Elektrische Antriebe_04
12
G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I 45 4. Stromrichtergespeiste Gleichstromantriebe Der geregelte Gleichstromantrieb erfüllt in Verbindung mit dem für den jeweiligen Verwendungs- zweck ausgewählten Stromrichter sehr viele Antriebsanforderungen und erweist sich bezüglich des Kennlinienfeldes, seiner Regelbarkeit und Dynamik als universell anwendbar. Durch die Gleichstrommaschine mit Kommutator sind diesem Antrieb jedoch Grenzen gesetzt. 4.1 Antriebe mit netzgeführten Stromrichtern Bei der Speisung einer Gleichstrom-Nebenschlussmaschine über ein Stromrichter-Stellglied treten infolge des Oberschwingungsgehalts der Gleichspannung und bei lückendem Ankerstrom Beson- derheiten im Betriebsverhalten auf, die beim Entwurf des Antriebssystems beachtet werden müssen. Beim stationären Verhalten der stromrichtergespeisten Gleichstrom-Nebenschlussmaschine unter- scheidet man drei Betriebsbereiche: • Bei großen Widerstandsmomenten kann die Welligkeit des Gleichstromes vernachlässigt werden (w i ≈ 0). • Bei kleinen Widerstandsmomenten kann die Welligkeit des Gleichstromes nicht mehr vernachlässigt werden (w i > 0). • Bei sehr kleinen Widerstandsmomenten lückt der Ankerstrom. Die Maschine verliert hier ihr Nebenschlussverhalten. Im Lückbereich wird die Ankerzeitkonstante unwirksam und aus dem Abfall der Drehzahl- Drehmomenten-Kennlinie kann der fiktive Ankerkreiswiderstand ermittelt werden. Für den nach- stehenden Bereich ω 1 ·L A > 10·R A bei p = 2 (B2), ω 1 ·L A > 7·R A bei p = 3 (M3) und ω 1 ·L A > 4·R A bei p = 6 (B6, M6) gilt näherungsweise: R Al fiktiver Ankerkreiswiderstand im Lückbereich δ Stromführungsdauer im Bogenmaß ω 1 Netzfrequenz L A Ankerkreisinduktivität Fiktiver Ankerkreiswiderstand in Abhängigkeit vom Ankerstrom Im Lückbereich löschen die stromführenden Thyristoren vorzeitig. Die Überlappungen entfallen. Dadurch verringern sich die negativen Spannungszeitflächen in der Gleichspannung. Als Folge steigt die mittlere Gleichspannung mit abnehmendem Laststrom stark an. A 1 2 Al L p 4 = R ⋅ ω ⋅ δ ⋅ π (4.1) Lückbereich lückfreier Bereich w i > 0 w i ≈ 0 R Al R A + R Al R A R A 0 I d 0 I dl
Transcript of Elektrische Antriebe_04

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
45
4. Stromrichtergespeiste Gleichstromantriebe Der geregelte Gleichstromantrieb erfüllt in Verbindung mit dem für den jeweiligen Verwendungs-zweck ausgewählten Stromrichter sehr viele Antriebsanforderungen und erweist sich bezüglich des Kennlinienfeldes, seiner Regelbarkeit und Dynamik als universell anwendbar. Durch die Gleichstrommaschine mit Kommutator sind diesem Antrieb jedoch Grenzen gesetzt.
4.1 Antriebe mit netzgeführten Stromrichtern Bei der Speisung einer Gleichstrom-Nebenschlussmaschine über ein Stromrichter-Stellglied treten infolge des Oberschwingungsgehalts der Gleichspannung und bei lückendem Ankerstrom Beson-derheiten im Betriebsverhalten auf, die beim Entwurf des Antriebssystems beachtet werden müssen. Beim stationären Verhalten der stromrichtergespeisten Gleichstrom-Nebenschlussmaschine unter-scheidet man drei Betriebsbereiche: • Bei großen Widerstandsmomenten kann die Welligkeit des Gleichstromes vernachlässigt
werden (wi ≈ 0). • Bei kleinen Widerstandsmomenten kann die Welligkeit des Gleichstromes nicht mehr
vernachlässigt werden (wi > 0). • Bei sehr kleinen Widerstandsmomenten lückt der Ankerstrom. Die Maschine verliert hier
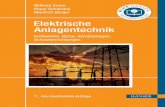
ihr Nebenschlussverhalten. Im Lückbereich wird die Ankerzeitkonstante unwirksam und aus dem Abfall der Drehzahl-Drehmomenten-Kennlinie kann der fiktive Ankerkreiswiderstand ermittelt werden. Für den nach-stehenden Bereich ω1·LA > 10·RA bei p = 2 (B2), ω1·LA > 7·RA bei p = 3 (M3) und ω1·LA > 4·RA bei p = 6 (B6, M6) gilt näherungsweise:
RAl fiktiver Ankerkreiswiderstand im Lückbereich δ Stromführungsdauer im Bogenmaß ω1 Netzfrequenz LA Ankerkreisinduktivität
Fiktiver Ankerkreiswiderstand
in Abhängigkeit vom Ankerstrom
Im Lückbereich löschen die stromführenden Thyristoren vorzeitig. Die Überlappungen entfallen. Dadurch verringern sich die negativen Spannungszeitflächen in der Gleichspannung. Als Folge steigt die mittlere Gleichspannung mit abnehmendem Laststrom stark an.
A12Al L p 4 = R ⋅ω⋅δ⋅π (4.1)
Lückbereichlückfreier Bereich
wi > 0 wi ≈ 0RAl
RA + RAl
RA
RA
0Id0 Idl

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
46
----- Lückgrenze
Kennlinienfeld der stromrichtergespeisten Gleichstrommaschine
Durch entsprechende Dimensionierung der Glättungsdrossel kann man den Lückbereich vermeiden. Der Grenzstrom, bei dem Lücken auftritt, lässt sich nach Gl. 4.2 berechnen:
Idl Strom an der Lückgrenze fl(p, α) Lückfaktor (abhängig von der Pulszahl p des Stromrichters und vom Steuerwinkel α)
Lückfaktor fl in Abhängigkeit von der Aussteuerung Ud/Udi bei vollgesteuerten 3pulsigen
Stromrichterschaltungen (M3-Schaltung)
Lückfaktor fl in Abhängigkeit von der Aussteuerung Ud/Udi bei vollgesteuerten 6pulsigen
Stromrichterschaltungen (M6-, B6-Schaltung)
Der Grenzstrom, bei dem Lücken auftritt, ist bei α = 0° minimal und bei α = 90° maximal.
Die folgenden 4 Oszillogramme zeigen bei einer B6-Stromrichterschaltung die zeitlichen Verläufe der Ankerspannung uA = ud und des Ankerstromes iA = id. Die ersten drei
) (p,f LU
= I lA
didl α⋅ (4.2)
30°45°
60°
75°
90°
105°
120°
135°150°
1,0
0,8
0,6
0,4
0,2
0
-0,2
-0,4
-0,6
-0,8
-1,0
Id·R
Ud0
Id
Ud
f l in
ms
1,50
1,25
1,00
0,75
0,50
0,25
0,200
0,4 0,6 0,8 1Ud / Udi
f l in
ms
0,30
0,25
0,20
0,15
0,10
0,05
0,200
0,4 0,6 0,8 1Ud / Udi

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
47
Oszillogramme wurden bei nahezu konstantem Aussteuerungswinkel α und das 4. Oszillogramm bei minimalem Aussteuerungswinkel α aufgenommen.
-100
0
100
200
300
400
500
-5
0
5
10
15
20
25
0 1 2 3 4 5 6 7 8 9 10t in ms
Ud = 240 V Id = 1,0 A n = 750 min-1
i d in
A
u d in
V
-100
0
100
200
300
400
500
-5
0
5
10
15
20
25
0 1 2 3 4 5 6 7 8 9 10t in ms
Ud = 241 V Id =4,2 A n = 750 min-1
i d in
A
u d in
V
ud und id bei lückendem Ankerstrom ud und id bei lückfreiem Ankerstrom (α ≈ 60°, Leerlauf) (α ≈ 60°, wi > 0, Lückgrenze)
-100
0
100
200
300
400
500
-5
0
5
10
15
20
25
0 1 2 3 4 5 6 7 8 9 10t in ms
Ud = 249 V Id = 17,5 A n = 750 min-1
i d in
A
u d in
V
600
0
100
200
300
400
500
-5
0
5
10
15
20
25
0 1 2 3 4 5 6 7 8 9 10t in ms
Ud = 466 V Id = 6,6 A n = 1500 min-1
i d in
A
u d in
V
ud und id bei lückfreiem Ankerstrom ud und id bei lückfreiem Ankerstrom (α ≈ 60°, wi ≈ 0, großes Drehmoment) (α ≈ 20°, kleines Drehmoment)
Bei Vollaussteuerung (α ≈ 0°) ist die Welligkeit des Ankerstromes gering, die Lückgrenze wird erst bei sehr kleinen Ankerströmen erreicht. Dynamisches Verhalten Unter dem dynamischen Verhalten elektrischer Antriebssysteme versteht man den zeitlichen Verlauf der Regelgrößen, z. B. Drehzahl oder Drehmoment, bei Änderung von Führungsgrößen, (wie Ankerspannung oder Erregerstrom) oder bei Änderung von Störgrößen (wie Wider-standsmoment). Bei rascher Änderung der Führungs- bzw. Störgrößen können im Gegensatz zu den bisher langsam angenommenen Arbeitspunktwanderungen (auf den stationären Kennlinien) die elektromagnetischen Ausgleichsvorgänge nicht mehr vernachlässigt werden. Zur Bestimmung des dynamischen Verhaltens muss das vollständige Gleichungssystem der zeitlich veränderlichen Kenngrößen aufgestellt werden. Für eine Gleichstrom-Nebenschluss-maschine mit Φ = konst. gilt:
dtdn J 2 + m = i
2 c = m
dt
di L + i R +n c = u
WAA
AAAAA
⋅⋅π⋅πΦ⋅
⋅⋅⋅Φ⋅ (4.3)

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
48
Beide Differentialgleichungen sind linear und haben konstante Koeffizienten. Zur Berechnung interessierender Größen, wie n und i, kann deshalb die Laplace-Transformation herangezogen werden. Die zeitlich veränderlichen Größen verlaufen im allgemeinen von einem stationären Anfangs-zustand X aus nach x = X + ∆x. Werden nur kleine Änderungen berücksichtigt, dann erhält man zwei Gleichungssysteme, die getrennt betrachtet werden können. Für den stationären Anfangszustand gilt:
Für die Änderungen gilt:
Für die DGL 4.5 sind die Anfangsbedingungen Null. Es erfolgt die Transformation in den Bildbereich. ο•
Hieraus ergeben sich für die Änderungen ∆iA(s) und ∆uA(s):
Aus den DGL 4.7 und 4.8 erhält man durch Umstellung die Änderungen ∆n(s) und ∆iA(s) in Abhängigkeit von ∆uA(s) und ∆mW(s). Hierbei werden eingeführt die elektromagnetische Ankerzeitkonstante τA und die elektromechanische Zeitkonstante τM.
Für Gleichstrommaschinen in Normalausführung mit Nennleistungen 100 W ≤ PN ≤ 100 kW weisen die Zeitkonstanten τA ≈ 12...80 ms und τM ≈ 20...40 ms auf.
WAA
AAA
M = I 2 c = M
I R +n c = U
⋅πΦ⋅
⋅⋅Φ⋅ (4.4)
dtnd J 2 + m = i
2 c = m
dtid
L + i R +n c = u
WAA
AAAAA
∆⋅⋅π∆∆⋅
πΦ⋅
∆
∆⋅∆⋅∆⋅Φ⋅∆
(4.5)
n(s) s J 2 + (s)m = (s)i 2 c = (s)m
(s)i s) L + (R + n(s) c = (s)u
WAA
AAAA
∆⋅⋅⋅π∆∆⋅πΦ⋅
∆
∆⋅⋅∆⋅Φ⋅∆ (4.6)
Φ⋅∆⋅⋅π⋅
Φ⋅π⋅∆
∆ c
n(s) s 4 J + c
2 (s)m = (s)i
2W
A (4.7)
)L s + (R c
n(s) s 4 J + 2 (s)m + n(s) c = (s)u AA
2W
A ⋅⋅Φ⋅
∆⋅⋅π⋅π⋅∆∆⋅Φ⋅∆ (4.8)
) s + s + (1 c
) s + (1 (s)m cR 2 - (s)u
= n(s)MA
2M
AWA
A
τ⋅τ⋅τ⋅⋅Φ⋅
τ⋅⋅∆⋅Φ⋅⋅π
∆∆ (4.9)
MA2
M
WA
AM
AA s + s + 1
(s)m cR 2 + (s)u s
R1 = (s)i
τ⋅τ⋅τ⋅
∆⋅Φ⋅⋅π
∆⋅τ⋅⋅∆ (4.10)
2
2A
MA
AA ) (c
4 J R = RL =
Φ⋅π⋅⋅
ττ (4.11)

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
49
Als Führungsverhalten des Antriebssystems bezeichnet man nach (Gl. 4.9 und 4.10) die Abhängigkeit der Größen n(s) und iA(s) von uA(s) für ∆mW = 0. Bei den Anfangsbedingungen von Null erhält man:
Das Störverhalten bestimmt man mit ∆uA = 0:
Die Übertragungsfunktionen (4.12 bis 4.15) zeigen das gleiche Nennerpolynom. Es prägt den Zeitverlauf von n und iA. Die Wurzeln der charakteristischen Gleichung 1 + s · τM + s2 · τM · τA lauten:
Für 4τA < τM sind s1/2 negativ und reell; die Vorgänge verlaufen aperiodisch. Dieser Verlauf tritt bei
den meisten Gleichstrommaschinen mit angekuppelter Arbeitsmaschine auf. 4τA = τM sind s1 = s2 = - 1/2τA. Die Wurzeln sind negativ und reell (aperiodischer Grenzfall). 4τA > τM sind s1/2 negativ und komplex; es bilden sich Schwingungsvorgänge aus. Dieser
Verlauf kann bei trägheitsarmen Antrieben auftreten. Nach den Übertragungsfunktionen kann der Signalflussplan der konstant erregten Gleichstromnebenschlussmaschine aufgestellt werden.
-+
uA
Führungs-größe
Störgröße
Regel-größe
mW
n
iA
1 2 3
4
-+uq
mA mB
Signalflussplan der Gleichstrom-Nebenschlussmaschine
MA2
MA s + s + 11
c1 =
(s)un(s)
τ⋅τ⋅τ⋅⋅
Φ⋅ (4.12)
MA2
M
M
AA
A
s + s + 1 s
R1 =
(s)u(s)i
τ⋅τ⋅τ⋅τ⋅
⋅ (4.13)
MA2
M
A2A
W s + s + 1 s 1
) (cR 2 - =
(s)mn(s)
τ⋅τ⋅τ⋅τ⋅+
⋅Φ⋅⋅π (4.14)
MA2
MW
A
s + s + 11
c 2 =
(s)m(s)i
τ⋅τ⋅τ⋅⋅
Φ⋅π (4.15)
ττ
±⋅τ M
A
A2/1
4 - 1 1
21 - = s (4.16)
c J s 2
1 = s ) (c
2 R
2 c
) s + (1 R1
M2
A
AA
Φ⋅⇒⋅⋅πτ⋅⋅Φ⋅
π⋅⇒
πΦ⋅
⇒τ⋅⋅
⇒
43
21

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
50
Das Übergangsverhalten bei sprungartiger Führungsgrößenänderung soll bei einer drehzahl-unabhängigen Belastung (MW = konst.) bestimmt werden. Bei stationärem Ausgangszustand und sprungförmiger Spannungsänderung bestimmt man mit ∆uA(s) = ∆UA(s)/s und ∆mW(s) = 0 nach Gl. (4.9 und 4.10) das Führungsverhalten.
Für Gl. (4.17 und 4.18) erfolgt die Rücktransformation in den Zeitbereich. •ο
Drehzahl- und Stromübergangsverhalten
der Gleichstrom-Nebenschlussmaschine bei
Spannungssprung
Das Störverhalten wird bei Betrieb an konstanter Spannung (UA = konst.) ermittelt. Bei stationärem Ausgangszustand und sprungförmiger Änderung des Widerstandsdrehmoments bestimmt man mit ∆mW = ∆MW/s und ∆uA(s) = 0 nach Gl. (4.9 und 4.10) das Störverhalten.
Für Gl. (4.21 und 4.22) erfolgt die Rücktransformation in den Zeitbereich. •ο
) s + s + (1 s1
c(s)U
= (s)nMA
2M
AW τ⋅τ⋅τ⋅⋅
⋅Φ⋅
∆∆ (4.17)
MA2
M
M
A
AAW s + s + 1
R
(s)U = (s)i
τ⋅τ⋅τ⋅τ
⋅∆
∆ (4.18)
⋅⋅⋅
Φ⋅∆
∆⋅⋅
21
t s1
t s2A
W s - se s - e s
+ 1 c
U = (t)n
21
(4.19)
21
t s t s
AA
AAW s - s
e - e R
U = (t)i21 ⋅⋅
⋅τ⋅
∆∆ (4.20)
) s + s + (1 s) s + (1 M
) (c
R 2 - = (s)nMA
2M
AW2A
z τ⋅τ⋅τ⋅⋅τ⋅⋅∆
⋅Φ⋅⋅π
∆ (4.21)
) s + s + (1 s1 M
c 2 = (s)i
MA2
MWAz τ⋅τ⋅τ⋅⋅⋅∆⋅
Φ⋅π
∆ (4.22)
⋅τ
⋅⋅⋅∆⋅
Φ⋅⋅π
∆⋅⋅⋅⋅
)s - (s e - e +
s - se s - e s
+ 1 M ) (c
R 2 - = (t)n
21M
t s t s
21
t s1
t s2
W2A
z
2121
(4.23)
⋅⋅⋅∆⋅
Φ⋅π
∆⋅⋅
21
t s1
t s2
WAz s - se s - e s
+ 1 M c 2 = (t)i
21
(4.24)
1,5
1,01,0
1,5
0,5 0,5
0
-0,5 -0,5
0
0 4 6 8 10
τ A = τ M
4τ A = τ M
τ A = τ M
4τ A = τ M
t/τ A2
∆ n W ∆ U/c· Φ
∆ iAW
∆ U/RA

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
51
Für t » τA kann das Glied es2·t = e-t/τA ≈ 0 gesetzt werden. Die Übergangsvorgänge werden bei τA « τM allein von der elektromechanischen Zeitkonstante geprägt. Der Strom iA kann sich dann nahezu sprunghaft ändern. Die Drehzahländerung ist jedoch stets an die elektromechanischen Zeitkonstante τM geknüpft.
Drehzahl- und Stromübergangsverhalten
der Gleichstrom- Nebenschlussmaschine
bei Drehmomenten- sprung MW
Struktur und Parameteränderungen im Signalflussplan des stromrichtergesteuerten Gleichstrom-antriebes beim Übergang in den Lückbereich erschweren die Optimierung des dynamischen Verhaltens des geregelten Antriebssystems. Im Signalflussplan der Gleichstrom-Nebenschlussmaschine (S. 41) ändert sich der Block 1.
Mit einer adaptiven Ankerstromregelung, die sich der Änderung der Regelstrecke anpasst, wird im gesamten Ankerstrombereich ein optimales Übergangsverhalten erreicht.
4.2 Antriebe mit Pulssteller Bei batteriegetriebenen Elektrofahrzeugen werden zur Ankerspannungsstellung und bei Gleichstromstellantrieben verlustarm arbeitende Pulssteller angewendet. Der Pulssteller ist ein hochwertiges Stellglied mit geringer Totzeit. Beim Pulssteller (Gleichstromsteller) wird durch ein elektronisches Stellglied S die Netzspannung UN mit möglichst hoher Frequenz fP pulsförmig auf den Antrieb geschaltet. Bei der häufig verwendeten Pulsbreitensteuerung ist dabei innerhalb der konstanten Periodendauer tp = 1/fP die Einschaltzeit tE einstellbar. In den Pausen fließt der Ankerstrom über einen Freilaufkreis mit der Diode D weiter.
S L
GM
IDIN
IA
UA
uL
UN
RA
D
tE tA tP
uL
uL UA
UN
t
iAiN
iD
S elektronischer Ein-Ausschalter D Freilaufdiode L Gesamtinduktivität des Ankerkreises (LP + LA) RA Ankerkreiswiderstand
Grundschaltung eines Pulsstellers und Pulsbreitensteuerung der Gleichspannung UA
Betrieblückender R1 Betrieb lückfreier
) s + (1 R1
AlAA
⇒τ⋅⋅
⇒ 11
1,5
1,01,0
1,5
0,5 0,5
0
-0,5 -0,5
0
0 4 6 8 10
τA = τ M
4τA = τ M
τ A = τ M
4τA = τM
t/τ A2
∆ n Z −∆ M W ·(2 π ·R A )
∆ iAZ
∆ MW·2π /(c·Φ)(c· Φ) 2

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
52
Wenn das Stellglied S während der Zeit tE geschlossen ist, nimmt der Antrieb mit iA = iN Energie aus dem Netz auf. Die Spannungsgleichung des Kreises bei geschlossenem Schalter (0 ≤ t ≤ tE) lautet:
In der Zeit tA ist das Stellglied S geöffnet; der Strom iA = iD klingt infolge der magnetischen Energie der Induktivität L nur langsam über den Freilaufkreis ab. Im Freilaufkreis gilt bei geöffnetem Schalter (tE ≤ t ≤ tP):
Mit den Gl. (4.3, 4.25 und 4.26) kann das Drehzahl-Drehmomenten-Kennlinienfeld abhängig vom Tastverhältnis tE/tP bestimmt werden. Für den Betrieb des pulsgesteuerten Antriebs sind auch der Lückbereich und die auftretende Stromschwankungsbreite ∆iA von Bedeutung, die aus den Stromverläufen (4.27 und 4.28) ermittelt werden. Schalter geschlossen (0 ≤ t ≤ tE):
Schalter geöffnet (tE ≤ t ≤ tP):
mit ∆iA = │IA2│ - │IA1│ als Stromschwankungsbreite. Durch Einsetzen von tE und tP in Gl. (4.27 und 4.28) erhält man nach Umstellung für den Puls-steller in Grundschaltung:
Für tP « τA vereinfacht sich Gl. (4.29) zu:
Bei tE/tP = 0,5 stellt sich die größte Stromschwankungsbreite ∆iA ein. Das Stromlücken tritt dann auf, wenn der Strom iA nach Gl. (4.27 und 4.28) Null wird. Entspricht dabei die Stromführungsdauer der Periodendauer tP, so liegt gerade die Lückgrenze vor. Bei vorgegebenem Lückgrenzstrom Idl gilt für die erforderliche Ankerkreisinduktivität L = LP + LA:
Durch geeignete Wahl der Pulsfrequenz bzw. Vergrößerung der Ankerkreisinduktivität kann der Lückbereich eingeengt bzw. vermieden werden. Die Vergrößerung der Pulsfrequenz ist gegen-über dem unwirtschaftlichen Einsatz von Glättungsdrosseln vorzuziehen. Außerdem wird damit das dynamische Verhalten des Pulsstellers verbessert. Mit dem Gleichstromsteller können hohe Forderungen an den Drehzahlstellbereich (S = 1 : 0,001) erfüllt werden. Als Mittelwert der Spannungsimpulse stellt sich die Ankerspannung UA nach Gl. (4.32) ein.
Die Ankerspannung kann so stufenlos zwischen Null und UN variiert werden.
dtdi L + i R +n c = u + U = U A
AALAN ⋅⋅⋅Φ⋅ (4.25)
dtdi L + i R +n c = 0 = u +U A
AALA ⋅⋅⋅Φ⋅ (4.26)
A/t
A
N1A
A
NA e
Rn c - U
- I + R
n c - U = i τ−⋅
⋅Φ⋅⋅Φ⋅ (4.27)
AE /) t- t(
A2A
AA e
Rn c I +
Rn c = i τ−⋅
⋅Φ⋅+
⋅Φ⋅− (4.28)
AP
AEPAE
/t
/)t - t(/t
A
NA e - 1
)e - (1 )e - (1 RU = i τ−
τ−τ− ⋅⋅∆ (4.29)
⋅⋅∆
P
EE
NA t
t - 1 t L
U = i (4.30)
AdlN
AdlN
PA
R I 2 UR I 2 + U
ln
t R = L
⋅⋅−⋅⋅
⋅ (4.31)
AE
EN
P
ENA t+ t
t U = tt U = U ⋅⋅ (4.32)

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
53
Durch Vertauschen der Anordnung von Freilaufdiode und Stellglied kann eine Rücklieferung von Energie in die Batterie beim Pulssteller erfolgen. Die Möglichkeit der Energierückgewinnung wird bei Elektrofahrzeugen genutzt. Wegen der geringen dynamischen Anforderungen kann die Umschaltung Fahr- zum Bremsbetrieb auch mit mechanischen Schaltern durchgeführt werden.
Schalter 1 geschlossen: Motorbetrieb
Schalter 2 geschlossen: Nutzbremsung
Prinzipschaltung eines Pulsstellers für
Elektrofahrzeuge
Im Motorbetrieb fließt der Ankerstrom im Kreis Gleichstrommaschine - Batterie - T. Den Frei-laufkreis bilden bei Löschung von T die Gleichstrommaschine - D1. Im Bremsbetrieb fließt bei Löschung von T der Ankerstrom im Kreis Gleichstrommaschine - D2 - Batterie - D1. Den Frei-laufkreis bilden die Gleichstrommaschine - D2 - T. Erfolgt die Einspeisung eines Elektrofahrzeuges durch einen Fahrdraht, so ist der Schaltungs-aufbau entsprechend. Es ist jedoch ein LC-Filter notwendig, um die Stromrichterventile bei Stromunterbrechung vor Überspannungen, bedingt durch die Fahrleitungsinduktivität, zu schützen. Für Gleichstrom-Servoantriebe werden häufig transistorisierte 4-Quadranten-Gleichstromsteller in Brückenschaltung (T1 - T4) verwendet.
Prinzipschaltung eines
Transistorstellers mit IGBT´s
Als Stellglied werden heute eingesetzt: • Feldeffekttransistoren bis zu rd. 10 kW bei hoher Pulsfrequenz (über 20 kHz); • IGBT's bis zu rd. 1000 kW bei mittlerer Pulsfrequenz (bis rd. 16 kHz) • GTO-Thyristoren bei hohen Leistungen (fP < 2 kHz). 4.3 Regelung von Gleichstromantrieben Stromrichtergespeiste Gleichstromantriebe besitzen generell eine Steuer- und Regeleinrichtung. Sie hat folgende Hauptaufgaben zu erfüllen: • Bereitstellung der Steuersignale für das Stromrichterstellglied, • Schutz des Stromrichterstellgliedes vor betriebsmäßigen Überlastungen, • genaue Einhaltung vorgegebener Regelgrößen des Antriebssystems, wie Drehmomente,
Drehzahlen, Drehwinkel entsprechend den technologischen Sollwerten unabhängig von Störgrößeneinwirkungen,
• Realisierung definierter Fahrkurven und Übergangsprozesse in den technologischen Anlagen, in denen Antriebe als Stellglieder eingesetzt sind.
UN
uLiA
UA
GM
2 1
11 2
D2D1
T
T1 T3
T2 T4
GML1L2L3
UC C
UA
IAL

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
54
Bei der Drehzahlverstellung einer stromrichtergespeisten Gleichstrommaschine wird im allgemeinen nur die Ankerspannung UA verändert. Die Spannung der Erregerwicklung UE wird meistens nicht beeinflusst. Bei betriebswarmer Maschine stellt sich ein nahezu konstanter Erregerstrom IE und damit ein entsprechend konstanter Fluss Φ in der Maschine ein. Die Drehzahlverstellung kann grundsätzlich mit einer Steuereinrichtung oder einer Regel-einrichtung erfolgen. Ein optimales dynamisches Verhalten bei Sollwert- und Störgrößen-änderungen kann jedoch nur mit Regeleinrichtungen erreicht werden.
Drehzahlsteuerung Mit der Eingangsgröße (Führungsgröße w), die über ein Potentiometer einstellbar ist, wird das Stellglied (vollgesteuerte B6-Schaltung mit Steuersatz) beeinflusst. Am Ausgang des Stellgliedes steht die Gleichspannung Ud = UA als Stellgröße zur Verfügung. Der Ankerstrom Id = IA stellt sich entsprechend dem Drehmoment ein. Die Drehzahl stellt sich proportional zur Maschinen-quellenspannung UqM ein, da der Fluss in der Maschine nahezu konstant ist.
Drehzahlsteuerung einer Gleichstrommaschine
Signalfluss einer Steuerung
Drehzahlregelung Der Drehzahlsollwert nW (Führungsgröße w) wird mit dem Drehzahlistwert der Tachomaschine nM verglichen und die Sollwertabweichung dem Drehzahlregler zugeführt. Der Drehzahlregelung ist eine Ankerstromregelung unterlagert, die einerseits den Stromrichter gegen Überlastung schützt und anderseits zu einem guten dynamischen Verhalten für die Stromregelung führt. Der überlagerte Drehzahl-Regelkreis liefert für den Ankerstrom-Regelkreis die Führungsgröße, die mit dem Stromistwert verglichen wird. Der Ausgang des Stromreglers beeinflusst das Stellglied (vollgesteuerte B6-Schaltung mit Steuersatz). Am Ausgang des Stellgliedes steht die Gleichspan-nung Ud = UA als Stellgröße zur Verfügung. Der Ankerstrom Id = IA stellt sich abhängig vom Drehmoment und vom Stromregler ein. Die Drehzahl stellt sich proportional zur Maschinen-quellenspannung UqM ein.
Stellglied
FührungsgrößeStellgröße Steuergröße
Steuerstrecke
L1L2L3
USα Ud
Id
Uq
IE
n
MW
LA RA
GM
z2
Steuerstrecke xy
z1
Stellgliedw
w Führungsgröße (Sollwert)
z1, z2 Störgrößen
y Stellgröße
x Steuergröße

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
55
Drehzahlregelung einer Gleichstrommaschine
Signalflussplan einer Regelung
Verlauf der Regelgröße nach einer sprunghaften
Änderung des Drehmomentes mW
Verlauf der Regelgröße nach einer sprunghaften
Änderung der Führungsgröße w
L1L2
L3
1 Drehzahlregler2 Stromregler
1 2uRnW Ud Uq
Id IEMW
nTGM
RegelstreckeStellgliedReglerFührungsgröße Stellgröße Regelgröße
α
LA RA
xy
y Stellgröße
x Regelgröße
z1
wRegeleinrichtung
w Führungsgröße (Sollwert)
z1, z2 Störgrößen
z2
Regelstrecke
Anregelzeit
Regelgröße x
Ausregelzeit
xm
Last m W
Toleranzband
Führungsgröße w
Regelgröße
t
Toleranzband
Ausregelzeit
Anregelzeit
xm
t

G. Schenke, 7.2008 Elektrische Antriebe FB Technik, Abt. E+I
56
Das quasistationäre und das dynamische Verhalten des drehzahlgeregelten Gleichstromantriebs kann in einem Blockschaltbild dargestellt werden.
Blockschaltbild des drehzahlgeregelten Gleichstromantriebes
c J s 2
1 = s ) (c
2 R
2 c
) s + (1 R1
M2
A
AA
Φ⋅⇒⋅⋅πτ⋅⋅Φ⋅
π⋅⇒
πΦ⋅
⇒τ⋅⋅
⇒ 4321
Die Blöcke 1 - 4 stellen die Gleichstrommaschine mit sogenannter EMK-Schleife dar (Signalflussplan der GNM 4.1-9).
Der Block 5 stellt den netzgeführten Stromrichter als Totzeitglied mit der Verstärkung kSt dar.
Block 6 stellt den Stromregler mit PI-Verhalten und Block 7 den Drehzahlregler ebenfalls mit PI-Verhalten dar. Die PI-Regler verhindern eine bleibende Drehzahlabweichung bei Drehmomenten-sprüngen.
St sSt e k τ⋅−⋅⇒5
n
nn
i
ii s
) s + (1 k s
) s + (1 k τ⋅
τ⋅⋅⇒
τ⋅τ⋅⋅
⇒ 76
7 6 5 1 2
4
3
nW niAW iAuR
uA uq mAmB
mW
+ _ + + +_
_
_