Elektrische Welle - Synchronlauf von 2 Motoren Ein ... · angesteuert werden und in einer...
22
Elektrische Welle - Synchronlauf von 2 Motoren Ein Beispiel für Mechatronik Manfred Hermanski Fachhochschule Bielefeld
-
Upload
truongkiet -
Category
Documents
-
view
236 -
download
0
Transcript of Elektrische Welle - Synchronlauf von 2 Motoren Ein ... · angesteuert werden und in einer...
Elektrische Welle - Synchronlauf von 2 Motoren
Ein Beispiel für Mechatronik
Manfred Hermanski Fachhochschule Bielefeld
Elektrische Welle
ELEWELLE_17.doc 04.10.10 2
Inhaltsverzeichnis
1 EINLEITUNG 2
2 AUFGABE 3
3 REGLERKONZEPT 5
4 ANHANG 22
4.1 Literaturhinweise: 22
4.2 Simulationsbeispiel 2: Simulation eines Gleichstrommotors 9
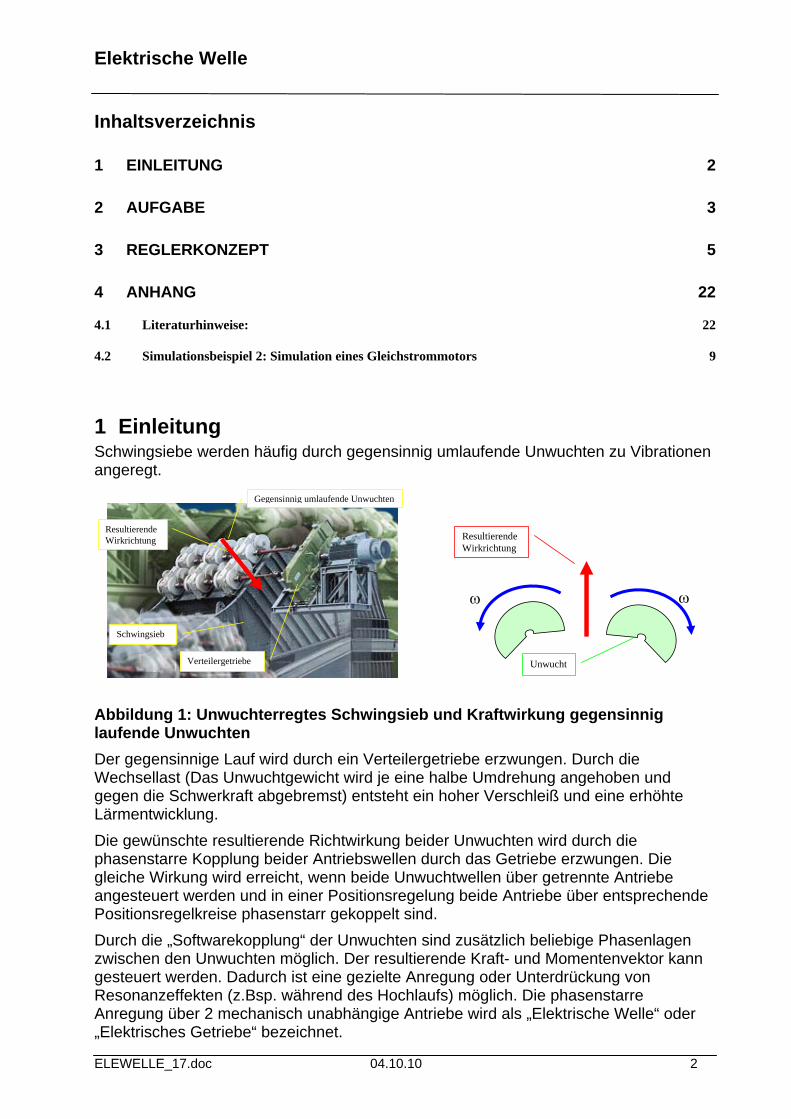
1 Einleitung Schwingsiebe werden häufig durch gegensinnig umlaufende Unwuchten zu Vibrationen angeregt.
Schwingsieb
Gegensinnig umlaufende Unwuchten
Verteilergetriebe
Resultierende Wirkrichtung
Unwucht
Resultierende Wirkrichtung
Abbildung 1: Unwuchterregtes Schwingsieb und Kraftwirkung gegensinnig laufende Unwuchten
Der gegensinnige Lauf wird durch ein Verteilergetriebe erzwungen. Durch die Wechsellast (Das Unwuchtgewicht wird je eine halbe Umdrehung angehoben und gegen die Schwerkraft abgebremst) entsteht ein hoher Verschleiß und eine erhöhte Lärmentwicklung.
Die gewünschte resultierende Richtwirkung beider Unwuchten wird durch die phasenstarre Kopplung beider Antriebswellen durch das Getriebe erzwungen. Die gleiche Wirkung wird erreicht, wenn beide Unwuchtwellen über getrennte Antriebe angesteuert werden und in einer Positionsregelung beide Antriebe über entsprechende Positionsregelkreise phasenstarr gekoppelt sind.
Durch die „Softwarekopplung“ der Unwuchten sind zusätzlich beliebige Phasenlagen zwischen den Unwuchten möglich. Der resultierende Kraft- und Momentenvektor kann gesteuert werden. Dadurch ist eine gezielte Anregung oder Unterdrückung von Resonanzeffekten (z.Bsp. während des Hochlaufs) möglich. Die phasenstarre Anregung über 2 mechanisch unabhängige Antriebe wird als „Elektrische Welle“ oder „Elektrisches Getriebe“ bezeichnet.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 3
Ein weiteres Anwendungsbeispiel für „Elektrische Welle“ sind modernen Flexodruckmaschinen bei denen Dutzende phasensynchrone Antriebe eingesetzt werden. Hierbei sollen jedoch keine Schwingungen angeregt werden, ausgewuchtete Wellen drucken verschiedene Farben nacheinander passgenau (Mikrometerbereich).
Abbildung 2: Anwendungsbeispiel „Elektrische Welle“ in einer Flexodruckmaschine aus dem Hause Fischer&Krecke.
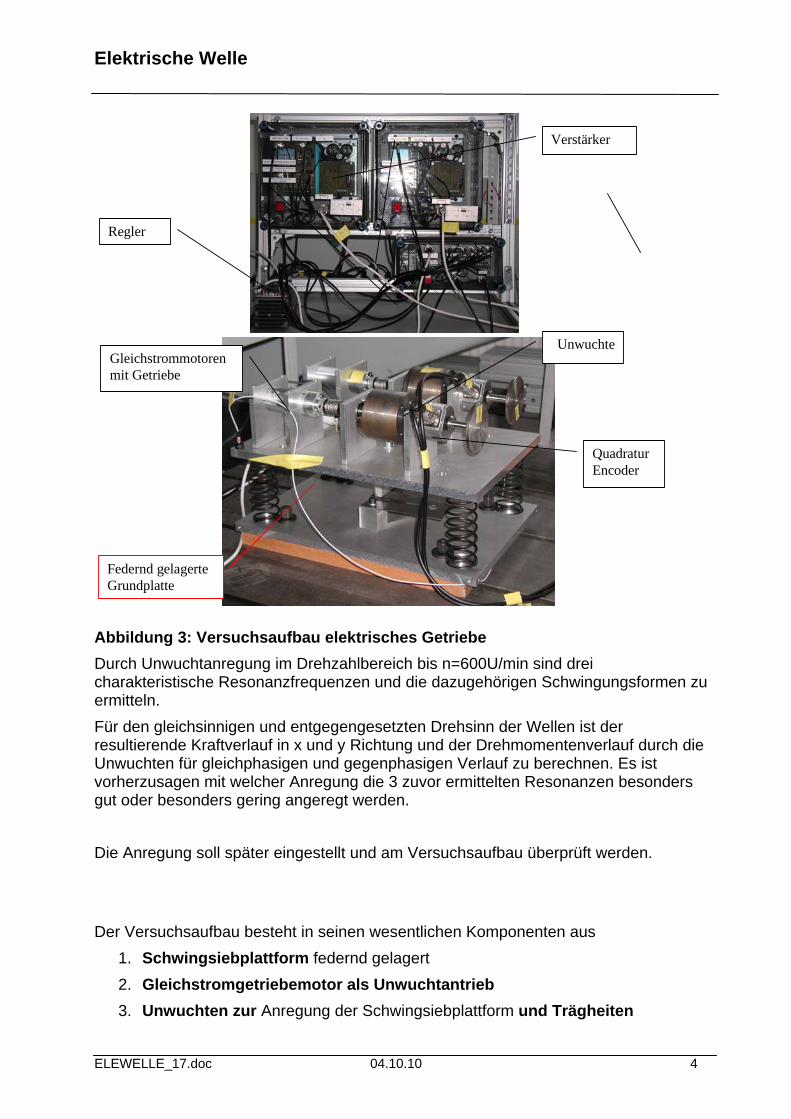
2 Aufgabe Zwei Gleichstromgetriebemotore (24V) sollen zwei mechanisch unabhängige Wellen mit Unwuchten phasenstarr antreiben (Abbildung 3). Der Phasenunterschied und die Drehrichtung sind beliebig einzustellen. Die Drehzahl und die Phasenlage der Antriebe wird über Quadraturencoder ermittelt. Die Regelung soll durch zwei Positionsregler die einem virtuellen Antrieb folgen realisiert werden.
Elektrische Welle
ELEWELLE_17.doc 04.10.10 4
Gleichstrommotoren mit Getriebe
Verstärker
Unwuchte
Federnd gelagerte Grundplatte
Quadratur Encoder
Regler
Abbildung 3: Versuchsaufbau elektrisches Getriebe
Durch Unwuchtanregung im Drehzahlbereich bis n=600U/min sind drei charakteristische Resonanzfrequenzen und die dazugehörigen Schwingungsformen zu ermitteln.
Für den gleichsinnigen und entgegengesetzten Drehsinn der Wellen ist der resultierende Kraftverlauf in x und y Richtung und der Drehmomentenverlauf durch die Unwuchten für gleichphasigen und gegenphasigen Verlauf zu berechnen. Es ist vorherzusagen mit welcher Anregung die 3 zuvor ermittelten Resonanzen besonders gut oder besonders gering angeregt werden.
Die Anregung soll später eingestellt und am Versuchsaufbau überprüft werden.
Der Versuchsaufbau besteht in seinen wesentlichen Komponenten aus
1. Schwingsiebplattform federnd gelagert
2. Gleichstromgetriebemotor als Unwuchtantrieb
3. Unwuchten zur Anregung der Schwingsiebplattform und Trägheiten
Elektrische Welle
ELEWELLE_17.doc 04.10.10 5
4. Quadraturencoder zur Messung der Position und Berechnung der Drehzahl
5. Verstärker zur Ansteuerung der Motoren
6. Regler (programmierbarer Regler (Labview) auf cRIO Basis)
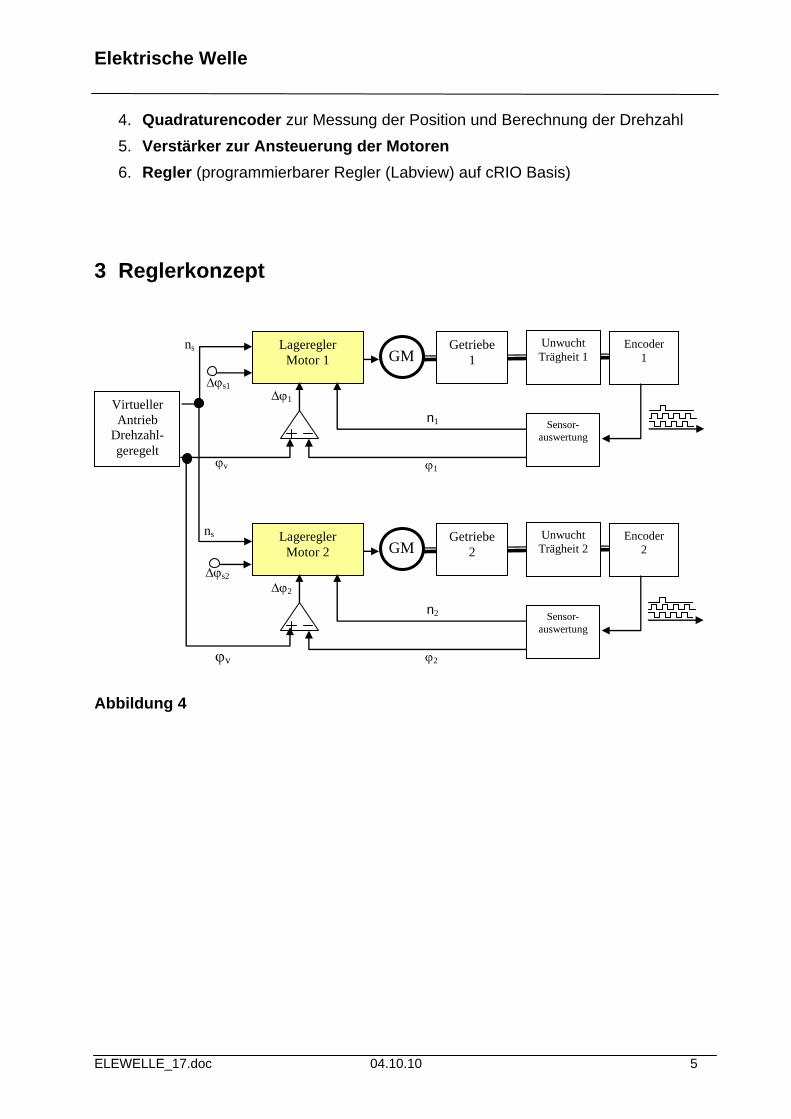
3 Reglerkonzept
Virtueller Antrieb
Drehzahl-geregelt
Lageregler Motor 1
Unwucht Trägheit 1
Getriebe 1
Encoder 1 GM
ns
1
n1 Sensor-auswertung
1
s1
v
Lageregler Motor 2
Unwucht Trägheit 2
Getriebe 2
Encoder 2 GM
ns
2
n2 Sensor-auswertung
2
s2
v
Abbildung 4
Elektrische Welle
ELEWELLE_17.doc 04.10.10 6
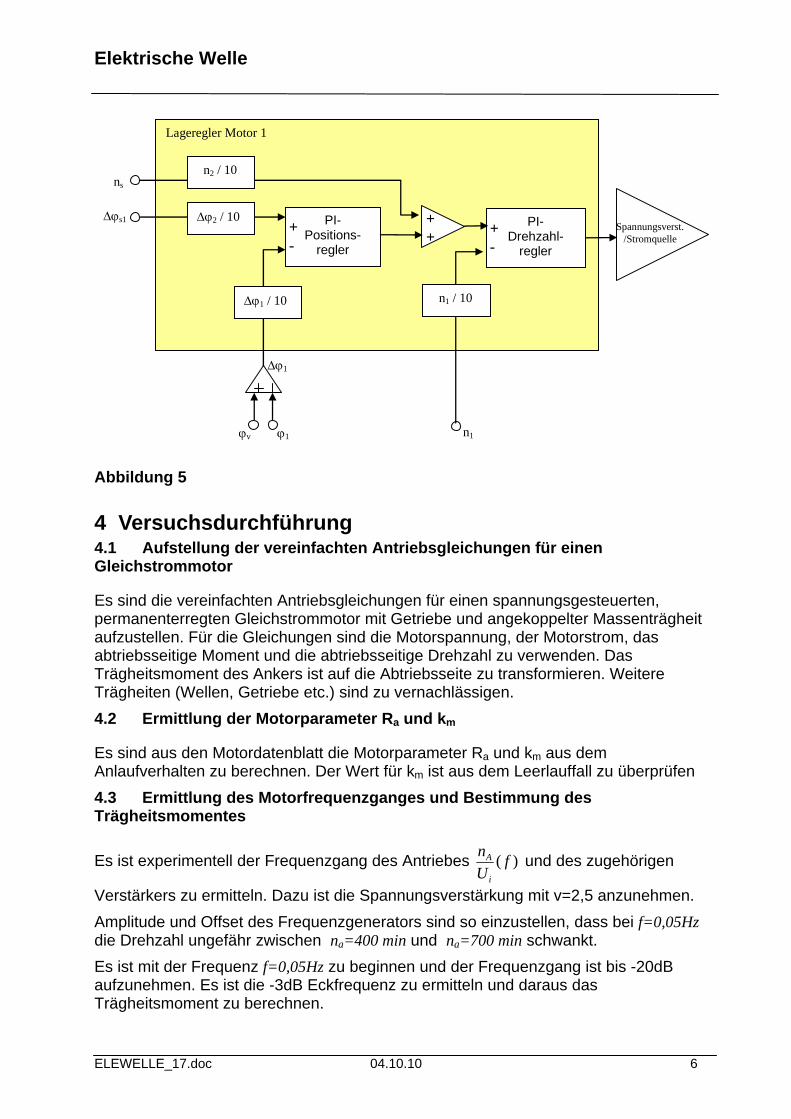
Lageregler Motor 1
ns
+ +
1
PI- Positions-
regler
+ -
v
Spannungsverst. /Stromquelle
PI- Drehzahl-
regler
+-
1
s1
n1
1 / 10 n1 / 10
2 / 10
n2 / 10
Abbildung 5
4 Versuchsdurchführung 4.1 Aufstellung der vereinfachten Antriebsgleichungen für einen Gleichstrommotor
Es sind die vereinfachten Antriebsgleichungen für einen spannungsgesteuerten, permanenterregten Gleichstrommotor mit Getriebe und angekoppelter Massenträgheit aufzustellen. Für die Gleichungen sind die Motorspannung, der Motorstrom, das abtriebsseitige Moment und die abtriebsseitige Drehzahl zu verwenden. Das Trägheitsmoment des Ankers ist auf die Abtriebsseite zu transformieren. Weitere Trägheiten (Wellen, Getriebe etc.) sind zu vernachlässigen.
4.2 Ermittlung der Motorparameter Ra und km
Es sind aus den Motordatenblatt die Motorparameter Ra und km aus dem Anlaufverhalten zu berechnen. Der Wert für km ist aus dem Leerlauffall zu überprüfen
4.3 Ermittlung des Motorfrequenzganges und Bestimmung des Trägheitsmomentes
Es ist experimentell der Frequenzgang des Antriebes )( fU
n
i
A und des zugehörigen
Verstärkers zu ermitteln. Dazu ist die Spannungsverstärkung mit v=2,5 anzunehmen.
Amplitude und Offset des Frequenzgenerators sind so einzustellen, dass bei f=0,05Hz die Drehzahl ungefähr zwischen na=400 min und na=700 min schwankt.
Es ist mit der Frequenz f=0,05Hz zu beginnen und der Frequenzgang ist bis -20dB aufzunehmen. Es ist die -3dB Eckfrequenz zu ermitteln und daraus das Trägheitsmoment zu berechnen.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 7
Vor dem Programmstart ist die Anzahl der Sample zu bestimmen, die bei einer Abtastrate von 10ms eine Analyse der Frequenz f=0,05Hz ermöglichen.
Das auf diese Weise ermittelte Trägheitsmoment ist mit dem Trägheitsmoment, berechnet aus Geometrie und Material zu vergleichen.
Aus dem abgeschätzten Grenzwert des Frequenzganges für n=0/min ist noch einmal die Momentenkonstante abzusichern.
Der Frequenzgang ist nach Amplitude und Phase (Bode-Diagramm) und als Nyquist Diagramm darzustellen.
V M
na Ja
Ui
Berechnung Drehzahl aus Encoder Signalen
Steuersoftware
Quadratur Encoder Signale
Signalgenerator
)sin(ˆ tUUU ioffseti
Frequenzgang
j
i
a
tji
tja e
U
n
eU
enˆˆ
Quadratur Encoder
iU
an
Abbildung 6: Aufbau FRF Messung
4.4 Bestimmung Reglerkonstanten für drehzahlgeregelten Antrieb
Für den spannungsgeregelten Antrieb sind die Regelkonstanten eines PI Reglers entsprechend den Gleichungen in 5.1.4 zu bestimmen. Es ist die Dämpfung und Resonanzfrequenz des geregelten Antriebs „sinnvoll“ anzunehmen. Für die Wahl der Resonanzfrequenz ist die Grenzfrequenz des Antriebs zu beachten.
Es ist weiter zu beachten, dass der P-Anteil des Reglers das Verhältnis zwischen einem Sprung der Sollwertdrehzahl und der Reglerausgangsspannung ist. Bei realistischen Sollwertsprüngen sollte der Regler nicht übersteuern.
4.5 Simulation drehzahlgeregelten Antrieb
Für den spannungsgeregelten Antrieb ist ein Simulationsmodell zu erstellen und die Regelung zu überprüfen. Dazu ist der Drehzahlsollwert mit einer Periodendauer von 1s zwischen 500 und 550 U/min zu verändern. Es ist darauf zu achten, dass während des Regelvorganges die Grenzwerte des Reglers nicht überschritten werden (Nichtlinearer Regler nicht betrachtet).
4.6 Inbetriebnahme der Drehzahlregelung
Das Simulationsmodell des spannungsgeregelten Antriebes ist als Sollwertvorgabe für die Drehzahlregelung beider Antriebe am Prüfstand zu verwenden. Der Drehzahlregler ist in Betrieb zu nehmen. Der Motor ist Spannungsgesteuert.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 8
Achtung! Es ist zu beachten dass für den Drehzahl- und Lageregler alle Ist- und Sollwerte um den Faktor 10 reduziert sind.
Setzen Sie dazu alle Reglerkonstanten für die Lageregelung auf Null (Lageregelung ist unwirksam).
Vu na Ja
Ui
Programm
Steuersoftware
Quadratur Encoder Signale
Lageregler
Virtueller Motor
Quadratur Encoder
a
a
n
Grad/
sn
Grads /
Programm v
vn
Grada /
- +
Abbildung 7
4.7 Erweiterung um Positionsregler
Die Regelung ist um einen Positionsregler zu erweitern, der zum Drehzahlregler in Kaskadenschaltung aufgebaut ist.
4.8 Ermittlung der mechanischen, Resonanzfrequenzen des Versuchsaufbaus
Mit einem Antrieb mit Unwucht sind die Resonanzfrequenzen im Bereich 100 – 300 U/min zu ermitteln.
4.9 Phasengekoppelte Anregung der Resonanzen
Durch „geschickte Wahl“ der Phasendifferenz der Antriebe sind die verschiedenen Resonanzfrequenzen jeweils stark und schwach anzuregen.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 9
5 Anhang 5.1 Gleichstrommotor
5.1.1 Gleichstrommotor ohne Drehzahlregler
Abbildung 8 zeigt ein Modell eines Permanenterregten Gleichstrommotors, der über ein Getriebe eine Trägheitslast antreibt. Der Motor wird von einem vorgeschalteten Verstärker gespeist.
Rm Lm
Uo Io
Ui VU
m m
nm Mm
Jm
a a
na
Ja
a
m
n
ni
Abbildung 8: Motor Modell
Für den Ankerstromkreis gilt die Gleichung:
meo
mmmo kdt
dILIRU
Dabei entspricht eind kU der induzierten Ankerspannung.
Für die mechanische Last gilt:
omm
ges Ikdt
dJ
Das Motormoment 0IKM mm ist proportional zum Ankerstrom
Dabei ist Jges das auf der Motorseite bezogene Trägheitsmoment. Das Trägheitsmoment Ja ist entsprechend auf die Motorseite transformiert.
2i
JJJ a
mges
Die Übersetzung i ist bei Getrieben das Verhältnis zwischen Antriebs- und Abtriebsdrehzahl.
In einer Leistungsbetrachtung für den Leerlauf kann gezeigt werden, dass me kk gilt.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 10
memomome
mmind
mmmooo
oindmooo kkIkIk
MIU
MRIIU
IURIIU
0
2
2
Die Gleichungen können zusammengefasst und nach der höchsten Ableitung aufgelöst werden.
omges
m
ommomm
o
IkJdt
d
UkIRLdt
dI
1
1
Es entsteht ein gekoppeltes Differential Gleichungssystem 1. Ordnung

Elektrische Welle
ELEWELLE_17.doc 04.10.10 11
5.1.2 Vereinfachtes Motormodell spannungsgesteuert
Der induktive Widerstand ist meistens gegenüber dem ohmschen Widerstand zu vernachlässigen. Im Modell eines Gleichstrommotors (GM) kann die Induktivität vernachlässigt werden.
omges
m
m
ommo
IkJdt
d
R
UkI
1
Die Beschreibung des elektrischen Teils des GM wird algebraisch und kann nach I aufgelöst werden. Setzt man I in die mechanische Beschreibung des GM ein, so wird diese zu einer Differentialgleichung erster Ordnung mit nur einer Variablen.
m
omm
ges
mm
m
ommo
R
Uk
J
k
dt
d
R
UkI
Nach Umformung lautet die Motorgleichung
mmommgesm kUkJR 2
Die Beschreibung der Mechanik auf der Motorseite kann auf die Abtriebsseite transformiert werden
i
MM
JJiJiJ
i
am
amges
am
22
Damit lautet die Motorgleichung
amomam
amomam
ikUkiJR
ikUkii
JR
22
22
Die motorseitige Drehmomentenkonstante kann ebenfalls zu einer abtriebsseitigen Konstante transformiert werden.
mM kiK
Damit lautet die Motorgleichung in der Beschreibung mit Winkelgeschwindigkeiten
aMoMam KUKJR 2

Elektrische Welle
ELEWELLE_17.doc 04.10.10 12
und in der Beschreibung durch Drehzahlen:
oMaMam UKnKnJRs
2
60
min2
Mit den Transformationsbeziehungen:
i
MMJJiJiJkiKin
sa
mamgesmMamaa
; ; ; ; 60
min2 22
5.1.3 Frequenzgang vereinfachtes Motormodell GM
Transformiert in den Frequenzbereich (Laplace-Bereich) lautet die GM-Beschreibung
oMaMam UKKsJR 2
Durch Einbeziehung des Spannungsverstärkers vU lautet die Motorgleichung
iMMma UvKKsJR 2
Der Frequenzgang des vereinfachten Motors in der Drehzahlbeschreibung lautet damit
2min2
60
Mm
M
i
a
KsJR
vKss
U
n
Für den statischen Fall vereinfacht sich der Frequenzgang zu:
Mi
a
K
vsHzf
U
n
min2
600
Aus dem experimentell ermittelten Frequenzgang kann aus dem statischen Grenzwert
HzfU
n
i
a 0 die Drehmomentenkonstante KM ermittelt, beziehungsweise überprüft
werden.
Die Eckfrequenz fg des Frequenzganges, bei der
dBHzf
U
n
fU
n
i
a
gi
a
3)0(
)(
log20
ist, wird erreicht, wenn 2Mgm KJR mit gg f 2 .
Bei bekanntem Innenwiderstand des Motors und bekannter Motorkonstante kann aus dieser Bedingung das Trägheitsmoment des Motorsystems ermittelt werden.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 13
5.1.4 Spannungsgesteuerter Motor mit Trägheitslast und PI-Regler
Die Motorgleichung lautet:
aMoMam KUKJR 2
Ein PI-Regler zur Einstellung der Motorspannung ist durch folgende Funktion beschrieben:
dt
TKU as
IasPi 1
Bezieht man zusätzlich einen Spannungsverstärker hinzu, dann lauten die Reglergleichungen:
dtT
KvU
vUU
asI
asPUo
Uio
1
Das dynamische Verhalten des geregelten Motors wird durch folgende Gleichung beschrieben:
sIaMIasasIPUMamI MTKTdtTKvKJRT 2
Differenzieren führt auf das Gleichungssystem
sIaMIasasIPUMamI MTKTTKvKJRT 2
Setzt man voraus, dass sich das Störmoment und die Solldrehzahl nur sehr langsam ändert 0 ; 0 ssM oder zumindest der Regelvorgang schneller erfolgt als eine
Sollwertänderung der Drehzahl, dann vereinfacht sich die Gleichung zur Beschreibung des Führungsverhaltens zu
aMIasaIPUMamI KTTKvKJRT 2
Umstellung der Gleichung zeigt die bekannte Struktur eines Systems 2. Ordnung
saaIPU
MIa
PUM
mI TKv
KT
KvK
JRT
Das System wird durch die „Kraft“ s angetrieben. Die „Steifigkeit“ ist Eins und die
„Trägheit“ PUM
mI
KvK
JRTM
. Die Kreisfrequenz des Regelkreises ist
JRT
KvK
mI
PUMres
und die „Dämpfung“ lautet IPU
M TKv
Kb
1

Elektrische Welle
ELEWELLE_17.doc 04.10.10 14
Die Abklingkonstante ist M
b
2 und die Dämpfung ist
res
D
Die Werte für TI und KP des Regler lassen sich berechnen, sofern man das dynamische Verhalten des Gesamtsystems, bestehend aus Regler und Motor festlegt. Das Regler-Motor System ist ein System 2. Ordnung, dass mit einer Resonanzfrequenz res
schwingen kann. Diese Schwingung kann gedämpft sein was durch Dämpfungszahl D beschrieben wird.
Dämpfung resres M
bD
2
Gibt man res und D vor, so sind nur noch die „Trägheit“ M und die Dämpfung b
unbestimmt.
DM
bres 2
Die Dämpfung b und die „Trägheit“ M hängen von den noch unbekannten Reglerparametern ab.
IPU
M TKv
Kb
1 und
PUM
MI
KvK
JRTM
Setzt man diese in obige Gleichung ein, so ergibt sich:
D
KvK
JRT
TKv
K
M
bres
PUM
MI
IPU
M
2
1
Die Reglerkonstante TI kürzt sich heraus. Der Ausdruck lässt sich nach der einzigen unbekannten KP auflösen.
DJR
KvKKv
K
resM
PUMPU
M
2
1
JRDKvKKv
KMresPUM
PU
M
21
JRDKvKK MresPUMM 22
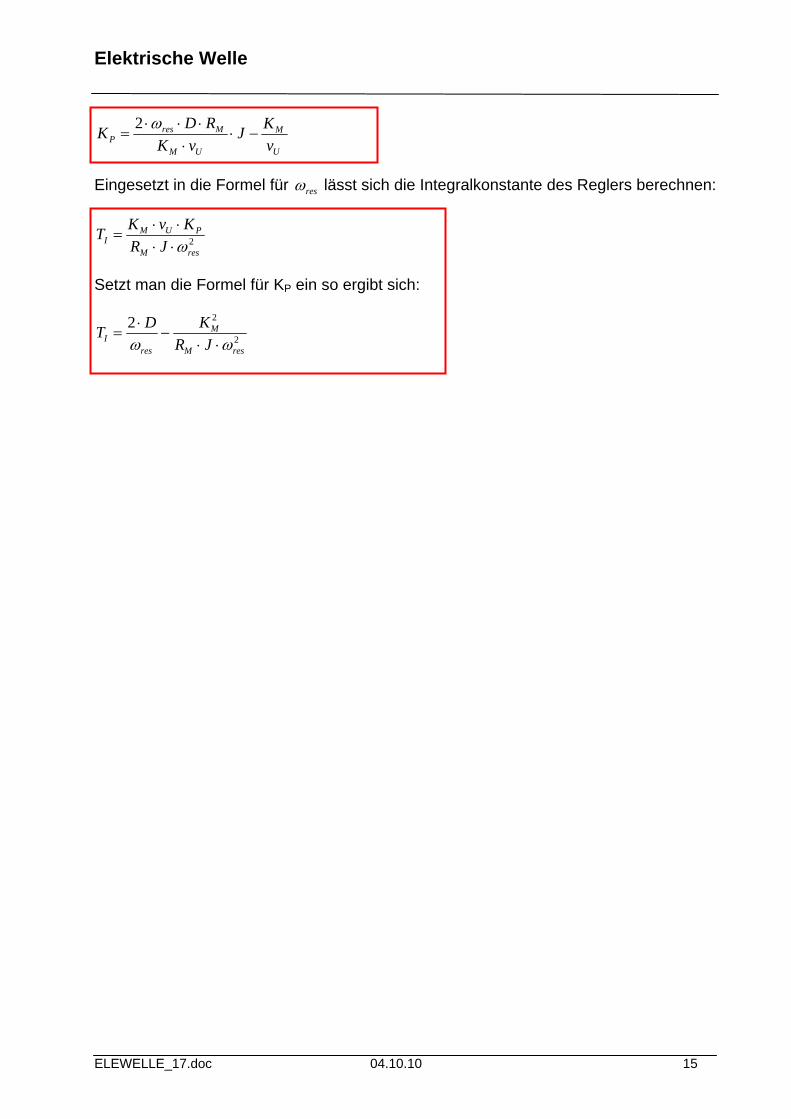
Für die Proportionalkonstante KP des Reglers ergibt sich damit folgender Ausdruck:
Elektrische Welle
ELEWELLE_17.doc 04.10.10 15
U
M
UM
MresP v
KJ
vK
RDK
2
Eingesetzt in die Formel für res lässt sich die Integralkonstante des Reglers berechnen:
2resM
PUMI JR
KvKT
Setzt man die Formel für KP ein so ergibt sich:
2
22
resM
M
resI JR
KDT

Elektrische Welle
ELEWELLE_17.doc 04.10.10 16
5.1.5 Gegenüberstellung fremderregtes SDOF und GM mit PI-Regler
Mechanische SDOF
Systemeingang Fi(t)
Systemeausgang so(t)
Blockschaltbild
c, b, m
c b m
s(t)
a(t)
PI-Regler
xcxbxmtFi )(
Zeitbereich
s(t), Fi(t)
Zeit t
(t), so(t)
Tff
m
c
m
b 1 , 2 ,
2 000
te
T
Frequenzbereich / Frequenzgang
Frequenz f
Amplitudengang i
o
F
sˆˆ
Zeit t
Frequenz f
f0
si
o
F
s
, ˆˆ
c1
-90° Phasengang
Systembeschreibung im Zeitbereich
Systembeschreibung im Frequenzbereich
M I0(t)
J , Rm, KM, Kp
Strukturparameter
I
PU
M
PUM
mIs T
Kv
K
KvK
JRT1
Systemverhalten
Systemkenngrößen
20
2 2
1
ssM
s
m
bT
Kv
Kb
JRT
KvK
KvK
JRTM I
PU
M
mI
PUM
resPUM
mI
2 ; 1 ; ;

Elektrische Welle
ELEWELLE_17.doc 04.10.10 17
5.1.6 Drehzahlregler mit vereinfachtem Motormodell (Stromsteuerung)
Bei vernachlässigter Induktivität und geschwindigkeitsproportionalem Dämpfungsmoment vereinfachen sich die Motorgleichungen.
0
00
Ikdt
dJ
kUIR
mm
ges
mmm
Mit den Transformationsgleichungen zur Umrechnung Antriebs - Abtriebsseite
i
MMJJiJiJin
sa
mamgesamaa
; ; ; 60
min2 22
lauten die Gleichungen:
0
00
IKdt
dJ
und
KUIR
Ma
aMm
Benutzt man zur Motoransteuerung einen Verstärker, der als steuerbare Stromquelle arbeitet, so wird in der elektrischen Beschreibung die benötigte Motorspannung direkt berechenbar.
aMm KIRU 00
Ein PI-Regler zur Einstellung des Motorstroms ist durch folgende Funktion beschrieben:
dt
TKU as
IasPi 1
Bezieht man zusätzlich eine spannungsgesteuerte Stromquelle hinzu, dann lauten die Reglergleichungen:
dtT
KvI
vUI
asI
asPi
ii
10
0
Das dynamische Verhalten des geregelten Motors wird durch folgende Gleichung beschrieben:
sIasasIPiMaI MTdtTKvKJT
Differenzieren führt auf das Gleichungssystem

Elektrische Welle
ELEWELLE_17.doc 04.10.10 18
sIasasIPimaI MTTKvKJT
Setzt man voraus, dass sich das Störmoment und die Solldrehzahl nur sehr langsam ändert 0 ; 0 ssM oder zumindest der Regelvorgang schneller erfolgt als eine
Sollwertänderung der Drehzahl, dann vereinfacht sich die Gleichung zur Beschreibung des Führungsverhaltens zu
asaIPimaI TKvKJT
Umstellung der Gleichung zeigt die bekannte Struktur eines Systems 2. Ordnung
saaIaPim
I
asaIaPim
I
TKvK
JT
TKvK
JT
Das System wird durch die „Kraft“ s angetrieben. Die „Steifigkeit“ ist Eins und die
„Trägheit“ Pim
I
KvK
JTM
. Die Kreisfrequenz des Regelkreises ist gesI
mPires JT
kKv
und die „Dämpfung“ lautet ITb .
Nach Transformation in den Frequenzbereich (Laplace-Bereich) kann direkt der Frequenzgang angegeben werden
J
KvKTD
JT
KvK
J
KvK
KvK
JTM
mit
ssM
n
n
JT
KvKs
J
KvKs
KvK
JT
sTsKvK
JT
sTsKvK
JT
PimI
res
I
PiMres
PiM
PiM
I
ress
a
s
a
I
PiMPiM
PiM
I
IPiM
Is
a
aaIaPiM
Is
4
, 2
,
2
1
1
1
2
22
22
2

Elektrische Welle
ELEWELLE_17.doc 04.10.10 19
5.1.7 Technische Daten und Motorkonstanten
Der verwendete Motor ist ein 24 V Gleichstrommotor der Fa. Dunkermotore vom Typ GR 42X40 mit einem Getriebe i=4 vom Typ PLG 42 S. Im Motordatenblatt finden sich folgende Angaben:
Nennspannung UN / V 24
Nenndrehzahl nN / U min 3100
Leerlaufdrehzahl NL / U min 3800
Anlaufstrom IA / A 5,68
Nennstrom IN / A 1,2
Nenndrehmoment MN / Ncm 5,7
Anlaufmoment MA / Ncm 33
Leerlaufstrom IL / A 0,18
Trägheitsmoment JM / gcm2 110
Tabelle 1: Motorkenndaten GR 42X40 24V
Aus den Motorkenndaten und den Motorgleichungen lassen sich die Motorparameter Rm und km berechnen.
omges
m
mmom
IkJdt
d
kUIR
10
Für den Sonderfall, dass die Drehzahl Null ist, beschränkt nur der ohmsche Wicklungswiderstand den Anlaufstrom.
A
Nm I
UR
Aus dem Anlaufstrom und dem Anlaufdrehmoment lässt sich die Momentenkonstante km bestimmen
A
Am I
Mk
Aus der Leerlaufbetrachtung können mit der Momentenkonstante km kleine Verlustmomente MV (Reibung, magn. Verluste usw.) des Motors berechnet werden.
LmV IkM
Die Momentenkonstante km kann ebenfalls aus den Leerlaufdaten überprüft werden.

Elektrische Welle
ELEWELLE_17.doc 04.10.10 20
2min60
min60
2
s
n
IRUk
ns
kUIR
L
LaNm
LmNLm
5.2 Unwucht, Schwerpunkt Kreisring
S
u
ra ri
Abbildung 9: Kreisring
Der Schwerpunktabstand u berechnet sich zu (siehe L9)
sin
3
222
33
ia
ia
rr
rru
Die Masse berechnet sich zu
22ia rrdm
d=Dicke des Kreisringes
Die von dem Kreisring hervorgerufenen Fliehkräfte sind
2332 sin3
2 iau rrdmuF

Elektrische Welle
ELEWELLE_17.doc 04.10.10 21
5.3 Schwingamplitude einer unwuchterregten Masse
umUM
umx
tUtumtxMFu
sinsinsin 222
5.4 Resultierende Kraft und Momentenwirkung 2 Unwuchten
Unwucht U1
x
Unwucht U2
z
y
h
l l
Fz(t)
Fy(t)
F(t)
Mx(t)
S
Für 2 in der y-z Ebene rotierenden Unwuchten sind die resultierenden Kräfte Fy(t), Fx(t), im Schwerpunkt und das Moment Mx(t), zu berechnen.
hFhFlFlFF
tUFtUF
tUFtUF
yuyuzuzuzu
yuzu
yuzu
21212
22
11
22
222
2
12
112
1
cossin
cossin

Elektrische Welle
ELEWELLE_17.doc 04.10.10 22
6 Anhang 6.1 Literaturhinweise:
1. Reuter, Manfred; Zacher Serge; Regelungstechnik für Ingenieure ; Vieweg Verlag
2. Wendt, Lutz; Taschenbuch der Regelungstechnik; Harri Deutsch Verlag
3. Hering, Ekbert; Steinhart, Heinrich; Taschenbuch der Mechatronik; Fachbuchverlag Leipzig
4. Einführung in LabVIEW Autoren: Wolfgang Gorgi / Ergun Metin 328 Seiten, gebunden, mit CD-ROM, Carl Hanser Verlag, September 2006
5. LabVIEW – Das Grundlagenbuch, 4., überarbeitete Auflage Autoren: R. Jamal / A. Hagestedt 576 Seiten, gebunden. mit CD-ROM, Verlag: Addison-Wesley, August 2004
6. LabVIEW – Das Anwenderbuch, 2. revidierte Auflage Autoren: Rahman Jamal / Herbert Pichlik 536 Seiten, gebunden, mit CD-ROM, Verlag: Prentice Hall, 15. September 1999
7. Handbuch für die Programmierung mit LabVIEW Autor: Prof. Dr.-Ing. Bernward Mütterlein 460 Seiten, gebunden, mit CD-ROM, Elsevier Verlag April 2007
8. LabVIEW für Studenten, 4., veränderte Auflage Autor: Rahman Jamal / Andre Hagestedt 576 Seiten, gebunden, mit CD-ROM, Verlag: Pearson Studium, August 2004
9. Mayr, Martin; Technische Mechanik; Hanser Verlag