Steuerung und Regelung von KFZ-Antriebssträngen · Excellence in Automotive R&D Steuerung und...
21
Excellence in Automotive R&D Steuerung und Regelung von KFZ-Antriebssträngen 9. Vorlesung: Motorprüfstände und Prüfstandsautomatisierung Konzepte, Anforderungen und Messsysteme Dr.-Ing. Carsten Haukap Vortragender: Dipl.-Ing. Steffen Schaum Berlin, 23.06.2008
Transcript of Steuerung und Regelung von KFZ-Antriebssträngen · Excellence in Automotive R&D Steuerung und...

Excellence in Automotive R&D
Steuerung und Regelung von KFZ-Antriebssträngen9. Vorlesung: Motorprüfstände und Prüfstandsautomatisierung
Konzepte, Anforderungen und Messsysteme
Dr.-Ing. Carsten Haukap
Vortragender: Dipl.-Ing. Steffen Schaum
Berlin, 23.06.2008

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 2
Inhalte
DoE - Design of Experiments & Modellbildung im Applikationsprozess
• Motorprüfstand und Prüfstandsautomatisierung
• Mathematische und statistische Grundlagen der Modellbildung
• Praktische Anwendung der Versuchsplanung und Modellbildung

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 3
Einfache datengetriebeneModelle
Komplexität
Physikalische Relevanz
)]([])()[()](1[
][
][
)](1[
])1()1()1[(
)]1()1()()1([
)1(
)-()1()-()1(])(-[)1(
)-()1()-()1()]-()-([)1()]-()-([)(
)-(
)1(
)-(
)1()1()(
12212112212121
2
21
122122112121221121
2221112212211121
2
21
1222112121
22112121
2
21
1222112121
2
21
122211212121
2
22
1
1121
TKTKTTzTKTKTTKKzKK
TTKTKTTKTKTTKTTKTT
zTKKTKKTKTKTKTKTT
zKK
TTKTTKTTKK
zTKTKTTKK
zKK
TzTKTzTKTTzTTzKK
TzTKTzTKTzTzKKTzTzzG
Tz
TK
Tz
TKKKzG
⋅+⋅−⋅+⋅⋅+⋅++−++⋅+−=
⋅⋅+⋅−⋅⋅+⋅−⋅⋅−⋅⋅−⋅+
⋅⋅−+⋅−+⋅+⋅+⋅+⋅+−−+
⋅+−=
⋅−⋅−⋅−⋅−⋅⋅−−+
⋅−⋅+−⋅++⋅−−−+
⋅−−=
⋅−⋅+⋅−⋅+⋅+⋅+⋅−−=
⋅−⋅+⋅−⋅+⋅⋅−−=⋅⋅
−⋅+
−⋅+−−=
Datengetriebene
Modelle mit Expertenwissen
Einfachephysikalische Modelle
Physikalische Modelle
DoE for im Applikationsprozess
Kompromiss
� Vereinfachte physikalische Ansätze (empirische Faktoren)
� Datengetriebene Modelle (DoE) mit Expertenwissen
Empirische Modelle vs. Physikalische Modelle

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 4
DoE Prozess
Messungen
2
(IAV)
Optimierung Integration in ECU
VersuchsplanungProzessdefinition
Model-Analyzer (IAV)
Modellbildung
Verzahnung der Modellbildung und der Prüfstandautomatisierung

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 5
MotorenprüfstandeBeispielhafter Aufbau und Komponenten
Hauptkomponenten
• Motor(Schnellbefestigungssysteme – "Paletten")
• Bremse (Leistungsaufnahme/Vernichtung)- Retarder (Energievernichtung)- Leistungsklassen- Trägheit – "Dynamik"
Prüfstandszelle• Konditionierte Zellentemperatur
- i.d.R.: 22 ...25°C- Klimakammer : -40° ... 40°
• Konditionierter Zellendruck- i.d.R.: Umgebung oder 1020hPa
- Höhenprüfstand :900hPa ... 1030hPa° • Luftfeuchte
(i.d.R. ϕ = 50% rel. Feuchte)
• Automatische Feuer- und Gefahrstoffwarnalagen und Löscheinrichtung (CO2)
Ver- und Endsorgung• Ölversorgung
(Temperaturkonditioniert 40...120°C )• Kühlwasser
(Temperaturkompensiert 20 ... 80°C)• Ansaugluft
(Temperatur, Druck und Feuchte)• Kühlluft
(Temperatur geregelt über Thermostat)• Externe Aufladung und/oder Intercooler
(z.B. Tierftemperatur AGR - Abgasrückführung)• Kraftstoffe: Diesel, Benzin, CNG, LPG,
Sonderkraftstoffe (H2)

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 6
PrüfstandstechnikMesstechnik
Basismesstechnik
• Kraftstoffwaagen: Gravimetrie / Coriolis
• Zündwinkel, Einspritzzeitpunkt
• Luftmengen
• BlowBy
• Ölverbrauch
• Indizierung
• Sensorik: Temperatur, Druck, Feuchte
Partikelmesstechnik
• Teilstrom-verdünnungssysteme
• Vollstromtunnel
• Dynamische Partikel-messung
• Rauchwertmessung

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 7
Leistungsspektrum PrüfstandstechnikMesstechnik
Abgasmesstechnik
• Horiba Mexa 7100 FX / FXEGR
• Horiba Mexa 7100 D / DEGR
• Horiba Mexa 5120, FR THC
• Testa Fast-FID
• 2-Linien Betrieb
• 16-Kanal-Selektion Einzelentnahmen
• AGR-Messtechnik
• Massenspektrometer

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 8
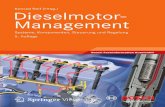
PrüfstandstechnikTemperaturmesstechnik - Thermosensor
TE_Bez. BaseDiameter Length mm
01_01_00 0.1 - 3.005_05_00 0.5 - -05_15_05 0.5 5.0 1.505_15_10 0.5 10.0 1.505_15_20 0.5 20.0 1.510_30_12 1.0 12.0 3.010_30_15 1.0 15.0 3.015_15_00 1.5 - -15_30_03 1.5 3.0 3.030_30_00 3.0 - -
Top of the sensor [mm]
Abg
ast
em
pe
ratu
ren
[°C
]
200
300
400
500
600
700
800
900
Abgastemperaturen [°C]: 01_01_00 05_05_00 05_15_20 05_15_10 05_15_05 10_30_15 10_30_12 15_15_00 15_30_03 30_30_00
nmot_w [1/min]:
mabg [kg/h]:
nmot
_w [1
/min
]
0
1000
2000
3000
4000
5000
6000
7000
time [s]
46 50 54 58 62 66
mab
g [k
g/h]
0
100
200
300
400
500

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 9
PrüfstandstechnikSondermesstechnik
Akustikprüfstand
DGV (Doppler-Global-Velocimetry)
-> 3D-Strömungsfeld
ILM (Integrale Lichtleitmesstechnik)

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 10
Anforderungen an PST-SystemeSystematisierung der Automatisierungssysteme
ECU Engine Dyno
ProcedureCtrl
APS(z.B. INCA)
Data/CtrlIntegration
GeneralMeas & Ctrl Dyno Ctrl
TestData
???
MBCToolModels
StrategyBypass
Operator
Engineer
Simulation
A: ASAP3/MCDA: ASAP3/MCDA: ASAP3/MCDA: ASAP3/MCD----3MC over Ethernet3MC over Ethernet3MC over Ethernet3MC over Ethernet
B: B: B: B: XCPXCPXCPXCP (over Ethernet/USB/CAN)(over Ethernet/USB/CAN)(over Ethernet/USB/CAN)(over Ethernet/USB/CAN)
C: High Bandwidth, BUSC: High Bandwidth, BUSC: High Bandwidth, BUSC: High Bandwidth, BUS
???: ???: ???: ???: XCPXCPXCPXCP Gateway / IAV Gateway / IAV Gateway / IAV Gateway / IAV EtherCalEtherCalEtherCalEtherCal / / / / dSPACEdSPACEdSPACEdSPACE Generic Serial Interface / Generic Serial Interface / Generic Serial Interface / Generic Serial Interface / etc.etc.etc.etc.

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 11
Anforderungen an PST-SystemeSystematisierung der Automatisierungssysteme
Data/CtrlIntegration
ProcedureCtrl
Data Acquisition and Control DAC (Prüfstandssystem)z.B. PumaOpen (AVL), Stars (Schenck), Test Automation (A&D)
Procedure Control (Automatisierung)z.B. Cameo (AVL), Vega (Schenck), MPI² (IAV)
• Aufgabe des DAC ist die Datenerfassung, Regelung des Betriebspunktes sowiedie Kommunikation zum Motorsteuergerät
• Aufgabe der Procedure Control ist das "intelligente" Abarbeiten eines Versuchs-planes (u.a. Verstellstrategie, Reaktion auf Grenzwertverletzung, u.a.)

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 12
++ sicher+- verschiedene
Wege möglich-- langsam
++ sicher+- verschiedene
Wege möglich-- langsam
++ sicher++ definierter direkter
Weg-- langsam
Schrittweite
StartwertSollwertMesswert
Einparameterverstellung Wechselschrittverstellung
schrittw. Vektorverstellung
++ schnell++ definierter direkter
Weg-- bei zu großen Verstellschritten
extreme Grenzverletzung möglich
gleichz. VektorverstellungDefault:
x
y
z
x
y
z
Verstellstrategien
Prüfstandsautomatisierung - Verstellstrategien

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 13
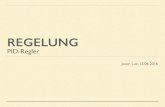
Prüfstandsautomatisierung - VerstellstrategienVektorverstellstrategie mit Grenzwertüberwachung
Start of Post Injection / °KWnOT
Du
rati
on
of
Po
st
Inje
cti
on
/ °
KW
Exhaust Temperature
-35 -32.5 -30 -27.5 -25
10
14
18
22
24
28
5
15
15
800
600
600
850
800
800
850
2. Example: Post-Injection adjustment strategies for filter regeneration
temperature & quantity-dependent adjustmentBase Setting
Demand Value
ConstraintMAF
MAP
SOI
Measurement Value
1. Example: Three dimensional adjustment of SOI, MAF & MAP
with respect to combustion Lambda
Multidimensionale Verstellung
Anpassung der Schrittweiten

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 14
Dynamischer Parameterverstellung mit Grenzüberwachung:Kleine Verstellschritte + kurze Stabilisierungszeit
Bei Grenzverletzung wird der letzte Verstellschritt zurückgenommen, anschließend erneute Verstellung mit reduzierter Schrittweite (1/3)
Bei Nichterreichen des Sollwertes wird alternativer Ersatzpunkt gemessen
MessParam.Max
Vers
tellp
ara
mete
rM
essp
ara
mete
r
Zeit
Param.TSynch + MessParam.Tsynch = Gesamtstabilisierungszeit
Param.DeltaHigh
Sollwert aus Versuchsplan Alternativer Messpunkt
(Param.DeltaHigh) / 3
- Param.DeltaHigh
Automatisierte Parameterverstellung
Prüfstandsautomatisierung - Verstellstrategien

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 15
Prüfstandsautomatisierung - Verstellstrategien Automatisierte Indirekte Parameterverstellung
MessParam.MaxWarning
Sollwert
Vers
tellp
ara
mete
r (D
irekt)
Param.DeltaHigh
Param.DeltaHighMax
Param.DeltaHigh
Messp
ara
mete
r (Lim
it)
MessParam.Max
Zeit
Vers
tellp
ara
mete
r (Ind
irekt)
Alternativer Messpunkt
Param.Soll
Param.Tsynch + MessParam.Tsynch
zul. Toleranz
Gesamtwartezeit
Param.DeltaHighAdd

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 16
2
SOI / deg.CA
Air mass / mg/str.
Boo
st p
ress
ure
/ hP
a
Air Fuel Ratio
CO
HC
Exh.Temp.
Cyl. Pressure
Boost press.
Air mass
SOI
Matlab Based Test Bench Automation
ControlledLimits
3 AdjustedParameters
Test space
and adjustment
steps:
* Target
o
Single steps
Starting point(ECU)
Resulting Measuring point
IAV – MPI² - Example für DoE Measurements for a constant Operating Point Measurements on test bench
2
(IAV)

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 17
Automatisierte Versuchsraumvermessung
Parameter x
Para
mete
r y
Not valid (e.g. knocking area)
Starting point
Set point
Limit Value
Vector setting 1. iteration
Vector setting 2. iteration
Parameter x
Para
mete
r y
Not valid (e.g. knocking area)
Starting point
Set point
Limit Value
Vector setting 1. iteration
Vector setting 2. iteration
Parameter x
Para
mete
r y
Not valid (e.g. knocking area)
Starting point
Set point
Limit Value
Vector setting 1. iteration
Vector setting 2. iteration
Not valid (e.g. knocking area)
Starting point
Set point
Limit Value
Vector setting 1. iteration
Vector setting 2. iteration

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 18
Limit (temp,knocking,COV,...)
Par
amet
er X
Setting point (schedule)
Driveablecombination
Starting point(map or optimized)
Legend
Starting point(map)
900
450
Automatisierte Versuchsraumvermessung
Parameter Y
22.50

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 19
ATLAS / MPI²
ATLAS (A&D)
„BoundaryFinder“
MPI² (IAV)
„CapiParaScreen“
2
SOI / deg.CA
Air mass / mg/str.
Boo
st p
ress
ure
/hP
a
Air Fuel Ratio
CO
HC
Exh.Temp.
Cyl. Pressure
Boost press.
Air mass
SOI
2
SOI / deg.CA
Air mass / mg/str.
Boo
st p
ress
ure
/hP
a
Air Fuel Ratio
CO
HC
Exh.Temp.
Cyl. Pressure
Boost press.
Air mass
SOI
Air Fuel Ratio
CO
HC
Exh.Temp.
Cyl. Pressure
Boost press.
Air mass
SOI
Atlas: - Multitasking
- Real-time Skript Programmierung
MPI²: - Einfache Programmierung in Matlab
- Viele vorhandene Funktionen u. Programme
ATLAS (Prüfstandsmesssystem) und MPI² (Automatisierungssystem)

© IAV GmbH · 07/2006 · CaH · MD-G1 · 09 Motorpruefstand und Automatisierung.ppt 20
HiL simulation at the engine test cellSimulation setup
Test Cell System
Ethernet (TCP/IP)
Ethernet (UDP/IP)
FahrzeugFahrzeug
Opal-RT®
PC
Realtime
QNX (PC)
Setpoints
Measuring
Model User Interfacein Simulink
Compiled Realtime Models
Opal-RT® Control Desktop
EngineEngineEngineEngine DynamometerDynamometerDynamometerDynamometer
Security checking
Prerequisites
• Sophisticated vehicle model
• Realtime system at the test cell
• Fast control system at test cell

Excellence in Automotive R&D
Vielen DankDr.-Ing. Carsten Haukap
IAV GmbHIngenieurgesellschaft Auto und Verkehr
Carnotstraße 1, 10587 BerlinTelefon: +49 30 39978-9402