Institut für Technik und ihre DidaktikWilhelm-Klemm-Str. 1048149 Münster
55
Institut für Technik und ihre Didaktik Wilhelm-Klemm- Str. 10 48149 Münster Entwicklung eines Lehrroboters für die Lehrerausbildung im Fach Technik
description
Entwicklung eines Lehrroboters für die Lehrerausbildung im Fach Technik. Institut für Technik und ihre DidaktikWilhelm-Klemm-Str. 1048149 Münster. Inhalt: Idee und Vorgeschichte Planung Konstruktion und Fertigung Programmierung Ausblick. - PowerPoint PPT Presentation
Transcript of Institut für Technik und ihre DidaktikWilhelm-Klemm-Str. 1048149 Münster

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Entwicklung eines Lehrroboters für die Lehrerausbildung
im Fach Technik

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Entwicklung eines Lehrroboters als Grundlage für ein neu zu entwickelndes Seminar im Rahmen des Masterstudiengangs zum Thema Robotertechnik und Mechatronik

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Vorgabe:Roboter soll Bindeglied sein zwischen „Spielzeugrobotern“…

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Vorgabe:…und professionellen Robotern aus industrieller Fertigung.

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Ursprüngliche Planung:Der Roboter soll sich- als autonomer Fahrroboter - mit Hilfe von Ultraschallsensoren- und Kamera- im Freien zu Recht finden und bewegen können.

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Erste Experimente und Messungenzu den geplanten Vorgaben

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Neue Planung:Der Roboter soll sich- als autonomer Fahrroboter - mit Hilfe von Ultraschallsensoren- und Kamera- im Freien zu Recht finden und bewegen können.

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Der PrototypIm Jahr 2006 haben drei Studenten im Rahmen ihrer Examensarbeiten einen ersten Prototypen eines autonomen Fahrroboters entwickelt, konstruiert und programmiert.

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte1.1 Idee1.2 Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Der neue Roboter soll- kleiner, leichter und moderner als der Prototyp sein-sich eleganter im Raum bewegen können- übersichtlich gestaltet sein- über einen leistungsstarkern Mikrocontroller verfügen, der- genug Anschlussmöglichkeiten für Sensoren und Aktoren hat

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Aussuchen von Fertigelementen

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Getriebemotor

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Zahnriemenscheiben

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Linearkugellager

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Trapezgewindespindel

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Trapezgewindemutter

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick
Erstellen der einzelnen Fertigelemente als CAD-Modelle

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung2.1 Vorüberlegungen2.2 Erste Schritte2.3 Erstellung eines
CAD-Modells3. Konstruktion und Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Komponente: Realisierung:
Mikrokontroller C-Control Pro Application Board 128
Aktoren 2 Schrittmotoren (Antrieb), 2 Getriebemotoren (Greifarm)
Sensoren Kamera, 3 Ultraschallsensoren
Energieversorgung Akku, Spannungsregler
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programm5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
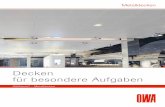
C-Control Pro Application Board 128
Clock CW/ CCWHalf/ FullEnable
Schritt motor- TreiberL297/L298
MStep
2x
Akku12 V
CMUcam
Wert (N.)
Entf.cm.
SRF 10
3x
Spannungs- Regler| 5V Program
m
Getriebemotor- TreiberL298
M2x
CW/ CCWEnable
Vref
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung3.1 Mechanik3.2 Elektronik4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1. Idee und Vorgeschichte2. Planung3. Konstruktion und
Fertigung4. Programmierung5. Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Erstmalig Einsatz des Lehrroboters:Masterstudiengang WS 08 / 09
Separate Programmierarbeitsplätze: - die Antriebssteuerung- der Greifarm- die Bilderkennung- die Ultraschall- Sensoren

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick
Version 3 ?
Weitere Entwicklung und Verbesserung des zweiten Modells.

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster
Inhalt:1.Idee und Vorgeschichte2.Planung3.Konstruktion und Fertigung4.Programmierung5.Ausblick

Institut für Technik und ihre Didaktik Wilhelm-Klemm-Str. 10 48149 Münster