STÄUBLI - cenit.com · Optimierung im SRS 23 Anwendung spezifischer Eigenschaften der...
25
STÄUBLI Inbegriff für hochdynamische Bewegungsabläufe Andreas Oldenburg 15. Mai 2014
Transcript of STÄUBLI - cenit.com · Optimierung im SRS 23 Anwendung spezifischer Eigenschaften der...

STÄUBLI Inbegriff für hochdynamische Bewegungsabläufe
Andreas Oldenburg
15. Mai 2014

Simulation
in der
Robotik
3
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS

4
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS

5
Stäubli Konzern
1892 in der Schweiz gegründetes Industrieunternehmen im Familienbesitz
Umsatz über 1 Milliarde Schweizer Franken mit über 4000 Mitarbeitern
Präsent auf 5 Kontinenten durch Niederlassungen in 25 Ländern und Vertretungen in 50 Ländern
6
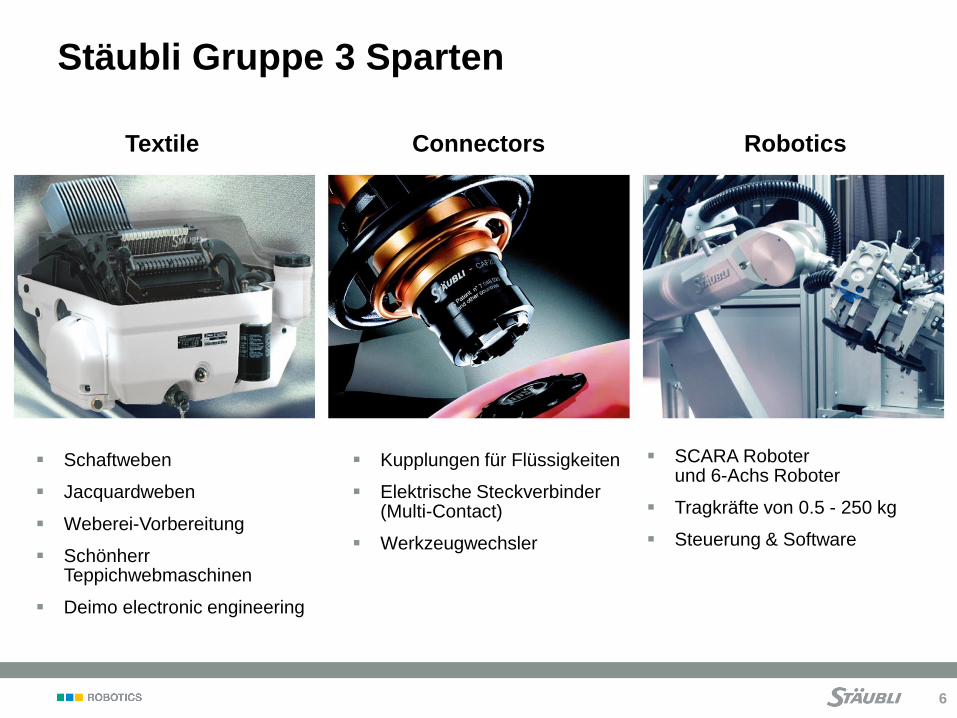
Textile Connectors Robotics
Schaftweben
Jacquardweben
Weberei-Vorbereitung
Schönherr Teppichwebmaschinen
Deimo electronic engineering
Kupplungen für Flüssigkeiten
Elektrische Steckverbinder (Multi-Contact)
Werkzeugwechsler
SCARA Roboter und 6-Achs Roboter
Tragkräfte von 0.5 - 250 kg
Steuerung & Software
Stäubli Gruppe 3 Sparten
7
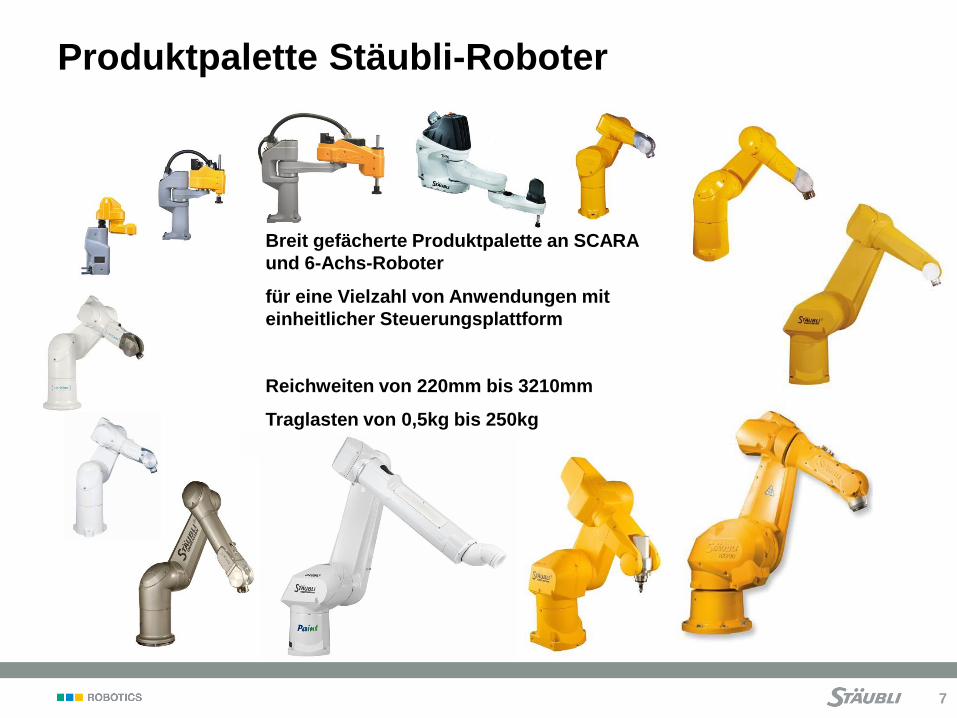
Breit gefächerte Produktpalette an SCARA
und 6-Achs-Roboter
für eine Vielzahl von Anwendungen mit
einheitlicher Steuerungsplattform
Reichweiten von 220mm bis 3210mm
Traglasten von 0,5kg bis 250kg
Produktpalette Stäubli-Roboter
Stäubli Robotics Märkte
Handling
Montage
Messtechnik
Beladung SGM etc.
Beladung Werkzeugmaschinen etc.
Lackieranwendungen
Prozesstechnik
Schleifen, fräsen, entgraten
schweißen, löten, abdichten
Anwendungen in Medizin- und Pharma
Anwendungen im Lebensmittelbereich
Waferhandling
Etc.

9
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS
10
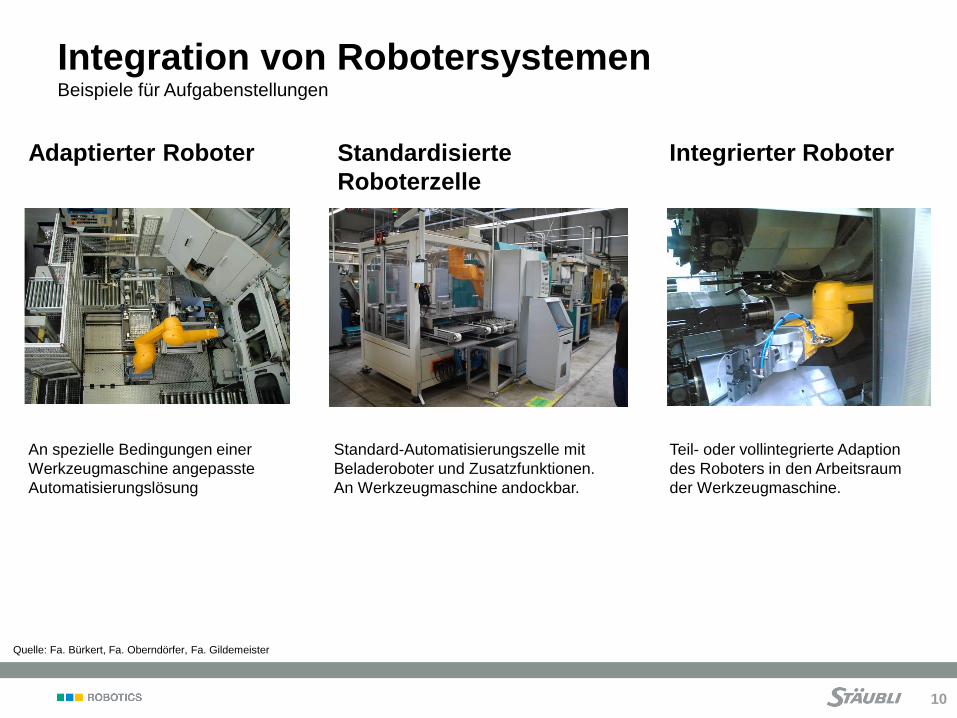
Standard-Automatisierungszelle mit
Beladeroboter und Zusatzfunktionen.
An Werkzeugmaschine andockbar.
Teil- oder vollintegrierte Adaption
des Roboters in den Arbeitsraum
der Werkzeugmaschine.
Integrierter Roboter
Quelle: Fa. Bürkert, Fa. Oberndörfer, Fa. Gildemeister
Standardisierte
Roboterzelle
Adaptierter Roboter
An spezielle Bedingungen einer
Werkzeugmaschine angepasste
Automatisierungslösung
Integration von Robotersystemen Beispiele für Aufgabenstellungen
11
Integration von Robotersystemen Anwendung von Simulationssystemen in der Robotik
• Auswahl geeigneter Roboter
• Prüfung von Arbeitsraum und Erreichbarkeiten
• Erkennen von Achsgrenzen und Kollisionen
• Taktzeitanalysen

12
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS
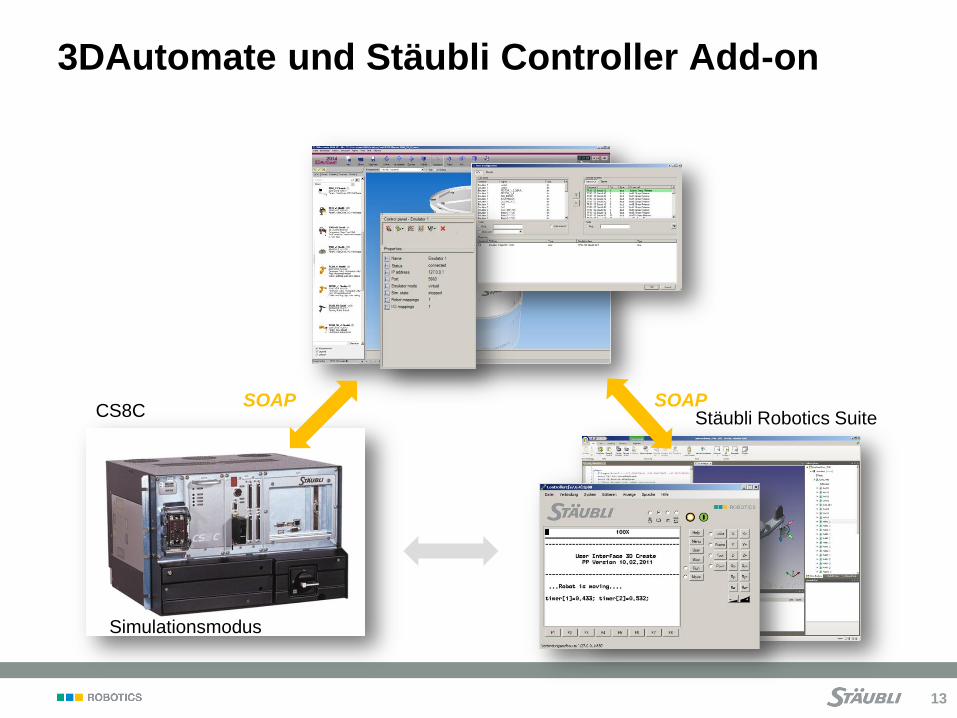
3DAutomate und Stäubli Controller Add-on
13
SOAP SOAP CS8C Stäubli Robotics Suite
Simulationsmodus
14
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS

Schnittstelle zur Stäubli Robotics Suite (SRS)
15
Jedem Roboter aus 3DAutomate kann ein Stäubli Emulator zugewiesen werden

Schnittstelle zur Stäubli Robotics Suite (SRS)
16
E/A´s aus 3DAutomate können mit den E/A´s des Stäubli Emulators verknüpft werden

Schnittstelle zur Stäubli Robotics Suite (SRS)
17
Idle keine Interaktion zwischen
3DAutomate und Stäubli Emulator
Polling Achswerte und E/A´s
werden vom Stäubli Emulator
aktualisiert ohne Synchronisierung
Virtual Achswerte und E/A´s
werden vom Stäubli Emulator
aktualisiert mit Synchronisierung
Jogging Achswerte werden von
3DAutomate an Stäubli Emulator
übergeben
18
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS

Post-Prozessor im Stäubli Controller Add-on Der Weg von RSL zu VAL3
19
Möglichkeiten von RSL:
• Teachen von Positionen mit Zuweisung der
Bewegungsart
• Basepositionen ändern
• Wartezeiten einfügen
• Ausgänge setzen, auf Eingänge warten
• Sequenzen anlegen und aufrufen
• Python Routinen starten
• Per Kommentare spezielle Schlüsselwörter einfügen
• Etc.

Post-Prozessor im Stäubli Controller Add-on Der Weg von RSL zu VAL3
20
Post-Prozessor Programmcode in VAL3

Post-Prozessor im Stäubli Controller Add-on Der Weg von RSL zu VAL3
21
Was wird von RSL in VAL3 konvertiert?
• Syntaktisch korrekte VAL3 Applikationen
• Sequenzen werden zu VAL3 Programmen
• Sequenz-Aufrufe werden zu call() Aufrufen
• Koordinatensysteme werden zu Frames
• Teachpositionen werden zu Points
• Tool Center Points werden zu Tools
• Koordinatenverschiebungen werden zu Vektorrechnungen
• Bewegungsanweisungen werden zu movej(), movel()
• Setzen von Ausgängen, Warten auf Eingänge
• Zeitmarken für Taktzeitmessung
• Per Kommentare weitere VAL3 Anweisungen

22
Stäubli-Konzern
Integration von Robotersystemen
Beispiele für Aufgabenstellungen
Nutzung von Simulationssystemen in der Robotik
3DAutomate und Stäubli Controller Add-on
Schnittstelle zur Stäubli Robotics Suite (SRS)
Post-Prozessor im Stäubli Controller Add-on
Optimierung im SRS

Optimierung im SRS
23
Anwendung spezifischer Eigenschaften der
Roboterprogrammiersprache VAL3
• Flexiblere Gestaltung der Bewegungsabläufe durch
Positionsberechnungen
• Anpassung von Geschwindigkeit/Beschleunigung entsprechend Traglast
bzw. Anforderungen an den Prozess
• Überschleifradien an z.B. Zwischenpositionen
• Schaltpunkte von Ausgängen bzw. optimaler Zeitpunkt zum Einlesen von
Eingängen
• Anwendung von weiteren VAL3 spezifischen Befehlen
• Einbindung in bestehende Applikationen über Bibliotheksschnittstelle von
VAL3
• Anpassung des Programmcodes zur Laufzeit
• Exakte Taktzeitmessung am echten Robotersystem

24

www.staubli.com
STÄUBLI Inbegriff für hochdynamische Bewegungsabläufe
Vielen Dank für ihre Aufmerksamkeit