
Drehfrequenz- geregelter Gleichstrom-...
21
Drehfrequenz- geregelter Gleichstrom- antrieb Entworfen und bearbeitet von der Klasse EEB99 Cuno-Berufskolleg I Anlagenautomatisierung / Herr Hütten Elektrische Maschinen und Anlagen / Herr Eisel
-
Upload
nguyenkhanh -
Category
Documents
-
view
220 -
download
0
Transcript of Drehfrequenz- geregelter Gleichstrom-...

Drehfrequenz-
geregelter
Gleichstrom-antrieb
Entworfen und bearbeitet von der Klasse EEB99 Cuno-Berufskolleg I
Anlagenautomatisierung / Herr Hütten Elektrische Maschinen und Anlagen / Herr Eisel
Seite 2 von 21
Allgemeine Übersicht Daniel GeislerFrank SobczakRené Vanscheidt
3
Arbeitsmaschine real und Versuchsaufbau Timo ConzeAndre JackiwRaul Weber
5
Tachogenerator und Messumformer Irfan AltunyayMathias Biernatowski
7
Sollwertgeber und Vergleicher Ulli FischerOliver Nock
10
Regler Markus SchwierenMarc Zimny
11
Stromrichter und Zündimpulse Markus DörrMarkus Knothe
Gleichstrommotoren Patrik DatzMarco Teichert
15
Layout und Koordination Daniel HeidelThorsten HirtzbruchAndre Müller

Seite 3 von 21
Drehfrequenzgeregelter Gleichstromantrieb
In dieser Ausarbeitung wird ein drehfrequenzgeregelter Gleichstromantrieb dargestellt. Die Aufgabe der einzelnen Gruppen ist es, die verschiedenen Einheiten, wie z.B. den „Regler“, explizit zu erklären. Die Hauptaufgabe dieser Anlage ist es eine Regelung nachzubilden, die in der Realität als z.B. Metall- oder Papierverarbeitende Maschine dargestellt ist. Um die Einheiten darzustellen, ist hier eine kleine Einführung zu den einzelnen Themen.
Blockschaltbild des drehfrequenzgeregelten Gleichstromantriebs
Die Arbeitsmaschine real und im Versuchsaufbau als Nachbildung Die Arbeitsmaschine ist ein fremderregter Gleichstromgenerator. Drei separate zuschaltbare 25 W Lampen bilden die Last.
Der Gleichstrommotor Es wird ein fremderregter Gleichstrommotor verwendet. Er hat ein ziemlich konstantes Drehmoment bei schwacher Belastung. Er ist besonders gut zu regeln, da er an getrennten Anker- und Erregerkreis.
Tachogenerator und Messumformer Der Tachogenerator ist da um die Drehzahl zu erfassen. Die erfasste Spannung ist proportional zur Drehzahl, d.h. bei hoher Spannung entsteht eine hohe Drehzahl. Die Polarität der Spannung gibt an welche Drehrichtung vorhanden ist. Der Messumformer soll die Spannung vom Tachogenerator an die Normspannung der Regelung anpassen.
Seite 4 von 21
Sollwertgeber und Vergleicher Der Sollwertgeber ist eine konstante Spannungsquelle, die eine Gleichspannung vorgibt, die der Tachogenerator bei gewünschter Drehzahl ausgeben soll. Der Vergleicher vergleicht die Vorgabe des Sollwertes mit dem Istwert aus dem Tachogenerator.
Der Regler Der Regler soll die Differenz vom vorhandenen Istwert zum Sollwert ausgleichen.
Stromrichter und Zündimpulsgeber Der Stromrichter und der Zündimpulsgeber wird verwendet für die verlustlose Drehzahlsteuerung von Gleichstrommaschinen. Der Stromrichter ist für die Umwandlung von Wechsel- in Gleichstrom zuständig. Der Zündimpulsgeber ist zum „zünden“ der Thyristoren des halbgesteuerten Stromrichters verwendet.
Abschließend ist zu sagen, dass die einzelnen Einheiten zu einer großen Anlagen zusammengeführt, eine Regeleinheit ergeben. Die einzelnen Themen werden im weiteren Verlauf dieser Gruppenarbeit noch intensiver dargestellt und zum allgemeinen Verständnis vorgetragen.
Daniel Geisler
Frank Sobczak René Vanscheidt
Seite 5 von 21
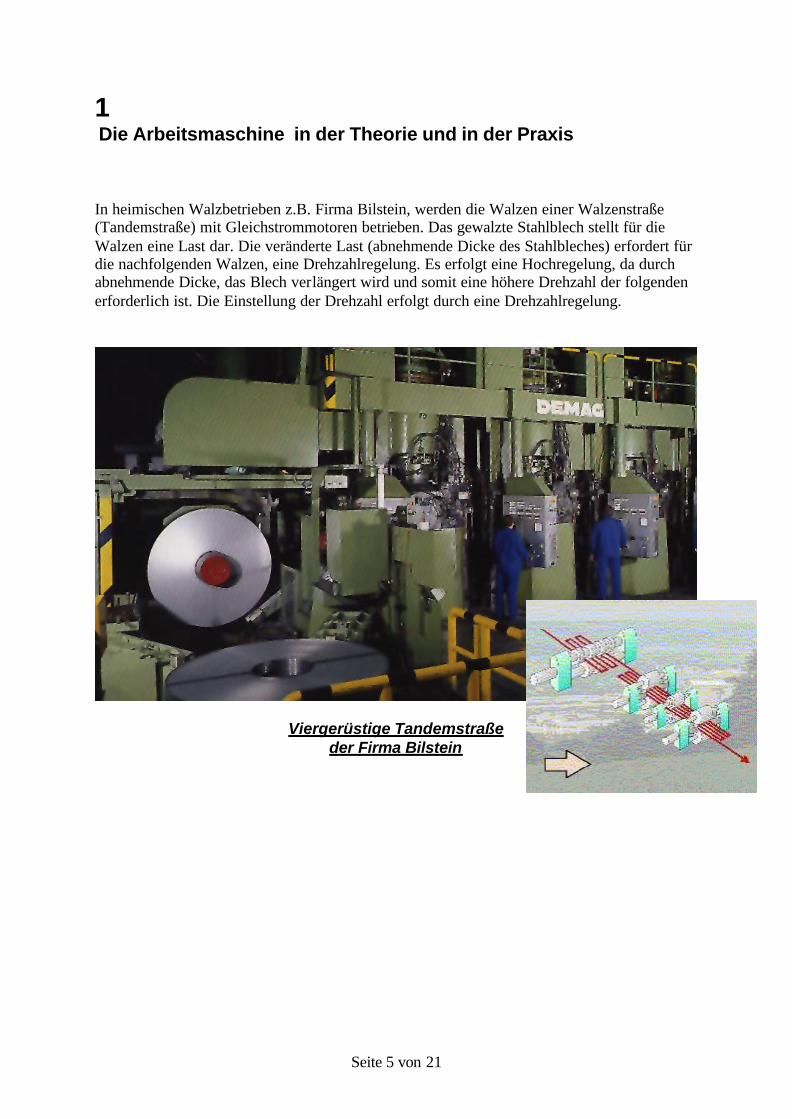
1 Die Arbeitsmaschine in der Theorie und in der Praxis In heimischen Walzbetrieben z.B. Firma Bilstein, werden die Walzen einer Walzenstraße (Tandemstraße) mit Gleichstrommotoren betrieben. Das gewalzte Stahlblech stellt für die Walzen eine Last dar. Die veränderte Last (abnehmende Dicke des Stahlbleches) erfordert für die nachfolgenden Walzen, eine Drehzahlregelung. Es erfolgt eine Hochregelung, da durch abnehmende Dicke, das Blech verlängert wird und somit eine höhere Drehzahl der folgenden erforderlich ist. Die Einstellung der Drehzahl erfolgt durch eine Drehzahlregelung.
Viergerüstige Tandemstraße der Firma Bilstein

Seite 6 von 21
In der Schule wird die Form des Versuchsablaufes mit eine r Antriebsmaschine (Motor- / Generatorsatz), und drei Lampen (unterschiedliche Last) simuliert. Der vom Gleichstrommotor angetriebene Generator liefert die Spannung, für die Versorgung von drei Lampen. Wenn ein Teil der Last wegfällt, muss der Gleichstrommotor schneller drehen, da sich der Widerstand der Lampenlast erhöht. Da aber der Motor auf einer konstanten Drehzahl gehalten werden muss, wird diese durch eine Regelschaltung mit Taktgeber und Phasenanschnittsteuerung wider runtergeregelt. Dies wird in der Schule mit einem Versuchsaufbau realisiert, da es nicht möglich ist eine Walzstraße oder ähnliches aufzubauen.
Timo Conze Andre Jackiw
Raul Weber
Seite 7 von 21
2 2.1 Messumformer Messumformer wandeln eine physikalische Größe in eine andere physikalische Größe um. Einige Beispiele für Messumformer und ihre physikalische Größen:
- Tachogenerator Drehfrequenz => Spannung
- Hallgenerator magnetische Feldstärke => Spannung
- Fotowiderstände Licht => Spannung
- PTC Widerstände Temperatur => Spannung
- NTC Widerstände
- Transformatoren Spannung => magn. Fluss => Spannung
2.2 Tachogeneratoren Tachogeneratoren formen eine Drehfrequenz in eine Spannung um
2.2.1 Unterschiedliche Tachogeneratoren
- Wechselstromgeneratoren - Drehstromgeneratoren - Drehstromgeneratoren mit Gleichrichter - Gleichstromgeneratoren mit Kommutator - Gleichstromgeneratoren ohne Kommutator
2.2.2 Wechselstromtachogenerator Wechselstrom – Tachogenerator sind im Prinzip Wechselstrommotoren, die im Generatorbetrieb arbeiten. Sie liefern eine sinusförmige Spannung deren Frequenz proportional zur Drehzahl ist. Vom mechanischen Aufbau her besitzt er einen Ständer mit Statorwicklung und ein Dauermagnet als Läufer, der vom Messobjekt angetrieben wird. Diese Tachogeneratoren sind äußerst Wartungsarm.

Seite 8 von 21
0
5
10
15
20
25
30
35
40
0 500 1000 1500 2000 2500 3000 3500
Drehzahl n in min ¹
Sp
ann
un
g U
in V
2.2.3 Drehstromtachogenerator Am Ausgang des Drehstrom –Tachogenerators kann eine Sinusförmige Spannung abgegriffen werden, mit einer Frequenz die der Drehfelddrehzahl des Läufers proportional ist. Die induzierte Spannung ist Drehrichtungsunabhängig. Diese Tachogeneratoren haben eine dreiphasige Wicklung im Ständer und im Anker einen Permanentmagneten. Drehstromtachogeneratoren können Maximaldrehzahlen von bis zu 10000 min ¹̄ erfassen und sind äußerst Wartungsarm.
2.3 Gleichstromtachogenerator mit Kommutator Bei Gleichstromtachogeneratoren kann man am Ausgang eine Gleichspannung abgreifen, welche proportional zur Drehzahl ist. Diese Tachogeneratoren bestehen im Ständer aus einem Dauermagneten und im Anker aus einer Kommutatorwicklung. Über Schleifkontakte wird die Induzierte Spannung vom Anker abgenommen. Die Stromwender und Bürsten müssen bei diesem Generatortyp ständig gewartet werden.
Spannungs - Drehzahldiagramm
0102030405060
7080
90
0 200 400 600 800
Drehzahl n in min ¹
Sp
ann
un
g U
in V

Seite 9 von 21
2.4 Gleichstromtachogenerator ohne Kommutator Die Spannung die dieser Gleichstromtachogenerator erzeugt, ist Drehrichtungsabhängig und proportional zur Drehzahl. Dieser Generatortyp ist sehr wartungsarm weil er keine Verschleißteile wie Bürsten und ein Kommutator besitzt. Außerdem eignet er sich für Antriebe mit großer Dynamik und hohen Drehzahlen (10000 min ¹̄)
-150
-100
-50
0
50
100
150
-10000
-10000
-1000
0-80
00-60
00-40
00-20
000
2000
4000
6000
8000
1000
010
000
1000
0
Drehzahl n in min ¹
Sp
ann
un
g U
in V
Mathias Biernatowski Irfan Altunyay

Seite 10 von 21
3 Sollwertgeber und Vergleicher
3.1 Sollwertgeber Für den Sollwert wird eine einstellbare Gleichspannung benötigt, der einzustellende Wert
richtet sich nach der gewünschten Drehfrequenz des Motors. 3.2 Vergleicher Der Vergleicher gibt die Regeldifferenz (e=w-r) heraus, indem er die Führungsgröße (Sollwert) und die Rückführungsgröße (Istwert) vergleicht. Es gibt mehrere Möglichkeiten dieses zu realisieren, einerseits über Software (SPS) und mit Operationsverstärkerschaltungen, die in dem gegebenen Fall eingesetzt werden. Bei der OP-Schaltung baut man erst einen Addierer auf, den man dann in einen Subtrahierer umfunktioniert, indem man eine Spannung umpolt. An dem ersten Eingang E1 wird die Führungsgröße und an den zweiten Eingang E2 die umgepolte Rückführgröße angelegt. Die Rückführgröße ist die Spannung, die vom Tachogenerator bei gewünschter Drehzahl ausgegeben wird, sie ist somit ein Maß für die momentane Drehfrequenz. Der Vergleicher ist in dem gegebenen Fall mit dem Regler in einem Kompaktgerät zusammengefasst, in dieses Kompaktgerät müssen nur noch Führungsgröße und Rückführgröße eingespeist werden.
Ulli Fischer Oliver Nock
Seite 11 von 21
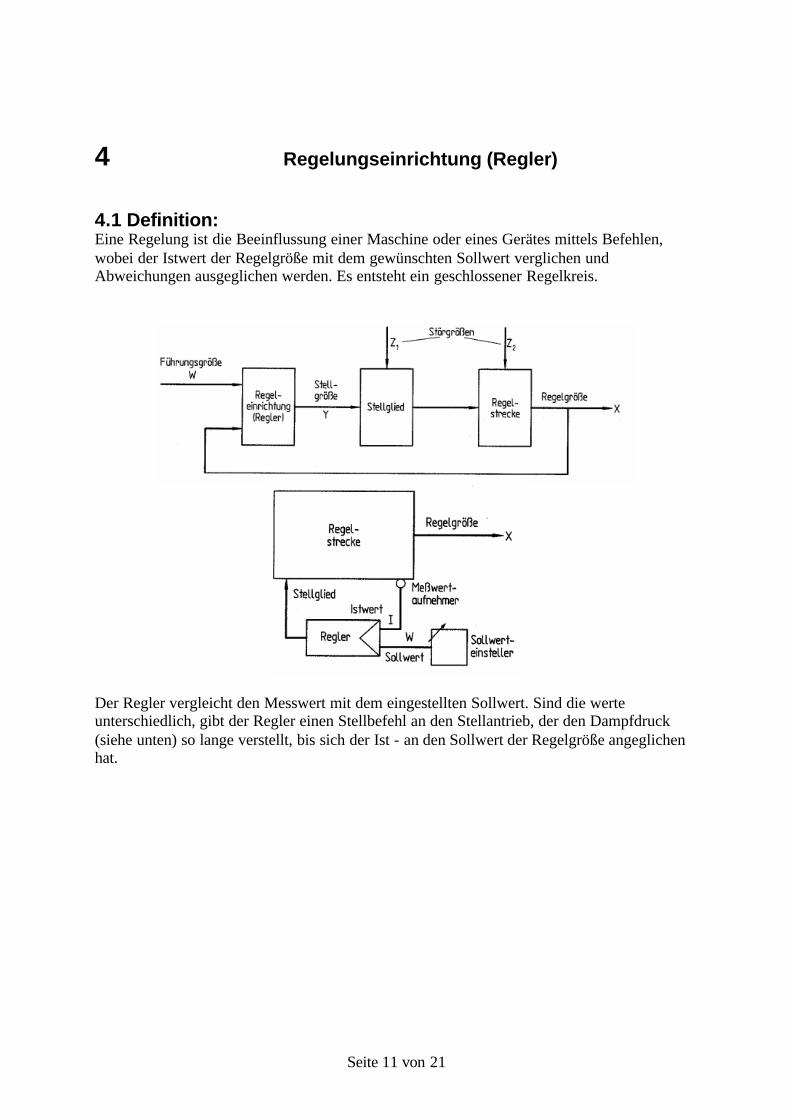
4 Regelungseinrichtung (Regler) 4.1 Definition: Eine Regelung ist die Beeinflussung einer Maschine oder eines Gerätes mittels Befehlen, wobei der Istwert der Regelgröße mit dem gewünschten Sollwert verglichen und Abweichungen ausgeglichen werden. Es entsteht ein geschlossener Regelkreis.
Der Regler vergleicht den Messwert mit dem eingestellten Sollwert. Sind die werte unterschiedlich, gibt der Regler einen Stellbefehl an den Stellantrieb, der den Dampfdruck (siehe unten) so lange verstellt, bis sich der Ist - an den Sollwert der Regelgröße angeglichen hat.
Seite 12 von 21
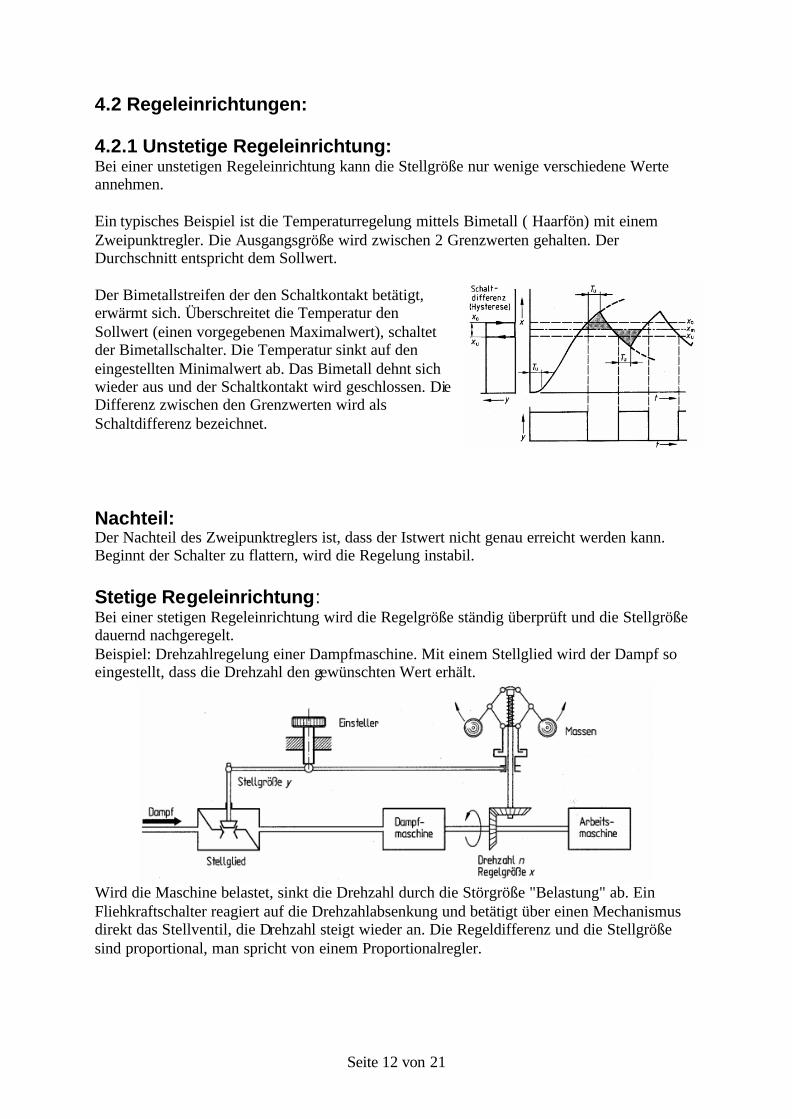
4.2 Regeleinrichtungen: 4.2.1 Unstetige Regeleinrichtung: Bei einer unstetigen Regeleinrichtung kann die Stellgröße nur wenige verschiedene Werte annehmen. Ein typisches Beispiel ist die Temperaturregelung mittels Bimetall ( Haarfön) mit einem Zweipunktregler. Die Ausgangsgröße wird zwischen 2 Grenzwerten gehalten. Der Durchschnitt entspricht dem Sollwert.
Der Bimetallstreifen der den Schaltkontakt betätigt, erwärmt sich. Überschreitet die Temperatur den Sollwert (einen vorgegebenen Maximalwert), schaltet der Bimetallschalter. Die Temperatur sinkt auf den eingestellten Minimalwert ab. Das Bimetall dehnt sich wieder aus und der Schaltkontakt wird geschlossen. Die Differenz zwischen den Grenzwerten wird als Schaltdifferenz bezeichnet. Nachteil: Der Nachteil des Zweipunktreglers ist, dass der Istwert nicht genau erreicht werden kann. Beginnt der Schalter zu flattern, wird die Regelung instabil. Stetige Regeleinrichtung: Bei einer stetigen Regeleinrichtung wird die Regelgröße ständig überprüft und die Stellgröße dauernd nachgeregelt. Beispiel: Drehzahlregelung einer Dampfmaschine. Mit einem Stellglied wird der Dampf so eingestellt, dass die Drehzahl den gewünschten Wert erhält.
Wird die Maschine belastet, sinkt die Drehzahl durch die Störgröße "Belastung" ab. Ein Fliehkraftschalter reagiert auf die Drehzahlabsenkung und betätigt über einen Mechanismus direkt das Stellventil, die Drehzahl steigt wieder an. Die Regeldifferenz und die Stellgröße sind proportional, man spricht von einem Proportionalregler.
Seite 13 von 21
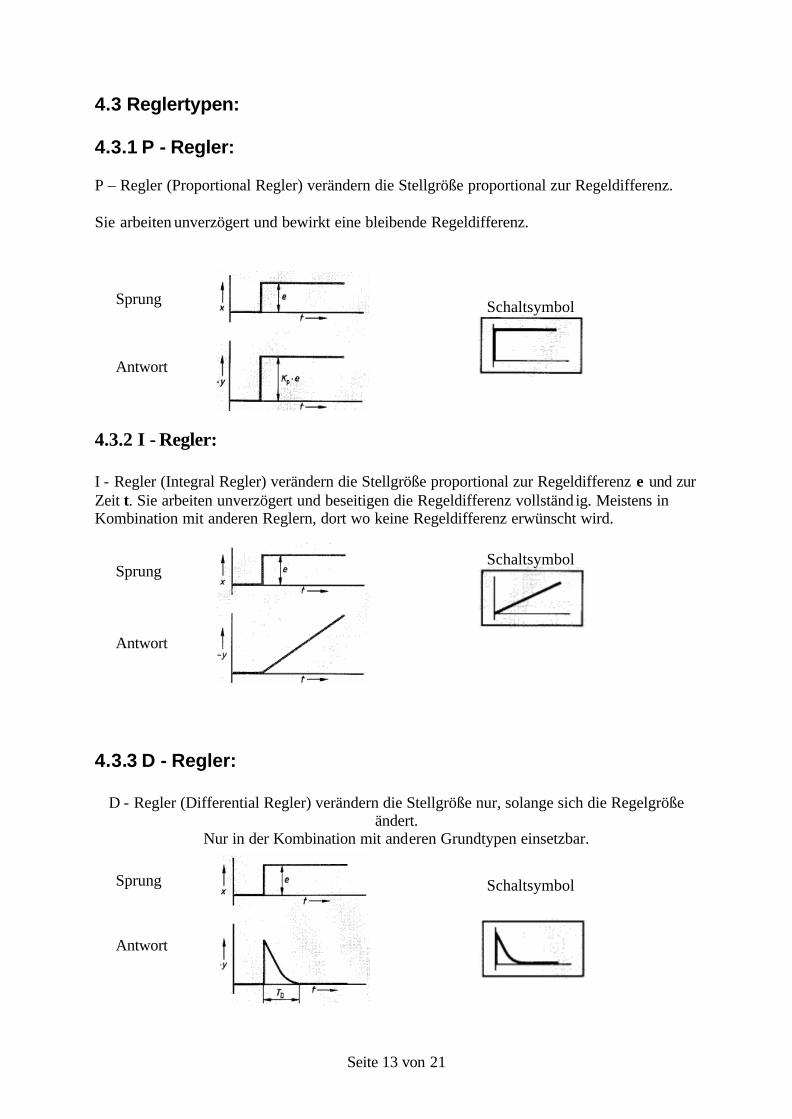
4.3 Reglertypen: 4.3.1 P - Regler: P – Regler (Proportional Regler) verändern die Stellgröße proportional zur Regeldifferenz.
Sie arbeiten unverzögert und bewirkt eine bleibende Regeldifferenz.
4.3.2 I - Regler: I - Regler (Integral Regler) verändern die Stellgröße proportional zur Regeldifferenz e und zur Zeit t. Sie arbeiten unverzögert und beseitigen die Regeldifferenz vollständ ig. Meistens in Kombination mit anderen Reglern, dort wo keine Regeldifferenz erwünscht wird. 4.3.3 D - Regler:
D - Regler (Differential Regler) verändern die Stellgröße nur, solange sich die Regelgröße ändert.
Nur in der Kombination mit anderen Grundtypen einsetzbar.
Schaltsymbol Sprung
Antwort
Schaltsymbol Sprung
Antwort
Sprung
Antwort
Schaltsymbol

Seite 14 von 21
4.3.4 PI - Regler: PI - Regler vermindern die Regeldifferenz sofort und beseitigen die verbleibende Regeldifferenz. Universal einsetzbar, geeignet für höhere Ansprüche an die Regelung wie z.B. einer
Druckregelung 4.3.5 PD - Regler: PD - Regler verändern die Stellgröße proportional zur Änderungsgeschwindigkeit der Regelgröße und proportional zur Regeldifferenz. Sie bewirken eine bleibende Regeldifferenz. Wegen mangelnder Genauigkeit als Regler selten einsetzbar. 4.3.6 PID - Regler: PID - Regler arbeiten schneller als P - Regler und verursachen keine bleibende Regeldifferenz. Einsatz bei hohen Anforderungen an die
Regelgeschwindigkeit und Genauigkeit.
Markus Schwieren Marc Zimny
Schaltsymbol Sprung
Antwort
Schaltsymbol Sprung
Antwort
Schaltsymbol
Sprung
Antwort

Seite 15 von 21
5
Gleichstrommaschinen
Inhalt z.B. über ...
· Wirkungsweise ( kommutierung, Ankerquerfeld ) · Schaltungen ( Nebenschluss, Reihenschluss ) · Betriebsverhalten · Einsatzmöglichkeiten
5.1. Anwendungsbeispiele Ein Gleichstrommotor ( DC - Drives ) ist eine elektrische Maschine, die sehr einfach in der Drehzahl und im Drehmoment zu steuern ist. Er wird deshalb in allen Größenordnungen gebaut. Es gibt Motoren mit unter einem Watt Leistung für die Feinwerktechnik oder Großmaschinen, die bei einer Spannung von 1500 Volt Leistungen von über 10.000 kW aufnehmen. Weit verbreitet sind dauermagneterregte Motoren bis zu ca. 100W, die in großer Stückzahl für die Kfz-Elektrik gefertigt werden. Sie werden dort für Scheibenwischer -, Gebläse - und Stellmotoren verwendet. In der Industrie kommen Gleichstrommotoren vor allem in Werkzeugmaschinen, Förderanlagen und Walzstraßen vor. In Nahverkehrsbahnen werden sie als Fahrmotoren verwendet. Außerdem werden sie häufig in Spielzeug verwendet. Sie werden dort eingesetzt, wo nur eine Versorgung durch Akkumulatoren oder Batterien möglich ist. Die Bedeutung von Gleichstromgeneratoren ist seit der Entwicklung des elektrischen Stromrichters stark zurückgegangen. Sie werden häufig als Tachogenerator ( Tachodynamo ) zur Erfassung des Drehzahl-Ist-Wertes verwendet.
5.2 Wirkungsweise Grundlegend ist zu sagen, das die Wirkungsweise eines Gleichstrommotors auf die Kraftwirkung, die ein stromdurchflossener Leiter in einem Magnetfeld erfährt, beruht. Das äußere Magnetfeld kann entweder von einem Gleichstrom IE ,der durch die Erregerwicklung fließt, oder von einem Dauermagneten erzeugt werden. In diesem Magnetfeld befindet sich eine ebenfalls von Gleichstrom IA durchflossene drehbare Spule, Ankerwicklung genannt, die das Ankerfeld hervorruft.
Seite 16 von 21
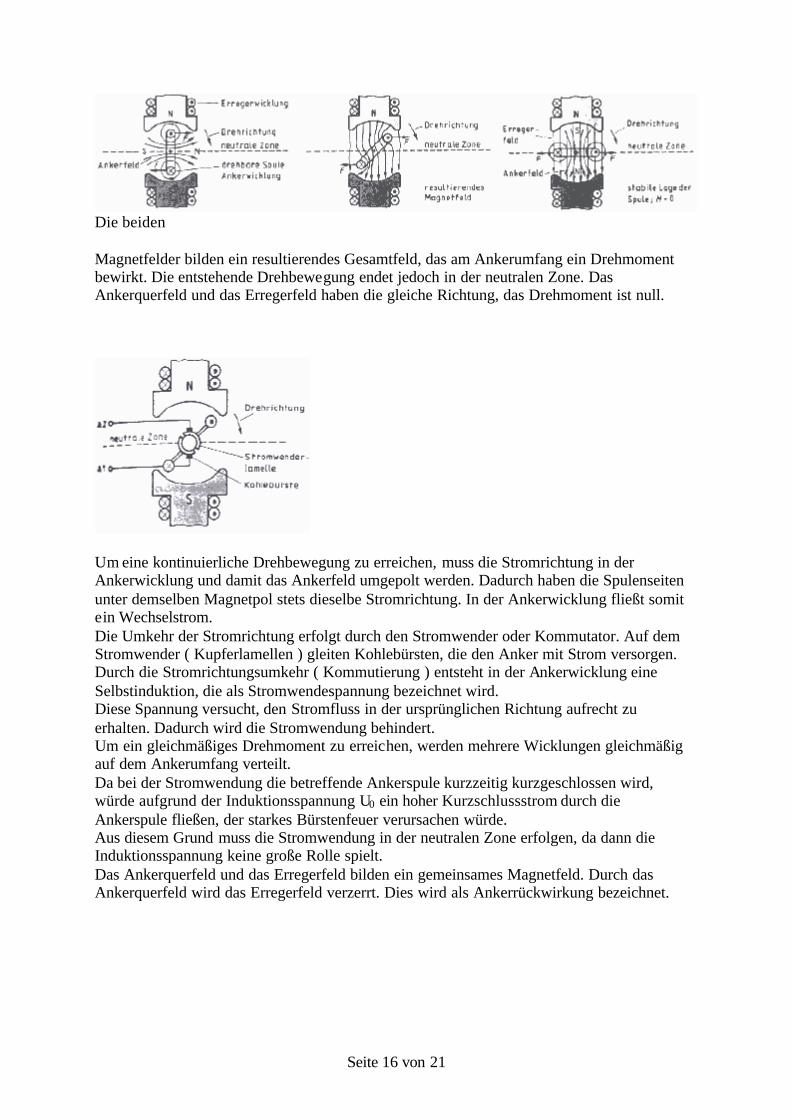
Die beiden
Magnetfelder bilden ein resultierendes Gesamtfeld, das am Ankerumfang ein Drehmoment bewirkt. Die entstehende Drehbewegung endet jedoch in der neutralen Zone. Das Ankerquerfeld und das Erregerfeld haben die gleiche Richtung, das Drehmoment ist null.
Um eine kontinuierliche Drehbewegung zu erreichen, muss die Stromrichtung in der Ankerwicklung und damit das Ankerfeld umgepolt werden. Dadurch haben die Spulenseiten unter demselben Magnetpol stets dieselbe Stromrichtung. In der Ankerwicklung fließt somit ein Wechselstrom. Die Umkehr der Stromrichtung erfolgt durch den Stromwender oder Kommutator. Auf dem Stromwender ( Kupferlamellen ) gleiten Kohlebürsten, die den Anker mit Strom versorgen. Durch die Stromrichtungsumkehr ( Kommutierung ) entsteht in der Ankerwicklung eine Selbstinduktion, die als Stromwendespannung bezeichnet wird. Diese Spannung versucht, den Stromfluss in der ursprünglichen Richtung aufrecht zu erhalten. Dadurch wird die Stromwendung behindert. Um ein gleichmäßiges Drehmoment zu erreichen, werden mehrere Wicklungen gleichmäßig auf dem Ankerumfang verteilt. Da bei der Stromwendung die betreffende Ankerspule kurzzeitig kurzgeschlossen wird, würde aufgrund der Induktionsspannung U0 ein hoher Kurzschlussstrom durch die Ankerspule fließen, der starkes Bürstenfeuer verursachen würde. Aus diesem Grund muss die Stromwendung in der neutralen Zone erfolgen, da dann die Induktionsspannung keine große Rolle spielt. Das Ankerquerfeld und das Erregerfeld bilden ein gemeinsames Magnetfeld. Durch das Ankerquerfeld wird das Erregerfeld verzerrt. Dies wird als Ankerrückwirkung bezeichnet.

Seite 17 von 21
Sollte es zu einem Bürstenfeuer kommen, verschmutzen die Lamellen und die Kohlebürsten werden abgenutzt.
Wird zwischen beiden Hauptpolen der neutralen Zone eine Wicklung angeordnet, kann die Ankerrückwirkung auf die neutrale Zone beschränkt und auch die Wirkung der Stromwendespannung aufgehoben werden. Diese Wicklungen nennt man dann Wendepolwicklungen. Das Erregerfeld wird in einer Polhälfte geschwächt, in der anderen weniger verstärkt ( Sättigung ). Die Feldschwächung wirkt drehzahlerhöhend und gleichzeitig drehmomentreduzierend. Der Motor wird instabil.

Seite 18 von 21
Stromwendespannung und Ankerrückwirkung sind vom Ankerstrom IA abhängig. Deshalb muss die Wendepolwicklung so in Reihe mit dem Anker geschaltet werden, dass ihr Feld dem Ankerfeld entgegenwirkt. Ihr Widerstand muss möglichst klein sein, um die Verluste gering zu halten. Die Wendepolwicklungen haben jedoch keinen Einfluss auf die Feldverzerrungen an den Polen.
Durch Kompensationswicklungen, die in die Hauptpole eingelegt werden, kann der Einfluss des Ankerfeldes ausgeglichen werden. Die Kompensationswicklung muss so vom Ankerstrom durchflossen werden, dass ihr Feld dem Ankerfeld entgegenwirkt. Auch sie muss niederohmig ausgeführt werden.
5.3 Betriebsverhalten
5.3.1 Anlassen
Beim Anlassen wird ein wesentlich höherer Strom als der Nennstrom fließen. Das liegt daran, das im Stillstand noch keine Gegenspannung im Anker induziert wird. Der fließende Strom wird nur durch den geringen Ankerkreiswiderstand RA begrenzt Desto geringer er ist, desto geringer sind die Verluste im Motor. Der hohe Anlaufstrom belastet das Netz. Er kann die Stromquelle und den Motor, gemeint ist die Ankerwicklung und der Kommutator, beschädigen. DIN VDE 0650 besagt, das der Anlassspitzenstrom das 1,5-fache des Nennstromes nicht überschreiten darf. Durch einen Anlasswiderstand ( Anlasser ) kann der Strom begrenzt werden. Dreht sich der Anker, so steigt mit zunehmender Drehzahl die Gegenspannung an und verringert die Stromaufnahme. Der Anlasswiderstand kann verringert werden, wobei die Verluste im Anlasser sehr schlecht sind. Mittlerweile gibt es gesteuerte Gleichstrommotoren. Dort können die Motoren verlustarm hochgefahren werden.
5.3.2 Drehrichtung
Gleichstrommotoren können sowohl links als auch rechts herum laufen.
Blickt man auf die Antriebsseite, gilt der Lauf im Uhrzeigersinn als Rechtslauf. Bei Motoren mit zwei Wellenenden ist das dem Kommutator gegenüberliegende Wellenende maßgebend für die Bestimmung der Drehrichtung. DIN VDE 0650 sagt, das Rechtslauf vorliegt, wenn die Erregerwicklung und die Ankerwicklung in der Reihenfolge der Ziffern vom Strom durchflossen wird. Möchte man die Drehrichtung eines Gleichstrommotors ändern, muss entweder die Stromrichtung im Anker oder die im Erregerfeld umgekehrt werden. Normalerweise wird die Umkehr des Stromes im Anker bevorzugt, da das Erregerfeld eine zu hohe Induktivität hat.
Seite 19 von 21
Diese würde beim umkehren ( reversieren ) eine hohe Induktionsspannung erzeugen, die die Drehrichtungsumkehr verzögern würde und zur Wicklungsbeschädigung führen kann. Außerdem wird dadurch beim häufigem Drehrichtungswechsel die ständige Ummagnetisierung des Hauptfeldes vermieden.
5.3.3 Drehzahl
Es gibt mehrere Faktoren für die Drehzahl eines Gleichstrommotors. Zum einen liegt es an der angelegten Spannung, weiter ist der Erregerfluss, der Ankerkreiswiderstand und der Lastdrehmoment verantwortlich. Außerdem wird die Drehzahl von den Konstruktionsdaten des Motors ( z.B. Polpaarzahl, Zahl der parallelen Ankerzweige ) beeinflusst. Diese Daten verändern sich während des Betriebes nicht und werden in der Maschinenkonstanten zusammengefasst.
5.3.4 Drehzahlsteuerung
5.3.4.1 Ankerstellbereich
Wird die Ankerspannung bei konstantem Erregerfeld und konstantem Lastmoment verringert, so sinkt der Ankerstrom. Dadurch wird das Drehmoment des Motors kleiner und die Drehzahl sinkt. Die geringere Drehzahl hat eine kleinere Gegenspannung zur Folge. Ankerstrom und Drehmoment steigen an. Die Drehzahl verringert sich so lange, bis das Drehmoment wieder gleich dem Lastmoment ist. Wird die Ankerspannung bei konstantem Erregerfluss verringert, so sinkt die Drehzahl des Motors unter die Nenndrehzahl.
5.3.4.2 Feldstellbereich
Wird das Erregerfeld bei konstanter Ankerspannung und konstantem Lastmoment geschwächt, Erregerstrom wird kleiner, nimmt die Gegenspannung ab. Der Ankerstrom und das Drehmoment steigen. Der Anker dreht sich schneller. Dadurch steigt die Gegenspannung wieder an und verringert den Ankerstrom. Die Drehzahl steigt so lange an, bis der Motor das gleiche Drehmoment hat wie vor der Änderung des Erregerfeldes. Eine Schwächung des Erregerfeldes ( Feldschwächenbereich ) bewirkt einen Anstieg der Drehzahl über die Nenndrehzahl des Motors hinaus. Die konstantem Ankerstrom verringert sich jedoch das nutzbare Drehmoment, während die Leistung konstant bleibt. Die Drehzahl wird durch die Kommutierungsgrenze begrenzt, bei der die Ankerrückwirkung die Stromwendung verhindert. Die Ankerrückwirkung kann durch die Kompensationswicklung ausgeglichen oder durch die Verringerung des Ankerstromes verringert werden. Eine Verringerung der Drehzahl durch die Stärkung des Erregerfeldes ist in der Regel wegen der magnetischen Sättigung nicht möglich.

Seite 20 von 21
5.3.5 Bremsen
Beim Bremsen hat man ähnliche Verhältnisse wie beim Anlassen. Schaltet man nämlich die Ankerspannung abrupt ab, so steigt der Strom in der Ankerwicklung stark an. Dies ist durch die im Erregerfeld induzierte Spannung zu erklären. Da die kompensierende Wirkung der Ankerspannung fehlt, steigt der Strom an. Da dieses sehr schlecht für den Motor ist, muss dir Spannung vor dem abschalten schrittweise herab gesetzt werden. Dies kann durch gesteuerte Gleichrichter oder mit Ankerwiderständen erfolgen. Die Spannungssteuerung wird hier allerdings bei weitem bevorzugt, da sie es ermöglicht, die Bewegungsenergie ins Netz, aus welchem der Motor versorgt wird, zurück zu speisen ( Nutzbremse ).
5.4 Schaltungen
5.4.1 Nebenschluss
Beim Nebenschlussmotor ist die Erregerwicklung parallel zur Ankerwicklung geschaltet. Beide Wicklungen liegen an einer Spannung.
Die Drehzahl fällt bei Belastung ab, da das Erregerfeld indirekt vom Ankerstrom ( Spannungsfall im Netz ) beeinflusst wird. Um beim Anlassen des Motors den Ankerstrom zu begrenzen, liegt in Reihe zum Anker der Anlasswiderstand. Im Betrieb wird er dann überbrückt. Die Erregerwicklung wird ebenfalls über den Anlasser geführt, damit beim Ausschalten des Motors die entstehende Selbstinduktion über den Anlasswiderstand und den Ankerkreis kurzgeschlossen wird. Der Nebenschlussmotor wird heute nur noch da verwendet, wo man nur eine Spannungsquelle hat und wo die Leistung permanenterregter Motoren nicht ausreicht.

Seite 21 von 21
5.4.2 Reihenschluss
Beim Reihenschlussmotor sind Ankerwicklung und Erregerwicklung in Reihe geschaltet. Beide Wicklungen werden vom gleichen Strom durchflossen. Die Erregerwicklung muss allerdings, nicht wie im Nebenschlussmotor, niederohmig sein. Beim Anlauf und bei Belastung wird ein großer Strom aufgenommen, der ein großes Drehmoment erzeugt. Es liegt ein hohes Anlaufdrehmoment vor. Die Kopplung des Erregerstroms mit dem Ankerstrom wirkt sich allerdings negativ auf die Drehzahl aus. Durch die Verringerung der Drehzahl bei Belastung steigt der Ankerstrom an. Das stärker werdende Erregerfeld bewirkt ein weiteres Absinken der Drehzahl, bis sich ein stabiler Arbeitspunkt einstellt. Die Drehzahl fällt bei Belastung stark ab. Bei Entlastung steigt die Drehzahl, und der Strom wird kleiner. Das Erregerfeld wird geschwächt und die Drehzahl steigt stark an. Bei völliger Entlastung ( Leerlauf ) nimmt die Drehzahl immer weiter zu, da das Erregerfeld weiter geschwächt wird. Der Motor geht durch. Die Drehzahl des Reihenschlussmotors ist sehr lastabhängig. Eine Drehzahlerhöhung kann durch einen Feldsteller parallel zur Erregerwicklung oder durch Anzapfung der Erregerwicklung erreicht werden. Eine Drehzahlminderung ist durch die Verringerung der Spannung möglich. Außerdem muss der Anlaufstrom durch einen Anlasser begrenzt werden. Der Reihenschlussmotor wird aufgrund des hohen Anlaufdrehmomentes und der Steuerung der Fahrgeschwindigkeit über die Betriebsspannung zum Antrieb von Fahrzeugen ( z.B. Straßenbahn, Lokomotive ) eingesetzt. Außerdem wird der Reihenschlussmotor bei Hebezeugen, Autoanlasser,.... verwendet.
Patrik Datz Marco Teichert


















