Humanoid Robot - 123seminarsonly.com · 15.01.2008 Humanoid Robot 2 Agenda 1. Begriffe 2....
22
15.01.2008 Humanoid Robot 1 Humanoid Robot Robotik A Thi Dieu Thu Ngo Mktnr: 200522194
Transcript of Humanoid Robot - 123seminarsonly.com · 15.01.2008 Humanoid Robot 2 Agenda 1. Begriffe 2....
15.01.2008 Humanoid Robot 1
Humanoid Robot
Robotik A
Thi Dieu Thu Ngo
Mktnr: 200522194
15.01.2008 Humanoid Robot 2
Agenda
1. Begriffe
2. Geschichte
3. Anwendungsbereiche
4. Forschung und Entwicklung
5. Kommerzielle Projekte: ASIMO
6. Projekte Humanoider Roboter in der K.I. Forschung
15.01.2008 Humanoid Robot 3
1. Begriffe
„A humanoid robot is a robot with its overall appearance based on that of the human body“
Konstruktion von Humanoid Robot ist ähnlich wie menschliche Köpfe
Verhalten ist auch wie Menschen nachempfunden.
Zwei humanoid Robot Type: Android Gynoids
(Quelle: wikipedia)
15.01.2008 Humanoid Robot 4
2. Geschichte
1495: skizziert Leonardo da Vinci einen simplen Automaten 1738: baut Jacques de Vaucanson einen mechanische
Flötenspieler 1921: den Begriff Roboter prägt erstmal durch Karel Capek 1927: schafft Fritz Lang in seinem Film, den ersten Roboter
der Filmgeschichte. 1939: stellt die Firma Westinghouse den humanoiden Roboter
Elektro vor 1970: schlägt Miomir Vukobratovic das Zero-Moment-Point-
Prinzip vor. 1973: baut die Waseda Universität den Wabot-1 1980: spielt der Wabot-2 auf einer elektischen Orgel Seit 1986: arbeitet Honda an der E-Serie, P-Serie, Asimo
hervorgehen. Seit ca. 1990 werden passiv dynamische Läufer entwickelt Seit ca. 2004 laufen, gehen und rennen Roboter schneller unf
Flexibler
15.01.2008 Humanoid Robot 5
Beispiele
Wabot-1 Honda ASIMO
15.01.2008 Humanoid Robot 6
3. Anwendungsbereich
Wartungsaufgaben von Industriewerken
Verwaltung der Gebäude und der Häuser
Dienstleitungen für menschliche Sorge
Kontrollieren und Betrieb der Industriefahrzeuge
Kooperative Arbeiten bei Menschen und humanoi Roboter
15.01.2008 Humanoid Robot 7
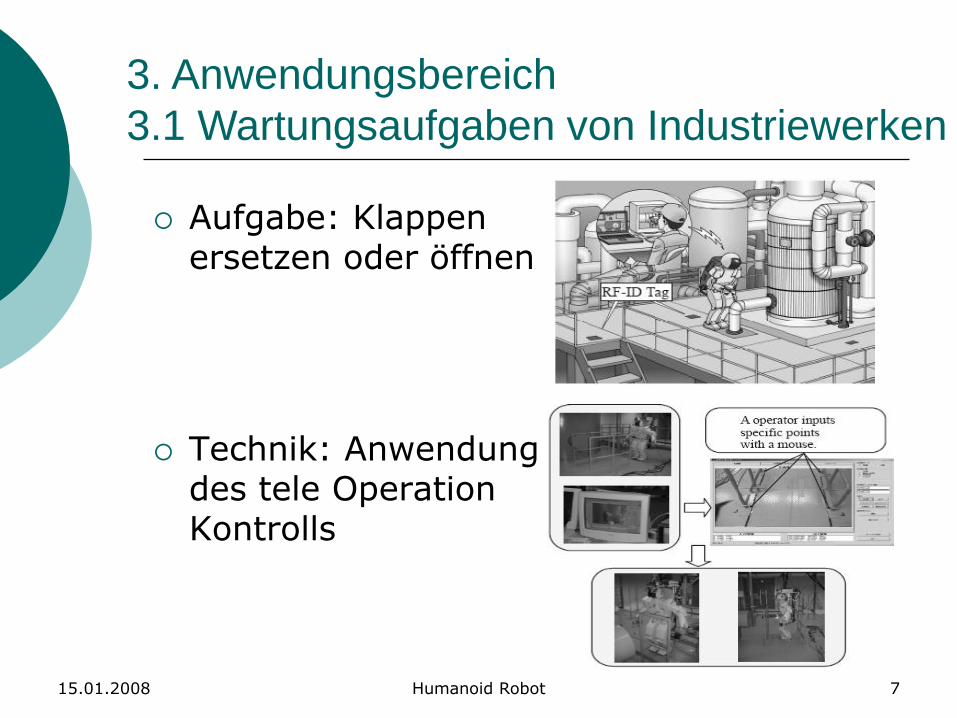
Aufgabe: Klappen
ersetzen oder öffnen
Technik: Anwendung des tele Operation Kontrolls
3. Anwendungsbereich
3.1 Wartungsaufgaben von Industriewerken
15.01.2008 Humanoid Robot 8
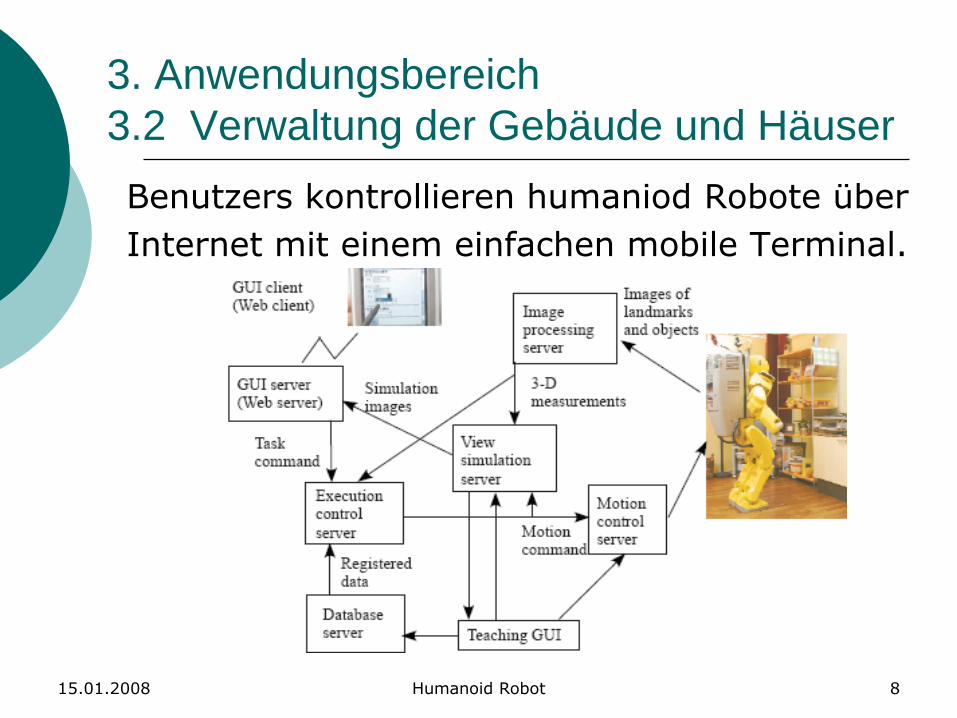
3. Anwendungsbereich
3.2 Verwaltung der Gebäude und Häuser
Benutzers kontrollieren humaniod Robote über
Internet mit einem einfachen mobile Terminal.
15.01.2008 Humanoid Robot 9
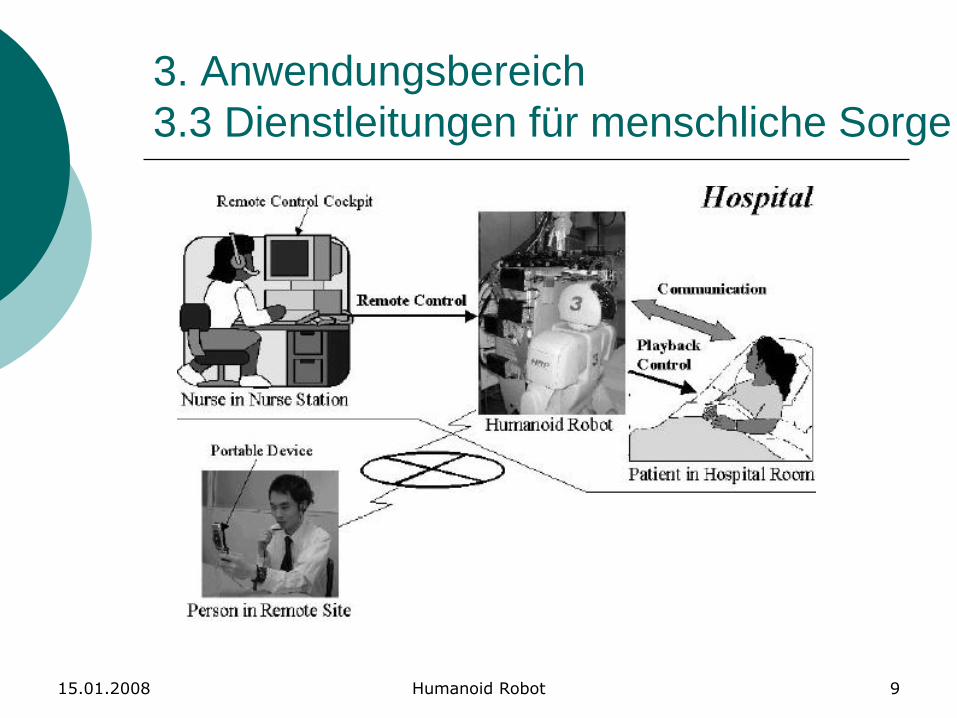
3. Anwendungsbereich
3.3 Dienstleitungen für menschliche Sorge
15.01.2008 Humanoid Robot 10
3. Anwendungsbereich
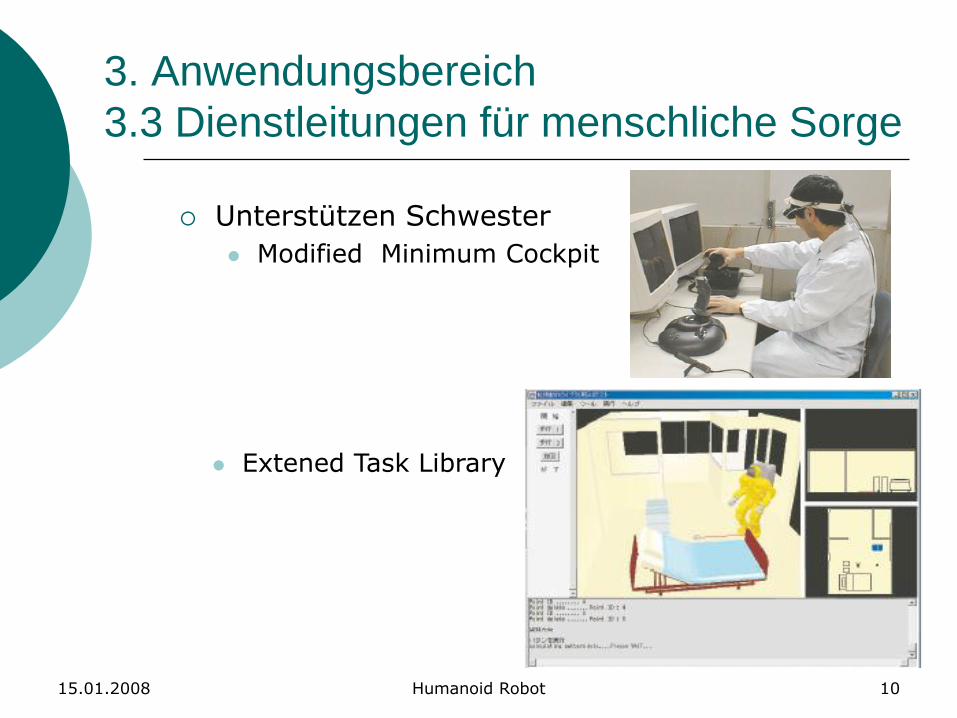
3.3 Dienstleitungen für menschliche Sorge
Unterstützen Schwester
Modified Minimum Cockpit
Extened Task Library
15.01.2008 Humanoid Robot 11
3. Anwendungsbereich
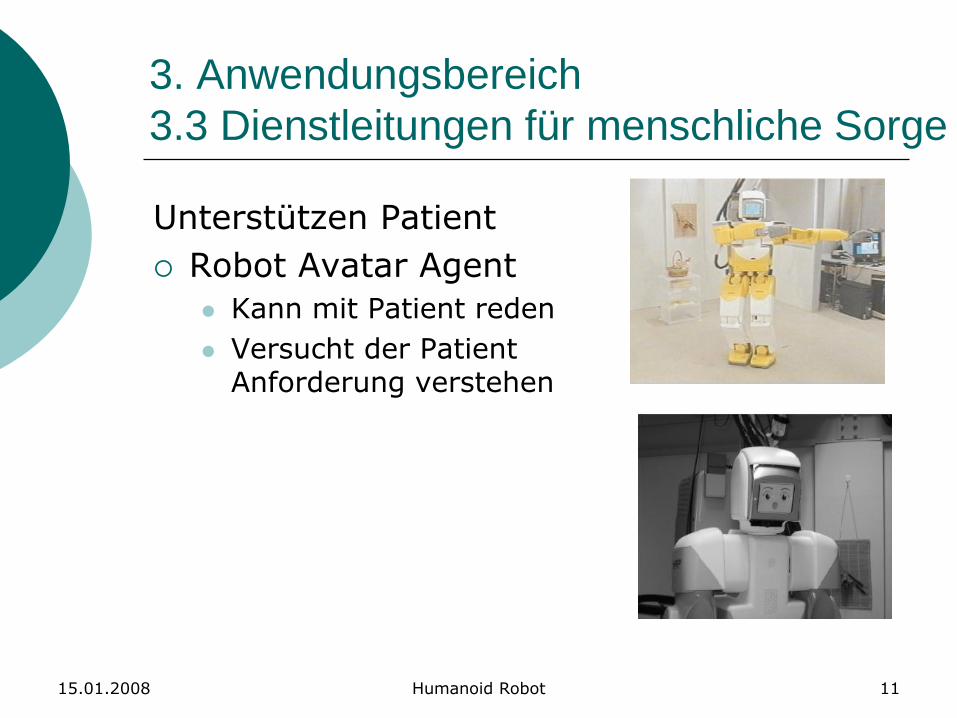
3.3 Dienstleitungen für menschliche Sorge
Unterstützen Patient
Robot Avatar Agent
Kann mit Patient reden
Versucht der Patient Anforderung verstehen
15.01.2008 Humanoid Robot 12
3. Anwendungsbereich
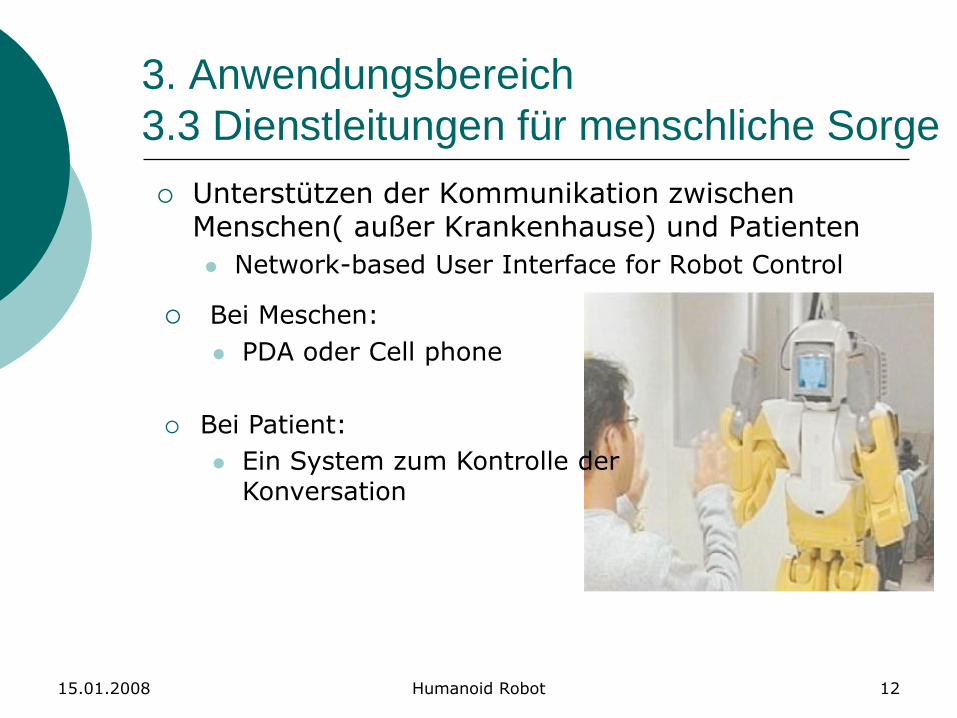
3.3 Dienstleitungen für menschliche Sorge
Unterstützen der Kommunikation zwischen Menschen( außer Krankenhause) und Patienten
Network-based User Interface for Robot Control
Bei Meschen:
PDA oder Cell phone
Bei Patient:
Ein System zum Kontrolle der Konversation

15.01.2008 Humanoid Robot 13
3. Anwendungsbereich
3.3 Kontrollieren und Betrieb der Fahrzeuge
Humanoid Robot kann die typische industriellen Fahrzeuge in Betrieb sein
3 Technologie werden entwickelt:
Protektion Technology
Full-Body Operation Control
Remote Control Technology
15.01.2008 Humanoid Robot 14
3. Anwendungsbereich
3.3 Kontrollieren und Betrieb der Fahrzeuge
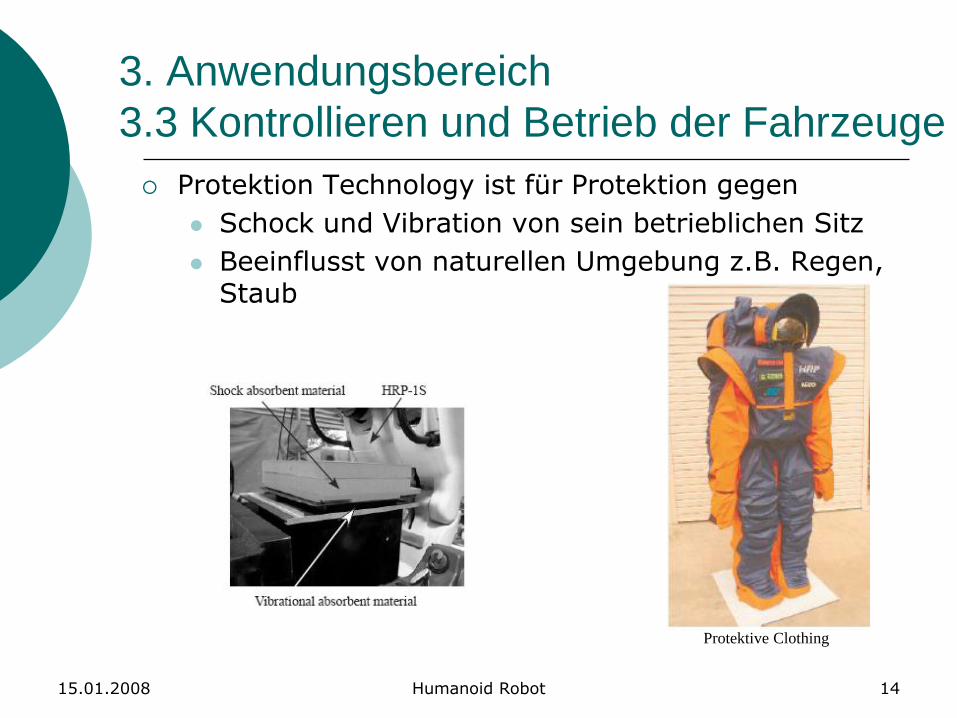
Protektion Technology ist für Protektion gegen
Schock und Vibration von sein betrieblichen Sitz
Beeinflusst von naturellen Umgebung z.B. Regen, Staub
Protektive Clothing
15.01.2008 Humanoid Robot 15
3. Anwendungsbereich
3.3 Kontrollieren und Betrieb der Fahrzeuge
Full-Body Opearation Control Technoloy ist zum Kontrolle aller humanoid robot Bewegung mit automar Kontrolle entwickelt.
Ziel: to prevent the robot from falling over
15.01.2008 Humanoid Robot 16
3. Anwendungsbereich
3.3 Kontrollieren und Betrieb der Fahrzeuge
Remote Control Technology ist Instructing the humanoid robot to perform total boday moverments under remote control and the remote Control System for excuting the remoter control tasks.
15.01.2008 Humanoid Robot 17
4. Forschung und Entwicklung
Der Entwicklung humanoider Roboter liegen zwei Hauptmotiv zugrunde:
Die Erschaffung künstlicher Intelligenz (KI.)
Die Konstruktion einer multifunktionalen Arbeitsmaschine
Aktueller Entwicklungsstand:
Aktualisieren der Fähigkeiten : gehen, Treppen steigen, rennen, Tablettwagen schieben, Tablett entgegennehmen, transportieren, übergeben, servieren, tanzen, bewegte Hindernisse umlaufen, Trompete spielen, Geige spielen…
15.01.2008 Humanoid Robot 18
4. Forschung und Entwicklung
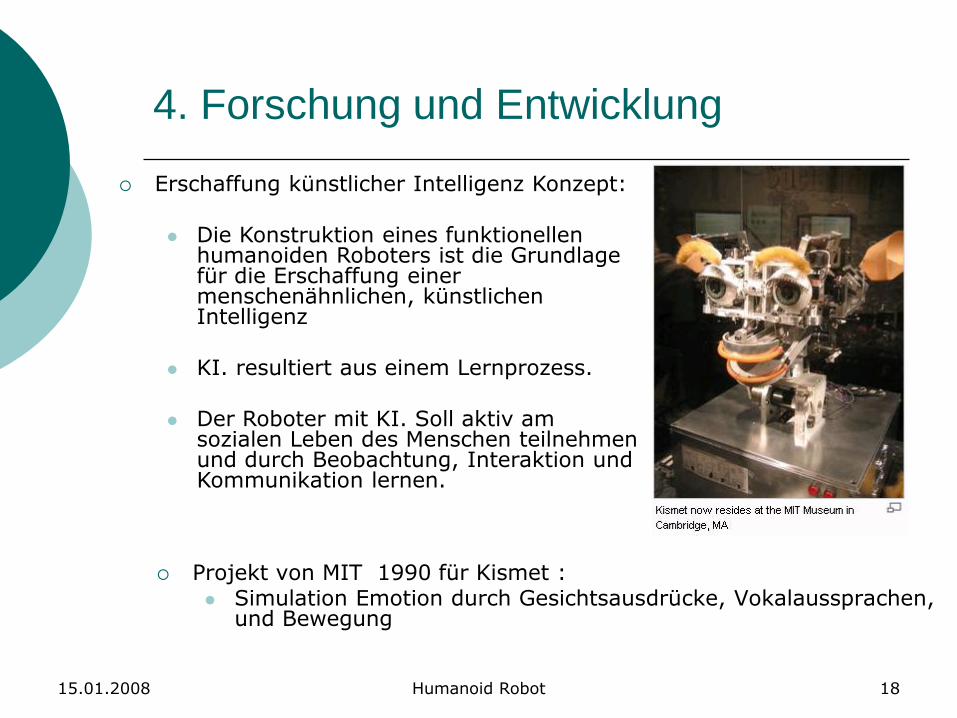
Projekt von MIT 1990 für Kismet :
Simulation Emotion durch Gesichtsausdrücke, Vokalaussprachen, und Bewegung
Erschaffung künstlicher Intelligenz Konzept:
Die Konstruktion eines funktionellen humanoiden Roboters ist die Grundlage für die Erschaffung einer menschenähnlichen, künstlichen Intelligenz
KI. resultiert aus einem Lernprozess.
Der Roboter mit KI. Soll aktiv am sozialen Leben des Menschen teilnehmen und durch Beobachtung, Interaktion und Kommunikation lernen.
15.01.2008 Humanoid Robot 19
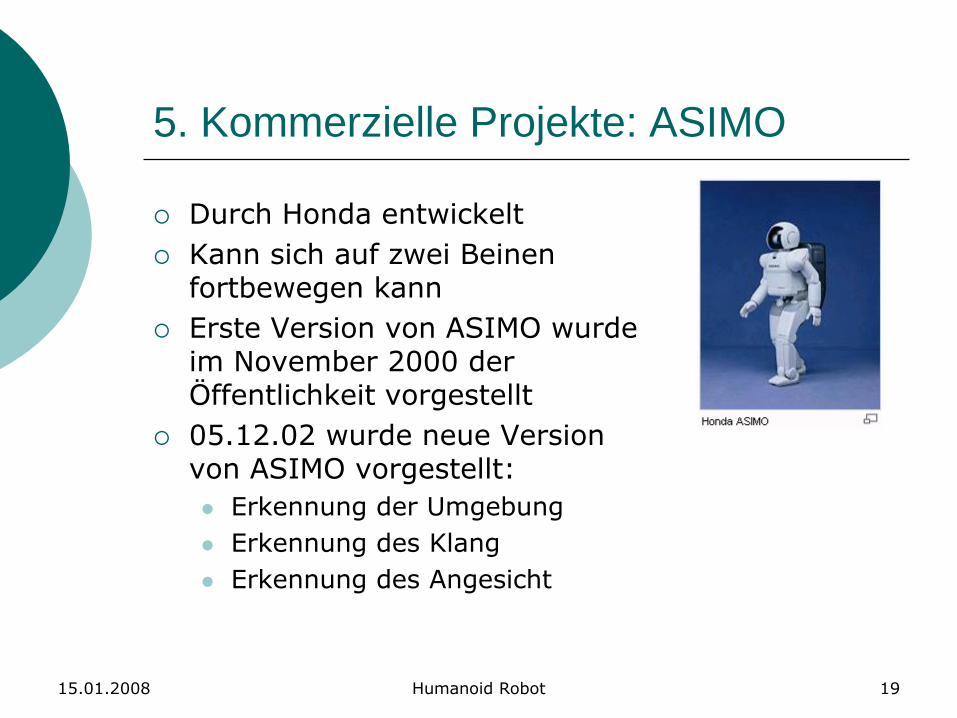
5. Kommerzielle Projekte: ASIMO
Durch Honda entwickelt
Kann sich auf zwei Beinen fortbewegen kann
Erste Version von ASIMO wurde im November 2000 der Öffentlichkeit vorgestellt
05.12.02 wurde neue Version von ASIMO vorgestellt:
Erkennung der Umgebung
Erkennung des Klang
Erkennung des Angesicht
15.01.2008 Humanoid Robot 20
6. Projekte Humanoider Roboter in der K.I. Forschung
15.01.2008 Humanoid Robot 21
Quelle
http://world.honda.com/ASIMO/
http://en.wikipedia.org/wiki/Humanoid_robot
International Conference on Humanoid Robots 2003
ISBN: 3-00-012047-5
15.01.2008 Humanoid Robot 22
Viele Dank für Aufmerksamkeit !!!
Frage ????