Sensoren in automotiven Szenarien -...
108
Institut für Verteilte Systeme Wissenschaftliches Seminar Sensoren in automotiven Szenarien Wintersemester 2013/14 Autoren: Martin Dobisch Lars Grotehenne Sören Falkenberg Steffen Janetzki Simon Parlow Ben Rabeler Christof Schmidt Christian Schildwächter Andreas Schulz Christian Speich Professor: Prof. Dr. rer. nat. Kaiser Betreuer: Sebastian Zug Betreuer: Christoph Steup
Transcript of Sensoren in automotiven Szenarien -...
Institut für Verteilte SystemeWissenschaftliches Seminar
Sensoren in automotiven Szenarien
Wintersemester 2013/14
Autoren: Martin DobischLars GrotehenneSören FalkenbergSteffen JanetzkiSimon ParlowBen RabelerChristof SchmidtChristian SchildwächterAndreas SchulzChristian Speich
Professor: Prof. Dr. rer. nat. Kaiser
Betreuer: Sebastian Zug
Betreuer: Christoph Steup

2
Wissenschaftliches Seminar- Sensoren in automotiven SzenarienOtto-von-Guericke-Universität Magdeburg,Institut für Verteilte Systeme,2013/14
Inhaltsverzeichnis
Abbildungsverzeichnis vi
Tabellenverzeichnis vii
1 Einleitung 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Einordnung der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Überblick Fahrerassistenzsysteme 3
2.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2.1 Begriffsdefinition . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.3 Geschichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Fahrerassistenzsysteme im Allgemeinen . . . . . . . . . . . . . . . . . . . 82.3.1 Systemaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3.2 Klassifikationen . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4 Fahrerassistenz aus Sensorsicht . . . . . . . . . . . . . . . . . . . . . . . . 112.4.1 Sensorik im Fahrzeug . . . . . . . . . . . . . . . . . . . . . . . . 112.4.2 Vorstellung mehrerer Fahrerassistenzsysteme . . . . . . . . . . . . 132.4.3 Beispiel einer Klassifikation nach Sensortyp . . . . . . . . . . . . . 16
3 Allgemeine Anforderungen 17
3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.1.1 Sensoren in Fahrzeugen . . . . . . . . . . . . . . . . . . . . . . . 183.1.2 Arten von Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2 Anforderungen in automobilen Systemen . . . . . . . . . . . . . . . . . . 243.2.1 Niedrige Herstellungskosten . . . . . . . . . . . . . . . . . . . . . 243.2.2 Hohe Zuverlässigkeit . . . . . . . . . . . . . . . . . . . . . . . . . 243.2.3 Harte Betriebsbedingungen . . . . . . . . . . . . . . . . . . . . . . 25
i
ii Inhaltsverzeichnis
3.2.4 Kleine Bauweise . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.5 Hohe Genauigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Optische Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.1 Umsetzung der Anforderungen . . . . . . . . . . . . . . . . . . . . 27
3.3.2 Nutzung in automotiven System . . . . . . . . . . . . . . . . . . . 29
3.4 Beschleunigungssensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4.1 Umsetzung der Anforderungen . . . . . . . . . . . . . . . . . . . . 32
3.4.2 Nutzung in automotiven System . . . . . . . . . . . . . . . . . . . 33
4 Laserscanner 35
4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3.1 Bestimmung der Distanz . . . . . . . . . . . . . . . . . . . . . . . 36
4.3.2 Bestimmung der Relativgeschwindigkeit . . . . . . . . . . . . . . 37
4.3.3 Signalauswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4 Probleme und Genauigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4.1 Genauigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4.2 Dämpfung der Atmosphäre . . . . . . . . . . . . . . . . . . . . . . 39
4.4.3 Diffuse Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4.4 Totale Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4.5 Mechanische Teile . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4.6 Vergleich mit anderen Systemen . . . . . . . . . . . . . . . . . . . 40
4.4.7 Alasca XT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.5 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.5.1 Adaptive Cruise Control Stop & Go . . . . . . . . . . . . . . . . . 43
4.5.2 Spurhalteassistent . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.5.3 Unfallfolgeminderung (Pre-Crash) . . . . . . . . . . . . . . . . . . 44
4.5.4 Automatische Notbremsung . . . . . . . . . . . . . . . . . . . . . 45
4.5.5 Fußgängerschutz . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.5.6 Mautbrücken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.5.7 Zukünftige Anwendungen . . . . . . . . . . . . . . . . . . . . . . 48
5 Radarsensoren 49
5.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.2 Mechanischer Aufbau eines Radargeräts . . . . . . . . . . . . . . . . . . . 50

Inhaltsverzeichnis iii
5.3 Arten von Radarsensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.3.1 Long-Range-Radar . . . . . . . . . . . . . . . . . . . . . . . . . . 515.3.2 Mid-Range-Radar . . . . . . . . . . . . . . . . . . . . . . . . . . 525.3.3 Short-Range-Radar . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.4 Vor- und Nachteile von Radarsystemen . . . . . . . . . . . . . . . . . . . . 535.4.1 Vorteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.4.2 Nachteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.4.3 Zwischenfazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.5 Messverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.5.1 Dopplereffekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.5.2 Puls-Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.5.3 Winkelbestimmung . . . . . . . . . . . . . . . . . . . . . . . . . . 545.5.4 FMCW-Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.6 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.6.1 Adaptive Cruise Control . . . . . . . . . . . . . . . . . . . . . . . 565.6.2 Toter-Winkel-Erkennung . . . . . . . . . . . . . . . . . . . . . . . 575.6.3 Radar-basierte Systeme . . . . . . . . . . . . . . . . . . . . . . . . 58
5.7 Beispiel für zukünftige Radarsensoren . . . . . . . . . . . . . . . . . . . . 595.7.1 Technische Neuerung . . . . . . . . . . . . . . . . . . . . . . . . . 595.7.2 Sensordatenfusion . . . . . . . . . . . . . . . . . . . . . . . . . . 595.7.3 Aufbau des Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . 605.7.4 Herstellungskosten und Massenproduktion . . . . . . . . . . . . . 605.7.5 Alternative zum Long-Range-Radarsensor . . . . . . . . . . . . . . 60
5.8 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6 Ultraschallsensoren 63
6.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 636.2 Ultraschallsensoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6.2.1 Physikalische Grundlagen . . . . . . . . . . . . . . . . . . . . . . 636.2.2 Aufbau und Funktion von Ultraschalldistanzsensoren . . . . . . . . 656.2.3 Unsicherheiten und Einschränkungen von Ultraschalldistanzsensoren 66
6.3 Anwendungsszenario: Parkassistenzsystem . . . . . . . . . . . . . . . . . 686.3.1 Aufbau und Funktion . . . . . . . . . . . . . . . . . . . . . . . . . 686.3.2 Vor- und Nachteile der Verwendung von Ultraschallsensoren . . . . 70
6.4 Alternative Einsatzmöglichkeiten . . . . . . . . . . . . . . . . . . . . . . . 706.4.1 Parklückenvermessung . . . . . . . . . . . . . . . . . . . . . . . . 706.4.2 Automatisches Einparken . . . . . . . . . . . . . . . . . . . . . . 71
iv Inhaltsverzeichnis
6.4.3 Überwachung des toten Winkels . . . . . . . . . . . . . . . . . . . 716.5 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
7 Positionsbestimmung/GPS 737.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.2 Satellitenbasierte Navigation . . . . . . . . . . . . . . . . . . . . . . . . . 73
7.2.1 Überblick über GPS . . . . . . . . . . . . . . . . . . . . . . . . . 737.2.2 Alternativen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 747.2.3 Funktionsweise der satellitenbasierten Navigation . . . . . . . . . . 757.2.4 Fehlerursachen von GPS . . . . . . . . . . . . . . . . . . . . . . . 777.2.5 A-GPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 797.2.6 DGPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.3 Satellitenlose Navigation . . . . . . . . . . . . . . . . . . . . . . . . . . . 807.3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 807.3.2 WLAN und Mobilfunk . . . . . . . . . . . . . . . . . . . . . . . . 807.3.3 Trägheits-/ Inertialnavigation . . . . . . . . . . . . . . . . . . . . . 827.3.4 Sonstige . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
7.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Literaturverzeichnis 94
Abbildungsverzeichnis
2.1 Verkehrstote [Bun09] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Systemaufbau [dM10, S.19] . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Sensorbereiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 Distanz (nach [Roh]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3 Relativgeschwindigkeit (nach [Roh]) . . . . . . . . . . . . . . . . . . . . . 37
4.4 Analoge Schwellenwerte (nach [SS06]) . . . . . . . . . . . . . . . . . . . 37
4.5 Digitale Signalerfassung (nach [SS06]) . . . . . . . . . . . . . . . . . . . . 38
4.6 Nebelsignal (nach [SS06]) . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.7 Diffuse Reflexion [Roh] . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.8 Totale Reflexion [Roh] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.9 Vergleich verschiedener Systeme [Bar] . . . . . . . . . . . . . . . . . . . . 41
4.10 Einbauvarianten des Alasca XT [FS05] . . . . . . . . . . . . . . . . . . . . 41
4.11 Anwendungsbereiche automobiler Sensorik [Spi] . . . . . . . . . . . . . . 42
4.12 Funktionsweise von ACC Stop & Go [Lux] . . . . . . . . . . . . . . . . . 43
4.13 Spurhalteassistent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.14 Auslösestrategie einer automatischen Notbremsung [FS05] . . . . . . . . . 45
4.15 RONE (Region of no Escape) [FS05] . . . . . . . . . . . . . . . . . . . . . 46
4.16 Mautbrücke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.17 Integrierte Querführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.1 Explosionsdarstellung eines FMCW-Radargerätes[Rei12] . . . . . . . . . . 50
5.2 Sensoren im Auto[Rei12] . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.3 Long-Range-Sensor von Bosch [Bil] . . . . . . . . . . . . . . . . . . . . . 51
5.4 Mid-Range-Sensor von Bosch[Bil] . . . . . . . . . . . . . . . . . . . . . . 52
5.5 Short-Range-Sensor[Rei10d] . . . . . . . . . . . . . . . . . . . . . . . . . 52
v

vi Abbildungsverzeichnis
5.6 Adaptive Cruise Control[ACCc] . . . . . . . . . . . . . . . . . . . . . . . 56
5.7 Seitenassistent[Kil10] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.8 Einparkhilfe[Rad] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.9 Long-Range-Radar der vierten Generation von der Firma Bosch[LRR13] . 59
6.1 Aufbau Ultraschall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.2 Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.3 Ringing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.4 [ass] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.5 Triangulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
7.1 Ermittlung der Entfernung R und Entstehung eines Fehlers durch ungenaue
Zeitmessung von einem Sender zu einem Empfänger [Zog11] . . . . . . . . 75
7.2 Ermittlung der Entfernung R durch unterstützendes zweites Satellitensignal
[Zog11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.3 Ermittlung der Position (Xp|YP) im Zweidimensionalen durch Triangulation
[Zog11] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7.4 Beispielhafte Darstellung für die Verzögerung des GPS-Signals durch die
Ionos- und Troposphäre (aus: [AN13]) . . . . . . . . . . . . . . . . . . . . 78
7.5 Reflexions- und Abschattungsfehler . . . . . . . . . . . . . . . . . . . . . 78
7.6 Entstehung einer größeren Fläche (links), wenn Satelliten nahe beieinander
liegen (aus: [Zog11]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.7 Open WLAN Map - Abdeckung Zentraleuropa [opea] . . . . . . . . . . . . 81
7.8 Inertial Navigation Chip [Has13] . . . . . . . . . . . . . . . . . . . . . . . 83
7.9 Navigation via Signals of Opportunity (NAVSOP) [bae13] . . . . . . . . . 84
7.10 Magnetfeld Deutschlands [Neu10] . . . . . . . . . . . . . . . . . . . . . . 85
Tabellenverzeichnis
2.1 Überblick Fahrerassistenzsysteme . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Klassifikation aus Sensorsicht . . . . . . . . . . . . . . . . . . . . . . . . 16
4.1 Anforderungen an LiDAR-Systeme [Spi] . . . . . . . . . . . . . . . . . . 40
6.1 Messabweichungen mit und ohne Kalibrierung . . . . . . . . . . . . . . . 66
6.2 Vor- und Nachteile, [par] . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7.1 Ungefähre Abschätzung der entstehenden Fehler bei der Positionsbestim-
mung in der Horizontalen bei GPS [Zog11] . . . . . . . . . . . . . . . . . 77
vii

Abkürzungen
AK Aufmerksamkeitskontrolle
ABS Antiblockiersystem
ACC Adaptive Cruise Control
AKL Adaptives Kurvenlicht
ANB Automatische Notbremse
ASR Antriebsschlupfregelung
ECU Electronic Control Unit
ESP Elektronisches Stabilitätsprogramm
FIS Fahrerinformationssystem
FAS Fahrerassistenzsystem
HBA Hydraulischer Bremsassistent
HMI Human Machine Interface
LCA Lane Change Assistant
LDW Lane Departure Warning
LKA Lane Keeping Assistant
LRR Long-Range-Radar
NV Night Vision
PDC Park Distance Control
SRR Short-Range-Radar
TSR Traffic Sign Recognizion
AKTIV Adaptive und kooperative Technologien für den intelligenten Verkehr
DARPA Defense Advanced Research Projects Agency
ix
LiDAR Light Detection and Ranging
INVENT Intelligenter Verkehr und nutzergerechte Technik
PROMETHEUS PROgraMme for a European Traffic of Highest Efficiency andUnprecedented Safety
ACC Active Cruise Control
FMCW Frequency Modulated Continuous Wave
LRR Long Range Radar
MRR Mid Range Radar
SRR Short Range Radar
LRR2 Long-Range-Radarsensoren der zweiten Generation von der FirmaBosch
LRR3 Long-Range-Radarsensoren der dritten Generation von der Firma Bosch
LRR4 Long-Range-Radarsensoren der vierten Generation von der Firma Bosch
ACC Active Cruise Control
ESP Elektronisches Stabilitätsprogramm
GPS Global Positioning System
GSM Global System for Mobile Communications
IMU Inertial Measurement Unit
NAVSOP Navigation via Signals of Opportunity
RSSI Received Signal Strength Indication
UMTS Universal Mobile Telecommunications System
GLONASS Globales Navigations-Satellitensystem
A-GPS Assisted Global Positioning System
1 Einleitung
1.1 Motivation
Gegenwärtig entwickeln sich die Fahrerassistenzsysteme zu einem gewichtigen Bestandteilin der Wahrnehmung eines Automobils. Spurhaltassistenten, Abstandsregler , Warnsysteme,usw. entlasten den Fahrer und automatisieren eintönige Aufgaben während des Steuern desKfz. Aus der Integration dieser Anwendungen in das Fahrzeug ergibt sich eine Vielzahl vonMessaufgaben, die insbesondere die Umgebungsüberwachung betreffen. Die dafür etablier-ten Technologien sind Laser- und Radarsysteme aber auch die seit Jahrzehnten präsentenUltraschallgeräte in unterschiedlicher Ausprägung. Gleichzeitig werden immer leistungs-stärkere bildgebende Verfahren verfügbar, die aus der Kombination verschiedener Systemezuverlässig Features der Umgebung unter Tag/Nacht Bedingungen erkennen können.
Bei der Auswahl einer aufgabenspezifischen Sensorik erfolgt die Auswahl nicht allein an-hand der Abbildungseigenschaften eines Sensors. Vielmehr müssen vor dem Hintergrundder kraftfahrzeugspezifischen Sicherheitsstandards umfangreiche Kriterienkataloge, die un-ter anderem die Umgebungsbedingungen (mechanische Belastung, thermische Bandbreite,ect.) und die Zuverlässigkeit des Gerätes einbeziehen berücksichtigt werden.
1.2 Einordnung der Arbeit
Die vorliegende Arbeit versucht die vielfältigen Anforderungen an Sensoren in automotivenSzenarien zu hinterfragen. Dabei werden zum einen die charakteristischen Messeigenschaf-ten der Sensorsysteme erläutert und darauf aufbauen deren Einbettung in Fahrerassistenz-systeme dargestellt.
Die Ausarbeitung entstand dabei eines wissenschaftlichen Seminars, dass von der Arbeits-gruppe für Eingebettete Systeme und Betriebssysteme im Wintersemester 2013/14 angebo-ten wurde. Neben den einzelnen Aufsätzen, die von einzelnen Studenten oder von Studen-
1

2 1 Einleitung
tengruppen erarbeitete wurden, sind auch die entsprechenden Vorträge auf der Webseite derArbeitsgruppe unter
http://eos.cs.ovgu.de/de/lecture/courses/ws1314/wis-saas/
zu finden.
Das Paper selbst gliedert sich folgendermaßen. Zunächst werden die aktuellen Assistenz-systeme im Hinblick auf ihren Anforderungskatalog untersucht. Dazu stellt das Kapitel 1die aktuelle Entwicklung dar. Kapitel 2 ergänzt die Darstellung um die spezifisch automo-tiven Umgebungsbedingungen an ein Messsystem. Die folgenden Kapitel widmen sich denLasersensoren, den Radarmessystemen und der Ultraschallsensorik. In Kapitel 5 wird einÜberblick über die positionsbezogene Sensorik gegeben.
Simon Parlow
2 ÜberblickFahrerassistenzsysteme
2.1 Einleitung
Fahrerassistenz ist ein aktuelles Thema. Die Zahl der unterschiedlichen Systeme und ihrFunktionsumfang nehmen rasant zu. Aus diesem Grund soll diese Arbeit einen Einstieg inden Bereich der Fahrerassistenzsysteme geben und einen Überblick über deren Funktionund Einsatz schaffen. Im Fokus stehen dabei nicht spezielle Systeme oder die spezifischeTechnik, sondern die Fahrerassistenz im Allgemeinen und die dazugehörende Sensorik. DieArbeit ist in drei Teilen aufgebaut . Zu Beginn werden wichtige Begrifflichkeiten definiert,sowie die Geschichte und die Motivation der Fahrerassistenzsysteme beschrieben. Darauf-folgend werden der Systemaufbau sowie Klassifikationen von Fahrerassistenzsystemen vor-gestellt. Im letzten Teil wird kurz die Fahrzeugsensorik sowie mehrere Fahrerassistenzsys-teme beschrieben. Zum Schluss erfolgt ein Beispiel zur Klassifizierung von Fahrerassis-tenzsystemen aus Sensorsicht.
2.2 Grundlagen
Dieses Kapitel beschäftigt sich mit der Klärung von Grundbegriffen sowie mit der Geschich-te und Motivation von Fahrerassistenzsystemen.
2.2.1 Begriffsdefinition
Im Bereich der Fahrerassistenz finden eine Vielzahl an Begriffen Verwendung, die nicht ein-deutig festgelegt sind und demzufolge durchaus unterschiedlich verstanden werden können.Um Verwirrung zu vermeiden werden die für diese Arbeit wichtigen Begriffe, insbesondereder Begriff des Fahrerassistenzsystems, genauer erklärt und definiert.
3
4 2 Überblick Fahrerassistenzsysteme
Fahrerassistenzsystem
Der Begriff Fahrerassistenzsystem (FAS) kann in seiner allgemeinen Bedeutung sehr weit-reichend sein. Laut Duden ist ein Fahrer “jmd. der fährt, ein Fahrzeug führt“ , Assis-tenz bedeutet “Beistand, Mithilfe“ und im Zusammenhang dazu wird ein System als eine“Einheit aus technischen Anlagen, Bauelementen, die eine gemeinsame Funktion haben“ ,definiert [Dud06] . Dies ist eine sehr schwammige Definition, die nicht wirklich erklärt wasFahrerassistenzsysteme sind und wie sie funktionieren.
Konrad Reif definiert in dem Buch “Fahrstabilisierungssysteme und Fahrerassistenzsyste-me“ Fahrerassistenzsysteme als Systeme, die den Fahrer bei seiner primären Fahraufgabeunterstützen [Rei10a]. Durch Information und Warnung sollen Komfort und Sicherheit er-höht werden. Außerdem sollen sie den Fahrer aktiv bei der Fahrzeugführung und Fahrzeug-stabilisierung unterstützen. Was genau die primäre Fahraufgabe ist, wird dort nicht weitererläutert. Nach Bubb sind primäre Fahraufgaben “all diejenigen, die sich mit dem Haltendes Fahrzeugs auf der Fahrbahn und der Stabilisation beschäftigen“ [HW06, S. 8]. Fah-rerassistenzsysteme haben also zum Einen das Ziel die Sicherheit des Fahrers zu erhöhen.Dies deckt sich auch mit einer Definition nach Gründl in welcher Fahrerassistenzsystemezu einer erhöhten aktiven Sicherheit beitragen, indem sie “Defizite bei der Aufnahme undVerarbeitung der relevanten Fahrerinformationen beseitigen, Fehlhandlungen des Fahrersvermeiden helfen, die Folgen von dennoch auftretenden Fahrfehlern mildern und die Bean-spruchung des Fahrers durch Über- oder Unterforderung abbauen“ [Gru05, S. 29]. Durchdiese Definition grenzt sich ein FAS auch gegen ein Fahrerinformationssystem (FIS) ab. MitFIS ist ein System gemeint, welches den Fahrer zwar unterhält oder informiert, jedoch nichtdie Fahraufgabe adressiert und dementsprechend nicht zu einer erhöhten Sicherheit beiträgt.Ein Navigationssystem wäre beispielsweise ein Fahrerassistenzsystem, der CD-Player abernicht. Bisher wurde in den Definitionen bestimmt, was Fahrerassistenzsysteme leisten sol-len, aber nicht wie sie es tun. Dies lässt die Definition noch immer sehr unscharf wirken.Eine genauere Definition von Fahrerassistenzsystemen erfolgt in den Spezifizierungen desProjektes Response 3. Demzufolge müssen Fahrerassistenzsysteme den folgenden Kriteriengerecht werden:
“1. Unterstützung der primären Fahraufgabe
2. Aktive Unterstützungen der Fahrzeugführung mit oder ohne Warnungen
3. Umfelderfassung und -interpretation
4. Komplexe Signalverarbeitung
5. Direkte Interaktion; System-Fahrer“[Sch07, S. 9]
Diese Definition eines Fahrerassistenzsystems ermöglicht es den Begriff enger zu fassen.Ein FAS muss also nun das Umfeld erfassen und interpretieren. Hierfür sollen Sensoren
2.2 Grundlagen 5
und komplexe Signalverarbeitung genutzt werden. Es wird also nicht nur spezifiziert welcheAufgaben Fahrerassistenzsysteme erfüllen sollen, sondern auch wie sie es sollen. Für unsereBetrachtungen ist diese Definition jedoch nun etwas zu eng gesteckt, da Systeme wie dasAntiblockiersystem (ABS) nicht die Umgebung des Fahrzeugs erfassen, und demnach keinFahrerassistenzsystem wären. Die für diese Arbeit geltende Definition stammt daher vonLindberg.
“Fahrerassistenzsysteme...
• ...unterstützen den Fahrer bei der Ausführung der primären Fahraufgabe oder auto-matisieren Teile davon, übernehmen sie jedoch nicht vollständig
• ...interagieren mit dem Fahrer
• ...können auf allen drei Ebenen der Fahraufgabe wirken
• ..bestehen aus
– Sensoren für die Erfassung von Umwelt und / oder Fahrzeug (z.B. Radar, Ka-mera, GPS-Sensor)
– einfachen oder komplexen Verarbeitungseinheiten
– Ausgabeeinheiten (Aktoren, Displays, Lautsprecher etc.)“[Lin12, S. 14]
Diese Definition erläutert nicht nur den Nutzen von Fahrerassistenzsystemen, sondern be-schreibt zudem auch den groben Aufbau des Systems.
Aktive Sicherheit
Das Ziel von aktiven Sicherheitssystemen ist es Unfälle zu vermeiden bevor sie entstehen.Dadurch wird vorbeugend zur Sicherheit im Straßenverkehr beigetragen. Bekannte Bei-spiele für aktive Fahrerassistenzsysteme sind das ABS, die Antriebsschlupfregelung (ASR)sowie das Elektronisches Stabilitätsprogramm (ESP). Diese Systeme unterstützen in kri-tischen Situationen den Fahrer, indem sie beispielsweise die Lenkbarkeit des Fahrzeugsgewährleisten. Die Funktion aktiver Sicherheitssysteme basiert im Wesentlichen auf demWissen über das Fahrzeug und der Umgebung. Dafür kann mit Sensoren die Umgebungerfasst und anschließend analysiert werden. Vor Gefahrensituationen wird der Fahrer danngewarnt. In Notfallsituationen können die Systeme auch autonom in die Fahrzeugdynamikeinzugreifen.
Passive Sicherheit
Passive Sicherheitssysteme haben die Aufgabe, Unfallfolgen zu verringern und zu mildern.Aus diesem Grund beschreibt die Passive Sicherheit den Schutz des Fahrers vor Verletzun-
6 2 Überblick Fahrerassistenzsysteme
gen im Falle eines Unfalls. Ziel hierbei ist es, die Schwere von Unfällen zu verringern. Be-kannte Beispiele für passive Sicherheitssysteme sind der Sicherheitsgurt, der Airbag sowiedie Karosserie eines Fahrzeugs. Für diese passiven Sicherheitssysteme ist nur der Zustanddes eigenen Fahrzeuges relevant.
2.2.2 Motivation
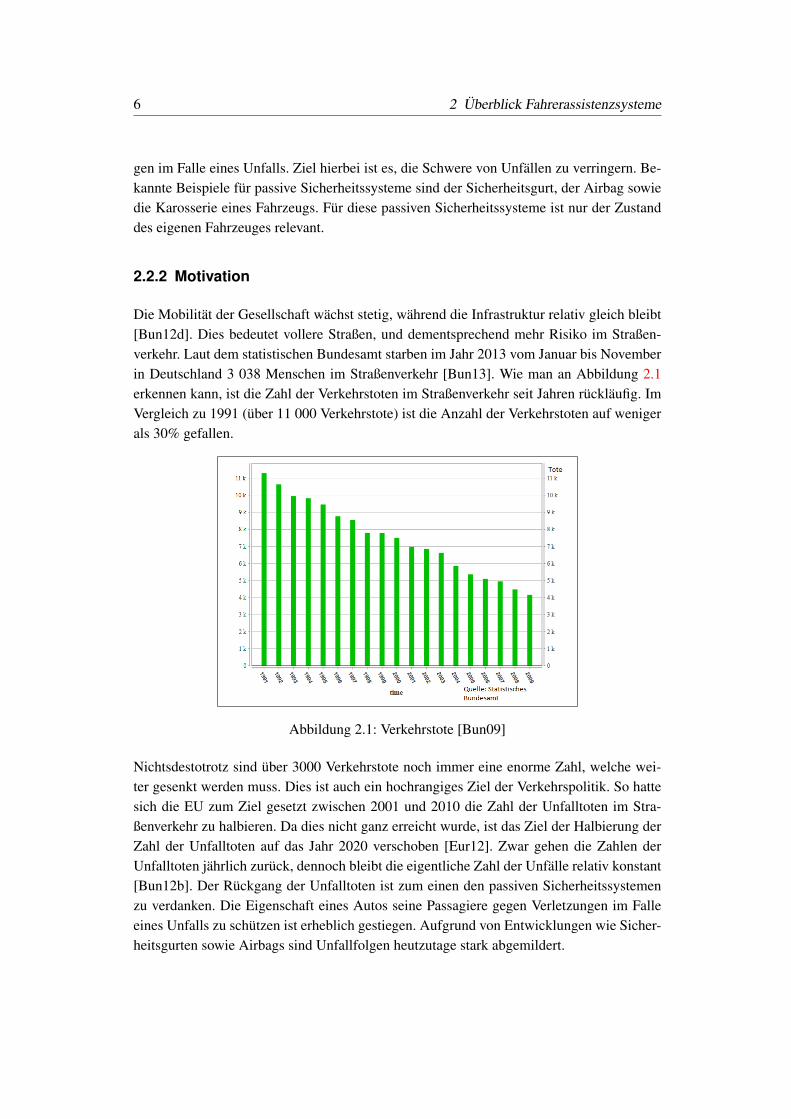
Die Mobilität der Gesellschaft wächst stetig, während die Infrastruktur relativ gleich bleibt[Bun12d]. Dies bedeutet vollere Straßen, und dementsprechend mehr Risiko im Straßen-verkehr. Laut dem statistischen Bundesamt starben im Jahr 2013 vom Januar bis Novemberin Deutschland 3 038 Menschen im Straßenverkehr [Bun13]. Wie man an Abbildung 2.1erkennen kann, ist die Zahl der Verkehrstoten im Straßenverkehr seit Jahren rückläufig. ImVergleich zu 1991 (über 11 000 Verkehrstote) ist die Anzahl der Verkehrstoten auf wenigerals 30% gefallen.
Abbildung 2.1: Verkehrstote [Bun09]
Nichtsdestotrotz sind über 3000 Verkehrstote noch immer eine enorme Zahl, welche wei-ter gesenkt werden muss. Dies ist auch ein hochrangiges Ziel der Verkehrspolitik. So hattesich die EU zum Ziel gesetzt zwischen 2001 und 2010 die Zahl der Unfalltoten im Stra-ßenverkehr zu halbieren. Da dies nicht ganz erreicht wurde, ist das Ziel der Halbierung derZahl der Unfalltoten auf das Jahr 2020 verschoben [Eur12]. Zwar gehen die Zahlen derUnfalltoten jährlich zurück, dennoch bleibt die eigentliche Zahl der Unfälle relativ konstant[Bun12b]. Der Rückgang der Unfalltoten ist zum einen den passiven Sicherheitssystemenzu verdanken. Die Eigenschaft eines Autos seine Passagiere gegen Verletzungen im Falleeines Unfalls zu schützen ist erheblich gestiegen. Aufgrund von Entwicklungen wie Sicher-heitsgurten sowie Airbags sind Unfallfolgen heutzutage stark abgemildert.
2.2 Grundlagen 7
Eine Abmilderung von Unfallfolgen ist unzureichend. Um das Ziel der Europäischen Unionumzusetzen müssen effektivere Maßnahmen zur Reduzierung von Verkehrsunfällen ergrif-fen werden. Dafür ist es notwendig, die Ursache von Unfällen näher zu kennen. Als Haupt-ursache für Unfälle gelten Fahrfehler der Fahrzeugführer [Bun12c]. Dahinter folgen Um-weltbedingungen und die geringste Ursache sind technische Mängel der Fahrzeuge. Zummenschlichen Fehlverhalten zählt beispielsweise falscher Abstand oder erhöhte Geschwin-digkeit, Missachtung der Vorfahrt oder auch Fehler beim Abbiegen [Bun12a]. Dies bedeu-tet, dass der Fahrer mehr unterstützt und informiert werden muss, um entlastet zu werden.Moderne Fahrerassistenzsysteme werden aus diesem Grund mit dem Ziel entwickelt dasLeistungsvermögen des Fahrers zu steigern, damit er den Anforderungen der jeweiligen Ver-kehrssituation gerecht wird. Dass große Erwartungen in die Fahrerassistenz gesetzt werden,spiegelt sich auch in den gesetzlichen Einführungen von Fahrerassistenzsystemen wieder.So wird beispielsweise ab 2014 das ESP Pflicht für alle neu zugelassenen Straßenfahrzeuge[Ver13]. Zwar ist der genaue Beitrag von Fahrerassistenzsystemen zur Verkehrssicherheitnoch nicht eindeutig geklärt, doch gibt es schon Studien die zumindest andeuten, dass dieFahrerassistenz ihre Zwecke erfüllt. So geht aus einer Ermittlung des Sicherheitspotenzi-als von Fahrerassistenzsystemen der Unfallforschung der Versicherer heraus, dass bestim-me Fahrerassistenzsysteme grundsätzlich in der Lage sind, das Unfallgeschehen positiv zubeeinflussen[THL11]. Auch die deutsche Verkehrswacht sieht in ausgewählten Fahrerassis-tenzsystemen erhebliches Potenzial zur Vermeidung von Verkehrsunfällen [Lan10].
2.2.3 Geschichte
Obwohl Fahrerassistenzsysteme nicht erforderlich für die eigentliche Mobilität des Fahr-zeugs sind, kamen sehr früh zunehmend Aspekte der Sicherheit und des Komforts bei derAutomobilentwicklung in den Vordergrund. Schon ab dem Jahr 1901 setzte sich zum ers-ten Mal das Lenkrad zur Ablösung von Lenkstöcken oder Lenkkurbeln durch. Auch derSicherheitsgurt, welcher 1903 zum ersten Mal patentiert wurde, sowie das Tachometer ge-hören im weitesten Sinne zu den frühesten Assistenzsystemen. Über die Jahrzehnte kamenimmer weitere Systeme hinzu, die heutzutage selbstverständlich sind, wie beispielsweiseim Jahre 1926 die Servolenkung oder das 1969 erstmals präsentierte ABS.
War bei früheren Systemen oftmals nur die Automatisierung einer bestimmten Aufgabedas Ziel, so wurde mit der Erfindung des ABS erstmalig die Stabilisierung des Fahrzeugesaktiv unterstützt. Die immer fortführende Automation von Fahraufgaben führt theoretischzu einem voll-autonomen Auto. Die autonome Fahrzeugführung wird dementsprechend alsFernziel der Fahrerassistenz propagiert, denn Fahrerassistenzsysteme stellen oftmals dieAutomatisierung einer (Teil-) Fahraufgabe dar. So ist Entwicklung auf dem Gebiet der auto-nomen Fahrzeugführung auch Entwicklung in der Fahrerassistenz. Wesentliche Grundlagenfür die Entwicklung zum autonomen Auto, und dementsprechend auch im Bereich der Fah-
8 2 Überblick Fahrerassistenzsysteme
rerassistenz, wurden in dem 1995 beendeten Forschungsprojekt PROMETHEUS geschaffen[Wik13b]. PROMETHEUS war das bislang größte Projekt zum Thema autonome Fahrzeugean dem zahlreiche Universitäten und Autohersteller teilnahmen. Einer der größten Erfolgedes Projektes war die 1995 von München bis Odense zurückgelegte Strecke eines autono-men Fahrzeuges unter Hilfseingriffen des Fahrers. Die Bedeutung der Fahrerassistenz hatseitdem drastisch zugenommen. So hat die Automobilentwicklung ab den neunziger Jahreneinige sehr wichtige Assistenzsysteme hervorgebracht. Dazu zählen zum einen die sehr er-folgreichen Systeme ESP (1995), der Abstandsregelautomat (1995) , sowie die 1987 auf denMarkt gekommene ASR [Wik14b, Wik14a]. Diese Entwicklung wurde durch die Förderungweiterer Projekte und Initiativen fortgesetzt. Dazu gehört beispielsweise das 2005 beende-te INVENT Projekt [INV14]. Dies war eine Forschungsinitiative deutscher Unternehmengefördert vom Bundesministerium für Bildung und Forschung. Ziel des Projektes warendie Entwicklung von Fahrerassistenzsystemen zur Erhöhung der Verkehrssicherheit und zurOptimierung des Verkehrsflusses. Auch die 2006 gestartete Initiative AKTIV schreibt inihren Zielen, dass neue Fahrerassistenzsysteme gebraucht werden, welche die Sicherheitfür alle Verkehrsteilnehmer erhöhen, den Fahrer entlasten und ihn effizient zum Ziel brin-gen, sowie ökonomisch und ökologisch sinnvoll und rechtlich abgesichert sind [AKT10].Um dies umzusetzen analysieren Fahrerassistenzsysteme heutzutage immer mehr den Zu-stand des eigenen Fahrzeugs sowie seine Umgebung. Der Entwicklung der Fahrerassistenzfolgend, wurden auch autonome Fahrzeuge stetig erfolgreicher. Durch Wettbewerbe wiedie DARPA Grand Challenge in den Jahren 2004, 2005 und 2007 wurde die Innovation indiesem Bereich stark voran getrieben [Wik13a]. Obwohl der Einsatz und die Nutzung vonmodernen Fahrerassistenzsystemen immer beliebter wird, ist es jedoch zweifelhaft ob dieVerwirklichung der autonomen Fahrzeugführung jemals gelingt.
2.3 Fahrerassistenzsysteme im Allgemeinen
In diesem Kapitel wird zu Beginn der allgemeine Aufbau von Fahrerassistenzsystemen vor-gestellt. Danach erfolgt eine Übersicht über verschiedene Klassifikationen von Fahrerassis-tenzsystemen.
2.3.1 Systemaufbau
Jedes Fahrerassistenzsystem funktioniert in einem Regelkreis. Der Fahrer steuert das Autound hat somit Einfluss auf das Fahrverhalten. Das Fahrverhalten wiederum, bedingt durchdie eingebauten Fahrerassistenzsysteme, nimmt Einfluss auf den Fahrer. Die Funktionali-täten von Fahrerassistenzsystemen können sehr unterschiedlich ausfallen, und ihr Nutzenund Zweck in verschiedenen Bereichen liegen, dennoch ist oftmals die prinzipielle Strukturgleich.
2.3 Fahrerassistenzsysteme im Allgemeinen 9
Für den strukturellen Aufbau eines Fahrerassistenzsystems schlägt die ForschungsinitiativeINVENT eine Unterteilung in drei Ebenen vor [INV05]:
1. Situationserfassung
2. Situationsanalyse und Aktionsentscheidung
3. Aktionsausführung
In der ersten Ebene, der Situationserfassung, werden durch verschiedene Sensoren sämtli-che für das System relevanten Merkmale erfasst. Dies beinhaltet das Erkennen von Ver-kehrsteilnehmern, des Verkehrszustands und des Bewegungszustands des eigenen Fahr-zeugs. Die Informationen der unterschiedlichen Sensorik können unter Nutzung von Sens-ordatenfusion vorverarbeitet werden. Hauptziel auf dieser Ebene ist eine vollständige Er-fassung der Umgebung. Auf der zweiten Ebene werden die gesammelten Informationenausgewertet. Aufbauend auf dem gelieferten Umgebungsmodell müssen hier verschiedeneHandlungsoptionen bei der Aktionsplanung berücksichtigt werden. Am Ende dieser Ebe-ne steht die Aktionsentscheidung. Die dritte Ebene, die Aktionsausführung, setzt die ge-wünschte Reaktion der Aktionsentscheidung um. Auf dieser Ebene werden Schnittstellenzu Fahrer und Fahrzeug bereitgestellt. Durch diese Schnittstellen ist der aktive Eingriff inMotor, Lenkung und Bremse möglich. Auch kann der Fahrer durch haptische, optische oderakustische Signale informiert oder gewarnt werden.
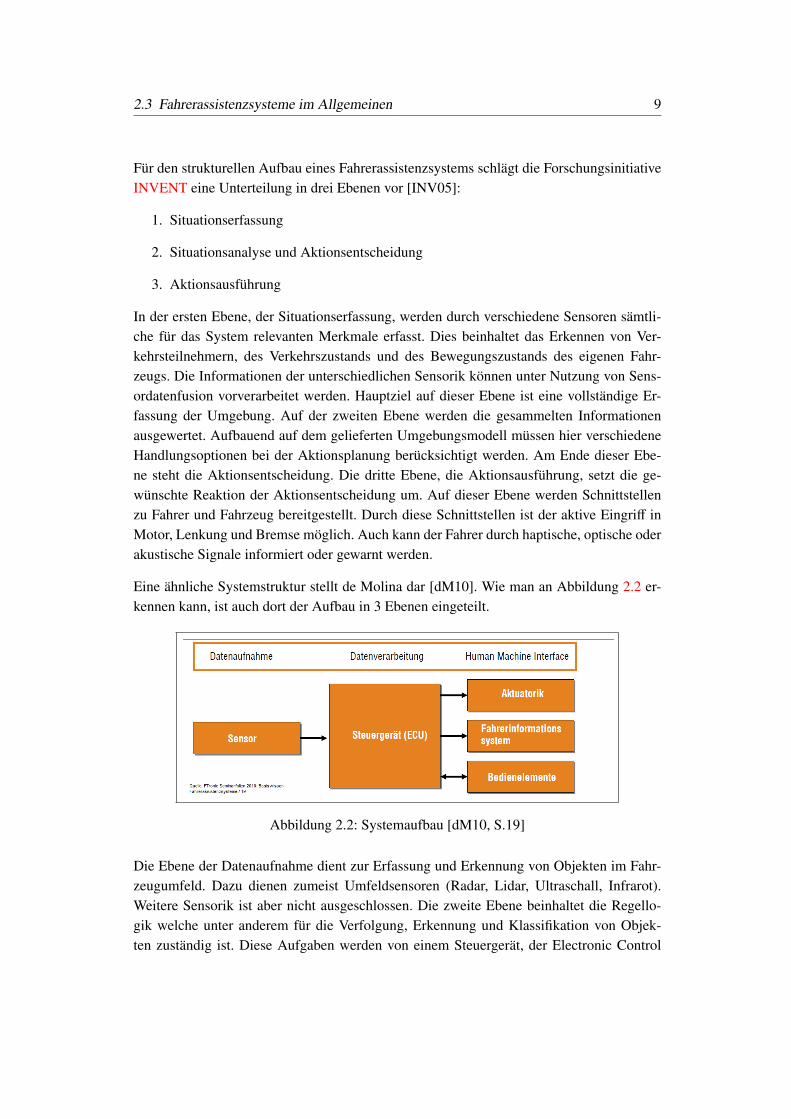
Eine ähnliche Systemstruktur stellt de Molina dar [dM10]. Wie man an Abbildung 2.2 er-kennen kann, ist auch dort der Aufbau in 3 Ebenen eingeteilt.
Abbildung 2.2: Systemaufbau [dM10, S.19]
Die Ebene der Datenaufnahme dient zur Erfassung und Erkennung von Objekten im Fahr-zeugumfeld. Dazu dienen zumeist Umfeldsensoren (Radar, Lidar, Ultraschall, Infrarot).Weitere Sensorik ist aber nicht ausgeschlossen. Die zweite Ebene beinhaltet die Regello-gik welche unter anderem für die Verfolgung, Erkennung und Klassifikation von Objek-ten zuständig ist. Diese Aufgaben werden von einem Steuergerät, der Electronic Control
10 2 Überblick Fahrerassistenzsysteme
Unit (ECU) , welche meist gleich im Sensorgehäuse mit verbaut ist, ausgeführt. Das Steu-ergerät kommuniziert auf direktionalem, oder im Falle der Bedienelemente auf bidirektio-nalem Weg mit dem Human Machine Interface (HMI). Das HMI stellt die dritte Ebene dar.Es ist eine Bedien- und Kommunikationseinheit, welche die Schnittstelle zwischen Fah-rer und System darstellt. Hier kann der Fahrer das System konfigurieren, sowie das Sys-tem dem Fahrer Rückmeldungen geben. Die Konfiguration kann anhand unterschiedlicherEingabemöglichkeiten erfolgen und die Rückmeldung des Systems über unterschiedlicheKanäle. So können optische Informationen, akustische Signale wie auch haptische Metho-den genutzt werden.
2.3.2 Klassifikationen
Durch die große Anzahl an unterschiedlichen Fahrerassistenzsystemen benötigt man beideren Betrachtung eine gewisse Klassifikation. Doch wie schon bei der Definition des Be-griffes des Fahrerassistenzsystems, so existiert auch bei der Klassifikation von Fahrerassis-tenzsystemen keine einheitliche Meinung in der Fachliteratur. Je nach Definition von FAS,der Art der Analyse und dem Ziel der Klassifikation kann so zum Beispiel nach Längs- undQuerführung oder nach Aufgabe klassifiziert werden [dM10]. Auch können die Systemeanhand ihres Einflusses auf die Straßensicherheit und den Verkehrsfluss eingeteilt werden[JG02].
Eine der bekanntesten Klassifizierungen ist die Unterteilung entsprechend der Ebene derFahraufgabe. Hierbei werden Fahrerassistenzsysteme in die Bereiche Planung, Führung undStabilisierung aufgeteilt [Lew11]. Andere Klassifikationen beinhalten mehr als nur drei Be-reiche. So unterscheidet Konrad Reif beispielsweise insgesamt fünf Bereiche [Rei10a], undandere Klassifikationen teilen Fahrerassistenzsysteme sogar in acht unterschiedliche Kate-gorien ein [LC06]. Der Vorteil solcher Klassifikationen ist, dass sie eine schärfere Unter-scheidung zulassen, falls diese denn möglich ist. Denn oftmals lassen Fahrerassistenzsys-teme sich in mehrere Kategorien der gleichen Klassifikation einteilen. Eine disjunkte Auf-teilung ist meistens sehr schwierig. Eine weitere gängige Einteilung ist die Unterscheidungnach Automatisierungsstufe [Lin12, Lew11]. Dies hat zum einen den Grund, dass dieseArt der Klassifizierung nicht speziell auf Fahrer-Fahrzeug ausgelegt ist, sondern bei jederMensch-Maschinen-Interaktion vorgenommen werden kann. Wie die Stufen des Automati-sierungsgrad definiert sind, ist je nach Klassifikation unterschiedlich. Einen Überblick überdiverse Einteilungen des Automatisierungsgrades findet sich bei Lindberg [Lin12]. Im All-gemeinen gibt der Nutzer bei höherem Automatisierungsgrad mehr Verantwortung an dieMaschine ab. Eine Verfeinerung zu dieser Klassifikation stellt Gruendl vor [Gru05]. Dortwird zum Grad der Automatisierung eine weitere Stufe, die der kompletten Übernahmehinzugefügt. Die Stufen der Automatisierung lauten bei ihm demzufolge:
“1. Information
2.4 Fahrerassistenz aus Sensorsicht 11
2. Warnung
3. Korrigierender Eingriff
4. Übernahme der Fahraufgabe“ [Gru05, S. 46]
Zusätzlich dazu kombiniert er diese Unterteilung noch mit der weiter oben beschriebenenAufteilung nach der Fahraufgabe. Dies führt schon zu einer spezifizierten, aber dennochübersichtlichen Klassifizierung. Anstatt sich nur auf eine beschränkte Menge von Automati-sierungsstufen zu begrenzen, kann man auch nach Handlungsphasen kategorisieren [Lin12].Fahrerassistenzsysteme können eine oder mehrere solcher Phasen unterstützen, im Gegen-satz zu nur einer Automatisierungsstufe. Dadurch ist trotz der großen Vielfalt an Systemeneine übersichtliche und klare Darstellung möglich, denn jedem FAS kann man eine Kombi-nation dieser Phasen zuordnen. In der Literatur gibt es diverse weitere Ansätze von Klassi-fikationen die sich je nach Eigenschaft und Beschaffenheit des Systems ausrichten. So exis-tieren Einteilungen in warnende und reaktive Systeme [DM13], in Sicherheits-, Komfort-,und Verkehrseffizienzsysteme [Pap07] oder auch nach der Art und Situation der Rückmel-dung [HW06]. Viele weitere Klassifikationen, zum Beispiel nach Fahrzeugtyp oder der Artvon Straße, für die das System ausgerichtet ist, sind denkbar.
Die vielen Möglichkeiten zur Klassifizierung von Fahrerassistenzsystemen bedeuten nicht,dass es “falsche“ oder “richtige“ Klassifikationen gibt. Vielmehr kommt es bei einem Klas-sifikationsschema auf die Nützlichkeit im jeweiligen Anwendungsfall und das eigene Zielan.
2.4 Fahrerassistenz aus Sensorsicht
Soll ein Fahrzeug in der Lage sein mithilfe eines Assistenzsystems den Fahrer zu unter-stützen, ist es auf zuverlässige Sensordaten angewiesen. Da Sensoren einen wichtigen Teilzum Erfolg von Fahrerassistenzsystemen beitragen, wird zum Schluss dieses Kapitels einebeispielhafte Klassifizierung bestimmter Fahrerassistenzsysteme aus der Sensorsicht vorge-nommen. Dafür wird zuerst die vorhandene Sensorik angesprochen sowie mehrere, unter-schiedliche Fahrerassistenzsysteme vorgestellt.
2.4.1 Sensorik im Fahrzeug
Sensoren erfassen Betriebszustände und Sollwerte, sie wandeln physikalische oder chemi-sche Größen in elektrische Signale um [Rei10a]. Im Fahrzeug sind eine riesige Anzahlan Sensoren verbaut, welche sich je nach der Art der Sicht unterschiedlich klassifizierenlassen. Aus Gründen der Übersichtlichkeit wird hier die Fahrzeugsensorik in “interne“ Sen-sorik zur Erfassung der Zustände des Fahrzeugs, sowie in “externe“ Sensorik zur Erfassung
12 2 Überblick Fahrerassistenzsysteme
des Fahrzeugumfeldes eingeteilt. Zur internen Sensorik zählen beispielsweise Raddrehzahl-sensoren, Beschleunigungsensoren und Lenkradwinkelsensoren [Rei11]. Raddrehzahlsen-soren dienen dazu, die Radbewegung von Fahrzeugrädern zu erfassen. Die Radbewegungist eine wichtige Größe zur Regelung der Fahrzeugverzögerung und der Fahrstabilität. Ausder ermittelten Radgeschwindigkeit, -beschleunigung und -richtung lassen sich Radschlupfsowie die Fahrzeuggeschwindigkeit berechnen. Beschleunigungssensoren werden zur Mes-sung der Fahrzeuglängs- und Fahrzeugquerbeschleunigung genutzt. Je nach Achse, könnensomit verschiedene Beschleunigungen gemessen werden [WHW09]. Der Lenkradwinkel-sensor kann zur Regelung der Fahrzeugstabilität, beispielsweise beim ESP, genutzt werden.Es wird der Lenkwinkel am Steuer gemessen, und nicht am Rad selbst. Der Lenkradwinkelgibt Informationen über den Fahrerwunsch aus, auf den Messwerte bezogen und plausibi-lisiert werden können. Eine genauere technische Beschreibung dieser Sensoren und Mess-prinzipien befindet sich bei Reif sowie bei Winner et al. [Rei11, WHW09].
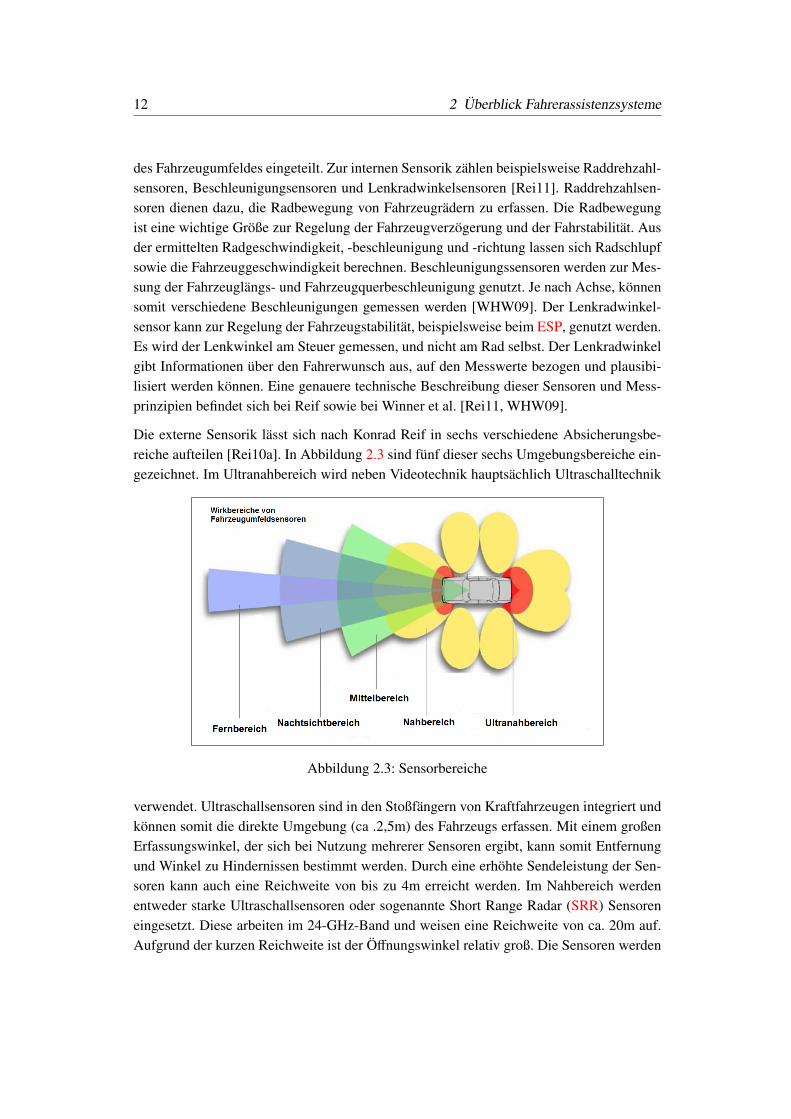
Die externe Sensorik lässt sich nach Konrad Reif in sechs verschiedene Absicherungsbe-reiche aufteilen [Rei10a]. In Abbildung 2.3 sind fünf dieser sechs Umgebungsbereiche ein-gezeichnet. Im Ultranahbereich wird neben Videotechnik hauptsächlich Ultraschalltechnik
Abbildung 2.3: Sensorbereiche
verwendet. Ultraschallsensoren sind in den Stoßfängern von Kraftfahrzeugen integriert undkönnen somit die direkte Umgebung (ca .2,5m) des Fahrzeugs erfassen. Mit einem großenErfassungswinkel, der sich bei Nutzung mehrerer Sensoren ergibt, kann somit Entfernungund Winkel zu Hindernissen bestimmt werden. Durch eine erhöhte Sendeleistung der Sen-soren kann auch eine Reichweite von bis zu 4m erreicht werden. Im Nahbereich werdenentweder starke Ultraschallsensoren oder sogenannte Short Range Radar (SRR) Sensoreneingesetzt. Diese arbeiten im 24-GHz-Band und weisen eine Reichweite von ca. 20m auf.Aufgrund der kurzen Reichweite ist der Öffnungswinkel relativ groß. Die Sensoren werden
2.4 Fahrerassistenz aus Sensorsicht 13
für gewöhnlich in der Stoßstange montiert. Die Überwachung des Mittelbereiches erfolgthauptsächlich durch Videotechnik. Bilder besitzen einen sehr hohen Informationsgehalt,folglich sind zur Auswertung von Verkehrssituationen komplexe Algorithmen zur Bildaus-wertung nötig. Aufgrund der beschränkten Auflösung der Bildsensoren kann hier eine unge-fähre Reichweite von 80m erreicht werden. Durch Einsatz zweier stereoskopischer Kameraskönnen zudem auch Tiefeninformationen gewonnen werden. Im Nachtsichtbereich werdengrundsätzlich Infrarotsichtsysteme (LiDAR, Infrarotkameras) eingesetzt. Infrarotkamerasnehmen den Frontbereich auf und geben diesen beispielsweise an ein Display (HMI) weiter.Die Reichweite beträgt hier bis zu 150m. Die Messreichweite kann jedoch bei entsprechendschlechtem Wetter sehr stark reduziert sein. Zu beachten ist, dass die Infrarottechnik nichtdie Sicht des entgegenkommenden Fahrers behindern kann. Die Sensoren werden in derStoßstange oder hinter der Windschutzscheibe verbaut. Im Fernbereich werden sogenann-te Long Range Radar (LRR) Sensoren eingesetzt, aber auch LiDAR ist möglich. Der Fre-quenzbereich in dem die LRR Sensoren arbeiten befindet sich zwischen 76 und 77 GHz. DieReichweite dieser Sensoren beträgt bis zu 200m. Aufgrund der hohen Reichweite besitzensie einen dementsprechend geringen Öffnungswinkel. Der sechste Bereich ist der Heckbe-reich. Dort werden zur Überwachung Ultraschallsensoren sowie Kameras eingesetzt. Da erdem Ultranahbereich stark ähnelt, ist er auf Abbildung 2.3 nicht mit eingezeichnet.
2.4.2 Vorstellung mehrerer Fahrerassistenzsysteme
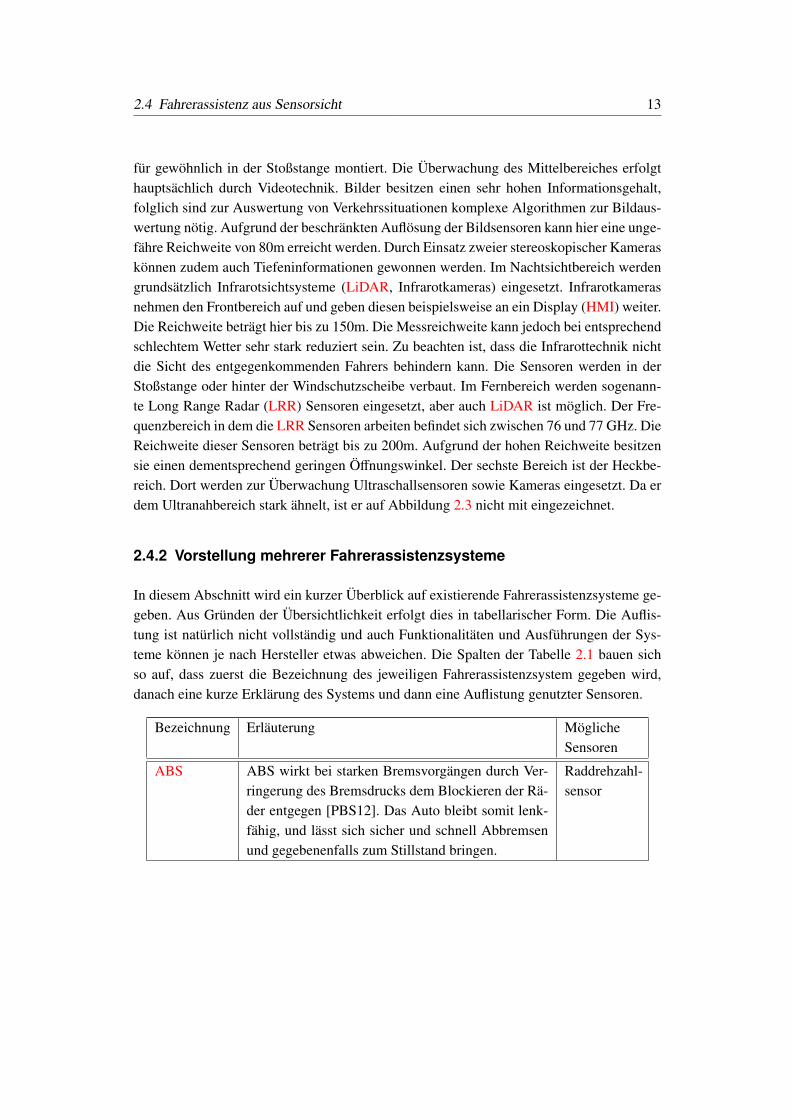
In diesem Abschnitt wird ein kurzer Überblick auf existierende Fahrerassistenzsysteme ge-geben. Aus Gründen der Übersichtlichkeit erfolgt dies in tabellarischer Form. Die Auflis-tung ist natürlich nicht vollständig und auch Funktionalitäten und Ausführungen der Sys-teme können je nach Hersteller etwas abweichen. Die Spalten der Tabelle 2.1 bauen sichso auf, dass zuerst die Bezeichnung des jeweiligen Fahrerassistenzsystem gegeben wird,danach eine kurze Erklärung des Systems und dann eine Auflistung genutzter Sensoren.
Bezeichnung Erläuterung MöglicheSensoren
ABS ABS wirkt bei starken Bremsvorgängen durch Ver-ringerung des Bremsdrucks dem Blockieren der Rä-der entgegen [PBS12]. Das Auto bleibt somit lenk-fähig, und lässt sich sicher und schnell Abbremsenund gegebenenfalls zum Stillstand bringen.
Raddrehzahl-sensor
14 2 Überblick Fahrerassistenzsysteme
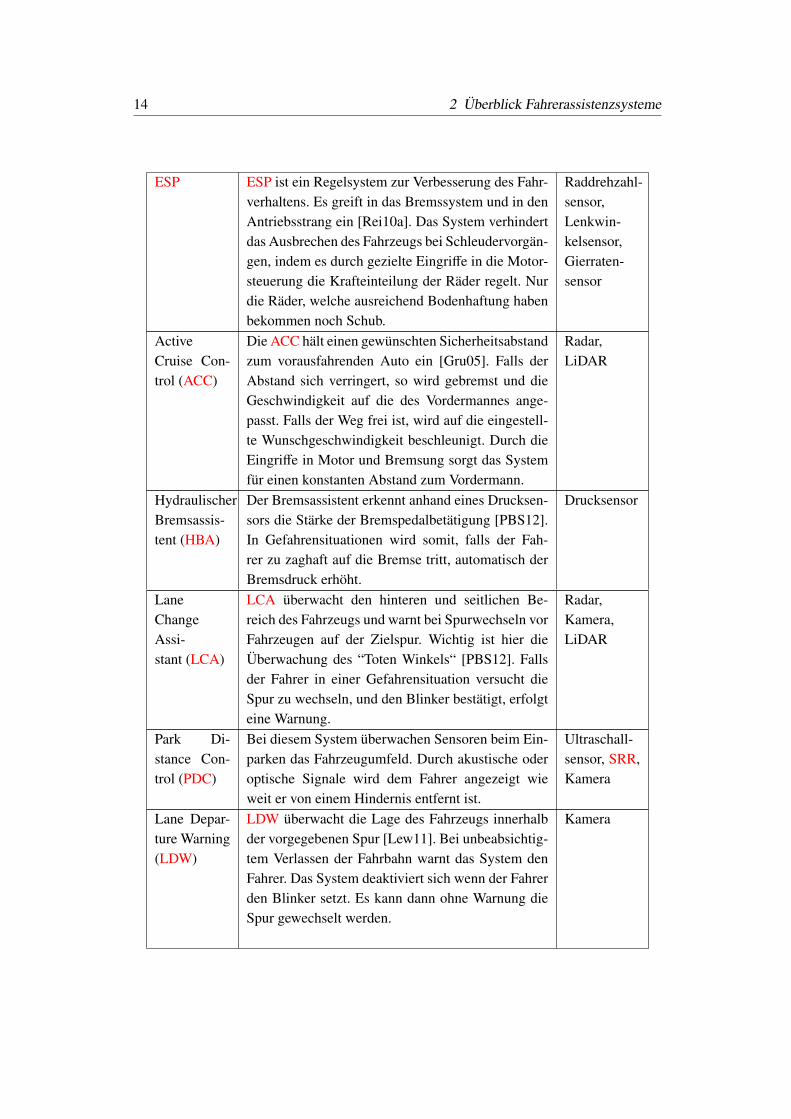
ESP ESP ist ein Regelsystem zur Verbesserung des Fahr-verhaltens. Es greift in das Bremssystem und in denAntriebsstrang ein [Rei10a]. Das System verhindertdas Ausbrechen des Fahrzeugs bei Schleudervorgän-gen, indem es durch gezielte Eingriffe in die Motor-steuerung die Krafteinteilung der Räder regelt. Nurdie Räder, welche ausreichend Bodenhaftung habenbekommen noch Schub.
Raddrehzahl-sensor,Lenkwin-kelsensor,Gierraten-sensor
ActiveCruise Con-trol (ACC)
Die ACC hält einen gewünschten Sicherheitsabstandzum vorausfahrenden Auto ein [Gru05]. Falls derAbstand sich verringert, so wird gebremst und dieGeschwindigkeit auf die des Vordermannes ange-passt. Falls der Weg frei ist, wird auf die eingestell-te Wunschgeschwindigkeit beschleunigt. Durch dieEingriffe in Motor und Bremsung sorgt das Systemfür einen konstanten Abstand zum Vordermann.
Radar,LiDAR
HydraulischerBremsassis-tent (HBA)
Der Bremsassistent erkennt anhand eines Drucksen-sors die Stärke der Bremspedalbetätigung [PBS12].In Gefahrensituationen wird somit, falls der Fah-rer zu zaghaft auf die Bremse tritt, automatisch derBremsdruck erhöht.
Drucksensor
LaneChangeAssi-stant (LCA)
LCA überwacht den hinteren und seitlichen Be-reich des Fahrzeugs und warnt bei Spurwechseln vorFahrzeugen auf der Zielspur. Wichtig ist hier dieÜberwachung des “Toten Winkels“ [PBS12]. Fallsder Fahrer in einer Gefahrensituation versucht dieSpur zu wechseln, und den Blinker bestätigt, erfolgteine Warnung.
Radar,Kamera,LiDAR
Park Di-stance Con-trol (PDC)
Bei diesem System überwachen Sensoren beim Ein-parken das Fahrzeugumfeld. Durch akustische oderoptische Signale wird dem Fahrer angezeigt wieweit er von einem Hindernis entfernt ist.
Ultraschall-sensor, SRR,Kamera
Lane Depar-ture Warning(LDW)
LDW überwacht die Lage des Fahrzeugs innerhalbder vorgegebenen Spur [Lew11]. Bei unbeabsichtig-tem Verlassen der Fahrbahn warnt das System denFahrer. Das System deaktiviert sich wenn der Fahrerden Blinker setzt. Es kann dann ohne Warnung dieSpur gewechselt werden.
Kamera
2.4 Fahrerassistenz aus Sensorsicht 15
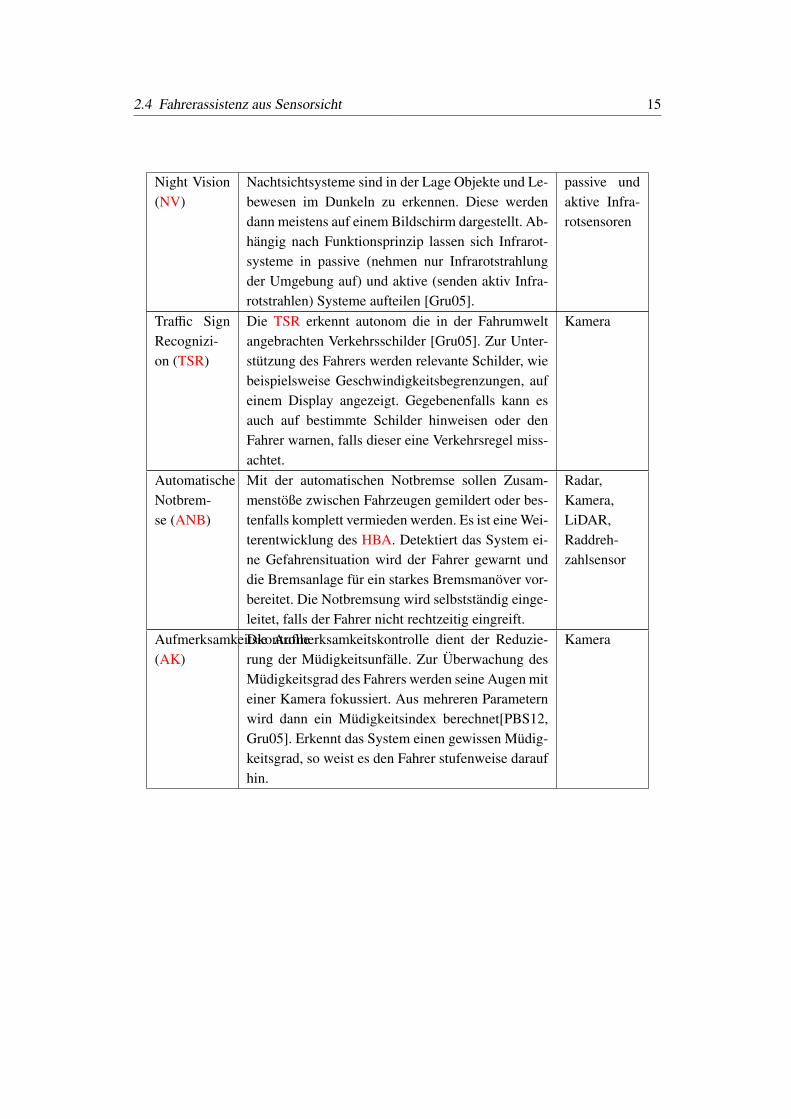
Night Vision(NV)
Nachtsichtsysteme sind in der Lage Objekte und Le-bewesen im Dunkeln zu erkennen. Diese werdendann meistens auf einem Bildschirm dargestellt. Ab-hängig nach Funktionsprinzip lassen sich Infrarot-systeme in passive (nehmen nur Infrarotstrahlungder Umgebung auf) und aktive (senden aktiv Infra-rotstrahlen) Systeme aufteilen [Gru05].
passive undaktive Infra-rotsensoren
Traffic SignRecognizi-on (TSR)
Die TSR erkennt autonom die in der Fahrumweltangebrachten Verkehrsschilder [Gru05]. Zur Unter-stützung des Fahrers werden relevante Schilder, wiebeispielsweise Geschwindigkeitsbegrenzungen, aufeinem Display angezeigt. Gegebenenfalls kann esauch auf bestimmte Schilder hinweisen oder denFahrer warnen, falls dieser eine Verkehrsregel miss-achtet.
Kamera
AutomatischeNotbrem-se (ANB)
Mit der automatischen Notbremse sollen Zusam-menstöße zwischen Fahrzeugen gemildert oder bes-tenfalls komplett vermieden werden. Es ist eine Wei-terentwicklung des HBA. Detektiert das System ei-ne Gefahrensituation wird der Fahrer gewarnt unddie Bremsanlage für ein starkes Bremsmanöver vor-bereitet. Die Notbremsung wird selbstständig einge-leitet, falls der Fahrer nicht rechtzeitig eingreift.
Radar,Kamera,LiDAR,Raddreh-zahlsensor
Aufmerksamkeitskontrolle(AK)
Die Aufmerksamkeitskontrolle dient der Reduzie-rung der Müdigkeitsunfälle. Zur Überwachung desMüdigkeitsgrad des Fahrers werden seine Augen miteiner Kamera fokussiert. Aus mehreren Parameternwird dann ein Müdigkeitsindex berechnet[PBS12,Gru05]. Erkennt das System einen gewissen Müdig-keitsgrad, so weist es den Fahrer stufenweise daraufhin.
Kamera
16 2 Überblick Fahrerassistenzsysteme
AdaptivesKurven-licht (AKL)
Dieses System soll, ebenso wie die NV, den Fah-rer in der Dunkelheit unterstützen. Scheinwerfersind normalerweise am Fahrzeug fest montiert. Diesführt dazu, dass bei Kurvenfahrten geradeaus, abernicht auf die Straße geleuchtet wird. Das AdaptiveKurvenlicht nutzt daher um bis zu 15 Grad horizon-tal schwenkbare Scheinwerfer [Gru05]. Die Fahrdy-namik wird anhand von Sensoren erkannt und da-durch auch in Kurven die Straße optimal ausge-leuchtet.
Lenkwinkel-sensor,Gierra-tensensor,Fahrge-schwindig-keitssensor
Lane Kee-ping Assi-stant (LKA)
Bei diesem System wird die Spurhaltung unterstützt.Es baut auf dem LDW System auf. Falls der Fahrerdie Fahrspur verlässt, so greift das System aktiv insLenksystem ein. Gelenkt wird dabei aber nicht voll-automatisch, sondern der Fahrer muss den vom Sys-tem vorgegebenen Lenkmomenten folgen [PBS12].
Kamera,
Tabelle 2.1: Überblick Fahrerassistenzsysteme
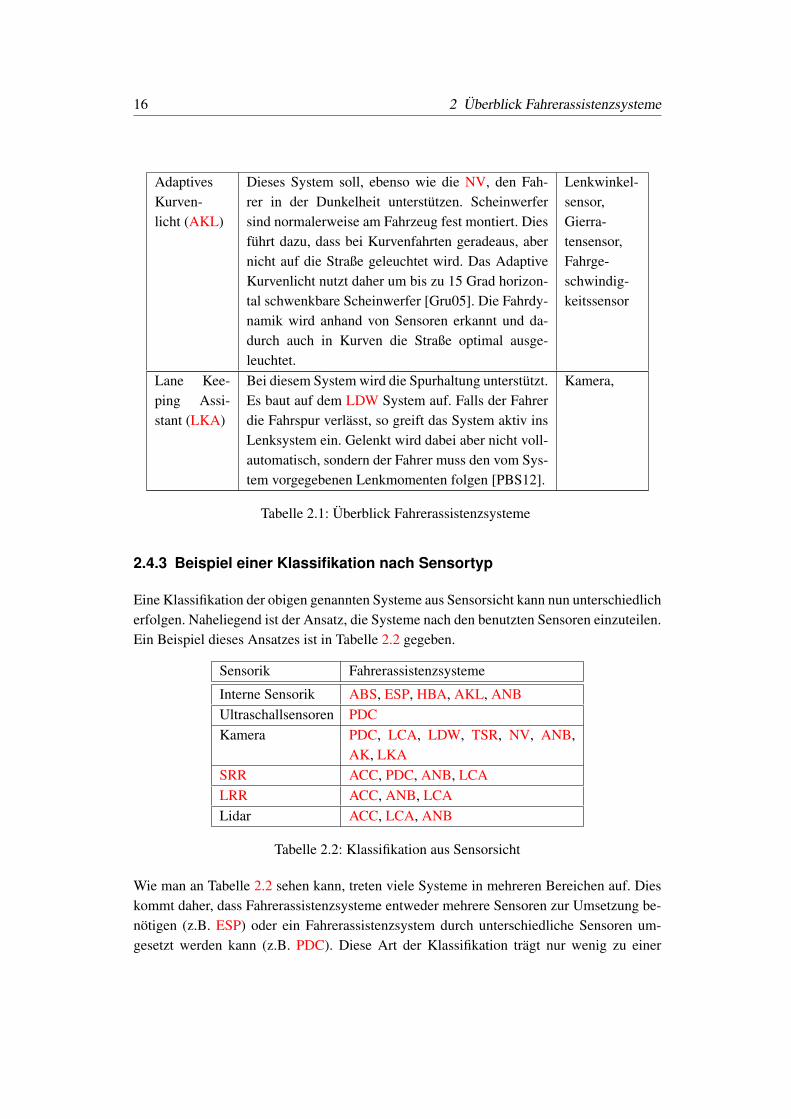
2.4.3 Beispiel einer Klassifikation nach Sensortyp
Eine Klassifikation der obigen genannten Systeme aus Sensorsicht kann nun unterschiedlicherfolgen. Naheliegend ist der Ansatz, die Systeme nach den benutzten Sensoren einzuteilen.Ein Beispiel dieses Ansatzes ist in Tabelle 2.2 gegeben.
Sensorik Fahrerassistenzsysteme
Interne Sensorik ABS, ESP, HBA, AKL, ANBUltraschallsensoren PDCKamera PDC, LCA, LDW, TSR, NV, ANB,
AK, LKASRR ACC, PDC, ANB, LCALRR ACC, ANB, LCALidar ACC, LCA, ANB
Tabelle 2.2: Klassifikation aus Sensorsicht
Wie man an Tabelle 2.2 sehen kann, treten viele Systeme in mehreren Bereichen auf. Dieskommt daher, dass Fahrerassistenzsysteme entweder mehrere Sensoren zur Umsetzung be-nötigen (z.B. ESP) oder ein Fahrerassistenzsystem durch unterschiedliche Sensoren um-gesetzt werden kann (z.B. PDC). Diese Art der Klassifikation trägt nur wenig zu einer

2.4 Fahrerassistenz aus Sensorsicht 17
besseren Übersicht bei. Eine Klassifikation ist also auch aus Sensorsicht vom Kontext ab-hängig und wird bestimmt von den eigenen Zielen. Modifizierungen des Ansatzes wärenbeispielsweise eine vorherige Klassifikation der Sensoren. Die Assistenzsysteme werdendann den Bereichen der Sensorklassifikation zugeordnet. So könnte man die Sensoren, wieweiter oben beschrieben nach Absicherungsbereich aufteilen und die Fahrerassistenzsyste-me den jeweiligen Bereichen (Ultranahbereich, Nahbereich, etc.) zuordnen. Auch Klassi-fikation nach Messprinzip oder Funktion (Abstandsmessung, Messung der Drehrate) sindmöglich [Rei11].

Andreas Schulz
3 Allgemeine Anforderungen
3.1 Einleitung
Dieses Kapitel soll einen allgemeinen Einblick in das Thema Sensoren und deren Anforde-rungen bieten. Dazu werde ich zuerst auf Arten von Sensoren eingehen. Zwei Arten undderen Anforderungen werde ich in einem späterem Abschnitt näher erläutern. Anschließendfolgen die allgemeinen Anforderungen an Sensoren und wie diese in Zukunft umgesetztund verbessert werden können. Beispielhaft werden die Anforderungen dann an optischenSensoren und Beschleunigungssensoren gezeigt und wie diese in Autos verwendet werden.Diese Arbeit bezieht sich größteils auf das Buch von Konrad Reif "Bosch Autoelektrik undAutoelektronik – Bordnetze, Sensoren und elektronische Systeme".
19
20 3 Allgemeine Anforderungen
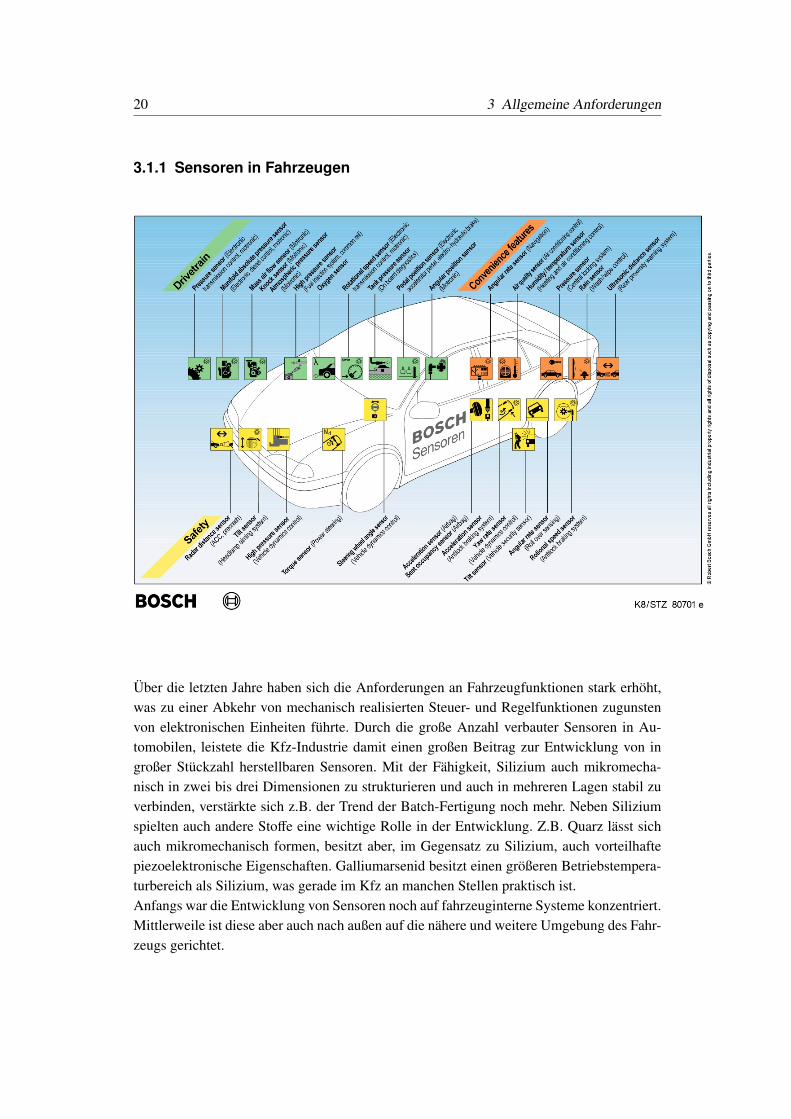
3.1.1 Sensoren in Fahrzeugen
Über die letzten Jahre haben sich die Anforderungen an Fahrzeugfunktionen stark erhöht,was zu einer Abkehr von mechanisch realisierten Steuer- und Regelfunktionen zugunstenvon elektronischen Einheiten führte. Durch die große Anzahl verbauter Sensoren in Au-tomobilen, leistete die Kfz-Industrie damit einen großen Beitrag zur Entwicklung von ingroßer Stückzahl herstellbaren Sensoren. Mit der Fähigkeit, Silizium auch mikromecha-nisch in zwei bis drei Dimensionen zu strukturieren und auch in mehreren Lagen stabil zuverbinden, verstärkte sich z.B. der Trend der Batch-Fertigung noch mehr. Neben Siliziumspielten auch andere Stoffe eine wichtige Rolle in der Entwicklung. Z.B. Quarz lässt sichauch mikromechanisch formen, besitzt aber, im Gegensatz zu Silizium, auch vorteilhaftepiezoelektronische Eigenschaften. Galliumarsenid besitzt einen größeren Betriebstempera-turbereich als Silizium, was gerade im Kfz an manchen Stellen praktisch ist.Anfangs war die Entwicklung von Sensoren noch auf fahrzeuginterne Systeme konzentriert.Mittlerweile ist diese aber auch nach außen auf die nähere und weitere Umgebung des Fahr-zeugs gerichtet.
3.1 Einleitung 21
• Nahbereichsradar erfasst rings um das Fahrzeug Objekte, die mit hoher Wahrschein-lichkeit eine Kollision verursachen könnten, um Zeit zu gewinnen und Sicherheits-systeme auch schon vordem Aufprall zu schärfen (Precrash-Sensoren).
• Bildsensoren können nicht nur Verkehrsschilder erfassen und in das Fahrerdisplayübertragen, sondern auch die Fahrbahnkontur erkennen, den Fahrer vor gefährlichenAbweichung warnen und bei Bedarf langfristig auch automatisches Fahren ermög-lichen. In Verbindung mit Infrarotstrahlern und einem Bildschirm im Sichtfeld desFahrers lassen IR-empfindliche Bildsensoren auch nachts, selbst bei nebligen Ver-hältnissen, eine weitreichende Fahrbahnbeobachtung zu (Night Vision).
• Weitbereichs-Radarsensoren beobachten auch unter schlechten Sichtbedingungen dieFahrbahn auf 150 m vor dem Fahrzeug, um die Fahrgeschwindigkeit vorausfahrendenFahrzeugen anzupassen und längerfristig auch automatisches Fahren zu unterstützen.
[Bos11]
22 3 Allgemeine Anforderungen
3.1.2 Arten von Sensoren
Positionssensoren
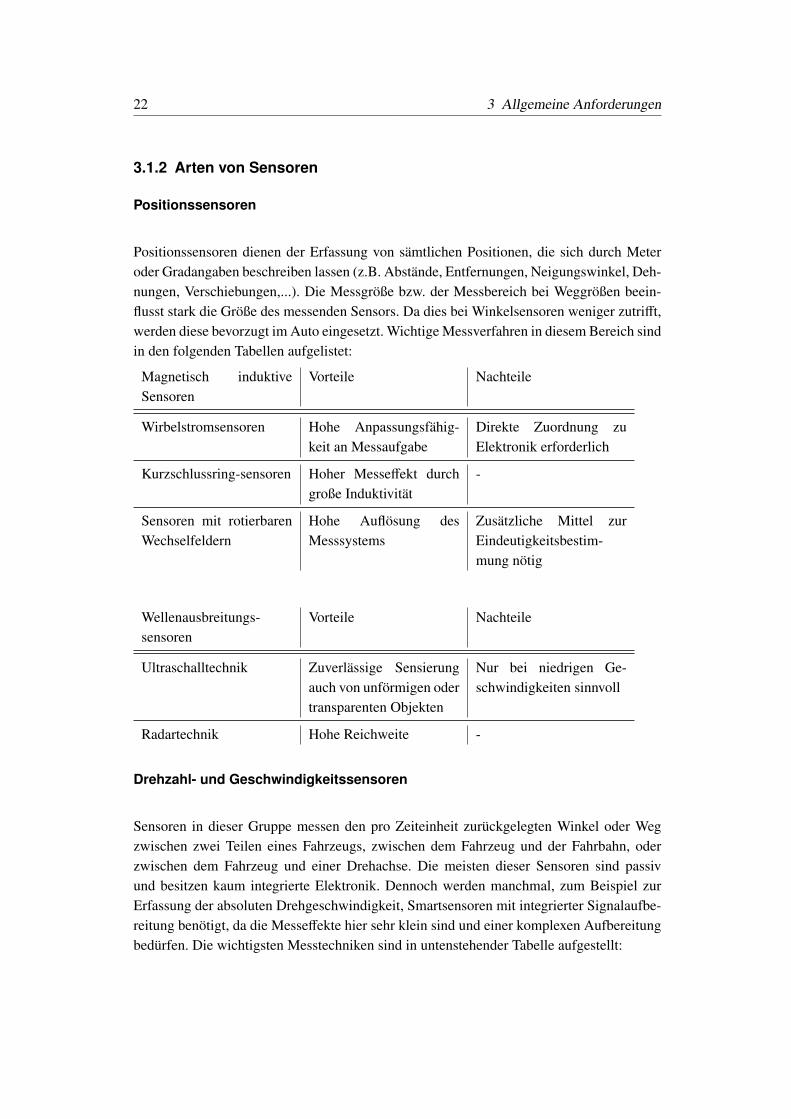
Positionssensoren dienen der Erfassung von sämtlichen Positionen, die sich durch Meteroder Gradangaben beschreiben lassen (z.B. Abstände, Entfernungen, Neigungswinkel, Deh-nungen, Verschiebungen,...). Die Messgröße bzw. der Messbereich bei Weggrößen beein-flusst stark die Größe des messenden Sensors. Da dies bei Winkelsensoren weniger zutrifft,werden diese bevorzugt im Auto eingesetzt. Wichtige Messverfahren in diesem Bereich sindin den folgenden Tabellen aufgelistet:
Magnetisch induktiveSensoren
Vorteile Nachteile
Wirbelstromsensoren Hohe Anpassungsfähig-keit an Messaufgabe
Direkte Zuordnung zuElektronik erforderlich
Kurzschlussring-sensoren Hoher Messeffekt durchgroße Induktivität
-
Sensoren mit rotierbarenWechselfeldern
Hohe Auflösung desMesssystems
Zusätzliche Mittel zurEindeutigkeitsbestim-mung nötig
Wellenausbreitungs-sensoren
Vorteile Nachteile
Ultraschalltechnik Zuverlässige Sensierungauch von unförmigen odertransparenten Objekten
Nur bei niedrigen Ge-schwindigkeiten sinnvoll
Radartechnik Hohe Reichweite -
Drehzahl- und Geschwindigkeitssensoren
Sensoren in dieser Gruppe messen den pro Zeiteinheit zurückgelegten Winkel oder Wegzwischen zwei Teilen eines Fahrzeugs, zwischen dem Fahrzeug und der Fahrbahn, oderzwischen dem Fahrzeug und einer Drehachse. Die meisten dieser Sensoren sind passivund besitzen kaum integrierte Elektronik. Dennoch werden manchmal, zum Beispiel zurErfassung der absoluten Drehgeschwindigkeit, Smartsensoren mit integrierter Signalaufbe-reitung benötigt, da die Messeffekte hier sehr klein sind und einer komplexen Aufbereitungbedürfen. Die wichtigsten Messtechniken sind in untenstehender Tabelle aufgestellt:
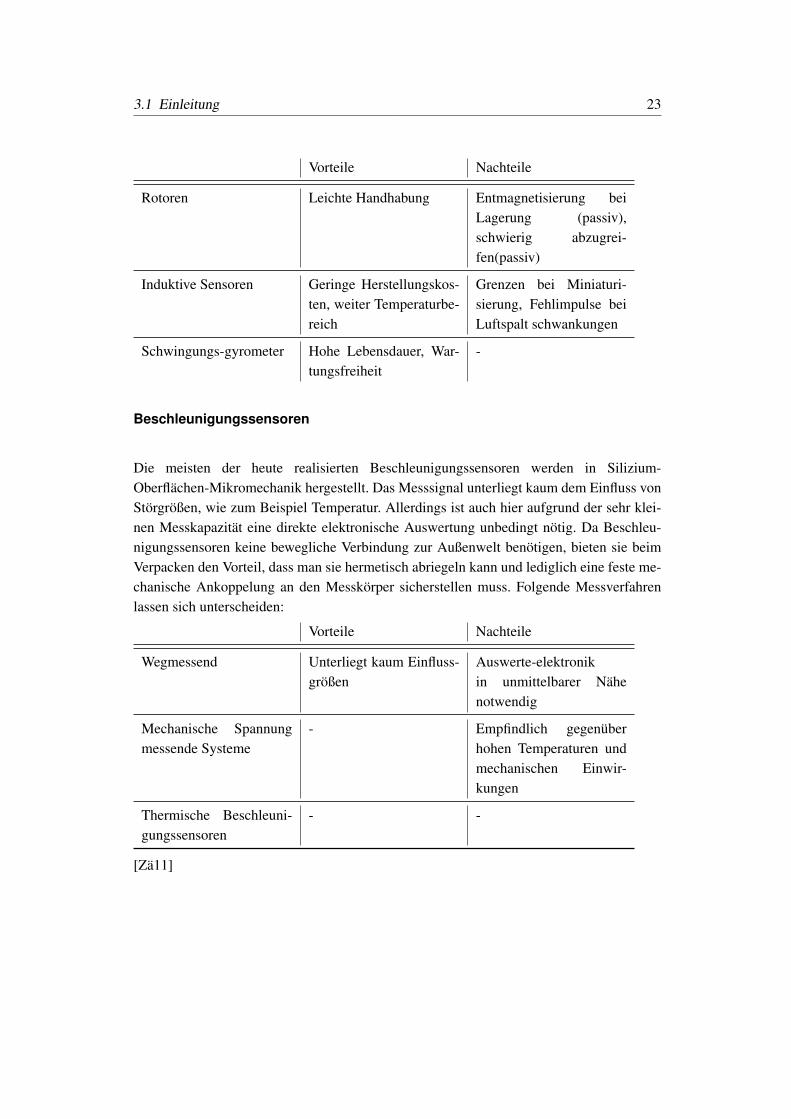
3.1 Einleitung 23
Vorteile Nachteile
Rotoren Leichte Handhabung Entmagnetisierung beiLagerung (passiv),schwierig abzugrei-fen(passiv)
Induktive Sensoren Geringe Herstellungskos-ten, weiter Temperaturbe-reich
Grenzen bei Miniaturi-sierung, Fehlimpulse beiLuftspalt schwankungen
Schwingungs-gyrometer Hohe Lebensdauer, War-tungsfreiheit
-
Beschleunigungssensoren
Die meisten der heute realisierten Beschleunigungssensoren werden in Silizium-Oberflächen-Mikromechanik hergestellt. Das Messsignal unterliegt kaum dem Einfluss vonStörgrößen, wie zum Beispiel Temperatur. Allerdings ist auch hier aufgrund der sehr klei-nen Messkapazität eine direkte elektronische Auswertung unbedingt nötig. Da Beschleu-nigungssensoren keine bewegliche Verbindung zur Außenwelt benötigen, bieten sie beimVerpacken den Vorteil, dass man sie hermetisch abriegeln kann und lediglich eine feste me-chanische Ankoppelung an den Messkörper sicherstellen muss. Folgende Messverfahrenlassen sich unterscheiden:
Vorteile Nachteile
Wegmessend Unterliegt kaum Einfluss-größen
Auswerte-elektronikin unmittelbarer Nähenotwendig
Mechanische Spannungmessende Systeme
- Empfindlich gegenüberhohen Temperaturen undmechanischen Einwir-kungen
Thermische Beschleuni-gungssensoren
- -
[Zä11]
24 3 Allgemeine Anforderungen
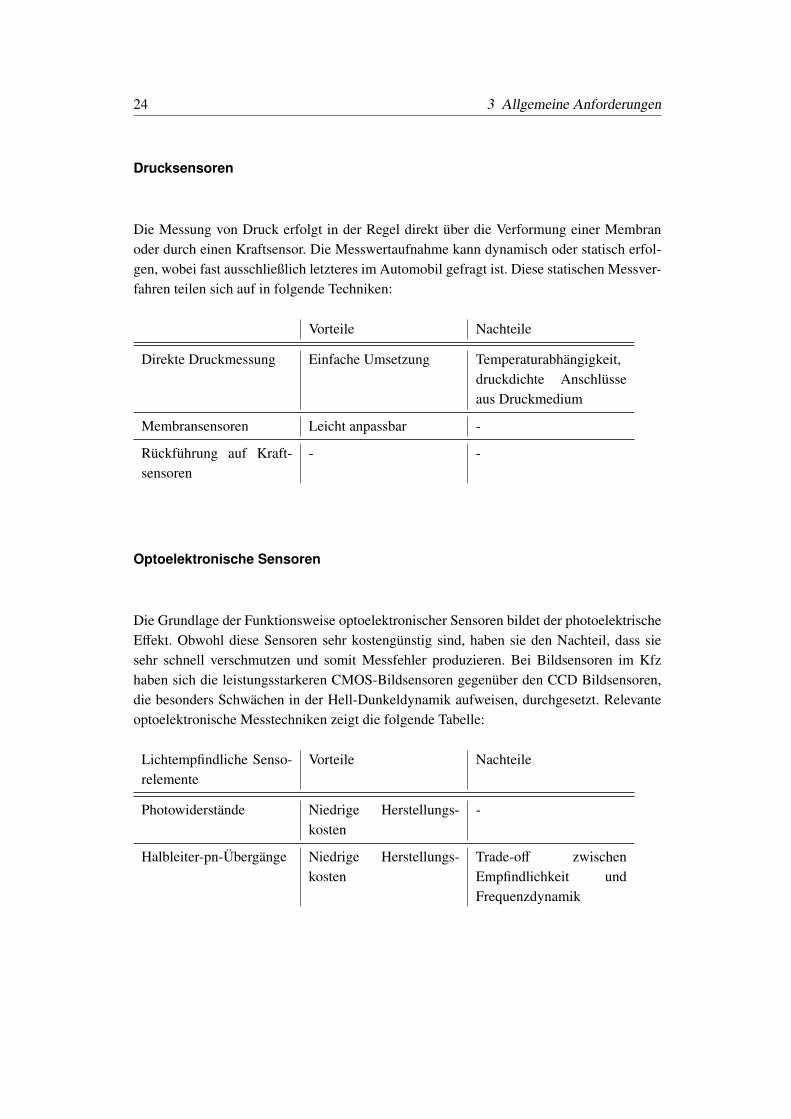
Drucksensoren
Die Messung von Druck erfolgt in der Regel direkt über die Verformung einer Membranoder durch einen Kraftsensor. Die Messwertaufnahme kann dynamisch oder statisch erfol-gen, wobei fast ausschließlich letzteres im Automobil gefragt ist. Diese statischen Messver-fahren teilen sich auf in folgende Techniken:
Vorteile Nachteile
Direkte Druckmessung Einfache Umsetzung Temperaturabhängigkeit,druckdichte Anschlüsseaus Druckmedium
Membransensoren Leicht anpassbar -
Rückführung auf Kraft-sensoren
- -
Optoelektronische Sensoren
Die Grundlage der Funktionsweise optoelektronischer Sensoren bildet der photoelektrischeEffekt. Obwohl diese Sensoren sehr kostengünstig sind, haben sie den Nachteil, dass siesehr schnell verschmutzen und somit Messfehler produzieren. Bei Bildsensoren im Kfzhaben sich die leistungsstarkeren CMOS-Bildsensoren gegenüber den CCD Bildsensoren,die besonders Schwächen in der Hell-Dunkeldynamik aufweisen, durchgesetzt. Relevanteoptoelektronische Messtechniken zeigt die folgende Tabelle:
Lichtempfindliche Senso-relemente
Vorteile Nachteile
Photowiderstände Niedrige Herstellungs-kosten
-
Halbleiter-pn-Übergänge Niedrige Herstellungs-kosten
Trade-off zwischenEmpfindlichkeit undFrequenzdynamik
3.1 Einleitung 25
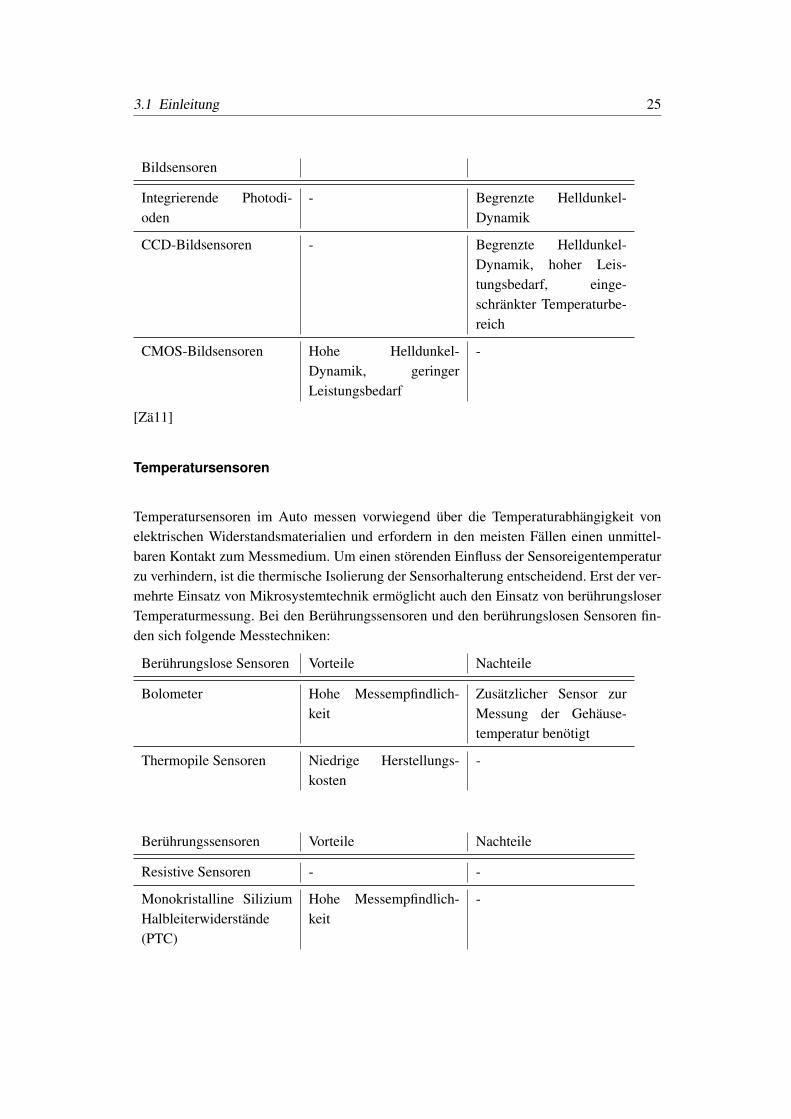
Bildsensoren
Integrierende Photodi-oden
- Begrenzte Helldunkel-Dynamik
CCD-Bildsensoren - Begrenzte Helldunkel-Dynamik, hoher Leis-tungsbedarf, einge-schränkter Temperaturbe-reich
CMOS-Bildsensoren Hohe Helldunkel-Dynamik, geringerLeistungsbedarf
-
[Zä11]
Temperatursensoren
Temperatursensoren im Auto messen vorwiegend über die Temperaturabhängigkeit vonelektrischen Widerstandsmaterialien und erfordern in den meisten Fällen einen unmittel-baren Kontakt zum Messmedium. Um einen störenden Einfluss der Sensoreigentemperaturzu verhindern, ist die thermische Isolierung der Sensorhalterung entscheidend. Erst der ver-mehrte Einsatz von Mikrosystemtechnik ermöglicht auch den Einsatz von berührungsloserTemperaturmessung. Bei den Berührungssensoren und den berührungslosen Sensoren fin-den sich folgende Messtechniken:
Berührungslose Sensoren Vorteile Nachteile
Bolometer Hohe Messempfindlich-keit
Zusätzlicher Sensor zurMessung der Gehäuse-temperatur benötigt
Thermopile Sensoren Niedrige Herstellungs-kosten
-
Berührungssensoren Vorteile Nachteile
Resistive Sensoren - -
Monokristalline SiliziumHalbleiterwiderstände(PTC)
Hohe Messempfindlich-keit
-
26 3 Allgemeine Anforderungen
3.2 Anforderungen in automobilen Systemen
3.2.1 Niedrige Herstellungskosten
Die Zielkosten von Sensoren im Automobil liegen typischerweise bei 1 - 30 Euro[Bos11]und damit oft bei unter einem Hundertstel von konventionellen Sensoren. Möglich wirddies vor allem durch die hohe Anzahl zu produzierender Sensoren. Bei Einführung neuerTechnik ist der Preis natürlich auf einem höherem Niveau und nimmt mit der Zeit ab.
EntwicklungstendenzFertigungsverfahren arbeiten in hohen „Nutzen“und meist automatisiert. Das heißt, ähnlichwie bei Halbleitersensoren, werden 100 - 1000 Sensoren auf einem Si-Wafer gleichzeitiggefertigt. Die Automobilindustrie hat mit ihrem hohen Bedarf damit ein sehr gutes Ver-fahren gefunden, weil es sich vor allem bei hohen Stückzahlen, von z.B. 1 - 10 MillionenStück/Jahr[Bos11], eignet.
3.2.2 Hohe Zuverlässigkeit
Entsprechend ihrer Aufgaben lassen sich Kfz-Sensoren in drei Zuverlässigkeitsklassen ord-nen:
• Lenkung, Bremse, Passagierschutz
• Motor/Triebstrang, Fahrwerk/Reifen
• Komfort, Diagnose, Information, Diebstahlsicherung
[Bos11]
Die Anforderungen ähneln durchaus denen aus der Luft- und Weltraumfahrt bekannten ho-hen Zuverlässigkeitswerten. Erforderlich sind z.B. Einsatz bester Materialien, Eigenüber-wachung, (Kurzzeit-)Ersatzstromversorgung und Mehrfachprogrammierung von kritischenEntscheidungsalgorithmen.
EntwicklungstendenzEs werden höchst zuverlässige Materialien und Techniken eingesetzt, wodurch schon beider Konstruktion eine hohe Zuverlässigkeit erzeugt wird. Desweiteren werden z.B. funkab-fragbare Sensoren auf der Basis von antennengekoppelten SAW-Elementen (Surface Acou-stic Wave, Oberflächenwellen) eingesetzt eingesezt, die zur Vermeidung von lösbaren undausfallgefährdeten Verbindungsstellen eingesetzt werden.
3.2 Anforderungen in automobilen Systemen 27
3.2.3 Harte Betriebsbedingungen
Kfz-Sensoren sind wie kaum eine andere Gattung entsprechend ihrem Anbauort extremenBelastungen ausgesetzt und müssen dort vielerlei Angriffen standhalten:
• mechanisch (Vibration, Stöße),
• klimatisch (Temperatur, Feuchte),
• chemisch (z. B. Spritzwasser, Salznebel, Kraftstoff, Motoröl, Batteriesäure),
• elektromagnetisch (Einstrahlung, leitungsgebundene Störimpulse, Überspannungen,Verpolung).
[Bos11]
Da Sensoren, um Vorteile auszuschöpfen, oft direkt an der Messstelle eingesetzt werden,haben sich die Anforderungen hier besonders verschärft.
EntwicklungstendenzSchutzmaßnahmen gegen die genannten Belastungen erfordern ein hohes Maß an spezifi-schem Knowhow in der Verpackungstechnik (Packaging):
• Passivierungs- und Anschlusstechnik,
• Abdicht- und Fügetechnik,
• EMV-Schutzmaßnahmen,
• schwingungsarme Montage,
• Lebensdauertest- und Simulationsmethoden,
• Verwendung resistenter Materialien usw.
[Bos11]
Desweiteren ist eine eingehende Kenntnis des Aufbauortes und der dortigen Beanspruchungerforderlich, weil die Qualität stark von der Beherschung dieser Schutzmaßnahmen abhängt.
3.2.4 Kleine Bauweise
Da sowohl eine immer kompakter werdende Form der Autos, als auch eine gleichzeitigbeibehaltener Innenraumkofort für die Passagiere erreicht werden soll, werden immer klei-nere Bauweisen erforderlich. Außerdem soll zur Kraftstoffeinsparung natürlich auch dasGewicht minimiert werden.
28 3 Allgemeine Anforderungen
EntwicklungstendenzDie z. T. aus der Schaltungstechnik bekannten Technologien zur Miniaturisierung elektro-nischer Bauelemente kommen massiv zum Einsatz:
• Schicht- und Hybridtechniken (dehnungs-, temperatur- und magnetfeldabhängigeWiderstände); Nanotechnologie.
• Halbleitertechniken (Hall- und Temperatursensoren).
• Oberflächen- und Bulk-Mikromechanik (Druck-, Beschleunigungs- und Drehratesen-soren aus Si).
• Mikrosystemtechnik (Kombination von zwei und mehr Mikrotechniken wie z. B. Mi-kroelektronik und Mikromechanik).
[Bos11]
Mikromechanische Herstellung bedeutet einerseits Abmessungen im µm-Bereich und To-leranzen im Sub-µm-Bereich. Obwohl die Abmessungen von Sensoren mm-Bereich liegen,werden sie dennoch mikromechanisch hergestellt und sind deshalb als mikromechanisch zubezeichnen. Das bekannteste Verfahren ist das anisotrope Ätzen von Silizium. Es ist des-halb so wichtig, weil es mit hoher Perfektion und kostengünstig hergestellt werden kann.Es bietet zudem die Möglichkeit der monolithischen Integration von Sensor und Auswerte-elektronik.
3.2.5 Hohe Genauigkeit
Die Genauigkeitsanforderungen sind im Vergleich zu Aufnehmern z. B. der Prozessindus-trie bis auf wenige Ausnahmen (z. B. Luftmassenmesser) eher bescheiden. Die zulässigenAbweichungen liegen im Allgemeinen bei > 1 % vom EW (Endwert des Messbereichs).Erreicht wird das vor allem mittels einer sorgfältigen Technik zum Abgleich der Exemplar-streuungen sowie zum Abgleich wirksamer Kompensationsmaßnahmen gegen Störeinflüs-se.
EntwicklungstendenzFertigungstoleranz und Verfeinerung der Abgleich- und Kompensationstechniken spielenhier eine große Rolle. Einen wesentlichen Schritt nach vorn bringt jedoch hier die hybrideoder monolithische Integration von Sensor- und Signalelektronik an der Messstelle. Diese„Intelligenten Sensoren“ nutzen die Sensorgenauigkeit voll aus und bieten folgende Mög-lichkeiten:
• Entlastung des Steuergeräts,
• Einheitliche, flexible und busfähige Schnittstelle,

3.3 Optische Sensoren 29
• Mehrfachnutzung von Sensoren,
• Nutzung kleinerer Messeffekte sowie von Hochfrequenz-Messeffekten (Verstärkungund Demodulation vor Ort),
• Korrektur von Sensorabweichungen an der Messstelle sowie gemeinsamer Abgleichund Kompensation von Sensor und Elektronik, vereinfacht und verbessert durch Spei-cherung der individuellen Korrekturinformationen im PROM
[Bos11]Intelligente Sensoren können unter Nutzung des mathematischen Sensormodells die ge-suchte Messgröße praktische fehlerfrei berechnen. Durch vorherige Bestimung von exem-plarspezifischen Modellparametern und deren Abspeicherung im PROM, lassen sich nichtnur statische, sondern auch dynamische Eigenschaften der Sensoren erheblich verbessern.
3.3 Optische Sensoren
3.3.1 Umsetzung der Anforderungen
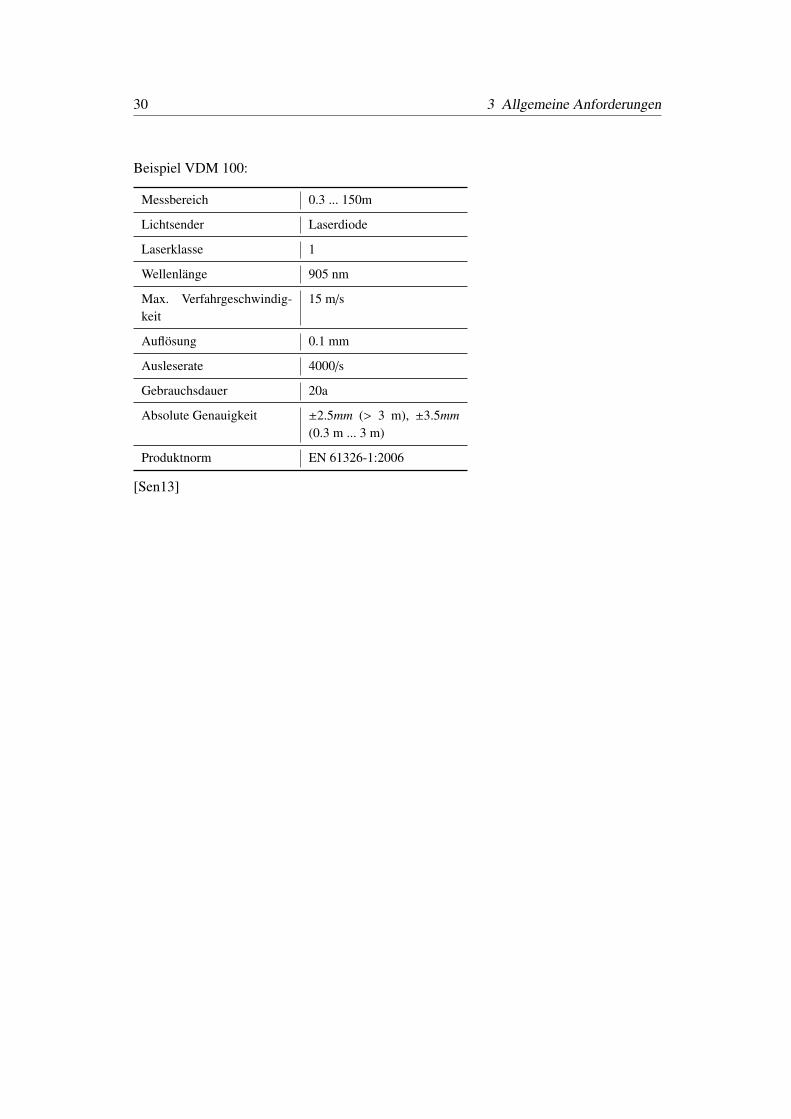
Eine hohe Zuverlässigkeit wird bei optischen Sensoren durch eine hohe Frequenz erreicht.Sie garantiert, dass genug Informationen zur Verarbeitung bereit stehen, sodass, wenn einMessfehler auftritt, trotzdem korrekt reagiert wird.Im automobilen Einsatz kann es zudem leicht zu Verschmutzungen des Sensors durch Staubund Ähnliches kommen, was bei optischen Sensoren zu erheblichen Messfehlern führt. Ausdiesen Grund benötigen diese entweder häufige Wartung oder nehmen langwellige Strah-lung auf, welche leicht um Staubpartikel gebeugt wird (IR statt UV).Um eine möglichst hohe Genauigkeit zu erreichen, wird bei Kameras z.B. die Auflösungausreichend hoch gewählt. Dabei reicht z.b. bei Tiefenmessungen eine relativ geringe Auf-lösung von 160x160 aber bei Bildaufnahmen sollte es eine möglichst Hohe sein. Natürlichkönnte immer eine sehr hohe Auflösung gewählt werden, was aber nicht immer wirtschaft-lich oder performant ist.
30 3 Allgemeine Anforderungen
Beispiel VDM 100:
Messbereich 0.3 ... 150m
Lichtsender Laserdiode
Laserklasse 1
Wellenlänge 905 nm
Max. Verfahrgeschwindig-keit
15 m/s
Auflösung 0.1 mm
Ausleserate 4000/s
Gebrauchsdauer 20a
Absolute Genauigkeit ±2.5mm (> 3 m), ±3.5mm(0.3 m ... 3 m)
Produktnorm EN 61326-1:2006
[Sen13]
3.3 Optische Sensoren 31
3.3.2 Nutzung in automotiven System
Optische Sensoren finden meist in Sicherheits und Komfortfunktionen Anwendung. EinigeBeispiele sind:
Einparkhilfen
[VW09]
Hier wird mit Hilde einer Kamera der derzeitige und optimale Fahrweg visualiert. Wichtigist hierbei, dass auch Tiefeninformationen geliefert werden, was z.B. durch 2 Kameras rea-lisiert werden kann. Die Auflöung muss in diesem Fall nicht sehr hoch gewählt werden, dieBildwiederholrate jedoch schon.
32 3 Allgemeine Anforderungen
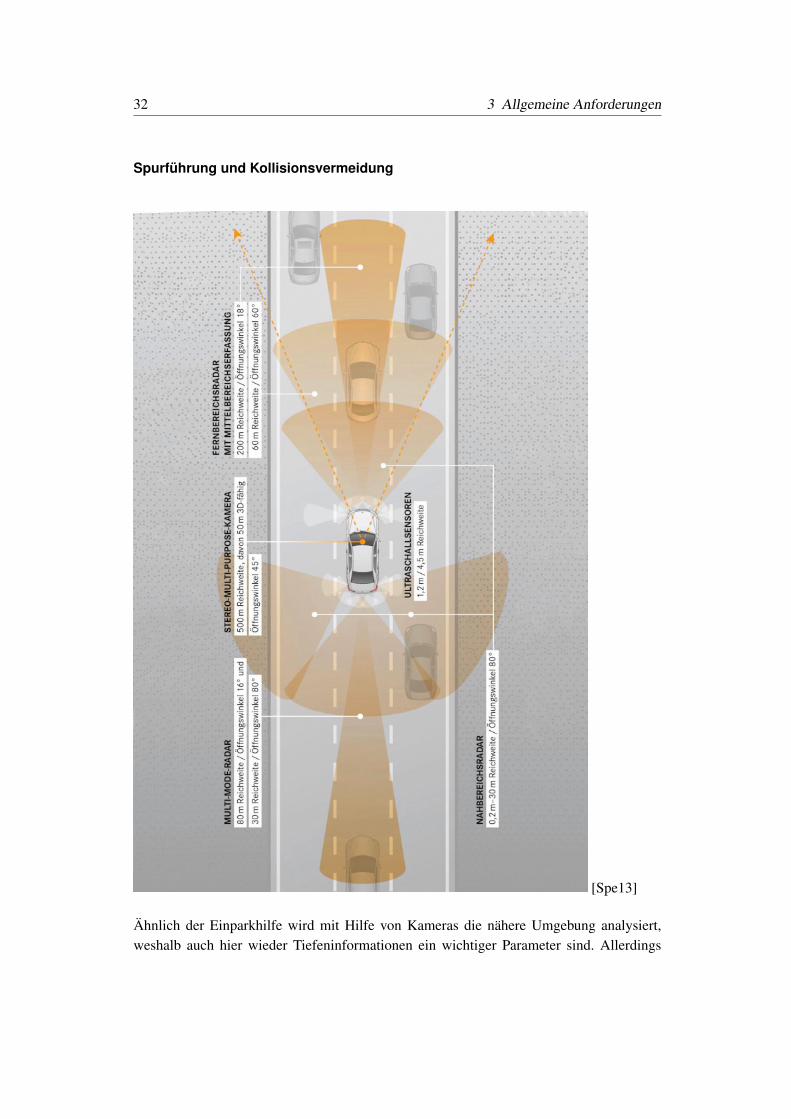
Spurführung und Kollisionsvermeidung
[Spe13]
Ähnlich der Einparkhilfe wird mit Hilfe von Kameras die nähere Umgebung analysiert,weshalb auch hier wieder Tiefeninformationen ein wichtiger Parameter sind. Allerdings
3.3 Optische Sensoren 33
sollte in diesem Fall die Auflösung möglichst hoch gewählt werden, damit auch weiterentfernte Objekte erkannt werden.
Verkehrszeichenerkennung
[Küa]
Diese Information muss nur einmal, bei Auftreten eines Schildes, verarbeitet werden, wasdazu führt, dass eine relativ geringe Bildwiederholrate ausreichend ist. Die gewonnen Da-ten werden dann auf dem Amaturenbrett angezeigt und müssen erst beim nächsten Schildwieder aktualisiert werden. Die Auswertung kann somit auch, zugunsten der Genauigkeit,länger dauern.
34 3 Allgemeine Anforderungen
3.4 Beschleunigungssensoren
3.4.1 Umsetzung der Anforderungen
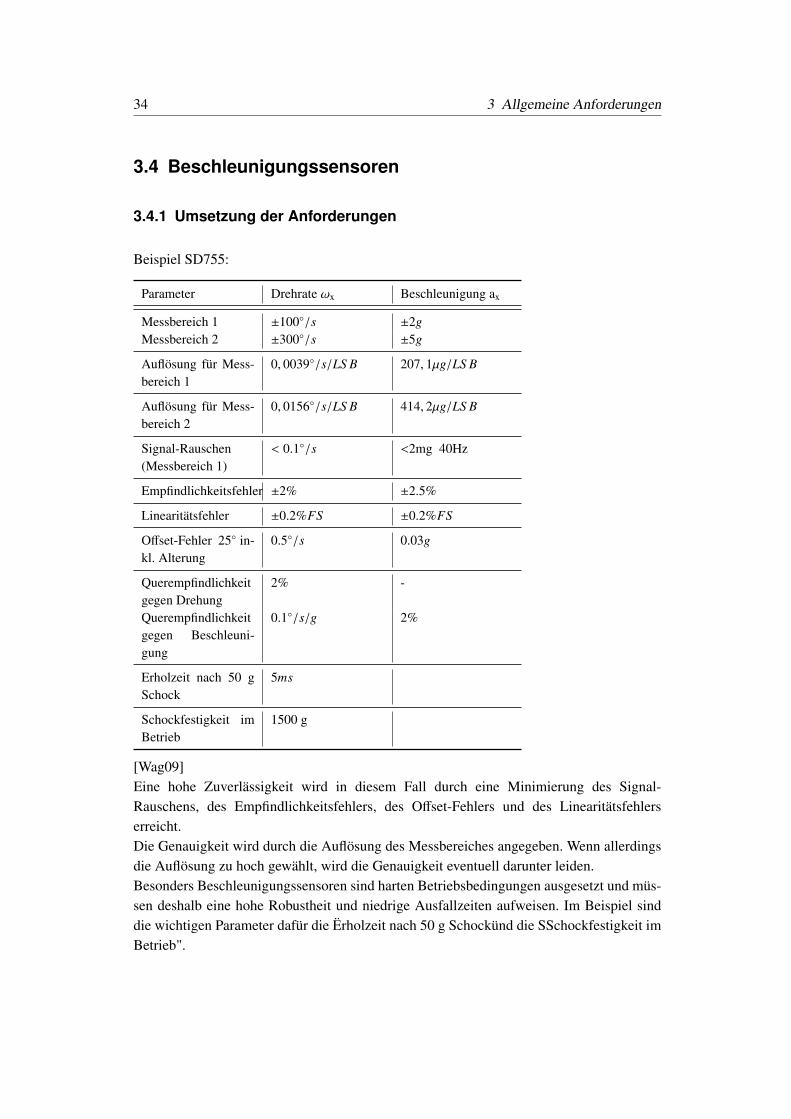
Beispiel SD755:
Parameter Drehrate ωx Beschleunigung ax
Messbereich 1 ±100◦/s ±2gMessbereich 2 ±300◦/s ±5g
Auflösung für Mess-bereich 1
0, 0039◦/s/LS B 207, 1µg/LS B
Auflösung für Mess-bereich 2
0, 0156◦/s/LS B 414, 2µg/LS B
Signal-Rauschen(Messbereich 1)
< 0.1◦/s <2mg 40Hz
Empfindlichkeitsfehler ±2% ±2.5%
Linearitätsfehler ±0.2%FS ±0.2%FS
Offset-Fehler 25◦ in-kl. Alterung
0.5◦/s 0.03g
Querempfindlichkeitgegen Drehung
2% -
Querempfindlichkeitgegen Beschleuni-gung
0.1◦/s/g 2%
Erholzeit nach 50 gSchock
5ms
Schockfestigkeit imBetrieb
1500 g
[Wag09]Eine hohe Zuverlässigkeit wird in diesem Fall durch eine Minimierung des Signal-Rauschens, des Empfindlichkeitsfehlers, des Offset-Fehlers und des Linearitätsfehlerserreicht.Die Genauigkeit wird durch die Auflösung des Messbereiches angegeben. Wenn allerdingsdie Auflösung zu hoch gewählt, wird die Genauigkeit eventuell darunter leiden.Besonders Beschleunigungssensoren sind harten Betriebsbedingungen ausgesetzt und müs-sen deshalb eine hohe Robustheit und niedrige Ausfallzeiten aufweisen. Im Beispiel sinddie wichtigen Parameter dafür die Ërholzeit nach 50 g Schockünd die SSchockfestigkeit imBetrieb".

3.4 Beschleunigungssensoren 35
3.4.2 Nutzung in automotiven System
Beschleunigungssensoren finden zum Beispiel beim Airbag eine Rolle, wo sie helfen zuentscheiden, ob dieser ausgelöst werden soll oder nicht. Diese Art von Sensor war einerder Ersten, der in Autos Einsatz fand[H02] und leitete damit maßgeblich den Weg zu denAutos, wie wir sie heute kennen.
Christian SpeichLars Grotehenne
4 Laserscanner
4.1 Einleitung
Light Detection and Ranging (LiDAR) ist eine Technologie zur Abstandsmessung im Stra-ßenverkehr. In den letzten Jahren gab es gute Fortschritte hinsichtlich der Witterungsfestig-keit, was sie durch vergleichbare Genauigkeit und geringeren Kosten zu einer guten Alter-native zum Radar macht.
LiDAR wird bereits unter anderem in Bereichen wie der Totwinkel-Überwachung, Spur-wechselassistent und Mautbrücken eingesetzt und besitzt eine gute Zukunftsperspektive alsz.B. Kreuzungsassistent oder Lateral Collision Avoidance.
4.2 Aufbau
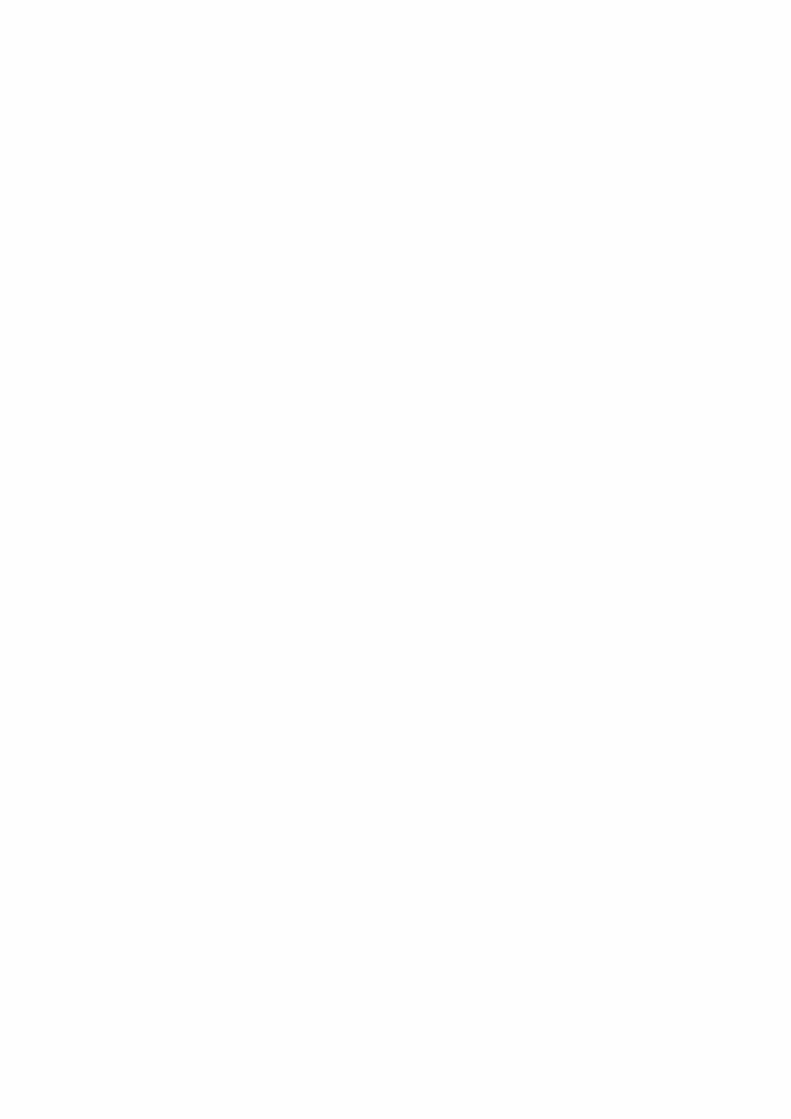
Ein LiDAR-System besteht aus einem Laser, einem Photo-Empfänger, der Auswertungs-elektronik und meist einer mechanischen Ablenkoptik.
Photo-EmpfängerAuswertelektronikLaser
Ablenkspiegel
Ausgehender StrahlEmpfangende Rückstreuung
Abbildung 4.1: Aufbau
Laser Der Laser sendet enggebündelte Lichtimpulse mit einer Länge von wenigen Nano-sekunden aus. Eine wichtige beschränkende Eigenschaft bei der Laserauswahl ist die Au-gensicherheit (Laserklasse 1), welche die Maximalleisung beschränkt. Vorwiegend werdenInfrarot-Laser verwendet.[FS05][SS06]
37
38 4 Laserscanner
Photo-Empfänger Als Empfänger werden vorwiedend Avalanche Photodioden verwen-det, welche durch ihre große interne Verstärkung (100-300) gute Eigenschaften bietet umdie sehr schwache Rückstreuung durch die Diffuse Reflektion zu erkennen.[SS06]
Sowohl Laser als auch Empfänger werden in mehreren Kanälen ausgeführt, um die vertikaleAuflösung zu verbessern.[Gid08][SS06]
Ablenkoptik Die Ablenkoptik ist ein Spiegel oder Prisma das zu sendende und empfan-gende Licht um 90 Grad ablenkt und durch eine horizontale Drehbewegung den Erfassung-bereich bis zu 270o ermöglicht.[KD04] Bei geringem horizontalen Erfassungsbereichen,kann diese Optik weggelassen werden. [SS06]
4.3 Funktionsweise
LiDAR-Systeme basieren im Automitive-Bereich auf dem Laufzeitverfahren, da diesesmehrzielfähig ist, d.h. es können mehrere Ziele erkannt werden, obwohl Störobjekte vor-handen sind.[SS06][Küb] Der IR-Emitter sendet einen Lichtimpuls, welcher mit dem zuerfassende Objekt durch Reflektion oder diffuse Rückstreuung wechselwirkt. Diese Wech-selwirkung wird vom Photo-Empfänger detektiert und die Zeit zwischen dem Senden undEmpfangen gemessen.[KD04]
4.3.1 Bestimmung der Distanz
d
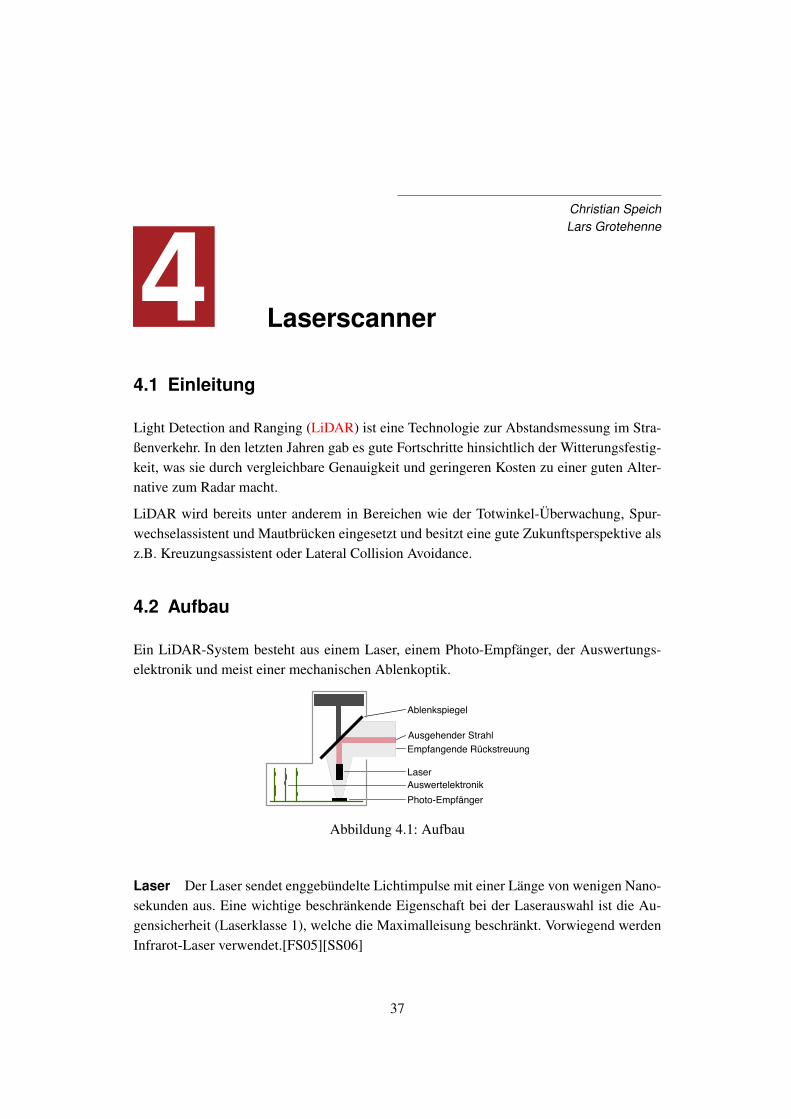
Abbildung 4.2: Distanz (nach [Roh])
Die ermittelte Laufzeit des Signals ist direkt proportional zur Entfernung des Objektes. Da-her kann unter Zuhilfenahme der Lichtgeschwindigkeit die Entfernung berechnet werden:
d =cl · t
2, cl ≈ 3 · 108 m
s
Mit einer Zählfrequenz von 1,5Ghz kann eine Auflösung von 10cm erreichtwerden.[SS06][Roh]
4.3 Funktionsweise 39
d₁ Δd
d₂
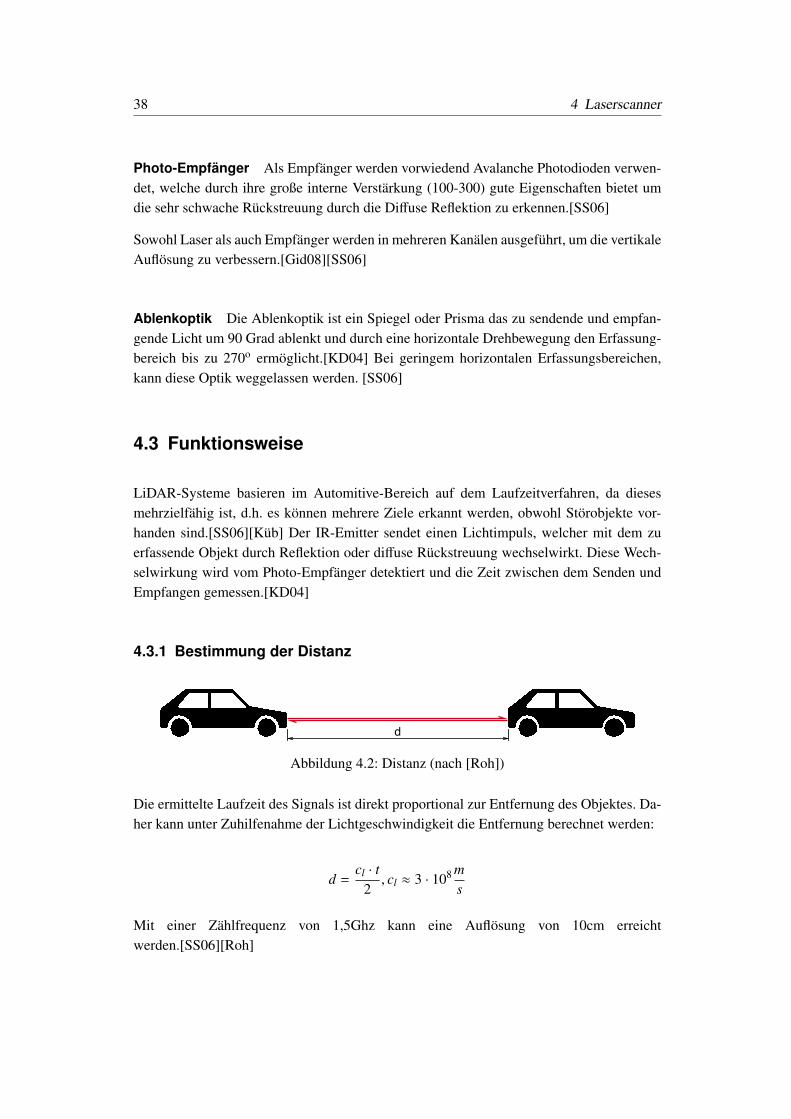
Abbildung 4.3: Relativgeschwindigkeit (nach [Roh])
4.3.2 Bestimmung der Relativgeschwindigkeit
Mittels mehrerer Messungen kann auch die Relativgeschwindigkeit des Objektes bestimmtwerden:
vrel =∆d∆t
=d2 − d1
t2 − t1[Roh]
Durch Addition mit der Fahrzeuggeschwindigkeit ist es möglich, die absolute Gewschwin-digkeit des Objektes zu berechnen. Im Umkehrschluss ist besteht auch die Möglichkeit,die eigene Fahrgeschwindigkeit zubestimmen, indem die Relativgeschwindigkeit zu einemfesten Objekt (z.B. einer Laternen, Leitplanken) gemessen wird.[KD04]
4.3.3 Signalauswertung
Analoge Schwellenwerte
Amplitude
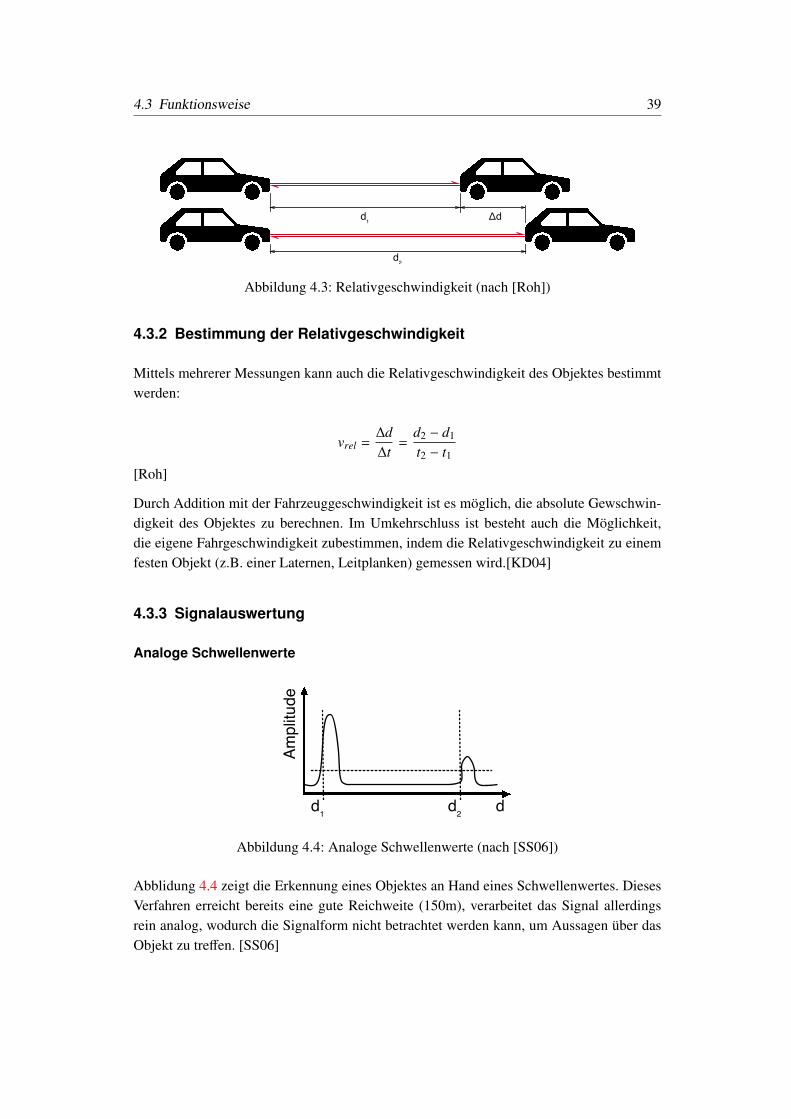
dd₂d₁
Abbildung 4.4: Analoge Schwellenwerte (nach [SS06])
Abblidung 4.4 zeigt die Erkennung eines Objektes an Hand eines Schwellenwertes. DiesesVerfahren erreicht bereits eine gute Reichweite (150m), verarbeitet das Signal allerdingsrein analog, wodurch die Signalform nicht betrachtet werden kann, um Aussagen über dasObjekt zu treffen. [SS06]
40 4 Laserscanner
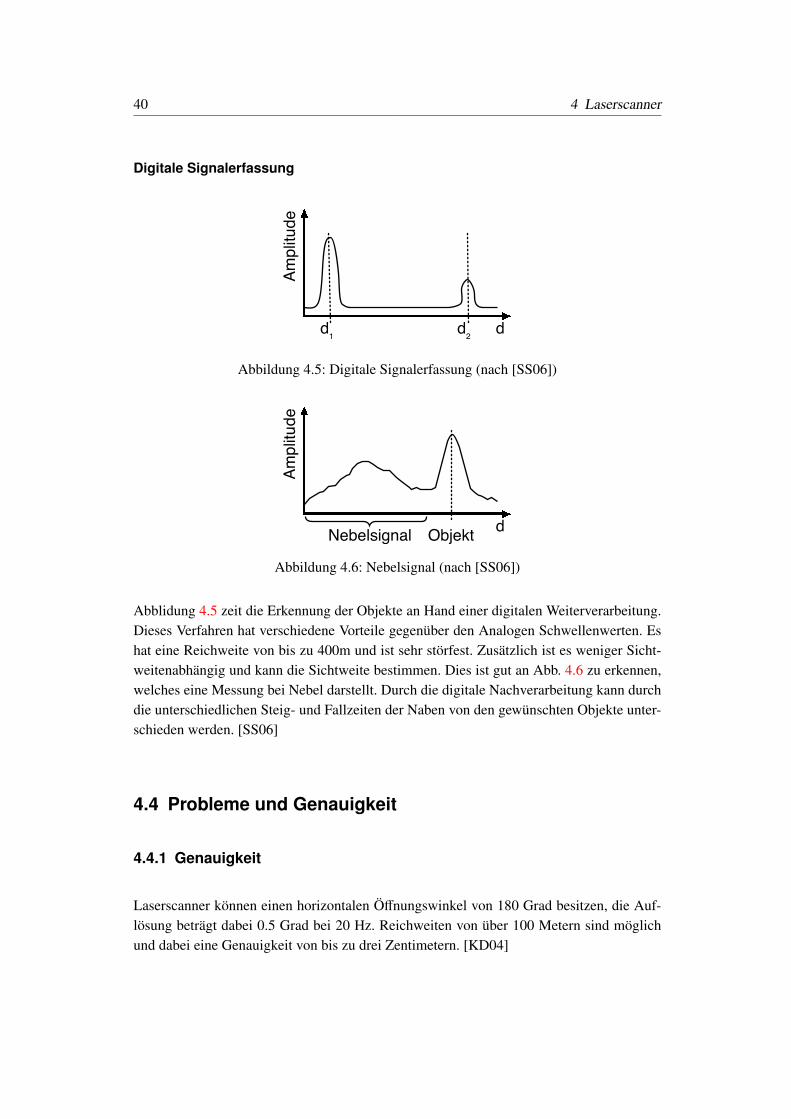
Digitale Signalerfassung
Amplitude
dd₂d₁
Abbildung 4.5: Digitale Signalerfassung (nach [SS06])
Amplitude
dNebelsignal Objekt
Abbildung 4.6: Nebelsignal (nach [SS06])
Abblidung 4.5 zeit die Erkennung der Objekte an Hand einer digitalen Weiterverarbeitung.Dieses Verfahren hat verschiedene Vorteile gegenüber den Analogen Schwellenwerten. Eshat eine Reichweite von bis zu 400m und ist sehr störfest. Zusätzlich ist es weniger Sicht-weitenabhängig und kann die Sichtweite bestimmen. Dies ist gut an Abb. 4.6 zu erkennen,welches eine Messung bei Nebel darstellt. Durch die digitale Nachverarbeitung kann durchdie unterschiedlichen Steig- und Fallzeiten der Naben von den gewünschten Objekte unter-schieden werden. [SS06]
4.4 Probleme und Genauigkeit
4.4.1 Genauigkeit
Laserscanner können einen horizontalen Öffnungswinkel von 180 Grad besitzen, die Auf-lösung beträgt dabei 0.5 Grad bei 20 Hz. Reichweiten von über 100 Metern sind möglichund dabei eine Genauigkeit von bis zu drei Zentimetern. [KD04]
4.4 Probleme und Genauigkeit 41
4.4.2 Dämpfung der Atmosphäre
Vor allem früher gab es bei LiDAR-Systeme große Probleme mit Witterungsbedingungen,vor allem mit Nebel. Wenn sich ein Lichtstrahl durch die Atmosphäre bewegt, wird die-ser durch die unterschiedlichen Bestandteile gedämpft. Dies lässt sich durch eine einfacheGleichung darstellen (siehe Formel 4.1). φt beschreibt dabei die Leistung die am Empfängerwieder ankommt. Sie hängt ab von der ausgesendeten Leistung φ0 und wird abgeschwächtdurch φr, den Teil der diffus reflektiert wird und die in Wärme umgewandelte Leistungφa. Um diese Probleme in den Griff zu bekommen, kann man die Leistung φ0 des Senderserhöhen oder das Licht stärker bündeln. [Roh]
φt = φ0 − φr − φa (4.1)
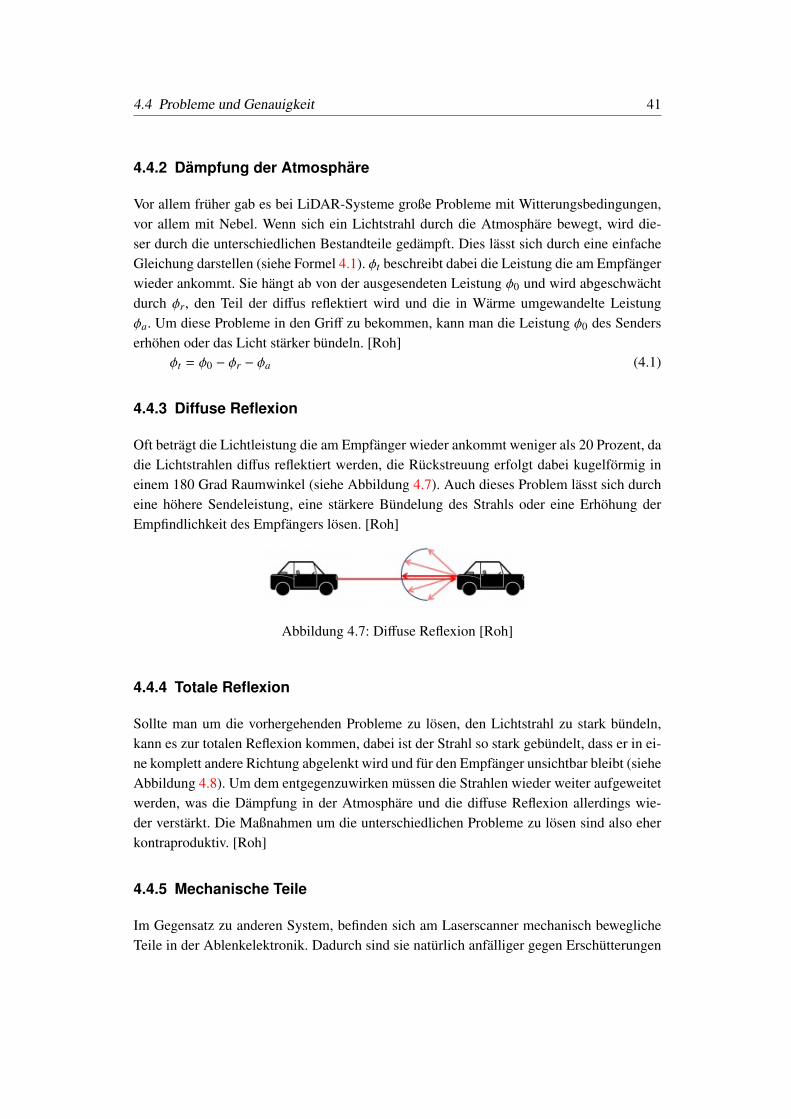
4.4.3 Diffuse Reflexion
Oft beträgt die Lichtleistung die am Empfänger wieder ankommt weniger als 20 Prozent, dadie Lichtstrahlen diffus reflektiert werden, die Rückstreuung erfolgt dabei kugelförmig ineinem 180 Grad Raumwinkel (siehe Abbildung 4.7). Auch dieses Problem lässt sich durcheine höhere Sendeleistung, eine stärkere Bündelung des Strahls oder eine Erhöhung derEmpfindlichkeit des Empfängers lösen. [Roh]
Abbildung 4.7: Diffuse Reflexion [Roh]
4.4.4 Totale Reflexion
Sollte man um die vorhergehenden Probleme zu lösen, den Lichtstrahl zu stark bündeln,kann es zur totalen Reflexion kommen, dabei ist der Strahl so stark gebündelt, dass er in ei-ne komplett andere Richtung abgelenkt wird und für den Empfänger unsichtbar bleibt (sieheAbbildung 4.8). Um dem entgegenzuwirken müssen die Strahlen wieder weiter aufgeweitetwerden, was die Dämpfung in der Atmosphäre und die diffuse Reflexion allerdings wie-der verstärkt. Die Maßnahmen um die unterschiedlichen Probleme zu lösen sind also eherkontraproduktiv. [Roh]
4.4.5 Mechanische Teile
Im Gegensatz zu anderen System, befinden sich am Laserscanner mechanisch beweglicheTeile in der Ablenkelektronik. Dadurch sind sie natürlich anfälliger gegen Erschütterungen

42 4 Laserscanner
Abbildung 4.8: Totale Reflexion [Roh]
und Verschmutzung. Die Verschmutzung sollte durch einen entsprechenden Einbau keiner-lei Problem darstellen. Bei VWs Kleinwagen up! geschieht dies zum Beispiel zwischenFrontscheibe und Innenspiegel. Dort ist das System auch gut gegen Unfälle gesichert. DasProblem der Erschütterungen und damit die Beeinflussung der beweglichen Teile wird durchimmer kompaktere und stabilere Bauarten weitestgehend verhindert. [Ham] [Roh]
4.4.6 Vergleich mit anderen Systemen
Reichweite (7% Ziel) Fläche 2 m2 bis 200 mDatenerneuerungsrate 10-200 ms
Auflösung 0.1 mGenauigkeit +/- 0.5 mAugensicher Klasse 1 nach EN 60825-1
vertikale Aufweitung in 1 bis 3 Ebenen 2◦C - 5◦Chorizontaler Erfassungsbereich mit 16-32 Kanälen 10◦C - 180◦C
geringer Einbauraumleichte Integrierbarkeit
Tabelle 4.1: Anforderungen an LiDAR-Systeme [Spi]
In Tabelle 4.1 lassen sich die Anforderungen an LiDAR-Systeme im automotiven Bereichenerkennen. Diese Anforderungen werden auch von anderen Systemen unterstützt. Wenn mannun LiDAR-Systeme mit anderen Systemen vergleicht (siehe Abbildung 4.9, 5 = sehr gutbis 0 = nicht gewährleistet), lässt sich erkennen, dass viele technische Details für das Li-DAR sprechen, vor allem seit man die Probleme mit der Witterungsempfindlichkeit in denGriff bekommen hat. Es punktet durch eine hohe Messgenauigkeit und der starken horizon-talen Auflösung. Des Weiteren liefert es sehr gute Werte bei der Querposition und gute beider Erfassung der Größe bei der Objekterkennung. Nachts funktioniert das System absolutproblemlos. Der gröste Konkurrent bei aktuellen Anwendungen ist sicherlich das Radar-System. Dies punktet vor allem dadurch, dass es nahezu unabhängig von Witterungsbedin-gungen arbeitet und über die bessere Technik zur Geschwindigkeitsmessung verfügt. Dafür
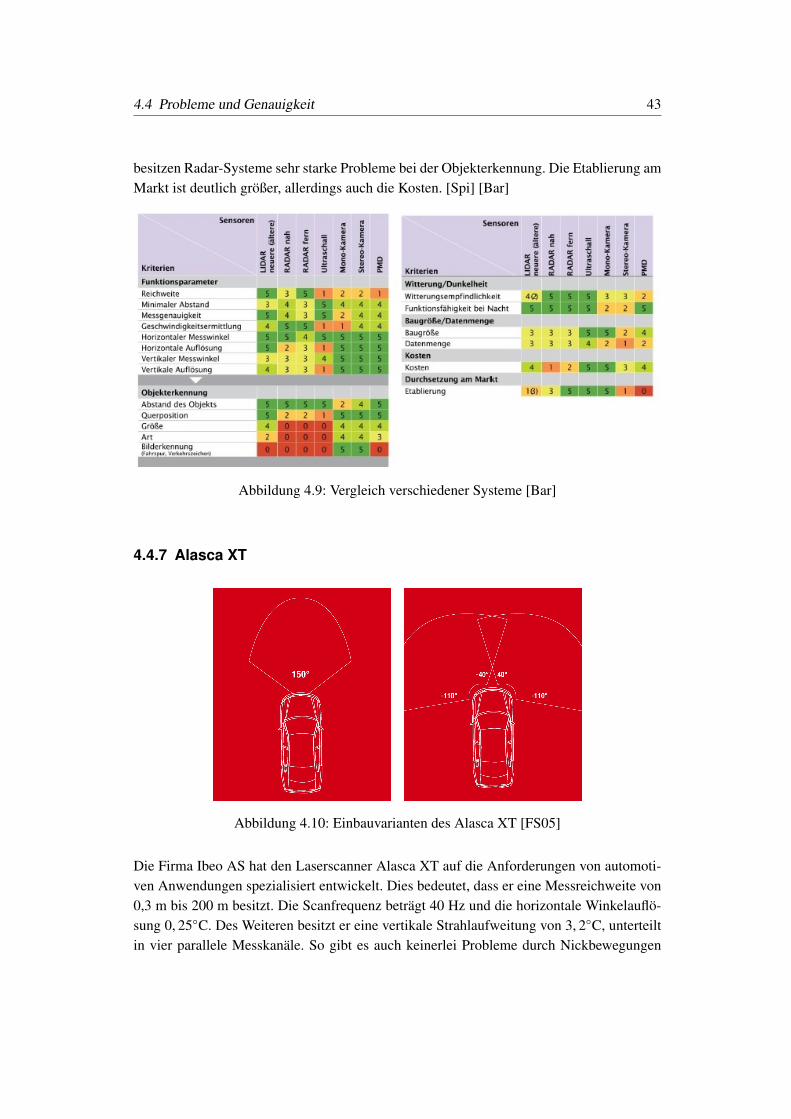
4.4 Probleme und Genauigkeit 43
besitzen Radar-Systeme sehr starke Probleme bei der Objekterkennung. Die Etablierung amMarkt ist deutlich größer, allerdings auch die Kosten. [Spi] [Bar]
Abbildung 4.9: Vergleich verschiedener Systeme [Bar]
4.4.7 Alasca XT
Abbildung 4.10: Einbauvarianten des Alasca XT [FS05]
Die Firma Ibeo AS hat den Laserscanner Alasca XT auf die Anforderungen von automoti-ven Anwendungen spezialisiert entwickelt. Dies bedeutet, dass er eine Messreichweite von0,3 m bis 200 m besitzt. Die Scanfrequenz beträgt 40 Hz und die horizontale Winkelauflö-sung 0, 25◦C. Des Weiteren besitzt er eine vertikale Strahlaufweitung von 3, 2◦C, unterteiltin vier parallele Messkanäle. So gibt es auch keinerlei Probleme durch Nickbewegungen
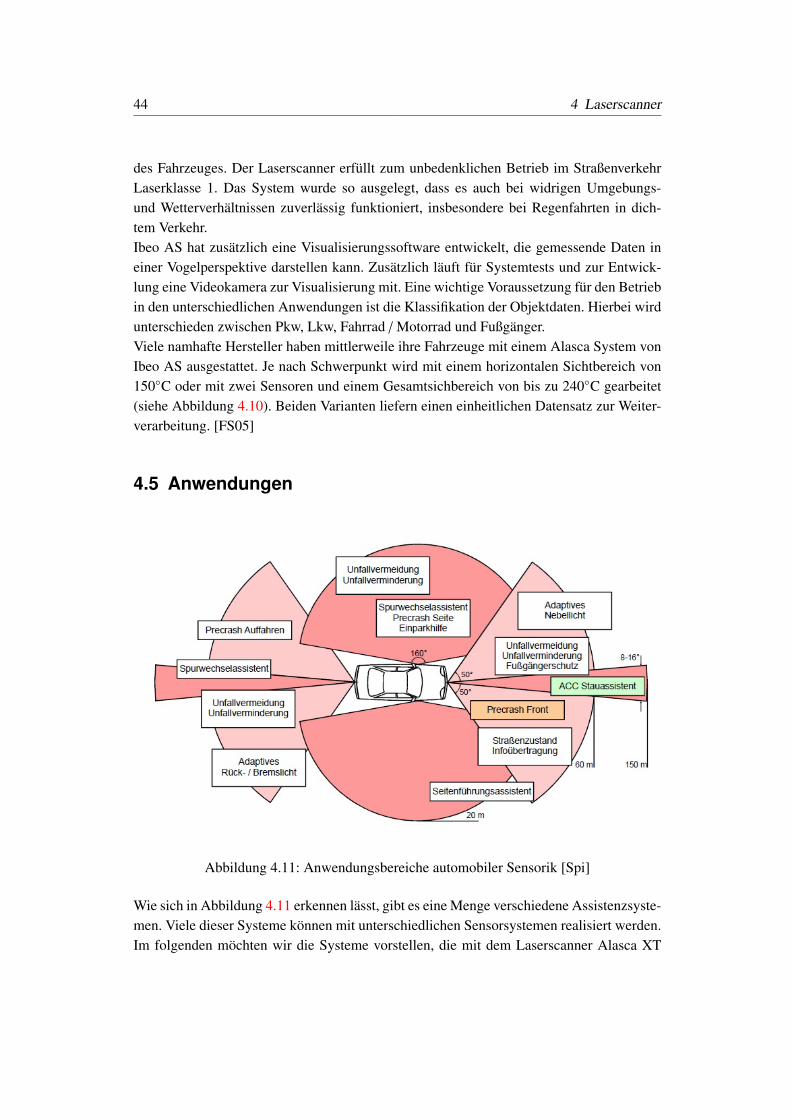
44 4 Laserscanner
des Fahrzeuges. Der Laserscanner erfüllt zum unbedenklichen Betrieb im StraßenverkehrLaserklasse 1. Das System wurde so ausgelegt, dass es auch bei widrigen Umgebungs-und Wetterverhältnissen zuverlässig funktioniert, insbesondere bei Regenfahrten in dich-tem Verkehr.Ibeo AS hat zusätzlich eine Visualisierungssoftware entwickelt, die gemessende Daten ineiner Vogelperspektive darstellen kann. Zusätzlich läuft für Systemtests und zur Entwick-lung eine Videokamera zur Visualisierung mit. Eine wichtige Voraussetzung für den Betriebin den unterschiedlichen Anwendungen ist die Klassifikation der Objektdaten. Hierbei wirdunterschieden zwischen Pkw, Lkw, Fahrrad / Motorrad und Fußgänger.Viele namhafte Hersteller haben mittlerweile ihre Fahrzeuge mit einem Alasca System vonIbeo AS ausgestattet. Je nach Schwerpunkt wird mit einem horizontalen Sichtbereich von150◦C oder mit zwei Sensoren und einem Gesamtsichbereich von bis zu 240◦C gearbeitet(siehe Abbildung 4.10). Beiden Varianten liefern einen einheitlichen Datensatz zur Weiter-verarbeitung. [FS05]
4.5 Anwendungen
Abbildung 4.11: Anwendungsbereiche automobiler Sensorik [Spi]
Wie sich in Abbildung 4.11 erkennen lässt, gibt es eine Menge verschiedene Assistenzsyste-men. Viele dieser Systeme können mit unterschiedlichen Sensorsystemen realisiert werden.Im folgenden möchten wir die Systeme vorstellen, die mit dem Laserscanner Alasca XT
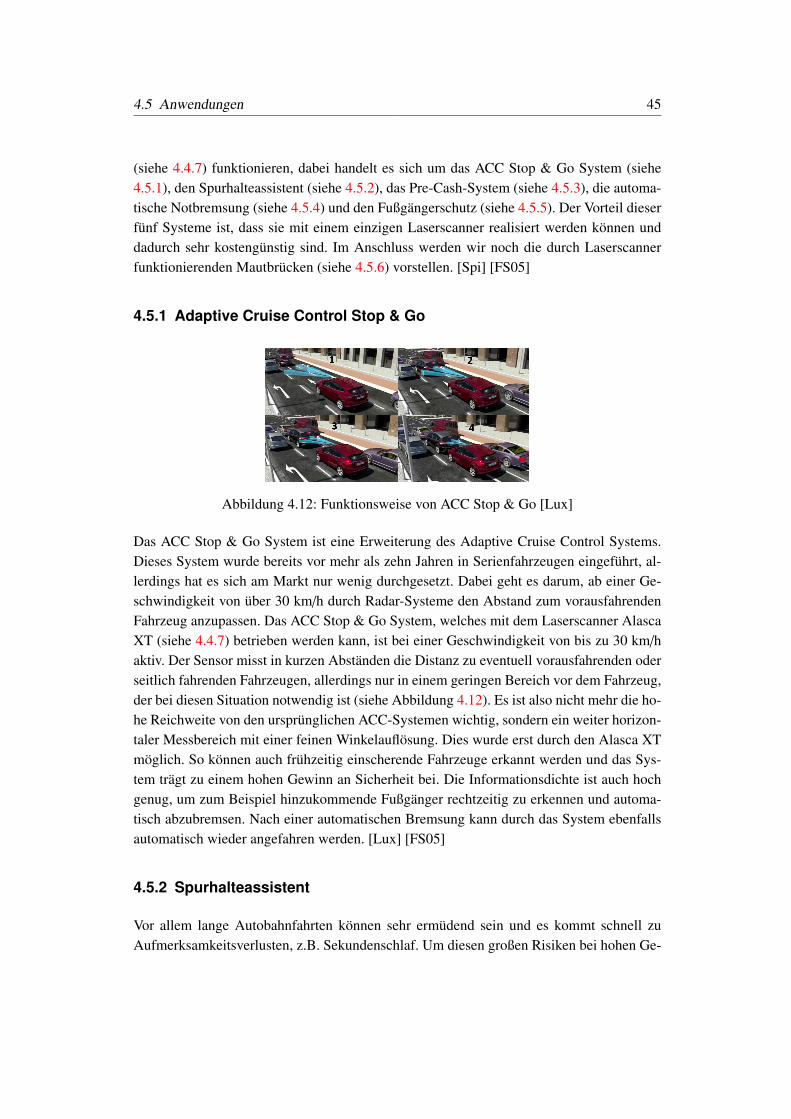
4.5 Anwendungen 45
(siehe 4.4.7) funktionieren, dabei handelt es sich um das ACC Stop & Go System (siehe4.5.1), den Spurhalteassistent (siehe 4.5.2), das Pre-Cash-System (siehe 4.5.3), die automa-tische Notbremsung (siehe 4.5.4) und den Fußgängerschutz (siehe 4.5.5). Der Vorteil dieserfünf Systeme ist, dass sie mit einem einzigen Laserscanner realisiert werden können unddadurch sehr kostengünstig sind. Im Anschluss werden wir noch die durch Laserscannerfunktionierenden Mautbrücken (siehe 4.5.6) vorstellen. [Spi] [FS05]
4.5.1 Adaptive Cruise Control Stop & Go
Abbildung 4.12: Funktionsweise von ACC Stop & Go [Lux]
Das ACC Stop & Go System ist eine Erweiterung des Adaptive Cruise Control Systems.Dieses System wurde bereits vor mehr als zehn Jahren in Serienfahrzeugen eingeführt, al-lerdings hat es sich am Markt nur wenig durchgesetzt. Dabei geht es darum, ab einer Ge-schwindigkeit von über 30 km/h durch Radar-Systeme den Abstand zum vorausfahrendenFahrzeug anzupassen. Das ACC Stop & Go System, welches mit dem Laserscanner AlascaXT (siehe 4.4.7) betrieben werden kann, ist bei einer Geschwindigkeit von bis zu 30 km/haktiv. Der Sensor misst in kurzen Abständen die Distanz zu eventuell vorausfahrenden oderseitlich fahrenden Fahrzeugen, allerdings nur in einem geringen Bereich vor dem Fahrzeug,der bei diesen Situation notwendig ist (siehe Abbildung 4.12). Es ist also nicht mehr die ho-he Reichweite von den ursprünglichen ACC-Systemen wichtig, sondern ein weiter horizon-taler Messbereich mit einer feinen Winkelauflösung. Dies wurde erst durch den Alasca XTmöglich. So können auch frühzeitig einscherende Fahrzeuge erkannt werden und das Sys-tem trägt zu einem hohen Gewinn an Sicherheit bei. Die Informationsdichte ist auch hochgenug, um zum Beispiel hinzukommende Fußgänger rechtzeitig zu erkennen und automa-tisch abzubremsen. Nach einer automatischen Bremsung kann durch das System ebenfallsautomatisch wieder angefahren werden. [Lux] [FS05]
4.5.2 Spurhalteassistent
Vor allem lange Autobahnfahrten können sehr ermüdend sein und es kommt schnell zuAufmerksamkeitsverlusten, z.B. Sekundenschlaf. Um diesen großen Risiken bei hohen Ge-
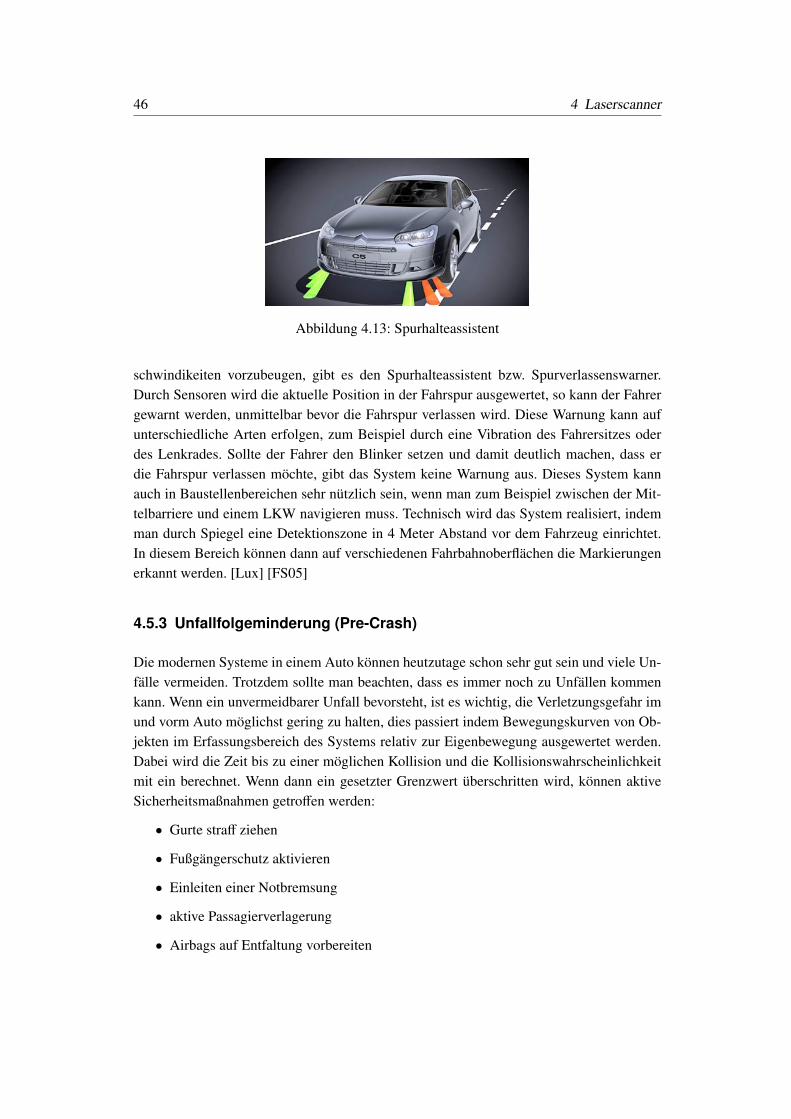
46 4 Laserscanner
Abbildung 4.13: Spurhalteassistent
schwindikeiten vorzubeugen, gibt es den Spurhalteassistent bzw. Spurverlassenswarner.Durch Sensoren wird die aktuelle Position in der Fahrspur ausgewertet, so kann der Fahrergewarnt werden, unmittelbar bevor die Fahrspur verlassen wird. Diese Warnung kann aufunterschiedliche Arten erfolgen, zum Beispiel durch eine Vibration des Fahrersitzes oderdes Lenkrades. Sollte der Fahrer den Blinker setzen und damit deutlich machen, dass erdie Fahrspur verlassen möchte, gibt das System keine Warnung aus. Dieses System kannauch in Baustellenbereichen sehr nützlich sein, wenn man zum Beispiel zwischen der Mit-telbarriere und einem LKW navigieren muss. Technisch wird das System realisiert, indemman durch Spiegel eine Detektionszone in 4 Meter Abstand vor dem Fahrzeug einrichtet.In diesem Bereich können dann auf verschiedenen Fahrbahnoberflächen die Markierungenerkannt werden. [Lux] [FS05]
4.5.3 Unfallfolgeminderung (Pre-Crash)
Die modernen Systeme in einem Auto können heutzutage schon sehr gut sein und viele Un-fälle vermeiden. Trotzdem sollte man beachten, dass es immer noch zu Unfällen kommenkann. Wenn ein unvermeidbarer Unfall bevorsteht, ist es wichtig, die Verletzungsgefahr imund vorm Auto möglichst gering zu halten, dies passiert indem Bewegungskurven von Ob-jekten im Erfassungsbereich des Systems relativ zur Eigenbewegung ausgewertet werden.Dabei wird die Zeit bis zu einer möglichen Kollision und die Kollisionswahrscheinlichkeitmit ein berechnet. Wenn dann ein gesetzter Grenzwert überschritten wird, können aktiveSicherheitsmaßnahmen getroffen werden:
• Gurte straff ziehen
• Fußgängerschutz aktivieren
• Einleiten einer Notbremsung
• aktive Passagierverlagerung
• Airbags auf Entfaltung vorbereiten
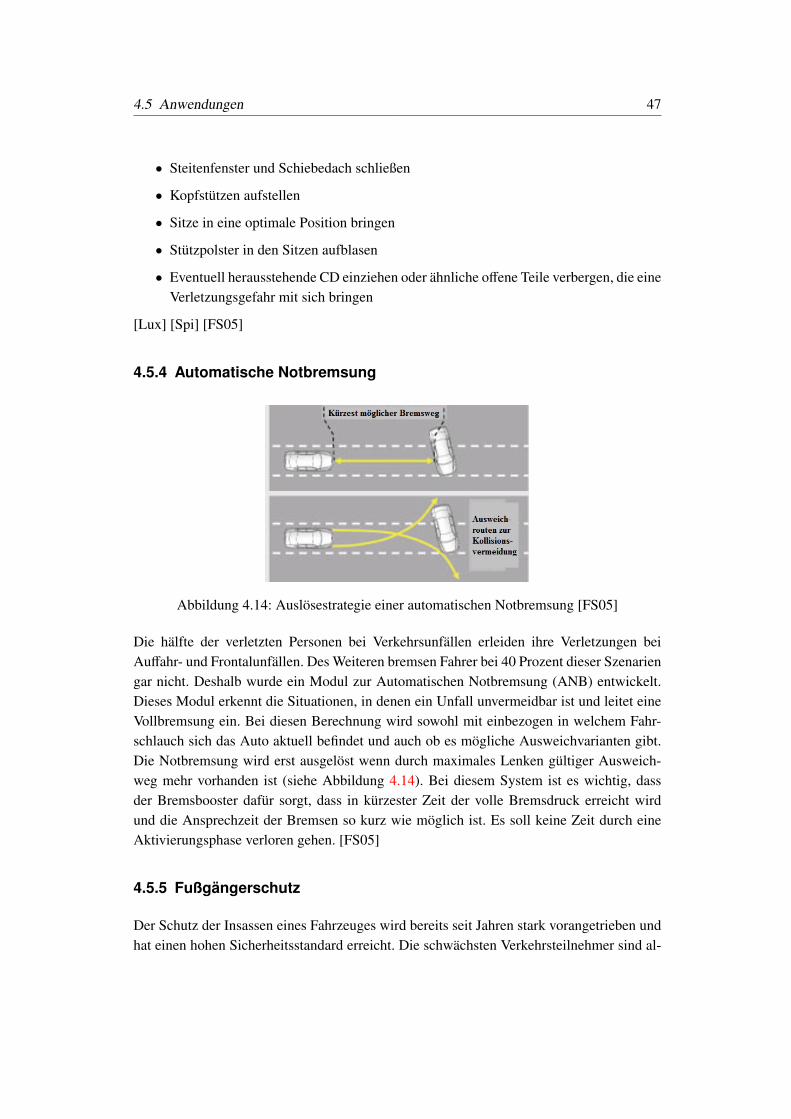
4.5 Anwendungen 47
• Steitenfenster und Schiebedach schließen
• Kopfstützen aufstellen
• Sitze in eine optimale Position bringen
• Stützpolster in den Sitzen aufblasen
• Eventuell herausstehende CD einziehen oder ähnliche offene Teile verbergen, die eineVerletzungsgefahr mit sich bringen
[Lux] [Spi] [FS05]
4.5.4 Automatische Notbremsung
Abbildung 4.14: Auslösestrategie einer automatischen Notbremsung [FS05]
Die hälfte der verletzten Personen bei Verkehrsunfällen erleiden ihre Verletzungen beiAuffahr- und Frontalunfällen. Des Weiteren bremsen Fahrer bei 40 Prozent dieser Szenariengar nicht. Deshalb wurde ein Modul zur Automatischen Notbremsung (ANB) entwickelt.Dieses Modul erkennt die Situationen, in denen ein Unfall unvermeidbar ist und leitet eineVollbremsung ein. Bei diesen Berechnung wird sowohl mit einbezogen in welchem Fahr-schlauch sich das Auto aktuell befindet und auch ob es mögliche Ausweichvarianten gibt.Die Notbremsung wird erst ausgelöst wenn durch maximales Lenken gültiger Ausweich-weg mehr vorhanden ist (siehe Abbildung 4.14). Bei diesem System ist es wichtig, dassder Bremsbooster dafür sorgt, dass in kürzester Zeit der volle Bremsdruck erreicht wirdund die Ansprechzeit der Bremsen so kurz wie möglich ist. Es soll keine Zeit durch eineAktivierungsphase verloren gehen. [FS05]
4.5.5 Fußgängerschutz
Der Schutz der Insassen eines Fahrzeuges wird bereits seit Jahren stark vorangetrieben undhat einen hohen Sicherheitsstandard erreicht. Die schwächsten Verkehrsteilnehmer sind al-
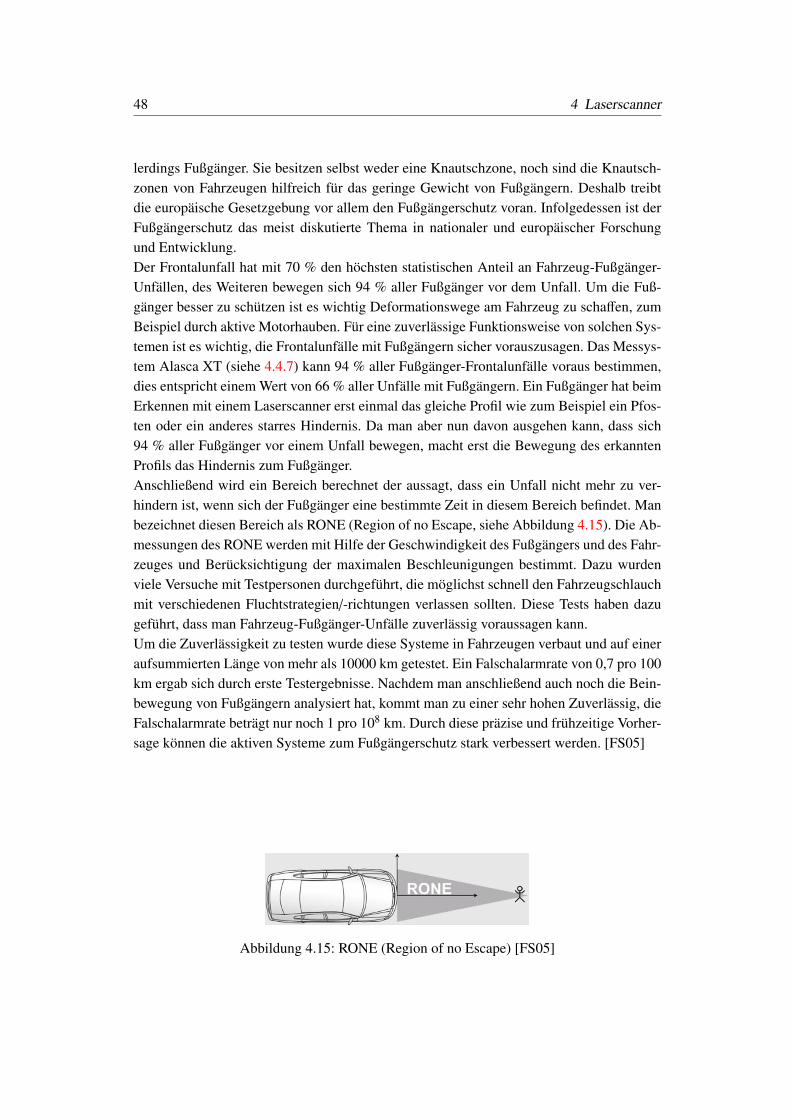
48 4 Laserscanner
lerdings Fußgänger. Sie besitzen selbst weder eine Knautschzone, noch sind die Knautsch-zonen von Fahrzeugen hilfreich für das geringe Gewicht von Fußgängern. Deshalb treibtdie europäische Gesetzgebung vor allem den Fußgängerschutz voran. Infolgedessen ist derFußgängerschutz das meist diskutierte Thema in nationaler und europäischer Forschungund Entwicklung.Der Frontalunfall hat mit 70 % den höchsten statistischen Anteil an Fahrzeug-Fußgänger-Unfällen, des Weiteren bewegen sich 94 % aller Fußgänger vor dem Unfall. Um die Fuß-gänger besser zu schützen ist es wichtig Deformationswege am Fahrzeug zu schaffen, zumBeispiel durch aktive Motorhauben. Für eine zuverlässige Funktionsweise von solchen Sys-temen ist es wichtig, die Frontalunfälle mit Fußgängern sicher vorauszusagen. Das Messys-tem Alasca XT (siehe 4.4.7) kann 94 % aller Fußgänger-Frontalunfälle voraus bestimmen,dies entspricht einem Wert von 66 % aller Unfälle mit Fußgängern. Ein Fußgänger hat beimErkennen mit einem Laserscanner erst einmal das gleiche Profil wie zum Beispiel ein Pfos-ten oder ein anderes starres Hindernis. Da man aber nun davon ausgehen kann, dass sich94 % aller Fußgänger vor einem Unfall bewegen, macht erst die Bewegung des erkanntenProfils das Hindernis zum Fußgänger.Anschließend wird ein Bereich berechnet der aussagt, dass ein Unfall nicht mehr zu ver-hindern ist, wenn sich der Fußgänger eine bestimmte Zeit in diesem Bereich befindet. Manbezeichnet diesen Bereich als RONE (Region of no Escape, siehe Abbildung 4.15). Die Ab-messungen des RONE werden mit Hilfe der Geschwindigkeit des Fußgängers und des Fahr-zeuges und Berücksichtigung der maximalen Beschleunigungen bestimmt. Dazu wurdenviele Versuche mit Testpersonen durchgeführt, die möglichst schnell den Fahrzeugschlauchmit verschiedenen Fluchtstrategien/-richtungen verlassen sollten. Diese Tests haben dazugeführt, dass man Fahrzeug-Fußgänger-Unfälle zuverlässig voraussagen kann.Um die Zuverlässigkeit zu testen wurde diese Systeme in Fahrzeugen verbaut und auf eineraufsummierten Länge von mehr als 10000 km getestet. Ein Falschalarmrate von 0,7 pro 100km ergab sich durch erste Testergebnisse. Nachdem man anschließend auch noch die Bein-bewegung von Fußgängern analysiert hat, kommt man zu einer sehr hohen Zuverlässig, dieFalschalarmrate beträgt nur noch 1 pro 108 km. Durch diese präzise und frühzeitige Vorher-sage können die aktiven Systeme zum Fußgängerschutz stark verbessert werden. [FS05]
Abbildung 4.15: RONE (Region of no Escape) [FS05]
4.5 Anwendungen 49
Abbildung 4.16: Mautbrücke
4.5.6 Mautbrücken
Die Firma Vitronic stellt in Deutschland Mautbrücken her (siehe Abbildung 4.16), dafürwerden unter anderem auch LiDAR-Systeme verwendet. Eine Mautbrücke besteht grund-sätzlich aus vier Bestandteilen.
Detektion Bei der Detektion werden alle Fahrzeuge auf der Straße befinden rund umdie Uhr erkannt. Dabei ist es egal, ob diese rasen, drängeln, die Spur wechseln oder Dichtnebeneinander fahren.
Identifikation Durch die Kennzeichenerkennung (AKLS) werden die Fahrzeuge zurMautabrechnung identifiziert.
Klassifikation Jedes Fahrzeug wird in die entsprechende Mautklasse eingeordnet, dabeiwerden auch schwierig zu klassifizierende Fahrzeuge erkannt, wie zum Beispiel die mitAnhängern, Dachgepäckträgern und Fahrradträgern.
Kommunikation Die Kommunikation geschieht durch sichere Transaktionen, zumBeispiel mit On-Board-Units (OBU) oder Erkennungsmarken.
Wichtiger Bestandteil dieses Systems ist die automatische KennzeichenerkennungAKLS, sie basiert auf einen Lasersystem, dass es in verschiedenen Ausführungen gibt,sowohl für höhre Geschwindigkeiten und den festen Verbau, zum Beispiel auf Autobahnen,als auch für den mobilen Einsatz aus Fahrzeugen heraus. Das System funktioniert wetterun-fabhängig. [Gmb]

50 4 Laserscanner
4.5.7 Zukünftige Anwendungen
An vielen weiteren Anwendungen wird natürlich bereits geforscht. Einige von diesen Sys-temen, die in den neusten Fahrzeugen verbaut sind oder in Zukunft vermutlich verbautwerden, möchten wir hier vorstellen. Dabei handelt es sich um Anwendungen die durchLaserscanner realisiert werden können.
Abbiegeassistent Der Abbiegeassistent wird aktiviert, sobald der Fahrer den Blinkersetzt. Wird der Blinker nach Links gesetzt, wird die Fahrspur auf des Gegenverkehrs ab-getastet, bei einer Gefahrenerkennung kann eine Notbremsung eingeleitet werden, wennder Fahrer nicht auf entsprechenden Warnsignale reagiert. Bei setzen des Blinkers nachRechts, wird vor allem die Fahrbahn rechts vom Auto nach Hindernissen abgesucht, diesdient hauptsächlich dazu, eine Kollision mit Fußgängern oder Fahrradfahrern zu verhindern.Diesen Assistenten kann man als Weiterentwicklung ACC Stop & Go Systems sehen (siehe4.5.1).
Integrierte Querführung Die integrierte Querführung (siehe Abbildung 4.17) funktio-niert bis zu einer Geschwindigkeit von 180 km/h. Sie ist in der Lage reguläre Fahrspuren,Baustellenmarkierungen, sowie Baustellenhindernisse zu erkennen. Das System soll dafürsorgen, dass das Fahrzeug souverän durch unübersichtliche Stellen gesteuert wird und derÜberblick über u"berlagernde Fahrbahn- und Baustellenmarkierungen behalten wird. Solltees beim Erkennen der Markierungen Probleme geben, orientiert sich das System an Leit-planken und Wänden. Zur Sicherheit kann das System dauerhaft durch den Fahrer übersteu-ert werden. Dies System kann unter der Verwendung von Laserscannern als Weiterentwick-lung des Spurhalteassistenten (siehe 4.5.2) gesehen werden.
Abbildung 4.17: Integrierte Querführung
[Spi]
Steffen JanetzkiSören Falkenberg
5 Radarsensoren
5.1 Einleitung
Radarsysteme gibt es schon seit Anfang des 20 Jahrhundert. Im autotiven Bereich werdendie ersten Radarsysteme erst Ende der 70er Jahre eingesetzt. Heutezutage sind diese Sys-teme nicht mehr wegzudenken und vielseitig Einsetzbar. Aus diesen Gründen beschäftigenwir uns in unserer Arbeit speziell mit der Funktionsweise und dem Einsatz von automoti-ven Radarsensoren. Wir werden im Rahmen unserer wissenschaftlichen Arbeit aufzeigen,warum diese im automotiven Bereich so wichtig sind, wo die Nachteile dieser Technik lie-gen und warum wir nicht ausschließlich Radarsysteme verwenden können. Dabei zeigenwir zunächst den mechanischen Aufbau eines FMCW-Radargeräts um die Komplexität ei-nes solchen Gerätes darzustellen. Es gibt jedoch verschiedene Arten von Radaren, deshalbstellen wir eine Auswahl dieser kurz vor, gehen dabei auf ihre Stärken und Schwächenein und zeigen im Anschluss einen generellen Vergleich gegenüber anderen Systemen. DesWeiteren betrachten wir die unterschiedlichen Messverfahren und wie diese funktionieren.Am Ende folgt ein kleiner Überblick über das breite Spektrum an verschiedenen Anwen-dungsbereichen, die vielfältigen Einsatzmöglichkeiten. Als konkretes Beispiel und Blick indie nahe Zukunft verwenden wir den im Jahr 2014 in Serie genommenen und von der FirmaBosch entwickelten Sensor der bereits vierten Generation - den "LRR4".
51
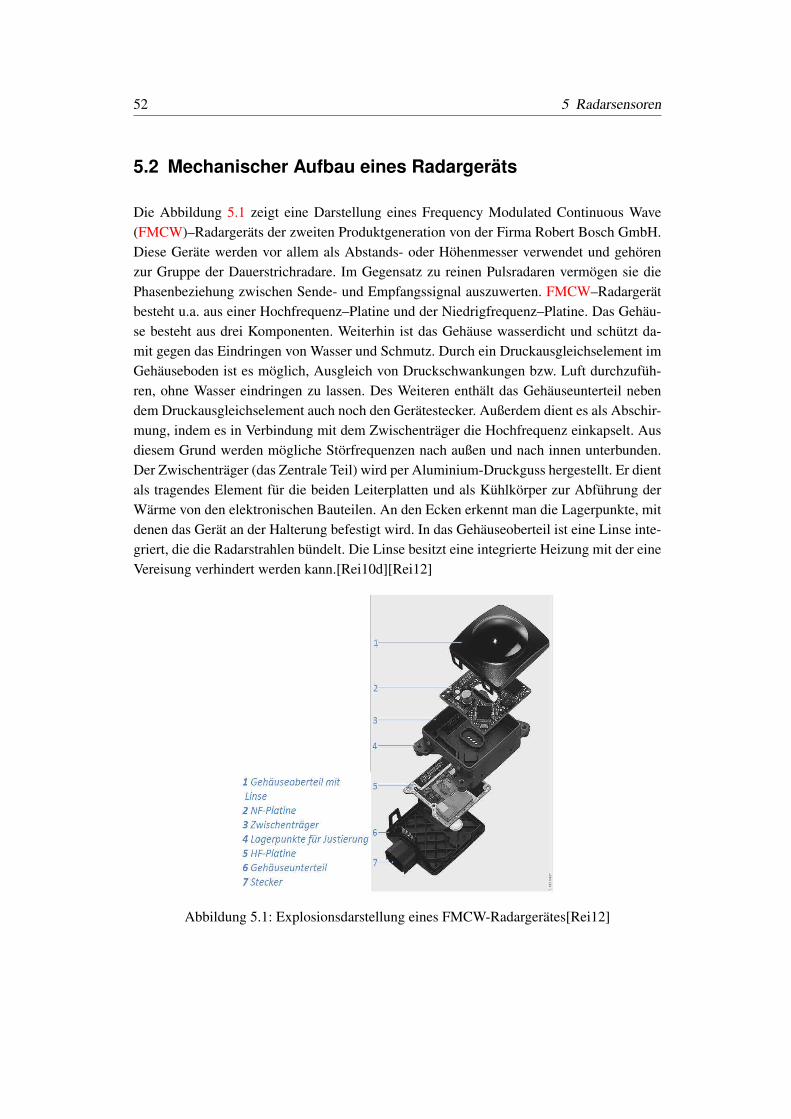
52 5 Radarsensoren
5.2 Mechanischer Aufbau eines Radargeräts
Die Abbildung 5.1 zeigt eine Darstellung eines Frequency Modulated Continuous Wave(FMCW)–Radargeräts der zweiten Produktgeneration von der Firma Robert Bosch GmbH.Diese Geräte werden vor allem als Abstands- oder Höhenmesser verwendet und gehörenzur Gruppe der Dauerstrichradare. Im Gegensatz zu reinen Pulsradaren vermögen sie diePhasenbeziehung zwischen Sende- und Empfangssignal auszuwerten. FMCW–Radargerätbesteht u.a. aus einer Hochfrequenz–Platine und der Niedrigfrequenz–Platine. Das Gehäu-se besteht aus drei Komponenten. Weiterhin ist das Gehäuse wasserdicht und schützt da-mit gegen das Eindringen von Wasser und Schmutz. Durch ein Druckausgleichselement imGehäuseboden ist es möglich, Ausgleich von Druckschwankungen bzw. Luft durchzufüh-ren, ohne Wasser eindringen zu lassen. Des Weiteren enthält das Gehäuseunterteil nebendem Druckausgleichselement auch noch den Gerätestecker. Außerdem dient es als Abschir-mung, indem es in Verbindung mit dem Zwischenträger die Hochfrequenz einkapselt. Ausdiesem Grund werden mögliche Störfrequenzen nach außen und nach innen unterbunden.Der Zwischenträger (das Zentrale Teil) wird per Aluminium-Druckguss hergestellt. Er dientals tragendes Element für die beiden Leiterplatten und als Kühlkörper zur Abführung derWärme von den elektronischen Bauteilen. An den Ecken erkennt man die Lagerpunkte, mitdenen das Gerät an der Halterung befestigt wird. In das Gehäuseoberteil ist eine Linse inte-griert, die die Radarstrahlen bündelt. Die Linse besitzt eine integrierte Heizung mit der eineVereisung verhindert werden kann.[Rei10d][Rei12]
Abbildung 5.1: Explosionsdarstellung eines FMCW-Radargerätes[Rei12]
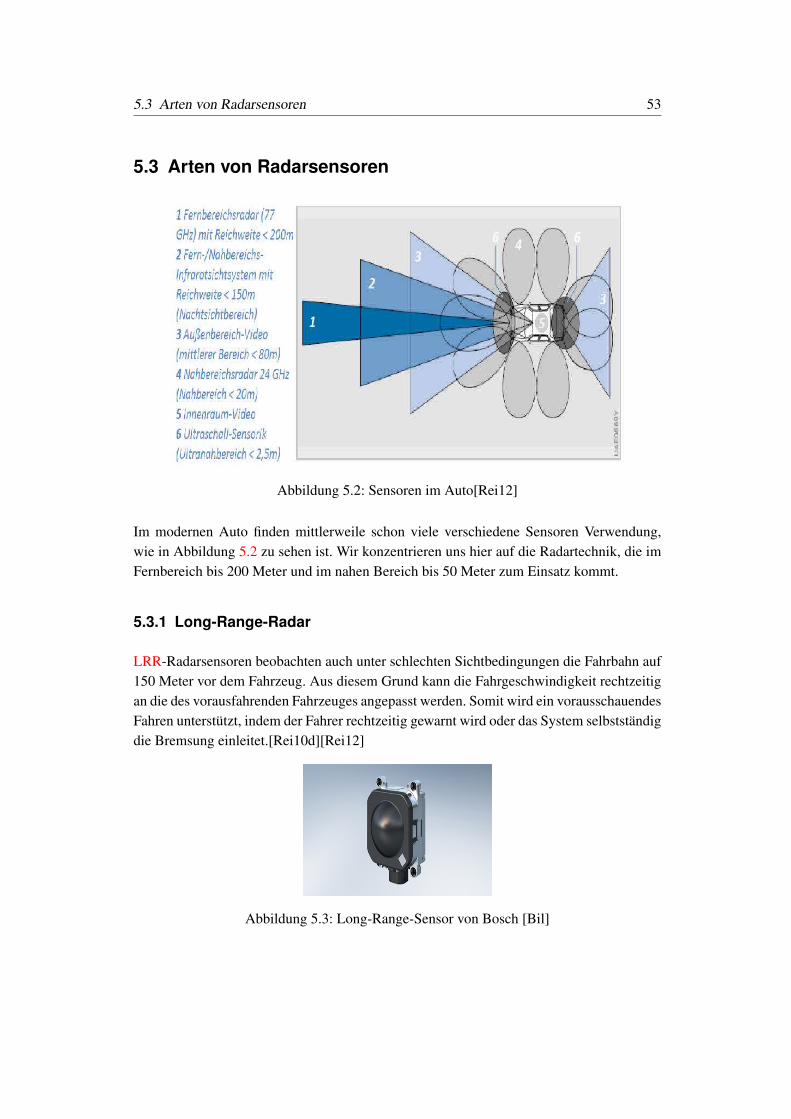
5.3 Arten von Radarsensoren 53
5.3 Arten von Radarsensoren
Abbildung 5.2: Sensoren im Auto[Rei12]
Im modernen Auto finden mittlerweile schon viele verschiedene Sensoren Verwendung,wie in Abbildung 5.2 zu sehen ist. Wir konzentrieren uns hier auf die Radartechnik, die imFernbereich bis 200 Meter und im nahen Bereich bis 50 Meter zum Einsatz kommt.
5.3.1 Long-Range-Radar
LRR-Radarsensoren beobachten auch unter schlechten Sichtbedingungen die Fahrbahn auf150 Meter vor dem Fahrzeug. Aus diesem Grund kann die Fahrgeschwindigkeit rechtzeitigan die des vorausfahrenden Fahrzeuges angepasst werden. Somit wird ein vorausschauendesFahren unterstützt, indem der Fahrer rechtzeitig gewarnt wird oder das System selbstständigdie Bremsung einleitet.[Rei10d][Rei12]
Abbildung 5.3: Long-Range-Sensor von Bosch [Bil]
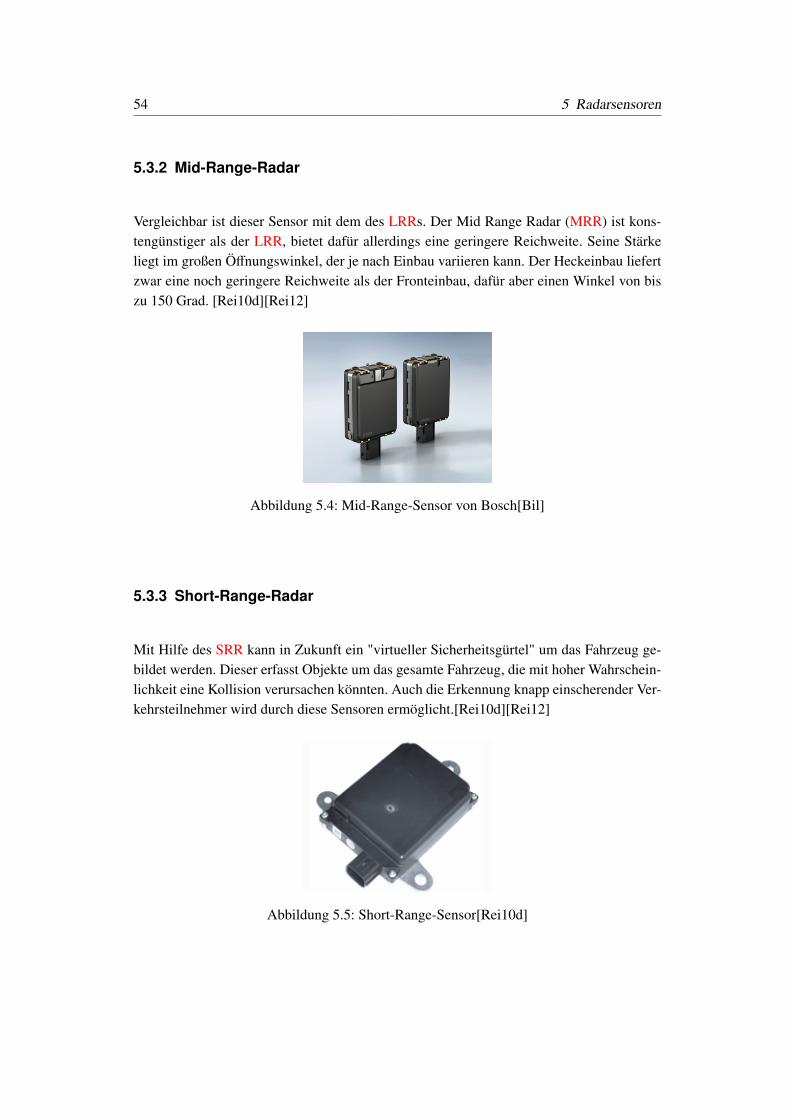
54 5 Radarsensoren
5.3.2 Mid-Range-Radar
Vergleichbar ist dieser Sensor mit dem des LRRs. Der Mid Range Radar (MRR) ist kons-tengünstiger als der LRR, bietet dafür allerdings eine geringere Reichweite. Seine Stärkeliegt im großen Öffnungswinkel, der je nach Einbau variieren kann. Der Heckeinbau liefertzwar eine noch geringere Reichweite als der Fronteinbau, dafür aber einen Winkel von biszu 150 Grad. [Rei10d][Rei12]
Abbildung 5.4: Mid-Range-Sensor von Bosch[Bil]
5.3.3 Short-Range-Radar
Mit Hilfe des SRR kann in Zukunft ein "virtueller Sicherheitsgürtel" um das Fahrzeug ge-bildet werden. Dieser erfasst Objekte um das gesamte Fahrzeug, die mit hoher Wahrschein-lichkeit eine Kollision verursachen könnten. Auch die Erkennung knapp einscherender Ver-kehrsteilnehmer wird durch diese Sensoren ermöglicht.[Rei10d][Rei12]
Abbildung 5.5: Short-Range-Sensor[Rei10d]
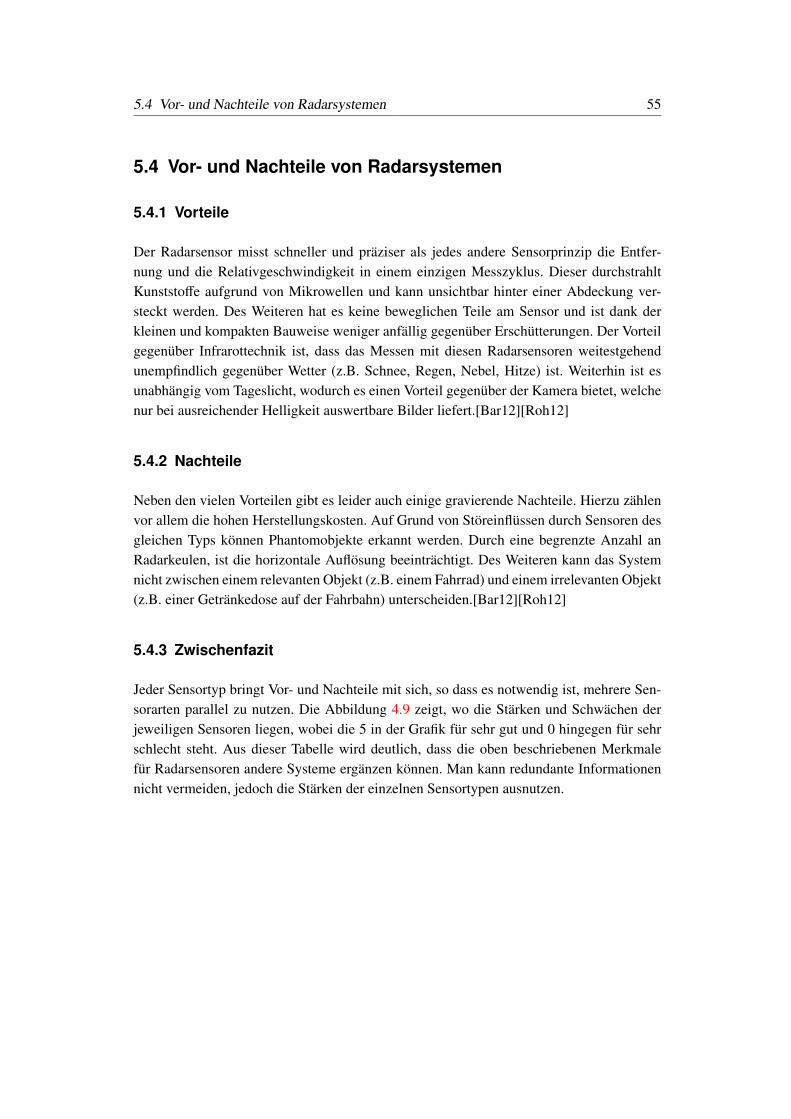
5.4 Vor- und Nachteile von Radarsystemen 55
5.4 Vor- und Nachteile von Radarsystemen
5.4.1 Vorteile
Der Radarsensor misst schneller und präziser als jedes andere Sensorprinzip die Entfer-nung und die Relativgeschwindigkeit in einem einzigen Messzyklus. Dieser durchstrahltKunststoffe aufgrund von Mikrowellen und kann unsichtbar hinter einer Abdeckung ver-steckt werden. Des Weiteren hat es keine beweglichen Teile am Sensor und ist dank derkleinen und kompakten Bauweise weniger anfällig gegenüber Erschütterungen. Der Vorteilgegenüber Infrarottechnik ist, dass das Messen mit diesen Radarsensoren weitestgehendunempfindlich gegenüber Wetter (z.B. Schnee, Regen, Nebel, Hitze) ist. Weiterhin ist esunabhängig vom Tageslicht, wodurch es einen Vorteil gegenüber der Kamera bietet, welchenur bei ausreichender Helligkeit auswertbare Bilder liefert.[Bar12][Roh12]
5.4.2 Nachteile
Neben den vielen Vorteilen gibt es leider auch einige gravierende Nachteile. Hierzu zählenvor allem die hohen Herstellungskosten. Auf Grund von Störeinflüssen durch Sensoren desgleichen Typs können Phantomobjekte erkannt werden. Durch eine begrenzte Anzahl anRadarkeulen, ist die horizontale Auflösung beeinträchtigt. Des Weiteren kann das Systemnicht zwischen einem relevanten Objekt (z.B. einem Fahrrad) und einem irrelevanten Objekt(z.B. einer Getränkedose auf der Fahrbahn) unterscheiden.[Bar12][Roh12]
5.4.3 Zwischenfazit
Jeder Sensortyp bringt Vor- und Nachteile mit sich, so dass es notwendig ist, mehrere Sen-sorarten parallel zu nutzen. Die Abbildung 4.9 zeigt, wo die Stärken und Schwächen derjeweiligen Sensoren liegen, wobei die 5 in der Grafik für sehr gut und 0 hingegen für sehrschlecht steht. Aus dieser Tabelle wird deutlich, dass die oben beschriebenen Merkmalefür Radarsensoren andere Systeme ergänzen können. Man kann redundante Informationennicht vermeiden, jedoch die Stärken der einzelnen Sensortypen ausnutzen.
56 5 Radarsensoren
5.5 Messverfahren
Von Radargeräten ausgesendete, elektromagnetische Wellen, die an metallischen Oberflä-chen reflektieren, werden vom Empfangsteil des Gerätes wieder empfangen und bezüglichZeit und/oder Frequenz verglichen. Dadurch können Abstand und Relativgeschwindigkeitzu dem reflektierenden Objekt ermittelt werden. Vorrangig wird diese Technik im ACC-System angewendet, welches eine Geschwindigkeitsregelung im Falle eines langsamer vor-aus fahrenden Fahrzeuges ermöglichen und einen vorgegebenen Abstand einhalten soll. DasProblem hierbei ist allerdings, dass das empfangene Signal einem gesendeten Signal eindeu-tig zugeordnet werden muss. Dafür gibt es verschiedene Verfahren, die bekanntesten sindunter Anderem die nun folgenden. [Rei10d][Rei12]
5.5.1 Dopplereffekt
Dieser Effekt beschreibt eine Wellenlängenverschiebung zwischen sich bewegenden Ob-jekten. Verändert sich der Abstand des Senders zum Empfänger, verändern sich auch dieWellenlängen. So erhöht sich die Frequenz der reflektierten elektromagnetischen Welle,wenn sich das Objekt in Richtung des Senders bewegt und verringert sich, wenn es sichvom Sender wegbewegt.[Rei10d][Rei12]
5.5.2 Puls-Modulation
Bei der Puls-Modulation werden Pulse in einer Größenordnung von 10 Nanosekunden bis30 Nanosekunden ausgesendet. Deren Laufzeit, also die Zeit zwischen Aussenden undEmpfang dieser Pulse ist dabei von entscheidender Bedeutung und spiegelt die Entfer-nung zum vorausfahrenden Fahrzeug wider. Über die Lichtgeschwindigkeit c und den ver-doppelten Abstand d zum reflektierenden Objekt kann die Laufzeit wie folgt berechnetwerden:[Rei10d][Rei12]τ = 2d
cBei einem Abstand d = 150m und c = 300 000 km/s beträgt die Laufzeitτ ≈ 1,0µs.
5.5.3 Winkelbestimmung
Zur Bestimmung der seitlichen Lage des Objekts werden Radarstrahlen in verschiedeneRichtungen ausgestrahlt. Objekte innerhalb dieses Winkels reflektieren diese Strahlen mitunterschiedlicher Stärke. Die reflektierten Strahlen werden ausgewertet, der stärkste vonihnen wird bestimmt. Es gibt zwei Möglichkeiten zur Bestimmung des Winkels. Die erste
5.5 Messverfahren 57
Variante ist es, einen einzelnen Strahl zu schwenken (scannen). Bei der anderen Methodewerden mehrere Radarkeulen parallel ausgesendet und ausgewertet. Dafür sind mindestenszwei sich überlappende "Keulen"notwendig, weil die Verhältnisse der Amplituden von dengemessenen benachbarten Strahlen Aufschluss auf den Sichtwinkel geben.[Rei10d][Rei12]
5.5.4 FMCW-Modulation
Im Gegensatz zur Pulsmodulation ist nicht eine direkte Laufzeitmessung notwendig, son-dern eine indirekte (FMCW). Bei diesem Verfahren werden die Frequenzen vom FMCW-Radar zwischen Sendesignal und Empfangssignal verglichen. Es werden gleichmäßig mo-dulierte Radarwellen für einige Millisekunden in der entsprechenden Frequenz gesendet.Das von Hindernissen und Objekten reflektierte Signal wird mit dem Ausgangssignal ver-glichen. Geschwindigkeit und Entfernung zum reflektierenden Objekt können durch Ab-weichungen im Frequenzbild ausgelesen werden.[Rei10d][Rei12]
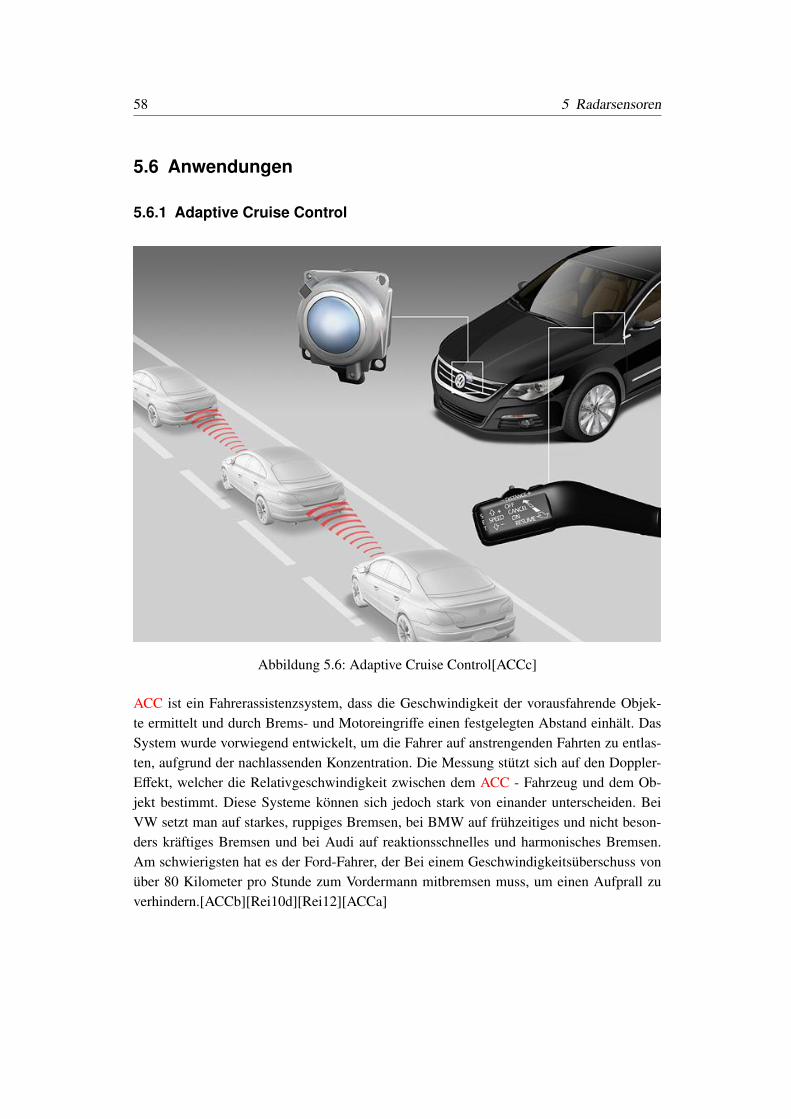
58 5 Radarsensoren
5.6 Anwendungen
5.6.1 Adaptive Cruise Control
Abbildung 5.6: Adaptive Cruise Control[ACCc]
ACC ist ein Fahrerassistenzsystem, dass die Geschwindigkeit der vorausfahrende Objek-te ermittelt und durch Brems- und Motoreingriffe einen festgelegten Abstand einhält. DasSystem wurde vorwiegend entwickelt, um die Fahrer auf anstrengenden Fahrten zu entlas-ten, aufgrund der nachlassenden Konzentration. Die Messung stützt sich auf den Doppler-Effekt, welcher die Relativgeschwindigkeit zwischen dem ACC - Fahrzeug und dem Ob-jekt bestimmt. Diese Systeme können sich jedoch stark von einander unterscheiden. BeiVW setzt man auf starkes, ruppiges Bremsen, bei BMW auf frühzeitiges und nicht beson-ders kräftiges Bremsen und bei Audi auf reaktionsschnelles und harmonisches Bremsen.Am schwierigsten hat es der Ford-Fahrer, der Bei einem Geschwindigkeitsüberschuss vonüber 80 Kilometer pro Stunde zum Vordermann mitbremsen muss, um einen Aufprall zuverhindern.[ACCb][Rei10d][Rei12][ACCa]
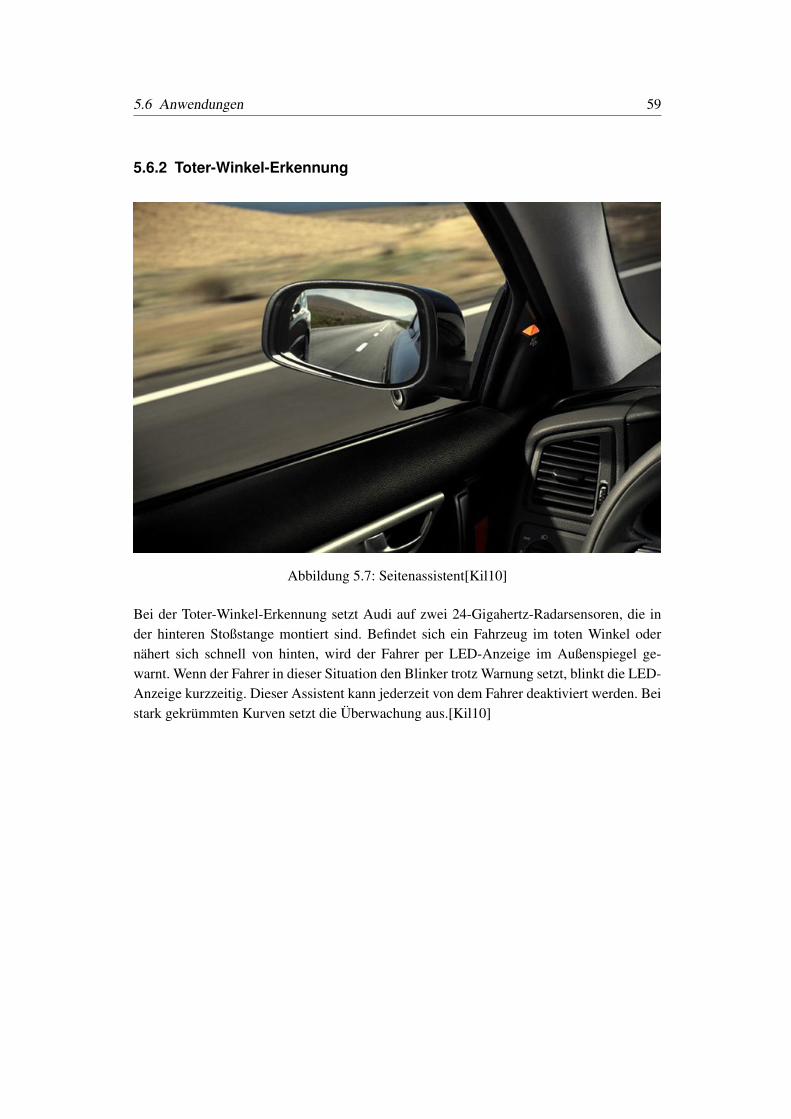
5.6 Anwendungen 59
5.6.2 Toter-Winkel-Erkennung
Abbildung 5.7: Seitenassistent[Kil10]
Bei der Toter-Winkel-Erkennung setzt Audi auf zwei 24-Gigahertz-Radarsensoren, die inder hinteren Stoßstange montiert sind. Befindet sich ein Fahrzeug im toten Winkel odernähert sich schnell von hinten, wird der Fahrer per LED-Anzeige im Außenspiegel ge-warnt. Wenn der Fahrer in dieser Situation den Blinker trotz Warnung setzt, blinkt die LED-Anzeige kurzzeitig. Dieser Assistent kann jederzeit von dem Fahrer deaktiviert werden. Beistark gekrümmten Kurven setzt die Überwachung aus.[Kil10]
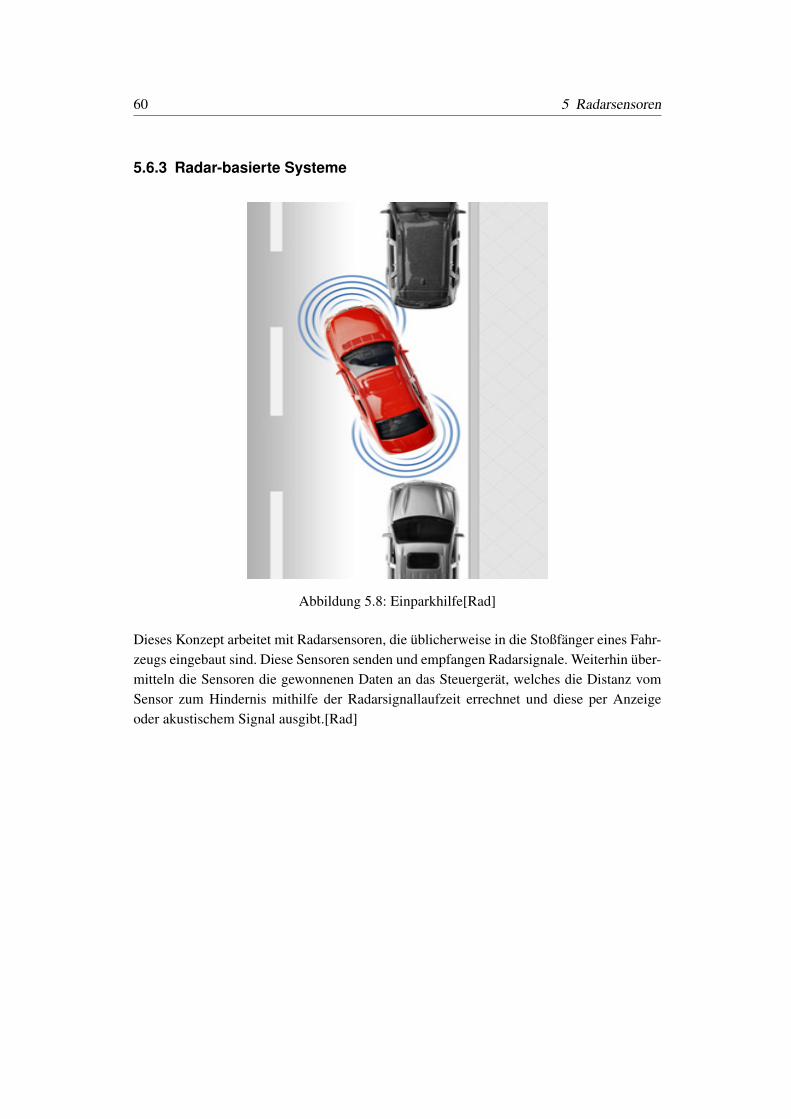
60 5 Radarsensoren
5.6.3 Radar-basierte Systeme
Abbildung 5.8: Einparkhilfe[Rad]
Dieses Konzept arbeitet mit Radarsensoren, die üblicherweise in die Stoßfänger eines Fahr-zeugs eingebaut sind. Diese Sensoren senden und empfangen Radarsignale. Weiterhin über-mitteln die Sensoren die gewonnenen Daten an das Steuergerät, welches die Distanz vomSensor zum Hindernis mithilfe der Radarsignallaufzeit errechnet und diese per Anzeigeoder akustischem Signal ausgibt.[Rad]
5.7 Beispiel für zukünftige Radarsensoren 61
5.7 Beispiel für zukünftige Radarsensoren
Abbildung 5.9: Long-Range-Radar der vierten Generation von der Firma Bosch[LRR13]
Die Abbildung 5.9 zeigt den neusten von der Firma Bosch entwickelten LRR, der das 77-Gigahertz-Frequenzband nutzt. Dieser ist leistungsfähiger und kompakter als sein direk-tes Vorgängermodell. Der neue Radarsensor kann Hindernisse und einscherende Fahrzeugeschneller erfassen. Aus diesem Grund können die Sicherheitsfunktionen schneller ausge-löst werden z.B. automatische Notbremsung. Somit steigt die Sicherheit vom Fahrer. DieseLong-Range-Radarsensoren der vierten Generation von der Firma Bosch (LRR4) gehen2014 in Serie. [LRR13]
5.7.1 Technische Neuerung
Die größte technische Änderung beim neuen LRR4 ist die Zahl der eingesetzten Radar-keulen.Während beim Vorgänger nur vier "Keulen"gebündelt nach vorn schauen, werdennun zwei zusätzliche gebildet, die den Öffnungswinkel von 30 Grad auf 40 Grad erweitern.Diese können andere Objekte bereits bei einem Abstand von rund 250 Metern erfassen.Vorher lag der Abstand beim Long-Range-Radarsensoren der zweiten Generation von derFirma Bosch (LRR2) bei 150 m und beim Long-Range-Radarsensoren der dritten Generati-on von der Firma Bosch (LRR3) schon ein wenig unter 250 Metern. Aufgrund der höherenDistanz kann das ACC-System auch bei Geschwindigkeiten von über 160 Kilometern proStunde genutzt werden. Zusätzliche Informationen bietet ein weiterer nach oben gerichte-ter Radarstrahl. Durch den diesen und den sechs Basiskeulen ermöglicht das System eineHöhenschätzung der erfassten Objekte im Nahbereich.[LRR13]
5.7.2 Sensordatenfusion
Leistungsfähige Assistenzsysteme nutzen oftmals mehr als nur einen Sensor. Der LRR4kann die Daten eines zweiten optionalen Radarsensors, einer Videokamera und die der
62 5 Radarsensoren
Ultraschallsensoren auf dem eigenen Steuergerät verarbeiten. Durch die SSensordatenfu-sionëntsteht durch Softwarealgorithmen ein detailliertes "Bild". Mit diesem "Bild"wird dasUmfeld analysiert und vom "Fahrzeugäusgewertet. Somit kann es Gefahren erkennen undsituationsbedingte Einschätzungen treffen, um das Risiko für sich und andere Verkehrs-teilnehmer so gering wie möglich zu halten. Dabei können Fußgänger und Radfahrer miteinbezogen werden z.B. bei einer automatischen Notbremsung. Dies fordern unter Ande-ren die Vorschriften der Verbraucher-Schutzorganisation Euro NCAP bis 2016. Der Nutzensolcher Systeme wurde von einer Studie der Europäischen Union belegt und als hilfreichempfunden, um Unfälle zu vermeiden bzw. die Schwere einzudämmen.[LRR13]
5.7.3 Aufbau des Sensors
Weiterhin setzt Bosch auf unbewegliche Teile aufgrund der Robustheit und der Eignungfür alle PKW-Klassen. Eine Heizung der Linse ist auch wieder zu finden im neuen Mo-dell, denn die Linsenheizung gewährleistet volle Sensorverfügbarkeit selbst bei schlechtenWitterungsbedingungen (Schnee und Eis). Beim Hochfrequenzmodul wird eine Silizium-Germanium-Technologie eingesetzt.[LRR13]
5.7.4 Herstellungskosten und Massenproduktion
Die Herstellungskosten werden sinken, weil alle Bauteile mit Standard-Lötprozessen verar-beitet werden können. Gerhard Steiger (Vorsitzender des Bereichsvorstands des Geschäfts-bereichs Chassis Systems Control) erklärte der Presse, dass die Radarsensoren leistungsfä-higer und kostengünstiger gemacht wurden und dass die Radartechnik reif für den Massen-markt ist. Dies untermauern auch die geplanten Fertigungszahlen von Bosch. Vom Jahr 2000bis zum Frühjahr 2013 wurden eine Million Radarsensoren gefertigt. Die zweite Millionwird 2014 angesetzt und bereits 2016 sollen 10 Million Sensoren auf dem Band hergestelltwurden sein.[LRR13]
5.7.5 Alternative zum Long-Range-Radarsensor
Seit Mitte 2013 bietet Bosch die MRR an, welche noch kostengünstiger als die LRR sind,aber auch eine geringere Reichweite (ca. 160 Meter) haben. Mit den MRRs lassen sich be-reits alle Notbremsfunktionen und ACC bis zu 160 Kilometer pro Stunde umsetzen. Miteinem Öffnungswinkel von 150 Grad decken sie ein breites Spektrum ab. Eine Variantefür den Heckeinsatz startet im Jahr 2014. Dieser Sensor erkennt frühzeitig schnell heran-fahrende Fahrzeuge und kann u.a. beim Spurwechsel vor einer Kollision warnen. (SieheAbbildung 5.7)[LRR13]
5.8 Fazit 63
5.8 Fazit
Es ist wirklich faszinierend, was die Technik heute schon ermöglicht und was speziell imBereich automotiver Radarsysteme möglich ist, um den Fahrer zu unterstützen und die Si-cherheit zu fördern. Genau das war es, was wir uns von diesem Thema auch erhofft hatten,wodurch unser Interesse für dieses Thema geweckt wurde und uns auch bis zum Schlussnicht enttäuschte. Wir haben gezeigt, dass Radarsysteme aus der Automobilbranche nichtmehr wegzudenken sind, da sie eine Basis für eine Vielzahl von Assistenzsystemen dar-stellen. Unsere Auswahl ist aber nur ein Bruchteil von dem, was mit ihnen möglich ist. InZukunft wird es vorraussichtlich noch viel mehr dieser nützlichen Helfer geben, die dasFahren noch stärker automatisieren und sicherer gestalten. Der noch große Nachteil derRadarsysteme ist allerdings der hohe Kostenpunkt, der der aufwendigen Verarbeitung undkomplexen Programmierung geschuldet ist. Auch dies wird womöglich in den weiterenJahren zu Gunsten des Endverbrauchers verringert werden, was sich z.B. in dem von unsbereits vorgestellten "LRR4" zeigte. Gezeigt haben wir aber auch, dass neben der Radar-technik auch weitere Systeme im automotiven Bereich Verwendung finden und wie sie sichgegenseitig ergänzen. Aus diesem Grund kann man nicht auf andere Systeme verzichten,denn es würde zu einem großen Sicherheits- und Komfortdefizit führen.

Martin Dobisch
6 Ultraschallsensoren
6.1 Einleitung
In modernen Fahrzeugen werden immer häufiger Fahrassistenzsysteme verbaut, um die Si-cherheit und den Komfort der Insassen zu erhöhen. Häufig werden zur Detektion von Hin-dernissen im Straßenverkehr und dem Ermitteln von Abständen zu Objekten Ultraschall-sensoren genutzt. Dieses Kapitel erläutert die grundsätzliche Funktion dieser Sensoren, ihreVor- und Nachteile und erläutert ein mögliches Einsatzszenario im automobilen und zeigtalternative Szenarien im automobilen Kontext auf.
6.2 Ultraschallsensoren
6.2.1 Physikalische Grundlagen
Grundlage für die Distanzmessung mittels Ultraschall ist das Echo-Laufzeit-Verfahren, dasauf der Ausbreitungsgeschwindigkeit von Schallwellen und ihrer Reflexion an Hindernis-sen beruht. Eine Folge von Ultraschallimpulsen wird zum Zeitpunkt t0 von einem Ultra-schalltransmitter gesendet. Treffen diese dabei auf ein Objekt, so werden sie reflektiert underzeugen Echos, die vom Ultraschallreceiver zum Zeitpunkt t1 empfangen werden, sieheAbbildung 6.1
Um die Entfernung zu bestimmen, wird die Laufzeit des Schalls ermittelt in dem t0 von t1subtrahiert wird. Anschließend multipliziert man die ermittelte Laufzeit mit der Geschwin-digkeit des Schalls und erhält die Strecke, die von den Ultraschallimpulsen zurückgelegtwurde. Da die Distanz zweimal durchlaufen wird, ist die sich ergebene Strecke zu halbie-ren. Zusammengefasst wird diese Rechnung in Gleichung (6.1), wobei s für den Abstandzum Objekt, t für die Laufzeit und v für die Geschwindigkeit des Schalls steht.
s =v · t2
(6.1)
65
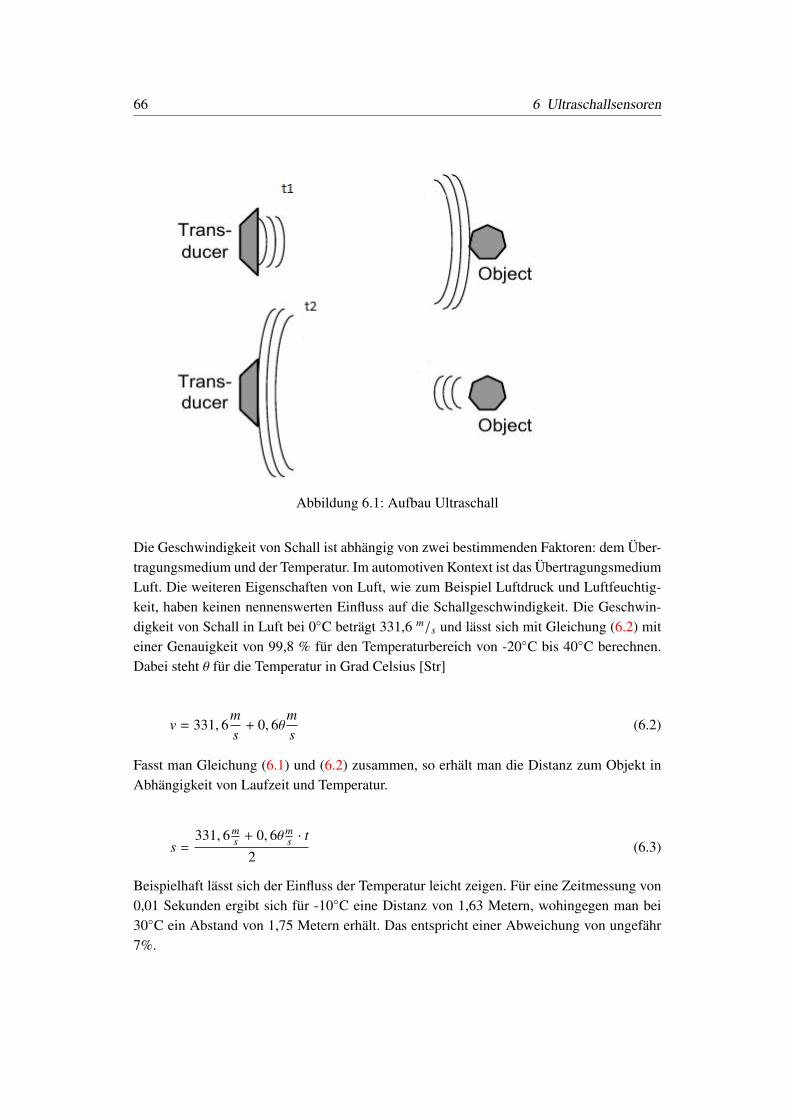
66 6 Ultraschallsensoren
Abbildung 6.1: Aufbau Ultraschall
Die Geschwindigkeit von Schall ist abhängig von zwei bestimmenden Faktoren: dem Über-tragungsmedium und der Temperatur. Im automotiven Kontext ist das ÜbertragungsmediumLuft. Die weiteren Eigenschaften von Luft, wie zum Beispiel Luftdruck und Luftfeuchtig-keit, haben keinen nennenswerten Einfluss auf die Schallgeschwindigkeit. Die Geschwin-digkeit von Schall in Luft bei 0◦C beträgt 331,6 m/s und lässt sich mit Gleichung (6.2) miteiner Genauigkeit von 99,8 % für den Temperaturbereich von -20◦C bis 40◦C berechnen.Dabei steht θ für die Temperatur in Grad Celsius [Str]
v = 331, 6ms
+ 0, 6θms
(6.2)
Fasst man Gleichung (6.1) und (6.2) zusammen, so erhält man die Distanz zum Objekt inAbhängigkeit von Laufzeit und Temperatur.
s =331, 6 m
s + 0, 6θms · t
2(6.3)
Beispielhaft lässt sich der Einfluss der Temperatur leicht zeigen. Für eine Zeitmessung von0,01 Sekunden ergibt sich für -10◦C eine Distanz von 1,63 Metern, wohingegen man bei30◦C ein Abstand von 1,75 Metern erhält. Das entspricht einer Abweichung von ungefähr7%.
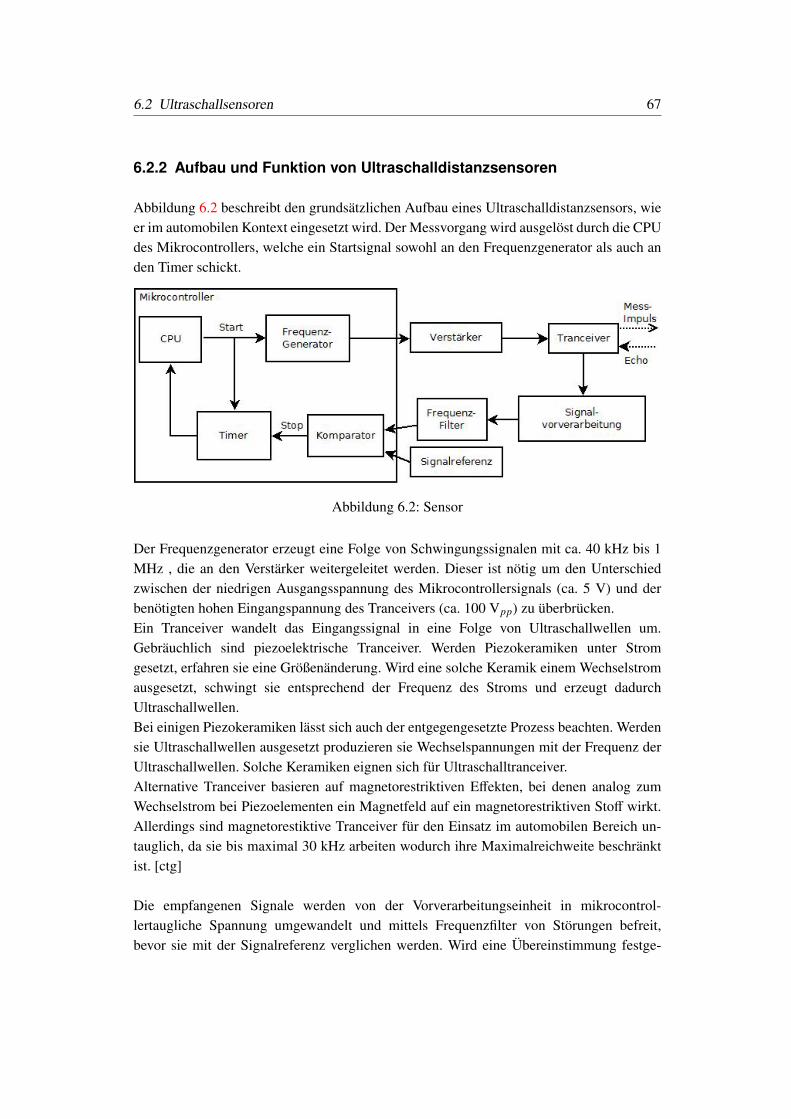
6.2 Ultraschallsensoren 67
6.2.2 Aufbau und Funktion von Ultraschalldistanzsensoren
Abbildung 6.2 beschreibt den grundsätzlichen Aufbau eines Ultraschalldistanzsensors, wieer im automobilen Kontext eingesetzt wird. Der Messvorgang wird ausgelöst durch die CPUdes Mikrocontrollers, welche ein Startsignal sowohl an den Frequenzgenerator als auch anden Timer schickt.
Abbildung 6.2: Sensor
Der Frequenzgenerator erzeugt eine Folge von Schwingungssignalen mit ca. 40 kHz bis 1MHz , die an den Verstärker weitergeleitet werden. Dieser ist nötig um den Unterschiedzwischen der niedrigen Ausgangsspannung des Mikrocontrollersignals (ca. 5 V) und derbenötigten hohen Eingangspannung des Tranceivers (ca. 100 Vpp) zu überbrücken.Ein Tranceiver wandelt das Eingangssignal in eine Folge von Ultraschallwellen um.Gebräuchlich sind piezoelektrische Tranceiver. Werden Piezokeramiken unter Stromgesetzt, erfahren sie eine Größenänderung. Wird eine solche Keramik einem Wechselstromausgesetzt, schwingt sie entsprechend der Frequenz des Stroms und erzeugt dadurchUltraschallwellen.Bei einigen Piezokeramiken lässt sich auch der entgegengesetzte Prozess beachten. Werdensie Ultraschallwellen ausgesetzt produzieren sie Wechselspannungen mit der Frequenz derUltraschallwellen. Solche Keramiken eignen sich für Ultraschalltranceiver.Alternative Tranceiver basieren auf magnetorestriktiven Effekten, bei denen analog zumWechselstrom bei Piezoelementen ein Magnetfeld auf ein magnetorestriktiven Stoff wirkt.Allerdings sind magnetorestiktive Tranceiver für den Einsatz im automobilen Bereich un-tauglich, da sie bis maximal 30 kHz arbeiten wodurch ihre Maximalreichweite beschränktist. [ctg]
Die empfangenen Signale werden von der Vorverarbeitungseinheit in mikrocontrol-lertaugliche Spannung umgewandelt und mittels Frequenzfilter von Störungen befreit,bevor sie mit der Signalreferenz verglichen werden. Wird eine Übereinstimmung festge-
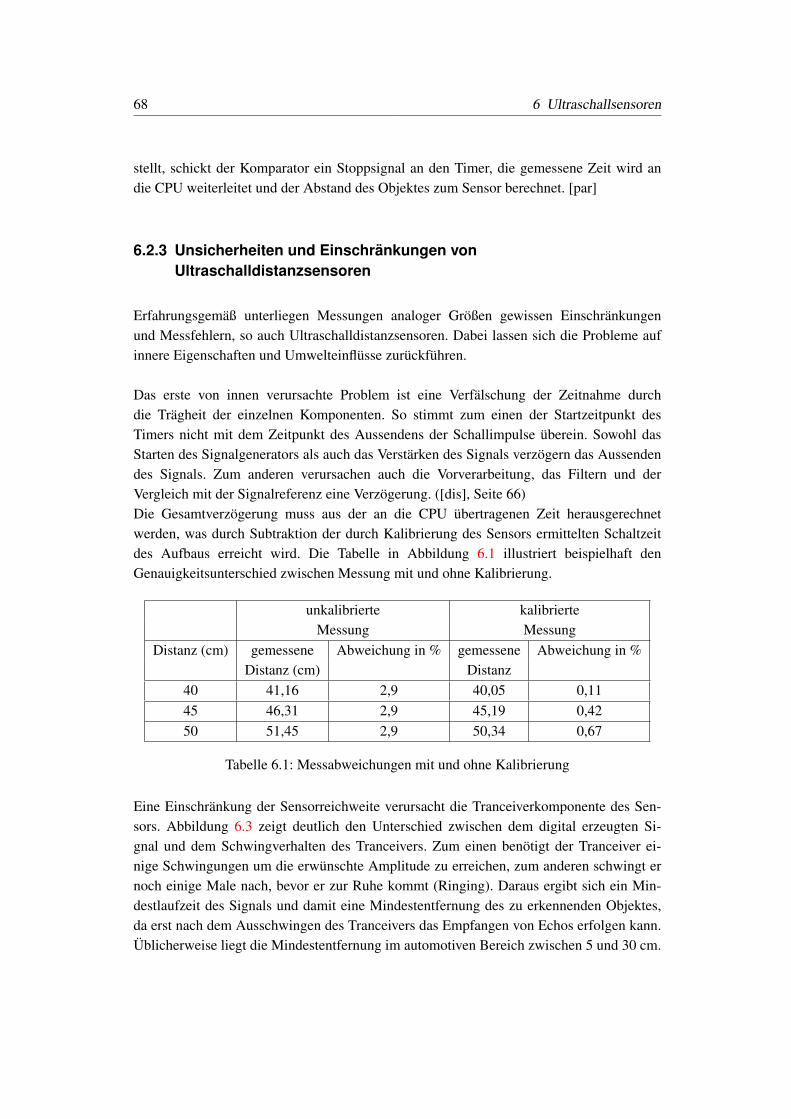
68 6 Ultraschallsensoren
stellt, schickt der Komparator ein Stoppsignal an den Timer, die gemessene Zeit wird andie CPU weiterleitet und der Abstand des Objektes zum Sensor berechnet. [par]
6.2.3 Unsicherheiten und Einschränkungen vonUltraschalldistanzsensoren
Erfahrungsgemäß unterliegen Messungen analoger Größen gewissen Einschränkungenund Messfehlern, so auch Ultraschalldistanzsensoren. Dabei lassen sich die Probleme aufinnere Eigenschaften und Umwelteinflüsse zurückführen.
Das erste von innen verursachte Problem ist eine Verfälschung der Zeitnahme durchdie Trägheit der einzelnen Komponenten. So stimmt zum einen der Startzeitpunkt desTimers nicht mit dem Zeitpunkt des Aussendens der Schallimpulse überein. Sowohl dasStarten des Signalgenerators als auch das Verstärken des Signals verzögern das Aussendendes Signals. Zum anderen verursachen auch die Vorverarbeitung, das Filtern und derVergleich mit der Signalreferenz eine Verzögerung. ([dis], Seite 66)Die Gesamtverzögerung muss aus der an die CPU übertragenen Zeit herausgerechnetwerden, was durch Subtraktion der durch Kalibrierung des Sensors ermittelten Schaltzeitdes Aufbaus erreicht wird. Die Tabelle in Abbildung 6.1 illustriert beispielhaft denGenauigkeitsunterschied zwischen Messung mit und ohne Kalibrierung.
unkalibrierte kalibrierteMessung Messung
Distanz (cm) gemessene Abweichung in % gemessene Abweichung in %Distanz (cm) Distanz
40 41,16 2,9 40,05 0,1145 46,31 2,9 45,19 0,4250 51,45 2,9 50,34 0,67
Tabelle 6.1: Messabweichungen mit und ohne Kalibrierung
Eine Einschränkung der Sensorreichweite verursacht die Tranceiverkomponente des Sen-sors. Abbildung 6.3 zeigt deutlich den Unterschied zwischen dem digital erzeugten Si-gnal und dem Schwingverhalten des Tranceivers. Zum einen benötigt der Tranceiver ei-nige Schwingungen um die erwünschte Amplitude zu erreichen, zum anderen schwingt ernoch einige Male nach, bevor er zur Ruhe kommt (Ringing). Daraus ergibt sich ein Min-destlaufzeit des Signals und damit eine Mindestentfernung des zu erkennenden Objektes,da erst nach dem Ausschwingen des Tranceivers das Empfangen von Echos erfolgen kann.Üblicherweise liegt die Mindestentfernung im automotiven Bereich zwischen 5 und 30 cm.
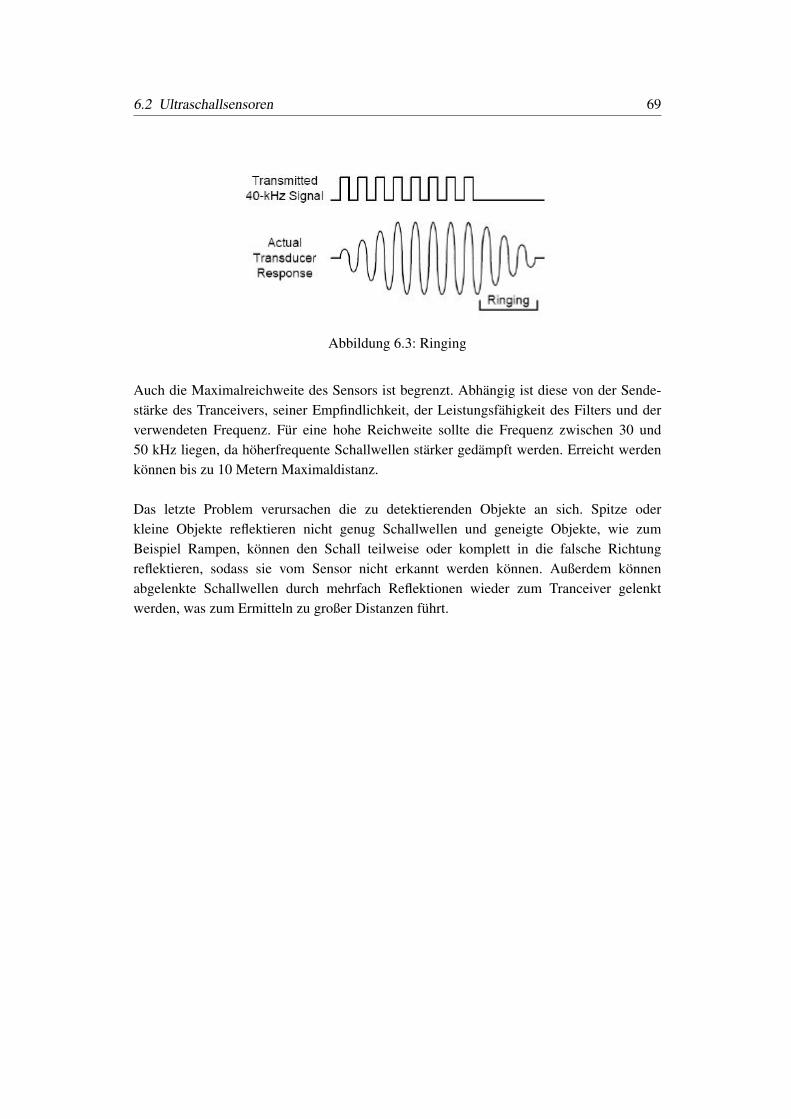
6.2 Ultraschallsensoren 69
Abbildung 6.3: Ringing
Auch die Maximalreichweite des Sensors ist begrenzt. Abhängig ist diese von der Sende-stärke des Tranceivers, seiner Empfindlichkeit, der Leistungsfähigkeit des Filters und derverwendeten Frequenz. Für eine hohe Reichweite sollte die Frequenz zwischen 30 und50 kHz liegen, da höherfrequente Schallwellen stärker gedämpft werden. Erreicht werdenkönnen bis zu 10 Metern Maximaldistanz.
Das letzte Problem verursachen die zu detektierenden Objekte an sich. Spitze oderkleine Objekte reflektieren nicht genug Schallwellen und geneigte Objekte, wie zumBeispiel Rampen, können den Schall teilweise oder komplett in die falsche Richtungreflektieren, sodass sie vom Sensor nicht erkannt werden können. Außerdem könnenabgelenkte Schallwellen durch mehrfach Reflektionen wieder zum Tranceiver gelenktwerden, was zum Ermitteln zu großer Distanzen führt.
70 6 Ultraschallsensoren
6.3 Anwendungsszenario: Parkassistenzsystem
Abbildung 6.4: [ass]
6.3.1 Aufbau und Funktion
Für eine elektronische Einparkhilfe werden 2 bis 8 Ultraschallsensoren in die Stoßstangendes Autos montiert. [Ltd] Daraus ergibt sich ein Problem, was in Abbildung 6.5 ersichtlichwird. Zwar ist jeder Sensor für sich in der Lage den Abstand von sich zu einem detektiertenObjekt zu bestimmen, doch stimmt dieser Abstand nur genau dann mit dem Abstand zumFahrzeug überein, wenn sich das Hindernis auf einer Achse senkrecht zur Stoßstange vordem Sensor befindet.Die Lösung des Problems liegt in der Berechnung der tatsächlichen Distanz aus den Mess-werten von mindestens 2 Sensoren mittels Triangulation. [sys13]
Aus dem Satz des Pythagoras ergeben sich für beide Sensoren (T1 und T2) folgende Drei-ecksgleichungen ((6.4) und (6.5)), woraus man Gleichung (6.6) erhalten kann.
l21 = x21 + d2 (6.4)
l22 = x22 + d2 (6.5)
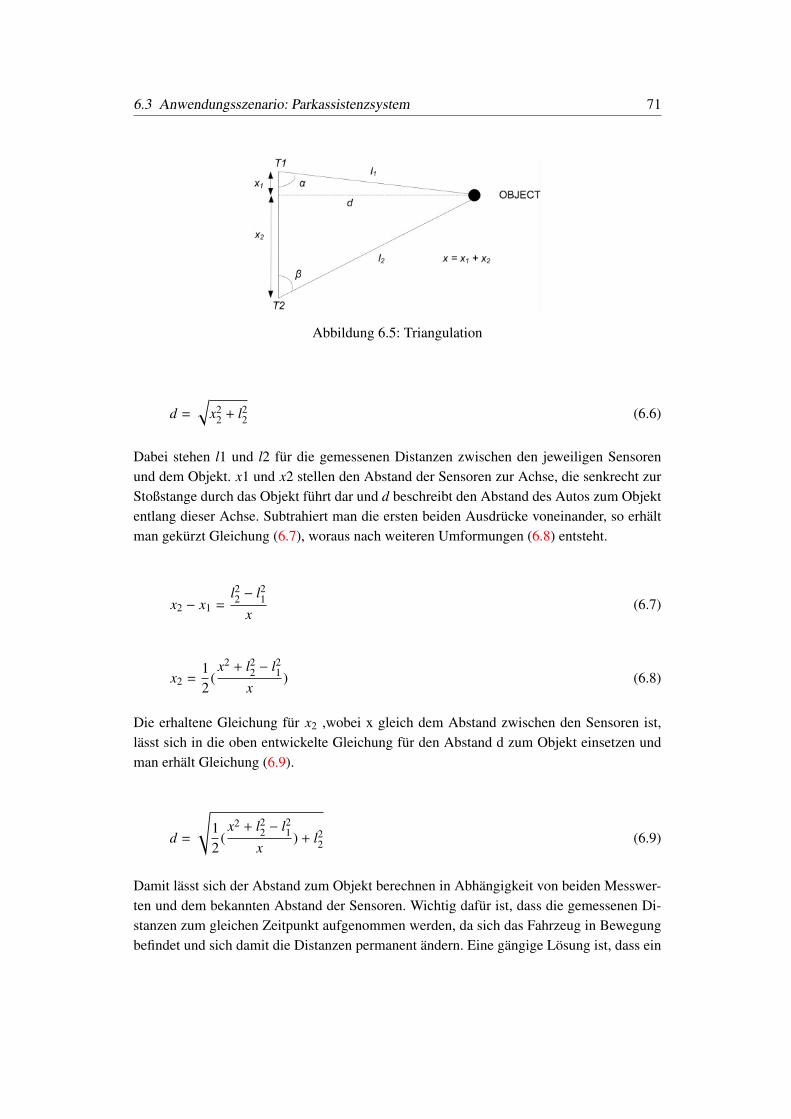
6.3 Anwendungsszenario: Parkassistenzsystem 71
Abbildung 6.5: Triangulation
d =
√x2
2 + l22 (6.6)
Dabei stehen l1 und l2 für die gemessenen Distanzen zwischen den jeweiligen Sensorenund dem Objekt. x1 und x2 stellen den Abstand der Sensoren zur Achse, die senkrecht zurStoßstange durch das Objekt führt dar und d beschreibt den Abstand des Autos zum Objektentlang dieser Achse. Subtrahiert man die ersten beiden Ausdrücke voneinander, so erhältman gekürzt Gleichung (6.7), woraus nach weiteren Umformungen (6.8) entsteht.
x2 − x1 =l22 − l21
x(6.7)
x2 =12
(x2 + l22 − l21
x) (6.8)
Die erhaltene Gleichung für x2 ,wobei x gleich dem Abstand zwischen den Sensoren ist,lässt sich in die oben entwickelte Gleichung für den Abstand d zum Objekt einsetzen undman erhält Gleichung (6.9).
d =
√12
(x2 + l22 − l21
x) + l22 (6.9)
Damit lässt sich der Abstand zum Objekt berechnen in Abhängigkeit von beiden Messwer-ten und dem bekannten Abstand der Sensoren. Wichtig dafür ist, dass die gemessenen Di-stanzen zum gleichen Zeitpunkt aufgenommen werden, da sich das Fahrzeug in Bewegungbefindet und sich damit die Distanzen permanent ändern. Eine gängige Lösung ist, dass ein
72 6 Ultraschallsensoren
Sensor sein Signal aussendet, was auch von den anderen Sensoren empfangen wird, welcheaus der Zeit und dem Abstand zum sendenden Sensor die jeweilige Distanz zum Hindernissbestimmen. Durch ein zeitlich alternierende Sendersensorwahl erreicht man eine maximaleAbdeckung des zu durchsuchenden Raums mit zeitlich Konsistenten Messwerten.
6.3.2 Vor- und Nachteile der Verwendung von Ultraschallsensoren
Zur Realisierung von Einparkhilfen kann man auch eine Reihe von alternativen Sensorenverwenden, zum Beispiel optische Sensoren oder Radarmesssysteme. Daraus ergeben sicheinige Vor- und Nachteile, die in folgender Tabelle 6.2 dargestellt werden.
Vorteile Nachteile
deutlich günstiger als Im Gegensatz zu Radarsensoren , dieandere Systeme auch durch die Stoßstange funktionieren,
benötigen Ultraschallsensoren ein freiesSichtfeld, weshalb die Stoßstange zurMontage aufgebohrt werden muss
funktionieren unabhängig Sensoren fallen ohne Warnung aus, wenn dievon Lichtverhältnissen Oberfläche zu stark verschmutzt ist
Erkennung von kleinen Objekten oder Objektenmit schrägen Oberflächen nicht zuverlässigErkennung von Objekten deren Abstand kleiner alsdie Mindestreichweite der Sensoren nicht möglichSensorwerte sind temperaturabhängig
Tabelle 6.2: Vor- und Nachteile, [par]
6.4 Alternative Einsatzmöglichkeiten
Neben dem vorgestellten Parkassistenzsystem gibt es eine Reihe weiterer Anwendungs-gebiete für Ultraschallsensoren in Automobilen. Eine kurze Auswahl soll an dieser Stellevorgestellt werden.
6.4.1 Parklückenvermessung
Die erste Anwendung ist thematisch eng verwandt mit dem Parkassistenten. Gerade inGroßsstädten ist die Parkplatzsuche zeit und nervraubend. Deshalb bietet es sich an, vor-handene Parklücken automatisch auf ihre Größe und damit ihre Eignung als Parkplatz zu
6.5 Fazit 73
prüfen. Dafür werden Ultraschallsensoren seitlich in die Frontstoßstange integriert. DieseUnterscheiden zwischen Fahrzeugen und Parklücken anhand der gemessenen Distanzen.Wird eine Parklücke erreicht steigt die Distanz sprungartig an. Es wird die Zeit bis zumnächsten Fahrzeug gemessen und aus der Geschwindigkeit des zu parkenden Fahrzeugswird die Größe der Parklücke errechnet. Der Fahrer erhält je nach Eignung einen optischenoder akustischen Hinweis und kann dein Einparkvorgang beginnen.
6.4.2 Automatisches Einparken
Kombiniert man die Parklückenvermessung und den Parkassistenten mit einem automa-tischen Lenksystem so erhällt ein automatisches Einparksystem. Aktuell erhältliche Sys-teme ermitteln automatisch Parklücken und übernehmen die notwendigen Lenkmanöver.Der Fahrer muss lediglich schalten sowie Bremse und Gaspedal bedienen. Natürlich wä-re auch ein vollautomatisches System denkbar, allerdings ist der rechtliche Rahmen dafürnoch nicht gegeben. [Sto12]
6.4.3 Überwachung des toten Winkels
Eine oft unterschätzte Gefahr beim Führen eines Fahrzeugs ist der tote Winkel, also derBereich an den Seiten des Fahrzeugs, dass nicht durch die Spiegel eingesehen werden kann.Abhilfe geschaffen wird mit seitlich in die Stoßstangen eingelassenen Ultraschallsensoren.Die hinteren Sensoren erfassen Objekte im Toten Winkel und geben gegebenfalls optischeund akustische Warnungen aus. Die forderen Sensoren helfen bei der Plausibilitätsprüfungder Warnung. So werden überholte oder entgegenkommende Fahrzeuge zuerst von den for-deren Sensoren erfasst, sodass in diesem Fall keine Warnung gegeben wird. [Ser]
6.5 Fazit
Ultraschallsensoren sind aus modernen Fahrzeugen nicht mehr wegzudenken. Ihre zahl-reichen Anwendungsmöglichkeiten, die sich einfach durch Verwendung der Sensoren fürmehrere Zwecke kombinieren, und ihr geringer Preis machen sie zu effizienten Helfernim Auto und erhöhen sowohl den Fahrkomfort als auch die Sicherheit der Insassen. Aller-dings stellen Ultraschallsensoren kein Allheimittel da. Die Ultraschallsensoren anhaftendenSchwächen bei der Objekterkennung und Reichweite machen die Kombination mit anderenSensorsystemen erforderlich um den maximalen Grad an Sicherheit gewährleisten zu kön-nen.

Ben RabelerChristian Schildwächter
7 Positionsbestimmung/GPS
7.1 Einleitung
Satellitengestützte Systeme (besonders das Global Positioning System (GPS)) haben sichweltweit durchgesetzt und sind vorherrschend in der Navigation und Positionsbestimmungim automobilen Bereich. Wir beschreiben zuerst die Funktionsweise von satellitenbasiertenNavigationssystem, die aktuelle Lage von Alternativen zu GPS, die Fehlerursachen und wieFehler durch unterstützende Verfahren in Echtzeit minimiert werden können. Jedoch ent-wickeln sich nicht nur satellitenbasierte Alternativen zu GPS, sondern auch satellitenloseAlternativen auf die im letzten Abschnitt dieses Kapitels eingegangen wird. Diese Alterna-tiven bieten sich als Unterstützung für satellitenbasierte Systeme an, z.B. für eine höhereGenauigkeit oder um eine geringe Satellitendichte auszugleichen, wie es in Tunneln oderHäuserschluchten der Fall ist (siehe 7.5b).
7.2 Satellitenbasierte Navigation
7.2.1 Überblick über GPS
NAVSTAR GPS (offzielle Bezeichnung: Navigational Satellite Timing and Ranging –Global Positioning System) löste ab etwa 1985 das alte Satellitennavigationssystem NNSSder US-Marine ab. Der erste GPS-Satellit wurde 1978 ins All befördert [WB08]. Stand Ja-nuar 2014 ist GPS soweit entwickelt, dass 32 Satelliten verfügbar sind.[gps14]. Das Systemist seit 1990 funktionsfähig und seit dem 2.Mai 2000 auch im zivilen Gebrauch nutzbar.Es hat sich seitdem dort als vorherrschendes Mittel zur Positionsbestimmung entwickelt.Vor allem im automotiven Kontext wird GPS zur Navigation genutzt, aber auch in vielenweiteren Anwendungsfällen (Vermessung, Luftfahrt, Schiffahrt) hat sich GPS als wichtigesInstrument zur Positionsbestimmung entwickelt.
75
76 7 Positionsbestimmung/GPS
7.2.2 Alternativen
Bei GPS handelt es sich um ein amerikanisches Produkt, was für andere Länder Nachteilemit sich bringt. So sind sie abhängig von der USA, was z.B. in Kriegs- oder wirtschaftli-chen Szenarien zu Konflikten führen kann, wenn die USA andere Länder insofern Machtausüben kann, dass sie die anderen Länder ausschließt. Vor allem deswegen aber auch umeine Verbesserung der Satellitennavigation zu erzielen, haben sich drei weitere Alternativenzu GPS gebildet:
GLONASS (deutsche Abkürzung für globales Navgation-Satellitensystem) wurde von derdamaligen UdSSR am 12.Oktober mit dem Start von drei Satelliten gestartet. Heute wirdes von der gemeinschaft unabhängiger Staaten weitergeführt. Wie bei GPS sind 24 Satelli-ten nötig, um die notwendige Abdeckung zu gewährleisten. Dieser Stand wurde erst 2011erreicht, was vor allem an der geringen Lebensdauer der Satelliten (ca. 3 Jahre) lag. Mittler-weile wurde eine Lebensdauer von zehn Jahren erreicht. 2008 wurde das erste zivile nutz-bare Gerät verkauft, das GLONASS unterstützt. Als zukünftiges Ziel sollen 30 Satellitenzur Verfügung gestellt werden [Pre09] [Zog11].
Galileo wird von der europäischen Union und europäischen Weltraumorganisation verant-wortet. Es sind auch andere Länder wie Israel, Marokko oder Saudi-Arabien, die ein Inter-esse an einer Alternative zu GLONASS und GPS interessiert sind, an Galileo beteiligt. Dieshat seitens der USA für Kritik gesorgt, da befürchtet wird, dass Galileo unkontrolliert militä-risch genutzt werden konnten. 2005 und 2008 wurden erste Testsatelliten ins All gebracht.2011 und 2012 sind jeweils zwei funktionale Satelliten ins All gebracht worden. Eigent-lich sollten 2013 4-6 weitere Satelliten installiert werden, was jedoch aufgrund technischerVerzögerungen nicht gelang. Auch das Ziel Ende 2014 mit 18 Satelliten ein vorläufig funk-tionierendes System zu installieren erscheint damit in Gefahr [Heg13]. In der Ausbaustufe(2020) soll Galileo 30 Satelliten umfassen. Geplant sind mehrere Dienste (offener Dienst,kommerzieller Dienst, sicherheitskritischer Dienst, öffentlich-regulierter Dienst und Such-und Rettungsdienst). Je nach Dienst sollen die Genauigkeiten variieren. Für den öffentli-chen Dienst ist eine Genauigkeit von 15m in der horizontalen und 35m in der vertikalenvorgesehen [Zog11].
Mit Compass (Beidou-2) möchte wie die europäische Union auch China ein eigenständi-ges zu GLONASS und GPS konkurrierendes System aufbauen. Der erste Test-Satellit vonBeidou-2 wurde 2007 installiert. 2010 wurden fünf nutzbare Satelliten bereitgestellt. 2011wurde das System offiziell in Betrieb und war für Unternehmen im asiatischen Raum ver-fügbar. Ende 2012 startete die öffentliche Nutzung im asiatischen Raum.
Auch Indien verfolgt das Ziel ein Ortungssystem über Satelliten zu entwickeln. Im Gegen-satz zu GPS, GLONASS oder Galileo soll es nur den indischen Raum abdecken. Der ersteSatellit wurde 2013 ins All gebracht
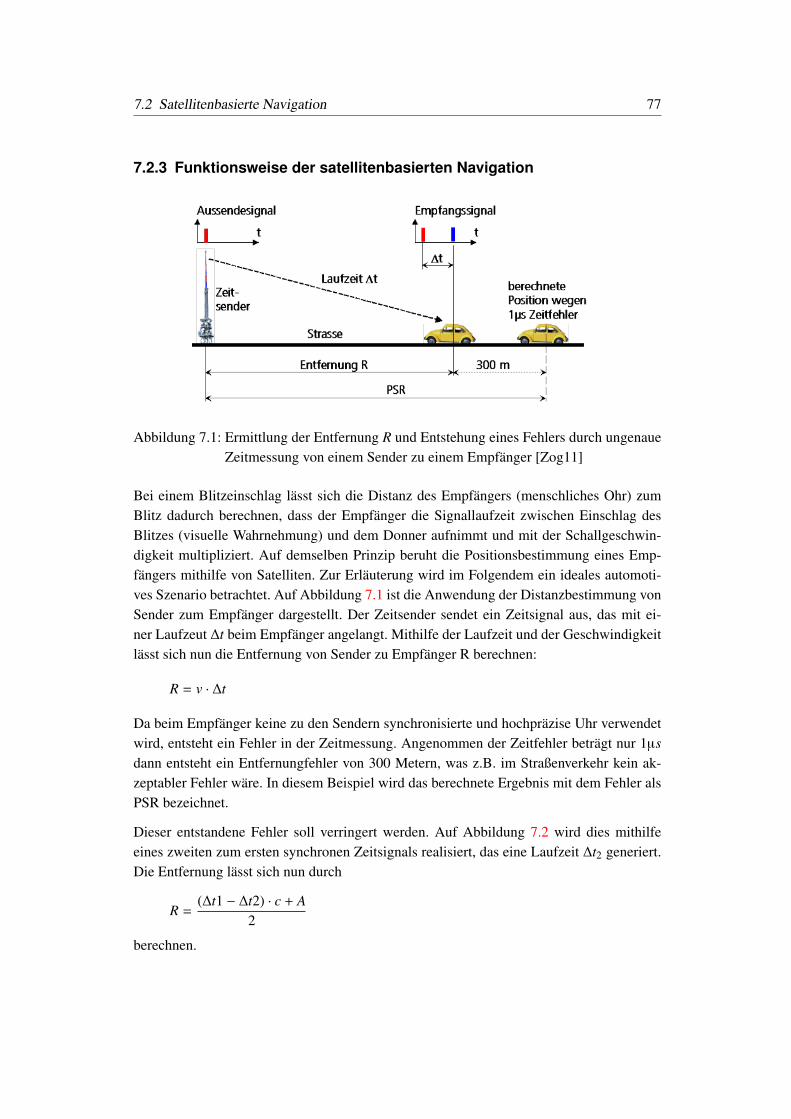
7.2 Satellitenbasierte Navigation 77
7.2.3 Funktionsweise der satellitenbasierten Navigation
Abbildung 7.1: Ermittlung der Entfernung R und Entstehung eines Fehlers durch ungenaueZeitmessung von einem Sender zu einem Empfänger [Zog11]
Bei einem Blitzeinschlag lässt sich die Distanz des Empfängers (menschliches Ohr) zumBlitz dadurch berechnen, dass der Empfänger die Signallaufzeit zwischen Einschlag desBlitzes (visuelle Wahrnehmung) und dem Donner aufnimmt und mit der Schallgeschwin-digkeit multipliziert. Auf demselben Prinzip beruht die Positionsbestimmung eines Emp-fängers mithilfe von Satelliten. Zur Erläuterung wird im Folgendem ein ideales automoti-ves Szenario betrachtet. Auf Abbildung 7.1 ist die Anwendung der Distanzbestimmung vonSender zum Empfänger dargestellt. Der Zeitsender sendet ein Zeitsignal aus, das mit ei-ner Laufzeut ∆t beim Empfänger angelangt. Mithilfe der Laufzeit und der Geschwindigkeitlässt sich nun die Entfernung von Sender zu Empfänger R berechnen:
R = v · ∆t
Da beim Empfänger keine zu den Sendern synchronisierte und hochpräzise Uhr verwendetwird, entsteht ein Fehler in der Zeitmessung. Angenommen der Zeitfehler beträgt nur 1µsdann entsteht ein Entfernungfehler von 300 Metern, was z.B. im Straßenverkehr kein ak-zeptabler Fehler wäre. In diesem Beispiel wird das berechnete Ergebnis mit dem Fehler alsPSR bezeichnet.
Dieser entstandene Fehler soll verringert werden. Auf Abbildung 7.2 wird dies mithilfeeines zweiten zum ersten synchronen Zeitsignals realisiert, das eine Laufzeit ∆t2 generiert.Die Entfernung lässt sich nun durch
R =(∆t1 − ∆t2) · c + A
2
berechnen.
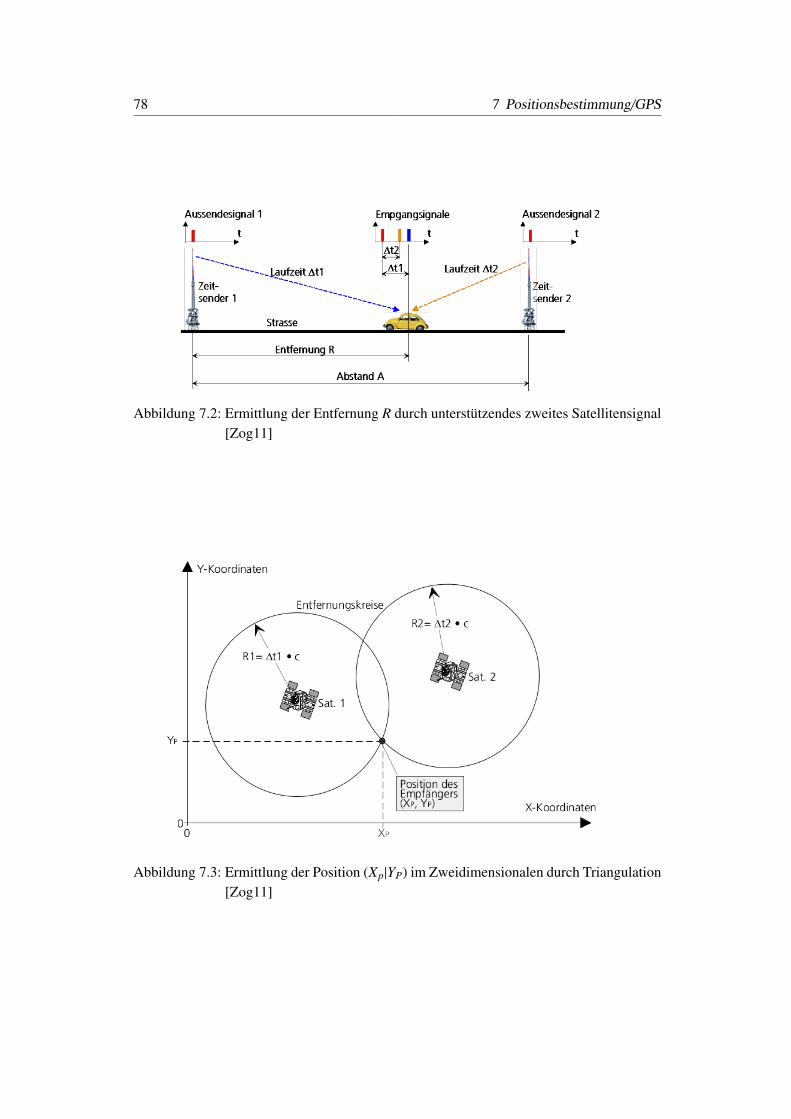
78 7 Positionsbestimmung/GPS
Abbildung 7.2: Ermittlung der Entfernung R durch unterstützendes zweites Satellitensignal[Zog11]
Abbildung 7.3: Ermittlung der Position (Xp|YP) im Zweidimensionalen durch Triangulation[Zog11]
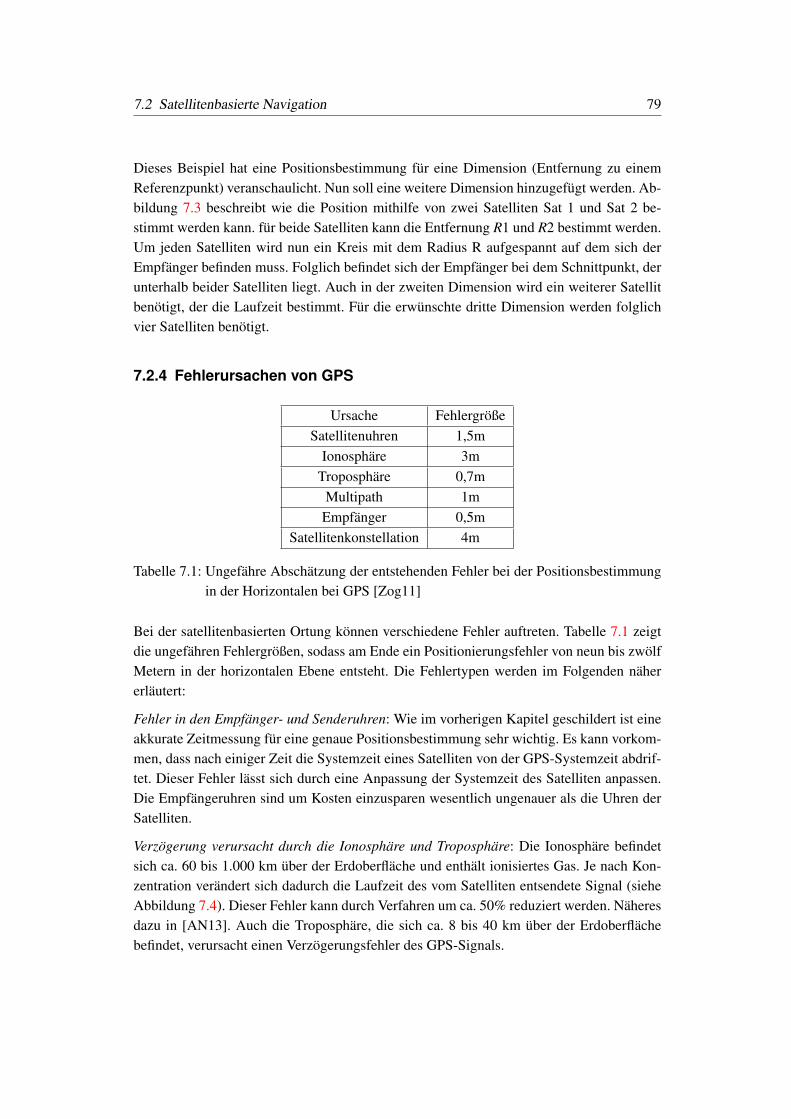
7.2 Satellitenbasierte Navigation 79
Dieses Beispiel hat eine Positionsbestimmung für eine Dimension (Entfernung zu einemReferenzpunkt) veranschaulicht. Nun soll eine weitere Dimension hinzugefügt werden. Ab-bildung 7.3 beschreibt wie die Position mithilfe von zwei Satelliten Sat 1 und Sat 2 be-stimmt werden kann. für beide Satelliten kann die Entfernung R1 und R2 bestimmt werden.Um jeden Satelliten wird nun ein Kreis mit dem Radius R aufgespannt auf dem sich derEmpfänger befinden muss. Folglich befindet sich der Empfänger bei dem Schnittpunkt, derunterhalb beider Satelliten liegt. Auch in der zweiten Dimension wird ein weiterer Satellitbenötigt, der die Laufzeit bestimmt. Für die erwünschte dritte Dimension werden folglichvier Satelliten benötigt.
7.2.4 Fehlerursachen von GPS
Ursache FehlergrößeSatellitenuhren 1,5m
Ionosphäre 3mTroposphäre 0,7m
Multipath 1mEmpfänger 0,5m
Satellitenkonstellation 4m
Tabelle 7.1: Ungefähre Abschätzung der entstehenden Fehler bei der Positionsbestimmungin der Horizontalen bei GPS [Zog11]
Bei der satellitenbasierten Ortung können verschiedene Fehler auftreten. Tabelle 7.1 zeigtdie ungefähren Fehlergrößen, sodass am Ende ein Positionierungsfehler von neun bis zwölfMetern in der horizontalen Ebene entsteht. Die Fehlertypen werden im Folgenden nähererläutert:
Fehler in den Empfänger- und Senderuhren: Wie im vorherigen Kapitel geschildert ist eineakkurate Zeitmessung für eine genaue Positionsbestimmung sehr wichtig. Es kann vorkom-men, dass nach einiger Zeit die Systemzeit eines Satelliten von der GPS-Systemzeit abdrif-tet. Dieser Fehler lässt sich durch eine Anpassung der Systemzeit des Satelliten anpassen.Die Empfängeruhren sind um Kosten einzusparen wesentlich ungenauer als die Uhren derSatelliten.
Verzögerung verursacht durch die Ionosphäre und Troposphäre: Die Ionosphäre befindetsich ca. 60 bis 1.000 km über der Erdoberfläche und enthält ionisiertes Gas. Je nach Kon-zentration verändert sich dadurch die Laufzeit des vom Satelliten entsendete Signal (sieheAbbildung 7.4). Dieser Fehler kann durch Verfahren um ca. 50% reduziert werden. Näheresdazu in [AN13]. Auch die Troposphäre, die sich ca. 8 bis 40 km über der Erdoberflächebefindet, verursacht einen Verzögerungsfehler des GPS-Signals.
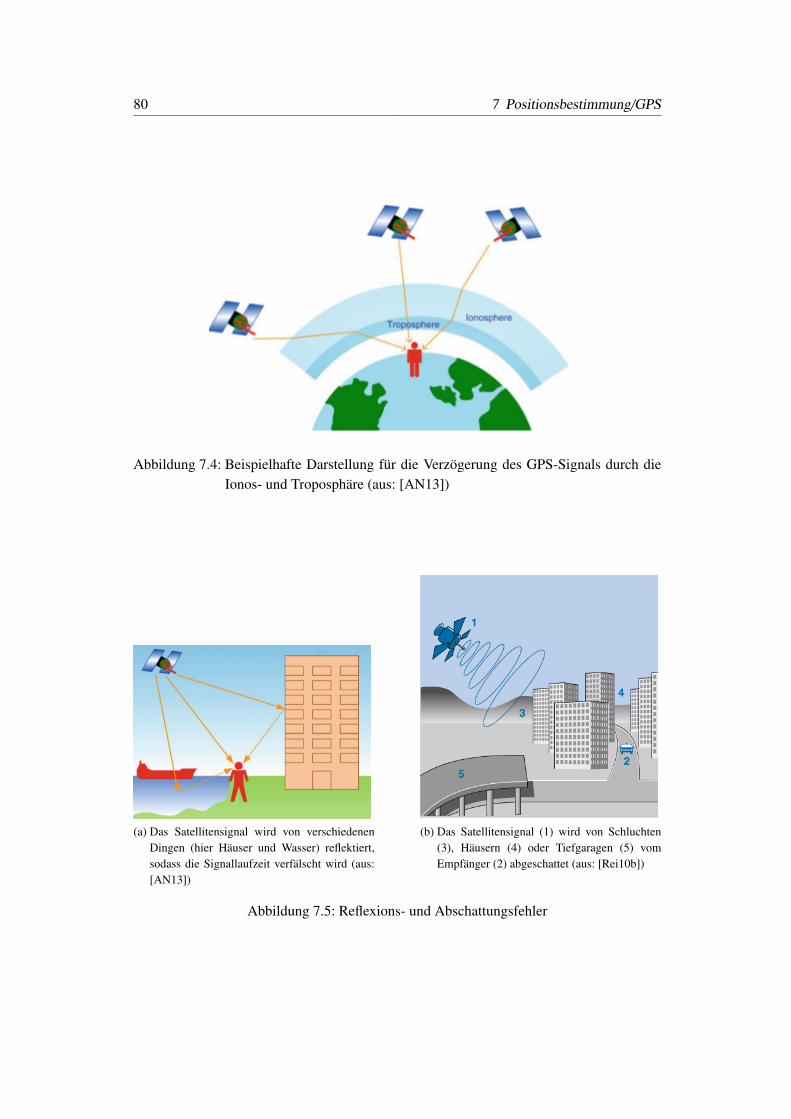
80 7 Positionsbestimmung/GPS
Abbildung 7.4: Beispielhafte Darstellung für die Verzögerung des GPS-Signals durch dieIonos- und Troposphäre (aus: [AN13])
(a) Das Satellitensignal wird von verschiedenenDingen (hier Häuser und Wasser) reflektiert,sodass die Signallaufzeit verfälscht wird (aus:[AN13])
(b) Das Satellitensignal (1) wird von Schluchten(3), Häusern (4) oder Tiefgaragen (5) vomEmpfänger (2) abgeschattet (aus: [Rei10b])
Abbildung 7.5: Reflexions- und Abschattungsfehler
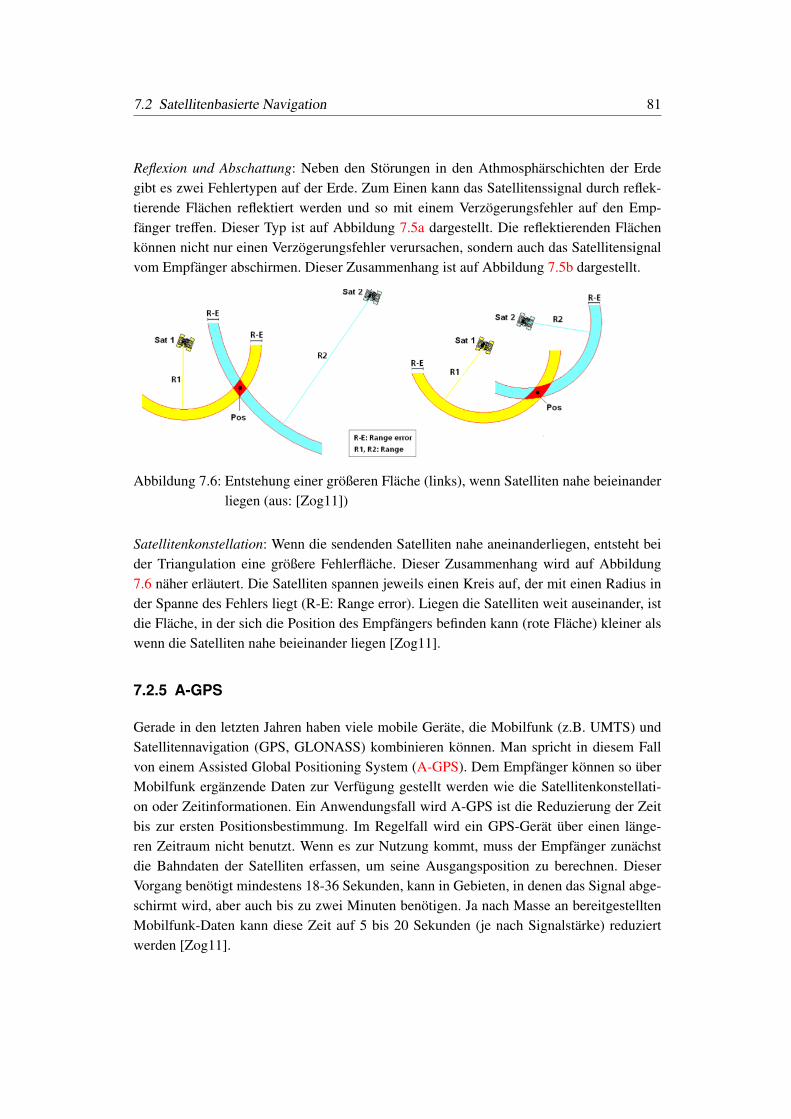
7.2 Satellitenbasierte Navigation 81
Reflexion und Abschattung: Neben den Störungen in den Athmosphärschichten der Erdegibt es zwei Fehlertypen auf der Erde. Zum Einen kann das Satellitenssignal durch reflek-tierende Flächen reflektiert werden und so mit einem Verzögerungsfehler auf den Emp-fänger treffen. Dieser Typ ist auf Abbildung 7.5a dargestellt. Die reflektierenden Flächenkönnen nicht nur einen Verzögerungsfehler verursachen, sondern auch das Satellitensignalvom Empfänger abschirmen. Dieser Zusammenhang ist auf Abbildung 7.5b dargestellt.
Abbildung 7.6: Entstehung einer größeren Fläche (links), wenn Satelliten nahe beieinanderliegen (aus: [Zog11])
Satellitenkonstellation: Wenn die sendenden Satelliten nahe aneinanderliegen, entsteht beider Triangulation eine größere Fehlerfläche. Dieser Zusammenhang wird auf Abbildung7.6 näher erläutert. Die Satelliten spannen jeweils einen Kreis auf, der mit einen Radius inder Spanne des Fehlers liegt (R-E: Range error). Liegen die Satelliten weit auseinander, istdie Fläche, in der sich die Position des Empfängers befinden kann (rote Fläche) kleiner alswenn die Satelliten nahe beieinander liegen [Zog11].
7.2.5 A-GPS
Gerade in den letzten Jahren haben viele mobile Geräte, die Mobilfunk (z.B. UMTS) undSatellitennavigation (GPS, GLONASS) kombinieren können. Man spricht in diesem Fallvon einem Assisted Global Positioning System (A-GPS). Dem Empfänger können so überMobilfunk ergänzende Daten zur Verfügung gestellt werden wie die Satellitenkonstellati-on oder Zeitinformationen. Ein Anwendungsfall wird A-GPS ist die Reduzierung der Zeitbis zur ersten Positionsbestimmung. Im Regelfall wird ein GPS-Gerät über einen länge-ren Zeitraum nicht benutzt. Wenn es zur Nutzung kommt, muss der Empfänger zunächstdie Bahndaten der Satelliten erfassen, um seine Ausgangsposition zu berechnen. DieserVorgang benötigt mindestens 18-36 Sekunden, kann in Gebieten, in denen das Signal abge-schirmt wird, aber auch bis zu zwei Minuten benötigen. Ja nach Masse an bereitgestelltenMobilfunk-Daten kann diese Zeit auf 5 bis 20 Sekunden (je nach Signalstärke) reduziertwerden [Zog11].
82 7 Positionsbestimmung/GPS
7.2.6 DGPS
Eine Möglichkeit einen Zeitfehler, der durch ein verfälschtes Signal entstanden ist, zu er-fassen, besteht darin eine GPS-Referenzstation zu benutzen. Diese kennt ihre genaue Koor-dinatenposition und ist mit einer sehr genauen Uhr ausgestattet. Nun wird das GPS-Signalvon der Referenzstation empfangen. Nun kann aus der Differenz vom übermittelten GPSmit einem unbekannten Fehler zur bekannten Position der Referenzstation der Fehler desGPS-Signals berechnet werden. Dieser Fehler kann nun an umliegende Empfänger übermit-telt werden, wodurch diese, wenn sie sich nahe genug an der Referenzstation befinden, ihrErgebnis wesentlich verbessern können. Es wird eine Verbesserung auf ca. 0,3m bis 2,5merreicht. Dies hängt von der Distanz des Empfängers zum DGPS-Sender ab. HochgenaueVerfahren erreichen sogar eine Verbesserung in den mm-Bereich. Dieses Verfahren wirdz.B. beim Milität, in der Schiffahrt, Luftfahrt, Landwirtschaft oder bei der Vermessung derGeodäsie eingesetzt [Zog11] [Ler12].
7.3 Satellitenlose Navigation
7.3.1 Einleitung
Wie schon beschrieben, bieten sich satellitenlose Systeme als Unterstützung für satelliten-basierte Systeme an, doch besonders in nicht automobilen Szenarien bietet die satellitenloseNavigation Vorteile: mit dem Smartphone ist GPS Navigation nur wenige Stunden möglich,da sie viel Energie verbraucht. Nahezu jedes Smartphone besitzt einen Inertialsensor, da-her ist eine Trägheits- oder Inertialnavigation möglich, welche bis zu 70% energiesparenderund genauer ist [sma12]. Zukünftig wird sich auch die Indoornavigation weiter verbreiten,die besonders in Flughäfen oder großen Einkaufszentren sinnvoll ist und einer satellitenge-stützten Navigation überlegen wäre.
7.3.2 WLAN und Mobilfunk
Die Standortbestimmung per WLAN basiert auf der Kenntnis der Position des Routers, vondem man ein Signal empfängt, oder der Kenntnis eines Ortes mit der jeweiligen Signalstär-ke eines Routers (z.B. Signalstärkemuster entlang einer Straße, Routerstandort selbst mussnicht bekannt sein). Besonders in Städten oder Gebäuden ist diese Technik sinnvoll, da dortviele WLAN Netze existieren, wie in 7.7 zu erkennen. Diese können öffentliche Hotspotssein, Firmen- oder private Netzwerke. Wie bei GPS erhöht die Anzahl der zur Verfügungstehenden Signale die Genauigkeit der Positionsbestimmung. Das Verfahren funktioniertähnlich wie GPS mit Multilateration, bei der die Signalstärke in Verbindung zur Entfernung
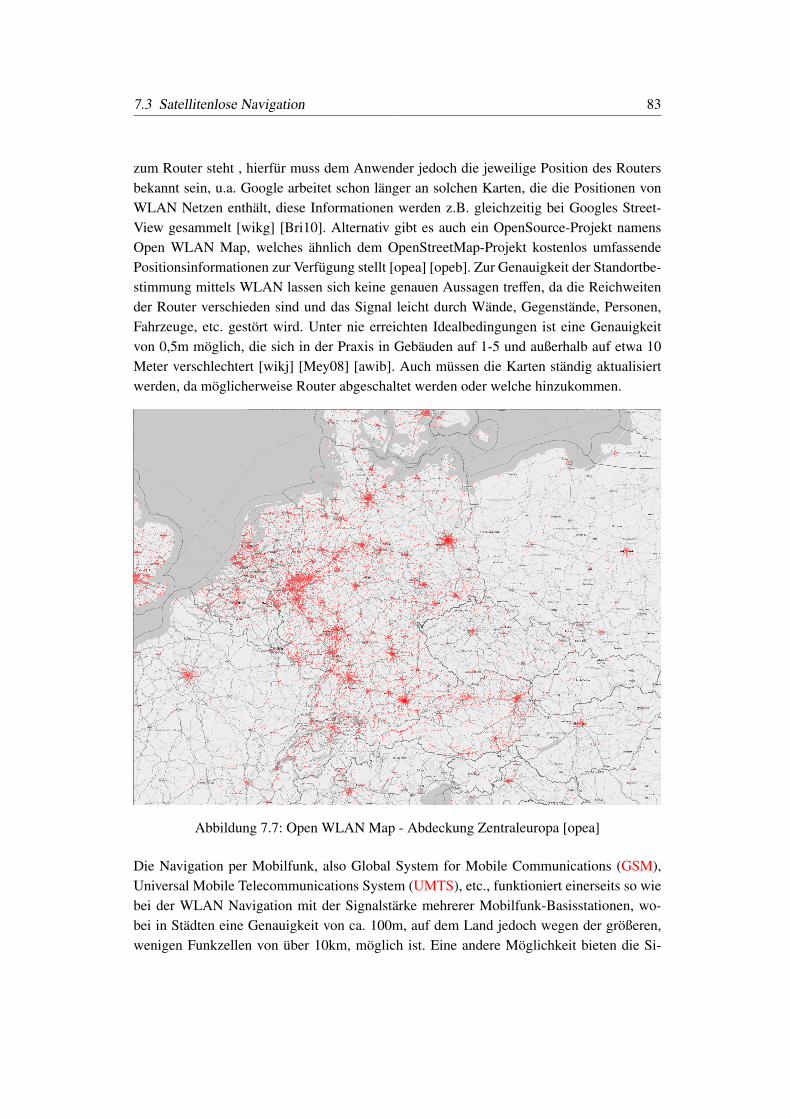
7.3 Satellitenlose Navigation 83
zum Router steht , hierfür muss dem Anwender jedoch die jeweilige Position des Routersbekannt sein, u.a. Google arbeitet schon länger an solchen Karten, die die Positionen vonWLAN Netzen enthält, diese Informationen werden z.B. gleichzeitig bei Googles Street-View gesammelt [wikg] [Bri10]. Alternativ gibt es auch ein OpenSource-Projekt namensOpen WLAN Map, welches ähnlich dem OpenStreetMap-Projekt kostenlos umfassendePositionsinformationen zur Verfügung stellt [opea] [opeb]. Zur Genauigkeit der Standortbe-stimmung mittels WLAN lassen sich keine genauen Aussagen treffen, da die Reichweitender Router verschieden sind und das Signal leicht durch Wände, Gegenstände, Personen,Fahrzeuge, etc. gestört wird. Unter nie erreichten Idealbedingungen ist eine Genauigkeitvon 0,5m möglich, die sich in der Praxis in Gebäuden auf 1-5 und außerhalb auf etwa 10Meter verschlechtert [wikj] [Mey08] [awib]. Auch müssen die Karten ständig aktualisiertwerden, da möglicherweise Router abgeschaltet werden oder welche hinzukommen.
Abbildung 7.7: Open WLAN Map - Abdeckung Zentraleuropa [opea]
Die Navigation per Mobilfunk, also Global System for Mobile Communications (GSM),Universal Mobile Telecommunications System (UMTS), etc., funktioniert einerseits so wiebei der WLAN Navigation mit der Signalstärke mehrerer Mobilfunk-Basisstationen, wo-bei in Städten eine Genauigkeit von ca. 100m, auf dem Land jedoch wegen der größeren,wenigen Funkzellen von über 10km, möglich ist. Eine andere Möglichkeit bieten die Si-
84 7 Positionsbestimmung/GPS
gnallaufzeiten zwischen Mobilteil und Basisstation. Die Signallaufzeit wird zur Synchroni-sation der beiden Kommunikationspartner mit dem ermittelten Timing Advance Parameterausgeglichen, damit die Nachrichten rechtzeitig ankommen. Der Timing Advance Parame-ter ist somit abhängig von der Entfernung zur Basisstation, so kann mithilfe von weiterenBasisstationen in Städten die eigene Position auf etwa 30m eingegrenzt werden [gps].
Das Fraunhofer-Institut für Integrierte Schaltungen IIS Nürnberg hat mit awiloc eine Tech-nologie entwickelt, die allgemein auf der Received Signal Strength Indication (RSSI) ba-siert, also der Stärke von verschiedenen Signalen wie WLAN, GSM, UMTS, etc. DerSchwerpunkt liegt jedoch klar bei WLAN, wodurch die oben beschriebenen Genauigkei-ten von wenigen Metern erreicht werden können [rss] [awia].
7.3.3 Trägheits-/ Inertialnavigation
Die Trägheits- bzw. Inertialnavigation ist eine Art der Koppelnavigation, bei der die ak-tuelle Position kontinuierlich mithilfe der Richtung und Geschwindigkeit bestimmt wird.Früher wurde die Richtung mit einem einfachen Kompass oder mit den Sternen bestimmt,die Geschwindigkeit eines Schiffes mit einem Log, wobei ein bleibeschwertes Holzbrett imWasser fast an der gleichen Stelle bleibt und so mit einer Sanduhr die Geschwindigkeit proZeit gemessen werden konnte [wikh]. In Flugzeugen benutzte man einen Fahrtmesser, derdie Geschwindigkeit proportional zum Fahrtwind bestimmt [wika].
Bei der Trägheitsnavigation werden Inertialsensoren (Inertial Measurement Unit (IMU))anstatt Log und Fahrtmesser eingesetzt, damit können Beschleunigungen (m/s2) in x-, y-und z-Richtung, sowie Winkelgeschwindigkeiten (◦/s oder rad/s) um x-, y- und z-Achsegemessen werden. Von einem bekannten Ausgangspunkt, der z.B. mithilfe von GPS er-mittelt wird, kann der zurückgelegte Weg alleine mit dem Inertialsystem bestimmt werden→ schrittbasierte Navigation. Mit den modernen Sensoren konnte der Messfehler von un-ter 5% auf 0,1% des zurückgelegten Weges verbessert werden [wike]. Eine IMU bestehtaus drei Beschleunigungs- und Drehratensensoren, um die Beschleunigungen in den dreiRichtungen und die Winkelgeschwindigkeiten um die drei Achsen zu messen, einem Ma-gnetometer (Kompass) um die Genauigkeit zu erhöhen, z.B. kann somit die Kreiseldriftdes Drehratensensors ausgeglichen werden, die durch kleine Unwuchten entsteht und unter0, 01◦ pro Stunde liegt [wikf]. Zusätzlich kann eine IMU noch ein Thermometer enthal-ten, um Messfehler bei schwankenden Temperaturen zu kompensieren. Zur Integration derBeschleunigungs- und Winkelgeschwindigkeitswerte wird eine hochpräzise Uhr benötigt,um genaue Distanzen und Rotationen zu erhalten. Beschleunigungen müssen doppelt inte-griert werden um die Strecke zu erhalten, mit
s(t) = v(t) = a(t)
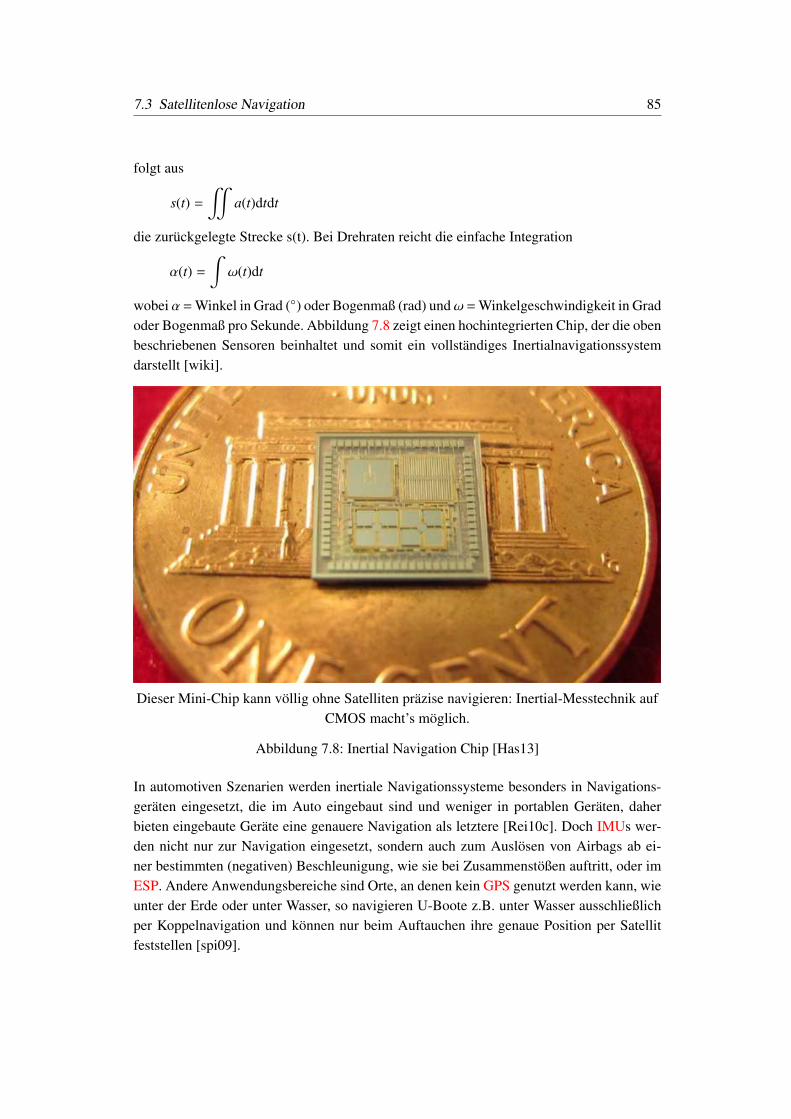
7.3 Satellitenlose Navigation 85
folgt aus
s(t) =
"a(t)dtdt
die zurückgelegte Strecke s(t). Bei Drehraten reicht die einfache Integration
α(t) =
∫ω(t)dt
wobei α = Winkel in Grad (◦) oder Bogenmaß (rad) undω = Winkelgeschwindigkeit in Gradoder Bogenmaß pro Sekunde. Abbildung 7.8 zeigt einen hochintegrierten Chip, der die obenbeschriebenen Sensoren beinhaltet und somit ein vollständiges Inertialnavigationssystemdarstellt [wiki].
Dieser Mini-Chip kann völlig ohne Satelliten präzise navigieren: Inertial-Messtechnik aufCMOS macht’s möglich.
Abbildung 7.8: Inertial Navigation Chip [Has13]
In automotiven Szenarien werden inertiale Navigationssysteme besonders in Navigations-geräten eingesetzt, die im Auto eingebaut sind und weniger in portablen Geräten, daherbieten eingebaute Geräte eine genauere Navigation als letztere [Rei10c]. Doch IMUs wer-den nicht nur zur Navigation eingesetzt, sondern auch zum Auslösen von Airbags ab ei-ner bestimmten (negativen) Beschleunigung, wie sie bei Zusammenstößen auftritt, oder imESP. Andere Anwendungsbereiche sind Orte, an denen kein GPS genutzt werden kann, wieunter der Erde oder unter Wasser, so navigieren U-Boote z.B. unter Wasser ausschließlichper Koppelnavigation und können nur beim Auftauchen ihre genaue Position per Satellitfeststellen [spi09].

86 7 Positionsbestimmung/GPS
7.3.4 Sonstige
NAVSOP
Der britische Rüstungskonzern BAE Systems entwickelt ein Navigationssystem, dass sichanhand verschiedenster Signale orientiert. Wie in 7.9 zu sehen, werden u.a. Satelliten-,Luftverkehr-, Fernseh-, WLAN-, Mobilfunk- und Radiosignale zur Positionsbestimmungverarbeitet. Durch die Vielfalt der Signalquellen, ist NAVSOP besonders robust gegenüberStörungen, was bei Systemen, die nur mit GPS arbeiten nicht gegeben ist, da diese z.B.durch Störsender gestört werden können [wikb]. Auch falsche GPS-Signale durch Spooferoder Reflexionen werden als solche erkannt und können sogar bei der Positionsbestimmunghelfen [wikc]. Das fertige System soll etwa so groß wie eine Münze sein und auch fürnichtmilitärische Zwecke zur Verfügung gestellt werden [son12] [bae13].
Abbildung 7.9: NAVSOP [bae13]
Magnetfelder in Gebäuden
IndoorAtlas ist ein Spin-off der Univerity of Oulu in Finnland und nach eigenen Anga-ben das erste Unternehmen, welches Magnetfeldveränderungen in Gebäuden mithilfe vonSmartphones verarbeitet. Die Stahlmassen in den Wänden eines Gebäudes verzerren dasMagnetfeld der Erde so, dass es in jedem Raum eindeutig identifizierbar ist und mithilfedes Kompasses eines Smartphones so die aktuelle Position ermittelt werden kann. Natür-lich muss auch bei diesem Verfahren zuerst eine Karte mit den benötigten Informationen
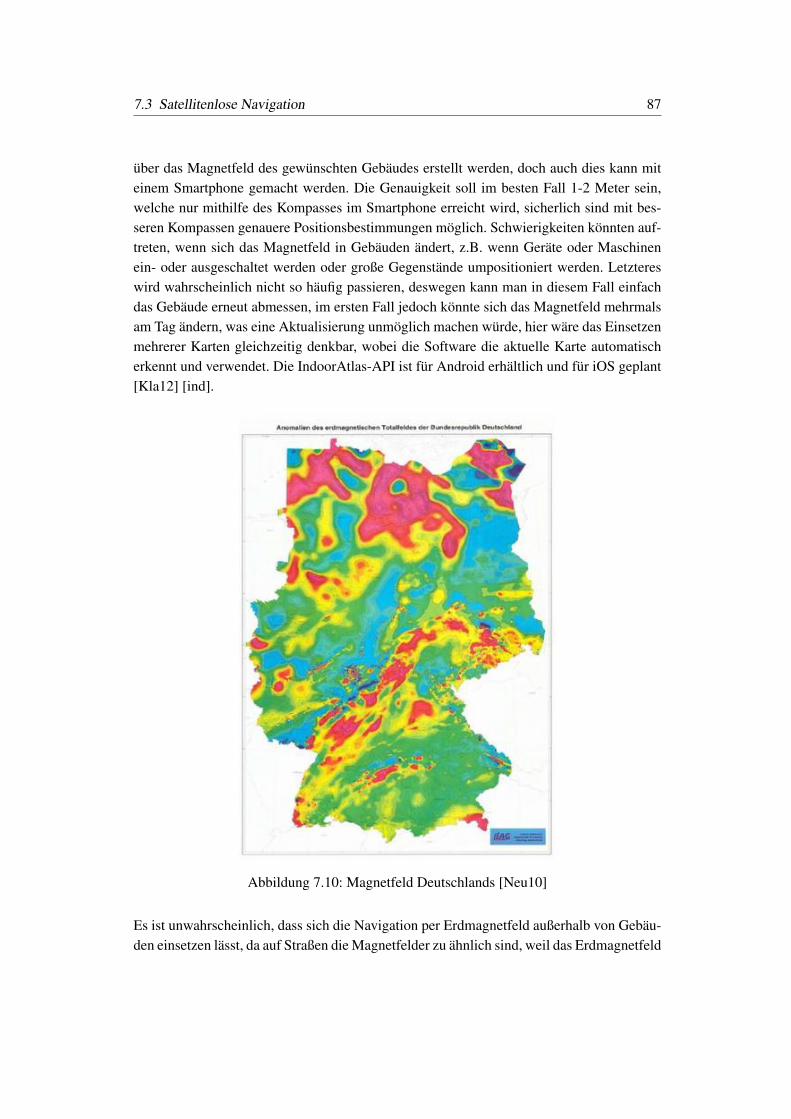
7.3 Satellitenlose Navigation 87
über das Magnetfeld des gewünschten Gebäudes erstellt werden, doch auch dies kann miteinem Smartphone gemacht werden. Die Genauigkeit soll im besten Fall 1-2 Meter sein,welche nur mithilfe des Kompasses im Smartphone erreicht wird, sicherlich sind mit bes-seren Kompassen genauere Positionsbestimmungen möglich. Schwierigkeiten könnten auf-treten, wenn sich das Magnetfeld in Gebäuden ändert, z.B. wenn Geräte oder Maschinenein- oder ausgeschaltet werden oder große Gegenstände umpositioniert werden. Letztereswird wahrscheinlich nicht so häufig passieren, deswegen kann man in diesem Fall einfachdas Gebäude erneut abmessen, im ersten Fall jedoch könnte sich das Magnetfeld mehrmalsam Tag ändern, was eine Aktualisierung unmöglich machen würde, hier wäre das Einsetzenmehrerer Karten gleichzeitig denkbar, wobei die Software die aktuelle Karte automatischerkennt und verwendet. Die IndoorAtlas-API ist für Android erhältlich und für iOS geplant[Kla12] [ind].
Abbildung 7.10: Magnetfeld Deutschlands [Neu10]
Es ist unwahrscheinlich, dass sich die Navigation per Erdmagnetfeld außerhalb von Gebäu-den einsetzen lässt, da auf Straßen die Magnetfelder zu ähnlich sind, weil das Erdmagnetfeld
88 7 Positionsbestimmung/GPS
immer relativ gleich verzerrt wird, es ließen sich höchstens verschiedene geologische Regio-nen unterscheiden, oder ob man über eine Brücke fährt. Da die in 7.10 gezeigten Anomaliendes Magnetfeldes aber nur -0,7 bis 1,2 Mikrotesla ausmachen und oft große Regionen ab-decken ist das Verfahren nicht nur mit billigen Magnetometern, wie sie in Smartphones zufinden sind, sehr ungenau [Neu10].
7.4 Zusammenfassung
Integrierte Navigation, also die Kombination mehrerer Verfahren, wird immer wichtiger, dasie aufgrund verschiedener Messdaten Fehler minimieren kann und die Navigation somitgenauer und ausfallsicherer ist als die mit konventionellen Technologien [wikd]. Außerdemwird die Indoor-Navigation immer beliebter, da man sich z.B. mithilfe von WLAN ziemlichgenau in großen Gebäuden zurechtfinden kann, diese Technik ist in Museen oder auf Mes-sen sehr praktisch, da man sich schnell zu dem gewünschten Ziel navigieren lassen kann.Smartphones sind der wichtigste Faktor der satellitenlosen Navigation außerhalb automo-tiver Szenarien, da sie weit verbreitet sind und verschiedenste Technologien vereinen, z.B.Mobilfunk, WLAN, Inertialsensoren, Kompass, und somit viele Möglichkeiten zur Nutzungund Kombination dieser entstanden.
Literaturverzeichnis
[ACCa] ACC-Systeme.
[ACCb] Adaptive Cruise Control.
[ACCc] Bild vom ACC-System eines Vw’s.
[AKT10] AKTIV: Adaptive und kooperative Technologien für den intelligenten Verkehr,2010. [Online; Stand 24. Januar 2014].
[AN13] Aboelmagd Noureldin, Tashfeen B. Karamat, Jacques Georgy: Fundamentalsof Inertial Navigation, Satellite-based Positioning and their Integration. 2013.
[ass] Park Assist Function with display of surroundings. http://www.audi.com.my/sea/brand/my/models/q3/q3/equipment/park_assist_function.
html.
[awia] awiloc - Die autarke WLAN-Lokalisierung des Fraunhofer IIS für Städte undGebäude. http://www.iis.fraunhofer.de/de/bf/ln/technologie/
rssi.html. [Online; accessed 11.01.2014].
[awib] Technische Lösung - Fraunhofer IIS. http://www.iis.fraunhofer.de/de/bf/ln/technologie/rssi/tl.html. [Online; accessed 11.01.2014].
[bae13] BAE Systems locates opportunity to replace GPS.http://www.baesystems.com/article/BAES_057640/
bae-systems-locates-opportunity-to-replace-gps, 2013. [On-line; accessed 11.01.2014].
[Bar] Bartl, Steffi. http://www.leibniz-institut.de/ss2012/bartel_
lidar-sensorik-automobilapplikationen.pdf. [Online; accessed09.01.2014].
[Bar12] Bartl, Steffi: LIDAR-Sensorikin Automobilapplikationen, Oktober 2012.
[Bil] Bilder von MRR und LRR.
[Bos11] Bosch: Bosch Autoelektrik und Autoelektronik – Bordnetze, Sensoren und elek-tronische Systeme. Konrad Reif, 2011.
89
90 Literaturverzeichnis
[Bri10] Briegleb, Volker: Datenschützer: Street-View-Autos scannen pri-vate Funknetze. http://www.heise.de/newsticker/meldung/
Datenschuetzer-Street-View-Autos-scannen-private-Funknetze-Update-984118.
html, 2010. [Online; accessed 11.01.2014].
[Bun09] Bundesamt, Statistisches: Verkehrstote im Straßenverkehr, 2009. [Online;Stand 24. Januar 2014].
[Bun12a] Bundesamt, Statistisches: Fehlverhalten der Fahrzeugführer bei Unfällen mitPersonenschaden, 2012. [Online; Stand 24. Januar 2014].
[Bun12b] Bundesamt, Statistisches: Polizeilich erfasste Unfälle, 2012. [Online; Stand 24.Januar 2014].
[Bun12c] Bundesamt, Statistisches: Ursachen von Unfällen mit Personenschaden, 2012.[Online; Stand 24. Januar 2014].
[Bun12d] Bundesamt, Statistisches: Verkehrsmittelbestand und Infrastruktur, 2012. [On-line; Stand 24. Januar 2014].
[Bun13] Bundesamt, Statistisches: November 2013: Mehr Unfälle, aber weniger Tote imStraßenverkehr, 2013.
[ctg] Magnetostrictive Versus Piezoelectric TransducersFor Power Ultrasonic Applications. http://www.
ctgclean.com/blog/technology-library/articles/
magnetostrictive-versus-piezoelectric-transducers-for-power-ultrasonic-applications/.
[dis] ’Distance Measurement of an Object or Obstacle by Ultrasound Sensors usingP89C51RD2.
[dM10] Molina, Dr. Karl de: Basiswissen über Fahrerassistenzsysteme V3.0. Techni-scher Bericht, FTronik, 2010.
[DM13] Dejan Mitrovic, Dorde Vuletic: A Survey of Advanced driver assistance sys-tems (ADAS). Technischer Bericht, University of Belgrade, 2013.
[Dud06] Dudenredaktion, Dudenredaktion: Duden - Die deutsche Rechtschreibung. Bd.1. Dudenverlag, Bibliographisches Institut und F.A. Brockhaus, Mannheim, 24Auflage, 2006.
[Eur12] Europarlament: Kurzdarstellung über die Europäische Union, 2012. [Online;Stand 24. Januar 2014].
[FS05] Fuerrstenberg, Kay und Dr. Roland Schulz: Laserscanner für Fahrerassis-tenzsysteme. Seiten 718–727, 2005.

Literaturverzeichnis 91
[Gid08] Gidel, Samuel, et al.: Pedestrian detection method using a multilayer lasers-canner: Application in urban environment. IEEE Conference on IntelligentRobots and Systems, 2008.
[Gmb] GmbH, Vitronic Dr.-Ing. Stein Bildverarbeitungssysteme. http://www.
vitronic.de/verkehr/mautkontrolle-und-erhebung/. [Online; acces-sed 15.01.2014].
[gps] GPS - Alternativen. http://gpso.de/technik/gsmnavi.html. [Online;accessed 11.01.2014].
[gps14] GPS CONSTELLATION STATUS FOR 01/12/2014.http://www.navcen.uscg.gov/?Do=constellationStatus, 12.01.2014, 2014.
[Gru05] Gruendl, Martin: Fehler und Fehlverhalten als Ursache von Verkehrsunfällenund Konsequenzen für das Unfallvermeidungspotenzial und die Gestaltung vonFahrerassistenzsystemen. Doktorarbeit, Universität Regensburg, 2005.
[H02] H, Grace R: Automotive Applications of MEMS/MST: The Migration from Dis-crete Solutions, Advanced Microsystems Automotive Applications Proceedings.Springer, 2002.
[Ham] Hammerschmidt, Christoph. http://www.pcwelt.de/
ratgeber/Radar__Lidar__Kamera_-_die_Augen_der_
Sicherheits-Assistenten-Autos_mit_Durchblick-8238798.html.[Online; accessed 09.01.2014].
[Has13] Hascher, Wolfgang: Inertial-Messtechnik: Präzisions-Navigation völlig oh-ne GPS. http://www.elektroniknet.de/messen-testen/sonstiges/artikel/96594/, 2013. [Online; accessed 11.01.2014].
[Heg13] Hegmann, Gerhard: Europa schiesst keinen Satelliten pünktlich ins All.http://www.welt.de/wirtschaft/article121117850/Europa-schiesst-keinen-Satelliten-puenktlich-ins-All.html, abgerufen am 12.1.2014, 2013.
[HW06] Hagen Wolf, Rolf M. Zollner, Heiner Bubb: Ergonomischer Lösungsansatzfür die gleichzeitige Rückmeldung mehrerer Fahrerassistenzsysteme an denFahrer. Technischer Bericht, Technische Universität München, 2006.
[ind] IndoorAtlas About. https://www.indooratlas.com/about. [Online; ac-cessed 11.01.2014].
[INV05] INVENT: Vorausschauende Aktive Sicherheit VAS, 2005. Broschüre.
[INV14] INVENT: intelligent traffic and userfriendly technology, 2014. [Online; Stand24. Januar 2014].

92 Literaturverzeichnis
[JG02] John Golias, George Yannis, Constantinos Antoniou: Classification of driver-assistance systems according to their impact on road safety and traffic efficien-cy. Transport Reviews, 2002.
[KD04] Kaempchen, Nico, Kay Ch Fuerstenberg und Klaus CJ Dietmayer: Ein Sen-sorfusionssystem für automotive Sicherheits-und Komfortapplikationen. AktiveSicherheit durch Fahrerassistenz, 2004.
[Kil10] Kilimann, Susanne: Assistenzsysteme sollen Unfälle vermeiden, März 2010.
[Kla12] Klas, Christian: IndoorAtlas Mit dem Smartphone-Kompassin Gebäuden zurechtfinden. http://www.golem.de/news/
indooratlas-mit-dem-smartphone-kompass-in-gebaeuden-zurechtfinden-1207-93070.
html, 2012. [Online; accessed 11.01.2014].
[Küa] Kunz, Sabrina: schlaue begleiter. VW.
[Küb] Kuppers, Michael. [Online; accessed 28.01.2014].
[Lan10] Landesverkehrswacht: Zu Fahrerassistenzsystemen FAS für Straßen- und spe-ziell Nutzfahrzeuge. Technischer Bericht, Deutsche Verkehrswacht, 2010.
[LC06] Lindgren, Anders und Fang Chen: State of the Art Analysis:An Overview of Ad-vanced Driver Assistance Systems (ADAS) and Possible Human Factors Issues.In: Human Factors and Economic Aspects on Safety, 2006.
[Ler12] Lerch, Reinhard: Elektrische Messtechnik. 2012. Seite 429.
[Lew11] Lewandowitz, L.: Markenspezifische Auswahl, Parametrierung und Gestaltungder Produktgruppe Fahrerassistenzsysteme. Karlsruher Schriftenreihe Fahr-zeugsystemtechnik. KIT Scientific Publishing, 2011.
[Lin12] Lindberg, Thomas: Entwicklung einer ABK-Metapher für gruppierte Fahreras-sistenzsysteme. Doktorarbeit, Technische Universität Berlin, 2012.
[LRR13] Bosch präsentiert neuen Radarsensor, August 2013.
[Ltd] Ltd, Fuzhou Minpn Electronic Technology Co.: Backup Parking Systemswith LCD Digital Display and 2 to 8 Ultrasonic Sensors Optional. http://minpn.manufacturer.globalsources.com/si/6008825316915/
pdtl/Parking-assist/1056012560/Parking-Systems.htm.
[Lux] http://homepages.thm.de/~hg6458/semsts/Das_Auto_der_Zukunft.
pdf. [Online; accessed 09.01.2014].
[Mey08] Meyer, Steffen: Bodenständig Positionsbestimmung perWLAN statt GPS. http://www.heise.de/ct/artikel/
Positionsbestimmung-per-WLAN-statt-GPS-1898179.html, 2008.[Online; accessed 11.01.2014].
Literaturverzeichnis 93
[Neu10] Neumann, Laura: Neue erdmagnetische Karte für Deutsch-land. http://www.weltderphysik.de/gebiet/
planeten/nachrichten-geo-und-planetenphysik/2010/
neue-erdmagnetische-karte-fuer-deutschland/, 2010. [Online;accessed 11.01.2014].
[opea] Open WLAN Map - free and open WLAN-based location services. http://www.openwlanmap.org/?lang=. [Online; accessed 11.01.2014].
[opeb] OpenStreetMap. http://www.openstreetmap.org/. [Online; accessed11.01.2014].
[Pap07] Papadakis, Ioannis: Fahrerassistenzsysteme: Überblick und aktueller Trends.Technischer Bericht, Universität Karlsruhe, 2007.
[par] Parking Sensors. http://www.which.co.uk/cars/choosing-a-car/
car-features/parking-systems-explained/parking-sensors/.
[PBS12] Patrick Bulling, Thorsten Fischer, Wladislav Giss und Tobias Schmitz: Fah-rerassistenz Gegenüberstellung und Bewertung der einzelnen Systeme. Techni-scher Bericht, Hochschule für Wirtschaft und Umwelt Nürtingen – Geislingen(Steige), 2012.
[Pre09] Preiss, Frank: GLONASS - Russlands Weltraumauge.http://www.sicherheitspolitik-dss.de/autoren/preisz/fpglonas.pdf, 2009.
[Rad] Assistenzsysteme zum Rückwärtsfahren / Einparkhilfe.
[Rei10a] Reif, K.: Fahrstabilisierungssysteme und Fahrerassistenzsysteme. Bosch Fach-information Automobil. Vieweg+Teubner Verlag, 2010.
[Rei10b] Reif, Konrad: Fahrstabilisierungssysteme und Fahrerassistenzsysteme. 2010.
[Rei10c] Reif, Konrad: Fahrstabilisierungssysteme und Fahrerassistenzsysteme, KapitelFahrzeugnavigation, Seite 192ff. Springer, 2010.
[Rei10d] Reif, Konrad: Sensoren im Kraftfahrzeug. Vieweg+Teubner Verlag, Junir 2010.
[Rei11] Reif, Konrad: Bosch Autoelektrik und Autoelektronik. Bosch FachinformationAutomobil. Vieweg + Teubner, 2011.
[Rei12] Reif, Konrad: Fahrstabilisierungssysteme und Fahrerassistenzsysteme. View-eg+Teubner Verlag, Oktober 2012.
[Roh] Rohde, Christian. http://www.htw-mechlab.de/index.php/
fachvortrag-umfeldsensorik-mit-dem-lidar-vor-und-nachteile-ggu-radar/.[Online; accessed 09.01.2014].

94 Literaturverzeichnis
[Roh12] Rohde, Christian: Fachvortrag “Umfeldsensorik mit dem Lidar: Vor- undNachteile ggü. Radar”, November 2012.
[rss] Received Signal Strength Indication. https://de.wikipedia.org/wiki/Received_Signal_Strength_Indication. [Online; accessed 11.01.2014].
[Sch07] Schwarz, Juergen: Code of Practice für die Entwicklung, Validierung undMarkteinführung von künftigen Fahrerassistenzsystemen (ADAS). In: RESPON-SE 3 a PReVENT Project, 2007.
[Sen13] Sensotek: SENSOREN ZUM SCHUTZ UND KOMFORT VON PERSONENUND FAHRZEUGEN. Sensotek, 2012/2013.
[Ser] Service, Bosch Media: Kraftfahrzeugtechnik. http://www.bosch-presse.de/presseforum/details.htm?txtID=4624.
[sma12] SmartNavi: Navigation ohne GPS. http://www.pocketnavigation.de/2012/07/smartnavi-navigation-ohne-gps/, 2012. [Online; accessed11.01.2014].
[son12] Neue Wege für eine Navigation ohne GPS. http://www.pocketnavigation.de/2012/07/neue-wege-fur-eine-navigation-ohne-gps/, 2012. [On-line; accessed 11.01.2014].
[Spe13] Speedhead.de: Mercedes-Benz C-Klasse 2014: Intelligent Drive - Die C-Klasselernt denken, 2013.
[Spi] Spies. http://www.adv-radio-sci.net/4/99/2006/ars-4-99-2006.
pdf. [Online; accessed 09.01.2014].
[spi09] U-Boot-Kollision: Knapp an der Katastrophe vor-bei. http://www.spiegel.de/panorama/
u-boot-kollision-knapp-an-der-katastrophe-vorbei-a-607971.
html, 2009. [Online; accessed 15.01.2014].
[SS06] Spies, M. und H. Spies: Automobile Lidar Sensorik: Stand, Trends und zukünfti-ge Herausforderungen. Adv. Radio Sci., 4:99–104, 2006.
[Sto12] Stockburger, Christoph: Automatische Einparksysteme für Au-tos im Test. http://www.spiegel.de/auto/aktuell/
automatische-einparksysteme-fuer-autos-im-test-a-833354.
html, may 2012.
[Str] Stroppe, Heribert: ’Phyik für Studierende der Natur- und Ingenieurwissen-schaften. 15 Auflage.
[sys13] Triangulation in automotive ultrasonic park-assist systems. http://www.eetimes.com/document.asp?doc_id=1280871, may 2013.
Literaturverzeichnis 95
[THL11] Thomas Hummel, Matthias Kuhn, Jeno Bende und Antje Lang: Fahrerassis-tenzsysteme - Ermittlung des Sicherheitspotenzials auf Basis des Schadenge-schehens der Deutschen Versicherer. Technischer Bericht, Unfallforschung derVersicherer, 2011.
[Ver13] Verkehrswacht: Fahrerassistenzsysteme für Straßen- und speziell Nutzfahrzeu-ge, 2013.
[VW09] VW: Die intelligenten Fahrerassistenzsysteme des Caravelle, 2009.
[Wag09] Wagner, Prof. Dr. Bernhard: Sensoren für Beschleunigung und Drehrate.Technischer Bericht, Fraunhofer-Institut für Siliziumtechnologie, 2009.
[WB08] White, Ron und Tim Bowns: How Global Positioning Systems Work.http://www.pcmag.com/article2/0,2817,2316534,00.asp, 2008.
[WHW09] Winner, H., S. Hakuli und G. Wolf: Handbuch Fahrerassistenzsysteme:Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort :mit 550 Abbildungen und 45 Tabellen. Atz/Mtz-Fachbuch. Vieweg + Teubner,2009.
[wika] Fahrtmesser. https://de.wikipedia.org/wiki/Fahrtmesser. [Online;accessed 15.01.2014].
[wikb] GPS-Jammer. https://de.wikipedia.org/wiki/GPS-Jammer. [Online;accessed 11.01.2014].
[wikc] GPS-Spoofing. https://de.wikipedia.org/wiki/GPS-Spoofing. [Onli-ne; accessed 11.01.2014].
[wikd] Integrierte Navigation. https://de.wikipedia.org/wiki/Integrierte_Navigation. [Online; accessed 15.01.2014].
[wike] Koppelnavigation. https://de.wikipedia.org/wiki/
Koppelnavigation. [Online; accessed 15.01.2014].
[wikf] Kreiseldrift. https://de.wikipedia.org/wiki/Kreiseldrift. [Online;accessed 15.01.2014].
[wikg] Lateration. https://de.wikipedia.org/wiki/Trilateration. [Online;accessed 11.01.2014].
[wikh] Log (Messgerät). https://de.wikipedia.org/wiki/Log_%28Messger%C3%A4t%29. [Online; accessed 15.01.2014].
[wiki] Trägheitsnavigationssystem. https://de.wikipedia.org/wiki/
Inertiales_Navigationssystem. [Online; accessed 15.01.2014].
96 Literaturverzeichnis
[wikj] WLAN-basierte Ortung. https://de.wikipedia.org/wiki/
WLAN-basierte_Ortung. [Online; accessed 11.01.2014].
[Wik13a] Wikipedia: DARPA Grand Challenge — Wikipedia, Die freie Enzyklopädie,2013. [Online; Stand 24. Januar 2014].
[Wik13b] Wikipedia: Prometheus (Forschungsprogramm) — Wikipedia, Die freie Enzy-klopädie, 2013. [Online; Stand 24. Januar 2014].
[Wik14a] Wikipedia: Abstandsregeltempomat — Wikipedia, Die freie Enzyklopädie, 2014.[Online; Stand 24. Januar 2014].
[Wik14b] Wikipedia: Fahrdynamikregelung — Wikipedia, Die freie Enzyklopädie, 2014.[Online; Stand 24. Januar 2014].
[Zog11] Zogg, Jean-Marie: GPS und GNSS: Grundlagen der Ortung und Navigationmit Satelliten, Band 180. 2011.
[Zä11] Zankert, Sigrid: Vehicle Sensors, 2011.