
6. Himmelsmechanik - astro.uni-jena.detloehne/EinfAstro/Vorlesung6.pdf · Probleme der...
85
6. Himmelsmechanik . . . ist die astronomische Disziplin, die sich mit der Bewegung der Himmelsk¨ orper befasst.
Transcript of 6. Himmelsmechanik - astro.uni-jena.detloehne/EinfAstro/Vorlesung6.pdf · Probleme der...
6. Himmelsmechanik
. . . ist die astronomische Disziplin, die sich mit der Bewegung derHimmelskorper befasst.
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
M1
M2
M3
MN
Das N-Korper-Problem:
N Punktmassen im leeren Raum
Wechselwirkung entsprechend Newton’schemGravitationsgesetzoft sehr gute Naherung, da(i) Entfernungen viel großer als Ausdehnung
(ii) Ausdehnung meist nahezu kugelformig
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
M1
M2
M3
MN
Das N-Korper-Problem:
N Punktmassen im leeren Raum
Wechselwirkung entsprechend Newton’schemGravitationsgesetz
oft sehr gute Naherung, da(i) Entfernungen viel großer als Ausdehnung
(ii) Ausdehnung meist nahezu kugelformig
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
M1
M2
M3
MN
Das N-Korper-Problem:
N Punktmassen im leeren Raum
Wechselwirkung entsprechend Newton’schemGravitationsgesetzoft sehr gute Naherung, da(i) Entfernungen viel großer als Ausdehnung
(ii) Ausdehnung meist nahezu kugelformig
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
M1
M2
M3
MN
Das N-Korper-Problem:
N Punktmassen im leeren Raum
Wechselwirkung entsprechend Newton’schemGravitationsgesetzoft sehr gute Naherung, da(i) Entfernungen viel großer als Ausdehnung
(ii) Ausdehnung meist nahezu kugelformig
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
Beispiele fur weitere Probleme:
Verallgemeinerung des N-Korper-Problems auf Bewegung und Rotationausgedehnter, nichtspharischer Korper (u. a. Prazessions- undNutationstheorie)
Bewegung eines ausgedehnten Korpers in nichtgleichformigemGravitationsfeld (u. a. Gezeitentheorie)
Bewegung kunstlicher Himmelskorper mit Triebwerk (Astrodynamik)
Bewegung in starken Gravitationsfelder (z. B. nahe Neutronensternen)oder Untersuchung mit sehr hoher Genauigkeit (z. B.Navigationssatelliten): Allgemeine Relativitatstheorie (relativistischeHimmelsmechanik)
Heute nur das wichtigste: das Zwei-Korper-Problem.
Wer mehr wissen mochte: Vorlesung”Celestial Mechanics“,
von Prof. Krivov (fast) jedes Jahr im Wintersemester gehalten.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
Beispiele fur weitere Probleme:
Verallgemeinerung des N-Korper-Problems auf Bewegung und Rotationausgedehnter, nichtspharischer Korper (u. a. Prazessions- undNutationstheorie)
Bewegung eines ausgedehnten Korpers in nichtgleichformigemGravitationsfeld (u. a. Gezeitentheorie)
Bewegung kunstlicher Himmelskorper mit Triebwerk (Astrodynamik)
Bewegung in starken Gravitationsfelder (z. B. nahe Neutronensternen)oder Untersuchung mit sehr hoher Genauigkeit (z. B.Navigationssatelliten): Allgemeine Relativitatstheorie (relativistischeHimmelsmechanik)
Heute nur das wichtigste: das Zwei-Korper-Problem.
Wer mehr wissen mochte: Vorlesung”Celestial Mechanics“,
von Prof. Krivov (fast) jedes Jahr im Wintersemester gehalten.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.1. Probleme der Himmelsmechanik6.1. Probleme der Himmelsmechanik
Beispiele fur weitere Probleme:
Verallgemeinerung des N-Korper-Problems auf Bewegung und Rotationausgedehnter, nichtspharischer Korper (u. a. Prazessions- undNutationstheorie)
Bewegung eines ausgedehnten Korpers in nichtgleichformigemGravitationsfeld (u. a. Gezeitentheorie)
Bewegung kunstlicher Himmelskorper mit Triebwerk (Astrodynamik)
Bewegung in starken Gravitationsfelder (z. B. nahe Neutronensternen)oder Untersuchung mit sehr hoher Genauigkeit (z. B.Navigationssatelliten): Allgemeine Relativitatstheorie (relativistischeHimmelsmechanik)
Heute nur das wichtigste: das Zwei-Korper-Problem.
Wer mehr wissen mochte: Vorlesung”Celestial Mechanics“,
von Prof. Krivov (fast) jedes Jahr im Wintersemester gehalten.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
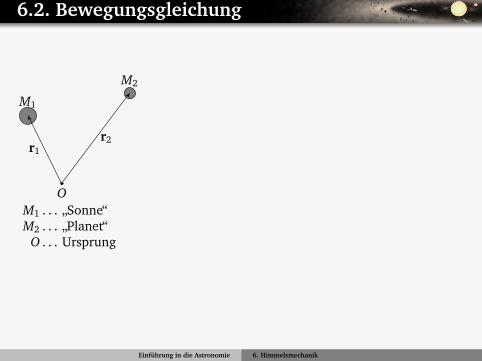
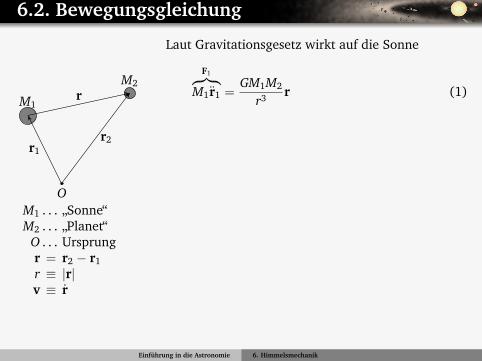
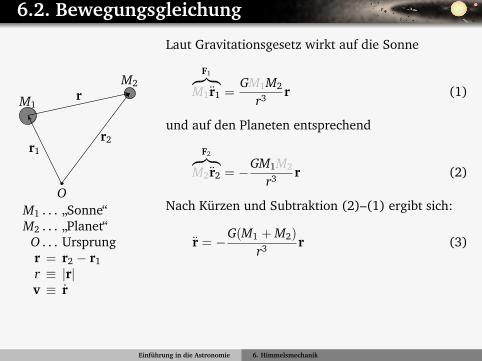
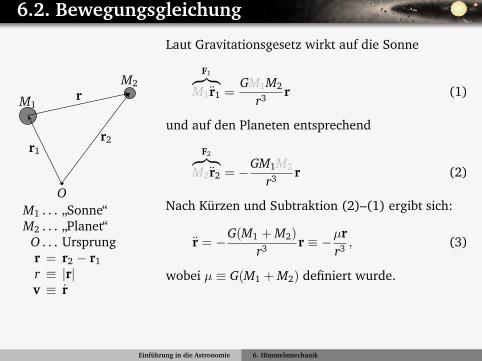
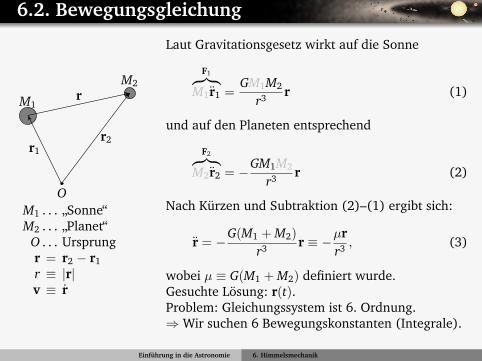
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
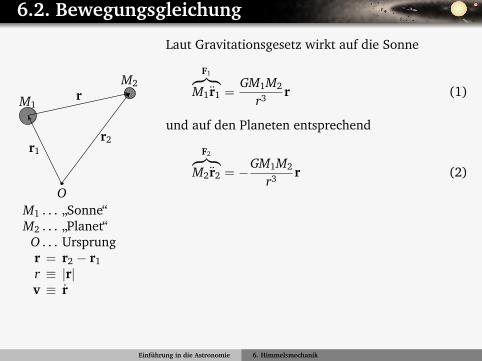
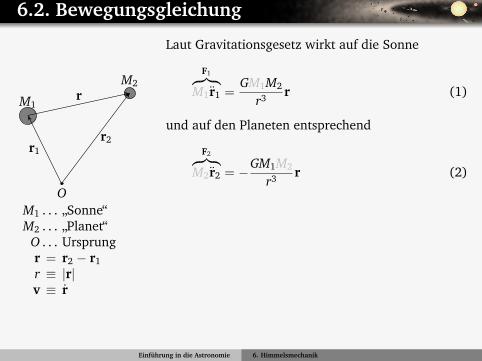
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprung
r = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r
≡ −µrr3 ,
(3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r ≡ −µrr3 , (3)
wobei µ ≡ G(M1 + M2) definiert wurde.
Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.2. Bewegungsgleichung6.2. Bewegungsgleichung
M1
M2
O
r1r2
r
M1 . . .”Sonne“
M2 . . .”Planet“
O . . . Ursprungr = r2 − r1
r ≡ |r|v ≡ r
Laut Gravitationsgesetz wirkt auf die Sonne
F1︷ ︸︸ ︷M1r1 =
GM1M2
r3 r (1)
und auf den Planeten entsprechend
F2︷ ︸︸ ︷M2r2 = −GM1M2
r3 r (2)
Nach Kurzen und Subtraktion (2)–(1) ergibt sich:
r = −G(M1 + M2)
r3 r ≡ −µrr3 , (3)
wobei µ ≡ G(M1 + M2) definiert wurde.Gesuchte Losung: r(t).Problem: Gleichungssystem ist 6. Ordnung.⇒Wir suchen 6 Bewegungskonstanten (Integrale).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) = r× r + r× r
= 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) = r× r + r× r
= 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) =r× r + r× r
= 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) =r× r +r× r
= 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) =r× r +r× r = 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.3. Drehimpulsintegral6.3. Drehimpulsintegral
Vektorprodukt r× (3) ergibt:
r× r = −µr× rr3 = 0.
Aber es gilt auch
ddt
(r× r) =r× r +r× r = 0
und somit (nach Integration)
r× r ≡ c, c = const.
Diese Konstante ist der reduzierte (ohne M2) Drehimpulsvektor des Planeten(im Bezug auf den Stern).
Einerseits ist c ⊥ r (und c ⊥ r), andererseits gilt c = const, sodass dieBewegung in einer Ebene (senkrecht zu c) bleibt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)
=ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3
= −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)
=ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3
= −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3
= −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3
= −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3 = −µ rr2
=ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3 = −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3 = −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)
bzw.ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3 = −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)bzw.
ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
Skalarprodukt r · (3) oder v · (3) ergibt:
v · v = −µv · rr3 .
Die linke Seite ist eine zeitliche Ableitung:
v · v =ddt
(v · v2
)=
ddt
(v2
2
).
Die rechte Seite auch:
−µv · rr3 = −µ r · r
r3 = −µ rr2 =
ddt
(µr
).
Daraus ergibt sich
ddt
(v2
2
)=
ddt
(µr
)bzw.
ddt
(v2
2− µ
r
)= 0
oder (nach Integration uber t)
v2
2− µ
r=
h2, h = const.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
v2
2− µ
r=
h2, h = const
Links stehen reduzierte (ohne M2) kinetische und potenzielle Energie.
”h“ ist die Energiekonstante.
h < 0: Bewegung raumlich beschrankt, da r→∞ nicht moglich.
h ≥ 0: Bewegung ins Unendliche moglich.
Bisher 4 Integrale gefunden. . .
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
v2
2− µ
r=
h2, h = const
Links stehen reduzierte (ohne M2) kinetische und potenzielle Energie.
”h“ ist die Energiekonstante.
h < 0: Bewegung raumlich beschrankt, da r→∞ nicht moglich.
h ≥ 0: Bewegung ins Unendliche moglich.
Bisher 4 Integrale gefunden. . .
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
v2
2− µ
r=
h2, h = const
Links stehen reduzierte (ohne M2) kinetische und potenzielle Energie.
”h“ ist die Energiekonstante.
h < 0: Bewegung raumlich beschrankt, da r→∞ nicht moglich.
h ≥ 0: Bewegung ins Unendliche moglich.
Bisher 4 Integrale gefunden. . .
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.4. Energieintegral6.4. Energieintegral
v2
2− µ
r=
h2, h = const
Links stehen reduzierte (ohne M2) kinetische und potenzielle Energie.
”h“ ist die Energiekonstante.
h < 0: Bewegung raumlich beschrankt, da r→∞ nicht moglich.
h ≥ 0: Bewegung ins Unendliche moglich.
Bisher 4 Integrale gefunden. . .
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)
=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)]
=µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)]
=µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)]
=µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)] =µ
r3
[rrr− rr2]
=µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)] =µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)] =µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)] =µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik

6.5. Laplace-Integral6.5. Laplace-Integral
Vektorprodukt c× (3):
c× r = (r× r)×(−µr
r3
)=µ
r3 [r× (r× r)]
oder, da a× (b× c) = b · (a · c)− c · (a · b),
c× r =µ
r3 [r · (r · r)− r · (r · r)] =µ
r3
[rrr− rr2] =
µrrr2 −
µrr
=ddt
(−µr
r
).
Wegen c = const gilt aber auch
c× r =ddt
(c× r)
und somit
c× r + µrr
= const ≡ −µe.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.5. Laplace-Integral6.5. Laplace-Integral
c× r + µrr
= const ≡ −µe. (4)
Dies ist das Laplace-Integral und e ist der Laplace-Vektor.
Haben wir jetzt 7 Integrationskonstanten?
Nein! Der Laplace-Vektor ist nicht ganz unabhangig von den vorigenIntegralen:
c · e = 0
und
µ2(e2 − 1) = hc2 (c = |c| und e = |e|).
Es sind also bisher 5 Konstanten. Die sechste ist die Position entlang der Bahnzu einem fixen Zeitpunkt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.5. Laplace-Integral6.5. Laplace-Integral
c× r + µrr
= const ≡ −µe. (4)
Dies ist das Laplace-Integral und e ist der Laplace-Vektor.
Haben wir jetzt 7 Integrationskonstanten?
Nein! Der Laplace-Vektor ist nicht ganz unabhangig von den vorigenIntegralen:
c · e = 0
und
µ2(e2 − 1) = hc2 (c = |c| und e = |e|).
Es sind also bisher 5 Konstanten. Die sechste ist die Position entlang der Bahnzu einem fixen Zeitpunkt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.5. Laplace-Integral6.5. Laplace-Integral
c× r + µrr
= const ≡ −µe. (4)
Dies ist das Laplace-Integral und e ist der Laplace-Vektor.
Haben wir jetzt 7 Integrationskonstanten?
Nein! Der Laplace-Vektor ist nicht ganz unabhangig von den vorigenIntegralen:
c · e = 0
und
µ2(e2 − 1) = hc2 (c = |c| und e = |e|).
Es sind also bisher 5 Konstanten. Die sechste ist die Position entlang der Bahnzu einem fixen Zeitpunkt.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
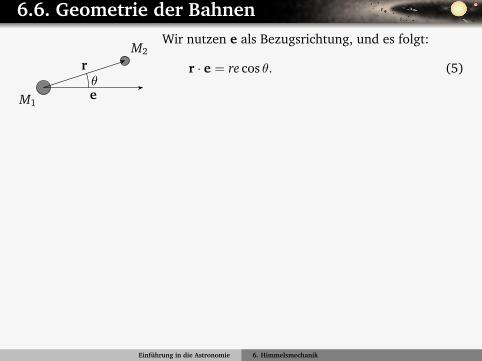
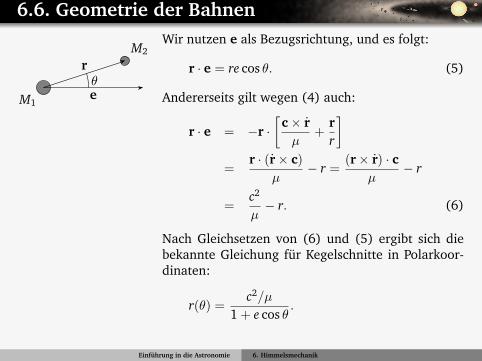
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]
=r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r.
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]
=r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r.
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]
=r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r.
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]=
r · (r× c)
µ− r
=(r× r) · c
µ− r
=c2
µ− r.
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]=
r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r.
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]=
r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r. (6)
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
M1
M2
r
eθ
Wir nutzen e als Bezugsrichtung, und es folgt:
r · e = re cos θ. (5)
Andererseits gilt wegen (4) auch:
r · e = −r ·[
c× rµ
+rr
]=
r · (r× c)
µ− r =
(r× r) · cµ
− r
=c2
µ− r. (6)
Nach Gleichsetzen von (6) und (5) ergibt sich diebekannte Gleichung fur Kegelschnitte in Polarkoor-dinaten:
r(θ) =c2/µ
1 + e cos θ.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a a e
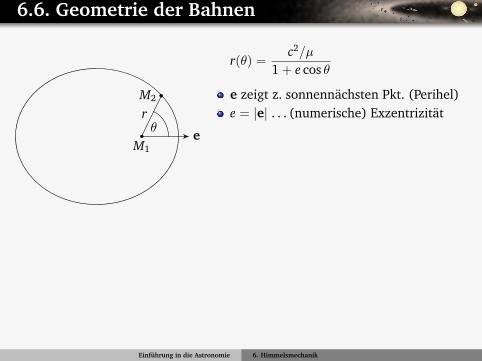
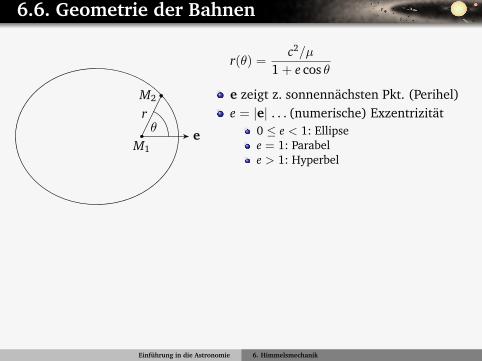
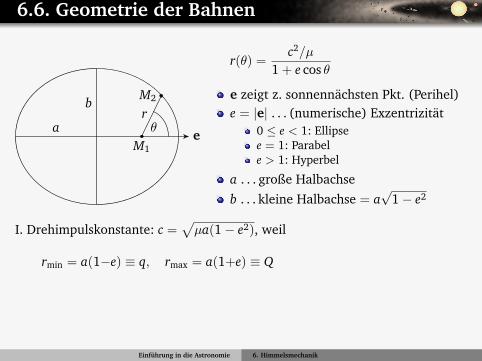
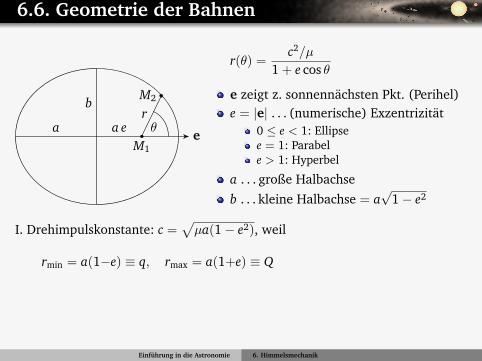
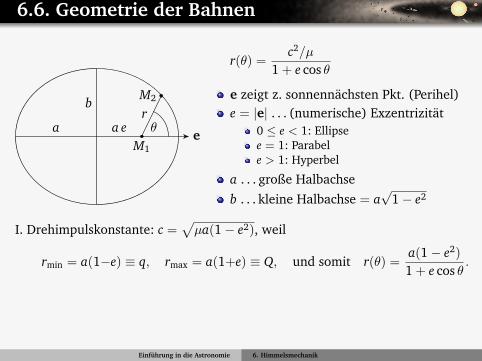
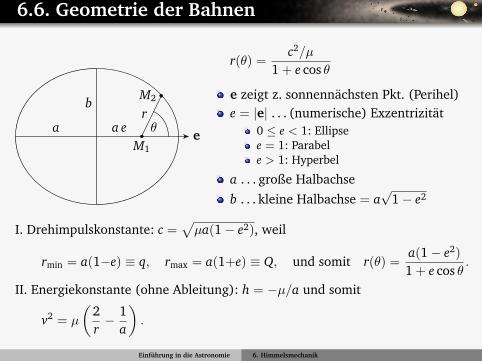
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q
, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a a e
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q
, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a
a e
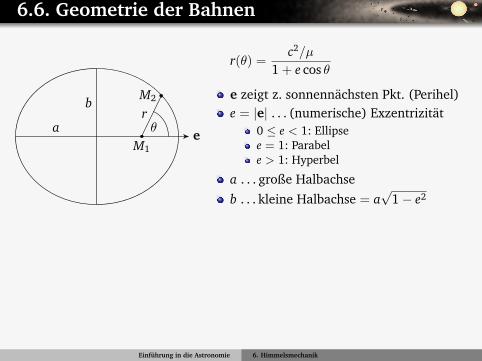
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q
, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a
a e
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q
, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a a e
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q
, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a a e
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.6. Geometrie der Bahnen6.6. Geometrie der Bahnen
e
M2
θr
M1
b
a a e
r(θ) =c2/µ
1 + e cos θ
e zeigt z. sonnennachsten Pkt. (Perihel)e = |e| . . . (numerische) Exzentrizitat
0 ≤ e < 1: Ellipsee = 1: Parabele > 1: Hyperbel
a . . . große Halbachse
b . . . kleine Halbachse = a√
1− e2
I. Drehimpulskonstante: c =√µa(1− e2), weil
rmin = a(1−e) ≡ q, rmax = a(1+e) ≡ Q, und somit r(θ) =a(1− e2)
1 + e cos θ.
II. Energiekonstante (ohne Ableitung): h = −µ/a und somit
v2 = µ
(2r− 1
a
).
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
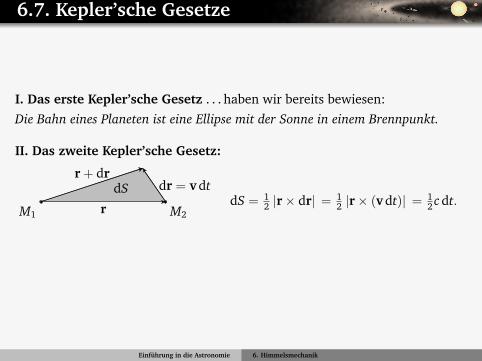
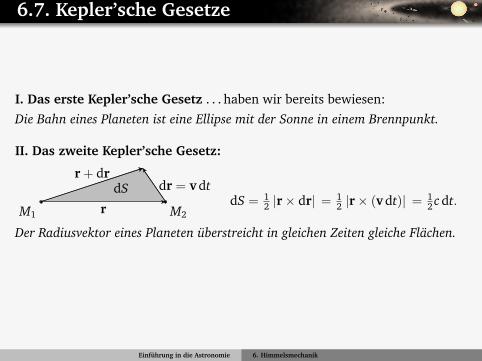
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
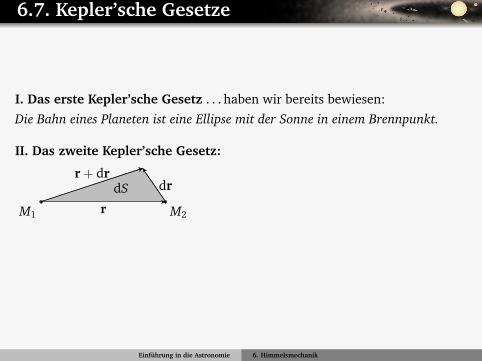
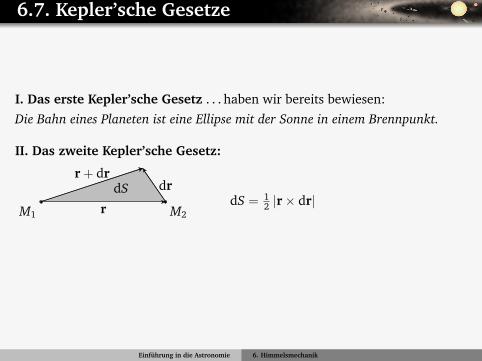
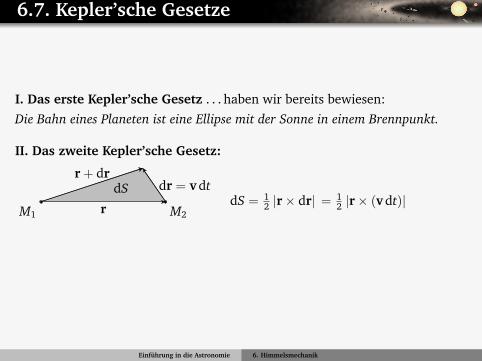
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr
= v dt
dS = 12 |r× dr|
= 12 |r× (v dt)| = 1
2 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr
= v dtdS = 1
2 |r× dr|
= 12 |r× (v dt)| = 1
2 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr
= v dt
dS = 12 |r× dr|
= 12 |r× (v dt)| = 1
2 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr = v dtdS = 1
2 |r× dr| = 12 |r× (v dt)|
= 12 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr = v dtdS = 1
2 |r× dr| = 12 |r× (v dt)| = 1
2 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
I. Das erste Kepler’sche Gesetz . . . haben wir bereits bewiesen:
Die Bahn eines Planeten ist eine Ellipse mit der Sonne in einem Brennpunkt.
II. Das zweite Kepler’sche Gesetz:
M1 M2
r + dr
r
dS dr = v dtdS = 1
2 |r× dr| = 12 |r× (v dt)| = 1
2 c dt.
Der Radiusvektor eines Planeten uberstreicht in gleichen Zeiten gleiche Flachen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt
= 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ
=4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP
= 12
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ
=4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ
=4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ
=4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ
=4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ=
4π2
G(M1 + M2)
≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ=
4π2
G(M1 + M2)≈ 4π2
GM1
(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ=
4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.7. Kepler’sche Gesetze6.7. Kepler’sche Gesetze
III. Das dritte Kepler’sche Gesetz:
Integration von dS uber eine volle Umlaufperiode P:
S = 12
P∫0
c dt = 12 cP = 1
2
√µa(1− e2)P.
Andererseits gilt fur die Flache einer Ellipse
S = πab = πa2√
1− e2.
Nach Gleichsetzen, Quadrieren und Umformen folgt
P2
a3 =4π2
µ=
4π2
G(M1 + M2)≈ 4π2
GM1(→ fur alle Planeten gleich).
Die Quadrate der Umlaufzeiten zweier Planeten verhalten sich wie die drittenPotenzen ihrer großen Halbachsen.
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
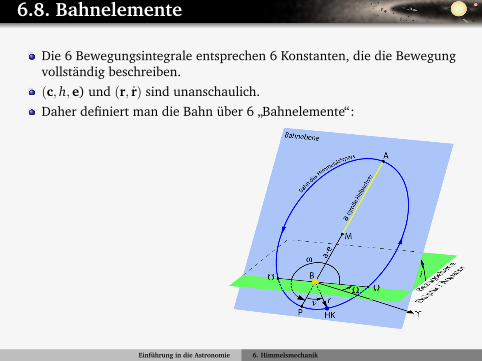
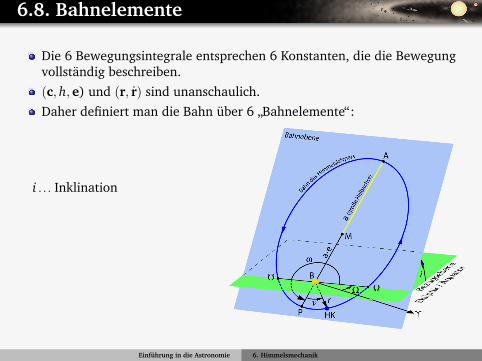
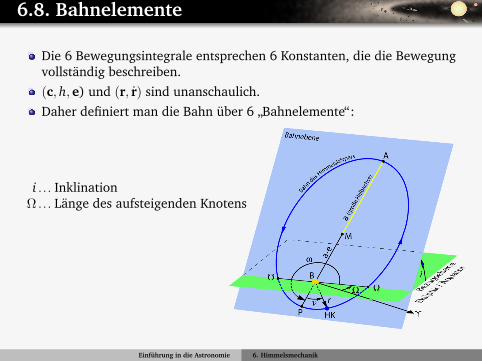
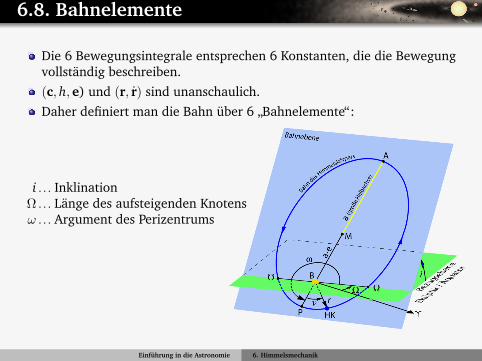
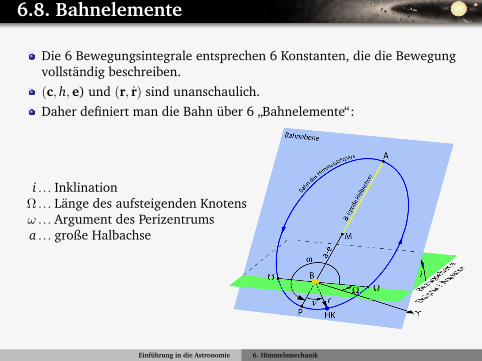
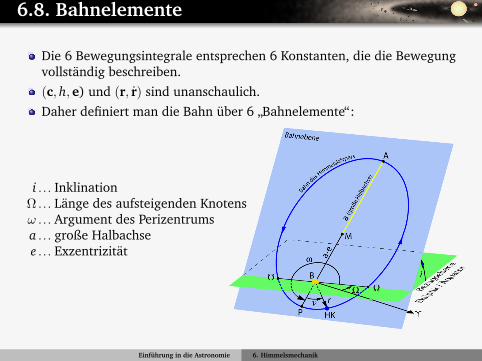
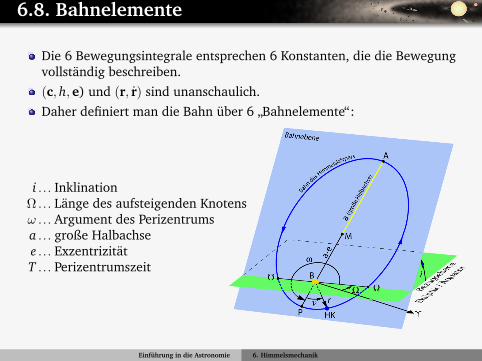
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . Inklination
Ω . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotens
ω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrums
a . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachse
e . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . Exzentrizitat
T . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik
6.8. Bahnelemente6.8. Bahnelemente
Die 6 Bewegungsintegrale entsprechen 6 Konstanten, die die Bewegungvollstandig beschreiben.
(c, h, e) und (r, r) sind unanschaulich.
Daher definiert man die Bahn uber 6”Bahnelemente“:
i . . . InklinationΩ . . . Lange des aufsteigenden Knotensω . . . Argument des Perizentrumsa . . . große Halbachsee . . . ExzentrizitatT . . . Perizentrumszeit
Einfuhrung in die Astronomie 6. Himmelsmechanik


















