Prof. Konstantin Meyl -- Elektromagnetische Umweltverträglichkeit Teil2 (InhaltsVZ)
description
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 1/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 1/17
Regelungstechnik 2 für EITTeil 2: Grundlagen der Signalabtastung
Version 1.0
Prof. Dr. David Zogg
Institut für Automation IA
Hochschule für Technik
Fachhochschule Nordwestschweiz
Windisch, Januar 2012
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 2/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 2/17
Dokumentenkontrolle
Änderungen
Version Datum Autoren Bemerkung
1.0 11.01.2012 David Zogg Erstellung
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 3/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 3/17
1. Zweck 4 2. Referenzen 4 3. Symbol- und Abkürzungsverzeichnis 4 4. Einführung 6 4.1. Lernziele 6 4.2. Praxisbeispiel „Prüfstand mit vertikaler Linearachse“ 6 4.3. Vom zeitdiskreten Regelkreis zum Abtast-/Halteglied 8 4.4. Zeitdiskreter PID-Regler 10 4.5. Rekursive Form des zeitdiskreten PID-Reglers 11 4.6. Anwendung auf Bandwebmaschine 12 4.7. Zusammenfassung 17
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 4/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 4/17
1. Zweck
Das vorliegende Skript dient als Grundlage für das Modul „Regelungstechnik 2“ (rt2) im6. Semester des Studiengangs Elektro- und Informationstechnik (EIT).
Im Modul „Regelungstechnik 1“ (rt1) des 5. Semesters wurde die Auslegung von zeitkon-tinuierlichen PID- und Zustandsreglern behandelt. Das vorliegende Modul „Regelungs-technik 2“ (rt2) befasst sich nun mit der zeitdiskreten Darstellung.
Im vorliegenden zweiten Teil werden die Grundlagen der Signalabtastung vermittelt.
2. Referenzen
[ 1 ] H. Mann, H. Schiffelgen, R. Froriep: Einführung in die Regelungstechnik, 11. Auf-lage, Hanser Verlag, München 2009
[ 2 ] M. Reuter, S. Zacher: Regelungstechnik für Ingenieure, 12. Auflage, Vie- weg+Teubner Verlag, Wiesbaden 2008
[ 3 ] H. Gassmann: Theorie der Regelungstechnink, 2. Auflage, Verlag Harri Deutsch,Rapperswil/Frankfurt 2003
[ 4 ] H.P. Geering: Regelungstechnik, 3. Auflage, Springer Verlag, Zürich/Berlin 1994
3. Symbol- und Abkürzungsverzeichnis
A Aktuator
A/D Analog-Digital-Wandler
CAN Controller Area Network (Realtime-Bussystem)
D/A Digital-Analog-Wandler
e Regelfehler
FOH First Order Hold (Abtastung erster Ordnung)
G Strecke (Übertragungsfunktion)
K Regler (Übertragungsfunktion)
K P Verstärkung P-Anteil
K I Verstärkung I-Anteil
K D Verstärkung D-Anteil
MU Messumformer
PWM Pulse Width Modulation (Pulsbreitenmodulation)
S Sensor
s Laplace-Operator
T A Abtastzeit
T T Totzeit
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 5/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 5/17
T N Nachstellzeit (I-Anteil)
T V Vorhaltezeit (D-Anteil)
u Eingangsgrösse (Stellgrösse, Steuergrösse)
w Führungsgrösse (Sollwert)
x Zustandsgrösse
y Ausgangsgrösse (Messgrösse, Istwert) ZOH Zero Order Hold (Abtastung nullter Ordnung)
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 6/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 6/17
4. Einführung
4.1. Lernziele
Lernziel Taxonomiestufe (Bloom) Wesentliche Schritte der Signalabtastung im diskreten
Regelkreis begreifen
Verständnis
Gleichungen des zeitdiskreten PID-Reglers verstehen Verständnis
Zeitdiskreten PID-Regler implementieren können Anwendung
4.2. Praxisbeispiel „Prüfstand mit vertikaler Linearachse“
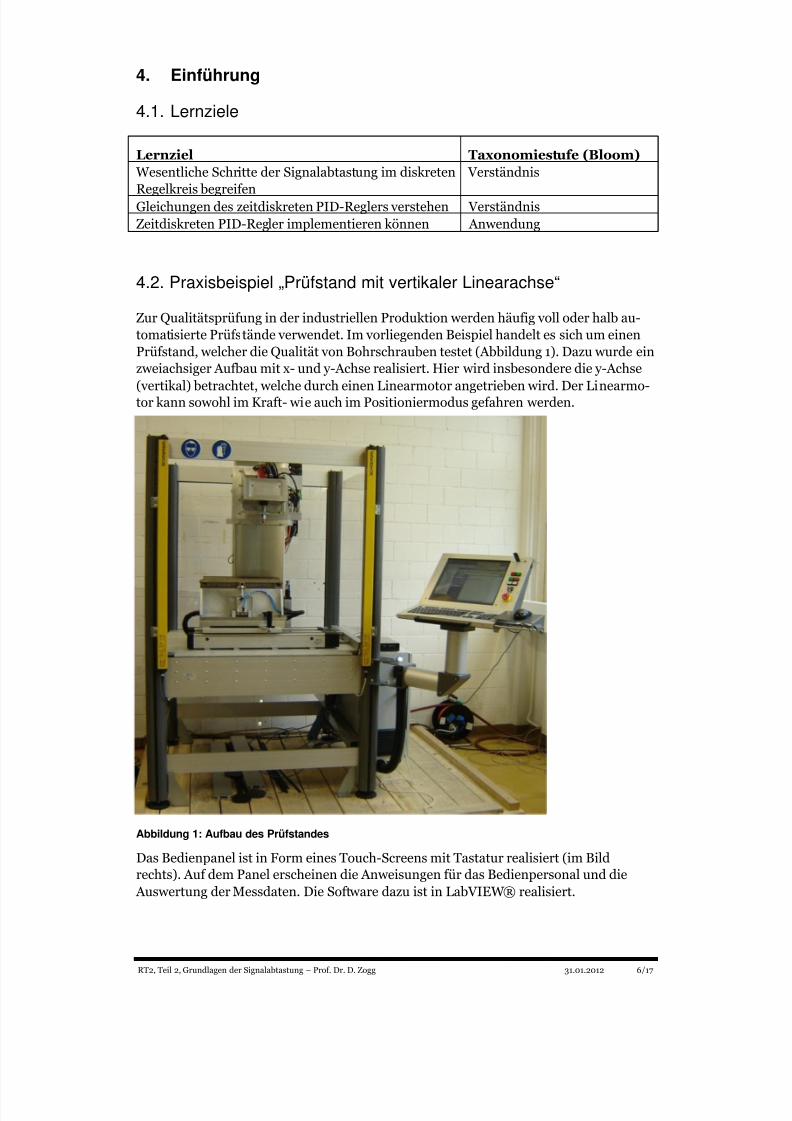
Zur Qualitätsprüfung in der industriellen Produktion werden häufig voll oder halb au-
tomatisierte Prüfstände verwendet. Im vorliegenden Beispiel handelt es sich um einen
Prüfstand, welcher die Qualität von Bohrschrauben testet (Abbildung 1). Dazu wurde ein
zweiachsiger Aufbau mit x- und y-Achse realisiert. Hier wird insbesondere die y-Achse
(vertikal) betrachtet, welche durch einen Linearmotor angetrieben wird. Der Linearmo-tor kann sowohl im Kraft- wie auch im Positioniermodus gefahren werden.
Abbildung 1: Aufbau des Prüfstandes
Das Bedienpanel ist in Form eines Touch-Screens mit Tastatur realisiert (im Bild
rechts). Auf dem Panel erscheinen die Anweisungen für das Bedienpersonal und die
Auswertung der Messdaten. Die Software dazu ist in LabVIEW® realisiert.
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 7/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 7/17
Die Maschinenrichtlinie schreibt vor, dass Massnahmen zum Schutz des Bedienperso-
nals getroffen werden. Deshalb wurde ein Lichtvorhang sowie ein Not-Aus-Knopf in
Reichweite des Bedienpersonals implementiert. Diese Vorrichtungen müssen hardware-
mässig alle Antriebe der Achsen blockieren. Somit ist ein sicherer halbautomatischer
Betrieb gewährleistet.
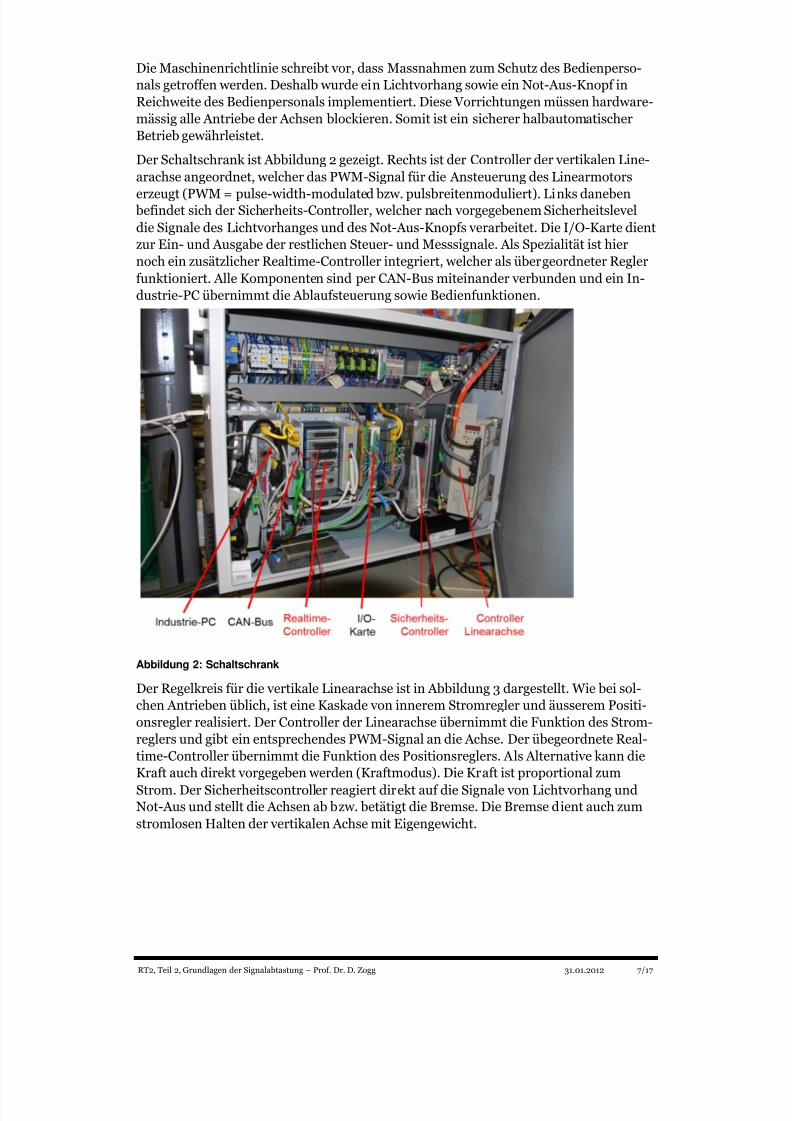
Der Schaltschrank ist Abbildung 2 gezeigt. Rechts ist der Controller der vertikalen Line-
arachse angeordnet, welcher das PWM-Signal für die Ansteuerung des Linearmotors
erzeugt (PWM = pulse-width-modulated bzw. pulsbreitenmoduliert). Links daneben befindet sich der Sicherheits-Controller, welcher nach vorgegebenem Sicherheitslevel
die Signale des Lichtvorhanges und des Not-Aus-Knopfs verarbeitet. Die I/O-Karte dient
zur Ein- und Ausgabe der restlichen Steuer- und Messsignale. Als Spezialität ist hier
noch ein zusätzlicher Realtime-Controller integriert, welcher als übergeordneter Regler
funktioniert. Alle Komponenten sind per CAN-Bus miteinander verbunden und ein In-
dustrie-PC übernimmt die Ablaufsteuerung sowie Bedienfunktionen.
Abbildung 2: Schaltschrank
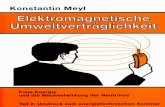
Der Regelkreis für die vertikale Linearachse ist in Abbildung 3 dargestellt. Wie bei sol-
chen Antrieben üblich, ist eine Kaskade von innerem Stromregler und äusserem Positi-
onsregler realisiert. Der Controller der Linearachse übernimmt die Funktion des Strom-
reglers und gibt ein entsprechendes PWM-Signal an die Achse. Der übegeordnete Real-
time-Controller übernimmt die Funktion des Positionsreglers. Als Alternative kann die
Kraft auch direkt vorgegeben werden (Kraftmodus). Die Kraft ist proportional zum
Strom. Der Sicherheitscontroller reagiert direkt auf die Signale von Lichtvorhang und
Not-Aus und stellt die Achsen ab bzw. betätigt die Bremse. Die Bremse dient auch zum
stromlosen Halten der vertikalen Achse mit Eigengewicht.
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 8/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 8/17
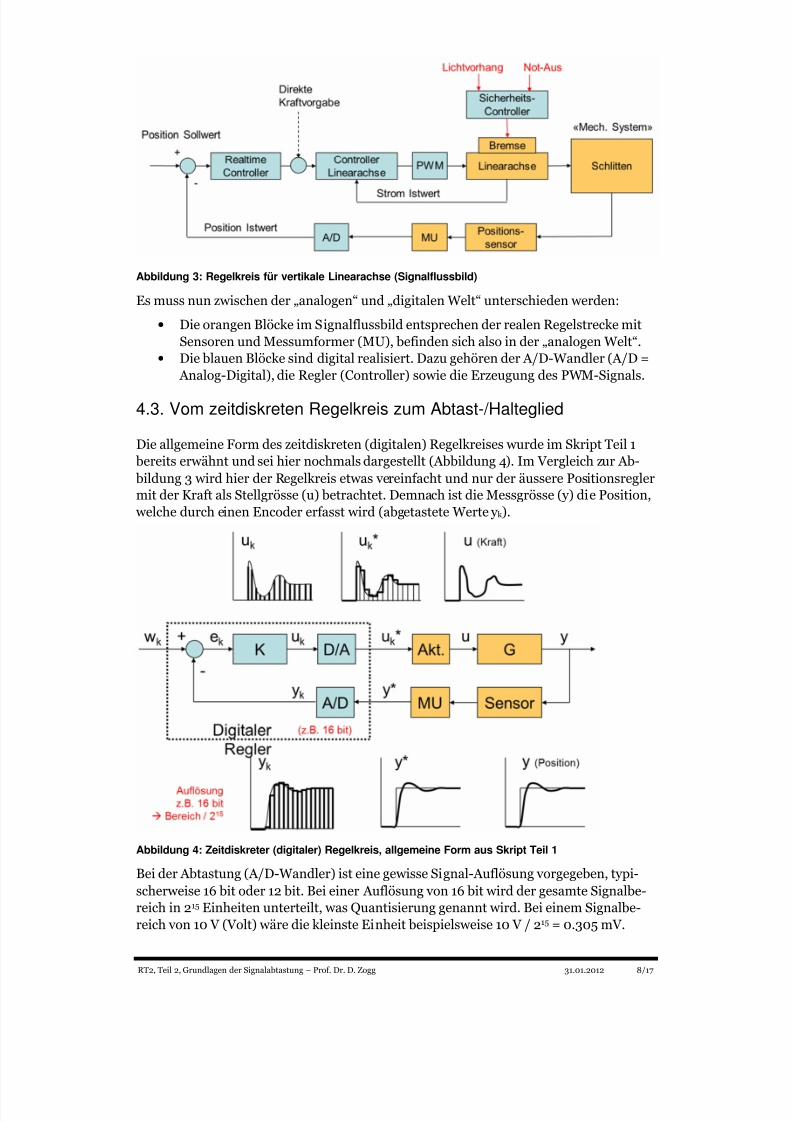
Abbildung 3: Regelkreis für vertikale Linearachse (Signalflussbild)
Es muss nun zwischen der „analogen“ und „digitalen Welt“ unterschieden werden:
• Die orangen Blöcke im Signalflussbild entsprechen der realen Regelstrecke mit
Sensoren und Messumformer (MU), befinden sich also in der „analogen Welt“.
• Die blauen Blöcke sind digital realisiert. Dazu gehören der A/D-Wandler (A/D =
Analog-Digital), die Regler (Controller) sowie die Erzeugung des PWM-Signals.
4.3. Vom zeitdiskreten Regelkreis zum Abtast-/Halteglied
Die allgemeine Form des zeitdiskreten (digitalen) Regelkreises wurde im Skript Teil 1
bereits erwähnt und sei hier nochmals dargestellt (Abbildung 4). Im Vergleich zur Ab-
bildung 3 wird hier der Regelkreis etwas vereinfacht und nur der äussere Positionsregler
mit der Kraft als Stellgrösse (u) betrachtet. Demnach ist die Messgrösse (y) die Position,
welche durch einen Encoder erfasst wird (abgetastete Werte y k ).
Abbildung 4: Zeitdiskreter (digitaler) Regelkreis, allgemeine Form aus Skript Teil 1
Bei der Abtastung (A/D-Wandler) ist eine gewisse Signal-Auflösung vorgegeben, typi-
scherweise 16 bit oder 12 bit. Bei einer Auflösung von 16 bit wird der gesamte Signalbe-
reich in 215 Einheiten unterteilt, was Quantisierung genannt wird. Bei einem Signalbe-
reich von 10 V (Volt) wäre die kleinste Einheit beispielsweise 10 V / 215 = 0.305 mV.
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 9/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 9/17
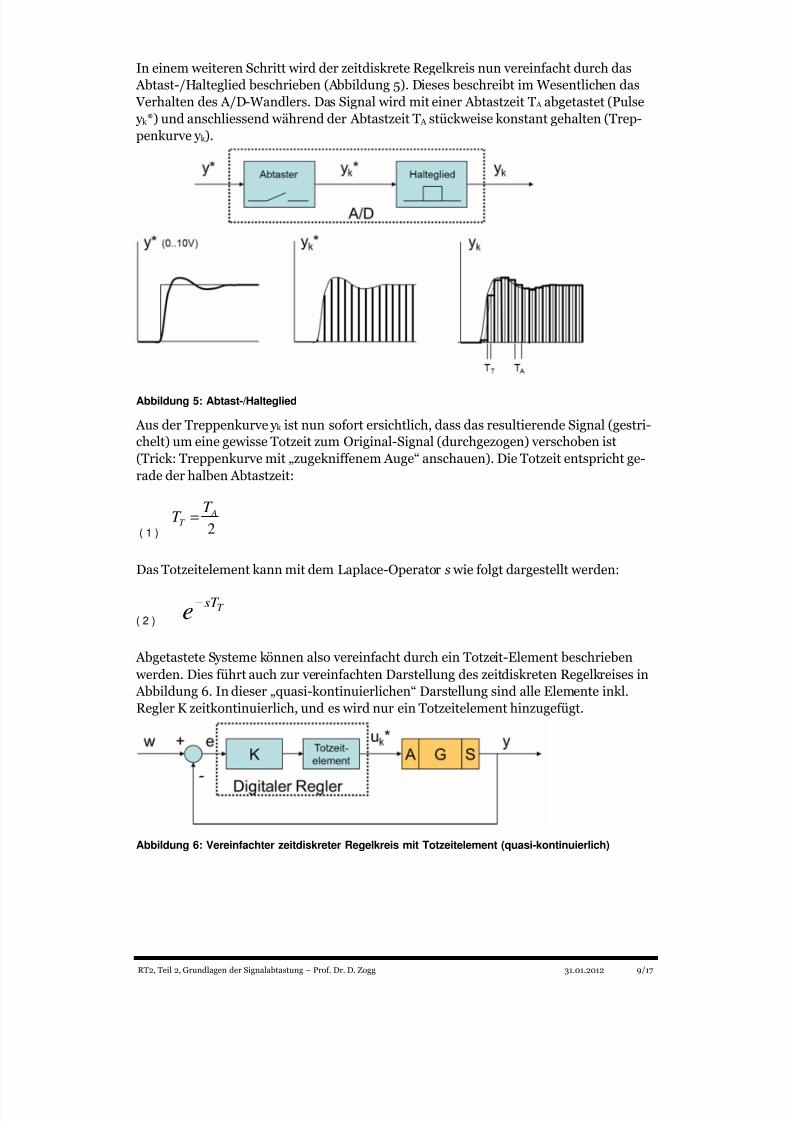
In einem weiteren Schritt wird der zeitdiskrete Regelkreis nun vereinfacht durch das
Abtast-/Halteglied beschrieben (Abbildung 5). Dieses beschreibt im Wesentlichen das
Verhalten des A/D-Wandlers. Das Signal wird mit einer Abtastzeit T A abgetastet (Pulse
y k *) und anschliessend während der Abtastzeit T A stückweise konstant gehalten (Trep-
penkurve y k ).
Abbildung 5: Abtast-/Halteglied
Aus der Treppenkurve y k ist nun sofort ersichtlich, dass das resultierende Signal (gestri-
chelt) um eine gewisse Totzeit zum Original-Signal (durchgezogen) verschoben ist
(Trick: Treppenkurve mit „zugekniffenem Auge“ anschauen). Die Totzeit entspricht ge-
rade der halben Abtastzeit:
( 1 )
Das Totzeitelement kann mit dem Laplace-Operator s wie folgt dargestellt werden:
( 2 )
Abgetastete Systeme können also vereinfacht durch ein Totzeit-Element beschrieben
werden. Dies führt auch zur vereinfachten Darstellung des zeitdiskreten Regelkreises in
Abbildung 6. In dieser „quasi-kontinuierlichen“ Darstellung sind alle Elemente inkl.
Regler K zeitkontinuierlich, und es wird nur ein Totzeitelement hinzugefügt.
Abbildung 6: Vereinfachter zeitdiskreter Regelkreis mit Totzeitelement (quasi-kontinuierlich)
2
AT
T T =
T sT e−
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 10/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 10/17
4.4. Zeitdiskreter PID-Regler
In diesem Abschnitt soll nun ein zeitdiskreter Regler K am Beispiel des PID-Reglers nä-
her betrachtet werden. Dazu wird der Regler K aus dem Regelkreis in Abbildung 4 aus-
geschnitten und hat den abgetasteten Regelfehler ek als Eingang sowie die abgetastete
Stellgrösse uk als Ausgang (Abbildung 7).
Abbildung 7: Zeitdiskreter Regler K
Es werden nun die einzelnen Anteile (P, I, D) des Reglers direkt in zeitdiskreter
Schreibweise entwickelt. Der P-Anteil ist gleich wie im zeitkontinuierlichen Bereich de-
finiert:
( 3 ) k pk P eK u ⋅=,
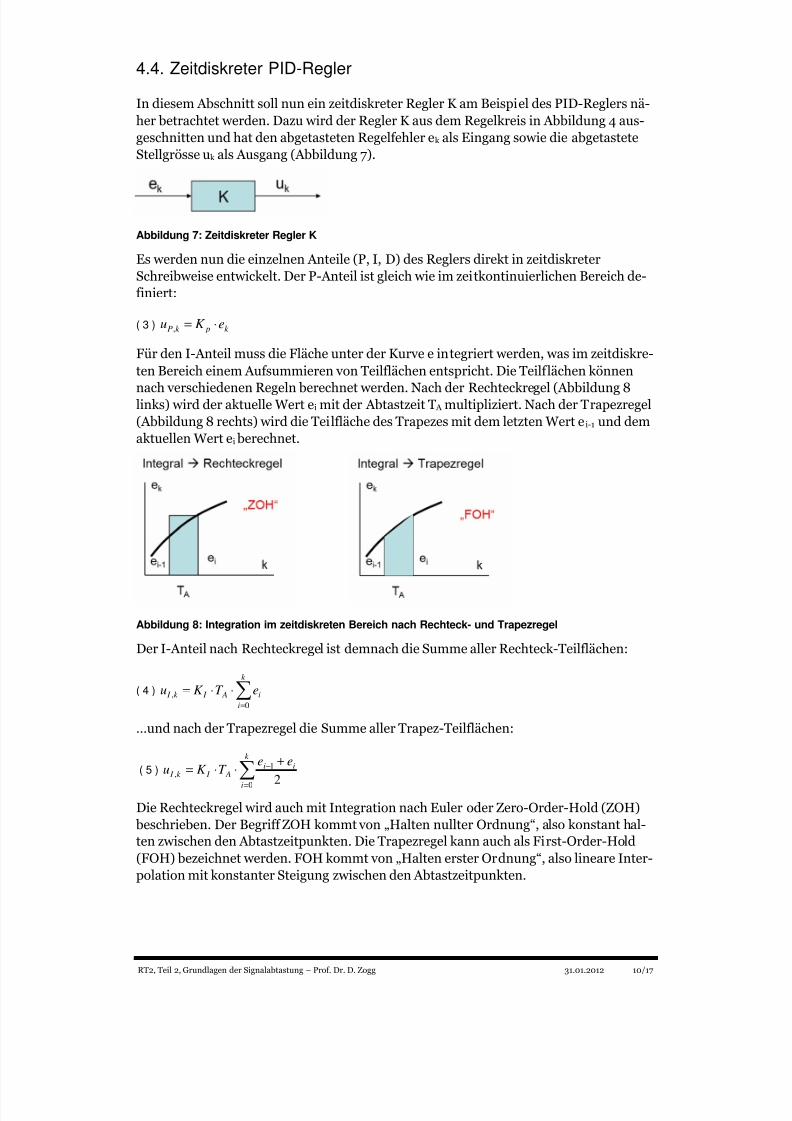
Für den I-Anteil muss die Fläche unter der Kurve e integriert werden, was im zeitdiskre-
ten Bereich einem Aufsummieren von Teilflächen entspricht. Die Teilflächen können
nach verschiedenen Regeln berechnet werden. Nach der Rechteckregel (Abbildung 8links) wird der aktuelle Wert ei mit der Abtastzeit T A multipliziert. Nach der Trapezregel
(Abbildung 8 rechts) wird die Teilfläche des Trapezes mit dem letzten Wert ei-1 und dem
aktuellen Wert ei berechnet.
Abbildung 8: Integration im zeitdiskreten Bereich nach Rechteck- und Trapezregel
Der I-Anteil nach Rechteckregel ist demnach die Summe aller Rechteck-Teilflächen:
( 4 ) ∑=
⋅⋅=
k
i
i A I k I eT K u0
,
…und nach der Trapezregel die Summe aller Trapez-Teilflächen:
( 5 ) ∑=
−+
⋅⋅=
k
i
ii A I k I
eeT K u
0
1,
2
Die Rechteckregel wird auch mit Integration nach Euler oder Zero-Order-Hold (ZOH)
beschrieben. Der Begriff ZOH kommt von „Halten nullter Ordnung“, also konstant hal-
ten zwischen den Abtastzeitpunkten. Die Trapezregel kann auch als First-Order-Hold
(FOH) bezeichnet werden. FOH kommt von „Halten erster Ordnung“, also lineare Inter-
polation mit konstanter Steigung zwischen den Abtastzeitpunkten.

5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 11/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 11/17
Nun bleibt noch der D-Anteil, bei welchem anstelle der Ableitung de/dt der Differenzen-quotient gebildet wird:
( 6 ) )( 1, −−⋅= k k
A
Dk D ee
T
K u
Die Steigung wird also durch die Differenz des aktuellen minus letzten Wertes ek – ek-1, dividiert durch die Abtastzeit T A berechnet.
Alle drei Anteile werden noch mit den entsprechenden Verstärkungs-Konstanten K P , K I ,
K D multipliziert. Es wird auch sofort ersichtlich, wie die Abtastzeit T A in den Gleichun-gen für I- und D-Anteil eine wesentliche Rolle spielt.
Zusammengefasst kann der PID-Regler nach Rechteckregel wie folgt dargestellt werden(geschlossene Form):
( 7 )
)( 1
0
−
=
−⋅+⋅⋅+⋅= ∑ k k
A
Dk
i
i A I k pk eeT
K eT K eK u
…und nach Trapezregel (geschlossene Form):
( 8 ) )(2
1
0
1−
=
−−⋅+
+⋅⋅+⋅= ∑ k k
A
Dk
i
ii A I k pk ee
T
K eeT K eK u
4.5. Rekursive Form des zeitdiskreten PID-Reglers
Für die Programmierung in einem Mikrokontroller ist statt der Summenbildung einerekursive Schreibweise erforderlich, welche aus dem alten Wert von uk und den Werten von ek den neuen Wert von uk berechnet.
Der P-Anteil bleibt auch rekursiv in der Form ( 3 ). Für den I-Anteil nach Rechteckregellautet die rekursive Form:
( 9 ) k A I k I k I eT K uu ⋅⋅+=−1,,
Für den D-Anteil lautet die rekursive Form:
( 10 )
)( 1, −−⋅= k k
A
Dk D ee
T
K u
Die Form ( 9 ) wird auch „Linksregel“ genannt, da die Differenz zwischen aktuellem Wert ek und früherem Wert ek-1 „links“ davon gebildet wird.
Für den PID-Regler wird bei jedem Zeitschritt k die Summe aus den rekursiven Anteilengebildet:
( 11 ) k Dk I k Pk uuuu ,,, ++=
Anstelle der einzelnen Berechung der P-, I-, und D-Anteile mit anschliessender Summa-tion ( 10 ) ist es auch möglich, den vollständigen PID-Regler in rekursiver Form darzu-stellen.

5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 12/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 12/17
Dazu wird zunächst die geschlossene Form für den PID-Regler für den Zeitschritt k an-gegeben (Rechteckregel):
( 12 )
)( 1
0
−
=
−⋅+⋅⋅+⋅= ∑ k k
A
Dk
i
i A I k pk eeT
K eT K eK u
…und zum Zeitschritt k-1:
( 13 ) )( 21
1
0
11 −−
−
=
−−−⋅+⋅⋅+⋅= ∑ k k
A
Dk
i
i A I k pk eeT
K eT K eK u
Durch Bildung der Differenz von ( 12 ) - ( 13 ) und umformen kann der vollständigePID-Regler wie folgt rekursiv angegeben werden (Rechteckregel):
( 14 ) 221101 −−−⋅+⋅+⋅+= k k k k k ebebebuu
mit den Koeffizienten:
( 15 )
A
D A I P
T
K T K K b ++=0
A
DP
T
K K b 21 −−=
A
D
T
K b =2
Übung: Berechnen Sie die Differenz ( 12 ) - ( 13 ) und verifizieren Sie das Resultat.
Wird anstelle von ( 12 ) und ( 13 ) die Trapezregel verwendet, so folgt:
( 16 ) )(2
1
0
1−
=
−−⋅+
+⋅⋅+⋅= ∑ k k
A
Dk
i
ii A I k pk ee
T
K eeT K eK u
( 17 ) )(2
21
1
0
111 −−
−
=
−
−−−⋅+
+⋅⋅+⋅= ∑ k k
A
Dk
i
ii A I k pk ee
T
K eeT K eK u
( 18 ) 221101 −−−⋅+⋅+⋅+= k k k k k ebebebuu
( 19 )
A
D A I P
T
K T K K b ++=
20
A
D A I P
T
K T K K b 2
21 −+−=
A
D
T
K b =2
Buch [ 1 ], Seite 247, Bild 6.12 gibt eine tabellarische Übersicht zu den digitalenPID-Regelalgorithmen für Rechteck- und Trapezregel.
4.6. Anwendung auf Bandwebmaschine
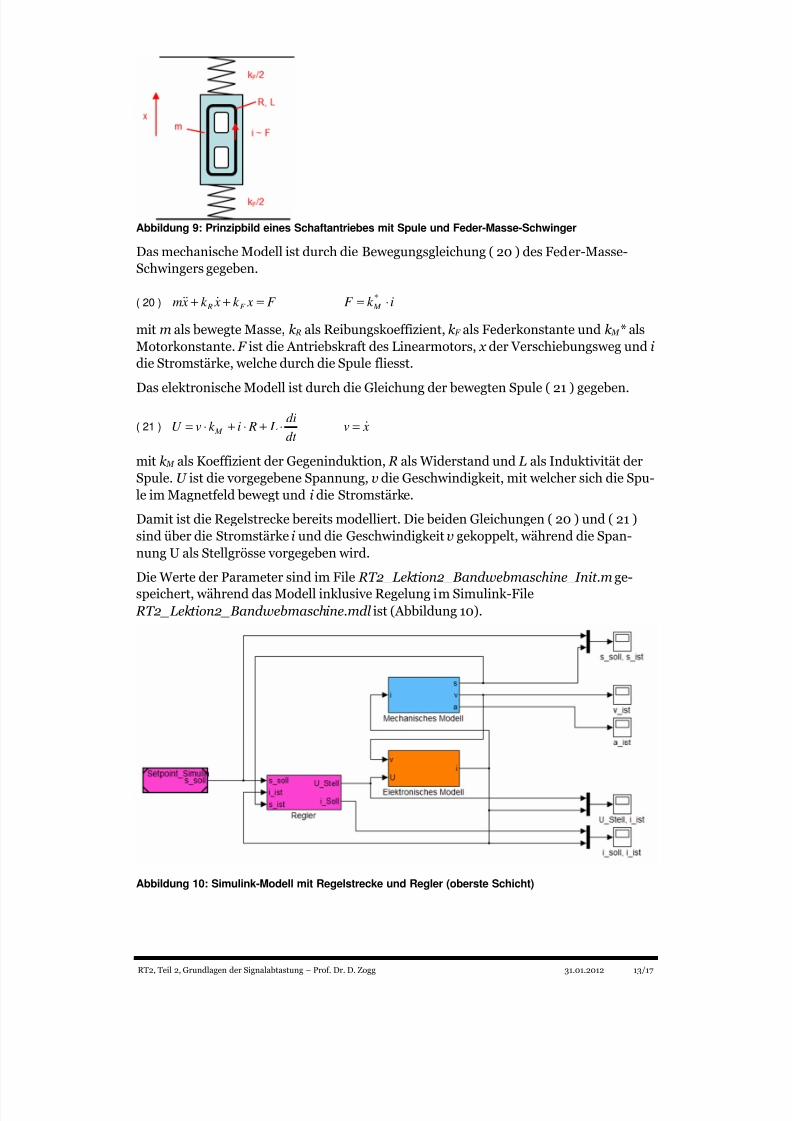
In diesem Abschnitt sollen nun die zeitdiskreten PID-Regler auf ein reales Beispiel ausder Industrie angewandt werden. Moderne Bandwebmaschinen führen die Schäfte nichtmehr rein mechanisch über Nockenwellen-Hebel-Mechanismen, sondern über einenelektromechanischen Schaftantrieb basierend auf dem Prinzip des Linearmotors. Jeder
Schaft führt einen oder mehrere Kettfäden, welche in Auf- und Abwärtsbewegung ein vorgegebenes Webmuster ergeben. Eine Webmaschine enthält mehrere Schaftantriebe.Das Prinzipbild eines Schaftantriebes ist in Abbildung 9 gegeben. Der Linearmotor istdurch eine stromdurchflossene Spule realisiert, welche sich in einem permanentenMagnetfeld bewegt. Zudem ist die bewegte Masse gefedert, damit ein Teil der Bewe-gungsenergie aus der Schwingungsenergie des Feder-Masse-Systems gewonnen werdenkann.
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 13/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 13/17
Abbildung 9: Prinzipbild eines Schaftantriebes mit Spule und Feder-Masse-Schwinger
Das mechanische Modell ist durch die Bewegungsgleichung ( 20 ) des Feder-Masse-
Schwingers gegeben.
( 20 ) F xk xk xm F R =++ &&& ik F M ⋅=*
mit m als bewegte Masse, k R als Reibungskoeffizient, k F als Federkonstante und k M * als
Motorkonstante. F ist die Antriebskraft des Linearmotors, x der Verschiebungsweg und i
die Stromstärke, welche durch die Spule fliesst.
Das elektronische Modell ist durch die Gleichung der bewegten Spule ( 21 ) gegeben.
( 21 )dt
di L Rik vU M ⋅+⋅+⋅= xv &=
mit k M als Koeffizient der Gegeninduktion, R als Widerstand und L als Induktivität der
Spule. U ist die vorgegebene Spannung, v die Geschwindigkeit, mit welcher sich die Spu-
le im Magnetfeld bewegt und i die Stromstärke.
Damit ist die Regelstrecke bereits modelliert. Die beiden Gleichungen ( 20 ) und ( 21 )
sind über die Stromstärke i und die Geschwindigkeit v gekoppelt, während die Span-
nung U als Stellgrösse vorgegeben wird.
Die Werte der Parameter sind im File RT2_Lektion2_Bandwebmaschine_Init.m ge-
speichert, während das Modell inklusive Regelung im Simulink-File
RT2_Lektion2_Bandwebmaschine.mdl ist (Abbildung 10).
Abbildung 10: Simulink-Modell mit Regelstrecke und Regler (oberste Schicht)
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 14/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 14/17
Hier interessiert nun der Regler-Block in Abbildung 11. Analog zu Abbildung 3 (vertika-
ler Linearmotor für Prüfstand) ist hier eine Kaskade mit übergeordnetem Positionsregler
(Position PID Controller) und untergeordnetem Stromregler (Current PID Controller)
realisiert. Zudem ist eine Positions-Vorsteuerung (Position Feedforward) vorgesehen,
um vorgegebene Trajektorien schneller fahren zu können und den restlichen Regelkreis
zu entlasten. Die zeitliche Abtastung des Positionssignales s_ist und des Stromsignales
i_ist ist durch Zero-Order-Hold-Blöcke realisiert. Für die beiden Regler werden eben-
falls zeitdiskrete PID-Regler-Blöcke verwendet. Beim Stromregler wird die Stellgrösse
durch einen zusätzlichen PWM-Block in ein pulsbreitenmoduliertes Spannungs-Signal
U_Stell gewandelt, wie dies in der Realität durch eine H-Brücke geschieht.
Die Abtastzeit des inneren Stromreglers ist wesentlich schneller gewählt als diejenige
des äusseren Positionsreglers. Der Stromregler ist hier als reiner P-Regler parametriert,
während der Positionsregler als vollständiger PID-Regler parametriert ist. Als Integrati-
onsmethode wird „Trapezoidal“ gewählt, um höchstmögliche Genauigkeit zu haben.
Abbildung 11: Regler-Block mit Kaskade (Positions- und Stromregler)
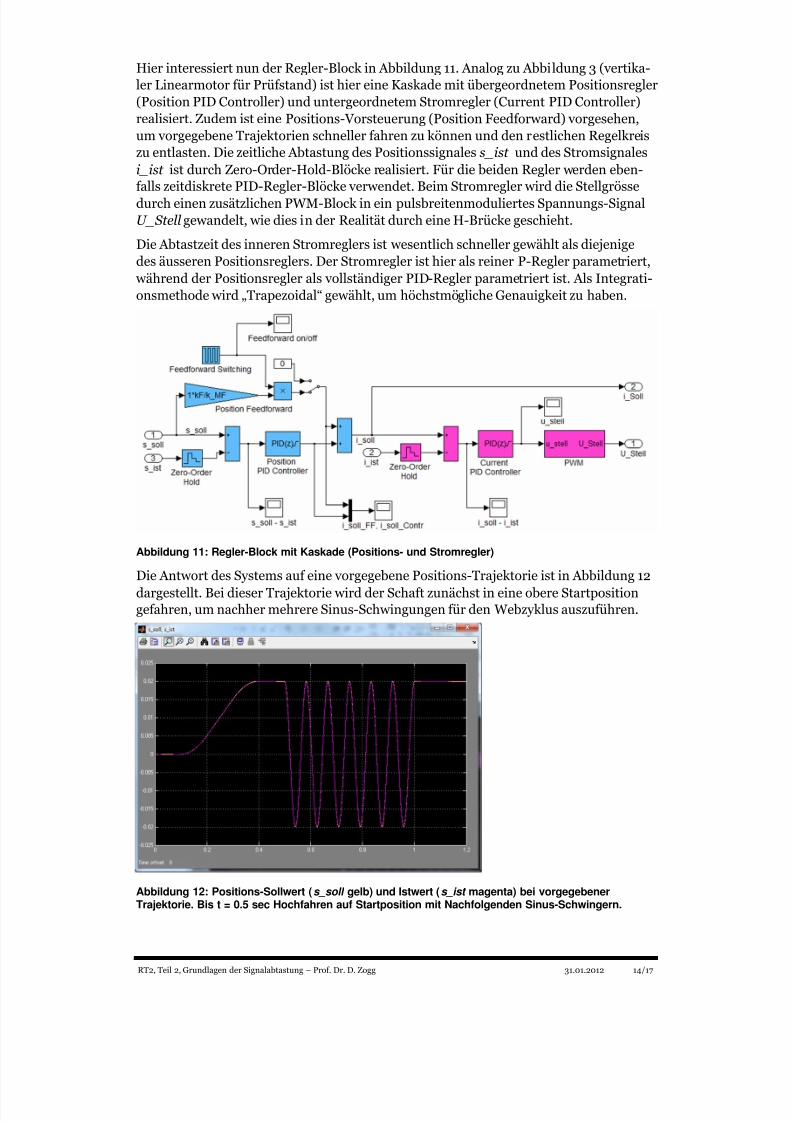
Die Antwort des Systems auf eine vorgegebene Positions-Trajektorie ist in Abbildung 12
dargestellt. Bei dieser Trajektorie wird der Schaft zunächst in eine obere Startposition
gefahren, um nachher mehrere Sinus-Schwingungen für den Webzyklus auszuführen.
Abbildung 12: Positions-Sollwert (s_soll gelb) und Istwert (s_ist magenta) bei vorgegebenerTrajektorie. Bis t = 0.5 sec Hochfahren auf Startposition mit Nachfolgenden Sinus-Schwingern.
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 15/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 15/17
Die Sinus-Schwingungen sind in der Nähe der Eigenfrequenz des Masse-Feder-
Schwingers gewählt, so dass fast eine freie Schwingung mit minimalem Stromverbrauch
entsteht. Trotzdem wird auch während dieser Phase geregelt.
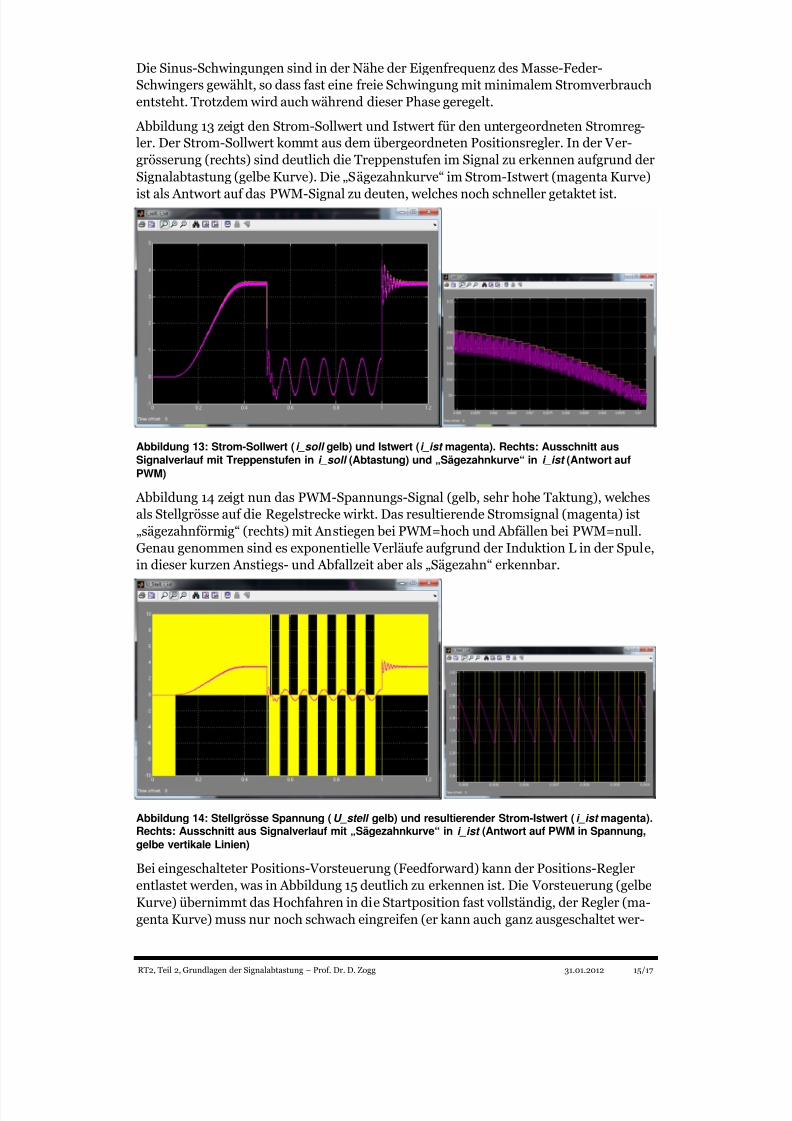
Abbildung 13 zeigt den Strom-Sollwert und Istwert für den untergeordneten Stromreg-
ler. Der Strom-Sollwert kommt aus dem übergeordneten Positionsregler. In der Ver-
grösserung (rechts) sind deutlich die Treppenstufen im Signal zu erkennen aufgrund der
Signalabtastung (gelbe Kurve). Die „Sägezahnkurve“ im Strom-Istwert (magenta Kurve)
ist als Antwort auf das PWM-Signal zu deuten, welches noch schneller getaktet ist.
Abbildung 13: Strom-Sollwert (i_soll gelb) und Istwert (i_ist magenta). Rechts: Ausschnitt ausSignalverlauf mit Treppenstufen in i_soll (Abtastung) und „Sägezahnkurve“ in i_ist (Antwort auf
PWM)
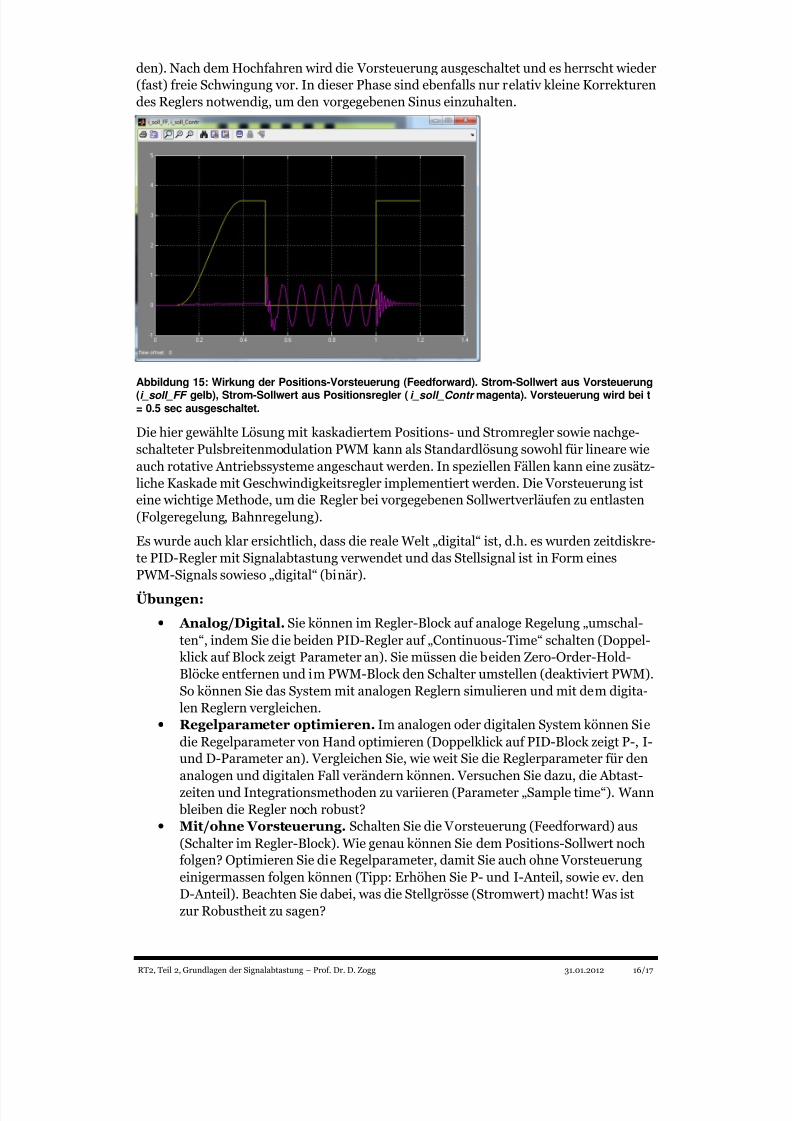
Abbildung 14 zeigt nun das PWM-Spannungs-Signal (gelb, sehr hohe Taktung), welches
als Stellgrösse auf die Regelstrecke wirkt. Das resultierende Stromsignal (magenta) ist
„sägezahnförmig“ (rechts) mit Anstiegen bei PWM=hoch und Abfällen bei PWM=null.
Genau genommen sind es exponentielle Verläufe aufgrund der Induktion L in der Spule,
in dieser kurzen Anstiegs- und Abfallzeit aber als „Sägezahn“ erkennbar.
Abbildung 14: Stellgrösse Spannung (U_stell gelb) und resultierender Strom-Istwert (i_ist magenta).Rechts: Ausschnitt aus Signalverlauf mit „Sägezahnkurve“ in i_ist (Antwort auf PWM in Spannung,
gelbe vertikale Linien)
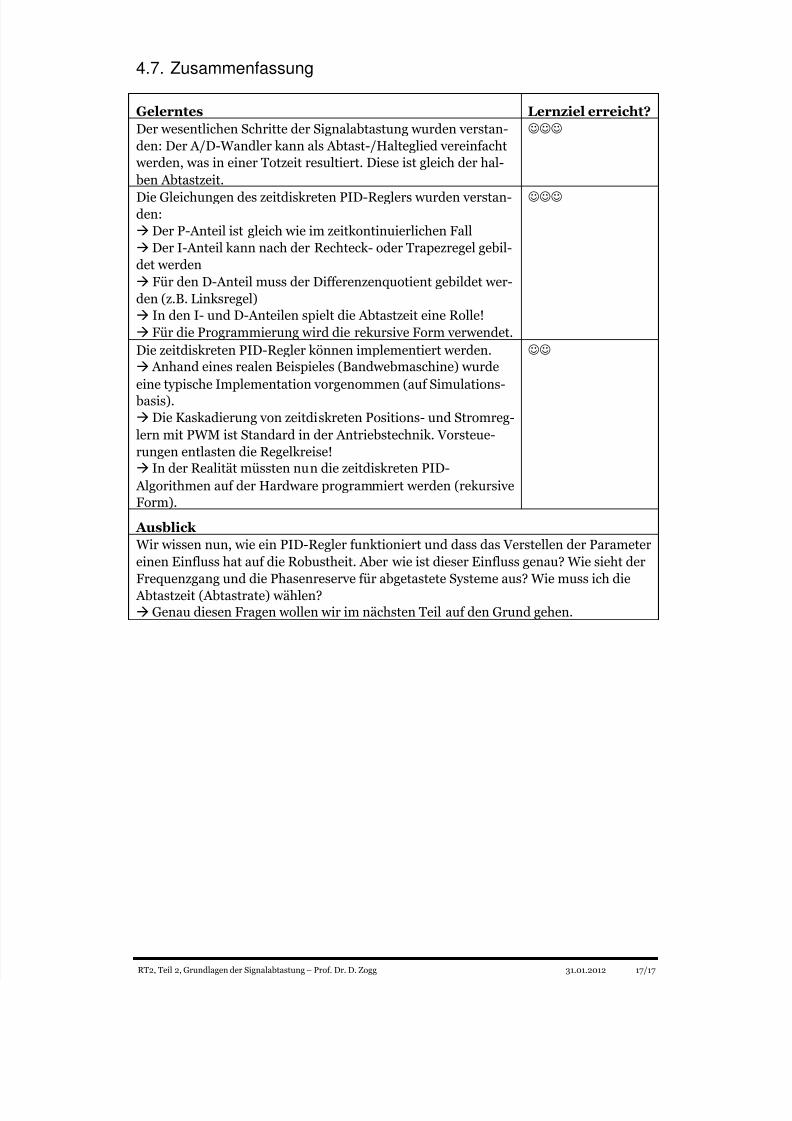
Bei eingeschalteter Positions-Vorsteuerung (Feedforward) kann der Positions-Regler
entlastet werden, was in Abbildung 15 deutlich zu erkennen ist. Die Vorsteuerung (gelbe
Kurve) übernimmt das Hochfahren in die Startposition fast vollständig, der Regler (ma-
genta Kurve) muss nur noch schwach eingreifen (er kann auch ganz ausgeschaltet wer-
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 16/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 16/17
den). Nach dem Hochfahren wird die Vorsteuerung ausgeschaltet und es herrscht wieder
(fast) freie Schwingung vor. In dieser Phase sind ebenfalls nur relativ kleine Korrekturen
des Reglers notwendig, um den vorgegebenen Sinus einzuhalten.
Abbildung 15: Wirkung der Positions-Vorsteuerung (Feedforward). Strom-Sollwert aus Vorsteuerung
(i_soll_FF gelb), Strom-Sollwert aus Positionsregler (i_soll_Contr magenta). Vorsteuerung wird bei t= 0.5 sec ausgeschaltet.
Die hier gewählte Lösung mit kaskadiertem Positions- und Stromregler sowie nachge-
schalteter Pulsbreitenmodulation PWM kann als Standardlösung sowohl für lineare wie
auch rotative Antriebssysteme angeschaut werden. In speziellen Fällen kann eine zusätz-
liche Kaskade mit Geschwindigkeitsregler implementiert werden. Die Vorsteuerung ist
eine wichtige Methode, um die Regler bei vorgegebenen Sollwertverläufen zu entlasten
(Folgeregelung, Bahnregelung).
Es wurde auch klar ersichtlich, dass die reale Welt „digital“ ist, d.h. es wurden zeitdiskre-
te PID-Regler mit Signalabtastung verwendet und das Stellsignal ist in Form eines
PWM-Signals sowieso „digital“ (binär).
Übungen:
• Analog/Digital. Sie können im Regler-Block auf analoge Regelung „umschal-
ten“, indem Sie die beiden PID-Regler auf „Continuous-Time“ schalten (Doppel-
klick auf Block zeigt Parameter an). Sie müssen die beiden Zero-Order-Hold-
Blöcke entfernen und im PWM-Block den Schalter umstellen (deaktiviert PWM).
So können Sie das System mit analogen Reglern simulieren und mit dem digita-
len Reglern vergleichen. • Regelparameter optimieren. Im analogen oder digitalen System können Sie
die Regelparameter von Hand optimieren (Doppelklick auf PID-Block zeigt P-, I-
und D-Parameter an). Vergleichen Sie, wie weit Sie die Reglerparameter für den
analogen und digitalen Fall verändern können. Versuchen Sie dazu, die Abtast-
zeiten und Integrationsmethoden zu variieren (Parameter „Sample time“). Wann
bleiben die Regler noch robust? • Mit/ohne Vorsteuerung. Schalten Sie die Vorsteuerung (Feedforward) aus
(Schalter im Regler-Block). Wie genau können Sie dem Positions-Sollwert noch
folgen? Optimieren Sie die Regelparameter, damit Sie auch ohne Vorsteuerung
einigermassen folgen können (Tipp: Erhöhen Sie P- und I-Anteil, sowie ev. den
D-Anteil). Beachten Sie dabei, was die Stellgrösse (Stromwert) macht! Was ist
zur Robustheit zu sagen?
5/17/2018 RT2 EIT Skript Teil2 Signalabtastung V1.0 - slidepdf.com
http://slidepdf.com/reader/full/rt2-eit-skript-teil2-signalabtastung-v10 17/17
RT2, Teil 2, Grundlagen der Signalabtastung – Prof. Dr. D. Zogg 31.01.2012 17/17
4.7. Zusammenfassung
Gelerntes Lernziel erreicht?Der wesentlichen Schritte der Signalabtastung wurden verstan-den: Der A/D-Wandler kann als Abtast-/Halteglied vereinfacht werden, was in einer Totzeit resultiert. Diese ist gleich der hal- ben Abtastzeit.
☺☺☺
Die Gleichungen des zeitdiskreten PID-Reglers wurden verstan-den:Der P-Anteil ist gleich wie im zeitkontinuierlichen FallDer I-Anteil kann nach der Rechteck- oder Trapezregel gebil-det werden Für den D-Anteil muss der Differenzenquotient gebildet wer-den (z.B. Linksregel) In den I- und D-Anteilen spielt die Abtastzeit eine Rolle! Für die Programmierung wird die rekursive Form verwendet.
☺☺☺
Die zeitdiskreten PID-Regler können implementiert werden. Anhand eines realen Beispieles (Bandwebmaschine) wurde
eine typische Implementation vorgenommen (auf Simulations- basis).Die Kaskadierung von zeitdiskreten Positions- und Stromreg-lern mit PWM ist Standard in der Antriebstechnik. Vorsteue-rungen entlasten die Regelkreise! In der Realität müssten nun die zeitdiskreten PID- Algorithmen auf der Hardware programmiert werden (rekursiveForm).
☺☺
Ausblick Wir wissen nun, wie ein PID-Regler funktioniert und dass das Verstellen der Parametereinen Einfluss hat auf die Robustheit. Aber wie ist dieser Einfluss genau? Wie sieht derFrequenzgang und die Phasenreserve für abgetastete Systeme aus? Wie muss ich die Abtastzeit (Abtastrate) wählen?Genau diesen Fragen wollen wir im nächsten Teil auf den Grund gehen.