Rastanlagen an BAB – Verbesserung der Auslastung und ... · 3. Kurzfassung – Abstract....
70
Rastanlagen an BAB – Verbesserung der Auslastung und Erhöhung der Kapazität durch Telematiksysteme Berichte der Bundesanstalt für Straßenwesen Verkehrstechnik Heft V 241
Transcript of Rastanlagen an BAB – Verbesserung der Auslastung und ... · 3. Kurzfassung – Abstract....

Rastanlagen an BAB – Verbesserung
der Auslastung und Erhöhung
der Kapazität durch Telematiksysteme
Berichte derBundesanstalt für Straßenwesen
Verkehrstechnik Heft V 241
Ber
icht
e d
er B
und
esan
stal
t fü
r S
traß
enw
esen
H
eft
V 4
1
ISSN 0943-9331ISBN 978-3-95606-105-9
ISBN Stand = Rah20140722_Umschlag V 241.indd 1
menbreite 190 mm + Rückenbreite ---------------------------------------------------------------->22.07.14 13:41

von
Jessica KleineRainer Lehmann
Jan Lohoff Lutz Rittershaus
Bundesanstalt für StraßenwesenBergisch Gladbach
Berichte derBundesanstalt für Straßenwesen
Verkehrstechnik Heft V 241
Rastanlagen an BAB – Verbesserung
der Auslastung und Erhöhung
der Kapazität durch Telematiksysteme
20140722_Umschlag V 241.indd 2 22.07.14 13:41

Die Bundesanstalt für Straßenwesenveröffentlicht ihre Arbeits- und Forschungs-ergebnisse in der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen. Die Reihebesteht aus folgenden Unterreihen:
A - AllgemeinesB - Brücken- und IngenieurbauF - FahrzeugtechnikM - Mensch und SicherheitS - StraßenbauV - Verkehrstechnik
Es wird darauf hingewiesen, dass die unterdem Namen der Verfasser veröffentlichtenBerichte nicht in jedem Fall die Ansicht desHerausgebers wiedergeben.
Nachdruck und photomechanische Wieder-gabe, auch auszugsweise, nur mit Genehmi-gung der Bundesanstalt für Straßenwesen,Stabsstelle Presse und Öffentlichkeitsarbeit.
Die Hefte der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen könnendirekt bei der Carl Schünemann Verlag GmbH,Zweite Schlachtpforte 7, D-28195 Bremen,Telefon: (04 21) 3 69 03 - 53, bezogen werden.
Über die Forschungsergebnisse und ihre Veröffentlichungen wird in der Regel in Kurzform im Informationsdienst Forschung kompakt berichtet.Dieser Dienst wird kostenlos angeboten;Interessenten wenden sich bitte an dieBundesanstalt für Straßenwesen,Stabsstelle Presse und Öffentlichkeitsarbeit.
Ab dem Jahrgang 2003 stehen die Berichte der Bundesanstalt für Straßenwesen (BASt) zum Teil als kostenfreier Download im elektronischen BASt-Archiv ELBA zur Verfügung. http://bast.opus.hbz-nrw.de
Impressum
Bericht zum Forschungsprojekt F1100.6510002:Telematiksysteme zur Verbesserung der streckenbezogenen Auslastung und Erhöhung der Kapazität von Rastanlagen an BAB - Maßnahmenkatalog
HerausgeberBundesanstalt für StraßenwesenBrüderstraße 53, D-51427 Bergisch GladbachTelefon: (0 22 04) 43 - 0Telefax: (0 22 04) 43 - 674
RedaktionStabsstelle Presse und Öffentlichkeitsarbeit
Druck und VerlagFachverlag NW in derCarl Schünemann Verlag GmbHZweite Schlachtpforte 7, D-28195 BremenTelefon: (04 21) 3 69 03 - 53Telefax: (04 21) 3 69 03 - 48www.schuenemann-verlag.de
ISSN 0943-9331ISBN 978-3-95606-105-9
Bergisch Gladbach, August 2014
20140722_Impressum V 241.indd 1 22.07.14 13:48

3
Kurzfassung – Abstract
Rastanlagen an BAB – Verbesserung derAuslastung und Erhöhung der Kapazität durchTelematiksysteme
Erhebungen im Auftrag des damaligen Bundesministe-riums für Verkehr, Bau und Stadtentwicklung (BMVBS)im März 2008 belegten, dass auf und an den Bundes-autobahnen etwa 14.000 Lkw-Parkstände fehlen.Neben der baulichen Schaffung neuer Parkstandkapa-zitäten fördert das Bundesministerium für Verkehr unddigitale Infrastruktur (BMVI) auch den Einsatz telema-tischer Systeme zur besseren Auslastung und Kapazi-tätserhöhung auf Rastanlagen. Auch aufgrund unre-gelmäßiger Nachfrage ist ein Verteilen der Nachfrageinnerhalb eines Streckenabschnitts erforderlich. Dieskann durch den Einsatz von Telematik geleistet wer-den.
Zur Ermittlung der Belegung der Rastanlagen aufeinem Streckenabschnitt werden diese mit Detektions-technik ausgerüstet. Die detektierten Daten über dieBelegung von Lkw-Parkständen werden zu Informatio-nen aufbereitet. Diese Parkinformationen können überverschiedene Kommunikationswege (z. B. über elek-tronische Anzeigen an der Autobahn oder das Internet)den Lkw-Fahrern sowie den Logistikunternehmenübermittelt werden. Für die Güterverkehrsbranche be-deutet dies eine verbesserte Planbarkeit der Lenk- undRuhezeiten der Lkw-Fahrer. Gleichzeitig soll mittelsParkinformationen eine gleichmäßigere Auslastungdes Parkangebots an Bundesautobahnen (BAB) erzieltund somit das Auftreten gefährlicher Situationen durchverkehrsgefährdend abgestellte Fahrzeuge in den Zu-fahrten von Rastanlagen verhindert werden. Insge-samt ist somit von einer Erhöhung der Sicherheit füralle Verkehrsteilnehmer auf den BAB auszugehen.
Bewährte Detektoren, wie Induktivschleifen, stehenauf Rastanlagen vor neuen Herausforderungen. Hier-für bedurfte es neuer technischer Entwicklungen, wel-che die besonderen Randbedingungen auf einer Rast-anlage und die Anforderungen an die Informationsqua-lität von Parkinformationen berücksichtigen. Neue De-tektoren wurden im Rahmen von Pilotprojekten derBundesländer erprobt.
Die Bundesanstalt für Straßenwesen (BASt) hat die Pilotprojekte unter wissenschaftlichen Gesichtspunk-ten mit dem Fokus einer zukünftigen Evaluierung be-gleitet. Dazu wurde ein einheitliches Bewertungsver-fahren für Telematiksysteme auf Rastanlagen entwi -ckelt. Das Bewertungsverfahren erlaubt – im Gegen-satz zu Prüfungen gemäß Technischen Lieferbedin-gungen für Streckenstationen (TLS) –, den Fokus auf
die Bewertung des Gesamtkonzeptes zu legen, d. h.,das Zusammenspiel aus Detektion, Steuerungsverfah-ren und Kommunikation zum Verkehrsteilnehmer kannsystematisch analysiert werden.
Ergebnis bisheriger Tätigkeiten der BASt ist weiterhindie Entwicklung eines neuen Steuerungsverfahrens„Kompaktparken“, welches das vorhandene Spektrumtelematischer Systeme auf Rastanlagen sinnvoll er-gänzt. Kompaktparken basiert auf der Idee, durch zeit-liches Sortieren mehr parkende Fahrzeuge auf derRastanlage zu platzieren, die Flächen von Fahrgasseneinzusparen und geordnetes, sicheres Parken zu un-terstützen.
Als Koordinierungsstelle der deutschen Location CodeList und Mitglied in der internationalen Traveller Infor-mation Services Association (TISA) unterstützt dieBASt die Weiterentwicklung von Diensten zur Bereit-stellung von Parkinformationen in die Fahrzeuge.
Der vorliegende Bericht fasst den Stand der gewonne-nen Erkenntnisse über Maßnahmen zur Auslastungund Erhöhung der Kapazität von Rastanlagen an BABzusammen. Der Bericht basiert auf Literaturrecher-chen, eigenen Untersuchungen und Tätigkeiten derBASt sowie Gesprächen mit Betreibern und Anbieterntelematischer Systeme für Rastanlagen. Zunächstwerden die derzeit eingesetzten Techniken für Detek -tion und Kommunikation sowie Steuerungsverfahrenvorgestellt. Ergänzend werden mögliche, bislang nochnicht für das telematische Lkw-Parken eingesetzteTechniken betrachtet.
Darauf aufbauend wurde ein Konzept entwickelt, wiezukünftig eine intelligente Streckensteuerung wirkenkann. Diese soll im Gegensatz zu Parkinformationenfür einzelne Rastanlagen die Belegung mehrerer Rast-anlagen eines Streckenabschnitts berücksichtigen undParkempfehlungen für die Nutzer ermöglichen. Dazuwird vom Stand der Technik ausgehend eine möglicheRealisierungsvariante beschrieben und der erforder -liche Entwicklungsbedarf aufgezeigt. Vorschläge zurGestaltung von Parkinformationen runden das Kon-zept ab.
Es ist beabsichtigt, den Bericht im Sinne eines Maß-nahmenkataloges mit fortschreitendem Erkenntnis-stand zu aktualisieren. Er soll im Besonderen Betrei-bern und Dienstanbietern Orientierung bei der Sys -temgestaltung bieten. Gleichzeitig sollen Entwicklun-gen im Bereich fahrzeugseitiger Parkinformationen an-gestoßen werden.
Das Bewertungsverfahren wiederum soll zukünftigeine vergleichende Bewertung von telematischen Sys -temen auf Rastanlagen ermöglichen und zu einer kon-tinuierlichen Verbesserung der Systeme beitragen.Zum Zeitpunkt der Berichtslegung stehen die abschlie-

ßenden Ergebnisse der einheitlichen Bewertung derDetektoren in den Pilotprojekten aus und sind mit einerFortschreibung des Berichts zu ergänzen.
Rest areas on motorways – Improving theutilization and increasing the capacity byintelligent traffic systems
According to an investigation in March 2008 at thattime by the Federal Ministry of Transport, Building andUrban Affairs about 14,000 truck parking spaces aremissing in the near of motorways in Germany. Besideconstructional enlargement of rest areas the FederalMinistry of Transport and Digital Infrastructure (BMVI)encourage the use of intelligent traffic systems (ITS).ITS ought to be used to detect automatically theoccupancy rate of rest areas and to provide betterdemand management and also to achieve an increaseof capacity of truck parking spaces.
The occupancy rate of rest areas within a motorwaysection should be automatically detected by specialsensors. The detected data on the availability of truckparking spaces are processed into information. Theseparking information can be transmitted to the truckdrivers and logistics companies through variouscommunication channels (e.g. via electronic displayson the highway or internet). For the freight industry, thismeans improved ability to plan the driving and restperiods for truck drivers. Furthermore a balancedutilization of rest areas will be achieved on motorwaysby parking information and the occurrence ofdangerous situations with trucks parked in thedriveways of rest areas can be prevented. Overall, thesafety for all road users can be improved on themotorway.
Tried and tested detectors, such as inductive loops,facing new challenges at rest areas. For this purpose,it required new technical developments which take intoaccount the specific constraints on a rest area and thedemands on the information quality of parkinginformation. New detectors have been tested in pilotprojects of the federal states.
The Federal Highway Research Institute (BASt) hasaccompanied the pilot projects from a scientificviewpoint with the focus of a future evaluation. For thispurpose, a unified evaluation process for ITS on restareas was developed. The evaluation process allows –in contrast to tests in accordance with the TechnicalDelivery Conditions for Roadway Stations (TLS) – tofocus on the assessment of the overall concept, i.e. theinteraction of the detection, control methods, andcommunication to road users can be systematicallyanalyzed.
Result of the Federal Highway Research Instituteactivities was the development of a new controlprocedure "Compact Parking", which extends theexisting range of ITS on rest areas. The methodachieves that a number of trucks are parking in acompact way, side by side and without a driving lanebetween them. With the help of dynamic displaysabove the parking rows, the drivers receive the needfulinformation to park their vehicle in a parking row, inwhich other trucks have the same or an earlierdeparture time. This system can increase the rest areacapacity in short-term and more quickly thanconstructional enlargement of rest areas.
As a coordinating organization of the German LocationCode List and a member of the International TravellerInformation Services Association (TISA), the FederalHighway Research Institute supports the developmentof services for the provision of parking information tothe vehicles.
The report summarizes the state of knowledge gainedon measures to increase occupancy and capacity ofrest areas on motorways. The report is based onliterature research, own investigations and activities ofthe Federal Highway Research Institute and interviewswith operators and providers of ITS for rest areas.First, the technologies currently used for detection andcommunication, and control methods are presented. Inaddition possible future technologies are consideredand discussed.
Based on that a concept was developed which willallow better ITS based capacity management on restareas of a motorway section in future. It takes intoaccount the availability of all rest areas of a motorwaysection and gives in-vehicle information andrecommendation for users. Based on the state of theart one possible implementation version is described todemonstrate the required developments. Proposals fordesigning of parking information complete the concept.
It is intended to update the report in terms of a catalogof measures with advancing knowledge. The reportintended to provide guidance in system design, inparticular, to operators and service providers. At thesame time, it intends to initiate further developmentsfor in-vehicle parking information.
The unified evaluation process should enable futurecomparative assessment of ITS on rest areas andcontribute to the continuous improvement of thesystems. For time reporting the final results of theuniform evaluation process of all pilot projects are stillto come and will be supplemented with an update ofthe report.
4
5
Inhalt
Abkürzungen . . . . . . . . . . . . . . . . . . . . . . . . . 6
Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . 9
2 Grundlagen der Systeme fürtelematisches Lkw-Parken. . . . . . . . . 10
2.1 Definitionen. . . . . . . . . . . . . . . . . . . . . . 10
2.2 Datenerfassung . . . . . . . . . . . . . . . . . . 11
2.2.1 Begriffsbestimmungen . . . . . . . . . . . . . 11
2.2.2 Induktivschleifendetektor . . . . . . . . . . . 12
2.2.3 Erdmagnetfelddetektor . . . . . . . . . . . . . 13
2.2.4 Videokameradetektoren . . . . . . . . . . . . 14
2.2.5 Radardetektoren . . . . . . . . . . . . . . . . . . 15
2.2.6 Kombinationen von Sensoren . . . . . . . 16
2.2.7 Manuell erhobene Daten . . . . . . . . . . . 16
2.3 Korrekturen bei Bilanzierungsverfahren . . . . . . . . . . . . . 17
2.4 Kommunikation zum Verkehrsteilnehmer. . . . . . . . . . . . . . . . 18
2.4.1 Maßnahmenspektrum. . . . . . . . . . . . . . 18
2.4.2 Dynamische Wegweisung mit Parkinformationen. . . . . . . . . . . . . . . . . 18
2.4.3 Verkehrswarndienst über TMC . . . . . . . 20
2.4.4 Verkehrswarndienst über TPEG . . . . . . 22
2.4.5 Mobilitätsdatenmarktplatz „Verkehrsinformationen“ und Anbindung privater Dienste . . . . . . . . . 23
2.5 Steuerungsstrategien . . . . . . . . . . . . . . 25
2.5.1 Ziele der Steuerung . . . . . . . . . . . . . . . 25
2.5.2 Steuerungsverfahren für einzelne Rastanlagen . . . . . . . . . . . . . . . . . . . . . 26
2.5.3 Intelligente Streckensteuerung über mehrere Rastanlagen. . . . . . . . . . 27
2.5.4 Kolonnenparken . . . . . . . . . . . . . . . . . . 27
2.5.5 Kompaktparken. . . . . . . . . . . . . . . . . . . 28
3 Übersicht über die Pilotprojekte . . . . 29
4 Bewertung der Systeme für telematisches Lkw-Parken. . . . . . . . . 30
4.1 Stand bisheriger Bewertungen und Ziele. . . . . . . . . . . . . . . . . . . . . . . . 30
4.2 Grundlagen der Beurteilenden Statistik . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3 Bewertungsverfahren Einzelpark-standsdetektion (Entwurf) . . . . . . . . . . . 35
4.3.1 Klassifizierungsgenauigkeit bei Einzelparkstandsdetektion . . . . . . . . . . 35
4.3.2 Langzeitstabilität für Einzelparkstandsdetektion . . . . . . . . . . 36
4.3.3 Informationsqualität . . . . . . . . . . . . . . . 38
4.3.4 Weitere Bewertungsaussagen fürEinzelparkstandsdetektion . . . . . . . . . . 39
4.4 Bewertungsverfahren für Bilanzierungsverfahren (Entwurf) . . . . . 40
4.4.1 Klassifizierungsgenauigkeit von Bilanzierungsverfahren . . . . . . . . . . . . . 40
4.4.2 Langzeitstabilität für Bilanzierungsverfahren . . . . . . . . . . . . . 43
4.4.3 Informationsqualität . . . . . . . . . . . . . . . 45
4.4.4 Weitere Bewertungsaussagen für Bilanzierungsverfahren . . . . . . . . . . . . . 46
4.5 Bewertung der Wirksamkeit von Parkinformationssystemen . . . . . . . . . . 46
4.6 Lastenheft zur funktionalen Ausschreibung . . . . . . . . . . . . . . . . . . . 47
5 Vorschlag für eine intelligente Streckensteuerung . . . . . . . . . . . . . . . 48
5.1 Vorbemerkung . . . . . . . . . . . . . . . . . . . 48
5.2 Anforderung an Detektion. . . . . . . . . . . 48
5.2.1 Detektionsverfahren . . . . . . . . . . . . . . . 48
5.2.2 Lage der Detektoren auf der Rastanlage . . . . . . . . . . . . . . . . . . . . . . 48
5.2.3 Fahrzeugklassifizierung . . . . . . . . . . . . 49
5.2.4 Informationsqualität . . . . . . . . . . . . . . . 49
5.2.5 Manuelle Korrekturen . . . . . . . . . . . . . . 50
6
5.2.6 Toleranzgrenze der Langzeitstabilität bei Einzelparkstandsdetektion . . . . . . . 51
5.2.7 Toleranzgrenze der Langzeitstabilität bei Bilanzierungsverfahren . . . . . . . . . . 51
5.2.8 Automatische Korrekturverfahren. . . . . 52
5.2.9 Wirtschaftlichkeit. . . . . . . . . . . . . . . . . . 52
5.3 Anforderung an die Streckensteuerung . . . . . . . . . . . . . . . . 53
5.3.1 Aufgabe der Streckensteuerung. . . . . . 53
5.3.2 Aufbereitung der Detektionsdaten . . . . 53
5.3.3 Ableiten der Anzahl freier Parkstände . . . . . . . . . . . . . . . . . . . . . . 54
5.3.4 Ableiten einer Zustandsbeschreibung . . . . . . . . . . . . . 55
5.3.5 Ableiten von Empfehlungen . . . . . . . . . 56
5.4 Anforderung an ein Kommunikationskonzept. . . . . . . . . . . . 58
5.4.1 Akteure einer Streckensteuerung. . . . . 58
5.4.2 Informationswege zum Nutzer . . . . . . . 60
5.4.3 Einsatz von TMC . . . . . . . . . . . . . . . . . 60
5.4.4 Einsatz von TPEG . . . . . . . . . . . . . . . . 61
5.4.5 Einsatz von Smartphoneapplikationen. . . . . . . . . . . 61
5.4.6 Einsatz von Navigationsgeräten . . . . . . 62
6 Zusammenfassung und Ausblick. . . . . . . . . . . . . . . . . . . . . . . . 62
7 Literatur . . . . . . . . . . . . . . . . . . . . . . . . 65
Anhang
Der Anhang zum Bericht ist im elektronischenBASt-Archiv ELBA unter
http://bast.opus.hbz-nrw.de abrufbar.
Abkürzungen
ADAC Allgemeiner Deutscher Automobilclub e. V.
ALERT Agreed Layer of European RDS-TMC
AVERZ Autobahnverzeichnis
BAB Bundesautobahn
BAG Bundesamt für Güterverkehr
BASt Bundesanstalt für Straßenwesen
BMVBS Bundesministerium für Verkehr, Bau und Stadtentwicklung
BMVI Bundesministerium für Verkehr und digitale Infrastruktur
DAB Digital Audio Broadcasting
ECL Event Code List
Kfz Kraftfahrzeug
LCL Location Code List
Lkw Lastkraftwagen
MDM Mobilitäts-Daten-Marktplatz
PKI Parking Information
Pkw Personenkraftwagen
PWC Parkplatz mit WC
RDS Radio Data System
StVO Straßenverkehrsordnung
TISA Traveller Information Services Association
TLS Technische Lieferbedingungen für Streckenstationen
TMC Traffic Message Channel
TPEG Transport Protocol Experts Group
TR Tank- und Rastanlage
DefinitionenBewertungsverfahren ist ein Entwurf zur Be-
schreibung der Langzeitstabilität und der Klassi-fizierungsgenauigkeit von Detektionsverfahrenbis hin zur Bewertung der Qualität vonParkinforma tionen.
Bilanzierungsverfahren beschreibt die Erfassungeinfahrender und ausfahrender Fahrzeuge füreinen Bereich oder die gesamte Rastanlage, umauf die Anzahl der auf der Rastanlage befind -lichen Lkw zu schließen.
(Detektions-)Daten umfassen alle eine Situationauf der Rastanlage beschreibenden, gemesse-nen und verarbeiten Angaben, die nicht demVerkehrsteilnehmer zur Verfügung gestellt wer-den (z. B. Anzahl Fahrzeuge auf der Rast-anlage).
Detektion umfasst das Detektionsverfahren unddie dafür eingesetzte Detektionstechnik zur Erfassung der Situation auf einer Rastanlage.
Detektionstechnik charakterisiert die eingesetztenDetektoren.
Detektionsverfahren untergliedert sich in Bilanzie-rungsverfahren und Einzelparkstandsdetektion.
Detektor ist z. B. eine Induktivschleife, Laser-scanner, Videokamera mit zugehöriger Auswer-tesoftware (Sensor und Auswertung).
Dynamische Wegweisung mit Parkinforma-tionen übermitteln die Anzahl freier Parkständeim Vorfeld einer Rastanlage. Sie wurden imRahmen der Pilotprojekte zur Anzeige numeri-scher Parkinformationen genutzt.
Einzelparkstandsdetektion beschreibt die Erfas-sung der Belegung der Parkstände.
(Park-)Informationen umfassen alle Angaben zurSituation auf der Rastanlage, die dem Verkehrs-teilnehmer zur Verfügung gestellt werden.
Informationsqualität ergibt sich aus der Kombina-tion von Klassifizierungsgenauigkeit und Lang-zeitstabilität.
Intelligente Streckensteuerung beschreibt einSteuerungsverfahren, welches aus Detektions -daten mehrerer Rastanlagen Parkinformationenfür einen begrenzten Streckenabschnitt ermit-telt.
Klassifizierungsgenauigkeit beschreibt die Häu-figkeit von Falschklassifizierungen von Fahrzeu-gen, nicht jedoch, welche Fahrzeugklasse wieoft falsch detektiert wurde.
Korrektur(verfahr)en sind Teil des Steuerungs-verfahrens. Sie wirken z. B. unmittelbar auf die Detektionsdaten, wenn eine hohe Abweichungzwischen der Anzahl gemessener und tatsäch-lich vorhandener Lkw festgestellt wurde. Korrek-turen können jedoch auch in Form von Korrek-turfaktoren erfolgen, wenn z. B. aus der AnzahlLkw auf einer Rastanlage auf die Anzahl freierParkstände geschlossen wird.
Langzeitstabilität sagt etwas über die Häufigkeitder Abweichung zwischen tatsächlicher und ge-messener Anzahl Lkw aus, nicht jedoch über dieHöhe der Abweichung.
Parkstand ist ein zum Parken eines Fahrzeugs ab-gegrenzter Teil einer öffentlichen Verkehrsfläche(FGSV, 2012).
Rastanlagen sind Parkierungseinrichtungen deröffentlichen Hand an BAB (sowohl bewirtschaf-tet als auch unbewirtschaftet).
Steuerungsverfahren beschreibt die Prozesse,die erforderlich sind, um aus Daten der Detek -tion die für den Verkehrsteilnehmer bereitge-stellten Parkinformationen zu erzeugen.
Streckenabschnitt umfasst einen über mehrereKilometer sich erstreckenden Abschnitt derBAB, innerhalb dessen sich mehrere Rastanla-gen befinden.
Streckenbezogene Kapazität ist die Summe allerfür Lkw verkehrsrechtlich ausgewiesener Park-stände eines Streckenabschnitts.
Streckenbezogene Nachfrage ist die Summe allerLkw, die zu einem bestimmten Zeitpunkt aufeinem Streckenabschnitt parken wollen.
Toleranzgrenze beschreibt die wahrnehmbare Ab-weichung zwischen Parkinformation und tat-sächlicher Situation auf einer Rastanlage ausSicht eines Verkehrsteilnehmers.
7


1 EinleitungAnfang 2008 wurde auf Initiative des damaligenBundesministeriums für Verkehr, Bau und Stadtent-wicklung (BMVBS) die Parksituation auf Autobah-nen für Lkw bundesweit erhoben (BMVBS, 2008).Die Zählungen erstreckten sich über insgesamt vierNächte. Die Straßenbauverwaltungen der Länderund das Bundesamt für Güterverkehr (BAG) erho-ben dabei die zwischen 22:00 und 3:00 Uhr abge-stellten Lkw auf bewirtschafteten und unbewirt-schafteten Rastanlagen der Bundesautobahnen(BAB) sowie auf den Autohöfen und weiteren be-kannten Abstellorten entlang der BAB. Danach feh-len etwa 14.000 Lkw-Parkstände auf und an BAB(BMVBS, 2012). Die Nachfrage für Lkw-Parkständeergibt sich dabei streckenbezogen (fehlende Park-stände pro Kilometer).
Die Einhaltung gesetzlich vorgeschriebener Lenk-und Ruhezeiten trägt zur Verkehrssicherheit allerVerkehrsteilnehmer bei. Fehlen hierfür Parkflächen,wird die Verkehrssicherheit insbesondere durchordnungswidriges Parken von Lkw außerhalb derdafür vorgesehenen Parkstände reduziert (Bergi-sche Universität Wuppertal, 2003). Ebenso werdenUnfälle infolge von Übermüdung und/oder man-gelnder Aufmerksamkeit in EVERS et al. (2006) be-schrieben. Befragungen belegen, dass u. a. die ver-kehrsbezogenen Rahmenbedingungen der Lkw-Fahrertätigkeit einen wesentlichen Belastungsfak-tor für die Fahrzeugführer darstellen. Genannt wur-den schlechte Parkmöglichkeiten, das Verhaltenanderer Verkehrsteilnehmer und hohes Verkehrs-aufkommen (EVERS, 2009).
Der 2010 beschlossene „Aktionsplan Güterverkehrund Logistik – Logistikinitiative für Deutschland“des damaligen BMVBS beschreibt in der Maßnah-me 5A das Ziel, „Mehr Parkflächen für Lkw an Bun-desautobahnen“ zu schaffen (BMVBS, 2010).Neben dem beschleunigten Ausbau der Rastanla-gen sollen auch telematische Systeme eingesetztwerden.
Auch aufgrund unregelmäßiger Nachfrage ist einVerteilen der Nachfrage innerhalb eines Strecken-abschnitts erforderlich. Dies kann nur durch Tele-matik geleistet werden. In Bezug auf Parkinforma-tionen ist es das Ziel, den Parksuchenden bei derEinfahrt in einen BAB-Streckenabschnitt mit tele-matischer Unterstützung zu einem geeigneten frei-en Parkstand zu leiten. Mittels Parkinformationenkönnen die vorhandenen Parkstandskapazitäten
für Lkw durch eine gleichmäßigere und insgesamthöhere Auslastung effizienter ausgenutzt werden.Für die Güterverkehrsbranche soll damit eine ver-besserte Planbarkeit der Lenk- und Ruhezeiten derLkw-Fahrer erzielt werden. Insgesamt ist von einerErhöhung der Verkehrssicherheit für alle Verkehrs-teilnehmer auszugehen.
Umfassende Erfahrungen zu telematischen Syste-men liegen für die Verkehrssteuerung auf beson-ders staugefährdeten Strecken- und Netzabschnit-ten auf BAB vor (Strecken- und Netzbeeinflus-sungsanlagen). Hierfür werden Detektoren miteiner hohen Erfassungsgenauigkeit eingesetzt, umdie mittlere Geschwindigkeit und die Verkehrsstär-ke zu ermitteln. Steuerungsverfahren leiten darausdie erforderlichen Maßnahmen, wie dynamischeGeschwindigkeitsbeschränkungen oder Lkw-Über-holverbote, ab bzw. warnen Verkehrsteilnehmer vorGefahren (z. B. Unfälle, Stau). Regelwerke, wie dieTechnischen Lieferbedingungen für Streckenstatio-nen (BASt, 2012), das Merkblatt für die Ausstattungvon Verkehrsrechnerzentralen (BASt, 1999) unddie Richtlinien für Wechselverkehrszeichenanlagenan Bundesfernstraßen (BMVBS, 1997), bilden hier-für einen bewährten Rahmen.
Die für die Randbedingungen auf der freien Stre-cke – also für einen anderen Geschwindigkeitsbe-reich – optimierten Detektoren, wie Induktivschlei-fen, stehen auf Rastanlagen vor neuen Herausfor-derungen. Daher bedurfte es neuer technischerEntwicklungen, welche die besonderen Randbedin-gungen auf einer Rastanlage und die Anforderun-gen an die Informationsqualität von Parkinformatio-nen berücksichtigen. So gilt es, parkende und lang-sam fahrende Fahrzeuge zu detektieren und zuklassifizieren. Fahrmanöver, wie Rangieren, aberauch Sichteinschränkungen durch Bäume oder ord-nungswidrig abgestellte Fahrzeuge erschweren dieErfassung der Belegung von Rastanlagen in derPraxis. Im Rahmen von Pilotprojekten wurdendaher ausgewählte Rastanlagen mit unterschied -licher Detektionstechnik ausgestattet, um prakti-sche Erfahrungen zu sammeln.
Die Detektoren sollen automatisch Daten über be-legte Parkstände oder die Anzahl ein- und ausge-fahrender Lkw ermitteln. Aus diesen Daten leitenSteuerungsverfahren Informationen über freieParkstandskapazitäten ab. Diese Parkinformatio-nen können über verschiedene Kommunikations-wege den Lkw-Fahrern sowie den Logistikunter-nehmen übermittelt werden. Seit April 2008 infor-
9

miert im Vorfeld der Rastanlage Aichen (A 8) undseit September 2008 vor der Rastanlage Brohltal/Ost (A 61) je ein dynamischer Wegweiser über dieAnzahl freier Parkstände dieser Rastanlagen. Wei-tere Pilotprojekte wurden seither realisiert.
Die Bundesanstalt für Straßenwesen (BASt) ist be-auftragt, die Pilotprojekte unter wissenschaftlichenGesichtspunkten zu begleiten und zu evaluieren.Das Ziel des Forschungsauftrages ist die Bewer-tung der Wirksamkeit und der Effizienz der in denPilotprojekten umgesetzten und geplanten Syste-me. Die kontinuierlich gewonnenen Erkenntnissemünden in den vorliegenden Bericht. Vor einer ab-schließenden Bewertung aller Pilotprojekte mussteein einheitliches Bewertungsverfahren entwickeltwerden. Die Umsetzung des entworfenen Bewer-tungsverfahrens steht zum Zeitpunkt der Berichts-legung für die Pilotprojekte aus. Alle Bewertungs -ergebnisse sind mit einer Fortschreibung des Be-richts zu ergänzen. Der Entwurf des Bewertungs-verfahrens ist anschließend erneut hinsichtlich sei-ner Eignung zu prüfen und ggf. anzupassen. Insbe-sondere sind Anpassungen hinsichtlich der Para-meter zu erwarten.
Der Bericht soll im Besonderen Betreibern undDiensteanbietern Orientierung bei der System -gestaltung bieten. Gleichzeitig sollen Entwicklun-gen im Bereich fahrzeugseitiger Parkinformationenangestoßen werden. Der Bericht fasst dazu den Er-kenntnisstand bis Oktober 2013 (sofern nicht an-ders gekennzeichnet) zusammen. Die Fortschrei-bung ist auf der Basis laufender Forschungstätig-keiten und praktischer Erfahrungen erforderlich, dazum Zeitpunkt der Berichtslegung keine abschlie-ßende Beurteilung aller Maßnahmen möglich war(siehe Bild 1).
Das Dokument umfasst das Grundlagenkapitel 2,welches die Maßnahmen und technischen Ausfüh-
rungen von Systemen des telematischen Lkw-Parkens allgemein beschreibt. Kapitel 3 dient derÜbersicht über die Pilotprojekte und fasst denStand der Pilotprojekte für das telematische Lkw-Parken bis Dezember 2011 zusammen. Darauf auf-bauend wurde im Kapitel 5 ein Konzept entwickelt,wie zukünftig eine intelligente Streckensteuerungwirken kann. Es wird vom Stand der Technik aus-gehend eine mögliche Realisierungsvariante be-schrieben und der erforderliche Entwicklungsbedarfaufgezeigt. Vorschläge zur Gestaltung von Park -informationen runden das Konzept ab.
Der Maßnahmenkatalog beinhaltet für die einheit -liche Bewertung telematischer Systeme auf Rast-anlagen ein vorläufiges Bewertungsverfahren imKapitel 4. Mit einer weiteren Fortschreibung sinddort die Ergebnisse der Bewertung der Pilotprojek-te zu ergänzen.
2 Grundlagen der Systeme fürtelematisches Lkw-Parken
2.1 Definitionen
Zum besseren Verständnis werden nachfolgendgrundlegende im Bericht verwandte Begriffe erläu-tert. Da bislang keine Regelwerke zum telema -tischen Lkw-Parken bestehen, erfolgt die Begriffs-neubestimmung für das telematische Lkw-Parkenin Anlehnung an gängige Regelwerke wie BMVBS(1997) und BASt (1999), FGSV (2012) sowie BASt(2012).
Die Nachfrage für Lkw-Parkstände ergibt sich stre -ckenbezogen (fehlende Parkstände pro Kilometer)(BMVBS, 2008). Telematik soll dabei im Besonde-ren der Verteilung der Nachfrage auf die verfüg bareKapazität einer Strecke dienen. Mit der Einfahrt ineinen BAB-Streckenabschnitt soll der Verkehrsteil-nehmer mit Unterstützung telematischer Systemezu einem freien Parkstand auf einer der Rastanla-gen oder einen Stellplatz auf einem Autohof imStreckenabschnitt geleitet werden.
Es ergeben sich für telematische Systeme austechnischer Sicht vier Verarbeitungsebenen: Detek-tion, Korrekturen (Plausibilität), Steuerungsverfah-ren und Kommunikation.
Die Detektionstechnik beschreibt ein technisch-physikalisches System mit Ausgabe der erfasstenverkehrstechnischen Kenngrößen (z. B. Fahrzeug -
10
Bild 1: Aktualisierung des Maßnahmenberichts

art, Geschwindigkeit, …). Diese können auf Plausi-bilität geprüft und ggf. geglättet oder mit Korrektur-verfahren aufbereitet werden.
Das Steuerungsverfahren wertet die verkehrstech-nischen Kenngrößen der Detektion aus und be-rechnet Steuerungsgrößen. VerkehrstechnischeKenngrößen und Steuerungsgrößen werden nach-folgend auch mit dem Begriff „(Detektions-)Daten“zusammengefasst.
Mittels geeigneter Kommunikationsmedien werdendem Verkehrsteilnehmer ausgehend von denSteuerungsgrößen lenkende „Parkinformationen“zur Situation auf den Rastanlagen übermittelt.Möglicherweise werden die Parkinformationen z. B. durch Endgeräte weiter aufbereitet (im Sinnevon Empfehlungen) oder nur dann dem Verkehrs-teilnehmer dargeboten, wenn sie für ihn relevantsind.
2.2 Datenerfassung
2.2.1 Begriffsbestimmungen
Der übergeordnete Begriff „Datenerfassung“ bzw.der äquivalent verwendete Begriff „Detektion“ sollzunächst spezifiziert werden (siehe auch FGSV,2010). Allgemein wird die Datenerfassung unter-gliedert in
• Erfassungseinheit (Detektor) bestehend ausSensor, Signalwandler, Signalaufbereitung undSignalauswertung,
• Speichereinheit des Detektors und
• Übertragungseinheit z. B. an Streckenstation.
Durch die Signalauswertung der physikalischenMessgrößen, z. B. bedingt durch die Änderung derInduktivität, wird die verkehrstechnische Kenn -größe „Fahrzeugart“ ermittelt, plausibilisiert, ge-speichert und an die Streckenstation (im weitestenSinne des Steuerungsverfahrens) übertragen.
Für die Datenerfassung auf Rastanlagen existierenbislang in der Praxis zwei Detektionsverfahren zurErmittlung der Anzahl belegter Parkstände:
• direkte Messung mittels Einzelparkstandsdetek-tion (Bild 2),
• indirekte Erhebung mittels Bilanzierungsverfah-ren (Bild 3).
Die beiden Detektionsverfahren unterscheiden sichhinsichtlich der Lage der Detektoren auf der Rast-anlage (vgl. Bild 2 und Bild 3). Bilanzierungsverfah-ren beruhen auf der Detektion in den Zu- und Ab-fahrten, wohingegen bei der Einzelparkstandsde-tektion die Belegung jedes einzelnen Parkstandesermittelt wird.
Bilanzierungsverfahren sind insbesondere für grö-ßere Rastanlagen eine – bezogen auf den einzel-nen Parkstand – kostengünstige Detektionsmög-lichkeit. Aussagen, ob die Fahrzeuge tatsächlichauf verkehrsrechtlich ausgewiesenen Parkständenstehen, sind jedoch bei diesem Verfahren nichtmöglich. Die Anordnung der Detektoren in der Zu-fahrt zum Lkw-Parkbereich kann jedoch die Aussa-gegenauigkeit verbessern.
Die Einzelparkstandsdetektion erlaubt auch beiAusfall eines einzelnen Sensors Aussagen zur Be-legung der Rastanlage, jedoch steigen die Kostenmit der Ausstattung größerer Rastanlagen durchdie hohe Anzahl erforderlicher Sensoren. Einzel-parkstandsdetektion eignet sich zur Bestimmungbelegter und freier verkehrsrechtlich ausgewiese-ner Parkstände einer Rastanlage. Fahrzeuge, diesich außerhalb dieser Parkstände befinden, könnendamit nicht erfasst werden.
Die im Rahmen von Pilotprojekten eingesetztenDetektionstechniken, bezeichnet nach der Art dereingesetzten Sensoren, umfassen
• Induktivschleifendetektoren,
11
Bild 2: Einzelparkstandsdetektion
Bild 3: Bilanzierungsverfahren

• Erdmagnetfelddetektoren,
• Videokameras zur Objekterkennung,
• Seitenradardetektoren und
• die Kombinationen verschiedener Sensoren.
Tabelle 1 beschreibt vereinfacht die bisherigen An-wendungsgebiete der Detektionstechniken für diebeiden Detektionsverfahren.
Für die Detektionstechniken werden nachfolgendAussagen zusammengefasst zum
• Funktionsprinzip,
• den erfassbaren verkehrstechnischen Kenngrö-ßen,
• den Positionen im Straßenraum (d. h. neben,über, auf und in der Fahrbahn),
• Randbedingungen und Messungsgenauigkeitbeim Einsatz auf Rastanlagen.
Grundlegende technische Aussagen in den Kapi-teln 2.2.2 bis 2.2.6 zu den einzelnen Detektions-techniken basieren auf Hinweispapieren der For-schungsgesellschaft für Straßen- und Verkehrswe-sen (siehe FGSV, 2006, sowie FGSV, 2010) undkönnen dort und in weiterführender Literatur vertieftwerden. Ziel hier ist die kurze Darstellung der Detektionstechnik. Hierbei fließen auch die wäh-rend der Pilotprojekte der Länder gesammeltenpraktischen Erfahrungen ein. Es handelt sich somitnicht um eine abschließende Bewertung, sonderneine grobe, auf Gesprächen und Befragungen basierende Charakterisierung der Detektionstech-niken für den Einsatz auf Rastanlagen.
2.2.2 Induktivschleifendetektor
Funktionsprinzip
Ein Induktivschleifendetektor besteht aus in derFahrbahn verlegten Drahtschleifen sowie einer De-tektions- und Auswerteeinheit. Die Detektionseinheitbildet zusammen mit den Drahtschleifen einen elek-tromagnetischen Schwingkreis. Elektromagnetischwirkende Metallteile eines Fahrzeuges verändernbeim Überfahren die Induktivität der Schleife undverstimmen damit diesen Schwingkreis. Diese Ver-änderung wird von der Auswerteeinheit erkannt undausgewertet (siehe FGSV, 2006, und FGSV, 2010).
Für Induktivschleifendetektoren kommen zwei ver-schiedene technische Ausführungen zur Anwen-dung: Einzelschleife und Doppelschleife. Für einereine Erfassung der Fahrzeuganzahl, wie es für An-wendungen auf Rastanlagen erforderlich ist, ist dieAnordnung nur einer Schleife prinzipiell ausrei-chend. Zu beachten ist, dass dann durch die Ver-kehrsführung gewährleistet sein muss, dass dieVerkehrsarten getrennt werden, da keine genaueFahrzeugklassifizierung möglich ist.
Bei dem Prinzip der Doppelschleife werden zweiSchleifen in einem definierten Abstand in die Ober-fläche der Fahrbahn eingebracht. Neben der Erfas-sung der Fahrzeuganzahl kann dadurch aus demzeitlichen Signalabstand von Schleife 1 zu Schleife2 sowie dem Schleifenabstand die Fahrzeugge-schwindigkeit ermittelt werden. Da zwei Signale beieiner Überfahrt generiert werden, kann eine besse-re Signalverarbeitung/-vergleich und damit eine hö-here Genauigkeit bei der Fahrzeugklassifizierungerzielt werden. Auch die Fahrtrichtung kann erkanntwerden. Aus diesem Grund eignen sich Doppel-schleifen zur Bilanzierung der Fahrzeuganzahl und-klassen (siehe FGSV, 2006, sowie FGSV, 2010).
Die Messungen sind unabhängig von Witterungs-und Lichtverhältnissen. Die Detektoren können inihrer Genauigkeit durch elektromagnetische Feldernachteilig beeinflusst werden. Stahlarmierungen imdirekten Umfeld können die Detektionsgenauigkeitbeeinträchtigen (FGSV, 2010).
Erfassbare Kenngrößen
Die Fahrzeugklassifizierung kann über die gemes-sene Fahrzeuglänge erfolgen. Diese wird über dieBelegungszeit einer Induktivschleife durch dasFahrzeug und dessen Geschwindigkeit bestimmt.Dazu ist eine bestimmte Mindestgeschwindigkeit
12
Detektionstechniken Bilanz Einzelps.
Induktivschleifensensoren + -
Erdmagnetfeldsensoren + +
Video zur Objekterkennung - +
Video zur Kennzeichenerfassung + -
Radarsensoren + -
Kombinationen von Sensoren + -
Tab. 1: Detektionstechniken in den Pilotprojekten (Dez. 2011)

des Fahrzeuges erforderlich, ideal ist eine gleich-bleibende Geschwindigkeit (kein Beschleunigenoder Bremsen im Bereich der Induktivschleifen).
Da die gemessene Belegungszeit nicht nur von dertatsächlichen Fahrzeuglänge abhängt, kann dieLänge nur abgeschätzt werden. Eine differenzierteAuswertung der Verstimmungskurven der Fahr-zeugsignale und der Vergleich mit in der Auswerte-einheit bereits gespeicherten Verstimmungsmus -tern ermöglichen eine umfassende Unterscheidungvon bis zu 8+1-Klassen („+1“ entspricht nicht klas-sifizierbare Fahrzeuge), siehe auch TLS, 2012, undFGSV, 2010.
Für Anwendungen auf Rastanlagen kann meisteine einfachere Klassifizierung aufgrund der Ver-kehrsführung erfolgen: Stehen lediglich Parkständefür Pkw und sonstige Fahrzeuge über 6 m (also z. B. für Lkw und Bus gemeinsam) zur Verfügung,kann die Klassifizierung in Pkw-ähnlich und Lkw-ähnlich ausreichend sein.
Position im Straßenraum
Die Induktivschleifen (Drahtschleifen) werden ab-hängig vom Fahrbahnaufbau in einem ca. 10 mmbreiten und ca. 70 mm tiefen Schnitt in die Oberflä-che der Fahrbahn eingebracht. Über die Induktiv-schleifen sollen möglichst alle zu- und abfahrendenFahrzeuge idealerweise mittig geführt werden, d. h.,die Fahrstreifenbreite ist zu beachten (FGSV, 2010).
Die Erfassungsgenauigkeit kann verbessert wer-den, wenn Brems- und Beschleunigungsvorgängeim Bereich der Induktivschleifen weitestgehendausgeschlossen sind, d. h., wenn die Fahrzeugeeine konstante Geschwindigkeit haben. Dies erfor-dert, die Länge des Verzögerungs- und Beschleuni-gungsstreifens zu berücksichtigen.
Weiterhin sollte der Erfassungsort möglichst so ge-wählt werden, dass die Fahrzeuge zum Beispielaufgrund von Vorfahrtsregelungen innerhalb derRastanlage nicht über den Induktivschleifen zumStehen kommen, da die für die Klassifizierung er-forderliche Verstimmung des Schwingkreises nurdurch fahrende Fahrzeuge erzielt werden kann.
Einsatz auf Rastanlagen
• Bilanzierungsverfahren
Induktivschleifen wurden in mehreren Pilot- projekten für die Bilanzierung der ein- und aus-
fahrenden Fahrzeuge z. B. in Hessen einge-setzt.
Eine weitere Anwendungsmöglichkeit von In-duktivschleifendetektoren ist die Fahrzeug(wie-der)erkennung mittels fahrzeugindividueller Ver-stimmungskurven (siehe auch MAIER, ROTH,2008). Dies ist im Besonderen für das automa -tische Plausibilisieren und Korrigieren von Be-deutung (Kapitel 2.3). Im praktischen Einsatzbefindet sich ein Fahrzeugwiedererkennungs-verfahren mittels Induktivschleifen auf der Rast-anlage Börde, A 2.
• Einzelparkstandsdetektion
Der Einsatz erfolgte bislang nicht für die Einzel-parkstandsdetektion, da der Verlegeaufwandder Induktivschleifen auf (teils gepflasterten)Parkstandflächen sehr hoch ist. Denkbar ist je-doch die Anwesenheitsdetektion wie bei Licht -signalanlagen, sie erfordert jedoch auch ent-sprechende Neuentwicklungen hinsichtlich derSignalauswertung. Auf benachbarten Parkstän-den kann es aufgrund des unterschiedlichenmetallischen Aufbaus von Lkw zu Phantom -detektionen kommen.
2.2.3 Erdmagnetfelddetektor
Funktionsprinzip
Die Detektion basiert auf der Auswertung der Än-derung des Erdmagnetfelds. Das Erdmagnetfeldwird durch die Bewegung oder das Vorhandenseinvon Metallteilen (z. B. in den Stahlkarosserien vonFahrzeugen) verändert. Diese Erdmagnetfeldände-rungen, die sich durch die Veränderungen der mag -netischen Flussdichte ausdrücken, werden von denErdmagnetfelddetektoren registriert (FGSV, 2010).
Erdmagnetfelddetektoren sind in verschiedenenAusführungen verfügbar: Es werden sowohl kabel-gebundene Detektoren (für Energieversorgung undDatenübertragung) angeboten wie auch kabelloseDetektoren, die die Daten per Funk übertragen undmittels eingebauter Batterie mit Energie versorgtwerden. Die Einsatzzeit richtet sich dabei nach derÜbertragungshäufigkeit der Detektionsdaten undder Batteriekapazität (FGSV, 2010).
Die Detektion ist unabhängig von Lichtverhältnis-sen und weitestgehend unabhängig von Witte-rungseinflüssen möglich. Lediglich bei oberflächen-bündig eingebauten Sensoren wurde vereinzelt
13

beobachtet, dass es zu Einschränkungen bei grö-ßeren Wasserfilmdicken auf der Sensoroberflächekommen kann. Stahlarmierungen im direkten Um-feld können ebenfalls die Detektionsgenauigkeitbeeinträchtigen. Die Detektoren können auf exter-ne Magnetfelder wie z. B. von Induktivschleifenoder Starkstromleitungen reagieren (FGSV, 2010).
Erfassbare Kenngrößen
• Einzelparkstandsdetektion
Hierbei wird ausschließlich die Veränderung dermagnetischen Flussdichte (Verdichtung und Ab-lenkung) durch die metallische Masse über demDetektor ermittelt. Es wird somit nur die Anwe-senheit des darüber befindlichen Fahrzeugesdetektiert (FGSV, 2010).
• Bilanzierungsverfahren
Wie bei der Einzelparkstandsdetektion wird dieVeränderung der magnetischen Flussdichte er-mittelt. Durch die Bewegung des Fahrzeugeskann neben der Anwesenheit des Fahrzeugesnoch zusätzlich die Länge geschätzt werden,sodass eine grobe Fahrzeugklassifizierung an-hand der Länge möglich ist (FGSV, 2010).
Im Pilotprojekt an der A 5 zwischen Anschluss-telle Hartheim-Heitersheim und AnschlusstelleEfringen-Kirchen in Fahrtrichtung Weil am Rheinwird eine Ausführungsvariante zur Fahrzeug-klassifizierung für kurze und lange Fahrzeuge(über und unter 6 m Länge) auf den Rastan -lagen umgesetzt. Dies ist mit der Installationzweier Erdmagnetfelddetektoren möglich, die in einem Abstand knapp über 6 m zueinander installiert werden. Auszuwerten ist dann diegleichzeitige Anwesenheit eines Fahrzeugs aufbeiden Detektoren. Zu beachten ist, dass zweiFahrzeuge, die in sehr kurzem räumlichem Ab-stand zueinander fahren, fälschlicherweise alsein Lkw klassifiziert werden könnten.
Position im Straßenraum
Die Erdmagnetfelddetektoren können entweder ineinem vertikalen Bohrloch oberflächenbündig mitder Fahrbahn oder tieferliegend in einem horizon -tal liegenden Leerrohr eingebaut werden. Die Ein-bauvariante in einem Leerrohr hat den Vorteil, dassdie Detektoren vor Feuchtigkeit besser geschütztsind und leichter ausgetauscht oder in ihrer Lageverändert werden können. Diese Einbaumöglich-
keiten bestehen sowohl für die Einzelparkstandsde-tektion wie auch für Bilanzierungsverfahren. DieDetektoren sind so zu platzieren, dass sie mög-lichst mittig überfahren oder überparkt werden(FGSV, 2010).
Einsatz auf Rastanlagen
• Einzelparkstandsdetektion
Bei der Detektion von parkenden Fahrzeugenwerden die Erdmagnetfelddetektoren in derRegel im vorderen Bereich eines Parkstandeseingebracht, um die größere metallische Massedes Motors zu detektieren. Die Detektionsge-nauigkeit wird stark dadurch beeinflusst, ob dieFahrzeugführer über dem Detektor zum Stehenkommen oder ggf. nicht weit genug vorfahren.
Im Rahmen des Pilotprojektes auf der Rastanla-ge Montabaur sollte in einer Parkstandsreihe, inder mehrere Lkw hintereinander parken können,die Anwesenheit von Fahrzeugen detektiert wer-den. Die Detektion eines Fahrzeugendes mitErdmagnetfelddetektoren ist aufgrund der Tat-sache, dass sich am Fahrzeugende wenigermetallische Masse befindet als im vorderen Be-reich eines Fahrzeuges (Motorbereich), wesent-lich schwieriger. Gleiches gilt für die Platzierungder Detektoren in der Mitte des Parkstandes (z. B. für Holztransporte o. Ä., Aufbauten/An-hänger). Sind die Detektoren sehr empfindlicheingestellt, d. h. reagieren sie auch auf kleineÄnderungen des Erdmagnetfeldes, wurde in derPraxis beobachtet, dass die Detektoren dannauch auf weiter entfernt parkende Fahrzeuge(auf einem benachbarten Parkstand) reagierthaben.
• Bilanzierungsverfahren
Bei dem Bilanzierungsverfahren sind mittels Magnetfeldänderungen fahrende Fahrzeuge zudetektieren und zu klassifizieren. Zur Bilanzie-rung der Fahrzeuge werden Magnetfeldsenso-ren auf der Rastanlage Aichen, A 8, eingesetzt.
2.2.4 Videokameradetektoren
Funktionsprinzip
Die Videotechnik umfasst die elektronischen Ver-fahren zur Aufnahme, Übertragung, Bearbeitungund Wiedergabe von bewegten Bildern in digitalerForm. Für die verkehrstechnischen Bewertungen
14

werden die Grauwertstufenänderungen ausgewer-tet. Auf dieser Basis werden Veränderungen im Ver-kehrs- oder Parkraum ermittelt. Ein Spezialgebietder Videotechnik ist die automatisierte Texterken-nung (engl. Optical Character Recognition (OCR)).Im verkehrstechnischen Bereich wird diese Mög-lichkeit für die Kfz-Kennzeichenerfassung genutzt.Die Auswertung der Fahrzeugkennzeichen eignetsich für Bilanzierungsverfahren, um Fahrzeuge inder Abfahrt wiederzuerkennen (FGSV, 2010).
Die Messungen sind von den Lichtverhältnissen ab-hängig (Ausleuchtung und Gegenlicht). Ebensokann die Detektionsgenauigkeit durch Witterungs-einflüsse (Regen, Nebel oder Schnee) beeinträchtigtwerden. Je komplexer die zu erfassende Rastanlageist, desto mehr Abschattungen werden sich einstel-len, was nur durch mehrere oder höher gelegeneKameras ausgeglichen werden kann (FGSV, 2010).
Beim Einsatz von Videokameradetektoren sind diegesetzlichen Bestimmungen bezüglich des Daten-schutzes zu beachten (FGSV, 2010).
Erfassbare Kenngrößen
Bildänderungen gegenüber einem Referenzbildkönnen automatisch ausgewertet werden (z. B. fah-rende oder auf Parkstand ankommende Lkw). Mitgeeigneter Software können Bewegungsmustersowie Kfz-Kennzeichen und Fahrzeugklassen undder Standort von Fahrzeugen erkannt werden(FGSV, 2010).
Videotechnik eignet sich sowohl für die Bilanzie-rung als auch für Einzelparkstandsdetektion. Fürdie Einzelparkstandsdetektion ist zu ermitteln, wieviele Parkstände mit einer Videokamera erfasstwerden können.
Umfassende Ergebnisse des Arbeitskreises 3.2.9„Videodetektion in VBA“ werden im geplanten Wis-sensdokument der Forschungsgesellschaft fürStraßen und Verkehrswesen (FGSV) aktuell zu-sammengefasst und erscheinen in Kürze.
Position im Straßenraum
Prinzipiell müssen die Kameras erhöht angebrachtwerden. Die Wahl der Höhe richtet sich hierbeinach der Aufgabenstellung. So genügt zum Beispielfür eine Kfz-Kennzeichenerfassung eine geringe Installationshöhe. Es muss lediglich gewährleistetsein, dass sich die Kamera oberhalb eines Manipu-lationsbereiches befindet (FGSV, 2010).
Für eine Einzelparkstandsdetektion muss die Ka-mera möglichst hoch angebracht sein, um Abschat-tungen durch die dicht nebeneinander parkendenLkw zu vermeiden.
Einsatz auf Rastanlagen
Videodetektion wurde zur Kennzeichenerfassung(Fahrzeugwiedererkennung) in den Pilotprojektendes PWC Spitzberg Nord und Süd, A 70, eingesetzt(beendet). Eine eigens für diesen Einsatz optimier-te Videodetektion kommt auf dem PWC Am Nöth-nitzgrund, A 17, zum Einsatz. Dort kann neben derBelegung einzelner Parkstände auch erfasst wer-den, ob Fahrzeuge in der Fahrgasse parken(DÖGE, KRIMMLING, 2012).
2.2.5 Radardetektoren
Funktionsprinzip
Radardetektoren generieren ein elektromagne -tisches Signal. Dieses wird von einer Antenne (diesowohl sendet wie auch empfängt) gebündelt ab-gestrahlt. Die Radarstrahlung wird von einem vor-beifahrenden Fahrzeug reflektiert und von der An-tenne wieder empfangen. Aufgrund des Doppler -effektes ergibt sich durch das bewegte Fahrzeugbei der reflektierten Radarstrahlung eine Frequenz-änderung, aus der die verkehrstechnischen Kenn-größen abgeleitet werden können (FGSV, 2010).
Die Messungen sind unabhängig von Lichtverhält-nissen. Durch dichten Nebel, Schnee oder Regennimmt die Detektionsgenauigkeit jedoch ab. Fehler– insbesondere bei der Längenunterscheidung –können dadurch entstehen, dass zwei dicht hinter-einander fahrende Fahrzeuge als nur ein Fahrzeugmit entsprechend falscher Länge erkannt werden(FGSV, 2010).
Der Einsatz in Kurven sollte vermieden werden, dadies mit systematischen Messfehlern verbundenist, die mit kleiner werdendem Krümmungsradiusanwachsen. Es können nur bewegte Fahrzeuge mit einer Mindestgeschwindigkeit von ca. 10 bis 20 km/h (je nach Gerätetyp) detektiert werden(FGSV, 2010).
Erfassbare Kenngrößen
Radargeräte messen die Geschwindigkeit, Anwe-senheit, Fahrtrichtung und Fahrzeuglänge einzel-ner Fahrzeuge (FGSV, 2010.) Damit erlauben sie
15
16
die Fahrzeugklassifizierung für Bilanzierungsver-fahren.
Position im Straßenraum
Die Anbringung der Radarsonde kann von der Seiteoder über der Fahrbahn erfolgen (Seiten-/Über-kopfradardetektoren). Der Einbau in die Fahrbahnist ebenfalls möglich (FGSV, 2010).
Einsatz auf Rastanlagen
Bodenradardetektoren sind in Kombination mit Laserscannern auf der Tank- und Rastanlage Buddikate, A 1, im Einsatz. Auf der Tank- und Rast-anlage Brohltal-Ost werden Bodenradare in Kombi-nation mit Ultraschallsensoren eingesetzt.
2.2.6 Kombinationen von Sensoren
Funktionsprinzip
Verschiedene Sensorsysteme können zu Kombina-tionsdetektoren vereinigt werden, um die Vorteileder einzelnen Sensoren zu nutzen bzw. derenNachteile zu kompensieren. Es sind, je nach Auf-gabenstellung, verschiedene Kombinationen mög-lich (FGSV, 2010). Deswegen entfällt an dieserStelle eine generelle Beschreibung einer Gesamt-funktionalität.
Erfassbare Kenngrößen
Durch die Kombination von mehreren Sensortypenkönnen mehr Kenngrößen erfasst werden, die inihrer Gesamtheit zu einer größeren Aussagekraftfür Bilanzierungsverfahren führen (FGSV, 2010).
Position im Straßenraum
Die Anbringung der Sensoren richtet sich nach deneinzelnen Systemen (siehe Einzelbeschreibungen).
Einsatz auf Rastanlagen
Praktisch erprobt wurden bislang Radar-Laser-scanner-Detektoren, Radar-Ultraschall-Detektorensowie die Kombination von Induktivschleifen undKennzeichenerfassung bei Bilanzierungsverfahren.
Bislang fanden Kombinationsdetektoren nur für dieBilanzierung von Fahrzeugen praktische Anwen-dung. Der höhere Entwicklungsaufwand der Kombi-nationsdetektoren und die damit einhergehendegrößere Anzahl gemessener Eingangsgrößen er-
möglichen im Rahmen der Pilotprojekte auch auto-matische Korrekturen, die auf der Fahrzeugwieder-erkennung basieren (vgl. Kapitel 2.3).
2.2.7 Manuell erhobene Daten
Analog zur Stauerfassung für öffentliche Verkehrs-informationen ist die Ergänzung durch manuelle, d. h. augenscheinliche Erfassung durch die Polizeiund Verkehrsteilnehmer denkbar.
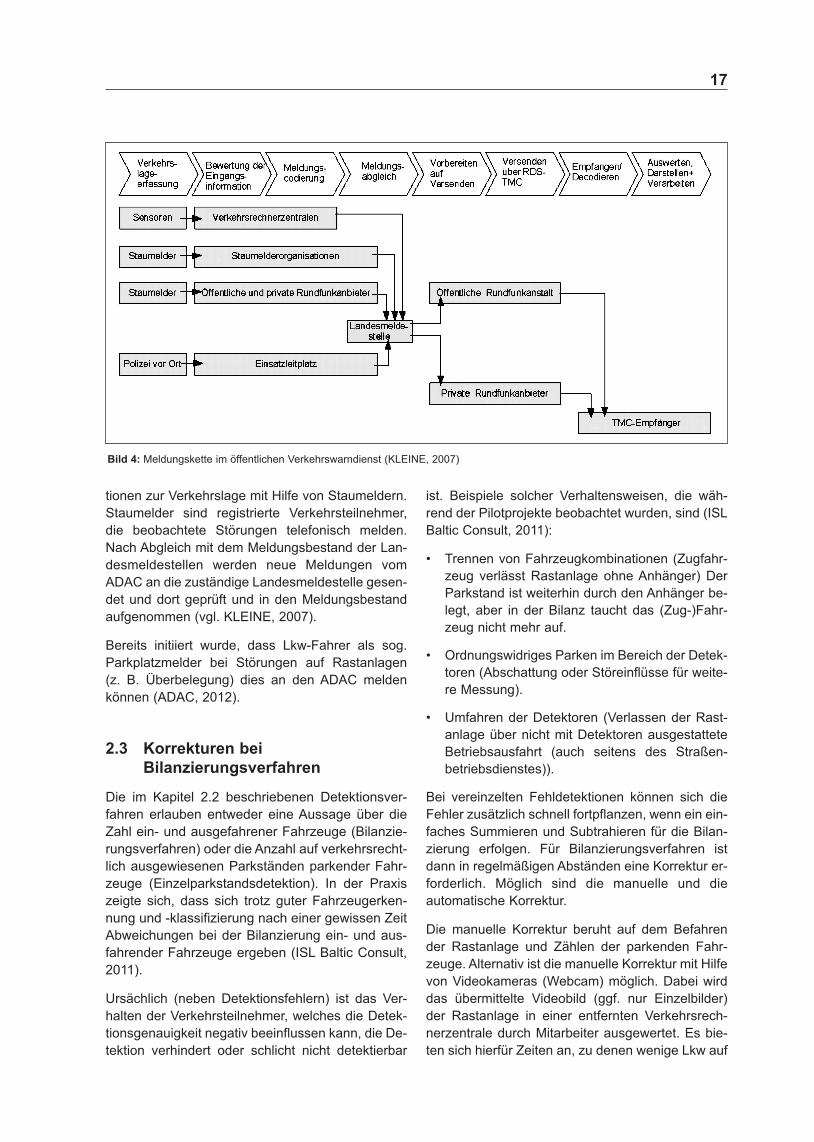
Nach der Richtlinie für den Verkehrswarndienst(RVWD) müssen Polizei und andere Straßenver-kehrs-/-baubehörden ihnen bekannte Gefahren -lagen und Verkehrsstörungen im Verkehrsablaufden zentralen Einsatzleitplätzen und den Landes-meldestellen melden (BMVBW, 2000). Die Einsatz-leitzentralen der Polizei erfassen die eingegangeneMeldung. Für Unfälle und andere Störungen im flie-ßenden Verkehr haben sich hierfür die in Bild 4 be-schriebenen Meldeketten bewährt.
Die Verkehrslageerfassung erfolgt automatisiertoder stützt sich auf Beobachtungen, welche in denEinsatzleitplätzen der Polizei oder durch Staumel-derorganisationen erfasst werden. Die Landesmel-destelle erhält von diesen Stellen die Verkehrsmel-dungen in codierter Form und gleicht den Mel-dungseingang ab. Die von der Landesmeldestelleautorisierten Meldungen werden den Rundfunkan-stalten zur Verfügung gestellt (KLEINE, 2007).
Die meisten öffentlich-rechtlichen Rundfunkanstal-ten betreiben aufgrund der erforderlichen Orts-kenntnis für ihr Sendegebiet eigene Verkehrs- redaktionen. Anlass für die Verkehrsredaktionen,die eingehenden Meldungen von der Landesmel-destelle ebenfalls auf Plausibilität zu prüfen, ist diejourna listische Sorgfaltspflicht. Im Rahmen der re-daktionellen Freiheit kann die RundfunkanstaltMeldungen ebenfalls ergänzen, löschen oder in-haltlich verändern, z. B. unter Einbeziehung eige-ner Staumelder oder von Verkehrsdaten Dritter (z. B. Floating Car Data). Rundfunkanstalten undeinige private Rundfunkanbieter verbreiten dieseals „TMC-Meldung“ (TMC steht für Traffic MessageChannel). TMC-Meldungen werden häufig zur Navigation im Fahrzeug genutzt (siehe Kapitel2.4.3; KLEINE, 2007).
Bewährt für die Verkehrslageerfassung hat sich dieBerücksichtigung von Beobachtungen von Ver-kehrsteilnehmern (manuell erhobener Eingangs -daten). So sammeln der ADAC e. V. und auch eini-ge öffentlich-rechtliche Rundfunkanstalten Informa-
tionen zur Verkehrslage mit Hilfe von Staumeldern.Staumelder sind registrierte Verkehrsteilnehmer,die beobachtete Störungen telefonisch melden.Nach Abgleich mit dem Meldungsbestand der Lan-desmeldestellen werden neue Meldungen vomADAC an die zuständige Landesmeldestelle gesen-det und dort geprüft und in den Meldungsbestandaufgenommen (vgl. KLEINE, 2007).
Bereits initiiert wurde, dass Lkw-Fahrer als sog.Parkplatzmelder bei Störungen auf Rastanlagen (z. B. Überbelegung) dies an den ADAC meldenkönnen (ADAC, 2012).
2.3 Korrekturen beiBilanzierungsverfahren
Die im Kapitel 2.2 beschriebenen Detektionsver-fahren erlauben entweder eine Aussage über dieZahl ein- und ausgefahrener Fahrzeuge (Bilanzie-rungsverfahren) oder die Anzahl auf verkehrsrecht-lich ausgewiesenen Parkständen parkender Fahr-zeuge (Einzelparkstandsdetektion). In der Praxiszeigte sich, dass sich trotz guter Fahrzeugerken-nung und -klassifizierung nach einer gewissen ZeitAbweichungen bei der Bilanzierung ein- und aus-fahrender Fahrzeuge ergeben (ISL Baltic Consult,2011).
Ursächlich (neben Detektionsfehlern) ist das Ver-halten der Verkehrsteilnehmer, welches die Detek-tionsgenauigkeit negativ beeinflussen kann, die De-tektion verhindert oder schlicht nicht detektierbar
ist. Beispiele solcher Verhaltensweisen, die wäh-rend der Pilotprojekte beobachtet wurden, sind (ISLBaltic Consult, 2011):
• Trennen von Fahrzeugkombinationen (Zugfahr-zeug verlässt Rastanlage ohne Anhänger) DerParkstand ist weiterhin durch den Anhänger be-legt, aber in der Bilanz taucht das (Zug-)Fahr-zeug nicht mehr auf.
• Ordnungswidriges Parken im Bereich der Detek-toren (Abschattung oder Störeinflüsse für weite-re Messung).
• Umfahren der Detektoren (Verlassen der Rast-anlage über nicht mit Detektoren ausgestatteteBetriebsausfahrt (auch seitens des Straßen -betriebsdienstes)).
Bei vereinzelten Fehldetektionen können sich dieFehler zusätzlich schnell fortpflanzen, wenn ein ein-faches Summieren und Subtrahieren für die Bilan-zierung erfolgen. Für Bilanzierungsverfahren istdann in regelmäßigen Abständen eine Korrektur er-forderlich. Möglich sind die manuelle und dieautoma tische Korrektur.
Die manuelle Korrektur beruht auf dem Befahrender Rastanlage und Zählen der parkenden Fahr-zeuge. Alternativ ist die manuelle Korrektur mit Hilfevon Videokameras (Webcam) möglich. Dabei wirddas übermittelte Videobild (ggf. nur Einzelbilder)der Rastanlage in einer entfernten Verkehrsrech-nerzentrale durch Mitarbeiter ausgewertet. Es bie-ten sich hierfür Zeiten an, zu denen wenige Lkw auf
17
Bild 4: Meldungskette im öffentlichen Verkehrswarndienst (KLEINE, 2007)
18
der Rastanlage parken, da andernfalls möglicheAbschattungen zu Zählfehlern führen oder mitMehrkosten für weitere Videokameras verbundensind. Manuelle Korrekturen sind oft nur in größerenzeitlichen Abständen zu leisten.
Eine automatische Korrektur basiert nicht auf einerMomentaufnahme zur korrekten Anzahl Fahrzeugeauf der Rastanlage, wie es die manuelle Korrekturerfordert. Stattdessen wird fortlaufend versucht,den Fehler, also die Abweichung zwischen tatsäch-licher und gemessener Belegung, so gering wiemöglich zu halten. Bisher liegen keine im Detail un-tersuchten praktischen Erfahrungen mit automa -tischen Korrekturen vor. Es ist von Weiterentwick-lungen und Verbesserungen in naher Zukunft aus-zugehen.
2.4 Kommunikation zumVerkehrsteilnehmer
2.4.1 Maßnahmenspektrum
Die meisten Pilotprojekte haben den Schwerpunktauf die Detektionstechnik gelegt. Eine Vielzahl derVersuche läuft daher im Blindbetrieb ab, d. h. ohneKommunikation zum Verkehrsteilnehmer. In einigenPilotprojekten werden den Lkw-Fahrern Informatio-nen über die Anzahl freier Parkstände (numerisch)mittels dynamischer Wegweisung in unmittelbarerNähe zur Rastanlage angezeigt.
Mit Parkinformationen über freie Kapazitäten vonmehreren Rastanlagen auf dem Streckenabschnittwird eine bessere räumliche Verteilung über meh-rere Anlagen hinweg erwartet. Mittels Beschilde-rung ist dies aus wahrnehmungspsychologischenGesichtspunkten nicht möglich (siehe auch VwV-StVO zu §§ 39-43, Absatz 11, Häufung von Ver-kehrszeichen, 2001). Hierfür eignen sich jedochfahrzeuginterne Informationssysteme.
Bereits heute bietet der analoge Rundfunk dieMöglichkeit, digital codierte Verkehrsmeldungenüber das Radio Data System (RDS) als TMC-Meldung zu verbreiten. Ereignisinformationen wer-den über TMC durch die Landesmeldestellen undRundfunkanstalten verbreitet. Diese umfassenderzeit überwiegend Stauereignisse sowie Ver-kehrsstörungen infolge von Baustellen, Unfällenund besonderen Wetterereignissen. TMC bietetauch technische Möglichkeiten, Parkinformationenvon Rastanlagen zu versenden. TMC-fähige Endgeräte können die Meldungen decodieren
und Verkehrslageinformationen teilweise bereits in der Navigation berücksichtigen (KLEINE, 2007).
Zukünftig bietet das Übertragungsprotokoll TPEG(Transport Protocol Experts Group) die Möglichkeit,weiterführende Parkinformationen über digitalenRundfunk oder internetbasierte Mobilfunkkommuni-kation in die Fahrzeuge zu übermitteln (TISA,2013). Geeignete Flottenmanagement- und Navi-gationsgeräte an Bord des Fahrzeuges könnten zu-künftig diese Informationen aufbereiten und denFahrer bei der Wahl der Rastanlage lenkend unter-stützen.
Individualisierte Mobilitätsdienste sollen sich da-durch auszeichnen, dass die Fahrzeugführer unterBerücksichtigung der gewählten Fahrtroute, derverbleibenden Lenk- und der erforderlichen Ruhe-zeit sowie Parkinformationen zu geeigneten freienParkständen geführt werden. Für die erfolgreicheUmsetzung ist, wie auch bei Staumeldungen, eineenge Zusammenarbeit verschiedener Akteure er-forderlich. So müssen Rundfunkanstalten, Landes-meldestellen, Nutzerorganisationen, Endgeräteher-steller sowie Diensteanbieter gemeinsam an derUmsetzung derartiger Dienste arbeiten. DiesemZiel, individualisierte Mobilitätsdienste flächende -ckend zu ermöglichen, hat sich das Projekt „Meta -datenplattform Verkehrsinformationen“ der High-tech-Initiative der Bundesregierung verschrieben.Innerhalb des Projektes wurde ein Mobilitätsdaten-marktplatz (MDM) entwickelt und erprobt, der denDiensteanbietern das Suchen und Beziehen vondynamischen Daten des Straßenverkehrs erleich-tert. Der Pilotbetrieb des MDM hat Mitte 2011 be-gonnen und soll 2014 in den Regelbetrieb überge-hen (MDM, 2011).
2.4.2 Dynamische Wegweisung mitParkinformationen
Vermittelbare Informationen
Nach Befragungen in einer Studie im Auftrag desMinisteriums für Wissenschaft, Wirtschaft und Ver-kehr des Landes Schleswig-Holstein entscheidensich 54 % aller befragten Lkw-Fahrer spontan und29 % ca. 1 Stunde vorher, welche Rastanlage sieanfahren (ISL Baltic Consult, 2009). Bei den bislangdurchgeführten Pilotprojekten werden die Park- informationen über dynamische Wegweiser in we-nigen Hundert Metern Entfernung zur Rastanlageangezeigt. Für Lkw-Fahrer stellen Informationendynamischer Wegweiser in unmittelbarer Nähe zur

Rastanlage damit zwar eine wichtige Orientierungs-hilfe, jedoch kein Planungsinstrument dar.
Über dynamische Wegweiser wird lediglich die nu-merische Anzahl freier verkehrsrechtlich ausgewie-sener Parkstände für Lkw auf der Rastanlage ver-mittelt. Bei Anwendung von Bilanzierungsverfahrenhandelt es sich hierbei um eine aus der Anzahl ein-und ausfahrender Lkw abgeleitete Parkinformation.
Funktionalität
Die im Bund-Länder-Fachausschuss „Straßenver-kehrsordnung/-ordnungswidrigkeiten“ (BLFA-StVO/OWi) abgestimmten Beschilderungsvorgaben fürtelematisches Lkw-Parken sehen die Darstellungvon numerischen Parkinformationen für eine ein -zige Rastanlage vor (siehe Bild 5).
Die dynamische Wegweisung wird räumlich ge-trennt zur bestehenden Beschilderung aufgestellt(additive Aufstellung) und befindet sich ca. 350-400 m vor der Ausfahrttafel (Wegweiser zur Rast-anlage). Weiterhin liegt den Straßenbauverwaltun-
gen ein Konzept des BLFA-StVO/OWi für Parkinfor-mationen vor, welches auf dem Gelände der Rast-anlage eingesetzt werden kann, um eine bessereVerteilung der Lkw innerhalb der Rastanlage zu er-reichen (BASt, 2008).
Wirkungsspektrum
Die via dynamische Wegweisung übermittelte Infor-mation über die Anzahl freier Parkstände für eineRastanlage hat eine begrenzte lenkende Wirkungfür einen Streckenabschnitt. Auch Befragungen zei-gen, dass die Lkw-Fahrer Parkinformationen übermehrere Rastanlagen für die Planung von Lenk-und Ruhezeiten bevorzugen (ISL Baltic Consult,2011).
Die dynamische Wegweisung mit Parkinformatio-nen kann punktuell für Rastanlagen mit besondershoher Nachfrage eingesetzt werden, um Parken in-nerhalb und im Zulauf der Rastanlage zu beeinflus-sen. Die erwartete Wirkung ist dann, das Parken inder Zufahrt und im vorgelagerten Tankstellenbe-reich zu vermeiden und auf die verkehrsrechtlichausgewiesenen Parkstände zu verlagern.
Zu beachten ist, dass der Verkehrsteilnehmer aufder Basis der vermittelten numerischen Parkinfor-mationen selbstständig Rückschlüsse hinsichtlichder Eignung der Rastanlage für die geplante Pausetätigen muss. In der Praxis interpretieren Verkehrs-teilnehmer die Information basierend auf eigenenErfahrungen. Unerwünschte Verhaltensweisen kön-nen weiterhin auftreten, wie Befragungen gezeigthaben, z. B. bei Anzeige „0 freie Parkstände“ wirdweiterhin verkehrs- und ordnungswidrig geparkt(ISL Baltic Consult, 2011).
Die Auswertung der Befragung von 153 Lkw-Fah-rer/Innen im Jahr 2010 ergab, dass ein Drittel derBefragten, „auf jeden Fall auf der Rastanlage par-ken (würden), wenn eine dynamische Informations-anzeige ‚0‘ freie Lkw-Parkstände (anzeigt) und siebereits eine Rastanlage für ihre gesetzliche Ruhe-zeit (suchen)“ (ISL Baltic Consult, 2011). Die Len-kungswirkung ist mittelbar und basiert auf der An-nahme, dass Verkehrsteilnehmer die „richtigen“Schlüsse aus der Information ziehen (siehe auchBild 6).
Die hohen Kosten für die Installation und Stromver-sorgung dynamischer Wegweiser mit Parkinforma-tionen sollten mit dem zu erwartenden reduziertenUnfallpotenzial (gemäß durchzuführender Unfall-analysen) im Einzelfall abgewogen werden.
19
Bild 5: Dynamische Wegweiser vor der Rastanlage Brohltal-Ost (Foto: Landesbetrieb Mobilität Rheinland-Pfalz)
Bild 6: Auszug einer Befragung von Lkw-Fahrern (basierendauf ISL Baltic Consult, 2011)

2.4.3 Verkehrswarndienst über TMC
Vermittelbare Informationen
Der analoge Rundfunk bietet die Möglichkeit, digitalcodierte Verkehrsmeldungen über das Radio DataSystem (RDS) zu verbreiten. Bereits heute werdenseitens der Landesmeldestellen jährlich ca.300.000 verkehrsrelevante Ereignisse über TMCdurch die Landesmeldestellen und Rundfunkanstal-ten verbreitet. Diese umfassen überwiegend Stau-ereignisse sowie Störungen infolge von Baustellen,Unfällen und besonderen Wettereignissen (KLEINE, 2007).
TMC bietet auch die Möglichkeit, Parkinformatio-nen seitens der Rundfunkanstalten zu versenden,Im Rahmen der Pilotprojekte wurde der Einsatz vonTMC in Betracht gezogen. Es liegen keine ausge-werteten praktischen Erfahrungen hierzu vor.
Inwieweit Flottenmanagement- und Navigations -systeme an Bord des Fahrzeuges die TMC-Park -informationen decodieren können, hängt unter an-derem von der Aktualität der im Fahrzeug installier-ten Orts- und Ereignislisten ab (siehe Funktionali-tät). Auch die Darstellung der Informationen imFahrzeugendgerät kann herstellerabhängig variie-ren. Es ist aktuell nicht erhoben, wie viele Endgerä-te eine spezielle lenkende und unterstützende Dar-stellung von Parkinformationen bieten.
Funktionalität
RDS-TMC basiert auf dem ALERT-C-Protokoll(Agreed Layer of European RDS-TMC), welchesweltweit standardisiert ist (vgl. CEN-EN-ISO 14819-1). Die Übertragung von TMC-Meldungen inALERT-C basiert auf Codelisten: Die LocationCode List (LCL) dient der Codierung von Orteneiner Verkehrsstörung und die Event Code List(ECL) für die Codierung des eingetretenen Ereig-nisses. Der Aufbau beider Listen ist standardisiert(vgl. CEN-EN-ISO 14819-2 und CEN-EN-ISO14819-3).
Die LCL umfasst die Streckenabschnitte der Bun-desautobahnen gemäß dem Autobahnverzeichnis(KÜHNEN, 2006) einschließlich der Autobahn -kreuze, Autobahndreiecke und Anschlussstellen.Im nachgeordneten Netz werden je nach verkehr -licher Bedeutung Bundes-, Land-/Staats-, Kreis-und kommunale Straßen in unterschiedlicher Dich-te erfasst. Die zuständigen Stellen in den Bundes-ländern aktualisieren hoheitlich die LCL. Alle Ände-
rungen werden einmal im Jahr zentral durch dieBASt erfasst und die 16 Länderlisten zu einer bun-desweiten LCL zusammengefügt und veröffentlicht(BASt, 2013).
Die Codierung von Rastanlagen in der LCL erfolgtebis 2009 nicht vollständig und somit nicht flächen-deckend. Meist beschränkte sich die Codierung aufgrößere, oftmals bewirtschaftete Rastanlagen.Diese dienten bislang im Verkehrswarndienst dazu,den Ort einer Störung mit einer höheren räumlichenGenauigkeit zu beschreiben als allein auf Basis dernächsten Anschlussstelle (KLEINE et al., 2010).
Unbewirtschaftete Rastanlagen wurden in den frü-heren Versionen der LCL meist als weniger bedeut-sam im strategischen Netz des Verkehrswarn -dienstes eingestuft und daher nicht codiert. EineSchwierigkeit bei deren Codierung in der LCL be-steht darin, dass unbewirtschaftete Rastanlagen ineinigen Regionen nicht mit einem Namen beschil-dert waren. Im Autobahnverzeichnis (KÜHNEN,2006) sind 2006 knapp 15 % aller Rastanlagenohne Namen ausgewiesen. Die Angabe des kor-rekten, an Ort und Stelle ausgewiesenen Namensstellt jedoch die Grundvoraussetzung für alle in derLCL codierten Objekte dar (KLEINE et al., 2010))
Der Umfang der durch die LCL 8.0 abgebildetenParkstandskapazitäten für Lkw wurde im Juni 2009erstmals deutschlandweit ermittelt. In der vom24.03.2009 bis 13.04.2010 im Verkehrswarndiensteingesetzten LCL 8.0 waren 40.185 Objekte co-diert. Davon bildeten 832 Codes die 1.198 Park-und Rastanlagen an Autobahnen ab. Dabei werdendie Rastanlagen, welche in beiden Fahrtrichtungenvorhanden sind, durch einen Code repräsentiert.Die Informationen zur betroffenen Fahrtrichtung er-geben sich aus den Angaben der Verkehrsmeldung(KLEINE et al., 2010). Insgesamt zeichnete sicheine relativ gute Abdeckung der Rastanlagen in derLCL 8.0 ab, denn bereits zwei Drittel der Gesamt-parkstandskapazität aller Rastanlagen auf BABwaren seinerzeit codiert.
Für die Codierung von Rastanlagen stehen in derLCL die in Tabelle 2 genannten Typen zur Verfü-gung. Erst seit 2010 werden auch alle Autohöfe, miteiner Kapazität von zusammen fast 18.000 Stell-plätzen (BMVBS, 2012), in die LCL aufgenommen.Die Autohöfe müssen gemäß der Definitionen vonStVO und VwV-StVO zu Zeichen 448.1 auch aufder Autobahn ausgeschildert sein. Diese Autohöfeerfüllen besondere Bedingungen, um eine Ausschil-
20
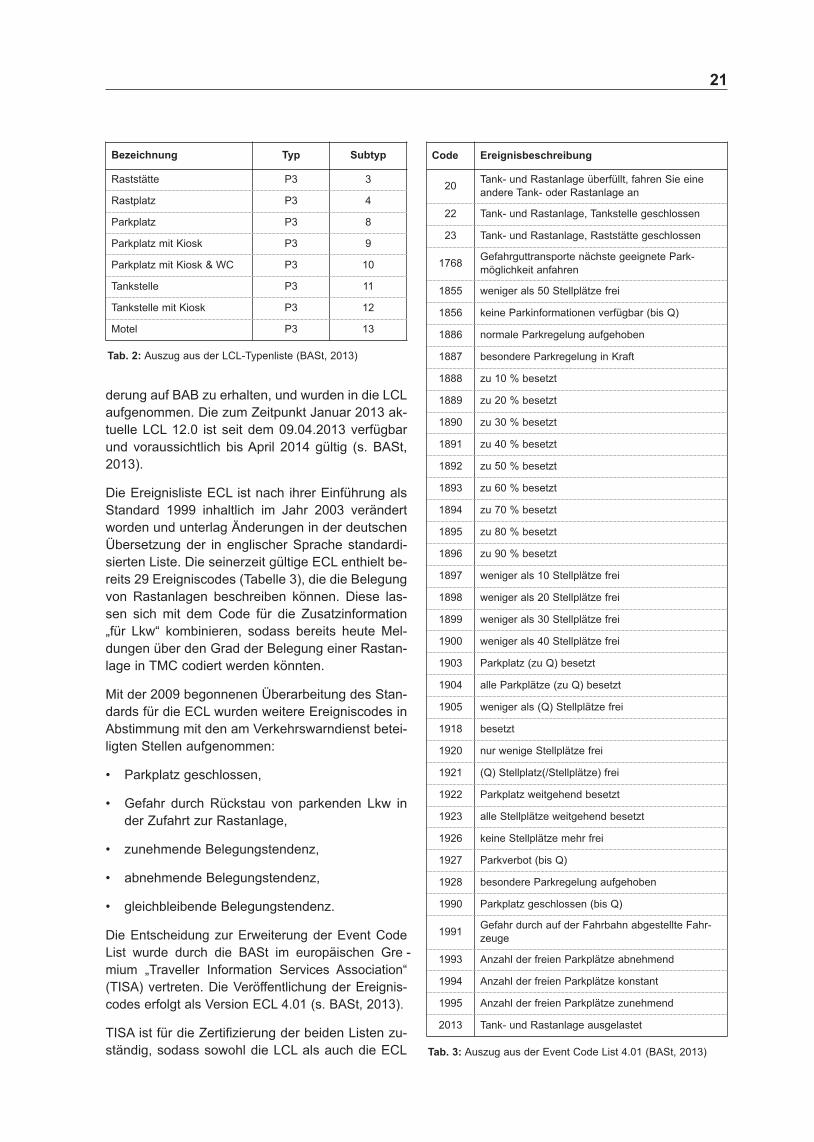
derung auf BAB zu erhalten, und wurden in die LCLaufgenommen. Die zum Zeitpunkt Januar 2013 ak-tuelle LCL 12.0 ist seit dem 09.04.2013 verfügbarund voraussichtlich bis April 2014 gültig (s. BASt,2013).
Die Ereignisliste ECL ist nach ihrer Einführung alsStandard 1999 inhaltlich im Jahr 2003 verändertworden und unterlag Änderungen in der deutschenÜbersetzung der in englischer Sprache standardi-sierten Liste. Die seinerzeit gültige ECL enthielt be-reits 29 Ereigniscodes (Tabelle 3), die die Belegungvon Rastanlagen beschreiben können. Diese las-sen sich mit dem Code für die Zusatzinformation„für Lkw“ kombinieren, sodass bereits heute Mel-dungen über den Grad der Belegung einer Rastan-lage in TMC codiert werden könnten.
Mit der 2009 begonnenen Überarbeitung des Stan-dards für die ECL wurden weitere Ereigniscodes inAbstimmung mit den am Verkehrswarndienst betei-ligten Stellen aufgenommen:
• Parkplatz geschlossen,
• Gefahr durch Rückstau von parkenden Lkw inder Zufahrt zur Rastanlage,
• zunehmende Belegungstendenz,
• abnehmende Belegungstendenz,
• gleichbleibende Belegungstendenz.
Die Entscheidung zur Erweiterung der Event CodeList wurde durch die BASt im europäischen Gre -mium „Traveller Information Services Association“(TISA) vertreten. Die Veröffentlichung der Ereignis-codes erfolgt als Version ECL 4.01 (s. BASt, 2013).
TISA ist für die Zertifizierung der beiden Listen zu-ständig, sodass sowohl die LCL als auch die ECL
21
Bezeichnung Typ Subtyp
Raststätte P3 3
Rastplatz P3 4
Parkplatz P3 8
Parkplatz mit Kiosk P3 9
Parkplatz mit Kiosk & WC P3 10
Tankstelle P3 11
Tankstelle mit Kiosk P3 12
Motel P3 13
Tab. 2: Auszug aus der LCL-Typenliste (BASt, 2013)
Code Ereignisbeschreibung
20 Tank- und Rastanlage überfüllt, fahren Sie eine andere Tank- oder Rastanlage an
22 Tank- und Rastanlage, Tankstelle geschlossen
23 Tank- und Rastanlage, Raststätte geschlossen
1768 Gefahrguttransporte nächste geeignete Park-möglichkeit anfahren
1855 weniger als 50 Stellplätze frei
1856 keine Parkinformationen verfügbar (bis Q)
1886 normale Parkregelung aufgehoben
1887 besondere Parkregelung in Kraft
1888 zu 10 % besetzt
1889 zu 20 % besetzt
1890 zu 30 % besetzt
1891 zu 40 % besetzt
1892 zu 50 % besetzt
1893 zu 60 % besetzt
1894 zu 70 % besetzt
1895 zu 80 % besetzt
1896 zu 90 % besetzt
1897 weniger als 10 Stellplätze frei
1898 weniger als 20 Stellplätze frei
1899 weniger als 30 Stellplätze frei
1900 weniger als 40 Stellplätze frei
1903 Parkplatz (zu Q) besetzt
1904 alle Parkplätze (zu Q) besetzt
1905 weniger als (Q) Stellplätze frei
1918 besetzt
1920 nur wenige Stellplätze frei
1921 (Q) Stellplatz(/Stellplätze) frei
1922 Parkplatz weitgehend besetzt
1923 alle Stellplätze weitgehend besetzt
1926 keine Stellplätze mehr frei
1927 Parkverbot (bis Q)
1928 besondere Parkregelung aufgehoben
1990 Parkplatz geschlossen (bis Q)
1991 Gefahr durch auf der Fahrbahn abgestellte Fahr-zeuge
1993 Anzahl der freien Parkplätze abnehmend
1994 Anzahl der freien Parkplätze konstant
1995 Anzahl der freien Parkplätze zunehmend
2013 Tank- und Rastanlage ausgelastet
Tab. 3: Auszug aus der Event Code List 4.01 (BASt, 2013)

internationale Standards erfüllen. TMC-Meldungensind daher in jeder Sprache decodierbar, für dieeine Übersetzung der ECL vorliegt. Die LCL wirdvon Kartenherstellern oft unmittelbar für die Ver-wendung in Navigationsgeräten aufbereitet undnutzbar gemacht. Mittels TMC lassen sich daherbeliebige Kombinationen aus Ereigniscodes undOrtscodes erstellen.
Wirkungsspektrum
Parkinformationen über TMC sind derzeit eine Aus-nahme und werden in der Praxis nicht flächen -deckend eingesetzt. Zahlreiche Voraussetzungenhierfür wären jedoch erfüllt: TMC steht in Deutsch-land flächendeckend zur Verfügung und eine Viel-zahl der Fahrzeuge verfügt über ein Empfangsgerät(Navigationsgerät, Autoradio).
Das Wirkungsspektrum lässt sich nur theoretischbetrachten: Die Anzahl und Häufigkeit der Aktuali-sierung von TMC-Meldungen sind technisch be-dingt begrenzt. Pro RDS-Sendezyklus von 15 Mi-nuten ist nur ein Bruchteil der Übertragungskapazi-tät für die Übertragung von TMC-Meldungen vorge-sehen. In der Praxis bedeutet das, dass innerhalbvon 15 Minuten ca. 300 Verkehrsmeldungen über-tragen werden können. Bedingt durch die Codie-rung mit Ereigniscodes und dem Zusatzcode „fürLkw“ muss jede Meldung zu Rastanlagen aus zweiHauptmeldungen zusammengesetzt werden (vgl.CEN-EN-ISO 14819-1).
Im Allgemeinen werden Verkehrsmeldungen drei-mal wiederholt (KLEINE, 2007). Damit ergibt sichfür einen Sendezyklus ein Meldungsumfang fürtheoretisch 50 Rastanlagen pro 15 Minuten. Ver-kehrsmeldungen mit höherer Bedeutung, z. B. Stauund Unfall, führen zu einer weiteren Reduktion(wobei Staus in den Abend- und Nachtstunden we-niger häufig auftreten als tagsüber). Sollen Meldun-gen zu Rastanlagen alle fünf Minuten aktualisiertwerden, dann können rechnerisch nur für 16 Rast-anlagen Parkinformationen gesendet werden.
Auf den ersten Blick scheint das Wirkungsspektrumvon TMC-Parkinformationen begrenzt. Bislang liegtkein Konzept vor, inwieweit TMC für Parkinforma-tionen flächendeckend genutzt werden könnte.
Neben der Übertragung von Parkinformationenüber TMC besteht seit langem die Möglichkeit,diese Parkinformationen im Rahmen des gespro-chenen Rundfunks zu übermitteln. Zu beachten ist,dass der hörende Verkehrsteilnehmer nur eine be-
grenzte Informationsmenge erfassen kann. Kurze,lenkende Informationen müssen daher sinnvoll fürden gesprochenen Verkehrswarndienst aus denreinen numerischen Parkinformationen aufbereitetwerden. Auch hier ist es daher erforderlich, eine ab-gestimmte Vorgehensweise zwischen Straßenbau-verwaltungen (Verkehrsrechnerzentralen), Landes-meldestellen und Rundfunkanstalten zu finden.
2.4.4 Verkehrswarndienst über TPEG
Vermittelbare Informationen
Bei dem Dienst TPEG handelt es sich um die tech-nische Weiterentwicklung von RDS-TMC (vgl. Kapi-tel 2.4.3). Da TPEG jedoch nicht mehr über denanalogen Rundfunk, sondern über den digitalenRundfunk (DAB, Digital Audio Broadcast) oder In-ternet (IP, Internet Protocoll) übertragen wird, bietetTPEG neben einigen technischen Fortschrittenauch eine deutlich größere Bandbreite an übermit-telbaren Informationen. Neben der Übertragung derherkömmlichen Verkehrswarnungen und der Ver-kehrslage bietet TPEG weitere Applikationen, mitdenen zum Beispiel Kraftstoffpreise, Informationenzum öffentlichen Nahverkehr oder zulässigeHöchstgeschwindigkeiten übertragen werden kön-nen. In der Parking Information Application (PKI,TISA, 2013) können Rastanlagenverfügbarkeit und-preise übermittelt werden. Neben der aktuellenund prognostizierten Verfügbarkeit können unteranderem auch folgende Informationen bereitge-stellt werden:
• Betreiber und Adresse,
• Anzahl und Größe der Rastanlage,
• zugelassene Fahrzeuge (z. B. Größe, Bela-dung),
• Öffnungszeiten,
• Preisgestaltung,
• Facilities: bewacht, Selbstparken,
• weitere Service-Einrichtungen (z. B. Tankstelle,Restaurant etc.).
Mit der PKI-Applikation verfügt TPEG über einenleistungsfähigen Standard zur Übertragung vonParkinformationen zwischen Dienstanbietern undVerkehrsteilnehmern. Zurzeit überträgt der Bayeri-sche Rundfunk in Zusammenarbeit mit dem ADACund der BMT (Bayerische Medien-Technik) über
22

DAB+ die Belegung der bayerischen Parkhäusermit Hilfe von TPEG-PKI (BR, 2011).
Funktionalität
Die TPEG-Übertragung ist plattformunabhängig,sodass die Übertragung über den digitalen Rund-funk, alternativ jedoch auch über Internet oder digi-tales Fernsehen erfolgen werden kann.
Während der auf dem analogen Rundfunk basie-rende RDS-TMC-Dienst schon jetzt deutschland-weit verfügbar ist, hat der auf dem digitalen Rund-funk basierende TPEG-Dienst zurzeit nur eine ge-ringe Netzabdeckung. Nach einem weitestgehenderfolglosen Einsatz von DAB seit 1995 (REILING,2013) wurde mit der Einführung von DAB+ am01.08.2011 ein Neustart mit deutlich verbessertemProgrammangebot durchgeführt. Auch wenn in denkommenden Jahren mit einer flächendeckendenVersorgung aller Autobahnen mit digitalem Rund-funk ausgegangen werden kann, muss die Ausstat-tung mit TPEG-fähigen Endgeräten erst noch auf-gebaut werden.
Der alternative Übertragungsweg der TPEG-Mel-dung über das Internet (TPEG over IP) ist technischweniger problematisch. Die Firma BMW überträgtmittels Mobilfunk seit einigen Jahren ihre Verkehrs-informationen über „TPEG over IP“ in die Fahrzeu-ge (BMW, 2013). Unter Berücksichtigung der zu-nehmenden Nachfrage weiterer Dienstanbieter (z. B. Flottenmanagement) nach internetbasiertenLösungen stellt der Übertragungsweg via Interneteine gute und verhältnismäßig schnell verfügbareAlternative dar.
Wirkungsspektrum
Die vielfältigen Informationen, die mit einer TPEG-Nachricht übertragen werden können, bieten gera-de für die Nutzung in Navigationsgeräten eine brei-te Fülle an Anwendungsmöglichkeiten. In Kombina-tion mit weiteren Informationen, wie zum Beispielder gewählten Route, der verbleibenden Lenkzeitoder der Größe des Fahrzeugs, kann das Geräteine personalisierte Empfehlung aus Parkinforma-tionen ableiten.
In vielen Navigationsgeräten und auch den Anwen-dungen für Smartphones könnte „TPEG over IP“mit verhältnismäßig geringem Aufwand empfangenwerden, da die benötigte Mobilfunkanbindung inden Fahrzeugen teilweise schon vorhanden ist. Ein
Problem dieser IP-basierten Mobilfunkübertragungstellen jedoch momentan die Kosten für die benö-tigte Datenverbindung dar. Im Heimatnetz sind dielaufenden Kosten für die zu übertragenen Daten-mengen oft durch Pauschalen (Flatrate) abgedeckt,außerhalb des Heimatnetzes können die teilweisehohen Roaming-Kosten jedoch die Verbreitung derIP-basierten Übertragung bei ausländischen Ver-kehrsteilnehmern hemmen.
Während die momentan noch fehlende Netzab -deckung für „TPEG over DAB“ ein Nachteil ist, bie-tet die neue Technik jedoch einige Vorteile gegen-über RDS-TMC:
• Ein wesentlicher Unterschied von DAB zum her-kömmlichen RDS-TMC ist die deutlich schnel -lere Übertragungsgeschwindigkeit des digitalenRundfunks. In Kombination mit der in TPEGnicht benötigten Verifizierung der Meldung (drei-malige Wiederholung) kann die generierte Mel-dung fast direkt im Fahrzeug weiterverarbeitetwerden.
• Neben der schnellen Übertragung der Nachrich-ten ist auch das verfügbare Datenvolumen im di-gitalen Rundfunk deutlich größer als im analo-gen Rundfunk. Im Gegensatz zu RDS-TMC kön-nen alle benötigten Informationen zu Rastanla-gen mit TPEG codiert und anschließend über-tragen werden.
Zusammenfassend lässt sich feststellen, dass„TPEG over DAB“ in der Zukunft eine erfolgsver-sprechende Übertragungsmöglichkeit darstellt. Inden nächsten Jahren ist jedoch nicht mit einer flächendeckenden DAB-Verfügbarkeit zu rechnen(REILING, 2013), sodass „TPEG over IP“ zunächsteine sinnvolle Alternative mit überschaubaremtechnischem Aufwand darstellt.
2.4.5 Mobilitätsdatenmarktplatz „Verkehrs -informationen“ und Anbindung privaterDienste
Vermittelbare Informationen
Die Informationsbereitstellung ins Fahrzeug kannnicht nur einen wesentlichen Beitrag zur Erhöhungder Verkehrssicherheit leisten, sondern auch zu in-dividualisierten Mobilitätsdiensten führen.
Das Übertragungsprotokoll TPEG bietet die Mög-lichkeit, umfassende Parkinformationen über digita-len Rundfunk oder internetbasierte Mobilfunkkom-
23
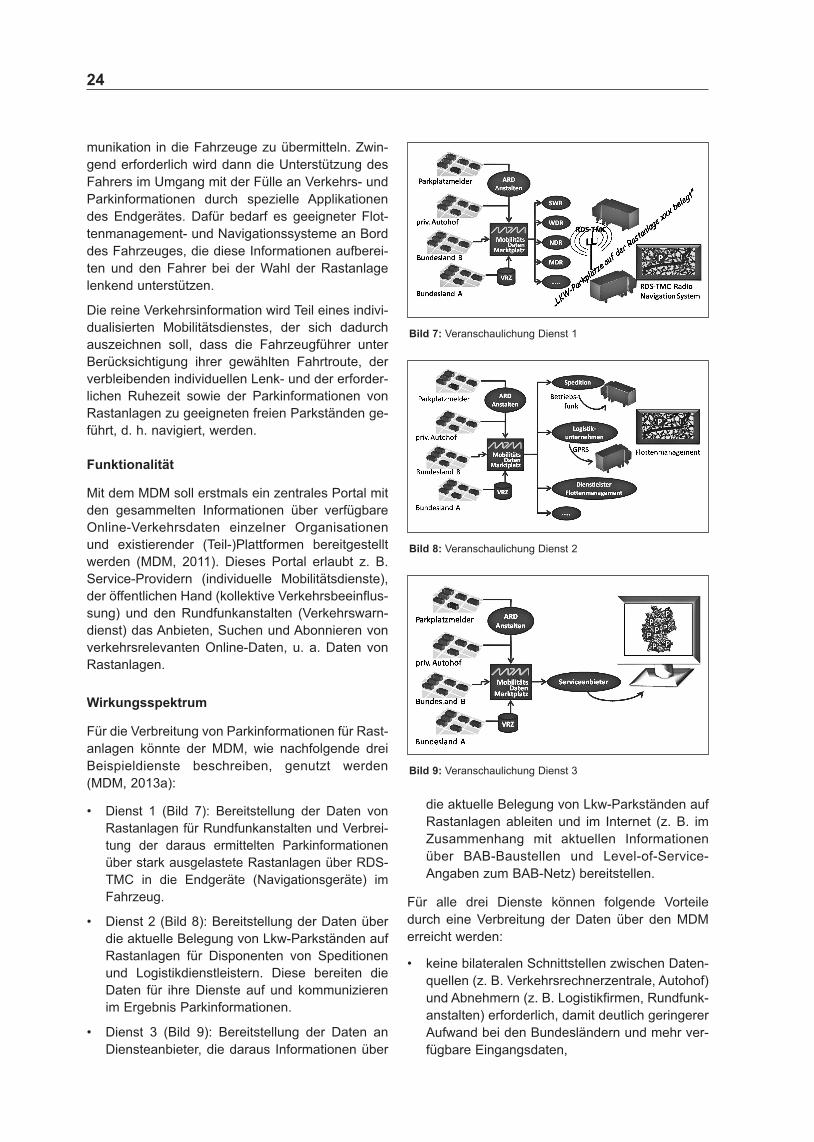
munikation in die Fahrzeuge zu übermitteln. Zwin-gend erforderlich wird dann die Unterstützung desFahrers im Umgang mit der Fülle an Verkehrs- undParkinformationen durch spezielle Applikationendes Endgerätes. Dafür bedarf es geeigneter Flot-tenmanagement- und Navigationssysteme an Borddes Fahrzeuges, die diese Informationen aufberei-ten und den Fahrer bei der Wahl der Rastanlagelenkend unterstützen.
Die reine Verkehrsinformation wird Teil eines indivi-dualisierten Mobilitätsdienstes, der sich dadurchauszeichnen soll, dass die Fahrzeugführer unterBerücksichtigung ihrer gewählten Fahrtroute, derverbleibenden individuellen Lenk- und der erforder-lichen Ruhezeit sowie der Parkinformationen vonRastanlagen zu geeigneten freien Parkständen ge-führt, d. h. navigiert, werden.
Funktionalität
Mit dem MDM soll erstmals ein zentrales Portal mitden gesammelten Informationen über verfügbareOnline-Verkehrsdaten einzelner Organisationenund existierender (Teil-)Plattformen bereitgestelltwerden (MDM, 2011). Dieses Portal erlaubt z. B.Service-Providern (individuelle Mobilitätsdienste),der öffentlichen Hand (kollektive Verkehrsbeeinflus-sung) und den Rundfunkanstalten (Verkehrswarn-dienst) das Anbieten, Suchen und Abonnieren vonverkehrsrelevanten Online-Daten, u. a. Daten vonRastanlagen.
Wirkungsspektrum
Für die Verbreitung von Parkinformationen für Rast-anlagen könnte der MDM, wie nachfolgende dreiBeispieldienste beschreiben, genutzt werden(MDM, 2013a):
• Dienst 1 (Bild 7): Bereitstellung der Daten vonRastanlagen für Rundfunkanstalten und Verbrei-tung der daraus ermittelten Parkinformationenüber stark ausgelastete Rastanlagen über RDS-TMC in die Endgeräte (Navigationsgeräte) imFahrzeug.
• Dienst 2 (Bild 8): Bereitstellung der Daten überdie aktuelle Belegung von Lkw-Parkständen aufRastanlagen für Disponenten von Speditionenund Lo gistikdienstleistern. Diese bereiten dieDaten für ihre Dienste auf und kommunizierenim Ergebnis Parkinformationen.
• Dienst 3 (Bild 9): Bereitstellung der Daten an Diensteanbieter, die daraus Informationen über
die aktuelle Belegung von Lkw-Parkständen aufRastanlagen ableiten und im Internet (z. B. imZusammenhang mit aktuellen Informationenüber BAB-Baustellen und Level-of-Service-Angaben zum BAB-Netz) bereitstellen.
Für alle drei Dienste können folgende Vorteiledurch eine Verbreitung der Daten über den MDMerreicht werden:
• keine bilateralen Schnittstellen zwischen Daten-quellen (z. B. Verkehrsrechnerzentrale, Autohof)und Abnehmern (z. B. Logistikfirmen, Rundfunk-anstalten) erforderlich, damit deutlich geringererAufwand bei den Bundesländern und mehr ver-fügbare Eingangsdaten,
24
Bild 7: Veranschaulichung Dienst 1
Bild 8: Veranschaulichung Dienst 2
Bild 9: Veranschaulichung Dienst 3
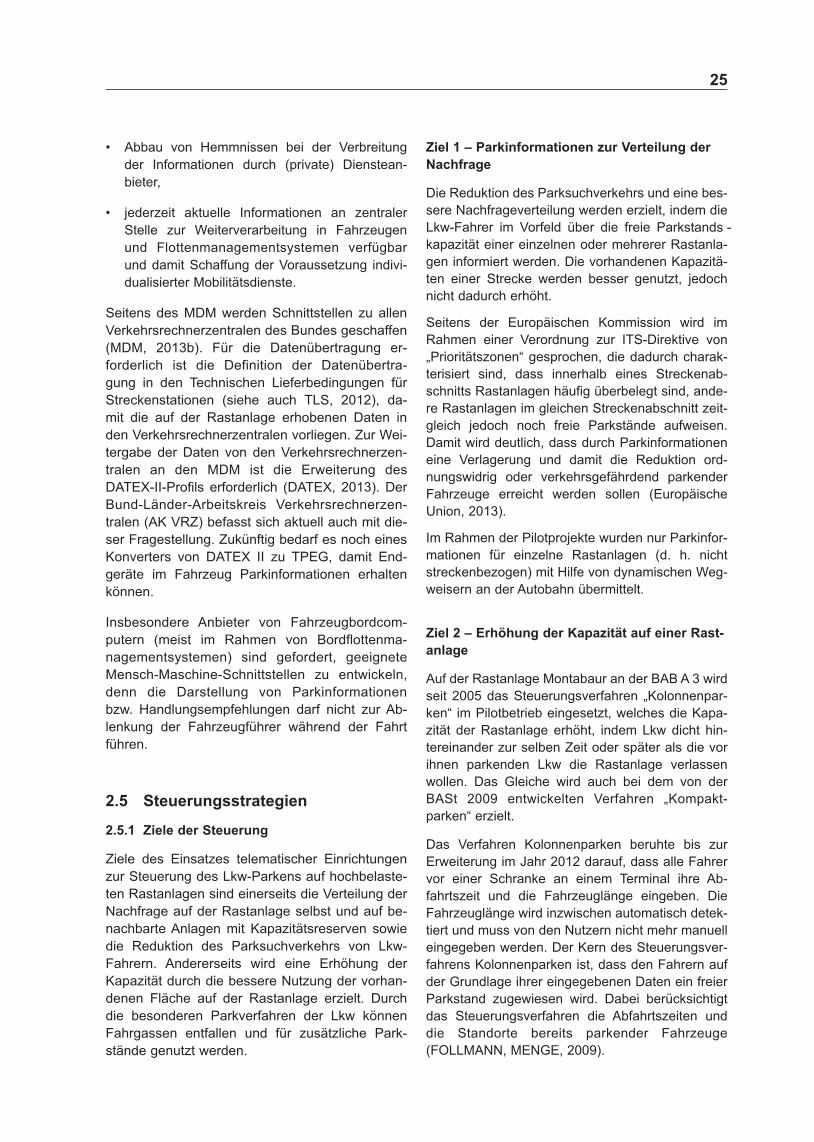
• Abbau von Hemmnissen bei der Verbreitung der Informationen durch (private) Dienstean-bieter,
• jederzeit aktuelle Informationen an zentralerStelle zur Weiterverarbeitung in Fahrzeugenund Flottenmanagementsystemen verfügbarund damit Schaffung der Voraussetzung indivi-dualisierter Mobilitätsdienste.
Seitens des MDM werden Schnittstellen zu allenVerkehrsrechnerzentralen des Bundes geschaffen(MDM, 2013b). Für die Datenübertragung er-forderlich ist die Definition der Datenübertra-gung in den Technischen Lieferbedingungen fürStreckenstationen (siehe auch TLS, 2012), da-mit die auf der Rastanlage erhobenen Daten inden Verkehrsrechnerzentralen vorliegen. Zur Wei-tergabe der Daten von den Verkehrsrechnerzen-tralen an den MDM ist die Erweiterung des DATEX-II-Profils erforderlich (DATEX, 2013). DerBund-Länder-Arbeitskreis Verkehrsrechnerzen-tralen (AK VRZ) befasst sich aktuell auch mit die-ser Fragestellung. Zukünftig bedarf es noch einesKonverters von DATEX II zu TPEG, damit End-geräte im Fahrzeug Parkinformationen erhaltenkönnen.
Insbesondere Anbieter von Fahrzeugbordcom -putern (meist im Rahmen von Bordflottenma-nagementsystemen) sind gefordert, geeigneteMensch-Maschine-Schnittstellen zu entwickeln,denn die Darstellung von Parkinformationen bzw. Handlungsempfehlungen darf nicht zur Ab-lenkung der Fahrzeugführer während der Fahrtführen.
2.5 Steuerungsstrategien
2.5.1 Ziele der Steuerung
Ziele des Einsatzes telematischer Einrichtungenzur Steuerung des Lkw-Parkens auf hochbelaste-ten Rastanlagen sind einerseits die Verteilung derNachfrage auf der Rastanlage selbst und auf be-nachbarte Anlagen mit Kapazitätsreserven sowiedie Reduktion des Parksuchverkehrs von Lkw-Fahrern. Andererseits wird eine Erhöhung der Kapazität durch die bessere Nutzung der vorhan-denen Fläche auf der Rastanlage erzielt. Durchdie besonderen Parkverfahren der Lkw könnenFahrgassen entfallen und für zusätzliche Park-stände genutzt werden.
Ziel 1 – Parkinformationen zur Verteilung derNachfrage
Die Reduktion des Parksuchverkehrs und eine bes-sere Nachfrageverteilung werden erzielt, indem dieLkw-Fahrer im Vorfeld über die freie Parkstands -kapazität einer einzelnen oder mehrerer Rastanla-gen informiert werden. Die vorhandenen Kapazitä-ten einer Strecke werden besser genutzt, jedochnicht dadurch erhöht.
Seitens der Europäischen Kommission wird imRahmen einer Verordnung zur ITS-Direktive von„Prioritätszonen“ gesprochen, die dadurch charak-terisiert sind, dass innerhalb eines Streckenab-schnitts Rastanlagen häufig überbelegt sind, ande-re Rastanlagen im gleichen Streckenabschnitt zeit-gleich jedoch noch freie Parkstände aufweisen.Damit wird deutlich, dass durch Parkinformationeneine Verlagerung und damit die Reduktion ord-nungswidrig oder verkehrsgefährdend parkenderFahrzeuge erreicht werden sollen (EuropäischeUnion, 2013).
Im Rahmen der Pilotprojekte wurden nur Parkinfor-mationen für einzelne Rastanlagen (d. h. nichtstreckenbezogen) mit Hilfe von dynamischen Weg-weisern an der Autobahn übermittelt.
Ziel 2 – Erhöhung der Kapazität auf einer Rast-anlage
Auf der Rastanlage Montabaur an der BAB A 3 wirdseit 2005 das Steuerungsverfahren „Kolonnenpar-ken“ im Pilotbetrieb eingesetzt, welches die Kapa-zität der Rastanlage erhöht, indem Lkw dicht hin-tereinander zur selben Zeit oder später als die vorihnen parkenden Lkw die Rastanlage verlassenwollen. Das Gleiche wird auch bei dem von derBASt 2009 entwickelten Verfahren „Kompakt -parken“ erzielt.
Das Verfahren Kolonnenparken beruhte bis zur Erweiterung im Jahr 2012 darauf, dass alle Fahrervor einer Schranke an einem Terminal ihre Ab-fahrtszeit und die Fahrzeuglänge eingeben. DieFahrzeuglänge wird inzwischen automatisch detek-tiert und muss von den Nutzern nicht mehr manuelleingegeben werden. Der Kern des Steuerungsver-fahrens Kolonnenparken ist, dass den Fahrern aufder Grundlage ihrer eingegebenen Daten ein freierParkstand zugewiesen wird. Dabei berücksichtigtdas Steuerungsverfahren die Abfahrtszeiten unddie Standorte bereits parkender Fahrzeuge (FOLLMANN, MENGE, 2009).
25
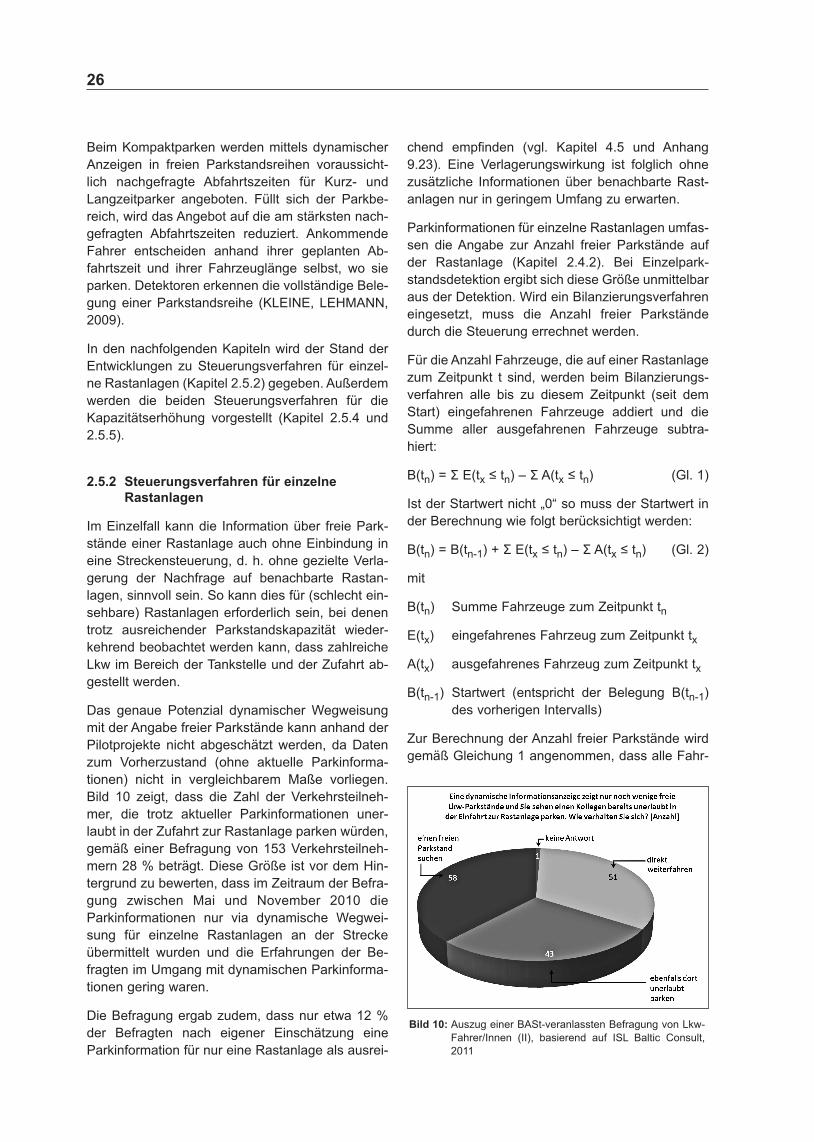
Beim Kompaktparken werden mittels dynamischerAnzeigen in freien Parkstandsreihen voraussicht-lich nachgefragte Abfahrtszeiten für Kurz- undLangzeitparker angeboten. Füllt sich der Parkbe-reich, wird das Angebot auf die am stärksten nach-gefragten Abfahrtszeiten reduziert. AnkommendeFahrer entscheiden anhand ihrer geplanten Ab-fahrtszeit und ihrer Fahrzeuglänge selbst, wo sieparken. Detektoren erkennen die vollständige Bele-gung einer Parkstandsreihe (KLEINE, LEHMANN,2009).
In den nachfolgenden Kapiteln wird der Stand derEntwicklungen zu Steuerungsverfahren für einzel-ne Rastanlagen (Kapitel 2.5.2) gegeben. Außerdemwerden die beiden Steuerungsverfahren für die Kapazitätserhöhung vorgestellt (Kapitel 2.5.4 und2.5.5).
2.5.2 Steuerungsverfahren für einzelneRastanlagen
Im Einzelfall kann die Information über freie Park-stände einer Rastanlage auch ohne Einbindung ineine Streckensteuerung, d. h. ohne gezielte Verla-gerung der Nachfrage auf benachbarte Rastan -lagen, sinnvoll sein. So kann dies für (schlecht ein-sehbare) Rastanlagen erforderlich sein, bei denentrotz ausreichender Parkstandskapazität wieder-kehrend beobachtet werden kann, dass zahlreicheLkw im Bereich der Tankstelle und der Zufahrt ab-gestellt werden.
Das genaue Potenzial dynamischer Wegweisungmit der Angabe freier Parkstände kann anhand derPilotprojekte nicht abgeschätzt werden, da Datenzum Vorherzustand (ohne aktuelle Parkinforma -tionen) nicht in vergleichbarem Maße vorliegen.Bild 10 zeigt, dass die Zahl der Verkehrsteilneh-mer, die trotz aktueller Parkinformationen uner-laubt in der Zufahrt zur Rastanlage parken würden,gemäß einer Befragung von 153 Verkehrsteilneh-mern 28 % beträgt. Diese Größe ist vor dem Hin-tergrund zu bewerten, dass im Zeitraum der Befra-gung zwischen Mai und November 2010 dieParkinforma tionen nur via dynamische Wegwei-sung für einzelne Rastanlagen an der Streckeübermittelt wurden und die Erfahrungen der Be-fragten im Umgang mit dynamischen Parkinforma-tionen gering waren.
Die Befragung ergab zudem, dass nur etwa 12 %der Befragten nach eigener Einschätzung eineParkinformation für nur eine Rastanlage als ausrei-
chend empfinden (vgl. Kapitel 4.5 und Anhang9.23). Eine Verlagerungswirkung ist folglich ohnezusätzliche Informationen über benachbarte Rast-anlagen nur in geringem Umfang zu erwarten.
Parkinformationen für einzelne Rastanlagen umfas-sen die Angabe zur Anzahl freier Parkstände aufder Rastanlage (Kapitel 2.4.2). Bei Einzelpark-standsdetektion ergibt sich diese Größe unmittelbaraus der Detektion. Wird ein Bilanzierungsverfahreneingesetzt, muss die Anzahl freier Parkständedurch die Steuerung errechnet werden.
Für die Anzahl Fahrzeuge, die auf einer Rastanlagezum Zeitpunkt t sind, werden beim Bilanzierungs-verfahren alle bis zu diesem Zeitpunkt (seit demStart) eingefahrenen Fahrzeuge addiert und dieSumme aller ausgefahrenen Fahrzeuge subtra-hiert:
B(tn) = Σ E(tx ≤ tn) – Σ A(tx ≤ tn) (Gl. 1)
Ist der Startwert nicht „0“ so muss der Startwert inder Berechnung wie folgt berücksichtigt werden:
B(tn) = B(tn-1) + Σ E(tx ≤ tn) – Σ A(tx ≤ tn) (Gl. 2)
mit
B(tn) Summe Fahrzeuge zum Zeitpunkt tn
E(tx) eingefahrenes Fahrzeug zum Zeitpunkt tx
A(tx) ausgefahrenes Fahrzeug zum Zeitpunkt tx
B(tn-1) Startwert (entspricht der Belegung B(tn-1)des vorherigen Intervalls)
Zur Berechnung der Anzahl freier Parkstände wirdgemäß Gleichung 1 angenommen, dass alle Fahr-
26
Bild 10: Auszug einer BASt-veranlassten Befragung von Lkw-Fahrer/Innen (II), basierend auf ISL Baltic Consult,2011

zeuge auf der Rastanlage einen Parkstand einneh-men. Die Anzahl Fahrzeuge auf der RastanlageB(tn) wird von der Anzahl aller verkehrsrechtlichausgewiesenen Lkw-Parkstände auf der Rastan -lage subtrahiert und ergibt die Anzahl freier Park-stände.
2.5.3 Intelligente Streckensteuerung übermehrere Rastanlagen
Einen großen Beitrag zur Verbesserung der Nach-fragesituation für Lkw-Parkstände an BAB könnenintelligente Streckensteuerungen leisten. Dabeimüssen die Parkinformationen mehrere (ggf. alle)Rastanlagen eines Streckenabschnitts umfassen.Idealerweise erfolgt eine Information darüber, wel-che Rastanlage über ausreichende freie Kapazitä-ten erfolgt, insbesondere dann, wenn einzelneRastanlagen im Streckenabschnitt bereits keinefreien Parkstände mehr aufweisen.
Die Darstellung streckenbezogener Parkinformatio-nen kann unter Berücksichtigung wahrnehmungs-psychologischer Aspekte nicht durch Beschilderunggeleistet werden (siehe Kapitel 2.4). Für Steue-rungsverfahren ergeben sich daraus größere Spiel-räume, aus der detektierten Nachfrage sinnvollestreckenbezogene Informationen für verschiedeneKommunikationswege abzuleiten.
Bislang existiert keine automatische Steuerung fürdie Einbindung von Parkinformationen in TMC oderTPEG, sodass hier Entwicklungsbedarf besteht.
2.5.4 Kolonnenparken
Das in der Patentschrift EP 1 408 455 B1 (EP 1408 455 B1, 2007) beschriebene Verfahren „Anla-ge zur optimalen Ausnutzung des Parkraumes vonParkplätzen für Kraftfahrzeuge“ (im Weiteren be-zeichnet mit „Kolonnenparken“) ist dadurch cha-rakterisiert, dass durch technische UnterstützungLkw-Fahrern ein freier Parkstand zugewiesen wird.Dabei soll mit Kenntnis der Länge und Abfahrtszeitder Fahrzeuge ein Hintereinanderaufstellen vonFahrzeugen, die zeitlich nacheinander abfahren,erzielt werden. Es sollen mehrere Lkw ohne Fahr-gasse unmittelbar hinter- und nebeneinander par-ken. Der Nutzen des Kolonnenparkens liegt somitin der Schaffung von zusätzlicher Parkstandskapa-zität ohne weiteren konventionellen Ausbau, dadurch die Umnutzung der Fahrgasse zwischen parallelen Parkflächen zusätzliche Parkstände ent-stehen.
Der Prozess eines Belegungsvorgangs mit einemLkw auf der Rastanlage beginnt mit der Ankunft desFahrers an einem Terminal (Bild 11), wo der Fahrerseine Fahrzeuglänge (bis zur Erweiterung im Jahr2012) und die geplante Abfahrtszeit eingebenmuss, um den Parkbereich befahren zu können (EP1 408 455 B1, 2007). Seit 2012 wird die Länge desFahrzeuges automatisch detektiert. Für ein rei-bungsloses Funktionieren müssen die Angabendes Fahrers inhaltlich korrekt sein. Abschließendbestätigt der Fahrer seine Eingaben und forderteinen Parkschein an.
Im Steuerungsrechner wird geprüft, ob ein Park-stand frei ist, der für das Fahrzeug eine ausrei-chende Länge bietet, und ob die in der Reihe be-reits parkenden Fahrzeuge eine frühere Abfahrts-zeit haben. Ist ein geeigneter Parkstand auf der ge-samten Rastanlage nicht zu finden, wird der Lkw-Fahrer mit seinem Fahrzeug abgewiesen (Schran-ke öffnet nicht). Andernfalls wird ihm eine geeigne-te Parkstandsreihe zugewiesen und der Fahrerkann in den Parkbereich einfahren.
Auf einem Parkschein wird der Fahrer informiert,in welcher Parkstandsreihe (Bild 12) er sein Fahr-zeug abstellen soll (M+C Lkw-Parksysteme GmbH& CoKG, 2013). Seit 2012 wird dies auch damitunterstützt, dass die zugewiesene Reihe miteinem grün leuchtenden Pfeil zusätzlich verdeut-licht wird.
27
Bild 11: Anfahrt Terminal auf TR-Anlage Montabaur (Sept.2009)
Bild 12: Ausweisung der Parkstandsreihen auf TR-AnlageMontabaur (Sept. 2009)
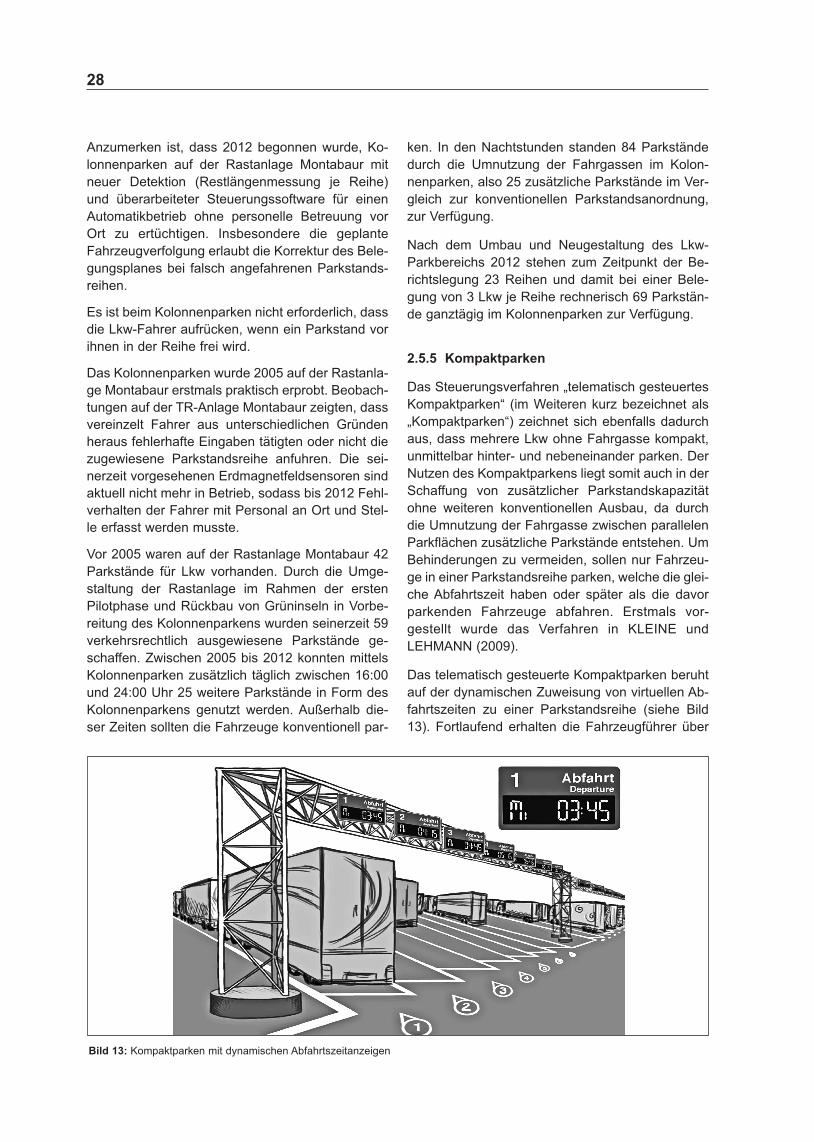
28
Anzumerken ist, dass 2012 begonnen wurde, Ko-lonnenparken auf der Rastanlage Montabaur mitneuer Detektion (Restlängenmessung je Reihe)und überarbeiteter Steuerungssoftware für einenAutomatikbetrieb ohne personelle Betreuung vorOrt zu ertüchtigen. Insbesondere die geplanteFahrzeugverfolgung erlaubt die Korrektur des Bele-gungsplanes bei falsch angefahrenen Parkstands-reihen.
Es ist beim Kolonnenparken nicht erforderlich, dassdie Lkw-Fahrer aufrücken, wenn ein Parkstand vorihnen in der Reihe frei wird.
Das Kolonnenparken wurde 2005 auf der Rastanla-ge Montabaur erstmals praktisch erprobt. Beobach-tungen auf der TR-Anlage Montabaur zeigten, dassvereinzelt Fahrer aus unterschiedlichen Gründenheraus fehlerhafte Eingaben tätigten oder nicht diezugewiesene Parkstandsreihe anfuhren. Die sei-nerzeit vorgesehenen Erdmagnetfeldsensoren sindaktuell nicht mehr in Betrieb, sodass bis 2012 Fehl-verhalten der Fahrer mit Personal an Ort und Stel-le erfasst werden musste.
Vor 2005 waren auf der Rastanlage Montabaur 42Parkstände für Lkw vorhanden. Durch die Umge-staltung der Rastanlage im Rahmen der ersten Pilotphase und Rückbau von Grüninseln in Vorbe-reitung des Kolonnenparkens wurden seinerzeit 59verkehrsrechtlich ausgewiesene Parkstände ge-schaffen. Zwischen 2005 bis 2012 konnten mittelsKolonnenparken zusätzlich täglich zwischen 16:00und 24:00 Uhr 25 weitere Parkstände in Form desKolonnenparkens genutzt werden. Außerhalb die-ser Zeiten sollten die Fahrzeuge konventionell par-
ken. In den Nachtstunden standen 84 Parkständedurch die Umnutzung der Fahrgassen im Kolon-nenparken, also 25 zusätzliche Parkstände im Ver-gleich zur konventionellen Parkstandsanordnung,zur Verfügung.
Nach dem Umbau und Neugestaltung des Lkw-Parkbereichs 2012 stehen zum Zeitpunkt der Be-richtslegung 23 Reihen und damit bei einer Bele-gung von 3 Lkw je Reihe rechnerisch 69 Parkstän-de ganztägig im Kolonnenparken zur Verfügung.
2.5.5 Kompaktparken
Das Steuerungsverfahren „telematisch gesteuertesKompaktparken“ (im Weiteren kurz bezeichnet als„Kompaktparken“) zeichnet sich ebenfalls dadurchaus, dass mehrere Lkw ohne Fahrgasse kompakt,unmittelbar hinter- und nebeneinander parken. DerNutzen des Kompaktparkens liegt somit auch in derSchaffung von zusätzlicher Parkstandskapazitätohne weiteren konventionellen Ausbau, da durchdie Umnutzung der Fahrgasse zwischen parallelenParkflächen zusätzliche Parkstände entstehen. UmBehinderungen zu vermeiden, sollen nur Fahrzeu-ge in einer Parkstandsreihe parken, welche die glei-che Abfahrtszeit haben oder später als die davorparkenden Fahrzeuge abfahren. Erstmals vor-gestellt wurde das Verfahren in KLEINE und LEHMANN (2009).
Das telematisch gesteuerte Kompaktparken beruhtauf der dynamischen Zuweisung von virtuellen Ab-fahrtszeiten zu einer Parkstandsreihe (siehe Bild13). Fortlaufend erhalten die Fahrzeugführer über
Bild 13: Kompaktparken mit dynamischen Abfahrtszeitanzeigen

dynamische Anzeigen oberhalb der Parkstandsrei-hen Abfahrtszeiten angezeigt. Ankommende Fahr-zeugführer sollen mit Hilfe dieser Information in derReihe parken, in der die eigene geplante Abfahrts-zeit angezeigt wird.
Die Kenntnis der zu erwartenden Nachfrage ist dieGrundlage zur Festlegung sinnvoller virtueller Ab-fahrtszeiten für die verfügbaren Parkstandsreiheneiner Rastanlage. Bei ausreichendem Befolgungs-grad entspricht dann die angenommene der Reihezugewiesene Abfahrtszeit der tatsächlichen Ab-fahrtszeit der Fahrzeuge in der Reihe.
Die Fahrer entscheiden selbstständig anhand dererkennbaren Restlänge einer Reihe, ob sie ihrFahrzeug dort noch parken können, und entschei-den sich somit selbst für eine geeigneteParkstands reihe. Es ist nicht erforderlich, dass dieLkw-Fahrer aufrücken, wenn ein Parkstand vorihnen in der Reihe frei wird.
Bild 14 verdeutlicht die Funktionsweise der Steue-rung für einen Ausschnitt des Parkbereichs mit vierParkstandsreihen. Die Aufenthaltszeit wird immer inBezug zur aktuellen Uhrzeit umgerechnet und inForm von Abfahrtszeiten auf den dynamischen An-zeigen dargestellt. Um 20:00 werden in Bild 14 aus-gehend von der vermuteten Nachfrage die Ab-fahrtszeiten von 6:00 bis 7:30 angeboten (das ent-spricht einer Aufenthaltszeit von 10 bis 11,5 Stun-den). Eine zeitliche Aktualisierung ist (parametrier-bar) alle 15 Minuten vorgesehen und führt zu denveränderten dynamischen Anzeigen in Bild 14 fürden Zeitpunkt 20:15. Dabei werden die angezeigtenAbfahrtszeiten um 15 Minuten erhöht. Erfolgt dievollständige Belegung einer Reihe, wie in Bild 14
für 20:21 dargestellt, so wird die zugehörige Ab-fahrtszeit 07:15 auf die benachbarte, noch freieReihe 7 übertragen und steht dem Verkehrsteilneh-mer weiter zur Verfügung. Zu dieser Zeit werdendann in den vier Reihen nur noch Abfahrtszeitenangeboten, die einer Aufenthaltszeit von 10,5 bis11,5 Stunden entsprechen. Durch die dynamischeFreigabe von freien oder teilweise gefüllten Reihenist demnach keine Behinderung zu erwarten, da dieFahrzeuge in den vorderen Parkständen eine frü-here Abfahrt planen.
Das Steuerungsverfahren soll den Fahrern den Ein-druck eines unterstützenden Instruments vermittelnund überlässt die Wahl einer Parkstandsreihe be-wusst dem Lkw-Fahrer. Das heißt auch, dass keineKorrekturen für ein Fehlverhalten der Lkw-Fahrerim Steuerungsverfahren benötigt werden.
Zur intelligenten Steuerung der dynamischen Ab-fahrtszeitanzeigen ist der Einsatz von Detektions-technik erforderlich. Die Detektionstechnik soll fürjede Parkstandsreihe mindestens die Erfassungder Belegung des „letzten“ Parkstandes einerReihe ermöglichen. Dazu eignen sich bereits einfa-che (Laser-)Sensoren, die an den Querträgern derdynamischen Anzeigen montiert werden.
Die Herausforderung für den neuen Steuerungsan-satz besteht somit in der Entscheidung, wann unddurch welche neue Abfahrtszeit eine angezeigteAbfahrtszeit ersetzt wird. Dabei hängt vor allem dieerzielbare Auslastung der Rastanlage von der Qua-lität dieser Entscheidung ab.
Die erste Pilotinstallation ist 2014 auf der Rastanla-ge Jura-West an der BAB A 3 geplant. Bislang lie-gen ausschließlich Simulationsergebnisse zur Wirk-samkeit des Kompaktparkens vor.
3 Übersicht über diePilotprojekte
Im Blickpunkt der Pilotprojekte der Bundesländerstehen die Erprobung neuer Detektionsverfahrenund -techniken für die Belegung von Lkw-Parkstän-den und die Erfassung der Fahrzeuge auf einerRastanlage. Anhang 9.1 fasst die verschiedenenPilotprojekte im BAB-Netz zusammen.
Die Fachhochschule Erfurt hat mit der Laufzeit vonSeptember 2010 bis Juni 2013 das Projekt „Tele-matische Lösungen zur Überbelegung von Lkw-
29
Bild 14: Zeit- und belegungsabhängige Berechnung der An -zeigen
30
Rastanlagen an Bundesautobahnen (TeleLaB)“ initiiert. Im Rahmen des Projektes und als Ergebniseiner studentischen Arbeit entstanden in Abstim-mung mit der Bundesanstalt für StraßenwesenSteckbriefe für die laufenden oder seinerzeit in Baubefindlichen Pilotprojekte für telematisches Lkw-Parken (siehe FH Erfurt, 2012, und KREMTZ, 2011).
Das Forschungsvorhaben TeleLaB hat das Ziel, „dievorhandenen technischen Möglichkeiten zur Detek-tion der Rastanlagenbelegung systematisch durchAuswertungen, Befragungen und eigene Labor- undFeldversuche zu evaluieren, um so technische Defi-zite zu identifizieren und entsprechende Weiterent-wicklungen zu induzieren. In einer zentralen Ar-beitsphase sollen dafür die Optimierungsmöglich-keiten vorhandener und Einsatzmöglichkeiten neuerTechniken zur verbesserten Detektion der Rastanla-genbelegung analysiert und getestet werden. Dabeisollen auch die rechtlichen Umsetzungshemmnisse,die verkehrsorganisatorischen Effekte, Standarisie-rungsvorhaben und technologische Entwicklungenim europäischen Rahmen sowie die Kosten mit ein-bezogen werden, um umsetzbare, wirksame undwirtschaftlich tragfähige Lösungsvorschläge zu ent-wickeln“ (FH Erfurt, 2012).
Das (Zwischen-)Ergebnis der Arbeiten der FH Erfurtwurde der BASt in Form von Steckbriefen für die Pilotprojekte zur Verfügung gestellt und ist in Aus-zügen in den Anlagen 9.3 bis 9.22 dargestellt. DerDokumentationsstand ist Ende Dezember 2011.
4 Bewertung der Systeme fürtelematisches Lkw-Parken
4.1 Stand bisheriger Bewertungenund Ziele
Die Evaluation der Pilotprojekte beruht seitens derBundesländer bisher noch auf verschiedenen Be-wertungsverfahren. Meist lag der Fokus auf der De-tektion, da die detektierte (bzw. abgeleitete) Anzahlfreier Parkstände numerisch dem Verkehrsteilneh-mer kommuniziert wurde.
Sofern allein Aussagen über die Genauigkeit dereinzelnen Detektoren benötigt werden, bietet sichdie Vorgehensweise gemäß TLS an (siehe TLS,2012). Eine umfassende Bewertung der Detek -tionstechnik für die Zwecke des telematischen Lkw-Parkens erlaubt die TLS-Prüfung jedoch nicht. Zubeachten ist, dass zur Ermittlung der Anzahl Fahr-
zeuge auf der Rastanlage mehr als ein Detektor be-nötigt wird und somit die eigentliche Informations-qualität vom Zusammenspiel mindestens zweierDetektoren abhängt. Dies wird in der TLS-Prüfungnicht berücksichtigt.
Die Güte und Brauchbarkeit von telematischenSys temen zur Steuerung der Lkw-Nachfrage aufBAB sollen zukünftig mess- und vergleichbar ermit-telt werden. Das hierfür nachfolgend entwickelteBewertungsverfahren soll einfach umsetzbar sein,um eine flächendeckende Bewertung bei geringemAufwand und Kosten zu ermöglichen. Weiterhinsollen die Ergebnisse für alle Rastanlagen, die aufBasis dieses Bewertungsverfahrens beurteilt wur-den, vergleichbar sein. Das Bewertungsverfahrensoll zudem die Basis bieten, um die Systemkostenund Aufwände in Relation zur erreichbaren Qualitätzu setzen.
Die bisherigen Bewertungsverfahren berücksich -tigen außerdem nicht die angestrebte Parkinforma-tion (numerisch/beschreibend, siehe Kapitel 5). EinDetektor, dessen Daten noch mehrfach plausibili-siert, aufbereitet und zu beschreibenden Parkinfor-mationen überführt werden, muss beispielsweisekeine 8+1-Fahrzeugklassifizierung leisten können.Es scheint daher wichtig zu bewerten, ob das, wasder Verkehrsteilnehmer wahrnimmt, mit den über-mittelten Parkinformationen übereinstimmt. Dahermüssen die Referenzdaten aus der Perspektive derVerkehrsteilnehmer erhoben und den Parkinforma-tionen gegenübergestellt werden.
Das Bewertungsverfahren soll aber auch die Rand-bedingungen des Systems würdigen. So kann aus-schließlich eine Einzelparkstandsdetektion Datenüber die verkehrsrechtlich ausgewiesenen Park-stände erheben. Bei Bilanzierungsverfahren wirdhingegen die Anzahl aller Fahrzeuge auf der ge-samten Rastanlage innerhalb des detektieren Be-reichs ermittelt und die Anzahl freier Parkständerechnerisch bestimmt. Falsch wäre es daher, beiEinzelparkstandsdetektion als Referenzwert dieAnzahl aller Fahrzeuge auf der Rastanlage zu er-mitteln und mit den Daten der Detektion zu verglei-chen. Insoweit ist die Perspektive des Verkehrsteil-nehmers unter Umständen weiter einzuschränken.In den Referenzdaten spiegelt sich also das wider,was durch das zu bewertende System maximal ge-leistet werden soll. Diese „Soll“-Forderung wirddurch zu erhebende Referenzdaten abgebildet undmit den „Kann“-Leistungen des Systems vergli-chen.
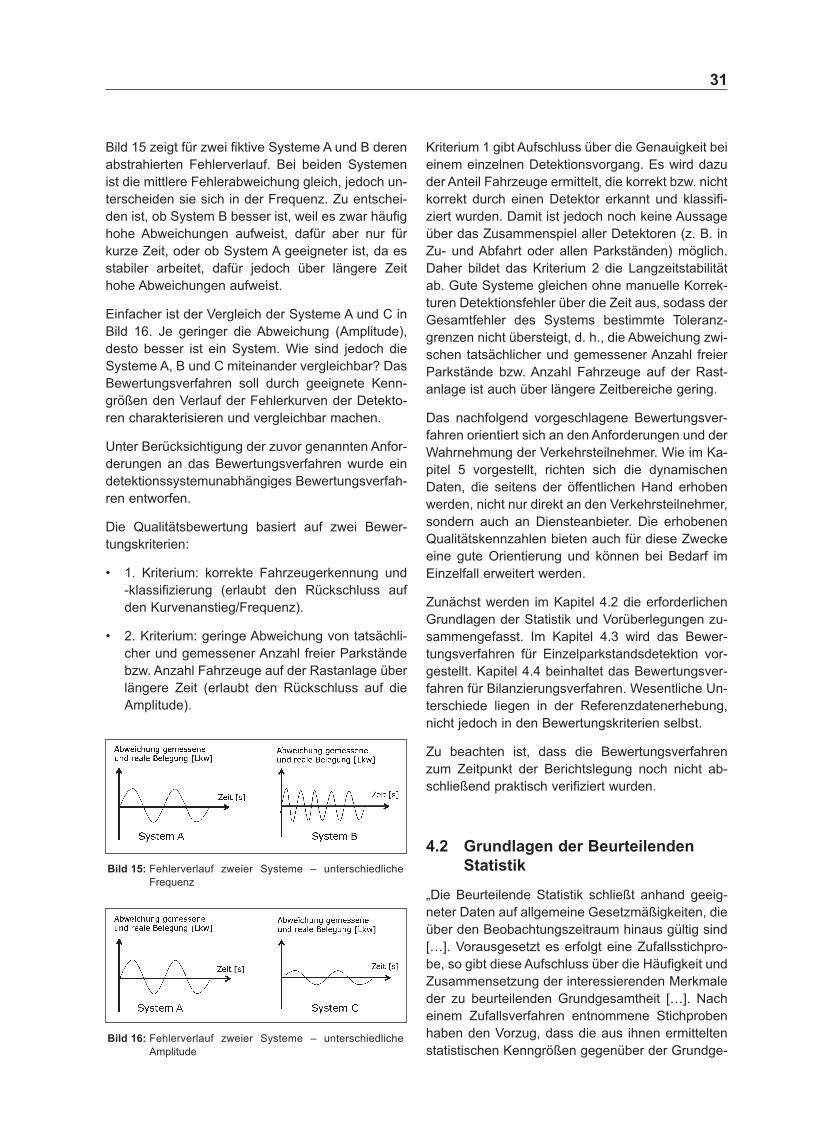
Bild 15 zeigt für zwei fiktive Systeme A und B derenabstrahierten Fehlerverlauf. Bei beiden Systemenist die mittlere Fehlerabweichung gleich, jedoch un-terscheiden sie sich in der Frequenz. Zu entschei-den ist, ob System B besser ist, weil es zwar häufighohe Abweichungen aufweist, dafür aber nur fürkurze Zeit, oder ob System A geeigneter ist, da esstabiler arbeitet, dafür jedoch über längere Zeithohe Abweichungen aufweist.
Einfacher ist der Vergleich der Systeme A und C inBild 16. Je geringer die Abweichung (Amplitude),desto besser ist ein System. Wie sind jedoch dieSysteme A, B und C miteinander vergleichbar? DasBewertungsverfahren soll durch geeignete Kenn-größen den Verlauf der Fehlerkurven der Detekto-ren charakterisieren und vergleichbar machen.
Unter Berücksichtigung der zuvor genannten Anfor-derungen an das Bewertungsverfahren wurde eindetektionssystemunabhängiges Bewertungsverfah-ren entworfen.
Die Qualitätsbewertung basiert auf zwei Bewer-tungskriterien:
• 1. Kriterium: korrekte Fahrzeugerkennung und -klassifizierung (erlaubt den Rückschluss aufden Kurvenanstieg/Frequenz).
• 2. Kriterium: geringe Abweichung von tatsächli-cher und gemessener Anzahl freier Parkständebzw. Anzahl Fahrzeuge auf der Rastanlage überlängere Zeit (erlaubt den Rückschluss auf dieAmplitude).
Kriterium 1 gibt Aufschluss über die Genauigkeit beieinem einzelnen Detektionsvorgang. Es wird dazuder Anteil Fahrzeuge ermittelt, die korrekt bzw. nichtkorrekt durch einen Detektor erkannt und klassifi-ziert wurden. Damit ist jedoch noch keine Aussageüber das Zusammenspiel aller Detektoren (z. B. inZu- und Abfahrt oder allen Parkständen) möglich.Daher bildet das Kriterium 2 die Langzeitstabilitätab. Gute Systeme gleichen ohne manuelle Korrek-turen Detektionsfehler über die Zeit aus, sodass derGesamtfehler des Systems bestimmte Toleranz-grenzen nicht übersteigt, d. h., die Abweichung zwi-schen tatsächlicher und gemessener Anzahl freierParkstände bzw. Anzahl Fahrzeuge auf der Rast-anlage ist auch über längere Zeitbereiche gering.
Das nachfolgend vorgeschlagene Bewertungsver-fahren orientiert sich an den Anforderungen und derWahrnehmung der Verkehrsteilnehmer. Wie im Ka-pitel 5 vorgestellt, richten sich die dynamischenDaten, die seitens der öffentlichen Hand erhobenwerden, nicht nur direkt an den Verkehrsteilnehmer,sondern auch an Diensteanbieter. Die erhobenenQualitätskennzahlen bieten auch für diese Zweckeeine gute Orientierung und können bei Bedarf imEinzelfall erweitert werden.
Zunächst werden im Kapitel 4.2 die erforderlichenGrundlagen der Statistik und Vorüberlegungen zu-sammengefasst. Im Kapitel 4.3 wird das Bewer-tungsverfahren für Einzelparkstandsdetektion vor-gestellt. Kapitel 4.4 beinhaltet das Bewertungsver-fahren für Bilanzierungsverfahren. Wesentliche Un-terschiede liegen in der Referenzdatenerhebung,nicht jedoch in den Bewertungskriterien selbst.
Zu beachten ist, dass die Bewertungsverfahrenzum Zeitpunkt der Berichtslegung noch nicht ab-schließend praktisch verifiziert wurden.
4.2 Grundlagen der BeurteilendenStatistik
„Die Beurteilende Statistik schließt anhand geeig-neter Daten auf allgemeine Gesetzmäßigkeiten, dieüber den Beobachtungszeitraum hinaus gültig sind[…]. Vorausgesetzt es erfolgt eine Zufallsstichpro-be, so gibt diese Aufschluss über die Häufigkeit undZusammensetzung der interessierenden Merkmaleder zu beurteilenden Grundgesamtheit […]. Nacheinem Zufallsverfahren entnommene Stichprobenhaben den Vorzug, dass die aus ihnen ermitteltenstatistischen Kenngrößen gegenüber der Grundge-
31
Bild 15: Fehlerverlauf zweier Systeme – unterschiedliche Frequenz
Bild 16: Fehlerverlauf zweier Systeme – unterschiedliche Amplitude

32
samtheit im allgemeinen nur die unvermeidlichenZufallsfehler (symmetrisch und meist klein) aufwei-sen, die, da sie das Resultat nicht verzerren – beimehrfachen Wiederholungen gleichen sich zufälli-ge Fehler im Mittel aus – , abgeschätzt werden kön-nen […]. Hypothesen können nur geprüft, nie aberbewiesen werden!“ (SACHS, 1992).
Für die Qualitätsbewertung gilt es, die mathemati-schen Grundsätze der Beurteilenden Statistik soaufzubereiten, dass eine sowohl für Auftraggeber(öffentliche Hand) als auch für Lieferanten von De-tektionstechnik und Entwickler von Steuerungsver-fahren nachvollziehbare und verlässliche Aussageüber die Güte ihrer Produkte getroffen werdenkann. Dabei bedarf es eines Verfahrens, welchesmit möglichst geringem Aufwand und begrenztenKosten eine übertragbare und vergleichbare Be-wertung telematischer Systeme erlaubt (vgl. Kapitel5.1).
Begriffsdefinitionen
Am Beispiel „Ziehen von Kugeln aus einer Urne“sollen knapp die Definitionen wichtiger mathema -tischer Grundlagen aufgeführt werden, bevor dieseauf die Bewertung von Parkinformationen ange-wandt werden. Die Kugeln in einer Urne sollen 6verschiedene Farben haben. Die Kugeln werden inder Mathematik als Merkmalsträger bezeichnet, dieverschiedene Farben als Merkmalsausprägung(vgl. SACHS, 1992). Übertragen auf die Bewertungder Parkinformationen ist der Merkmalsträgergleich der Abweichung zwischen Parkinformationund tatsächlicher Situation auf der Rastanlage.Dann ist die Merkmalsausprägung gleich der Höhedieser Abweichung.
„Aufgabe der beurteilenden oder schließenden Sta-tistik ist es, aufgrund einer oder mehrerer Zufalls-stichproben aus einer Urne Schlüsse zu ziehen hin-sichtlich der Zusammensetzung des Inhalts (derGrundgesamtheit) dieser Urne. Diese Schlüssesind Wahrscheinlichkeitsaussagen. Grundlage desstatistischen Schlusses ist die Wiederholbarkeit derZufallsstichprobe“ (SACHS, 1992). Interessiert alsodie Häufigkeit der Kugeln je Farbe in der Urne, sowird mittels Stichprobe versucht, von der Farbzu-sammensetzung der Stichprobe auf die Farbzu-sammensetzung aller in der Urne befindlichen Ku-geln zu schließen. Wird dies wiederholt unter glei-chen Randbedingungen getan, so nähert sich dasso geschätzte Ergebnis der tatsächlichen Farbzu-sammensetzung (ausreichend genau) an.
Übertragen auf Parkinformationen lassen sich Aus-sagen gewinnen, wie oft und in welcher Höhe Ab-weichungen zwischen Parkinformation und tatsäch-licher Situation auf der Rastanlage vorliegen. Dabeiist es zunächst unerheblich, ob die Parkinformationund Situation durch numerische Aussagen, wie dieAnzahl freier Parkstände, oder beschreibende Aus-sagen, wie „frei“ und „belegt“, beschrieben werden.
Zufällige Stichprobenziehung
Da bei der Einzelparkstandsdetektion jede Mes-sung unabhängig von vorherigen Messungen er-folgt und jeder Detektor unabhängig von anderendetektiert, ist eine zufällige Stichprobe jederzeitwiederholbar möglich.
Anders ist dies bei Bilanzierungsverfahren, denn esmuss der zeitliche Aspekt bei der Ermittlung vonParkinformationen berücksichtigt werden. Für dieBerechnung aller Fahrzeuge auf einer Rastanlagezum Zeitpunkt t werden alle bis zu diesem Zeit-punkt (seit dem Start) eingefahrenen Fahrzeugeaddiert und die Summe aller ausgefahrenen Fahr-zeuge gemäß Gleichung 1 subtrahiert (s. Kapitel2.5.2).
Für die Bewertung ist zusätzlich der Fehleranteil zuberücksichtigen:
mit
E(tx) eingefahrenes Fahrzeug zum Zeitpunkt tx
ΔE(tx) Fehler bei Messung einfahrender Fahrzeu-ge zum Zeitpunkt tx
A(tx) ausgefahrenes Fahrzeug zum Zeitpunkt tx
ΔA(tx) Fehler bei Messung ausfahrender Fahrzeu-ge zum Zeitpunkt tx
B(tn) Summe Fahrzeuge zum Zeitpunkt tn
ΔB(tn) Fehleranteil der Summe zum Zeitpunkt tn
Der Fehleranteil der Summe ΔB(tn) ist abhängigvon den Fehlern der Messungen in der Zu- und Ab-fahrt. Ist das Fehlverhalten beider Detektoren in Zu-fahrt und Abfahrt im Mittel gleich, so gilt für t→∞ dieGleichung 1 (Kapitel 2.5.2), da sich dann die Feh-leranteile über die Zeit immer wieder aufheben.

33
Wenn sich aber aufgrund unterschiedlicher Rand-bedingungen und Lage der Detektoren einseitigeAbweichungen der Fehleranteile auf lange Sichteinstellen, würde ohne Korrekturen nach Gleichung3 der absolute Gesamtfehler |ΔB(tn)| stetig zuneh-men.
Ist beispielsweise der Fehler der Detektion in derZufahrt fälschlicherweise so, dass 5 % zu viele Lkw(aufgrund falscher Klassifizierung) gemessen wer-den, und ist in der Abfahrt jede Messung korrekt,dann würde ohne Korrekturen nach der Zufahrt von100 Lkw die Abweichung zwischen Parkinformati-on und tatsächlicher Situation +5, nach 1.000 Lkw+50 und nach 10.000 Lkw +500 Fahrzeuge betra-gen.
Die Fehler der Detektoren in den Zu- und Abfahr-ten müssen sich über die Zeit ausgleichen, d. h. ΔE(tx ≤ tn) ≅ ΔA(tx ≤ tn), oder durch Korrekturen inzeitlichen Abständen ausgeglichen werden. Dieszeigt, dass die Parkinformationen zeitlich voneinan-der abhängig sind. Sofern die Korrekturen nicht ste-tig, sondern zu definierten Zeitpunkten erfolgen, hatdies Auswirkungen auf die Wiederholbarkeit derBewertung und beeinflusst die Stichprobenziehung.
Die Wiederholbarkeit ist nur eingehalten, wenn dasSystem zu einem wiederkehrenden Systemzustandbewertet wird. Übertragen auf das Bilanzierungs-verfahren bedeutet dies, dass Annahmen getroffenwerden müssen, wann das System einen ver-gleichbaren Zustand eingenommen hat.
Bild 17 verdeutlicht, dass die Werte A(t = tx) überdie Höhe der Abweichung zwischen tatsächlicherund gemessener Anzahl Lkw nur vergleichbar sind,wenn der Zeitpunkt tx immer im selben zeitlichen
Abstand Δ zur letzten Korrektur liegt. Gleiche Rand-bedingungen erlauben einen Vergleich, d. h., beimanuellen Korrekturen alle 24 Stunden können dieMessung zur gleichen Uhrzeit an verschiedenenTagen verglichen werden. Daraus ableiten lässtsich die Aussage, wie hoch die wahrscheinlichemittlere Abweichung zwischen Parkinformation undtatsächlicher Situation Δ Stunden nach der letztenKorrektur ist. Es wird in Bild 17 ein hypothetischerVerlauf der Abweichung zwischen tatsächlicher undgemessener Anzahl Lkw angenommen. Dieser Ver-lauf ist im Allgemeinen unbekannt. Die Bewer-tungszeitpunkte erlauben nur einen punktuellenRückschluss auf den Kurvenverlauf, also Aussagenzur Höhe der Abweichung zwischen gemessenerund tatsächlicher Anzahl Lkw (Merkmalsausprä-gung).
Alternativ erfolgt der Vergleich zum Zeitpunkt nachEinfahrt der gleichen Anzahl Fahrzeuge nach derletzten Korrektur. Da das tägliche Fahrzeugkollektivjedoch hinsichtlich der Fahrzeugklassen und An-kunftszeitpunkte nicht reproduzierbar ist, ist es einesinnvolle Vereinfachung, entweder mindestenseinen oder mehrere Zeitpunkte (Δ Stunden) nachden manuellen Korrekturen festzulegen oder unab-hängig von den Fahrzeugarten den Auswahlansatz„jedes x-te Fahrzeug“ zu wählen.
Um statistisch sichere Aussagen über die Güteeines Systems, welches alle 24 h manuell korrigiertwerden muss, mittels Stichproben zu erhalten,wären rechnerisch mindestens 100 Tage erforder-lich, um die Referenzdaten zu erheben. Dies ist fürein einfaches Bewertungsverfahren nicht handhab-bar. Da Systeme, die alle 24 h eine manuelle Kor-rektur benötigen, in der Praxis voraussichtlichkeine breite Verwendung finden werden, werdenderartige Systeme mit dem zuvor genanntenhohen Aufwand nicht im Bewertungsverfahren be-rücksichtigt.
Das Bewertungsverfahren richtet sich an Systeme,die mindestens 1 Woche, im Rahmen der Bewer-tung jedoch mindestens 2 Wochen ohne (zeitlichdiskrete manuelle) Korrekturen arbeiten. Dabei er-folgt die Festlegung eines zufällig auszuwählendenzweiwöchigen Bewertungszeitraums. Die Wieder-holbarkeit der Bewertung ist gewährleistet, wobeider Einfluss variierender Randbedingungen fürausreichend gute Systeme als unwesentlich einge-stuft wird. Sollten sich erhebliche Unterschiedezweier Bewertungszeiträume eines Systems in denBewertungsergebnissen widerspiegeln, bedarf es
Bild 17: Einfluss der (zeitlich diskreten) Korrekturen auf Be-wertungszeitpunkte

34
einer Analyse der Einflussfaktoren (z. B. Witte-rungsabhängigkeit). Handelt es sich um seltene Er-eignisse, kann der Erhebungszeitraum um dieDauer der Störung verlängert werden. Handelt essich um häufig auftretende Einflussfaktoren, ist zubedenken, dass das eingesetzte Detektions- undSteuerungssystem ganzjährig gute Ergebnisse lie-fern sollte und ggf. für die Randbedingungen aufder Rastanlage ungeeignet ist.
Lieferanten- und Abnehmerrisiko und Stichprobenumfang
Die Verwendung von Stichproben kann zu einerFehleinschätzung des Systems führen. Die Bewer-tung über 14 Tage (mit je z. B. 10 Zeitpunkten) kannzu der richtigen Einschätzung führen, dass ein fähi-ges System auch wahrscheinlich fähig ist (siehe Ta-belle 4).
Mit einer kleinen Wahrscheinlichkeit kann der Feh-ler 1. Art auftreten, d. h., ein eigentlich fähiges Sys -tem wird fälschlicherweise als wahrscheinlich unfä-hig eingestuft (Lieferantenrisiko α). Beim Fehler 2.Art wird ein eigentlich unfähiges System als wahr-scheinlich fähig auf Basis der Stichprobe eingestuft(Abnehmerrisiko β). Die Wahrscheinlichkeiten, mitdenen ein Fehler 1. oder 2. Art erfolgt, sollten ge-ring sein und vertraglich festgelegt werden.
Der erforderliche Stichprobenumfang lässt sichnach Festlegung der Wahrscheinlichkeit für denFehler 1. und 2. Art berechnen (HARTUNG, 1991):
mit
n Stichprobenumfang
p0 geforderter Anteil der Messungen, mit einer Abweichung zwischen tatsächlicher und ge-messener Belegung innerhalb der Toleranz-grenzen in der Stichprobe (aus der Grundge-samtheit)
p1 tatsächlicher Anteil der Messungen, miteiner Abweichung zwischen tatsächlicherund gemessener Belegung außerhalb derToleranzgrenzen
α maximal akzeptiertes Risiko für einen Fehler1. Art
β maximal akzeptiertes Risiko für einen Fehler2. Art
u1-α/2 1-α/2-Quantil der StandardnormalverteilungN(0,1)
u1-β 1-β-Quantil der StandardnormalverteilungN(0,1)
Soll ein System, welches beispielsweise eine tat-sächliche Detektionsgenauigkeit von p1 = 0,95 hat,die Anforderung erfüllen, dass es in der Stichprobemindestens größer p0 = 0,9 aufweist, ergibt sich beiα = β = 0,05 ein Stichprobenumfang von 290 unab-hängigen Beobachtungen. Anders ausgedrückt be-deutet dies, dass ein System, welches in 290 Stich-proben 95 % richtig detektiert hat, mit einer hohenSicherheit (von 1 – α = 95 %) auch tatsächlich dieAnforderung erfüllt, mindestens 90 % aller Klassifi-zierungen korrekt zu erfüllen.
In der Praxis kann der Aufwand mit steigender Aus-sagensicherheit und in Abhängigkeit von p1 sehrhoch und damit nicht praktikabel werden. In dersel-ben Konstellation würde ein System mit p1 = 0,91ein Stichprobenumfang von über 9.000 erfordern.
Für den Bewertungsansatz werden daher nicht αund β vorgegeben, sondern das Konfidenzintervallbestimmt. Die Breite des Konfidenzintervalls ergibtsich in Abhängigkeit vom Stichprobenumfang mitfolgender Gleichung 5 (nach SACHS, 1992):
Für einen aus der Stichprobe ermittelten Wert und einen Stichprobenumfang n bei einer statisti-schen Irrtumswahrscheinlichkeit von α = 0,05 ergibtsich für den wahren Wert p ein Konfidenzintervallum in dem der wahre Wert p mit einer Wahr-scheinlichkeit von 1 – α = 95 % liegt. Je kleiner derStichprobenumfang ist, desto größer wird das Kon-fidenzintervall, d. h., das System kann nur sehrgrob bewertet werden.
Wahrheit: Wahrheit: System ist fähig System ist unfähig
Stichprobe: System ist fähig Abnehmerrisiko
Stichprobe: System ist fähig Lieferantenrisiko
Tab. 4: Lieferanten- und Abnehmerrisiko
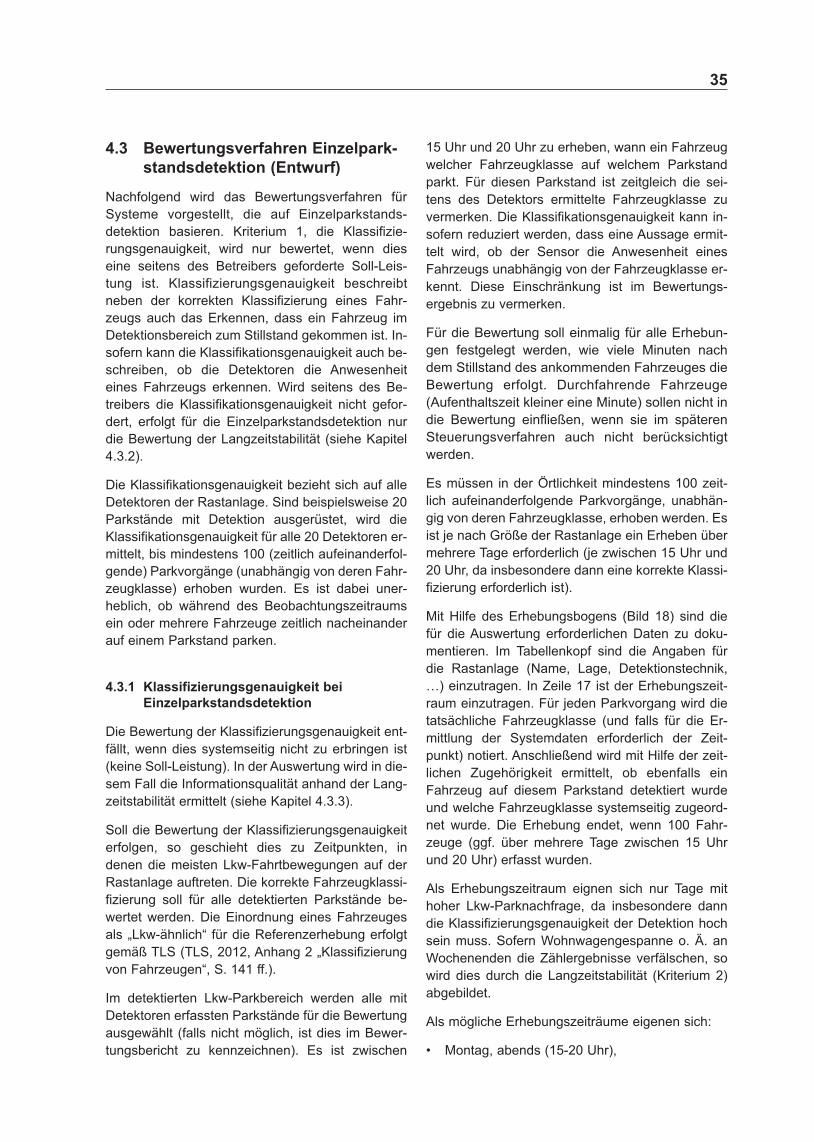
4.3 Bewertungsverfahren Einzelpark -standsdetektion (Entwurf)
Nachfolgend wird das Bewertungsverfahren für Systeme vorgestellt, die auf Einzelparkstands -detektion basieren. Kriterium 1, die Klassifizie-rungsgenauigkeit, wird nur bewertet, wenn dieseine seitens des Betreibers geforderte Soll-Leis -tung ist. Klassifizierungsgenauigkeit beschreibtneben der korrekten Klassifizierung eines Fahr-zeugs auch das Erkennen, dass ein Fahrzeug imDetektionsbereich zum Stillstand gekommen ist. In-sofern kann die Klassifikationsgenauigkeit auch be-schreiben, ob die Detektoren die Anwesenheiteines Fahrzeugs erkennen. Wird seitens des Be-treibers die Klassifikationsgenauigkeit nicht gefor-dert, erfolgt für die Einzelparkstandsdetektion nurdie Bewertung der Langzeitstabilität (siehe Kapitel4.3.2).
Die Klassifikationsgenauigkeit bezieht sich auf alleDetektoren der Rastanlage. Sind beispielsweise 20Parkstände mit Detektion ausgerüstet, wird dieKlassifikationsgenauigkeit für alle 20 Detektoren er-mittelt, bis mindestens 100 (zeitlich aufeinanderfol-gende) Parkvorgänge (unabhängig von deren Fahr-zeugklasse) erhoben wurden. Es ist dabei uner-heblich, ob während des Beobachtungszeitraumsein oder mehrere Fahrzeuge zeitlich nacheinanderauf einem Parkstand parken.
4.3.1 Klassifizierungsgenauigkeit beiEinzelparkstandsdetektion
Die Bewertung der Klassifizierungsgenauigkeit ent-fällt, wenn dies systemseitig nicht zu erbringen ist(keine Soll-Leistung). In der Auswertung wird in die-sem Fall die Informationsqualität anhand der Lang-zeitstabilität ermittelt (siehe Kapitel 4.3.3).
Soll die Bewertung der Klassifizierungsgenauigkeiterfolgen, so geschieht dies zu Zeitpunkten, indenen die meisten Lkw-Fahrtbewegungen auf derRastanlage auftreten. Die korrekte Fahrzeugklassi-fizierung soll für alle detektierten Parkstände be-wertet werden. Die Einordnung eines Fahrzeugesals „Lkw-ähnlich“ für die Referenzerhebung erfolgtgemäß TLS (TLS, 2012, Anhang 2 „Klassifizierungvon Fahrzeugen“, S. 141 ff.).
Im detektierten Lkw-Parkbereich werden alle mitDetektoren erfassten Parkstände für die Bewertungausgewählt (falls nicht möglich, ist dies im Bewer-tungsbericht zu kennzeichnen). Es ist zwischen
15 Uhr und 20 Uhr zu erheben, wann ein Fahrzeugwelcher Fahrzeugklasse auf welchem Parkstandparkt. Für diesen Parkstand ist zeitgleich die sei-tens des Detektors ermittelte Fahrzeugklasse zuvermerken. Die Klassifikationsgenauigkeit kann in-sofern reduziert werden, dass eine Aussage ermit-telt wird, ob der Sensor die Anwesenheit einesFahrzeugs unabhängig von der Fahrzeugklasse er-kennt. Diese Einschränkung ist im Bewertungs -ergebnis zu vermerken.
Für die Bewertung soll einmalig für alle Erhebun-gen festgelegt werden, wie viele Minuten nachdem Stillstand des ankommenden Fahrzeuges dieBewertung erfolgt. Durchfahrende Fahrzeuge(Aufenthaltszeit kleiner eine Minute) sollen nicht indie Bewertung einfließen, wenn sie im späterenSteuerungsverfahren auch nicht berücksichtigtwerden.
Es müssen in der Örtlichkeit mindestens 100 zeit-lich aufeinanderfolgende Parkvorgänge, unabhän-gig von deren Fahrzeugklasse, erhoben werden. Esist je nach Größe der Rastanlage ein Erheben übermehrere Tage erforderlich (je zwischen 15 Uhr und20 Uhr, da insbesondere dann eine korrekte Klassi-fizierung erforderlich ist).
Mit Hilfe des Erhebungsbogens (Bild 18) sind diefür die Auswertung erforderlichen Daten zu doku-mentieren. Im Tabellenkopf sind die Angaben fürdie Rastanlage (Name, Lage, Detektionstechnik,…) einzutragen. In Zeile 17 ist der Erhebungszeit-raum einzutragen. Für jeden Parkvorgang wird dietatsächliche Fahrzeugklasse (und falls für die Er-mittlung der Systemdaten erforderlich der Zeit-punkt) notiert. Anschließend wird mit Hilfe der zeit-lichen Zugehörigkeit ermittelt, ob ebenfalls einFahrzeug auf diesem Parkstand detektiert wurdeund welche Fahrzeugklasse systemseitig zugeord-net wurde. Die Erhebung endet, wenn 100 Fahr-zeuge (ggf. über mehrere Tage zwischen 15 Uhrund 20 Uhr) erfasst wurden.
Als Erhebungszeitraum eignen sich nur Tage mithoher Lkw-Parknachfrage, da insbesondere danndie Klassifizierungsgenauigkeit der Detektion hochsein muss. Sofern Wohnwagengespanne o. Ä. anWochenenden die Zählergebnisse verfälschen, sowird dies durch die Langzeitstabilität (Kriterium 2)abgebildet.
Als mögliche Erhebungszeiträume eigenen sich:
• Montag, abends (15-20 Uhr),
35

• Dienstag, abends (15-20 Uhr),
• Mittwoch, abends (15-20 Uhr),
• Donnerstag, abends (15-20 Uhr).
Dabei soll der Erhebungszeitraum keine Feiertageumfassen oder an Feiertage angrenzen. Soferneine manuelle Korrektur stattfindet, soll nicht dererste Tag nach der manuellen Korrektur erhobenwerden. Je nach Größe der Rastanlage ist ein Erheben über mehrere Tage erforderlich, da dieLkw in den Abendstunden in den meisten Fälleneine längere Aufenthaltsdauer planen und somitan einem Abend je nach Größe der Rastanlagenicht 100 Parkvorgänge erhoben werden können.Wichtig ist, dass insgesamt 100 Fahrzeuge aufden mit Detektionstechnik ausgerüsteten Park-ständen klassifiziert wurden. Eine Bewertung au-ßerhalb der oben genannten Zeiträume ist zu ver-meiden.
4.3.2 Langzeitstabilität fürEinzelparkstandsdetektion
Es wird zu festgelegten Zeitpunkten bewertet, obdie tatsächliche Anzahl belegter Parkstände vonder seitens des Systems ermittelten Anzahl beleg-ter Parkstände abweicht. Über einen Zeitraum von14 Tagen werden zu festgelegten Zeitpunkten ins-gesamt (mindestens) 100 Zählungen aller belegtenoder freien Parkstände durchgeführt. Dieser Ver-gleich erfolgt über zwei Wochen täglich zu Zeit-punkten mit den meisten Lkw-Fahrbewegungen aufder Rastanlage. Diese Zeitpunkte sind täglich:
• morgens um 5:00, 6:00, 7:00, 8:00 und 9:00 Uhr,
• mittags um 13:00 Uhr,
• abends um 17:00, 18:00, 19:00, 20:00 und21:00 Uhr.
Dabei muss mindestens ein Tag nach der letztenmanuellen Korrektur abgewartet werden, sodass
36
Bild 18: Erhebungsbogen für Klassifizierungsgenauigkeit (Einzelparkstandsdetektion)

von einem eingeschwungenen Zustand des zu bewertenden Systems ausgegangen werden kann(d. h., auf jedem Detektor wurde mindestens einmalseit der Korrektur geparkt). Zählbeginn ist somit(frühestens) der Nachmittag des zweiten Tagesnach dem letzten manuellen Korrigieren. Es istnicht zulässig, während des Bewertungszeitraumserneut manuell Korrekturen vorzunehmen (Ausnah-me nach 7 Tagen mit Abwertung um eine Qualitäts-stufe, siehe Kapitel 4.3.3).
Für jeden zuvor festgelegten Zeitpunkt werden dietatsächliche Anzahl belegter Parkstände und dieseitens des zu bewertenden Systems ermittelte An-zahl belegter Parkstände notiert.
Die tatsächliche Anzahl belegter Parkstände ergibtsich aus der Summe aller zu diesem Zeitpunkt tat-sächlich parkenden (d. h. mindestens seit einer Minute stehenden) Fahrzeuge auf allen durch dasSystem detektierten Parkständen. Als Referenzwerden alle Fahrzeuge unabhängig von ihrer Fahr-zeugklasse gezählt, wenn sie auf einem detektier-ten Parkstand parken. Eine Berücksichtigung derFahrzeugklasse erfolgt nur, wenn dies auch sys- temseitig erfolgt (siehe auch Kriterium „Klassifizie-rungsgenauigkeit“). Falls eine Fahrzeugklassifizie-rung erfolgt, so ist nachfolgend für die Bewertungder Langzeitstabilität die Bezeichnung „Fahrzeug“auf „Lkw-ähnliches Fahrzeug“ einzuschränken, d. h., nur die mit einem Lkw-ähnlichen Fahrzeug be-legten Parkstände wären zu erheben. Systeme, dieeine Fahrzeugklassifizierung erlauben, können hin-sichtlich der Langzeitstabilität nicht mit Systemenverglichen werden, die für die Einzelparkstands- detektion keine Fahrzeugklassifizierung erbringen.Im Bewertungsergebnis ist dies zu dokumentieren.
Für den gleichen Zeitpunkt wie bei der Referenz- erhebung ist seitens des zu bewertenden Systemsdie Aussage erforderlich, wie viele Fahrzeuge aufden detektierten verkehrsrechtlich ausgewiesenenParkständen stehen. Anzumerken ist, dass auch dieAngabe, wie viele Parkstände frei sind, zulässig ist,dann jedoch empfiehlt sich auch die Erhebung derfreien Parkstände alternativ zur Anzahl belegterParkstände. Wird eine andere Aussage als die An-zahl parkender Fahrzeuge vom zu bewertenden System gefordert, beispielsweise das Erkennennicht befahrbarer Parkstände aufgrund von parken-den Fahrzeugen in der Fahrgasse, kann bei vorlie-genden Referenzdaten auch diese Aussage bewer-tet werden. Diese und andere Besonderheiten sindbei der Bewertung zu kennzeichnen. Wichtig ist,
dass die Langzeitstabilität abbildet, in welcher Qua-lität das zu bewertende System Parkinformationenüber längere Zeit liefert. Der Inhalt der Parkinforma-tion ist somit zweitrangig und wird durch vergleich-bares inhaltliches Referenzmaterial abgebildet.
Die nachfolgende Beschreibung geht davon aus,dass für jeden Erhebungszeitpunkt die Differenzzwischen tatsächlicher und gemessener Anzahl be-legter Parkstände ermittelt werden soll. Die Höheder Differenz wird in der Auswertung nur qualitativbewertet.
Mit Hilfe des Erhebungsbogens in Bild 19 sind die fürdie Auswertung erforderlichen Daten zu dokumentie-ren. Im Tabellenkopf sind die Angaben für die Rast-anlage (Name, Lage, Detektionstechnik, …) einzu-tragen. Die Spalten B und C sind für die Angabe desErhebungstages vorgesehen. Es sollen Datum undWochentag im 14-tägigen Erhebungszeitraum ein-getragen werden. Die täglichen Erhebungszeitpunk-te sind in Spalte D festgelegt. Für jeden Erhebungs-zeitpunkt wird an Ort und Stelle die tatsäch liche An-zahl belegter Parkstände im detektierten Bereich inSpalte E eingetragen. In Spalte F wird die zum glei-chen Zeitpunkt seitens des Systems ermittelte An-zahl belegter Parkstände eingetragen.
Die Differenz aus E und F bildet die Grundlage fürdie Bewertung, ob diese innerhalb oder außerhalbder Toleranzgrenzen liegt. Die Festlegung der Tole-ranzgrenze wird in Kapitel 5.2.7 diskutiert. Es istvorgesehen, die Bewertung der Langzeitstabilität fürjede Toleranzgrenze von 0 bis 10 durchzuführen.
Die Bewertungsfrage lautet: Liegt die Differenz zwi-schen tatsächlicher und gemessener Anzahl beleg-ter Parkstände innerhalb der Toleranzgrenzen (ent-spricht „j“) oder außerhalb der Toleranzgrenzen(entspricht „n“)? Liegt die Abweichung innerhalb derToleranz, so wird das System für diesen Zeitpunktals „gut“ bewertet. Liegt die Differenz außerhalbdes Toleranzbereichs, wird das System für diesenZeitpunkt als „schlecht“ bewertet. Es wird dieSumme über die Häufigkeit „schlechter“ Zeitpunktefür unterschiedliche Toleranzgrenzen ausgewertet.Es wird die Gesamtsumme über die Häufigkeit„guter“ und „schlechter“ Zeitpunkte für unterschied-liche Toleranzgrenzen ausgewertet.
Nach Auswertung aller Erhebungszeitpunkte wirddie auf 100 normierte Summe aller schlechten Er-gebnisse als Langzeitinstabilität bewertet. Zu be-achten ist, dass die Systeme nur für gleiche Tole-ranzgrenzen miteinander verglichen werden.
37

4.3.3 Informationsqualität
Bei der Klassifizierungsgenauigkeit wird bewertet,wie oft die inhaltlichen Aussagen des Systems zurFahrzeugklasse mit der Realität übereinstimmen.Die Klassifizierungsungenauigkeit entspricht dergegenteiligen Darstellung. Die Anzahl falsch klassi-fizierter oder gar nicht erkannter Fahrzeuge ist zuermitteln (Bild 18, Spalte F). Dieser Wert kann alsKlassifizierungsungenauigkeit interpretiert werdenund fließt in die Bewertung der Informationsqualitätein.
Bei der Langzeitstabilität wird bewertet, wie oft dieinhaltlichen Aussagen des Systems zur Belegungmit der Realität übereinstimmen. Dies kann auchdie Aussage sein, wie viele verkehrsrechtlich aus-gewiesene Parkstände noch frei sind oder wie vielebelegt sind oder wie viele frei, aber blockiert sind.Die Langzeitinstabilität entspricht der gegenteiligenDarstellung.
Die Kriterien Klassifizierungsungenauigkeit undLangzeitinstabilität werden in das Bewertungssche-ma in Bild 20 übertragen. Es ergeben sich darausfünf Informationsqualitätsstufen von A bis E. Dabeiist A das bestmögliche (höchste Qualität) und E dasschlechteste Ergebnis (niedrigste Qualität). Die In-formationsqualitätsstufen sagen dabei etwas überdie Häufigkeit von unerwünschten Fehlern der De-tektion aus.
Für die Ermittlung der Informationsqualitätsstufenwird die Langzeitinstabilität stärker berücksichtigtals die Klassifizierungsungenauigkeit. Hintergrundist, dass im dauerhaften Betrieb keine bzw. wenigemanuelle Korrekturen angestrebt werden. Insbe-sondere bei der Einzelparkstandsdetektion ist esfür die Anzahl belegter (bzw. freier) Parkstände un-erheblich, ob ein Parkstand von einem Lkw odereinem Wohnwagengespann belegt ist – praktischsteht der Parkstand nicht zur Verfügung.
38
Bild 19: Erhebungsbogen für Kriterium Langzeitstabilität (Einzelparkstandsdetektion)
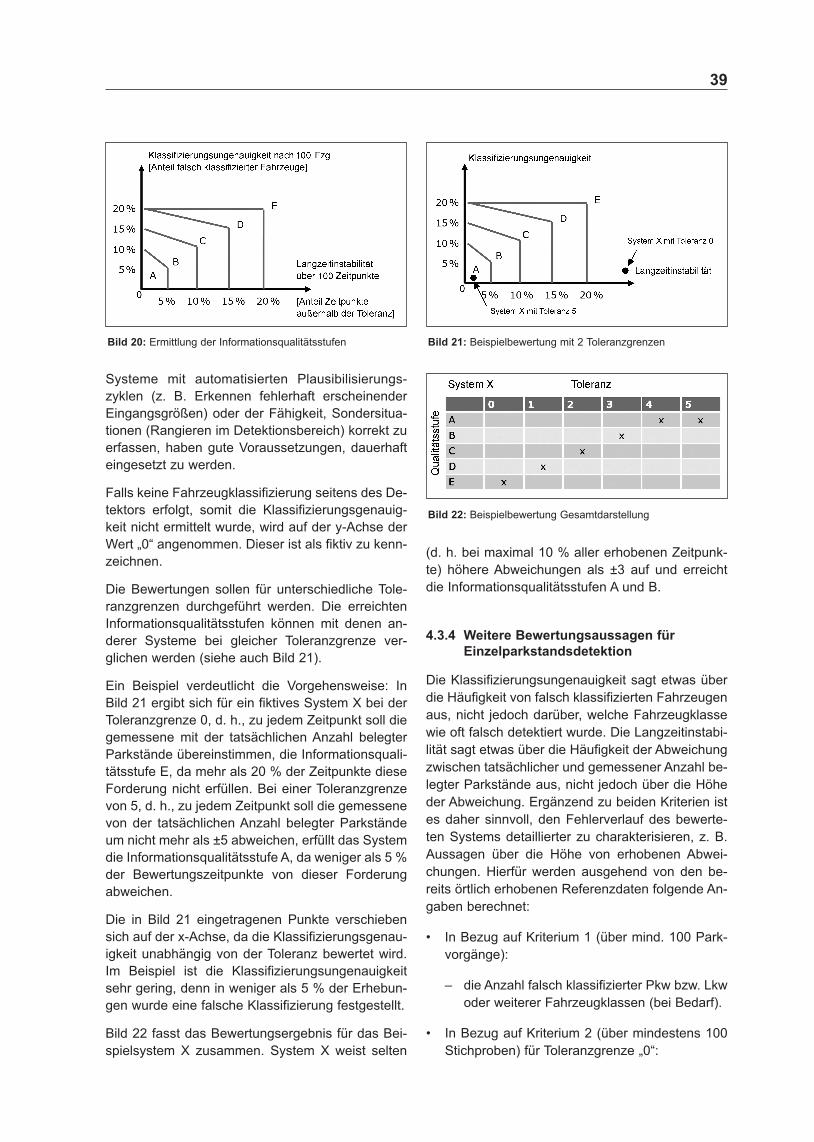
Systeme mit automatisierten Plausibilisierungs -zyklen (z. B. Erkennen fehlerhaft erscheinenderEingangsgrößen) oder der Fähigkeit, Sondersitua-tionen (Rangieren im Detektionsbereich) korrekt zuerfassen, haben gute Voraussetzungen, dauerhafteingesetzt zu werden.
Falls keine Fahrzeugklassifizierung seitens des De-tektors erfolgt, somit die Klassifizierungsgenauig-keit nicht ermittelt wurde, wird auf der y-Achse derWert „0“ angenommen. Dieser ist als fiktiv zu kenn-zeichnen.
Die Bewertungen sollen für unterschiedliche Tole-ranzgrenzen durchgeführt werden. Die erreichtenInformationsqualitätsstufen können mit denen an-derer Systeme bei gleicher Toleranzgrenze ver-glichen werden (siehe auch Bild 21).
Ein Beispiel verdeutlicht die Vorgehensweise: InBild 21 ergibt sich für ein fiktives System X bei derToleranzgrenze 0, d. h., zu jedem Zeitpunkt soll diegemessene mit der tatsächlichen Anzahl belegterParkstände übereinstimmen, die Informationsquali-tätsstufe E, da mehr als 20 % der Zeitpunkte dieseForderung nicht erfüllen. Bei einer Toleranzgrenzevon 5, d. h., zu jedem Zeitpunkt soll die gemessenevon der tatsächlichen Anzahl belegter Parkständeum nicht mehr als ±5 abweichen, erfüllt das Systemdie Informationsqualitätsstufe A, da weniger als 5 %der Bewertungszeitpunkte von dieser Forderungabweichen.
Die in Bild 21 eingetragenen Punkte verschiebensich auf der x-Achse, da die Klassifizierungsgenau-igkeit unabhängig von der Toleranz bewertet wird.Im Beispiel ist die Klassifizierungsungenauigkeitsehr gering, denn in weniger als 5 % der Erhebun-gen wurde eine falsche Klassifizierung festgestellt.
Bild 22 fasst das Bewertungsergebnis für das Bei-spielsystem X zusammen. System X weist selten
(d. h. bei maximal 10 % aller erhobenen Zeitpunk-te) höhere Abweichungen als ±3 auf und erreichtdie Informationsqualitätsstufen A und B.
4.3.4 Weitere Bewertungsaussagen fürEinzelparkstandsdetektion
Die Klassifizierungsungenauigkeit sagt etwas überdie Häufigkeit von falsch klassifizierten Fahrzeugenaus, nicht jedoch darüber, welche Fahrzeugklassewie oft falsch detektiert wurde. Die Langzeitinstabi-lität sagt etwas über die Häufigkeit der Abweichungzwischen tatsächlicher und gemessener Anzahl be-legter Parkstände aus, nicht jedoch über die Höheder Abweichung. Ergänzend zu beiden Kriterien istes daher sinnvoll, den Fehlerverlauf des bewerte-ten Systems detaillierter zu charakterisieren, z. B.Aussagen über die Höhe von erhobenen Abwei-chungen. Hierfür werden ausgehend von den be-reits örtlich erhobenen Referenzdaten folgende An-gaben berechnet:
• In Bezug auf Kriterium 1 (über mind. 100 Park-vorgänge):
– die Anzahl falsch klassifizierter Pkw bzw. Lkwoder weiterer Fahrzeugklassen (bei Bedarf).
• In Bezug auf Kriterium 2 (über mindestens 100Stichproben) für Toleranzgrenze „0“:
39
Bild 20: Ermittlung der Informationsqualitätsstufen Bild 21: Beispielbewertung mit 2 Toleranzgrenzen
Bild 22: Beispielbewertung Gesamtdarstellung

40
– Mittelwert der Abweichung,
– Streuung der Abweichung,
– maximale Abweichung.
Zu Beginn der Referenzdatenerhebung ist die Sys -temzeit zu dokumentieren und der Referenzerhe-bung zugrunde zu legen. Die Abweichung zwischenörtlicher Erhebung (Fahrzeug parkt auf Detektor)und Erkennung und Dokumentation im Sys tem sollin Anlehnung an die TLS maximal eine Minute be-tragen. Der systemtypische Zeitversatz zwischentatsächlicher Belegungsänderung durch das Par-ken eines Fahrzeuges und Systemreaktion ist fürdie Auswertungen zu dokumentieren (Mittelwert).Bei Bedarf können auffällig lange Reaktionszeitenim Bewertungsbericht notiert werden. Bei der Be-wertung der Langzeitstabilität wird keine Reak -tionszeit berücksichtigt, da es sich um eine Mo-mentaufnahme der Belegung handelt. Abweichen-de Festlegungen sind im Bewertungsbericht zu do-kumentieren.
Bei der Einzelparkstandsdetektion kann zusätzlichzu den genannten Bewertungskriterien erhobenwerden, mit welcher Verzögerung ein Detektor denParkstand wieder als frei meldet, nachdem dasFahrzeug diesen verlassen hat. Sollte währendeines ununterbrochenen Parkvorgangs der Detek-tor abwechselnd „Parkstand frei“ und „Parkstandbelegt“ melden, so ist dies ebenfalls ein Bewer-tungsmerkmal, welches im Bewertungsbericht ver-merkt werden soll.
Betreiber können weitere Bewertungskriterien ein-führen, wie z. B. die Klassifizierungsgleichförmig-keit (Erkennen derselben Fahrzeugklasse für einidentisches Fahrzeug in der Zu- und Abfahrt) oderdie Klassifizierungsgenauigkeit für verschiedeneSondersituationen (z. B. Klassifikation eines Fahr-zeugs, welches im Bereich des Detektors rangiert).
Besondere Wetter- und Witterungsbedingungenbzw. Verkehrsereignisse sind während des Bewer-tungszeitraums zu dokumentieren.
4.4 Bewertungsverfahren fürBilanzierungsverfahren (Entwurf)
4.4.1 Klassifizierungsgenauigkeit vonBilanzierungsverfahren
Die Systeme müssen während der Bewertung 14Tage ohne manuelle Korrekturen arbeiten. Erfolgenvor Ablauf der 14 Bewertungstage mehrere manu-
elle Korrekturen, ist das System der schlechtestenInformationsqualitätsstufe zuzuordnen. EinzigeAusnahme ist ein manuelles Korrigieren nach 7Tagen. Dann können die Ergebnisse verwendetwerden, jedoch erfolgt insgesamt eine Abwertungum eine Informationsqualitätsstufe (siehe Kapitel4.4.3). Dies ist im Bewertungsergebnis zu vermer-ken.
Manuelles Korrigieren (siehe auch Kapitel 2.3) be-ruht auf dem Befahren der Rastanlage und Zählender parkenden Fahrzeuge. Alternativ ist ein manu-elles Korrigieren mit Hilfe von Videokameras (i. Allg.als Webcam bezeichnet) möglich. Dabei wird dasübermittelte Videobild (ggf. nur Einzelbilder) derRastanlage in einer entfernten Zentrale durch Mit-arbeiter ausgewertet. Die dabei manuell ermittelteAnzahl Fahrzeuge auf der Rastanlage bildet dieneue (korrigierte) Ausgangslage für das system -seitige Addieren und Subtrahieren ein- und ausfah-render Lkw.
Die Erhebung der Referenzdaten über die tatsäch-liche Anzahl parkender bzw. ein- oder ausfahrenderFahrzeuge auf der Rastanlage orientiert sich beider Fahrzeugklassifizierung (in Pkw-ähnlich undLkw-ähnlich) an den TLS (vgl. TLS, 2012, Anhang 2„Klassifizierung von Fahrzeugen“, S. 141 ff.).
Die korrekte Fahrzeugklassifizierung wird in der Zufahrt und der Abfahrt in Zeiten mit einem hohenAnteil von Lkw-Fahrten geprüft. In der Zufahrt desdetektierten Lkw-Parkbereichs wird ein Detektor fürdie Bewertung ausgewählt. Es ist dann in der Zu-fahrt zwischen 15 Uhr und 20 Uhr zu ermitteln,wann ein Fahrzeug den zu bewertenden Detektorpassiert und welche Fahrzeugklasse vorliegt (Pkw-ähnlich oder Lkw-ähnlich, wenn keine davon ab-weichenden Anforderungen an den Detektor beste-hen). Es müssen so viele Fahrbewegungen (unab-hängig von deren Fahrzeugklasse) für diesen De-tektor erhoben werden, dass insgesamt 100 Lkw-ähnliche Fahrzeuge den Detektor passiert haben(der Anteil der Pkw-ähnlichen Fahrzeuge ist unbe-deutend, soll jedoch mehr als 100 Pkw-ähnlicheFahrzeuge umfassen).
Mit Hilfe des Erhebungsbogens (Bild 24) sind diefür die Auswertung erforderlichen Größen zu doku-mentieren. Im Tabellenkopf sind die Angaben fürdie Rastanlage (Name, Lage, Detektionstechnik,…) einzutragen. In Zeile 17 und 18 sind die zusam-menhängenden Bewertungszeiträume einzutragen(siehe unten). Für jede Einfahrt wird die tatsäch -
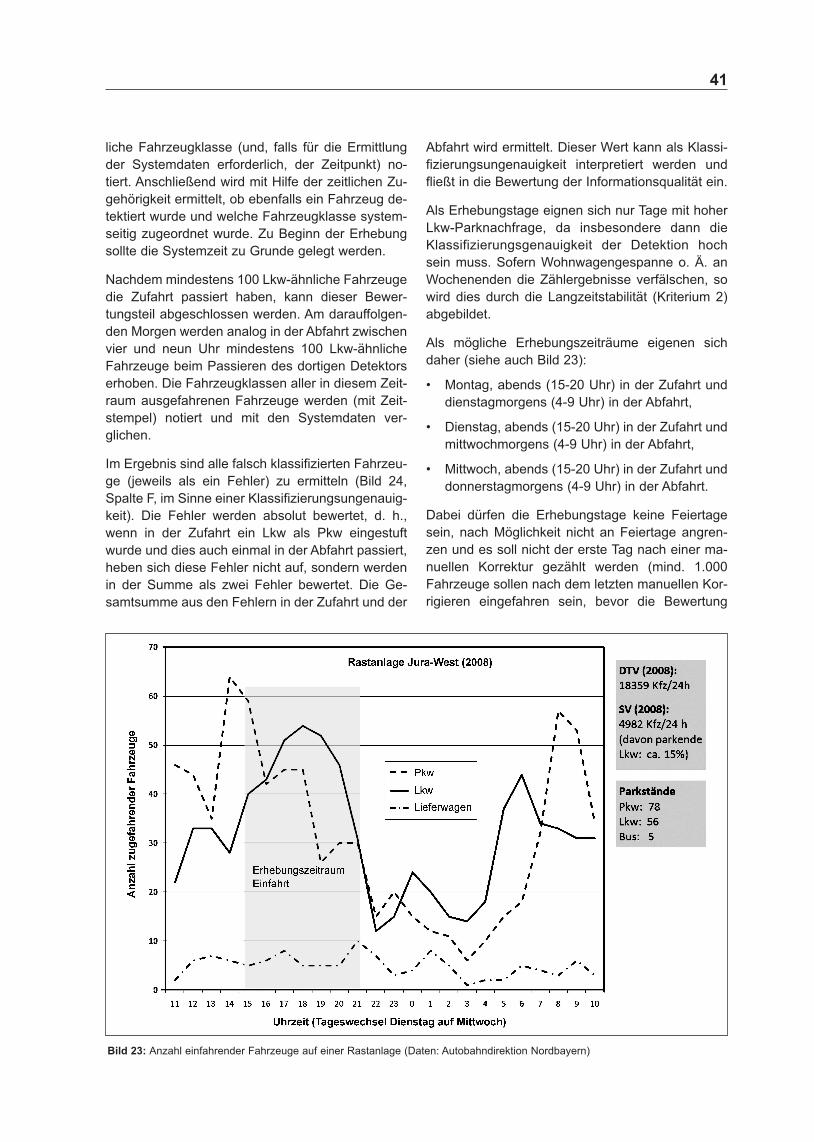
liche Fahrzeugklasse (und, falls für die Ermittlungder Systemdaten erforderlich, der Zeitpunkt) no-tiert. Anschließend wird mit Hilfe der zeitlichen Zu-gehörigkeit ermittelt, ob ebenfalls ein Fahrzeug de-tektiert wurde und welche Fahrzeugklasse system-seitig zugeordnet wurde. Zu Beginn der Erhebungsollte die Systemzeit zu Grunde gelegt werden.
Nachdem mindestens 100 Lkw-ähnliche Fahrzeugedie Zufahrt passiert haben, kann dieser Bewer-tungsteil abgeschlossen werden. Am darauffolgen-den Morgen werden analog in der Abfahrt zwischenvier und neun Uhr mindestens 100 Lkw-ähnlicheFahrzeuge beim Passieren des dortigen Detektorserhoben. Die Fahrzeugklassen aller in diesem Zeit-raum ausgefahrenen Fahrzeuge werden (mit Zeit-stempel) notiert und mit den Systemdaten ver -glichen.
Im Ergebnis sind alle falsch klassifizierten Fahrzeu-ge (jeweils als ein Fehler) zu ermitteln (Bild 24,Spalte F, im Sinne einer Klassifizierungsungenauig-keit). Die Fehler werden absolut bewertet, d. h.,wenn in der Zufahrt ein Lkw als Pkw eingestuftwurde und dies auch einmal in der Abfahrt passiert,heben sich diese Fehler nicht auf, sondern werdenin der Summe als zwei Fehler bewertet. Die Ge-samtsumme aus den Fehlern in der Zufahrt und der
Abfahrt wird ermittelt. Dieser Wert kann als Klassi-fizierungsungenauigkeit interpretiert werden undfließt in die Bewertung der Informationsqualität ein.
Als Erhebungstage eignen sich nur Tage mit hoherLkw-Parknachfrage, da insbesondere dann dieKlassifizierungsgenauigkeit der Detektion hochsein muss. Sofern Wohnwagengespanne o. Ä. anWochenenden die Zählergebnisse verfälschen, sowird dies durch die Langzeitstabilität (Kriterium 2)abgebildet.
Als mögliche Erhebungszeiträume eigenen sichdaher (siehe auch Bild 23):
• Montag, abends (15-20 Uhr) in der Zufahrt unddienstagmorgens (4-9 Uhr) in der Abfahrt,
• Dienstag, abends (15-20 Uhr) in der Zufahrt undmittwochmorgens (4-9 Uhr) in der Abfahrt,
• Mittwoch, abends (15-20 Uhr) in der Zufahrt unddonnerstagmorgens (4-9 Uhr) in der Abfahrt.
Dabei dürfen die Erhebungstage keine Feiertagesein, nach Möglichkeit nicht an Feiertage angren-zen und es soll nicht der erste Tag nach einer ma-nuellen Korrektur gezählt werden (mind. 1.000Fahrzeuge sollen nach dem letzten manuellen Kor-rigieren eingefahren sein, bevor die Bewertung
41
Bild 23: Anzahl einfahrender Fahrzeuge auf einer Rastanlage (Daten: Autobahndirektion Nordbayern)
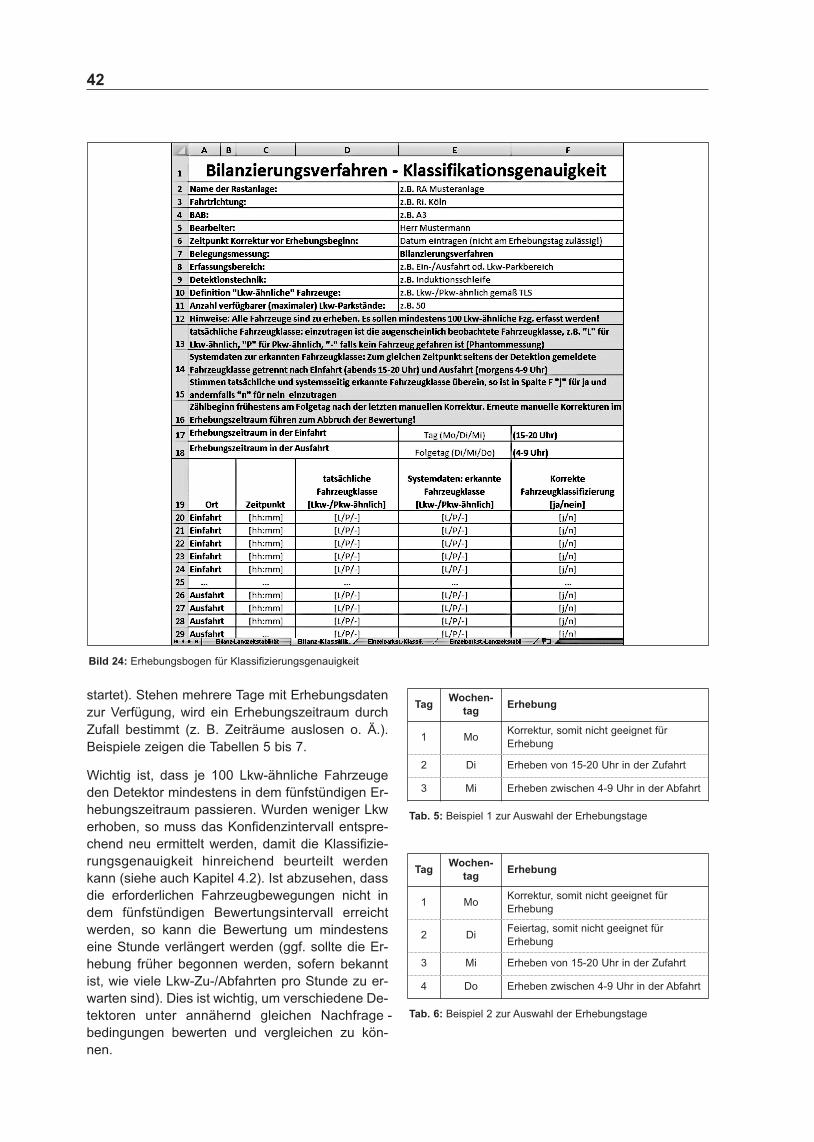
startet). Stehen mehrere Tage mit Erhebungsdatenzur Verfügung, wird ein Erhebungszeitraum durchZufall bestimmt (z. B. Zeiträume auslosen o. Ä.).Beispiele zeigen die Tabellen 5 bis 7.
Wichtig ist, dass je 100 Lkw-ähnliche Fahrzeugeden Detektor mindestens in dem fünfstündigen Er-hebungszeitraum passieren. Wurden weniger Lkwerhoben, so muss das Konfidenzintervall entspre-chend neu ermittelt werden, damit die Klassifizie-rungsgenauigkeit hinreichend beurteilt werdenkann (siehe auch Kapitel 4.2). Ist abzusehen, dassdie erforderlichen Fahrzeugbewegungen nicht indem fünfstündigen Bewertungsintervall erreichtwerden, so kann die Bewertung um mindestenseine Stunde verlängert werden (ggf. sollte die Er-hebung früher begonnen werden, sofern bekanntist, wie viele Lkw-Zu-/Abfahrten pro Stunde zu er-warten sind). Dies ist wichtig, um verschiedene De-tektoren unter annähernd gleichen Nachfrage -bedingungen bewerten und vergleichen zu kön-nen.
42
Bild 24: Erhebungsbogen für Klassifizierungsgenauigkeit
Tag Wochen-tag Erhebung
1 Mo Korrektur, somit nicht geeignet für Erhebung
2 Di Erheben von 15-20 Uhr in der Zufahrt
3 Mi Erheben zwischen 4-9 Uhr in der Abfahrt
Tab. 5: Beispiel 1 zur Auswahl der Erhebungstage
Tag Wochen-tag Erhebung
1 Mo Korrektur, somit nicht geeignet für Erhebung
2 Di Feiertag, somit nicht geeignet für Erhebung
3 Mi Erheben von 15-20 Uhr in der Zufahrt
4 Do Erheben zwischen 4-9 Uhr in der Abfahrt
Tab. 6: Beispiel 2 zur Auswahl der Erhebungstage
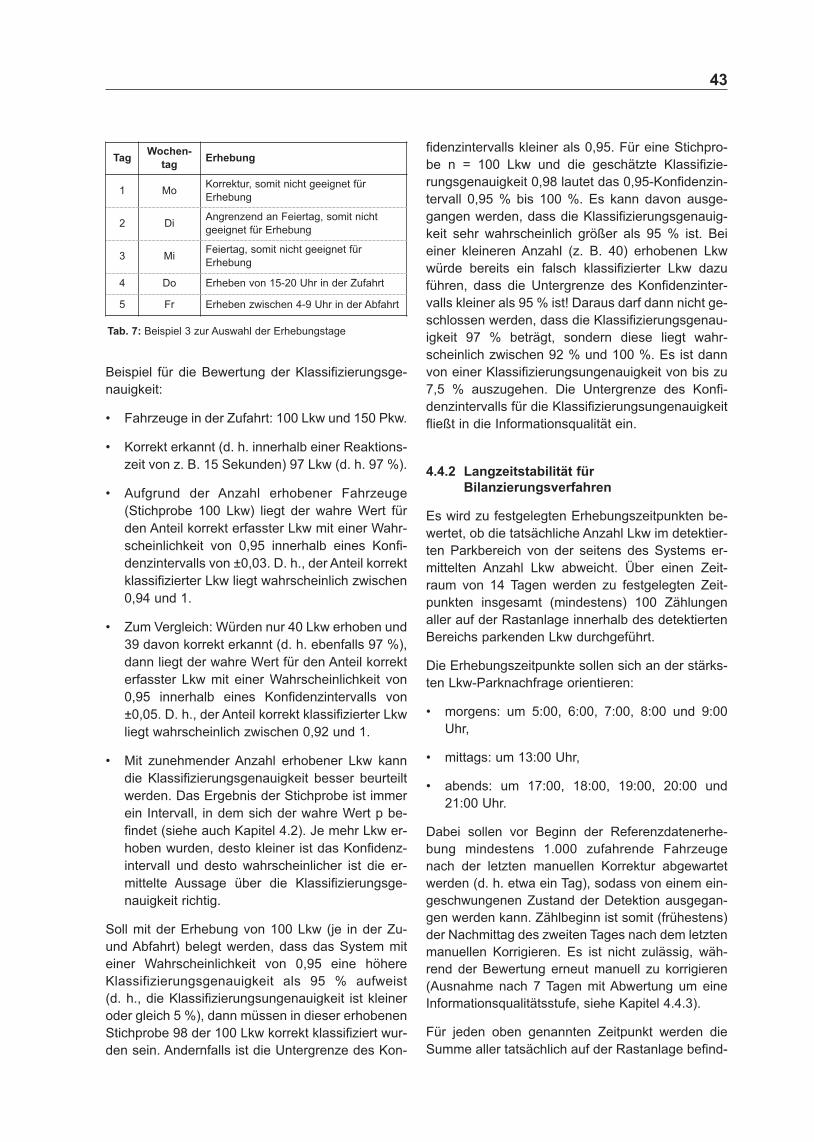
Beispiel für die Bewertung der Klassifizierungsge-nauigkeit:
• Fahrzeuge in der Zufahrt: 100 Lkw und 150 Pkw.
• Korrekt erkannt (d. h. innerhalb einer Reaktions-zeit von z. B. 15 Sekunden) 97 Lkw (d. h. 97 %).
• Aufgrund der Anzahl erhobener Fahrzeuge(Stichprobe 100 Lkw) liegt der wahre Wert fürden Anteil korrekt erfasster Lkw mit einer Wahr-scheinlichkeit von 0,95 innerhalb eines Konfi-denzintervalls von ±0,03. D. h., der Anteil korrektklassifizierter Lkw liegt wahrscheinlich zwischen0,94 und 1.
• Zum Vergleich: Würden nur 40 Lkw erhoben und39 davon korrekt erkannt (d. h. ebenfalls 97 %),dann liegt der wahre Wert für den Anteil korrekterfasster Lkw mit einer Wahrscheinlichkeit von0,95 innerhalb eines Konfidenzintervalls von±0,05. D. h., der Anteil korrekt klassifizierter Lkwliegt wahrscheinlich zwischen 0,92 und 1.
• Mit zunehmender Anzahl erhobener Lkw kanndie Klassifizierungsgenauigkeit besser beurteiltwerden. Das Ergebnis der Stichprobe ist immerein Intervall, in dem sich der wahre Wert p be-findet (siehe auch Kapitel 4.2). Je mehr Lkw er-hoben wurden, desto kleiner ist das Konfidenz-intervall und desto wahrscheinlicher ist die er-mittelte Aussage über die Klassifizierungsge-nauigkeit richtig.
Soll mit der Erhebung von 100 Lkw (je in der Zu-und Abfahrt) belegt werden, dass das System miteiner Wahrscheinlichkeit von 0,95 eine höhereKlassifizierungsgenauigkeit als 95 % aufweist (d. h., die Klassifizierungsungenauigkeit ist kleineroder gleich 5 %), dann müssen in dieser erhobenenStichprobe 98 der 100 Lkw korrekt klassifiziert wur-den sein. Andernfalls ist die Untergrenze des Kon-
fidenzintervalls kleiner als 0,95. Für eine Stichpro-be n = 100 Lkw und die geschätzte Klassifizie-rungsgenauigkeit 0,98 lautet das 0,95-Konfidenzin-tervall 0,95 % bis 100 %. Es kann davon ausge-gangen werden, dass die Klassifizierungsgenauig-keit sehr wahrscheinlich größer als 95 % ist. Beieiner kleineren Anzahl (z. B. 40) erhobenen Lkwwürde bereits ein falsch klassifizierter Lkw dazuführen, dass die Untergrenze des Konfidenzinter-valls kleiner als 95 % ist! Daraus darf dann nicht ge-schlossen werden, dass die Klassifizierungsgenau-igkeit 97 % beträgt, sondern diese liegt wahr-scheinlich zwischen 92 % und 100 %. Es ist dannvon einer Klassifizierungsungenauigkeit von bis zu7,5 % auszugehen. Die Untergrenze des Konfi-denzintervalls für die Klassifizierungsungenauigkeitfließt in die Informationsqualität ein.
4.4.2 Langzeitstabilität fürBilanzierungsverfahren
Es wird zu festgelegten Erhebungszeitpunkten be-wertet, ob die tatsächliche Anzahl Lkw im detektier-ten Parkbereich von der seitens des Systems er-mittelten Anzahl Lkw abweicht. Über einen Zeit-raum von 14 Tagen werden zu festgelegten Zeit-punkten insgesamt (mindestens) 100 Zählungenaller auf der Rastanlage innerhalb des detektiertenBereichs parkenden Lkw durchgeführt.
Die Erhebungszeitpunkte sollen sich an der stärks -ten Lkw-Parknachfrage orientieren:
• morgens: um 5:00, 6:00, 7:00, 8:00 und 9:00Uhr,
• mittags: um 13:00 Uhr,
• abends: um 17:00, 18:00, 19:00, 20:00 und21:00 Uhr.
Dabei sollen vor Beginn der Referenzdatenerhe-bung mindestens 1.000 zufahrende Fahrzeugenach der letzten manuellen Korrektur abgewartetwerden (d. h. etwa ein Tag), sodass von einem ein-geschwungenen Zustand der Detektion ausgegan-gen werden kann. Zählbeginn ist somit (frühestens)der Nachmittag des zweiten Tages nach dem letztenmanuellen Korrigieren. Es ist nicht zulässig, wäh-rend der Bewertung erneut manuell zu korrigieren(Ausnahme nach 7 Tagen mit Abwertung um eineInformationsqualitätsstufe, siehe Kapitel 4.4.3).
Für jeden oben genannten Zeitpunkt werden dieSumme aller tatsächlich auf der Rastanlage befind-
43
Tag Wochen-tag Erhebung
1 Mo Korrektur, Erhebung
somit nicht geeignet üf r
2 Di zü
Angren end geeignet f r
an Feiertag, Erhebung
somit nicht
3 Mi Feiertag, somit Erhebung
nicht geeignet üf r
4 Do Erheben von 15-20 Uhr in der Zufahrt
5 Fr Erheben zwischen 4-9 Uhr in der Abfahrt
Tab. 7: Beispiel 3 zur Auswahl der Erhebungstage

lichen und die seitens des zu bewertenden Sys -tems ermittelte Anzahl Lkw notiert. Die tatsächlicheAnzahl Lkw ergibt sich aus der Summe aller zu die-sem Zeitpunkt tatsächlich parkenden oder fahren-den Lkw-ähnlichen Fahrzeuge innerhalb des durchdas System detektierten Bereichs. Wird beispiels-weise nur ein Teilbereich der Rastanlage detektiert,so werden auch nur die in diesem Bereich tatsäch-lich parkenden oder fahrenden Lkw-ähnlichenFahrzeuge gezählt. Für den gleichen Zeitpunkt istseitens des zu bewertenden Systems die Aussageerforderlich, wie viele Fahrzeuge sich innerhalb die-ses Bereichs befinden.
Die Einordnung eines Fahrzeugs als „Lkw-ähnlich“erfolgt für die Referenzdatenerhebung nach TLS.Abweichende Festlegungen bei der Referenz -datenerhebung (z. B. Klassifizierung anhand derFahrzeuglänge) sind im Erhebungsbogen zu doku-mentieren. Die Anzahl Lkw-ähnlicher Fahrzeugeauf einer Rastanlage kann durch Befahren der
Rastanlage bestimmt werden. Dabei kann es zuFehlern in den Referenzdaten kommen, wenn zwi-schenzeitlich neue Fahrzeuge ein- bzw. ausfahren.Alternativ können Webcams genutzt werden, soferndiese ein korrektes Zählen der Lkw-ähnlichen Fahr-zeuge aufgrund ihrer Standorte zulassen (Moment-aufnahme). Die genaueste Referenzerhebung istmit einem Blick von „oben“ möglich z. B. durch dieNutzung eines Optokopters (Momentaufnahmeüber die gesamte Rastanlage). Das gewählte Ver-fahren zur Referenzdatenerhebung für die Bewer-tung der Langzeitstabilität ist zu dokumentieren.
Mit Hilfe des Erhebungsbogens (Bild 25) sind diefür die Auswertung erforderlichen Größen zu doku-mentieren. Im Tabellenkopf sind die Angaben fürdie Rastanlage (Name, Lage, Detektionstechnik,…) einzutragen. Die Spalten B und C sind für dieAngabe des Erhebungstages vorgesehen. Es sollen Datum und Wochentag der Erhebungstageim 14-tägigen Erhebungszeitraum eingetragen wer-
44
Bild 25: Erhebungsbogen für Kriterium Langzeitstabilität

den. Die täglichen Erhebungszeitpunkte sind inSpalte D festgelegt. Für jeden Erhebungszeitpunktwird vor Ort die tatsächliche Anzahl Lkw-ähnlicherFahrzeuge im detektierten Bereich in Spalte E ein-getragen. In Spalte F wird die zum gleichen Zeit-punkt seitens des Systems ermittelte Anzahl Lkweingetragen. Die Differenzen aus E und F bilden dieGrundlage für die Bewertung, ob diese innerhalboder außerhalb der Toleranzgrenzen liegt. DieHöhe der Differenz wird in der Auswertung nur qua-litativ bewertet. Hinweise zur Festlegung der Tole-ranzgrenzen finden sich in Kapitel 5.2.7.
Die Bewertungsfrage lautet: Liegt die Abweichungzwischen tatsächlicher und gemessener Belegunginnerhalb der Toleranzgrenzen (entspricht „j“) oderaußerhalb der Toleranzgrenzen (entspricht „n“)? InBild 26 ist auf der y-Achse die Summe aller Abwei-chungen zwischen gemessener und tatsächlicherAnzahl Lkw aufgetragen. Für den Prüfzeitpunkt inBild 26 liegt die Abweichung (zugehöriger y-Wert)innerhalb der Toleranz, sodass das System für die-sen Zeitpunkt als „gut“ bewertet wird. Liegt derMesswert außerhalb des Toleranzbereichs, würdedas System für diesen Zeitpunkt als „schlecht“ be-wertet. Es wird die Gesamtsumme über die Häufig-keit „guter“ und „schlechter“ Zeitpunkte für unter-schiedliche Toleranzgrenzen ausgewertet.
Zu beachten ist, dass nur die Systeme miteinanderverglichen werden können, die auf Basis der glei-chen Toleranzgrenze bewertet wurden. Die Aus-wertungen der Abweichung zwischen tatsächlicherund gemessener Anzahl Lkw werden für jede Tole-ranzgrenze von 0 bis 10 im Rahmen der Detek -tionsbewertung durchgeführt.
4.4.3 Informationsqualität
Die Kriterien Klassifizierungsgenauigkeit und Lang-zeitstabilität werden in das Bewertungsschema inBild 27 übertragen. Es ergeben sich daraus 5 Infor-mationsqualitätsstufen von A bis E. Dabei ist A dasbestmögliche und E das schlechteste Ergebnis. DieQualitätsstufen sagen dabei etwas über die Häufig-keit von unerwünschten Fehlern seitens der Detek-tion aus.
Für die Ermittlung der Informationsqualität wird dieLangzeitinstabilität stärker berücksichtigt als dieKlassifizierungsungenauigkeit. Hintergrund ist, dassfür den dauerhaften Betrieb mit wenigen manuellenKorrekturen die korrekte Klassifizierung wenigervon Bedeutung ist als die Langzeitstabilität. Syste-
me mit automatisierten Plausibilisierungs zyklen (z. B. Erkennen fehlerhaft erscheinender Ein -gangsgrößen) oder der Fähigkeit, Sondersituatio-nen (Parken, Halten oder Rangieren im Detek -tionsbereich) korrekt zu erfassen, haben gute Vo- raussetzungen für den automatischen Dauerbetrieb.
Die Bewertungen sollen für unterschiedliche Tole-ranzgrenzen durchgeführt werden. Die erreichtenQualitätsstufen können mit denen anderer Systemebei gleicher Toleranzgrenze verglichen werden.
Folgendes Beispiel verdeutlicht die Vorgehenswei-se: In Bild 28 ergibt sich für ein fiktives System Xbei der Toleranzgrenze 0, d. h., zu jedem Zeitpunktsoll die gemessene mit der tatsächlichen AnzahlLkw übereinstimmen, die Qualitätsstufe E, da mehrals 20 % der erhobenen Zeitpunkte diese Forde-
45
Bild 26: Querschnitt für einen Erhebungszeitpunkt
Bild 28: Beispielbewertung Gesamtdarstellung
Bild 27: Ermittlung der Informationsqualitätsstufen

rung nicht erfüllen. Bei einer Toleranzgrenze von 5,d. h. zu jedem Zeitpunkt soll die gemessene vonder tatsächlichen Anzahl Lkw um nicht mehr als ±5abweichen, erfüllt das System die Qualitätsstufe A,da weniger als 5 % der Bewertungszeitpunkte vondieser Forderung abweichen. Die in Bild 28 einge-tragenen Punkte verschieben sich auf der x-Achse,da die Klassifizierungsungenauigkeit unabhängigvon der Toleranz bewertet wird. Im Beispiel ist dieKlassifizierungsungenauigkeit sehr gering, denn inweniger als 5 % der Erhebungen erfolgte eine fal-sche Klassifizierung.
Bild 29 fasst das Bewertungsergebnis für das Bei-spielsystem X zusammen. Liegt die Toleranzgrenzebei ±3, ist das bewertete System gut geeignet, da esdie Qualitätsstufen A und B erreicht, d. h. sehr seltenhöhere Abweichungen als ±3 zu verzeichnen sind.
4.4.4 Weitere Bewertungsaussagen fürBilanzierungsverfahren
Das Kriterium 1, Klassifizierungsungenauigkeit,sagt etwas über die Häufigkeit von Falschklassifi-zierungen aus, nicht jedoch welche Fahrzeugklas-se wie oft falsch detektiert wurde. Das Kriterium 2,Langzeitinstabilität, sagt etwas über die Häufigkeitder Abweichung zwischen tatsächlicher und ge-messener Anzahl Lkw aus, nicht jedoch über dieHöhe der Abweichung. Ergänzend zu beiden Krite-rien ist es daher sinnvoll, den Fehlerverlauf des be-werteten Systems detaillierter zu charakterisieren,z. B. Aussagen über die Höhe von erhobenen Ab-weichungen. Hierfür werden ausgehend von denbereits vorliegenden Referenzdaten (aus den Erhe-bungsbögen in Bild 24 und Bild 25) folgende Anga-ben berechnet:
In Bezug auf Kriterium 1 (über jeweils mind.100 Er-hebungen):
• in der Zufahrt falsch klassifizierte Pkw und Lkw,
• in der Abfahrt falsch klassifizierte Pkw und Lkw.
In Bezug auf Kriterium 2 (über mindestens 100 Er-hebungszeitpunkte) für Toleranzgrenze „0“:
• Mittelwert der Abweichung,
• Streuung der Abweichung,
• maximale Abweichung.
Zu Beginn der Referenzdatenerhebung ist die Sys -temzeit zu dokumentieren und der Referenzerhe-bung zu Grunde zu legen. Die Abweichung zwi-schen Erhebung an Ort und Stelle (Fahrzeug über-fährt Detektor in Zufahrt oder Abfahrt) und Erken-nung im System (Addieren/Subtrahieren/Klassi -fizieren) soll in Anlehnung an die TLS maximal eineMinute betragen. Der systemtypische Zeitversatzzwischen tatsächlicher Belegungsänderung durchdie Einfahrt eines Fahrzeuges und Systemreaktionist für die Auswertungen der Fahrzeugklassifizie-rung zu dokumentieren (Mittelwert). Bei Bedarf kön-nen auffällig lange Reaktionszeiten im Bewertungs-bericht notiert werden.
Bei der Bewertung der Langzeitstabilität wird keineReaktionszeit berücksichtigt, da es sich um eineMomentaufnahme der Anzahl Lkw auf der Rast -anlage handelt. Abweichende Festlegungen sind imBewertungsbericht zu dokumentieren.
Besondere Wetter- und Witterungsbedingungenbzw. Verkehrsereignisse sind während des Bewer-tungszeitraums zu dokumentieren.
Betreiber können weitere Bewertungskriterien ein-führen, wie z. B. die Klassifizierungsgleichförmig-keit (im Sinne derselben Fahrzeugklasse für einidentisches Fahrzeug in der Zu- und Abfahrt) oderdie Klassifizierungsgenauigkeit für verschiedeneSondersituationen (z. B. ein Fahrzeug parkt im Be-reich des Detektors oder rangiert dort).
4.5 Bewertung der Wirksamkeit vonParkinformationssystemen
Befragungen
Die Wirksamkeit kann anhand von Befragungen ab-geleitet werden. 2010 wurde im Auftrag der BASteine Befragung von 153 Lkw-Fahrer/Innen durch-geführt (ISL Baltic Consult, 2011). Die Befragungs-ergebnisse sind in Anhang 9.23 dargestellt.
46
Bild 29: Beispielbewertung mit 2 Toleranzgrenzen

Die überwiegende Mehrheit der Befragten empfin-det die Bereitstellung dynamischer Parkinformatio-nen als hilfreich für die Planung der gesetzlichenLenk- und Ruhezeiten. Dabei wurde deutlich, dassaus Sicht der Fahrer diese Informationen über min-destens zwei Rastanlagen infolge bereitgestelltwerden sollten. Der hohe Ausstattungsgrad derFahrzeuge mit Mobiltelefon, Internetzugang undNavigationsgeräten stellt eine gute Voraussetzungfür die zukünftige Entwicklung individueller Mobili-tätsdienste dar (ISL Baltic Consult, 2011).
Weiterer Untersuchungsbedarf
Die in den Kapiteln 4.3 und 4.4 beschriebenen Be-wertungsverfahren müssen praktisch evaluiert wer-den. Sie sollen der Einschätzung der Informations-qualität von Parkinformationssystemen auf Rastan-lagen dienen. Zum Zeitpunkt der Berichtslegung lie-gen noch keine abschließenden Auswertungen vor.
Bei ausreichendem Erhebungsumfang auf unter-schiedlichen Rastanlagen lassen sich zukünftigAussagen über Einsatzbereiche der Detektions-techniken ableiten. So werden die Detektionstech-niken mit unterschiedlichen Randbedingungen ver-schieden gut umgehen. Je nach Maßnahmenzielund Kostenumfang kann dann eine geeignete Detektionstechnik ausgewählt werden. Hierfür lie-gen derzeit keine belastbaren Daten vor.
Es ist angedacht, ein Auswahlschema zu entwer-fen, unter welchen Randbedingungen welche Infor-mationsqualitätsstufe gefordert werden soll: Sokann es einer höheren Informationsqualität der De-tektion bei numerischen Parkinformationen als beibeschreibenden Parkinformationen bedürfen. Auchdie Ungenauigkeit, die seitens der Steuerung aus-geglichen werden kann, hat Einfluss auf die festzu-legende Informationsqualitätsstufe. Ebenso sollendie Größe und Bedeutung der Rastanlage im Stre -ckenabschnitt berücksichtigt werden.
Auf der Grundlage bisheriger Untersuchungen istes nicht möglich, Aussagen zur Wirksamkeit vonParkinformationen abzuleiten. Hierzu zählen:
• Verbreitungsgrad der Information (Anzahl undArt der Informationssenken/-abnehmer),
• Akzeptanz der Parkinformationen,
• Reduktion des Parksuchverkehrs,
• Abnahme des ordnungswidrigen und verkehrsge-fährdenden Parkens (Vergleich Vorher-Nachher),
• Verteilung der Nachfrage auf benachbarte Anla-gen einer Strecke,
• Nutzen-/Kosten-Verhältnisse,
• Sicherheitsgewinn,
• Übertragbarkeit der Maßnahme.
Die Wirksamkeit von Parkinformationen ist grund-sätzlich beschränkt, wenn die Nachfrage die vor-handene Kapazität eines Streckenabschnitts (deut-lich) übersteigt. Eine gute Wirksamkeit von Park -informationen ist jedoch zu erwarten, wenn dieParknachfrage annähernd gleich der Parkkapazitäteiner Strecke ist. Die Wirtschaftlichkeit ist dann da -rüber begründet, dass der Ausbau von Rastanlagenbegrenzt möglich ist und Telematik zwingend erfor-derlich ist, um die Nachfrage auf die Kapazität einerStrecke zu verteilen.
Nach Abschluss der Pilotprojektphase können be-lastbare Daten zu diesen Fragestellungen erhobenwerden. Insbesondere die geplante Ausstattung derRastanlagen auf der A 9 zwischen Nürnberg undMünchen sollte systematische Erhebungen zuoben genannten Fragestellungen ermöglichen.
4.6 Lastenheft zur funktionalenAusschreibung
Nach Abschluss der Bewertung einer ausreichen-den Anzahl Parkinformationssysteme werden andieser Stelle Hinweise für die funktionale Aus-schreibung gegeben. Funktionale Forderungen um-fassen auf der Grundlage vorliegender Erfahrungender Pilotprojekte folgende Aspekte:
• geringer Betriebsaufwand, d. h. stabiler Betriebdes Systems (mind. 14 Tage ohne manuelleKorrekturen, Wartung, o. Ä.),
• hohe Verfügbarkeit (max. Ausfalldauer pro Jahrbegrenzen),
• Festlegung des maximalen Wartungsaufwands,
• Anforderungen, die sich aus dem Einbau derDetektion ergeben (Wasserfestigkeit etc.).
Insbesondere die Anforderungen an die Informa -tionsqualität sind zu beschreiben. Wichtig ist dieFestlegung der Art, Häufigkeit und Informations-qualität von Parkinformationen für Dienstanbieterund Verkehrsteilnehmer.
47
5 Vorschlag für eine intelligenteStreckensteuerung
5.1 Vorbemerkung
In den Pilotprojekten bestand die Aufgabe derSteuerung darin, die numerische „Anzahl freierParkstände“ abzuleiten. Diese Steuerung ist sehrstark von der Klassifikationsgenauigkeit des Detek-tors abhängig (siehe auch Kapitel 4). Bilanzie-rungsverfahren erlauben hierüber nur abgeleiteteAussagen aus der Anzahl Fahrzeuge auf der Rast-anlage. Zudem kann der Verkehrsteilnehmer ohneKenntnis der Gesamtanzahl aller Parkstände einerRastanlage aus der Anzahl freier Parkstände nurwenige Erkenntnisse ziehen. Es bleibt dem Ver-kehrsteilnehmer überlassen, die richtigen Schlüsseaus der Parkinformation zu ziehen, sodass uner-wünschte Verhaltensweisen nicht auszuschließensind.
Eine intelligente Streckensteuerung soll daher derVerteilung einer Nachfrage auf die vorhandene Ka-pazität eines Streckenabschnitts dienen. Baulichkönnen die erforderlichen Parkkapazitäten nicht al-lein punktuell durch wenige große Rastanlagen be-reitgestellt werden, sondern müssen der strecken-bezogenen Nachfrage angepasst werden. Auchaufgrund unregelmäßiger Nachfrage ist daher einVerteilen der Nachfrage innerhalb eines Strecken-abschnitts erforderlich. Dies kann nur durch Tele-matik geleistet werden. Bislang wurde jedoch keinKonzept realisiert, welches flächendeckend einebessere Verteilung der Nachfrage erreichen kann.
Ausgehend von den im Rahmen der Pilotprojektegesammelten Erfahrungen und den Vorgaben derEU (vgl. Europäische Union, 2013) wird dahernachfolgend ein Konzept entworfen, wie eine intel-ligente Streckensteuerung flächendeckend umge-setzt werden kann. Es ist zunächst ein möglichesRealisierungskonzept welches der regelmäßigenFortschreibung und Aktualisierung bedarf, sofernneue praktische Erkenntnisse vorliegen (hier seiauf die aktuellen Planungen zu Streckensteuerun-gen in Bayern (A 9) und Rheinland-Pfalz (A 61) ver-wiesen).
Für die Straßenbauverwaltung wird sich nicht mehrnur die Frage stellen, welche Detektion erforderlichist. Es steht vielmehr die Frage im Mittelpunkt, wel-che Inhalte und über welchen Weg die Verkehrs-teilnehmer Parkinformationen erhalten sollen. DasBundesministerium für Verkehr und digitale Infra-
struktur (BMVI; ehemals BMVBS) erklärt hierzu,dass die Parkinformation ins Führerhaus übertra-gen werden soll (BMVBS, 2012). Dazu bedarf esder Zusammenarbeit zwischen öffentlicher Handund privaten Dienstanbietern, wenn Endgeräte undDienste im Fahrzeug aufbauend auf Detektion s -daten der öffentlichen Hand den Fahrer unterstüt-zen und informieren sollen.
Für Steuerungsverfahren ergeben sich darausneue Aufgaben. Zu klären wird sein, ob diese zen-tral in einer Verkehrsrechnerzentrale oder dezentralin Fahrzeugendgeräten angesiedelt sein werden.Eine sinnvolle Mischung kann eine Alternative zubeiden darstellen. Die Steuerungsziele müssen neudefiniert werden. Teilweise bedarf es der Schaffungneuer Schnittstellen und Übertragungsprotokolle.
Es sind auch Veränderungen zu erwarten hinsicht-lich der Detektion. So wird die Entscheidung für einDetektionsverfahren zukünftig stärker in Abhängig-keit von den Gegebenheiten des Streckenab-schnitts getroffen werden. Zudem können fahr-zeugseitig erhobene Daten diese sinnvoll ergän-zen. Die Steuerung hat dann die Aufgabe, dieDaten der Detektion in geeignete Parkinformatio-nen für den Verkehrsteilnehmer aufzubereiten.
Nachfolgend wird ein Konzept zur Datenerhebung/-aufbereitung und Bereitstellung von Parkinforma-tionen ins Fahrzeug entworfen. Handlungs- undEntwicklungsbedarf wird aufgezeigt und möglicheLösungsvarianten werden angesprochen.
5.2 Anforderung an Detektion
5.2.1 Detektionsverfahren
Die Entscheidung, ob eine Einzelparkstandsdetek-tion oder Bilanzierung der ein- und ausfahrendenFahrzeuge erfolgen soll, ist mit Blick auf die Anzahlzu beschaffender Detektoren in erster Linie einewirtschaftliche Frage. Das Steuerungsverfahrenmuss in der Lage sein, sowohl mit Daten über dieAnzahl freier/belegter verkehrsrechtlich ausgewie-sener Parkstände als auch mit Daten über die An-zahl Lkw, die sich auf der Rastanlage/im detektier-ten Parkbereich befinden, umzugehen.
5.2.2 Lage der Detektoren auf der Rastanlage
Die Lage der Detektoren ist abhängig vom gewähl-ten Detektionsverfahren und der eingesetzten De-tektionstechnik sowie individuellen Randbedingun-
48

gen der Rastanlage. Die Festlegung der geeigne-ten Standorte ist in enger Abstimmung mit Herstel-lern der Detektionstechnik sinnvoll. Allgemeine Hin-weise sind in Kapitel 2.2 aufgeführt. Nachfolgendsind Erkenntnisse der Pilotprojektphase zusam-mengefasst.
Erdmagnetfelddetektoren zur Einzelparkstands- detektion basieren auf der Messung der Änderungder magnetischen Flussdichte des Erdmagnetfeldes.Die Pilotprojekte haben gezeigt, dass im Bereich desMotorblocks diese Änderung am deutlichs ten unddamit am besten detektiert werden kann. Aussagenüber Fahrzeuglängen sind fehlerbehaftet. Da dieVielzahl möglicher Fahrzeugaufbauten die Auswer-tung für einen zweiten im hinteren Teil des Park-stands verbauten Detektor erschwert, wurde einerelativ hohe Fehlerquote beobachtet.
Videotechniken und Laserscanner sollen bei Einzel-parkstandsdetektion unter Kostenaspekten so plat-ziert werden, dass mit einem Detektor möglichstviele Parkstände erfasst werden können. Als Rand-bedingungen sind hierbei die Erfassungsweiten und-winkel sowie der tote Winkel der Detektoren ineinem dreidimensionalen Raum zu berücksichtigen.Diesem kann durch eine entsprechende Montagehö-he (unter Abwägung steigender Baukosten)und/oder -entfernung sowie Kamerawinkel Rech-nung getragen werden. Weiterhin sind Abschattun-gen durch Fahrzeuge – und hier insbesondere durchordnungswidrig parkende Fahrzeuge – zu berück-sichtigen. Auf eine ausreichende Ausleuchtung inden Nachtstunden ist ebenso zu achten wie auf Be-einträchtigungen durch Gegenlicht von Fahrzeugenoder Sonneneinstrahlungen bei jeder Jahreszeit.
Beim Bilanzierungsverfahren konzentriert sich dieDetektion auf die Zu- und Abfahrt eines Parkberei-ches oder die gesamte Rastanlage. Gibt es mehre-re Zu- und Abfahrten zum Lkw-Parkbereich (meistbei Tank- und Rastanlagen), kann es unter Um-ständen aus technischen und wirtschaftlichen Ge-sichtspunkten günstiger sein, die Detektion in denVerzögerungs- und Beschleunigungsstreifen vonEin- und Ausfahrt vorzunehmen. Das heißt, es er-folgt die Erfassung aller Fahrzeuge auf der gesam-ten Rastanlage. Hierbei kann jedoch nicht unter-schieden werden, ob ein Lkw auf einem Lkw-Park-stand parkt oder im Tankstellenbereich ist.
Bei der Detektion in den Verzögerungs- und Be-schleunigungsstreifen von Ein- und Ausfahrten soll-ten die Detektoren möglichst in einem Bereich plat-ziert werden, in dem die erreichten Fahrzeugge-
schwindigkeiten gleichbleibend sind. Alle Detek -toren sollen so platziert werden, dass sie möglichstmittig befahren werden und nicht von parkendenFahrzeugen – und hier insbesondere durch ord-nungswidrig parkende Fahrzeuge – dauerhaft be-legt oder abgeschattet sind. Im Kurvenverlauf sinddie Schleppkurven der Lkw zu berücksichtigen.Eine Unterscheidung zwischen Pkw- und Lkw-ähn-lichen Fahrzeugen ist erforderlich. Diese Anforde-rungen gelten für alle Detektionstechniken.
5.2.3 Fahrzeugklassifizierung
Die zu erfassenden Fahrzeugklassen für telema -tisches Lkw-Parken sind Pkw- und Lkw-ähnlicheFahrzeuge. Eine detailliertere Klassifizierung ist oftnicht erforderlich (zu definierende Anforderung desBetreibers). Nur für den Fall, dass Bus- und Wohn-wagenparkstände gesondert ausgewiesen sind undfür Lkw nicht erreichbar und nutzbar sind, kann einegenauere Fahrzeugklassifizierung sinnvoll sein, umden reinen Lkw-Anteil genauer beziffern zu können.
Es eignen sich, wie im Kapitel 2.2 beschrieben,Merkmale wie die äußere Gestalt des Fahrzeugs,die elektromagnetisch wirksame Masse, Abmes-sungen des Fahrzeugs und andere messbare Eigenschaften je nach Möglichkeiten der eingesetz-ten Detektionstechnik (FGSV, 2010).
Bei der Einzelparkstandsdetektion wird bei einfa-chen Anwendungen jedes detektierte Objekt alsBelegung des Parkstands eingestuft. Es kann alsoauch ein Pkw oder Motorrad die Belegung einesLkw-Parkstands verursachen, wenn sie im Erfas-sungsbereich des Detektors parken. Der Betreiberdefiniert die Anforderung (abhängig vom beobach-teten Verhalten der Verkehrsteilnehmer auf derRastanlage), ob eine feinere Unterscheidung erfor-derlich ist. Es ist zu erwarten, dass in Zeiten großerNachfrage keine Pkw-ähnlichen Fahrzeuge aufLkw-Parkständen über längere Zeit parken werdenund auf eine Fahrzeugklassifizierung bei Einzel-parkstandsdetektion verzichtet werden kann.
5.2.4 Informationsqualität
Der Aspekt der Informationsqualität ist im Kapitel 4vertieft. Die Informationsqualität ermittelt sich ausder Klassifizierungsgenauigkeit und der Langzeit-stabilität.
Die zu fordernde Klassifizierungsgenauigkeit sollwirtschaftliche und technische Einschränkungen
49
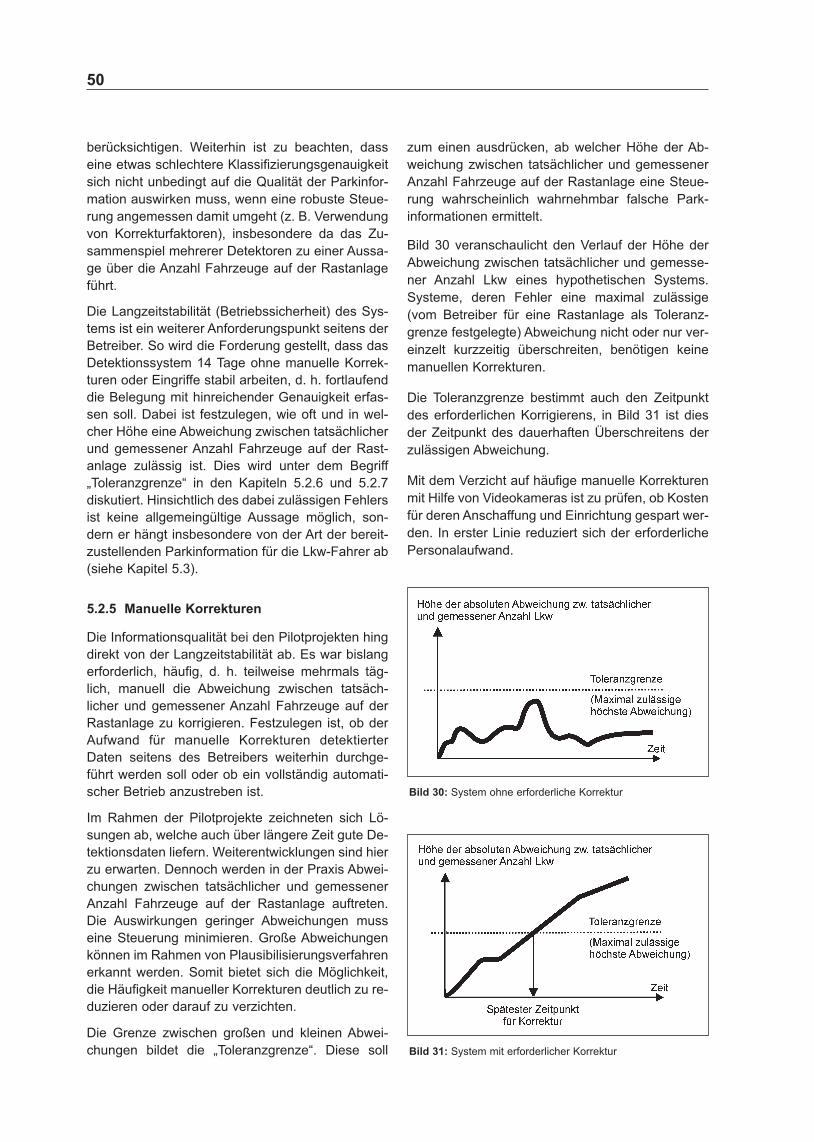
berücksichtigen. Weiterhin ist zu beachten, dasseine etwas schlechtere Klassifizierungsgenauigkeitsich nicht unbedingt auf die Qualität der Parkinfor-mation auswirken muss, wenn eine robuste Steue-rung angemessen damit umgeht (z. B. Verwendungvon Korrekturfaktoren), insbesondere da das Zu-sammenspiel mehrerer Detektoren zu einer Aussa-ge über die Anzahl Fahrzeuge auf der Rastanlageführt.
Die Langzeitstabilität (Betriebssicherheit) des Sys -tems ist ein weiterer Anforderungspunkt seitens derBetreiber. So wird die Forderung gestellt, dass dasDetektionssystem 14 Tage ohne manuelle Korrek-turen oder Eingriffe stabil arbeiten, d. h. fortlaufenddie Belegung mit hinreichender Genauigkeit erfas-sen soll. Dabei ist festzulegen, wie oft und in wel-cher Höhe eine Abweichung zwischen tatsächlicherund gemessener Anzahl Fahrzeuge auf der Rast-anlage zulässig ist. Dies wird unter dem Begriff „Toleranzgrenze“ in den Kapiteln 5.2.6 und 5.2.7diskutiert. Hinsichtlich des dabei zulässigen Fehlersist keine allgemeingültige Aussage möglich, son-dern er hängt insbesondere von der Art der bereit-zustellenden Parkinformation für die Lkw-Fahrer ab(siehe Kapitel 5.3).
5.2.5 Manuelle Korrekturen
Die Informationsqualität bei den Pilotprojekten hingdirekt von der Langzeitstabilität ab. Es war bislangerforderlich, häufig, d. h. teilweise mehrmals täg-lich, manuell die Abweichung zwischen tatsäch -licher und gemessener Anzahl Fahrzeuge auf derRastanlage zu korrigieren. Festzulegen ist, ob derAufwand für manuelle Korrekturen detektierterDaten seitens des Betreibers weiterhin durchge-führt werden soll oder ob ein vollständig automati-scher Betrieb anzustreben ist.
Im Rahmen der Pilotprojekte zeichneten sich Lö-sungen ab, welche auch über längere Zeit gute De-tektionsdaten liefern. Weiterentwicklungen sind hierzu erwarten. Dennoch werden in der Praxis Abwei-chungen zwischen tatsächlicher und gemessenerAnzahl Fahrzeuge auf der Rastanlage auftreten.Die Auswirkungen geringer Abweichungen musseine Steuerung minimieren. Große Abweichungenkönnen im Rahmen von Plausibilisierungsverfahrenerkannt werden. Somit bietet sich die Möglichkeit,die Häufigkeit manueller Korrekturen deutlich zu re-duzieren oder darauf zu verzichten.
Die Grenze zwischen großen und kleinen Abwei-chungen bildet die „Toleranzgrenze“. Diese soll
zum einen ausdrücken, ab welcher Höhe der Ab-weichung zwischen tatsächlicher und gemessenerAnzahl Fahrzeuge auf der Rastanlage eine Steue-rung wahrscheinlich wahrnehmbar falsche Park -informationen ermittelt.
Bild 30 veranschaulicht den Verlauf der Höhe derAbweichung zwischen tatsächlicher und gemesse-ner Anzahl Lkw eines hypothetischen Systems. Systeme, deren Fehler eine maximal zulässige(vom Betreiber für eine Rastanlage als Toleranz-grenze festgelegte) Abweichung nicht oder nur ver-einzelt kurzzeitig überschreiten, benötigen keinemanuellen Korrekturen.
Die Toleranzgrenze bestimmt auch den Zeitpunktdes erforderlichen Korrigierens, in Bild 31 ist diesder Zeitpunkt des dauerhaften Überschreitens derzulässigen Abweichung.
Mit dem Verzicht auf häufige manuelle Korrekturenmit Hilfe von Videokameras ist zu prüfen, ob Kostenfür deren Anschaffung und Einrichtung gespart wer-den. In erster Linie reduziert sich der erforderlichePersonalaufwand.
50
Bild 30: System ohne erforderliche Korrektur
Bild 31: System mit erforderlicher Korrektur

5.2.6 Toleranzgrenze der Langzeitstabilität beiEinzelparkstandsdetektion
Die Toleranzgrenze beschreibt einen vom Ver-kehrsteilnehmer nicht mehr unmittelbar wahrnehm-baren Anteil freier Parkstände, die z. B. zu viel oderzu wenig als frei gemeldet wurden. Sind beispiels-weise noch 10 von 100 Parkständen auf einer Rast-anlage als frei gemeldet, so wird der Verkehrsteil-nehmer aufgrund der Größe der Rastanlage nichtunmittelbar auf einem Blick erkennen können obgenau 10 Parkstände noch frei sind oder tatsäch-lich nur 5 oder gar 15.
Die Toleranzgrenze sollte immer größer null sein,denn auch Fehler bei der Referenzerhebung (z. B.durch Befahren eines großen Parkbereichs) kön-nen zu Abweichungen führen, die nicht zuunguns -ten eines Detektionssystems ausgelegt werden sol-len. Für die Bewertung der Langzeitstabilität ist viel-mehr wichtig, ob Verkehrsteilnehmer die Parkinfor-mationen wahrscheinlich als richtig oder falschempfinden werden. Daher kann sich die Festlegungder Toleranzgrenze an der Anzahl verfügbarer ver-kehrsrechtlich ausgewiesener Lkw-Parkstände undan der Bedeutung der Rastanlage im Streckenver-lauf orientieren.
Eine sinnvolle Toleranzgrenze bei der Einzelpark-standsdetektion, die in numerische Parkinformatio-nen eingehen, sind 5 % der verfügbaren Lkw-Park-stände (aufgerundet auf ganzzahlige Werte). Beieiner Rastanlage mit beispielsweise 45 Lkw-Park-ständen ergibt sich die Toleranzgrenze mit „±3“. Istz. B. die tatsächliche Belegung 38 und wird seitensder telematischen Steuerung die Belegung 40 ge-meldet, werden Verkehrsteilnehmer diese geringeAbweichung auf die Dynamik des Parkverhaltenszurückführen können, ohne an der Richtigkeit derParkinformation zu zweifeln. Wird also eine Abwei-chung kleiner oder gleich drei zwischen tatsäch -licher und der seitens des zu bewertenden Systemsermittelten Anzahl belegter Parkstände festgestellt,so wird dieser Bewertungszeitpunkt als „gut“ einge-stuft. Ist die Abweichung größer als die Toleranz-grenze, so wird dies als „schlecht“ eingestuft.
Werden beschreibende Parkinformationen (Rast-anlage ist frei/belegt) vermittelt, kann ein größererToleranzbereich angewandt werden. Abweichun-gen zwischen der tatsächlichen und gemessenenAnzahl belegter Parkstände würden lediglich zueinem zeitlich verzögerten Zustandswechsel füh-ren, d. h., die Parkinformation „die Rastanlage ist
belegt“ kommt einige Minuten zu früh oder zu spät.Jedoch wird zu diesem Zeitpunkt in der Realität dieRastanlage nahezu belegt sein, sodass diese zeit-liche Verzögerung keine großen Auswirkungen aufdie Akzeptanz der Verkehrsteilnehmer haben sollte.
Für eine große Rastanlage mit einer hohen zulässi-gen Abweichung können z. B. auch kostengünstigeSysteme eingesetzt werden, die häufig etwas hö-here Abweichungen aufweisen (Langzeitstabilitätim Bereich C oder D, siehe Kapitel 4). Andererseitsmüsste auf einer kleinen Rastanlage, die i. Allg. nurgeringe Abweichungen zulässt, ein hochwertigesSystem eingesetzt werden mit einem geringerenmaximalen Fehler. In diesem Zusammenhang wirdbereits deutlich, dass die numerische Meldung frei-er Parkstände bei Fehlern schnell zu Akzeptanz-verlusten führen kann.
5.2.7 Toleranzgrenze der Langzeitstabilität beiBilanzierungsverfahren
In der Praxis orientiert sich die Festlegung der To-leranzgrenze an verkehrstechnischen Maßgaben.Zu entscheiden ist, ab welcher Abweichung zwi-schen Parkinformation und realer Situation die Ver-kehrsteilnehmer die Parkinformationen wahrschein-lich als richtig oder falsch empfinden werden.
Für die Festlegung bieten die Anzahl verfügbarerverkehrsrechtlich ausgewiesener Lkw-Parkständeund die Bedeutung der Rastanlage im Streckenver-lauf eine gute Orientierung. Eine mögliche Tole-ranzgrenze bei Daten von Bilanzierungsverfahren,die in numerische Parkinformationen eingehen,sind 5 % der verfügbaren Lkw-Parkstände (aufge-rundet auf ganzzahlige Werte).
Anders als bei Einzelparkstandsdetektion ist jedochzu bedenken, dass die Anzahl freier Parkständeeine rechnerische Größe ist. So beeinflussen auchdie Berechnungsformel und die Wahl von Parame-tern das Ergebnis. Im Kapitel 5.3.3 wird ein mög -licher Zusammenhang zwischen Steuerung und Toleranzgröße beschrieben.
Werden beschreibende Parkinformationen (Rast-anlage ist frei/belegt) vermittelt, kann ein größererToleranzbereich angewandt werden. Abweichun-gen zwischen der tatsächlichen und gemessenenAnzahl belegter Parkstände würden lediglich zueinem zeitlich verzögerten Zustandswechsel füh-ren, d. h., die Parkinformation „die Rastanlage istbelegt“ kommt einige Minuten zu früh oder zu spät.
51

Jedoch wird zu diesem Zeitpunkt in der Realitätdie Rastanlage nahezu belegt sein, sodass diesezeitliche Verzögerung keine großen Auswirkungenauf die Akzeptanz der Verkehrsteilnehmer habenwird.
5.2.8 Automatische Korrekturverfahren
Verschiedene Ansätze für die automatische Korrek-tur werden aktuell verfolgt (und teilweise, z. B. inBaden-Württemberg, praktisch angewandt):
• Festlegung bestimmter Unter- und Obergrenzenzur möglichen Belegung: Werte außerhalb die-ser Grenzen fließen nicht in die Ermittlung derParkinformation ein (z. B. „nicht weniger als 0Fahrzeuge auf der Rastanlage“ und „nicht mehrals xx Fahrzeuge auf der Rastanlage“),
• Korrektur mittels historischer Ganglinien (sofernGanglinien verfügbar sind, erfolgt in bestimmtenzeitlichen Abständen ein Gleichsetzen mit histo-rischen Daten),
• Fahrzeugidentifikation in Zu- und Abfahrt.
Mit der automatischen Fahrzeugidentifikation gehtder Wunsch einher, einen Neustart des Systemsohne manuelle Eingaben zu ermöglichen, wobei dieerforderliche Genauigkeit erst nach einer „Ein-schwingzeit“ erreicht wird.
Die Fahrzeugidentifikation basiert darauf, ein- undausfahrende Fahrzeuge anhand bestimmter (sei-tens der Detektion erfassbarer) individueller Merk-male zu identifizieren. Bei der Einfahrt wird demFahrzeug eine Identifikationsnummer oder Identifi-kationskennzeichen zugewiesen. Wird das Fahr-zeug in der Abfahrt mit gleichen oder (je nach Soft-ware sehr) ähnlichen Eigenschaften wiedererkannt,so wird es aus einer Bestandsdatenbank gelöscht.Fahrzeuge, die nach einer gewissen Zeit nochimmer in der Datenbank geführt werden, können
automatisch aus dieser gelöscht werden. Es liegthier die Annahme zugrunde, dass Fahrzeuge eineRastanlage immer nach einer gewissen Zeit verlas-sen (siehe auch Bild 32).
5.2.9 Wirtschaftlichkeit
Aktuell liegen keine verallgemeinerbaren Daten vor,auf deren Grundlage eine Abschätzung über Zu-sammenhänge von Kosten und Informationsquali-tät erfolgen kann.
Bei der Konzeption ist daher auf das Verhältnis zwi-schen streckenbezogener Nachfrage und Kapazitätzu achten. Es sollte unter Berücksichtigung derStreckencharakteristik ermittelt werden, welche An-teile der Nachfrage im Streckenabschnitt verlagertwerden müssen (Überbelegungen) und wo freieKapazitäten verfügbar sind (Unterbelegungen).Grundsätzlich ist die Wirksamkeit der Strecken-steuerung begrenzt, wenn die Streckennachfragedie Streckenkapazität (dauerhaft deutlich) über-steigt. Ordnungswidriges Parken oder verkehrsge-fährdend parkende Fahrzeuge sind dann trotzStreckensteuerung nicht auszuschließen und derNutzen hinsichtlich der Verkehrssicherheit ist ge-ring.
Es sollte bei der Entscheidung über die Ausstattungvon Rastanlagen mit Detektionstechnik die vorhan-dene Anzahl verkehrsrechtlich ausgewiesener Lkw-Parkstände berücksichtigt werden.
Unter wirtschaftlichen Gesichtspunkten sollte aufdie Einbindung kleinerer unbewirtschafteter Rast-anlagen ohne WC (P) in eine Streckensteuerungverzichtet werden, d. h., es erfolgt keine Ausstat-tung mit Detektionstechnik. Auf eine Empfehlung,diese Rastanlage gezielt anzufahren, sollte im Rah-men einer intelligenten Streckensteuerung verzich-tet werden. Eine derartige Empfehlung kann nurausgesprochen werden, wenn eine Mindestanzahlvon Parkständen vorhanden und auch frei ist (d. h.für den Verkehrsteilnehmer auch sicher erreichbarund nutzbar).
Unbewirtschaftete Rastanlagen mit WC (PWC)bieten Beleuchtung im Bereich des WC-Gebäudesund ab 30 Lkw-Parkständen auch auf der gesam-ten Rastanlage. Da ein Stromanschluss vorhan-den ist, ist bei einer Mindestanzahl von Lkw-Park-ständen die Ausstattung mit Detektionstechnik zurEinbindung in eine Streckensteuerung sinnvoll. Es wird empfohlen, ausgehend von einer stre -ckenspezifischen Mindestanzahl an Lkw-Park-
52
Bild 32: Prinzip der Korrektur mittels Fahrzeugidentifikation
ständen pro Rastanlage die Gesamtanzahl tele-matisch zu erfassender Parkstände zu ermittelnund im Verhältnis zur Nachfrage und dem Ge-samtangebot (alle Lkw-Parkstände einer Strecke)hinsichtlich der erforderlichen Detektionstechnikzu bewerten.
Hinsichtlich der Detektion von freien Lkw-Parkstän-den stellen Tank- und Rastanlagen die größte He -rausforderung dar, da es sich häufig um weitläufigeund mehrfach verzweigte Anlagen handelt. Sofernbei dem Bilanzierungsverfahren die Erfassung derein- und ausfahrenden Lkw nicht in den Verzöge-rungs- und Beschleunigungsstreifen erfolgt, wer-den innerhalb der Rastanlage mehrere Detektorenerforderlich. Es muss berücksichtigt werden, dasssolche Anlagen in der Regel eine rückwärtige Be-triebszufahrt haben, die je nach Lage der Detek -toren ebenfalls ausgestattet werden muss.
5.3 Anforderung an dieStreckensteuerung
5.3.1 Aufgabe der Streckensteuerung
Bei einer Streckensteuerung soll der Verkehrsteil-nehmer geleitet werden. Detektionsdaten müssendaher genutzt werden, um
• die Belegungszustände für alle Rastanlagen derStrecke abzuleiten (verfügbar, frei, vollständigbelegt, überfüllt, keine Aussage),
• Prognosen für die Belegungszustände zu ermit-teln (z. B. vollständig belegt in 30 Minuten),
• Empfehlungen abzuleiten (alternative Rastanla-ge/Autohof, wenn eine Rastanlage nicht (mehr)frei ist) und
• bei Bedarf in einem Endgerät oder durch dieSpedition auch Routenänderungen zu ermittelnund zu veranlassen.
Routenänderungen sind Einzelfallentscheidungenund nicht Teil der hier beschriebenen Strecken-steuerung.
5.3.2 Aufbereitung der Detektionsdaten
Parkinformationen können ausschließlich auf infra-strukturseitig ermittelten Daten beruhen (Detekto-ren). Fahrzeugseitig erhobene Daten können dieseergänzen oder zukünftig ersetzen. Nachfolgend
wird jedoch nur von infrastrukturbasierten Detek -tionsdaten ausgegangen.
Einzelparkstandsdetektion
Für die Einzelparkstandsdetektion können Ansätzezum Plausibilisieren sinnvoll sein, die die Richtig-keit von Parkinformationen über die Anzahl freierParkstände verbessern. Werden beispielsweiseErdmagnetfelddetektoren eingesetzt, so sollten dieDaten der Detektoren dahingehend analysiert wer-den, ob mehrere Detektoren zum gleichen Zeit-punkt „Parkstand belegt“ melden (mögliche Ursa-che: Einstellung der Messungsempfindlichkeit). Beibenachbarten Detektoren würde in solch einem Fallz. B. nur noch der mittlere Parkstand als belegt de-finiert werden.
Für die Einzelparkstandsdetektion kann, sofern derfehlerhafte Zustand eines einzelnen Detektors be-kannt (bzw. erkannt) wurde, mit Annahmen die An-zahl belegter Parkstände geschätzt werden. Sokönnte pauschal angenommen werden, dass derbetroffene Parkstand zu bestimmten Zeiten (tags-über) immer frei oder (nachts) immer belegt ist. Er-fahrungswerte können eine feinere Festlegung un-terstützen. Diese Festlegung ist nur bei einer gerin-gen Anzahl defekter Detektoren sinnvoll.
Bilanzierungsverfahren
Für die weitere Entwicklung von Steuerungsverfah-ren für Rastanlagen mit Bilanzierungsverfahrenkönnten u. a. folgende Ansätze die allgemeine Ver-lässlichkeit und damit die Akzeptanz der Parkinfor-mationen verbessern (ggf. als Teil eines automa -tischen fortlaufenden Plausibilisierens):
• Die Höhe der detektierten Fahrzeugzu-/-abnah-me pro Zeitintervall kann eine Orientierung bie-ten. Wird also eine Zunahme größer z. B. 10Fahrzeuge pro Minute über mehrere Intervallehinweg festgestellt, kann dies ein Anzeichen fürFehldetektionen sein. Hierbei können auch zeit-abhängige Grenzwerte sinnvoll sein (Ganglinienzeigen typische Zeitbereiche, zu denen vielebzw. wenige Fahrzeuge zufahren).
• Wenn die Aktualisierung von Parkinformationennicht in Echtzeit erfolgt (z. B. aggregiert übereine/mehrere Minute/n), ist auch die Bewertungder Zahl innerhalb einer bestimmten Zeit zu-oder ausgefahrener Fahrzeuge denkbar, so z. B. der Vergleich mit Vorher-Intervallen oderhistorischen Ganglinien.
53

54
5.3.3 Ableiten der Anzahl freier Parkstände
Einzelparkstandsdetektion
Parkinformationen umfassen bislang die Angabenzur Anzahl freier Parkstände. Für Einzelparkstands-detektion kann diese numerische Parkinformationunmittelbar detektiert werden.
Bilanzierungsverfahren
Bei Bilanzierungsverfahren wird dieser Wert bislangaus der Anzahl Lkw auf der Rastanlage oder inner-halb des detektierten Bereichs ermittelt. Es zeigtsich aus der praktischen Erfahrung, dass in denAbendstunden nicht alle Lkw auf verkehrsrechtlichausgewiesenen Parkständen parken. Die Folge ist,dass die Anzahl freier Parkstände falsch einge-schätzt wird. Es wird daher vorgeschlagen, einenneuen Korrekturfaktor G einzuführen.
Der Korrekturfaktor G soll ausdrücken, welcher An-teil der Fahrzeuge zu einer bestimmten Uhrzeitwahrscheinlich nicht auf einem ausgewiesenenParkstand steht. Wird die Anzahl aller verkehrs-rechtlich ausgewiesenen Parkstände mit diesemKorrekturfaktor multipliziert, ergibt sich ein fiktiverParkraum, auf dem sich die Fahrzeuge befindenkönnen. Davon subtrahiert wird die detektierte An-zahl Fahrzeuge auf der Rastanlage und somit dieAnzahl freier Parkstände geschätzt.
Beispiel: Auf einer Rastanlage stehen 53 verkehrs-rechtlich ausgewiesene Parkstände zur Verfügung.Detektiert wurden 53 Lkw auf der Rastanlage. Be-kannt ist, dass sich um diese Uhrzeit etwa 20 % derLkw im Tankstellen- oder sonstigen Bereichen auf-halten, wenn sich die Rastanlage am frühen Abenddeutlich füllt. Es ist also nicht davon auszugehen,dass sich alle detektieren 53 Lkw auf den 53 Park-ständen befinden. Die Annahme, dass die Rastan-lage zu diesem Zeitpunkt belegt ist, wird sich mitder Realität vermutlich nicht decken. Der Korrektur-faktor G würde daher wie folgt angewandt: Die An-zahl freier Parkstände ist gleich der Anzahl Park-stände multipliziert mit G abzüglich der Anzahl Lkwauf Rastanlage (53 · 1,2 - 53 = 11).
Es wird demnach geschätzt, dass, obwohl 53 Lkw aufder Rastanlage sind, diese nicht alle 53 Parkständebelegen, sondern noch 11 Parkstände frei sind.
Wird der zuvor genannte Korrekturfaktor G einge-setzt, eignen sich auch Bilanzierungsverfahren mitDetektoren in den Zu- und Abfahrten für eine annä-
hernde Schätzung der Anzahl freier verkehrsrecht-lich ausgewiesener Parkstände.
Die tageszeitabhängige Schätzung für den Korrek-turfaktor G sollte durch Beobachtungen auf derRastanlage regelmäßig geprüft und angepasst wer-den, denn gute Parkinformationen sollen dazu bei-tragen, dass der Anteil Lkw, die ordnungswidrig par-ken, stetig abnimmt. Als Erhebungszeitpunkt bietetsich die Zeit an, zu der etwa so viele Fahrzeuge aufder Rastanlage sind wie die Anzahl verkehrsrecht-lich ausgewiesener Parkstände auf der Rastanlage.Die Beobachtungen können auch für eine Analysevon Verhaltensänderungen herangezogen werden.
Der Korrekturfaktor G kann auch dazu dienen, denAnteil Busse und Wohnwagengespanne in der An-zahl detektierter Lkw-ähnlicher Fahrzeuge zu be-rücksichtigen. Der mit G abgebildete fiktive Park-raum wird entsprechend angepasst.
Der Einsatz eines Korrekturfaktors wirkt sich auf dieAnforderungen an die Detektionstechnik aus. Um-gekehrt darf die falsche Wahl des KorrekturfaktorsG eine gute Langzeitstabilität des Detektors nichtverschlechtern. Die Genauigkeit der abgeleitetenAnzahl freier Parkstände kann ebenfalls anhandder Toleranzgrenze (wie bei Detektionsverfahren inKapitel 4) beurteilt werden.
Tabelle 8 veranschaulicht fünf Szenarien, die dazudienen sollen, mögliche Wechselwirkungen zwi-schen guten Detektoren (Delta innerhalb der Tole-ranz) und mittels Korrekturfaktor errechneter An-zahl freier Parkstände darzustellen.
In diesem Beispiel soll gelten, dass bei 45 Lkw aufder Rastanlage sieben Parkstände frei sind (d. h.,15 % Fahrzeuge parken zu diesem Zeitpunkt nichtauf verkehrsrechtlich ausgewiesenen Parkstän-den). Der optimale Korrekturfaktor wäre G = 1,15.Die Toleranzgrenze ergibt sich in diesem Beispielfür alle Szenarien mit ±3.
In Szenario 1 werden fünf Lkw zu wenig detektiert.Bei einer Detektionsbewertung würde dieser Prüf-zeitpunkt außerhalb der Toleranzgrenze von ±3 lie-gen. Ohne Korrekturfaktor, d. h. G = 1,0, liegt dieAbweichung zwischen errechneter Anzahl freierParkstände (5) und tatsächlicher Anzahl freier Park-stände (7) innerhalb der Toleranzgrenze von ±3.Günstige Randbedingungen führen in diesem Fallzu annähernd richtigen Parkinformationen. Der Ein-satz des richtigen Korrekturfaktors (G = 1,15)würde in Szenario 1 dazu führen, dass statt der tat-
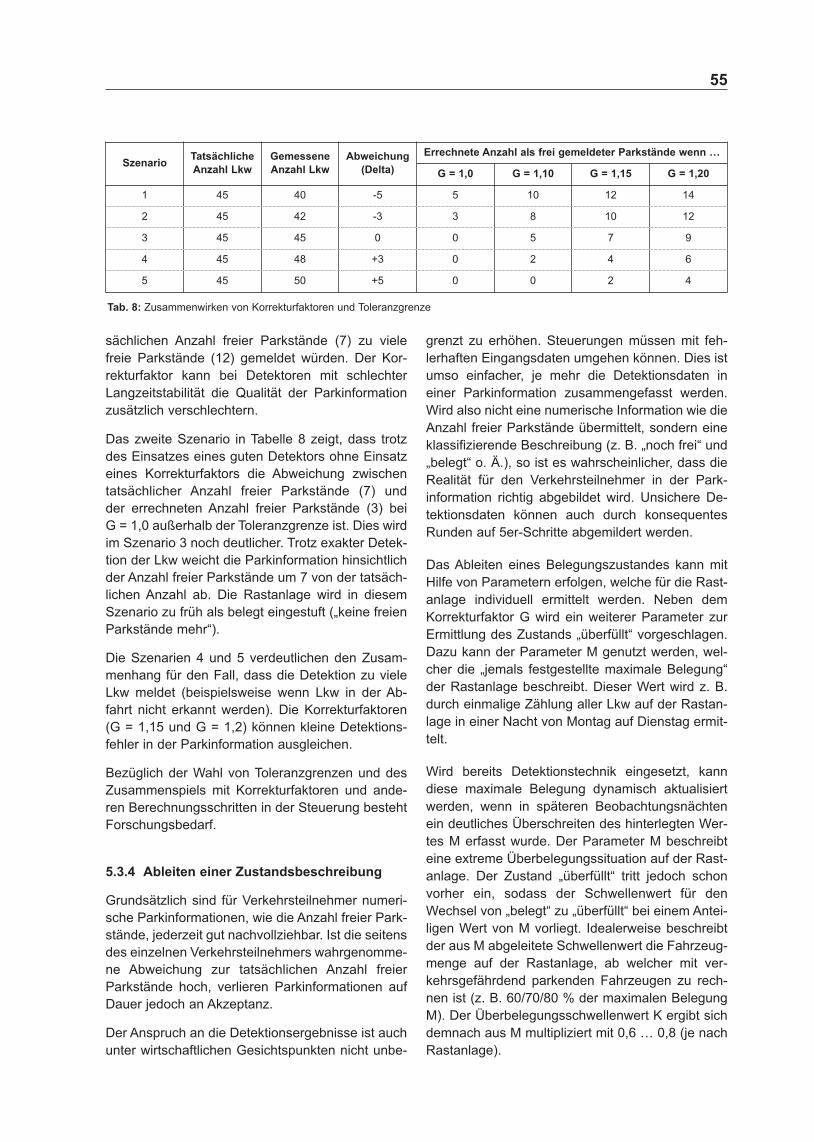
sächlichen Anzahl freier Parkstände (7) zu vielefreie Parkstände (12) gemeldet würden. Der Kor-rekturfaktor kann bei Detektoren mit schlechterLangzeitstabilität die Qualität der Parkinformationzusätzlich verschlechtern.
Das zweite Szenario in Tabelle 8 zeigt, dass trotzdes Einsatzes eines guten Detektors ohne Einsatzeines Korrekturfaktors die Abweichung zwischentatsächlicher Anzahl freier Parkstände (7) und der errechneten Anzahl freier Parkstände (3) bei G = 1,0 außerhalb der Toleranzgrenze ist. Dies wirdim Szenario 3 noch deutlicher. Trotz exakter Detek-tion der Lkw weicht die Parkinformation hinsichtlichder Anzahl freier Parkstände um 7 von der tatsäch-lichen Anzahl ab. Die Rastanlage wird in diesemSzenario zu früh als belegt eingestuft („keine freienParkstände mehr“).
Die Szenarien 4 und 5 verdeutlichen den Zusam-menhang für den Fall, dass die Detektion zu vieleLkw meldet (beispielsweise wenn Lkw in der Ab-fahrt nicht erkannt werden). Die Korrekturfaktoren(G = 1,15 und G = 1,2) können kleine Detektions-fehler in der Parkinformation ausgleichen.
Bezüglich der Wahl von Toleranzgrenzen und desZusammenspiels mit Korrekturfaktoren und ande-ren Berechnungsschritten in der Steuerung bestehtForschungsbedarf.
5.3.4 Ableiten einer Zustandsbeschreibung
Grundsätzlich sind für Verkehrsteilnehmer numeri-sche Parkinformationen, wie die Anzahl freier Park-stände, jederzeit gut nachvollziehbar. Ist die seitensdes einzelnen Verkehrsteilnehmers wahrgenomme-ne Abweichung zur tatsächlichen Anzahl freierParkstände hoch, verlieren Parkinformationen aufDauer jedoch an Akzeptanz.
Der Anspruch an die Detektionsergebnisse ist auchunter wirtschaftlichen Gesichtspunkten nicht unbe-
grenzt zu erhöhen. Steuerungen müssen mit feh-lerhaften Eingangsdaten umgehen können. Dies istumso einfacher, je mehr die Detektionsdaten ineiner Parkinformation zusammengefasst werden.Wird also nicht eine numerische Information wie dieAnzahl freier Parkstände übermittelt, sondern eineklassifizierende Beschreibung (z. B. „noch frei“ und„belegt“ o. Ä.), so ist es wahrscheinlicher, dass dieRealität für den Verkehrsteilnehmer in der Park- information richtig abgebildet wird. Unsichere De-tektionsdaten können auch durch konsequentesRunden auf 5er-Schritte abgemildert werden.
Das Ableiten eines Belegungszustandes kann mitHilfe von Parametern erfolgen, welche für die Rast-anlage individuell ermittelt werden. Neben demKorrekturfaktor G wird ein weiterer Parameter zurErmittlung des Zustands „überfüllt“ vorgeschlagen.Dazu kann der Parameter M genutzt werden, wel-cher die „jemals festgestellte maximale Belegung“der Rastanlage beschreibt. Dieser Wert wird z. B.durch einmalige Zählung aller Lkw auf der Rastan-lage in einer Nacht von Montag auf Dienstag ermit-telt.
Wird bereits Detektionstechnik eingesetzt, kanndiese maximale Belegung dynamisch aktualisiertwerden, wenn in späteren Beobachtungsnächtenein deutliches Überschreiten des hinterlegten Wer-tes M erfasst wurde. Der Parameter M beschreibteine extreme Überbelegungssituation auf der Rast-anlage. Der Zustand „überfüllt“ tritt jedoch schonvorher ein, sodass der Schwellenwert für denWechsel von „belegt“ zu „überfüllt“ bei einem Antei-ligen Wert von M vorliegt. Idealerweise beschreibtder aus M abgeleitete Schwellenwert die Fahrzeug-menge auf der Rastanlage, ab welcher mit ver-kehrsgefährdend parkenden Fahrzeugen zu rech-nen ist (z. B. 60/70/80 % der maximalen BelegungM). Der Überbelegungsschwellenwert K ergibt sichdemnach aus M multipliziert mit 0,6 … 0,8 (je nachRastanlage).
55
Szenario TatsächlicheAnzahl Lkw
GemesseneAnzahl Lkw
Abweichung(Delta)
Errechnete Anzahl als frei gemeldeter Parkstände wenn …
G = 1,0 G = 1,10 G = 1,15 G = 1,20
1 45 40 -5 5 10 12 14
2 45 42 -3 3 8 10 12
3 45 45 0 0 5 7 9
4 45 48 +3 0 2 4 6
5 45 50 +5 0 0 2 4
Tab. 8: Zusammenwirken von Korrekturfaktoren und zToleran zgren e
56
Liegt die Anzahl gezählter Fahrzeuge auf der Rast-anlage unter der Anzahl verkehrsrechtlich ausge-wiesener Parkstände, ist die Rastanlage mit Si-cherheit „frei“. Sie sollte weiterhin als „frei“ gelten,wenn die Anzahl gezählter Fahrzeuge unter demmit Hilfe des Faktors G ermittelten fiktiven Park-raum liegt. Übersteigt die gezählte Anzahl Fahrzeu-ge diesen Wert, gilt die Rastanlage als „belegt“, undzwar so lange, bis die Anzahl gezählter Lkw denmittels des Parameters M errechneten Überbele-gungsschwellenwertes K überschreitet, d. h., dieRastanlage ist „überfüllt“.
Es liegen aktuell noch keine Erfahrungen vor, wiedie Verkehrsteilnehmer auf bestimmte Belegungs-zustände reagieren würden: Fahren sie trotzdemauf „vollständig belegte“ Rastanlagen? Verhindertdie Information über den Belegungszustand „über-füllt“ das weitere Einfahren von Fahrzeugen?Neben beschreibenden Parkinformationen bietensich für Endgeräte auch farbliche Darstellungen an(Grün, Gelb, Orange, Rot).
5.3.5 Ableiten von Empfehlungen
Ebenso wichtig wie die Information zum Bele-gungszustand der Rastanlage ist eine Empfehlung,wie sich der Verkehrsteilnehmer verhalten soll.Empfehlungen können umfassen:
• Parken auf der Rastanlage selbst (vollständigeNutzung aller noch freien verkehrsrechtlich aus-gewiesenen Parkstände statt Parken in den Zu-/Abfahrten).
• Die Fahrt zur (über-)nächsten Rastanlage inFahrtrichtung fortsetzen.
• Die Nutzung von Autohöfen auf der Strecke.
• Vorzeitiges Parken auf einer vorherigen Rastan-lage (bei rechtzeitiger Information).
Idealerweise werden Staus und die daraus resultie-rende Fahrzeitverlängerung berücksichtigt, wenndie Empfehlung lautet, auf der (über-)nächstenRastanlage in Fahrtrichtung zu parken. Endgerätekönnen zudem die verbleibende Lenkzeit auswer-ten. Auch eine Prognose für den Belegungszustandeiner entfernten Rastanlage sollte ermittelt werden(z. B. vollständig belegt in 30 min).
Der Einsatz von Prognoseverfahren für Parkinfor-mationen ist nicht bekannt. Nachfolgend wird daherein Vorschlag für die Ermittlung einer Kurzzeitprog -
nose dargestellt. Diese könnte anhand der Zu-undAbnahme der Anzahl Fahrzeuge auf der Rastan -lage in den letzten 5 bis 15 Minuten geschätzt wer-den. Sollten Erhebungen zeigen, dass insbesonde-re in den Abendstunden relativ konstante Anstiegezu beobachten sind, wäre eine einfache Prognoseüber eine lineare Hochrechnung für einen kurzenZeithorizont möglich.
Prognosen sind erforderlich für die Empfehlung, dieFahrt zur (über-)nächsten Rastanlage in Fahrtrich-tung fortzusetzen (also zu einer vom aktuellenStandort entfernten Rastanlage). Dazu bedarf esfolgender Informationen:
• aktueller Belegungszustand auf der nächstenRastanlage,
• aktueller Belegungszustand auf der übernächs -ten Rastanlage,
• Tendenz: geschätzter Belegungszustand auf derübernächsten Rastanlage in xx Minuten Fahrzeit(z. B. abgeleitet aus der Zunahme der Fahrzeu-ge der vergangenen 5/10/15 Minuten mittels linearer Hochrechnung),
• Entfernung und verkehrslageabhängige Fahr-zeit zur übernächsten Rastanlage.
Wichtig ist hier in erster Linie die voraussichtlicheFahrzeit zur (über-)nächsten Rastanlage, da dieverbleibende Lenkzeit den größten Einfluss auf dieEntscheidung „parken“ oder „weiterfahren“ hat. Istdie nächste Rastanlage voll, so muss ohnehin eineAlternative gesucht werden (also die übernächste(noch freie) Rastanlage/Autohof). Wird die Rastan-lage nach Ablauf der erforderlichen Fahrzeit auchbelegt sein, so sollte rechtzeitig eine Alternative(Autohof zwischen beiden Rastanlagen) empfohlenwerden.
Entscheidend scheint weniger ein hochgenauesPrognoseverfahren zu sein, welches dem Fahrererlaubt, seine Lenkzeit bis zur letzten Minute aus-zunutzen, als mehr die rechtzeitige Handlungsemp-fehlung, wenn sich abzeichnet, dass nun die vor-aussichtlich letzte Parkmöglichkeit vor Ablauf derLenkzeit erreicht ist. Dabei wird die Verkehrslage(Erreichbarkeit!) einen größeren Einfluss auf dieseEmpfehlung haben als der zukünftige Belegungs-zustand von Rastanlagen, denn nur wenn ausrei-chend freie Parkstände vorhanden sind, kann dasParken dort empfohlen werden. Die Aufgabe desPrognoseverfahrens ist es also, den Zeitpunkt des

Zustandswechsels von „frei“ auf „belegt“ möglichstgenau zu bestimmen. Die Entscheidung basiertdann nur noch darauf, ob ein Fahrzeug rechtzeitigvor der prognostizierten Änderung des Belegungs-zustandes die Rastanlage erreicht oder nicht.Möchte ein Verkehrsteilnehmer sicher einen Park-stand finden, wird die Prognose eher auf pessimis -tischen Annahmen basieren. Der Fahrer wird dannbesser früher eine Rastanlage anfahren, als aufden letzten freien Parkstand zu hoffen.
Zu entscheiden ist,
• wie Autohöfe in die Streckensteuerung der Ver-kehrsrechnerzentralen einbezogen werden,
• welche Rastanlagen mit Detektion ausgerüstetwerden sollen,
• ab welcher Mindestanzahl (noch freier) verfüg-barer Parkstände der Verkehrsteilnehmer eineParkinformation/Empfehlung erhalten soll,
• ob die Parkinformation beschreibend oder nu-merisch sein soll.
In Bild 33 ist ein vorläufiger Entwurf aufgestellt, wieeine beschreibende standortabhängige Parkinfor-mation mit zugehöriger Handlungsempfehlung aus-sehen kann. Dabei werden der Belegungszustandder Rastanlage selbst und die Belegungszuständeder vor- und nachgelagerten Rastanlagen berück-sichtigt. Zudem fließt die Verkehrslage auf demStreckenabschnitt nach der Rastanlage in dieHandlungsempfehlung ein. Das Schema kann fürbeliebig viele Rastanlagen in einem Streckenab-
57
Bild 33: Entwurf zur Ermittlung streckenbezogener Parkinformationen und -empfehlungen
58
schnitt erweitert werden. Alternativ können auchstandortabhängige Parkinformationen unter Be-rücksichtigung der vorherigen und nächsten zweiRastanlagen erstellt werden.
Beispiel zu Bild 33 Zeile 1: Die Rastanlage ist„voll/belegt“. Der Verkehrsteilnehmer kann bereitsauf der vorherigen Rastanlage parken, dazumüsste er dort bereits die Information erhalten „dienächste Rastanlage in xx km ist voll, hier parken“.Alternativ kann der Verkehrsteilnehmer zur über-nächsten Rastanlage gelenkt werden, wenn er aufHöhe der belegten Rastanlage die Information er-hält, dass „diese Rastanlage belegt ist, Parken inxx km empfohlen“. Entscheidend ist hier die ver-bleibende Lenkzeit.
Aus Bild 33 wird deutlich, dass durch die rechtzei-tige Information über aktuelle und prognostizierteBelegungszustände der nachfolgenden Rastan-lagen die Nachfrage nicht nur in, sondern auch ent-gegen der Fahrtrichtung verlagert werden kann.Sind beispielsweise zwei Rastanlagen infolge be-legt, so lautet die Parkinformation, auf der letztennoch freien Rastanlage vor den beiden kommen-den belegten Rastanlagen zu parken: „Die über-nächsten zwei Rastanlagen sind voll, hier parken!“Wirkungsvoller wird diese Parkinformation, wennzudem noch Stau nach der übernächsten Rastan-lage bekannt ist: „Die übernächsten zwei Rastan -lagen sind voll und Stau in 20 km, hier parken!“.
Die Parkinformationen und insbesondere dieHandlungsempfehlungen sind standortabhängig,da sie Prognosen („belegt in xx Minuten“) und dievom Standort erforderliche Fahrzeit (xx Minuten)kombinieren. Endgeräte könnten neben denstandortabhängigen Informationen und Empfeh-lungen auch noch die verbleibende Lenkzeit und die geplante Route des Fahrers berücksichti-gen.
Im Gegensatz zu diesen individuellen Parkinfor-mationen/-empfehlungen können allgemeineParkinformationen nur die Situation für alle imStre ckenabschnitt vorhandenen Rastanlagen be-schreiben, d. h. Aussagen treffen, wo noch wieviele Parkstände frei bzw. welche Rastanlagennoch frei sind. Als geringer wird die Wirkung einfa-cher Parkinformationen eingeschätzt, welche dieFahrer darüber informieren, wo Rastanlagen be-legt sind, ohne alternative Parkempfehlung auszu-sprechen.
5.4 Anforderung an einKommunikationskonzept
5.4.1 Akteure einer Streckensteuerung
Bild 34 zeigt die Komponenten für die Bereitstellungvon Parkinformationen.
Die Detektoren, welche über die Streckenstationenan die Unterzentralen bzw. von dort an die Ver-kehrsrechnerzentralen der Länder angebundensind, liefern dynamische Daten zur Parksituationauf den Rastanlagen. Zukünftig ist denkbar, dassneben den lokalen Daten der Detektoren auch fahr-zeugbasierte Daten eingebunden werden könnten(z. B. FCD-Daten). Die Kommunikation zwischenDetektoren, Streckenstation und Zentralen basiertauf Protokollen gemäß TLS (vgl. TLS, 2012, undBASt, 1999).
Die Daten zur aktuellen Situation auf Rastanlagensollen zukünftig über den MDM verteilt werden. Fürdie strukturierte Bereitstellung der Daten wurde imRahmen des MDM-Projektes und der EasyWay Expert and Studies Group 3 „Freight & LogisticsServices“ ein DATEX-II-Datenprofil definiert(DATEX, 2013). Mit diesem Datenprofil ist es mög-lich, sowohl die statischen Daten zu einer Rastan-lage als auch die dynamischen Daten zu beschrei-ben.
Zu den statischen Daten gehören z. B.:
• die geografische Lage einer Rastanlage,
• die Art der Rastanlage (PWC, TR, …),
• Rastanlagenname,
• Zugehörigkeit zu einem Streckenabschnitt,
• Anzahl der insgesamt zur Verfügung stehendenParkstände, differenziert nach Fahrzeugtypen,
• Art des dynamischen Parkraummanagements(falls vorhanden),
• Betreiber,
• evtl. anfallende Parkgebühren,
• sonstiges Serviceangebot,
• Erfassungsprinzip (Bilanzierungsverfahren; Ein-zelparkstandsdetektion).
Die statischen Daten für Rastanlagen können aufdem MDM hinterlegt und nur bei Bedarf (z. B. Aus-bau) oder zyklisch aktualisiert werden.

Die zur Rastanlage verfügbaren dynamischenDaten, die zur Erstellung von Parkinformationen er-forderlich sind, sind:
• Anzahl freier (oder belegter) Parkstände, diffe-renziert nach Fahrzeugtypen,
• qualitative Zustandsbeschreibung (z. B. frei,wenig frei, belegt, überfüllt, geschlossen o. Ä.),
• sonstige Daten (z. B. Anzahl zu-/abgefahrenerFahrzeuge in einem kurzen Zeitintervall für Prognosen),
• ggf. Angaben zur Genauigkeit der Detektion.
Die IT-Systeme der Verkehrsrechnerzentralen derLänder müssen zur Bereitstellung von dynami-schen Verkehrsdaten mit Schnittstellen zum MDMausgerüstet werden. Über diese Schnittstellen istauch die Abgabe der in DATEX II codierten Parkin-formation an den MDM vorzusehen (Bild 34).
Über den MDM könnten auch Daten von Autohöfeneingebunden werden.
Dritte, d. h. Verkehrsinformationszentralen, Rund-funkanstalten, private Rundfunkanbieter, private(Navigations-)Dienstanbieter und Speditionen, kön-nen die Daten über den MDM beziehen (MDM,2011). Je nach gewähltem Kommunikationsmedi-um ist es erforderlich, die Daten zu geeignetenParkinformationen aufzubereiten. Dazu ist es erfor-
derlich, die Parkinformation z. B. für die Übertra-gung „TPEG over IP“ von DATEX II in das TPEG-Format zu konvertieren.
Mit dem zuvor beschriebenen DATEX-II-Profil ist esmöglich, eine Vielzahl von Daten über Rastanlagenstrukturiert an Dritte über den MDM weiterzugeben.Es ist derzeit nicht bekannt, welche Daten tatsäch-lich seitens privater Diensteanbieter bevorzugt wer-den.
Aus Gesprächen mit Vertretern von Anbietern ent-sprechender Dienste ist zu erkennen, dass einmöglichst breites Datenspektrum bevorzugt wird,weil es dem Anbieter ermöglicht, auf Basis der er-haltenen detaillierten Daten und unter Berücksichti-gung weiterer Daten (z. B. Verkehrslage) eigeneAuswerte- und Prognoseverfahren anzuwendenund Empfehlungen für den Dienstenutzer abzulei-ten. Sinnvoll für solche Anwendungen ist, Angabenzur Qualität der dynamischen Daten verfügbar zumachen. Liegen solche Qualitätsdaten bei den Ver-kehrsrechnerzentralen vor, sollte eine Weitergabeerwogen werden.
Über die Bereitstellung von Daten an privateDienstleister via MDM hinaus stellt sich die Frage,ob die öffentliche Hand einen eigenen Dienst für dieVerkehrsteilnehmer anbieten sollte. Über entspre-chende TPEG-Dienste, die mittels DAB+ oderSmartphoneapplikationen angeboten werden,könnten Parkinformationen weitergegeben werden
59
Bild 34: Komponenten streckenbezogener Steuerung der Lkw-Parkraumnachfrage
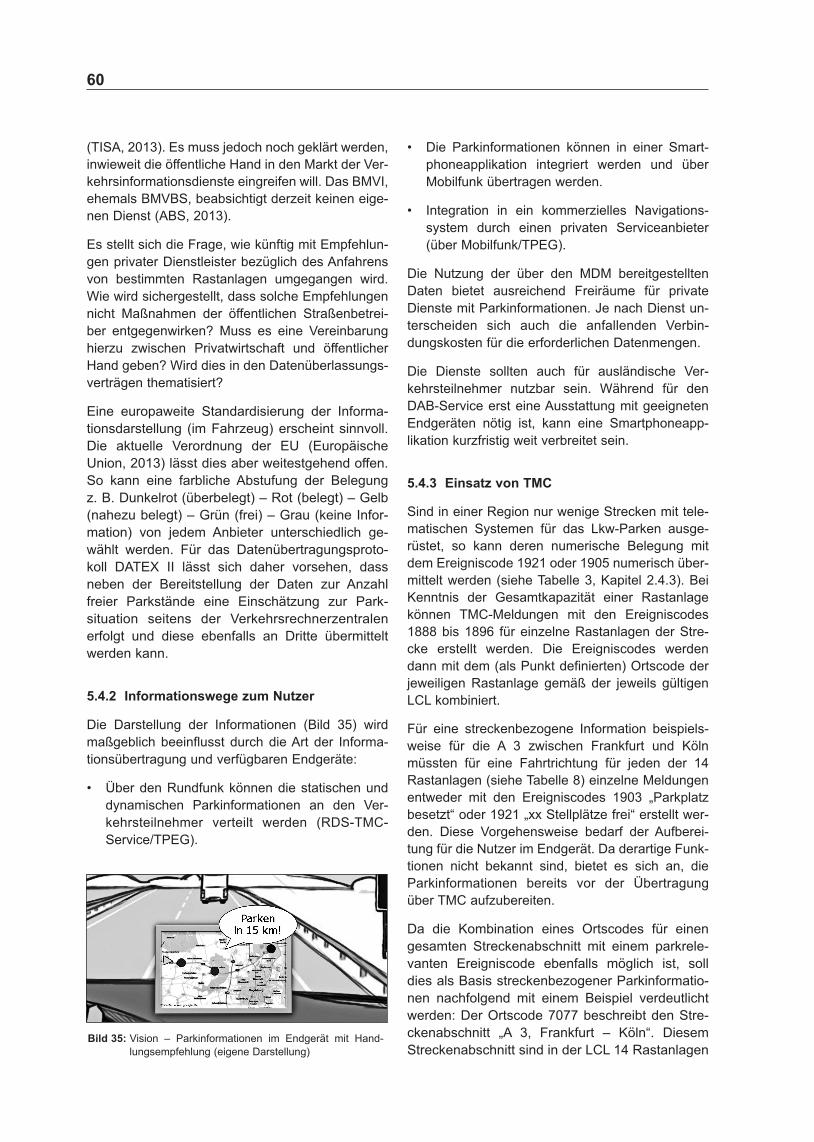
(TISA, 2013). Es muss jedoch noch geklärt werden,inwieweit die öffentliche Hand in den Markt der Ver-kehrsinformationsdienste eingreifen will. Das BMVI,ehemals BMVBS, beabsichtigt derzeit keinen eige-nen Dienst (ABS, 2013).
Es stellt sich die Frage, wie künftig mit Empfehlun-gen privater Dienstleister bezüglich des Anfahrensvon bestimmten Rastanlagen umgegangen wird.Wie wird sichergestellt, dass solche Empfehlungennicht Maßnahmen der öffentlichen Straßenbetrei-ber entgegenwirken? Muss es eine Vereinbarunghierzu zwischen Privatwirtschaft und öffentlicherHand geben? Wird dies in den Datenüberlassungs-verträgen thematisiert?
Eine europaweite Standardisierung der Informa -tionsdarstellung (im Fahrzeug) erscheint sinnvoll.Die aktuelle Verordnung der EU (EuropäischeUnion, 2013) lässt dies aber weitestgehend offen.So kann eine farbliche Abstufung der Belegung z. B. Dunkelrot (überbelegt) – Rot (belegt) – Gelb(nahezu belegt) – Grün (frei) – Grau (keine Infor-mation) von jedem Anbieter unterschiedlich ge-wählt werden. Für das Datenübertragungsproto-koll DATEX II lässt sich daher vorsehen, dassneben der Bereitstellung der Daten zur Anzahl freier Parkstände eine Einschätzung zur Park -situation seitens der Verkehrsrechnerzentralen erfolgt und diese ebenfalls an Dritte übermitteltwerden kann.
5.4.2 Informationswege zum Nutzer
Die Darstellung der Informationen (Bild 35) wirdmaßgeblich beeinflusst durch die Art der Informa -tionsübertragung und verfügbaren Endgeräte:
• Über den Rundfunk können die statischen unddynamischen Parkinformationen an den Ver-kehrsteilnehmer verteilt werden (RDS-TMC-Service/TPEG).
• Die Parkinformationen können in einer Smart -phoneapplikation integriert werden und überMobilfunk übertragen werden.
• Integration in ein kommerzielles Navigations -system durch einen privaten Serviceanbieter(über Mobilfunk/TPEG).
Die Nutzung der über den MDM bereitgestelltenDaten bietet ausreichend Freiräume für privateDienste mit Parkinformationen. Je nach Dienst un-terscheiden sich auch die anfallenden Verbin-dungskosten für die erforderlichen Datenmengen.
Die Dienste sollten auch für ausländische Ver-kehrsteilnehmer nutzbar sein. Während für denDAB-Service erst eine Ausstattung mit geeignetenEndgeräten nötig ist, kann eine Smartphoneapp -likation kurzfristig weit verbreitet sein.
5.4.3 Einsatz von TMC
Sind in einer Region nur wenige Strecken mit tele-matischen Systemen für das Lkw-Parken ausge -rüstet, so kann deren numerische Belegung mitdem Ereigniscode 1921 oder 1905 numerisch über-mittelt werden (siehe Tabelle 3, Kapitel 2.4.3). BeiKenntnis der Gesamtkapazität einer Rastanlagekönnen TMC-Meldungen mit den Ereigniscodes1888 bis 1896 für einzelne Rastanlagen der Stre -cke erstellt werden. Die Ereigniscodes werdendann mit dem (als Punkt definierten) Ortscode derjeweiligen Rastanlage gemäß der jeweils gültigenLCL kombiniert.
Für eine streckenbezogene Information beispiels-weise für die A 3 zwischen Frankfurt und Kölnmüssten für eine Fahrtrichtung für jeden der 14Rastanlagen (siehe Tabelle 8) einzelne Meldungenentweder mit den Ereigniscodes 1903 „Parkplatzbesetzt“ oder 1921 „xx Stellplätze frei“ erstellt wer-den. Diese Vorgehensweise bedarf der Aufberei-tung für die Nutzer im Endgerät. Da derartige Funk-tionen nicht bekannt sind, bietet es sich an, dieParkinformationen bereits vor der Übertragungüber TMC aufzubereiten.
Da die Kombination eines Ortscodes für einen gesamten Streckenabschnitt mit einem parkrele-vanten Ereigniscode ebenfalls möglich ist, solldies als Basis streckenbezogener Parkinformatio-nen nachfolgend mit einem Beispiel verdeutlichtwerden: Der Ortscode 7077 beschreibt den Stre -ckenabschnitt „A 3, Frankfurt – Köln“. DiesemStreckenabschnitt sind in der LCL 14 Rastanlagen
60
Bild 35: Vision – Parkinformationen im Endgerät mit Hand-lungsempfehlung (eigene Darstellung)
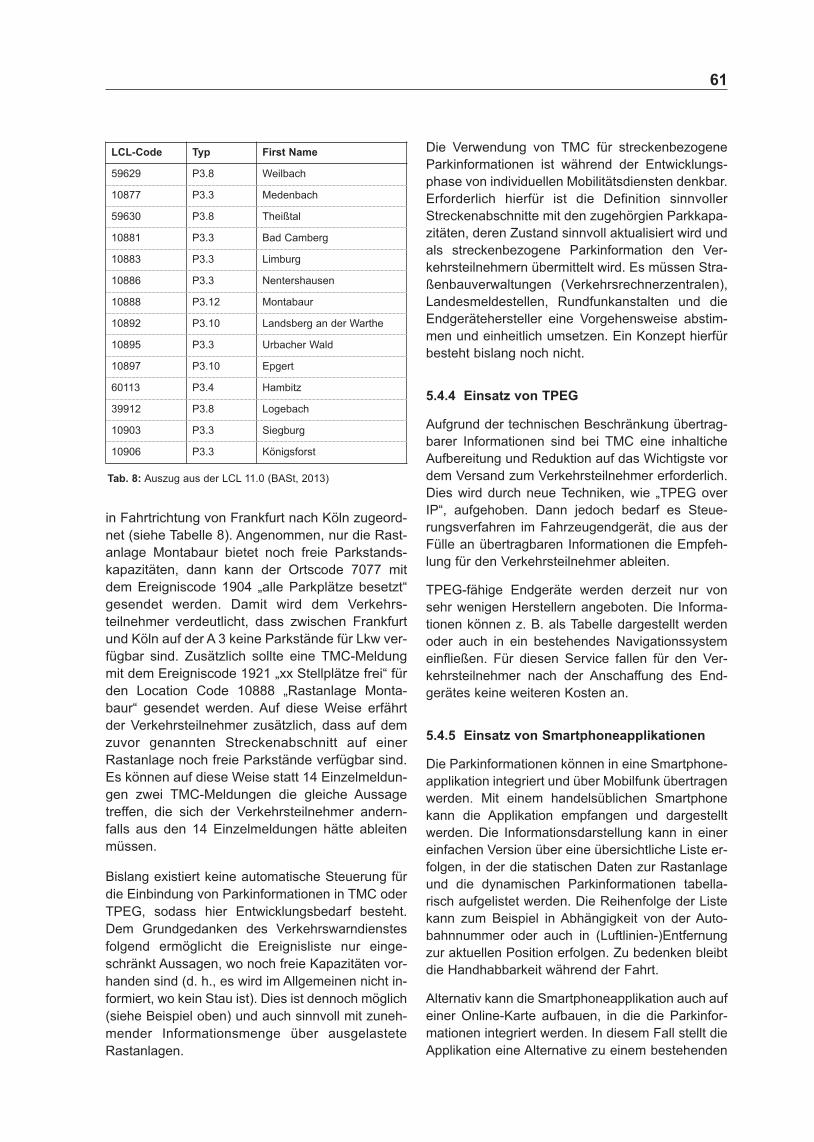
in Fahrtrichtung von Frankfurt nach Köln zugeord-net (siehe Tabelle 8). Angenommen, nur die Rast-anlage Montabaur bietet noch freie Parkstands -kapazitäten, dann kann der Ortscode 7077 mitdem Ereigniscode 1904 „alle Parkplätze besetzt“gesendet werden. Damit wird dem Verkehrs -teilnehmer verdeutlicht, dass zwischen Frankfurtund Köln auf der A 3 keine Parkstände für Lkw ver-fügbar sind. Zusätzlich sollte eine TMC-Meldungmit dem Ereigniscode 1921 „xx Stellplätze frei“ fürden Location Code 10888 „Rastanlage Monta-baur“ gesendet werden. Auf diese Weise erfährtder Verkehrsteilnehmer zusätzlich, dass auf demzuvor genannten Streckenabschnitt auf einerRastanlage noch freie Parkstände verfügbar sind.Es können auf diese Weise statt 14 Einzelmeldun-gen zwei TMC-Meldungen die gleiche Aussagetreffen, die sich der Verkehrsteilnehmer andern-falls aus den 14 Einzelmeldungen hätte ableitenmüssen.
Bislang existiert keine automatische Steuerung fürdie Einbindung von Parkinformationen in TMC oderTPEG, sodass hier Entwicklungsbedarf besteht.Dem Grundgedanken des Verkehrswarndienstesfolgend ermöglicht die Ereignisliste nur einge-schränkt Aussagen, wo noch freie Kapazitäten vor-handen sind (d. h., es wird im Allgemeinen nicht in-formiert, wo kein Stau ist). Dies ist dennoch möglich(siehe Beispiel oben) und auch sinnvoll mit zuneh-mender Informationsmenge über ausgelasteteRastanlagen.
Die Verwendung von TMC für streckenbezogeneParkinformationen ist während der Entwicklungs-phase von individuellen Mobilitätsdiensten denkbar.Erforderlich hierfür ist die Definition sinnvollerStreckenabschnitte mit den zugehörgien Parkkapa-zitäten, deren Zustand sinnvoll aktualisiert wird undals streckenbezogene Parkinformation den Ver-kehrsteilnehmern übermittelt wird. Es müssen Stra-ßenbauverwaltungen (Verkehrsrechnerzentralen),Landesmeldestellen, Rundfunkanstalten und dieEndgerätehersteller eine Vorgehensweise abstim-men und einheitlich umsetzen. Ein Konzept hierfürbesteht bislang noch nicht.
5.4.4 Einsatz von TPEG
Aufgrund der technischen Beschränkung übertrag-barer Informationen sind bei TMC eine inhalticheAufbereitung und Reduktion auf das Wichtigste vordem Versand zum Verkehrsteilnehmer erforderlich.Dies wird durch neue Techniken, wie „TPEG overIP“, aufgehoben. Dann jedoch bedarf es Steue-rungsverfahren im Fahrzeugendgerät, die aus derFülle an übertragbaren Informationen die Empfeh-lung für den Verkehrsteilnehmer ableiten.
TPEG-fähige Endgeräte werden derzeit nur vonsehr wenigen Herstellern angeboten. Die Informa-tionen können z. B. als Tabelle dargestellt werdenoder auch in ein bestehendes Navigationssystemeinfließen. Für diesen Service fallen für den Ver-kehrsteilnehmer nach der Anschaffung des End -gerätes keine weiteren Kosten an.
5.4.5 Einsatz von Smartphoneapplikationen
Die Parkinformationen können in eine Smartphone-applikation integriert und über Mobilfunk übertragenwerden. Mit einem handelsüblichen Smartphonekann die Applikation empfangen und dargestelltwerden. Die Informationsdarstellung kann in einereinfachen Version über eine übersichtliche Liste er-folgen, in der die statischen Daten zur Rastanlageund die dynamischen Parkinformationen tabella-risch aufgelistet werden. Die Reihenfolge der Listekann zum Beispiel in Abhängigkeit von der Auto-bahnnummer oder auch in (Luftlinien-)Entfernungzur aktuellen Position erfolgen. Zu bedenken bleibtdie Handhabbarkeit während der Fahrt.
Alternativ kann die Smartphoneapplikation auch aufeiner Online-Karte aufbauen, in die die Parkinfor-mationen integriert werden. In diesem Fall stellt dieApplikation eine Alternative zu einem bestehenden
61
LCL-Code Typ First Name
59629 P3.8 Weilbach
10877 P3.3 Medenbach
59630 P3.8 Theißtal
10881 P3.3 Bad Camberg
10883 P3.3 Limburg
10886 P3.3 Nentershausen
10888 P3.12 Montabaur
10892 P3.10 Landsberg an der Warthe
10895 P3.3 Urbacher Wald
10897 P3.10 Epgert
60113 P3.4 Hambitz
39912 P3.8 Logebach
10903 P3.3 Siegburg
10906 P3.3 Königsforst
Tab. 8: Auszug aus der LCL 11.0 (BASt, 2013)

Navigationssystem dar, mit der dann auch ein Routing zur Rastanlage möglich ist. Während fürdie Darstellung der Informationen in einer Karte beihäufiger Nutzung ein hohes Datenvolumen erzeugtwird (ca. 1 MB/100 km), beträgt das Datenvolumenfür die Listendarstellung nur wenige kB und istsomit auch für Verkehrsteilnehmer ohne Daten-Flatrate attraktiv.
Eine Smartphoneapplikation, welche für den Fahreraus den Parkinformationen die für ihn wichtigen In-formationen filtert, wird einen hohen Nutzen auf-weisen können. Auf eventuell im Endgerät hinter-legtem Kartenmaterial (Autobahnen schematisch)kann die Applikation die Parkinformationen für diekommenden nächsten Rastanlagen filtern, wennder Fahrer zuvor seine Route hinterlegt oder einenbestimmten Autobahnabschnitt ausgewählt hat.Idealerweise stellt die Applikation die Parkinforma-tion (frei/belegt) für die nächste Rastanlage aktuellund die übernächste(n) Rastanlage(n) prognosti-ziert dar.
5.4.6 Einsatz von Navigationsgeräten
Die Integration von Parkinformationen kann in einkommerzielles Navigationssystem durch einen pri-vaten Serviceanbieter erfolgen (über Mobilfunk/TPEG). Dieser integriert die statischen und dynami-schen Parkinformationen in sein bestehendes Navi-gationssystem, sodass diese zusammen mit denanderen benötigten Informationen (z. B. Verkehrs-lageinformationen) verarbeitet werden können.Idealerweise stellt das Navigationsgerät die Park -information (frei/belegt) für die nächste Rastanlageaktuell und die übernächste(n) Rastanlage(n) prog -nostiziert dar. In Abhängigkeit von der Lenkzeit undder Route erhält der Fahrer eine Empfehlung, aufwelcher Rastanlage er (spätestens) parken sollte.
6 Zusammenfassung undAusblick
Erhebungen im Auftrag des damaligen Bundesmi -nisteriums für Verkehr, Bau und Stadtentwicklung(BMVBS) im März 2008 belegten, dass auf und anden Bundesautobahnen (BAB) etwa 14.000 Lkw-Parkstände fehlen (BMVBS, 2008). Dies wirkt sichauf die Verkehrssicherheit aller Verkehrsteilnehmeraus. Zu beobachten ist, dass Fahrzeuge ordnungs-widrig außerhalb der dafür vorgesehenen Parkstän-de abgestellt werden.
Die Bundesregierung will das bestehende Park-standdefizit schnellstmöglich verringern (BMVBS,2012). Neben dem beschleunigten Ausbau derRastanlagen sollen auch telematische Systemeeingesetzt werden. Baulich können die erforder -lichen Parkkapazitäten nicht allein punktuell durchwenige große Rastanlagen und Autohöfe bereitge-stellt werden, sondern werden streckenbezogenbereitgestellt. Telematische Systeme helfen, dieschwankende Nachfrage besser auf die verfügbareKapazität einer Strecke zu verteilen. Daher werdengroße Potenziale telematischer Systeme in einer intelligenten Streckensteuerung gesehen.
Ziel von Parkinformationen ist es, Parksuchendebei der Einfahrt in einen BAB-Streckenabschnitt mittelematischer Unterstützung zu einem freien ver-kehrsrechtlich ausgewiesenen Parkstand einerRastanlage oder einem freien Stellplatz auf einemAutohof zu leiten. Mittels Parkinformationen könnendie vorhandenen Lkw-Parkkapazitäten durch einegleichmäßigere und insgesamt höhere Auslastungeffizienter genutzt werden. Für die Güterverkehrs-branche soll damit eine verbesserte Planbarkeit derLenk- und Ruhezeiten der Lkw-Fahrer erzielt wer-den. Insgesamt ist mit einer Erhöhung der Ver-kehrssicherheit für alle Verkehrsteilnehmer auf BABzu rechnen.
Umfassende Erfahrungen zu telematischen Syste-men liegen für die Verkehrssteuerung auf beson-ders staugefährdeten Strecken- und Netzabschnit-ten auf BAB vor (Stecken- und Netzbeeinflus-sungsanlagen). Hierfür werden Detektoren miteiner hohen Erfassungsgenauigkeit eingesetzt, umdie gefahrenen Geschwindigkeiten und die Ver-kehrsstärke zu ermitteln. Steuerungsverfahren leiten daraus die erforderlichen Maßnahmen wiedynamische Geschwindigkeitsbeschränkungenoder Lkw-Überholverbote ab bzw. warnen Ver-kehrsteilnehmer vor Gefahren (z. B. Unfälle, Stau).
Diese bewährten und für die Randbedingungen aufder freien Strecke, also für einen anderen Ge-schwindigkeitsbereich optimierten Detektoren, wieInduktivschleifen, stehen auf Rastanlagen vorneuen Herausforderungen. Hierfür bedurfte esneuer technischer Entwicklungen, welche die be-sonderen Randbedingungen auf Rastanlagen undAnforderungen an die Erfassungsgenauigkeit be-rücksichtigen. So gilt es, parkende und langsamfahrende Fahrzeuge zu detektieren. Fahrmanöverwie Rangieren, aber auch Einschränkungen durchBäume oder ordnungswidrig abgestellte Fahrzeuge
62

erschweren die Erfassung der Belegung von Rast-anlagen in der Praxis. Im Rahmen von Pilotprojek-ten wurden daher ausgewählte Rastanlagen mit un-terschiedlicher Detektionstechnik ausgestattet, umpraktische Erfahrungen zu sammeln.
Für die Datenerfassung auf Rastanlagen existierenbislang in der Praxis zwei Detektionsverfahren zurErmittlung der Anzahl belegter Parkstände:
• direkte Erfassung mittels Einzelparkstands -detektion,
• indirekte Erfassung mittels Bilanzierungsverfah-ren.
Die beiden Detektionsverfahren unterscheiden sichhinsichtlich der Lage der Detektoren auf der Rast-anlage. Bislang am häufigsten im Einsatz befindensich Bilanzierungsverfahren, die jedoch hohe Anfor-derungen an die Erfassungsgüte stellen. EinzelneMessfehler werden andernfalls ohne Korrekturenüber längere Zeit summiert und können daher zueiner hohen Abweichung zwischen tatsächlicherund gemessener Anzahl Lkw auf der Rastanlageführen.
Die technischen Möglichkeiten zur Erfassung derBelegung einer Rastanlage sind mit ihren Stärkenund Schwächen beschrieben. Kein technisches System wird unter wirtschaftlichen Gesichtspunktenunter allen Randbedingungen immer korrekte Er-gebnisse erzielen. Daher ist es auch für Anwen-dungen des telematischen Lkw-Parkens erforder-lich, die Systeme weiter hinsichtlich ihrer Einsatz-gebiete zu bewerten. Dazu gehört auch, die Detek-tionstechnik stärker im Kontext der Steuerungsver-fahren zu bewerten. So ist es eine Aufgabe derSteuerung, auf nicht plausible Werte angemessenzu reagieren (z. B. keine Informationsweitergabe),Werte zu glätten (z. B. Auf-/Abrunden) oder im Kon-text von aktueller Tageszeit und historischen Datenzu bewerten (z. B. Vergleich mit Daten der voran-gegangenen Intervalle). Algorithmen für automati-sche Fehlerkorrekturen der Daten sind weiter zuentwickeln.
Die Detektionstechniken für die Belegungserfas-sung von Rastanlagen wurden seit dem ersten Pilotprojekt kontinuierlich verbessert. Jedoch zeigtedie Praxis wiederholt, dass Sondersituationen (z. B.Trennen von Zugmaschine und Anhänger, Rangie-ren im Detektionsbereich o. Ä.) zu Abweichungenzwischen tatsächlicher und gemessener Belegungführen. Der Aufwand, diese Sondersituationen er-
fassen zu wollen, muss im Verhältnis zur Wirkungbewertet werden. Treten die Sondersituationen sel-ten auf, so sollte nicht der Detektor diese erfassenmüssen, sondern eine Steuerung so robust sein,dass sie davon nicht beeinflusst wird.
Die Steuerungsverfahren sind bislang weder füreinzelne Rastanlagen und Autohöfe noch für Stre -ckenzüge weit entwickelt. Hier zeigt sich For-schungs- und Entwicklungsbedarf, der im vorlie-genden Dokument angestoßen wird. Es empfiehltsich daher, die Detektion stärker im Kontext des an-schließenden Plausibilisierens und der Steuerungzu bewerten. Gleichen diese Detektionsfehler sichaus, so muss der Detektor nicht als ungeeignet ein-gestuft werden, nur weil er nicht immer die Tole-ranzgrenzen einhält. Die Festlegung von Toleranz-grenzen ist ebenfalls zu vertiefen. Die im Berichtvorgestellten Beispiele zeigen, dass, obwohl dieDetektoren die Anzahl Lkw auf der Rastanlage um+5 Fahrzeuge zu viel erfasst haben, die Steuerungdurch Korrekturfaktoren den Fehler bei der Berech-nung freier Parkstände auf +1 reduzieren konnte.Die vorgeschlagenen Korrekturfaktoren bringenzwar Unschärfe in die Parkinformation, erlaubenaber gleichzeitig, das örtlich zu beobachtende Ver-halten besser abzubilden und unter Umständenauch Detektionsfehler auszugleichen. Forschungs-bedarf zeigt sich hier, wenn es darum geht, geeig-nete Korrekturfaktoren ohne großen Aufwand zu er-heben. Bezüglich der Wahl von Toleranzgrenzenund des Zusammenspiels mit Korrekturfaktorenund anderer Berechnungsschritte in der Steuerungbesteht Forschungsbedarf.
Die detektierten Daten werden durch die Steuerungzu Parkinformationen aufbereitet. Parkinformatio-nen können über verschiedene Kommunikations-wege den Lkw-Fahrern sowie den Logistikunter-nehmen übermittelt werden. Mit der Entwicklungdes Mobilitätsdatenmarktplatzes werden das Su-chen und Beziehen von dynamischen Daten desStraßenverkehrs für Diensteanbieter erleichtert.Damit soll sich zukünftig auch die Bereitstellungvon Parkinformationen im Fahrzeug vereinfachen.Synergien sollen sich zukünftig aus der Kombina -tion von Park- und Routeninformationen von Navi-gationsgeräten sowie der verbleibenden Lenkzeitergeben. Ableiten lassen sich individuelle Parkemp-fehlungen innerhalb des vorausliegenden Stre -ckenabschnittes.
Mit der Entwicklung neuer Detektions- und Steue-rungsverfahren für Parkinformationen stand die
63
Frage nach Bewertungsgrößen und Bewertungs-verfahren im Raum. Einen weiteren Berichts-schwerpunkt bilden daher Empfehlungen für dieUmsetzung eines einheitlichen Bewertungsverfah-rens für telematische Systeme auf Rastanlagen anBAB. Das Bewertungsverfahren erlaubt – im Ge-gensatz zu Prüfungen gemäß Technischen Liefer-bedingungen für Streckenstationen (TLS) –, denFokus auf die Bewertung des Gesamtkonzeptes zulegen, d. h., das Zusammenspiel von Detektion,Steuerungsverfahren und Kommunikation zumVerkehrsteilnehmer kann systematisch analysiertwerden. Notwendig ist dieses Vorgehen, da zur Er-mittlung der Parkinformation mehr als ein Sensorbenötigt wird und somit die eigentliche Informati-onsqualität vom Zusammenspiel mindestens zwei-er Sensoren, aber auch den darauf aufbauendenSteuerungsverfahren abhängt. Durch die Festle-gung einheitlicher Rahmenbedingungen für die Be-wertung insbesondere bei der Referenzdatenerhe-bung lassen sich zudem die Bewertungsergebnis-se verschiedener Telematiksysteme vergleichen.
Aktuell bedarf es noch der Validierung insbesonde-re der Grenzen der Güteklassen. Dies soll in Ab-stimmung mit den Ländern erfolgen. Zudem ist dieAnwendung des Bewertungskonzeptes in den be-stehenden Pilotprojekten vorgesehen. Anschlie-ßend wird es erforderlich sein, ein Schema zu ent-wickeln, unter welchen Randbedingungen welcheInformationsqualitätsstufe zu fordern ist. Hierbeisollen dann die Lage und Größe der Rastanlage,die geplanten Parkinformationen und die mög -lichen Einflussfaktoren der Steuerung berücksich-tigt werden.
Der Fokus weiterer systematischer Auswertungenist es, mit zunehmendem Verbreitungsgrad dieWirksamkeit der Systeme, insbesondere Strecken-steuerungen, statistisch zu ermitteln.
Der zunächst grob skizzierte Vorschlag für dieStreckensteuerung, ausgehend von der Datener-fassung bis hin zur Informationsverbreitung zumVerkehrsteilnehmer, bedarf der Weiterentwicklungund Verfeinerung. Erforderliche Standardisierun-gen des DATEX-II-Profils für Parkinformationenhaben begonnen. Die Entwicklung von Parkinfor-mationskonzepten bettet sich in internationale Ent-wicklungen ein. Insbesondere das Informations-konzept für den Verkehrsteilnehmer wird auch inZukunft noch im Fokus internationaler Diskussio-nen stehen.
Diskussions- und Abstimmungsbedarf besteht auchmit Anbietern von Informationsdiensten. Konzeptesind zu entwickeln, die sicherstellen, dass mög-lichst viele Verkehrsteilnehmer Parkinformationenerhalten. Inhaltlich sollten sich diese nicht wider-sprechen. Die Entwicklungen im Endgerätemarktsollten auf Basis einfacher Parkinformationen zu-künftige individuelle Empfehlungen für den Nutzeranstreben. Dieses Ziel kann nur durch intensive Ab-stimmungen zwischen Datenerhebung (seitens derLänder/Verkehrsrechnerzentralen) und Bereitstel-lung von Parkinformationen durch private Dienste-anbieter erreicht werden.
Als Koordinierungsstelle der deutschen LocationCode List und Mitglied in der internationalen Traveller Information Services Associtation unter-stützt die BASt die Weiterentwicklung von Dienstenzur Bereitstellung von Parkinformationen in dieFahrzeuge.
Weiteres Ergebnis bisheriger Tätigkeiten der BAStist die Entwicklung eines neuen Steuerungsverfah-rens „Kompaktparken“, welches das vorhandeneSpektrum telematischer Systeme auf Rastanlagensinnvoll ergänzt. Kompaktparken basiert, wie auchKolonnenparken, auf der Idee, durch zeitliches Sor-tieren mehr parkende Lkw auf kleinem Raum zuplatzieren, die Flächen von Fahrgassen einzuspa-ren und geordnetes, sicheres Parken zu unterstüt-zen.
Beim Kompaktparken parken Lkw dicht hinterei -nander, welche zur selben Zeit oder später als dievor ihnen parkenden Lkw die Rastanlage verlassenwollen. Mittels dynamischer Anzeigen werden infreien Parkstandsreihen voraussichtlich nachge-fragte Abfahrtszeiten für Kurz- und Langzeitparkerangeboten. Füllt sich der Parkbereich, wird das An-gebot auf die am stärksten nachgefragten Abfahrts-zeiten reduziert. Ankommende Fahrer entscheidenanhand ihrer geplanten Abfahrtszeit und ihrer Fahr-zeuglänge selbst, wo sie parken. Detektoren erken-nen die vollständige Belegung einer Parkstandsrei-he, sodass die dynamischen Anzeigen aktualisiertwerden.
Das Steuerungsverfahren „Kompaktparken“ wird ineinem gesonderten Arbeitsprogramm der BASt wei-terentwickelt, um die zeitnahe technische Erpro-bung zu ermöglichen. Vorgesehen ist eine erste Pilotanwendung auf einer Rastanlage in Bayern ab2014. Zudem erfolgen Auswertungen zur Wirksam-keit und Wirtschaftlichkeit des Verfahrens.
64
Das vorliegende Wissenspapier fasst den Stand derEntwicklungen zum Berichtszeitpunkt im Oktober2013 zusammen. Eine regelmäßige inhaltliche Fort-schreibung und Aktualisierung sind beabsichtigt.
7 LiteraturABS, J. (2013): Telematisches Lkw-Parken auf
Bundesautobahnen, Vortrag im Rahmen derVeranstaltung „Intelligente Verkehrs-Systeme imStraßenverkehr“ – Nationale IVS-Konferenz am26. Februar 2013 im BMVBS Berlin
ADAC (2012): Herzlich willkommen als Parkplatz-und Staumelder des ADAC, Zugriff am 23.05.2012, http://www.adac.de
Bergische Universität Wuppertal (2003): Sicher-heits- und Betriebserfordernisse beim Bau von Rastanlagen der Bundesautobahnen (FE02.0201/2000/MRB)
BERGT, M., GATHER, M., LÜTTMERDING, A.,RÄDER-GROßMANN, T. (2008): Belegung derAutobahnparkplätze durch Lkw in Thüringen –Phase II: Konkretisierung der Maßnahmenemp-fehlungen. Auftraggeber: Thüringer Landesamtfür Bau und Verkehr, Oktober 2008
BMW (2013): BMW-Techniklexikon – Navigations-system. Verfügbar unter: http://www.bmw-diplomatic-sales.com/de/de/insights/technology/technology_guide_2012/articles/navigation_system.html
BR (2011): Digitalradio – Testphase für Verkehrs -infodienst TPEG, Bayerischer Rundfunk. Ver-fügbar unter: http://www.br.de/unternehmen/inhalt/technik/digitalradio-verkehrsinfo-tpeg100.html
Bundesanstalt für Straßenwesen (BASt), 1999:Merkblatt für die Ausstattung von Verkehrsrech-nerzentralen und Unterzentralen
Bundesanstalt für Straßenwesen (BASt), 2012:Technische Lieferbedingungen für Streckensta-tionen,Ausgabe 2012, FGSV-Verlag, Bekannt-machung BMV ARS 2/2013 vom 03.01.2013
Bundesanstalt für Straßenwesen (BASt), 2008:Konzept für eine einheitliche Beschilderung zurdynamischen Anzeige freier Lkw-Parkstände aufRastanlagen an Bundesautobahnen, Entwurfvom 19.08.2008; unveröffentlicht
Bundesanstalt für Straßenwesen (BASt), 2013: Location Code List/Event Code List, Zugriff am10.06.2013; www.bast.de
Bundesministerium für Verkehr, Bau und Stadtent-wicklung (2008): Parksituation für Lkw auf BABin Deutschland in den Nachtstunden, Zugriff am17.07.2013, www.bmvbs.de
Bundesministerium für Verkehr, Bau und Stadtent-wicklung (2010): Aktionsplan Güterverkehr undLogistik – Logistikinitiative für Deutschland, Bro-schüre, November 2010, Herausgeber Bundes-ministerium für Verkehr, Bau und Stadtentwick-lung, Bonn
Bundesministerium für Verkehr, Bau und Stadtent-wicklung (2012): Lkw-Parken in einem moder-nen, bedarfsgerechten Rastanlagensystem,Broschüre. Hrsg.: Bundesministerium für Ver-kehr, Bau und Stadtentwicklung, Bonn
Bundesministerium für Verkehr, Bau und Woh-nungswesen (1997): Richtlinie für Wechselver-kehrszeichenanlagen an Bundesfernstraßen(RWVA), Verkehrsblatt – Dokument Nr. B 6740
Bundesministerium für Verkehr, Bau und Woh-nungswesen (2000): Richtlinie für den Verkehrs-warndienst, Verkehrsblatt 2000, S. 642
CEN-EN-ISO 14819-1 (2003): Traffic and TravelerInformation (TTI) – TTI Messages via trafficmessage coding – Part 1: Coding protocol forRadio Data System – Traffic Message Channel(RDS-TMC) – RDS-TMC using ALERT-C
CEN-EN ISO 14819-2 (2003): Traffic and TravelerInformation (TTI) – TTI Messages via trafficmessage coding – Part 2: Event and informationcodes for Radio Data System – Traffic MessageChannel (RDS-TMC)“
CEN-EN ISO 14819-3 (2003): Traffic and TravelerInformation (TTI) – TTI Messages via trafficmessage coding – Part 3: Location Referencingfor ALERT-C
DATEX (2013): DATEX II Profil für IntelligentesLkw-Parken (ITP). Version 00-01-00, unveröf-fentlichter Entwurf, Stand: 20.06.2013
DÖGE, K.-P., KRIMMLING, J. (2012): Experienceswith Video-Based Parking Space Surveilannce;19th ITS World Congress and Exhibition on Intelligent Transport Systems and Services,Wien, Oktober 2012
65

Europäische Patentschrift EP 1 408 455 B1 (2007):Anlage zur optimalen Ausnutzung des Parkrau-mes von Parkplätzen für Kraftfahrzeuge, Patent-inhaber MANNS, Klaus, Dr.
Europäische Union (2006): Verordnung (EG) Nr.561/2006 des Europäischen Parlaments unddes Rates vom 15. März 2006 zur Harmonisie-rung bestimmter Sozialvorschriften im Straßen-verkehr und zur Änderung der Verordnung(EWG) Nr. 3821/85 und (EG) Nr. 2135/98 desRates sowie zur Aufhebung der Verordnung(EWG) Nr. 3820/85 des Rates. Amtsblatt der Europäischen Kommission vom 11.04.2006
Europäische Union (2013): Commission delegatedregulation (EU) C(2013) 2549 final No …/... of15.5.2013 supplementing ITS Directive 2010/40/EU of the European Parliament and of theCouncil with regard to the provision of information services for safe and secure parkingplaces for trucks and commercial vehicles; Zu-griff am 25.07.2013 verfügbar unter: http://ec.europa.eu/transport/themes/its/news/doc/c%282013 %292549_en.pdf;
EVERS, C. (2009): Auswirkungen von arbeitsbezo-genen Belastungen und Stress auf das Ver-kehrsverhalten von Lkw-Fahrern, Berichte derBundesanstalt für Straßenwesen, Heft M 204
EVERS, C. & AUERBACH, K. (2006): Übermüdungals Ursache schwerer Lkw-Unfälle, Zeitschrift fürVerkehrssicherheit, 52, 67-70.
FH Erfurt (2012): Telematische Lösungen zur Über-belegung von Lkw-Parkplätzen an Bundesauto-bahnen (TeleLaB), Zugriff am 23.04.2012, http://www.fh-erfurt.de/
FOLLMANN, J., MENGE, J. (2009): Verbesserungder Parkmöglichkeiten für Lkw an Autobahnen.Straßenverkehrstechnik, Heft 1/2009 Kirsch-baumverlag, Bonn, S. 25-31
Forschungsgesellschaft für Straßen- und Verkehrs-wesen – FGSV (2006): Hinweise zur Qualitäts-anforderung und Qualitätssicherung der lokalenVerkehrsdatenerfassung für Verkehrsbeeinflus-sungsanlagen, FGSV-Verlag, FGSV-Nr.: FGSV386
Forschungsgesellschaft für Straßen- und Verkehrs-wesen – FGSV (2010): Hinweise zur kurzzei tigenautomatischen Erfassung von Daten des Stra-ßenverkehrs, FGSV-Verlag, FGSV-Nr.: FGSV
Forschungsgesellschaft für Straßen- und Ver-kehrswesen – FGSV (2012): Begriffsbestim-mungen – Teil Verkehrsplanung, Straßenent-wurf und Straßenbetrieb; FGSV-Verlag, FGSV-Nr.: FGSV 220
HARTUNG, J. (1991): Statistik – Lehr- und Hand-buch der angewandten Statistik, 8. Auflage, R.Oldenburg Verlag
ISL Baltic Consult (2009): TechnologieoptimiertesLkw-Parken in Schleswig-Holstein, Auftrag -geber: Ministerium für Wissenschaft, Wirtschaftund Verkehr des Landes Schleswig-Holstein
ISL Baltic Consult, Urbane Resourcen (2011): Eva-luierung von Pilotprojekten zu telematischenVerfahren für Lkw-Parken auf Bundesautobah-nen, zweiter Zwischenbericht, FE 230010 imAuftrag der Bundesanstalt für Straßenwesen;(unveröffentlicht)
KLEINE, J. (2007): Vorstudie zur Qualitätsbewer-tung von Verkehrsinformationen, Schlussberichtdes Forschungsprojektes F1100.6206000 (un-veröffentlicht)
KLEINE, J., LEHMANN, R. (2009): Neuer telemati-scher Steuerungsansatz für das Parkraum -management von Lkw auf Rastanlagen an Bun-desautobahnen. In: Straßenverkehrstechnik,Heft 12/2009
KLEINE, J. LEHMANN, R., RITTERSHAUS, L.(2010): Telematiksysteme zur Verbesserung derKapazität und Auslastung von Rast- und Park-platzanlagen an BAB, Schlussbericht des For-schungsprojektes F1100.6508024 (unveröffent-licht)
KREMTZ, L. (2011): Evaluation von Pilotanlagenzur automatischen Detektion der Lkw-Parkplatz-belegung, Masterarbeit, Fachhochschule Erfurt
KÜHNEN, M. A. (2006): Autobahnverzeichnis(AVERZ) 2006, Berichte der Bundesanstalt fürStraßenwesen, Heft V 154
LÜTTMERDING, A., GATHER, M., HEINITZ, F.,HESSE, N. (2008): Belegung der Autobahnpark-plätze durch Lkw in Thüringen – Bestandsauf-nahme und grundsätzliche Maßnahmenempfeh-lungen, Berichte des Instituts Verkehr undRaum, Band 3, 2008
66
MAIER, F., ROTH, C. (2008): Fahrzeugwiederer-kennung unter Verwendung der Signaturen ausInduktivschleifendetektoren. In: Straßenver-kehrstechnik Heft 2/2008
M+C Lkw-Parksysteme GmbH & CoKG, 2013: Telematisch gesteuertes Lkw-Parken (Lkw-Kolonnen-Parken); Zugriff am 19.07.2013 http://www.lkw-parken.de/
MDM (2011): Mobilitäts-Daten-Marktplatz, das Pro-jekt: Eine Plattform für alle Marktteilnehmer. Zu-griff am 19.07.2013 www.mdm-portal.de
MDM (2013a): Mobilitäts-Daten-Marktplatz, Benut-zerhandbuch, Version 1.6.1. Verfügbar unter:http://hilfe.mdm-portal.de/startseite/dokumentation.html
MDM (2013b): Mobilitäts-Daten-Marktplatz, Techni-sche Schnittstellenbeschreibung, Version 2.3.1.Verfügbar unter: http://hilfe.mdm-portal.de/startseite/dokumentation.html
REILING, G. (2013): Aufbruch ins digitale Zeitalter.In: Automotive-IT vom 08.09.2103
TISA (2013): Intelligent Transport Systems (ITS) —Traffic and Travel Information (TTI) via TransportProtocol Experts Group, Generation 2 (TPEG2)– Part 14: Parking Information (TPEG2-PKI_1.1/001), SP13009 TPEG2 PKI 20130315.TISA-Spezifikation, Entwurf für ISO/TS 21219Part 14, 15.03.2013.
SACHS, L. (1992): Angewandte Statistik – Anwen-dung statistischer Methoden, 7. Auflage, Sprin-ger Verlag
Verwaltungsvorschrift zur Straßenverkehrsordnung(VwV-StVO 2001), Verkehrsblatt, Dokumenta -tion Nr. B3404, Version 01/01
67

68
Schriftenreihe
Berichte der Bundesanstaltfür Straßenwesen
Unterreihe „Verkehrstechnik“
2009V 176: Bestimmung der vertikalen Richtcharakteristik der Schall-abstrahlung von Pkw, Transportern und LkwSchulze, Hübelt 13,00
V 177: Sicherheitswirkung eingefräster Rüttelstreifen entlang der BAB A24Lerner, Hegewald, Löhe, Velling 13,50
V 178: Verkehrsentwicklung auf Bundesfernstraßen 2007 – Jah-resauswertung der automatischen DauerzählstellenFitschen 26,00
V 179: Straßenverkehrszählung 2005: MethodikKathmann, Ziegler, Thomas 15,50
V 180: Verteilung von Tausalzen auf der FahrbahnHausmann 14,50
V 181: Vorraussetzungen für dynamische Wegweisung mit integ-rierten Stau- und ReisezeitinformationenHülsemann, Krems, Henning, Thiemer 18,50
V 182: Verkehrsqualitätsstufenkonzepte für Hauptverkehrsstra-ßen mit straßenbündigen Stadt-/StraßenbahnkörpernSümmermann, Lank, Steinauer, M. Baier,R. Baier, Klemps-Kohnen 17,00
V 183: Bewertungsverfahren für Verkehrs- und Verbindungsqua-litäten von HauptverkehrsstraßenLank, Sümmermann, Steinauer, Baur, Kemper, Probst,M. Baier, R. Baier, Klemps-Kohnen, Jachtmann, Hebel 24,00
V 184: Unfallrisiko und Regelakzeptanz von FahrradfahrernAlrutz, Bohle, Müller, Prahlow, Hacke, Lohmann 19,00
V 185: Möglichkeiten zur schnelleren Umsetzung und Priorisie-rung straßenbaulicher Maßnahmen zur Erhöhung der Verkehrs-sicherheitGerlach, Kesting, Thiemeyer 16,00
V 186: Beurteilung der Streustoffverteilung im WinterdienstBadelt, Moritz 17,00
V 187: Qualitätsmanagementkonzept für den Betrieb der Verkehrs-rechnerzentralen des BundesKirschfink, Aretz 16,50
2010V 188: Stoffeinträge in den Straßenseitenraum – ReifenabriebKocher, Brose, Feix, Görg, Peters, Schenker 14,00
V 189: Einfluss von verkehrsberuhigenden Maßnahmen auf die PM10-Belastung an StraßenDüring, Lohmeyer, Pöschke, Ahrens, Bartz, Wittwer,Becker, Richter, Schmidt, Kupiainen, Pirjola,Stojiljkovic, Malinen, Portin 16,50
V 190: Entwicklung besonderer Fahrbahnbeläge zur Beeinflus-sung der GeschwindigkeitswahlLank, Steinauer, Busen 29,50Dieser Bericht liegt nur in digitaler Form vor und kann kostenpflich-tig unter www.nw-verlag.de heruntergeladen werden.
V 191: Verkehrsentwicklung auf Bundesfernstraßen 2008Fitschen, Nordmann 27,00Dieser Bericht ist als Buch und als CD erhältlich oder kann ferner als kostenpflichtiger Download unter www.nw-verlag.de herunter-geladen werden.
V 192: Anprall von Pkw unter großen Winkeln gegen Fahrzeu-grückhaltesystemeGärtner, Egelhaaf 14,00
V 193: Anprallversuche an motorradfahrerfreundlichen Schutz-einrichtungenKlöckner 14,50
V 194: Einbindung städtischer Verkehrsinformationen in ein regi-onales VerkehrsmanagementAnsorge, Kirschfink, von der Ruhren, Hebel, Johänning 16,50
V 195: Abwasserbehandlung an PWC-AnlagenDieser Bericht liegt nur in digitaler Form vor und kann kostenpflich-tig unter www.nw-verlag.de heruntergeladen werden.Londong, Meyer 29,50
V 196: Sicherheitsrelevante Aspekte der StraßenplanungBark, Kutschera, Baier, Klemps-Kohnen E 16,00
V 197: Zählungen des ausländischen Kraftfahrzeugverkehrs auf den Bundesautobahnen und Europastraßen 2008Lensing 16,50
V 198: Stoffeintrag in Straßenrandböden – Messzeitraum 2005/2006Kocher, Brose, Chlubek, Karagüzel, Klein, Siebertz 14,50
V 199: Stoffeintrag in Straßenrandböden – Messzeitraum 2006/2007Kocher, Brose, Chlubek, Görg, Klein, Siebertz 14,00
V 200: Ermittlung von Standarts für anforderungsgerechte Da-tenqualität bei VerkehrserhebungenBäumer, Hautzinger, Kathmann, Schmitz,Sommer, Wermuth 18,00
V 201: Quantifizierung der Sicherheitswirkungen verschiedener Bau-, Gestaltungs- und Betriebsformen auf LandstraßenVieten, Dohmen, Dürhager, Legge 16,00
2011V 202: Einfluss innerörtlicher Grünflächen und Wasserflächen auf die PM10-BelastungEndlicher, Langner, Dannenmeier, Fiedler, Herrmann,Ohmer, Dalter, Kull, Gebhardt, Hartmann 16,00
V 203: Bewertung von Ortsumgehungen aus Sicht der Verkehrs-sicherheitDohmen, Vieten, Kesting, Dürhager, Funke-Akbiyik 16,50
V 204: Einfluss von Straßenrandbegrünung auf die PM10-Belas-tungBracke, Reznik, Mölleken, Berteilt, Schmidt 22,00Dieser Bericht liegt nur in digitaler Form vor und kann kostenpflich-tig unter www.nw-verlag.de heruntergeladen werden.
V 205: Verkehrsentwicklung auf Bundesfernstraßen 2009Fitschen, Nordmann 27,50Dieser Bericht ist sowohl als gedrucktes Heft der Schriftenreihe als auch als CD erhältlich oder kann außerdem als kostenpflichtiger Download unter www.nw-verlag.de heruntergeladen werden.
V 206: Sicherheitspotenzialkarten für Bundesstraßen nach den ESNFärber, Lerner, Pöppel-Decker 14,50
V 207: Gestaltung von Notöffnungen in transportablen Schutz-einrichtungenBecker 16,00
V 208: Fahrbahnquerschnitte in baulichen Engstellen von Orts-durchfahrtenGerlach, Breidenbach, Rudolph, Huber, Brosch, Kesting 17,50

V 209: Stoffeintrag in Straßenrandböden – Messzeitraum 2008/2009Beer, Surkus, Kocher 14,50
2012V 210: Schmale zweibahnig vierstreifige Landstraßen (RQ 21)Maier, Berger 18,50
V 211: Innliegende Linkseinfädelungsstreifen an plangleichen Knotenpunkten innerorts und im Vorfeld bebauter GebieteRichter, Neumann, Zierke, Seebo 17,00
V 212: Anlagenkonzeption für Meistereigehöfte – Optimierung von ArbeitsabläufenSchmauder, Jung, Paritschkow 19,00
V 213: Quantifizierung von Verkehrsverlagerungen durch Bau-stellen an BABLaffont, Mahmoudi, Dohmen, Funke-Akbiyik, Vieten 18,00
V 214: Vernetzungseignung von Brücken im Bereich von Lebens-raumkorridorenSchmellekamp, TegethofDieser Bericht liegt nur in digitaler Form vor und kann unter http://bast.opus.hbz-nrw.de/ heruntergeladen werden.
V 215: Stauprävention auf BAB im WinterKirschfink, Poschmann, Zobel, Schedler 17,00
V 216: Verbesserung der Verkehrssicherheit auf einbahnig zwei-streifigen Außerortsstraßen (AOSI)Lippold, Weise, Jährig 17,50
V 217: Verbesserung der Bedingungen für Fußgänger an Lichtsi-gnalanlagenAlrutz, Bachmann, Rudert, Angenendt, Blase,Fohlmeister, Häckelmann 18,50
V 218: Empfehlungen zum richtigen Aufbringen von Tausalzlö-sungenHausmann 16,00
V 219: Bewältigung großer Verkehrsmengen auf Autobahnen im WinterRoos, Zimmermann, Schulz, Riffel 16,50
2013V 220: Maßnahmen zur Bewältigung der besonderen psychischen Belastung des Straßenbetriebsdienstpersonals – PilotstudiePöpping, Pollack, Müller 16,00
V 221: Bemessungsverkehrsstärken auf einbahnigen LandstraßenArnold, Kluth, Ziegler, Thomas 18,50
V 222: Aktualisierung des MLuS 02 – Erstellung der RLuSDüring, Flassak, Nitzsche, Sörgel, Dünnebeil, Rehberger 19,50
V 223: Verkehrsentwicklung auf Bundesfernstraßen 2010Fitschen, Nordmann 16,50Dieser Bericht ist sowohl als gedrucktes Heft der Schriftenreihe als auch als CD erhältlich oder kann außerdem als kostenpflichtiger Download unter www.nw-verlag.de heruntergeladen werden.
V 224: Prüfung und Bewertung von Schutzeinrichtungen der Auf-haltestufe H4b für den Einsatz auf Brücken – Teil 1 und 2Bergerhausen, Klostermeier, Klöckner, Kübler 19,00
V 225: Neue Technik für den Straßenbetriebsdienst –Teil 1: Neue Informations- und KommunikationstechnikenTeil 2: Autonomes Fahren für den StraßenbetriebsdienstHolldorb, Häusler, Träger 21,50
V 226: Bewertungsmodell für die Verkehrssicherheit von Land-straßenMaier, Berger, Schüller, Heine 18,00
V 227: Radpotenziale im StadtverkehrBaier, Schuckließ, Jachtmann, Diegmann,Mahlau, Gässler 17,00
V 228: Sicherheitskenngrößen für den RadverkehrBaier, Göbbels, Klemps-Kohnen 15,50
V 229: Straßenverkehrszählungen (SVZ) mit mobilen Mess-Sys-temenSchmidt, Frenken, Hellebrandt, Regniet, Mahmoudi 20,50
V 230: Verkehrsadaptive NetzsteuerungenHohmann, Giuliani, Wietholt 16,50
V 231: Verkehrsentwicklung auf Bundesfernstraßen 2011Fitschen, Nordmann 28,50Dieser Bericht ist sowohl als gedrucktes Heft der Schriftenreihe als auch als CD erhältlich oder kann außerdem als kostenpflichtiger Download unter www.nw-verlag.de heruntergeladen werden.
V 232: Reflexkörper und Griffigkeitsmittel in Nachstreumittelge-mischen für Markierungssysteme Recknagel, Eichler, Koch, Proske, Huth 23,50
V 233: Straßenverkehrszählung 2010 – ErgebnisseLensing 16,00
V 234: Straßenverkehrszählung 2010 – MethodikLensing 17,50
2014 V 235: Dynamische Messung der Nachtsichtbarkeit von Fahr-bahnmarkierungen bei NässeDrewes, Laumer, Sick, Auer, Zehntner 16,00
V 236: Verkehrsentwicklung auf Bundesfernstraßen 2012Fitschen, Nordmann 28,50Die Ergebnisdateien sind auch als CD erhältlich oder können au-ßerdem als kostenpflichtiger Download unter www.nw-verlag.de heruntergeladen werden.
V 237: Monitoring von Grünbrücken – Arbeitshilfe für den Nach-weis der Wirksamkeit von Grünbrücken für die Wiedervernetzung im Rahmen der KP II – MaßnahmenBund-Länder ArbeitskreisDieser Bericht liegt nur in digitaler Form vor und kann unter http://bast.opus.hbz-nrw.de/ heruntergeladen werden. Der Anhang ist interaktiv. Das heißt er kann ausgefüllt und gespeichert werden.
V 238: Optimierung der Arbeitsprozesse im Straßenbetriebs-dienst – SommerdienstSchmauder, Jung, Paritschkow 19,00
V 239: Dynamische Messung der Griffigkeit von Fahrbahnmar-kierungenSteinauer, Oeser, Kemper, Schacht, Klein 16,00
V 240: Minikreisverkehre – Ableitung ihrer Einsatzbereiche und EinsatzgrenzenBaier, Leu, Klemps-Kohnen, Reinartz, Maier, Schmotz in Vorbereitung
V 241: Rastanlagen an BAB – Verbesserung der Auslastung und Erhöhung der Kapazität durch TelematiksystemeKleine, Lehmann, Lohoff, Rittershaus 16,50
Alle Berichte sind zu beziehen im:
Carl Schünemann Verlag GmbHZweite Schlachtpforte 728195 BremenTel. (0421) 3 69 03-53Fax (0421) 3 69 03-48www.schuenemann-verlag.de
Dort ist auch ein Komplettverzeichnis erhältlich.