Dissertation Stekeler Druck September 2015...
178
FORSCHUNGSBERICHT AGRARTECHNIK des Fachausschusses Forschung und Lehre der Max-Eyth-Gesellschaft Agrartechnik im VDI (VDI-MEG) Tobias Stekeler Simultanerfassung von Mastschweinen mit RFID- Technologie 547 Dissertation Hohenheim 2015
Transcript of Dissertation Stekeler Druck September 2015...

FORSCHUNGSBERICHT AGRARTECHNIK des Fachausschusses Forschung und Lehre der Max-Eyth-Gesellschaft Agrartechnik im VDI (VDI-MEG)
Tobias Stekeler Simultanerfassung von Mastschweinen mit RFID-Technologie
547
Dissertation Hohenheim 2015

Universität Hohenheim Institut für Agrartechnik
Fg. Verfahrenstechnik der Tierhaltungssysteme Prof. Dr. Thomas Jungbluth
Simultanerfassung von Mastschweinen mit RFID-Technologie
Dissertation zur Erlangung des Grades eines Doktors
der Agrarwissenschaften
vorgelegt
der Fakultät Agrarwissenschaften
von M.Sc. Tobias Stekeler
aus Thalheim
2015

Die vorliegende Arbeit wurde am 13.05.2015 von der Fakultät Agrarwissenschaften der Universität Hohenheim als „Dissertation zur Erlangung des Grades eines Dok-tors der Agrarwissenschaften“ angenommen.
Dekan: Prof. Dr. R.T. Vögele
Berichterstatter: Prof. Dr. T. Jungbluth
Mitberichter: Prof. Dr. R. Doluschitz
Mündliche Prüfung: Prof. Dr. T. Jungbluth
Prof. Dr. R. Doluschitz
apl. Prof. Dr. U. Weiler
Leitung Kolloquium Prof. Dr.-Ing. S. Böttinger
Tag der mündlichen Prüfung: 27.07.2015
Die vorliegende Arbeit wurde von der Claas-Stiftung, der H. Wilhelm Schaumann-Stiftung, der Max-Eyth-Stiftung und durch ein Promotionsstipendium der Fakultät Agrarwissenschaften an der Universität Hohenheim gefördert.
Alle Rechte vorbehalten. Die Verwendung von Texten und Bildern, auch auszugs-weise, ist ohne Zustimmung des Autors urheberrechtswidrig und strafbar. Das gilt insbesondere für Vervielfältigung, Übersetzung, Mikroverfilmung sowie die Einspei-cherung und Verarbeitung in elektronischen Systemen.
© 2015
Im Selbstverlag: Tobias Stekeler
Bezugsquelle: Universität Hohenheim
Institut für Agrartechnik -440-
Garbenstr. 9
D-70599 Stuttgart
Danksagung Mein herzlicher Dank gilt Herrn Prof. Dr. T. Jungbluth für das entgegengebrachte Vertrauen von Anfang an, sein offenes Ohr bei allen Anliegen, seine stets passen-den Worte und die große Unterstützung durch die ganze Promotion hindurch. Herrn Prof. Dr. R. Doluschitz und Frau apl. Prof. Dr. U. Weiler danke ich für die engagierte Durchsicht der Arbeit, die konstruktive Kritik und die angenehmen Gespräche, die ich nicht nur im Rahmen der Promotion, sondern auch während meines Studiums erfahren durfte.
Herrn Dr. D. Herd danke ich für sein Vertrauen und seine Unterstützung. Die Be-treuung in fachlichen und organisatorischen Fragen während seiner Zeit am Institut, aber auch unser freundschaftliches Verhältnis waren mir eine große Hilfe.
Frau apl. Prof. Dr. E. Gallmann gilt mein besonderer Dank. Hier fand ich Unterstüt-zung und Rat in allen Höhen und Tiefen des wissenschaftlichen Arbeitens. Ihre menschliche Art und ihre fachliche Kompetenz waren mir eine Hilfe von unschätz-barem Wert, ohne die vieles anders gelaufen wäre. Ich kann hier nur ein herzliches „Vergelt’s Gott!“ sagen.
Großen Anteil am Erfolg des Projektes hat Herr B. Rößler. Ich danke ihm für sein außerordentliches Engagement, seine vielen geleisteten Stunden, unser freund-schaftliches Verhältnis und die unzähligen fachlichen Gespräche, die mir eine un-glaubliche Freude und Inspiration waren. An dieser Stelle sei auch allen Mitdokto-randen und Mitarbeitern des Instituts für die freundschaftliche Art gedankt, die in fachlichen wie auch nicht fachlichen Belangen gepflegt wurde.
Für den Erfolg der Arbeit war aber auch die Hilfe weiterer Personen notwendig, die als Mitarbeiter am Institut, in den zentralen Einrichtungen wie Werkstatt und Mess-technik und auf der Versuchsstation Agrarwissenschaften beschäftigt sind. Ihnen gilt mein Dank für ihre Unterstützung. Hervorheben möchte ich hier Herrn PD Dr. H. Grimm für seinen Rat und Hilfe in statistischen Fragestellungen, Frau N. Hammer und Herrn F. Adrion, denen ich viel Erfolg beim Abschluss ihres aktuellen Projektes zur UHF-Tierkennzeichnung wünsche, Herrn C. Herzog, dem ich ebenfalls viel Er-folg bei seinem Projekt wünsche, und Herrn E. Reichenecker, stellvertretend für die Mitarbeiter des Unteren Lindenhofes.
Auf meinem Weg wurde ich aber auch von Menschen begleitet, die mich noch auf andere, wertvolle Art und Weise unterstützt, gefordert und gefördert haben, meine Freunde und meine Familie. Insbesondere meiner Familie möchte ich für alle jenes danken, was sie für mich getan und was sie mitgetragen haben, nicht nur in Bezug auf diese Arbeit, sondern mein ganzes Leben hindurch.
Thalheim, im August 2015 Tobias Stekeler

Meiner Familie „Leider erkennt man fast nirgendwo die wahre Schönheit der Landwirtschaft, dass
sie einen geistigen Inhalt und gleichsam eine Seele hat. Eben dadurch, nicht bloß
wegen ihrer Nützlichkeit, steht sie über allen Gewerben, und ihr Betrieb gewährt
dem, welcher die Sprache der Natur versteht, nicht nur alle Vorteile, die er erstrebt,
sondern auch Genüsse, so wie sie nur die Wissenschaft gewähren kann.“
Justus von Liebig (1803 – 1873) in "Es ist ja dies die Spitze meines Lebens"

I
INHALTSVERZEICHNIS
1 EINLEITUNG ........................................................................................................... 1
2 PROBLEMSTELLUNG UND ZIELSETZUNG .................................................................... 3
3 TECHNISCHE GRUNDLAGEN .................................................................................... 7
3.1 Einführung .................................................................................................. 7
3.2 Aufbau und Funktionsweise ....................................................................... 8
3.3 Frequenzbereiche..................................................................................... 10
3.4 Energieversorgung des Transponders ..................................................... 11
3.5 Datenübertragung und Erfassungsreichweite ........................................... 13
3.5.1 Lastmodulation durch induktive Kopplung ..................................... 13
3.5.2 Modulierter Rückstrahlquerschnitt (Lastmodulation durch elektromagnetische Kopplung)....................................................... 15
3.6 Betriebsarten ............................................................................................ 21
3.7 Antikollisionsverfahren .............................................................................. 23
3.8 Standardisierung ...................................................................................... 26
3.8.1 ISO 11784 ...................................................................................... 27
3.8.2 ISO 11785 ...................................................................................... 28
3.8.3 ISO 14223 ...................................................................................... 30
3.8.4 ISO 18000-6c ................................................................................. 30
4 KENNTNISSTAND .................................................................................................. 33
4.1 Tierkennzeichnung ................................................................................... 33
4.2 Elektronische Tierkennzeichnung ............................................................. 35
4.3 Entwicklung der elektronischen Tierkennzeichnung ................................. 36
4.4 Precision Livestock Farming ..................................................................... 42
4.5 Stand der elektronischen Tierkennzeichnung bei Schweinen .................. 43
4.6 Anwendung der elektronischen Tierkennzeichnung in der praktischen Schweinehaltung ...................................................................................... 47
4.7 Simultanerfassung von Schweinen........................................................... 49
5 ENTWICKLUNG EINES MEHRFACHLESEGERÄTES ZUR SIMULTANERFASSUNG VON
MASTSCHWEINEN .................................................................................................... 53
5.1 Einleitung .................................................................................................. 53
5.2 Material und Methoden ............................................................................. 54
5.2.1 LF-Transponderohrmarken ............................................................ 54
5.2.2 Komponenten des Mehrfachlesegerätes ....................................... 54
5.2.3 Aufbau und Steuerung des Mehrfachlesegerätes .......................... 58
5.2.4 Prüftisch ......................................................................................... 60
5.2.5 Prüfstand ....................................................................................... 60
5.3 Methodisches Vorgehen ........................................................................... 62
II Inhaltsverzeichnis
5.3.1 Statische Versuche zur Bestimmung des Erfassungsbereiches .... 62
5.3.2 Dynamische Versuche zur Bestimmung der Erfassungssicherheit ..................................................................... 63
5.4 Ergebnisse ............................................................................................... 65
5.4.1 Erfassungsreichweite .................................................................... 65
5.4.2 Erfassungsbereich ......................................................................... 68
5.4.3 Dynamische Versuche zur Erfassungssicherheit ........................... 70
5.5 Diskussion ................................................................................................ 74
6 BEWERTUNG VON UHF-TRANSPONDERN FÜR DEN EINSATZ ZUR ELEKTRONISCHEN
TIERKENNZEICHNUNG .............................................................................................. 79
6.1 Einleitung ................................................................................................. 79
6.2 Material und Methoden ............................................................................ 81
6.2.1 Transponder .................................................................................. 81
6.2.2 Lesegeräte ..................................................................................... 82
6.2.3 Prüftisch und Wasserbehälter ........................................................ 83
6.2.4 Prüfstand ....................................................................................... 84
6.3 Methodisches Vorgehen .......................................................................... 87
6.3.1 Statische Versuche zur Bestimmung der Wirkung von Einflussgrößen auf die Erfassungsreichweite und den Erfassungsbereich ......................................................................... 87
6.3.2 Dynamische Versuche zur Bestimmung der Wirkung von Einflussgrößen auf die Erfassungssicherheit ................................. 89
6.4 Ergebnisse zur Bestimmung der Erfassungsreichweite ........................... 91
6.4.1 Erfassungsreichweite der Einzeltransponder ................................. 91
6.4.2 Erfassungsreichweiten mit Lesegerät I .......................................... 91
6.4.3 Erfassungsreichweiten mit Lesegerät II ......................................... 95
6.4.4 Einfluss des Transpondertyps und des Lesegerätes auf die Erfassungsreichweite .................................................................... 98
6.4.5 Einfluss der Orientierung auf die Erfassungsreichweite ................ 99
6.4.6 Einfluss der Wasserbehältergröße auf die Erfassungsreichweite .................................................................. 100
6.4.7 Bestimmung des Erfassungsbereiches........................................ 101
6.5 Ergebnisse der dynamischen Versuche zur Bestimmung der Erfassungssicherheit .............................................................................. 104
6.5.1 Einfluss von Wasser .................................................................... 105
6.5.2 Einfluss der Geschwindigkeit ....................................................... 105
6.5.3 Einfluss der Transponderanzahl .................................................. 106
6.5.4 Einfluss der Orientierung ............................................................. 108
6.5.5 Interaktion der Einflussgrößen Wasser und Orientierung ............ 108
6.6 Diskussion .............................................................................................. 109
6.6.1 Vorgehensweise .......................................................................... 109
6.6.2 Bestimmung der Erfassungsreichweite........................................ 111
Inhaltsverzeichnis III
6.6.3 Erfassungsreichweite der Transpondertypen A, B und N ............ 111
6.6.4 Wirkung von Wasser, Orientierung und Lesegerät ...................... 112
6.6.5 Bestimmung des Erfassungsbereiches ........................................ 114
6.6.6 Bestimmung der Erfassungssicherheit ......................................... 115
7 SIMULTANERFASSUNG VON MASTSCHWEINEN MIT UHF-TRANSPONDERN ................ 117
7.1 Einleitung ................................................................................................ 117
7.2 Material und Methoden ........................................................................... 117
7.2.1 UHF-Transponderohrmarken ....................................................... 117
7.2.2 Lesegeräte und Erfassungsportal ................................................ 118
7.2.3 Versuchsdurchführung ................................................................. 120
7.3 Ergebnisse ............................................................................................. 122
7.3.1 Einfluss von Transpondertyp, Lesegerät und Anordnung ............ 123
7.3.2 Interaktion der Einflussgrößen Transpondertyp, Lesegerät und Lesegeräteanordnung .................................................................. 125
7.3.3 Einfluss des Versuchstermins und der Wiederholung .................. 129
7.4 Diskussion .............................................................................................. 132
7.4.1 Wirkung von Transpondertyp, Lesegerät und Lesegeräteanordnung .................................................................. 133
7.4.2 Einfluss des Versuchstermins, der Wiederholung und des Einzeltieres .................................................................................. 137
8 GESAMTDISKUSSION UND SCHLUSSFOLGERUNGEN ............................................... 139
9 ZUSAMMENFASSUNG .......................................................................................... 143
10 SUMMARY ....................................................................................................... 145
11 LITERATURVERZEICHNIS .................................................................................. 147
12 ABBILDUNGSVERZEICHNIS ................................................................................ 161
13 TABELLENVERZEICHNIS .................................................................................... 165
IV
ABKÜRZUNGSVERZEICHNIS A (Einheit) Ampere (SI-Einheit für die elektronische Stromstärke) AIN Animal identification number (USA) AK Antikollision AMS Automatisches Melksystem AOW Akustische Oberflächenwelle ASCII American standard code for information interchange (Einfache
Zeichenkodierung für die Darstellung des Alphabetes, von Zif-fern und Sonderzeichen durch eine 7-Bit-Folge)
Bit Binary digit BSE bovine spongiforme Enzephalopathie BSI Bundesamt für Sicherheit in der Informationstechnik bzw. beziehungsweise CDMA Code division multiple access / Codemultiplexverfahren CIT complex, individual, time-variant CLI Command line interpreter (Kommandozeileninterpreter zur text-
basierten Befehlseingabe) cm Zentimeter CMOS Complementary metaloxide semiconductor (Halbleiterbauele-
mente für Mikroprozessoren und ihre logischen Schaltungen) CRC Cyclic redundancy check (16 bit-Fehlererkennungsfolge nach
ISO 11785) csv Comma separated values (Dateiformat, bei dem ein Komma zur
Trennung von einfachen Datensätzen verwendet wird) D elektrische Flussdichte d Durchmesser d.h. das heißt dB Dezibel E elektrisches Feld EG Europäische Gemeinschaft EID Electronic identification number engl. Englisch EPC Electronic product code EPCC1G2 UHF RFID-Protokoll von EPCglobal Inc, aufgenommen in die
ISO 18000-Normenreihe für RFID-Anwendungen im Waren-flussmanagement
ERP Equivalent radiated power (Leistungsangabe eines Senders für die Sendeleistung einer Dipolantenne in ihrer Hauptstrahlrich-tung, die von diesem Sender gespeist wird)
et al. et alii / und andere etc. et cetera / und so weiter eTK Elektronische Tierkennzeichnung EU Europäische Union
Abkürzungsverzeichnis V
EWG Europäische Wirtschaftsgemeinschaft f Frequenz FAL Forschungsanstalt für Landwirtschaft FDMA Frequency domain multiple access / Frequenzmultiplexverfah-
ren FDX Full duplex / Betriebsart Vollduplex ggf. gegebenenfalls GHz Gigahertz H (Einheit) Henry (abgeleitete SI-Einheit für die Induktivität) HDX Half duplex / Betriebsart Halbduplex HF High frequency / Hochfrequenz Hz (Einheit) Hertz (abgeleitete SI-Einheit für die Frequenz) i.d.R. in der Regel ICAR International Committee for Animal Recording / Internationales
Komitee für Leistungsprüfungen in der Tierproduktion IDEA Projet Identification Électronique des Animaux (Europaweites
Forschungsprojekt zum Einsatz elektronischer Tierkennzeich-nung in der Nutztierhaltung)
IMAG Instituut voor Milieu- en Agritechniek (NL) IP International protection (Schutzart von Gehäusen gegen Ein-
dringen von Staub und Wasser) ISM industrial, scientifical, medical (reservierte Frequenzbereiche
für Industrie, Wissenschaft und Medizin) ISO International Organization for Standardization / Internationale
Organisation für Normung JRE Java runtime environment (Laufzeitumgebung zur Ausführung
von Java-Programmen) kg (Einheit) Kilogramm (SI-Einheit für die Masse) kHz Kilohertz L Induktivität l Länge LED Light emitting diode / Leuchtdiode LF Low frequency / Niederfrequenz LG Lebendgewicht LSB Least significant bit (letztes Bit des ISO 11784-
Transpondercodes) m (Einheit) Meter (SI-Einheit für die Länge) m/s (Einheit) Meter pro Sekunde (abgeleitete SI-Einheit für die Geschwindig-
keit) MHz Megahertz MKS Maul- und Klauenseuche mm Millimeter ms Millisekunde

VI Abkürzungsverzeichnis
MSB Most significant bit (erstes Bit des ISO 11784-Transponder-codes)
mV Millivolt n Anzahl NAIS National Animal Identification System (USA) NIAE National Institute of Agricultural Engineering (UK) Nr. Nummer o.g. oben genannt OEM Original equipment manufacturer P Polarisation p Wahrscheinlichkeit PC Personal Computer PE Polyethylen PLF Precision Livestock Farming PVC Polyvinylchlorid Q Gütefaktor einer induktiven Antenne r Abstand, Radius R elektrischer Widerstand R2 Bestimmtheitsmaß RF Radio-frequency / Radiofrequenz RFID Radio-frequency identification / Radiofrequenz-Identifizierung RL Richtlinie RS232 Standard für eine serielle Schnittstelle zwischen Computern
und externen Geräten RX Receiver / Empfänger S Poynting-Strahlungsvektor (Vektorprodukt aus E und H, gibt
also Richtung und Betrag des Energietransportes elektromag-netischer Wellen an)
s (Einheit) Sekunde (SI-Einheit für die Zeit) SAW Surface acoustic wave / Akustische Oberflächenwelle SDMA Space division multiple access / Raummultiplexverfahren SEQ Sequence / sequentielle Betriebsart SHF Super high frequency / Superhochfrequenz t Zeit TCP/IP Transmission control protocol / internet protocol (ein Netzwerk-
protokoll) TDMA Time domain multiple access / Zeitmultiplexverfahren TFDL Technische en Fysische Dienst Landbouw (NL) TTL Transistor-Transistor-Logik (Schaltungstechnik für logische
Schaltungen) TX Transmitter / Sender u.Ä. und Ähnliches u.a. unter anderem UHF Ultra high frequency / Ultrahochfrequenz
Abkürzungsverzeichnis VII
UML Unified Modeling Language USB Universal serial bus (Serielles Bussystem zur Verbindung von
Computern mit externen Geräten) UUID Universally unique identifier V (Einheit) Volt (SI-Einheit für die elektrische Spannung) v.a. vor allem vgl. vergleiche v.l. von links VO Verordnung W (Einheit) Watt (abgeleitete SI-Einheit für die Leistung) W-LAN Wireless local area network (funkbasiertes, lokales Netzwerk) XML Extensible markup language (Auszeichnungssprache zur Be-
schreibung und zum Austausch komplexer Daten) z.B. zum Beispiel z.T. zum Teil ε Permittivität ε0 elektrische Feldkonstante λ Länge einer Welle µW Microwave / Mikrowelle µA Mikroampere µH Mikrohenry π Pi Ω (Einheit) Ohm (abgeleitete SI-Einheit für den elektrischen Widerstand) Ø Durchschnitt % Prozent ° Grad °C Grad Celsius
1
1 EINLEITUNG Die landwirtschaftliche Nutztierhaltung ist einerseits geprägt von steigenden An-sprüchen der Gesellschaft an den Tierschutz und die Lebensmittelsicherheit, ande-rerseits aber durch eine sehr starke, erzeugerpreissenkende Marktstellung des Le-bensmitteleinzelhandels. Letzteres führt zu mengenanpassendem Verhalten in der Landwirtschaft, d.h., die Tierhaltung wird entweder aufgegeben oder ausgeweitet. Zwischen 2005 und 2014 hat sich z.B. in der Schweinehaltung die Gesamtzahl an Tieren kaum erhöht, die Zahl der schweinehaltenden Betriebe ging dagegen stark zurück. Die durchschnittliche Anzahl gehaltener Tiere pro landwirtschaftlichem Be-trieb hat sich dadurch von 303 im Jahr 2005 auf 400 im Jahr 2009 und von 794 im Jahr 2010 auf 1037 im Jahr 2014 um jeweils fast ein Drittel erhöht (Statistisches Bundesamt 2009, 2014)1. Dies ermöglicht dem Landwirt eine Kostendegression, er-höht aber gleichzeitig den Anspruch an die Haltung seiner Tiere. Die Tiere sollen in großen Beständen bestmöglich gehalten und versorgt werden – um sowohl hohe Leistungen als auch hohe Tierschutzstandards zu gewährleisten. Um diesen scheinbaren Widerspruch aufzulösen, können in der Tierhaltung Daten über das einzelne Tier und seine Haltungsumgebung elektronisch erfasst und diese wiederum zur Steuerung der Prozesse innerhalb des Haltungssystems verwendet werden. Diese Art der Tierhaltung wird mit dem englischsprachigen Begriff „Preci-sion Livestock Farming“ (PLF) umschrieben. Der PLF-Ansatz bietet die Möglichkeit, insbesondere in großen Tierbeständen, eine „automatische Überwachung und Er-höhung der Tiergesundheit, des Tierschutzes, der Qualitätssicherung, […] des Ri-sikomanagements“ (Berckmans 2008) und somit auch des Tierwohls insgesamt zu erreichen. Der Schlüssel zur einzeltierspezifischen Überwachung und Betreuung ist eine elektronische Kennzeichnung und Identifizierung der Tiere eines Bestandes. Diese wird mit Hilfe einer „Radiofrequenz-Identifizierung“ (RFID) genannten Tech-nologie erreicht. Sie arbeitet mit Hilfe von Radiowellen, indem ein am Tier z.B. als Ohrmarke angebrachter „Transponder“ die Identifizierungsnummer eines Tieres trägt und diese bei Bedarf an eine Erkennungseinheit, ein sogenanntes „Lesegerät“ senden kann. Transponder und Lesegerät bilden zusammen ein „RFID-System“. Durch den PLF-Ansatz und seine Schlüsseltechnologie RFID kann ein hoher Tier-schutz in strukturell bedingt steigenden Herdengrößen gewährleistet werden. Dar-über hinaus lässt sich aber auch dem zweiten der beiden eingangs erwähnten ge-sellschaftlichen Ansprüche an die landwirtschaftliche Nutztierhaltung begegnen, dem der Lebensmittelsicherheit. Da Tiere eindeutig gekennzeichnet sind, lässt sich ihr Lebensweg anhand eines entsprechenden Herkunftsnachweises rückverfolgen.
1 Das Statistische Bundesamt hob die Erfassungsgrenze zur Viehbestandserhebung im Mai 2010 auf 50 Schweine oder 10 Zuchtsauen an.

2

3
2 PROBLEMSTELLUNG UND ZIELSETZUNG Spätestens seit 1990 sieht die Europäische Union (EU) die Kennzeichnung von Tie-ren als notwendig an, um veterinärrechtliche Kontrollen zur Tierseuchenüberwa-chung und die Rückverfolgbarkeit im Seuchenfall durchführen zu können (Anonym 1990, 1992). Es hatte sich aber gezeigt, dass die hierzu erlassenen Richtlinien 90/425/EWG und 92/102/EWG von den EU-Mitgliedsstaaten nur unzureichend um-gesetzt wurden. Die problematische und verzögerte Eindämmung aufgetretener Tierseuchen und Lebensmittelskandale in der Europäischen Union hatten dies of-fenbart. Daher sahen sich der Europäische Rat und das Europäische Parlament durch die Erfahrungen mit der bovinen spongiformen Enzephalopathie (BSE) ge-zwungen mit den Verordnungen (EG) Nr. 820/1997 und Nr. 1760/2000 in den Jah-ren 1997 und 2000 für alle Mitgliedstaaten unmittelbare und verbindliche Rechts-normen zu erlassen. Diese sollten die Kennzeichnung und Registrierung von Rin-dern durch zwei Ohrmarken mit tierindividueller Identifizierungsnummer und einem Tierpass sowie durch die Einrichtung einer zentralen elektronischen Datenbank re-geln (Anonym 1997, 2000). Ähnliche Erfahrungen wurden infolge der seuchenhaften Ausbreitung der Maul- und Klauenseuche (MKS) bei Schafen und Ziegen gemacht und daher mit der Verord-nung (EG) Nr. 21/2004 eine an die Verordnung (EG) Nr. 1760/2000 angelehnte Rechtsnorm für die Kennzeichnung und Registrierung von Schafen und Ziegen in-nerhalb der EU erlassen, da „die praktische Umsetzung der genannten Richtlinie [gemeint ist die oben erwähnte Richtlinie 92/102/EWG] nicht zufriedenstellend ist und verbessert werden muss“ (Anonym 2004). Diese Verordnung schreibt u.a. eine elektronische Einzeltierkennzeichnung für Schafe und Ziegen ab dem 1. Januar 2008 vor. Der Rat der Europäischen Union geht davon aus, dass „die elektronische Kennzeichnung von Schafen und Ziegen [...] technisch mittlerweile so weit fortge-schritten [ist], dass sie angewandt werden kann“ (Anonym 2004). Zu dieser Bewer-tung kam der Europäische Rat nach Abschluss eines europäischen Großversuchs zur elektronischen Kennzeichnung von Tieren (Projet Identification Électronique des Animaux, IDEA-Projekt), auch wenn seiner Einschätzung nach „die Kennzeichnung von Schafen und Ziegen mittels elektronischer Kennzeichen erheblich verbessert werden kann, sofern bestimmte Anforderungen an die Begleitmaßnahmen erfüllt sind“ (Anonym 2004). Das IDEA-Projekt ging auf die Problematik ein, dass die bisher verwendeten Kenn-zeichnungssysteme wie visuelle Ohrmarken, Tätowierungen u.Ä. „nicht effizient und verlässlich genug sind, um eine sachgemäße Rückverfolgung und veterinärmedizi-nische Überwachung von Nutztieren zu gewährleisten“(Ribó et al. 2003). Aus die-sem Grund wurde das Projekt im März 1998 von der Europäischen Kommission mit dem Ziel einer Machbarkeitsanalyse zur Einführung eines Systems zur elektroni-schen Einzeltierkennzeichnung in Europa gestartet (Ribó et al. 2001). Neben den

4 Problemstellung und Zielsetzung
Gründen einer verlässlichen Rückverfolgbarkeit und veterinärmedizinischen Über-wachung des europäischen Nutztierbestandes wurden noch andere Nutzenaspekte einer elektronischen Einzeltierkennzeichnung zur Begründung des Projekts ange-führt (Ribó et al. 2003): Die zuverlässige Identifizierung und Zählung von prämien-berechtigten Nutztieren; eine ebenso zuverlässige Identifizierung und Erfassung von Zuchttieren und deren Nachkommen z.B. für eine flächendeckende Nachkom-menprüfung; die Automatisierung von Arbeiten im landwirtschaftlichen Betrieb wie Füttern, Überwachen, Melken, Wiegen, Separieren usw. und sich daraus möglich-erweise ergebende Steigerungen der Kosteneffizienz und Produktivität. Dabei wurde aber auch sowohl auf den Zeitbedarf als auch auf die Fehler- und Manipula-tionsanfälligkeit einer visuellen, handschriftlichen Tiererfassung in den genannten Bereichen hingewiesen. Im Rahmen dieses IDEA-Projektes wurden von 1998 bis 2001 in sechs Ländern der Europäischen Union fast eine Million Nutztiere mit Transpondern ausgestattet, um so die Leistungsfähigkeit eines Systems zur elektronischen Einzeltierkennzeich-nung zu überprüfen. Die Ergebnisse des IDEA-Projektes zeigen, „dass eine elekt-ronische Kennzeichnung mit [...] elektronischen Ohrmarken eine effiziente und zu-verlässige Methode zur Nutztiererfassung darstellt“ (Ribó et al. 2001). Dieses Er-gebnis bezieht sich aber nur auf die im IDEA-Projekt verwendeten Nutztierarten Rinder, Schafe und Ziegen. Die elektronische Einzeltierkennzeichnung von Schwei-nen und Geflügel, die innerhalb der EU deutlich größere Bestände als die kleinen oder großen Wiederkäuer bilden, wurde nicht betrachtet. Mit einer vergleichbaren Begründung, wie sie dem IDEA-Projekt zugrunde liegt, kann aber auch bei Schweinen aufgrund der Haltungsstruktur die Frage nach einer Einzeltierkennzeichnung gestellt werden: Mastschweine werden in der arbeitsteili-gen Erzeugungsstruktur meist in zwei oder drei Haltungsstufen in jeweils speziali-sierten Betrieben gehalten die z.T. räumlich sehr weit voneinander entfernt liegen und in denen sich ggf. Tiere verschiedener Herkünfte vermischen. Voraussetzung für eine mögliche Einzeltierkennzeichnung von Schweinen bzw. Mastschweinen ist die automatisierte Erfassung der Einzeltieridentitäten, da die Verbringung zwischen den Haltungsstufen, d.h. die Ein- und Ausstallung der Tiere, meist in großen Grup-pen erfolgt. Eine Erfassung der Einzeltierdaten von Hand wäre mit unverhältnismä-ßig hohen Kosten durch den Arbeitszeitaufwand und einer sehr hohen Fehlerwahr-scheinlichkeit des Verfahrens verbunden. Mit einer elektronischen Tierkennzeichnung kann eine lückenlose, individuelle Rückverfolgbarkeit jedes Tieres erreicht und gleichzeitig der Arbeitszeitaufwand und die Fehlerwahrscheinlichkeit bei der Tiererfassung deutlich reduziert werden. Vor allem stellt sie die Schlüsseltechnologie für den Precision Livestock Farming-Ansatz dar und somit für die sich hieraus ergebenden Nutzenaspekte. Die Möglich-keiten einer einzeltierspezifischen Überwachung und Betreuung im Hinblick auf z.B. Fütterung, Gesundheitsmonitoring, Aktivität oder Gewichtsverlauf sind hierdurch in

Problemstellung und Zielsetzung 5
großen Beständen überhaupt erst gegeben. Die elektronische Tierkennzeichnung steht somit im momentanen Bestreben die Rückverfolgbarkeit entlang der Lebens-mittelkette zu verbessern und den Nutzen von Farm Management-Systemen zu er-höhen mehr denn je im Mittelpunkt (Umstätter et al. 2014, Barge et al. 2013, Costa et al. 2013). Der derzeitige Stand der Technik in der elektronischen Tierkennzeichnung lässt es aber nicht zu, mehrere Tiere zum Beispiel aus einer Gruppe heraus simultan zu erfassen: Sind mehrere Tiere oder genauer deren RFID-Transponder im Erfas-sungsbereich eines RFID-Lesegerätes, kommt es beim Datenaustausch zwischen Transpondern und Lesegerät zu einer Datenkollision, was die Erfassung der Trans-ponder durch das Lesegerät unmöglich macht (Finkenzeller 2012). Das bedeutet, dass zur Erfassung aller Einzeltieridentitäten einer Nutztiergruppe, die Nutztiere ein-zeln durch den Erfassungsbereich des Lesegerätes geführt werden müssen. Gerade diese technische Einschränkung behindert u.a. die breite Akzeptanz dieser Systeme in der Mastschweinehaltung und lässt die Vorteile einer einzeltierspezifi-schen Prozesssteuerung von Tierhaltungssystemen nach dem PLF-Ansatz mit er-höhter Tiergerechtheit und ressourceneffizienter Bestandsführung in den Hinter-grund treten. Denn die Vereinzelung bedeutet einen zusätzlichen Aufwand für den Landwirt und den Transporteur – zum Beispiel bei der Verladung der Tiere. Sie er-fordert einen baulichen Mehraufwand für den Landwirt durch eine Vereinzelungs-einrichtung und einen zeitlichen Mehraufwand für beide, Landwirt und Transporteur, bei der Verladung selbst. Darüber hinaus verursacht eine Vereinzelung bei Schwei-nen Stress (Schrader & Ladewig 1999, de Jong et al. 1998). Dies zeigt sich auch dadurch, dass die Vereinzelung häufig als Stressor bei Untersuchungen zum Ver-halten und physiologischen Reaktionen von Schweinen verwendet wird (Souza & Zanella 2008, Herskin & Hedemann 2001, Ruis et al. 1997, 2001b, 2001a). Dieser zusätzliche Stress sollte vermieden werden. Ziel des Vorhabens ist es daher, neue Technologien und Methoden zu entwickeln und zu bewerten, mit denen elektronisch, d.h. durch RFID, gekennzeichnete Mast-schweine zur Erfassung nicht vereinzelt werden müssen, sondern simultan, d.h. gleichzeitig in der Gruppe identifiziert werden können. Dies soll auf Grundlage zweier Lösungsansätze geschehen: Im ersten Lösungsansatz wird ein „Mehrfachlesegerät“ entwickelt. Die Betriebsfre-quenz dieses Mehrfachlesegerätes soll im Niederfrequenzbereich (LF, für engl.: low frequency) des RFID-Spektrums liegen, der durch die Norm ISO 11785 für die An-wendung in der Tierhaltung vorgesehen ist. Eine simultane Erfassung der Schweine soll durch eine Änderung des Lesegerätedesigns erreicht werden. Das Lesegerät soll nicht wie sonst üblich einen einzelnen, großen Erfassungsbereich aufbauen, sondern mehrere kleine, aufeinander abgestimmte Erfassungsbereiche nutzen, über die das Tier beim Erfassungsvorgang läuft. Dieser Ansatz geht davon aus,

6 Problemstellung und Zielsetzung
dass durch die Verwendung mehrerer kleiner Erfassungsbereiche, die auf der Lauf-fläche der Tiere verteilt werden, die Wahrscheinlichkeit erhöht wird, dass sich zu einem bestimmten Zeitpunkt nur ein Tier, d.h. nur ein Transponder, in einem be-stimmten Erfassungsbereich befindet. In diesem Fall kommt es nicht zu einer Da-tenkollision, obwohl die Tiere in einer Gruppe verbleiben können. Im zweiten Lösungsansatz werden Transponderohrmarken entwickelt, die im nicht ISO-11785-konformen Ultrahochfrequenzbereich (UHF) des RFID-Spektrums ar-beiten. UHF-Systeme weisen zum einen eine deutlich höhere Erfassungsreichweite als LF-Systeme auf und eignen sich zum anderen sehr gut für die Simultanerfas-sung. Die Anwesenheit mehrere Transponder im Erfassungsbereich führt nicht zu einer Datenkollision. Nachteilig wirkt sich aus, dass die Anwesenheit von Flüssig-keiten wie zum Beispiel die Gewebsflüssigkeit von Schweinen UHF-Signale stören und absorbieren kann. Entwicklungen für den Einsatz in der Logistik zeigen aber, dass UHF-Transponder auf die Verwendung in der Nähe von Flüssigkeiten hin ab-gestimmt werden können. Die Anwendung bereits abgestimmter UHF-Transponder soll untersucht und bewertet werden.
7
3 TECHNISCHE GRUNDLAGEN RFID ist eine Technik, die einen sicht- und berührungskontaktlosen Datenaus-tausch zwischen einem Informationsträger und einer Abfrageeinheit ermöglicht. Diese Art von Datenaustausch beruht auf der Nutzung von elektromagnetischen Wellen, genauer Radiowellen. Das Akronym „RFID“ steht daher für Radiofrequenz-Identifizierung“ (engl.: radio-frequency identification). Im Folgenden werden die Funktionsweise von RFID sowie technische und physika-lische Grundlagen der Nutzung dieser Technik erläutert. 3.1 Einführung Das Bundesamt für Sicherheit in der Informationstechnik (BSI) definiert ein RFID-System durch folgende Eigenschaften: „ 1. Elektronische Identifikation:
Das System ermöglicht eine eindeutige Kennzeichnung von Objekten durch elektronisch gespeicherte Daten.
2. Kontaktlose Datenübertragung: Die Daten können zur Identifikation des Objekts drahtlos über einen Funkfrequenzkanal ausgelesen werden.
3. Senden auf Abruf (on call): Ein gekennzeichnetes Objekt sendet seine Daten nur dann, wenn ein dafür vorgesehenes Lesegerät diese Daten abruft.“
(Oertel et al. 2004) Damit beschreibt es die wesentlichen Eigenschaften eines RFID-Systems in aller Kürze. Durch diese Eigenschaften ermöglicht ein RFID-System die automatische Identifizierung von Objekten, d.h., deren Identität kann maschinell erfasst werden und steht zur elektronischen Weiterverarbeitung zur Verfügung. Dieser Vorgang ge-schieht über eine Funkverbindung zwischen dem Objekt und einem Gerät, das für die Erfassung des Objekts geeignet ist, einem sogenannten „Lesegerät“. Präziser wäre der Begriff „Erfassungsgerät“ – „Lesegerät“ oder „Leser“ hat sich aber in der Umgangs- wie in der Fachsprache durchgesetzt (vgl. u.a. Finkenzeller 2012; Kern 2006; Oertel et al. 2004). Dieser Begriff leitet sich von „reading device“ (engl.: Le-segerät) bzw. „reader“ (engl.: Leser) ab, der im englischen Sprachgebrauch die ebenfalls präziseren Begriffe „interrogator“ (engl.: Abfrager) und „transceiver“ (engl.: Sende-Empfangsgerät) weitestgehend ersetzt hat (vgl. Paret 2009, Anonym 1996a, 2003a, Finkenzeller 2003, Holm et al. 1976, Koelle et al. 1975). Bisweilen wird auch im deutschen Sprachgebrauch der Begriff „reader“ verwendet.

8 Technische Grundlagen
Die oben erwähnte Funkverbindung besteht nun nicht direkt zwischen dem Lesege-rät und dem Objekt, sondern zwischen dem Lesegerät und einem am Objekt ange-brachten sogenannten „Transponder“. Ein Transponder ist der eingangs genannte Informationsträger der mit dem Lesegerät Daten austauschen kann. „Transponder“ ist ein aus „transmitter“ (engl.: Sender) und „responder“ (engl.: Antworter) zusam-mengesetztes Kunstwort. Der entsprechende, aber nicht mehr gebräuchliche deutschsprachige Begriff ist daher auch „Antwortsender“ (vgl. u.a. Artmann 1984). Beide Begriffe verweisen in gleicher Weise auf seine Funktion: Er antwortet dem Lesegerät, indem er auf Abruf Daten sendet. Denn der Transponder stellt den ei-gentlichen Daten- und somit letztendlich Informationsträger des RFID-Systems dar (Finkenzeller 2012). Seine Information trägt er in Form binärer Daten, im einfachs-ten Fall eine elektronische, unverschlüsselte und individuelle Nummer (EID) mit ei-ner Länge von wenigen Bits. Durch seine Anbringung am Objekt kennzeichnet der Transponder dieses indirekt; er trägt die für das Objekt relevante Information, seine EID geht auf das zu kennzeichnende Objekt über. Daher ist die Art der Anbringung des Transponders am Objekt wesentlich für seine spätere Bauform. Dabei kann zwischen Kunststoffkapseln, Glaskapseln, Etiketten, Karten und Sondergehäusen wie z.B. Textiletiketten unterschieden werden (Kern 2006). Das Lesegerät kommuniziert also nicht mit dem Objekt selbst, sondern indirekt über den Transponder. Der Transponder selbst verhält sich im Regelfall passiv, d.h., er sendet keine Daten. Darin besteht eine Abgrenzung von RFID zu anderen digitalen Funktechniken wie Mobilfunk, W-LAN oder Bluetooth, d.h., Daten werden nicht per-manent übermittelt, sondern nur auf Abruf durch das Lesegerät (Oertel et al. 2004). Erst wenn der Transponder in den Ansprechbereich eines entsprechenden Lesege-rätes kommt, wird er aktiv und übermittelt Daten (Finkenzeller 2012). Im einfachsten Fall ist dies seine EID. Der Ansprechbereich ist der Teil des vom Lesegerät aufge-bauten elektromagnetischen Feldes, in dem eine Kommunikation mit einem Trans-ponder möglich ist, oder genauer gesagt die Daten des Transponders erfasst wer-den können. 3.2 Aufbau und Funktionsweise Ein RFID-System besteht also grundsätzlich, wie in Abbildung 1 dargestellt, aus den beiden Komponenten Lesegerät und Transponder (Finkenzeller 2012) und besitzt die oben genannten Eigenschaften. Beide Komponenten sind symmetrisch aufge-baut und besitzen eine Antenne zum Senden und Empfangen sowie einen integrier-ten Schaltkreis („Mikrochip“) zur Verarbeitung der empfangenen Signale (Kern 2006).

Technische Grundlagen 9
Abbildung 1: Grundbestandteile eines RFID-Systems (nach: Finkenzeller 2012) Zwischen Lesegerät und Transponder findet ein Austausch von Signalen bzw. von Daten statt. Dieser Austausch wird über die sogenannte Luftschnittstelle zwischen Lesegerät und Transponder abgewickelt: Das Lesegerät baut ein magnetisches bzw. elektromagnetisches Feld auf, wodurch ein Transponder mit Energie versorgt werden kann. Dadurch können beide Komponenten des RFID-Systems kodierte Radiowellen austauschen, die von ihren Antennen empfangen und von ihrer inter-nen Elektronik dekodiert werden (Kern 2006). Der Ablauf dieses Datenaustausches folgt bei allen RFID-Systemen im Wesentlichen dem in Abbildung 2 dargestellten Schema: Die Elektronik des Lesegeräts erzeugt ein Aktivierungssignal, das von der Antenne des Lesegeräts abgegeben wird. Die Transponderantenne empfängt die-ses Signal und gibt dieses an die Transponderelektronik weiter. Diese moduliert das Antwortsignal des Transponders – wie bereits erwähnt im einfachsten Fall seine EID – und gibt dieses zur Abgabe an die Transponderantenne weiter. Dieses Signal wird von der Antenne des Lesegerätes empfangen und zur Aufbereitung an die Elektro-nik des Lesegerätes weitergeleitet.
Abbildung 2: Funktionsweise eines RFID-Systems (aus: Kern 1997)

10 Technische Grundlagen
Das RFID-System ist über das Lesegerät meist an ein weiteres System wie einen Rechner oder ein Netzwerk angeschlossen (Kern 2006). So können die vom Lese-gerät erfassten Daten des Transponders weiterverarbeitet, gespeichert und für eine weitergehende Nutzung bereitgestellt werden. 3.3 Frequenzbereiche Die für die RFID-Technik namensgebenden Radiowellen sind Wellen des elektro-magnetischen Spektrums in einem Frequenzbereich von 30 kHz bis 3 GHz. Durch die Erzeugung und Verbreitung dieser Wellen gilt ein RFID-System rechtlich als Funkanlage. Andere Funkdienste wie Rundfunk, Polizeifunk oder Mobilfunk dürfen durch seinen Betrieb nicht beeinträchtigt werden (Finkenzeller 2012). Es können also nicht beliebig Frequenzen für den Betrieb von RFID-Systemen genutzt werden, sondern nur wenige Frequenzen bzw. Frequenzbänder. Dieses sind im Wesentli-chen lizenzfreie Bänder der sogenannten ISM-Frequenzbereiche (industrial, scien-tifical medical), die weltweit industriellen, wissenschaftlichen oder medizinischen Anwendungen vorbehalten sind (Schoblick & Schoblick 2005). Neben diesen ISM-Frequenzbereichen werden auch die Frequenzen unter 135 kHz für RFID genutzt, die sich besonders gut für induktiv gekoppelte Systeme eignen, da hohe magneti-sche Feldstärken verwendet werden können (Finkenzeller 2012). Die für den Betrieb von RFID-Systemen weltweit verwendeten Frequenzen befinden sich im Bereich der Langwellen von 30 bis 300 kHz (engl.: low frequency, LF) und in den ISM-Bändern der Kurzwellen von 3 bis 30 MHz (engl.: high frequency, HF), der Dezimeterwellen von 0,3 bis 3 GHz (engl.: ultra high frequency, UHF) und der Zentimeterwellen von 3 bis 30 GHz (engl.: super high frequency, SHF). Es handelt sich dabei um die die Frequenzen <135 kHz (LF), 13,56 MHz (HF), 868 MHz bzw. 915 MHz (UHF) und 2,45 GHz (SHF bzw. Microwave) (Tabelle 1). Üblich ist es, für die Frequenzbereiche die englischsprachigen Abkürzungen bzw. Begriffe „LF“, „HF“, „UHF“ und „µW“ bzw. die daraus abgeleiteten deutschsprachigen Begriffe „Niederfrequenz“, „Hochfrequenz“, „Ultrahochfrequenz“ und „Mikrowelle“ zu benut-zen.

Technische Grundlagen 11
Tabelle 1: Betriebsfrequenzen von RFID-Systemen (verändert nach: Bovenschulte et al. 2007)
Frequenzbereich RFID-
Betriebsfrequenzen ISM-Band
LF low frequency
30-300 kHz 125-135 kHz nein
HF high frequency
3-30 MHz 13,56 MHz weltweit einheitlich
UHF ultra high frequency
0,3 GHz - 3 GHz 868 MHz (EU)
915 MHz (USA) weltweit unterschiedlich
µW microwave
3-30 GHz 2,45 GHz weltweit einheitlich
Die Wahl der Betriebsfrequenz eines RFID-Systems, d.h. die Frequenz auf der das Lesegerät sendet, ist für dessen Funktionssicherheit und Störanfälligkeit von ent-scheidender Bedeutung (Clasen 2007, Kern 2006). Die Frequenzen unterscheiden sich wesentlich in ihren Ausbreitungseigenschaften, in ihren möglichen Datenüber-tragungsraten, in ihren Möglichkeiten der physikalischen Kopplung von RFID-Systemen und in ihren Reichweiten. Die Betriebsfrequenz ist daher eines der Haupt-unterscheidungsmerkmale von RFID-Systemen. 3.4 Energieversorgung des Transponders Die Energieversorgung des Lesegerätes eines RFID-Systems wird im Regelfall mit Netzspannung oder im Falle von mobilen Geräten mit einem Akkumulator sicherge-stellt. Für den Transponder entfällt dagegen aufgrund seiner Mobilität die Möglich-keit der Energieversorgung über Netzspannung. Er kann, wie mobile Lesegeräte durch eine Batterie oder in selteneren Fällen durch einen Akkumulator mit Energie versorgt werden. Eine zweite Möglichkeit besteht darin, dass der Transponder seine Energie durch Induktion aus dem magnetischen (bei LF- und HF-RFID-Systemen) oder dem elektromagnetischen (bei UHF-RFID-Systemen) Feld des Lesegeräts ge-winnt. Das bedeutet, dass die für den Betrieb des Transponders und somit die für das ganze RFID-System benötigte Energie vom Lesegerät bereitgestellt wird. Diese zweite Möglichkeit ist die häufigste Form der Energieversorgung des Transponders in RFID-Systemen. Wie in Kapitel 3.2 erläutert, sind Lesegerät und Transponder symmetrisch aufge-baut. Im Falle der Energiegewinnung aus dem magnetischen Feld besitzen beide eine Antennenspule und einen dieser Spule parallelgeschalteten Kondensator. Spule und Kondensator bilden zusammen einen Schwingkreis, dessen Resonanz-

12 Technische Grundlagen
frequenz durch eine geeignete Wahl von Induktivität und Kapazität auf die Betriebs-frequenz des RFID-Systems abgestimmt ist. Wird an der Antennenspule des Lese-gerätes Spannung angelegt, erzeugt diese ein magnetisches Wechselfeld mit einer bestimmten Frequenz. Ein Teil der Feldlinien dieses magnetischen Wechselfeldes erreichen und durchdringen die Antennenspule des Transponders und induzieren dort eine Spannung (Finkenzeller 2012, Schoblick & Schoblick 2005). Diese dient gleichgerichtet der Spannungsversorgung des integrierten Transponderschaltkrei-ses. Diese Art der Energieversorgung aus dem magnetischen Feld der Lesegerä-teantenne wird induktive Kopplung oder, da sie dem Prinzip eines Transformators folgt, auch transformatorische Kopplung genannt. Sie kann aber nur im reaktiven Nahfeld der Lesegeräteantenne genutzt werden, denn eine induktive Kopplung ist in deren Fernfeld nicht möglich (Finkenzeller 2012, Kern 2006, Schoblick & Schoblick 2005). Im Fernfeld erfolgt die Energiegewinnung durch die Entnahme von Energie aus der elektrischen Komponente des elektromagnetischen Feldes (Finkenzeller 2012). Die durch ein elektrisches Feld induzierte Spannung dient ebenfalls gleichgerichtet der Spannungsversorgung des integrierten Transponder-schaltkreises (Finkenzeller 2012). Die Möglichkeit der Energiegewinnung aus dem elektromagnetischen Feld wird bei UHF-Frequenzen genutzt, da hier aufgrund der kurzen Wellenlänge das Fernfeld schon unmittelbar an der Sendeantenne des Le-segerätes beginnt und eine Nutzung des Nahfeldes daher nicht möglich wäre. Durch die kurze Wellenlänge ist darüber hinaus der Einsatz von Dipolantennen möglich, d.h. „von Antennen mit weitaus kleineren Abmessungen und besserem Wirkungs-grad“ (Finkenzeller 2012) als es bei LF möglich wäre. Wie bei den Komponenten des RFID-Systems herrscht auch im Falle der Energie-versorgung von RFID-Transpondern Unklarheit in der Terminologie (vgl. Kapi-tel 3.1). Im allgemeinen Sprachgebrauch sowohl im deutsch- als auch englischspra-chigen Raum ist die Bezeichnung von batteriebetriebenen Transpondern als „ak-tive“ Transponder und die von induktiv versorgten Transpondern als „passive“ Transponder üblich (vgl. u.a. Finkenzeller 2012; Kern 2006; Oertel et al. 2004). Dem stehen aber die Bezeichnungen „battery assisted“ (engl.: batteriegestützt bzw. ak-kumulatorgestützt) bzw. „remotely powered“ (engl.: fernbetrieben) oder „batteryless“ (engl.: batterielos) entgegen. Diese Bezeichnungen wurden in der ISO-Norm 19762-3 „Information technology – Automatic identification and data capture (AIDC) techniques – Harmonized vocabulary – Part 3: Radio frequency identification (RFID)” festgelegt (Paret 2009). Die Bezeichnungen „active“ und „passive“ beziehen sich nach dieser Norm nicht auf die Energieversorgung des Transponders, sondern darauf, wie er dem Lesegerät antworten kann. Ein aktiver Transponder im Sinne der Norm antwortet, indem er mit Hilfe eines Signalgebers selbstständig ein Signal er-zeugt. Ein passiver Transponder dagegen moduliert oder reflektiert ein Signal, dass er vom Lesegerät empfangen hat, da er keinen Signalgeber besitzt. Nahezu alle RFID-Systeme arbeiten heute auf diese Art und Weise (Paret 2009). Im folgenden Kapitel 3.5 wird die Funktionsweise von passiven Transpondern im Sinne der ISO-

Technische Grundlagen 13
Norm erläutert, da in der vorliegenden Arbeit ausschließlich solche Transponder verwendet wurden. 3.5 Datenübertragung und Erfassungsreichweite Passive Transponder im Sinne der ISO-Norm 19762-3 besitzen keine Sendeeinheit (engl.: transmitter) und senden daher keine aktiven Signale an das Lesegerät zu-rück2. Das Lesegerät stellt für die Datenübertragung ein elektromagnetisches Me-dium in Form einer unmodulierten Trägerfrequenz zur Verfügung. Der Transponder kann Daten an das Lesegerät übermitteln, indem er die elektrische Charakteristik dieser Trägerfrequenz moduliert. Dazu können zwei technisch-physikalisch ähnli-che Verfahren verwendet werden, die sich – wie die Verfahren der Energieübertra-gung – durch die Frequenzeigenschaften der verwendeten elektromagnetischen Wellen, d.h. durch die induktive und die elektromagnetische Kopplung, unterschei-den. Die Ähnlichkeit besteht darin, dass zur Datenübertragung die Eingangsimpe-danz an der Transponderantenne je nach Verfahren in Form des Wirk- oder des Blindwiderstandes verändert wird (Paret 2009). Daher könnten beide Verfahren als „Lastmodulation“ bezeichnet werden, was teilweise im englischen Sprachgebrauch getan wird („load modulation“). Im deutschen Sprachgebrauch bezieht sich diese Bezeichnung aber nur auf das Verfahren bei induktiver Kopplung (vgl. Finkenzeller 2012; Paret 2010; Schoblick and Schoblick 2005). 3.5.1 Lastmodulation durch induktive Kopplung Die Lastmodulation durch induktive Kopplung ist das mit Abstand am häufigsten angewendete Verfahren zur Datenübertragung in RFID-Systemen (Finkenzeller 2012). Die Frequenzen, die für dieses Verfahren verwendet werden, liegen in den Frequenzbereichen unter 30 MHz, d.h. im LF-Bereich (<135 kHz) und im HF-Bereich (13,56 MHz). Es werden Rahmen- bzw. Ferritantennen verwendet, da diese auf das magnetische Feld ansprechen (Bergmann et al. 1999). Denn wie die Energieübertragung bei in-duktiver Kopplung nutzt auch die Datenübertragung bei induktiver Kopplung das unmittelbare magnetische Feld der Lesegeräteantenne. Diese Kopplung besteht, solange sich der Transponder im Nahfeld, d.h. in einem
Abstand von r < λ2π
zur Lesegeräteantenne, befindet (Finkenzeller 2012) und reso-
nant zur Betriebsfrequenz ist. Dadurch entzieht er, wie in Kapitel 3.4 dargestellt, dem magnetischen Feld Energie. Dieser Energieentzug führt zu einer Rückwirkung auf das Lesegerät in Form einer höheren Impedanz der Antennenspule (Finkenzeller 2012) und einer daraus folgenden höheren Stromaufnahme
2 Richtig wäre daher die Bezeichnung „Responder“ anstatt „Transponder“

14 Technische Grundlagen
(Schoblick & Schoblick 2005). Allein die resultierende Spannungsänderung kann schon als eine Form der Datenübertragung im Sinne von „0“/„1“ oder „abwe-send“/“anwesend“ verwendet werden, wie bei frühen Formen der elektronischen Tierkennzeichnung geschehen (Broadbent 1970, Simpson 1968). Sie entspricht ei-ner Amplitudenmodulation der Spannung der Lesegeräteantenne. Es können aber auch komplexere, binär codierte Daten übertragen werden, indem der Energieentzug des Transponders von diesem selbst im Takt der zu übertragen-den Daten gesteuert wird. Dies wird durch eine Änderung der Eingangsimpedanz der Transponderantenne durch Zu- und Abschalten eines Lastwiderstandes (ohm-sche Lastmodulation) oder einer (Teil-) Kapazität (kapazitive Lastmodulation) er-reicht (Finkenzeller 2012, Schoblick & Schoblick 2005). Beides entspricht einer ge-zielten Veränderung der Resonanzfrequenz des Transponders (Finkenzeller 2012). Kennzeichnend für die Verwendung der induktiven Kopplung ist der starke Abfall der magnetischen Feldstärke bei zunehmender Entfernung von der erzeugenden Antenne, d.h. die Abhängigkeit vom reaktiven Nahfeld (Abbildung 3).
Abbildung 3: Abhängigkeit der Feldstärke von der Distanz zur Antenne bei indukti-ven Systemen (aus: Finkenzeller 2012)
Außerhalb dieses Bereiches mit einem Radius von λ
2π um die Antenne wird das
magnetische Feld zu schwach um einen Transponder ausreichend mit Energie zu versorgen (Kern 2006). Es ist also keine Kopplung zwischen den beiden Antennen-
spulen von Lesegerät und Transponder mehr möglich. Der Radius von λ
2π um die
Antenne des Lesegeräts stellt daher für das Verfahren der induktiven Kopplung eine unüberwindliche Grenze dar (Finkenzeller 2012).

Technische Grundlagen 15
Der tatsächliche Bereich, in dem ein Transponder erfasst werden kann, d.h. der Erfassungsbereich, ist aber im Regelfall deutlich kleiner als der das Nahfeld einneh-mende Raum. Dieser Erfassungsbereich hängt von der Signalstärke des Lesegerä-tes bzw. der Feldstärke (Kern 2006), von der Antennenfläche und Windungszahl der Transponderspule, der Mindestspannung und der Eingangsimpedanz des Transponders sowie von einer exakt auf die Betriebsfrequenz abgestimmten Reso-nanzfrequenz des Transponders ab (Finkenzeller 2012). Letzteres kann aufgrund von Fertigungstoleranzen in der Praxis leider nicht immer gewährleistet werden. Die genannten Einflussgrößen sind aber technisch beherrschbar. Eine nicht kalkulier-bare Einflussgröße, die ein RFID-System im praktischen Betrieb stark beeinträchti-gen kann, ist die Orientierung der Antennenspule des Lesegerätes zur Antennen-spule des Transponders. Liegen beide Spulen parallel zueinander auf einer Mittel-achse, ist die Durchdringung der Transponderspule durch die magnetischen Feldli-nien der Lesegerätespule maximal. Sie durchdringen die Spule senkrecht und es wird die größtmögliche Spannung induziert. Wird die Transponderspule aber gegen die Mittelachse gekippt und/oder von dieser verschoben, reduziert sich die indu-zierte Spannung. Keine Spannung wird mehr induziert, wenn die Transponderspule in einem Winkel von 90° zur Lesegerätespule steht, da die Feldlinien die Transpon-derspule nicht mehr durchdringen, sondern in deren Radialebene verlaufen (Finkenzeller 2012). Auch unter Optimierung der genannten Einflussgrößen erreicht der Erfassungsbe-reich in der Regel nur einen Radius von deutlich unter 1 m um die Antenne des Lesegeräts. Mit RFID-Systemen, die das Verfahren der induktiven Kopplung bzw. Lastmodulation verwenden, können daher nur Transponder erfasst werden, die ma-ximal einen Meter vom Lesegerät entfernt sind. 3.5.2 Modulierter Rückstrahlquerschnitt (Lastmodulation durch elektromag-
netische Kopplung) Sollen Transponder erfasst werden, die sich in einer Entfernung von über einem Meter zum Lesegerät befinden, ist eine induktive Kopplung im Nahfeld nicht ausrei-chend. Zudem ist dieses Verfahren für kurzwellige, höherfrequente RFID-Systeme im UHF-Bereich (868 MHz bzw. 915 MHz) oder im Mikrowellenbereich (2,5 GHz)
ungeeignet, da sich das Nahfeld nach r < λ2π
auf wenige Millimeter verkürzt. Das in
diesem Anwendungsfall eingesetzte Verfahren des modulierten Rückstrahlquer-schnitts (engl.: modulated backscatter) basiert dagegen auf einer elektromagneti-schen Kopplung im Fernfeld. Es nutzt einen Effekt der aus der Radar-Technik bekannt ist: Eine Objekt, dessen Ausdehnung größer als etwa die halbe Länge einer elektromagnetischen Welle ist, reflektiert diese Welle (Finkenzeller 2012, Schoblick & Schoblick 2005). Der Rück-
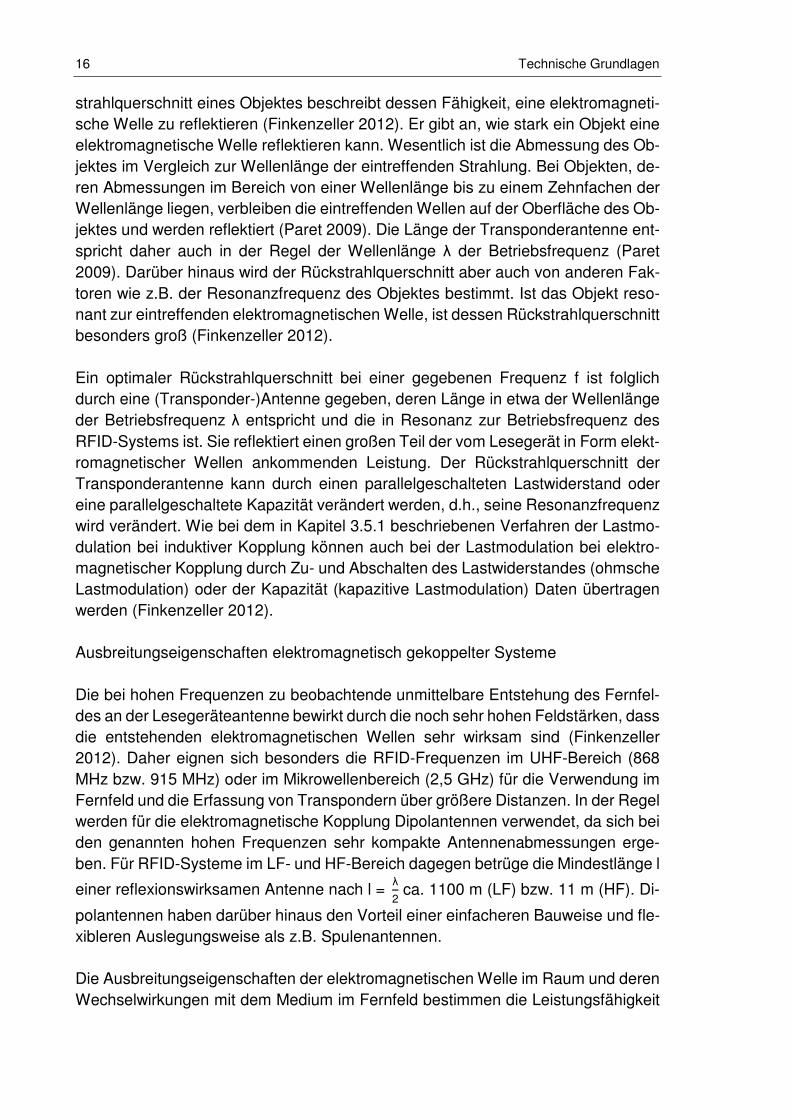
16 Technische Grundlagen
strahlquerschnitt eines Objektes beschreibt dessen Fähigkeit, eine elektromagneti-sche Welle zu reflektieren (Finkenzeller 2012). Er gibt an, wie stark ein Objekt eine elektromagnetische Welle reflektieren kann. Wesentlich ist die Abmessung des Ob-jektes im Vergleich zur Wellenlänge der eintreffenden Strahlung. Bei Objekten, de-ren Abmessungen im Bereich von einer Wellenlänge bis zu einem Zehnfachen der Wellenlänge liegen, verbleiben die eintreffenden Wellen auf der Oberfläche des Ob-jektes und werden reflektiert (Paret 2009). Die Länge der Transponderantenne ent-spricht daher auch in der Regel der Wellenlänge λ der Betriebsfrequenz (Paret 2009). Darüber hinaus wird der Rückstrahlquerschnitt aber auch von anderen Fak-toren wie z.B. der Resonanzfrequenz des Objektes bestimmt. Ist das Objekt reso-nant zur eintreffenden elektromagnetischen Welle, ist dessen Rückstrahlquerschnitt besonders groß (Finkenzeller 2012). Ein optimaler Rückstrahlquerschnitt bei einer gegebenen Frequenz f ist folglich durch eine (Transponder-)Antenne gegeben, deren Länge in etwa der Wellenlänge der Betriebsfrequenz λ entspricht und die in Resonanz zur Betriebsfrequenz des RFID-Systems ist. Sie reflektiert einen großen Teil der vom Lesegerät in Form elekt-romagnetischer Wellen ankommenden Leistung. Der Rückstrahlquerschnitt der Transponderantenne kann durch einen parallelgeschalteten Lastwiderstand oder eine parallelgeschaltete Kapazität verändert werden, d.h., seine Resonanzfrequenz wird verändert. Wie bei dem in Kapitel 3.5.1 beschriebenen Verfahren der Lastmo-dulation bei induktiver Kopplung können auch bei der Lastmodulation bei elektro-magnetischer Kopplung durch Zu- und Abschalten des Lastwiderstandes (ohmsche Lastmodulation) oder der Kapazität (kapazitive Lastmodulation) Daten übertragen werden (Finkenzeller 2012). Ausbreitungseigenschaften elektromagnetisch gekoppelter Systeme Die bei hohen Frequenzen zu beobachtende unmittelbare Entstehung des Fernfel-des an der Lesegeräteantenne bewirkt durch die noch sehr hohen Feldstärken, dass die entstehenden elektromagnetischen Wellen sehr wirksam sind (Finkenzeller 2012). Daher eignen sich besonders die RFID-Frequenzen im UHF-Bereich (868 MHz bzw. 915 MHz) oder im Mikrowellenbereich (2,5 GHz) für die Verwendung im Fernfeld und die Erfassung von Transpondern über größere Distanzen. In der Regel werden für die elektromagnetische Kopplung Dipolantennen verwendet, da sich bei den genannten hohen Frequenzen sehr kompakte Antennenabmessungen erge-ben. Für RFID-Systeme im LF- und HF-Bereich dagegen betrüge die Mindestlänge l
einer reflexionswirksamen Antenne nach l = λ
2 ca. 1100 m (LF) bzw. 11 m (HF). Di-
polantennen haben darüber hinaus den Vorteil einer einfacheren Bauweise und fle-xibleren Auslegungsweise als z.B. Spulenantennen. Die Ausbreitungseigenschaften der elektromagnetischen Welle im Raum und deren Wechselwirkungen mit dem Medium im Fernfeld bestimmen die Leistungsfähigkeit

Technische Grundlagen 17
und Reichweite elektromagnetisch gekoppelter Systeme wie die in der vorliegenden Arbeit verwendeten UHF-Systeme. Diese Wechselwirkungen werden „praktisch alle […] durch das E-Feld bewirkt“ (Bergmann et al. 1999). Es handelt sich dabei um die im Folgenden beschriebenen Erscheinungen der Freiraumdämpfung, der Dämp-fung durch Materie, der Reflexion und der Beugung elektromagnetischer Wellen: Freiraumdämpfung Ein elektromagnetisches Feld breitet sich von seiner Quelle kugelförmig im Raum aus. Dadurch verteilt sich die abgestrahlte elektromagnetische Leistung auf eine immer größer werdende Oberfläche. Unabhängig von der Wechselwirkung mit ei-nem Medium nimmt daher die Strahlungsleistungsdichte mit zunehmendem Ab-stand r von der Quelle durch die sogenannte Freiraumdämpfung mit 4πr2 ab (Detlefsen & Siart 2009). Dämpfung durch Materie Materie besitzt die Eigenschaft, Strahlung bestimmter Wellenlängen zu absorbieren und andere nicht. Eine Absorption findet statt, wenn Atome oder Moleküle durch die Strahlungsleistung in höhere Energiezustände angeregt werden (Haas 2002). Indu-ziert eine elektromagnetische Welle einen elektrischen Strom in einem Leiter, wird ihr Leistung entzogen. Dies gilt auch für Dielektrika, da in ihnen zwar kein Stromfluss freier Ladungsträger möglich ist, es aber zu Verschiebungen der Ladungsträger kommen kann. Diese Ausrichtung der Ladungen in einem Dielektrikum unter Ein-fluss eines elektrischen Feldes wird als dielektrische Polarisation bezeichnet. Kann die Polarisation des Dielektrikums bei hohen Frequenzen dem schnell wechselnden elektromagnetischen Feld oder genauer der elektrischen Feldkomponente nicht
trägheitslos folgen, führt die Maxwellsche Verschiebungsstromdichte ∂D
∂t zu einer Ab-
sorption der Leistung (Bergmann et al. 1999). Die elektrische Flussdichte D steht mit dem elektrischen Feld E, der Permittivität ε und der Polarisation P in Zusam-menhang, sodass gilt (Detlefsen & Siart 2009):
D = ε0εrE = ε0E+P (1) Dadurch zeigt sich, dass die Wechselwirkung elektromagnetischer Wellen mit die-lektrischen Materialien in der relativen Permittivität εr erfasst ist (Detlefsen & Siart 2009). Die drei für die Absorptionsvorgänge wichtigsten dielektrischen Polarisationsme-chanismen sind die Ionenpolarisation, die Elektronenpolarisation und die Orientie-rungspolarisation (Detlefsen & Siart 2009). Durch sie werden Atome, Moleküle oder deren Ladungen nach dem auf sie wirkenden elektrischen Feld hin ausgerichtet. Durch die Polarisation kommt es zu Leistungsverlusten, d.h. zur Absorption von

18 Technische Grundlagen
Leistung durch die Materie. Für die Anwendung von UHF-RFID-Systemen ist die Orientierungspolarisation die Bedeutendste, da durch sie die Absorption elektro-magnetischer Wellen des UHF-Bereiches durch Wasser erfolgt. Sie ist bei Molekü-len zu beobachten, die wie z.B. Wasser ein Dipolmoment aufweisen. Die molekula-ren Dipole richten sich nach der elektrischen Feldkomponente des auf sie wirkenden elektromagnetischen Feldes aus. Da es sich bei diesem um ein Wechselfeld han-delt, orientieren sich die Wassermoleküle in derselben Frequenz wie das Feld um. Die dabei entstehende Rotationsenergie wird an umliegende Moleküle abgegeben, d.h., es entsteht Wärme durch innere Reibung. Die Polarisierbarkeit bzw. die relative Permittivität εr eines Stoffes ist zum einen temperaturabhängig, da die thermische Bewegung der Moleküle die Polarisierung hemmt und zum anderen frequenzabhängig, da die Orientierungspolarisation durch die Bewegung ganzer Moleküle einer großen Trägheit unterliegt (Detlefsen & Siart 2009, Haas 2002). Das Maximum der relativen Permittivität εr und damit das Ab-sorptionsmaximum von Wasser liegt bei Raumtemperatur bei einer Frequenz des elektromagnetischen Feldes von ca. 18 GHz (Ellison et al. 1996, Abbildung 4). Für die Anwendung von RFID-Systemen ist daher die frequenzabhängige Absorption elektromagnetischer Wellen durch Wasser zu beachten: Frequenzen des UHF-Bereiches, d.h. von ca. 1 GHz, werden noch sehr stark absorbiert, Frequenzen im LF-Bereich, d.h. von ca. 100 bis 150 kHz, werden dagegen praktisch nicht absor-biert (Finkenzeller 2012).
Abbildung 4: Komplexe Permittivität von Wasser bei 25°C mit Realteil ε' (Polarisa-tion) und Imaginärteil ε'' (Absorption), aggregierte Daten mehrerer Untersuchungen (Ellison et al. 1996)

Technische Grundlagen 19
Reflexion und Interferenz Wenn eine elektromagnetische Welle auf eine Grenzfläche zwischen zwei Medien mit unterschiedlichen elektromagnetischen Eigenschaften trifft, treten eine reflek-tierte und eine in das wechselnde Medium weiterlaufende (transmittierte) Welle auf (Detlefsen & Siart 2009). Die reflektierte Welle trifft dabei im Ausgangsmedium wie-derum auf gleichfrequente, ihr nachfolgende elektromagnetische Wellen. Durch das Aufeinandertreffen dieser Wellen treten Interferenzen, d.h. Wellenüberlagerungen, auf. Sind die reflektierte Welle und die ihr folgende Welle phasengleich, tritt eine konstruktive Interferenz auf, haben beide Wellen entgegengesetzte Phasen, liegt eine destruktive Interferenz vor (Haas 2002). Eine konstruktive Interferenz wirkt amplitudenerhöhend, eine destruktive Interferenz amplitudenauslöschend. Dadurch kommt es zu Bereichen innerhalb des räumlich geschlossenen Ansprechbereiches des Lesegerätes, in denen das elektromagnetische Feld ausgelöscht ist und ein Transponder lokal nicht erfasst werden kann. Diese Stellen treten gehäuft auf Mehr-fachen der Wellenlänge λ auf. Andererseits kann es auch außerhalb des Ansprech-bereiches zu isolierten lokalen Stellen kommen, an denen ein Transponder weit ent-fernt vom Lesegerät erfasst werden kann (Paret 2009). Leitende Materialien wie Metalle erzeugen sehr starke Reflexionen. Die elektrische Komponente einer auftreffenden elektromagnetischen Welle ruft an der Oberfläche des Leiters Wechselströme hervor, die entgegengesetzte elektrische Felder erzeu-gen und dadurch das Eindringen der Welle in den Leiter verhindern (Bergmann et al. 1999). Bei nicht-leitenden Materialien, d.h. Dielektrika, wird die Reflexion an der Grenzfläche von der Permittivität εr des Materials bestimmt. Trifft eine elektromag-netische Welle auf ein Dielektrikum mit geringer Permittivität, ist nur eine sehr ge-ringe Reflexion zu beobachten (Helmus et al. 2009). Auch der Unterschied in den Materialeigenschaften ist von Bedeutung: Je geringer der Unterschied zwischen der Permittivität zweier Medien ist, desto geringer ist auch die Reflexion an der Grenz-fläche der Medien. Die Reflexion wird aber nicht nur von den Materialeigenschaften eines Objektes bestimmt, sondern auch von dessen Abmessungen, Form und Ober-flächenbeschaffenheit (Helmus et al. 2009). Objekte, deren Abmessungen in der Größenordnung der ganzen oder der halben Wellenlänge sind, stellen schon auf-grund ihrer Ausdehnung eine Reflexionsquelle dar (Helmus et al. 2009). Scharfe Kanten und Spitzen des Objektes erhöhen die Reflexion bei bestimmten Wellenlän-gen zusätzlich (Finkenzeller 2012). Bei der praktischen Anwendung von RFID-Systemen kommt hier dem Abstrahlwin-kel der Lesegeräteantenne besondere Bedeutung zu. Ist dieser, wie bei den meis-ten Lesegeräten, verhältnismäßig weit, d.h. zwischen 70° und 90°, werden in der Einsatzumgebung sehr viele reflektierende Objekte vom elektromagnetischen Feld erfasst (Paret 2009). Durch die unterschiedlichen Oberflächen, Materialeigenschaf-ten und Ausrichtungen der Objekte zum Lesegerät werden die elektromagnetischen

20 Technische Grundlagen
Wellen breit gestreut. Durch eine Verringerung des Abstrahlwinkels kann dem ent-gegengetreten werden. Allerdings verringert sich dann auch die Breite des An-sprechbereiches des Lesegerätes zugunsten einer größeren Erfassungsreichweite. Beugung Ein Objekt, auf das eine elektromagnetische Welle trifft, führt nicht nur zu einer Ab-sorption und Reflexion, sondern kann auch eine Beugung der Welle verursachen. Es kann daher auch im geometrischen Schattenbereich des Objektes eine Strah-lungsleistung beobachtet werden (Detlefsen & Siart 2009), die nicht von transmit-tierter Leistung stammt. Sie geht aus dem Bereich des elektromagnetischen Feldes hervor, der nicht abgeschattet ist. Eine Beugung tritt aber nur auf, wenn die Aus-dehnung des Objektes ungefähr der Größenordnung der Wellenlänge entspricht o-der kleiner ist (Haas 2002). Der Erfassungsbereich des Transponders wird bei der elektromagnetischen Kopp-lung durch die genannten Erscheinungen Freiraumdämpfung, Dämpfung durch Ma-terie, Reflexion und Beugung elektromagnetischer Wellen eingeschränkt. Die Leis-tung des vom Lesegerät gesendeten Signals verringert sich stark auf dem Weg zur Transponderantenne durch die Freiraumdämpfung, die Dämpfung durch die per-mittiven Eigenschaften der im Raum vorliegenden Materie sowie Reflexionen durch andere Objekte. Der Transponder selbst kann wiederum nur etwa die Hälfte der ankommenden Leistung reflektieren, da er aus dieser die eigene Energieversor-gung sicherstellt (Finkenzeller 2012). Das reflektierte Trägersignal wird wiederum durch die Freiraumdämpfung, permittive Dämpfung und Fremdreflexionen verrin-gert, sodass nur ein sehr geringer Teil der ursprünglich ausgestrahlten Leistung wieder an der (Empfangs-)Antenne des Lesegerätes ankommt. Daher beeinflussen insbesondere Objekte, die sich im Umfeld von Lesegerät und Transponder befin-den, und deren permittive Eigenschaften den Erfassungsbereich eines auf der elekt-romagnetischen Kopplung basierenden RFID-Systems stark. Dies ist bei der stär-keren induktiven Kopplung nicht der Fall, hier sind aufgrund der Kopplung über das magnetische Feld fast ausschließlich die permeablen Eigenschaften eines Objektes relevant. Durch die Nutzung elektromagnetischer Wellen ist zudem deren Polarisation (man beachte den Unterschied zur vorgenannten dielektrischen Polarisation von Dipolen) für den Erfassungsbereich von großer Bedeutung, die wiederum von der Ausrich-tung der erzeugenden Antenne im Raum abhängig ist. Denn die Daten- und Ener-gieübertragung zwischen zwei Antennen ist dann optimal, wenn sie die gleiche, d.h. eine parallele Ausrichtung im Raum haben (Finkenzeller 2012). Dadurch haben beide die gleiche Polarisationsrichtung. Bei den häufig verwendeten Dipolantennen ist das der Fall, wenn die beiden Leiter parallel zueinander im Raum liegen. Sind die Polarisationsrichtungen der beiden Antennen um 90° verschoben, kann von der

Technische Grundlagen 21
empfangenden Antenne nur noch 1/100 der möglichen Leistung aus dem elektro-magnetischen Feld der Sendeantenne entnommen werden, was einer Dämpfung von 20 dB entspricht (Finkenzeller 2012). Die Ausrichtung der Transponderantenne ist aber im Gegensatz zur der des Lese-gerätes im Regelfall nur schwer oder nicht bestimmbar, sodass sich dadurch der Erfassungsbereich stark verändern kann. Durch die Verwendung von zirkular pola-risierten Sendeantennen kann dem begegnet werden (Schoblick & Schoblick 2005). Sie erzeugen keine linear, d.h. vertikal oder horizontal polarisierten elektromagneti-schen Wellen, sondern solche, bei denen der Richtungsvektor der elektrischen Feldkomponente um den sogenannten Poynting-Strahlungsvektor rotiert (Abbildung 5).
Abbildung 5: Polarisation von Dipol-Sendeantennen (Finkenzeller 2012) Durch die zirkulare Polarisation kommt es aber im Vergleich zu einer linearen Pola-risation zu einem Leistungsverlust. Dieser ist jedoch mit einer Dämpfung von ca. 3 dB (Finkenzeller 2012) deutlich geringer als der durch eine nicht optimale Aus-richtung des Transponders verursachte Leistungsverlust. 3.6 Betriebsarten Unter der Betriebsart eines RFID-Systems versteht man die zeitliche Koordination der Energie- und Datenübertragung zwischen Lesegerät und Transponder. Es müs-sen die Energieübertragung vom Lesegerät zum Transponder (Energieübertra-gung), die Datenübertragung vom Lesegerät zum Transponder (Lesegerätesignal) und die Datenübertragung vom Transponder zurück zum Lesegerät (Transponder-signal) aufeinander abgestimmt werden: Die Energie kann kontinuierlich oder se-quentiell, das Lesegerätesignal und das Transpondersignal können zeitgleich oder zeitversetzt übertragen werden (Abbildung 6).

22 Technische Grundlagen
Abbildung 6: Energie- und Datenübertragung zwischen Lesegerät und Transpon-der bei unterschiedlichen Betriebsarten (verändert nach: Paret 2010) Durch die Betrachtung zweier Übertragungsebenen (Energie und Daten) bei batte-rielosen RFID-Systemen kommt es bei der Bezeichnung der Verfahren zu einer un-einheitlichen Terminologie. Aus der Funktechnik ist die Unterscheidung der Daten-übertragung in Simplex und Duplex bekannt. Bei einer Simplexverbindung kann eine Datenübertragung nur in eine Richtung erfolgen, bei einer Duplexverbindung in beide Richtungen. Bei Duplexverbindungen wird unterschieden, ob die Daten-übertragung in beide Richtungen zeitgleich (Vollduplex, FDX) oder nur zeitversetzt (Halbduplex, HDX) möglich ist. Diese Terminologie wird auch für RFID-Systeme verwendet. Allerdings muss bei batterielosen RFID-Systemen zusätzlich noch die zeitliche Anordnung des energieübertragenden Signals beachtet werden. Hier kann zwischen kontinuierlicher und sequentieller (SEQ) Energieübertragung unterschie-den werden. Es kommt in der Literatur daher häufig vor, dass Systeme mit sequentieller Ener-gieübertragung als Halbduplex-Systeme bezeichnet werden, alle Systeme mit kon-tinuierlicher Energieübertragung dagegen als Vollduplexsysteme (Finkenzeller 2012). Beispiele hierfür sind bei Geers et al. (1997) und Kampers et al. (1999) bzw. in der ISO-Norm 11785 zu finden. Neuere Literatur verwendet die in Abbildung 6 dargestellte Einteilung der Betriebsarten (Finkenzeller 2012, Paret 2009, Kern 2006). Teilweise werden dabei sequentielle Systeme als Sonderformen von Halb-duplexsystemen angesehen (vgl. Schoblick & Schoblick 2005). Der Nachteil der Duplex-Verfahren besteht darin, dass das Lesegerätesignal und das deutlich schwächere Transpondersignal vom Signal der Energieübertragung überlagert werden. Außerdem können HDX/FDX-Transponder durch ihren kontinu-ierlichen Aktivierungszustand nur die Hälfte der Betriebsspannung von SEQ-
Technische Grundlagen 23
Transpondern aufbauen (Finkenzeller 2012). Der Vorteil der beiden Duplex-Verfah-ren gegenüber dem sequentiellen Verfahren ist aber, dass der Transponder keine Energie zwischenspeichern muss, da er kontinuierlich versorgt wird. Dadurch wird ein deutlich kleinerer Kondensator zur Zwischenspeicherung benötigt, was wiede-rum einen Vorteil bei der Transponderminiaturisierung darstellt. Werden HDX/FDX-Verfahren und SEQ-Verfahren gleichzeitig verwendet, wie bei der ISO-Norm 11785 vorgesehen, ist mit einem zusätzlichen Problem zu rechnen: Werden mehrere Lesegeräte gleichzeitig verwendet, ist die Wahrscheinlichkeit hoch, dass ein Lesegerät sein Signal während der Ruhepause eines anderen aus-sendet. Ein SEQ-Transponder kann in diesem Fall nicht erfasst werden. Da der SEQ-Transponder im Vergleich zu HDX/FDX-Transpondern nur ein sehr schwa-ches Ansprechsignal benötigt, betrifft dies einen Bereich weit über den Ansprech-bereich des Lesegerätes hinaus. Andererseits wird die Leistung der HDX/FDX-Transponder beeinträchtigt, da sie ohne die Pausen, die für die Aktivierung der SEQ-Transponder benötigt werden, schneller erfasst werden könnten. Eine kombi-nierte Anwendung senkt also die Leistung beider Verfahren (Kampers et al. 1999). 3.7 Antikollisionsverfahren Bis jetzt wurde die Kommunikation zwischen einem Lesegerät und einem Trans-ponder, d.h. eine 1:1-Beziehung, beschrieben. Oft liegt aber eine 1:n-Beziehung vor, d.h., es befinden sich mehrere Transponder im Erfassungsbereich eines Lese-gerätes. In diesem Fall muss zwischen zwei Phasen der Kommunikation unterschie-den werden: Das Lesegerät sendet Signale gleichzeitig an mehrere Transponder. Diese Signale können von den Transpondern auch gleichzeitig empfangen werden. Da dies mit einem Radiosender vergleichbar ist, der von mehreren Empfangsgerä-ten empfangen wird, wird dieses Verfahren „Broadcast“-Verfahren (engl.: Rundfunk) genannt (Finkenzeller 2012). Ein Problem ergibt sich in der entgegengesetzten Richtung, d.h., wenn mehrere Transponder ihre Daten gleichzeitig an ein Lesegerät senden wollen. Die Transponder können nicht erkennen, ob andere Transponder bereits mit dem Lesegerät kommunizieren. Da alle Transponder auf derselben Fre-quenz senden, überlagern sich ihre Signale und es kommt zu einer Kollision der zu übertragenden Daten (Oertel et al. 2004). Dieser Vorgang, Mehrfachzugriff (engl.: multi-access) genannt, führt zunächst dazu, dass das Lesegerät nicht unterschei-den kann, ob es sich um ein oder mehrere Signale handelt (Kern 2006). Um alle Transponder erfassen zu können, müssen die Signale der einzelnen Transponder vereinzelt werden. Ein Verfahren, das bei einem Mehrfachzugriff die Erfassung mehrere Transponder durch eine Vereinzelung der Signale erlaubt, wird Antikollisi-onsverfahren genannt. Technisch wird eine Vereinzelung der Signale, d.h. eine Antikollision, durch vier grundsätzliche Verfahren umgesetzt. Diese technischen Verfahren, auch Multiplex-Verfahren genannt, vereinzeln durch ein entsprechendes Zugriffsprotokoll die

24 Technische Grundlagen
Transpondersignale entweder in der Frequenz, in der Zeit, im Raum oder in der Kodierung. Es handelt sich dabei um das Frequenzmultiplexverfahren, das Zeitmul-tiplexverfahren, das Raummultiplexverfahren und das Codemultiplexverfahren. Zur Durchführung dieser Verfahren ist ein schneller Datenaustausch notwendig; die Datenübertragungsrate korreliert direkt positiv mit der Frequenz. Dadurch ist eine Signalvereinzelung bzw. eine simultane Erfassung von mehreren Transpondern, die sich im Ansprechbereich des Lesegeräts befinden, bei UHF-Systemen sehr gut möglich. Hier reicht die Datenübertragungsrate auch bei einer raschen Bewegung der Transponder durch den Ansprechbereich des Lesegerätes aus, um diese zu erfassen. Bei HF-Systemen ist dies in weitaus geringerem Umfang möglich. Bei LF-Systemen ist die Anwendung von Antikollisionsverfahren zwar technisch möglich, aber aufgrund der geringen Datenübertragungsrate stark eingeschränkt. Eine Mög-lichkeit bietet hier das Raummultiplexverfahren. Frequenzmultiplexverfahren Beim Frequenzmultiplexverfahren (engl.: frequency domain multiple access, FDMA) werden den Transpondern mehrere Übertragungskanäle auf verschiedenen, von der Betriebsfrequenz unabhängigen Trägerfrequenzen gleichzeitig zur Verfügung gestellt (Finkenzeller 2012). Dies erlaubt ein gleichzeitiges Senden der Transponder an das Lesegerät, beschränkend wirkt allerdings die Anzahl der verfügbaren Kanäle (Kern 2006). Die Transponder müssen dazu in der Lage sein über frei einstellbare Übertragungskanäle auf zur Betriebsfrequenz anharmonischen Antwortfrequenzen zu senden (Finkenzeller 2012). Energieversorgung und Lesersignal, sprich das Broadcast, findet auf der Betriebsfrequenz statt. Der Mehrfachzugriff, d.h. die Ant-wort der Transponder, erfolgt auf Übertragungskanälen verschiedener Antwortfre-quenzen. Dies macht das FDMA aber sehr aufwändig: Das Lesegerät muss für je-den Empfangskanal einen eigenen Empfänger besitzen. Daher ist dieses Antikolli-sionsverfahren auf wenige Anwendungen beschränkt (Finkenzeller 2012). Zeitmultiplexverfahren Wesentlich häufiger werden Zeitmultiplexverfahren (engl.: time domain multiple ac-cess, TDMA) angewendet. Die gesamte Übertragungskapazität eines Frequenzka-nals wird zeitlich auf die sich im Ansprechbereich befindenden Transponder aufge-teilt. Jeder Transponder erhält ein Zeitfenster, in dem er dem Lesegerät seine Daten übermitteln kann. Es ist hierbei zwischen transpondergesteuerten und lesergesteu-erten Verfahren zu unterscheiden. Zu den transpondergesteuerten Verfahren gehört das sogenannte ALOHA-Verfahren. Es wird ausschließlich bei Transpondern verwendet, die nur wenige Da-ten wie z.B. ihre EID an das Lesegerät senden müssen (Finkenzeller 2012). Das Lesegerät sendet einen Aufruf an die Transponder, ihre EID zu übermitteln. Die

Technische Grundlagen 25
Transponder senden daraufhin ihre EID in regelmäßigen, bestimmten Zeitabstän-den. Diese Übertragungszeit der Daten ist deutlich kürzer als der Zeitabstand zwi-schen den Datenübertragungen (Kern 2006). Zudem beginnen die Transponder ihre Sendeintervalle nach dem Aufrufsignal mit einer individuellen Verzögerung (Oertel et al. 2004). Dadurch besteht eine gewisse Wahrscheinlichkeit, dass zu einem be-stimmten Zeitpunkt nur einer der Transponder seine Daten an das Lesegerät sendet und keine Kollision der Daten auftritt. Dieser Aufruf-Zyklus wird mehrfach durchlau-fen, sodass nach einiger Zeit das Lesegerät alle Transponder in seinem Ansprech-bereich erfasst hat. Die Erfassungsrate bzw. der Datendurchsatz ist daher von der Frequenz, der Aufenthaltsdauer der Transponder im Ansprechbereich der Lesege-räteantenne, der Länge der Daten, der Länge des Abstandes zwischen den Daten-übertragungen und der Anzahl der Transponder abhängig. So geht z.B. ab einer bestimmten Menge an Transpondern der effektive Datendurchsatz stark zurück (Kern 2006). Diesem Problem kann mit einem lesergesteuerten Verfahren wie dem dynamischen Slotted-ALOHA-Verfahren, einer Variation des ALOHA, entgegengetreten werden. Hier wird vorab die Anzahl der zur Verfügung stehenden Zeitfenster z.B. in Abhän-gigkeit der zu erwartenden Transponderanzahl bestimmt. Diese Anzahl übermittelt das Lesegerät zusammen mit dem Sendeaufruf an die Transponder. Die Transpon-der wählen ein Zeitfenster nach dem Zufallsprinzip und übermitteln in diesem ihre EID. Kommt es zu keiner Datenkollision, d.h., sendet in diesem Zeitfenster nur ein Transponder, wird er vom Lesegerät erfasst und anschließend für eine bestimmte Zeit stummgeschaltet. Dieser Ablauf wird solange wiederholt, bis alle Transponder erfasst worden sind (Anonym 2007a). Raummultiplexverfahren Ein deutlich seltener verwendetes Verfahren ist das Raummultiplexverfahren (engl.: space division multiple access, SDMA). Es legt den Ansprechbereich des Lesege-rätes räumlich so aus, dass sich die Wahrscheinlichkeit stark erhöht, dass sich darin jeweils nur ein einzelner Transponder befindet. Das kann zum einen durch die Ge-staltung der Abstrahlcharakteristik der Lesegeräteantenne geschehen. Wird der Ab-strahlwinkel verkleinert, entsteht eine gestauchte Richtkeule. Diese Richtkeule kann z.B. gezielt auf Transponder ausgerichtet werden (Finkenzeller 2012). Zum anderen kann dies durch eine Reduzierung des Ansprechbereiches der Lesegeräteantenne bei gleichzeitiger Erhöhung der Anzahl der verwendeten Lesegeräte geschehen. Die Anordnung der kleineren Antennen in einem flächendeckenden Antennenarray sorgt dafür, dass mehrere Transponder simultan erfasst werden können, wenn sie sich räumlich verteilt über das Array bewegen. Diese Art von SDMA findet z.B. bei Marathonläufen Verwendung (Kern 2006). Hier werden die Tartanmatten am Start/Zieleinlauf mit einem Antennenarray ausgestattet. Die Läufer bewegen einen an ihren Schuhen angebrachten Transponder durch mehrere Ansprechbereiche des Arrays, indem sie über die Tartanmatten laufen. Durch die räumliche Verteilung

26 Technische Grundlagen
der Läufer und die kleinräumigen Ansprechbereiche können so mehrere Transpon-der simultan erfasst werden. Codemultiplexverfahren Um Daten eines Transponder übertragen zu können, müssen diese Daten, d.h. de-ren binäre Signaldarstellung, zuerst an den Übertragungskanal angepasst (codiert) und dann auf diesen aufgetragen (moduliert) werden (Abbildung 7).
Quelle
Senke
Codierung Modulierung
Decodierung Demodulierung
Übertragung
Abbildung 7: Codierung und Modulation im Datenübertragungsmodell Das Codemultiplexverfahren (engl.: code division multiple access, CDMA) analy-siert die Signale von Transpondern anhand ihrer Codierung auf Datenkollisionen. Bei der Manchester-Codierung z.B. wird eine binäre 0 mit einem fallenden Signal-pegel und eine binäre 1 mit einem ansteigenden Signalpegel dargestellt (Finkenzeller 2012). Gegensätzliche Bits mehrerer Datenübertragungen verursa-chen hier eine Kollision, indem sich der fallende Pegel des einen Signals und der ansteigende Pegel des anderen Signals in einer Halbbitperiode gegenseitig aufhe-ben. Das Lesegerät prüft die EID der Transponder entlang eines binären Suchbau-mes und schaltet diese ggf. selektiv aus, bis nur noch ein Transponder antworten kann (Kern 2006). Hat dieser seine Daten übertragen, wird er ausgeschaltet und der Algorithmus beginnt von neuem, bis alle Transponder im Ansprechbereich er-fasst sind. 3.8 Standardisierung Zur Anwendung von RFID-Systemen für die elektronische Tierkennzeichnung exis-tieren drei Normen der Internationalen Organisation für Normung (ISO). Im Jahr 1996 wurden die beiden ISO-Normen 11784 und 11785 zur Codestruktur bzw. zum technischen Konzept der Anwendung veröffentlicht. Die Aufteilung der Standardi-sierung der elektronischen Tierkennzeichnung in diese zwei Teile wird damit be-gründet, dass eine eigenständige Norm für die Codestruktur des Transponders und

Technische Grundlagen 27
damit allgemein für die Tieridentifizierungsnummer flexibler sei, da sie auch für an-dere Identifizierungssysteme wie z.B. den Strichcode Verwendung finden könne (Kampers et al. 1999). Außerdem sei angesichts mehrerer Anbieter von RFID-Systemen eine Vereinheitlichung der Codestruktur schneller zu erreichen gewesen als eine Vereinheitlichung der technischen Konzepte. Infolge gewachsener Ansprüche an eine elektronische Tierkennzeichnung wurde 2003 die ISO-Norm 14223 zu erweiterten Möglichkeiten der Anwendung von RFID-Systemen zur Tierkennzeichnung veröffentlicht. Darüber hinaus ist für die vorliegende Arbeit die ISO-Normenserie 18000-1 bis 18000-6 von Bedeutung, die den Datenaustausch in der Warenwirtschaft mit RFID standardisiert. Die verwendeten UHF-RFID-Systeme arbeiten mit dem Class-1 Ge-neration-2 UHF RFID-Protokoll von EPCglobal Inc., das 2006 als Teil 6c in diese ISO-Normenserie aufgenommen wurde (O’Connor 2006).
3.8.1 ISO 11784 Die ISO-Norm 11784 „Radio-frequency identification of animals – Code structure“ (Anonym 1996b) definiert die Codestruktur der Transponder. Da der Transponder-code durch die Kennzeichnung des Tieres mit dem betreffenden Transponder auf das Tier übergeht, ist er so aufgebaut, dass er als weltweit eindeutige Tieridentifi-zierungsnummer dienen kann. Bestimmte Bits oder Bitfolgen codieren dabei ver-schiedene Informationen, die zusammen die Einzelidentität des Tieres darstellen. Der Code ist insgesamt 64 Bits lang und besteht aus fünf Teilen: Bit 1: Art der Anwendung Das erste Bit gibt an, ob der vorliegende Transponder für die elektronische Tier-kennzeichnung vorgesehen ist oder nicht. Ist dieses erste Bit eine binäre Eins, kenn-zeichnet der Transponder ein Tier, ist es eine binäre Null, wird der Transponder für eine andere Anwendung benutzt (Kampers et al. 1999). Bit 2 bis 15: Reservierter Block Die folgenden 14 Bits wurden nicht definiert, da sie für künftige, noch nicht be-stimmte Verwendungen vorgesehen sind. Bit 16: Vorliegen weiterer Daten Bit 16 zeigt an, ob im Anschluss an die 64 Bits des Transpondercodes noch weitere Daten folgen. Hat das Bit einen Binärwert von Eins, besitzt der Transponder einen erweiterten Speicher. Es sind weitere Daten wie z.B. Sensordaten vorhanden, de-ren Struktur durch eine Folgenorm, die 2003 veröffentlichte ISO 14223, definiert ist

28 Technische Grundlagen
(Kampers et al. 1999). Hat das Bit den Binärwert Null, sind keine weiteren Daten vorhanden. Bit 17 bis 26: Länder- oder Herstellercode Durch die Bits 17 bis 26 wird eine dreistellige Nummer codiert, die einen eindeutigen Ländercode (000-899) nach ISO 3166 darstellt. Hat ein Staat keine zuständige Be-hörde mit zentraler Datenbank zur Vergabe eindeutiger Tieridentifizierungsnum-mern, wird statt des Ländercodes ein dreistelliger Herstellercode (900 bis 998) ver-wendet. Ein Herstellercode kann von einem Unternehmen beim Internationalen Ko-mitee für Leistungsprüfungen in der Tierproduktion (ICAR) beantragt werden. Wird statt des Ländercodes ein Herstellercode verwendet, ist der Hersteller selbst für die Eindeutigkeit der Transpondercodes verantwortlich (Hogewerf 2011a). Bit 27 bis 64: Eindeutige Identifizierungsnummer Die letzten 38 Bits codieren eine Dezimalzahl von 12 Stellen, die in Verbindung mit dem Länder- oder Herstellercode eine weltweit eindeutige Tieridentifizierungsnum-mer darstellt. Die Länge der 38 Bits ermöglicht 238 Kombinationen und damit ca. 275 Milliarden eindeutige Nummern. Sie wurde gewählt, um eine „ausreichende Anzahl an Kombinationen für alle Tiere eines großen Landes“ zu haben, wobei sich die Vergabe der Identifizierungsnummer frühestens nach 30 Jahren wiederholen soll (Anonym 1996b). Diese Nummer selbst enthält allerdings keine Information wie z.B. Geburtsbetrieb, Zuchtvereinigung oder Region (Hogewerf 2011a). 3.8.2 ISO 11785 Das technische Konzept der Aktivierung von Transpondern durch Lesegeräte und der Datenübertragung zwischen beiden wird durch die ISO-Norm 11785 „Radio-fre-quency identification of animals – Technical concept“ definiert (Anonym 1996a). Sie zeichnet sich dadurch aus, dass zwei Betriebsarten verwendet werden können: Ein sequentielles Verfahren (SEQ) und ein Vollduplexverfahren (FDX). In der Norm selbst wird das sequentielle Verfahren aber als „half duplex“ bzw. „HDX“ und das Duplexverfahren als „full duplex“ bzw. „FDX“ bezeichnet (vgl. Kapitel 3.6). Der Transpondercode wird so übertragen, dass mit dem letzten Bit (LSB, least signifi-cant bit) die Codeübertragung begonnen und mit dem ersten Bit (MSB, most signi-ficant bit) beendet wird. Aktivierung Zur Aktivierung von Transpondern sendet das Lesegerät periodisch ein Signal mit
einer Frequenz von 134,2±13,42×10-3 kHz und einer Dauer von 50 ms. Befindet sich ein FDX-Transponder im Ansprechbereich des Lesegerätes, beginnt er sofort ein Antwortsignal zu senden, ein SEQ-Transponder dagegen speichert zunächst die dem Feld entnommene Energie und wartet auf einen Abfall des Aktivierungssignals (Kampers et al. 1999). Empfängt das Lesegerät in den ersten 50 ms das Signal

Technische Grundlagen 29
eines FDX-Transponders, verlängert es sein Aktivierungssignal, bis das Antwortsig-nal vollständig empfangen ist, maximal aber auf 100 ms. Anschließend schaltet das Lesegerät sein Aktivierungssignal ab. Sendet ein SEQ-Transponder in einem Zeit-raum von 1 bis 2 ms nach einem Signalabfall von 3 dB ein Antwortsignal, beträgt diese Pause 20 ms. Wurde 3 ms nach einem Signalabfall von 3 dB kein SEQ-Signal empfangen, sendet das Lesegerät erneut ein Aktivierungssignal von 50 ms Dauer aus. FDX-Verfahren Ein FDX-Transponder überträgt sein Antwortsignal auf zwei Seitenbändern der Ak-tivierungsfrequenz, d.h. auf 129,0 bis 133,2 kHz und 135,2 bis 139,4 kHz. Die Über-tragung eines Bits benötigt 32 Schwingungen der Aktivierungsfrequenz, woraus sich eine Bitrate von 4194 bit/s ergibt (Kampers et al. 1999). Der FDX-Transponder wiederholt sein Antwortsignal, solange er sich im Ansprech-bereich des Lesegerätes befindet. Dem eigentlichen Transpondercode nach ISO 11784 wird eine Startsequenz (engl.: header) von 11 Bits mit dem Inhalt „00000000001“ vorangestellt. Die weiteren Bits werden in Achterblöcken übertra-gen, die durch ein Kontrollbit mit dem Binärwert „1“ getrennt sind um eine Wieder-holung der Startsequenz zu vermeiden. Dem 64 bit-Transpondercode folgen eine 16 bit-Fehlererkennungsfolge (engl.: cyclic redundancy check, CRC) und ein An-hang (engl.: Trailer) von 24 Bits, der für zukünftige Anwendungen wie z.B. Sensor-daten vorgesehen sind. Ein Datentelegramm eines FDX-Transponders besteht also aus 128 Bits. Bei einer Bitrate von 4194 bit/s werden 30,5 ms für seine Übertragung benötigt. SEQ-Verfahren
Der SEQ-Transponder überträgt seine Daten, indem er mit 124,2±2 kHz den Binär-
wert „1“ und mit 134,2±1,5 kHz den Binärwert „0“ darstellt. Die Übertragung eines Bits benötigt 16 Schwingungen, wodurch sich eine Bitrate von 8387,5 bit/s für eine binäre 0 und eine Bitrate von 7762,5 bit/s für eine binäre 1 ergeben. Eine Startsequenz wird bei SEQ-Transpondern eigentlich nicht benötigt, da der Startzeitpunkt der Signalübertragung genau definiert ist (Kampers et al. 1999). Die Startsequenz wird aber zur Synchronisation von Lesegerät und Transponder benö-tigt und beträgt daher 8 Bits mit dem Inhalt „01111110“. Darauf folgen der 64 Bits lange Transpondercode, die 16 Bits lange Fehlererkennungsfolge und der noch un-definierte Anhang von 24 Bits. Da keine Kontrollbits wie bei den FDX-Transpondern verwendet werden, hat das Datentelegramm eines SEQ-Transponders eine Länge von 112 Bits. Bei einer durchschnittlichen Bitrate von 8075 bit/s benötigt die Über-tragung des Datentelegramms 13,9 ms.
30 Technische Grundlagen
3.8.3 ISO 14223 Die ISO-Norm 14223 „Radiofrequency [sic!] identification of animals – Advanced transponders“ (Anonym 2003a) stellt eine Weiterentwicklung der ISO-Norm 11785 dar. Daher ist die Aktivierung und der Datenaustausch zwischen einem Lesegerät und einem fortgeschrittenen Transponder als vollständig abwärtskompatibel zu den ISO-Normen 11784 und 11785 definiert. Ein fortgeschrittener Transponder nach ISO 14223 verhält sich im Ansprechbereich eines Lesegerätes genauso wie ein Transponder nach ISO 11785. Er antwortet nach dem in der ISO 11785 definierten Protokoll und übermittelt seinen ISO-11784-kompatiblen Code (Hogewerf 2011a). Fortgeschrittene Transponder besitzen einen erweiterten Speicher. Die Daten kön-nen blockweise übertragen und gegen ein Überschreiben gesichert werden (Clasen 2006). Haben fortgeschrittene Transponder außer ihrer Tieridentifizierungsnummer noch weitere Daten zu übertragen, ist Bit 16 des Transpondercodes auf den Binär-wert 1 gesetzt (siehe Kapitel 3.8.2). Das Lesegerät schaltet in diesem Fall den Transponder in den ISO-14223-Modus, in dem er nur auf Kommandosignale des Lesegerätes antwortet und nicht wie im ISO-11785-Modus seinen Transpondercode wiederholt. Er fällt in den ursprünglichen Modus zurück, wenn er sich nicht mehr im Ansprechbereich des Lesegerätes befindet oder wenn die Datenübertragungspro-zesse im ISO-14223-Modus abgeschlossen sind. Neben einem erweiterten Speicher der Transponder wurde mit der ISO-Norm 14223 die Möglichkeit für elektronische Tierkennzeichnungssysteme eingeführt, ein TDMA-Antikollisionsverfahren zu verwenden, d.h. Transponder simultan erfassen zu können. Allerdings dürfen sich in diesem Fall nur weiterentwickelte Transponder im Ansprechbereich des Lesegerätes befinden, da das Abschalten aller anwesen-den Transponder eine Voraussetzung für das verwendete Antikollisionsverfahren ist (Hogewerf 2011a). Darüber hinaus ist die Datenübertragungsrate zu gering, um eine zuverlässige simultane Erfassung mehrerer Transponder unter dynamischen Bedingungen zu erreichen, d.h., wenn sie sich durch den Ansprechbereich des Le-segerätes bewegen (Hogewerf 2011b). Durch die geringere Datenübertragungsrate im Vergleich zu ISO-11785-Transpondern ist zudem der Gebrauch von ISO-14223-Transpondern generell weniger stark verbreitet (Hogewerf 2011b). 3.8.4 ISO 18000-6c Die RFID-Normenreihe ISO 18000 „Information technology - Radio frequency iden-tification for item management“ definiert die Luftschnittstelle von RFID-Systemen, d.h. den Datenaustausch zwischen Lesegerät und Transponder im Warenflussma-nagement. Die Reihe gliedert sich in sechs Teile, die verschiedene RFID-Frequenzen abdecken. Die ISO-Norm 18000-6 „Parameters for air interface com-munications at 860 MHz to 960 MHz” befasst sich mit der Luftschnittstelle im UHF-Frequenzbereich. Sie beschreibt drei Typen von Luftschnittstellen A, B und C. Typ C

Technische Grundlagen 31
entspricht dem „Class-1 Generation-2 UHF RFID“-Protokoll von EPCglobal Inc. (EPCC1G2), das 2006 mit unwesentlichen Veränderungen als Ergänzung in die ISO 18000-6 aufgenommen wurde (O’Connor 2006). Die Spezifikationen der ISO-Norm 18000-6 sind daher „unerlässlich für die Anwendung“ des Class-1 Generation-2 UHF RFID-Protokolls (Anonym 2008a). In beiden Spezifikationen wird ein identi-sches UHF-System beschrieben (Clasen 2006) bzw. zwei kompatible Systeme, die sich lediglich durch die Verwendung unterschiedlicher Datenelemente unterschei-den (Walk 2007). Die Betriebsfrequenz EPCC1G2-kompatibler UHF-RFID-Systeme liegt in Abhängig-keit der vor Ort für diese Anwendung freigegebenen Frequenzen im Frequenzband von 860-960 MHz (Anonym 2008a). Die Betriebsart des Systems entspricht einem sequentiellen Verfahren, ein Duplex-Verfahren ist ausgeschlossen. Die Bitrate be-trägt 26,7 bis 128 kbit/s; diese hängt von den vor Ort geltenden Funkregularien ab. Zur Vermeidung von Datenkollisionen mehrerer Transponder wird ein dynamisches Slotted-ALOHA-Verfahren (vgl. Kapitel 3.7), d.h. ein TDMA-Verfahren, verwendet.
Der Speicher eines EPCC1G2-Transponders ist in vier logisch getrennte Bereiche aufgeteilt: Ein optionaler Passwort-Speicher für ein Zugangspasswort und ein soge-nanntes „Kill-Passwort“, ein veränderbarer Speicher für einen Nutzercode, ein un-veränderbarer Speicher für den herstellerdefinierten Transpondercode und ein op-tionaler Speicher für eine nutzerspezifische Datenspeicherung. Die Länge des Zu-gangspasswortes und des Kill-Passwortes beträgt je 32 Bits, wobei die Belegung und die Verwendung dieser Passwörter optional sind. Durch die Anwendung des Kill-Passwortes kann der Transponder permanent unbrauchbar gemacht werden (Walk 2007). Ein Nutzercode muss auf dem Transponder vorhanden sein, jedoch ist seine Länge zwischen 16 und 496 Bits variabel. Der Transpondercode hat eine Länge von 64 Bits und ist nicht veränderbar. Der optionale Speicher erlaubt die Speicherung von nutzerspezifischen Anwendungsdaten. Er hat in den meisten An-wendungen einen Umfang von 512 Bits.

32

33
4 KENNTNISSTAND 4.1 Tierkennzeichnung Tiere wurden über Jahrhunderte hinweg nur gekennzeichnet, um die Zugehörigkeit zu ihrem Besitzer anzuzeigen. Vor über 100 Jahren begann man die Herkunft und Nachkommenschaft von Zuchttieren zur Führung sogenannter Herdbücher zu do-kumentieren. Für die Zucht war das Wissen um die Abstammung eines Zuchttieres und die Sicherheit darüber von großer Bedeutung. Dafür mussten bestimmte Zucht-tiere als solche identifiziert und in einem Herdbuch registriert werden können. In den 1950er Jahren begann man in einigen Ländern damit, Tiere aus veterinär-medizinischen Gründen für Tiergesundheitsprogramme zu kennzeichnen (Wismans 1999). In der Europäischen Gemeinschaft (EG) bzw. der Europäischen Union (EU) wurden seit dieser Zeit immer detailliertere Richtlinien und Verordnungen erlassen, die zunächst nur die Verbringung (Anonym 1964), später auch die Haltung, Kenn-zeichnung und Registrierung von Tieren betrafen. Hierfür wurden Gründe der vete-rinärmedizinischen Überwachung, Seuchenkontrolle und Rückverfolgbarkeit ange-führt. Anfang der 1990er Jahre wurde die erste Richtlinie zur Einführung einer Tier-kennzeichnung in der EG erlassen (Anonym 1990). Darüber hinaus sah Geers (1994) zu dieser Zeit die Notwendigkeit eines „effektiven Systems zur Identifizierung und Registrierung von Tieren“ in einem weiter zusammenwachsenden Binnenmarkt in Europa. Er führt folgende Gründe an: „Vermeidung von Betrug, Organisation künstlicher Besamungen, Kontrolle von Wohlergehen und Gesundheit der Tiere, öf-fentliche Gesundheitsüberwachung, Registrierung der Transporte von Tieren, Tier-kadavern und Schlachtabfällen, Quantifizierung der auf dem Markt gehandelten Mengen und die Entwicklung von geographischen Informationssystemen und zent-ralen Datenbanken.“ Er forderte eine Automatisierung der bestehenden visuellen Kennzeichnungssysteme (Geers 1994). Neben anderen stellte zu dieser Zeit Augsburg (1990) fest, dass es durch das Feh-len eines Kennzeichnungs- und Identifizierungssystems nahezu unmöglich sei, den Ursprung eines rückstandsbelasteten Tieres bzw. des Rückstandes selbst ausfindig zu machen. Ein solches System könne aber eine Rückverfolgung vereinfachen und beschleunigen. Es könne auch zukünftige Verstöße unterbinden und sicherstellen, dass sich keine weiteren belasteten oder erkrankten Tiere am Untersuchungsort befinden bzw. in Verkehr kommen. Dies erhöhe die Lebensmittelsicherheit und die Tiergesundheit. Die Ausbreitung von Tierseuchen könne rückverfolgt, überwacht und eingedämmt, der Seuchenursprung ausfindig gemacht und somit die allge-meine Tiergesundheit erhöht werden, was wiederum den Tierproduzenten zugute-komme. Die problematische und verzögerte Eindämmung verschiedener in den 1990er Jah-ren aufgetretener Tierseuchen und Lebensmittelskandale hatte in der Europäischen

34 Kenntnisstand
Union offenbart, dass die zu Beginn des Jahrzehnts erlassenen Richtlinien zur Kennzeichnung und Rückverfolgbarkeit von landwirtschaftlichen Nutztieren wie z.B. 90/425/EWG oder 92/102/EWG von den EU-Mitgliedsstaaten nur unzureichend um-gesetzt worden waren (Anonym 2007b). Daher sah sich die Europäische Union ge-zwungen für alle Mitgliedstaaten unmittelbare und verbindliche Rechtsnormen in Form von Verordnungen zur Kennzeichnung und Registrierung landwirtschaftlicher Nutztiere zu erlassen. Aktuelle Kennzeichnungsvorschriften erfassen daher, mit Ausnahme von Geflügel, alle landwirtschaftlichen Nutztiere in der Europäischen Union (Tabelle 2). Tabelle 2: Gesetzgebung der Europäischen Union zur Kennzeichnung landwirt-schaftlicher Nutztiere (verändert nach: Sprenger 2009)
Tierart Rechtsakt Bezug Kennzeichnungsart
Rinder VO (EG) Nr. 1760/2000 Individuum visuell,
elektronisch möglich
Schafe und Ziegen VO (EG) Nr. 21/2004 Herkunftsbetrieb,
Individuum1
visuell, elektronisch1
Schweine RL 2008/71/EG Herkunftsbetrieb visuell
Equiden VO (EG) Nr. 504/2008 Individuum elektronisch
1Zuchttiere, Tiere für den innergemeinschaftlichen Handel oder Ausfuhr in Drittländer
Zumindest für Rinder gibt es heute in vielen Ländern weltweit Kennzeichnungs- und Rückverfolgbarkeitssysteme (Schroeder & Tonsor 2012). Eine Ausnahme bilden die Vereinigten Staaten. Hier konnte bis heute kein nationales, rechtsverbindliches Sys-tem zu Kennzeichnung und Registrierung von landwirtschaftlichen Nutztieren durchgesetzt werden. Ein staatliches System mit freiwilliger Teilnahme, das „Natio-nal Animal Identification System“ (NAIS), bestand nur von 2004 bis 2010 (Schroeder & Tonsor 2012). Seit 2013 besteht ein Kennzeichnungssystem, das allerdings nur für Tiere gilt, die zwischen den Bundesstaaten gehandelt werden (Anonym 2014). Die Kennzeichnungssysteme wurden weltweit unter dem Eindruck von Erfahrungen mit Zoonosen, insbesondere der bovinen spongiformen Enzephalopathie (BSE) ein-geführt. Sie haben die direkte Beziehung zwischen Tierseuchenbekämpfung und Lebensmittelsicherheit aufgezeigt. Die Weltorganisation für Tiergesundheit sieht die Tierkennzeichnung daher nicht nur als Instrument für die Tierseuchenbekämpfung, sondern auch für die Sicherstellung der Lebensmittelsicherheit (Schroeder & Tonsor 2012). Folgerichtig wird beides von der Europäischen Kommission gleichrangig zur

Kenntnisstand 35
Begründung der obligatorischen Tierkennzeichnung herangezogen (Sprenger 2009). 4.2 Elektronische Tierkennzeichnung Neben der Bekämpfung von Tierseuchen und der Sicherstellung der Lebensmittel-sicherheit ist die Tierkennzeichnung auch für die Prozessautomatisierung in der Tierhaltung von Bedeutung. Visuelle Systeme wie nummerierte Ohrmarken oder Tätowierungen erlauben jedoch keine automatisierte Erfassung von Einzeltieren, die für eine effiziente Steuerung von Prozessen v.a. in großen Tierbeständen not-wendig ist. Elektronische Tierkennzeichnungssysteme mit Hilfe von RFID bieten da-gegen die Möglichkeit die Erfassung von Einzeltieren zu automatisieren und die er-fassten Daten gleichzeitig für verschiedene Prozesse bereitzustellen (Hartung 2010). Sie stellen insofern eine bedeutende Verbesserung im Vergleich zu visuellen Kennzeichnungssystemen dar, als sie ihre Aufgaben schneller und effizienter be-wältigen (Klindtworth 1998), Arbeitskosten (Artmann 1993) und Erfassungsfehler reduzieren (Eradus & Jansen 1999) und die Automatisierung verschiedener Pro-zesse wie z.B. Fütterung oder Tierüberwachung erlauben (Eradus & Jansen 1999). Der funktionale Bestandteil einer elektronischen Tierkennzeichnung ist der Trans-ponder. Die Möglichkeiten der Anbringung des Transponders am Tier sind von der Tierart und dem Anwendungsfall abhängig (Schwalm et al. 2009, Kern 2006, Hartung 2005): - Transponderohrmarke
Bei der Transponderohrmarke wird der Transponder in eine visuelle Ohrmarke integriert und ermöglicht dadurch sowohl eine visuelle und als auch eine elekt-ronische Kennzeichnung. Da das Verfahren der Kennzeichnung mit Ohrmarken in der Praxis allgemein bekannt ist, bei vielen Tierarten eingesetzt werden kann, einen geringen Aufwand bei der Applikation verursacht und sich für die überbe-triebliche Nutzung eignet, weist dieses Verfahren eine hohe Praktikabilität und Verbreitung auf.
- Transponderinjektat Ein Transponderinjektat besteht aus einem Transponder, der von einer Glas-kapsel von ca. 12 bis 34 mm Länge ummantelt ist. Es wird subkutan, intramus-kulär oder intraperitoneal injiziert. Nachteilig auf seine Verbreitung wirkt sich der Aufwand bei der Applikation und der Entnahme des Transponders im Schlacht-hof bei lebensmittelliefernden Tieren aus. Daher sind Transponderinjektate ent-gegen der ursprünglichen Annahme (Schön & Artmann 1993) nicht bei Nutztie-ren, sondern ausschließlich bei Heimtieren verbreitet.

36 Kenntnisstand
- Transponderhalsband Die Anbringung eines Transponders mit einem Halsband gehört zu den ersten Anwendungsfällen der elektronischen Tierkennzeichnung. Dadurch und durch seine einfache Anbringung hat das Transponderhalsband eine weite Verbrei-tung in der Milchviehhaltung gefunden. Bei Schweinen bestehen dagegen die Gefahr des Abstreifens und ein erhöhter Arbeitsaufwand, da bei nicht ausge-wachsenen Tieren die Weite des Bandes kontrolliert und nachgestellt werden muss (Schön & Artmann 1993). Außerdem kann ein Halsbandtransponder auf-grund hoher Kosten nicht überbetrieblich genutzt werden. Eine Abwandlung stellt das Fesselband dar, das bei Schafen und Ziegen, teilweise auch bei Milch-kühen, zum Einsatz kommt.
- Bolus Ein Bolus besteht aus einem Transponderinjektat, das in einen Keramikzylinder eingeschlossen ist. Zur Applikation wird der Schluckreflex von Tieren genutzt und der Bolus so über den Oesophagus im Netzmagen oder Pansen abgelegt, d.h., er kann nur bei Wiederkäuern eingesetzt werden.
Artmann (2000) sieht elektronische Kennzeichnungs- und Identifizierungssysteme als Schlüsseltechnologie zur Automatisierung von Prozessen: „Ihr Einsatz zielt auf eine qualitativ, wirtschaftlich und/oder ökologisch bessere Produktion, die dadurch erreicht wird, dass Vorgänge und Abläufe automatisierbar, gezielt beeinflussbar und nachvollziehbar werden. Sie schaffen auch die Voraussetzungen zur Erfassung und Zuordnung von produkt- bzw. tierbezogenen Messwerten und Maßnahmen ein-schließlich deren Dokumentation. Ein Nachweis der Produkteigenschaften wie auch der Herkunft sowie eine Verfolgung des Produktes über die gesamte Lebenszeit werden möglich. [...] Elektronische Systeme zur Identifikation gehen in ihrem An-wendungsbereich weit über den Einsatz zur Prozesssteuerung hinaus. Mit ihnen sind alle Aktionen in Betrieb, Handel und Verbänden sowie Versicherungen und Behörden automatisierbar.“ Elektronische Einzeltieridentifizierungssysteme sind daher auch die einzigen Identifizierungssysteme, die sich zur Prozesssteuerung in der Tierhaltung verbreitet haben (Artmann 1999). 4.3 Entwicklung der elektronischen Tierkennzeichnung Die Entwicklung der elektronischen Tierkennzeichnung für die Nutztierhaltung be-gann Ende der 1960er Jahre in Europa und in den Vereinigten Staaten. Die Her-dengrößen und die Haltungsverfahren veränderten sich hin zu größeren Tierbestän-den (Hooven 1978) und von der Einzelhaltung der Tiere hin zur Gruppenhaltung (Broadbent 1970). Diese Entwicklung führte dazu, dass z.B. Informationen über die individuelle Futteraufnahme eines Tieres nicht mehr vorhanden waren und daher auch nicht mehr der individuellen Leistung des Tieres gegenüber gestellt werden konnten (Street 1979, Broadbent 1970). Trotzdem sollte die Effizienz und die Pro-duktivität in der Nahrungsmittelproduktion gesteigert werden (Holm et al. 1976); das

Kenntnisstand 37
Management sollte verbessert und arbeitsextensiver gestaltet werden (Bridle 1976, Hensley et al. 1976). Es bestand der Bedarf nach einer technischen Möglichkeit, Tiere individuell kennzeichnen und automatisiert identifizieren zu können: „The dairyman can no longer depend on his memory to identify individual cows“ (Hooven 1978). Die Ansprüche an ein solches System zielten darauf ab, dass es das Tier dauerhaft und fälschungssicher kennzeichnet, ohne Batterien betrieben werden kann, aus einer gewissen Distanz und automatisiert lesbar ist, eine lange Lebens-dauer hat und zudem kostengünstig ist (Hooven 1978, Hanton 1976, Hensley et al. 1976). In Europa und den Vereinigten Staaten wurden mehrere technische Möglich-keiten für die Umsetzung einer solchen Kennzeichnung in Betracht gezogen, wie z.B. Kälte- und Laserbrand, magnetische Ohrmarken, farbkodierte Ohrmarken oder Halsbänder, Mustererkennung, videogestützte Erfassung von codierten, am Tier-kopf angebrachten Karten, elektroakustische Antwortsender, Implantate mit stabilen oder radioaktiven Isotopen, photovoltaisch oder batteriebetriebene Funksender (Holm et al. 1976, Turner et al. 1976). Es setzten sich Systeme durch, die auf der Verwendung magnetischer oder elektromagnetischer Felder beruhen, d.h. RFID-Systeme. Schon Ende der 1970er Jahre wurde rückblickend festgestellt, dass die auf elektromagnetischen Feldern beruhenden Systeme den optischen oder akusti-schen Systemen hinsichtlich Praktikabilität und Kosten überlegen waren (Street 1979). Der Grund dafür war, dass, nachdem schon bis in die 1940er Jahre die the-oretischen Grundlagen für die Anwendung von RFID gelegt worden waren (Hansell 1947, Hülsmeyer 1904), innerhalb der drei Jahrzehnte danach die wesentlichen elektronischen Bauelemente von RFID-Systemen wie Transistoren, integrierte Schaltkreise, CMOS-Logik und Mikroprozessoren verfügbar waren (Landt 2005, Street 1979). Am North of Scotland College of Agriculture und an der Universität Aberdeen wurde Ende der 1960er Jahre eine Einzeltierfütterung entwickelt, die von einem „electronic key“ (Broadbent 1970) gesteuert wurde. Der „electronic key“ war ein auf eine be-stimmte Frequenz zwischen 20 kHz und 100 kHz abgestimmter, mit einem Trage-gurt am Tier angebrachter Schaltkreis („tuned circuit“). Kam dieser Schaltkreis in die Nähe eines weiteren, als Resonanzfrequenzmesser fungierenden Schaltkreises („transmitter“) und bestand zwischen beiden Frequenzübereinstimmung, dann wurde dem „transmitter“ Energie entzogen. Dadurch öffnete sich für das Tier der Zugang zu einem durch den Transmitter verschlossenen Futtertrog (Simpson 1968). Dieses System konnte sechs Einzeltieridentitäten bzw. sechs Futtertröge un-terscheiden. Am National Institute of Agricultural Engineering (NIAE) in Silsoe, Großbritannien wurde Anfang der 1970er Jahre ein System entwickelt, bei dem ein „transponder“ mit einem Halsband an Rindern angebracht wurde (Bridle 1976). Der Transponder besaß zwei Antennenspulen, die jeweils auf einer von 20 Frequenzen zwischen 16 kHz und 73 kHz abgestimmt waren. Eine weitere Antennenspule in einem Treib-gang konnte den Transponder induktiv aktivieren, indem sie nacheinander auf allen

38 Kenntnisstand
20 Frequenzen sendete. Ein aktivierter Transponder sendete ein Signal mit 26,995 MHz zurück. Mit diesem System konnten bereits 190 Einzeltieridentitäten unterschieden werden. Zur gleichen Zeit wurden in Deutschland und in den Niederlanden passive, induktive Systeme entwickelt (Rossing 1976, 1999, Artmann 1976, Ploegaert 1976). Das vom Institut für Betriebstechnik der FAL in Braunschweig-Völkenrode entwickelte Sys-tem antwortete auf einer Frequenz von 27,155 MHz und konnte 255 Einzeltieriden-titäten unterscheiden (Artmann 1976). Das System des niederländischen Instituts für Agrartechnik (IMAG) und des niederländischen Technische en Fysische Dienst Landbouw (TFDL) konnte 256 Einzeltieridentitäten unterscheiden (Rossing 1976, 1999, Ploegaert 1976). Beide Systeme wurden für die Einzeltierfütterung von Milch-kühen in Laufställen entwickelt. Die sogenannten „transmitter“ waren mit Halsbän-dern an den Tieren angebracht. Arbeiten am Los Alamos Scientific Laboratory der Universität von Kalifornien führten Mitte der 1970er Jahre zu einem passiven System, bei dem ein subdermal als In-jektat angebrachter „transponder“ mit einer Frequenz von 915 MHz aktiviert werden konnte. Der Transponder antwortete durch Änderung seiner Reflexionseigenschaf-ten und sendete die Körpertemperatur des Tieres und seine Identifizierungsnummer auf den Hilfsträgerfrequenzen 10 kHz und 20 kHz zurück (Hensley et al. 1976, Koelle et al. 1975). Dieses System sollte die Erfassung von Weidetieren und deren Körpertemperatur aus einer Distanz von bis zu 3 m ermöglichen (Holm 1981). Mitte der 1970er Jahre war sowohl in Europa als auch in Nordamerika die Entwick-lung elektronischer Systeme zur Kennzeichnung von Tieren so weit vorangeschrit-ten, dass sie Gegenstand zweier internationaler Tagungen wurde (Saskatoon 1974 und Wageningen 1976). Zu dieser Zeit hatten sich zwei regional unterschiedliche Entwicklungsschwerpunkte gebildet: Die in Nordamerika entwickelten Systeme be-ruhten auf einer elektromagnetischen Kopplung zwischen Transponder und Lese-gerät, die in Europa entwickelten Systeme auf einer magnetischen, d.h. auf der in-duktiven Kopplung (Street 1979, Hooven 1978, Bridle 1976, Koelle et al. 1975). Diese beiden Ansätze beruhten letztendlich auf zwei unterschiedlichen Anwen-dungsfällen: In Europa sollten durch die Entwicklung elektronischer Kennzeich-nungssysteme Tiere in stallgebundenen Haltungssystemen, d.h. über kurze Entfer-nungen zwischen Tier und Lesegerät, identifiziert werden können. In Nordamerika stand der Wunsch nach einer automatisierten Kennzeichnung und Identifizierung von Weidetieren im Vordergrund. Daher wurden Systeme mit elektromagnetischer Kopplung unter Verwendung hoher Frequenzen bevorzugt, um hohe Reichweiten der Systeme zu erreichen. Das nordamerikanische System gelangte aber nicht bis zur Praxisreife (Rossing 1999), obwohl dessen Entwicklung von Vertretern der US-amerikanischen Tierhalterverbände begleitet worden war (Holm 1981). In Europa dagegen bestand weiterhin großes Interesse an der elektronischen Tierkennzeich-

Kenntnisstand 39
nung (Landt 2005). Die Verfügbarkeit von elektronischen Bauelementen mit gerin-gerer Leistungsaufnahme, geringerer Baugröße, breiterem Leistungsspektrum und höherer Leistungsfähigkeit eröffnete neue Möglichkeiten für deren Weiterentwick-lung. Mit einem vom NIAE zwischen 1976 und 1977 konzipierten System konnten durch Verwendung eines 24 bit-Schieberegisters auf dem Transponder und puls-codemodulierter Datenübertragung bereits bis zu 65356 Einzeltieridentitäten unter-schieden werden (Street 1979). Diese Entwicklung in der elektronischen Tierkennzeichnung wurde von der Industrie aufgegriffen und fortgeführt, sodass Ende der 1970er Jahre kommerzielle Tierer-kennungssysteme für die Milchviehhaltung erhältlich waren (Buck et al. 1987, Street 1979). In der Folge wurde eine Automatisierung von Arbeitsprozessen in der Milch-viehhaltung möglich, da neben Tiererkennungssystemen zwischenzeitlich auch leis-tungsfähige und preisgünstige Mikroprozessoren zur Verfügung standen. Diese wa-ren in der Lage, Teilprozesse autonom zu steuern und mit einem Zentralrechner zu kommunizieren. Außerdem war die Automatisierung einzelner Arbeitsschritte wie Kraftfutterzuteilung, Milchmengenmessung (Rossing 1974) oder Wiegen (Filby et al. 1979) schon so weit vorangeschritten, dass eine Verknüpfung und ein automati-sierter Betrieb von Teilprozessen, der über zentral vorgehaltene Daten zum Einzel-tier wie z.B. dessen Milchleistung gesteuert wurde, möglich war. Anfang der 1980er Jahre waren solche prozessgesteuerten Haltungssysteme sowohl in der wissen-schaftlichen Forschung (Laycock & Street 1984) als auch im praktischen Einsatz anzutreffen (Artmann 1984). Bis zum Ende des Jahrzehnts gehörte die tierindividu-elle Zuteilung von Kraftfutter über Abrufstationen mittels elektronischer Tiererken-nung in Abhängigkeit von einer tierindividuellen Milchmengenmessung bereits zum Standard in der Milchviehhaltung (Wendl 1998, Fritzsche 1991, Deininger et al. 1985). In der Schweinehaltung begann die elektronische Tierkennzeichnung zu dieser Zeit erst Eingang zu finden. Obwohl am Anfang ihrer Entwicklung auch eine Anwendung bei Schweinen in Betracht gezogen worden war (Broadbent 1967), dauerte es noch fast zwei Jahrzehnte, bis elektronische Tierkennzeichnungssysteme auch bei Schweinen eingesetzt wurden. Es fehlten u.a. geeignete Möglichkeiten, die anfangs noch verhältnismäßig großen Transponder am Tier anzubringen. Aus der Anwen-dung bei Rindern waren Halsband, Schultergurt, Bolus oder Injektat als Anbrin-gungsmöglichkeiten bekannt (Hooven 1978). Halsband bzw. Schultergurt schieden aber bei Schweinen aus ethologischen und ökonomischen Gründen sowie aufgrund des Wachstums der Tiere aus. Boli waren aus anatomischen Gründen ebenso un-geeignet wie Injektate, die zu dieser Zeit noch eine Länge von bis zu 10 cm aufwie-sen. Dagegen war schon früh, d.h. um 1970, eine Anbringung am Ohr von Schwei-nen vorgeschlagen worden (Broadbent 1970). Allerdings verhinderte zunächst eine fehlende Miniaturisierung wesentlicher Elektronikkomponenten die Entwicklung elektronischer Ohrmarken. Darauf konnten die Hersteller elektronischer Tierkenn-zeichnungssysteme erst Anfang der 1980er Jahre zurückgreifen.

40 Kenntnisstand
Sie waren zu dieser Zeit bemüht, die Anwendbarkeit ihrer meist für die Milchvieh-haltung entwickelten Systeme auf andere Tierarten und Tiergrößen auszuweiten (Artmann 1984). Diese Entwicklung von elektronischen Ohrmarken ging mit der Ent-wicklung der ersten Abruffütterungen für Schweine einher (Sherwin 1990, Slader & Gregory 1988). Hier sollten Erfahrungen, die bei Kraftfutterabrufstationen in der Milchviehhaltung gemacht worden waren, auf die Schweinehaltung übertragen wer-den (Kingston 1989, Edwards 1988). Schon Mitte der 1980er Jahre waren erste Abruffütterungen für in Gruppen gehaltene Wartesauen mit elektronischer Tierkenn-zeichnung in wissenschaftlichen Forschungseinrichtungen und in der Praxis anzu-treffen (Kingston 1989, Edwards 1988, Slader & Gregory 1988, Beckett et al. 1986, Edwards & Riley 1986, Zähres 1986). Mit der Etablierung einfacher prozessgesteuerter Haltungssysteme, die eine elekt-ronische Tierkennzeichnung mit der Automatisierung von Teilprozessen wie z.B. der Fütterung verknüpften, stiegen in den 1980er Jahren auch die Ansprüche an die Komplexität solcher Systeme. Sie sollten nicht nur Teilprozesse der Arbeitsroutine steuern, sondern in einem ganzheitlichen Ansatz zu Herdenmanagementsystemen ausgebaut werden. Der Tierhalter sollte nicht mehr nur in einzelnen Arbeitsprozes-sen entlasten werden, sondern sein Herdenmanagement sollte durch ein einzeltier-basiertes Gesundheits-, Verhaltens- und Leistungsmonitoring der Herde und darauf aufbauende Entscheidungsunterstützungsprozesse verbessert werden. Neben deutlich leistungsfähigerer Software waren dazu Sensoren notwendig, die eine Da-tengrundlage für ein solches System einzeltierspezifisch erheben konnten (Spahr 1993, Doluschitz 1990). Daher waren insbesondere die Verknüpfung der elektroni-schen Tierkennzeichnung mit dem Einsatz geeigneter Sensoren sowie Infrastruktu-ren für die Haltung, Verarbeitung und Interpretation der erhobenen Einzeltierdaten Gegenstand von Forschung und Entwicklung (Blair et al. 1994, Geers 1994, Lescourret et al. 1993, Spahr 1993, Goedseels et al. 1992). Die Überzeugung, der diese Entwicklung folgte, wurde wie folgt beschrieben: „The farmer will get more profit from an identification and monitoring system than from identification only“ (Geers et al. 1997). Beispiele dafür sind Vorhaben eine automatische Östruserken-nung bei Milchkühen durch die Messung der Aktivität des Tieres, der elektrischen Leitfähigkeit der Milch oder der Milchtemperatur zu erreichen bzw. bei Sauen durch Körpertemperaturmessung oder Überwachung der Anzahl und Dauer des Eberkon-taktes (Blair et al. 1994, Goedseels et al. 1992, Schlünsen et al. 1987). In dieser Zeit gelang mit der elektronischen Tierkennzeichnung auch der wohl wichtigste Schritt in der Automatisierung der Milchviehhaltung: die vollständige Automatisie-rung des Melkens durch automatische Melksysteme. Die Identifizierung des Einzel-tieres bildet die Grundlage für das Ablaufen der Entscheidungsalgorithmen, die an-hand von gespeicherten Daten des erfassten Tieres festlegen, ob das Melksystem aktiviert wird oder das Tier nicht gemolken wird (Schön & Auernhammer 1999, Schön & Artmann 1993).
Kenntnisstand 41
Durch die zunehmende Verbreitung und Anwendung der elektronischen Tierkenn-zeichnung war Anfang der 1990er Jahre eine Vielzahl unterschiedlicher, inkompa-tibler Systeme auf dem Markt erhältlich. Dadurch war die Anwendung eines Sys-tems nur in einem klar abgegrenzten Umfeld möglich (Kampers et al. 1999). Ein Austausch von gekennzeichneten Tieren oder Lesegeräten konnte, wenn über-haupt, nur zwischen Betrieben stattfinden, die ein Kennzeichnungssystem dessel-ben Herstellers verwendeten. Um eine überbetriebliche Nutzung z.B. zur Rückver-folgbarkeit im Seuchenfall zu ermöglichen, wurde 1991 von der Internationalen Or-ganisation für Normung eine Arbeitsgruppe zur Standardisierung der elektronischen Tierkennzeichnung eingesetzt (Kampers et al. 1999). Es wurden infolge dessen zwei Normen zur Tierkennzeichnung mit RFID erarbeitet und diese 19943 bzw. 1996 veröffentlicht: Die Norm ISO 11784, die die Datenstruktur des auf dem Transponder gespeicherten individuellen Tiercodes definierte, und die Norm ISO 11785, die das technische Konzept des Datenaustausches zwischen Transponder und Lesegerät festlegte (siehe Kapitel 3.8.2). Das Vorliegen eines einheitlichen Systems zur elekt-ronischen Tierkennzeichnung führte dazu, dass ein ursprüngliches Motiv seiner Ent-wicklung wieder aufgegriffen werden konnte: die Seuchenkontrolle. Vor dem Hintergrund des Ausbruchs verschiedener Tierseuchen in den 1990er Jah-ren untersuchte die Europäische Union daher von 1998 bis 2001 die Eignung elekt-ronischer Tierkennzeichnungssysteme, die den genannten ISO-Normen entspra-chen, für die offizielle Tierkennzeichnung. Positive Ergebnisse dieses europaweit angelegten Großversuches führten 2004 zur Einführung einer obligatorischen elekt-ronischen Kennzeichnung von Schafen und Ziegen ab 2008 (Anonym 2004). Die Einführung einer elektronischen Tierkennzeichnung bei Einhufern folgte 2009 (Anonym 2008b). Andere, außereuropäische Staaten wie Australien (2004), Ka-nada (2001/2006), Namibia (2009), Uruguay (2011) und Neuseeland (2012) führten ebenfalls eine obligatorische elektronische Kennzeichnung für bestimmte Tierarten, meist Wiederkäuer, ein (Hansen 2011). Für Schweine wurde bisher keine obligato-rische elektronische Kennzeichnung eingeführt, nur in Argentinien stellt sie seit 2009 eine Möglichkeit zur amtlichen Tierkennzeichnung dar (Vossenaar 2009). Heute ist die elektronische Tierkennzeichnung in der Milchviehhaltung fest etabliert. Auch in der Schweinehaltung verbreitet sie sich durch die steigende Anzahl von Abruffütterungen in der Sauenhaltung. Die Weiterentwicklung von Herdenmanage-ment- und Monitoringsystemen hält bis heute an (Junge et al. 2014, Hessel & Van den Weghe 2011, Ruiz-Garcia & Lunadei 2011, Wendl 1998) und mündete im Pre-cision Livestock Farming-Konzept.
3 Die ISO-Norm 11784 wurde ursprünglich 1994 veröffentlicht, erfuhr aber 1996 eine Änderung, auf der die aktuell gültige Norm basiert (Kampers et al. 1999)

42 Kenntnisstand
4.4 Precision Livestock Farming Precision Livestock Farming (PLF) bedeutet die „elektronische Erfassung, Aufberei-tung sowie Bereitstellung der entscheidungsrelevanten Daten, die zur Optimierung von Prozesssteuerungen und zum Einbinden in Datenaustauschprogrammen die-nen“ (Hartung 2005). Voraussetzung hierfür ist eine „einzeltierbezogene Datener-fassung, Tierüberwachung, Fütterung und Herdenführung“ (Schön et al. 2003), d.h. die elektronische Tierkennzeichnung mit Hilfe von RFID, die Schlüsseltechnologie des PLF-Ansatzes (vgl. Hartung 2005, Artmann 2000, Schön 2000, Jungbluth 1999). Zur Veranschaulichung vergleicht Hartung (Hartung 2005) Precision Live-stock Farming mit Precision Farming im Pflanzenbau (Abbildung 8): Bei beiden An-sätzen besteht die Notwendigkeit einer differenzierten Erfassung von Produktions- und Umweltdaten. Diese Erfassung erfolgt bei Precision Farming im Pflanzenbau mit Hilfe einer Satellitenortung bezogen auf Teilflächen, nicht auf die Gesamtfläche. Analog erfolgt die Erfassung bei Precision Livestock Farming mit Hilfe einer elekt-ronischen Tieridentifizierung nicht für die ganze Herde, sondern für das Einzeltier.
Abbildung 8: Vergleich von Precision Farming und Precision Livestock Farming (verändert nach: Hartung 2005) Der Ansatz von Precision Agriculture in seinen beiden Ausprägungen in den Berei-chen Pflanzenbau und Tierhaltung zielt auf eine optimierte, d.h. präzise Steuerung der Produktionsprozesse und betrachtet daher die kleinsten Produktionseinheiten. Bei Precision Farming im Pflanzenbau muss diese Größe als Teilfläche der Ge-samtfläche eines Schlages vorab definiert werden. Bei Precision Livestock Farming ist diese kleinste Produktionseinheit durch das Einzeltier im Gesamtbestand gege-ben. Das einzelne Tier ist daher die Betrachtungseinheit, auf welche die Optimie-rung der Prozesssteuerung in der Tierhaltung durch den PLF-Ansatz aufbaut. Dies steht im Gegensatz zu der bisherigen Betrachtung von ganzen Herden, Leistungs-gruppen oder Abteilen. Denn dem PLF-Ansatz liegt die Erkenntnis zugrunde, dass „Tiere, wie alle lebenden Organismen, komplex sind, sich individuell unterscheiden
Kenntnisstand 43
und im Lauf der Zeit unterschiedliches Verhalten zeigen“, d.h. als „CIT-Systeme (complex, individual, time-variant)“ zu betrachten sind (Berckmans 2004). Eine auf das Einzeltier bezogene Tierhaltung dient daher nicht nur ökonomischen, sondern auch gesellschaftlichen Zielen im Sinne von Tierwohl, Lebensmittelsicher-heit, Rückverfolgbarkeit und nachhaltiger Landwirtschaft. Mit PLF können in Tier-haltungssystemen Daten über das einzelne Tier und/oder seine Haltungsumgebung aus laufenden Prozessen elektronisch erfasst und diese Daten wiederum zur Steu-erung und Überwachung der Prozesse, des Tierwohls und des Ressourcenver-brauchs innerhalb des Haltungssystems verwendet werden. Der PLF-Ansatz bietet daher die Möglichkeit, insbesondere in großen Tierbeständen, eine „automatische Überwachung und Erhöhung der Tiergesundheit, des Tierwohls und der Qualitäts-sicherung entlang der gesamten Lebensmittelkette sowie eine Verbesserung der Risikoabschätzung und des Risikomanagements“ (Berckmans 2008) zu erreichen. 4.5 Stand der elektronischen Tierkennzeichnung bei Schweinen Als Konsequenz aus ihrer Schlüsselposition für die Tierseuchenbekämpfung, die Lebensmittelsicherheit und den Precision Livestock Farming-Ansatz erfährt die elektronische Tierkennzeichnung beständiges Forschungsinteresse zu Einsatz-möglichkeiten, Leistungsfähigkeit und Weiterentwicklungen. Ein wichtiger Meilenstein für den Einsatz elektronischer Tierkennzeichnungssys-teme war das Projet Identification Électronique des Animaux (IDEA-Projekt). In die-sem Projekt wurden von 1998 bis 2001 in sechs Ländern der Europäischen Union fast eine Million Nutztiere der Arten Rind, Schaf und Ziege elektronisch gekenn-zeichnet, um so die Leistungsfähigkeit von Systemen zur elektronischen Einzeltier-kennzeichnung nach den ISO-Normen 11784 und 11785 zu überprüfen. Die Ergeb-nisse des IDEA-Projektes zeigten, „dass eine elektronische Kennzeichnung mit [...] elektronischen Ohrmarken eine effiziente und zuverlässige Methode zur Nutztierer-fassung darstellt“ (Ribó et al. 2001). Durch das Projekt wurde „erwiesen, dass die Technologie [d.h. die elektronische Tierkennzeichnung] weit genug entwickelt ist, um [für die amtliche Kennzeichnung] eingesetzt zu werden“ (Anonym 2005). Letzt-endlich führte dieses Ergebnis zur obligatorischen Einführung einer elektronischen Kennzeichnung bei Schafen und Ziegen (Anonym 2002) und einer optionalen elekt-ronischen Kennzeichnung bei Rindern (Anonym 2005) in der Europäischen Union. Die Ergebnisse des IDEA-Projektes können nicht ohne Weiteres auf Schweine übertragen werden, da sich diese anatomisch und ethologisch von den untersuch-ten Tierarten Rind, Schaf und Ziege unterscheiden. Jedoch liegen auch zur elektro-nischen Kennzeichnung von Schweinen umfangreiche Untersuchungen und Pra-xiserfahrungen vor.
44 Kenntnisstand
In einer Untersuchung auf einem Versuchsbetrieb verglich Stärk et al. (1998) den Einsatz einer visuellen Ohrmarke und einer Transponderohrmarke bei Mastschwei-nen und Sauen. Bei den Mastschweinen wurden außerdem zwei Transponderinjek-tate (11,5 mm und 23 mm) im Ohrgrund appliziert. Während zweier Versuchsdurch-gänge über jeweils eine Mastperiode wurden bei den Mastschweinen keine Verluste der eingesetzten Transponderohrmarken festgestellt (0,0 %). Alle applizierten Transponderohrmarken konnten jederzeit unmittelbar und korrekt erfasst werden. Das 11,5 mm-Transponderinjektat wurde nur in einem Versuchsdurchgang einge-setzt und zeigte dort keinen Verluste (0,0 %). Beim 23 mm-Transponderinjektat wur-den in den beiden Versuchsdurchgängen Verluste von 15,8 % und 20,8 % beobach-tet. Die Verluste der visuellen Ohrmarken lagen in zwei Versuchsdurchgängen bei 0 % und 3,9 %. Bei Zuchtsauen gingen in einem Zeitraum von knapp einem Jahr 1,6 % der Transponderohrmarken verloren, 0,4 % wiesen bereits nach kurzer Zeit einen technischen Defekt auf, alle anderen Transponderohrmarken waren jederzeit korrekt erfassbar. Als Schlussfolgerung wurden Transponderohrmarken gegenüber den Transponderinjektaten präferiert, da sie einfacher zu handhaben sind und die Möglichkeit bieten, auch nicht-elektronische Informationen tragen zu können. Caja et al. (2005) untersuchten die Verwendung einer visuellen Ohrmarke, zwei Transponderohrmarken und fünf Transponderinjektaten (12 mm, 12 mm, 23 mm, 32 mm und 34 mm, Applikation intraperitoneal oder in den Ohrgrund) in der Mast-schweinehaltung eines Praxisbetriebes mit geschlossenem Produktionssystem. Die visuellen Ohrmarken wiesen während einer Mastperiode Verluste von 1,1 % auf. Bei den beiden Transponderohrmarken waren die Verluste höher (8,8 % und 44,9 %). Dies wurde allgemein mit einem höheren Gewicht der Transponderohrmar-ken erklärt, die auffallend hohe Verlustquote von 44,9 % im Speziellen mit der Ver-wendung eines ungeeigneten Kunststoffes bei der Fertigung der betreffenden Transponderohrmarke Die technischen Defekte lagen bei 5,5 % und 55,1 %. Dadurch waren am Ende der Mastperiode 0 % bzw. 85,7 % der Transponderohr-marken mit einem mobilen Handlesegerät erfassbar, d.h. 0 % bzw. 85,7 % der ge-kennzeichneten Tiere identifizierbar (Identifizierbarkeitsquote). Die intraperitoneal applizierten Transponderinjektate zeigten Verluste von 0 bis 2,0 %. Es zeigte sich kein Einfluss der Größe des Injektats. Bei keinem der Transponderinjektate wurde ein Defekt festgestellt, sodass sich Identifizierbarkeitsquoten von 98,0 bis 100 % ergaben. Bei den im Ohrgrund applizierten Transponderinjektaten wurden dagegen Verluste von 17,1 bis 72,5 %, Defekte von 0,0 bis 5,0 % und Identifizierbarkeitsquo-ten von 22,5 bis 80,6 % beobachtet. Bei den Verlusten zeigte sich, dass größere Injektate höhere Verlustquoten aufwiesen. Die Verwendung von intraperitoneal ap-plizierten Transponderinjektaten mittlerer Größe erwies sich in dieser Untersuchung als am zuverlässigsten und erfüllte gleichzeitig die Anforderungen an eine dauer-hafte und eindeutige Kennzeichnung.
Kenntnisstand 45
In einer weiteren Untersuchung verwendeten Babot et al. (2006) zwei visuelle Ohr-marken, zwei Transponderohrmarken und zwei intraperitoneal applizierte Trans-ponderinjektate (32 mm und 34 mm) um ihren Einsatz in der Mastschweinehaltung zweier Praxisbetriebe im geschlossenen System zu ermitteln. Die visuellen Ohrmar-ken zeigten Verluste von 0 % und 1,2 %. Die Verluste der beiden Transponderohr-marken unterschieden sich nicht voneinander (1,9 % und 2,7 %). Die Transponde-rohrmarken unterschieden sich aber hinsichtlich der technischen Defekte mit 0,6 % und 2,2 %. Auch hier wurde wie bei Caja et al. (2005) auf die Verwendung eines ungeeigneten Kunststoffes bei der Fertigung hingewiesen, da die meisten defekten Transponderohrmarken Verbissschäden und Abrieb zeigten. Die Identifizierbarkeit der Transponderohrmarken (95,9 % und 96,7 %) und der Transponderinjektate (98,3 % und 98,1 %) mit mobilen Handlesegeräten unterschied sich nicht. Die Ver-luste der Transponderinjektate lagen bei 1,7 % und 1,9 % und unterschieden sich nicht von den visuellen Ohrmarken und den Transponderohrmarken. Gosálvez et al. (2007) verglichen die Anwendung visueller und elektronischer Kenn-zeichnungsmöglichkeiten (Tätowierung, visuelle Ohrmarke; zwei Transponderohr-marken, zwei intraperitoneal applizierte Transponderinjektate) in der extensiven Schweinefleischerzeugung (Weidehaltung in Spanien) anhand zweier Praxisbe-triebe (A und B). Die Tätowierung erwies sich als ungeeignet, da sie durch die dunkle Haut der Schweine und wachstumsbedingte Verzerrungen schwierig zu er-fassen war. Die Verluste der visuellen Ohrmarken (A: 0 % und B: 28,1 %) und der zwei Transponderohrmarken (A: 0 % und B: 26,3 % bzw. A: 3,9 % und B: 19,8 %) unterschieden sich untereinander nicht, jedoch in Abhängigkeit von den Betrieben A und B, die eine unterschiedliche Einzäunung der Weide verwendeten. Bei den technischen Defekten unterschieden sich die zwei Transponderohrmarken (A: 16,9 % und B: 24,2 % bzw. A: 5,1 % und B: 2,0 %) in Abhängigkeit von der Betriebs-art. Für die Transponderinjektate, die nur auf Betrieb B eingesetzt worden waren, wurde die gleiche Beobachtung gemacht (8,0 % bzw. 31,3 %). Die Identifizierbarkeit wurde am Ende der Mastperiode mit Handlesegeräten ermittelt und zeigte bei den Transponderohrmarken (A: 83,1 % und B: 49,5 % bzw. A: 91,0 % und B: 78,2 %) einen Einfluss der Betriebsart und des Betriebs/der Einzäunung, bei den Transpon-derinjektaten (92,0 % bzw. 68,7 %) ein Einfluss der Betriebsart. Ebenfalls auf zwei Praxisbetrieben verglichen Schembri et al. (2007) die Anwen-dung einer Tätowierung, einer visuellen Ohrmarke und zweier Transponderohrmar-ken bei Mastschweinen. Bei den Betrieben handelte es sich zum einen um ein ge-schlossenes System (A) mit Mast in Kleingruppen (je 30 Tiere) auf teilperforierten Böden und zum anderen um einen Mastbetrieb (B) mit Großgruppen auf Tiefstreu (Anfangs- und Mittelmast) und vollperforierten Böden (Endmast). Fehler bei der Identifizierung durch Ablesen traten bei der Tätowierung am Mastende deutlich häu-figer auf (A: 60,0 % und B: 78,2 %) als bei der visuellen Ohrmarke (A: 5,6 % und B: 7,4 %) und den Transponderohrmarken (A: 14,2 % und B: 8,8 % bzw. A: 1,8 % und 7,1 %), da die Tätowiertinte verblasst war. Die Verluste der visuellen Ohrmarken

46 Kenntnisstand
waren in Betrieb A höher (29,0 %) als in Betrieb B (4,9 %). Bei den Transponde-rohrmarken war kein Einfluss des Haltungssystems zu beobachten, allerdings un-terschieden sich die beiden Transponderohrmarken untereinander (A: 0 % und B: 5,9 % bzw. A: 18,0 % und B: 20,2 %). Anlehnend an Caja et al. (2005) und Babot et al. (2006) wird auf ein unterschiedliches Gewicht der Transponderohrmarken und eine ungeeignete Formgebung hingewiesen. Auch Sherwin (1990) beobachtete bei Jungsauen einen Einfluss des Gewichts und der Gestaltung von Transponderohr-marken auf deren Attraktivität für das Bekauen durch andere Tiere. Dadurch können Ohrmarkenverluste erklärt werden. Die meisten Verluste traten bei Schembri et al. (2007) wie bei Caja et al. (2005) gegen Ende der Mastperiode auf. Die technischen Defekte der beiden Transponderohrmarken lagen bei 0 % (Betrieb A und B) bzw. 11,7 % (Betrieb A) und 6,0 % (Betrieb B). Das Haltungssystem hatte keinen Einfluss auf die Identifizierbarkeit der Transponderohrmarken am Ende der Mastperiode, al-lerdings unterschieden sich die Transponderohrmarken untereinander (A: 100 % und B: 96,5 % bzw. A: 70,3 % und B: 73,8 %). Bei den bisher dargestellten Untersuchungen (Gosálvez et al. 2007, Schembri et al. 2007, Babot et al. 2006, Caja et al. 2005, Stärk et al. 1998) wurde die Funktionsfä-higkeit der Transponderohrmarken und -injektate festgestellt, indem die Tiere fixiert wurden und ein mobiles Handlesegerät in einem definierten Abstand zum Kenn-zeichnungsmediums aktiviert wurde. Aus diesen auf diese Art und Weise ermittelten Defekten und den festgestellten Verlusten der Kennzeichnungsmedien wurde eine Identifizierbarkeitsquote abgeleitet. Sie stellt einen Quotienten aus der Anzahl der am Ende des Versuchszeitraums theoretisch identifizierbaren Tiere (d.h. mit vor-handenen und funktionstüchtigen Transpondern) und der Anzahl der zu Beginn ge-kennzeichneten Tiere dar. Klindtworth et al. (2004) ermittelten dagegen eine Identi-fizierungsquote. Im Unterschied zur Identifizierbarkeitsquote wurde die Anzahl iden-tifizierter Tiere zu einem bestimmten Zeitpunkt konkret ermittelt. Die Identifizierung war von einem sich verändernden, individuell gewählten Abstand eines Tieres zu einem stationären Lesegerät abhängig. Die Tiere waren dabei im Gegensatz zu den o.g. Untersuchungen nicht fixiert, sondern befanden sich bei der Identifizierung zur Gewichtsermittlung auf einer Waage. Es wurden drei Transponderinjektate (12,0 mm x 2,1 mm, 23,0 mm x 3,0 mm und 23,0 mm x 3,8 mm) und drei Applikati-onsorte (Ohrgrund, Ohrlappen, intraperitoneal) bei Mastschweinen auf einem Ver-suchsbetrieb untersucht. Die Identifizierungsquote nahm mit steigender Größe des Transponderinjektats zu, da sich deren Reichweite vergrößerte (0,0 % bis 72,7 %, 93,1 bis 100 % und 100 %). Die Verluste waren abhängig von der Größe und dem Applikationsort der Transponderinjektate. Im Ohrgrund nahmen die Verluste mit steigender Größe des Injektats zu (1,9 %, 4,1 % und 5,8 %). 50,0 % der im Ohrlap-pen applizierten Transponderinjektate aller Größen gingen verloren. Von den intra-peritoneal applizierten Transponderinjektaten gingen nur 2,0 % des größten Trans-ponderinjektats verloren, bei den anderen beiden lagen die Verluste bei 0 %. Die Verwendung des intraperitoneal applizierten 23 mm x 3,8 mm-Transponderinjektats wurde präferiert, da es geringe Verluste und sehr hohe Identifizierungsquoten

Kenntnisstand 47
zeigte. Allerdings wurde auf das Risiko des Transponderverbleibs in der Nahrungs-mittelkette hingewiesen. In einer eigenen unveröffentlichten Untersuchung auf einem Versuchsbetrieb (Stekeler 2007) wurde die Identifizierungsquote ebenfalls auf einer Waage mit ei-nem stationären Lesegerät, allerdings mit sich an dem Lesegerät vorbeibewegen-den Mastschweinen ermittelt. Die Tiere waren mit einer Transponderohrmarke ge-kennzeichnet. Die Identifizierungsquoten lagen zwischen 79,3 % und 100 %. Die Verluste betrugen während der Mastperiode 3,3 %, die technischen Defekte 1,7 %. Burose und Zähner (2009) stellten geringere Verluste und Defekte bei Mastschwei-nen fest. Sie verglichen eine visuelle und drei Transponderohrmarken auf 16 Pra-xisbetrieben mit unterschiedlichen Produktions- und Haltungssystemen. Weder zwi-schen den Kennzeichnungsmedien noch zwischen den Haltungs- und Produktions-systemen wurden Unterschiede der Anteile verlorener oder defekter Ohrmarken festgestellt. Die Verluste der Transponderohrmarken lagen durchschnittlich bei 2,1 % und die Defekte der Transponderohrmarken bei 0,5 %. 4.6 Anwendung der elektronischen Tierkennzeichnung in der praktischen
Schweinehaltung Werden Schweine heute elektronisch gekennzeichnet, geschieht dies nicht aus ad-ministrativen Gründen, sondern zur innerbetrieblichen Nutzung. Dazu werden Transponderohrmarken verwendet (vgl. Rau 2007, 2009). Der häufigste Anwen-dungsfall der elektronischen Tierkennzeichnung in der Schweinehaltung ist die tier-individuelle Fütterung von elektronisch gekennzeichneten Sauen mit einer Abrufsta-tion. Sie gehört in der Sauenhaltung schon seit längerer Zeit zum Stand der Technik (Ziron 2008, Schön & Artmann 1993) und hat sich in der Praxis bewährt (Rau 2007). Durch die obligatorische Gruppenhaltung von Wartesauen ab 2013 erfährt sie eine weitere Verbreitung. Mit einer Abruffütterungsanlage können die Tiere nicht nur tier-individuell gefüttert, sondern auch farblich markiert oder separiert werden um sie z.B. einer Trächtigkeitsuntersuchung oder dem Abferkelabteil zuführen zu können. Auf der elektronischen Kennzeichnung von Sauen basiert auch die Rauscheerken-nung in der Wartehaltung, indem anhand der Häufigkeit und der Dauer des Eber-kontakts ein Umrauschen der Tiere erkannt werden kann. Ausgehend von diesen Anwendungen in der Wartesauenhaltung wird die elektronische Tierkennzeichnung als Managementhilfe in allen Haltungsstufen der Ferkelproduktion eingesetzt (Bütfering 2011). Das Kennzeichnungssystem wird idealerweise mit einem Mana-gementsystem wie z.B. einem Sauenplaner über ein Betriebsnetzwerk verknüpft. Neben einer zentralen Auswertung und Steuerung können so z.B. mit einem mobi-len Lesegerät Daten im Stall erfasst, geändert oder abgefragt werden. Die Ausdeh-nung der elektronischen Kennzeichnung auf die Ferkelaufzucht und Schweinemast in geschlossenen Systemen kann zu einer Vereinfachung von Arbeitsprozessen
48 Kenntnisstand
und Erhöhung der Datensicherheit in der gesamten Produktionskette führen (Bütfering 2011, Rau 2009, Schwalm et al. 2009). Eine stufenübergreifende Nutzung der elektronischen Kennzeichnung zur Sicher-stellung einer lückenlosen einzeltierbasierten Rückverfolgbarkeit über die gesamte Wertschöpfungskette hinweg ist aus züchterischer Sicht für eine Nachkommenprü-fung sowie aus Sicht des Verbraucherschutzes für die Lebensmittelsicherheit er-wünscht. Die Rückverfolgbarkeit wird als Voraussetzung für die Sicherung des Ver-brauchervertrauens und die weitere Wettbewerbsfähigkeit von Schweinefleisch an-gesehen (Windhorst 2008, Doluschitz et al. 2006). Durch die Nutzung der elektroni-schen Einzeltierkennzeichnung kann diese Rückverfolgbarkeit entscheidend ver-bessert werden (Barge et al. 2013, Costa et al. 2013, Adam 2011, Doluschitz 2007). In Bayern wurde von 2002 bis 2004 der Einsatzes elektronischer Ohrmarken für den Herkunftsnachweis von Schweinefleisch über alle Stufen der Erzeugung hinweg un-tersucht (Anonym 2003b). Es wurde ein „elektronischer Verbund“ von Erzeugerbe-trieben aller Produktionsstufen der Schweinefleischerzeugung, Schlachtbetrieben und Vermarktern und einer Datenzentrale erstellt, indem jedes Tier durch eine elekt-ronische Ohrmarke gekennzeichnet wurde (Peschke & Opperman 2006). In diesem System waren neben dem aktuellen Besitzerbetrieb auch Angaben zum Geburts-betrieb eines Tieres bekannt; nach der Schlachtung konnten vom Verbraucher zu-sätzlich Informationen zur Fleischqualitätsuntersuchung und von landwirtschaftli-chen Betrieben Schlachtauswertungen abgefragt werden (Peschke & Opperman 2006). Mit diesem Forschungsvorhaben konnte die technische Machbarkeit eines solchen Systems nachgewiesen werden und die Möglichkeit eine lückenlose Rück-verfolgbarkeit sicherzustellen deutete sich an – als nicht geeignet erwies sich ein solches System das Tierangebot sehr kleiner Betriebe zu bündeln (Anonym 2003b). Ein weiteres stufenübergreifendes Informationssystem in der Schweinehaltung, das auf der Nutzung einzeltierbezogener Daten basiert, besteht seit 2001 in Nordrhein-Westfalen mit dem Ziel „Daten und Information der Fleischerzeugung zu erfassen und für Erzeuger und Organisationen verfügbar zu machen“ (Anonym 2011). Die Nutzung dieses Systems wird als Dienstleistung durch eine agrargewerbliche Ge-sellschaft angeboten. Es wird vornehmlich zur Nachkommen- und Futtermittelprü-fung im Feld genutzt, d.h., es befinden sich unter den Teilnehmern und Kunden Zuchtorganisationen, Futtermittelhersteller, Erzeugerbetriebe und Schlachtunter-nehmen. Pro Jahr werden ca. 80000 Mastschweine elektronisch gekennzeichnet, in den teilnehmenden Schlachtbetrieben geschlachtet und aggregierte Einzeltierda-ten zur Auswertung bereitgestellt (Anonym 2011). Die Datenquellen des Systems sind betriebliche Managementsysteme der Erzeugerbetriebe wie z.B. ein Sauenpla-ner, damit verknüpfte mobile Lesegeräte und von den Schlachtbetrieben erhobene und bereitgestellte Schlachtdaten (Adam 2011). Die Datenerfassung in den Erzeu-gerbetrieben und der Datenaustausch zwischen den Teilnehmern stellen sich aber

Kenntnisstand 49
aufgrund unzulänglicher Schnittstellen als Problem dar (Adam 2011). Dieses Prob-lem war schon zuvor an anderer Stelle als große Herausforderung innerhalb der Erzeugerstufe der Wertschöpfungskette Fleisch und im Austausch mit den ihr vor- und nachgelagerten Stufen erkannt worden (Doluschitz 2007, Doluschitz et al. 2006). Hinsichtlich der Tieridentifizierung im Schlachtbetrieb zeigen sich Tendenzen zu nicht ausreichenden Erfassungsquoten, Zuordnungsfehlern und Ohrmarkenver-lusten (Adam 2011). Bei letzterem wird auf die Schlachtgeschwindigkeit bzw. die Enthaarungsmaschine verwiesen. Burose und Zähner (2008) stellten bei unter-schiedlichen Bauarten von Enthaarungsmaschinen Verluste von 16,0 bis 41,6 % fest. Im gesamten Schlachtprozess beobachteten Santamarina et al. (2007) von 3,5 % bei SEQ-Ohrmarken und 11,5 % bei FDX-Ohrmarken. 4.7 Simultanerfassung von Schweinen Neben der Bewertung von Einsatzmöglichkeiten und Leistungsfähigkeit bestehen-der Tierkennzeichnungssysteme stellt deren Weiterentwicklung ein Schwerpunkt der aktuellen Forschung zum Thema dar. Dies wird gestützt durch ein weltweit stark gestiegenes Interesse an der elektronischen Tierkennzeichnung als Grundlage für Farm Management-Systeme (Umstätter et al. 2014). Insbesondere für den PLF-Ansatz wird an der Entwicklung von RFID-basierten Sen-sornetzwerken und Cloud-basierten Managementsystemen (Junge et al. 2014, Mertens et al. 2013, Scalera et al. 2013, Lokhorst et al. 2011, Kuhlmann 2010, Wang et al. 2006) und Transpondern bzw. Kennzeichnungssystemen mit erweiterter Leis-tung und Funktion (Maselyne et al. 2014, Karsten et al. 2013, Hessel & Van den Weghe 2011, Hogewerf 2011a, Ruiz-Garcia & Lunadei 2011, Burose 2010, Reiners et al. 2009, Schwalm et al. 2009) gearbeitet. Ein aktueller Forschungsansatz ist die Erweiterung der Funktionalität der elektroni-schen Tierkennzeichnung um die simultane Erfassung mehrerer Transponder. Dadurch sollen mehrere gekennzeichnete Tiere gleichzeitig z.B. gemeinsam in ei-ner Gruppe identifiziert werden können. Der Bedarf nach einer Simultanerfassung besteht in der Tierhaltung, wenn kleine Tiere identifiziert werden sollen (Barge et al. 2013, Artmann 1999) oder Tiere die sich eng zusammendrängen und nicht verein-zelt werden können (Artmann 1999) oder aus Gründen des Tierschutzes nicht ver-einzelt werden sollen (Kaufmann 2007). Eine Simultanerfassung könnte ein mani-pulationssicheres Verladen von individuell gekennzeichneten Tieren beim Transport ermöglichen (Geers 1994) und würde das Ein-, Um- oder Ausstallen dieser Tiere “deutlich vereinfachen“ (Bütfering 2011). Burose (2010) untersuchte zwei RFID-Systeme, mit denen eine Simultanerfassung von Schweinen erreicht werden soll, die sich in einer Gruppe durch einen Treibgang bewegen. Die beiden RFID-Systeme unterschieden sich sowohl durch die verwen-deten Transponderohrmarken („AK“ und „ISO“) als auch durch die zur Erfassung

50 Kenntnisstand
der Transponder verwendeten Lesegeräte voneinander. Das AK-System zeichnete sich dadurch aus, dass durch eine Modifikation der Transponderkomponente des Systems, d.h. der Transponderohrmarke, eine simultane Erfassung ermöglicht wird. Mit ihm wurden durchschnittliche Erfassungsquoten von 65 % bei 10 kg schweren Ferkeln und 84 % bei 25 kg schweren Ferkeln beobachtet. Beim ISO-System wur-den unmodifizierte, der ISO-Norm 11785 entsprechende Transponderohrmarken verwendet. Das Lesegerät war dagegen durch die Verwendung mehrerer Antennen darauf ausgerichtet, Transponder simultan erfassen zu können. Mit diesem System wurden durchschnittliche Erfassungsquoten von 52 % bis 98 % bei 13 bis 85 kg schweren Schweinen erreicht. Die Erfassungsquote wurde als Anteil erfasster Transponder an der Gesamtzahl erfassbarer Transponder während der Passage eines Lesegeräteportals durch eine Gruppe Schweine definiert. Von einer Abhän-gigkeit zwischen der Erfassungsquote und dem Tiergewicht wurde nicht berichtet. Einen weiteren Ansatz zur Simultanerfassung von Schweinen stellt die Verwendung deutlich höherer Frequenzbereiche als der von den bisher vorgestellten Systemen (Kapitel 4.2, 4.3 und 4.5) verwendete Niederfrequenzbereich (LF) dar. Mit dem Ein-satz eines RFID-Systems im Hochfrequenzbereich (HF) konnte bei Aufzuchtferkeln an einem Futtertrog eine Erfassungsquote von 97,3 % erreicht werden (Reiners et al. 2009, Hessel et al. 2008). Als Erfassungsquote wurde das Verhältnis zwischen den vom RFID-System erfassten Trogbesuchen und den tatsächlichen Trogbesu-chen verstanden. Die Antennen der im Versuch verwendeten HF-Lesegeräte waren in den Rundtrögen von Futterautomaten integriert, wo die Tiere bei der Futterauf-nahme identifiziert werden sollten. Die Tiere waren mit HF-Transponderohrmarken gekennzeichnet. Es war zu beobachten, dass die Erfassungsquote abnahm, je mehr Tiere sich am Futtertrog befanden. In einem Folgeversuch, bei dem die HF-Lesegeräteantennen nicht im, sondern über dem Futtertrog angebracht wurden, konnte eine entsprechende Erfassungssicherheit beobachtet und die Höhe der von Reiners et al.(2009) berichteten Erfassungsquote bestätigt werden (Maselyne et al. 2014). Die Verwendung des Ultrahochfrequenzbereich zur Kennzeichnung und Simultan-erfassung wurde zuletzt als Möglichkeit bei verschiedenen Tierarten diskutiert (Adrion et al. 2015, Umstätter et al. 2014, Barge et al. 2013, Stekeler 2011), u.a. auch bei Schweinen. Veröffentlichungen von meist nicht-wissenschaftlichen oder privatwirtschaftlichen Institutionen liegen hierzu in unterschiedlichem Umfang und methodischer Schärfe vor. In Dänemark wurde ein UHF-System zur Kennzeichnung und Simultanerfassung von Mastschweinen eingesetzt (Swedberg 2012a), allerdings liegt dazu keine wis-senschaftliche Publikation vor. Es wird von einer Erfassungsquote „von > 95 %“ und einer Erfassungsreichweite von ungefähr 2 m berichtet, unter der Voraussetzung, dass die verwendeten Transponderohrmarken nicht zu stark verschmutzt sind (Baadsgaard 2012). Eine kommerzielle Vermarktung des Kennzeichnungssystems

Kenntnisstand 51
wurde angekündigt (Swedberg 2012a), von einer tatsächlichen Anwendung in grö-ßerem Umfang ist aber bisher nichts bekannt. Dies gilt auch für ein ebenfalls kom-merziell angebotenes, UHF-basiertes Kennzeichnungssystem eines niederländi-schen Stallausrüsters (Swedberg 2012b). Untersuchungen zur Erfassungssicher-heit des Systems liegen nicht vor. An der Universität Adelaide wurden zwei UHF-Transponder mit dem Ziel entwickelt, eine Simultanerfassung von Schweinen zu erreichen (Leong et al. 2007a, Ng et al. 2005). Sie erreichten in Laborversuchen Erfassungsreichweiten von 0,80 m ohne Störgröße und 0,40 m, wenn sie sich auf einer Hand befanden (Leong et al. 2007b) bzw. 0,48 bis 1,00 m ohne Störgröße und 0,20 bis 0,27 m mit Störgröße (Leong et al. 2007a). Praxisversuche mit in Futterautomaten verbauten UHF-Lesegeräteantennen wurden angekündigt (Leong et al. 2007a, Ng et al. 2005), es liegen zu diesen Untersuchungen aber keine wissenschaftlich publizierten Ergeb-nisse vor. Es wurde aber an anderer Stelle davon berichtet, dass sich die UHF-Transponder „vollkommen zuverlässig“ gezeigt hätten (Cole 2008). In den Niederlanden erreichte ein von der Universität Wageningen untersuchtes, UHF-basiertes Kennzeichnungssystem mit Mastschweinen eine Erfassungsquote von 89,6 % (Hogewerf et al. 2013). Als Ansatzpunkt für eine Weiterentwicklung des Systems wurde neben der Steigerung der Erfassungsquote die Verhinderung zu-sätzlicher, unerwünschter Erfassungen von Transpondern von Tieren gesehen, die sich während eines Versuchsdurchganges in einer nahegelegenen Bucht aufhiel-ten. Weitere, allerdings nicht wissenschaftlich publizierte Berichte zum Einsatz von UHF-Systemen zur Kennzeichnung und Simultanerfassung liegen aus den Vereinigten Staaten und Neuseeland für andere Tierarten als das Schwein vor. Aus Nord-Dakota wird von einer nahezu vollständigen Erfassung von Kälbern berichtet, die mit UHF-Transpondern gekennzeichnet waren und in Gruppen von 2 bis 62 Tieren beim Verlassen einer Auktionshalle identifiziert wurden (Anonym 2008c). Das US-amerikanische Landwirtschaftsministerium erlaubt seit 2010 den Einsatz von UHF-Transpondern eines kommerziellen Herstellers zur Kennzeichnung von Rindern im Rahmen seines AIN-Systems(Animal Identification Number), das in einigen Bun-desstaaten das eingestellte NAIS-Programm ersetzt (Swedberg 2010). Für das Jahr 2010 wurde in den Vereinigten Staaten eine Studie zum Einsatz von UHF-Transpondern zur Kennzeichnung und Identifizierung von Kälbern angekündigt (Smith et al. 2010). Eine Veröffentlichung liegt bisher nicht vor. Es wird aber von einer nahezu vollständigen Erfassung der eingesetzten Transponder mit Handlese-geräten berichtet (Odermann 2011). Die Verwendung von Handlesegeräten lässt allerdings darauf schließen, dass keine Simultanerfassung, sondern eine Einzeler-fassung der Transponder vorlag. In Neuseeland wurden Versuche zur Kennzeich-nung von Hirschen, Schafen und Rindern mit UHF-Transpondern durchgeführt. Die Simultanerfassung der Tiere wurde auf vier Praxisbetrieben mit unterschiedlichen

52 Kenntnisstand
stationären Lesegeräten, Lesegeräteantennen, Anzahl und Anordnung der Lesege-räte untersucht. In einem Projektbericht wird von 75 bis 100 % erfassten Transpon-dern bei Hirschen, 94 bis 100 % bei Schafen und 72 % bei Rindern berichtet (Cooke et al. 2010). Da sich die verwendeten Lesegeräte in Anzahl und Anordnung zwi-schen den Betrieben und Tierarten unterscheiden und auch von keinen Wiederho-lungen berichtet wird, lassen sich die Ergebnisse nur schwer absichern, interpretie-ren und vergleichen. Sie geben aber einen Anhaltspunkt für die Möglichkeiten der Simultanerfassung mit UHF-Systemen. In Sachsen wurde der Einsatz des Mikrowellenbereiches (µW, 2,4 GHz) in Kombi-nation mit Transpondern untersucht, deren interne Logik auf der Nutzung von akus-tischen Oberflächenwellen (AOW, engl.: surface acoustic wave, SAW) basiert (Pache et al. 2011). Die Erfassungsreichweite des im Rahmen eines Forschungs-projektes entwickelten Systems betrug dabei mit stationären Lesegeräten bis zu 10 m (Pache et al. 2013). Das System wurde auf insgesamt vier Milchviehbetrieben eingesetzt. Auf einem dieser Praxisbetriebe wurden 15 Tiere gekennzeichnet und zweimal täglich beim Verlassen des Melkstandes in einer Selektionsschleuse ohne Vereinzelung identifiziert (Theis et al. 2010). Dabei wurde eine Erfassungsquote von 94,1 % beobachtet.
53
5 ENTWICKLUNG EINES MEHRFACHLESEGERÄTES ZUR SIMULTANERFASSUNG VON MASTSCHWEINEN
5.1 Einleitung Für die elektronische Tierkennzeichnung werden derzeit fast ausschließlich RFID-Systeme im Niederfrequenzbereich (LF, 134,2 kHz) nach ISO 11785 verwendet. Es stellt somit das Standardverfahren der elektronischen Tierkennzeichnung dar. Mit diesen Systemen lassen sich Transponder bzw. Tiere aber nur einzeln erfassen. Befinden sich mehrere Tiere bzw. Transponder im Erfassungsbereich des Lesege-rätes, kommt es zu einer Datenkollision, die dazu führt, dass nicht alle Transponder erfasst werden. Es ist daher nicht möglich mehrere Tiere aus einer Gruppe heraus, d.h. simultan mit einem Lesegerät zu identifizieren. Die Tiere müssen folglich das magnetische Feld des LF-Lesegerätes einzeln passieren, um identifiziert werden zu können. Um eine Datenkollision bei der Kommunikation mit mehreren Transpondern zu ver-meiden, wurden verschiedene Antikollisionsverfahren entwickelt (vgl. Kapitel 3.7). Aufgrund der geringen Datenübertragungsrate von LF-Systemen eignen sich die meisten Antikollisionsverfahren nicht für Anwendungen, bei denen sich LF-Transponder in Bewegung befinden. Eine Möglichkeit für die Anwendung von Anti-kollisionsverfahren bei LF-Systemen unter dynamischen Bedingungen, d.h., wenn sich der Transponder durch den Erfassungsbereich des Lesegerätes bewegt, ist das Raummultiplexverfahren, da hier die Vereinzelung der Signale nicht über einen Datenaustausch mit den einzelnen Transpondern erfolgt, sondern über die räumli-che Verteilung der Erfassungsbereiche des Lesegerätes. Mit einem flächendecken-den Array mehrerer Lesegeräteantennen wird die Wahrscheinlichkeit erhöht, dass sich zu einem Zeitpunkt nur ein einzelner Transponder in einem Erfassungsbereich befindet, wenn sich die Transponder räumlich verteilt über das Array bewegen. Die-ses Verfahren kommt z.B. bei Leichtathletik-Wettkämpfen zum Einsatz. Burose (2010) verwendete ein solches Lesegerät in Kombination mit ISO 11785-konformen Transponderohrmarken. Das Lesegerät arbeitete ausschließlich mit einer sequenti-ellen Energieübertragung (SEQ4). Das Ziel dieses Teils der Arbeit ist es ein Lesegerät zu entwickeln und zu bewerten, das mehrere Antennen steuern und somit ein Raummultiplexverfahren umsetzen soll, um mehrere Transponder simultan zu erfassen. Dieses Mehrfachlesegerät soll mit einer Aktivierungsfrequenz von 134,2 kHz arbeiten und beide in der ISO-Norm 11785 vorgesehenen Betriebsarten (SEQ und FDX) unterstützen. Die Entwicklung und Untersuchung des Mehrfachlesegerätes erfolgte im Rahmen einer Masterarbeit (Rößler 2011).
4 Es wird die in Kapitel 3.6 beschriebene Terminologie verwendet. Die in der ISO-Norm 11785 als „HDX“ bezeichnete Betriebsart wird als „SEQ“ bezeichnet.

54 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
5.2 Material und Methoden 5.2.1 LF-Transponderohrmarken Für die Untersuchungen wurden praxisübliche LF-Transponderohrmarken FlexoTronic R30 (Caisley International, Bocholt) verwendet (Abbildung 9). Es han-delte sich dabei um in Kunststoffgehäuse (Flexoplus, Caisley International, Bocholt) eingegossene LF-Transponder. Die verwendeten Transponder waren kompatibel mit ISO 11785 und arbeiteten mit der Betriebsart FDX auf einer Betriebsfrequenz von 134,2 kHz. Der Durchmesser der LF-Transponderohrmarken (im Folgenden „Transponder“) betrug 27 mm, die Höhe 15 mm und das Gewicht 3 g.
Abbildung 9: Transponderohrmarke FlexoTronic R30 5.2.2 Komponenten des Mehrfachlesegerätes
Ein RFID-Lesegerät bestand aus einem Radiofrequenz-Modul (RF-Modul), einer o-der mehreren Antennen, einer Steuerung, Schnittstellen zwischen den Komponen-ten und einem Gehäuse (vgl. Finkenzeller 2012). Die Steuerung war von und durch einen Personal Computer (PC) möglich. Die zum Bau des Mehrfachlesegerätes verwendeten Komponenten werden im Fol-genden beschrieben. RF-Modul RF-Module sind die Kernbausteine eines RFID-Lesegerätes. Daher wurden zu-nächst drei Produktmuster von RF-Modulen verschiedener Hersteller nach den Kri-terien Lesereichweite, Baugröße und Preis evaluiert. Ein Produkt der Fa. HID Glo-bal, Walluf zeigte dabei die besten Leistungen und wurde für den Bau des LF-Mehrfachlesegerätes ausgewählt (OMNIKEY LF MultiTag R/W Module). Das RF-Modul (30,5 mm x 24,4 mm) unterstützte die ISO-Normen 11784 und 11785 und arbeitete mit den Aktivierungsfrequenzen 125 kHz und 134,2 kHz (Anonym 2008d).

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 55
Es konnte daher mit einer großen Anzahl Transpondern unterschiedlicher Hersteller kommunizieren. Bei dem RF-Modul handelte es sich um ein sogenanntes OEM-Produkt (engl.: original equipment manufacturer), d.h. um eine Baugruppe, die ein Endanbieter von einem Zulieferer bezieht, um es in ein Endprodukt einzubauen. Daher waren für die Fertigung eines Lesegerätes neben dem RF-Modul weitere Komponenten notwendig, um Transponder erfassen zu können. Antennen Die Antennen des Mehrfachlesegerätes wurden nach Spezifikationen des Modul-herstellers selbst gefertigt. Da das RF-Modul zwei Aktivierungsfrequenzen unter-stützte, lag ein „vereinfachtes“ Antennendesign für die Verwendung beider Frequen-zen vor (Anonym 2007c). Eine geeignete Antenne sollte folgende Eigenschaften aufweisen (Anonym 2008d):
- Gütefaktor Q < 25 - Induktivität ≥ 356 µH und ≤ 435 µH - Maximale Größe von 200 mm x 200 mm
Zur Berechnung des Gütefaktors Q einer induktiven Antenne wird folgende Formel verwendet (Anonym 2008d, vgl. Finkenzeller 2012):
Q =2π·f·L
R (2)
mit f = Frequenz [Hz] L = Induktivität [H] R = Vorwiderstand [Ω] + Widerstand der Spule [Ω] Der Antennenrahmen wurde aus Plexiglas mit den Abmessungen 250 mm x 250 mm x 10 mm gefertigt. Der Rahmen besaß eine seitliche Nut (25 mm x 3 mm), worin die Antennenspule eingelassen wurde. Dadurch entstand eine Luft-spule von 200 mm x 200 mm. Die Spule bestand aus 25 Wicklungen eines Kupfer-drahtes mit einem Leiterquerschnitt von 0,03 mm2. Die Induktivität der Luftspule be-trug ~430 µH, der Widerstand 7 Ω. Dem Steckverbinder zwischen Spule und RF-Modul wurde ein Widerstand von 11 Ω in Reihe vorgeschaltet, sodass sich ein Ge-samtwiderstand von 18 Ω ergab. Nach der Formel (2) ergab sich für die Frequenz f = 134,2 kHz ein Gütefaktor Q der Luftspule von 20,14. Damit wurden die Antennen-spezifikationen des Modulherstellers erfüllt.

56 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Konfiguration Die Konfiguration der RF-Module war durch das Dienstprogramm „Reader Utility“ (Version 4.0.0.0, HID Global Corporation) möglich (Abbildung 10). Das RF-Modul wurde damit auf den Betriebsmodus von EM4x05-Transpondern, d.h. auf FDX-Transponder nach ISO 11785 eingestellt. Als Kommunikationsprotokoll wurde ein ASCII-Protokoll ausgewählt.
Abbildung 10: Screenshot Konfiguration der RF-Module mit „Reader Utility“, Ver-sion 4.0.0.0 Bedingt durch die spezifische Datenübertragung nach ISO 11785 (vgl. Kapitel 3.8.2) musste das empfangene Signal vom RF-Modul in mehreren Schritten aufbereitet werden, um den Transpondercode bzw. die auf dem Transponder gespeicherte na-tionale Identifizierungsnummer zu erhalten (vgl. Anonym 2008d und Abbildung 11):
1. Abschneiden der Startsequenz (vgl. Kapitel 3.8.2) 2. Invertierung des Datenstroms, sodass das LSB wieder an letzter und das
MSB wieder an erster Stelle steht 3. Invertierung jedes Halbbytes 4. Die beiden ersten Bytes enthalten nun den Anwendungscode (vgl. Kapitel
3.8.1 Bit 1 bis 16)

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 57
5. Die nächsten eineinhalb Bytes enthalten den Länder- oder Herstellercode. Er wird zweimal nach rechts verschoben und dann vom Hexadezimal- in das Dezimalsystem übertragen
6. Die letzten viereinhalb Bytes enthalten die eindeutige, nationale Identifizie-rungsnummer. Sie werden vom Hexadezimal- in das Dezimalsystem über-tragen
Abbildung 11: Aufbereitung des Signals eines FDX-Transponders nach ISO 11785 (Anonym 2008d) Einzellesegerät Das RF-Modul wurde in ein Gehäuse aus Weißblech (51 mm x 35 mm x 10 mm) verbaut, um es von elektromagnetischen Störungen abzuschirmen. Um eine Ver-bindung mit einem PC herstellen zu können, wurde ein USB-Schnittstellenkabel TTL-232R-3V3-WE (Fa. Future Technology Devices International, Glasgow) über Steckverbinder angeschlossen. Dieses Kabel besaß eine integrierte elektronische Schaltung, die TTL-Signale des RF-Moduls in RS232-Signale für den PC umwan-delte (Anonym 2010). Neben der Kommunikation zwischen RF-Modul und PC stellte das USB-Schnittstellenkabel auch die vom RF-Modul benötigte Betriebsspannung her. Durch die Verbindung des konfigurierten RF-Moduls mit der Antenne und einem PC war ein RFID-Lesegerät zur Erfassung von FDX-Transpondern nach ISO 11785 entstanden, das im Folgenden als Einzellesegerät bezeichnet wird (Abbildung 12).

58 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Abbildung 12: Einzellesegerät 5.2.3 Aufbau und Steuerung des Mehrfachlesegerätes Es wurden zwölf Einzellesegeräte gebaut, um sie zu einem Mehrfachlesegerät zu-sammenschließen (Abbildung 13). Sie wurden in einer Ebene rasterförmig in einem Abstand von 10 cm angeordnet, sodass die Luftspulen einen Abstand von 15 cm zueinander hatten. Die RF-Module und die USB-Schnittstellenkabel befanden sich in den Zwischenräumen. Jeweils vier Einzellesegeräte waren mit dem PC über ei-nen gemeinsamen, aktiven USB-Hub verbunden, der auch die Spannungsversor-gung der Einzellesegeräte sicherstellte. Es wurden also bis zu drei USB-Hubs für die Verbindung zwischen dem als Steuerungseinheit dienenden PC und dem Mehr-fachlesegerät benötigt.
Abbildung 13: Mehrfachlesegerät

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 59
Die Steuerung erfolgte mit einer selbstentwickelten Software. Diese teilte die zwölf Einzellesegeräte in zwei Gruppen auf und aktivierte die Gruppen mit einem verän-derbaren Zeitversatz. Die Software wurde in der Entwicklungsumgebung Eclipse (Version 3.5.2, The Eclipse Foundation Inc., Ottawa) in der Programmiersprache Java (Version SE 1.6, Oracle Corp., Redwood Shores) geschrieben. Das Programm wurde in der Java-Laufzeitumgebung (JRE, Java runtime environment) ausgeführt und über den Kommandozeileninterpreter (CLI, command line interpreter) cmd.exe des Betriebssystems Windows 7 (Microsoft Corp., Redmond) bedient. Neben der Steuerung des Mehrfachlesegerätes übernahm es auch die Aufnahme der von den Einzellesegeräten empfangenen Daten und die Speicherung dieser in einer Proto-kolldatei im CSV-Format (Abbildung 14). Folgende Daten eines Erfassungsereig-nisses wurden dabei gespeichert:
1. Gruppe des erfassenden Einzellesegerätes 2. Nummer des erfassenden Einzellesegerätes 3. Zeitpunkt des Datenempfangs durch die Steuerungssoftware [ms] 4. Zeitdifferenz zum letzten Erfassungsereignis des Einzellesegerätes [ms] 5. EID des erfassten Transponders (letzte fünf Stellen)
Abbildung 14: Auszug aus der Protokolldatei „01-01.07.2010 17_16_17.txt“ Durch die zentrale Steuerung und die räumlich verteilte Anordnung der Einzellese-geräte in einem Raster wurde ein Raummultiplexverfahren und somit ein Antikollisi-onsverfahren umgesetzt. Eine Simultanerfassung von mehreren FDX-Transpondern, die sich über das Mehrfachlesegerät bewegen, sollte durch die Kleinräumigkeit der Erfassungsbereiche der Einzellesegeräte erreicht werden.

60 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Durch diese sollte sich die Wahrscheinlichkeit erhöhen, dass sich zu einem be-stimmten Zeitpunkt nur ein einziger FDX-Transponder in einem dieser Erfassungs-bereiche befindet. Die Zuordnung der Einzellesegeräte zu einer Gruppe folgte einer schachbrettartigen Verteilung, sodass direkt nebeneinanderliegende Einzellesege-räte immer unterschiedlichen Gruppen angehörten. Durch die zeitversetzte Aktivie-rung (Taktung) der beiden Gruppen wurde die gegenseitige Störung der nahe bei-einanderliegenden Einzellesegeräte minimiert. 5.2.4 Prüftisch
Um den Erfassungsbereich des Systems aus Einzellesegerät und Transponder zu bestimmen, wurden Prüftische gefertigt. Sie wurden vollständig aus Holz, d.h. me-tallfrei gebaut, um störende Einflüsse gering zu halten. Die Tischoberfläche diente dabei als Messebene, auf der sich der Transponder befand. Das Einzellesegerät wurde an der Prüftischkante angebracht. Um die räumliche Ausdehnung des Erfas-sungsbereiches festhalten zu können, konnte auf der Messebene Rasterpapier un-terschiedlicher Auflösung aufgebracht werden. 5.2.5 Prüfstand Ziel war es, ein Mehrfachlesegerät zu entwickeln, mit dem durch die Anwendung eines Raummultiplexverfahrens mehrere Transponder simultan erfasst werden kön-nen. Um die Umsetzung des Raummultiplexverfahrens zu untersuchen, wurde ein Prüfstand entwickelt, mit dem mehrere Transponder gleichzeitig und unter konstan-ten Bedingungen durch die Erfassungsbereiche des Mehrfachlesegerätes bewegt werden konnten. Dieser Prüfstand bestand aus einem Holzrahmen (3000 mm x 1500 mm) mit Win-kelsteckverbindern aus Metall (Abbildung 15). Die Verbinder dienten der Aufnahme der Achsen und Lager für die Keilriemenscheiben (d = 200 mm). Die Keilriemen-scheiben waren aus Kunststoff und dienen der Führung eines Keilriemens (25 mm x 9000 mm). Der Keilriemen wurde bewegt, indem eine der vier Keilriemen-scheiben durch einen 24 V-Gleichstromgetriebemotor (RE40/GP42C, Fa. Maxon Motor) angetrieben wurde. Die Geschwindigkeit ließ sich dadurch stufenlos einstel-len. Der Keilriemen diente als Führungsriemen für Transponder. Auf ihm waren Kunststoffwinkel befestigt, die als Halterung eines Schnellwechselsystems dienten, mit dem Transponder auf einer Schiene in unterschiedlicher Anzahl und Orientie-rung am Führungsriemen angebracht werden konnten. Durch diese Anbringung al-ler Transponder auf einem Keilriemen hatten alle Transponder die gleiche Ge-schwindigkeit und einen konstanten Abstand zueinander. Die Laufrichtung des Führungsriemens befand sich in der Horizontalebene. Das Mehrfachlesegerät wurde in den Untersuchungen oberhalb des Führungsriemens angebracht, sodass die Hauptstrahlrichtung der einzelnen Antennen vertikal verlief.

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 61
Abbildung 15: RFID-Prüfstand mit horizontaler Laufrichtung Die Erfassung der Transponder erfolgte auf einer Messstrecke, die aus einer höl-zernen Führungsschiene mit einem Gleitbelag aus Polyvinylchlorid (PVC) bestand, um die Transponder gleichmäßig und ohne Schwingungen durch den Erfassungs-bereich des Lesegerätes bewegen zu können. Um den Abstand zwischen Lesege-räteantenne und Transponder variieren zu können, wurde eine höhenverstellbare Halterung metallfrei aus Holz gebaut, auf den das Mehrfachlesegerät gelegt wurde. Ein USB-basiertes Datenerfassungsmodul (DLP-IO20, Fa. DLP Design, Allen) er-fasste die Rundenzahl und damit implizit auch die Geschwindigkeit des Keilriemens mit Hilfe von Reed-Kontakten und Magneten, die am Keilriemen und an einer Keil-riemenscheibe angebracht waren. Diese beiden Werte, Rundenzahl und Geschwin-digkeit der Runde, wurden über eine USB-Schnittstelle des Steuerungs-PC an das Steuerungsprogramm des Mehrfachlesegerätes (Kapitel 5.2.3) abgegeben und die Protokolldatei um diese erweitert (Abbildung 16). Sie bestand dann aus folgenden Elementen:
1. Gruppe des erfassenden Einzellesegerätes 2. Nummer des erfassenden Einzellesegerätes 3. Zeitpunkt des Datenempfangs durch die Steuerungssoftware [ms] 4. Zeitdifferenz zum letzten Erfassungsereignis des Einzellesegerätes [ms] 5. EID des erfassten Transponders (letzte fünf Stellen) 6. Geschwindigkeit [m/s] 7. Rundenzahl

62 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Abbildung 16: Auszug aus der Protokolldatei „20.12.2010 15_15_12.txt“ 5.3 Methodisches Vorgehen 5.3.1 Statische Versuche zur Bestimmung des Erfassungsbereiches Zur Bestimmung des Erfassungsbereiches des Systems aus Einzellesegerät und Transponder wurde die Wirkung des elektromagnetischen Feldes des Einzellese-gerätes qualitativ und quantitativ untersucht. Die qualitative Untersuchung erfolgte, indem der vom Einzellesegerät induzierbare Strom mit Hilfe eines Feldmessgerätes (FM1 6030.000, Fa. Deister Electronics, Barsinghausen) bestimmt wurde. Das Feld-messgerät zeigte den vom Einzellesegerät in seiner Empfangsspule induzierten Strom in µA an. Durch die analoge Anzeige konnten keine exakten Werte gemessen werden, sodass elf Klassen für den Messbereich des Feldmessgerätes von 0 bis 100 µA gebildet wurden. Die quantitative Untersuchung erfolgte zum einen durch die Bestimmung der maximalen Erfassungsreichweite von Transpondern und zum anderen durch die räumliche Bestimmung des Bereiches, in dem ein Trans-ponder erfasst werden kann. Da bei der induktiven Energieübertragung eine starke Abhängigkeit von der Orien-tierung der Sende- zur Empfangsspule besteht, wurden die Untersuchungen zum Erfassungsbereich in der optimalen und in einer nicht optimalen Orientierung durch-geführt. Da sich die beiden Spulen im dreidimensionalen Raum befinden, lässt sich die Orientierung der Empfangsspule (Feldmessgerät oder Transponder) zur Sen-despule (Antennenspule des Einzellesegerätes) vektoriell beschreiben. Die Quer-schnittsebene der Sendespule wird dabei als in der Ursprungsebene Ex2x3 eines kartesischen Koordinatensystems liegend definiert, der Mittelpunkt (kreisförmige o-der quadratische Spule) bzw. der Schwerpunkt (rechteckige Spule) der Sendespule liegt dabei im Ursprung. Die Orientierung der Empfangsspule zur Sendespule lässt sich in diesem Modell mit dem Normalenvektor ihrer Querschnittsebene in ihrem Mittelpunkt (kreisförmige oder quadratische Spule) bzw. in ihrem Schwerpunkt (rechteckige Spule) beschreiben. Eine optimale Orientierung des Feldmessgerätes

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 63
und der Transponder liegt bei einem Normalenvektor a = -100
vor, d.h., die beiden
Spulen liegen parallel zueinander. Eine nicht optimale Orientierung liegt bei einem
Normalenvektor b = 010
vor, d.h., die beiden Spulen liegen orthogonal zueinander
und zur Ursprungsebene Ex1x2. Die maximale Erfassungsreichweite wurde in der Orientierung a und eine weitere Reichweite in der Orientierung b mit 23 Transpondern bestimmt. Im Gegensatz zum Vorgehen Kerns (1997) wurden die Transponder nicht mit einer konstanten Ge-schwindigkeit auf das Einzellesegerät zubewegt, sondern, indem sie in abnehmen-der Entfernung zum Lesegerät auf den Rasterpunkten des Prüftisches aufgesetzt wurden und sich die Versuchsperson entfernte. Wurden die Transponder erfasst, konnte die Entfernung zum Lesegerät am Rasterpunkt abgelesen werden. Wurden sie nicht erfasst, wurden die Transponder entfernt und an dem in Richtung Einzel-lesegerät nächstgelegenen Rasterpunkt wieder aufgesetzt. An den Rasterpunkten mit feststehendem Bezug zum Einzellesegerät wurde das Ereignis mit den Ausprä-gungen „Transponder erfasst/Transponder nicht erfasst“ notiert. Die Messung der maximalen Erfassungsreichweite wurde fünf Mal wiederholt. Für die Messungen wurde ein Rasterpapier mit einer Auflösung von 0,5 cm verwendet. In der Orientie-rung a wurden die Transponder orthogonal auf den Mittelpunkt des Einzellesegerä-tes zubewegt, in der Orientierung b orthogonal auf die Spulenwicklung seitlich des Mittelpunktes. Von den 23 Transpondern wurden neun, die sich in ihrer Erfassungsreichweite nicht unterschieden, für die weiteren Untersuchungen ausgewählt. Die quantitative Un-tersuchung des Erfassungsbereiches wurde mit einem dieser neun Transponder durchgeführt, die qualitative Untersuchung mit dem oben genannten Feldmessge-rät. Die Vorgehensweise folgte dem zur Bestimmung der maximalen Erfassungs-reichweite beschriebenen Verfahren. Die Transponder und das Feldmessgerät wur-den in den Orientierungen a und b auf einem Raster mit einer Auflösung von 2,5 cm bewegt. Allerdings wurden die Transponder bzw. das Feldmessgerät nicht nur auf den Rasterpunkten orthogonal zum Mittelpunkt des Einzellesegerätes aufgesetzt, sondern auf allen sich in der Messebene befindenden Rasterpunkten, sodass sich ein räumliches Bild des Erfassungsbereiches in der Messebene ergab. 5.3.2 Dynamische Versuche zur Bestimmung der Erfassungssicherheit Durch dynamische Versuche wurde die Erfassungssicherheit des RFID-Systems aus Mehrfachlesegerät und Transpondern bestimmt. Dazu wurden mit Hilfe des Prüfstandes bis zu neun Transponder simultan am Mehrfachlesegerät vorbei durch die Erfassungsbereiche von bis zu acht Einzellesegeräten geführt.
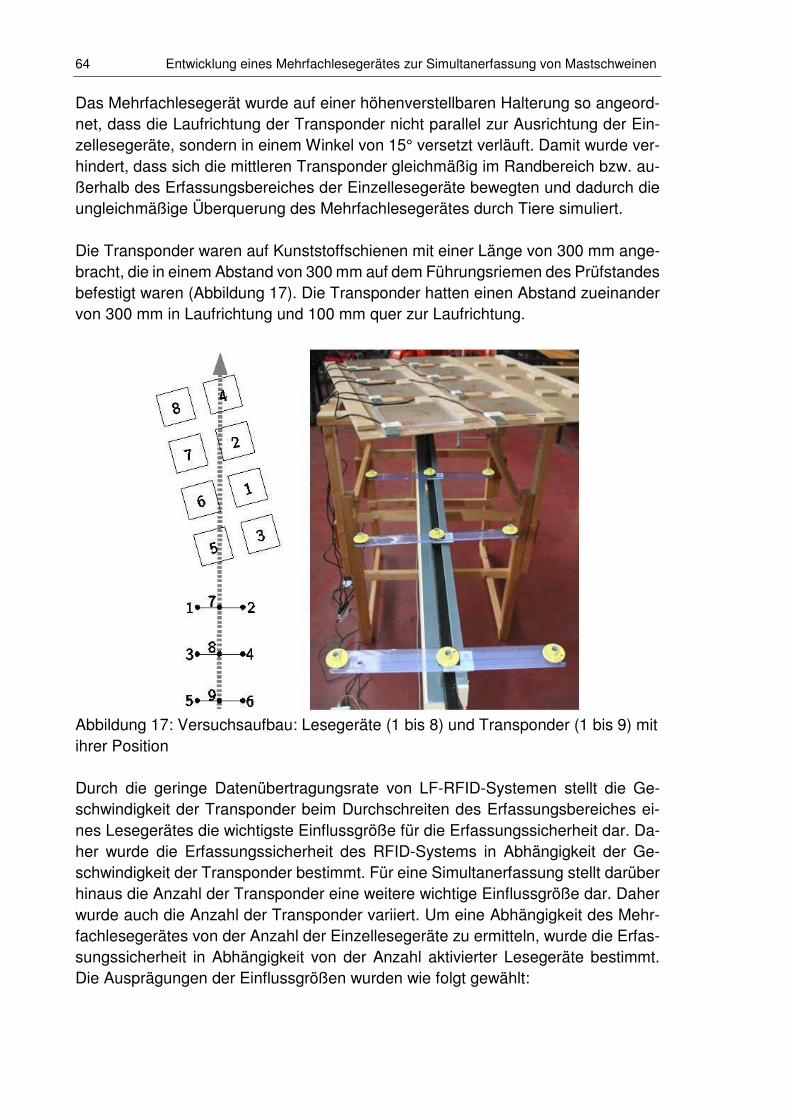
64 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Das Mehrfachlesegerät wurde auf einer höhenverstellbaren Halterung so angeord-net, dass die Laufrichtung der Transponder nicht parallel zur Ausrichtung der Ein-zellesegeräte, sondern in einem Winkel von 15° versetzt verläuft. Damit wurde ver-hindert, dass sich die mittleren Transponder gleichmäßig im Randbereich bzw. au-ßerhalb des Erfassungsbereiches der Einzellesegeräte bewegten und dadurch die ungleichmäßige Überquerung des Mehrfachlesegerätes durch Tiere simuliert. Die Transponder waren auf Kunststoffschienen mit einer Länge von 300 mm ange-bracht, die in einem Abstand von 300 mm auf dem Führungsriemen des Prüfstandes befestigt waren (Abbildung 17). Die Transponder hatten einen Abstand zueinander von 300 mm in Laufrichtung und 100 mm quer zur Laufrichtung.
Abbildung 17: Versuchsaufbau: Lesegeräte (1 bis 8) und Transponder (1 bis 9) mit ihrer Position Durch die geringe Datenübertragungsrate von LF-RFID-Systemen stellt die Ge-schwindigkeit der Transponder beim Durchschreiten des Erfassungsbereiches ei-nes Lesegerätes die wichtigste Einflussgröße für die Erfassungssicherheit dar. Da-her wurde die Erfassungssicherheit des RFID-Systems in Abhängigkeit der Ge-schwindigkeit der Transponder bestimmt. Für eine Simultanerfassung stellt darüber hinaus die Anzahl der Transponder eine weitere wichtige Einflussgröße dar. Daher wurde auch die Anzahl der Transponder variiert. Um eine Abhängigkeit des Mehr-fachlesegerätes von der Anzahl der Einzellesegeräte zu ermitteln, wurde die Erfas-sungssicherheit in Abhängigkeit von der Anzahl aktivierter Lesegeräte bestimmt. Die Ausprägungen der Einflussgrößen wurden wie folgt gewählt:

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 65
- Geschwindigkeit [m/s]: 1,0; 1,5; 2,0 - Anzahl der Transponder [n]: 3; 6; 9 - Anzahl aktivierter Einzellesegeräte [n]: 4; 6; 8
Der gewählte Abstand der Transponder ergab sich aus den Ergebnissen der stati-schen Versuche und lag bei 6 cm, als Orientierung der Transponder wurde a ge-wählt. Es ergaben sich 27 Varianten. Diese Varianten wurden fünf Mal randomisiert wiederholt, wobei eine Wiederholung 20 Runden der Transponder entsprach. Die in den einzelnen Varianten besetzten Transponderpositionen bzw. aktivierten Einzellesegeräte sind im Folgenden dargestellt (Tabelle 3 und Tabelle 4). Tabelle 3: Varianten nach Anzahl Transponderohrmarken
Anzahl Transpondernummern
3 2, 3, 6
6 1, 4, 5, 7, 8, 9
9 1-9
Tabelle 4: Varianten nach Anzahl aktiver Lesegeräte
Anzahl Lesegerätenummern
4 1, 2, 6, 7
6 1, 2, 4, 6, 7, 8
8 1-8
Die Zielgröße der Untersuchung zur Bestimmung der Erfassungssicherheit war die Erfassungsquote. Die Erfassungsquote stellt den Quotient aus der der Anzahl der erfassten Transponder und der Anzahl der erfassbaren Transponder dar. Sie ist wie folgt definiert:
Erfassungsquote [%] =Anzahl erfasster Transponder [n]
Anzahl erfassbarer Transponder [n]·100 (3)
Die Erfassungsquote kann auf eine Runde, auf eine Wiederholung oder alle Wie-derholungen bezogen werden 5.4 Ergebnisse 5.4.1 Erfassungsreichweite Im Folgenden sind die Ergebnisse aus der Bestimmung der maximalen Erfassungs-reichweite der Transponderohrmarken dargestellt (Tabelle 5, Abbildung 18).

66 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Tabelle 5: Ergebnisse der Bestimmung der maximalen Erfassungsreichweite
Transponder-nummer
9690000000…
Maximale Erfassungsreichweite
Orientierung a Orientierung b
Mittelwert [mm]
Standard- abweichung
[mm]
Mittelwert [mm]
Standard- abweichung
[mm]
70782 75,00 0,00 50,00 0,00
70783 73,00 2,45 50,00 0,00
70784 71,00 2,00 50,00 0,00
70785 75,00 0,00 50,00 0,00
70786 77,00 2,45 50,00 0,00
70787 75,00 3,16 49,00 2,00
70788 73,00 2,45 50,00 0,00
70789 77,50 2,50 50,00 0,00
70790 75,00 0,00 50,00 0,00
70791 72,00 2,45 49,00 2,00
70792 73,00 2,45 50,00 0,00
70793 74,00 2,00 50,00 0,00
70794 74,00 2,00 50,00 0,00
70795 74,00 2,00 50,00 0,00
70796 75,00 0,00 50,00 0,00
70797 71,00 2,00 49,00 2,00
70798 75,00 0,00 50,00 0,00
70799 72,00 2,45 50,00 0,00
70800 75,00 0,00 50,00 0,00
70801 73,75 2,17 50,00 0,00
70802 76,00 2,00 50,00 0,00
70803 73,00 2,45 50,00 0,00
70804 73,00 2,45 50,00 0,00
Die Einzeltransponder sind mit ihrer vollständigen EID, dem Mittelwert der maxima-len Erfassungsreichweite sowie deren Standardabweichung in den beiden unter-suchten Orientierungen a und b aufgeführt. Diese Werte wurden aus fünf Wieder-holungen berechnet. In der Orientierung a wurden mittlere Erfassungsreichweiten von 71,00 bis 77,50 mm erreicht (Standardabweichungen 0,00 bis 3,16 mm). In der Orientierung b wurde nahezu einheitlich eine mittlere Erfassungsreichweite von 50,00 mm mit einer Standardabweichung von 0,00 mm erreicht, lediglich bei drei Transpondern lag die mittlere Erfassungsreichweite bei 49,00 mm bei einer Stan-dardabweichung von 2,00 mm.

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 67
Die Standardabweichung war für alle Transponder in beiden Orientierungen insge-samt gering und kleiner als das Raster, in dem gemessen wurde. Deshalb wurde angenommen, dass sich die Transponder in ihrer Erfassungsreichweite nicht von-einander unterscheiden.
Abbildung 18: Erfassungsreichweite (n = 115) in Abhängigkeit von der Orientierung der Transponder zum Lesegerät Für die weiteren Untersuchungen zum Erfassungsbereich des RFID-Systems wa-ren neun Transponder notwendig. Es wurden diejenigen Transponder ausgewählt, die in Orientierung a einen Mittelwert der maximalen Erfassungsreichweite von 74 mm bis 75 mm und eine möglichst geringe Standardabweichung hatten (Tabelle 6). Tabelle 6: Verwendete Transponderohrmarken
Position Transpondernummer
1 969000000070782
2 969000000070785
3 969000000070790
4 969000000070796
5 969000000070798
6 969000000070800
7 969000000070793
8 969000000070795
9 969000000070794

68 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
5.4.2 Erfassungsbereich Die Ergebnisse aus der Untersuchung des Erfassungsbereiches der Einzellesege-räte wurden mit Hilfe von Diagrammen visualisiert (Abbildung 19, Abbildung 20, Ab-bildung 21, Abbildung 22). Die qualitative Untersuchung in den Orientierungen a (Abbildung 19) und b (Abbildung 20) wird nach Feldstärkeklassen aufgeteilt darge-stellt. Sie zeigen das von einer Antenne eines Einzellesegerätes aufgebaute Feld gemessen mit einem Feldmessgerät.
Abbildung 19: Feldstärke in Orientierung a
Abbildung 20: Feldstärke in Orientierung b Es ist zu erkennen, dass die ermittelten maximalen Erfassungsreichweiten der Transponder (Kapitel 5.4.1) im Bereich von über 100 µA liegen, das Feld aber weit darüber hinaus detektiert werden kann. Im Vergleich der beiden Orientierungen zeigt sich die Abhängigkeit des in einer Empfangsspule (in diesem Fall der des

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 69
Feldmessgerätes) induzierten Stroms von der Orientierung der beiden Spulen zuei-nander. Im Randbereich der Einzelantenne kann in der Orientierung b eine deutlich höhere Feldstärke gemessen werden als in der Orientierung a. Im Zentrum der Ein-zelantenne dagegen kann in der Orientierung b keine Feldstärke gemessen werden, in der Orientierung a zeigt sich aber ein weit ausgreifendes, sich erst in größerem Abstand zur Einzelantenne abschwächendes Feld. Bei der Bestimmung des Bereiches, in dem ein Transponder erfasst werden kann, spiegelte sich die Form des gemessenen Feldes wider (Abbildung 21, Abbil-dung 22). Dieser Bereich befand sich vollständig innerhalb des Feldstärkebereiches von über 100 µA.
Abbildung 21: Erfassungsbereich in Orientierung a
Abbildung 22: Erfassungsbereich in Orientierung b

70 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
5.4.3 Dynamische Versuche zur Erfassungssicherheit Die dynamischen Versuche zur Erfassungssicherheit zeigten eine mittlere Erfas-sungsquote aller Varianten und Wiederholungen von 94,6 % bei einer mittleren Standardabweichung von 0,81 %. Die durchschnittlichen Erfassungsquoten der 27 Varianten, d.h. die Mittelwerte aus den fünf Wiederholungen einer Variante, beweg-ten sich zwischen 65,0 % und 100 %, die Standardabweichungen zwischen 0,0 und 4,5 % (Tabelle 7). Von den 27 untersuchten Varianten erreichten 20 Varianten durchschnittliche Erfassungsquoten von mindestens 98,0 %, davon acht Varianten durchschnittliche Erfassungsquoten von 100 % mit einer Standardabweichung von 0 %. Deutlich geringere durchschnittliche Erfassungsquoten von 65,0 bis 66,7 % zeigten sich bei den Versuchsvarianten mit minimaler Anzahl Einzellesegeräte und maximaler Anzahl Transponder (Standardabweichung 0,3 bis 0,9 %).

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 71
Tabelle 7: Ergebnisse der dynamischen Versuche zur Erfassungssicherheit
Var
ian
te
An
zah
l Tra
nsp
on
der
[n
]
An
zah
l Les
eger
äte
[n]
Ges
chw
ind
igke
it [
m/s
]
Erf
assu
ng
squ
ote
[%
] W
ied
erh
olu
ng
1
Erf
assu
ng
squ
ote
[%
] W
ied
erh
olu
ng
2
Erf
assu
ng
squ
ote
[%
] W
ied
erh
olu
ng
3
Erf
assu
ng
squ
ote
[%
] W
ied
erh
olu
ng
4
Erf
assu
ng
squ
ote
[%
] W
ied
erh
olu
ng
5
Erf
assu
ng
squ
ote
[%
] M
itte
lwer
t
Sta
nd
ard
abw
eich
un
g
[%]
1 3 4 1,0 95,00 88,33 95,00 96,67 93,33 93,67 3,21
2 3 4 1,5 91,67 90,00 98,33 90,00 95,00 93,00 3,61
3 3 4 2,0 83,33 78,33 85,00 83,33 81,67 82,33 2,53
4 3 6 1,0 90,00 100,00 100,00 100,00 100,00 98,00 4,47
5 3 6 1,5 100,00 100,00 100,00 100,00 100,00 100,00 0,00
6 3 6 2,0 100,00 100,00 100,00 100,00 100,00 100,00 0,00
7 3 8 1,0 100,00 100,00 100,00 100,00 100,00 100,00 0,00
8 3 8 1,5 100,00 100,00 100,00 100,00 100,00 100,00 0,00
9 3 8 2,0 100,00 100,00 100,00 100,00 100,00 100,00 0,00
10 6 4 1,0 100,00 100,00 100,00 100,00 100,00 100,00 0,00
11 6 4 1,5 100,00 100,00 100,00 100,00 99,17 99,83 0,37
12 6 4 2,0 99,17 99,17 99,17 98,33 100,00 99,17 0,59
13 6 6 1,0 100,00 100,00 100,00 100,00 100,00 100,00 0,00
14 6 6 1,5 100,00 100,00 100,00 100,00 99,17 99,83 0,37
15 6 6 2,0 100,00 100,00 99,17 100,00 98,33 99,50 0,75
16 6 8 1,0 99,17 100,00 100,00 100,00 100,00 99,83 0,37
17 6 8 1,5 100,00 100,00 100,00 100,00 100,00 100,00 0,00
18 6 8 2,0 99,17 99,17 100,00 100,00 100,00 99,67 0,46
19 9 4 1,0 66,11 66,67 66,67 66,67 66,67 66,56 0,25
20 9 4 1,5 66,67 66,11 66,67 66,67 66,67 66,56 0,25
21 9 4 2,0 63,89 65,56 65,00 66,11 64,44 65,00 0,88
22 9 6 1,0 99,44 100,00 100,00 98,89 100,00 99,67 0,50
23 9 6 1,5 99,44 99,44 98,89 99,44 99,44 99,33 0,25
24 9 6 2,0 95,00 98,89 97,22 96,67 95,56 96,67 1,52
25 9 8 1,0 99,44 99,44 99,44 99,44 100,00 99,56 0,25
26 9 8 1,5 98,89 100,00 100,00 99,44 98,89 99,44 0,56
27 9 8 2,0 98,33 100,00 98,89 98,33 98,89 98,89 0,68

72 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
In den Varianten mit der maximalen Anzahl an Transpondern erreichte keine der Varianten eine durchschnittliche Erfassungsquote von 100 %, auch wenn diese in einzelnen Wiederholungen erreicht wurde. Diese Varianten zeigten eine vergleichs-weise große Streuung der Erfassungsquoten (Abbildung 23): die Standardabwei-chung beträgt bei der gemeinsamen Betrachtung aller Varianten mit 9 Transpon-dern 15,7 % bei einer durchschnittlichen Erfassungsquote von 88,0 %. Die Varian-ten mit 3 und mit 6 Transpondern erreichten dagegen höhere durchschnittliche Er-fassungsquoten von 96,3 bzw. 99,8 % mit einer geringeren Streuung als bei den Varianten mit 9 Transpondern.
Abbildung 23: Erfassungsquote (n = 135) in Abhängigkeit von der Anzahl der Trans-ponderohrmarken

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 73
Ein gegenläufiges Bild zeigte sich bei der Betrachtung der Ergebnisse nach der An-zahl der verwendeten Einzellesegeräte. Hier konnte bei zunehmender Anzahl Ein-zellesegeräte eine höhere Erfassungsquote und eine geringere Standardabwei-chung beobachtet werden (Abbildung 24). Bei den Varianten mit 8 und mit 6 Einzel-lesegeräten wurde eine durchschnittliche Erfassungsquote von 99,7 % bzw. 99,2 % bei einer Standardabweichung von 0,5 bzw. 1,8 % erreicht. Die Varianten mit 4 Ein-zellesegeräten erreichten dagegen eine durchschnittliche Erfassungsquote von 85,1 % bei einer vergleichsweise großen Streuung der beobachteten Werte (Stan-dardabweichung 14,7 %).
Abbildung 24: Erfassungsquote (n = 135) in Abhängigkeit von der Anzahl der Le-segeräte

74 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Bei der Betrachtung der Einflussgröße Geschwindigkeit zeigen sich nur sehr ge-ringe Unterschiede zwischen den Varianten (Abbildung 25). Die durchschnittlichen Erfassungsquoten der Varianten mit Geschwindigkeiten von 1,0, 1,5 und 2,0 m/s lagen bei 95,3 %, 95,3 % und 93,5 %. Auch die Streuung der beobachteten Werte unterschied sich zwischen den drei Geschwindigkeiten kaum (10,6 %, 10,6 % und 11,6 %) und war vergleichsweise groß.
Abbildung 25: Erfassungsquote (n = 135) in Abhängigkeit von der Geschwindigkeit 5.5 Diskussion Anhand der Ergebnisse lässt sich feststellen, dass das Mehrfachlesegerät unter La-borbedingungen funktioniert und sehr gute Ergebnisse liefert. Eine Simultanerfas-sung mehrerer Transponder im Raummultiplexverfahren war mit einem der ISO-Norm 11785 entsprechenden Mehrfachlesegerät unter den gegebenen Versuchs-bedingungen möglich. In zukünftigen Untersuchungen sollten jedoch weitere Para-meter wie der Abstand und die Orientierung der Transponder variiert werden. Damit eine sinnvolle Variation des Abstandes von Einzellesegerät zu Transponder erfol-gen kann, müssen jedoch RF-Module mit höherer Reichweite verwendet werden. Außerdem sollten mehr als drei Ausprägungen der Einflussgrößen untersucht wer-den, um die Wirkung der Einflussgrößen auf die Erfassungsquote deutlicher her-ausstellen zu können.
Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 75
Der Prüfstand (Kapitel 5.2.5) erwies sich als prinzipiell gut geeignet für Untersu-chungen von RFID-Systemen mit mehreren zu erfassenden Transpondern. Im Ver-suchsbetrieb zeigte sich jedoch, dass die Umrüstung und die manuelle Parametrie-rung zwischen den Varianten viel Zeit in Anspruch nimmt und fehleranfällig ist. Das Ziel sollte sein, mehr Varianten in kürzerer Zeit untersuchen zu können. Dazu ist es notwendig, den Prüfstand und das Prüfverfahren weiter zu automatisieren, z.B. durch eine automatische Geschwindigkeitsregelung sowie eine automatische Lese-gerätkonfiguration. Außerdem sollte eine effiziente Methode entwickelt werden, um die Positionen der Transponder auf dem Keilriemen zu randomisieren und somit den Effekt der Position der Transponder zu eliminieren. Bei der Bestimmung des Erfassungsbereiches des LF-RFID-Systems konnten die schon von Kern (1997, 2006) beschriebenen Formen beobachtet werden. Diese er-geben sich zum einen durch die Ausbreitung und den Abfall des magnetischen Fel-des um die erzeugende Antenne und zum anderen durch Orientierung der empfan-genden Antenne zur erzeugenden Antenne (Kapitel 3.5.1). Daher unterschieden sich die beobachteten Erfassungsbereiche stark in Abhängigkeit von den unter-suchten Orientierungen a und b. Die Ergebnisse der qualitativen Untersuchung mit dem Feldmessgerät zeigen in der Orientierung a eine große Mittelkeule, die sich in einem Winkel von 90° zur Antennenmitte befindet, sowie zwei kleinere seitliche Keu-len in Richtung der Längsachse der Antenne, d.h. in einem Winkel von 90° zur Mit-telkeule, stehend. Die Mittelkeule stellt die Hauptstrahlrichtung der Antenne dar. Die beobachteten Keulen in der Orientierung b stehen sowohl in der Größe der räumli-chen Ausdehnung als auch in ihrer Lage zwischen den beiden o.g. Keulen. Sie be-finden sich in einem Winkel von 45° bzw. 135° zur Antennenlängsachse, wobei sie sich nicht überscheiden, d.h., es gibt einen Bereich unmittelbar vor der Antenne, in dem in dieser Orientierung keine Feldstärke mehr gemessen werden konnte. Diese Formen spiegelten sich bei der Bestimmung des Erfassungsbereiches mit einem LF-Transponder wider und bestätigten daher die zuvor gemachten Beobachtungen. Der Erfassungsbereich der quantitativen Untersuchung mit dem LF-Transponder war aber erwartungsgemäß kleiner als der bei der qualitativen Untersuchung mit dem Feldmessgerät beobachtete. Im direkten Vergleich war zu erkennen, dass sich der Erfassungsbereich des LF-Transponders vollständig in einem Bereich von über 100 µA befand. In diesem Bereich von über 100 µA befanden sich auch die beobachteten Werte der Bestimmung der maximalen Erfassungsreichweite. Der Unterschied zwischen der maximalen Erfassungsreichweite und des mit einem Transponder bestimmten Er-fassungsbereiches lässt sich durch die unterschiedliche Methodik der beiden Un-tersuchungen erklären. Bei der Bestimmung der maximalen Erfassungsreichweite wurden 23 Transponder mit fünf Wiederholungen auf einem Raster von 0,5 cm un-tersucht. Bei der Bestimmung des Erfassungsbereiches wurde aus Gründen der Zeitersparnis lediglich ein zufällig ausgesuchter Transponder ohne Wiederholung auf einem Raster von 2,5 cm verwendet. Die unterschiedliche Methodik ist durch
76 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
die unterschiedlichen Ziele der beiden Untersuchungen begründet: die Bestimmung des Erfassungsbereiches diente dazu, eine räumliche Vorstellung des Bereiches zu gewinnen, in dem ein Transponder von dem entwickelten Lesegerät erfasst werden kann. Die Bestimmung der maximalen Erfassungsreichweite diente der Vorberei-tung der dynamischen Untersuchungen, indem aus einer Charge von LF-Transpondern neun LF-Transponder identifiziert werden konnten, die sich in ihrer Erfassbarkeit nicht unterscheiden. Aufgrund der beobachteten geringen Erfassungsreichweite erschien es nicht sinn-voll, bei der dynamischen Untersuchung zur Erfassungssicherheit den Abstand zwi-schen Antenne des Einzellesegerätes und Transpondern sowie die Orientierung zu variieren, da die Erfassungsreichweite von der Leistungsabgabe des RF-Moduls abhängig ist. Sie könnte unter Beibehaltung des Lesegerätekonzeptes mit anderen RF-Modulen erhöht werden. Aus diesem Grund wurde die dynamische Untersu-chung zur Erfassungssicherheit in Orientierung a mit einem Abstand von 6 cm durchgeführt. Die Ergebnisse der Untersuchungen zur Erfassungssicherheit zeigten bei der Be-trachtung der Einflussgrößen Anzahl Einzellesegeräte und Geschwindigkeit erwart-bare Ergebnisse. Mit steigender Anzahl an Einzellesegeräten nimmt die Wahr-scheinlichkeit zu, dass ein einzelner Transponder den Erfassungsbereich einer Sendeantenne passiert und sich dort für eine Erfassung ausreichend lange aufhält. Daher nahm die Erfassungsquote mit Erhöhung der Lesegeräteanzahl zu. Mit stei-gender Geschwindigkeit nahm die Erfassungsquote ab, da sich dadurch die Dauer, in der sich der Transponder im Erfassungsbereich befand und damit die Dauer, die zum Datenaustausch zwischen Einzellesegerät und Transponder zur Verfügung stand, verkürzte. Bei der Einflussgröße Anzahl Transponder konnte erwartet werden, dass mit stei-gender Anzahl an Transpondern die Erfassungsquote abnahm, da die Wahrschein-lichkeit erhöht wurde, dass sich mehrere Transponder gleichzeitig im Erfassungs-bereich eines Einzellesegerätes befanden. Bei den Varianten mit neun Transpon-dern wurden daher auch die geringsten Erfassungsquoten beobachtet. Die höchs-ten Erfassungsquoten erreichten aber die Varianten mit sechs Transpondern, nicht die mit drei Transpondern. Gleichzeitig war die Streuung der Erfassungsquote bei sechs Transponderohrmarken geringer als bei drei oder neun Transpondern. Diese Ergebnisse entsprachen nicht den Erwartungen, die eine Zunahme der Erfassungs-quoten und Abnahme der Streuung von den Varianten mit neun Transpondern über die Varianten mit sechs Transpondern zu jenen mit drei Transpondern vermuten ließen. Eine Erklärung hierfür ist, dass vermutlich die Position der Transponderohrmarken in der Versuchsanordnung eine Auswirkung auf die Erfassungssicherheit der Trans-ponder hatte. Denn die mittleren Transponderohrmarken (7 bis 9) wurden bei den

Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen 77
Varianten 19 bis 21, d.h. mit vier Einzellesegeräten und neun Transpondern, nie erfasst. Dies lässt sich dadurch erklären, dass aufgrund der Anordnung die mittleren Transponder nie alleine in einem Erfassungsbereich der vier Einzellesegeräte wa-ren bzw. dass die anderen Transponder (1 bis 6) gleichzeitig die bessere, d.h. die frühere Position im Erfassungsbereich hatten. Daraus lässt sich wiederum schließen, dass vier Einzellesegeräte nicht ausreichend waren, um eine hohe Erfassungsquote zu gewährleisten. Betrachtet man alle Vari-anten, liegt die mittlere Erfassungsquote bei 94,6 % mit einer mittleren Standardab-weichung von 0,81 %. Werden die Varianten mit vier Einzellesegeräten (Varianten 1 bis 3, 10 bis 12, 19 bis 21) nicht berücksichtigt, erhöht sich die mittlere Erfas-sungsquote auf 99,4 % bei einer mittleren Standardabweichung von 0,56 %. Insgesamt zeigte sich, dass weniger die einzelnen Einflussgrößen Anzahl der Transponder, Anzahl der Einzellesegeräte und Geschwindigkeit, sondern vielmehr die Kombination der beiden Einflussgrößen Anzahl Transponder und Anzahl Einzel-lesegeräte Einfluss auf die Erfassungssicherheit hatten. Ein Verhältnis der Anzahl Transponder zur Anzahl an Einzellesegeräten von 2,25 : 1 zeigte deutlich geringere bzw. nicht ausreichende Erfassungsquoten. Für eine sichere Erfassung mehrerer Transponder mit dem entwickelten Mehrfachlesegerät ist unter den beschriebenen Versuchsbedingungen daher ein engeres Verhältnis von höchstens 1,5 : 1 erforder-lich. Zur Bewertung der Eignung des entwickelten Lesegerätes für Praxisanwendungen zur Tierkennzeichnung bedeutsam ist die Begrenzung der Erfassungsreichweite LF-basierter Mehrfachlesegeräte. Diese ergibt sich allgemein aus der physikali-schen Grenze des Erfassungsbereiches eines LF-Lesegerätes (Kapitel 3.5.1). Im speziellen Fall eines LF-basierten Mehrfachlesegerätes muss die Erfassungsreich-weite der Einzellesegeräte aber so weit verringert sein, dass sich deren Erfassungs-bereiche sowohl räumlich als auch zeitlich möglichst nicht überlagern und nur so groß sind, dass die Wahrscheinlichkeit hoch ist, dass sich zu einem bestimmten Zeitpunkt nur ein Transponder im Erfassungsbereich befindet (Kleinräumigkeit, vgl. Kapitel 5.2.3). Dies wurde mit dem untersuchten Mehrfachlesegerät erreicht. Durch die gewählte Spulengröße der Einzelantennen von 20 cm x 20 cm bei einem Ab-stand von 15 cm in der Anordnung zu einem Mehrfachlesegerät scheint auch eine ausreichende Abdeckung in der Fläche bei gleichzeitiger Kleinräumigkeit für z.B. Schweine und Mastläufer erreicht. Die gewählten Abstände zwischen den Trans-pondern von 30 cm in Laufrichtung und 10 cm quer zur Laufrichtung in der Unter-suchung unterschreiten mögliche Abstände von Transponderohrmarken selbst bei dicht gedrängten Mastläufern und führten bei entsprechender Anzahl an Einzellese-geräten zu ausreichenden Erfassungsquoten. Allerdings ist die Erfassungsreich-weite, d.h. die Ausdehnung des Erfassungsbereiches in den Raum, durch die er-reichte Kleinräumigkeit ebenfalls begrenzt, im Falle des entwickelten und unter-suchten Mehrfachlesegerätes auf unter 10 cm.

78 Entwicklung eines Mehrfachlesegerätes zur Simultanerfassung von Mastschweinen
Eine Transponderohrmarke befindet sich allerdings bei einem sich über das Mehr-fachlesegerät bewegenden Schwein oder Mastläufer in einer Entfernung von deut-lich über 10 cm. Ein Transponder müsste daher statt am Ohr deutlich weiter distal, d.h. am Bein der Tiere befestigt werden. Mit Transpondern versehene Fesselbänder sind aber bei Schweinen nicht sinnvoll, da sie eine Beschäftigungsmöglichkeit dar-stellen würden, was wiederum zu Verlusten oder Defekten führen kann (Blair et al. 1994). Außerdem müsste bei den sich im Wachstum befindlichen Tieren ein Fes-selband im Verlauf von Aufzucht und Mast in regelmäßigen Abständen gewechselt oder geweitet werden, um nicht einzuwachsen. Dieses Wechseln oder Weiten be-deutet aber zum einen Stress für die Tiere und ist zum anderen nicht praktikabel, da es für den Landwirt einen zu hohen Aufwand bedeuten würde (Rau 2007), der nicht im Verhältnis zum zusätzlichen Nutzen durch die Kennzeichnung stünde. Denkbar wäre daher aber eine Anwendung bei Mastlämmern, Schafen und Ziegen. Eine weitere, bei Schweinen prinzipiell mögliche Anbringung am Bein der Tiere stellt die Verwendung von Transponderinjektaten dar. Das Transponderinjektat müsste in diesem Fall subkutan z.B. am Mittelfuß appliziert werden. Die Applikation des Transponderinjektats am Bein des Tieres hätte zusätzlich den Vorteil, dass es sich dort in einer größeren Entfernung zu verzehrfähigem Fleisch bzw. wertbestimmen-den Teilstücken des Schlachtkörpers befindet als bei den anderen bisher beim Schwein untersuchten Applikationsorten wie Ohrlappen, Ohrgrund und Bauchhöhle. Es kann weiter vermutet werden, dass der Transponder an dieser Stelle auch we-niger zur Wanderung innerhalb des Gewebes neigt. Die Wanderungsneigung des Transponderinjektats stellt ein höheres Risiko zum einen für dessen Verbleib im Schlachtkörper und zum anderen aber auch für dessen Verlust aus dem Tierkörper dar. Zu diesem Applikationsort liegen aber im Gegensatz zu den genannten Appli-kationsorten Ohr und Bauchhöhle (vgl. Hogewerf et al. 2007) keine Erkenntnisse zur Verträglichkeit der Applikation für das Tier sowie zu Verlusten und Funktionsfä-higkeit des Transponderinjektats vor. Außerdem hat sich die Verwendung von Transponderinjektaten bei Nutztieren, im Gegensatz zu Transponderohrmarken, entgegen ursprünglicher Annahmen nicht verbreitet. Zum einen sind, aus fachlicher Sicht unbegründete, Befürchtungen der Verbraucher zu erwarten, dass ein Trans-ponderinjektat im Schlachtkörper verbleibt und in die Lebensmittelkette gelangt. Zum anderen sind die Applikation des Transponderinjektats und dessen sichere Entnahme im Schlachthof mit einem deutlich höheren Aufwand als bei einer Trans-ponderohrmarke verbunden. Daher erscheint nach heutigem Kenntnisstand eine Verwendung von Transponder-ohrmarken bei Schweinen als sinnvoller. Um das entwickelte und untersuchte Mehr-fachlesegerät für diese Art der Kennzeichnung zu verwenden bedarf es einer Wei-terentwicklung hin zu einer größeren Erfassungsreichweite. Dieser sind aber durch die o.g. Einschränkung der Erfassungsreichweite für die Anwendung eines Raummultiplexverfahrens zur Simultanerfassung bei LF-RFID-Systemen Grenzen gesetzt.

79
6 BEWERTUNG VON UHF-TRANSPONDERN FÜR DEN EINSATZ ZUR ELEKTRONISCHEN TIERKENNZEICHNUNG
6.1 Einleitung RFID-Systeme im Ultrahochfrequenzbereich (UHF, 886 MHz) zeichnen sich durch eine hohe Reichweite und eine hohe Datenübertragungsrate aus. Die Ausprägung dieser beiden Eigenschaften prädestinieren diese Systeme zur Simultanerfassung von größeren, sich bewegenden, elektronisch gekennzeichneten Objekten. Durch die hohe Datenübertragungsrate lassen sich Antikollisionsverfahren umsetzen, die auch bei einer hohen Geschwindigkeit der Transponder eine sichere Erfassung ge-währleisten. Die hohe Reichweite ermöglicht es, auch größere oder sich entfernt befindende Objekte zu erfassen. UHF-Systeme werden daher zur Lagerhaltung und zur Wareneingangs- und -ausgangskontrolle eingesetzt. UHF-Systeme scheinen daher eine Alternative zu Niederfrequenzsystemen (LF, 134,2 kHz) in der elektronischen Tierkennzeichnung darzustellen. Sie gelten aber bisher aufgrund ihrer Empfindlichkeit gegenüber Wasser als für diesen Einsatz un-geeignet. Leitende Flüssigkeiten wie die Körperflüssigkeit von Tieren oder Wasser absorbieren UHF-Signale bei weitem stärker als LF-Signale. LF-Signale dagegen können die Körper(-flüssigkeit) von Tieren durchdringen ohne spürbar gedämpft zu werden. Die spezifische Absorptionsrate (Dämpfung) von Wasser liegt bei einer Fre-quenz von 100 kHz 100000-mal niedriger als bei einer Frequenz von 1 Ghz (Finkenzeller 2012). Dadurch können UHF-Transponder im Gegensatz zu LF-Transpondern in Anwesenheit von Wasser nicht mehr zuverlässig erfasst werden. Sie gelten als ungeeignet für die Kennzeichnung von Tieren oder wasserhaltigen Objekten (Kern 2006). In den letzten Jahren waren erhebliche Weiterentwicklungen der Leistungsfähigkeit und der Robustheit der Systeme zu beobachten. Es wurden UHF-Transponder ent-wickelt, die in Anwesenheit von Wasser oder anderer Störgrößen wie z.B. Metall einsetzbar sind (Schmidt 2009). Dies ging einher mit einer stark zunehmenden Ver-breitung von UHF-Anwendungen in Handel und Logistik. So verwenden heute die meisten Unternehmen, die RFID in logistischen Prozessen einsetzen, UHF-Systeme – obwohl bis vor kurzem noch andere RFID-Systeme als technologisch ausgereifter galten und daher bei Logistikanwendungen vorherrschten (Truschkin et al. 2009). Dieser Trend wurde durch die Standardisierung von UHF-Anwendungen durch das „EPC Class-1 Generation-2 UHF“-Protokoll gefördert. Im Jahr 2006 wurde dieses Protokoll in die ISO-Norm 18000-6 für UHF-Luftschnittstellen aufgenommen. Infolge der Standardisierung und einer Nachfrage-steigerung sanken die Kosten für einfache UHF-Transponder, sodass heute UHF-Anwendungen häufig günstiger sind als andere RFID-Anwendungen (Weinländer 2010, Clasen 2007).

80 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Aufgrund dieser Entwicklung in ihren Anwendungsmöglichkeiten können UHF-Systeme heute nicht mehr als grundsätzlich ungeeignet für die elektronische Tier-kennzeichnung (eTK) angesehen werden. Durch die Möglichkeit weiterentwickelte Transponder auch in Anwesenheit von Wasser oder Metall erfassen zu können, scheint das wesentliche Hemmnis für eine Anwendung in der Tierhaltung überwun-den zu sein. Untersuchungen zur Eignung dieser weiterentwickelten UHF-Transponder für die eTK gibt es jedoch kaum. Sie ist von Einflussgrößen des Anwendungsumfeldes ab-hängig, die sich destruktiv (Störgrößen) oder konstruktiv (Führungsgrößen) auswir-ken können (vgl. Kern 2006). Das Wissen um die Wirkung dieser Einflussgrößen ist daher für die Bewertung von RFID-Systemen in einem bestimmten Anwendungs-umfeld bedeutsam. In Praxisversuchen fehlen allerdings konstante, definierbare Versuchsbedingungen, um die Wirkung einzelner oder der Kombinationen mehrerer Einflussgrößen ermitteln zu können. Es ist daher notwendig eine konstante und re-produzierbare Versuchsumgebung zu schaffen, in der bestimmte Einflussgrößen gezielt variiert werden können. Daher war es das Ziel dieses Teils der Arbeit, die Wirkung von Einflussgrößen auf die Erfassung von weiterentwickelten UHF-Transpondern vor dem Hintergrund ei-nes Einsatzes zur eTK unter konstanten und reproduzierbaren Versuchsbedingun-gen zu untersuchen. Da die Einflussgröße „Wasser“ bei der Anwendung von UHF-Systemen als Störgröße wirkt und den bisherigen Einsatz von UHF-Systemen für die eTK verhinderte, wurde insbesondere diese Einflussgröße betrachtet. Zunächst wurde die maximale Erfassungsreichweite der UHF-Transponder mit zwei unter-schiedlichen UHF-Lesegeräten in Abhängigkeit von Wasser und von der Orientie-rung der Transponder zum Lesegerät bestimmt. Die maximale Erfassungsreich-weite wurde auf der Mittelachse des Lesegerätes bzw. der Lesegeräteantenne be-stimmt, die deren Hauptstrahlrichtung darstellt. In einem weiteren Schritt wurde der Erfassungsbereich bestimmt, d.h. der Bereich auf der Querschnittsebene des Lese-gerätes bzw. der Lesegeräteantenne, in dem die UHF-Transponder erfasst werden können. Dieser Bereich gibt eine räumliche Vorstellung davon, wie ein Transponder im Raum erfasst werden kann. Er wurde in Abhängigkeit von Wasser und von der Orientierung des Transponders zum Lesegerät bzw. zur Lesegeräteantenne be-stimmt. In einer anschließenden Untersuchung unter dynamischen Bedingungen wurden die UHF-Transponder durch den Erfassungsbereich der UHF-Lesegeräte bewegt. Dadurch wurde die Erfassungssicherheit der UHF-Transponder in einer Si-tuation bestimmt, wie sie im praktischen Einsatz beim Erfassen von gekennzeich-neten Tieren beim Durchtreiben durch ein Erfassungsportal entsteht bzw. entstehen würde. Die untersuchten Einflussgrößen waren: Wasser, Geschwindigkeit, Anzahl der Transponder und Orientierung der Transponder zum Lesegerät. Die Untersu-chung der Wirkung von Einflussgrößen auf die Erfassbarkeit weiterentwickelter UHF-Transpondertypen erfolgte teilweise im Rahmen einer Masterarbeit (Herzog 2012).

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 81
6.2 Material und Methoden 6.2.1 Transponder Die Untersuchungen wurden mit zwei weiterentwickelten UHF-Transpondertypen (A und B) und einem UHF-Standardtranspondertypen (N) durchgeführt (Abbildung 26).
Abbildung 26: UHF-Transponder A, B, N (v.l.) Bei A (MT 86 (HT); Harting Electric, Espelkamp) handelt es sich um einen markt-gängigen Transponder, der für die Luftfahrtindustrie entwickelt wurde, um unter un-günstigen Bedingungen wie z.B. auf Metall sicher erfasst werden zu können. Er ist unempfindlich gegenüber Feuchtigkeit, Chemikalien und mechanischer Belastung. Sein Kunststoffgehäuse (41 mm x 11 mm x 5 mm) ist IP 69K-geschützt. Nach Her-stellerangaben kann der Transponder auf einer Metallplatte eine Erfassungsreich-weite von > 2,5 m bei einer Lesegeräteleistung von 2 W ERP (equivalent radiated power) erreichen. Bei dem integrierten Schaltkreis des Transponders handelt es sich um einen Alien Higgs 3 (Alien Technology, Butterfield). Transpondertyp B (Harting Electric, Espelkamp) ist ein Prototyp, der im Rahmen der vorliegenden Arbeit vom Hersteller speziell auf die Anwesenheit von Wasser abge-stimmt wurde. Er besteht aus zwei zusammengeschweißten Leiterplatten (47 mm x 45 mm x 1 mm), zwischen denen sich der integrierte Schaltkreis (UCode G2XM; NXP Semiconductors, Eindhoven) und die Antenne befinden. Als Kontrolle N (UHF Tag; UPM Raflatac, Pirkkala) wurde ein UHF-Labeltransponder (24 mm x 24 mm) gewählt. Dieser Transponder stellt einen Stan-dardtyp dar, wie er zur Stückgutkennzeichnung in Handel und Logistik weit verbrei-tet ist. Er wurde zur besseren Handhabbarkeit auf ein Plättchen (25 mm x 25 mm x 2 mm) aus Polyvinylchlorid (PVC) aufgeklebt. Der Transponder besitzt einen integrierten Schaltkreis des Typs Monza (Impinj, Seattle). Alle drei Transpondertypen entsprechen den UHF-Normen ISO 18000-6-c bzw. EPC Class1 Gen2 und arbeiten auf einer Betriebsfrequenz von 868 MHz. Sie un-terstützen daher alle drei als Antikollisionsverfahren das Slotted-ALOHA-Verfahren.

82 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
In den Untersuchungen wurden sie ausschließlich durch ihren 96-bit-Transponder-code nach ISO 18000-6-c/EPC Class1 Gen2 identifiziert. 6.2.2 Lesegeräte Zwei UHF-Lesegerätetypen (I und II) mit unterschiedlichen Aufbaukonzepten ka-men zum Einsatz. Lesegerät I (Abbildung 27) ist monolithisch aufgebaut, d.h. die Sendeantenne und die Empfangsantenne sind gemeinsam mit der Schreib-Lese-Einheit in einem Ge-häuse (640 mm x 280 mm x 75 mm) verbaut (UDL500; Deister Electronic, Barsing-hausen). Die Sende- und die Empfangsantenne sind physisch getrennt, der Öff-nungswinkel der Sendeantenne beträgt 70°. Durch die monolithische Bauweise des Lesegerätes sind die Antennen bereits werkseitig eingestellt und die abgestrahlte Sendeleistung kalibriert. Eine LED-Statusanzeige an der Vorderseite des Gerätes zeigt während des Betriebs den Gerätestatus in den Farben Rot (Störung), Orange (Betriebsbereitschaft) und Grün (Erfassung eines Transponders) an. Die Konfigura-tion des Lesegerätes wird über eine Software (WebConfig; Deister Electronic, Bar-singhausen) vorgenommen, die über einen Steuerungs-PC ausgeführt wird. Der Zu-griff auf das Lesegerät erfolgt über einen Schnittstellenwandler RS485/USB (SNG3; Deister Electronic, Barsinghausen). Die abgestrahlte Sendeleistung des Gerätes ist über diese Software zwischen 0,1 W ERP und 2 W ERP einstellbar. Entsprechend gesetzlicher Vorgaben in der Europäischen Union wurde eine abgestrahlte Sende-leistung von 2 W ERP gewählt. Die Erfassungsreichweite des Lesegerätes wird mit bis zu 5 m in Abhängigkeit von den zu erfassenden Transpondern und der Anwen-dungsumgebung angegeben.
Abbildung 27:Lesegerät I UDL500 (Werkbild Deister Electronic, Barsinghausen) Bei Lesegerät II sind Sende- und Empfangsantenne kombiniert, aber nicht in ein gemeinsames Gehäuse mit der Schreib-Lese-Einheit (Abbildung 28) integriert (RRU4; Kathrein-Werke, Rosenheim). Bis zu vier Sende-Empfangs-Antennen (TX/RX-Antennen) können an eine Schreib-Lese-Einheit angeschlossen werden. In der vorliegenden Arbeit wurden TX/RX-Richtantennen mit einem Öffnungswinkel von 30° verwendet (Wide Range 520 10003; Kathrein-Werke, Rosenheim). Die mo-dulare Bauweise des Lesegerätes macht es notwendig, die Leistung der Schreib-

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 83
Lese-Einheit in Abhängigkeit vom Antennengewinn der verwendeten Antennen und der längenabhängigen Dämpfung der verwendeten Antennenkabel einzustellen um die gewünschte abgestrahlte Sendeleistung zu erhalten. Die Ausgangsleistung der Schreib-Lese-Einheit kann zwischen 0,1 W und 2 W eingestellt werden. Sie wurde so gewählt, dass sich eine abgestrahlte Sendeleistung von 2 W ERP an der Antenne ergab. Das Lesegerät wird über eine auf einem Steuerungs-PC ausgeführte Soft-ware (ReaderStart v2; Kathrein-Werke, Rosenheim) konfiguriert. Der Zugriff auf das Lesegerät erfolgt über ein Ethernet-Schnittstellenkabel mittels TCP/IP-Protokoll. Die Erfassungsreichweite des Lesegerätes wird mit bis zu 10 m angegeben.
Abbildung 28: Lesegerät II RRU4 Beide Lesegeräte bzw. deren Antennen sind zirkular polarisiert. Sie arbeiten auf einer Betriebsfrequenz von 868 MHz und unterstützen Transponderprotokolle nach ISO 18000-6-c bzw. EPC Class1 Gen2. 6.2.3 Prüftisch und Wasserbehälter Mit dem bereits in Kapitel 5.2.4 beschriebenen Prüftisch wurden statische Versuche zur Erfassung der UHF-Transponder durchgeführt. Bedingt durch die größere Reichweite von UHF-Systemen wurden zwei weitere Prüftische gefertigt, um den Messbereich in der Hauptstrahlrichtung der Lesegeräteantennen erweitern zu kön-nen. Um den Einfluss unterschiedlicher Wasservolumina auf die Erfassung der Transponder untersuchen zu können, wurden drei Wasserbehälter aus Polyvi-nylchlorid (PVC) gefertigt (Abbildung 29).
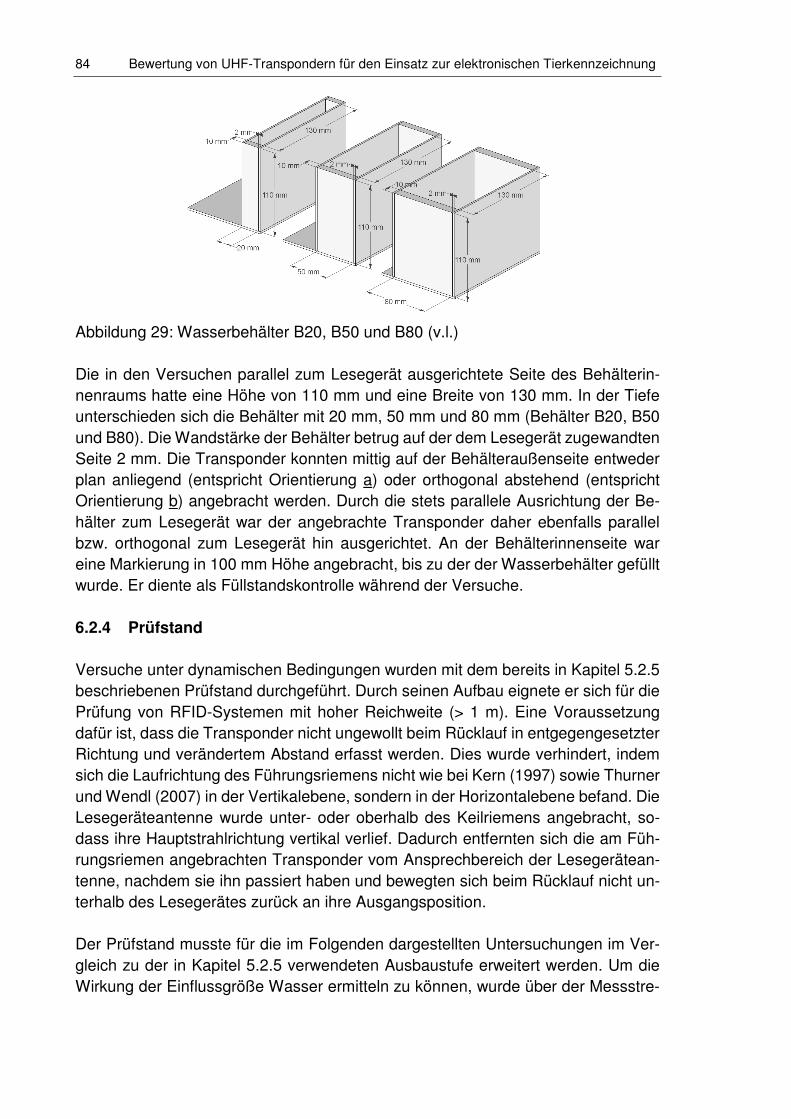
84 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Abbildung 29: Wasserbehälter B20, B50 und B80 (v.l.) Die in den Versuchen parallel zum Lesegerät ausgerichtete Seite des Behälterin-nenraums hatte eine Höhe von 110 mm und eine Breite von 130 mm. In der Tiefe unterschieden sich die Behälter mit 20 mm, 50 mm und 80 mm (Behälter B20, B50 und B80). Die Wandstärke der Behälter betrug auf der dem Lesegerät zugewandten Seite 2 mm. Die Transponder konnten mittig auf der Behälteraußenseite entweder plan anliegend (entspricht Orientierung a) oder orthogonal abstehend (entspricht Orientierung b) angebracht werden. Durch die stets parallele Ausrichtung der Be-hälter zum Lesegerät war der angebrachte Transponder daher ebenfalls parallel bzw. orthogonal zum Lesegerät hin ausgerichtet. An der Behälterinnenseite war eine Markierung in 100 mm Höhe angebracht, bis zu der der Wasserbehälter gefüllt wurde. Er diente als Füllstandskontrolle während der Versuche. 6.2.4 Prüfstand Versuche unter dynamischen Bedingungen wurden mit dem bereits in Kapitel 5.2.5 beschriebenen Prüfstand durchgeführt. Durch seinen Aufbau eignete er sich für die Prüfung von RFID-Systemen mit hoher Reichweite (> 1 m). Eine Voraussetzung dafür ist, dass die Transponder nicht ungewollt beim Rücklauf in entgegengesetzter Richtung und verändertem Abstand erfasst werden. Dies wurde verhindert, indem sich die Laufrichtung des Führungsriemens nicht wie bei Kern (1997) sowie Thurner und Wendl (2007) in der Vertikalebene, sondern in der Horizontalebene befand. Die Lesegeräteantenne wurde unter- oder oberhalb des Keilriemens angebracht, so-dass ihre Hauptstrahlrichtung vertikal verlief. Dadurch entfernten sich die am Füh-rungsriemen angebrachten Transponder vom Ansprechbereich der Lesegerätean-tenne, nachdem sie ihn passiert haben und bewegten sich beim Rücklauf nicht un-terhalb des Lesegerätes zurück an ihre Ausgangsposition. Der Prüfstand musste für die im Folgenden dargestellten Untersuchungen im Ver-gleich zu der in Kapitel 5.2.5 verwendeten Ausbaustufe erweitert werden. Um die Wirkung der Einflussgröße Wasser ermitteln zu können, wurde über der Messstre-

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 85
cke ein Wasserbehälter (2430 mm x 845 mm x 285 mm) aus Polyethylen (PE) an-gebracht. Der Abstand der Unterseite des Wasserbehälters zum Führungsriemen wurde so gewählt, dass die Transponder in allen Orientierungen möglichst nahe an dem sich über ihnen befindenden Wasserkörper vorbeigeführt werden. Darüber hinaus wurde die Datenerfassung und -ablage weiter automatisiert, indem der Betrieb des Prüfstandes durch eine individuell erstellte Software (Leitstand) er-weitert wurde. Die Datenerfassung wurde fast vollständig automatisiert und die Da-tenablage so gestaltet, dass dadurch der Aufwand zur manuellen Nach- und Aufbe-reitung für die Datenauswertung deutlich reduziert wurde. Die Funktion des Leitstandes wurde in einer gemeinsamen Veröffentlichung (Traunecker et al. 2012) wie folgt beschrieben: „Die der Implementierung vorausge-hende Anforderungsanalyse hatte ein Domänenmodell (Abbildung 30) zum Ergeb-nis. Ein Versuchsdurchgang (Testrun) selbst wird dabei mit einem Freitext beschrie-ben (labelingTestrun) und kann aus beliebig vielen Messrunden (Testround) beste-hen. Zur Unterscheidung von Versuchsdurchgängen werden diese mit einer eindeu-tigen Bezeichnung (UUID; universally unique identifier) versehen. Jede Messrunde wird fortlaufend nummeriert (roundcount) und referenziert den Zählerstand zu Be-ginn und am Ende der Runde (MeterReadingEvent) mit assoziiertem Zeitstempel (timestamp). Durch die beiden Zeitstempel (start / end) und der im Versuchslauf hinterlegten Keilriemenlänge (vbeltlength) kann auf die Rundenzeit gefolgert wer-den. Alle während einer Messrunde erfassten Transponder werden als Ereignis mit Zeitstempel (RFIDReadEvent) der Messrunde zugeordnet (detected). Die während eines Versuchsdurchgangs zu erwartenden Transponder werden über ihre elektro-nische Identifizierungsnummer (EID) mit diesem direkt verknüpft (registered).
Abbildung 30: UML-Domänenmodell eines Versuchslaufs Der Leitstand ist in der Programmiersprache Java (Java SE 6) implementiert worden und wird auf einem handelsüblichen Standard-PC ausgeführt (Abbildung 31). Der
class Domain Objects
Testrun
+ uuid :UUID+ labelingTestrun :Text+ operator :Text+ vbeltlength :Number
Testround
+ roundcount :Number
RFIDReadEvent
+ timestamp :DateTime
MeterReadingEvent
+ timestamp :DateTimeRFIDTag
+ id :Text
0..*
registered
1
1..*
rounds
1
1
0..*
0..*
detected
1
1start
1
1end
1

86 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Zählerstand des Rundenzählers wird über die serielle Schnittstelle (RS-232) zyk-lisch ausgelesen und bei jeder erkannten Erhöhung des Zählers ein Rundenereignis erzeugt. RFID-Lesegeräte können vom Leitstand sowohl seriell (RS-232) als auch via TCP/IP angesprochen werden. Bisher wurden für zwei unterschiedliche Herstel-ler von RFID-Lesegeräten (RRU4, Fa. Kathrein und UDL500, Fa. Deister Electronic) spezifische Module zur Kommunikation (Protokollinterpreter) entwickelt, das Sys-tem ist jedoch offen für Erweiterungen durch weitere Lesegeräte. Die RFID-Lesegeräte selbst werden durch herstellerspezifische Konfigurationssoftware para-metriert.
Abbildung 31: Leitstand: Softwarekomponenten und angebundene Systeme Über die Benutzungsoberfläche des Leistandes wird die Versuchsdurchführung ge-steuert. Der Ablauf strukturiert sich wie folgt (Abbildung 32): Zunächst werden die zur Kommunikation mit den Peripheriegeräten (Rundenzähler, RFID-Lesegerät) notwendigen Parameter eingestellt und deren ordnungsgemäße Funktionsweise geprüft. Danach werden die im Versuch verwendeten Transponder am Leitstand registriert, indem jeder Transponder einzeln manuell erfasst wird. Der Leitstand lis-tet dabei das jeweilige Erfassungsereignis. Nach Abschluss der Versuchseinstel-lung können beliebig viele Testrunden gefahren werden, um die Versuchseinstel-lungen zu prüfen und die Transponder betriebsbereit zu setzen. Danach wird der Versuchsdurchgang parametriert, d.h. die Anzahl der gewünschten Messrunden eingestellt und die Versuchsaufzeichnung gestartet. Während des Versuchs werden dem Versuchstechniker zum Monitoring relevante Informationen dargestellt (Run-denzeiten, Anzahl erkannter Transponder, Liste erfasster Transponder etc.). Mit dem Abschluss eines Versuchslaufs wird dieser gespeichert.
Abbildung 32: Schematische Darstellung eines Versuchsdurchlaufs

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 87
Je Versuchsdurchgang werden zwei Dateien gespeichert. Zum einen wird eine von Tabellenkalkulationsprogrammen interpretierbare Datei erzeugt, die entsprechend der Fragestellung aufbereitete Tabellenblätter enthält. Zum anderen werden die Rohdaten als XML-Serialisierung entsprechend dem oben vorgestellten Domänen-modell (Abbildung 30) gespeichert.“ 6.3 Methodisches Vorgehen 6.3.1 Statische Versuche zur Bestimmung der Wirkung von Einflussgrößen
auf die Erfassungsreichweite und den Erfassungsbereich Die Bestimmung der Erfassungsreichweite und des Erfassungsbereiches wurde mit den RFID-Systemen aus Lesegerät I bzw. II und den Transpondertypen A, B bzw. N durchgeführt. Die RFID-Systeme wurden in zwei Orientierungen der Transponder zum Lesegerät untersucht, die sich mit den beiden Schwerpunkten von Transponder und Lesege-räteantenne beschreiben lassen. Dabei wird angenommen, dass der Schwerpunkt der aufrecht im Raum stehenden Antenne des UHF-Lesegerätes den Ursprung ei-nes kartesischen Koordinatensystems bildet, dessen x1-Achse parallel zur Haupt-strahlrichtung der Antenne verläuft. Die Längsschnittebene durch die Höhe des Transponders wird als Ausgangsebene, der in dieser Ebene liegende Schwerpunkt des Transponders als Fußpunkt eines Normalenvektors angenommen, der die Ori-entierung des Transponders zur Lesegeräteantenne beschreibt. Dadurch wurde eine von der Bauart des Transponders und des Lesegerätes abgeleitete Orientie-rung der UHF-Transponder zur Antenne des UHF-Lesegerätes verwendet, die mit der bereits in Kapitel 5.3.1 erwähnten Orientierung bei der Untersuchung des LF-RFID-Systems vergleichbar ist. Die beiden untersuchten Orientierungen lassen sich hierdurch mit den beiden Normalenvektoren
a =-100
und b =010
beschreiben.
Die untersuchten Einflussgrößen bei der Bestimmung der Erfassungsreichweite wa-ren:
• Lage des Transponders zu einem Wasserkörper: vor, hinter, zwischen • Volumen des Wasserkörpers [mm³; n x 130 x 100]: 0, 20, 50, 80 • Orientierung des Transponders zum Lesegerät: a, b
Aus der Kombination der beiden Einflussgrößen Lage des Transponders zum Was-serkörper und Volumen des Wasserkörpers ergaben sich fünf Versuchsvarianten, die in den beiden Orientierungen a und b untersucht wurden (Tabelle 8).

88 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Tabelle 8: Versuchsvarianten bei der Bestimmung der Wirkung von Einflussgrößen auf die Erfassungsreichweite der Transpondertypen A, B und N
Die Variante f wurde nur in der Orientierung a untersucht, da durch die Orientierung b die beiden Wasserkörper aufgrund der Breite der Transponder (A = 41 mm, B = 45 mm, N = 24 mm) zu weit voneinander entfernt gewesen wären. Dieser Auf-bau hätte keinem mehrheitlich von Wasser umgebenen Transponder entsprochen. Die Erfassungsreichweite wurde blockweise mit den beiden Lesegeräten I und II bestimmt. Je Transpondertyp wurden fünf Einzeltransponder verwendet. Jede Ver-suchsvariante wurde pro Einzeltransponder fünf Mal wiederholt. Die Abfolge der un-tersuchten Einzeltransponder und Versuchsvarianten war vollständig randomisiert. Das Vorgehen bei der Messung folgte der in Kapitel 5.3.1 beschriebenen Art und Weise. Die Transponder wurden nicht mit einer konstanten Geschwindigkeit auf die Lesegeräteantenne zubewegt, sondern, indem sie in abnehmender Entfernung zur Lesegeräteantenne auf den Rasterpunkten des Prüftisches aufgesetzt wurden und sich die Versuchsperson anschließend entfernte. Das Raster hatte einen festste-henden Bezug zur Lesegeräteantenne mit einer Auflösung von 2,5 cm. Wurde der Transponder erfasst, wurde dieses Ereignis an dem betreffenden Rasterpunkt und in einer Versuchsliste notiert. Wurde der Transponder nicht erfasst, wurde er ent-fernt und an dem in Richtung Lesegeräteantenne nächstgelegenen Rasterpunkt wieder aufgesetzt. Das Ereignis „Transponder nicht erfasst“ wurde ebenfalls notiert. Der Transponder wurde in beiden Orientierung a und b orthogonal auf den Anten-nenschwerpunkt, d.h. entlang der vorgestellten x1-Achse, bewegt. Da sich bei der Auswertung der Versuche zur Bestimmung der Erfassungsreich-weite zeigte, dass sich die Einzeltransponder eines Transpondertyps nicht vonei-nander unterschieden, wurde die Bestimmung des Erfassungsbereiches mit einem jeweils zufällig ausgewählten Einzeltransponder eines Transpondertyps durchge-führt. Die Vorgehensweise folgte dem zur Bestimmung der maximalen Erfassungs-reichweite beschriebenen Verfahren mit dem Unterschied, dass der Transponder nicht nur auf den Rasterpunkten orthogonal zum Schwerpunkt der Lesegerätean-
Variante Behälter Lage des Transponders zum Wasserkörper bezogen auf das Lesegerät
Orientierung Transponder zu Lesegerät
a B20 hinter 2 cm Wasser a, b
b B20 ohne Wasser a, b
c B20 vor 2 cm Wasser a, b
d B50 vor 5 cm Wasser a, b
e B80 vor 8 cm Wasser a, b
f B20+B80 zwischen 2 und 8 cm Wasser a

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 89
tenne aufgesetzt wurde, sondern auf allen sich in der Messebene befindenden Ras-terpunkten, sodass sich ein räumliches Bild des Erfassungsbereiches in der Mess-ebene ergab. 6.3.2 Dynamische Versuche zur Bestimmung der Wirkung von Einflussgrö-
ßen auf die Erfassungssicherheit Zur Bestimmung der Wirkung bestimmter Einflussgrößen auf die Erfassungssicher-heit wurde der in Kapitel 6.2.4 beschriebene, erweiterte Prüfstand verwendet. Mit ihm konnte die Wirkung folgender Einflussgrößen auf die Erfassungssicherheit des Systems untersucht werden:
• Anwesenheit von Wasser im Erfassungsbereich: ja, nein • Transpondertyp: A, B, N • Orientierung der Transponder in Bezug zur Leseantenne: a, b • Geschwindigkeit der Transponder [m/s]: 1; 2, 3 • Transponderanzahl: 1, 5
Es wurden insgesamt 72 Varianten untersucht, die je dreimal wiederholt wurden. Eine Wiederholung entsprach 20 Runden des Transponders bzw. der Transponder auf dem Prüfstand. Dabei bildeten die Varianten mit Wasser und die Varianten ohne Wasser jeweils einen Block. Innerhalb dieser Blöcke wurde die Reihenfolge der Va-rianten vollständig randomisiert. Die Bestimmung der Erfassungssicherheit wurde mit dem Lesegerät II durchgeführt. Die Lesegeräteantenne befand sich dabei so unterhalb des Führungsriemens, dass die Hauptstrahlrichtung vertikal nach oben ausgerichtet war. Der Abstand zwischen den am Führungsriemen befestigten Transpondern und der Lesegeräteantenne be-trug 30 cm. Zur Befestigung und Ausrichtung der Transponder am Führungsriemen wurde dort ein Winkel aus PVC angebracht, an dem zwei verschiedene Halterungen mit einem Schnellwechselsystem befestigt werden konnten. Mit den Halterungen konnten bis zu fünf Transponder in Orientierung a bzw. b ausgerichtet werden. Durch diesen Versuchsaufbau wurde sichergestellt, dass die Orientierung von Transponder zu Lesegeräteantenne derjenigen aus den Untersuchungen zur Erfas-sungsreichweite und dem Erfassungsbereich entspricht und zudem ein schneller Wechsel zwischen den Varianten erfolgen konnte. Der Wasserbehälter war so über dem Führungsriemen angebracht, dass die vom Führungsriemen bewegten Trans-ponder möglichst nahe am Behälterboden vorbeigeführt wurden. Da die Position des Wasserbehälters nicht verändert werden konnte und die Transponder sich bau-artlich unterschieden, betrug der Abstand zwischen Transponder und Wasserbehäl-ter abhängig von der Orientierung ca. 0,1 cm bis 2 cm. Der Wasserbehälter selbst war in den Varianten mit Wasser bis zu einer Höhe von 8 cm gefüllt, sodass sich
90 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
am Erfassungspunkt eine Wassersäule von 8 cm über dem Transponder bzw. über den Transpondern befand. Die Zielgröße der Untersuchung zur Bestimmung der Erfassungssicherheit war die durchschnittliche Erfassungsquote aus den drei Wiederholungen einer Variante. Die Erfassungsquote stellt den Quotienten aus der Anzahl der erfassten Transponder und der Anzahl der erfassbaren Transponder dar und kann auf eine Runde, auf eine Wiederholung oder alle Wiederholungen bezogen werden. Sie ist wie folgt definiert (3):
Erfassungsquote [%] =Anzahl erfasster Transponder [n]
Anzahl erfassbarer Transponder [n]·100 (3)

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 91
6.4 Ergebnisse zur Bestimmung der Erfassungsreichweite 6.4.1 Erfassungsreichweite der Einzeltransponder Die durchschnittlichen Erfassungsreichweiten in allen untersuchten Varianten un-terschieden sich zwischen den Einzeltranspondern eines Transpondertyps nicht signifikant voneinander (Tabelle 9). Daher wurden im weiteren Verlauf nicht die Ein-zeltransponder, sondern der Transpondertyp betrachtet. Die niedrigsten durch-schnittlichen Erfassungsreichweiten wurden bei den Einzeltranspondern des Typs N beobachtet, sie lagen alle unter 30 cm. Die höchsten durchschnittlichen Er-fassungsreichweiten wurden mit den Einzeltranspondern des Typs B erreicht. Bei allen Einzeltranspondern konnten Werte von fast 150 cm oder darüber festgestellt werden. Der Bereich, in dem sich die durchschnittlichen Erfassungsreichweiten der Einzeltransponder des Typs A bewegten, befand sich mit ca. 65 bis 70 cm zwischen den beiden genannten Bereichen. Tabelle 9: Durchschnittliche Erfassungsreichweite [cm] der Einzeltransponder von Transpondertyp A, B und N
Transpondertyp Transpondernummer
1 2 3 4 5
A 69,7 b 65,9 b 68,2 b 70,8 b 66,0 b
B 152,4 a 145,8 a 147,2 a 137,6 a 150,8 a
N 23,3 c 26,8 c 23,3 c 24,1 c 27,0 c
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben unterscheiden sich signifikant (p<0,05)
6.4.2 Erfassungsreichweiten mit Lesegerät I Die Ergebnisse der Untersuchungen zur Erfassungsreichweite von Lesegerät I mit den Transpondertypen A, B, und N zeigten in den untersuchten Varianten a bis f und den beiden Orientierungen a und b durchschnittliche Erfassungsreichweiten von 0,0 cm bis 152,1 cm (Tabelle 10). Die arithmetischen Mittelwerte wurden aus fünf Messwiederholungen berechnet.

92 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Tabelle 10: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A, B und N mit Lesegerät I
Variante
Orientierung Orientierung a b
Transpondertyp Transpondertyp A B N A B N
a 109,5 93,0 60,5 44,6 144,0 42,0
b 71,4 49,4 33,5 5,1 90,9 24,5
c 140,5 109,7 35,2 23,1 152,1 33,5
d 103,0 17,6 0,0 63,6 125,0 24,1
e 65,4 52,0 0,0 1,0 115,0 20,6
f 41,6 17,7 5,5 - - -
Die höchste durchschnittliche Erfassungsreichweite der Versuchsreihe wurde mit 152,1 cm bei Transpondertyp B in Orientierung b der Variante c beobachtet, d.h., wenn sich der Transponder vor dem gefüllten Behälter B20 befand (Abbildung 33 und Abbildung 34). Die höchste durchschnittliche Erfassungsreichweite mit Trans-pondertyp A wurde mit 140,5 cm in Orientierung a ebenfalls in der Variante c ge-messen. Dies war zugleich die höchste in dieser Orientierung beobachtete durch-schnittliche Erfassungsreichweite. Die Erfassungsreichweite aller Transpondertypen war bei den Varianten a und c unabhängig von der Orientierung zum Lesegerät stets höher als bei der Variante b, d.h. ohne Wasser. Bei Transpondertyp A konnten in Orientierung a höhere Erfas-sungsreichweiten beobachtet werden als bei Transpondertyp B und N. In der Ori-entierung b erreichte Transpondertyp B dagegen höhere Erfassungsreichweiten als Transpondertyp A und N. Die Differenz der durchschnittlichen Erfassungsreichwei-ten zwischen den Transpondern A und B in einer bestimmten Variante war in der Orientierung b stets größer als in Orientierung a. Transpondertyp N zeigte in Orien-tierung a bei den Varianten mit Wasser (a, c, d, e und f) deutlich geringere durch-schnittliche Erfassungsreichweiten als die beiden anderen Transpondertypen. Die höchste durchschnittliche Erfassungsreichweite wurde in Variante a und Orientie-rung a mit 60,5 cm beobachtet. In Orientierung a konnte der Transpondertyp N in den Varianten d und e, d.h., wenn sich der Transponder vor den gefüllten Behältern B50 und B80 befand, nicht erfasst werden. Der gezielt auf die Anwesenheit von Wasser abgestimmte Transpondertyp B zeigte in Orientierung b bei allen Varianten mit Wasser (a, c, d und e) unabhängig vom Volumen der Behälter höhere durchschnittliche Erfassungsreichweiten als bei der
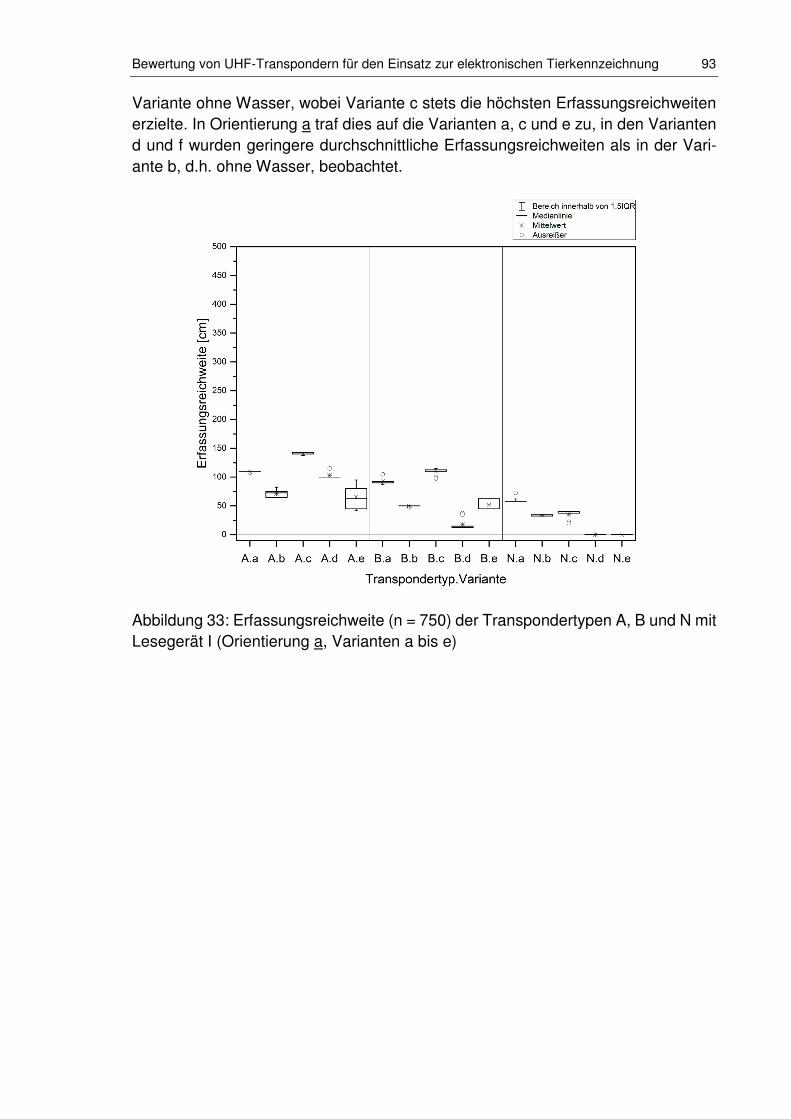
Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 93
Variante ohne Wasser, wobei Variante c stets die höchsten Erfassungsreichweiten erzielte. In Orientierung a traf dies auf die Varianten a, c und e zu, in den Varianten d und f wurden geringere durchschnittliche Erfassungsreichweiten als in der Vari-ante b, d.h. ohne Wasser, beobachtet.
Abbildung 33: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit Lesegerät I (Orientierung a, Varianten a bis e)

94 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Abbildung 34: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit Lesegerät I (Orientierung b, Varianten a bis e)
Abbildung 35: Erfassungsreichweite (n = 75) der Transpondertypen A, B und N mit Lesegerät I (Orientierung a, Variante f)

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 95
6.4.3 Erfassungsreichweiten mit Lesegerät II Mit Lesegerät II wurden bei den Transpondertypen A, B, und N in den untersuchten Varianten a bis f und den beiden Orientierungen a und b durchschnittliche Erfas-sungsreichweiten von 0,5 cm bis 394,0 cm beobachtet (Tabelle 11). Die durch-schnittlichen Erfassungsreichweiten entsprechen wie in Kapitel 6.4.1 dem arithme-tischen Mittelwert von fünf Messwiederholungen. Tabelle 11: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A, B und N mit Lesegerät II
Variante
Orientierung Orientierung a b
Transpondertyp Transpondertyp A B N A B N
a 173,5 241,8 83,8 17,1 196,1 3,5
b 42,1 72,0 61,2 21,4 175,5 10,6
c 228,3 284,0 41,4 30,9 394,0 2,5
d 69,5 60,6 0,5 38,9 217,4 5,0
e 78,8 99,9 10,8 34,2 245,2 4,5
f 34,5 64,0 0,0 - - -
Wie bei der Versuchsreihe mit Lesegerät I konnte auch mit Lesegerät II die höchste durchschnittliche Erfassungsreichweite der Versuchsreihe bei Transpondertyp B mit Variante c in Orientierung b beobachtet werden (Abbildung 36 und Abbildung 37). Sie lag mit 394,0 cm mehr als doppelt so hoch wie der Vergleichswert mit Lesege-rät I. Insgesamt lagen alle mit Lesegerät II beobachteten Werte bei Transponder-typ B deutlich über den Vergleichswerten mit Lesegerät I. Die höchste durchschnitt-liche Erfassungsreichweite mit Transpondertyp A konnte ebenfalls analog zu den Beobachtungen mit Lesegerät I mit 228,3 cm bei Variante c in Orientierung a er-reicht werden. Auch hier lag die beobachtete durchschnittliche Erfassungsreich-weite deutlich über dem Vergleichswert mit Lesegerät I. Allerdings war dieser Wert nicht der höchste in Orientierung a beobachtete. Dieser wurde mit Transpondertyp B und der Variante c erreicht und lag bei 284,0 cm. Wie bei Lesegerät I waren die Erfassungsreichweiten der beiden Transpondertypen A und B bei der Variante c unabhängig von der Orientierung zum Lesegerät stets höher als bei der Variante b, d.h. ohne Wasser. Die beobachteten Differenzen der durchschnittlichen Erfassungsreichweiten zwischen den Transpondern A und B in

96 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
einer bestimmten Variante waren in der Orientierung b größer als in der Orientie-rung a. Bei Transpondertyp N wurden mit Ausnahme der Variante b in der Orientierung a stets geringere durchschnittliche Erfassungsreichweiten beobachtet als bei den bei-den anderen Transpondertypen A und B. Im Vergleich der Ergebnisse des Trans-pondertyps N in Abhängigkeit von der Orientierung wurden in der Orientierung a stets höhere durchschnittliche Erfassungsreichweiten erzielt als in der Orientie-rung b. Eine Ausnahme stellt Variante d dar. Die höchste durchschnittliche Erfas-sungsreichweite wurde in der Orientierung a in der Variante a beobachtet und in lag bei 83,8 cm. Transpondertyp B erreichte bei den Varianten a und c, d.h. mit gefülltem Behälter B20, unabhängig von der Orientierung durchschnittliche Erfassungsreichweiten von annähernd (Variante a, Orientierung b) oder deutlich über 200 cm. Bei Transpon-dertyp A war das Erreichen eines Wertes von über 150 cm bis über 200 cm in diesen Varianten von der Orientierung abhängig. Die Werte von Transpondertyp N blieben stets deutlich unter 100 cm.
Abbildung 36: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit Lesegerät II (Orientierung a, Varianten a bis e)

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 97
Abbildung 37: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit Lesegerät II (Orientierung b, Varianten a bis e) Bei der Betrachtung der Ergebnisse in Variante f (Abbildung 38) zeigt sich im Ver-gleich zu den Ergebnissen mit Lesegerät I ein anderes Bild. Hier wurde nicht bei Transpondertyp A (34,5 cm), sondern bei Transpondertyp B (64,0 cm) die höchste durchschnittliche Erfassungsreichweite beobachtet. Transpondertyp N konnte in dieser Variante nicht erfasst werden.

98 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Abbildung 38: Erfassungsreichweite (n = 75) der Transpondertypen A, B und N mit Lesegerät II (Orientierung a, Variante f) 6.4.4 Einfluss des Transpondertyps und des Lesegerätes auf die Erfas-
sungsreichweite Für die Betrachtung des Einflusses des Transpondertyps und des Lesegerätes auf die durchschnittliche Erfassungsreichweite der RFID-Systeme mit Lesegerät I bzw. Lesegerät II und den Transpondertypen A, B bzw. N wurden die Ergebnisse der Varianten a bis e berücksichtigt (Tabelle 12). Innerhalb eines Lesegerätes unter-schieden sich die Erfassungsreichweiten der einzelnen Transpondertypen signifi-kant voneinander (Tabelle 12). Mit beiden Lesegeräten erreichte Transpondertyp B signifikant höhere durchschnittliche Erfassungsreichweiten als die beiden anderen Transpondertypen A und N. Letzterer erreichte im Vergleich mit den Transponder-typen A und B stets signifikant geringere durchschnittliche Erfassungsreichweiten. Bei Transpondertyp A und N war kein signifikanter Unterschied der durchschnittli-chen Erfassungsreichweite zwischen Lesegerät I und Lesegerät II zu beobachten. Mit Transpondertyp B und Lesegerät II konnten allerdings signifikant höhere durch-schnittliche Erfassungsreichweiten erreicht werden als mit Transpondertyp B und Lesegerät I.

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 99
Tabelle 12: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A, B und N mit den Lesegeräten I und II
Lesegerät Transpondertyp
A B N
I 62,7b 94,9c 27,4 a
II 73,5 b 198,7d 22,4a
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben unterscheiden sich signifikant (p<0,05)
6.4.5 Einfluss der Orientierung auf die Erfassungsreichweite Wie bei der Betrachtung des Einflusses des Transpondertyps und des Lesegerätes auf die durchschnittliche Erfassungsreichweite wurden auch bei der Betrachtung des Einflusses der Orientierung auf die durchschnittliche Erfassungsreichweite die Ergebnisse der Varianten a bis e berücksichtigt (Tabelle 13). Außer bei Lesegerät I mit Transpondertyp N unterschieden sich die durchschnittlichen Erfassungsreich-weiten aller Kombinationen aus Lesegerät und Transpondertyp in den beiden Ori-entierungen a und b signifikant voneinander. Auch innerhalb der beiden Orientie-rungen gab es signifikante Unterschiede in den durchschnittlichen Erfassungsreich-weiten zwischen den einzelnen Kombinationen aus Lesegerät und Transpondertyp mit Ausnahme der Kombinationen I.N und II.A in der Orientierung b. Bei Transpon-dertyp A und N wurden in der Orientierung a stets höhere durchschnittliche Erfas-sungsreichweiten erreicht als in der Orientierung b. Transpondertyp B erreichte in der Orientierung b höhere durchschnittliche Erfassungsreichweiten als in der Orien-tierung a. Die signifikant niedrigste durchschnittliche Erfassungsreichweite wurde von der Kombination aus Lesegerät II und Transpondertyp N in der Orientierung b beobachtet. Die signifikant höchsten durchschnittlichen Erfassungsreichweiten wur-den aber unabhängig von der Orientierung bei der Kombination aus Lesegerät I und Transpondertyp B erreicht.
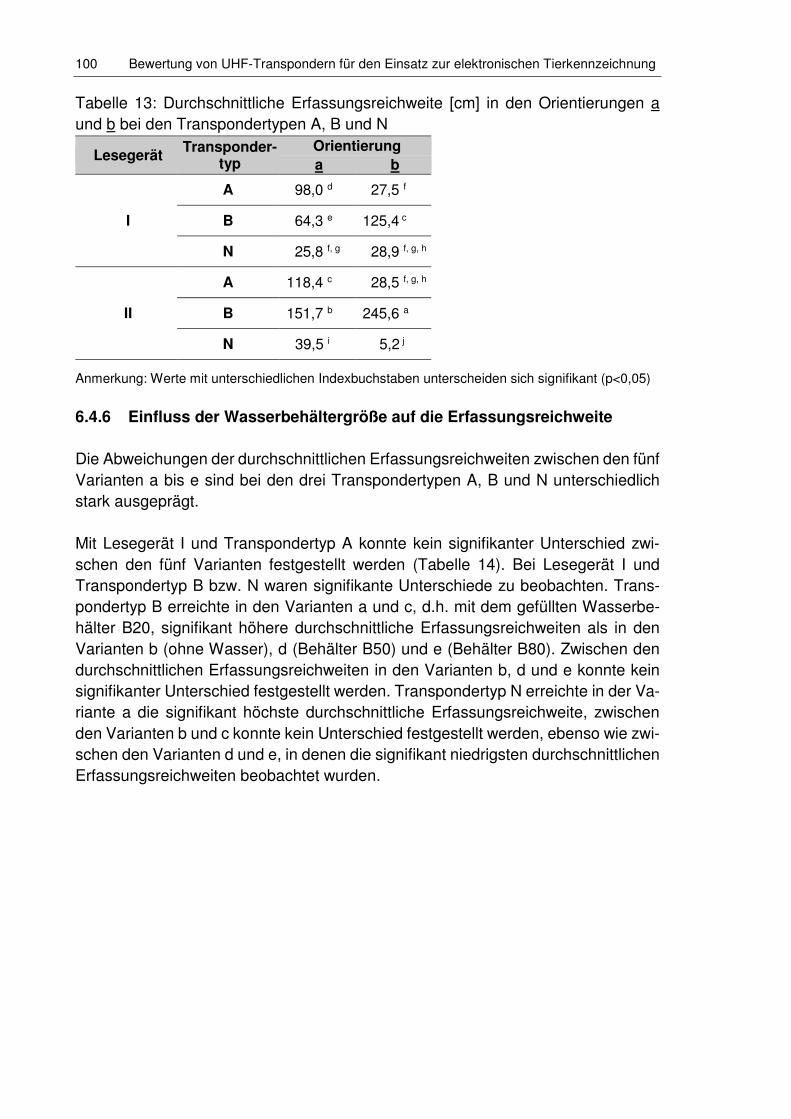
100 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Tabelle 13: Durchschnittliche Erfassungsreichweite [cm] in den Orientierungen a und b bei den Transpondertypen A, B und N
Lesegerät Transponder-
typ Orientierung a b
I
A 98,0 d 27,5 f
B 64,3 e 125,4 c
N 25,8 f, g 28,9 f, g, h
II
A 118,4 c 28,5 f, g, h
B 151,7 b 245,6 a
N 39,5 i 5,2 j
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben unterscheiden sich signifikant (p<0,05) 6.4.6 Einfluss der Wasserbehältergröße auf die Erfassungsreichweite Die Abweichungen der durchschnittlichen Erfassungsreichweiten zwischen den fünf Varianten a bis e sind bei den drei Transpondertypen A, B und N unterschiedlich stark ausgeprägt. Mit Lesegerät I und Transpondertyp A konnte kein signifikanter Unterschied zwi-schen den fünf Varianten festgestellt werden (Tabelle 14). Bei Lesegerät I und Transpondertyp B bzw. N waren signifikante Unterschiede zu beobachten. Trans-pondertyp B erreichte in den Varianten a und c, d.h. mit dem gefüllten Wasserbe-hälter B20, signifikant höhere durchschnittliche Erfassungsreichweiten als in den Varianten b (ohne Wasser), d (Behälter B50) und e (Behälter B80). Zwischen den durchschnittlichen Erfassungsreichweiten in den Varianten b, d und e konnte kein signifikanter Unterschied festgestellt werden. Transpondertyp N erreichte in der Va-riante a die signifikant höchste durchschnittliche Erfassungsreichweite, zwischen den Varianten b und c konnte kein Unterschied festgestellt werden, ebenso wie zwi-schen den Varianten d und e, in denen die signifikant niedrigsten durchschnittlichen Erfassungsreichweiten beobachtet wurden.

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 101
Tabelle 14: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A, B und N in den Varianten a bis e mit dem Lesegerät I
Lesegerät Transponder-
typ Variante
a b c d e
I
A 77,1a 38,3a 81,8a 83,3 a 33,2 a
B 118,5b 70,2a 130,9 b 71,3 a 83,5 a
N 51,3c 29,0b 34,4 b 12,1 a 10,3 a
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben innerhalb einer Zeile unterscheiden sich signifikant (p<0,05)
Mit Lesegerät II zeigten sich auch bei Transpondertyp A signifikante Unterschiede zwischen den Varianten a bis e (Tabelle 15). Die signifikant höchsten durchschnitt-lichen Erfassungsreichweiten wurden in den Varianten a und c erreicht. Bei Trans-pondertyp B wurde in der Variante c die signifikant höchste durchschnittliche Erfas-sungsreichweite beobachtet, die zugleich den höchsten der Vergleichswerte dar-stellte. Alle Werte der Kombination aus Lesegerät II und Transpondertyp B liegen zudem deutlich über 100 cm. Transpondertyp N erreichte in keiner Variante einen Wert von über 50 cm. Tabelle 15: Vergleich der mittleren Erfassungsreichweiten der Transpondertypen A, B und N in den Varianten a bis e mit dem Lesegerät II
Lesegerät Transponder-typ
Variante a b c d e
II
A 95,3ab 31,8a 129,6 b 54,2 a 56,5 a
B 219,0b 123,8a 339,0 c 139,0 a 172,6 ab
N 43,7b 35,9b 22,0 ab 2,8 a 7,7 a
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben innerhalb einer Zeile unterscheiden sich signifikant (p<0,05)
6.4.7 Bestimmung des Erfassungsbereiches Die Ergebnisse der Bestimmung des Erfassungsbereiches der RFID-Systeme wur-den mit Hilfe von Diagrammen visualisiert. Es wurden keine gleichmäßigen Formen der Erfassungsbereiche beobachtet, wie sie z.B. bei LF-RFID-Systemen vorzufin-den sind (vgl. Kapitel 5.4.2). Es handelte sich bei allen Untersuchungen um sich ungleichmäßig ausdehnende Bereiche, die teils von starken Einkerbungen gekenn-zeichnet sind und sich in vertikaler Richtung stärker ausdehnen als in horizontaler Richtung. Zum Teil traten innerhalb des Erfassungsbereiches kleinere Bereiche auf, in denen der Transponder nicht erfasst werden konnte, sogenannte „Erfassungslö-cher“. Die Form lässt sich keinem geometrischen Körper zuordnen. Sie ist am ehes-ten mit einer Keule vergleichbar.

102 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
In den folgenden Abbildungen sind die Erfassungsbereiche dargestellt, die bei der Kombination aus Lesegerät II und Transpondertyp A in den Varianten b bis e und Orientierung a beobachtet wurden. Wie schon bei der Untersuchung zur Erfas-sungsreichweite zu erkennen war, unterschieden sich auch die Erfassungsbereiche zwischen Variante b, d.h. mit leerem Behälter B20, und Variante c, d.h. mit wasser-gefülltem Behälter B20, stark voneinander (Abbildung 39). Die Ausdehnung des Er-fassungsbereiches in vertikaler Richtung, d.h. in Hauptstrahlrichtung, entspricht der in dieser Variante beobachteten durchschnittlichen Erfassungsreichweite von ca. 40 cm (Variante b) bzw. 225 cm (Variante c) (vgl. Abbildung 36). In horizontaler Richtung, d.h. orthogonal zur Hauptstrahlrichtung, beträgt die Ausdehnung ca. 25 cm in Variante b und ca. 150 cm in Variante c.
Abbildung 39: Erfassungsbereiche von Lesegerät II/Transpondertyp A, Orientierung a, Variante b (links) und Variante c (rechts)

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 103
In den Varianten d und e, d.h. bei Anwesenheit größerer Wasserkörper im Vergleich zur Variante c, wurden Erfassungsbereiche mit deutlich geringerer Ausdehnung be-obachtet als mit dem kleineren Wasserkörper (Abbildung 40). Die Erfassungsberei-che dieser beiden Varianten sind in ihrer Dimensionierung eher mit dem Erfas-sungsbereich in Variante b, d.h. ohne Wasser, zu vergleichen. Die größte Ausdeh-nung in vertikaler Richtung entspricht bei beiden Varianten wieder der beobachteten durchschnittlichen Erfassungsreichweite von ca. 70 cm bzw. 75 cm (vgl. Abbil-dung 36). In horizontaler Richtung beträgt die Ausdehnung ca. 50 cm. Im Vergleich zu den beiden Varianten b und c sind in den Erfassungsbereichen der Varianten d und e mehrere Erfassungslöcher zu erkennen.
Abbildung 40: Erfassungsbereiche von Lesegerät II/Transpondertyp A, Orientierung a, Variante d (links) und Variante e (rechts)

104 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
6.5 Ergebnisse der dynamischen Versuche zur Bestimmung der Erfas-sungssicherheit
In den dynamischen Versuchen zur Bestimmung der Erfassungssicherheit mit Le-segerät I zeigten die drei Transpondertypen A, B und N deutlich unterschiedliche Erfassungsquoten (Abbildung 41). Unabhängig von Geschwindigkeit und Orientierung sowie Anzahl der Transponder wurde im Vergleich zu den beiden anderen Transpondertypen B und N bei Trans-pondertyp A eine signifikant geringere durchschnittliche Erfassungsquote von 9,6 % beobachtet. Der Median lag bei 0 %, d.h., in mehr als jedem zweiten Versuchs-durchlauf wurde kein Transponder des Transpondertyps A erfasst. Bei Transpon-dertyp B lag die durchschnittliche Erfassungsquote bei 99,9 %, bei Transpondertyp N bei 99,7 % mit einer jeweils sehr geringen Streuung. Eine Wirkung der genannten Einflussgrößen auf die Erfassungsquote der Transpondertypen B und N konnte in dieser Versuchsanordnung somit nicht bestimmt werden. Im Folgenden wird daher nur auf die Ergebnisse von Transpondertyp A eingegan-gen.
Abbildung 41: Erfassungsquote (n = 216) der Transpondertypen A, B und N
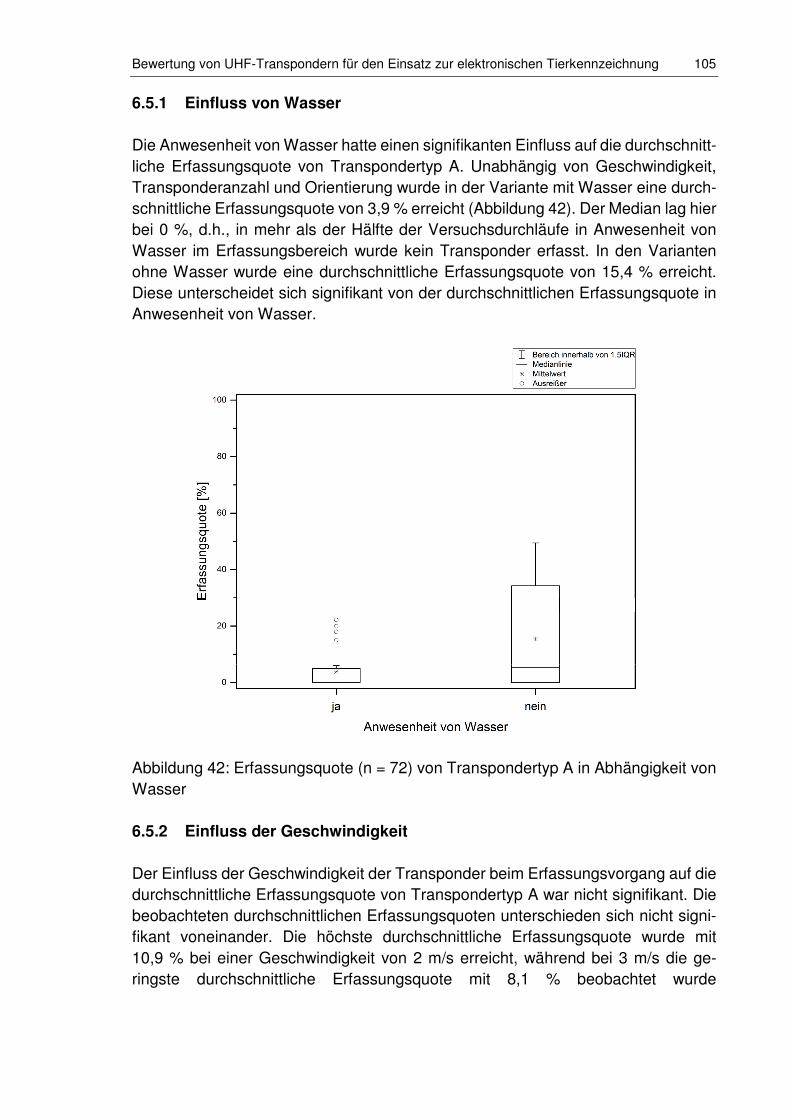
Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 105
6.5.1 Einfluss von Wasser Die Anwesenheit von Wasser hatte einen signifikanten Einfluss auf die durchschnitt-liche Erfassungsquote von Transpondertyp A. Unabhängig von Geschwindigkeit, Transponderanzahl und Orientierung wurde in der Variante mit Wasser eine durch-schnittliche Erfassungsquote von 3,9 % erreicht (Abbildung 42). Der Median lag hier bei 0 %, d.h., in mehr als der Hälfte der Versuchsdurchläufe in Anwesenheit von Wasser im Erfassungsbereich wurde kein Transponder erfasst. In den Varianten ohne Wasser wurde eine durchschnittliche Erfassungsquote von 15,4 % erreicht. Diese unterscheidet sich signifikant von der durchschnittlichen Erfassungsquote in Anwesenheit von Wasser.
Abbildung 42: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von Wasser 6.5.2 Einfluss der Geschwindigkeit Der Einfluss der Geschwindigkeit der Transponder beim Erfassungsvorgang auf die durchschnittliche Erfassungsquote von Transpondertyp A war nicht signifikant. Die beobachteten durchschnittlichen Erfassungsquoten unterschieden sich nicht signi-fikant voneinander. Die höchste durchschnittliche Erfassungsquote wurde mit 10,9 % bei einer Geschwindigkeit von 2 m/s erreicht, während bei 3 m/s die ge-ringste durchschnittliche Erfassungsquote mit 8,1 % beobachtet wurde

106 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
(Abbildung 43). Bei einer Geschwindigkeit von 1 m/s lag die durchschnittliche Er-fassungsquote bei 9,9 %.
Abbildung 43: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von der Geschwindigkeit der Transponder beim Erfassungsvorgang 6.5.3 Einfluss der Transponderanzahl Die Anzahl gleichzeitig zu erfassender Transponder hatte keinen signifikanten Ein-fluss auf die durchschnittliche Erfassungsquote des Transpondertyps A. Die durch-schnittlichen Erfassungsquoten des Transpondertyps A mit unterschiedler Anzahl an Einzeltranspondern unterschieden sich nicht signifikant voneinander. Mit einem einzelnen Transponder des Typs A wurde eine durchschnittliche Erfassungsquote von 7,7 % erreicht. In den Versuchsvarianten mit fünf Transpondern wurde eine durchschnittliche Erfassungsquote von 11,5 % beobachtet (Abbildung 44). Der Me-dian lag bei den Versuchen mit einem Transponder bei 0 %, bei den Versuchen mit fünf Transpondern bei 0,5 %. Es wurde in mehr als bzw. in der Hälfte aller Versuchs-durchläufe kein Transponder erfasst.

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 107
Abbildung 44: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von der Anzahl gleichzeitig zu erfassender Transponder
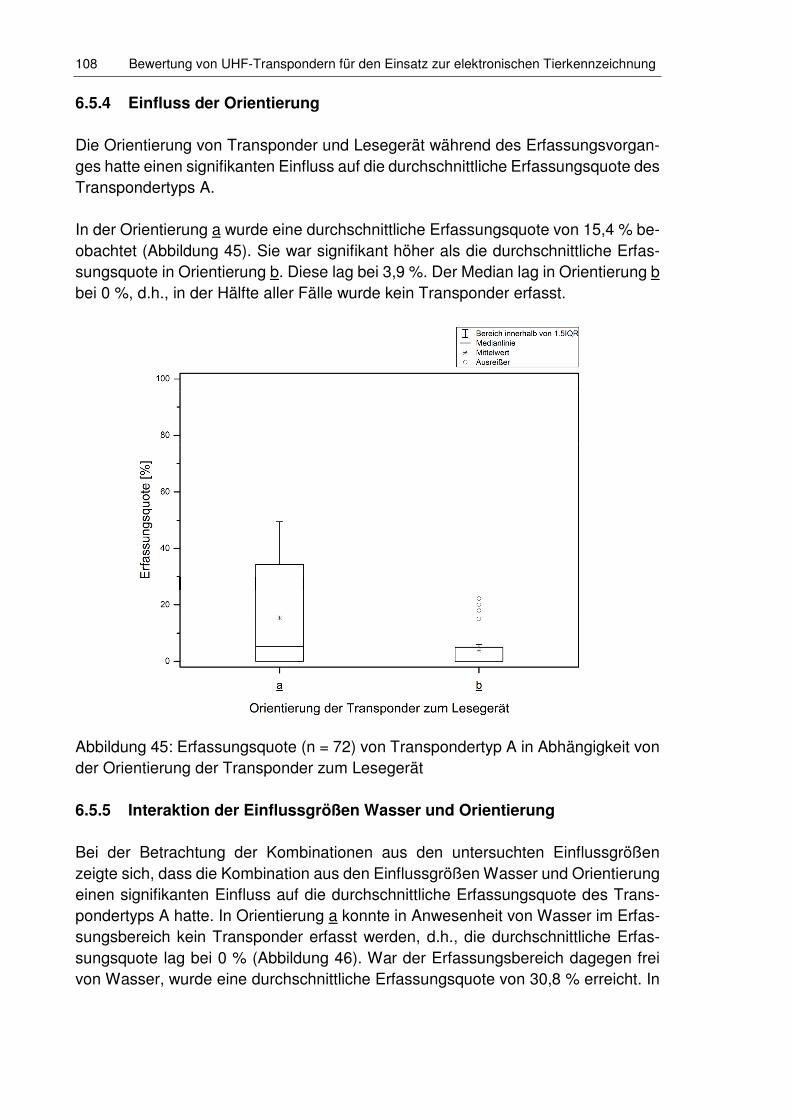
108 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
6.5.4 Einfluss der Orientierung Die Orientierung von Transponder und Lesegerät während des Erfassungsvorgan-ges hatte einen signifikanten Einfluss auf die durchschnittliche Erfassungsquote des Transpondertyps A. In der Orientierung a wurde eine durchschnittliche Erfassungsquote von 15,4 % be-obachtet (Abbildung 45). Sie war signifikant höher als die durchschnittliche Erfas-sungsquote in Orientierung b. Diese lag bei 3,9 %. Der Median lag in Orientierung b bei 0 %, d.h., in der Hälfte aller Fälle wurde kein Transponder erfasst.
Abbildung 45: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von der Orientierung der Transponder zum Lesegerät 6.5.5 Interaktion der Einflussgrößen Wasser und Orientierung Bei der Betrachtung der Kombinationen aus den untersuchten Einflussgrößen zeigte sich, dass die Kombination aus den Einflussgrößen Wasser und Orientierung einen signifikanten Einfluss auf die durchschnittliche Erfassungsquote des Trans-pondertyps A hatte. In Orientierung a konnte in Anwesenheit von Wasser im Erfas-sungsbereich kein Transponder erfasst werden, d.h., die durchschnittliche Erfas-sungsquote lag bei 0 % (Abbildung 46). War der Erfassungsbereich dagegen frei von Wasser, wurde eine durchschnittliche Erfassungsquote von 30,8 % erreicht. In

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 109
Orientierung b war ein gegensätzliches Verhalten zu beobachten. Hier wurde in An-wesenheit von Wasser im Erfassungsbereich eine durchschnittliche Erfassungs-quote von 7,7 % erreicht. Befand sich dagegen im Erfassungsbereich kein Wasser, konnte kein Transponder erfasst werden, d.h., die Erfassungsquote lag bei 0 %.
Abbildung 46: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von der Orientierung und Wasser 6.6 Diskussion Ziel der Untersuchung war es, die Wirkung von Einflussgrößen auf UHF-Transponder im Allgemeinen und zweier weiterentwickelter UHF-Transponder im Speziellen zu bestimmen, um Erklärungsansätze für das Verhalten der Transponder bei folgenden praktischen Untersuchungen im Stall zu erhalten. Insbesondere die Störgröße Wasser sollte betrachtet werden. Unter möglichst konstanten und repro-duzierbaren Bedingungen sollten die Erfassungsreichweite, der Erfassungsbereich und die Erfassungssicherheit unter Wirkung verschiedener Einflussgrößen be-stimmt und verglichen werden. 6.6.1 Vorgehensweise Die Untersuchungen konnte nicht in einem elektromagnetisch abgeschirmten Raum durchgeführt werden, der nur dem verfolgten Untersuchungszweck dient. Durch die
110 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
veränderte Position und Anwesenheit von sich im Raum befindenden Gegenstän-den während des Untersuchungszeitraumes können veränderte Reflexionen der elektromagnetischen Wellen des untersuchten RFID-Systems sowie von außerhalb durch diese Gegenstände nicht ausgeschlossen werden. Weitere, nicht konstant zu haltende Einflussgrößen waren die Temperatur und Luftfeuchtigkeit im Raum. Ge-nerell können diese die Permittivität von Materialien beeinflussen. Mit steigender Luftfeuchtigkeit werden zunehmend elektromagnetische Wellen im Raum absor-biert. Dieser Problematik wurde mit der vollständigen Randomisation innerhalb der o.g. Blöcke und einem möglichst kurzen Untersuchungszeitraum begegnet. Die Behälter B20, B50 und B80 und die Transponderhalterungen für die Orientie-rung b waren aus PVC gefertigt, da dieses Material eine sehr geringe Permittivität besitzt und dadurch eine sehr geringe Dämpfung des elektromagnetischen Feldes bewirkt. Damit sollte erreicht werden, dass das Material den auf ihm liegenden Transponder möglichst wenig von dem sich innerhalb des Behälters befindenden Wasser abschirmte. Allerdings kommt es an der Phasengrenze zwischen Materia-lien unterschiedlicher Permittivität wie z.B. Luft und PVC oder PVC und Wasser zur Beugung und Reflexion elektromagnetischer Wellen, die sich positiv oder negativ auf die Erfassbarkeit des Transponders ausgewirkt haben könnten. Um diesen nicht auszuschließenden Effekt zumindest für alle Varianten gleich zu halten, wurde die Variante ohne Wasser mit dem leeren Behälter B20 durchgeführt. Dasselbe gilt na-türlich für den Wasserbehälter, der in den dynamischen Versuchen verwendet wurde. Er war aus PE gefertigt, das ebenfalls eine sehr geringe Permittivität auf-weist. Auch er wurde aus den genannten Gründen in leerem Zustand während der Versuchsvarianten ohne Wasser auf dem Prüfstand belassen. Die beiden Lesegeräte zeigen auf unterschiedliche Art an, ob ein Transponder er-fasst worden ist. Lesegerät I besitzt eine optische LED-Statusanzeige am Gerät selbst, wohingegen die Erfassungen von Lesegerät II über eine Bildschirmanzeige am angeschlossenen PC abgelesen werden müssen. In den Grenzbereichen der Erfassungsreichweiten bzw. -bereiche war oft nicht eindeutig erkennbar, ob ein Transponder am betreffenden Rasterpunkt erfasst werden konnte oder nicht. Dies war über die Bildschirmanzeige des Lesegerätes II durch eine dort angegebene Er-fassungsfrequenz klarer zu entscheiden als über die die optische Anzeige am Le-segerät I. Daher war die Feststellung einer erfolgreichen Erfassung eines Trans-ponders im Grenzbereich der Erfassungsreichweiten bzw. -bereiche mit Lesegerät I auch subjektiv von der versuchsdurchführenden Person abhängig. Die Erfahrung zeigte aber, dass die Entscheidung im Grenzbereich im Regelfall zwischen zwei nebeneinanderliegenden Rasterpunkten getroffen werden musste. Dieser Abhän-gigkeit im Grenzbereich vom subjektiven Eindruck der Versuchsperson wurde damit begegnet, dass die Versuche immer von derselben Person durchgeführt wurden. Außerdem wurde die Person angelernt und für das Verhalten des Lesegerätes I sensibilisiert. Hierfür wurden mit der Versuchsperson definiert, in welcher Frequenz

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 111
die LED-Statusanzeige aufleuchten muss, um als erfolgreiche Erfassung am betref-fenden Rasterpunkt zu gelten. Ein standardisiertes Vorgehen war somit trotz der genannten Abhängigkeiten von der durchführenden Versuchsperson möglich. 6.6.2 Bestimmung der Erfassungsreichweite Die maximale Erfassungsreichweite zeigt an, in welcher Entfernung die Feldstärke des elektromagnetischen Feldes einer Lesegeräteantenne für einen bestimmten Transponder unter bestimmten Bedingungen gerade noch ausreicht, um die Kom-munikation mit dem Lesegerät aufzubauen – die sogenannte Ansprechfeldstärke. Die Feldstärke variiert aufgrund von auftretenden Interferenzen und Störgrößen wie z.B. Wasser im gesamten Raum um die Lesegeräteantenne (Kapitel 3.5). Es konnte bei der Versuchsplanung daher vermutet werden, dass sich die Erfassungsreich-weite eines UHF-RFID-Systems mit zunehmendem Wasservolumen in der direkten Umgebung des Transponders durch Dämpfungseffekte verringert. Die weiterentwi-ckelten Transponder A und B sollten sich hierbei vom Standardtranspondertyp N unterscheiden. Außerdem sollten sich Transpondertyp A und B untereinander un-terscheiden, da letzterer speziell auf die Anwesenheit von Wasser abgestimmt wor-den war. Erwartet wurde eine Erfassungsreichweite in der Reihenfolge N < A < B in Anwesenheit von Wasser bzw. bei größer werdendem Wasservolumen. Als weitere Einflussgröße wurde die Orientierung des Transponders zur Lesegerä-teantenne betrachtet, da diese bei ungünstiger Orientierung als Störgröße wirken kann. Dies liegt dann vor, wenn die Transponder- und die Lesegeräteantenne keine parallele Ausrichtung im Raum zueinander haben (Kapitel 3.5). Positiv kann sich eine nichtparallele Ausrichtung im Raum aber in dem speziellen Fall auswirken, wenn der Transponder dadurch von einem störenden Medium absteht, d.h. als so-genannter „Flag-Tag“ auf einem Störmedium sitzt und dadurch in seiner Erfassbar-keit weniger stark beeinträchtigt wird. 6.6.3 Erfassungsreichweite der Transpondertypen A, B und N Wie erwartet wurde, nahm die Erfassungsreichweite der Transpondertypen in der Reihenfolge N < A < B zu (vgl. Tabelle 9). Der Standardtranspondertyp N zeigte aber auch unter Einfluss von Wasser teilweise unerwartet hohe durchschnittliche Erfassungsreichweiten. Diese waren z.T. höher als in den Varianten ohne Wassereinfluss, was eher dem Verhalten der beiden wei-terentwickelten Transponder A und B entsprach als dem zu erwartenden. Eine Er-klärung dafür könnten die bereits angesprochenen Effekte der Beugung und positi-ven Reflexionen sein, die in der Versuchsanordnung zu höheren Erfassungsreich-weiten führten, als dies ohne sie der Fall gewesen wäre. Eine weitere Erklärung könnte sein, dass nicht die Anwesenheit und das Volumen von Wasser direkt am Transponder dessen Erfassung maßgeblich negativ beeinflusst, sondern dessen

112 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Verteilung im Ansprechbereich zwischen Lesegerät und Transponder. Gegen diese Vermutung spricht aber die Erfahrung mit der sogenannten Handprobe, d.h., wenn ein Transponder auf die flache Hand gelegt und dann in den Ansprechbereich des Lesegerätes gehalten wird. Hier ist eine deutliche Verringerung der Erfassung bis hin zur Nicht-Erfassbarkeit bei Standardtranspondern zu beobachten. Transpondertyp A erreichte wie erwartet durchschnittliche Erfassungsreichweiten, die sich zwischen denen der beiden anderen Transpondertypen bewegten. Es war allerdings eine Tendenz zu höheren Erfassungsreichweiten vergleichbar mit denen von Transpondertyp B und einem ähnlich positiven Verhalten in der Anwesenheit von Wasser (Tabelle 10 und Tabelle 11) zu beobachten. Allerdings war die Streuung der durchschnittlichen Erfassungsreichweiten deutlich größer als bei den beiden an-deren Transpondertypen, was sich auf einen stärkeren Einfluss der Orientierung zurückführen lässt. Die höchsten Erfassungsreichweiten wurden bei Transpondertyp B beobachtet. Sie waren zudem auch in den Varianten ohne Wasser stets höher als die bei Transpon-dertyp N beobachteten. Schon dies lässt den Schluss zu, dass es sich bei Trans-pondertyp B um einen technisch grundsätzlich höherwertigeren Transpondertypen als bei dem Standardtranspondertypen N handelt. Im Gegensatz zu den beiden an-deren Transpondertypen wurde in keiner Wiederholung eine Erfassungsreichweite von 0 cm beobachtet, dagegen wurde in einer Wiederholung eine sehr hohe Reich-weite von 455 cm erreicht. Dies zeigt zum einen die Streuung der Ergebnisse dieses Transpondertyps, andererseits aber die Robustheit und das Potential im Vergleich zu den beiden anderen Transpondertypen. 6.6.4 Wirkung von Wasser, Orientierung und Lesegerät In den Untersuchungen zeigte sich, dass UHF-Transponder auf die Anwesenheit von Wasser abgestimmt und unter Einfluss von Wasser in Entfernungen von ca. 50 bis 150 cm erfasst werden können. Wasser zeigte einen Einfluss auf die Erfas-sungsreichweite, der aber nicht dazu führte, dass einer der untersuchten Transpon-der in Anwesenheit von Wasser grundsätzlich nicht erfasst werden konnte. In den Varianten mit dem Wasservolumen B20 waren meist höhere Erfassungsreichweiten zu beobachten als in der Variante ohne Wasser. Das bedeutet, dass die Anwesen-heit von Wasser in diesem Falle die Erfassungsreichweite erhöht. Für die Trans-pondertypen A und B wurde dies erwartet. Sie sind von vorneherein auf die Anwe-senheit von Wasser abgestimmt worden. Dadurch wird die verstimmende Wirkung von Wasser für eine optimale Funktion des Transponders benötigt. Beim Transpon-dertypen N dagegen wurde dies, wie oben erwähnt, nicht erwartet und ist durch positiv wirkende Beugung und Reflexionen an der Phasengrenze zu erklären. Dies zeigt die Komplexität der Thematik und die unter bestimmten Umständen sogar füh-rende Wirkung des Wassers.

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 113
Ein deutlich negativer Effekt des Wassers zeigte sich erst bei den beiden größeren Volumina B50 und B80. Hier nahm die Erfassungsreichweite bei allen Transpondern wieder stark ab. Das lässt bei den Transpondertypen A und B ein Optimum an Was-ser vermuten, bei dessen Überschreitung die Erfassungsreichweiten wieder zurück-gehen. Allerdings, und das zeigte sich bei der Variante f, konnten die Transponder-typen A und B auch dann noch erfasst werden, wenn sie von zwei Seiten von Was-serkörpern mit den Volumina B20 und B50 eingeschlossen waren. Hier zeigt sich die geringere Empfindlichkeit der beiden weiterentwickelten Transpondertypen ge-genüber Wasser im Vergleich zum Standardtranspondertyp N. Eine Erfassung von N war unter dieser Bedingung nahezu unmöglich. Die Transpondertypen A und B konnten jedoch noch in einer Entfernung von über 60 cm erfasst werden. Dies zeigt das Potential weiterentwickelter Transponder für den Einsatz zur eTK auf. Sie sind gegenüber der Einflussgröße Wasser deutlich unempfindlicher als ein Stan-dardtransponder und können unter Bedingungen erfasst werden, die eine Erfas-sung des Standardtransponders nicht erlauben. Beim Standardtranspondertypen N zeigte sich in den Varianten mit den Wasservo-lumina B50 und B80 zudem sehr deutlich die Wirkung des Flag-Tag-Effektes im Vergleich der beiden Orientierungen a und b, insbesondere mit Lesegerät I (Tabelle 10 und Tabelle 11). Hier konnte der Transponder in den Varianten d und e durch das orthogonale Abstehen vom Störmedium in der Orientierung b im Gegen-satz zur Orientierung a noch erfasst werden Das bedeutet, dass sich in diesen Fäl-len die ungünstige Orientierung b weniger stark negativ auf die Erfassbarkeit aus-wirkte als das Störmedium. Dies galt bei den betrachteten Wasservolumina B50 und B80 wiederum nicht für den Transpondertypen A, der in der Orientierung b geringere Erfassungsreichweiten erreichte als in der Orientierung a. Bei Transpondertyp A wirkte sich durch dessen Abstimmung auf die Anwesenheit von Wasser diese Stör-größe weniger stark negativ auf die Erfassbarkeit aus, als die ungünstigere Orien-tierung b. Bei der Betrachtung der Varianten a, b und c zeigten die beiden Transpondertypen A und N in der Orientierung a höhere Erfassungsreichweiten als in der ungünstige-ren Orientierung b. Dieses Verhalten konnte auch so erwartet werden. Transpon-dertyp B zeigte dagegen ein entgegengesetztes Verhalten in Bezug auf die Erfas-sungsreichweite bei den unterschiedlichen Orientierungen. In der aus antennenthe-oretischer Sicht ungünstigeren Orientierung b wurden höhere Erfassungsreichwei-ten beobachtet als in der Orientierung a. Da sich beim Transpondertypen B die Lage der Antenne innerhalb des Transpondergehäuses aus dessen Bauform eindeutig ergibt, ist ein Irrtum hier ausgeschlossen. In der Orientierung a lagen die Lesegerä-teantenne und die Transponderantenne eindeutig parallel zueinander im Raum. Auch eine alleinige Erklärung durch positiv wirkende, feldverdichtende Reflexionen der Störgröße Wasser ist auszuschließen, da dieses Verhalten auch in der Variante b, d.h. ohne Wasser, zu beobachten war.

114 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
Im Vergleich der beiden Lesegeräte I und II zeigte das Lesegerät II die höheren Erfassungsreichweiten. Dies lässt sich zum einen grundsätzlich durch den geringe-ren Öffnungswinkel des Lesegerätes II von 30° im Vergleich zum Öffnungswinkel von 70° des Lesegerätes I erklären, wodurch sich ein gezielteres, „verdichteteres“ Feld ergibt. Zum anderen ist dies durch die deutlich höheren Erfassungsreichweiten in Kombination mit Transpondertyp B zu erklären. Die durchschnittliche Erfassungs-reichweite der Kombination B.II unterschied sich signifikant von der Kombination B.I (Tabelle 12). Mit B.II wurde eine doppelt so hohe durchschnittliche Erfassungsreich-weite als mit B.I beobachtet. Dieser Zusammenhang zwischen Transpondertyp und Lesegerät konnte aber nur bei Transpondertyp B beobachtet werden. Bei den bei-den anderen Transpondertypen A und N unterschieden sich die durchschnittlichen Erfassungsreichweiten zwischen den beiden Lesegeräten I und II nicht. Aus dieser Erkenntnis lässt sich dennoch ableiten, dass eine Interaktion zwischen Lesegerät und Transpondertyp grundsätzlich bestehen kann und dass aus einer optimierten Kombination aus beiden die Erfassungsreichweite eines UHF-RFID-Systems we-sentlich erhöht werden kann. Daraus ergibt sich ein Ansatz für eine weitere Verbes-serung der eTK mit UHF-RFID-Systemen. 6.6.5 Bestimmung des Erfassungsbereiches Bei der Bestimmung des Erfassungsbereiches wurde die gleiche Methodik in der-selben Versuchsumgebung verwendet wie bei der Bestimmung der Erfassungs-reichweite. Die beobachtete Ausdehnung des Erfassungsbereiches in der Haupt-strahlrichtung der Lesegeräteantenne deckte sich mit der zuvor bestimmten Erfas-sungsreichweite in der Hauptstrahlrichtung. Hier lag auch gleichzeitig stets die größte Ausdehnung des Erfassungsbereiches. Die Bestimmung der Erfassungs-reichweite kann daher dazu dienen, den Erfassungsbereich abzuschätzen, da des-sen manuelle Bestimmung mit einem sehr hohen Zeitaufwand verbunden ist. Durch die Abschätzung des Erfassungsbereiches mit Hilfe der Bestimmung der Er-fassungsreichweite, können natürlich Bereiche innerhalb des Erfassungsbereiches, in denen ein Transponder nicht erfasst werden kann, nicht ermittelt werden. Die beobachteten Erfassungslöcher nahmen aber in ihrer Ausdehnung und in der Häu-figkeit ihres Auftretens nur kleine Dimensionen an. Dadurch kann eine starke Be-einträchtigung der Erfassbarkeit, zumindest in der gegebenen Versuchsumgebung, nicht erwartet werden, insbesondere im Fall einer Bewegung des Transponders pa-rallel zur Lesegeräteantenne durch den Erfassungsbereich. Nicht auszuschließen ist aber, dass in einer wechselnden Versuchsumgebung de-struktive Interferenzen des Feldes auftreten, die zu vermehrten und ausgedehnte-ren Erfassungslöchern führen. Die Wirkung der Versuchsumgebung zeigt sich im Verlauf der Erfassungsbereiche, die von starken Einkerbungen geprägt waren, die auf destruktive Interferenzen in diesem Bereich schließen lassen. Eine Vorhersage, wo in einer bestimmten Umgebung Erfassungslöcher auftreten, erweist sich daher

Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung 115
als sehr aufwändig. Im Falle einer Praxisanwendung wäre sie auch nicht zielfüh-rend, da sich die Position, Häufigkeit und Ausdehnung im Zeitverlauf innerhalb einer nicht konstant zu haltenden Umgebung stark ändern können. Praktikabler im Sinne einer Abschätzung der räumlichen Erfassbarkeit eines UHF-RFID-Systems in einer bestimmten Anwendungsumgebung erscheint die Bestimmung der Erfassungs-reichweite in Hauptstrahlrichtung der Lesegeräteantenne. Diese muss aber als Ma-ximalwert angesehen werden, der sich durch Dämpfung oder destruktive Interferen-zen, die an dieser Stelle wirken, wieder verringern kann. 6.6.6 Bestimmung der Erfassungssicherheit Der Abstand zwischen Transponder und Lesegerät von 30 cm in den dynamischen Untersuchungen wurde anhand der Ergebnisse der statischen Untersuchungen ge-wählt. Er sollte so gewählt sein, dass die Transponder zumindest in der optimalen Orientierung a unter statischen Bedingungen gut erfassbar sind. Denn nicht die Er-fassungsreichweite war die Zielgröße der Untersuchung, sondern die Wirkung der Einflussgrößen Wasser, Geschwindigkeit, Orientierung und Transponderanzahl auf die Erfassungssicherheit der Transponder in Bewegung, da Praxisanwendungen von diesen Einflussgrößen geprägt sind. Die beiden Transpondertypen B und N erreichten Erfassungsquoten von annähernd 100 % (Abbildung 41) und somit eine ausreichende Erfassungssicherheit. Eine mögliche destruktive Wirkung der Einflussgrößen Wasser, Geschwindigkeit, Orien-tierung und Transponderanzahl konnte unter den gegebenen Versuchsbedingun-gen nicht festgestellt werden. Dieses Ergebnis war aber insofern überraschend, als dass die Distanz zwischen Transpondern und Lesegerät in den Versuchen größer war als die in den vorangegangenen statischen Versuchen beobachtete Erfas-sungsreichweite des Transpondertyps N. Eine Erklärung könnte auch hier in der Reflexion des elektromagnetischen Feldes und daraus resultierenden konstruktiven Interferenzen liegen. Hierfür sprechen insbesondere die Maße des Wasserkörpers über der Messstrecke, der den gesamten Erfassungsbereich des Lesegerätes ab-deckte. Außerdem bewegte sich der Transpondertyp N nicht unmittelbar am Was-serkörper vorbei, sondern in einem Abstand von ca. 2 cm, der sich aus dem kon-struktiv bedingten unveränderlichen Abstand zwischen Wasserbehälter und Füh-rungsriemen ergab. Dieser Abstand könnte die Dämpfung des elektromagnetischen Feldes um den Transponder soweit verringert haben, dass dieser in der gegebenen Entfernung zur Lesegeräteantenne ausreichend gut erfassbar war. Transpondertyp A erreichte im Gegensatz zu den beiden anderen Transponderty-pen B und N deutlich niedrigere Erfassungsquoten und damit keine ausreichende Erfassungssicherheit. Die Erfassungsquoten waren unabhängig von den Einfluss-größen Wasser, Geschwindigkeit und Transponderanzahl deutlich unterhalb der Vergleichswerte der Transpondertypen B und N. Gleichzeitig lag die Distanz zwi-schen Transpondern und Lesegerät beim Erfassungsvorgang unterhalb den in den

116 Bewertung von UHF-Transpondern für den Einsatz zur elektronischen Tierkennzeichnung
statischen Versuchen festgestellten Erfassungsreichweiten. Dies lässt den Schluss zu, dass die Erfassbarkeit des Transpondertyps A durch eine Bewegung des Trans-ponders negativ beeinflusst wird. Ein Einfluss der Geschwindigkeit der Bewegung auf die Erfassungsquote war dagegen nicht zu beobachten. Gegen die Vermutung, dass der negative Einfluss der Bewegung auf einem erhöhten Zeitbedarf für die Kommunikation zwischen Transpondertyp A und Lesegerät gründet, spricht die Tat-sache, dass sich kein signifikanter Unterschied in der Erfassungsquote ergab, un-abhängig davon, ob sich ein oder fünf Transponder im Erfassungsbereich befanden. Die Transponderanzahl hatte keinen Einfluss auf die Erfassungsquote. Diese Be-obachtung konnte bei den sehr hohen Datenübertragungsraten von UHF-RFID-Systemen erwartet werden. Einen signifikanten Einfluss auf die Erfassungsquote des Transpondertyps A hatten dagegen die beiden Einflussgrößen Wasser und Orientierung und insbesondere de-ren Interaktion. Die Anwesenheit von Wasser verringerte die Erfassungsquote. Dies war aufgrund der Ergebnisse der Bestimmung der Erfassungsreichweiten so nicht zu erwarten. Hier war der Transpondertyp A auch noch bei den größeren Wasser-volumina bis zu einer Distanz von über 30 cm zum Lesegerät erfassbar. Allerdings sind beide Ergebnisse nicht direkt vergleichbar, da es sich um unterschiedliche Wasservolumina und Abstände zwischen Transponder und Wasser handelte. Da-gegen bestätigte sich der Einfluss der Orientierung aus den Versuchen zur Erfas-sungsreichweite, d.h., in der Orientierung a wurden signifikant höhere Erfassungs-reichweiten beobachtet als in der Orientierung b. Allerdings wurde in Anwesenheit von Wasser in der Orientierung a eine Erfassungsquote von 0 % beobachtet. In der Orientierung b war dies bei Abwesenheit von Wasser zu beobachten. Andererseits waren deutlich höhere Erfassungsquoten zu beobachten, wenn sich in der Orientie-rung a kein Wasser im Erfassungsbereich befand bzw. wenn sich in der Orientie-rung b Wasser im Erfassungsbereich befand. Diese Interaktion von Wasser und Orientierung deutet wiederum stark auf das Auftreten von, in Abhängigkeit von der Orientierung, destruktiv oder konstruktiv wirkenden Interferenzen in der Versuchs-umgebung hin. Diese durch Reflexionen bedingten Interferenzen sind allerdings nicht oder nur sehr schwer und ungenau lokalisier- und kalkulierbar und sind somit in eine Anwendung einzubeziehen. Für eine Praxisanwendung ist es daher unerlässlich, auf Basis von Erkenntnissen, die unter weitgehend standardisierten Bedingungen in einer Ver-suchsumgebung gewonnen wurden, weitere Untersuchungen in einer praxisnahen Anwendungsumgebung durchzuführen. Erkenntnisse zu Erfassungsreichweite, -bereich und -sicherheit eines Transpondertyps unter Einfluss von Stör- oder Füh-rungsgrößen bilden hier die Grundlage für die Auswahl geeigneter Systeme und Gestaltung der Anwendungsumgebung sowie für die Bewertung der dort erreichten Ergebnisse. Diese wurden mit den gezeigten Untersuchungen geschaffen und las-sen somit eine zielführende Untersuchung der Transpondertypen in einer praxisori-entierten Anwendungsumgebung zu.

117
7 SIMULTANERFASSUNG VON MASTSCHWEINEN MIT UHF-TRANSPONDERN
7.1 Einleitung Um die Frage zu beantworten, ob und unter welchen Bedingungen aktuelle Ultrahochfrequenzsysteme zur eTK eingesetzt werden können, sind Untersuchungen in Praxisanwendungen notwendig. Eine Praxisumgebung zeichnet sich dadurch aus, dass bestimmte Einflussgrößen auf die Erfassbarkeit der RFID-Systeme im zeitlichen Ablauf in ihrem Auftreten und damit in ihrer Wirkung variabel sind. Für die vorliegende Arbeit bedeutet dies, dass die zuvor unter standardisierten und reproduzierbaren Versuchsbedingungen beobachteten Einflussgrößen Wasser, Orientierung und Geschwindigkeit nicht konstant gehalten werden können. Die gewonnenen Erkenntnisse über deren Wirkungen auf die Erfassungsreichweite und die Erfassungsquote bilden aber die Grundlage für die Planung der Praxisversuche und für die Einordnung der Ergebnisse. Darüber hinaus kann die unter standardisierten Bedingungen festgestellte Interaktion zwischen Transponder und Lesegerät erneut betrachtet und für Praxisanwendungen verifiziert oder falsifiziert werden. In einem Praxisversuch auf der Versuchsstation Agrarwissenschaften, Standort Lindenhöfe der Universität Hohenheim wurden daher Schweine mit UHF-Transponderohrmarken am rechten Ohr gekennzeichnet und zur Mast praxisüblich aufgestallt. Durch regelmäßige Erfassungsversuche über die gesamte Mastperiode hinweg wurde untersucht, ob sich UHF-Transponderohrmarken zur elektronischen Kennzeichnung von Schweinen eignen und eine Simultanerfassung erreicht werden kann. Um dies bewerten zu können, wurde während des Versuchszeitraumes die Erfassungsquote bei simultaner Erfassung der Tiere in verschiedenen Anordnungen der Lesegeräte bzw. Lesegeräteantennen ermittelt. 7.2 Material und Methoden 7.2.1 UHF-Transponderohrmarken Mit den in Kapitel 6 untersuchten Transpondertypen A und B wurden UHF-Transponderohrmarken gefertigt. Zu diesem Zweck wurden je zwölf Einzeltransponder der beiden UHF-Transpondertypen auf Kunststoffohrmarken aufgebracht. Dazu wurden M2,5 Linsenkopfschrauben (6 mm), Sechskantmuttern und Unterlegscheiben aus V2A-Stahl verwendet. Bei den Kunststoffohrmarken (50/35 mm x 45 mm) handelte es sich um handelsübliche Kunststoffohrmarken für Schweine, die aus einem Dornteil und einem Lochteil bestanden (MultiFlex U, Caisley International, Bocholt). Zur besseren visuellen Unterscheidung der beiden UHF-Transpondertypen wurden unterschiedliche Farben der Kunststoffohrmarken

118 Simultanerfassung von Mastschweinen mit UHF-Transpondern
verwendet: Transpondertyp A wurde auf gelben Kunststoffohrmarken und Transpondertyp B auf grünen Kunststoffohrmarken aufgebracht (Abbildung 47).
Abbildung 47: Fertigung der UHF-Transponderohrmarken A und B (v.l.) Die letzten vier Stellen des veränderbaren Nutzercodes der beiden Transpondertypen wurden fortlaufend in A101 bis A112 (Transpondertyp A) bzw. A201 bis A212 (Transpondertyp B) geändert, um die Auswertung der Versuchsergebnisse zu erleichtern. Diese fortlaufende Nummer wurde zusätzlich auf der Rückseite der Kunststoffohrmarke mit einem wasserfesten Stift notiert. Mit den gefertigten Transponderohrmarken konnten insgesamt 24 Schweine gekennzeichnet werden, d.h. je zwölf Schweine mit Transpondertyp A und Transpondertyp B. Die Kennzeichnung erfolgte bei allen Schweinen am rechten Ohr. 7.2.2 Lesegeräte und Erfassungsportal Für die Praxisuntersuchungen wurden dieselben Lesegeräte I und II verwendet, mit denen auch schon die Funktion der UHF-Systeme unter Laborbedingungen untersucht worden war (Kapitel 6). Beide Lesegeräte konnten sowohl im Einzel- als auch in einem Portalmodus betrieben werden. Im Portalmodus können mehrere Lesegeräte (Lesegerät I) bzw. Lesegeräteantennen (Lesegerät II) zusammengeschaltet und parallel betrieben werden. Diese Möglichkeit wird meist bei Wareneingangs- bzw. -ausgangskontrollen verwendet, um z.B. ganze Paletten von gekennzeichneten Gütern während der Verladung zu erfassen. Hierzu sind zwei oder mehrere Lesegeräteantennen zu beiden Seiten des Fahrwegs der Paletten angebracht. Auch ein RFID-basiertes Selektionstor bei gelenktem Kuhverkehr in AMS-Ställen (Automatisches Melksystem) oder in der Schafhaltung kann als RFID-Portal bezeichnet werden, auch wenn diese Systeme nicht im Ultrahochfrequenzbereich, sondern im Niederfrequenzbereich arbeiten. Bei Lesegerät I war durch den monolithischen Aufbau die Verwendung einer Datensteuereinheit (DCU1, Deister Electronic, Barsinghausen) notwendig, die beide Lesegeräte administriert und die erfassten Transponderdaten gefiltert an

Simultanerfassung von Mastschweinen mit UHF-Transpondern 119
einen angeschlossenen Rechner übermittelt. Bei Lesegerät II war die Möglichkeit einer Portalanwendung durch die Anschlussmöglichkeit von bis zu vier Sende-Empfangs-Antennen (TX/RX-Antennen) an die Schreib-Lese-Einheit gegeben. Im Kontrollgang des Maststalls der Versuchsstation Agrarwissenschaften, Standort Lindenhöfe wurden zwei Erfassungsportale in einem Abstand von 5,0 m hintereinander eingerichtet. Die Durchgangsbreite beider Erfassungsportale betrug 1,1 m. Dadurch konnten mehrere Tiere die Erfassungsportale gemeinsam in der Gruppe passieren. Das Erfassungsportal 1 wurde mit zwei Lesegeräten I ausgestattet, die über eine Datensteuereinheit verbunden waren, das Erfassungsportal 2 mit einem Lesegerät II mit zwei Sende-Empfangs-Antennen. Die Lesegeräte bzw. die Lesegeräteantennen waren vor den vorbeilaufenden Schweinen geschützt, indem sie jeweils zurückgesetzt neben einem Holzkasten positioniert wurden. Die Holzkästen befanden sich in Laufrichtung der Tiere gesehen vor den Lesegeräten bzw. Lesegeräteantennen. Sie definierten gleichzeitig die Durchgangsbreite der Portale. Die je zwei Lesegeräte bzw. Lesegeräteantennen konnten an speziell gefertigten Halterungen beiderseits des Kontrollgangs hintereinander oder übereinander angebracht werden. Die Versuchsumgebung zeichnete sich durch einen hohen Anteil an Metall aus, da der Kontrollgang beidseits durch die Gitterabtrennung leerstehender Buchten gebildet wurde. Dadurch waren Bedingungen gegeben, wie sie in Praxisanwendungen häufig anzutreffen sind. Durch die unterschiedlichen Arten der Anbringung der Lesegeräte bzw. Lesegeräteantennen waren mehrere Möglichkeiten gegeben, wie diese zu einem Erfassungsportal angeordnet werden konnten. Drei dieser möglichen Anordnungen wurden untersucht (Abbildung 48):
• Anordnung a: beide Lesegeräte bzw. Lesegeräteantennen in Laufrichtung der
Tiere rechts hintereinander in einem Abstand von 100 cm
• Anordnung b: ein Lesegerät bzw. eine Lesegeräteantenne in Laufrichtung der Tiere rechts und ein Lesegerät bzw. eine Lesegeräteantenne in einem Abstand von 100 cm in Laufrichtung der Tiere links
• Anordnung c: beide Lesegeräte bzw. Lesegeräteantennen in Laufrichtung der
Tiere rechts übereinander, das obere Lesegerät bzw. die obere Lesegeräteantenne um 45° in den Durchgang geneigt

120 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Abbildung 48: Lesegeräteanordnungen a, b und c (v.l.) Bei allen genannten Anordnungen waren die Lesegeräte bzw. Lesegeräteantennen vertikal angebracht. Die Halterungen ermöglichten es, die Höhe der befestigten Geräte zu variieren. Die Lesegeräte bzw. Lesegeräteantennen waren immer so angebracht, dass sich deren Schwerpunkt auf der Schulterhöhe der Tiere befand. Dadurch befanden sich die an den Ohren der Tiere angebrachten Transponder mit einer hohen Wahrscheinlichkeit im Bereich der größten Erfassungsreichweite der untersuchten RFID-Systeme. Eine Ausnahme bildete das obere Lesegerät bzw. die obere Lesegeräteantenne der Anordnung c, die sich jeweils 115 cm über dem Boden befanden. 7.2.3 Versuchsdurchführung Die vorliegenden Versuche wurden an 14 Versuchsterminen während der Anfangs-, Mittel- und Endmastperiode von Mastschweinen durchgeführt (Tabelle 16). Die Tiere wurden während der gesamten Mastperiode praxisüblich gehalten. Tabelle 16: Versuchstermine UHF-Transponderohrmarken mit durchschnittlichem Gewicht und durchschnittlicher Schulterhöhe
Versuchs-
termin Tiere mit
Transpondertyp A Tiere mit
Transpondertyp B Alle Tiere
Gewicht Ø [kg]
Schulterhöhe Ø [cm]
Gewicht Ø [kg]
Schulterhöhe Ø [cm]
Gewicht Ø [kg]
Schulterhöhe Ø [cm]
An
fan
gs-
m
ast
1 28,6 - 26,7 - 27,7 - 2 34,7 - 33,0 - 33,9 - 3 39,4 44 37,8 44 38,6 44 4 45,2 49 43,6 49 44,4 49 5 50,5 52 49,7 51 50,1 52 6 57,6 54 56,7 54 57,2 54
Mit
tel-
mas
t
7 63,0 54 61,5 54 62,3 54 8 69,5 56 68,0 56 68,8 56 9 75,8 58 74,0 57 74,9 58
10 81,9 59 80,6 59 81,3 59
En
d-
mas
t
11 91,7 62 92,5 62 92,1 62 12 99,8 62 100,9 64 100,4 63 13 105,5 63 107,2 65 106,4 64 14 110,5 64 112,6 64 111,6 65

Simultanerfassung von Mastschweinen mit UHF-Transpondern 121
In der Anfangs- und Mittelmast (Versuchstermine 1 bis 10) waren 24 Tiere mit den UHF-Transponderohrmarken gekennzeichnet. Diese Tiere wurden vor Versuchstermin 1 gekennzeichnet und aufgestallt (Ø 23,3 kg LG). Nach der Mittelmast (Ø 81,3 kg LG) wurden die UHF-Transponderohrmarken entfernt, gereinigt und mit ihnen weitere 24 Endmastschweine (Ø 92,1 kg LG) vor Versuchstermin 11 gekennzeichnet. An jedem Versuchstermin wurden die Tiere zunächst mit einer im Versuchsmaststall fest installierten Tierwaage einzeln gewogen und ihre Schulterhöhe gemessen. Dabei wurden die Tiere auf Verletzungen, Lahmheiten oder Erkrankungen untersucht, um festzustellen, ob sie an den folgenden Erfassungsversuchen teilnehmen können. Bei der Tierverwiegung wurde außerdem kontrolliert, ob zwischenzeitlich ein Verlust oder Defekt der UHF-Transponderohrmarke des Tieres aufgetreten war. Um die Erfassungsquote des UHF-Systems ermitteln zu können, wurden die Tiere gemeinsam durch das Erfassungsportal getrieben. Die Anordnung der beiden Lesegeräte bzw. Lesegeräteantennen wurde zwischen a, b und c variiert. An einem Versuchstermin fanden pro Anordnung acht Wiederholungen statt, sodass ein Versuchstermin aus 24 Versuchsdurchgängen bestand. Die Abfolge der Lesegeräteanordnungen wurde für jeden Versuchstermin randomisiert festgelegt. Die Erfassungsquote ergab sich als Quotient aus der Anzahl erfasster Transponderohrmarken einer Wiederholung und der Anzahl der vor der Wiederholung funktionsfähigen, d.h. erfassbaren Transponderohrmarken. Die Erfassungsquote wurde daher wie folgt definiert (3):
Erfassungsquote [%] =Anzahl erfasster Transponder [n]
Anzahl erfassbarer Transponder [n]·100 (3)
Im Folgenden ist, falls nicht anders angegeben, die durchschnittliche Erfassungsquote diejenige, die auf alle Wiederholungen im Versuchszeitraum bezogen ist. Sie stellt somit den Mittelwert der Erfassungsquoten aller Wiederholungen dar.
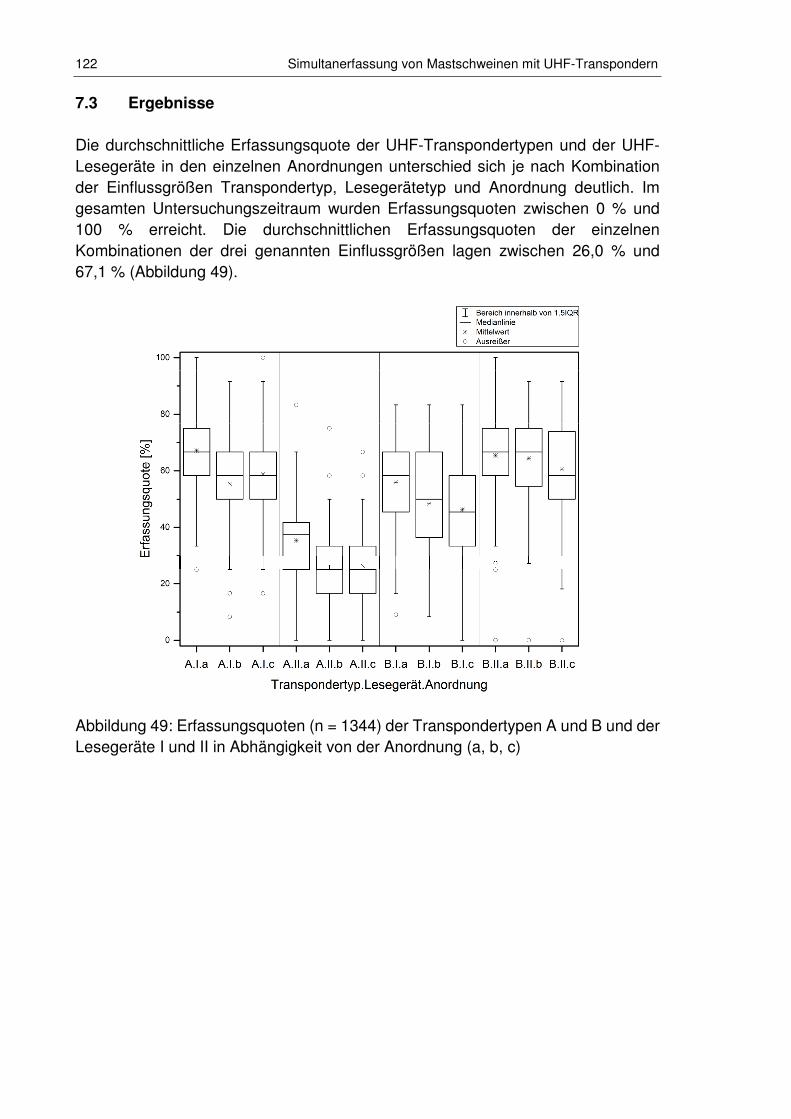
122 Simultanerfassung von Mastschweinen mit UHF-Transpondern
7.3 Ergebnisse Die durchschnittliche Erfassungsquote der UHF-Transpondertypen und der UHF-Lesegeräte in den einzelnen Anordnungen unterschied sich je nach Kombination der Einflussgrößen Transpondertyp, Lesegerätetyp und Anordnung deutlich. Im gesamten Untersuchungszeitraum wurden Erfassungsquoten zwischen 0 % und 100 % erreicht. Die durchschnittlichen Erfassungsquoten der einzelnen Kombinationen der drei genannten Einflussgrößen lagen zwischen 26,0 % und 67,1 % (Abbildung 49).
Abbildung 49: Erfassungsquoten (n = 1344) der Transpondertypen A und B und der Lesegeräte I und II in Abhängigkeit von der Anordnung (a, b, c)

Simultanerfassung von Mastschweinen mit UHF-Transpondern 123
7.3.1 Einfluss von Transpondertyp, Lesegerät und Anordnung Bei der Betrachtung der Erfassungsquoten der einzelnen Einflussgrößen Transpondertyp, Lesegerät und Anordnung zeigte sich, dass diese jeweils einen signifikanten Einfluss auf die Erfassungsquote hatten (p<0,001). Im Vergleich der beiden Transpondertypen erreichte Transpondertyp A signifikant geringere durchschnittliche Erfassungsquoten als Transpondertyp B (A: 44,9 %, B: 56,8 %; p<0,001). Die Streuung der beobachteten Erfassungsquoten in der Untersuchung war bei Transpondertyp A mit 22,3 % größer als bei Transpondertyp B mit 18,0 % (Abbildung 50).
Abbildung 50: Erfassungsquoten (n = 1344) der Transpondertypen A und B

124 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Die durchschnittlichen Erfassungsquoten, die bei den beiden Lesegerätetypen beobachtet wurden, unterschieden sich ebenfalls signifikant: Mit Lesegerät I wurden signifikant höhere durchschnittliche Erfassungsquoten erreicht als mit Lesegerät II (I: 55,3 %, II: 46,4 %; p<0,001). Die Standardabweichung lag bei Lesegerät I mit 17,9 % unter der von Lesegerät II mit 23,1 % (Abbildung 51).
Abbildung 51: Erfassungsquoten (n = 1344) der Lesegeräte I und II Auch die durchschnittlichen Erfassungsquoten der Lesegeräteanordnungen unterschieden sich signifikant voneinander. In Anordnung a wurden signifikant höhere durchschnittliche Erfassungsquoten beobachtet als in den Anordnungen b und c (a: 56,0 %a, b: 48,6 %b, c: 48,0 %b; p<0,001). Anordnung b und c unterschieden sich hinsichtlich der beobachteten durchschnittlichen Erfassungs-quote nicht signifikant voneinander. Die Unterschiede zwischen den Anordnungen waren geringer als bei den beiden Einflussgrößen Transpondertyp und Lesegerät. Dies zeigte sich auch in der Standardabweichung, die in Anordnung a bei 20,0 %, in Anordnung b bei 21,3 % und in Anordnung c bei 21,1 % lag (Abbildung 52).

Simultanerfassung von Mastschweinen mit UHF-Transpondern 125
Abbildung 52: Erfassungsquoten (n = 1344) der Anordnungen a, b und c 7.3.2 Interaktion der Einflussgrößen Transpondertyp, Lesegerät und Lese-
geräteanordnung Es zeigte sich, dass die Kombinationen sowohl von Transpondertyp und Lesegerät als auch von Transpondertyp und Anordnung einen signifikanten Einfluss auf die durchschnittliche Erfassungsquote hatten (p<0,001). Keinen Einfluss auf die durchschnittliche Erfassungsquote zeigte dagegen die Kombination aus Lesegerät und Anordnung. Die durchschnittlichen Erfassungsquoten lagen bei Transpondertyp A in Kombination mit Lesegerät I deutlich über den durchschnittlichen Erfassungsquoten mit Lesegerät II (A.I: 60,5 %, A.II: 29,2 %; p<0,05). Bei Transpondertyp B war der Unterschied zwar deutlich geringer, jedoch wurde mit Lesegerät II eine höhere durchschnittliche Erfassungsquote als mit Lesegerät I (B.II: 63,5 %, B.I: 50,2 %; p<0,05) beobachtet (Abbildung 53).
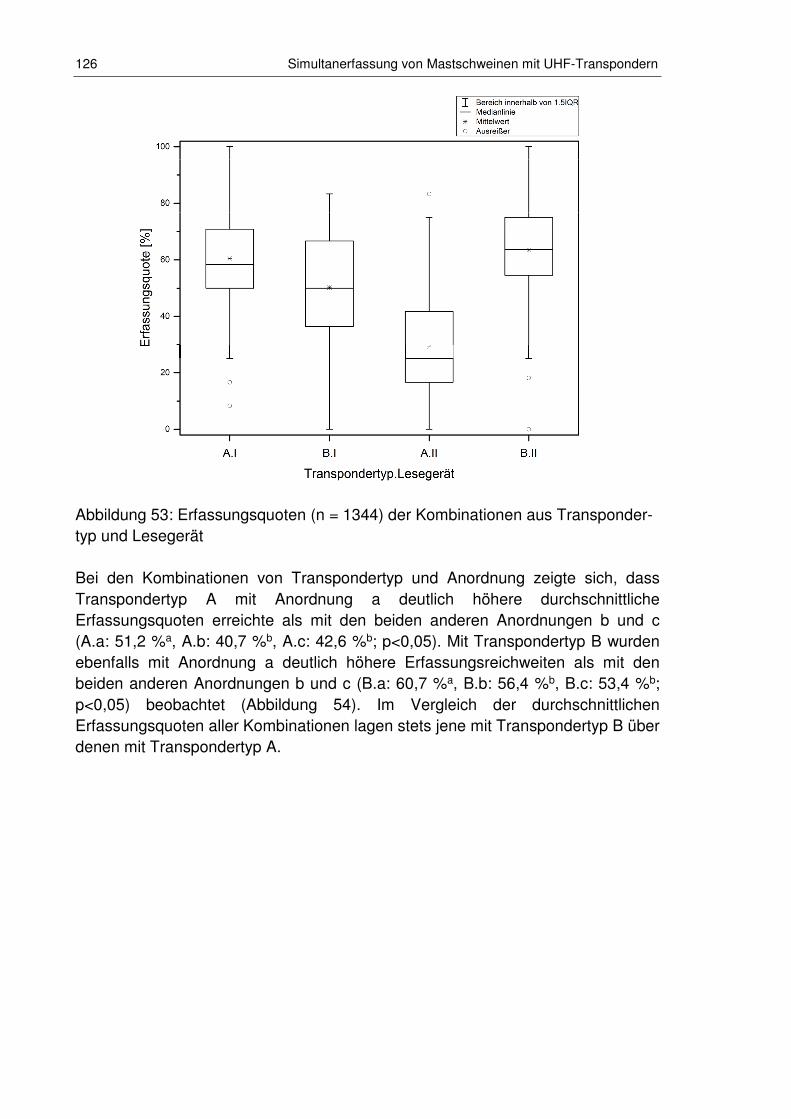
126 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Abbildung 53: Erfassungsquoten (n = 1344) der Kombinationen aus Transponder-typ und Lesegerät Bei den Kombinationen von Transpondertyp und Anordnung zeigte sich, dass Transpondertyp A mit Anordnung a deutlich höhere durchschnittliche Erfassungsquoten erreichte als mit den beiden anderen Anordnungen b und c (A.a: 51,2 %a, A.b: 40,7 %b, A.c: 42,6 %b; p<0,05). Mit Transpondertyp B wurden ebenfalls mit Anordnung a deutlich höhere Erfassungsreichweiten als mit den beiden anderen Anordnungen b und c (B.a: 60,7 %a, B.b: 56,4 %b, B.c: 53,4 %b; p<0,05) beobachtet (Abbildung 54). Im Vergleich der durchschnittlichen Erfassungsquoten aller Kombinationen lagen stets jene mit Transpondertyp B über denen mit Transpondertyp A.

Simultanerfassung von Mastschweinen mit UHF-Transpondern 127
Abbildung 54: Erfassungsquoten (n = 1344) der Kombinationen aus Transponder-typ und Anordnung Die Interaktion der drei Einflussgrößen Transpondertyp, Lesegerät und Anordnung waren unterschiedlich stark ausgeprägt. Die größten Unterschiede zeigten sich bei der Betrachtung der Kombination von Transpondertyp und Lesegerät in Abhängigkeit von der Anordnung (Tabelle 17). Tabelle 17: Durchschnittliche Erfassungsquoten [%] der Transpondertypen A und B und der Lesegeräte I und II in Abhängigkeit von der Anordnung (a, b, c) der Lese-geräte bzw. Antennen
Transpondertyp Lesegerät Anordnung a Anordnung b Anordnung c Mittelwert
A I 67,1f 55,4d 58,9d 60,5
II 35,3b 26,0a 26,3a 29,2
B I 55,9d 48,4c 46,2c 50,2
II 65,5ef 64,5ef 60,5de 63,5
Anmerkung: Werte mit unterschiedlichen Indexbuchstaben unterscheiden sich signifikant (p<0,05)
Im Hinblick auf die erreichte durchschnittliche Erfassungsquote erwiesen sich Transpondertyp B bzw. Lesegerät I als anspruchsloser hinsichtlich der Wahl des Kombinationspartners zur Erfassung als Transpondertyp A bzw. Lesegerät II. Der Unterschied zwischen den durchschnittlichen Erfassungsquoten, die mit Transpon-
128 Simultanerfassung von Mastschweinen mit UHF-Transpondern
dertyp B bzw. Lesegerät I erreicht wurden, sind wesentlich geringer als die Unter-schiede zwischen den durchschnittlichen Erfassungsquoten, die bei Transponder-typ A bzw. Lesegerät II beobachtet wurden. Dies liegt darin begründet, dass die Kombination A.II eine deutlich niedrigere durchschnittliche Erfassungsquote als die drei anderen Kombinationen A.I, B.I und B.II erreichte. Die höchste durchschnittli-che Erfassungsquote aller Kombinationen aus Transpondertyp und Lesegerät un-abhängig von der Anordnung erreichten Transpondertyp B und Lesegerät II (A.I: 60,5 %c, A.II: 29,2 %a, B.I: 50,2 %b, B.II: 63,5 %d; p<0,05). Bezieht man die Anordnungen in die Betrachtung mit ein, wurde die niedrigste durchschnittliche Erfassungsquote mit der Kombination A.II, und zwar in der Anord-nung b, beobachtet, die höchste durchschnittliche Erfassungsquote findet sich mit der Kombination A.I in der Anordnung a. Diese Kombination A.I.a bildet mit den beiden Kombinationen B.II.a und B.II.b eine homogene Gruppe mit den höchsten durchschnittlichen Erfassungsquoten. Bei dieser Betrachtung zeigte sich zudem, dass bei allen Kombinationen stets die Kombination in Anordnung a die höchste durchschnittliche Erfassungsquote erreichte. Die niedrigste durchschnittliche Erfas-sungsquote lag in den Kombinationen mit Transpondertyp A stets in Anordnung b, mit Transpondertyp B dagegen stets in Anordnung c. Entsprechend sind die durch-schnittlichen Erfassungsquoten der Lesegeräte in den einzelnen Anordnungen ab-hängig vom Transpondertyp. Es zeigte sich zudem, dass von den vier Kombinationen, die eine durchschnittliche Erfassungsquote von über 60 % erreichten, drei in Kombinationen aus Transpon-dertyp B und Lesegerät II zu beobachten waren (B.II.a, B.II.b, B.II.c), d.h., hier wur-den i.d.R. unabhängig von der Anordnung der Lesegeräte höhere durchschnittliche Erfassungsquoten erreicht als mit anderen Kombinationen.

Simultanerfassung von Mastschweinen mit UHF-Transpondern 129
7.3.3 Einfluss des Versuchstermins und der Wiederholung Es konnte ein signifikanter Zusammenhang (p<0,001) zwischen dem Versuchster-min und der durchschnittlichen Erfassungsquote aller Wiederholungen des Ver-suchstermins beobachtet werden. Dabei konnte kein zeitlich linearer Zusammen-hang festgestellt werden (Abbildung 55). Die höchste durchschnittliche Erfassungs-quote eines Versuchstermins wurde mit 56,0 % am Versuchstermin T03 erreicht, die niedrigste durchschnittliche Erfassungsquote eines Versuchstermins am Ver-suchstermin T08 mit 42,8 %. Bei den Versuchsterminen T01, T10 und T13 konnten Erfassungsquoten einzelner Wiederholungen von bis zu 100 % beobachtet werden, die Versuchstermine mit Erfassungsquoten einzelner Wiederholungen von 0 % wa-ren T01, T04, T05, T08, T10, T11 und T14.
Abbildung 55: Erfassungsquoten (n = 1344) in Abhängigkeit des Versuchstermins
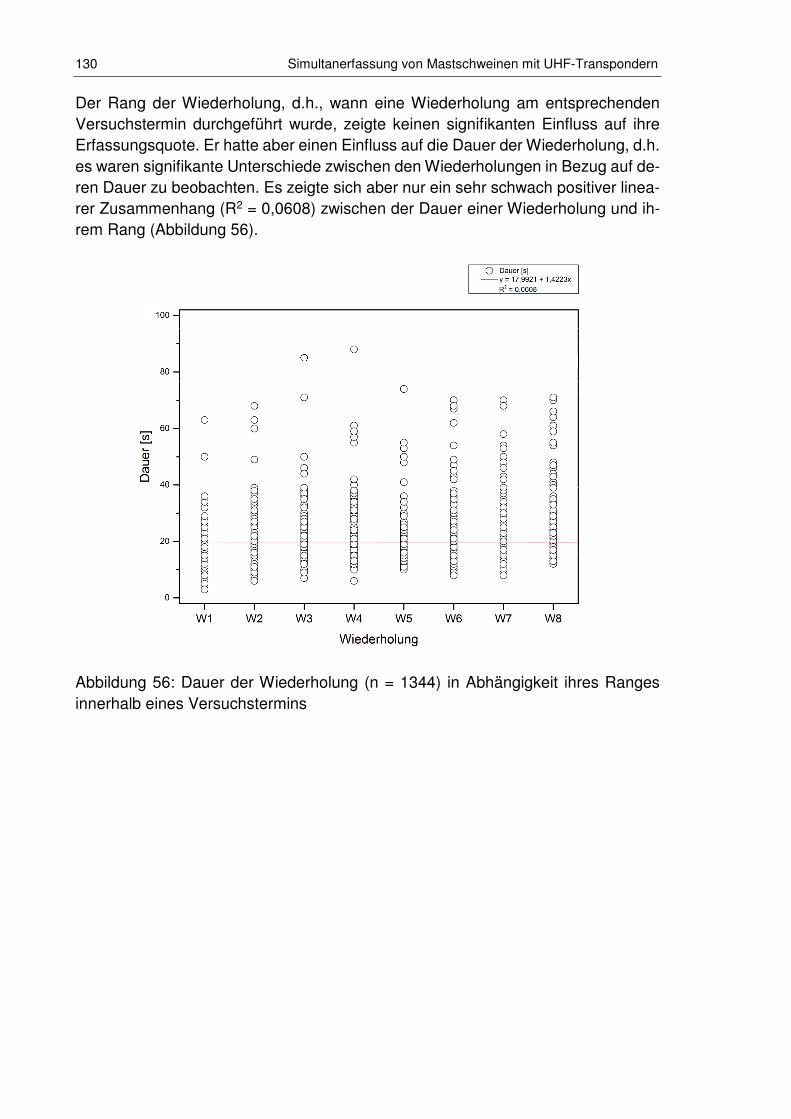
130 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Der Rang der Wiederholung, d.h., wann eine Wiederholung am entsprechenden Versuchstermin durchgeführt wurde, zeigte keinen signifikanten Einfluss auf ihre Erfassungsquote. Er hatte aber einen Einfluss auf die Dauer der Wiederholung, d.h. es waren signifikante Unterschiede zwischen den Wiederholungen in Bezug auf de-ren Dauer zu beobachten. Es zeigte sich aber nur ein sehr schwach positiver linea-rer Zusammenhang (R2 = 0,0608) zwischen der Dauer einer Wiederholung und ih-rem Rang (Abbildung 56).
Abbildung 56: Dauer der Wiederholung (n = 1344) in Abhängigkeit ihres Ranges innerhalb eines Versuchstermins

Simultanerfassung von Mastschweinen mit UHF-Transpondern 131
Auch der Versuchstermin hatte einen signifikanten Einfluss auf die Dauer einer Wie-derholung. Hier zeigte sich ein stärkerer positiver linearer Zusammenhang (R2 = 0,29987) als zwischen der Dauer einer Wiederholung und ihrem Rang (Abbildung 57).
Abbildung 57: Dauer der Wiederholung (n = 1344) in Abhängigkeit des Versuchs-termins Die Dauer einer Wiederholung konnte anhand der Erfassungszeitpunkte des ersten und des letzten Transponders ermittelt werden und ergibt sich aus der Differenz dieser beiden Zeitpunkte. Eine Transpondergeschwindigkeit, die mit der aus Kapitel 6.3.2 vergleichbar ist, konnte wegen der stark unterschiedlichen Geschwindigkeit der Einzeltiere bei der Passage der Erfassungsportale nicht sinnvoll bestimmt wer-den. Die ermittelte Dauer einer Wiederholung lässt aber einen Rückschluss auf die Geschwindigkeit der Tiergruppe insgesamt und somit auf die Geschwindigkeit der Transponder insgesamt beim Erfassungsvorgang zu.

132 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Bei der Betrachtung der Abhängigkeiten zwischen der Erfassungsquote und der Dauer einer Wiederholung zeigte sich ein sehr schwach positiver linearer Zusam-menhang (R2 = 0,01584) zwischen der Dauer einer Wiederholung und der Erfas-sungsquote (Abbildung 58).
Abbildung 58: Erfassungsquote (n = 1344) in Abhängigkeit von der Dauer einer Wiederholung 7.4 Diskussion In den Versuchen zeigte sich, dass alle untersuchten Einflussgrößen, d.h. Trans-pondertyp, Lesegerät und Anordnung der Lesegeräte, einen signifikanten Einfluss auf die Erfassungsquote des UHF-RFID-Systems hatten. Dies zeigt, dass die zu variierenden Einflussgrößen für die Untersuchung richtig gewählt worden waren. Sie sind auch diejenigen Einflussgrößen, die in Praxisanwendungen am einfachsten zu beeinflussen sind, da sie im Regelfall frei wählbar sind. Die weiteren, in der vor-hergehenden Untersuchung unter Laborbedingungen (Kapitel 6) untersuchten Ein-flussgrößen wie Wasser oder Orientierung sind im Gegensatz dazu nicht oder nur in geringem Maße beeinflussbar. Ihr Einfluss und der weiterer, nicht konstant zu haltender Einflussgrößen wie z.B. der Lufttemperatur zeigte sich in den hohen Stan-dardabweichungen, die über den gesamten Versuchszeitraum bei allen betrachte-
Simultanerfassung von Mastschweinen mit UHF-Transpondern 133
ten Einflussgrößen und deren Kombinationen zu beobachten waren. Die Erfas-sungsquoten streuten sowohl innerhalb der Versuchstermine als auch innerhalb der Versuchsvarianten über den gesamten Versuchszeitraum. Daher kann davon aus-gegangen werden, dass die Wirkung dieser Einflussgrößen im zeitlichen Ablauf auch innerhalb der einzelnen Wiederholungen unterschiedlich stark aufgetreten ist und das Ergebnis daher auch unterschiedlich stark positiv oder negativ beeinflusst hat. Dies stellt die Herausforderung für die Anwendung von UHF-RFID-Systemen zur eTK dar. Eine Optimierung der drei untersuchten Einflussgrößen Transponder-typ, Lesegerät und deren Anordnung muss daher diesen Aspekt miteinbeziehen. Das Ziel sollte sein, von den weiteren, nicht konstant zu haltenden Einflussgrößen unabhängiger zu sein. Die Ergebnisse der Laboruntersuchungen legen dabei nahe, dass der Einflussgröße Orientierung hier besondere Aufmerksamkeit gewidmet werden sollte. Es zeigte sich dort, dass bei den untersuchten Transpondertypen A und B weniger die Einflussgröße Wasser als die Orientierung die Erfassungsreich-weite negativ beeinflusste. 7.4.1 Wirkung von Transpondertyp, Lesegerät und Lesegeräteanordnung Bei der Betrachtung der Transpondertypen zeigte sich, dass Transpondertyp B hö-here Erfassungsquoten als Transpondertyp A erreichte, gleichzeitig die Streuung aber geringer war. Ein ähnliches Bild zeigte sich auch bei den zuvor durchgeführten Laboruntersuchungen (Kapitel 6), sowohl bei der Betrachtung der Erfassungsreich-weite als auch bei der Erfassungssicherheit. Die dort beobachtete stärkere Streu-ung der Erfassungsquoten von Transpondertyp A in den dynamischen Untersu-chungen konnte, neben dem Einfluss von Wasser, auf den Einfluss der Orientierung des Transponders zum Lesegerät zurückgeführt werden. Beide Einflussgrößen lie-ßen sich in den Praxisversuchen aber nicht konstant halten. Der Einfluss von Was-ser auf die Erfassbarkeit eines Transponders war zum einen durch das Trägertier gegeben. Er kann zwar für einen einzelnen Versuchstermin als konstant angenom-men werden, aufgrund des Wachstums der Tiere aber nicht für den gesamten Ver-suchszeitraum. Zum anderen war der Einfluss von Wasser durch die Anwesenheit einer unterschiedlichen Anzahl weiterer Tiere im Erfassungsbereich während des Erfassungsvorgangs gegeben. Dadurch kann er auch innerhalb eines Versuchster-mins und innerhalb einer Wiederholung als variabel angenommen werden. Die Ori-entierung des Transponders zum Lesegerät beim Erfassungsvorgang ergab sich durch den Winkel der Laufrichtung des Trägertieres zur Hauptstrahlrichtung des Le-segerätes, durch die Stellung des Kopfes und mehr noch durch die Stellung des Ohres. Dadurch kann die Variabilität dieser Einflussgröße in den dargestellten Pra-xisversuchen als sehr groß angenommen werden. Die größere Streuung der Erfas-sungsquoten von Transpondertyp A lässt sich daher durch die Wirkung und die Va-riabilität der Einflussgrößen Wasser und insbesondere Orientierung erklären. Auffallend ist, dass bei Transpondertyp A in drei Wiederholungen alle Transponder erfasst wurden, bei Transpondertyp B dagegen eine Erfassungsquote von 100 %

134 Simultanerfassung von Mastschweinen mit UHF-Transpondern
nur in einem Einzelfall erreicht wurde. Dagegen wurde bei Transpondertyp B nur in vier Wiederholungen eine Erfassungsquote von 0 % beobachtet, bei Transponder-typ A jedoch in 14 Wiederholungen. Transpondertyp B scheint daher unabhängiger von den Einflussgrößen des gegebenen Umfeldes zu sein als Transpondertyp A. Zieht man die höhere durchschnittliche Erfassungsquote des Transpondertyps B in diese Überlegung mit ein, zeigt das zunächst, dass Transpondertyp B im Hinblick auf die Erfassungssicherheit unter Praxisbedingungen eine bessere und stabilere Erfassbarkeit aufweist als Transpondertyp A. Allerdings kann ausgehend von die-sen Erkenntnissen noch keine Aussage getroffen werden, ob dieses stabile Niveau unter den gegebenen Bedingungen hin zu höheren Erfassungsquoten optimiert werden kann, was eine Voraussetzung für Praxisanwendungen darstellt. Bei Trans-pondertyp A scheint ein Potential für höhere Erfassungsquoten gegeben, wie die sehr hohen durchschnittlichen Erfassungsquoten von bis zu 100 % in mehreren Wiederholungen zeigen. Allerdings können diese hohen Erfassungsquoten bei stark variierenden Einflussgrößen nicht zuverlässig erreicht werden. Bezieht man wiede-rum die Erkenntnisse aus den Laboruntersuchungen in die Bewertung mit ein, kann darauf geschlossen werden, dass bei Transpondertyp A vor allem die Abhängigkeit von einer optimalen Orientierung, insbesondere auch in Anwesenheit von Wasser, begrenzend auf die Erfassungssicherheit wirkt. Eine Optimierung des Transponder-typs A müsste folglich hier ansetzen. Allerdings handelt es sich bei diesem Trans-pondertypen schon um einen auf die unmittelbare Anwesenheit von Metall hin opti-mierten Transpondertypen, sodass dem Transpondertyp B hier der Vorzug zu ge-ben wäre. Die Ergebnisse zeigten aber auch, dass nicht nur ein Einfluss des Transpondertyps, sondern auch ein Einfluss des Lesegerätes auf die erreichbare Erfassungsquote besteht. Mit Lesegerät I wurden höhere Erfassungsquoten erreicht als mit Lesege-rät II, die Streuung war gleichzeitig bei Lesegerät I geringer als bei Lesegerät II. Wiederholungen ohne erfasste Transponder traten bei Lesegerät I auch nur einmal auf, bei Lesegerät II allerdings 17-mal. Dagegen wurden Wiederholungen mit voll-ständiger Erfassung aller Transponder bei Lesegerät II nur einmal, bei Lesegerät I aber dreimal beobachtet. Dies zeigt, dass die Wahl des Lesegerätes ebenfalls von entscheidender Bedeutung für die erreichbaren Erfassungsquoten eines RFID-Systems ist. Folgerichtig konnte eine starke Interaktion zwischen dem Transpon-dertyp und dem Lesegerät festgestellt werden. Dadurch lässt sich wiederum die Streuung der beobachteten Erfassungsquoten bei Transpondertyp A zum Teil er-klären, da sich die beobachteten durchschnittlichen Erfassungsquoten und der Streubereich der Erfassungsquoten der beiden Kombinationen von Transponder-typ A mit den Lesegeräten I bzw. II deutlich voneinander unterscheiden. Dieser Un-terschied liegt bei Transpondertyp B ebenfalls vor, allerdings weniger deutlich aus-geprägt als bei Transpondertyp A. Unter den gegebenen Umständen erwiesen sich der Transpondertyp B und das Lesegerät I als anspruchsloser im Hinblick auf den Kombinationspartner als Transpondertyp A und Lesegerät II, d.h., die Kombination aus Transpondertyp B und Lesegerät I erreichte deutlich höhere durchschnittliche

Simultanerfassung von Mastschweinen mit UHF-Transpondern 135
Erfassungsquoten als die Kombination A.II. Trotzdem konnten mit Transponder-typ A oder Lesegerät II mit entsprechendem Kombinationspartner (A.I und B.II) durchschnittliche Erfassungsquoten von über 60 % beobachtet werden. Es zeigte sich also, dass bestimmte Kombinationen von Transpondertypen und Lesegeräten im Hinblick auf erreichbare Erfassungsquoten günstiger sind als andere. Ein be-stimmter Transpondertyp oder ein bestimmtes Lesegerät allein kann unter den ge-gebenen Bedingungen daher nicht als vorteilhaft bezeichnet werden. Das wird auch durch die Beobachtung deutlich, dass die beiden inversen Kombinationen A.I und B.II diejenigen mit den höchsten durchschnittlichen Erfassungsquoten waren, deut-lich vor den beiden anderen Kombinationen A.II und B.I. Es kann daher davon aus-gegangen werden, dass es jeweils einen passenden Systempartner bei der Aus-wahl der Komponenten eines RFID-Systems gibt und dieser vor einer Anwendung ermittelt werden muss. Bei der Planung und Bewertung von RFID-Anwendungen zur eTK sollten also nicht nur einzelne RFID-Komponenten, z.B. nur Transponder-typen, betrachtet und verglichen werden, sondern eher RFID-Systeme, d.h. die funktionale Einheit aus Transpondertyp und Lesegerät. Diese Schlussfolgerung bestätigt sich auch, wenn man die dritte untersuchte Ein-flussgröße, die Anordnung der Lesegeräte, in die Betrachtung miteinbezieht. Hier fällt auf, dass die Kombination aus Lesegerät und Anordnung der Lesegeräte keinen Einfluss auf die Erfassungsquote hatte, wohl aber die Kombinationen aus Trans-pondertyp und Lesegerät und aus Transpondertyp und Anordnung der Lesegeräte. Dies spricht zunächst einmal dafür, dass bis zu dem Zeitpunkt, zu dem eine opti-male Kombination aus Transpondertyp und Lesegerät gefunden ist, die Optimierung der Anordnung der Lesegeräte im Vergleich zur Suche nach alternativen Kombina-tionsmöglichkeiten aus Transpondertyp und Lesegerät eine untergeordnete Rolle spielt. Trotzdem hatten die Anordnung der Lesegeräte und die Kombination aus Transpondertyp und Lesegeräteanordnung einen Einfluss auf die Erfassungsquote. Erst wenn eine optimale Kombination aus Transpondertyp und Lesegerät gefunden ist, kommt der Anordnung der Lesegeräte zu einem Erfassungsportal also eine ent-scheidende Bedeutung im Hinblick auf die Erfassungsquote des RFID-Systems zu. In den vorliegenden Ergebnissen wurden die höchsten durchschnittlichen Erfas-sungsquoten der einzelnen Kombinationen aus Transpondertyp und Lesegerät stets in der Anordnung a beobachtet, wobei sich die tatsächlich erreichten durch-schnittlichen Erfassungsquoten zwischen den Kombinationen stark unterschieden. Die beobachteten Erfassungsquoten der Anordnungen b und c unterschieden sich zwar ebenfalls zwischen den Kombinationen, aber nicht innerhalb einer Kombina-tion aus Transpondertyp und Lesegerät. Die beiden höchsten durchschnittlichen Er-fassungsquoten wurden in Anordnung a mit den Kombinationen A.I und B.II beo-bachtet. Dies entspricht der Beobachtung, die bereits bei der Betrachtung der Inter-aktion von Transpondertyp und Lesegerät gemacht wurde. Allerdings unterschieden sich die Erfassungsquoten in Anordnung a nicht signifikant voneinander, d.h. A.I
136 Simultanerfassung von Mastschweinen mit UHF-Transpondern
und B.II erreichten in Anordnung a die höchste Erfassungsquote. Wie bei den an-deren Kombinationen aus Transpondertyp und Lesegerät, A.II und B.I, unterschied sich auch bei A.I die beobachtete Erfassungsquote in Anordnung a signifikant von Anordnung b und c. Bei der Kombination B.II wurden allerdings zwischen den An-ordnungen a, b und c keine signifikanten Unterschiede festgestellt. Diese Beobach-tung zeigt, dass die Kombination B.II hinsichtlich der Anordnung der Lesegeräte unabhängiger war als die anderen drei Kombinationen. Vergleicht man die Position der Lesegeräte in der vorliegenden Versuchsanord-nung, unterscheidet sich Anordnung a von Anordnung b dadurch, dass beide Lese-geräte auf der Seite des Erfassungsportals angebracht sind, zu der hin die Schweine ihre Transponderohrmarken tragen. Von Anordnung c unterscheidet sich Anordnung a wiederum dadurch, dass sich beide Lesegeräte auf der Höhe der Transponderohrmarken befinden und nicht um 45° geneigt darüber. Vorteilhaft er-scheint daher eine Anbringung beider Lesegeräte in räumlicher Nähe zu den Trans-ponderohrmarken auf gleicher Höhe und auf der Seite der Tiere, an der sich die Transponderohrmarken befinden. In den UHF-Erfassungsportalen, die im Handel und in der Logistik verwendet werden, wird dagegen eine gegenüberliegende An-ordnung der Lesegräte bevorzugt, um die Felddichte und daher die Erfassungs-quote zu erhöhen. Der Unterschied der vorliegenden Anwendung besteht aber da-rin, dass sich die Orientierung der Transponder zum Lesegerät und die Anwesenheit der Einflussgröße Wasser während der Passage des Erfassungsportals mit hoher Wahrscheinlichkeit deutlich ändert. Daher kann eine Erklärung für die Vorteilhaf-tigkeit der Anordnung a, d.h. der Anbringung beider Lesegeräte auf derselben Seite wie der Transponder, sein, dass durch das zweite Lesegerät eine weitere Möglich-keit der Erfassung unter eventuell besseren Bedingungen, d.h. einer besseren Ori-entierung, einem geringeren Wassereinfluss und einer geringeren Verdeckung durch andere Tiere, gegeben ist. Darüber hinaus werden durch diese Anbringung die Transponderohrmarken, wie bei den anderen beiden Anordnungen b und c, zwar unter Umständen vom Körper anderer Tiere verdeckt, im Gegensatz zur An-ordnung b aber nicht zusätzlich durch den Kopf des Trägertieres, an dem die Trans-ponderohrmarke zudem noch anliegen kann. Bei der Bewertung der Anordnungen ist zu beachten, dass die Reichweite der ein-zelnen RFID-Systeme wahrscheinlich nicht ausreichend war, um in allen Situatio-nen die gesamte Breite des Erfassungsportals zuverlässig abzudecken. In den La-boruntersuchungen (Kapitel 6) wurden unabhängig von der Einflussgröße Wasser zuverlässige, theoretische Erfassungsreichweiten von ca. 1,00 m bei guter Orien-tierung beobachtet. Die Breite des Erfassungsportals betrug dagegen 1,10 m. Bei größeren Schweinen mit einer angenommenen Schulterbreite von 0,30 m kann aber davon ausgegangen werden, dass sich der Transponder in einem maximalen Ab-stand von 0,80 m zu einem sich auf gleicher Höhe befindenden Lesegerät befand. Bei den Mastläufern dürfte der Abstand 1,00 m betragen haben. Die Breite des Er-

Simultanerfassung von Mastschweinen mit UHF-Transpondern 137
fassungsportals von 1,10 m sollte aber nicht unterschritten werden, um die Bewe-gung der Tiergruppe auch bei größeren Tieren nicht zu stark zu stören. Eine Be-stimmung des Erfassungsbereiches eines RFID-Systems ist daher vor Einrichtung eines Erfassungsportals unbedingt durchzuführen und in die Planung miteinzube-ziehen, um die Erfassungssicherheit des verwendeten Systems zu optimieren (vgl. auch Barge et al. 2013, Hogewerf et al. 2013). 7.4.2 Einfluss des Versuchstermins, der Wiederholung und des Einzeltieres Die Betrachtung der Zusammenhänge zwischen Erfassungsquote und Versuchs-termin zeigte einen signifikanten Zusammenhang, der aber nicht zeitlich linear war, d.h. die durchschnittlichen Erfassungsquoten der einzelnen Versuchstermine unter-schieden sich zwar voneinander, die Unterschiede waren aber nicht in sich im Zeit-ablauf gleichmäßig ändernden Gegebenheiten begründet. Daher waren die Erfas-sungsquoten unabhängig von der Größe der Tiere sowie der zunehmenden Gewöh-nung der Tiere an die Versuchsdurchführung. Mit der Größe der Tiere und mit der Gewöhnung an den Versuchsablauf nahm aber die durchschnittliche Geschwindig-keit der Einzeltiere ab und somit die Dauer der Wiederholungen zu. Durch die zu-nehmende Größe und die geringere Geschwindigkeit der Einzeltiere kann darauf geschlossen werden, dass sich zum Ende des Versuchszeitraums weniger Tiere gleichzeitig im Erfassungsportal befanden als zu Beginn des Versuchszeitraums. Dieser Schluss deckt sich mit den Beobachtungen der beteiligten Versuchsperso-nen, die zum Ende des Versuchszeitraums hin weniger Tiere gleichzeitig im Erfas-sungsportal beobachteten als zu Beginn. Da der Zusammenhang zwischen Erfas-sungsquote und Versuchstermin zwar signifikant, aber nicht zeitlich linear war, kön-nen daher die Tiergröße, die Anzahl Tiere im Erfassungsportal, die durchschnittliche Tiergeschwindigkeit und die Gewöhnung der Tiere an den Versuchsablauf als Ein-flussgrößen auf die Erfassungsquote im vorliegenden Versuch ausgeschlossen werden. Die Dauer einer Wiederholung als Indikator für die durchschnittliche Tiergeschwin-digkeit nahm zwar über den gesamten Versuchszeitraum zu, innerhalb eines Ver-suchstermins, d.h. über die Wiederholungen hinweg, zeigte sich aber nur ein sehr schwach positiver Zusammenhang, der allenfalls als Tendenz zu werten ist. Es ist daher nicht davon auszugehen, dass sich die durchschnittliche Geschwindigkeit der Tiere innerhalb eines Versuchstermins, d.h. in Abhängigkeit des Ranges der Wie-derholung, änderte. Dieser Rang zeigte wiederum keinen signifikanten Einfluss auf die Erfassungsquote. Auch die Dauer der Wiederholung zeigte allenfalls eine schwache Tendenz zu einem positiven Zusammenhang mit der Erfassungsquote. Dies lässt den Schluss zu, dass die durchschnittliche Geschwindigkeit der Tiere weder im gesamten Versuchszeitraum noch an den einzelnen Versuchsterminen für die Erfassung der Transponder zu hoch war und somit keinen Einfluss auf die Er-fassungsquote hatte. Diese Beobachtung deckt sich mit den Beobachtungen, die zuvor in den Laboruntersuchungen gemacht wurden (Kapitel 6).
138 Simultanerfassung von Mastschweinen mit UHF-Transpondern
Es kann mit diesem Schluss natürlich keine Aussage darüber getroffen werden, ob nicht doch die Geschwindigkeit eines einzelnen Tieres regelmäßig oder in Einzel-fällen für eine Erfassung des Transponders zu hoch war. Zumal der Einfluss der Geschwindigkeit auf die Erfassbarkeit eines UHF-Transponders nicht grundsätzlich auszuschließen ist, wie an anderer Stelle schon gezeigt wurde (Hammer et al. 2014). Andererseits kann ein Einfluss des Einzeltieres auf die Erfassung eines Transponders nicht nur in seiner individuellen Geschwindigkeit vermutet werden. Auch seine Bewegungspräferenzen in der Gruppe und im Erfassungsportal, seine Körpermasse und -zusammensetzung sowie die Körper- und Kopfhaltung beim Er-fassungsvorgang müssen als potenzielle Einflussgrößen betrachtet werden. Um diese zu untersuchen müsste u.a. derselbe Transponder mit verschiedenen Tieren untersucht werden, d.h. die Transponder in Praxisversuchen zwischen den Tieren wechseln. Falls es hierbei zu dem Ergebnis käme, dass ein Einzeltier aus den oben genannten Gründen einen Einfluss auf die Erfassbarkeit des Transponders hat, was wahrscheinlich ist, dann stellte sich die Frage, was die Folgerung daraus wäre. Wäre ein Einfluss in der Anatomie und Physiologie des Tieres begründet wie z.B. der Körpermasse, der Ohrstellung oder dem Ionengehalt der Körperflüssigkeit stünde eine Anpassung der Züchtung oder Fütterung an die Erfordernisse der Tie-ridentifizierung nicht im Verhältnis zum ihrem Nutzen, sodass weiterhin eine Wei-terentwicklung der Identifizierungstechnik gefordert wäre. Diese Schlussfolgerung müsste auch getroffen werden, läge der Einfluss des Einzeltieres in seiner Art und Weise, sich innerhalb einer Gruppe und bei der Passage des Erfassungsportals zu bewegen. Auch hier bliebe aus Nutzenerwägungen nur die Schlussfolgerung einer Weiterentwicklung der Identifizierungstechnik unter Beibehaltung des Zieles der Gruppenerfassung. Aus diesen Überlegungen heraus erscheint es, ausgehend von den bisherigen Er-gebnissen, sinnvoll, die Identifizierungstechnik in Form der RFID-Systeme und der Anordnung und Gestaltung der Erfassungsportale zu untersuchen und weiterzuent-wickeln. Dabei dürfen nicht nur die wesentlichen Systemeigenschaften und der Wir-kung von konstant zu haltenden Einflussgrößen auf die Erfassungssicherheit im Rahmen von Laboruntersuchungen bestimmt werden. Diese Ergebnisse müssen auch in Praxisversuchen verifiziert werden, wo das RFID-System spezifischen, nicht beeinflussbaren Einflussgrößen ausgesetzt ist, die durch das Einzeltier, die Tier-gruppe insgesamt, die Stallumgebung und deren Änderung im Zeitablauf gegeben sind. Eine Optimierung der Systemeigenschaften und der Ausprägung beeinfluss-barer Einflussgrößen wie z.B. der Lesegeräteanordnung muss dabei die Wirkung nicht beeinflussbarer, sich ändernder Einflussgrößen wie z.B. die Ohrstellung oder Geschwindigkeit eines Einzeltieres ausgleichen.

139
8 GESAMTDISKUSSION UND SCHLUSSFOLGERUNGEN Ziel der Arbeit war es, die Vereinzelung von elektronisch, d.h. durch RFID, gekenn-zeichnete Mastschweine zur Erfassung zu vermeiden und diese simultan d.h. gleichzeitig in der Gruppe identifizieren zu können. Hierzu wurden neue Technolo-gien und Methoden zur Erfassung und Kennzeichnung von Mastschweinen entwi-ckelt und untersucht. Für die Entwicklung von RFID-Systemen zur Tierkennzeichnung wurde eine metho-dische Vorgehensweise gewählt, mit deren Hilfe die zentralen Eigenschaften von RFID-Systemen aufeinander aufbauend bestimmt werden können. Es wurde eine Mess- und Prüfumgebung geschaffen, mit der RFID-Systeme sowohl im Niederfre-quenz- als auch im Ultrahochfrequenzbereich für die Eignung zur elektronischen Tierkennzeichnung untersucht werden können. Die Wirkung wesentlicher Einfluss-größen und die Ausprägung der zentralen Eigenschaften der RFID-Systeme kön-nen ermittelt werden. Die Vorgehensweise der Untersuchung folgt einem vierstufi-gen Ablauf (Abbildung 59):
Abbildung 59: Ablaufdiagramm der Untersuchung von RFID-Systemen
140 Gesamtdiskussion und Schlussfolgerungen
Ablauf der Untersuchung von RFID-Systemen:
1. Bestimmung der Erfassungsreichweite des RFID-Systems mit dem Mess-tisch. Variation von Einflussgrößen. Untersuchung aller Transponder einer Charge, um für die weiteren Untersuchungen geeignete, homogene Trans-ponder zu identifizieren.
2. Bestimmung des Erfassungsbereiches des RFID-Systems mit dem Mess-tisch. Variation von Einflussgrößen.
3. Bestimmung der Erfassungsquote mit dem dynamischen Prüfstand. Varia-tion von Einflussgrößen.
4. Bestimmung der Erfassungsquote des RFID-Systems mit dem Erfassungs-portal in einer Praxisumgebung. Variation von Einflussgrößen.
Wesentliche Einflussgrößen können in den einzelnen Schritten gezielt eingesetzt und ihre Wirkung auf die Eigenschaften des RFID-Systems untersucht werden. Die einzelnen Schritte sind daher auch in Zusammenhang mit den drei Zielgrößen Er-fassungsreichweite, Erfassungsbereich und Erfassungsquote und den drei Unter-suchungsinstrumenten Messtisch, Prüfstand und Erfassungsportal in einer Pra-xisumgebung zu sehen. Der Versuchsaufbau weiterer Untersuchungsschritte kann mit dieser Vorgehensweise anhand von Erkenntnissen aus den vorherigen Schritten geplant und die gewonnenen Ergebnisse entsprechend bewertet werden. Die Untersuchungen im Niederfrequenzbereich zeigten die Möglichkeiten einer Si-multanerfassung nach der ISO-Norm 11785 auf. Trotz der im Labor beobachteten hohen Erfassungssicherheit wurde der Nachteil dieses Frequenzbereiches für die Simultanerfassung deutlich: die begrenzte Erfassungsreichweite. Bei dem entwi-ckelten Mehrfachlesegerät wäre durch diese Einschränkung eine Anbringung des Transponders am Schwein mittels einer Ohrmarke nicht möglich. Alternative An-bringungsmöglichkeiten durch eine Fußfessel oder durch ein Transponderinjektat eignen sich nicht für die Verwendung bei Schweinen oder sind noch nicht ausrei-chend untersucht worden. Die Erfassungsreichweite ließe sich zweifellos für ein Mehrfachlesegerät wie das entwickelte noch erhöhen. Dadurch würden sich aber die Erfassungsbereiche der Einzellesegeräte in größerem Umfang überlagern und die erwünschte Kleinräumig-keit der Erfassungsbereiche als Grundlage des angestrebten Antikollisionsverfah-rens auflösen. Bei einem Raummultiplexverfahren im Niederfrequenzbereich mit dem angestrebten Anwendungsziel der Simultanerfassung von Einzeltieren sollte daher ein möglichst geringer Abstand zwischen Transponder und Lesegerät ange-strebt werden, um eine sichere Erfassung zu gewährleisten. Bei den Untersuchungen im Ultrahochfrequenzbereich zeigten sich das Potenzial, aber auch die aktuellen Grenzen dieses RFID-Bereiches für die elektronische Tier-kennzeichnung: Die untersuchten RFID-Systeme zeigten unter Laborbedingungen
Gesamtdiskussion und Schlussfolgerungen 141
auch unter Einfluss von Wasser Erfassungsreichweiten, die sich im Bereich von Niederfrequenzsystemen bewegten. Unter Praxisbedingungen mit störenden Ein-flussgrößen (Reflexion und Absorption von UHF-Signalen, sich ändernde Orientie-rung von Transponder und Lesegerät) konnten die verwendeten Transponder er-fasst werden. Eine Simultanerfassung von Schweinen mit den verwendeten UHF-Systemen war somit in einer sehr ungünstigen, d.h. wasser- und metallreichen Um-gebung mit starken Dämpfungseffekten durch die Körperflüssigkeit der gekenn-zeichneten Tiere möglich. Allerdings waren die erreichten Erfassungsquoten für eine Praxisanwendung noch nicht ausreichend und insbesondere deren Streuung deutlich zu hoch. Eine akzeptable Erfassungssicherheit war in einer Praxisumge-bung nicht gegeben. Es wurde aber deutlich, dass durch die richtige Kombination aus Transponder und Lesegerät die Erfassungsquoten deutlich verbessert werden können. Die höheren Erfassungsquoten des speziell auf den Einsatz in Anwesenheit von Wasser entwi-ckelten Transponders B im Vergleich zu Transponder A zeigten die Möglichkeiten weiterer Transponderentwicklungen im UHF-Bereich auf. Beide Transponder erwie-sen sich als robust genug, um im Versuchszeitraum der Stallumgebung mit chemi-scher und mechanischer Belastung standhalten zu können und scheinen dadurch, mit entsprechender Anbringung, eine dauerhafte Kennzeichnung gewährleisten zu können. Es besteht jedoch weiterer Forschungsbedarf, um die Erfassungsquoten durch eine optimierte Kombination aus Lesegeräten, Transpondern und Anordnung der Lesegeräte, aber auch durch eine weitere Anpassung von Transpondern an die Anwesenheit von Wasser und weiteren negativen Einflussgrößen zu verbessern. Die untersuchten RFID-Systeme im Niederfrequenz- und Ultrahochfrequenzbereich können daher nicht als geeignet für eine elektronische Tierkennzeichnung mit Si-multanerfassung bezeichnet werden. Allerdings zeigten UHF-RFID-Systeme durch die beobachteten Erfassungsreichweiten und deren besondere Eignung zu Simul-tanerfassung ein großes Potenzial für die elektronische Tierkennzeichnung auf. Vo-raussetzung ist eine weitere Anpassung an die Stallumgebung.

142
143
9 ZUSAMMENFASSUNG Ziel des Vorhabens war es, neue Technologien und Methoden zu entwickeln und zu bewerten, mit denen durch RFID gekennzeichnete Mastschweine zur Erfassung nicht vereinzelt werden müssen, sondern simultan, d.h. gleichzeitig in der Gruppe identifiziert werden können. Hierfür wurden zwei Lösungsansätze verfolgt. Ein Mehrfachlesegerät im RFID-Niederfrequenzbereich wurde entwickelt, das aus mehreren kleineren, aufeinander abgestimmten Einzellesegeräten bestand und so ein Raummultiplexverfahren umsetzte. Untersuchungen an einem neu entwickelten Prüfstand zeigten, dass mehrere Transponder simultan erfasst werden konnten. Die durchschnittlichen Erfassungsquoten lagen mit neun Transpondern, die sich ge-meinsam durch die Erfassungsbereiche des Mehrfachlesegerätes bewegten, bei 88,0 %, mit sechs Transpondern bei 96,3 % und mit drei Transpondern bei 99,8 %. Bei der Anzahl der aktiven Einzellesegeräte zeigte sich ein gegenläufiges Bild, d.h. mit steigender Anzahl an aktiven Einzellesegeräten nahm die durchschnittliche Er-fassungsquote zu. Mit vier Einzellesegeräten wurde eine durchschnittliche Erfas-sungsquote von 85,1 % erreicht, mit sechs Einzellesegeräten 99,2 % und mit acht Einzellesegeräten 99,7 %. Wurden acht Einzellesegeräte verwendet, konnte auch mit neun Transpondern eine durchschnittliche Erfassungsquote von über 98,0 % erreicht werden. Die Erfassungsreichweite des Mehrfachlesegerätes von unter 10 cm ist allerdings für eine Praxisanwendung bei Schweinen, die mit Ohr-marken gekennzeichnet werden, zu gering. RFID-Systeme im Ultrahochfrequenzbereich (UHF) werden zurzeit nicht in der land-wirtschaftlichen Tierhaltung verwendet, eignen sich aber gut für eine Simultanerfas-sung und wurden auf ihre Eignung für die elektronische Tierkennzeichnung unter-sucht. Insbesondere die Wirkung der Einflussgröße Wasser wurde betrachtet, da diese bei UHF-Anwendungen als Störgröße wirkt und eine Verwendung von UHF-Systemen in der Tierhaltung bisher verhindert hat. Ein Standard-Transpondertyp (N), zwei weiterentwickelte Transpondertypen (A und B) und zwei Lesegerätetypen (I und II) wurden untersucht. Es zeigte sich, dass mit den Transpondern A und B auch unter Einfluss von Wasser Erfassungsreichweiten von über 1 m erreicht wer-den können. Die im Einzelfall tatsächlich erreichte Erfassungsreichweite eines Transponders war abhängig von dem verwendeten Lesegerätetyp und der Orien-tierung des Transponders zum Lesegerät beim Erfassungsvorgang. Mit den untersuchten Transpondertypen A und B wurden elektronische Ohrmarken gefertigt und praxisüblich aufgestallte Schweine gekennzeichnet. Ob sich diese zur elektronischen Kennzeichnung und Simultanerfassung von Schweinen eignen, wurde durch regelmäßige Erfassungsversuche mit den Lesegerätetypen I und II über eine Mastperiode hinweg untersucht. Es wurden Erfassungsquoten von 0 bis 100 % erreicht. Die durchschnittliche Erfassungsquote von Transpondertyp A lag bei 44,9 %, die von Transpondertyp B bei 56,8 %. Es wurde dabei eine Interaktion

144 Zusammenfassung
zwischen Transpondertyp und Lesegerätetyp deutlich. Bei Transpondertyp A wur-den mit Lesegerätetyp I höhere durchschnittliche Erfassungsquoten beobachtet als mit Lesegerätetyp II (A.I: 60,5 %; A.II: 29,2 %). Bei Transpondertyp B dagegen zeig-ten sich mit Lesegerätetyp I geringere Erfassungsquoten als mit Lesegerätetyp II (B.I: 50,2 %; B.II: 63,5 %). Eine weitere Wechselwirkung wurde zwischen dem Transpondertyp und der Anordnung der Lesegeräte festgestellt. Die Untersuchungen im Ultrahochfrequenzbereich zeigten das Potenzial und die aktuellen Grenzen dieses Frequenzbereiches für eine Anwendung zur elektroni-schen Tierkennzeichnung. Mit UHF-Systemen können auch unter Einfluss der Stör-größe Wasser Erfassungsreichweiten erreicht werden, die sich im Bereich der Nie-derfrequenzsysteme bewegen. Unter Praxisbedingungen ist eine elektronische Tierkennzeichnung mit Simultanerfassung möglich, allerdings sind die beobachte-ten Erfassungsquoten nicht ausreichend für eine zuverlässige Erfassung von ge-kennzeichneten Tieren. Eine ausreichende Erfassungssicherheit war nicht gege-ben. Zusammenfassend können die untersuchten RFID-Systeme im Niederfrequenz- und Ultrahochfrequenzbereich daher als nicht geeignet für eine elektronische Tier-kennzeichnung mit Simultanerfassung bezeichnet werden. Ansatzpunkte für eine Weiterentwicklung der Systeme hin zu einer zuverlässigen Simultanerfassung unter Praxisbedingungen sind aber gegeben. Hier besteht weiterer Forschungs- und Ent-wicklungsbedarf hinsichtlich Kennzeichnungsmöglichkeiten, Transponder- und Le-segeräteeigenschaften und Interaktion der Systemkomponenten eines RFID-Systems.

145
10 SUMMARY The aim of the research project was to develop and evaluate technologies and meth-ods which enable a simultaneous identification of fattening pigs marked with RFID technology instead of identifying them individually. Two approaches were pursued for doing so. A multiple reading device was developed operating at RFID low frequency. This reading device was comprised of several small synchronized single readers in order to realize a space division multiple access (SDMA) operation mode. Examinations using a newly developed test bench showed that several transponders could be identified simultaneously. Identification rates of nine transponders moving simulta-neously through the reading area of the multiple reading device averaged 88.0 %, six transponders averaged 96.3 % and three transponders averaged 99.8 %. How-ever, a different picture emerged in regards to the number of activated single read-ers: increasing numbers of activated single readers led to increased average iden-tification rates. An average identification rate of 85.1 % was observed using four single readers, whereas six single readers averaged an identification rate of 99.2 % and eight single readers led to an average identification rate of 99.7 %. With the activation of eight single readers, even nine transponders could be identified simul-taneously at an average identification rate of more than 98.0 %. The multiple reading device’s reading distance of less than 10 cm is however not sufficient for practical applications in pig farming. RFID systems operating at ultra-high frequency (UHF) are currently not used in live-stock farming though they are well suited for simultaneous identification. The suita-bility of these systems for animal identification was investigated. In particular, the impact of water on the readability of UHF systems was observed since water acts as a disturbance value and has thus hindered the use of UHF systems for animal identification so far. One standard transponder type (N), two advanced transponder types (A and B) and two reading devices (I and II) were examined. With transpond-ers A and B, reading distances of more than 1 m could be achieved even when impacted by water. A transponder’s actual reading distance achieved varied case by case depending on which reading device was used as well as the transponder’s orientation towards the reading device during the reading process. The examined transponder types A and B were used to build electronic ear tags to tag customary housed pigs. The suitability for electronic tagging and simultaneous identification of pigs were tested through regular identification trials with reading de-vices I and II over the span of one fattening period. Identification rates of 0 % to 100 % were observed. The average identification rates were 44.9 % for transponder type A and 56.8 % for transponder type B. An interaction between the different tran-sponder types and reading devices was observable. Transponder type A achieved

146 Summary
significantly higher identification rates in combination with reading device I, in com-parison to reading device II (A.I: 60,5 %; A.II: 29,2 %). Transponder type B showed lower identification rates in combination with reading device I, in comparison to read-ing device II (B.I: 50,2 %; B.II: 63,5 %). Further interaction between transponder type and the array of the reading devices was observed. The ultra-high frequency trials showed the potential and the current limitations re-garding the application of ultra-high frequency in electronic animal identification. UHF systems are capable of achieving reading distances comparable to those of low frequency systems even when impacted by the disturbance value of water. Elec-tronic animal tagging and simultaneous identification are feasible under conditions of practice, the observed identification rates are however not sufficient enough for a reliable identification of tagged animals. Sufficient identification accuracy could not be achieved. In summary, the examined ultra-high and low frequency RFID-systems can be con-sidered to be unsuitable for simultaneous identification of animals. Starting points for further development of the systems resulting in a reliable simultaneous identifi-cation under conditions of practice are, however, present. Further research and de-velopment is required regarding tagging capabilities, transponder and reading de-vice features and the interaction of system components of RFID systems.

147
11 LITERATURVERZEICHNIS Adam, F., 2011. Informationssysteme in der Schweineproduktion auf der Basis
elektronischer Einzeltierkennzeichnung, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 103-112.
Adrion, F., Hammer, N., Rößler, B., Jezierny, D., Kapun, A., Gallmann, E., 2015. Aufbau, Funktion und Test eines statischen Prüfstandes für UHF-RFID Ohrmarken. Landtechnik 70 (Artikel zur Veröffentlichung angenommen).
Anonym, 1964. Richtlinie des Rates vom 26. Juni 1964 zur Regelung viehseuchenrechtlicher Fragen beim innergemeinschaftlichen Handelsverkehr mit Rindern und Schweinen. Rat der Europäischen Wirtschaftsgemeinschaft, Brüssel.
Anonym, 1990. Richtlinie des Rates vom 26. Juni 1990 zur Regelung der veterinärrechtlichen und tierzüchterischen Kontrollen im innergemeinschaftlichen Handel mit lebenden Tieren und Erzeugnissen im Hinblick auf den Binnenmarkt. Rat der Europäischen Gemeinschaften, Brüssel.
Anonym, 1992. Richtlinie 92/102/EWG des Rates vom 27. November 1992 über die Kennzeichnung und Registrierung von Tieren. Rat der Europäischen Gemeinschaften, Brüssel.
Anonym, 1996a. ISO 11785 Radio-frequency identification of animals - Technical concept. International Organization for Standarization, Genf.
Anonym, 1996b. ISO 11784 Radio-frequency identification of animals - Code structure. International Organization for Standarization, Genf.
Anonym, 1997. Verordnung (EG) Nr. 820/97 des Rates vom 21. April 1997 zur Einführung eines Systems zur Kennzeichnung und Registrierung von Rindern und über die Etikettierung von Rindfleisch und Rindfleischerzeugnissen. Rat der Europäischen Gemeinschaften, Brüssel.
Anonym, 2000. Verordnung (EG) Nr. 1760/2000 des Europäischen Parlamentes und des Rates vom 17. Juli 2000 zur Einführung eines Systems zur Kennzeichnung und Registrierung von Rindern und über die Etikettierung von Rindfleisch und Rindfleischerzeugnissen sowie zur Aufheb. Europäisches Parlament und Rat der Europäischen Union, Straßburg und Brüssel.
Anonym, 2002. Vorschlag für eine Verordnung des Rates zur Einführung eines Systems zur Kennzeichnung und Registrierung von Schafen und Ziegen und zur Änderung der Verordnung (EWG) Nr. 3508/92. Kommission der Europäischen Gemeinschaften, Brüssel.
Anonym, 2003a. ISO 14223 Radiofrequency identification of animals - Advanced transponders. International Organization for Standarization, Genf.

148 Literaturverzeichnis
Anonym, 2003b. Jahresbericht 2003 des Institutes für Tierhaltung und Tierschutz der Bayerischen Landesanstalt für Landwirtschaft. Bayerische Landesanstalt für Landwirtschaft, Institut für Tierhaltung und Tierschutz, Grub.
Anonym, 2004. Verordnung (EG) Nr. 21/2004 des Rates vom 17. Dezember 2003 zur Einführung eines Systems zur Kennzeichnung und Registrierung von Schafen und Ziegen und zur Änderung der Verordnung (EG) Nr. 1782/2003 sowie der Richtlinien 92/102/EWG und 64/432/EWG. Rat der Europäischen Union, Brüssel.
Anonym, 2005. Bericht der Kommission an den Rat und das Europäische Parlament über die Möglichkeit der Einführung der elektronischen Kennzeichnung von Rindern. Kommission der Europäischen Gemeinschaften, Brüssel.
Anonym, 2007a. Dynamisches “Slotted ALOHA” Antikollisionsverfahren bei EPC Class1 Gen2 Transpondern. Deister electronic GmbH, Barsinghausen.
Anonym, 2007b. Bericht der Kommission an den Rat über die Anwendung der elektronischen Kennzeichnung von Schafen und Ziegen. Kommission der Europäischen Gemeinschaften, Brüssel.
Anonym, 2007c. Data Sheet Omnikey 5534 Reader Core MultiTag. ITG Assa Abloy, Walluf.
Anonym, 2008a. EPC Radio-Frequency Identity Protocols Class-1 Generation-2 UHF RFID Protocol for Communications at 860 MHz - 960 MHz Version 1.2.0. EPCglobal Inc.
Anonym, 2008b. Verordnung (EG) Nr. 504/2008 der Kommission vom 6. Juni 2008 zur Umsetzung der Richtlinien 90/426/EWG und 90/427/EWG des Rates in Bezug auf Methoden zur Identifizierung von Equiden. Kommission der Europäischen Gemeinschaften, Brüssel.
Anonym, 2008c. High frequency tags boost read speed performance. Chaps News - Off. Publ. North Dakota Beef Cattle Improv. Assoc. 12 (1), 1-2.
Anonym, 2008d. User Manual Omnikey LF MultiTag R/W Module. HID Global Corporation, Irvine, CA.
Anonym, 2010. TTL-232R - TTL to USB Serial Converter Range of Cables Datasheet. Future Technology Devices International Ltd, Glasgow.
Anonym, 2011. Presseerklärung zur Fachtagung 10 Jahre IQ-Agrarservice. URL http://www.iq-agrar.de/fachtagung.html (aufgerufen am 18.01.2012)
Anonym, 2014. Animal Disease Traceabililty. URL http://www.aphis.usda.gov/wps/portal/aphis/ourfocus/animalhealth?1dmy&urile=wcm:path:/APHIS_Content_Library/SA_Our_Focus/SA_Animal_Health/SA_Traceability (aufgerufen am 09.06.2014)
Literaturverzeichnis 149
Artmann, R., 1976. Cow identification - a condition for individual feeding in loose house systems, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Artmann, R., 1984. Erkennungssysteme für Rinder - Stand und Entwicklungstendenzen. Landtechnik 39 (4), 166-171.
Artmann, R., 1993. Requirements for control systems in automated dairy farm, in: Proceedings XXV CIOSTA-CIGR V Congress. Wageningen, 295-306.
Artmann, R., 1999. Electronic identification systems: state of the art and their further development. Comput. Electron. Agric. 24 (1-2), 5-26.
Artmann, R., 2000. Stand und Entwicklung der elektronischen Identifikation in der Landwirtschaft und Industrie, in: 21. GIL-Jahrestagung. Freising-Weihenstephan, 1-5.
Augsburg, J.K., 1990. The benefits of animal identification for food safety. J. Anim. Sci. 68 (3), 880-883.
Baadsgaard, N.P., 2012. Final Pigtracker report: long-range RFID for accurate and reliable identification and tracking of pigs. Schweineforschungszentrum des Dänischen Fachverbandes der Land- & Ernährungswirtschaft, Kopenhagen.
Babot, D., Hernández-Jover, M., Caja, G., Santamarina, C., Ghirardi, J.J., 2006. Comparison of visual and electronic identification devices in pigs: on-farm performances. J. Anim. Sci. 84 (9), 2575-2581.
Barge, P., Gay, P., Merlino, V., Tortia, C., 2013. Radio frequency identification technologies for livestock management and meat supply chain traceability. Can. J. Anim. Sci. 93 (1), 23-33.
Beckett, M.P., Simmins, P.H., Walker, A.G., 1986. Electronic identification and individual feeding of sows in a very large group. J. Br. Soc. Anim. Prod. 42, 468.
Berckmans, D., 2004. Automatic on-line monitoring of animals by precision livestock farming, in: Madec, F., Clement, G. (Eds.), Animal Production in Europe: The Way Forward in a Changing World. Saint Malo, 27-30.
Berckmans, D., 2008. Precision livestock farming (PLF). Comput. Electron. Agric. 62 (I).
Bergmann, L., Schaefer, C., Raith, W., 1999. Lehrbuch der Experimentalphysik, Band 2: Elektromagnetismus. de Gruyter.
Blair, R.M., Nichols, D.A., Davis, D.L., 1994. Electronic animal identification for controlling feed delivery and detecting estrus in gilts and sows in outside pens. J. Anim. Sci. 72 (4), 891-898.

150 Literaturverzeichnis
Bovenschulte, M., Gabriel, P., Gaßner, K., Seidel, U., 2007. RFID: Potenziale für Deutschland. Bundesministerium für Wirtschaft und Technologie, Berlin.
Bridle, J.E., 1976. Automatic Dairy Cow Identification. J. Agric. Eng. Res. (21), 41-48.
Broadbent, P.J., 1967. Individual Feeding Device for Livestock. J. Br. Soc. Anim. Prod. 9, 269-270.
Broadbent, P.J., 1970. The evaluation of a device for feeding group-housed animals individually. Anim. Prod. 12, 245-252.
Buck, N.L., Spahr, S.L., Puckett, H.B., 1987. Performance of Electronic Animal Identification in the Milking Parlor. Appl. Eng. Agric. 3 (2), 153-158.
Burose, F., 2010. Elektronische Ohrmarken für eine lückenlose automatische Identifikation von Schweinen von der Geburt bis zur Schlachtung. Dissertation Universität Hohenheim.
Burose, F., Zähner, M., 2008. Elektronische Ohrmarken zur Rückverfolgung von Mastschweinen. Landtechnik 63 (3).
Burose, F., Zähner, M., 2009. Verlustrate und Funktionssicherheit von elektronischen Ohrmarken bei Mastschweinen. Landtechnik 64 (4).
Bütfering, L., 2011. Elektronische Tieridentifizierung in der Schweinehaltung - Erfahrungen aus dem Landwirtschaftszentrum Haus Düsse, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 86-92.
Caja, G., Hernández-Jover, M., Conill, C., Garín, D., Alabern, X., Farriol, B., Ghirardi, J., 2005. Use of ear tags and injectable transponders for the identification and traceability of pigs from birth to the end of the slaughter line. J. Anim. Sci. 83 (9), 2215-2224.
Clasen, M., 2006. Aktueller Stand der RFID- Standardisierung, in: Informationstechnische Gesellschaft im VDE (ITG) (Ed.), ITG-Fachbericht 195 Zum 2. Workshop RFID, Intelligente Funketiketten – Chancen Und Herausforderungen. Erlangen.
Clasen, M., 2007. RFID: Maßgeschneidert oder von der Stange?, in: Böttinger, S., Theuvsen, L., Rank, S., Morgenstern, M. (Eds.), 27. GIL-Jahrestagung. Stuttgart-Hohenheim, 43-46.
Cole, P., 2008. New Ear Tags for Animals. RFID J. URL http://www.rfidjournal.com/article/view/3912 (aufgerufen am 13.11.2011)
Cooke, A., Diprose, B., Brier, B., 2010. Use of UHF Tags in Deer and Sheep, Group. Rezare Systems Limited, New Zealand.

Literaturverzeichnis 151
Costa, C., Antonucci, F., Pallottino, F., Aguzzi, J., Sarriá, D., Menesatti, P., 2013. A Review on Agri-food Supply Chain Traceability by Means of RFID Technology. Food Bioprocess Technol. 6 (2), 353-366.
De Jong, I.C., Ekkel, E.D., van de Burgwal, J. a, Lambooij, E., Korte, S.M., Ruis, M. a, Koolhaas, J.M., Blokhuis, H.J., 1998. Effects of strawbedding on physiological responses to stressors and behavior in growing pigs. Physiol. Behav. 64 (3), 303-310.
Deininger, F., Greif, G., Lorenz, J., Seufert, H., 1985. Technik, Gebäude und Arbeitsverfahren in der Tierproduktion, in: Eichhorn, H. (Ed.), Landwirtschaftliches Lehrbuch Band 4: Landtechnik. Eugen Ulmer, Stuttgart-Hohenheim, p. 448.
Detlefsen, J., Siart, U., 2009. Grundlagen der Hochfrequenztechnik. Oldenbourg.
Doluschitz, R., 1990. Expert System for Management in Dairy Operations. Comput. Electron. Agric. 5, 17-30.
Doluschitz, R., 2007. Barrieren und Strukturbrüche überwinden. Fleischwirtschaft (5/2007 und 6/2007).
Doluschitz, R., Brockhoff, K., Jungbluth, T., Liepert, C., 2006. Probleme an Schnittstellen lösen. Fleischwirtschaft (9/2006).
Edwards, S.A., 1988. Effects of feed station design on the behaviour of group-housed sows using an electronic individual feeding system. Livest. Prod. Sci. 19 (3-4), 511-522.
Edwards, S.A., Riley, J.F., 1986. The application of the electronic identification and computerized feed dispensing system in dry sow housing. Pig News Inf. 7 (3), 295-298.
Ellison, W.J., Lamkaouchi, K., Moreau, J., 1996. Water: A dielectric reference. J. Mol. Liq. 68, 171-279.
Eradus, W.J., Jansen, M.B., 1999. Animal identification and monitoring. Comput. Electron. Agric. 24, 91-98.
Filby, D.E., Turner, M.J.B., Street, M.J., 1979. A Walk-through Weigher for Dairy Cows. J. Agric. Eng. Res. 24, 67-78.
Finkenzeller, K., 2003. RFID-Handbook. Wiley, Chichester, West Sussex.
Finkenzeller, K., 2012. RFID-Handbuch - Grundlagen und praktische Anwendungen von Transpondern, kontaktlosen Chipkarten und NFC, 6. Auflage. ed. Hanser, München.
Fritzsche, J., 1991. Rechnergestützte Produktionskontrolle und Prozeßsteuerung in der Milchviehhaltung bei unterschiedlichen Tierkonzentrationen, in:

152 Literaturverzeichnis
Milchviehhaltung in großen Beständen (KTBL-Arbeitspapier 164). Kuratorium für Technik und Bauwesen in der Landwirtschaft, Darmstadt.
Geers, R., 1994. Electronic monitoring of farm animals: a review of research and development requirements and expected benefits. Comput. Electron. Agric. 10 (1), 1-9.
Geers, R., Puers, R., Goedseels, V., Wouters, P., 1997. Electronic Identification, Monitoring and Tracking of Animals. CAB International, Wallingford.
Goedseels, V., Geers, R., Truyen, B., Wouters, P., Goossens, K., Villé, H., Janssens, S., 1992. A data-acquisition system for electronic identification, monitoring and control of group-housed pigs. J. Agric. Eng. Res. 52 (1990), 25-33.
Gosálvez, L.F., Santamarina, C., Averós, X., Hernández-Jover, M., Caja, G., Babot, D., 2007. Traceability of extensively produced Iberian pigs using visual and electronic identification devices from farm to slaughter. J. Anim. Sci. 85 (10), 2746-2752.
Haas, U., 2002. Physik - Für Pharmazeuten, Mediziner und Studierende mit Physik als Nebenfach. Wissenschaftliche Verlagsgesellschaft, Stuttgart.
Hammer, N., Adrion, F., Jezierny, D., Gallmann, E., Jungbluth, T., 2014. Influence of different setups of a dynamic test bench on the readability of UHF transponders, in: Proceedings of the International Conference of Agricultural Engineering. Zürich.
Hansell, C.W., 1947. Pulse Communication System. Patent 2,425,314. United States Patent Office, Vereinigte Staaten von Amerika.
Hansen, O.K., 2011. Obligatorische elektronische Tieridentifizierung im internationalen Umfeld, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 21-30.
Hanton, J.P., 1976. Rumen-implantable method of electronic identification of livestock, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Hartung, E., 2005. Precision Livestock Farming, in: Jungbluth, T., Büscher, W., Krause, M. (Eds.), Technik Tierhaltung. Eugen Ulmer, Stuttgart-Hohenheim, 40-47.
Hartung, E., 2010. Quo vadis Technik und Management in der Schweinehaltung?, in: Automatisierung und Roboter in der Landwirtschaft. Erfurt. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 53-60.
Helmus, M., Meins-Becker, A., Laußat, L., Kelm, A., 2009. RFID in der Baulogistik. Vieweg und Teubner, Wiesbaden.

Literaturverzeichnis 153
Hensley, J.C., Holm, D.M., Mort Sanders, W., 1976. Electronic Management for the Livestock Industry. Proc. Beef Improv. Fed. (June 76).
Herskin, M.S., Hedemann, M.S., 2001. Effects of surgical catheterization and degree of isolation on the behavior and exocrine pancreatic secretion of newly weaned pigs. Stress Int. J. Biol. Stress 79, 1179-1188.
Herzog, C., 2012. Bestimmung der Erfassungsreichweite, des Erfassungsbereichs und der Erfassungssicherheit von UHF-Transpondern unter Einfluss von Wasser. Master-Thesis Universität Hohenheim.
Hessel, E.F., Reiners, K., Hegger, A., Wendl, G., 2008. Simultane Einzeltiererkennung - Einsatz der RFID-Technologie unter Verwendung von HF-Transpondern. Landtechnik 63 (1), 38-40.
Hessel, E.F., Van den Weghe, H.F.A., 2011. Automatisches Monitoring des Fressverhaltens von Mastschweinen als Basis für ein Frühwarnsystem, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 60-67.
Hogewerf, P., 2011a. Elektronische Tierkennzeichnung - Standardisierung und technische Entwicklung, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 7-17.
Hogewerf, P., 2011b. Persönliche Mitteilung. Tagung Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda.
Hogewerf, P., Dirx, N., Verheijen, R., Ipema, B., 2013. The use of Ultra High Frequency (UHF) tags for fattening pig identification, in: Berckmans, D., Vandermeulen, J. (Eds.), Precision Livestock Farming ’13. Löwen, 440-448.
Hogewerf, P., Ipema, A.H., Binnendijk, G.P., Lambooij, E., Schuiling, H.J., 2007. Using injectable transponders for sheep identification.
Holm, D.M., 1981. Development of a National Electronic Identification System for Livestock. J. Anim. Sci. 53 (2), 542-530.
Holm, D.M., Bobbett, R.E., Koelle, A.R., Landt, J.A., Sanders, W.M., Depp, S.W., Seawright, G.L., 1976. Passive electronic identification with temperature monitoring, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Hooven, N.W., 1978. Cow Identification and Recording Systems. J. Dairy Sci. 61 (8), 1167-1180.
Hülsmeyer, C., 1904. Verfahren um entfernte metallische Gegenstände mittels elektrischer Wellen einem Beobachter zu melden. Patentschrift Nr.165546.

154 Literaturverzeichnis
IHK Stuttgart, 2006. RFID: Technologie und Anwendungen.
Jungbluth, T., 1999. Rindviehhaltung, in: Eichhorn, H. (Ed.), Landtechnik. Ulmer, Stuttgart, 440-519.
Junge, M., Jezierny, D., Gallmann, E., Jungbluth, T., 2014. Comparison of feed and water intake in static and dynamic groups of gestating sows as indicators for health monitoring, in: Proceedings of the International Conference of Agricultural Engineering. Zürich.
Kampers, F.W.H., Rossing, W., Eradus, W.J., 1999. The ISO standard for radiofrequency identification of animals. Comput. Electron. Agric. 24 (1-2), 27-43.
Karsten, S., Stamer, E., Hagemann, K., Newe, F., Auer, W., Krieter, J., 2013. Optimierung des Gesundheitsmanagements von tragenden Sauen auf Basis serieller Information, in: Bau, Technik und Umwelt in der landwirtschaftlichen Nutztierhaltung. Vechta. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 330-335.
Kaufmann, R., 2007. Mastschweine individuell und automatisch registrieren. Schweizer Landtechnik 30.
Kern, C., 1997. Technische Leistungsfähigkeit und Nutzung von injizierbaren Transpondern in der Rinderhaltung. Dissertation Technische Universität München.
Kern, C., 2006. Anwendung von RFID-Systemen. Springer, Berlin, Heidelberg, New York.
Kingston, N.G., 1989. Developments in modern intensive and conventional pig housing. Br. Vet. J. (145), 312-320.
Klindtworth, K., Spießl-Roith, E., Wendl, G., Klindtworth, M., 2004. Einsatz von Injektaten bei Schweinen. Landtechnik 59 (1), 44-45.
Klindtworth, M., 1998. Untersuchungen zur automatisierten Identifizierung von Rindern bei der Qualitätsfleischerzeugung mit Hilfe injizierbarer Transponder. Dissertation Technische Universität München.
Koelle, A.R., Bobbett, R.E., Landt, J.A., Sanders, W.M., Holm, D.M., Depp, S.W., 1975. Passive electronic identification and temperature monitoring system.
Kuhlmann, A., 2010. Entwicklung, Implementierung und Bewertung eines IT-Systems zur Prozessdokumentation und -unterstützung in der landwirtschaftlichen Nutztierhaltung. Dissertation Universität Hohenheim.
Landt, J., 2005. The history of RFID. IEEE Potentials 24 (4), 8–11.
Literaturverzeichnis 155
Laycock, C.L., Street, M.J., 1984. Development and Use of an Automated Management System for a Large Dairy Herd. Agric. Eng. 30, 265-273.
Leong, K.S., Ng, M.L., Cole, P.H., 2007a. Investigation on the Deployment of HF and UHF RFID Tag in Livestock Identification, in: 2007 IEEE Antennas and Propagation Society International Symposium. IEEE, Honolulu, 2773-2776.
Leong, K.S., Ng, M.L., Cole, P.H., 2007b. HF and UHF RFID Tag Design for Pig Tagging. URL http://autoidlab.cs.adelaide.edu.au/sites/default/files/publications/papers/paper_0.pdf (aufgerufen am 29.02.2012)
Lescourret, F., Genest, M., Barnouin, J., Chassagne, M., Faye, B., 1993. Data Modeling for Database Design in Production and Health Monitoring Systems for Dairy Herds. J. Dairy Sci. 76 (4), 1053-1062.
Lokhorst, C., Hogewerf, P., de Mol, R.M., Verhoeven, R., Steine, M., Lukkien, J., Bennebroek, M., 2011. Wireless Sensor Application for Dairy Cow Activity Monitoring, in: Lokhorst, C., Berckmans, D. (Eds.), 5th European Conference on Precision Livestock Farming. Czech Centre for Science and Society, Prag, 17-26.
Maselyne, J., Wouters, S., De Ketelaere, B., Mertens, K., Vangeyte, J., Hessel, E.F., Millet, S., van Nuffel, A., 2014. Validation of a High Frequency Radio Frequency Identification (HF RFID) system for registering feeding patterns of growing-finishing pigs. Comput. Electron. Agric. 102, 10-18.
Mertens, K., Kemps, B., Saeys, W., de Ketelaere, B., 2013. Smart Farm Assistant - A cloud based management tool for handling big data generated by PLF technologies, in: Bau, Technik und Umwelt in der landwirtschaftlichen Nutztierhaltung. Vechta. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 118-123.
Ng, M.L., Leong, K.S., Hall, D.M., Cole, P.H., 2005. A Small Passive UHF RFID Tag for Livestock Identification, in: Zhang, L., Yinghong, W. (Eds.), 2005 IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications. IEEE, Peking, 67-70.
O’Connor, M.C., 2006. Gen 2 EPC Protocol Approved as ISO 18000-6C. RFID J. URL http://www.rfidjournal.com/articles/view?2481 (aufgerufen am 21.01.2012)
Odermann, J., 2011. Cattle producers sought for age and source verification. Tri-State Livest. News. URL http://www.tsln.com/article/20110512/TSLN01/110519995 (aufgerufen am 28.02.2012)
Oertel, B., Wölk, M., Kelter, H., Ullmann, M., Wittmann, S., Hilty, L., Köhler, A., 2004. Risiken und Chancen des Einsatzes von RFID-Systemen: Trends und
156 Literaturverzeichnis
Entwicklungen in Technologien, Anwendungen und Sicherheit. Bundesamt für Sicherheit in der Informationstechnik, Bonn.
Pache, S., Theis, S., Hagemann, F., Ostertag, T., Schneider, P., 2011. Agro SAW Ident - ein alternatives System zur Tieridentifizierung, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 75-85.
Pache, S., Theis, S., Zietzschmann, S., Hagemann, F., Berger, W., Ostertag, T., Hütter, R., Schneider, P., 2013. Alternative elektronische Tierkennzeichnung. Sächsisches Landesamt für Umwelt, Landwirtschaft und Geologie (LfULG), Dresden.
Paret, D., 2009. RFID at Ultra and Super High Frequencies: Theory and Application, 1. Auflage. ed. John Wiley & Sons, Chichester, West Sussex.
Peschke, W., Opperman, P., 2006. Integrierte Schweineproduktion in Bayern - nur ein Pilotprojekt? Lfl-Schriftenreihe. 69-77. Bayerische Landesanstalt für Landwirtschaft, Freising-Weihenstephan.
Ploegaert, P.G.F., 1976. Technical aspects of cow identification in combination with milk yield recording and concentrate feeding in and outside the milking parlour, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Rau, K., 2007. Elektronische Einzeltierkennzeichnung in der Schweineproduktion. Schweinezucht aktuell 31, 38.
Rau, K., 2009. Elektronische Einzeltierkennzeichnung beim Schwein - Machbarkeitsstudie. Schweinezucht aktuell 35, 36-37.
Reiners, K., Hegger, A., Hessel, E.F., Böck, S., Wendl, G., Van den Weghe, H.F. a., 2009. Application of RFID technology using passive HF transponders for the individual identification of weaned piglets at the feed trough. Comput. Electron. Agric. 68 (2), 178-184.
Ribó, O., Cuypers, M., Korn, C., Meloni, U., Centioli, G., Cioci, D., Ussorio, A., Veran, J., 2003. IDEA Project - large scale project on livestock electronic identification. Final Report.
Ribó, O., Korn, C., Meloni, U., Cropper, M., De Winne, P., Cuypers, M., 2001. IDEA: a large-scale project on electronic identification of livestock. Rev. Sci. Tech. 20 (2), 426-436.
Rossing, W., 1974. Automatic milk-yield recording system for milking parlors, in: Proceedings of the International Federation of Automatic Control Symposium: Automatic Control for Agriculture. Saskatoon, Saskatchewan.

Literaturverzeichnis 157
Rossing, W., 1976. Cow identification for individual feeding in or outside the milking parlor, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Rossing, W., 1999. Animal identification: introduction and history. Comput. Electron. Agric. 24 (1-2), 1-4.
Rößler, B., 2011. Entwicklung , Bau und Untersuchung eines RFID-Mehrfachlesegerätes zur Simultanerfassung von. Bachelor-Thesis Universität Hohenheim.
Ruis, M.A., de Groot J, te Brake JH, Dinand Ekkel E, van de Burgwal JA, Erkens, J., Engel, B., Buist, W., Blokhuis, H., Koolhaas, J., 2001a. Behavioural and physiological consequences of acute social defeat in growing gilts: effects of the social environment. Appl. Anim. Behav. Sci. 70 (3), 201-225.
Ruis, M.A., te Brake, J.H., Engel, B., Buist, W.G., Blokhuis, H.J., Koolhaas, J.M., 2001b. Adaptation to social isolation. Acute and long-term stress responses of growing gilts with different coping characteristics. Physiol. Behav. 73 (4), 541-551.
Ruis, M.A., te Brake, J.H., Engel, B., Ekkel, E.D., Buist, W.G., Blokhuis, H.J., Koolhaas, J.M., 1997. The circadian rhythm of salivary cortisol in growing pigs: effects of age, gender, and stress. Physiol. Behav. 62 (3), 623-630.
Ruiz-Garcia, L., Lunadei, L., 2011. The role of RFID in agriculture: Applications, limitations and challenges. Comput. Electron. Agric. 79 (1), 42-50.
Santamarina, C., Hernández-Jover, M., Babot, D., Caja, G., 2007. Comparison of visual and electronic identification devices in pigs: slaughterhouse performance. J. Anim. Sci. 85 (2), 497-502.
Scalera, A., Conzon, D., Brizzi, P., Tomasi, R., Spirito, A.M., Hessel, E., 2013. An Internet of thing-based approach for single animal monitoring in a distributed farms environment, in: Bau, Technik und Umwelt in der landwirtschaftlichen Nutztierhaltung. Vechta. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), 444-449.
Schembri, N., Sithole, F., Toribio, J.A., Hernández-Jover, M., Holyoake, P.K., 2007. Lifetime traceability of weaner pigs in concrete-based and deep-litter production systems in Australia. J. Anim. Sci. 85, 3123-3130.
Schlünsen, D., Schön, H., Roth, H., 1987. Automatic detection of oestrus in dairy cows, in: Proceedings of the Third Symposium on Automation in Dairying. Wageningen, 166-175.
Schmidt, J., 2009. Neue Studie: Problemloser RFID-Einsatz auf Metall. RFID im Blick. URL http://www.rfid-im-blick.de/200906111488/neue-studie-problemloser-rfid-einsatz-auf-metall.html (aufgerufen am 28.07.2011)

158 Literaturverzeichnis
Schoblick, R., Schoblick, G., 2005. RFID Radio Frequency Identification. Franzis, Poing b. München.
Schön, H., 2000. Automatische Melksysteme: Stand der Technik, Melkphysiologie und Milchhygiene, Tierhaltung, bauliche Lösungen, Praxiserfahrungen, Management und Wirtschaftlichkeit. KTBL-Schrift 395. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), Darmstadt.
Schön, H., Artmann, R., 1993. Elektronik und Computer in der Landwirtschaft: rechnergestützte Verfahren für eine betriebsmittelsparende und umweltverträgliche Produktion. Ulmer, Stuttgart.
Schön, H., Auernhammer, H., 1999. Neue Techniken der Prozesssteuerung und Automatisierung im Pflanzenbau und in der Tierhaltung. Agrarwirtschaft: Zeitschrift für Betriebswirtschaft, Marktforschung und Agrarpolitik. 48 (3/4), 130-140.
Schön, H., Haidn, B., Wendl, G., 2003. Technische Innovationen in der Nutztierhaltung zur Verbesserung des Tier- und Verbraucherschutzes. Arch. Tierzucht 46 (Sonderausgabe “Efficient production of healthy animals”), 32-42.
Schrader, L., Ladewig, J., 1999. Temporal differences in the responses of the pituitary adrenocortical axis, the sympathoadrenomedullar axis, heart rate, and behaviour to a daily repeated stressor in domestic pigs. Physiol. Behav. 66 (5), 775-783.
Schroeder, T.C., Tonsor, G.T., 2012. International cattle ID and traceability: Competitive implications for the US. Food Policy 37 (1), 31–40.
Schwalm, A., Georg, H., Ude, G., 2009. Elektronische Tierkennzeichnung. Landbauforsch. - vTI Agric. For. Res. 59 (4), 279-286.
Sherwin, C.M., 1990. Ear-tag chewing, ear rubbing and ear traumas in a small group of gilts after having electronic ear tags attached. Appl. Anim. Behav. Sci. 28, 247-254.
Simpson, D.J., 1968. An automatic gate selector device for cattle feeding. Phys. Med. Biol. 13 (3), 459-460.
Slader, R.W., Gregory, A.M.S., 1988. An automatic feeding and weighing system for ad libitum fed pigs. Comput. Electron. Agric. 3 (2), 157-170.
Smith, C., Riesinger, M., Ringwall, K., Mattern, R., 2010. Pilot Project Uses High-frequency Electronic Identification. URL http://www.ag.ndsu.edu/news/newsreleases/2010/feb-1-2010/pilot-project-uses-high-frequency-electronic-identification (aufgerufen am 01.06.2014)

Literaturverzeichnis 159
Souza, A., Zanella, A., 2008. Social isolation elicits deficits in the ability of newly weaned female piglets to recognise conspecifics. Appl. Anim. Behav. Sci. 110 (1-2), 182-188.
Spahr, S.L., 1993. New Technologies and Decision Making in High Producing Herds. J. Dairy Sci. 76 (10), 3269-3277.
Sprenger, K.-U., 2009. EU-Rahmenbedingungen zur elektronischen Tierkennzeichnung, in: Elektronische Kennzeichnung bei Schafen und Ziegen. Bayerische Landesanstalt für Landwirtschaft, Grub.
Stärk, K.D.., Morris, R.S., Pfeiffer, D.U., 1998. Comparison of electronic and visual identification systems in pigs. Livest. Prod. Sci. 53 (2), 143-152.
Statistisches Bundesamt, 2009. Fachserie. 3, Land- und Forstwirtschaft, Fischerei. 4, Viehbestand und tierische Erzeugung. 1. Viehbestand.
Statistisches Bundesamt, 2014. Fachserie. 3, Land- und Forstwirtschaft, Fischerei. 4, Viehbestand und tierische Erzeugung. 1. Viehbestand.
Stekeler, T., 2007. RFID-Anwendung in der Schweineproduktion. Master-Thesis Universität Hohenheim.
Stekeler, T., 2011. Potenziale der Ultrahochfrequenztechnik für die elektronische Tierkennzeichnung, in: Elektronische Tieridentifizierung in der landwirtschaftlichen Nutztierhaltung. Fulda. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL).
Street, M.J., 1979. A Pulse-code Modulation System for Automatic Animal Identification. J. Agric. Eng. Res. 24, 249-258.
Swedberg, C., 2010. USDA approves first UHF tag for animal identification system. RFID J. URL http://www.rfidjournal.com/article/view/7304 (aufgerufen am 01.06.2014)
Swedberg, C., 2012a. PigTracker Project finds UHF tags effective for swine. RFID J. URL http://www.rfidjournal.com/article/view/9129 (aufgerufen am 19.01.2012)
Swedberg, C., 2012b. Dutch Technology Companies Develop EPC UHF Solution for Tracking Pigs. RFID J. URL http://www.rfidjournal.com/articles/view?9950 (aufgerufen am 03.01.2013)
Theis, S., Pache, S., Zietzschmann, S., Bernhardt, H., 2010. Neue elektronische Tierkennzeichnung mit SAW-basiertem RFID-System im 2,4 GHz ISM-Band. Landtechnik 65 (4), 248-251.
Thurner, S., Wendl, G., 2007. Identifizierungssicherheit von bewegten HF-Transpondern bei simultaner Erfassung. Landtechnik 62 (2), 106-107.

160 Literaturverzeichnis
Traunecker, J., Stekeler, T., Rößler, B., Herd, D., Gallmann, E., Jungbluth, T., 2012. Automatisierung eines RFID-Prüfstandes. Landtechnik 67 (3), 184-187.
Truschkin, E., Fürstenberg, F., Vogeler, S., Bensel, P., 2009. RFID in der Logistik – Empfehlungen für eine erfolgreiche Einführung, Schriftenr. ed. Universitätsverlag der Technischen Universität Berlin, Berlin.
Turner, M.J.B., Burgess, A.D., Street, M.J., 1976. Operational problems with automatic identification, in: Proceedings of the Symposium on Cow Identification and Their Applications. Wageningen.
Umstätter, C., Bhatti, S.A., Michie, C., Thomson, S., 2014. Overview of Ultra-High Frequency technology in livestock farming and stakeholder opinions, in: Proceedings of the International Conference of Agricultural Engineering. Zürich.
Vossenaar, F., 2009. Pigs breaking through in Argentina. Pig Prog. 25 (3), 28-29.
Walk, E., 2007. RFID-Standards 2007, in: Ident Jahrbuch. ident Verlag und Service GmbH, Rödermark, 52-59.
Wang, N., Zhang, N., Wang, M., 2006. Wireless sensors in agriculture and food industry - Recent development and future perspective. Comput. Electron. Agric. 50, 1-14.
Weinländer, M., 2010. Funketiketten steuern die Fertigung, in: A&D-Kompendium 2009/2010,150-152.
Wendl, G., 1998. Elektronikeinsatz in der Rinderhaltung - von der Identifizierung bis zur Automatisierung, in: Kaufmann, R. (Ed.), Elektronik in der Landtechnik. Eidgenössische Forschungsanstalt für Agrarwirtschaft und Landtechnik, Tänikon, 101-112.
Windhorst, H.-W., 2008. Die Stellung der deutschen Fleischwirtschaft im europäischen und globalen Rahmen, in: Spiller, A., Schulze, B. (Eds.), Zukunftsperspektiven Der Fleischwirtschaft. Universitätsverlag Göttingen, Göttingen, 3-30.
Wismans, W., 1999. Identification and registration of animals in the European Union. Comput. Electron. Agric. 24 (1-2), 99-108.
Zähres, W., 1986. Abruffütterung für Sauen. Landtechnik 41 (5), 234-240.
Ziron, M., 2008. Technikeinsatz bei Spitzenbetrieben in der Schweineproduktion, in: Precision Pig Farming. Kuratorium für Technik und Bauwesen in der Landwirtschaft (KTBL), Osnabrück, 100-105.
161
12 ABBILDUNGSVERZEICHNIS Abbildung 1: Grundbestandteile eines RFID-Systems (nach: Finkenzeller 2012) ... 9
Abbildung 2: Funktionsweise eines RFID-Systems (aus: Kern 1997) ..................... 9
Abbildung 3: Abhängigkeit der Feldstärke von der Distanz zur Antenne bei
induktiven Systemen (aus: Finkenzeller 2012) ............................................... 14
Abbildung 4: Komplexe Permittivität von Wasser bei 25°C mit Realteil ε'
(Polarisation) und Imaginärteil ε'' (Absorption), aggregierte Daten mehrerer
Untersuchungen (Ellison et al. 1996) ............................................................. 18
Abbildung 5: Polarisation von Dipol-Sendeantennen (Finkenzeller 2012) ............. 21
Abbildung 6: Energie- und Datenübertragung zwischen Lesegerät und Transponder
bei unterschiedlichen Betriebsarten (verändert nach: Paret 2010) ................ 22
Abbildung 7: Codierung und Modulation im Datenübertragungsmodell ................ 26
Abbildung 8: Vergleich von Precision Farming und Precision Livestock Farming
(verändert nach: Hartung 2005) ..................................................................... 42
Abbildung 9: Transponderohrmarke FlexoTronic R30 ........................................... 54
Abbildung 10: Screenshot Konfiguration der RF-Module mit „Reader Utility“, Version
4.0.0.0 ............................................................................................................ 56
Abbildung 11: Aufbereitung des Signals eines FDX-Transponders nach ISO 11785
(Anonym 2008d) ............................................................................................ 57
Abbildung 12: Einzellesegerät ............................................................................... 58
Abbildung 13: Mehrfachlesegerät .......................................................................... 58
Abbildung 14: Auszug aus der Protokolldatei „01-01.07.2010 17_16_17.txt“ ........ 59
Abbildung 15: RFID-Prüfstand mit horizontaler Laufrichtung ................................ 61
Abbildung 16: Auszug aus der Protokolldatei „20.12.2010 15_15_12.txt“ ............. 62
Abbildung 17: Versuchsaufbau: Lesegeräte (1 bis 8) und Transponder (1 bis 9) mit
ihrer Position .................................................................................................. 64
Abbildung 18: Erfassungsreichweite (n = 115) in Abhängigkeit von der Orientierung
der Transponder zum Lesegerät .................................................................... 67
Abbildung 19: Feldstärke in Orientierung a ........................................................... 68
Abbildung 20: Feldstärke in Orientierung b ........................................................... 68
Abbildung 21: Erfassungsbereich in Orientierung a .............................................. 69
Abbildung 22: Erfassungsbereich in Orientierung b .............................................. 69
162 Abbildungsverzeichnis
Abbildung 23: Erfassungsquote (n = 135) in Abhängigkeit von der Anzahl der
Transponderohrmarken ................................................................................. 72
Abbildung 24: Erfassungsquote (n = 135) in Abhängigkeit von der Anzahl der
Lesegeräte ..................................................................................................... 73
Abbildung 25: Erfassungsquote (n = 135) in Abhängigkeit von der Geschwindigkeit
....................................................................................................................... 74
Abbildung 26: UHF-Transponder A, B, N (v.l.) ...................................................... 81
Abbildung 27:Lesegerät I UDL500 (Werkbild Deister Electronic, Barsinghausen) 82
Abbildung 28: Lesegerät II RRU4 ......................................................................... 83
Abbildung 29: Wasserbehälter B20, B50 und B80 (v.l.) ........................................ 84
Abbildung 30: UML-Domänenmodell eines Versuchslaufs ................................... 85
Abbildung 31: Leitstand: Softwarekomponenten und angebundene Systeme ...... 86
Abbildung 32: Schematische Darstellung eines Versuchsdurchlaufs ................... 86
Abbildung 33: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit
Lesegerät I (Orientierung a, Varianten a bis e) .............................................. 93
Abbildung 34: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit
Lesegerät I (Orientierung b, Varianten a bis e) .............................................. 94
Abbildung 35: Erfassungsreichweite (n = 75) der Transpondertypen A, B und N mit
Lesegerät I (Orientierung a, Variante f) ......................................................... 94
Abbildung 36: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit
Lesegerät II (Orientierung a, Varianten a bis e) ............................................. 96
Abbildung 37: Erfassungsreichweite (n = 750) der Transpondertypen A, B und N mit
Lesegerät II (Orientierung b, Varianten a bis e) ............................................. 97
Abbildung 38: Erfassungsreichweite (n = 75) der Transpondertypen A, B und N mit
Lesegerät II (Orientierung a, Variante f) ........................................................ 98
Abbildung 39: Erfassungsbereiche von Lesegerät II/Transpondertyp A, Orientierung
a, Variante b (links) und Variante c (rechts) ................................................. 102
Abbildung 40: Erfassungsbereiche von Lesegerät II/Transpondertyp A, Orientierung
a, Variante d (links) und Variante e (rechts) ................................................ 103
Abbildung 41: Erfassungsquote (n = 216) der Transpondertypen A, B und N .... 104
Abbildung 42: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von
Wasser ........................................................................................................ 105
Abbildung 43: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von
der Geschwindigkeit der Transponder beim Erfassungsvorgang ................ 106

Abbildungsverzeichnis 163
Abbildung 44: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von
der Anzahl gleichzeitig zu erfassender Transponder ................................... 107
Abbildung 45: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von
der Orientierung der Transponder zum Lesegerät ....................................... 108
Abbildung 46: Erfassungsquote (n = 72) von Transpondertyp A in Abhängigkeit von
der Orientierung und Wasser ....................................................................... 109
Abbildung 47: Fertigung der UHF-Transponderohrmarken A und B (v.l.) ........... 118
Abbildung 48: Lesegeräteanordnungen a, b und c (v.l.) ...................................... 120
Abbildung 49: Erfassungsquoten (n = 1344) der Transpondertypen A und B und der
Lesegeräte I und II in Abhängigkeit von der Anordnung (a, b, c) ................. 122
Abbildung 50: Erfassungsquoten (n = 1344) der Transpondertypen A und B ..... 123
Abbildung 51: Erfassungsquoten (n = 1344) der Lesegeräte I und II .................. 124
Abbildung 52: Erfassungsquoten (n = 1344) der Anordnungen a, b und c .......... 125
Abbildung 53: Erfassungsquoten (n = 1344) der Kombinationen aus Transpondertyp
und Lesegerät .............................................................................................. 126
Abbildung 54: Erfassungsquoten (n = 1344) der Kombinationen aus Transpondertyp
und Anordnung ............................................................................................ 127
Abbildung 55: Erfassungsquoten (n = 1344) in Abhängigkeit des Versuchstermins
..................................................................................................................... 129
Abbildung 56: Dauer der Wiederholung (n = 1344) in Abhängigkeit ihres Ranges
innerhalb eines Versuchstermins ................................................................. 130
Abbildung 57: Dauer der Wiederholung (n = 1344) in Abhängigkeit des
Versuchstermins .......................................................................................... 131
Abbildung 58: Erfassungsquote (n = 1344) in Abhängigkeit von der Dauer einer
Wiederholung ............................................................................................... 132
Abbildung 59: Ablaufdiagramm der Untersuchung von RFID-Systemen ............. 139

164

165
13 TABELLENVERZEICHNIS Tabelle 1: Betriebsfrequenzen von RFID-Systemen (verändert nach: Bovenschulte
et al. 2007) ..................................................................................................... 11
Tabelle 2: Gesetzgebung der Europäischen Union zur Kennzeichnung
landwirtschaftlicher Nutztiere (verändert nach: Sprenger 2009) .................... 34
Tabelle 3: Varianten nach Anzahl Transponderohrmarken ................................... 65
Tabelle 4: Varianten nach Anzahl aktiver Lesegeräte ........................................... 65
Tabelle 5: Ergebnisse der Bestimmung der maximalen Erfassungsreichweite ..... 66
Tabelle 6: Verwendete Transponderohrmarken .................................................... 67
Tabelle 7: Ergebnisse der dynamischen Versuche zur Erfassungssicherheit ....... 71
Tabelle 8: Versuchsvarianten bei der Bestimmung der Wirkung von Einflussgrößen
auf die Erfassungsreichweite der Transpondertypen A, B und N ................... 88
Tabelle 9: Durchschnittliche Erfassungsreichweite [cm] der Einzeltransponder von
Transpondertyp A, B und N ............................................................................ 91
Tabelle 10: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A,
B und N mit Lesegerät I ................................................................................. 92
Tabelle 11: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A,
B und N mit Lesegerät II ................................................................................ 95
Tabelle 12: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A,
B und N mit den Lesegeräten I und II ............................................................ 99
Tabelle 13: Durchschnittliche Erfassungsreichweite [cm] in den Orientierungen a
und b bei den Transpondertypen A, B und N ............................................... 100
Tabelle 14: Durchschnittliche Erfassungsreichweite [cm] der Transpondertypen A,
B und N in den Varianten a bis e mit dem Lesegerät I ................................. 101
Tabelle 15: Vergleich der mittleren Erfassungsreichweiten der Transpondertypen A,
B und N in den Varianten a bis e mit dem Lesegerät II ................................ 101
Tabelle 16: Versuchstermine UHF-Transponderohrmarken mit durchschnittlichem
Gewicht und durchschnittlicher Schulterhöhe .............................................. 120
Tabelle 17: Durchschnittliche Erfassungsquoten [%] der Transpondertypen A und B
und der Lesegeräte I und II in Abhängigkeit von der Anordnung (a, b, c) der
Lesegeräte bzw. Antennen .......................................................................... 127

ISSN 0931-6264