y , Losung: 9 , y y (2 Fehler nach dem 1. Schritt...Ein Fehler von 2.6· 10−6 entspricht 1 km....
50
Prof. Dr. Barbara Wohlmuth Lehrstuhl f¨ ur Numerische Mathematik Lokaler Fehler y ′ = y 2 ,y (0.2) = 5/9,L¨osung: y = 1 (2−t) 2 10 0 10 1 10 2 10 3 10 4 10 -14 10 -12 10 -10 10 -8 10 -6 10 -4 10 -2 10 0 1/h Fehler Fehler nach dem 1. Schritt (I) Euler explizit (II) Euler implizit (IIIa) Crank-Nicolson (IIIb) Heun (IVa) Euler modifiziert (IVb) Euler mod. implizit Kapitel IV (esv08) 1
Transcript of y , Losung: 9 , y y (2 Fehler nach dem 1. Schritt...Ein Fehler von 2.6· 10−6 entspricht 1 km....

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
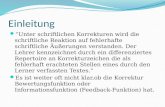
Lokaler Fehler
y′ = y2, y(0.2) = 5/9, Losung: y = 1(2−t)2
100
101
102
103
104
10−14
10−12
10−10
10−8
10−6
10−4
10−2
100
1/h
Feh
ler
Fehler nach dem 1. Schritt
(I) Euler explizit(II) Euler implizit(IIIa) Crank−Nicolson(IIIb) Heun(IVa) Euler modifiziert(IVb) Euler mod. implizit
Kapitel IV (esv08) 1

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Globaler Fehler
y′ = y2, y(0.2) = 5/9, Losung: y = 1(2−t)2
100
101
102
103
104
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
1/h
Feh
ler
Fehler bei t=1.2
(I) Euler explizit(II) Euler implizit(IIIa) Crank−Nicolson(IIIb) Heun(IVa) Euler modifiziert(IVb) Euler mod. implizit
Kapitel IV (esv09) 2

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Lokaler Fehler: Vergleich
y′ = 2ty, y(0) = 1, Fehler bei t = h
1/2 1/8 1/32 1/12810
−10
10−5
100
h
Feh
ler
exp. Eulerc*h²mod. EulerHeunC*(h²)²
Ordnung p entspricht der Steigung −p im doppelt logarithmischen Plot
Kapitel IV (konvergenz01) 3

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Globaler Fehler: Vergleich
y′ = 2ty, y(0) = 1, Fehler bei t = 1
1/2 1/8 1/32 1/128
10−4
10−2
100
h
Feh
ler
exp. Eulerc*hmod. EulerHeunC*h²
Beobachtung: Globaler Fehler ist eine Ordnung niedriger als Lokaler
Kapitel IV (konvergenz02) 4

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Globaler Fehler: Vergleich
y′ = 5y, y(0) = 1, Fehler bei t = 2
1 1/4 1/16 1/64 1/256 1/1024
100
102
104
106
h
Feh
ler
exp. Eulerimp. EulerHeunC−NC*hC*h2
Kapitel IV (konvergenz03) 5

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Globaler Fehler: Vergleich
y′ = −5y, y(0) = 1, Fehler bei t = 2
1 1/4 1/16 1/64 1/256 1/1024
10−8
10−6
10−4
10−2
100
h
Feh
ler
exp. Eulerimp. EulerHeunC−NC*hC*h2
Kapitel IV (konvergenz04) 6

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta Verfahren
yi+1 = yi + hφ(ti, hi, yi), φ(ti, hi, yi) =
s∑
j=1
γjkj,
kj = f
(
ti + αjhi, yi + hi
s∑
l=1
βjlkl
)
, j = 1, 2, . . . , s
wobei s als die Stufe des Verfahrens bezeichnet wird. Runge–Kutta Verfahrenkonnen mit Hilfe des Butcherschemas charakterisiert werden:
α1 β11 β12 . . . β1s
α2 β21 β22 . . . β2s... ... ... . . . ...
αs βs1 βs2 . . . βss
γ1 γ2 . . . γs
α1 0 0 . . . 0
α2 β21 0 . . . 0... ... ... . . . ...
αs βs1 βs2 . . . 0
γ1 γ2 . . . γs
implizit explizit
Bedingung fur die Konsistenz:∑s
j=1 γj = 1
Kapitel IV (rk01) 7

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Butcher–Schema, Beispiele
Impliziter Euler:1 1
1
RK (1895): explizit, 4stufig, 4te Ordnung:
0 0 0 0 0
1/2 1/2 0 0 0
1/2 0 1/2 0 0
1 0 0 1 0
1/6 2/6 2/6 1/6
implizit, 2stufig, 4te Ordnung:
1/2 −√3/6 1/4 1/4 −
√3/6
1/2 +√3/6 1/4 +
√3/6 1/4
1/2 1/2
Kapitel IV (rk02) 8

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
RK 3 Verfahren: verschiedene Schrittweiten
Restringiertes Dreikorperproblem, 1 Periode
−1 0 1−2
−1
0
1
2n = 6000
RK 3
−1 0 1−2
−1
0
1
2n = 12000
RK 3
−1 0 1−2
−1
0
1
2n = 24000
RK 3
−1 0 1−2
−1
0
1
2n = 48000
RK 3
Kapitel IV (rk03) 9

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
RK 4 Verfahren: verschiedene Schrittweiten
Restringiertes Dreikorperproblem, 1 Periode
−1 0 1−2
−1
0
1
2n = 6000
RK 4
−1 0 1−2
−1
0
1
2n = 12000
RK 4
−1 0 1−2
−1
0
1
2n = 24000
RK 4
−1 0 1−2
−1
0
1
2n = 48000
RK 4
Kapitel IV (rk04) 10

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta Verfahren, Vergleich
Restringiertes Dreikorperproblem, Fehler e(T )
104
105
10−6
10−4
10−2
100
102
Anzahl der Schritte
Feh
ler
EulerHeunRK 3RK 4
Langeneinheit fur die euklidische Norm |(x, y)| ist die mittlere Entfernung Erde–Mond (384000
km). Ein Fehler von 2.6 · 10−6 entspricht 1 km. Fur die letzte Rechnung benotigte das RK
4–Verfahren 768000 Funktionsauswertungen.
Kapitel IV (rk05) 11

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
RK4–Verfahren: Vergleich
Vergleich von 3 expliziten Runge-Kutta Verfahren der Stufe 4 am Beispiel
y′ = y2, y(0.8) =5
6mit y(t) =
1
2− t, t ∈ [0.8, 1.8].
klassisch
012
12
12 0 1
2
1 0 0 1
16
13
13
16
3/8–Regel
013
13
23 −1
3 1
1 1 −1 1
18
38
38
18
Kuntzmann
025
25
35 − 3
2034
1 1944 −15
444044
55360
125360
125360
55360
Kapitel IV (rk06) 12

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
RK4–Verfahren: Vergleichy′ = y2, y(0.8) = 5/6, Losung y = 1/(2 − t), Fehler bei t = 1.8
100
101
102
103
10−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
Fehler für t=1.8
1/h
err
or
classical3/8−RegelKuntzmann
101.7
101.8
101.9
10−6
10−5
Zoom
1/h
err
or
classical3/8−RegelKuntzmann
Kapitel IV (rk07) 13

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta Verfahren, Vergleich
y′ = −200ty2, y(−1) = 1/101, bestimme y(0)
Einfluss von Rundungsfehlern: Fehler ≤ C(
hp + epsh
)
1 1e−02 1e−04 1e−0610
−12
10−8
10−4
100
h
Feh
ler
EulerHeunRK 3RK 4
Beobachtung: Je großer die Ordnung, desto fruher tritt der Effekt auf
Kapitel IV (rk09) 14

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Einfluss von Rundungsfehlern
y′ = y2, y(0.2) = 5/9, Losung: y = 1(2−t)2
100
101
102
103
104
105
106
10−12
10−10
10−8
10−6
10−4
10−2
100
1/h
erro
r
Fehler bei t=1.2 (double, eps = 2.2e−16)
(I) Euler explizit(IIIb) Heun(IVa) Euler modifiziert
100
101
102
103
104
105
106
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
1/her
ror
Fehler bei t=1.2 (single, eps = 1.2e−7)
(I) Euler explizit(IIIb) Heun(IVa) Euler modifiziert
Kapitel IV (esv10) 15

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta Verfahren, Rundungsfehler
Einfluss der Ordnung p auf Rundungsfehler
2 4 6 8 10 12 14 16 18 2010
−8
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
p
h opt
optimale Schrittweite
singledouble
2 4 6 8 10 12 14 16 18 2010
−16
10−14
10−12
10−10
10−8
10−6
10−4
10−2
pe op
t
optimaler Fehler
singleeps (single)doubleeps (double)
Mit der Maschinengenauigkeit eps gilt: eopt = O(epsp
p+1)
Kapitel IV (rk09a) 16

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Einfluss der Glattheit der Losung auf Konvergenz
y′ =√t, y(0) = 0, Fehler bei t = 1
101
102
103
10−6
10−4
10−2
Fehler gegen Anzahl der Schritte
EulerHeunRK 3RK 4
Theorie: Um Ordnung p zu beobachten, muss Losung in Cp+1 sein.
Kapitel IV (rk10) 17

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Einfluss der Glattheit der Losung auf Konvergenz
y′ = ta, y(0) = 0, Fehler bei t = 1
a = 0.5 a = 1.5 a = 2.5
a = 3.5 a = 4.5 a = 5.5
Bei kleinem a liefern Verfahren hoherer Ordnung keine schnellere Konvergenz
Kapitel IV (rk11) 18

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Implizite Runge–Kutta Verfahren
Ordnung 2
12
12
1
Ordnung 4
12 −
√36
14
14 −
√36
12 +
√36
14 +
√36
14
12
12
Ordnung 6: Kuntzmann und Butcher
12 −
√1510
536
29 −
√1515
536 −
√1530
12
536 +
√1524
29
536 −
√1524
12 +
√1510
536 +
√1530
29 +
√1515
536
518
49
518
Innere Iteration: km+1i = f
(
ti + αihi, yi + hi
s∑
l=1
βilkml
)
Kapitel IV (rk19) 19

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Anzahl der inneren Iterationen: My′ = 1
4ty, y(0) = 1
0 0.2 0.4 0.6 0.8 1 1.2 1.41
1.1
1.2
1.3
1.4Implizites RK4−Verfahren
Zeit t
y(t)
exact solutionh = 0.325h = 0.18571h = 0.13
0 0.2 0.4 0.6 0.8 1 1.2 1.40
1
2
3
4
5
6
7
8
9Innere Iterationen
Zeit t
Anz
ahl d
er I
tera
tione
n
h = 0.325h = 0.18571h = 0.13
y′ = ty2, y(0) = 1
0 0.2 0.4 0.6 0.8 1 1.2 1.41
2
3
4
5
6
7
8Implizites RK4−Verfahren
Zeit t
y(t)
exact solutionh = 0.325h = 0.18571h = 0.13
0 0.2 0.4 0.6 0.8 1 1.2 1.40
20
40
60
80
100
120Innere Iterationen
Zeit t
Anz
ahl d
er I
tera
tione
n
h = 0.325h = 0.18571h = 0.13
Beobachtung: M abhangig von Schrittweite und Lipschitz–Konstante
Kapitel IV (rk20) 20

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Einfluss des Startwertes auf innere Iteration
y′ = 14ty, y(0) = 1 Startwerte k0i+1 = 0 und k0i+1 = knmax
i
0 0.2 0.4 0.6 0.8 1 1.2 1.40
1
2
3
4
5Innere Iterationen h = 0.0026
Zeit t
Anz
ahl d
er I
tera
tione
n
Startwert 0Startwert aus vorigem Schritt
0 0.2 0.4 0.6 0.8 1 1.2 1.40
1
2
3
4
5Innere Iterationen h = 0.00026
Zeit t
Anz
ahl d
er I
tera
tione
nStartwert 0Startwert aus vorigem Schritt
Kapitel IV (rk21) 21

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Van der Pol’s Gleichung
I have a theory that whenever you want to get in trouble with a method, look forthe Van der Pol equation. (P. E. Zadunaisky, 1982)
Aufgabe: Modellierung der Schwingung einer Geigensaite.
Pizzicato–Effekt: rasches Abklingen der Schwingung
Bogenstrich halt die Schwingung aufrecht. Die Saite nimmt beim Ubergang von Gleit– zu
Haftreibung, bei gleicher Geschwindigkeit von Saite und Bogen, Energie auf.
Modellierung: unstetige Anregung, keine Sinus–Schwingung
x′′ − ε(
x2k − x2
)
x′ +Dx = 0.
mit den Anfangswerten y′(0) = 1 und D = 1, sowie ε = 10.
Weitere Beispiele: Uhr (Pendel oder Batterie),Luftstrom bei Blasinstrumentenelektrischer Schaltkreis
Kapitel IV (konvergenz10) 22

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Anzahl der inneren Iterationen (implizit RK4)
Vanderpol–Oszillator
Abbruchkriterium: ‖km+1 − km‖ < 10e-12
0 10 20 30 40 50
−2
−1
0
1
2
3 h = 0.1
0 10 20 30 40 50
−2
−1
0
1
2
3 h = 0.076923
0 10 20 30 40 50
−2
−1
0
1
2
3 h = 0.0625
0 10 20 30 40 50
−2
−1
0
1
2
3 h = 0.052632
0 10 20 30 40 500
50
100
150
200
250Innere Iterationen
Zeit t
Anz
ahl d
er It
erat
ione
n
Beobachtung: lokal stark unterschiedliche Anzahl von Iterationen
Kapitel IV (rk22) 23

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Innere Iterationen: Fixpunkt vs. Newton
0 20 405
100
200
Zeit
Inne
re It
erat
ione
nh = 0.1
0 20 4005
10
20
30
40
Zeit
Inne
re It
erat
ione
n
h = 0.05
0 20 400
5
10
15
20
Zeit
Inne
re It
erat
ione
n
h = 0.025
0 20 400
5
10
15
Zeit
Inne
re It
erat
ione
n
h = 0.0125
Kapitel IV (rk22a) 24

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Unterschiedliche implizite RK–Verfahren
y′ = ty2, y(0) = 1
0 0.2 0.4 0.6 0.8 1 1.2 1.41
2
3
4
5
6
7
8Implizite RK−Verfahren
Zeit t
y(t)
Ordnung 2Ordnung 4Ordnung 6
0 0.2 0.4 0.6 0.8 1 1.2 1.40
10
20
30
40
50
60Innere Iterationen
Zeit t
Anz
ahl d
er It
erat
ione
n
Ordnung 2Ordnung 4Ordnung 6
Beobachtung: Anzahl der inneren Iterationen hangt von der Ordnung ab
Kapitel IV (rk24) 25

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Implizite RK–Verfahren: Fehler
y′ = ty2, y(0) = 1
101
102
10−10
10−5
100
Anzahl der Schritte
Feh
ler
Ordnung 2Ordnung 4Ordnung 6
Kapitel IV (rk25) 26

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
KollokationIdee: Setze ein Polynom qi ∈ P(s)([ti, ti+1]) mit
• qi(ti) = yi
• q(tij) = f(
tij, qi(tij))
fur j = 1, . . . , s, d.h. qi erfullt die DGL an denKollokationspunkten tij = ti + αjhi mit 0 ≤ α1 < α2 < . . . < αs ≤ 1
Setze yi+1 := qi(ti+1).⇒ Mittels Quadratur konnen damit RKV hoherer Ordnung entwickelt werden.Entsprechend der gewahlten Quadratur Regel, lassen sich bei gegebener Stufenzahls folgende Ordnung erwarten:
• Gauß-Legendre→Ordnung 2s
• Gauß-Radau IA bzw.IIA→Ordnung 2s − 1 (Anfangs- bzw. Endpunkt miteingeschlossen)
• Gauß-Lobatto→Ordnung 2s− 2
Neben Radau-IA/IIA gibt es noch weitere Verfahren von Lobatto/Radau(z.B.Lobatto IIIB,Lobatto IIIC,...).
Kapitel IV (rk44) 27

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Kollokation - Vergleich von 6 impliziten Runge-Kutta
Verfahren
Gauss-Legendre Gauss-Radau-(IIA) Gauss-Lobatto
Stufe 1 impliziter Euler Crank-Nicolson
12
12
1
1 1
1
0 0 0
1 12
12
12
12
Hammer-Hollingsworth Stufe 2 Stufe 3
12 −
√36
14
14 −
√36
12 +
√36
14 +
√36
14
12
12
13
512 − 1
12
1 34
14
34
14
0 16
−13
16
12
16
512 − 1
12
1 16
23
16
16
23
16
Kapitel IV (rk45) 28

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Kollokation - Vergleich von 6 impliziten Runge-Kutta
Verfahren
101
102
10−14
10−12
10−10
10−8
10−6
10−4
10−2
Number of steps
Err
or
Hammer−Hollingsworth
Ch4
Gauss−Lobatto3
Ch4
Gauss−Radau2
Ch3
Crank−Nicolson
Ch2
Impliziter−Euler
Ch1
Gauss−Legendre1
Ch2
Kapitel IV (rk46) 29

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettete Runge–Kutta Verfahren
Bogacki– und Shampine–Verfahren: FSAL–Verfahren RK3(2)
012
12
34 0 3
4
1 29
13
49
p = 3 29
13
49
p = 2 1172
512
59 −1
8
ki4 = f
(
ti + hi, yi + hi
(
2
9ki1 +
1
3ki2 +
4
9ki3
))
ki+11 = f
(
ti+1, yi+1)
= f
(
ti + hi, yi + hi
(
2
9ki1 +
1
3ki2 +
4
9ki3
))
= ki4
First Same As Last
Entspricht in Matlab dem Aufruf von ode23
Kapitel IV (rk16) 30

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettete Runge–Kutta Verfahren
DOPRI5(4)–Verfahren: FSAL–Verfahren
015
15
310
340
940
45
4445 −56
15329
89
193726561 −25360
2187644486561 −212
729
1 90173168 −355
33467325247
49176 − 5103
18656
1 35348 0 500
1113125192 −2187
67841184
p = 5 35348 0 500
1113125192 −2187
67841184
p = 4 517957600 0 7571
16695393640 − 92097
3392001872100
140
Entspricht in Matlab dem Aufruf von ode45
Kapitel IV (rk17) 31

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettete Runge–Kutta Verfahren
DOPRI8(7)–Verfahren: Butcherschema
entnommen aus Deuflhard/Bornemann
Kapitel IV (rk18) 32

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Motivation fur adaptive Schrittweite
Ziel: Gegebene Genauigkeit mit moglichst minimalem Aufwand zu erreichen
Idee: Wahle lokal unterschiedliche Schrittweiten
Minimierungsproblem: Bestimme fur gegebene Anzahl der Schritte die Verteilungder Stutzstellen, so dass der Fehler minimal wird
Aber: Viel zu teuer
Ausweg: Bestimme die Schrittweite moglichst groß, so dass eine relative lokaleGenauigkeit erfullt ist
Umsetzung: Bestimme den Fehler durch Vergleich mit einer besseren Losung
• halbe Schrittweite
• hohere Ordnung
hneu =??
Kapitel IV (adapt01) 33

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Adaptives Verfahren: Berechnung der neuen Schrittweitenach Dahmen-Reusken
p : Ordnung des Verfahrens, EST: Schatzung des Fehlers, Parameter αmax, αmin,β und TOL
α = βp
√
hTOL
EST
α = min{α,αmax}α = max{α, αmin}
hneu = αh
hneu = min{hneu, hmax}hneu = max{hneu, hmin}
Validierung: Ist EST ≤ hTOL oder h = hmin?
Kapitel IV (adapt20) 34

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–Verfahren
y′ = y, y(0) = 1
0 0.2 0.4 0.6 0.8 11
1.5
2
2.5
3
t
y
exakte Loesung
0 0.2 0.4 0.6 0.8 110
−2
10−1
t
h
Knoten und lokale Schrittweite
TOL = 1e−6
Beobachtung: Geringe Schwankungen in der Schrittweite
Kapitel IV (adapt02) 35

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–Verfahren
y′ = −200ty2, y(0) = 1
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
t
y
exakte Loesung
0 0.2 0.4 0.6 0.8 1
10−2
10−1
t
h
Knoten und lokale Schrittweite
TOL = 1e−5
Beobachtung: Starke Schwankungen in der Schrittweite
Kapitel IV (adapt03) 36

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–Verfahren
y′ = −sgn(t)y, y(−1) = 1/e
−1 −0.5 0 0.5 10.2
0.4
0.6
0.8
1
t
y
exakte Loesung
−1 −0.5 0 0.5 110
−4
10−3
10−2
10−1
t
h
Knoten und lokale Schrittweite
TOL = 1e−5
Beobachtung: Algorithmus erkennt die Singularitat;Vorgabe von minimaler Schrittweite verhindert “Festfressen”
Kapitel IV (adapt04) 37

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–VerfahrenRestringiertes Dreikorperproblem (1)
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.1−>#f=421
adaptiv RK4(3)
0 5 10 15
havg = 2.8 · 10−1
hmin= 3.0 · 10−5
hmax= 1.0 · 100
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.01−>#f=741
adaptiv RK4(3)
0 5 10 15
havg = 1.5 · 10−1
hmin= 1.7 · 10−5
hmax= 6.1 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.001−>#f=1809
adaptiv RK4(3)
0 5 10 15
havg = 6.5 · 10−2
hmin= 9.6 · 10−6
hmax= 3.3 · 10−1
Kapitel IV (adapt05) 38

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–VerfahrenRestringiertes Dreikorperproblem (2)
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.1−>#f=369
adaptiv RK4(3)
0 2 4 6 8 10
havg = 1.9 · 10−1
hmin= 3.0 · 10−5
hmax= 8.4 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.01−>#f=673
adaptiv RK4(3)
0 2 4 6 8 10
havg = 1.1 · 10−1
hmin= 1.6 · 10−5
hmax= 6.7 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.001−>#f=1653
adaptiv RK4(3)
0 2 4 6 8 10
havg = 4.8 · 10−2
hmin= 9.3 · 10−6
hmax= 3.6 · 10−1
Kapitel IV (adapt06) 39

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–VerfahrenRestringiertes Dreikorperproblem (3)
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.1−>#f=405
adaptiv RK4(3)
0 1 2 3 4 5
havg = 8.8 · 10−2
hmin= 2.7 · 10−5
hmax= 8.6 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.01−>#f=821
adaptiv RK4(3)
0 1 2 3 4 5
havg = 4.5 · 10−2
hmin= 1.5 · 10−5
hmax= 4.5 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.001−>#f=1813
adaptiv RK4(3)
0 1 2 3 4 5
havg = 2.1 · 10−2
hmin= 8.6 · 10−6
hmax= 2.5 · 10−1
Kapitel IV (adapt07) 40

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–VerfahrenRestringiertes Dreikorperproblem (4)
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.1−>#f=2085
adaptiv RK4(3)
0 5 10 15 20 25
havg = 1.0 · 10−1
hmin= 3.2 · 10−5
hmax= 5.3 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.01−>#f=2205
adaptiv RK4(3)
0 5 10 15 20 25
havg = 9.7 · 10−2
hmin= 2.6 · 10−3
hmax= 3.2 · 10−1
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5TOL=0.0001−>#f=9193
adaptiv RK4(3)
0 5 10 15 20 25
havg = 2.0 · 10−2
hmin= 1.4 · 10−4
hmax= 9.0 · 10−2
Kapitel IV (adapt08) 41

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Eingebettetes RK4(3)–VerfahrenVanderpol–Oszillator
0 10 20 30 40 50−3
−2
−1
0
1
2
3TOL=10−>#f=2025
adaptiv RK4(3)
0 10 20 30 40 50
havg = 1.4 · 10−1
hmin= 7.1 · 10−7
hmax= 7.8 · 10−1
0 10 20 30 40 50−3
−2
−1
0
1
2
3TOL=1−>#f=2105
adaptiv RK4(3)
0 10 20 30 40 50
havg = 1.3 · 10−1
hmin= 4.5 · 10−7
hmax= 8.1 · 10−1
0 10 20 30 40 50−3
−2
−1
0
1
2
3TOL=0.1−>#f=2513
adaptiv RK4(3)
0 10 20 30 40 50
havg = 1.1 · 10−1
hmin= 2.8 · 10−7
hmax= 5.0 · 10−1
Kapitel IV (adapt09) 42

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta: adaptiv vs. aquidistantRestringiertes Dreikorperproblem, Fehler e(T )
102
103
104
105
106
10−10
10−8
10−6
10−4
10−2
100
Feh
ler
adaptivaequidistant
Anzahl der Funktionsauswertungen
Blau: Standard RK 4–Verfahren, Rot: eingebettetes RK4(3)–Verfahren
Fur einen Fehler in der Großenordnung von 1 km benotigt das aquidistante Verfahren mit 384000
Funktionsauswertungen uber 60mal mehr als das adaptive (6261).
Kapitel IV (adapt11) 43

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta: adaptiv vs. aquidistantRestringiertes Dreikorperproblem
−40 −20 0 20 40 60−60
−40
−20
0
20
40
60#f = 1000
RK 4
−1.5 −1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5#f = 741
adaptiv RK4(3)
Blau: Aquidistante Punkte, Rot: Adaptive Punkte,bei ahnlicher Anzahl von Funktionsauswertungen.
Kapitel IV (adapt12) 44

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta: adaptiv vs. aquidistantVanderpol–Oszillator, Fehler e(T )
104
105
10−10
10−8
10−6
10−4
10−2
adaptiväquidistantC*Anzahl4
Anzahl der Funktionsauswertungen
Blau: Standard RK4–Verfahren, Rot: eingebettetes RK4(3)–Verfahren
Kapitel IV (adapt13) 45

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Runge–Kutta: adaptiv vs. aquidistantVanderpol–Oszillator
0 10 20 30 40 50−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Zeit t
Lösu
ng x
(t)
RK4, h = 0.081566
#f = 2452
0 10 20 30 40 50−3
−2
−1
0
1
2
3#f=2513
adaptiv RK4(3)
Blau: Aquidistante Punkte, Rot: Adaptive Punkte,bei ahnlicher Anzahl von Funktionsauswertungen.
Kapitel IV (adapt14) 46

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Lokale SchrittweiteDreikorper-Problem
TOL = 1e-2
−2 −1 0 1−2
−1
0
1
2Eingebettetes Runge−Kutta Verfahren RK4(3)
TOL = 1e−02, Schritte = 10717
0 5 10 15 20 2510
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
TOL = 1e-3
−2 −1 0 1−2
−1
0
1
2Eingebettetes Runge−Kutta Verfahren RK4(3)
TOL = 1e−03, Schritte = 38897
0 5 10 15 20 2510
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
Kapitel IV (adapt16) 47

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Lokale SchrittweiteVanderpol-Oszillator
TOL = 1e-1
0 10 20 30−3
−2
−1
0
1
2
3
t
x(t)
Lösung
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
th
Schrittweite
Kapitel IV (adapt17) 48

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Fehlversuche: Einfluss des Faktors βVanderpol-Oszillator
TOL = 5 · 10−2, αmax = 2, αmin = 0.5
β = 0.85
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 108# Schritte: 1149Aufwand: 1302
β = 0.9
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 172# Schritte: 1095Aufwand: 1267
β = 0.95
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 320# Schritte: 1012Aufwand: 1332
Kapitel IV (adapt18) 49

Prof. Dr. Barbara Wohlmuth
Lehrstuhl fur Numerische Mathematik
Fehlversuche: Einfluss der ToleranzVanderpol-Oszillator
β = 0.9, αmax = 2, αmin = 0.5
TOL = 5 · 10−1
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 168# Schritte: 453Aufwand: 621
TOL = 5 · 10−2
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 172# Schritte: 1095Aufwand: 1267
TOL = 5 · 10−3
0 5 10 15 20 25 30
10−4
10−3
10−2
10−1
100
t
h
Schrittweite
# Fehlversuche: 135# Schritte: 3112Aufwand: 3247
Kapitel IV (adapt19) 50