3 Li near e Al gebr a I/I I - uni-due.dehn213me/mt/w10/einfuehrung/kurs3.pdf · (*8.3.1815 in...
8
47 §3 Lineare Algebra I/II Urspr¨ unglich gab es parallel zu den Analysis-Vorlesungen zu Beginn des Mathematik-Studiums eine Vorlesung mit dem Titel ”Analytische Geometrie”, bei der dann im Laufe der Zeit die Namen ”Analytische Geometrie und Lineare Algebra”, ”Lineare Algebra und Analytische Geo- metrie” und schließlich ”Lineare Algebra” zeigten, dass sich die Inhalte und die Schwerpunkte allm¨ ahlich ver¨ anderten. Heutzutage wird teilweise nur noch am Rande auf geometrische Aspekte hingewiesen. Als Begleitlekt¨ ure zu meiner Einf¨ uhrungsvorlesung ”Lineare Algebra und Geometrie” im Win- tersemester 1965/66 (in T¨ ubingen) wurde u.a. das Buch ”Analytische Geometrie” (in der 5. Auflage) von G. Pickert empfohlen; es ist in 3 Kapitel unterteilt: I. Affine Geometrie II. Metrische Geometrie III. Projektive Geometrie a) Gleichungssysteme und Matrizen Im 1.Kapitel werden Gegenst¨ ande der Linearen Algebra behandelt: Vektorr¨ aume, Lineare Glei- chungssysteme, Matrizen, Determinanten, Eigenwerte und Eigenvektoren. Es wird bei allen Begriffen sofort eine Verbindung zur Geometrie hergestellt, zu Parallelver- schiebungen oder Parallelprojektionen. Gleichungssysteme wurden schon 1700 v.Chr. von den Babyloniern gel¨ ost, allerdings noch nicht systematisch. Die erste systematische Behandlung linearer Gleichungssysteme findet man in einem chinesischen Lehrbuch ”Mathematik in neun B¨ uchern”, das wahrscheinlich von Chang Ts’ang (um 165 - 142 v.Chr.) verfasst wurde und von dem eine Bearbeitung von Liu Hui (3. Jh. n.Chr.) aus dem Jahre 263 (?) n.Chr. vorliegt. Dort findet man in Buch VIII. mit dem Titel ”Rechteckige Tabelle” ein L¨ osungsverfahren, in dem man ohne M¨ uhe den Gauß-Algorithmus erkennen kann. Dieses Verfahren ist allerdings sehr wahrscheinlich im Westen nicht bekannt geworden. Der Begriff des Vektors wurde 1843/44 von William Rowan Hamilton (*4.8.1805 in Dublin, †2.9.1865 im Observatorium Dunsink bei Dublin) und Siegmund Ludolf Robert Graßmann (*8.3.1815 in Stettin, †14.8.1901 in Stettin) in die Mathematik eingef¨ uhrt. Hamilton suchte nach einem Zahlensystem f¨ ur den dreidimensionalen Raum, das das leistet, was die komplexen Zahlen in der Ebene leisten. b) Kegelschnitte Im 2. Kapitel geht es dann um Vektorr¨ aume mit Skalarprodukt, um symmetrische Bilinearfor- men und quadratische Formen, um den Begriff des Winkels und um Polarkoordinaten im R n . Als Abbildungen werden Translationen, Drehungen, Spiegelungen und Gleit- bzw. Schubspiegelun- gen betrachtet. In diesem Kapitel wird auch angegeben, wie man den Inhalt von Parallelotopen berechnet und wie sich der Inhalt unter bijektiven affinen Abbildungen verh¨ alt. Außerdem geht es um das vektorielle oder Kreuzprodukt von Vektoren. Wir finden folgenden
Transcript of 3 Li near e Al gebr a I/I I - uni-due.dehn213me/mt/w10/einfuehrung/kurs3.pdf · (*8.3.1815 in...

47
§3 Lineare Algebra I/II
Ursprunglich gab es parallel zu den Analysis-Vorlesungen zu Beginn des Mathematik-Studiumseine Vorlesung mit dem Titel ”Analytische Geometrie”, bei der dann im Laufe der Zeit dieNamen ”Analytische Geometrie und Lineare Algebra”, ”Lineare Algebra und Analytische Geo-metrie” und schließlich ”Lineare Algebra” zeigten, dass sich die Inhalte und die Schwerpunkteallmahlich veranderten. Heutzutage wird teilweise nur noch am Rande auf geometrische Aspektehingewiesen.
Als Begleitlekture zu meiner Einfuhrungsvorlesung ”Lineare Algebra und Geometrie” im Win-tersemester 1965/66 (in Tubingen) wurde u.a. das Buch ”Analytische Geometrie” (in der 5.Auflage) von G. Pickert empfohlen; es ist in 3 Kapitel unterteilt:
I. A!ne Geometrie
II. Metrische Geometrie
III. Projektive Geometrie
a) Gleichungssysteme und Matrizen
Im 1.Kapitel werden Gegenstande der Linearen Algebra behandelt: Vektorraume, Lineare Glei-chungssysteme, Matrizen, Determinanten, Eigenwerte und Eigenvektoren.Es wird bei allen Begri"en sofort eine Verbindung zur Geometrie hergestellt, zu Parallelver-schiebungen oder Parallelprojektionen.Gleichungssysteme wurden schon 1700 v.Chr. von den Babyloniern gelost, allerdings noch nichtsystematisch. Die erste systematische Behandlung linearer Gleichungssysteme findet man ineinem chinesischen Lehrbuch ”Mathematik in neun Buchern”, das wahrscheinlich von ChangTs’ang (um 165 - 142 v.Chr.) verfasst wurde und von dem eine Bearbeitung von Liu Hui (3.Jh. n.Chr.) aus dem Jahre 263 (?) n.Chr. vorliegt. Dort findet man in Buch VIII. mit dem Titel”Rechteckige Tabelle” ein Losungsverfahren, in dem man ohne Muhe den Gauß-Algorithmuserkennen kann. Dieses Verfahren ist allerdings sehr wahrscheinlich im Westen nicht bekanntgeworden.Der Begri" des Vektors wurde 1843/44 von William Rowan Hamilton (*4.8.1805 in Dublin,†2.9.1865 im Observatorium Dunsink bei Dublin) und Siegmund Ludolf Robert Graßmann(*8.3.1815 in Stettin, †14.8.1901 in Stettin) in die Mathematik eingefuhrt. Hamilton suchte nacheinem Zahlensystem fur den dreidimensionalen Raum, das das leistet, was die komplexen Zahlenin der Ebene leisten.
b) Kegelschnitte
Im 2. Kapitel geht es dann um Vektorraume mit Skalarprodukt, um symmetrische Bilinearfor-men und quadratische Formen, um den Begri" des Winkels und um Polarkoordinaten im Rn. AlsAbbildungen werden Translationen, Drehungen, Spiegelungen und Gleit- bzw. Schubspiegelun-gen betrachtet. In diesem Kapitel wird auch angegeben, wie man den Inhalt von Parallelotopenberechnet und wie sich der Inhalt unter bijektiven a!nen Abbildungen verhalt. Außerdem gehtes um das vektorielle oder Kreuzprodukt von Vektoren. Wir finden folgenden

48
Satz
Sind a und b linear unabhangig, so ist der Vektor c eindeutig dadurch bestimmt, dass er zu aund b senkrecht ist, seine Lange ubereinstimmt mit dem Flacheninhalt eines vom 2-Bein (a, b)aufgespannten Parallelogramms und (a, b, c) ein orientiertes 3-Bein darstellt.
In den Paragraphen 21 bis 23 geht es um Kreis und Kugel, um komplexe metrische Raumeund um Hyperflachen, das sind die geometrischen Gebilde, die sich als Nullstellenmenge einerGleichung der Form
n!
i,j=1
ai,jxixj + 2n!
i=1
aixi + a = 0,
bei der nicht alle ai,j verschwinden, darstellen lassen.
Wir betrachten den Fall n = 2 und verwenden die Variablen x und y statt x1 und x2. WelchePunktmenge wird beschrieben, wenn wir fordern
13x2 ! 10xy + 13y2 ! 72 = 0 ?
Setzen wir x =1"2(u + v) und y =
1"2(!u + v), so erhalten wir aus obiger Gleichung die
Bedingung13
2(u2 + 2uv + v2)! 10
2(v2 ! u2) +
13
2(u2 ! 2uv + v2)! 72 = 0
oder aquivalent13u2 + 5u2 + 13v2 ! 5v2 ! 72 = 0
oder aquivalent
18u2 + 8v2 ! 72 = 0 #$ u2
4+
v2
9! 1 = 0 .
Aus der letzten Darstellung erkennen wir, dass die Menge aller Punkte (u, v) % R2, die dieletzte Gleichung erfullen, den Rand einer Ellipse bilden. Was bedeutet aber der Ubergang vonden Variablen x, y zu den Variablen u, v? Wir konnen das auch folgendermaßen beschreiben:
"xy
#=
1"2
"1 1!1 1
# "uv
#
oder "uv
#=
1"2
"1 !11 1
# "xy
#
Was wird aus dem Vektor (1, 0)T bzw. aus dem Vektor (0, 1)T , wenn wir die letzte ”Transfor-mation” betrachten? Wir erhalten die Vektoren
1"2
"11
#und
1"2
"!11
#.
Das lasst sich so interpretieren, dass wir die ”neuen Vektoren” durch Drehung des Koordina-tensystems um 90! gegen den Uhrzeigersinn erhalten.

49
Allgemein erhalten wir im Fall n = 2 nach geeigneter ”Koordinatentransformation” die folgen-den Gebilde, wobei wir die Variablen mit x und y bezeichnen:
x2
a2+
y2
b2= 1 Ellipse
x2
a2! y2
b2= 1 Hyperbel
x2
a2+
y2
b2= !1 nullteilige Kurve zweiter Ordnung
y2 = a2x2 Paar sich schneidender reeller Geraden
y2 = !a2x2 Paar sich schneidender nichtreeller Geraden
y2 = 2px Parabel
y2 = a2 Paar reeller paralleler Geraden
y2 = !a2 Paar nichtreeller paralleler Geraden
y2 = 0 Doppelgerade
Wir wollen noch kurz auf die Namensgebung eingehen. O.B.d.A. konnen wir a & b voraussetzen;sonst benennen wir die Variablen um. Dann erhalten wir durch Verschiebung des Nullpunktes inden Punkt (a, 0) bei der Ellipse und durch Verschiebung des Nullpunktes in den Punkt (!a, 0)bei der Hyperbel die Gleichung
y2 = 2px + (!2 ! 1)x2
mit ! = 1 fur die Parabel, mit
! =
"a2 ! b2
a< 1 fur die Ellipse und ! =
"a2 + b2
a> 1 fur die Hyperbel
sowie p =b2
afur die beiden letzten Falle. ! heißt Exzentrizitat der Quadrik, und die obige Glei-
chung wird Scheitelgleichung der Hyperflache zweiter Ordnung genannt. Von der Große ! istder Name der Quadriken abgeleitet. Parabel kommt von dem griechischen Wort "#$#%#&&!'(fur ’gleichkommen’, Ellipse von dem griechischen Wort !&&!'"!'( fur ’mangeln’ und Hyper-bel von dem griechischen Wort )"!$%#&&!'( fur ’ubertre"en’. Diese Namensgebung geht aufApollonius von Alexandria (262?-190?) zuruck.
Wir konnen zeigen, dass der Schnitt einer Ebene E mit einem geraden Kreiskegel eine Ellipseergibt. Dazu passen wir in den Kreiskegel zwei Kugeln ein, die die Schnittebene (von oben bzw.unten) in den Punkten F1 und F2 beruhren (vgl. Skizze).

50
Wir zeigen, dass fur jeden Punkt P , der in der Mantelflache des Kegels und der Schnittebeneliegt, die Summe der Abstande zu den Punkten F1 und F2 konstant ist. Wir betrachten dieGerade durch die Spitze S des Kegels und den Punkt P ; diese Gerade ist eine Tangente an diebeiden Kugeln und beruhrt diese in den Punkten U und V . Diese beiden Punkte liegen auf zweiparallelen Ebenen E1 und E2, die alle Beruhrpunkte von S an die beiden Kugeln enthalten.Damit ist d(U, V ) = const = 2a. Da der Abstand eines Punktes (außerhalb einer Kugel) zuallen Beruhrpunkten mit der Kugel gleich groß ist, erhalten wir
d(P, V ) = d(P, F2) und d(P, U) = d(P, F1)

51
und damitd(P, F1) + d(P, F2) = d(P, U) + d(P, V ) = d(U, V ) = 2a .
Also ist die Schnittkurve der Ebene mit der Mantelflache des geraden Kreiskegels eine Ellipse.
Die Idee fur diesen Beweis geht auf Germinal Pierre Dandelin (*12.04.1794 in Le Bourget(bei Paris), †15.02. 1847 in Brussel) und Lambert Adolf Jacob Quetelet (*22.02.1796 inGent, †17.02.1874 in Brussel) zuruck, weshalb die Kugeln auch (Quetelet–)DandelinscheKugeln genannt werden.
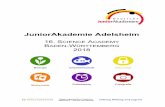
Im Fall n = 3 ergeben sich nach geeigneter ”Koordinatentransformation” mit x, y, z stattx1, x2, x3 die folgenden geometrischen Gebilde:
x2
a2+
y2
b2+
z2
c2= 1 Ellipsoid
x2
a2+
y2
b2! z2
c2= 1 einschaliges Hyperboloid
!x2
a2! y2
b2+
z2
c2= 1 zweischaliges Hyperboloid
x2
a2+
y2
b2+
z2
c2= !1 nullteilige Flache zweiter Ordnung
x2
a2+
y2
b2= z2 Kegel mit reellen Erzeugenden
x2
a2+
y2
b2+ z2 = 0 Kegel mit nichtreellen Erzeugenden
x2
a2+
y2
b2= 2z elliptisches Paraboloid
x2
a2! y2
b2= 2z hyperbolisches Paraboloid
x2
a2+
y2
b2= 1 elliptischer Zylinder
x2
a2! y2
b2= 1 hyperbolischer Zylinder
x2
a2+
y2
b2= !1 Zylinder mit nichtreellen Erzeugenden
y2 = a2x2 Paar sich schneidender reeller Ebenen
y2 = !a2x2 Paar sich schneidender nichtreeller Ebenen
x2 = 2pz parabolischer Zylinder
x2 = a2 Paar reeller paralleler Ebenen
x2 = !a2 Paar nichtreeller paralleler Ebenen
x2 = 0 Doppelebene

52
Ellipsoid Einschaliges Hyperboloid Zweischaliges Hyperboloid
Kegel Elliptisches Paraboloid Hyperbolisches Paraboloid
Elliptischer Zylinder Hyperbolischer Zylinder Parabolischer Zylinder
c) Determinanten
Die Form und die Schreibweise der Matrizen geht auf eine Arbeit von Arthur Cayley (*16.8.1821 in Richmond, †26.1.1895 in Cambridge) aus dem Jahr 1855 zuruck. Er schreibt furein lineares Gleichungssystem
A!'x =!'b ,
setzt die Existenz von A"1 voraus und verweist bezuglich der Berechnung von A"1 auf die”wohlbekannte” Theorie der Determinanten.Die Determinante kann man als Funktion auf dem Vektorraum der quadratischen (n ( n)-Matrizen
An =
$
%&a11 . . . a1n...
...an1 . . . ann
'
()
mit reellen oder komplexen Zahlen als Eintragen rekursiv definieren. Ist n = 1, so definiert man
det(a11) = a11 ;
Ist fur (n ! 1) ( (n ! 1)-Matrizen die Determinante schon definiert, so setzt man fur eine(n( n)-Matrix An die Determinante durch
det An =n!
j=1
(!1)j+1a1j · det A#1j .

53
Dabei ist A#1j die (n! 1)( (n! 1)-Matrix, die aus An dadurch hervorgeht, dass man die erste
Zeile und die j-te Spalte streicht. Dann erhalt man z.B.
det
"a11 a12
a21 a22
#= a11 · a22 ! a12 · a21
und
det
$
&a11 a12 a13
a21 a22 a23
a31 a32 a33
'
)
= a11 · det
"a22 a23
a32 a33
#! a12 · det
"a21 a23
a31 a33
#+ a13 · det
"a21 a22
a31 a32
#
= a11(a22a33 ! a23a32)! a12(a21a33 ! a23a31) + a13(a21a32 ! a22a31)
= a11a22a33 + a12a23a31 + a13a21a32 ! (a13a22a31 + a11a23a32 + a12a21a33) .
Die Determinantenschreibweise mit Indizes geht wohl auf Leibniz zuruck, obwohl viele Eigen-schaften schon fruher bekannt waren. Die erste zusammenfassende Darstellung findet man 1770in einer Arbeit von Alexandre Theophile Vandermonde (*28.2.1735 in Paris ,†1.1.1796in Paris), allerdings ohne die Leibniz’sche Schreibweise. Der Determinantenmultiplikationssatzund der Entwicklungssatz von Pierre Simon Laplace (*28.3.1749 in Beaumont-en-Auge,†5.3.1827 in Paris) gehen wohl auf Arbeiten von Augustin-Louis Cauchy (21.8.1789 in Pa-ris, †22.5.1857 in Sceaux (bei Paris)) zuruck. Der Entwicklungssatz besagt, dass man bei derrekursiven Berechnung der Determinante statt der ersten Zeile irgendeine Zeile auswahlen kannund dass es auch moglich ist, statt einer Zeile eine Spalte als ”Entwicklungsspalte” zu wahlen,d.h. es gilt (bei festem i):
det An =n!
j=1
(!1)i+jaij · det A#ij .
Dabei ist A#ij die (n ! 1) ( (n ! 1)-Matrix, die aus An dadurch hervorgeht, dass man die i-te
Zeile und die j-te Spalte streicht. Bei der Entwicklung nach einer Spalte erhalt man (bei festemj):
det An =n!
i=1
(!1)i+jaij · det A#ij .
Es gibt auch eine explizite Definition der Determinante einer (n ( n)-Matrix, die wohl aufLeibniz zuruckgeht:
det An =!
!$Sn
sign *n*
i=1
ai!(i)
Dabei ist Sn die Gruppe aller Permutationen der Zahlen 1, 2, . . . , n und sign * das Vorzeichender Permutation *. Da Sn aus n! Elementen besteht, wird die Anzahl der Summanden beiwachsendem n sehr schnell groß.
Die Interpretation der Determinante als orientiertes Volumen eines Parallelflachs findet manebenfalls bei Cauchy.
Fur Kegelschnitte wollte man das Koordinatensystem so wahlen, dass die zugehorige Gleichungeine moglichst einfache Form hat. Dies ist genau dann der Fall, wenn die Koordinatenachsen

54
mit den Hauptachsen des Kegelschnitts ubereinstimmen. Um die zugehorige Koordinatentrans-formation durchzufuhren, benotigt man die Eigenwerte von geeigneten (2 ( 2)-Matrizen. Furden Fall n = 3 wurden die entsprechenden Fragestellungen zwischen 1800 und 1830 an der EcolePolytechnique in Paris gelost. Es wurde gezeigt, dass eine reelle symmetrische (3 ( 3)-Matrixreelle Eigenwerte besitzt.