Mechatronisches Praktikum - uni-saarland.de · einfachsten elektrischen Motor 3 - den Linearmotor....
18
Transcript of Mechatronisches Praktikum - uni-saarland.de · einfachsten elektrischen Motor 3 - den Linearmotor....

Mechatronisches Praktikum
Aufbau und Analyse eines Antriebsstrangs
(Parameterbestimmung bei elektrischen Kleinantrieben)
Lehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Inhaltsverzeichnis
1 Theorie 3
1.1 Die Lorentz-Kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Der Gleichstrommotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Die Funktionsweise des Gleichstrommotors . . . . . . . . . . . . . . . . . . . 71.2.2 Technische Besonderheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.3 Erregung von Gleichstrommotoren . . . . . . . . . . . . . . . . . . . . . . . . 101.2.4 Leistungsbilanz und Drehmoment . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3 Mechanische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 Praxis 16
2.1 Grundlagenversuch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2 Parameterbestimmung eines Antriebssystems . . . . . . . . . . . . . . . . . . . . . . 172.3 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Mechatronisches Praktikum Seite 2 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
1 Theorie
E�ekte und Phänomene der Elektrizität und des Magnetismus begleiten uns seit jeher. Kein Wun-der, denn auÿer der Gravitation, sowie der schwachen und starken Kernkräfte, haben alle anderenKräfte einen einzigen Ursprung - den Elektromagnetismus. Bereits im Altertum stellten die Griechenfest, dass Bernstein nach Reibung Federn und Stroh anzieht. Ebenso kannten sie auch schon dennatürlich vorkommenden Magnetstein (Magnetit). Welche komplexe Theorie dahinter steckt undwo Zusammenhänge und Unterschiede bestehen, konnten sie jedoch höchstens erahnen. Und sowar es James Clerk Maxwell, der Mitte des 19. Jahrhunderts der �Theorie des Elektromagnetismus�,sprich der Elektrodynamik ein mathematisches Gesicht gab. Eine Leistung, welcher viele praktischeArbeiten, durch bsp. Maricourt, Gilbert, Mitchell, Coulomb, Ampère, Biot, Savart und nicht zuvergessen Faraday und Henry, vorausgegangen waren.Auch wenn nur sehr wenige Menschen ein Bewusstsein für den Elektromagnetismus besitzen, istder Umgang mit ihm (genauer: sein Nutzen) in der heutigen Zeit eine Selbstverständlichkeit. Nochvor etwas mehr als 100 Jahren gab es in den Haushalten kaum elektrisches Licht, geschweige dennElektromotoren. An Mobilfunktelefone oder Computer war überhaupt nicht zu denken. Viele Ma-schinen und Geräte wurden mit Dampf- und / oder Muskelkraft betrieben, bis man sie nach undnach mit Elektromotoren ausgestattet hat. Dieses Vorgehen und auch die (Weiter-) Entwicklung derElektromotoren tragen einen sehr groÿen Anteil daran, dass sich eine moderne Industriegesellschaft,wie wir sie heute kennen, entwickeln konnte. Mittlerweile gibt es kaum einen technischen Bereich,in dem keine elektrische Maschine zum Einsatz kommt. Der VDE schreibt: �Insgesamt verbrauchenElektromotoren mehr als die Hälfte des in Deutschland erzeugten Stroms!�. Interessant dabei ist,dass weit über 70 % der zur Verfügung stehenden Energie durch Generatoren bereitgestellt wer-den. Daraus ergibt sich eine zentrale Bedeutung der elektrischen Maschinen für unsere Gesellschaft.Im ersten Teil dieses Praktikums lernen Sie grundlegende,
Jedlik-Motor (1827)
physikalische Hintergründe und Mechanismen kennen, wel-che die Funktionsweise eines Gleichstrommotors möglich ma-chen bzw. diese erklären. Sie werden selbst einen solchen Mo-tor in stark vereinfachter Weise bauen und zusätzlich sehen,wie vielfältig man den gleichen physikalischen E�ekt nutzenkann. Neben dem Motorbetrieb soll auch auf den Generator-betrieb, sprich auf die elektrischen Maschinen als Energie-wandler, kurz eingegangen werden.Da ein Motor im Allgemeinen für eine bestimmte Arbeits-maschine genutzt wird und die mechanische Anpassung des Motors an die Maschine häu�g durchein Getriebe erfolgt, experimentieren Sie im zweiten Teil mit einer Motor-Getriebe-Kombination.Sie setzen sich mit den dafür notwendigen mechanischen Grundlagen auseinander, führen einfacheMessungen durch und charakterisieren den verwendeten Motor. Danach sind Sie prinzipiell in derLage, ein einfaches Getriebe mit Motor entsprechend einer Last zu dimensionieren.
Mechatronisches Praktikum Seite 3 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Als Abschluss erwartet Sie ein dezenter Einblick in die Welt der Klein- und Mikroantriebe. Ihnenwerden verschiedenste Motortypen und ihre Anwendungen vorgestellt. Besonderes Augenmerk solldabei auf den elektrischen Antrieben als mechatronische Systeme liegen, d.h. auf der funktionalenEinheit aus Elektromotor und Steuerung / Regelung. Sie sollen sehen, dass ein Elektromotor sichlediglich auf den ersten Blick, also rein ober�ächlich betrachtet, �nur� dreht.
1.1 Die Lorentz-Kraft
Der Zusammenhang zwischen elektrischen und magnetischen Kraftwirkungen war lange Zeit nichtbekannt. Erst 1820 fand Hans Christian Oersted heraus, dass sich die Orientierung einer Kompass-nadel durch einen elektrischen Strom manipulieren lässt. Andersherum werden aber auch bewegteLadungen in bzw. durch ein Magnetfeld beein�usst. Für den Aufbau und die Funktionsweise einesGleichstrommotors ist die Kraft auf bewegte Ladungen im Magnetfeld von maÿgeblicher Bedeu-tung. Sie ist bekannt unter dem Namen Lorentzkraft1 und wird fast ausnahmslos für die Erzeugungder Rotation bei Elektromotoren verwendet2. Selbst die immer mehr an Bedeutung zunehmendenlinearen Antriebe basieren auf ihr.
B
F v
0Q
! "Abbildung 1.1: Kraft auf eine bewegte Ladung im Magnetfeld
Die Lorentzkraft ergibt sich als Kreuzprodukt des Geschwindigkeitsvektors Ñv und des Flussdichte-vektors ÑB, skalarmultipliziert mit der Ladung Q:
ÑF � Q � Ñv � ÑB (1.1)
1Hendrik Antoon Lorentz, niederländischer Mathematiker und Physiker2Ausnahmen sind bsp.: Reluktanzmotor, Hysteresemotor, Piezomotor
Mechatronisches Praktikum Seite 4 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Für den Betrag der Kraft gilt:
F � Q � v � B � sin ���Q � Ñv , ÑB�� (1.2)
Hier entspricht F der eingefärbten Fläche in Abbildung 1.2, welche die Zusammenhänge der ein-zelnen Gröÿen im Bezug auf die �Rechte-Hand-Regel� darstellt. Aus sin �0X� � 0 folgt, dass keineKraft auf eine Ladung wirkt die sich längst der ÑB-Feldlinien bewegt.
Abbildung 1.2: Rechte-Hand-Regel
Betrachtet man nun einen geraden, stromdurch�ossenen Leiter im Magnetfeld, so ergibt sich mitQ � I � t und Ñl � Ñv � t :
ÑF � I � Ñl � ÑB (1.3)
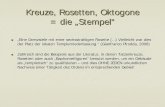
D.h. auf ein Leiterstück der Länge l, welches vom Strom I durch�ossen wird und das sich in einemMagnetfeld ÑB be�ndet, wirkt senkrecht zur Ñl-ÑB-Ebene eine Kraft ÑF. Abbildung 1.3 zeigt den wohleinfachsten elektrischen Motor3 - den Linearmotor. Anhand der blauen Kreuze erkennt man, dassdas Magnetfeld senkrecht in die Zeichenebene hineinzeigt, weshalb ÑB und Ñl einen rechten Winkelbilden und somit für den Betrag von ÑF gilt:
F � I � l � B (1.4)
Wie oben bereits erwähnt, ist diese Kraftwirkung besonders wichtig für die Funktionsweise elektri-scher Motoren. Dies wird nun weiter am Beispiel des Gleichstrommotors verdeutlicht.
I
B F
Abbildung 1.3: Schematische Darstellung eines Linearmotors
3lateinisch: Beweger
Mechatronisches Praktikum Seite 5 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
1.2 Der Gleichstrommotor
Wann genau der erste Gleichstrommotor und damit der erste elektrische Motor überhaupt erfundenwurde, ist unklar. Eigentlich ging es nach Oersted's Entdeckung nur noch um die Konstruktion.Und so kam es, dass verschiedene Personen relativ zeitgleich an funktionsfähigen Motoren tüftelten,unter anderen Faraday, Barlow, Jedlik, Ritchie und Jacobi.
Abbildung 1.4: Erste Motorenmodelle (1800-1850)
Wie man den Modellen in Abbildung 1.4 entnehmen kann, hatten die ersten Motoren keinerleipraktischen Nutzen. Aber schon 1834 begann Jacobi mit der Entwicklung eines technisch nutzbarenMotors. Dank des russischen Zaren Nikolaus I., er �nanzierte die Arbeit von Jacobi, war dieser Motornur vier Jahre später so fortgeschritten, dass er Anwendung als Bootsmotor fand. Und so fuhr am13. September 1838 auf der Newa in St. Petersburg ein Boot mit Schaufelrädern und Elektromotor,welcher von 64 Zink-Platin-Batterien gespeist wurde. Diese Fahrt mit 14 Passagieren dauerte knappzwei Stunden und ging über ca. sieben Kilometer, weshalb Jacobi selbst seine Entwicklung fürsinnlos hielt, da man damals noch keine leistungsfähigen elektrischen Energiequellen kannte.
Mechatronisches Praktikum Seite 6 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
!
"
# F
F
B
!
"
M
!
!
Abbildung 1.5: Drehmomententstehung beim Gleichstrommotor
1.2.1 Die Funktionsweise des Gleichstrommotors
Gleichstrommotoren bestehen grundsätzlich aus einem feststehenden Stator (Ständer) und einemsich drehenden Rotor (Läufer). So sind die in Abbildung 1.5 dargestellten Magnetpole Bestandteiledes Ständers, wohingegen der gelbe Zylinder mit der Leiterschleife dem Läufer entspricht. Anhanddieses sehr einfachen Fall eines Rotors mit nur einer Leiterschleife, erkennt man direkt, wie mit Hilfeder Lorentzkraft ein Drehmoment auf den Rotor erzeugt wird. Die Richtung der Kraftwirkung ergibtsich aus den Ausführungen in Abschnitt 1.1. Weil die Leiterschleife fest in den Nuten des Rotorsliegt, wirkt die Kraft auch auf diesen. D.h. der Motor dreht im mathematisch negativen Drehsinn.Damit ist prinzipiell erklärt wie eine Drehbewegung entsteht. Es ist jedoch notwendig, sich dieserEntstehung etwas genauer zu widmen, denn der obige Aufbau würde nach einer Vierteldrehungstehen bleiben.
!
"
F
F B
tangentialFtangentialF
!
"
FF
B
!
"
F
F
B
tangentialF
tangentialF
# ## ###
Abbildung 1.6: Problem bei fehlender Kommutierung
Mechatronisches Praktikum Seite 7 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Während die Leiterschleife bestromt wird, bleibt die Kraftwirkung auf sie konstant, da sich dashomogene Magnetfeld nicht ändert und der Rotor vollständig in diesem dreht. Was sich jedochändert, ist die Verteilung der Kraft. Aufgrund der drehbaren, aber örtlich festen Lagerung desRotors, ergibt sich eine Zerlegung in die tangential zur Rotorober�äche angreifende Kraft ÑFtangential(siehe Abbildung 1.6 / I) und die Normalkomponente (nicht eingezeichnet). Für das DrehmomentM ist einzig und allein die Tangentialkomponente von Bedeutung. Betragsmäÿig gilt:
M � R � Ftangential (1.5)
Bei der Startposition in Abbildung 1.5 wirkt die gesamte vom Magnetfeld hervorgerufene Krafttangential, weshalb hier auch ein Drehmomentmaximum vorliegt. Mit der Drehung wird die Tan-gentialkraft immer kleiner und die Normalkraft immer gröÿer. Diese erreicht nach 90X ihr Maximum,was gleichbedeutend damit ist, dass die Tangentialkomponente verschwindet. Auf die Leiterschlei-fe, respektive dem Rotor, wirkt nun kein Moment mehr (Abbildung 1.6 / II). Sollte es zu einemÜberdrehen4 des Rotors bzgl. der Gleichgewichtslage kommen, so dreht dieser entsprechend Ab-bildung 1.6 / III eigenständig zurück. Der Motor würde also nur dann weiterdrehen, wenn beimÜberdrehen mehr als 180X erreicht werden. Im Normalfall ist das nicht möglich und wäre auch nichtsinnvoll. Man braucht eine Lösung, welche jederzeit für eine Rotation sorgt. Dazu sei nochmalsdie dritte Darstellung von Abbildung 1.6 betrachtet. Es leuchtet sofort ein, dass wenn der Stromjetzt andersherum durch die Leiterschleife �ieÿen würde, die Drehbewegung aufrecht erhalten wird.Wenn also im Gleichgewichtspunkt eine Stromumkehr erfolgt, rotiert der Läufer weiter. Dafür zu-ständig ist der sogenannte Kommutator bzw. Stromwender, welcher sich sowohl mechanisch alsauch elektronisch realisieren lässt. Abbildung 1.7 zeigt schematisch eine sehr einfache mechanischeUmsetzung. Wie man sieht, �ndet genau im Gleichgewichtspunkt die Umpolung statt, so dass derdem magnetischen Nordpol nähere Leiter den Strom immer aus der Zeichenebene herausführt undder dem Südpol zugewandte Leiter den Strom immer in die Zeichenebene hineinführt. Eine simpleVariante des Gleichstrommotors wäre damit vorgestellt.
!
"
B
!
"
B
!
"
B
!
"
B
Abbildung 1.7: Kommutator (Stege -> schwarz / Bürsten -> lila)
4bsp. aufgrund von Massenträgheiten
Mechatronisches Praktikum Seite 8 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
1.2.2 Technische Besonderheiten
In der Praxis sind Gleichstrommotoren wesentlich komplizierter aufgebaut als in Abschnitt 1.2.1.Ebenso gibt es eine Reihe physikalischer E�ekte, welche bei den obigen Ausführungen nicht beach-tet wurden, die aber bei der Konstruktion und Dimensionierung eines solchen Motors von groÿerBedeutung sind. Ohne zu sehr auf technische Details einzugehen, sollen in diesem Abschnitt einigewichtige Besonderheiten kurz beleuchtet werden.
Zur Erhöhung des Drehmoments bringt man!"#$$#%&'()#%
*++#,#+-./&"0%,
12"&#+%
12"(/303
42/3
5607#+-./&"0%,
!23"#()'8
9:+()#;$.);<#=#+%
>#""#
Abbildung 1.8: Schematischer Aufbau
mehrere Leiterschleifen auf dem Läuferum-fang unter. Zusätzlich sorgt man durch spe-zielle Ständerkonstruktionen dafür, dass dasDrehmoment nahezu konstant bleibt. So ver-wendet man, wie in Abbildung 1.8 zu sehen,speziell geformte Polschuhe, welche nicht nurdurch ihre Geometrie, sondern auch durch be-sondere Materialeigenschaften für ein homo-genes Magnetfeld und einen geringeren ma-gnetischen Widerstand sorgen.Eine weitere wichtige konstruktive Maÿnahmestellt die Blechung des Läufers dar. Währender sich dreht, wird er stets und ständig umma-gnetisiert, wodurch Wirbelströme entstehen.Aufgrund der Blechung lassen sich diese kleinhalten, da die einzelnen Läuferbleche gegen-einander elektrisch isoliert sind (siehe Abbildung 1.9). Desweiteren muss beachtet werden, dassnicht nur eine Kraft auf die Leiterstücke im Läufer wirkt, sondern auch eine Spannung induziertwird, wenn sich die Leiterschleifen der Läuferwicklung im Ständermagnetfeld drehen. Kommt es zu-sätzlich zu einer zeitlichen Änderung des Läuferstroms, so erfolgt eine weitere Spannungsinduktion.Erstere führt zu einer Verringerung des ursprünglichen Läuferstroms (Lenz'sche Regel) als Ursachefür die Drehung. Aus der zweiten Induktion folgt das sogenannte Bürstenfeuer5. D.h. es kommt zurFunkenbildung am Kommutator, welche Beschädigungen hervorrufen kann. Beide E�ekte lassensich durch technische Anpassungen des Motors beein�ussen bzw. minimieren.Als letztes sei noch kurz auf die Ankerrückwirkung6 eingegangen, welche eine Feldverzerrung ver-ursacht und zwar in dem Sinne, dass das vom Läuferstrom verursachte Läuferfeld sich mit demStänderfeld zu einem verdrehten Luftspaltfeld überlagert, welches widerrum zur Verschiebung derneutralen Zone führt. Daraus resultieren Probleme bei der Kommutierung und unerwünschte nichtlineare Abhängigkeiten zwischen Drehmoment und Ankerstrom, sowie zwischen Drehmoment undDrehzahl. Mit Hilfe von Kompensationswicklungen im Ständer lassen sich die Ankerrückwirkungund alle Folgeerscheinungen praktisch aufheben.
5entsteht auch durch mechanisches Abheben der Bürsten von den Kommutatorstegen, bei schneller Rotationdes Läufers
6Anker: i.A. Maschinenteile in denen Spannungen induziert werden
Mechatronisches Praktikum Seite 9 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Abbildung 1.9: Anker eines Universalmotors
1.2.3 Erregung von Gleichstrommotoren
Bisher wurde nicht darauf eingegangen, wie das Magnetfeld in einem Gleichstrommotor erzeugtwird. Man unterscheidet grundsätzlich zwischen drei verschiedenen Erregungsarten:
� Anker- und Erregerwicklung galvanisch getrennt: Fremderregung
� Anker- und Erregerwicklung parallel geschaltet: Nebenschlusserregung
� Anker- und Erregerwicklung in Reihe geschaltet: Reihenschlusserregung
Unabhängig davon, welche dieser Erregungsarten bei einem Gleichstrommotor zum Einsatz kommt,erzeugt hier ein Elektromagnet das Magnetfeld. Eine andere Möglichkeit besteht in der sogenann-ten Permanentmagneterregung, d.h. mittels eines Dauermagneten wird ein konstantes Magnetfelderzeugt. Dadurch ist man im Bezug auf den Drehzahlbereich eingeschränkter, spart aber die Energiefür die sonst notwendige Erzeugung des Magnetfeldes. Es sei angemerkt, dass in speziellen Fällendie Kombination von zwei oder mehreren Erregungsarten genutzt wird.
Mechatronisches Praktikum Seite 10 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Obwohl es vier verschiedene Möglichkeiten der Erregung gibt, weisen Gleichstrommotoren nur zweiArten von Betriebsverhalten auf. So zeigen Motoren mit Permanent-, Fremd- und Nebenschlusserre-gung das sogenannte Nebenschlussverhalten und Reihenschlussmotoren das Reihenschlussverhalten.Da letztere für dieses Praktikum nicht relevant sind, soll an dieser Stelle nur auf das Nebenschluss-verhalten eingegangen werden.Motoren mit Nebenschlussverhalten erfahren nur eine geringe Drehzahländerung, wenn sie bsp. mitNenndrehzahl nN laufen und dabei Lastschwankungen auftreten. Dieses typische Merkmal spiegeltsich in den M-n-Kennlinien solcher Motoren wider. Dabei handelt es sich um monoton fallendeGeraden mit groÿer negativer Steigung.
Abbildung 1.10: Nebenschlusskennlinie
Durch das Anlaufmoment MA und die Leerlaufdrehzahl n0 ist die M-n-Kennlinie eines Gleichstrom-motors mit Nebenschlussverhalten eindeutig gegeben (siehe Abbildung 1.10). Interessant dabei ist,dass das Anlaufmoment bei gröÿeren Motoren als eine rein theoretische Gröÿe verstanden werdenkann, was an den sehr hohen Strömen im Einschaltaugenblick liegt. Diese könnten problemloszehnmal höher als der Nennstrom werden, was das Versorgungsnetz bzw. die Energiequelle enormbelasten würde. In der Praxis sorgen deshalb verschiedene Techniken für die Begrenzung des An-laufstroms. Bei Klein- und Mikroantrieben ist der Anlaufstrom eher unproblematisch.
Mechatronisches Praktikum Seite 11 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Berechnen lässt sich das Anlaufmoment wie folgt:
M�n � 0� � MA �
k2 �Φ �UA
RA� k2 �Φ � IA � km � IA (1.6)
UA � Ankerspannung (�die Spannung über dem Rotor�)
RA � Ankerkreiswiderstand
IA � Ankerstrom (hier gleichzeitig der Anlaufstrom)
Φ � magnetischer Luftspalt�uss (hier konstant)
k2 �k1
2π, k1 ist die sogenannte Maschinenkonstante7
km � Drehmomentkonstante des Motors
Läuft der Motor ohne Last, so dreht er mit seiner Leerlaufdrehzahl n0, für die gilt:
n0 �UA
k1 �Φ(1.7)
Man kann sich merken, dass der stationäre Arbeitspunkt des Motors im Nennbetrieb in der Nähedieser Leerlaufdrehzahl liegt. Mit den Zusammenhängen des nächsten Abschnittes kann dies rechteinfach nachvollzogen werden.Um ein besseres Verständnis für die obigen Gröÿen zu erhalten, sei hier nun noch das Ersatz-schaltbild eines fremderregten Gleichstrommotors vorgestellt. Damit lassen sich die elektrischenVerhältnisse im stationären Zustand beschreiben.
AU
iU
AR
AI
EU
ER
EI
Abbildung 1.11: Ersatzschaltbild eine fremderregten Gleichstrommotors
7Die Maschinenkonstante k1 wird im Datenblatt vom Hersteller angegeben oder messtechnisch ermittelt!
Mechatronisches Praktikum Seite 12 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Die linke Seite von Abbildung 1.11 entspricht dem Ankerkreis, die rechte dem Erregerkreis. D.h.UA ist die Spannung welche von auÿen an den Läufer angeschlossen wird. Dementsprechend �ieÿtein Strom IA durch den Anker mit dem ohmschen Widerstand RA. Wie oben bereits erwähnt,wird während der Rotation des Läufers eine Spannung Ui im Ankerkreis induziert. Aufgrund dessengeht diese Induktionsspannung natürlich auch in das Ersatzschaltbild ein. Die Fremderregung wirddadurch deutlich, dass Anker- und Erregerkreis unabhängig voneinander sind. Es gelten folgendeGleichungen:
UA � RA � IA �Ui (1.8)UE � RE � IE (1.9)
Für einen rein permanenterregten Gleichstrommotor braucht man den Erregerkreis nicht beachten.Desweiteren sei angemerkt, dass beim Anlauf des Motors die gesamte Ankerspannung über demAnkerkreiswiderstand abfällt, weil zu diesem Zeitpunkt noch keine Induktionsspannung vorliegt.Daraus folgt der oben angesprochene sehr hohe Anlaufstrom.
1.2.4 Leistungsbilanz und Drehmoment
Wir betrachten noch einmal den Ankerkreis entsprechend der Abbildung 1.11, für dessen Leistungs-aufnahme gilt:
PA � UA � IA � �RA � IA �Ui� � IA � RA � I2A �Ui � IA � PVA �Ui � IA (1.10)
Hier gehen die Ankerwicklungsverluste PVA als Wärme verloren. Da Bürsten- und Eisenverluste8
vergleichsweise gering sind, können sie für überschlägige Rechnungen vernachlässigt werden. D.h.der noch verbleibende Leistungsanteil Ui � IA muss der (inneren) mechanisch abgegebenen Leistungentsprechen:
Pmech � Ui � IA (1.11)
Um herauszu�nden, welche mechanische Leistung an der Welle des Motors zur Verfügung steht,müssten noch die Reibungsverluste von dieser Leistung abgezogen werden. Oft sind diese jedochso gering, dass man sie vernachlässigen kann. Ist ein Erregerkreis vorhanden, so gehen zusätzlichErregerwicklungsverluste - ebenfalls in Form von Wärme - verloren.
PVE � RE � I2E � UE � IE (1.12)
Insgesamt ergibt sich somit für den Wirkungsgrad:
η �
Pmech
Pel�
Ui � IA
UA � IA �UE � IE(1.13)
8Eisenverluste = Wirbelstrom- und Ummagnetisierungsverluste
Mechatronisches Praktikum Seite 13 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Von der mechanischen Seite aus gilt:
Pmech � ω � M � 2 �π � n � M (1.14)
und damit folgt für das Drehmoment:
Ui � IA � 2 �π � n � M � M �
Ui � IA
2 �π � n(1.15)
bzw. mit Ui � k1 �Φ � n:
M �
k1 �Φ � n � IA
2 �π � n�
k1
2 �π�Φ � IA � k2 �Φ � IA , k2 �
k1
2 �π(1.16)
Hier ist das Drehmoment abhängig von Fluss und Strom. Man erkennt sofort, dass für k2 �Φ � const.gilt: M � IA. Häu�g ist jedoch der Zusammenhang zwischen Drehmoment und Drehzahl gefragt,welcher sich durch einfache Umformungen herleiten lässt:
M �
Ui � IA
2 �π � n(1.17)
Ui � k1 �Φ � n und UA � IA � RA � I2A �Ui � IA � IA �
UA �Ui
RA(1.18)
� M �
k1 �Φ � n � UA�k1�Φ�nRA
2 �π � n�
k1 �Φ �UA
2 �π � RA�
k21 �Φ
2
2 �π � RA� n (1.19)
�
k2 �Φ �UA
RA�
k1 � k2 �Φ2
RA� n (1.20)
1.3 Mechanische Grundlagen
In diesem Praktikum soll lediglich der stationäre Betriebszustand betrachtet werden. D.h. der Motorläuft mit einer konstanten Drehzahl und unterliegt keinen Lastschwankungen. Er liefert ein soge-nanntes Beharrungsmoment (statisches Moment), welches dem Lastmoment der Arbeitsmaschinedas Gleichgewicht hält. Dabei dienen in der Regel Getriebe zur Anpassung von Drehzahl, Dreh- undTrägheitsmoment der Lastseite an die Motorseite (Abbildung 1.12). Am häu�gsten werden dafürZahnradgetriebe verwendet.
!"#"$ %&#$'&(&
)$(&'#*+,-*./'0&
Abbildung 1.12: Elektrisches Antriebssystem
Mechatronisches Praktikum Seite 14 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Die für den Praktikumsversuch wichtigen Zusammenhänge werden nun anhand von Abbildung 1.13vorgestellt. Dort steht der Index M für den Motor und der Index L für die Last. Desweiteren handeltes sich um verlustlose Betrachtungen. Leistungsbilanz (Rotation und Translation):
P � v � F � M �ω , mit v � r �ω � M � r � F (1.21)
Leistungsbilanz (Zahnradgetriebe):
PM � ωM � MM � 2 �π � nM � MM � 2 �π � nL � ML � ωL � ML � PL (1.22)
Daraus folgt für das Übersetzungsverhältnis u:
u �
ML
MM�
ωM
ωL�
nM
nL(1.23)
Ist zusätzlich der Wirkungsgrad ηG des Getriebes bekannt, so gilt:
MM �
1ηG
�1u� ML (1.24)
,M
v
F
!MMM nM ,,
MR
LR
LL n,
LM
Abbildung 1.13: Rotation und Translation / Zahnradgetriebe (schematisch)
Mechatronisches Praktikum Seite 15 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
2 Praxis
2.1 Grundlagenversuch
Im ersten Teil des Praktikums werden zunächst einmal die theoretischen Grundlagen des Skriptesdurchgesprochen. Sie haben die Möglichkeit Fragen zu stellen und zu diskutieren, bevor sie dann ineinem einfachen Versuch zeigen, dass sie die Grundlagen verstanden haben. Danach betrachten wirweitere simple Konstruktionen, welche der theoretischen Anschauung dienen und ebenfalls diskutiertwerden sollen.
Ziel
� Grundprinzipien der elektromagnetischen Antriebstechnik verstehen
Versuch
� Aufbau eines einfachen Motors mit einer selbstgewickelter Spule, einem Permanentmagnet,zwei Büroklammern und einer 9V-Batterie
� über die Konstruktion entscheiden sie in ihrer Gruppe, entsprechend der obigen Ausführungenim Theorieteil, selbstständig
� Analyse / Untersuchung des gleichen E�ektes durch verschiedene Experiemente
Dauer
� � 1, 5 h
Mechatronisches Praktikum Seite 16 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Material
� 9V-Block-Batterie
� 2 Büroklammern
� Kupferlackdraht �g 0, 4 mm�
� Permanentmagnet, axial magnetisiert, 1 Polpaar
� Schaumsto�platte
2.2 Parameterbestimmung eines Antriebssystems
Elektrische Antriebe sind mechatronische Systeme, die eine Vielzahl von wissenschaftlichen undtechnischen Bereichen kombinieren bzw. vereinen. Um dies zu verdeutlichen soll dieser Hauptteildienen. Sie sollen sehen, dass selbst das Vermessen und das Auslegen eines einfachen Systems eineFülle an Themen beinhaltet.
Ziel
� erste praktische Erfahrungen mit einer Motor-Getriebe-Kombination, sowie deren Auslegungund der dazugehörigen Messtechnik sammeln
Versuch
Die genaue Versuchsanleitung, inkl. technischer Daten, erhalten sie am Praktikumstag. Sie solltenjedoch vor dem Praktikum überlegen, wie sie die folgenden Aufgabenstellungen lösen könnten!
� Zusammenbau eines mehrstu�gen Getriebes mit vorgegebener Übersetzung, Seilwinde, En-coderscheibe, Lichtschranke und Gleichstromnebenschlussmotor als Antrieb
� Beschaltung der Lichtschranke zur Messung der Drehzahl
� Bestimmung der M-n-Kennlinie des Motors, auf zwei verschiedene Arten (siehe Theorieteil!)
Mechatronisches Praktikum Seite 17 von 18

FR 7.4 - MechatronikLehrstuhl für AntriebstechnikProf. Dr.-Ing. Matthias Nienhaus
Dauer
� � 2 h
Material
� Breadboard mit Steckbrücken
� Widerstände
� Leuchtdioden
� eitech Konstruktionsset
� Lichtschranke Vishay TCST2103
� Faden und Gewichte
� Netzteil mit Kabel und Klemmen
� Multimeter
� Oszilloskop
� Werkzeug
2.3 Ausblick
Der dritte und letzte Teil des Praktikums bietet ihnen einen Einblick in die Welt der Klein- undMikroantriebe. Anhand einiger Beispielmotoren werden sie sehen, wie vielseitig die Antriebstechnikist. Dabei informieren wir sie über verschiedene Themen: �Getriebetypen, Winkelmesser, Encoder,Elektronik, Schmiermittel, Magnetik, Lagertechnik, Sensorik, Materialien, ...�. Den Abschluss bildeteine Demonstration verschiedener Ansteuerungsschemen auf Basis eines Technosoft-Starter-Kits.
Mechatronisches Praktikum Seite 18 von 18