Projektierung einer Kontinuierlichen Regelung mit ... · Applikationen & Tools Answers for...
25
Applikationen & Tools Answers for industry. Deckblatt Projektierung einer Kontinuierlichen Regelung mit Pulsbreiten- Modulation SIMATIC PCS 7 Applikationsbeschreibung y August 2010
Transcript of Projektierung einer Kontinuierlichen Regelung mit ... · Applikationen & Tools Answers for...
Applikationen & Tools
Answers for industry.
Deckblatt
Projektierung einer Kontinuierlichen Regelung mit Pulsbreiten-Modulation
SIMATIC PCS 7
Applikationsbeschreibung August 2010

2 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Industry Automation und Drives Technologies Service & Support Portal Dieser Beitrag stammt aus dem Internet Serviceportal der Siemens AG, Industry Automation und Drives Technologies. Durch den folgenden Link gelangen Sie direkt zur Downloadseite dieses Dokuments. http://support.automation.siemens.com/WW/view/de/44364150 Bei Fragen zu diesem Beitrag wenden Sie sich bitte über folgende E-Mail-Adresse an uns: [email protected]
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 3
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
s
SIMATIC PCS 7 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Einführung 1
Projektierung 2
Simulationsbeispiel 3
Fazit 4
Literaturhinweis 5
Historie 6

Gewährleistung und Haftung
4 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Gewährleistung und Haftung
Hinweis Die Applikationsbeispiele sind unverbindlich und erheben keinen Anspruch auf Vollständigkeit hinsichtlich Konfiguration und Ausstattung sowie jeglicher Eventualitäten. Die Applikationsbeispiele stellen keine kundenspezifischen Lösungen dar, sondern sollen lediglich Hilfestellung bieten bei typischen Auf-gabenstellungen. Sie sind für den sachgemäßen Betrieb der beschriebenen Produkte selbst verantwortlich. Diese Applikationsbeispiele entheben Sie nicht der Verpflichtung zu sicherem Umgang bei Anwendung, Installation, Betrieb und Wartung. Durch Nutzung dieser Applikationsbeispiele erkennen Sie an, dass wir über die beschriebene Haftungsregelung hinaus nicht für etwaige Schäden haftbar gemacht werden können. Wir behalten uns das Recht vor, Änderungen an diesen Applikationsbeispielen jederzeit ohne Ankündigung durchzuführen. Bei Abweichungen zwischen den Vorschlägen in diesem Applikationsbeispiel und anderen Siemens Publikationen, wie z.B. Katalogen, hat der Inhalt der anderen Dokumentation Vorrang.
Für die in diesem Dokument enthaltenen Informationen übernehmen wir keine Gewähr. Unsere Haftung, gleich aus welchem Rechtsgrund, für durch die Verwendung der in diesem Applikationsbeispiel beschriebenen Beispiele, Hinweise, Programme, Projektierungs- und Leistungsdaten usw. verursachte Schäden ist ausgeschlossen, soweit nicht z.B. nach dem Produkthaftungsgesetz in Fällen des Vorsatzes, der groben Fahrlässigkeit, wegen der Verletzung des Lebens, des Körpers oder der Gesundheit, wegen einer Übernahme der Garantie für die Beschaffenheit einer Sache, wegen des arglistigen Verschweigens eines Mangels oder wegen Verletzung wesentlicher Vertragspflichten zwingend gehaftet wird. Der Schadensersatz wegen Verletzung wesentlicher Vertragspflichten ist jedoch auf den vertragstypischen, vorhersehbaren Schaden begrenzt, soweit nicht Vorsatz oder grobe Fahrlässigkeit vorliegt oder wegen der Verletzung des Lebens, des Körpers oder der Gesundheit zwingend gehaftet wird. Eine Änderung der Beweislast zu Ihrem Nachteil ist hiermit nicht verbunden. Weitergabe oder Vervielfältigung dieser Applikationsbeispiele oder Auszüge daraus sind nicht gestattet, soweit nicht ausdrücklich von Siemens Industry Sector zugestanden.

Vorwort
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 5
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Vorwort Ziel der Applikation
Eine kontinuierliche Regelung mit Pulsbreiten-Modulation ist aus einem herkömmlichen PID-Regler und einer nachfolgenden Pulsformerstufe aufgebaut. Die Pulsformerstufe wandelt die analoge Stellgröße des Reglers in eine Folge digitaler Impulse um, deren Impulslänge (bzw. deren Puls/Pause-Verhältnis) äquivalent zur analogen Stellgröße ist. Die Regelung dient zur Ansteuerung schaltender Stellglieder (z.B. Heizung ein/aus oder Ventil auf/zu). Dieser Anwendungsfall ist zu unterscheiden von einer Schrittregelung. Ein Schrittregler dient zur Ansteuerung integral wirkender Stellglieder (z.B. motorgetriebener Ventile) mit binären Ausgangssignalen auffahren / stopp / zufahren. Während es einen Funktionsbaustein PIDStepL bzw. CTRL_S für Schrittregler in der Advanced Process Library bzw. in der PCS 7 Standard-Library gibt, ist eine Pulsformerstufe in den PCS 7-Bibliotheken nicht bekannt. Der Funktionsbaustein PULSEGEN findet sich nur in der CFC-Library ELEM_400. Das vorliegende Projektierungsbeispiel zeigt die Anwendung der kontinuierlichen Regelung mit Pulsbreiten-Modulation auf einen simulierten Prozess. Ziel der Applikation ist, die Aspekte bei der Projektierung von kontinuierlichen Regelungen mit Pulsbreiten-Modulation aufzuzeigen, auf die es in der Praxis besonders ankommt, damit die Struktur eine vorteilhafte Dynamik entwickelt, und sich in allen Betriebsarten korrekt verhält.
Kerninhalte dieser Applikation Folgende Kernpunkte werden in dieser Applikation behandelt: • Zusammenwirken von kontinuierlichem Regler und Pulsbreiten-Modulation
hinsichtlich Einstellungen und Wahl der Abtastzeiten. • Zusammenwirken von kontinuierlichem Regler und Pulsbreiten-Modulation
hinsichtlich Betriebsarten-Umschaltungen. • Simulations-Beispiel
Gültigkeit … gültig für PCS 7 V7.1, prinzipiell übertragbar auf V7.0 ab SP1.
Inhaltsverzeichnis
6 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Inhaltsverzeichnis Gewährleistung und Haftung...................................................................................... 4 Vorwort.......................................................................................................................... 5 1 Einführung.......................................................................................................... 7
1.1 Grundlagen zur Regelung mit Pulsbreiten-Modulation ........................ 7 1.2 Abtastzeiten, Impulsdauer und Reglergenauigkeit .............................. 9 1.3 Anwendungsbeispiele .......................................................................... 9 1.3.1 Zweipunktreglung mit unipolarem Stellbereich (0% ... +100%) ........... 9 1.3.2 Dreipunktregelung mit zwei binären Stellgliedern.............................. 10 1.3.3 Zweipunktreglung mit bipolarem Stellbereich (-100% ... +100%) ...... 10
2 Projektierung.................................................................................................... 11 2.1 Instanzbildung der Messstelle............................................................ 11 2.2 Pulsbreiten-Modulations-Baustein einbauen ..................................... 12 2.3 Simulation für Regler mit Pulsbreitenmodulation ............................... 16 2.4 Zweipunkt oder Dreipunktregelung .................................................... 16 2.5 Synchronisierung von Regler und Pulsformerstufe............................ 16 2.6 Parametrierung und Reglereinstellung............................................... 17 2.7 Regelkreisüberwachung (Control Performance Monitoring) .............. 18
3 Simulationsbeispiel ......................................................................................... 20 4 Fazit................................................................................................................... 23 5 Literaturhinweis ............................................................................................... 24 6 Historie.............................................................................................................. 25
1 Einführung1.1 Grundlagen zur Regelung mit Pulsbreiten-Modulation
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 7
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
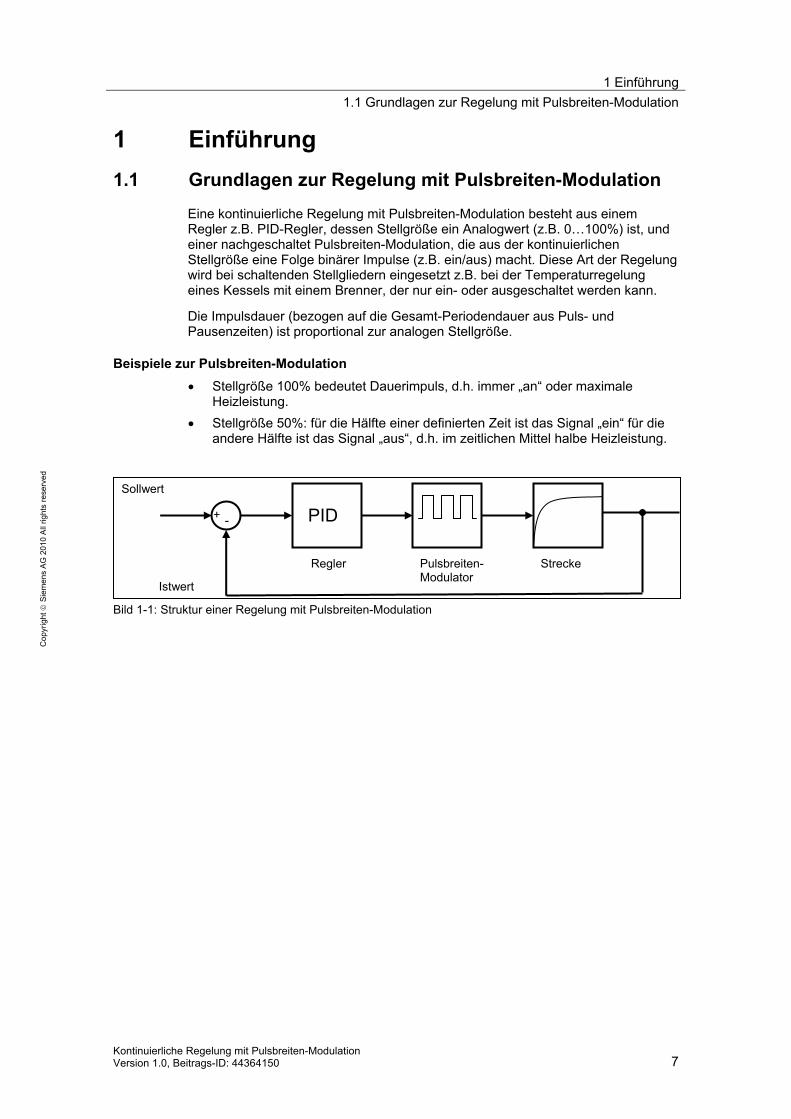
1 Einführung 1.1 Grundlagen zur Regelung mit Pulsbreiten-Modulation
Eine kontinuierliche Regelung mit Pulsbreiten-Modulation besteht aus einem Regler z.B. PID-Regler, dessen Stellgröße ein Analogwert (z.B. 0…100%) ist, und einer nachgeschaltet Pulsbreiten-Modulation, die aus der kontinuierlichen Stellgröße eine Folge binärer Impulse (z.B. ein/aus) macht. Diese Art der Regelung wird bei schaltenden Stellgliedern eingesetzt z.B. bei der Temperaturregelung eines Kessels mit einem Brenner, der nur ein- oder ausgeschaltet werden kann.
Die Impulsdauer (bezogen auf die Gesamt-Periodendauer aus Puls- und Pausenzeiten) ist proportional zur analogen Stellgröße.
Beispiele zur Pulsbreiten-Modulation • Stellgröße 100% bedeutet Dauerimpuls, d.h. immer „an“ oder maximale
Heizleistung. • Stellgröße 50%: für die Hälfte einer definierten Zeit ist das Signal „ein“ für die
andere Hälfte ist das Signal „aus“, d.h. im zeitlichen Mittel halbe Heizleistung.
Bild 1-1: Struktur einer Regelung mit Pulsbreiten-Modulation
PID
Regler Pulsbreiten-Modulator
Strecke
Sollwert
Istwert
+ -
1 Einführung 1.1 Grundlagen zur Regelung mit Pulsbreiten-Modulation
8 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
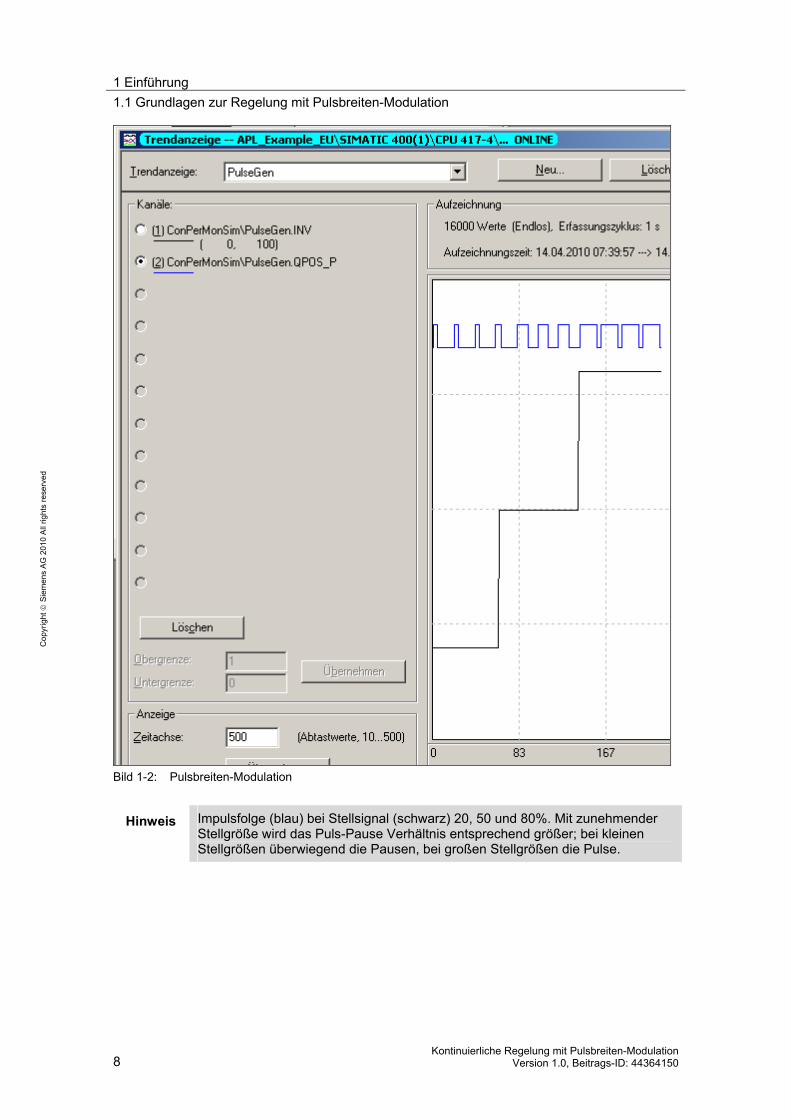
Bild 1-2: Pulsbreiten-Modulation
Hinweis Impulsfolge (blau) bei Stellsignal (schwarz) 20, 50 und 80%. Mit zunehmender Stellgröße wird das Puls-Pause Verhältnis entsprechend größer; bei kleinen Stellgrößen überwiegend die Pausen, bei großen Stellgrößen die Pulse.
1 Einführung1.2 Abtastzeiten, Impulsdauer und Reglergenauigkeit
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 9
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
1.2 Abtastzeiten, Impulsdauer und Reglergenauigkeit
Der Regler berechnet in jedem Abtastschritt eine geeignete Stellgröße. Diese Stellgröße wird vom Pulsbreiten-Modulator in einen Impuls mit bestimmter, zur aktuellen Stellgröße passenden, Dauer umgewandelt. Es ist daher sinnvoll erst dann wieder eine neue Stellgröße zu berechnen, wenn die Zeit der maximalen Impulslänge (Puls-Periodendauer) verstrichen ist. Um eine gute Auflösung der Impulsdauer (im Sinne der Amplituden-Quantisierung) zu erreichen muss die Abtastzeit des Pulsbreiten-Modulators sehr viel kleiner als die des Reglers sein.
Beispiel Die Abtastzeit des Reglers sei mit 5s festgelegt. Die maximale Impulslänge (Puls-Periodendauer) ist somit 5s. Wenn der Pulsbreiten-Modulator mit einen Abtastzeit von 0,5s betrieben wird kann die Impulslänge im Raster von 0,5s bestimmt werden, also in 10% Schritten der Stellgröße. Wird der Pulsbreiten-Modulator im 0,1s Zyklus aufgerufen, erhält man eine Rasterung in 2% Schritten.
Diese Amplituden-Quantisierung („Rasterung“) der Stellgröße hat auch Auswirkung auf die Genauigkeit der Regelung. Es können nur Istwerte stationär genau erreicht werden, die in das Stellgrößen-Raster multipliziert mit der Streckenverstärkung fallen. Im obigen Beispiel wäre das bei einer Streckenverstärkung von 5°C/% eine Schrittweite von:
2% * 5°C/%=10°C.
Sollwerte, die nicht in dieses Raster fallen, können nicht präzise erreicht werden, und es entsteht eine Dauerschwingung des Istwerts um den Sollwert. Bei geringen Anforderungen an die Genauigkeit der Regelung kann die Schwingung durch eine Totzone um den Sollwert verhindert werden. Allerdings muss die Totzone so groß sein, dass der Istwert innerhalb der Totzone einen Wert seiner Rasterschritte annehmen kann. Im Beispiel wäre also eine Totzone von ±5°C notwendig. Bei kleineren Totzonen entsteht einen Dauerschwingung um den Rand der Totzone.
1.3 Anwendungsbeispiele
Es können verschiedenen Klassen von Anwendungsbeispielen unterschieden werden, in Abhängigkeit der Wirkungsrichtung des Stellgliedes bzw. der Stellglieder.
1.3.1 Zweipunktreglung mit unipolarem Stellbereich (0% ... +100%)
• Temperaturregelung mit Gasbrennern an/aus • Temperaturregelung mit elektrischer Heizung an/aus (über Schütz oder
Halbleiter-Relais) • Durchflussregelung mit Schaltventil auf/zu oder Pumpe an/aus Generell findet man binäre Stellglieder wie elektrische Heizungen oder Schaltventile eher bei kleineren Anlagen z.B. im Laborbereich, in der Bioverfahrenstechnik (Fermenter) oder in der Pharmaindustrie. Bei größeren Rohrdurchmessern sind Schaltventile dagegen unüblich, und größere Apparate (Reaktoren oder Kolonnen) werden eher mit Dampf als mit Strom beheizt.
1 Einführung 1.3 Anwendungsbeispiele
10 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
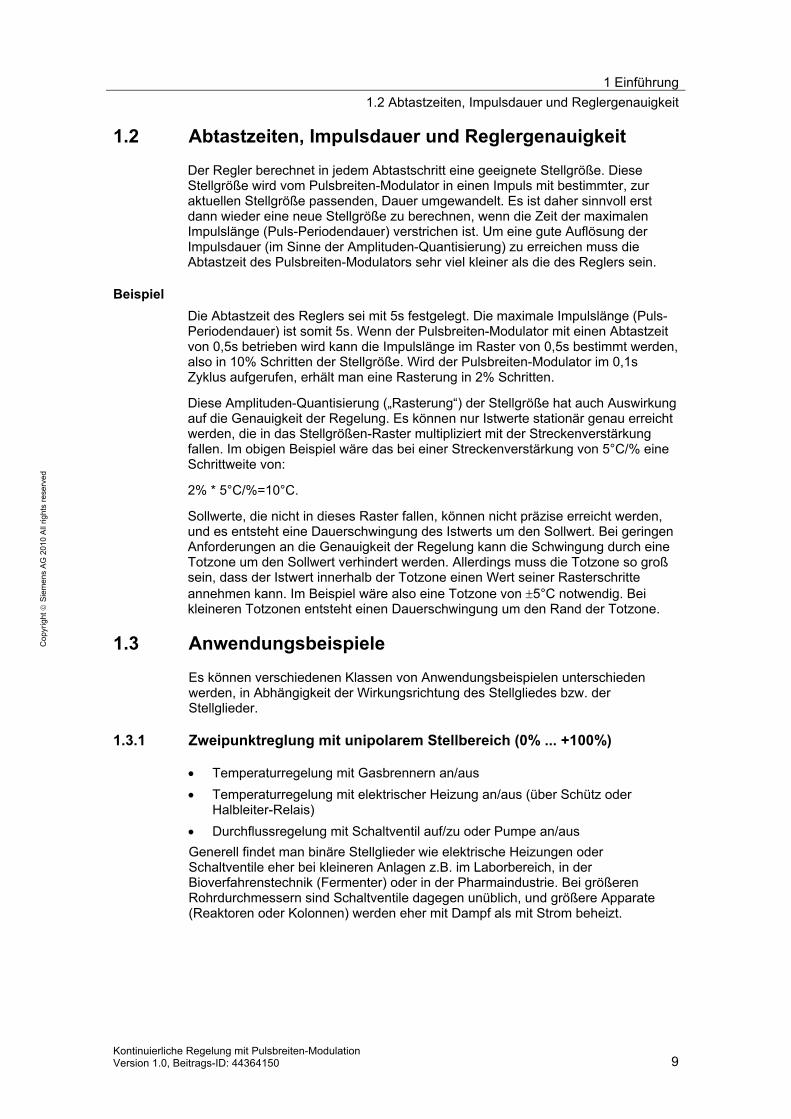
1.3.2 Dreipunktregelung mit zwei binären Stellgliedern
• Temperaturregelung mit Heizung (z.B. elektrische Heizung an/aus) und Kühlung (z.B. Schaltventil im Kühlwasser-Zulauf auf/zu, oder Kühlgebläse an/aus)
• pH-Wert-Regelung mit zwei Schaltventilen auf/zu für die Zudosierung von Säure oder Lauge
• Druckregelung mit zwei Schaltventilen auf/zu für Zufuhr von Gas (z.B. Beaufschlagung mit Inerten) oder die Entlüftung des Apparates
In diesen Fällen erfüllt die Pulsformerstufe auch die Aufgabe eines Split-Range-Gliedes, das die Stellgröße eines Reglers auf zwei Stellglieder mit entgegen gesetzter Wirkungsrichtung verteilt.
Bild 1-3: PCS 7 Automatisierung eines Fermenters für rekombinante Proteine zur Produktion von
Impfstoffen.
Hinweis Sowohl die pH-Wert-Regelung QIC300 als auch die Temperatur-Regelung TIC500 arbeiten als Dreipunktregelung mit Pulsbreiten-Modulation
1.3.3 Zweipunktreglung mit bipolarem Stellbereich (-100% ... +100%)
Diese Konfiguration macht nur Sinn, wenn es ein binäres Stellglied gibt, dass bei Ausgangssignal TRUE in die eine, und bei Ausgangssignal FALSE in die andere Richtung physikalisch wirkt. Das bedeutet, dass der Regler keine Möglichkeit hat, die Stellgröße null auszugeben. Obwohl der Funktionsbaustein PULSEGEN diese Möglichkeit vorsieht, wird sie in der Praxis selten verwendet.
2 Projektierung2.1 Instanzbildung der Messstelle
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 11
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
2 Projektierung Falls Sie eine kontinuierliche Regelung mit Pulsbreiten-Modulation neu im Projekt anlegen, ist grundsätzlich die Verwendung eines Messstellentyps mit kontinuierlichem Regler z.B. “PIDConL_ConPerMon" aus der Advanced Process Library (APL) zu empfehlen.
2.1 Instanzbildung der Messstelle
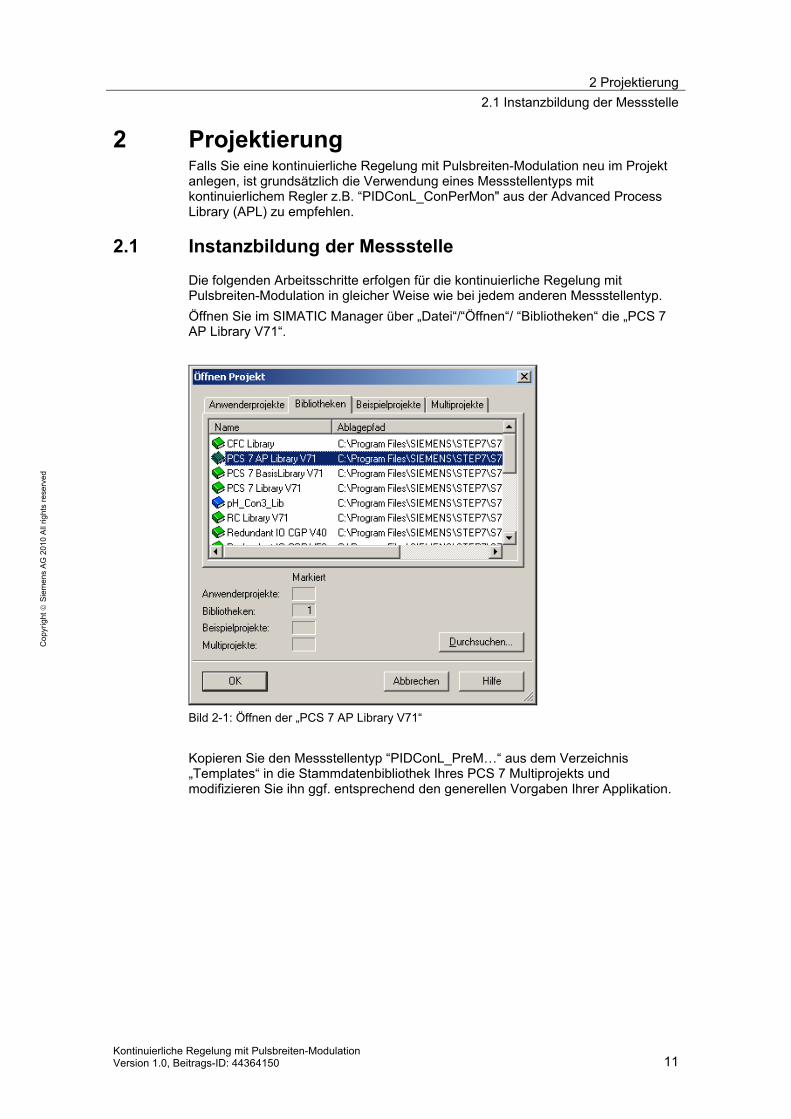
Die folgenden Arbeitsschritte erfolgen für die kontinuierliche Regelung mit Pulsbreiten-Modulation in gleicher Weise wie bei jedem anderen Messstellentyp. Öffnen Sie im SIMATIC Manager über „Datei“/“Öffnen“/ “Bibliotheken“ die „PCS 7 AP Library V71“.
Bild 2-1: Öffnen der „PCS 7 AP Library V71“
Kopieren Sie den Messstellentyp “PIDConL_PreM…“ aus dem Verzeichnis „Templates“ in die Stammdatenbibliothek Ihres PCS 7 Multiprojekts und modifizieren Sie ihn ggf. entsprechend den generellen Vorgaben Ihrer Applikation.
2 Projektierung 2.2 Pulsbreiten-Modulations-Baustein einbauen
12 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
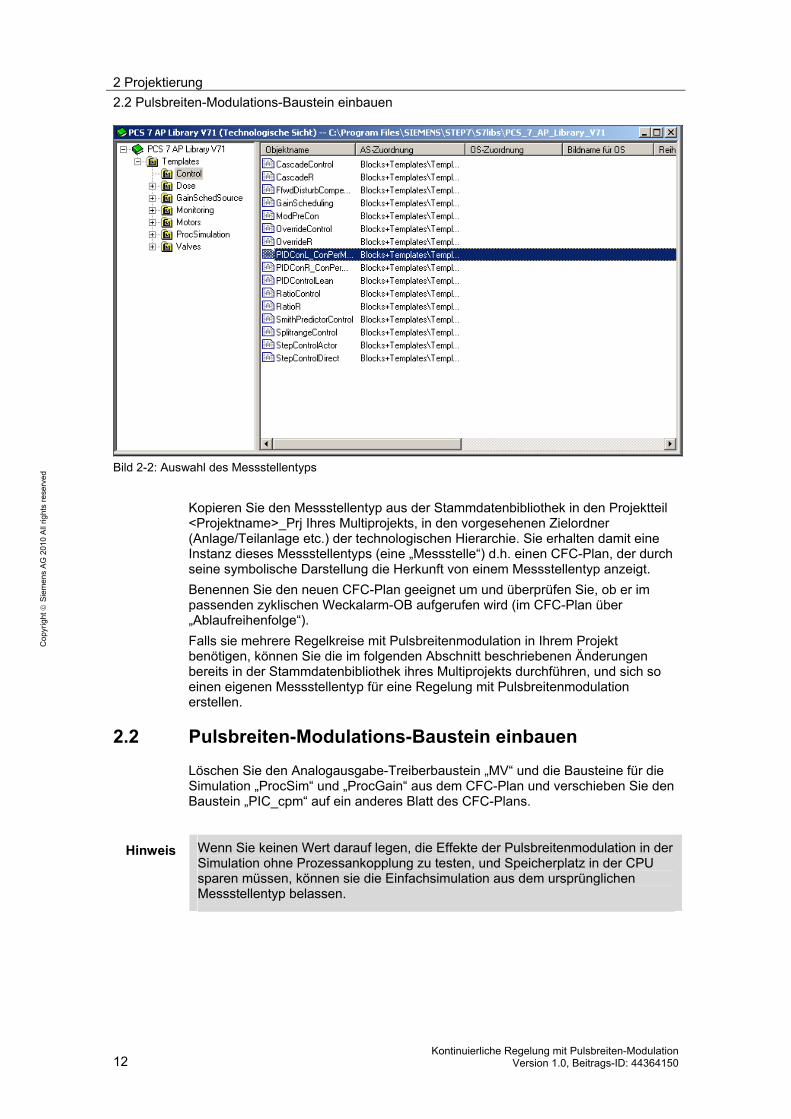
Bild 2-2: Auswahl des Messstellentyps
Kopieren Sie den Messstellentyp aus der Stammdatenbibliothek in den Projektteil <Projektname>_Prj Ihres Multiprojekts, in den vorgesehenen Zielordner (Anlage/Teilanlage etc.) der technologischen Hierarchie. Sie erhalten damit eine Instanz dieses Messstellentyps (eine „Messstelle“) d.h. einen CFC-Plan, der durch seine symbolische Darstellung die Herkunft von einem Messstellentyp anzeigt. Benennen Sie den neuen CFC-Plan geeignet um und überprüfen Sie, ob er im passenden zyklischen Weckalarm-OB aufgerufen wird (im CFC-Plan über „Ablaufreihenfolge“). Falls sie mehrere Regelkreise mit Pulsbreitenmodulation in Ihrem Projekt benötigen, können Sie die im folgenden Abschnitt beschriebenen Änderungen bereits in der Stammdatenbibliothek ihres Multiprojekts durchführen, und sich so einen eigenen Messstellentyp für eine Regelung mit Pulsbreitenmodulation erstellen.
2.2 Pulsbreiten-Modulations-Baustein einbauen
Löschen Sie den Analogausgabe-Treiberbaustein „MV“ und die Bausteine für die Simulation „ProcSim“ und „ProcGain“ aus dem CFC-Plan und verschieben Sie den Baustein „PIC_cpm“ auf ein anderes Blatt des CFC-Plans.
Hinweis Wenn Sie keinen Wert darauf legen, die Effekte der Pulsbreitenmodulation in der Simulation ohne Prozessankopplung zu testen, und Speicherplatz in der CPU sparen müssen, können sie die Einfachsimulation aus dem ursprünglichen Messstellentyp belassen.
2 Projektierung2.2 Pulsbreiten-Modulations-Baustein einbauen
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 13
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
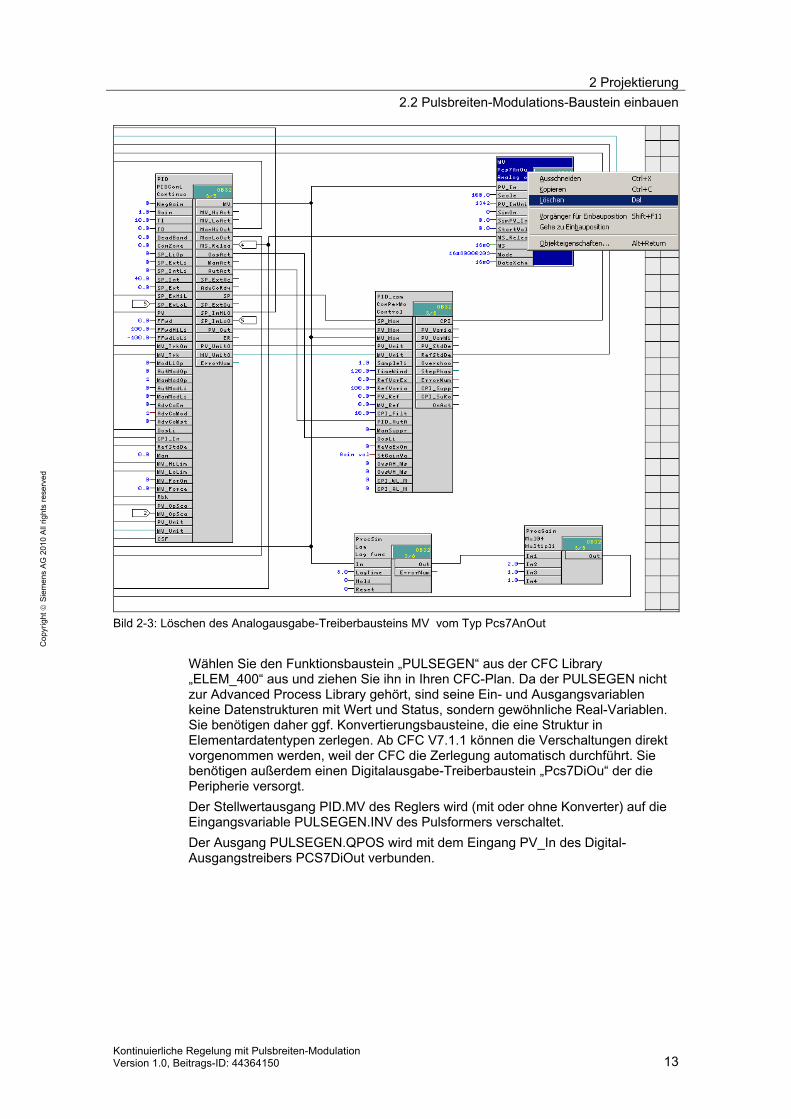
Bild 2-3: Löschen des Analogausgabe-Treiberbausteins MV vom Typ Pcs7AnOut
Wählen Sie den Funktionsbaustein „PULSEGEN“ aus der CFC Library „ELEM_400“ aus und ziehen Sie ihn in Ihren CFC-Plan. Da der PULSEGEN nicht zur Advanced Process Library gehört, sind seine Ein- und Ausgangsvariablen keine Datenstrukturen mit Wert und Status, sondern gewöhnliche Real-Variablen. Sie benötigen daher ggf. Konvertierungsbausteine, die eine Struktur in Elementardatentypen zerlegen. Ab CFC V7.1.1 können die Verschaltungen direkt vorgenommen werden, weil der CFC die Zerlegung automatisch durchführt. Sie benötigen außerdem einen Digitalausgabe-Treiberbaustein „Pcs7DiOu“ der die Peripherie versorgt. Der Stellwertausgang PID.MV des Reglers wird (mit oder ohne Konverter) auf die Eingangsvariable PULSEGEN.INV des Pulsformers verschaltet. Der Ausgang PULSEGEN.QPOS wird mit dem Eingang PV_In des Digital-Ausgangstreibers PCS7DiOut verbunden.
2 Projektierung 2.2 Pulsbreiten-Modulations-Baustein einbauen
14 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
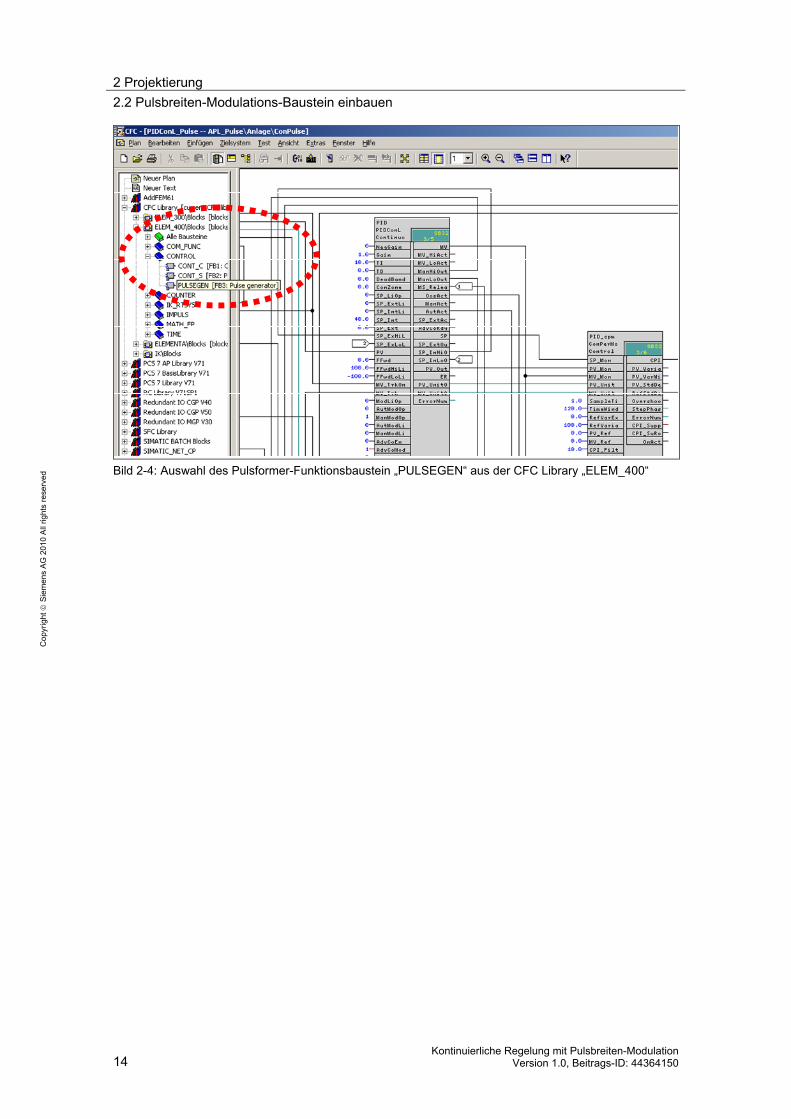
Bild 2-4: Auswahl des Pulsformer-Funktionsbaustein „PULSEGEN“ aus der CFC Library „ELEM_400“
2 Projektierung2.2 Pulsbreiten-Modulations-Baustein einbauen
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 15
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
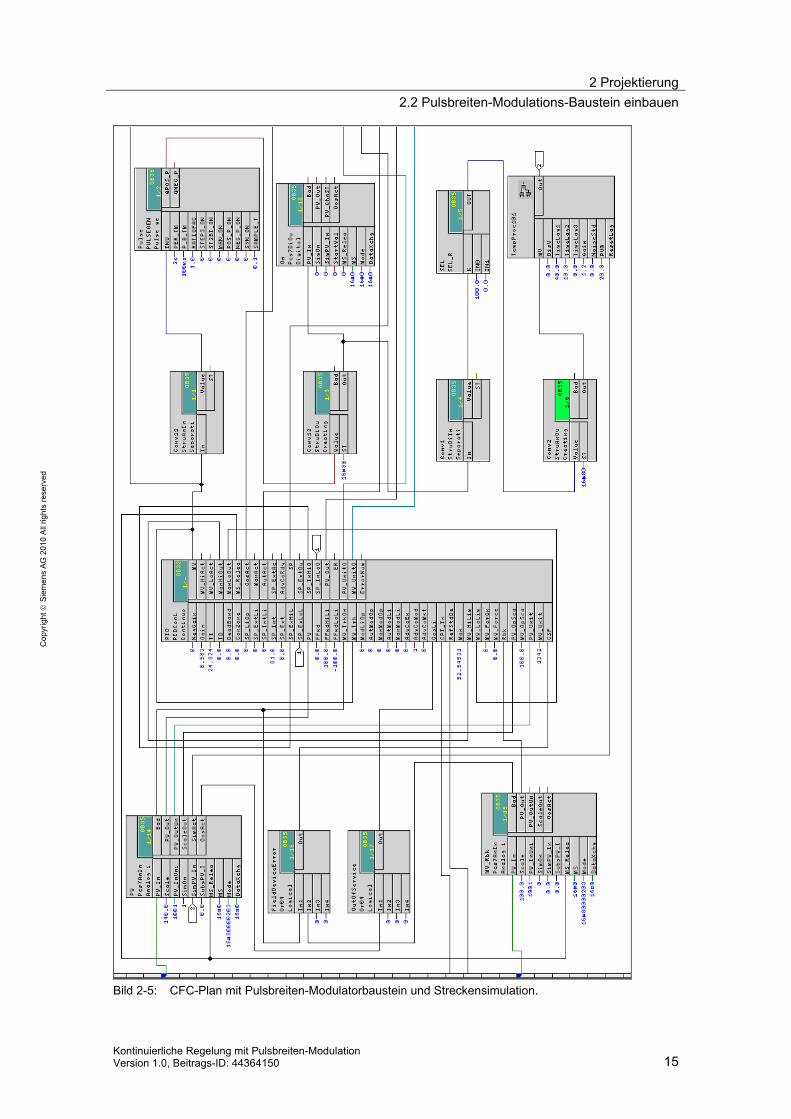
Bild 2-5: CFC-Plan mit Pulsbreiten-Modulatorbaustein und Streckensimulation.
2 Projektierung 2.3 Simulation für Regler mit Pulsbreitenmodulation
16 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Hinweis Im Plan sind die unterschiedlichen Zyklen zu sehen, in die die Bausteine eingebaut sind (OB32, OB35), siehe Abschnitt 2.6.
2.3 Simulation für Regler mit Pulsbreitenmodulation
Als Simulationsumgebung zum Test der Pulsbreitenmodulation kann eine Kopie des Temperaturstreckenmodells der Kaskadenregelung verwendet werden. Der Ausgang QPOS des Bausteins PULSEGEN wird mit dem Eingang K des Schalterbausteins SEL verbunden. Immer wenn QPOS =1 ist wird der Wert 100 ("volle Heizleistung") auf den Eingang MV des Streckenmodels (TempProc101) geschaltet. Für QPOS = 0 ist der Eingang MV gleich 0. Durch die Trägheit der Temperaturregelstrecke wird eine Regelgröße erreicht, die zum zeitlichen Mittelwert der Impulse korrespondiert. Der Ausgang Out des Streckenmodels wird mit dem Simulationseingang SimPV_In des Treiberbausteins Pcs7AnIn für die Regelgröße verschaltet.
2.4 Zweipunkt oder Dreipunktregelung
Je nach Parametrierung des Impulsformers können PID-Regler mit Dreipunktverhalten oder mit bipolarem beziehungsweise unipolarem Zweipunktausgang konfiguriert werden, vgl. Anwendungsbeispiele in Abschnitt 1.3. Tabelle 2-1: Konfiguration der Pulsformerstufe PULSEGEN
Konfiguration STEP3_ON ST2BI_ON
Dreipunktregelung TRUE beliebig Zweipunktreglung mit bipolarem Stellbereich (-100% ... +100%)
FALSE TRUE
Zweipunktreglung mit unipolarem Stellbereich (0% ... +100%)
FALSE FALSE
2.5 Synchronisierung von Regler und Pulsformerstufe
Eine Besonderheit des Pulsbreiten-Modulations-Bausteins PULSEGEN ist die Möglichkeit per Parametrierung eine automatische Synchronisierung durchzuführen. Der Impulsformer wertet immer im Zeitabstand der Puls-Periodendauer PER_TM die Eingangsgröße INV aus und wandelt den Wert in ein Impulssignal mit dem entsprechenden Puls-Pause-Verhältnis um. Das bedeutet, dass Änderungen der Eingangsgröße INV normalerweise erst in der nächsten Puls-Periode wirksam werden (siehe dazu auch Bild 2-6). Die automatische Synchronisation "SYN_ON" (= TRUE) bewirkt dagegen eine neue Berechnung der Impulsdauer, sobald sich die Stellgröße (Eingang INV) ändert. Damit ist gewährleistet, dass eine sich ändernde Eingangsgröße auch schnellstmöglich als Impuls ausgegeben wird, auch wenn der Regler in einem schnelleren Zyklus als die Puls-Periodendauer PER_TM bearbeitet wird. Mit dieser Maßnahme lässt sich die Dauerschwingung des Istwerts vermindern. Gleichzeitig wird aber der Istwert mit einer kleineren fiktiven Stellgröße erreicht, da die Impulslänge häufiger berechtet wird und die Gesamtlänge von Impuls und Pause nicht erreicht wird. Wird z.B. bei einer maximalen Impulslänge von 2 sec im Zyklus von 1 sec synchronisiert und der Regler gibt eine aktuelle Stellgröße von
2 Projektierung2.6 Parametrierung und Reglereinstellung
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 17
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
50% aus, bedeutet das, dass der Impuls 1 sec ausgegeben wird und dann 1 sec Pause wäre. Durch die neue Synchronisation nach 1 sec kann die Pause nicht eingehalten werden, denn die Impulslänge wird nun neu berechnet und ausgegeben. Der Istwert wird jetzt größer und der Regler arbeitet mit einer kleineren Stellgröße dem entgegen. Die konstante Puls-Periodendauer und damit der reproduzierbare Zusammenhang zwischen analoger Stellgröße und Puls/Pause-Verhältnis geht dadurch verloren. Der Nachteil tritt beim Umschalten des Reglers von Automatik auf Hand zutage, wobei die letzte Stellgröße erhalten bleibt. Da sich jetzt die Stellgröße nicht mehr ändert wird auch nicht neu synchronisiert, und es wird wieder die ursprüngliche Puls-Periodendauer wirksam. Die Folge ist, dass der Istwert wegläuft. Die automatische Synchronisation sollte daher abgeschaltet bleiben (Eingang "SYN_ON" = FALSE), um die anschauliche Interpretierbarkeit der analogen Stellgröße und die korrekte Funktion der Hand-/Automatik-Umschaltung sicherzustellen.
2.6 Parametrierung und Reglereinstellung
QPOS_P
tP_B_TM
PER_TM
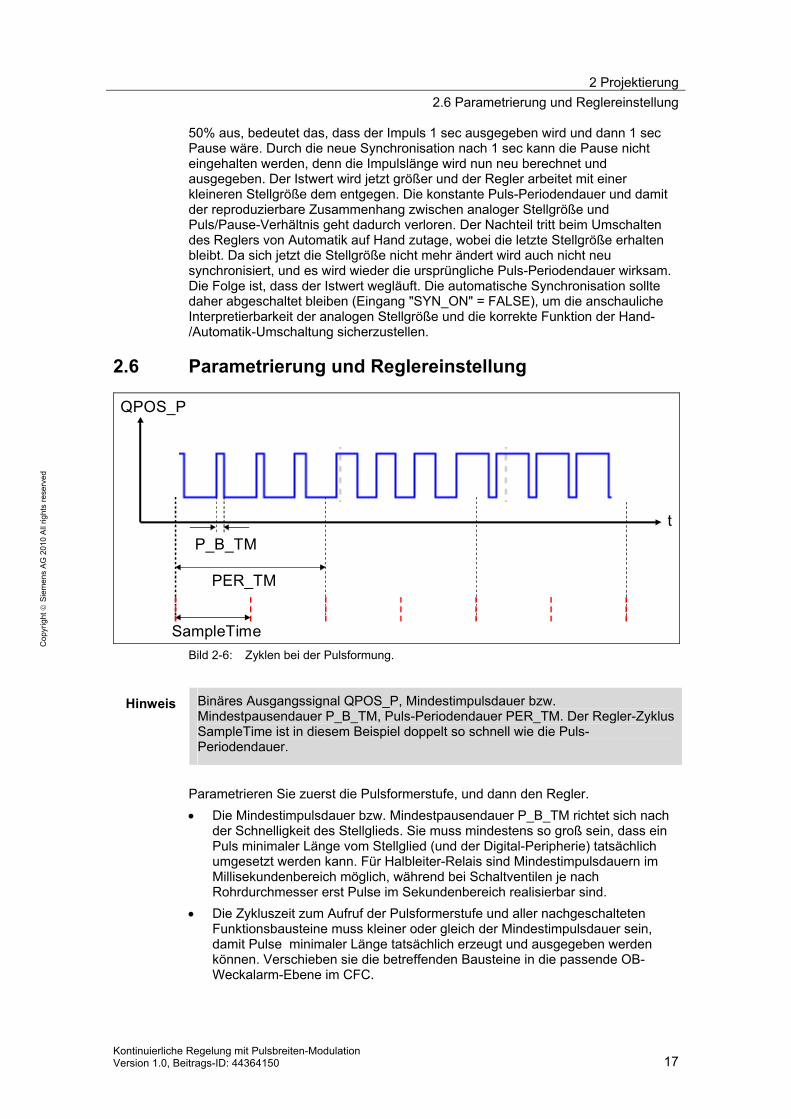
SampleTime Bild 2-6: Zyklen bei der Pulsformung.
Hinweis Binäres Ausgangssignal QPOS_P, Mindestimpulsdauer bzw. Mindestpausendauer P_B_TM, Puls-Periodendauer PER_TM. Der Regler-Zyklus SampleTime ist in diesem Beispiel doppelt so schnell wie die Puls-Periodendauer.
Parametrieren Sie zuerst die Pulsformerstufe, und dann den Regler. • Die Mindestimpulsdauer bzw. Mindestpausendauer P_B_TM richtet sich nach
der Schnelligkeit des Stellglieds. Sie muss mindestens so groß sein, dass ein Puls minimaler Länge vom Stellglied (und der Digital-Peripherie) tatsächlich umgesetzt werden kann. Für Halbleiter-Relais sind Mindestimpulsdauern im Millisekundenbereich möglich, während bei Schaltventilen je nach Rohrdurchmesser erst Pulse im Sekundenbereich realisierbar sind.
• Die Zykluszeit zum Aufruf der Pulsformerstufe und aller nachgeschalteten Funktionsbausteine muss kleiner oder gleich der Mindestimpulsdauer sein, damit Pulse minimaler Länge tatsächlich erzeugt und ausgegeben werden können. Verschieben sie die betreffenden Bausteine in die passende OB-Weckalarm-Ebene im CFC.
2 Projektierung 2.7 Regelkreisüberwachung (Control Performance Monitoring)
18 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
• Parametrieren Sie die Puls-Periodendauer PER_TM mindestens um den Faktor 20 (für Stellgrößenquantisierung 5%) bis 100 (für Stellgrößenquantisierung 1%) größer als die Mindestimpulsdauer.
• Wählen Sie die Zykluszeit des Reglers gleich der Puls-Periodendauer, so dass jeder einzelne vom Regler berechnete Stellwert innerhalb eines Abtastintervalls in eine dazu passende Pulsfolge umgesetzt werden kann. Dennoch muss die Regler-Abtastzeit schnell genug für die Prozess-Dynamik sein. Falls Ihnen die Zykluszeit entsprechend der Puls-Periodendauer im Hinblick auf die Bedienbarkeit des Reglers zu lang erscheint, können Sie auch kürzere Reglerzyklen verwenden, wobei in Kauf genommen wird, dass vom Regler geänderte Stellwerte erst zu Beginn der nächsten Puls-Periode weiterverarbeitet werden, oder die in Abschnitt 2.5 diskutierten Effekte der Synchronisierung auftreten.
Die Reglereinstellung kann anschließend problemlos mit dem PCS 7 PID-Tuner vorgenommen werden. Achten Sie bei der Vorgabe von Stellwertsprüngen darauf, dass es sich um ein ganzzahliges Vielfache der Stellgrößenquantisierung handelt, damit die Vorgaben präzise in Pulsfolgen umgesetzt werden können.
Beispiel Ein Stellgrößensprung von 20 auf 30% ist besser als einer von 21.5 auf 32.6%. Anhand der im PID-Tuner berechneten Prozessverstärkung und der durch die Pulsformung erzeugten Stellgrößenquantisierung kann die erreichbare stationäre Genauigkeit der Regelung ermittelt werden:
Tipp Istwert-Quantisierung = Stellgrößen-Quantisierung * Prozess-Verstärkung.
Parametrieren Sie zum Schluss die Totzone DeadBand des Reglers:
Tipp DeadBand >= 0.5* Istwert-Quantisierung
2.7 Regelkreisüberwachung (Control Performance Monitoring)
Die erzielbare Regelgüte (Varianz der Regelgröße) im Sinne der Regelkreisüberwachung (Control Performance Monitoring) hängt von der Parametrierung der Pulsformerstufe ab. Daher ist folgende Reihenfolge bei der Inbetriebnahme immer einzuhalten: 1. Parametrierung des Pulsformers 2. PID-Tuning 3. Initialisierung des ConPerMon-Baustein Dennoch wird die Regelkreisüberwachung erschwert durch die mit der Pulsformung einhergehende Amplituden-Quantisierung der Stellgröße. Die in Kapitel 3 gezeigte Arbeitsbewegung vergrößert die Varianz der Regelgröße und verschlechtert die Regelgüte - für alle Sollwerte die nicht zufällig auf einen Rasterpunkt der Amplituden-Quantisierung fallen. Dadurch wird die Regelgüte sollwertabhängig. Durch die Einführung einer Totzone wird die Arbeitsbewegung und die damit verbundene Varianz der Regelgröße vermieden, auf Kosten einer bleibenden

2 Projektierung2.7 Regelkreisüberwachung (Control Performance Monitoring)
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 19
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Regelabweichung. Dadurch erkennt der ConPerMon-Baustein nach einem Sollwertsprung den neuen stationären Zustand nicht mehr automatisch, und die Sprungauswertung muss per Mausklick im Bildbaustein abgebrochen werden, damit der CPI überhaupt wieder aktualisiert werden kann.
3 Simulationsbeispiel
20 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
3 Simulationsbeispiel Temperaturregelung eines Kessels über Ein-/ Ausschalten des Brenners
In APL_Example_EU ist kein Simulationsbeispiel für die kontinuierliche Regelung mit Pulsbreiten-Modulation enthalten. Sie können die "Teilanlage" für den einfachen Regelkreis mit ConPerMon entsprechend Kapitel 2 modifizieren, um die Simulation eines Temperaturregelkreises mit Pulsbreiten-Modulation zu erstellen. Folgende Streckenparameter wurden verwendet: Tabelle 3-1: Prozessparameter des modifizierten Beispielprojekts
ProcSimC Temperatur-Regelstrecke
Gain 1,2 TimeLag1 40s TimeLag2 10s PV0 20 Noise Variance 0 SampleTime 0,1s
Tabelle 3-2: Parameter PULSEGEN
PULSEGEN
PER_TM 2s P_B_TM 0,1s SampleTime 0,1s
Die Reglerparameter wurden mit dem PID-Tuner ermittelt. Tabelle 3-3: Reglerparameter für PI-Regler
PID
Gain 0,58 TI 25s TD - DeadBand 0 SampleTime 2s
Bei den gewählten Parametern des Pulsfomers kommt es zu einer Stellgrößenrasterung von 5%, was bei einer Streckenverstärkung von 1,2 [°C/%] zu einer Rasterung des Istwerts in 6°C Schritten führt. D.h. es können nur Solltemperaturen exakt erreicht werden die, um den Offset von 20°C bereinigt, durch 6 teilbar sind. Bei allen anderen Sollwerten entsteht im stationären Betrieb eine Dauerschwingung des Istwerts um den Sollwert.
3 Simulationsbeispiel
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 21
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
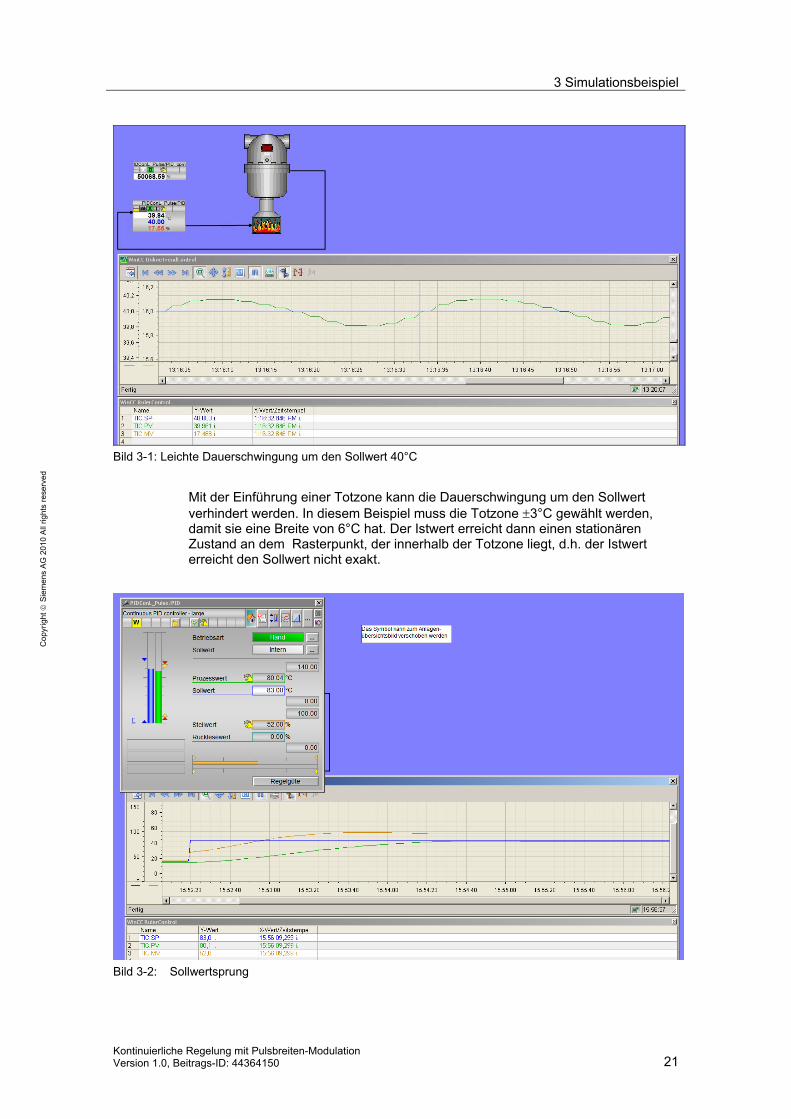
Bild 3-1: Leichte Dauerschwingung um den Sollwert 40°C
Mit der Einführung einer Totzone kann die Dauerschwingung um den Sollwert verhindert werden. In diesem Beispiel muss die Totzone ±3°C gewählt werden, damit sie eine Breite von 6°C hat. Der Istwert erreicht dann einen stationären Zustand an dem Rasterpunkt, der innerhalb der Totzone liegt, d.h. der Istwert erreicht den Sollwert nicht exakt.
Bild 3-2: Sollwertsprung

3 Simulationsbeispiel
22 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
Hinweis Sollwertsprung von 40 auf 83°C mit Regler-Totzone ±3°C, der Istwert erreicht einen stationären Zustand bei 80°C, weil (80-20)=60 durch 6 teilbar ist, d.h. einen Rasterpunkt darstellt
4 Fazit
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 23
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
4 Fazit Für Prozesse mit schaltenden Stellgliedern ist eine kontinuierliche Regelung mit Pulsbreiten-Modulation gut geeignet. Obwohl es in den PCS 7 eigenen Bibliotheken keine Pulsformerstufe gibt, kann der Baustein PULSEGEN aus der CFC-Library ELEM_400 dafür eingesetzt werden. Man muss bei gegebener Mindestimpulsdauer dabei einen Kompromiss zwischen der stationären Genauigkeit der Regelung und der Puls-Periodendauer finden. Eine große Puls-Periodendauer bedeutet hohe Genauigkeit, aber entsprechend langsame Regler-Abtastzeiten. Kürzere Puls-Periodendauern verringern durch die grobe Stellgrößen-Quantisierung die Genauigkeit, und erfordern entsprechend breite Totzonen beim Regler. Die Kombination aus Pulsformer und Digitalausgangstreiber ersetzt den Analogausgangstreiber des Reglers, und zwar unabhängig davon, um was für einen Reglertyp es sich handelt. Ein Pulsformer kann also genauso gut hinter einen Prädiktivregler (MPC) gesetzt werden wie hinter einen PID-Regler, und ist auch mit erweiterten PID-Strukturen kombinierbar (z.B. Gain-Scheduling, Override, Störgrößenaufschaltung, Verhältnis-Regelung). Auch eine Split-Range-Funktion kann prinzipiell hinter jeden kontinuierlichen Regler geschaltet werden, um die Stellgröße des Reglers auf zwei Stellglieder mit entgegengesetzter Wirkungsrichtung zu verteilen. Falls es sich bei den Stellgliedern um binäre Aktoren handelt, übernimmt der Funktionsbaustein PULSEGEN auch die Split-Range-Funktion.
Sonderfälle • Bei einer Kaskadenregelung kommt eine Pulsformung selbstverständlich nur
für den Folgeregler in Frage. • Beim Smith-Prädiktor sollte das reglerinterne Prozessmodell mit dem analogen
Ausgangssignal des Reglerbausteins angesteuert werden. Bei der Modellbildung aus Lerndaten im MPC-Konfigurator wird ebenfalls das analoge Ausgangssignal des Reglers verwendet, so dass bei der Modellbildung das Verhalten des Prozesses incl. Pulsformerstufe erfasst und im Modell abgebildet wird.

5 Literaturhinweis
24 Kontinuierliche Regelung mit Pulsbreiten-Modulation
Version 1.0, Beitrags-ID: 44364150
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
5 Literaturhinweis Diese Liste ist keinesfalls vollständig und spiegelt nur eine Auswahl an geeigneter Literatur wider. Tabelle 5-1
Titel
/1/ Müller, J., Pfeiffer, B-M., Hunger, V. „Regeln mit Simatic – Praxisbuch für Regelungen mit Simatic S7 und PCS7.“ Zweite, erweiterte Auflage. Publicis MCD Verlag, Erlangen, 2002. (ISBN 3-89578-195-9)
/2/ Onlife-Hilfe PCS 7 Advanced Library Kapitel: “Templates/Messstellentypen”
6 Historie
Kontinuierliche Regelung mit Pulsbreiten-Modulation Version 1.0, Beitrags-ID: 44364150 25
Cop
yrig
ht ©
Sie
men
s A
G 2
010
All
right
s re
serv
ed
6 Historie Tabelle 6-1
Version Datum Änderung
V1.0 August 2010 Erste Ausgabe