Adaptive Methoden zur Abbildung vom Sensorraum zur Aktion fileAdaptive Methoden zur Abbildung vom...
30
Adaptive Methoden zur Abbildung vom Sensorraum zur Aktion Verwendete Modelle: • Neuronale Netze – “Adaptive Linear Combinator” (ALC) – “Multi-Layer Perceptron” – “Functional Link Network” – “Radial Basis Functions” (RBF) – “Associative Memory Networks” (AMNs) – ... • Fuzzy-Controller – “Conventional Controller” (Mamdani-Typ) – “Function Approximator” - TSK-Modell – “Function Approximator” - B-Spline-Modell (*) Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 190
Transcript of Adaptive Methoden zur Abbildung vom Sensorraum zur Aktion fileAdaptive Methoden zur Abbildung vom...
Adaptive Methoden zur Abbildung vom Sensorraum zurAktion
Verwendete Modelle:
• Neuronale Netze
– “Adaptive Linear Combinator” (ALC)– “Multi-Layer Perceptron”– “Functional Link Network”– “Radial Basis Functions” (RBF)– “Associative Memory Networks” (AMNs)– ...
• Fuzzy-Controller
– “Conventional Controller” (Mamdani-Typ)– “Function Approximator” - TSK-Modell– “Function Approximator” - B-Spline-Modell (*)
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 190
Lernverfahren:
• Uberwachtes Lernen (*)
• Reinforcement-Lernen (*)
• Unuberwachtes-Lernen
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 191
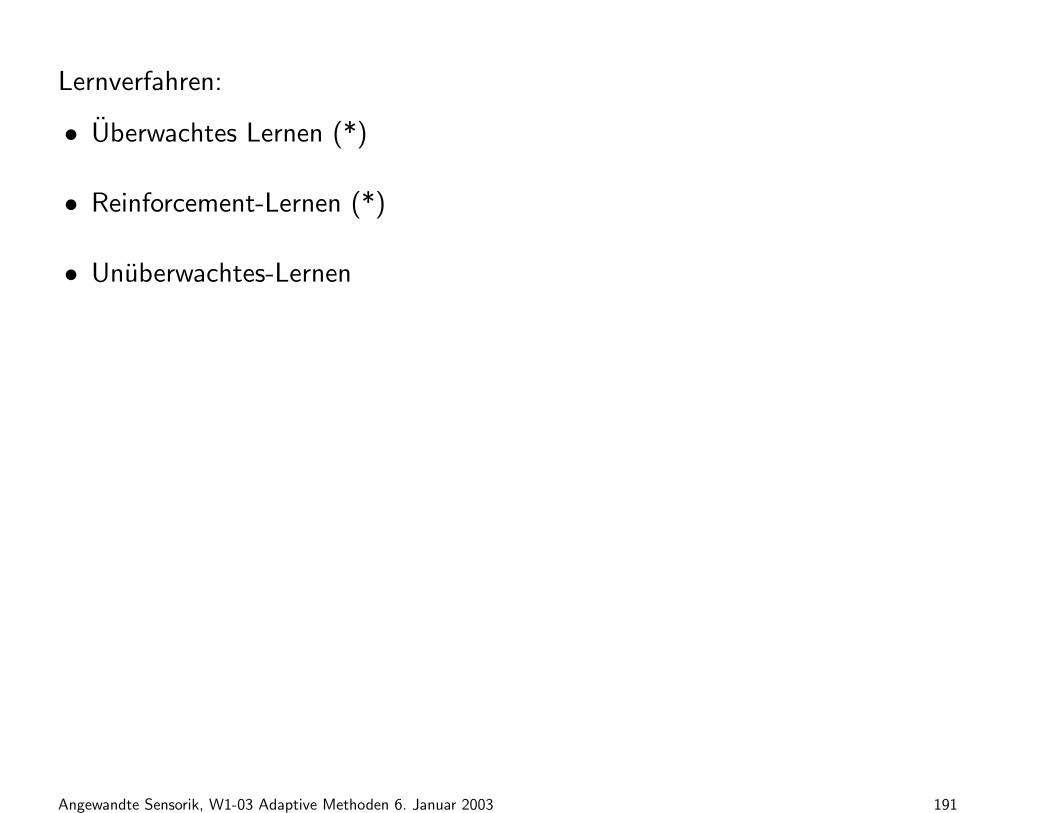
Ein Vergleich zwischen menschlichem Gehirn und Computer
Kriterium Gehirn Computer
Parallelitat hoch niedrigPrazision maßig hoch
Fehlertoleranz hoch niedrigSpeicherzugriff global lokal
numerische, prazise Berechnungen schlecht gutErkennung von Mustern gut schlecht
fehlerloses Speichern von Daten schlecht gutSelbstorganisation ja bisher nicht
Verallgemeinern von Beispielen gut schlecht
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 192
Why Fuzzy Logic for Control - I (E)
“The way we have to describe Nature is generally incomprehensive to us.”- Richard P. Feynman, “QED. The Strange Theory of Light and Matter”
“It should be possible to explain the laws of physics to a barmaid”.- Albert Einstein.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 193
Einfuhrung in die Fuzzy-Regelung
• ungenaue natursprachliche Abstufungen von Begriffen wie “groß, “schon”, “stark” ...
• menschliche Denk- und Verhaltensmodelle mit der einstufigen Logik:
��
� Autofahren: “Wenn-Dann”-Regeln
��
� Autoparken: genau auf den Millimeter?
• unscharfe Sprache statt numerischer Beschreibung:��
� bremse 2.52 m vor der Kurve
→ nur in Maschinesystemen��
� bremse kurz vor der Kurve
→ in naturlicher Sprache
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 194
Einfuhrung II
L.A. Zadehs principle of incompatibility :
“Stated informally, the essence of this principle is that as the complexity of a system
increases, our ability to make precise and yet significant statements about its behaviour
diminishes until a threshold is reached beyond which precision and significance (or relevance)
become almost mutually exclusive characteristics.”
Fuzzy: indistintive, vague, unclear.
Fuzzy-Mengen / Fuzzy-Logik als Mechanismus zur
• Abstraktion von unnotigen/zu komplexen Details,
• Behandlung von Problemen, die nicht einfach mit “ja” oder “nein” beantwortet werden
konnen,
• Modellierung von (“soft”) Konzepten ohne scharfe Grenzen.
• “Computing with words”.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 195
Charakteristische Funktion – Zugehorigkeitsfunktion
Scharfe Mengen lassen sich definieren durch Angabe ihrer charakteristischenFunktion:
µA(x) =
{1 furx ∈ A0 furx /∈ A,
(1)
wobei µA : X → {0, 1}.Fur Fuzzy-Mengen A verwendet man auch eine verallgemeinertecharakteristische Funktion µA, die jedem Element x ∈ X eine reelle Zahl aus[0, 1] zuordnet — den “Grad”, zu dem das Element x zur beschriebenenunscharfen Menge A gehort:
µA : X → [0, 1]
µA wird als Zugehorigkeitsfunktion (ZF) bezeichnet.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 196
Fuzzy-Menge
Eine Fuzzy-Menge A uber einem Universum X ist gegeben durch eineAbbildung µA : X → [0, 1]. Fur x ∈ X bezeichnet µA(x) den Grad derZugeorigkeit (des Enthaltenseins) von x in A.Als Tragermenge einer Fuzzy-Menge bezeichnet man die Menge allerElemente aus X mit positiver Zugehorigkeit zu A:support(µA(x)) = {x ∈ X | µA(x) > 0}.Notation:
X endlich: A = µA(x1)/x1 + · · ·+ µA(xn)/xn
=n∑
i=1
µA(xi)/xi
X unendlich: A =∫
X
µA(x)/x
Beispiele:
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 197
die Menge der ganzen Zahlen, die ungefahr gleich 10 sind:
G10 = 0.1/7 + 0.5/8 + 0.8/9 + 1/10 + 0.8/11 + 0.5/12 + 0.1/13
die Menge der reellen Zahlen, die ungefahr gleich 10 sind:
G10 =
∫IR
e−(x−10)2
/x
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 198
Linguistische Variablen und Linguistische Terme
In Anwendungen werden Fuzzy-Mengen zumeist eingesetzt zur Modellierunglinguistischer Terme.Viele Begriffe der naturlichen Sprache lassen sich durch Fuzzy-Mengencharakterisieren.Ein linguistischer Term (Wert, Label) ist die Quantifizierung eines Begriffesder naturlichen Sprache durch eine Fuzzy-Menge.Eine linguistische Variable ist eine Variable, die eine Reihe linguistischer Termeannehmen kann.Beispiele:
linguistische Variable: “GESCHWINDIGKEIT”linguistische Terme von “GESCHWINDIGKEIT”:“hoch”,“niedrig”,“rasant”,“okonomisch”
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 199
Linguistische Variable: Definition
Eine linguistische Variable ist durch ein Quintupel
(v, T (v), X,G, M)
charakterisiert.Dabei ist:
• v: der Name der Variable;
• T (v): eine Menge von linguistischen Termen von v, wobei jeder Wert eine Fuzzy-Menge
in dem Universum X ist;
• G: eine Syntaxregel, die T (v) aus einer Menge von Grundtermen erzeugt;
• M : eine semantische Regel, die jedem Wert von T (v) seine Bedeutung zuordnet.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 200
Darstellungen der ZF
• Diskrete Darstellung:
– Array mit fester Große,– Speicherung der ZF-Werte fur den gesamten x-Wertebereich,– beliebige Formen.
• Parametrische Darstellung:
– Funktionen mit Parametern,– wenig Speicherplatz,– typische Arten: Singleton, Dreiecksform, Trapezform, Glockenkurve,
B-Spline Basisfunktionen.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 201
Methoden zur Generierung der ZF
• Kontext-abhangige Spezifikation:experimentell, unter Berucksichtigung der jeweiligen Anwendung.
• Aufbau durch Sample-Daten:Clustering, Lagrange-Interpolation, “Least-square Curve Fitting”,Neuronale Netze.
• Wissenserwerb durch Experten:ein oder mehrere Experten,direkt und indirekt.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 202
Fuzzy-Regelung - I
Grundidee Fuzzy-Regelung:
• Beschreibung des gewunschten Reglerverhaltens mit Hilfe umgangssprachlicher,
qualitativer Regeln.
• Quantifizierung linguistischer Werte durch Fuzzy-Mengen.
• Regel–Auswertung durch Verfahren der Fuzzy-Logik bzw. der Interpolation.
Fuzzy-Regeln fur die Regelung
”IF (eine Menge Konditionen werden erfullt)
THEN(eine Menge Konsequenzen konnen bestimmt werden)“
In den Pramissen (Antecedenten) vom IF-Teil:linguistische Variablen aus der Domane der Prozeßzustande;
In den Konklusionen (Konsequenten) vom THEN-Teil:linguistische Variablen aus der Regelungsdomane.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 203
Fuzzy-Regelung - II
Fuzzy-Regelung ist vom Prinzip:
• intelligente Regelung:
Verwendung von Expertenwissen
• linguistische Regelung:
Regelung ist transparent,
ein Pluspunkt fur Mensch-Maschine-Schnittstelle
• parallele Regelung:
Modularisierung,
hohe Verarbeitungsgeschwindigkeit
Vorteile:
• Reglerentwurf ohne besondere Modell-
kenntnisse moglich
• Reglerentwurf effizient
• Echtzeit-Anforderungen erfullt
• Robustheit auch beim Einsatz von billigen Sensoren
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 204
Comparison of Three Fuzzy Controller Models - IF-part (E)
All fuzzy controllers employ true fuzzy sets for modelling linguistic terms for each input. The
input space is partioned into overlapping cells, which reflects the vague modelling of linguistic
concepts on one side and enables the continuous transition of output values on the other side.
The IF-part of a rule is generally modelled as:��
��(x1 is A1
i1) and (x2 is A2
i2) and . . . (xn is An
in),
where xj is the j-th input (j = 1, . . . , n) and Ajij
is the i-th linguistic term defined on xj.
The “and”-operation is implemented with a so-called t−norm, which is represented by “min”
or “product” in most applications.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 205
Comparison of Three Fuzzy Controller Models -Membership Functions (E)
In up-to-date control applications, mainly triangle and trapezoid set functions are used.
Recently, Fuzzy Basis Functions based on “Gaussian” “Cauchy”, “sinc”, “Laplace”,
“Logistic”, “Hyperbolic Tangent”.
However, all the above set functions need additional special parameters apart from the
partition positions (called knots in the following) on the universe of discourse of each input.
Since the knots are the only intrinsic parameters resulting from the partition of the input
space, the selection and tuning of these additional parameters are neither natural nor intuitive.
Linguistic terms based on B-spline basis functions can be generated if the knots are given,
they do not need ANY additional parameters.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 206
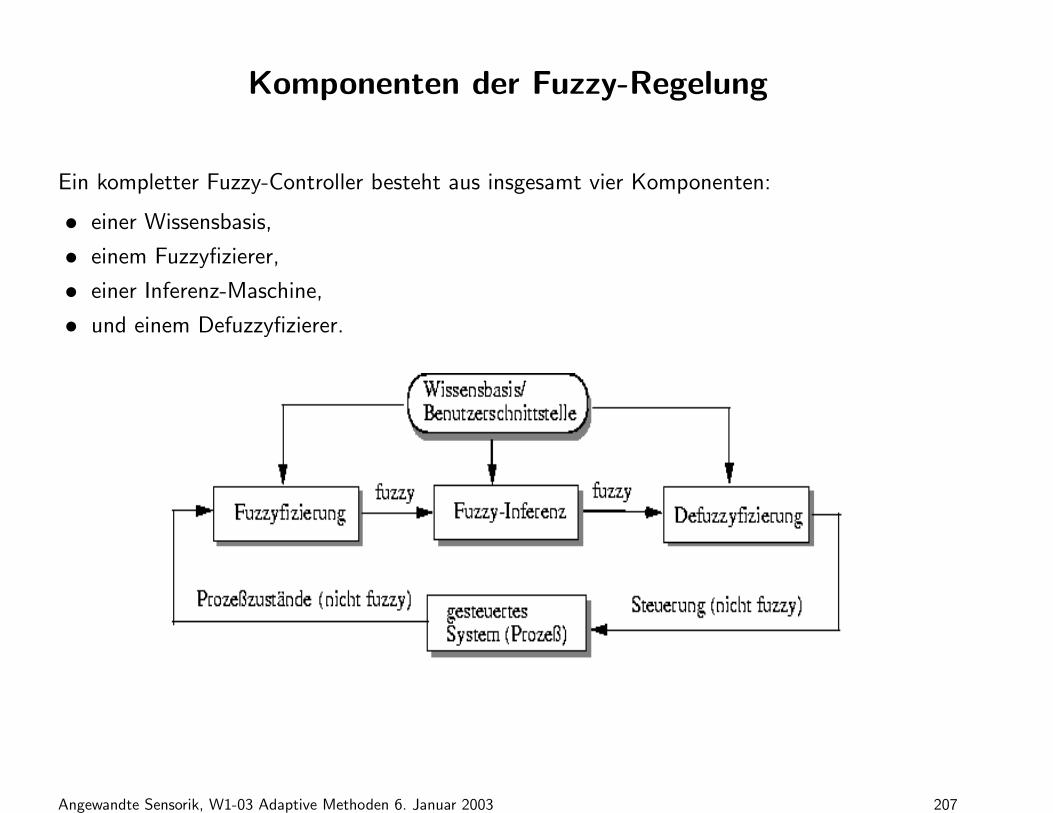
Komponenten der Fuzzy-Regelung
Ein kompletter Fuzzy-Controller besteht aus insgesamt vier Komponenten:
• einer Wissensbasis,
• einem Fuzzyfizierer,
• einer Inferenz-Maschine,
• und einem Defuzzyfizierer.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 207
Wissensbasis
In der Wissensbasis ist das Expertenwissen abgelegt, auf das sich ein Fuzzy-System wahrend
einer Regelung stutzt. In ihr befinden sich
die Zugehorigkeitsfunktionen,mit denen die linguistischen Terme der linguistischen Variablen (die Ein- und
Ausgangsgroßen) mathematisch beschrieben werden;
die Zugehorigkeitsfunktionen des Fuzzyfizierers, in rechner-internen Darstellungen;
die Regelungsstrategien,in Form von
”Wenn-Dann“-Regeln abgespeichert.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 208
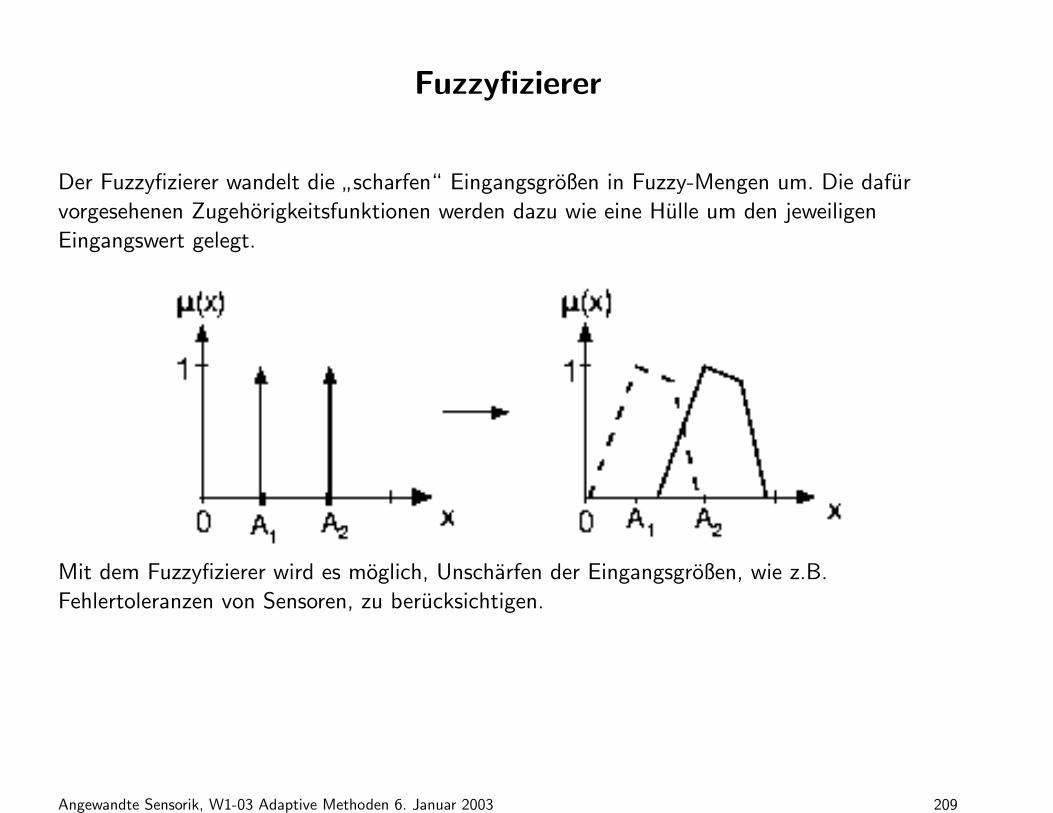
Fuzzyfizierer
Der Fuzzyfizierer wandelt die”scharfen“ Eingangsgroßen in Fuzzy-Mengen um. Die dafur
vorgesehenen Zugehorigkeitsfunktionen werden dazu wie eine Hulle um den jeweiligen
Eingangswert gelegt.
Mit dem Fuzzyfizierer wird es moglich, Unscharfen der Eingangsgroßen, wie z.B.
Fehlertoleranzen von Sensoren, zu berucksichtigen.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 209
Inferenz-Maschine: I
Die Inferenz-Maschine vergleicht die fuzzyfizierten Eingangswerte mit den ZF der
Antecedenten fur jede Regel und erschließt daraus durch geeignete Kombination der
Fuzzy-Mengen der Ausgangsvariablen (Konsequenten).
Fur die mathematische Modellierung des Vergleichs und des Schlußfolgerns existieren viele
Losungsvorschlage. Eine einfache Methode ist die Inferenz mit Hilfe der Min-Max-Operatoren.
Beispiel:
Gegeben sei ein Regelsystem mit zwei Antecedenten A und B und einer Konsequenten C:
R1: IF (x is A1 and y is B1)
THEN (z is C1)
R2: IF (x is A2 and y is B2)
THEN (z is C2)
. . .
Rk: IF (x is Ak and y is Bk)
THEN (z is Ck)
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 210
Inferenz-Maschine: II
Zunachst werden die fuzzyfizierten Eingangsdaten A′ und B′ mit den ZF Ai und Bi der i-ten
Regel verglichen, und man erhalt so fur jede Regel die Ubereinstimmungsmaße aAiund aBi
:
aAi= max(min(A
′, Ai))
aBi= max(min(B
′, Bi))
Diese Ubereinstimmungsmaße werden schließlich zu einem Gesamtmaß ω′i verknupft, das den
Erfullungsgrad der gesamten Eingangsbedingungen der i-ten Regel angibt:
ω′i = min(aAi
, aBi)
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 211
Inferenz-Maschine: III
Der Erfullungsgrad kann noch zusatzlich mit einem Regelgewicht ri ∈ [0, 1] multipliziert
werden. Regeln, die z.B. in Alarmfallen die Sicherheit gewahrleisten sollen, konnen dadurch
gegenuber anderen Regeln starker gewichtet werden. Man erhalt somit:
ωi = ri · ω′i
Die tatsachliche Schlußfolgerungsfunktion C ′i des Konsequenten Ci errechnet sich aus:
C′i = min(ωi, Ci)
Zuletzt faßt man alle Schlußfolgerungen C ′i zusammen und erhalt die Ausgangsfunktion CA:
CA = max(C′1, C
′2, . . . , C
′k)
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 212
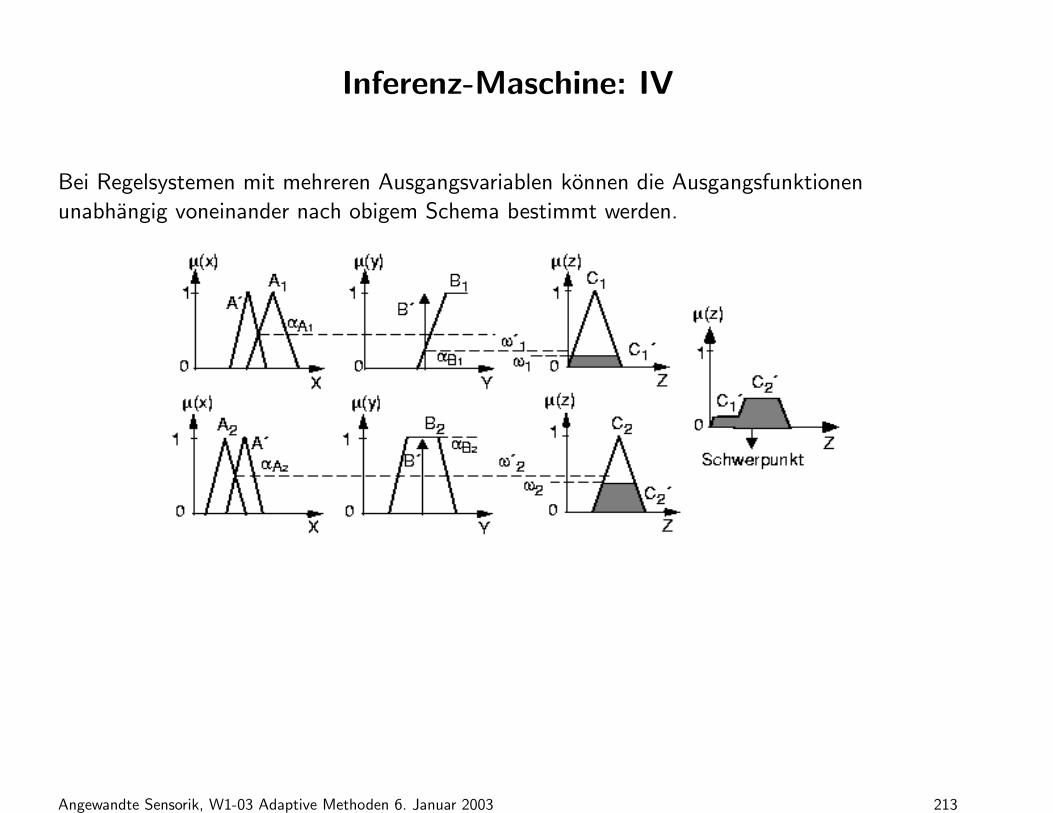
Inferenz-Maschine: IV
Bei Regelsystemen mit mehreren Ausgangsvariablen konnen die Ausgangsfunktionen
unabhangig voneinander nach obigem Schema bestimmt werden.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 213
Defuzzyfikation
Um in einem Regelungsprozeß konkrete Stellgroßen an die Aktuatoren senden zu konnen,
mussen aus den durch die Inferenz gewonnenen Ausgangsfunktionen”scharfe“ Ausgangswerte
gebildet werden.
Eine vernunftige Vorgehensweise ist die Schwerpunktmethode. Der Ausgangswert wird hierbei
als Schwerpunkt der Ausgangsfunktion bezuglich ihrer Abszisse berechnet.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 214
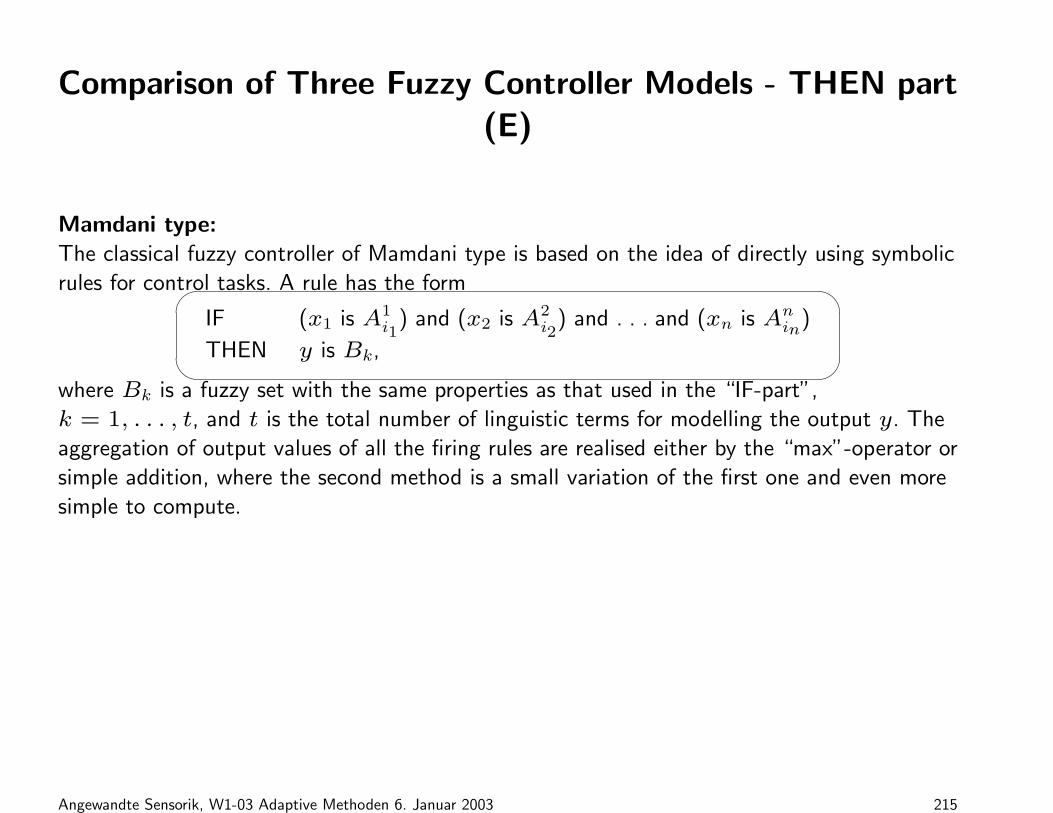
Comparison of Three Fuzzy Controller Models - THEN part(E)
Mamdani type:The classical fuzzy controller of Mamdani type is based on the idea of directly using symbolic
rules for control tasks. A rule has the form�
�
�
�IF (x1 is A1
i1) and (x2 is A2
i2) and . . . and (xn is An
in)
THEN y is Bk,
where Bk is a fuzzy set with the same properties as that used in the “IF-part”,
k = 1, . . . , t, and t is the total number of linguistic terms for modelling the output y. The
aggregation of output values of all the firing rules are realised either by the “max”-operator or
simple addition, where the second method is a small variation of the first one and even more
simple to compute.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 215
Probleme der Regler vom Mamdani-Typ: (E)
• viele Freiheitsgrade beim Entwurf
(Implikations-Relation, Inferenz-Mechanismen, Fuzzyfikation- und
Defuzzyfikationsstrategie, ...)
• Auswahl und Quantifizierung der linguistischen Werte erfordert Erfahrung
(keine systematischen Richtlinien)
• keine Aussage uber die Wirkung der Wahl der Zugehorigkeitsfunktions-Form
(warum Dreiecke/Trapeze? andere Funktionen?)
• Bewertungskriterien fur einen optimalen Regler
(Glatte, Approximations-Genauigkeit, ....)
• Nachweis der Stabilitat
(wie bei fast allen nicht-linearen Systemen)
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 216
Zwei Typen von adaptiven Fuzzy-Reglern
• Sugeno-Typ:
IF x1 is Ai1 and x2 is Ai
2 and . . . and xn is Ain
THEN y = pi0 + pi
1x1 + pi2x2 + · · ·+ pi
nxn
wobei die Parameter von Ai1 bis An
i , sowie pi0, pi
1, pi2, · · ·+ pi
n adaptiv gewonnen werden
konnen.
(erfolgreich eingesetzt bei Funktion-
Approximation und uberwachtes Lernen.)
• B-Spline-Typ:
Nachbildung der B-Spline-Interpolation mit Hilfe von a priori Wissen
Ein spezieller Sugeno-Typ, aber effektiver, schneller, geeignet fur uberwachtes Lernen und
unuberwachtes Lernen.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 217
TSK (Tagaki-Sugeno-Kang) model: (E)
A rule using a TSK model of order 1 looks like:�
�
�
�IF (x1 is A1
i1) and (x2 is A2
i2) and . . . and (xn is An
in)
THEN y = ai0 + ai
1x1 + · · ·+ ainxn,
where ai0, ai
1, . . . , ain are the coefficients of a simplified local linear model. These parameters
can be identified by optimising a least squares performance index using the data acquired by
observing a skilled human operator’s control action. The recent work with TSK model shows
that it is a suitable function approximator.
However, the TSK model is a multi-local-model black-box. Obviously, the knowledge
acquisition with this model is indirect and not intuitive.
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 218
B-Spline type: (E)
A Rule(i1, i2, . . . , in) with the n conjunctive terms in the IF-part is given in the following
form: �
�
�
�IF (x1 is X1
i1,k1) and (x2 is X2
i2,k2) and . . . and (xn is Xn
in,kn)
THEN y is Yi1i2...in,
where
• xj: the j-th input (j = 1, . . . , n),
• kj: the order of the B-spline basis functions used for xj,
• Xjij,kj
: the i-th linguistic term of xj defined by B-spline basis functions,
• ij = 1, . . . , mj, representing how fine the j-th input is fuzzy partitioned,
• Yi1i2...in: the control vertex (deBoor points) of Rule(i1, i2, . . . , in).
Angewandte Sensorik, W1-03 Adaptive Methoden 6. Januar 2003 219








![Inoffizielle Inventor Hilfeseite Adaptive Feder erzeugen ...inventor.cad.de/download/Adaptive-Feder-erzeugen.pdf · Autodesk Inventor (tm) - NICHT REGISTRIERTE VERSION - [Feder l.ipt]](https://static.fdokument.com/doc/165x107/5e1031c9960167417f1b5f86/inoffizielle-inventor-hilfeseite-adaptive-feder-erzeugen-autodesk-inventor-tm.jpg)








