
Simulation – Fach im Modul „Modellbildung und Simulation ... · Fakult at f ur Informatik und...
182
Fakult¨ at f¨ ur Informatik und Automatisierung Institut f¨ ur Automatisierungs- und Systemtechnik Fachgebiet Simulation und Optimale Prozesse Simulation – Fach im Modul ” Modellbildung und Simulation“ – – Fach im Modul ” Simulationstechnik“ Dr.-Ing. Siegbert Hopfgarten Tel., E-Mail: +49 3677 69-1418, [email protected] Fachgebietsinternetseite: http://www.tu-ilmenau.de/simulation Vorlesungsskript: Lehre/Vorlesungen, Seminare, Praktika/Simulation 1 / 172
Transcript of Simulation – Fach im Modul „Modellbildung und Simulation ... · Fakult at f ur Informatik und...

Fakultat fur Informatik und AutomatisierungInstitut fur Automatisierungs- und Systemtechnik
Fachgebiet Simulation und Optimale Prozesse
Simulation
– Fach im Modul”Modellbildung und Simulation“ –
– Fach im Modul”Simulationstechnik“
Dr.-Ing. Siegbert Hopfgarten
Tel., E-Mail: +49 3677 69-1418, [email protected]: http://www.tu-ilmenau.de/simulation
Vorlesungsskript: Lehre/Vorlesungen, Seminare, Praktika/Simulation
1 / 172
Inhalt
1 Einleitung - Begriffe, Motivation, Beispiele
2 Modelle
3 Analoge Simulation
4 Digitale Simulation
5 Simulationssprachen und -systeme
2 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Was ist Simulation?
< lat., simulare > vortauschen
1.) bewusste Vortauschung von Krankheiten oder ubertriebene Darstellungihrer Symptome
2.) Sammelbegriff fur die Darstellung oder Nachbildung physikalischer,technischer, biologischer, psychologischer oder okonomischer Prozesse oderSysteme durch mathematische oder physikalische Modelle, wobei dieUntersuchung des Modelles einfacher, billiger oder ungefahrlicher als die desOriginals ist und die Erkenntnisse Ruckschlusse auf die Eigenschaften desOriginals erlauben
→ Simulation ist das Experimentieren an einem Modell.
3 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
Zwei Aspekte der Simulation:
1. Modellbeschreibung (z. B. x(t) = −3x(t) + 2u(t), x(0) = 0.5)
2. Experimentbeschreibung (z. B. t ∈ [0, 10] )
Oft nicht strikt trennbar; durch Software nicht immer unterstutzt
Gefahr: Experimentdurchfuhrung an Modell, das fur diese Experimente nichtgultig ist
Was ist ein System? (siehe auch DIN 19226)
In betrachtetem Zusammenhang gegebene Anordnung von Gebilden(Teilsystemen); Beziehungen zueinander und zur Umwelt
Gebilde: Gegenstande, Denkmethoden oder deren Ergebnisse
Hullflache (gedacht): Abgrenzung zur/Wechselwirkung mit Umwelt
Betrachteter Zusammenhang: durch Aufgabenstellung gegeben; in derRegelungs- und Systemtechnik: Beziehungen durch Wirkungen
Voraussetzungen fur sinnvolle Untersuchungen: Steuerbarkeit(Beeinflussbarkeit) und Beobachtbarkeit (Messbarkeit von Signalen)
4 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Beispiel: Globaler Wasserkreislauf (Aggregationsgrad,Detailliertheitsgrad)Quelle: http://bildungsserver.hamburg.de/
Schwarze Zahlen in 1.000 km3, blaue Zahlen in 1.000 km3/y5 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Beispiel: Talsperren in ThuringenBildquelle: Thur. Talsperrenverwaltung; jetzt: Thur. Fernwasserversorgung
6 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Beispiel: Nordthuringer TalsperrensystemBildquelle: Thur. Talsperrenverwaltung; jetzt: Thur. Fernwasserversorgung
7 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Beispiel: AbwasserreinigungBildquelle: Wasser- und Abwasserzweckverband Jena
8 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
Was ist ein Experiment?
Datengewinnung von einemSystem bei Aufschaltung vonEingangssignalen
Nachteil des Experiments amrealen System: Einfluss vonStorgroßen; gewisse Anzahlnutzlicher Ausgangen nichtdirekt messbar
Vorteil der Simulation: Zugriffauf alle Ein–/Ausgangsgroßen
Problem bei der Simulation:Simulationslaufe außerhalb desExperimentgultigkeitsbereichesdes Experimentes liegen
Was ist ein Modell?
Abbildung eines Systems oder einesProzesses (Gesamtheit derVorgange) in ein anderesbegriffliches oder gegenstandlichesSystem
Bsp.: begriffliches System:
x(t) = f (x(t), u(t), t) , x(0) = x0
Bsp: gegenstandliches System:Hochwasseruberlauf an einerTalsperre im Maßstab getreuenNachbau (s. Abb.)
9 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Gegenstandliches ModellBildquelle: Thuringer Fernwasserversorgung
10 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
Warum ist Modellierung wichtig?
Modellierung: Prozess des Ordnens von Wissen uber ein System
Modellierung als Problemlosungswerkzeug
”(Natur–)Wissenschaftler sind glucklich, wenn sie die Welt beobachten und
verstehen konnen.“ (Analyseaspekt)
”Ingenieure mochten die Welt zu ihrem Vorteil verandern.“ (Entwurfsaspekt)
Warum ist Simulation wichtig?
Neben Experimenten mit dem realen System: Simulation einzige verfugbareTechnik zur Analyse komplexer dynamischer Prozesse
Analytische Techniken im Allgemeinen leistungsfahiger, aber durchProzesskomplexitat begrenzt
Simulation: meistgenutzte Problemlosungsstrategie
11 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
Grunde zum Einsatz von Simulationstechniken
Entwurf/Veranderung eines reales System; Test in unbekanntenParameterbereichen; gangige Praxis bei technischen Systemen
Experiment am Original gefahrlich, teuer, kompliziert, . . . (Bsp.: Kernreaktor,kostenintensive Wasserqualitatsuntersuchungen)
Zeitkonstanten (Eigenwerte) sind sehr klein/groß (Bsp.: explosionsartigechemische Reaktionen, Talsperrensysteme, Entwicklung von Sternen)
Vermeidung von Storungen am realen System (Bsp.:Wasserqualitatsuntersuchungen in Rohrleitungsnetzen)
Unterdruckung von Storungen am Modell, die am realen Systemunvermeidbar (Bsp.: Freilandwachstumsprozesse)
Storungen, Zustande, Systemparameter nicht zuganglich
12 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Probleme bei der Anwendung der Simulation
Ironischerweise Vorteil der Simulation gleichzeitig Nachteil: allgemeine und
einfache Anwendbarkeit
Leicht: Nutzung von SimulationsprogrammenExperimentieren mit Modell hat keine KonsequenzenAber: Intelligente Nutzung der Simulation setzt voraus, dass manweiß, was man tut!
Modellverliebtheit
Systemverstandnis entsteht oft erst nach vielen, gezielten Simulationslaufen
Luenberger:”Ein kluger Gedanke spart oft Tausende von Rechnerlaufen.“
13 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
Kriterien zur Wahl der Simulationsmittel
Aufgabenstellung (Einschatzung von Umfang und Kompliziertheit)
Vorhandene Hard– und Software
Spezielle Kentnisse des Bearbeiters (Einarbeitung, Flexibilitat,Programmierkenntnisse)
Okonomische Kriterien (Rechner, Losungszeitraum, erwarteter Nutzen,Ersparnis teurer Experimente)
Abgrenzung
Schwerpunkt: Modellierung und digitale Simulation zeitkontinuierlicher undzeitdiskreter analoger Systeme
14 / 172

1. Einleitung - Begriffe, Motivation, Beispiele
Allgemeine Vorgehensweise
Originalprozess Rechnermodell
Prozessmodell
Modelleignung Modellverifikation
ProgrammierungSystemanalyseModellbildung
Modellvalidierung
15 / 172
1. Einleitung - Begriffe, Motivation, Beispiele
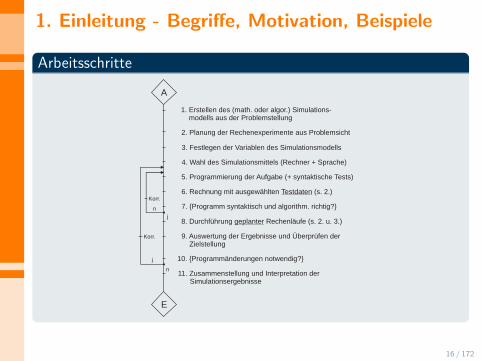
Arbeitsschritte
1. Erstellen des (math. oder algor.) Simulations- modells aus der Problemstellung
2. Planung der Rechenexperimente aus Problemsicht
3. Festlegen der Variablen des Simulationsmodells
4. Wahl des Simulationsmittels (Rechner + Sprache)
5. Programmierung der Aufgabe (+ syntaktische Tests)
6. Rechnung mit ausgewählten Testdaten (s. 2.)
7. Programm syntaktisch und algorithm. richtig?
8. Durchführung geplanter Rechenläufe (s. 2. u. 3.)
9. Auswertung der Ergebnisse und Überprüfen der Zielstellung
10. Programmänderungen notwendig?
11. Zusammenstellung und Interpretation der Simulationsergebnisse
A
E
Korr.
Korr.
j
n
n
j
16 / 172
Literatur I
A. Angermann, M. Beuschel, M. Rau, and U. Wohlfahrt.
MATLAB R©-Simulink R©-Stateflow R©.Oldenbourg, 2009.
D.P. Atherton and P. Borne (Eds.).
Concise encyclopedia of modelling and simulation.Pergamon Press, 1992.
P. Beater.
Regelungstechnik und Simulationstechnik mit Scilab und Modelica.Books on Demand, Norderstedt, 2010.
B.S. Bennett.
Simulation Fundamentals.Prentice Hall, 1995.
O. Beucher.
MATLAB und Simulink. Eine kursorientierte Einfuhrung.mitp, 2013.
O. Beucher.
Ubungsbuch Signale und Systeme.Springer, 2015.http://link.springer.com/book/10.1007%2F978-3-662-45955-3.
O. Beucher.
Signale und Systeme: Theorie, Simulation, Anwendung. Eine beispielhafte Einfuhrung mit MATLAB.Springer, 2015.http://link.springer.com/book/10.1007%2F978-3-662-45965-2.
17 / 172

Literatur IIA. Biran and M. Breiner.
MATLAB 5 fur Ingenieure.Addison–Wesley, 2000.
W. Bub and P. Lugner.
Systematik der Modellbildung, Teil 1: Konzeptionelle Modellbildung.VDI-Berichte 925, Modellbildung fur Regelung und Simulation, S. 1-18, VDI-Verlag, Dusseldorf, 1992.
W. Bub and P. Lugner.
Systematik der Modellbildung, Teil 2: Verifikation und Validation.VDI-Berichte 925, Modellbildung fur Regelung und Simulation, S. 19-43, VDI-Verlag, Dusseldorf, 1992.
F. E. Cellier.
Coninuous System Modeling.Springer, 1991.
F.E. Cellier and E. Kofman.
Continuous System Simulation.Springer, 2006.
DIN19226.
Leittechnik: Regelungstechnik und Steuerungstechnik.Deutsches Institut fur Normung, 1994.
P. Fritzson.
Introduction to Modeling and Simulation of Technical and Physical Systems with Modelica.IEEE Press, 2004.
P. Fritzson.
Priciples of Object-Oriented Modeling and Simulation with Modelica 2.1.IEEE Press, 2004.
18 / 172

Literatur III
P. Junglas.
Praxis der Simulationstechnik.Europa-Lehrmittel, 2014.
G. Lappus and G. Schmidt.
Simulation als vielseitiges Werkzeug - Eine Ubersicht.In K. H. Fasol and K. Diekmann, editors, Simulation in der Regelungstechnik, pages 1–29. Springer, 1990.
L Ljung and T. Glad.
Modeling of Dynamic Systems.Prentice Hall, 1994.
G. Ludyk.
CAE von Dynamischen Systemen – Analyse, Simulation und Entwurf von Regelungssystemen.Springer, 1990.
S. E. Mattsson, M. Anderson, and Astrom, K. J.
Object-Oriented Modeling and Simulation.In D. A. Linkens, editor, CAD for Control Systems, pages 31–69. Marcel Dekker, New York, 1993.
M. Otter.
Objektorientierte Modellierung Physikalischer Systeme, Teil 1.at - Automatisierungstechnik, 47(1):A1–A4 und weitere 15 Teile von OTTER, M. als Haupt– bzw. Co–Autor undanderer Autoren), 1999.
K. Reinisch.
Kybernetische Grundlagen und Beschreibung kontinuierlicher Systeme.Verlag Technik, 1974.
19 / 172

Literatur IV
F. Richert, J. Ruckert, and A. Schloßer.
Vergleich von Modelica und Matlab anhand der Modellbildung eines Dieselmotors.at, 51(6):247–254, 2003.
G. Schmidt.
Simulationstechnik.R. Oldenbourg, 1980.
W. Schweitzer.
MATLAB R© kompakt.Oldenbourg, 2013.
H. Schwetlick and H. Kretzschmar.
Numerische Verfahren fur Naturwissenschaftler und Ingenieure.Fachbuchverlag Leipzig, 1991.
U. Stein.
Programmieren mit MATLAB. Programmiersprache, Grafische Benutzeroberlachen, Anwendungen.Hanser, 2015.
Ph. Thomas.
Simulation of Industrial Processes for Control Engineers.Butterworth-Heinemann, 1999.
M. Tiller.
Intoduction to physical modeling with Modelica.Kluwer, 2001.
20 / 172

Literatur V
P. P. J. van den Bosch and van der Klauw, A.
Modeling, Identification and Simulation of Dynamical Systems.CRC Press, 1994.
A. Weinmann.
Computerunterstutzung fu Regelungsaufgaben.Springer, 1999.
J. Wernstedt.
Experimentelle Prozessanalyse.Verlag Technik, 1989.
R.L. Wood and K.L. Lawrence.
Modeling and Simulation of Dynamic Systems.Prentice Hall, 1997.
21 / 172
2. Modelle2.1 Einteilung von Modellen
Einteilung
Prozessmodell = Systemmodell + Signalmodell(e)
Im Folgenden und im Wesentlichen im Rahmen der Lehrveranstaltungbetrachtet: Systemmodell
Physikalische Modelle, Strukturmodelle (”white box“); erhalten aus Bilanz-
und Erhaltungsgleichungen in unterschiedlichen Fachgebieten (Bsp.:Differentialgleichungen (Dgln.), Ubertragungsfunktionen,Zustandsraumdarstellung, linear/nichtlinear, zeitkontinuierlich/zeitdiskret,Modellvereinfachungen, . . .)
Verhaltensmodelle (”black box“); Bsp.: Kennfelder (
”lookup table“),
Polynomansatze, kunstliche neuronale Netze
Mischformen (”grey box“)
Siehe Lehrveranstaltungen: Modellbildung, Regelungs- und Systemtechnik,Elekrotechnik, Mechanik, Physik, . . .
22 / 172
2. Modelle2.2 Zeitkontinuierliche Modelle2.2.1 Systeme mit konzentrierten Parametern
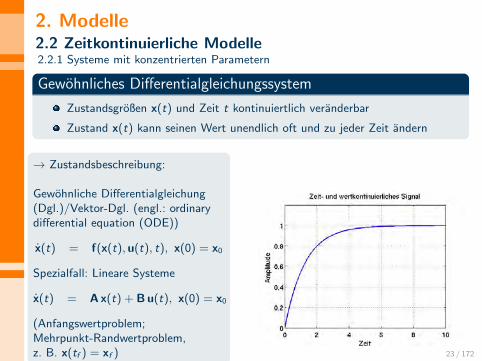
Gewohnliches Differentialgleichungssystem
Zustandsgroßen x(t) und Zeit t kontinuiertlich veranderbar
Zustand x(t) kann seinen Wert unendlich oft und zu jeder Zeit andern
→ Zustandsbeschreibung:
Gewohnliche Differentialgleichung(Dgl.)/Vektor-Dgl. (engl.: ordinarydifferential equation (ODE))
x(t) = f(x(t), u(t), t), x(0) = x0
Spezialfall: Lineare Systeme
x(t) = A x(t) + B u(t), x(0) = x0
(Anfangswertproblem;Mehrpunkt-Randwertproblem,z. B. x(tf ) = xf ) 23 / 172

2. Modelle2.2 Zeitkontinuierliche Modelle
Differential-algebraische Gleichungssysteme
Engl.: Differential-algebraic equation system (DAE system)
Implizit: f(x(t), x(t), u(t), t) = 0 , x(0) = x0
Semi-explizit: x(t) = f(x(t), u(t), t), x(0) = x0
0 = g(x(t), u(t), t)
Mit konstanter oder zeit- und/oder zustandsabhangiger, singularerMasse-Matrix M(t, x):
M(t, x) x(t) = f(x(t), u(t), t), x(0) = x0
x(t) - Zustandsvariable (differentielle V.), u(t) - algebraische Variable
Konsistente Anfangswerte!
(Differentiations-)Index: minimale Anzahl der analytischen Differentiationender algebraischen Gleichung nach der Zeit, bis explizites Dgl.-system entsteht(−→ Indexreduktion)
24 / 172

2. Modelle2.2 Zeitkontinuierliche Modelle
Neben Differentiationsindex: Storindex: Maß fur die Empfindlichkeit(Sensitivitat) der Losung gegenuber Stor-Term bzw. Anfangswerten
Z. B. Differentiationsindex 1:
0 =∂g
∂x
∂x
∂t︸︷︷︸f
+∂g
∂u
∂u
∂t︸︷︷︸u
+∂g
∂t
u(t) = −[∂g
∂u
]−1∂g
∂xf(x(t), u(t), t)−
[∂g
∂u
]−1∂g
∂t
Semi-expizites Dgl.-system, wenn[∂g∂u
]−1existiert
Differentiationsindex: 0 (ODE-System), 1, 2, 3, . . .; je hoher, destoschwieriger zu losen
Beim indexreduzierten System: Anfangsbedingungen der abgeleitetenGleichungen mussen auch erfullt sein
Drift: indexreduziertes System erhoht die Losungsmannigfaltigkeit; kannBerechnungsstabilitat beeintrachtigen
25 / 172
2. Modelle2.2 Zeitkontinuierliche Modelle
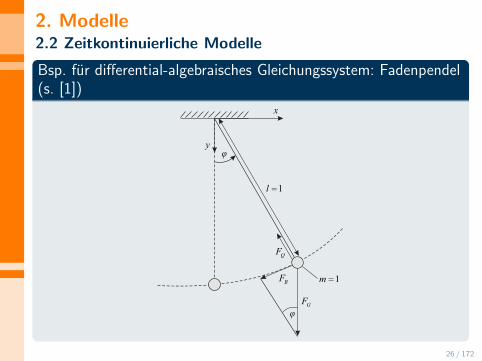
Bsp. fur differential-algebraisches Gleichungssystem: Fadenpendel(s. [1])
QF
1m =
1l =
GF
BF
φ
φy
x
26 / 172

2. Modelle2.2 Zeitkontinuierliche Modelle
Bsp. fur differential-algebraisches Gleichungssystem: Fadenpendel(1a)-(1e)
Variablenzuordnung: Algebraische Variable: λ(t) - Spannkraftstarke,FQ (t) = −λ(t)q = −λ(t)[x1(t) x2(t)]T , - Spannkraft,Zustandsvektor: x(t) = [x1(t) x2(t) x3(t) x4(t)]T = [x(t) y(t) vx (t) vy (t)]T ,Konstanten: g - Erdbeschleunigung, l = 1 - Lange, m = 1 - Masse
Kraftebilanz; kleine Winkel
x1(t) = x3(t) (1a)
x2(t) = x4(t) (1b)
x3(t) = −2λ(t)x1(t) (1c)
x4(t) = −2λ(t)x2(t)− g (1d)
0 = x21 (t) + x2
2 (t)− 1 (1e)
⇓ Umformung in ODE-System
λ(t) = − [2x1(t)x3(t) + 2x2(t)x4(t)]λ(t)− 3
2gx4(t)
Differentiationsindex: 327 / 172

2. Modelle2.2 Zeitkontinuierliche Modelle2.2.2 Systeme mit verteilten Parametern
Zustandsgroßen x(s, t), Ort s und Zeit t kontinuiertlich veranderbar
Zustand x(s, t) kann seinen Wert unendlich oft, zu jeder Zeit andern
Beschreibung durch partielle Dgl. (engl.: partial differential equation (PDE))
Bsp.: Diffusionsgleichung
∂x(s, t)
∂t= σ
∂2x(s, t)
∂s2
mit x - Konzentration, σ - Diffusionskonstante, s - Ort (Weg) und t - Zeit .
-1.5 -1 -0.5 0 0.5 1 1.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1 Color: c Vector field: -grad(c)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
28 / 172

2. Modelle2.2 Zeitkontinuierliche Modelle2.2.2 Systeme mit verteilten Parametern
Zustandsgroßen x(s, t), Ort s und Zeit t kontinuiertlich veranderbar
Zustand x(s, t) kann seinen Wert unendlich oft, zu jeder Zeit andern
Beschreibung durch partielle Dgl. (engl.: partial differential equation (PDE))
Bsp.: Diffusionsgleichung
∂x(s, t)
∂t= σ
∂2x(s, t)
∂s2
mit x - Konzentration, σ - Diffusionskonstante, s - Ort (Weg) und t - Zeit .
-1.5 -1 -0.5 0 0.5 1 1.5-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1 Color: c Vector field: -grad(c)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
28 / 172

2. Modelle2.3 Zeitdiskrete Modelle
Zeit t ist diskretisiert, d. h. nur zuausgewahlten Zeiten tk
bzw. diskreten Zeitpunkten(k = 0, 1, . . . ,K) ist dieBeobachtung des Systems und/oderder Eingriff in das System moglich
Ausgehend vonDifferentialgleichung: Einfuhrungeiner Diskretisierung∆t = tk+1 − tk ; Reprasentationzeitdiskreter Modelle durchDifferenzengleichungen
Zeitachse aquidistant geteilt
dx
dt≈ ∆x
∆t=
x(tk+1)− x(tk )
∆t=
xk+1 − xk
∆t= fk (xk , uk , tk ) , x0
(2)
29 / 172
2. Modelle2.3 Zeitdiskrete Modelle
Haufig ist zeitdiskretes Modell diskretisierte Variante des kontinuierlichenModelles (s. Bsp. System 1. Ordnung):
x(t) = −x(t) + u(t) , x(0) = x0
Haufiges Vorkommen in technischen und computergesteuerten Systemen
Falls Zeitachse nicht aquidistant geteilt: i. Allg. ereignis-diskreteSystembeschreibung bevorzugt
30 / 172

2. Modelle2.4 Qualitative Modelle, 2.5 Ereignis-diskrete Modelle2.4 Qualitative Modelle
Zeitachse von Natur aus diskretisiert (nicht notwendigerweise aquidistant)
Abhangige Variable (Amplitude) ist ebenfalls diskretisiert (wertdiskret)
2.5 Ereignis-diskrete Modelle
Paradoxerweise: Zeit- undAmplitude normalerweisekontinuierlich
Unterschied zu zeit- undwertkontinuierlichen Modellen:in endlicher Zeitdauer kann nureine endliche Anzahl vonZustandsveranderungenauftreten (Bsp.:Pumpenforderregimes)
Zeit- und zustandsabhangigeEreignisse
Auch gemischtereignis-diskrete/zeitkontinuierlicheModelle (hybride Modelle) moglich. 31 / 172

2. Modelle2.6 Systembeschreibung chaotischer Systeme
Gewohnliche oder partielle nichtlineare Dgln./Dgl.-Systeme
Bsp.:”Wetter“
Abbildung : Rotierende Konvektionszellen
32 / 172
2. Modelle2.6 Systembeschreibung chaotischer Systeme
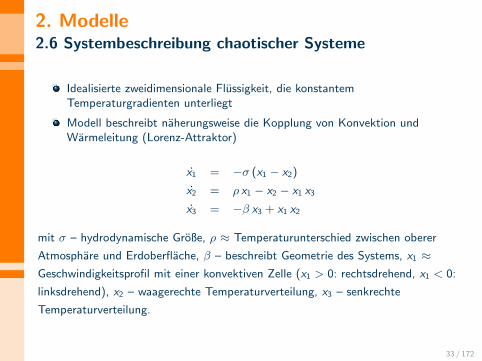
Idealisierte zweidimensionale Flussigkeit, die konstantemTemperaturgradienten unterliegt
Modell beschreibt naherungsweise die Kopplung von Konvektion undWarmeleitung (Lorenz-Attraktor)
x1 = −σ (x1 − x2)
x2 = ρ x1 − x2 − x1 x3
x3 = −β x3 + x1 x2
mit σ – hydrodynamische Große, ρ ≈ Temperaturunterschied zwischen oberer
Atmosphare und Erdoberflache, β – beschreibt Geometrie des Systems, x1 ≈Geschwindigkeitsprofil mit einer konvektiven Zelle (x1 > 0: rechtsdrehend, x1 < 0:
linksdrehend), x2 – waagerechte Temperaturverteilung, x3 – senkrechte
Temperaturverteilung.
33 / 172

2. Modelle2.6 Systembeschreibung chaotischer Systeme
x1 = −σ (x1 − x2)
x2 = ρ x1 − x2 − x1 x3
x3 = −β x3 + x1 x2
Bsp.: x1 > 0 und x2 > 0: erwarmte Flussigkeit steigt auf, gekuhlte fallt
Gleichgewichtspunkte:
1 x1 = x2 = x3 = 0 keine konvektive Bewegung;festkorperahnliche Warmeableitung
2 x1 = x2 =√β (ρ− 1), x3 = ρ− 1 ; Gleichgewicht stabil fur
1 ≤ ρ < 24, aber fur ρ ≥ 24 instabil3 x1 = x2 = −
√β (ρ− 1), x3 = ρ− 1
Letzte beiden Gleichgewichtspunkte: entsprechen regelmaßigem
”Rollen“ der Konvektionszelle
Animation des Lorenz-Attraktors (Funktion lorenz unter MATLAB R©)
34 / 172

2. Modelle2.7 Stochastisches Modell – Beispiel fur Signalmodelle
Signalbeschreibung durchKenngroßen wie Erwartungswert,Streuung, (Auto-, Kreuz-)Korrelationsfunktionen, (Auto-,Kreuz-)Leistungsdichtespektren
35 / 172
2. Modelle2.8 Spektrum der Modellierung und Simulation
Es∆
Systems
BlackBox
WhiteBox
AEs
Analysis
Circuits
Economic Systems
Electric
Speculation Design
ODEs
ODEs
PsychologicalSystems
BiologicalChemicalSystems
MechanicalSystemsSystems
ControlPrediction
PDEs
Social
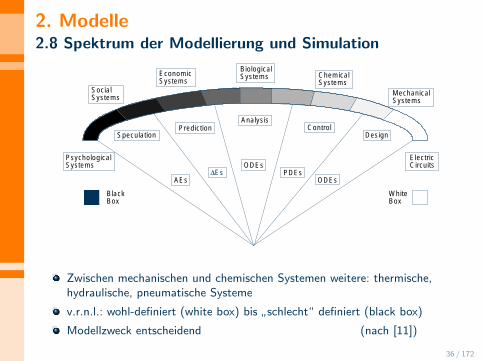
Zwischen mechanischen und chemischen Systemen weitere: thermische,hydraulische, pneumatische Systeme
v.r.n.l.: wohl-definiert (white box) bis”schlecht“ definiert (black box)
Modellzweck entscheidend (nach [11])
36 / 172
2. Modelle2.9 Systembegriff und Aufgabenstellungen
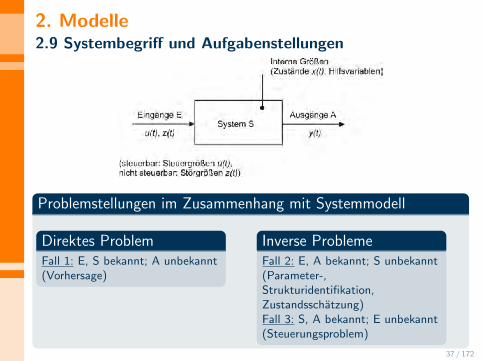
Problemstellungen im Zusammenhang mit Systemmodell
Direktes ProblemFall 1: E, S bekannt; A unbekannt(Vorhersage)
Inverse ProblemeFall 2: E, A bekannt; S unbekannt(Parameter-,Strukturidentifikation,Zustandsschatzung)Fall 3: S, A bekannt; E unbekannt(Steuerungsproblem)
37 / 172
2. Modelle2.9.1 Fall 1: Direktes Problem
0( , ),
( , )
x f x u x
y f x u
=
=
&
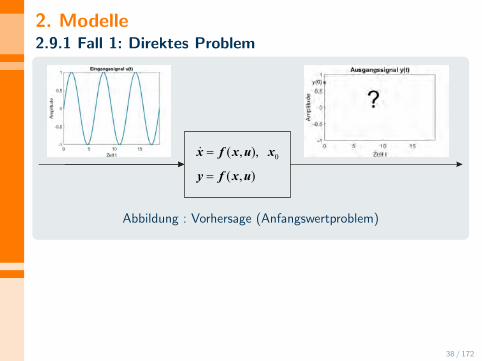
Abbildung : Vorhersage (Anfangswertproblem)
Fall 1: Vorhersage
Berechnung des zukunftigen Systemverhaltens (t ∈ [t0 = 0, t0 + K ]) unterNutzung des Systemmodells S (t0 = 0:
”Gegenwart“, K : Zeithorizont)
. . . ausgehend vom Anfangszustand x(0)
. . . bei bekannter oder angenommener Steuerung u(t) und evtl. Storung z(t)
D. h., eine Simulationsrechnung
38 / 172

2. Modelle2.9.1 Fall 1: Direktes Problem
0( , ),
( , )
x f x u x
y f x u
=
=
&
Abbildung : Vorhersage (Anfangswertproblem)
Fall 1: Vorhersage
Berechnung des zukunftigen Systemverhaltens (t ∈ [t0 = 0, t0 + K ]) unterNutzung des Systemmodells S (t0 = 0:
”Gegenwart“, K : Zeithorizont)
. . . ausgehend vom Anfangszustand x(0)
. . . bei bekannter oder angenommener Steuerung u(t) und evtl. Storung z(t)
D. h., eine Simulationsrechnung38 / 172

2. Modelle2.9.2 Fall 2: Inverses Problem
ˆmin ( , , , )
ˆ ˆ( , )
px x u p
y f x u
J
=
Abbildung : Parameteridentifikation
Fall 2: z. B. Parameteridentifikation
Berechnung der Modellparameter p unter Nutzung des Systemmodells S,gemessener Eingangs- u(t) und Zustands- x(t) bzw. Ausgangsgroßen y(t)
Typisch: Optimierungsproblem, z. B. Methode der kleinsten Fehlerquadrate
(MKQ) minp||xi − xi ||2 , i = 1, 2, . . . , nm
xi - Messwerte, xi - Modellwerte, nm - Anzahl der Stutzstellen
. . . ausgehend von einem Anfangsparameterdatensatz
. . . bei angenommener Modellstruktur
. . . iterative Losung des Problems (schrittweise Verbesserung der Parameter)
D. h., eine Simulationsrechnung pro Iteration zur Berechnung derModellwerte xi
39 / 172

2. Modelle2.9.2 Fall 2: Inverses Problem
ˆmin ( , , , )
ˆ ˆ( , )
px x u p
y f x u
J
=
Abbildung : Parameteridentifikation
Fall 2: z. B. Parameteridentifikation
Berechnung der Modellparameter p unter Nutzung des Systemmodells S,gemessener Eingangs- u(t) und Zustands- x(t) bzw. Ausgangsgroßen y(t)
Typisch: Optimierungsproblem, z. B. Methode der kleinsten Fehlerquadrate
(MKQ) minp||xi − xi ||2 , i = 1, 2, . . . , nm
xi - Messwerte, xi - Modellwerte, nm - Anzahl der Stutzstellen
. . . ausgehend von einem Anfangsparameterdatensatz
. . . bei angenommener Modellstruktur
. . . iterative Losung des Problems (schrittweise Verbesserung der Parameter)
D. h., eine Simulationsrechnung pro Iteration zur Berechnung derModellwerte xi
39 / 172

2. Modelle2.9.3 Fall 3: Inverses Problem
0
min ( , , )
( , ),
ux u
x f x u x
J t
=&
Abbildung : Optimalsteuerungsproblem
Fall 3: Optimalsteuerungsproblem
Berechnung der optimalen Steuerung u(t) unter Nutzung des SystemmodellsS und gewunschter Zustands- x(t) bzw. Ausgangsgroßen y(t)
Optimalsteuerungsproblem
minu(t)
J(x(t), u(t))
J - Zielfunktional
. . . ausgehend von einer Anfangssteuerung u0(t)
. . . unter Nutzung des Systemmodells S
. . . iterative Losung des Optimalsteuerungs-/nichtlinearenOptimierungsproblems (schrittweise Verbesserung der Steuerung)
D. h., eine Simulationsrechnung pro Iteration zur Berechnung der Steuerung
40 / 172

2. Modelle2.9.3 Fall 3: Inverses Problem
0
min ( , , )
( , ),
ux u
x f x u x
J t
=&
Abbildung : Optimalsteuerungsproblem
Fall 3: Optimalsteuerungsproblem
Berechnung der optimalen Steuerung u(t) unter Nutzung des SystemmodellsS und gewunschter Zustands- x(t) bzw. Ausgangsgroßen y(t)
Optimalsteuerungsproblem
minu(t)
J(x(t), u(t))
J - Zielfunktional
. . . ausgehend von einer Anfangssteuerung u0(t)
. . . unter Nutzung des Systemmodells S
. . . iterative Losung des Optimalsteuerungs-/nichtlinearenOptimierungsproblems (schrittweise Verbesserung der Steuerung)
D. h., eine Simulationsrechnung pro Iteration zur Berechnung der Steuerung40 / 172

3. Analoge SimulationSimulation von zeit- und wertkontinuierlichen Systemen, z. B. zumSystemverstandnis, d. h. Simulation mit verschiedenen Werten derSytemparameter → Schulung des Systemdenkens
Bsp.: System 1. Ordnung
x(t) = −a x(t) + b u(t) , x(0) = x0
y(t) = c x(t)
z. B. mit u(t) = σ(t) , σ(t) =
1 fur t ≥ 00 fur t < 0
Schaltung/Signalflussbild
x0
x(t)u(t) y(t)x(t)
a
cb∫dt
1
41 / 172

3. Analoge Simulation
Rechnerisch: Auswertung der Bewegungsgleichung
x(t) = x0 e−at +
t∫0
e−a(t−τ)b u(τ)dτ
Ruckkopplung offen: reiner Integrator (System ohne Ausgleich),d. h. a = 0 . Fur b = 1 und x0 = 0.1:
x(t) = x0 +
t∫0
b dτ
= x0 + b t
= x0 + t
42 / 172

3. Analoge Simulation
Ruckkopplung geschlossen: Verzogerungsglied (System mitAusgleich; stabil), z. B. a = 1
T1= 10, d.h. T1 = 0.1, b = 1,
x0 = 0.1 :
x(t) = x0 e−at +
t∫0
e−a(t−τ)b dτ
= x0 e−at + b e−at
t∫0
eaτdτ
= x0 e−at +b
ae−at
[eaτ
]t
0
= x0 e−at +b
ae−at (eat − 1)
= x0 e−at +b
a
(1− e−at)
43 / 172

3. Analoge Simulation
Durch stetiges Verandern des Modellparameters a: ausgehend vom Integratorerhalt man ein T1-Glied (analoge Simulation).
Ebenso kann z. B. u(t) von σ(t) nach δ(t) verandert werden (Spungfunktion→ Impulsfunktion).
An einem Analogrechner (AR) ist wahrend dieser Anderungen gleichzeitg dieBeobachtung des Ausgangssignals moglich.
Analogrechner: siehe nachste Seite
44 / 172

3. Analoge SimulationAnalogrechner (Bildquelle: http://rechentechnik.foerderverein-tsd.de/
45 / 172
3. Analoge Simulation
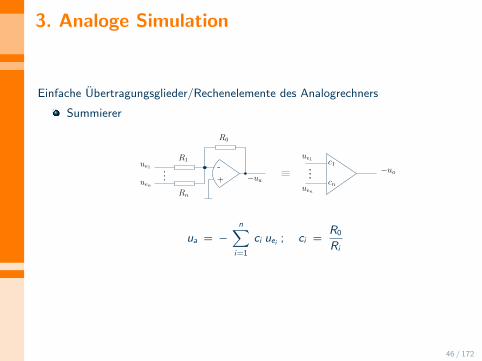
Einfache Ubertragungsglieder/Rechenelemente des Analogrechners
Summierer
ue1
uen
ue1 c1−ua
R1
R0
uen
-
Rn
+ −ua cn
1
ua = −n∑
i=1
ci uei ; ci =R0
Ri
46 / 172

3. Analoge SimulationEinfache Ubertragungsglieder/Rechenelemente des Analogrechners
Integrator
ue1
uen
R1
−ua0
ue1 c1k0 ua
C
Rnuen
ua cn+
-
1
ua(t) = −
n∑
i=1
1
CRi
∫ t
0
uei (τ)dτ + ua0
ua(t) = −
n∑
i=1
R0
Ri
1
R0C
∫ t
0
uei (τ)dτ + ua0
ua(t) = −
n∑
i=1
Ci
T
∫ t
0
uei (τ)dτ + ua0
ci =R0
Ri, T =
1
k0= CR0 , R0 - fiktiver Widerstand
47 / 172

3. Analoge Simulation
Einfache Ubertragungsglieder/Rechenelemente des Analogrechners
Komparator
-ue1
R1
ue2
R2
ue1
x1
0
ue2
ua
A+
1
ue1 + ue2 > 0→ x = 1
ue1 + ue2 < 0→ x = 0
Koeffizientenpotentiometer, Verstarker mit einem oder mehreren Eingangen,Multiplizierer, Dividierer, Funktionsgeber, hydride Elemente (Logik, Speicher,Schalter)
48 / 172

3. Analoge Simulation
Programmierung des Analogrechners in 4 Schritten
1 Aufstellen des Koppelplanes
2 Normierung
3 Koeffizientenvergleich
4 Entnormierung
3 Betriebsarten: Anfangswertannahme, Rechnen, Halten
Gegenuberstellung der analogen, digitalen und hybriden Simulation(Analogrechner (AR), Digitalrechner (DR), Hybridrechner (AR steuert DR;Verbindung von AR und DR uber Steuer- und Datenkoppelwerk)
49 / 172

3. Analoge Simulation
Vor- und Nachteile der analogen Simulation im Vergleich zur digitalen Simulation
Vorteile
Berucksichtigung: Wesentliche Elemente dynamischer Systeme habenanalogen Charakter (Prozesse, Messglieder, Umformer)
”Parallelprozessor“-Eigenschaften: Rechengeschwindigkeit der Gesamtaufgabe
identisch mit der der Teilaufgaben an Einzelelementen
AR besitzt um 1 bis 2 Zehnerpotenzen hohere Rechengeschwindigkeit als DR
Interaktivitat
Anschluss von Echtzeitelementen einfach
Digitale Simulatoren haben oft Analogrechner als Vorbild
50 / 172

3. Analoge Simulation
Vor- und Nachteile der analogen Simulation im Vergleich zur digitalen Simulation
Nachteile
Große statische und dynamische Fehler der Rechenelemente
Schaltfehler bei Betriebsartensteuerung (Anfangswertannahme, Rechnen,Halten)
Skalierung immer notwendig
Koppelplanerstellung manuell
Begrenzte Rechenkapazitat
Hoher Preis
Vorteile der digitalen Simulation: umfangreichere Palette und Moglichkeiten
(Programmierbarkeit, Softwareunterstutzung)
51 / 172
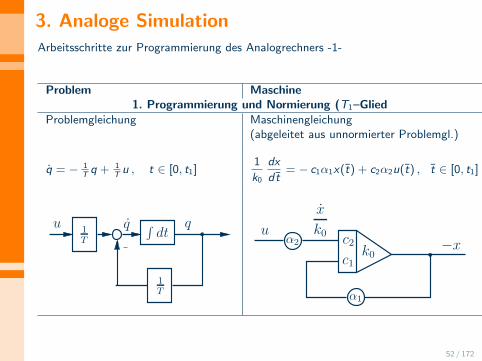
3. Analoge SimulationArbeitsschritte zur Programmierung des Analogrechners -1-
Problem Maschine1. Programmierung und Normierung (T1–Glied )
Problemgleichung Maschinengleichung(abgeleitet aus unnormierter Problemgl.)
q = − 1T
q + 1T
u , t ∈ [0, t1]1
k0
dx
dt= − c1α1x(t) + c2α2u(t) , t ∈ [0, t1]
q∫dt1
T
1T
u q
1
−xu
c1
c2k0
x
k0
α1
α2
1
52 / 172
3. Analoge Simulation
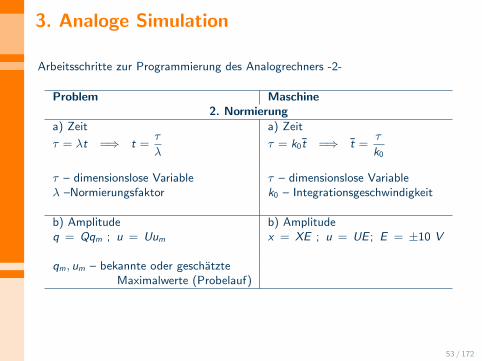
Arbeitsschritte zur Programmierung des Analogrechners -2-
Problem Maschine2. Normierung
a) Zeit a) Zeit
τ = λt =⇒ t =τ
λτ = k0t =⇒ t =
τ
k0
τ – dimensionslose Variable τ – dimensionslose Variableλ –Normierungsfaktor k0 – Integrationsgeschwindigkeit
b) Amplitude b) Amplitudeq = Qqm ; u = Uum x = XE ; u = UE ; E = ±10 V
qm, um – bekannte oder geschatzteMaximalwerte (Probelauf)
53 / 172

3. Analoge Simulation
Arbeitsschritte zur Programmierung des Analogrechners -3-
Problem Maschine2. Normierung
c) Problemgleichung c) Maschinengleichungdq
dt=
dQ
d( τλ
)qm = − 1
TQqm +
1
TUum
1
k0
dx
dt=
1
k0
dX
d( τk0
)E = c1α1XE + c2α2UE
Multiplikation mit
∣∣∣∣ · 1λqm
Multiplikation mit
∣∣∣∣ · 1
E
dQ
dτ= − 1
λTQ +
1
λT
um
qmU (∗) dx
dτ= − c1α1X + c2α2U (∗∗)
54 / 172

3. Analoge Simulation
Arbeitsschritte zur Programmierung des Analogrechners -4-
3. Koeffizientenvergleich (*) mit (**)
c1α1 =1
λT=⇒ α1 =
1
c1λT
c2α2 =1
λT
um
qm=⇒ α2 =
1
c2λT
um
qm
Mit ciλ ist αi ∈ [0, 1] zu sichern!
55 / 172

3. Analoge Simulation
Arbeitsschritte zur Programmierung des Analogrechners -5-
4. Entnormierung
a) Zeit
Es muss sein: λt = k0t =⇒ t =k0
λt
t – problemabhangig festlegenk0
λ– Zeitmaßstab
k0
λ
< 1 Zeitdehnung
k0
λ=
t
t;
t
t< 1 =⇒ t > t
= 1 Echtzeit> 1 Zeitraffung =⇒ t < t
56 / 172

3. Analoge Simulation
Arbeitsschritte zur Programmierung des Analogrechners -6-
b) Amplitude
Es muss sein: Q = X =⇒q
qm=
X
E=⇒ q =
qm
EX
u
um=
U
E=⇒ u =
um
EU
qm
Eist Amplitudenmaßstab
57 / 172
4. Digitale Simulation
Historie
Mitte der 1960-er Jahre zugige Entwicklung blockorientierterSimulationssysteme
Motiv:
insbesondere Regelungstechniker forderten Werkzeuge fur Analyseund Entwurfaußerdem: Entwicklung der zustandsorientierten Simulation zurLosung vornehmlich der Zustandsdgl./-dzgl.
58 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Zerlegung des zu untersuchenden Systems in geeignete Blocke; daraufaufbauend: moglichst problemnahe Notation
Bei blockorientierter Simulation:
Simulationssprache (Metasprache)Translator ubersetzt Metasprache in BasisspracheTypisch: Reihenfolge der Notation der Blocke unabhangig vonderen AbarbeitungSystem von Unterprogrammen (Funktionen, Prozeduren)Beispiele: MATLAB R©/Simulink R©, Scilab, . . .Installation auf Workstations oder PCsDigitalrechner arbeitet seriell (Einprozessormaschine oder inKernen)Zeitachse diskretisiertFunktionswerte werden nacheinander berechnet
59 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Erlauterung der sequentiellen Vorgehensweise bei der digitalen Simulation an einemSystem 1. Ordnung
x = f (x , u) ≈ xk+1 − xk
h= a xk + b uk
k - diskrete Zeit , h - Schrittweite
xk+1 − xk = h (a xk + b uk )
xk+1 = (h a + 1)xk + h b uk
Mult.h b
u(k)Sprung-funktion
Mult.(1 + h a)
Summ.x(k+1) Mult.
c
x(k) y(k)Integrator
60 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Fazit: Enthalt das zu simulierende System Ruckfuhrungen, so sind diezuruckgefuhrten Signale xk+1 noch nicht bekannt, wenn aus ihnen derEingang des Integrators berechnet werden soll. Es steht nur xk zur Verfugung.
Eingang des Integrators kann nur berechnet werden aus (h a + 1)xk undh b uk , nicht aber aus (h a + 1)xk+1.
Losung des Problems:
a) Reales System besitzt Totzeit Tt ; evtl. kann h = Tt gewahltwerden
b) Fehler umso kleiner, je mehr Zeitschritte (Aufwand!)c) Abtastsysteme fehlerfrei simulierbar (t = Tt)d) Iteration der Ruckfuhrung (meist benutzt), d. h. in jedem
Arbeitsschritt wird gesamtes System (einschließlichRuckfuhrungen) so lange iteriert, bis sich am Ausgang stationarerWert einstellt; dann nachster Zeitschritt
61 / 172

4. Digitale Simulation4.1 Blockorientierte SimulationKernstuck der Simulation – Numerische Integration
Allgemein: Numerische Integration zur Berechnung . . .
. . . der Flache unter einerKurve (hier wenig relevant)
Losen des bestimmten Integrals
I =b∫
a
f (t)dt (Naherung → Fehler)
0 0.5 1 1.5 2
0
20
40
60
80
100Flaeche = 7.1132
t
f(t)
a b
. . . eines Zeitverlaufes,z. B. x(t) (relevant!)
Problemstellung bei derUntersuchung dynamischerSysteme
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Zustandsverlauf
t
x(t)
62 / 172

4. Digitale Simulation4.1 Blockorientierte SimulationWiederholung: numerische Berechnung eines bestimmten Integrals
Aufgabenstellung: I =b∫
a
f (t)dt
Newton-Cotes-Formeln, z. B. aquidistant unterteilte Zeitachse
tj = a + j h (j = 0, 1, 2, . . . n) mit h = b−an
fur n = 1: Trapez–Regel:
I1 =h
2(f0 + f1)
fur n = 2: Simpson–Regel (Keplersche Fass–Regel):
I2 =h
3(f0 + 4 f1 + f2)
bei hinreichend glattem Funktionsverlauf arbeitet Simpson–Regelsehr genaufur n = 3: 3
8 –Regel:
I3 =3
8h (f0 + 3 f1 + 3 f2 + f3)
63 / 172

4. Digitale Simulation4.1 Blockorientierte SimulationProblemstellung bei dynamischen Systemen: Schwerpunkt im Rahmen derVeranstaltung
”Simulation“!
- Andere Aufgabenstellung im Vergleich zu vorheriger Folie -
Gegeben: Systembeschreibung x(t) = f (x, u, t) (Dgl. n–ter Ordnung bzw. n
Dgln. 1. Ordnung), p Zeitfunktionen ui (t), u = (u1 u2 . . . up)T , nAnfangswerte xi (t0)
Gesucht: (Numerische) Losung x(t) = g(t, t0, x0) (Approximation)
64 / 172

4. Digitale Simulation4.1 Blockorientierte SimulationRichtungsfeld → Losung x(t) = g(t, t0, x0)
t0 t1
x0
x1
t
x(t)
∂ x / ∂ t = f(x1,t
1)
Voraussetzungen:
Falls f (x, t) stetig ∀x ∈ X , dann geht durch (t0, x0) mindestens eineLosungskurve
Falls f (x, t) die Lipschitz-Bedingung |fk+1 − fk | ≤ K · |xk+1 − xk |, K > 0, Kkonst. ∀x ∈ X erfullt, geht durch den Punkt (t0, x0) genau eine Losungskurve
Praktisch erfullt, wenn ∂f∂x ≤ K , ∀x ∈ X
65 / 172
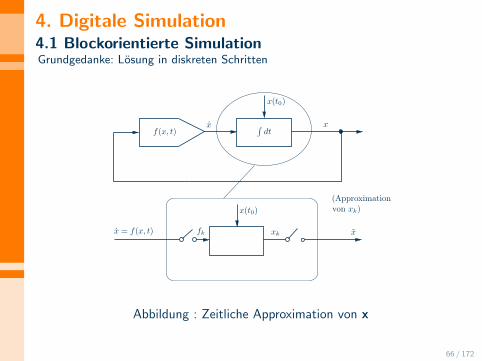
4. Digitale Simulation4.1 Blockorientierte SimulationGrundgedanke: Losung in diskreten Schritten
x(t0)
f(x, t)
fkx = f(x, t)
(Approximation
∫dt
x x
von xk)
x
x(t0)
xk
1
Abbildung : Zeitliche Approximation von x
66 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Zeitliche Diskretisierung:
Aquidistant (zunachst betrachtet)Nicht aquidistantDurch Kollokation (Zeitdiskretisierung und Werteberechnungdurch Polynomapproximation)
Aufstellen einer numerischen Integrationsformel (Formel furZuwachs/Anderung von x)
Schreibweise: xk = x(tk ), xk+1 = x(tk+1) = x(tk + h)
Naherung durch Taylorreihe, Abbruchfehler:
x(tk + h) ≈ x(tk ) + ∆x
= x(tk ) +dx(t)
dt
∣∣∣∣∣t=tk
·h +1
2!
d2x(t)
dt2
∣∣∣∣∣t=tk
·h2 + . . .
Methode p-ter Ordnung, wenn die mit ihr berechnete Losung bis zum p-tenGlied mit der Taylorreihe ubereinstimmt
67 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Abbruch der Taylorreihenach dem linearen Termliefert folgendeRekursionsformel(EULER-Verfahren):
xk+1 = xk + xk · h = xk + fk · h
Fehler:
εk+1 = |xk+1 − xk+1| =
∣∣∣∣xkh2
2!+ . . .
∣∣∣∣≈ |xk |
h2
2!=
1
2
∣∣∣fk
∣∣∣ h2 = O(h2)
Der Fehler ist von derOrdnung h2.
hopt
Schrittweite h
Fehl
er
Diskretisierungsfehler
Rundungsfehler
Gesamtfehler
Abbildung : Fehlerarten
68 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Wahl der Schrittweite h
h orientiert sich an der kleinsten Zeitkonstante Tmin des Systems;Empfehlung: h = Tmin
10. . . Tmin
4
Numerische Stabilitat
nicht: Systemstabilitat
limt→∞
x(t) = xs , ∀x(t0) = x0
sondern: numerische Stabilitat
Definition:
∣∣∣∣∣δxk+1
δxk
∣∣∣∣∣ ≤ 1 ∀k
69 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Beispiel:
x = −a x , x(0) = x0, a =1
T, t ≥ 0
x(t) = e−at , stabil fur a > 0
Stabilitat des EULER–Verfahrens:
xk+1 = xk + h fk = xk + h xk
xk+1 = xk − h a xk = xk (1− h a)
xk+1 = xk − h a xk = xk (1− h a)
δxk = xk − xk
δxk+1
δxk= 1− h a∣∣∣∣∣δxk+1
δxk
∣∣∣∣∣ = |1− h a| ≤ 1, → 0 ≤ h a ≤ 2
System stabil fur a > 0 und Verfahren numerisch stabil fur:
h ≤ 2
a= 2T (Einfluss der Schrittweite!)
70 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Weitere Verfahren
Trapez-Verfahren (Funktionswerte bei k = 0, 1, . . . k − 1 gegeben)
xk+1 = xk +h
2(fk+1 + fk )
Adams-Bashfort-V. (ahnlich EULER-V., aber gewichtetes Mittel bzgl. fk ,fk−1)
xk+1 = xk +h
2(3fk − fk−1)
Runge-Kutta-Verfahren approximieren Taylorreihenentwicklung
Runge-Kutta-V. 2. Ordnung (p = 2, HEUN-V., verbessertesEULER-V.); verbesserte Vorhersage (Pradiktion (P)) durchEULER-Schritt; Nutzung linearer Naherung, so dass bei xk+ 1
2auch
fk
2 gilt
xPk+ 1
2= xk +
h
2f (xk , uk )
xk+1 = xk + h · f (xPk+ 1
2, uk+ 1
2)
71 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
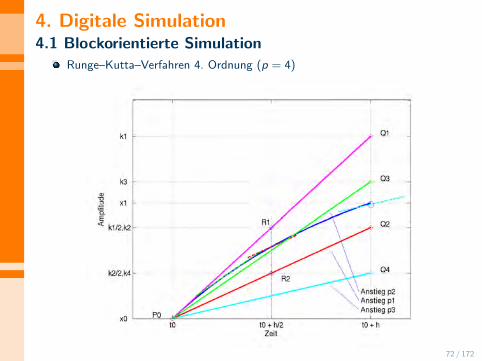
Runge–Kutta–Verfahren 4. Ordnung (p = 4)
72 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Erlauterungen zum Runge-Kutta-Verfahren 4. Ordnung
1. x(t) in P0(x0, t0) durch Tangente genahert;bei t0 + h ist k1 eine erste Naherung (Q1);x ≈ ∆x/h:
∆x ≈ k1 = h · tanα = hx = hf (x0, t0)
h = ti+1 − ti .
Bei R1(x0 + k12, t0 + h
2) gilt naherungsweise der
Anstieg p1 (siehe Verlauf x(t))
p1 = f (x0 + k12, t0 + h
2) .
2. Gerade P0Q2 mit p1 liefert
∆x ≈ k2 = hf (x0 + k12, t0 + h
2) .
3. Auf Gerade P0Q2 entsteht bei t0 + h2
R2(x0 + k22, t0 + h
2) mit p2 = f (x0 + k2
2, t0 + h
2) .
73 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
4. Gerade P0Q3 mit p2 liefert
∆x ≈ k3 = hf (x0 + k22, t0 + h
2) .
5. Die in R3(x0 + k3, t0 + h) vorgeschriebene Richtung p3
fuhrt zu P0Q4 und damit bei Q4 zu
∆x ≈ k4 = hf (x0 + k3, t0 + h) .
6. Aus k1 · · · k4 wird gewogenes Mittel gebildet∆x = 1
6(k1 + 2k2 + 2k3 + k4),
womit x(t0 + h) = x(t0) + ∆x zu berechnen ist.
Tabelle : Arbeitsschritte des Runge–Kutta-Verfahrens 4. Ordnung (sieheauch vorhergehende Abb.)
74 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Charakterisierung der Integrationsverfahren
explizite/implizite (bzw. offene/geschlossene),
Einschritt-/Mehrschritt-,
Pradiktor-/Korrektor-,
rekursive/iterative Verfahren
explizit (offen) implizit (geschlossen)
EULER–Verfahren (-vorwarts) EULER-V. (-ruckwarts)- Vorwartsdifferenzenapproximation - - Ruckwartsdifferenzenapproximation -xk+1 = f (xk , xk ) xk+1 = f (xk+1, xk+1, uk+1)
(nur losbar mit Iterationsverfahren,z.B. Sukzessive Approximation)
xk+1 = xk + h xk xk+1 = xk + h xk+1
Trapez–Verfahrenxk+1 = xk + h
2(xk+1 + xk )
75 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Charakterisierung der Integrationsverfahren - Fortsetzung
explizit (offen) implizit (geschlossen)
Runge-Kutta-V. 4. Ordnung Heun-V. (verbessertes EULER-V.)xk+1 = xk + h
6(k1 + 2k2 + 2k3 + k4)
k1 = f (xk , uk )k2 = f (xk + h
2k1, uk+ 1
2)
k3 = f (xk + h2
k2, uk+ 12)
k4 = f (xk + h k3, uk+1)
xk+1 = f (xk+1, uk+1)≈ f (xk + h xk , uk+1)
Vorhersage:xk = f (xk , uk )
2 Pradiktorschritte:xP
k+1 = xk + h xk
xPk+1 = f (xP
k+1, uk+1)Korrektorschritt:
xk+1 = xk + h2
(xPk+1 + xk )
Einschritt-V. Mehrschritt-V.
alle Argumente aus [tk , tk+1], Verwendung zeitlich weiter zuruck-max. einen Zeitschritt
”alt“ liegender Stutzwerte
in [tk−m, tk−m+1, . . . tk , tk+1]
Mittelpunktregel:xk+1−xk−1
2h≈ xk
76 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Schrittweitensteuerung
bisher: feste Integrationsschrittweite
Schrittweitensteuerung (nicht aquidistante zeitliche Diskretisierung)
h xIntegrations-algorithmus
Schrittweiten-steuerung
abschatzungFehler-
κsoll
κist
1
hneu = haltκsoll
κist
77 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
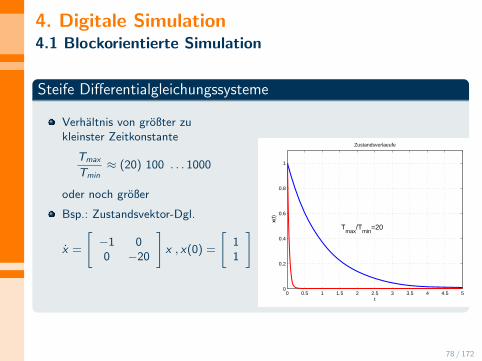
Steife Differentialgleichungssysteme
Verhaltnis von großter zukleinster Zeitkonstante
Tmax
Tmin≈ (20) 100 . . . 1000
oder noch großer
Bsp.: Zustandsvektor-Dgl.
x =
[−1 00 −20
]x , x(0) =
[11
]
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
Zustandsverlaeufe
t
x(t)
Tmax
/Tmin
=20
78 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Numerische Stabilitat am vorangegangenen Beispiel
EULER–vorwarts: h1 < 0.1 , h2 < 2
EULER–ruckwarts: stabil ∀h
→ Verwendung impliziter Verfahren (z.B. Heun-Gear-Verfahren);
”Problem“: Anlauf, Pradiktion
Integration bei unstetiger rechter Seite der Dgl.
z.B. Sprungsignal, Begrenzung, unstetige Regler
→ Einschrittverfahren mit automatischer Schrittweitensteuerung (h wird sogewahlt, dass Unstetigkeit an der Intervallgrenze tk , tk+1 , . . . liegt)
79 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Integration von differential-algebraischen Systemen(DAE-Systemen)
Sehr hohe Steifigkeit: DAE-System
DAE-System: algebraische Schleife
Verfahren mit Ruckwarts-Differenzen-Formeln (engl.: backward differentiationformulas (BDF)), d. h. implizite Mehrschritt-Verfahren oderKollokationsverfahren
80 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
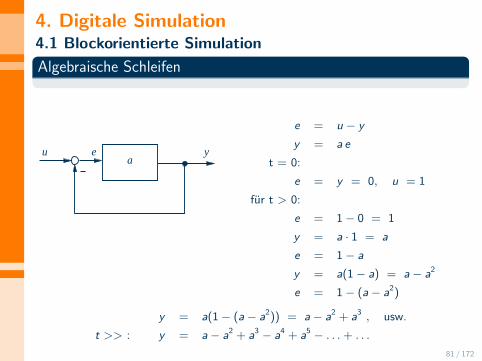
Algebraische Schleifen
ua
ye
1
e = u − y
y = a e
t = 0:
e = y = 0, u = 1
fur t > 0:
e = 1− 0 = 1
y = a · 1 = a
e = 1− a
y = a(1− a) = a− a2
e = 1− (a− a2)
y = a(1− (a− a2)) = a− a2 + a3 , usw.
t >> : y = a− a2 + a3 − a4 + a5 − . . .+ . . .
81 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Algebraische Schleifen - Fortsetzung
Konvergenz: nur fur −1 < a < 1
y =a
1 + a
Ausweg: zeitdiskrete Realisierung
e(k) = u(k)− y(k − 1)
y(k) = a e(k)
Algebraische Schleifen konnen, wenn sie nicht entdeckt werden, zuInstabilitaten bei einem stabilen Modell fuhren.
Auswege beim Auftreten von algebraischen Schleifen:
Vermeiden (so weit wie moglich; nicht immer moglich)Schleifenverstarkung < 1: Tt (Modellveranderung; akzeptabel)Iterative Losung
82 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Algebraische Schleifen - Fortsetzung
Im Allgemeinen fuhrt Auftreten von algebraischen Schleifen (neben anderenSystemeigenschaften) zu einem DAE-System:
x(t) = f (x, u, t)
0 = g(x, u, t)
Losung mittels BDF- oder Kollokationsverfahren
Stationare Punkte
Bestimmung der Ruhelage/des Gleichgewichtszustandes
x(t) = f (x, u, t), x(0) = x0
Losung der algebraischen Gleichung (Nullstellenbestimmung)
0 = f (xs , u), u = us = const.,Anfangswert: x0S = x0
Losungsverfahren (z.B. Newton–Raphson–Verfahren, Picard–Verfahren)
83 / 172
4. Digitale Simulation4.1 Blockorientierte Simulation
Empfehlungen zum Einsatz numerischer Integrationsverfahren
1. Versuch: Runge-Kutta-V. 4./5. Ordnung mit Schrittweitensteuerung(Dormand-Prince-V., explizites Einschritt-V.)
Bei geringen Genauigkeitsanforderungen: Runge-Kutta-V. 2./3. Ordnung(Bogacki-Shampine-V., explizites Einschrittverfahren; auch geeignet beimoderater Steifigkeit)
Bei hoheren Genauigkeitsanforderungen: Adams-Bashfort-Moulton-V.(explizites Mehrschrittverfahren)
Fur steife Differentialgleichungssysteme:
Gear-V. bzw. Heun-Gear-V. variabler Ordnung (implizitesMehrschrittverfahren; benutzt numerische(Ruckwarts-)Differenzen)implizites Runge-Kutta-V. 2. Ordnung (implizitesEinschrittverfahren; benutzt Trapezregel und Ruckwartsdifferenz)
Fur DAE-Systeme: BDF- oder Kollokationsverfahren
84 / 172

4. Digitale Simulation4.1 Blockorientierte Simulation
Numerische Differentiation - Pendant zur Integration
Aufbauend auf Newtonschen Interpolationspolynom:
dx
dt
∣∣∣∣∣t=tk
=xk − xk−1
hSchrittweite h = tk − tk−1
Genauere Ergebnisse liefern Ausdrucke, die symmetrisch zu tk liegen, z.B.:
dx
dt
∣∣∣∣∣t=tk
=xk+1 − xk−1
2h
oder fur die 2. Ableitung
d2x
dt2
∣∣∣∣∣t=tk
=1
h2(xk+1 − 2xk + xk−1)
85 / 172
4. Digitale Simulation4.2 Zustandsorientierte Simulation
Leistungsfahige Modellierungsmethoden + Fortschritte in der Rechentechnik→ verbesserte Anwendbarkeit von Methoden zum optimalen Systementwurf(optimale Steuerung, adaptive on–line Steuerung)
Bei diesen Problemstellungen:
Objektsimulation ist kleiner TeilNicht zweckmaßig: Anwendung von SimulationssystemenBesser: numerische Integration von Differentialgleichungssystemenoder Auswertung der Bewegungsgleichung fur lineare bzw.quasi–lineare Systeme
Zur Erinnerung: Zustandsbeschreibung:
x(t) = A x(t) + B u(t)
y(t) = C x(t) + D u(t)
Bei zeitvarianten Systemen sind die Systemmatrizen zeitabhangig,z.B. A = A(t) .
86 / 172
4. Digitale Simulation4.2 Zustandsorientierte Simulation
Allgemeine Losung der Zustands-Dgl.:
x(t) = ΦΦΦ(t)x(0) +
t∫0
ΦΦΦ(t − τ)Bu(τ)dτ
ΦΦΦ(t) = eAt
Numerische Losung der Zustands-Dgl. mittels numerischer Integration undrekursiver Beziehung xk+1 = f (xk )
Weiterfuhrende Literatur, z.B. Ludyk [19] oder Reinisch [22]
87 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Objektorientierte Modellierung: Verallgemeinerung der blockorientiertenModellierung
Geeignet fur multidisziplinare Systemmodellierung und -simulation(Simulationssysteme oft auf Fachgebiete zugeschnitten; Modellierung vonKomponenten oder Disziplinen anderer Fachgebiete nicht oder nur ineingeschranktem Maße moglich)
Praxisanwendungen: Automobilindustrie, Luft- und Raumfahrt, Robotik,Thermodynamik (Gase, Flussigkeiten), Klimatisierung, Kraftwerke, Mechanik(Mehrkorpersysteme), Optik, Abwasserreinigung, . . .
Bisher: meist blockorientierte (kausale) Modellierung vorherrschend
88 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Kausale Modellierung - Vorteile/Nutzlichkeit
Systemverstandnis (Pole, Nullstellen, Ubertragungsfunktion, -verhalten,lineares/nichtlineares/linearisiertes System, . . .
Beschreibung der Steuerungs-/Regelungsstruktur
Kausale Modellierung - Nachteile
Aufwandig zu erzeugen/umzuformen; manuelle Ableitung aus Zustands- undErhaltungsgleichungen; fehlertrachtig
Weniger gut wiederverwendbar
Schwierigkeiten bei komplexen Systemen, konsistente Anfangsbedinungenherzustellen (bei differential-algebraischen Gleichungssystemen(DAE-Systemen))
89 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Kausale Modellierung - Nachteile (Fortsetzung)
A priori (Im Vorhinein): Was ist bekannt (Eingang), was ist unbekannt(Ausgang)?
Annahmen uber Kausalitat auf Komponentenebene (nicht: Gesamtsystem)
Robustheit, Wartung: Modellparameter”verteilt“ (nicht im Sinne von
Systemen mit verteilten Parametern, sondern im Sinne”verstreut“ im
gesamten Modell (Signalflussbild))
Diagramm beinhaltet nicht genugend Informationen, umAnfangsbedingungen zu berechnen
90 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Akausale Modellierung (physikalisch, objektorientiert) - Merkmale
Beschreibung eines Systems/einer Komponente anhand von Zustands- undErhaltungsgleichungen (i. d. R. Kombination; −→ DAE-System);physikalische Gesetzmaßgikeiten
Keine explizite Festlegung uber Ein- und Ausgang
Zwei Arten von Variablen: Potenzial- und Flussvariablen; (Potenzialvariablen:Triebkrafte); Einheit des Produkts von Fluss- und Potenzialvariablentypischerweise Einheit der Leistung
Objektdiagramm: hierarchischer Aufbau, Verallgemeinerung desBlockschaltbilds
Beispiele (s. auch nachste beide Folien):
Block- und objektorientierte Modellierung eines elektrischenNetzwerks (Blockschaltbild, Objektdiagramm)Objektdiagramm eines AntriebsstrangsObjektdiagramm eines Motors
91 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Blockorientierte vs. physikalische objektorientierte Modellierung
Blockorientiert (Ursache → Wirkung, Ein-/Ausgang, kausal)
Objektorientiert (physikalisch, akausal)
92 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Verbindungen
Signalflusse
Starre mechanische
Regler Getriebe LastMotor
1
Abbildung : Objektdiagramm eines Antriebsstrangs
93 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
richterStrom-
Motor-tragheit
Strom
EMK
Drehzahl
FlanschMechanischer
R L
1
Abbildung : Objektdiagramm eines Motors
Bestandteile des Objektdiagramms
Grafische Darstellung der physikalischen Komponenten
Schnittstellen, mit denen die Komponente mit anderen Bauteilen verbundenwerden kann
94 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Bestandteile des Objektdiagramms (Fortsetzung)
Gerichtete oder ungerichtete Verbindungslinien (elektrische, hydraulischeLeitungen, mechanisch starre Verbindungen, aber auch Signalflusse)
Komponenten werden unabhangig von Umgebung definiert (lokale undSchnittstellenvariablen)
Komponente ist hierarchisch aufgebaut oder durch algebraische bzw. Dgln.beschrieben
Arten von Verbindungsgleichungen zwischen Komponenten
Verbundene Variablen haben denselben Wert: Potenzialvariablen, Bsp.:Spannung, Weg, Geschwindigkeit, Druck
Die Summe der verbundenen Variablen verschwindet: Flussvariablen, Bsp.:Strom, Kraft, Moment, Volumen–, Massenstrom; an allen Elementen gleichepositive Flussrichtung, z.B. in Element hinein
95 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Beispiele fur elektrische Einzelkomponenten (Objektdiagramm undBeschreibungsgleichungen)
Widerstand
v1 v2
i2i1
u
R+
1
0 = i1 + i2
u = v1 − v2
u = R i1
Kapazitat
v1 v2
i2i1 C
u
+
1
0 = i1 + i2
u = v1 − v2
i1 = C u
Elektrische Zweipole haben Gemeinsamkeiten (Stromsumme = Null,Spannung = Potentialdifferenz) ⇒ Definition einer (noch nicht vollstandigen)Klasse (eines Teil-Modells) Zweipol
96 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Beispiele fur elektrische Einzelkomponenten (Objektdiagramm undBeschreibungsgleichungen) - Fortsetzung
Induktivitat
v1 v2
i2i1
u
L+
1
0 = i1 + i2
u = v1 − v2
u1 = Ldi1dt
Spannungsquelle
∼v2
i2i1
v1
u
u(t)
+
1
0 = i1 + i2
u = v1 − v2
u = A sinωt
97 / 172
4. Digitale Simulation4.3 Objektorientierte Simulation
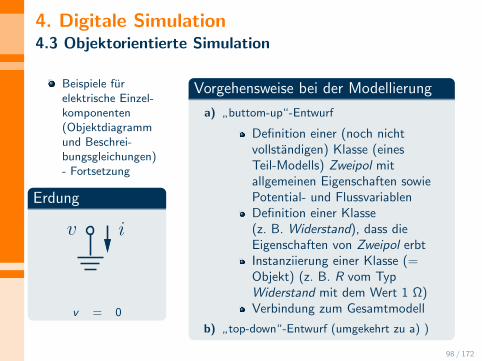
Beispiele furelektrische Einzel-komponenten(Objektdiagrammund Beschrei-bungsgleichungen)- Fortsetzung
Erdung
v i
1
v = 0
Vorgehensweise bei der Modellierung
a)”buttom-up“-Entwurf
Definition einer (noch nichtvollstandigen) Klasse (einesTeil-Modells) Zweipol mitallgemeinen Eigenschaften sowiePotential- und FlussvariablenDefinition einer Klasse(z. B. Widerstand), dass dieEigenschaften von Zweipol erbtInstanziierung einer Klasse (=Objekt) (z. B. R vom TypWiderstand mit dem Wert 1 Ω)Verbindung zum Gesamtmodell
b)”top-down“-Entwurf (umgekehrt zu a) )
98 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Zusammenschaltung o. g. Komponenten
ElektrischerSchaltkreis(Objektdiagramm)
u(t)
g
3
1
2
R
C+
+
A
+
∼
1
Anmerkungen
17 Gleichungen, 17 Unbekannte;R.i1 R.i2 R.v1 R.v2 R.uC .i1 C .i2 C .v1 C .v2 C du
dt
A.i1 A.i2 A.v1 A.v2 A.ug .i g .v
1 Zustand (C .u); Beschreibung lauftauf Zustandsbeschreibung hinaus, d.h.x(t) = f (x , u, t); Anfangszustandbekannt, Parameter bekannt
99 / 172

4. Digitale Simulation4.3 Objektorientierte Simulation
Ablauf der objektorientierten Simulation
Modellierungs-system
Objektor.Transformations-Symbolische
algorithmen
numerischeUbliche
Integrations-verfahren
Losung
diagramm
Zustands-Objekt-
form
besetzteMatrizen)
DAEs
(groß,schwach
1
100 / 172
4. Digitale Simulation4.3 Objektorientierte Simulation
Anmerkungen
Manuelle Umformung aufwandig (nach der interessierendenZustandsableitung); → Algorithmen sortieren DAEs (rekursiveBerechnungsvorschrift, nicht vereinfacht; symbolische Verarbeitung)
Vorgehen systematisch und einfach
Rechnerunterstutzung unabdingbar
Seit den 1990-er Jahren: Entwicklung von Softwaresystemen und Sprachen(unvollstandige Liste: ABACUS, Omola, Dymola R©, Modelica R©,OpenModelica, SimulationX, Wolfram System Modeler R©, MapleSimTM . . . )
Weiterfuhrende Literatur: Otter, et. al. [21], Fritzson [15]
101 / 172

5. Simulationssprachen und -systeme5.1 Ubersicht – kleine Auswahl
Bsp.: Softwarebibliotheken
The Numerical Algorithm Group (NAG) / Kommerzielle numerischeAlgorithmen / nag.co.uk
Netlib / Freie mathematische Software (Numerik, wissenschaftlichesRechnen) / netlib.org
Bsp.: Simulationssysteme mit grafischer Oberflache
LabVIEW / Grafische Programmierumgebung (Messdatenerfassung und-verarbeitung, Messgeratesteuerung, eingebettete Systeme, Steuerung,Regelung, . . .) / ni.com/labview/d/
102 / 172

5.1 Ubersicht – kleine Auswahl
Bsp.: Integrierte Systeme (Modellierungssprache undSimulationsumgebung)
OpenModelica, Dymola / Objektorientiert; Modellbildung und Simulation /openmodelica.org, http://www.3ds.com/products-services/catia/products/dymola
MATHMODELICA / Objektorientiert; Modellbildung und Simulation /http://www.mathcore.com/products/mathmodelica/
MATLAB R©/Simulink R© / MATLAB R©: fuhrende Sprache furwiss.-techn. Berechnungen, Steuerungsentwurf, . . . ; Modellierung,Simulation, Analyse dynamischer Systeme, usw. / mathworks.com
GNU Octave / Freie Software; numerische Berechnungen, . . .; uberwiegendMATLAB R©-kompatibel / octave.org
Scilab / Freie Software; numerische Berechnungen, ahnlich MATLAB R© . . . /scilab.org
Bsp.: Sprachen
MATLAB R© / Hochsprache fur wiss.-techn. Berechnungen / mathworks.com
Modelica R© / Freie Software; Objektorientierte Sprache / modelica.org
103 / 172

5.1 Ubersicht – kleine Auswahl
Bsp.: Simulation industrieller Prozesse
gPROMS / Modellierung, Simulation und Optimierung kont. dyn. Systeme;Simulator einzubetten in Kundenanwendungen /http://psenterprise.com/gproms.html
WITNESS / Modellierung, Simulation und Optimierung derArbeitsumgebung einschl. Geschaftsprozesse / lanner.com/en/witness.cfm
Bsp.: Web-basierte und verteilte Simulation
RT-LAB / Echzeit-Modellierungs- und Steuerungswerkzeug (HiL) /opal-rt.com
JSIM / Java-basiert; Schwerpunkt: Physiologie, Biomedizin /http://www.physiome.org/jsim/
104 / 172

5.1 Ubersicht – kleine Auswahl
Bsp.: Sonstige
Hybride Systeme
Netzwerke
Anwendungsspezifische Systeme (Welt, Umwelt, Wirtschaft, Produktion,CAD, Ressourcen, u.v.a.m.)
Ubersicht
en.wikipedia.org/wiki/List_of_computer_simulation_software
105 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.1 Einleitung
MATLAB R©: Hochsprache fur wissenschaftlich-technische Berechnungen
(Berechnungen, Visualisierung, Programmierung) in leicht handhabbarer
Umgebung
Mathematisch-numerische Berechnungen (auch symbolische)Modellierung, Simulation, Prototyping, Algorithmen, . . .Datenanalyse, -auswertung und -visualisierungWissenschaftlich-technische grafische DarstellungenAnwenderprogrammentwicklung (einschl. grafischesBenutzerinterface)Physikalische objekt-orientierte Modellierung
Simulink R©: Block- (tw. objekt-)orientiertes grafisches Simulationssystem
Fachgebietsspezifische Toolboxen
Abkurzung MATLAB R©: matrix laboratory
Grundlegendes Datenelement: Feld (array, matrix)Interaktiv (Kommando–Interpreter)Ursprungliche Entwicklung: leichter Zugang zu LINPACK undEISPACK (zwei Bibliotheken,
”state-of-the-art“ der
Matrizenrechnung) und grafische Veranschaulichung106 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung
Uberblick (Quelle: www.de.mathworks.com/products)
107 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.1 Einleitung
Entwicklung von MATLAB R© im Verlaufe der Zeit: Toolboxen,Objektorientierung (Klassendefinitionen, . . .)
Verfugbarkeit: PCs und Workstations, verschiedene Betriebssysteme(WINDOWS, Unix, Linux, . . .), TU Ilmenau: im Uni-Rechnernetz (ThuringerLandeslizenz der Unis; zeitparallele Zugriffe)
Kommerzielles Produkt; Studentenversion (82,00 e)(https://www.academic-center.de/cgi-bin/program/S1672) mit(kleinen) Einschrankungen (MATLAB R©, Simulink R© (1000 Blocke), 12Toolboxen; auch: Prototyping, Test auf Arduino, LEGO MINDSTORMSNXT, Raspberry Pi)
Informationen
http://www.mathworks.com
http://www.mathworks.de
Literaturliste (Bibliothek), Copy-Shop, Internet
Alternativen zu MATLAB R©:
Scilab/Xcos unter Linux, Windows, usw. (Freie, quelloffeneSoftware, GPL-kompatibel), https://www.scilab.orgGNU Octave unter Linux, Windows, usw. (Freie, quelloffeneSoftware), https://www.gnu.org/software/octave 108 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.2 Arbeitsumgebung
Kommando-, Workspace-, Verzeichnis-, Historiefenster
Reiter Home, Plots, Apps
Kommandomanipulation; -folgen in ASCII-Skript-Dateien; (*.m)
Hilfe, Informationen, Ubersichten, usw.
Befehl Erlauterung
demo Beispiele
doc schlusselwort Hypertext-Dokumentation (auch PDF-Format)
help, help help,help fcn | m-file | thema Textuelle Online-Hilfe
exist Test, ob Variable oder Funktione definiert
type Auflisten vom M-Files
edit Editieren von M-Files
109 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.2 Arbeitsumgebung
Wichtige”Betriebssystemkommandos“
cd Verzeichniswechsel
pwd Ausgabe des gegenwartigen Arbeitsverzeichnisses
ls, dir Inhaltsverzeichnis
delete Loschen von Dateien
!befehl Betriebssystemskommandos ((WIN)DO(W)S, LINUX, . . .)
Sonstiges
format Zahlenformat (short, long, e, g, bank, . . .)
; / ... Ausgabeunterdruckung/Kommandofortsetzung
Workspace:who, whos Info zu Variablen (Kurz-, Langform); s. auch Workspace
clear Loschen von Variablen oder Funktionen
save, load Speichern bzw. Laden von Variablen in bzw.
von Datei mit angebbarem Format (-mat, -ascii, u.a.)
diary Tagebuchfunktion, d. h. Speichern aller Kommandos undErgebnisausgaben des Kommandofensters in einer Datei
110 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.3 MATLAB R©-Kommandosprache
Variable und Datentypen
Variable: erste 31 Zeichen signifikant; Buchstaben, Ziffern, ; beginnend mitBuchstaben; keine explizite Vereinbarung; Speicherung im Workspace(Arbeitsspeicher)
Spezielle Variable und Variablenwerte
Variable Erlauterung
ans Antwortvariable, wenn das Ergebnis keiner Variablenzugewiesen wurde
eps Relative Genauigkeit
realmax, realmin Großte bzw. kleinste darstellbare Gleitkommazahl
pi π = 3.1415926 . . .
i,j Imaginare Einheit
inf Unendlich (∞)
NaN”not a number“ , Ergebnis eines unbestimmten
Ausdruckes, z. B. 00
111 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.3 MATLAB R©-Kommandosprache
Datentypen (Klassen) – eine Auswahl
Datentyp Erlauterung
double Vektoren, Matrizen, 3D-Felder;Elemente reelle oder komplexe Zahlen; voll besetzt;Indizierung bei 3-D-F.: (Zeile, Spalte, Seite)
sparse Schwach besetzte Matrizen (sparse matrices)
char Zeichenketten(-felder)
cell Mehrdimensionale”Zellenfelder“; Zellen: Elemente
unterschiedlicher Datentypen, auch Strukturen
struct Elemente unterschiedlicher Datentypen
einer Variablen zusammengefaßt
int8, ..., int64, Vorzeichenbehaftete unduint16, ..., uint64, . . . vorzeichenlose ganze Zahlenfelder
logical Boolesche Felder
. . . . . .
112 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.3 MATLAB R©-KommandospracheZahlen, Zeichen(ketten)
Vorzeichenbehaftete reelle oder komplexe Zahlen in Festkomma- oder inwissenschaftlicher Darstellung (Mantisse, Exponent):
Bsp.: 3 9.6 -.99 1e3 -5.34e-4 -3.14j 1i 3-4i
Zeichen(ketten) in Hochkomma eingeschlossen, Bsp. ’xyz’ ,’er hat’’s’
Operatoren (doc ops)
Arithmetische, Vergleichs–, logische, bitweise, Mengen- und spezielleOperatoren
Funktionen (doc elfun)
Mathematische Funktionen (Winkelfunktionen, Exponentialfunktion,Logarithmen, Wurzel, Rundung, Teiler, Rest, Komplexe Zahlen, ...) (docelfun) u.v.a., z.B. Umwandlung von Datentypen (Zeichenketten,numerisch), Zeichenkettenmanipulation
Ausdrucke
Ausdrucke werden aus Variablen, Zahlen, Zeichenketten, Operatoren undFunktionen gebildet.
113 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.3 MATLAB R©-Kommandosprache
Ein-/Ausgabe
save Speicherung aller Workspace-Variablenin einer binaren oder ASCII-Datei
Bsp.:save fname Speicherung der Datei fname.matsave matlab.mat
save fname X,Y,Z fname.mat; Inhalt: X, Y und Zsave fname -ascii fname.mat im ASCII-Format
load Laden von Variablen aus einer binarenoder ASCII-Datei in den Workspace
Bsp.:load fname Laden aus dem binaren MAT-File fname.matload dto. matlab.matload test.dat Laden aus der ASCII-Datei test.dat bzw.(oder load test -ascii) test; Abspeichern in Variable/Matrix test
114 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.3 MATLAB R©-Kommandosprache
Ein-/Ausgabe (Fortsetzung)
input Tastatureingabe durch NutzerBsp.: n=input(’Wieviele Messwerte ?’);
Eingabe: MATLAB R©-AusdruckBsp.: Name=input(’Wie ist Ihr Name? : ’,’s’);
Eingabe: Zeichenkette; wird nicht ausgewertet
fopen, fclose,fread, fwrite,fscanf, fprintf . . .
”low–level“-E/A-Kommandos
print Ausgabe von Grafiken auf Drucker, Plotter oder inDatei; Formate (PS, EPS, JPG, PNG, TIF, HPGL,druckerspezifisch); Zusammenwirken mit GhostScript
plot(x,y) Grafik mit linearer Achseneinteilung, y = f (x)
Weitere Kommandos zur grafischen Darstellung: siehe Visualisierung
Weitere Sprachelemente: siehe M-File-Programmierung
115 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Matrizen, Teilmatrizen (doc elmat)
Matrix A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
=
1 2 34 5 67 8 6
A=[1 2 3;4 5 6;7 8 6]
Teilmatrix B =
[a11 a12
a21 a22
]B=A(1:2,1:2)
Generierung von Matrizen
Funktion Erlauterung
zeros, ones, eye Null-, Eins-, Einheitsmatrizen
rand, randn zufallig belegte Matrizen (Gleich-, Normalverteilung)
linspace, logspace Vektor mit aquidistanter/logarithmischer Teilung
diag Diagonalmatrizen/Diagonalen
116 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Matrizenoperationen
Operator Erlauterung
’ Transposition
+, - Addition, Subtraktion
* Matrizenmultiplikation
.* Elementweise Multiplikation
\, /, ./ Links-, Rechts- und elementweise Division
ˆ, .ˆ Potenzierung, elementweise Potenzierung
117 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
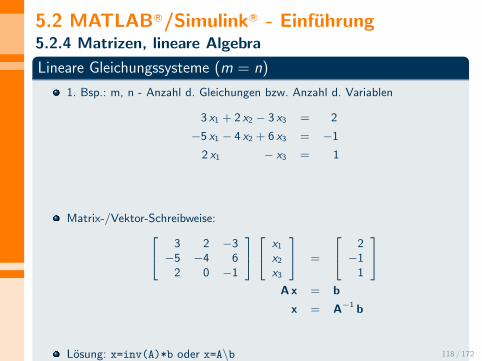
Lineare Gleichungssysteme (m = n)
1. Bsp.: m, n - Anzahl d. Gleichungen bzw. Anzahl d. Variablen
3 x1 + 2 x2 − 3 x3 = 2
−5 x1 − 4 x2 + 6 x3 = −1
2 x1 − x3 = 1
Matrix-/Vektor-Schreibweise: 3 2 −3−5 −4 6
2 0 −1
x1
x2
x3
=
2−1
1
A x = b
x = A−1 b
Losung: x=inv(A)*b oder x=A\b
118 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (m = n)
1. Bsp.: m, n - Anzahl d. Gleichungen bzw. Anzahl d. Variablen
3 x1 + 2 x2 − 3 x3 = 2
−5 x1 − 4 x2 + 6 x3 = −1
2 x1 − x3 = 1
Matrix-/Vektor-Schreibweise: 3 2 −3−5 −4 6
2 0 −1
x1
x2
x3
=
2−1
1
A x = b
x = A−1 b
Losung: x=inv(A)*b oder x=A\b
118 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (m = n)
1. Bsp.: m, n - Anzahl d. Gleichungen bzw. Anzahl d. Variablen
3 x1 + 2 x2 − 3 x3 = 2
−5 x1 − 4 x2 + 6 x3 = −1
2 x1 − x3 = 1
Matrix-/Vektor-Schreibweise: 3 2 −3−5 −4 6
2 0 −1
x1
x2
x3
=
2−1
1
A x = b
x = A−1 b
Losung: x=inv(A)*b oder x=A\b 118 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
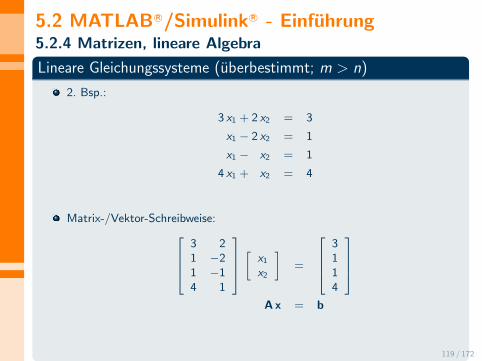
Lineare Gleichungssysteme (uberbestimmt; m > n)
2. Bsp.:
3 x1 + 2 x2 = 3
x1 − 2 x2 = 1
x1 − x2 = 1
4 x1 + x2 = 4
Matrix-/Vektor-Schreibweise:3 21 −21 −14 1
[ x1
x2
]=
3114
A x = b
Losung (i. S. kleinste Fehlerquadrate): hier nur moglich: x=A\b
119 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (uberbestimmt; m > n)
2. Bsp.:
3 x1 + 2 x2 = 3
x1 − 2 x2 = 1
x1 − x2 = 1
4 x1 + x2 = 4
Matrix-/Vektor-Schreibweise:3 21 −21 −14 1
[ x1
x2
]=
3114
A x = b
Losung (i. S. kleinste Fehlerquadrate): hier nur moglich: x=A\b
119 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (uberbestimmt; m > n)
2. Bsp.:
3 x1 + 2 x2 = 3
x1 − 2 x2 = 1
x1 − x2 = 1
4 x1 + x2 = 4
Matrix-/Vektor-Schreibweise:3 21 −21 −14 1
[ x1
x2
]=
3114
A x = b
Losung (i. S. kleinste Fehlerquadrate): hier nur moglich: x=A\b 119 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (unterbestimmt; m < n)
3. Bsp.: keine eindeutige Losung
6 x1 + 8 x2 + 7 x3 + 3 x4 = 7
3 x1 + 5 x2 + 4 x3 + x4 = 8
Losung: siehe MATLAB-Online-Hilfe (Linear Equations/Systems of LinearEquations/Underdetermined Systems (Stichworte: Basislosungen; hochstensm Nicht-Null-Komponenten; Linearkombination; Nullraum-Vektor))
120 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Lineare Gleichungssysteme (unterbestimmt; m < n)
3. Bsp.: keine eindeutige Losung
6 x1 + 8 x2 + 7 x3 + 3 x4 = 7
3 x1 + 5 x2 + 4 x3 + x4 = 8
Losung: siehe MATLAB-Online-Hilfe (Linear Equations/Systems of LinearEquations/Underdetermined Systems (Stichworte: Basislosungen; hochstensm Nicht-Null-Komponenten; Linearkombination; Nullraum-Vektor))
120 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.4 Matrizen, lineare Algebra
Matrizenfunktionen (doc matfun)
Befehl Erlauterung
norm, cond Matrix- oder Vektornorm, Konditionszahl
rank, inv Rang, Inverse einer Matrix
det Determinante einer Matrix
trace Spur einer Matrix (Summe der Diagonalelemente)
chol, lu Cholesky-, LU-Faktorisierung
eig Eigenwerte, -vektoren
poly Koeffizienten des charakteristischen Polynoms
. . .
121 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
- Anfangswertprobleme -
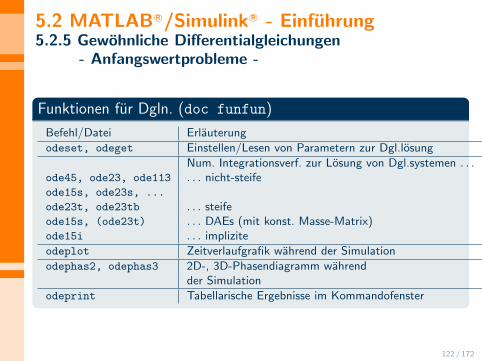
Funktionen fur Dgln. (doc funfun)
Befehl/Datei Erlauterung
odeset, odeget Einstellen/Lesen von Parametern zur Dgl.losung
Num. Integrationsverf. zur Losung von Dgl.systemen . . .ode45, ode23, ode113 . . . nicht-steifeode15s, ode23s, ...
ode23t, ode23tb . . . steifeode15s, (ode23t) . . . DAEs (mit konst. Masse-Matrix)ode15i . . . implizite
odeplot Zeitverlaufgrafik wahrend der Simulation
odephas2, odephas3 2D-, 3D-Phasendiagramm wahrendder Simulation
odeprint Tabellarische Ergebnisse im Kommandofenster
122 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
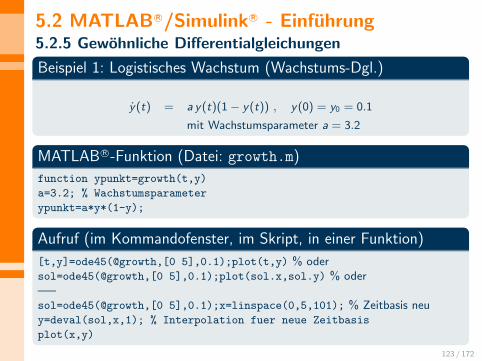
Beispiel 1: Logistisches Wachstum (Wachstums-Dgl.)
y(t) = a y(t)(1− y(t)) , y(0) = y0 = 0.1
mit Wachstumsparameter a = 3.2
MATLAB R©-Funktion (Datei: growth.m)
function ypunkt=growth(t,y)
a=3.2; % Wachstumsparameter
ypunkt=a*y*(1-y);
Aufruf (im Kommandofenster, im Skript, in einer Funktion)
[t,y]=ode45(@growth,[0 5],0.1);plot(t,y) % odersol=ode45(@growth,[0 5],0.1);plot(sol.x,sol.y) % oder—–sol=ode45(@growth,[0 5],0.1);x=linspace(0,5,101); % Zeitbasis neuy=deval(sol,x,1); % Interpolation fuer neue Zeitbasis
plot(x,y)
123 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 2: Van-der-Pol-Schwinger (Dgl.-system)
y(t) =
[y1(t)y2(t)
]=
[y2(t)
µ(1− y 2
1 (t))
y2(t)− y1(t)
], y(0) = y0 =
[20
]µ = 1, 1000
MATLAB R©-Funktion (Datei: shvdpmue.m)
function dydt=shvdpmue(t,y,mue) % mit weiterer Parameteruebergabe
dydt=[y(2);mue*(1-y(1)ˆ2)*y(2)-y(1)];
Aufruf (im Kommandofenster, im Skript, in einer Funktion)
options=odeset(’OutputFcn’,’odeplot’); mue=1;
[t,y]=ode45(@shvdpmue,[0 50],[2;0],options,mue); % oder
[t,y]=ode15s(@shvdpmue,[0 50],[2;0],options,mue);
Eigenschaft fur µ = 1, 1000?
µ = 1: nicht-steif, µ = 1000: steif
124 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 2: Van-der-Pol-Schwinger (Dgl.-system)
y(t) =
[y1(t)y2(t)
]=
[y2(t)
µ(1− y 2
1 (t))
y2(t)− y1(t)
], y(0) = y0 =
[20
]µ = 1, 1000
MATLAB R©-Funktion (Datei: shvdpmue.m)
function dydt=shvdpmue(t,y,mue) % mit weiterer Parameteruebergabe
dydt=[y(2);mue*(1-y(1)ˆ2)*y(2)-y(1)];
Aufruf (im Kommandofenster, im Skript, in einer Funktion)
options=odeset(’OutputFcn’,’odeplot’); mue=1;
[t,y]=ode45(@shvdpmue,[0 50],[2;0],options,mue); % oder
[t,y]=ode15s(@shvdpmue,[0 50],[2;0],options,mue);
Eigenschaft fur µ = 1, 1000?µ = 1: nicht-steif, µ = 1000: steif
124 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 2: Van-der-Pol-Schwinger (Steifes Dgl.-system)
y(t) =
[y1(t)y2(t)
]=
[y2(t)
µ(1− y 2
1 (t))
y2(t)− y1(t)
], y(0) = y0 =
[20
]µ = 1000
Jacobi-Matrix, MATLAB R©-Funktion (Datei: shvdpjacob1000.m)
Jacobi-Matrix: J =∂f
∂y=
[∂f1∂y1
∂f1∂y2
∂f2∂y1
∂f2∂y2
]=
[0 1
−2µy1y2 − 1 µ(1− y 21 )
]function J = shvdpjacob1000(t,y,mue)
J = [0 1; -2*mue*y(1)*y(2)-1 mue*(1-y(1)ˆ2)];
Aufruf (im Kommandofenster, im Skript, in einer Funktion)
options=odeset(’Jacobian’,@shvdpjacob1000);mue=1000;
[t,y]=ode15s(@shvdpmue,[0 50],[2;0],options,mue);
125 / 172
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
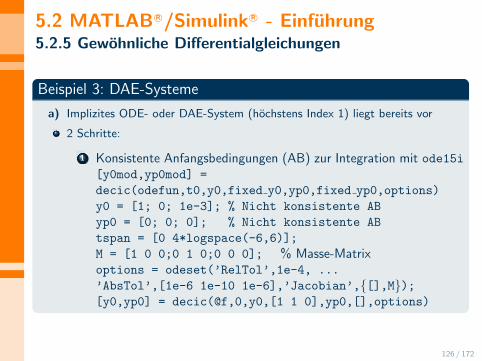
Beispiel 3: DAE-Systeme
a) Implizites ODE- oder DAE-System (hochstens Index 1) liegt bereits vor
2 Schritte:
1 Konsistente Anfangsbedingungen (AB) zur Integration mit ode15i[y0mod,yp0mod] =
decic(odefun,t0,y0,fixed y0,yp0,fixed yp0,options)
y0 = [1; 0; 1e-3]; % Nicht konsistente AB
yp0 = [0; 0; 0]; % Nicht konsistente AB
tspan = [0 4*logspace(-6,6)];
M = [1 0 0;0 1 0;0 0 0]; % Masse-Matrixoptions = odeset(’RelTol’,1e-4, ...
’AbsTol’,[1e-6 1e-10 1e-6],’Jacobian’,[],M);[y0,yp0] = decic(@f,0,y0,[1 1 0],yp0,[],options)
126 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 3: DAE-Systeme (Fortsetzung)
zu a) Implizites ODE- oder DAE-System (hochstens Index 1) liegt bereits vor
2 Losen mit ode15i
[t,y] = ode15i(@f,tspan,y0,yp0,options)
MATLAB R©-Funktion (Datei: f.m)
function res = f(t,y,yp)
res = [ yp(1) + 0.04*y(1) - 1e4*y(2)*y(3);
yp(2) - 0.04*y(1) + 1e4*y(2)*y(3) + 3e7*y(2)*y(2);
y(1) + y(2) + y(3) - 1];
Bsp.: Chemische Reaktion (s. o., ihb1dae.m)
Weiteres Bsp.: Diskretisierte partielle Dgl. mit beweglichem Gitter(Burgers-Gleichung; Mechanik, Nichtlineare Akustik, Fluid-, Gasdynamik,Verkehrsfluss), iburgersode.m)
127 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 3: DAE-Systeme (Fortsetzung)
b) DAE-System (Differentiationsindex > 1) liegt vor
6 Schritte (symbolisch (Symbolic Math ToolboxTM
), numerisch):
1 Definition der symbolischen Variablen und des DAE-Systems2 Falls Dgl.-system hoherer Ordnung: → Dgl.-system 1. Ordnung3 Falls Differentiationsindex > 1: Reduzierung4 Symbolisches System → numerisches
”MATLAB R© function
handle“5 Konsistente Anfangsbedingungen (AB)6 Losen mit ode15i, ode15s, ode23t
Bsp.: Planares Pendel (siehe MATLAB-Online-Dokumentation))
128 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
- Mehrpunkt-Randwertproblem -
Beispiel 4: Dgl. mit Anfangs- und Endbedingung (s. [1]):Mehrpunkt-Randwertproblem (Kleine Durchbiegungen am
Biegebalken; 1 +(
dydx
)2 ≈ 1)
( ) 0M x >
0 1
y
x
Dgl.: − d2y
dx2=
M(x)
EI (x)= b(x) =
5− 4x
100e−x
mit l = 1, y(0) = 0, y(1) = 0, Biegemomentverlauf M(x), Biegesteifigkeit EI (x)
129 / 172
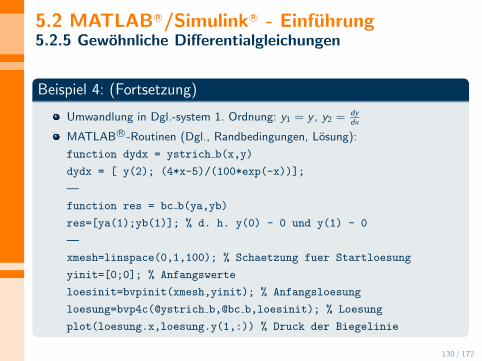
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Beispiel 4: (Fortsetzung)
Umwandlung in Dgl.-system 1. Ordnung: y1 = y , y2 = dydx
MATLAB R©-Routinen (Dgl., Randbedingungen, Losung):
function dydx = ystrich b(x,y)
dydx = [ y(2); (4*x-5)/(100*exp(-x))];
—
function res = bc b(ya,yb)
res=[ya(1);yb(1)]; % d. h. y(0) - 0 und y(1) - 0
—
xmesh=linspace(0,1,100); % Schaetzung fuer Startloesung
yinit=[0;0]; % Anfangswerte
loesinit=bvpinit(xmesh,yinit); % Anfangsloesung
loesung=bvp4c(@ystrich b,@bc b,loesinit); % Loesung
plot(loesung.x,loesung.y(1,:)) % Druck der Biegelinie
130 / 172
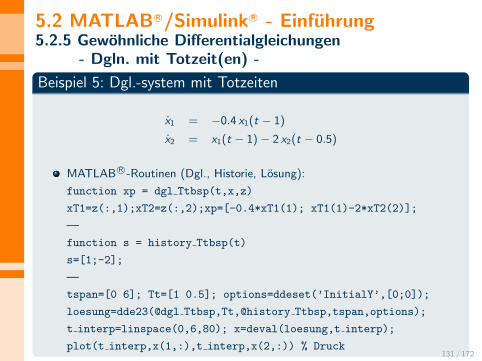
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
- Dgln. mit Totzeit(en) -
Beispiel 5: Dgl.-system mit Totzeiten
x1 = −0.4 x1(t − 1)
x2 = x1(t − 1)− 2 x2(t − 0.5)
MATLAB R©-Routinen (Dgl., Historie, Losung):
function xp = dgl Ttbsp(t,x,z)
xT1=z(:,1);xT2=z(:,2);xp=[-0.4*xT1(1); xT1(1)-2*xT2(2)];
—
function s = history Ttbsp(t)
s=[1;-2];
—
tspan=[0 6]; Tt=[1 0.5]; options=ddeset(’InitialY’,[0;0]);
loesung=dde23(@dgl Ttbsp,Tt,@history Ttbsp,tspan,options);
t interp=linspace(0,6,80); x=deval(loesung,t interp);
plot(t interp,x(1,:),t interp,x(2,:)) % Druck131 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.5 Gewohnliche Differentialgleichungen
Im Gegensatz: numerische Integration zur Ermittlung desbestimmten Integrals
Flacheninhalt (Bsp.)
I =
5∫0
|x |dx
Befehl Erlauterung
quad, quad8 Numerische Integration (bestimmte Integration)
MATLAB R©-Befehl:
F=quad(’abs’,0,5);
Ergebnis:
F=12.5
132 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.6 Partielle Differentialgleichungen
Partial Differential Equation ToolboxTM
Funktionen zur Losung von PDEs (2D-, 3D-, Zeit) mittelsFinite-Differenzen-Methode
Statische, Zeit-, Frequenzbereichs-, Eigenwertprobleme
Nachbearbeitung, Visualisierung
Diffusion, Waremubertragung, Strukturmechanik, Elektrostatik,Magnetostatik, AC-Leistungsmagnetismus; nutzerspezifische, gekoppelteSysteme
Siehe Online-Nutzerdokumentation
133 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.7 Polynome, Interpolation
Darstellung von Polynomen: Koeffizienten des Polynoms in absteigenderReihenfolge der Potenzen in vektorieller Form,z. B. steht p=[1 0 -2 -5] fur p(x) = x3 − 2 x − 5
Polynomfunktionen (doc polyfun)
Befehl Erlauterung
roots(p) Wurzeln (Nullstellen) des Polynoms
poly Berechnung der Polynomkoeffizienten aus den Wurzeln(siehe auch poly bei Matrizen)
polyval(p,5) Berechnung des Wertes des Polynoms fur x = 5
conv, deconv Polynommultiplikation, -divisionBsp.: a=[1 2 3], b=[4 5 6], c=conv(a,b)
(Ergebnis: c=[4 13 28 27 18])[q,r]=deconv(c,a)
(Ergebnisse: q=[4 5 6], r=[0 0 0 0 0])
134 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.7 Polynome, Interpolation
Polynomfunktionen (Fortsetzung)
Befehl Erlauterung
polyder Ableitung eines Polynoms
polyfit Anpassung der Polynomkoeffizienten an Daten
residue Residuenberechnung (Partialbruchzerlegung)Bsp.: 2 s+5
s4+3 s3+2 s2 = As+2
+ Bs+1
+ Cs
+ Ds2
Ergebnis: A=-0.25, B=3, C=-2.75, D=2.5
Interpolation
Befehl Erlauterung
interp1 1D-Interpolation (linear, spline, kubisch)
interp2 2D–Interpolation
. . .
spline Spline-Interpolation (siehe auch Splines-Toolbox)
135 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.8 Schwach besetzte Matrizen
Funktionen fur schwach besetzte Matrizen (doc sparfun)
Befehl Erlauterung
speye Einheitsmatrix
sprand, sprandn Zufallige belegte Matrizen(Gleich-, Normalverteilung)
spdiags Diagonalmatrizen/Diagonalen (jeweils schwach besetzt)
. . .
sparse, full Umwandlung in schwach besetzte Matrix bzw.umgekehrt
spconvert Einlesen von Daten und Speichern in schwachbesetzter Matrix
. . .
136 / 172
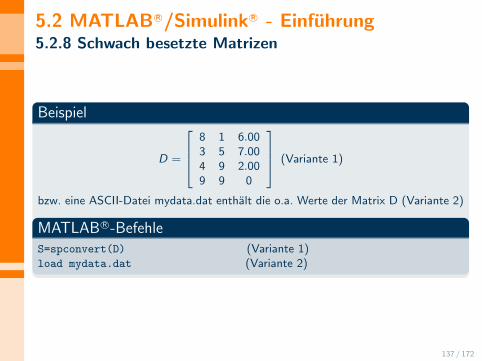
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.8 Schwach besetzte Matrizen
Beispiel
D =
8 1 6.003 5 7.004 9 2.009 9 0
(Variante 1)
bzw. eine ASCII-Datei mydata.dat enthalt die o.a. Werte der Matrix D (Variante 2)
MATLAB R©-BefehleS=spconvert(D) (Variante 1)load mydata.dat (Variante 2)
137 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.8 Schwach besetzte Matrizen
Weitere Funktionen fur schwach besetzte Matrizen
Befehl Erlauterung
nnz Anzahl von Null verschiedener Elemente
find Auffinden von Null verschiedener Elemente
spfun Anwendung von Funktionen auf von Nullverschiedene Elemente
spy Visualisierung der Besetzheitsstruktur
BeispielZ=sprandn(100,100,0.3);
[L,U,P]=lu(Z,1e-3);
[L,U,P]=luinc(Z,’0’);
spy(Z), spy(L), spy(U), spy(P)
Algorithmen zur Umordnung
Funktionen zur lineraren Algebra
Iterative Methoden zur Losung linearer Gleichungen, usw.
138 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
– Erganzung zu Abschnitt 5.2.3; weitere Sprachelemente (doc lang) –
Skripte, Funktionen (doc function)
Skripte, Funktionen und Unterfunktionen mit variabler Anzahl von Argumentenfunction c=test(a,b)
if nargin== 1,
c = a. 2; % Quadratzahl einer Zahl
elseif nargin==2
c = a + b; % Summe zweier Zahlen
end
139 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Lokale und globale Variable
Variable innerhalb von Funktionen lokal
Wenn Variable vor ersten Auftreten mit global vereinbart, Zugriff in allenFunktionen bzw. im Workspace, in denen Variable auch mit globalvereinbart wurde, auf die gleiche Variable
Beispiel: Rauber-Beute-Modell
y1(t) = y1 − α y1(t) y2(t)
y2(t) = −y2(t) + β y1(t) y2(t)
function [yp]=sh lotka(t,y)
% LOTKA Lotka-Volterra predator-prey model
global ALPHA BETA
yp = [y(1) - ALPHA*y(1)*y(2); -y(2) + BETA*y(1)*y(2)];
Befehle im Workspace:global ALPHA BETA
ALPHA=0.01; BETA=0.02;
[t,y]=ode23(@sh lotka,[0 50],[1;1]); plot(t,y)
140 / 172
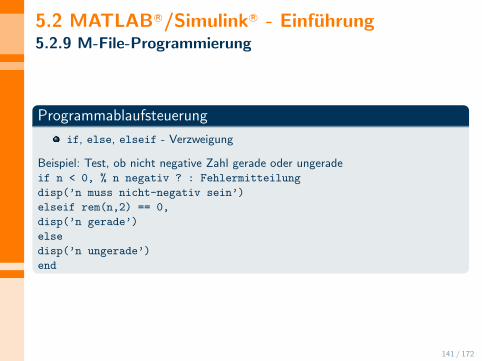
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Programmablaufsteuerung
if, else, elseif - Verzweigung
Beispiel: Test, ob nicht negative Zahl gerade oder ungeradeif n < 0, % n negativ ? : Fehlermitteilung
disp(’n muss nicht-negativ sein’)
elseif rem(n,2) == 0,
disp(’n gerade’)
else
disp(’n ungerade’)
end
141 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Programmablaufsteuerung (Fortsetzung)
switch - Ausfuhrung bestimmter Anweisungen in Abhangigkeit des Werteseiner Variablen oder eines Ausdruckes
Beispiel:switch zahl
case -1
disp(’minus Eins’)
case 0
disp(’Null’)
case 1
disp(’plus Eins’)
case 2,3,4
disp(’plus Zwei, Drei oder Vier’)
otherwise
disp(’anderer Wert’)
end
142 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Programmablaufsteuerung (Fortsetzung)
while - Ausfuhrung von Anweisungen solange ein Ausdruck wahr ist
Beispiel:n=1;
while prod(1:n) < 1e100,
n = n + 1;
end
Ausstieg aus while-Schleife mit break moglich
for - Laufanweisung
Beispiel:A=zeros(6);
for i=1:6; for j=1:2:6;
A(i,j)=j*3+i;
end; end
143 / 172
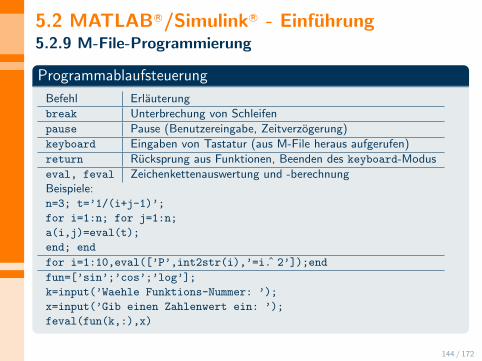
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Programmablaufsteuerung
Befehl Erlauterung
break Unterbrechung von Schleifen
pause Pause (Benutzereingabe, Zeitverzogerung)
keyboard Eingaben von Tastatur (aus M-File heraus aufgerufen)
return Rucksprung aus Funktionen, Beenden des keyboard-Modus
eval, feval Zeichenkettenauswertung und -berechnungBeispiele:n=3; t=’1/(i+j-1)’;
for i=1:n; for j=1:n;
a(i,j)=eval(t);
end; end
for i=1:10,eval([’P’,int2str(i),’=i. 2’]);end
fun=[’sin’;’cos’;’log’];
k=input(’Waehle Funktions-Nummer: ’);
x=input(’Gib einen Zahlenwert ein: ’);
feval(fun(k,:),x)
144 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.9 M-File-Programmierung
Programmablaufsteuerung
Befehl Erlauterung
error, warning Fehlermitteilung (danach Programmstopp),Warnung (danach Programmfortsetzung)
Bsp.: if n <= 1, error(’n muss groesser als 1 sein!’),end
. . .
Debugger Programmtest (Schrittbetrieb, Unterbrechungspunkte, . . .)
Hinweise zur Optimierung des MATLAB R©-Codes
Vektorisierung der Schleifen
Anstelle von
i=0; for t=0:0.01:10; i=i+1; y(i)=sin(t); end
ist die vektorisierte Version besser:
t=0:0.01:10;y=sin(t);
Vorherige Speicherplatzzuweisung fur Matrizen:
y=zeros(1,100); for i=1:100, y(i)=det(x i);end
145 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
2D-Darstellung (doc graph2d)
Befehl Erlauterung
plot 2D-Grafik mit linearer AchsenteilungBeispiele: plot(x), plot(A), plot(x,y)
plot(x,y,’m--’), plot(x,y,’o’,x,2*y,’g:’)
plotyy 2D-Grafik mit linearer Achsenteilung,2 Ordinaten mit unterschiedlicher Skalierung
loglog 2D-Grafik mit logarithmischer Achsenteilung
semilogx, semilogy 2D-Grafik mit linearer Teilung der Abszisse undlogarithmischer Teilung der Ordinate u. umgekehrt
146 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
Grafik- und Achsenbeschriftung, allgemeine Grafikbefehle (docgraph2d, doc graphics)
Befehl Erlauterung
title Grafiktitel
xlabel, ylabel Abszissen-, Ordinatenbeschriftung
legend Grafiklegende
text Text an Position (xpos,ypos); Bsp. text(2,3,’Min.’)
gtext Platzierung des Textes mittels Maus
axis Achsenskalierung; Bsp. axis([xmin xmax ymin ymax])
grid Gitternetzlinien
hold on Beibehalten der Grafik (weitere Kurven in gleiche Grafik)
hold off Freigabe der Grafik zum Uberschreiben
subplot Unterteilung eines Bildes (figure) in mehrere GrafikenBsp.: subplot(3,2,1) 6 Grafiken, 3x2, Ansprechen der 1. Grafik
147 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
2D-Darstellung (doc graph2d)
Befehl Erlauterung
figure Erzeugung von Bildern (Grafikfenstern)/Bild im Vordergrund
clf Loschen des Bildinhaltes
close [all] Schließen des/aller Fenster(s)
gcf”Handle“ des aktuellen Bildes (get current figure)
gca”Handle“ des aktuellen Achsenkreuzes
(get current axis)
get, set Lesen bzw. Setzen von Eigenschaften
print Drucken von Grafikfensterinhalten
Grafikobjekte: figure, axes, line, text, patch, surface, image, light, uicontrol,uimenu
148 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
3D-Darstellung (doc graph3d)
Befehl Erlauterung
plot3 Linien und Punkte im 3D-Raum
meshgrid, mesh 3D-Werteberechnung und 3D-Netz
surf 3D-Oberflache
colorbar Farbskalierung
colormap Farbeinstellung
view Beleuchtung, Schattierung, Ansicht (Blickwinkel)
rotate, rotate3d interaktive Ansicht
149 / 172
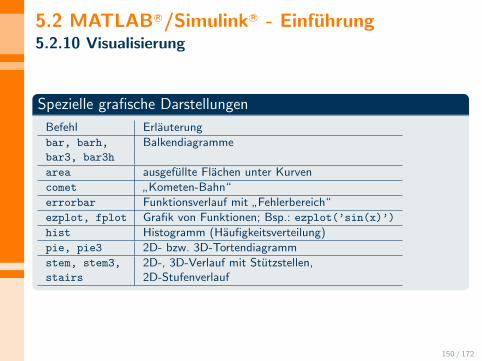
5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
Spezielle grafische Darstellungen
Befehl Erlauterung
bar, barh, Balkendiagrammebar3, bar3h
area ausgefullte Flachen unter Kurven
comet”Kometen-Bahn“
errorbar Funktionsverlauf mit”Fehlerbereich“
ezplot, fplot Grafik von Funktionen; Bsp.: ezplot(’sin(x)’)
hist Histogramm (Haufigkeitsverteilung)
pie, pie3 2D- bzw. 3D-Tortendiagramm
stem, stem3, 2D-, 3D-Verlauf mit Stutzstellen,stairs 2D-Stufenverlauf
150 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.10 Visualisierung
Spezielle grafische Darstellungen (Fortsetzung)
contour, contourf, Iso-Liniendarstellung (2D, ausgefullt)contour3 Iso-Liniendarstellung (3D)
pcolor”Farbausdruck“ einer Matrix
meshc, meshz, kombinierte Darstellungen (raumlich, Iso-Linien)waterfall, surfc
slice Scheiben in einer bestimmten Ebene
Bildverarbeitungsbefehle, Image Processing Toolbox
151 / 172

5.2 MATLAB R©/Simulink R© - Einfuhrung5.2.11 Simulink R© – Simulation dynamischer Systeme
Modellierung, Simulation und Analyse dynamischer Systeme
Erzeugen von Simulationsmodellen mit Hilfe hinterlegter Elemente inBibliotheken: Continuous, Discrete, Nonlinear, Sources, Sinks, MathOperations, Signal Routing, Ports & Subsystems, User-Defined Functions,Simulink Extras
Verbinden und Parametrieren der Elemente (Blocke); auch selbstprogrammierte Inhalte
Einstellen der Experimentierbedingungen
Simulation
Auswertung
Merkmale
Zusammenfassung von Blocken zu Untermodellen und Bibliotheken
Kopplung zwischen MATLAB R© und Simulink R©, MATLAB R©/Simulink R© undanderen Programmiersprachen (z. B. C, C++, FORTRAN)
Simulink R©-Debugger
152 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink – Simulation dynamischer Systeme
Beispiel: Regelkreis
SRw u y
Z. B. Ubertragungsfunktionsblocke fur Strecke GS (s) = 1(T1s+1)(T2s+1)
,
T1 = 5, T2 = 1 und Regler GR (s) = KR = 5 (Bibl. Continuous)
Summationsstelle (Math Operations), Quelle/Signal = Fuhrungsgroße(Sources), Senke/Signal = Regelgroße (Sinks), Verbindungslinien
153 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink – Simulation dynamischer Systeme
Beispiel: Tanksystem
Ausfuhrliche Behandlung in der Ubung
Systembeschreibung
Aufbau eines Simulink-Simulationsdiagramms: eintank.mdl, eintank1.mdl
- Modell mit interner/externer Eingangsgroße (bzw. *.slx)
154 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Beispiel: Tanksystem (Fortsetzung)
Simulation
Arbeitspunktbestimmung (et l.mdl, externe Ein- und Ausgangsgroße) undLinearisierung
Sprungantwort des linearisierten Modells (et l ss.mdl,Zustandsraumdarstellung)
Verhalten im Regelkreis mit PI-Regler (et vlim.mdl)
Verhalten im Regelkreis mit Zwei-Punkt-Regler (et zpr.mdl)
155 / 172
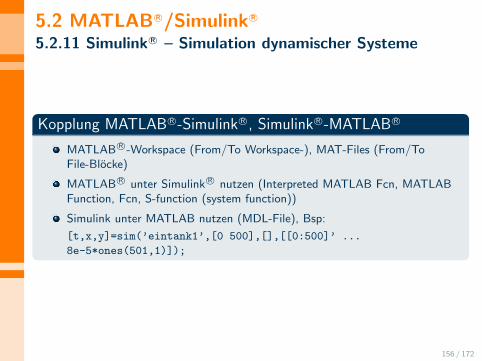
5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Kopplung MATLAB R©-Simulink R©, Simulink R©-MATLAB R©
MATLAB R©-Workspace (From/To Workspace-), MAT-Files (From/ToFile-Blocke)
MATLAB R© unter Simulink R© nutzen (Interpreted MATLAB Fcn, MATLABFunction, Fcn, S-function (system function))
Simulink unter MATLAB nutzen (MDL-File), Bsp:
[t,x,y]=sim(’eintank1’,[0 500],[],[[0:500]’ ...
8e-5*ones(501,1)]);
156 / 172
5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Warum S-functions? (Level-2 S-function als M-File)
Hinzufugen neuer algorithmischer Blocke
Einbeziehung z.B. existierenden C-Codes
Systembeschreibung als mathematisches Gleichungssystem
Grafische Animationen
Arbeitsweise von S-functions
Simulink-Block mit Eingang, Ausgang und Zustand x = [xTc xT
d ]T mit xc -kontinuerlicher Zustandsvektor und xd - diskontinuierlicher Zustandsvektor;Achtung! : Direkter Durchgriff → Gefahr algebraischer Schleifen
Simulationsschritte in Simulink (wiederholter Aufruf von Blocken)
157 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Aufbau von M-File S-functions
M-File S-Function Template (Vorlage):
matlabroot\toolbox\simulink\blocks\sfuntmpl.m (doc sfuntmpl, typesfuntmpl)
Empfehlung: Orientierung an Beispielen
Simulationsschritt Funktion
Initialisierung mdlInitializeSizes
Berechnung nachster Abtastzeitpunkt mdlGetTimeOfNextVarHit(optional bei variabler Abtastzeit)
Berechnung der Ausgange mdlOutputs
Aktualisierung der diskreten Zustande mdlUpdate
Berechnung der Ableitungen mdlDerivatives(rechte Seite der Dgl.)
Beenden der Simulation mdlTerminate
158 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Anpassung von M-File S-functions am Bsp. Tanksystem;Simulink-Modell: et m.mdl, M-FIle S-function: et mfsf.m
Initialisierung: (mdlInitializeSizes)Sizes.NumContStates=1; % Anzahl kontinuierl. Zustande
Sizes.Outputs=1; % Anzahl Ausgange
Sizes.Inputs=1; % Anzahl Eingange
Sizes.DirFeedthrough=0; % Durchgriff
x0=0.2; % Anfangszustand
Ausgangsgleichung: (mdlOutputs)sys=x; % Ausgang(1)=Zustand(1)
Ableitung (rechte Seite der Dgl.):sys=64.9612*(u(1)-3e-5*sqrt(2*9.81*x(1)));
159 / 172
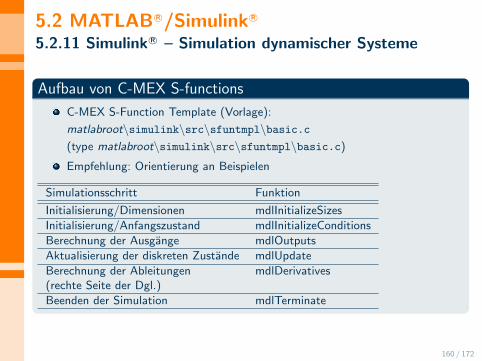
5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Aufbau von C-MEX S-functions
C-MEX S-Function Template (Vorlage):
matlabroot\simulink\src\sfuntmpl\basic.c(type matlabroot\simulink\src\sfuntmpl\basic.c)
Empfehlung: Orientierung an Beispielen
Simulationsschritt Funktion
Initialisierung/Dimensionen mdlInitializeSizes
Initialisierung/Anfangszustand mdlInitializeConditions
Berechnung der Ausgange mdlOutputs
Aktualisierung der diskreten Zustande mdlUpdate
Berechnung der Ableitungen mdlDerivatives(rechte Seite der Dgl.)
Beenden der Simulation mdlTerminate
160 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Anpassung von CMEX S-functions am Bsp. Tanksystem;Simulink-Modell: et c.mdl, M-FIle S-function: et cmsf.c
Typ und Name der S-function:# define S FUNCTION LEVEL 2
# define S FUNCTION NAME et cmsf
Initialisierung/Dimensionen: (mdlInitializeSizes)ssSetNumContStates(S, 1); /* Anzahl kontinuierl. Zustande */
ssSetOutputPortWidth(S, 0, 1); /* Anzahl Ausgange */
ssSetInputPortWidth(S, 0, 1); /* Anzahl Eingange */
ssSetInputPortDirectFeedThrough(S, 0, 1); /* Durchgriff */
Initialisierung/Anfangszustand: (MDL INITIALIZE CONDITIONS)*x0=0.2; % Anfangszustand
Ausgangsgleichung: (mdlOutputs)y[0]=x[0];
Ableitung (rechte Seite der Dgl.):dx[0]=64.9612*(u(0)-3e-5*sqrt(2*9.81*x[0]));
161 / 172

5.2 MATLAB R©/Simulink R©
5.2.11 Simulink R© – Simulation dynamischer Systeme
Einbeziehung der CMEX S-function et cmsf.c
Ubersetzung: mex et cmsf.c; Erzeugung einer dynamischen Bibliothek(WINDOWS: et cmsf.mexw32, et cmsf.mexw64, Linux: et cmsf.mexglx,et cmsf.mexa64)
Simulationsoptionen (Menu oder simset) und Simulation
Hinweise zur effizienten Simulation
Vermeidung von”Interpreted MATLAB R©-Fcn-Blocken“ (besser: Fcn mit
elementaren mathematischen Funktionen)
Vermeidung von M-File S-functions (etwas besser: CMEX S-function)
Nachteilig: Memory-Blocke
Maximale Schrittweite zu klein, Zeitbasis zu lang?
Zu große Genauigkeit? (Standard: 0.1 % meist ausreichend)
Liegt steifes Dgl.-system vor? (ode15s)
Verschiedene Abtastzeiten?
Algebraische Schleifen? 162 / 172

5.2 MATLAB R©/Simulink R©
5.2.12 SimscapeTM
und Objektorientierung
Objektorientierte Erweiterungen
SimscapeTM
: Modellierungs- und Simulationsumgebung fur physikalischeSysteme (domaneubergreifend); Bibliotheken; Erweiterbarkeit;Modellaustausch; HiL; C-Code-Export
SimPowerSystemsTM
(fruher: SimPowerTM
): ElektrischeEnergieversorgungssysteme
SimMecanicsTM
: Mehrkorper-Systeme (3D-Mechanik)
SimElectronicsTM
: elektronische und mechatronische Systeme
163 / 172

5.3 Modelica R© und OpenModelica
Modelica R©
Freie, objektorientierte, gleichungsbasierte Sprache zur zweckmaßigen Modellierungphysikalischer Systeme (https://modelica.org)
OpenModelica
Quelloffene Modelica R©-basierte Modellierungs- und Simulationsumgebung(https://openmodelica.org) mit OMEdit (OpenModelica Connection Editor:quelloffener benutzerfreundliche grafische Benutzerschnittstelle, Simulation,Ergebnisdarstellung, Modellaustausch (engl.: FMI = Functional Mockup Interface))
Eine kommerzielle Alternative
DYMOLA R©: DYnamic MOdeling LAboratory http://www.3ds.com/de/produkte-und-services/
catia/funktionsumfang/catia-systementwicklung/modelica-systemsimulation/dymola/
164 / 172

5.3 Modelica R© und OpenModelica
Weitere Werkzeuge
OMC: OpenModelica-Compiler
OMShell: OpenModelica-Shell
OMNotebook: Mathematica-ahnliches Notebook fur Lehrzwecke
DrControl under OMNotebook: Interaktives Kursmaterial furRegelungstechnik
OMOptim: Optimierung
OMPython: Schnittstelle zur Python-Umgebung
. . .
165 / 172

5.3 Modelica R© und OpenModelica
Struktur der OpenModelica-Umgebung
Bildquelle: https://openmodelica.org
166 / 172

5.3 Modelica R© und OpenModelica
Modellierungs- und Simulationsumgebung (allg.)
Bibliothek Modell
Übersetzung
ÜbersetztesModell
p =
x =0
t , t0 1
AndereProgramme
Simulations-programm
AnimationGrafik- und
Numerikausgabe
Modelleditor
Simulationssteuerung
(Parameter,Anfangswerte,Zeithorizont,Simulation,Skripte)
Visualisierung
167 / 172

5.3 Modelica R© und OpenModelica
Vorgehen bei der Modellerstellung
Klassenkonzept (ahnlich objektorienierter Programmierung)
Hierarchische Modellerstellung (Objektorientierung und Gleichungen)
Festlegung von Potenzial- und Flussvariablen
Definition von Konnektoren mit Potenzial- und Flussvariablen
Verallgemeinerbare Sachverhalte extrahieren (Teilmodelle (Klassen)),z. B. elektrischer Zweipol)
Spezifizierung mit Vererbung (z. B. Ohmscher Widerstand)
Verbinden von Objekten
→ Gesamtmodell (”Bottom-Up“-, (
”Top-Down“)-Entwurf)
168 / 172

5.3 Modelica R© und OpenModelica
OpenModelica Connection Editor
Verschiedene Ansichten/Fenster (Modell (Designer-, Hauptfenster), Suche,Bibliotheken-, Modell-Navigator (Hierarchische Struktur; Bibliotheken:Elektrik, Magnetismus, Mechanik, Hydraulik, Flussigkeiten, Medien (Stoffe),Thermodynamik, Mathematik, Blocke, Zustandsgraphen, SI-Einheiten),Dokumentation, Variablen, Meldungen)
Designer-Fenster: Hauptfenster (Symbol (Icon), Diagramm, Modelica-Text,Dokumentation)
169 / 172

5.3 Modelica R© und OpenModelica
Bearbeiten von Aufgabenstellungen (OMEdit)
1.) Simulationsdiagramm aus Bibliothekselementen (Bsp.: RC-Netz mitSpannungsquelle und Erdung, s. Bsp., Abschnitt 4.3)
2.) Problemstellung bearbeiten anhand math.-physikal. Beschreibung;Programmieren in Modelica (Bsp.: planares, reibungsfreies Pendel, s. o.)
Math.-physikal. Beschreibung
J ω = −m g l sin(ϕ)
ϕ = ω
mit m - Masse, l - Lange, g - Erdbeschleu-nigung, J - Tragheitsmoment (J = m l2), ϕ -Auslenkwinkel, ω - Winkelgeschwindigkeit,ω - Winkelbeschleunigung.
Illustration
170 / 172

5.3 Modelica R© und OpenModelica
Bearbeiten von Aufgabenstellungen (Fortsetzung)
Programmtechnische Umsetzung; aufeinander folgende Wahl der
Reiter/Menupunkte/Fenster:
Im Hauptfenster: Deklaration von Variablen und Parametern;Werte; Modellgleichungen
parameter Real m=1;
parameter Real l=1;
parameter real g=9.81;
parameter Real J=m*l 2;
Real phi(start=1),w;
der(phi)=w;
J*der(w)=-m*g*l*sin(phi);
Datei/SpeichernSimulation/Simulieren - Ubersetzen und Simulation (mitSimulationsparametereinstellungen: Start-, Endzeit,Integrationsverfahren (Standard: dassl, (Euler-, Runge-Kutta-,Radau-, Lobatto-, Inline-Verfahren))Im Variablen-Fenster: Variablen auswahlen furAnzeige/Speichern/Druck (→ Reiter: Plotten)
171 / 172

5.3 Modelica R© und OpenModelica
Bearbeiten von Aufgabenstellungen (Fortsetzung),Integrationsverfahren, Skripte
3.) Teilweise Nutzung von Bibliothekselementen, teilweise Erstellung neuer
Modelle, Aufbau eines Gesamtmodells (s. o., ausfuhrlich: Ubung)
Nutzung des vordefinierten Konnektors”Pin“
Definition eines Teilmodells”Elektrisches Bauelement mit zwei
Anschlussen“Nutzung des Teilmodells und Spezifizierung eigener Modelle furKonstantspannungquelle, Widerstand und InduktivitatAufbau des Stromkreises
Numerische Integrationsverfahren
Skripte (nutzbar unter OMShell)172 / 172


















