
Projektname: DCMM - hit-karlsruhe.de · egal wie abstrakt diese sind, entworfen und hinterfragt....
45
Studienfach: Produktentstehungsprozess MTB 451 – Sommersemester 2014 Dozent: Prof. Dr.- Ing. Peter Weber Projektname: DCMM Directly Controllable Mechatronic Manipulator Abgabedatum: 27.06.2014 Projektteam: Gruppe 3 Matrikelnummer Name, Vorname 39272 Hoffmann, Thomas 39214 Serrer, Tobias 38973 Mierswa, Jan 38903 Zimmerer, Kevin 43581 Büyükcolak, Mehmet 34169 Nowosad, Michael
Transcript of Projektname: DCMM - hit-karlsruhe.de · egal wie abstrakt diese sind, entworfen und hinterfragt....

Studienfach:
Produktentstehungsprozess MTB 451 – Sommersemester 2014 Dozent: Prof. Dr.- Ing. Peter Weber
Projektname:
DCMM Directly Controllable Mechatronic Manipulator Abgabedatum: 27.06.2014 Projektteam: Gruppe 3
Matrikelnummer Name, Vorname
39272 Hoffmann, Thomas
39214 Serrer, Tobias
38973 Mierswa, Jan
38903 Zimmerer, Kevin
43581 Büyükcolak, Mehmet
34169 Nowosad, Michael
DCMM VORWORT
II
Vorwort
Sehr geehrter Leser,
die vorliegende Ausarbeitung wurde im Rahmen der Veranstaltung MTB 451 –
Produktentstehungsprozess (PEP) unter Leitung des verantwortlichen Dozenten Herrn Prof.
Dr.- Ing. Peter Weber im Sommersemester 2014 verfasst.
Produktentstehungsprozess ist eine in der Industrie verwendete Methode, die die
Arbeitsabläufe von der Idee bis zum fertigen Produkt dokumentiert und unabhängig von
dessen Größe und Funktion anwendbar ist. Dabei werden verschiedene Lösungsvorschläge,
egal wie abstrakt diese sind, entworfen und hinterfragt. Durch ein Ranking werden die
Bewertungskriterien gewichtet und eine Nutzwertanalyse hilft aus den Lösungsalternativen
die sogenannte „ausgewählte Lösung“ zu ermitteln.
Die Aufgabe bestand darin, über ein selbst gewähltes Produkt eine
Entwicklungsdokumentation in Form einer Ausarbeitung unter Verwendung der in der
Vorlesung gelehrten Methode Produktentstehungsprozess zu erstellen. Studenten sollen
gemeinsam als Team ingenieurmäßige Arbeitsmethoden anwenden. Dabei wird die
Teamfähigkeit jedes einzelnen gestärkt und die Lehrinhalte der Vorlesung wiederholt und
vertieft.
Die Ausarbeitung bildet die Basis mit allen relevanten Informationen und Auswertungen für
den theoretisch nächsten Schritt:
Einen Prototypen zu fertigen und einen ausgefeilten Herstellungsprozess zu ermöglichen.
Gleichzeitig wurde zu dieser Ausarbeitung ein Datenträger mit allen relevanten Inhalten und
eine Web- Dokumentation erstellt. Die Web- Dokumentation kann ebenfalls unter folgender
Adresse angeschaut werden:
http://mic.hit-karlsruhe.de/projekte/SS14-DCMM/
Wir wünschen allen Lesern viel Spaß beim Lesen und stehen Ihnen bei Fragen gerne zur
Verfügung.
(Die E-Mail Adressen finden Sie unter der Überschrift: „Teamvorstellung“)
DCMM DANKSAGUNG
III
Danksagung
Zu Beginn möchten wir uns im Namen des ganzen Teams bei unserem Dozenten Herrn
Professor Dr.- Ing. Peter Weber für die konstruktive Hilfestellungen während dem gesamten
Bearbeitungszeitraum und für die geopferte Zeit nach Vorlesungsende bedanken. Durch die
interessante und lehrreiche Vorlesung bekamen wir Einblicke in die Methoden und Verfahren
der Industrie zur Entwicklungsdokumentation und ingenieursmäßige Arbeitsmethoden,
welche Professor Dr.- Ing. Peter Weber mit vielen anwendungsbezogenen Beispielen aus der
Praxis erläuterte.
Des Weiteren möchten wir uns bei Herrn Prof. Dipl.-Ing. Jürgen Walter bedanken, der uns
durch seine vielseitige Unterstützung in Form von Videos, Beratung, Vermittlung und seinem
Engagement für das Projekt begeisterte. Mit seinem Bestand an Equipment und fachlichem
Wissen hat er uns jeder Zeit unterstützt und durch sein Engagement maßgeblich zu der
technischen Umsetzung beigetragen.
Außerdem Bedanken wir uns herzlich bei Herrn Forstner, der einen optimierten Aufbau
durch seine konstruktiven Ratschläge ermöglichte.
Ein weiterer Dank gilt auch der Hochschule Karlsruhe für Technik und Wirtschaft, die alle
elektronischen Komponenten sowie den technischen Aufbau finanzierte und bereitgestellt
hat.

DCMM TEAMVORSTELLUNG
IV
Teamvorstellung
Abbildung 1 Gruppenfoto Team DCMM
v.l.n.r.: Michael Nowosad, Mehmet Büyükcolak, Jan Mierswa, Kevin Zimmerer, Thomas
Hoffmann, Tobias Serrer
Michael Nowosad: Kevin Zimmerer: Mail: [email protected] Mail: [email protected] Mat.-Nr.: 34169 Mat.-Nr.: 38903
Mehmet Büyükcolak: Thomas Hoffmann: Mail: [email protected] Mail: [email protected] Mat.-Nr.: 43581 Mat.-Nr.: 39272
Jan Mierswa: Tobias Serrer: Mail: [email protected] Mail: [email protected] Mat.-Nr.: 38973 Mat.-Nr.: 39214

DCMM EIDESSTATTLICHE ERKLÄRUNG
V
Eidesstattliche Erklärung
„Wir versichern hiermit an Eides statt, dass die vorliegende Arbeit selbstständig und ohne Hilfe
von Außenstehenden erstellt wurde. Alle Hilfsmittel, sowie Literatur wurden angegeben. Alle
Ausführungen, welche anderen Schriften entstammen, wörtlich sowie sinngemäß, wurden als
solche gekennzeichnet. Die vorliegende Arbeit wurde in gleicher oder ähnlicher Form noch
nicht veröffentlich oder einer Prüfungsbehörde vorgelegt.“
Karlsruhe, den 24.06.2014
Thomas Hoffmann
Tobias Serrer
Jan Mierswa
Kevin Zimmerer
Mehmet Büyükcolak
Michael Nowosad

DCMM INHALTSVERZEICHNIS
VI
Inhaltsverzeichnis
Vorwort ...................................................................................................................................... II
Danksagung ............................................................................................................................... III
Teamvorstellung ........................................................................................................................ IV
Eidesstattliche Erklärung ............................................................................................................ V
Inhaltsverzeichnis ...................................................................................................................... VI
1. Problemstellung ................................................................................................................. 1
2. Stand der Technik ............................................................................................................... 2
2.1 Mechanische Manipulatoren ........................................................................................... 2
2.2 Industrieroboter ............................................................................................................... 2
2.2.1 Portalroboter ............................................................................................................ 2
2.2.3 5/6/7-Achs Roboter .................................................................................................. 3
3. Aufgabenstellung ............................................................................................................... 4
4. Mindmap ............................................................................................................................ 5
5. Projektplan ......................................................................................................................... 6
6. Anforderungsliste ............................................................................................................... 7
7. Blackbox ............................................................................................................................. 9
8. Funktionsstruktur ............................................................................................................. 10
8.1 Legende – Funktionsstruktur nach Roth ........................................................................ 10
8.2 Funktionsstrukturplan .................................................................................................... 11
9. Morphologie ..................................................................................................................... 12
10. Vor- und Nachteile der Komponenten .......................................................................... 13
10.1 Teilfunktionen A, B, C, D, AC: Wärmeenergie abführen .............................................. 13
10.2 Teilfunktionen E, F*, Q*: Elektrische Energie und Signale weiterleiten ...................... 14
10.3 Teilfunktion G, H, I, J, K: Steuersignal in elektrische Signale wandeln ......................... 15
10.4 Teilfunktion L, M, N: Steuersignal in elektrische Signale wandeln .............................. 16
10.5 Teilfunktion O*, P, Z*: Daten erfassen, verarbeiten und weiterleiten ........................ 17
10.6 Teilfunktion R, S, T, U, V, W: Umwandeln der elektrischen in mechanische Energie .. 18
10.7 Teilfunktion X*: Verknüpfung der Einzelbewegung zur Gesamtbewegung ................ 19
10.8 Teilfunktion Y*: Aufteilen des Steuersignals ................................................................ 20

DCMM INHALTSVERZEICHNIS
VII
10.9 Teilfunktion AA, AB: Anzeigen von Statuswerten ........................................................ 21
10.10 Teilfunktion AD: Greifen des Reagenzglases ............................................................. 22
11. Lösungsalternativen ...................................................................................................... 23
12. Ranking .......................................................................................................................... 24
12.1 Auswahl der Bewertungskriterien (aus der Anforderungsliste) .................................. 24
12. 2 Matrix der ausgewählten Bewertungskriterien .......................................................... 25
13. Nutzwertanalyse............................................................................................................ 27
13.1 Verfahrensmatrix Nutzwertanalyse ............................................................................. 27
13.2 Ergebnis und Auswertung der Nutzwertanalyse .......................................................... 28
14. Ausgewählte Lösung ...................................................................................................... 29
15. Fazit ............................................................................................................................... 30
16. Literaturverzeichnis ....................................................................................................... 31
17. Abbildungsverzeichnis ................................................................................................... 32
18. Tabellenverzeichnis ....................................................................................................... 34
19. Quellen .......................................................................................................................... 35

DCMM PROBLEMSTELLUNG
1
1. Problemstellung
In Chemielaboratorien werden die Laboranten durch den Umgang mit giftigen, ätzenden und
reizenden Stoffen gesundheitlichen Gefahren ausgesetzt. Die zum Schutz vorgeschriebene
Arbeitskleidung schränkt die Bewegungs- und Arbeitsfreiheit stark ein.

DCMM STAND DER TECHNIK
2
2. Stand der Technik
2.1 Mechanische Manipulatoren
Abbildung 2 Mechanische Manipulatoren
Manipulatoren wie sie z.B. für den Umgang mit radioaktiven Materialien eingesetzt werden.
Der Bediener befindet sich hinter einer Schutzscheibe. Die Bewegung wird rein mechanisch
übertragen.
2.2 Industrieroboter
Industrieroboter können an verschiedene Aufgaben angepasst werden. In der Regel werden
sie einmal programmiert und führen dann selbständig immer wieder die gleichen Handlungen
aus. Man unterscheidet generell zwischen folgenden Typen:
2.2.1 Portalroboter
Abbildung 3 Portalroboter
Der Roboter führt seine Bewegungen über Linearachsen aus und verfügt über drei
Freiheitsgrade.

DCMM STAND DER TECHNIK
3
2.2.2 SCARA-Roboter
Ein sogenannter "Selective Compliance Assembly Robot Arm" besitzt in der Regel vier Achsen und vier Freiheitsgrade.
Dieser Robotertyp zeichnet sich durch eine hohe
Wiederholgenauigkeit und Positioniergeschwindigkeit
aus. Er kann jedoch nur auf einer Ebene arbeiten, da er zu
wenig Freiheitsgrade besitz, um nicht planparallele
Bewegungen auszuführen.
2.2.3 5/6/7-Achs Roboter
Abbildung 5 7-Achs Roboter
Diese Roboter sind in ihrer Bewegungsfreiheit vergleichbar mit dem menschlichen Arm. Sie
besitzen genügend Achsen (Freiheitsgrade) um sehr flexibel arbeiten zu können.
Abbildung 4 Scara-Roboter

DCMM AUFGABENSTELLUNG
4
3. Aufgabenstellung
Die Laboranten werden räumlich von den Chemikalien getrennt. Der Umgang mit den
Chemikalien wird durch einen Manipulator mit mindestens vier Freiheitsgraden realisiert. Der
Manipulator muss chemieresistent und die Steuerung soll intuitiv bedienbar sein.

DCMM MINDMAP
5
4. Mindmap
Abbildung 6 Mindmap

DCMM PROJEKTPLAN
6
5. Projektplan
Tabelle 1 Gantt-Diagramm

DCMM ANFORDERUNGSLISTE
7
6. Anforderungsliste
Tabelle 2 Anforderungsliste Blatt 1

DCMM ANFORDERUNGSLISTE
8
Tabelle 3 Anforderungsliste Blatt 2

DCMM BLACKBOX
9
7. Blackbox
Die Blackbox dient als erste Veranschaulichung des Systems, wobei nur das Verhalten nach
außen betrachtet werden soll. Die Funktionsweiße und Technik des Systems wird durch die
Blackbox nicht erläutert. Sie dient lediglich dazu, einen Überblick über die Ein- und
Ausgangsgrößen, sowie Störgrößen und Restriktionen zu geben.
Abbildung 7 Blackbox
DCMM FUNKTIONSSTRUKTUR
10
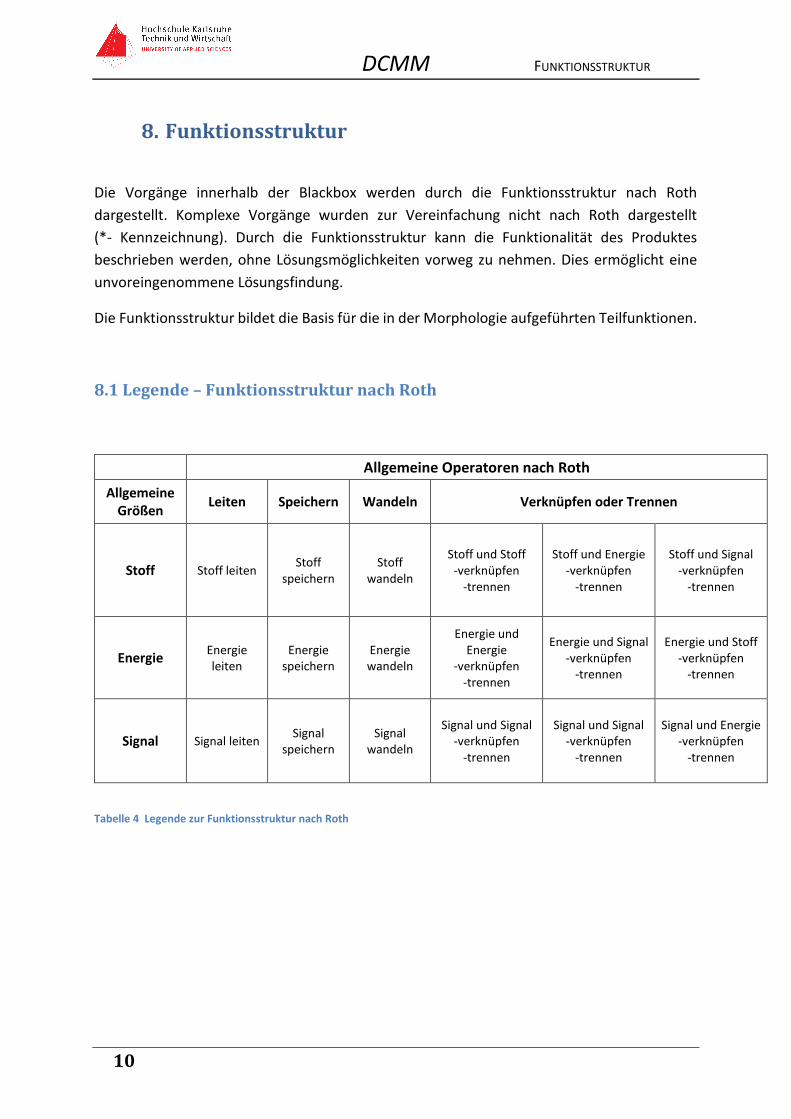
8. Funktionsstruktur
Die Vorgänge innerhalb der Blackbox werden durch die Funktionsstruktur nach Roth
dargestellt. Komplexe Vorgänge wurden zur Vereinfachung nicht nach Roth dargestellt
(*- Kennzeichnung). Durch die Funktionsstruktur kann die Funktionalität des Produktes
beschrieben werden, ohne Lösungsmöglichkeiten vorweg zu nehmen. Dies ermöglicht eine
unvoreingenommene Lösungsfindung.
Die Funktionsstruktur bildet die Basis für die in der Morphologie aufgeführten Teilfunktionen.
8.1 Legende – Funktionsstruktur nach Roth
Tabelle 4 Legende zur Funktionsstruktur nach Roth
Allgemeine Operatoren nach Roth
Allgemeine Größen
Leiten Speichern Wandeln Verknüpfen oder Trennen
Stoff Stoff leiten Stoff
speichern Stoff
wandeln
Stoff und Stoff -verknüpfen
-trennen
Stoff und Energie -verknüpfen
-trennen
Stoff und Signal -verknüpfen
-trennen
Energie Energie leiten
Energie speichern
Energie wandeln
Energie und Energie
-verknüpfen -trennen
Energie und Signal -verknüpfen
-trennen
Energie und Stoff -verknüpfen
-trennen
Signal Signal leiten Signal
speichern Signal
wandeln
Signal und Signal -verknüpfen
-trennen
Signal und Signal -verknüpfen
-trennen
Signal und Energie -verknüpfen
-trennen

DCMM FUNKTIONSSTRUKTUR
11
8.2 Funktionsstrukturplan
Abbildung 8 Funktionsstrukturplan

DCMM MORPHOLOGIE
12
9. Morphologie
Anhand des Funktionsstrukturplanes von Roth können mehrere Teilfunktionen bestimmt
werden. Die Morphologie ist eine Problemlösungsmethode, die zur Entscheidungsfindung
angewandt wird. Dabei werden sinnvolle Lösungskomponenten aufgelistet. Der
morphologische Kasten ermöglicht einen kurzen Überblick über die in Frage kommenden
Bauelemente. Die Teilfunktionen wurden falls möglich gruppiert und mit den jeweils
durchzuführenden Arbeitsabläufen zusammengefasst.
Tabelle 5 Morphologie

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
13
10. Vor- und Nachteile der Komponenten
Im Folgenden wurden die jeweiligen Lösungskomponenten des morphologischen Kastens
aufgelistet und objektiv deren Vor- und Nachteile herausgearbeitet. Die Vor- und Nachteile
gelten teilweise nur bei einem direkten Vergleich der jeweiligen Lösungskomponenten.
10.1 Teilfunktionen A, B, C, D, AC: Wärmeenergie abführen
Kühlkörper Lüfter Kühlung durch Gehäuse
Abbildung 9 Kühlkörper-IC
Abbildung 10 Lüfter
Abbildung 11 IC-Gehäuse
Abbildung 12 Kühlkörper-Motor
Abbildung 13 Motorgehäuse
Vo
rtei
le
Keine Geräuschentwicklung
Verschleißfrei
Kein Ansteuerung nötig
Effektive Kühlung
Kühlung einstellbar
Kühlung mehrerer Bauteile gleichzeitig möglich
Keine zusätzlichen Kosten
Kein zusätzlicher Platz nötig
Kein zusätzliches Gewicht
Nac
hte
ile
Mäßige Kühlung Zusätzliches Gewicht Ungünstige Positionierung
auf Bauteil notwendig Anpassung des Aufbaus erforderlich
Zusätzlicher Energieverbrauch
Geräuschentwicklung
Hoher Platzbedarf
Verschleiß
Kühlung nur bei geringer Wärmeentwicklung ausreichend
Gehäuse kann anliegende Bauteile mit erhitzen
Verletzungsgefahr durch erhitzte Oberfläche

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
14
10.2 Teilfunktionen E*, F*, Q*: Elektrische Energie und Signale weiterleiten
Geätzte Platine Kupferkabel Steckbrett
Abbildung 14 Geätzte Platine
Abbildung 15 Kupferkabel
Abbildung 16 Steckbrett
Vo
rtei
le
Kompakte Bauweise
Kostengünstig bei hohen Stückzahlen
Optische Inspektion möglich
Geschützte Leitung
Nachträglich erweiterbar
Gutes Preis-Leistungs-Verhältnis
Für Prototypen geeignet
Erweiterbar
Teile schnell austauschbar
Nac
hte
ile
Teuer bei Einzelfertigung
Nicht erweiterbar
Großer Herstellungsaufwand
Verkabelungsaufwand
Bei großen Schaltungen unübersichtlich
Erhöhter Platzbedarf durch Isolierungen
Nicht für hohe Stückzahlen geeignet
Hoher Aufwand durch Bestückung
Nur im niedrigen Frequenzbereich verwendbar

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
15
10.3 Teilfunktion G, H, I, J, K: Steuersignal in elektrische Signale wandeln
Potentiometer Gabellichtschranke mit Drehscheibe
Inkrementaldrehgeber
Abbildung 17 Potentiometer
Abbildung 18 Gabellichtschranke
mit Drehscheibe
Abbildung 19 Inkrementaldrehgeber
Vo
rtei
le
Direkt über ADC auslesbar
Minimaler Schaltungsaufwand
Stufenlos auswertbar
Hohe Auflösung möglich
Kein mechanischer Verschleiß
Geringes Gewicht
Nur ein Bauteil Endlos drehbar Unempfindlich gegen
Vibrationen und Stöße
Nac
hte
ile
Begrenzter Drehwinkel Mechanischer
Verschleiß Signalunterbrechung
bei Stößen und Vibrationen möglich
Schlechte Miniaturisierbarkeit
Medienempfindlichkeit
Zwei Bauteile werden benötigt
Teilweise Abschirmung von Fremdlicht notwendig
Zusätzliche Auswertung notwendig
Mechanischer Verschleiß
Zusätzliche Auswertung notwendig
Kein absolute Winkelbestimmung

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
16
10.4 Teilfunktion L, M, N: Steuersignal in elektrische Signale wandeln
Kippschalter Taster Touchpad
Abbildung 20 Kippschalter
Abbildung 21 Taster Abbildung 22 Touchpad
Vo
rtei
le
Gute Ergonomie/Haptik
Geringer Kostenaufwand
Schaltzustand anhand Schalterstellung erkennbar
Gute Ergonomie/Haptik
Sehr geringer Kostenaufwand
Platzsparend
Gute Ergonomie/Haptik
Mehrere Zustände wählbar
Benutzeroberfläche änderbar
Gestensteuerung möglich
Nac
hte
ile
Hoher Platzbedarf Mechanische
Abnutzung Unbeabsichtigtes Aus-
und Einschalten durch Hängenbleiben möglich
Nur zwei Zustände sind möglich
Mechanische Abnutzung
Schaltzustand nicht erkennbar
Hoher Kostenaufwand Ansteuerung Anfällig für Kratzer und
Bruch Kein haptisches
Feedback
DCMM VOR- UND NACHTEILE DER KOMPONENTEN
17
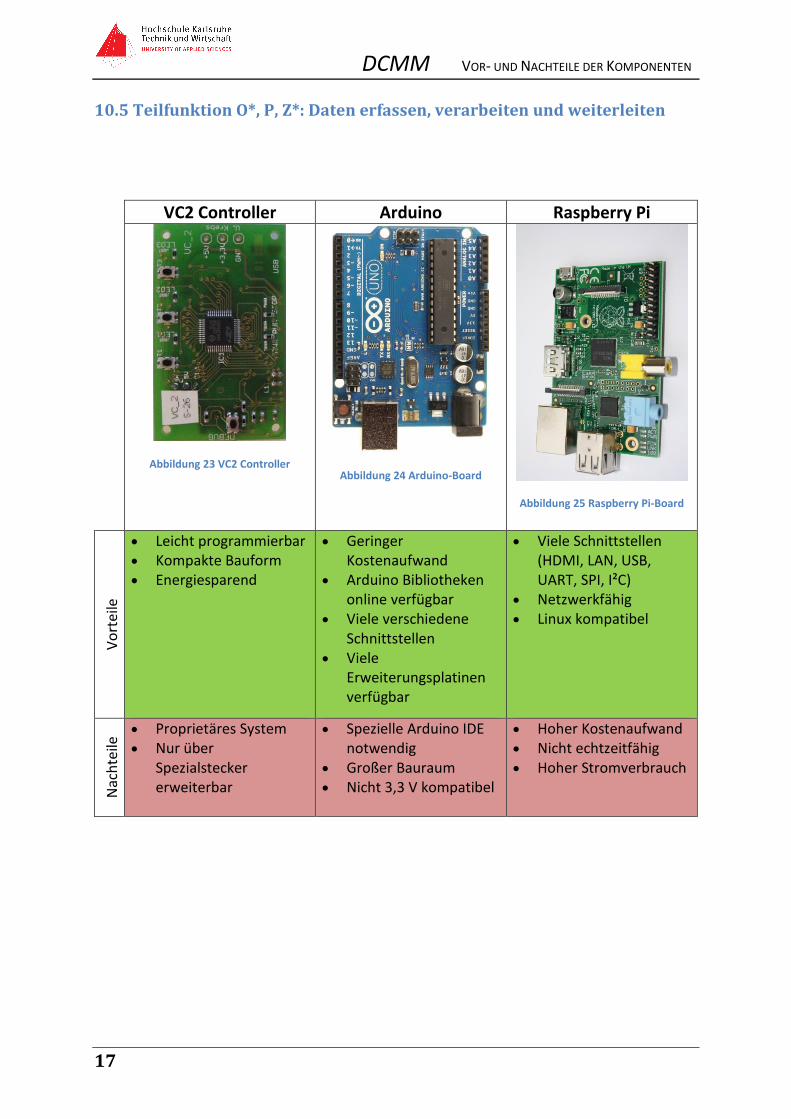
10.5 Teilfunktion O*, P, Z*: Daten erfassen, verarbeiten und weiterleiten
VC2 Controller Arduino Raspberry Pi
Abbildung 23 VC2 Controller
Abbildung 24 Arduino-Board
Abbildung 25 Raspberry Pi-Board
Vo
rtei
le
Leicht programmierbar Kompakte Bauform Energiesparend
Geringer Kostenaufwand
Arduino Bibliotheken online verfügbar
Viele verschiedene Schnittstellen
Viele Erweiterungsplatinen verfügbar
Viele Schnittstellen (HDMI, LAN, USB, UART, SPI, I²C)
Netzwerkfähig Linux kompatibel
Nac
hte
ile Proprietäres System
Nur über Spezialstecker erweiterbar
Spezielle Arduino IDE notwendig
Großer Bauraum Nicht 3,3 V kompatibel
Hoher Kostenaufwand Nicht echtzeitfähig Hoher Stromverbrauch
DCMM VOR- UND NACHTEILE DER KOMPONENTEN
18
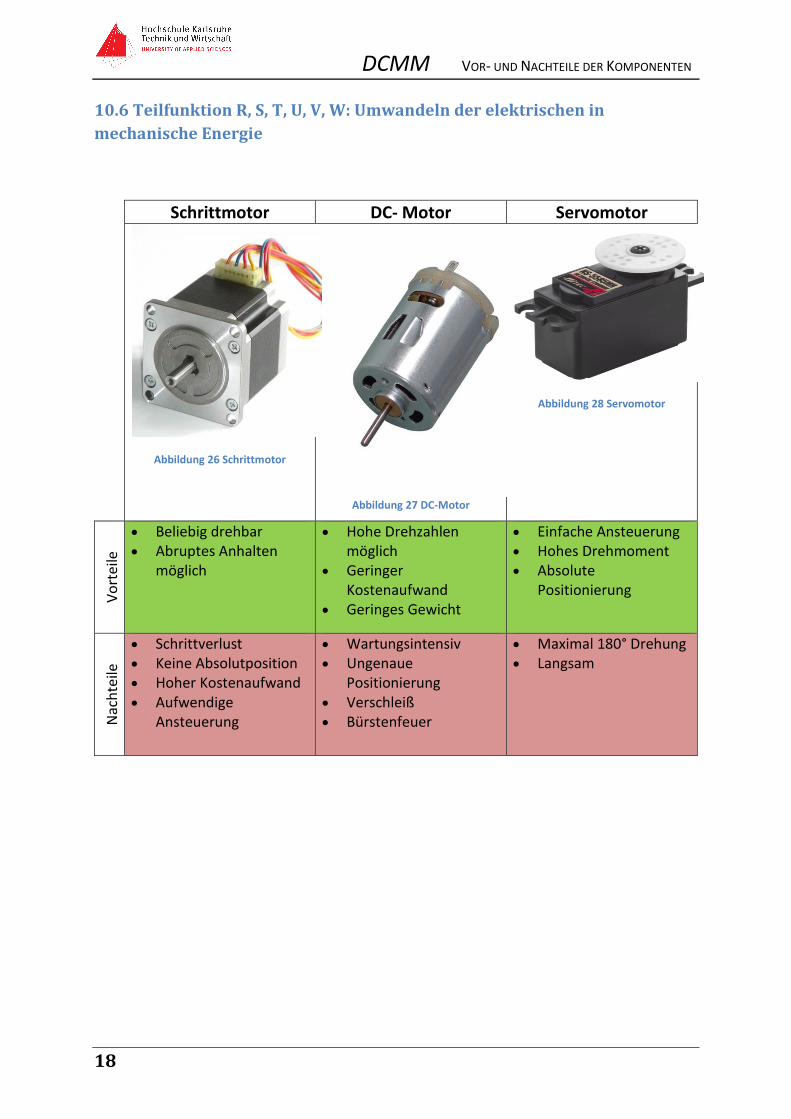
10.6 Teilfunktion R, S, T, U, V, W: Umwandeln der elektrischen in
mechanische Energie
Schrittmotor DC- Motor Servomotor
Abbildung 26 Schrittmotor
Abbildung 27 DC-Motor
Abbildung 28 Servomotor
Vo
rtei
le
Beliebig drehbar Abruptes Anhalten
möglich
Hohe Drehzahlen möglich
Geringer Kostenaufwand
Geringes Gewicht
Einfache Ansteuerung Hohes Drehmoment Absolute
Positionierung
Nac
hte
ile
Schrittverlust Keine Absolutposition Hoher Kostenaufwand Aufwendige
Ansteuerung
Wartungsintensiv Ungenaue
Positionierung Verschleiß Bürstenfeuer
Maximal 180° Drehung Langsam

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
19
10.7 Teilfunktion X*: Verknüpfung der Einzelbewegung zur
Gesamtbewegung
Roboterarm Portalroboter Delta Roboter
Abbildung 29 Roboterarm
Abbildung 30 Portalroboter
Abbildung 31 Delta Roboter
Vo
rtei
le
Hohe Beweglichkeit
Geringer Platzbedarf
Sehr universell einsetzbar
Große Traglasten Einfache Steuerung Sehr großer
Arbeitsraum
Geringes Trägheitsmoment
Hohe Geschwindigkeiten/ Beschleunigungen
Kompakte Bauweise
Nac
hte
ile Geringe Tragekraft
Hohe Belastung durch Eigengewicht
Aufwendiges Portal Geringe Beweglichkeit Niedrige
Arbeitsgeschwindigkeit
Kleiner Arbeitsraum Geringe Tragkraft Hoher
Steuerungsaufwand

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
20
10.8 Teilfunktion Y*: Aufteilen des Steuersignals
Roboterarm mit Lageerkennung
Eingabefeld Joystick
Abbildung 32 Roboterarm mit Lageerkennung
Abbildung 33 Eingabefeld
Abbildung 34 Joystick
Vo
rtei
le
1 zu 1 Ansteuerung des Roboterarms
Intuitiv bedienbar Komplexe Bewegung
schnell umsetzbar
Exakte Eingabe der Koordinaten
Funktionen gut erweiterbar
Geringer Platzbedarf bei Bedienung
Leichte Ansteuerung des Roboterarms
Nac
hte
ile
Auf Dauer anstrengende Handhabung
Großer Platzbedarf Unbeabsichtigte
Eingabe möglich
Teuer Bedienkenntnisse
erforderlich
Nur relative Eingabe möglich
Bedienkenntnisse erforderlich
DCMM VOR- UND NACHTEILE DER KOMPONENTEN
21
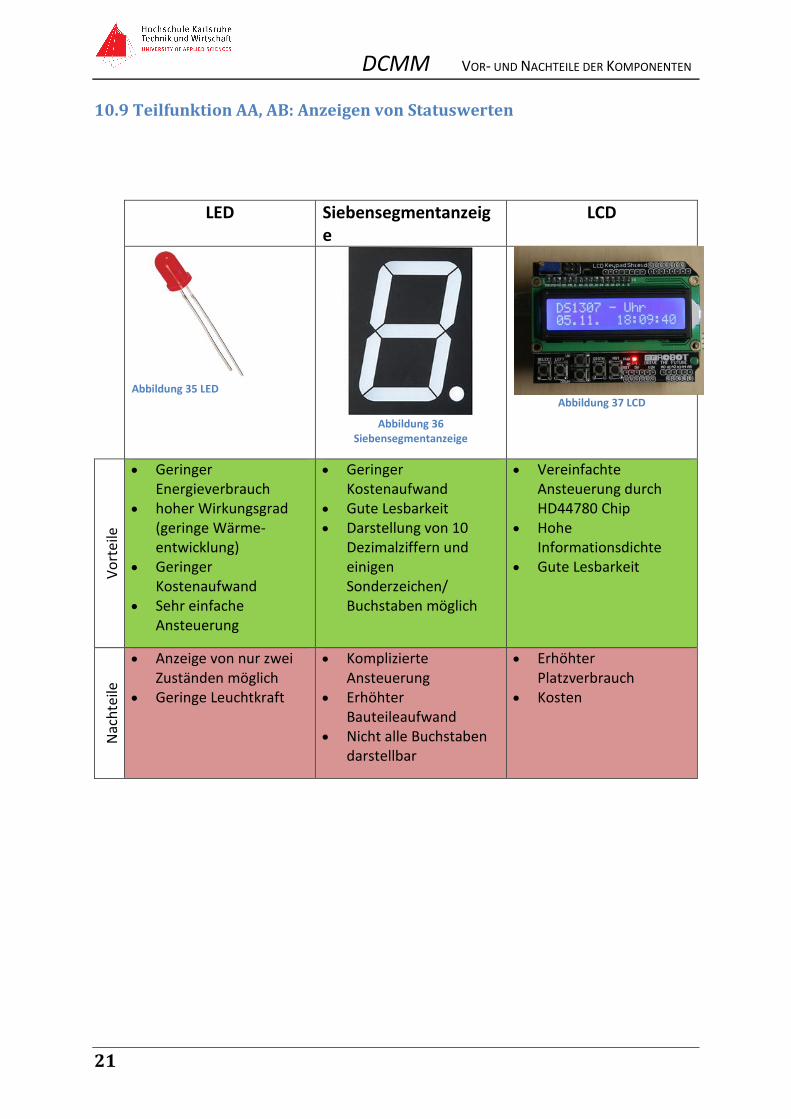
10.9 Teilfunktion AA, AB: Anzeigen von Statuswerten
LED Siebensegmentanzeige
LCD
Abbildung 35 LED
Abbildung 36
Siebensegmentanzeige
Abbildung 37 LCD
Vo
rtei
le
Geringer Energieverbrauch
hoher Wirkungsgrad (geringe Wärme-entwicklung)
Geringer Kostenaufwand
Sehr einfache Ansteuerung
Geringer Kostenaufwand
Gute Lesbarkeit Darstellung von 10
Dezimalziffern und einigen Sonderzeichen/ Buchstaben möglich
Vereinfachte Ansteuerung durch HD44780 Chip
Hohe Informationsdichte
Gute Lesbarkeit
Nac
hte
ile
Anzeige von nur zwei Zuständen möglich
Geringe Leuchtkraft
Komplizierte Ansteuerung
Erhöhter Bauteileaufwand
Nicht alle Buchstaben darstellbar
Erhöhter Platzverbrauch
Kosten

DCMM VOR- UND NACHTEILE DER KOMPONENTEN
22
10.10 Teilfunktion AD: Greifen des Reagenzglases
Unterdruckgreifer Kraftbegrenzter Greifer Wegbegrenzter Greifer
Abbildung 38 Unterdruckgreifer
Abbildung 39 Kraftbegrenzter Greifer
Abbildung 40 Wegbegrenzter
Greifer
Vo
rtei
le
Geringe mechanische Belastung für das Reagenzglas
Einstellbare Saugkraft über Luftdruck
Greift verschiedene Durchmesser mit gleicher Maximalkraft
Zerstörung des Reagenzglases ausgeschlossen
Stufenlos schließbarer Greifer
Universell einsetzbar – nicht nur bei Reagenz-gläsern
Nac
hte
ile
Erhöhter Platzbedarf Nicht für alle
Oberflächen geeignet Nicht für alle
Geometrien geeignet
Nur zwei Greifer Stellungen
Geringe maximale Traglast
Reagenzglas-durchmesser muss eingestellt werden
Zerstörungsgefahr bei Fehlbedienung

DCMM LÖSUNGSALTERNATIVEN
23
11. Lösungsalternativen
Tabelle 6 Morphologie mit Lösungsalternativen

DCMM RANKING
24
12. Ranking
12.1 Auswahl der Bewertungskriterien (aus der Anforderungsliste)
Die Anforderungen wurden in der Matrix vermischt, um eine objektivere Haltung
einzunehmen.
Folgende Kriterien wurden für die Matrix der Bewertungskriterien aus der Anforderungsliste
ausgewählt:
Aus Physikalisch-Technische Funktion:
Eigengewicht
Arbeitsraum des Armes
Leistungsaufnahme
Aus Technologie:
Freiheitsgrade
Programmiersprache
Aus Wirtschaftlichkeit:
Entwicklungskosten
Garantiezeit
Verkaufspreis
Aus Mensch-Produkt-Beziehungen:
Betriebsstunden bis Wartung
Geräuschentwicklung
DCMM RANKING
25
12. 2 Matrix der ausgewählten Bewertungskriterien
Bei der Matrix der ausgewählten Bewertungskriterien werden die
Anforderungen einzeln miteinander verglichen. Dabei wurde jeweils das
wichtigere Kriterium mit einem „+“ versehen. Durch den Vergleich aller
Anforderungen kann für jedes Kriterium ein Gewichtungsfaktor zugeordnet
werden. Der Gewichtungsfaktor ist maßgebend für die Bestimmung des
Nutzwertes.

DCMM RANKING
26
Tabelle 7 Bewertungskriterien

DCMM NUTZWERTANALYSE
27
13. Nutzwertanalyse
Bei der Nutzwertanalyse werden die unterschiedlichen Lösungsalternativen bewertet. Durch
die unabhängige Bewertung der einzelnen Kriterien kann für jede Alternative eine
Punktsumme ermittelt werden. Um eine zielführende Bewertung zu erhalten, wird zusätzlich
jedes Kriterium mit der zugeordneten Gewichtung multipliziert, woraus der Nutzwert jeder
Alternative resultiert. Wird die Punktsumme der alternativen Lösung durch die Punktsumme
der idealen Lösung dividiert, erhält man die Wertigkeit. Die gleiche Berechnung gilt für den
Nutzwert, jedoch resultiert hieraus die gewichtete Wertigkeit. Durch die gewichtete
Wertigkeit können die Alternativen gut bewertet werden, jedoch stellt sie keine hinreichende
Bedingung zur Auswahl dar.
13.1 Verfahrensmatrix Nutzwertanalyse
Tabelle 8 Verfahrensmatrix der Nutzwertanalyse

DCMM NUTZWERTANALYSE
28
13.2 Ergebnis und Auswertung der Nutzwertanalyse
Tabelle 9 Ergebnis der Nutzwertanalyse
Nach den Richtzahlen für den Grad der Wertigkeit (nach Hansen) gilt:
Tabelle 10 Grad der Wertigkeit (nach Hansen)
Laut Hansen sind die Lösungen „1 zu 1 Roboterarm“ und „Joystick-Roboterarm“ mit einer
gewichteten Wertigkeit 𝑤𝑔 ≥ 0,7 günstig und sinnvoll in der Umsetzung.
Aus der Nutzwertanalyse geht hervor, dass die 2. Lösungsalternative mit einer gewichteten
Wertigkeit von 0,73 den höchsten Wert hat.

DCMM AUSGEWÄHLTE LÖSUNG
29
14. Ausgewählte Lösung
Abbildung 41 1 zu 1 Roboterarm
Als Lösung wurde die zweite Lösungsalternative „1 zu 1 Roboterarm“ gewählt. Diese weist
zum einen die beste Wertigkeit auf und bietet aufgrund der gewählten Steuerung eine einfach
zu erlernende Bedienung. Das gewählte Konzept ermöglicht eine effiziente Bedienung, ohne
eine lange Einarbeitungsphase voraus zu setzen.
Mit der Unterstützung von Herrn Jürgen Walter wurde der mechanische Aufbau erst in diesem
Umfang möglich und dafür wollten wir uns an dieser Stelle nochmals bedanken.

DCMM FAZIT
30
15. Fazit
Im Rahmen der Vorlesung Produktentstehungsprozess und Mikrocomputertechnik Labor
konnten wir praktische Eindrücke in industrielle Entwicklungsmethodik gewinnen und
gleichzeitig unsere wichtigen Soft Skills verbessern. Viele Themen der Vorlesung wurden damit
intensiv wiederholt und zum ersten Mal umgesetzt, was uns nicht nur Spaß gemacht hat,
sondern uns auch ideal auf unseren späteren Werdegang vorbereitet hat.
Der zeitliche Ablauf musste wegen des großen Hardwareaufwandes klar definiert sein. Durch
Setzen der richtigen Ziele am Anfang und einer guten Teamkoordination konnten wir viel Zeit
sparen und effektiv arbeiten.
Uns hat sehr gefallen, dass das Projekt ein gut funktionierendes Team aus uns gemacht hat,
bei dem jeder seine Fähigkeiten einbringen konnte. Die Aufgaben wurden gleichmäßig verteilt
und dennoch haben wir die wichtigen Entscheidungen zusammen diskutiert und zusammen
getroffen.
Abschließend wünschen wir unserem Dozenten Herrn Prof. Dr.- Ing. Peter Weber weiterhin
viel Erfolg, das stets hohe Niveau der Vorlesung trotz enorm ansteigender Anzahl an
Studenten beizubehalten, wobei wir diesbezüglich bester Dinge sind. Mit der richtigen
Einstellung können aus der Veranstaltung Produktentstehungsprozess sehr viele wertvolle
Erfahrungen in Theorie, Praxis und Zwischenmenschlichem gesammelt werden.

DCMM LITERATURVERZEICHNIS
31
16. Literaturverzeichnis
Um den tatsächlichen Umfang des Projektes hinzüglich der Umsetzung mittels eines
Mikrocontrollers abschätzen zu können, war es erforderlich sich wesentliche Grundkenntnisse
der Mikrocontrollerprogrammierung anzueignen. Dabei halfen uns folgende Werke, die wir
jederzeit weiterempfehlen können.
Walter, Jürgen (2007): „Mikrocomputertechnik mit der 8051-Controller-Familie: Hardware,
Assembler, C 3. Auflage“
Wiegelmann, Jörg (2004): „Softwareentwicklung in C für Mikroprozessoren und
Mikrocontroller“

DCMM ABBILDUNGSVERZEICHNIS
32
17. Abbildungsverzeichnis
Abbildung 1 Gruppenfoto Team DCMM ................................................................................... IV
Abbildung 2 Mechanische Manipulatoren ................................................................................ 2
Abbildung 3 Portalroboter ......................................................................................................... 2
Abbildung 4 Scara-Roboter ........................................................................................................ 3
Abbildung 5 7-Achs Roboter ...................................................................................................... 3
Abbildung 6 Mindmap ............................................................................................................... 5
Abbildung 7 Blackbox ................................................................................................................. 9
Abbildung 8 Funktionsstrukturplan .......................................................................................... 11
Abbildung 9 Kühlkörper-IC ....................................................................................................... 13
Abbildung 10 Lüfter .................................................................................................................. 13
Abbildung 11 IC-Gehäuse ......................................................................................................... 13
Abbildung 12 Kühlkörper-Motor .............................................................................................. 13
Abbildung 13 Motorgehäuse .................................................................................................... 13
Abbildung 14 Geätzte Platine ................................................................................................... 14
Abbildung 15 Kupferkabel ........................................................................................................ 14
Abbildung 16 Steckbrett ........................................................................................................... 14
Abbildung 17 Potentiometer .................................................................................................... 15
Abbildung 18 Gabellichtschranke mit Drehscheibe ................................................................. 15
Abbildung 19 Inkrementaldrehgeber ....................................................................................... 15
Abbildung 20 Kippschalter ....................................................................................................... 16
Abbildung 21 Taster ................................................................................................................. 16
Abbildung 22 Touchpad ........................................................................................................... 16
Abbildung 23 VC2 Controller .................................................................................................... 17
Abbildung 24 Arduino-Board .................................................................................................... 17
Abbildung 25 Raspberry Pi-Board ............................................................................................ 17
Abbildung 26 Schrittmotor ....................................................................................................... 18
Abbildung 27 DC-Motor ........................................................................................................... 18
Abbildung 28 Servomotor ........................................................................................................ 18
Abbildung 29 Roboterarm ........................................................................................................ 19
Abbildung 30 Portalroboter ..................................................................................................... 19
Abbildung 31 Delta Roboter ..................................................................................................... 19
Abbildung 32 Roboterarm mit Lageerkennung ........................................................................ 20
Abbildung 33 Eingabefeld ........................................................................................................ 20
Abbildung 34 Joystick ............................................................................................................... 20
Abbildung 35 LED ..................................................................................................................... 21
Abbildung 36 Siebensegmentanzeige ...................................................................................... 21
Abbildung 37 LCD ..................................................................................................................... 21
Abbildung 38 Unterdruckgreifer .............................................................................................. 22

DCMM ABBILDUNGSVERZEICHNIS
33
Abbildung 39 Kraftbegrenzter Greifer ..................................................................................... 22
Abbildung 40 Wegbegrenzter Greifer ...................................................................................... 22
Abbildung 41 1 zu 1 Roboterarm ............................................................................................. 29

DCMM TABELLENVERZEICHNIS
34
18. Tabellenverzeichnis
Tabelle 1 Gantt-Diagramm ........................................................................................................ 6
Tabelle 2 Anforderungsliste Blatt 1 ........................................................................................... 7
Tabelle 3 Anforderungsliste Blatt 2 ........................................................................................... 8
Tabelle 4 Legende zur Funktionsstruktur nach Roth .............................................................. 10
Tabelle 5 Morphologie ............................................................................................................ 12
Tabelle 6 Morphologie mit Lösungsalternativen .................................................................... 23
Tabelle 7 Bewertungskriterien ............................................................................................... 26
Tabelle 8 Verfahrensmatrix der Nutzwertanalyse .................................................................. 27
Tabelle 9 Ergebnis der Nutzwertanalyse ................................................................................. 28
Tabelle 10 Grad der Wertigkeit (nach Hansen) ....................................................................... 28

DCMM QUELLEN
35
19. Quellen
Abbildung 2 Mechanische Manipulatoren:
http://www.leifiphysik.de/sites/default/files/medien/hotcell_kernspaltufusion_aus.jpg
(22.05.2014 17:19)
Abbildung 3 Portalroboter:
http://upload.wikimedia.org/wikipedia/commons/4/47/2_komponenten_einfachdosierer_a
uf_portal.jpg
(22.05.2014 17:21)
Abbildung 4 Scara-Roboter:
http://upload.wikimedia.org/wikipedia/commons/2/2d/KUKA_Industrial_Robot_KR10_SCAR
A.jpg
(22.05.2014 17:24)
Abbildung 5 7-Achs Roboter: http://weltderfertigung.de/images/k1024_800yaskawa_7-
achs-roboter_va1400_510.jpg
(22.05.2014 17:25)
Abbildung 8 Kühlkörper-1: http://www.fischerelektronik.de/uploads/pics/PM_ICK_SMD.jpg
(22.05.2014 17:26)
Abbildung 9 Lüfter:
http://www.conrad.de/medias/global/ce/8000_8999/8700/8710/8710/871058_RB_00_FB.E
PS_1000.jpg
(22.05.2014 17:28)
Abbildung 10 IC-Gehäuse: http://cdn-reichelt.de/bilder/web/xxl_ws/A200/SO-16.png
(22.05.2014 17:34)
Abbildung 11 Kühlkörper-2: http://www.kotte-zeller.de/$WS/kotte-zeller-
shop/websale8_shop-kotte-zeller-shop/produkte/medien/bilder/gross/900487.jpg
(25.05.2014 18:10)
Abbildung 12 Motorgehäuse:
http://www.conrad.de/medias/global/ce/2000_2999/2300/2360/2368/236867_LB_00_FB.E
PS_1000.jpg
(25.05.2014 18:13)
Abbildung 13 Geätzte Platine: http://bienonline.magix.net/public/undsonst-pcb/geaetzt.png
(25.05.2014 18:19)

DCMM QUELLEN
36
Abbildung 14 Kupferkabel: http://www.nbf-powercable.com/photo/pl7390-
kupferleiter_pvc_xlpe_isolierte_pvc_ummantelte_geflecht_geschirmt_flexible_steuerkabel.j
pg
(25.05.2014 18:21)
Abbildung 15 Steckbrett: https://www.projektlabor.tu-
berlin.de/fileadmin/fg52/onlinekurs/fehlersuche/steckbrett.jpg
(25.05.2014 18:22)
Abbildung 16 Potentiometer:
http://www.conrad.de/medias/global/ce/4000_4999/4500/4500/4500/450034_BB_00_FB.E
PS_1000.jpg
(25.05.2014 18:30)
Abbildung 17 Gabellichtschranke mit Drehscheibe: http://www.rn-
wissen.de/images/5/5f/Gp1a30.jpg
(25.05.2014 18:33)
Abbildung 18 Inkrementaler Drehgeber:
http://images.fotocommunity.com/photos/special/product/drehgeber-inkremental-
343f88cb-6e1f-4876-8cb9-45425b5bb581.jpg
(25.05.2014 18:40)
Abbildung 19 Kippschalter:
http://www.conrad.de/medias/global/ce/7000_7999/7000/7010/7010/701011_LB_00_FB.E
PS_1000.jpg
(25.05.2014 18:45)
Abbildung 20 Taster: http://www.shop-
014.de/shop_cfg/michawi/drucktasterrotrunderkopf.JPG
(25.05.2014 18:50)
Abbildung 21 Touchpad: http://img.edilportale.com/product-thumbs/b_prodotti-48616-
rel7fa000b6-b9df-455a-92e9-7253606ec291.jpg
(25.05.2014 18:53)
Abbildung 23 Arduino-Board: http://ecx.images-
amazon.com/images/I/81AZSyPZIvL._SL1500_.jpg
(25.05.2014 18:56)
Abbildung 24 Raspberry Pi-Board:
http://upload.wikimedia.org/wikipedia/commons/3/30/RaspberryPiModelBRev2.by.Philipp.
Bohk.jpg
(25.05.2014 18:59)

DCMM QUELLEN
37
Abbildung 25 Schrittmotor:
http://www.shop.robotikhardware.de/shop/catalog/images/stepp5010.jpg
(25.05.2014 19:03)
Abbildung 26 DC-Motor:
http://www.mind.ilstu.edu/curriculum/medical_robotics/dcmotor.jpg
(25.05.2014 19:08)
Abbildung 27 Servomotor: http://www.robotshop.com/media/files/images/hitec-hs-
5585mh-servo-motor-large.jpg
(25.05.2014 19:10)
Abbildung 28 Roboterarm:
http://www.ikhds.com/media/catalog/product/cache/1/image/800x/9df78eab33525d08d6e
5fb8d27136e95/a/r/arexx_roboterarm-pro_72dpi.jpg
(25.05.2014 19:13)
Abbildung 29 Portalroboter: http://www.hiwin.de/temp/images/1338/610-500-1-
jpg/Portalroboter_KM_R_3.jpg
(25.05.2014 19:20)
Abbildung 30 Delta Roboter:
http://t1.gstatic.com/images?q=tbn:ANd9GcQyBnG262lWxe7yTWPvJJlueTl16OT0oJpMETSLl
N7-sTnnfIQ4BikwY_M
(25.05.2014 19:24)
Abbildung 31 Roboterarm mit Lageerkennung:
http://www.hoegg.ch/newsletter/2011_01/media/Messarm.jpg
(25.05.2014 19:31)
Abbildung 32 Eingabefeld: http://www.kulttempel.de/images/produkte/i65/6500-
P1130382.JPG
(25.05.2014 19:33)
Abbildung 33 Joystick: http://yudamasputra.files.wordpress.com/2011/10/joystick-
yayayayayayayyayaaya2.jpg
(25.05.2014 19:41)
Abbildung 34 LED:
http://www.conrad.de/medias/global/ce/1000_1999/1800/1850/1857/185787_BB_00_FB.E
PS_1000.jpg
(25.05.2014 19:45)

DCMM QUELLEN
38
Abbildung 35 Siebensegmentanzeige: http://www.elv-
downloads.de/bilder/artikel/Produkte/13/1306/130621/Internet/normalneu/130621_w02_
7segmentanzeige.jpg
(25.05.2014 19:52)
Abbildung 36 LCD:
http://www.amateurfunk.de/__we_thumbs__/1658_4_rtc_ds1307_lcd.jpg
(25.05.2014 19:58)
Abbildung 37 Unterdruckgreifer:
http://www.festo.com/rep/de_de/assets/esG_1504u_150px.jpg
(25.05.2014 20:01)
Abbildung 38 Kraftbegrenzter Greifer: http://www.monolitix.com/115-0-
Greifer.html?rex_img_type=bild_text&rex_img_file=zweifingegreiferretortenglas.jpg
(25.05.2014 20:06)
Abbildung 39 Wegbegrenzter Greifer: http://www.ulrichc.de/product/robotic/mechanic.jpg
(25.05.2014 20:10)









![[DE] Mobile Ranking-Faktoren 2015 - Marcus Tober](https://static.fdokument.com/doc/165x107/5887e43c1a28abfb678b6e67/de-mobile-ranking-faktoren-2015-marcus-tober.jpg)







