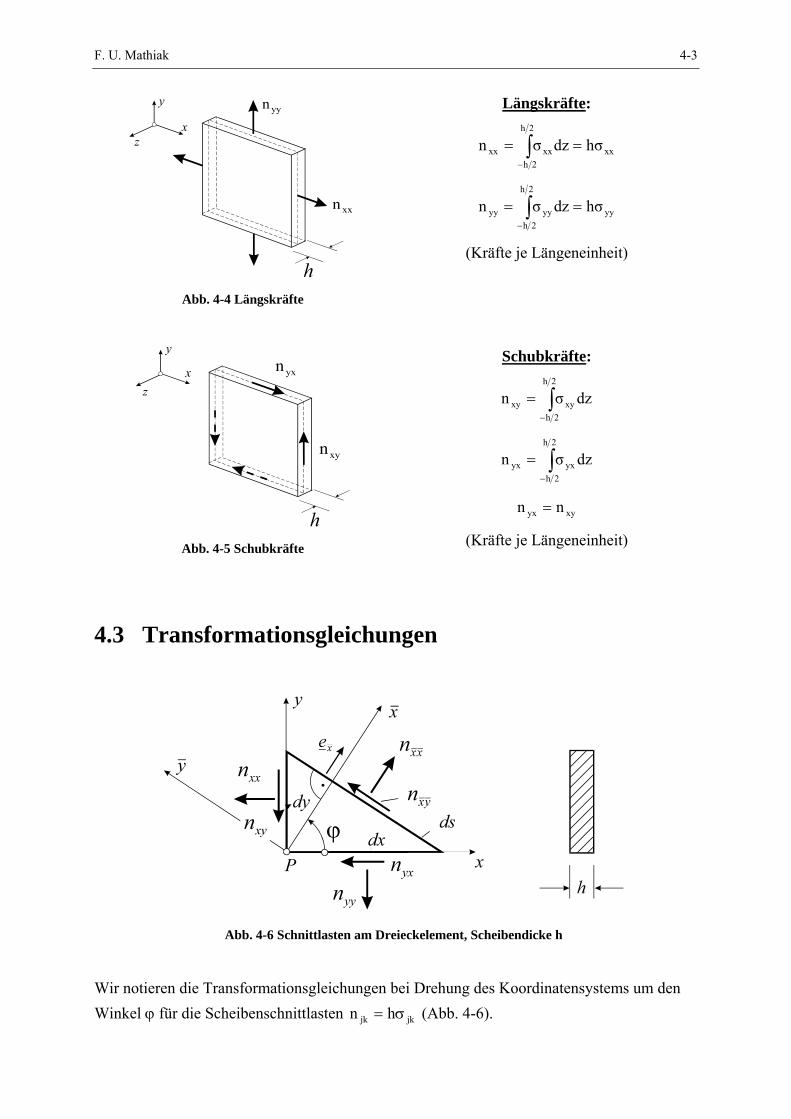
Abb. 4-3 Spannungen an einem Scheibenelement
Wegen )y,x(jkjk σ=σ besteht keine Abhängigkeit der Spannungen von der Dickenrichtung z
der Scheibe. Aus diesem Grunde ist es in der Scheibentheorie üblich, die Spannungen in Di-
ckenrichtung zu Scheibenschnittlasten zusammenzufassen. Mit hdz/h
/h
=∫−
2
2
gilt:
F. U. Mathiak 4-3
Abb. 4-4 Längskräfte
Längskräfte:
xx
2h
2hxxxx hσdzσn == ∫
−
yy
2h
2hyyyy hσdzσn == ∫
−
(Kräfte je Längeneinheit)
Abb. 4-5 Schubkräfte
Schubkräfte:
dzσn2h
2hxyxy ∫
−
=
dzσn2h
2hyxyx ∫
−
=
xyyx nn =
(Kräfte je Längeneinheit)
4.3 Transformationsgleichungen
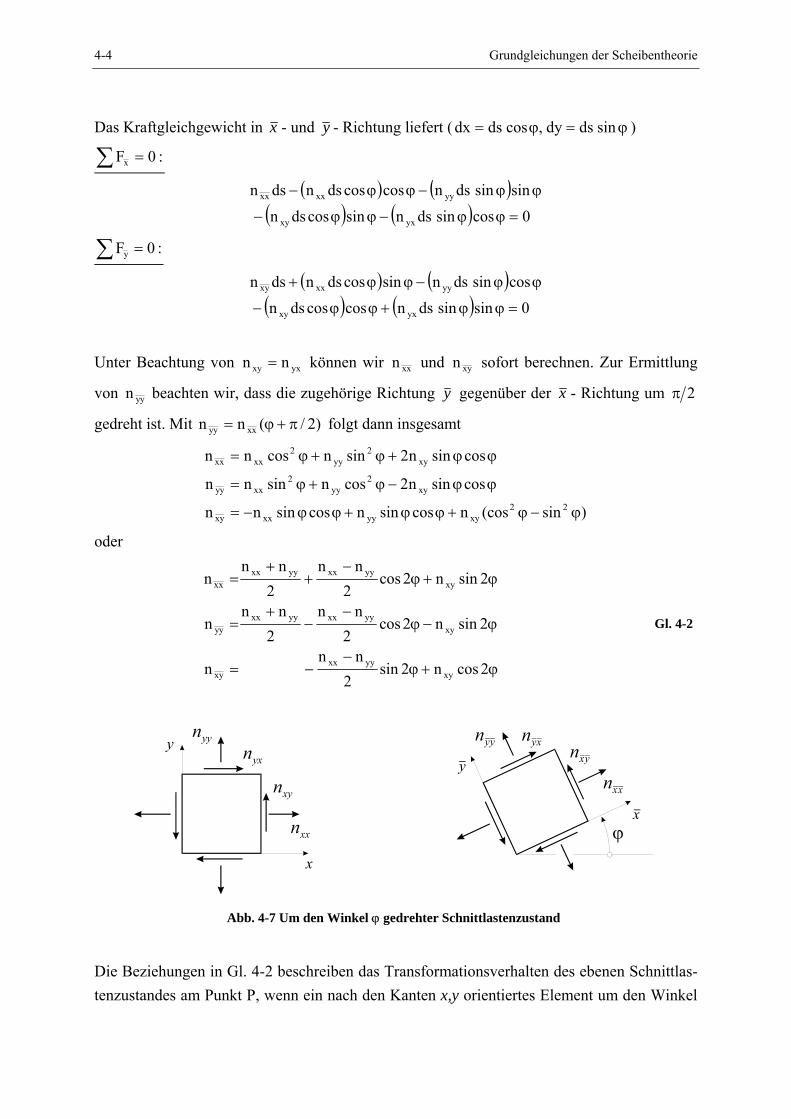
Abb. 4-6 Schnittlasten am Dreieckelement, Scheibendicke h
Wir notieren die Transformationsgleichungen bei Drehung des Koordinatensystems um den Winkel ϕ für die Scheibenschnittlasten jkjk hn σ= (Abb. 4-6).
4-4 Grundgleichungen der Scheibentheorie
Das Kraftgleichgewicht in x - und y - Richtung liefert ( ϕ=ϕ= sindsdy,cosdsdx )
:0Fx =∑
( ) ( )( ) ( ) 0cossindsnsincosdsn
sinsindsncoscosdsndsn
yxxy
yyxxxx
=ϕϕ−ϕϕ−
ϕϕ−ϕϕ−
:0Fy =∑
( ) ( )( ) ( ) 0sinsindsncoscosdsn
cossindsnsincosdsndsn
yxxy
yyxxyx
=ϕϕ+ϕϕ−
ϕϕ−ϕϕ+
Unter Beachtung von yxxy nn = können wir xxn und yxn sofort berechnen. Zur Ermittlung
von yyn beachten wir, dass die zugehörige Richtung y gegenüber der x - Richtung um π 2
gedreht ist. Mit )2/(nn xxyy π+ϕ= folgt dann insgesamt
)sin(cosncossinncossinnn
cossinn2cosnsinnn
cossinn2sinncosnn
22xyyyxxyx
xy2
yy2
xxyy
xy2
yy2
xxxx
ϕ−ϕ+ϕϕ+ϕϕ−=
ϕϕ−ϕ+ϕ=
ϕϕ+ϕ+ϕ=
oder
ϕ+ϕ−
−=
ϕ−ϕ−
−+
=
ϕ+ϕ−
++
=
2cosn2sin2
nnn
2sinn2cos2
nn2
nnn
2sinn2cos2
nn2
nnn
xyyyxx
yx
xyyyxxyyxx
yy
xyyyxxyyxx
xx
Gl. 4-2
Abb. 4-7 Um den Winkel ϕ gedrehter Schnittlastenzustand
Die Beziehungen in Gl. 4-2 beschreiben das Transformationsverhalten des ebenen Schnittlas-tenzustandes am Punkt P, wenn ein nach den Kanten x,y orientiertes Element um den Winkel
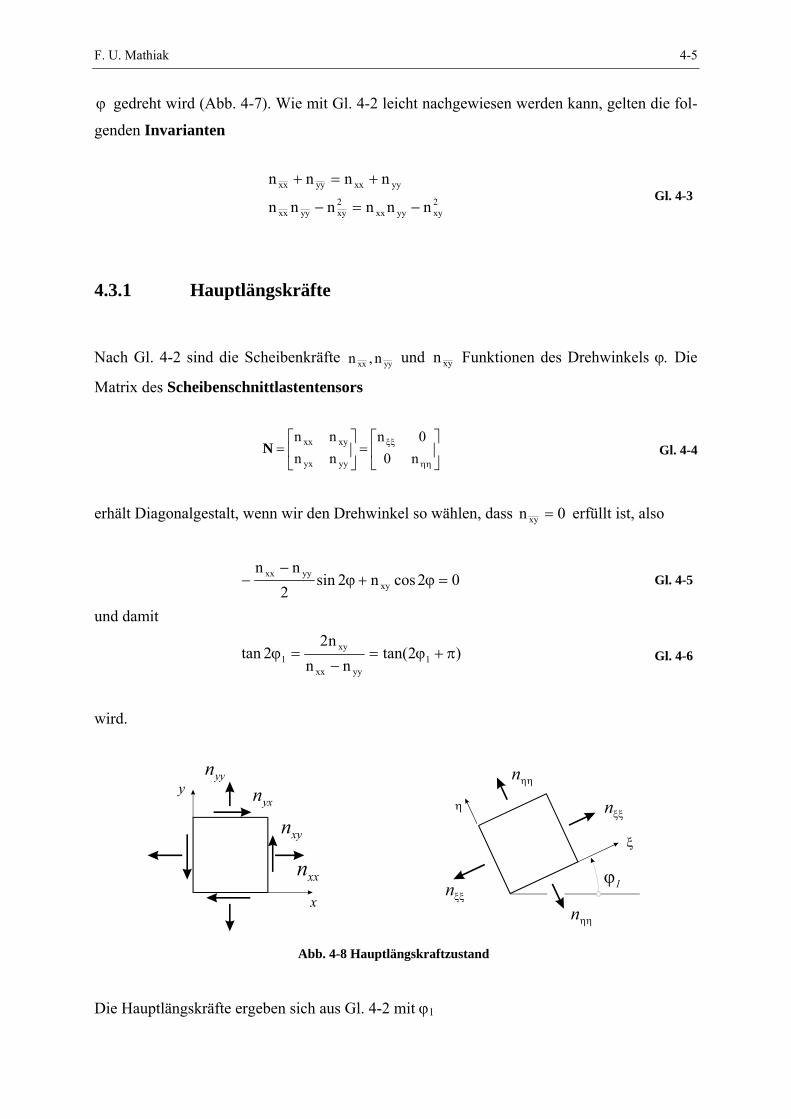
F. U. Mathiak 4-5
ϕ gedreht wird (Abb. 4-7). Wie mit Gl. 4-2 leicht nachgewiesen werden kann, gelten die fol-
genden Invarianten
2xyyyxx
2yxyyxx
yyxxyyxx
nnnnnn
nnnn
−=−
+=+ Gl. 4-3
4.3.1 Hauptlängskräfte
Nach Gl. 4-2 sind die Scheibenkräfte yyxx n,n und yxn Funktionen des Drehwinkels ϕ. Die
Matrix des Scheibenschnittlastentensors
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
ηη
ξξ
n00n
nnnn
yyyx
xyxxN Gl. 4-4
erhält Diagonalgestalt, wenn wir den Drehwinkel so wählen, dass 0n yx = erfüllt ist, also
02cosn2sin2
nnxy
yyxx =ϕ+ϕ−
− Gl. 4-5
und damit
)2tan(nn
n22tan 1
yyxx
xy1 π+ϕ=
−=ϕ Gl. 4-6
wird.
Abb. 4-8 Hauptlängskraftzustand
Die Hauptlängskräfte ergeben sich aus Gl. 4-2 mit ϕ1

4-6 Grundgleichungen der Scheibentheorie
1xy1yyxxyyxx
1xy1yyxxyyxx
2sinn2cos2
nn2
nnn
2sinn2cos2
nn2
nnn
ϕ−ϕ−
−+
=
ϕ+ϕ−
++
=
ηη
ξξ
Gl. 4-7
Ein mit 1ϕ gedrehtes Element (Abb. 4-8) unterliegt somit einem reinen Längskraftzustand.
Wegen ( )π+ϕ=ϕ 11 2tan2tan existiert eine zweite Richtung
212π
+ϕ=ϕ Gl. 4-8
für die Gl. 4-5 ebenfalls erfüllt ist. Für diese Drehwinkel werden außerdem die Längskräfte
extremal, denn die für das Vorliegen von Extremwerten notwendigen Bedingungen 0d
dn xx =ϕ
und 0d
dn yy =ϕ
führen wiederum auf Gl. 4-5. Der unter diesen Richtungen auftretende schub-
kraftfreie Zustand wird Hauptlängskraftzustand genannt. Die Achsen ξ und η heißen
Hauptachsen. Die Invarianten nach Gl. 4-3 gehen für den Hauptlängskraftzustand wegen 0n =ξη über in
2xyyyxx
yyxx
nnnnn
nnnn
−=
+=+
ηηξξ
ηηξξ Gl. 4-9
Aus Gl. 4-9 lassen sich die Hauptlängskräfte berechnen, ohne den Weg über die Transforma-tionsgleichungen Gl. 4-2 zu gehen. Eine direkte Zuordnung zum Drehwinkel ist dann aller-dings nicht möglich. Wir ordnen sie so an, dass 2211 nn > ist.
[ ][ ]2
xy2
yyxxyyxx22
2xy
2yyxxyyxx11
n4)nn()nn(21n
n4)nn()nn(21n
+−−+=
+−++= Gl. 4-10
Der Gl. 4-6 entspricht folgende Darstellung
21
21
yyxx
xy1 y1
y2tan1tan2
nnn2
2tan′−′
=ϕ−
ϕ=
−=ϕ Gl. 4-11
Auflösung nach y' liefert die Differentialgleichung der Hauptlängskrafttrajektorien.
F. U. Mathiak 4-7
1n2
nnn2
nny
2
xy
yyxx
xy
xxyy2,1 +⎟
⎟⎠
⎞⎜⎜⎝
⎛ −±
−=′ Gl. 4-12
Hinweis: Weil 1yy 21 −=′⋅′ gilt, schneiden sich die Hauptlängskrafttrajektorien in einem
Winkel von 90°.
4.3.2 Hauptschubkräfte
Die Richtung für die extremalen Schubkräfte erhalten wir aus der Forderung
ϕ−ϕ−−==ϕ
2sinn22cos)nn(0d
dnxyyyxx
yx
und damit
)2tan(2cot2tan1
n2nn
2tan 311xy
yyxx3 π+ϕ=ϕ−=
ϕ−=
−−=ϕ Gl. 4-13
Wegen 1
3 2tan12tanϕ
−=ϕ stehen die beiden Richtungen ϕ3 und ϕ1 senkrecht aufeinander.
Damit wird
413π
+ϕ=ϕ Gl. 4-14
d.h. die diesem Winkel zugeordneten Hauptschubkräfte
2xy
2yyxx12 n4)nn(
21n +−±= Gl. 4-15
treten in einer unter 45° gegen die Hauptlängskraftrichtung gedrehten Schnittfläche auf. Die-ser Hauptschubkraftzustand ist i.a. nicht längskraftfrei, vielmehr wirken in dieser Schnittflä-che die Längskräfte
)nn(21n yyxxM += Gl. 4-16
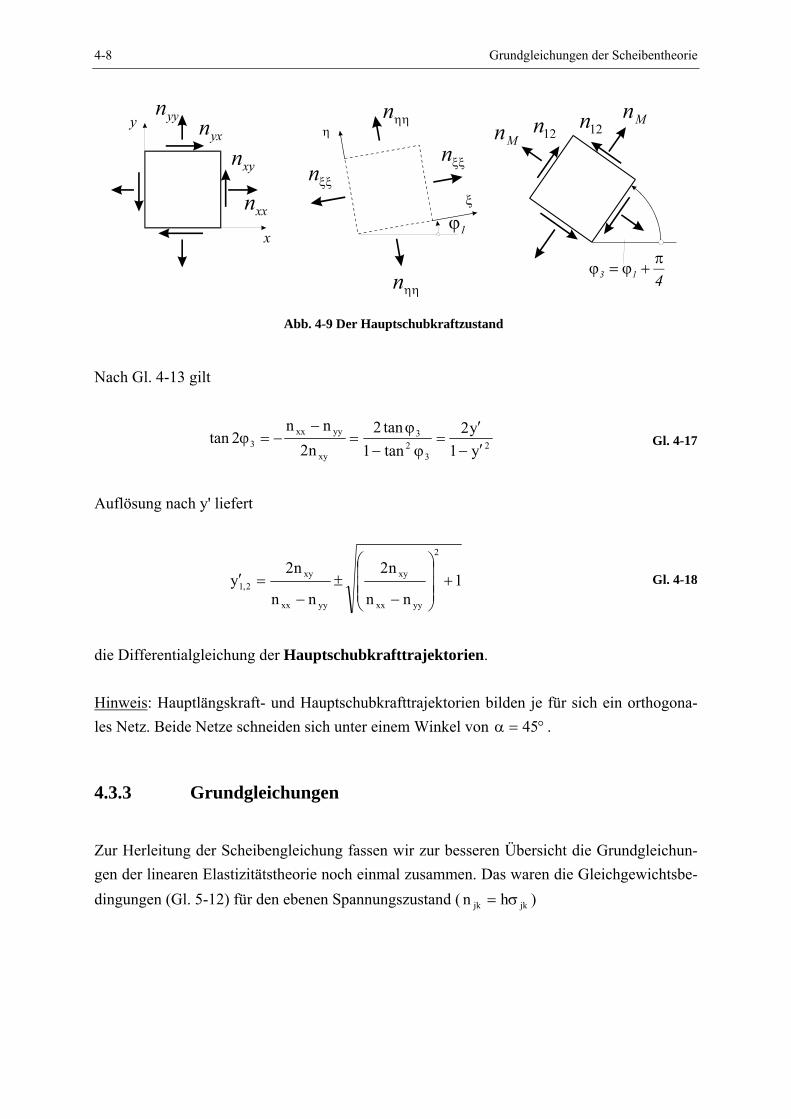
4-8 Grundgleichungen der Scheibentheorie
Abb. 4-9 Der Hauptschubkraftzustand
Nach Gl. 4-13 gilt
23
23
xy
yyxx3 y1
y2tan1tan2
n2nn
2tan′−′
=ϕ−
ϕ=
−−=ϕ Gl. 4-17
Auflösung nach y' liefert
1nn
n2
nn
n2y
2
yyxx
xy
yyxx
xy2,1 +
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−±
−=′ Gl. 4-18
die Differentialgleichung der Hauptschubkrafttrajektorien. Hinweis: Hauptlängskraft- und Hauptschubkrafttrajektorien bilden je für sich ein orthogona-les Netz. Beide Netze schneiden sich unter einem Winkel von °=α 45 .
4.3.3 Grundgleichungen
Zur Herleitung der Scheibengleichung fassen wir zur besseren Übersicht die Grundgleichun-gen der linearen Elastizitätstheorie noch einmal zusammen. Das waren die Gleichgewichtsbe-dingungen (Gl. 5-12) für den ebenen Spannungszustand ( jkjk hn σ= )
F. U. Mathiak 4-9
0fhy
nx
n
0fhy
nx
n
yyyxy
xyxxx
=+∂
∂+
∂
∂
=+∂
∂+
∂∂
Gl. 4-19
die kinematischen Beziehungen oder auch Verzerrungs-Verschiebungsrelationen
xv
yu,
yv,
xu
xyyyxx ∂∂
+∂∂
=γ∂∂
=ε∂∂
=ε Gl. 4-20
und das Werkstoffgesetz (hier für den isothermen Fall)
( )
( )xyxy
xxyy2yy
yyxx2xx
Ghn
νεεν1
Ehn
νεεν1
Ehn
γ=
+−
=
+−
=
Gl. 4-21
Mit Gl. 4-19 , Gl. 4-20 und Gl. 4-21 liegen 8 Gleichungen für die 8 Unbekannte (3 Schnittlas-ten, 3 Verzerrungen und 2 Verschiebungen vor. Ergänzt werden diese Gleichungen durch die Randbedingungen, die als Kraft- oder Verschiebungsrandbedingungen auftreten können. Abhängig vom konkret zu lösenden Randwertproblem ist es nun sinnvoll, entweder die Schnittlasten oder die Verzerrungen aus diesen Gleichungen zu eliminieren.
4.4 Elimination der Spannungen, Verschiebungsfunktion Beachten wir in Gl. 4-21 die kinematischen Beziehungen Gl. 4-20, dann folgt
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
yu
xvGhn
xuν
yv
ν1Ehn
yvν
xu
ν1Ehn
xy
2yy
2xx
Gl. 4-22
Beachten wir in Gl. 4-22 die Gleichgewichtsbedingungen Gl. 4-19, dann erhalten wir

4-10 Grundgleichungen der Scheibentheorie
( )
( ) 0fyx
ux
v12E
yxuν
yv
ν1E
0fyu
yxv
12E
yxvν
xu
ν1E
y
2
2
22
2
2
2
x2
222
2
2
2
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
ν++⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
−
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂ν+
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂+
∂∂
− Gl. 4-23
Die obigen Gleichungen können noch umgeschrieben werden.
( )
( )y
x
fE
12yv
xu
y11v
fE
12yv
xu
x11u
ν+−=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
ν−ν+
+∆
ν+−=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
ν−ν+
+∆
Gl. 4-24
Die Gl. 4-24 heißen Lamé-Naviersche1 Verschiebungsdifferentialgleichungen. In diesem partiellen Differentialgleichungssystem treten nur noch die unbekannten Verschiebungsfelder u(x,y) und v(x,y) auf. Eine Lösung kann mit Hilfe der Verschiebungsfunktion Φ(x,y) erzeugt werden. Dazu machen wir den folgenden speziellen Ansatz
2
2
2
2
2
x)y,x(B
y)y,x(A)y,x(v
yx)y,x()BA()y,x(u
∂Φ∂
−∂Φ∂
=
∂∂Φ∂
+= Gl. 4-25
mit den beiden noch freien Konstanten A und B. Wir betrachten im Folgenden den homoge-nen Fall (fx = fy = 0). Die Scheibe wird also nur noch durch Randverschiebungen beansprucht. Dann verbleiben von Gl. 4-24
( )
( ) ( ) 0x
By1
A2
0yx
B1
A2
2
2
2
2
2
=∆Φ∂∂
−∆Φ∂∂
ν−
=∆Φ∂∂∂
⎟⎠⎞
⎜⎝⎛ +
ν− Gl. 4-26
Für ν−
−=1
A2B ist die erste der beiden Gleichungen erfüllt und die zweite geht über in
01
A2=∆∆Φ
ν−, die dann für
1 Gabriel Lamé, frz. Mathematiker u. Physiker, 1795-1870 und Claude Louis Marie Henri Navier, frz. Physiker, 1785-1836
F. U. Mathiak 4-11
0=∆∆Φ Gl. 4-27
mit beliebigem A ebenfalls erfüllt ist. Von Gl. 4-27 ist eine Lösung aufzusuchen, aus der sich dann die Verformungen
2
2
2
2
2
2
2
x)y,x(
11
x)y,x(
12
y)y,x()y,x(v
yx)y,x(
11)y,x(u
∂Φ∂
ν−ν+
+∆Φ=∂Φ∂
ν−+
∂Φ∂
=
∂∂Φ∂
ν−ν+
−= Gl. 4-28
ergeben.
4.5 Elimination der Verschiebungen, Spannungsfunktion
Dieser Weg ist immer dann von Vorteil, wenn Spannungs- oder Kraftrandbedingungen vor-gegeben sind. Aus den Grundgleichungen Gl. 4-19, Gl. 4-20 und Gl. 4-21 müssen jetzt die Verschiebungen eliminiert werden. Im Folgenden wird wieder nur der homogene Fall mit fx = fy = 0 betrachtet, die Scheibe soll also nur durch Randlasten belastet werden. Zur Herlei-tung der maßgebenden Differentialgleichung betrachten wir die Kompatibilitätsbedingungen für den ebenen Fall, von denen lediglich
0yx
2xy
xy2
2yy
2
2xx
2
=∂∂
ε∂−
∂
ε∂+
∂ε∂ Gl. 4-29
verbleibt. Aus dieser Gleichung eliminieren wir mit Hilfe des Werkstoffgesetzes für den ebe-nen Spannungszustand (isothermer Fall) die Verzerrungen
0yx
n)1(2
xn
xn
yn
yn xy
2
2xx
2
2yy
2
2yy
2
2xx
2
=∂∂
∂ν+=
∂∂
ν−∂
∂+
∂
∂ν−
∂∂ Gl. 4-30
Unter Berücksichtigung der Gleichgewichtsbedingungen kann noch etwas umgeformt wer-den. Aus Gl. 4-19 folgt, wenn wir die 1. Gleichung nach x und die zweite nach y differenzie-ren und anschließend addieren
4-12 Grundgleichungen der Scheibentheorie
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂
∂+
∂∂
−=∂∂
∂→
⎪⎪
⎭
⎪⎪
⎬
⎫
=∂
∂+
∂∂
∂
=∂∂
∂+
∂∂
2yy
2
2xx
2yx
2
2yy
2xy
2
yx2
2xx
2
yn
xn
yxn
2
0yn
yxn
0yx
nxn
Berücksichtigen wir diesen Sachverhalt in Gl. 4-30, dann erhalten wir
0)nn( yyxx =+∆ Gl. 4-31
Durch Einführung der Airyschen1 Spannungsfunktion F(x,y), aus der die Schnittkräfte nach folgender Vorschrift ermittelt werden
yxFn,
xFn,
yFn
2
xy2
2
yy2
2
xx ∂∂∂
−=∂∂
=∂∂
= Gl. 4-32
kann Gl. 4-31 noch vereinfacht werden. Mit Gl. 4-32 sind die Gleichgewichtsbedingungen erfüllt. Die Kompatibilitätsbedingungen Gl. 4-31 erfordern dann
0yF
yxF2
xF
4
4
22
4
4
4
=∂∂
+∂∂
∂+
∂∂ Gl. 4-33
oder unter Verwendung des planaren Laplace-Operators
0)y,x(F =∆∆ Gl. 4-34
4.6 Randbedingungen
4.6.1 Verschiebungsrandbedingungen
4.6.1.1 Der Eingespannte Rand x = x0 = konst.
1 Sir (seit 1872) George Bidell Airy, brit. Mathematiker und Astronom, 1801-1892
F. U. Mathiak 4-13
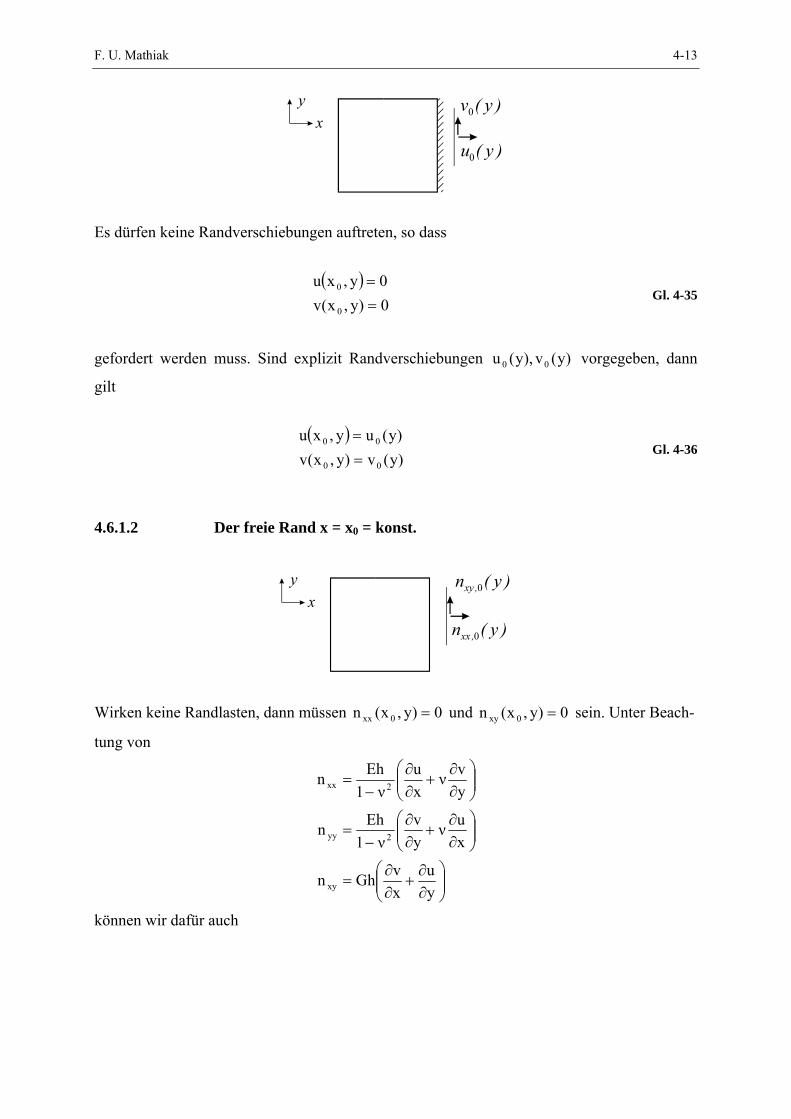
Es dürfen keine Randverschiebungen auftreten, so dass
( )0)y,x(v0y,xu
0
0
==
Gl. 4-35
gefordert werden muss. Sind explizit Randverschiebungen )y(v),y(u 00 vorgegeben, dann
gilt
( ))y(v)y,x(v)y(uy,xu
00
00
==
Gl. 4-36
4.6.1.2 Der freie Rand x = x0 = konst.
Wirken keine Randlasten, dann müssen 0)y,x(n 0xx = und 0)y,x(n 0xy = sein. Unter Beach-
tung von
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
−=
yu
xvGhn
xuν
yv
ν1Ehn
yvν
xu
ν1Ehn
xy
2yy
2xx
können wir dafür auch
4-14 Grundgleichungen der Scheibentheorie
0yu
xv
0yvν
xu
y,x
y,x
0
0
=⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
=⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
Gl. 4-37
schreiben. Sind Randschnittlasten )y,x(n 00,xx und )y,x(n 00,xy vorgegeben, dann muss
)y(nGh1
yu
xv
)y(nE
1yvν
xu
0,xyy,x
0,xx
2
y,x
0
0
=⎥⎦
⎤⎢⎣
⎡∂∂
+∂∂
ν−=⎥
⎦
⎤⎢⎣
⎡∂∂
+∂∂
Gl. 4-38
erfüllt sein.
4.6.2 Kraftrandbedingungen
4.6.2.1 Der Eingespannte Rand x = x0 = konst.
Hinweis: Da es erhebliche Schwierigkeiten bereitet, die Bedingungen des eingespannten Ran-des in den Kräften zu formulieren, ist es rechentechnisch günstiger, diesen Fall mit den Lamé-Navierschen Verschiebungsdifferentialgleichungen zu lösen.
4.6.2.2 Der freie Rand x = x0 = konst.
Bei homogenen Randbedingungen müssen wieder 0)y,x(n 0xx = und 0)y,x(n 0xy = sein,
sonst gilt
( ) ( )( ) ( )y,xny,xn
y,xny,xn
00,xy0xy
00,xx0xx
=
= Gl. 4-39
F. U. Mathiak 5-1
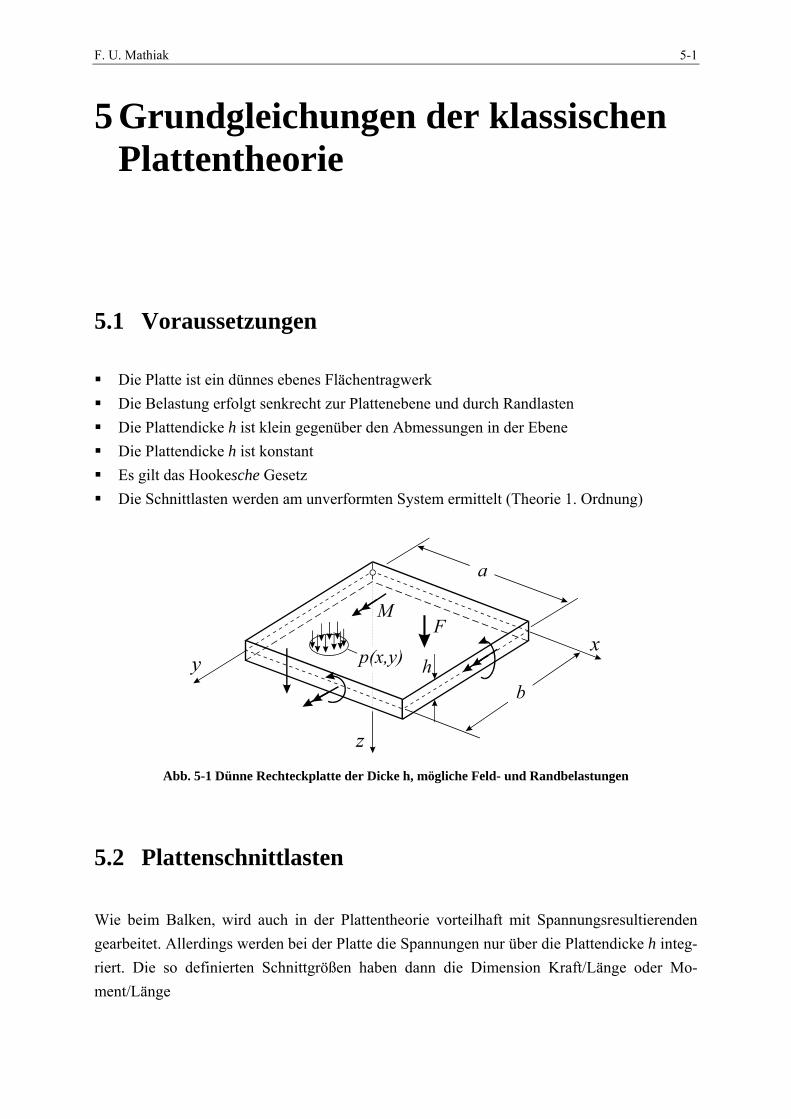
5 Grundgleichungen der klassischen Plattentheorie 5.1 Voraussetzungen Die Platte ist ein dünnes ebenes Flächentragwerk Die Belastung erfolgt senkrecht zur Plattenebene und durch Randlasten Die Plattendicke h ist klein gegenüber den Abmessungen in der Ebene Die Plattendicke h ist konstant Es gilt das Hookesche Gesetz Die Schnittlasten werden am unverformten System ermittelt (Theorie 1. Ordnung)
Abb. 5-1 Dünne Rechteckplatte der Dicke h, mögliche Feld- und Randbelastungen
5.2 Plattenschnittlasten Wie beim Balken, wird auch in der Plattentheorie vorteilhaft mit Spannungsresultierenden gearbeitet. Allerdings werden bei der Platte die Spannungen nur über die Plattendicke h integ-riert. Die so definierten Schnittgrößen haben dann die Dimension Kraft/Länge oder Mo-ment/Länge
5-2 Grundgleichungen der klassischen Plattentheorie
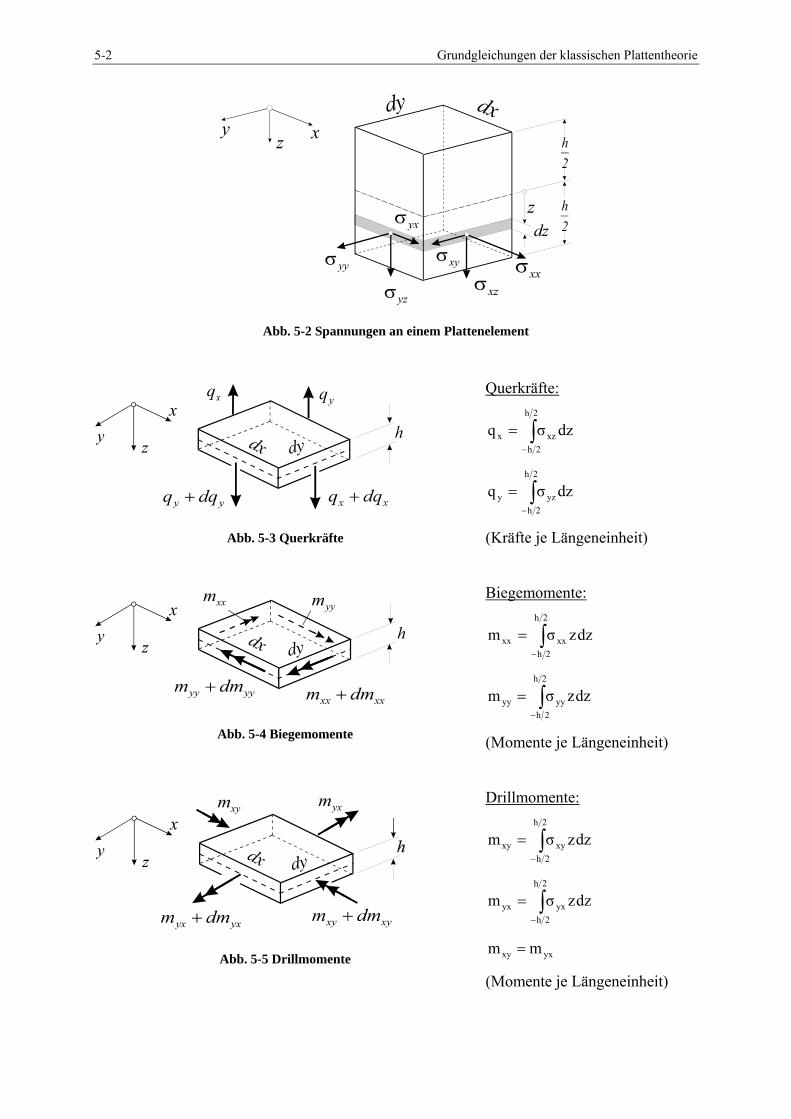
Abb. 5-2 Spannungen an einem Plattenelement
Abb. 5-3 Querkräfte
Querkräfte:
dzσq2h
2hxzx ∫
−
=
dzσq2h
2hyzy ∫
−
=
(Kräfte je Längeneinheit)
Abb. 5-4 Biegemomente
Biegemomente:
dzzσm2h
2hxxxx ∫
−
=
dzzσm2h
2hyyyy ∫
−
=
(Momente je Längeneinheit)
Abb. 5-5 Drillmomente
Drillmomente:
dzzσm2h
2hxyxy ∫
−
=
dzzσm2h
2hyxyx ∫
−
=
yxxy mm =
(Momente je Längeneinheit)
F. U. Mathiak 5-3
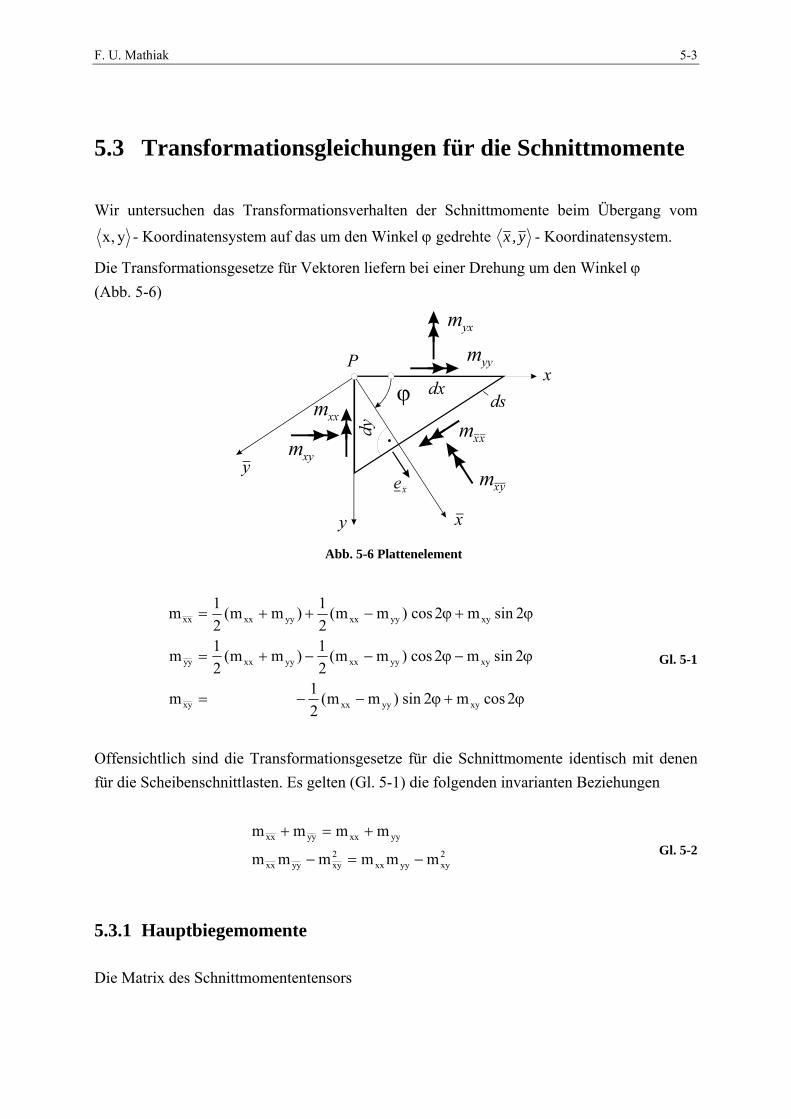
5.3 Transformationsgleichungen für die Schnittmomente Wir untersuchen das Transformationsverhalten der Schnittmomente beim Übergang vom
y,x - Koordinatensystem auf das um den Winkel ϕ gedrehte y,x - Koordinatensystem.
Die Transformationsgesetze für Vektoren liefern bei einer Drehung um den Winkel ϕ (Abb. 5-6)
Abb. 5-6 Plattenelement
ϕ+ϕ−−=
ϕ−ϕ−−+=
ϕ+ϕ−++=
2cosm2sin)mm(21m
2sinm2cos)mm(21)mm(
21m
2sinm2cos)mm(21)mm(
21m
xyyyxxyx
xyyyxxyyxxyy
xyyyxxyyxxxx
Gl. 5-1
Offensichtlich sind die Transformationsgesetze für die Schnittmomente identisch mit denen für die Scheibenschnittlasten. Es gelten (Gl. 5-1) die folgenden invarianten Beziehungen
2xyyyxx
2yxyyxx
yyxxyyxx
mmmmmm
mmmm
−=−
+=+ Gl. 5-2
5.3.1 Hauptbiegemomente Die Matrix des Schnittmomententensors
5-4 Grundgleichungen der klassischen Plattentheorie
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
ηη
ξξ
m00m
mmmm
yyyx
xyxxM
erhält Diagonalgestalt, wenn wir den Drehwinkel ϕ so wählen, dass
02cosm2sin)mm(21
xyyyxx =ϕ+ϕ−− Gl. 5-3
und damit
)2tan(mm
m22tan 1
yyxx
xy1 π+ϕ=
−=ϕ Gl. 5-4
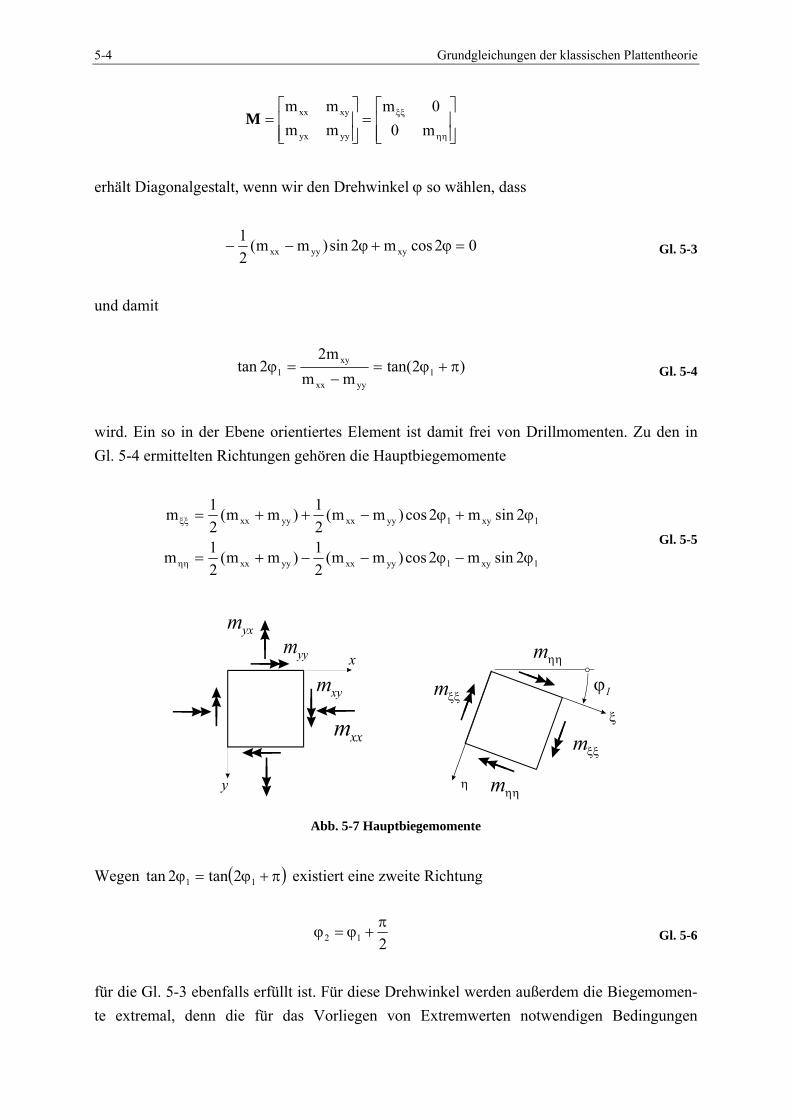
wird. Ein so in der Ebene orientiertes Element ist damit frei von Drillmomenten. Zu den in Gl. 5-4 ermittelten Richtungen gehören die Hauptbiegemomente
1xy1yyxxyyxx
1xy1yyxxyyxx
2sinm2cos)mm(21)mm(
21m
2sinm2cos)mm(21)mm(
21m
ϕ−ϕ−−+=
ϕ+ϕ−++=
ηη
ξξ
Gl. 5-5
Abb. 5-7 Hauptbiegemomente
Wegen ( )π+ϕ=ϕ 11 2tan2tan existiert eine zweite Richtung
212π
+ϕ=ϕ Gl. 5-6
für die Gl. 5-3 ebenfalls erfüllt ist. Für diese Drehwinkel werden außerdem die Biegemomen-te extremal, denn die für das Vorliegen von Extremwerten notwendigen Bedingungen
F. U. Mathiak 5-5
0d
dm xx =ϕ
und 0d
dm yy =ϕ
führen wiederum auf Gl. 5-4. Der unter diesen Richtungen auftre-
tende drillmomentenfreie Zustand wird Hauptbiegemomentenzustand genannt. Die Achsen ξ und η heißen Hauptachsen. Die Invarianten Gl. 5-2 gehen für den Hauptbiegemomenten-
zustand wegen 0m =ξη über in
2xyyyxx
yyxx
mmmmm
mmmm
−=
+=+
ηηξξ
ηηξξ Gl. 5-7
Aus Gl. 5-7 lassen sich die Hauptmomente berechnen, ohne den Weg über die Transformati-onsgleichungen zu gehen. Eine direkte Zuordnung zum Drehwinkel ist dann allerdings nicht möglich. Wir ordnen sie so an, dass 2211 mm > ist und erhalten
⎥⎦⎤
⎢⎣⎡ +−−+=
⎥⎦⎤
⎢⎣⎡ +−++=
2xy
2yyxxyyxx22
2xy
2yyxxyyxx11
m4)mm()mm(21m
m4)mm()mm(21m
Gl. 5-8
Wegen yyxx
xy2
12
11 mm
m2y1y2
tan1tan2
2tan−
=′−′
=ϕ−
ϕ=ϕ folgt aus Gl. 5-4 die Differentialglei-
chung der Hauptbiegemomententrajektorien.
1m2
mmm2
mmy
2
xy
xxyy
xy
xxyy2,1 −⎟
⎟⎠
⎞⎜⎜⎝
⎛ −±
−=′ Gl. 5-9
Hinweis: Wegen 1yy 21 −=′⋅′ schneiden sich die Hauptbiegemomententrajektorien in einem
Winkel von 90°.
5.3.2 Hauptdrillmomente Die Richtung für die extremalen Drillmomente erhalten wir aus der Forderung
ϕ−ϕ−−==ϕ
2sinm22cos)mm(0d
dmxyyyxx
yx
und damit
5-6 Grundgleichungen der klassischen Plattentheorie
)2tan(2cot2tan1
m2mm
2tan 311xy
yyxx3 π+ϕ=ϕ−=
ϕ−=
−−=ϕ Gl. 5-10
Diesen Richtungen sind die Hauptdrillmomente
2xy
2yyxx12 m4)mm(
21m +−±= Gl. 5-11
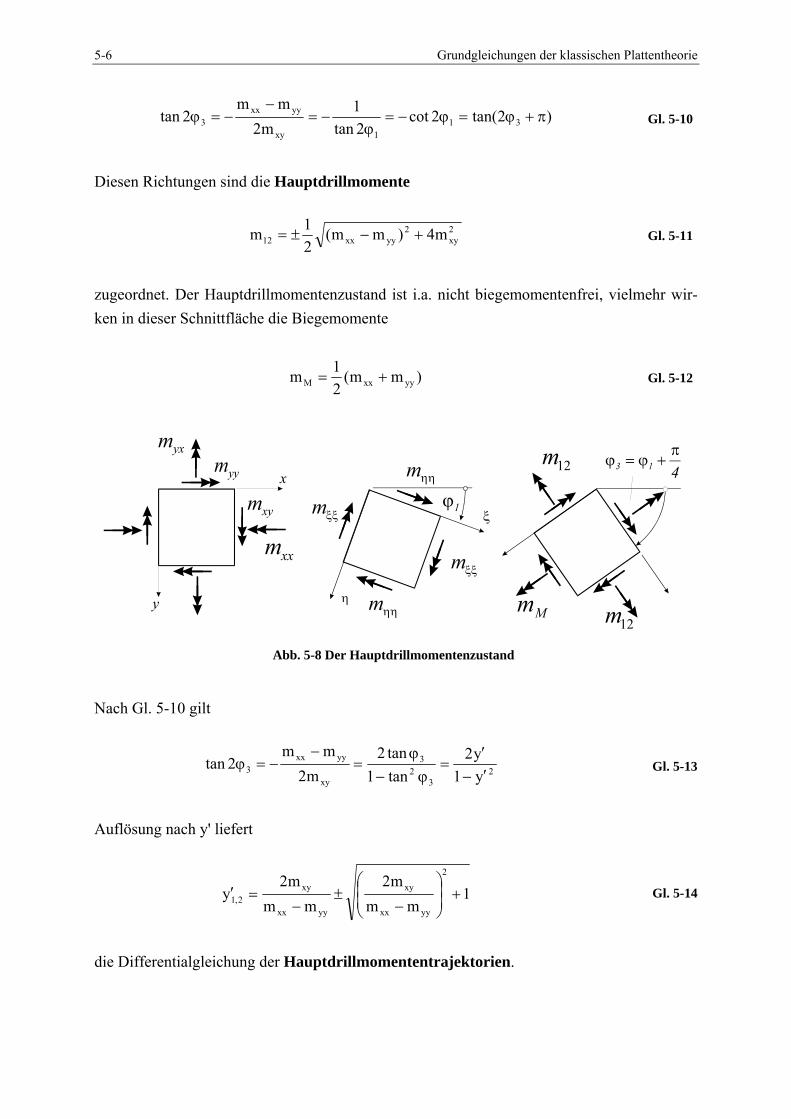
zugeordnet. Der Hauptdrillmomentenzustand ist i.a. nicht biegemomentenfrei, vielmehr wir-ken in dieser Schnittfläche die Biegemomente
)mm(21m yyxxM += Gl. 5-12
Abb. 5-8 Der Hauptdrillmomentenzustand
Nach Gl. 5-10 gilt
23
23
xy
yyxx3 y1
y2tan1tan2
m2mm
2tan′−′
=ϕ−
ϕ=
−−=ϕ Gl. 5-13
Auflösung nach y' liefert
1mm
m2mm
m2y
2
yyxx
xy
yyxx
xy2,1 +⎟
⎟⎠
⎞⎜⎜⎝
⎛
−±
−=′ Gl. 5-14
die Differentialgleichung der Hauptdrillmomententrajektorien.

F. U. Mathiak 5-7
Hinweis: Wegen 1yy 21 −=′⋅′ schneiden sich die Hauptdrillmomententrajektorien in einem
Winkel von 90°. Die Hauptdrill- und die Hauptbiegemomententrajektorien bilden je für sich ein orthogonales Netz. Wegen 13 2tan/12tan ϕ−=ϕ stehen die beiden Richtungen 32ϕ und
12ϕ senkrecht aufeinander. Damit wird 413π
+ϕ=ϕ . Beide Netze schneiden sich unter einem
Winkel von °=α 45 .
5.4 Gleichgewicht am Plattenelement Wir betrachten ein aus der Platte geschnittenes Element der Abmessungen dx dy (s.h. Abb.
5-2). Das Element wird durch eine Flächenlast p(x,y) sowie die durch den Schnitt freigesetz-ten Querkräfte qx, qy und Momente mxx, myy, mxy = myx entsprechend Abb. 5-3 - Abb. 5-5 be-lastet. Kraft- und Momentengleichgewicht fordern
∑ = 0Fz : 0dyqdxqdy)dxx
qq(dx)dyy
qq(dydxp xy
xx
yy =−−
∂∂
++∂
∂++
0M x =∑ : 02
dydydxy
qdxdyqdxdy
xm
dydxy
m yy
xyyy =∂
∂++
∂
∂−
∂
∂−
∑ = 0M y : 02
dxdxdyx
qdydxqdydx
ym
dxdyx
m xx
yxxx =∂∂
−−∂
∂+
∂∂
Mit 0dydx → liefert das Kraftgleichgewicht
0py
qx
q yx =+∂
∂+
∂∂
Gl. 5-15
sowie das Momentengleichgewicht getrennt um beide Achsen
0qy
mx
m
0qy
mx
m
yyyxy
xyxxx
=−∂
∂+
∂
∂
=−∂
∂+
∂∂
Gl. 5-16
Einsetzen von Gl. 5-16 in Gl. 5-15 ergibt
0pym
yxm
2xm
2yy
2xy
2
2xx
2
=+∂
∂+
∂∂
∂+
∂∂ Gl. 5-17

5-8 Grundgleichungen der klassischen Plattentheorie
5.5 Das Verschiebungsfeld w(x,y) Die Verschiebung eines Punktes P mit dem Abstand z von der Mittelfläche setzt sich zusam-men aus der Verschiebung w(x,y) der Plattenmittelfläche und den Verschiebungen u(x,y,z) sowie v(x,y,z), die sich wie folgt auf die Verschiebung w zurückführen lassen.
Abb. 5-9 Verschiebung des Punktes P
Unter der Voraussetzung kleiner Verformungen und kleiner 1. Ableitungen der Verformun-gen entnehmen wir Abb. 5-9:
xwz)z,y,x(u∂∂
−= ywz)z,y,x(v∂∂
−=
wobei die Verschiebung w der Plattenmittelfläche nur von den Koordinaten x, y abhängt. Damit ergeben sich die Verzerrungen
0;ywz
yv;
xwz
xu
zz2
2
yy2
2
xx =ε∂∂
−=∂∂
=ε∂∂
−=∂∂
=ε
yxwz2
xv
yu 2
xy ∂∂∂
−=∂∂
+∂∂
=γ
0yzxz =γ=γ
In einer dünnen Platte kann mit guter Näherung ein ebener Spannungszustand ( )0zz =σ un-
terstellt werden, für den gilt:
xyxyxxyy2yyyyxx2xx G)(1
E)(1
Eγ=σνε+ε
ν−=σνε+ε
ν−=σ
F. U. Mathiak 5-9
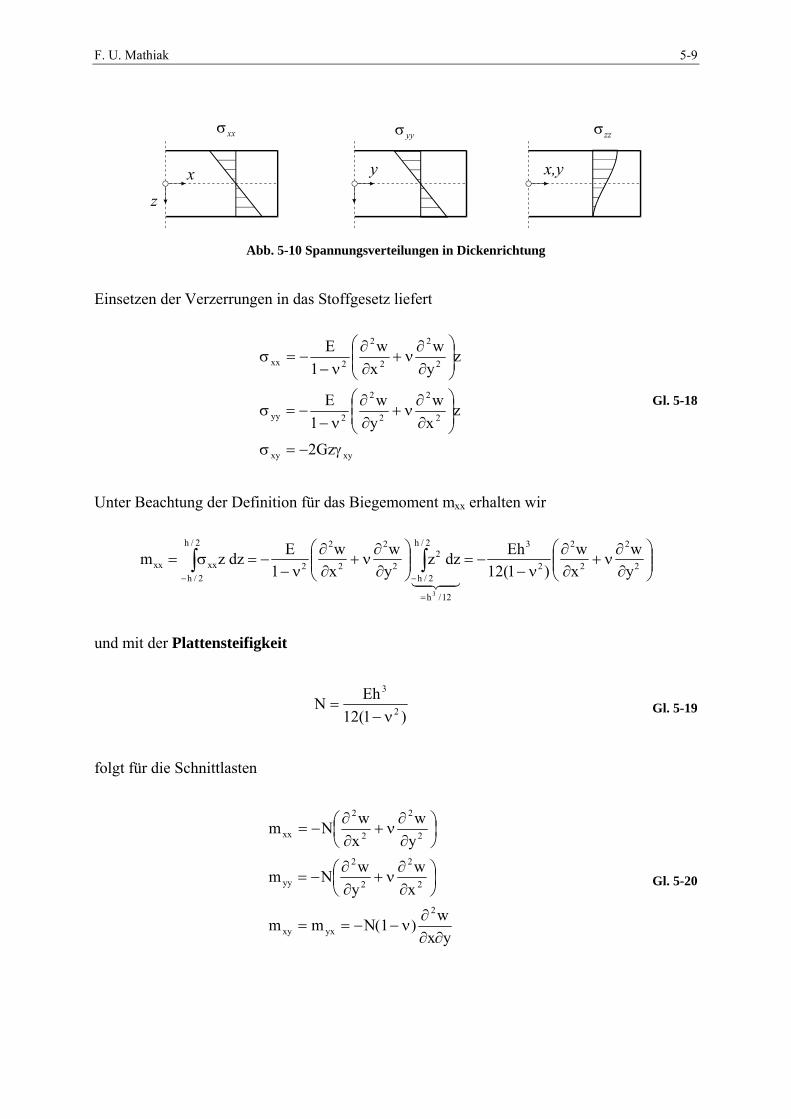
Abb. 5-10 Spannungsverteilungen in Dickenrichtung
Einsetzen der Verzerrungen in das Stoffgesetz liefert
xyxy
2
2
2
2
2yy
2
2
2
2
2xx
Gz2
zxw
yw
1E
zyw
xw
1E
γ−=σ
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
ν+∂∂
ν−−=σ
⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
ν+∂∂
ν−−=σ
Gl. 5-18
Unter Beachtung der Definition für das Biegemoment mxx erhalten wir
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
ν+∂∂
ν−−=⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
ν+∂∂
ν−−=σ=
=
−−∫∫ 2
2
2
2
2
3
12/h
2/h
2/h
22
2
2
2
2
2/h
2/hxxxx y
wxw
)1(12Ehdzz
yw
xw
1Edzzm
343421
und mit der Plattensteifigkeit
)1(12EhN 2
3
ν−= Gl. 5-19
folgt für die Schnittlasten
( )yx
w1Nmm
xw
ywNm
yw
xwNm
2
yxxy
2
2
2
2
yy
2
2
2
2
xx
∂∂∂
ν−−==
⎟⎠⎞
⎜⎝⎛
∂∂
ν+∂∂
−=
⎟⎠⎞
⎜⎝⎛
∂∂
ν+∂∂
−=
Gl. 5-20
5-10 Grundgleichungen der klassischen Plattentheorie
wy
Nyw
xw
yNq
wx
Nyw
xw
xNq
2
2
2
2
y
2
2
2
2
x
∆∂∂
−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−=
∆∂∂
−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
−=
Gl. 5-21
In Gl. 5-21 wurde der planare Laplace1 - Operator
2
2
2
2
yx ∂∂
+∂∂
=∆ Gl. 5-22
eingeführt.
5.6 Die Plattendifferentialgleichung Einsetzen von Gl. 5-20 in Gl. 5-17 führt auf
( ) 0pyx
wywN
yxw1N2
yxw
xwN 22
4
4
4
22
4
22
4
4
4
=+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂ν+
∂∂
−∂∂
∂ν−−⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂ν+
∂∂
−
und zusammengefasst
Np
yw
yxw2
xw
4
4
22
4
4
4
=∂∂
+∂∂
∂+
∂∂ Gl. 5-23
Unter Beachtung von Gl. 5-22 können wir dafür auch kürzer
N)y,x(p)y,x(w =∆∆ Gl. 5-24
schreiben.
1 Pierre Simon Marquis de (seit 1817) Laplace, frz. Mathematiker und Physiker, 1749-1827
F. U. Mathiak 5-11
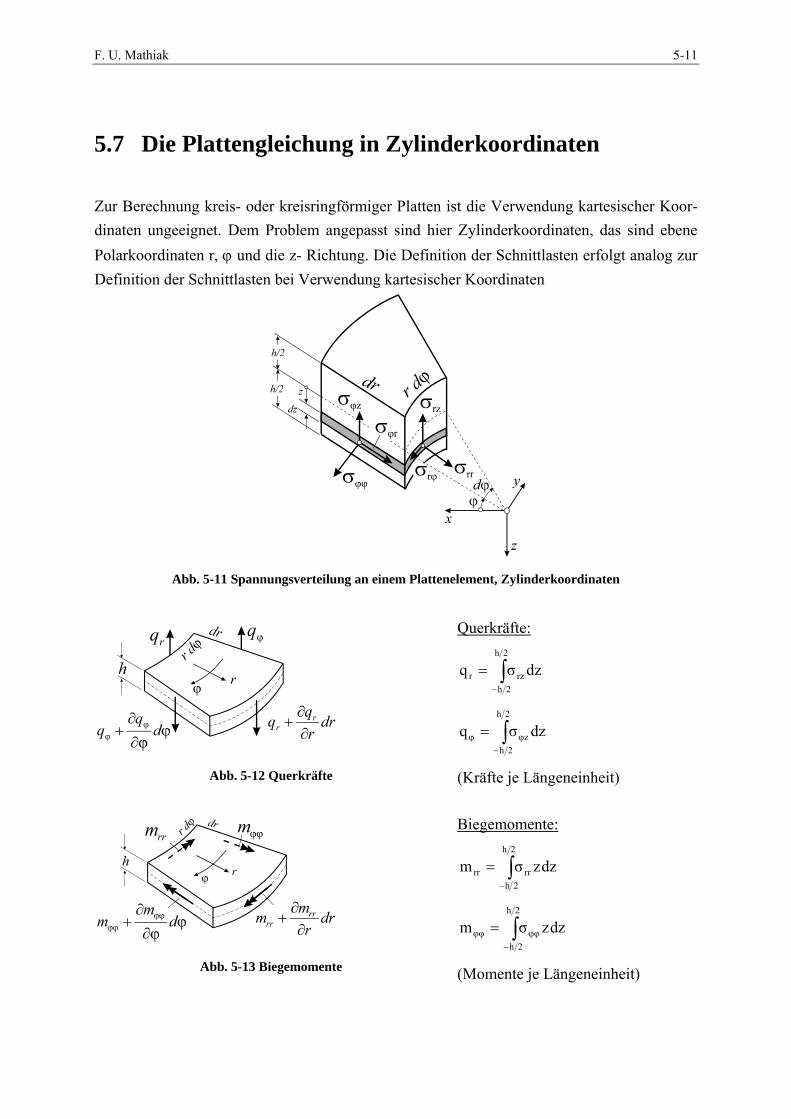
5.7 Die Plattengleichung in Zylinderkoordinaten Zur Berechnung kreis- oder kreisringförmiger Platten ist die Verwendung kartesischer Koor-dinaten ungeeignet. Dem Problem angepasst sind hier Zylinderkoordinaten, das sind ebene Polarkoordinaten r, ϕ und die z- Richtung. Die Definition der Schnittlasten erfolgt analog zur Definition der Schnittlasten bei Verwendung kartesischer Koordinaten
Abb. 5-11 Spannungsverteilung an einem Plattenelement, Zylinderkoordinaten
Abb. 5-12 Querkräfte
Querkräfte:
dzσq2h
2hrzr ∫
−
=
dzσq2h
2hz∫
−ϕϕ =
(Kräfte je Längeneinheit)
Abb. 5-13 Biegemomente
Biegemomente:
dzzσm2h
2hrrrr ∫
−
=
dzzσm2h
2h∫
−ϕϕϕϕ =
(Momente je Längeneinheit)
5-12 Grundgleichungen der klassischen Plattentheorie
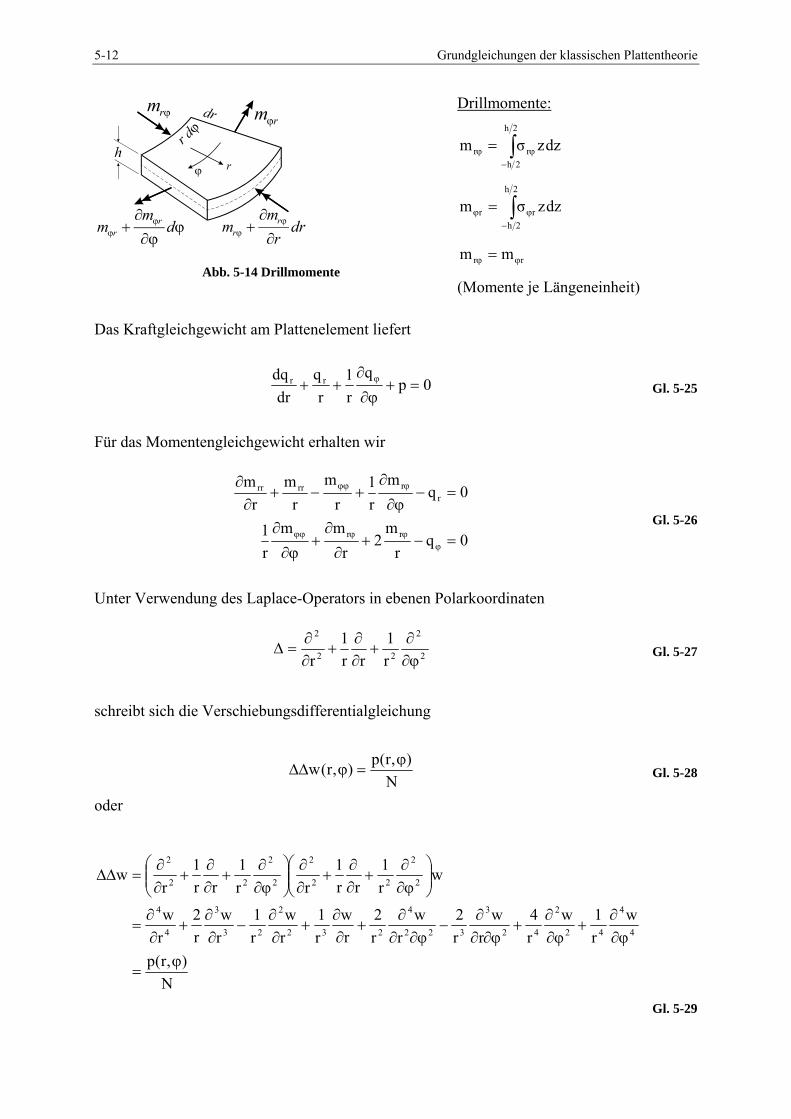
Abb. 5-14 Drillmomente
Drillmomente:
dzzσm2h
2hrr ∫
−ϕϕ =
dzzσm2h
2hrr ∫
−ϕϕ =
rr mm ϕϕ =
(Momente je Längeneinheit) Das Kraftgleichgewicht am Plattenelement liefert
0pq
r1
rq
drdq rr =+
ϕ∂
∂++ ϕ Gl. 5-25
Für das Momentengleichgewicht erhalten wir
0qr
m2
rmm
r1
0qm
r1
rm
rm
rm
rr
rrrrrr
=−+∂
∂+
ϕ∂
∂
=−ϕ∂
∂+−+
∂∂
ϕϕϕϕϕ
ϕϕϕ
Gl. 5-26
Unter Verwendung des Laplace-Operators in ebenen Polarkoordinaten
2
2
22
2
r1
rr1
r ϕ∂∂
+∂∂
+∂∂
=∆ Gl. 5-27
schreibt sich die Verschiebungsdifferentialgleichung
N),r(p),r(w ϕ
=ϕ∆∆ Gl. 5-28
oder
N),r(p
wr1w
r4
rw
r2
rw
r2
rw
r1
rw
r1
rw
r2
rw
wr1
rr1
rr1
rr1
rw
4
4
42
2
42
3
322
4
232
2
23
3
4
4
2
2
22
2
2
2
22
2
ϕ=
ϕ∂∂
+ϕ∂
∂+
ϕ∂∂∂
−ϕ∂∂
∂+
∂∂
+∂∂
−∂∂
+∂∂
=
⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ∂∂
+∂∂
+∂∂
⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ∂∂
+∂∂
+∂∂
=∆∆
Gl. 5-29

F. U. Mathiak 5-13
Die Schnittlasten sind
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ∂
∂∂∂
ν−−=
⎥⎦
⎤⎢⎣
⎡∂∂
ν+ϕ∂
∂+
∂∂
−=
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ϕ∂
∂+
∂∂
ν+∂∂
−=
ϕ
ϕϕ
wr1
rN1m
rww
r1
rw
r1Nm
wr1
rw
r1
rwNm
r
2
2
2
2
2
2
2
22
2
rr
Gl. 5-30
( )
( )wr1Nq
wr
Nqr
∆ϕ∂∂
−=
∆∂∂
−=
ϕ
Gl. 5-31
Im Falle der Rotationssymmetrie ist 0=ϕ∂∂ , )r(ww = , )r(pp = und der planare Laplace-
Operator reduziert sich auf ⎟⎠⎞
⎜⎝⎛=+=∆
drdr
drd
r1
drd
r1
drd
2
2
. Mit )(drd ′= geht Gl. 5-29 über in
N)r(pw
r1w
r1w
r2w
drdwr
drd
r1
drdr
drd
r1w
drd
r1
drd
drd
r1
drd)r(w
32
2
2
2
2
=′+′′−′′′+′′′′=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+=∆∆
Gl. 5-32
0mdr
wddrdw
r1Nm
drdw
r1
drwdNm
r
2
2
2
2
rr
=
⎟⎟⎠
⎞⎜⎜⎝
⎛ν+−=
⎟⎟⎠
⎞⎜⎜⎝
⎛ν+−=
ϕ
ϕϕ Gl. 5-33
0qdrdwr
drd
r1
drdNqr
=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−=
ϕ
Gl. 5-34
5-14 Grundgleichungen der klassischen Plattentheorie
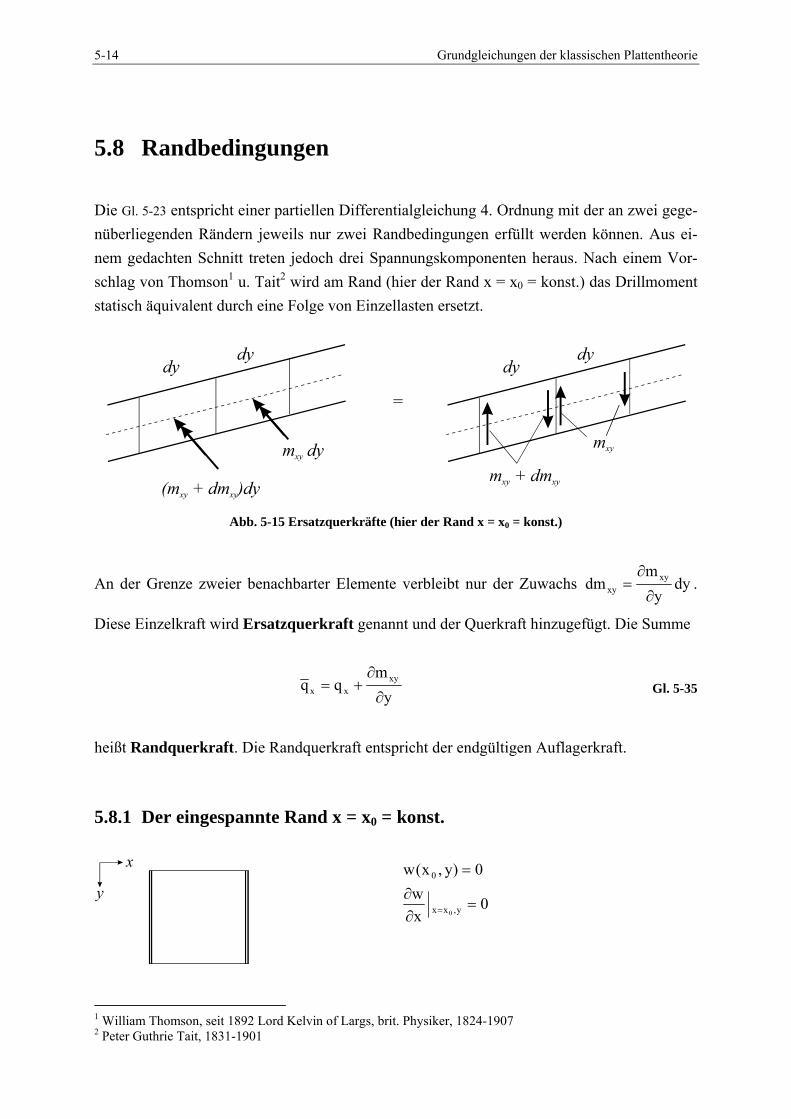
5.8 Randbedingungen Die Gl. 5-23 entspricht einer partiellen Differentialgleichung 4. Ordnung mit der an zwei gege-nüberliegenden Rändern jeweils nur zwei Randbedingungen erfüllt werden können. Aus ei-nem gedachten Schnitt treten jedoch drei Spannungskomponenten heraus. Nach einem Vor-schlag von Thomson1 u. Tait2 wird am Rand (hier der Rand x = x0 = konst.) das Drillmoment statisch äquivalent durch eine Folge von Einzellasten ersetzt.
Abb. 5-15 Ersatzquerkräfte (hier der Rand x = x0 = konst.)
An der Grenze zweier benachbarter Elemente verbleibt nur der Zuwachs dyy
mdm xy
xy ∂
∂= .
Diese Einzelkraft wird Ersatzquerkraft genannt und der Querkraft hinzugefügt. Die Summe
ym
qq xyxx ∂
∂+= Gl. 5-35
heißt Randquerkraft. Die Randquerkraft entspricht der endgültigen Auflagerkraft.
5.8.1 Der eingespannte Rand x = x0 = konst.
0xw
0)y,x(w
y,xx
0
0=
∂∂
=
=
1 William Thomson, seit 1892 Lord Kelvin of Largs, brit. Physiker, 1824-1907 2 Peter Guthrie Tait, 1831-1901
F. U. Mathiak 5-15
Aus w = 0 folgt 0yw,0
yw
2
2
=∂∂
=∂∂ usw. Aus 0
xw
=∂∂ folgt sofort 0
yxw2
=∂∂
∂ , 0yxw
2
3
=∂∂
∂
Damit ist aber am Rand auch 0mxy = und damit nach Gl. 5-35 ist xx qq = . Die Reaktionslas-
ten sind
y,xx3
3
x
y,xx2
2
xx
0
0
xwNq
xwNm
=
=
∂∂
−=
∂∂
−= Gl. 5-36
5.8.2 Der gelenkig gelagerte Rand x = x0 = konst.
( )( ) 0y,xm
0y,xw
0xx
0
==
Wegen w = 0 ist dann auch 0yw,0
yw
2
2
=∂∂
=∂∂ usw. Dann ist
y,xx0
2
2
2
2
xx
0
yw
xwNm
==⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
∂∂
ν+∂∂
−=321
.
Um mxx = 0 zu erfüllen, genügt es also auch 0xw
y,xx2
2
0=
∂∂
= zu fordern oder auch 0w =∆
0xw
0)y,x(w
y,xx2
20
0=
∂∂
=
=
Gl. 5-37
oder
0w
0)y,x(w
y,xx
0
0=∆
=
=
Gl. 5-38
Für die Reaktionskraft gilt
( )y,xx
2
2
2
2
x
0yw2
xw
xNq
=⎥⎦
⎤⎢⎣
⎡∂∂
ν−+∂∂
∂∂
−= Gl. 5-39
5-16 Grundgleichungen der klassischen Plattentheorie
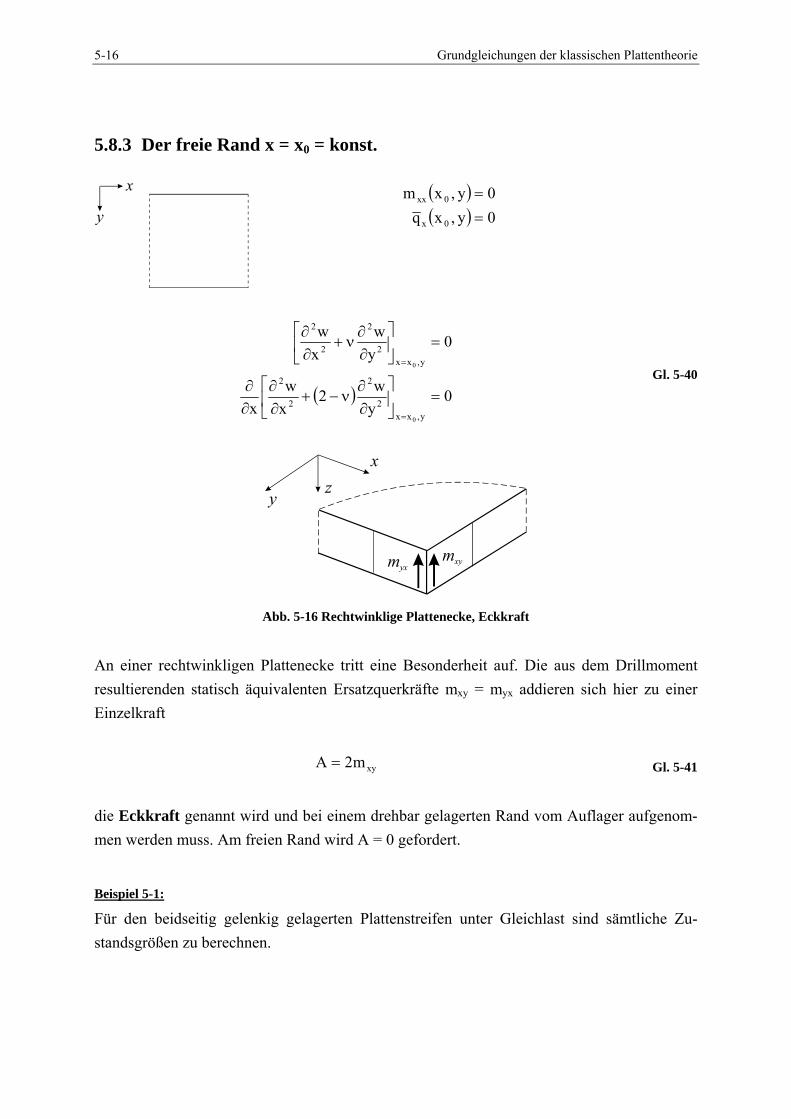
5.8.3 Der freie Rand x = x0 = konst.
( )( ) 0y,xq
0y,xm
0x
0xx
==
( ) 0yw2
xw
x
0yw
xw
y,xx2
2
2
2
y,xx2
2
2
2
0
0
=⎥⎦
⎤⎢⎣
⎡∂∂
ν−+∂∂
∂∂
=⎥⎦
⎤⎢⎣
⎡∂∂
ν+∂∂
=
= Gl. 5-40
Abb. 5-16 Rechtwinklige Plattenecke, Eckkraft
An einer rechtwinkligen Plattenecke tritt eine Besonderheit auf. Die aus dem Drillmoment resultierenden statisch äquivalenten Ersatzquerkräfte mxy = myx addieren sich hier zu einer Einzelkraft
xym2A = Gl. 5-41
die Eckkraft genannt wird und bei einem drehbar gelagerten Rand vom Auflager aufgenom-men werden muss. Am freien Rand wird A = 0 gefordert.
Beispiel 5-1:
Für den beidseitig gelenkig gelagerten Plattenstreifen unter Gleichlast sind sämtliche Zu-standsgrößen zu berechnen.
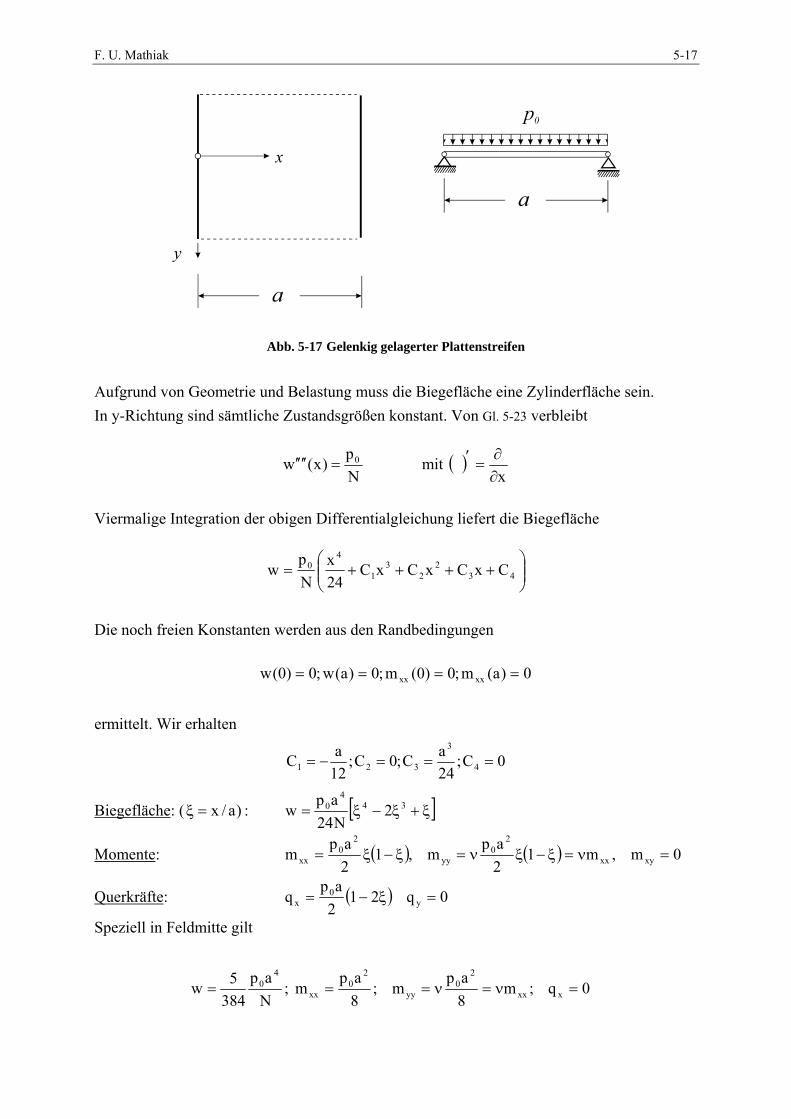
F. U. Mathiak 5-17
Abb. 5-17 Gelenkig gelagerter Plattenstreifen Aufgrund von Geometrie und Belastung muss die Biegefläche eine Zylinderfläche sein. In y-Richtung sind sämtliche Zustandsgrößen konstant. Von Gl. 5-23 verbleibt
Np)x(w 0=′′′′ mit ( )
x∂∂
=′
Viermalige Integration der obigen Differentialgleichung liefert die Biegefläche
⎟⎟⎠
⎞⎜⎜⎝
⎛++++= 43
22
31
40 CxCxCxC
24x
Np
w
Die noch freien Konstanten werden aus den Randbedingungen
0)a(m;0)0(m;0)a(w;0)0(w xxxx ====
ermittelt. Wir erhalten
0C;24aC;0C;
12aC 4
3
321 ===−=
Biegefläche: ( )a/x=ξ : [ ]ξ+ξ−ξ= 344
0 2N24ap
w
Momente: ( ) ( ) 0m,m12ap
m,12ap
m xyxx
20
yy
20
xx =ν=ξ−ξν=ξ−ξ=
Querkräfte: ( ) 0q212ap
q y0
x =ξ−=
Speziell in Feldmitte gilt
Nap
3845w
40= ; 0q;m
8ap
m;8ap
m xxx
20
yy
20
xx =ν=ν==
5-18 Grundgleichungen der klassischen Plattentheorie
Wegen 0mxy = entsprechen die Querkräfte 2ap)a(q)0(q 0
xx =−= den Randquerkräften und
damit den endgültigen Auflagerkräften. Hinweis: Aufgrund der zylindrischen Biegefläche existiert keine Krümmung in y-Richtung. Trotzdem erhalten wir auch Biegemomente xxyy mm ν= . Für Stahlbeton (ν = 1/5) hätten wir
xxyy m2,0m = . Diese allein aus der Querdehnung herrührenden Momente, sind nach DIN
1045 mit einer Querbewehrung ≥ 1/5 der Hauptbewehrung abzudecken.
5.9 Die Platte auf nachgiebiger Unterlage
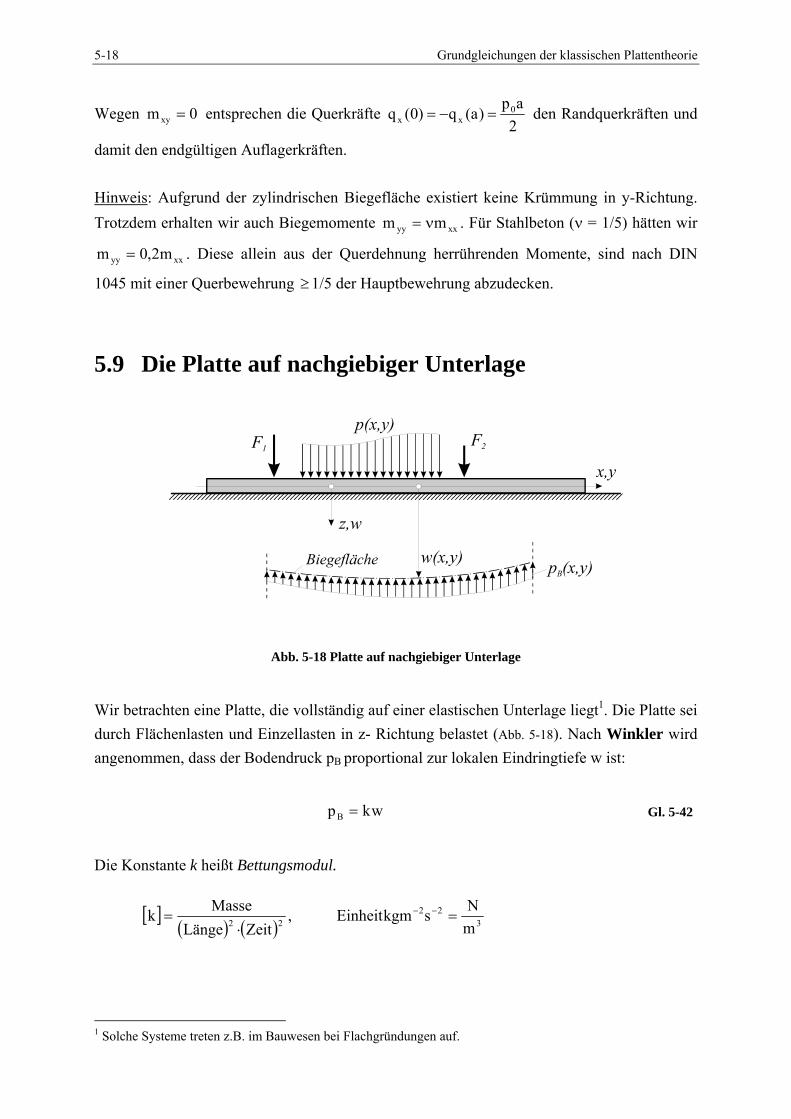
Abb. 5-18 Platte auf nachgiebiger Unterlage
Wir betrachten eine Platte, die vollständig auf einer elastischen Unterlage liegt1. Die Platte sei durch Flächenlasten und Einzellasten in z- Richtung belastet (Abb. 5-18). Nach Winkler wird angenommen, dass der Bodendruck pB proportional zur lokalen Eindringtiefe w ist:
wkpB = Gl. 5-42
Die Konstante k heißt Bettungsmodul.
[ ]( ) ( ) 3
2222 m
NskgmEinheit,ZeitLänge
Massek =⋅
= −−
1 Solche Systeme treten z.B. im Bauwesen bei Flachgründungen auf.
F. U. Mathiak 5-19
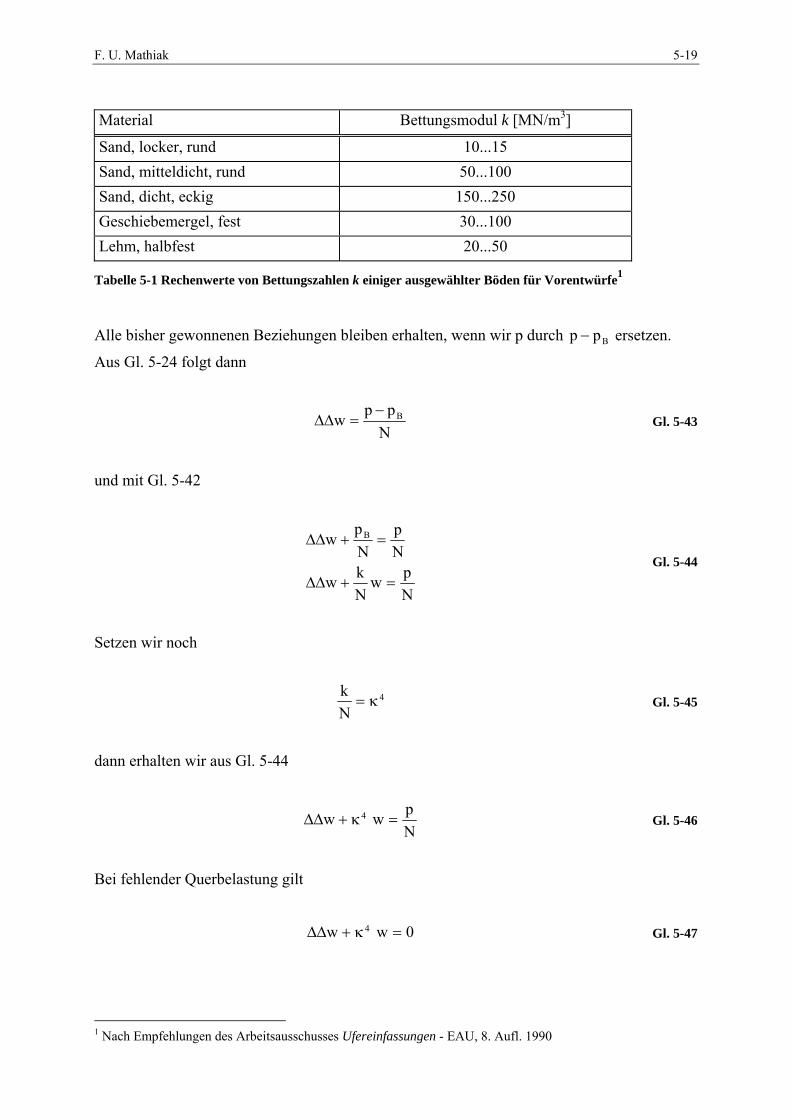
Material Bettungsmodul k [MN/m3]
Sand, locker, rund 10...15 Sand, mitteldicht, rund 50...100 Sand, dicht, eckig 150...250 Geschiebemergel, fest 30...100 Lehm, halbfest 20...50
Tabelle 5-1 Rechenwerte von Bettungszahlen k einiger ausgewählter Böden für Vorentwürfe1
Alle bisher gewonnenen Beziehungen bleiben erhalten, wenn wir p durch Bpp − ersetzen.
Aus Gl. 5-24 folgt dann
Nppw B−
=∆∆ Gl. 5-43
und mit Gl. 5-42
Npw
Nkw
Np
Npw B
=+∆∆
=+∆∆ Gl. 5-44
Setzen wir noch
4
Nk
κ= Gl. 5-45
dann erhalten wir aus Gl. 5-44
Npww 4 =κ+∆∆ Gl. 5-46
Bei fehlender Querbelastung gilt
0ww 4 =κ+∆∆ Gl. 5-47
1 Nach Empfehlungen des Arbeitsausschusses Ufereinfassungen - EAU, 8. Aufl. 1990

5-20 Grundgleichungen der klassischen Plattentheorie
F. U. Mathiak 6-1
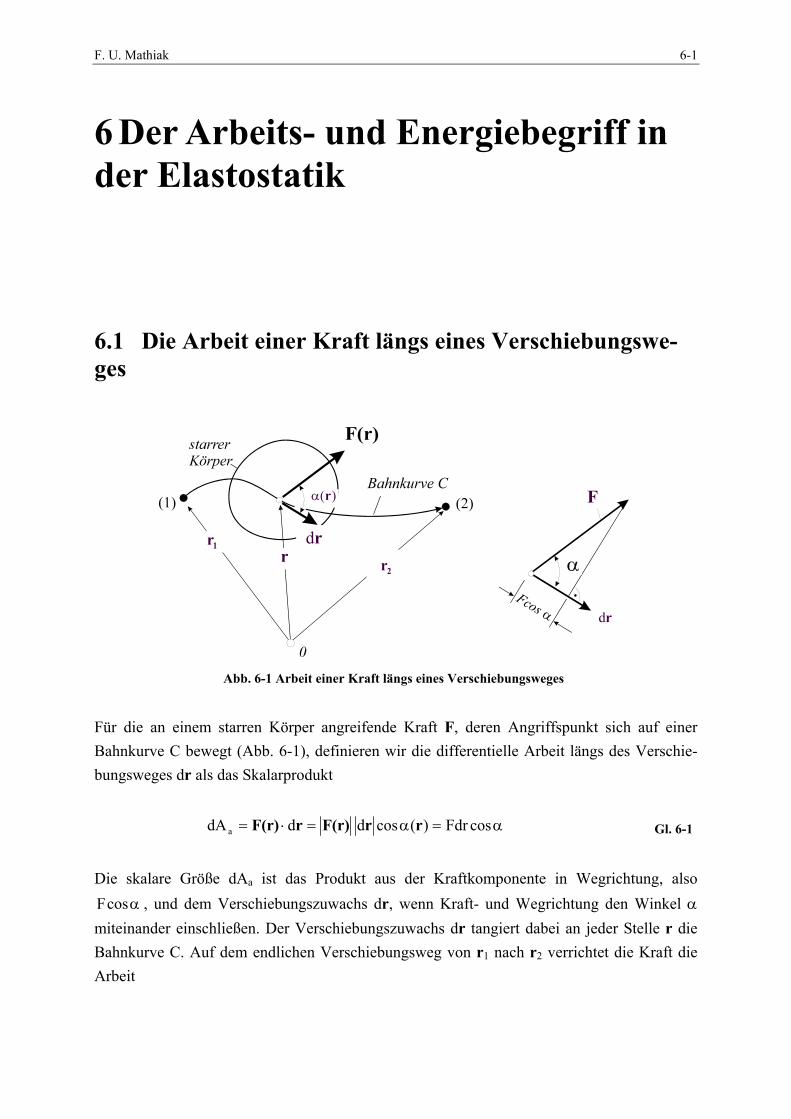
6 Der Arbeits- und Energiebegriff in der Elastostatik 6.1 Die Arbeit einer Kraft längs eines Verschiebungswe-ges
Abb. 6-1 Arbeit einer Kraft längs eines Verschiebungsweges Für die an einem starren Körper angreifende Kraft F, deren Angriffspunkt sich auf einer Bahnkurve C bewegt (Abb. 6-1), definieren wir die differentielle Arbeit längs des Verschie-bungsweges dr als das Skalarprodukt
α=α=⋅= cosFdr)(cosdddAa rrF(r)rF(r) Gl. 6-1
Die skalare Größe dAa ist das Produkt aus der Kraftkomponente in Wegrichtung, also
αcosF , und dem Verschiebungszuwachs dr, wenn Kraft- und Wegrichtung den Winkel α miteinander einschließen. Der Verschiebungszuwachs dr tangiert dabei an jeder Stelle r die Bahnkurve C. Auf dem endlichen Verschiebungsweg von r1 nach r2 verrichtet die Kraft die Arbeit

6-2 Der Arbeits- und Energiebegriff
rrFr
r
d)(A2
1
a ∫ ⋅= Gl. 6-2
Sonderfall: Hängt die Kraft zFeF = nicht vom Verschiebungswege r ab, und sind Kraft und
Verschiebungsdifferential zdzd er = für den gesamten Verschiebungsweg parallel, dann geht
Gl. 6-2 über in
)zz(FdzFd)(A 12
z
za
2
1
2
1
−==⋅= ∫∫ rrFr
r
Gl. 6-3
Die Arbeit kann sowohl positiv, negativ oder auch Null sein. Die Definition wurde gerade so gewählt, dass bei positiver Arbeit Aa die Kraft F Arbeit verrichtet, während bei negativer Ar-beit Aa Arbeit gegen die Kraft aufgewendet werden muss. Für rF d⊥ ist der differentielle Ar-
beitsanteil dpa gleich Null. Die Arbeit hat die Dimension:
[ ] 2
2
a )Zeit()Länge(MasseA ⋅
= Einheit: JNmskgm 22 ==−
Beispiel: 6-1
Gesucht wird die Arbeit einer linear veränderlichen Streckenlast (Abb. 6-2) an einem vorge-gebenen Verschiebungsweg
( )22 463f)x(w ξ+ξ−ξ= . ( )lx=ξ
Abb. 6-2 Kragträger mit linear veränderlicher Streckenlast
Wir führen die Lösung des Problems auf die Arbeit einer infinitesimalen Kraft dF längs des Verschiebungsweges w(x) zurück. Die Arbeit der differentiellen Kraft dF = q(x) dx am Ver-schiebungswege w(x) ist: )x(wdx)x(q)x(w)x(dFdAa ==
F. U. Mathiak 6-3
Für die Arbeit der gesamten Linienlast q(x) gilt dann: dx)x(w)x(qdAA0x
aa ∫∫=
==l
.
Beachten wir ξ∆+=−
+= qqxqqq)x(q rl
ll
l, dann liefert die Integration
( ) ( ) ⎟⎠⎞
⎜⎝⎛ ∆+=ξξ+ξ−ξξ∆+= ∫ q
4513q
52fd46qq
3fA
1
0
22a ll l
l
und für den Sonderfall Gleichstreckenlast erhalten wir mit 0r qqq == l und 0q =∆
fq4,0f5q2
A 00
a ll
== .
Achtung: Prinzipiell falsch wäre es, im Fall der Gleichstreckenlast mittels der Resultierenden
l0qR = und dem zugehörigen Angriffspunkt 2* l=ξ sowie der dortigen Verschiebung
f4817)(w * =ξ die Arbeit fq354,0f
48q17
)(RwA 00*
a ll
==ξ= zu ermitteln.
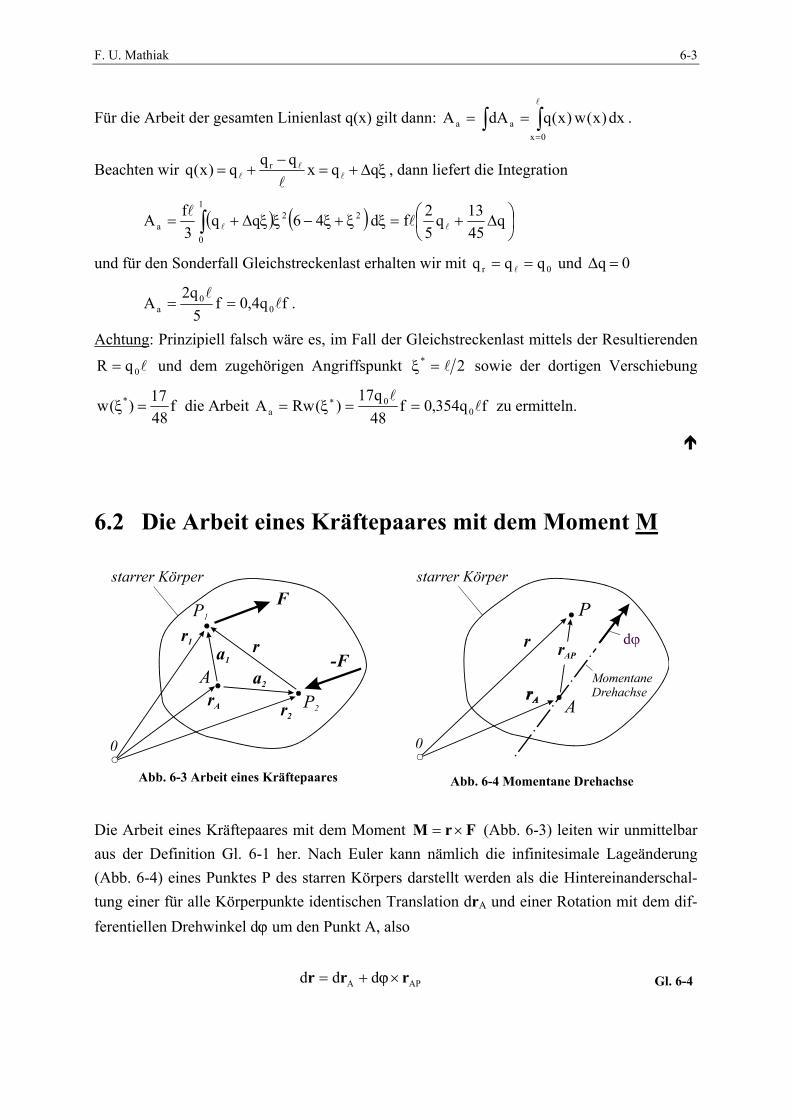
6.2 Die Arbeit eines Kräftepaares mit dem Moment M
Abb. 6-3 Arbeit eines Kräftepaares
Abb. 6-4 Momentane Drehachse
Die Arbeit eines Kräftepaares mit dem Moment FrM ×= (Abb. 6-3) leiten wir unmittelbar aus der Definition Gl. 6-1 her. Nach Euler kann nämlich die infinitesimale Lageänderung (Abb. 6-4) eines Punktes P des starren Körpers darstellt werden als die Hintereinanderschal-tung einer für alle Körperpunkte identischen Translation drA und einer Rotation mit dem dif-ferentiellen Drehwinkel dϕ um den Punkt A, also
APA ddd rrr ×+= ϕ Gl. 6-4

6-4 Der Arbeits- und Energiebegriff
Dabei ist A ein beliebiger Punkt des Körpers und rAP der Verbindungsvektor von A nach P. Nach Gl. 6-1 ist die differentielle Arbeit des Kräftepaares:
( ) ( ) ( )[ ]( )[ ] ( ) ( ) ( ) ϕϕϕϕϕ
ϕϕdMdrFdrFrdFaadF
addradrFrrFdrFrdF
21
2A21
⋅=⋅×−=×⋅−=×⋅=−×⋅=×+−×+⋅=−⋅=⋅−+⋅= 1A21a ddddA
Der translatorische Anteil hebt sich offensichtlich heraus, und es verbleibt
ϕϕ d)M( ⋅=adA Gl. 6-5
Dreht sich der Körper mit dem Kräftepaar von 1ϕ bis 2ϕ , so wird die Arbeit
∫ ⋅=2
1
aAϕ
ϕ
ϕϕ d)M( Gl. 6-6
verrichtet.
Beispiel: 6-2
Gesucht wird die Arbeit eines Momentes M an der Verdrehung des Stabendes nach Gl. 6-7,
wenn die Verschiebung ( )22 463f)x(w ξ+ξ−ξ= vorgegeben ist.
Abb. 6-5 Balken mit Endmoment
Wird der Balken durch ein Moment M mit Drehrichtung um die negative y-Achse belastet, dann leistet dieses Moment Arbeit an der Tangentenneigung w', denn es gilt für kleine Ver-formungen w'(x)(x)(x)tan =ϕ≈ϕ und damit
'MwA2
1
a =ϕ⋅= ∫ϕ
ϕ
dM
Differentiation der Biegelinie nach x liefert: ( )l
ll 3
f4)x('w333
f4'w 2 ==→ξ+ξ−ξ=
Für die Arbeit des Momentes erhalten wir dann: l
lf
3M4)('MwAa ==

F. U. Mathiak 6-5
6.3 Das Potential einer Kraft Zur Auswertung des Integrals Gl. 6-2 ist in aller Regel die explizite Angabe der Bahnkurve C erforderlich, da sich mit der Lageänderung des Körpers im Allgemeinen auch die Kraft F än-dert. Wir sprechen in diesem Fall von einem Kraftfeld F(r). In einem stationären1 Kraftfeld ist F(r) nur vom Ort r abhängig, in einem instationären Kraftfeld hängt F(r,t) zusätzlich noch von der Zeit t ab.
Abb. 6-6 Bewegung einer Kraft auf einer geschlossenen Bahnkurve
Betrachten wir Abb. 6-6, dann ist i.a. )b(21
)a(21 AA −− ≠ . Ist jedoch die Arbeit vom Weg unabhän-
gig, dann hängt sie nur vom Anfangs- und Endpunkt der Bahnkurve ab. Wir sprechen dann von einem konservativen2 Kraftfeld. Wegunabhängigkeit
)b(21
)a(21 AA −− =
oder auch
01
)b(2
2
)a(1
=⋅+⋅ ∫∫ drFdrF
ist gegeben, wenn gilt
0A)C(
a =⋅= ∫ drF Gl. 6-7
Die Arbeit verschwindet demnach längs eines beliebigen geschlossenen Weges. Allgemein kann gezeigt werden, dass für ein Kraftfeld, das Gl. 6-7 genügt, ein Potential U(r) existieren muss, aus dem durch Gradientenbildung
1 von lat. stationarius ›stillstehend‹, ›zum Standort gehörig‹ 2 zu lat. conservare ›bewahren‹, ›erhalten‹

6-6 Der Arbeits- und Energiebegriff
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
−=−∇=−= zyx zU
yU
xU)(U)(Ugrad eeerrF Gl. 6-8
das Kraftfeld F selbst gewonnen werden kann. Setzen wir nämlich Gl. 6-8 in Gl. 6-2, dann folgt unter Beachtung von
( )
dUdzzUdy
yUdx
xU
dzdydxzU
yU
xUU zyxzyx
=∂∂
+∂∂
+∂∂
=
++⋅⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
=⋅∇ eeeeeedr
[ ])(U)(U)(dU)(UA 12
r
r
r
r
r
r21
2
1
2
1
2
1
rrrrdrrdF(r) −−=−=⋅∇−=⋅= ∫∫∫− Gl. 6-9
Die Wegunabhängigkeit eines konservativen Kraftfeldes begründet sich aus dem Sachverhalt, dass die Arbeit allein aus der Potentialdifferenz der Orte r2 und r1 gewonnen werden kann. Die Komponentendarstellung von Gl. 6-8 hinsichtlich einer kartesischen Basis liefert
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
∂∂
−==zU,
yU,
xUF,F,F zyxF Gl. 6-10
Die Rotation eines Vektorfeldes (hier des Kraftfeldes F) wird in der Vektoranalysis als Wir-bel des Vektorfeldes bezeichnet und symbolisch, unter Verwendung des Nablaoperators, in der Form FF ×∇=rot geschrieben. Kraftfelder, die ein Potential besitzen, sind demnach wirbelfrei, denn es gilt:
0eee =⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂−
∂∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂∂
−∂∂
∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂−
∂∂∂
=∇×∇=xy
Uyx
Uzx
Uxz
Uyz
Uzy
UUgradUrot22
z
22
y
22
x
Das Potential U(x,y,z) des Kraftfeldes muss also den folgenden Integrabilitätsbedingungen genügen:
0xy
Uyx
U;0zx
Uxz
U;0yz
Uzy
U 222222
=∂∂
∂−
∂∂∂
=∂∂
∂−
∂∂∂
=∂∂
∂−
∂∂∂ Gl. 6-11
6.3.1 Das Potential einer Gewichtskraft
F. U. Mathiak 6-7
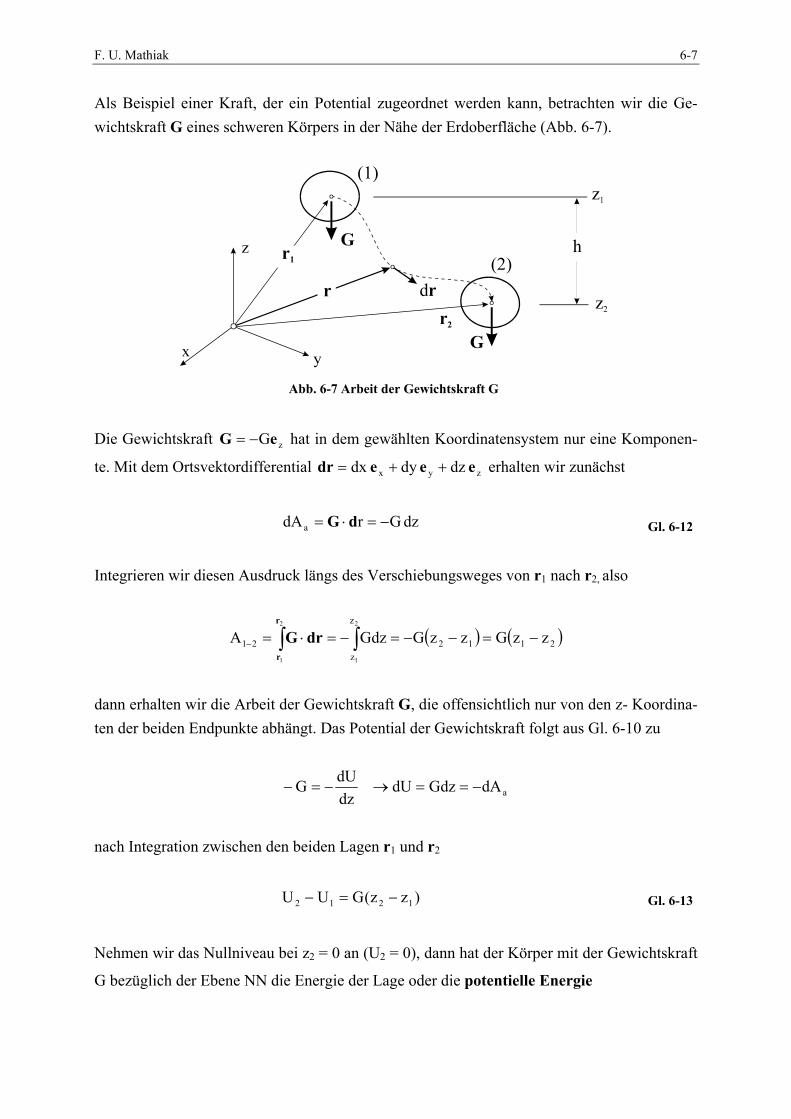
Als Beispiel einer Kraft, der ein Potential zugeordnet werden kann, betrachten wir die Ge-wichtskraft G eines schweren Körpers in der Nähe der Erdoberfläche (Abb. 6-7).
Abb. 6-7 Arbeit der Gewichtskraft G Die Gewichtskraft zGeG −= hat in dem gewählten Koordinatensystem nur eine Komponen-
te. Mit dem Ortsvektordifferential zyx dzdydx eeedr ++= erhalten wir zunächst
dzGrdAa −=⋅= dG Gl. 6-12
Integrieren wir diesen Ausdruck längs des Verschiebungsweges von r1 nach r2, also
( ) ( )21
z
z1221 zzGzzGGdzA
2
1
2
1
−=−−=−=⋅= ∫∫−
r
r
drG
dann erhalten wir die Arbeit der Gewichtskraft G, die offensichtlich nur von den z- Koordina-ten der beiden Endpunkte abhängt. Das Potential der Gewichtskraft folgt aus Gl. 6-10 zu
adAGdzdUdzdUG −==→−=−
nach Integration zwischen den beiden Lagen r1 und r2
)zz(GUU 1212 −=− Gl. 6-13
Nehmen wir das Nullniveau bei z2 = 0 an (U2 = 0), dann hat der Körper mit der Gewichtskraft
G bezüglich der Ebene NN die Energie der Lage oder die potentielle Energie
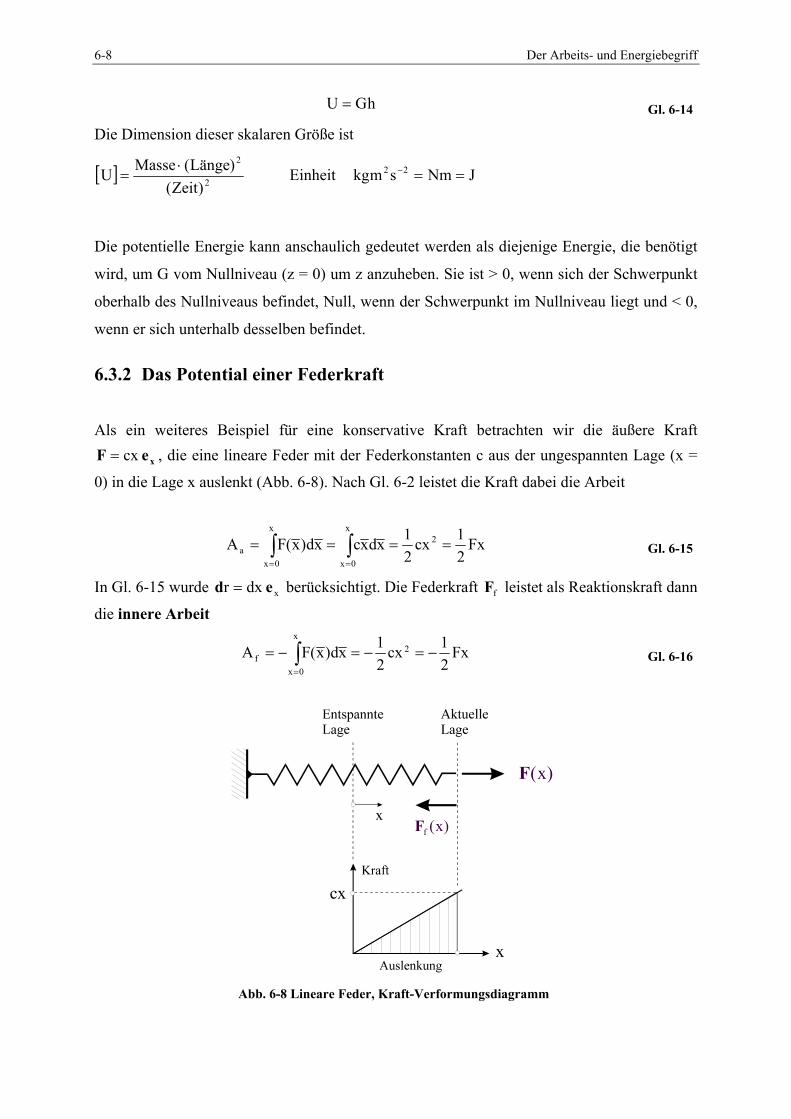
6-8 Der Arbeits- und Energiebegriff
hGU = Gl. 6-14
Die Dimension dieser skalaren Größe ist
[ ] JNmsmkgEinheit)Zeit(
)Länge(MasseU 222
2
==⋅
= −
Die potentielle Energie kann anschaulich gedeutet werden als diejenige Energie, die benötigt
wird, um G vom Nullniveau (z = 0) um z anzuheben. Sie ist > 0, wenn sich der Schwerpunkt
oberhalb des Nullniveaus befindet, Null, wenn der Schwerpunkt im Nullniveau liegt und < 0,
wenn er sich unterhalb desselben befindet.
6.3.2 Das Potential einer Federkraft Als ein weiteres Beispiel für eine konservative Kraft betrachten wir die äußere Kraft
xeF cx= , die eine lineare Feder mit der Federkonstanten c aus der ungespannten Lage (x =
0) in die Lage x auslenkt (Abb. 6-8). Nach Gl. 6-2 leistet die Kraft dabei die Arbeit
Fx21cx
21xdxcxd)x(FA 2
x
0x
x
0xa ==== ∫∫
==
Gl. 6-15
In Gl. 6-15 wurde xdxr ed = berücksichtigt. Die Federkraft fF leistet als Reaktionskraft dann
die innere Arbeit
Fx21cx
21xd)x(FA 2
x
0xf −=−=−= ∫
=
Gl. 6-16
Abb. 6-8 Lineare Feder, Kraft-Verformungsdiagramm

F. U. Mathiak 6-9
Zur Berechnung des Potentials der Federkraft beachten wir Gl. 6-10 und erhalten
cxdxdUFF fx −=−=≡
Integration liefert
2f cx
21U = Gl. 6-17
Geometrisch entspricht das Potential der Federkraft U der in Abb. 6-8 schraffierten Dreiecks-fläche unterhalb der linearen Kraft-Verschiebungskurve. Auch das Potential U der Federkraft ist nur bis auf eine (additive) Konstante festgelegt. Entsprechende Beziehungen lassen sich für eine Drehfeder mit der Federkonstanten cd herlei-ten. Ist ydc eM ϕ= das äußere Moment, das die lineare Feder aus der ungespannten Lage
0=ϕ in die Lage ϕ auslenkt, dann folgt unter Beachtung von ϕd yd eϕ= die dabei vom
äußeren Moment geleistete Arbeit
ϕ=ϕ=ϕϕ=ϕϕ= ∫∫ϕ
=ϕ
ϕ
=ϕ
M21c
21dcd)(MA 2
d0
d0
a Gl. 6-18
Für das Federmoment MM −=f folgt dann analog zu Gl. 6-17
2df c
21U ϕ= Gl. 6-19
Hinweis: Zu den Kräften, die sich nicht aus einem Potential ableiten lassen, gehören z.B. die geschwindigkeitsabhängigen Reibungskräfte, die dem Materialgesetz
v)v(f vR −= mit 0)v(f >
genügen. Unter Beachtung von dtdtdt
r vdrd == liefert Gl. 6-7
0dtv)v(fdtv
)v(frAa <−=⋅−=⋅= ∫∫∫ vvdR
eine Arbeit, die immer negativ ist. Wegen 0Aa ≠ lässt sich ein Potential nicht nachweisen.
Da diese Kräfte Arbeit zerstreuen, werden sie auch dissipative Kräfte1 genannt. Zur Berech-nung der Arbeit einer dissipativen Kraft muss deshalb der vollständige Verschiebungszustand des Kraftangriffspunktes bekannt sein.
1 zu lat. dissipare ›zerstreuen‹, ›verschwenden‹

6-10 Der Arbeits- und Energiebegriff
6.4 Formänderungs- und Ergänzungsenergie für elasti-sche Körper
Wir betrachten in einem ersten Schritt einen elastischen Körper, der einem einachsigen Span-nungs- und Deformationszustand unterworfen ist. Die einzigen von Null verschiedenen Span-nungs- und Verzerrungskomponenten sind dann z.B. σ xx und ε xx . Ist die Spannung σ xx eine
allgemeine Funktion von ε xx , also
)(f xxxx ε=σ Gl. 6-20
dann definieren wir als Differential der spezifischen1 Formänderungsenergie (Abb. 6-9)
xxxx)s( d)(fdW εε= Gl. 6-21
Nach Integration über den gesamten Verzerrungszustand erhalten wir die spezifische Form-änderungsenergie
∫ε
=ε
+εε=εxx
xx 0
)s(xxxxxx
)s( )0(Wd)(f)(W Gl. 6-22
Ist der Ausgangszustand spannungs- und verzerrungsfrei, dann verschwindet die Integrations-
konstante )0(W )s( , und es verbleibt
∫ε
=ε
εε=εxx
xx 0xxxxxx
)s( d)(f)(W Gl. 6-23
Fassen wir umgekehrt die Dehnungen als Funktion der Spannungen auf, also
*xx xxf ( )ε = σ Gl. 6-24
und bilden formal das Integral
xx
xx
(s)* * (s)*xx xx xx
0
W ( ) f ( )d W (0)σ
σ =
σ = σ σ +∫ Gl. 6-25
1 also auf die Volumeneinheit bezogene
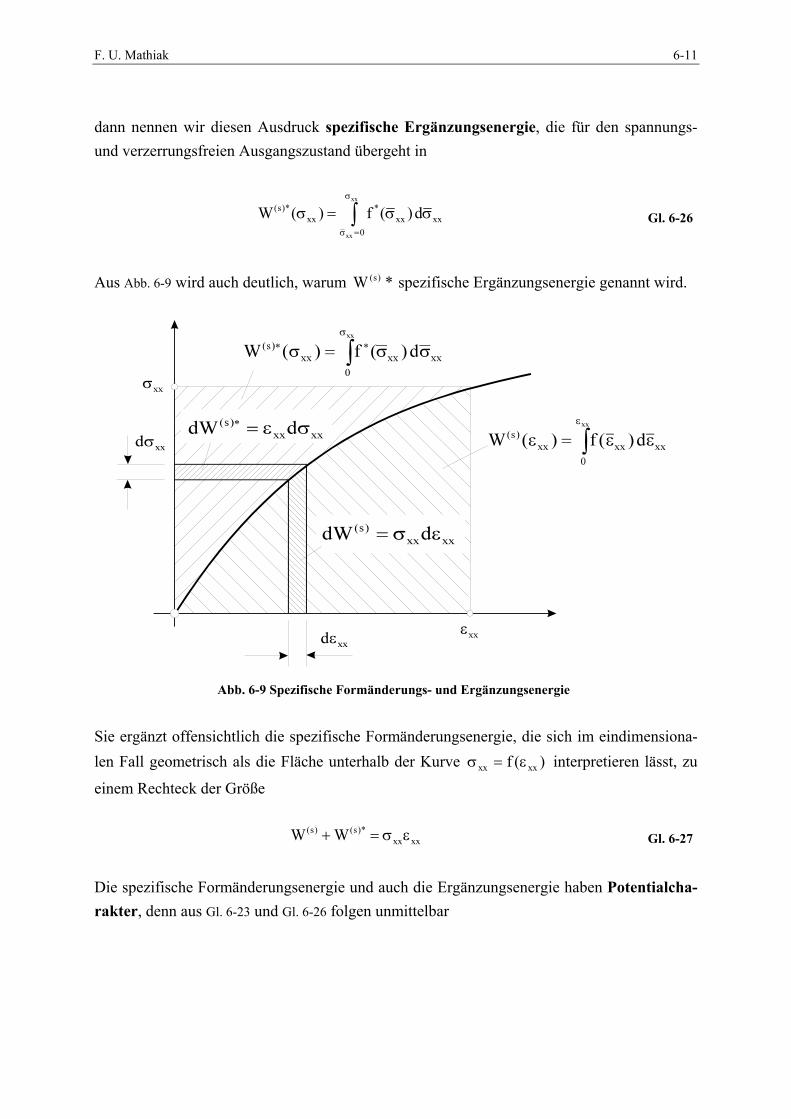
F. U. Mathiak 6-11
dann nennen wir diesen Ausdruck spezifische Ergänzungsenergie, die für den spannungs- und verzerrungsfreien Ausgangszustand übergeht in
xx
xx
(s)* *xx xx xx
0
W ( ) f ( )dσ
σ =
σ = σ σ∫ Gl. 6-26
Aus Abb. 6-9 wird auch deutlich, warum *W )s( spezifische Ergänzungsenergie genannt wird.
Abb. 6-9 Spezifische Formänderungs- und Ergänzungsenergie
Sie ergänzt offensichtlich die spezifische Formänderungsenergie, die sich im eindimensiona-len Fall geometrisch als die Fläche unterhalb der Kurve )(f xxxx ε=σ interpretieren lässt, zu
einem Rechteck der Größe
(s) (s)*xx xxW W+ = σ ε Gl. 6-27
Die spezifische Formänderungsenergie und auch die Ergänzungsenergie haben Potentialcha-rakter, denn aus Gl. 6-23 und Gl. 6-26 folgen unmittelbar

6-12 Der Arbeits- und Energiebegriff
(s)
xx xxxx(s)*
*xx xx
xx
dW f ( )d
dW f ( )d
= ε = σε
= σ = εσ
Gl. 6-28
oder in Worten:
1. Die spezifische Formänderungsenergie ist das Potential der Spannung. 2. Die spezifische Ergänzungsenergie ist das Potential der Verzerrung.
Abb. 6-10 Linear elastisches Material, Formänderungs- und Ergänzungsenergie
Bei linear elastischem Material sind die Maßzahlen für die spezifische Formänderungsenergie und die spezifische Ergänzungsenergie gleich. Hier gilt nämlich nach Hooke: xxxx Eε=σ
und damit
(s) (s)* 2 2xx xx xx xx
E 1 1W W2 2E 2
= = ε = σ = σ ε
In Verallgemeinerung auf den dreidimensionalen Fall erhalten wir die spezifische Formände-rungsenergie für Hookesches Material in Matrizenschreibweise
( ) εDεεDεεσ TTT(s)
21
21
21W === Gl. 6-29
und unter Beachtung von Luε = gilt weiter
u)LDL(uDεε TTT ()21
21W(s) == Gl. 6-30

F. U. Mathiak 6-13
Ausrechnen von Gl. 6-29 liefert in kartesischen Koordinaten
( ) ( )⎥⎦⎤
⎢⎣⎡ +++++
−+++= 2
zx2
yz2
xy2
zzyyxx2
zz2
yy2
xx(s) γγγ
21εεε
ν21νεεεGW Gl. 6-31
und wenn die Verzerrungen durch die Verschiebungen ersetzt werden
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+⎟⎠⎞
⎜⎝⎛
∂∂
+∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
+∂∂
−+⎟
⎠⎞
⎜⎝⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
=222
2222
(s)
zx
xz
vz
zv
xv
yu
21
zw
yv
xu
ν21ν
zw
yv
xu
GW Gl. 6-32
Die Formänderungsenergie ergibt sich in jedem Fall durch Integration der spezifischen Form-änderungsenergie über das Gesamtvolumen des betrachteten Körpers.
∫=(V)
(s)dVWW Gl. 6-33
6.5 Formänderungs- und Ergänzungsenergie für den ge-raden Balken
Wir beschränken uns auf linear elastisches Material, für das Formänderungs- und Ergän-zungsenergie identisch sind. Für die folgenden Untersuchungen wird der isotherme Fall mit T = 0 zugrunde gelegt.
6.5.1 Schiefe Biegung mit Normalkraft Von den Verzerrungen verbleibt nur die Dehnung vywzuxx ′′−′′−′=ε . Alle anderen Verzer-
rungen sind Null. Die spezifische Formänderungsenergie reduziert sich unter Beachtung von 0=ν und G = E/2 auf
( )
( )22222
22xx
)s(
vyvwyz2wzvyu2wzu2u2E
vywzu2E
2EW
′′+′′′′+′′+′′′−′′′−′=
′′−′′−′=ε=

6-14 Der Arbeits- und Energiebegriff
und mit dxdAdV = erhalten wir bei Bezugnahme auf Hauptzentralachsen
dxdAy)x(vdAyz)x(v)x(w2dAz)x(w
dAy)x(v)x(u2dAz)x(w)x(u2dA)x(u
2EdVWW
0x
I
)A(
22
0
)A(
I
)A(
22
0
)A(
0
)A(
A
)A(
2
)V(
)s(
zzyy
∫ ∫∫∫
∫∫∫
∫=
===
===
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
′′+′′′′+′′+
′′′−′′′−′
==l
3214321321
321321321
Nach Zusammenfassung verbleibt
[ ] dx)x(vEI)x(wEI)x(uEA21W
0x
2zz
2yy
2∫=
′′+′′+′=l
Gl. 6-34
Die spezifische isotherme Formänderungsenergie lässt sich unter Beachtung von
⎥⎥⎦
⎤
⎢⎢⎣
⎡−+=
σ=ε y
I)x(Mz
I)x(M
A)x(N
E1
E zz
z
yy
yxxxx
auch als Funktion der Schnittlasten N(x), My(x) und Mz(x) darstellen:
2
zz
z
yy
y2xx
)s( yI
)x(MzI
)x(MA
)x(NE21
2EW
⎥⎥⎦
⎤
⎢⎢⎣
⎡−+=ε=
Integration über das Stabvolumen liefert bei Bezugnahme auf die Hauptzentralachsen
dxEI
)x(MEI
)x(MEA
)x(N21W
0x zz
2z
yy
2y
2
∫= ⎥
⎥⎦
⎤
⎢⎢⎣
⎡++=
l
Gl. 6-35
Beispiel: 6-3
Für den durch eine Normalkraft F und eine Linienlast q0 belasteten Kragträger ist die Formänderungsenergie zu berechnen. Lösung: Aus Gleichgewicht ergeben sich die Schnittlasten:
N = F = konst.; ( )20y x
2q)x(M −−= l
Mit Gl. 6-35 erhalten wir dann

F. U. Mathiak 6-15
( )yy
520
2
0x
4
yy
20
2
0x yy
2y
2
EI40q
2EAFdxx
4EIq
EAF
21dx
EI(x)M
EA(x)N
21W ll
lll
+=⎥⎥⎦
⎤
⎢⎢⎣
⎡−+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+= ∫∫
==
Hinweis: Die Verschiebung u eines Dehnstabes infolge Einzellast F am Stabende ist bekannt-
lich EAFu l
= . Die Arbeit der Kraft F an dieser Verschiebung ist nach Gl. 6-15
EA2FFu
21A
2l==
und damit identisch mit der im Körper gespeicherten Formänderungsenergie, die z.B. dazu genutzt werden kann, den Körper bei der Entlastung wieder in seinen Ausgangszustand zu bringen.
6.5.2 Querkraftbeanspruchung
Für den schubelastischen Balken galt: ( )w21
21
yyxz ′+ω=ϕ=ε . Mit Gl. 6-31 finden wir dann
2y
)S( G21W ϕ=
und nach Integration über das Gesamtvolumen des Stabes
dx)x(GA21W
0x
2y∫
=
ϕ=l
Gl. 6-36
Unter Beachtung des Werkstoffgesetzes für die Querkraft yz GAQ ϕ= können wir mit Gl.
6-36 auch
dxGA
)x(Q21W
0x
2z∫
=
=l
Gl. 6-37
schreiben. Durch formale Erweiterung auf den zweidimensionalen Fall erhalten wir in Erwei-terung von Gl. 6-36
dx)x(GA21dx)x(GA
21W
0x
2z
0x
2y ∫∫
==
ϕ+ϕ=ll
Gl. 6-38
Und entsprechend von Gl. 6-37

6-16 Der Arbeits- und Energiebegriff
dxGA
)x(Q21dx
GA)x(Q
21W
0x
2y
0x
2z ∫∫
==
+=ll
Gl. 6-39
Im Fall des schubstarren Balkens liegt kein Stoffgesetz für die Querkräfte vor. Wir gehen deshalb von den aus Gleichgewichtsbetrachtungen ermittelten Schubspannungen
)z(bI)z(S)x(Q
yy
yzxz =σ
aus. Mit Gl. 6-26 erhalten wir 2
yy
yz2xz
)S(
)z(bI)z(S)x(Q
G21
G21*W
⎥⎥⎦
⎤
⎢⎢⎣
⎡=σ=
bzw.:
∫ ∫∫=
=σ=l
0x )A(2
2y
2
2z
)V(
2xz dA
)z(b)z(S
dxGI
)x(Q21dV
G1
21W
yy
Die obige Beziehung können wir noch etwas kompakter schreiben, wenn wir den nur von der Geometrie abhängigen dimensionslosen Querschnittswert
∫=κ)A(
2
2y
yyz dA
)z(b)z(S
IA
2 Gl. 6-40
einführen. Wir erhalten dann
∫=
κ=l
0x
2z
z dxGA
)x(Q21W Gl. 6-41
Beispiel 6-1: Gesucht wird die Formänderungsenergie für einen Balken mit Rechteckquer-schnitt der Breite b und der Höhe h.
Lösung: ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−=
22
y hz21
8bh)z(S und damit
120bhdA
b)z(S 5
)A(2
2y =∫
Für den Querschnittswert erhalten wir
( )2,1
56
120bh
12bhbhdA
)z(b)z(S
IA 5
23)A(
2
2y
yyz 2 ====κ ∫
und damit

F. U. Mathiak 6-17
∫=
=l
0x
2z dxGA
)x(Q21
56W
Beispiel 6-2: Gesucht wird die Formänderungsenergie eines Balkens mit Kreisquerschnitt (Ra-dius a).
2323
y
4
yy2
az1a
32)z(S;
4aI;aA
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−=
π=π= ;
2
az1a2)z(b ⎟⎠⎞
⎜⎝⎛−= ; dz)z(bdA =
65a
0z
2525
a
az
2y
)A(2
2y a
725a
325a
94dz
az1a
94dz
)z(b)z(S
dA)z(b)z(S
π=π=⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−== ∫∫∫
=−=
11,19
10a725
4a
adA)z(b)z(S
IA 6
24
2
)A(2
2y
yyz 2 ==π
⎟⎟⎠
⎞⎜⎜⎝
⎛ π
π==κ ∫
und damit
∫=
=l
0x
2z dxGA
)x(Q21
910W
Für den Fall der schiefen Biegung mit Qz und Qy werden die oben hergeleiteten Beziehungen sinnvoll erweitert. Wir erhalten entsprechend Gl. 6-41
∫∫==
κ+κ=ll
0x
2y
y0x
2z
z dxGA
)x(Q21dx
GA)x(Q
21W Gl. 6-42
Bei dünnwandigen Walzprofilen (I-Profil, U-Profil usw.) wird die Querkraft Qz vorwiegend durch den Steg abgetragen. Bezeichnet A die Querschnittsfläche des Gesamtquerschnittes und ASteg die Querschnittsfläche des Steges, dann kann näherungsweise
Stegz A
A=κ Gl. 6-43
gesetzt werden.
6.5.3 Torsion Wir beschränken uns auf den wölbfreien Kreis- bzw. Kreisringquerschnitt. Für den Verschie-bungsvektor gilt
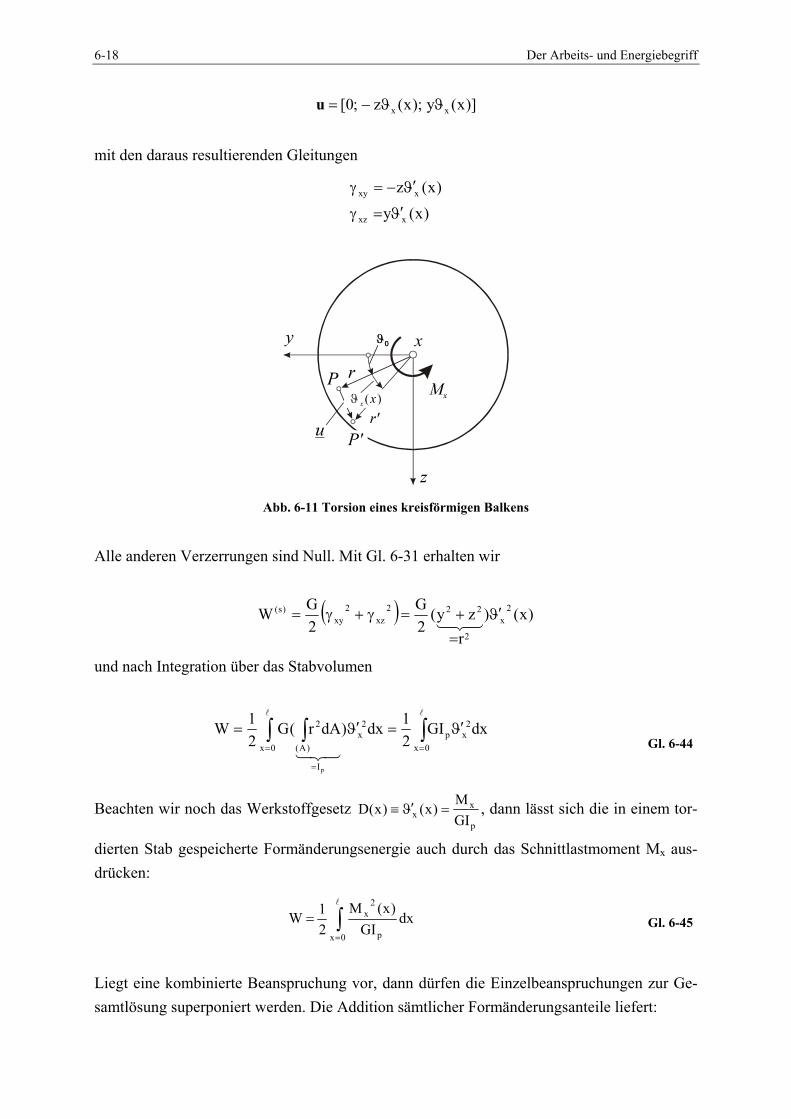
6-18 Der Arbeits- und Energiebegriff
)]x(y);x(z;0[ xx ϑϑ−=u
mit den daraus resultierenden Gleitungen
)x(y)x(z
xxz
xxy
ϑ′=γ
ϑ′−=γ
Abb. 6-11 Torsion eines kreisförmigen Balkens Alle anderen Verzerrungen sind Null. Mit Gl. 6-31 erhalten wir
( ) )x()r
zy(2G
2GW 2
x
2
222xz
2xy
)s( ϑ′
=+=γ+γ=321
und nach Integration über das Stabvolumen
∫∫ ∫==
=
ϑ′=ϑ′=ll
321 0x
2xp
0x
2x
I
)A(
2 dxGI21dx)dAr(G
21W
p
Gl. 6-44
Beachten wir noch das Werkstoffgesetz p
xx GI
M)x()x(D =ϑ′≡ , dann lässt sich die in einem tor-
dierten Stab gespeicherte Formänderungsenergie auch durch das Schnittlastmoment Mx aus-drücken:
∫=
=l
0x p
2x dxGI
)x(M21W Gl. 6-45
Liegt eine kombinierte Beanspruchung vor, dann dürfen die Einzelbeanspruchungen zur Ge-samtlösung superponiert werden. Die Addition sämtlicher Formänderungsanteile liefert:
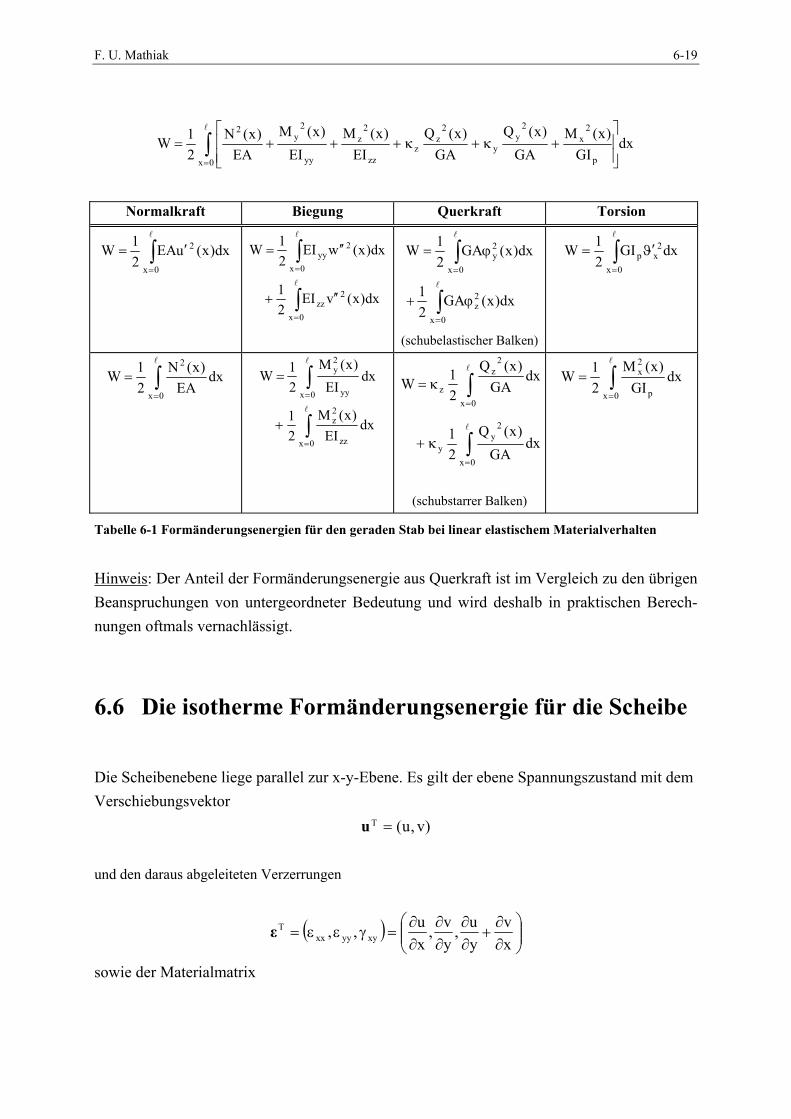
F. U. Mathiak 6-19
dxGI
)x(MGA
)x(QGA
)x(QEI
)x(MEI
)x(MEA
)x(N21W
0x p
2x
2y
y
2z
zzz
2z
yy
2y
2
∫= ⎥
⎥⎦
⎤
⎢⎢⎣
⎡+κ+κ+++=
l
Normalkraft Biegung Querkraft Torsion
∫=
′=l
0x
2 dx)x(uEA21W
∫
∫
=
=
′′+
′′=
l
l
0x
2zz
0x
2yy
dx)x(vEI21
dx)x(wEI21W
dx)x(GA21
dx)x(GA21W
0x
2z
0x
2y
∫
∫
=
=
ϕ+
ϕ=
l
l
(schubelastischer Balken)
∫=
ϑ′=l
0x
2xp dxGI
21W
∫=
=l
0x
2
dxEA
)x(N21W
∫
∫
=
=
+
=
l
l
0x zz
2z
0x yy
2y
dxEI
)x(M21
dxEI
)x(M21W
∫
∫
=
=
κ+
κ=
l
l
0x
2y
y
0x
2z
z
dxGA
)x(Q21
dxGA
)x(Q
21W
(schubstarrer Balken)
∫=
=l
0x p
2x dx
GI)x(M
21W
Tabelle 6-1 Formänderungsenergien für den geraden Stab bei linear elastischem Materialverhalten
Hinweis: Der Anteil der Formänderungsenergie aus Querkraft ist im Vergleich zu den übrigen Beanspruchungen von untergeordneter Bedeutung und wird deshalb in praktischen Berech-nungen oftmals vernachlässigt.
6.6 Die isotherme Formänderungsenergie für die Scheibe
Die Scheibenebene liege parallel zur x-y-Ebene. Es gilt der ebene Spannungszustand mit dem Verschiebungsvektor
)v,u(T =u und den daraus abgeleiteten Verzerrungen
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂
∂∂
∂∂
=γεε=xv
yu,
yv,
xu,, xyyyxx
Tε
sowie der Materialmatrix

6-20 Der Arbeits- und Energiebegriff
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
=
2ν100
01ν
0ν1
ν1E
2ESD
Für die spezifische Formänderungsenergie erhalten wir dann
⎥⎦⎤
⎢⎣⎡ γ
ν−+ν++
−== 2
xyyyxx2
yy2
xx2(s)
21εε2εε
)ν1(2E
21W εDε ES
T Gl. 6-46
und unter Beachtung von Luε =
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+∂∂ν−
+∂∂
∂∂
ν+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
−=
=
222
2
(s)
xv
yu
21
yv
xu2
yv
xu
)ν1(2E
21W (Lu)D(Lu) ES
T
Gl. 6-47
Die Formänderungsenergie der gesamten Körpers ist dann (Scheibendicke h)
( )∫∫∫∫ ==A(A)
(s) dA2hdAWhW (Lu)D(Lu) ES
T Gl. 6-48
6.7 Formänderungsenergie für die schubstarre Platte
Die Plattenmittelfläche liege in der x-y-Ebene. Die Verschiebung
⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
−∂∂
−==ywz,
xwz)v,u(Tu
eines Punktes P mit dem Abstand z von der Plattenmittelfläche lässt sich durch die Änderung des Verschiebungsfeldes w(x,y) ausdrücken. Daraus ergeben sich die Verzerrungen
( ) zzyx
w2,yw,
xw,, T
2
2
2
2
2
xyyyxxT κε =⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
∂−
∂∂
−∂∂
−=γεε=
Mit der Materialmatrix für den ebenen Spannungszustand

F. U. Mathiak 6-21
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ν−ν
ν
ν−=
2100
0101
1E
2D
folgt für die Spannungen Dεσ = und damit die spezifische Formänderungsenergie
DκκDεεεσ T2
TT)s(
2z
21
21W === Gl. 6-49
Ausrechnen liefert
( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂−
∂∂
∂∂
ν−−∆ν−
=yx
wyw
xw)1(2w
)1(2EzW
2
2
2
2
22
2
2)s( Gl. 6-50
In jedem Fall ist die Formänderungsenergie der gesamten Platte
dA21dA
12h
21dVWW
)A(
T
)A(
T3
)V(
)s( ∫∫∫∫∫ === κDκDκκ PL Gl. 6-51
wobei
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
ν−ν
ν
ν−=
2100
0101
)1(12Eh
2
3
PLD
die Materialmatrix der Plattenbiegung bezeichnet.


















