Erich Kleiner, März 2018 1. Prinzip Schalten Verstärkung...
15
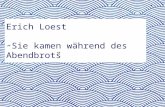
DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, März 2018 1. Prinzip ASA_Sig_Ausg.doc 1 1 Signalausgabe Diese Unterlage zeigt die Ansteuerung von Aktoren durch Steuerung und Regelung. Sie basiert zum Teil auf H. Heckmann: Ein - Ausgabe. Inhalt: Seite: 1 Prinzip der Signalausgabe 1 2 Ausgangsschaltungen der Ausgabegeräte 2.1 Binär - Ausgabe allgemein 2 2.2 Smart - Power - Technik 2 2.3 Relaisausgabe mit Treiber - IC 3 2.4 Probleme / Massnahmen bei Bef.-Ausgabe 4 2.5 Binär - Ausgabegeräte, Beispiele 4 2.6 Analog - Ausgabe, Beispiel 6 3 Prozesseingriffe 6 4 Aktoren 9 4.1 Elektrische Leistungsschaltgeräte 10 4.2 Motor Control Center MCC, Intellig. MCC 11 4.3 Intelligenter Stellantrieb 11 4.4 Magnetventile 12 4.5 Proportionale Stellglieder 12 4.6 Positionierung 13 Literaturhinweise 13 Anhang (Produkt-Fotos als Beispiele) 13 Bild 1: Prinzip der Signalausgabe 1 Prinzip der Signalausgabe Bild 1 zeigt die prinzipielle Wirkungsweise und die Wege der Signalausgabe aus SPS / PLS, die heute praktisch nur noch für (binäre) Befehle und (analoge) Stellgrößen verwendet wird. Zum Eingriff in den Prozess werden in der CPU einer Speicher - programmierten Leiteinrichtung Be- fehle und Stellgrößen gebildet und per Back-Plane- Bus an Ausgabegeräte gesendet. Für Testzwecke kann in der CPU simuliert werden. Die Ausgabe- geräte prüfen ggf. den regelmäßigen Empfang bzw. den Pegel des erhaltenen Ausgabewertes und melden festgestellte Fehler. Binär - Ausgabegeräte ordnen die in den empfang- enen Telegrammen enthaltenen Ausgabesignale nach festem Schema ihren Leistungsstufen zu. Da diese meist von "außen" gespeist werden überwach- en sie meist diese Speisespannung. Die Befehle gehen verdrahtet - oft per Vielfachkabel und über Unterverteiler - an Leistungsschaltgeräte in Schränk- en oder Wand - Kästen zur Ansteuerung von Motor- en für z.B. Pumpen oder Stellantriebe. Analog - Ausgabegeräte setzen die empfangenen Digital - Werte sequenziell in analoge Signale um und geben sie per Multiplexer an Halteverstärker und Ausgangsstufen für Spannung oder Strom. Die- se Signale werden meist als Stellgröße für Stell- glieder der Regelung benötigt, die im Feld angeord- net sind. Bei genügend vielen werden auch hier oft aus Aufwandsgründen Vielfachkabel und vor-Ort angeordnete Unterverteiler verwendet. Steuerung / Regelung Verarbeitungs- Gerät Ausgabe- Geräte Von Berechnung Simulations- Wert Durch Service 24V Ü ext. Vers. Ü Schaltanlage Unterverteiler Schaltfelder Berechnung Simulation Back Plane Bus Telegramm - Empfang, - Auswertung mit Überwachung Signalausgabe mit Spann.Überw. Verkabelung Zwischen - Klemmen Verstärkung, Schalten Leistungs- Schalt- gerät Leistungs - Verkabelung Prozess - Eingriff FELD Antrieb (E - Motor) Aggregate (z.B. Pumpe, Ventil) M U I Halteverstärker Stromausgang Multiplexer # U Digital / Analogwandler Ü I U Pro- port.-. Spule direktes Ventil Analoge Stellgröße Positionsrückführung Servo- Ventil Pos.-Regler Unterverteiler Vorsteuer- Ventile
Transcript of Erich Kleiner, März 2018 1. Prinzip Schalten Verstärkung...

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, März 2018 1. Prinzip
ASA_Sig_Ausg.doc 1
1 Signalausgabe Diese Unterlage zeigt die Ansteuerung von Aktoren durch Steuerung und Regelung. Sie basiert zum Teil auf H. Heckmann: Ein - Ausgabe.
Inhalt: Seite: 1 Prinzip der Signalausgabe 1 2 Ausgangsschaltungen der Ausgabegeräte 2.1 Binär - Ausgabe allgemein 2 2.2 Smart - Power - Technik 2 2.3 Relaisausgabe mit Treiber - IC 3 2.4 Probleme / Massnahmen bei Bef.-Ausgabe 4 2.5 Binär - Ausgabegeräte, Beispiele 4 2.6 Analog - Ausgabe, Beispiel 6 3 Prozesseingriffe 6 4 Aktoren 9 4.1 Elektrische Leistungsschaltgeräte 10 4.2 Motor Control Center MCC, Intellig. MCC 11 4.3 Intelligenter Stellantrieb 11 4.4 Magnetventile 12 4.5 Proportionale Stellglieder 12 4.6 Positionierung 13 Literaturhinweise 13 Anhang (Produkt-Fotos als Beispiele) 13 Bild 1: Prinzip der Signalausgabe
1 Prinzip der Signalausgabe
Bild 1 zeigt die prinzipielle Wirkungsweise und die Wege der Signalausgabe aus SPS / PLS, die heute praktisch nur noch für (binäre) Befehle und (analoge) Stellgrößen verwendet wird. Zum Eingriff in den Prozess werden in der CPU einer Speicher - programmierten Leiteinrichtung Be-fehle und Stellgrößen gebildet und per Back-Plane- Bus an Ausgabegeräte gesendet. Für Testzwecke kann in der CPU simuliert werden. Die Ausgabe-geräte prüfen ggf. den regelmäßigen Empfang bzw. den Pegel des erhaltenen Ausgabewertes und melden festgestellte Fehler. Binär - Ausgabegeräte ordnen die in den empfang-enen Telegrammen enthaltenen Ausgabesignale nach festem Schema ihren Leistungsstufen zu. Da diese meist von "außen" gespeist werden überwach-en sie meist diese Speisespannung. Die Befehle gehen verdrahtet - oft per Vielfachkabel und über Unterverteiler - an Leistungsschaltgeräte in Schränk-en oder Wand - Kästen zur Ansteuerung von Motor-en für z.B. Pumpen oder Stellantriebe. Analog - Ausgabegeräte setzen die empfangenen Digital - Werte sequenziell in analoge Signale um und geben sie per Multiplexer an Halteverstärker und Ausgangsstufen für Spannung oder Strom. Die-se Signale werden meist als Stellgröße für Stell-glieder der Regelung benötigt, die im Feld angeord-net sind. Bei genügend vielen werden auch hier oft aus Aufwandsgründen Vielfachkabel und vor-Ort angeordnete Unterverteiler verwendet.
Steuerung / Regelung
Verarbeitungs-
Gerät
Ausgabe-
Geräte
Von Berechnung
Simulations-
WertDurch Service
24VÜ
ext.
Vers.
Ü
Schaltanlage
Unterverteiler
Schaltfelder
Berechnung
Simulation
Back Plane Bus
Telegramm
- Empfang,
- Auswertung mit
Überwachung
Signalausgabe mit
Spann.Überw.
Verkabelung
Zwischen - Klemmen
Verstärkung,
Schalten
Leistungs-
Schalt-
gerät
Leistungs -
Verkabelung
Prozess - Eingriff
FELD
Antrieb (E - Motor)
Aggregate (z.B. Pumpe, Ventil)
M
UI
Halteverstärker
Stromausgang
Multiplexer
#U
Digital /
Analogwandler
Ü
IU
Pro-
port.-.
Spule
direktes
Ventil
Analo
ge
Ste
llgrö
ße
Positio
nsrü
ckfü
hru
ng
Servo-
Ventil
Pos.-Regler
Unterverteiler
Vorsteuer-
Ventile

Signalausgabe Automatisierungssysteme DHBW Mannheim 2. Ausgabeschaltungen der Ausgabegeräte Erich Kleiner, August 2003
2 ASA_Sig_Ausg.doc
2 Ausgangsschaltungen der Ausgabegeräte 2.1 Binär - Ausgabe allgemein Bild 2.1 zeigt die prinzipiellen Möglichkeiten der binären Signalausgabe: Bild 2.1: prinzipielle Schaltungen a) zeigt die Ausgabe per Relais, die immer noch ihre Berechtigung hat, insbesondere durch Einsatz von langlebigen Reed - Relais und optimierter Spulen - Ansteuerung, b) wird hauptsächlich zur Ansteuerung von Lampen / LEDs verwendet, ist für Befehlsausgabe wegen der Gefahr von Fehlschaltung bei Erdschluß nicht zu empfehlen, c) zeigt das Prinzip von Kurzschluss - sicheren Aus-gängen (manchmal auch Überlast - sicher) mit Ab-schaltung (Kurzschluss) der Ansteuerung bei zu kleinem Lastwiderstand, d) die heute gebräuchliche Methode bei höheren Leistungen (einige A) mit Leistungs - FET. Neben der Spannungsfestigkeit ist bei elektronisch-en Leistungsschaltern der zumutbare Strom ein wichtiges Kriterium. Wegen des dabei auftretenden Spannungsabfalls am Bauelement und wegen der Verlustleistung im Bauelement kommt es vor allem auf den Durchlasswiderstand an. Dabei ist zu be-achten, daß dieser, was ganz allgemein für MOSFET gilt, mit zunehmender Chiptemperatur anwächst und bei der oberen Grenztemperatur (~ 150 ° C) etwa doppelt so groß ist wie bei Raum-temperatur. Wegen des i.a. zu beachtenden Be-triebstemperaturgebietes und der bei Leistungs-bauelementen immer vorhandenen inneren Temp-eraturüberhöhung darf man demnach nie mit den im Datenblatt zu findenden RDS(on) - Werten rechnen,
sondern muß immer gleich einen Zuschlagsfaktor mit einkalkulieren, im ungünstigsten Fall eine Ver-doppelung. 2.2 Smart - Power - Technik Mit den sogenannten Smart-Power-Prozessen (Bild 2.2.1) lassen sich Ausgabesysteme, bestehend aus Ansteuerlogik, Überwachungs- und Meldefunkt-ionen sowie Leistungsstufen, wirtschaftlich und raumsparend auf einen Chip zu-sammenfassen. Sie ermöglichen es, gleichzeitig komplexere Logikschaltungen sowie Analog- funktionen und Leistungsstufen zu integrieren. Vor allem bei niedrigen Betriebsspannungen (< 60 V) haben hier Mischtechnologien mit Bipolar-, CMOS- und DMOS-Transistoren neue Möglichkeiten eröff-net. Dabei wird eine integrierte BiCMOS-Leistungs-technologie mit optimierten DMOS-Schalter zum Erreichen eines niedrigen Einschaltwiderstandes
(RON F < 0,3 mm2 ) angewandt. Bild 2.2.1 zeigt
die wichtigsten Schaltertypen und die Forderungen für Kfz-Anwendungen, die auch für die Industriean-wendungen sinnvoll sind. Bei Anwendungen mit hoher Sperrspannung (unter 100 V) oder bei hohen Ausgangsströmen (unter 15 A) wurden dazu diskrete Transistoren mit integriert-en Treiberschaltungen verwendet. Um hier zu “echt-en” Ein-Chip-Smart-Power-Lösungen zu gelangen, sind heute wirtschaftliche Isolationsverfahren für An-wendungen bei bis zu 500 V (Betrieb an der Netz-spannung) verfügbar. Der TEMPFET ist ein Multi-chip - Bauelement, bei dem eine enge thermische Kopplung durch “Chip-on-Chip” - Montage erzielt wird (s. Bild 2.2.2). Das Bild zeigt die inte-grierte Lösung einer FET - Ausgangsstufe mit Temperatur - Sen-sor S, der bei > 150 °C leitend wird und den Transistor abschaltet. Der Widerstand begrenzt den Gate-Source-Strom. Die heutigen Möglichkeiten der Integration verschie-dener Funktionen, um zu “Ausgabesystemen” zu kommen, sind in Bild 2.2.3 am Beispiel eines PROFET angegeben.
+
+
a) mit Potenzial-
Trennung
(Reed-Relais)
b) ohne Potenzial-
Trennung,
schaltet gegen 0,
Erdschluß kann
einschalten!
c) ohne Potenzial-
Trennung,
schaltet gegen +
mit Überlast-
Abschaltung
d) mit Potenzial-
Trennung,
mit Leistungs -
FET für
größere Leistung
24 V
24 V
24 V
0 V
0 V
0 V
Kabel
Last
24 V
S
G
D
S
UG
Bild 2.2.1: Smart-Power-Schalter
Bild 2.2.2: TEMPFET
Smart Power Technik
Eingang
Status
+
-
Eingang
Status
-
+ +
-
US (+) 4 .. 25 V
US dynamisch 0,4 s < 50 V
ULast < 60 V
Temperatur - 40 .. 150 °C
RON 0,3 .. 0,5 /mm2
Last
Last Last
Eingang
Status
Eing.

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, August 2003 2. Ausgabeschaltungen der Ausgabegeräte
ASA_Sig_Ausg.doc 3
Bild 2.2.3: Blockschaltbild eines PROFET (höher "Intelligenz" als TEMPFET) Kfz.- Schalter, Gate - Spannung > UBB
(erzeugt durch "Ladungs - Pumpe") ST: Status - Ausgang, IN: Eingang 2.3 Relaisausgabegeräte mit IC - Treiber Das Relais zur Leistungsverstärkung wird sich auch in Zukunft neben dem binären elektronischen Ver-stärker als Bauelement der Ausgabe behaupten. Die Gründe hierfür sind: • das Relais ist einfach und robust; • durch neue Entwicklungen wurde die Schaltleist-
ung erhöht bei gleichzeitiger Volumen- und Kostenreduzierung;
• es ist insbesondere bei höheren Spannungen und/oder Strömen kostengünstiger als elek-tronische Lösungen;
• die Schaltstrecke bewirkt im Auszustand immer eine galvanische Trennung zur Speisespannung (Sicherheit)
Nachteilig ist die hohe Verlustleistung durch dauernd fließenden Strom, insbesondere bei Auslegung für große Spannungstoleranzen. Dies wird durch den Einsatz moderner IC - Treiber weitgehend vermied-en, die den Strom um bis zu 50% verringern können. Das ist bei Anwendungen mit Temperaturproblemen mit hoher Packungsdichte, räumlicher Enge oder schlechten Kühlmöglichkeiten wichtig. Die Relais - Treiber -ICs begrenzen den durch die Spule eines elektro - mechanischen Relais fließend-en Strom durch getaktete Stromregelung. Ein so an-gesteuertes 6 V - Relais braucht im Gegensatz zu einem herkömmlich betriebenen 12 V - Relais we-sentlich weniger Strom (Bild 2.3.1). Dadurch ergeben sich folgende Vorteile: - reduzierte Stromaufnahme durch den Taktberieb, - deutlich herabgesetzte Eigenerwärmung im Relais, - definierte Einschaltspannungs- und Abschaltstrom-
schwelle über den gesamten Betriebstemperatur-bereich,
- kein Einschalten bei Verpolung möglich, - verminderte Kontaktprellung, - Relaistreiber direkt von Elektroniksignal ansteuer-
bar. Das Prinzip der getakteten, Pulsweiten - modulierten Stromregelung zeigt Bild 2.3.2. Die Relaisspule dient als Energie - Speicher. Ein Oszillator (20 kHz) schal-tet über ein Latch (Speicher, S) den Schalter S1 ein. Nun lädt sich die Relaisspule nach einer Exponen- tialfunktion solange auf, bis ein fest eingestellter
Bild 2.3.1: Relais - Stromaufnahme ohne / mit IC Bild 2.3.2: Prinzip der getakteten Stromregelung Strom - Grenzwert (z.B. 150 mA) erreicht ist. Der Strom wird über den Shunt - Widerstand RMess ge-messen und veranlasst über einen Komparator die Rückstellung des Latch, sodass der Schalter S1 wieder geöffnet wird. In der Relaisspule beginnt nun über die Diode der Freilauf, der ein Absinken der Spulenspannung zur Folge hat. Der Freilauf endet mit dem nächsten Set - Befehl des Oszillators. Bei Ausschalten des ICs wird S2 umgeschaltet, wo-durch der Freilaufstrom über die Zenerdiode fließt. Die höhere Spannung bewirkt, dass der Strom schneller abkommutiert und bereits zu 0 geworden ist bevor der Relaiskontakt öfnet. Dadurch steht die volle Feder - Rückstellkraft des Ankers zur Verfüg-ung, der Kontakt öffnet schneller und die Abbrand- Gefahr wird reduziert.
Überspannungs-
Schutz
Spannungs-
Quelle
ULogik
Pegel-
Umsetzer
Laststrom-
Begrenzung
Begrenzung d.
neg. Abschalt-
Spannung bei
induktiver Last
Leerlauf-
Erfassung
Kurzschluss-
Erfassung
Lade -
Gleichrichter
Ladungs-
Pumpe
Spannungs-
Sensorik
Temperatur -
Sensor
OUT
LogikESDST
IN
GateschutzUBB
140
120
100
80
60
40
20
7 8 9 10 11 12 13 14 15 16 V
mA
Sp
ule
nstr
om
Spulenspannung
Relais ohne IC
Relais mit IC
=
R
S
Oszillator
20 Hz
S
R
EINAUS
Komparator
S1
S2
Freilauf -
Kreis
Relais
L
RCU
RMess
<< RCU

Signalausgabe Automatisierungssysteme DHBW Mannheim 2. Ausgabeschaltungen der Ausgabegeräte Erich Kleiner, August 2003
4 ASA_Sig_Ausg.doc
2.4 Probleme / Maßnahmen bei Signalausgaben Tabelle 2.4.1 gibt eine Übersicht über die Probleme beim Ein / Ausschalten verschiedener Verbraucher. Nachfogend sind die wichtigsten Maßnahmen dar-gestellt. Beim Einschalten von Signallampen fließt je nach Konstruktion ein Einschaltstrom vom bis zu 10 - Fachen des Nennstroms, was die Auslegung des Schaltgliedes und die Absicherung bzw. Strombe-grenzung problematisch macht. Bild 2.4.1 zeigt einen Parallelwiderstand, über den die Lampe dauernd geheizt wird. Heute ist diese Notlösung durch LED - Einsatz kaum mehr nötig. Bild 2.4.2 zeigt den Spannungsverlauf beim Aus-schalten von unbeschalteten Induktivitäten. Hier entstehen hohe Induktionsspannungen, die steil ansteigen und dadurch Störungen verursachen bzw. Bauelemente beschädigen / zerstören können. Bild 2.4.3 zeigt eine Diode über der Induktivität, wodurch die Spannung begrenzt wird. Bild 2.4.4 zeigt eine Diode im Ausgabegerät, durch die dieses geschützt wird, wenn - wie meist - keine Diode an der Induktivität selbst angebracht ist. Hier wird die Induktivität gegen 0 geschaltet. Durch die kleine Durchlassspannung der Diode klingt der Strom nur langsam ab. Das geht mit der Zenerdiode in Bild 2.4.5 schneller.
Tabelle 2.4.1: Typische Lasten und Besonderheiten Tabelle 2.4.2: Entstörmöglichkeiten für indukt. Last Bild 2.4.5: Zenerdiode im Ausgangskreis Bild 2.4.6: Diode bei Schaltung gegen Spannung
Last Einschalten Ausschalten
Gühlampe bis 15-facher Strom unkritisch
LED unkritisch unkritisch
Induktivität unkritisch hohe ind. Spannung
(z.B. Magnet- (einige kV !) ohne
ventil) Entstörglied
Motor Stromüberhöhung - normaler Betrieb:
beim Anlauf Motor-Nachlauf
(Dynamo !)
- Blockierung:
wie Induktivität
Heizelement unkritisch, unkritisch
Stromüberhöhung
möglich
Einschaltstrom:
7 .. 10 • INenn
ggf. „Vorheizwiderstand“
Lampen - Ansteuerung
+
UA
US
US
tUA
IL
Abschalt-
ZeitpunktIL
Entstörglied Vorteil: Nachteil: Energie-
Absorbtion :
- einfach, langsamer
- sehr kleine Freilauf im Verbraucher
Störspannung
- billig, Zusatztrom im Widerstand
- bipolar im EIN -
nuttzbar Zustand
schneller 2 Bauele- im Widerstand
Freilauf mente
definierte 2 Bauele- in der Z - Diode
Freilauf- mente
spannung
- bipolar, teures im Varistor
- hohe Energie- Bauelement
absobtion
auch HF - abklingende im Verbraucher
Bedämpfung Schwingung
+
IL
UA
UZ
US
US
tUA
IL
UZ
UA
IL
UA
US
+
UA
US
Mehrere kV
im s - Bereich,
d.h. mit hoher
Frequenz!
UA
+UA
US
Induktivität
mit Löschdiode
UA
abhängig von
„Freiwerde - Zeit“
(bis Diode leitet)
Durchlassspanng.

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, Oktober 2010 2. Ausgabeschaltungen der Ausgabegeräte
ASA_Sig_Ausg.doc 5
Die in Tabelle 2.4.1 aufgelisteten Besonderheiten sind beim Einsatz von Ausgabegeräten zu beachten, denn: - das Abschalten erfolgt meist sehr schnell (z.B.
durch den Temperatursensor im TEMPFET), - die in der Induktivität L gespeicherte Energie I
2 L/2 kann sehr groß sein, da der quadratisch
eingehende Strom I u.U. sehr hoch sein kann (z.B. blockierender Motor),
- die Ausgangsstufe selbst ist meist schon am oberen Ende ihrer Leistungsfähigkeit (Höchste Chip - Temperatur) und kann keine zusätzliche Energie mehr absorbieren.
In Tabelle 2.4.2 sind die üblichen Entstörglieder mit ihren Vor- und Nachteilen aufgeführt. So eignet sich eine einfache Diode sehr gut für einen Motor, der blockieren kann. Wenn dieser aber bidirektional betrieben werden muss ist ein Varistor nötig, der die hohe gespeicherte Energie unabhäng-ig von der Stromflussrichtung absorbieren kann. Es muss jeweils das am Besten geeignete Bedämpf-ungsglied gemäß dem Verbraucher und den spezi-ellen Anforderungen ausgewählt werden. Oft sind auch mehrere parallel geschaltete Bedämpfungs-glieder zweckmäßig, z.B. ein Kondensator parallel zu einem Varistor. 2.5 Binär - Ausgabegeräte, Beispiele Bild 2.5.1 zeigt das Prinzip der Binärausgabegeräte, die folgenden Bilder Beispiele aus dem Ein/Ausgabe - System S 600 des ABB - PLS Advant. Bild 2.5.1: Ausgabegeräte - Prinzip
AusgabegerätCPU
Datenbank
Binärwert
Anwender-
Programm
Controller
MeldungEmpfangs- Spannungs-
u. Funktionsüberwachung
Speicherung
Ausgänge
. .
Up
Bild 2.5.2: 32 x 24 V DC, 200 mA
Bild 2.5.3: 16 x 24 V DC, 2 A, isoliert
Bild 2.5.4: 16 x max. 230 V AC, isoliert

Signalausgabe Automatisierungssysteme DHBW Mannheim 3. Prozesseingriffe Erich Kleiner, August 2003
6 ASA_Sig_Ausg.doc
2.6 Analog - Ausgabe Analogsignal - Ausgaben werden hauptsächlich ge-braucht um Stellgrößen von Reglern an Stellglieder zu übermitteln, die meist in einiger Entfernung vom Ausgabegerät angeordnet sind. Dafür wird meist "eingeprägter Strom" verwendet, d.h. die Ausgangs-stufe des Ausgabegerätes regelt den Strom im Aus-gabekreis auf den Wert der Stellgröße. Dadurch können die Werte nicht durch Leitungswiderstände (Temperatur - abhängig!) verfälscht werden. Manche Stellglieder benötigen aber auch Spannungen. Nur noch recht selten müssen konventionelle Anzei-gegeräte oder Schreiber angesteuert werden, die dann normalerweise ein Strom - Signal benötigen. Bild 2.6.1 zeigt das Prinzip, Bild 2.6.2 ein Beispiel aus dem ABB Advant Ein/Ausgabe - System S 600 Bild 2.6.1: Prinzip der Analogsignal - Ausgabgeräte Teilweise kann per Parameter der Ausgangs - Sig-nalbereich und / oder ein Ersatz - Wert festgelegt werden , den ein Ausgang annehmen soll, wenn die Aktualisierung durch die Verarbeitung ausfällt oder der Wert außerhalb des zulässigen Bereiches liegt.
3. Prozesseingriffe Tabelle 3.1: Prozesseingriffe
Bild 2.6.2: Analog - Ausgabegerät - Beispiel (ABB Advant S 600) 8 x 0/4 .. 20 mA, -20 .. 20 mA, 0 .. 5/10 V, -10 .. 10 V pro Kanal bis 500 V isoliert
AusgabegerätCPU
Datenbank
Analogwert
Parameter
Anwender-
Programm
Controller
MeldungEmpfangs -
u. Funkt.überwachung
Ausg.
. .# U
Multi-
plexer
Halte-
Verst.
Eingriffsart Vorrichtung Antrieb Regelung
Medien fördern:
- Flüssigkeiten: Pumpen E-Motor - mit Drosselung *
- mit Bypass
- mit veränderb. Drehzahl
- Gase: Gebläse E-Motor - mit Schaufelverstellung *
- mit veränderb. Drehzahl
Medienfluß ändern:
- Flüssigkeiten: Ventile E-Motor / hydr. / pneum. (lineare / gleichproz. Kennlinie!)
Schieber E-Motor / hydr. / pneum. -- (Absperrorgan)
- Steuerflüssigkeit: Magnetventil El.-Magnetspule -- (Absperrorgan)
/ Steuerluft
- Gase: Klappen E-Motor / hydr. / pneum. (lineare / gleichproz. Kennlinie!)
Bewegung von
- Werkstück /
- Werkzeug (direkt) Linearmotor Lage-Messung
Schnecke, Schraube E-Motor Lage-Messung, Strombegrenz.
el. Schrittmotor Schritte (Impulse)
Zylinder / Kolben hydraul. / pneumat. Lage-Messung
* nicht mehr aktuell

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, August 2003 3. Prozesseingriffe
ASA_Sig_Ausg.doc 7
Automatisierung ist nicht möglich ohne selbsttätige Eingriffe in den Prozess. Tabelle 3.1 listet die prinzipiellen Möglichkeiten auf, wie in verfahrens-technische Prozesse oder in Fertigungsprozesse eingegriffen werden kann. Hauptsächlich dazu dient die Signalausgabe in leittechnischen Einrichtungen. Darüber hinaus werden meist nur noch wichtige Sammelalarme konventionell angezeigt / akustisch gemeldet, so dass dafür Signalausgaben nötig sind. Nachfolgend einige Besonderheiten der verschiede-nen Möglichkeiten der Prozesseingriffe. Die Förderung von Flüssigkeiten erfolgt durch Pumpen (meist Kreiselpumpen), die von Elektro-motoren angetrieben werden. Eine bestimmte Anlage stellt durch ihre Leitungsführung, ihre Bauteile und Förderhöhe einen bestimmten nicht-linearen Widerstand dar, in Bild 3.1 als Anlagen-kennlinie dargestellt. Der Volumenstrom (Durch-fluss) eines bestimmten Pumpenaggregates ist ab-hängig von der Förderhöhe bzw. dem Anlagenwider-stand, in Bild 3.1 als Pumpenkennlinie dargestellt. So ergibt sich am Schnittpunkt der beiden Kenn-linien der Durchfluss der Anordnung (a). Wird ein geringerer Durchfluss benötigt, so kann - der Anlagenwiderstand durch Drosselung erhöht
(Bild 3.1, b) oder ein Teil der Leistung durch einen Bypass aufgenommen werden (Bild 3.2), oder
- die Pumpenleistung durch Reduzieren der Dreh-zahl (Bild 3.1, c) mittels Umrichter verringert werden (Bild 3.3).
b) ist nicht wirtschaftlich, da die nicht benötigte Leistung in Verlustwärme umgewandelt wird ("Reibung"),
c) benötigt mit Asynchronmotor ca. 66% und mit Synchronmotor ca. 56% der el. Leistung von a), dem Preis für den Umrichter steht die Einsparung des Drossel / Bypass - Ventils gegenüber.
Inzwischen gibt es Pumpen mit "Integrierten An-trieben" (Bild 3.4): Motor, Umrichter und Elektronik in einem Gehäuse, sogar mit Bus - Verbindung zwisch-en mehreren, sich die Gesamtleistung wirtschaftlich selbst aufteilenden Aggregaten, da eine Pumpe bei kleiner Teillast nicht wirtschaftlich arbeitet. Zur Ansteuerung des Umrichters wird eine analoge Ausgabe benötigt, oder nur eine Feldbus - Verbindung bei integrierten Antrieben. Bei der Förderung von Gasen gilt für Gebläse ähnliches: an Stelle von verstellbaren Leit- oder Laufschaufeln (Bild 3.5, stark vereinfacht) wird heute meist die Drehzahl des Antriebsmotors verändert. Wo noch Schaufelverstellungen eingesetzt werden, erfolgt ihre Verstellung meist hydraulisch, weil so die hier nötigen hohen Kräfte schneller aufgebracht werden können als mit Elektromotoren (Trägheit). Um den Medienfluss im Prozess zu ändern werden so genannte "Ventile", "Schieber" und "Klappen" eingesetzt. Dabei sind zu unterscheiden: - Absperrorgane (nur AUF oder ZU, z.B. Absperren
des Weges durch ein Reserveaggregat), und
Bild 3.1: Pumpen / Anlagenkennlinie Bild 3.2: Drosselung, Bild 3.3: Drehzahlverstellung Bild 3.4: Pumpe mit "integriertem" Antrieb (KSB) Bild 3.5: Leit- oder Laufschaufelverstellung bei Gebläsen - Regelorgane (z.B. Einstellen eines bestimmten
Durchflusses). Ventile, Schieber und Klappen werden daher häufig z.B. als "Absperrventil" bzw. Regelventil" bezeich-net.
Fö
rderh
öhe H
Pumpenkennlinie
volle Drehzahl
red. Drehzahl
Anlagenkennlinie
gedrosselt
Vollastdrosseln
Drehzahl
reduzieren
a
b
c
Durchfluss Q
gewünschter
Durchfluss
Kreisel-
PumpeDrosselventil
Bypass-
ventil
gewünschter
Durchfluss
Q Qgewünschter
Durchfluss
MKreisel-
Pumpe
Asynchron /
Synchron-
Motor
M Asynchronmotor
Leistungsschalterf Umrichter
Läufer
Leit-Schaufel
(„Drallklappe“)
Lauf-
Schaufel

Signalausgabe Automatisierungssysteme DHBW Mannheim 3. Prozesseingriffe Erich Kleiner, Januar 2006
8 ASA_Sig_Ausg.doc
Tabelle 3.2 zeigt die geläufigen Bezeichnungen: Bild 3.6: Regelventil, hydr. Antrieb Zur Bewegung von Werkstück oder Werkzeug in der Fertigungstechnik werden verschieden konstru-ierte Elektro - Motoren oder hydraulische / pneu-matische Vorrichtungen eingesetzt (siehe Kap. 4), je nach Anforderungen an Schnelligkeit und Kraft.
Die Realisierung von Drehbewegungen durch Schritt- Servo- und Torquemotoren zeigt Bild 1.4.10 Schrittmotoren werden über eine Positioniersteue-rung zur Takterzeugung und einen Treiberverstärker zur für die meist 4 Spulen angesteuert (Bild 1.4.11), Position bzw. Geschwindigkeit werden über RS232, PROFIBUS („PROFIdrive-Profil“) oder CANopen zugeführt. Sie haben ein nachgeschaltetes Getriebe oder eine elektrische Bremse und können als billigste Variante ohne Wegmessung eingesetzt werden (Bild 1.4.12). Für hohe Anforderungen erhalten sie auch eine Wegmessung. Servomotoren stellen die Position über Wegmes-sung und einen integrierten P- Verstärker ein, Ansteuerung wie vor, oft integriert (Bild 1.4.13). Torquemotoren sind hochpolige, permanent erregte Synchronmotoren und können z.B. direkt in einen runden Werkzeugtisch eingebaut werden.
Stellglieder werden hydrau-lisch / pneumatisch mit einer Membran (Bild 3.6) oder mit-tels Elektromotor verstellt, letzterer erlaubt nur eine relativ langsame Verstellung. Stellglieder werden mit linearer oder gleichprozen-tiger (bezogen auf Durchfluss-änderung) Öffnungskennlinie gebaut. Unterschied: "Fein-fühligkeit" im oberen / unteren Hubbereich (Bild 3.9).
Heute werden für Drehbewegungen meist Schritt-, Servo- und –Torquemotoren eingesetzt, und für Linearbewegungen meist solche Motoren mit Um-setzung der Drehbewegung in Linearbewegung mittels Spindel oder Zahnriemen oder direkt Linearmotoren. Bei hohen Verstellgeschwindigkeiten ist das Bremsen in der Zielposition stets problematisch.
Medium: Funktionalität: Stellglied: Antrieb:
- Flüssigkeiten: - absperren (AUF / ZU): (Absperr)Ventil, El.Motor / hydraul. / pneumat.
(Absperr)Schieber
Magnetventil El.Magnet
- regeln („drosseln“) (Regel)Ventil, El.Motor / hydraul. / pneumat.
Drosselklappe
- Gase - absperren (AUF / ZU): (Absperr)Klappe El.Motor / hydraul. / pneumat.
Magnetventil El.Magnet
- regeln (Regel)Klappe, El.Motor / hydraul. / pneumat.
Drosselklappe
Bild 3.7: Ventil, Elektromotor-Antrieb
Bild 3.8: Ventil mit integriertem Antrieb
Bild 3.9: Öffnungskennlinien
Elektromotorischer Antrieb (Samson)
Elektromotor
verstellt Stellglied
Endschalter
(Weg und Drehmoment) /
Stellungsmessung
Ventil
Integrierte Steuerung /
Regelung (Bus-Anschluss)
gleichprozentig:
Hub*Vo
lum
en
*
Hub*Vo
lum
en
* (kleine Last feinfühliger regelbar)
(* „normiert“)
(Vollast feinfühliger regelbar)
oder
linear:
Hydraulischer Antrieb (SAMSON Ffm)
Membran
für Drucköl / -Luft
verstellt Stellglied
Endschalter /
Stellungsmessung
Ventil
Tabelle 1.4.3: Antriebe für Dreh- und Linearbewegungen
Antriebsart Schrittmotoren Servo- motoren
Torque- motoren
Linear- motoren
ohne Wegmessg. mit Wegmessg mit Wegmessg. mit Wegmessg.
Preis: niedrig mittel mittel mittel hoch
Moment / Kraft
bis ca. 40 Nm bis 3.600 Nm Bis 42.000 Nm Bis 10.000 N
M
M
Band
M
Drehtisch
Arm
Bild 1.4.10: Drehbewegungen
RS232,
PROFIBUS,
CANopen
(Position,
Geschwindigkeit, ..)
Leist-
Verst.
Takt + -
M
Pos.-
Sterg.
M
Bild 1.4.11: Ansteuerung von Schritt-, Servo- und Torquemotoren

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, Dez. 2016 4. Aktoren
ASA_Sig_Ausg.doc 9
Für lineare Bewegungen werden die Drehbewegungen der oben gezeigten Motoren mittels Spindel oder Zahnriemen umgesetzt oder es werden direkt Linearmotoren eingesetzt (Bild 1.4.15). In vertikaler Anwendung brauchen Linearantriebe eine Bremse oder ein Gegengewicht. Die Wärme durch die hohe elektrische Leis-tung dieser Antriebsart muss durch spezielle Kühlvorrichtungen abge-führt werden. Die gewünschte Position kann dem Antriebsver-stärker über Analogsignal, RS232, PROFIBUS („PROFIdrive“) oder CANopen vorgegeben werden (Bild 1.4.16). Bild 1.4.17 zeigt Beispiele für den Einsatz von Line-armotoren. Es gibt sehr verschiedene Ausführung-en, z.B. den rechts abgebildeten „tubularen“ DC-Linearmotor, bei dem die Führung des Läufers durch die Last zu gewährleisten ist. Die Wicklung befindet sich im fest stehenden inneren Teil, so dass keine beweglichen Leitungen notwendig sind. Diesen Antrieb gibt es bis 16 N Nenn – Kraft. (-> Anhang!) Nach wie vor spielen pneumatische Antriebe für line-are Bewegungen eine große Rolle. Bild 1.4.18 zeigt eine Auswahl der Firma FESTO Deutschland. Der Fluidik-Muskel ist schneller als Kolben / Zylinder und wirkt dehnend und zusammenziehend.
4. Aktoren:Tabelle 4 enthält eine Übersicht:
Signal - Art Realisierung Anwendung (Beispiele)
- Eigenschaften
EIN/AUS - Schalten: Leistungsschütze mit elektrischer Selbsthaltung, Niederspannungsmotoren
(binär) „Elektronische Schütze“ (Power-FET, Thyristor)
Mechanisch verklinkte Leistungsschalter Mittelspannungsmotoren, Einspeisungen, Kupplungen
Stellen in Endlagen Magnetventile (mit / ohne Koppelrelais) Absperrventile, Hub - Zylinder
auch mit Zwischen- Wendeschütz - Schaltung mit Selbsthaltung Absperrorgane mit Elektromotor, z.B. Klappen
Stellung auch mit Zwischenstellung durch HALT - Taste
(binär) oder zusätzlichen Endschalter
Stellen Wendeschütz - Schaltung ohne Selbsthaltung, Regelorgane mit Elektromotor (für „Schrittregler“)
(analog / digital) Thyristor - Steller - langsam, Start - und Stopp - Zeit
Schrittmotor Positionierung (Plotter)
- genau, kleinere Kräfte
Proportionalmagnete Positionierung bei kleinen Wegen
Direktantrieb (Linearmotor, Hohlwellenmotor) Positionierung (Werkzeugmaschinentisch)
Servomotor (Motor mit Wegrückführung) Positionierung
Elektro - hydraulisch / pneumatisch
- Proportionalventile allgemein Regelorgane (Regelklappe)
- schnell, große Verstärkung möglich (2-stufig)
- Servoventile genaue, große Regelorgane (Regelventile Turbine)
- schnell, sehr genau, große Verstärkung
Leistungssteller in Thyristor - Technik Drehzahlregelung für Motoren (NS und MS, z.B. Pumpe)
Bild 1.4.12: Schrittmotoren (Fa. Ströga)
Bild 1.4.13: Servomotor mit integ. Steuerung, Endschalter und NOT-AUS (Fa. GFC)
Bild 1.4.14: Torque-
Motor (Fa. HWIN)
M
Spindel
M
Schiene mit
Perm.Magn.
M
Mit mech.
Bremse
Od. Gegen-
Gewicht Bild 1.4.15: Linearbewegungen
M
Antr.-
Verst.
10 V,
RS232,
PROFIBUS,
CANopen,
Bild 1.4.16: Linearmotor - Ansteuerung
Bild 1.4.17: Linearmotoren (Fa. HIWIN, Fa. Bobolowski, Fa Beckhoff, Transportsystem)
Bild 1.4.18: Zylinder, Spanner, Greifer, „Fluidik- Muskel“, Sauggreifer, Ventilinsel (max. 16Ventile)
oder Zahnriemen

Signalausgabe Automatisierungssysteme DHBW Mannheim 4. Aktoren Erich Kleiner, Juli 2015
10 ASA_Sig_Ausg.doc
4.1 Elektrische Leistungsschaltgeräte Zu den häufigsten Automatisierungs - Aufgaben im Feldbereich zählt das Ein - und Ausschalten von elektrischen Motoren für Antriebe von z.B. Pumpen und Lüftern, und oft auch von Einspeiseschaltern und Kupplungen zwischen Schienensystemen. Kleinere Leistungen werden über Leistungsschütze, größere über mechanisch verklinkte Leistungs-schalter dreiphasig ein und ausgeschaltet. Die Spulen der Leistungsschütze bzw. die Motoren bei verklinkten Leistungsschaltern benötigen eine höhere Spannung / Leistung als die Ausgabegeräte von SPS / PLS sinnvollerweise verwenden, darum werden Koppelrelais zwischengeschaltet. Bild 4.1.1 zeigt von links nach rechts die drei häuf-igsten Möglichkeiten, sowie darunter die typischen Merkmale: - Leistungsschütz mit Dauerbefehl, d.h. Befehl
während der ganzen Betriebszeit. - Leistungsschütz mit abgesteuerten Befehlen, d.h.
die Befehle dauern nur so lang wie nötig um das Leistungsschütz ein oder auszuschalten. Ein EIN - Befehl schaltet eine elektrische Selbsthaltung ein, ein AUS - Befehl unterbricht sie.
- Mechanisch verklinkter Leistungsschalter, eben-falls mit abgesteuerten Befehlen.
Stellantriebe für Ventile, Klappen und Schieber oder reversierbare Antriebe für Positionierungen müssen in beiden Richtungen laufen können, dazu werden sie über "Wendeschütz" - Schaltungen angesteuert (Bild 4.1.2). Stellantriebe mit Motor-antrieb werden hauptsächlich als Absperrarmaturen in der Steuerung verwendet, in relativ langsam reagierenden Prozessen auch als Stellglied für (Schritt-) Regler. Stellantriebe müssen in den Endlagen (AUF und ZU) abgesteuert werden, das erfolgt normalerweise über Weg - Endschalter (Kontakte), die im Stellantrieb eingebaut sind. Zum Schutz des Stellantriebs bei Blockieren des Stellgliedes sind außerdem oft Drehmoment - Wächter vorhanden, über die der Motor ebenfalls abgesteuert wird. So ergibt sich ein gewisser Logik - Aufwand, der meist in der elek-tronischen Steuerung realisiert wird, so dass der Leistungsteil einfach und ohne "Selbsthaltung" aufgebaut werden kann. Bild 4.1.3 zeigt vereinfacht die typischen Aufgaben einer Stellantriebs - Steuerung. Die Befehle (von Hand und Automatik) setzen Befehlsspeicher, die normalerweise durch die Weg - Endschalter zurück gesetzt werden. Manchmal wird dies z.B. in Richtung ZU gesperrt, damit "richtig ZU" gefahren wird, indem erst der Drehmoment - Wächter bei vom Weg - Endschalter gemeldeter Endlage abschaltet. Bei Ansprechen eines Drehmoment - Wächters (zur Sicherheit in "Ruhestrom") in Zwischenstellung wird über einen Drehmoment - Speicher abgesteuert, denn der Drehmoment - Wächter geht nach Wegfall des Drehmoments durch Abschaltung des Motors in Ruhelage zurück und würde einen neuen Befehl erlauben, was den Stellantrieb beschädigen könnte.
Bild 4.1.3: Stellantriebs - Steuerung Nur durch einen Gegenbefehl des Bedieners wird ein Drehmomentspeicher wieder zurückgesetzt. In den Bildern 4.1.1 und 4.1.2 ist das Verhalten bei Ausfall von Elektronik- und Steuerspannung (für die Leistungsschütze) angegeben. Das ist für die Be-trachtung der Anlagen - Verfübgarkeit bei Störungen und Service - Aktivitäten wichtig, z.B. Geräte - Tausch oder Programm - Änderung.
Typ: Leist.schalter Leist.schalter Leist.schalter
mit Kopp.Rel. mit Kopp.Rel. mit Kopp.Rel.
Merkmale: ohne elektr. Mit elektr. Mechanische
Selbsthaltung Selbsthaltung Verklinkung
bei Ausfall der
- Steuerspannung: schaltet AUS schaltet AUS Zustand bleibt
- Elektronikspanng.: schaltet AUS Zustand bleibt Zustand bleibt
Anwendung: E-Motoren NS E-Motoren NS, E-Motoren MS,
Z.B.: Einspeisungen, Einspeisungen,
Kupplungen Kupplungen
Befehle:
- Steuerspannung,
- Koppelrelais
Leistungsschalter
ProzessM M
M
M
EIN AUS EIN AUS EIN
Bild 4.1.1: Antriebe
Bild 4.1.2: Stellantrieb mit Elektromotor - Antrieb
M
oder:
Typ: Wendeschütze
mit Kopperelais
Merkmale: Anlauf - und
Stopp - Zeit !
Bei Ausfall der
- Steuerspannung: Zustand bleibt
- Elektronikspanng.: Zustand bleibt

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, September 2002 4. Aktoren
ASA_Sig_Ausg.doc 11
4.2 Motor Control Center Die für das Schalten eines elektrischen Verbraucher nötigen Bauelemente wie Sicherungen, Koppel-relais, Trennschalter, Leistungsschütz, Thermischer Auslöser und ggf. Hilfsrelais sind meist in einer Einschub - Konstruktion untergebracht, damit sie als eine Einheit gefertigt und beim Hersteller geprüft werden können. Bei der hohen Anzahl solcher Schalteinrichtungen lohnt sich Standardisierung und Serienfertigung. Eine solche Kombination wird auch "Motor Control Center" (MCC) genannt. Zunehmend werden statt mechanischen Schaltschützen elek-tronische Schalter (Thyristoren, Leistungs - FETs) verwendet. Durch Einführung der Feldbus - Technologie kann man nun auch "Intelligente MCCs" bauen, bei denen eine kleine Speicher - programmierte Steuer-ung und das Leistungs - Schaltgerät in einem Gehäuse untergebracht sind, das z.B. an der Wand neben dem Antriebsmotor montiert ist (Bild 4.2.1). In der Gebäudeautomation ist es üblich, auch Regelungen direkt hier unterzubringen ("DDC"). Die übergeordnete Steuerung / Regelung sowie die Kommunikation (Zentrale Warte, höhere Komm. -Ebenen) sind per Feldbus verbunden. Dadurch entfällt die aufwändige Verkabelung zwischen Elektronik und Schaltgerät und man kann sich mehr Überwachungsfunktionen und hieraus mehr Infor-mationen an die Kommunikation "leisten", da das MCC wirtschaftlich in Serie gefertigt werden kann. Für die Leistungszuführung wird ein Sicherungs-abgang in einer Verteilung benötigt oder ist ebenfalls im Gehäuse untergebracht und per "Energie - Bus" (Ring) über eine Hauptsicherung für mehrere MCCs versorgt. Dadurch entfallen Schaltschränke sowie Kabel zwischen diesen und den Motoren. Hieraus ergeben sich folgende Vorteile: - Ersatz elektromechanischer Verriegelungen usw.
durch die Elektronik mit mehr und flexibel anpass-baren Möglichkeiten,
- einfachere Planung und Inbetriebnahme, da mehr Werte parametrierbar gemacht werden und per Busanschluss eingestellt werden können,
- geringere Ersatzteilhaltung, da ein Typ durch Para-metrierung für einen größeren Einsatzbereich verwendet werden kann,
- zusätzliche Betriebs - und Fehlermeldungen für die Prozessführung,
- Erleichterung der vorbeugenden Wartung durch mehr und besser zugängliche Informationen,
- Diagnosemöglichkeiten für Schaltgerät und Motor mit zentralem Service - Rechner auch über Inter- / Intranet.
Üblich sind folgende Schutz - und Meldefunktionen: - Überlastschutz, Unterlast - Überwachung, - Schutz gegen Blockierung während des Anlaufs, - "Thermisches Gedächtnis" zur Verhinderung neuer
Starts bei zu hoher Erwärmung, - Überwachung von unsymmetrischer Belastung und
Phasen-Reihenfolge, - Thermischer Schutz von Wicklung und Lager, - Erdschlussalarm,
- Momentenbegrenzung, - Sicherungsüberwachung, - Speicherung der letzten Auslöseursache, - Zählung von Starts und Betriebsstunden. Tabelle 4.2 zeigt Vor - und Nachteile der Lösung mit elektromechanischem und elektronischem Leist-ungsschaltgerät: Bild 4.2.1: Intelligentes Motor Control Center 4.3 Intelligenter Stellantrieb Als Gegenstück zum intelligenten MCC werden auch inzwischen "intelligente Stellantriebe" verwendet. Bild 4.1.3 lässt trotz Vereinfachung erkennen, dass zwischen Elektronik und Schaltgerät sowie Elektronik und Feld diverse Verbindungen nötig sind, die über E/A - Geräte per Verkabelung her-gestellt und in Betrieb genommen werden müssen. Wenn Elektronik, Schaltgerät und Antrieb in einem Gehäuse am Stellglied vor - Ort untergebracht und per Feldbus mit der übrigen Steuerung verbunden sind, können die internen Verbindungen wirtschaft-lich in der Fertigung beim Hersteller ausgeführt werden. Dadurch kann man sich außerdem Erfass-ung und Vorverarbeitung von mehr Informationen erlauben, z.B. analoge Drehmoment - Erfassung mit Speicherung des Kurvenverlaufs über dem Weg und Vergleich der aktuellen Kurve mit der bei Inbetriebnahme. Diese Prozess - nahe Technik ist zwar in der An-schaffung noch teurer als die konventionelle Lösung, amortisiert sich aber über die besseren Wartungs-möglichkeiten per Service - PC am Bus - System bzw. über Inter- / Intranet.
3Sich.
Überw.
Trenn-
Schalter
An-
Steuerg.
CPU
- Steuerung,
- ggf. Regelung,
- Überwachung,
- Auswertung,
- Diagnose
T
Drehkontrolle,
Vibration, ..
Hand-
Steuerg.Prozess- u.
Konfigurat.-
Daten
Energie-
Bus
SchnittstelleFeldbus
M
Schaltgerät: Vorteile: Nachteile:
elektro- galv. Trennung geringere
mechanisch Im Lastkreis Lebensdauer
geringere Kosten mehr Verdrahtung
Halbleiter Sanft - Anlauf Verlustleistung
und -Auslauf im Lastkreis
höhere höhere
Lebensdauer Kosten

Signalausgabe Automatisierungssysteme DHBW Mannheim 4. Aktoren Erich Kleiner, Januar 2006
12 ASA_Sig_Ausg.doc
4.4 Magnetventile Für viele Prozesseingriffe werden Magnetventile eingesetzt: kleine Ventile, die durch eine Magnet-spule geöffnet oder geschlossen werden. Ohne Stromfluss werden sie durch Federkraft zurückgestellt. Je nach elektrischer Leistung können sie direkt von Ausgabegeräten angesteuert werden oder über verstärkende und meist die Spannung umsetzende Koppelrelais (Bild 4.4) Magnetventile öffnen / schließen selbst einen Medienfluss (z.B. Ölzufuhr bei Brennern) oder steuern als "Pilotventile" mit Drucköl /- Luft einen Kolben in einem Zylinder, mit dem irgendeine lineare Verstellung mit großer Kraft durchgeführt wird, z.B. das Öffnen / Schließen einer sehr großen Armatur. Da Magnetventile oft für Sicherheits - relevante Auf-gaben eingesetzt werden (z.B. Explosionsgefahr im Feuerraum) benutzt man hier keine "Selbsthaltung" (Zustands - Speicherung) in der Anlage, damit z.B. bei Ausfall der Elektronikspannung oder Drahtbruch die Spule nicht länger erregt bleibt. Dazu muss "nicht erregte" Spule den für die Anlage sicheren Zustand bedeuten. 4.5 Proportional wirkende Stellglieder Für langsame Regelstrecken werden oft Stellglieder mit Elektromotor - Antrieb eingesetzt. Diese brauch-en HÖHER / TIEFER - Befehle angepasster Länge, "Inkremente", und werden dazu von "Inkremental - Reglern" (Schrittreglern) angesteuert. Für schnellere Regelungen sowie für solche Stellglieder, die eine hohe Verstellkraft benötigen, werden proportional arbeitende Stellglieder benutzt. Bild 4.5.1 zeigt als typische Beispiele ein elektro - hydraulisches Stellglied mit Prallplatte und einen Servomotor. Elektro - hydraulische Stellglieder (Bild 4.5.1 links) können sehr schnell verstellen und - je nach Konstruktion - mit viel Kraft. Darin sind sie den elektromotorischen Stellgliedern weit überlegen. Hier beeinflusst eine Magnetspule den Durchfluss von zwei Steuerölkreisen, die ihrerseits einen Kolb-en verstellen. Durch die Konstruktion heben sich die Kräfte auf das Steuerorgan (hier "Prallplatte") auf. Die Spule kann von der Regelung direkt mit einem Stromsignal angesteuert werden und stellt die Stell-glied - Position nach dem Stromwert ein. Dazu wird ein "normales" Analog - Ausgabegerät verwendet. Für hohe Ansprüche an Stellgeschwindigkeit und Genauigkeit werden auch spezielle Ausgabegeräte mit Hub - Rückführung benutzt. In diesen wird oft die so genannte "Dither - Frequenz" der Stellgröße überlagert, die eine leichte Vibration des Stellgliedes bewirkt und dadurch ein Festsitzen verhindert. Servomotoren (im Bild rechts) sind meist kleine Elektromotoren, die durch eine Positions-Rückführung die Stellgliedposition auf die meist als Spannung empfangene Stellgröße einstellen. Dazu ist ein Analog - Ausgabegerät mit Spannungs-ausgang nötig, Anwendung meist in der Fertigungs-automation.
Bild 4.4: Magnetventile Bild 4.5.1: Proportional wirkende Stellglieder Bild 4.5.2: Drehzahlsteller Drehzahlsteller (elektronische Wechselrichter, Bild 4.5.2) werden zunehmend zum Einstellen der Dreh-zahl und damit der Förderleistung von Pumpen und Ventilatoren verwendet anstelle von Verlusten pro-duzierenden Drosselungen. Die Ansteuerung erfolgt über normale Ausgabegeräte mit Spannung oder Stromsignal.
AUF (oder ZU) AUF (oder ZU) ZU AUF
P
oder: P
Typ: Magnetventil Magnetventil Pilotventile
direkt mit Kopp.Rel. direkt
Merkmale: aktiviert = aktiviert = aktiviert =
AUF (oder ZU) AUF (oder ZU) Bewegung
bei Ausfall der
- Steuerspannung: - ZU (oder AUF) Zustand bleibt
- Elektronikspanng.: ZU (oder AUF) ZU (oder AUF) Zustand bleibt
Anwendung: Absperrarmatur,
Z.B.: lineare - Bewegung lineare Bewegung
mA
U
P
- +
M
U
UU
P
Prallplatte
(Beisp.)
f
Hub
Spezie
lle
Ausgabegerä
te
Typ: Strom / Druck- Servo - Motor
Wandler (e/H) auch mit hydr.
Verstärkung,
Merkmale: als Proportional- Anlauf- und
oder Servoventil, Stopp - Zeit !
schnell und stark
Bei Ausfall der
- Steuerspannung: - -
- Elektronikspanng.: schließt schließt
M
Typ: Drehzahl-
steller
Merkmale: wirtschaftlicher
Betrieb,
Anschaffung teuer,
für NS und MS
Bei Ausfall der
- Steuerspannung: stoppt
- Elektronikspanng.: stoppt

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, Juli 2015 4. Aktoren
ASA_Sig_Ausg.doc 13
Für die proportionale Verstellung von Stellgliedern gibt es noch viele weitere Möglichkeiten, die vom jeweiligen Prozess und Produkt des Stellgliedes abhängig sind [1]. 4.6 Positionierung Insbesondere in der Fertigungstechnik sind Möglichkeiten zur Positionierung von Werkstück oder Werkzeug nötig, die schnell und genau arbeiten sollen [1]. Bild 4.6 zeigt zwei Beispiele: Schrittmotoren (Bild 4.6 links) werden oft in der Fertigungsautomatisierung zur Positionierung ein-gesetzt. Sie können sehr genau und schnell positionieren. Ein Controller erzeugt Pulse (Schritte) und Richtungssignal, ein Treiber schaltet damit dieLeistungsspannung auf die (meist) 4 Stator-Spulen. Der Controller wird heute oft direkt über Bus von einer Steuerung angesteuert. Solange keine Schritte durch zu hohen mechanischen Widerstand verloren gehen wird keine Positionsmessung benötigt. Entsprechendes gilt auch für die Positionierung mittels Servomotoren und Torquemotoren. (siehe auch „Prozesseingriffe“, S. 8-9) Auch Linearmotoren (Bild 4.6 rechts) werden zur Positionierung in der Fertigung eingesetzt, z.B. zum Positionieren eines Werkzeugschlittens. Sie benötig-en einen speziellen Leistungssteller, der mit dem Positionswert als Spannungs - oder Stromsignal oder über Bus angesteuert wird und die Position über eine Rückführung einstellt.
Literatur - Hinweise: [1] "Automatiserungs - Technik", Autorenteam, Lektorat: Prof. Dr. Dietmar Schmidt (in der DHBW - Bibliothek mehrfach vorhanden) Aktuelle Anzeigen in Fachzeitschriften (z.B. atp, etz)
Anhang (Produkt-Fotos) Konventioneller „Schaltanlagen-Schrank“ (ABB) mit - eingebauten RIO-Geräten (oben links), - konventionell verdrahtet zu: - Leistungsschalter-Einsätzen (links), - Leistungsschalter-Einschüben (rechts) Auch mit MODBUS als Schaltanlagen-Bus zwischen den Schaltgeräten ausführbar.
Typ: Schritt - Motor Linear - Motor
(„Direktantrieb“).
Merkmale: 1 - 40 000 10-fach schneller
Schritte / s, als Stellmotoren
Kleine Kräfte
Bei Ausfall der
- Steuerspannung: Zustand bleibt -
- Elektronikspanng.: Zustand bleibt Zustand bleibt
Bild 4.6: Schrittmotor, Linearmotor
Controller

Signalausgabe Automatisierungssysteme Berufsakademie Mannheim Anhang Erich Kleiner, Juli 2015
14 ASA_Sig_Ausg.doc
„SmartWire-Darwin“ (Moeller/Eaton) - Bus zur Verbindung von Bedien- und Schaltgeräten (99 Teiln., 100m), - durch Rundkabel auch auf Peripherie erweiterbar (Sensoren, Aktoren), - Stecker mit Schneid-Kontakten - Gateway zu Profibus / CANopen Energiebus-System „FieldPower“ (Weidmüller) - Abzweig-Kästchen mit Schneid- Klemmen, - Stichleitungen konventionell Angeschlossen oder vorkonfektioniert, - Zusatzgeräte aufsteckbar (z.B. Wechselrichter, rechts unten) „SIMOTION D“- Regelungsbaugruppe mit integriertem Steller (Siemens)
Motorstarter mit integrierter CPU-Funktionalität Siemens ET200 S
oder Geräte (z.B. Wechslrichter) aufstecken

DHBW Mannheim Automatisierungssysteme Signalausgabe Erich Kleiner, März 2018 Anhang
ASA_Sig_Ausg.doc 15
ABB – Universal- Motor Control Center
Elektronische „Kompaktstarter“ ABB Baureihe HF bis max. 0,6 / 2,4 / 6,5 A