Bestimmung der Triebwerksleistung eines überfliegenden...
82
Fakult¨ at I - Institut f¨ ur Sprache und Kommunikation Fachgebiet Audiokommunikation Masterarbeit Bestimmung der Triebwerksleistung eines ¨ uberfliegenden Flugzeuges durch Audio Feature Extraction vorgelegt von Sebastian Schl¨ uter [email protected] Matr.-Nr.: 302614 am 13. April 2015 Betreuer: . Prof. Dr. Stefan Weinzierl Leiter des Fachgebietes Audiokommunikation . Dipl.-Ing. Stefan Becker Prokurist der BeSB GmbH Berlin
Transcript of Bestimmung der Triebwerksleistung eines überfliegenden...
Fakultat I - Institut fur Sprache und Kommunikation
Fachgebiet Audiokommunikation
Masterarbeit
Bestimmung der Triebwerksleistung eines
uberfliegenden Flugzeuges durch
Audio Feature Extraction
vorgelegt von
Sebastian Schluter
Matr.-Nr.: 302614
am
13. April 2015
Betreuer:
. Prof. Dr. Stefan WeinzierlLeiter des Fachgebietes Audiokommunikation
. Dipl.-Ing. Stefan BeckerProkurist der BeSB GmbH Berlin
Eidesstattliche Erklarung
Hiermit erklare ich an Eides statt gegenuber der Fakultat I der Technischen Univer-
sitat Berlin, dass die vorliegende, dieser Erklarung angefugte Arbeit selbststandig
und nur unter Zuhilfenahme der im Literaturverzeichnis genannten Quellen und
Hilfsmittel angefertigt wurde. Alle Stellen der Arbeit, die anderen Werken dem Wort-
laut oder dem Sinn nach entnommen wurden, sind kenntlich gemacht. Ich reiche die
Arbeit erstmals als Prufungsleistung ein.
Mit meiner Unterschrift bestatige ich, dass ich uber fachubliche Zitierregeln unter-
richtet worden bin und verstanden habe. Die im betroffenen Fachgebiet ublichen
Zitiervorschriften sind eingehalten worden.
Eine Uberprufung der Arbeit auf Plagiate mithilfe elektronischer Hilfsmittel darf
vorgenommen werden.
.............................................................. ..........................................................
Ort, Datum Unterschrift
ii

Danksagung
Zunachst mochte ich mich bei Dipl.-Ing. Stefan Becker fur die engagierte Betreuung
dieser Arbeit und bei Prof. Dr. Stefan Weinzierl fur deren Ermoglichung bedanken.
Insbesondere danke ich Dipl.-Ing. Christoph Zellmann und Dr. Jean-Marc Wunderli
von der Empa fur die sehr gute Zusammenarbeit.
Mein Dank gilt außerdem meiner Familie und meinen Freunden, ohne deren Unter-
stutzung die Erstellung dieser Arbeit nicht moglich gewesen ware.
iii

Kurzfassung
Im Rahmen des interdisziplinaren Forschungsprojektes sonAIR stellt sich die
Frage, wie aus Tonaufnahmen eines uberfliegenden Flugzeuges dessen Trieb-
werksleistung bestimmt werden kann. Diese wird benotigt, um einem neuen
Schallemissionsmodell, das derzeit durch das schweizerische Forschungsinsti-
tut Empa entwickelt wird, den jeweiligen Flugzustand zuordnen zu konnen.
Aus Voruntersuchungen der BeSB GmbH Berlin ist der prinzipielle Zusam-
menhang von Leistung und Drehton eines Flugzeugtriebwerks bekannt. Letz-
terer wird kontinuierlich erfasst, unter Berucksichtigung der Schallausbrei-
tungszeit und des Doppler-Effektes der bewegten Quelle zugeordnet und damit
der zeitliche Verlauf der Triebwerksleistung bestimmt. Dazu werden bekann-
te Methoden der Audiosignalverarbeitung entsprechend angepasst und ange-
wandt. Dies wird fur ein startendes bzw. landendes Flugzeug im Nah- und
Fernbereich eines Flughafens ermoglicht und soll als Grundlage fur ein neues
Berechnungsmodell dienen, das zur Minderung der Belastung durch Fluglarm
beitragen kann.
iv
Inhaltsverzeichnis
Abbildungsverzeichnis vii
Tabellenverzeichnis ix
1 Einleitung 1
2 Grundlagen 3
2.1 Flugzeugtriebwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Schallentstehung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 Drehklang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.2 Buzz Saw Noise . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Schallausbreitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.1 Doppler-Effekt . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.3.2 Atmosphare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4 Frequenzanalyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4.1 Fouriertransformation . . . . . . . . . . . . . . . . . . . . . . 12
2.4.2 Fensterfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4.3 Spektrogramm . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Methodik 15
3.1 Eingangsdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.1 Positionsdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.2 Protokoll . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.3 Audioaufzeichnungen . . . . . . . . . . . . . . . . . . . . . . . 19
3.2 Datenverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.1 Audio Pre-Processing . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.2 Blockverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2.3 Frequenzfilterung . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2.4 Ausbreitungsrechnung . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Audio Feature Extraction . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.1 Peak-Erkennung . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.2 Doppler-Kompensation . . . . . . . . . . . . . . . . . . . . . . 29
3.3.3 N1-Bestimmung . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4 Softwareumsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
v
Inhaltsverzeichnis
4 Ergebnisse 37
4.1 Validierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2 Gesamtergebnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3 Einzelergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 Diskussion 45
5.1 Landungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.1.1 Erkennungsrate . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.1.2 Umstromungsgerausche . . . . . . . . . . . . . . . . . . . . . . 48
5.1.3 Niedrige Drehzahl . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.1.4 Zeitsynchronisation . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2 Starts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2.1 Erkennungsrate . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.2.2 Buzz Saw Noise . . . . . . . . . . . . . . . . . . . . . . . . . . 54
6 Fazit 56
Literaturverzeichnis 57
Anhang x
A.1 Triebwerksdarstellungen . . . . . . . . . . . . . . . . . . . . . . . . . x
A.2 Ergebnisdarstellungen . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
A.2.1 Landungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiv
A.2.2 Starts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
A.3 DVD-ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxiv
vi

Abbildungsverzeichnis
1 Prinzipieller Aufbau eines modernen Mehrwellen-Turbofantriebwerks
mit Nieder-, Mittel- und Hochdruckteil . . . . . . . . . . . . . . . . . 4
2 Vergleich der Abstrahlcharakteristiken verschiedener Triebwerksschall-
quellen bei Triebwerken mit kleinem und großem Bypassverhaltnis . . 5
3 Schematische Darstellung der Abstrahlcharakteristiken von internen
Larmquellen eines Triebwerks . . . . . . . . . . . . . . . . . . . . . . 6
4 Entfernungsabhangige Absorptionskoeffizienten der Luft . . . . . . . . 10
5 Hanning-Fensterfunktion . . . . . . . . . . . . . . . . . . . . . . . . . 13
6 Positionsdaten (Karte) eines landenden Flugzeuges, relative Koordi-
naten des Messpunktes und der Start-/Landebahn . . . . . . . . . . . 17
7 Positionsdaten (3D) eines landenden Flugzeuges, relative Koordina-
ten des Messpunktes und der Start-/Landebahn . . . . . . . . . . . . 18
8 Spektrogramm der Audioaufzeichnung eines landenden Flugzeuges . . 19
9 Egalisierungs-, Tiefpass- und Hochpass-Filter mit spezifischen Grenz-
frequenzen fur ein landendes Flugzeug . . . . . . . . . . . . . . . . . 23
10 Spektrogramm der Audioaufzeichnung eines landenden Flugzeuges
nach der Filterung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
11 Betrag eines Kurzzeit-Spektrums vor und nach der Filterung mit mar-
kiertem Peak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
12 Berechnete Schallausbreitungszeit von jeder erfassten Position eines
landenden Flugzeuges zum Messpunkt . . . . . . . . . . . . . . . . . 26
13 Gefundene Peaks in allen Kurzzeit-Spektren, Median der Peaks und
ausgewahlte Peaks fur ein landendes Flugzeug . . . . . . . . . . . . . 28
14 Berechnete relative Geschwindigkeit eines landenden Flugzeuges zum
Messpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
15 Triebwerk CFM International S.A. CFM56-5C . . . . . . . . . . . . . 31
16 Berechnete und selektierte N1-Werte fur ein landendes Flugzeug . . . 34
17 Programmablaufplan . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
18 Ermittelte N1-Werte und stuckweise kubische Interpolation fur ein
landendes Flugzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
19 Ermittelte N1-Werte und stuckweise kubische Interpolation fur ein
startendes Flugzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
vii
Abbildungsverzeichnis
20 Vergleich der ermittelten N1-Werte mit den Cockpit-Daten fur ein
landendes Flugzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
21 Vergleich der ermittelten N1-Werte mit den Cockpit-Daten fur ein
startendes Flugzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
22 Vergleich der ermittelten N1-Werte mit den Cockpit-Daten fur ein
landendes Flugzeug mit Umstromungsgerauschen . . . . . . . . . . . 43
23 Vergleich der ermittelten N1-Werte mit den Cockpit-Daten fur ein
landendes Flugzeug mit niedriger Drehzahl . . . . . . . . . . . . . . . 44
24 Vergleich der ermittelten N1-Werte mit den Cockpit-Daten fur ein
startendes Flugzeug mit Buzz Saw Noise . . . . . . . . . . . . . . . . 44
25 Spektrale Crest-Faktoren fur das Beispiel eines landenden Flugzeuges 47
26 Spektrogramm der gefilterten Audioaufzeichnung eines landenden Flug-
zeuges mit Umstromungsgerauschen . . . . . . . . . . . . . . . . . . . 48
27 Spektrogramm der gefilterten Audioaufzeichnung eines landenden Flug-
zeuges mit niedriger Drehzahl . . . . . . . . . . . . . . . . . . . . . . 50
28 Spektrogramm der gefilterten Audioaufzeichnung eines startenden Flug-
zeuges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
29 Spektrale Crest-Faktoren fur das Beispiel eines startenden Flugzeuges 53
30 Triebwerk CFM International S.A. CFM56-5B . . . . . . . . . . . . . x
31 Triebwerk Honeywell International Inc. LF507 . . . . . . . . . . . . . x
32 Triebwerk Pratt and Whitney PW4000-100 . . . . . . . . . . . . . . . xi
33 Triebwerk Rolls-Royce plc. RB211 Trent 700 . . . . . . . . . . . . . . xi
34 Triebwerk General Electric GE90 . . . . . . . . . . . . . . . . . . . . xii
viii

Tabellenverzeichnis
1 Technische Daten und errechnete Konstanten der untersuchten Trieb-
werke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2 Uberblick der Ergebnisse der ausgewerteten Landungen . . . . . . . . 41
3 Uberblick der Ergebnisse der ausgewerteten Starts . . . . . . . . . . . 42
4 N1-Drehzahlen ab denen Buzz Saw Noise emittiert wird, Frequenz-
abstand zur BPF und maximaler Fehler . . . . . . . . . . . . . . . . . 55
ix
1 Einleitung
Die Eidgenossische Materialprufungs- und Forschungsanstalt (Empa) entwickelt der-
zeit ein neues Modell zur Berechnung von Fluglarm, um An- und Abflugverfahren
besser hinsichtlich der verursachten Larmbelastung bewerten und optimieren zu
konnen. Teil dessen ist ein Emissionsmodell, das dreidimensionale Richtcharakte-
ristiken von startenden und landenden Flugzeugen beinhalten wird und anhand von
Messungen im Nah- und Fernbereich eines schweizerischen Großflughafens erstellt
werden soll. Dafur wird auch der jeweilige Flugzustand benotigt, zu dem, neben
der Klappen- und Fahrwerksstellung, die gesetzte Leistung der Triebwerke gehort.
Da diese in der Regel nicht von den Fluggesellschaften preisgegeben wird, ist zu
untersuchen, wie sich die Triebwerksleistung aus akustischen Messungen bestimmen
lasst.
Die BeSB GmbH Berlin fuhrte bereits Untersuchungen zu deren Bestimmung bei
Triebwerksprobelaufen durch. Dabei konnte der direkte Zusammenhang von Leis-
tung und Drehton bei Turbofantriebwerken festgestellt werden, jedoch auf Einzel-
fallbetrachtungen unter statischen Bedingungen beschrankt [1]. Im Rahmen dieser
Arbeit besteht daher erstmals die Moglichkeit, ein entsprechendes technisches Ver-
fahren zur kontinuierlichen Erfassung des Drehtones zu entwickeln, zu implemen-
tieren und an einer Vielzahl von Ereignissen zu erproben. Hierfur sollen bekannte
Methoden der Audio Feature Extraction entsprechend angepasst, erganzt und ange-
wendet werden.
Als Eingangsdaten sollen Audioaufzeichnungen einer Vielzahl an Uberflugen dienen,
die als Teil der Messungen durch die Empa vorgenommen wurden. Ebenso wird
durch diese der Zugriff auf die dabei erfassten Positionsdaten der uberfliegenden
Flugzeuge, als auch auf die protokollierten Triebwerkstypen und relevanten meteo-
rologischen Werte ermoglicht.
Da es sich bei Flugzeugen um relativ schnell bewegte Schallquellen handelt, un-
terliegt der Frequenz-Zeit-Verlauf des Drehtones einem starken Doppler-Effekt. Um
diesen zu korrigieren, muss anhand der Positionsdaten die relative Geschwindigkeit
des Flugzeuges zum Messpunkt am Boden bestimmt werden. Zudem muss zu je-
dem Zeitpunkt des Uberfluges die Dauer ermittelt werden, die der Schall fur die
Ausbreitung von der Quelle zum Empfanger benotigt, um die Eingangsdaten syn-
chronisieren zu konnen.
1
1 Einleitung
Ein Abgleich des Triebwerkstyps mit einer zu erstellenden Datenbank liefert dessen
zugehorige Spezifikationen. Mittels dieser ist es moglich, aus dem entzerrten Drehton
die Drehzahl des Triebwerks und damit ein unmittelbares Maß fur dessen gesetzte
Leistung, zu ermitteln.
Zur Uberprufung der Ergebnisse wurden von der Fluggesellschaft Swiss die Cockpit-
Daten fur die von ihr durchgefuhrten Uberfluge zur Verfugung gestellt.
Um die Machbarkeit des Projektes sicherzustellen, wurden im Vorfeld erste eigene
Versuche durchgefuhrt. Dazu wurden in der Verlangerung der Start-/Landebahn des
Flughafens Berlin-Tegel Tonaufnahmen von startenden und landenden Flugzeugen
vorgenommen. Diesen konnten anhand der Uhrzeit Registrierungsnummern und da-
mit Flugzeug- und Triebwerkstyp zugeordnet werden. Aus den Audioaufzeichnungen
wurden Spektrogramme und Kurzzeit-Spektren erstellt und darin der Verlauf des
gesuchten Drehtones identifiziert. Unter Kenntnis des Doppler-Effektes konnte dar-
an die Geschwindigkeit der bewegten Quelle abgeschatzt und aus der empfangenen
Frequenz die tatsachlich emittierte bestimmt werden. Mit Hilfe der Triebwerksspe-
zifikationen wurde daraus die Drehzahl und damit die relative Leistung bestimmt.
Fur diese Arbeit soll zunachst nur eine Auswahl der von der Empa durchgefuhrten
Messungen ausgewertet werden, fur die entsprechende Vergleichsdaten der Swiss
verfugbar sind. Liefert die hier entwickelte Methode dabei verlassliche Ergebnisse,
kann sie im Anschluss auch auf die Uberfluge angewendet werden, deren Verlaufe
der Triebwerksleistung bisher unbekannt sind.
2
2 Grundlagen
2.1 Flugzeugtriebwerke
Flugzeugtriebwerke funktionieren nach dem Prinzip des dritten Newtonschen Axioms
actio = reactio. Der Vorwartsschub wird dadurch erzeugt, dass der Impuls der aus-
tretenden Luft großer ist als der Eintrittsimpuls. Da die eintretenden Luftmasse
nahezu gleich der austretenden ist, lasst sich dies nur durch eine Erhohung der Aus-
trittsgeschwindigkeit realisieren. Bei modernen Strahltriebwerken wird dies erreicht,
indem sie die in sie eintretende Luft durch einen thermodynamischem Kreispro-
zess beschleunigen und als schnellen Gasstrahl wieder ausstoßen. Dabei unterschei-
det man jene Triebwerke, die die Geschwindigkeit einer kleinen Luftmasse stark
erhohen (Turbojet), von denen, die eine große Luftmasse im Verhaltnis weniger stark
beschleunigen (Turbofan). Da sich letztere durch einen besseren Vortriebswirkungs-
grad, eine vergleichsweise geringere Larmemission und durch einen geringeren spe-
zifischen Brennstoffverbrauch auszeichnen, wird diese Variante heutzutage bei der
zivilen Luftfahrt bevorzugt eingesetzt [2, S. 1-4].
Bei einem Turbojettriebwerk entsteht der Schub nur durch einen schnellen Heißgas-
strahl. Die Luft wird von der Gasturbine angesaugt, durch den Verdichter kompri-
miert, in der Brennkammer erhitzt und als heißer Gasstrahl durch die Schubduse
nach hinten ausgestoßen. Dabei wird die Turbine angetrieben, die uber eine Welle
wiederum den Verdichter antreibt [2, S. 19-20].
Turbofantriebwerke werden auch als ZTL-Triebwerke bezeichnet, das fur Zweistrom-
Turbo-Luftstrahl steht. Weitere typische Bezeichnungen sind Zweikreis- und Bypass-
triebwerk, die auch die Arbeitsweise dieses Typs beschreiben. Dieser zeichnet sich
dadurch aus, dass dem oben beschriebenen Kerntriebwerk eine Turbine nachgeschal-
tet ist, die einen zusatzlichen Fan bzw. Niederdruckverdichter antreibt. Durch diesen
wird ein sekundarer kalter Luftstrahl (Nebenstrom) erzeugt, der am Kern vorbei-
gefuhrt wird und den Großteil des Schubs erzeugt [2, S. 23-24]. Wie groß dieser
Anteil ist, wird durch das sog. Bypass- bzw. Nebenstromverhaltnis µ angegeben.
Dies wird aus dem Verhaltnis des Luftmassenstroms im Sekundarkreis zu dem des
Primarkreises bestimmt [2, S. 39] und liegt heutzutage bei zivilen Triebwerken im
Bereich von ca. 4 ≤ µ ≤ 9 [2, S. 135].
3
2 Grundlagen
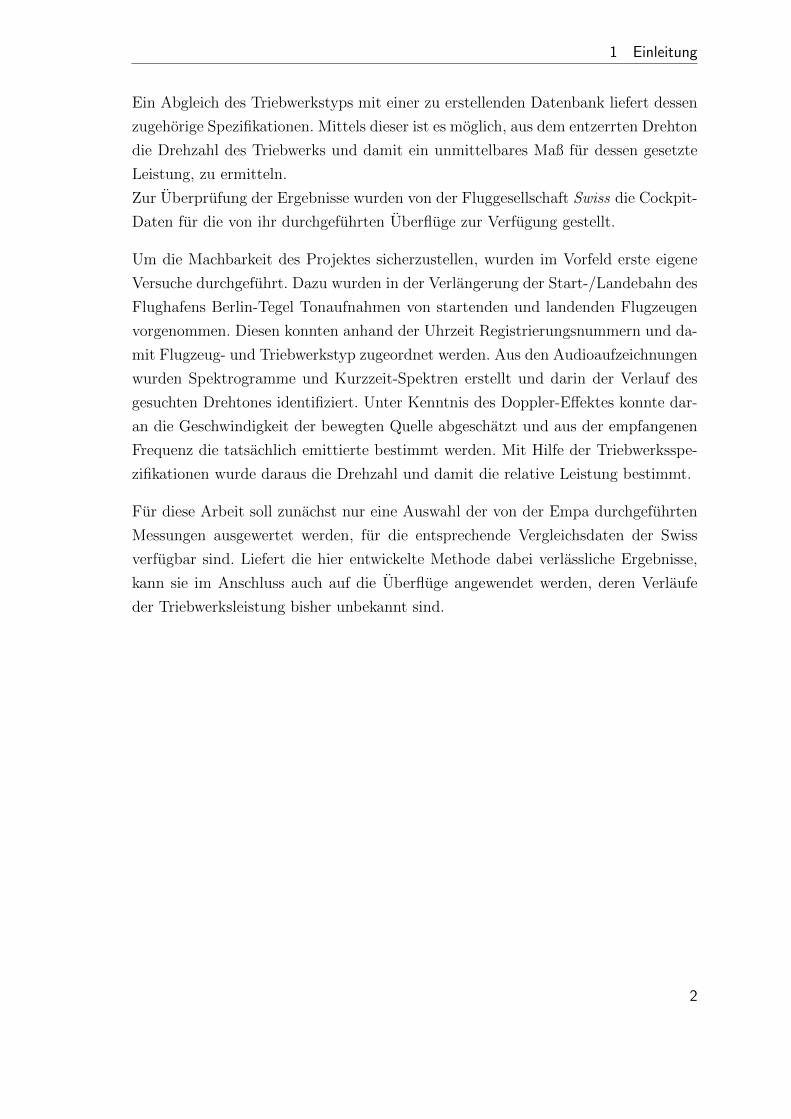
Abbildung 1: Prinzipieller Aufbau eines modernen Mehrwellen-Turbofantriebwerksmit Nieder-, Mittel- und Hochdruckteil [2, S. 30]
Moderne Triebwerke werden zudem mit (mindestens) zwei Wellen ausgefuhrt. Dabei
wird die Turbine auf Nieder- und Hochdruckturbine aufgeteilt, die jeweils uber eine
eigene Welle mit dem entsprechenden Nieder- bzw. Hochdruckverdichter verbunden
sind. In Abbildung 1 ist der Aufbau eines mehrwelligen Turbofantriebwerks der
Anschauung halber schematisch dargestellt.
Die Niederdruckwelle dreht sich stets langsamer als der Hochdruckteil des Trieb-
werks, da ansonsten der auf ihr befestigte Fan an seinen Blattspitzen zu hohe Ge-
schwindigkeiten erreichen wurde. Dabei wird die Wellendrehzahl uber die Aerody-
namik der entsprechenden Niederdruckturbine geregelt [2, S. 31]. Diese Große wird
auch als N1 -Drehzahl bezeichnet und in Prozent zu einer Referenzdrehzahl angege-
ben, die nicht immer die maximale sein muss. Die Leistung eines Triebwerks wird
prinzipiell durch seinen Schub ausgedruckt, der sich jedoch wahrend des Fluges nur
schwer messtechnisch erfassen lasst. Daher dient die Drehzahl der Niederdruckwelle
als Ersatzgroße hierfur, die auch dem Piloten als Hauptleistung angezeigt wird [2,
S. 292-293].
4
2 Grundlagen
2.2 Schallentstehung
Vom rein aerodynamischen Larm abgesehen, der durch das Umstromen der einzelnen
Flugzeugkomponenten bedingt ist, sind die Triebwerke die dominanten Schallquellen
an einem Flugzeug. Wahrend bei Turbojettriebwerken aufgrund der hohen Strahlge-
schwindigkeiten die Schubduse bzw. der Strahl an sich ausschlaggebend ist, hat diese
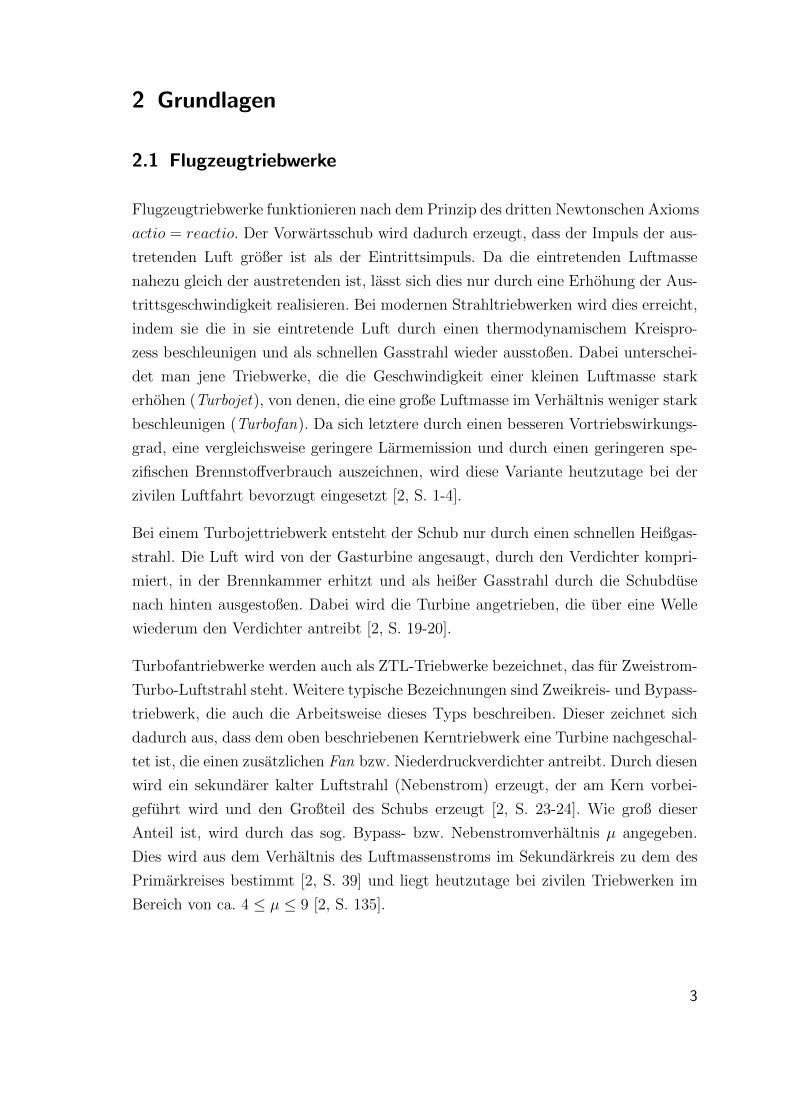
Schallquelle bei Turbofantriebwerken an Bedeutung verloren. Dafur tritt der durch
Fan, Verdichter und Turbine erzeugte Schall in den Vordergrund, wobei die durch
den Fan entstehenden Gerausche mit zunehmendem Bypassverhaltnis dominieren,
wie es in den in Abbildung 2 schematisch dargestellten Abstrahlcharakteristiken der
Einzelkomponenten verdeutlicht wird [2, S. 1266-1267].
Abbildung 2: Vergleich der Abstrahlcharakteristiken verschiedener Triebwerks-schallquellen bei Triebwerken mit kleinem (links) und großem (rechts)Bypassverhaltnis [2, S. 1267]
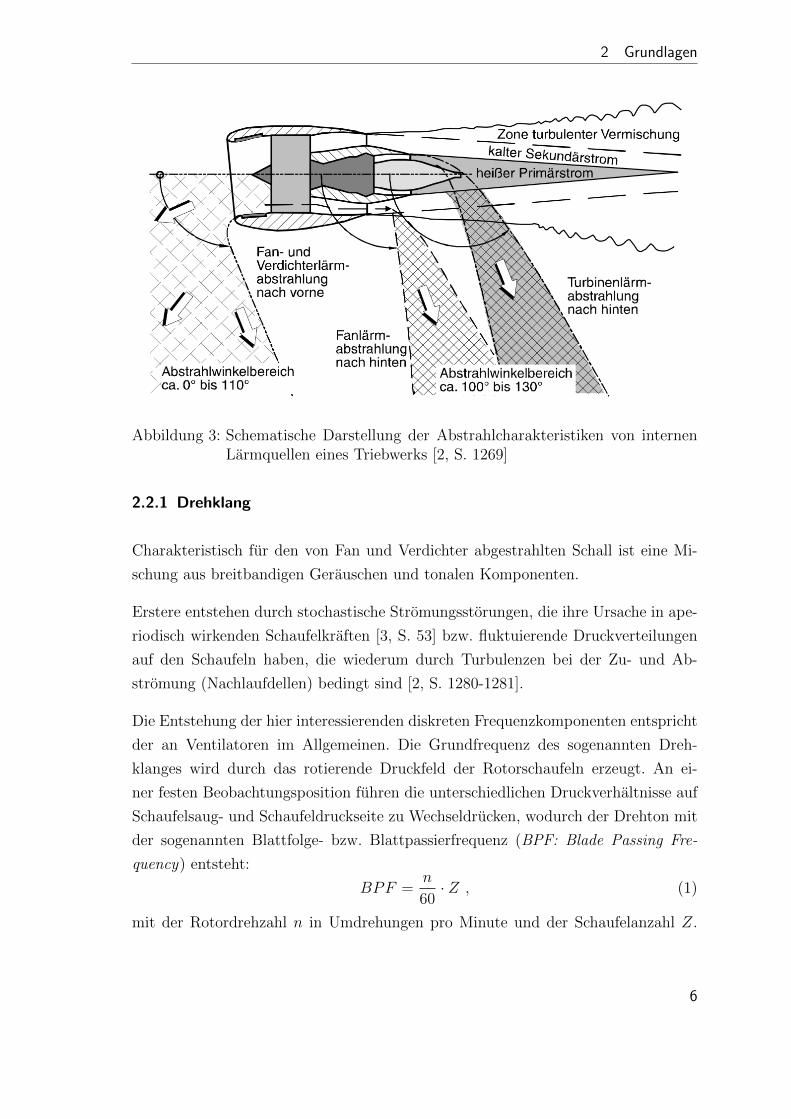
Ein Großteil des durch Fan und Verdichter emittierten Schalls wird durch den Trieb-
werkseinlauf nach vorne abgestrahlt. Dabei wird ein relativ großer Winkelbereich bis
ca. 110◦, bezogen auf die Triebwerksachse, abgedeckt. Ein Teil des durch den Fan
erzeugten Schalls wird auch uber den Sekundarkreis nach hinten abgestrahlt, jedoch
im Bereich der turbulenten Vermischung von Sekundarstrom und Umgebungsluft so
gebrochen, dass nur ein kleiner Winkelbereich von 100◦ bis 130◦ abgedeckt wird [2,
S. 1268-1267]. Veranschaulicht wird dies in Abbildung 3 auf der nachsten Seite.
5
2 Grundlagen
Abbildung 3: Schematische Darstellung der Abstrahlcharakteristiken von internenLarmquellen eines Triebwerks [2, S. 1269]
2.2.1 Drehklang
Charakteristisch fur den von Fan und Verdichter abgestrahlten Schall ist eine Mi-
schung aus breitbandigen Gerauschen und tonalen Komponenten.
Erstere entstehen durch stochastische Stromungsstorungen, die ihre Ursache in ape-
riodisch wirkenden Schaufelkraften [3, S. 53] bzw. fluktuierende Druckverteilungen
auf den Schaufeln haben, die wiederum durch Turbulenzen bei der Zu- und Ab-
stromung (Nachlaufdellen) bedingt sind [2, S. 1280-1281].
Die Entstehung der hier interessierenden diskreten Frequenzkomponenten entspricht
der an Ventilatoren im Allgemeinen. Die Grundfrequenz des sogenannten Dreh-
klanges wird durch das rotierende Druckfeld der Rotorschaufeln erzeugt. An ei-
ner festen Beobachtungsposition fuhren die unterschiedlichen Druckverhaltnisse auf
Schaufelsaug- und Schaufeldruckseite zu Wechseldrucken, wodurch der Drehton mit
der sogenannten Blattfolge- bzw. Blattpassierfrequenz (BPF: Blade Passing Fre-
quency) entsteht:
BPF =n
60· Z , (1)
mit der Rotordrehzahl n in Umdrehungen pro Minute und der Schaufelanzahl Z.
6

2 Grundlagen
Das Spektrum des rotierenden Druckfeldes enthalt neben der BPF auch deren hohere
Harmonische, die zusammen mit dieser den Drehklang ergeben [3, S. 47]. Wechselwir-
kungen des Rotors mit feststehenden Bauteilen, wie Statorschaufeln und Stutzstreben
bei Axialventilatoren, fuhren dabei zu einer zusatzlichen Erhohung der Amplitude
[4, S. 297-298].
2.2.2 Buzz Saw Noise
Uberschreitet die Geschwindigkeit der Spitzen der Rotorblatter die Schallgeschwin-
digkeit des umgebenden Mediums, kommt es zu Verdichtungsstoßen, d.h. Unste-
tigkeitsflachen an den Kanten der Schaufeln [3, S. 49]. Dadurch entsteht fur einen
ruhenden Beobachter ein sagezahnformiger Druckverlauf, der unter bestimmten Be-
dingungen ausbreitungsfahig ist. Das hierbei entstehende Gerausch wird aufgrund
seiner Signalgestalt als Buzz Saw Noise bezeichnet. Da sich die Geometrien der
Schaufeln geringfugig unterscheiden, sind auch die entstehenden Stoßfronten indi-
viduell verschieden. Diese Unterschiede wiederholen sich mit jeder Rotordrehung,
weshalb so zusatzliche tonale Komponenten bei der Rotordrehfrequenz und deren
ganzzahligen Vielfachen entstehen. Dabei kommt es auch zu einer Umverteilung der
Energie hin zu den Rotorharmonischen und die Amplitude der BPF im Spektrum
sinkt. [3, S. 50]. Ab welcher Drehzahl Buzz Saw Noise entsteht, lasst sich uber den
Durchmesser des Triebwerksfans d aus der Umfangsgeschwindigkeit vu berechnen:
vu =πd
Tn. (2)
Mit der Zeit fur eine Umdrehung Tn in Sekunden ergibt sich:
n =60
Tn= 60 · vu
πd. (3)
Setzt man vu = c, folgt daraus, dass sich fur Drehzahlen
n > 60 · cπd
(4)
die Blattspitzen mit Uberschallgeschwindigkeit drehen und somit Buzz Saw Noise
emittiert wird.
7

2 Grundlagen
2.3 Schallausbreitung
Auf dem Weg vom uberfliegenden Flugzeug zum Messpunkt am Boden erleidet der
emittierte Schall zahlreiche Verluste, Verzerrungen und Verzogerungen. Um den Fre-
quenzgehalt des ursprunglichen Drehklanges rekonstruieren zu konnen, ist es zuvor
erforderlich, die frequenzabhangigen Einflusse bei der Schallausbreitung auf ihre
Relevanz zu untersuchen. Eine Betrachtung von Faktoren, die alle Frequenzen glei-
chermaßen betreffen, ist dabei fur diese Arbeit nicht erforderlich. Eine Ausnahme
hierbei bildet der Temperatureinfluss auf die Schallgeschwindigkeit und damit auf
die Laufzeit, da diese benotigt wird, um den tatsachlichen Zeitpunkt der Schall-
abstrahlung bestimmen zu konnen. Etwaige Einflusse durch Brechung, Streuung,
Beugung und Reflexion auf dem Ubertragungsweg werden vernachlassigt.
2.3.1 Doppler-Effekt
Ein Schallsignal kann nur verzerrungsfrei von dessen Quelle zum Empfanger ubertra-
gen werden, wenn sich die Signallaufzeit dabei nicht wahrend der Ubermittlung
verandert. Bewegen sich Sender und Empfanger jedoch relativ zueinander, ist auch
die Laufzeit des Schalls zwischen diesen zeitvariant und das Signal wird bei der
Ubertragung verformt. D.h. die Frequenz fQ der vom Sender emittierten reinen Tone
unterscheidet sich von der am Empfanger ankommenden Frequenz fE. Dieser Effekt
ist nach seinem Entdecker Christian Doppler benannt und ist zur Bestimmung der
Grundfrequenz des abgestrahlten Drehklanges zwingend erforderlich [5, S. 59-60].
Fur den Fall eines im Medium ruhenden Empfangers und einer sich auf diesen zu
bewegenden Quelle, verkurzt sich die empfangene Wellenlange
λE = λQ −∆x (5)
um die Strecke ∆x, die die Quelle innerhalb einer Periode TQ zuruckgelegt hat.
Bewegt sich diese mit der Geschwindigkeit U gegenuber dem Medium, ergibt sich
[5, S. 61-62]:
λE = λQ − U · TQ = λQ −U
fQ. (6)
8

2 Grundlagen
Mit der Beziehung c = λ · f wird daraus:
λE = λQ −U · λQc
= λQ ·(
1− U
c
), (7)
bzw.
fE =c
λE=
fQ
1− Uc
. (8)
Fur eine beliebig im dreidimensionalen Raum bewegte Quelle gilt daher:
fE =fQ
1− vrelc
, (9)
mit der relativen Geschwindigkeit vrel der Quelle in Bezug auf den Empfanger. Diese
lasst sich aus dem Skalarprodukt der Geschwindigkeit ~v der Quelle in Relation zum
Medium und des Einheitsvektors ~eQE, der von der Quelle auf den Empfanger zeigt,
bestimmen:
vrel = ~v ◦ ~eQE . (10)
2.3.2 Atmosphare
Luftabsorption
Teile des Schalls werden bei der Ausbreitung in der Atmosphare durch Absorption
in der Luft gedampft. Welche Frequenzanteile dabei in welchem Maße absorbiert
werden, hangt von der Umgebungstemperatur, dem Luftdruck, der relativen Luft-
feuchtigkeit und der Entfernung ab [6, S. 5].
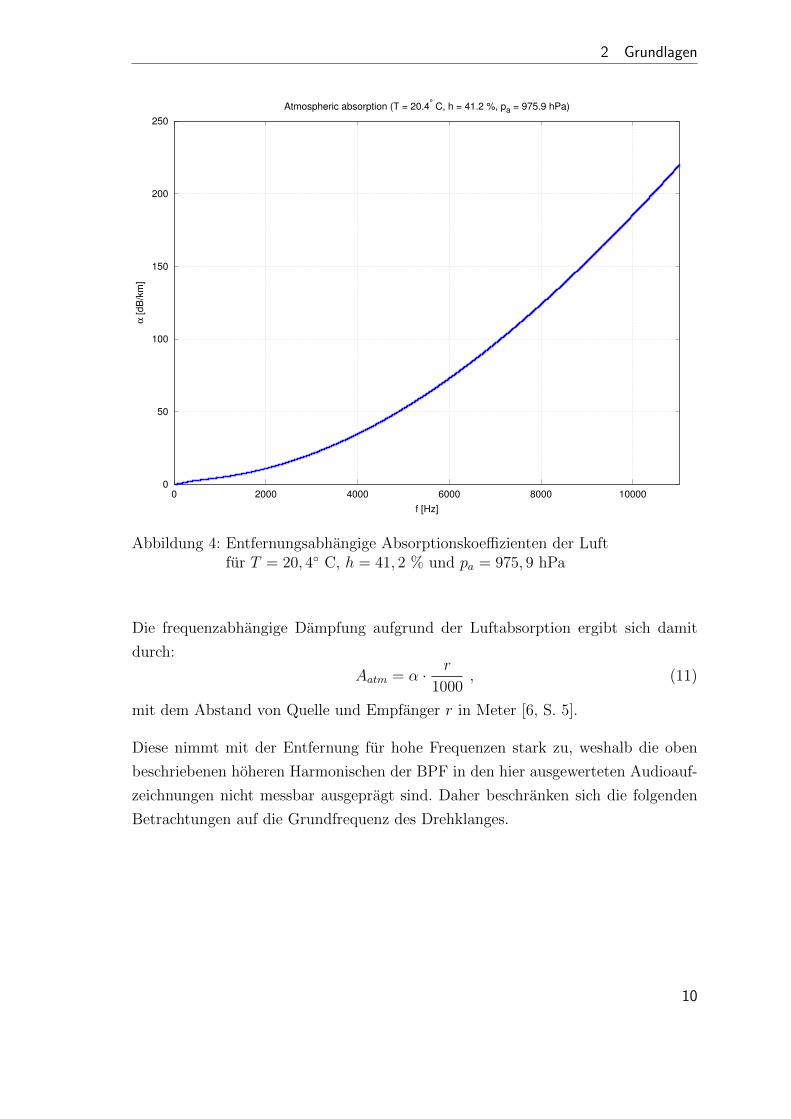
Eine Formel zur Berechnung der Schallabsorption durch Luft ist in der internationa-
len Norm ISO 9613-1 gegeben [7]. Fur das in Abschnitt 3 verwendete Beispielereignis
bei einer Temperatur von T = 20, 4◦ C (in 2 m Hohe), einer relativen Luftfeuch-
tigkeit von h = 41.2 % und einem Luftdruck von pa = 975, 9 hPa sind die danach
berechneten Absorptionskoeffizienten α in Dezibel pro Kilometer uber dem interes-
sierenden Frequenzbereich in Abbildung 4 auf der nachsten Seite dargestellt.
9
2 Grundlagen
0
50
100
150
200
250
0 2000 4000 6000 8000 10000
α [
dB
/km
]
f [Hz]
Atmospheric absorption (T = 20.4° C, h = 41.2 %, pa = 975.9 hPa)
Abbildung 4: Entfernungsabhangige Absorptionskoeffizienten der Luftfur T = 20, 4◦ C, h = 41, 2 % und pa = 975, 9 hPa
Die frequenzabhangige Dampfung aufgrund der Luftabsorption ergibt sich damit
durch:
Aatm = α · r
1000, (11)
mit dem Abstand von Quelle und Empfanger r in Meter [6, S. 5].
Diese nimmt mit der Entfernung fur hohe Frequenzen stark zu, weshalb die oben
beschriebenen hoheren Harmonischen der BPF in den hier ausgewerteten Audioauf-
zeichnungen nicht messbar ausgepragt sind. Daher beschranken sich die folgenden
Betrachtungen auf die Grundfrequenz des Drehklanges.
10
2 Grundlagen
Schallgeschwindigkeit
Um die Laufzeit ∆t zu ermitteln, die der Schall fur die Ausbreitung von der Quelle
zum Empfanger benotigt, ist die Kenntnis der Schallgeschwindigkeit c erforderlich:
∆t =|~rQE|c
. (12)
Dabei ist c temperaturabhangig und berechnet sich nach:
c =
√κ
R
Mmol
T0 , (13)
mit dem Adiabatenexponenten κ = 1, 4 (fur zweiatomige Gase), der allgemeinen
Gaskonstanten R = 8, 314 Nm/K, der molaren Masse von Luft Mmol = 28, 8 g (fur
80 % Stickstoff und 20 % Sauerstoff ) und der absoluten Temperatur T0 in Kelvin
(0◦ C = 273, 15 K) [5, S. 21-26].
Da die Temperatur innerhalb der Troposphare mit zunehmender Hohe sinkt, nimmt
auch die Schallgeschwindigkeit mit dieser ab. Damit wirkt sich die vertikale Tempera-
turschichtung sowohl auf die Ausbreitungszeit, als auch auf die Doppler-Verschiebung
aus. Dies kann fur die Untersuchungen im Nahbereich des Flughafens aufgrund der
relativ geringen Uberflughohen vernachlassigt werden, sollte jedoch bei der Auswer-
tung der Messungen im Fernbereich berucksichtigt werden.
11

2 Grundlagen
2.4 Frequenzanalyse
2.4.1 Fouriertransformation
Um den Frequenzgehalt eines Signals untersuchen zu konnen, muss dieses zunachst
in den Frequenzbereich uberfuhrt werden. In der digitalen Signalverarbeitung kann
das Spektrum nur an einer endlichen Anzahl von diskreten Stutzstellen bestimmt
werden. Dies geschieht durch die diskrete Fouriertransformation (DFT ), die gegeben
ist durch:
X(k) =N−1∑n=0
x[n]e−jkn2πN , k = 0, 1, ..., N − 1 . (14)
Sie wird durch den schnellen Algorithmus FFT (Fast Fourier Transform) durch-
gefuhrt, was den Rechenaufwand erheblich reduziert [8, S. 44-45]. Voraussetzung
dafur ist allerdings, dass die Lange N des berechneten Datenblockes einer Zweier-
potenz entspricht. Der Abstand der Stutzstellen im resultierenden Spektrum und
damit die Frequenzauflosung wird bestimmt durch [9, S. 822]:
∆f =1
NTs=fsN
, (15)
mit der Samplingfrequenz fs. Die einer Stutzstelle k entsprechende Frequenz ist
damit:
f(k) = ∆f · k . (16)
2.4.2 Fensterfunktion
Die DFT wird fur einzelne Blocke durchgefuhrt, die nur kurze Zeitanteile des Signals
enthalten. Dieses Ausschneiden entspricht im Zeitbereich der Multiplizierung des
Signals mit einem Rechteckfenster und somit im Frequenzbereich der Faltung mit
dessen Spektrum. Ist die Blocklange dabei nicht ein ganzzahliges Vielfaches der
Signalperiode, kommt es zum Leck-Effekt und der Spektralanteil des Signals wird
zu breit dargestellt. Dies lasst sich durch andere Fensterformen, die das Signal am
Anfang und Ende des Blockes ein- bzw. ausblenden, teilweise unterdrucken [10, S.
550-551]. Dabei muss zwischen der Breite der Hauptkeule um die gesuchten Frequenz
und der Hohe der benachbarten Nebenkeulen abgewogen werden.
12
2 Grundlagen
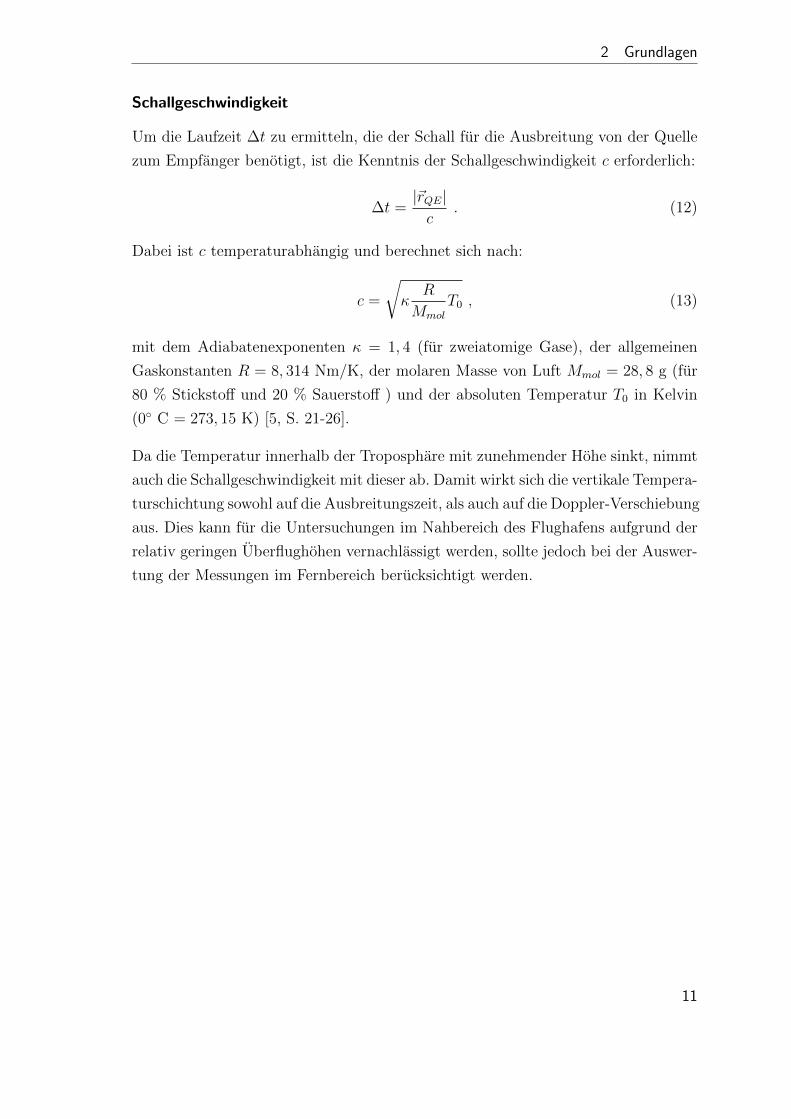
Einen guten Kompromiss zwischen Hauptkeulenbreite und Nebenkeulendampfung
bietet das Hanning-Fenster, das beschrieben wird durch [8, S. 110]:
w(n) =1
2
[1− cos
(2πn
N
)], −N/2 ≤ n ≤ N/2 , (17)
und fur eine Blocklange von N = 4096 in Abbildung 5 dargestellt ist.
0
0.2
0.4
0.6
0.8
1
0 500 1000 1500 2000 2500 3000 3500 4000
w(n
)
n [samples]
Hanning window
Abbildung 5: Hanning-Fensterfunktion fur die Blocklange N = 4096
13

2 Grundlagen
2.4.3 Spektrogramm
Berechnet man fur jeden uberlappenden Block (siehe Abschnitt 3.2.2 auf Seite 21)
eines Signals eine Kurzzeit-FFT und tragt die Frequenzkomponenten mit den ihren
Pegeln entsprechenden Farben uber der Zeit auf, erhalt man ein Spektrogramm. Die-
se Darstellung liefert einen schnellen Uberblick uber den Zeitverlauf der im Signal
enthaltenden tonalen Komponenten und wird daher in dieser Arbeit zur Visualisie-
rung der Audioaufzeichnungen eingesetzt.
Das Spektrogramm der Tonaufnahme des im folgenden Abschnitt verwendeten Bei-
spiels eines landenden Flugzeuges ist in Abbildung 8 auf Seite 19 dargestellt.
14
3 Methodik
Systeme zur Analyse von Audiodaten werden in der Regel dazu genutzt, musikalische
Inhalte oder Sprache zu verarbeiten. Dabei sollen aus den Rohdaten zusatzliche
Informationen (Meta-Daten) gewonnen werden, die der verstandlichen Beschreibung
der eigentlichen Inhalte dienen. Dies kann jedoch auch in anderen Disziplinen von
Vorteil sein, in denen die zugrunde liegenden Signale ebenso tonale Komponenten
aufweisen und in großen Datenbanken vorliegen, die nur automatisiert verarbeitet
werden konnen [11, S. 1].
Im Allgemeinen kann ein solches System in zwei Verarbeitungsschritte aufgeteilt
werden. Der erste Schritt dient dazu, sogenannte Features zu extrahieren, die gan-
ze Blocke des Eingangssignals durch jeweils nur einen Wert beschreiben, wodurch
sich die Datenmenge fur die weitere Verarbeitung reduzieren lasst. Dabei werden
zunachst Low Level Features extrahiert, die in der Regel noch keine unmittelbar
verstandliche Bedeutung haben mussen. Sie dienen einzig der Abbildung auf High
Level Features im folgenden Schritt, die eine Reprasentation der Eingangsdaten
durch eine leichter von Menschen interpretierbare Große darstellen. So lassen sich
schrittweise hohere Abstraktionsgrade erreichen und damit aussagekraftige Meta-
Daten erzeugen [11, S. 4-6].
Dieses Vorgehen soll in dieser Arbeit entsprechend adaptiert und auf Audioaufnah-
men von startenden und landenden Flugzeugen angewandt werden. Dadurch sollen
Informationen uber die dabei gesetzte Triebwerksleistung gewonnen werden und auf
eine fur diese ubliche Große abgebildet werden.
Zur beispielhaften Darstellung der hier dokumentierten Methodik wurde der Uberflug
Nr. 02 221 A343 eines Flugzeuges im Landeanflug ausgewahlt. Das entsprechende
Modell A343-313E ist ein Großraumflugzeug der A340-Familie des Flugzeugherstel-
lers Airbus, das mit vier Triebwerken des Typs CFM56-5C ausgerustet ist.
15
3 Methodik
3.1 Eingangsdaten
Die Empa fuhrte in der naheren Umgebung eines schweizerischen Großflughafens1
eine Messkampagne zur Erfassung der An- und Abflugbewegungen durch. Dazu
gehorten zum einen akustische Messungen, bestehend aus Tonaufnahmen und Schall-
pegelmessungen in Terzen. Zum anderen wurden auch die raumlichen Bewegun-
gen der startenden bzw. landenden Flugzeuge erfasst, wofur ein optisches System
(SciTrackS ) zum Einsatz kam, das aus zwei automatisch dem Objekt folgenden
Kameras links und rechts der Piste bestand. Die Akustikmessungen fanden in der
Verlangerung der Start-/Landebahnen, unmittelbar unter dem Flugpfad statt. Fur
Landungen betrug der Abstand zur Aufsetzzone ca. 2,1 km, bei Starts zum Start-
punkt ca. 2,6 km.
Die Messdaten liegen, getrennt nach Starts und Landungen, in separaten Ordnern
fur jedes Ereignis vor. Ein Ereignis bezeichnet dabei den Uberflug eines Flugzeu-
ges uber den entsprechenden Messpunkt in Verlangerung der ubergeordneten Start-
/Landebahn.
3.1.1 Positionsdaten
Die durch das optische System erfassten Positionsdaten (Track) wurden in CSV -
Dateien (Comma-Separated Values) abgelegt und ubermittelt. Diese enthalten, ne-
ben einem absoluten Zeitstempel in Sekunden seit Mitternacht, die Koordinaten
und Hohenangaben uber Normalnull mit zugehorigen Standardabweichungen und
die Geschwindigkeitskomponenten in die drei Raumrichtungen. Die Track-Daten lie-
gen in einer Auflosung von 200 ms und einer Dauer von 60 s um den Zeitpunkt des
kurzesten Abstandes von Flugzeug und Messpunkt vor.
Ebenso wurden die Koordinaten der Messpunkte ubermittelt, wobei hier zu den
Hohenangaben noch die Hohe des verwendeten Mikrofonstativs von 4 m zu addieren
ist.
1Aus Grunden des Datenschutzes darf der Flughafen im Rahmen dieser Arbeit nicht namentlichgenannt werden.
16
3 Methodik
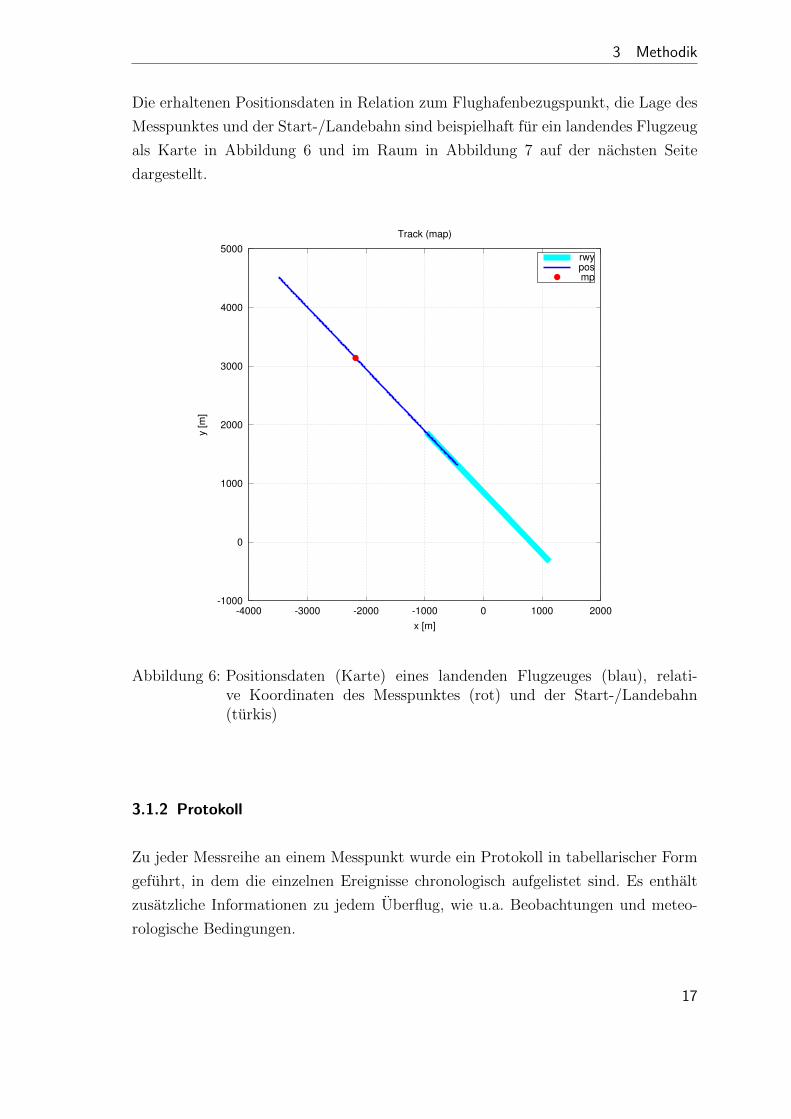
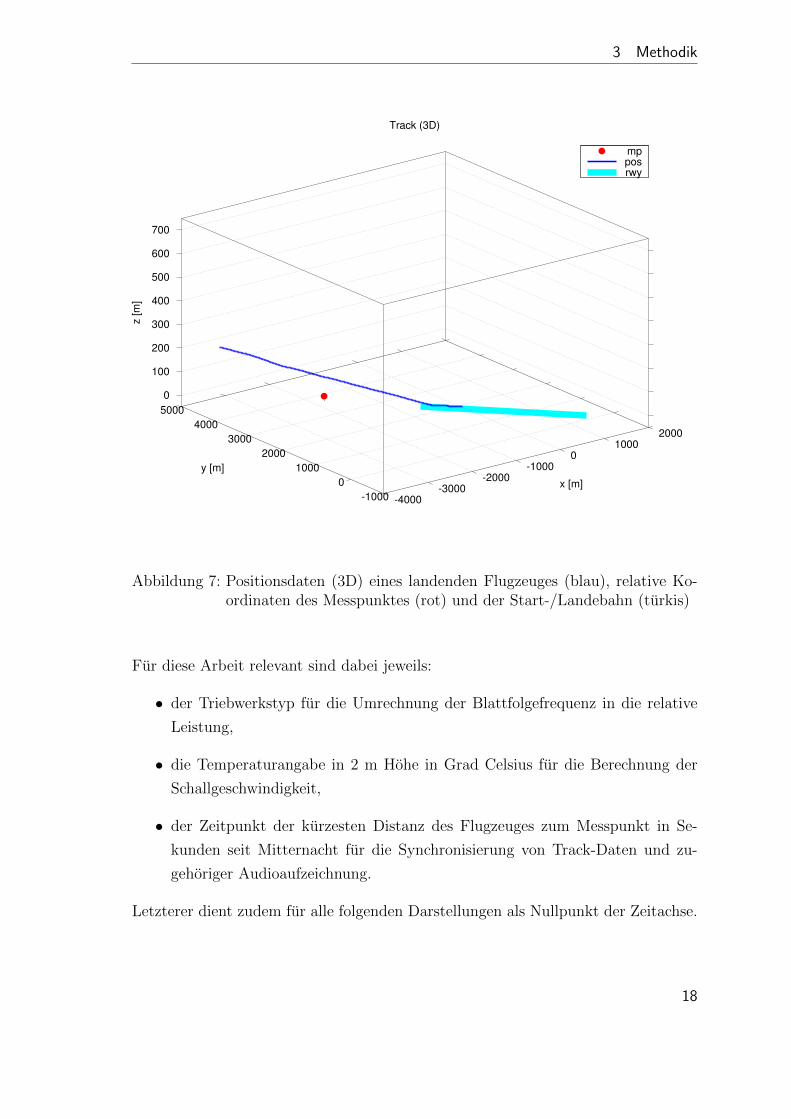
Die erhaltenen Positionsdaten in Relation zum Flughafenbezugspunkt, die Lage des
Messpunktes und der Start-/Landebahn sind beispielhaft fur ein landendes Flugzeug
als Karte in Abbildung 6 und im Raum in Abbildung 7 auf der nachsten Seite
dargestellt.
-1000
0
1000
2000
3000
4000
5000
-4000 -3000 -2000 -1000 0 1000 2000
y [
m]
x [m]
Track (map)
rwyposmp
Abbildung 6: Positionsdaten (Karte) eines landenden Flugzeuges (blau), relati-ve Koordinaten des Messpunktes (rot) und der Start-/Landebahn(turkis)
3.1.2 Protokoll
Zu jeder Messreihe an einem Messpunkt wurde ein Protokoll in tabellarischer Form
gefuhrt, in dem die einzelnen Ereignisse chronologisch aufgelistet sind. Es enthalt
zusatzliche Informationen zu jedem Uberflug, wie u.a. Beobachtungen und meteo-
rologische Bedingungen.
17
3 Methodik
Track (3D)
mpposrwy
-4000-3000
-2000-1000
01000
2000
x [m]-1000
0
1000
2000
3000
4000
5000
y [m]
0
100
200
300
400
500
600
700
z [m
]
Abbildung 7: Positionsdaten (3D) eines landenden Flugzeuges (blau), relative Ko-ordinaten des Messpunktes (rot) und der Start-/Landebahn (turkis)
Fur diese Arbeit relevant sind dabei jeweils:
• der Triebwerkstyp fur die Umrechnung der Blattfolgefrequenz in die relative
Leistung,
• die Temperaturangabe in 2 m Hohe in Grad Celsius fur die Berechnung der
Schallgeschwindigkeit,
• der Zeitpunkt der kurzesten Distanz des Flugzeuges zum Messpunkt in Se-
kunden seit Mitternacht fur die Synchronisierung von Track-Daten und zu-
gehoriger Audioaufzeichnung.
Letzterer dient zudem fur alle folgenden Darstellungen als Nullpunkt der Zeitachse.
18
3 Methodik
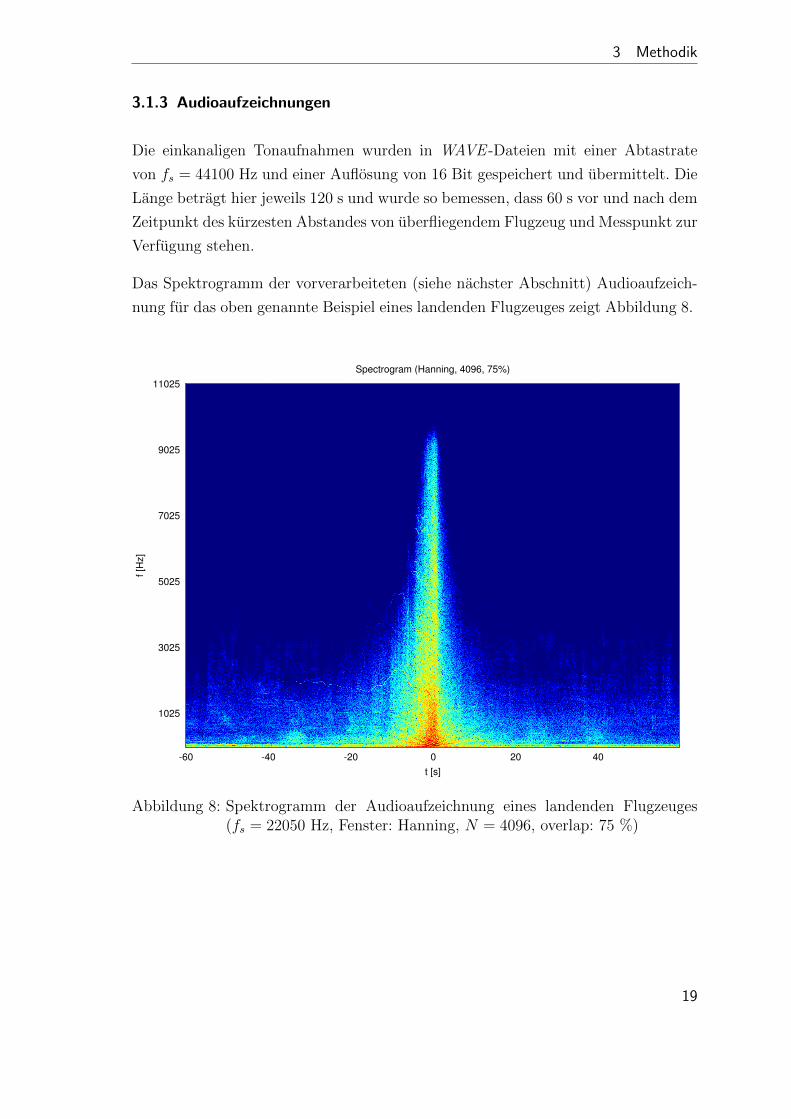
3.1.3 Audioaufzeichnungen
Die einkanaligen Tonaufnahmen wurden in WAVE -Dateien mit einer Abtastrate
von fs = 44100 Hz und einer Auflosung von 16 Bit gespeichert und ubermittelt. Die
Lange betragt hier jeweils 120 s und wurde so bemessen, dass 60 s vor und nach dem
Zeitpunkt des kurzesten Abstandes von uberfliegendem Flugzeug und Messpunkt zur
Verfugung stehen.
Das Spektrogramm der vorverarbeiteten (siehe nachster Abschnitt) Audioaufzeich-
nung fur das oben genannte Beispiel eines landenden Flugzeuges zeigt Abbildung 8.
11025
9025
7025
5025
3025
1025
-60 -40 -20 0 20 40
f [H
z]
t [s]
Spectrogram (Hanning, 4096, 75%)
Abbildung 8: Spektrogramm der Audioaufzeichnung eines landenden Flugzeuges(fs = 22050 Hz, Fenster: Hanning, N = 4096, overlap: 75 %)
19

3 Methodik
3.2 Datenverarbeitung
3.2.1 Audio Pre-Processing
Bevor Low Level Features extrahiert werden, sollten die Audiodaten so aufberei-
tet werden (Pre-Processing), dass moglichst verlassliche Ergebnisse erzielt werden.
Dabei konnen zum einen unnotigen Signalanteile weggelassen werden, um die Da-
tenmenge zu reduzieren, und zum anderen sollten Informationen entfernt werden,
die moglicherweise das Ergebnis negativ beeinflussen konnten [11, S. 38].
Es findet zunachst eine Reduktion der Stutzstellen (Downsampling) des Audiosi-
gnals auf 22050 Samples (Abtastwerte) pro Sekunde statt, wodurch nach dem Ab-
stasttheorem noch der Bereich bis zur Nyquist-Frequenz von 11025 Hz zur Analy-
se zur Verfugung steht, was fur die angestrebten Untersuchungen ausreichend ist.
Dies dient zum einen der Datenreduktion, zum anderen wird dadurch die Frequen-
zauflosung bei gleicher Blocklange und damit gleichbleibender Rechengeschwindig-
keit, verdoppelt (siehe Gleichung (15) auf Seite 12). Die damit einhergehende Hal-
bierung der Zeitauflosung ist fur die folgenden Berechnungen akzeptabel und kann
teilweise durch uberlappende Blockbildung (siehe folgenden Abschnitt) kompensiert
werden.
Um vergleichbare Werte zu gewahrleisten, wird der Gleichspannungsanteil (DC Off-
set), in Form der Abweichung des Signal-Mittelwertes von Null, entfernt. Dies lasst
sich bei der hier vorliegenden Offline-Datenverarbeitung durch eine einfache Sub-
traktion dieses Wertes von jedem Sample erreichen [11, S. 39]:
x(i) = xDC(i)− 1
L
L−1∑i=0
xDC(i) . (18)
Um zudem sicherzustellen, dass alle Eingangssignale eine maximale Amplitude von
Eins aufweisen, werden diese auf ihr Maximum normalisiert [11, S. 40]:
x(i) =xs(i)
max∀i
(|xs(i)|). (19)
20
3 Methodik
3.2.2 Blockverarbeitung
Fur die weitere Verarbeitung muss das Eingangssignal zunachst in einzelne Blocke
aufgeteilt werden, die nacheinander bearbeitet werden. Deren Lange N ist zum einen
fur die zeitliche Auflosung, zum anderen fur die Frequenzauflosung relevant (siehe
Gleichung (15) auf Seite 12).
Im vorliegenden Fall sind die Positionsdaten, denen spater die N1-Werte zugeordnet
werden sollen, in einer Auflosung von 0, 2 s gegeben. D.h. dass bei einer bereits auf
22050 Hz reduzierten Abtastrate jede Sekunde theoretisch in 5 aufeinanderfolgende
Blocke a 4410 Samples aufgeilt werden kann. Da fur die FFT die Blocklange eine
Zweierpotenz sein muss, wurde N = 4096 gewahlt, was einer zeitlichen Auflosung
von 185, 6 ms entspricht. Um zunachst intern mit einer hoheren Zeitauflosung rech-
nen zu konnen, werden zu 75 % uberlappende Blocke (Overlap) gebildet, d.h. aufein-
anderfolgende Blocke sind nur um 1024 Werte zueinander verschoben [11, S. 20-21].
Dies entspricht einer theoretischen Zeitauflosung von 46, 4 ms.
Fur die gewahlte Blocklange von N = 4096 und die Samplingrate fs = 22050 Hz
ergibt sich nach Gleichung (15) auf Seite 12 eine Frequenzauflosung von ∆f =
5, 38 Hz. Diese begrundet, neben der Datenreduktion, das im vorherigen Abschnitt
beschriebene Downsampling.
3.2.3 Frequenzfilterung
Da sich fur jeden Uberflug, bedingt durch die unterschiedlichen eingesetzten Trieb-
werke und den geschwindigkeitsabhangigen Doppler-Effekt, der zu betrachtende Fre-
quenzbereich andert, werden fur jedes Ereignis individuell angepasste Filter verwen-
det.
Um die Dampfung der hohen Frequenzen durch die Schallabsorption in Luft (siehe
Abbildung 4 auf Seite 10) und den dadurch bedingten Abfall des Amplitudenganges
auszugleichen, wird zunachst ein Hochpass-Filter 4. Ordnung zur Egalisierung ein-
gesetzt. Die Grenzfrequenz fc,e wird dabei so gewahlt, dass sie der maximalen am
Messpunkt empfangenen Blattfolgefrequenz entspricht.
Dafur wird ein, fur diesen Lande- bzw. Startabschnitt typischer, N1-Wert angenom-
men, der uber die Triebwerkskonstante KTW (siehe Gleichung (28) auf Seite 30) in
21

3 Methodik
die entsprechend emittierte Blattfolgefrequenz umgerechnet wird. Nach mehrfacher
Messwiederholung hat sich dabei, an den hier ausgewerteten Messpunkten, fur Lan-
dungen eine zu erwartende N1-Drehzahl N1exp von 52 % und fur Starts von 82 %
als realistisch erwiesen.
Mit der maximalen relativen Geschwindigkeit vrel,max (siehe Gleichung (10) auf Sei-
te 9) des Flugzeuges in Bezug auf den Messpunkt ergibt sich durch die Doppler-
Verschiebung (siehe Gleichung (9) auf Seite 9) die Grenzfrequenz zu:
fc,e =N1expKTW
1− vrel,maxc
. (20)
Zur Einschrankung des zu untersuchenden Frequenzbereichs wird zum einen ein
Tiefpass-Filter 12. Ordnung eingesetzt, dessen Grenzfrequenz 20 % oberhalb der
Grenzfrequenz zur Egalisierung fc,e gewahlt wurde, um zusatzlich Schwankungen
der Drehzahl in diesem Bereich zuzulassen:
fc,l = 1, 20 · fc,e . (21)
Zum anderen wird ein Hochpass-Filter 12. Ordnung verwendet, mit einer Grenzfre-
quenz, die wiederum 20 % unterhalb der tiefsten empfangenen Blattfolgefrequenz
liegt:
fc,h = 0, 80 · N1expKTW
1− vrel,minc
, (22)
mit der minimalen relativen Geschwindigkeit vrel,min, die negativ ist und sich beim
Entfernen des Flugzeuges vom Messpunkt ergibt.
Fur das hier verwendet Beispiel ergeben sich dadurch folgende Grenzfrequenzen:
fc,e = 1910, 4 Hz ,
fc,l = 2292, 5 Hz ,
fc,h = 980, 7 Hz .
22
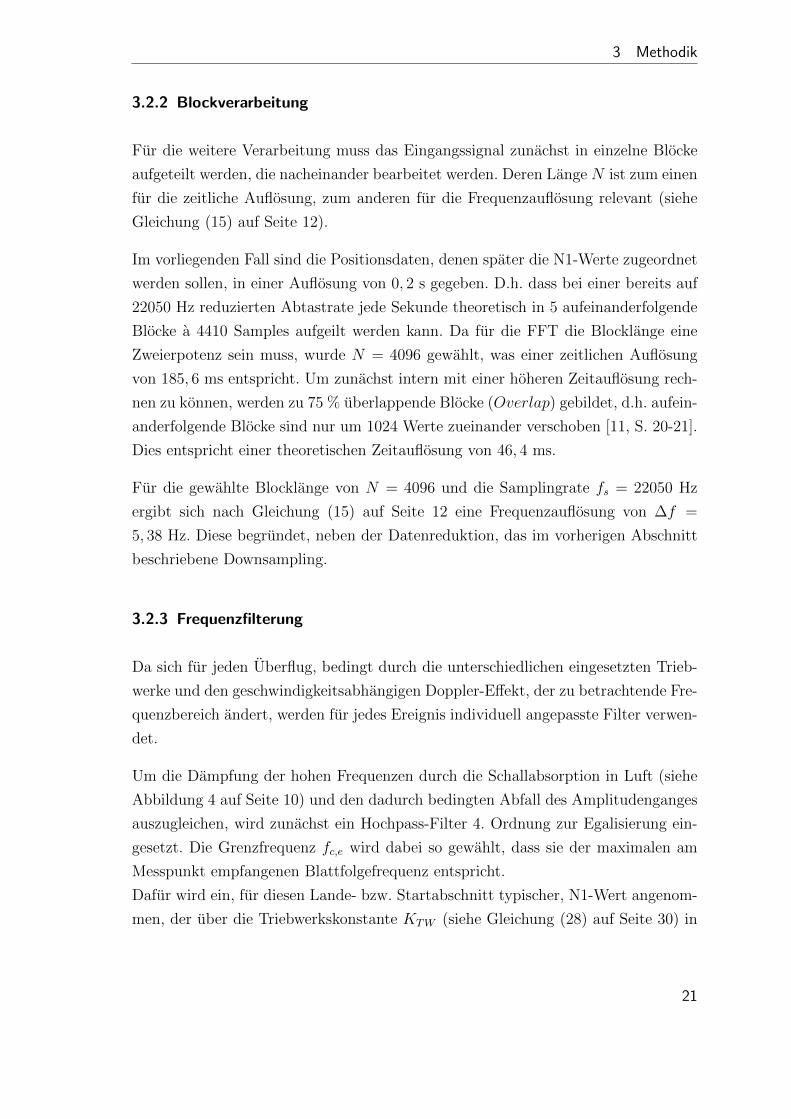
3 Methodik
Die drei ereignisspezifischen Filter mit Butterworth-Charakteristik zeigt Abbildung 9
beispielhaft fur die Landung eines Flugzeuges.
-100
-80
-60
-40
-20
0
0 1000 2000 3000 4000 5000
m [
dB
]
f [Hz]
Filter
equalizationlowpass
highpass
Abbildung 9: Egalisierungs-, Tiefpass- und Hochpass-Filter mit spezifischen Grenz-frequenzen fur ein landendes Flugzeug
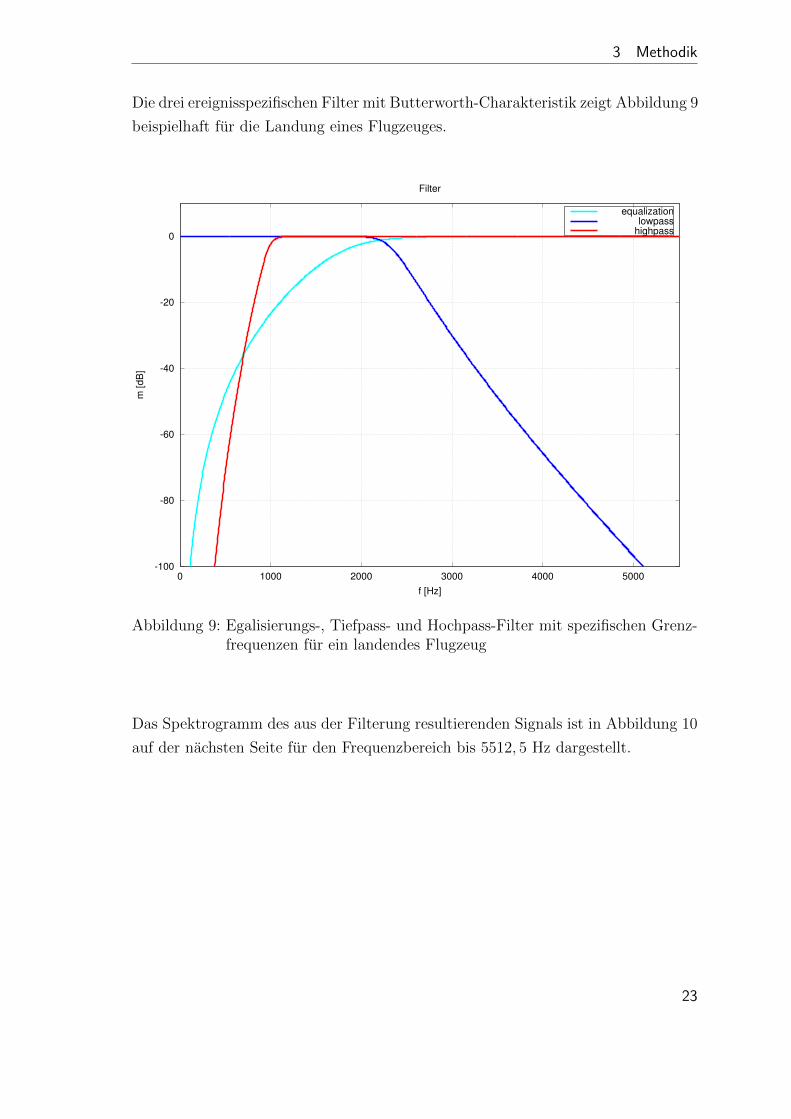
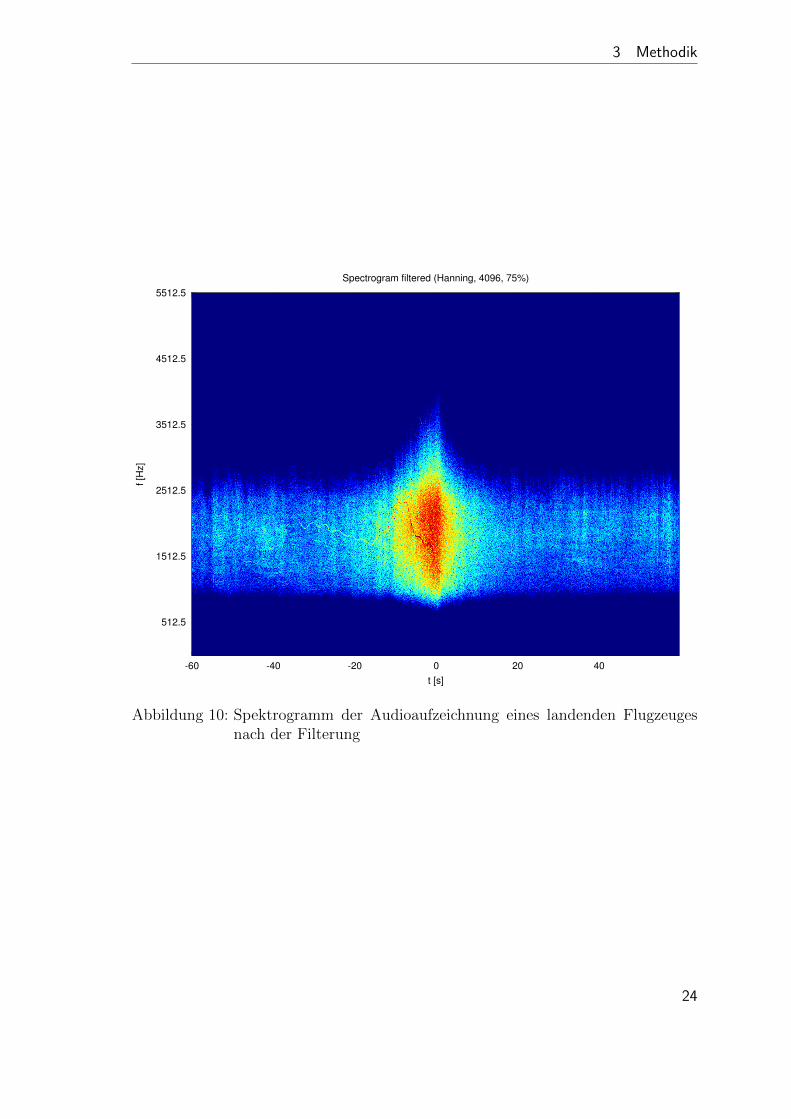
Das Spektrogramm des aus der Filterung resultierenden Signals ist in Abbildung 10
auf der nachsten Seite fur den Frequenzbereich bis 5512, 5 Hz dargestellt.
23
3 Methodik
5512.5
4512.5
3512.5
2512.5
1512.5
512.5
-60 -40 -20 0 20 40
f [H
z]
t [s]
Spectrogram filtered (Hanning, 4096, 75%)
Abbildung 10: Spektrogramm der Audioaufzeichnung eines landenden Flugzeugesnach der Filterung
24
3 Methodik
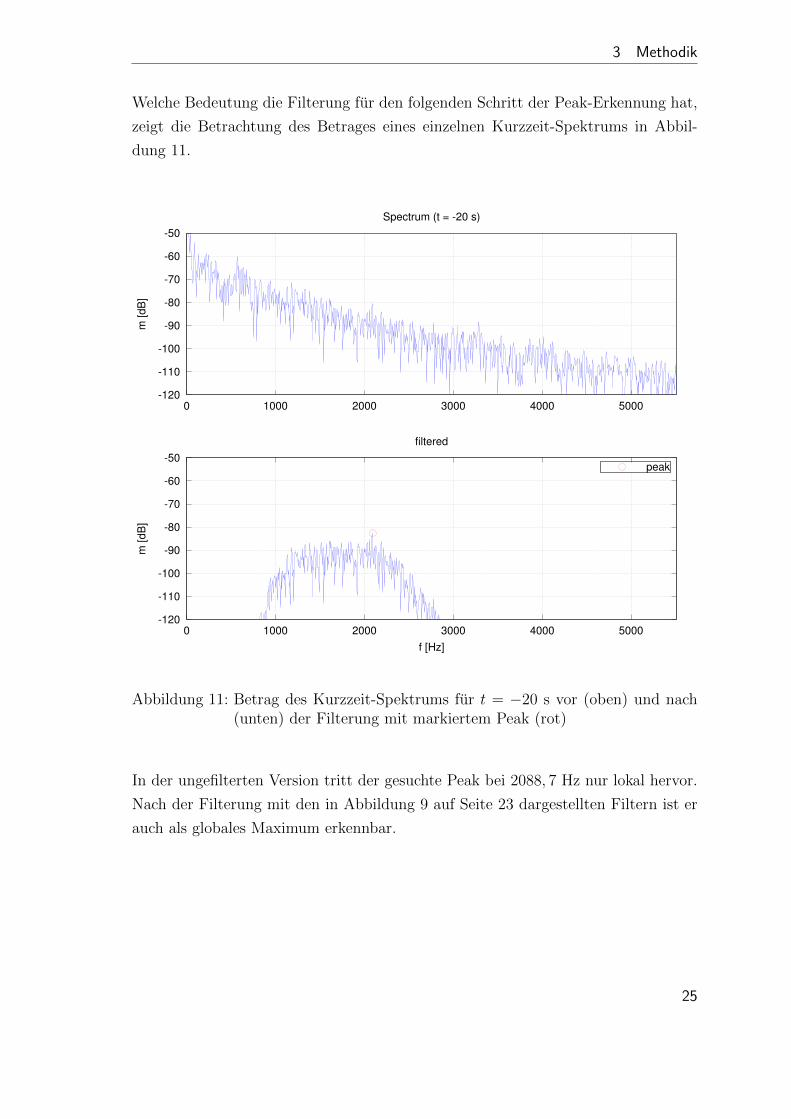
Welche Bedeutung die Filterung fur den folgenden Schritt der Peak-Erkennung hat,
zeigt die Betrachtung des Betrages eines einzelnen Kurzzeit-Spektrums in Abbil-
dung 11.
-120
-110
-100
-90
-80
-70
-60
-50
0 1000 2000 3000 4000 5000
m [dB
]
Spectrum (t = -20 s)
-120
-110
-100
-90
-80
-70
-60
-50
0 1000 2000 3000 4000 5000
m [dB
]
f [Hz]
filtered
peak
Abbildung 11: Betrag des Kurzzeit-Spektrums fur t = −20 s vor (oben) und nach(unten) der Filterung mit markiertem Peak (rot)
In der ungefilterten Version tritt der gesuchte Peak bei 2088, 7 Hz nur lokal hervor.
Nach der Filterung mit den in Abbildung 9 auf Seite 23 dargestellten Filtern ist er
auch als globales Maximum erkennbar.
25
3 Methodik
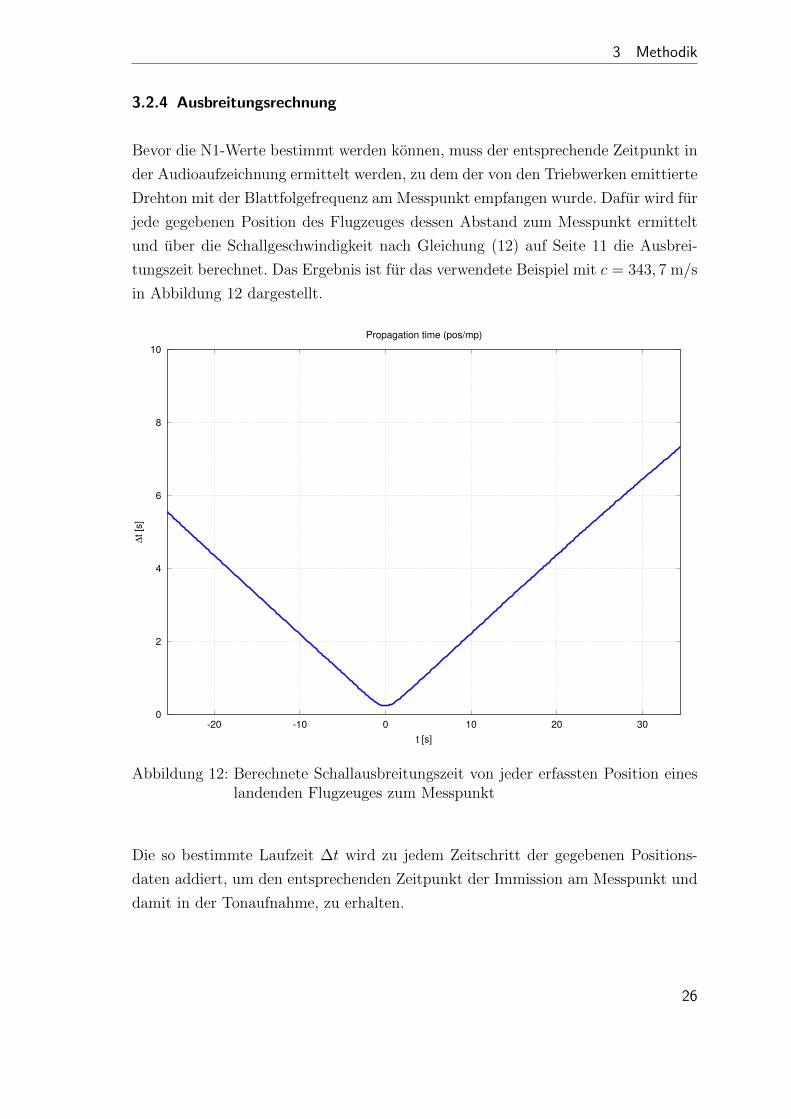
3.2.4 Ausbreitungsrechnung
Bevor die N1-Werte bestimmt werden konnen, muss der entsprechende Zeitpunkt in
der Audioaufzeichnung ermittelt werden, zu dem der von den Triebwerken emittierte
Drehton mit der Blattfolgefrequenz am Messpunkt empfangen wurde. Dafur wird fur
jede gegebenen Position des Flugzeuges dessen Abstand zum Messpunkt ermittelt
und uber die Schallgeschwindigkeit nach Gleichung (12) auf Seite 11 die Ausbrei-
tungszeit berechnet. Das Ergebnis ist fur das verwendete Beispiel mit c = 343, 7 m/s
in Abbildung 12 dargestellt.
0
2
4
6
8
10
-20 -10 0 10 20 30
∆t [s
]
t [s]
Propagation time (pos/mp)
Abbildung 12: Berechnete Schallausbreitungszeit von jeder erfassten Position eineslandenden Flugzeuges zum Messpunkt
Die so bestimmte Laufzeit ∆t wird zu jedem Zeitschritt der gegebenen Positions-
daten addiert, um den entsprechenden Zeitpunkt der Immission am Messpunkt und
damit in der Tonaufnahme, zu erhalten.
26
3 Methodik
3.3 Audio Feature Extraction
Nach der Aufbereitung der Eingangsdaten folgt die eigentliche Extraktion der Low
Level Features. Darunter werden hier Peaks verstanden, die fur jeden Datenblock
nur aus der Frequenzkomponente bestehen, die der empfangenen Blattfolgefrequenz
entspricht. Uber die Zwischenschritte der Kompensation des Doppler-Effektes und
der Abbildung der Triebwerksspezifikationen kann aus diesen schließlich der Zeit-
verlauf der relativen N1-Drehzahl bestimmt werden, die hier als High Level Feature
interpretiert wird und als Maß fur die Triebwerksleistung dient.
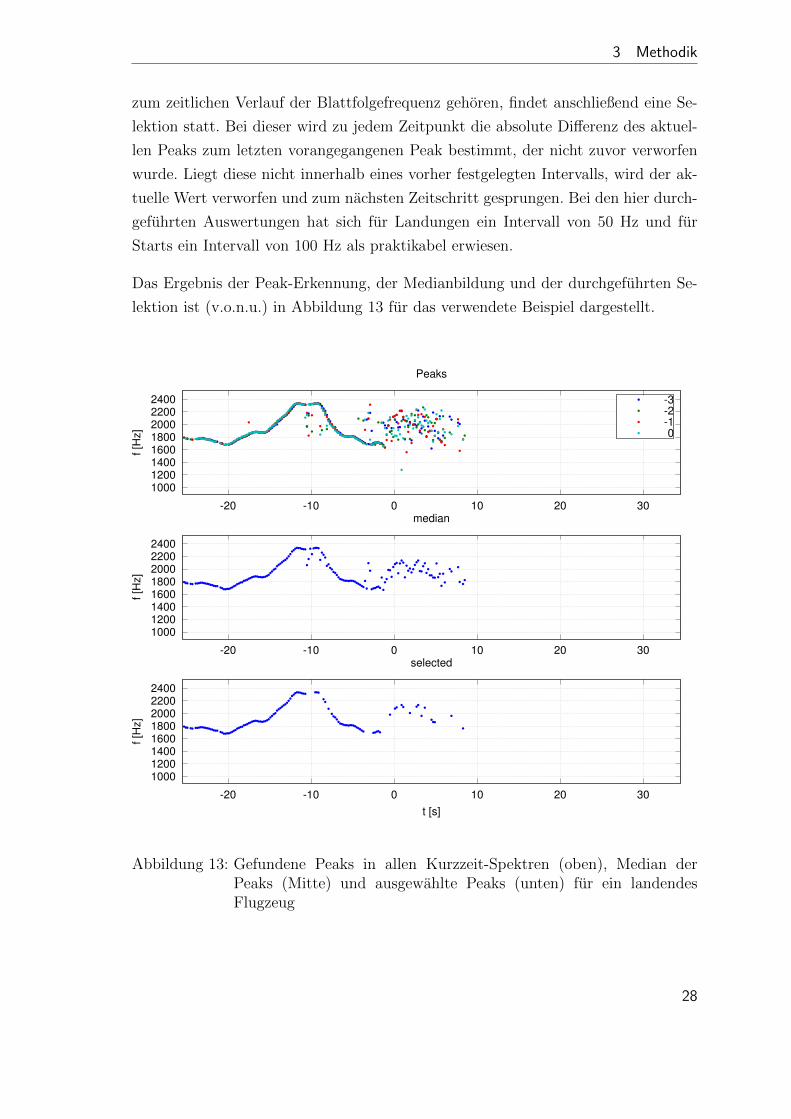
3.3.1 Peak-Erkennung
Zu jedem ermittelten Immissionszeitpunkt werden zunachst vier uberlappende Blocke
gebildet, jeweils mit der Hanning-Fensterfunktion multipliziert und eine FFT durch-
gefuhrt. Innerhalb dieser Kurzzeit-Spektren wird daraufhin die Position und Hohe
des absoluten Maximums ermittelt. Dabei entspricht die Position innerhalb des
Spektrums einer Stutzstelle der DFT, aus der sich, uber die Blocklange und die Ab-
tastrate nach Gleichung (16) auf Seite 12, die zugehorige Frequenz bestimmen lasst.
Liegt die Hohe des gefundenen Maximums uber einem zuvor definierten Schwellwert,
der zur Rauschunterdruckung dient, wird die Frequenz dem entsprechenden Block
als Peak zugeordnet und ansonsten verworfen (siehe Abbildung 13 auf der nachsten
Seite, oben). Dabei hat sich ein absoluter Schwellwert von 0, 3, der in Schritten von
0, 05 iterativ angenahert wurde, als am besten geeignet herausgestellt.
Aus den verbleibenden Peaks der vier uberlappenden Blocke wird der Mittelwert
ermittelt, um die Werte auf die Zeitschritte der Track-Daten mit 200 ms Abstand
zu reduzieren und dabei den Verlauf zu glatten (siehe Abbildung 13 auf der nachsten
Seite, Mitte). Dafur wird der Median verwendet, da dieser, im Vergleich zum arith-
metischen Mittelwert, robuster gegenuber einzelnen Ausreißern ist. Er wird aus einer
Menge der Lange L von nach Große sortierten Werten xi gebildet [12, S. 26-27]:
xmed =
xL+12
, fur L ungerade,
12
(xL
2+ xL
2+1
), fur L gerade.
(23)
Um aus den verbleibenden Frequenzen moglichst nur diejenigen zu ermitteln, die
27
3 Methodik
zum zeitlichen Verlauf der Blattfolgefrequenz gehoren, findet anschließend eine Se-
lektion statt. Bei dieser wird zu jedem Zeitpunkt die absolute Differenz des aktuel-
len Peaks zum letzten vorangegangenen Peak bestimmt, der nicht zuvor verworfen
wurde. Liegt diese nicht innerhalb eines vorher festgelegten Intervalls, wird der ak-
tuelle Wert verworfen und zum nachsten Zeitschritt gesprungen. Bei den hier durch-
gefuhrten Auswertungen hat sich fur Landungen ein Intervall von 50 Hz und fur
Starts ein Intervall von 100 Hz als praktikabel erwiesen.
Das Ergebnis der Peak-Erkennung, der Medianbildung und der durchgefuhrten Se-
lektion ist (v.o.n.u.) in Abbildung 13 fur das verwendete Beispiel dargestellt.
10001200140016001800200022002400
-20 -10 0 10 20 30
f [H
z]
Peaks
-3-2-10
10001200140016001800200022002400
-20 -10 0 10 20 30
f [H
z]
median
10001200140016001800200022002400
-20 -10 0 10 20 30
f [H
z]
t [s]
selected
Abbildung 13: Gefundene Peaks in allen Kurzzeit-Spektren (oben), Median derPeaks (Mitte) und ausgewahlte Peaks (unten) fur ein landendesFlugzeug
28
3 Methodik
3.3.2 Doppler-Kompensation
Um nach Gleichung (9) auf Seite 9 aus der gemessenen die tatsachlich abgestrahl-
te Frequenz zu bestimmen, wird die Geschwindigkeit des Flugzeuges in Relation
zum Messpunkt benotigt. Diese berechnet sich nach Gleichung (10) auf Seite 9
aus dem Skalarprodukt des Geschwindigkeitsvektors des Flugzeuges und des Ein-
heitsvektors, der auf den Messpunkt zeigt. Die Track-Daten enthalten bereits die
hierfur benotigten Geschwindigkeitskomponenten in die drei Raumrichtungen. Aus
den ebenfalls gegebenen Raumkoordinaten des Flugzeuges zu jedem Zeitpunkt und
denen des Messpunktes lasst sich der hierfur benotigte Einheitsvektor ~eQE bestim-
men. Er ergibt sich aus dem entsprechenden Richtungsvektor geteilt durch dessen
Betrag:
~eQE =~rQE
|~rQE|=
1√r2QE,x + r2QE,y + r2QE,z
rQE,x
rQE,y
rQE,z
, (24)
wobei sich die einzelnen Richtungskomponenten unmittelbar durch die Differenz der
Raumkoordinaten von Empfanger und Quelle ergeben: rQE,x
rQE,y
rQE,z
=
xE − xQyE − yQzE − zQ
. (25)
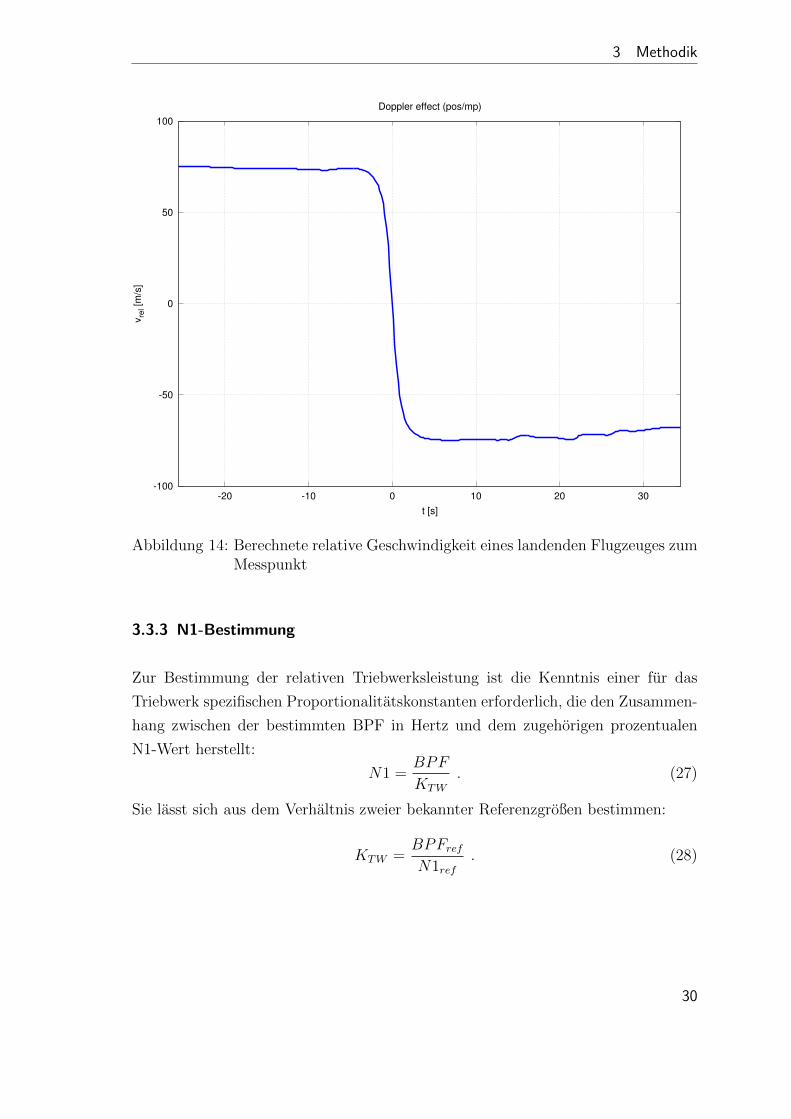
Die berechnete relative Geschwindigkeit eines landenden Flugzeuges zum Messpunkt
ist in Abbildung 14 auf der nachsten Seite beispielhaft dargestellt.
Die zuvor aus der Audioaufzeichnung am Messpunkt ermittelten Peaks konnen da-
mit nun mittels Gleichung (9) auf Seite 9 in die tatsachlich emittierten Blattpassier-
frequenzen des uberfliegenden Flugzeuges umgerechnet werden:
BPF = fpeak ·(
1− vrelc
). (26)
29
3 Methodik
-100
-50
0
50
100
-20 -10 0 10 20 30
vre
l [m
/s]
t [s]
Doppler effect (pos/mp)
Abbildung 14: Berechnete relative Geschwindigkeit eines landenden Flugzeuges zumMesspunkt
3.3.3 N1-Bestimmung
Zur Bestimmung der relativen Triebwerksleistung ist die Kenntnis einer fur das
Triebwerk spezifischen Proportionalitatskonstanten erforderlich, die den Zusammen-
hang zwischen der bestimmten BPF in Hertz und dem zugehorigen prozentualen
N1-Wert herstellt:
N1 =BPF
KTW
. (27)
Sie lasst sich aus dem Verhaltnis zweier bekannter Referenzgroßen bestimmen:
KTW =BPFref
N1ref
. (28)
30
3 Methodik
Diese sind in den frei zuganglichen Musterzulassungen (TCDS: Type Certificate Da-
ta Sheet) des jeweiligen Triebwerks zu finden, wie sie unter anderem von der Eu-
ropaischen Agentur fur Flugsicherung (EASA: European Aviation Safety Agency)2,
bzw. deren US-amerikanischen Pendant, der FAA (Federal Aviation Administrati-
on)3, herausgegeben werden [13, S. 11]. Die Angaben in diesen beschranken sich
jedoch auf die des N1-Wertes bei der maximalen Drehzahl des Rotors nmax in Um-
drehungen pro Minute (rpm: revolutions per minute). Um diese in die benotigte
Blattfolgefrequenz umrechnen zu konnen, wird nach Gleichung (1) auf Seite 6 die
Schaufelanzahl Z des Fans benotigt. Da diese in der Regel weder in den entsprechen-
den Zertifizierungen, noch in frei verfugbaren Spezifikationen enthalten ist, musste
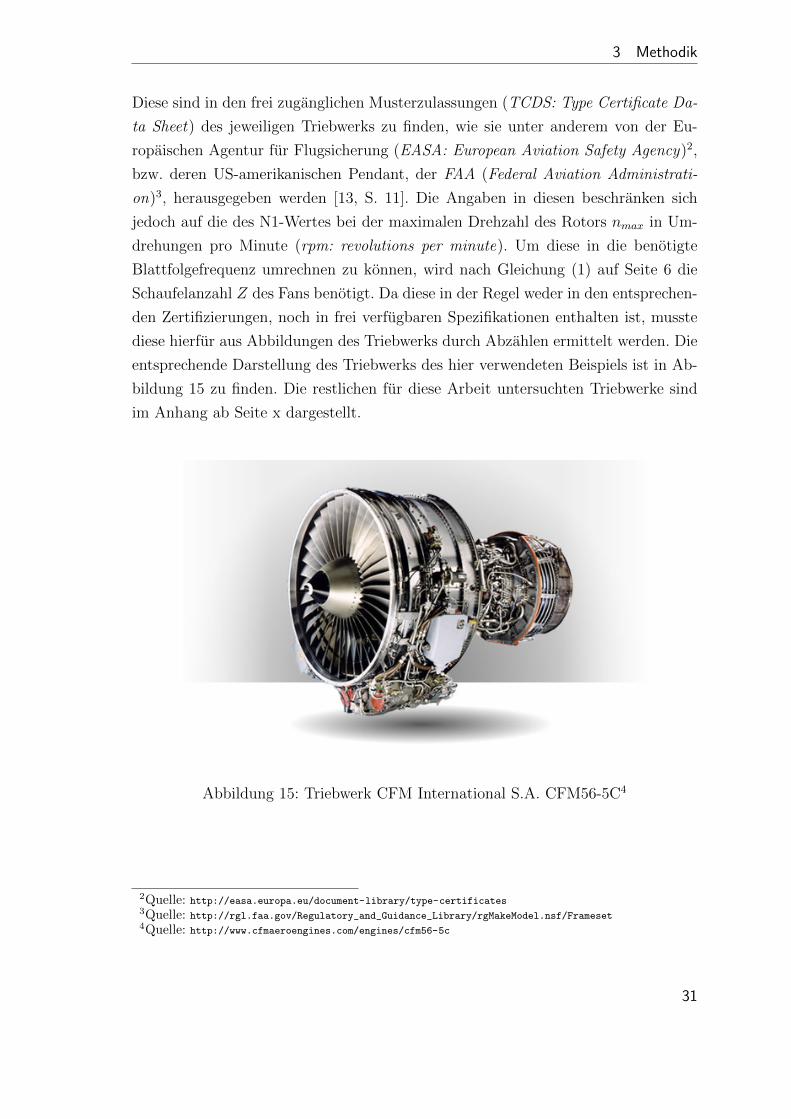
diese hierfur aus Abbildungen des Triebwerks durch Abzahlen ermittelt werden. Die
entsprechende Darstellung des Triebwerks des hier verwendeten Beispiels ist in Ab-
bildung 15 zu finden. Die restlichen fur diese Arbeit untersuchten Triebwerke sind
im Anhang ab Seite x dargestellt.
Abbildung 15: Triebwerk CFM International S.A. CFM56-5C4
2Quelle: http://easa.europa.eu/document-library/type-certificates3Quelle: http://rgl.faa.gov/Regulatory_and_Guidance_Library/rgMakeModel.nsf/Frameset4Quelle: http://www.cfmaeroengines.com/engines/cfm56-5c
31
3 Methodik
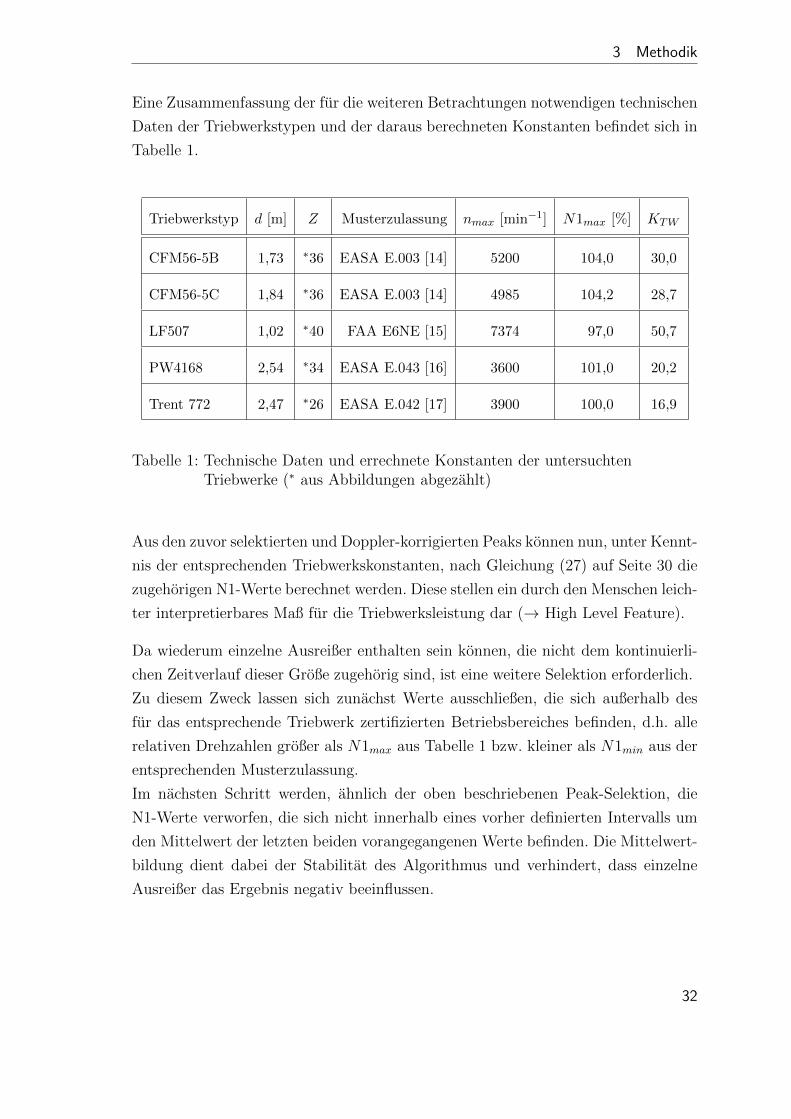
Eine Zusammenfassung der fur die weiteren Betrachtungen notwendigen technischen
Daten der Triebwerkstypen und der daraus berechneten Konstanten befindet sich in
Tabelle 1.
Triebwerkstyp d [m] Z Musterzulassung nmax [min−1] N1max [%] KTW
CFM56-5B 1,73 ∗36 EASA E.003 [14] 5200 104,0 30,0
CFM56-5C 1,84 ∗36 EASA E.003 [14] 4985 104,2 28,7
LF507 1,02 ∗40 FAA E6NE [15] 7374 97,0 50,7
PW4168 2,54 ∗34 EASA E.043 [16] 3600 101,0 20,2
Trent 772 2,47 ∗26 EASA E.042 [17] 3900 100,0 16,9
Tabelle 1: Technische Daten und errechnete Konstanten der untersuchtenTriebwerke (∗ aus Abbildungen abgezahlt)
Aus den zuvor selektierten und Doppler-korrigierten Peaks konnen nun, unter Kennt-
nis der entsprechenden Triebwerkskonstanten, nach Gleichung (27) auf Seite 30 die
zugehorigen N1-Werte berechnet werden. Diese stellen ein durch den Menschen leich-
ter interpretierbares Maß fur die Triebwerksleistung dar (→ High Level Feature).
Da wiederum einzelne Ausreißer enthalten sein konnen, die nicht dem kontinuierli-
chen Zeitverlauf dieser Große zugehorig sind, ist eine weitere Selektion erforderlich.
Zu diesem Zweck lassen sich zunachst Werte ausschließen, die sich außerhalb des
fur das entsprechende Triebwerk zertifizierten Betriebsbereiches befinden, d.h. alle
relativen Drehzahlen großer als N1max aus Tabelle 1 bzw. kleiner als N1min aus der
entsprechenden Musterzulassung.
Im nachsten Schritt werden, ahnlich der oben beschriebenen Peak-Selektion, die
N1-Werte verworfen, die sich nicht innerhalb eines vorher definierten Intervalls um
den Mittelwert der letzten beiden vorangegangenen Werte befinden. Die Mittelwert-
bildung dient dabei der Stabilitat des Algorithmus und verhindert, dass einzelne
Ausreißer das Ergebnis negativ beeinflussen.
32
3 Methodik
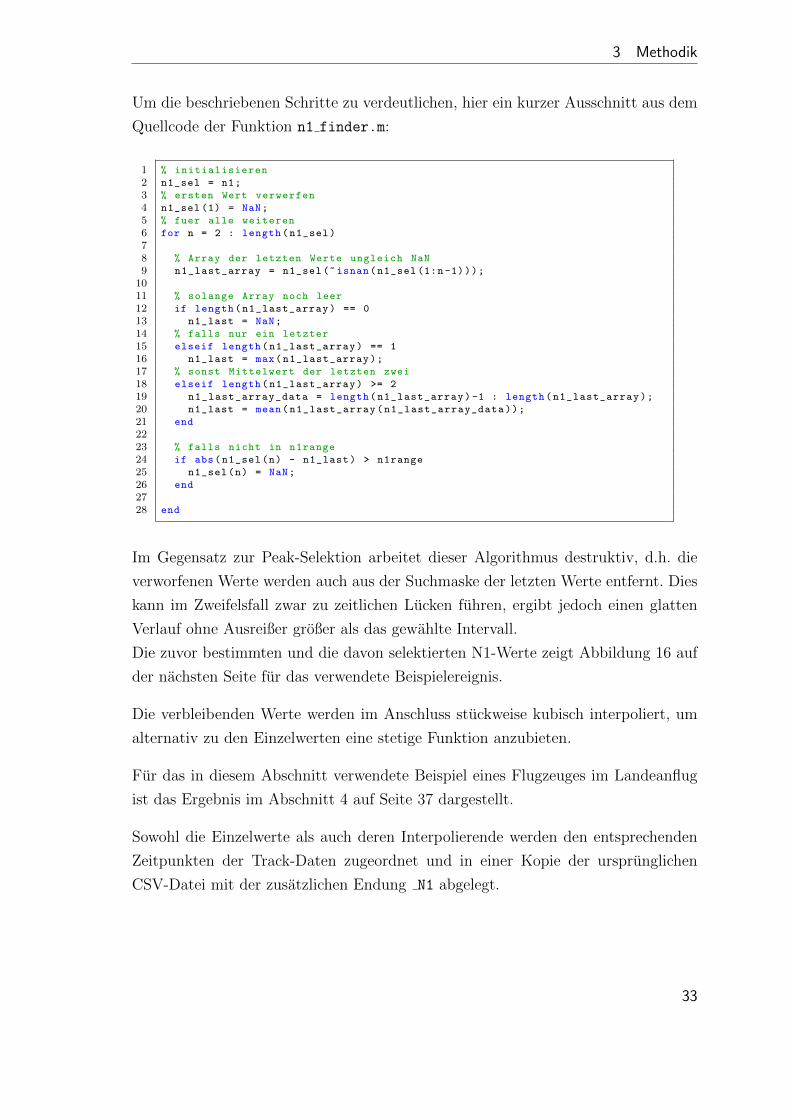
Um die beschriebenen Schritte zu verdeutlichen, hier ein kurzer Ausschnitt aus dem
Quellcode der Funktion n1 finder.m:
1 % initialisieren
2 n1_sel = n1;
3 % ersten Wert verwerfen
4 n1_sel (1) = NaN;
5 % fuer alle weiteren
6 for n = 2 : length(n1_sel)
78 % Array der letzten Werte ungleich NaN
9 n1_last_array = n1_sel (~isnan(n1_sel (1:n-1)));
1011 % solange Array noch leer
12 if length(n1_last_array) == 0
13 n1_last = NaN;
14 % falls nur ein letzter
15 elseif length(n1_last_array) == 1
16 n1_last = max(n1_last_array);
17 % sonst Mittelwert der letzten zwei
18 elseif length(n1_last_array) >= 2
19 n1_last_array_data = length(n1_last_array)-1 : length(n1_last_array);
20 n1_last = mean(n1_last_array(n1_last_array_data));
21 end
2223 % falls nicht in n1range
24 if abs(n1_sel(n) - n1_last) > n1range
25 n1_sel(n) = NaN;
26 end
2728 end
Im Gegensatz zur Peak-Selektion arbeitet dieser Algorithmus destruktiv, d.h. die
verworfenen Werte werden auch aus der Suchmaske der letzten Werte entfernt. Dies
kann im Zweifelsfall zwar zu zeitlichen Lucken fuhren, ergibt jedoch einen glatten
Verlauf ohne Ausreißer großer als das gewahlte Intervall.
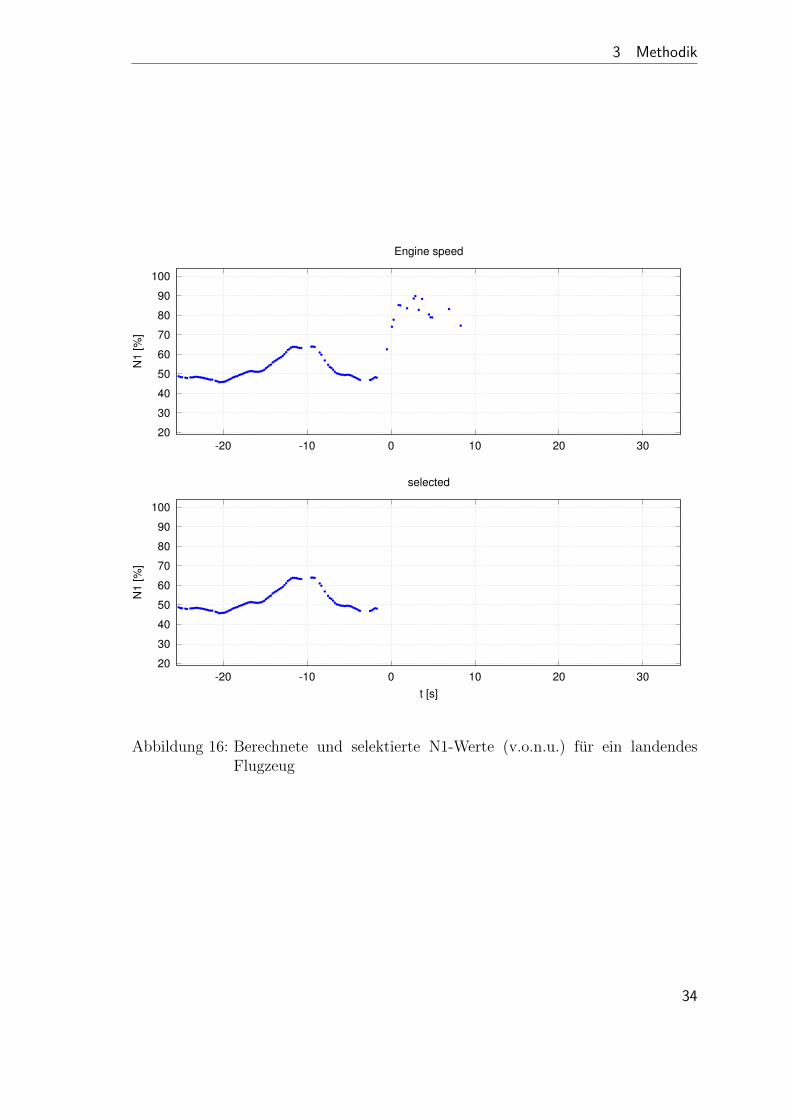
Die zuvor bestimmten und die davon selektierten N1-Werte zeigt Abbildung 16 auf
der nachsten Seite fur das verwendete Beispielereignis.
Die verbleibenden Werte werden im Anschluss stuckweise kubisch interpoliert, um
alternativ zu den Einzelwerten eine stetige Funktion anzubieten.
Fur das in diesem Abschnitt verwendete Beispiel eines Flugzeuges im Landeanflug
ist das Ergebnis im Abschnitt 4 auf Seite 37 dargestellt.
Sowohl die Einzelwerte als auch deren Interpolierende werden den entsprechenden
Zeitpunkten der Track-Daten zugeordnet und in einer Kopie der ursprunglichen
CSV-Datei mit der zusatzlichen Endung N1 abgelegt.
33
3 Methodik
20
30
40
50
60
70
80
90
100
-20 -10 0 10 20 30
N1 [%
]
Engine speed
20
30
40
50
60
70
80
90
100
-20 -10 0 10 20 30
N1 [%
]
t [s]
selected
Abbildung 16: Berechnete und selektierte N1-Werte (v.o.n.u.) fur ein landendesFlugzeug
34
3 Methodik
3.4 Softwareumsetzung
Die Realisierung des entwickelten Verfahrens erfolgte mit GNU Octave5, einer Soft-
ware zur numerischen Berechnung und freien Alternative zu MATLAB. Diese ist
ebenso zur Stapelverarbeitung, d.h. der automatisierten sequenziellen Verarbeitung
von großen Datenmengen, geeignet.
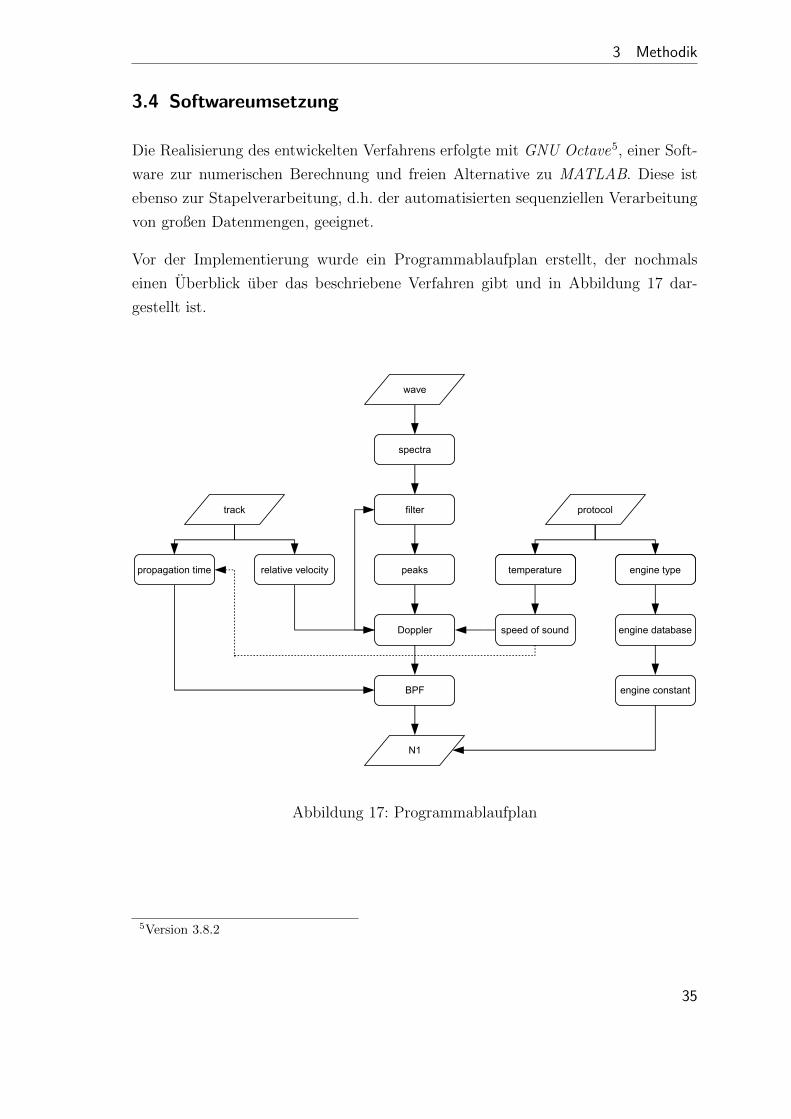
Vor der Implementierung wurde ein Programmablaufplan erstellt, der nochmals
einen Uberblick uber das beschriebene Verfahren gibt und in Abbildung 17 dar-
gestellt ist.
propagation time relative velocity
spectra
filter
peaks
Doppler
BPF
engine typetemperature
engine constant
speed of sound
engine typetemperature
engine database
track
wave
protocol
N1
Abbildung 17: Programmablaufplan
5Version 3.8.2
35
3 Methodik
Die jeweiligen Funktionen wurden in entsprechenden Skripten umgesetzt, die in
der zentralen Funktion n1 finder.m enthalten sind oder von dieser aus aufgerufen
werden. Im Einzelnen sind dies:
. pro read.m – Liest das Protokoll aus CSV-Datei ein
. track read.m – Liest die Track-Daten mit einzeiligem Header aus CSV-Datei ein
. mp table.m – Enthalt die Messpunkttabelle
. mp comp.m – Gibt die Koordinaten des Messpunktes aus
. eng table.m – Enthalt die Triebwerkstabelle und berechnet die Konstanten
. eng comp.m – Durchsucht die Triebwerkstabelle nach dem Triebwerkstyp
. v rel.m – Bestimmt die relative Geschwindigkeit und Ausbreitungszeit
. track write n1.m – Schreibt die Track-Daten mit Header und N1 in CSV-Datei
. nan int.m – Interpoliert Werte stuckweise durch kubische Polynome
. atm abs.m – Berechnet den Absorptionskoeffizienten der Luft
Die Stapelverarbeitung aller Ereignisse einer Operation wird durch das Skript
Auswertung Landungen.m bzw. Auswertung Starts.m aufgerufen. In diesem wer-
den auch die fur die Berechnungen notwendigen und an den jeweiligen Messpunkt
angepassten Einstellungen vorgenommen.
Aufgrund seines Umfangs von ca. 1300 Zeilen ist der Quellcode nicht im Anhang
angefugt und findet sich nur auf der DVD-ROM, die der gedruckten Fassung beiliegt
(siehe Seite xxiv).
36
4 Ergebnisse
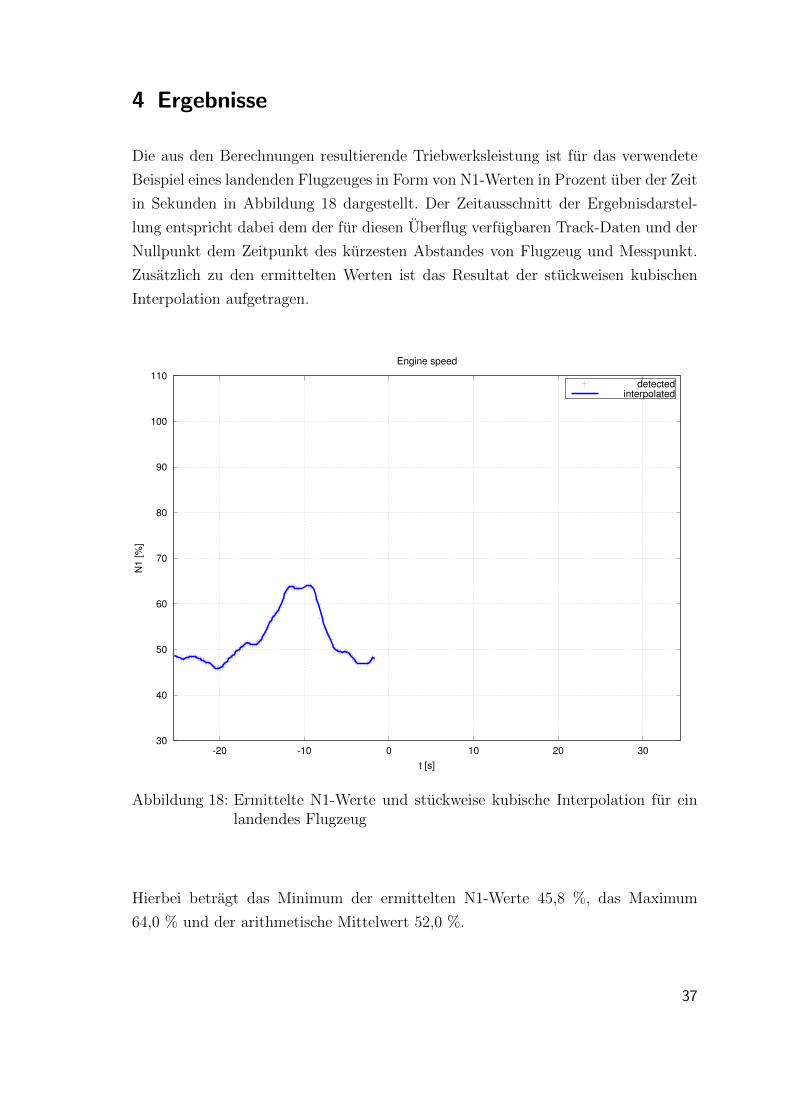
Die aus den Berechnungen resultierende Triebwerksleistung ist fur das verwendete
Beispiel eines landenden Flugzeuges in Form von N1-Werten in Prozent uber der Zeit
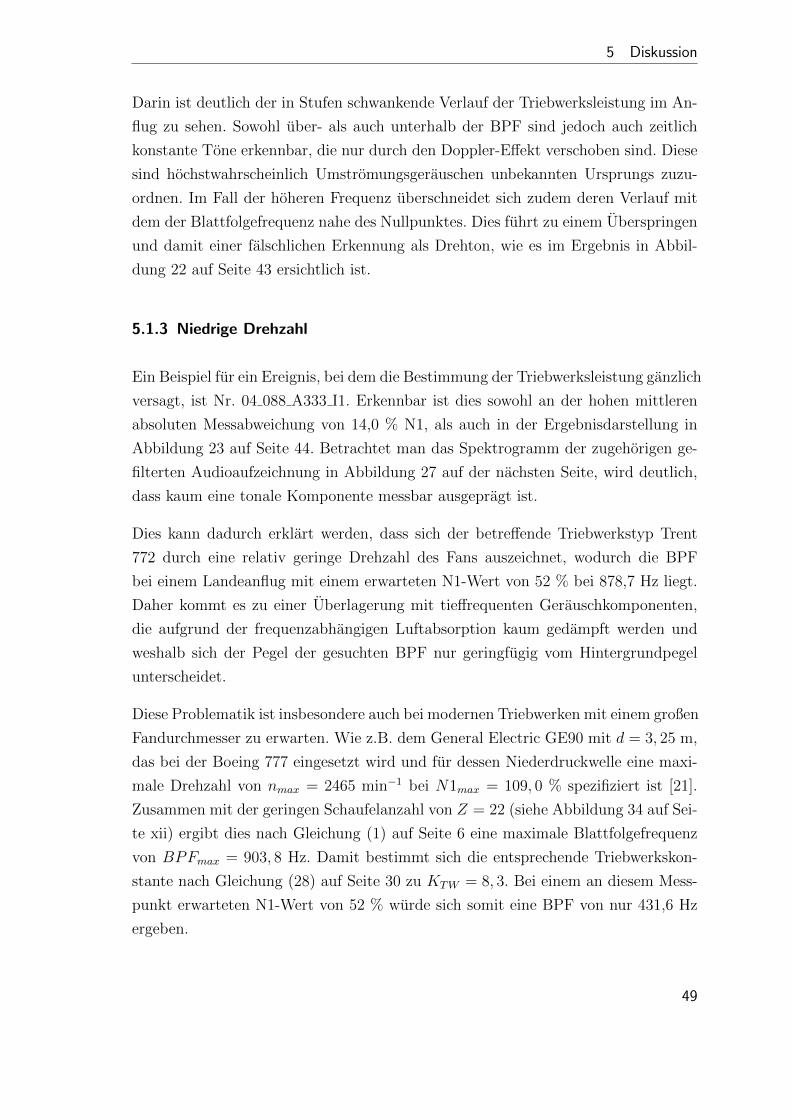
in Sekunden in Abbildung 18 dargestellt. Der Zeitausschnitt der Ergebnisdarstel-
lung entspricht dabei dem der fur diesen Uberflug verfugbaren Track-Daten und der
Nullpunkt dem Zeitpunkt des kurzesten Abstandes von Flugzeug und Messpunkt.
Zusatzlich zu den ermittelten Werten ist das Resultat der stuckweisen kubischen
Interpolation aufgetragen.
30
40
50
60
70
80
90
100
110
-20 -10 0 10 20 30
N1 [%
]
t [s]
Engine speed
detectedinterpolated
Abbildung 18: Ermittelte N1-Werte und stuckweise kubische Interpolation fur einlandendes Flugzeug
Hierbei betragt das Minimum der ermittelten N1-Werte 45,8 %, das Maximum
64,0 % und der arithmetische Mittelwert 52,0 %.
37
4 Ergebnisse
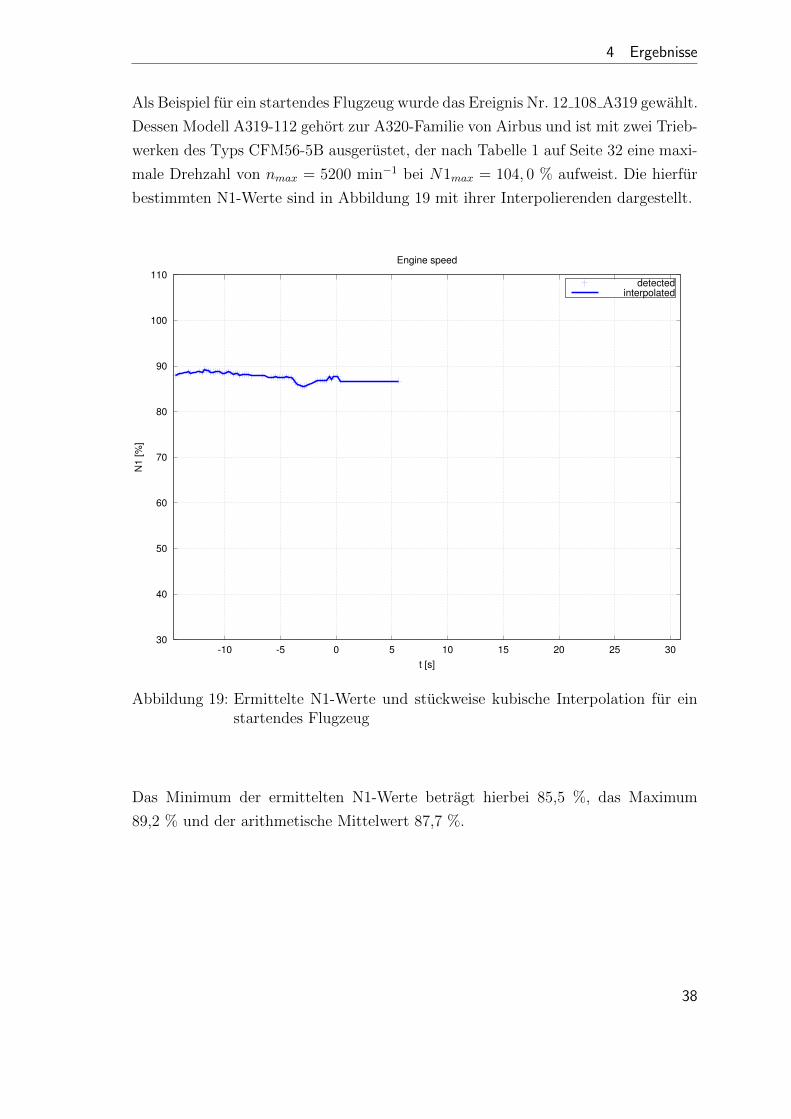
Als Beispiel fur ein startendes Flugzeug wurde das Ereignis Nr. 12 108 A319 gewahlt.
Dessen Modell A319-112 gehort zur A320-Familie von Airbus und ist mit zwei Trieb-
werken des Typs CFM56-5B ausgerustet, der nach Tabelle 1 auf Seite 32 eine maxi-
male Drehzahl von nmax = 5200 min−1 bei N1max = 104, 0 % aufweist. Die hierfur
bestimmten N1-Werte sind in Abbildung 19 mit ihrer Interpolierenden dargestellt.
30
40
50
60
70
80
90
100
110
-10 -5 0 5 10 15 20 25 30
N1 [%
]
t [s]
Engine speed
detectedinterpolated
Abbildung 19: Ermittelte N1-Werte und stuckweise kubische Interpolation fur einstartendes Flugzeug
Das Minimum der ermittelten N1-Werte betragt hierbei 85,5 %, das Maximum
89,2 % und der arithmetische Mittelwert 87,7 %.
38
4 Ergebnisse
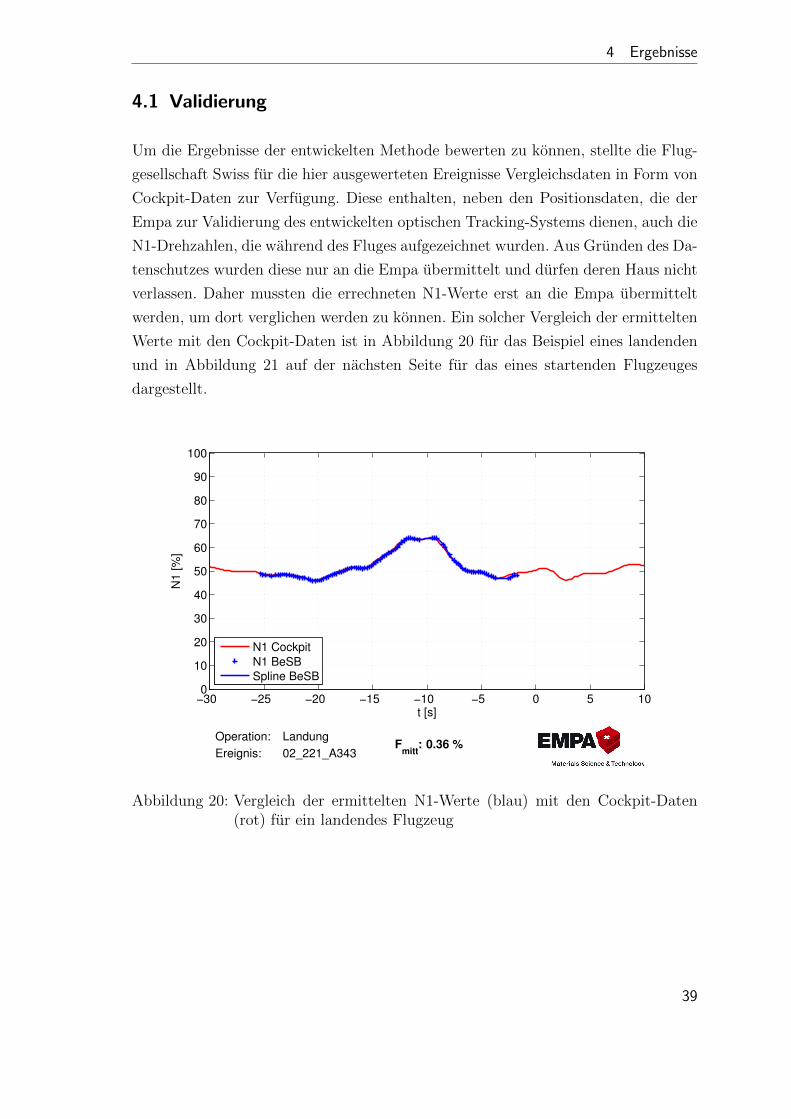
4.1 Validierung
Um die Ergebnisse der entwickelten Methode bewerten zu konnen, stellte die Flug-
gesellschaft Swiss fur die hier ausgewerteten Ereignisse Vergleichsdaten in Form von
Cockpit-Daten zur Verfugung. Diese enthalten, neben den Positionsdaten, die der
Empa zur Validierung des entwickelten optischen Tracking-Systems dienen, auch die
N1-Drehzahlen, die wahrend des Fluges aufgezeichnet wurden. Aus Grunden des Da-
tenschutzes wurden diese nur an die Empa ubermittelt und durfen deren Haus nicht
verlassen. Daher mussten die errechneten N1-Werte erst an die Empa ubermittelt
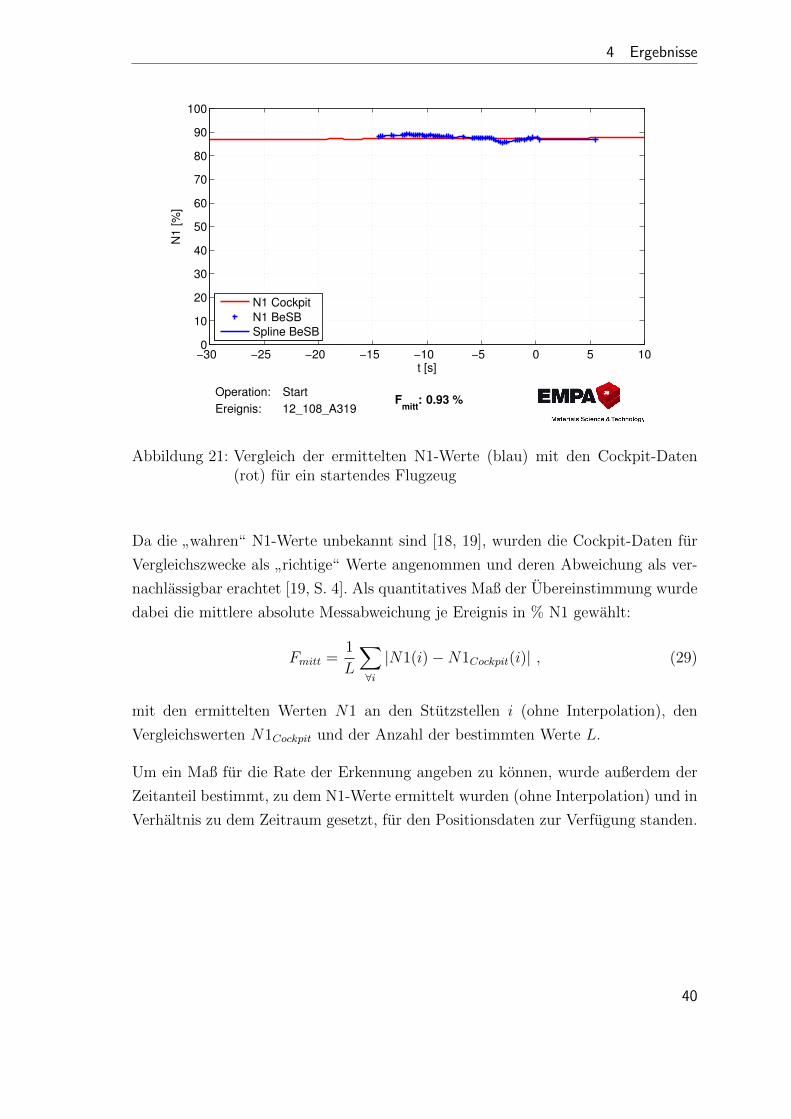
werden, um dort verglichen werden zu konnen. Ein solcher Vergleich der ermittelten
Werte mit den Cockpit-Daten ist in Abbildung 20 fur das Beispiel eines landenden
und in Abbildung 21 auf der nachsten Seite fur das eines startenden Flugzeuges
dargestellt.
−30 −25 −20 −15 −10 −5 0 5 100
10
20
30
40
50
60
70
80
90
100
t [s]
N1
[%
]
N1 Cockpit
N1 BeSB
Spline BeSB
Operation:
Ereignis:
Landung
02_221_A343F
mitt: 0.36 %
Abbildung 20: Vergleich der ermittelten N1-Werte (blau) mit den Cockpit-Daten(rot) fur ein landendes Flugzeug
39
4 Ergebnisse
−30 −25 −20 −15 −10 −5 0 5 100
10
20
30
40
50
60
70
80
90
100
t [s]
N1
[%
]
N1 Cockpit
N1 BeSB
Spline BeSB
Operation:
Ereignis:
Start
12_108_A319F
mitt: 0.93 %
Abbildung 21: Vergleich der ermittelten N1-Werte (blau) mit den Cockpit-Daten(rot) fur ein startendes Flugzeug
Da die”wahren“ N1-Werte unbekannt sind [18, 19], wurden die Cockpit-Daten fur
Vergleichszwecke als”richtige“ Werte angenommen und deren Abweichung als ver-
nachlassigbar erachtet [19, S. 4]. Als quantitatives Maß der Ubereinstimmung wurde
dabei die mittlere absolute Messabweichung je Ereignis in % N1 gewahlt:
Fmitt =1
L
∑∀i
|N1(i)−N1Cockpit(i)| , (29)
mit den ermittelten Werten N1 an den Stutzstellen i (ohne Interpolation), den
Vergleichswerten N1Cockpit und der Anzahl der bestimmten Werte L.
Um ein Maß fur die Rate der Erkennung angeben zu konnen, wurde außerdem der
Zeitanteil bestimmt, zu dem N1-Werte ermittelt wurden (ohne Interpolation) und in
Verhaltnis zu dem Zeitraum gesetzt, fur den Positionsdaten zur Verfugung standen.
40
4 Ergebnisse
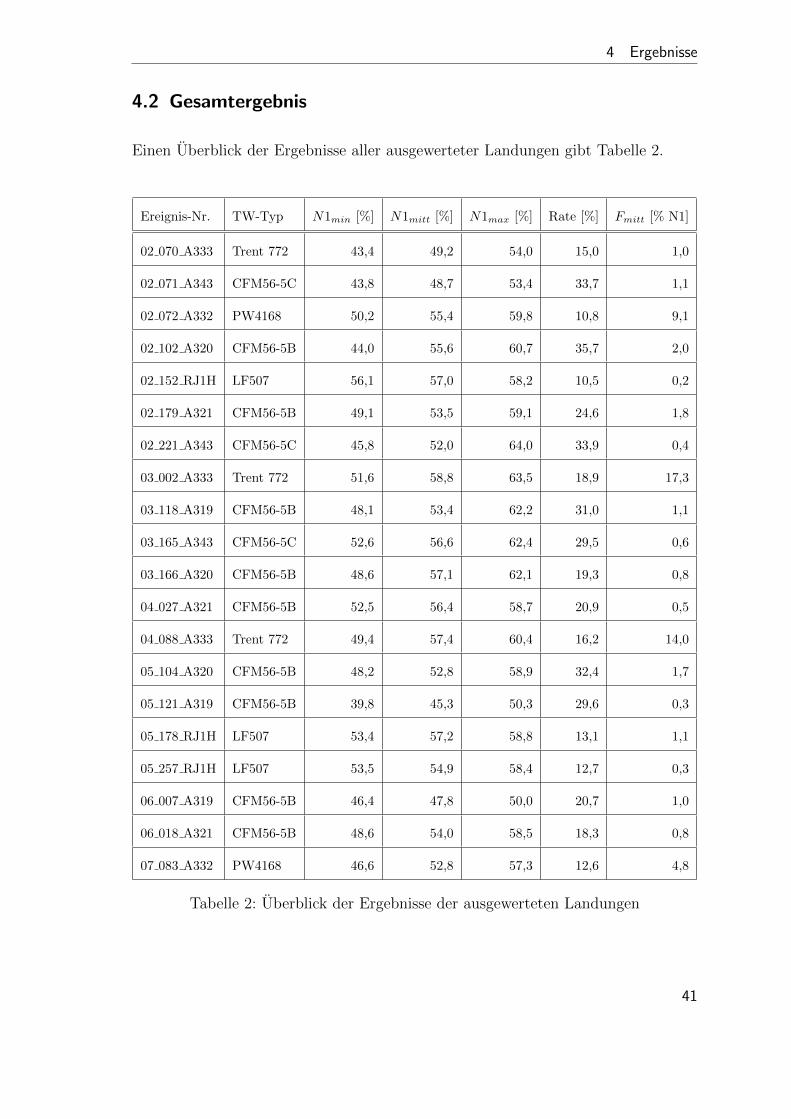
4.2 Gesamtergebnis
Einen Uberblick der Ergebnisse aller ausgewerteter Landungen gibt Tabelle 2.
Ereignis-Nr. TW-Typ N1min [%] N1mitt [%] N1max [%] Rate [%] Fmitt [% N1]
02 070 A333 Trent 772 43,4 49,2 54,0 15,0 1,0
02 071 A343 CFM56-5C 43,8 48,7 53,4 33,7 1,1
02 072 A332 PW4168 50,2 55,4 59,8 10,8 9,1
02 102 A320 CFM56-5B 44,0 55,6 60,7 35,7 2,0
02 152 RJ1H LF507 56,1 57,0 58,2 10,5 0,2
02 179 A321 CFM56-5B 49,1 53,5 59,1 24,6 1,8
02 221 A343 CFM56-5C 45,8 52,0 64,0 33,9 0,4
03 002 A333 Trent 772 51,6 58,8 63,5 18,9 17,3
03 118 A319 CFM56-5B 48,1 53,4 62,2 31,0 1,1
03 165 A343 CFM56-5C 52,6 56,6 62,4 29,5 0,6
03 166 A320 CFM56-5B 48,6 57,1 62,1 19,3 0,8
04 027 A321 CFM56-5B 52,5 56,4 58,7 20,9 0,5
04 088 A333 Trent 772 49,4 57,4 60,4 16,2 14,0
05 104 A320 CFM56-5B 48,2 52,8 58,9 32,4 1,7
05 121 A319 CFM56-5B 39,8 45,3 50,3 29,6 0,3
05 178 RJ1H LF507 53,4 57,2 58,8 13,1 1,1
05 257 RJ1H LF507 53,5 54,9 58,4 12,7 0,3
06 007 A319 CFM56-5B 46,4 47,8 50,0 20,7 1,0
06 018 A321 CFM56-5B 48,6 54,0 58,5 18,3 0,8
07 083 A332 PW4168 46,6 52,8 57,3 12,6 4,8
Tabelle 2: Uberblick der Ergebnisse der ausgewerteten Landungen
41
4 Ergebnisse
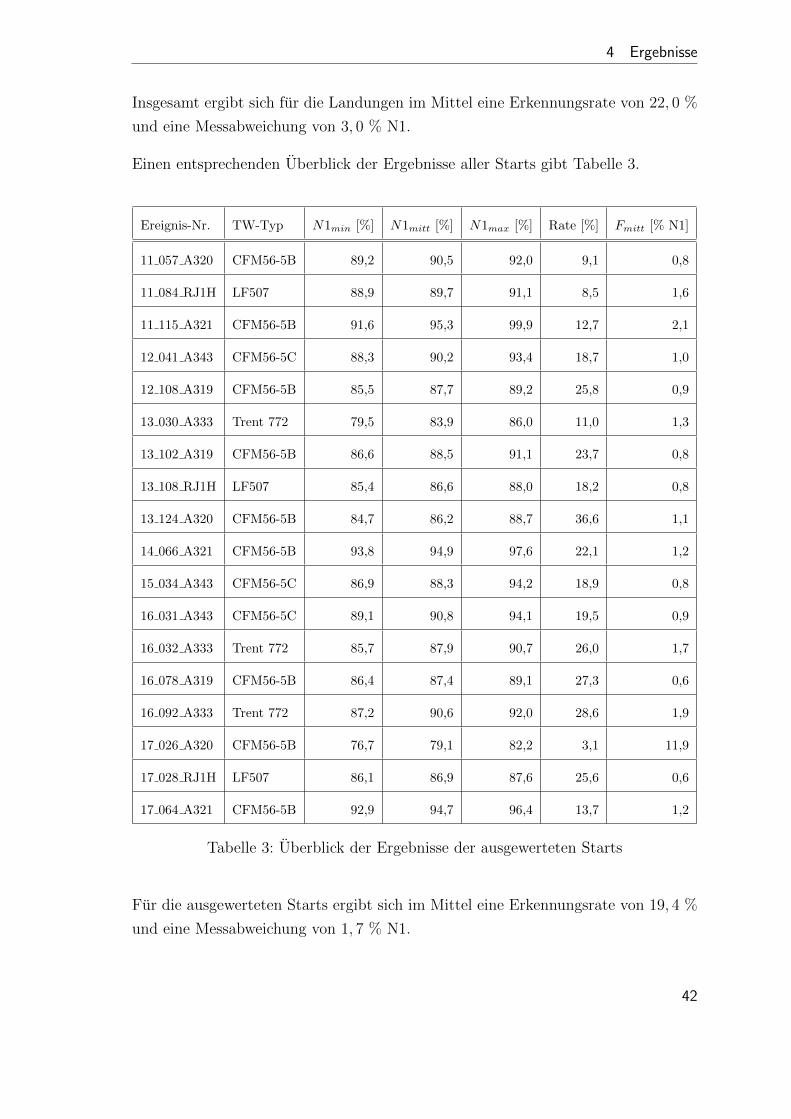
Insgesamt ergibt sich fur die Landungen im Mittel eine Erkennungsrate von 22, 0 %
und eine Messabweichung von 3, 0 % N1.
Einen entsprechenden Uberblick der Ergebnisse aller Starts gibt Tabelle 3.
Ereignis-Nr. TW-Typ N1min [%] N1mitt [%] N1max [%] Rate [%] Fmitt [% N1]
11 057 A320 CFM56-5B 89,2 90,5 92,0 9,1 0,8
11 084 RJ1H LF507 88,9 89,7 91,1 8,5 1,6
11 115 A321 CFM56-5B 91,6 95,3 99,9 12,7 2,1
12 041 A343 CFM56-5C 88,3 90,2 93,4 18,7 1,0
12 108 A319 CFM56-5B 85,5 87,7 89,2 25,8 0,9
13 030 A333 Trent 772 79,5 83,9 86,0 11,0 1,3
13 102 A319 CFM56-5B 86,6 88,5 91,1 23,7 0,8
13 108 RJ1H LF507 85,4 86,6 88,0 18,2 0,8
13 124 A320 CFM56-5B 84,7 86,2 88,7 36,6 1,1
14 066 A321 CFM56-5B 93,8 94,9 97,6 22,1 1,2
15 034 A343 CFM56-5C 86,9 88,3 94,2 18,9 0,8
16 031 A343 CFM56-5C 89,1 90,8 94,1 19,5 0,9
16 032 A333 Trent 772 85,7 87,9 90,7 26,0 1,7
16 078 A319 CFM56-5B 86,4 87,4 89,1 27,3 0,6
16 092 A333 Trent 772 87,2 90,6 92,0 28,6 1,9
17 026 A320 CFM56-5B 76,7 79,1 82,2 3,1 11,9
17 028 RJ1H LF507 86,1 86,9 87,6 25,6 0,6
17 064 A321 CFM56-5B 92,9 94,7 96,4 13,7 1,2
Tabelle 3: Uberblick der Ergebnisse der ausgewerteten Starts
Fur die ausgewerteten Starts ergibt sich im Mittel eine Erkennungsrate von 19, 4 %
und eine Messabweichung von 1, 7 % N1.
42
4 Ergebnisse
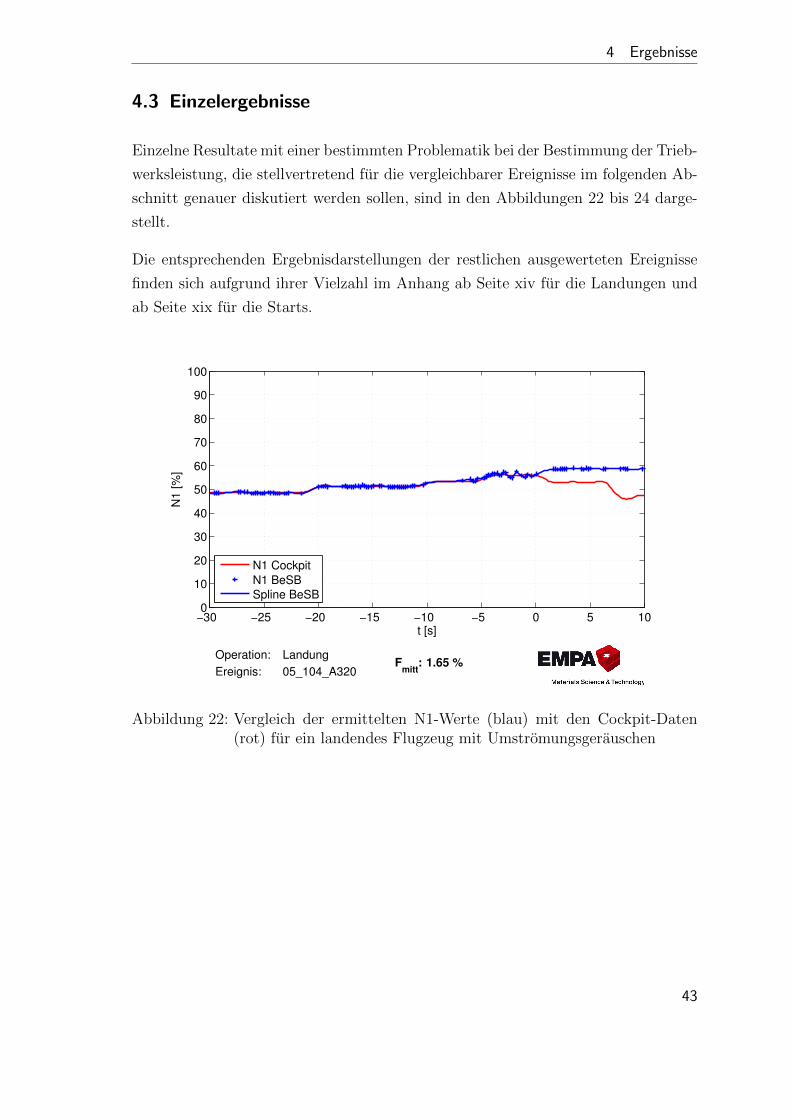
4.3 Einzelergebnisse
Einzelne Resultate mit einer bestimmten Problematik bei der Bestimmung der Trieb-
werksleistung, die stellvertretend fur die vergleichbarer Ereignisse im folgenden Ab-
schnitt genauer diskutiert werden sollen, sind in den Abbildungen 22 bis 24 darge-
stellt.
Die entsprechenden Ergebnisdarstellungen der restlichen ausgewerteten Ereignisse
finden sich aufgrund ihrer Vielzahl im Anhang ab Seite xiv fur die Landungen und
ab Seite xix fur die Starts.
−30 −25 −20 −15 −10 −5 0 5 100
10
20
30
40
50
60
70
80
90
100
t [s]
N1
[%
]
N1 Cockpit
N1 BeSB
Spline BeSB
Operation:
Ereignis:
Landung
05_104_A320F
mitt: 1.65 %
Abbildung 22: Vergleich der ermittelten N1-Werte (blau) mit den Cockpit-Daten(rot) fur ein landendes Flugzeug mit Umstromungsgerauschen
43
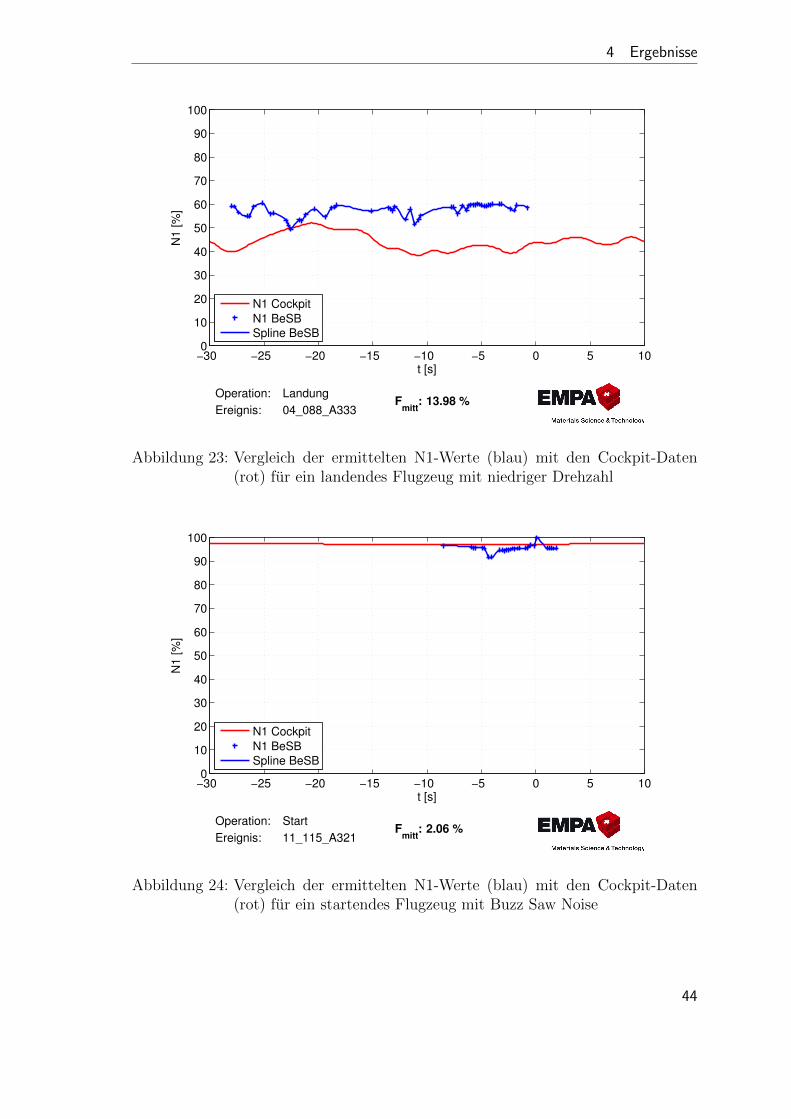
4 Ergebnisse
−30 −25 −20 −15 −10 −5 0 5 100
10
20
30
40
50
60
70
80
90
100
t [s]
N1
[%
]
N1 Cockpit
N1 BeSB
Spline BeSB
Operation:
Ereignis:
Landung
04_088_A333F
mitt: 13.98 %
Abbildung 23: Vergleich der ermittelten N1-Werte (blau) mit den Cockpit-Daten(rot) fur ein landendes Flugzeug mit niedriger Drehzahl
−30 −25 −20 −15 −10 −5 0 5 100
10
20
30
40
50
60
70
80
90
100
t [s]
N1
[%
]
N1 Cockpit
N1 BeSB
Spline BeSB
Operation:
Ereignis:
Start
11_115_A321F
mitt: 2.06 %
Abbildung 24: Vergleich der ermittelten N1-Werte (blau) mit den Cockpit-Daten(rot) fur ein startendes Flugzeug mit Buzz Saw Noise
44

5 Diskussion
Betrachtet man das Gesamtergebnis aus Tabelle 2 auf Seite 41 und Tabelle 3 auf Sei-
te 42, sind die Resultate sehr vielversprechend. Im arithmetischen Mittel ergibt sich
fur die Landungen eine Messabweichung von 3,0 % N1 und fur die Starts von 1,7 %
N1, wobei der Median mit jeweils 1,0 % N1 deutlich darunter liegt. Dies erklart sich
durch einzelne deutliche Ausreißer, bei denen die Triebwerksdrehzahl offensichtlich
nicht richtig erkannt wurde. Davon betroffen sind 4 der 20 ausgewerteten Landun-
gen, bei denen die mittlere absolute Abweichung zu den Cockpit-Daten im Bereich
von 4,8 bis 17,3 % N1 liegt. Bei den Starts trifft dies nur auf 1 von 18 Ereignissen
mit einer Abweichung von 11,9 % N1 zu.
Um die Ergebnisse beurteilen zu konnen, genugt es jedoch nicht, allein die Mess-
abweichungen der ermittelten von den”richtigen“ Werten zu betrachten. Vielmehr
ist zu beachten, dass jedes Ergebnis auf Eingangsdaten aus realen Messungen be-
ruht, die sich in ihrer Qualitat stark voneinander unterscheiden. Dabei sind zum
einen Fremdgerausche im interessierenden Frequenzbereich der jeweiligen Audio-
aufzeichnung zu berucksichtigen, die das Messergebnis verfalschen konnen. Zum
anderen wurden die Messungen uber einen Zeitraum von insgesamt vier Wochen
durchgefuhrt, wodurch von nicht konstanten Messbedingungen auszugehen ist. Fur
die Interpretation der Ergebnisse ist es daher unerlasslich, auch die zugehorigen
Eingangsdaten in Relation zu diesen zu betrachten. Ebenso unterscheiden sich Lan-
dungen und Starts grundlegend bezuglich ihrer Auswertbarkeit, so dass diese im
Folgenden getrennt untersucht werden.
45

5 Diskussion
5.1 Landungen
Fur die Landungen soll zuerst das Ergebnis des bisher in dieser Arbeit verwendeten
Beispiels, das in Abbildung 18 auf Seite 37 dargestellt ist, stellvertretend genauer
betrachtet werden.
5.1.1 Erkennungsrate
Die erste N1-Drehzahl von 48,8 % konnte bereits zu Beginn des Zeitraumes, fur den
Track-Daten vorhanden sind, erfasst werden. Dies entspricht einer Entfernung vom
Messpunkt von 1,9 km und einer Schalllaufzeit von 5,5 s.
Der Zeitraum, fur den N1-Werte ermittelt werden konnten, erstreckt sich nur kurz
bis vor den Nullpunkt, was eine Erkennungsrate von 33,9 % zur Folge hat. Betrach-
tet man jedoch das Spektrogramm der zugehorigen, bereits vorverarbeiteten und
gefilterten Audioaufzeichnung in Abbildung 10 auf Seite 24, erkennt man, dass sich
nach dem Punkt des kurzesten Abstandes von Flugzeug und Messpunkt (t = 0 s)
keine tonale Komponente mehr ausbildet, die erfasst werden konnte.
Dies bestatigt auch eine entsprechende Untersuchung der Tonalitat mittels des spek-
tralen Crest-Faktors (Spectral Crest Factor), der bestimmt wird durch das Verhaltnis
des Maximums des jeweiligen Betrages eines Kurzzeit-Spektrums zu dessen Summe
[11, S. 59]:
vtsc(t) =
max0≤k≤N/2−1
|X(k)|
N/2−1∑k=0
|X(k)|. (30)
Die theoretisch resultierenden Werte liegen im Bereich 2/N ≤ vtsc ≤ 1, wobei sich
der untere Grenzwert fur ein komplett flaches Spektrum und das Maximum fur einen
reinen Sinuston ergibt [11, S. 59]. Fur das verwendete Beispiel sind die spektralen
Crest-Faktoren in Abbildung 25 auf der nachsten Seite uber der relativen Zeitachse
dargestellt. Darin erkennbar sind zum einen die insgesamt sehr kleinen Werte, die
fur einen relativ gering ausgepragten tonalen Gehalt sprechen, was dessen Erken-
nung merklich erschwert. Zum anderen nimmt der spektrale Crest-Faktor kurz vor
dem zeitlichen Nullpunkt auf ein Minimum ab, was sich mit den angemerkten Be-
obachtungen deckt. Zudem ist bei ca. t = −10 s ein relatives Minimum in dessen
46
5 Diskussion
0
0.02
0.04
0.06
0.08
0.1
0.12
-20 -10 0 10 20 30
vts
c
t [s]
Spectral crest factor
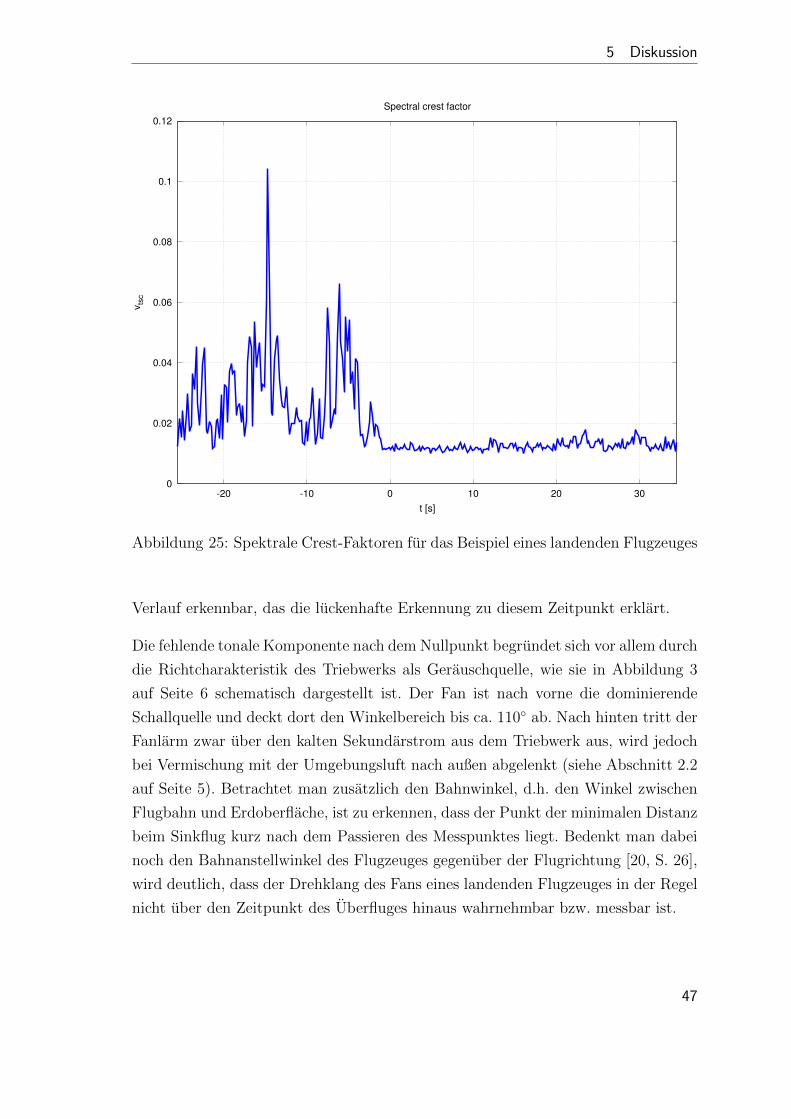
Abbildung 25: Spektrale Crest-Faktoren fur das Beispiel eines landenden Flugzeuges
Verlauf erkennbar, das die luckenhafte Erkennung zu diesem Zeitpunkt erklart.
Die fehlende tonale Komponente nach dem Nullpunkt begrundet sich vor allem durch
die Richtcharakteristik des Triebwerks als Gerauschquelle, wie sie in Abbildung 3
auf Seite 6 schematisch dargestellt ist. Der Fan ist nach vorne die dominierende
Schallquelle und deckt dort den Winkelbereich bis ca. 110◦ ab. Nach hinten tritt der
Fanlarm zwar uber den kalten Sekundarstrom aus dem Triebwerk aus, wird jedoch
bei Vermischung mit der Umgebungsluft nach außen abgelenkt (siehe Abschnitt 2.2
auf Seite 5). Betrachtet man zusatzlich den Bahnwinkel, d.h. den Winkel zwischen
Flugbahn und Erdoberflache, ist zu erkennen, dass der Punkt der minimalen Distanz
beim Sinkflug kurz nach dem Passieren des Messpunktes liegt. Bedenkt man dabei
noch den Bahnanstellwinkel des Flugzeuges gegenuber der Flugrichtung [20, S. 26],
wird deutlich, dass der Drehklang des Fans eines landenden Flugzeuges in der Regel
nicht uber den Zeitpunkt des Uberfluges hinaus wahrnehmbar bzw. messbar ist.
47
5 Diskussion
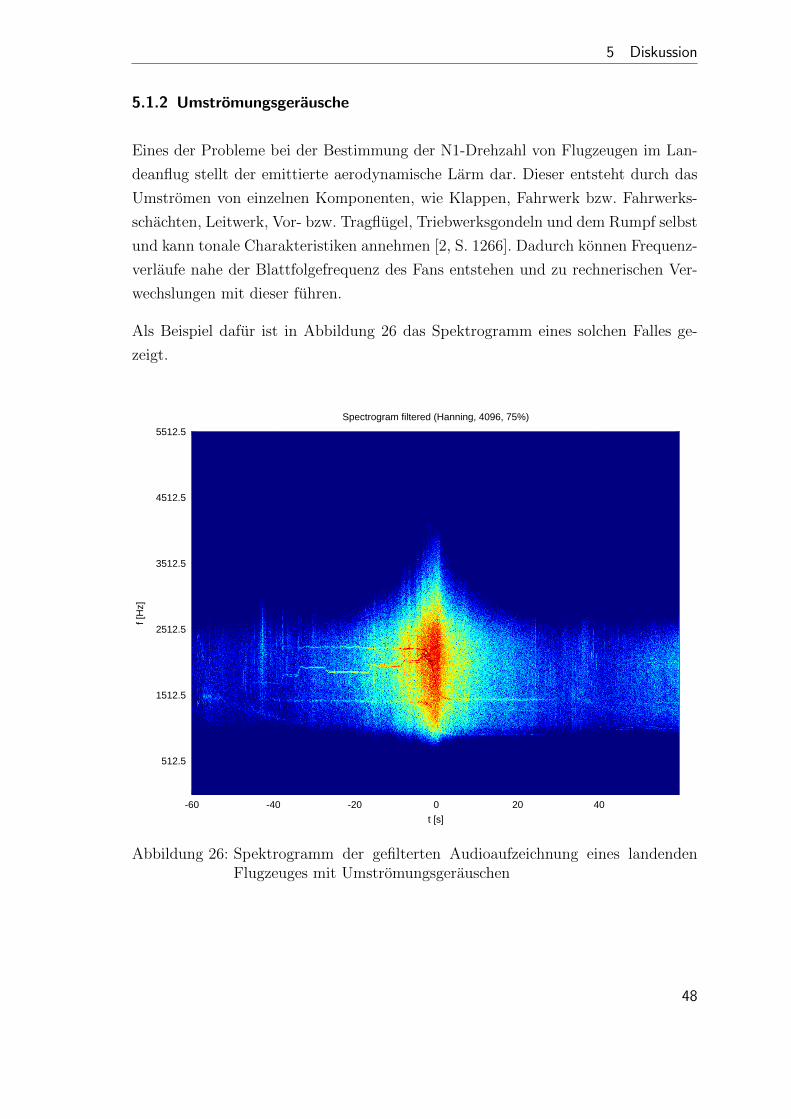
5.1.2 Umstromungsgerausche
Eines der Probleme bei der Bestimmung der N1-Drehzahl von Flugzeugen im Lan-
deanflug stellt der emittierte aerodynamische Larm dar. Dieser entsteht durch das
Umstromen von einzelnen Komponenten, wie Klappen, Fahrwerk bzw. Fahrwerks-
schachten, Leitwerk, Vor- bzw. Tragflugel, Triebwerksgondeln und dem Rumpf selbst
und kann tonale Charakteristiken annehmen [2, S. 1266]. Dadurch konnen Frequenz-
verlaufe nahe der Blattfolgefrequenz des Fans entstehen und zu rechnerischen Ver-
wechslungen mit dieser fuhren.
Als Beispiel dafur ist in Abbildung 26 das Spektrogramm eines solchen Falles ge-
zeigt.
5512.5
4512.5
3512.5
2512.5
1512.5
512.5
-60 -40 -20 0 20 40
f [H
z]
t [s]
Spectrogram filtered (Hanning, 4096, 75%)
Abbildung 26: Spektrogramm der gefilterten Audioaufzeichnung eines landendenFlugzeuges mit Umstromungsgerauschen
48
5 Diskussion
Darin ist deutlich der in Stufen schwankende Verlauf der Triebwerksleistung im An-
flug zu sehen. Sowohl uber- als auch unterhalb der BPF sind jedoch auch zeitlich
konstante Tone erkennbar, die nur durch den Doppler-Effekt verschoben sind. Diese
sind hochstwahrscheinlich Umstromungsgerauschen unbekannten Ursprungs zuzu-
ordnen. Im Fall der hoheren Frequenz uberschneidet sich zudem deren Verlauf mit
dem der Blattfolgefrequenz nahe des Nullpunktes. Dies fuhrt zu einem Uberspringen
und damit einer falschlichen Erkennung als Drehton, wie es im Ergebnis in Abbil-
dung 22 auf Seite 43 ersichtlich ist.
5.1.3 Niedrige Drehzahl
Ein Beispiel fur ein Ereignis, bei dem die Bestimmung der Triebwerksleistung ganzlich
versagt, ist Nr. 04 088 A333 I1. Erkennbar ist dies sowohl an der hohen mittleren
absoluten Messabweichung von 14,0 % N1, als auch in der Ergebnisdarstellung in
Abbildung 23 auf Seite 44. Betrachtet man das Spektrogramm der zugehorigen ge-
filterten Audioaufzeichnung in Abbildung 27 auf der nachsten Seite, wird deutlich,
dass kaum eine tonale Komponente messbar ausgepragt ist.
Dies kann dadurch erklart werden, dass sich der betreffende Triebwerkstyp Trent
772 durch eine relativ geringe Drehzahl des Fans auszeichnet, wodurch die BPF
bei einem Landeanflug mit einem erwarteten N1-Wert von 52 % bei 878,7 Hz liegt.
Daher kommt es zu einer Uberlagerung mit tieffrequenten Gerauschkomponenten,
die aufgrund der frequenzabhangigen Luftabsorption kaum gedampft werden und
weshalb sich der Pegel der gesuchten BPF nur geringfugig vom Hintergrundpegel
unterscheidet.
Diese Problematik ist insbesondere auch bei modernen Triebwerken mit einem großen
Fandurchmesser zu erwarten. Wie z.B. dem General Electric GE90 mit d = 3, 25 m,
das bei der Boeing 777 eingesetzt wird und fur dessen Niederdruckwelle eine maxi-
male Drehzahl von nmax = 2465 min−1 bei N1max = 109, 0 % spezifiziert ist [21].
Zusammen mit der geringen Schaufelanzahl von Z = 22 (siehe Abbildung 34 auf Sei-
te xii) ergibt dies nach Gleichung (1) auf Seite 6 eine maximale Blattfolgefrequenz
von BPFmax = 903, 8 Hz. Damit bestimmt sich die entsprechende Triebwerkskon-
stante nach Gleichung (28) auf Seite 30 zu KTW = 8, 3. Bei einem an diesem Mess-
punkt erwarteten N1-Wert von 52 % wurde sich somit eine BPF von nur 431,6 Hz
ergeben.
49
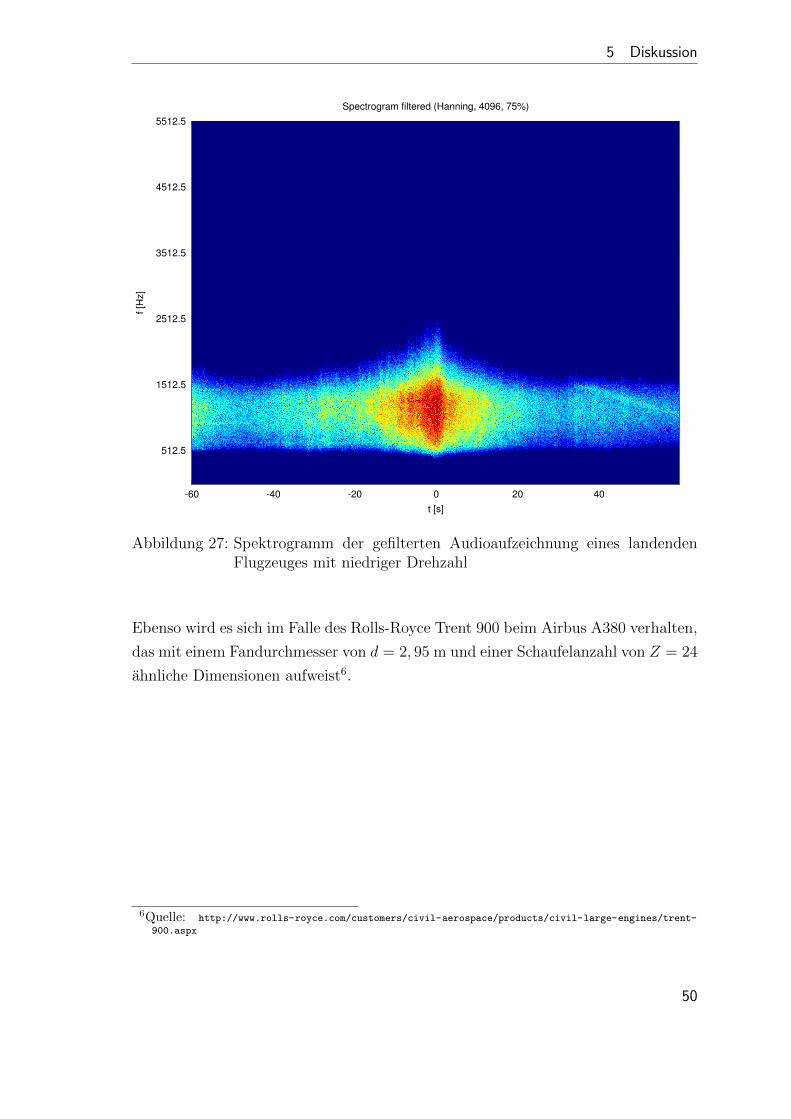
5 Diskussion
5512.5
4512.5
3512.5
2512.5
1512.5
512.5
-60 -40 -20 0 20 40
f [H
z]
t [s]
Spectrogram filtered (Hanning, 4096, 75%)
Abbildung 27: Spektrogramm der gefilterten Audioaufzeichnung eines landendenFlugzeuges mit niedriger Drehzahl
Ebenso wird es sich im Falle des Rolls-Royce Trent 900 beim Airbus A380 verhalten,
das mit einem Fandurchmesser von d = 2, 95 m und einer Schaufelanzahl von Z = 24
ahnliche Dimensionen aufweist6.
6Quelle: http://www.rolls-royce.com/customers/civil-aerospace/products/civil-large-engines/trent-
900.aspx
50

5 Diskussion
5.1.4 Zeitsynchronisation
Ein weiteres Problem stellt die zeitlich Synchronisation von Cockpit-Daten und Ton-
aufnahmen dar. Als Beispiel hierfur sei Ereignis Nr. 02 102 A320 genannt, dessen
Vergleichsdarstellung im Anhang auf Seite xiv zu finden ist.
Da die Verlaufe der erkannten und der”richtigen“ N1-Werte bei der Mehrheit der
restlichen ausgewerteten Uberfluge synchron sind, kann davon ausgegangen werden,
dass der Fehler hierbei nicht Teil des Berechnungsverfahrens ist. Vielmehr liegen die
Cockpit-Daten nur mit teilweise stark versetzten Zeitstempeln vor und mussten erst
durch die Empa anhand charakteristischer Punkte mit der realen Zeitachse synchro-
nisiert werden, was zu den beobachteten leichten Abweichungen fuhren konnte.
51
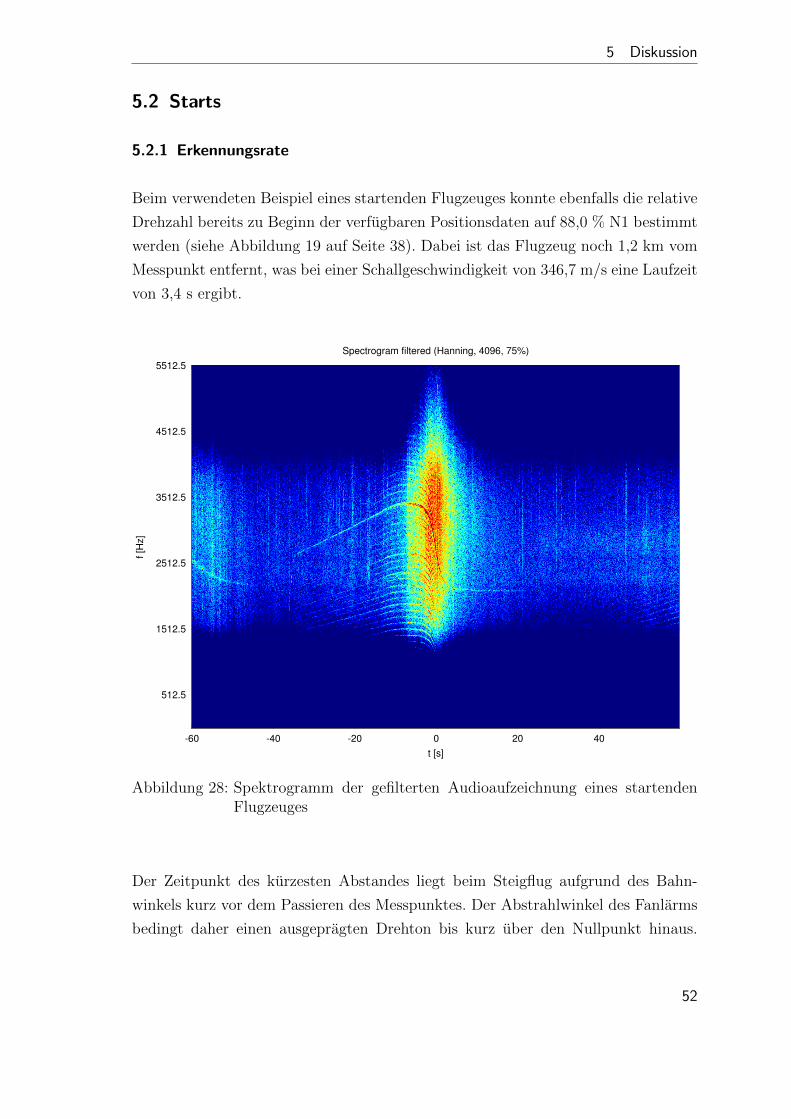
5 Diskussion
5.2 Starts
5.2.1 Erkennungsrate
Beim verwendeten Beispiel eines startenden Flugzeuges konnte ebenfalls die relative
Drehzahl bereits zu Beginn der verfugbaren Positionsdaten auf 88,0 % N1 bestimmt
werden (siehe Abbildung 19 auf Seite 38). Dabei ist das Flugzeug noch 1,2 km vom
Messpunkt entfernt, was bei einer Schallgeschwindigkeit von 346,7 m/s eine Laufzeit
von 3,4 s ergibt.
5512.5
4512.5
3512.5
2512.5
1512.5
512.5
-60 -40 -20 0 20 40
f [H
z]
t [s]
Spectrogram filtered (Hanning, 4096, 75%)
Abbildung 28: Spektrogramm der gefilterten Audioaufzeichnung eines startendenFlugzeuges
Der Zeitpunkt des kurzesten Abstandes liegt beim Steigflug aufgrund des Bahn-
winkels kurz vor dem Passieren des Messpunktes. Der Abstrahlwinkel des Fanlarms
bedingt daher einen ausgepragten Drehton bis kurz uber den Nullpunkt hinaus.
52
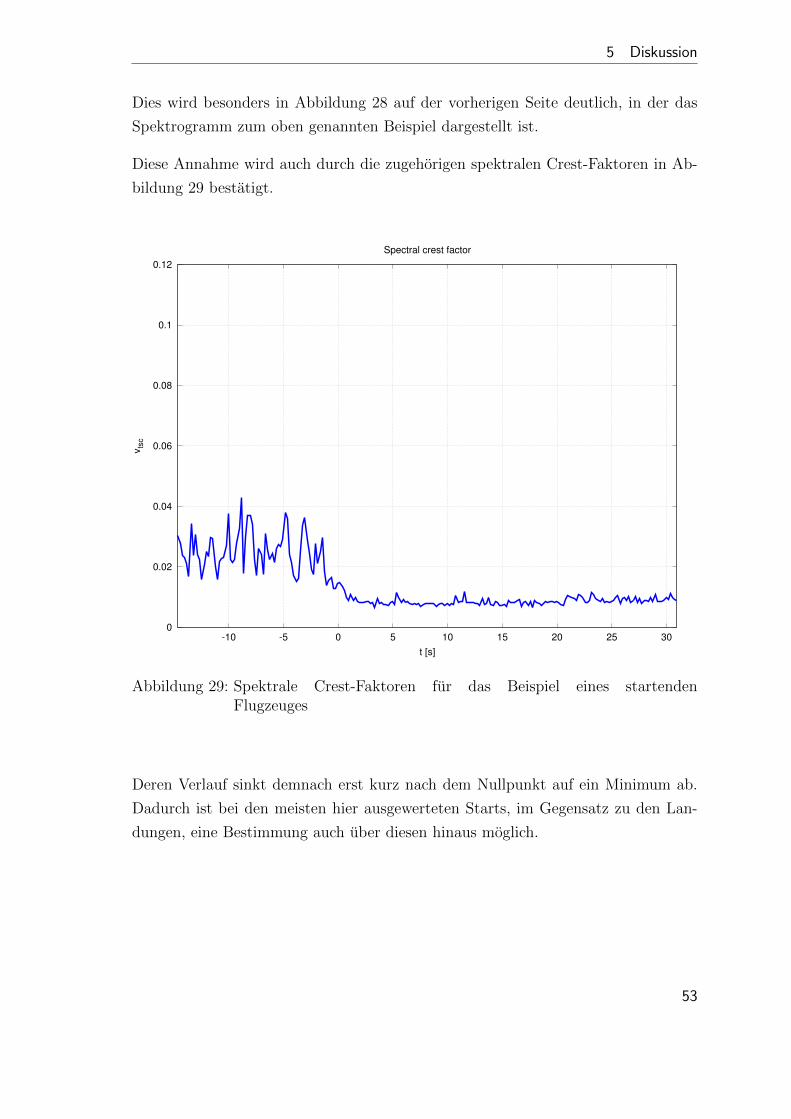
5 Diskussion
Dies wird besonders in Abbildung 28 auf der vorherigen Seite deutlich, in der das
Spektrogramm zum oben genannten Beispiel dargestellt ist.
Diese Annahme wird auch durch die zugehorigen spektralen Crest-Faktoren in Ab-
bildung 29 bestatigt.
0
0.02
0.04
0.06
0.08
0.1
0.12
-10 -5 0 5 10 15 20 25 30
vts
c
t [s]
Spectral crest factor
Abbildung 29: Spektrale Crest-Faktoren fur das Beispiel eines startendenFlugzeuges
Deren Verlauf sinkt demnach erst kurz nach dem Nullpunkt auf ein Minimum ab.
Dadurch ist bei den meisten hier ausgewerteten Starts, im Gegensatz zu den Lan-
dungen, eine Bestimmung auch uber diesen hinaus moglich.
53

5 Diskussion
5.2.2 Buzz Saw Noise
Als großte Fehlerquelle bei der Erkennung der Triebwerksdrehzahl von startenden
Flugzeugen hat sich der in Abschnitt 2.2.2 auf Seite 7 beschriebene Buzz Saw Noise
(BSN ) erwiesen. Dessen tonale Komponenten folgen in ihrem zeitlichen Verlauf der
gesuchten Blattfolgefrequenz, da beide ein Vielfaches der Rotordrehfrequenz fn sind,
was deutlich in Abbildung 28 auf Seite 52 zu erkennen ist. Dementsprechend liegt
die BPF genau zwischen zwei Obertonen des BSN. Der dabei zu uberwindende
Frequenzabstand ergibt sich daher mit Gleichung (1) auf Seite 6 und Gleichung (27)
auf Seite 30 zu:
fn =n
60=BPF
Z=KTWN1
Z. (31)
Um den minimalen Abstand zu bestimmen, ist die Kenntnis des N1-Wertes erfor-
derlich, ab dem Buzz Saw Noise emittiert wird. Nach Gleichung (4) auf Seite 7 mit
Gleichung (27) auf Seite 30 und Gleichung (1) auf Seite 6 lasst sich die Drehzahl
bestimmen, ab der die Umfangsgeschwindigkeit der Schaufelspitzen die Schallge-
schwindigkeit uberschreitet:
n > 60 · cπd
⇔ 60 · BPFZ
> 60 · cπd
⇔ KTwN1
Z>
c
πd
⇒ N1 >c
πd· Z
KTW
,
mit dem Durchmesser des Fans d, dessen Schaufelanzahl Z und der zuvor bestimm-
ten Proportionalitatskonstanten KTW aus Tabelle 1 auf Seite 32. Die Berechnung
mit c = 340 m/s ergibt die in Tabelle 4 auf der nachsten Seite aufgefuhrten N1-
Drehzahlen N1BSN , ab denen Buzz Saw Noise erzeugt wird, was demnach auf alle
hier untersuchten Starts zutrifft.
Die minimalen Abstande ∆fBSN der jeweiligen BPF vom nachstgelegenen Oberton
der Rotordrehfrequenz ergeben sich nach Gleichung (31) und sind ebenfalls in Ta-
belle 4 auf der nachsten Seite aufgefuhrt.
Die Frequenzabstande liegen teils innerhalb des bei der Peak-Selektierung definierten
Suchintervalls von 100 Hz. Dadurch kann es, bedingt durch schwankenden Energie-
gehalt oder Fremdgerausche, zu Sprungen zwischen den Verlaufen der BPF und
54
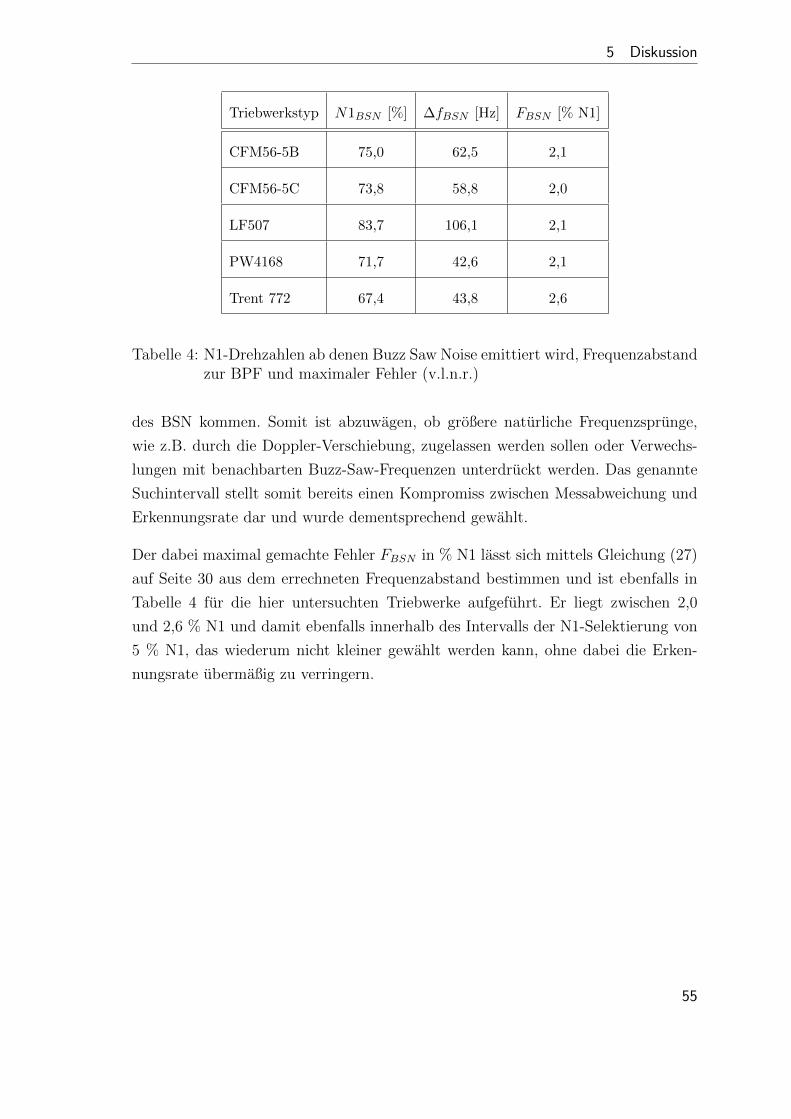
5 Diskussion
Triebwerkstyp N1BSN [%] ∆fBSN [Hz] FBSN [% N1]
CFM56-5B 75,0 62,5 2,1
CFM56-5C 73,8 58,8 2,0
LF507 83,7 106,1 2,1
PW4168 71,7 42,6 2,1
Trent 772 67,4 43,8 2,6
Tabelle 4: N1-Drehzahlen ab denen Buzz Saw Noise emittiert wird, Frequenzabstandzur BPF und maximaler Fehler (v.l.n.r.)
des BSN kommen. Somit ist abzuwagen, ob großere naturliche Frequenzsprunge,
wie z.B. durch die Doppler-Verschiebung, zugelassen werden sollen oder Verwechs-
lungen mit benachbarten Buzz-Saw-Frequenzen unterdruckt werden. Das genannte
Suchintervall stellt somit bereits einen Kompromiss zwischen Messabweichung und
Erkennungsrate dar und wurde dementsprechend gewahlt.
Der dabei maximal gemachte Fehler FBSN in % N1 lasst sich mittels Gleichung (27)
auf Seite 30 aus dem errechneten Frequenzabstand bestimmen und ist ebenfalls in
Tabelle 4 fur die hier untersuchten Triebwerke aufgefuhrt. Er liegt zwischen 2,0
und 2,6 % N1 und damit ebenfalls innerhalb des Intervalls der N1-Selektierung von
5 % N1, das wiederum nicht kleiner gewahlt werden kann, ohne dabei die Erken-
nungsrate ubermaßig zu verringern.
55
6 Fazit
In Rahmen dieser Arbeit sollte ein Verfahren entwickelt werden, das aus akustischen
Messungen die Triebwerksleistung eines landenden bzw. startenden Flugzeuges be-
stimmt. Diese stellt eine Komponente des Flugzustandes dar, welcher zur Skalierung
eines neuen Emissionsmodells benotigt wird, das derzeit durch die Eidgenossische
Materialprufungs- und Forschungsanstalt entwickelt wird.
Dazu wurden Methoden genutzt, die auch bei der Analyse von musikalischen In-
halten zum Einsatz kommen. Durch entsprechende Anpassungen und Erganzungen
war es moglich, diese auf ein anderes Anwendungsgebiet zu ubertragen und auch
dort effektiv einzusetzen. Damit konnte der Drehton des Flugzeugtriebwerks konti-
nuierlich erfasst und anhand einer typenspezifischen Konstanten in die der Leistung
entsprechende relative Drehzahl der Niederdruckwelle umgerechnet werden. Dabei
mussten zudem bei der Schallausbreitung vom Flugzeug zum Messpunkt, aufgrund
der großen relativen Geschwindigkeit und Distanz, der Doppler-Effekt und die Aus-
breitungszeit berucksichtigt werden.
Ein Vergleich der Resultate mit entsprechenden Cockpit-Daten, die durch die Flug-
gesellschaft Swiss bereitgestellt wurden, zeigte eine sehr gute Ubereinstimmung mit
diesen. Die Erwartungen an die zeitliche Erkennungsrate und die absolute Messab-
weichung konnten nicht in allen Fallen erfullt, die Grunde dafur jedoch ausfuhrlich
dargelegt werden. Insgesamt konnte gezeigt werden, dass die entwickelte Metho-
de verlassliche Ergebnisse liefert, solange die entsprechenden tonalen Komponenten
messbar sind. Damit kann dieses Verfahren nun direkt auf alle von der Empa erfass-
ten Uberfluge im Nahbereich des Flughafens angewandt werden.
Eine erste aktuelle Auswertung von Messungen im Fernbereich, d.h. in bis zu 18 km
Entfernung, ergab ebenso vielversprechende Ergebnisse. Die Uberflughohe betragt
dort ca. 1500 m, wodurch, bedingt durch die atmospharische Absorption, hohe Fre-
quenzen entsprechend stark gedampft werden. Damit verkleinert sich vor allem der
Zeitbereich, in dem die Blattfolgefrequenz am Boden noch messbar ist. Ebenso spielt
dadurch die Temperaturabhangigkeit der Schallgeschwindigkeit und damit auch der
Laufzeit und der Doppler-Verschiebung, eine großere Rolle. Daher sind hierfur noch
weitere Anpassungen an die jeweiligen Messpunkte erforderlich, um eine maximale
Erkennungsrate bei minimaler Messabweichung zu erzielen.
56
Literaturverzeichnis
[1] Kohler, Wolfram (2007): Der Drehton eines Turbofantriebwerkes bei
Standlaufen als akustischer Index fur den Triebwerkstyp und die Leistungsstu-
fe. Projektarbeit, Fachgebiet Signale und Systeme der Akustik, Fakultat V,
Technische Universitat Berlin.
[2] Braunling, Willy J. G. (2009): Flugzeugtriebwerke: Grundlagen, Aero-
Thermodynamik, ideale und reale Kreisprozesse, Thermische Turbomaschinen,
Komponenten, Emissionen und Systeme. 3., vollstandig uberarbeitete und er-
weiterte Auflage. Berlin Heidelberg: Springer.
[3] Raitor, Till (2009): Experimentelle Ermittlung dominanter Schallquellme-
chanismen von Radialverdichtern. Dissertation, Fachgebiet Experimentelle
Stromungsmechanik, Fakultat V, Technische Universitat Berlin.
[4] Zeller, Peter (2012):”Mechatronische Gerausche.” In: Peter Zeller (Hrg.)
Handbuch Fahrzeugakustik - Grundlagen, Auslegung, Berechnung, Versuch, 2.,
uberarbeitete Auflage, Kap. 13.1. Wiesbaden: Vieweg+Teubner, S. 294–310.
[5] Moser, Michael (2012): Technische Akustik. 9., aktualisierte Auflage. Berlin
Heidelberg: Springer.
[6] ISO (1999): ISO 9613-2: Dampfung des Schalls bei der Ausbreitung im Freien
- Teil 2: Allgemeines Berechnungsverfahren. Berlin: Beuth.
[7] ISO (1993): ISO 9613-1: Acoustics - Attentuation of sound during propagation
outdoors - Part 1: Calculation of the absorption of sound by the atmosphere.
Berlin: Beuth.
[8] Weinzierl, Stefan (1996): Einfuhrung in die digitale Signalverarbeitung. Vorle-
sungsskript. Fachgebiet Audiokommunikation, Fakultat I, Technische Univer-
sitat Berlin.
[9] Zolzer, Udo (2008):”Digitale Signalverarbeitung, Filter und Effekte.” In: Ste-
fan Weinzierl (Hrg.) Handbuch der Audiotechnik, Kap. 15. Berlin Heidelberg:
Springer, S. 813–848.
57
Literaturverzeichnis
[10] Vorlander, Michael (2010):”Digitale Signalverarbeitung in der Messtechnik.”
In: Michael Moser (Hrg.) Messtechnik der Akustik, Kap. 9. Berlin Heidelberg:
Springer, S. 537–575.
[11] Lerch, Alexander (2011): An Introduction to Audio Content Analysis. Vorle-
sungsskript. Fachgebiet Audiokommunikation, Fakultat I, Technische Univer-
sitat Berlin.
[12] Bortz, Jurgen und Christof Schuster (2010): Statistik fur Human- und Sozi-
alwissenschaftler. 7., vollstandig uberarbeitete und erweiterte Auflage. Berlin
Heidelberg: Springer.
[13] Scheiderer, Joachim (2008): Angewandte Flugleistung - Eine Einfuhrung in die
operationelle Flugleistung. Berlin Heidelberg: Springer.
[14] EASA (2012): E.003 CFM International S.A. - CFM56-5Band5C series engi-
nes. European Aviation Safety Agency, Koln.
[15] FAA (2002): E6NE Honeywell International Inc. ALF502-LF507 series engines.
Federal Aviation Administration, Washington, D.C.
[16] EASA (2013): E.043 (IM) Pratt and Whitney PW4000-100 series engines. Eu-
ropean Aviation Safety Agency, Koln.
[17] EASA (2014): E.042 Rolls-Royce plc. RB211 Trent 700 series engines. Euro-
pean Aviation Safety Agency, Koln.
[18] DIN (1987): DIN 55350-13: Begriffe der Qualitatssicherung und Statistik - Teil
13: Begriffe zur Genauigkeit von Ermittlungsverfahren und Ermittlungsergeb-
nissen. Berlin: Beuth.
[19] DIN (1995): DIN 1319-1: Grundlagen der Messtechnik - Teil 1: Grundbegriffe.
Berlin: Beuth.
[20] Klußmann, Niels und Arnim Malik (2012): Lexikon der Luftfahrt. 3., aktuali-
sierte Auflage. Berlin Heidelberg: Springer.
[21] EASA (2014): E.002 (IM) General Electric GE90 series engines. European
Aviation Safety Agency, Koln.
58
Anhang
A.1 Triebwerksdarstellungen
Abbildung 30: Triebwerk CFM International S.A. CFM56-5B7
Abbildung 31: Triebwerk Honeywell International Inc. LF5078
7Quelle: http://www.cfmaeroengines.com/engines/cfm56-5b8Quelle: https://commerce.honeywell.com/wcsstore/B2BDirectMyAerospaceAssetStore/images/catalog/
Lf507-800x800.jpg
x
Anhang
Abbildung 32: Triebwerk Pratt and Whitney PW4000-1009
Abbildung 33: Triebwerk Rolls-Royce plc. RB211 Trent 70010
9Quelle: http://www.pw.utc.com/PW4000100_Engine10Quelle: http://www.rolls-royce.com/customers/civil-aerospace/products/civil-large-engines/trent-
700.aspx
xi
Anhang
Abbildung 34: Triebwerk General Electric GE9011
11Quelle: http://www.geaviation.com/commercial/engines/ge90/
xii
Anhang
A.2 Ergebnisdarstellungen
xiii
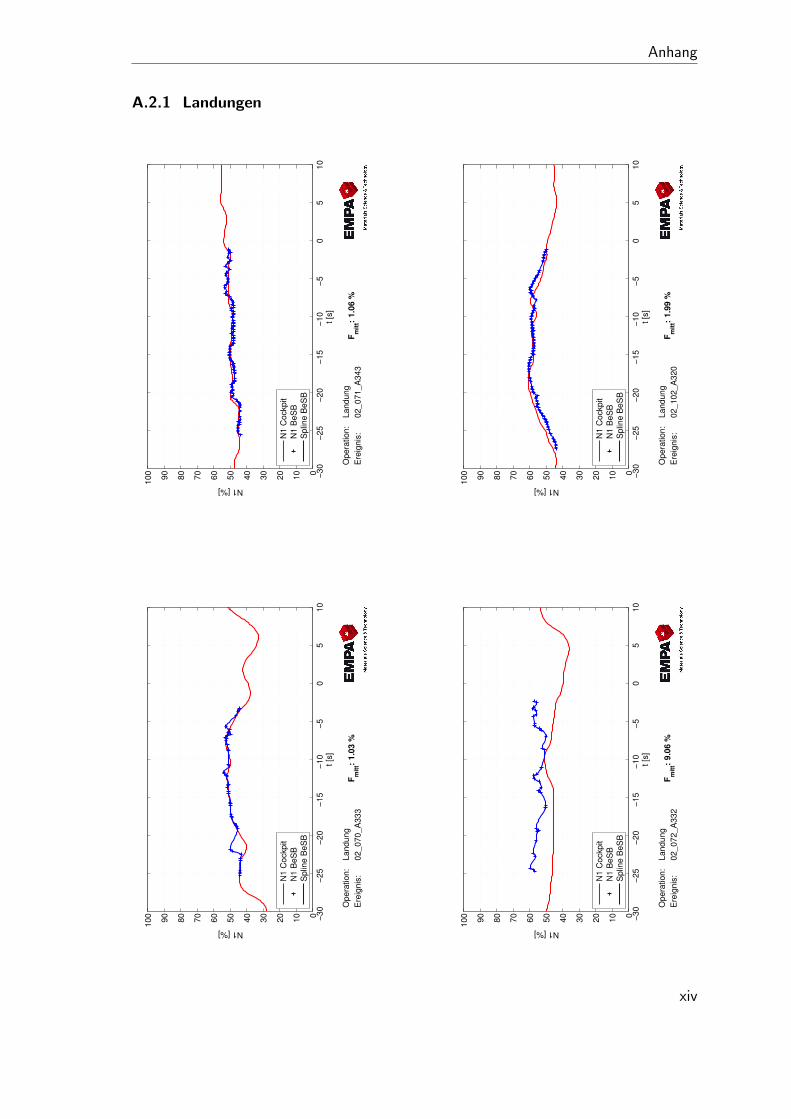
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_070_A
333
Fm
itt:
1.0
3 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_071_A
343
Fm
itt:
1.0
6 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_072_A
332
Fm
itt:
9.0
6 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_102_A
320
Fm
itt:
1.9
9 %
Anhang
A.2.1 Landungen
xiv
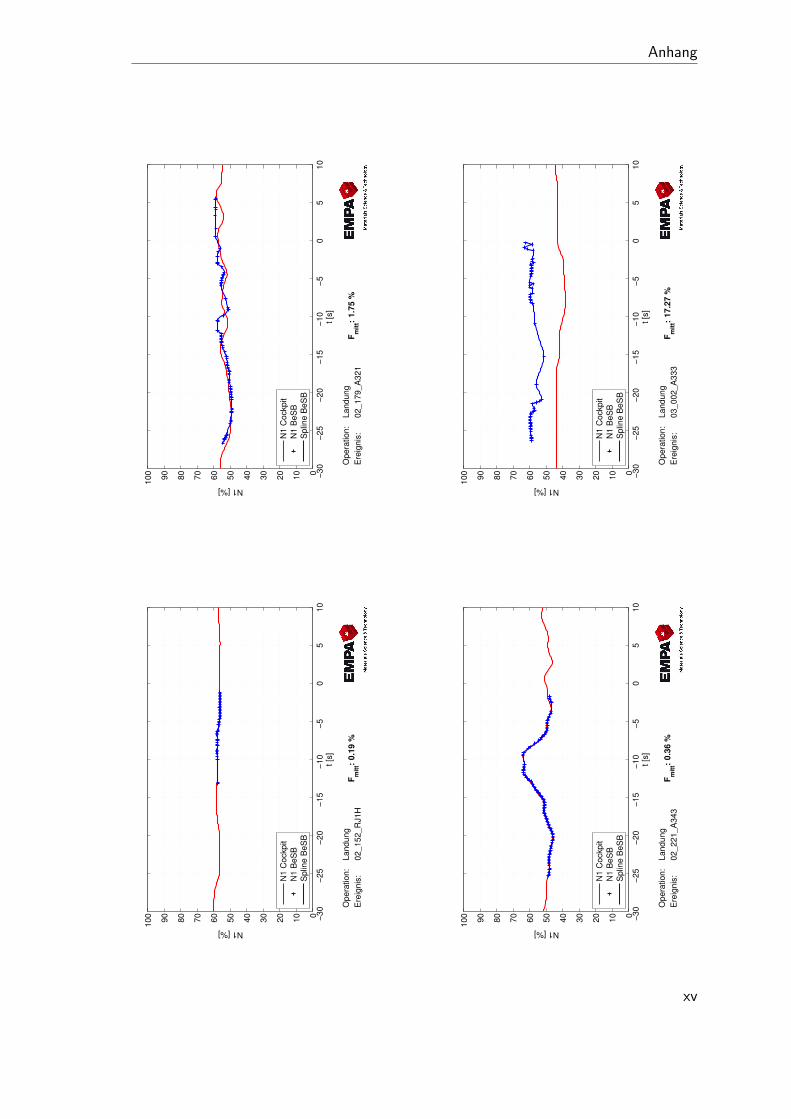
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_152_R
J1H
Fm
itt:
0.1
9 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_179_A
321
Fm
itt:
1.7
5 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
02_221_A
343
Fm
itt:
0.3
6 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
03_002_A
333
Fm
itt:
17.2
7 %
Anhang
xv
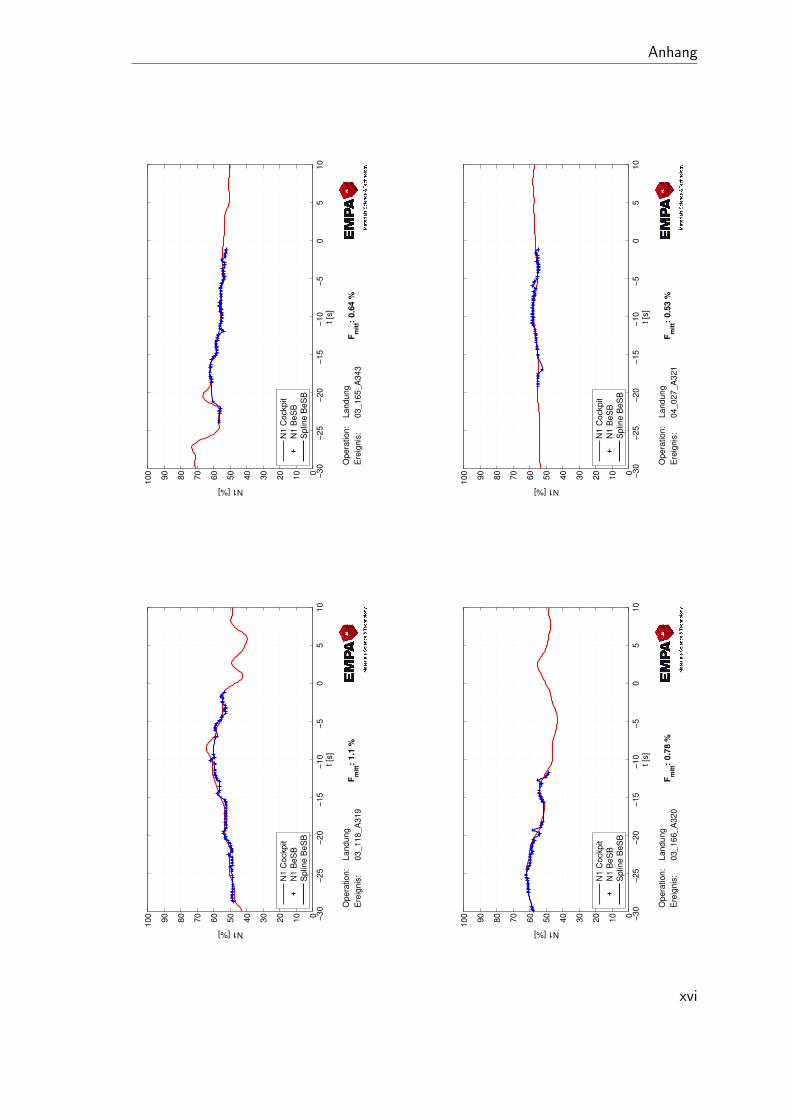
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
03_118_A
319
Fm
itt:
1.1
%
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
03_165_A
343
Fm
itt:
0.6
4 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
03_166_A
320
Fm
itt:
0.7
8 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
04_027_A
321
Fm
itt:
0.5
3 %
Anhang
xvi
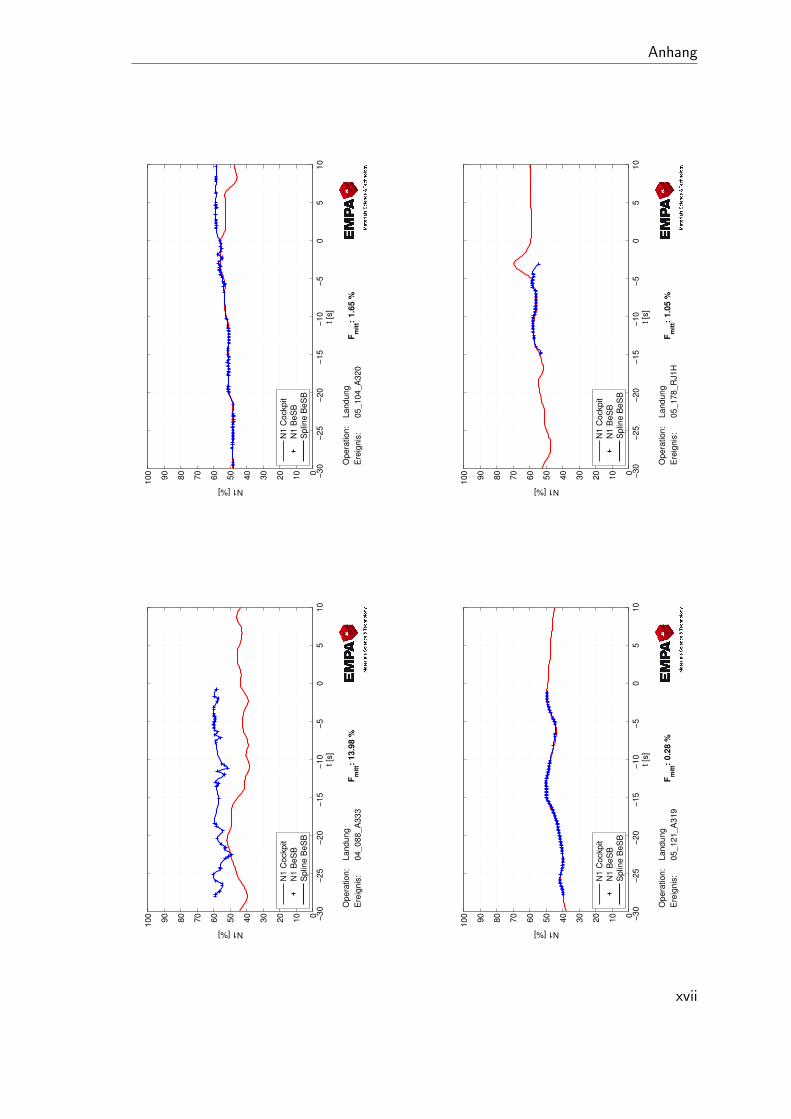
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
04_088_A
333
Fm
itt:
13.9
8 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
05_104_A
320
Fm
itt:
1.6
5 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
05_121_A
319
Fm
itt:
0.2
8 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
05_178_R
J1H
Fm
itt:
1.0
5 %
Anhang
xvii
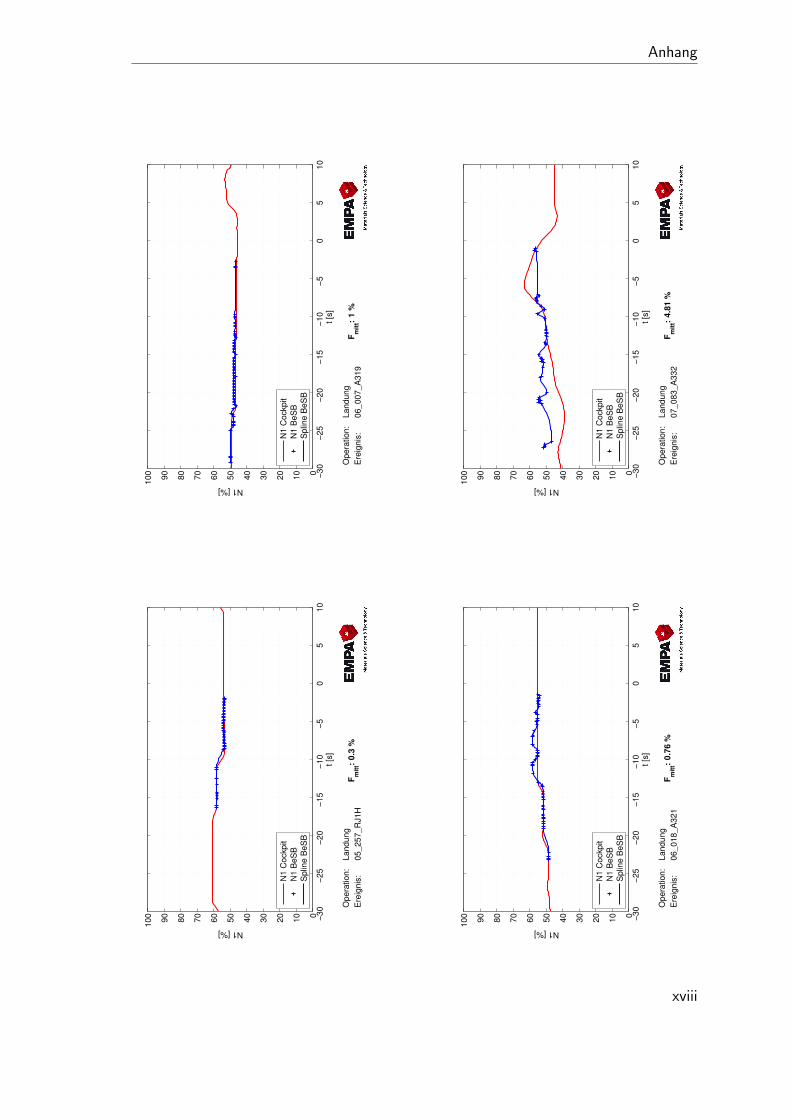
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
05_257_R
J1H
Fm
itt:
0.3
%
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
06_007_A
319
Fm
itt:
1 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
06_018_A
321
Fm
itt:
0.7
6 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Landung
07_083_A
332
Fm
itt:
4.8
1 %
Anhang
xviii
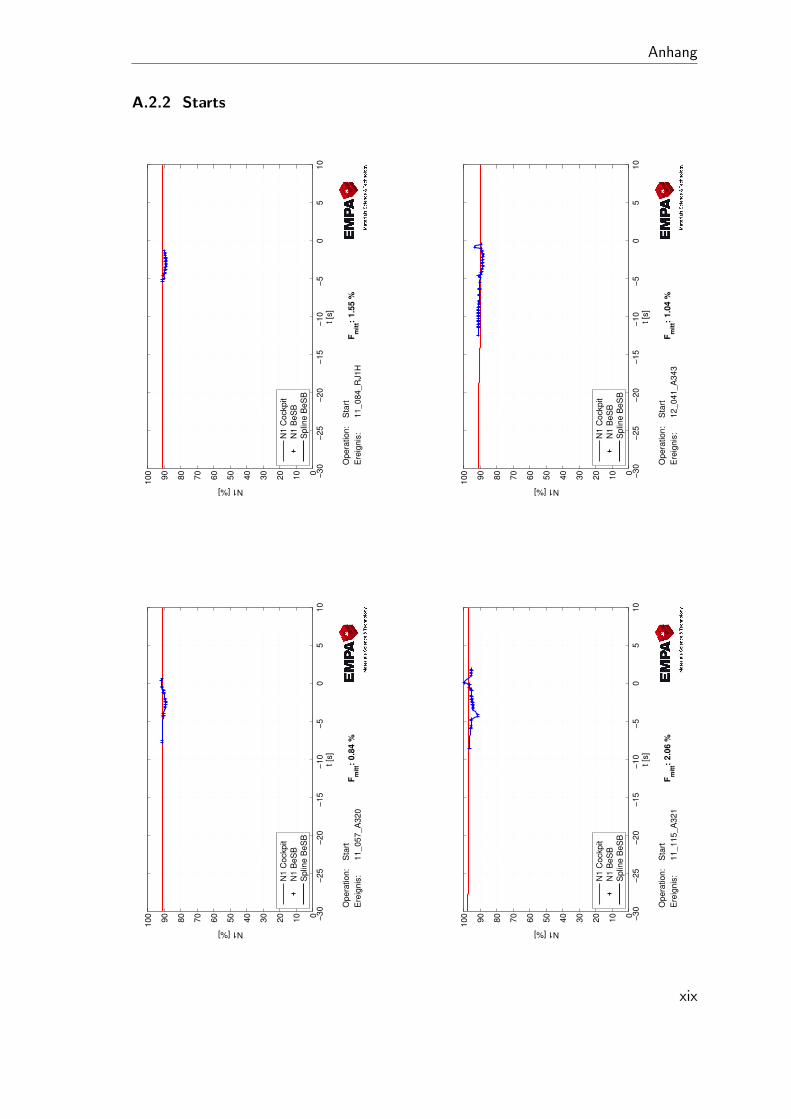
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
11_057_A
320
Fm
itt:
0.8
4 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
11_084_R
J1H
Fm
itt:
1.5
5 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
11_115_A
321
Fm
itt:
2.0
6 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
12_041_A
343
Fm
itt:
1.0
4 %
Anhang
A.2.2 Starts
xix
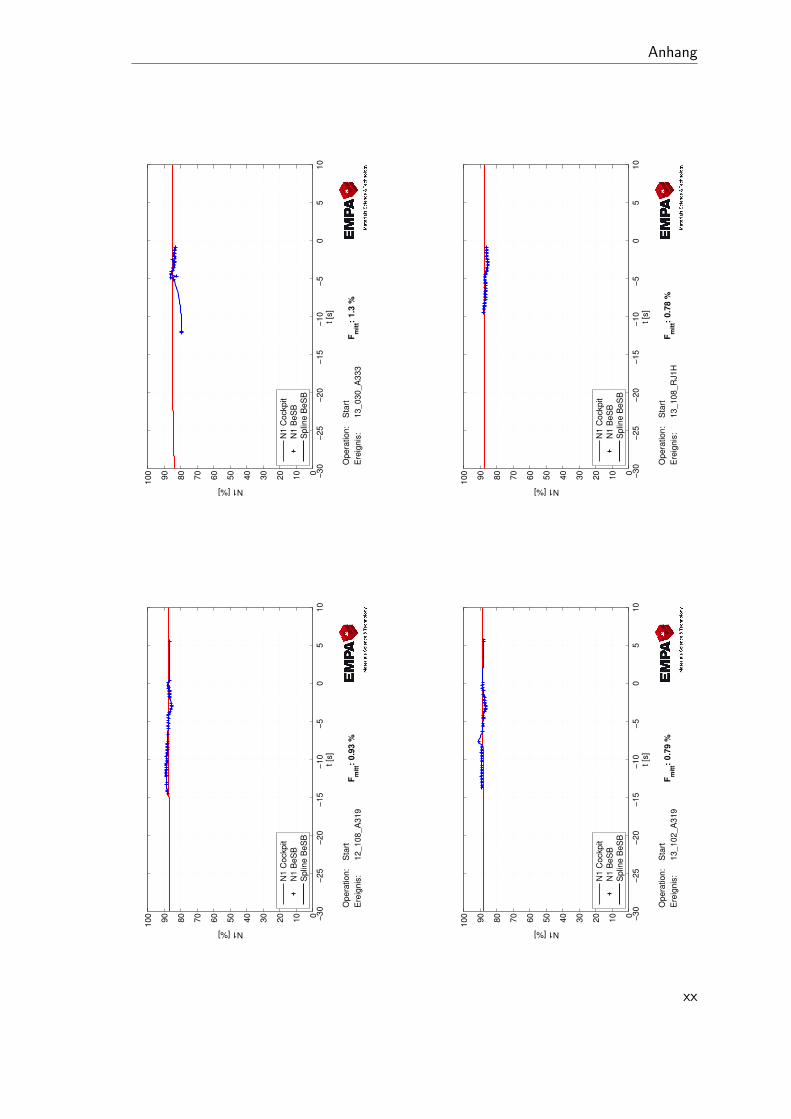
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
12_108_A
319
Fm
itt:
0.9
3 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
13_030_A
333
Fm
itt:
1.3
%
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
13_102_A
319
Fm
itt:
0.7
9 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
13_108_R
J1H
Fm
itt:
0.7
8 %
Anhang
xx
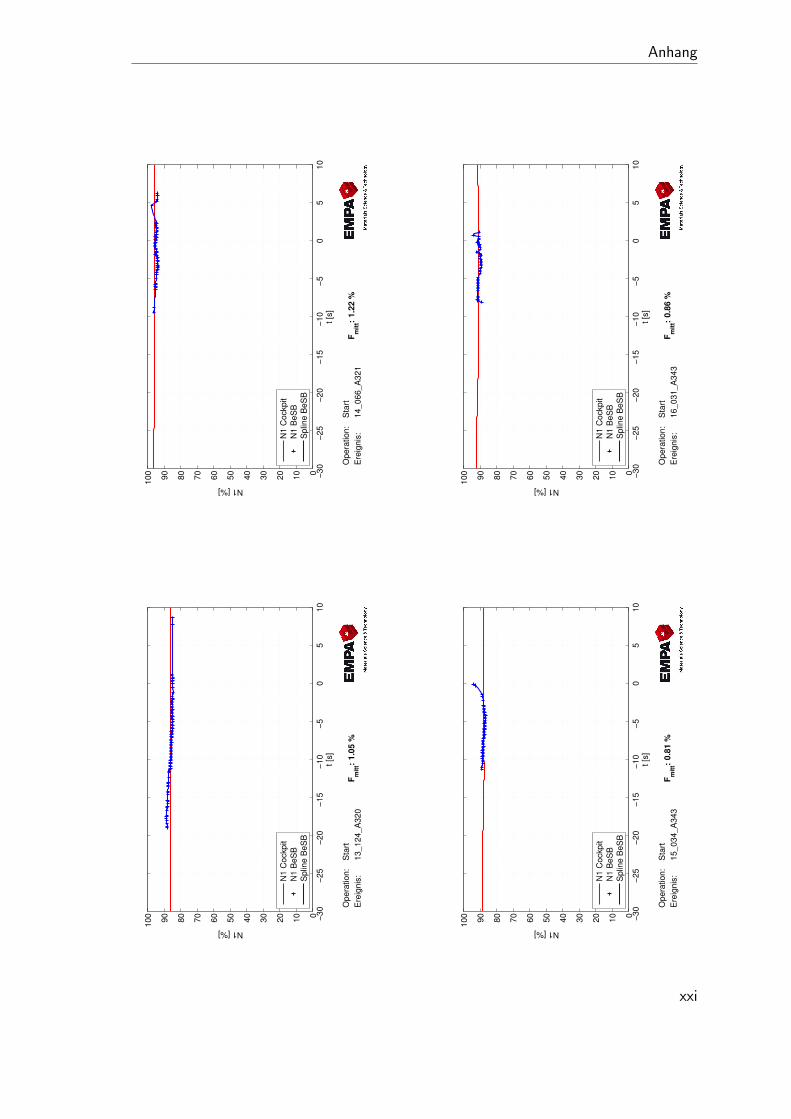
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
13_124_A
320
Fm
itt:
1.0
5 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
14_066_A
321
Fm
itt:
1.2
2 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
15_034_A
343
Fm
itt:
0.8
1 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
16_031_A
343
Fm
itt:
0.8
6 %
Anhang
xxi
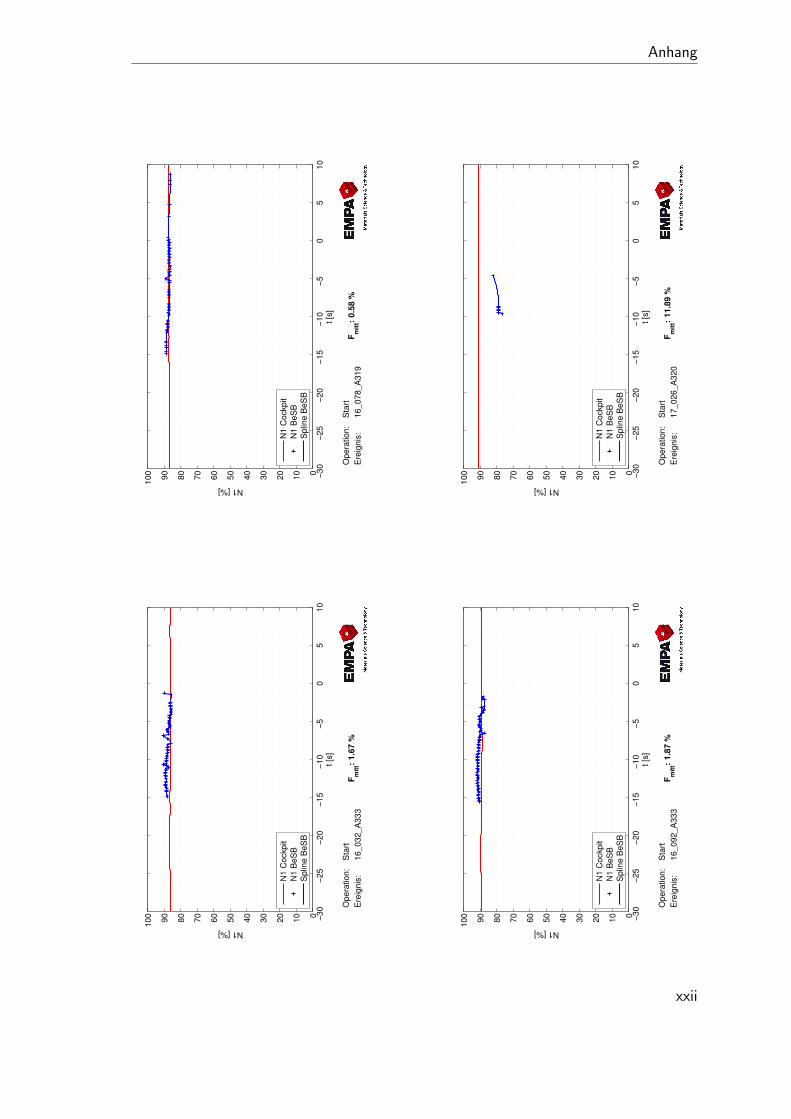
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
16_032_A
333
Fm
itt:
1.6
7 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
16_078_A
319
Fm
itt:
0.5
8 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
16_092_A
333
Fm
itt:
1.8
7 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
17_026_A
320
Fm
itt:
11.8
9 %
Anhang
xxii
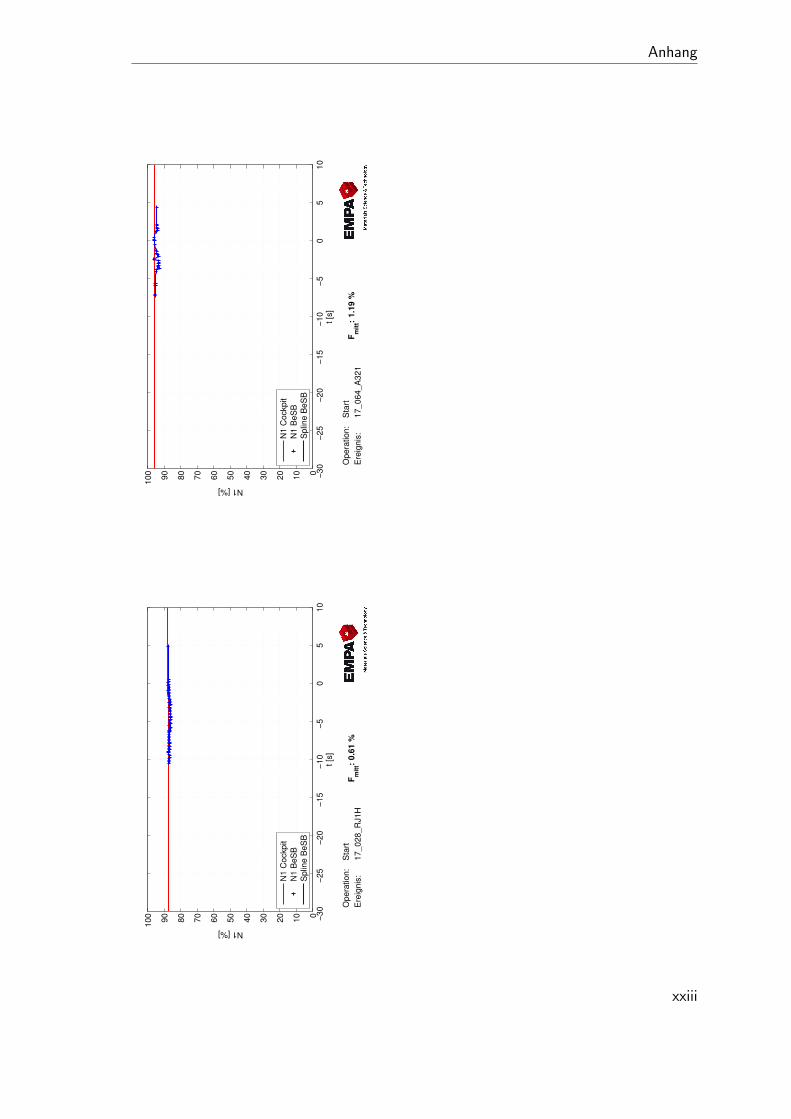
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
17_028_R
J1H
Fm
itt:
0.6
1 %
−30
−25
−20
−15
−10
−5
05
10
0
10
20
30
40
50
60
70
80
90
100
t [s
]
N1 [%]
N1 C
ockpit
N1 B
eS
B
Splin
e B
eS
B
Opera
tion:
Ere
ignis
:
Sta
rt
17_064_A
321
Fm
itt:
1.1
9 %
Anhang
xxiii

Anhang
A.3 DVD-ROM
• Arbeit im Volltext
– Druckfassung als PDF
./SchlueterSebastian MasA.pdf
– Webversion (geschutzt) als PDF
./SchlueterSebastian MasA web.pdf
• Octave
– Skripte
./Octave/∗.m
– Eingangsdaten
./Octave/DATA/...
– Ergebnisse
./Octave/OUTPUT/...
• Literatur
– Volltexte als PDFs
./Literatur/∗.pdf
– BibTeX-Datei
./Literatur/bibliography.bib
xxiv