
7.11. Extrema unter Nebenbedingungen - IAZDerne/Mathematik2/dateien/maple/MB_7_11.pdf · Methode 2:...
14
7.11. Extrema unter Nebenbedingungen Randextrema Wir haben schon bemerkt, daß die üblichen Tests mit Hilfe von (eventuell höheren) Ableitungen nur Kriterien für (lokale) Extrema im Inneren des Definitionsgebietes liefern. Wie verfährt man, um Extrema zu bestimmen, die auf dem Rand liegen? Diese Aufgabe gliedert sich in zwei Teile: 1. Auf dem Rand liegende Punkte bestimmen, die dort maximal oder minimal sind (Extrema unter der Nebenbedingung, auf dem Rand zu liegen). 2. Durch Vergleich mit den Punkten im Inneren prüfen, ob es sich um lokale oder globale Extrema der Funktion handelt. Beispiel 1: Zweidimensionale Differenz von Sinusfunktionen Betrachten wir die auf den ersten Blick recht simpel erscheinende Funktion = ( ) f , xy - ( ) sin x ( ) sin y auf dem quadratischen Definitionsbereich Q = [-2, 2] [-2, 2] aller Punkte (x,y) , deren Koordinaten beide zwischen -2 und 2 liegen.
Transcript of 7.11. Extrema unter Nebenbedingungen - IAZDerne/Mathematik2/dateien/maple/MB_7_11.pdf · Methode 2:...
7.11. Extrema unter NebenbedingungenRandextrema
Wir haben schon bemerkt, daß die üblichen Tests mit Hilfe von (eventuell höheren) Ableitungen nur Kriterien für (lokale) Extrema im Inneren des Definitionsgebietes liefern. Wie verfährt man, um Extrema zu bestimmen, die auf dem Rand liegen?
Diese Aufgabe gliedert sich in zwei Teile:
1. Auf dem Rand liegende Punkte bestimmen, die dort maximal oder minimal sind (Extrema unter der Nebenbedingung, auf dem Rand zu liegen).
2. Durch Vergleich mit den Punkten im Inneren prüfen, ob es sich um lokale oder globale Extrema der Funktion handelt.
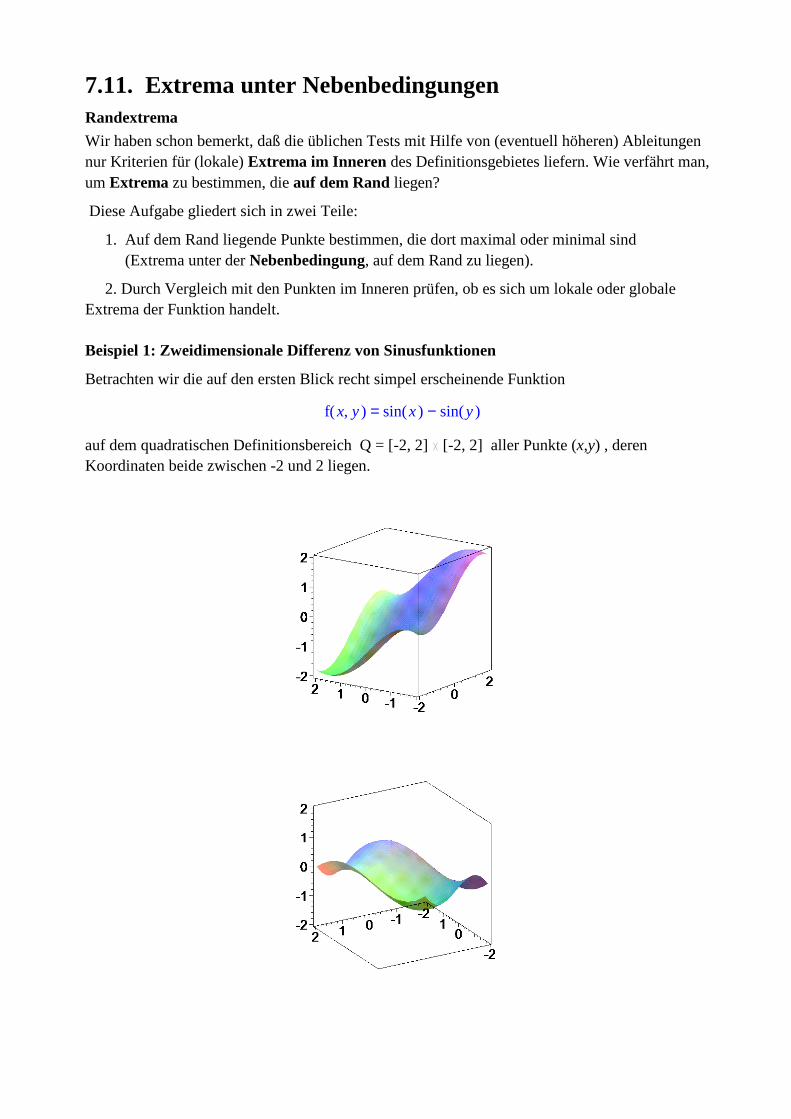
Beispiel 1: Zweidimensionale Differenz von Sinusfunktionen
Betrachten wir die auf den ersten Blick recht simpel erscheinende Funktion
= ( )f ,x y − ( )sin x ( )sin y
auf dem quadratischen Definitionsbereich Q = [-2, 2] [-2, 2] aller Punkte (x,y) , deren Koordinaten beide zwischen -2 und 2 liegen.

Das Bild läßt mehrere lokale Maxima und Minima (darunter je ein globales) sowie einige Sattelpunkte erkennen. Wir wollen die entsprechenden Punkte rechnerisch bestimmen. Die stationären Punkte im Inneren
sind die Lösungen des Gleichungssystems
= ∂∂x
( )f ,x y ( )cos x = 0 , = ∂∂y
( )f ,x y − ( )cos y = 0 .
Dieses Gleichungssystem hat in jedem Quadranten innerhalb von Q genau eine Lösung:
, = xπ2
= yπ2
, = x −π2
= yπ2
, = x −π2
= y −π2
, = xπ2
= y −π2
Um zu sehen, ob es sich um lokale Extrema oder Sattelpunkte handelt, prüfen wir die zweiten Ableitungen:
= ( )Hf ,x y
− ( )sin x 00 ( )sin y
,
k(x,y) = -sin(x), = ( )d ,x y − ( )sin x ( )sin y ,
=
d ,
π2
π2
−1 < 0 ,
=
d ,−
π2
π2
1 > 0 , =
k ,−
π2
π2
1 > 0 ,
=
d ,−
π2
−π2
−1 < 0 ,
=
d ,
π2
−π2
1 > 0 , =
k ,
π2
−π2
−1 < 0 .

Ergebnis:
Sattelpunkte in der Höhe 0: (π2
, π2
) und (−π2
, −π2
) ,
lokales Minimum -2 bei (−π2
, π2
) ,
lokales Maximum 2 bei (π2
, −π2
) .
Da die Sinusfunktion nur Werte zwischen -1 und 1 annimmt, handelt es sich sogar um ein globales Minimum bzw. Maximum! Punkte auf den Rändern
Der rechte Rand wird in unserem Beispiel beschrieben durch
x = 2 , y = -2 ... 2 , = ( )f ,2 y − ( )sin 2 ( )sin y ,
= d
d
y( )f ,2 y − ( )cos y = 0 <=> = y −
π2
oder = yπ2
Kurze Rechnung (2. Ableitung prüfen!) ergibt:
Lokale Maxima: + ( )sin 2 1 bei (2, −π2
), 0 bei (2, 2) (rechte hintere Ecke)
Lokale Minima: − ( )sin 2 1 bei (2, π2
) , 2 ( )sin 2 bei (2, -2) (rechte vordere Ecke)
Dies gilt aber nur bei Beschränkung auf die rechte Randkurve! Die beiden lokalen Maxima der Randkurve sind in Wirklichkeit keine lokalen Maxima der Gesamtfunktion f (d.h. der durch sie beschriebenen Fläche). Das sieht man, wenn man die partielle Ableitung nach x bildet:
= ∂∂x
( )f ,x y ( )cos x = ( )cos 2 < 0 für = x 2 .
Die Funktion ist also bei Annäherung an den rechten Rand stets monoton fallend. Insbesondere kann kein Punkt auf dem rechten Rand ein lokales Maximum sein!
Aus dem gleichen Grund hat die Funktion in den anderen beiden Punkten tatsächlich lokale Minima:
− ( )sin 2 1 in (2,π2
) und 2 ( )sin 2 in (2,-2).
Beides sind keine globalen Minima, da es Minima in der Höhe -2 gibt (siehe oben).
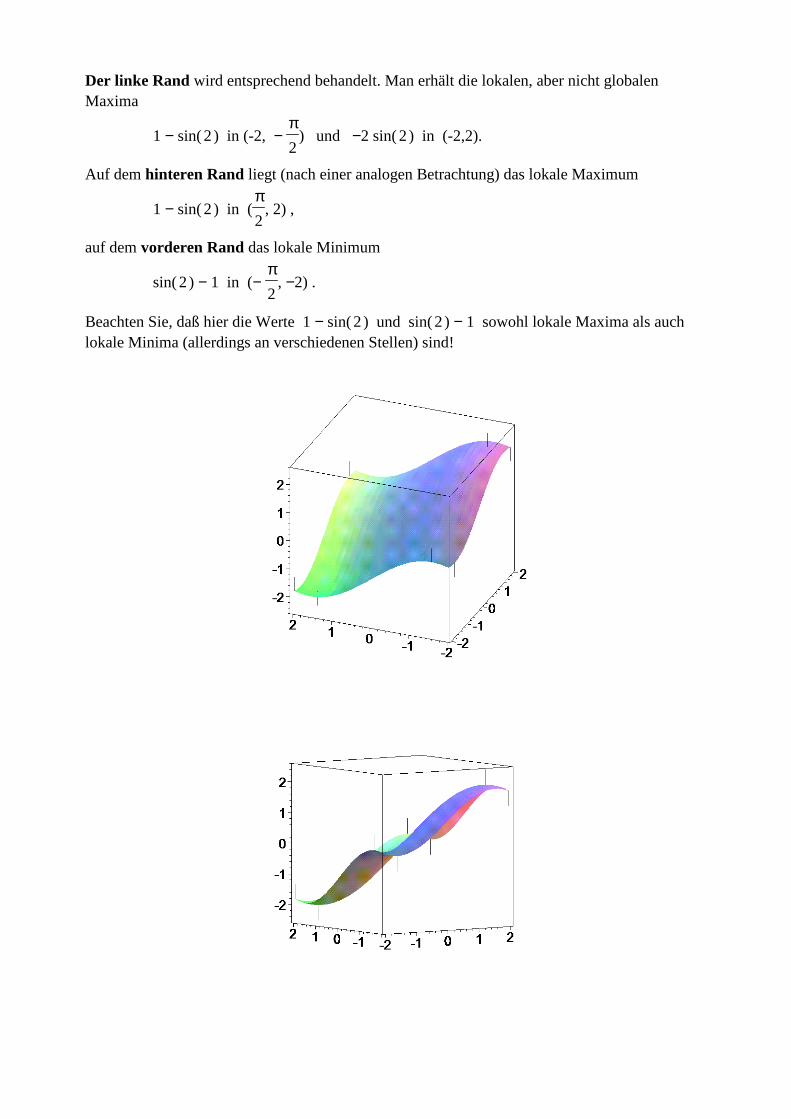
Der linke Rand wird entsprechend behandelt. Man erhält die lokalen, aber nicht globalen Maxima
− 1 ( )sin 2 in (-2, −π2
) und −2 ( )sin 2 in (-2,2).
Auf dem hinteren Rand liegt (nach einer analogen Betrachtung) das lokale Maximum
− 1 ( )sin 2 in ( ,π2
2) ,
auf dem vorderen Rand das lokale Minimum
− ( )sin 2 1 in ( ,−π2
−2) .
Beachten Sie, daß hier die Werte − 1 ( )sin 2 und − ( )sin 2 1 sowohl lokale Maxima als auch lokale Minima (allerdings an verschiedenen Stellen) sind!
Gleichungen oder Ungleichungen
beschreiben häufig gewisse eingeschränkte Bereiche, innerhalb derer Extrema einer mehrdimensionalen Funktion gesucht sind. Man hat also z.B. die Extrema einer Funktion
( )f ,x y
unter einer oder mehreren Nebenbedingungen der Form = ( )g ,x y 0
zu bestimmen. Entsprechendes gilt für Funktionen in drei und mehr Variablen.
Eine typische Aufgabe dieser Art ist es, höchste und tiefste Punkte eines Weges über ein Funktionsgebirge zu berechnen.
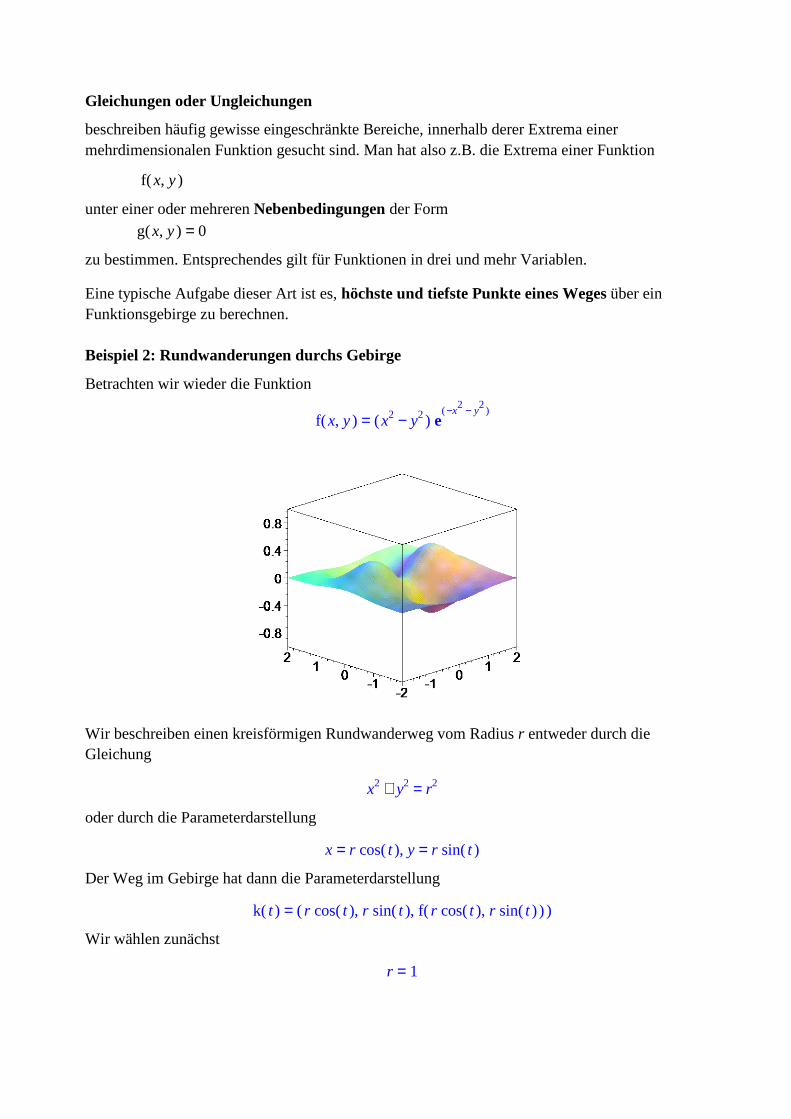
Beispiel 2: Rundwanderungen durchs Gebirge
Betrachten wir wieder die Funktion
= ( )f ,x y ( ) − x2 y2 e( )− − x
2y2
Wir beschreiben einen kreisförmigen Rundwanderweg vom Radius r entweder durch die Gleichung
= + x2 y2 r2
oder durch die Parameterdarstellung
, = x r ( )cos t = y r ( )sin t
Der Weg im Gebirge hat dann die Parameterdarstellung
= ( )k t ( ), ,r ( )cos t r ( )sin t ( )f ,r ( )cos t r ( )sin t
Wir wählen zunächst
= r 1
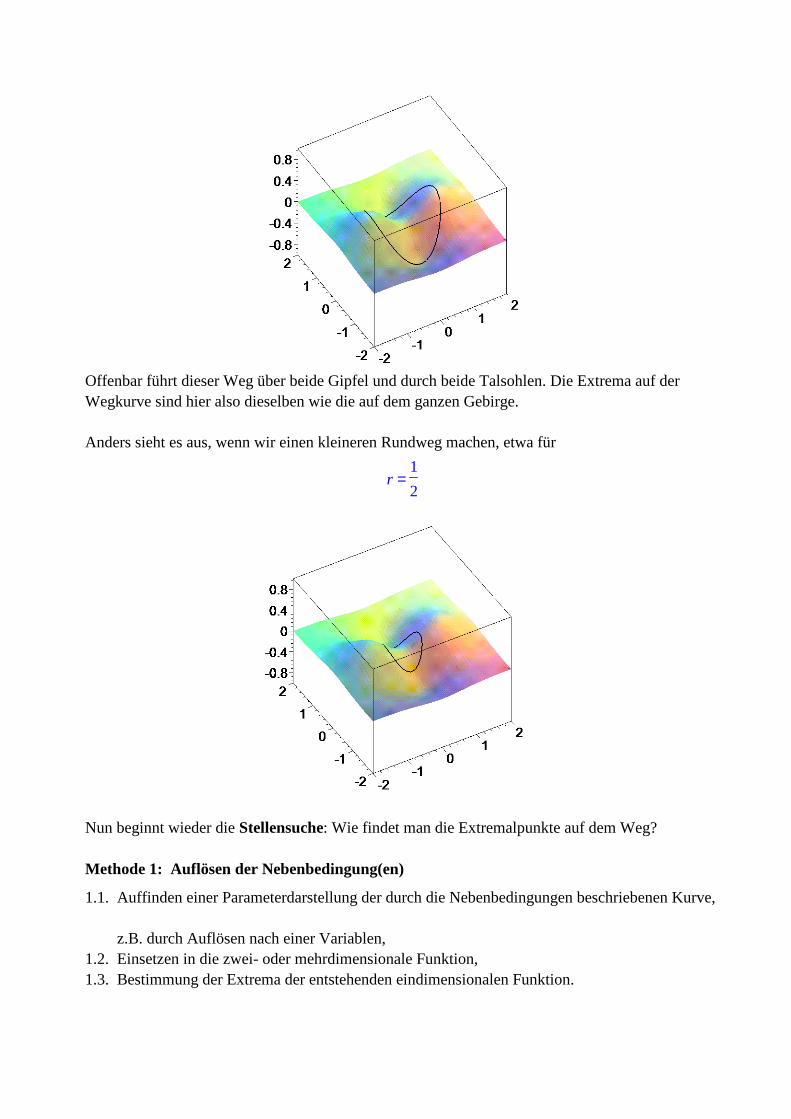
Offenbar führt dieser Weg über beide Gipfel und durch beide Talsohlen. Die Extrema auf der Wegkurve sind hier also dieselben wie die auf dem ganzen Gebirge.
Anders sieht es aus, wenn wir einen kleineren Rundweg machen, etwa für
= r1
2
Nun beginnt wieder die Stellensuche: Wie findet man die Extremalpunkte auf dem Weg? Methode 1: Auflösen der Nebenbedingung(en)
1.1. Auffinden einer Parameterdarstellung der durch die Nebenbedingungen beschriebenen Kurve, z.B. durch Auflösen nach einer Variablen, 1.2. Einsetzen in die zwei- oder mehrdimensionale Funktion,1.3. Bestimmung der Extrema der entstehenden eindimensionalen Funktion.
In unserem Beispiel:
= ( )f ,x y ( ) − x2 y2 e( )− − x
2y2
= ( )f ,r ( )cos t r ( )sin t r2 ( ) − 2 ( )cos t 2 1 e( )−r
2
Ableitung nach t :
= ∂∂t
( )f ,r ( )cos t r ( )sin t −4 r2 e( )−r
2
( )cos t ( )sin t
Lösen der Gleichung
= −4 r2 e( )−r
2
( )cos t ( )sin t 0
liefert im Falle ≠ r 0 für t mit ≤ 0 t < 2π die Werte
, , , = t 0π2
π3 π2
bzw. in kartesischen Koordinaten:
, , , = x r 0 −r 0
, , , = y 0 r 0 −r
und die zugehörigen Funktionswerte
, , , = ( )f ,r 0 r2 e( )−r
2
= ( )f ,0 r r2 e( )−r
2
= ( )f ,−r 0 −r2 e( )−r
2
= ( )f ,0 −r −r2 e( )−r
2
Falls eine Auflösung der Nebenbedingung kompliziert oder sogar mit elementaren Mitteln unmöglich ist, bietet sich an:
Methode 2: Lagrange-Parameter (oder Lagrange-Multiplikatoren)
Es sei f die unter den durch stetig differenzierbare Funktionen gj gegebenen Nebenbedingungen
= g1 0 , ... , = gk 0
zu maximierende bzw. minimierende Funktion in n Variablen x1, ... , xn .
2.1. Bilde die Lagrange-Funktion L = f + λ1 g1 + ... + λk gk (mit den Parametern λ1 , ... , λk) .
2.2. Berechne deren partielle Ableitungen nach den Variablen xi und λj und setze sie gleich 0.
2.3. Löse das entstehende System von + n k Gleichungen in + n k Unbekannten.
Im allgemeinen ist das kein lineares Gleichungssystem! Unter den Lösungen befinden sich die Stellen, an denen Extrema unter den gegebenen Nebenbedingungen liegen (siehe Anhang).
Wie man dann die tatsächlichen Extrema herausfiltert, ist ein ganz anderes (eventuell hartes) Problem.
Die Ableitung nach den Parametern kann man sich natürlich sparen: Es kommen genau die Nebenbedingungen heraus!
In unserem Beispiel machen wir den Ansatz

= ( )L , ,x y λ + ( ) − x2 y2 e( )− − x
2y2
λ ( ) + − x2 y2 r2
Nullstellensuche für die drei partiellen Ableitungen nach x, y und λ ergibt das Gleichungssystem
= − + 2 x e( )− − x
2y2
2 ( ) − x2 y2 x e( )− − x
2y2
2 λ x 0
= − − + 2 y e( )− − x
2y2
2 ( ) − x2 y2 y e( )− − x
2y2
2 λ y 0
= + − x2 y2 r2 0
Der Fall = x 0 führt auf die Lösungen = y r und = y −r. Umgekehrt führt = y 0 auf die Lösungen = x r und = x −r . Nach Division der ersten Gleichung durch 2x und der zweiten durch 2y bleiben die Gleichungen
= − + + e( )− − x
2y2
e( )− − x
2y2
x2 e( )− − x
2y2
y2 λ 0
= − − + + e( )− − x
2y2
e( )− − x
2y2
x2 e( )− − x
2y2
y2 λ 0
= + − x2 y2 r2 0
Subtraktion der zweiten von der ersten Gleichung ergibt
= 2 e( )− − x
2y2
0
was keine weiteren Lösungen besitzt, da die Exponentialfunktion nur positive Werte annimmt. Wir gelangen also zum gleichen Ergebnis, allerdings auf einem mühsameren Weg. Manchmal ist die zweite Methode aber die einfachere oder sogar die einzig sinnvolle!
Beispiel 3: Nochmals ein Eierbecher
Zu dem Rotationsparaboloid
= ( )f ,x y + x2 y2
stellen wir eine Nebenbedingung in Form einer Ellipsengleichung
= + x2
a2
y2
b21
bzw.
= + − b2 x2 a2 y2 a2 b2 0
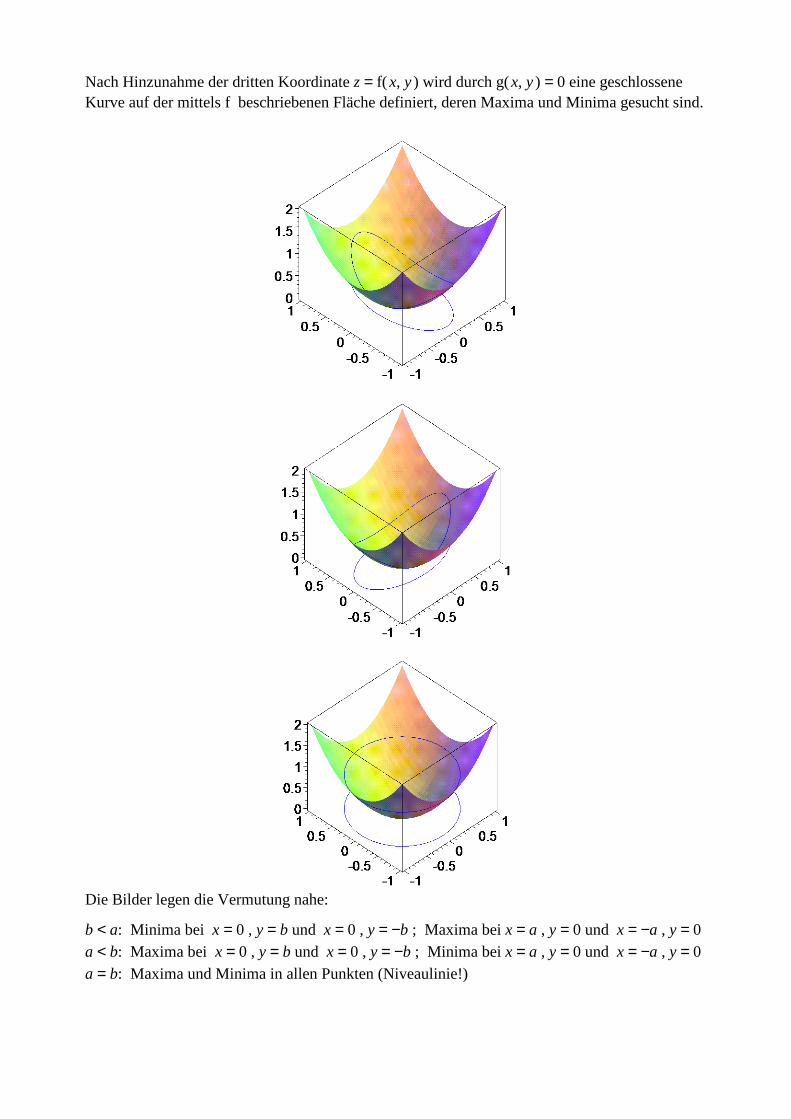
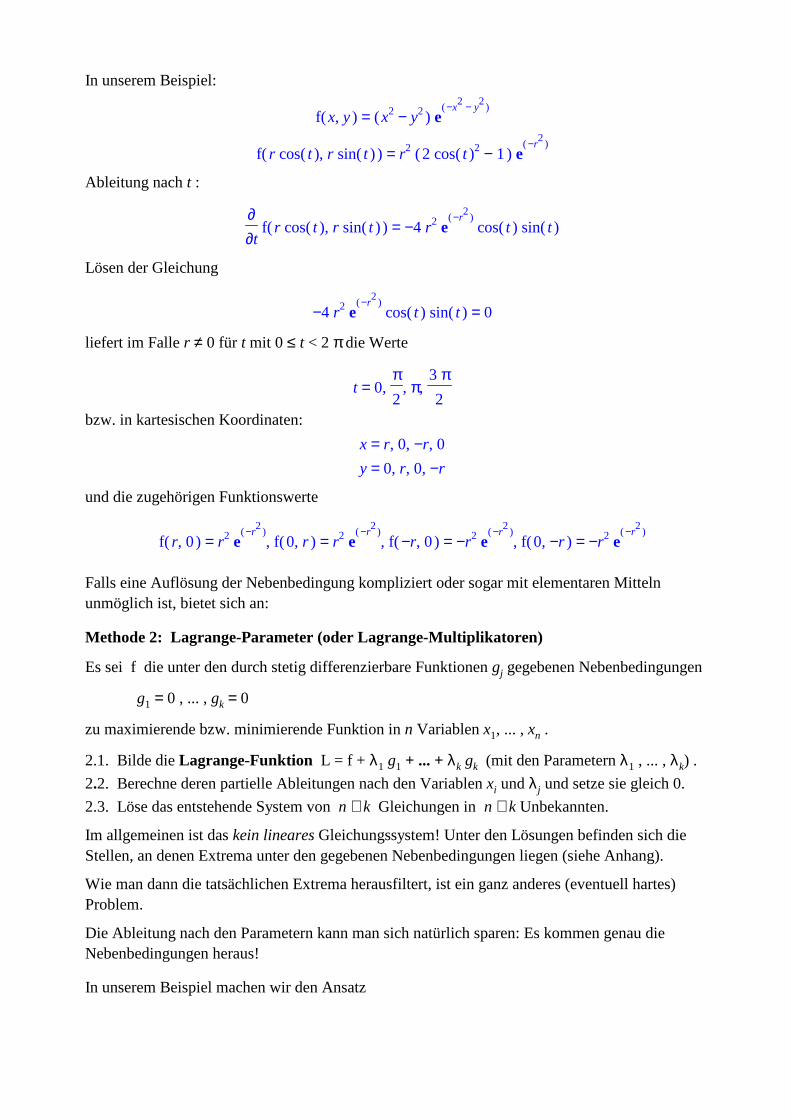
Nach Hinzunahme der dritten Koordinate = z ( )f ,x y wird durch = ( )g ,x y 0 eine geschlossene Kurve auf der mittels f beschriebenen Fläche definiert, deren Maxima und Minima gesucht sind.
Die Bilder legen die Vermutung nahe:
< b a: Minima bei = x 0 , = y b und = x 0 , = y −b ; Maxima bei = x a , = y 0 und = x −a , = y 0 < a b: Maxima bei = x 0 , = y b und = x 0 , = y −b ; Minima bei = x a , = y 0 und = x −a , = y 0 = a b: Maxima und Minima in allen Punkten (Niveaulinie!)

Methode 1: Auflösen der Nebenbedingung
nach y ergibt zunächst die beiden Kurvenäste
, = y− + + b2 x2 a2 b2 1
a = y −
− + + b2 x2 a2 b2 1
a
und Einsetzen der Auflösung = y ( )h x in die Funktion f führt in beiden Fällen auf
= ( )f ,x ( )h x +
− 1
b2
a2x2 b2
also
für < b a eine nach oben offene Parabel, Minimum bei = x 0, Randmaxima bei = x −a und = x a , für < a b eine nach unten offene Parabel, Maximum bei = x 0, Randminima bei = x −a und = x a ,
für = a b die Konstante b2 .
Damit haben wir auch rechnerisch die an den Schaubildern abgelesenen Werte bekommen.
Methode 2: Lagrange-Multiplikator
λ multipliziert mit der Nebenbedingungs-Funktion g und addiert zur Flächenfunktion f ergibt
= ( )L , ,x y λ + + x2 y2 λ ( ) + − b2 x2 a2 y2 a2 b2
Ableiten nach ,x y und λ führt auf das Gleichungssystem
= + 2 x 2 λ b2 x 0
= + 2 y 2 λ a2 y 0
= + − b2 x2 a2 y2 a2 b2 0
Für = x 0 muß wegen der dritten Gleichung = y b oder = y −b sein. Analog finden wir die Lösungen = y 0 und = x a oder = x −a. In allen anderen Fällen ist weder x noch y Null, und wir dürfen die erste Gleichung durch 2x, die zweite durch 2y dividieren. Es folgt
= λ a2 λ b2 = −1, also = a b (beide als positiv vorausgesetzt).
Damit ergeben sich genau die gleichen Extremalstellen wie nach Methode 1.
Erheblich komplizierter wird es, wenn wir die Ellipse drehen, z.B. um π4
:
= + ( ) + x y 2
a2
( ) − x y 2
b21
bzw.
= + − b2 ( ) + x y 2 a2 ( ) − x y 2 a2 b2 0

Versuchen Sie es mit Methode 1: Auflösen nach y ergibt den Kurvenast
= y − + a2 x b2 x a b + − a2 b2 4 x2
+ a2 b2
und einen zweiten mit der negativen Wurzel. Dieser Ansatz führt auf eine heillose Rechnerei! Lassen wir das und gehen wir lieber gleich zu
Methode 2:
= ( )L , ,x y λ + + x2 y2 λ
+ −
( ) + x y 2
a2
( ) − x y 2
b21
Nullstellensuche für die partiellen Ableitungen nach ,x y und λ führt auf
= + 2 x λ
+
2 ( ) + x y
a2
2 ( ) − x y
b20
= + 2 y λ
−
2 ( ) + x y
a2
2 ( ) − x y
b20
= + − ( ) + x y 2
a2
( ) − x y 2
b21 0
Subtraktion der zweiten von der ersten Gleichung ergibt nach Multiplikation mit b2
2 und
Ausklammern von − x y:
= ( ) + b2 2 λ ( ) − x y 0
also ist entweder = x y = a
2 oder = x y = −
a
2 (wegen der dritten Gleichung), oder es ist
= λ −b2
2 , was eingesetzt in die Summe der ersten und zweiten Gleichung auf
=
− 1
b2
a2( ) + x y 0
führt, und hier sind die Lösungen = x −y = b
2 und = x −y = −
b
2 (wegen der dritten Gleichung), es
sei denn, a ist gleich b .
Lassen wir zur Kontrolle MAPLE das Gleichungssystem für ,x y und λ lösen! Die Antwort ist
{ }, , = ya
2 = λ −
a2
2 = x
a
2{ }, , = y −
a
2 = λ −
a2
2 = x −
a
2{ }, , = λ −
b2
2 = y
b
2 = x −
b
2, , ,
{ }, , = λ −b2
2 = y −
b
2 = x
b
2 Die Extremalpunkte sind also:
, , , , , , = xa
2 = y
a
2 = ( )f ,x y
a2
2bzw = x −
a
2 = y −
a
2 = ( )f ,x y
a2
2
, , , , , , = xb
2 = y −
b
2 = ( )f ,x y
b2
2bzw = x −
b
2 = y
b
2 = ( )f ,x y
b2
2
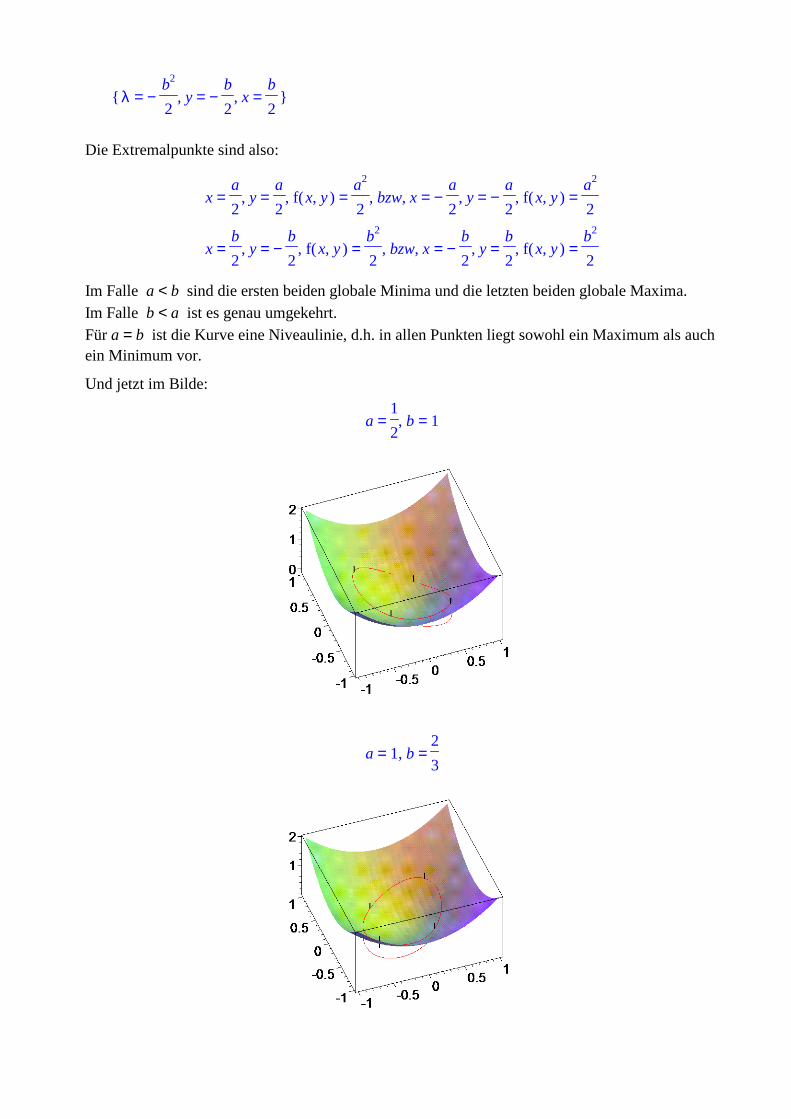
Im Falle < a b sind die ersten beiden globale Minima und die letzten beiden globale Maxima.Im Falle < b a ist es genau umgekehrt. Für = a b ist die Kurve eine Niveaulinie, d.h. in allen Punkten liegt sowohl ein Maximum als auch ein Minimum vor.
Und jetzt im Bilde:
, = a1
2 = b 1
, = a 1 = b2
3

Anhang: Implizite Funktionen
Schon mehrfach ist uns das Problem begegnet, eine implizit durch eine oder mehrere Gleichungen gegebene Kurve oder Fläche durch explizite Parameterdarstellungen zu beschreiben - mit anderen Worten: die Gleichung(en) aufzulösen. Obwohl das in vielen Fällen nicht geht oder zumindest enorm schwierig werden kann, gibt einen interessanten Satz, der wenigstens eine Aussage über die Existenz einer Lösung (ohne konkrete Konstruktionsmethode) und über deren Ableitung macht, sofern die beteiligten Funktionen gute Differenzierbarkeitseigenschaften haben. Satz über implizite Funktionen
Ist eine Funktion f von einer Teilmenge A des Raumes Rn nach R stetig differenzierbar auf einer
Umgebung des inneren Punktes a = (a1, ..., an) und ist = ( )f a 0, aber die n-te partielle Ableitung
≠ ( )fxn
a 0, so ist die Gleichung = ( )f x 0 in folgendem Sinne bei a lokal nach xn auflösbar:
Es gibt eine Umgebung U von (a1, ..., a − n 1) in R − n 1 und eine Umgebung V von an in R, so daß das
Rechteck U x V ganz in A enthalten ist und ≠ ( )fxn
,u v 0 für alle ( ,u v) aus U x V gilt.
Weiter gibt es eine partiell differenzierbare Funktion g von U nach V mit
= ( )f ,u v 0 <=> = ( )g u v ,
und die partiellen Ableitungen von g lassen sich mit Hilfe derer von f berechnen:
= ( )gxi
u −( )fx
i,u v
( )fxn
,u v für = i 1, ..., − n 1.
Der mittlere Teil ist wieder eine Folge des Mittelwertsatzes, der letzte ergibt sich mit der Kettenregel! Der exakte Beweis ist allerdings recht technisch und soll hier übergangen werden. Anschaulich ist der Satz zumindest für = n 2 einleuchtend (einschließlich der Bedingung an die Ableitung, ohne die es sicher nicht geht: Falls die partielle Ableitung nach x2 verschwindet, liegt eine senkrechte Tangente vor):
Mit Hilfe dieses Satzes kann man nun erläutern, wann und warum das Verfahren mit den
Lagrange-Multiplikatoren zur Eingrenzung von Extremalstellen unter Nebenbedingungen
funktioniert. Wir beschränken uns auf den Fall einer einzigen Nebenbedingung und betrachten zwei stetig differenzierbare Funktionen f und g von einer Teilmenge des Rn nach R. Zu jeder
Extremalstelle a von f innerhalb der durch
= ( )g x 0
eingeschränkten Teilmenge des Definitionsbereichs gibt es unter der Voraussetzung
≠ ( )g´ a 0
eine Zahl λ (genannt Lagrange-Multiplikator ) mit
= + ( )f ´ a λ ( )g´ a 0.
Denn wir können (nach eventueller Variablenvertauschung) annehmen, daß die partielle Ableitung gx
nin a nicht verschwindet, und die Gleichung = ( )g x 0 lokal nach xn auflösen, d.h. ein h mit
g( ,u v) = 0 <=> h(u) = v
in einer Umgebung von a = (a1, ..., an) = ( ,b an) "finden". Hat f in a ein lokales Extremum auf der
durch = ( )g x 0 beschriebenen Menge, so ist das ein lokales Extremum der Funktion
fok(u) = ( )f ( )k u an der Stelle b = (a1, ..., a − n 1), wobei k(u) = (u, h(u)) gesetzt wurde.
Mit der Kettenregel berechnen wir nun für = i 1, ..., − n 1:
0 = ∂∂xi
( )fok b = ∑ = j 1
n
∂
∂xj
( )f ( )k b
∂
∂xi
( )kj b = +
∂
∂xi
( )f a
∂
∂xn
( )f a
∂
∂xi
( )h b ,
und nach dem Satz über implizite Funktionen (f durch g und g durch h ersetzen!) ist das gleich
∂∂xi
( )f a -
∂
∂xn
( )f a
∂
∂xi
( )g a / ∂∂xn
( )g a = +
∂
∂xi
( )f a λ
∂
∂xi
( )g a .
Für = i n ist die letzte Gleichungskette klar, und es folgt
= + ( )f ´ a λ ( )g´ a 0.
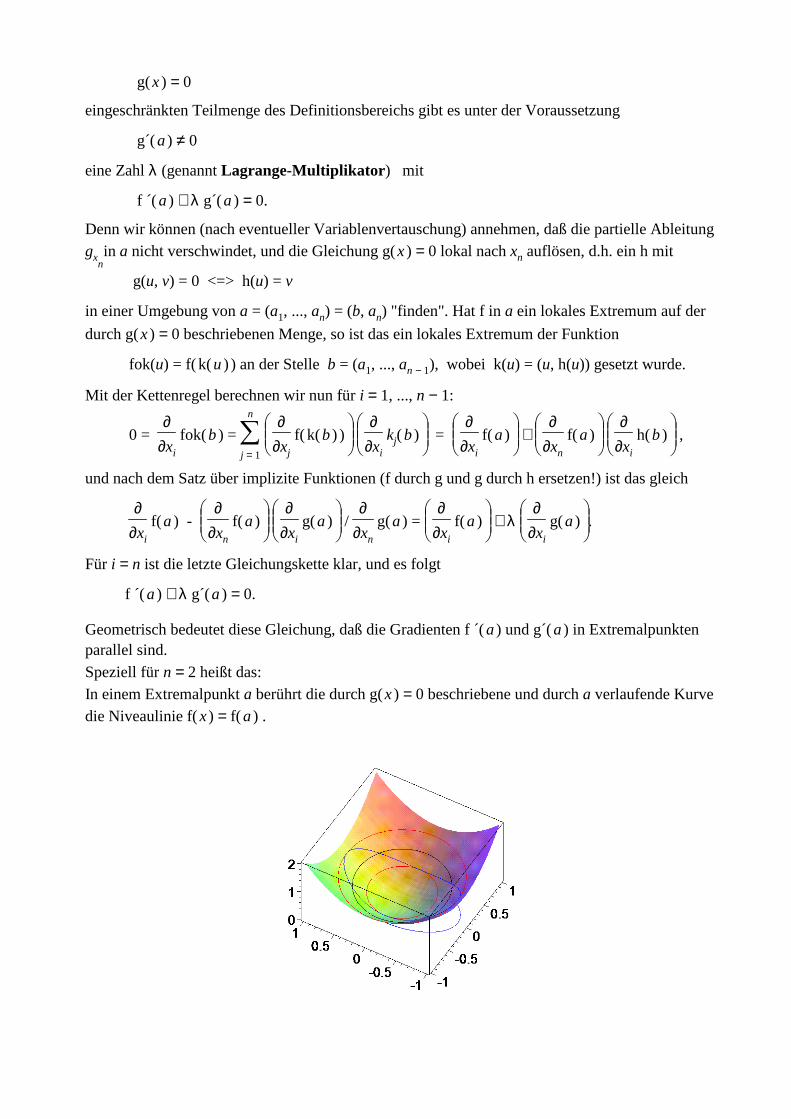
Geometrisch bedeutet diese Gleichung, daß die Gradienten ( )f ´ a und ( )g´ a in Extremalpunkten parallel sind. Speziell für = n 2 heißt das: In einem Extremalpunkt a berührt die durch = ( )g x 0 beschriebene und durch a verlaufende Kurve die Niveaulinie = ( )f x ( )f a .


















![t q]= dt L q,q ,t - physik.tu-freiberg.de · Bewegungsgleichung 4./5. Lösung durch Integration ... ungedämpfter harmonischer Oszillator (Federkraftschwinger) Nebenbedingungen y](https://static.fdokument.com/doc/165x107/5b9f33a609d3f204248cdc8e/t-q-dt-l-qq-t-bewegungsgleichung-45-loesung-durch-integration-ungedaempfter.jpg)