Modellierung der atmosphärischen Signalverzögerung für...
25
Modellierung der atmosphärischen Signalverzögerung für GNSS- und SBAS-basierte Navigationsanwendungen Gottfried Thaler Institut für Geodäsie und Geophysik, TU-Wien
Transcript of Modellierung der atmosphärischen Signalverzögerung für...
Modellierung der atmosphärischen Signalverzögerung für GNSS- und
SBAS-basierte Navigationsanwendungen
Gottfried Thaler
Institut für Geodäsie und Geophysik, TU-Wien
19.05.2010 22. Navigations-Get-Together
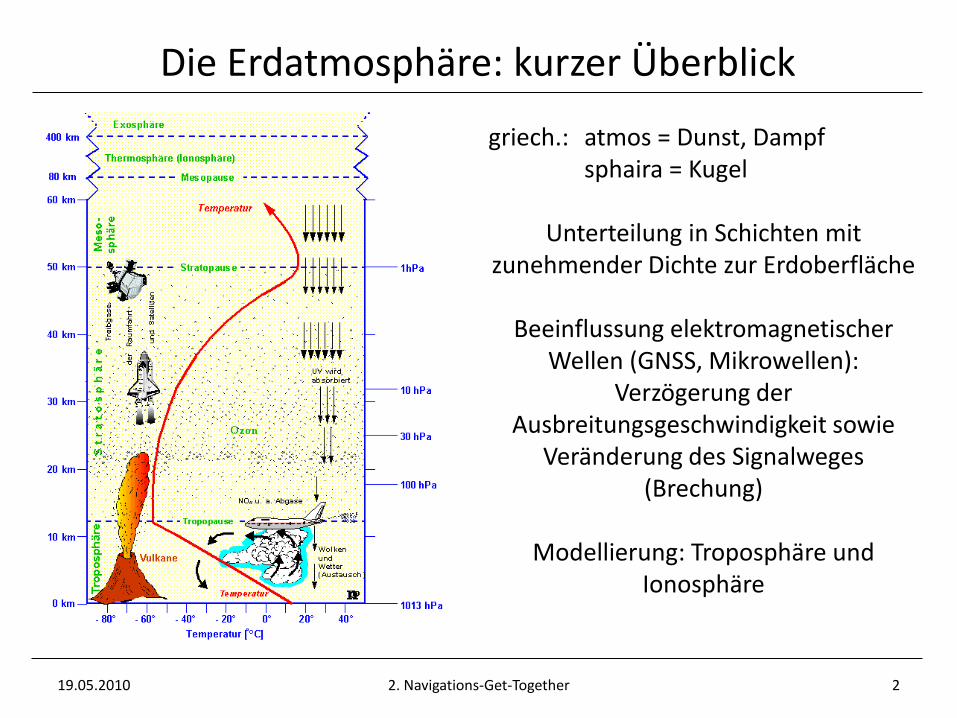
Die Erdatmosphäre: kurzer Überblick
griech.: atmos = Dunst, Dampfsphaira = Kugel
Unterteilung in Schichten mit zunehmender Dichte zur Erdoberfläche
Beeinflussung elektromagnetischer Wellen (GNSS, Mikrowellen):
Verzögerung der Ausbreitungsgeschwindigkeit sowie
Veränderung des Signalweges (Brechung)
Modellierung: Troposphäre und Ionosphäre
19.05.2010 2. Navigations-Get-Together 3
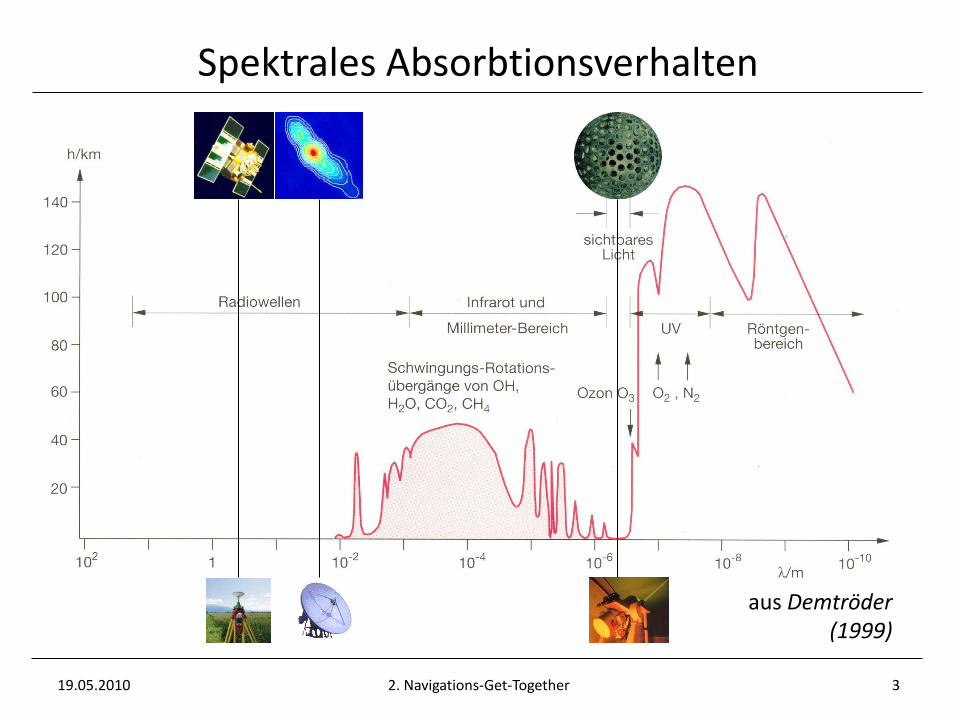
Spektrales Absorbtionsverhalten
aus Demtröder (1999)
19.05.2010 2. Navigations-Get-Together 4
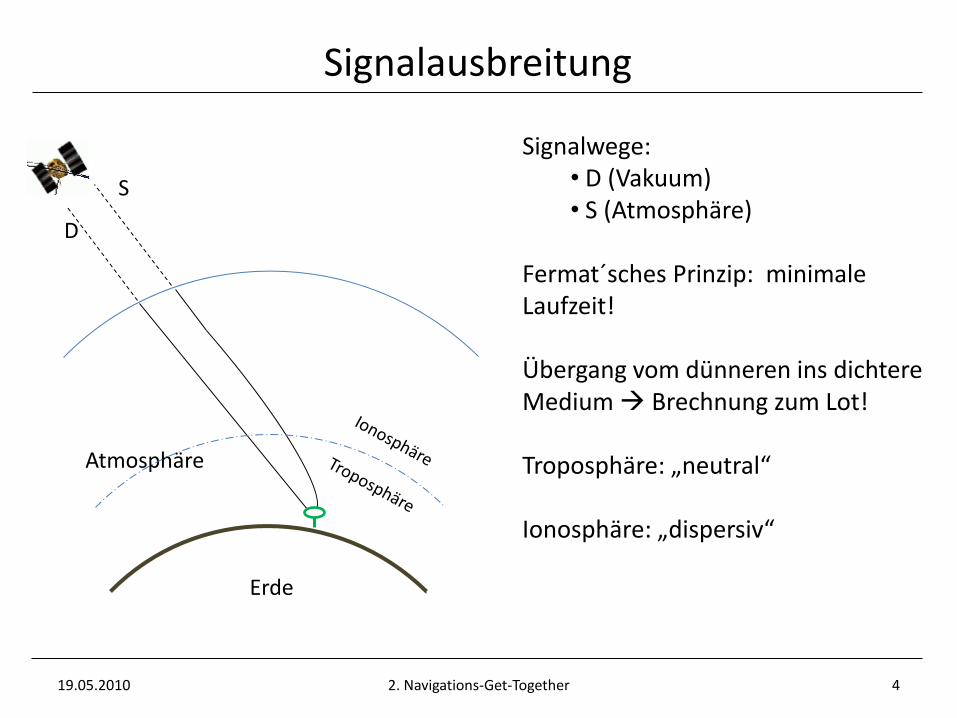
Signalausbreitung
Signalwege:• D (Vakuum)• S (Atmosphäre)
Fermat´sches Prinzip: minimale Laufzeit!
Übergang vom dünneren ins dichtere Medium Brechnung zum Lot!
Troposphäre: „neutral“
Ionosphäre: „dispersiv“
Erde
Atmosphäre
D
S
19.05.2010 2. Navigations-Get-Together 5
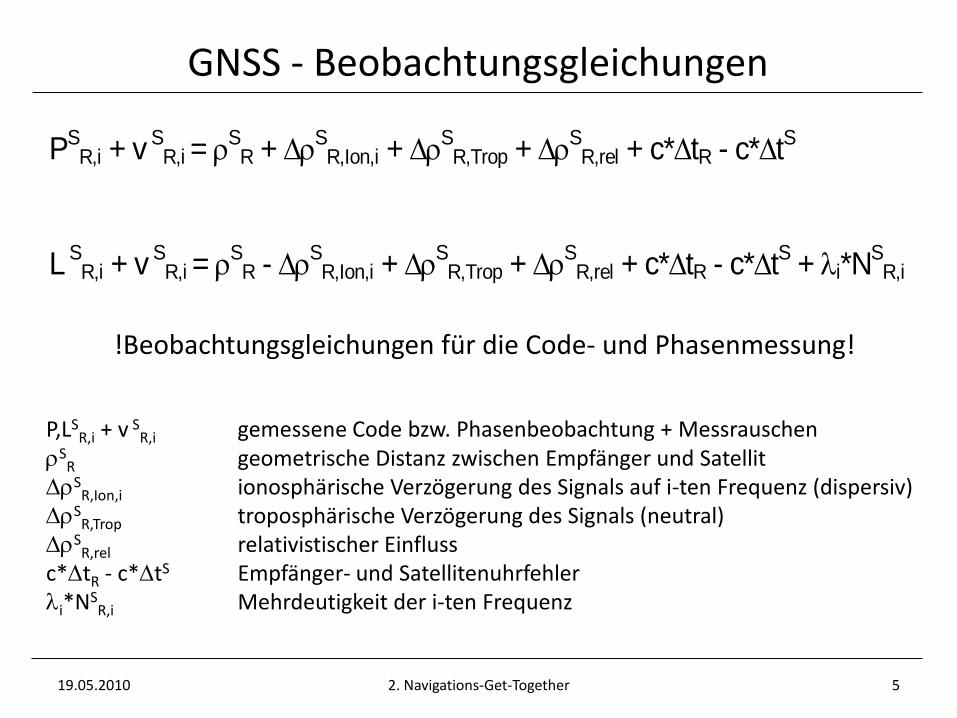
GNSS - Beobachtungsgleichungen
!Beobachtungsgleichungen für die Code- und Phasenmessung!
P,LSR,i + v S
R,i gemessene Code bzw. Phasenbeobachtung + MessrauschenS
R geometrische Distanz zwischen Empfänger und SatellitS
R,Ion,i ionosphärische Verzögerung des Signals auf i-ten Frequenz (dispersiv)S
R,Trop troposphärische Verzögerung des Signals (neutral)S
R,rel relativistischer Einflussc*tR - c*tS Empfänger- und Satellitenuhrfehleri*NS
R,i Mehrdeutigkeit der i-ten Frequenz
PSR,i + v S
R,i = SR + S
R,Ion,i + SR,Trop + S
R,rel + c*tR - c*tS
L SR,i + v S
R,i = SR - S
R,Ion,i + SR,Trop + S
R,rel + c*tR - c*tS + i*NS
R,i
19.05.2010 2. Navigations-Get-Together 6
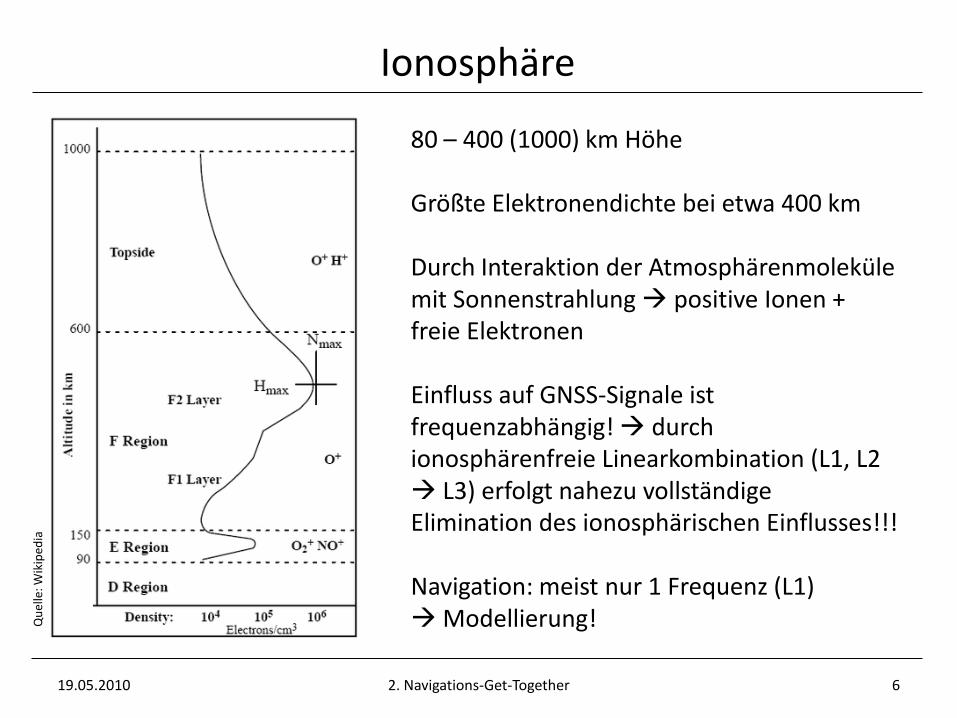
Ionosphäre
80 – 400 (1000) km Höhe
Größte Elektronendichte bei etwa 400 km
Durch Interaktion der Atmosphärenmoleküle mit Sonnenstrahlung positive Ionen + freie Elektronen
Einfluss auf GNSS-Signale ist frequenzabhängig! durch ionosphärenfreie Linearkombination (L1, L2 L3) erfolgt nahezu vollständige Elimination des ionosphärischen Einflusses!!!
Navigation: meist nur 1 Frequenz (L1)Modellierung!Q
uel
le: W
ikip
edia
19.05.2010 2. Navigations-Get-Together 7
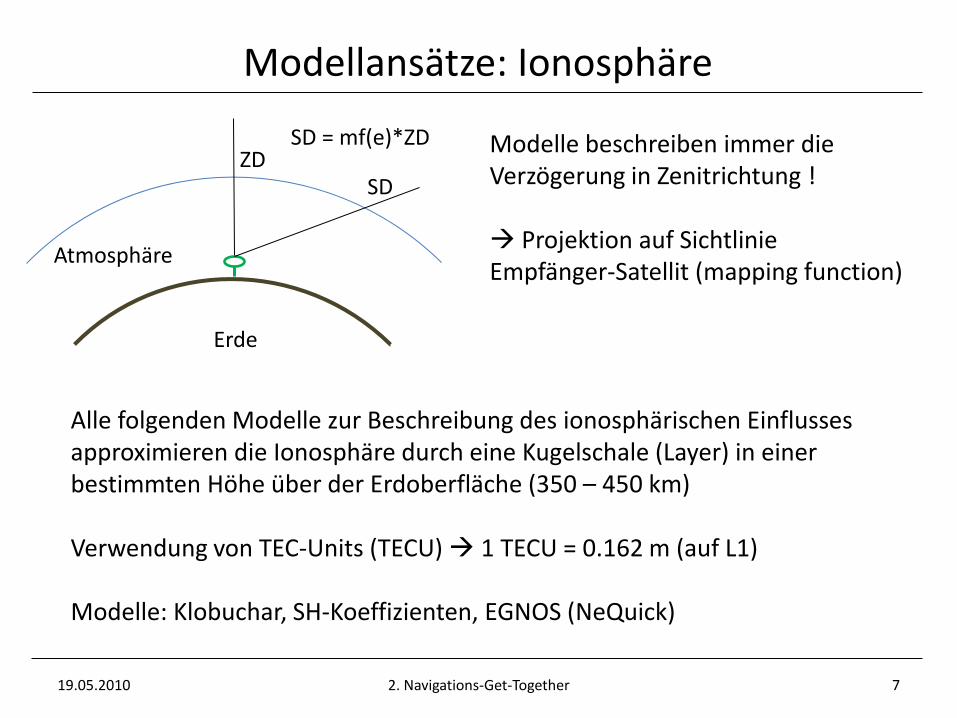
Modellansätze: Ionosphäre
Erde
Atmosphäre
ZDSD
SD = mf(e)*ZD Modelle beschreiben immer die Verzögerung in Zenitrichtung !
Projektion auf Sichtlinie Empfänger-Satellit (mapping function)
Alle folgenden Modelle zur Beschreibung des ionosphärischen Einflusses approximieren die Ionosphäre durch eine Kugelschale (Layer) in einer bestimmten Höhe über der Erdoberfläche (350 – 450 km)
Verwendung von TEC-Units (TECU) 1 TECU = 0.162 m (auf L1)
Modelle: Klobuchar, SH-Koeffizienten, EGNOS (NeQuick)
19.05.2010 2. Navigations-Get-Together 8
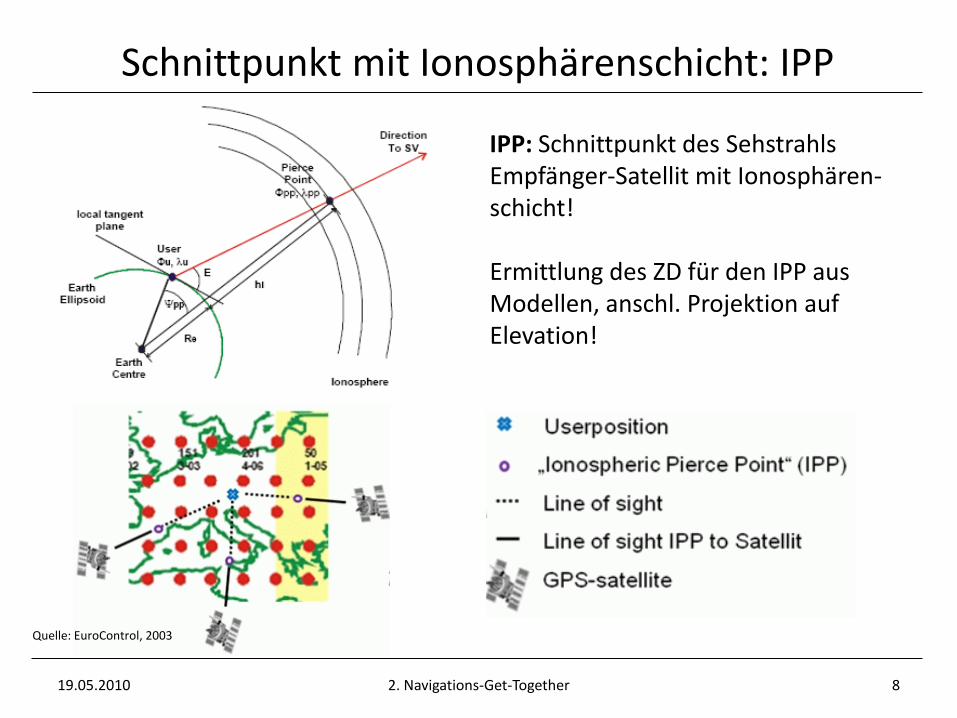
Schnittpunkt mit Ionosphärenschicht: IPP
IPP: Schnittpunkt des Sehstrahls Empfänger-Satellit mit Ionosphären-schicht!
Ermittlung des ZD für den IPP aus Modellen, anschl. Projektion auf Elevation!
Quelle: EuroControl, 2003
19.05.2010 2. Navigations-Get-Together 9
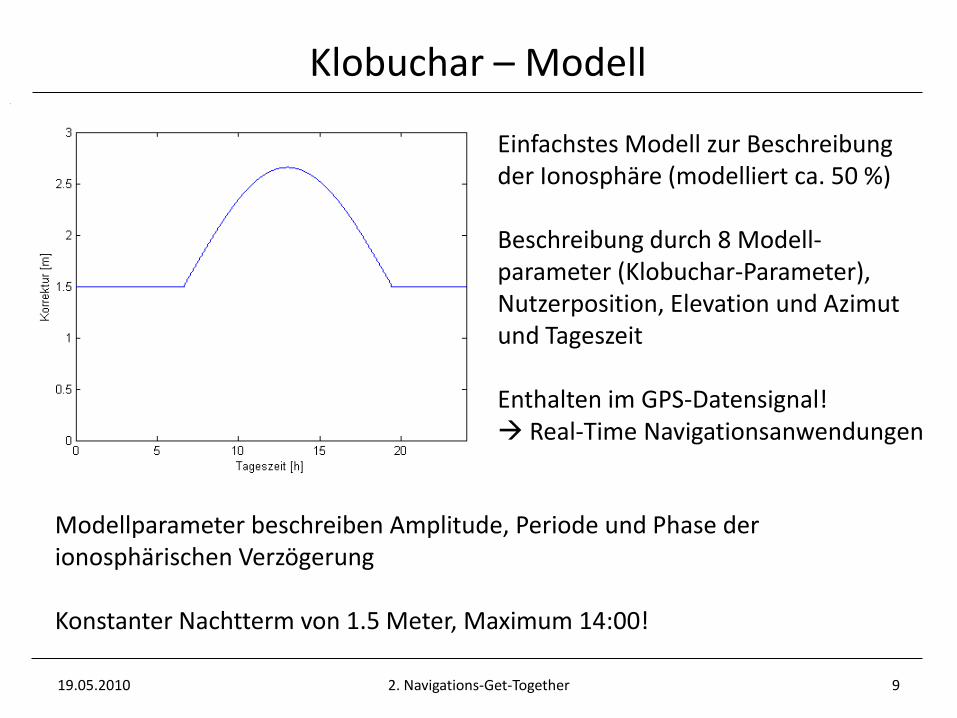
Klobuchar – Modell
Einfachstes Modell zur Beschreibung der Ionosphäre (modelliert ca. 50 %)
Beschreibung durch 8 Modell-parameter (Klobuchar-Parameter), Nutzerposition, Elevation und Azimut und Tageszeit
Enthalten im GPS-Datensignal! Real-Time Navigationsanwendungen
Modellparameter beschreiben Amplitude, Periode und Phase der ionosphärischen Verzögerung
Konstanter Nachtterm von 1.5 Meter, Maximum 14:00!
19.05.2010 2. Navigations-Get-Together 10
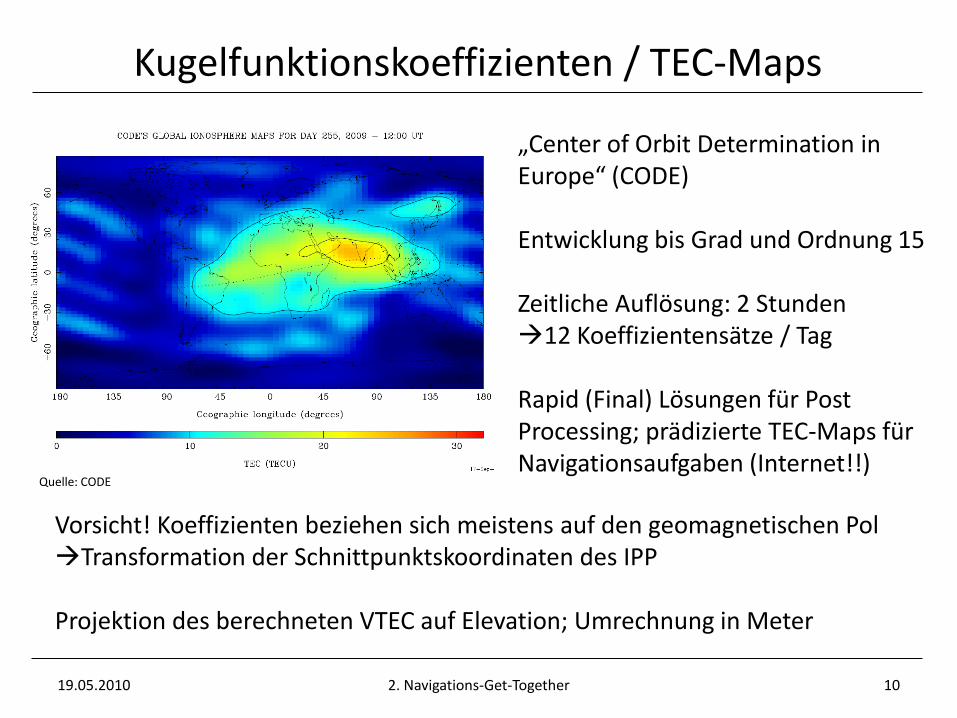
Kugelfunktionskoeffizienten / TEC-Maps
„Center of Orbit Determination in Europe“ (CODE)
Entwicklung bis Grad und Ordnung 15
Zeitliche Auflösung: 2 Stunden12 Koeffizientensätze / Tag
Rapid (Final) Lösungen für Post Processing; prädizierte TEC-Maps für Navigationsaufgaben (Internet!!)
Vorsicht! Koeffizienten beziehen sich meistens auf den geomagnetischen PolTransformation der Schnittpunktskoordinaten des IPP
Projektion des berechneten VTEC auf Elevation; Umrechnung in Meter
Quelle: CODE
19.05.2010 2. Navigations-Get-Together 11
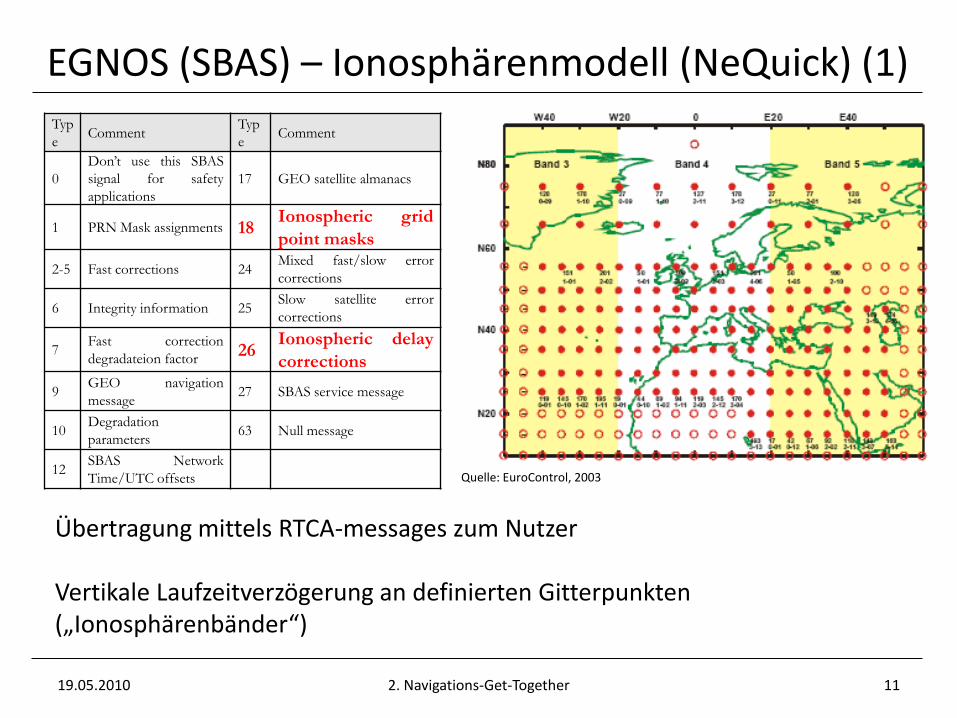
EGNOS (SBAS) – Ionosphärenmodell (NeQuick) (1)Typ
eComment
Typ
eComment
0
Don’t use this SBAS
signal for safety
applications
17 GEO satellite almanacs
1 PRN Mask assignments 18Ionospheric grid
point masks
2-5 Fast corrections 24Mixed fast/slow error
corrections
6 Integrity information 25Slow satellite error
corrections
7Fast correction
degradateion factor26
Ionospheric delay
corrections
9GEO navigation
message27 SBAS service message
10Degradation
parameters63 Null message
12SBAS Network
Time/UTC offsets
Übertragung mittels RTCA-messages zum Nutzer
Vertikale Laufzeitverzögerung an definierten Gitterpunkten („Ionosphärenbänder“)
Quelle: EuroControl, 2003
19.05.2010 2. Navigations-Get-Together 12
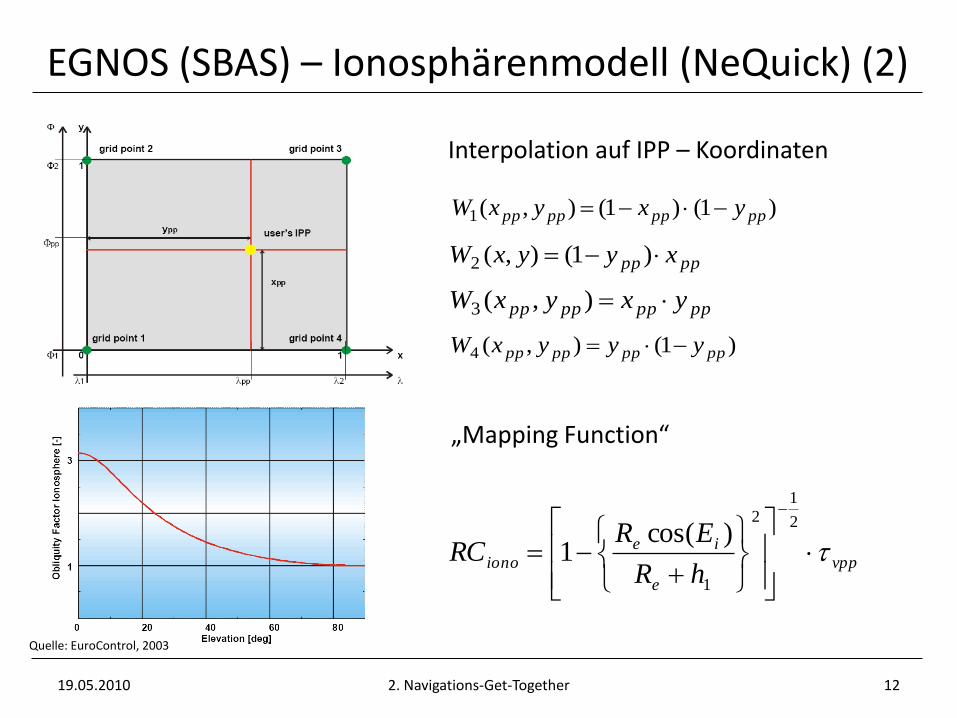
EGNOS (SBAS) – Ionosphärenmodell (NeQuick) (2)
„Mapping Function“
vpp
e
ie
ionohR
ERRC
2
1
2
1
)cos(1
Interpolation auf IPP – Koordinaten
)1()1(),(1 pppppppp yxyxW
pppp xyyxW )1(),(2
pppppppp yxyxW ),(3
)1(),(4 pppppppp yyyxW
Quelle: EuroControl, 2003
19.05.2010 2. Navigations-Get-Together 13
0,000
1,000
2,000
3,000
4,000
5,000
6,000
10
,87
46
6
18
,89
95
0
27
,05
21
6
35
,30
14
8
43
,60
71
3
51
,91
30
4
60
,13
06
9
68
,08
53
0
75
,30
02
0
80
,04
80
0
78
,72
96
7
72
,77
00
3
65
,40
67
6
57
,64
57
4
49
,76
90
1
41
,87
87
9
34
,02
14
5
26
,22
25
2
18
,49
89
6
10
,86
41
5
Ko
rre
ktu
r [m
]
Elevation [°]
Ionosphärische Korrekturmodelle
EGNOS (NeQuick)
CODE SH (prädiziert)
Klobuchar
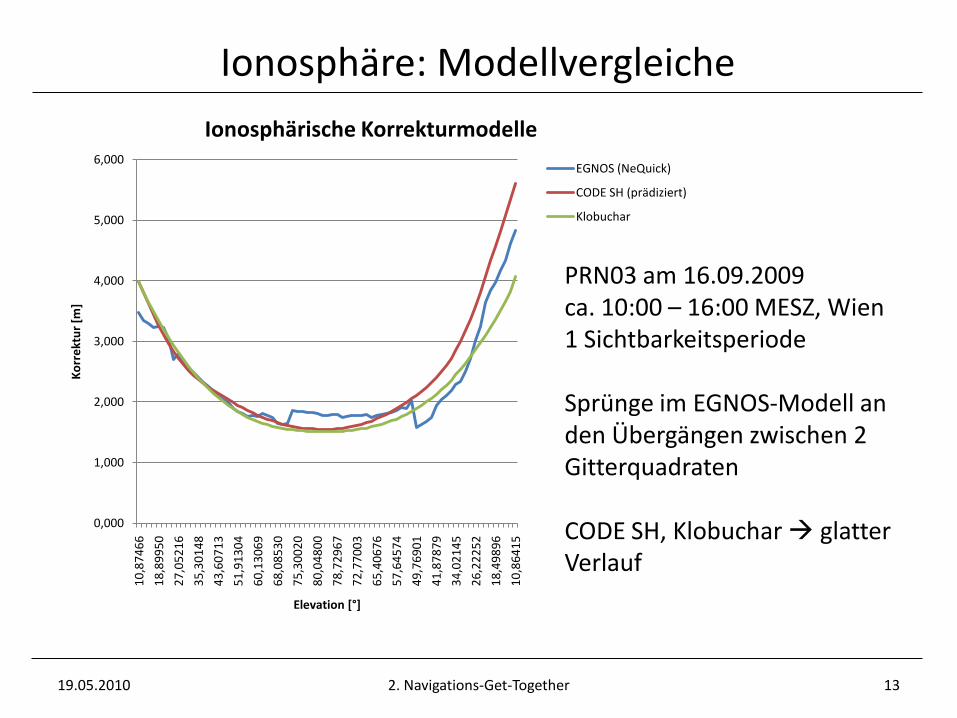
Ionosphäre: Modellvergleiche
PRN03 am 16.09.2009ca. 10:00 – 16:00 MESZ, Wien1 Sichtbarkeitsperiode
Sprünge im EGNOS-Modell an den Übergängen zwischen 2 Gitterquadraten
CODE SH, Klobuchar glatter Verlauf
19.05.2010 2. Navigations-Get-Together 14
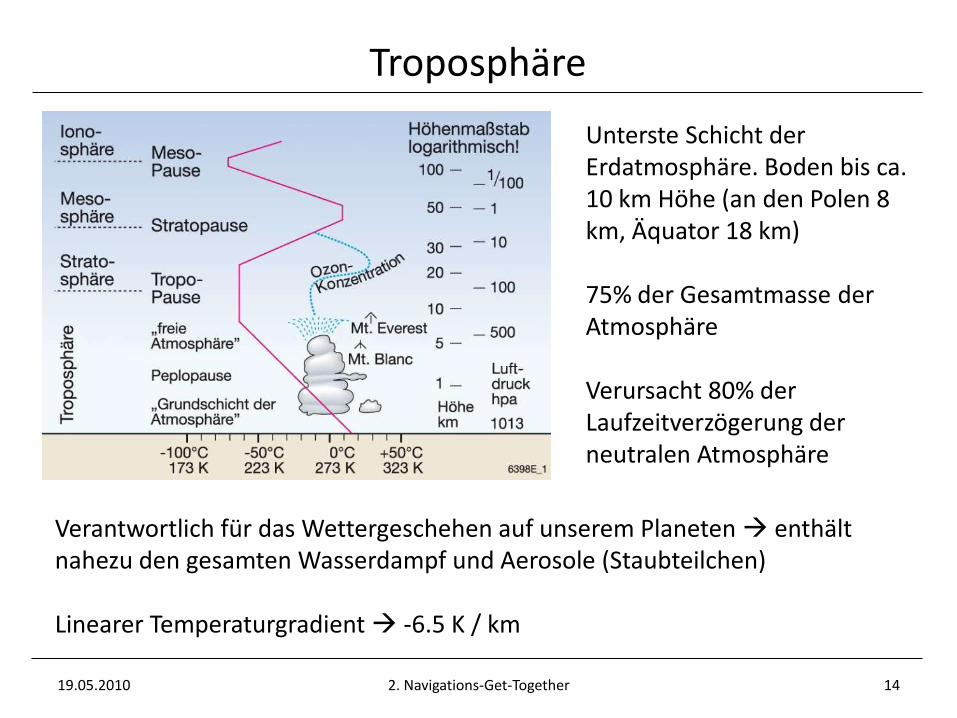
Troposphäre
Unterste Schicht der Erdatmosphäre. Boden bis ca. 10 km Höhe (an den Polen 8 km, Äquator 18 km)
75% der Gesamtmasse der Atmosphäre
Verursacht 80% der Laufzeitverzögerung der neutralen Atmosphäre
Verantwortlich für das Wettergeschehen auf unserem Planeten enthält nahezu den gesamten Wasserdampf und Aerosole (Staubteilchen)
Linearer Temperaturgradient -6.5 K / km
19.05.2010 2. Navigations-Get-Together 15
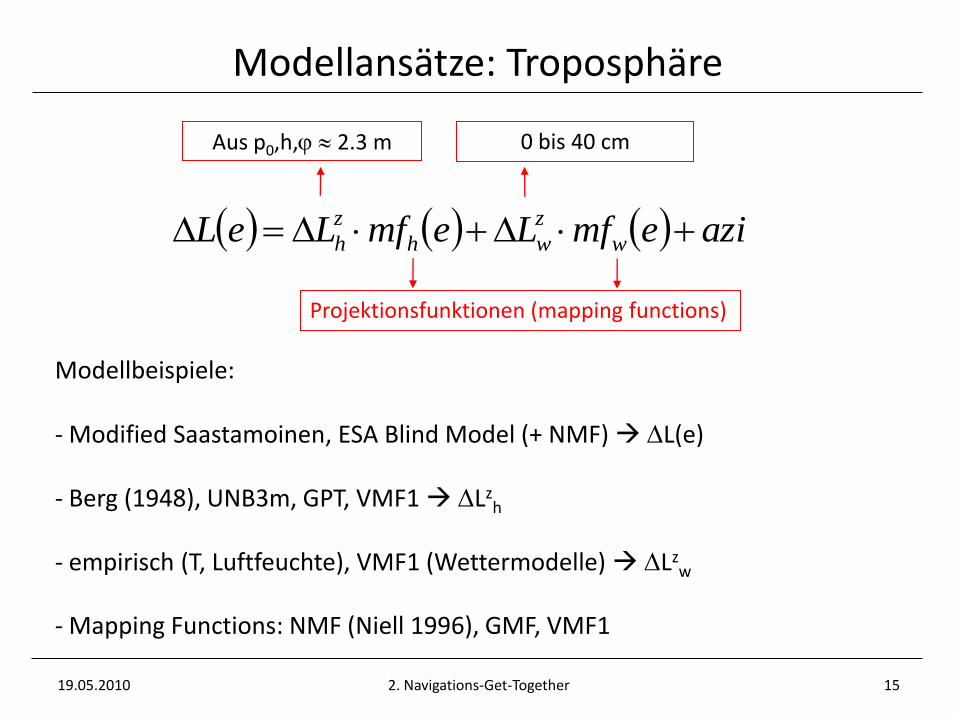
Modellansätze: Troposphäre
aziemfLemfLeL w
z
wh
z
h
Aus p0,h, 2.3 m 0 bis 40 cm
Projektionsfunktionen (mapping functions)
Modellbeispiele:
- Modified Saastamoinen, ESA Blind Model (+ NMF) L(e)
- Berg (1948), UNB3m, GPT, VMF1 Lzh
- empirisch (T, Luftfeuchte), VMF1 (Wettermodelle) Lzw
- Mapping Functions: NMF (Niell 1996), GMF, VMF1
19.05.2010 2. Navigations-Get-Together 16
Modified Saastamoinen Model
RzBeT
Pz
Tro
2)tan(*05.0
1255*
)cos(
002277.0
Eingangsparameter Druck, Temperatur und Luftfeuchtigkeit direkt gemessen (in den seltensten Fällen) berechnet aus Standardatmosphäre + Höhe des Rovers
Prädestiniert für real-time Navigationsaufgaben(nur Höhe des Rovers benötigt)
%50
18
25.1013
0
0
0
0
0
hR
CelsiusT
mbarP
mH
00
00
225.5
00
*0006396.0exp*
*0065.0
*0000226.01*
HHRR
HHTT
HHPP
hh
19.05.2010 2. Navigations-Get-Together 17
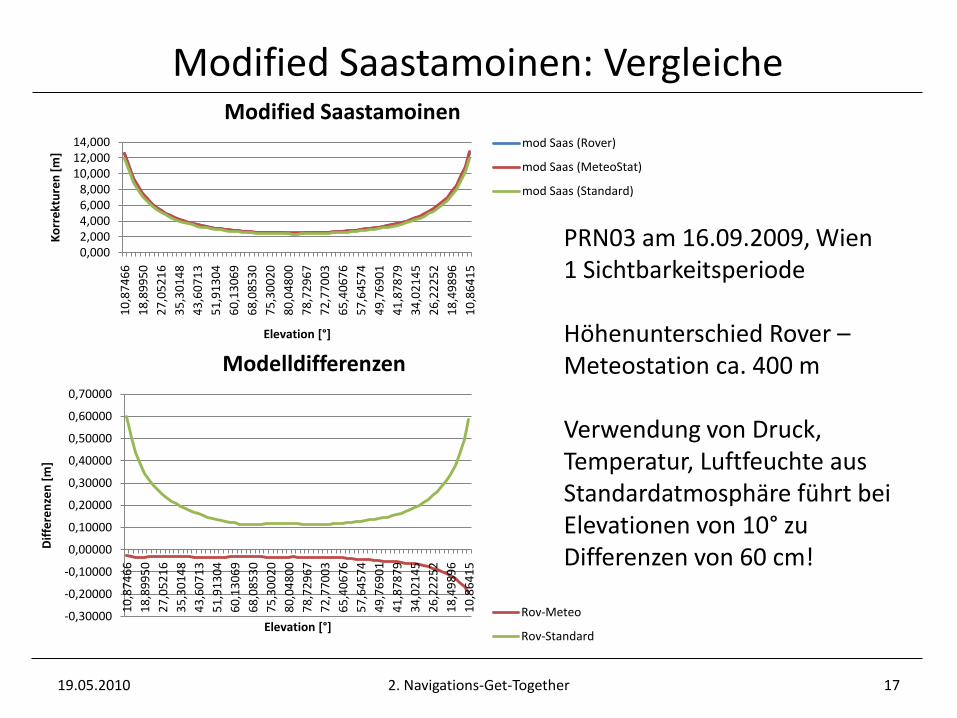
Modified Saastamoinen: Vergleiche
0,0002,0004,0006,0008,000
10,00012,00014,000
10
,87
46
6
18
,89
95
0
27
,05
21
6
35
,30
14
8
43
,60
71
3
51
,91
30
4
60
,13
06
9
68
,08
53
0
75
,30
02
0
80
,04
80
0
78
,72
96
7
72
,77
00
3
65
,40
67
6
57
,64
57
4
49
,76
90
1
41
,87
87
9
34
,02
14
5
26
,22
25
2
18
,49
89
6
10
,86
41
5
Ko
rre
ktu
ren
[m
]
Elevation [°]
Modified Saastamoinenmod Saas (Rover)
mod Saas (MeteoStat)
mod Saas (Standard)
-0,30000
-0,20000
-0,10000
0,00000
0,10000
0,20000
0,30000
0,40000
0,50000
0,60000
0,70000
10
,87
46
6
18
,89
95
0
27
,05
21
6
35
,30
14
8
43
,60
71
3
51
,91
30
4
60
,13
06
9
68
,08
53
0
75
,30
02
0
80
,04
80
0
78
,72
96
7
72
,77
00
3
65
,40
67
6
57
,64
57
4
49
,76
90
1
41
,87
87
9
34
,02
14
5
26
,22
25
2
18
,49
89
6
10
,86
41
5
Dif
fere
nze
n [
m]
Elevation [°]
Modelldifferenzen
Rov-Meteo
Rov-Standard
PRN03 am 16.09.2009, Wien1 Sichtbarkeitsperiode
Höhenunterschied Rover –Meteostation ca. 400 m
Verwendung von Druck, Temperatur, Luftfeuchte aus Standardatmosphäre führt bei Elevationen von 10° zu Differenzen von 60 cm!
19.05.2010 2. Navigations-Get-Together 18
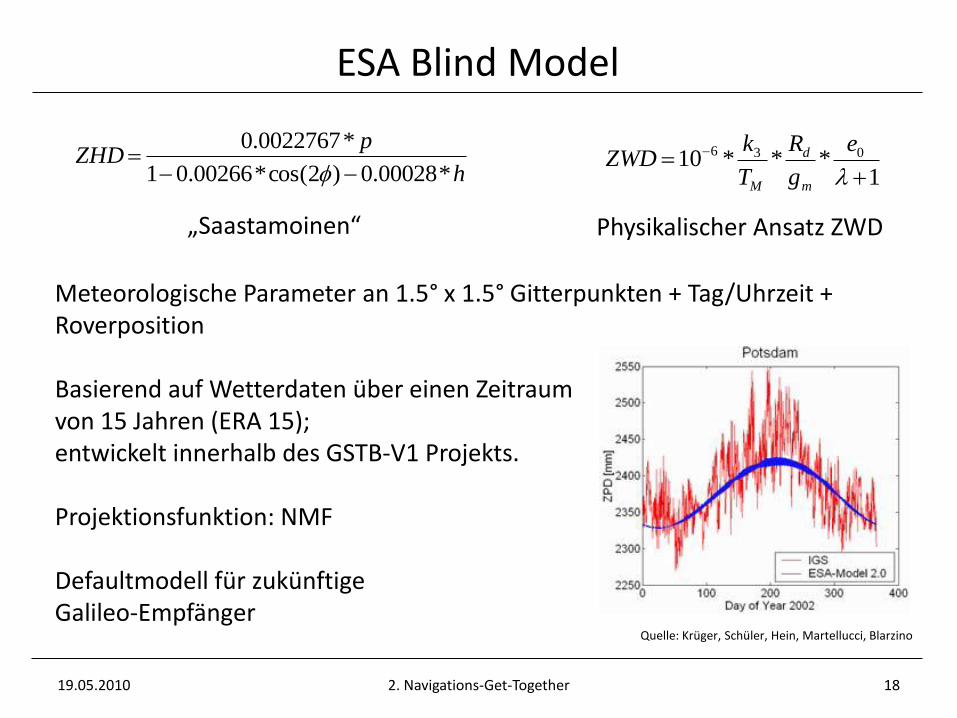
ESA Blind Model
h
pZHD
*00028.0)2cos(*00266.01
*0022767.0
1***10 036
e
g
R
T
kZWD
m
d
M
„Saastamoinen“ Physikalischer Ansatz ZWD
Meteorologische Parameter an 1.5° x 1.5° Gitterpunkten + Tag/Uhrzeit + Roverposition
Basierend auf Wetterdaten über einen Zeitraumvon 15 Jahren (ERA 15);entwickelt innerhalb des GSTB-V1 Projekts.
Projektionsfunktion: NMF
Defaultmodell für zukünftigeGalileo-Empfänger
Quelle: Krüger, Schüler, Hein, Martellucci, Blarzino
19.05.2010 2. Navigations-Get-Together 19
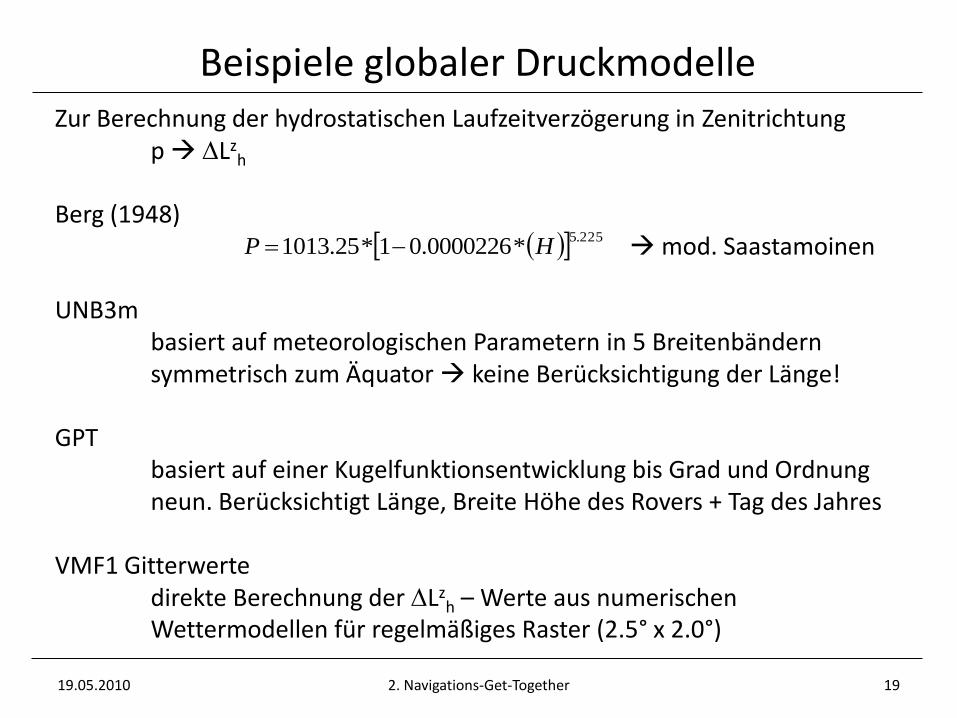
Beispiele globaler DruckmodelleZur Berechnung der hydrostatischen Laufzeitverzögerung in Zenitrichtung
p Lzh
Berg (1948)mod. Saastamoinen
UNB3mbasiert auf meteorologischen Parametern in 5 Breitenbändernsymmetrisch zum Äquator keine Berücksichtigung der Länge!
GPTbasiert auf einer Kugelfunktionsentwicklung bis Grad und Ordnung neun. Berücksichtigt Länge, Breite Höhe des Rovers + Tag des Jahres
VMF1 Gitterwertedirekte Berechnung der Lz
h – Werte aus numerischen Wettermodellen für regelmäßiges Raster (2.5° x 2.0°)
225.5*0000226.01*25.1013 HP
19.05.2010 2. Navigations-Get-Together 20
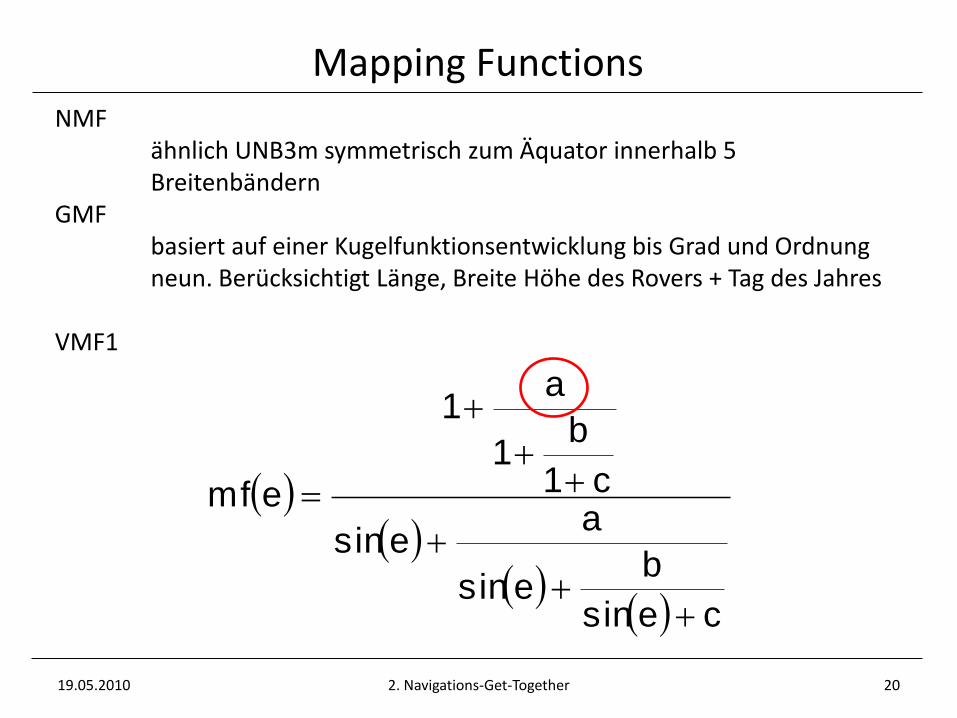
Mapping FunctionsNMF
ähnlich UNB3m symmetrisch zum Äquator innerhalb 5 Breitenbändern
GMFbasiert auf einer Kugelfunktionsentwicklung bis Grad und Ordnung neun. Berücksichtigt Länge, Breite Höhe des Rovers + Tag des Jahres
VMF1
cesin
besin
aesin
c1
b1
a1
emf
19.05.2010 2. Navigations-Get-Together 21
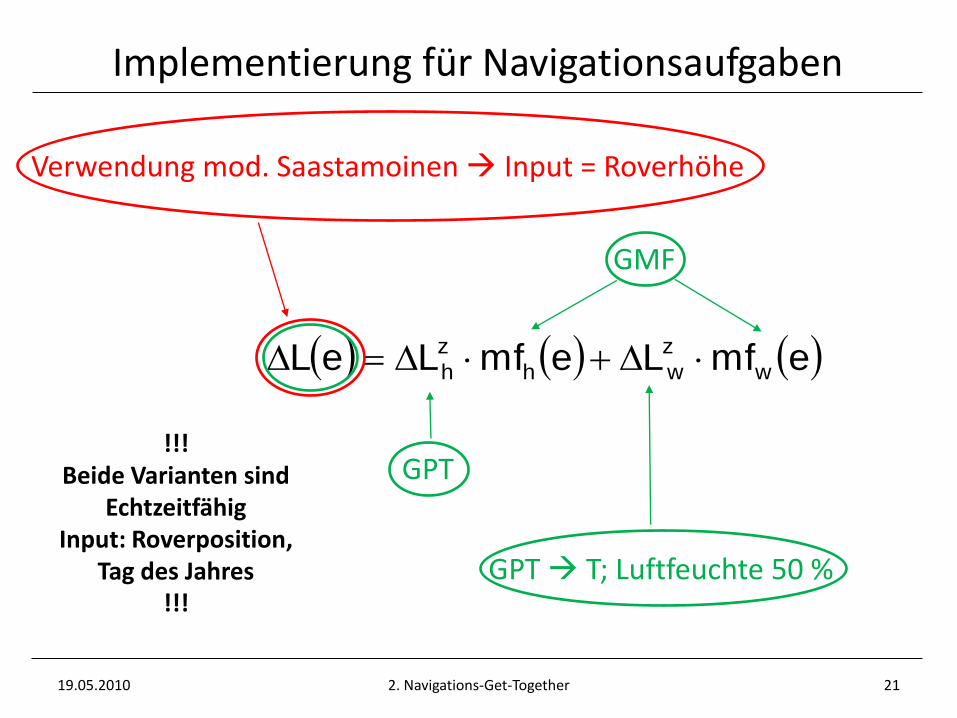
Implementierung für Navigationsaufgaben
emfLemfLeL w
z
wh
z
h
Verwendung mod. Saastamoinen Input = Roverhöhe
GMF
GPT T; Luftfeuchte 50 %
GPT!!!
Beide Varianten sindEchtzeitfähig
Input: Roverposition,Tag des Jahres
!!!
19.05.2010 2. Navigations-Get-Together 22
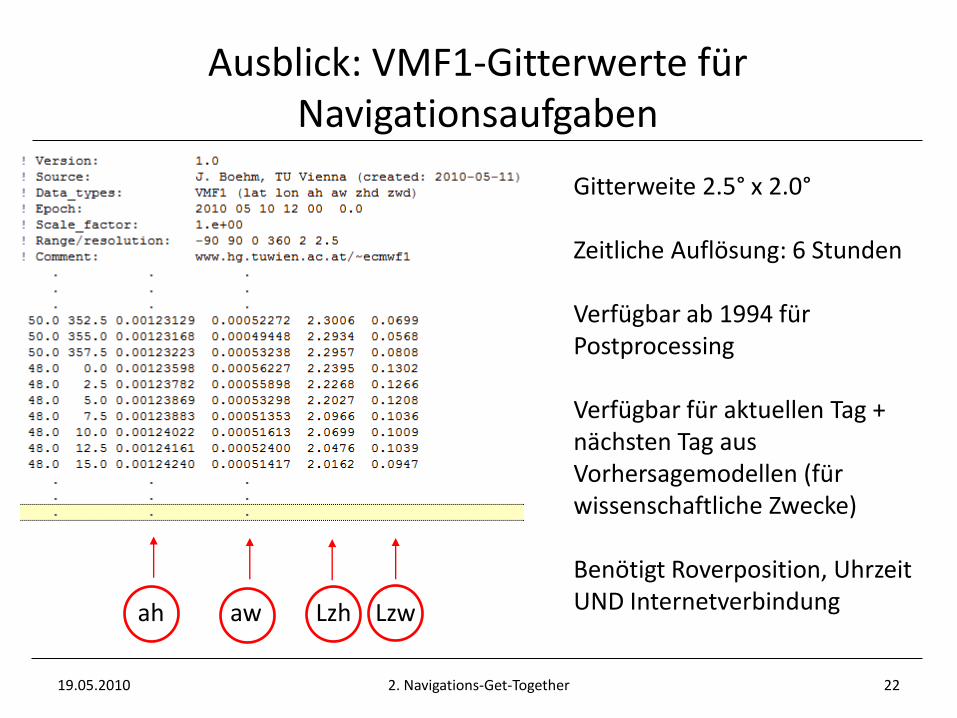
Ausblick: VMF1-Gitterwerte für Navigationsaufgaben
ah aw Lzh Lzw
Gitterweite 2.5° x 2.0°
Zeitliche Auflösung: 6 Stunden
Verfügbar ab 1994 für Postprocessing
Verfügbar für aktuellen Tag + nächsten Tag aus Vorhersagemodellen (für wissenschaftliche Zwecke)
Benötigt Roverposition, Uhrzeit UND Internetverbindung
19.05.2010 2. Navigations-Get-Together 23
Zusammenfassung (1)
Erdatmosphäre beeinflusst die Ausbreitung elektromagnetischer WellenModellierung !!!
Unterteilung in ionosphärische (dispersiv) und troposphärische (neutral) Laufzeitverzögerung
Modelliert wird immer die Verzögerung in Zenitrichtung!
Verwendung von Projektionsfunktionen (mapping functions) zur Umrechnung in schräge Laufzeitverzögerungen
„Single Layer“ – Modelle für die Ionosphäre
Unterteilung in hydrostatische und feuchte Laufzeitverzögerung für die Troposphäre
19.05.2010 2. Navigations-Get-Together 24
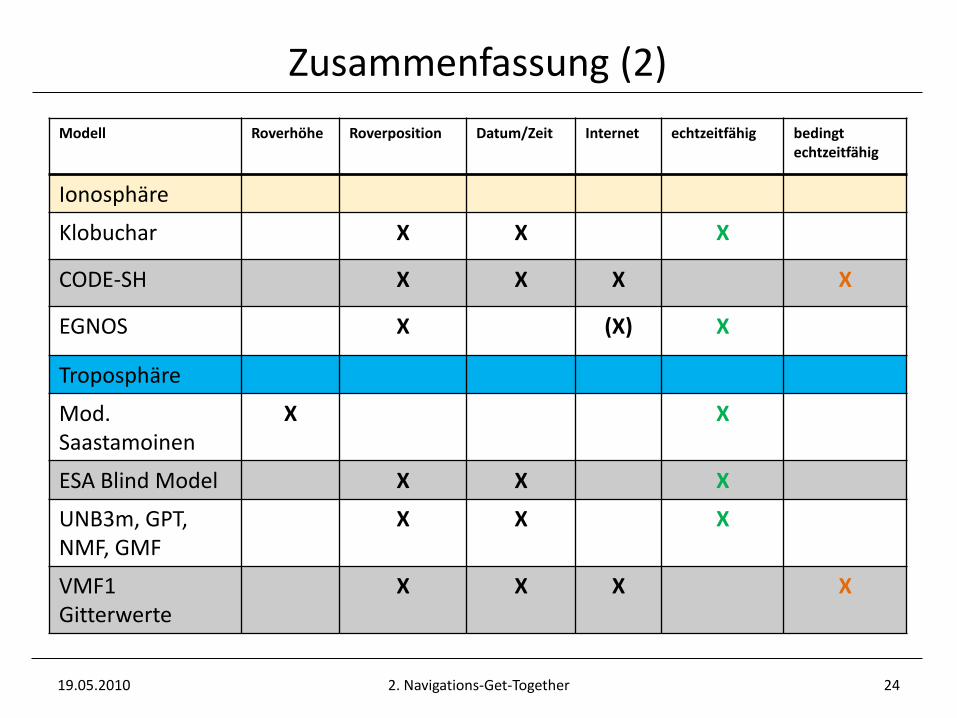
Zusammenfassung (2)
Modell Roverhöhe Roverposition Datum/Zeit Internet echtzeitfähig bedingt echtzeitfähig
Ionosphäre
Klobuchar X X X
CODE-SH X X X X
EGNOS X (X) X
Troposphäre
Mod. Saastamoinen
X X
ESA Blind Model X X X
UNB3m, GPT, NMF, GMF
X X X
VMF1 Gitterwerte
X X X X

Vielen Dank für ihre Aufmerksamkeit!