Antriebsanalyse basierend auf im Versuch gemessenen Daten ... · Abaqus verfügt über keine...
44
3DS.COM © Dassault Systèmes | Confidential Information | 2016-11-08 | ref.: 3DS_Document_2015 Antriebsanalyse basierend auf im Versuch gemessenen Daten am Beispiel eines Insassenschutzmodells Ivan Podkolzin (Dassault Systemes Deutschland GmbH) Dr. Bastian Näser (BMW AG) Dr. Darius Friedemann (IAT Ingenieurgesellschaft für Automobiltechnik mbH) Andreas Huf (BMW AG) Vortragender: Dr. Axel Reichert (Dassault Systemes Deutschland)
Transcript of Antriebsanalyse basierend auf im Versuch gemessenen Daten ... · Abaqus verfügt über keine...

3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 20
16-1
1-08
| re
f.: 3
DS
_Doc
umen
t_20
15
Antriebsanalyse basierend auf im
Versuch gemessenen Daten am Beispiel
eines Insassenschutzmodells
Ivan Podkolzin (Dassault Systemes Deutschland GmbH)
Dr. Bastian Näser (BMW AG)
Dr. Darius Friedemann (IAT Ingenieurgesellschaft für
Automobiltechnik mbH)
Andreas Huf (BMW AG)
Vortragender: Dr. Axel Reichert
(Dassault Systemes Deutschland)

2
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 20
16-1
1-08
| re
f.: 3
DS
_Doc
umen
t_20
15
Kontext: Wozu werden Antriebsanalysen gebraucht?
Status: Aktueller Arbeitsvorgang ist kompliziert
Neuer Vorgang für Antrieb in Abaqus
Testmodell
Neue Methode für Antrieb im Einsatz
Zusammenfassung: Neue Methode bringt Vorteile
Inhalt

3
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Wozu werden Antriebsanalysen gebraucht? Während eines Crash-Ereignis trifft ein Fahrzeug auf ein starres oder deformierbares Hindernis.
Aus der Fahrzeugsicht:
Fahrzeugstruktur absorbiert die Aufprallenergie
Fahrgastzelle muss möglichst undeformiert bleiben
Dabei deformiert das Frontend des Fahrzeugs auf eine vordefinierte Weise
Aus Sicht der Insassen:
Aufgrund der Massenträgheit bewegen sich Körper nach dem Aufprall weiter
Rückhaltesysteme (RHS) – Sicherheitsgurte und Airbags ermöglichen dem Insassen,
Beschleunigungsänderungen im Crash zu überstehen

4
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Wozu werden Antriebsanalysen gebraucht? Während eines Crash-Ereignis trifft ein Fahrzeug auf ein starres oder deformierbares Hindernis.
Aus Sicht des Insassenschutzingenieurs:
Da die Fahrgastzelle fast undeformiert bleibt:
Es wird als eine angemessene Annahme betrachtet, die Karosserie starr zu setzen. Dabei wird die Performance der Insassenschutzanalysen gesteigert
Dummy, Rückhaltesystem, Sitz und die starre Zelle werden basierend auf Beschleunigungen im Crash-Fall angetrieben (daher der Name der Analysen)
Die Beschleunigungshistorie im Crash wird aufgezeichnet:
Im Versuch durch Beschleunigungsaufnehmer
In Simulationen durch entsprechende Ausgaben
Antriebsanalysen stellen Insassen und ihre unmittelbare Umgebung in Vordergrund und ermöglichen, mit einem hohen Turn-around, unterschiedliche Szenarien und Konfigurationen der RHS zu bewerten
Modelle für Antriebsanalysen werden als Schlittenmodelle (eng. Sledge Model) bezeichnet

5
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Beschleunigungsaufnehmer in Abaqus Für Insassenschutzzwecke werden Beschleunigungen an sechs unterschiedlichen Positionen im
Fahrzeug verwertet
Für jede Position sind Beschleunigungen in lokalen X-, Y- und Z-Richtung vorhanden
Connector vom Typ Accelerometer misst genau das, was die aufgeklebten Sensoren auch im Versuch
messen: Beschleunigungen in lokalen Koordinaten
Dieser Connectortyp wird auch verwendet, um Sensor (Beschleunigungsaufnehmer) in Simulationen
abzubilden
Es ist nicht möglich, Connector vom Typ Accelerometer via *Connector Motion mit
gespeicherten Beschleunigungshistorie (Amplituden) anzutreiben
Abaqus verfügt über keine Randbedingungsfunktionalität (Boundary) in einem lokalen
Koordinatensystem

6
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Aktueller Arbeitsvorgang ist kompliziert Momentan brauchen Antriebsanalysen folgende Schritte:
1. Mit einer alternativen Methode werden in Modellen Randbedingungen in lokalen Koordinatensystemen aufgebracht (Daten aus dem Versuch)
Diese Läufe liefern Verschiebungsamplituden (drei für translatorische Freiheitgraden und drei für die rotatorischen) in globalen Koordinaten für Abaqus
2. Schlittenmodelle in Abaqus werden mit den gewonnenen Amplituden (in globalen Koordinaten) angetrieben
Es gibt einen großen Anreiz aus Wirtschaftsgründen und aus dem Streben zur Eleganz den aktuellen Prozess zu ändern:
Damit nur ein FEA-Instrument eingesetzt wird
Damit die Analysen in einem Schritt gemacht werden, so dass Versuchsdaten direkt bei Antriebsanalysen verwendet werden

7
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neuer Vorgang für Antrieb in Abaqus Connector vom Typ Cartesian hat Antriebsfunktionalität
Dafür brauchen Cartesian-Connectors Daten (Abaqus-Amplituden) im globalen Koordinatensystem
Somit müssen Beschleunigungswerte aus lokalen Koordinatensystemen in globale transformiert
werden
Für die Datentransformation brauchen wir Verdrehungswinkel an den Positionen der
Beschleunigungsaufnehmer
Keine Daten für lokale Verdrehungen sind aus dem Versuch vorhanden:
Verdrehungswinkel aufzuzeichnen ist sehr teuer und wird in der Regel nicht gemacht
Keine Lösung? Im Gegenteil…

8
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neuer Vorgang für Antrieb in Abaqus Lösung:
Wir rekonstruieren Verdrehungen während der Simulation:
Connectors vom Typ Cartesian werden mit *Connector Motion angetrieben
Ausgangslage der lokalen Koordinatensystemen ist bekannt (diese haben gleiche Ausrichtung wie das globale Koordinatensystem)
Nach der Transformation werden die Daten in lokalen Koordinatensystemen im ersten Inkrement den Daten in globalen Koordinatensystemen gleich sein
Nach dem Aufbringen der Beschleunigungen im ersten Inkrement haben unsere lokalen Koordinatensystemen verdreht
Im zweiten Inkrement nehmen wir aus dem ersten Inkrement ergebene Verdrehung und transformieren die Daten für das zweite Inkrement
Genauso wird das Transformationsvorgang in nächsten Inkrementen wiederholt

9
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neuer Vorgang für Antrieb in Abaqus Lösung:
Es gibt unterschiedliche Transformationsregel. Diese verwenden entsprechende Rotationsausgaben
In der vorgeschlagenen Lösung werden Euler-Winkel angewendet und die entsprechende
Transformationsregel
Für die beschriebene “On-Fly”-Transformation wird Abaqus-Unterrutine VUAMP() und die Sensorfunktionalität verwendet
Dummy-Connectors werden mit Versuchsdaten angetrieben und ‚senden‘ via Sensor-Funktionalität
Werte in jedem Inkrement an VUAMP()
VUAMP() wendet die Transformationsregel an und gibt Werte im globalen Koordinatensystem wieder
an Connector vom Typ Cartesian, die dem Antrieb dienen

10
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neuer Vorgang für Antrieb in Abaqus Connector vom Typ Euler verwenden die Standard-x-Konvention
Standard-x-Konvention (z, x′, z):
Zuerst wird mit dem Winkel α um die Z-Achse des Koordinatensystems in Ausgangslage gedreht (z).
Es folgt eine Drehung mit dem Winkel β um die X-Achse in deren Lage nach der ersten Drehung (x′)
und schließlich eine Drehung mit dem Winkel γ um die Z-Achse in deren Lage nach den beiden
vorherigen Drehungen (z)

11
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neuer Vorgang für Antrieb in Abaqus Transformationsregel:
𝑥 𝑦 𝑧 𝑇 – Werte im globalen Koordinatensystem
𝑥′ 𝑦′ 𝑧′ 𝑇– Werte im lokalen Koordinatensystem
𝑥𝑦𝑧
=
cos𝛼 cos 𝛾 − sin 𝛼 cos𝛽 sin 𝛾 − cos𝛼 sin 𝛾 − sin 𝛼 cos𝛽 cos 𝛾 sin 𝛼 sin𝛽sin 𝛼 cos 𝛾 + cos𝛼 cos𝛽 sin 𝛾 − sin𝛼 sin 𝛾 + cos𝛼 cos𝛽 cos 𝛾 − cos𝛼 sin 𝛽
sin 𝛽 sin 𝛾 sin 𝛽 cos 𝛾 cos 𝛽
𝑥′𝑦′
𝑧′

12
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt
Im ersten Schritt der Methodenerprobung:
Ein Starrkörper (blau) wird verschiebungsgesteuert geführt und entsprechende Daten werden generiert
• Accelerometer an drei Positionen dienen als Beschleunigungsaufnehmer
• NB: drei Positionen sind hinreichend, um die Bewegung des Körpers zu beschreiben (Die drei Punkte dürfen
nicht kollinear sein)
Beschleunigungsaufnehmer 1:
CA1, CA2, CA3
Beschleunigungsaufnehmer 2:
CA1, CA2, CA3 Beschleunigungsaufnehmer 3:
CA1, CA2, CA3

13
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
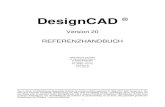
Neue Methode wurde auf einem Testmodell erprobt Im zweiten Schritt 2 wird der Starrkörper mit den im Schritt 1 gewonnenen Daten angetrieben.
Schema für logische Modellierung während der Rechnung
Dat
en in
loka
len
Koo
rdin
aten
Amplitudes (Ax)
VUAMP()
(Controller)
lokale CA1,CA2, CA3 im
gegebenen Inkrement als
Sensoren
CA1,CA2, CA3 (Amplituden) in globalen
Koordinaten im gegebenen Zeitinkrement
Datenspender: Cartesian-Connectors
CUR1,CUR2, CUR3 –
Eulerwinkel aus der Simulation
im geg. Zeitinkrement als
Sensorausgaben
1 2 3
4

14
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Modellvorbereitung:
…am Beispiel einer Messposition
Im Modellbereich werden Amplituden für den Antrieb definiert:
*amplitude, name=10VEHCMI0000AC_A1, DEFINITION=USER
*amplitude, name=10VEHCMI0000AC_A2, DEFINITION=USER
*amplitude, name=10VEHCMI0000AC_A3, DEFINITION=USER
Im Step-Bereich wird der Antrieb mit Versuchsdaten der „Datenspender“ definiert:
*Connector Motion, type=ACCELERATION, AMPLITUDE=10VEHCMI0000ACXA
Con_10VEHCMI0000AC_orig, 1, 1.
*Connector Motion, type=ACCELERATION,AMPLITUDE=10VEHCMI0000ACYA
Con_10VEHCMI0000AC_orig, 2, 1.
*Connector Motion, type=ACCELERATION,AMPLITUDE=10VEHCMI0000ACZA
Con_10VEHCMI0000AC_orig, 3, 1.
1

15
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Versuchsdaten und Eulerwinkel werden als Sensoren an VUAMP() gesendet:
Im Step-Bereich:
*Output, history, frequency=1, name=10VEHCMI0000AC_ORIG_A1, sensor
*Element Output, elset=Con_10VEHCMI0000AC_origCA1
*Output, history, frequency=1, name=10VEHCMI0000AC_ORIG_A2, sensor
*Element Output, elset=Con_10VEHCMI0000AC_origCA2
*Output, history, frequency=1, name=10VEHCMI0000AC_ORIG_A3, sensor
*Element Output, elset=Con_10VEHCMI0000AC_origCA3
…
*Output, history, frequency=1, name=EULER_1_1, sensor
*Element Output, elset=euler_1CCUR1,
*Output, history, frequency=1, name=EULER_1_2, sensor
*Element Output, elset=euler_1CCUR2,
*Output, history, frequency=1, name=EULER_1_3, sensor
*Element Output, elset=euler_1CCUR3,
2

16
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt VUAMP()-Schnittstelle :
3
subroutine vuamp( * ampName, time, ampValueOld, dt, nProps, props,
* nSvars, svars, lFlagsInfo,
* nSensor, sensorValues, sensorNames,
* jSensorLookUpTable, AmpValueNew, lFlagsDefine,
* AmpDerivative, AmpSecDerivative, AmpIncIntegral)
include 'vaba_param.inc'
c
dimension sensorValues(nSensor), svars(nSvars),
* props(nProps)
character*80 sensorNames(nSensor)
character*80 ampName
c time indices
parameter (iStepTime = 1,
* iTotalTime = 2,
* nTime = 2)
c flags passed in for information
parameter (iInitialization = 1,
* iRegularInc = 2,
* ikStep = 3,
* nFlagsInfo = 3)
c optional flags to be defined
parameter (iComputeDeriv = 1,
* iComputeSecDeriv = 2,
* iComputeInteg = 3,
* iStopAnalysis = 4,
* iConcludeStep = 5,
* nFlagsDefine = 5)
dimension time(nTime), lFlagsInfo(nFlagsInfo),
* lFlagsDefine(nFlagsDefine)
dimension jSensorLookUpTable(*)

17
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt VUAMP()-Schnittstelle : Werte für Eulerwinkel werden eingelesen
3 c get sensor values for the Euler angles
v_EULER11 = vGetSensorValue('EULER_1_1',jSensorLookUpTable,sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG1,
c * sensorNames(iR_CU1))
v_EULER12 = vGetSensorValue('EULER_1_2',jSensorLookUpTable,sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG2,
c * sensorNames(iR_CRF2))
v_EULER13 = vGetSensorValue('EULER_1_3',jSensorLookUpTable,sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG2,
c * sensorNames(iR_CRF2))

18
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt VUAMP()-Schnittstelle : Versuchsdaten aus den ‚Datenspender‘ werden eingelesen
3 v_10VEHCMI0000AC_O_A1 = vGetSensorValue('10VEHCMI0000AC_ORIG_A1',
jSensorLookUpTable, sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG1,
c * sensorNames(iR_CU1))
v_10VEHCMI0000AC_O_A2 = vGetSensorValue('10VEHCMI0000AC_ORIG_A2',
jSensorLookUpTable, sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG2,
c * sensorNames(iR_CRF2))
v_10VEHCMI0000AC_O_A3 = vGetSensorValue('10VEHCMI0000AC_ORIG_A3',
jSensorLookUpTable, sensorValues)
c call xplb_abqerr(1, 'Sensor %S value: %R',0,v_CDMG2,
c * sensorNames(iR_CRF2))

19
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt VUAMP()-Schnittstelle : Amplitude in einem lokalen Koordinatensystem wird berechnet (1)
3 if (ampName(1:18) .eq. '10VEHCMI0000AC_A1' ) then
d_1 = v_10VEHCMI0000AC_O_A1
d_2 = v_10VEHCMI0000AC_O_A2
d_3 = v_10VEHCMI0000AC_O_A3
alpha = v_EULER11
beta = v_EULER12
gamma = v_EULER13

20
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt VUAMP()-Schnittstelle : Amplitude in einem lokalen Koordinatensystem wird berechnet (2)
3 transform_coeff_1_1=cos(alpha)*cos(gamma)-sin(alpha)*cos(beta)*sin(gamma)
transform_coeff_1_2=-cos(alpha)*sin(gamma)-sin(alpha)*cos(beta)*cos(gamma)
transform_coeff_1_3=sin(alpha)*sin(beta)
transform_coeff_2_1=sin(alpha)*cos(gamma)+cos(alpha)*cos(beta)*sin(gamma)
transform_coeff_2_2=-sin(alpha)*sin(gamma)+cos(alpha)*cos(beta)*cos(gamma)
transform_coeff_2_3=-cos(alpha)*sin(beta)
transform_coeff_3_1=sin(beta)*sin(gamma)
transform_coeff_3_2=sin(beta)*cos(gamma)
transform_coeff_3_3=cos(beta)
ampValueNew = transform_coeff_1_1*d_1+transform_coeff_1_2*d_2+transform_coeff_1_3*d_3
end if

21
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Analog werden Amplituden auch für Freiheitsgraden 2 und 3 gemacht. Für alle sechs Positionen
Mit in VUAMP() errechneten Amplituden werden Connectoren für den Antrieb geführt:
*Connector Motion, type=ACCELERATION, AMPLITUDE=10VEHCMI0000AC_A1
Con_10VEHCMI0000AC, 1, 1.
*Connector Motion, type=ACCELERATION, AMPLITUDE=10VEHCMI0000AC_A2
Con_10VEHCMI0000AC, 2, 1.
*Connector Motion, type=ACCELERATION, AMPLITUDE=10VEHCMI0000AC_A3
Con_10VEHCMI0000AC, 3, 1.
4

22
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Vergleich zwischen der Originalrechnung (Schritt 1) und der Antriebssimulation (Schritt 2):
Originalrechnung: Endzustand Antriebsanalyse: Endzustand

23
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Vergleich zwischen der Originalrechnung (Schritt 1) und der Antriebssimulation (Schritt 2):

24
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Ein für die Übereinstimmung repräsentativer Vergleich zwischen den Beschleunigungsaufgaben der
gegebenen Lösung und der Beschleunigungen aus der Aufprall-Originalrechnung in lokaler
X-Richtung

25
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode wurde auf einem Testmodell erprobt Fazit: Eine sehr gute Übereinstimmung der Antriebssimulation mit dem Originallauf
Methode ist bereit für einen Test mit einem Schlittenmodell aus dem produktiven Prozess

26
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Für den Einsatzerprobung mit einem echten Insassenschutzmodell wurden folgende Daten zur
Verfügung gestellt:
Positionen der Beschleunigungsaufnehmer (aus dem Versuch)
Aufgezeichnete Beschleunigungen in lokalen X-, Y- und Z-Richtungen
Amplituden für Qualitätsüberprüfung, die mit einer alternativen Methode generiert wurde
FE-Netz des Starrkörpers
Quelle: BMW AG

27
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz FE-Netz des Starrkörpers dient lediglich der Visualisierung – kein Bedarf für die Berechnung
Antriebsrechnung ohne Starrkörper läuft unter 2 Minuten mit einem CPU
Antriebsrechnung mit dem Starrkörper etwa 5 Minuten mit einem CPU
Quelle: BMW AG

28
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz
Quelle: BMW AG

29
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
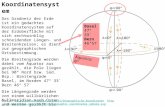
Neue Methode für Antrieb im Einsatz Antriebsmodell wurde im Vergleich zum Testmodell modifiziert
Der Referenzknoten des Schlittens ist per MPC an Knoten (Positionen der
Beschleunigungsaufnehmer) angebunden
An Knoten der Messstellen wurden kleine Masse und eine kleine Trägheit gesetzt
Anstatt von drei Positionen wurden alle sechs Positionen und entsprechende Datensätze verwendet
Datenspender:
Cartesian-Connectors
MPC
Referenzknoten

30
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz

31
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Während der Animation wird eine Abwanderung der Referenzknoten von der Knoten (zum Vergleich
mit der aktuellen Lösung) registriert:

32
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
U1
NB: (Abaqusblau – neue Methode, Rot – Alternative Methode)

33
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
U2

34
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
U3

35
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
UR1

36
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
UR2

37
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Vergleich zwischen den Referenzknotenverschiebungen der neuen Methode und den Verschiebungen
des aktuellen Prozesses
UR3

38
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Gründe für Ergebnisunterschiede:
In Realität deformiert sich die Fahrgastzelle, die in der Analyse starr gesetzt wurde
Das spiegelt sich wieder in aufgezeichneten Beschleunigungen
Der Code muss mit der Überbestimmung zurecht kommen und einen Gleichgewichtszustand
ermitteln:
Im Fall der Kombination von MPC (multi-point constraints – eine starre Verbindung) und dem Antrieb der
Connectors in Abaqus
…oder beim Aufbringen der Randbedingungen mit einer alternativen Methode
Je mehr Knoten angetrieben werden, desto stärker wird der Ausmaß der Verletzung der Annahme
vom Starrkörper und, dementsprechend, desto mehr künstliche Energie wird in Zwangsbedingungen
verbraucht, um diese möglichst wenig zu verletzen (ALLCW)

39
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz ALLCW-Vergleich zwischen dem Antriebsanalyse mit fünf Knoten gegen einer Analyse mit sechs
angetriebenen Knoten:
ALLCW

40
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
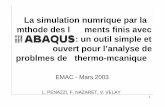
Neue Methode für Antrieb im Einsatz Ein für die Übereinstimmung repräsentativer Vergleich zwischen den Beschleunigungsaufgaben der
gegebenen Lösung und der Beschleunigungen aus dem Versuch (10BPILRILO00AC) in lokaler
X-Richtung A1

41
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Ein für die Übereinstimmung repräsentativer Vergleich zwischen den Beschleunigungsaufgaben der
gegebenen Lösung und der Beschleunigungen aus dem Versuch (10BPILRILO00AC) in lokaler
Y-Richtung A2

42
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode für Antrieb im Einsatz Ein für die Übereinstimmung repräsentativer Vergleich zwischen den Beschleunigungsaufgaben der
gegebenen Lösung und der Beschleunigungen aus dem Versuch (10BPILRILO00AC) in lokaler
Z-Richtung A3

43
3DS
.CO
M/S
IMU
LIA
© D
assa
ult S
ystè
mes
| C
onfid
entia
l Inf
orm
atio
n |
2016
-11-
08 |
ref.:
3D
S_D
ocum
ent_
2015
Neue Methode bringt Vorteile Fazit:
Die Antriebsmethode wurde auf einem Testmodell und einem Modell aus dem produktiven
Zyklus erfolgreich getestet
Die Methode ermöglicht Durchführung der Antriebsanalysen gänzlich in Abaqus sowohl in zwei
Schritten (aktueller Vorgang - mit Erzeugung der Verschiebungsamplituden für den Referenzknoten
des Schlittens), als auch in einem Schritt mit der direkten Anwendung der Versuchsdaten (oder der
Daten aus einer Crash-Simulation)
Überbestimmung infolge des starren Ersatzmodells der Karosserie führt zu einem Fehler im Antrieb
gegen die Realität. Der Fehler wird aufgrund von der Vorteilen in Effizienzsteigerung der
Berechnungsprozessen im Insassenschutzbereich toleriert

44
3DS
.CO
M ©
Das
saul
t Sys
tèm
es |
Con
fiden
tial I
nfor
mat
ion
| 20
16-1
1-08
| re
f.: 3
DS
_Doc
umen
t_20
15