D:/Daten/ UNI/ Physik/AP/ ProjektPraktikum/ Trichter ... · wir das Programm IPS verwenden. Zu...
34
Der Trichter Bewegung im Zentralpotential Projektpraktikum 2007 Uni Konstanz Max Klammer Christian Haase Jörg Schnitzbauer Paul Kühler Sebastian Mährlein 1
Transcript of D:/Daten/ UNI/ Physik/AP/ ProjektPraktikum/ Trichter ... · wir das Programm IPS verwenden. Zu...

Der TrichterBewegung im
Zentralpotential
Projektpraktikum 2007Uni Konstanz
Max KlammerChristian Haase
Jörg SchnitzbauerPaul Kühler
Sebastian Mährlein
1

Inhaltsverzeichnis Inhaltsverzeichnis
Inhaltsverzeichnis
1 Einleitung 3
2 Theoretische Grundlagen 32.1 Grundsätzliche Annahmen zur Bahnkurve . . . . . . . . . . . . . . . . 32.2 Trägheitsmoment und Rotationsenergie . . . . . . . . . . . . . . . . . 42.3 Rollreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4 Herleitung der Bewegungsgleichungen . . . . . . . . . . . . . . . . . . 62.5 Berechnung von g . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.5.1 Variation des Trichterwinkels . . . . . . . . . . . . . . . . . . 82.5.2 Bestimmung von g an Kreisbahnen . . . . . . . . . . . . . . . 92.5.3 Bestimmung von g an Umkehrpunkten . . . . . . . . . . . . . 92.5.4 Bestimmung von g aus der Bewegungsgleichung . . . . . . . . 10
2.6 Vergleich mit dem Kepler-Problem . . . . . . . . . . . . . . . . . . . . 10
3 Versuchsdurchführung 113.1 Versuchsaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2 Aufnahme der Bilder . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.3 Koordinaten durch Objekterkennung . . . . . . . . . . . . . . . . . . . 153.4 Kalibriermessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 Auswertung 174.1 Aufbereitung der Messergebnisse . . . . . . . . . . . . . . . . . . . . . 174.2 Plots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.1 Trajektorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.2 Radius r(t) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234.2.3 Radialgeschwindigkeit vr(t) . . . . . . . . . . . . . . . . . . . 254.2.4 Winkelgeschwindigkeit vϕ(t) . . . . . . . . . . . . . . . . . . 274.2.5 Radialbeschleunigung ar(t) . . . . . . . . . . . . . . . . . . . 294.2.6 Winkelbeschleunigung aϕ(t) . . . . . . . . . . . . . . . . . . . 31
4.3 Bestimmung von g . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.4 Fehlerdiskussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Fazit 34
Literaturverzeichnis 34
2
2 THEORETISCHE GRUNDLAGEN
1 Einleitung
Die Idee in diesem Versuch ist es, eine Kugel in einen Trichter einzuschießen, um darausdie Erdbeschleunigung g zu bestimmen. Dabei soll der Verlauf der Kugel mit einerKamera untersucht und Daten aus dem Grafikmaterial gewonnen werden. Dazu wollenwir das Programm IPS verwenden. Zu erwarten sind Kreis- oder Ellipsenbahnen, diesich dem Mittelpunkt des Trichters nähern. Interessant wäre noch die Betrachtung beiVariation der Erdbeschleunigung. Da wir hierfür nicht auf den Mond fliegen können,wollen wir - falls es sich realisieren lässt - den Trichter während des Versuchs gebremstfallen lassen.
2 Theoretische Grundlagen
2.1 Grundsätzliche Annahmen zur Bahnkurve
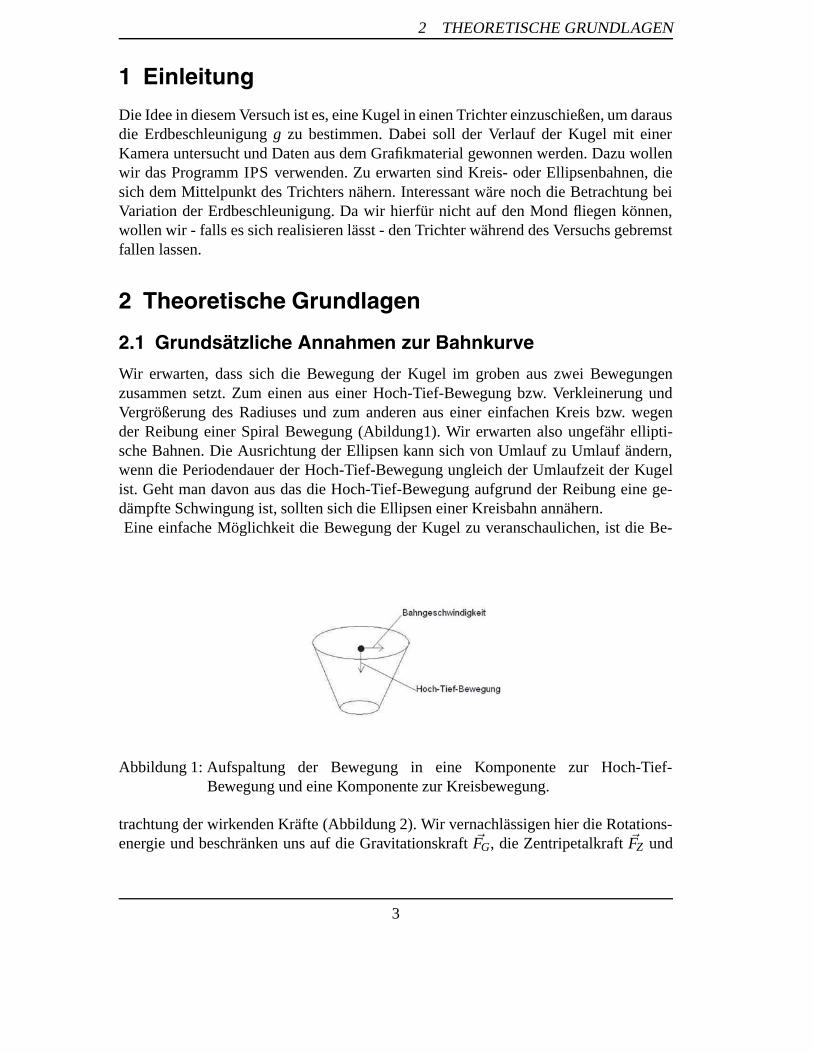
Wir erwarten, dass sich die Bewegung der Kugel im groben aus zwei Bewegungenzusammen setzt. Zum einen aus einer Hoch-Tief-Bewegung bzw. Verkleinerung undVergrößerung des Radiuses und zum anderen aus einer einfachen Kreis bzw. wegender Reibung einer Spiral Bewegung (Abildung1). Wir erwarten also ungefähr ellipti-sche Bahnen. Die Ausrichtung der Ellipsen kann sich von Umlauf zu Umlauf ändern,wenn die Periodendauer der Hoch-Tief-Bewegung ungleich der Umlaufzeit der Kugelist. Geht man davon aus das die Hoch-Tief-Bewegung aufgrund der Reibung eine ge-dämpfte Schwingung ist, sollten sich die Ellipsen einer Kreisbahn annähern.Eine einfache Möglichkeit die Bewegung der Kugel zu veranschaulichen, ist die Be-
Abbildung 1: Aufspaltung der Bewegung in eine Komponente zur Hoch-Tief-Bewegung und eine Komponente zur Kreisbewegung.
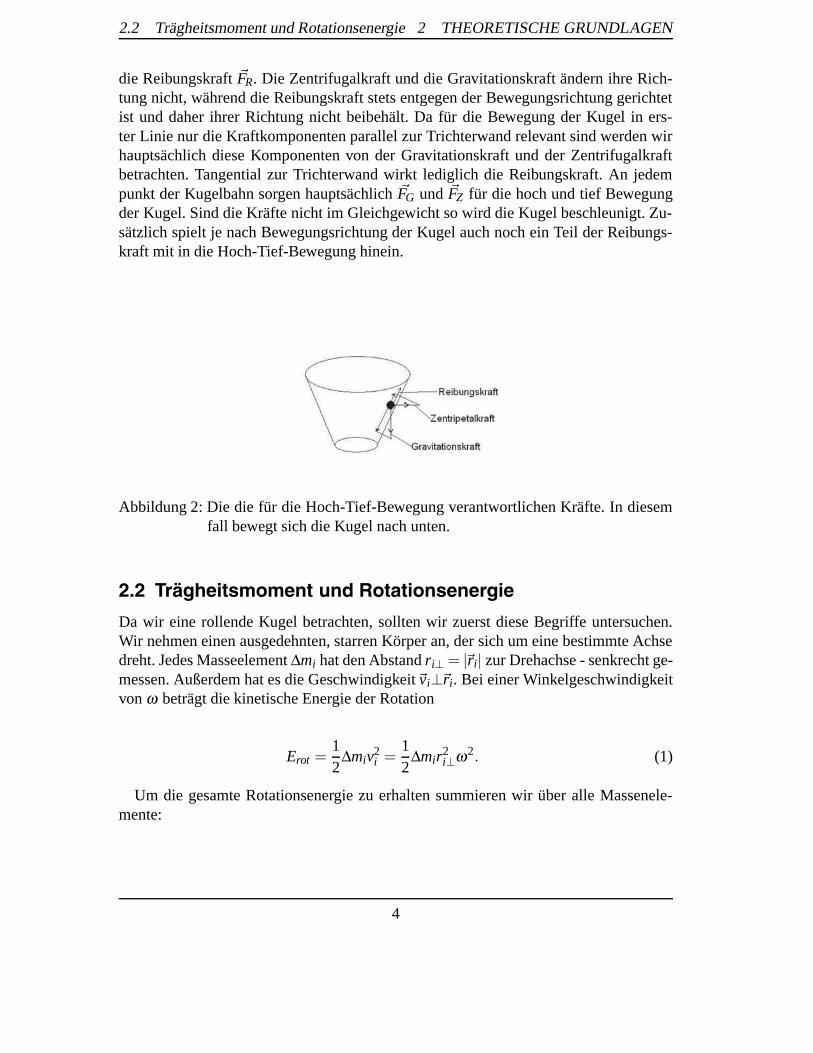
trachtung der wirkenden Kräfte (Abbildung 2). Wir vernachlässigen hier die Rotations-energie und beschränken uns auf die Gravitationskraft �FG, die Zentripetalkraft �FZ und
3
2.2 Trägheitsmoment und Rotationsenergie 2 THEORETISCHE GRUNDLAGEN
die Reibungskraft �FR. Die Zentrifugalkraft und die Gravitationskraft ändern ihre Rich-tung nicht, während die Reibungskraft stets entgegen der Bewegungsrichtung gerichtetist und daher ihrer Richtung nicht beibehält. Da für die Bewegung der Kugel in ers-ter Linie nur die Kraftkomponenten parallel zur Trichterwand relevant sind werden wirhauptsächlich diese Komponenten von der Gravitationskraft und der Zentrifugalkraftbetrachten. Tangential zur Trichterwand wirkt lediglich die Reibungskraft. An jedempunkt der Kugelbahn sorgen hauptsächlich �FG und �FZ für die hoch und tief Bewegungder Kugel. Sind die Kräfte nicht im Gleichgewicht so wird die Kugel beschleunigt. Zu-sätzlich spielt je nach Bewegungsrichtung der Kugel auch noch ein Teil der Reibungs-kraft mit in die Hoch-Tief-Bewegung hinein.
Abbildung 2: Die die für die Hoch-Tief-Bewegung verantwortlichen Kräfte. In diesemfall bewegt sich die Kugel nach unten.
2.2 Trägheitsmoment und Rotationsenergie
Da wir eine rollende Kugel betrachten, sollten wir zuerst diese Begriffe untersuchen.Wir nehmen einen ausgedehnten, starren Körper an, der sich um eine bestimmte Achsedreht. Jedes Masseelement Δmi hat den Abstand ri⊥ = |�ri| zur Drehachse - senkrecht ge-messen. Außerdem hat es die Geschwindigkeit�vi⊥�ri. Bei einer Winkelgeschwindigkeitvon ω beträgt die kinetische Energie der Rotation
Erot =12
Δmiv2i =
12
Δmir2i⊥ω2. (1)
Um die gesamte Rotationsenergie zu erhalten summieren wir über alle Massenele-mente:
4
2.3 Rollreibung 2 THEORETISCHE GRUNDLAGEN
Erot = limN→∞
Δmi→0
(12
N
∑i=1
Δmir2i⊥ω2
)(2)
=12
ω2∫V
r2⊥dm. (3)
Wir definieren den Ausdruck
JDe f=∫V
r2⊥dm =
∫V
r2⊥ρdV (4)
als Trägheitsmoment dieses Körpers bezüglich dieser bestimmten Drehachse. Wobeiρ die Dichte des Materials ist, welche inhomogen sein kann. Zu beachten ist, dass esnicht zu jeder Achse gleich ist. Aufgrund der Symmetrie unserer Kugel stellt dies jedochkein Problem dar. Damit erhält man die Rotationsenergie in kürzerer Form:
Erot =12
Jω2 (5)
- [2]
2.3 Rollreibung
Die bei einem rollenden runden Körper auftretenden Reibung ist zurückzuführen aufdie Anziehungskräfte zwischen den Atomen und der Deformation der Unterfläche ander Berührstelle. Um einen Körper abzurollen benötigt man ein Drehmoment um dieBerührstelle, welches größer ist als das entgegengesetzte der Rollreibung. Experimentelllässt sich erkennen, dass das Reibungsdrehmoment DR linear mit der Normalkraft desKörpers ansteigt:
DR = γR ·FN. (6)
Im Gegensatz zum Reibungskoeffizienten der Gleit- oder Haftreibung ist der Roll-reibungskoeffizient γR nicht einheitslos, sondern hat die Dimension einer Länge. Die-ser Koeffizient lässt sich experimentell bestimmen, wenn man einen Kreiszylinder eineschiefe Ebene herunterrollen lässt. Er bewegt sich bis zu einem Grenzwinkel nicht, dabis dahin das Drehmoment durch die Schwerkraft noch nicht groß genug ist. Rollrei-bung hat quantitativ wesentlich geringere Effekte als Haft- oder Gleitreibung. Dies liegtdaran, dass beim Abrollen manche Unebenheiten, welche bei Gleit- und Haftreibung fürdie Verzahnung sorgen, ’übersprungen’ werden. - [2]
5

2.4 Herleitung der Bewegungsgleichungen 2 THEORETISCHE GRUNDLAGEN
2.4 Herleitung der Bewegungsgleichungen
Zum besseren Verständnis siehe Skizze in Abbildung 3:
xy
z
r
α
Abbildung 3:
Wir versuchen das Problem analytisch zu lösen. Die Lagrange-Funktion L setzt sichaus translatorischer, Rotations- und potentieller Energie zusammen:
Ekin =12
m�v2 (7)
Erot =12
J�v2
r2K
(8)
Epot = mgz (9)
mit m: Masse der Kugel,�v: Geschwindigkeit der Kugel, J: Trägheitsmoment der Ku-gel, rK: Radius der Kugel.
Daraus ergibt sich:
L = T −U = Ekin +Erot −Epot =12
m�v2 +12
J�v2
r2K
−mgz. (10)
Aus Symmetriegründen wählen wir Zylinderkoordinaten. Der Ortsvektor in Zylin-derkoordinaten ist:
6

2.4 Herleitung der Bewegungsgleichungen 2 THEORETISCHE GRUNDLAGEN
�r =
⎛⎝ r · cos(ϕ)
r · sin(ϕ)z
⎞⎠ (11)
Daraus ergibt sich der Gewschwindigkeitsvektor zu:
�v =�r =
⎛⎝ r · cos(ϕ)− r · sin(ϕ)ϕ
r · sin(ϕ)+ r · cos(ϕ)ϕz
⎞⎠ (12)
Davon bilden wir das Betragsquadrat, welches sich vereinfachen lässt zu: �v2 = r2 +r2ϕ2 + z2. Zusätzlich fügen wir die aus der Skizze ersichtliche Zwangsbedingung z =
rtan(α) ein und verwenden somit r und ϕ als generalisierte Koordinaten. Mit z = r
tan(α)
und J = 25mr2
K ergibt sich:
L =710
m
(r2 + r2ϕ2 +
r2
tan2(α)
)− mgr
tan(α)(13)
r und ϕ bieten sich deshalb als generalisierte Koordinaten an, da wir unsere Kameraauf die z-Achse setzen wollen und sie senkrecht nach unten filmen soll. Somit könnenwir genau diese Daten direkt aus den Bildern gewinnen. Nun können wir die Bewe-gungsgleichungen nach Euler-Lagrange aufstellen:
ddt
∂L∂ q j
− ∂L∂q j
= Rj (14)
wobei q j die generalisierten Koordinaten sind und R j den Reibungsterm darstellt. Wirnehmen diese linear in jeder Richtungsgeschwindigkeit an. Somit ist
�R = γ(r�er + ϕ�eϕ + z�ez) (15)
mit γ als allgemeinen Reibungskoeffizienten. Wir berechnen:
ddt
∂L∂ r
=75
r +75
mrtan2(α)
=75
m[1+ cot2(α)]r (16)
∂L∂ r
=75
mrϕ2 − cot(α)mg (17)
ddt
∂L∂ϕ
=75(mr2ϕ +2mrrϕ) (18)
∂L∂ϕ
= 0 (19)
7

2.5 Berechnung von g 2 THEORETISCHE GRUNDLAGEN
Nun erhalten wir ein gekoppeltes Differentialgleichungssystem für r und ϕ:
75
m[1+ cot2(α)]r− 75
mϕ2r + cot(α)mg = γ r (20)
75
mr2ϕ +145
mrrϕ = γϕ . (21)
An dieser Stelle müssen wir feststellen, dass wir diese Gleichungen nicht komplettlösen können. Außerdem ist es schwierig mit der auftretenden Reibung umzugehen.Deshalb brauchen wir alternative Überlegungen um g mit diesem System zu bestimmen.Wir hatten dazu einige Ideen, die im nächsten Kapitel erläutert werden.
2.5 Berechnung von g
2.5.1 Variation des Trichterwinkels
Aufgrund der Reibung verliert die Kugel Energie und bleibt nicht für ewig auf einerbestimmten Bahnhöhe. Allgemein muss also die Funktion von r(t) fallend sein. Hättenwir eine perfekte Kreisbahn, so wäre dies sogar komplett monoton und gleichmäßig.Dies lässt sich in der Praxis jedoch nie realisieren, da dafür die richtige Einschussge-schwindigkeit und der richtige Einschusswinkel gewählt werden müsste. Das könnenwir mit unserem geringen Mitteln allerdings nicht erreichen. Deshalb haben wir immermehr oder weniger starke Ellipsenbahnen. Bei diesen wird r(t) um eine fallende Ruhe-lage oszillieren. Genau dies wollen wir ausnützen und nehmen die Ellipsenbahnen alsVorteil. Wir betrachten die Differentialgleichung (20) für r(t) und setzen r = 0. Dadurchbefinden wir uns an den Gleichgewichtslagen von r(t). Diese liegen anschaulich dort,wo die Oszillation durch die fallende Ruhelage geht.
m[1+ cot2(α)]r︸ ︷︷ ︸=0
−mϕr + cot(α)mg = Rr. (22)
Dadurch ist die Gleichung schon sehr stark vereinfacht. r und ϕ lassen sich aus denMessungen berechnen. Immer noch problematisch bleibt der Reibungsterm. Der Trickbesteht nun darin mit zwei Trichtern zu messen, die zwar aus dem gleichen Materialsind, aber unterschiedliche Öffnungswinkel haben. Dadurch wäre die Reibung gleichund wir können folgende Gleichungen voneinander abziehen:
−mr1ϕ21 + cot(α1)mg = Rr (23)
−mr2ϕ22 + cot(α2)mg = Rr (24)
8

2.5 Berechnung von g 2 THEORETISCHE GRUNDLAGEN
⇒ m(r2ϕ22 − r1ϕ2
1 )+mg[cot(α1)− cot(α2)] = 0 (25)
⇒ g =r1ϕ2
1 − r2ϕ22
cot(α1)− cot(α2). (26)
2.5.2 Bestimmung von g an Kreisbahnen
Läuft die Kugel auf einer Kreisbahn, so sind die effektiv wirkenden Komponenten derGravitationskraft und der Zentripetalkraft annähernd im Gleichgewicht. Da die Bahn-geschwindigkeit aufgrund von Reibung stets verringert wird, muss der Radius immerkleiner werden, um diese Gleichgewicht aufrecht zu erhalten und man erhält daher im-mer nur Spiralbahnen. Auf einem sehr kleinen segment dieser Spiralbahn kann manallerdings die Änderung des Radiuses vernachlässigen. Man erhält dann die Gravitati-onskonstante durch
sin(α)‖�FZ‖ = cos(α)‖�FG‖⇔ sin(α)m ·ω2 · r = cos(α)m ·g
⇔ g =sin(α)r ·ω2
cos(α).
wobei α der Öffnungswinkel des Trichters ist.Das Problem bei dieser Methode ist das sie wirklich nur für Kreisbahnen funktioniertund es sehr schwer ist die Kugel auf so eine ruhige Laufbahn zu bringen. Bewegt sie sichnoch in radialer Richtung muss man selbst, wenn die Kugel grade nicht beschleunigteinen Teil der Reibungskraft in dem Kräftegleichgewicht berücksichtigen.
2.5.3 Bestimmung von g an Umkehrpunkten
Eine Möglichkeit g aus den gemessenen Daten von elliptischen Bahnen zu bestimmen,ohne dabei einen Fehler durch Reibungskräfte berücksichtigen zu müssen, ist in demman sich bei der Auswertung auf die lokalen Minima und Maxima der Radius-Kurvebeschränkt. Lässt man die Kugel auf elliptischen Bahnen rollen, so gibt es bei jeder El-lipse einen Punkt mit minimalem radialem Abstand vom Zentrum und genauso einenmit maximalem Abstand. Man zerlegt nun an diesen Punkten die Bewegung der Ku-gel in zwei Komponenten eine davon in Richtung des Trichterzentrums bzw. genauentgegengesetzt dazu und die andere tangential zur Bahnkurve. Da sich die Kugel aneinem Umkehrpunkt befindet ist die Geschwindigkeitskomponente in radialer Richtung
9

2.6 Vergleich mit dem Kepler-Problem 2 THEORETISCHE GRUNDLAGEN
null. Daher spielt an diesem Punkt die Reibungskraft für das Kräftegleichgewicht ausZentrifugalkraft und Gravitationskraft keine Rolle. Miss man an diesem Punkt die Win-kelgeschwindigkeit und die Beschleunigung in radialer Richtung so lässt sich dort dieGravitationskraft bestimmen. Dabei ist zu beachten, das die über die Kamera gemesseneradiale Beschleunigung nur eine Projektion der eigentlichen Beschleunigung ist.
ar
sin(α)=
sin(α)‖�FZ‖− cos(α)‖�FG‖m
⇔ g =sin(α)ω2 · r− ar
sin(α)
cos(α).
Wichtig ist zu beachten, dass dies nur an bestimmten Punkten der Bahnkurve gilt.
2.5.4 Bestimmung von g aus der Bewegungsgleichung
Natürlich lässt sich g auch aus der von uns hergeleiteten Bewegungsgleichung bestim-men, in dem wir einfach alle auftretenden Größen messen. Die Schwierigkeit im Ver-gleich zu den anderen Methoden ist hierbei, den Reibungskoeffizienten zu bestimmen.Aus den von uns gemessenen Daten lässt sich g ausgesprochen schwer bestimmen, dawir zum einen die Gravitationskonstante logischerweise nicht verwenden können undzum anderen, da die Reibungskraft linear von der Normalkraft abhängt, welche sichstets mit der Zentripetalkraft ändert.
2.6 Vergleich mit dem Kepler-Problem
Nachdem wir uns einige Zeit mit dem theoretischen Problem beschäftigt hatten, kamauch die Vermutung auf, dass wir es mit einem Kepler-Problem zu tun haben. Dies istnatürlich nicht richtig, den es liegt ein ganz anderes Potential vor. Die PlanetenbahnenKeplers beruhen sich auf dem Newtonschen Gravitationsgesetz. Dieses beschreibt eineKraft, die mit 1
r2 skaliert. Das zugehöriges Gravitationspotential ist proportional zu 1r .
Wir haben es hier jedoch mit einem Potential zu tun, das in jeglichem Abstand einekonstante Kraft zum Mittelpunkt des Trichters verursacht. Wir haben also hier keiner-Abhängigkeit und im Potential eine lineare (Epot = mgz = mg r
tan(α) ). Wie sich unsereEllipsenbahnen im Vergleich zu denen Keplers decken, werden wir in der Auswertungsehen. Außerdem können wir nach der Auswertung sehen ob Keplers zweites Gesetzfür den Trichter gilt, das besagt, dass der Radiusvektor von der Sonne zum Planeten ingleichen Zeiten gleiche Flächen überstreicht. Dies ist äquivalent zu ϕ = const. DieseGröße lässt sich leicht aus den gewonnenen Bilddaten ermitteln.
10

3 VERSUCHSDURCHFÜHRUNG
3 Versuchsdurchführung
Im diesem Abschnitt des Protokolls soll die konkrete Versuchsdurchführung und dieWeiterverarbeitung der Messdaten beschrieben werden. Hierbei soll auch besonders aufdie Komplikationen und Fehlerquellen bei den einzelnen Stufen der Messungen einge-gangen werden.
3.1 Versuchsaufbau
Abbildung 4: Foto des Versuchsaufbau
Den konkreten Aufbau unsres Versuches beschreiben Abbildung 4 und 5 mit allen
11
3.1 Versuchsaufbau 3 VERSUCHSDURCHFÜHRUNG
wichtigen Details.
Die ersten Probleme bestanden bereits bei der Installation des Aufbaus. Der Trichtermusste möglichst so eingespannt werden, dass er fest von der Halterungsklemme gehal-ten, jedoch auf keinen Fall minimal gedrückt wird, da dies eine kleine Verbiegung desTrichters insgesamt mit sich brächte. Außerdem muss die Trichteroberkante mit einerWasserwaage exakt waagrecht justiert werden, da sonst das zu beschreibende Potentialnicht zylindersymmetrisch zur senkrechten Trichterachse läge.Als nächstes musste die Kamera wackelfest an der waagrechten Stativstande befestigtwerden. Dies realisierten wir mit einem Styropormantel, der an der Oberseite des Ge-häuses der Kamera angebracht wurde und durch den die Stativstange geschoben undbefestigt wurde.Nun war die Kamera so zu justieren, dass ihr Objektiv genau senkrecht über dem Mit-telpunkt des Zylinders liegt. Dies erreichten wir bestmöglich indem mir mit einem Lotden Mittelpunkt der Linse auf die Mitte des Trichters projizierten. Außerdem ist dabeidarauf zu achten, dass die Linse genau waagrecht liegt, was sonst eine optische Ver-krümmung des Bildes und somit eine ungleiche Verschiebung der Messpunkte mit sichbrächte. Diese Fehlerquelle konnten wir leider nicht hundert prozentig ausschließen, dadie Optik der Kamera nicht zuverlässig im Gehäuse ausgerichtet war. Daher musstenmir den dadurch entstehenden Messfehler durch einen Korrekturfaktor bei den gemes-senen Koordinaten minimieren. Siehe hierfür Abschnitt 3.4.
Zum definierten „Einschuss“ der Kugel bogen wir ein Kunstoff-Rohr so, dass es sichan die Rundung des Trichters anschmiegt, wenn wir das Rohr mit leichtem Gefälle vonoben in den Trichter legen. Nach einigen Versuchen befestigten wir diese Einschuss-vorrichtung so, dass die Kugel beim Eintritt möglichst „natürlich“,in einer möglichstkurzen Zeit, in ihre Trajektorie übergeht.Um die Mitte des Trichters optisch gut erkennbar zu machen, füllten wir den Tricht-erhals mit einem schwarzen Schaumstoff, der störende Lichtreflexe absorbiert. Als Ur-sprung des Koordinatensystems benutzten wir einen einmal geknickten Kupferdraht,den wir in den Schaumstoff steckten und der das Licht sehr gut reflektiert.
Die Kugeln für die Messung besorgten wir uns aus einem großen Kugellager, da dieseMetallkugeln relativ schwer und ihre Oberflächen sehr glatt sind. Außerdem kann mandavon ausgehen, dass die Kugeln aus einem Kugellager sehr nahe an eine perfekt rundeKugel kommen. Ein weiterer Vorteil der Metallkugeln ist die reflektierende Oberfläche,da dies unbedingt zur optischen Detektion benötigt wird. Aus diesem Grund wurde auchnoch eine Schreibtischlampe am Aufbau befestigt die den Trichter sehr gut ausleuchtet,ohne dabei selbst im Bild zu sein oder andere störende Schatten auf den Trichter zu
12

3.2 Aufnahme der Bilder 3 VERSUCHSDURCHFÜHRUNG
Abbildung 5: Foto des Versuchsaufbau. Detailansicht Trichter
werfen.
Das führt uns dann gleich zu der optischen Aufnahmetechnik, die im nächsten Abschnitterklärt wird.
3.2 Aufnahme der Bilder
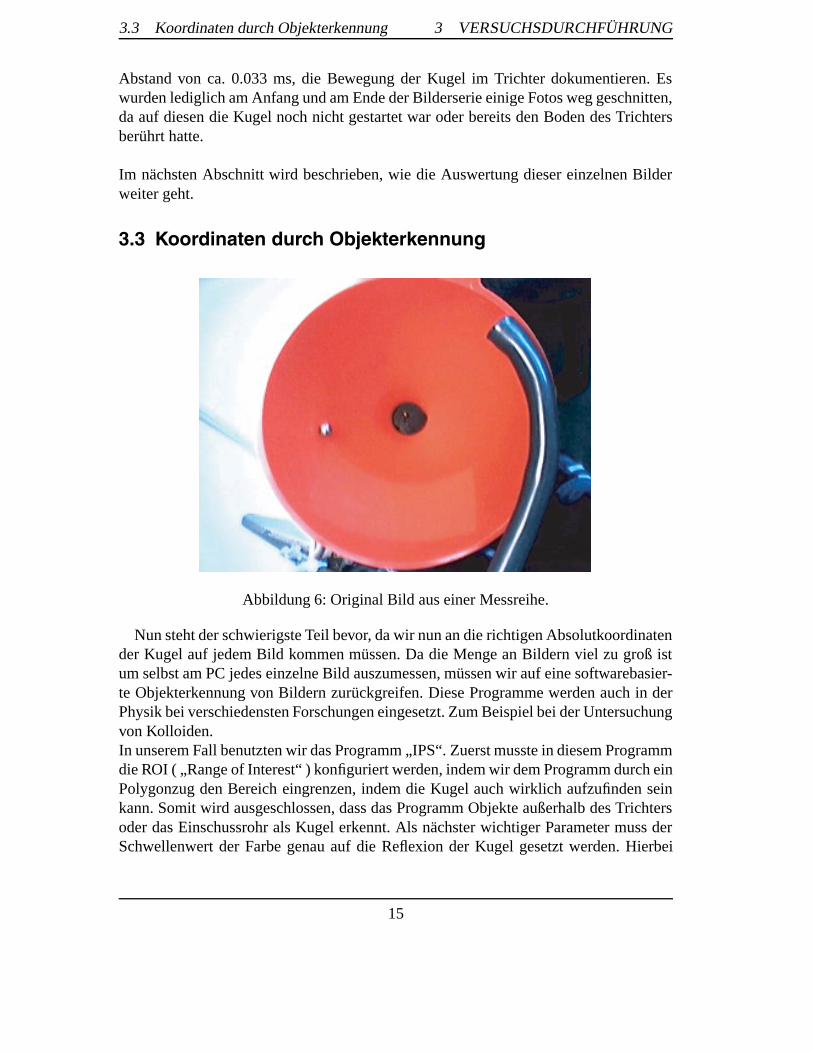
Die Aufnahme der Bilder erfolgt mit der über dem Trichter installierten 2 MegaPixelWebcam von Philipps. Diese wird mit dem PC über USB verbunden und mit Hilfe dermitgelieferten Software konfiguriert. Nach verschiedenen Probeaufnahmen mit unter-schiedlichen Belichtungs-, Gamma- und anderen Einstellungen fanden wir die optimaleKonfiguration der Kamera heraus. Diese ist in Tabelle 1 aufgelistet.Bei den Einstellungen kommt es besonders darauf an, dass die Lichtreflexion der Kugelund des Mittelpunktes sehr dominant im Kontrast ist. Das heißt die Umgebung, insbe-sondere der Trichter, muss relativ dunkel und vor allem im Farbverlauf sehr homogensein. Dies erreicht man am besten mit einem niedrigen Gammawert und einer relativhohen Helligkeitseinstellung. Siehe Abbildung 6Die Bilder pro Sekunde (fps - frames per second) mussten natürlich so hoch wie möglichsein. Leider liefert die Kamera nicht mehr als 30 Bilder pro Sekunde, womit uns einedeutliche obere Schranke für die Messgenauigkeit gesetzt wird! Der Weißabgleich wur-
13

3.2 Aufnahme der Bilder 3 VERSUCHSDURCHFÜHRUNG
de an das Farbspektrum der ausleuchtenden Lampe angepasst, so dass die Reflektionenan Kugel und Koordinatenursprung wirklich weiß sind. Die Verschlussgeschwindigkeitmuss zwar einerseits sehr hoch sein, da sonst die Kugel durch die längere Belichtungs-zeit als Ei oder gar als Strich aufgenommen wird. Anderseits bekommt man Problememit der Helligkeit, wenn die Verschlussgeschwindigkeit zu hoch ist, da das Objektiv derKamera nicht sehr Lichtstark ist.
Bilder pro Sekunde 30Helligkeit ca. 70 %
Gamma-Wert ca. 10 %Weißabgleich drinnen
Verschlussgeschwindigkeit 1/100
Tabelle 1: Optimale Konfiguration der Kamera
Die Aufnahme der Kugelbewegung erfolgte dann im FreeWare Programm „VirtualDub“[1].Eswurde zeitgleich zur Aufnahme eine Textdatei ausgegeben, welche die Zeit t (Genauig-keit 10−6s) zu jedem aufgenommen Bild beinhaltet. Dies liefert uns nun schon zu jedemBild die erste wichtige Messgröße. Die Zeit t.
Aus dem aufgenommen Film wird nun ebenfalls mit VirtualDub eine Bildersequenzerstellt, welches aus allen Einzelbildern des Filmes besteht. Hierbei erwies sich einjpeg-Format mit einer Auflösung von 640x480 Pixel und einer 24-bit Farbtiefe als aus-reichend. So entstand zu jeder Messung eine Reihe aus ca. 300 Bildern, die in einem
14
3.3 Koordinaten durch Objekterkennung 3 VERSUCHSDURCHFÜHRUNG
Abstand von ca. 0.033 ms, die Bewegung der Kugel im Trichter dokumentieren. Eswurden lediglich am Anfang und am Ende der Bilderserie einige Fotos weg geschnitten,da auf diesen die Kugel noch nicht gestartet war oder bereits den Boden des Trichtersberührt hatte.
Im nächsten Abschnitt wird beschrieben, wie die Auswertung dieser einzelnen Bilderweiter geht.
3.3 Koordinaten durch Objekterkennung
Abbildung 6: Original Bild aus einer Messreihe.
Nun steht der schwierigste Teil bevor, da wir nun an die richtigen Absolutkoordinatender Kugel auf jedem Bild kommen müssen. Da die Menge an Bildern viel zu groß istum selbst am PC jedes einzelne Bild auszumessen, müssen wir auf eine softwarebasier-te Objekterkennung von Bildern zurückgreifen. Diese Programme werden auch in derPhysik bei verschiedensten Forschungen eingesetzt. Zum Beispiel bei der Untersuchungvon Kolloiden.In unserem Fall benutzten wir das Programm „IPS“. Zuerst musste in diesem Programmdie ROI ( „Range of Interest“ ) konfiguriert werden, indem wir dem Programm durch einPolygonzug den Bereich eingrenzen, indem die Kugel auch wirklich aufzufinden seinkann. Somit wird ausgeschlossen, dass das Programm Objekte außerhalb des Trichtersoder das Einschussrohr als Kugel erkennt. Als nächster wichtiger Parameter muss derSchwellenwert der Farbe genau auf die Reflexion der Kugel gesetzt werden. Hierbei
15

3.4 Kalibriermessung 3 VERSUCHSDURCHFÜHRUNG
setzt man eine untere und obere Schranke, zwischen denen die Helligkeit des zu detek-tierenden Objekts liegt. In unserem Fall konnten wir durch die richtige Kontrastkonfigu-ration der Kamera, diesen Bereich sehr eng wählen. Ein weiter wichtiger Parameter istdie Objektgröße. Damit keine minimalen Reflexionen als Objekt erkannt werden setztenwir hier eine Untergrenze von minimal 5 Pixel (für den Ursprung) und 25 Pixel (für dieKugel). Die Parameter entsprechen der Fläche des Objektes auf dem Foto.
Das Programm erkennt nun aufgrund der bestimmten Konfiguration die Kugel oder denUrsprung, da es geschickter ist diese beiden Objekte nicht in einer gemeinsamen Ausga-bedatei zu haben. Eigentlich müsste der Koordinatenursprung der Zylinderkoordinatendes Trichters immer dieselben Koordinaten haben, aber die Varianz der Messwerte fürden Ursprung bietet uns eine Möglichkeit zur Abschätzung des Messfehlers durch Wa-ckeln der Kamera oder anderen Verschiebungen des Bildes.Somit ließen wir für jede Messung, dass Programm zweimal durchlaufen und erhieltensomit die Relativkoordinaten der Kugel und des Ursprungs in zwei getrennten Textdatei-en. Die Relativkoordinaten beziehen sich auf das Koordinatensystem, die das Programmin die Bilder legt.Um reale Koordinaten in Meter zu bekommen müssen wir noch eine Kalibriermessungmachen. In diese lassen wir gleich einen Korrekturfaktor für die optische Verzerrungdes Bildes eingehen.
3.4 Kalibriermessung
Bei der Kalibriermessung geht es darum eine Relation, also einen Umrechnungsfaktor,zwischen den Einheiten des IPS-Programms und realen Streckeneinheiten in m zu fin-den. Hierbei vermessen wir eine bekannte Strecke mit Hilfe des Objekterkennungspro-gramms. Um diesen Umrechnungsfaktor gleich als Korrekturfaktor zu nutzten weisenwir den 4 verschiedenen Quadranten (auf den Ursprung des Trichters bezogen) 4 ver-schiedene Kalibrierfaktoren zu. Dies korrigiert dann leichte optische Verzerrungen desBildes, die aufgrund einer nicht genau orthogonalen Orientierung der Optik der Kamerazur „Rotationsebene“ der Kugel entstehen kann.
Die Kalibriermessung realisierten wir, indem wir einen Streifen weißes Papier mit zweikleinen schwarzen Punkten in einem definierten Abstand (a =4.05 cm) jeweils in Rich-tung der Koordinatenachsen des Programms in den Trichter legten. Die Bilder für die4 Richtungen (−x,+x,−y,+y) erzeugten wir analog zur Messung mit der Kugel. SieheAbbildung 7
Bei der Berechnung der Kalibrierfaktoren fk (siehe Tabelle 3) muss die Projektionvon a auf die Rotationsebene benutzt werden, da dies die Strecke ist, die das Programmeffektiv misst. Es gilt daher für die Projektion a⊥:
16

4 AUSWERTUNG
Abbildung 7: Original Messbild aus der Kalibriermessung. Hier für den Bereich x > 0
a⊥ = a · sinα (27)
Die berechneten Kalibrierfaktoren sind in Tabelle 3 zu finden.
x1 x2 y1 y2 Δx Δy a⊥[m] fk = Δxia [m]
x < 0 175.97 120.48 167.05 167.48 55.49 (-0.43) 0.0216 0.000389x > 0 319.16 371.19 166.48 166.27 -52.03 (0.21) 0.0216 0.000415y < 0 261.47 261.37 289.07 236.32 (0.10) 52.75 0.0216 0.000410y > 0 257.74 257.12 90.639 36.305 (0.62) 54.33 0.0216 0.000398
Tabelle 2: Bestimmung des Kalibrier- und Korrekturfaktors fk
4 Auswertung
4.1 Aufbereitung der Messergebnisse
Die Großen Datenmengen, die wir durch das Auslesen der Bilder erhalten müssen zu-nächst etwas bearbeitet werden da verschiedene kleine Fehler in den Daten auftreten.Zum einen erkannte das Bilderkennungsrogramm in manchen Bildern zwei Kugeln,was wohl in den meisten Fällen an einem ungünstigen Lichtreflex lag. Auf diese Weisehaben wir für einen Zeitpunkt zwei verschiedene Kugelpositionen.Ein größeres Problem ist das die Kamera oder das Programm mit dem wir die Videos
17
4.1 Aufbereitung der Messergebnisse 4 AUSWERTUNG
in Bildersequenzen getrennt haben uns mehrfach hintereinander das gleiche Bild trotzfortlaufender Zeit liefert. Dieser Fehler tritt in allen Messreihen mehrfach auf und er-streckt sich manchmal über ein Zeitintervall von fast einer halben Sekunde (entsprichtca. 15 Bildern). Die Daten über den eigentlichen Verlauf der Kugel in diesem Zeitraumsind dadurch verloren.Dazu kommt, dass die Zeit welche von der Kamera den einzelnen Bildern zugeordnetwird nicht ganz korrekt zu sein scheint. Das durchschnittliche Zeitintervall zwischenzwei Bildern beträgt ca. 36ms hin und wieder macht die angegebene Zeit aber einenSprung mehr als das doppelte obwohl die zugehörigen Bilder zeitlich eindeutig nicht soweit auseinander liegen, was sich leicht an der Bewegung der Kugel bzw. den Graphenerkennen lässt.Da wir in der Auswertung aus den Daten die Geschwindigkeit und die Beschleunigungder Kugel berechnen wollen, haben diese kleinen Fehler eine nicht zu vernachlässi-gende Auswirkung. Zunächst sortieren wir die Werte aus, die durch falsches Auslesenentstanden sind. Anhand der r(t)-Kurve lässt sich leicht erkennen welcher Datenpunktzur Kugel gehört und welcher nur ein Lichtreflex ist. Um das Problem durch die un-genaue Zeitmessung der Kamera zu lösen, berechnen wir aus der gesamten Messdauerund der Anzahl der Bilder in diesem Zeitraum die durchschnittliche Zeit zwischen zweiAufnahmen. Diese linear mit dem Bildindex fortlaufende Zeit liefert uns sehr viel bes-sere Ergebnisse, da sich die Zeitsprünge so auf alle Bilder verteilen.Die sich wiederholenden Bilder nehmen wir bis auf das jeweils erste komplett aus unse-ren Datenreihen heraus. Dabei müssen wir beachten das wir in unserer angepassten Zeitden Zeitsprung der dadurch auftritt berücksichtigen, denn diese Bilder waren ja trotzfortlaufender Zeit gleich geblieben. In den Graphen zu der Messreihe führt das Fehlender Daten über einen solchen Zeitraum zu einem unschönen Verlauf der jeweiligen Kur-ve. Dies lässt sich aber leider nicht vermeiden, da die eigentlichen Daten einfach nichtvorhanden sind.Die so bearbeiteten Messreihen sollen nun von kartesischen Koordinaten in Polarkoordi-naten umgewandelt werden. Dazu verschieben wir zunächst das Zentrum des Koordina-tensystems in die Mitte des Trichters. Aus den x,y -Werten den Radius zu bilden ist nichtweiter schwer. Um auf den Winkel zu kommen müssen wir eine wenn-dann-Bedingungeinbauen, um anhand des Vorzeichens der x,y -Werte festzustellen, in welchem Qua-dranten wir uns befinden. Zur Berechnung der Winkelgeschwindigkeit benötigen wireinen fortlaufenden Winkel, also einen der nicht bei 2π abbricht. Dies verwirklichenwir über einen Zählindex der die Umläufe zählt. An dieser Stelle bereiten die fehlendenWerte wieder ein Problem, da an einigen Stellen der Zählindex aufgrund der fehlendenWerte nicht erhöht wird. Dies lässt sich aber leicht in den entsprechenden Graphen er-kennen und manuell beheben.Zur weiteren Auswertung bilden wir aus jeweils zwei aufeinander folgenden Winkelnbzw. Radius Werten und dem dazugehörigen Zeitintervall die Winkel bzw. Radial -
18

4.2 Plots 4 AUSWERTUNG
Geschwindigkeit, aus der wir wieder auf die gleiche Weise die jeweilige Beschleuni-gung berechnen.
4.2 Plots
4.2.1 Trajektorie
Da die Plots der insgesamt 8 Messreihen deutlichen den Rahmen dieses Protokollssprengen würden, beschränken wir uns im Folgenden auf 2 exemplarische Messreihen.
Messreihe 2 steht für alle Messreihen, bei denen wir bereits bei der Versuchsdurch-führung versuchten, so gut wir möglich Kreisbahnen zu erhalten, also die Schwankungvon r(t) so gering wie möglich zuhalten.Messreihe 6 steht für diejenigen Messreihen, bei denen wir versuchten, durch geeigneteWahl der Anfangsbedingungen (Richtung und Betrag von �v0) sehr ausgeprägte Ellip-senbahnen zu erhalten. Zuerst betrachten wir die Trajektorie dieser beiden Messreihen.
Abbildung 8 zeigt die Trajektorie der Messreihe 2. Hier sind schöne Kreisbahnen, bzw.dreidimensional gesehen eine schöne Spiralbahn, zu erkennen. Das sieht man daran,dass sich die Linie nur selten schneidet. Es existieren allerdings auch ein paar weni-ge Messfehler. So deutet die Linie, die diagonal durch den Mittelpunkt geht, eindeutigdarauf hin, dass die Kamera eine Zeitverzögerung in der Aufnahme hatte und somit min-destens ein Bild ausgelassen hat. Wir werden sehen, dass sich dieser Messfehler durchalle anderen Plots durchzieht, da die errechneten Geschwindigkeiten und Beschleuni-gungen um diesen fehlenden Punkt herum nicht mehr stimmen.Des Weiteren ist auf dem Plot auch eindeutig eine „Vorzugsspirale“ zu sehen, auf derbesonders viele Liniensegmente sehr dicht liegen.
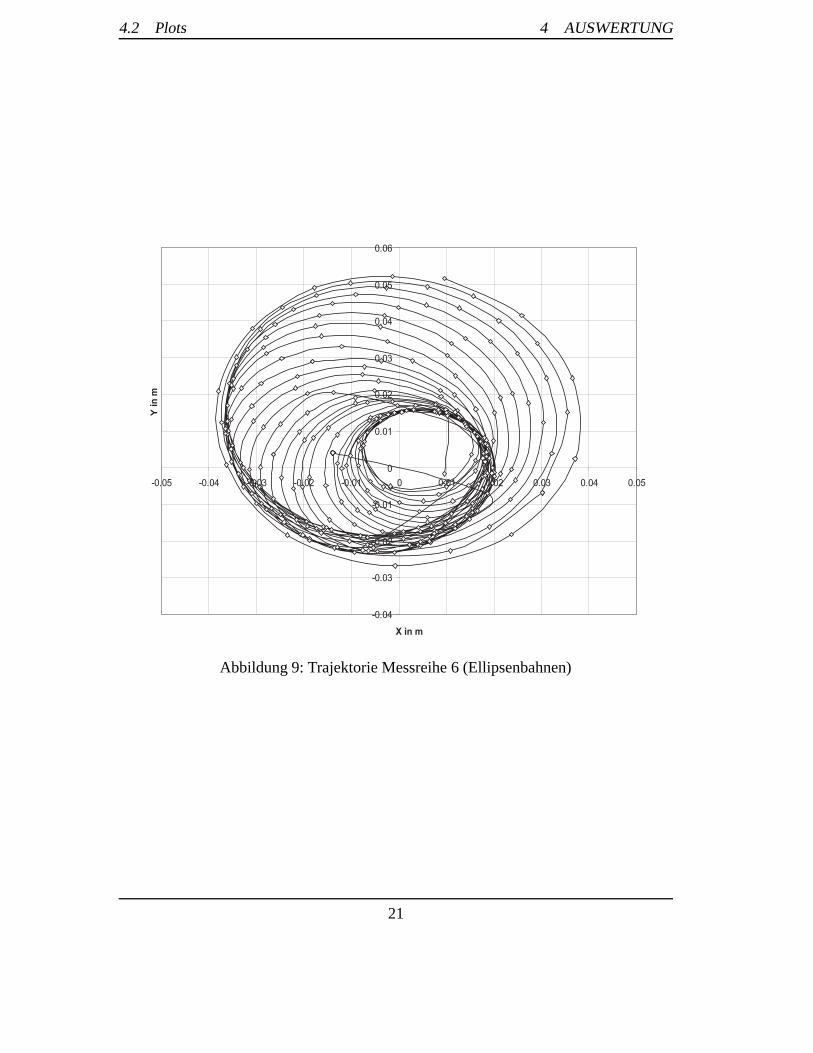
Auf Abbildung 9, die Messreihe 6 darstellt, sind die gewünschten Ellipsenbahnensehr gut zu erkennen. Das besondere an dieser Trajektorie ist, dass die Achsen allerEllipsen fast gleiche Orientierung besitzen. Das bedeutet, dass die Ellipsen sich nichtdrehen (vergleiche Messreihe 5 in Abbildung 10). Auch bei dieser Messung sind imTrajektorie Plot schon wieder ein paar Messfehler, ähnlich wie bei Messreihe 2, zu er-kennen.Noch deutlicher als im vorherigen Plot ist auch die „Vorzugsspirale“ zu erkennen. DieseVorzugsspirale ist somit eine Regelmäßigkeit, deren Ursache noch zu klären ist. Weitereinteressante Verbindungen zu dieser Vorzugsspirale zeigen die r(t)−Plots in Abschnitt4.2.2.
Als letzten Sonderfall der Trajektorienbetrachtung wollen wir uns die Bewegung derKugel bei Messreihe 5 anschauen. Diese ist in Abbildung 10 zu sehen. In diesem Fall
19

4.2 Plots 4 AUSWERTUNG
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
-0.06 -0.04 -0.02 0 0.02 0.04 0.06
X
Y
Abbildung 8: Trajektorie Messreihe 2 (Kreisbahnen)
handelt es sich wieder um Ellipsenbahnen, jedoch drehen sich die Ellipsen zusätzlichum den Koordinatenursprung. Dieses Phänomen beobachteten wir bei den meisten Mes-sungen. Die Vorzugsspirale ist in diesem Fall noch deutlicher. Es ist sehr interessant dasssie zuerst sehr unscharf ist und dann mit fallendem r immer „fokusierter“ wird.Da die weiteren Plots dieser Messreihe sich nicht sonderlich von den ersten beiden Fäl-len unterscheiden, werden wir diese Messreihe 5 nicht einzeln betrachten, sondern nurals Sonderfall der Ellipsentrajektorie sehen.
20
4.2 Plots 4 AUSWERTUNG
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
-0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
X in m
Y in
m
Abbildung 9: Trajektorie Messreihe 6 (Ellipsenbahnen)
21

4.2 Plots 4 AUSWERTUNG
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05 0.06Y in
m
X in m
Abbildung 10: Trajektorie Messreihe 6 (drehende Ellipsenbahnen)
22
4.2 Plots 4 AUSWERTUNG
4.2.2 Radius r(t)
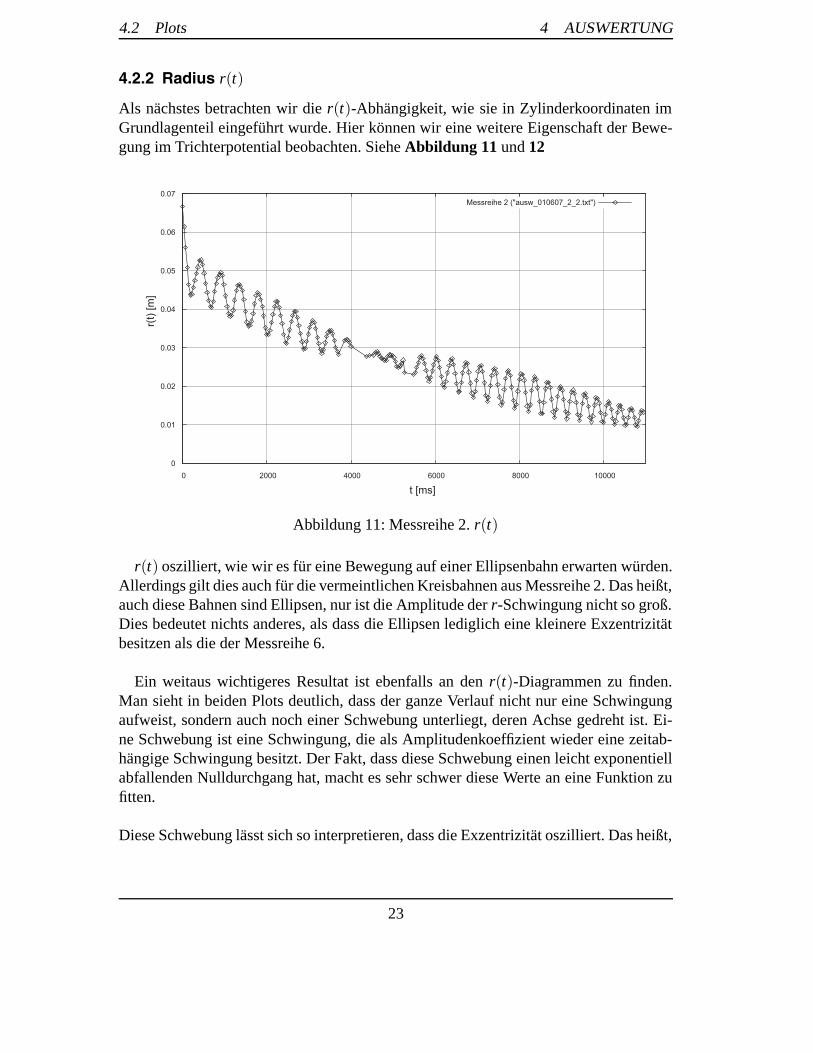
Als nächstes betrachten wir die r(t)-Abhängigkeit, wie sie in Zylinderkoordinaten imGrundlagenteil eingeführt wurde. Hier können wir eine weitere Eigenschaft der Bewe-gung im Trichterpotential beobachten. Siehe Abbildung 11 und 12
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0 2000 4000 6000 8000 10000
r(t) [
m]
t [ms]
Messreihe 2 ("ausw_010607_2_2.txt")
Abbildung 11: Messreihe 2. r(t)
r(t) oszilliert, wie wir es für eine Bewegung auf einer Ellipsenbahn erwarten würden.Allerdings gilt dies auch für die vermeintlichen Kreisbahnen aus Messreihe 2. Das heißt,auch diese Bahnen sind Ellipsen, nur ist die Amplitude der r-Schwingung nicht so groß.Dies bedeutet nichts anderes, als dass die Ellipsen lediglich eine kleinere Exzentrizitätbesitzen als die der Messreihe 6.
Ein weitaus wichtigeres Resultat ist ebenfalls an den r(t)-Diagrammen zu finden.Man sieht in beiden Plots deutlich, dass der ganze Verlauf nicht nur eine Schwingungaufweist, sondern auch noch einer Schwebung unterliegt, deren Achse gedreht ist. Ei-ne Schwebung ist eine Schwingung, die als Amplitudenkoeffizient wieder eine zeitab-hängige Schwingung besitzt. Der Fakt, dass diese Schwebung einen leicht exponentiellabfallenden Nulldurchgang hat, macht es sehr schwer diese Werte an eine Funktion zufitten.
Diese Schwebung lässt sich so interpretieren, dass die Exzentrizität oszilliert. Das heißt,
23

4.2 Plots 4 AUSWERTUNG
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
0.055
0 2000 4000 6000 8000 10000
r(t) [
m]
t [ms]
Messreihe 6 ("ausw_010607_6.txt")
Abbildung 12: Messreihe 6. r(t)
das die Ellipsen sich ständig „ausbeulen“ oder „zusammenziehen“ um dann in einenKreis über zu gehen und umgekehrt. Die Ellipsen sind zu jenen Zeitpunkten Kreise,wenn die Schwebung gerade einen Nulldurchgang hat. Dies lässt sich in der weiterenAuswertung noch ausnutzen (siehe Auswertung Abschnitt 4.3).
24
4.2 Plots 4 AUSWERTUNG
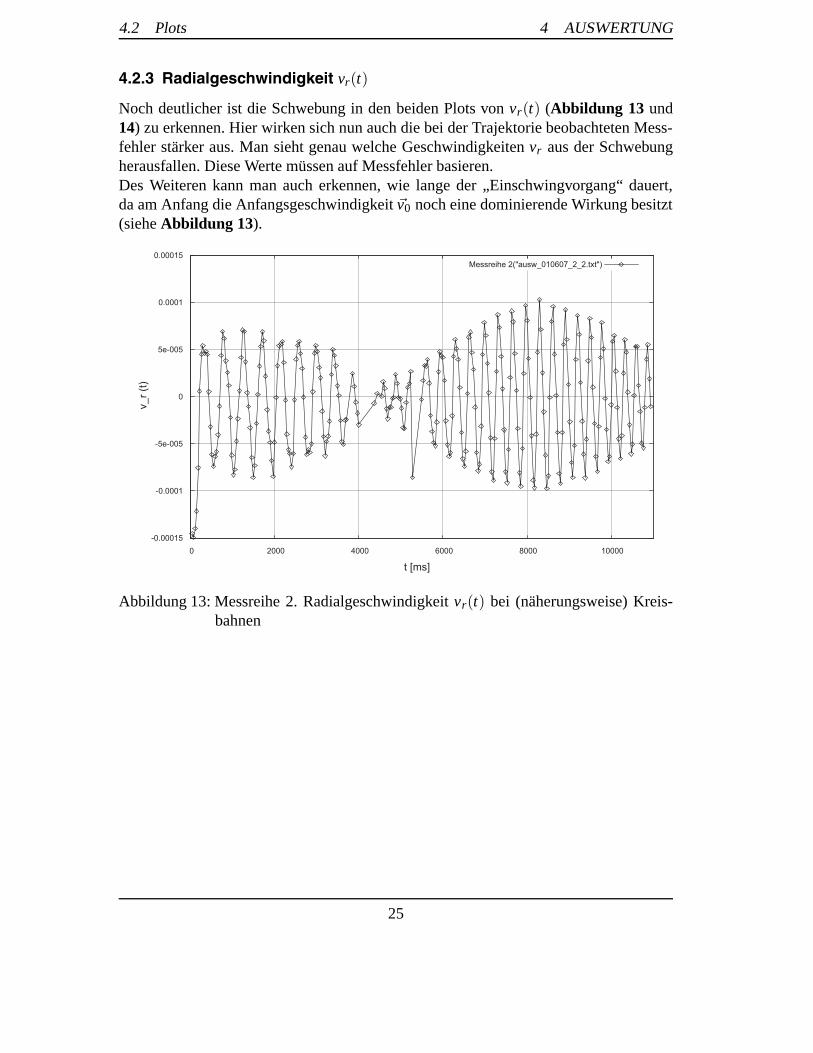
4.2.3 Radialgeschwindigkeit vr(t)
Noch deutlicher ist die Schwebung in den beiden Plots von vr(t) (Abbildung 13 und14) zu erkennen. Hier wirken sich nun auch die bei der Trajektorie beobachteten Mess-fehler stärker aus. Man sieht genau welche Geschwindigkeiten vr aus der Schwebungherausfallen. Diese Werte müssen auf Messfehler basieren.Des Weiteren kann man auch erkennen, wie lange der „Einschwingvorgang“ dauert,da am Anfang die Anfangsgeschwindigkeit �v0 noch eine dominierende Wirkung besitzt(siehe Abbildung 13).
-0.00015
-0.0001
-5e-005
0
5e-005
0.0001
0.00015
0 2000 4000 6000 8000 10000
v_r (
t)
t [ms]
Messreihe 2("ausw_010607_2_2.txt")
Abbildung 13: Messreihe 2. Radialgeschwindigkeit vr(t) bei (näherungsweise) Kreis-bahnen
25

4.2 Plots 4 AUSWERTUNG
-0.00025
-0.0002
-0.00015
-0.0001
-5e-005
0
5e-005
0.0001
0.00015
0.0002
0.00025
0 2000 4000 6000 8000 10000
v_r (
t)
t [ms]
Messreihe 6 ("ausw_010607_6.txt")
Abbildung 14: Messreihe 6. Radialgeschwindigkeit vr(t) bei Ellipsen
26

4.2 Plots 4 AUSWERTUNG
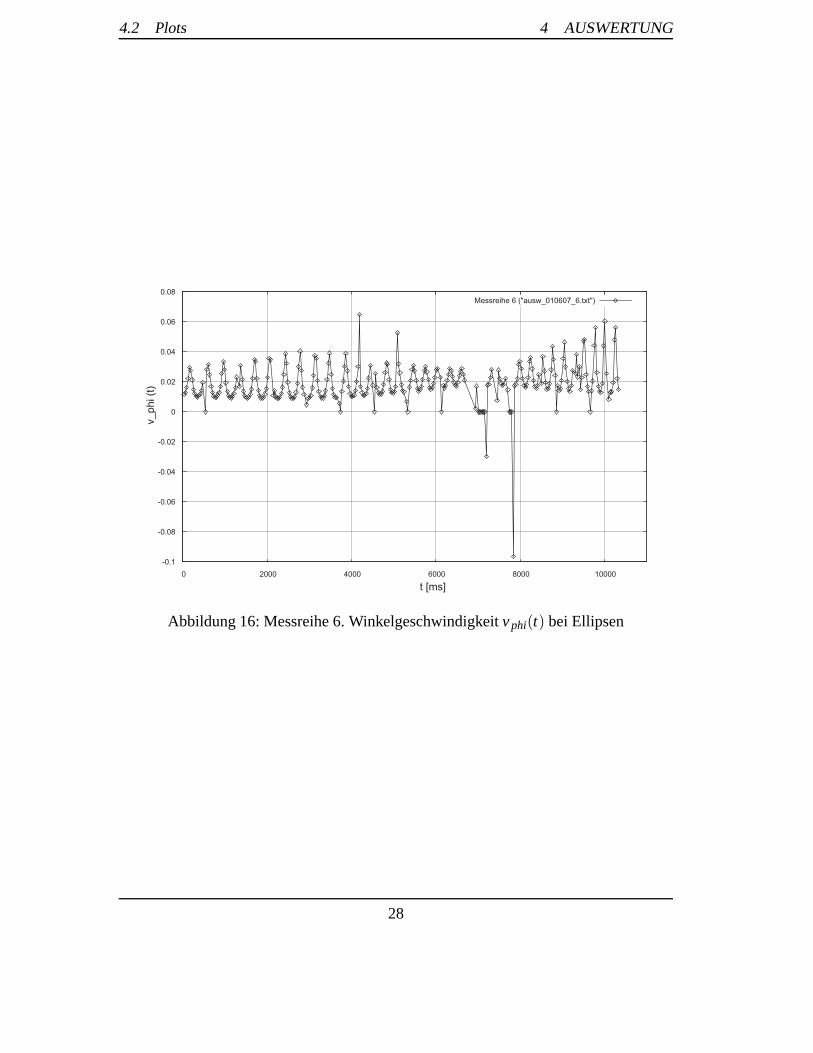
4.2.4 Winkelgeschwindigkeit vϕ(t)
Auch in den vϕ(t)-Plots (Abbildung 15 und 16) müssen wir wieder ein paar aus derReihe tanzenden Werte als Messfehler akzeptieren.Die wichtigste Schlussfolgerung aus diesen Plots ist die Erkenntnis, dass die Winkelge-schwindigkeit vϕ auf keinen Fall konstant ist sondern auch oszilliert. Dies beweist unseinmal mehr, dass es sich hier nicht um ein Kepler-Problem handelt. Die Oszillation derWinkelgeschwindigkeit kann wieder von der Oszillation der Exzentrizität herkommen,ist im Allgemeinen aber sehr schwer beschreibbar. Denn die Winkelgeschwindigkeit vϕist nicht exakt die Winkelgeschwindigkeit der Ellipsen, da diese schräg zu unserer Mes-sebene liegen!
Über den Vergleich der beiden vϕ-Plots können wir schließen, dass je größer die Ex-zentrizität der Ellipsen ist, desto Spitzer die oberen Peaks von vϕ(t).
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0 2000 4000 6000 8000 10000
v_ph
i (t)
t [ms]
Messreihe 2("ausw_010607_2_2.txt")
Abbildung 15: Messreihe 2. Winkelgeschwindigkeit vphi(t) bei (näherungsweise)Kreisbahnen
27
4.2 Plots 4 AUSWERTUNG
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0 2000 4000 6000 8000 10000
v_ph
i (t)
t [ms]
Messreihe 6 ("ausw_010607_6.txt")
Abbildung 16: Messreihe 6. Winkelgeschwindigkeit vphi(t) bei Ellipsen
28

4.2 Plots 4 AUSWERTUNG
4.2.5 Radialbeschleunigung ar(t)
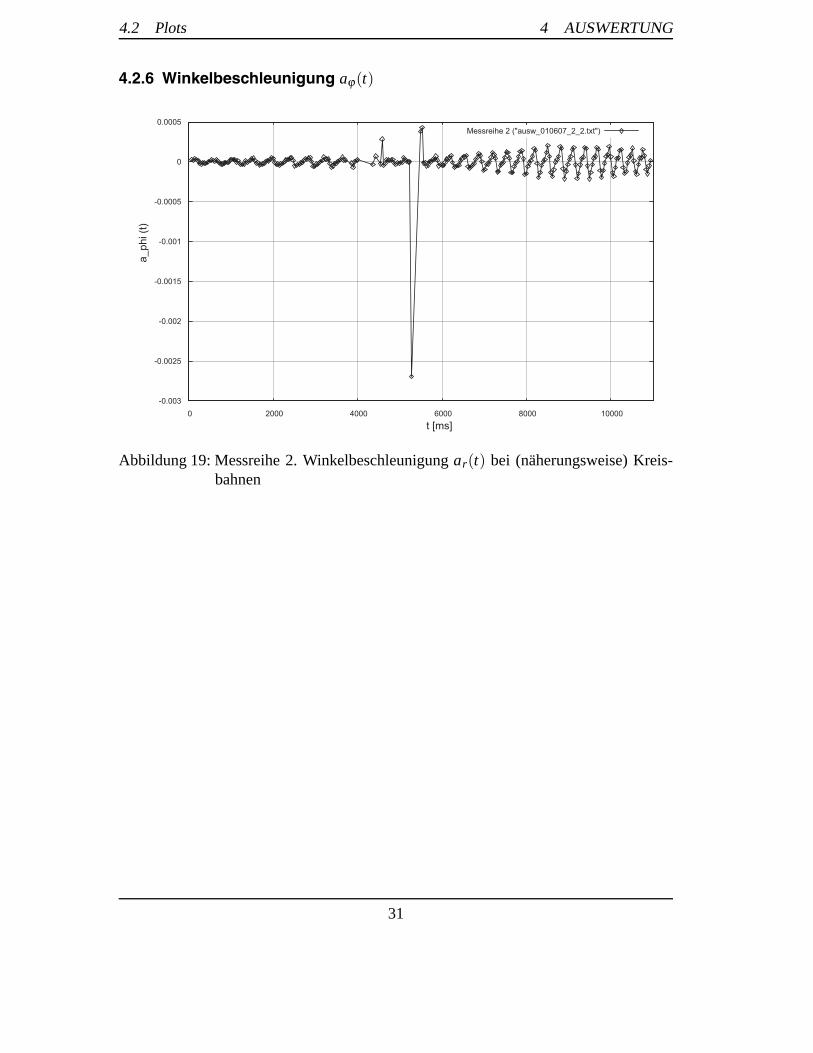
Die Beschleunigungen ar und aφ zeigen denselben charakteristisch Verlauf wie die Ge-schwindigkeiten vr und vφ . Die Peaks sind nur spitzer und die Werte generell extremer.An den Beschleunigungen in�er- und�eϕ -Richtung können wir auf die wirkenden Kräfteschließen. Dies benutzt man bei der weiteren Auswertung um mit Kräftegleichgewich-ten argumentieren zu können. Siehe Auswertung 4.3
-4e-006
-3e-006
-2e-006
-1e-006
0
1e-006
2e-006
3e-006
0 2000 4000 6000 8000 10000
a_r (
t)
t [ms]
Messreihe 2 ("ausw_010607_2_2.txt")
Abbildung 17: Messreihe 2. Radialbeschleunigung ar(t) bei (näherungsweise) Kreis-bahnen
29

4.2 Plots 4 AUSWERTUNG
-8e-006
-6e-006
-4e-006
-2e-006
0
2e-006
4e-006
6e-006
8e-006
1e-005
0 2000 4000 6000 8000 10000
a_r (
t)
t [ms]
Messreihe 6 ("ausw_010607_6.txt")
Abbildung 18: Messreihe 6. Radialbeschleunigung ar(t) bei Ellipsen
30
4.2 Plots 4 AUSWERTUNG
4.2.6 Winkelbeschleunigung aϕ(t)
-0.003
-0.0025
-0.002
-0.0015
-0.001
-0.0005
0
0.0005
0 2000 4000 6000 8000 10000
a_ph
i (t)
t [ms]
Messreihe 2 ("ausw_010607_2_2.txt")
Abbildung 19: Messreihe 2. Winkelbeschleunigung ar(t) bei (näherungsweise) Kreis-bahnen
31

4.2 Plots 4 AUSWERTUNG
-0.004
-0.003
-0.002
-0.001
0
0.001
0.002
0.003
0.004
0 2000 4000 6000 8000 10000
a_ph
i (t)
t [ms]
Messreihe 6 ("ausw_010607_6.txt")
Abbildung 20: Messreihe 2. Winkelbeschleunigung ar(t) bei Ellipsen
32
4.3 Bestimmung von g 4 AUSWERTUNG
4.3 Bestimmung von g
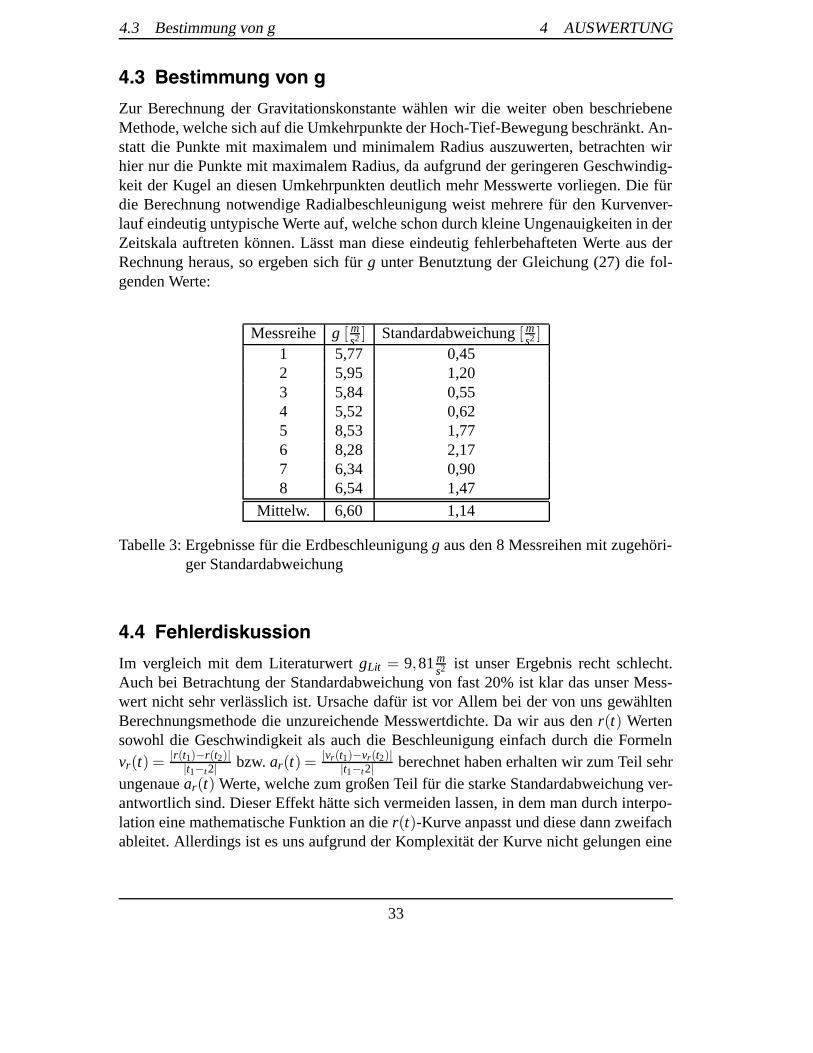
Zur Berechnung der Gravitationskonstante wählen wir die weiter oben beschriebeneMethode, welche sich auf die Umkehrpunkte der Hoch-Tief-Bewegung beschränkt. An-statt die Punkte mit maximalem und minimalem Radius auszuwerten, betrachten wirhier nur die Punkte mit maximalem Radius, da aufgrund der geringeren Geschwindig-keit der Kugel an diesen Umkehrpunkten deutlich mehr Messwerte vorliegen. Die fürdie Berechnung notwendige Radialbeschleunigung weist mehrere für den Kurvenver-lauf eindeutig untypische Werte auf, welche schon durch kleine Ungenauigkeiten in derZeitskala auftreten können. Lässt man diese eindeutig fehlerbehafteten Werte aus derRechnung heraus, so ergeben sich für g unter Benutztung der Gleichung (27) die fol-genden Werte:
Messreihe g [ ms2 ] Standardabweichung [ m
s2 ]1 5,77 0,452 5,95 1,203 5,84 0,554 5,52 0,625 8,53 1,776 8,28 2,177 6,34 0,908 6,54 1,47
Mittelw. 6,60 1,14
Tabelle 3: Ergebnisse für die Erdbeschleunigung g aus den 8 Messreihen mit zugehöri-ger Standardabweichung
4.4 Fehlerdiskussion
Im vergleich mit dem Literaturwert gLit = 9,81 ms2 ist unser Ergebnis recht schlecht.
Auch bei Betrachtung der Standardabweichung von fast 20% ist klar das unser Mess-wert nicht sehr verlässlich ist. Ursache dafür ist vor Allem bei der von uns gewähltenBerechnungsmethode die unzureichende Messwertdichte. Da wir aus den r(t) Wertensowohl die Geschwindigkeit als auch die Beschleunigung einfach durch die Formelnvr(t) = |r(t1)−r(t2)|
|t1−t2| bzw. ar(t) = |vr(t1)−vr(t2)||t1−t2| berechnet haben erhalten wir zum Teil sehr
ungenaue ar(t) Werte, welche zum großen Teil für die starke Standardabweichung ver-antwortlich sind. Dieser Effekt hätte sich vermeiden lassen, in dem man durch interpo-lation eine mathematische Funktion an die r(t)-Kurve anpasst und diese dann zweifachableitet. Allerdings ist es uns aufgrund der Komplexität der Kurve nicht gelungen eine
33

LITERATURVERZEICHNIS
solche Interpolation durchzuführen.Zusätzlich wird unsere gesammte Messung durch die Verzerrung des Bildes beeinträch-tigt, die wir zwar berücksichtigt haben aber dennoch wohl nicht ganz ausgleichen konn-ten.Insgesammt ist uns bei der Auswertung klar geworden, dass unser Modell der Kugel-bewegung nicht ganz Richtig sein kann. Dies zeigt sich vor allem in der Schwebungder r(t)-Kurven welche sich durch die von uns gemachten Annahmen nicht erklärenlässt. Daher ist es wahrscheinlich, das die verwendete Formel (27) nicht alle Aspekteder Bewegung berücksichtigt und somit unvollständig ist.
5 Fazit
Die Bewegung eines Teilchens in einem eigentlich sehr einfachen Potential mit ganzstrikten homogenen Zwangsbedingungen ist analytisch sehr einfach zu beschreiben.Möchte man aber durch ein Experiment auf bestimmte Parameter oder Gesetzmäßig-keiten der Bewegung kommen, so stellt dies viele unterschiedliche Probleme dar.Bei unsrem Versuch mit dem Trichter stellte sich heraus, dass wir, bevor wir g bestim-men können, erstmal viele kleine Schritte meistern müssen. So war zum Beispiel einerder größten Lerneffekte bei diesem Projekt, der Umgang mit gewaltigen Datenmengen.Man muss erst lernen, den Überblick und vor allem den Blick fürs Wesentliche zu fin-den.Es ist zwar schade, dass wir keine sehr genauen Werte für g bekommen konnten, aberimmerhin haben wir unser selbstgestecktes Ziel erreicht, indem wir wenigstens eineMethode gefunden haben, experimentell aus unserem Messaufbau g zu ermitteln.Alles in allem ist es sehr erstaunlich wie viele Faktoren in eine so einfache Versuchsideeeinfließen.
Literaturverzeichnis
[1] Nützliches FreeWare-Programm. http://www.virtualdub.org
[2] Quelle: Demtröder - Experimantalphysik 1 , 4.Auflage, 2006
34