






Sprachen
Seiten
Rechtliche


CityGML als Grundlage für die Indoor Positionierung mittels Range Imaging
Münchner Fortbildungsseminar Geoinformationssystem10.03.2010
Andreas Donaubauer, Tobias Kohoutek, Rainer MautzETH Zürich, Institut für Geodäsie und Photogrammetrie (IGP)

Inhalt
1. Übersicht Indoor-Positionierungssysteme
2. Unterscheidungskriterien für digitale 3D-Innenraummodelle
3. CityGML als geometrisch-semantisches Innenraummodell
4. Range Imaging als Messmethode
5. CityGML + Range Imaging als Positionierungsmethode
6. Fazit und Ausblick
2
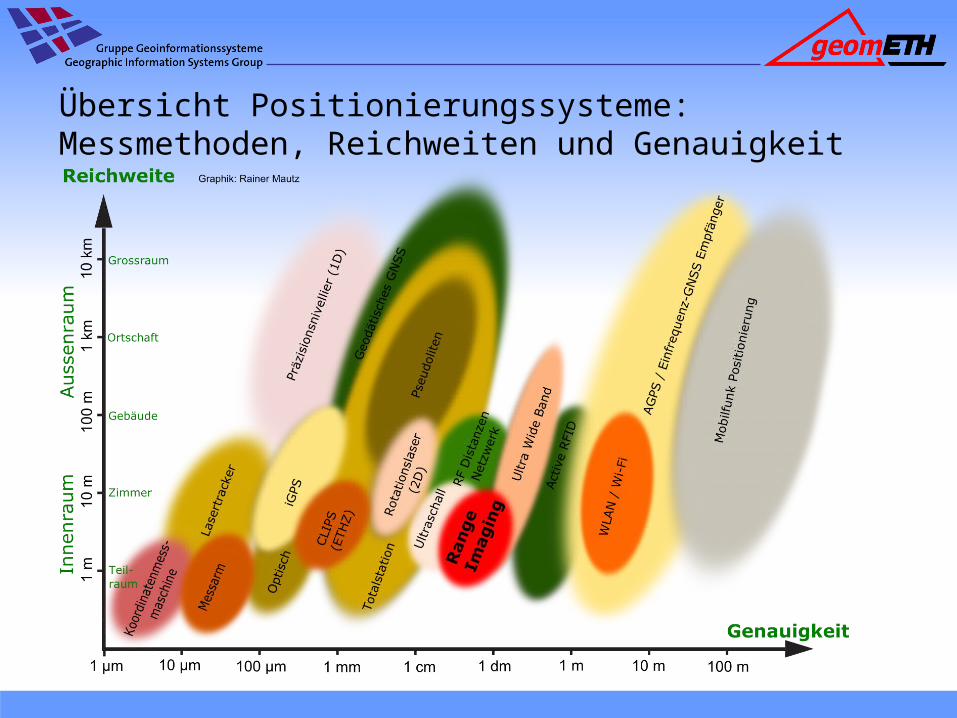
Übersicht Positionierungssysteme: Messmethoden, Reichweiten und Genauigkeit
4
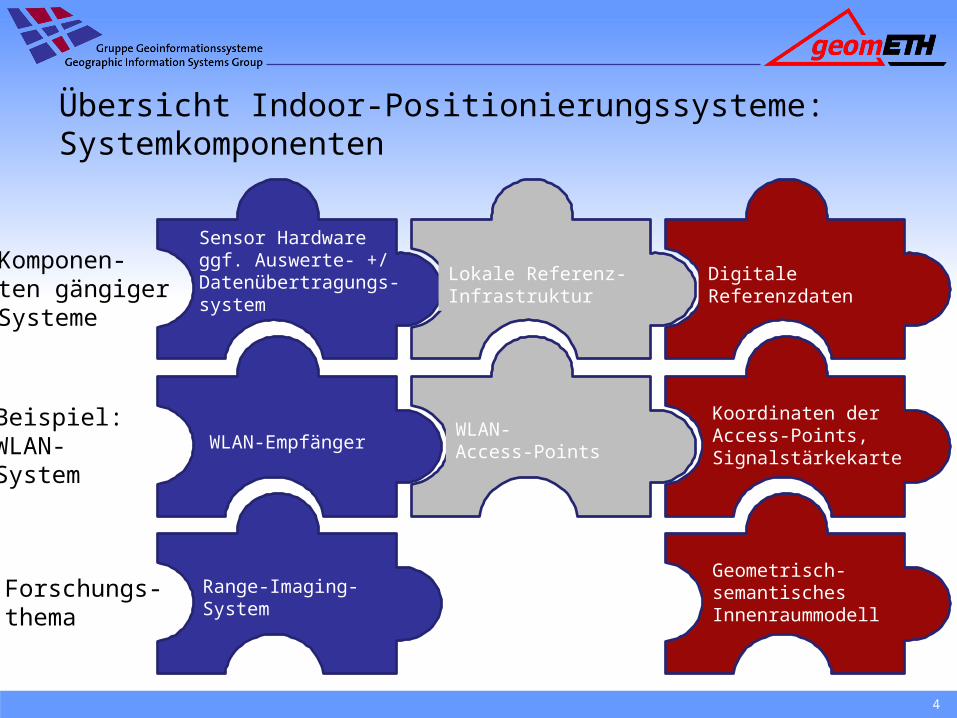
Übersicht Indoor-Positionierungssysteme: Systemkomponenten
Sensor Hardwareggf. Auswerte- +/Datenübertragungs-system
Lokale Referenz-Infrastruktur
Digitale Referenzdaten
WLAN-EmpfängerWLAN-Access-Points
Koordinaten derAccess-Points,Signalstärkekarte
Range-Imaging-System
Beispiel: WLAN-System
Forschungs-thema
Komponen-ten gängiger Systeme
Geometrisch-semantisches Innenraummodell
5
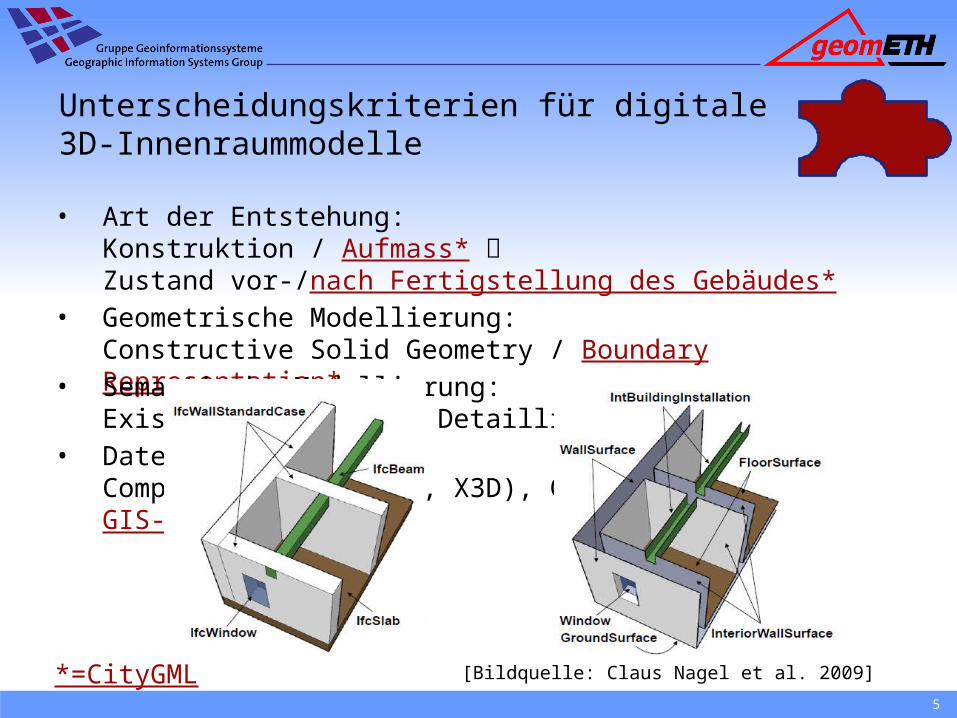
Unterscheidungskriterien für digitale3D-Innenraummodelle
• Art der Entstehung: Konstruktion / Aufmass* Zustand vor-/nach Fertigstellung des Gebäudes*
*=CityGML
• Geometrische Modellierung:Constructive Solid Geometry / Boundary Representation*
• Semantische Modellierung:Existenz (Ja*/Nein), Detaillierungsgrad
• Datenformat:Computergrafik (VRML, X3D), CAAD/BIM-Welt (IFC), GIS-Welt (CityGML)*
[Bildquelle: Claus Nagel et al. 2009]
6
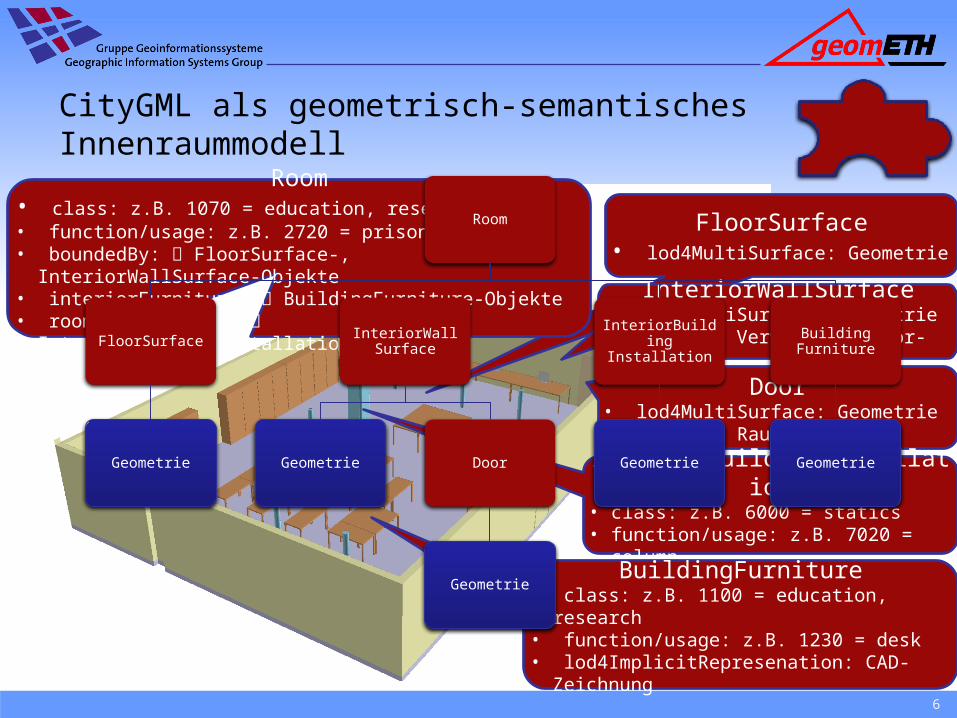
CityGML als geometrisch-semantisches Innenraummodell
FloorSurface• lod4MultiSurface: Geometrie
InteriorWallSurface• lod4MultiSurface: Geometrie• opening: Verweis auf Door-
Objekte
Door• lod4MultiSurface: Geometrie• address: Raumnummer etc.
InteriorBuildingInstallation• class: z.B. 6000 = statics• function/usage: z.B. 7020 = column
BuildingFurniture• class: z.B. 1100 = education, research• function/usage: z.B. 1230 = desk• lod4ImplicitRepresenation: CAD-
Zeichnung
Room• class: z.B. 1070 = education, research• function/usage: z.B. 2720 = prison cell• boundedBy: FloorSurface-, InteriorWallSurface-Objekte• interiorFurniture: BuildingFurniture-Objekte• roomInstallation: InteriorBuildingInstallation-Objekte
Room
FloorSurface
Geometrie
InteriorWallSurface
Geometrie Door
Geometrie
InteriorBuildingInstallation
Geometrie
BuildingFurniture
Geometrie

Range Imaging als Messmethode
• kombinierte CMOS/CCD-Technologie
• parallele Aufnahme der lokalen Helligkeit und eines
Distanzbildes
• Distanzmessung erfolgt mittel time-of-flight (TOF) Verfahren
für jedes Pixel
7
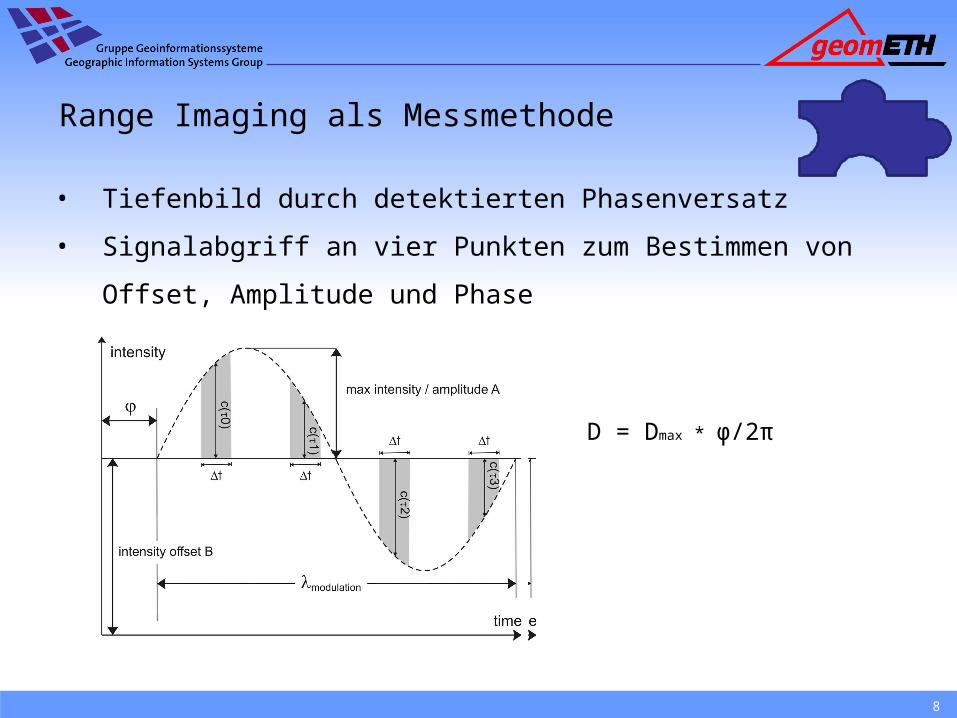
Range Imaging als Messmethode
• Tiefenbild durch detektierten Phasenversatz
• Signalabgriff an vier Punkten zum Bestimmen von Offset,
Amplitude und Phase
8
D = Dmax * φ/2π
CityGML + Range Imaging als Positionierungsmethode
1. „Grobpositionierung“ mittels Objekterkennung und
logischer Auswertung der CityGML-Datenbasis
2. Einschränkung des Suchraums für die anschliessende
Feinpositionierung
3. „Feinpositionierung“ mittels Entfernungsmessung
9
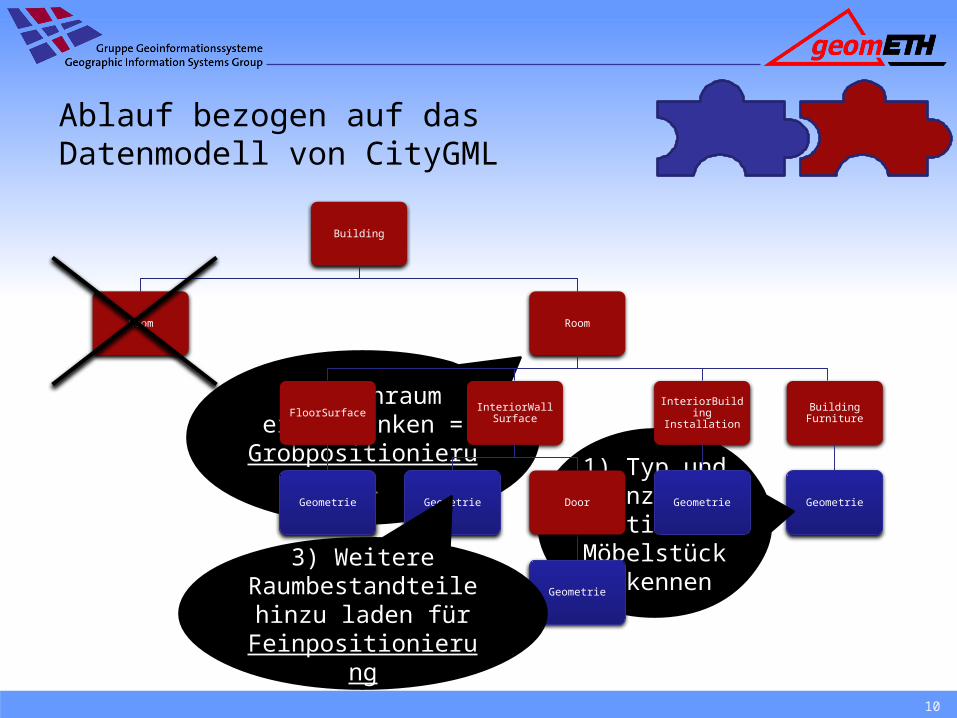
Ablauf bezogen auf das Datenmodell von CityGML
10
Room
Building
Room
BuildingFurniture
Geometrie
1) Typ und Anzahl
bestimmter Möbelstück erkennen
2) Suchraum einschränken =
Grobpositionierung
FloorSurface
Geometrie
InteriorWallSurface
Geometrie Door
Geometrie
InteriorBuildingInstallation
Geometrie
3) Weitere Raumbestandteile
hinzu laden fürFeinpositionierung
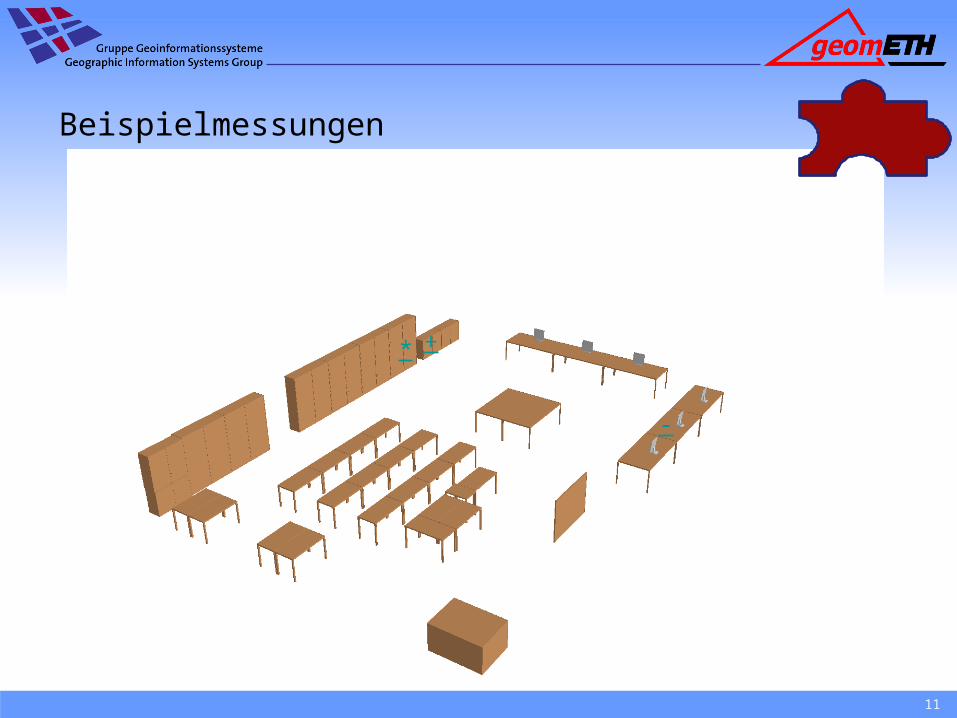
11
Beispielmessungen
* +
-

Fazit
• Range Imaging:- Kinematische Messung von 3D-Koordinaten in Echtzeit Erfassung von
Räumen in ihrer Lage + darin enthaltener Objekte- Identifikation von Objekten kann durch maschinelles Lernen trainiert
werden- Grenzen: relativ kleiner eindeutiger Messbereich der Kamera, Mixed
Pixels, störende Objekte, Mehrdeutigkeiten
• CityGML scheint aus folgenden Gründen geeignet:- Geometrisch-semantisches Modell und Detaillierungsgrad sind
Messmethode angemessen (keine verborgenen oder nur teilweise sichtbaren Objekte im Gegensatz zu CAAD)
- Kopplung von Outdoor- und Indoor-Positionierungsverfahren durch Unterstützung geodätischer Bezugssysteme
12

Ausblick
• Implementierung der Positionierungsmethode mit Grob- und Feinpositionierung
• Forschungsfragen:- Welcher Genauigkeitsbereich / welche Zuverlässigkeit kann erreicht
werden und welche Anwendungsmöglichkeiten gibt es somit für die Methode?
- Wo liegen die Vor- und Nachteile der Methode im Vergleich zu Techniken, die ohne ein semantisch-geometrisches Innenraummodell arbeiten?
- Wie muss ein geometrisch-semantisches Innenraummodell beschaffen sein, das die Methode optimal unterstützt? Reicht CityGML? Erweiterung? Anforderungen an Datenqualität?
13
Top Related