geo-konzept GPS-Empfänger · PDF filegeo-konzept GPS-Empfänger Vergleich Genauigkeit...
12
geo-konzept GPS-Empfänger Vergleich Genauigkeit der statischen und dynamischen Positionierung DLG-Prüfbericht 5148F Deutsche Landwirtschafts- Gesellschaft e.V. Prüfstelle für Landmaschinen Anmelder geo-konzept Gut Wittenfeld D-85111 Adelschlag Telefon: 0 84 24/89 89-0 Fax: 0 8424/89 89-80 Vorbemerkungen Nach Vorgesprächen im Januar 2002 erteilte die Firma geo- konzept mit Sitz in Adelschlag am 5. Mai 2002 der DLG-Prüfstelle für Landmaschinen in Potsdam- Bornim den Auftrag über einen FokusTest zur Genauigkeit der Positionierung mit den folgenden GPS-Empfängern: Trimble, AgGPS114, DGPS Omnistar Trimble, AgGPS132, GPS standalone Garmin, GPS Maus, GPS standalone Leica Geosystems, GS50, DGPS Landstar geo-konzept, geo-kombi 12B plus, DGPS Langwelle ALF/UKW Rasant OmniSTAR Europe BV, OmniSTAR HP, Zweifrequenz Korrekturdienst Vergleichend sollen bei den GPS- Empfängern sowohl die statische als auch die dynamische Genauig- keit der Positionierung geprüft wer- den. Mittels der Messergebnisse werden die Empfänger in verschie- dene Anwendungsgruppen ein- geteilt. Die GPS-Empfänger mit unter- schiedlicher Ausstattung hinsicht- lich GPS-System, Korrekturdienst, Qualitäts- und Preisklasse wurden am 27. Mai 2002 in der DLG-Prüf- stelle Groß-Umstadt angeliefert. Die Messungen fanden vom 29. Mai bis 12. Juli 2002 in drei Wiederholungen auf der Fahrzeug- prüfbahn (Rundlauf) der DLG- Prüfstelle in Groß-Umstadt statt. Bild 2: Überblick Versuchs- gelände
Transcript of geo-konzept GPS-Empfänger · PDF filegeo-konzept GPS-Empfänger Vergleich Genauigkeit...

geo-konzept
GPS-Empfänger VergleichGenauigkeit der statischen und dynamischen Positionierung
DLG-Prüfbericht 5148F
Deutsche Landwirtschafts-Gesellschaft e.V.
Prüfstelle für Landmaschinen
Anmeldergeo-konzept
Gut WittenfeldD-85111 Adelschlag
Telefon: 0 8424/89 89-0Fax: 0 8424/89 89-80
VorbemerkungenNach Vorgesprächen im Januar2002 erteilte die Firma geo-konzept mit Sitz in Adelschlag am5. Mai 2002 der DLG-Prüfstelle für Landmaschinen in Potsdam-Bornim den Auftrag über einenFokusTest zur Genauigkeit derPositionierung mit den folgendenGPS-Empfängern:
Trimble, AgGPS114, DGPS Omnistar
Trimble, AgGPS132, GPS standalone
Garmin, GPS Maus, GPS standalone
Leica Geosystems, GS50, DGPS Landstar
geo-konzept, geo-kombi 12B plus, DGPSLangwelle ALF/UKW Rasant
OmniSTAR Europe BV, OmniSTAR HP,Zweifrequenz Korrekturdienst
Vergleichend sollen bei den GPS-Empfängern sowohl die statischeals auch die dynamische Genauig-keit der Positionierung geprüft wer-den. Mittels der Messergebnissewerden die Empfänger in verschie-dene Anwendungsgruppen ein-geteilt.Die GPS-Empfänger mit unter-schiedlicher Ausstattung hinsicht-lich GPS-System, Korrekturdienst,Qualitäts- und Preisklasse wurdenam 27. Mai 2002 in der DLG-Prüf-stelle Groß-Umstadt angeliefert.Die Messungen fanden vom 29. Mai bis 12. Juli 2002 in dreiWiederholungen auf der Fahrzeug-prüfbahn (Rundlauf) der DLG-Prüfstelle in Groß-Umstadt statt.
Bild 2: ÜberblickVersuchs-gelände
DLG-Prüfbericht 5148F 2
Kurzbeschreibung
Hersteller Garmin geo-konzept Leica OmniSTAR Trimble TrimbleGeosystems
Name (Bez. i. Bericht) GPS Maus geo-kombi GS50 OmniSTAR HP Ag 114 Ag 132Empfänger-Bezeichnung GPS35 HVS geo-kombi GS50 / TR500 OmniSTAR AgGPS114 AgGPS132
12B plus HP 8200GPS-System GPS ohne DGPS DGPS Zweifrequenz DGPS GPS
Korrektur GPS ohne KorrekturKorrekturdaten – AdV / DeTex Landstar OmniSTAR OmniSTAR –Anbieter (ALF)Korrekturdienst/System – ALF, Langwelle L-Band Satellit, Wide Area L-Band Satellit, –
Rasant, UKW VBS Service GPS Augment. VBS ServiceSystem
Anzahl Kanäle 12 12 12 12 12 12Garantierte stat. Genauigkeit 15 m RMS 1 m 0,4 m 10 cm ≤ 1 m RMS ca. 10 mSerien Nummer 719 60 803 34 50945 / 18409 386982 0224 042 509 0224 022 444Firmware Version unbekannt 3.2 / 1.1 4.00 2.3 HP 1.52 1.50
(Aktuell 02)
Prüfbedingungen / Prüfungsablauf
Der FokusTest zu den Kriterienstatische und dynamische Genau-igkeit der Positionierung unterlandwirtschaftlichen Einsatzbedin-gungen fand auf der Fahrzeug-prüfbahn (Rundlauf – Bild 2) derDLG-Prüfstelle für Landmaschinen,Groß-Umstadt statt. Der dort ein-gesetzte Messwagen fährt automa-tisch eine Kreisbahn ab. Die Tole-ranz des Messaufbaus mit Refe-renzsystem liegt bei +/- 5 cm. DieMesswerte wurden in 10 cm Feh-lerklassen eingeteilt.
Die Haupteinflussfaktoren auf dieGPS-Position sind:– Satellitenkonstellation und Geo-
metrie– Atmosphärische Bedingungen– Einfluss von Störquellen– Mehrwegeeffekte– Qualität der Empfänger und
Antennen – Typ des GPS-Systems– Korrektursignal– Filter und Glättung der Daten
Messungen der Genauigkeit vonGPS-Empfängern sind daher immernur für den Ort und die Zeit derMessung gültig. Um den Einfluss auf die Genauig-keit der Positionsangaben allerGPS-Empfängern vergleichbar zu
halten, wurden die Messungen mitallen Empfängern parallel durchge-führt.Um die Aussagen verallgemeinernzu können wurden 3 Wieder-holungen à 24 h Messzeit inAbständen von 2 – 4 Wochen für
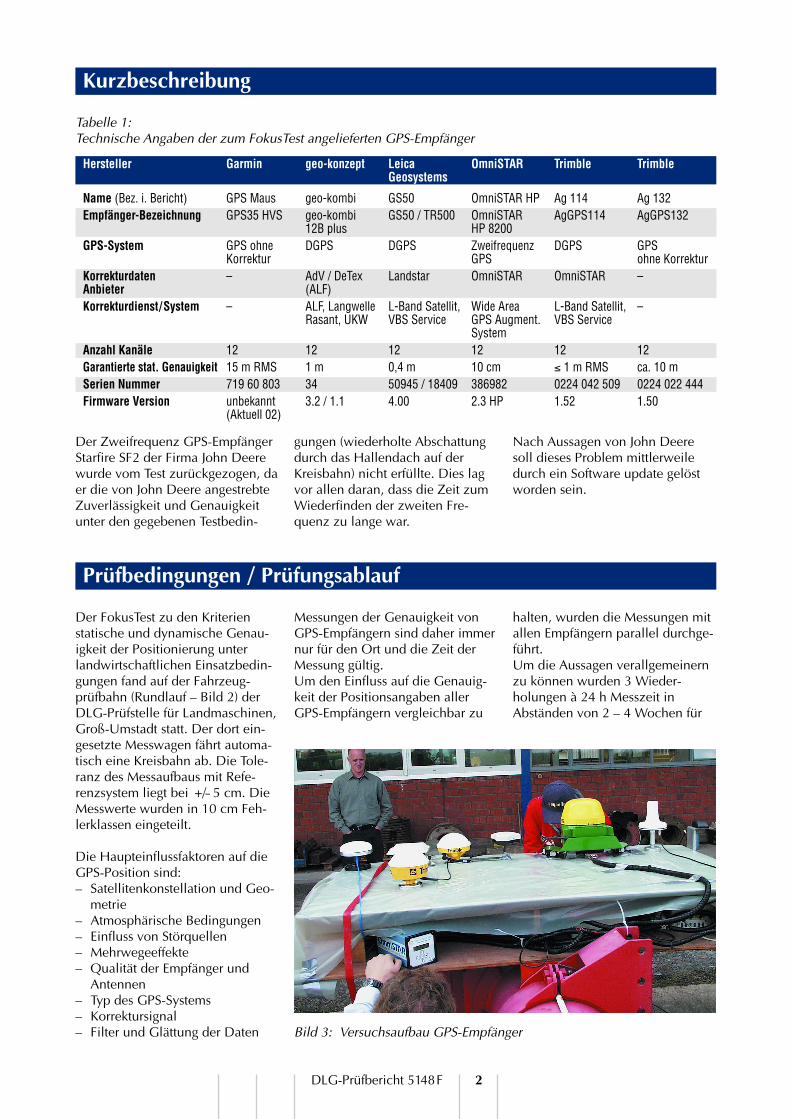
Tabelle 1: Technische Angaben der zum FokusTest angelieferten GPS-Empfänger
Der Zweifrequenz GPS-EmpfängerStarfire SF2 der Firma John Deerewurde vom Test zurückgezogen, daer die von John Deere angestrebteZuverlässigkeit und Genauigkeitunter den gegebenen Testbedin-
gungen (wiederholte Abschattungdurch das Hallendach auf derKreisbahn) nicht erfüllte. Dies lagvor allen daran, dass die Zeit zumWiederfinden der zweiten Fre-quenz zu lange war.
Nach Aussagen von John Deeresoll dieses Problem mittlerweiledurch ein Software update gelöstworden sein.
Bild 3: Versuchsaufbau GPS-Empfänger

DLG-Prüfbericht 5148F 3
Fehler und Genauigkeitsmaße
Per Definition ist die Genauigkeitein Maß für die Korrektheit einergemessenen Position im Vergleichzu:– einer wahren Position (Absolute
Genauigkeit) oder – dem Mittelwert aller gemesse-
nen Positionen (Relative Genau-igkeit).
Die Genauigkeit kann außerdem – in Ruhe (statisch) oder – in Bewegung (dynamisch) ermittelt werden.Für die Landwirtschaft istbesonders die dynamische Genau-igkeit von Interesse. Die dynamische Genauigkeit lässtsich nicht aus der statischenGenauigkeit ableiten (Vgl. Bild 4)!Die Positionierung mittels GPSbasiert auf statistischen Verfahren.Angaben zur Genauigkeit könnendaher nicht eindeutig (100%ig)beschrieben werden sondern eben-falls als statistische Werte mit dendazugehörigen Wahrscheinlichkei-ten. Dabei bedeutet, dass z. B. bei68 % Wahrscheinlichkeit in 68 %(oder ~2/3) der Fälle die Abwei-chung der Positionsangabe kleineroder gleich dem angegebenenWert ist. In einem Drittel der Fällekann die Abweichung aber darüberliegen.Von den Herstellern wird häufigdie horizontale, statische, relative
Genauigkeit als „Mittlerer Punkt-fehler“ oder „dRMS“ mit 63 % –68 % Wahrscheinlichkeit angege-ben. Es finden sich darüber hinausallerdings sehr unterschiedlicheMethoden zur Angabe der Genauig-keit. Die Genauigkeitsangaben ver-schiedener Hersteller sind nur ver-gleichbar, wenn die Methode zurErmittlung der Angaben bekannt ist(Vgl. Tabellen 6 + 7).Da die Genauigkeit der GPS-Posi-tionierung eine Funktion mehrererParameter einschließlich Ort undZeit ist, sind die numerischenErgebnisse nur für Ort und Zeit dertatsächlichen Messung gültig. Um für den landwirtschaftlichenEinsatz sinnvolle Aussagen zuwechselnden Einsatzorten treffenzu können wird daher zur Beurtei-lung der Empfänger ein System derKlassifizierung herangezogen(Tabelle 2).In der Praxis kann es aufgrund deroben genannten Störeinflüsse zuAusreißern kommen, die von denstatistischen Größen nicht erfasstwerden. Das sind einzelne Mess-werte, die überdurchschnittlichgroße Abweichungen aufweisen. Der mittlere oder durchschnittli-che Fehler ist ein Maß für einenVersatz (Off-Set) des Mittels allerMesswerte im Verhältnis zum Soll-wert. Dieser Lageversatz beein-
trächtigt besonders das Wiederauf-finden von bereits eingemessenenPunkten. Zusätzlich verursacht erz. B. den Versatz einer komplettenVermessung der Feldgrenzen,dabei kann die berechnete Größeder Fläche durchaus korrekt sein,die Lage im Vergleich zu anderenMessungen bzw. Kartenmaterialaber falsch.Der „CrossTrack“-Fehler ist dieAbweichung quer zur gefahrenenSpur. Im Falle der Kreisbahn desRundlaufes ist das die Abweichungdes Kreisbahnradius. Der „Cross-Track“-Fehler dient zur Beurteilungvon Lenksystemen, hier berechnetfür 24 h. Für das reine Parallelfahren wirdoft auch ein so genannter „Pass-to-Pass“-Fehler für eine kurze Zeit-spanne berechnet. Hierbei geht esdarum, die Abweichungen zwi-schen zwei benachbartenAnschlussfahrten zu ermitteln, dieZeitintervalle schwanken je nachSchlaggröße (üblich ca. 15 min –30 min). Dieser Wert ist nicht ein-deutig definiert und wurde hiernicht berechnet. Als Faustregel gilt:Der „Pass-to-Pass“-Fehler ist bis zu3-mal kleiner als der „CrossTrack“-Fehler.
jeweils statische und dynamischeMessungen an aufeinander folgen-den Tagen durchgeführt. Die GPS-Empfänger mit unter-schiedlichen Ausstattungen wieAntennen, Korrektursignal, Emp-fänger-Typ und -Qualität wurdenauf dem Messwagen des Rundlaufsmontiert (Bild 3). Das 4 m hohe Vordach der Testhal-le im S-W (Bild 2) schattet dieSatellitensignale teilweise ab. Diesentspricht in etwa der Situation beieinem dichten Baumbestand amFeldrand.Für den stationären Versuch wurdeder Messwagen auf dem Referenz-punkt „B“ positioniert (Bild 2).Während der dynamischen Ver-suche war der Messwagen konstant
mit ca. 8 km/h in Bewegung. Zur Berechnung seiner tatsäch-lichen Position dient ein Referenz-system mit vier fixen Punkten A, B,C und D (Bild 2). Der Rundlauf der DLG-Prüfstelleliegt bei 8°54.7’E und 49°52.5’N(geogr. L/B, ETRS89, HKVV).Alle Daten wurden in geographi-schen Koordinaten (L/B), bezogenauf das WGS84 Ellipsoid gespei-chert, und anschließend inmetrische Daten X (Rechtswert) / Y (Hochwert) transformiert. Die Abweichungen (Messwert –Referenzwert) wurden jeweils ein-zeln in X- und Y-Richtung berech-net und die 2 dimensionale = hori-zontale Abweichung daraus abge-leitet.
Ein Histogramm der Häufigkeitender horizontalen Abweichung mit10 cm Fehlerklassen wurde erstellt(Bilder 5, 6, 8 + 9).In Analogie zu den gebräuchlichenstatistischen Größen wurde diehorizontale Positionsgenauigkeit,entsprechend der Fehlerklasse, mit50 %, 68 %, 95 % und 98 %Wahrscheinlichkeit ermittelt. Die statistischen Größen wie„Standardabweichung“ (s oder„RMS“), „Fehlerkreisradius“(CEP50/95) und „dRMS“ oder„Mittlerer Punktfehler“ gelten aus-schließlich für Werte mit Normal-bzw. Rayleighverteilung.

Die geprüften DGPS-Empfängerder „Klasse II“ mit horizontalenAbweichungen ≤ 1 m (68 % Wahr-scheinlichkeit) sind für alle land-wirtschaftlichen Arbeiten im Be-reich teilflächenspezifischer Be-wirtschaftung gut geeignet.
Die Abweichungen (horizontal,68%) des Zweifrequenz-Empfän-gers OmniSTAR HP „Klasse III“liegen im Dezimeter Bereich mit≤ 0,3 m dynamisch und ≤ 0,1 mstatisch (Tabelle 4 + 5), diese Er-gebnisse sind für DGPS-Empfängerbisher unerreicht. Der Empfängereignet sich besonders für Anwen-dungen mit hohen Genauigkeitsan-forderungen in Vermessung undAutomation (Tabelle 2).
Die Herstellerspezifikationen zurstatischen Genauigkeit (Horizon-tale Abweichung, „dRMS“ bei 68 %Wahrscheinlichkeit) werden vonallen Empfängern unter den gege-benen Bedingungen erfüllt (Bild 4).Zuverlässigkeit, Positions- undWiederholgenauigkeit der geprüf-ten GPS-Empfänger sind unter-schiedlich. Die GPS-Empfängerlassen sich klar in verschiedeneAnwendungsgruppen unterteilen(Tabelle 3).
Die durchschnittliche Abweichungder GPS-Empfänger ohne Korrektur„Klasse 0“ liegt deutlich überdenen der DGPS-Empfänger. Diesbedeutet, dass Messungen mit GPSohne Korrektur (Geräte der „Klasse0“), die an unterschiedlichen Tagenoder mit verschiedenen Gerätendurchgeführt werden, u. U. einen
großen Versatz aufweisen. Sie soll-ten nicht für präzise Vermessungs-aufgaben verwendet werden.
Bedingt durch interne Datenverar-beitung (Filtern, Glätten etc.) zei-gen die verschiedenen Systeme sta-tisch und dynamisch unterschied-liche Genauigkeiten.
Im Verhältnis zum statischen Ver-such sind z.B. die dynamischenWerte der Garmin GPS Maus deut-lich besser.
Beim OmniSTAR HP Zweifre-quenz-Empfänger hingegen wirktsich im dynamischen Einsatz dieAbschattung und der dadurchbedingte teilweise Signalverlust miteinhergehenden (längeren) Re-Initi-alisierungsphasen negativ aus.
DLG-Prüfbericht 5148F 4
Messergebnisse
Bild 4: Messergebnisse im Vergleich: Horizontale (2-Dimensionale) Abweichung mit 68 % Wahrscheinlichkeit sowie der Mittlere (Durchschnittliche) Fehler sowohl statisch als auch dynamisch gemessen. Zusätzlich derdynamische „CrossTrack“-Fehler, das ist die Abweichung quer zur Fahrspur.

DLG-Prüfbericht 5148F 5
Tabelle 2: Klassifizierung der landwirtschaftlich genutzten GPS-Empfänger nach Empfängertyp und Einsatzmöglichkeiten
Tabelle 3: Messergebnisse zur Klassifizierung der geprüften GPS-Empfänger. Gemessene Genauigkeit ist die HorizontaleAbweichung mit 68 % Wahrscheinlichkeit. Als gemessene Genauigkeit wird jeweils der maximale Wertangegeben (statisch oder dynamisch).
Klassifizierung Klasse 0 Klasse I Klasse II Klasse III Klasse IV
Messergebnisse Klasse 0 Klasse II Klasse III
Garantierte Genauigkeit (stationär /relativ) 15 m 5 m 1 m 0,5 m 0,05 m
Bewertung (Prüfzeichen) Genauigkeit ≤ 15 m Genauigkeit ≤ 1 m Genauigkeit ≤ 0,5 m
Geprüfter Empfänger Garmin GPS Maus Trimble AgGPS114, OmniSTAR OmniSTAR HP
gemessene Genauigkeit 68 % 3,5 m 0,6 m 0,3 m
Geprüfter Empfänger Trimble AgGPS132 Leica GS50, Landstar
gemessene Genauigkeit 68 % 2,5 m 0,6 m
Geprüfter Empfänger geo-kombi 12B plus, LW DGPS
gemessene Genauigkeit 68 % 0,9 m
GPS-System GPS DGPS DGPS Zweifrequenz RTK GPS(Fast update rate) GPS
Korrektursignal Kein funkgestützte Wie Kl. I und: Wide area Eigene ReferenzSysteme L-Band Satellit services for Station oder vgl.(RDS, Mobil-, decimeter GPS VRS ServiceKüstenfunk)
Einsatzgebiete Logistik + Wie Kl. 0 und: Wie Kl. I und: Wie Kl. II und: Wie Kl. III und:Navigation, Ertragskartierung, Feldgrenzen- Vermessung, Steuerung inFeldbegehung, Variable Geräte- Vermessung, Autonome Fahr- Reihenkulturen,Bonituren, steuerung, Lenkhilfen zeugsteuerung Einzelpflanzen-Probenahme Flächenaufmaß positionen
Signal Stabilität Hoch Mittel Mittel Gering Gering
Signal Qualität Gering Gut Gut Gut / Sehr gut Sehr gut
Preisklasse ab 200,– € 1.000,– € 2.500,– € 7.000,– € 30.000,– €
Die Qualität der Korrektursignalehängt allgemein von der Entfer-nung des Empfängers zur Referenz-station ab. Die Satelliten gestütztenDienste bieten eine „Virtuelle Re-ferenzstation“, diese liefert Standortunabhängig hohe Genauigkeit.
Der geo-kombi wird mit funkge-stützten Korrektursignalen aufLangwelle (ALF) oder UKW
(Rasant) betrieben. Die Empfangs-situation dieser Dienste kann lokalsehr unterschiedlich sein.Je genauer die angestrebte Positio-nierung der Empfänger ist, destohäufiger werden Werte von inter-nen Filtern aufgrund unzureichen-der Genauigkeit ausgeschlossen.Empfangsstabilität und Positions-genauigkeit verhalten sich gegen-läufig.
Deutlich wird jedoch auch, dassdie Empfangsstabilität allein keinQualitätskriterium ist. Die GPS-Empfänger ohne Korrektur zeigtenkaum Signalverlust, verzeichnenaber die größten Positionierungs-fehler.
DLG-Prüfbericht 5148F 6
Messergebnisse im Detail
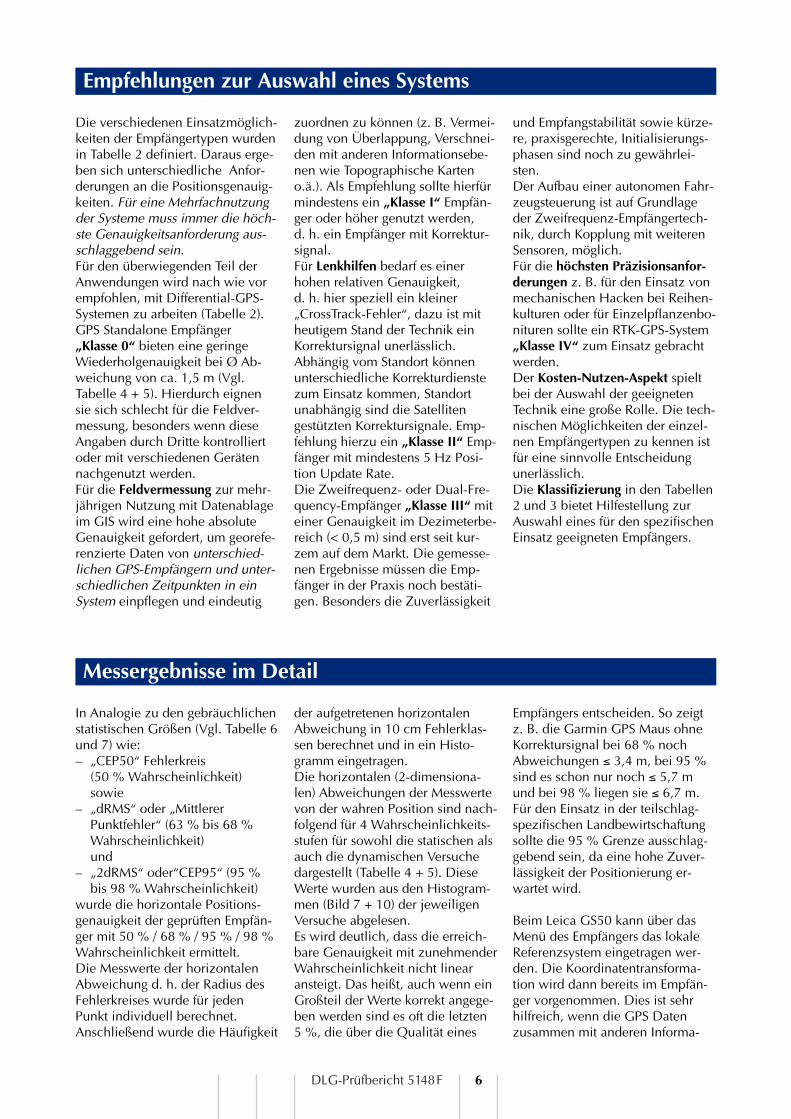
Empfehlungen zur Auswahl eines Systems
Die verschiedenen Einsatzmöglich-keiten der Empfängertypen wurdenin Tabelle 2 definiert. Daraus erge-ben sich unterschiedliche Anfor-derungen an die Positionsgenauig-keiten. Für eine Mehrfachnutzungder Systeme muss immer die höch-ste Genauigkeitsanforderung aus-schlaggebend sein. Für den überwiegenden Teil derAnwendungen wird nach wie vorempfohlen, mit Differential-GPS-Systemen zu arbeiten (Tabelle 2). GPS Standalone Empfänger„Klasse 0“ bieten eine geringeWiederholgenauigkeit bei Ø Ab-weichung von ca. 1,5 m (Vgl.Tabelle 4 + 5). Hierdurch eignensie sich schlecht für die Feldver-messung, besonders wenn dieseAngaben durch Dritte kontrolliertoder mit verschiedenen Gerätennachgenutzt werden. Für die Feldvermessung zur mehr-jährigen Nutzung mit Datenablageim GIS wird eine hohe absoluteGenauigkeit gefordert, um georefe-renzierte Daten von unterschied-lichen GPS-Empfängern und unter-schiedlichen Zeitpunkten in einSystem einpflegen und eindeutig
zuordnen zu können (z. B. Vermei-dung von Überlappung, Verschnei-den mit anderen Informationsebe-nen wie Topographische Karteno.ä.). Als Empfehlung sollte hierfürmindestens ein „Klasse I“ Empfän-ger oder höher genutzt werden,d. h. ein Empfänger mit Korrektur-signal.Für Lenkhilfen bedarf es einerhohen relativen Genauigkeit, d. h. hier speziell ein kleiner„CrossTrack-Fehler“, dazu ist mitheutigem Stand der Technik einKorrektursignal unerlässlich.Abhängig vom Standort könnenunterschiedliche Korrekturdienstezum Einsatz kommen, Standortunabhängig sind die Satellitengestützten Korrektursignale. Emp-fehlung hierzu ein „Klasse II“ Emp-fänger mit mindestens 5 Hz Posi-tion Update Rate.Die Zweifrequenz- oder Dual-Fre-quency-Empfänger „Klasse III“ miteiner Genauigkeit im Dezimeterbe-reich (< 0,5 m) sind erst seit kur-zem auf dem Markt. Die gemesse-nen Ergebnisse müssen die Emp-fänger in der Praxis noch bestäti-gen. Besonders die Zuverlässigkeit
und Empfangstabilität sowie kürze-re, praxisgerechte, Initialisierungs-phasen sind noch zu gewährlei-sten. Der Aufbau einer autonomen Fahr-zeugsteuerung ist auf Grundlageder Zweifrequenz-Empfängertech-nik, durch Kopplung mit weiterenSensoren, möglich.Für die höchsten Präzisionsanfor-derungen z. B. für den Einsatz vonmechanischen Hacken bei Reihen-kulturen oder für Einzelpflanzenbo-nituren sollte ein RTK-GPS-System„Klasse IV“ zum Einsatz gebrachtwerden. Der Kosten-Nutzen-Aspekt spieltbei der Auswahl der geeignetenTechnik eine große Rolle. Die tech-nischen Möglichkeiten der einzel-nen Empfängertypen zu kennen istfür eine sinnvolle Entscheidungunerlässlich. Die Klassifizierung in den Tabellen2 und 3 bietet Hilfestellung zurAuswahl eines für den spezifischenEinsatz geeigneten Empfängers.
In Analogie zu den gebräuchlichenstatistischen Größen (Vgl. Tabelle 6und 7) wie: – „CEP50“ Fehlerkreis
(50 % Wahrscheinlichkeit) sowie
– „dRMS“ oder „MittlererPunktfehler“ (63 % bis 68 %Wahrscheinlichkeit) und
– „2dRMS“ oder“CEP95“ (95 % bis 98 % Wahrscheinlichkeit)
wurde die horizontale Positions-genauigkeit der geprüften Empfän-ger mit 50 % / 68 % / 95 % / 98 %Wahrscheinlichkeit ermittelt. Die Messwerte der horizontalenAbweichung d. h. der Radius desFehlerkreises wurde für jedenPunkt individuell berechnet.Anschließend wurde die Häufigkeit
der aufgetretenen horizontalenAbweichung in 10 cm Fehlerklas-sen berechnet und in ein Histo-gramm eingetragen.Die horizontalen (2-dimensiona-len) Abweichungen der Messwertevon der wahren Position sind nach-folgend für 4 Wahrscheinlichkeits-stufen für sowohl die statischen alsauch die dynamischen Versuchedargestellt (Tabelle 4 + 5). DieseWerte wurden aus den Histogram-men (Bild 7 + 10) der jeweiligenVersuche abgelesen. Es wird deutlich, dass die erreich-bare Genauigkeit mit zunehmenderWahrscheinlichkeit nicht linearansteigt. Das heißt, auch wenn einGroßteil der Werte korrekt angege-ben werden sind es oft die letzten5 %, die über die Qualität eines
Empfängers entscheiden. So zeigtz. B. die Garmin GPS Maus ohneKorrektursignal bei 68 % nochAbweichungen ≤ 3,4 m, bei 95 %sind es schon nur noch ≤ 5,7 mund bei 98 % liegen sie ≤ 6,7 m. Für den Einsatz in der teilschlag-spezifischen Landbewirtschaftungsollte die 95 % Grenze ausschlag-gebend sein, da eine hohe Zuver-lässigkeit der Positionierung er-wartet wird.
Beim Leica GS50 kann über dasMenü des Empfängers das lokaleReferenzsystem eingetragen wer-den. Die Koordinatentransforma-tion wird dann bereits im Empfän-ger vorgenommen. Dies ist sehrhilfreich, wenn die GPS Datenzusammen mit anderen Informa-
DLG-Prüfbericht 5148F 7
tionsebenen (z. B. TopographischeKarten) verarbeitet werden.Bei den dynamischen Versuchenwurde mit dem Empfänger OmniSTAR HP ein starker Anstiegder Positionierungsfehler mitzunehmender Wahrscheinlichkeitgemessen. Hier liegt ein Problemdurch die (Teil-)Abschattung undden zeitweiligen Verlust derSatellitensignale (der zweiten Fre-quenz) zugrunde. Zur „Re-initialisierung“ (d. h.Wiederfinden des Signals und Auf-lösen unbekannter Parameter zurBerechnung der neuen Position)benötigt der Empfänger eine gewis-se Zeit während der er größereAbweichungen zu verzeichnen hat. Es zeigt sich, dass die Zuverlässig-
keit (Signalstabilität) der Zwei-frequenz-Empfänger-Systeme nochverbessert werden muss. GPS-Systeme mit höherer Genauigkeitreagieren empfindlicher auf (Teil-)Abschattung. Für höchste Genauig-keit muss während der Messungauf beste Signalqualität geachtetwerden.Der Trimble AgGPS114 DGPS zeigtbeim dynamischen Versuch starkeAusreißer, daher wird hier bei98 % das Messergebnis deutlichschlechter. Das Ausreißerproblemliegt vor allem an Interferenzen(Störung) zwischen den benachbar-ten Antennen. Die Abstände zwi-schen den Antennen konnten auf-grund des Messaufbaus nicht aus-reichend groß gewählt werden
(Abstand ca. 25 cm). Ausreißer indieser Größenordnung wurden invergleichbaren Praxiseinsätzennicht festgestellt. Die „SmartAntenna“ (integriertesEmpfänger und Antenne Modul)des AgGPS114 ist anfälliger fürStörungen als die kombinierteAntenne (GPS und Korrektursignal)des sonst baugleichen AgGPS132.Interferenzen treten in der land-wirtschaftlichen Praxis selten auf,dennoch sollte darauf geachtetwerden, das z. B. Antennen desBordfunks, Radio oder Mobiltele-fon weit genug von der GPS An-tenne entfernt platziert werden(Abstand > 50 cm).
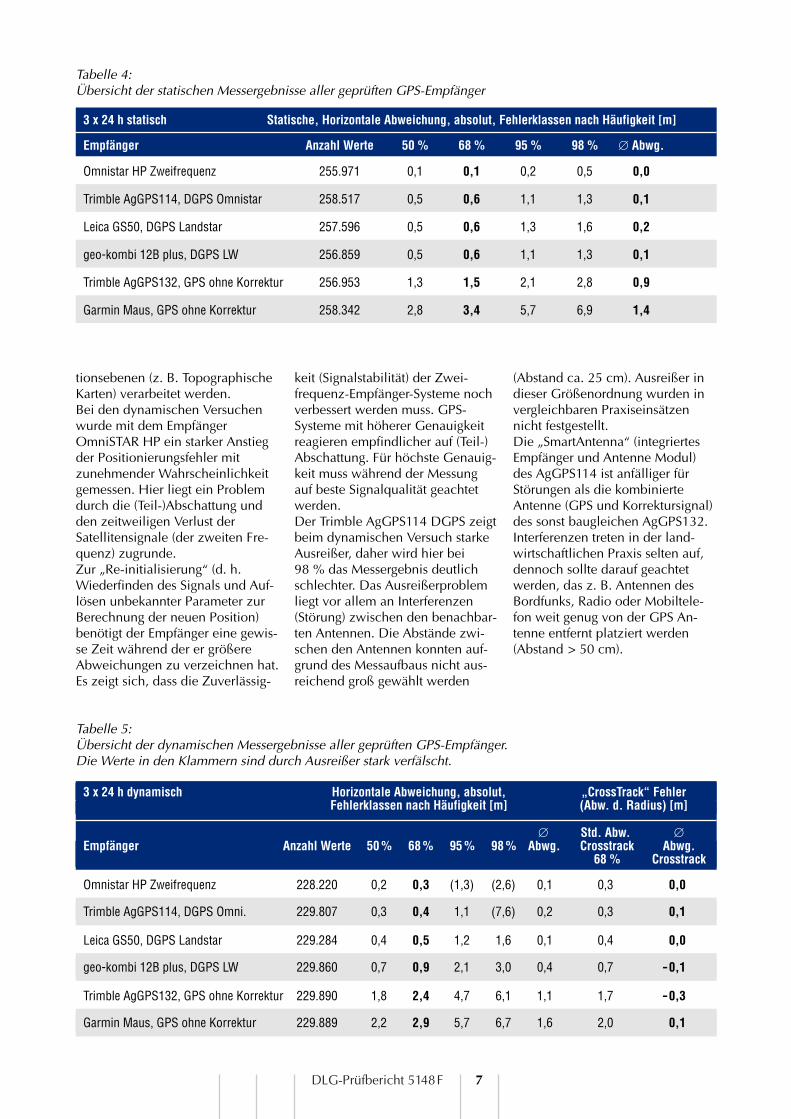
Tabelle 5: Übersicht der dynamischen Messergebnisse aller geprüften GPS-Empfänger. Die Werte in den Klammern sind durch Ausreißer stark verfälscht.
Tabelle 4: Übersicht der statischen Messergebnisse aller geprüften GPS-Empfänger
3 x 24 h statisch Statische, Horizontale Abweichung, absolut, Fehlerklassen nach Häufigkeit [m]
Empfänger Anzahl Werte 50 % 68 % 95 % 98 % ∅ Abwg.
Omnistar HP Zweifrequenz 255.971 0,1 0,1 0,2 0,5 0,0
Trimble AgGPS114, DGPS Omnistar 258.517 0,5 0,6 1,1 1,3 0,1
Leica GS50, DGPS Landstar 257.596 0,5 0,6 1,3 1,6 0,2
geo-kombi 12B plus, DGPS LW 256.859 0,5 0,6 1,1 1,3 0,1
Trimble AgGPS132, GPS ohne Korrektur 256.953 1,3 1,5 2,1 2,8 0,9
Garmin Maus, GPS ohne Korrektur 258.342 2,8 3,4 5,7 6,9 1,4
3 x 24 h dynamisch Horizontale Abweichung, absolut, „CrossTrack“ Fehler Fehlerklassen nach Häufigkeit [m] (Abw. d. Radius) [m]
∅ Std. Abw. ∅Empfänger Anzahl Werte 50 % 68 % 95 % 98 % Abwg. Crosstrack Abwg.
68 % Crosstrack
Omnistar HP Zweifrequenz 228.220 0,2 0,3 (1,3) (2,6) 0,1 0,3 0,0
Trimble AgGPS114, DGPS Omni. 229.807 0,3 0,4 1,1 (7,6) 0,2 0,3 0,1
Leica GS50, DGPS Landstar 229.284 0,4 0,5 1,2 1,6 0,1 0,4 0,0
geo-kombi 12B plus, DGPS LW 229.860 0,7 0,9 2,1 3,0 0,4 0,7 -0,1
Trimble AgGPS132, GPS ohne Korrektur 229.890 1,8 2,4 4,7 6,1 1,1 1,7 -0,3
Garmin Maus, GPS ohne Korrektur 229.889 2,2 2,9 5,7 6,7 1,6 2,0 0,1
DLG-Prüfbericht 5148F 8
Graphische Darstellung der Messergebnisse
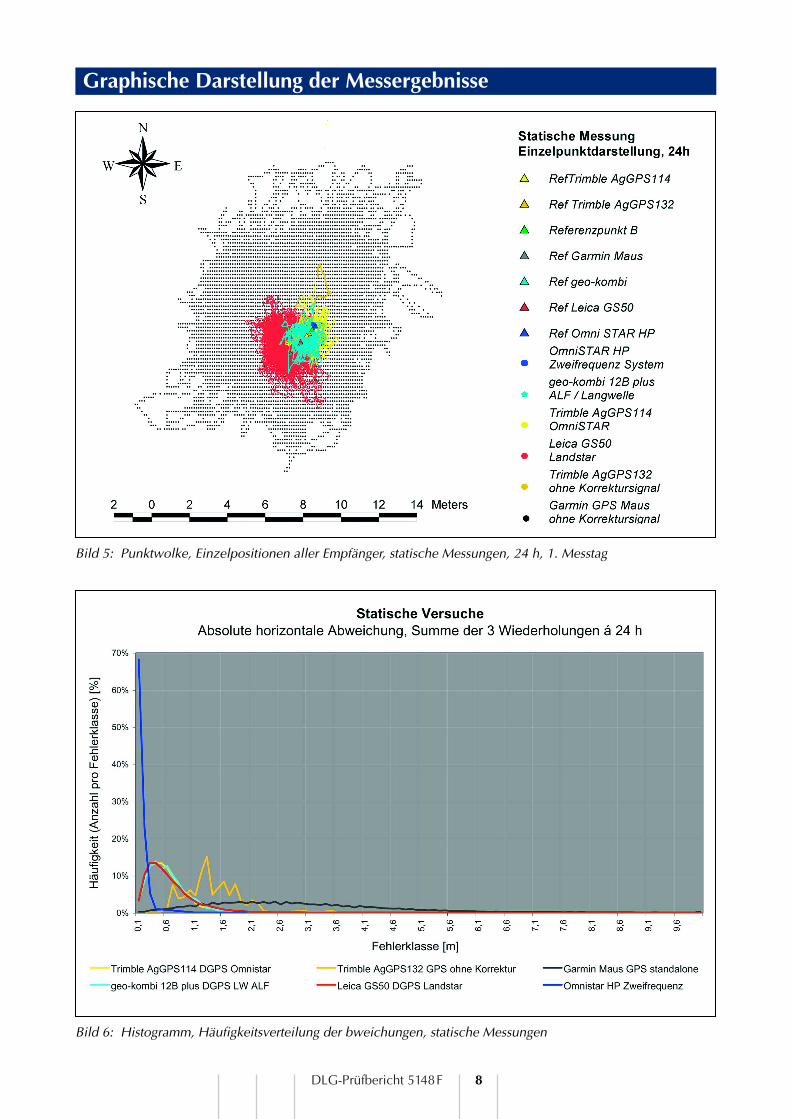
Bild 5: Punktwolke, Einzelpositionen aller Empfänger, statische Messungen, 24 h, 1. Messtag
Bild 6: Histogramm, Häufigkeitsverteilung der bweichungen, statische Messungen

DLG-Prüfbericht 5148F 9
Bild 7: Kumulative Darstellung, Häufigkeitsverteilung der Abweichungen, statische Messungen
Bild 8: Punktwolke, Einzelpositionen aller Empfänger, dynamische Messungen, Ø Kreisbahn 44 m

DLG-Prüfbericht 5148F 10
In Bild 5 wird der Effekt der schein-baren Genauigkeit durch Streichenvon Kommastellen sichtbar. Bei derGarmin GPS Maus werden nur 4 Stellen nach dem Komma zurPositionsangabe in Grad und Dezi-malminuten genutzt. Hierdurchergeben sich Sprünge zwischenden Einzelpositionen von 12 cm(Ost-West) und 19 cm (Nord-Süd),
es entsteht das in Bild 5 sichtbarerasterförmige Muster. Dieser Effekt ergibt eine stetigere /ruhigere Anzeige der Positionen.Dies vermittelt den Eindruck einerkorrekten Positionsangabe. Tat-sächlich ist die Positionsangabenicht stetig, vielmehr wird der kriti-sche Bereich nicht angezeigt. DasResultat ist eine Positionsangabe
mit geringerer Genauigkeit.Die Empfänger der anderen Her-steller verwenden 6 bzw. Leicasogar 7 Kommastellen bei derAngabe der Positionen in Grad undDezimalminuten. Hier sind keineSprünge zwischen den Einzelposi-tionen zu erkennen (Genauigkeitder Angaben mit 6 Kommastellen ≤ 1 cm).
Bild 9: Histogramm, Häufigkeitsverteilung der Abweichungen, dynamische Messungen
Bild 10: Kumulative Darstellung, Häufigkeitsverteilung der Abweichungen, dynamische Messungen

DLG-Prüfbericht 5148F 11
Formeln und Umrechnungsfaktoren
Die üblicherweise zur GPS-Evalu-ierung verwendeten Formeln ba-sieren auf den getrennt berechne-ten Standardabweichungen vonRechts- und Hochwert (sX/Y oder„RMSX/Y“ mit 68 % Wahrschein-lichkeit).
Voraussetzung zur Berechnung derStandardabweichung ist eine nor-malverteilte Grundgesamtheit, dieswar bei den Ergebnissen der dyna-mischen Versuche teilweise nichtgewährleistet. Die Formeln für die zweidimensio-nalen Werte gehen von einer „Ray-leighverteilung“ (sx ≈ sy) aus.
Beides sind z. T. stark vereinfachteAnnahmen, die aber üblicherweisezur Bewertung von GPS-Empfän-gern herangezogen werden.
Statistischer Wert Beschreibung Formel Wahrscheinlichkeit Dimension
Tabelle 6: Formeln (genäherte Werte) zur Berechnung der üblicherweise für GPS-Evaluierung verwendeten statistischen Größen unter Angabe der dazugehörigen Wahrscheinlichkeit
sabsRMS
Empirische (absolute)Standardabweichung oder„Root Mean Square“ vomRechts- oder Hochwert
68.3 % 1-D
srelCrossTrack-Fehler
Standardabweichung des Fehlers vom Rechts-,Hochwert oder Radius(„CrossTrack“-Fehler)
68.3 % 1-D
mPdRMS
Mittlerer Punktfehler oder„Distance RMS“
63 % – 68 % 2-D
(Vereinfachung entsprechend dem Rayleigh Fehler Modell)
2dRMS
CEP50
Doppelte dRMS
Fehlerkreis (Circular Error Propable)
93 % – 98 %
50 %
2-D
2-D
CEP95 95 % CEP CEP95 ≈ 2.08 · CEP
CEP50 ≈ 0.59 · (sx + sy)
95 % 2-D
CEP99 99 % CEP CEP95 ≈ 2.08 · CEP 99 % 2-D
sabs = ����N
∑i =1
Devi2
N – 1
srel = ����N· (Devi2) – ( Devi)2
N (N – 1)
N
∑i =1
N
∑i =1
mp ≈ �����(sx2+sy
2)
2dRMS ≈ �����([2*sx]2 + [2*sy]2)
Tabelle 7: Umrechnungsfaktoren zum Vergleich unterschiedlicher statistischer Angaben:Der Wert aus der linken Spalte multipliziert mit dem angegebenen Faktor ergibt den Wert aus der oberen Zeile.X-Y steht für Rechtswert oder Hochwert d. h. eine eindimensionale Größe. Horizontal bezeichnet einezweidimensionale Größe, also Rechts- und Hochwert.
Umrechnugs-faktoren
statistischer Werte
Dimension
X-Y, 1-D
Horizontal,2-D
StatistischerWert
Mittelwerts, RMS
2*s, 2*RMSCEP 50 %MittelwertmP, dRMSCEP 95 %2dRMS
Dimension
StatistischerWert
Wahrschein-lichkeit58 %68 %95 %50 %54%
63% bis 68%95 %
93% bis 98%
X-Y , 1-D
Mittel-Wert
–0,800,410,680,640,570,330,27
s, RMS
1,25–
0,510,850,800,710,410,34
2*s,2*RMS
2,461,96
–1,671,561,390,810,67
Horizontal, 2-D
CEP50
1,481,180,60
–0,940,830,480,40
Mittel-Wert
1,571,250,641,06
–0,890,500,42
mP, dRMS
1,771,410,721,201,13
–0,580,48
CEP95
3,062,441,242,082,011,73
–0,832
2dRMS
93 % bis98 %95 %63 % bis
68 %54 %50 %95 %68 %58 %
3,682,941,502,5
2,362,081,20
–
DLG-Prüfbericht 5148F 12
Deutsche Landwirtschafts-Gesellschaft e.V.Prüfstelle für LandmaschinenMax-Eyth-Weg 1, D-64823 Groß-UmstadtTelefon: 0 6078/96 35-0, Fax: 0 6078/96 35-90E-Mail: [email protected]: www.dlg-test.de
Deutsche Landwirtschafts-Gesellschaft e.V.Prüfstelle für LandmaschinenLerchensteig 42, D-14469 PotsdamTelefon: 03 31/5 6702-0, Fax: 03 31/5 6702-90E-Mail: [email protected]: www.dlg-test.de
03/2003© DLG
Download aller DLG-Prüfberichte unter: www.dlg-test.de!
Prüfung
Prüfungsdurchführung
DLG-Prüfstelle für Landmaschinen,Max-Eyth-Weg 1,D-64823 Groß-Umstadt
Fachlich verantwortlich
Cornelia Weltzien, Prüfingenieurin
Dr. Alexander von Chappuis,Fachgebietsleiter Technik Pflanzenproduktion
Berichterstatter
Dipl.-Ing. (FH) Cornelia WeltzienDLG-Prüfstelle für Landmaschinen,Am Lerchensteig 42,D-14469 Potsdam-Bornim