Modellierung und Regelung eines Drei-Tank-Systems · 1. Motivation 2. Problemstellung und...
21
Modellierung und Regelung eines Drei-Tank-Systems Robert Geiger Lehrstuhl für Automation Betreuer: A. Alexopoulos, L. Mekacher Zouaghi Proseminar TI SS2013
Transcript of Modellierung und Regelung eines Drei-Tank-Systems · 1. Motivation 2. Problemstellung und...
Modellierung und Regelung eines Drei-Tank-Systems
Robert Geiger
Lehrstuhl für Automation Betreuer: A. Alexopoulos, L. Mekacher Zouaghi
Proseminar TI SS2013
Inhalt
1. Motivation
2. Problemstellung und Lösungsansatz
3. Die Drei-Tank Anlage
4. Modellierung
5. Model Predictive Controller (MPC)
6. Ergebnis
7. Fazit
1

Motivation
2
Industrielle Prozesse Unterliegen immer mehr Auflagen
(Umweltschutz, Anlagensicherheit) Sollen so nah wie möglich am Optimalpunkt
gefahren werden Sollen gegen externe Einflüsse gewappnet
sein
Motivation
3
Problemstellung
Gegeben: Drei-Tank System Physikalische
Grundbedingungen
Gesucht: Mathematisches
Grundmodell der Anlage
Regler für die Wasserhöhe der Tanks
4
Lösungsansatz
Modell Zustandsraumdarstellung
Regler Model Predictive Control
5

Die Drei-Tank Anlage
6
1 3 21
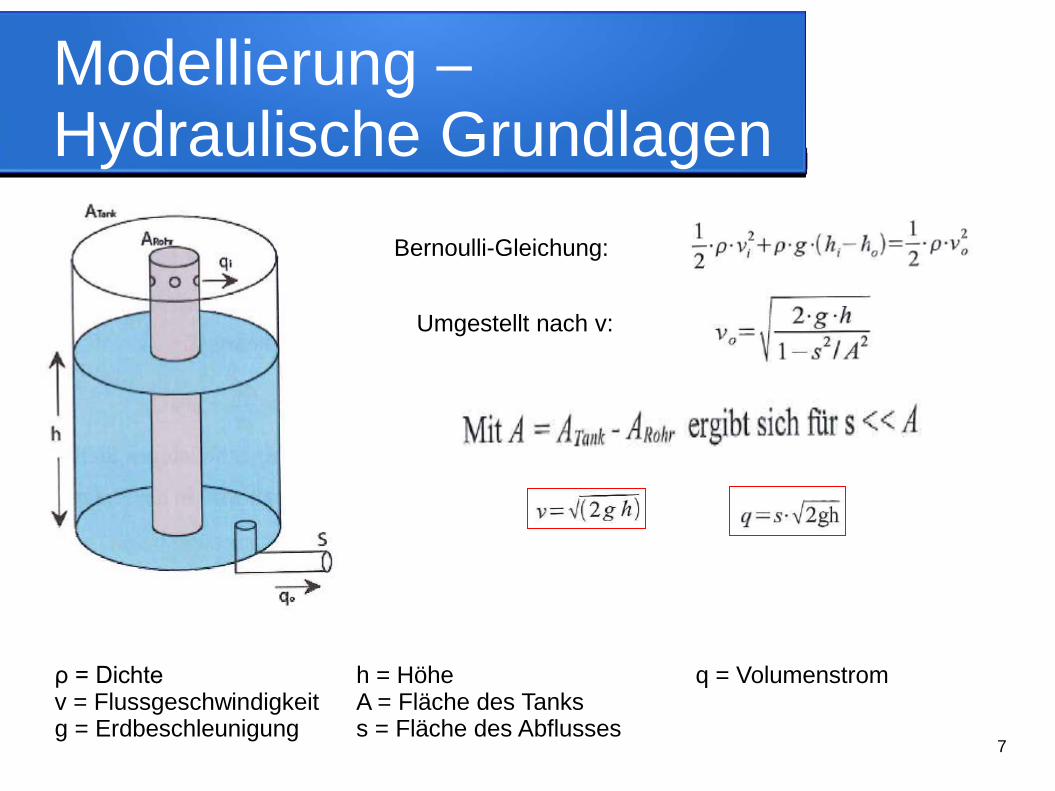
Modellierung – Hydraulische Grundlagen
Bernoulli-Gleichung:
Umgestellt nach v:
ρ = Dichte v = Flussgeschwindigkeit g = Erdbeschleunigung
h = Höhe A = Fläche des Tanks s = Fläche des Abflusses
q = Volumenstrom
7
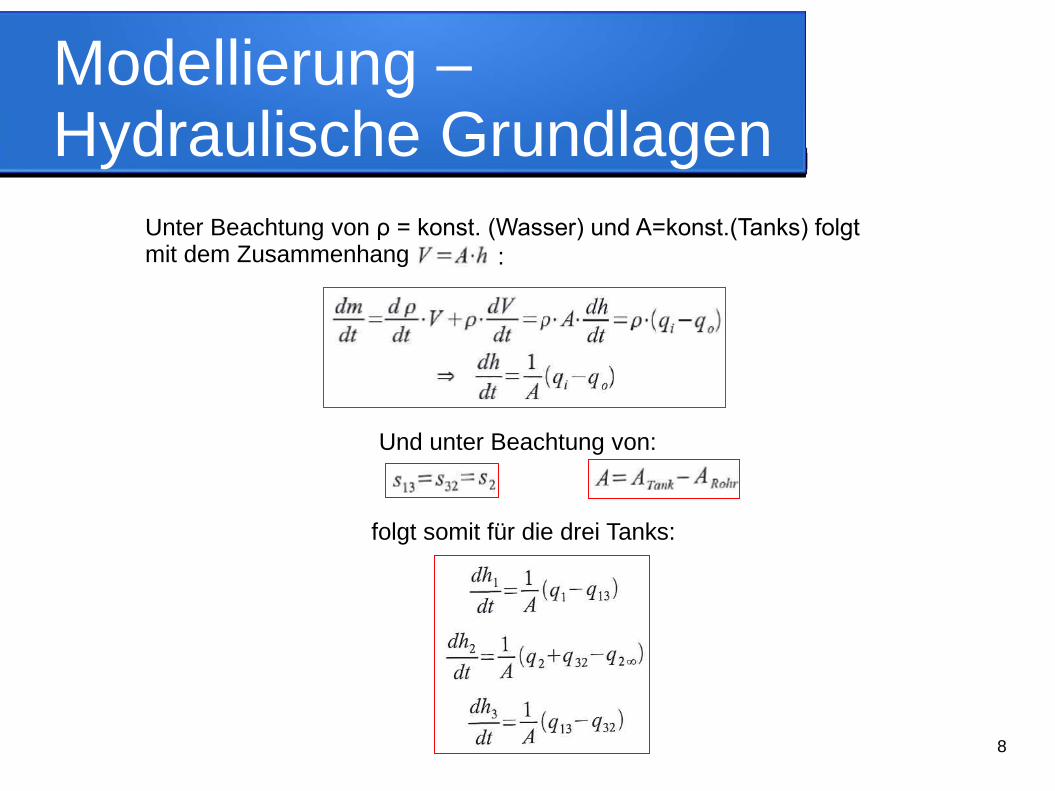
Modellierung – Hydraulische Grundlagen
Und unter Beachtung von:
Unter Beachtung von ρ = konst. (Wasser) und A=konst.(Tanks) folgt mit dem Zusammenhang :
folgt somit für die drei Tanks:
8
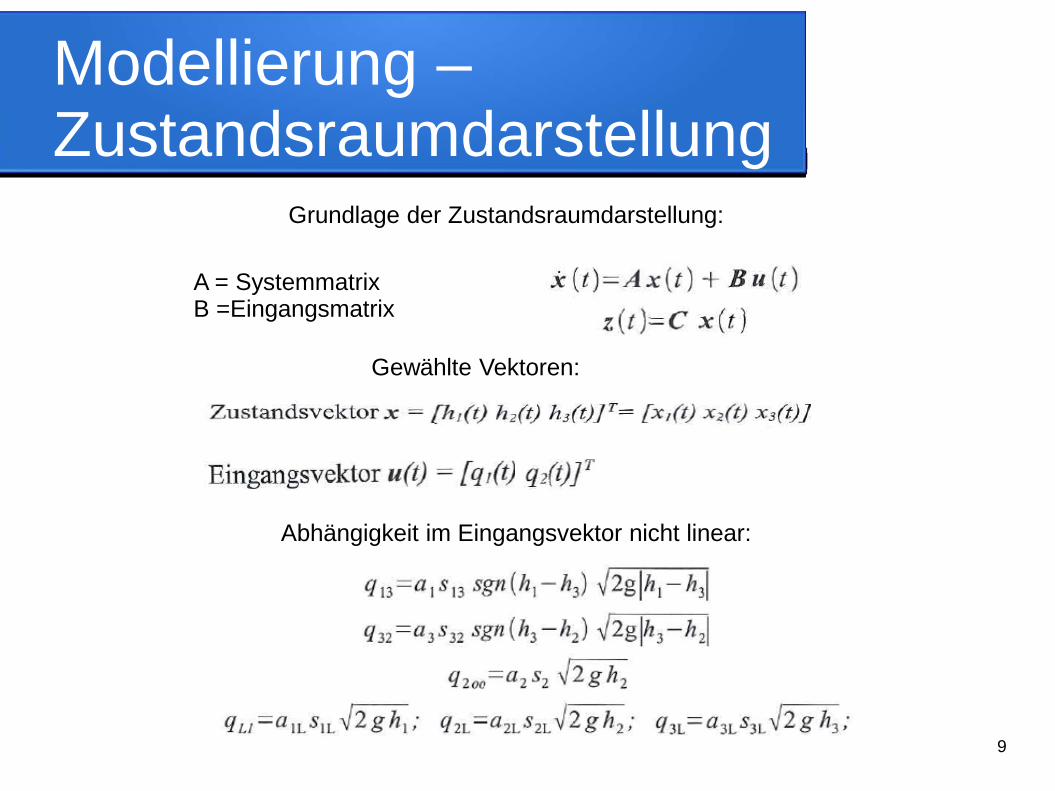
Modellierung – Zustandsraumdarstellung
A = Systemmatrix B =Eingangsmatrix
Grundlage der Zustandsraumdarstellung:
Gewählte Vektoren:
Abhängigkeit im Eingangsvektor nicht linear:
9
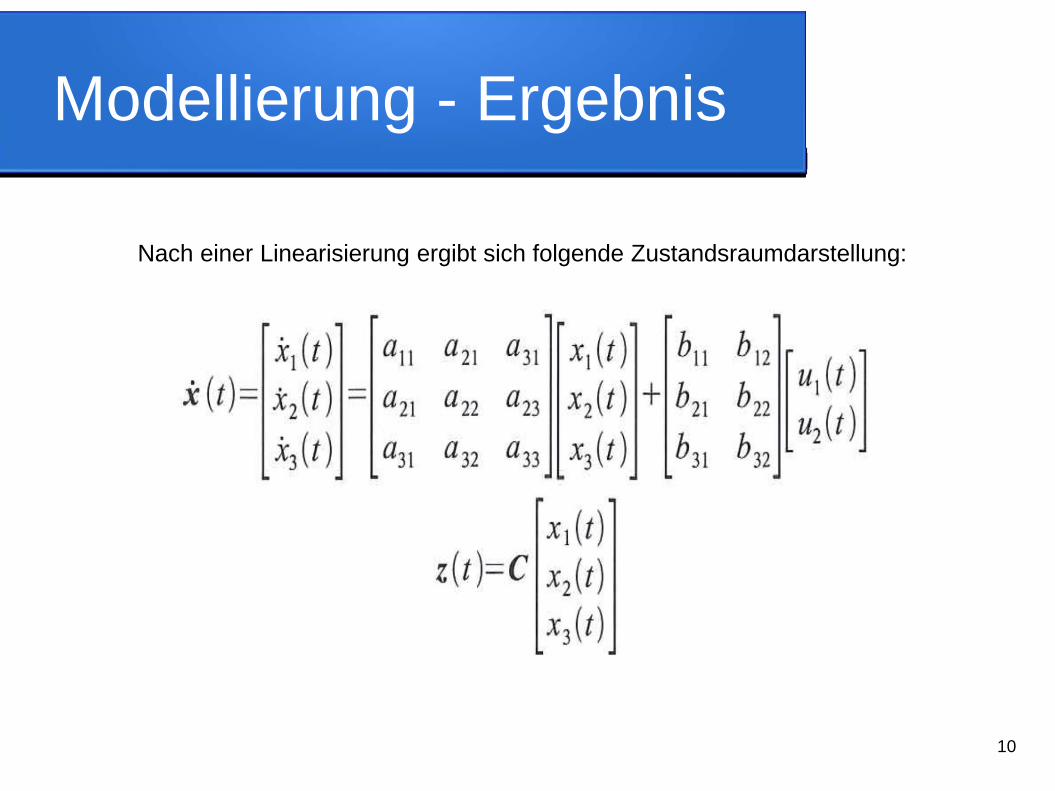
Modellierung - Ergebnis
Nach einer Linearisierung ergibt sich folgende Zustandsraumdarstellung:
10
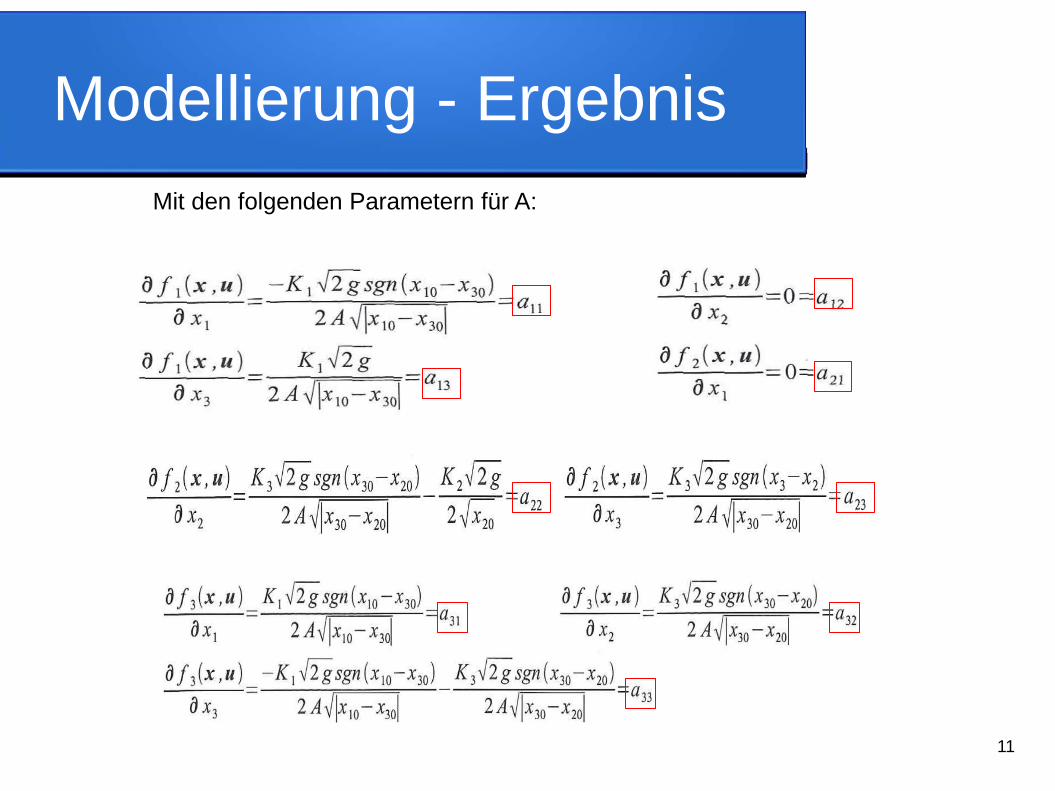
Modellierung - Ergebnis Mit den folgenden Parametern für A:
11
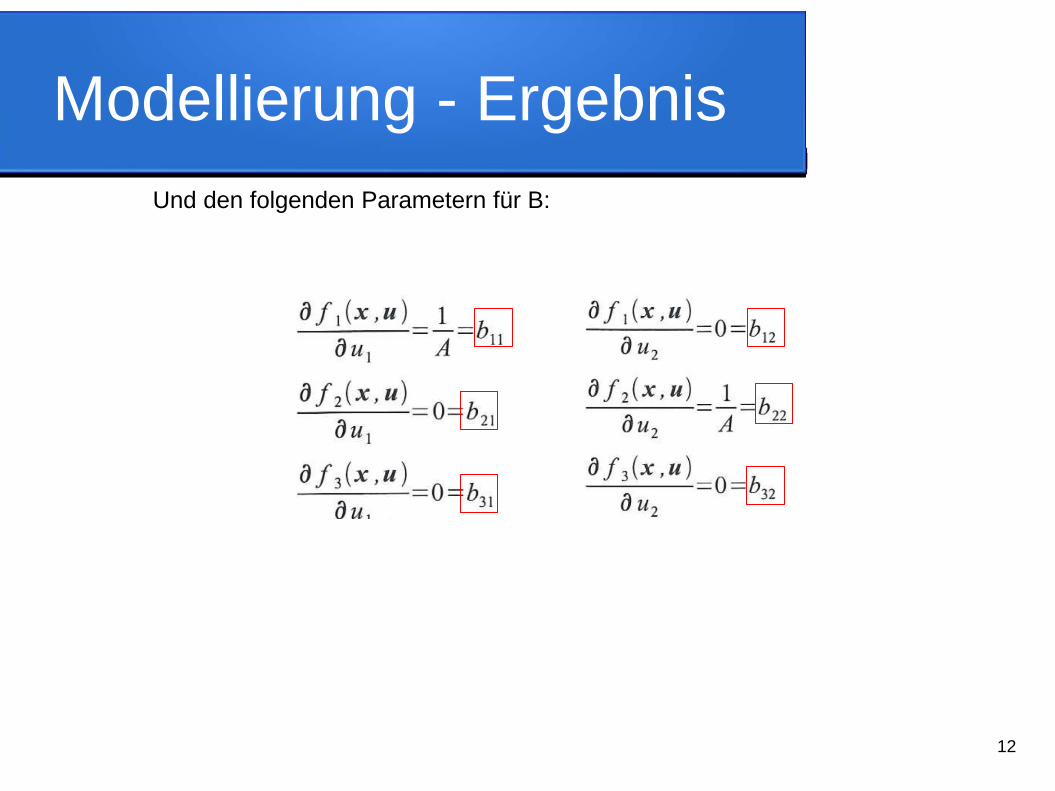
Modellierung - Ergebnis Und den folgenden Parametern für B:
12
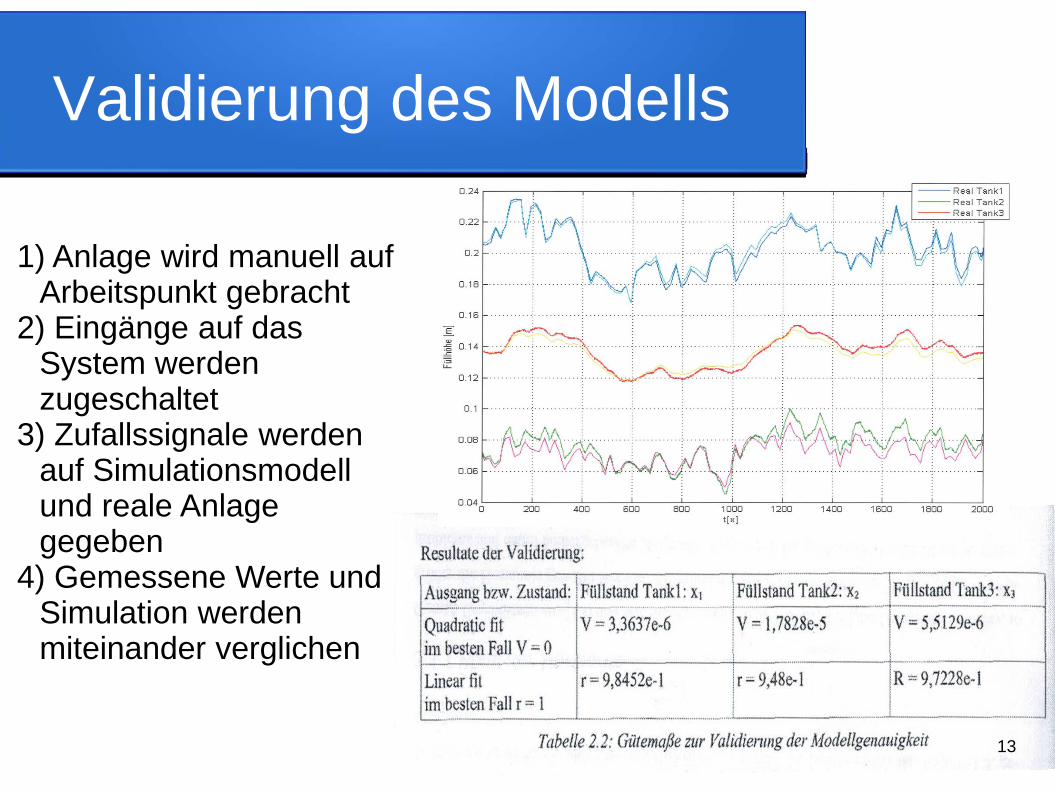
Validierung des Modells
1) Anlage wird manuell auf Arbeitspunkt gebracht
2) Eingänge auf das System werden zugeschaltet
3) Zufallssignale werden auf Simulationsmodell und reale Anlage gegeben
4) Gemessene Werte und Simulation werden miteinander verglichen
13
Der MPC Regler - Grundlagen
Wird in der Industrie für viele Anlagen verwendet
Sehr gut geeignet für Prozesse mit langsamer Dynamik
Es wird ein mathematisches Modell der Regelstrecke (Drei-Tank Modell) verwendet
Über dieses wird das zukünftige Prozessverhalten prädiziert und so die Regelung optimiert
Für Multiple Input/Multiple Output (MIMO) Systeme geeignet
14
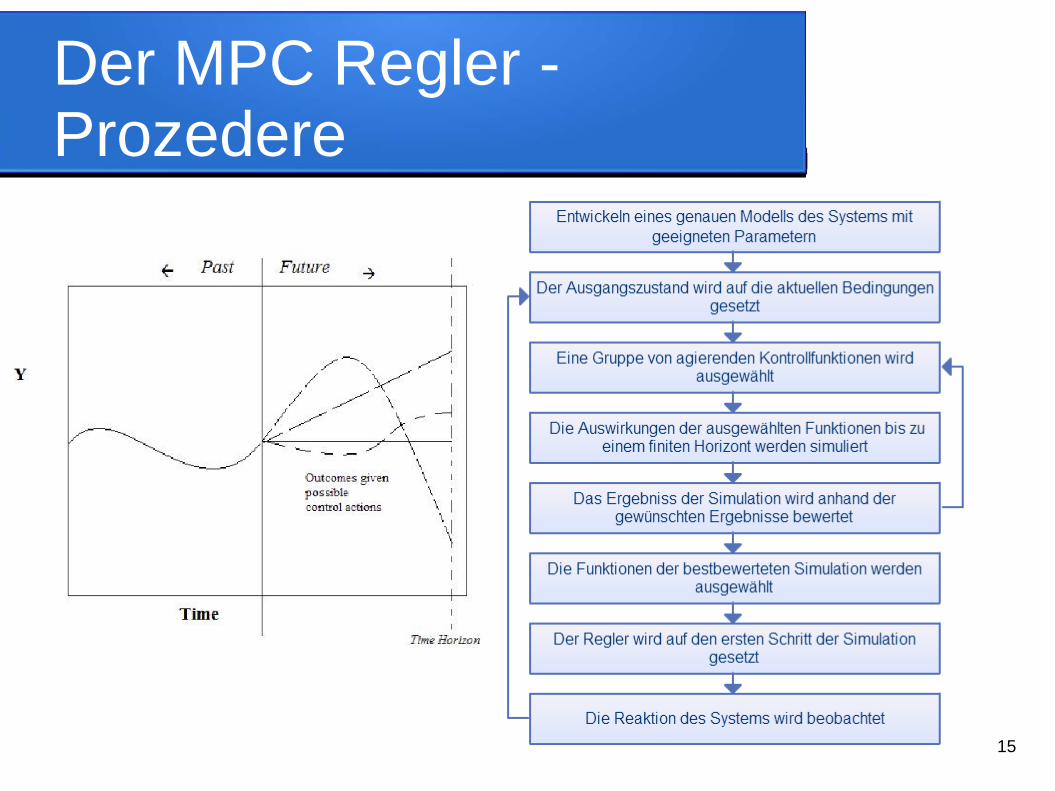
Der MPC Regler - Prozedere
15
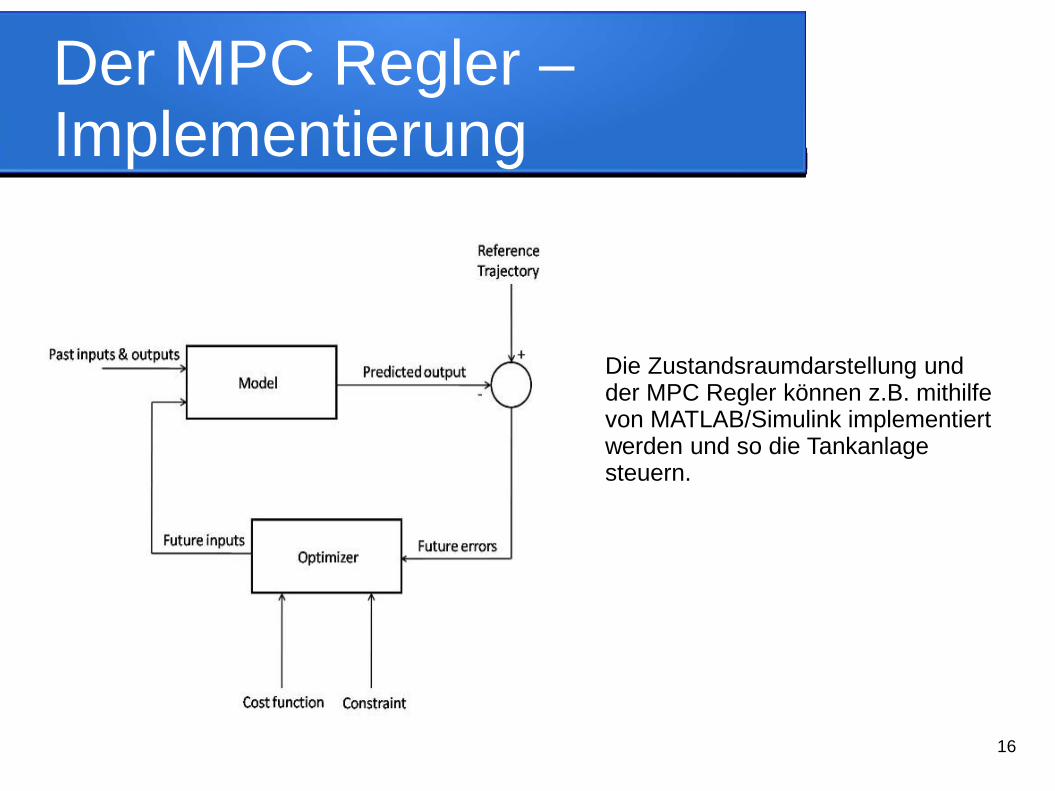
Der MPC Regler – Implementierung
Die Zustandsraumdarstellung und der MPC Regler können z.B. mithilfe von MATLAB/Simulink implementiert werden und so die Tankanlage steuern.
16
Ergebnis
17
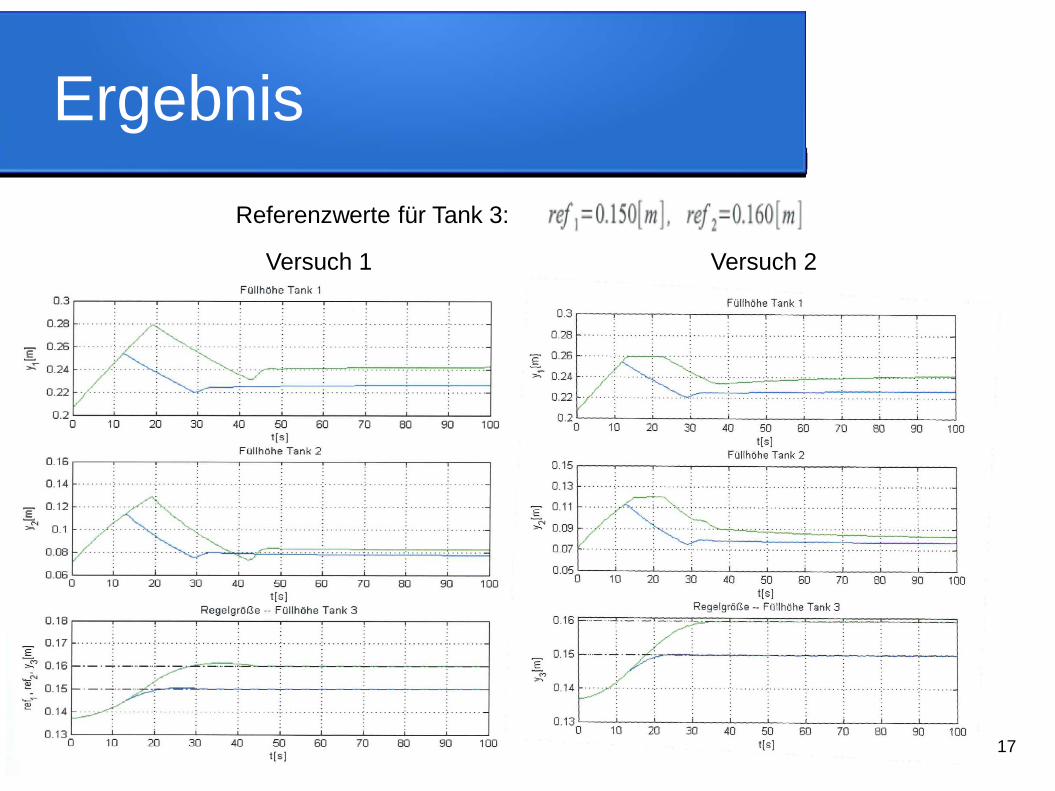
Versuch 1 Versuch 2
Referenzwerte für Tank 3:
Ergebnis
(Video in Druckversion nicht enthalten)
18
Fazit
Der MPC Regler ist sehr gut geeignet um das Drei-Tank-System zu regeln, da er fehlertolerant ist und mit mehreren Eingangssignalen umgehen kann.
Es gibt noch einige Verbesserungsmöglichkeiten wodurch der Algorithmus z.B. robuster gegenüber Fehlern wird.
Diese sind dank seiner Modularität auch im Nachhinein leicht zu integrieren.
19
Quellen http://img.fotocommunity.com/photos/13530586.jpg, zuletzt besucht am 28.6.13
http://ec.europa.eu/enterprise/sectors/chemicals/media/photos/competitiveness.jpg, zuletzt besucht am 28.6.13
http://studieninfo.ftmv.de/bilder/Anlagenbau.jpg, zuletzt besucht am 28.6.13
https://controls.engin.umich.edu/wiki/index.php/MPC, zuletzt besucht am 29.06.13
Diplomarbeit „Fehlertolerante Regelung eines Dreitanksystems mit prädiktivem Regelalgorithmus“, Steffen Lutze,
20