Vehicle Motion Observer - TU Dortmund · Chassis Systems Control Networking of system domains...
35
1 Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights. Chassis Systems Control Vehicle Motion Observer – Bestimmung der Fahrzeugbewegung ohne Fahrzeug- und Reifenmodelle Dortmunder Regelungstechnische Kolloquien 2008
Transcript of Vehicle Motion Observer - TU Dortmund · Chassis Systems Control Networking of system domains...

1 Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Vehicle Motion Observer –Bestimmung der Fahrzeugbewegung ohne Fahrzeug- und Reifenmodelle
Dortmunder Regelungstechnische Kolloquien 2008
2
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
3
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
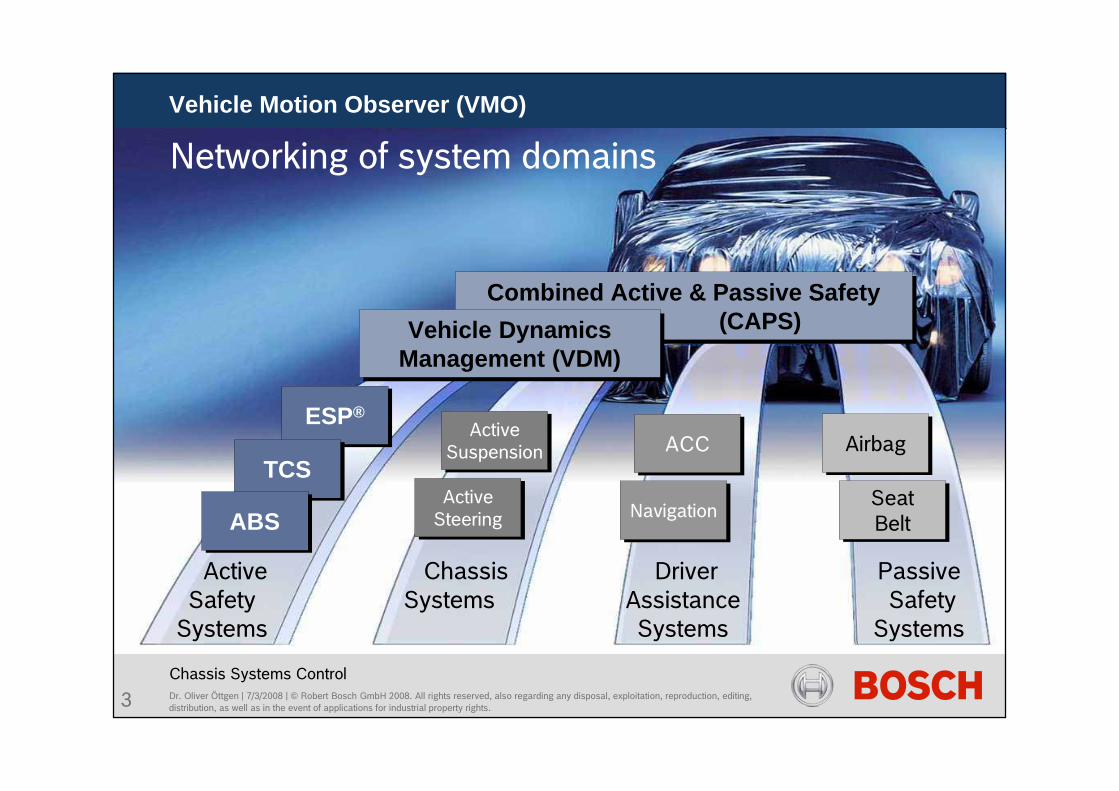
Networking of system domains
ActiveSafety
Systems
PassiveSafety
Systems
DriverAssistanceSystems
ChassisSystems
ESP®ESP®
TCSTCS
ABSABS
Combined Active & Passive Safety(CAPS)
Combined Active & Passive Safety(CAPS)
Active SteeringActive
Steering
ACCACC
NavigationNavigation Seat Belt
Seat Belt
AirbagAirbagActive Suspension
Active Suspension
Vehicle Dynamics Management (VDM)Vehicle Dynamics
Management (VDM)
4
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
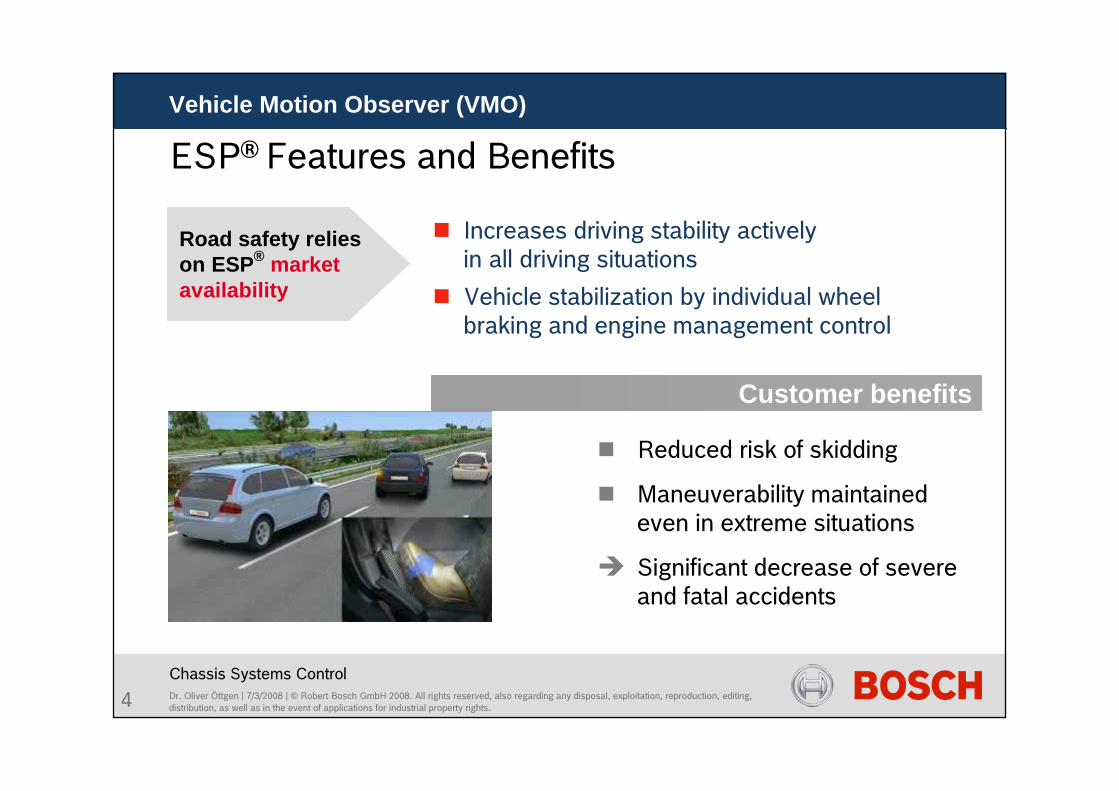
ESP® Features and Benefits
Increases driving stability actively in all driving situations
Vehicle stabilization by individual wheel braking and engine management control
Reduced risk of skidding
Maneuverability maintained even in extreme situations
Significant decrease of severe and fatal accidents
Customer benefits
Road safety relies on ESP® market availability
5
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
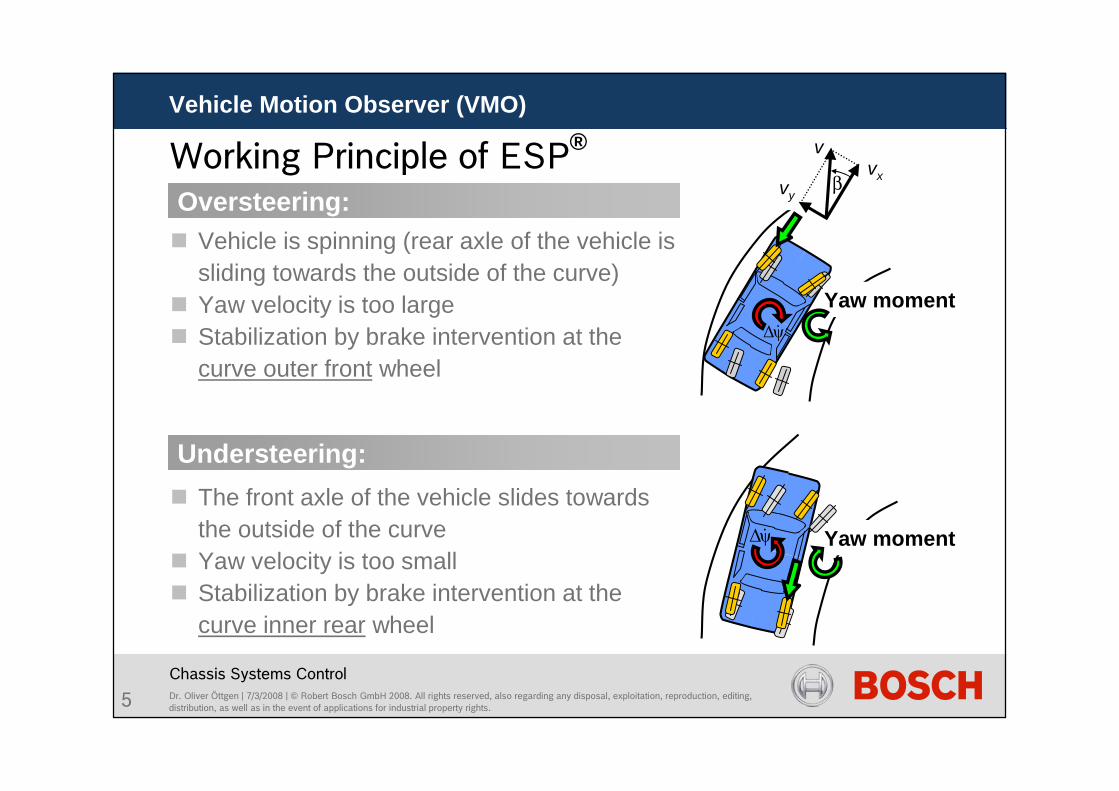
Working Principle of ESP®
Yaw momentψ∆
Oversteering:Vehicle is spinning (rear axle of the vehicle is sliding towards the outside of the curve)Yaw velocity is too largeStabilization by brake intervention at the curve outer front wheel
Yaw momentψ∆
Understeering:The front axle of the vehicle slides towards the outside of the curveYaw velocity is too smallStabilization by brake intervention at the curve inner rear wheel
vvx
vyβ
6
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
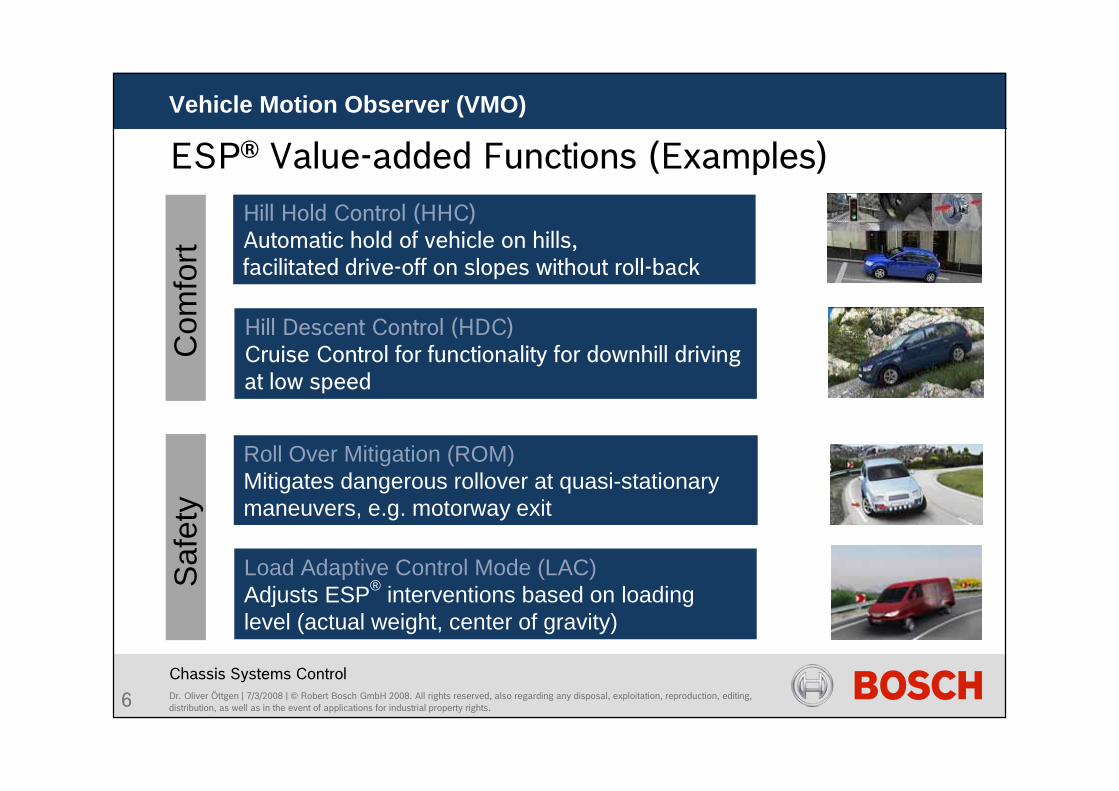
ESP® Value-added Functions (Examples)
Load Adaptive Control Mode (LAC)Adjusts ESP® interventions based on loading level (actual weight, center of gravity)
Roll Over Mitigation (ROM)Mitigates dangerous rollover at quasi-stationary maneuvers, e.g. motorway exit
Saf
ety
Hill Hold Control (HHC)Automatic hold of vehicle on hills, facilitated drive-off on slopes without roll-back
Hill Descent Control (HDC)Cruise Control for functionality for downhill driving at low speed
Com
fort
7
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
8
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
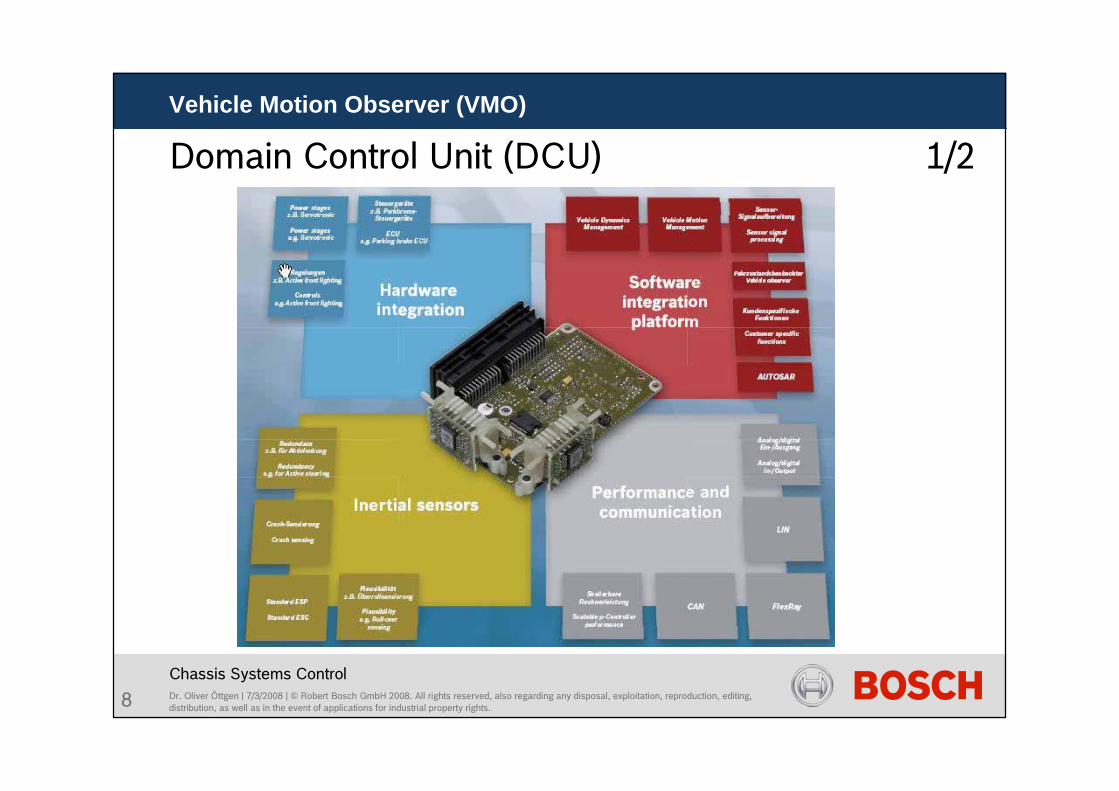
Domain Control Unit (DCU) 1/2
9
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
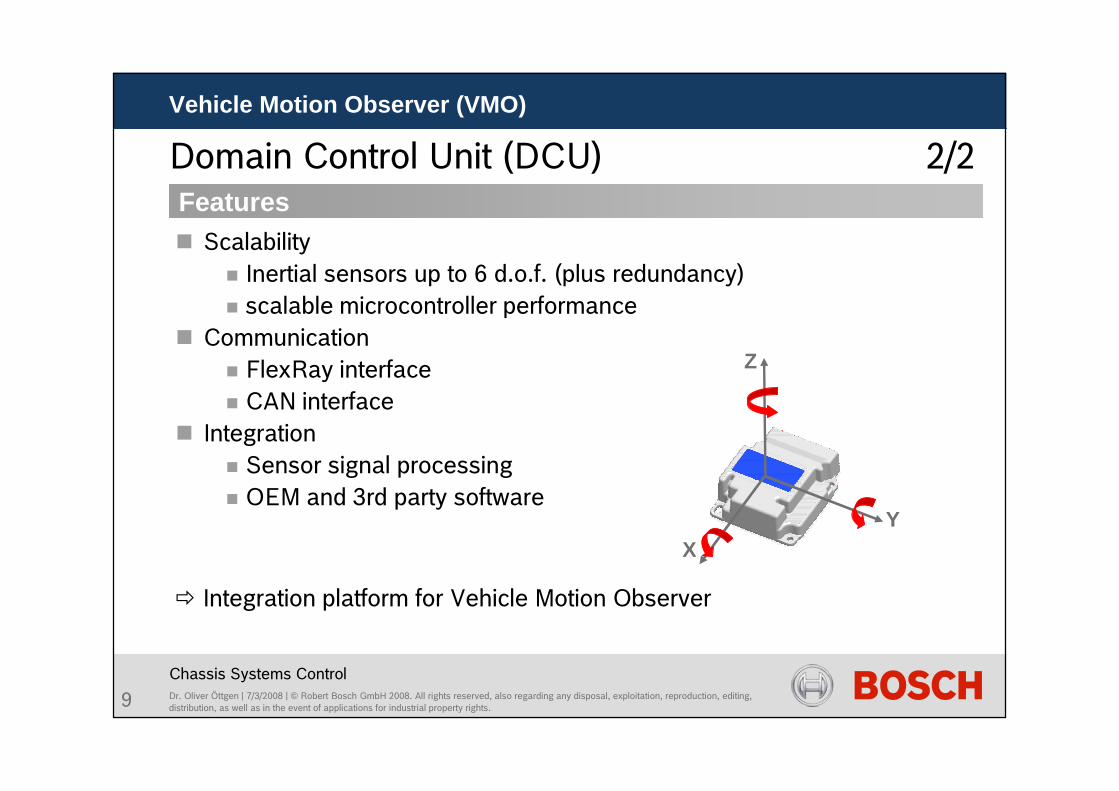
FeaturesScalability
Inertial sensors up to 6 d.o.f. (plus redundancy)scalable microcontroller performance
CommunicationFlexRay interfaceCAN interface
IntegrationSensor signal processingOEM and 3rd party software
Domain Control Unit (DCU) 2/2
YX
Z
Integration platform for Vehicle Motion Observer
10
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
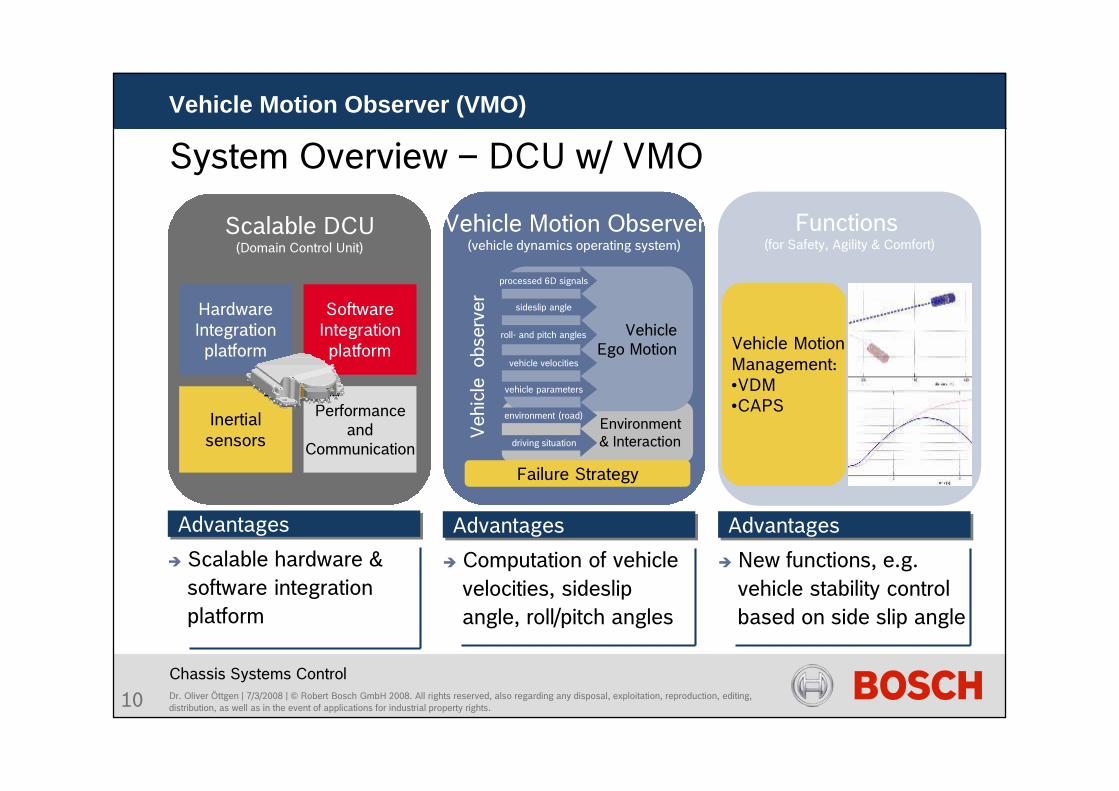
System Overview – DCU w/ VMO
Scalable DCU(Domain Control Unit)
HardwareIntegration
platform
HardwareIntegration
platform
SoftwareIntegrationplatform
SoftwareIntegrationplatform
InertialsensorsInertialsensors
Performanceand
Communication
Performanceand
Communication
Scalable hardware & software integration platform
AdvantagesAdvantages
Computation of vehicle velocities, sideslip angle, roll/pitch angles
AdvantagesAdvantages
New functions, e.g. vehicle stability control based on side slip angle
AdvantagesAdvantages
Vehicle Motion Observer(vehicle dynamics operating system)
Functions (for Safety, Agility & Comfort)
Vehicle MotionManagement:•VDM•CAPS
Environment& Interaction
VehicleEgo Motion
Veh
icle
obs
erve
r
sideslip angle
vehicle velocities
roll- and pitch angles
environment (road)
driving situation
processed 6D signals
vehicle parameters
Failure Strategy
11
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
12
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
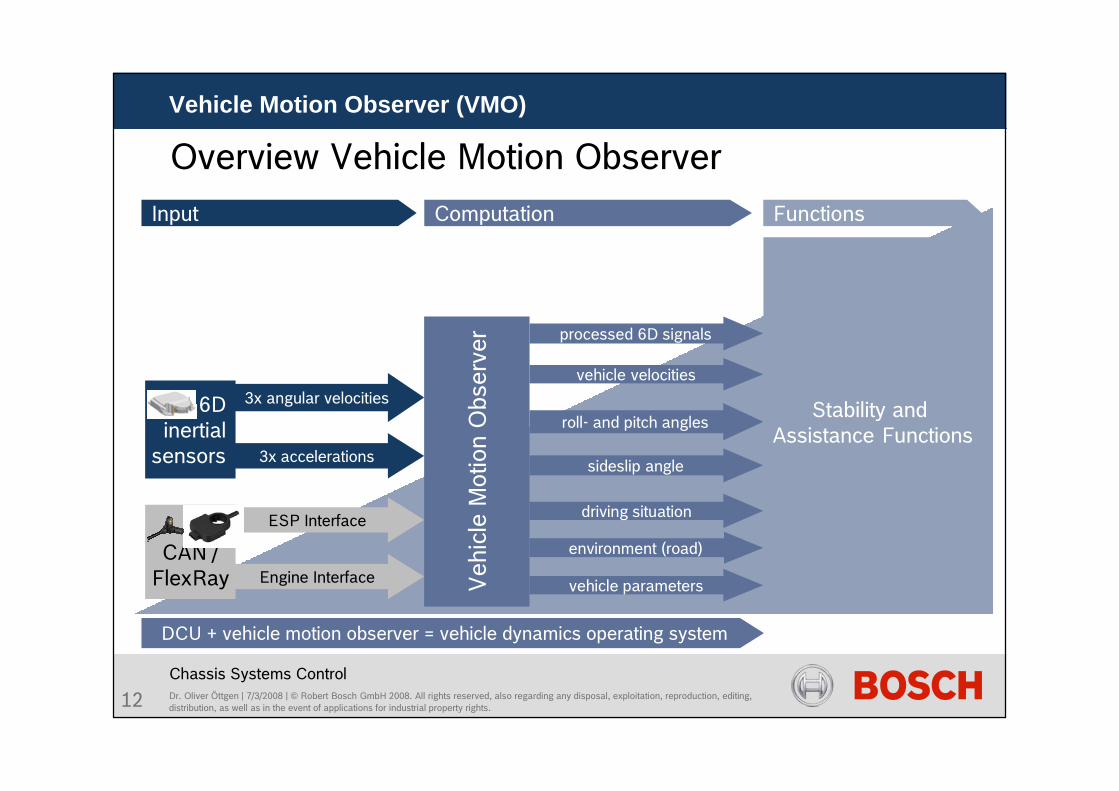
Overview Vehicle Motion Observer
6Dinertial
sensorsV
ehic
le M
otio
n O
bser
ver
Engine Interface
Stability and Assistance Functions
CAN /FlexRay
Input
DCU + vehicle motion observer = vehicle dynamics operating system
sideslip angle
vehicle velocities
roll- and pitch angles
environment (road)
driving situation
processed 6D signals
vehicle parameters
FunctionsComputation
ESP Interface
3x angular velocities
3x accelerations
13
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
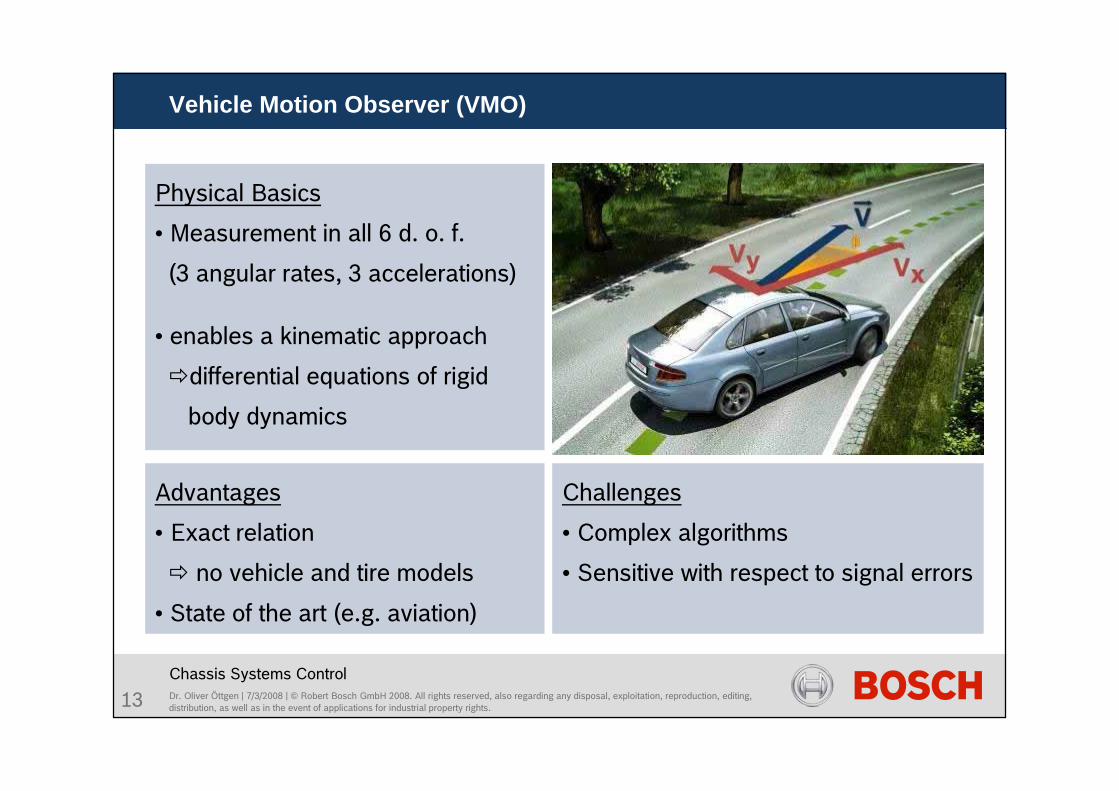
Advantages
• Exact relation
no vehicle and tire models
• State of the art (e.g. aviation)
Challenges
• Complex algorithms
• Sensitive with respect to signal errors
Physical Basics
• Measurement in all 6 d. o. f.
(3 angular rates, 3 accelerations)
• enables a kinematic approach
differential equations of rigid
body dynamics
14
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
XR
ZR
YR
X´
Y´
αzXR
ZR, Z´
YR
αz
X´
XR
ZR,Z´
YR
X´´
αy´
Z´´
Y´, Y´´
αz
αz
αy´
αx´´
X´
XR
ZR,Z´
YR
X´´, X´´´
Z´´´
Y´, Y´´Y´´´
αx´´
Z´´
αy´
αz
αz
αy´
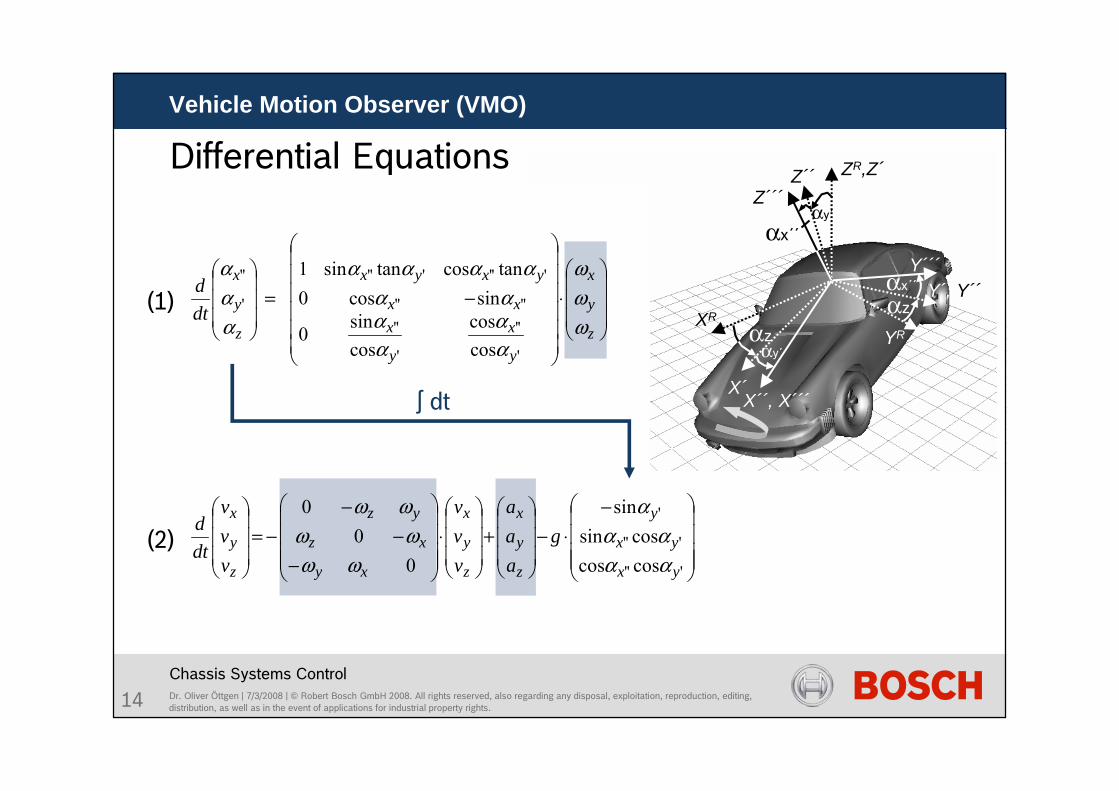
Differential Equations
(1)
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ −⋅−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−−
−−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
'''
'''
'
coscoscossin
sin
00
0
yx
yx
y
z
y
x
z
y
x
xy
xz
yz
z
y
xg
aaa
vvv
vvv
dtd
αααα
α
ωωωω
ωω
(2)
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
−=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
z
y
x
y
x
y
xxx
yxyx
z
y
x
dtd
ωωω
αα
αα
αααααα
ααα
'
''
'
''''''
''''''
'
''
coscos
cossin
0
sincos0tancostansin1
∫ dt
15
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
16
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
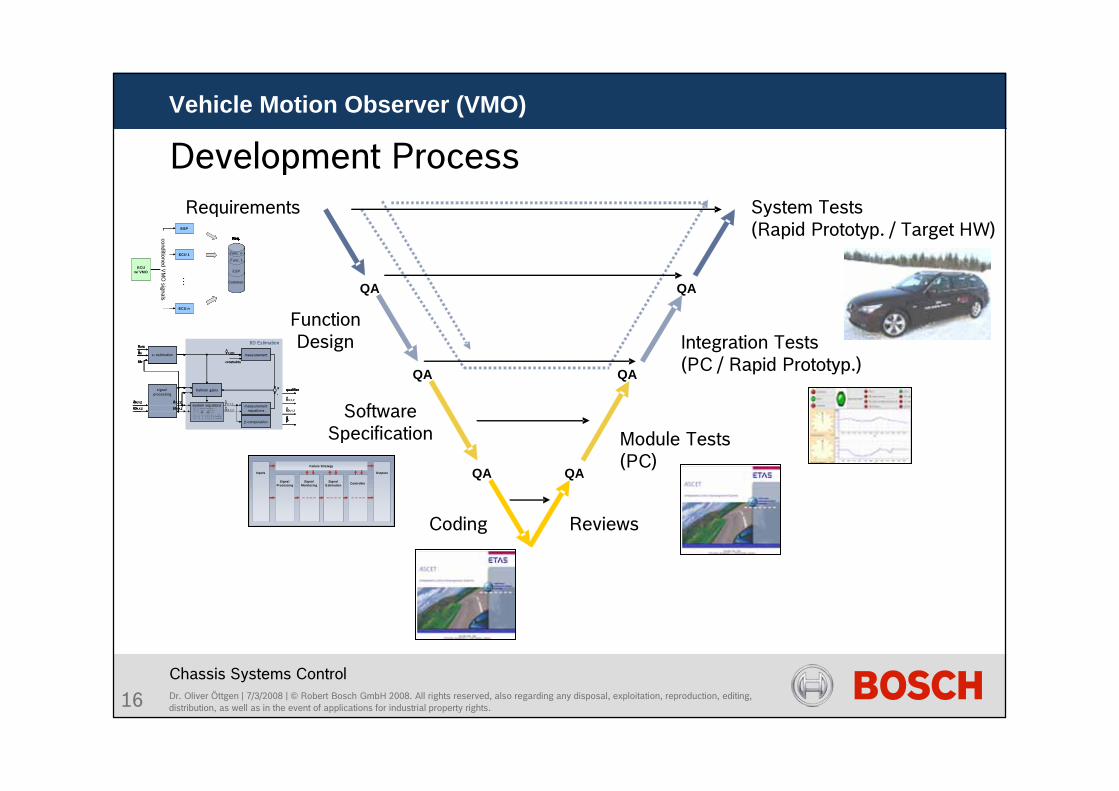
Development ProcessRequirements
FunctionDesign
Software Specification Module Tests
(PC)
System Tests(Rapid Prototyp. / Target HW)
Integration Tests(PC / Rapid Prototyp.)
Coding
QA
QA
QA QA
QA
QA
Reviews
Inputs Outputs
Failure Strategy
Signal Processing
Signal Monitoring
Signal Estimation Controller
Func. n
Func. 1
ESP
Common
Req.
Func. n
Func. 1
ESP
Common
Req.
Func. n
Func. 1
ESP
Common
Req.
ESP
ECU 1
ECU n
ECUw/ VMO
conditioned VM
O signals
…
6D Estimation
vX,Y,Z^
αX,Y,Z^
signal processing
aX,Y,Z
ωX,Y,Z
signal processing
aX,Y,Z
ωX,Y,Z
β̂β computation β̂β computation
aX,Y,Z
ωX,Y,Z
aX,Y,Z
ωX,Y,Zsystem equations vX,Y,Z
αX,Y,Z
^^
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
θϕθϕ
θ−⋅−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωω−ω−ω
ωω−−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωωω
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
θϕ
θϕ
ϕ−ϕθϕθϕ
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ψθϕ
coscoscossin
sing
aaa
vvv
00
0
vvv
coscos
cossin
0
sincos0tancostansin1
z
y
x
z
y
x
xy
xz
yz
z
y
x
z
y
x
qualifierqualifier
vwhl,i
ωZ
vX estimationδS
vwhl,i
ωZ
vX estimationδS
Kalman gains
measurementequations
measurementvX Whl^
constraints
+-
Kalman gains
measurementequations
measurementvX Whl^
constraints
+-
Inputs Outputs
Failure Strategy
Signal Processing
Signal Monitoring
Signal Estimation Controller
Func. n
Func. 1
ESP
Common
Req.
Func. n
Func. 1
ESP
Common
Req.
Func. n
Func. 1
ESP
Common
Req.
ESP
ECU 1
ECU n
ECUw/ VMO
conditioned VM
O signals
…
6D Estimation
vX,Y,Z^
αX,Y,Z^
signal processing
aX,Y,Z
ωX,Y,Z
signal processing
aX,Y,Z
ωX,Y,Z
β̂β computation β̂β computation
aX,Y,Z
ωX,Y,Z
aX,Y,Z
ωX,Y,Zsystem equations vX,Y,Z
αX,Y,Z
^^
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
θϕθϕ
θ−⋅−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωω−ω−ω
ωω−−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωωω
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
θϕ
θϕ
ϕ−ϕθϕθϕ
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ψθϕ
coscoscossin
sing
aaa
vvv
00
0
vvv
coscos
cossin
0
sincos0tancostansin1
z
y
x
z
y
x
xy
xz
yz
z
y
x
z
y
x
qualifierqualifier
vwhl,i
ωZ
vX estimationδS
vwhl,i
ωZ
vX estimationδS
Kalman gains
measurementequations
measurementvX Whl^
constraints
+-
Kalman gains
measurementequations
measurementvX Whl^
constraints
+-
17
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
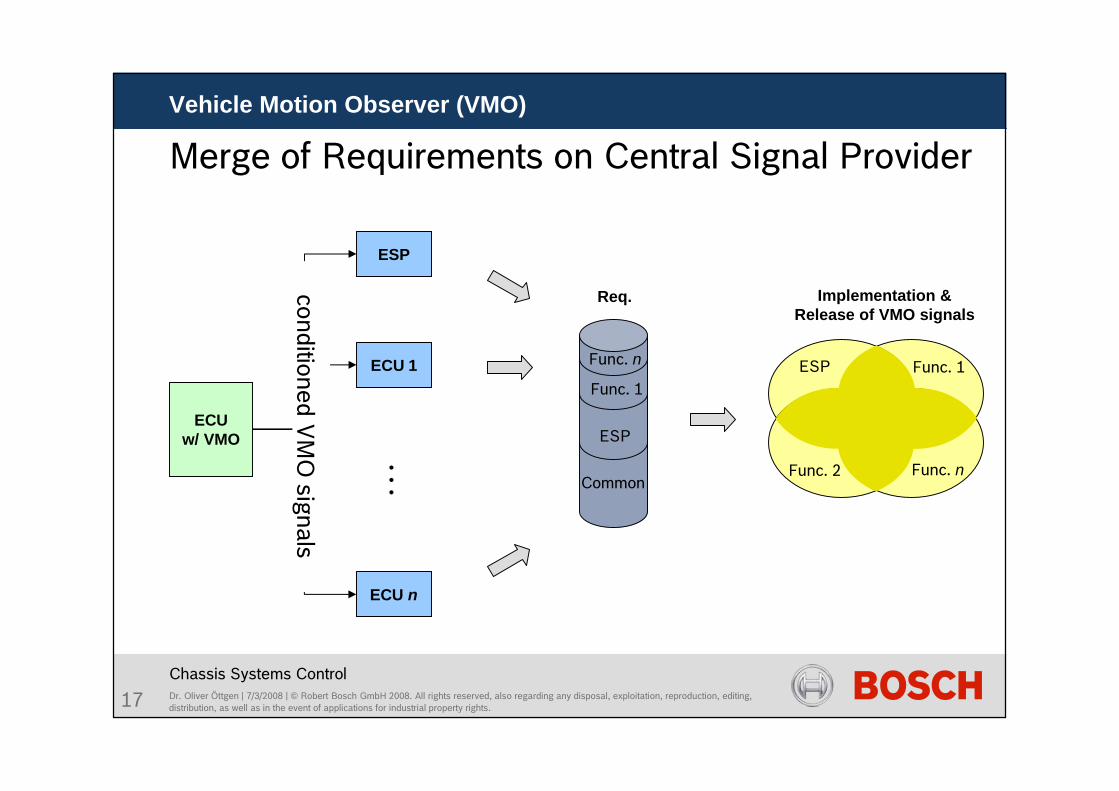
Merge of Requirements on Central Signal Provider
Func. n
Func. 1
ESP
Common
Req.
ESP
ECU 1
ECU n
ECUw/ VMO
conditioned VM
O signals
Func. 2
ESP Func. 1
Func. n
Implementation & Release of VMO signals
…
18
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
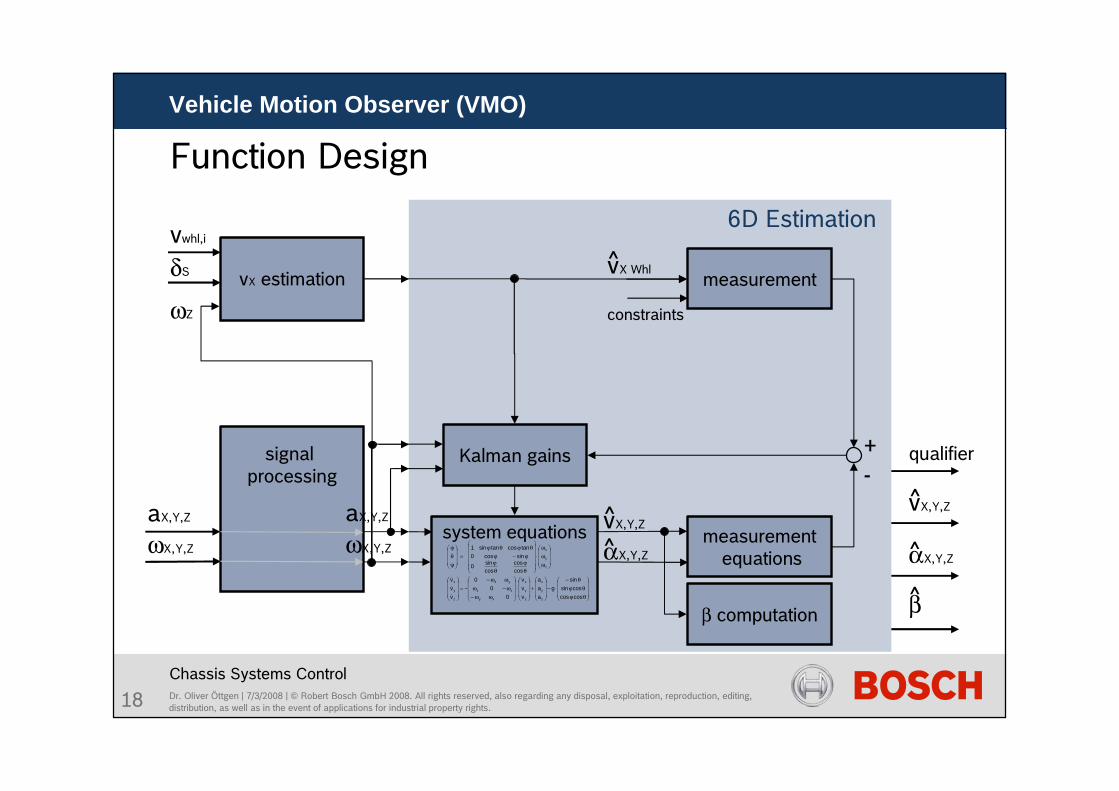
6D Estimation
vX,Y,Z^
αX,Y,Z^
signal processing
aX,Y,Z
ωX,Y,Z
β̂β computation
Function Design
aX,Y,Z
ωX,Y,Zsystem equations vX,Y,Z
αX,Y,Z
^^
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
θϕθϕ
θ−⋅−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛⋅⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωω−ω−ω
ωω−−=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ωωω
⋅
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
θϕ
θϕ
ϕ−ϕθϕθϕ
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
ψθϕ
coscoscossin
sing
aaa
vvv
00
0
vvv
coscos
cossin0
sincos0tancostansin1
z
y
x
z
y
x
xy
xz
yz
z
y
x
z
y
x
qualifier
vwhl,i
ωZ
vX estimationδS
Kalman gains
measurementequations
measurementvX Whl^
constraints
+-
19
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
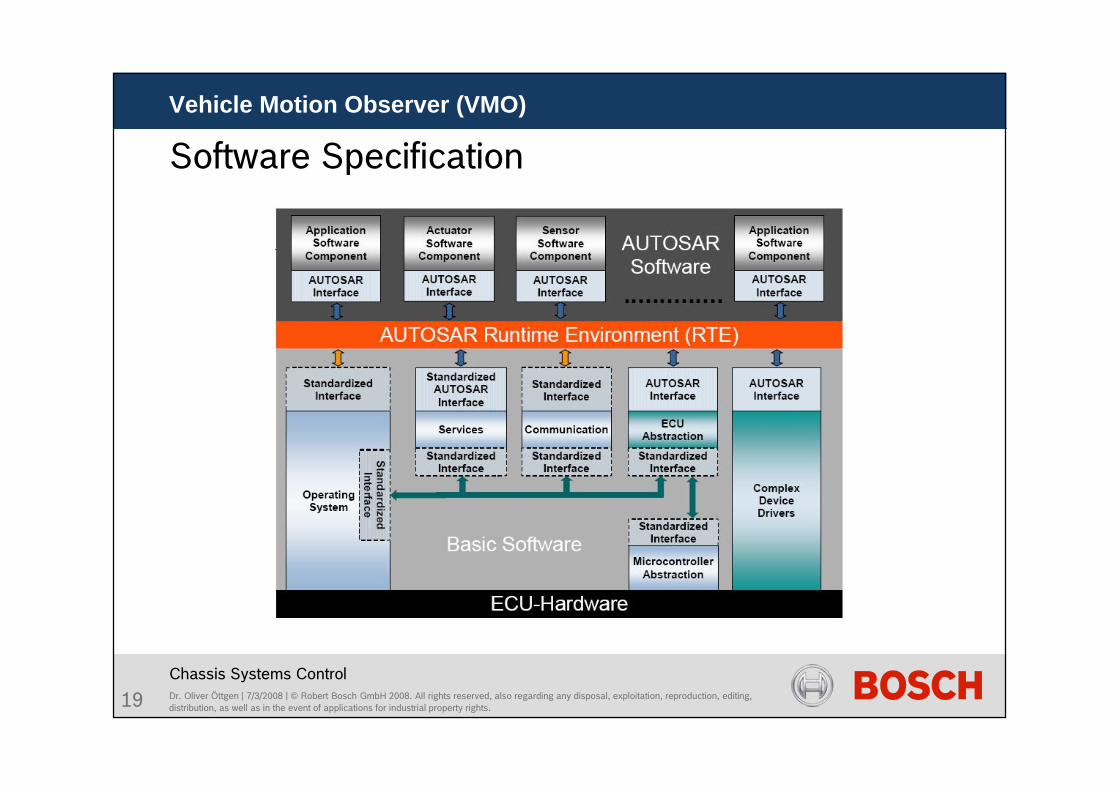
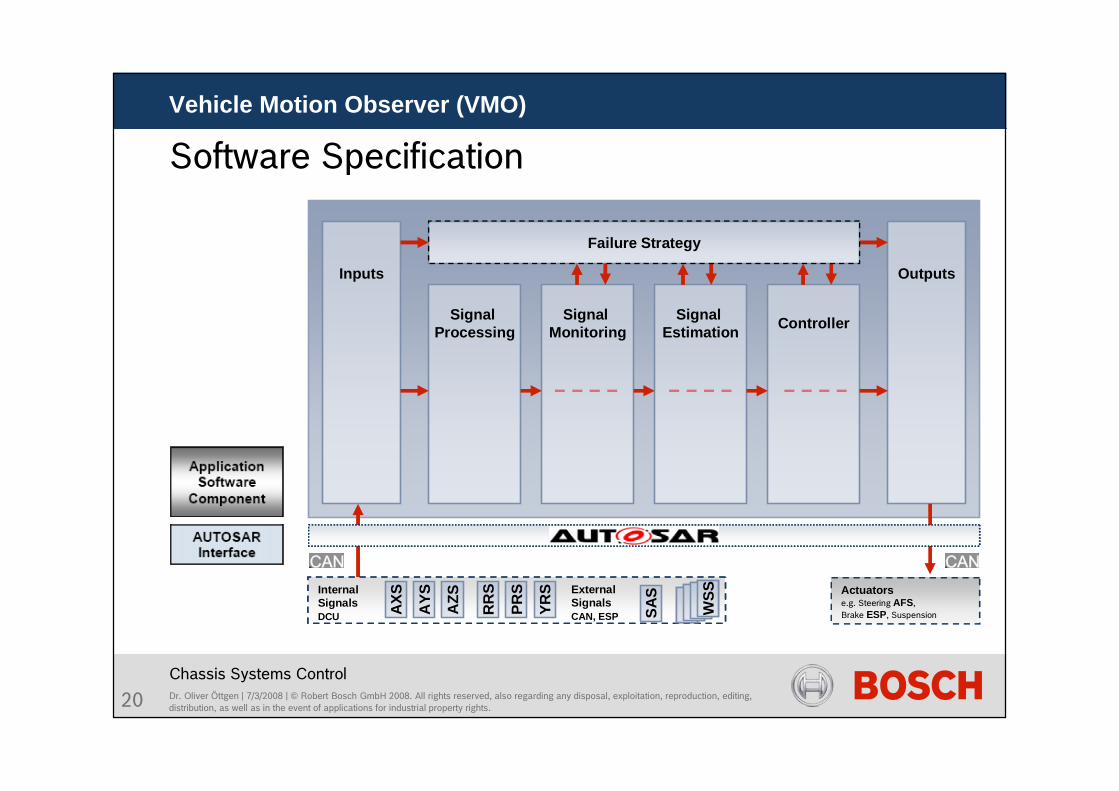
Software Specification
20
Inputs Outputs
Failure Strategy
Signal Processing
Signal Monitoring
Signal Estimation Controller
InternalSignalsDCU
ExternalSignalsCAN, ESP S
AS
AX
S
AY
S
AZS
RR
S
PR
S
YR
S
WS
SInternalSignalsDCU
ExternalSignalsCAN, ESP S
AS
AX
S
AY
S
AZS
RR
S
PR
S
YR
S
WS
SW
SS Actuators
e.g. Steering AFS, Brake ESP, Suspension
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Software Specification
21
Offline Online
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
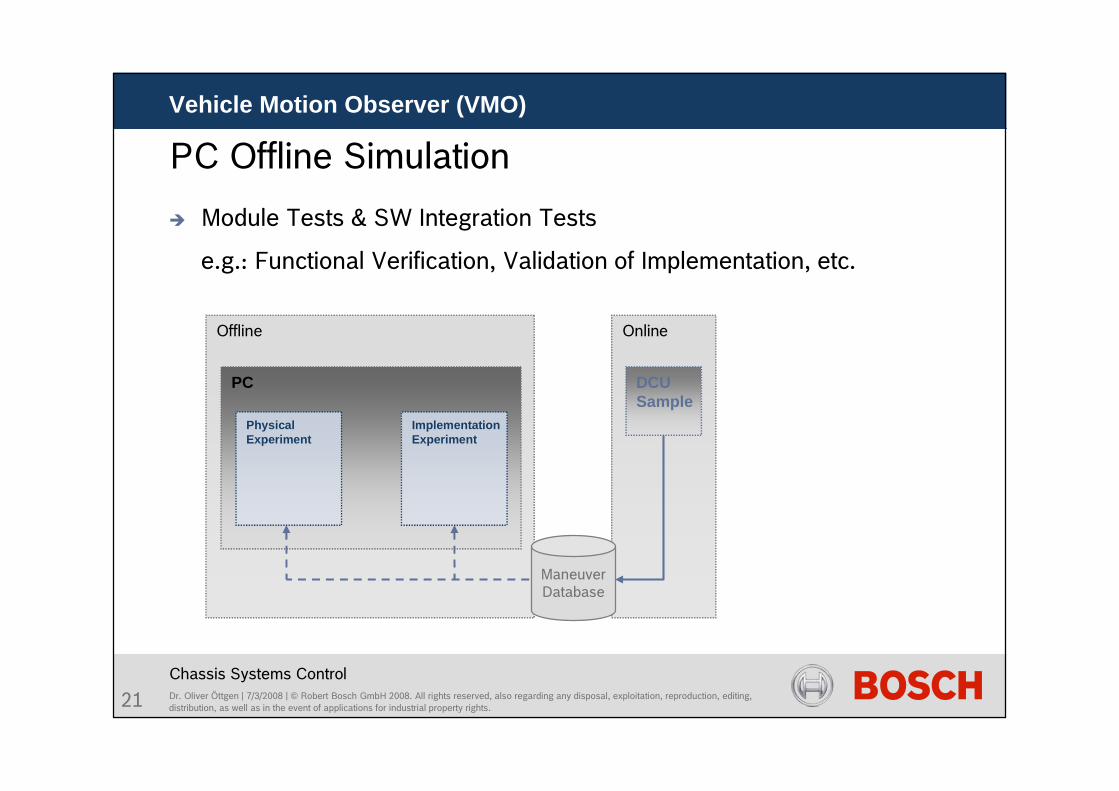
PC Offline Simulation
DCUSample
PC
PhysicalExperiment
Implementation Experiment
ManeuverDatabase
Module Tests & SW Integration Tests
e.g.: Functional Verification, Validation of Implementation, etc.
22
Online
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
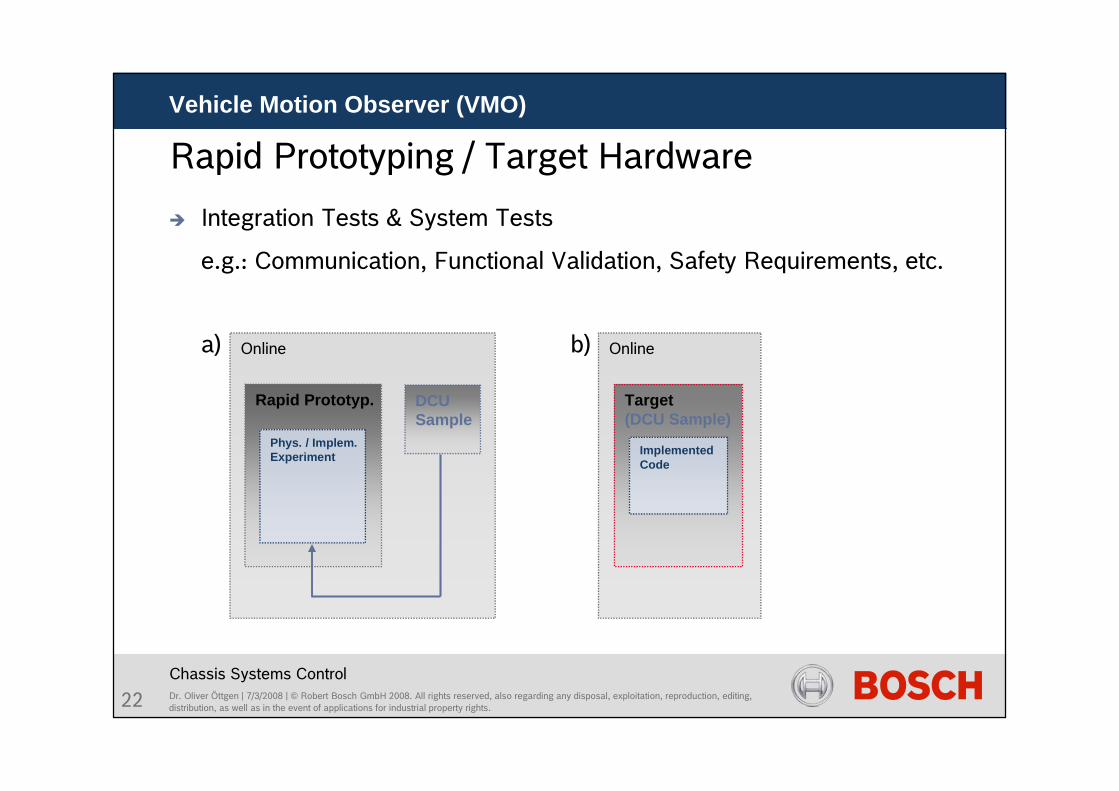
Rapid Prototyping / Target Hardware
Integration Tests & System Tests
e.g.: Communication, Functional Validation, Safety Requirements, etc.
Online
AUTOSAR RTE
Rapid Prototyp.
Phys. / Implem.Experiment
DCUSample
Target(DCU Sample)
Implemented Code
a) b)
23
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
24
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Experimental Vehicle (Winter Testing 2007/2008)Vehicle: BMW 530d automatic (E61)Drive Train: 3.0L diesel, 235 hp, RWDSensors: DCU with 6D inertial sensors (sample)Actuators: ESP®premium (production level), AFS (ZFLS)
25
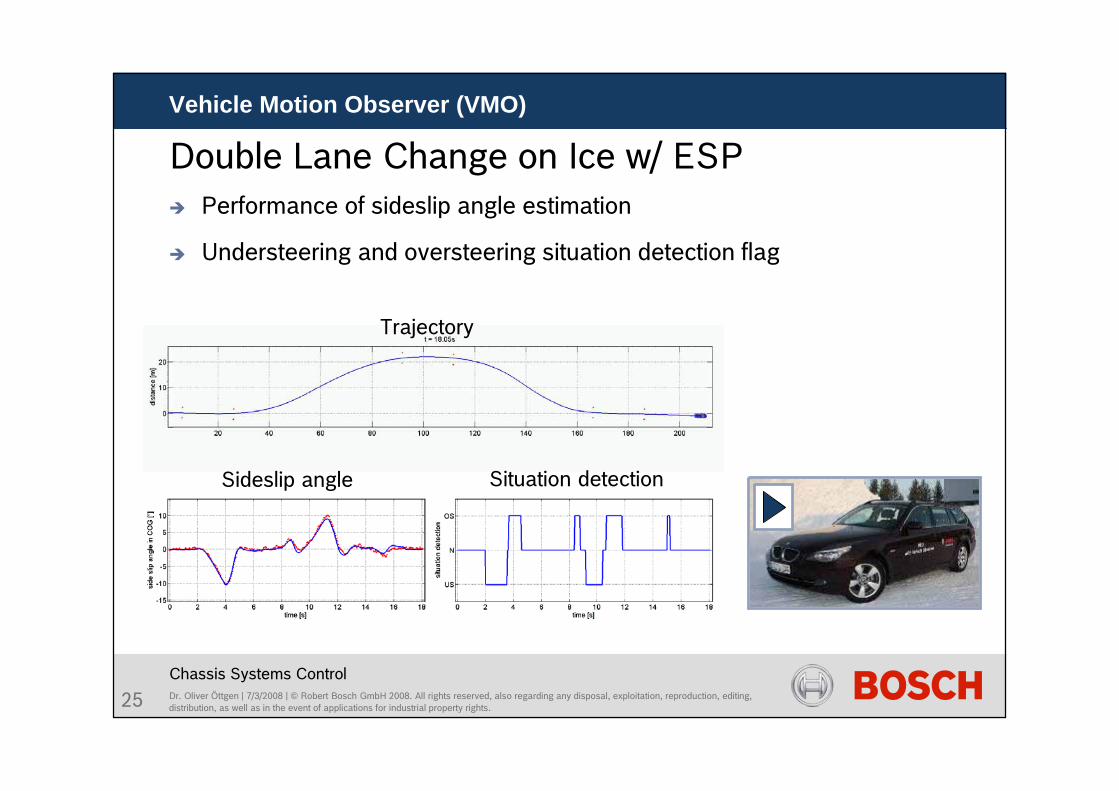
Double Lane Change on Ice w/ ESPPerformance of sideslip angle estimation
Understeering and oversteering situation detection flag
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Sideslip angle Situation detection
Trajectory
26
Vx
[kph
]
0
10
20
30
40
50
60
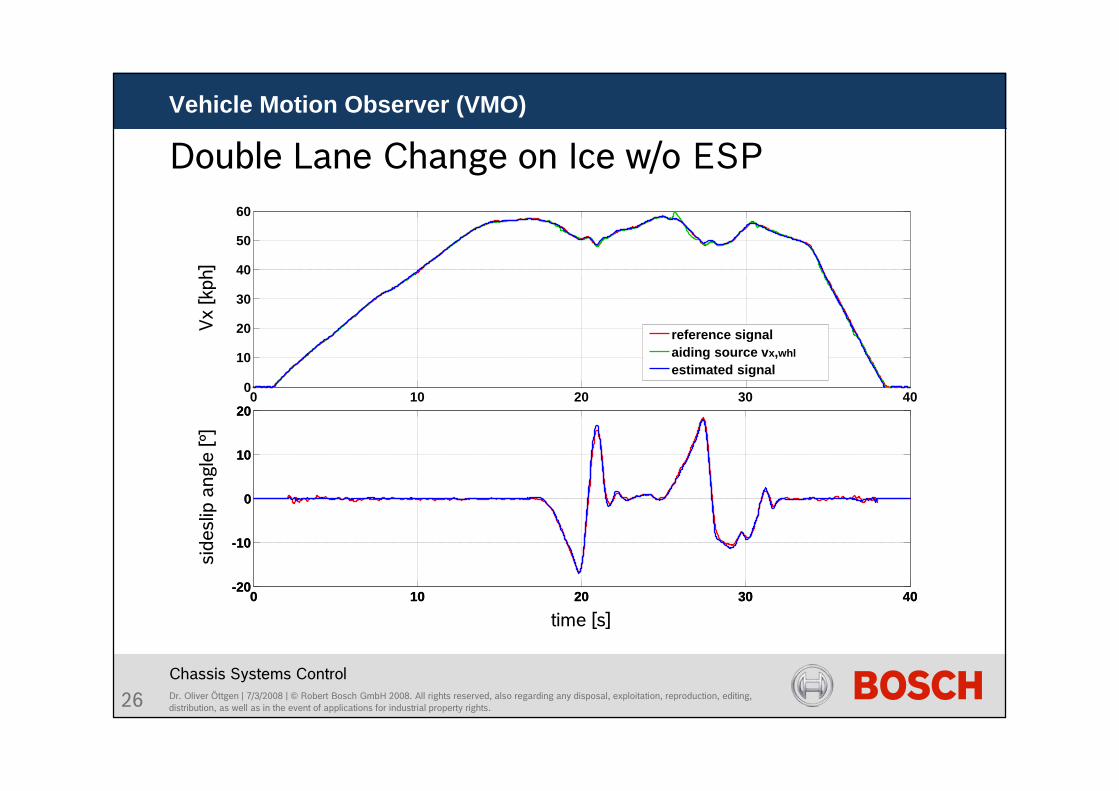
reference signalaiding source vx,whlestimated signal
0 10 20 30 40
time [s]
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Double Lane Change on Ice w/o ESPV
y[k
ph]
-20
-10
0
10
20
0 10 20 30 40
time [s]
side
slip
ang
le [°
]
0 10 20 30 40-20
-10
0
10
20
27
0 20 40 60 80 100 120 1400
20
40
60
80lo
ng. v
eloc
ity [k
ph]
0 20 40 60 80 100 120 140-40
-20
0
20
40
time [s]
side
slip
ang
le [d
eg]
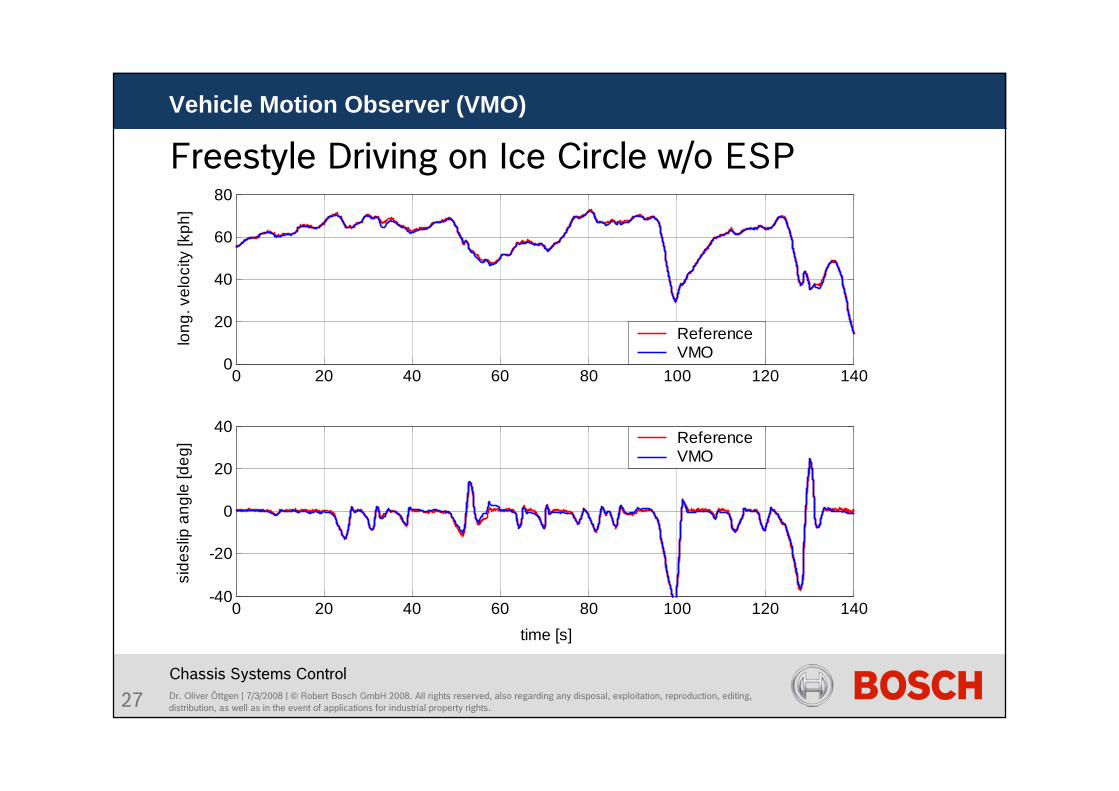
ReferenceVMO
ReferenceVMO
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Freestyle Driving on Ice Circle w/o ESP
28
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
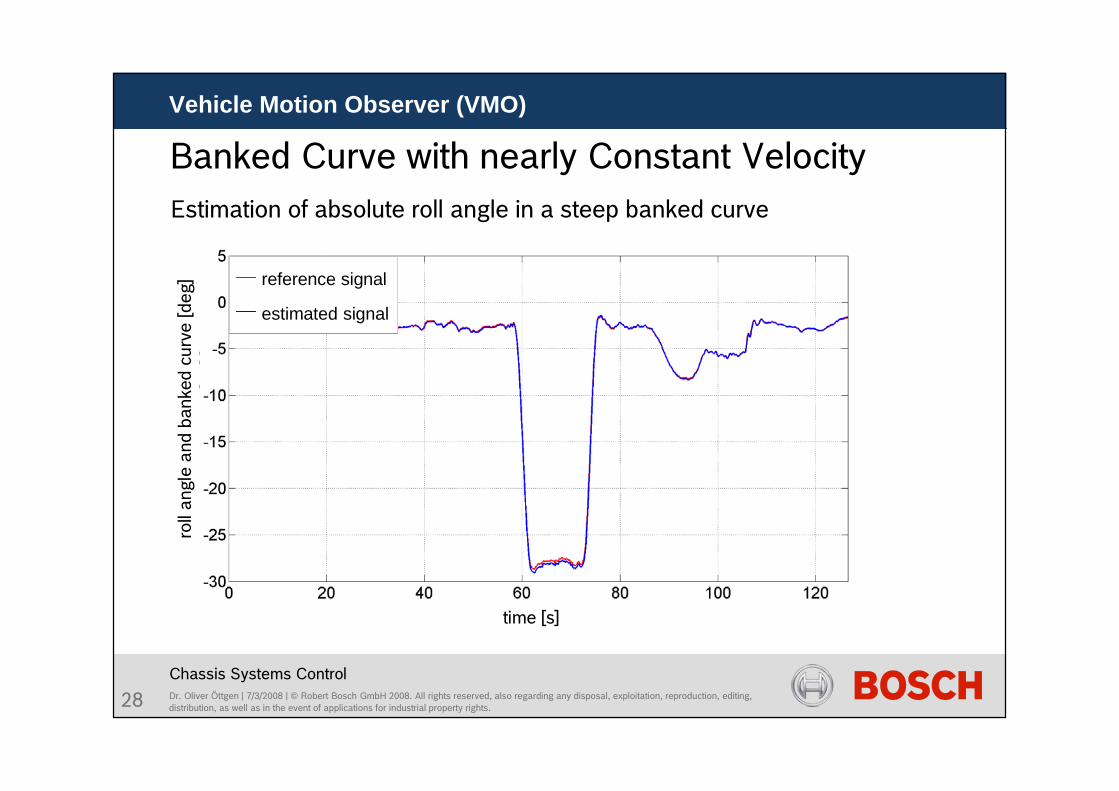
Banked Curve with nearly Constant VelocityEstimation of absolute roll angle in a steep banked curve
reference signal
estimated signal
time [s]
roll
angl
e an
d ba
nked
cur
ve [d
eg] reference signal
estimated signal
time [s]
roll
angl
e an
d ba
nked
cur
ve [d
eg]
29
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
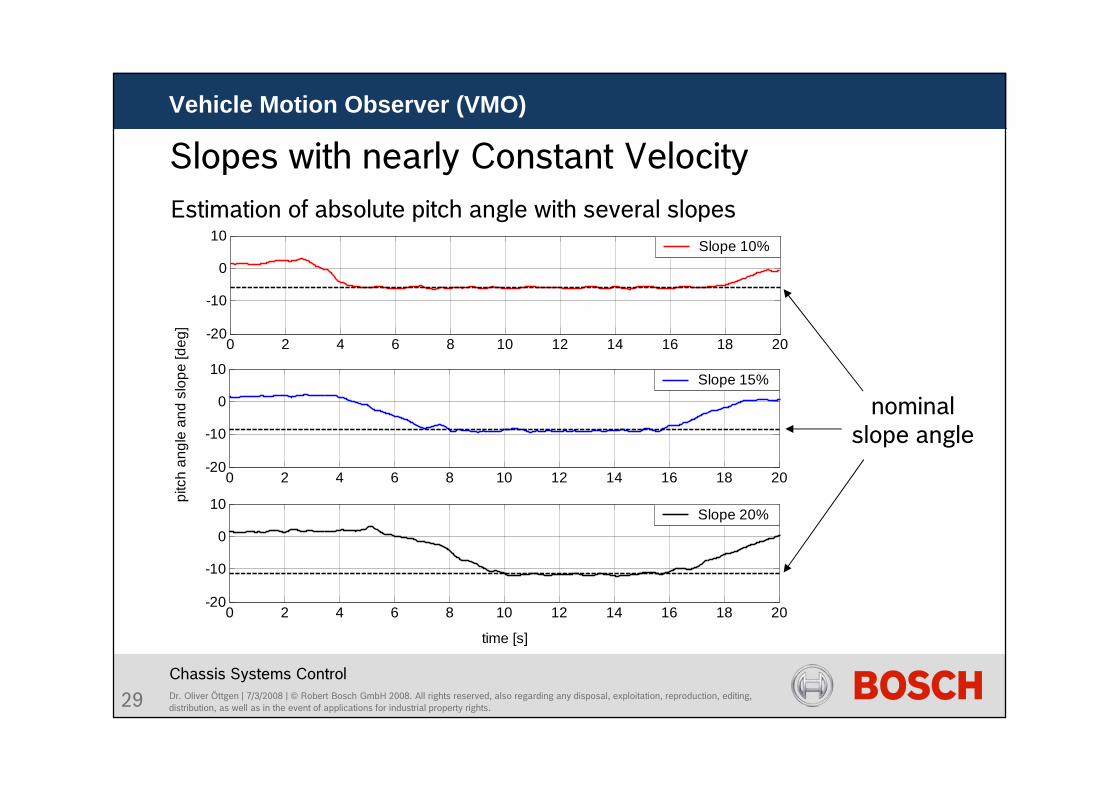
Slopes with nearly Constant Velocity
0 2 4 6 8 10 12 14 16 18 20-20
-10
0
10
0 2 4 6 8 10 12 14 16 18 20-20
-10
0
10
pitc
h an
gle
and
slop
e [d
eg]
0 2 4 6 8 10 12 14 16 18 20-20
-10
0
10
time [s]
Slope 10%
Slope 15%
Slope 20%
Estimation of absolute pitch angle with several slopes
nominalslope angle
30
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
ContentsIntroduction
System Overview
Vehicle Motion ObserverPhysical BasicsDevelopment Process
Results of Test Drives
Conclusion and Outlook
31
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Conclusion and OutlookVehicle Motion Observer
improved accuracy of established signal: long. velocity
high accuracy of new signals: lat. velocity, sideslip angle, etc.
accuracy of VMO signals suitable for vehicle dynamics control
Operating System for current and new vehicle dynamics control systems
small set of VMO interface signals to other ECUs
central signal processing and monitoring
enhancement of safety, agility and comfort by sideslip angle control
32
Vehicle Motion Observer (VMO)
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
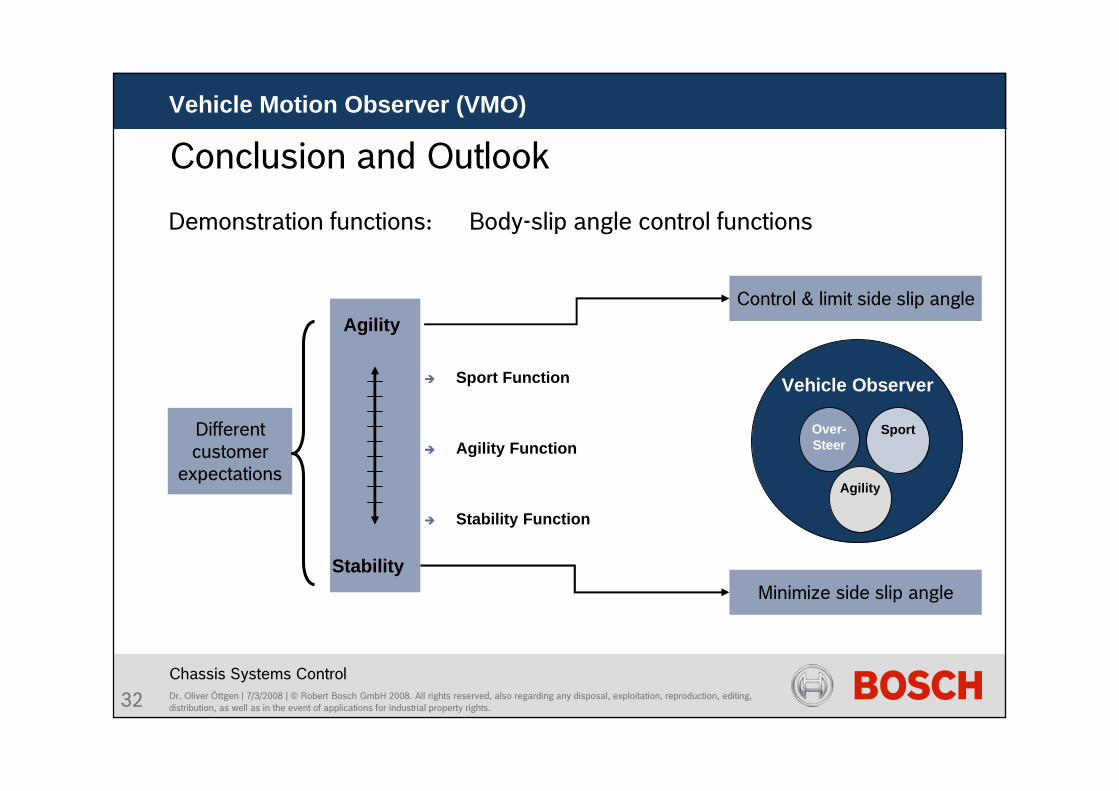
Conclusion and Outlook
Stability
AgilityControl & limit side slip angle
Minimize side slip angle
Differentcustomer
expectations
Sport Function
Agility Function
Stability Function
Demonstration functions: Body-slip angle control functions
Vehicle Observer
Over-Steer
Sport
Agility

33 Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Thank you for your attention!Thank you for your attention!
Vehicle Motion Observer –Bestimmung der Fahrzeugbewegung ohne Fahrzeug- und Reifenmodelle
Dortmunder Regelungstechnische Kolloquien 2008
34
Contact Information
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
Career at Bosch Personalabteilung AbstattRobert-Bosch-Allee 174232 Abstatt E-mail: [email protected]
35
Contact Information
Dr. Oliver Öttgen | 7/3/2008 | © Robert Bosch GmbH 2008. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
Chassis Systems Control
BewerbungWo? Bei der Personalabteilung des Standortes:
Robert Bosch GmbHPersonalabteilung AbstattRobert-Bosch-Allee 174232 Abstatt E-mail: [email protected]
Wie? Vollständige Bewerbungsunterlagen an die Personalabteilung Bewerbungsschreiben, tabellarischer Lebenslauf, Lichtbild, Zeugniskopien
Onlinebewerbung bevorzugt
Weitere Informationen sowie Adressen und aktuelle Stellenangebote finden Sie unter www.bosch-career.de
Direkteinstieg