
Vergleich und Bewertung von 3D-Sensoren für mobile...
20
Seminar Vergleich und Bewertung von 3D-Sensoren für mobile Roboter Maike Kuhnert Betreuer : Dipl.-Inf. Stefan Czarnetzki Eingereicht am : 19. Oktober 2009
Transcript of Vergleich und Bewertung von 3D-Sensoren für mobile...

Seminar
Vergleich und Bewertung von3D-Sensoren für mobile Roboter
Maike Kuhnert
Betreuer : Dipl.-Inf. Stefan CzarnetzkiEingereicht am : 19. Oktober 2009


III
Inhaltsverzeichnis
1 Einleitung 11.1 Grundlagen der 3D Sensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Anwendungsgebiete . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 3D-Laser-Entfernungsmesser 32.1 Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Einsatzmöglichkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Stereo-Vision Kameras 63.1 Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Einsatzmöglichkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Time-of-Flight Kameras 94.1 Funktionsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.2 bekannte Probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104.3 Bewertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124.4 Einsatzmöglichkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5 Vergleich der vorgestellten 3D-Sensoren 13
6 Ausblick und Fazit 15
Literatur 16

IV
Bildverzeichnis
1.1 Anwendungsgebiete von 3D Sensoren . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 3D Laser-Entfernungsmesser,Hukoyo URG-04LX [PBP08] . . . . . . . . . . . . . . . 3
3.1 Stereo-Vision Kamera, [Vid09] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Funktionsweise von Stereo-Vision [FH08] . . . . . . . . . . . . . . . . . . . . . . . . 63.3 Vergleich von Oberflächen, betrachtet mit Stereo-Vision, [PBP08] . . . . . . . . . . . 7
4.1 Time-of-Flight-Kamera [PBP08] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94.2 Prinzip von Time-of-Flight Messungen [RLS99] . . . . . . . . . . . . . . . . . . . . . 104.3 Veränderung des Amplituden-Threshold-Parameter . . . . . . . . . . . . . . . . . . . 114.4 fehlerhafte Messungen durch Reflektionen . . . . . . . . . . . . . . . . . . . . . . . . 12

1
1 Einleitung
Heutzutage bekommen Sensoren, die die Bereitstellung von 3D-Datenbereichen unterstützen, im-mer mehr Aufmerksamkeit. Insbesondere Anwendungen, welche für unstrukturierte Umgebungenkonzipiert wurden, können auf diese Art vereinfacht und zuverlässiger gestaltet werden. Beispielehierzu sind vorallem die 3D-Wahrnehmung und das 3D-Mapping. Weiterhin können derartige Sen-soren unterstützend in der Safety, Security und Rescue Robotik (SSRR) eingesetzt werden.Der wesentliche Vorteil von 3D-Daten ist, dass diese es ermöglichen Abschätzungen von Distan-zen durchzuführen, um zum Beispiel realistische Karten von Katastrophengebieten zu zeichnenoder um verletzte Menschen von Schatten zu unterscheiden.
Diese Arbeit beschreibt und bewertet zunächst drei unterschiedliche Arten von 3D Sensoren:
∙ 3D-Laser-Entfernungsmesser
∙ Stereo-Vision Kameras
∙ Time-of-Flight Kameras
Hierbei werden die ersten beiden Technologien kurz vorgestellt. Die Betrachtung der Time-of-FlightKameras fällt ausführlicher aus, da diese eine neue Technologie darstellen. Anschließend werdendiese dann anhand eines Prototypen verglichen und in entsprechende Anwendungsgebiete einsor-tiert.
1.1 Grundlagen der 3D Sensorik
Ziel der 3D-Sensorik ist es, Informationen nicht nur in 2D, sondern direkt in 3D aufzunehmen undso vorallem Informationen über Distanzen in den jeweiligen Messbereichen zu bekommen. Hierbeiist momentan der 3D-Laser-Entfernungsmesser die am häufigsten gebräuchlichste Technologiegefolgt von Stereo-Vision und Time-of-Flight-Kameras. Bei der Entwicklung von neuen Technolo-gien ist besonders darauf zu achten, dass diese an ihren späteren Anwendungbereich angepasstwerden. Zum Beispiel dürfen Sensoren für mobile Roboter nicht zu große Rechenanforderungenoder ein zu hohes Gewicht haben.

2 1 Einleitung
1.2 Anwendungsgebiete
3D Sensoren werden in vielen unterschiedlichen Bereichen eingesetzt. So gibt es beispielswei-se neben der Kartenerstellung und Lokalisierung interessante Anwendungsgebiete wie z.B. 3D-sensorunterstützte, vorausschauende Sicherheitssysteme im Automobil. Ebenso finden diese aberauch in der plastischen und in der wiederherstellenden Chirurgie Verwendung. Die in dieser Aus-arbeitung beschriebenen Sensoren beziehen sich in erster Linie jedoch auf 3D-Wahrnehmung und3D-Mapping, d.h. Lokalisierung und Kartenerstellung im Bezug auf Nutzung in der autonomen Ro-botik.
Bild 1.1: Anwendungsgebiete von 3D Sensoren

3
2 3D-Laser-Entfernungsmesser
3D-Laser-Entfernungsmesser sind die am meisten genutzte Technologie im 3D-Mapping. Vielevon ihnen lassen sich jedoch aufgrund ihrer Größe und benötigten Rechenleistung, da sie norma-lerweise für geometrische Anwendungen konzipiert sind, nicht zusammen mit mobilen Roboternverwenden. Daher wird hier meistens ein 2D-Laser benutzt und dieser um eine dritte Dimensionerweitert, z.B. durch eine spezielle Bewegung des Roboters. Den Betrachtungen in dieser Arbeitwird ein 2D-Laser-Sensor mit einer leicht nickenden Bewegung des Roboters zugrunde gelegt,vgl. [PBP08].
Bild 2.1: 3D Laser-Entfernungsmesser,Hukoyo URG-04LX [PBP08]
2.1 Funktionsweise
Es gibt 2 verschiedene Funktionsweisen von Laserscannern:Zum einen gibt es punkt- oder auch streifenbasierte Laserscanner. Diese projizieren einen Laser-strahl oder auch einen Laserstreifen auf ein Objekt. Mithilfe von Sensoren, wie z.B. einer Kameramit einer festen Position, wird dieser Punkt ermittelt und anschließend dann mit dem Prinzip derTriangulation der Abstand berechnet.
Der anderen Methode liegt die Messung der Laufzeit des Lichtes zugrunde. Hierbei wird ein La-serstrahl zum Objekt gesendet und dort reflektiert, dabei wird gemessen wielange das Licht für dieStrecke benötigt. Die Distanz D zwischen A und B wird nun aus der Lichtgeschwindigkeit c undder Zeit t, die das Signal von A nach B benötigt, berechnet:
D =ct
2(2.1)
4 2 3D-Laser-Entfernungsmesser
Die größte Schwierigkeit hierbei ist die Zeit t möglichst exakt zu messen. Da die Zeiten sehr kleinsind, muss die Zeit in Nanosekunden gemessen werden. Hierbei entspricht 1m genau 6, 67ns.Um in einem Bereich die Entfernungen zu messen, muss der 3D-Laser-Entfernungsmesser denMessbereich einzeln abtasten und somit für alle Punkte die Entfernungen abspeichern. Diese Tech-nik benötigt natürlich eine gewisse Zeit um Informationen über den kompletten Messbereich aufzu-nehmen. Um dieses schneller zu gestalten wird der Laserstrahl mithilfe eines Spiegels abgelenkt,sodass man in einer Messung z.B. einen kompletten horizontalen Scan durchführen kann. Durchdie nickende Bewegung des Roboters können dann viele dieser horizontalen Scans durchgeführtwerden, so dass nach ca. 3 Sekunden Informationen über ein Messfeld von 240∘×90∘ vorliegen.
2.2 Bewertung
Laser-Scanner stellen eine sehr erprobte, gut etablierte Technologie dar. Doch ist die Anwendungvon 3D-Scanner momentan hauptsächlich auf geometrische Anwendungen ausgerichtet. Dahersind diese nur bedingt für die Nutzung auf mobilen Robotern geeignet, da Gewicht und Stromver-brauch zu groß sind.
Eine Lösung sind hier 2D-Laser die zu 3D umfunktioniert werden. Die größten Vorteile dieser Tech-nologie sind dann die geringe Größe, das geringe Gewicht und die geringen Rechenanforderungen.Sicherlich schwanken diese von Hersteller zu Hersteller, doch kann man Sensoren einsetzen, diegerade einmal 160g wiegen, dabei sehr kompakt sind (LBH in cm: 5, 5, 7) und einen geringenStromverbrauch haben (2,5W). Wohingegen 3D-Sensoren schon mehrere Kilogramm wiegen undwegen des starken Laserstrahls, der wegen der späteren Exaktheit nötig ist, das 10fache und mehran Leistung benötigen.
Der größte Nachteil dieser Technik ist die Dauer eines Scans. Für das Abscannen von 90 Gradwerden schon über 3 Sekunden benötigt. Das System aus [SNH03] benötigt 3.4 Sekunden umeinen Scan mit 256×181 Datenpunkten in einem Messbereich von 240∘×90∘ zu erzeugen. Währendeines Scans kann die Bewegung des Roboters somit nicht vernachlässigt werden. Hier existierenzwei mögliche Problemlösungen: Entweder muss der Roboter während des Scan-Vorgangs derUmgebung stoppen, oder es existiert eine Bewegung die eben diese Dauer kompensiert, d.h. dieBewegungen ist für den Scan-Vorgang optimiert.
Ein anderer Nachteil ist, dass die Reichweite beschränkt ist. Die maximale Reichweite bei demvorliegenden Sensor liegt bei ca. 4m. Andere Sensoren, die für mobile Roboter konzipiert wurden,liegen in ähnlichen Bereichen. Mit 3D-Laserscannern ist die Reichweite natürlich wesentlich höher,doch sind diese wie schon erwähnt, nicht für den Einsatz auf mobilen Robotern
Wie sich im Verlauf dieser Arbeit noch heraustellen wird, ist die Qualität der Datenpunkte viel höherals die von Stereo-Vision und Time-of-Flight Kameras. Der Mittelwert und auch die Standardabwei-chung der Messungen mit der 3D-Laser Technologie gegenüber der tatsächlichen Enfernung amBoden ist wesentlich geringer als bei diesen Kameras.

2.3 Einsatzmoglichkeiten 5
2.3 Einsatzmoglichkeiten
Mithilfe der 3D-Laser-Technik ist es möglich, automatische Systeme zur Vermessung und Digi-talisierung von 3D-Innenräumen zu entwerfen [SNH03]. Diese Systeme können so eingerichtetwerden, dass sie auf Robotern autonom ausgeführt werden, so dass die Roboter letzendlich inGefahrenbereichen ohne zusätzliches Risiko genutzt werden können. Natürlich werden diese Sys-teme nicht nur in Gefahrenbereichen genutzt, sondern auch zur möglichst exakten Vermessungund Kartenerstellung und damit auch zur Lokalisierung der Roboter selbst. Die Anwendungsgebie-te von 3D-Laser-Entfernungsmessern sind sehr vielfältig, da diese sehr exakt arbeiten.

6
3 Stereo-Vision Kameras
Bild 3.1: Stereo-Vision Kame-ra, [Vid09]
Stereo-Vision ist eine zweite Alternative um Umgebungen in 3Dzu vermessen. In Teilbereichen kann man diese Technologie auchauf mobilen Robotern einsetzen. Ein großer Nachteil von Stereo-Vision-Kameras ist aber die hohe Rechenanforderung. Daher kön-nen auf mobilen Robotern nur Stereo-Vision-Kameras eingesetztwerden, die einen eingebetteten Prozessor für die entsprechendenBerechnungen besitzen.Hier wird eine stereo-on-chip-Kamera der Firma Videre Design[Vid09] genauer betrachtet.
3.1 Funktionsweise
Dieser Abschnitt erläutert, wie Stereo-Vision-Kameras 3D-Messungen durchführen.
Bild 3.2: Funktionsweise von Stereo-Vision [FH08]
Zunächst nehmen beide Einzelkame-ras, die versetzt angeordnet sind,gleichzeitig Bilder der selben Situa-tion auf. In beiden Bildern wird dieentsprechende Entfernung zu einemPunkt gemessen. Anschießend wirddie Disparität, der Versatz, zwischenden beiden Bildern berechnet. Mithil-fe der Disparität d, der Brennweite f
und der Basislänge b wird nun mittelsdem geometrischen Prinzip der Trian-gulierung, siehe Bild 3.2, eine Tiefeim Bild erzeugt. Wichtig ist, dass dieKamera genauestens kalibiriert werden um möglichst exakte Distanzen zu messen. Anschließendwerden diese Messungen mittels IEEE 1394 (FireWire) zu einem PC übertragen oder auf demRoboter selbst verarbeitet.

3.2 Bewertung 7
3.2 Bewertung
Diese Kamera erzeugt einen 3D-Datensatz mit 640 × 480 Daten und 30 Frames in der Sekunde.Sehr wichtig ist, dass die Kamera kailbriert wird und diese Einstellungen auf dem Chip der Kameragespeichert werden. Der größte Nachteil an dieser Methode ist die Abhängigkeit von der jeweiligenUmgebung. Wichtig sind einerseits die Lichtverhältnisse: Existieren gute Lichtverhältnisse arbeitetdie Kamera, bis auf kleinste Messfehler, exakt. Sind die Lichtverhältnisse jedoch nicht ausreichendfür die Kamera, können die Messungen zu schlechten und falschen Ergebnissen führen. Ebensowichtig sind aber auch die anderen Eigenschaften der Umgebung, wie zum Beispiel reflektierendeund merkmallose Oberflächen. Ein Beispiel kann man gut in Abbildung 3.3 erkennen.
Bild 3.3: Vergleich von Oberflachen, betrachtet mit Stereo-Vision, [PBP08]
Ebenso muss bei dem Einsatz von Stereo-Vision Kameras der Fokus der Kamera brücksichtigtwerden. Die Fehlerrate bei der Schätzung der Tiefe erhöht sich deutlich mit der Entfernung. ImNahbereich werden Entfernungen zu Gegenständen, wenn diese erkannt werden, gut gemessen.Einziger Nachteil der Kamera ist die geringe Reichweite, die durch den Versatz der beiden Kamerasbegrenzt ist. Allgemein ist Stereo-Vision eine gute und schnelle Möglichkeit eines 3D-Sensors füreinen mobilen Roboter.

8 3 Stereo-Vision Kameras
3.3 Einsatzmoglichkeiten
Stereo-Vision unterstützt Realzeitanwendungen und liefert nutzbare Informationen über die kom-pletten Messbereiche. Daher wird diese Technik in vielen unterschiedlichen Anwendungen verwen-det:Robotik, Ortung von Personen, Umgebungsmodellierung, Hinderniserkennung, Kartenerstellungund Navigation. Natürlich sind auch alle vorher angesprochenen Anwendungsgebiete denkbar.

9
4 Time-of-Flight Kameras
Bild 4.1: Time-of-Flight-Kamera[PBP08]
Eine dritte Alternative um Umgebungen in 3D zu vermessenbilden Time-of-Flight Kameras. Diese sind noch nicht so weitverbreitet wie Stereokameras oder 3D-Laser.Hier wird eine Kamera Swissranger SR-3000 der Firma „Cen-tre Suisse d’Electronique et de Microtechnique“ näher be-trachtet.Allgemein bilden diese Art von Kameras eine noch neueTechnologie, die in ihrem Einsatz noch recht unerforscht ist.Dementsprechend gibt es noch Probleme, die den Einsatzauf mobilen Robotern sehr einschränken.
4.1 Funktionsweise
Diese Art von Sensoren benutzt eine Reihe von Zellen, ähnlich zu der Speicherung von Bildern, beidenen die Informationen in Pixel gespeichert werden, um die Phasenverschiebung von emittiertenmodulierten Infrarotlicht zu messen. Mit diesem kann eine Time-of-Flight basierte Abstandsmes-sung, ähnlich dem Prinzip der Lichtlaufzeitmessung des Laserscanners, gleichzeitig in jeder Zel-le des Arrays durchgeführt werden. Da die Geschwindigkeit des Lichtes bekannt ist, kann eineEntfernung gemessen werden, indem die Zeit gestoppt wird, die ein Signal benötigt um von ei-nem Hindernis zu einem bestimmten Punkt zu gelangen. In der Praxis [RLS99] liegen die aktiveLichtquelle und der Emfänger sehr nah beieinander. Das erleichtert das Einstellen und vermeidetSchatteneffekte.
Das grundlegende Prinzip von Time-of-Flight Messungen ist in Abbildung 4.2 zu sehen. Eine Quel-le sendet einen Lichtimpuls aus und beginnt mit einer Messung in Nanosekunden. Der Lichtimpulswandert zum Ziel und zurück, wobei die Messung gestoppt wird. Da das Signal den Weg zweimaldurchläuft entspricht eine Zeit von 6.67ns genau 1m. Daher ist es besonders wichtig, dass Senderund Empfänger im vorraus synchronisiert werden. Das größte Problem ist hier die Realisierungder Zeitmessung, welches in [RLS99] und [Lan00] näher diskutiert wird. Ein anderes Problem istder kurze Lichtimpuls. Es kann unter Umständen auftreten, dass der Lichtimpuls zu kurz ist umaus diesem sinnvolle Informationen zu gelangen. Daher wird der Impuls in bestimmten Abständen

10 4 Time-of-Flight Kameras
Bild 4.2: Prinzip von Time-of-Flight Messungen [RLS99]
erneut gesendet.
Mittels USB kann der Sensor mit einem Rechner verbunden werden. Der Sensor generiert farb-kodierte Bilder und ebenso auch Intensitäts-Bilder. Das erste Signal entspricht der gemessenenPhasenverschiebung, das Zweite der Amplitude. Die gemessenen Entfernungen werden in Far-ben dargestellt, die Reichweite geht von rot (Nahbereich) zu violett (weit entfernt). Schwarze Pixelstellen nutzlose Werte dar, meistens aufgrund von zu geringem modulatem Licht. Die zugrundeliegende Technologie des SR-3000 ist noch sehr unausgereift. Daher ist es nicht ungewöhnlich,dass es noch Nachteile gibt, deren Kompensation noch nicht sehr ausgereift ist.
4.2 bekannte Probleme
Eine sehr große Schwierigkeit liegt bei dem sogenannten wrap-around Fehler. Für eine beliebigePhasenverschiebung gilt die Periode von: k∗2∗� für beliebige k. Das bedeutet, wenn die Phase von2� 8m entspricht, dann werden zwei Punkten, 0.2m und 8.2m die gleichen Messwerte zugeordnet.Der sogenannte Amplituden-Threshold-Parameter dient dazu dieses Problem zu beheben. DieserParameter macht es möglich nur Werte für Pixel mit einer bestimmten minimalen Helligkeit zu be-trachten. Der Bereich für nicht genutzte Pixel wird hierbei ignoriert. Allgemein lässt sich sagen,dass je höher der Amplituden-Threshold-Parameter desto größere Qualität aber auch desto weni-ger Messwerte. Das schwierigste ist, einen entsprechenden Wert für diesen Paramter zu finden.Wird er zu niedrig gewählt, werden möglicherweise korrekte Daten verworfen, wird er hingegen zuhoch gewählt, ist der Messbereich nicht mehr repräsentativ genug. Daher ist bei dieser Kameravon Nöten diesen Parameter stets der jeweiligen Umgebung anzupassen. Dieses Problem ist inAbbildung 4.3 zu erkennen.
Das erste Bild zeigt das Ausgangsbild. Im zweiten Bild liegt ein sehr niedriger Amplituden-Threshold-Parameter vor, so dass Fehler passieren. Der Boden und die Wand scheinen gleichweit entfernt.Das letzte Bild in der Reihe ist mit einem sehr hohem Wert des Parameters entstanden. Hierbei

4.2 bekannte Probleme 11
Bild 4.3: Veranderung des Amplituden-Threshold-Parameter
sind einige nützliche Informationen verloren gegangen, so dass in dieser Situation wohl das vor-letzte Bild eine fast optimale Einstellung besitzt. Hierbei kann man schon erkennen, wie schwieriges sein kann, den Parameter möglichst optimal zu wählen.
Ein andere wichtiger Parameter bei der Einstellung von Time-of-Flight Kameras ist die sogenannteIntegrationszeit (integration time) oder auch Belichtungszeit (exposure time). Mit dieser wird diewahrgenomme Helligkeit eingestellt. Die Belichtungszeit bestimmt Bildrate, Stromverbrauch unddie Helligkeit der LEDs. Die Qualität der Bilder erhöht sich mit einer höheren Belichtungszeit, zeit-gleich nimmt aber auch die minimale Entfernung zu. Eine Auto-Belichtungsfunktion kann verwendetwerden um die Integrationszeit und Beleuchtungsintensität optimal einzustellen.
Es existieren zwei Möglichkeiten um die Fehler, verursacht durch wrap-around, zu verringern. EineMöglichkeit, wie oben erwähnt, ist die Veränderung des Amplituden-Threshold-Parameters. DieseEinstellung funktioniert nur bei einfach strukturierten, merkmallosen Hindernissen, z.B. Schränkeoder Türen. Sobald Reflektionen von den Hindernissen abgelenkt werden, wird mit dieser Einstel-lung kein Vorteil mehr erzielt. Eine weitere Alternative ist es daher zwei verschiedene modularealternierende Frequenzen zu nutzen. Also zwei verschiedene Messwerte miteinander zu verglei-chen und somit Fehler auszuschließen. Der Vorteil hierbei ist, dass es zu einem Hindernis mehrereMesswerte gibt, die miteinander verglichen werden können. Von Nachteil ist, dass die Informatio-nen nun später zur Verfügung stehen und auch Fehler nicht völlig ausgeschlossen werden kön-nen.
Ein weiteres bekanntes Problem von Time-of-Flight Kameras ist das geringe Sichtfeld. Aufgrund derLED Technik wird der Bildmittelpunkt sehr stark ausgeleuchtet, die Ecken werden jedoch vernach-lässigt. Dieses Problem lässt sich jedoch mit eine hohem Amplituden-Threshold ausgleichen.
Ebenfalls problematisch ist die hohe Anfälligkeit der Kamera bei unterschiedlichen Lichtbedingun-gen, vorallem bei Sonnenlicht, da dieses ebenfalls Infrarotlicht enthält und die Messergebnissedementsprechend beeinflusst. Das kann bei verschiedenen Situationen, z.B. helle reflektierendeGegenstände im Nahbereich, dunkle Gegenstände weiter entfernt, zu falschen Entfernungswertenführen. Dieses lässt sich in Abbildung 4.4 erkennen.

12 4 Time-of-Flight Kameras
Bild 4.4: fehlerhafte Messungen durch Reflektionen
4.3 Bewertung
Generell stellen Time-of-Flight Kameras eine vielversprechende Technologie dar um 3D Daten zuerzeugen. Aber die Entwicklung dieser Technologie steckt noch in den Anfängen. Bis nützliche In-formationen mittels der Sensoren erzeugt werden können, müssen einige Parameter von Hand ein-gestellt werden. Einige Probleme sind grundsätzlicher Art, z.B. die wrap-around-Fehler oder falscheMessungen aufgrund von Reflexionen. Andere Probleme, wie die starke Lichtempfindlichkeit oderder geringe Sichtbereich, können per Software oder auch durch zukünftige Hardwareentwicklungengelöst werden. Time-of-Flight Kameras ergänzen die Schwächen der Stereo-Vision-Systeme. EineTime-of-Flight Kamera arbeitet sehr zuverlässig auf homogenen und ebenen Flächen, wo Stereo-Vision Kameras eher schlecht funktionieren. Die Genauigkeit der Datenpunkte ist sehr hoch. Den-noch ist ein Einsatz von dieser Technologie für die Ermittlung von den 3D-Daten auf einem mobilenRoboter in einer beliebigen Umgebung nicht trivial, da wie oben erwähnt sehr viele Parameter vonHand eingestellt werden müssen.
4.4 Einsatzmoglichkeiten
Time-of-Flight-Kameras werden in der Automobilindustrie in Assistenten- und Sicherheitssystemeneingesetzt. Ebenso finden solche Kameras in der Mensch-Maschine Interaktion Verwendung, dadiese Kameras in Realzeit arbeiten können. In der mobilen Robotik sind diese Kameras ebensozu finden. Mit diesen können sehr schnell Karten von fremden Umgebungen erzeugt werden. Dadie Entfernungsberechnung sehr einfach gehalten ist, ist auch keine große Rechenleistung erfor-derlich, so dass diese Systeme den begrenzten Ressourcen mobiler Roboter genügen. AndereVerwendung finden diese Kameras bei jeglichen Anwendungen von Messungen in Umgebungenmit relativ konstanten Lichtbedingungen.

13
5 Vergleich der vorgestellten 3D-Sensoren
Der Vergleich wird auf Basis der schon vorgestellten Beispielsensoren vorgenommen. WichtigePunkte sind hier vorallem die Einsetzbarkeit auf mobilen Robotern, daher die Betrachtung derphysikalischen Eigenschaften und im weiteren die Eigenschaften bei der Datenerfassung, um einegewisse Genauigkeit und Aktualität der Daten garantieren zu können.
Generell sind sich die drei verschiedenen Sensoren in vielen Aspekten sehr ähnlich. Zunächst istes sehr positiv, dass alle Sensoren auf mobilen Robotern einsetzbar sind, da ihre physikalischenEigenschaften den beschränkten Ressourcen, wie z.B. beschränkte Größe, Gewicht und Energie,dieser genügen. Ebenso sind die Kosten dieser Sensoren auf gleichem Niveau. In ihren Messun-gen arbeiten sie zunächst auch sehr analog, da zunächst die Anzahl der Messpunkte nicht sehrunterschiedlich ist. Wichtig ist auch, dass alle Sensoren direkt 3D-Daten zur Verfügung stellen undkeine anschließende Berechnungen oder Umrechnungen mehr notwendig ist. Diese unterscheidensich lediglich in ihrer Repräsentation, doch ist eine Koordinatenumrechnung kein großer Rechen-aufwand. So dass es bei diesen Kritikpunkten für den Einsatz auf dem mobilen Roboter egal seinkann, welcher Sensor zum Einsatz kommt.
Große (LBH in mm) Gewicht Leistung
3D URG40-LX 50, 50, 70 425g 2.5 WSTOC 132, 39, 44 261g 2.4 WSR-3000 42.3, 50, 67 162g 12 W
Tabelle 5.1: Allgemeine physikalische Eigenschaften
Leider kann man dieses nicht verallgemeinert sagen, da es gravierende Unterschiede in der Quali-tät der Daten, in der Reichweite und in der Updatefrequenz gibt. Der 3D-Laser-Entfernungsmesserliefert zuverlässig eine hohe Qualität der Daten, liegt aber bei der Updatefrequenz sehr hinter derStereo-Vision Kamera und der Time-of-Flight Kamera zurück. Leider ist aber auch immer ein Fehlerdurch Rauschen zu erkennen. Dieser Fehler kann durch einfaches Filtern behoben werden. DieseFilterung, um eben mögliche Messfehler, die durch Rauschen verursacht worden sind, auszuzu-schließen, ist aber nur bei Stereo-Vision und Time-of-Flight Kameras möglich, da diese die nötigeUpdatefrequenz zur Verfügung stellen. Beim Laserscanner ist dieses schwierig zu realisieren, dahier der Scanvorgang schon 100mal so lange dauert wie bei den anderen Sensoren. Diese bringenaber leider andere grundlegende Nachteile mit sich, die nicht durch einfaches Filtern gelöst werdenkönnen.
14 5 Vergleich der vorgestellten 3D-Sensoren
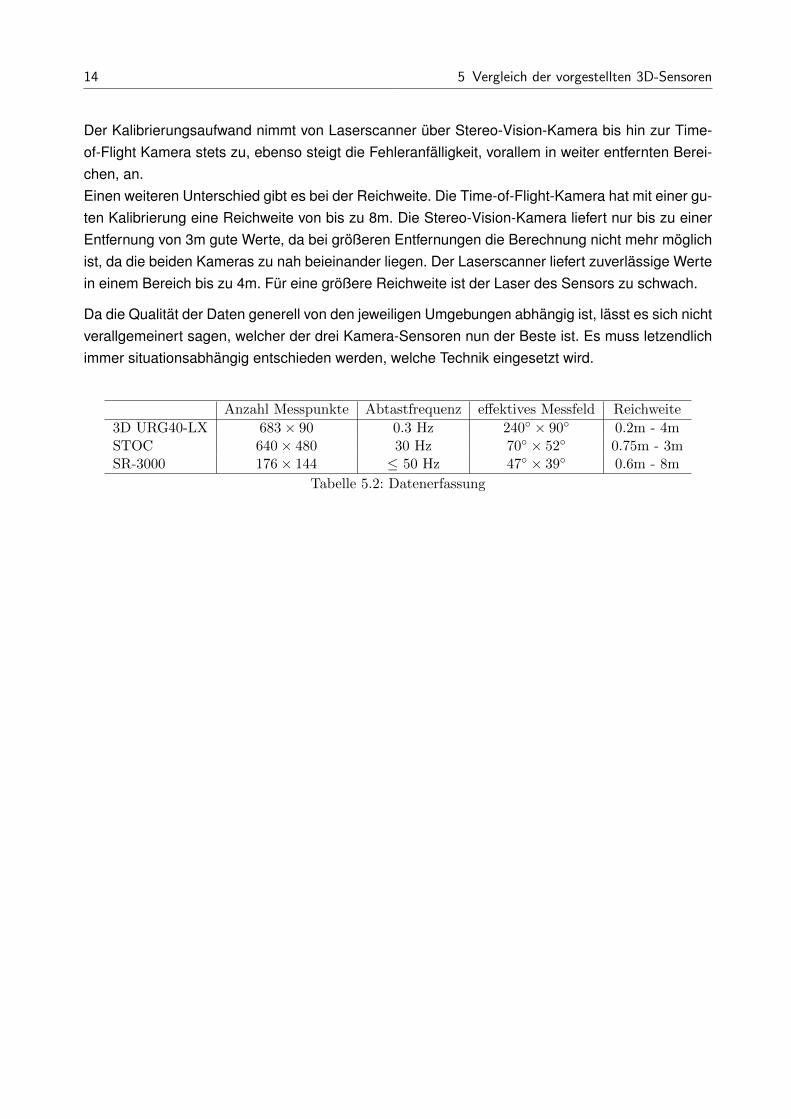
Der Kalibrierungsaufwand nimmt von Laserscanner über Stereo-Vision-Kamera bis hin zur Time-of-Flight Kamera stets zu, ebenso steigt die Fehleranfälligkeit, vorallem in weiter entfernten Berei-chen, an.Einen weiteren Unterschied gibt es bei der Reichweite. Die Time-of-Flight-Kamera hat mit einer gu-ten Kalibrierung eine Reichweite von bis zu 8m. Die Stereo-Vision-Kamera liefert nur bis zu einerEntfernung von 3m gute Werte, da bei größeren Entfernungen die Berechnung nicht mehr möglichist, da die beiden Kameras zu nah beieinander liegen. Der Laserscanner liefert zuverlässige Wertein einem Bereich bis zu 4m. Für eine größere Reichweite ist der Laser des Sensors zu schwach.
Da die Qualität der Daten generell von den jeweiligen Umgebungen abhängig ist, lässt es sich nichtverallgemeinert sagen, welcher der drei Kamera-Sensoren nun der Beste ist. Es muss letzendlichimmer situationsabhängig entschieden werden, welche Technik eingesetzt wird.
Anzahl Messpunkte Abtastfrequenz effektives Messfeld Reichweite
3D URG40-LX 683 × 90 0.3 Hz 240∘ × 90∘ 0.2m - 4mSTOC 640 × 480 30 Hz 70∘ × 52∘ 0.75m - 3mSR-3000 176 × 144 ≤ 50 Hz 47∘ × 39∘ 0.6m - 8m
Tabelle 5.2: Datenerfassung

15
6 Ausblick und Fazit
Die Bildung und Verarbeitung von 3D-Daten wird immer wichtiger für die mobile Robotik. Hierbeisind insbesondere Systeme in unstrukturierten Bereichen, wie die Safety, Security und RescueRobotik (SSRR) auf solche Daten angewiesen. In dieser Arbeit wurde die Funktionsweise und dieNutzbarkeit drei verschiedener 3D-Sensoren erläutert und anhand von Prototypen Beispiele auf-gezeigt, die auch auf mobilen Robotern einsetzbar sind.Generell sind 3D-Laser-Entfernungsmesser die verlässlichste und dementsprechend auch die ammeisten eingesetzte Technologie. Normalerweise sind diese Sensoren aber aufgrund ihrer hohenRechenanforderungen nicht für mobile Roboter geeignet, so dass herkömmliche 2D-Sensoren miteiner zusätzlichen Roboterbewegung zu 3D-Sensoren umfunktioniert werden. Solche Systeme ga-rantieren eine gewisse Qualität der Daten, besitzen aber nur eine geringe Update-Frequenz.Um diesen Nachteil zu umgehen werden Stereo-Vision-Kameras eingesetzt. Diese haben einesehr hohe Update-Freuquenz, insbesondere wenn eine stereo-on-chip-Kamera eingesetzt wird.Ein Beispiel hierfür ist der hier betrachtete Prototyp STOC der Firma VidereDesign. Nachteil dieserTechnologie sind die größere Fehleranfälligkeit bei geringeren Distanzen und die Abhängigkeit vonder Umgebung. Insbesondere werden merkmalslose Objekte nicht erkannt.Als letztes werden Time-of-Flight Kameras untersucht, die theoretisch die Vorteile von 3D-Laser-Entfernungsmessern und Stereo-Vision Kameras vereinen. Die praktische Entwicklung dieser Ka-meras ist noch nicht sehr ausgereift. Die Update-Frequenz ist schon sehr groß, aber die Qualitätder Daten ist noch gering. Ebenso müssen vor dem Einsatz einer solchen Kamera viele Parametergenauestens eingestellt werden.
Letzendlich sind alle drei vorgestellten Technologien für die Erstellung von 3D-Daten einsetzbar.Idealerweise benutzt man alle drei Technologien zusammen, wenn es die Gegebenheiten zulassen.Oder nutzt wenigstens zwei dieser Technologien um die Fehlerrate zu verringern.
In der Zukunft wird die Entwicklung der Time-of-Flight Kameras sicherlich einen großen Einfluss aufdie weitere Entwicklung von 3D-Daten Erfassung in der mobilen Robotik nehmen. Letzendlich wirdes aber nie nur eine Technologie geben, da die Anwendungsbereiche, auch in der mobilen Robotik,sehr unterschiedlich sind und somit auch unterschiedliche Anforderungen mit sich bringen.

16
Literatur
[FH08] FRANK HOFMANN, Dr. rer. n.: Stereovision. (2008). http://www.rst.e-technik.
uni-dortmund.de
[Lan00] LANGE, Robert: 3D Time-of-flight distance measurement with custom solid-state imagesensors in CMOS/CCD-technology. 2000 http://dokumentix.ub.uni-siegen.de/
opus/volltexte/2006/178/pdf/lange.pdf
[PBP08] POPPINGA, Jann ; BIRK, Andreas ; PATHAK, Kaustubh: A Characterization of 3D Sensorsfor Response Robots. (2008). http://www.robocup2009.org
[RLS99] R. LANGE, A. B. P. Seitz S. P. Seitz ; SCHWARTE, R.: Time-of-flight range imaging with acustom solid-state image sensor. In: Laser Metrology and Inspection (1999)
[SNH03] SURMANN, Hartmut ; NÜCHTER, Andreas ; HERTZBERG, Joachim: An autonomous mobilerobot with a 3D laser range finder for 3D exploration and digitalization of indoor environ-ments. (2003)
[Vid09] VIDERE-DESIGN (Hrsg.): Videre-Design Homepage. Videre-Design, 2009. http://www.videredesign.com



![Electronic Structure of the 3d Metals: An Investigation by ... · phase atom. Both laser polarization, as used in [Borne97], and the use of magnetic hexapole guides, favored by another](https://static.fdokument.com/doc/165x107/5cfdf54a88c993912c8bd9dd/electronic-structure-of-the-3d-metals-an-investigation-by-phase-atom-both.jpg)










