![Durchführung eines Workshops am 23.10.2008 zum ......Franka Bierwagen [franka.bierwagen@uni-potsdam.de] Projekt BrISaNT Szenario Entwurf 2008 Seite (1) Praktische Umsetzung (Genaue](https://static.fdokument.com/doc/165x107/611a2a6653535f159f177cfa/durchfhrung-eines-workshops-am-23102008-zum-franka-bierwagen-frankabierwagenuni-.jpg)
Entwicklungsstand humanoider Roboter und potentielle ... · Innovationskongress IGES Institut 14...
26
17.11.2006 http://www.ira.uka.de Entwicklungsstand humanoider Roboter und potentielle Einsatzperspektiven in menschenzentrierter Umgebung Rüdiger Dillmann Karlsruhe Institute of Technology (KIT) Fakultät für Informatik wwwiaim.ira.uka.de
Transcript of Entwicklungsstand humanoider Roboter und potentielle ... · Innovationskongress IGES Institut 14...

17.11.2006http://www.ira.uka.de
Entwicklungsstand humanoider Roboter
und potentielle Einsatzperspektiven in
menschenzentrierter Umgebung
Rüdiger Dillmann
Karlsruhe Institute of Technology (KIT)
Fakultät für Informatik
wwwiaim.ira.uka.de
Innovationskongress IGES Institut 23.10.2008, Berlin2
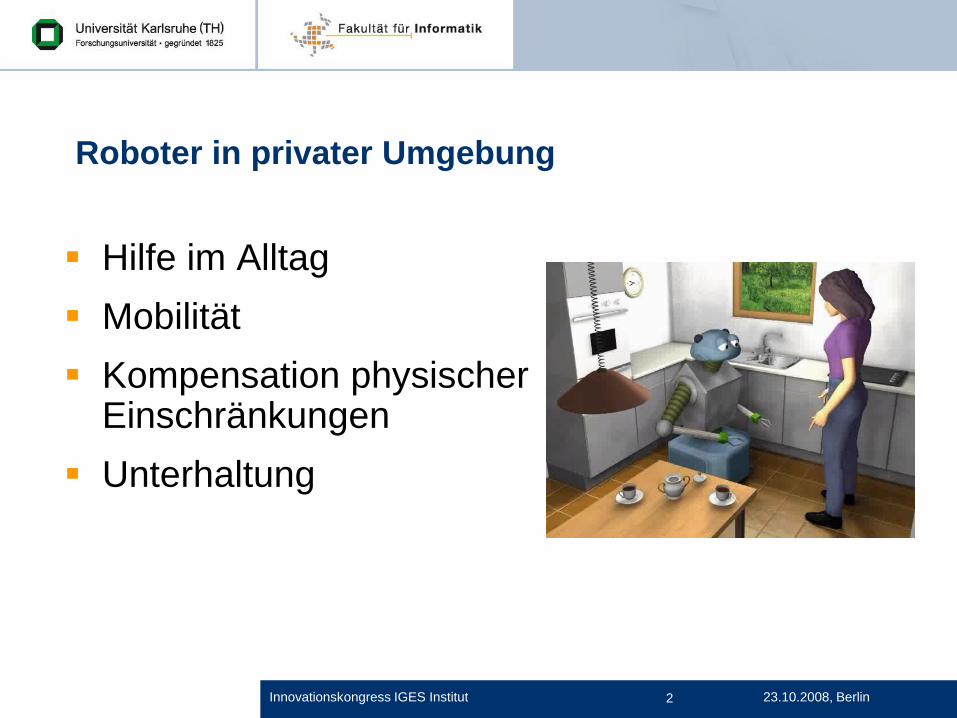
Roboter in privater Umgebung
Hilfe im Alltag
Mobilität
Kompensation physischer Einschränkungen
Unterhaltung

Innovationskongress IGES Institut 23.10.2008, Berlin3
Potentielle Einsatzbereiche
von Assistenzroboter
Quelle: Toyota Motor Corporation – Robot Technologies, 2007
Innovationskongress IGES Institut 23.10.2008, Berlin4
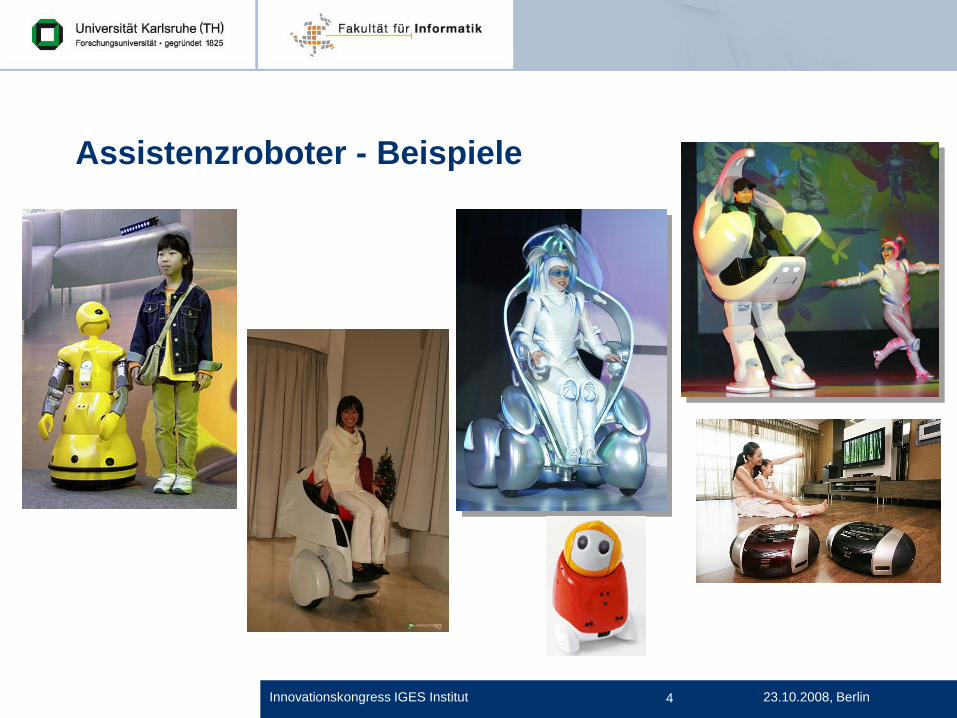
Assistenzroboter - Beispiele
Innovationskongress IGES Institut 23.10.2008, Berlin5
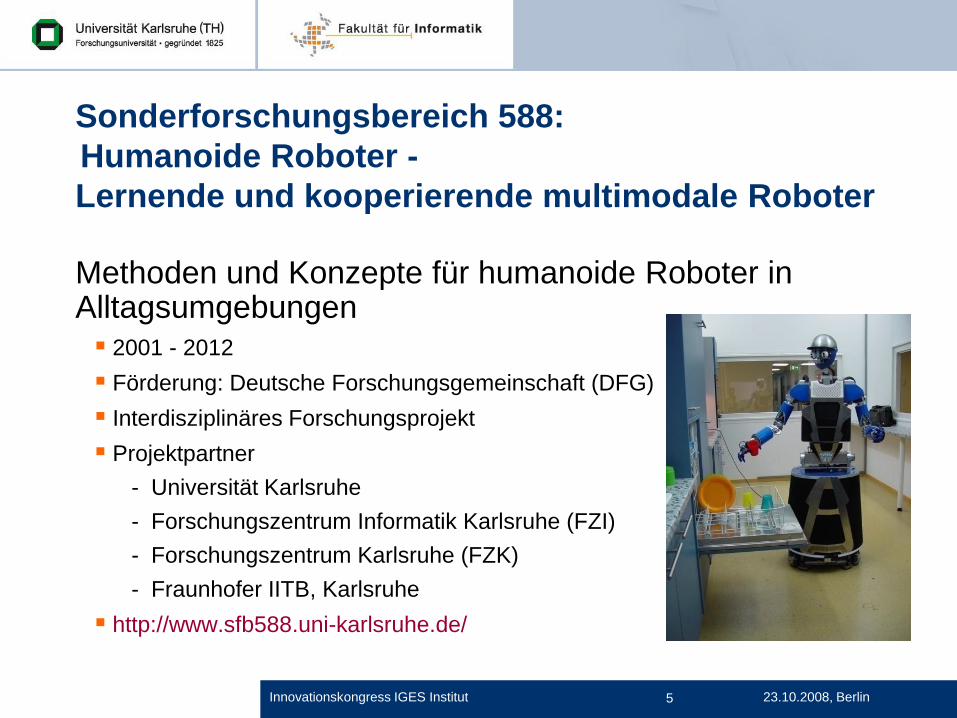
Sonderforschungsbereich 588:
Humanoide Roboter -
Lernende und kooperierende multimodale Roboter
Methoden und Konzepte für humanoide Roboter in Alltagsumgebungen 2001 - 2012
Förderung: Deutsche Forschungsgemeinschaft (DFG)
Interdisziplinäres Forschungsprojekt
Projektpartner
- Universität Karlsruhe
- Forschungszentrum Informatik Karlsruhe (FZI)
- Forschungszentrum Karlsruhe (FZK)
- Fraunhofer IITB, Karlsruhe
http://www.sfb588.uni-karlsruhe.de/

Innovationskongress IGES Institut 23.10.2008, Berlin6
Humanoide Roboter
Asimo, Honda, Japan
Wabian, Waseda University, Japan
HRP-2, Kawada Industries, Japan
(Ikeuchi Lab)
Innovationskongress IGES Institut 23.10.2008, Berlin7
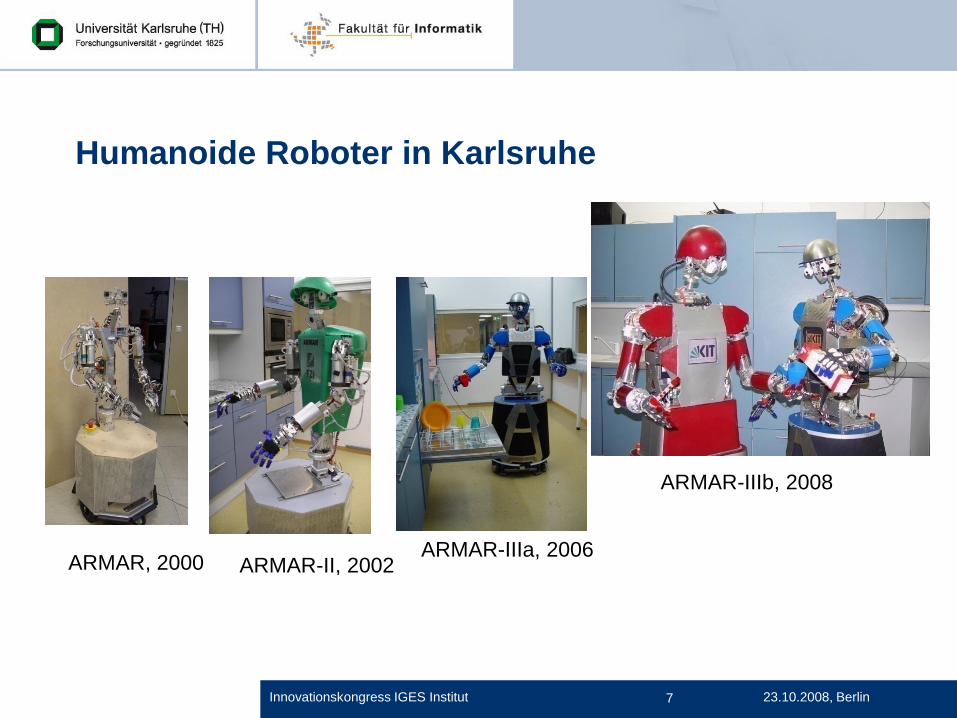
Humanoide Roboter in Karlsruhe
ARMAR-IIIa, 2006ARMAR-II, 2002ARMAR, 2000
ARMAR-IIIb, 2008

Innovationskongress IGES Institut 23.10.2008, Berlin8
Einsatzszenario: Alltagsumgebung
Innovationskongress IGES Institut 23.10.2008, Berlin9
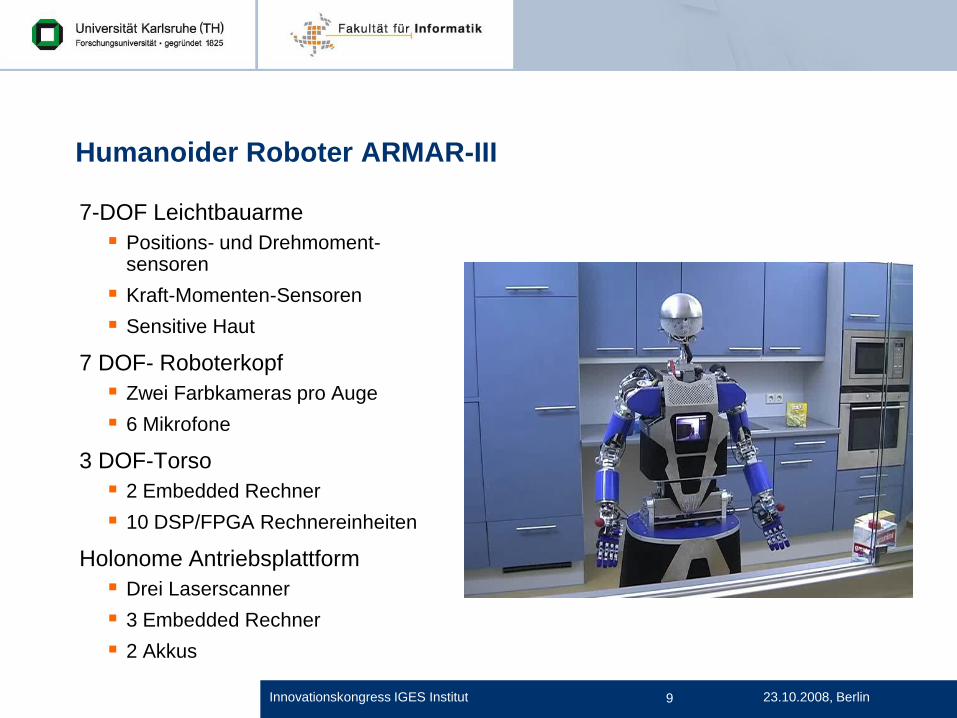
Humanoider Roboter ARMAR-III
7-DOF Leichtbauarme
Positions- und Drehmoment-sensoren
Kraft-Momenten-Sensoren
Sensitive Haut
7 DOF- Roboterkopf
Zwei Farbkameras pro Auge
6 Mikrofone
3 DOF-Torso
2 Embedded Rechner
10 DSP/FPGA Rechnereinheiten
Holonome Antriebsplattform
Drei Laserscanner
3 Embedded Rechner
2 Akkus
Innovationskongress IGES Institut 23.10.2008, Berlin10
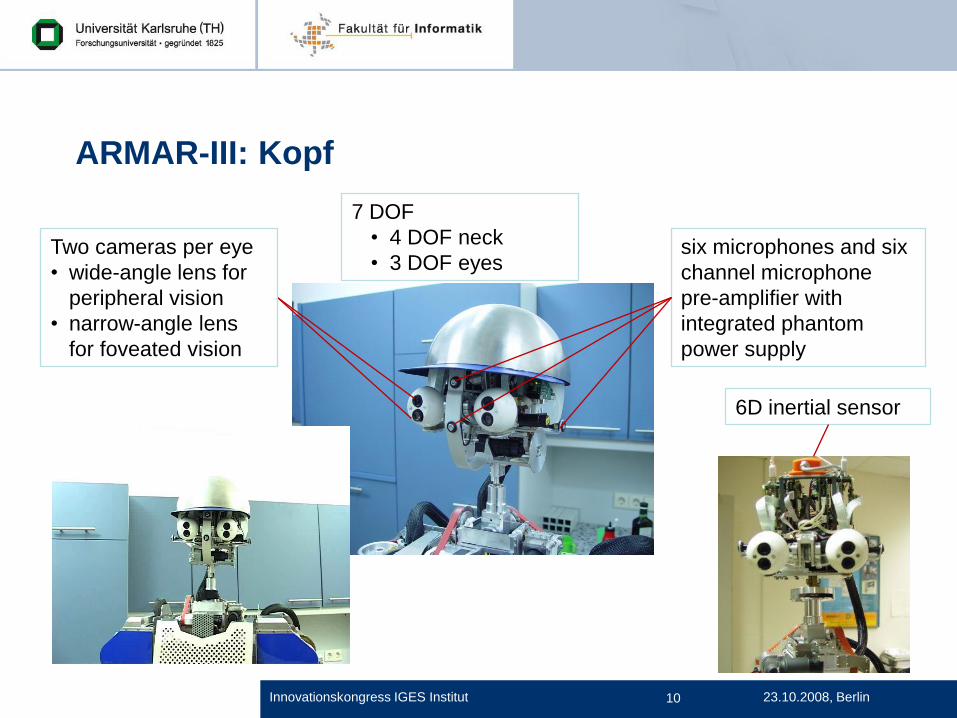
ARMAR-III: Kopf
Two cameras per eye
• wide-angle lens for
peripheral vision
• narrow-angle lens
for foveated vision
six microphones and six
channel microphone
pre-amplifier with
integrated phantom
power supply
7 DOF
• 4 DOF neck
• 3 DOF eyes
6D inertial sensor

Innovationskongress IGES Institut 23.10.2008, Berlin11
ARMAR III: 5-Finger Hände
• Pneumatic actuated humanoid
five-finger hand.
• Lightweight: 250g.
• Compliant parallel kinematics with 8
DoFs (2 coupled joints).
• Position control
Haptic sensor suite
• 8 Position sensors, one per DoF
• 6 Pressure sensors for torque sensing
• 3 tactile skin segments at finger tips
Redundant contact sensing and localization
Suited for impedance control
10-fold Miniature Valve Bench
Integrated Position Sensors
Miniature Pneumatic Actuators
Pressure Sensors
Innovationskongress IGES Institut 23.10.2008, Berlin12
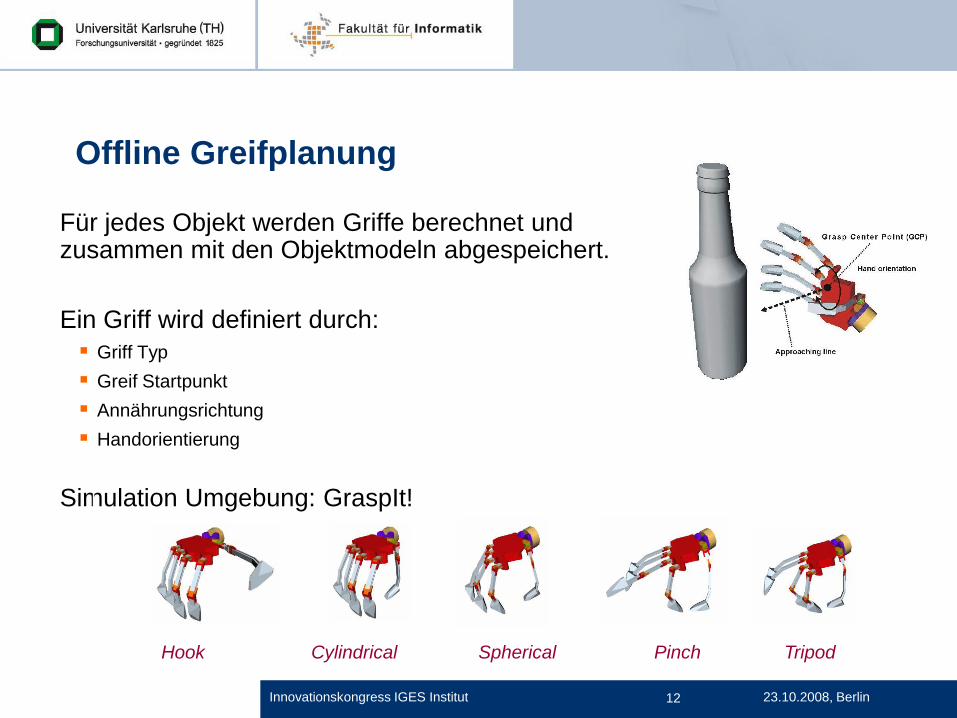
Offline Greifplanung
Für jedes Objekt werden Griffe berechnet und zusammen mit den Objektmodeln abgespeichert.
Ein Griff wird definiert durch:
Griff Typ
Greif Startpunkt
Annährungsrichtung
Handorientierung
Simulation Umgebung: GraspIt!
Hook Cylindrical Spherical Pinch Tripod
Innovationskongress IGES Institut 23.10.2008, Berlin13
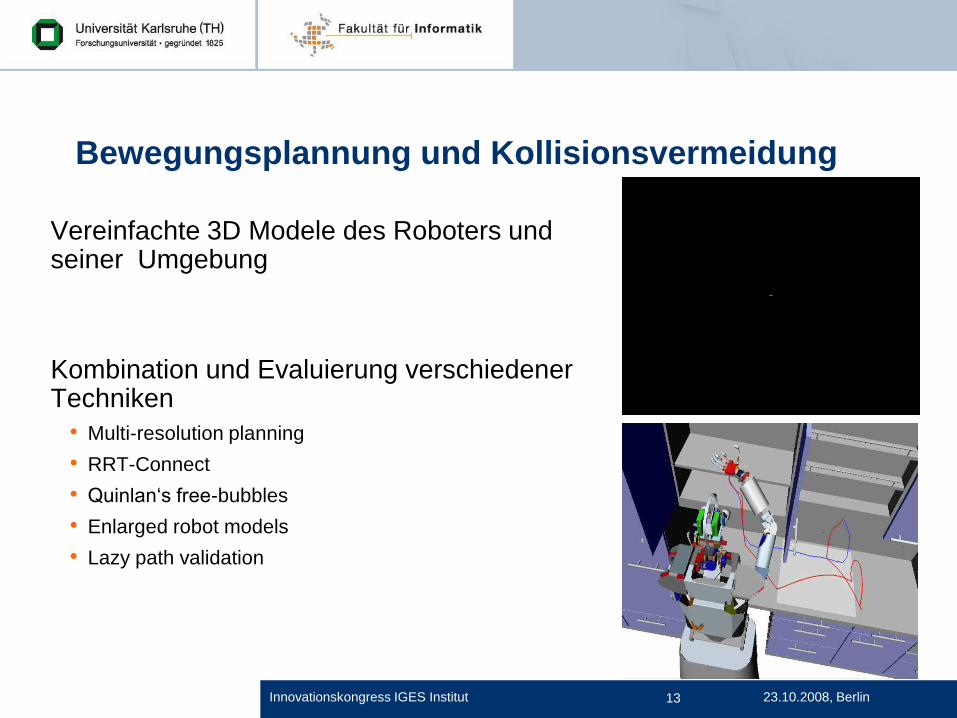
Bewegungsplannung und Kollisionsvermeidung
Vereinfachte 3D Modele des Roboters und seiner Umgebung
Kombination und Evaluierung verschiedener Techniken
• Multi-resolution planning
• RRT-Connect
• Quinlan‘s free-bubbles
• Enlarged robot models
• Lazy path validation
Innovationskongress IGES Institut 23.10.2008, Berlin14
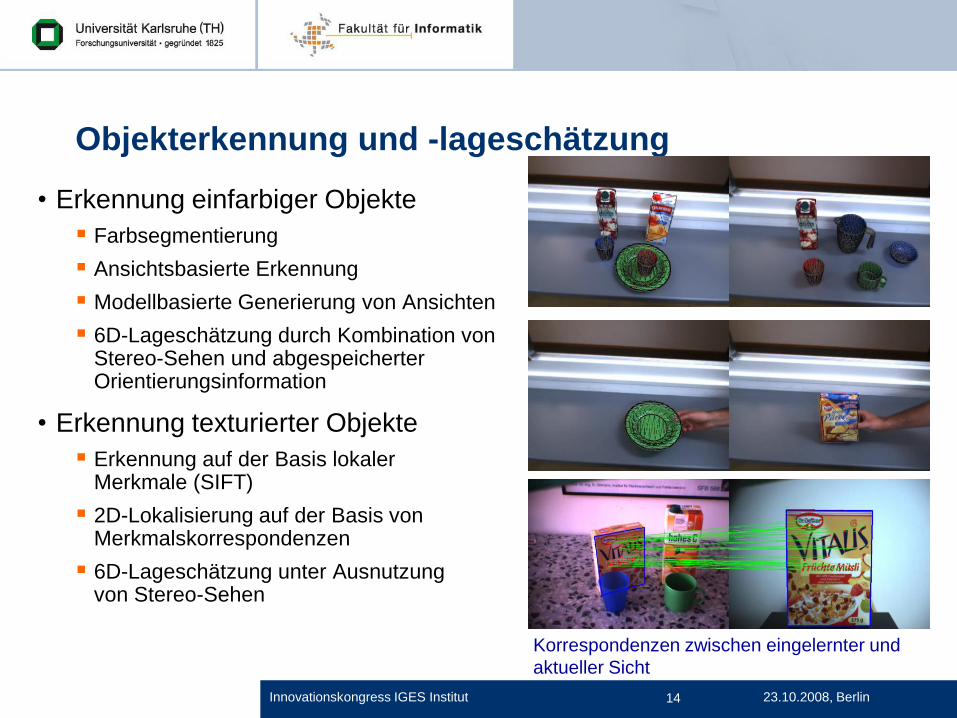
Objekterkennung und -lageschätzung
• Erkennung einfarbiger Objekte
Farbsegmentierung
Ansichtsbasierte Erkennung
Modellbasierte Generierung von Ansichten
6D-Lageschätzung durch Kombination von Stereo-Sehen und abgespeicherter Orientierungsinformation
• Erkennung texturierter Objekte
Erkennung auf der Basis lokalerMerkmale (SIFT)
2D-Lokalisierung auf der Basis vonMerkmalskorrespondenzen
6D-Lageschätzung unter Ausnutzungvon Stereo-Sehen
Korrespondenzen zwischen eingelernter und
aktueller Sicht
Innovationskongress IGES Institut 23.10.2008, Berlin15
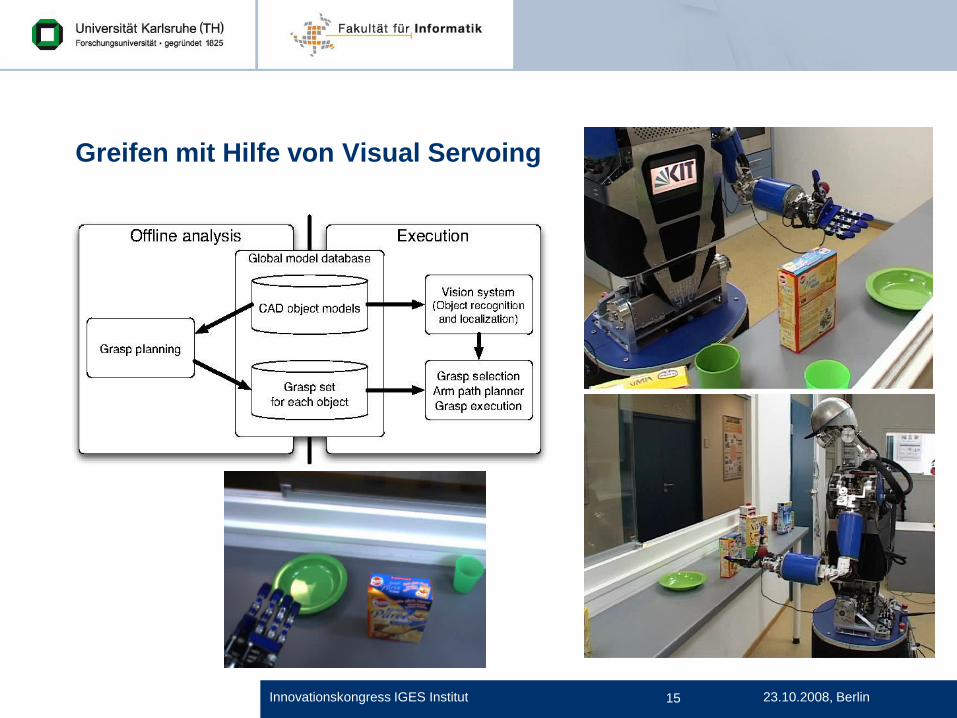
Greifen mit Hilfe von Visual Servoing

Innovationskongress IGES Institut 23.10.2008, Berlin16
Erste integrierte Demonstration
Innovationskongress IGES Institut 23.10.2008, Berlin17
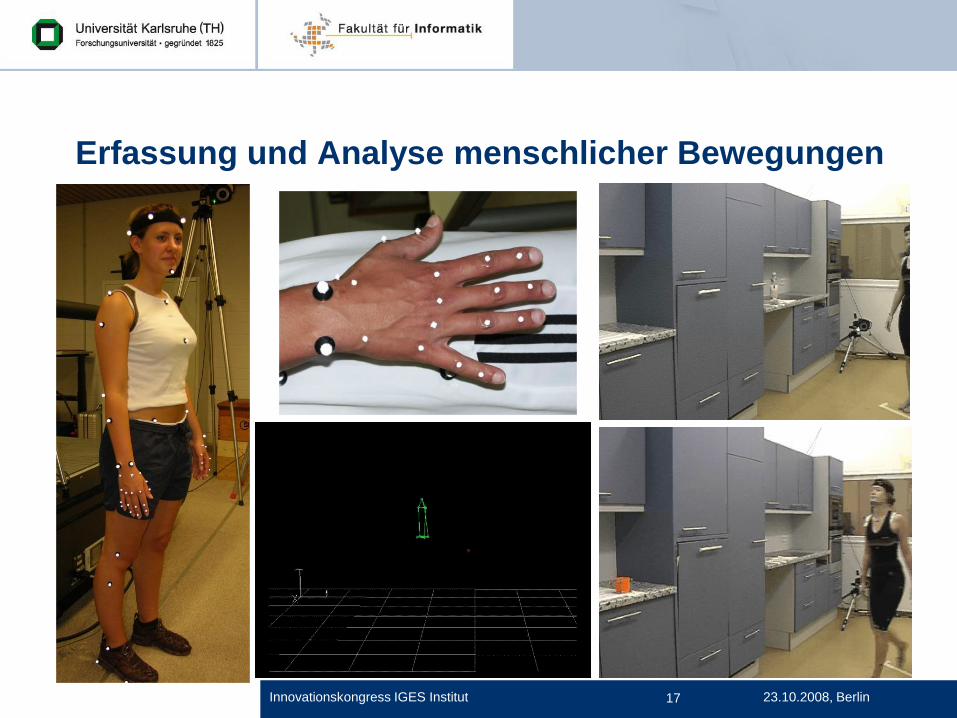
Erfassung und Analyse menschlicher Bewegungen
Innovationskongress IGES Institut 23.10.2008, Berlin18
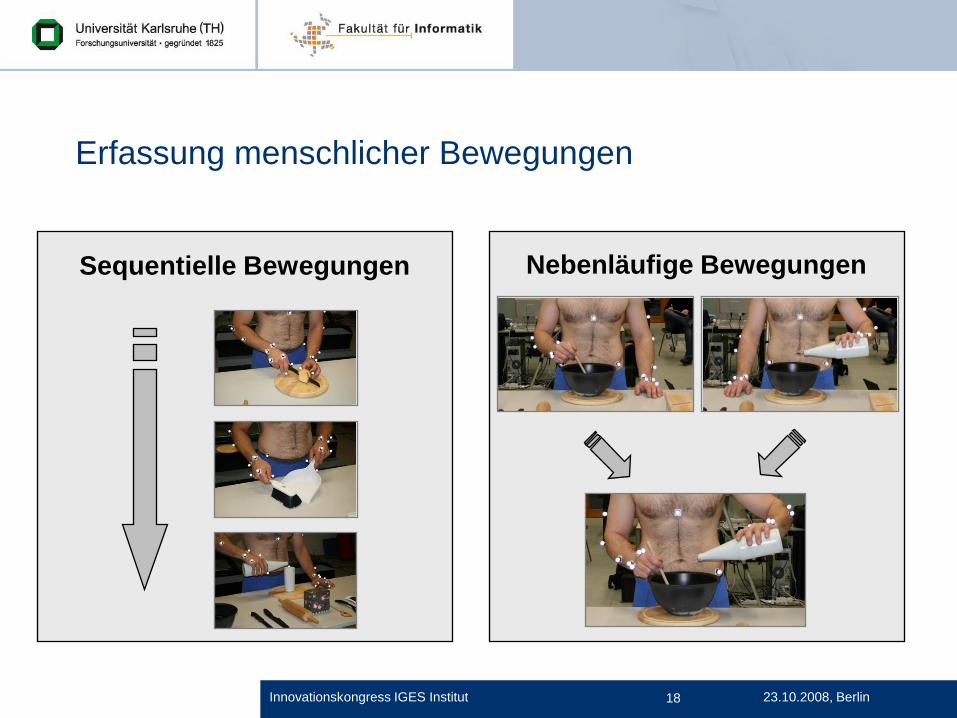
Erfassung menschlicher Bewegungen
Nebenläufige BewegungenSequentielle Bewegungen
Innovationskongress IGES Institut 23.10.2008, Berlin19
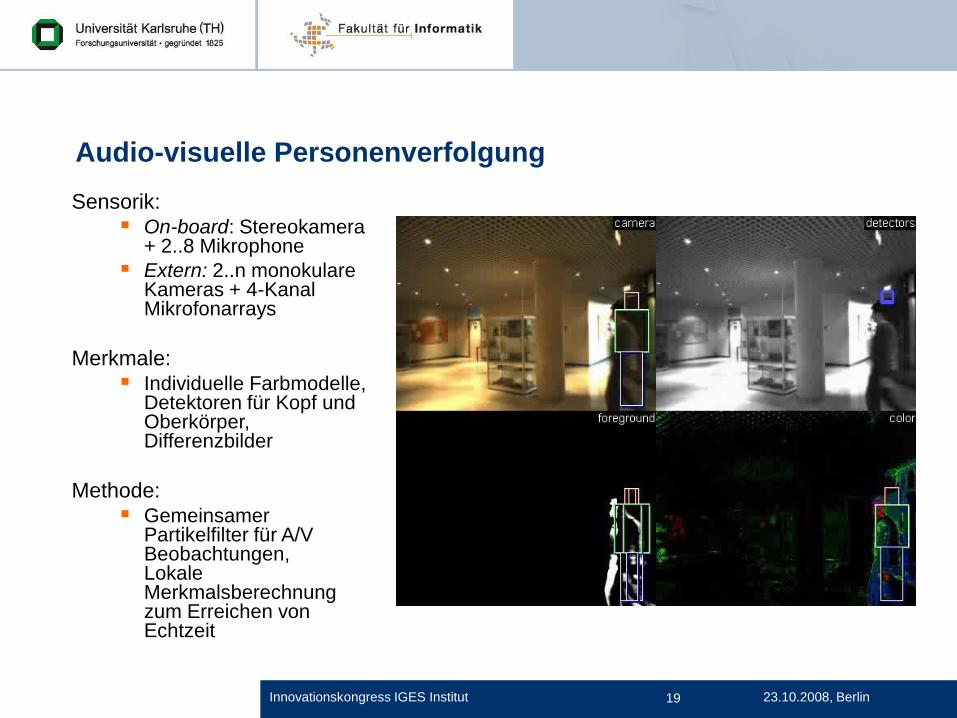
Audio-visuelle Personenverfolgung Video
Sensorik: On-board: Stereokamera
+ 2..8 Mikrophone
Extern: 2..n monokulare Kameras + 4-Kanal Mikrofonarrays
Merkmale: Individuelle Farbmodelle,
Detektoren für Kopf und Oberkörper, Differenzbilder
Methode: Gemeinsamer
Partikelfilter für A/V Beobachtungen, Lokale Merkmalsberechnung zum Erreichen von Echtzeit
Innovationskongress IGES Institut 23.10.2008, Berlin20
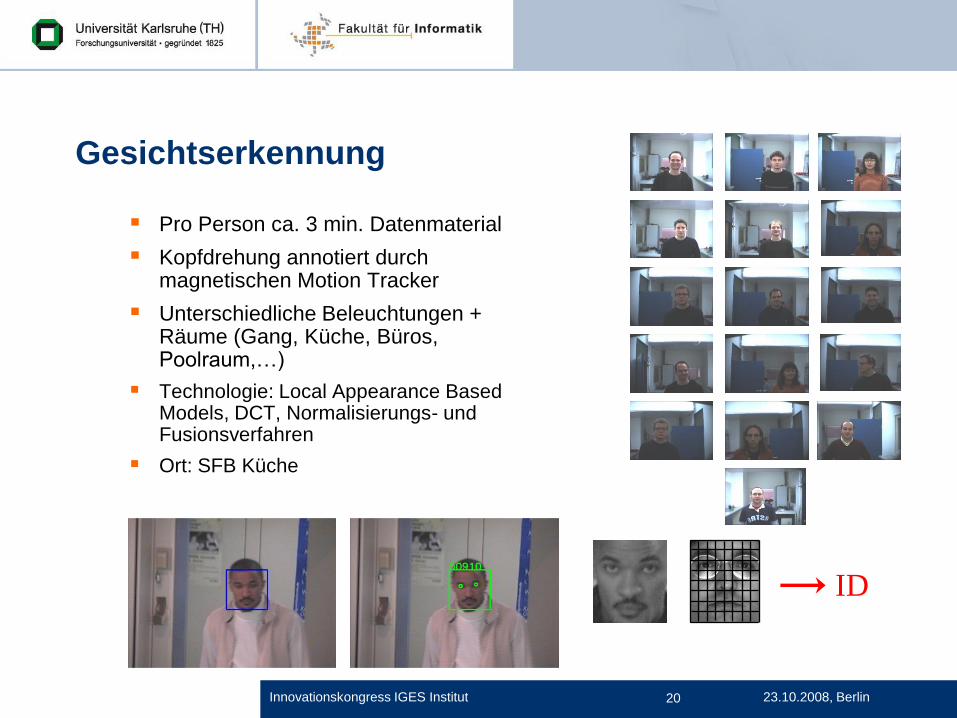
ID
Gesichtserkennung
Pro Person ca. 3 min. Datenmaterial
Kopfdrehung annotiert durch magnetischen Motion Tracker
Unterschiedliche Beleuchtungen + Räume (Gang, Küche, Büros, Poolraum,…)
Technologie: Local Appearance Based Models, DCT, Normalisierungs- und Fusionsverfahren
Ort: SFB Küche
Innovationskongress IGES Institut 23.10.2008, Berlin2117.11.2006http://wwwiaim.ira.uka.de
Interaktives Lernen - Sprache & Dialog
Interaktives Lernen neuer Wörter und Begriffe
Lernen von neuen Wörtern und Einordnung neuer Begriffe in die Ontologie
Anpassung der Dialogstrategie an die Benutzerbedürfnisse
Interaktive Lernmethoden
- Untersuchung von Engagement-Strategien und
Aufmerksamkeit zur Initiierung von Dialogen
- Lernen von Gesichtern und Namen während der Interaktion
Halbautomatische Generierung von hybriden Sprachmodellen

Innovationskongress IGES Institut 23.10.2008, Berlin2217.11.2006http://wwwiaim.ira.uka.de
Interaktives Lernen - Handlungswissen
Modellierung von Handlungen
Zweihändige, feinmotorische Handhabungen
Synchronisation zwischen den Händen
Probabilistische Handlungsmodelle zur Erkennung der Teilziele unter Berücksichtigung von Objektrollen
Wiedererkennung von (Teil-) Handlungen
Entwicklung von Ähnlichkeitsmaßen für komplexe Handlungen
Relevanzmodelle einzelner Merkmale von Handlungen
Innovationskongress IGES Institut 23.10.2008, Berlin23
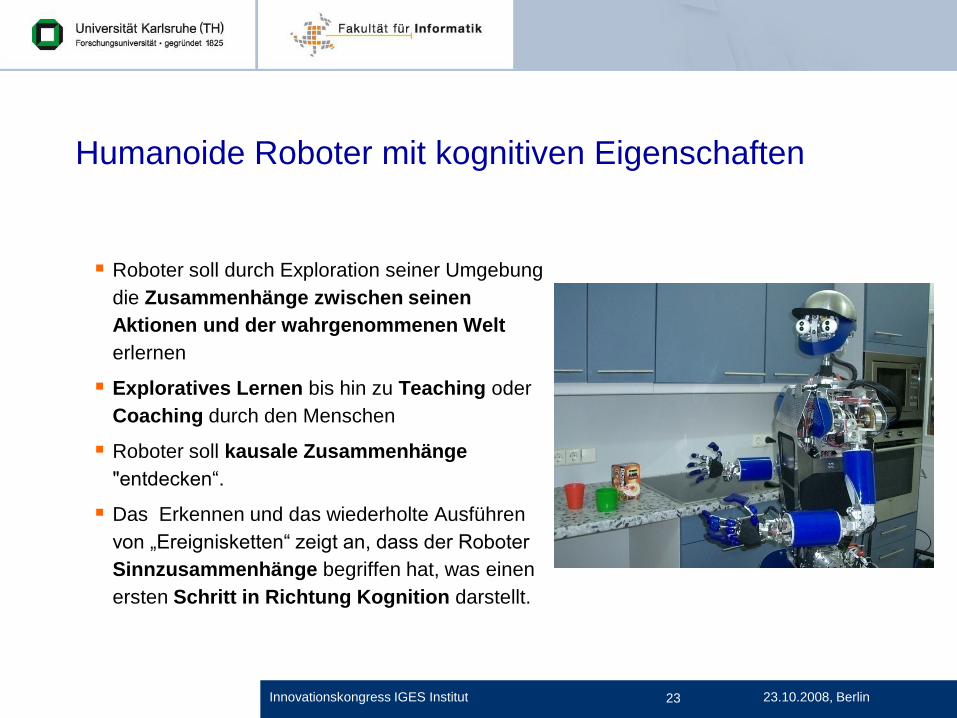
Humanoide Roboter mit kognitiven Eigenschaften
Roboter soll durch Exploration seiner Umgebung
die Zusammenhänge zwischen seinen
Aktionen und der wahrgenommenen Welt
erlernen
Exploratives Lernen bis hin zu Teaching oder
Coaching durch den Menschen
Roboter soll kausale Zusammenhänge
"entdecken“.
Das Erkennen und das wiederholte Ausführen
von „Ereignisketten“ zeigt an, dass der Roboter
Sinnzusammenhänge begriffen hat, was einen
ersten Schritt in Richtung Kognition darstellt.
Innovationskongress IGES Institut 23.10.2008, Berlin24
Was können humanoide Roboter heute?
• Schlüsselfähigkeiten für zukünftige Technologien
Mensch-Maschine Interaktion
Natürliche Dialoge
Lernen von Handlungswissen und Aufgaben
Adaption an wechselnden Situationen
Feinfühlige Manipulation (visuelle und haptische Sinne)
Beherrschung mechatronischer Systeme mit hoher Bewegungsfreiheit
Modulare und skalierbare Rechnersysteme
Innovationskongress IGES Institut 23.10.2008, Berlin25
Was können wir künftig erwarten?
• Schlüsselfähigkeiten und Technologien
Multimodale Dialoge
Situationserfassung und Situationsbewertung
Verstehen menschlicher Handlungen
Autonomes Entscheiden und Problemlösen
Anpassung und Personalisierung
Robuste Anwendungen im Alltag und in öffentlichen Bereichen
Gedächtnisstrukturen
Selbstüberwachung
...
Innovationskongress IGES Institut 23.10.2008, Berlin26
Vielen Dank für Ihre Aufmerksamkeit
Rüdiger Dillmann
http://wwwiaim.ira.uka.de
Weitere Informationen zum SFB588 unter:
http://www.sfb588.uni-karlsruhe.de