Positionsbestimmung mit GPS* - dvw.de · PDF filePositionsbestimmung mit GPS* Von G. Merke!,...
37
Positionsbestimmung mit GPS* Von G. Merke!, München Bezugssystem WGS 84 Definition des wes 84 Bezugssysteme der Satellitengeodäsie müssen global und geozentrisch ge- lagert sein, da die Bewegung der Satelliten um den Massenmittelpunkt der Erde (Geozentrum G) erfolgt. Als Bezugssystem verwendet man das World Geodetic System 1984 (WGS 84) in dem die jeweilige dreidimensionale Position der Satelliten mittels kartesischer Koordinaten (rechtwinklige 3D- Koordinaten) festgelegt ist. Selbstverständlich beziehen sich die Koordina- ten der Beobachtungsstationen, deren Positionen aus Messungen zu den Satelliten hervorgegangen sind, auf das gleiche Koordinatensystem. Das System wird auch als konventionelles terrestrisches Bezugssystem (Conven- tional Terrestrical System CTS) bezeichnet. X CTP z Bezugssystem wes 84 y * Nach einem Vortrag, gehalten beim Seminar »Einführung in die Praxis der GPS-Messungen<< des DVW-Landesverein Bayern am 15. März 1996 in München Mitteilungsblatt DVW-Baye 4/1996 539
Transcript of Positionsbestimmung mit GPS* - dvw.de · PDF filePositionsbestimmung mit GPS* Von G. Merke!,...
Positionsbestimmung mit GPS*
Von G. Merke!, München
Bezugssystem WGS 84
Definition des wes 84
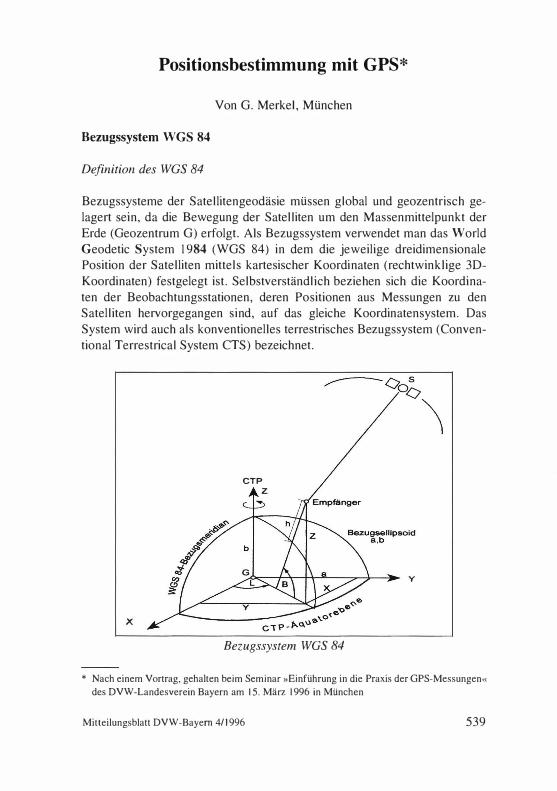
Bezugssysteme der Satellitengeodäsie müssen global und geozentrisch gelagert sein, da die Bewegung der Satelliten um den Massenmittelpunkt der Erde (Geozentrum G) erfolgt. Als Bezugssystem verwendet man das World Geodetic System 1984 (WGS 84) in dem die jeweilige dreidimensionale Position der Satelliten mittels kartesischer Koordinaten (rechtwinklige 3DKoordinaten) festgelegt ist. Selbstverständlich beziehen sich die Koordinaten der Beobachtungsstationen, deren Positionen aus Messungen zu den Satelliten hervorgegangen sind, auf das gleiche Koordinatensystem. Das System wird auch als konventionelles terrestrisches Bezugssystem (Conventional Terrestrical System CTS) bezeichnet.
X
CTP z
Bezugssystem wes 84
y
* Nach einem Vortrag, gehalten beim Seminar »Einführung in die Praxis der GPS-Messungen<<
des DVW-Landesverein Bayern am 15. März 1996 in München
Mitteilungsblatt DVW-Bayern 4/1996 539
Die Lagerung und Orientierung der Achsen wird durch internationale Dienste überwacht.
G: Geozentrum (Massenmittelpunkt der Erde)
Z-Achse: Zum Nordpol in seiner als CTP (Conventional Terrestrial Pole) bezeichneten Lage.
X-Achse: Schnittgerade der Ebene des WGS 84-Bezugsmeridian und der CTP-Äquatorebene. Wobei der Bezugsmeridian parallel zum Nullmeridian ist, den das BIH (Bureau International de I' Heure) festgelegt hat (Meridian von Greenwich).
Y-Achse: Rechtwinklig nach Osten auf der X-Achse, ebenfalls in der CTP-Äquatorebene.
In diesem System ist zugleich ein Bezugsellipsoid definiert, dessen Lage und Orientierung mit dem oben definierten kartesischen Koordinatensystem (WGS 84 Coordinate System) zusammenfällt.
Wichtige geometrische Parameter:
• Große Halbachse a 6 378 137,00 m • Kleine Halbachse b = 6 356 752,3142 m • Abplattung f I : 298,257223563
f = 0,00335281066474 • Quadrat der ersten
numerischen Exzentrizität e2 = 0,00669437999013 • Quadrat der zweiten
numerischen Exzentrizität e'2 = 0,00673949674227
Neben der geometrischen Festlegung dieses Koordinatensystems gehören zum WGS 84 unter anderem:
• ein mathematisches Modell des Schwerefeldes der Erde,
• die Lichtgeschwindigkeit im Vakuum,
• das Produkt aus der Gravitationskonstanten und der Masse der Erde.
Die räumliche Lage von Vermessungspunkten im WGS 84 wird ausgedrückt durch:
• geozentrische dreidimensionale kartesische Koordinaten X, Y, Z oder
• ellipsoidische Breite B, ellipsoidische Länge L und ellipsoidische Höhe h.
Da diese Koordinaten für viele praktischen Anwendungen sehr unanschaulich sind, werden sie in eine ebene Abbildung umgerechnet. Man wählt z. B.
540 Mitteilungsblatt DVW-Bayern 411996
die zweidimensionalen kartesischen UTM-Koordinaten E und N in Meridiansteifen mit dem Mittelmeridianen 3°, 9°, 15° usw. unter Ansatz des Maßstabfaktors 0,9996. Hierzu kommt die Höhe, falls man es wünscht, die aber in einem vorgegebenen jeweils genau zu bezeichnenden System berechnet ist.
Die ellipsoidischen Koordinaten eines Punktes sind:
B = ellipsoidische Breite: Winkel, den die Ellipsoidnormale durch einen Punkt mit der Äquatorebene bildet.
L = ellipsoidische Länge: Winkel, den die ellipsoidische Meridianebene durch einen Punkt mit der Nullmeridianebene bildet. Die ellipsoidische Meridianebene wird durch die Ellipsoidnormale in dem Punkt und der Rotationsachse aufgespannt.
h = ellipsoidische Höhe: Länge der Ellipsoidnormalen zwischen einem Punkt und dem Ellipsoid.
Realisiert wird das WGS 84 global durch
• die 5 Stationen des Kontrollsegments,
• die Stationen, die permanent die GPS- Satelliten tracken, das sind die Fiducial Points des Cooperative International GPS NETwork (CIGNET) und
• das International Terrestrial Reference System (ITRS) des Erdrotationsdienstes.
Damit konnte das WGS 84 im europäischen Bereich durch das EUREF (EUropean REference Frame) und im deutschen Bereich durch das DREF (Deutsches REFerenznetz) eingeführt werden. Für die gesamte Bundesrepublik Deutschland liegen damit I 09 Punkte mit einem mittleren Punktabstand von 50 bis 70 km dreidimensional mit einer Genauigkeit von etwa 3 cm vor. Auch dieses DREF-Netz wurde zwischenzeitlich in einigen Bundesländern mit einem mittleren Punktabstand von 20 bis 25 km verdichtet.
Die in der klassischen Landesvermessung verwendeten Ellipsoide entsprechen in ihrer Lagerung und Orientierung nicht diesen Festlegungen. Um die GPS- Koordinaten in das Landessystem umrechnen zu können sind
• 3 Koordinatenverschiebungen (LlX, Ll Y, LlZ) in den Koordinatenachsen
• 3 Rotationswinkel der Koordinatenachsen und
• I Maßstabsfaktor
notwendig.
Mitteilungsblatt DVW-Bayern 4/1996 541
Um diese sieben Parameter der Koordinatentransformation berechnen zu können, sind auf mindestens drei Punkten mit bekannten Landeskoordinaten GPS- Beobachtungen durchzuführen.
Höhen
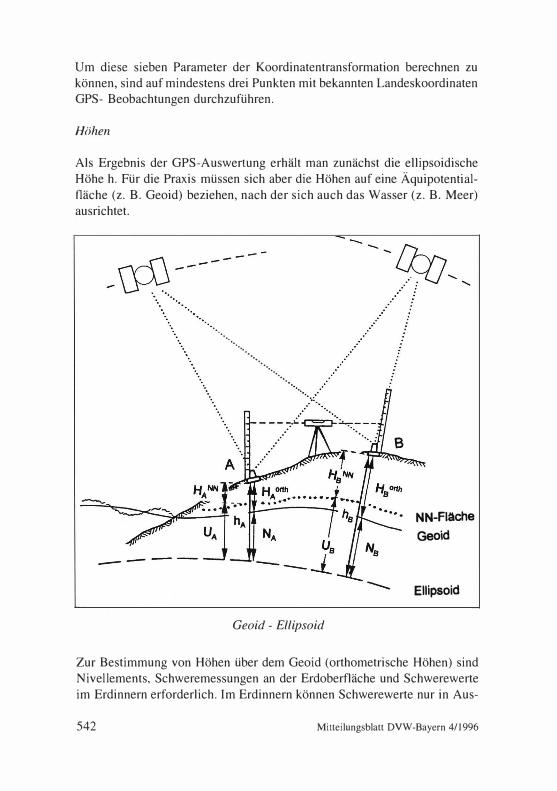
Als Ergebnis der GPS-Auswertung erhält man zunächst die ellipsoidische Höhe h. Für die Praxis müssen sich aber die Höhen auf eine Äquipotentialfläche (z. B. Geoid) beziehen, nach der sich auch das Wasser (z. B. Meer) ausrichtet.
·. ······· .... ·. ····· ······ .....
Geoid - Ellipsoid
--
• NN-Fiache Geoid
Ellipsoid
Zur Bestimmung von Höhen über dem Geoid (orthometrische Höhen) sind Nivellements, Schweremessungen an der Erdoberfläche und Schwerewerte im Erdinnern erforderlich. Im Erdinnern können Schwerewerte nur in Aus-
542 Mitteilungsblatt DVW-Bayern 411996
nahmefällen gemessen werden, so daß an ihrer Stelle im allgemeinen Näherungswerte verwendet werden müssen.
Die Höhen des Deutschen Haupthöhennetzes (DHHN) und deren Verdichtungsnetze beruhen derzeit noch auf einem seit 1912 schrittweise aufgebauten Höhensystem »Normalorthometrischer« Höhen über Normalnull (NN). Sie sind nur genäherte Höhen über dem Geoid, da keine Schweremessungen eingeführt wurden. Die rohen Nivellementergebnisse wurden so reduziert, als ob sie im Schwerefeld eines homogenen Rotationsellipsoides gemessen worden wären (Normalorthometrische Reduktion). Das bedeutet, daß die Auswirkungen der gesamten Topographie der Erde und der verschiedenen Dichtewerte der Gesteine nicht berücksichtigt wurden.
Geoid: Fläche gleichen Schwerepotentials. Die Vorstellung einer ruhenden und unter den Kontinenten fortgesetzten Meeresoberfläche kommt dem Geoid sehr nahe.
NN: Fläche, die dadurch entsteht, daß man die Höhenwerte der an der Erdoberfläche höhenmäßig bestimmten Punkte senkrecht nach unten abträgt und die so erhaltenen Punkte zu einer kontinuierlichen Fläche verbindet. Die NN-Fläche ist in der Bundesrepublik Deutschland eine Näherung für das Geoid.
Zusammenhang zwischen ellipsoidischer Höhe, orthometrischer Höhe und Höhe über NN:
I h = H""h + N = HNN + u I Hierin bedeutet:
h = ellipsoidische Höhe: senkrechter Abstand eines Punktes vom Ellipsoid;
H""" = orthometrische Höhe: der in der Lotlinie gemessene Abstand eines Punktes vom Geoid;
HNN = NN-Höhen:
N Geoidundulation:
U NN-Undulation:
Mitteilungsblatt DVW-Bayem 4/1996
der in der Lotlinie gemessene Abstand eines Punktes von Normalnull (NN);
Abstand des Geoid vom Bezugsellipsoid;
Abstand der NN-Fiäche vom Bezugsellipsoid.
543
Für die Bundesrepublik Deutschland beträgt die Geoidundulation N auf das Besselellipsoid bezogen im Bereich der fünf Grundlinien Null, da diese mit der orthometrischen Höhe auf das Ellipsoid reduziert wurden. Sie wächst mit dem Abstand von den Grundlinien bis I 0 m an. Dagegen beträgt sie, auf das WGS 84-Ellipsoid bezogen, ca. 50 m.
Die Geoidundulation sowie die NN-Undulation werden aus identischen Punkten gewonnen, von denen sowohl die ellipsoidische Höhe als auch die orthometrische bzw. die NN-Höhe bekannt sind. Sie können absolut mit einer Genauigkeit von einigen dm, relativ auf 2 bis 3 mm pro km Entfernung bestimmt werden.
Möglichkeiten der Positionsbestimmung
Je nach Aufgabenstellung ist die eine oder andere Möglichkeit der Positionsbestimmung anzuwenden.
Resultat A1t
dynamisch I kinematisch statisch
(Echtzeitverfahren)
(z. B. Navigation) (z. B. Geodäsie)
absolut (AGPS) Navigationslösung Einzelpunktbestimmung
relativ (DGPS) Differentielles - GPS) Relatives GPS
(differentiell) (DGPS) (RTDGPS) (Basislinien)
(Funkverbindung nötig)
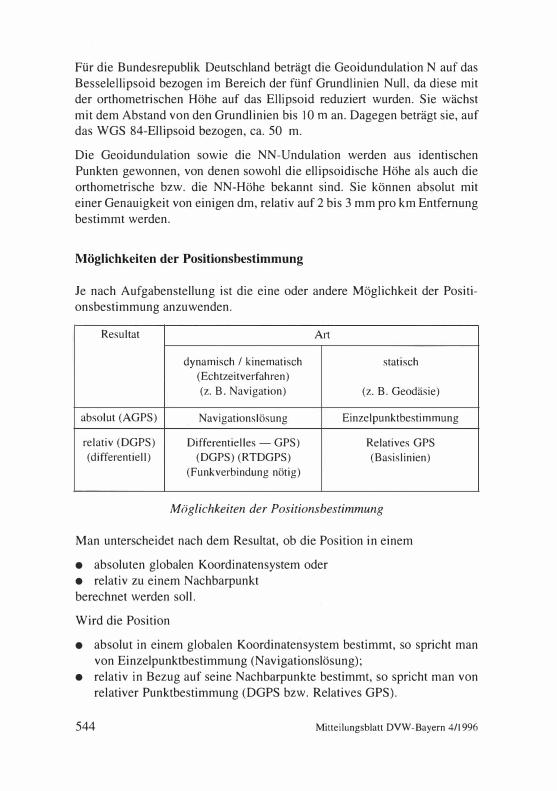
Möglichkeiten der Positionsbestimmung
Man unterscheidet nach dem Resultat, ob die Position in einem
• absoluten globalen Koordinatensystem oder • relativ zu einem Nachbarpunkt berechnet werden soll.
Wird die Position
• absolut in einem globalen Koordinatensystem bestimmt, so spricht man von Einzelpunktbestimmung (Navigationslösung);
• relativ in Bezug auf seine Nachbarpunkte bestimmt, so spricht man von relativer Punktbestimmung (DGPS bzw. Relatives GPS).
544 Mitteilungsblatt DVW-Bayern 4/1996
Absolutes GPS (AGPS) Differentielles GPS (DGPS)
,� /� �/�� �of _l ___ � /
!.\ � WGSSt. • Ko
. !�y � X
_________ Y_::::::,,_i,/x Referenz �
Rover
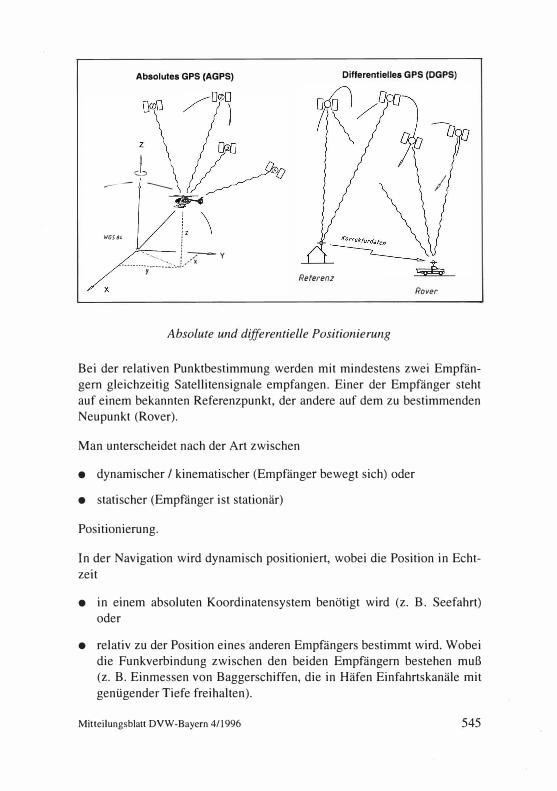
Absolute und differentielle Positionierung
Bei der relativen Punktbestimmung werden mit mindestens zwei Empfängern gleichzeitig Satellitensignale empfangen. Einer der Empfänger steht auf einem bekannten Referenzpunkt, der andere auf dem zu bestimmenden Neupunkt (Rover).
Man unterscheidet nach der Art zwischen
• dynamischer I kinematischer (Empfänger bewegt sich) oder
• statischer (Empfänger ist stationär)
Positionierung.
In der Navigation wird dynamisch positioniert, wobei die Position in Echtzeit
• in einem absoluten Koordinatensystem benötigt wird (z. B. Seefahrt) oder
• relativ zu der Position eines anderen Empfängers bestimmt wird. Wobei die Funkverbindung zwischen den beiden Empfängern bestehen muß (z. B. Einmessen von Baggerschiffen, die in Häfen Einfahrtskanäle mit genügender Tiefe freihalten).
Mitteilungsblatt DVW-Bayern 411996 545
In der Vermessung wird bislang meist statisch positioniert, seit neuester Zeit ist auch eine relative Punktbestimmung mit der üblichen Genauigkeit der Basislinien in Echtzeit möglich.
Die Navigationslösung des GPS, bei der nur ein Empfänger eingesetzt wird, liefert die Position (X, Y, Z-+ B, L, h -+ Landeskoordinaten), die Kursrichtung und die Geschwindigkeit über Grund. Diese Werte werden aus Laufzeitmessungen (Codemessungen) ermittelt.
Bei den geodätischen Anwendung von GPS sind zwei oder mehr Empfänger gleichzeitig (simultan) im Einsatz. Die Datensätze werden zusammengespielt und gemeinsam ausgewertet. Man bestimmt hieraus die Position (X, Y, Z) für einen Punkt (Referenzpunkt) aus der Navigationslösung und die Entfernungsdifferenzen �X, � Y, �Z (Basis Iinie) zum anderen Punkt (Rover) sowie zusätzlich die Empfängeruhrfehler.
Absolute Positionierung
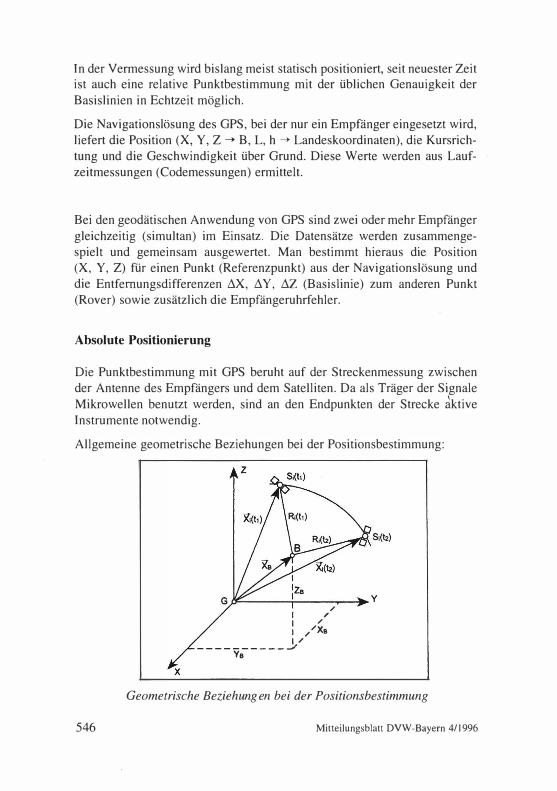
Die Punktbestimmung mit GPS beruht auf der Streckenmessung zwischen der Antenne des Empfängers und dem Satelliten. Da als Träger der Signale Mikrowellen benutzt werden, sind an den Endpunkten der Strecke dktive Instrumente notwendig.
Allgemeine geometrische Beziehungen bei der Positionsbestimmung:
546
z
�------;------r--�y I / I / 1 //Xe I/ __________ ..../ Ye
/
Geometrische Beziehungen bei der Positionsbestimmung
Mitteilungsblatt DVW-Bayern 411996
In der Skizze bzw. in den nachstehenden Formeln bedeuten:
Ri Distanz zwischen Satellit Si und Empfangsantenne B;
--> Xi Ortsvektor des Satelliten im CTP-System mit den Komponenten Xi,
Yi,Zi; --> Xa Ortsvektor der Empfangsantenne B im CTP-System mit den Kompo-
nenten X8, Y B• Za. --> -->
Die Distanz ergibt sich aus: R; = IX;- Xs l= V(X;- Xs)2 + (Y;- Ys)2 + (Z;- Zs)2
Die GPS-Signale können nach verschiedenen Gesichtspunkten beobachtet und ausgewertet werden:
• die Codephase (Pseudodistanz), • die Trägerphase, • der Doppler-Count.
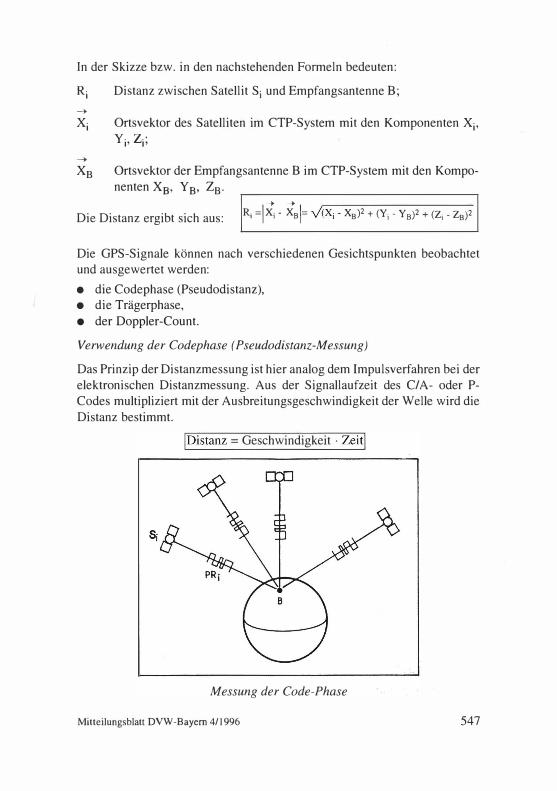
Verwendung der Codephase ( Pseudodistanz- Messung)
Das Prinzip der Distanzmessung ist hier analog dem Impulsverfahren bei der elektronischen Distanzmessung. Aus der Signallaufzeit des C/A- oder PCodes multipliziert mit der Ausbreitungsgeschwindigkeit der Welle wird die Distanz bestimmt.
!Distanz = Geschwindigkeit · Zeitl
Messung der Code-Phase
Mitteilungsblatt DVW-Bayern 4/1996 547
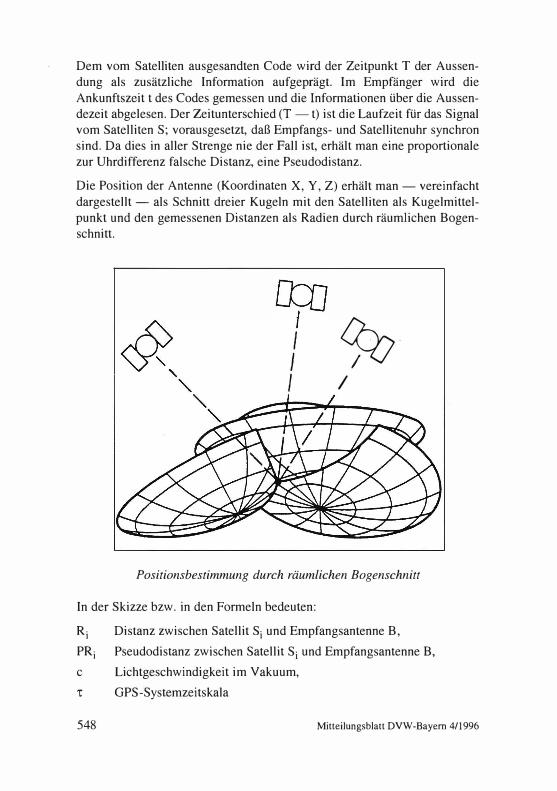
Dem vom Satelliten ausgesandten Code wird der Zeitpunkt T der Aussendung als zusätzliche Information aufgeprägt. Im Empfänger wird die Ankunftszeit t des Codes gemessen und die Informationen über die Aussendezeit abgelesen. Der Zeitunterschied (T- t) ist die Laufzeit für das Signal vom Satelliten S; vorausgesetzt, daß Empfangs- und Satellitenuhr synchron sind. Da dies in aller Strenge nie der Fall ist, erhält man eine proportionale zur Uhrdifferenz falsche Distanz, eine Pseudodistanz.
Die Position der Antenne (Koordinaten X, Y, Z) erhält man -vereinfacht dargestellt - als Schnitt dreier Kugeln mit den Satelliten als Kugelmittelpunkt und den gemessenen Distanzen als Radien durch räumlichen Bogenschnitt.
9J !� I I
Positionsbestimmung durch räumlichen Bogenschnitt
In der Skizze bzw. in den Formeln bedeuten:
R i Distanz zwischen Satellit Si und Empfangsantenne B,
PRi Pseudodistanz zwischen Satellit Si und Empfangsantenne B,
c Lichtgeschwindigkeit im Vakuum,
't GPS-Systemzeitskala
548 Mitteilungsblatt DVW-Bayem 4/1996
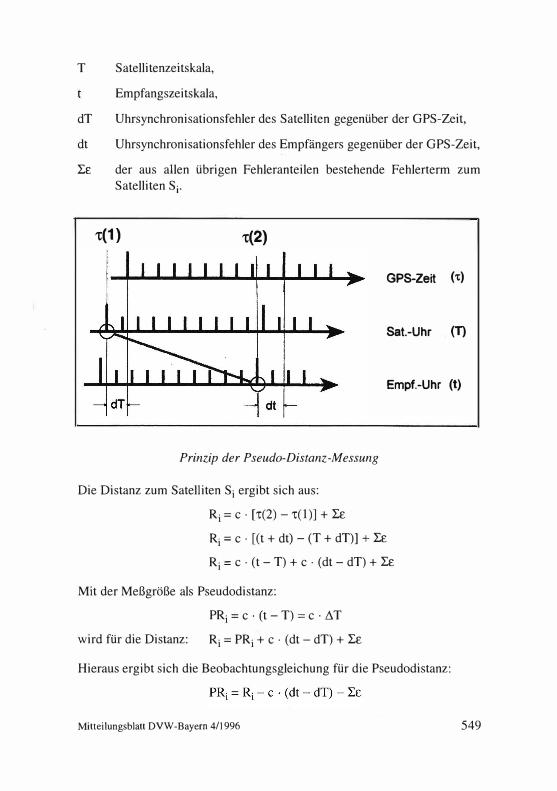
T Satellitenzeitskala,
Empfangszeitskala,
dT Uhrsynchronisationsfehler des Satelliten gegenüber der GPS-Zeit,
dt Uhrsynchronisationsfehler des Empfängers gegenüber der GPS-Zeit,
LE der aus allen übrigen Fehleranteilen bestehende Fehlerterm zum Satelliten Si.
t{1) t(2)
GPS-Zeit {"t)
Sat.-Uhr (T)
Empf.-Uhr (t)
Prinzip der Pseudo-Distanz-Messung
Die Distanz zum Satelliten Si ergibt sich aus:
Ri = c · ['t(2)- 't(l)] + LE
Ri = c · [(t + dt) - (T + dT)] + LE
Ri = c · (t - T) + c · (dt - dT) + LE
Mit der Meßgröße als Pseudodistanz:
PRi = c · ( t - T) = c · L1 T
wird für die Distanz: Ri = PRi + c · (dt - dT) + LE
Hieraus ergibt sich die Beobachtungsgleichung für die Pseudodistanz:
Mitteilungsblatt DVW-Bayem 4/1996 549
In der Vektorschreibweise aus den bekannten Satellitenkoordinaten:
Damit können aus 4 Gleichungen die dreidimensionalen Koordinaten des Empfängers (XB, Y B• ZB) und der Zeitfehler des Empfängers (dt) berechnet werden, wobei die Koordinaten des Satelliten (Xi, Yi, Zi) und sein Synchronisationsfehler (dT) bekannt sind. Die übrigen Fehleranteile versucht man durch Modelle zu erfassen. Es müssen also simultane Messungen zu mindestens vier Satelliten durchgeführt werden.
Die Positionsbestimmung kann praktisch in Echtzeit erfolgen und die Position des Empfängers beispielsweise zu jeder Sekunde berechnet werden.
Das Auswerteprogramm des Empfängers muß zusätzlich folgende Probleme lösen:
• die Drehung der Erde während der Signallaufzeit muß berücksichtigt werden;
• die Zykluslänge beim C/A- Code beträgt I Millisekunde (das entspricht ca. 300 km), damit sind die Pseudostrecken nicht eindeutig;
• die troposphärischen und ionosphärischen Laufzeitverzögerungen dürfen nicht vernachlässigt werden;
• das funktionelle Modell ist nicht linear.
Verwendung der Trägerphase
Das Prinzip der Distanzmessung ist hier analog der Phasenmessung bei der elektronischen Distanzmessung.
Bei den Trägersignalen der GPS-Satelliten muß die Codierung der Trägersignale wieder rückgängig gemacht werden, um die ursprünglichen sinusförmige Signale zu erhalten. Zur Messung der Trägerphase wird das empfangene Trägersignal mit einem im Empfänger erzeugten Referenzsignal verglichen. Aus der Phasenverschiebung erhält man einen Teil der Wellenlänge (1,1 = 19,05 cm bei L1 und A.2 = 24,45 cm bei L2) und zwar mit einer Auflösung von 1 bis 2 mm. Die Zahl N der ganzen Wellenlängen ist zunächst unbekannt und wird »Mehrdeutigkeit« (Ambiguity) genannt.
550 Mitteilungsblatt DVW-Bayern 411996
Geozentrum
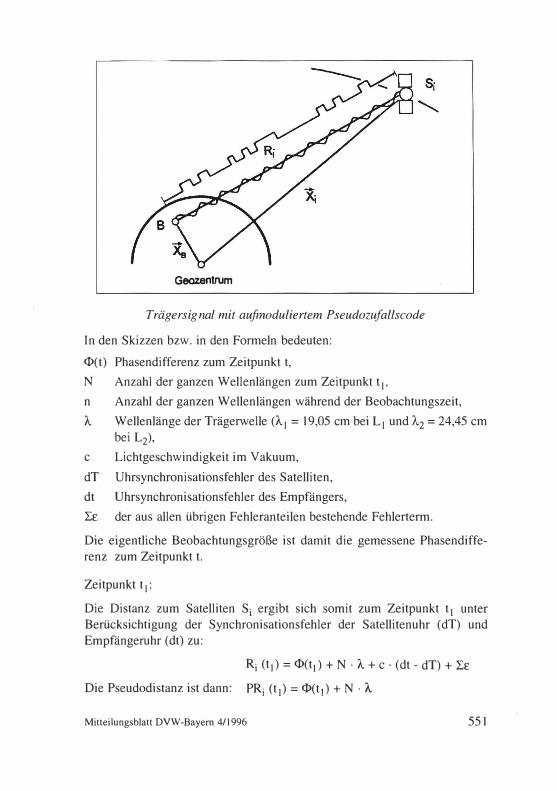
Trägersignal mit aufmoduliertem Pseudozufallscode
In den Skizzen bzw. in den Formeln bedeuten:
<l>(t) Phasendifferenz zum Zeitpunkt t,
N Anzahl der ganzen Wellenlängen zum Zeitpunkt t1 ,
n Anzahl der ganzen Wellenlängen während der Beobachtungszeit,
'A Wellenlänge der Trägerwelle ('A1 = 19,05 cm bei L1 und "-2 = 24,45 cm bei L2),
c Lichtgeschwindigkeit im Vakuum,
dT Uhrsynchronisationsfehler des Satelliten,
dt Uhrsynchronisationsfehler des Empfängers,
I:e der aus allen übrigen Fehleranteilen bestehende Fehlerterm.
Die eigentliche Beobachtungsgröße ist damit die gemessene Phasendifferenz zum Zeitpunkt t.
Zeitpunkt t1 :
Die Distanz zum Satelliten Si ergibt sich somit zum Zeitpunkt t1 unter Berücksichtigung der Synchronisationsfehler der Satellitenuhr (dT) und Empfängeruhr (dt) zu:
Ri (tl) = <l>(tl) + N · 'A + c · (dt - dT) + I:e
Die Pseudodistanz ist dann: PRi (t1) = <l>(t1) + N · 'A
Mitteilungsblatt DVW-Bayern 4/1996 551
Nl
nl Empflinger
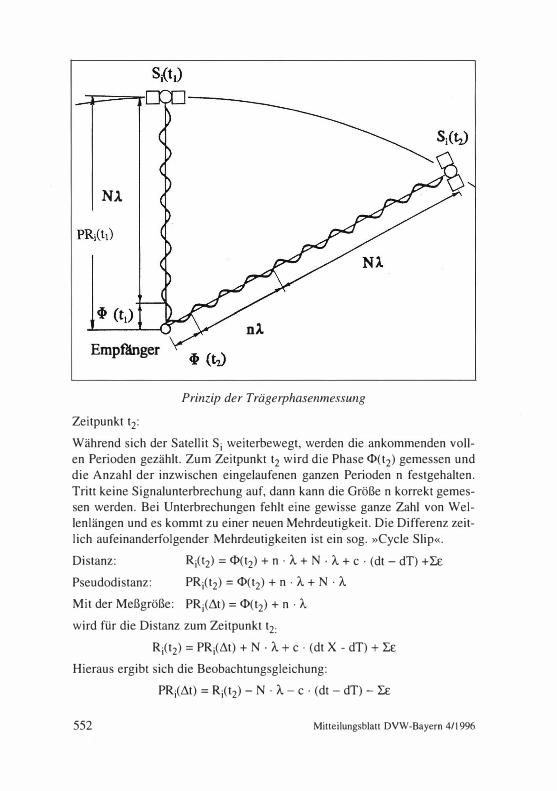
Prinzip der Trägerphasenmessung
Zeitpunkt t2:
Während sich der Satellit Si weiterbewegt, werden die ankommenden vollen Perioden gezählt. Zum Zeitpunkt t2 wird die Phase <l>(t2) gemessen und die Anzahl der inzwischen eingelaufenen ganzen Perioden n festgehalten. Tritt keine Signalunterbrechung auf, dann kann die Größe n korrekt gemessen werden. Bei Unterbrechungen fehlt eine gewisse ganze Zahl von Wellenlängen und es kommt zu einer neuen Mehrdeutigkeit. Die Differenz zeitlich aufeinanderfolgender Mehrdeutigkeiten ist ein sog. »Cycle Slip«.
Distanz:
Pseudodistanz:
Ri(t2) = <l>(t2) + n · A. + N · A. + c · (dt - dT) +Er PRi(t2) = <l>(t2) + n · A. + N · A.
Mit der Meßgröße: PRj(.::lt) = <l>(t2) + n · A
wird für die Distanz zum Zeitpunkt t2:
Ri(t2) = PRi(Llt) + N · A. + c · (dt X - dT) +Er Hieraus ergibt sich die Beobachtungsgleichung:
PRi(Llt) = Ri(t2) - N · A.- c · (dt- dT)- Er
552 Mitteilungsblatt DVW-Bayern 4/1 996
In der Vektorschreibweise:
Neben den drei gesuchten Koordinaten des Beobachtungsortes (X8, Y 8, Z8) treten noch als weitere Unbekannte die Anzahl der ganzen Wellenlängen N einschließlich der Cycle Slips, sowie der Uhrenfehler des Empfängers dt auf.
Modeme GPS- Empfänger bieten die Möglichkeit die Signale gleichzeitig zu allen sichtbaren Satelliten zu benutzen (all in view) und besitzen entsprechend viele Empfangskanäle ( � 8 ). Dies ist insbesondere bei der Anwendung schneller Meßverfahren im Vermessungswesen von Bedeutung.
Relative Positionierung
Das Verfahren beruht darauf, daß ein Großteil der auf die GPS-Meßgrößen wirkenden Fehlereinflüsse bei gleichzeitiger Beobachtung in benachbarten Beobachtungsstationen genähert gleich sind und somit bei der Differenzbildung weitgehend eliminiert werden können. Um z. B. die Positionsverschlechterung, die durch die SA (Selective Availability) hervorgerufen wird, umgehen zu können und um die volle Genauigkeit des GPS ausschöpfen zu können, ist die gleichzeitige Messung mit zwei Empfängern notwendig.
Differentielles GPS (D GPS bzw. RT GPS )
Das DGPS-Verfahren ist überwiegend für Nutzer gedacht, die nur Zugriff auf den C/A- Code haben (Messung der Codephase).
Grundidee:
Empfängt man an einer Bodenstation, die im System WGS 84 koordinatenmäßig bekannt ist (Referenzstation), die Signale eines Satelliten, so können aus der Differenz von gemessener und berechneter Pseudoentfemung die augenblicklichen Entfernungskorrekturen berechnet und als Korrektursignale abgestrahlt werden. Der Nutzer verwendet die Korrekturen, bei den von ihm angemessenen Satelliten.
Mitteilungsblatt DVW-Bayem 4/1 996 553
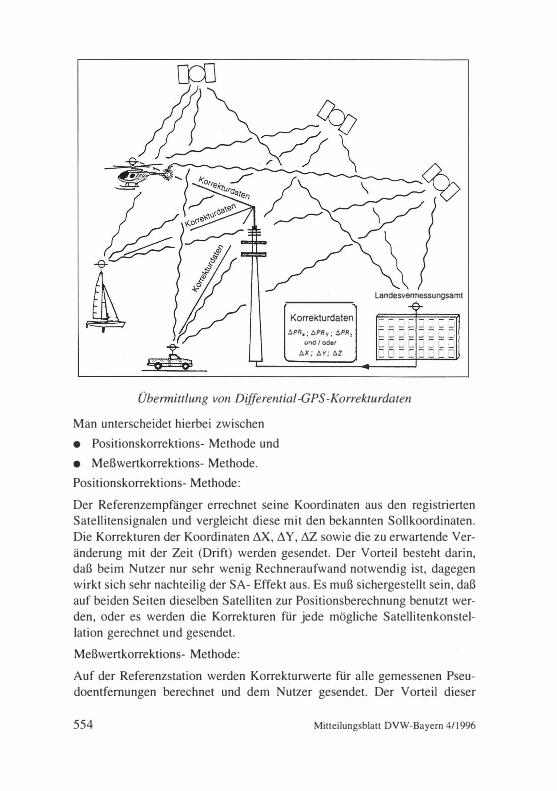
Korrekturdaten !l.PR."; t:.PRy; !l.PR:
und I oder llX; llY; llZ
Landesvennessungsamt
Übermittlung von Dif.ferential-GPS-Korrekturdaten
Man unterscheidet hierbei zwischen
• Positionskorrektions- Methode und
• Meßwertkorrektions- Methode.
Positionskorrektions- Methode:
Der Referenzempfl:inger errechnet seine Koordinaten aus den registrierten Satellitensignalen und vergleicht diese mit den bekannten Sollkoordinaten. Die Korrekturen der Koordinaten LlX, Ll Y, LlZ sowie die zu erwartende Veränderung mit der Zeit (Drift) werden gesendet. Der Vorteil besteht darin, daß beim Nutzer nur sehr wenig Rechneraufwand notwendig ist, dagegen wirkt sich sehr nachteilig der SA- Effekt aus. Es muß sichergestellt sein, daß auf beiden Seiten dieselben Satelliten zur Positionsberechnung benutzt werden, oder es werden die Korrekturen für jede mögliche Satellitenkonstellation gerechnet und gesendet.
Meßwertkorrektions- Methode:
Auf der Referenzstation werden Korrekturwerte für alle gemessenen Pseudoentfemungen berechnet und dem Nutzer gesendet. Der Vorteil dieser
554 Mitteilungsblatt DVW-Bayern 4/1996
Methode besteht darin, daß beliebig viele Nutzer zugelassen sind, aber als Nachteil wirkt sich aus, daß beim Nutzer relativ viel Rechnerleistung installiert sein muß.
Voraussetzungen für beide Methoden:
• genau vermessene Bodenstation (fest oder mobil), die Korrekturdaten für die einzelnen Satelliten berechnet (Referenzstation),
• Sender muß die Korrekturdaten an Nutzer übertragen,
• Nutzer muß die Korrekturdaten empfangen und verarbeiten,
• Nutzer muß mindestens vier Satelliten empfangen können, für die Korrekturdaten bereitgestellt werden,
• Fehler müssen für Referenzstation und Nutzer gleich sein.
Die Korrekturdaten sind bis zu einer Entfernung von einigen I 00 km von der Referenzstation soweit repräsentativ, daß eine Relativgenauigkeit von wenigen Metern erzielt werden kann. Mit wachsender Entfernung zwischen Referenzstation und Nutzer ändert sich die Richtung zu einem bestimmten Satelliten, und damit sind die Korrekturwerte nicht mehr gleich (außer Uhrfehler).
Die Nutzeranwendung ist hier sehr vielfältig:
• Fahrzeugnavigation (Polizei, Rettungsdienst, Feuerwehr, Transport, Taxi),
• Kartierungen von Geo-Informationen (Waldschäden, Bodennutzung, Bodengüte, Ernteertragsbestimmung und Düngemittelausbringung, Umweltüberwachungsaufgaben, Altlasten),
• Anwendungen in der Hydrographie.
Relati ve Positionierung mit Trägerphasen
Für hohe Anforderungen an die Genauigkeit (z. B. Geodäsie, Luftfahrt bei Landungen) bezieht man die Messungen auf die Trägerphase.
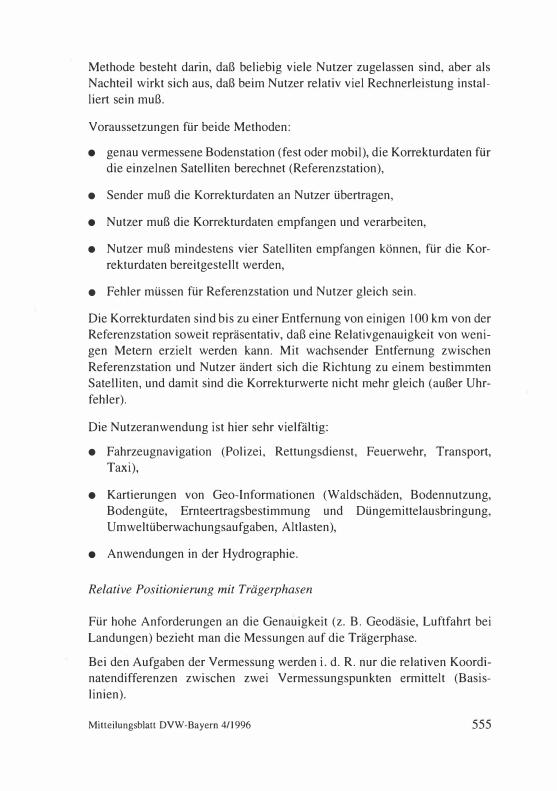
Bei den Aufgaben der Vermessung werden i. d. R. nur die relativen Koordinatendifferenzen zwischen zwei Vermessungspunkten ermittelt (Basislinien).
Mitteilungsblatt DVW-Bayern 4/1996 555
z [11] [C[J Q)'] [([J ...
I I
I I
Ii /;
' I I '
I
z
Basislinien
Man mißt simultan mit mindestens zwei Empfängern, die dieselben Satelliten empfangen. Diese Daten müssen gemeinsam in einem Computer ausgewertet werden.
Diese gemeinsame Auswertung erfolgt:
• anschließend durch Zusammentrag der Messungen (Post Processing) oder
• in Echtzeit durch Funkübertragung der Meßdaten an die Referenzstation (Real Time Differential GPS = RTDGPS).
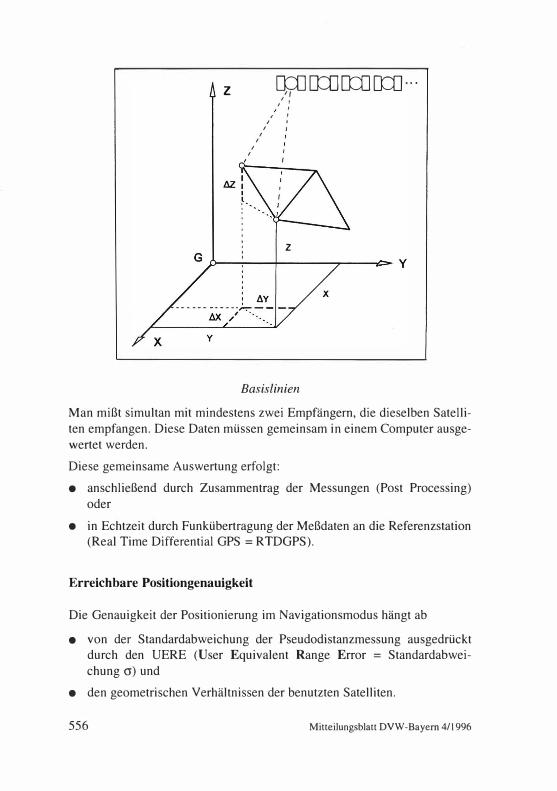
Erreichbare Positiongenauigkeit
Die Genauigkeit der Positionierung im Navigationsmodus hängt ab
• von der Standardabweichung der Pseudodistanzmessung ausgedrückt durch den UERE (User Equivalent Range Error = Standardabweichung cr) und
• den geometrischen Verhältnissen der benutzten Satelliten.
556 Mitteilungsblatt DVW-Bayern 411 996
Genauigkeit der Distanzen
Die Distanz zwischen Empfänger und Satellit ist mit den vorher eingeführten Abkürzungen:
Ri = PRi + c · ( dt - dT) + LE
Die Signale werden aber auf dem Weg vom Satelliten zum Empfänger vielfältig verfälscht. Die wesentlichen Fehlereinflüsse können auf das
• Raumsegment (Satellitenposition, Signalgenerierung),
• Kontrollsegment (Bahnberechnung),
• Nutzersegment (Empfängerbedingungen, Atmosphäre, Signalqualität)
aufgeteilt werden.
Die wichtigsten Fehlerquellen sind:
• Vorhersagegenauigkeit der Bahndaten (Bahnfehler .<:lr),
• Fehler der Satellitenuhren (dT),
• atmosphärische Störungen:
-Verzögerung durch die Ionosphäre (Llion)
- Verzögerung durch die Troposphäre (.<:ltrop)
• Fehler der Empfängeruhr (dt)
• sonstige Fehler (E): - Mehrwegempfang (Multipath)
- Empfängerrauschen usw.
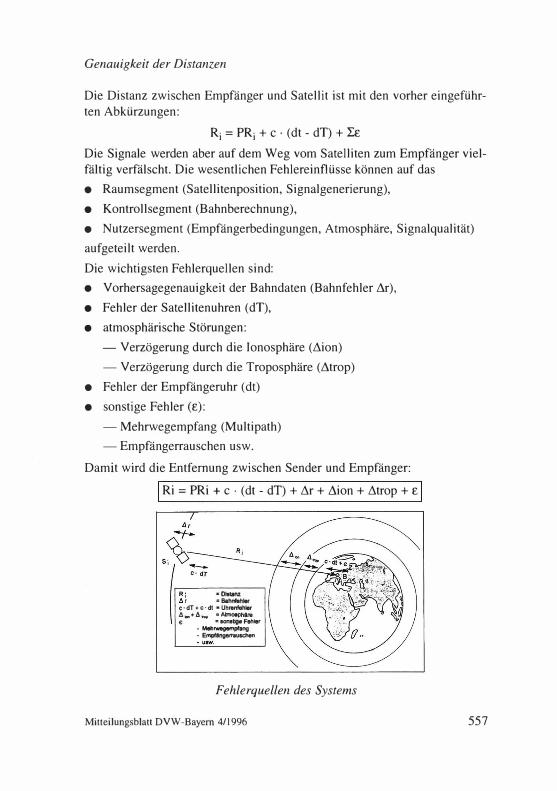
Damit wird die Entfernung zwischen Sender und Empfänger:
I Ri = PRi + c · ( dt - dT) + Llr + .<:lion + Lltrop + E I .��, s%��� ·
-
I! r = Bahnfehler c · dT + c · dt • Uhrenfehler lJ. .... + ll...,. • Atmolphtre E: • sonstige Fehler
·-pfang - Empftngei'TIIuschen - uaw.
Fehler quellen des Systems
Mitteilungsblatt DVW-Bayern 4/1996 557
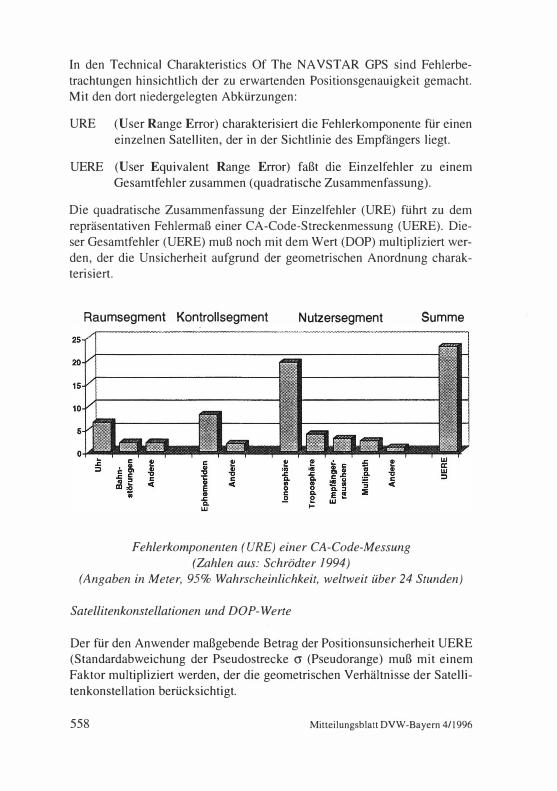
In den Technical Charakteristics Of The NAVSTAR GPS sind Fehlerbetrachtungen hinsichtlich der zu erwartenden Positionsgenauigkeit gemacht. Mit den dort niedergelegten Abkürzungen:
URE (User Range Error) charakterisiert die Fehlerkomponente für einen einzelnen Satelliten, der in der Sichtlinie des Empfängers liegt.
UERE (User Equivalent Range Error) faßt die Einzelfehler zu einem Gesamtfehler zusammen (quadratische Zusammenfassung).
Die quadratische Zusammenfassung der Einzelfehler (URE) führt zu dem repräsentativen Fehlermaß einer CA-Code-Streckenmessung (UERE). Dieser Gesamtfehler (UERE) muß noch mit dem Wert (DOP) multipliziert werden, der die Unsicherheit aufgrund der geometrischen Anordnung charakterisiert.
Raumsegment Kontrollsegment Nutzersegment
Fehlerkomponenten (UR E ) einer CA- Code- Messung (Zahlen aus: Schrödter 1994)
Summe
(Angaben in Meter, 95% Wahrscheinlichkeit, weltweit über 24 Stunden )
Satellitenkonstellationen und DOP- Werte
Der für den Anwender maßgebende Betrag der Positionsunsicherheit UERE (Standardabweichung der Pseudostrecke cr (Pseudorange) muß mit einem Faktor multipliziert werden, der die geometrischen Verhältnisse der Satellitenkonstellation berücksichtigt.
558 Mitteilungsblatt DVW-Bayern 4/1996
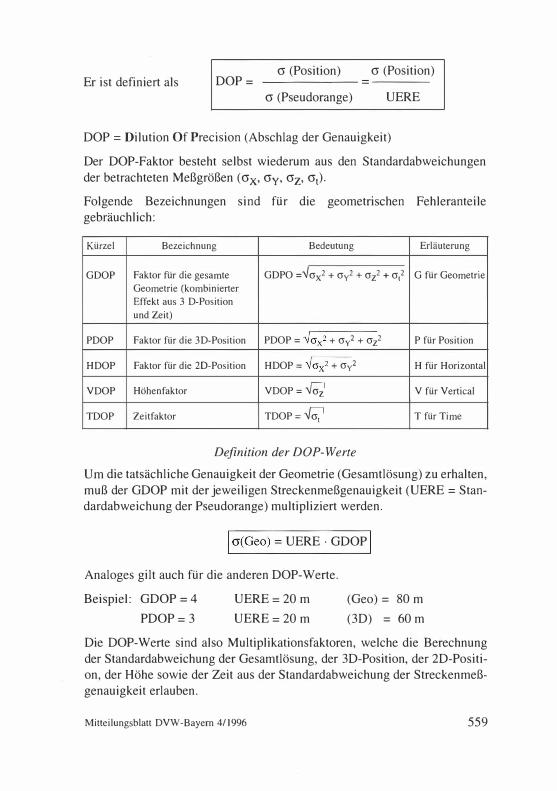
DOP = 0 (Position) 0 (Position)
Er ist definiert als ------- = ----0 (Pseudorange) UERE
DOP = Dilution Of Precision (Abschlag der Genauigkeit)
Der DOP-Faktor besteht selbst wiederum aus den Standardabweichungen der betrachteten Meßgrößen (0x, 0y, 0z, 0t).
Folgende Bezeichnungen sind für die geometrischen Fehleranteile gebräuchlich:
Kürzel Bezeichnung Bedeutung Erläuterung
GDOP Faktor für die gesamte GDPO =--Jcrx2 + cry2 + cri + cr.Z G für Geometrie Geometrie (kombinierter Effekt aus 3 D-Position und Zeit)
PDOP Faktor für die 3D-Position PDOP = --Jcrx2 + cry2 + cri P für Position
HDOP Faktor für die 20-Position HDOP = --Jcrx2 + cry2 H für Horizontal
VDOP Höhenfaktor VDOP= � V für V ertical
TDOP Zeitfaktor TDOP= R T für Time
Definition der DOP- Werte
Um die tatsächliche Genauigkeit der Geometrie (Gesamtlösung) zu erhalten, muß der GDOP mit der jeweiligen Streckenmeßgenauigkeit (UERE = Standardabweichung der Pseudorange) multipliziert werden.
I0(Geo) = UERE · GDOP I Analoges gilt auch für die anderen DOP-Werte.
Beispiel: GDOP = 4
PDOP = 3
UERE = 20 m
UERE = 20 m
(Geo) = 80 m
(3D) = 60 m
Die DOP-Werte sind also Multiplikationsfaktoren, welche die Berechnung der Standardabweichung der Gesamtlösung, der 3D-Position, der 2D-Position, der Höhe sowie der Zeit aus der Standardabweichung der Streckenmeßgenauigkeit erlauben.
Mitteilungsblatt DVW-Bayern 411996 559
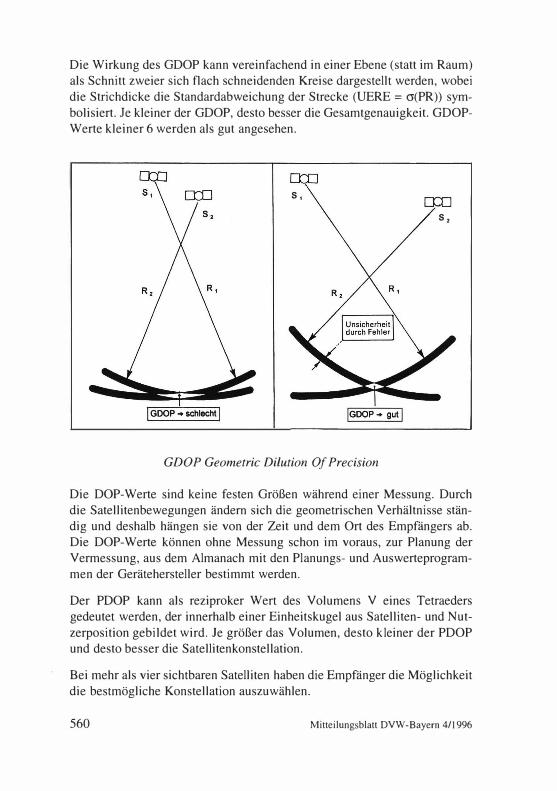
Die Wirkung des GDOP kann vereinfachend in einer Ebene (statt im Raum) als Schnitt zweier sich flach schneidenden Kreise dargestellt werden, wobei die Strichdicke die Standardabweichung der Strecke (UERE = cr(PR)) symbolisiert. Je kleiner der GDOP, desto besser die Gesamtgenauigkeit GDOPWerte kleiner 6 werden als gut angesehen.
0::::0 s,
s,
GDOP Geometrie Dilution Of Precision
Die DOP-Werte sind keine festen Größen während einer Messung. Durch die Satellitenbewegungen ändern sich die geometrischen Verhältnisse ständig und deshalb hängen sie von der Zeit und dem Ort des Empfangers ab. Die DOP-Werte können ohne Messung schon im voraus, zur Planung der Vermessung, aus dem Almanach mit den Planungs- und Auswerteprogrammen der Gerätehersteller bestimmt werden.
Der PDOP kann als reziproker Wert des Volumens V eines Tetraeders gedeutet werden, der innerhalb einer Einheitskugel aus Satelliten- und Nutzerposition gebildet wird. Je größer das Volumen, desto kleiner der PDOP und desto besser die Satellitenkonstellation.
Bei mehr als vier sichtbaren Satelliten haben die Empfänger die Möglichkeit die bestmögliche Konstellation auszuwählen.
560 Mitteilungsblatt DVW-Bayern 4/1 996
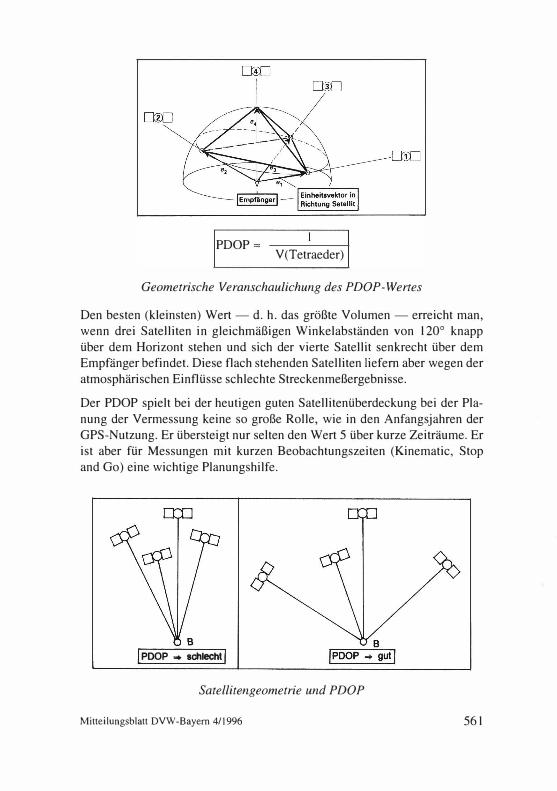
PDOP"" V (Tetraeder)
Geometrische Veranschaulichung des PDOP-Wertes
Den besten (kleinsten) Wert- d. h. das größte Volumen- erreicht man, wenn drei Satelliten in gleichmäßigen Winkelabständen von 120° knapp über dem Horizont stehen und sich der vierte Satellit senkrecht über dem Empfänger befindet. Diese flach stehenden Satelliten liefern aber wegen der atmosphärischen Einflüsse schlechte Streckenmeßergebnisse.
Der PDOP spielt bei der heutigen guten Satellitenüberdeckung bei der Planung der Vermessung keine so große Rolle, wie in den Anfangsjahren der GPS-Nutzung. Er übersteigt nur selten den Wert 5 über kurze Zeiträume. Er ist aber für Messungen mit kurzen Beobachtungszeiten (Kinematic, Stop and Go) eine wichtige Planungshilfe.
B I PDOP ,.. schlecht I
Satellitengeometrie und PDOP
Mitteilungsblatt DVW-Bayern 4/1996 561
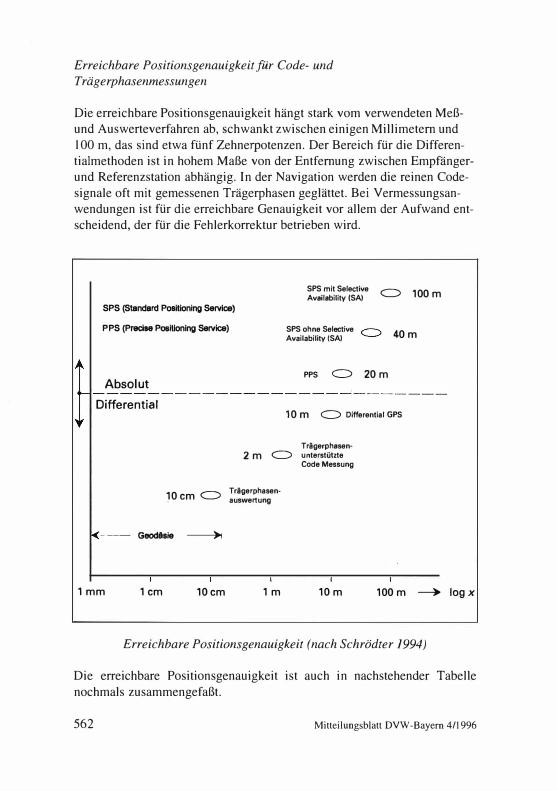
Erreichbare Positionsgenauigkeit für Code- und Trägerphasenmessungen
Die erreichbare Positionsgenauigkeit hängt stark vom verwendeten Meßund Auswerteverfahren ab, schwankt zwischen einigen Millimetern und 100 m, das sind etwa fünf Zehnerpotenzen. Der Bereich für die Differentialmethoden ist in hohem Maße von der Entfernung zwischen Empfängerund Referenzstation abhängig. In der Navigation werden die reinen Codesignale oft mit gemessenen Trägerphasen geglättet. Bei Vermessungsanwendungen ist für die erreichbare Genauigkeit vor allem der Aufwand entscheidend, der für die Fehlerkorrektur betrieben wird.
SPS (Standard Posltlonlng Service)
PPS (Precise Posllloning Service)
Absolut
SPS mit Selective Availability (SA) c=:> 100m
SPS ohne Selective Availability (SAl
PPS c=:> 20m
40m
�--------------------------Differential
10 cm c=:>
GaodAsie �
1mm 1cm 10cm
1 0 m c=:> Differential GPS
Trägerphasen-2 m c=:> unterstützte
Code Messung
Trägerphasen· auswertung
1m 10m 100m � logx
Erreichbare Positionsgenauigkeit (nach Schrödter 1994 )
Die erreichbare Positionsgenauigkeit ist auch in nachstehender Tabelle nochmals zusammengefaßt.
562 Mitteilungsblatt DVW-Bayem 4/1 996
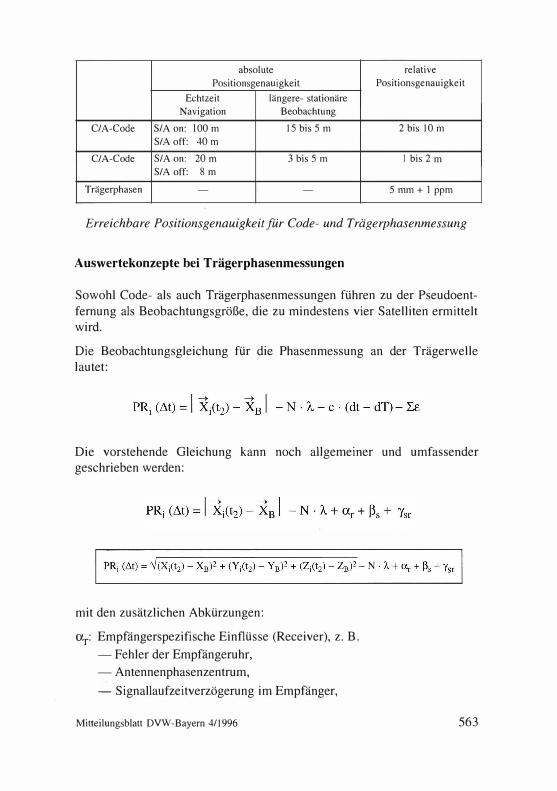
absolute relative Positionsgenauigkeit Positionsgenauigkeit
Echtzeit längere- stationäre Navigation Beobachtung
C/A-Code S/A on: lOO m 15 bis 5 m 2bis10m S/A off: 4 0m
C/A-Code S/A on: 20m 3 bis 5 m I bis 2m S/A off: Sm
Trägerphasen - - 5 mm + I ppm
Erreichbare Positionsgenauigkeit f ür Code- und Trägerphasenmessung
Auswertekonzepte bei Trägerphasenmessungen
Sowohl Code- als auch Trägerphasenmessungen führen zu der Pseudoentfernung als Beobachtungsgröße, die zu mindestens vier Satelliten ermittelt wird.
Die Beobachtungsgleichung für die Phasenmessung an der Trägerwelle lautet:
Die vorstehende Gleichung kann noch allgemeiner und umfassender geschrieben werden:
mit den zusätzlichen Abkürzungen:
ay.: Empfängerspezifische Einflüsse (Receiver), z. B.
- Fehler der Empfängeruhr, - Antennenphasenzentrum,
- Signallaufzeitverzögerung im Empfänger,
Mitteilungsblatt DVW-Bayern 4/1996 563
ßs: Satellitenspezifische Einflüsse, z. B.
-Fehler der Satellitenuhr,
- Bahnfehler des Satelliten,
Ysr: Satelliten-Empfänger-Paarspezifische Einflüsse, z.B.
- Atmosphärische Einflüsse (Ionosphäre und der Troposphäre),
- Mehrwegeffekt,
N: Unbekannte Anzahl der vollen Wellenlängen (Ambiguity).
Von den in der obigen Gleichung enthaltenen Parametern ist geodätisch nur der erste Term von Interesse, da nur hier die zu bestimmenden Empfängerkoordinaten enthalten sind.
Zur Lösung der Mehrdeutigkeit und zur Behandlung der Fehlereinflüsse bei der Phasenmessung gibt es zwei unterschiedliche Konzepte:
e Schätzung der Störparameter Die originären Phasenmessungen aller Stationen eines Projektes werden einer gemeinsamen Ausgleichung unterzogen und alle wirksamen Fehlereinflüsse werden als Parameter geschätzt (z. B. bei wissenschaftlichen Programmpaketen und großräumigen Netzen). Der Vorteil liegt in der größeren Unabhängigkeit von simultanen Messungen und in der größeren Flexibilität.
• Eliminierung der Störparamter Durch Differenzbildung ·werden Beobachtungsgleichungen formuliert, die weitgehend frei von gemeinsamen Fehlereinflüssen sind (z. B. bei den Programmpaketen der Firmensoftware und kleinräumigen Netzen). Der Vorteil ist, daß die Parameterschätzung vereinfacht ist, da die Beobachtungsgleichungen von vielen gemeinsamen Fehlereinflüssen befreit sind.
Differenzbildung
Die gemeinsamen Fehlereinflüsse eliminiert man durch Differenzen zwischen Datensätzen, die
e simultan zu zwei Satelliten,
e zu verschiedenen Zeitpunkten zu einem Satelliten,
e simultan mit zwei Empfängern zu einem Satellit
aufgenommen wurden.
564 Mitteilungsblatt DVW-Bayern 4/1 996
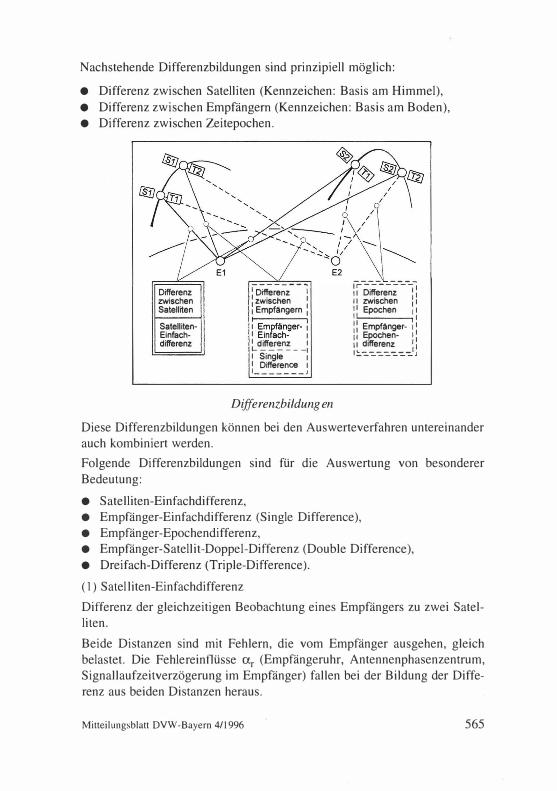
Nachstehende Differenzbildungen sind prinzipiell möglich:
e Differenz zwischen Satelliten (Kennzeichen: Basis am Himmel), e Differenz zwischen Empfängern (Kennzeichen: Basis am Boden), e Differenz zwischen Zeitepochen.
Differenz zwischen Satell�en
SatellitenEinfachdifferenz
IDitt;;;;�z
- --; : zwischen 1 1 Empfängern : 1 Empfänger- 1 I Einfach- 1 � d.!_ff!'"�� - -: I Single 1 I Difference 1 1 _______ ,
Differenzbildungen
lr-- -- -- - -------11 Differenz : : 11 zwischen 1 1 II Epochen I I I I :: Empfänger- 11 11 Epochen- I : 11 differenz I 1 1:_-::..-::..\:..-::..-::..-::..-::..IJ
Diese Differenzbildungen können bei den Auswerteverfahren untereinander auch kombiniert werden.
Folgende Differenzbildungen sind für die Auswertung von besonderer Bedeutung:
• Satelliten-Einfachdifferenz, • Empfänger-Einfachdifferenz (Single Difference), • Empfänger-Epochendifferenz, • Empfänger-Satellit-Doppel-Differenz (Double Difference), • Dreifach-Differenz (Triple-Difference).
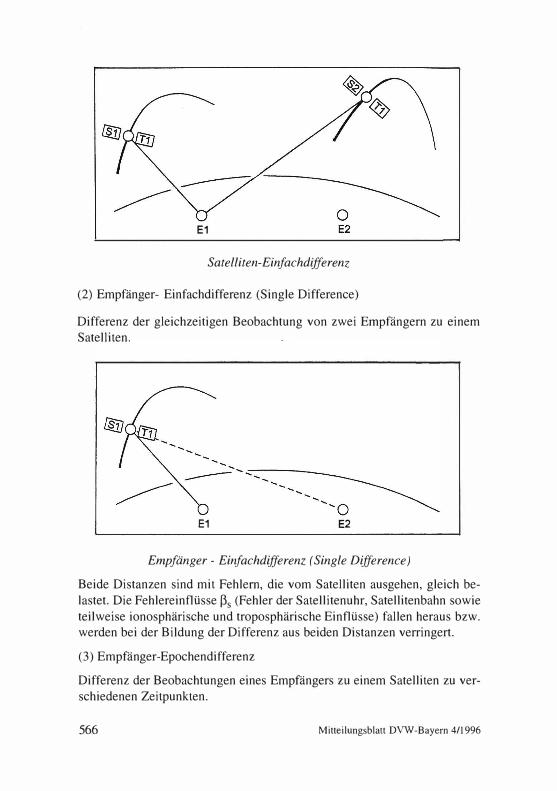
(I) Satelliten-Einfachdifferenz
Differenz der gleichzeitigen Beobachtung eines Empfängers zu zwei Satelliten.
Beide Distanzen sind mit Fehlern, die vom Empfänger ausgehen, gleich belastet. Die Fehlereinflüsse ar (Empfängeruhr, Antennenphasenzentrum, Signallaufzeitverzögerung im Empfänger) fallen bei der Bildung der Differenz aus beiden Distanzen heraus.
Mitteilungsblatt DVW-Bayern 4/1 996 565
E1
Satelliten- Einfachdifferenz
(2) Empfänger- Einfachdifferenz (Single Difference)
Differenz der gleichzeitigen Beobachtung von zwei Empfängern zu einem Satelliten.
E1 E2
Empfänger - Einfachdifferenz (Single Difference )
Beide Distanzen sind mit Fehlern, die vom Satelliten ausgehen, gleich belastet. Die Fehlereinflüsse ßs (Fehler der Satellitenuhr, Satellitenbahn sowie teilweise ionosphärische und troposphärische Einflüsse) fallen heraus bzw. werden bei der Bildung der Differenz aus beiden Distanzen verringert.
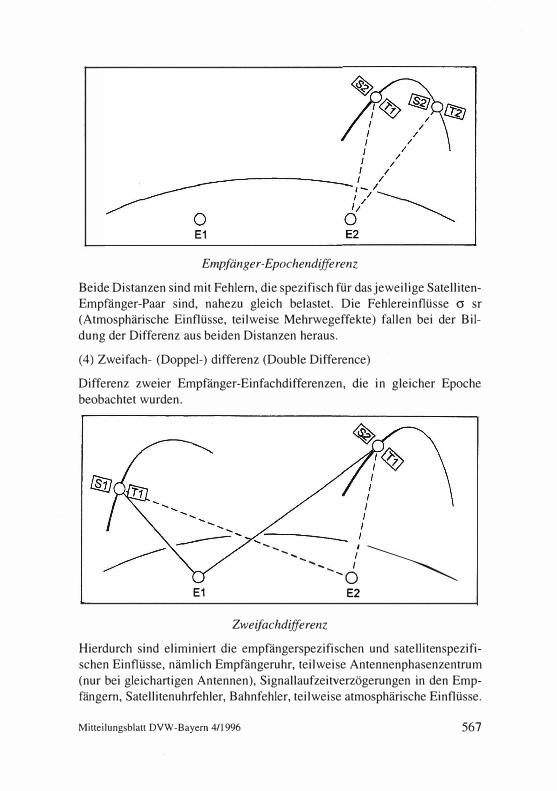
(3) Empfänger-Epochendifferenz
Differenz der Beobachtungen eines Empfängers zu einem Satelliten zu verschiedenen Zeitpunkten.
566 Mitteilungsblatt DVW-Bayern 4/1 996
E1
Empfänger-Epochendifferenz
Beide Distanzen sind mit Fehlern, die spezifisch für das jeweilige SatellitenEmpfänger-Paar sind, nahezu gleich belastet. Die Fehlereinflüsse a sr (Atmosphärische Einflüsse, teilweise Mehrwegeffekte) fallen bei der Bildung der Differenz aus beiden Distanzen heraus.
(4) Zweifach- (Doppel-) differenz (Double Difference)
Differenz zweier Empfänger-Einfachdifferenzen, die in gleicher Epoche beobachtet wurden .
E1
.... ---
.................... � � ........ I ........ 0 E2
Zweifachdifferenz
Hierdurch sind eliminiert die empfängerspezifischen und satellitenspezifischen Einflüsse, nämlich Empfängeruhr, teilweise Antennenphasenzentrum (nur bei gleichartigen Antennen), Signallaufzeitverzögerungen in den Empfängern, Satellitenuhrfehler, Bahnfehler, teilweise atmosphärische Einflüsse.
Mitteilungsblatt DVW-Bayern 4/1 996 567
Die Zweifachdifferenzen sind in der Geodäsie die wichtigsten Auswertegrößen.
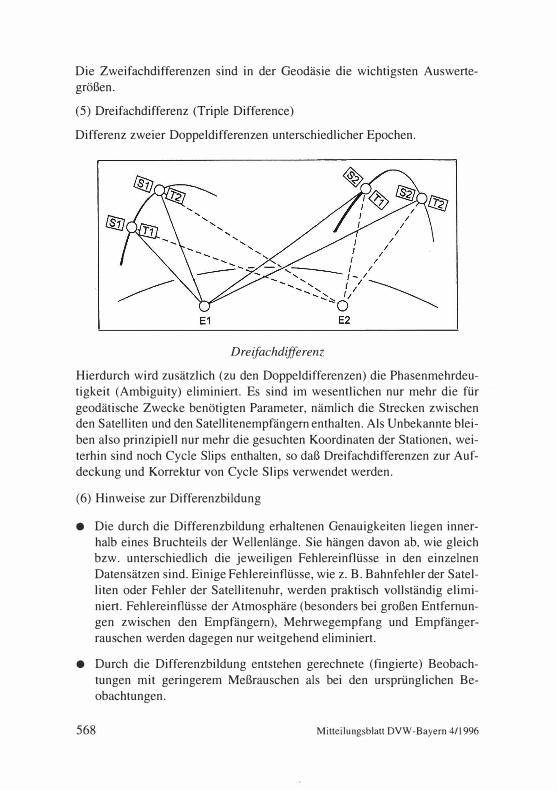
(5) Dreifachdifferenz (Triple Difference)
Differenz zweier Doppeldifferenzen unterschiedlicher Epochen.
Dreifachdifferenz
Hierdurch wird zusätzlich (zu den Doppeldifferenzen) die Phasenmehrdeutigkeit (Ambiguity) eliminiert. Es sind im wesentlichen nur mehr die für geodätische Zwecke benötigten Parameter, nämlich die Strecken zwischen den Satelliten und den Satellitenempfängern enthalten. Als Unbekannte bleiben also prinzipiell nur mehr die gesuchten Koordinaten der Stationen, weiterhin sind noch Cycle Slips enthalten, so daß Dreifachdifferenzen zur Aufdeckung und Korrektur von Cycle Slips verwendet werden.
(6) Hinweise zur Differenzbildung
• Die durch die Differenzbildung erhaltenen Genauigkeiten liegen innerhalb eines Bruchteils der Wellenlänge. Sie hängen davon ab, wie gleich bzw. unterschiedlich die jeweiligen Fehlereinflüsse in den einzelnen Datensätzen sind. Einige Fehlereinflüsse, wie z. B. Bahnfehler der Satelliten oder Fehler der Satellitenuhr, werden praktisch vollständig eliminiert. Fehlereinflüsse der Atmosphäre (besonders bei großen Entfernungen zwischen den Empfängern), Mehrwegempfang und Empfängerrauschen werden dagegen nur weitgehend eliminiert.
• Durch die Differenzbildung entstehen gerechnete (fingierte) Beobachtungen mit geringerem Meßrauschen als bei den ursprünglichen Beobachtungen.
568 Mitteilungsblatt DVW-Bayern 4/1 996
• Jede Differenzbildung eliminiert zwar systematische Effekte, vergrößert jedoch die Standardabweichung der neuen, abgeleiteten »Beobachtungen«.
• Diese gerechneten Beobachtungen werden zur Analyse der Daten vor der eigentlichen Koordinatenberechnung, aber auch zur Koordinatenberechnung selbst verwendet.
• Durch die Differenzbildung entsteht ausgleichungstechnisch bei der Koordinatenberechnung das Problem, daß die gerechneten Beobachtungen nicht mehr unabhängig voneinander sind. Es entstehen korrelierte Beobachtungen, was bei strenger Berücksichtigung zu numerischen Problemen führen kann.
Linearkombination der Phasenmessung
Die GPS- Trägersignale werden mit zwei verschiedenen Frequenzen L1 und L2 ausgestrahlt, damit der Einfluß der Ionosphäre berechnet werden kann. Zusätzlich kann man aber verschiedene Linearkombinationen aus den Trägerfrequenzen bilden und damit besondere Eigenschaften nutzen, um die Phasenmehrdeutigkeit mit kürzeren Beobachtungszeiten zuverlässig bestimmen zu können.
Die Daten der beiden Trägersignale lauten:
L1 - Signal:
Lr Signal:
f1 = 1575,42 MHz
f2 = 1227,60 MHz
1..1 = 19,05 cm
"-2 = 24,45 cm
Zur Bildung der Linearkombination von zwei Phasenmessungen dienen nachstehende Formeln:
Phasenlage:
Frequenz:
Wellenlänge:
<l>n.m = n · <1>1 + m · <1>2
fn.m = n · f + m · f2
f = "-I . "-2 n.m 1 _ � n . "2 + m . A J
Durch passende Wahl von n und m können Signale mit besonderen Eigenschaften gerechnet werden.
Mitteilungsblatt DVW-Bayern 4/1996 569
Von besonderer Bedeutung sind, das
• Wide Lane Signal,
• Narrow Lane Signal und
• Ionosphärenfreie Signal.
Wide Lane Signal LI'> = L1 - L2:
fl'> = I · 1 575,42 + (-I) · I 227,60
19,05 . 24,45
I · 24,45 + (-I) · 19,05
mit n = I und m = -I
= 347,82 MHz
= 86,25 cm
Von Vorteil ist die Wellenlänge AL'>, die etwa viermal so groß als A.1 oder "-2 ist. Damit kann die unbekannte Zahl N von Wellenlängen zwischen Empfänger und Satellitenantenne leichter bestimmt werden. Als Nachteil wirkt sich das etwa um den Faktor 6 verstärkte Meßrauschen gegenüber den originalen Phasenmessungen aus.
Narrow Lane Signal LE = L1 + L2: mit n = I und m = I
fE = I I 575,42 + II 226,60
19,05. 24,45
I ·24,45+ 1·19,05
= 2 803,02 MHz
10,7 cm
Der Vorteil liegt in dem sehr geringen Meßrauschen gegenüber den originären Phasenmessungen. Wegen der geringen Wellenlänge stört das geringe Meßrauschen aber und es ist die Auflösung der Mehrdeutigkeit nur bei sehr kurzen Basislinien (wenige km) möglich.
Ionosphären freies Signal L0 = l (LI'> + LE) mit n = -.!!. = - I ,2833 ... 2 m �
mit n "" 9 wird m ""- 7
f0 = 9 · 1 575,42 + (-7) · 1 227,60 = 5 585,58 MHz
"-o = 19,05 . 24,45
5,4 cm 9. 24,45 + (-7) . 19,05
Hiermit ist der Einfluß der Ionosphäre auf die Beobachtungen weitgehend eliminiert. Als Nachteile gelten, daß das Meßrauschen um den Faktor 3
570 Mitteilungsblatt DVW-Bayern 4/1996
höher liegt und daß die Phasenmehrdeutigkeit keinen ganzzahligen Wert mehr darstellt, da m und n auch keine ganzen Zahlen sind.
Bestimmung der Phasenmehrdeutigkeit (Ambigui ty)
In den Trägerphasenmessungen geht für die Entfernungsmessung die zunächst unbekannte ganze Zahl N von Wellenzügen zwischen Empfängerund Satellitenantenne ein. Sie bleibt aber über die gesamte Beobachtungsdauer gleich, so lange kein Cycle Slip entsteht. Ihr wichtigstes Merkmal ist die Ganzzahligkeit. Falls sie bestimmt ist, kann mit sehr kurzen Beobachtungszeiten die hohe Genauigkeit von GPS voll genutzt werden. Für ihre Bestimmung gibt es mehrere Verfahren. Exemplarisch soll hier nur ein modernes Verfahren mit Suchalgorithmen, sehr vereinfachend, dargestellt werden.
Lösung mit Suchalgorithmen
Die Suchalgorithmen zur Lösung der Ambiguity werden bei kurzen Beobachtungszeiten und kurzen Basislinien verwendet. Hier wird die Kenntnis der ganzen Zahl der Mehrdeutigkeit genutzt und gelangt dadurch sehr schnell zu Lösungen. Man berechnet zunächst eine Näherungslösung einschließlich einer Genauigkeitsabschätzung. In diesem Lösungsraum muß die korrekte Lösung liegen.
Zum einfacheren Verständnis wird das Grundprinzip der Methode nur im zweidimensionalen Raum (Ebene) erläutert unter Vernachlässigung aller systematischen Fehleranteile (Empfängeruhr, Satellitenuhr, Atmosphäre usw.). Der geometrische Ort des Empfängers sind konzentrische Kugeln um den Satelliten als Mittelpunkt mit dem Abstand der Wellenlänge der Trägersignale bzw. deren Linearkombinationen (z. B. A 1= 19,0 cm bei L1 , A2 = 24,4 cm bei L2, At:-. = 86,2 cm bei Lt:-., AL = 10,7 cm bei LL). Der Radius der innersten Kugel ist dabei (N · A + Phasenreststück). Im zweidimensionalen Raum werden die Kugelschalen zu konzentrischen Kreisen und in der Nähe des Empfängers, wegen der großen Entfernung zum Satelliten, zu parallelen Geraden.
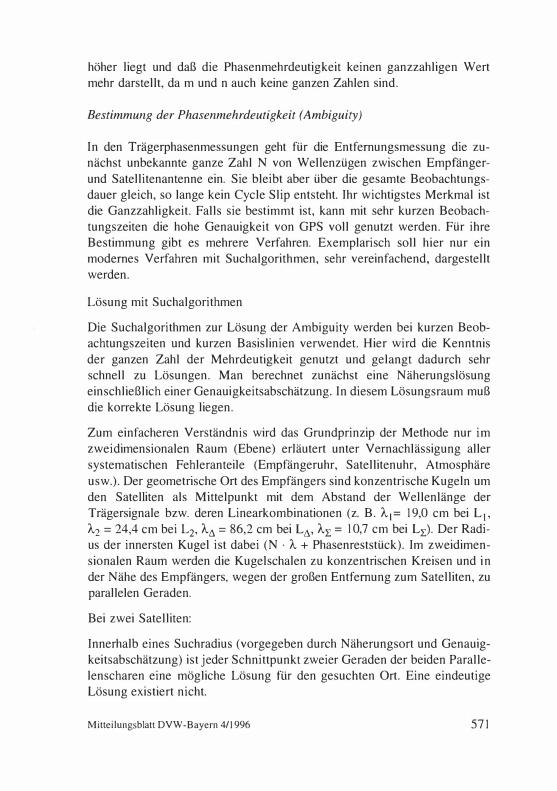
Bei zwei Satelliten:
Innerhalb eines Suchradius (vorgegeben durch Näherungsort und Genauigkeitsabschätzung) ist jeder Schnittpunkt zwei er Geraden der beiden Parallelenscharen eine mögliche Lösung für den gesuchten Ort. Eine eindeutige Lösung existiert nicht.
Mitteilungsblatt DVW-Bayern 4/1 996 57 1
572
Wellenfront Satellit 1
I I
t Suchradius ..",.. r- ..... r-.... )' "
I \ :! I ' !2. CD :::J
.-. [ fn
l 111 I � \ I ;::;: �
"'� V ........ - -..",...
Mehrdeutigkeits-5uchmethode (2 Satelliten)
Wellenfront Satellit 1 ·�� t
(;;)�� / / � V / / �
� ... 0� � A.-r / -, ��0� / �V / V /� /- j V / V / /'
VI / / V / / / / / V1v / V / / / / / \;' V / / / \/ / V / V
X / V // � / � .....L /-/ / 7 /
V � f'\ / CD v :::J
v -. [ -fn
1 111 � '/ ;::;: �
Mehrdeutigkeits-Suchmethode (3 Satelliten)
Mitteilungsblatt DVW-Bayern 41 1 996
Mehrdeutigkeits-Suchmethode ( 4 Satelliten)
Mehrdeutigkeits-Suchmethode (5 Satelliten)
Mitteilungsblatt DVW-Bayern 4/1 996 573
Bei drei Satelliten:
Wird ein dritter Satellit zusätzlich beobachtet, können viele der ursprünglich möglichen Lösungen ausgeschlossen werden, da der Widerspruch in der dritten Phasenbeobachtung zu groß wird. Die übrig bleibenden möglichen Lösungen (Schnittpunkte) werden durch Berechnung statistischer Kenngrößen, wie z. B. die Wurzel aus der Verbesserungsquadratsumme der Beobachtungen (RMS) untersucht.
Im dargestellten Beispiel unterscheiden sich die möglichen Lösungen (mit Kreis versehen) nur geringfügig von der korrekten Lösung, so daß eine sichere Entscheidung noch nicht zu treffen ist.
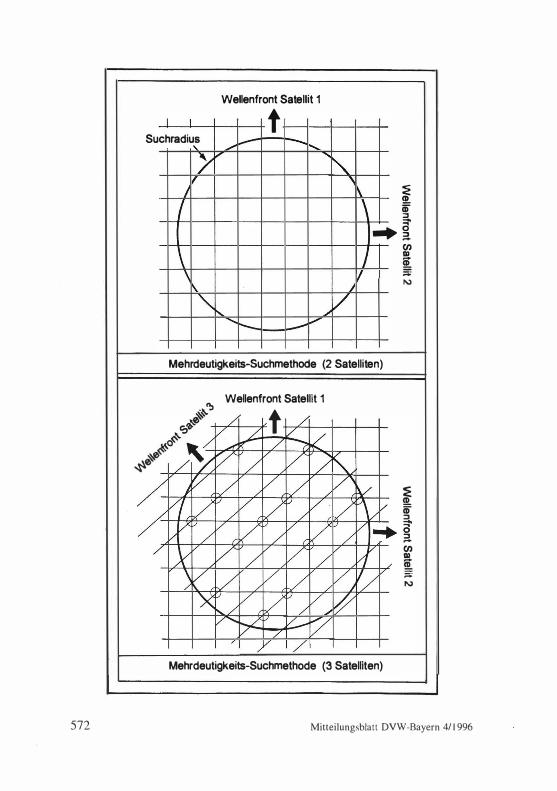
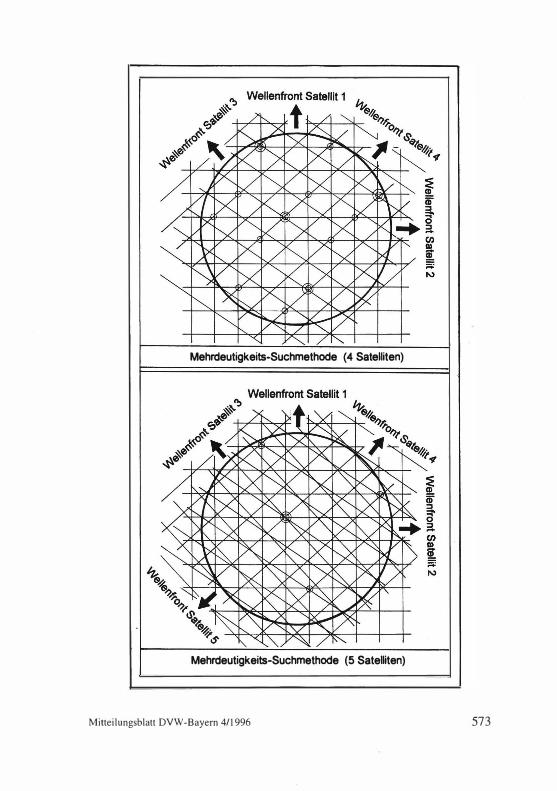
Bei vier Satelliten:
Die Hinzunahme eines vierten Satelliten verwirft alle oder viele der bisher betrachteten eventuellen Lösungen, außer der korrekten Lösung. Im Beispiel verbleiben vier Altemativlösungen.
Es gibt jetzt zwei Möglichkeiten:
• entweder wird diejenige Lösung mit den minimalen RMS akzeptiert, oder
• die richtige Lösung kann noch nicht bestimmt werden; es sind noch zusätzliche Beobachtungen (fünfter Satellit) erforderlich.
Um diese Entscheidung treffen zu können, sind statistische Tests mit geeigneten Grenzwerten erforderlich.
Literatur:
Bauer, M. ( 1994): Vermessung und Ortung mit Satelliten, 3. Auflage, Wichmann Verlag.
Bichtemann, G. Hankemeier, P. ( /993): DGPS- Dienste in Norddeutschland; SPN 1 / 1993.
Heister, H. ( 1993):
574
Einführung in die Positionsbestimmung mit dem Global Positioning System (GPS),
In: Das Globale Positioning System im praktischen Einsatz der Landes- und Ingenieur
vermessung; Schriftenreihe Studiengang Vermessungswesen Universität der Bundes
wehr München, Heft 45.
Mitteilungsblatt DVW-Bayern 4/1 996
Hofmann - Wellenhof Kienast, Lichtenegger (1994): GPS in der Praxis, Springer- Verlag, Wien.
Ludwig, 0. ( 1993): Aspekte bei der GPS- Auswertung.
In: Aktuelle GPS-Messungen, VDV- Schriftenreihe Band 6.
Müller, A. ( 1993): Global Positioning System.
In: GPS eine universelle geodätische Methode, Schriftenreihe des DVW Band II, Ver
lag Konrad Wittwer.
Nagel, E. ( 1989): Das Globale Positionierungssystem (GPS) und sein Einsatz im Vermessungswesen.
Mitteilungsblatt des DVW Landesverein Bayern, 111989.
Seeber, G. (1989): Satellitengeodäsie, Walter de Gruyter, Berlin.
Seeber, G. ( 1992): Konzepte und Einsatzmöglichkeiten für die kinematische Nutzung von GPS.
In: Anwendungen des Global Positioning Systems, Schriftenreihe des DVW Band 2, Verlag Konrad Wittwer.
Seeber, G. ( 1996): Grundprinzipien zur Vermessung mit GPS, Der Vermessungsingenieur, 2/1996.
Scherrer, R., Fricker, P. ( 1987): GPS- Das Vermessungs-System der Zukunft, Firmenschrift Wild Heerbrugg.
Stober, M. ( 1994): Grundlagen von GPS.
In: Einstieg in die GPS- Praxis, Tagungsband 26 der Veröffentlichungen der Fach
hochschule für Technik Stuttgart.
Schrödter, F. (1994): GPS- Navigation, Franzis- Verlag, Poing.
Vogel, M. ( 1995): Auswertung von GPS- Beobachtungen.
In: GPS- Leistungsbilanz ' 94, Schriftenreihe des DVW Band 18 , Verlag Konrad Witt
wer.
Wübbena, G. (1993): Verfahren des GPS- Positionsbestimmung: Beobachtungs- und Auswertetechniken.
In: GPS eine universelle geodätische Methode, Schriftenreihe des DVW Band 1 1 , Ver
lag Konrad Wittwer.
Mitteilungsblatt DVW-Bayern 4/1996 575