Integrierte mechatronische Fluidfördersytseme · Fehlerdiagnose und aktive Beeinflussung in...
26
Integrierte mechatronische Fluidfördersytseme Industrietag an der TU Darmstadt Das TTN-Hessen wird kofinanziert aus Mittel des Europäischen Sozialfonds (ESF). gefördert durch
Transcript of Integrierte mechatronische Fluidfördersytseme · Fehlerdiagnose und aktive Beeinflussung in...
Integrierte mechatronische Fluidfördersytseme
Industrietag an der TU Darmstadt
Das TTN-Hessen wird kofinanziert aus Mittel des Europäischen Sozialfonds (ESF).
gefördert durch
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 2
Agenda
09:00 Uhr Prof. Dr.-Ing. PelzDas Vorhaben Mechatronische Fluidfördersysteme – ein Überblick
09:30 Uhr Prof. Dr.-Ing. SchlaakPeristaltische Fluidförderung für kleine Volumina unter Einsatzdielektrischer Elastomeraktoren nach bionischem Vorbild
10:00 Uhr Prof. Dr.-Ing. BinderMagnetgelagerter integrierter Pumpenantrieb
10:30 Uhr Kaffeepause
10:45 Uhr Prof. Dr.-Ing. WerthschützkyEntwicklung eines integrierten Sensorsystems
11:15 Uhr Prof. Dr.-Ing. PelzHydrodynamische Aspekte bei integrierten Fluidfördersystemen
11:45 Uhr Prof. Dr.-Ing. NordmannFehlerdiagnose und aktive Beeinflussung in Kreiselpumpen mit Hilfe aktiver Magnetlager und elektrischer Antriebe
12:15 Uhr Mittagsimbiss
13:00 Uhr Prof. Dr.-Ing. KonigorskiVom Modul zum System - Unsere Zukunftsthemen
13:30 Uhr Fazitrunde
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 3
Ziele
Information über den aktuellen Stand der Arbeiten an der Technischen Universität Darmstadt zum Thema integrierte Fluidsysteme.
Diskussion der aktuellen Ergebnisse
Information über unser zukünftiges Forschungsthema
Ihr Feed Back
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 4
Beteiligte Fachgebiete
Elektrische EnergiewandlungProf. Dr.-Ing. Dr.-Ing. h.c. A. Binder
FluidsystemtechnikProf. Dr.-Ing. P. PelzProf. Dr.-Ing. B. StoffelDr.-Ing. G. Ludwig
Mechatronik im MaschinenbauProf. Dr.-Ing. R. Nordmann
Mess- und SensortechnikProf. Dr.-Ing. R. Werthschützky
Mikrotechnik und Elektromechanische SystemeProf. Dr.-Ing. H.F. Schlaak
Regelungstechnik und MechatronikProf. Dr.-Ing. U. Konigorski
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 5
Zeitlicher Ablauf der Forschungsthemen
2005 erster Industrietag
2005 … 2008 Integrierte, mechatronische FluidfördersystemeDFG Paketvorhaben
2008 zweiter Industrietag
2009…1011 gepl. erste Förderperiodeintegrierte, adaptive FluidsystemeDFG Forschergruppe
2012…1015 gepl. zweite Förderperiodeintegrierte, adaptive FluidsystemeDFG Forschergruppe
Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick
Peter Pelz
Gefördert durch die Deutsche Forschungsgemeinschaft
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 7
Anforderungen an Fluidfördersysteme
Fluidfördersysteme sind
energieeffizient
robustlange Standzeithohe Anlagenverfügbarkeit
einfachbei Inbetriebnahmeim Wartungsfall
genau hinsichtlich Volumenstrom / Dosierung
leiseBildquelle KSB
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 8
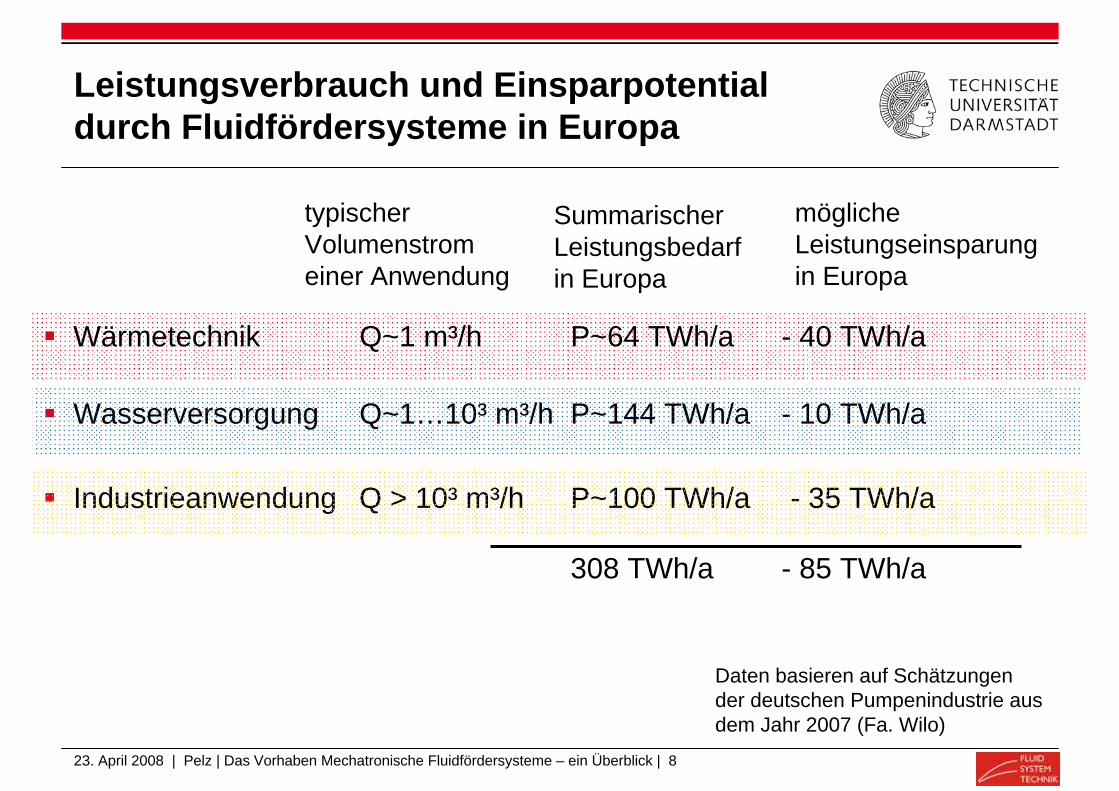
Leistungsverbrauch und Einsparpotential durch Fluidfördersysteme in Europa
Wärmetechnik Q~1 m³/h P~64 TWh/a - 40 TWh/a
Wasserversorgung Q~1…10³ m³/h P~144 TWh/a - 10 TWh/a
Industrieanwendung Q > 10³ m³/h P~100 TWh/a - 35 TWh/a
308 TWh/a - 85 TWh/a
Daten basieren auf Schätzungen der deutschen Pumpenindustrie aus dem Jahr 2007 (Fa. Wilo)
Summarischer Leistungsbedarf in Europa
mögliche Leistungseinsparungin Europa
typischer Volumenstrom einer Anwendung

23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 9
Potential der Leistungseinsparung
85 TWh/a entsprechen der Leistung von ca. 10 Kernkraftwerken
Einsparung durch
1. verbesserte Auslegung der Systeme
2. verbesserte Regelung der Systeme
„System Approach“Daten basieren auf Schätzungen der deutschen Pumpenindustrie aus dem Jahr 2007 (Fa. Wilo)
°C
Bildquelle Wilo AG

23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 10
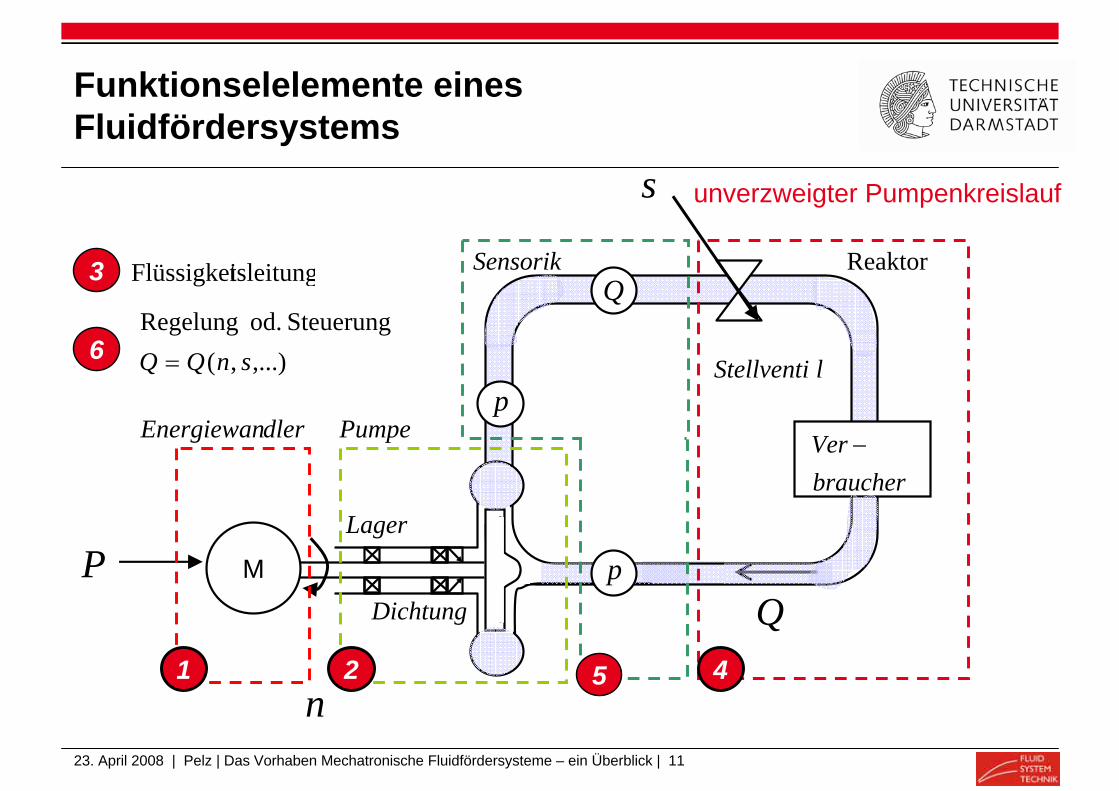
Funktionselelemente eines Fluidfördersystems
1. elektrischer (chemischer) Energiewandler
2. Pumpe
3. Flüssigkeitsleitung
4. Reaktor inkl. Drosselventil
5. SensorikVolumenstrom + Druck
6. Steuerung / Regelung
°C
Bildquelle Wilo AG
1
2
3
4
5
6
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 11
Funktionselelemente eines Fluidfördersystems
M
braucherVer −
P
n
dlerEnergiewan
1
Pumpe
Lager
Dichtung
2
s
lStellventi
Reaktor
4
tsleitungFlüssigkei 3
,...),( snQQ =
Steuerung od. Regelung6
Q
Q
p
p
Sensorik
5
unverzweigter Pumpenkreislauf
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 12
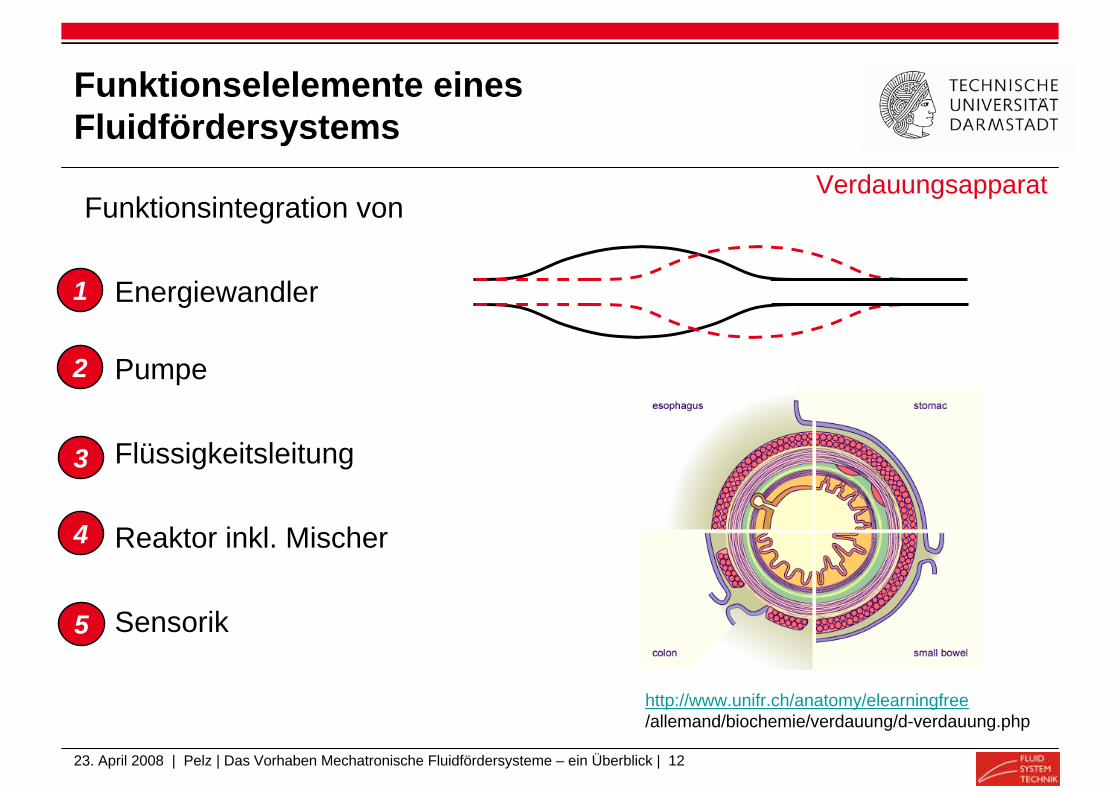
Funktionselelemente eines Fluidfördersystems
http://www.unifr.ch/anatomy/elearningfree/allemand/biochemie/verdauung/d-verdauung.php
VerdauungsapparatFunktionsintegration von
Energiewandler
Pumpe
Flüssigkeitsleitung
Reaktor inkl. Mischer
Sensorik
1
2
3
4
5
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 13
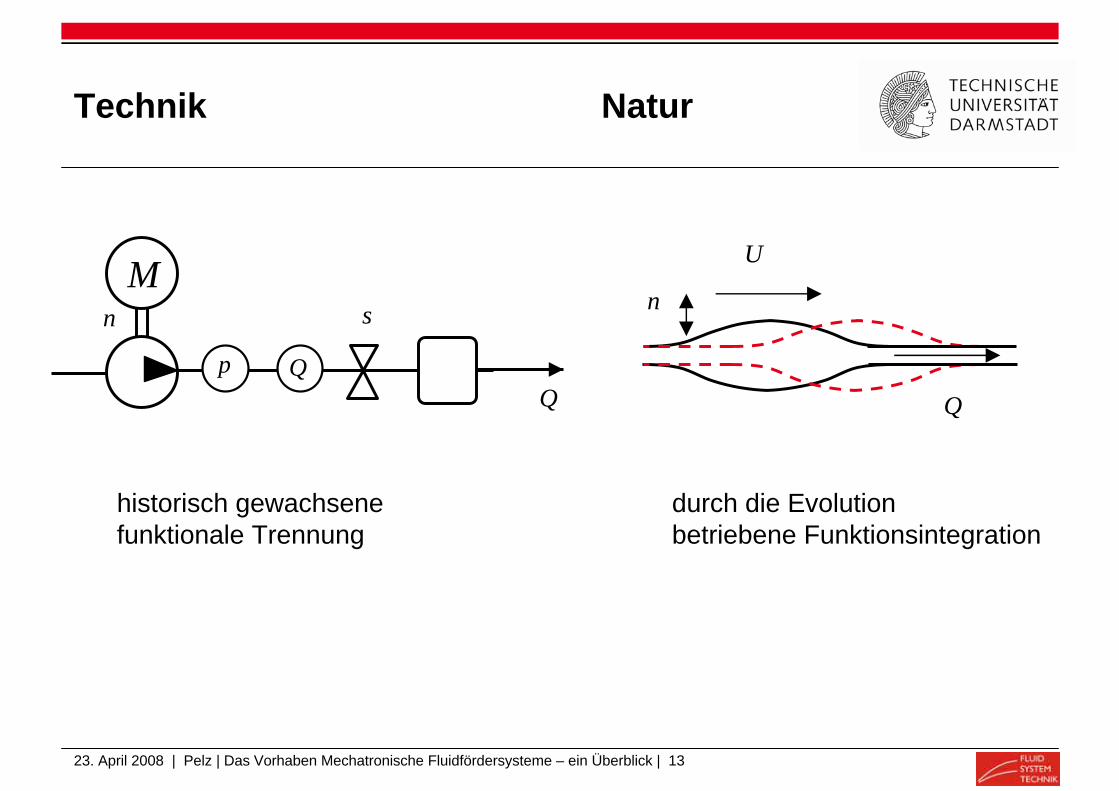
Technik Natur
Q
M
historisch gewachsene funktionale Trennung
durch die Evolution betriebene Funktionsintegration
sn
U
QpQ
n

23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 14
Technik Natur
Q
M
historisch gewachsene funktionale Trennung
Energieeffizient
Robustheit (Dichtungen)
Aufwändig
durch die Evolution betriebene Funktionsintegration
Load Sharing
Energieeffizienz
Robustheit
sn
U
QpQ
n
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 15
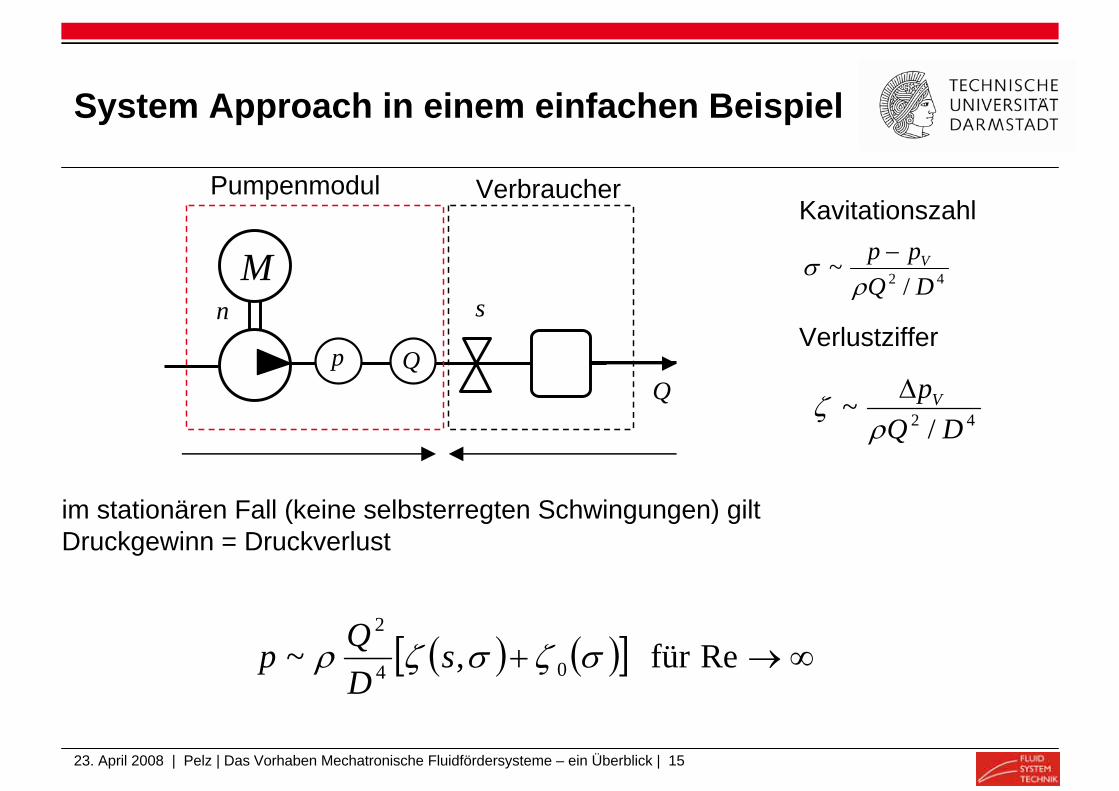
System Approach in einem einfachen Beispiel
Msn
Qp
Pumpenmodul Verbraucher
Q
im stationären Fall (keine selbsterregten Schwingungen) gilt Druckgewinn = Druckverlust
( ) ( )[ ] ∞→+ Refür ,~ 04
2
σζσζρ sDQp
42 /~
DQpp V
ρσ −
Kavitationszahl
Verlustziffer
42 /~
DQpV
ρζ Δ
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 16
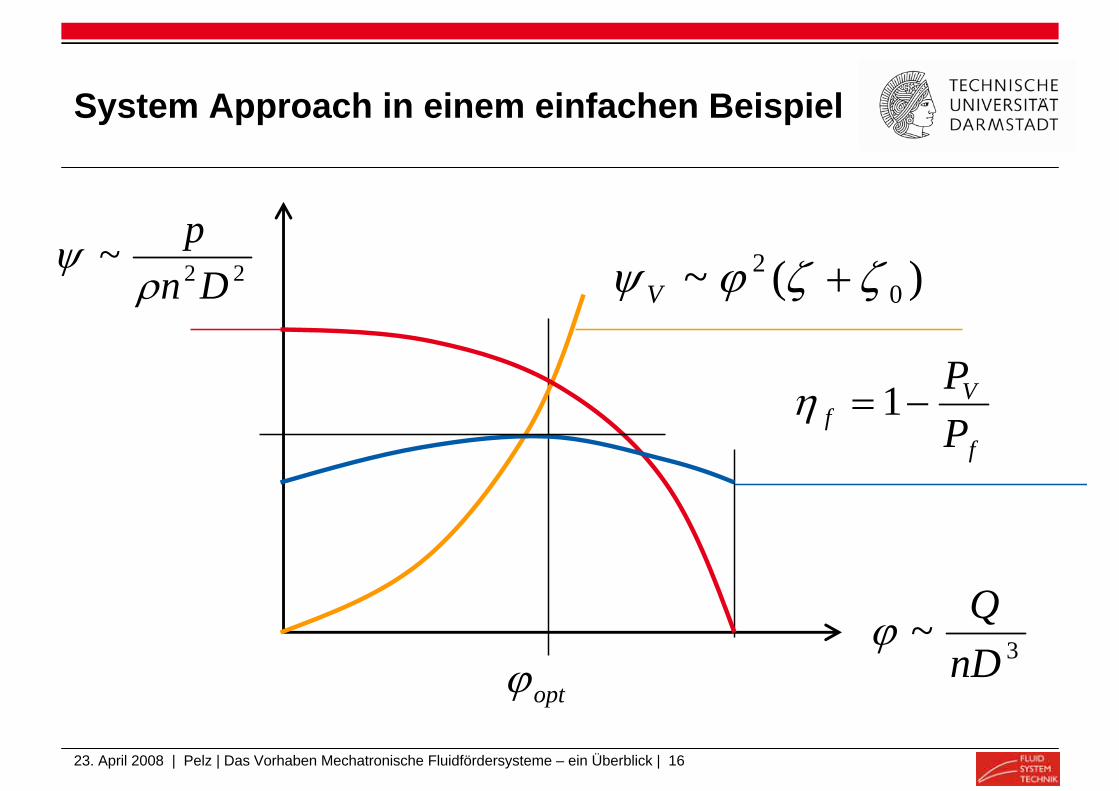
System Approach in einem einfachen Beispiel
22~Dn
pρ
ψ
f
Vf P
P−= 1η
3~nDQϕ
)(~ 02 ζζϕψ +V
optϕ
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 17
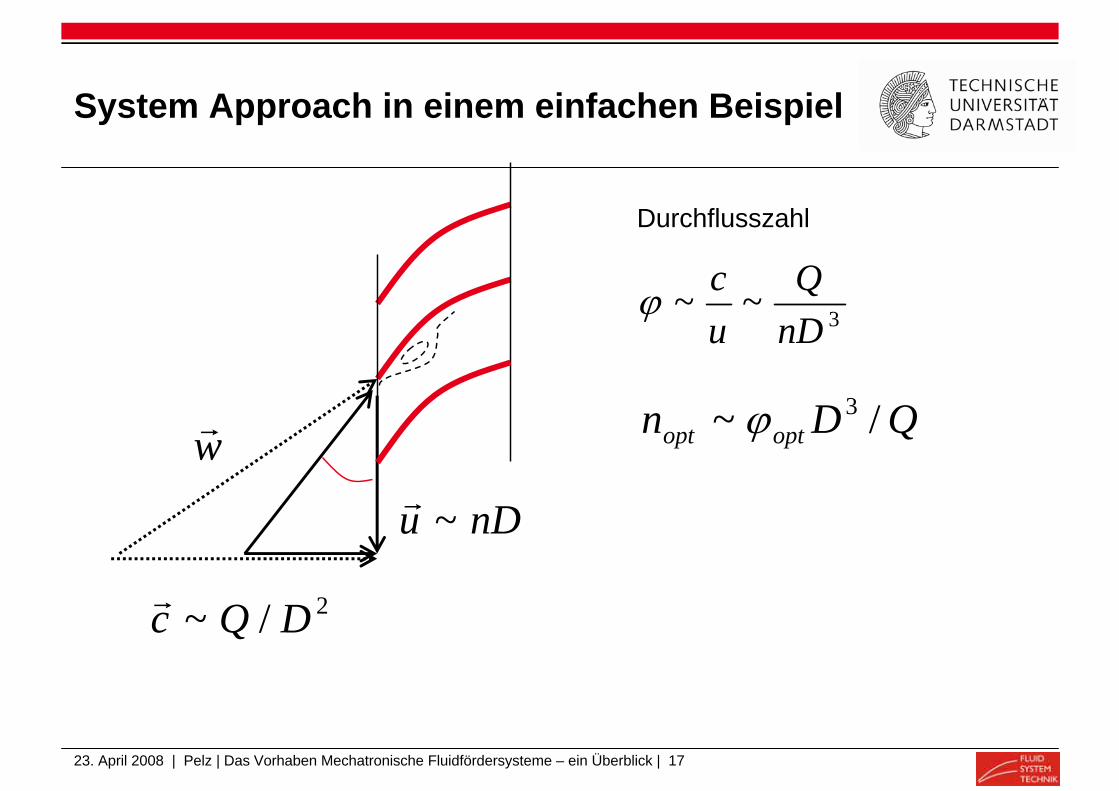
System Approach in einem einfachen Beispiel
nDu ~r
2/~ DQcr
3~~nDQ
ucϕ
wr
Durchflusszahl
QDn optopt /~ 3ϕ
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 18
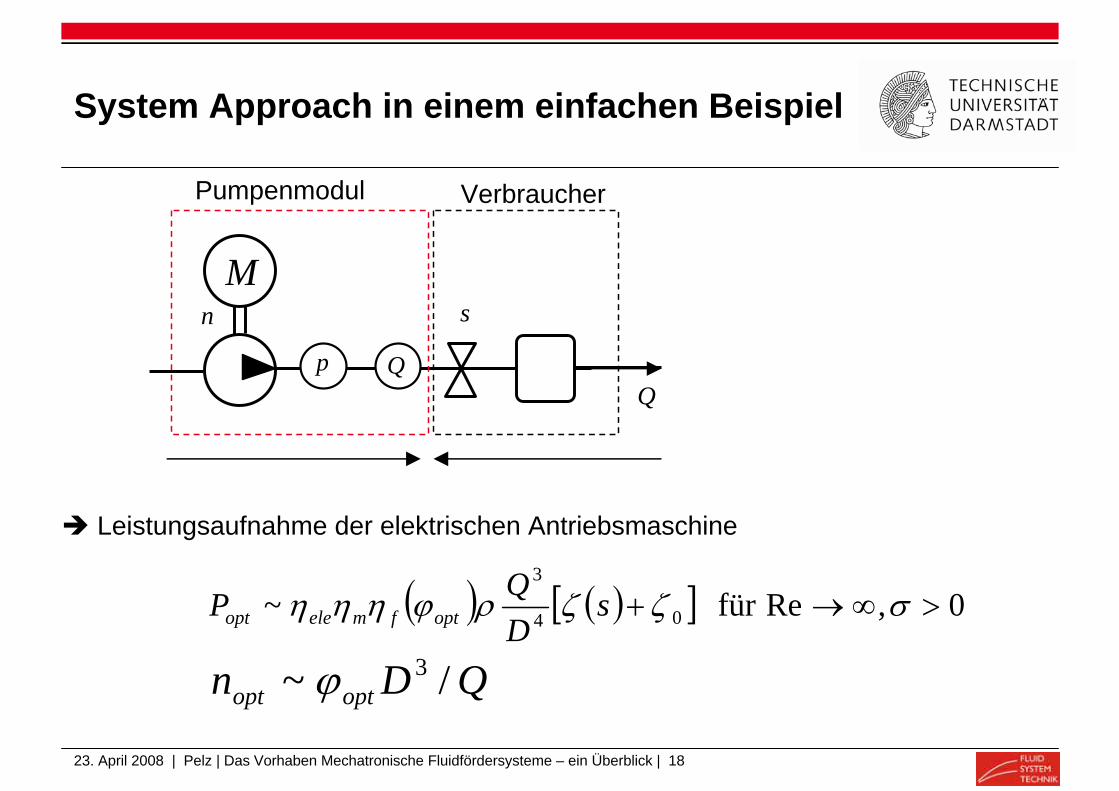
System Approach in einem einfachen Beispiel
Msn
Qp
Pumpenmodul Verbraucher
Q
Leistungsaufnahme der elektrischen Antriebsmaschine
( ) ( )[ ] 0,Refür ~ 04
3
>∞→+ σζζρϕηηη sDQP optfmeleopt
QDn optopt /~ 3ϕ
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 19
Was ist das System?
Bildquelle KSB
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 20
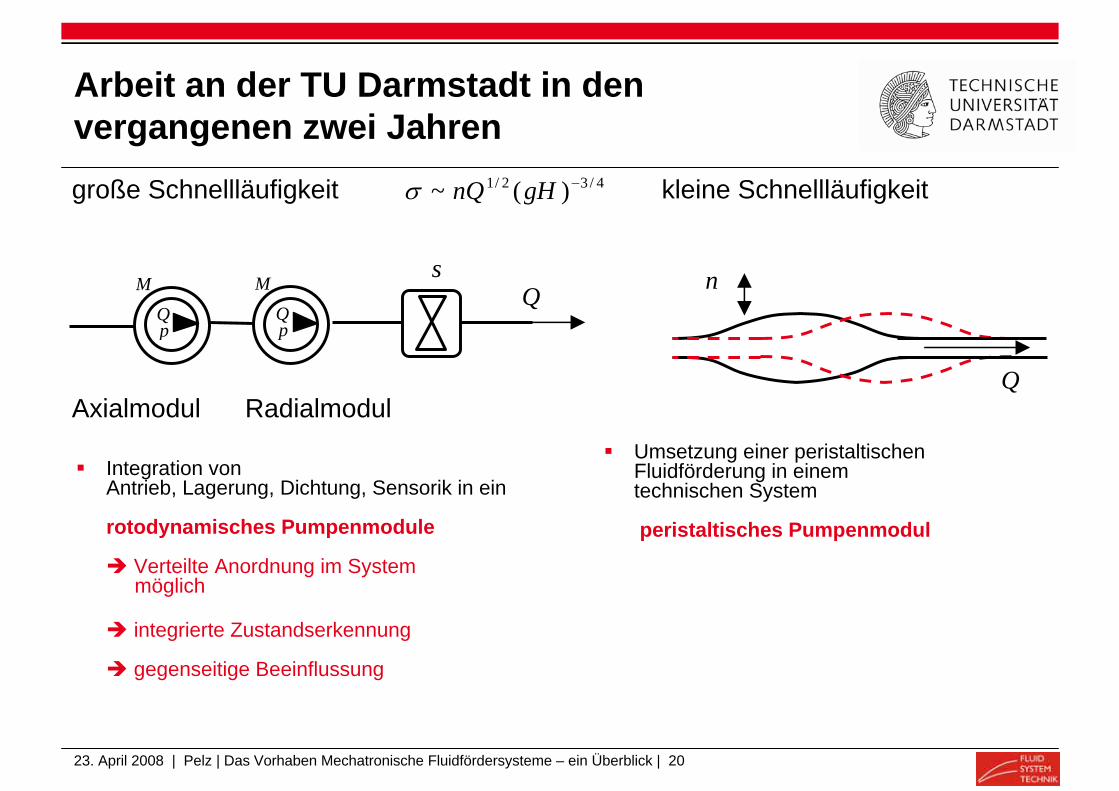
Arbeit an der TU Darmstadt in den vergangenen zwei Jahren
Integration von Antrieb, Lagerung, Dichtung, Sensorik in ein
rotodynamisches Pumpenmodule
Verteilte Anordnung im System möglich
integrierte Zustandserkennung
gegenseitige Beeinflussung
Q
n
Umsetzung einer peristaltischen Fluidförderung in einem technischen System
peristaltisches Pumpenmodul
Qp
Ms
Qp
M Q
Axialmodul Radialmodul
große Schnellläufigkeit kleine Schnellläufigkeit4/32/1 )(~ −gHnQσ
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 21
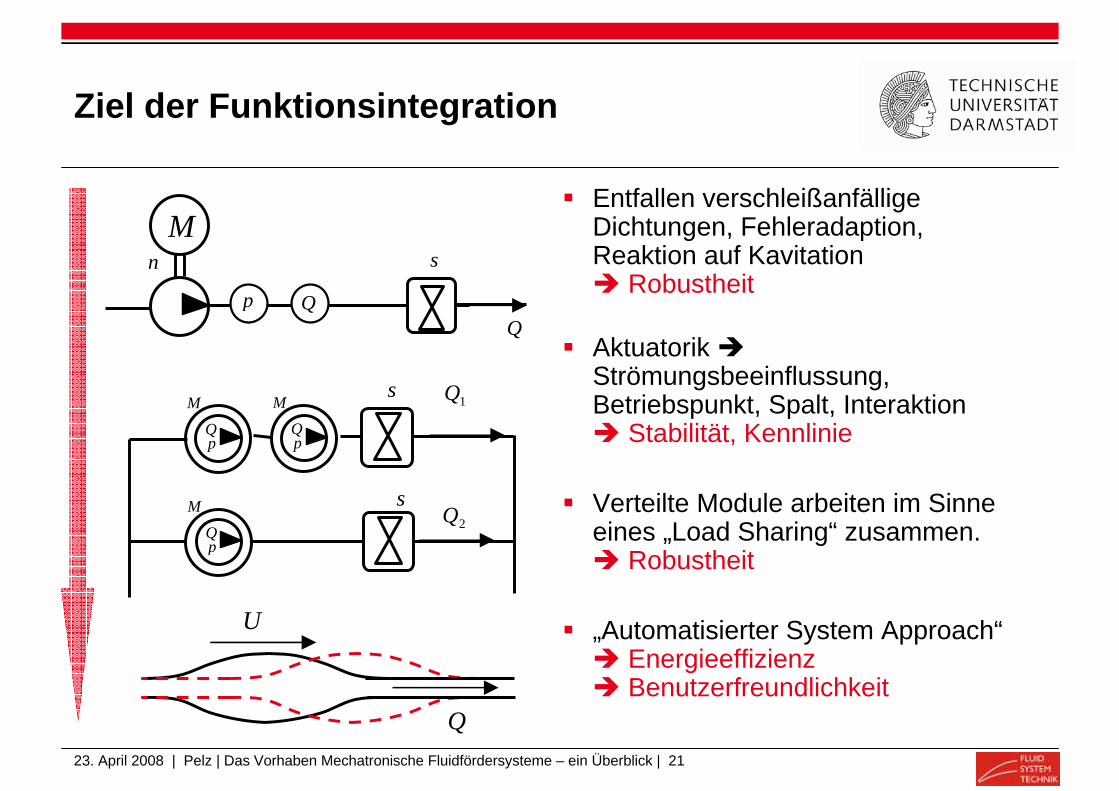
Ziel der Funktionsintegration
Q
U
Qp
M
Qp
M
s
s
Qp
M 1Q
2Q
Msn
QpQ
Entfallen verschleißanfällige Dichtungen, Fehleradaption, Reaktion auf Kavitation
Robustheit
AktuatorikStrömungsbeeinflussung, Betriebspunkt, Spalt, Interaktion
Stabilität, Kennlinie
Verteilte Module arbeiten im Sinne eines „Load Sharing“ zusammen.
Robustheit
„Automatisierter System Approach“EnergieeffizienzBenutzerfreundlichkeit
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 22
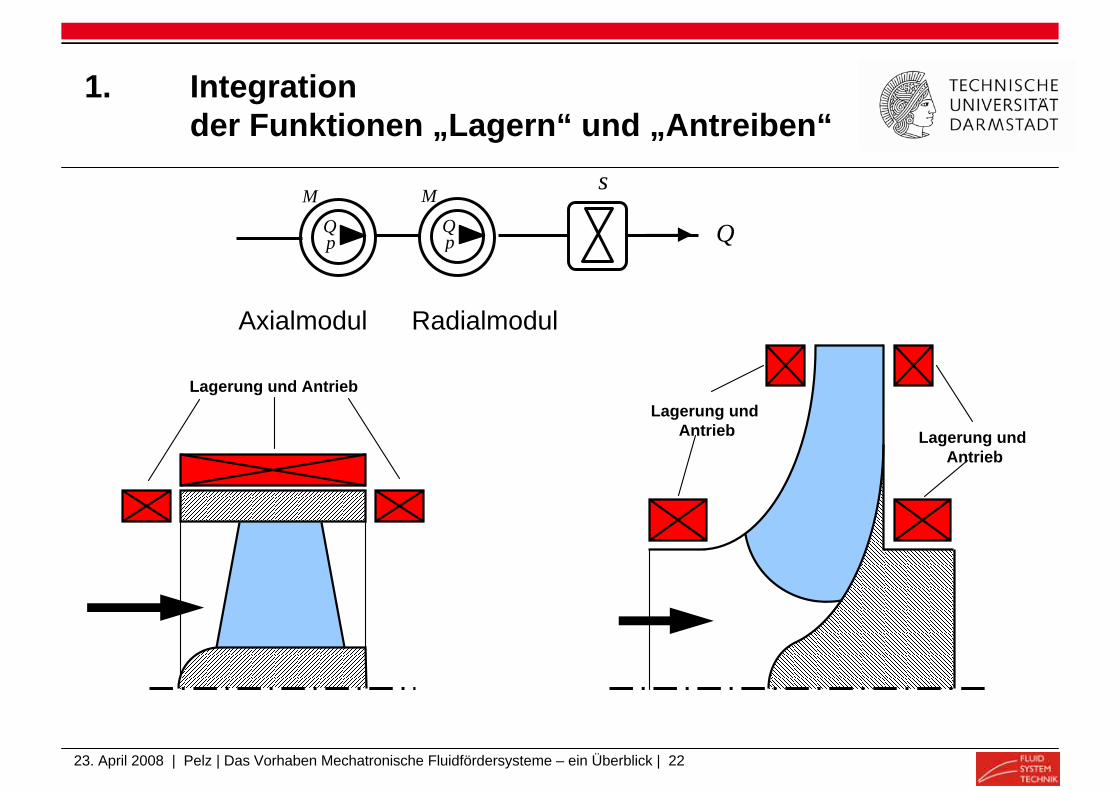
Lagerung undAntrieb Lagerung und
Antrieb
1. Integration der Funktionen „Lagern“ und „Antreiben“
Lagerung und Antrieb
Qp
Ms
Qp
M
Q
Axialmodul Radialmodul
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 23
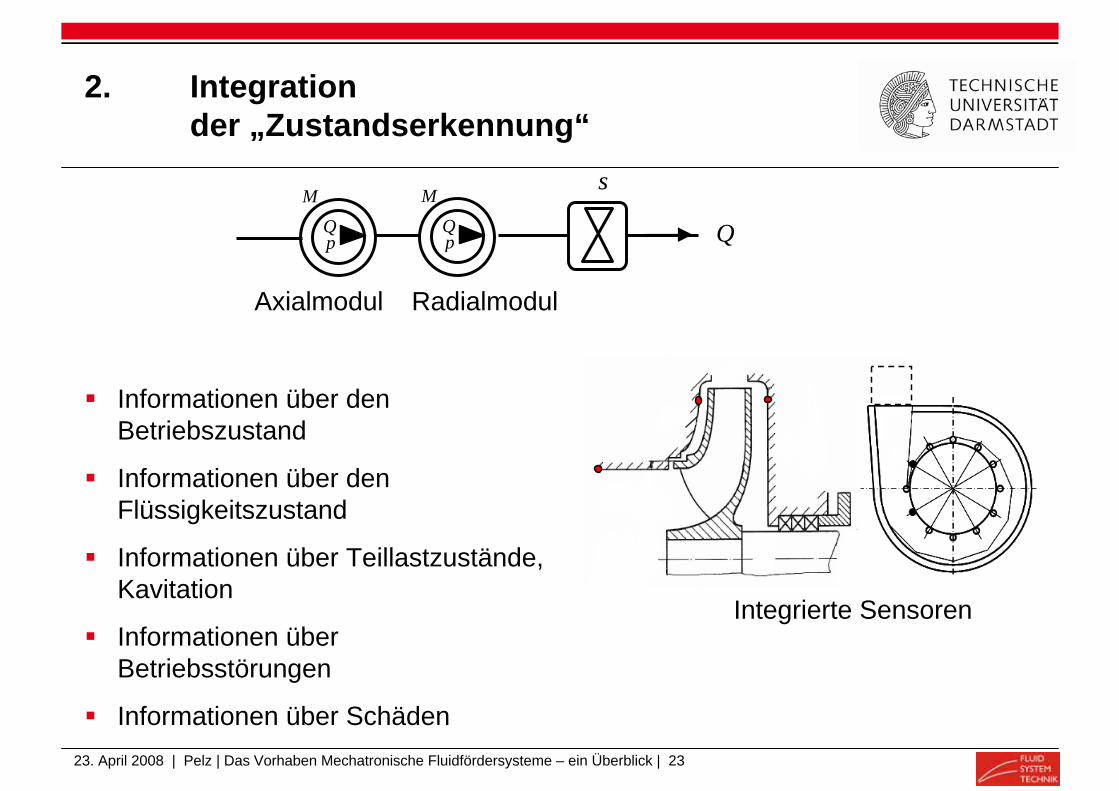
Informationen über den Betriebszustand
Informationen über den Flüssigkeitszustand
Informationen über Teillastzustände, Kavitation
Informationen über Betriebsstörungen
Informationen über Schäden
2. Integration der „Zustandserkennung“
Qp
Ms
Qp
M
Q
Axialmodul Radialmodul
Integrierte Sensoren
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 24
3. Aktive Reaktion
Anpassung/ Optimierung des Betriebszustands
Selbsttätiges Fehlermanagement
Qp
Ms
Qp
M
Q
Axialmodul Radialmodul
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 25
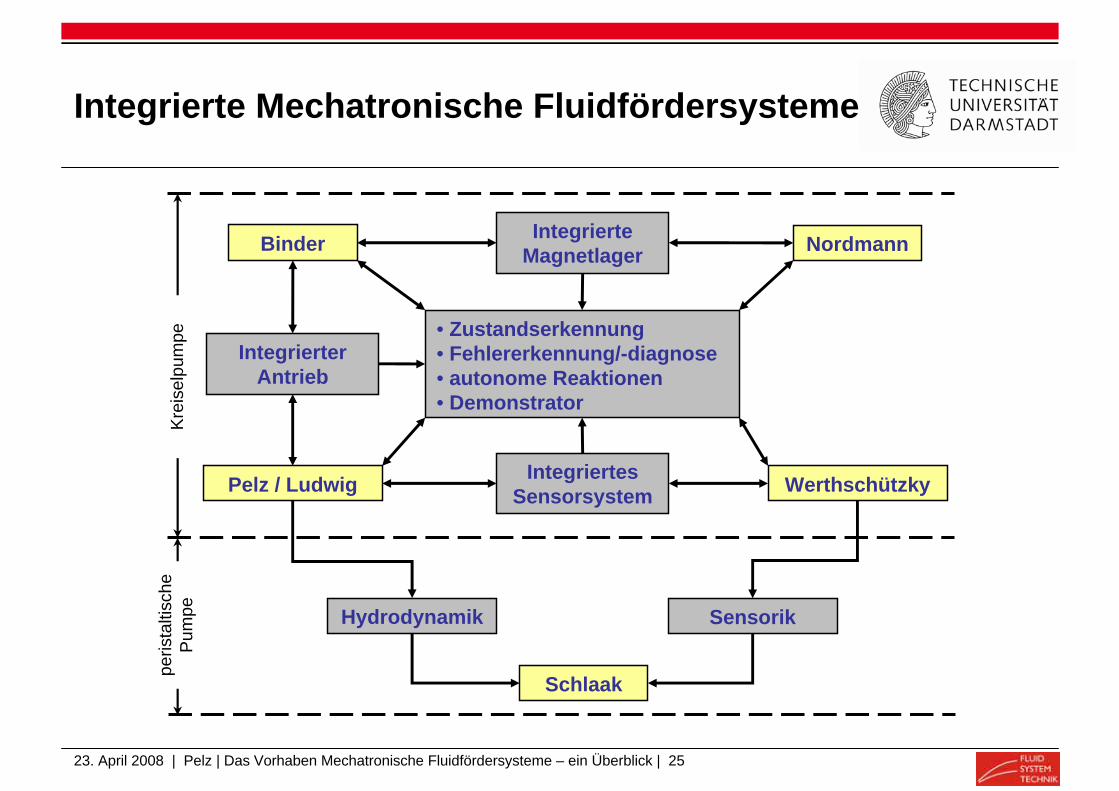
Integrierte Mechatronische Fluidfördersysteme
Binder NordmannIntegrierte Magnetlager
Integrierter Antrieb
Pelz / Ludwig WerthschützkyIntegriertes Sensorsystem
• Zustandserkennung• Fehlererkennung/-diagnose• autonome Reaktionen• Demonstrator
Schlaak
SensorikHydrodynamik
Krei
selp
umpe
peris
talti
sche
P
umpe
23. April 2008 | Pelz | Das Vorhaben Mechatronische Fluidfördersysteme – ein Überblick | 26
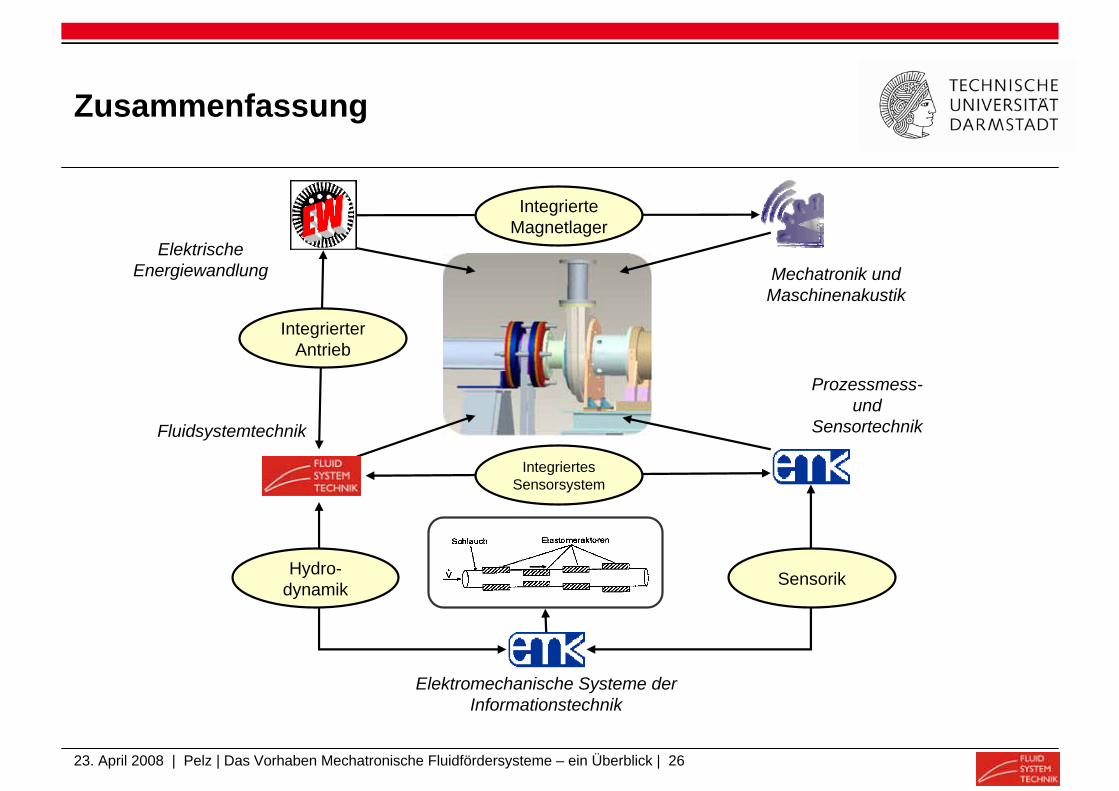
Zusammenfassung
Integriertes Sensorsystem
Integrierte Magnetlager
Integrierter Antrieb
Hydro-dynamik Sensorik
Fluidsystemtechnik
Prozessmess-und
Sensortechnik
Elektrische Energiewandlung Mechatronik und
Maschinenakustik
Elektromechanische Systeme der Informationstechnik